Embed Size (px)
DESCRIPTION
Introdução a sistemas de primeira ordem e segunda ordem.
Citation preview
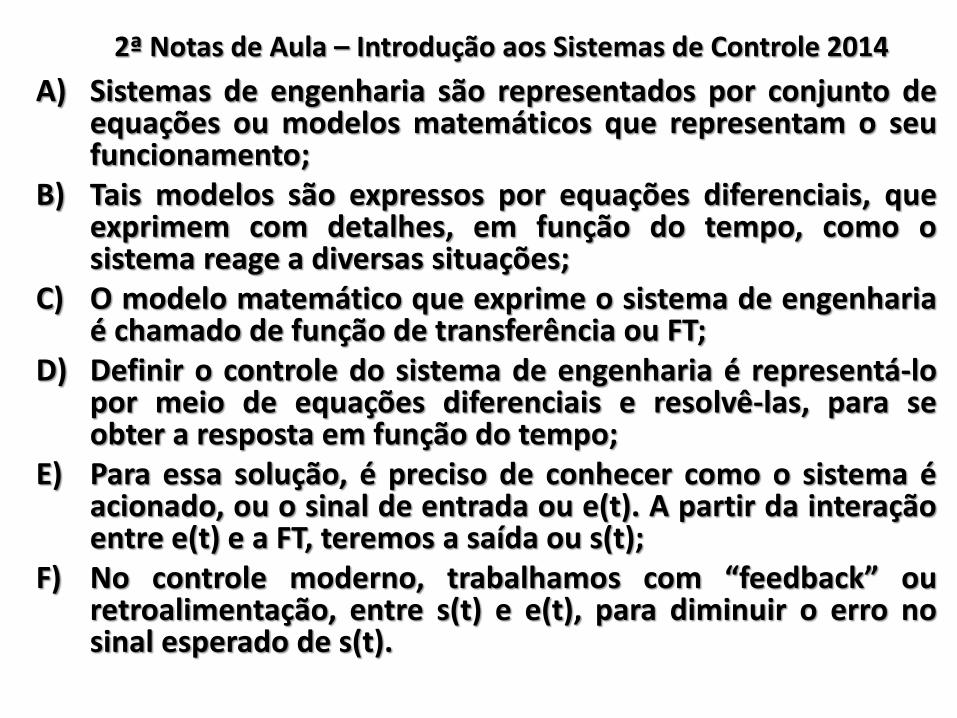
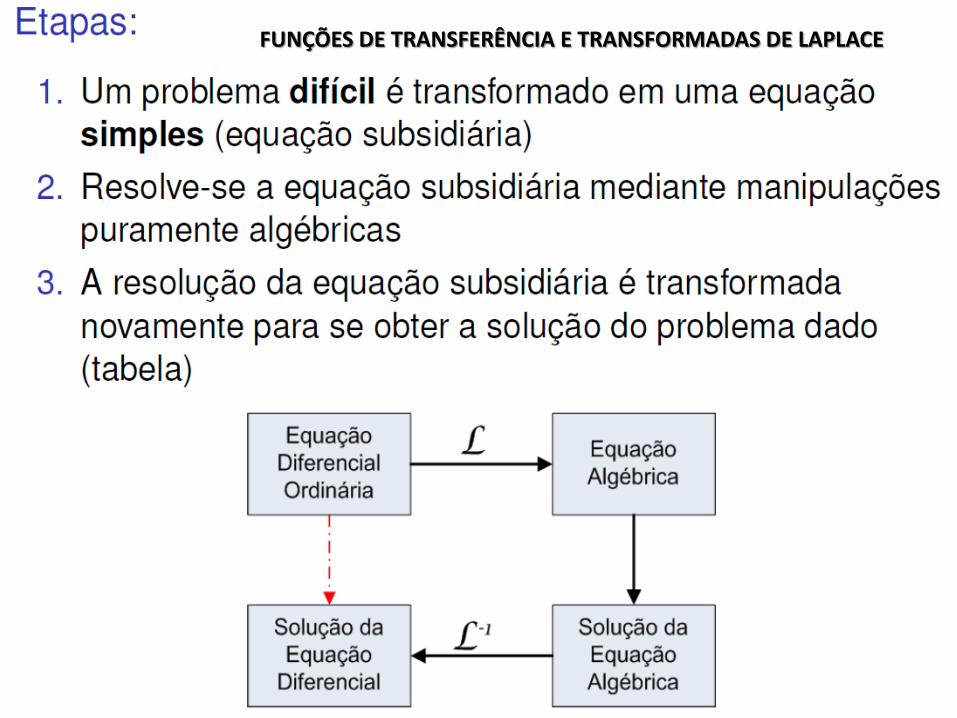
2ª Notas de Aula – Introdução aos Sistemas de Controle 2014
A) Sistemas de engenharia são representados por conjunto de equações ou modelos matemáticos que representam o seu funcionamento;
B) Tais modelos são expressos por equações diferenciais, que exprimem com detalhes, em função do tempo, como o sistema reage a diversas situações;
C) O modelo matemático que exprime o sistema de engenharia é chamado de função de transferência ou FT;
D) Definir o controle do sistema de engenharia é representá-lo por meio de equações diferenciais e resolvê-las, para se obter a resposta em função do tempo;
E) Para essa solução, é preciso de conhecer como o sistema é acionado, ou o sinal de entrada ou e(t). A partir da interação entre e(t) e a FT, teremos a saída ou s(t);
F) No controle moderno, trabalhamos com “feedback” ou retroalimentação, entre s(t) e e(t), para diminuir o erro no sinal esperado de s(t).
2
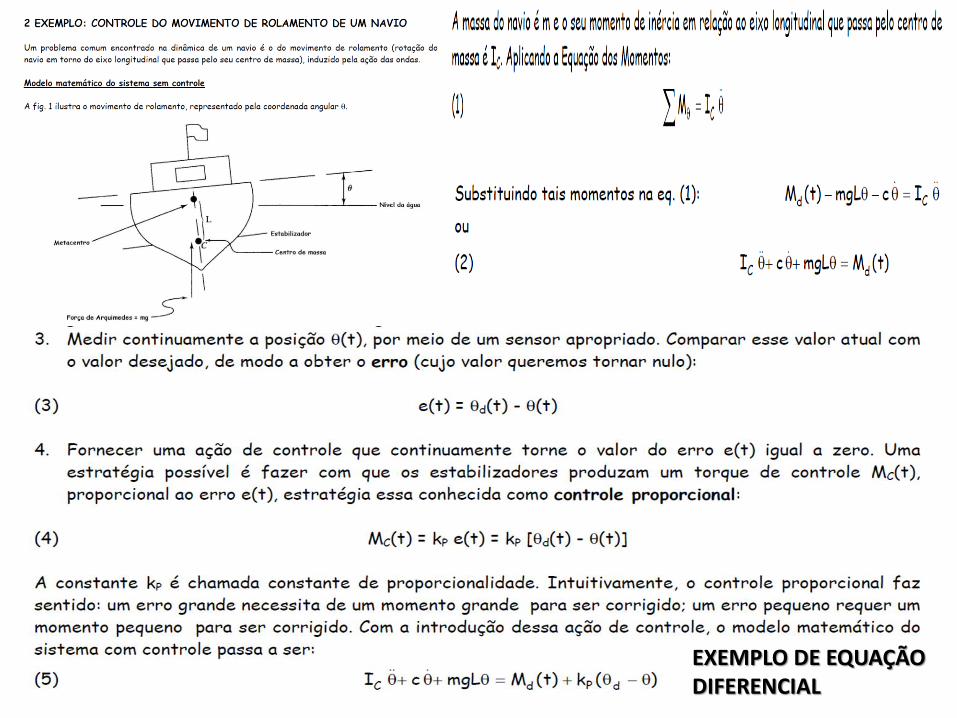
EXEMPLO DE EQUAÇÃO DIFERENCIAL
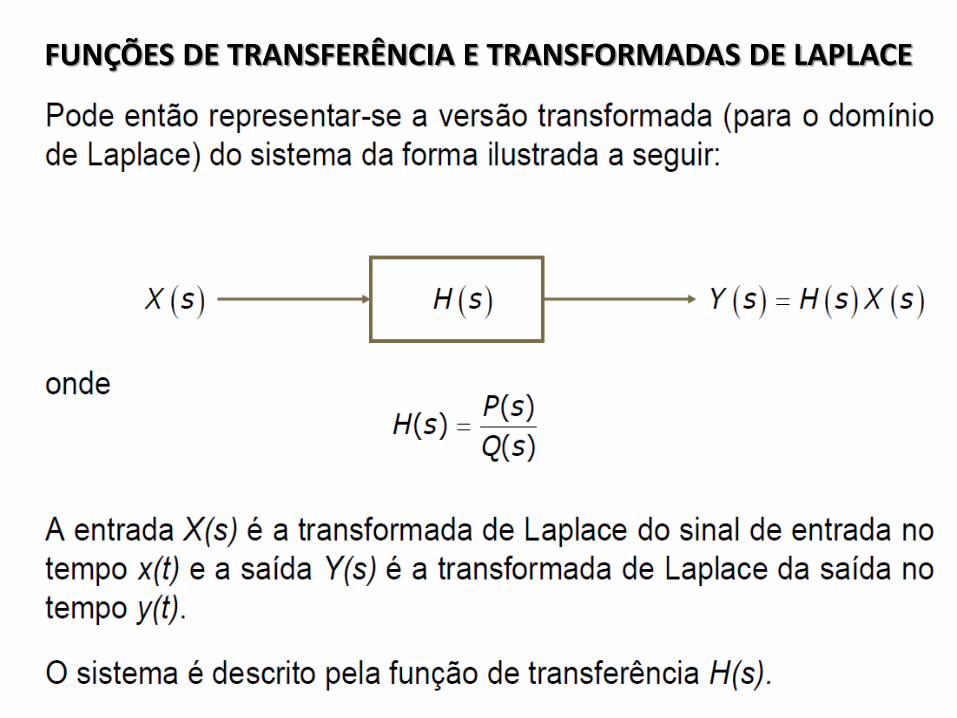
FUNÇÕES DE TRANSFERÊNCIA E TRANSFORMADAS DE LAPLACE
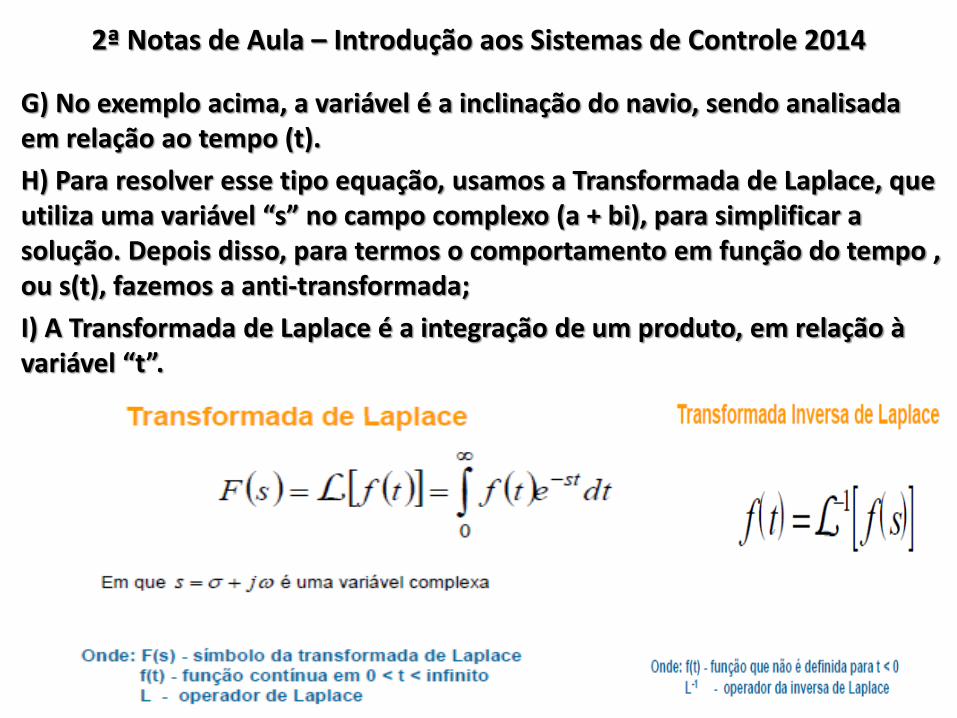
G) No exemplo acima, a variável é a inclinação do navio, sendo analisada em relação ao tempo (t).
H) Para resolver esse tipo equação, usamos a Transformada de Laplace, que utiliza uma variável “s” no campo complexo (a + bi), para simplificar a solução. Depois disso, para termos o comportamento em função do tempo , ou s(t), fazemos a anti-transformada;
I) A Transformada de Laplace é a integração de um produto, em relação à variável “t”.
2ª Notas de Aula – Introdução aos Sistemas de Controle 2014
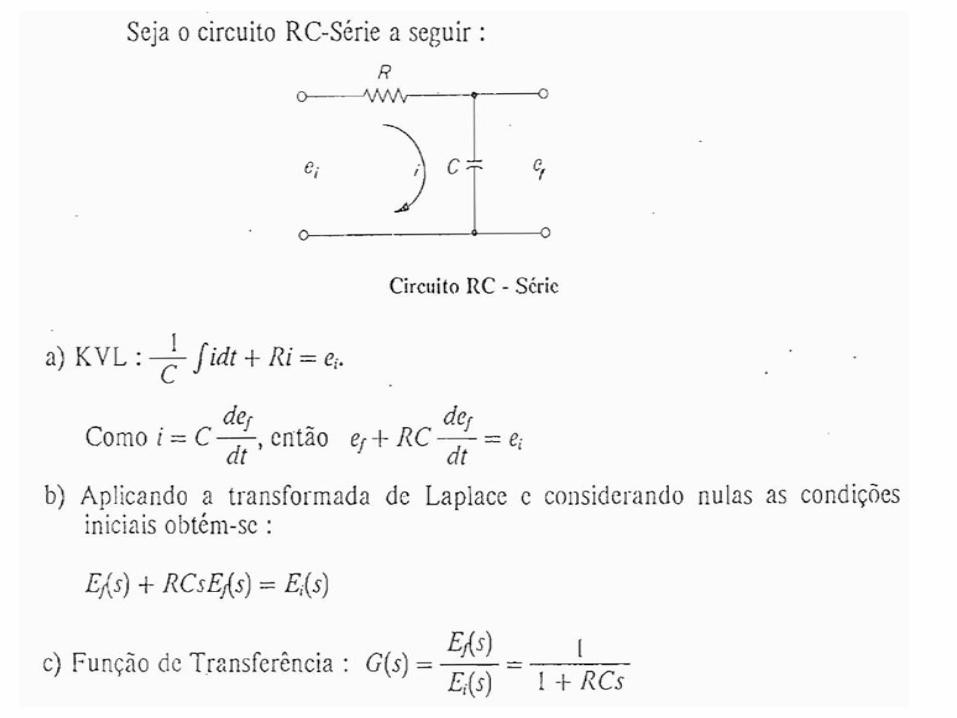

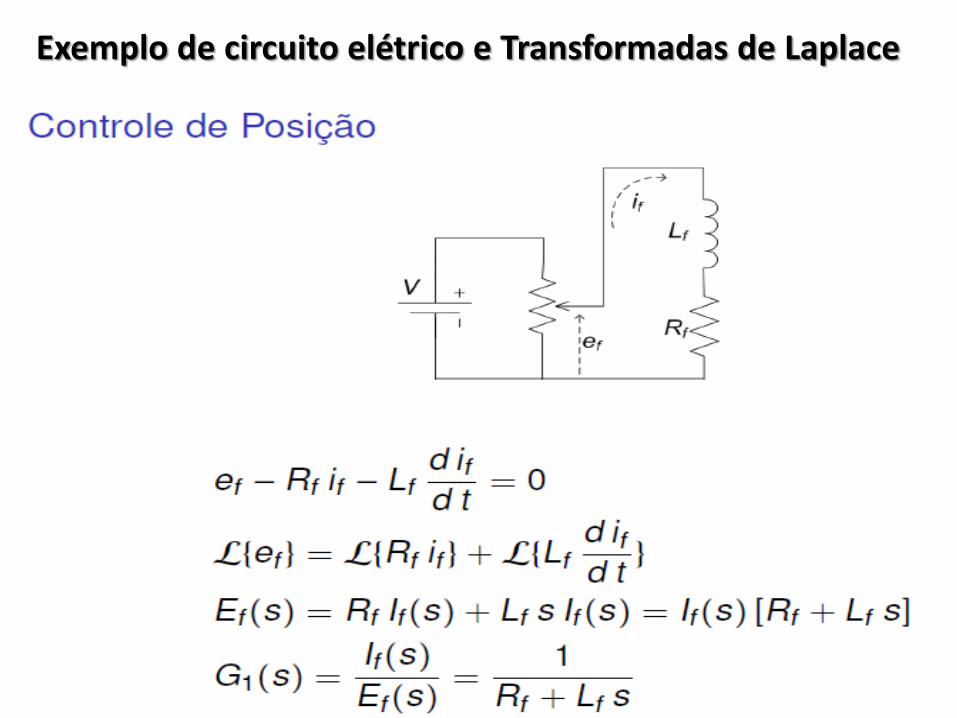
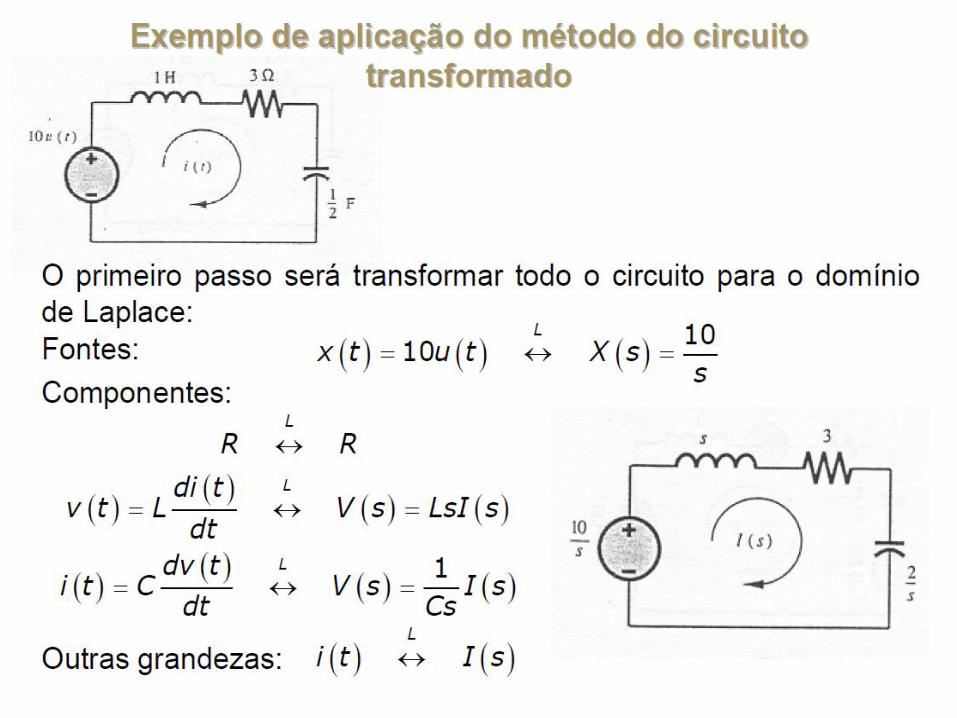
Exemplo de circuito elétrico e Transformadas de Laplace
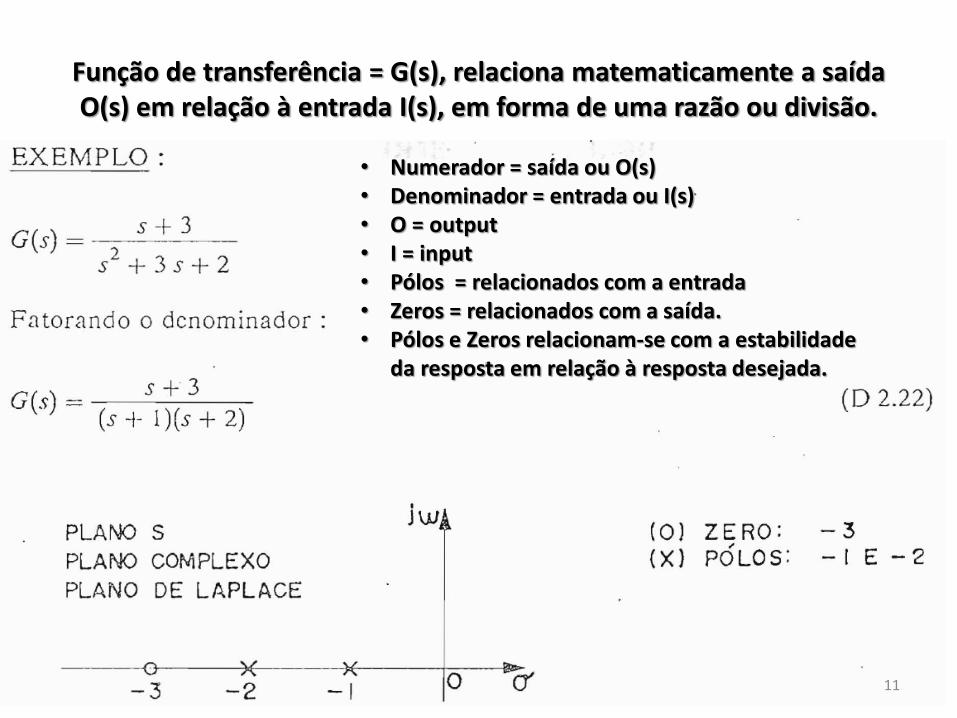
Função de transferência = G(s), relaciona matematicamente a saída O(s) em relação à entrada I(s), em forma de uma razão ou divisão.
• Numerador = saída ou O(s) • Denominador = entrada ou I(s) • O = output • I = input • Pólos = relacionados com a entrada • Zeros = relacionados com a saída. • Pólos e Zeros relacionam-se com a estabilidade
da resposta em relação à resposta desejada.
11
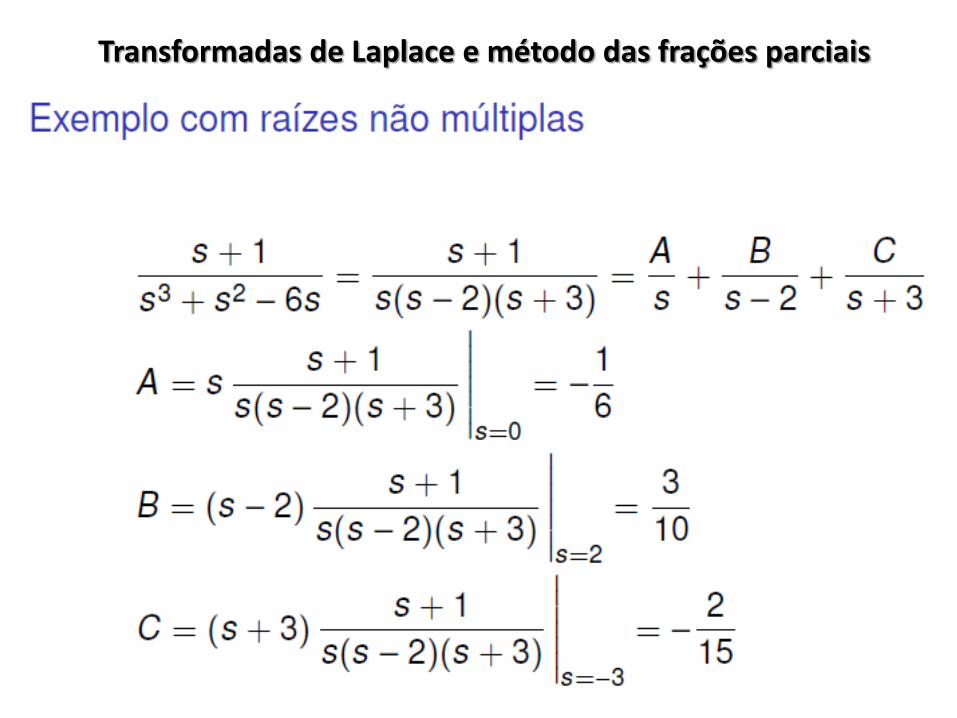
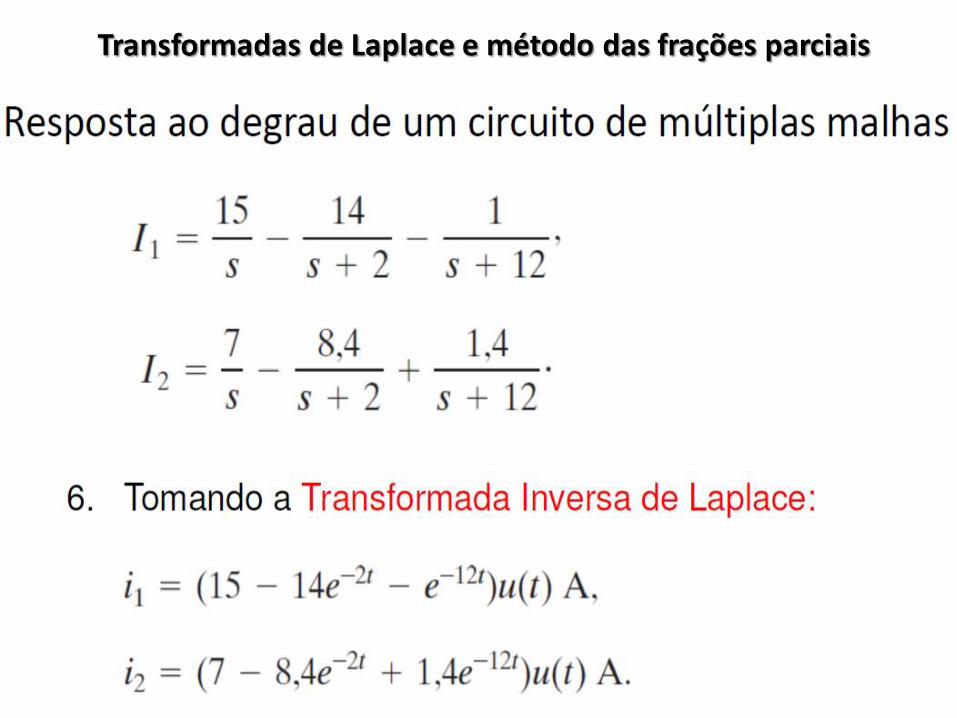
Transformadas de Laplace e método das frações parciais
FUNÇÕES DE TRANSFERÊNCIA E TRANSFORMADAS DE LAPLACE
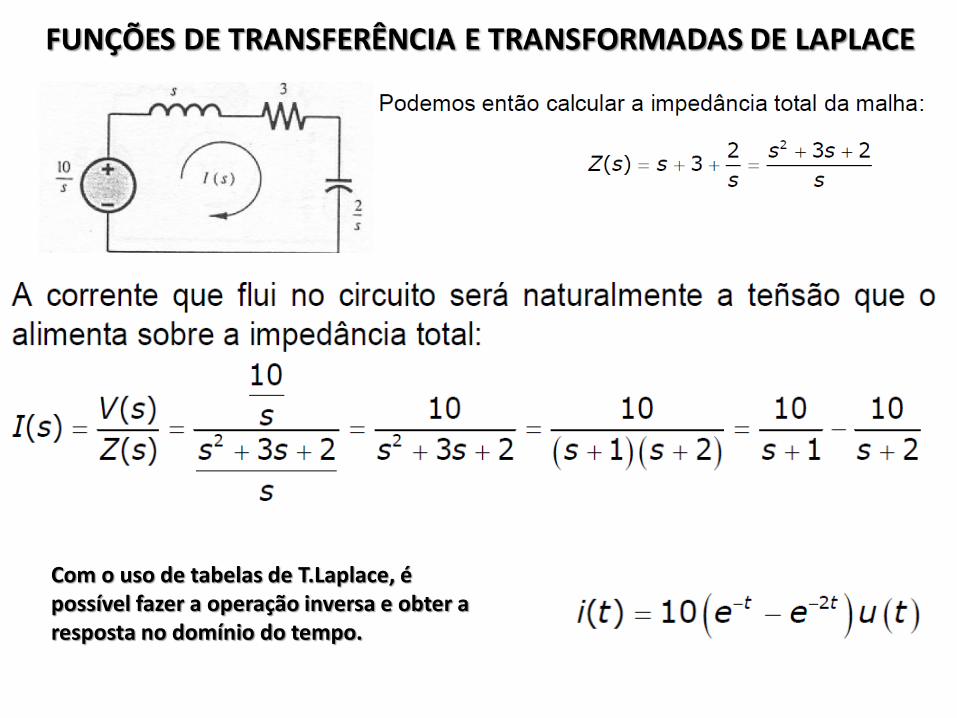
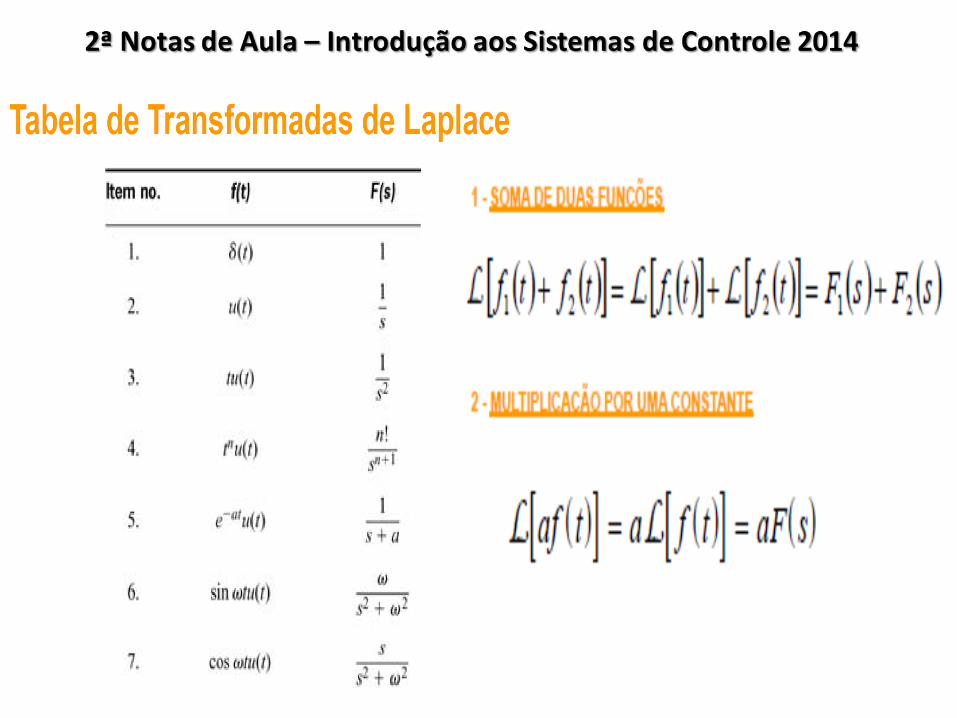
Com o uso de tabelas de T.Laplace, é possível fazer a operação inversa e obter a resposta no domínio do tempo.
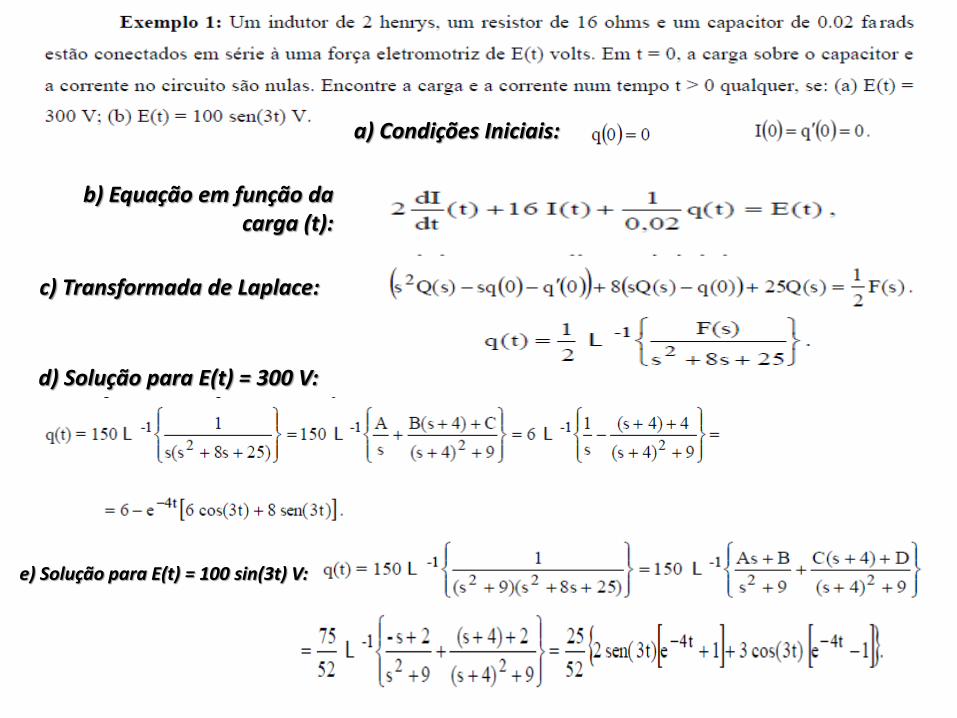
a) Condições Iniciais:
b) Equação em função da carga (t):
c) Transformada de Laplace:
d) Solução para E(t) = 300 V:
e) Solução para E(t) = 100 sin(3t) V: