Embed Size (px)
DESCRIPTION
Apresentação da tese de doutorado "Modelagem e Compensação da Dinâmica de Robôs Móveis e sua Aplicação em Controle de Formação". Autor: Felipe Nascimento Martins
Citation preview

Modelagem e Compensacao da Dinamica de RobosMoveis e sua Aplicacao em Controle de Formacao
Felipe Nascimento Martins
6 de Marco de 2009
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 1 / 113
Tese de Doutorado em Engenharia Eletrica - Automacao
Universidade Federal do Espırito Santo - UFESPrograma de Pos-Graduacao em Engenharia Eletrica - PPGEE
Laboratorio de Automacao Inteligente - LAI
Felipe Nascimento Martins
Orientadores:Dr. Mario Sarcinelli Filho - UFESDr. Teodiano Freire Bastos Filho - UFESDr. Ricardo Carelli - Universidad Nacional de San Juan, Argentina
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 2 / 113
Sumario
1 Introducao
2 Modelo do Robo MovelModelo CinematicoModelo Dinamico
3 Compensacao Adaptativa da DinamicaControlador CinematicoPrimeiro Controlador DinamicoSegundo Controlador DinamicoConsideracoes sobre a RobustezComparacao de DesempenhoExperimentos
4 Controle de Sistemas Multirrobos com Comp. DinamicaControle Descentralizado de FormacaoControle Centralizado de Formacao
5 Conclusoes
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 3 / 113
Introducao
Sumario
1 Introducao
2 Modelo do Robo MovelModelo CinematicoModelo Dinamico
3 Compensacao Adaptativa da DinamicaControlador CinematicoPrimeiro Controlador DinamicoSegundo Controlador DinamicoConsideracoes sobre a RobustezComparacao de DesempenhoExperimentos
4 Controle de Sistemas Multirrobos com Comp. DinamicaControle Descentralizado de FormacaoControle Centralizado de Formacao
5 Conclusoes
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 4 / 113
Introducao
Introducao
Robos: substituem o homem em tarefas repetitivas, perigosas ou degrande precisao;
Robos manipuladores: movimentacao de material, pintura, soldagem,etc.;
Robos moveis: transporte de material, assistencia domestica,assistencia a pessoas com deficiencia, busca e localizacao,entretenimento, etc.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 5 / 113

Introducao
Introducao
Robos: substituem o homem em tarefas repetitivas, perigosas ou degrande precisao;
Robos manipuladores: movimentacao de material, pintura, soldagem,etc.;
Robos moveis: transporte de material, assistencia domestica,assistencia a pessoas com deficiencia, busca e localizacao,entretenimento, etc.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 5 / 113
Introducao
Introducao
Robos: substituem o homem em tarefas repetitivas, perigosas ou degrande precisao;
Robos manipuladores: movimentacao de material, pintura, soldagem,etc.;
Robos moveis: transporte de material, assistencia domestica,assistencia a pessoas com deficiencia, busca e localizacao,entretenimento, etc.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 5 / 113
Introducao
Robo Movel
Definicao (Canudas de Wit, et. al., 1996)
Veıculo capaz de movimentacao autonoma, equipado com atuadorescontrolados por um computador embarcado.
Meios de Deslocamento
No solo: atraves de rodas, esteiras, patas, etc.;No ar: como aviao, helicoptero ou balao;Na agua: como um barco, navio ou submarino.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 6 / 113
Introducao
Robo Movel
Definicao (Canudas de Wit, et. al., 1996)
Veıculo capaz de movimentacao autonoma, equipado com atuadorescontrolados por um computador embarcado.
Meios de Deslocamento
No solo: atraves de rodas, esteiras, patas, etc.;No ar: como aviao, helicoptero ou balao;Na agua: como um barco, navio ou submarino.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 6 / 113

Introducao
Robo Movel
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 7 / 113

Introducao
Robo Movel
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 8 / 113

Introducao
Sistema Multirrobos
Atualmente existem diversas pesquisas envolvendo o controle coordenadode varios robos moveis: Sistemas Multirrobos.
Execucao de tarefas de maneira mais eficiente, com custo mais baixoe com maior tolerancia a falhas;
Exemplos: busca de uma aeronave perdida, localizacao de pessoas emescombros, vigilancia de uma grande area, localizacao de minasterrestres, transporte de cargas, mapeamento de grandes areas,sensoreamento de areas (redes de sensores moveis), etc.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 9 / 113

Introducao
Sistema Multirrobos
Atualmente existem diversas pesquisas envolvendo o controle coordenadode varios robos moveis: Sistemas Multirrobos.
Execucao de tarefas de maneira mais eficiente, com custo mais baixoe com maior tolerancia a falhas;
Exemplos: busca de uma aeronave perdida, localizacao de pessoas emescombros, vigilancia de uma grande area, localizacao de minasterrestres, transporte de cargas, mapeamento de grandes areas,sensoreamento de areas (redes de sensores moveis), etc.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 9 / 113

Introducao
Sistema Multirrobos
Atualmente existem diversas pesquisas envolvendo o controle coordenadode varios robos moveis: Sistemas Multirrobos.
Execucao de tarefas de maneira mais eficiente, com custo mais baixoe com maior tolerancia a falhas;
Exemplos: busca de uma aeronave perdida, localizacao de pessoas emescombros, vigilancia de uma grande area, localizacao de minasterrestres, transporte de cargas, mapeamento de grandes areas,sensoreamento de areas (redes de sensores moveis), etc.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 9 / 113

Introducao
Sistema Multirrobos
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 10 / 113

Introducao
Definicao do Problema
Desenvolvimento de controladores que realizem a compensacao dadinamica de robos moveis tipo uniciclo de forma adaptativa, gerandovelocidades como sinais de comando;
Controle coordenado de um grupo de robos moveis tipo uniciclo paraseguirem uma formacao desejada, com compensacao adaptativa dadinamica de cada um.
Dinamica (Fierro et.al, 2002)
Incertezas na dinamica do veıculo causam degradacao no sistema em malha
fechada. O erro que e tolerado para um unico veıculo pode nao ser aceitavel
quando os agentes de um sistema multirrobos necessitam navegar mantendo uma
formacao.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 11 / 113

Introducao
Definicao do Problema
Desenvolvimento de controladores que realizem a compensacao dadinamica de robos moveis tipo uniciclo de forma adaptativa, gerandovelocidades como sinais de comando;
Controle coordenado de um grupo de robos moveis tipo uniciclo paraseguirem uma formacao desejada, com compensacao adaptativa dadinamica de cada um.
Dinamica (Fierro et.al, 2002)
Incertezas na dinamica do veıculo causam degradacao no sistema em malha
fechada. O erro que e tolerado para um unico veıculo pode nao ser aceitavel
quando os agentes de um sistema multirrobos necessitam navegar mantendo uma
formacao.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 11 / 113

Introducao
Definicao do Problema
Desenvolvimento de controladores que realizem a compensacao dadinamica de robos moveis tipo uniciclo de forma adaptativa, gerandovelocidades como sinais de comando;
Controle coordenado de um grupo de robos moveis tipo uniciclo paraseguirem uma formacao desejada, com compensacao adaptativa dadinamica de cada um.
Dinamica (Fierro et.al, 2002)
Incertezas na dinamica do veıculo causam degradacao no sistema em malha
fechada. O erro que e tolerado para um unico veıculo pode nao ser aceitavel
quando os agentes de um sistema multirrobos necessitam navegar mantendo uma
formacao.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 11 / 113

Introducao
Definicao do Problema
Desenvolvimento de controladores que realizem a compensacao dadinamica de robos moveis tipo uniciclo de forma adaptativa, gerandovelocidades como sinais de comando;
Controle coordenado de um grupo de robos moveis tipo uniciclo paraseguirem uma formacao desejada, com compensacao adaptativa dadinamica de cada um.
Dinamica (Fierro et.al, 2002)
Incertezas na dinamica do veıculo causam degradacao no sistema em malha
fechada. O erro que e tolerado para um unico veıculo pode nao ser aceitavel
quando os agentes de um sistema multirrobos necessitam navegar mantendo uma
formacao.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 11 / 113

Modelo do Robo Movel
Sumario
1 Introducao
2 Modelo do Robo MovelModelo CinematicoModelo Dinamico
3 Compensacao Adaptativa da DinamicaControlador CinematicoPrimeiro Controlador DinamicoSegundo Controlador DinamicoConsideracoes sobre a RobustezComparacao de DesempenhoExperimentos
4 Controle de Sistemas Multirrobos com Comp. DinamicaControle Descentralizado de FormacaoControle Centralizado de Formacao
5 Conclusoes
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 12 / 113
Modelo do Robo Movel Modelo Cinematico
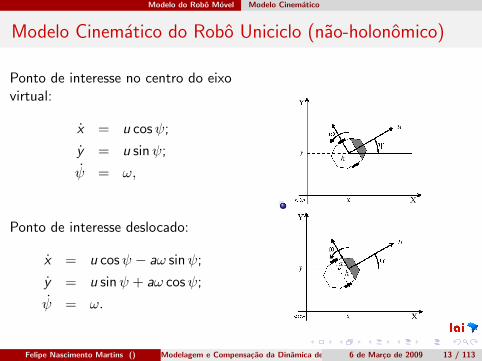
Modelo Cinematico do Robo Uniciclo (nao-holonomico)
Ponto de interesse no centro do eixovirtual:
x = u cosψ;
y = u sinψ;
ψ = ω,
Ponto de interesse deslocado:
x = u cosψ − aω sinψ;
y = u sinψ + aω cosψ;
ψ = ω.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 13 / 113
Modelo do Robo Movel Modelo Dinamico
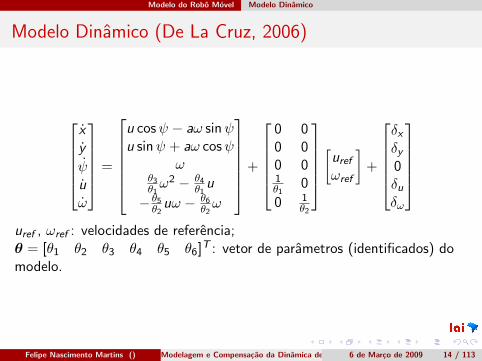
Modelo Dinamico (De La Cruz, 2006)
xy
ψuω
=
u cosψ − aω sinψu sinψ + aω cosψ
ωθ3θ1ω2 − θ4
θ1u
− θ5θ2
uω − θ6θ2ω
+
0 00 00 01θ1
0
0 1θ2
[uref
ωref
]+
δxδy0δuδω
uref , ωref : velocidades de referencia;θ = [θ1 θ2 θ3 θ4 θ5 θ6]
T : vetor de parametros (identificados) domodelo.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 14 / 113

Modelo do Robo Movel Modelo Dinamico
Modelo Dinamico (De La Cruz, 2006)
θ1 =
[Ra
ka
(mr2 + 2Ie
)+ 2rkDT
]1
(2rkPT )> 0 [s]
θ2 =
[Ra
ka
(Ied
2 + 2r2(Iz + mb2
))+ 2rdkDR
]1
(2rdkPR)> 0 [s]
θ3 =Ra
ka
mbr
2kPT> 0 [sm/rad2]
θ4 =Ra
ka
(kakb
Ra+ Be
)1
rkPT+ 1 > 0
θ5 =Ra
ka
mbr
dkPR> 0 [s/m]
θ6 =Ra
ka
(kakb
Ra+ Be
)d
2rkPR+ 1 > 0
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 15 / 113

Modelo do Robo Movel Modelo Dinamico
Proposta de Representacao do Modelo Dinamico
xy
ψuω
=
u cosψ − aω sinψu sinψ + aω cosψ
ωθ3θ1ω2 − θ4
θ1u
− θ5θ2
uω − θ6θ2ω
+
0 00 00 01θ1
0
0 1θ2
[uref
ωref
]+
δxδy0δuδω
⇓[
uω
]=
θ3θ1ω2 − θ4
θ1u
− θ5θ2
uω − θ6θ2ω
+
[ 1θ1
0
0 1θ2
] [uref
ωref
]+
[δuδω
]
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 16 / 113

Modelo do Robo Movel Modelo Dinamico
Proposta de Representacao do Modelo Dinamico
[θ1 00 θ2
] [uω
]+
[θ4 −θ3ωθ5ω θ6
] [uω
]=
[uref
ωref
]
⇓
∆ + Hv + C(v)v + F(v)v = vr,
onde
v =
[uω
], vr =
[uref
ωref
], H =
[θ1 00 θ2
],
C(v) =
[0 −θ3ωθ3ω 0
], F(v) =
[θ4 00 θ6 + (θ5 − Iθ3)u
],
I = 1 rad2/m2.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 17 / 113

Modelo do Robo Movel Modelo Dinamico
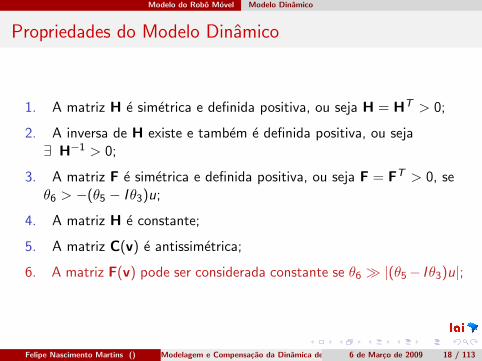
Propriedades do Modelo Dinamico
1. A matriz H e simetrica e definida positiva, ou seja H = HT > 0;
2. A inversa de H existe e tambem e definida positiva, ou seja∃ H−1 > 0;
3. A matriz F e simetrica e definida positiva, ou seja F = FT > 0, seθ6 > −(θ5 − Iθ3)u;
4. A matriz H e constante;
5. A matriz C(v) e antissimetrica;
6. A matriz F(v) pode ser considerada constante se θ6 � |(θ5− Iθ3)u|;
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 18 / 113

Modelo do Robo Movel Modelo Dinamico
Propriedades do Modelo Dinamico
1. A matriz H e simetrica e definida positiva, ou seja H = HT > 0;
2. A inversa de H existe e tambem e definida positiva, ou seja∃ H−1 > 0;
3. A matriz F e simetrica e definida positiva, ou seja F = FT > 0, seθ6 > −(θ5 − Iθ3)u;
4. A matriz H e constante;
5. A matriz C(v) e antissimetrica;
6. A matriz F(v) pode ser considerada constante se θ6 � |(θ5− Iθ3)u|;
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 18 / 113

Modelo do Robo Movel Modelo Dinamico
Propriedades do Modelo Dinamico
1. A matriz H e simetrica e definida positiva, ou seja H = HT > 0;
2. A inversa de H existe e tambem e definida positiva, ou seja∃ H−1 > 0;
3. A matriz F e simetrica e definida positiva, ou seja F = FT > 0, seθ6 > −(θ5 − Iθ3)u;
4. A matriz H e constante;
5. A matriz C(v) e antissimetrica;
6. A matriz F(v) pode ser considerada constante se θ6 � |(θ5− Iθ3)u|;
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 18 / 113

Modelo do Robo Movel Modelo Dinamico
Propriedades do Modelo Dinamico
1. A matriz H e simetrica e definida positiva, ou seja H = HT > 0;
2. A inversa de H existe e tambem e definida positiva, ou seja∃ H−1 > 0;
3. A matriz F e simetrica e definida positiva, ou seja F = FT > 0, seθ6 > −(θ5 − Iθ3)u;
4. A matriz H e constante;
5. A matriz C(v) e antissimetrica;
6. A matriz F(v) pode ser considerada constante se θ6 � |(θ5− Iθ3)u|;
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 18 / 113

Modelo do Robo Movel Modelo Dinamico
Propriedades do Modelo Dinamico
1. A matriz H e simetrica e definida positiva, ou seja H = HT > 0;
2. A inversa de H existe e tambem e definida positiva, ou seja∃ H−1 > 0;
3. A matriz F e simetrica e definida positiva, ou seja F = FT > 0, seθ6 > −(θ5 − Iθ3)u;
4. A matriz H e constante;
5. A matriz C(v) e antissimetrica;
6. A matriz F(v) pode ser considerada constante se θ6 � |(θ5− Iθ3)u|;
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 18 / 113
Modelo do Robo Movel Modelo Dinamico
Propriedades do Modelo Dinamico
1. A matriz H e simetrica e definida positiva, ou seja H = HT > 0;
2. A inversa de H existe e tambem e definida positiva, ou seja∃ H−1 > 0;
3. A matriz F e simetrica e definida positiva, ou seja F = FT > 0, seθ6 > −(θ5 − Iθ3)u;
4. A matriz H e constante;
5. A matriz C(v) e antissimetrica;
6. A matriz F(v) pode ser considerada constante se θ6 � |(θ5− Iθ3)u|;
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 18 / 113
Modelo do Robo Movel Modelo Dinamico
Propriedades do Modelo Dinamico
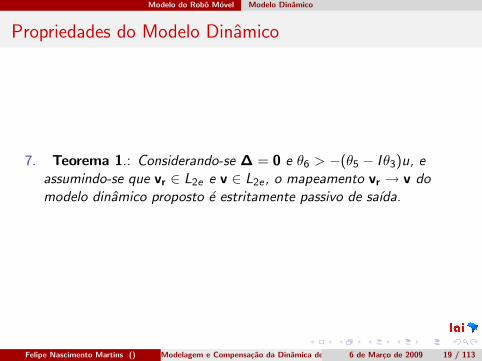
7. Teorema 1.: Considerando-se ∆ = 0 e θ6 > −(θ5 − Iθ3)u, eassumindo-se que vr ∈ L2e e v ∈ L2e , o mapeamento vr → v domodelo dinamico proposto e estritamente passivo de saıda.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 19 / 113

Modelo do Robo Movel Modelo Dinamico
Identificacao de Parametros
Realizada em quatro diferentes robos uniciclo: tres Pioneer (daempresa Mobile Robots) e uma cadeira de rodas robotica;
Enviados sinais de referencia compostos por uma soma de 6componentes senoidais de frequencias diferentes, enquanto asvelocidades desenvolvidas eram armazenadas;
Calculo dos parametros foi realizado off-line por mınimos quadrados;
Analise dos resultados mostrou que os parametros sao linearmenteindependentes;
Condicoes θ6 > −(θ5 − Iθ3)u e θ6 � |(θ5 − Iθ3)u| foram verificadas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 20 / 113
Modelo do Robo Movel Modelo Dinamico
Identificacao de Parametros
Realizada em quatro diferentes robos uniciclo: tres Pioneer (daempresa Mobile Robots) e uma cadeira de rodas robotica;
Enviados sinais de referencia compostos por uma soma de 6componentes senoidais de frequencias diferentes, enquanto asvelocidades desenvolvidas eram armazenadas;
Calculo dos parametros foi realizado off-line por mınimos quadrados;
Analise dos resultados mostrou que os parametros sao linearmenteindependentes;
Condicoes θ6 > −(θ5 − Iθ3)u e θ6 � |(θ5 − Iθ3)u| foram verificadas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 20 / 113

Modelo do Robo Movel Modelo Dinamico
Identificacao de Parametros
Realizada em quatro diferentes robos uniciclo: tres Pioneer (daempresa Mobile Robots) e uma cadeira de rodas robotica;
Enviados sinais de referencia compostos por uma soma de 6componentes senoidais de frequencias diferentes, enquanto asvelocidades desenvolvidas eram armazenadas;
Calculo dos parametros foi realizado off-line por mınimos quadrados;
Analise dos resultados mostrou que os parametros sao linearmenteindependentes;
Condicoes θ6 > −(θ5 − Iθ3)u e θ6 � |(θ5 − Iθ3)u| foram verificadas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 20 / 113

Modelo do Robo Movel Modelo Dinamico
Identificacao de Parametros
Realizada em quatro diferentes robos uniciclo: tres Pioneer (daempresa Mobile Robots) e uma cadeira de rodas robotica;
Enviados sinais de referencia compostos por uma soma de 6componentes senoidais de frequencias diferentes, enquanto asvelocidades desenvolvidas eram armazenadas;
Calculo dos parametros foi realizado off-line por mınimos quadrados;
Analise dos resultados mostrou que os parametros sao linearmenteindependentes;
Condicoes θ6 > −(θ5 − Iθ3)u e θ6 � |(θ5 − Iθ3)u| foram verificadas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 20 / 113
Modelo do Robo Movel Modelo Dinamico
Identificacao de Parametros
Realizada em quatro diferentes robos uniciclo: tres Pioneer (daempresa Mobile Robots) e uma cadeira de rodas robotica;
Enviados sinais de referencia compostos por uma soma de 6componentes senoidais de frequencias diferentes, enquanto asvelocidades desenvolvidas eram armazenadas;
Calculo dos parametros foi realizado off-line por mınimos quadrados;
Analise dos resultados mostrou que os parametros sao linearmenteindependentes;
Condicoes θ6 > −(θ5 − Iθ3)u e θ6 � |(θ5 − Iθ3)u| foram verificadas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 20 / 113

Modelo do Robo Movel Modelo Dinamico
Identificacao de Parametros
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 21 / 113

Modelo do Robo Movel Modelo Dinamico
Comentarios sobre o Modelo
∆ + Hv + C(v)v + F(v)v = vr
Entradas sao referencias de velocidade linear e angular: comuns emrobos moveis comerciais;
Modelo inclui a dinamica dos atuadores e servos;
Propriedades sao uteis no desenvolvimento de controladores e analisede estabilidade dos sistemas em malha fechada;
Possui estrutura similar a representacao classica do modelo dinamico(com entradas em torque), o que permite aproveitar tecnicas deprojeto e adaptar controladores projetados com base naquele modelo;
(H− 2C) e antissimetrica, ja que H = 0.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 22 / 113
Modelo do Robo Movel Modelo Dinamico
Comentarios sobre o Modelo
∆ + Hv + C(v)v + F(v)v = vr
Entradas sao referencias de velocidade linear e angular: comuns emrobos moveis comerciais;
Modelo inclui a dinamica dos atuadores e servos;
Propriedades sao uteis no desenvolvimento de controladores e analisede estabilidade dos sistemas em malha fechada;
Possui estrutura similar a representacao classica do modelo dinamico(com entradas em torque), o que permite aproveitar tecnicas deprojeto e adaptar controladores projetados com base naquele modelo;
(H− 2C) e antissimetrica, ja que H = 0.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 22 / 113
Modelo do Robo Movel Modelo Dinamico
Comentarios sobre o Modelo
∆ + Hv + C(v)v + F(v)v = vr
Entradas sao referencias de velocidade linear e angular: comuns emrobos moveis comerciais;
Modelo inclui a dinamica dos atuadores e servos;
Propriedades sao uteis no desenvolvimento de controladores e analisede estabilidade dos sistemas em malha fechada;
Possui estrutura similar a representacao classica do modelo dinamico(com entradas em torque), o que permite aproveitar tecnicas deprojeto e adaptar controladores projetados com base naquele modelo;
(H− 2C) e antissimetrica, ja que H = 0.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 22 / 113

Modelo do Robo Movel Modelo Dinamico
Comentarios sobre o Modelo
∆ + Hv + C(v)v + F(v)v = vr
Entradas sao referencias de velocidade linear e angular: comuns emrobos moveis comerciais;
Modelo inclui a dinamica dos atuadores e servos;
Propriedades sao uteis no desenvolvimento de controladores e analisede estabilidade dos sistemas em malha fechada;
Possui estrutura similar a representacao classica do modelo dinamico(com entradas em torque), o que permite aproveitar tecnicas deprojeto e adaptar controladores projetados com base naquele modelo;
(H− 2C) e antissimetrica, ja que H = 0.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 22 / 113

Modelo do Robo Movel Modelo Dinamico
Comentarios sobre o Modelo
∆ + Hv + C(v)v + F(v)v = vr
Entradas sao referencias de velocidade linear e angular: comuns emrobos moveis comerciais;
Modelo inclui a dinamica dos atuadores e servos;
Propriedades sao uteis no desenvolvimento de controladores e analisede estabilidade dos sistemas em malha fechada;
Possui estrutura similar a representacao classica do modelo dinamico(com entradas em torque), o que permite aproveitar tecnicas deprojeto e adaptar controladores projetados com base naquele modelo;
(H− 2C) e antissimetrica, ja que H = 0.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 22 / 113

Modelo do Robo Movel Modelo Dinamico
Comentarios sobre o Modelo
∆ + Hv + C(v)v + F(v)v = vr
Entradas sao referencias de velocidade linear e angular: comuns emrobos moveis comerciais;
Modelo inclui a dinamica dos atuadores e servos;
Propriedades sao uteis no desenvolvimento de controladores e analisede estabilidade dos sistemas em malha fechada;
Possui estrutura similar a representacao classica do modelo dinamico(com entradas em torque), o que permite aproveitar tecnicas deprojeto e adaptar controladores projetados com base naquele modelo;
(H− 2C) e antissimetrica, ja que H = 0.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 22 / 113

Compensacao Adaptativa da Dinamica
Sumario
1 Introducao
2 Modelo do Robo MovelModelo CinematicoModelo Dinamico
3 Compensacao Adaptativa da DinamicaControlador CinematicoPrimeiro Controlador DinamicoSegundo Controlador DinamicoConsideracoes sobre a RobustezComparacao de DesempenhoExperimentos
4 Controle de Sistemas Multirrobos com Comp. DinamicaControle Descentralizado de FormacaoControle Centralizado de Formacao
5 Conclusoes
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 23 / 113

Compensacao Adaptativa da Dinamica Controlador Cinematico
Controlador Cinematico
Foi projetado um controlador de seguimento de trajetorias, estavel nosentido de Lyapunov;
Tal controlador tambem pode ser usado num problema deposicionamento;
A orientacao final do robo nao e controlada, podendo ser obtida pormeio de chaveamento de controladores;
Para uma trajetoria desejada suave, com xd e yd limitados, ocontrolador projetado limita as acoes de controle de forma a garantirque os sinais enviados estejam dentro dos limites aceitaveis.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 24 / 113

Compensacao Adaptativa da Dinamica Controlador Cinematico
Controlador Cinematico
Foi projetado um controlador de seguimento de trajetorias, estavel nosentido de Lyapunov;
Tal controlador tambem pode ser usado num problema deposicionamento;
A orientacao final do robo nao e controlada, podendo ser obtida pormeio de chaveamento de controladores;
Para uma trajetoria desejada suave, com xd e yd limitados, ocontrolador projetado limita as acoes de controle de forma a garantirque os sinais enviados estejam dentro dos limites aceitaveis.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 24 / 113
Compensacao Adaptativa da Dinamica Controlador Cinematico
Controlador Cinematico
Foi projetado um controlador de seguimento de trajetorias, estavel nosentido de Lyapunov;
Tal controlador tambem pode ser usado num problema deposicionamento;
A orientacao final do robo nao e controlada, podendo ser obtida pormeio de chaveamento de controladores;
Para uma trajetoria desejada suave, com xd e yd limitados, ocontrolador projetado limita as acoes de controle de forma a garantirque os sinais enviados estejam dentro dos limites aceitaveis.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 24 / 113

Compensacao Adaptativa da Dinamica Controlador Cinematico
Controlador Cinematico
Foi projetado um controlador de seguimento de trajetorias, estavel nosentido de Lyapunov;
Tal controlador tambem pode ser usado num problema deposicionamento;
A orientacao final do robo nao e controlada, podendo ser obtida pormeio de chaveamento de controladores;
Para uma trajetoria desejada suave, com xd e yd limitados, ocontrolador projetado limita as acoes de controle de forma a garantirque os sinais enviados estejam dentro dos limites aceitaveis.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 24 / 113
Compensacao Adaptativa da Dinamica Controlador Cinematico
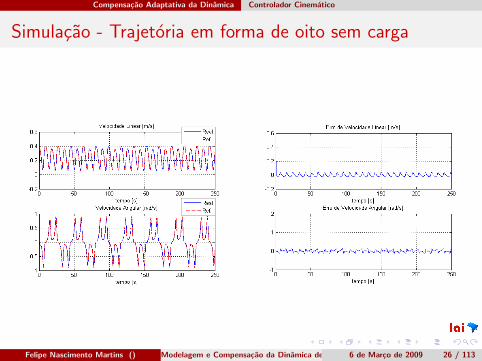
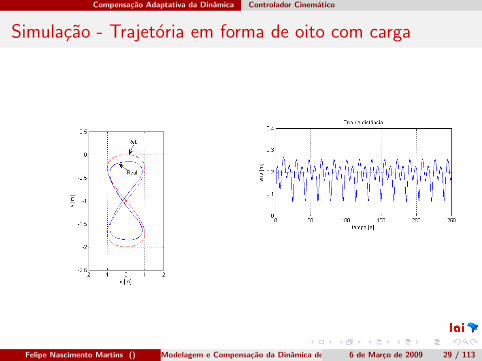
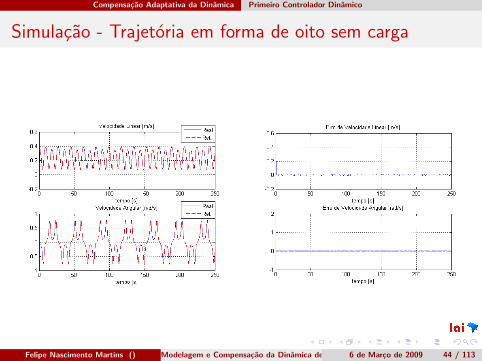
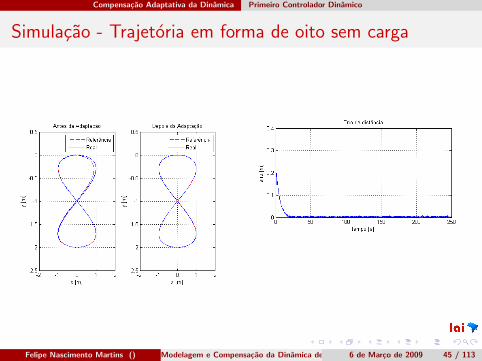
Simulacoes
Ganhos ajustados para percorrer uma trajetoria circular;
Apresentados resultados para trajetorias em forma de oito: excitacaoda dinamica;
Verificado que a orientacao do robo nao precisa ser controlada deforma explıcita para seguimento de trajetoria (plataformanao-holonomica);
Variacao de carga simulada atraves da variacao dos parametros domodelo do robo.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 25 / 113
Compensacao Adaptativa da Dinamica Controlador Cinematico
Simulacoes
Ganhos ajustados para percorrer uma trajetoria circular;
Apresentados resultados para trajetorias em forma de oito: excitacaoda dinamica;
Verificado que a orientacao do robo nao precisa ser controlada deforma explıcita para seguimento de trajetoria (plataformanao-holonomica);
Variacao de carga simulada atraves da variacao dos parametros domodelo do robo.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 25 / 113

Compensacao Adaptativa da Dinamica Controlador Cinematico
Simulacoes
Ganhos ajustados para percorrer uma trajetoria circular;
Apresentados resultados para trajetorias em forma de oito: excitacaoda dinamica;
Verificado que a orientacao do robo nao precisa ser controlada deforma explıcita para seguimento de trajetoria (plataformanao-holonomica);
Variacao de carga simulada atraves da variacao dos parametros domodelo do robo.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 25 / 113
Compensacao Adaptativa da Dinamica Controlador Cinematico
Simulacoes
Ganhos ajustados para percorrer uma trajetoria circular;
Apresentados resultados para trajetorias em forma de oito: excitacaoda dinamica;
Verificado que a orientacao do robo nao precisa ser controlada deforma explıcita para seguimento de trajetoria (plataformanao-holonomica);
Variacao de carga simulada atraves da variacao dos parametros domodelo do robo.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 25 / 113
Compensacao Adaptativa da Dinamica Controlador Cinematico
Simulacao - Trajetoria em forma de oito sem carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 26 / 113

Compensacao Adaptativa da Dinamica Controlador Cinematico
Simulacao - Trajetoria em forma de oito sem carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 27 / 113

Compensacao Adaptativa da Dinamica Controlador Cinematico
Simulacao - Trajetoria em forma de oito com carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 28 / 113
Compensacao Adaptativa da Dinamica Controlador Cinematico
Simulacao - Trajetoria em forma de oito com carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 29 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Primeiro Controlador Dinamico
Projetado com base no modelo proposto por De La Cruz (2006);
Recebe referencias de velocidade vd e compensa a dinamica, gerandocomandos de velocidade vr ao robo;
Flexibilidade: pode ser usado para compensar a dinamica do veıculoem conjunto com outros controladores cinematicos, como deseguimento de caminhos ou posicionamento com orientacao final.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 30 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Primeiro Controlador Dinamico
Projetado com base no modelo proposto por De La Cruz (2006);
Recebe referencias de velocidade vd e compensa a dinamica, gerandocomandos de velocidade vr ao robo;
Flexibilidade: pode ser usado para compensar a dinamica do veıculoem conjunto com outros controladores cinematicos, como deseguimento de caminhos ou posicionamento com orientacao final.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 30 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Primeiro Controlador Dinamico
Projetado com base no modelo proposto por De La Cruz (2006);
Recebe referencias de velocidade vd e compensa a dinamica, gerandocomandos de velocidade vr ao robo;
Flexibilidade: pode ser usado para compensar a dinamica do veıculoem conjunto com outros controladores cinematicos, como deseguimento de caminhos ou posicionamento com orientacao final.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 30 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Diagrama Geral do Sistema
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 31 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Modelo Dinamico (De La Cruz, 2006)
xy
ψuω
=
u cosψ − aω sinψu sinψ + aω cosψ
ωθ3θ1ω2 − θ4
θ1u
− θ5θ2
uω − θ6θ2ω
+
0 00 00 01θ1
0
0 1θ2
[uref
ωref
]+
δxδy0δuδω
[uω
]=
θ3θ1ω2 − θ4
θ1u + uref
θ1
− θ5θ2
uω − θ6θ2ω + ωref
θ2
Parametrizacao Linear:[
uref
ωref
]=
[u 0 −ω2 u 0 00 ω 0 0 uω ω
] [θ1 θ2 θ3 θ4 θ5 θ6
]T
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 32 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Projeto do Controlador
»uref
ωref
–=
»θ1 00 θ2
– »uω
–+
»0 0 −ω2 u 0 00 0 0 0 uω ω
– ˆθ1 θ2 θ3 θ4 θ5 θ6
˜T,
Portanto, a dinamica pode ser representada por
vr = Hv + η.
Baseado na dinamica inversa, a lei de controle proposta e»uref
ωref
–=
»θ1 00 θ2
– »σ1
σ2
–+
»0 0 −ω2 u 0 00 0 0 0 uω ω
– ˆθ1 θ2 θ3 θ4 θ5 θ6
˜T,
ouvr = Hσ + η.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 33 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Projeto do Controlador
vr = Hσ + η,
ondeσ1 = uc
ref + kuu, ku > 0,
σ2 = ωcref + kωω, kω > 0,
u = ucref − u, ω = ωc
ref − ω.
A lei de controle tambem pode ser escrita como
vr = G(σ1, σ2, u, ω)θ,
ondeθ = [θ1 θ2 θ3 θ4 θ5 θ6]
T ,
G =
[σ1 0 −ω2 u 0 00 σ2 0 0 uω ω
].
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 34 / 113
Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
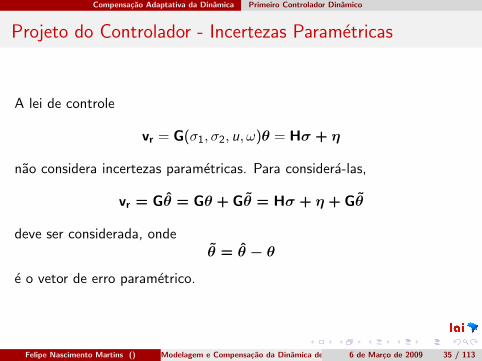
Projeto do Controlador - Incertezas Parametricas
A lei de controle
vr = G(σ1, σ2, u, ω)θ = Hσ + η
nao considera incertezas parametricas. Para considera-las,
vr = Gθ = Gθ + Gθ = Hσ + η + Gθ
deve ser considerada, ondeθ = θ − θ
e o vetor de erro parametrico.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 35 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Analise de Estabilidade
Considerando-se a funcao candidata de Lyapunov
V =1
2vTHv +
1
2θTγθ,
e a lei de adaptacao de parametros
˙θ = γ−1GTv,
conclui-se queV = −vTHKv 6 0.
onde γ > 0 ∈ R6×6 e uma matriz diagonal e ˙θ = ˙θ. Portanto, v ∈ L∞ eθ ∈ L∞. Ou seja, o equilıbrio e estavel.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 36 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Analise de Estabilidade
Tambem e possıvel concluir que v e quadrado integravel, i.e., v ∈ L2.Considerando-se vr limitado, tem-se G ∈ L∞.Ja que v ∈ L∞ e θ ∈ L∞, da equacao de erro do sistema
˙v = −H−1Gθ − Kv
pode-se concluir que ˙v ∈ L∞.Como v ∈ L2 e ˙v ∈ L∞, o Lema de Barbalat garante que v → 0 comt →∞. Ou seja, o equilıbrio e assintoticamente estavel.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 37 / 113
Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
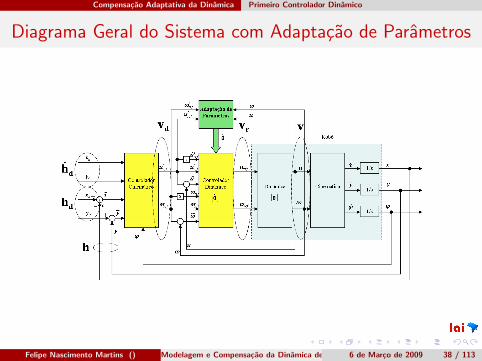
Diagrama Geral do Sistema com Adaptacao de Parametros
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 38 / 113
Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Adaptacao de Parametros com Modificacao-σ
Para tornar o sistema mais robusto na presenca de ruıdos, disturbios ouerros de medicao, um termo de modificacao-σ foi inserido na lei de ajustedos parametros
˙θ = γ−1GTv − γ−1Γθ,
onde Γ > 0 ∈ R6×6 e uma matriz de ganhos diagonal. Substituindo em Vresulta
V = −vTHKv − θTΓθ − θTΓθ.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 39 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Adaptacao de Parametros com Modificacao-σ
Usando a mesma candidata de Lyapunov e possıvel concluir que v e θsao finalmente limitados;
A modificacao-σ torna a lei de adaptacao mais robusta, mas aumentao limite de erro;
A fronteira do limite de erro depende do valor singular mınimo damatriz de ganhos Γ. Como seus valores sao arbitrarios, tal fronteirapode ser feita pequena: no limite, se Γ = 0, entao v → 0 quandot →∞.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 40 / 113
Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Adaptacao de Parametros com Modificacao-σ
Usando a mesma candidata de Lyapunov e possıvel concluir que v e θsao finalmente limitados;
A modificacao-σ torna a lei de adaptacao mais robusta, mas aumentao limite de erro;
A fronteira do limite de erro depende do valor singular mınimo damatriz de ganhos Γ. Como seus valores sao arbitrarios, tal fronteirapode ser feita pequena: no limite, se Γ = 0, entao v → 0 quandot →∞.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 40 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Adaptacao de Parametros com Modificacao-σ
Usando a mesma candidata de Lyapunov e possıvel concluir que v e θsao finalmente limitados;
A modificacao-σ torna a lei de adaptacao mais robusta, mas aumentao limite de erro;
A fronteira do limite de erro depende do valor singular mınimo damatriz de ganhos Γ. Como seus valores sao arbitrarios, tal fronteirapode ser feita pequena: no limite, se Γ = 0, entao v → 0 quandot →∞.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 40 / 113
Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Analise do Erro de Seguimento
Pode-se mostrar que o erro de seguimento h diminui sempre que
‖h‖ > ‖Av‖min(kx , ky )
ou |min(kx , ky )| > ‖Av‖.
Quando se utiliza a lei de adaptacao ˙θ = γ−1GTv, foi provado quev → 0. Nesse caso, tal condicao e assintoticamente verificada, o quesignifica que h → 0 com t →∞.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 41 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Analise do Erro de Seguimento
Usando a lei de adaptacao mais robusta ˙θ = γ−1GTv − γ−1Γθ, foiprovado que v e finalmente limitado, o que significa que existe um limite Rnuma norma do sinal. Logo, h tambem e finalmente limitado por
R‖A‖min(kx , ky )
.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 42 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Notas
O controlador proposto nao garante que θ → 0 com t →∞. Issonao e um problema, ja que θ → 0 nao e requisito para que v sejafinalmente limitado ou tenda a zero;
A plataforma nao-holonomica restringe a direcao de velocidade linearque pode ser desenvolvida pelo robo. O fato de que v tende a umvalor limitado indica que o robo deve estar orientado de formatangente a trajetoria;
As leis de adaptacao consideram que o erro de seguimento develocidade e gerado por erro no valor estimado dos parametrosdinamicos.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 43 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Notas
O controlador proposto nao garante que θ → 0 com t →∞. Issonao e um problema, ja que θ → 0 nao e requisito para que v sejafinalmente limitado ou tenda a zero;
A plataforma nao-holonomica restringe a direcao de velocidade linearque pode ser desenvolvida pelo robo. O fato de que v tende a umvalor limitado indica que o robo deve estar orientado de formatangente a trajetoria;
As leis de adaptacao consideram que o erro de seguimento develocidade e gerado por erro no valor estimado dos parametrosdinamicos.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 43 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Notas
O controlador proposto nao garante que θ → 0 com t →∞. Issonao e um problema, ja que θ → 0 nao e requisito para que v sejafinalmente limitado ou tenda a zero;
A plataforma nao-holonomica restringe a direcao de velocidade linearque pode ser desenvolvida pelo robo. O fato de que v tende a umvalor limitado indica que o robo deve estar orientado de formatangente a trajetoria;
As leis de adaptacao consideram que o erro de seguimento develocidade e gerado por erro no valor estimado dos parametrosdinamicos.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 43 / 113
Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Simulacao - Trajetoria em forma de oito sem carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 44 / 113
Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Simulacao - Trajetoria em forma de oito sem carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 45 / 113
Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
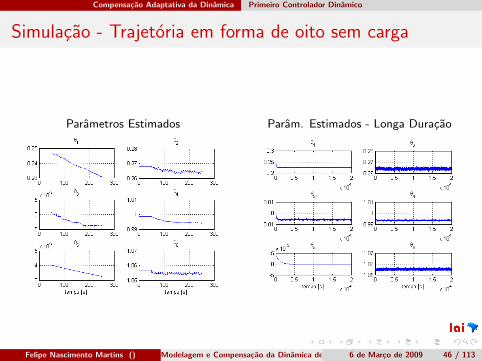
Simulacao - Trajetoria em forma de oito sem carga
Parametros Estimados Param. Estimados - Longa Duracao
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 46 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Simulacao - Trajetoria em forma de oito com carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 47 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Simulacao - Trajetoria em forma de oito com carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 48 / 113

Compensacao Adaptativa da Dinamica Primeiro Controlador Dinamico
Simulacao - Trajetoria em forma de oito com carga
Parametros Estimados Param. Estimados - Longa Duracao
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 49 / 113

Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Segundo Controlador Dinamico
Projetado com base no modelo Hv + C(v)v + F(v)v = vr,considerando suas propriedades;
Recebe referencias de velocidade vd e compensa a dinamica, gerandocomandos de velocidade vr ao robo;
Flexibilidade: pode ser usado para compensar a dinamica do veıculoem conjunto com outros controladores cinematicos, como deseguimento de caminhos ou posicionamento com orientacao final.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 50 / 113
Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Segundo Controlador Dinamico
Projetado com base no modelo Hv + C(v)v + F(v)v = vr,considerando suas propriedades;
Recebe referencias de velocidade vd e compensa a dinamica, gerandocomandos de velocidade vr ao robo;
Flexibilidade: pode ser usado para compensar a dinamica do veıculoem conjunto com outros controladores cinematicos, como deseguimento de caminhos ou posicionamento com orientacao final.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 50 / 113

Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Segundo Controlador Dinamico
Projetado com base no modelo Hv + C(v)v + F(v)v = vr,considerando suas propriedades;
Recebe referencias de velocidade vd e compensa a dinamica, gerandocomandos de velocidade vr ao robo;
Flexibilidade: pode ser usado para compensar a dinamica do veıculoem conjunto com outros controladores cinematicos, como deseguimento de caminhos ou posicionamento com orientacao final.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 50 / 113
Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Projeto do Controlador
Lei de controle proposta:
vr = H(vd + T(v)) + Cvd + Fvd,
onde v = vd − v,
T(v) =
[lu 00 lω
][tanh(ku
luu)
tanh(kωlωω)
],
sendo ku > 0 e kω > 0 ganhos constantes e lu ∈ R e lω ∈ R constantes desaturacao.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 51 / 113
Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Analise de Estabilidade
Considerando-se a funcao candidata de Lyapunov V = 12 v
THv, eaplicando-se as propriedades 1 (que afirma que H e uma matriz simetrica edefinida positiva), 3 (que afirma que a matriz F e simetrica e definidapositiva) e 5 (de antissimetria da matriz C), pode-se concluir que V < 0,ou seja, v ∈ L∞ e v → 0 com t →∞.Tambem e possivel verificar que v ∈ L2, ou seja, v e um sinal quadradointegravel.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 52 / 113

Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Incerteza Parametrica
Considerando a incerteza parametrica, a lei de controle e
vr = H(vd + T(v)) + Cvd + Fvd,
onde H, C, e F sao estimativas de H, C, e F, respectivamente. Paraprojetar a lei de adaptacao, a equacao da lei de controle e reescrita em seuformato de parametrizacao linear:
vr = Gθ =
[σ1 0 −ωdω ud 0 00 σ2 udω − uωd 0 uωd ωd
]θ,
onde σ1 = ud + lu tanh(kulu
u), e σ2 = ωd + lω tanh(kωlωω).
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 53 / 113
Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Incerteza Parametrica
Como θ = θ − θ, vr = Gθ + Gθ, ou
vr = Hσ + Cvd + Fvd + Gθ,
onde σ = vd + T(v). Ja que v = vd − v, tem-se σ = ˙v + T(v) + v.Logo, em malha fechada,
−Gθ = H(˙v + T(v)) + Cv + Fv.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 54 / 113
Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Analise de Estabilidade
Considerando-se a funcao candidata de Lyapunov
V =1
2vTHv +
1
2θTγ−1θ > 0,
assumindo que θ = 0, escolhendo a lei de ajuste de parametros como˙θ = γGTv e usando as propriedades do modelo, pode-se concluir quev ∈ L∞, e θ ∈ L∞.Como ˙v ∈ L∞ e v ∈ L2, o Lema de Barbalat garante que v → 0 comt →∞, o que prova que o objetivo de controle e cumprido.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 55 / 113

Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Adaptacao de Parametros - Modificacao-σ
Considerando-se a lei de adaptacao mais robusta
˙θ = γGTv − γΓθ,
e fazendo um desenvolvimento similar ao que foi realizado para o primeirocontrolador dinamico, pode-se concluir que v e θ sao finalmente limitados.Tambem conclui-se que h e finalmente limitado.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 56 / 113

Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Notas
Este controlador apresenta o termo T(v) de saturacao dos sinais deerro de velocidade, que nao existe no primeiro controlador;
Utiliza sinais desejados de velocidade vd na compensacao dadinamica, o que e uma vantagem em relacao ao primeiro no caso emque os sinais medidos apresentam ruıdo;
Nao ha garantia de que θ → 0 com t →∞.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 57 / 113

Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Notas
Este controlador apresenta o termo T(v) de saturacao dos sinais deerro de velocidade, que nao existe no primeiro controlador;
Utiliza sinais desejados de velocidade vd na compensacao dadinamica, o que e uma vantagem em relacao ao primeiro no caso emque os sinais medidos apresentam ruıdo;
Nao ha garantia de que θ → 0 com t →∞.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 57 / 113

Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Notas
Este controlador apresenta o termo T(v) de saturacao dos sinais deerro de velocidade, que nao existe no primeiro controlador;
Utiliza sinais desejados de velocidade vd na compensacao dadinamica, o que e uma vantagem em relacao ao primeiro no caso emque os sinais medidos apresentam ruıdo;
Nao ha garantia de que θ → 0 com t →∞.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 57 / 113

Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
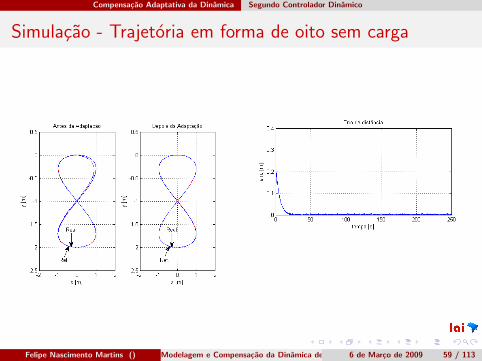
Simulacao - Trajetoria em forma de oito sem carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 58 / 113
Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Simulacao - Trajetoria em forma de oito sem carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 59 / 113

Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Simulacao - Trajetoria em forma de oito sem carga
Parametros Estimados Param. Estimados - Longa Duracao
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 60 / 113

Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Simulacao - Trajetoria em forma de oito com carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 61 / 113

Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
Simulacao - Trajetoria em forma de oito com carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 62 / 113
Compensacao Adaptativa da Dinamica Segundo Controlador Dinamico
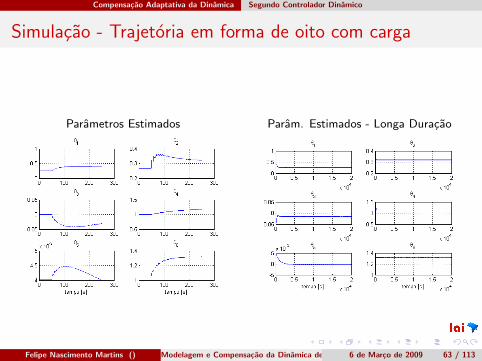
Simulacao - Trajetoria em forma de oito com carga
Parametros Estimados Param. Estimados - Longa Duracao
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 63 / 113

Compensacao Adaptativa da Dinamica Consideracoes sobre a Robustez
Consideracoes sobre a Robustez
Considerando disturbios nao modelados ∆, analise realizada mostrou queos erros convergem, em um tempo finito, a uma regiao limitada detamanho
‖v‖ < ‖∆‖λmin(HKv) + λmin(F)
.
Ou seja, quanto maior for o disturbio ∆, maior e a regiao deconvergencia de v;
Tambem foi mostrado que os erros de controle sao limitados quandose considera, tambem, que existe variacao limitada de parametrosdurante a realizacao de uma tarefa, ou seja, θ 6= 0.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 64 / 113

Compensacao Adaptativa da Dinamica Consideracoes sobre a Robustez
Consideracoes sobre a Robustez
Considerando disturbios nao modelados ∆, analise realizada mostrou queos erros convergem, em um tempo finito, a uma regiao limitada detamanho
‖v‖ < ‖∆‖λmin(HKv) + λmin(F)
.
Ou seja, quanto maior for o disturbio ∆, maior e a regiao deconvergencia de v;
Tambem foi mostrado que os erros de controle sao limitados quandose considera, tambem, que existe variacao limitada de parametrosdurante a realizacao de uma tarefa, ou seja, θ 6= 0.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 64 / 113

Compensacao Adaptativa da Dinamica Consideracoes sobre a Robustez
Consideracoes sobre a Robustez
Considerando disturbios nao modelados ∆, analise realizada mostrou queos erros convergem, em um tempo finito, a uma regiao limitada detamanho
‖v‖ < ‖∆‖λmin(HKv) + λmin(F)
.
Ou seja, quanto maior for o disturbio ∆, maior e a regiao deconvergencia de v;
Tambem foi mostrado que os erros de controle sao limitados quandose considera, tambem, que existe variacao limitada de parametrosdurante a realizacao de uma tarefa, ou seja, θ 6= 0.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 64 / 113

Compensacao Adaptativa da Dinamica Consideracoes sobre a Robustez
Variacao dos Parametros em Degrau
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 65 / 113

Compensacao Adaptativa da Dinamica Comparacao de Desempenho
Comparacao de Desempenho
(a): Somente controladorcinematico;
(b): Compensacao dinamica comerro parametrico de 10%, semadaptacao;
(c): Compensacao dinamica comerro parametrico de 10%, comadaptacao;
(d): Compensacao dinamica exata,sem adaptacao.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 66 / 113

Compensacao Adaptativa da Dinamica Experimentos
Experimentos - Trajetoria em forma de oito
Robo uniciclo comercial da empresa MobileRobots: Pioneer 3-DX;
Computador a bordo;
Sensores: encoders, ultrassonicos, laser, camera(perspectiva ou omnidirecional);
Velocidades: umax = 1, 2m/s,ωmax = 1, 745rad/s;
Capacidade de carga: ate 23kg .
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 67 / 113
Compensacao Adaptativa da Dinamica Experimentos
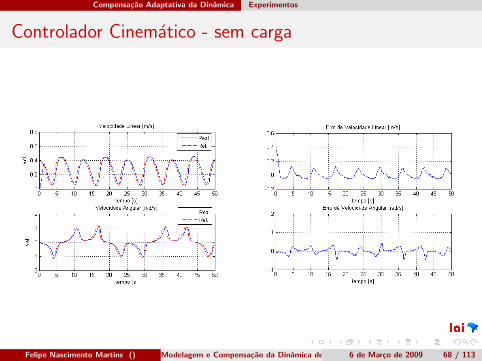
Controlador Cinematico - sem carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 68 / 113
Compensacao Adaptativa da Dinamica Experimentos
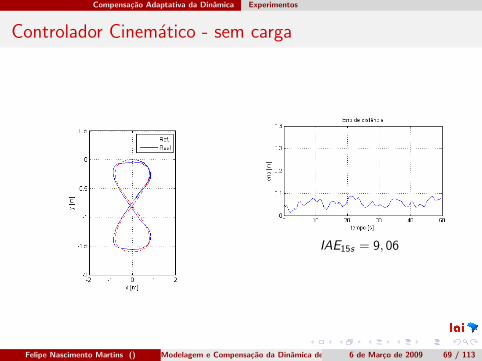
Controlador Cinematico - sem carga
IAE15s = 9, 06
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 69 / 113

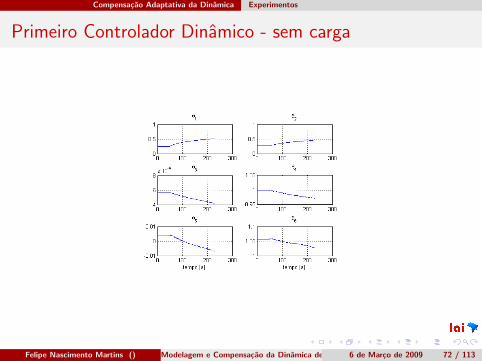
Compensacao Adaptativa da Dinamica Experimentos
Primeiro Controlador Dinamico - sem carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 70 / 113

Compensacao Adaptativa da Dinamica Experimentos
Primeiro Controlador Dinamico - sem carga
Antes adapt.: IAE15s = 10, 67
Depois adapt.: IAE15s = 6, 06
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 71 / 113
Compensacao Adaptativa da Dinamica Experimentos
Primeiro Controlador Dinamico - sem carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 72 / 113
Compensacao Adaptativa da Dinamica Experimentos
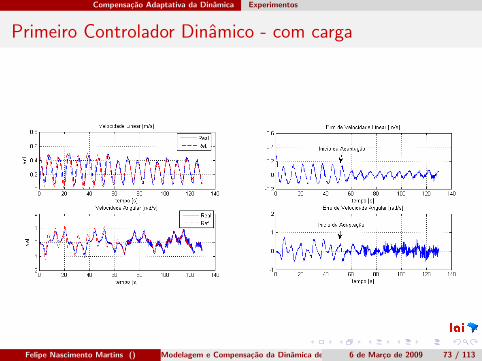
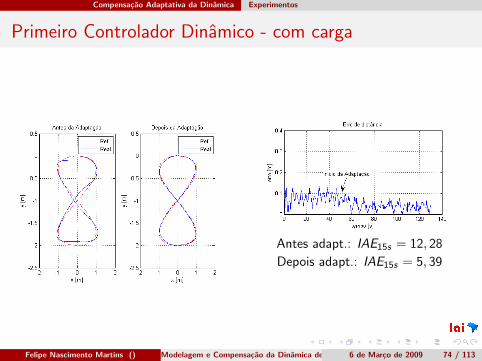
Primeiro Controlador Dinamico - com carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 73 / 113
Compensacao Adaptativa da Dinamica Experimentos
Primeiro Controlador Dinamico - com carga
Antes adapt.: IAE15s = 12, 28
Depois adapt.: IAE15s = 5, 39
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 74 / 113

Compensacao Adaptativa da Dinamica Experimentos
Primeiro Controlador Dinamico - com carga
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 75 / 113

Compensacao Adaptativa da Dinamica Experimentos
Segundo Controlador Dinamico - parametros corretos
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 76 / 113

Compensacao Adaptativa da Dinamica Experimentos
Segundo Controlador Dinamico - parametros corretos
IAE50s = 8, 93
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 77 / 113

Compensacao Adaptativa da Dinamica Experimentos
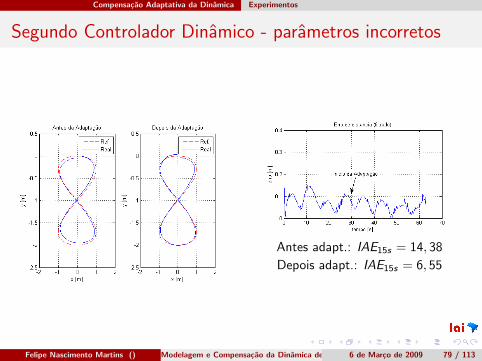
Segundo Controlador Dinamico - parametros incorretos
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 78 / 113
Compensacao Adaptativa da Dinamica Experimentos
Segundo Controlador Dinamico - parametros incorretos
Antes adapt.: IAE15s = 14, 38
Depois adapt.: IAE15s = 6, 55
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 79 / 113

Compensacao Adaptativa da Dinamica Experimentos
Segundo Controlador Dinamico - parametros incorretos
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 80 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica
Sumario
1 Introducao
2 Modelo do Robo MovelModelo CinematicoModelo Dinamico
3 Compensacao Adaptativa da DinamicaControlador CinematicoPrimeiro Controlador DinamicoSegundo Controlador DinamicoConsideracoes sobre a RobustezComparacao de DesempenhoExperimentos
4 Controle de Sistemas Multirrobos com Comp. DinamicaControle Descentralizado de FormacaoControle Centralizado de Formacao
5 Conclusoes
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 81 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica
Sistemas Multirrobos
Conforme observado por Fierro (2002), incertezas na dinamica doveıculo causam degradacao no sistema em malha fechada que podenao ser aceitavel quando os agentes de um sistema multirrobosnecessitam navegar mantendo uma formacao;
Devido a sua flexibilidade, os controladores projetados podem serutilizados em conjunto com controladores cinematicos de formacao deforma a realizarem a compensacao da dinamica de cada robo membrodo grupo;
A influencia da compensacao dinamica na reducao dos erros deformacao foi testada em diferentes esquemas de controle de formacao.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 82 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica
Sistemas Multirrobos
Conforme observado por Fierro (2002), incertezas na dinamica doveıculo causam degradacao no sistema em malha fechada que podenao ser aceitavel quando os agentes de um sistema multirrobosnecessitam navegar mantendo uma formacao;
Devido a sua flexibilidade, os controladores projetados podem serutilizados em conjunto com controladores cinematicos de formacao deforma a realizarem a compensacao da dinamica de cada robo membrodo grupo;
A influencia da compensacao dinamica na reducao dos erros deformacao foi testada em diferentes esquemas de controle de formacao.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 82 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica
Sistemas Multirrobos
Conforme observado por Fierro (2002), incertezas na dinamica doveıculo causam degradacao no sistema em malha fechada que podenao ser aceitavel quando os agentes de um sistema multirrobosnecessitam navegar mantendo uma formacao;
Devido a sua flexibilidade, os controladores projetados podem serutilizados em conjunto com controladores cinematicos de formacao deforma a realizarem a compensacao da dinamica de cada robo membrodo grupo;
A influencia da compensacao dinamica na reducao dos erros deformacao foi testada em diferentes esquemas de controle de formacao.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 82 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica
Sistemas Multirrobos - Controle de Formacao
Objetivo e fazer com que os robos alcancem e mantenham uma formacaodesejada. Exemplos de aplicacao:
Deslocamento do grupo em formacao (patrulha, monitoramento,escolta, remocao de neve em pistas de aeroporto);
Movimentacao de cargas que nao podem ser movimentadas porapenas um robo (empurrando ou carregando);
Seguimento de lıder mantendo a formacao - o lıder pode ser um roboou outro agente, como uma pessoa.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 83 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica
Sistemas Multirrobos - Controle de Formacao
Objetivo e fazer com que os robos alcancem e mantenham uma formacaodesejada. Exemplos de aplicacao:
Deslocamento do grupo em formacao (patrulha, monitoramento,escolta, remocao de neve em pistas de aeroporto);
Movimentacao de cargas que nao podem ser movimentadas porapenas um robo (empurrando ou carregando);
Seguimento de lıder mantendo a formacao - o lıder pode ser um roboou outro agente, como uma pessoa.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 83 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica
Sistemas Multirrobos - Controle de Formacao
Objetivo e fazer com que os robos alcancem e mantenham uma formacaodesejada. Exemplos de aplicacao:
Deslocamento do grupo em formacao (patrulha, monitoramento,escolta, remocao de neve em pistas de aeroporto);
Movimentacao de cargas que nao podem ser movimentadas porapenas um robo (empurrando ou carregando);
Seguimento de lıder mantendo a formacao - o lıder pode ser um roboou outro agente, como uma pessoa.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 83 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica
Sistemas Multirrobos - Controle de Formacao
Objetivo e fazer com que os robos alcancem e mantenham uma formacaodesejada. Exemplos de aplicacao:
Deslocamento do grupo em formacao (patrulha, monitoramento,escolta, remocao de neve em pistas de aeroporto);
Movimentacao de cargas que nao podem ser movimentadas porapenas um robo (empurrando ou carregando);
Seguimento de lıder mantendo a formacao - o lıder pode ser um roboou outro agente, como uma pessoa.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 83 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica
Sistemas Multirrobos - Arquiteturas de Controle
Do ponto de vista de controle, a arquitetura de um sistema multirrobospode ser:
Descentralizada: cada robo possui seu proprio sistema de controle eo mınimo de sensores necessarios. Pode, ou nao, haver comunicacaoentre os robos, e nenhum robo precisa conhecer o modelo dos outros.Ex.: mapeamento de areas, busca de minas, deslocamento mantendoformacao;
Centralizada: existe um unico agente de controle que conhece eenvia sinais a todos os robos. E necessario que haja comunicacaoentre o agente de controle e todos os robos do grupo. Ex.: controlede uma equipe de robos moveis por meio de uma camera, controledas patas de um robo a patas (manipuladores).
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 84 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica
Sistemas Multirrobos - Arquiteturas de Controle
Do ponto de vista de controle, a arquitetura de um sistema multirrobospode ser:
Descentralizada: cada robo possui seu proprio sistema de controle eo mınimo de sensores necessarios. Pode, ou nao, haver comunicacaoentre os robos, e nenhum robo precisa conhecer o modelo dos outros.Ex.: mapeamento de areas, busca de minas, deslocamento mantendoformacao;
Centralizada: existe um unico agente de controle que conhece eenvia sinais a todos os robos. E necessario que haja comunicacaoentre o agente de controle e todos os robos do grupo. Ex.: controlede uma equipe de robos moveis por meio de uma camera, controledas patas de um robo a patas (manipuladores).
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 84 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica
Sistemas Multirrobos - Arquiteturas de Controle
Do ponto de vista de controle, a arquitetura de um sistema multirrobospode ser:
Descentralizada: cada robo possui seu proprio sistema de controle eo mınimo de sensores necessarios. Pode, ou nao, haver comunicacaoentre os robos, e nenhum robo precisa conhecer o modelo dos outros.Ex.: mapeamento de areas, busca de minas, deslocamento mantendoformacao;
Centralizada: existe um unico agente de controle que conhece eenvia sinais a todos os robos. E necessario que haja comunicacaoentre o agente de controle e todos os robos do grupo. Ex.: controlede uma equipe de robos moveis por meio de uma camera, controledas patas de um robo a patas (manipuladores).
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 84 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Controle Descentralizado de Formacao
Neste sistema de controle, nao existe um agente centralizador do controlenem da informacao sensorial. Cada robo:
recebe as referencias das variaveis de formacao;
calcula suas proprias velocidades de referencia;
Recebe a informacao ou percebe a posicao e orientacao dos demaismembros do grupo (formacao) ou do agente a ser seguido(lıder-seguidor).
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 85 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Controle Descentralizado de Formacao
Neste sistema de controle, nao existe um agente centralizador do controlenem da informacao sensorial. Cada robo:
recebe as referencias das variaveis de formacao;
calcula suas proprias velocidades de referencia;
Recebe a informacao ou percebe a posicao e orientacao dos demaismembros do grupo (formacao) ou do agente a ser seguido(lıder-seguidor).
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 85 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Controle Descentralizado de Formacao
Neste sistema de controle, nao existe um agente centralizador do controlenem da informacao sensorial. Cada robo:
recebe as referencias das variaveis de formacao;
calcula suas proprias velocidades de referencia;
Recebe a informacao ou percebe a posicao e orientacao dos demaismembros do grupo (formacao) ou do agente a ser seguido(lıder-seguidor).
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 85 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Controle Descentralizado de Formacao
Neste sistema de controle, nao existe um agente centralizador do controlenem da informacao sensorial. Cada robo:
recebe as referencias das variaveis de formacao;
calcula suas proprias velocidades de referencia;
Recebe a informacao ou percebe a posicao e orientacao dos demaismembros do grupo (formacao) ou do agente a ser seguido(lıder-seguidor).
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 85 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Controle Descentralizado de Formacao
Brandao (2008) propos uma estrategia de controle descentralizadolıder-seguidor:
Nao ha comunicacao explıcita entre o lıder e o seguidor;
O lıder se desloca de forma independente e carrega um objetopadronizado que o identifica;
O seguidor identifica a posicao relativa do lıder atraves de medidas dosensor de varredura laser ;
Compensacao da dinamica foi adicionada ao robo seguidor atraves dosegundo controlador dinamico.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 86 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Controle Descentralizado de Formacao
Brandao (2008) propos uma estrategia de controle descentralizadolıder-seguidor:
Nao ha comunicacao explıcita entre o lıder e o seguidor;
O lıder se desloca de forma independente e carrega um objetopadronizado que o identifica;
O seguidor identifica a posicao relativa do lıder atraves de medidas dosensor de varredura laser ;
Compensacao da dinamica foi adicionada ao robo seguidor atraves dosegundo controlador dinamico.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 86 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Controle Descentralizado de Formacao
Brandao (2008) propos uma estrategia de controle descentralizadolıder-seguidor:
Nao ha comunicacao explıcita entre o lıder e o seguidor;
O lıder se desloca de forma independente e carrega um objetopadronizado que o identifica;
O seguidor identifica a posicao relativa do lıder atraves de medidas dosensor de varredura laser ;
Compensacao da dinamica foi adicionada ao robo seguidor atraves dosegundo controlador dinamico.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 86 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Controle Descentralizado de Formacao
Brandao (2008) propos uma estrategia de controle descentralizadolıder-seguidor:
Nao ha comunicacao explıcita entre o lıder e o seguidor;
O lıder se desloca de forma independente e carrega um objetopadronizado que o identifica;
O seguidor identifica a posicao relativa do lıder atraves de medidas dosensor de varredura laser ;
Compensacao da dinamica foi adicionada ao robo seguidor atraves dosegundo controlador dinamico.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 86 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Controle Descentralizado de Formacao
Brandao (2008) propos uma estrategia de controle descentralizadolıder-seguidor:
Nao ha comunicacao explıcita entre o lıder e o seguidor;
O lıder se desloca de forma independente e carrega um objetopadronizado que o identifica;
O seguidor identifica a posicao relativa do lıder atraves de medidas dosensor de varredura laser ;
Compensacao da dinamica foi adicionada ao robo seguidor atraves dosegundo controlador dinamico.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 86 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Sensor Laser - Identificacao do Lıder
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 87 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Sensor Laser - Identificacao do Lıder
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 87 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
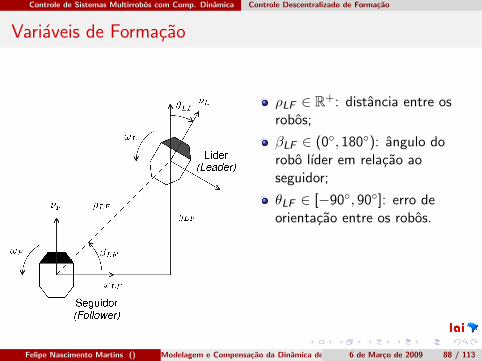
Variaveis de Formacao
ρLF ∈ R+: distancia entre osrobos;
βLF ∈ (0◦, 180◦): angulo dorobo lıder em relacao aoseguidor;
θLF ∈ [−90◦, 90◦]: erro deorientacao entre os robos.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 88 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Compensacao da Dinamica do Seguidor
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 89 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Simulacoes
Controle Descentralizado de Formacao;
Um robo lıder e um robo seguidor;
Compensacao da dinamica do seguidor realizada com o SegundoControlador Dinamico;
Robo lıder executa uma serie de posicionamentos, variandoconstantemente sua velocidade;
ρLFd = 1m, βLFd = 90o .
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 90 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Simulacao - 2 Robos Lıder-Seguidor
Pontos de destino do lıder:(5; 0)m, (10; 3)m, (15; 3)m,(15; 0)m, (10; 0)m, (5; 3)m,
(0; 3)m e (0; 0)m.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 91 / 113
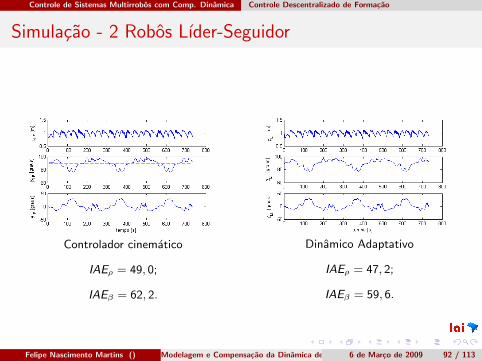
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Simulacao - 2 Robos Lıder-Seguidor
Controlador cinematico
IAEρ = 49, 0;
IAEβ = 62, 2.
Dinamico Adaptativo
IAEρ = 47, 2;
IAEβ = 59, 6.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 92 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Experimentos
Controle Descentralizado de Formacao;
Um robo lıder e um robo seguidor;
Compensacao da dinamica do seguidor realizada com o SegundoControlador Dinamico;
Robo lıder executa controlador de posicionamento com desvio deobstaculos, o que provoca variacao de sua velocidade ao longo docaminho;
ρLFd = 0, 7m, βLFd = 60o .
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 93 / 113
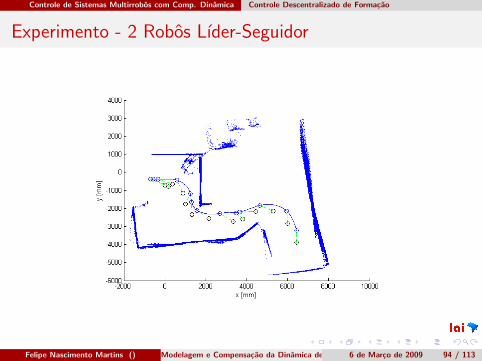
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Experimento - 2 Robos Lıder-Seguidor
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 94 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Descentralizado de Formacao
Experimento - 2 Robos Lıder-Seguidor
Controlador cinematico
IAEρ = 3, 98;
IAEβ = 12, 71.
Dinamico Adaptativo
IAEρ = 4, 39;
IAEβ = 8, 85.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 95 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Controle Centralizado de Formacao
Neste sistema de controle, o agente de controle
recebe toda a informacao sensorial e executa o algoritmo de controlede formacao;
envia a todos os robos sinais de referencia de velocidade linear eangular;
precisa ter informacao de posicao e velocidade de cada robo membroda formacao;
precisa conhecer o modelo cinematico (e o dinamico) de cada um dosagentes do grupo.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 96 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Controle Centralizado de Formacao
Neste sistema de controle, o agente de controle
recebe toda a informacao sensorial e executa o algoritmo de controlede formacao;
envia a todos os robos sinais de referencia de velocidade linear eangular;
precisa ter informacao de posicao e velocidade de cada robo membroda formacao;
precisa conhecer o modelo cinematico (e o dinamico) de cada um dosagentes do grupo.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 96 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Controle Centralizado de Formacao
Neste sistema de controle, o agente de controle
recebe toda a informacao sensorial e executa o algoritmo de controlede formacao;
envia a todos os robos sinais de referencia de velocidade linear eangular;
precisa ter informacao de posicao e velocidade de cada robo membroda formacao;
precisa conhecer o modelo cinematico (e o dinamico) de cada um dosagentes do grupo.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 96 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Controle Centralizado de Formacao
Neste sistema de controle, o agente de controle
recebe toda a informacao sensorial e executa o algoritmo de controlede formacao;
envia a todos os robos sinais de referencia de velocidade linear eangular;
precisa ter informacao de posicao e velocidade de cada robo membroda formacao;
precisa conhecer o modelo cinematico (e o dinamico) de cada um dosagentes do grupo.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 96 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Controle Centralizado de Formacao
Neste sistema de controle, o agente de controle
recebe toda a informacao sensorial e executa o algoritmo de controlede formacao;
envia a todos os robos sinais de referencia de velocidade linear eangular;
precisa ter informacao de posicao e velocidade de cada robo membroda formacao;
precisa conhecer o modelo cinematico (e o dinamico) de cada um dosagentes do grupo.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 96 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Compensacao da Dinamica em Sistemas Multirrobos
Cinematico e DinamicoCentralizados
Cinematico Centralizado eDinamico Descentralizado
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 97 / 113
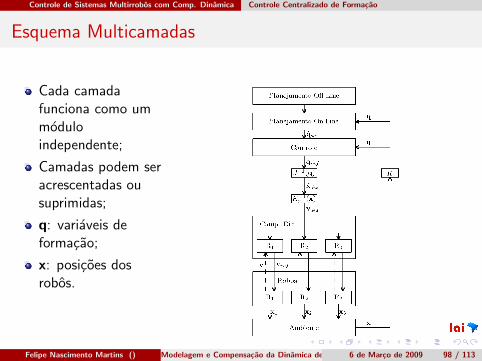
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Esquema Multicamadas
Cada camadafunciona como ummoduloindependente;
Camadas podem seracrescentadas ousuprimidas;
q: variaveis deformacao;
x: posicoes dosrobos.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 98 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Estrutura Virtual: Variaveis de Formacao
Baseado na proposta deMas (2008);
PF = [xF yF ψF ];
SF = [pF qF βF ];
q = [PF SF ]T ;
x =[(h1)
T (h2)T (h3)
T ]T ;
q = J(x)x.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 99 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Lei de Controle de Formacao
A Camada de Planejamento envia a Camada de Controle os vetores querepresentam a formacao desejada qdes = [PFd SFd ]T e sua variacao notempo qdes = [PFd SFd ]T . Definindo-se o erro de formacao comoq = qdes − q, a lei de controle de formacao proposta e
qref = qdes + κq.
Considerando-se que existe uma diferenca δv entre os valores reais edesejados, tal que q = qdes + δv, e usando a funcao candidata deLyapunov V = 1
2 qTq > 0, pode-se mostrar que uma condicao suficiente
para a reducao do erro e dada por
‖q‖ > ‖δv‖λmin(κ)
.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 100 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Notas
Os erros de formacao q sao finalmente limitados e seu limite dependedo erro de seguimento de velocidade δv e dos ganhos κ;
Uma reducao em δv provoca reducao em tal limite, o que motiva arealizacao da compensacao da dinamica dos robos;
O controlador proposto e capaz de fazer com que os robos atinjamuma formacao desejada que pode ser fixa ou variante no tempo, tantoem posicao e orientacao como em forma;
Os ganhos da matriz κ podem ser ajustados de forma a priorizar ocontrole da forma ou da pose da estrutura virtual;
Controlar o centroide facilita o deslocamento de todo o grupomantendo sua forma: escolta, patrulha, redes de sensores, etc.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 101 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Notas
Os erros de formacao q sao finalmente limitados e seu limite dependedo erro de seguimento de velocidade δv e dos ganhos κ;
Uma reducao em δv provoca reducao em tal limite, o que motiva arealizacao da compensacao da dinamica dos robos;
O controlador proposto e capaz de fazer com que os robos atinjamuma formacao desejada que pode ser fixa ou variante no tempo, tantoem posicao e orientacao como em forma;
Os ganhos da matriz κ podem ser ajustados de forma a priorizar ocontrole da forma ou da pose da estrutura virtual;
Controlar o centroide facilita o deslocamento de todo o grupomantendo sua forma: escolta, patrulha, redes de sensores, etc.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 101 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Notas
Os erros de formacao q sao finalmente limitados e seu limite dependedo erro de seguimento de velocidade δv e dos ganhos κ;
Uma reducao em δv provoca reducao em tal limite, o que motiva arealizacao da compensacao da dinamica dos robos;
O controlador proposto e capaz de fazer com que os robos atinjamuma formacao desejada que pode ser fixa ou variante no tempo, tantoem posicao e orientacao como em forma;
Os ganhos da matriz κ podem ser ajustados de forma a priorizar ocontrole da forma ou da pose da estrutura virtual;
Controlar o centroide facilita o deslocamento de todo o grupomantendo sua forma: escolta, patrulha, redes de sensores, etc.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 101 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Notas
Os erros de formacao q sao finalmente limitados e seu limite dependedo erro de seguimento de velocidade δv e dos ganhos κ;
Uma reducao em δv provoca reducao em tal limite, o que motiva arealizacao da compensacao da dinamica dos robos;
O controlador proposto e capaz de fazer com que os robos atinjamuma formacao desejada que pode ser fixa ou variante no tempo, tantoem posicao e orientacao como em forma;
Os ganhos da matriz κ podem ser ajustados de forma a priorizar ocontrole da forma ou da pose da estrutura virtual;
Controlar o centroide facilita o deslocamento de todo o grupomantendo sua forma: escolta, patrulha, redes de sensores, etc.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 101 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Notas
Os erros de formacao q sao finalmente limitados e seu limite dependedo erro de seguimento de velocidade δv e dos ganhos κ;
Uma reducao em δv provoca reducao em tal limite, o que motiva arealizacao da compensacao da dinamica dos robos;
O controlador proposto e capaz de fazer com que os robos atinjamuma formacao desejada que pode ser fixa ou variante no tempo, tantoem posicao e orientacao como em forma;
Os ganhos da matriz κ podem ser ajustados de forma a priorizar ocontrole da forma ou da pose da estrutura virtual;
Controlar o centroide facilita o deslocamento de todo o grupomantendo sua forma: escolta, patrulha, redes de sensores, etc.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 101 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Compensacao da Dinamica dos Robos
A Camada de Compensacao Dinamica recebevdes = [(vd1)
T (vd2)T (vd3)
T ]T e gera vref = [(vr1)T (vr2)
T (vr3)T ]T
usando o segundo controlador dinamico com adaptacao deparametros;
O erro de velocidade de cada robo da formacao vi esta relacionadocom o erro de velocidade da formacao δv atraves de
δv =
δv1
δv2
δv3
= J(x)Kr(x)
v1
v2
v3
.Como a compensacao dinamica reduz vi, esta camada pode provocarreducao nos erros de formacao q.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 102 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Compensacao da Dinamica dos Robos
A Camada de Compensacao Dinamica recebevdes = [(vd1)
T (vd2)T (vd3)
T ]T e gera vref = [(vr1)T (vr2)
T (vr3)T ]T
usando o segundo controlador dinamico com adaptacao deparametros;
O erro de velocidade de cada robo da formacao vi esta relacionadocom o erro de velocidade da formacao δv atraves de
δv =
δv1
δv2
δv3
= J(x)Kr(x)
v1
v2
v3
.
Como a compensacao dinamica reduz vi, esta camada pode provocarreducao nos erros de formacao q.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 102 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Compensacao da Dinamica dos Robos
A Camada de Compensacao Dinamica recebevdes = [(vd1)
T (vd2)T (vd3)
T ]T e gera vref = [(vr1)T (vr2)
T (vr3)T ]T
usando o segundo controlador dinamico com adaptacao deparametros;
O erro de velocidade de cada robo da formacao vi esta relacionadocom o erro de velocidade da formacao δv atraves de
δv =
δv1
δv2
δv3
= J(x)Kr(x)
v1
v2
v3
.Como a compensacao dinamica reduz vi, esta camada pode provocarreducao nos erros de formacao q.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 102 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Simulacoes
Plataforma MRSiM (Brandao, 2008);
Modelo dinamico dos robos Pioneer 3-DX;
Formacao desejada varia de posicao e forma ao longo do tempo:SFd = [0, 75m 0, 75m π/6rad ] entre t = 14s e t = 46s, eSFd = [1m 1m π/3rad ] nos demais instantes;
Ganhos κ foram ajustados sem a compensacao dinamica;
Posicao dos robos mostrada a cada 8s.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 103 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Simulacoes
Plataforma MRSiM (Brandao, 2008);
Modelo dinamico dos robos Pioneer 3-DX;
Formacao desejada varia de posicao e forma ao longo do tempo:SFd = [0, 75m 0, 75m π/6rad ] entre t = 14s e t = 46s, eSFd = [1m 1m π/3rad ] nos demais instantes;
Ganhos κ foram ajustados sem a compensacao dinamica;
Posicao dos robos mostrada a cada 8s.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 103 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Simulacoes
Plataforma MRSiM (Brandao, 2008);
Modelo dinamico dos robos Pioneer 3-DX;
Formacao desejada varia de posicao e forma ao longo do tempo:SFd = [0, 75m 0, 75m π/6rad ] entre t = 14s e t = 46s, eSFd = [1m 1m π/3rad ] nos demais instantes;
Ganhos κ foram ajustados sem a compensacao dinamica;
Posicao dos robos mostrada a cada 8s.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 103 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Simulacoes
Plataforma MRSiM (Brandao, 2008);
Modelo dinamico dos robos Pioneer 3-DX;
Formacao desejada varia de posicao e forma ao longo do tempo:SFd = [0, 75m 0, 75m π/6rad ] entre t = 14s e t = 46s, eSFd = [1m 1m π/3rad ] nos demais instantes;
Ganhos κ foram ajustados sem a compensacao dinamica;
Posicao dos robos mostrada a cada 8s.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 103 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Simulacoes
Plataforma MRSiM (Brandao, 2008);
Modelo dinamico dos robos Pioneer 3-DX;
Formacao desejada varia de posicao e forma ao longo do tempo:SFd = [0, 75m 0, 75m π/6rad ] entre t = 14s e t = 46s, eSFd = [1m 1m π/3rad ] nos demais instantes;
Ganhos κ foram ajustados sem a compensacao dinamica;
Posicao dos robos mostrada a cada 8s.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 103 / 113
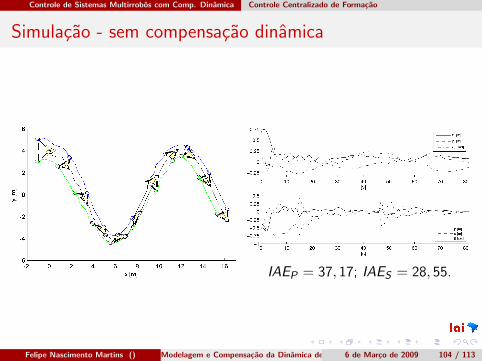
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Simulacao - sem compensacao dinamica
IAEP = 37, 17; IAES = 28, 55.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 104 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Simulacao - com compensacao dinamica adaptativa
IAEP = 16, 79; IAES = 13, 33.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 105 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Experimentos
Dois Pioneer 2-DX e um Pioneer 3-DX;
Duas etapas: primeiro os robos devem se posicionar numa formacaofixa, diferente da original. Depois devem seguir a formacao desejada,que se desloca e gira simultaneamente;
Experimentos repetidos com e sem carga, com e sem compensacaodinamica;
Posicao e velocidade de cada robo e obtida via odometria etransmitida ao agente centralizador (rede sem fio);
Posicao dos robos mostrada a cada 3s.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 106 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Experimentos
Dois Pioneer 2-DX e um Pioneer 3-DX;
Duas etapas: primeiro os robos devem se posicionar numa formacaofixa, diferente da original. Depois devem seguir a formacao desejada,que se desloca e gira simultaneamente;
Experimentos repetidos com e sem carga, com e sem compensacaodinamica;
Posicao e velocidade de cada robo e obtida via odometria etransmitida ao agente centralizador (rede sem fio);
Posicao dos robos mostrada a cada 3s.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 106 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Experimentos
Dois Pioneer 2-DX e um Pioneer 3-DX;
Duas etapas: primeiro os robos devem se posicionar numa formacaofixa, diferente da original. Depois devem seguir a formacao desejada,que se desloca e gira simultaneamente;
Experimentos repetidos com e sem carga, com e sem compensacaodinamica;
Posicao e velocidade de cada robo e obtida via odometria etransmitida ao agente centralizador (rede sem fio);
Posicao dos robos mostrada a cada 3s.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 106 / 113
Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Experimentos
Dois Pioneer 2-DX e um Pioneer 3-DX;
Duas etapas: primeiro os robos devem se posicionar numa formacaofixa, diferente da original. Depois devem seguir a formacao desejada,que se desloca e gira simultaneamente;
Experimentos repetidos com e sem carga, com e sem compensacaodinamica;
Posicao e velocidade de cada robo e obtida via odometria etransmitida ao agente centralizador (rede sem fio);
Posicao dos robos mostrada a cada 3s.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 106 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Experimentos
Dois Pioneer 2-DX e um Pioneer 3-DX;
Duas etapas: primeiro os robos devem se posicionar numa formacaofixa, diferente da original. Depois devem seguir a formacao desejada,que se desloca e gira simultaneamente;
Experimentos repetidos com e sem carga, com e sem compensacaodinamica;
Posicao e velocidade de cada robo e obtida via odometria etransmitida ao agente centralizador (rede sem fio);
Posicao dos robos mostrada a cada 3s.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 106 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Experimento - sem compensacao dinamica, sem carga
t < 30s 30s < t < 52s
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 107 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Experimento - com carga
Sem compensacaoIAEP = 8, 17; IAES = 7, 33
Com compensacaoIAEP = 6, 86; IAES = 5, 02
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 108 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Escalonamento da Formacao
Podem ser utilizados robos com diferentesmodelos cinematicos;
Aumentar o numero de robos exige modificacaona definicao das variaveis de formacao SF ePF , na lei de controle, na matriz Jacobiana,etc.;
Outra opcao e definir uma nova estruturavirtual (triangulo) para cada novo roboacrescentado a formacao: (n − 2) estruturasvirtuais para um grupo de n robos;
Nesse caso, pode-se fusionar ou nao os sinaisde comando gerados aos robos que sao comunsa mais de uma estrutura.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 109 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Escalonamento da Formacao
Podem ser utilizados robos com diferentesmodelos cinematicos;
Aumentar o numero de robos exige modificacaona definicao das variaveis de formacao SF ePF , na lei de controle, na matriz Jacobiana,etc.;
Outra opcao e definir uma nova estruturavirtual (triangulo) para cada novo roboacrescentado a formacao: (n − 2) estruturasvirtuais para um grupo de n robos;
Nesse caso, pode-se fusionar ou nao os sinaisde comando gerados aos robos que sao comunsa mais de uma estrutura.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 109 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Escalonamento da Formacao
Podem ser utilizados robos com diferentesmodelos cinematicos;
Aumentar o numero de robos exige modificacaona definicao das variaveis de formacao SF ePF , na lei de controle, na matriz Jacobiana,etc.;
Outra opcao e definir uma nova estruturavirtual (triangulo) para cada novo roboacrescentado a formacao: (n − 2) estruturasvirtuais para um grupo de n robos;
Nesse caso, pode-se fusionar ou nao os sinaisde comando gerados aos robos que sao comunsa mais de uma estrutura.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 109 / 113

Controle de Sistemas Multirrobos com Comp. Dinamica Controle Centralizado de Formacao
Escalonamento da Formacao
Podem ser utilizados robos com diferentesmodelos cinematicos;
Aumentar o numero de robos exige modificacaona definicao das variaveis de formacao SF ePF , na lei de controle, na matriz Jacobiana,etc.;
Outra opcao e definir uma nova estruturavirtual (triangulo) para cada novo roboacrescentado a formacao: (n − 2) estruturasvirtuais para um grupo de n robos;
Nesse caso, pode-se fusionar ou nao os sinaisde comando gerados aos robos que sao comunsa mais de uma estrutura.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 109 / 113

Conclusoes
Sumario
1 Introducao
2 Modelo do Robo MovelModelo CinematicoModelo Dinamico
3 Compensacao Adaptativa da DinamicaControlador CinematicoPrimeiro Controlador DinamicoSegundo Controlador DinamicoConsideracoes sobre a RobustezComparacao de DesempenhoExperimentos
4 Controle de Sistemas Multirrobos com Comp. DinamicaControle Descentralizado de FormacaoControle Centralizado de Formacao
5 Conclusoes
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 110 / 113
Conclusoes
Conclusoes - Contribuicoes
Nova representacao do modelo dinamico do robo uniciclo;
Estudo e determinacao das propriedades de tal modelo;
Desenvolvimento de controladores dinamicos adaptativos;
Estudo da estabilidade dos sistemas em malha fechada;
Estudo de robustez a disturbios e variacoes parametricas;
Comparacao de desempenho;
Simulacoes e experimentos com os controladores propostos;
Estudo de sistemas multirrobos de controle centralizado edescentralizado de formacao com compensacao dinamica;
Proposta de um controlador de formacao e estudo da influencia dacompensacao dinamica nos erros de formacao;
Realizacao de simulacoes e experimentos de tais sistemas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 111 / 113
Conclusoes
Conclusoes - Contribuicoes
Nova representacao do modelo dinamico do robo uniciclo;
Estudo e determinacao das propriedades de tal modelo;
Desenvolvimento de controladores dinamicos adaptativos;
Estudo da estabilidade dos sistemas em malha fechada;
Estudo de robustez a disturbios e variacoes parametricas;
Comparacao de desempenho;
Simulacoes e experimentos com os controladores propostos;
Estudo de sistemas multirrobos de controle centralizado edescentralizado de formacao com compensacao dinamica;
Proposta de um controlador de formacao e estudo da influencia dacompensacao dinamica nos erros de formacao;
Realizacao de simulacoes e experimentos de tais sistemas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 111 / 113

Conclusoes
Conclusoes - Contribuicoes
Nova representacao do modelo dinamico do robo uniciclo;
Estudo e determinacao das propriedades de tal modelo;
Desenvolvimento de controladores dinamicos adaptativos;
Estudo da estabilidade dos sistemas em malha fechada;
Estudo de robustez a disturbios e variacoes parametricas;
Comparacao de desempenho;
Simulacoes e experimentos com os controladores propostos;
Estudo de sistemas multirrobos de controle centralizado edescentralizado de formacao com compensacao dinamica;
Proposta de um controlador de formacao e estudo da influencia dacompensacao dinamica nos erros de formacao;
Realizacao de simulacoes e experimentos de tais sistemas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 111 / 113

Conclusoes
Conclusoes - Contribuicoes
Nova representacao do modelo dinamico do robo uniciclo;
Estudo e determinacao das propriedades de tal modelo;
Desenvolvimento de controladores dinamicos adaptativos;
Estudo da estabilidade dos sistemas em malha fechada;
Estudo de robustez a disturbios e variacoes parametricas;
Comparacao de desempenho;
Simulacoes e experimentos com os controladores propostos;
Estudo de sistemas multirrobos de controle centralizado edescentralizado de formacao com compensacao dinamica;
Proposta de um controlador de formacao e estudo da influencia dacompensacao dinamica nos erros de formacao;
Realizacao de simulacoes e experimentos de tais sistemas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 111 / 113
Conclusoes
Conclusoes - Contribuicoes
Nova representacao do modelo dinamico do robo uniciclo;
Estudo e determinacao das propriedades de tal modelo;
Desenvolvimento de controladores dinamicos adaptativos;
Estudo da estabilidade dos sistemas em malha fechada;
Estudo de robustez a disturbios e variacoes parametricas;
Comparacao de desempenho;
Simulacoes e experimentos com os controladores propostos;
Estudo de sistemas multirrobos de controle centralizado edescentralizado de formacao com compensacao dinamica;
Proposta de um controlador de formacao e estudo da influencia dacompensacao dinamica nos erros de formacao;
Realizacao de simulacoes e experimentos de tais sistemas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 111 / 113
Conclusoes
Conclusoes - Contribuicoes
Nova representacao do modelo dinamico do robo uniciclo;
Estudo e determinacao das propriedades de tal modelo;
Desenvolvimento de controladores dinamicos adaptativos;
Estudo da estabilidade dos sistemas em malha fechada;
Estudo de robustez a disturbios e variacoes parametricas;
Comparacao de desempenho;
Simulacoes e experimentos com os controladores propostos;
Estudo de sistemas multirrobos de controle centralizado edescentralizado de formacao com compensacao dinamica;
Proposta de um controlador de formacao e estudo da influencia dacompensacao dinamica nos erros de formacao;
Realizacao de simulacoes e experimentos de tais sistemas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 111 / 113
Conclusoes
Conclusoes - Contribuicoes
Nova representacao do modelo dinamico do robo uniciclo;
Estudo e determinacao das propriedades de tal modelo;
Desenvolvimento de controladores dinamicos adaptativos;
Estudo da estabilidade dos sistemas em malha fechada;
Estudo de robustez a disturbios e variacoes parametricas;
Comparacao de desempenho;
Simulacoes e experimentos com os controladores propostos;
Estudo de sistemas multirrobos de controle centralizado edescentralizado de formacao com compensacao dinamica;
Proposta de um controlador de formacao e estudo da influencia dacompensacao dinamica nos erros de formacao;
Realizacao de simulacoes e experimentos de tais sistemas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 111 / 113

Conclusoes
Conclusoes - Contribuicoes
Nova representacao do modelo dinamico do robo uniciclo;
Estudo e determinacao das propriedades de tal modelo;
Desenvolvimento de controladores dinamicos adaptativos;
Estudo da estabilidade dos sistemas em malha fechada;
Estudo de robustez a disturbios e variacoes parametricas;
Comparacao de desempenho;
Simulacoes e experimentos com os controladores propostos;
Estudo de sistemas multirrobos de controle centralizado edescentralizado de formacao com compensacao dinamica;
Proposta de um controlador de formacao e estudo da influencia dacompensacao dinamica nos erros de formacao;
Realizacao de simulacoes e experimentos de tais sistemas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 111 / 113
Conclusoes
Conclusoes - Contribuicoes
Nova representacao do modelo dinamico do robo uniciclo;
Estudo e determinacao das propriedades de tal modelo;
Desenvolvimento de controladores dinamicos adaptativos;
Estudo da estabilidade dos sistemas em malha fechada;
Estudo de robustez a disturbios e variacoes parametricas;
Comparacao de desempenho;
Simulacoes e experimentos com os controladores propostos;
Estudo de sistemas multirrobos de controle centralizado edescentralizado de formacao com compensacao dinamica;
Proposta de um controlador de formacao e estudo da influencia dacompensacao dinamica nos erros de formacao;
Realizacao de simulacoes e experimentos de tais sistemas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 111 / 113

Conclusoes
Conclusoes - Contribuicoes
Nova representacao do modelo dinamico do robo uniciclo;
Estudo e determinacao das propriedades de tal modelo;
Desenvolvimento de controladores dinamicos adaptativos;
Estudo da estabilidade dos sistemas em malha fechada;
Estudo de robustez a disturbios e variacoes parametricas;
Comparacao de desempenho;
Simulacoes e experimentos com os controladores propostos;
Estudo de sistemas multirrobos de controle centralizado edescentralizado de formacao com compensacao dinamica;
Proposta de um controlador de formacao e estudo da influencia dacompensacao dinamica nos erros de formacao;
Realizacao de simulacoes e experimentos de tais sistemas.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 111 / 113

Conclusoes
Conclusoes - Sugestao de Trabalhos Futuros
Estudo de tecnica para ajuste automatico de ganhos do sistema, parareducao de erros ou minimizacao de consumo de energia;
Estudo de filtros para os sinais medidos, para melhorar desempenhoda compensacao dinamica e da adaptacao de parametros;
Estudo de tecnicas que permitam o aumento do numero de estruturasvirtuais de forma automatica;
Estudo de tecnicas aplicadas ao Esquema Multicamadas para evitarcolisao entre os robos da formacao e com obstaculos, por exemplocom modificacao da forma da estrutura virtual;
Experimentos com transporte de uma carga comum a varios robos.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 112 / 113

Conclusoes
Conclusoes - Sugestao de Trabalhos Futuros
Estudo de tecnica para ajuste automatico de ganhos do sistema, parareducao de erros ou minimizacao de consumo de energia;
Estudo de filtros para os sinais medidos, para melhorar desempenhoda compensacao dinamica e da adaptacao de parametros;
Estudo de tecnicas que permitam o aumento do numero de estruturasvirtuais de forma automatica;
Estudo de tecnicas aplicadas ao Esquema Multicamadas para evitarcolisao entre os robos da formacao e com obstaculos, por exemplocom modificacao da forma da estrutura virtual;
Experimentos com transporte de uma carga comum a varios robos.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 112 / 113
Conclusoes
Conclusoes - Sugestao de Trabalhos Futuros
Estudo de tecnica para ajuste automatico de ganhos do sistema, parareducao de erros ou minimizacao de consumo de energia;
Estudo de filtros para os sinais medidos, para melhorar desempenhoda compensacao dinamica e da adaptacao de parametros;
Estudo de tecnicas que permitam o aumento do numero de estruturasvirtuais de forma automatica;
Estudo de tecnicas aplicadas ao Esquema Multicamadas para evitarcolisao entre os robos da formacao e com obstaculos, por exemplocom modificacao da forma da estrutura virtual;
Experimentos com transporte de uma carga comum a varios robos.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 112 / 113

Conclusoes
Conclusoes - Sugestao de Trabalhos Futuros
Estudo de tecnica para ajuste automatico de ganhos do sistema, parareducao de erros ou minimizacao de consumo de energia;
Estudo de filtros para os sinais medidos, para melhorar desempenhoda compensacao dinamica e da adaptacao de parametros;
Estudo de tecnicas que permitam o aumento do numero de estruturasvirtuais de forma automatica;
Estudo de tecnicas aplicadas ao Esquema Multicamadas para evitarcolisao entre os robos da formacao e com obstaculos, por exemplocom modificacao da forma da estrutura virtual;
Experimentos com transporte de uma carga comum a varios robos.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 112 / 113

Conclusoes
Conclusoes - Sugestao de Trabalhos Futuros
Estudo de tecnica para ajuste automatico de ganhos do sistema, parareducao de erros ou minimizacao de consumo de energia;
Estudo de filtros para os sinais medidos, para melhorar desempenhoda compensacao dinamica e da adaptacao de parametros;
Estudo de tecnicas que permitam o aumento do numero de estruturasvirtuais de forma automatica;
Estudo de tecnicas aplicadas ao Esquema Multicamadas para evitarcolisao entre os robos da formacao e com obstaculos, por exemplocom modificacao da forma da estrutura virtual;
Experimentos com transporte de uma carga comum a varios robos.
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 112 / 113

Conclusoes
Fim
Obrigado!
Felipe Nascimento Martins () Modelagem e Compensacao da Dinamica de Robos Moveis e sua Aplicacao em Controle de Formacao6 de Marco de 2009 113 / 113