Embed Size (px)
DESCRIPTION
apostila de sinais e sistemas UFSC
Citation preview

Capítulo 2
Sinais e Sistemas
2 Sinais e Sistemas 12.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12.2 Sinais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.2.1 Conceitos básicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22.2.2 Exemplos de sinais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2.3 Periodicidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.3 Transformada de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3.1 Definição . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3.2 Transformada de Fourier de um sinal periódico . . . . . . . . . . . . . . . . . . 52.3.3 Propriedades da transformada de Fourier . . . . . . . . . . . . . . . . . . . . . 52.3.4 Alguns pares transformados importantes . . . . . . . . . . . . . . . . . . . . . . 62.3.5 Método prático para determinar transformadas de sinais periódicos . . . . . . . 6
2.4 Sistemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.4.1 Sistemas lineares invariantes no tempo . . . . . . . . . . . . . . . . . . . . . . . 82.4.2 Filtros ideais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.4.3 Causalidade e realizabilidade de sistemas . . . . . . . . . . . . . . . . . . . . . . 92.4.4 Sistema (canal) sem distorção . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4.5 Equalização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.5 Energia e potência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.5.1 Conceitos básicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.5.2 Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.5.3 Decibel (dB) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.6 Largura de banda e densidade espectral de energia e potência . . . . . . . . . . . . . . 122.6.1 Largura de banda absoluta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.6.2 Densidade espectral de energia . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.6.3 Densidade espectral de potência . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.7 Ruído . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.7.1 Modelagem matemática do ruído . . . . . . . . . . . . . . . . . . . . . . . . . . 162.7.2 Ruído branco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.7.3 Ruído térmico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.A Uma nota sobre trigonometria e números complexos . . . . . . . . . . . . . . . . . . . 18
2.1 Introdução
Nesta disciplina faremos bastante uso da teoria de sinais e sistemas (especialmente os de tempocontínuo). Esta é uma das bases da teoria de comunicações, uma vez que todos os canais físicos,como cabos coaxiais e canais de propagação eletromagnética, assim como muitas das mensagens deinteresse, são fundamentalmente analógicos. (Canais digitais surgem apenas como uma idealização,geralmente após uma etapa de processamento analógico.)
1

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 2
No nosso contexto, sinais de tempo contínuo serão usados1 para representar mensagens e sinais naentrada e na saída do canal, o qual será modelado como um sistema linear. Sistemas lineares tambémmodelam muito do processamento que é realizado nos transmissores e receptores, como filtragem desinais.
As notas a seguir revisam brevemente alguns tópicos essenciais da teoria de sinais e sistemas detempo contínuo, incluindo sua ferramenta mais importante no nosso contexto, a transformada deFourier. Outro objetivo importante é estabelecer parte da notação utilizada nesta disciplina (e naárea de comunicações), a qual difere da que é tipicamente usada em textos sobre a teoria de sinais esistemas.
2.2 Sinais
2.2.1 Conceitos básicos
Um sinal é uma função f : A → B que representa matematicamente algum fenômeno físico. Exemplosincluem uma variação de tensão elétrica/pressão/temperatura/humidade ao longo do tempo, voz,música, imagens, vídeos, etc.
O domínio da função, A, é tipicamente expresso através de variáveis independentes, cujo númerodefine a dimensionalidade do sinal. Isto é, um sinal que é função de N variáveis independentes édito um sinal N -dimensional. Por exemplo, uma variação de tensão elétrica v(t) possui uma únicavariável independente (o tempo t ∈ R), sendo portanto um sinal unidimensional, enquanto umaimagem I(h, v) possui duas variáveis independentes (as dimensões horizontal e vertical, (h, v) ∈ R2),sendo portanto um sinal bidimensional.
O contradomínio da função, B, define o tipo de valor assumido pelo sinal, isto é, diz-se que o sinalassume valores em B. Por exemplo, se B = R, diz-se que o sinal é de valor real ou simplesmente umsinal real; da mesma forma, se B = C, diz-se que o sinal é de valor complexo ou um sinal complexo.
Consideraremos aqui principalmente sinais reais ou complexos que são função de um único parâ-metro, o tempo. Assim, um sinal é definido como uma função x : R → R (para um sinal real) oux : R→ C (para um sinal complexo), sendo adotada a notação x(t), onde t ∈ R.
Diversas operações com sinais podem ser definidas, entre elas as operações básicas de adição desinais, x1(t) + x2(t), e a multiplicação de sinais, x1(t)x2(t), assim como transformações da variávelindependente, como o deslocamento no tempo, x(t− t0), e o escalonamento no tempo, x(t/τ).
Alguns parâmetros básicos de um sinal são os seus valores máximo e mínimo,
xmax = maxt∈R
x(t), e xmin = mint∈R
x(t)
seu valor de pico (ou amplitude de pico)
xp = maxt∈R|x(t)|
e seu valor médio (ou nível DC, ou média temporal)
x(t) = limT→∞
1
T
∫ T/2
−T/2x(t) dt.
Um sinal que possui xp <∞ é dito ser limitado em amplitude ou de amplitude limitada.A duração de um sinal x(t) é definida como a largura do menor intervalo de tempo fora do qual
o sinal assume o valor zero. Isto é, se [t1, t2] é o menor intervalo tal que x(t) = 0 para todo t < t1 epara todo t > t2, então x(t) tem duração D = t2 − t1. Um sinal que possui duração finita, D <∞, édito ser limitado no tempo ou de tempo limitado.
1Outro tipo de sinal importante será o de ruído, o qual está presente em qualquer sistema de comunicação. Noentanto, o ruído é um sinal aleatório, e para entendê-lo a fundo é preciso fazer uso da teoria de probabilidade eprocessos estocásticos—outra base da teoria de comunicações. Nesta disciplina, apenas um descrição superficial doruído será considerada, deixando uma análise mais rigorosa para disciplinas subsequentes.

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 3
Um sinal que assume valores x(t) ∈ A em um conjunto contável A = . . . , a1, a2, a3, . . . é dito serum sinal discreto em amplitude ou de amplitude discreta. Caso contrário é dito ser de amplitudecontínua.
Um sinal que só está definido para instantes de tempo inteiros t ∈ Z é dito ser um sinal discretono tempo ou de tempo discreto. Caso contrário, é dito ser de tempo contínuo. Um sinal detempo discreto é, na verdade, uma sequência, sendo mais comumente representado pela notação x[n],onde n ∈ Z. De forma mais geral, um sinal x(t) que se mantém constante em cada intervalo nT ≤t < (n+ 1)T , onde n ∈ Z, pode também ser interpretado como um sinal de tempo discreto, pois podeser biunivocamente associado a uma sequência x[n] tal que x(t) = x[n] para todo nT ≤ t < (n+ 1)T .
Um sinal simultaneamente de amplitude discreta e de tempo discreto é dito ser um sinal digital.De forma mais geral, qualquer sinal que possa ser biunívocamente associado a uma sequência devalores discretos (“dígitos”) é dito ser um sinal digital. Um sinal que não é digital é dito ser um sinalanalógico.
Por hora, estaremos interessados em estudar sinais de tempo contínuo e de amplitude contínua.
2.2.2 Exemplos de sinais
Alguns sinais importantes são o degrau unitário,
u(t) =
1, t > 0
0, t < 0
o pulso retangular,
rect(t) =
1, |t| < 1/2
0, |t| > 1/2
= u(t+ 1/2)− u(t− 1/2) t
rect(t)
12− 1
2
1
e o impulso unitário (ou função delta de Dirac), definido implicitamente pelas propriedades
δ(t) = 0, ∀t 6= 0∫ ∞−∞
δ(t) dt = 1t
δ(t)
ou simplesmente ∫ ∞−∞
x(t)δ(t) dt = x(0), para todo x(t) contínuo.
O impulso unitário pode ainda ser obtido dos sinais anteriores através de
δ(t) =d
dtu(t)
ou como um limiteδ(t) = lim
τ→0
1
τrect(t/τ).
Outro sinal importante é o pulso sinc (ou função sinc),
sinc(t) =senπt
πt
(sinc(0) = 1)t
sinc(t)
1−1
1
2−2−3 3

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 4
Atenção! Alguns autores (por exemplo, Lathi) definem sinc(t) = sen(t)/t, o que resulta emcruzamentos de zero em instantes múltiplos de π. No contexto de processamento de sinais, a notaçãoque utilizamos (Haykin-Moher) é muito mais conveniente por resultar em cruzamentos de zero eminstantes inteiros.
2.2.3 Periodicidade
Um sinal x(t) é dito periódico se existe T0 > 0 tal que x(t + T0) = x(t), para todo t. Nesse caso,dizemos que x(t) é periódico de período T0. O menor valor possível para T0 é chamado de períodofundamental. Um sinal que não é periódico é dito aperiódico.
É fácil ver que, se x(t) é periódico, então seu valor médio (assim como qualquer outro parâmetrode amplitude, como valor de pico) pode ser obtido a partir de um único período:
x(t) =1
T0
∫T0
x(t) dt.
A frequência (temporal) f0 de um sinal periódico, medida em hertz (Hz = s−1), é definidacomo sendo o inverso do seu período, f0 = 1/T0. Se T0 é o período fundamental do sinal, então f0 échamada de frequência fundamental.
Exemplos de sinais periódicos incluem as funções senoidais (ou sinusoidais)
cos(2πf0t+ φ)
(que incluem as funções seno e cosseno como casos particulares) e a exponencial complexa
ej2πf0t = cos(2πf0t) + j sen(2πf0t).
2.3 Transformada de Fourier
Estaremos frequentemente interessados no conteúdo frequencial dos sinais envolvidos na comunicação.Esta informação pode ser obtida a partir da transformada de Fourier do sinal, a qual correspondeà sua decomposição em uma combinação linear de funções senoidais (no nosso caso, exponenciaiscomplexas). A trasformada de Fourier pode ser interpretada como uma representação diferente eequivalente do sinal original, a qual nos permite extrair facilmente certas propriedades de um sinalao observá-lo através de um ângulo diferente.
2.3.1 Definição
A transformada de Fourier de um sinal x(t) é definida como:
X(f) = Fx(t) =
∫ ∞−∞
x(t)e−j2πft dt.
O sinal x(t) pode ser recuperado a partir da transformada inversa de Fourier:
x(t) = F−1X(f) =
∫ ∞−∞
X(f)ej2πtf df.
Usaremos a seguinte notação para indicar um par transformado: x(t)←→ X(f).
Atenção! Muitos autores utilizam a notação X(ω) ou X(jω) para representar a transformadade Fourier, correspondendo ao uso da frequência angular ω = 2πf , medida em radianos por segundo,como variável independente. No entanto, no contexto de comunicações, a frequência temporal f , me-dida em Hertz, é muito mais significativa e mais relevante na prática. Além disso, como a frequênciatemporal corresponde exatamente ao inverso do período, observa-se uma grande simetria nas expres-sões da transformada de Fourier direta e inversa (não há o fator de 1/2π). Esta simetria torna diversasexpressões e propriedades úteis muito mais simples de utilizar (e memorizar). Assim, utilizaremossempre a variável f nas expressões da transformada de Fourier, assim como nas expressões de funçõessenoidais como exp(2πf0t), cos(2πf0t) e sen(2πf0t)—mesmo que isso implique, nesses casos, em terque sempre “trazer junto” o fator de 2π (o resultado final compensa).

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 5
2.3.2 Transformada de Fourier de um sinal periódico
Se x(t) é um sinal periódico, então a expressão da transformada de Fourier não pode ser usadadiretamente. Ao invés disso, podemos calculá-la a partir dos coeficientes da série de Fourier.
Suponha que x(t) tenha período fundamental T0. Então os coeficientes da série de Fourier (expo-nencial) de x(t) são dados por
Xk =1
T0
∫T0
x(t)e−j2πkf0t dt, k = −∞, . . . ,∞
onde f0 = 1/T0 é a frequência fundamental. Nesse caso, x(t) possui a seguinte expansão em série
x(t) =
∞∑k=−∞
Xkej2πkf0t
e sua transformada de Fourier é dada por
X(f) =∞∑
k=−∞Xkδ(f − kf0).
2.3.3 Propriedades da transformada de Fourier
Algumas propriedades importantes da transformada de Fourier são listadas abaixo.Sejam x(t)←→ X(f), x1(t)←→ X1(f), x2(t)←→ X2(f). Temos:
ax1(t) + bx2(t)←→ aX1(f) + bX2(f) LinearidadeX(t)←→ x(−f) Dualidade
x(at)←→ 1
|a|X(f
a
)Dilatação no tempo
x1(t) ∗ x2(t)←→ X1(f)X2(f) Convoluçãox1(t)x2(t)←→ X1(f) ∗X2(f) Multiplicação∫ ∞
−∞|x(t)|2 dt =
∫ ∞−∞|X(f)|2 df Teorema de Parseval∫ ∞
−∞x1(t)x
∗2(t) dt =
∫ ∞−∞
X1(f)X∗2 (f) df Teorema de Parseval (caso geral)
x∗(t)←→ X∗(−f) Simetria conjugada
Em particular, se x(t) é real, então:
• X(−f) = X∗(f)
• Se X(f) = |X(f)|ej∠X(f), então |X(f)| é uma função par e ∠X(f) é uma função ímpar.
Além disso, caso x(t) seja um sinal periódico de período T0, com coeficientes da série de Fourierdados por Xk, k = −∞, . . . ,∞, temos também uma versão do Teorema de Parseval, válida paraqualquer T0:
Px = limT→∞
1
T
∫ T/2
−T/2|x(t)|2 dt =
∞∑k=−∞
|Xk|2.

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 6
2.3.4 Alguns pares transformados importantes
δ(t− t0)←→ e−j2πft0
ej2πf0t ←→ δ(f − f0)cos(2πf0t)←→ 1
2δ(f + f0) + 12δ(f − f0)
sen(2πf0t)←→ − 12j δ(f + f0) + 1
2j δ(f − f0)rect(t)←→ sinc(f)
sinc(t)←→ rect(f)
rect(t/τ)←→ τ sinc(fτ)
sinc(t/τ)←→ τ rect(fτ)
1/πt←→ −j sgn(f)∑n δ(t− nT0)←→ (1/T0)
∑k δ(f − k/T0)
Exemplos:
• rect(t/τ)←→ τ sinc(τf)
f
τsinc(τf)
1τ
τ
2τ
t
rect(t/τ)
τ2
1 ←→
Dica: o parâmetro mais importante do pulso retangular é a largura do pulso, enquanto oparâmetro mais importante da função sinc é o intervalo entre cruzamentos de zero. Nospares transformados entre rect e sinc, um parâmetro é sempre o inverso do outro.
•∞∑
k=−∞δ(t− kT0)←→
1
T0
∞∑k=−∞
δ(f − k/T0)
δT0(t)
0 T0−T0−2T0 2T0
|FδT0(t)|
1
T0
2
T0
− 2
T0
0− 1
T0
· · ·· · · · · · · · ·
(a) (b)
AAT0
,
Figura 2.1: (a) Trem de impulsos (domínio do tempo) e (b) seu espectro correspondente.
Dica: da mesma forma, o parâmetro mais importante de um trem de impulsos é seu espaça-mento entre impulsos. O espaçamento no domínio da frequência será exatamente o inversodo espaçamento no domínio do tempo.
2.3.5 Método prático para determinar transformadas de sinais periódicos
Como ferramenta matemática, a transformada de Fourier pode parecer um tanto “incompleta” pelofato de não poder ser diretamente aplicável a sinais periódicos; precisamos indiretamente recorrer àsérie de Fourier. Seria mais interessante, no entanto, que a mesma ferramenta pudesse ser usada paratodos os propósitos, independente da periodicidade do sinal. Assim, bastaria dominarmos uma única

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 7
ferramenta mais geral—a transformada de Fourier—enquanto a série de Fourier seria obtida comocaso particular.
Felizmente, existe um método prático para alcançar esse objetivo, desde que se aceite e se estejafamiliarizado com a expressão para a transformada de um trem de impulsos—um sinal que, assimcomo sua transformada, é simultaneamente periódico e de tempo de discreto. Esse par transformadosozinho captura todo o potencial adicional que a série de Fourier pode proporcionar. Essencialmente,a idéia é partir de um sinal aperiódico, cuja transformada sabemos calcular, e então recuperar o sinaloriginal, periódico, fazendo-se a convolução com um trem de impulsos.
Seja x(t) um sinal periódico de período T0, e defina o sinal aperiódico
x(t) = x(t) rect(t/T0)
como sendo uma “janela” de um único período de x(t).
t
x(t)
T0
t
x(t)
T0
Observe que podemos recuperar x(t) como
x(t) = x(t) ∗∞∑
k=−∞δ(t− kT0).
Seja X(f) = Fx(t) a transformada de Fourier de x(t). Pela propriedade da convolução, temos
X(f) = X(f)1
T0
∞∑k=−∞
δ(f − k/T0)
=∞∑
k=−∞
1
T0X(f)δ(f − k/T0)
=
∞∑k=−∞
1
T0X(k/T0)︸ ︷︷ ︸Xk
· δ(f − k/T0)
ondeXk =
1
T0X(k/T0), k = −∞, . . . ,∞
são os coeficientes da série de Fourier de x(t). Assim, temos que a transformada X(f) corresponde àtransformada X(f) multiplicada por 1/T0 e “amostrada na frequência” em intervalos de 1/T0.
Exemplo: Desejamos encontrar a transformada de Fourier de uma onda quadrada x(t) dada por
tT2
1
T0
x(t)
−T0 −T2
Sabemos quex(t) = x(t) rect(t/T0) = rect(t/T )←→ X(f) = T sinc(fT )

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 8
Portanto,
Xk =1
T0X(k/T0) =
T
T0sinc
(kT
T0
)e
X(f) =
∞∑k=−∞
T
T0sinc
(kT
T0
)δ(f − k/T0).
Sugestão: esboce o gráfico para o caso familiar T = T0/2, e confirme a forma que você conhece.
2.4 Sistemas
2.4.1 Sistemas lineares invariantes no tempo
Considere um sistema S· que transforma uma entrada x(t) em uma saída y(t) = Sx(t). Parai = 1, 2, seja yi(t) = Sxi(t) a saída correspondente a uma entrada xi(t).
S·x(t) y(t)
Um sistema é dito linear se, para quaisquer x1(t), x2(t),
ax1(t) + bx2(t) ay1(t) + by2(t)S·
e é dito invariante no tempo se, para qualquer t0,
x(t− t0) y(t− t0)S·
Seja h(t) = Sδ(t) a resposta ao impulso do sistema:
δ(t) h(t)S·
Então: y(t) = x(t) ∗ h(t)
Y (f) = X(f)H(f)onde
h(t)︸︷︷︸resposta ao impulso
←→ H(f)︸ ︷︷ ︸resposta em frequência
2.4.2 Filtros ideais
Filtros são sistemas destinados a remover alguma componente de um sinal. Alguns filtros ideais serãoespecialmente importantes no nosso contexto.
• Filtro passa-baixa FPBf2·, com frequência de corte f2 e largura de banda W = f2:
f
FPBf2·
f2−f2
1
• Filtro passa-alta FPAf1·, com frequência de corte f1:
f
FPAf1·
f1−f1
1

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 9
• Filtro passa-faixa FPFf1,f2·, com frequências de corte (inferior) f1 e (superior) f2 e largurade banda W = f2 − f1:
f
FPFf1,f2·
f1−f1
1
f2−f2
2.4.3 Causalidade e realizabilidade de sistemas
Um sistema é dito causal se h(t) = 0, para todo t < 0. Um sistema é realizável (isto é, pode serimplementado na prática, em tempo real) se e somente se é causal.
Critério de Paley-Wiener : Seja |H(f)| uma função tal que∫∞−∞ |H(f)|2 df <∞. A função |H(f)|
pode ser a resposta de magnitude de um sistema causal se e somente se∫ ∞−∞
∣∣∣∣ ln |H(f)|1 + f2
∣∣∣∣ df <∞.Em outras palavras, se H(f) é tal que |H(f)| viola o critério acima, então H(f) é não-causal. Por
outro lado, se |H(f)| é uma função que satisfaz o critério acima, então existe alguma função ∠H(f)tal que H(f) = |H(f)|ej∠H(f) é um sistema causal.
A partir do critério de Paley-Wiener, é possível mostrar que filtros ideais (por possuírem transiçõesabruptas e regiões nulas em um intervalo contínuo) não são realizáveis.
Teoricamente, uma forma de obter um filtro causal como aproximação de um filtro não-causalseria atrasar a sua resposta ao impulso h(t) e truncá-la em t = 0. Quanto maior o atraso, melhora aproximação. No entanto, esta aproximação dificilmente é a melhor. Além disso, pode não existiruma topologia de circuito (analógico) prática que de fato realize essa resposta ao impulso.
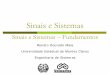
Na prática, filtros realizáveis possuem, ao invés de transições abruptas, transições entre amplitudesque ocorrem ao longo de uma faixa de largura não-nula, chamada de região ou faixa de transição.Métodos de projeto populares incluem os filtros de Butterworth, Chebyshev (Tipo I e Tipo II) eelíptico. Um exemplo (para filtro elíptico) está indicado na figura abaixo.
Figura 2.2: Exemplos de filtros passa-baixa e passa-faixa realizáveis, destacando as faixas de passagem,de transição e de corte.
Certamente, o filtro de Butterworth é um dos que possui a especificação mais simples, sendocaracterizado por apenas dois parâmetros: a ordem do filtro, n, e sua frequência de corte, fp. A

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 10
magnitude da resposta em frequência do filtro é dada por
|H(f)| =√
1
1 + (f/fp)2n
onde fp (em Hz) é a frequência de corte de 3dB do filtro, isto é, o valor para o qual |H(fp)|2 = 1/2.
0 200 400 600 800 1000 1200 1400 1600 1800 2000
0.2
0.4
0.6
0.8
1
Frequency (Hz)
Ma
gn
itu
de |H
(f)|
Como pode ser observado, o ganho do filtro é unitário em f = 0, nulo em f = ∞, e transicionade forma contínua e monotônica ao longo de todo o espectro. Em comparação com outros tipos defiltro convencionais, o filtro Butterworth possui a vantagem de ser maximamente plano na faixa depassagem e introduzir pouca distorção de fase; no entanto, sua faixa de transição é consideravelmentelarga (ou não é bem definida em geral).
2.4.4 Sistema (canal) sem distorção
Dizemos que um sistema é sem distorção se possui resposta ao impulso e resposta em frequênciadadas por
h(t) = αδ(t− t0)H(f) = αe−j2πft0
onde α 6= 0, isto é, o sistema aplica apenas possivelmente um ganho (ou atenuação) e um atraso.Nesse caso, H(f) deve ter magnitude constante e fase linear.
f
|H(f)|α
f
6 H(f)2π
−2π
1t0
− 1t0
É fácil ver que a saída de um sistema sem distorção tem exatamente a mesma forma da entrada.
2.4.5 Equalização
Um exemplo da aplicação de filtros está no modelamento e equalização de canais de comunicação.Suponha que um sinal de mensagem m(t) é transmitido através de um canal de comunicação e
que o sinal r(t) é recebido. Suponha que o canal é modelado como um sistema LIT com resposta emfrequência Hc(f), e que Hc(f) introduz distorção. Suponha também que m(t) possui frequênciamáxima B Hz.
Nesse caso, o que pode ser feito, no receptor, para que m(t) seja recuperado sem distorção? Isto é,como compensar a distorção introduzida? Uma solução é introduzir um filtro equalizador Hr(f),na saída do canal, conforme diagrama de blocos abaixo:
m(t) −→ Hc(f) −→ r(t) −→ Hr(f) −→ y(t)

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 11
Para que o sistema equivalente (entre m(t) e y(t)) não introduza distorção, o filtro equalizador deveser projetado de tal forma que
Hc(r)Hr(f) = αe−j2πft0 , ∀|f | < B.
Dessa forma, obtém-se y(t) = αm(t− t0).
2.5 Energia e potência
2.5.1 Conceitos básicos
Seja um sinal x(t) ∈ C. Alguns parâmetros importantes são definidos2 a seguir:
• Energia: Ex =
∫ ∞−∞|x(t)|2 dt = lim
T→∞
∫ T/2
−T/2|x(t)|2 dt
• Potência média (ou valor médio quadrático): Px = |x(t)|2 = limT→∞
1
T
∫ T/2
−T/2|x(t)|2 dt
• Valor rms (root-mean-square): xrms =√Px
Podemos classificar um sinal x(t) quanto à sua energia e potência:
• Sinal de energia: Ex <∞ (o que implica automaticamente Px = 0)
• Sinal de potência: Ex =∞ mas Px <∞É fácil ver que, se x(t) é periódico de período T0, então sua potência média pode ser calculada
comoPx = |x(t)|2 =
1
T0
∫T0
|x(t)|2 dt.
Em particular, qualquer sinal periódico não-nulo necessariamente possui potência não-nula e portantoenergia infinita.
Obs: sinais com Px =∞ não são fisicamente possíveis.3
2Por que chamamos tais valores de energia e potência? Esta terminologia tem significado físico quando x(t) (real)é interpretado como um sinal de tensão ou de corrente aplicado a uma carga de resistência R; nesse caso a potênciainstantânea dissipada pela carga é dada por p(t) = v2(t)/R = i2(t)R, e portanto numericamente igual a x2(t) quandoR = 1Ω. A potência (média) nada mais é do que a média temporal da potência instantânea, enquanto a energia totaldissipada é a integral de p(t).
3Estritamente falando, todos os sinais (não-nulos) observados na natureza são de energia e aperiódicos, pois temduração limitada. Na verdade, o conceito de um instante de tempo t→∞ (ou t→ −∞) é uma abstração matemática,não é fisicamente concebível. No entanto, sinais de potência ou periódicos servem como um modelo útil para sinais que secomportam dessa forma durante um intervalo finito suficientemente longo. Para todos os propósitos práticos, o intervalo(−∞,∞) deve ser interpretado como um intervalo de observação [−T/2, T/2] cuja duração T é suficientemente longadentro do contexto de interesse. Uma situação familiar de natureza semelhante é a de um capacitor descarregando, umprocesso que, teoricamente, só “termina” em t =∞ (mas, na prática, algumas constantes de tempo são suficientes). Nonosso contexto, uma função senoidal (de duração infinita, periódica) será utilizada para modelar um sinal (de energia)que permanece senoidal durante um intervalo de observação suficientemente longo.

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 12
2.5.2 Exemplos
Seja x(t) = a cos(2πf0t), onde f0 = 1/T0. Temos
Px = limT→∞
1
T
∫ T/2
−T/2|x(t)|2dt
=1
T0
∫T0
|x(t)|2dt
=1
T0
∫T0
a2 cos2 (2πf0t)dt
=a2
T0
∫T0
1
2(1 + cos (2π2f0t)) dt
=a2
2+
a2
2T0
∫T0
cos (2π2f0t)dt
=a2
2.
Note que este resultado é válido para qualquer frequência f0, e também é válido para uma senóidecom qualquer fase, por exemplo, x(t) = a cos(2πf0t+ φ).
2.5.3 Decibel (dB)
O decibel (dB) é uma unidade usada para comparar valores de potência, conforme a expressão aseguir: (
P1
P2
)dB
= 10 log10
(P1
P2
)onde P1 e P2 são valores de potência. Isto é, a razão P1/P2, em dB, é dada por 10 log10(P1/P2).
Por exemplo:
• P1 = 1000P2 =⇒ P1
P2= 30dB
• P1 = 2P2 =⇒ P1
P2≈ 3dB
Atenção! É comum utilizar a expressão 20 log10(V1/V2) como definição do decibel quando seestá comparando valores de amplitude. O resultado é idêntico, pois a potência é proporcionalao quadrado da amplitude, i.e., P1/P2 = (V1/V2)
2. No entanto, é errado utilizar o fator 20 paraconverter em dB uma razão entre potências!
O decibel também pode ser usado para descrever valores absolutos de potência, quando compara-dos com algum valor de referência. Nesse caso, a unidade é alterada para indicar o valor de referência.Duas unidades são comumente usadas: o dBW,
(P )dBW = 10 log10
(P
1
)para um valor de referência de 1 W, e o dBm,
(P )dBm = 10 log10
(P
10−3
)para um valor de referência de 1 mW.
2.6 Largura de banda e densidade espectral de energia e potência
2.6.1 Largura de banda absoluta
Um sinal real x(t) ↔ X(f) é dito ser (absolutamente) limitado em banda ou de banda (ab-soluta) limitada se existem valores de frequência 0 ≤ f1 ≤ f2 < ∞ tal que X(f) = 0 para todo

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 13
f /∈ [−f2,−f1] ∪ [f1, f2]. Dependendo do contexto, um sinal de banda limitada pode ser classificadocomo passa-faixa, se o valor de f1 é considerado suficientemente grande dentro do contexto, ou comopassa-baixa, se f1 é pequeno. No caso de um sinal passa-faixa, sua largura de banda (absoluta)é definida como o menor valor de f2 − f1 tal que f1 e f2 satisfazem a definição acima, enquanto nocaso de um sinal passa-baixa, toma-se f1 = 0, isto é, sua largura de banda (absoluta) correspondesimplesmente ao valor de f2. Note que a largura de banda de um sinal real é sempre medida a partirdos valores positivos de frequência (f > 0).
|X(f)|
f
B−B· · · · · ·
f2−f2 −f1 f1
|X(f)|
(a) (b)
f
Figura 2.3: (a) Sinal passa-baixa com largura de banda de B Hz (f1 = 0, f2 = B). (b) Sinalpassa-faixa com largura de banda B = f2 − f1 Hz.
A definição de largura de banda absoluta, embora conveniente matematicamente, apresenta umsério problema prático, conforme enunciado no seguinte teorema.
Teorema 1 (Princípio da Incerteza) Um sinal não-nulo não pode ser, simultaneamente, limitadono tempo e absolutamente limitado em banda.
Como exemplo temos o pulso retangular rect(t), que é limitado no tempo mas ilimitado em banda,e inversamente a função sinc(t), que é limitada em banda mas ilimitada no tempo.
Prova. Primeiramente observe que qualquer processamento linear ou deslocamento no tempo (i.e.,passar por um sistema sem distorção h(t) = αδ(t− t0), com α 6= 0) não altera a ocupação espectral deum sinal. Assim, sem perda de generalidade, considere um sinal x(t) limitado a [−T/2, T/2]. Então,podemos escrever x(t) = x(t) rect(t/T ), de modo que
X(f) = X(f) ∗ T sinc (fT ) = T
∫ ∞−∞
X(θ) sinc ((f − θ)T ) dθ.
Seja B > 0 tal que X(f) = 0 para todo |f | > B. Como sinc(fT ) é uma função ilimitada e aperiódica,sempre existirá algum f0 > B tal que
T
∫ ∞−∞
X(θ) sinc ((f0 − θ)T ) dθ 6= 0.
Porém, o lado esquerdo da equação acima corresponde a X(f0), que, por hipótese, é igual a 0, levandoa uma contradição.
Esse resultado contradiz a nossa intuição, pois estamos acostumados a lidar, na prática, comsinais que consideramos limitados em banda (por exemplo, sinais de voz), mas que, como quaisquersinais observáveis na natureza, necessariamente possuem duração finita. A contradição é resolvidaadotando-se alguma outra definição mais relaxada de largura de banda. Um definição conveniente éa que considera o conteúdo de energia/potência do sinal, conforme veremos a seguir.

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 14
x(t)
2B
X(f)
1
T
2
T
3
T
4
T
5
T− 1
T− 2
T− 3
T− 4
T− 5
T
T
t
f
1
T
2−T
2
x(t)
1
B−B1
2B
2
2B
3
2B
4
2B
5
2B− 1
2B− 2
2B− 3
2B− 4
2B− 5
2B
X(f)
F·
F−1·
F·
F−1·
t
f
Figura 2.4: Pulso retangular e função sinc.
2.6.2 Densidade espectral de energia
A densidade espectral de energia (DEE) de um sinal real de energia x(t) é definida como
Ψx(f) = |X(f)|2.A DEE possui as seguintes propriedades:
• Ψx(f) é uma função real, não negativa, e par;
• Ex =∫∞−∞Ψx(f)df ;
• Se y(t) = H(f)x(t), então Ψy(f) = |H(f)|2Ψx(f).
Em particular, se H(f) = FPFf1,f2(f) (filtro passa-faixa ideal entre f1 e f2), então a energia de x(t)contida entre as frequências f1 e f2 pode ser calculada como a energia de y(t) = H(f)x(t), i.e.,
Ex[f1, f2] , Ey =
∫ ∞−∞
Ψy(f)df =
∫ ∞−∞|H(f)|2Ψx(f)df
=
∫ −f1−f2
Ψx(f)df +
∫ f2
f1
Ψx(f)df = 2
∫ f2
f1
Ψx(f)df.
Vale mencionar que a expressão acima é justamente o que se espera do conceito de “densidadeespectral de energia”, isto é, uma função da frequência que, quando integrada em uma região, retornaa energia contida naquela região. Além disso, devemos lembrar que, quando mencionamos, na prática,a faixa de frequências [f1, f2], estamos nos referindo, matematicamente, à faixa [−f2,−f1] ∪ [f1, f2]da variável independente f da transformada de Fourier exponencial.
A partir do conceito de densidade espectral de energia, é possível definir um critério prático paralargura de banda.
Definição 1 A largura de banda de um sinal real passa-baixa, sob o critério ε · 100% de energia, édefinida como o valor de B tal que
2
∫ ∞B
Ψx(f)df = εEx.

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 15
Isto é, B é a largura de banda de ε · 100% de energia de um sinal se exatamente ε · 100% da energiadeste sinal se encontra fora da faixa [0, B].
Outra definição possível para largura de banda utiliza um critério de atenuação, o qual tipicamenteé mais simples de calcular.
Definição 2 A largura de banda de um sinal de energia real passa-baixa, sob o critério L dB deatenuação, é definida como o valor de B tal que
10 log10
(Ψx(f)
Ψx(0)
)≤ −L para todo |f | > B.
Obs: A largura de banda de um sinal passa-faixa pode ser definida de forma análoga, tanto sobo critério ε · 100% de energia quanto sob o critério de atenuação.
2.6.3 Densidade espectral de potência
A densidade espectral de potência (DEP) de um sinal real de potência x(t) é uma função Sx(f),real, não-negativa e par, que permite determinar a potência média de x(t) contida em qualquerfaixa de frequências desejada. Especificamente, para determinar a potência de x(t) contida entre asfrequências f1 e f2 (onde f2 > f1 ≥ 0), calcula-se
Px[f1, f2] =
∫ −f1−f2
Sx(f)df +
∫ f2
f1
Sx(f)df = 2
∫ f2
f1
Sx(f)df.
Em particular, a potência média (total, sem restrição de faixa) de x(t) pode ser determinada como
Px = Px[0,∞] =
∫ ∞−∞
Sx(f)df.
Vale mencionar que o conceito de “potência de x(t) contida entre as frequências f1 e f2” corres-ponde, na prática, ao cálculo da potência do sinal y(t) = FPFf1,f2x(t) dado pela passagem de x(t)por um filtro passa-faixa ideal entre f1 e f2. (De fato, esta é justamente a operação realizada naprática por um analisador de espectro para estimar o conteúdo espectral de um sinal—exceto que ofiltro passa-faixa, obviamente, não é ideal.)
A definição matemática da DEP é pouco intuitiva e potencialmente difícil de calcular na prática,sendo mencionada aqui apenas a título de curiosidade. Matematicamente, a DEP de um sinal x(t) édefinida como
Sx(f) , limT→∞
1
T|XT (f)|2
ondeXT (f) = F x(t) rect(t/T ) .
Decorre da definição uma propriedade interessante:
y(t) = x(t) ∗ h(t) e h(t)↔ H(f) =⇒ Sy(f) = |H(f)|2Sx(f).
Em particular, se H(f) é filtro passa-faixa ideal entre f1 e f2, então “a potência de x(t) contida entreas frequências f1 e f2” pode ser calculada justamente como sendo a potência de y(t), i.e.,
Py =
∫ ∞−∞
Sy(f)df =
∫ ∞−∞|H(f)|2Sx(f)df =
∫ −f1−f2
Sx(f)df +
∫ f2
f1
Sx(f)df = Px[f1, f2]
como era de se esperar. (Na verdade, pode-se mostrar que essa é a única definição que satisfazsimultaneamente todas as propriedades desejadas.)
A partir do conceito de densidade espectral de potência, é possível definir um critério prático paralargura de banda.

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 16
Definição 3 A largura de banda de um sinal real passa-baixa, sob o critério ε · 100% de potência, édefinida como o valor de B tal que
2
∫ ∞B
Sx(f)df = εPx.
Isto é, B é a largura de banda de ε · 100% de potência de um sinal se exatamente ε · 100% da potênciadeste sinal se encontra fora da faixa [0, B].
Outra definição possível para largura de banda utiliza um critério de atenuação, o qual tipicamenteé mais simples de calcular.
Definição 4 A largura de banda de um sinal de potência real passa-baixa, sob o critério L dB deatenuação, é definida como o valor de B tal que
10 log10
(Sx(f)
Sx(0)
)≤ −L para todo |f | > B.
Obs: A largura de banda de um sinal de potência passa-faixa pode ser definida de forma análoga,tanto sob o critério ε · 100% de potência quanto sob o critério de atenuação.
Além de sua utilidade na caracterização do conteúdo espectral de um sinal e na correspondentedefinição de largura de banda, o conceito de densidade espectral de potência mostra-se útil em muitassituações para permitir modelar e facilmente determinar a potência média de sinais de potênciaaperiódicos aleatórios. Nesta categoria encontram-se os sinais aleatórios conhecidos como ruído.
2.7 Ruído
Ruído é qualquer sinal indesejado que interfere na comunicação ou na medição de outro sinal.Quanto à sua origem, ruído pode ser classificado como:
• Ruído externo (proveniente de fontes de energia externas ao sistema)
– Interferência (causada por fontes de origem humana)
– Ruído atmosférico
– Ruído solar
– Ruído cósmico
• Ruído interno (proveniente de características internas do sistema)
– Ruído térmico
– Ruído de disparo (shot noise)
– Ruído de contato (flicker noise)
– Ruído pipoca (burst/popcorn noise)
Obs: Embora às vezes tratada como um tipo de ruído, distorção (linear ou não-linear) é umfenômeno distinto de ruído, uma vez que se trata de uma transformação determinística do sinal deinteresse. Por exemplo, uma diferença marcante é o fato de que a distorção cessa quando o sinal éanulado, o que não acontece com ruído ou interferência. Entretanto, em muitas situações, ocorremdistorções de natureza tão complexa ou difícil de compensar na prática que, para todos os efeitos, érazoável tratá-la como uma fonte adicional de ruído.
2.7.1 Modelagem matemática do ruído
Um ruído aleatório x(t) pode ser modelado matematicamente como um processo estocástico, ca-racterizado principalmente por dois parâmetros:

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 17
• A distribuição de probabilidade de suas amplitudes, pX(x)
– Ex: ruído gaussiano, laplaciano, uniforme, etc
• Sua densidade espectral de potência, Sx(f)
– Ex: ruído branco, rosa, vermelho, etc
Tais parâmetros podem ser deduzidos a partir de princípios físicos ou estimados experimentalmenteatravés de medições. Nesse caso, assume-se que as propriedades estatísticas do ruído não variam aolongo do tempo, um conceito conhecido como ergodicidade.
2.7.2 Ruído branco
Um modelo importante de sinal aleatório, conhecido como ruído branco, é caracterizado, entreoutras propriedades, por possuir média nula e densidade espectral de potência constante no valorN0/2 ao longo de todo o espectro. Isto é, ruído branco w(t) possui DEP dada por
Sw(f) =N0
2−∞ ≤ f ≤ ∞
onde a constante N0 é medida em W/Hz.
N0
2
Sw(f )
f
· · · · · ·
A terminologia branco é dada em analogia à composição da luz branca, a qual é formada pelacombinação de luz de todas as cores (lembrando que a cor é caracterizada pelo comprimento de onda,sendo portanto equivalente à frequência).
De posse da DEP, podemos facilmente determinar a potência de w(t) contida em qualquer faixade frequências [f1, f2] de largura B = f2 − f1 calculando:
Pw[f1, f2] =
∫ −f1−f2
Sw(f)df +
∫ f2
f1
Sw(f)df = 2
∫ f2
f1
Sw(f)df =N0
2· 2B = N0B.
Na prática, todo sinal físico possui banda limitada; assim, um modelo mais realista para ruídobranco considera uma largura de banda Bn, de tal forma que densidade espectral de potência éconstante em N0/2 para |f | < Bn e nula para |f | > Bn, isto é,
Sn(f) =
N0/2, −Bn < f < Bn
0, caso contrário.
Note que, nesse caso, a potência de ruído é dada por Pn = (N0/2)(2Bn) = N0Bn.
2.7.3 Ruído térmico
Um tipo importante de ruído é o chamado ruído térmico, o qual é provocado pela agitação deelétrons livres em um condutor, e portanto é inerente a qualquer circuito eletrônico.
Ruído térmico pode ser modelado como um processo estocástico gaussiano de média nula e DEPdada por4
Sx(f) =h|f |
eh|f |kT − 1
4Esse resultado se refere à potência disponível, i.e., assumindo que o ruído está sendo aplicado uma carga comimpedância tal que a máxima transferência de potência é atingida. Caso se deseje obter o valor rms da tensão de malhaaberta, deve-se usar como DEP o dobro da expressão indicada. Para mais detalhes, veja por exemplo Haykin-Moher(2a ed.), capítulo 11.

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 18
onde
• h é a constante de Planck, h = 6.63× 10−34 W/Hz2
• k é a constante de Boltzmann, k = 1.38× 10−23 W/Hz/K
• T é a temperatura absoluta, em Kelvin (= 273 + C).
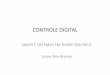
Para f kT/h, o que corresponde à aproximadamente 6 THz em temperatura ambiente, aexpressão para a DEP pode ser aproximada como
Sx(f) ≈ kT.
Assim, para todos os propósitos práticos, ruído térmico pode ser modelado de maneira extremamenteprecisa como ruído branco.
Em temperatura ambiente, temos aproximadamente
Sx(f) ≈ 4 · 10−21 W/Hz ≈ −174 dBm/Hz.
Um gráfico da DEP do ruído térmico está ilustrado na figura abaixo.
100
102
104
106
108
1010
1012
3.65
3.7
3.75
3.8
3.85
3.9
3.95
4
4.05x 10
−21
Frequency (Hz)
Amplitude(W
/Hz)
Exemplo: Se n(t) é ruído térmico (em temperatura ambiente) com largura de banda Bn =10 GHz, então
Pn = (N0/2) · 2Bn = 4 · 10−21 · 20 · 109 = 80 · 10−12 = 80 pW.
Alternativamente, temos
Pn (dBm) = −174 + 10 log10(20 · 109) = −70.97 dBm.
2.A Uma nota sobre trigonometria e números complexos
Em comunicações e processamento de sinais (assim como na análise de circuitos elétricos), precisamosfrequentemente lidar com funções senoidais (reais), as quais surgem naturalmente nesses contextos.Para manipular tais funções, frequentemente precisamos realizar cálculos trigonométricos muitas vezestediosos e pouco intuitivos. Uma enorme redução de complexidade, assim como uma maior intuiçãono processo dedutivo, pode ser conseguida fazendo uso de números complexos—um artifício mate-mático que nos acostumamos a usar mas cuja motivação para seu uso na engenharia muitas vezes nospassa despercebida. É devido a esse poder de simplificação que a nossa ferramenta mais importante—atransformada de Fourier—é utilizada mais frequentemente em sua versão complexa.

EEL7062 — Apostila complementar — NÃO SUBSTITUI A LEITURA DOS LIVROS 19
Provavelmente, a enorme importância dos números complexos no contexto da trigonometria sedeve essencialmente à fórmula de Euler:
ejθ = cos θ + j sen θ, onde θ ∈ R.
Ao tentar compreender a fórmula acima, não devemos tentar “elevar a constante e ao número jθ”.Ao invés disso, devemos interpretá-la simplesmente como a observação de que a soma cos θ + j sen θsatisfaz as mesmas propriedades algébricas que esperaríamos do exponencial ejθ.
Como veremos abaixo, a fórmula de Euler nos permite encontrar com grande facilidade diversospares transformados e identidades trigonométricas importantes.
A partir fórmula de Euler, podemos deduzir:
cos θ = Reejθ =ejθ + e−jθ
2, pois Rez =
z + z∗
2
sen θ = Imejθ =ejθ − e−jθ
2j, pois Imz =
z − z∗2j
Conhecendo o par transformado ej2πfct ←→ δ(f − fc) e propriedades básicas da transformada deFourier, as expansões acima nos levam imediatamente a:
cos 2πfct =ej2πfct + e−j2πfct
2←→ 1
2δ(f − fc) +
1
2δ(f + fc)
sen 2πfct =ej2πfct − e−j2πfct
2j←→ 1
2jδ(f − fc)−
1
2jδ(f + fc)
cos(2πfct+ θ) =ejθej2πfct + e−jθe−j2πfct
2←→ 1
2ejθδ(f − fc) +
1
2e−jθδ(f + fc)
e ainda:x(t) cos 2πfct←→
1
2X(f − fc) +
1
2X(f + fc)
Note que, uma vez que nos acostumamos a expandir um cosseno em exponenciais complexas, não hánecessidade de se esforçar para memorizar a equação acima.
A fórmula de Euler também nos permite facilmente obter identidades trigonométricas importantes(e nem sempre fáceis de memorizar). Pelas regras de multiplicação de exponenciais, obtemos:
ej(a+b) = ejaejb = (cos a+ j sen a)(cos b+ j sen b)
= cos a cos b− sen a sen b+ j(sen a cos b+ cos a sen b)
o que nos leva a
(∗) cos(a+ b) = Reej(a+b) = cos a cos b− sen a sen b
sen(a+ b) = Imej(a+b) = sen a cos b+ cos a sen b
(∗∗) cos(a− b) = cos a cos b+ sen a sen b
e portanto
(∗) + (∗∗) =⇒ cos a cos b =1
2
(cos(a− b) + cos(a+ b)
)(∗∗)− (∗) =⇒ sen a sen b =
1
2
(cos(a− b)− cos(a+ b)
).