Embed Size (px)
DESCRIPTION
Apresentação sobre Motor de Indução Trifásico - Características, Acionamento e Controle de Velocidade Básico
Citation preview

allenz NAI 1
INVERSORES-2002-2006
Motor de Indução Trifásico
• Características que o tornam superior:
– Simplicidade: Ao contrário do motor CC, não requere manutenção do conjunto escovas / comutador;
– Possui tamanho e peso reduzidos para uma mesma potência nominal, portanto custo menor;
– Mecanismo mais simples mais fácil de ser fabricado;
– Pode ser ligado diretamente a rede elétrica. Não necessita de fonte CC;

allenz NAI 2
INVERSORES-2002-2006
Motor de Indução Trifásico
• Barreiras ao emprego do motor de indução trifásico (anos 80):
– Havia maior dificuldade em se variar a velocidade em um acionamento controlado;
– Com motor CC basta variar a tensão aplicada a armadura;
– Em CA os sistemas de controle eram mais sofisticados e o resultado era de baixa performance;
– Custo global do sistema (não apenas o relativo a máquina) era maior.

allenz NAI 3
INVERSORES-2002-2006
Evolução Tecnológica nos anos 90
• Custo dos componentes de eletrônica de potência e de controle diminuiu continuamente e por conseguinte o custo dos conversores de freqüência idem;
• Tendência de vantagem cada vez maior de custo total do sistema máquina mais acionamento para as máquinas CA;
• Novas técnicas como o controle vetorial possibilitaram às máquinas CA comportamento similar ou superior aos das máquinas CC.

allenz NAI 4
INVERSORES-2002-2006
Modelamento da Máquina de Indução Trifásica
• Componentes:– Estator:
• Enrolamentos nos quais é aplicada alimentação de tensão alternada.
– Rotor:• Composto de:
– Ou por uma gaiola de esquilo curto-circuitada.– Ou por enrolamentos;
De qualquer forma, através de indução eletro-magnética, o campo magnético produzido nos enrolamentos do estator produz correntes no rotor, de modo que, da interação de ambos os campos magnéticos será produzido o conjugado que levará máquina a rotação.

allenz NAI 5
INVERSORES-2002-2006
Máquina de Indução Trifásica

allenz NAI 6
INVERSORES-2002-2006
Modelamento da Máquina de Indução Trifásica
• O campo magnético produzido no estator é girante, devido a:
– Característica da CA trifásica da alimentação do estator;
– Distribuição geométrica espacial dos enrolamentos do estator;
O campo produzido pelas correntes induzidas no rotor terá também as mesmas características e procurará sempre acompanhar o campo girante do estator.

allenz NAI 7
INVERSORES-2002-2006
Velocidade Angular do Campo Girante
• Depende da:– Freqüência da rede;– Numero de pólos da Máquina;
• Número de Pares de Pólos:– Indica quantos enrolamentos há no estator,
deslocados espacialmente de modo simétrico, e que são alimentados pela mesma tensão de fase.
• Ex: Se há 3 enrolamentos ( um para cada fase ) estiverem dispostos num arco de 180o e outros 3 enrolamentos ocuparem os 180o restantes, diz se que esta é uma máquina de 4 pólos (ou 2 pares de pólos).

allenz NAI 8
INVERSORES-2002-2006
O Campo Girante
• No caso de um motor de 4 pólos:– Dada a simetria circular da máquina, tem-se o
campo resultante, visto no entreferro, o qual apresenta pólos resultantes deslocados 90o espacial um do outro;
– A resultante no centro do arranjo é sempre nula, no entanto o que importa é o fluxo magnético presente no entreferro (distância entre o rotor e o estator da máquina);
– A cada ciclo completo das tensões de alimentação (360o elétricos) corresponderá a uma rotação de 180o no eixo.

allenz NAI 9
INVERSORES-2002-2006
O Campo Girante• Tal máquina possui 4 pólos (2 pólos norte e 2 pólos
sul), distribuídos simetricamente e intercalados:

allenz NAI 10
INVERSORES-2002-2006
O Campo Girante• Tal máquina possui 4 pólos (2 pólos norte e 2 pólos
sul), distribuídos simetricamente e intercalados:

allenz NAI 11
INVERSORES-2002-2006
O Campo Girante• Tal máquina possui 4 pólos (2 pólos norte e 2 pólos
sul), distribuídos simetricamente e intercalados:

allenz NAI 12
INVERSORES-2002-2006
O Campo Girante• Tal máquina possui 4 pólos (2 pólos norte e 2 pólos
sul), distribuídos simetricamente e intercalados:

allenz NAI 13
INVERSORES-2002-2006
Máquina de Quatro Pólos

allenz NAI 14
INVERSORES-2002-2006
Velocidade Angular do Campo Girante• A velocidade de rotação do campo girante, chamada
de velocidade síncrona, é dada por: ( = 2..f)
(em rad/s)
Sendo: p Número de pólos S Velocidade angular (em rad/s) das tensões de alimentação da máquina,
• Por ser mais prático, podemos também trabalhar com f em Hz e com n em RPM:
(em r.p.m.)
p
ω2ωs
p
fns
..602

allenz NAI 15
INVERSORES-2002-2006
Rotação do Rotor
• A corrente induzida no rotor possui uma freqüência que é a diferença da freqüência do campo girante e da rotação do rotor;
• Assim, na partida, com a máquina parada, a freqüência da corrente induzida é máxima (60 Hz no caso);
• A freqüência da corrente induzida vai-se reduzindo enquanto o rotor acelera até chegar tipicamente a uns poucos Hz , quando á máquina atingir a rotação de regime.

allenz NAI 16
INVERSORES-2002-2006
Rotação do Rotor• Desta análise concluímos que:
• Se o rotor girar a mesma velocidade do campo girante, a diferença é zero, assim não haverá corrente induzida uma vez que não há variação de fluxo pelas espiras do rotor.
• Não havendo corrente induzida no rotor, não há como sustentar conjugado no eixo.
– A produção de conjugado no eixo da máquina deriva do fato de que a velocidade do rotor é sempre diferente da velocidade do campo girante.

allenz NAI 17
INVERSORES-2002-2006
Rotação do Rotor• Mas, em regime estável, ainda manterá
sempre uma pequena diferença. Ex:
– Num motor de 4 Pólos em 60 Hz temos:
– Entretanto a rotação do eixo especificada é de :– O que corresponde a uma freqüência assincrona de:
– A freqüência da corrente induzida no rotor é:
rpmp
fns 1800
4
60602602
rpm1720
Hzpn
fA 3357120
41720
602,
Hzfff Ainduzida 672335760 ,,

allenz NAI 18
INVERSORES-2002-2006
Rotação do Rotor
• Essa diferença entre a velocidade angular síncrona e a velocidade angular do rotor, pode ser convertida em um valor de índice:
• Ao qual da-se o nome de:
... Escorregamento (S)...
• O qual pode ser obtido também, da mesma forma,a partir dasrotações em RPM.
s
mss
%,
,
44
04401800
17201800
ou
S

allenz NAI 19
INVERSORES-2002-2006
O Escorregamento e o Fator de Potência
• Com a máquina girando em vazio, o escorregamento é mínimo e a corrente induzida também, apenas suficiente para produzir o conjugado à vazio.
• As correntes que circulam pelos enrolamentos do motor são apenas para manter a magnetização, tendo-se assim uma carga altamente indutiva e um fator de potência extremamente baixo:
(cos < 0,3)

allenz NAI 20
INVERSORES-2002-2006
O Escorregamento e o Fator de Potência
• A medida que uma carga mecânica é aplicada ao motor a velocidade rotórica diminui, causando aumento do escorregamento e da freqüência da corrente induzida no rotor.
• O aumento da corrente do rotor reflete na corrente do estator, provocando também, o aumento desta.
• Apesar de estarmos solicitando mais potência da linha de alimentação, estamos produzindo mais potência mecânica, e, com um fator de potência melhor.

allenz NAI 21
INVERSORES-2002-2006
O Escorregamento e o Fator de Potência
• A carga plena a máquina terá um escorregamento que promove o equilíbrio entre o conjugado do motor (CM) e o conjuga resistente da carga (CRE).
• O fator de potência típico é de:
0,95 > cos > 0,8
Dependendo do porte do motor, sendo que motores maiores apresentam também maior fator de potência.

allenz NAI 22
INVERSORES-2002-2006
Motores de Alto Rendimento• Os motores elétricos são responsáveis por 21,6% do
consumo total de energia elétrica no Brasil (SIESE - Eletrobrás 2003), o que justifica o uso de motores de alto rendimento.
• Os motores de alto rendimento são motores projetados para, fornecendo a mesma potência útil na ponta do eixo que outros tipos de motores, consumirem menos energia elétrica da rede.
• LEI DE EFICIÊNCIA ENERGÉTICA (Decreto n° 4.508, de 11 de Dezembro de 2002) define os níveis mínimos de eficiência energética de motores elétricos trifásicos de indução, rotor de gaiola de esquilo, de fabricação nacional ou importados, para comercialização ou uso no Brasil.
• NBR 7094: “Máquinas Elétricas Girantes - Motores de Indução - Especificação”, define os valores nominais mínimos para motores alto rendimento.
• Motores de alto rendimento tem custo superior aos Standard, porém devido à redução do consumo de energia em função do seu maior rendimento, é possível obter um retorno do investimento inicial rapidamente:

allenz NAI 23
INVERSORES-2002-2006
Motores de Alto Rendimento• Construtivamente os motores de alto rendimento
possuem as seguintes características:– Chapas magnéticas de melhor qualidade (aço silício).
– Maior volume de cobre, que reduz a temperatura de operação.
– Enrolamentos especiais, que produzem menos perdas estatóricas.
– Rotores tratados termicamente, reduzindo perdas rotóricas.
– Anéis de curto circuito dimensionados para reduzir as perdas Joule.
– Projetos de ranhuras do motor são otimizados para incrementar o rendimento (Altos fatores de enchimento das ranhuras, que provêm melhor dissipação do calor gerado).

allenz NAI 24
INVERSORES-2002-2006
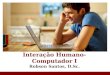
A Curva de conjugado• Uma curva de conjugado típica mostra três
regiões distintas que representam os três modos de operação de um motor (para este estando ligado direto a rede com f=60 Hz)
– Tração;
– Regeneração;
– Reversão.

allenz NAI 25
INVERSORES-2002-2006
A Curva de conjugado

allenz NAI 26
INVERSORES-2002-2006
Modo Tração• Em tração, o rotor gira no mesmo sentido do campo
girante;
• O fluxo no entreferro se mantém constante se o conjugado se manter constante;
• A medida que o escorregamento aumenta, o conjugado também aumenta (ou vice-versa) e o aumento é proporcional se estiver na região linear;
• A operação normal do motor se dá na região linear, uma vez que se o CRE exceder a um valor máximo, o motor parará;
– Se isso ocorrer teremos elevadas perdas de potência no rotor, devido a altas correntes induzidas. As perdas provocam aquecimento e o aquecimento prolongado danifica o motor.
• Na região linear a corrente do rotor cresce de maneira praticamente linear com o escorregamento;
– O mesmo acontece com a potência e o conjugado.

allenz NAI 27
INVERSORES-2002-2006
Modo Regeneração• O rotor e o campo girante movem-se no
mesmo sentido, mas a velocidade mecânica M, é maior que a velocidade síncrona s .
– Isso resulta em um escorregamento negativo.
• Isso significa que a máquina está operando como gerador, entregando potência ao sistema de linha de alimentação à qual o estator estiver conectado.
• Esta situação só pode ocorrer se tivermos um controlador capaz de variar a freqüência da CA de alimentação e se, a partir de um regime estável, a freqüência passar a ser diminuída.

allenz NAI 28
INVERSORES-2002-2006
Modo Reversão• O campo girante gira em sentido oposto ao rotor,
levando a um escorregamento: 2 > S > 1• Isso ocorre se repentinamente provocando a mudança
no sentido de rotação do campo pela inversão da conexão de duas das três fases da alimentação do estator;
• O conjugado produzido (que tende a acompanhar o campo girante) se opõe ao movimento do rotor, levando a uma frenagem da máquina;
• Enquanto estiver revertendo (desacelerando em um sentido) o conjugado presente é pequeno mas correntes são elevadas;
• A energia retida na massa girante e dissipada internamente na máquina, levando-a ao aquecimento. O número de reversões deve ser comedido para não provocar superaquecimento devido ao acumulo sucessivo de calor;

allenz NAI 29
INVERSORES-2002-2006
Métodos de Variação da Velocidade da Máquina de Indução
• Do ponto de vista do acionamento, a velocidade de um motor de indução pode ser variada de uma das seguintes maneiras:– Controle da resistência do rotor (antigo);– Controle da tensão do estator (antigo);– Controle da freqüência do estator (antigo);– Controle da tensão e da freqüência do estator
(controle escalar);– Controle da corrente (controle vetorial).

allenz NAI 30
INVERSORES-2002-2006
Controle pela Resistência do Rotor• Para uma máquina de rotor bobinado é possível,
externamente, colocar resistências que se somem à impedância própria do rotor:

allenz NAI 31
INVERSORES-2002-2006
Controle pela Resistência
• A variação de Rx permite mover a curva conjugado-Velocidade da máquina como mostrado nos três casos abaixo:

allenz NAI 32
INVERSORES-2002-2006
Controle pela Resistência• Note que para um determinado conjugado, o
aumento da resistência associada ao rotor leva a uma diminuição da velocidade mecânica.
• Este método permite, além de limitar a corrente de partida, também elevar o conjugado de partida.
• Obviamente é um método de baixa eficiência energética devido a dissipação de potência nas resistências.
• O balanceamento das 3 fases é fundamental para a boa operação da máquina.
• Este acionamento foi (é) usado especialmente em situações que requeriam um grande número de partidas/paradas, além de elevado conjugado.

allenz NAI 33
INVERSORES-2002-2006
Controle pela Resistência
• Os resistores podem ser substituídos por um retificador trifásico que “enxerga” uma resistência variável, determinada pelo ciclo de trabalho do transistor de saída (fig b);
• Outros arranjos, permitem que, ao invés de se dissipar energia em uma resistência externa, se possa envia-la de volta a rede. A relação entre a tensão CC definida pelo retificador e a corrente Id refletem para o enrolamento do rotor como resistência equivalente (fig c).

allenz NAI 34
INVERSORES-2002-2006
Controle Pela Tensão de Alimentação do Estator
Das equações do conjugado, podemos observar que:
O conjugado é proporcional ao quadrado da tensão aplicada ao estator.
Assim, para um dado conjugado resistente, uma redução na tensão provoca uma diminuição da velocidade (de fato um aumento no escorregamento).
2rS
2
rS
2Sr
d
XXSRωS
VR3C
2rS
2rS
2Sr
S XXRωVR3
C

allenz NAI 35
INVERSORES-2002-2006
Controle Pela Tensão de Alimentação do Estator

allenz NAI 36
INVERSORES-2002-2006
Controle Pela Tensão de Alimentação do Estator
• Este tipo de acionamento não é aplicável a cargas que necessitem de:
– Conjugado constante (independente da velocidade);– Elevado conjugado de partida.
• Além do mais:– a faixa de ajuste da velocidade é relativamente pequena;– O ajuste é feito as custas de redução significativa do
conjugado disponível.

allenz NAI 37
INVERSORES-2002-2006
Controle Pela Tensão de Alimentação do Estator
• Para que a performance desse tipo de acionamento seja satisfatória, motores especiais são construídos (denominados de classe D):– Tais motores possuem elevada resistência no
enrolamento de rotor de modo que a faixa de variação de velocidade se torne maior e não seja muito severa a perda de conjugado em baixas velocidades.
• O acionamento é simples e de baixo custo, justificando o uso para aplicações de baixa performance tais como ventiladores e bombas centrífugas, que exigem baixo conjugado de partida.

allenz NAI 38
INVERSORES-2002-2006
Controle Pela Tensão de Alimentação do Estator

allenz NAI 39
INVERSORES-2002-2006
Controle Pela Variação da Freqüência
• O Conjugado do motor é dado por:
• Já o fluxo pode ser resumido em:
Assim, o Conjugado é dependente do fluxo e o fluxo, por sua vez, é dependente da freqüência!
Rme IkC Corrente rotóricaConjugado do
motor Fluxo magnético
f
VV S
S
S .2
10

allenz NAI 40
INVERSORES-2002-2006
Controle Pela Variação da Freqüência
• Pelas equações apresentadas anteriormente conclui-se que:
– Manipulando-se apenas a freqüência da fonte de alimentação CA do estator, tanto a velocidade quanto o conjugado de um motor de indução, podem ser variados simultaneamente, de modo que:
• A velocidade é diretamente proporcional a freqüência da CA;
• O conjugado é inversamente proporcional a freqüência da CA.

allenz NAI 41
INVERSORES-2002-2006
Controle Pela Variação da Freqüência
• No entanto tal acionamento não é conveniente, pois:
– reduzindo-se a freqüência, aumenta-se o fluxo levando-se a uma saturação da máquina o que provoca a alteração da característica conjugado-velocidade.
– Para baixas freqüências, com a diminuição das reatâncias, a corrente do estator tende a se elevar demasiadamente.
– Se a freqüência for elevada acima da freqüência nominal, fluxo e conjugado diminuem, característica similar a dos motores CC, quando se faz elevação de velocidade por meio de enfraquecimento do campo.

allenz NAI 42
INVERSORES-2002-2006
Controle Pela Variação da Freqüência
• Uma alimentação deste tipo pode ser obtida por meio de um inversor que forneça uma tensão constante (valor eficaz), variando apenas a freqüência.

allenz NAI 43
INVERSORES-2002-2006
Controle da Tensão e da Freqüência
• Se a relação entre a tensão e a freqüência da alimentação do motor for mantida constante, o fluxo de entreferro não se altera, de modo que o conjugado máximo não se altera.
• Uma vez que a tensão nominal da máquina não deve ser excedida, este tipo de acionamento aplica-se para velocidades iguais ou menores que a velocidade nominal.

allenz NAI 44
INVERSORES-2002-2006
Controle com Variação da Tensão e da Freqüência
• Consideremos a relação entre a tensão e a freqüência seja constante (Volts/Herts constante);
• Dai pela lei de Lenz:
• O fluxo é constante:dt
)t(d)t(v
f
V.
2
1V 000

allenz NAI 45
INVERSORES-2002-2006
Conversores Estáticos de Freqüência
• Concluímos então que para podermos variar a velocidade de um motor de indução mantendo o conjugado constante, devemos manter constante a relação tensão/freqüência;
• O inversor que utiliza o princípio de manter V/Hz constante é denominado inversor escalar.
• A figura mostra a característica conjugado-velocidade para uma excitação deste tipo, para velocidades abaixo da velocidade nominal.

allenz NAI 46
INVERSORES-2002-2006
Controle da Tensão e da Freqüência

allenz NAI 47
INVERSORES-2002-2006
Controle da Tensão e da Freqüência

allenz NAI 48
INVERSORES-2002-2006
Controle da Tensão e da Freqüência
• Notamos que o motor será capaz de girar em qualquer velocidade abaixo da nominal.
• No entanto, em rotações muito baixas o motor perde a capacidade de produção de conjugado.– Isso ocorre em função das perdas existentes na
resistência do estator, que se torna muito resistivo.
• Uma das soluções possíveis é modificar a curva Volts/Hz, de modo a compensar este efeito.

allenz NAI 49
INVERSORES-2002-2006
Controle da Tensão e da Freqüência
Sem Compensação
Compensação Máxima
60Hz
220V
Compensação IxR

allenz NAI 50
INVERSORES-2002-2006
Controle da Tensão e da Freqüência

allenz NAI 51
INVERSORES-2002-2006
Controle com Variação da Tensão e da Freqüência
• A novidade foi poder sintetizar de forma simples uma tensão trifásica com tensão e freqüência ajustáveis.
• A idéia central é variar a velocidade do campo girante do motor, mantendo sua amplitude nominal, ou seja, conservando o fluxo magnético no valor especificado pelo fabricante.
• O motor será capaz de girar em qualquer velocidade abaixo da nominal.
• No entanto para rotações muito baixas, o motor ainda apresenta perda de capacidade de produzir conjugado...

allenz NAI 52
INVERSORES-2002-2006
Sistemas Automáticos de Controle
• Consiste num conjunto de elementos interligados em malha fechada, isto é, além do fluxo de informação no sentido direto (da entrada para a saída), existe outro no sentido contrário (da saída para a entrada), chamado de realimentação (feedback).

allenz NAI 53
INVERSORES-2002-2006
Sistemas Automáticos de Controle
COMANDOELEMENTO FINAL DE COMANDO
PLANTA
SINAL DECOMANDO
VARIÁVELMANIPULADA
VARIÁVELCONTROLADA
ENTRADA SAÍDA
PERTURBAÇÕES
SENSORCOMPARADOR
REALIMENTAÇÃO

allenz NAI 54
INVERSORES-2002-2006
EtapaRetificadora
Link DCEtapa
Inversora
Interfaces e "Drives"
CPU
• Entradas / Saídas digitais• Entradas / Saídas analógicas• Interface serial
I.H.M
Estrutura BásicaEstrutura Básica
Unidade de Controle
Unidade de Potência

allenz NAI 55
INVERSORES-2002-2006
AC DC AC
Circuito de PotênciaCircuito de Potência

allenz NAI 56
INVERSORES-2002-2006
Ponte não controlada na entrada que pode ser monofásica ou trifásicadependendo do modelo do inversor.
+ Ud
- Ud
REDE
+ Ud
- Ud
REDE
RetificadorRetificador

allenz NAI 57
INVERSORES-2002-2006
Filtra a tensão retificada diminuindo seu "ripple", e fornece a correntede saída; Também faz a troca de reativos com o motor.
CR
K1 Circuito de pré-carga
Circuito IntermediárioCircuito Intermediário

allenz NAI 58
INVERSORES-2002-2006
Os transistores operam como chaves
CH1
(+)
(-)
Link DC
T1T2T3
CH4
CH3
CH6
CH5
CH2
Etapa InversoraEtapa Inversora

allenz NAI 59
INVERSORES-2002-2006
Transforma o nível de tensão CC do link em uma tensão alternada paraque a mesma seja aplicada ao motor.
Como é possível transformar uma tensão CC em tensão CA ?
CH1
CH4
T1
T1
CH1CH4aberta
fechada
+ Ud
- Ud
+ Ud
- Ud
Etapa InversoraEtapa Inversora

allenz NAI 60
INVERSORES-2002-2006
Sistema de modulação PWM ( Pulse Width Modulation )
portadora
Senóide de referência
Tensão média de saída
Forma de onda da saída
ModulaçãoModulação

allenz NAI 61
INVERSORES-2002-2006
sp
fnm
1
120
Escorregamento
Número de pólos
Freqüência
VelocidadeAssíncrona ou Mecânica
Equação da VelocidadeEquação da Velocidade
Mecânica (Rotórica)Mecânica (Rotórica)

allenz NAI 62
INVERSORES-2002-2006
Controle Escalar Controle Vetorial
Equação de Conjugado do Motor
Corrente rotórica
2IkC me
Conjugado do motor
Fluxo magnético
Filosofias de ControleFilosofias de Controle

allenz NAI 63
INVERSORES-2002-2006
f
Uk
m 1
2IkC me
O conjugado será constante se o produto entre o fluxo e acorrente rotórica for constante.
Podemos considerar que I2 seja praticamente constante. Assim devemos avaliar como se comporta o fluxo.
Kf
U
Controle EscalarControle Escalar

allenz NAI 64
INVERSORES-2002-2006
Controle VetorialControle Vetorial• O controle vetorial é um método de controle, com
uma visão da máquina e dos seus modelos dinâmicos, que toma em consideração tanto a amplitude das grandezas como a sua fase, fazendo utilização de "vetores espaciais", cujas projeções são as variáveis trifásicas.
• Tradicionalmente o controle vetorial utiliza a estratégia de matrizes de transformação do sistema de 3 eixos para um sistema de 2 eixos (transformadas de Clark e Park). A estrutura de regulação (malha fechada) recebe assim duas constantes como referência: a componente do conjugado (sobre o eixo q) e a componente do fluxo (sobre o eixo d).

allenz NAI 65
INVERSORES-2002-2006
TRANSF
TRANSF
Integrador
Valor estimado
Correntede
magnetização
Correntede
saída
Tensãode
saída
IqId
Id = corrente de excitação
Iq = corrente de conjugado
Controle VetorialControle Vetorial

allenz NAI 66
INVERSORES-2002-2006
n
I
PWM
referência
regulador
regulador
regulador
Correntede
magnetização
Valor estimado
Valor estimado
Vetorial "Sensorless"Vetorial "Sensorless"

allenz NAI 67
INVERSORES-2002-2006
"Encoder"
n
I
PWM
referência
regulador
regulador
regulador
Correntede
magnetização
Valor real
Vetorial com "Encoder"Vetorial com "Encoder"

allenz NAI 68
INVERSORES-2002-2006
Inversores de FreqüênciaCaracterística
CorrenteContínua Escalar C / "Encoder"
Controle deVelocidade
SIM SIM SIM SIM
Controle deconjugado
SIM NÃO NÃO SIM
SincronismoComPrecisão
SIM NÃO NÃO SIM
"Sensorless"Vetorial
Comparativos entre TecnologiasComparativos entre Tecnologias

allenz NAI 69
INVERSORES-2002-2006
Inversores de Freqüência
CaracterísticaCorrente
Contínua EscalarC/ "Encoder"
Precisão de
velocidade0,025 % 1 % 0,5 % 0,01 %
Faixa de
Variação de
Velocidade
1:100 1:10 1:20 1:100
conjugado de
Partida150 % 100 % 150 % 150 %
"Sensorless"
Vetorial
Comparativo entre TecnologiasComparativo entre Tecnologias

allenz NAI 70
INVERSORES-2002-2006
Tipo de Inversor
Escalar VetorialSensorless
VetorialCom
Encoder
CP / CN 1,0 1,5 1,5
IP / IN 1,5 1,5 1,5Valores máximos válidos para tempos de aceleração menores que 60 s.
Características de PartidaCaracterísticas de Partida

allenz NAI 71
INVERSORES-2002-2006
Rampa de freqüência; Frenagem reostática; Frenagem regenerativa; Frenagem por injeção de corrente contínua.
Sistemas normalmente aplicados :
O inversor deve fazer com que o motor desacelere a carga e pare após um determinado tempo
Características de FrenagemCaracterísticas de Frenagem

allenz NAI 72
INVERSORES-2002-2006
t
f
Tempo da Rampa programável
Este sistema é eficiente para cargas de baixa até media inércia.
Rampa de FreqüênciaRampa de Freqüência

allenz NAI 73
INVERSORES-2002-2006
Sobretensão
MOTOR
GERADOR
REDE
REDE
Para cargas com baixa inércia.
Para cargas com inércia mais elevada.
Rampa de FreqüênciaRampa de Freqüência

allenz NAI 74
INVERSORES-2002-2006
Energia dissipada por efeito Joule
Módulo de frenagem
Resistor de frenagem
GERADORREDE
Não deve haver sobre-tensão no Link CC, para evitar que o inversor entre em bloqueio na execução da rampa.
Frenagem ReostáticaFrenagem Reostática

allenz NAI 75
INVERSORES-2002-2006
Tipo fita (maior porte) ou fio (menor porte);
O valor Ôhmico dependerá do modelo do inversor (maiores correntes implica em menores valores ôhmicos); A potência de dissipação poderá ser definida através da seguinte relação :
PP Motorsistor 2,0
Re(valores em kW)
Resistor de FrenagemResistor de Frenagem

allenz NAI 76
INVERSORES-2002-2006
MOTORREDE
GERADORREDE
Ponte regenerativa Ponte inversora
Frenagem RegenerativaFrenagem Regenerativa

allenz NAI 77
INVERSORES-2002-2006
t
f
tCC
UCC
Injeção de C.C.
tmorto
Frenagem reostática
Freqüência mínima
Frenagem por Injeção CCFrenagem por Injeção CC
trampa

allenz NAI 78
INVERSORES-2002-2006
Permite a alteração da curva U/f padrão ajustando a característica de tensão e freqüência em uma condição não convencional.
U/f AjustávelU/f Ajustável

allenz NAI 79
INVERSORES-2002-2006
Permite escolher uma rampa linear ou “S” para a aceleração e desaceleração.
Rampa SRampa S

allenz NAI 80
INVERSORES-2002-2006
Esta função permite que duas entradas digitais sejam programadas para acelerar e desacelerar o motor.
&
Acelera
Desacelera
Habilitação
Referência defreqüência
Potenciômetro eletrônico
Potenciômetro EletrônicoPotenciômetro Eletrônico

allenz NAI 81
INVERSORES-2002-2006
Ajuste de velocidades pré-definidas, através de combinações de entradas digitais. Um CLP pode comandar as entradas digitais do Inversor.
DI´s
f1
f2
f3
f4
f5
f6
f7
f8
"Multispeed""Multispeed"

allenz NAI 82
INVERSORES-2002-2006
Esta função permite que o motor execute uma seqüência pré-programada de velocidades, em tempos pré-definidos.
Ciclo AutomáticoCiclo Automático

allenz NAI 83
INVERSORES-2002-2006
n
V
Referência develocidade
Corrente Ativada saída
velocidade
Compensação de EscorregamentoCompensação de Escorregamento

allenz NAI 84
INVERSORES-2002-2006
VelocidadeMotor
Referêncian1 n2
BandaProibida
BandaProibida
Rejeição de FreqüênciasRejeição de FreqüênciasPermite que o Inversor rejeite freqüências indesejada como por exemplo freqüências que causam ressonância mecânica na máquina (vibração excessiva).

allenz NAI 85
INVERSORES-2002-2006
Tensão no link DC
Pulsos de saída
Tensão de saída
Freqüência de saída
desabilitado
Tempo ajustável
tFalta < 2 s
““Ride ThroughRide Through””

allenz NAI 86
INVERSORES-2002-2006
PROCESSO
REGULADORPID
(Inversor)
Referência
Realimentação
Velocidade
(Sinal padronizado)
Esta função permite controlar automaticamente através de açãoP.I.D , nível, pressão, vazão, temperatura, etc.
Regulador P.I.DRegulador P.I.D

allenz NAI 87
INVERSORES-2002-2006
Esta função permite a regulação da velocidade do motor em malha fechada, através de realimentação por “encoder”.
PROCESSO
REGULADORPI
(Inversor)
Referência
Realimentação
Velocidade
("Encoder" incremental)
Regulador de VelocidadeRegulador de Velocidade

allenz NAI 88
INVERSORES-2002-2006
Inversores de Freqüência
USA Canadá Europa
Linha de ProdutosLinha de Produtos

allenz NAI 89
INVERSORES-2002-2006
Certificações Internacionais
Faixa de freqüência de saída 0...300 Hz
Ponte inversora a transistor IGBT
IHM remota para painéis (cabos de 1/2, 1, 2, 5, 7.5 ou 10 m)
Interface serial RS-232 ou RS-485
Características GeraisCaracterísticas Gerais

allenz NAI 90
INVERSORES-2002-2006
Padronização de programação
Produtos de nível internacional (exportação)
Compatibilidade eletromagnética “EMC”
Grau de proteção IP20 e NEMA 1 (CFW-09)
Características GeraisCaracterísticas Gerais

allenz NAI 91
INVERSORES-2002-2006
Rampa Linear e rampa tipo “S”
Frenagem CC
Compensação I x R manual e automática
Função de JOG
Curva U/F ajustável
Características GeraisCaracterísticas Gerais

allenz NAI 92
INVERSORES-2002-2006
Função “Multi-Speed” - 8 velocidades
Rejeição de freqüências críticas
“Ride-Through” (operação durante falhas
momentâneas da rede)
Compensação de escorregamento
Características GeraisCaracterísticas Gerais

allenz NAI 93
INVERSORES-2002-2006
µLINE Função “Flying Start” (partida com motor girando)
CFW-07 Frenagem Reostática incorporada
Regulador PID Superposto (Versão HVAC)
CFW-09 Função Flying Start (partida com motor girando)
Função Ride-Through (quedas momentâneas da rede)
H.M.I. com função COPY
Características GeraisCaracterísticas Gerais

allenz NAI 94
INVERSORES-2002-2006
CARACTERÍSTICAS µLINE CFW-07 CFW-09
Alimentação Monofásica (Vca)
Alimentação Trifásica (Vca)
Entradas digitais programáveis
Saídas digitais programáveis
Entradas analógicas programáveis
Saídas analógicas programáveis
Freqüência de chaveamento (kHz)
200-240 220-230 220-230
04 03
01 02
01 02
-- 01
2,5 / 5 10 2,5 / 5
200-240 380-480
220-230 380-480
06
03
02
02
220-230 380-480
1,25 / 2,5 / 5 / 10
Regulador de VelocidadeRegulador de Velocidade

allenz NAI 95
INVERSORES-2002-2006
Inversor uLINE CFW-07
Tensão de Alimentação
Motor (CV)
I Nom. do CFW (A)
I Nom. do CFW (A)
Motor (CV)
220 Vca
Monofásico
1,6
2,6
4,0
0,25
0,5
1,0
1,8
2,6
4,1
6,0
7,3
10
0,33
0,5
1,0
1,5
2,0
3,0
CFW-09
Motor (CV)
I Nom. do CFW (A)
6,0
7,0
10
1,5
2,0
3,0
Características GeraisCaracterísticas Gerais

allenz NAI 96
INVERSORES-2002-2006
Inversor uLINE CFW-07 CFW-09 Tensão de
AlimentaçãoMotor (CV)
I Nom. do CFW (A)
I Nom. do CFW (A)
Motor (CV)
Motor (CV)
I Nom. do CFW (A)
220 Vca
Trifásico
7,0 2,0 10
16
3,0
5,0
67
101316242845547086
105130
1,52,03,04,06,07,510152025304050
Características GeraisCaracterísticas Gerais

allenz NAI 97
INVERSORES-2002-2006
Inversor uLINE CFW-07
Tensão de Alimentação
Motor (CV)
I Nom. do CFW (A)
I Nom. do CFW (A)
Motor (CV)
380 Vca
Trifásico
1,0
1,6
2,6
4,0
0,25
0,5
1,0
2,0
2,6
4,1
6,5
9,3
13
16
1,0
2,0
3,0
5,0
7,5
10
Características GeraisCaracterísticas Gerais

allenz NAI 98
INVERSORES-2002-2006
Inversor CFW-09 Tensão de
AlimentaçãoMotor (CV)
I Nom. do CFW (A)
I Nom. do CFW (A)
Motor (CV)
380 Vca
Trifásico
3,04,05,09,0131624303845
1,52,03,05,07,51015202530
607086
105142180240361450600
40506075
100125150270300400
Características GeraisCaracterísticas Gerais

allenz NAI 99
INVERSORES-2002-2006
Inversor uLINE CFW-07 Tensão de
AlimentaçãoMotor (CV)
I Nom. do CFW (A)
I Nom. do CFW (A)
Motor (CV)
440 Vca
Trifásico
1,0
1,6
2,6
4,0
0,33
0,75
1,5
2,0
2,6
4,1
6,5
9,3
13
16
1,5
2,0
4,0
6,0
7,5
12,5
Características GeraisCaracterísticas Gerais

allenz NAI 100
INVERSORES-2002-2006
Inversor CFW-09 Tensão de
AlimentaçãoMotor (CV)
I Nom. do CFW (A)
I Nom. do CFW (A)
Motor (CV)
440 Vca
Trifásico
3,04,05,09,0131624303845
1,52,03,06,010
12,515202530
607086
105142180240361450600
40506075
100150200300350500
Características GeraisCaracterísticas Gerais

allenz NAI 101
INVERSORES-2002-2006
Curto-Circuito na saída (Fase-fase e fase-terra)
Sobrecarga no motor ( I x t )
Subtensão e sobretensão
Falta de fase na alimentação
Sobretemperatura na Potência
Erro de programação
Erro da comunicação Serial
ProteçõesProteções

allenz NAI 102
INVERSORES-2002-2006
MDW-01
Controle Escalar
"Motordrive""Motordrive"

allenz NAI 103
INVERSORES-2002-2006
O que é ?
O motordrive consiste de um motor de indução e um inversor de freqüência formando uma unidadeintegrada, compacta e robusta
Características GeraisCaracterísticas Gerais

allenz NAI 104
INVERSORES-2002-2006
Produto Inovador
Motor + Inversor
(unidade integrada do mesmo fabricante)
Rotação Nominal 1800 rpm (IV pólos) e
3600 rpm (II pólos)
Classe de isolação “F”
Carcaça de alumínio
Características GeraisCaracterísticas Gerais

allenz NAI 105
INVERSORES-2002-2006
Formas construtivas do motor:
B3T (com pés - padrão), B35T (com pés e flange FF-
especial) e B34T (com pés e flange C - especial)
Controle microprocessado
Modulação PWM senoidal
Interface homem-máquina remota (opcional -
composta por display e cabo de 2, 5 ou 10 m)
Mesmas características elétricas e proteções do
CFW-07
Características GeraisCaracterísticas Gerais

allenz NAI 106
INVERSORES-2002-2006
2,0/3AC.380-480
3,0/3AC.380-480
5,0/3AC.380-480
2 / 380-480
3 / 380-480
5 / 380-480
Modelo MDW-01
Motor(CV / Vca)
Tensão de Alimentação
220 Vca
Monofásico
Carcaça
2,0/1AC.220-230 2 / 220 90 S/L
220 Vca
Trifásico
2,0/3AC.220-230
3,0/3AC.220-230
5,0/3AC.220-230
2 / 220
3 / 220
5 / 220
90S
90L
100L
380 Vca
Trifásico
90S
90L
100L
EspecificaçãoEspecificação

allenz NAI 107
INVERSORES-2002-2006
Elevada compactação
Robustez elevada (Inversor IP55)
Custo reduzido da instalação elétrica
Eliminação de problemas entre motor e Inversor
Padronização de programação com uLINE, CFW-07,
CFW-09
Frenagem reostática incorporada (standard)
VantagensVantagens