Embed Size (px)
Citation preview

A Informática na Indústria Automóvel
2005 / 2006
979331 Hugo José Lara Branco
Departamento de Engenharia Informática

A Informática na Indústria Automóvel
2005 / 2006
979331 Hugo José Lara Branco
Departamento de Engenharia Informática
Janeiro de 2006
Orientador : Doutor. António Cardoso Costa

A Informática na Indústria Automóvel
iii
Agradecimentos
Gostaria de deixar aqui expresso os meus agradecimentos a todos os que me ajudaram e apoiaram na realização deste trabalho.
Em primeiro lugar quero agradecer ao meu orientador, Dr. António Cardoso Costa, pela
grande ajuda prestada na realização do projecto, indicando sempre o caminho a seguir e por se disponibilizar a apadrinhar o tema do projecto.
Agradeço também à minha família, em especial aos meus pais e irmãos, por todo o apoio
que me deram ao longo da realização deste projecto, assim como durante toda a minha vida. Quero deixar um agradecimento especial à minha esposa, Joana, por todo o apoio, força,
carinho, amor e compreensão que me deu em todos os momentos difíceis. Muito obrigado mesmo, pois foi de uma extrema importância.
Por fim gostaria de agradecer a todos os meus amigos, que estiveram sempre do meu
lado, em especial Hélder Parracho, Jaime Tomé, João Baptista e Mário Sousa.

A Informática na Indústria Automóvel
iv
Resumo
Este relatório tem como objectivo mostrar a utilização da informática na indústria automóvel bem como as suas vantagens e benefícios. Ficou bem vincada a ideia de que a informática trouxe enormes vantagens para a indústria automóvel.
Pode-se considerar que o relatório está dividido em 2 partes principais, sem contar com a
introdução e conclusão. A primeira parte fala da necessidade da utilização de sistemas informáticos para o controlo de variadas funções nos automóveis. É realizado um enquadramento da necessidade de utilizar a informática nos automóveis e de seguida é descrita a utilização de tais sistemas nos automóveis. São referidos os principais sistemas desenvolvidos nas várias áreas da indústria automóvel e para cada um deles é realizado um resumo que descritivo das suas características e funcionamento.
A segunda parte fala da necessidade que todos os sistemas têm de comunicarem entre si.
Para tal são desenvolvidos barramentos de dados especializados para o efeito. São referidas as diferentes arquitecturas usadas na montagem de sistemas electrónicos e de seguida é descrito o funcionamento de dois barramentos de dados. Esses barramentos são dos que têm maior destaque no ambiente automóvel. Para finalizar também é feita uma referência a todos os outros barramentos de dados usados nos automóveis.
As duas partes descritas anteriormente são as mais importantes do relatório, embora este
ainda possua uma outra parte. Esta última parte fala do futuro dos automóveis. Refere sistemas informáticos que estão a ser desenvolvidos e outros que poderão a vir a ser desenvolvidos, mostrando que os automóveis vão tornar-se cada vez mais inteligentes e mais autónomos.
A principal ideia que o relatório deixa é de que hoje em dia a informática é totalmente
indispensável na indústria automóvel e que com a sua ajuda os carros tornaram-se mais perfeitos, agradáveis e fáceis de utilizar.

A Informática na Indústria Automóvel
v
Índice Geral Agradecimentos ............................................................................................... iii Resumo ............................................................................................................. iv
Índice Geral........................................................................................................ v
Índice de Figuras ............................................................................................. vii Índice de Tabelas............................................................................................ viii Notação e Glossário......................................................................................... ix
1 – Introdução.................................................................................................... 1
1.1 – Contextualização......................................................................................................... 1
1.2 – Objectivos .................................................................................................................... 3
1.3 – Motivações Pessoais à Realização do Projecto ....................................................... 4 1.4 – Organização e Estrutura do Relatório ....................................................................... 4
2 –A Informática nos Principais Ramos da Indústria Automóvel .................. 6
2.1 – Enquadramento ........................................................................................................... 6
2.2 – A Informática em Veículos Mais Limpos................................................................... 9
2.2.1 – Funcionamento do Sistema de Diagnóstico On-Board................................... 10
2.3 – A Informática no Design e Modelação Automóvel ................................................. 14
2.3.1 – O P2V – Virtual Vehicle Presentation................................................................ 15
2.3.2 – DMU...................................................................................................................... 16
2.3.3 – RAMSIS................................................................................................................ 17
2.4 – A Informática e os Sistemas de Entretenimento e Informação ............................. 20
2.4.1 – O Integrated Control Sysytem (ICS) da Alfa Romeo........................................ 22
2.4.2 – O iDrive da BMW................................................................................................. 23
2.4.3 –Bird View .............................................................................................................. 24
2.4.4 – G-Book................................................................................................................. 26
2.4.5 – O TeleAid da Mercedes ...................................................................................... 27
2.4.6 – HEAD-UP DISPLAY............................................................................................. 28
2.4.7 – BMW CONNECTEDDRIVE .................................................................................. 30
2.4.8 – O Automóvel Conectado.................................................................................... 31
2.4.9 – FUTURELIFE HOUSE.......................................................................................... 31
2.4.10 – VOLKSWAGEN RSE ......................................................................................... 31
2.5 – A Informática nos Novos Sistemas de Segurança Automóvel.............................. 32
2.5.1 – ABS ...................................................................................................................... 35
2.5.2 – ESP ...................................................................................................................... 36
2.5.3 – AIRBAG................................................................................................................ 37
2.6 – A Informática nos Sistemas de Controlo de Motores Automóveis....................... 38

A Informática na Indústria Automóvel
vi
2.6.1 – Sistema VTEC da Honda .................................................................................... 39
2.7 – A Informática e Veículos Inteligentes...................................................................... 40
2.7.1 – Controlo de Cruzeiro Adaptativo....................................................................... 41 2.8 – Conclusão .................................................................................................................. 43
3 – Os Barramentos de Dados e Redes nos Automóveis............................. 44
3.1 – Contextualização....................................................................................................... 44
3.2 – Arquitecturas dos Sistemas Electrónicos............................................................... 46
3.2.1 – Arquitectura Centralizada .................................................................................. 46
3.2.2 – Arquitectura Distribuída..................................................................................... 47
3.2.3 – Considerações .................................................................................................... 48
3.3 – Principais Barramento de Dados Automóveis........................................................ 50
3.3.1 – CONTROLLER AREA NETWORK (CAN) ........................................................... 51
3.3.1.2 – Padrões do CAN........................................................................................... 57
3.3.1.3 – Detecção de Falhas...................................................................................... 58
3.3.1.4 – Aspectos de Implementação....................................................................... 59
3.3.1.5 – Implementações CAN .................................................................................. 61
3.3.1.6 – Aplicações CAN............................................................................................ 64
3.3.2 – MEDIA ORIENTED SYSTEM TRANSPORT (MOST) .......................................... 64
3.3.2.1 – A rede MOST................................................................................................. 67
3.3.3 – Restantes barramentos Existentes ................................................................... 71
3.3.3.1 – INTELLIGENT TRANSPORT SYSTEM DATA BUS (IDB)............................ 71
3.3.3.2 – DIGITAL DATA BUS (D2B)........................................................................... 72
3.3.3.3 – BLUETOOTH................................................................................................. 72
3.3.3.4 – ZIGBEE.......................................................................................................... 73
3.3.3.5 – LOCAL INTERCONNECT NETWORK (LIN)................................................. 74
3.3.3.6 – FLEXRAY ...................................................................................................... 74
3.3.3.7 – TIME-TRIGGERED PROTOCOL (TTP)......................................................... 75
3.3.3.8 – TIME-TRIGGERED CAN (TTCAN) ................................................................ 75 3.4 - Conclusão................................................................................................................... 76
4 – O Futuro ..................................................................................................... 77
4.1 – Novos Sistemas......................................................................................................... 77
4.1.1 – Sistemas de Segurança...................................................................................... 78
4.1.2 – Sistemas de Navegação..................................................................................... 79
4.2 – O Automóvel Inteligente ........................................................................................... 80
4.3 – O Automóvel do Futuro ............................................................................................ 82 4.4 - Conclusão................................................................................................................... 84
5 – Conclusão .................................................................................................. 86
Bibliografia....................................................................................................... 89

A Informática na Indústria Automóvel
vii
Índice de Figuras Figura 1 – Ringspeed Splash.................................................................................................. 1
Figura 2 – Maserati M12 .......................................................................................................... 2
Figura 3 – Automóvel híbrido construído por Ferdinand Porsche em 1900....................... 3
Figura 4 – Exemplo de uma leitura de uma linha de dados em série................................ 11
Figura 5 – Imagem da luz de aviso existente no painel de instrumentos ......................... 12
Figura 6 – Sistema de capacete virtual ................................................................................ 16
Figura 7 – Exemplo de um modelo de um sistema RAMSIS .............................................. 20
Figura 8 – Monitor do ICS ..................................................................................................... 22
Figura 9 – Sistema iDrive da BMW ....................................................................................... 24
Figura 10 – Imagem apresentada no ecrã do sistema Bird ViewTM.................................. 26
Figura 11 – Os Head Up Displays ......................................................................................... 29
Figura 12 – Funcionamento de um sistema HUD................................................................ 30
Figura 13 - O BMW CONNECTEDDRIVE ............................................................................. 30
Figura 14 - O sistema RSE da Volkswagen ......................................................................... 31
Figura 15 – Sistema de Joystick da Mercedes .................................................................... 34
Figura 16 – Relações entre informações e suas funções num automóvel ....................... 44
Figura 17 – Representação da Arquitectura Centralizada................................................. 47
Figura 18 – Representação da Arquitectura Distribuída ................................................... 47
Figura 19 – Relação entre a responsabilidade de cada ECU, de um determinado sistema
de controlo e a complexidade desse sistema como um todo............................................ 49
Figura 20 – Relação entre o comprimento de rede e a taxa de transmissão de dados... 52
Figura 21 – Níveis de tensão de uma rede CAN.................................................................. 53
Figura 22 – Mensagens do tipo CAN 2.0A ........................................................................... 55
Figura 23 - Mensagens do tipo CAN 2.0B ............................................................................ 56
Figura 24 – Rede CAN com duas sub redes........................................................................ 59
Figura 25 – Medidas no desenvolvimento de um cabo ...................................................... 60
Figura 26 – Dispositivos que o barramento MOST liga ...................................................... 66
Figura 27 – Diferentes transmissões de dados numa rede MOST .................................... 68

A Informática na Indústria Automóvel
viii
Índice de Tabelas Tabela 1 – Principais Sistemas Inteligentes num automóvel ............................................ 41
Tabela 2 – Erros existentes em cada nível .......................................................................... 58
Tabela 3 – Resumo das características do BasicCan......................................................... 62
Tabela 4 – Resumo das características do FullCan............................................................ 63
Tabela 5 – Camadas de rede do barramento MOST............................................................ 69

A Informática na Indústria Automóvel
ix
Notação e Glossário
BrainStorming – O brainstorming é mais do que uma técnica de dinâmica de grupo é uma actividade desenvolvida para explorar a potencialidade criativa do indivíduo, colocando-a ao serviço dos seus objectivos. Baud – Baud é uma unidade de velocidade de transmissão. A velocidade em bauds é o número de mudanças na linha de transmissão (seja em frequência, amplitude, fase etc) ou eventos por segundo. Em baixas velocidades, cada evento representa apenas uma condição de bit, e a taxa em bauds é igual ao valor em bps (bits por segundo). Para velocidades mais elevadas, cada evento representa mais do que um bit, e a taxa em bauds não segue o valor em bps. Exemplo: 250 baud significa que são transmitidos 250 sinais por Segundo. Se casa sinal transportar 4 bits, então estão a ser transmitidos 1000 bits por segundo (1000 bit/s), CD - Compact disc. É actualmente o mais popular meio de armazenamento de dados digitais, principalmente música comercializada e software de computador, caso em que o CD recebe o nome de CD-ROM. A tecnologia utilizada nos DVD’s é semelhante à dos CD’s. DVD – Digital Versatile Disc (antes denominado Digital Video Disc). Contém informações digitais, tendo uma maior capacidade de armazenamento que o CD áudio ou CD-ROM, devido a uma tecnologia de compressão de dados. Drive-by-wire – Comando do acelerador em que o movimento do pedal é transmitido para a central electrónica do motor. Esta então analisa o movimento e outras condições, como a rotação do motor, para comandar a abertura da borboleta de aceleração, que é feita por um motor eléctrico. Além de eliminar o cabo, que se pode desgastar ou transmitir vibrações vindas do motor, o sistema permite obter suavidade quando se acelera ou se tira o pé rapidamente, evitando solavancos.
Concept Cars – Protótipos que expressam as tendências da indústria automóvel. GPS – Global Positioning System. O Sistema de Posicionamento Global é um sistema de posicionamento por satélite utilizado para determinação da posição na superfície da Terra ou em órbita. É constituído por uma constelação de satélites. GSM – Global System for Mobile Communications. É um sistema global de comunicações móveis, sendo o padrão mais popular para telemóveis. Híbrido – Embora o termo tenha sentido amplo, é como se denominam os veículos que possuem dois motores de tipos diferentes, sendo um eléctrico e outro a combustão (a gasolina ou a diesel, por exemplo). Em geral o motor eléctrico movimenta o veículo em baixas velocidades e o motor a combustão (com o auxílio do eléctrico) em altas. As baterias são recarregadas nas desacelerações e travagens por um sistema regenerativo, o que dispensa a

A Informática na Indústria Automóvel
x
recarga por meio externo. Automóveis híbridos estão à venda desde 1997 no Japão, com o Toyota Prius. LCD – Liquid Crystal Display. Um monitor de cristais líquidos, muito leve e fino sem partes móveis. LED – Light Emiting Diode. Dispositivo semicondutor emissor de luz. Multicast – É o envio de informação para múltiplos destinatários simultaneamente. PDA - Personal Digital Assistants. Assistente Pessoal Digital, é um computador de dimensões reduzidas (cerca de A6), dotado de grande capacidade computacional, cumprindo as funções de agenda e sistema informático de escritório elementar, com possibilidade de ligação a um computador pessoal e a uma rede informática sem fios - wi-fi - para acesso a correio electrónico e Internet. TFT – Thin-Film Transístor. Transístor de película fina, feito pelo depósito de finas películas para os contactos metálicos, camadas semicondutoras activas e camadas isolantes. Transceivers – Dispositivo que funcionam como transmissor e receptor ao mesmo tempo.
A Informática na Indústria Automóvel
1
1 – Introdução
Este capítulo serve de introdução e apresentação ao projecto. Nele são apresentados a
sua contextualização, os seus objectivos, as motivações que levaram ao seu desenvolvimento e a sua organização e estrutura. Neste último ponto são descritos os capítulos do relatório e é feita uma pequena descrição de cada um deles.
1.1 – Contextualização O minuto que trouxe o primeiro automóvel para a rua, foi um grande símbolo de tecnologia
e inovação [10]. No último século, a tecnologia sofreu uma grande e rápida evolução, estando muitas vezes a indústria automóvel à frente desta. Um carro é basicamente uma estrutura assente em quatro rodas que se transportam pessoas e objectos do ponto A para o ponto B. Há mais de um século que esta é a melhor definição de um automóvel, se pensarmos apenas no seu lado prático. Mas será um automóvel apenas isso? Desde os primeiros triciclos e quadriciclos de Benz, Opel, Porsche, Peugeot ou Renault que se estabeleceram metas ainda hoje válidas. Um bom carro tem de ser mais rápido, mais eficiente, confortável, simples de usar, tecnologicamente avançado e visualmente apelativo que os antecessores e concorrentes. Mas por estranho que pareça, a base que os pioneiros construíram continua a ser a regra. As rodas continuam de borracha, os volantes continuam redondos, os motores são de combustão interna e consomem energias fósseis. As ligações entre as várias partes são mecânicas, há um espaço para bagagens e outro para passageiros. [3]
Tirando estas parecenças, mesmo os carros comuns da actualidade, seriam inimagináveis
pelos pioneiros. Tudo devido à incessante busca de novas formas e conceitos e do imparável avanço tecnológico, que permitem criar veículos insólitos como o Ringspeed Splash, presente na Figura 1.
Figura 1 – Ringspeed Splash

A Informática na Indústria Automóvel
2
Apesar de tudo não deixa de ser curioso que as invenções revolucionárias da actualidade foram, na sua maioria, exploradas no início da indústria automóvel. Umas não tiveram êxito por terem surgido antes do tempo, outras ainda porque não reuniram consensos ou apoios.[3]
Hoje em dia o automóvel é uma das maiores montras tecnológicas existentes. A maior
parte destas tecnologias é devido a uma das principais preocupações dos fabricantes automóveis de hoje em dia, que é a segurança. O cinto de segurança nasceu no final dos anos 50 pelas mãos da Volvo, o airbag foi testado em 1973 pela General Motors, tendo surgido mais tarde (1988) de série num Chrysler e hoje em dia são obrigatórios, bem como toda uma panóplia electrónica, só possível com o avanço fulgurante da informática, que até tenta corrigir os erros do condutor.
Para além disto, a tecnologia colocada ao serviço do condutor também já é uma velha
preocupação. O controlo de cruzeiro foi patenteado em 1945 por um cego, Ralph Teetor e comercializado a partir de 1958 pela Chrysler. O ar condicionado surgiu em 1940 na Packard, os vidros eléctricos em 1948 na Daimler, dois anos antes de nascer a direcção assistida. Mas há 30 anos seria difícil imaginar sensores de estacionamento, de luminosidade ou de chuva, bancos que fazem massagens, sistemas de navegação com actualização em tempo real que falam com os condutores, etc. Tudo isto em prol do bem estar a bordo. [3]
Para testar as novas tendências e precaver o futuro, sempre se criaram carros de sonho,
como os que ensaiavam conceitos e anteciparam o que hoje chamamos concept cars. Para provar que se podia ir mais longe sempre se criaram super carros, como o Maserati MC12 da Figura 2.
Figura 2 – Maserati M12
O que nunca tinha sido feito era efectuar uma alteração radical no automóvel, mudando-
lhe algo tão imutável até agora como o método de propulsão. Finalmente a combustão interna

A Informática na Indústria Automóvel
3
parece ter sucessor viável, com o hidrogénio a ser, mais do que uma hipótese, uma realidade. Isto em paralelo com sistemas híbridos que conjugam combustíveis fósseis, biológicos, sintéticos e electricidade, embora estes sistemas híbridos já tenham sido apresentados no fim do século XIX (1900) pelas mãos de um senhor chamado Ferdinand Porsche.
Figura 3 – Automóvel híbrido construído por Ferdinand Porsche em 1900
Devido a todos estes condicionalismos, foi imprescindível incluir a informática na indústria automóvel. Assim os automóveis foram invadidos por uma quantidade sem fim de novos sistemas informáticos.
1.2 – Objectivos O objectivo deste projecto é apresentar e descrever o grande envolvimento que a
informática e os seus sistemas tiveram com a indústria automóvel. São referidas as principais utilizações da informática nos principais ramos da indústria automóvel, onde são apresentados quais os principais sistemas informáticos, nesses mesmos ramos. Em cada sistema apresentado é explicado o seu funcionamento e como este age com o automóvel.
Para que todos os sistemas informáticos operem em simultâneo no automóvel, eles têm de
poder comunicar uns com os outros, trocando informações e dados importantes para a sua actuação. Assim sendo, é descrito o funcionamento dos principais barramentos de dados existentes nos automóveis.
Por fim é apresentado um possível cenário do futuro dos automóveis. É descrito o que é
esperado dos futuros sistemas informáticos no controlo, entretenimento, navegação e informação automóvel. Também é realizada uma abordagem ao automóvel realmente “inteligente”.

A Informática na Indústria Automóvel
4
1.3 – Motivações Pessoais à Realização do Projecto O motivo pelo qual escolhi este projecto foi pelo facto de ser um tema bastante actual,
interessante e cheio de tecnologia. A informática tem tomado conta dos automóveis, controlando quase tudo num automóvel. Toda esta simbiose entre a informática e os automóveis é um mundo bastante vasto e muito interessante para mim e achei que a realização deste trabalho era uma boa oportunidade para aprofundar o meu conhecimento desse mundo.
O facto de aliar a informática e sistemas informáticos aos automóveis também foi um factor
muito determinante na escolha do tema do projecto, pois para além de apreciar bastante todos esses sistemas, que são acompanhados de variados dispositivos para poderem ser controlados, tenho também um gosto especial por automóveis.
1.4 – Organização e Estrutura do Relatório
A estrutura do relatório está dividida em 5 capítulos, os quais se descrevem de seguida:
� Introdução – Este é o primeiro capítulo e serve de apresentação ao projecto, realizando uma contextualização do tema, falando dos seus objectivos, motivações para a sua realização e indicando a sua estrutura.
� A Informática nos Principais Ramos da Indústria Automóvel – Este é o segundo
capítulo e fala dos principais sistemas informáticos utilizados nos variados ramos da indústria. Os ramos mais importantes da indústria automóvel estão completamente dominados por novos sistemas informativos.
O capítulo está dividido nos seguintes pontos:
1. A Informática em Veículos mais Limpos 2. A Informática no Design e Modelação Automóvel
3. A Informática e os Sistemas de Entretenimento e Informação
4. A Informática nos Novos Sistemas de Segurança Automóvel
5. A Informática nos Sistemas de Controlo de Motores Automóveis
6. A Informática e Veículos Inteligentes
Os Barramentos de Dados e Redes nos Automóveis – Este é o terceiro capítulo e fala dos principais barramentos existentes nos automóveis. Só os dois principais barramentos é que são descritos, falando das suas características e funcionamento.

A Informática na Indústria Automóvel
5
Só estes barramentos é que foram referidos, porque o objectivo desde capítulo não era a descrição de todos os barramentos existentes, mas sim mostrar a importância da existência de redes para a comunicação entre os vários sistemas presentes no automóvel. Os barramentos descritos são 1. Controller Area Network (CAN) 2. Media Oriented System Transport (MOST)
3. Referência aos outros barramentos existents
Este capítulo mostra como é fundamental os vários sistemas informáticos comunicarem entre si e essa comunicação acontece pelas diferentes redes existentes nos automóveis.
� O Futuro – Este é o quarto capítulo e fala do futuro dos sistemas informáticos nos
automóveis. Aborda o automóvel inteligente do futuro, demonstrando como este deve ser e agir com os sistemas informáticos que poderão ser desenvolvidos e como o automóvel vai ser controlado por esses sistemas.
� Conclusão – Este é o quinto e último capítulo onde é apresentado uma conclusão geral do projecto e algumas considerações pessoais.

A Informática na Indústria Automóvel
6
2 –A Informática nos Principais Ramos da Indústria Automóvel
Este capítulo aborda os sistemas informáticos nos principais ramos da indústria automóvel. Começa por realizar um pequeno enquadramento sobre a necessidade do aparecimento da informática nos automóveis e de seguida descreve os principais sistemas informáticos existentes e usados nas várias áreas da indústria automóvel.
2.1 – Enquadramento
À mediada que a indústria informática ia avançando o Homem logo concluiu que a informática iria ser uma grande aliada de quase todas as outras indústrias existentes. A indústria automóvel não foi excepção e demorou pouco tempo para a informática e os sistemas electrónicos começarem a ser introduzidos nos automóveis.
Os automóveis mais antigos eram construídos a pensar simplesmente no seu lado prático.
Outros factores como o conforto, segurança e os níveis de emissão de poluentes não eram vistos como factores de grande prioridade aos olhos dos construtores automóveis.
Mas isso com o passar do tempo foi-se alterando. Os construtores aperceberam-se que
um carro podia ser muito mais do que aquilo que ele efectivamente era. Com o desenvolvimento computacional e tecnológico os computadores passaram a ser explorados como um meio de controlar várias funções de um automóvel. Agora eles são usados para controlar factores como a emissão de gases dos motores, a potência, o consumo de combustível, segurança, comunicações e navegação. Nos dias de hoje os automóveis contêm vários computadores que controlam os mais variados tipos de funções, como por exemplo o motor, janelas, fecho centralizado, retrovisores, etc.
Se o automóvel que guia tem menos de 10 anos é certo que ele carregue consigo vários
computadores a bordo. No final dos anos 80, os chips e sistemas informáticos começaram a entrar nos automóveis controlando os sistemas de ignição e injecção de combustível. Hoje, são usados para comandar o ar condicionado, o painel de instrumentos e o rádio. Servem até para corrigir erros dos condutores [8]. Componentes mecânicos estão a ser substituídos por sensores e motores eléctricos e os carros são agora capazes de captar, receber e transmitir informações. Escolhem o melhor caminho para chegar ao destino e não há de faltar muito para que ele controle a direcção para que o condutor possa trabalhar ou realizar outra tarefa qualquer. Hoje, os engenheiros automóveis estão a usar os computadores em grandes inovações automóveis, que estão e irão ajudar a produzir automóveis mais seguros, limpos, “inteligentes”, etc.

A Informática na Indústria Automóvel
7
Os automóveis de hoje incorporam computadores de alto nível para responder às necessidades de segurança, ambiente a bordo, comunicações e ainda de entretenimento que os consumidores/condutores têm. O controlo electrónico de um automóvel de hoje é tão grande que chega a controlar mais de 86% de todos os sistemas num veículo tradicional.
Mas é quase certo que a utilização dos computadores e sistemas informáticos, no mundo
automóvel, não fique por aqui. Enquanto os automóveis de hoje gozam de uma quantidade impressionante de computadores e sistemas informáticos, o futuro promete um controlo total do automóvel por parte desses sistemas. Eventualmente, a presença dos computadores nos automóveis será total, eles ajudarão a projectar os carros e todos os seus componentes, desenharão as fábricas e máquinas que os construirão e realizarão testes de pista, antes mesmo que ele seja construído [8]. As pessoas vão poder comprar o seu automóvel pela Internet, depois de o ter experimentado virtualmente. Os computadores encarregar-se-ão de avisar as pessoas quando for necessário qualquer tipo de manutenção, seja uma troca de óleo, calibragem nos pneus ou uma ida à oficina para resolver problemas mais sérios. Sistemas que vão controlar a condução, evitar acidentes e até realizar uma pesquisa pelo corpo do condutor para o colocar numa melhor posição de condução, vão passar a ser usuais nos automóveis. Á medida que os computadores e seus chips se tornam mais pequenos e potentes, eles têm um papel cada vez mais importante e determinante na mudança da mobilidade moderna.
Muitos destes sistemas já existem em automóveis de gama média e alta ou estão em
pleno desenvolvimento. A Daimler-Chrysler, por exemplo, trabalha numa série de inovações que deverão chegar ao mercado na próxima década, entre elas um sistema de direcção sem volante e sem pedais, um método de "reboque virtual" em que dois ou mais camiões trabalham em conjunto sob o comando de um único motorista sem nenhuma ligação física e um sistema capaz de identificar peões no meio do trânsito e identificar sinais de trânsito e semáforos.
Para se poder ter uma ideia de como a utilização de computadores nos automóveis tem crescido é apresentado de seguida uma pequena comparação bastante interessante:
• Comparação de um automóvel com a nave espacial Apollo 11:
Os automóveis de hoje contêm mais computadores e sistemas informáticos do que nave espacial Apollo 11. Aliás a tecnologia computacional de um automóvel de hoje é quase 1000 vezes maior do que aquela que guiou a missão da Apollo 11 à lua. Para milhões de pessoas a primeira missão do Homem à lua continua a ser um testemunho da capacidade e habilidade humana, em tornar os seus sonhos em realidade, usando a tecnologia. O programa da Apollo 11, que levou e trouxe pela primeira vez o homem à lua, será para sempre olhado como um dos maiores feitos da humanidade. Hoje, a maioria de nós tem quase 1000 vezes mais capacidade computacional disponível nos automóveis que usamos diariamente do que os

A Informática na Indústria Automóvel
8
computadores que guiaram e levaram a Apollo 11 à lua. Portanto, enquanto uma viagem à mercearia não seja tão excitante como uma viagem à lua, os computadores que trabalham para chegarmos à mercearia, iriam por Neil Armstrong e os outros astronautas da Apollo 11, verdes de inveja [10].
Automóveis de Hoje Apollo 11 � 1,000,000 bytes de memória � 36,000 bytes � 56 milhões de ciclos por segundo � 43000 ciclos por segundo � Processador de 32 bits � Processador de 14 bits
Tudo isto mostra que temos um grande pacote tecnológico ao nosso comando. E embora o automóvel não vá fazer nenhum passeio à lua, por enquanto num futuro próximo, é bom saber que a melhor tecnologia do mundo existente no momento, está a ajudar as missões terrestres a serem mais seguras, limpas e confortáveis, do que alguma vez foram.
Os automóveis de hoje contêm um número infindável de microprocessadores a maioria dos quais torna serviços mais rápidos e fáceis de gerir. Qualquer motor automóvel e sistema computacional é diferente, mas todos os sensores e dispositivos têm de estar em perfeita sintonia com os automóveis para serem eficientes e trabalharem sem erros. Os automobilistas raramente reconhecem a importância dos sistemas de computador existentes por baixo da carroçaria e por trás dos painéis de instrumentos. Algumas das razões para o aumento de toda a informática nos automóveis são:
• A necessidade de sofisticados sistemas de controlo do motor para controlar
emissões de gases e consumo de combustível. • Avançados sistemas de diagnóstico e reparação do motor.
• Redução do número de redes e barramentos existentes nos automóveis.
• Novos sistemas de segurança.
• Novas necessidades de conforto.
• Novas necessidades de comunicação e de entretenimento.
Enquanto as funções mecânicas continuam a ser substituídas por electrónicas, a
performance dos processadores e softwares estão a crescer para responder a essa mudança. A indústria automóvel é uma das que mais contribui para o rápido crescimento do mercado de semicondutores. A solução de memórias Flash em circuitos integrados continua a ter uma grande expansão. Instrumentos de navegação GPS, computadores pessoais em automóveis e sistemas de reconhecimento por voz, estão todos a utilizar memórias Flash. A utilização de memória Flash é muito grande pois aguenta com altas temperaturas e com muita humidade, mantendo uma alta performance durante longos anos.

A Informática na Indústria Automóvel
9
Derivado ao facto da indústria automóvel utilizar tantos componentes informáticos e electrónicos, ela não se fica pela liderança da inovação, mas também ajuda na liderança económica. A indústria automóvel foi responsável por mais de 90000 postos de trabalho, apenas na indústria da electrónica e informática, em 1998.
2.2 – A Informática em Veículos Mais Limpos
A informática ajuda a tornar os automóveis mais limpos, devido ao controlo que hoje em dia tem sobre o motor. Sistemas de controlo de emissões de gases fazem diminuir bastante as emissões de dióxido de carbono e enxofre do motor.
Os computadores revolucionaram a emissão de gazes, por parte dos motores dos
automóveis, ajudando os construtores de automóveis a produzir automóveis que são 99% mais limpos do que eram há 35 anos atrás. Por exemplo, quando engenheiros desenvolveram um catalizador mais sofisticado, isto em 1981, eles utilizaram sistemas de diagnóstico computorizados (Sistemas de Diagnostico a Bordo/On-Board – SDO), para regular o tempo de ignição e a quantidade de combustível injectado por ciclo de motor, para minimizar as emissões de gazes. Hoje, tudo afecta as emissões de gases e performance do motor do automóvel, como a velocidade, aceleração, a temperatura do ar exterior, o uso do ar condicionado e os requisitos eléctricos do motor, isto apenas para nomear alguns factores. A partir de 1996 todos os automóveis passaram a possuir este sistema.
O SDO também realiza um diagnóstico ao motor, para se certificar que o motor está
sempre em boas condições. Se algum problema ou avaria é detectada, o SDO ilumina uma luz de aviso, no painel de instrumentos do automóvel, para alertar o condutor. Esta luz de aviso, normalmente, tem a frase “Check Engine”, ou “Service Engine Soon” ou simplesmente tem o símbolo do motor. SDO também guarda importantes informações sobre a avaria detectada, para que o técnico que vai realizar a reparação possa rápida e seguramente resolver o problema.
O SDO não protege apenas o ambiente como também os consumidores/condutores, ao
identificar um pequeno problema antes que este se torne numa grande dor de cabeça para os mesmo, devido a grandes contas de reparação. Por exemplo, ao identificar uma reparação simples e relativamente barata, como a substituição do sensor de oxigénio, o SDO pode mais tarde poupar o dono do automóvel do custo da substituição do catalizador. Ao ajudar a garantir que o motor está nas perfeitas condições, este sistema permite aos donos dos automóveis pouparem dinheiro e tempo.

A Informática na Indústria Automóvel
10
2.2.1 – Funcionamento do Sistema de Diagnóstico On-Board
O SDO foi introduzido pela General Motors em 1981, com o propósito de monitorizar o sistema de escape do motor de um automóvel [1]. Quando o computador do SDO detecta um problema no sistema de escape do motor, é suposto acontecer três acções diferentes. Primeiro é ligada uma luz de aviso no painel de instrumentos do automóvel para avisar o condutor que existe um problema. Depois é introduzido um código no computador do SDO. Por fim esse código é gravado na memória do computador para que mais tarde possa ser lido por um técnico, quando este estiver a realizar o diagnóstico e reparação do problema. Este SDO foi denominado SDO de 1ª Geração.
Os principais objectivos deste sistema eram:
• Melhorar as emissões de gases do motor, alertando o condutor quando uma avaria existir
• Ajudar os técnicos de reparações a identificarem e repararem a avaria existente
O SDO está ligado aos sistemas que são considerados as causas mais prováveis das avarias no sistema de escape e do motor, de um automóvel. Estes sistemas são:
• Todos os sensores mais importantes do motor • O sistema de medição de combustível
• O funcionamento da recirculação do combustível
De seguida são apresentadas as principais características do SDO de 1ª geração:
• Luz de indicação de avaria • Codificação das avarias
• Diagnóstico da monitorização dos principais sensores de entrada de dados, da
medição do combustível e do funcionamento da recirculação do combustível
• Monitorização de circuitos de abertura e de fecho Quando ocorre uma avaria a luz de aviso é ligada no painel de instrumentos e assim
continua até as condições normais regressarem, deixando o código da avaria gravado na memória do computador. O SDO avalia os circuitos/sistemas e se durante 3 avaliações consecutivas a avaria não se verificar, a luz de aviso apaga-se

A Informática na Indústria Automóvel
11
O código da avaria gravado na memória do computador, indica em qual dos circuitos/sistemas a avaria aconteceu. Esse código, continua guardado na memória de longo prazo do computador, quer a avaria seja contínua ou intermitente. O SDO da Toyota guardava o código da avaria na memória do computador, até este ser limpo pela remoção da alimentação do automóvel (desligar a bateria).
Este sistema funcionou tão bem que em 1986, o estado da Califórnia ordenou que todos
os carros aí vendidos, estivessem equipados com o SDO. Por esta razão o SDO tornou-se um padrão e todos os carros vendidos no estado da Califórnia passaram a ter este sistema [1].
Embora a regulamentação do SDO não requeresse, o uso de linhas (streams) de dados
em série acessíveis por ferramentas de pesquisa foram introduzidas por alguns fabricantes automóveis. Dados em série são informações electrónicas sobre sensores e actuadores, que são acessíveis por um único fio vindo do SDO. O termo dados em série implica que a informação seja codificada digitalmente e transmitida em série por palavras de dados. Essas palavras de dados são visualizadas por uma ferramenta de pesquisa. Os dados em série do SDO da Toyota, consistem em mais 20 palavras de dados, que incluem valores de sensores, modificações de estados, estados de actuadores e outros dados de operações do motor.
Figura 4 – Exemplo de uma leitura de uma linha de dados em série
Esta primeira versão do SDO tinha bastantes restrições. Primeiro apenas cobria o sistema de escape do motor. Os vapores do depósito do combustível não eram monitorizados, as emissões de gases não eram medidas e apenas dispositivos especificamente instalados para o controlo de emissão de gases eram monitorizados. Para além disso não havia definido, na indústria automóvel, um padrão do SDO. Cada construtor automóvel tinha um termo diferente para a luz de aviso existente no painel de instrumentos do automóvel. A GM tinha o nome de “Check Engine” ou “Service Engine”, a Chrysler chamou-lhe “Power Loss” e a Ford apenas deu-lhe o nome de luz de “Engine”. A maioria dos construtores automóveis chamou-lhe a luz

A Informática na Indústria Automóvel
12
de “Check Engine”.Mas isto tornou-se confuso para técnicos e também para os condutores. Muitos condutores ao verem a luz de “Check Engine” ligada levavam os seus automóveis ao mecânico e pediam uma mudança de óleo ou um ajuste qualquer, esperando que a luz se apague-se. É escusado dizer que tal não acontecia e que depois de se ter gasto algum dinheiro em reparações desnecessárias, o SDO tinha de ser diagnosticado e depois reparada a avaria. Também é preciso frisar que o sistema de codificação de avarias era diferente de construtor para construtor, o que tornava o diagnóstico da avaria mais difícil.
A crescente preocupação com o ambiente nos anos 90, nomeadamente a qualidade do ar, levou com que a partir de 1996 todos os carros vendidos nos Estados Unidos estivessem equipados com uma nova versão do SDO. Este sistema ficou conhecido por SDOII ou SDO de 2ª Geração. Esta preocupação era tal que quase todos os construtores automóveis já tinham os seus carros equipados com o novo SDO a partir de 1995. Se o automóvel que conduz é de 1995, ou ainda mais recente, o mais provável é que esteja equipado com o SDOII.
De entre as várias diferenças do SDO e do SDOII, a principal foi o aparecimento de um
padrão para o novo sistema. Todas as luzes de aviso existentes no painel de instrumentos do automóvel, passaram a dizer “Check Engine” ou a imagem de um motor com a palavra “Check” por cima desta.
Figura 5 – Imagem da luz de aviso existente no painel de instrumentos
Também o sistema de codificação de avarias obedece agora a um padrão. Agora o sistema de codificação é composto por mais de 400 códigos diferentes, para as diferentes avarias. Todas as causas que podem provocar gastos excessivos são agora monitorizadas. Se o tampão do depósito de combustível está mal fechado e estão a escapar-se vapores de combustível, a luz de aviso “Check Engine” é ligada e é gravado o código da respectiva avaria na memória do computador do SDOII. Outra grande diferença entre os dois sistemas é que no SDO quando é detectada uma avaria a luz de aviso é ligada e é gravado o código na memória do computador. A luz de aviso é desligada quando a avaria for reparada, mas o código da avaria vai ser guardado na memória do computador. No SDOII a luz só se apaga quando a avaria for reparada e quando for feito um reset na memoria do computador. Este funcionamento pode provocar dois problemas para o condutor. Primeiro se a luz se ligar devido a uma fuga de gazes do depósito de combustível, ela não se apaga mesmo depois da fuga ser reparada, tendo o condutor que levar o automóvel a uma oficina de reparação para ser realizado um reset na memória do computador e assim a luz apagar-se, mas essa operação traz despesas para o condutor. Segundo, existe sempre o perigo de o técnico de

A Informática na Indústria Automóvel
13
reparação realizar um reset à luz, sem ter feito a reparação do problema. Neste caso o que vai acontecer é que a luz de aviso vai voltar a acender.
As principais características deste novo SDO são:
• Monitorização contínua e testes de funcionalidade, realizados uma vez por viagem • Diagnóstico do sensor de oxigénio
• Diagnóstico do depósito de combustível
• Detecção de uma falha de ignição do motor
• Monitorização da eficiência do catalizador
• Monitorização do fluxo da recirculação do combustível
• Medição do fluxo de evaporação (a partir de 1995)
• Monitorização secundária de ar
• Novas regras para a luz de aviso de avaria
• Padronização da codificação de avarias e das linhas de dados em série
• Ferramenta de pesquisa
É extremamente importante que o condutor do automóvel esteja familiarizado com a luz de “Check Engine”, assim como todas as outras luzes de aviso existentes no painel de instrumentos do seu automóvel. Este conhecimento vai ajudar a eliminar custos e reparações desnecessárias. Quando uma luz de aviso se acendo no painel de instrumentos, o que deve ser feito antes de se levar o automóvel para reparação é a consulta do significado dessa luz, no manual do automóvel.
Sistemas de diagnóstico similares ajudam na performance dos outros sistemas do automóvel, como por exemplo sistemas relacionados com o funcionamento dos airbags, ou travões anti bloqueio.

A Informática na Indústria Automóvel
14
2.3 – A Informática no Design e Modelação Automóvel
A beleza é fundamental num automóvel. O design é cada vez mais um elemento diferenciador na indústria automóvel. Aliar o estilo, ergonomia e performance é o desafio que as novas tecnologias de concepção respondem. Sistemas de modelação 3D, centros de simulação e software específico fazem parte do dia a dia criativo.
Devido a esta conjuntura as marcas automóveis criam novas tendências e recorrem a toda
a tecnologia disponível para conceber um carro de sonho. Realidade virtual e visualização a três dimensões são a última moda para criar os carros de hoje e do futuro [7].
Marcas como a Opel e a Renault, recorrem à tecnologia para conceber os seus carros.
Software específico e centros de simulação computorizados são agora essenciais no processo de criação. Realidade virtual e modelos digitais a 3D são ferramentas de trabalho essenciais.
O Centro de Simulação Técnica (CST) da Renault, concebeu um programa de modelação
virtual para a visualização 3D interactiva dos veículos. Designado por P2V – Virtual Vehicle Presentation – este programa cria um modelo digital para ser utilizado no processo de criação do automóvel. O P2V baseia-se na interface de programação da aplicação gráfica Íris Performer, desenvolvida pela Silicon Graphics e permite aos designers corrigir dados, adicionar cores ou materiais, para além de testar o veículo em cenas animadas. Por outro lado este programa também permite avaliar a qualidade perceptível e estudar o design do veículo. Mas o design é algo muito controverso, pois mesmo com a ajuda deste sistema bastante avançado e evoluído, os últimos modelos da Renault (Megane II, Modus, VelSatis) não escaparam de grandes criticas, por parte dos críticos, devido ao seu design considerado bastante arrojado e talvez futurista demais. Talvez daqui a uns anos se diga que a Renault já estava a prever o design do futuro.
Há dez anos que a Renault aposta na investigação nas áreas da realidade virtual e
simulação de condução. Nas palavras de Andras Kemeny, director do CST, “a missão principal do centro é testar as técnicas digitais mais sofisticadas e disponibilizá-las, devidamente validadas, para todos aqueles que estão envolvidos no processo de design”.
Também a Opel enveredou pela realidade virtual a três dimensões no desenvolvimento de
novos veículos. A tecnologia de que a marca dispõe é vasta, passando por óculos que recebem imagens geradas por computador, a projectores que criam representações pictóricas a 3D de um automóvel completo. Mas as inovações não se ficam por aqui. A Opel desenvolveu duas tecnologias que permitem alterar componentes e avaliar dados a partir de um modelo digital criado pelo computador.
A primeira tecnologia designada por Digital Mock Up (DMU) auxilia os designers e
engenheiros na integração de componentes do veículo. No passado era necessário esperar

A Informática na Indústria Automóvel
15
várias semanas por peças de amostra. Actualmente, com o DMU, é possível determinar a melhor instalação de componentes a partir dos dados que o computador processou. A outra tecnologia, RAMSIS, permite a simulação perfeita de um cenário de condução e permite aos designers criar as posições de assento mais ergonómicas e confortáveis. Este sistema mostra as posições dos ocupantes do carro, para além de simular um cenário de condução. Assim, é possível avaliar não só o espaço disponível para a cabeça, ombros e pernas como também a legibilidade e utilização amigável dos instrumentos. O RAMSIS também permite fazer estimativas ortopédicas da curvatura da coluna vertebral e analisar os níveis de fadiga.
2.3.1 – O P2V – Virtual Vehicle Presentation Na indústria a definição e design normalmente materializam-se na forma de um modelo de
CAD. O software P2V ajuda a optimizar estes modelos, não apenas em termos de pesquisa mas também em termos de comunicações.
O P2V é o resultado de vários anos de pesquisa por parte da RENAULT Technical Centre
of Simulation (Centro técnico de simulação) e foi elaborado em parceria com a Oktal. O P2V permite que dados provenientes dos principais softwares de CAM/CAD(Catia, Proingeneer, Alias) sejam lidos e rapidamente transformados em dados adaptados a uma visualização 3D em tempo real e de elevada qualidade.
Graças a uma interface simples o utilizador pode escolher a qualidade que deseja obter
dos dados inseridos, assim como o equipamento que quer aplicar. O resultado fica disponível em bibliotecas que podem ser utilizadas mais tarde na criação de novos materiais, cujas propriedades podem ser parametrizadas. O P2V também oferece uma descrição dos diferentes tipos de fontes de luz e a sua posição. Finalmente, acções básicas como a movimentação de partes, mudança de equipamentos, etc., podem ser descritas e realizadas durante a visualização 3D do automóvel. Tudo isto é realizado pelo software P2V, para que todos os parâmetros adicionados pelo utilizador sejam usados da melhor maneira [7].
Disponível num ambiente SGI/Irix e num ambiente PC, quer seja numa plataforma
Linux/Unix ou Windows, o P2V pode interagir com diferentes dispositivos como a power wall, conjunto de realidade virtual para a cabeça, centro de realidade, sistema force feedback, luvas ou sensores de posição, etc. Estes sistemas ajudam os técnicos a estarem submergidos pelo veículo virtual. Tudo isto possibilita aos técnicos terem uma visualização interactiva e em tempo real do automóvel, através de imagens fixas ou vídeos de alta definição. O sistema faz com que os técnicos possam sentir o automóvel como se estivessem realmente dentro dele, isto através de um capacete de realidade virtual que faz com que o operador fique isolado do mundo real. O capacete tem 1 ecrã para cada olho e cada ecrã passa uma imagem diferente, para que assim o operador possa ter uma excelente percepção do mundo virtual.

A Informática na Indústria Automóvel
16
Figura 6 – Sistema de capacete virtual
Durante a fase de pesquisa, o P2Vé a ferramenta ideal para as revisões do projecto. A
imersão de um modelo 3D em tempo real é o resultado da alta qualidade do sistema, tornando a percepção do estudo do modelo mais simplificada. As suas grandes vantagens são a permissão da utilização de uma grande diversidade de modelos, ser de fácil utilização e permitir que os modelos numéricos possam ser usados para testes e validar variados parâmetros. P2V faz com que seja mais fácil melhorar o design do produto antes de este ser realizado.
2.3.2 – DMU
O desenvolvimento de maquetas digitais começou com a introdução da modelação 3D. As primeiras maquetas eram desenvolvidas utilizando um número muito grande de modelos e com todas as partes integradas, o que tornava o desenvolvimento fraco.
O aparecimento de maquetas virtuais permite que variados modelos em 3D possam ser posicionados num mesmo espaço, em 3D também, para que seja representado a forma final do automóvel. Estes vários modelos podem estar guardados numa base de dados.
Nem todos os tipos de representações são usados nas maquetas digitais. O principal modelo 3D é o modelo que vai ser usado para a construção da maqueta 3D, pois este representa a principal parte 3D do modelo Para se construir a maqueta digital é seguida uma metodologia constituída pelos seguintes passos:
1. Criação das diferentes partes do modelo

A Informática na Indústria Automóvel
17
2. Criação da uma conta de materiais necessários para a construção da estrutura
3. Unir os diferentes modelos
4. Posicionar os modelos nos seus sítios correctos, para a criação da maqueta digital
No passo 1, a criação das diferentes partes deve ser feita dentro dos seus contextos e na
sua posição final
2.3.3 – RAMSIS
Nos nossos dias o uso de manequins computorizados são muitas vezes usados para o desenvolvimento dos interiores dos automóveis, cockpits dos aviões, compartimentos de passageiros e sítios de trabalho. Para além da redução do tempo e custos de desenvolvimento os manequins digitais contribuem para o aumento da qualidade do ambiente de trabalho e para um uso mais amigável do produto. RAMSIS é a principal ferramenta ergonómica computorizada e já foi usada durante muitos anos para o desenvolvimento da habitabilidade dos passageiros em automóveis, camiões, aviões e veículos de construção [5].
O RAMSIS automóvel é um sistema CAD especialista em manequins e desenvolvido para
a análise ergonómica do automóvel. As suas diferentes aplicações vão desde o design ergonómico das áreas do condutor e passageiros ao design por completo do automóvel, para que possa haver um trabalho de manutenção eficiente, preventivo e correcto. RAMSIS não está apenas disponível para utilizadores puros de aplicações CAD, mas este sistema ergonómico também pode ser utilizado para testes de tempo real nos laboratórios de realidade virtual dos construtores automóveis.
Conhecimento estatístico detalhado sobre as medidas e comportamento do corpo das
pessoas é essencial para se criar uma representação exacta de um espaço que vai servir de habitáculo para uma pessoa. Extensos projectos de pesquisa com pessoas reais permitiram a reprodução de variados comportamentos de grupos de pessoas num automóvel. Estes resultados foram integrados nas bases de dados dos sistemas RAMSIS.
Por isso um sistema RAMSIS tem um grande espectro de dados antropomórficos das
regiões globais mais importantes, como por exemplo Ásia, América do Norte e Europa. Estatísticas fáceis de operar permitiram a geração de imagens digitais de grupos de clientes e a sua integração no design global e no processo de desenvolvimento do automóvel.
Durante a realização de extensas experiências, os institutos de pesquisa analisaram a
postura e o comportamento de pessoas num automóvel. Graças à possibilidade de se poder guardar a informação obtida nas bases de dados dos sistemas RAMSIS, pode-se simular a

A Informática na Indústria Automóvel
18
postura do condutor, pode-se realizar previsões realistas do futuro ambiente do local do condutor e pode-se também prever condições de habitabilidade.
Modelos adicionais de postura, como por exemplo o modelo da postura erecta ou o
modelo da postura do passageiro, estão ambos disponíveis e podem ser usadas de acordo com o processo de design das aplicações necessárias.
Depois de se posicionar o manequim RAMSIS no seu ambiente de habitabilidade o
utilizador tem variadas funções de análise à sua escolha, como o cálculo do espaço e suas necessidades, a vista directa e indirecta do manequim e a simulação da força máxima disponível da postura do manequim. Estas funções analíticas providenciam ao utilizador uma extensa informação sobre a qualidade ergonómica do produto e possíveis aspectos críticos do design.
O sistema RAMSIS pode operar em várias plataformas e o software pode ser facilmente e eficientemente integrado na cadeia do processo de desenvolvimento. RAMSIS está disponível em versão Unix e Windows e como uma ferramenta que pode ser totalmente integrada no software CATIA V4 e V5.
Os aspectos técnicos do RAMSIS são:
• Estruturação dos modelos: – Visualização da pele do manequim em modo de wireframe, shaded ou 3D. – Representação física das junções correctas, com 53 junções e 104 graus de liberdade
• Base de dados antropomórfica:
– Dados de diferentes grupos de idades de crianças – Topologia baseada no peso do corpo, proporção e corpulência – Dados antropomórficos focalizados por mercados alvo (Europa, América do Norte, México, América do Sul, Japão/Coreia)
• Manipulação geométrica
– Geração directa de geometrias básicas – Possibilidade de realizar rotações e translações – Importação e exportação directa com interfaces CAD (IGES, VDA, SAT)
• Pacote de desenho paramétrico – Geração e análise do pacote de desenho, baseado nas especificações de design – Estudo rápido de parâmetros em fases muito iniciais do design

A Informática na Indústria Automóvel
19
– Capacidade de adicionar componentes do utilizador para uma análise de design precoce
• Simulação da postura orientada à tarefa
– Optimização automática da postura
– Detecção de auto colisões
– Definição de tarefas interactivas e do tipo independentes, pelo utilizador
• Simulação e análise de simulações – Animação numérica e interactiva das junções
– Rotações e translações numéricas e interactivas
– Animações automáticas com objectos alvo para o utilizador definir cadeias de junções
• Análise de saúde e conforto
– Análise de conforto para as várias partes do corpo
– Avaliação ortopédica da curvatura da coluna
• Análise da visão e da visualização através dos espelhos – Visão interna do olho esquerdo e direito
– Análise da visualização dos espelhos interiores e exteriores
– Actualização em tempo real da visualização do manequim, mesmo durante a reprodução da animação
• Análise do cinto de segurança – Calculo e visualização das rotinas do cinto, incluindo os pontos de contacto com o manequim
– Análise para cintos de 2 e 3 apoios
• Análise da força – Indicação da força máxima e recomendada para os típicos elementos do interior do automóvel

A Informática na Indústria Automóvel
20
Figura 7 – Exemplo de um modelo de um sistema RAMSIS
O design de hoje e do futuro encontra-se centrado na segurança e no conforto dos
passageiros. No entanto, as marcas continuam a apostar numa aparência inovadora que transpire estilo. Afinal, existe em todos nós condutores um pequeno Michael Knight (quem não se lembra do Kit) que anseia por um carro perfeito que se estacione sozinho e que capte todas as atenções da Avenida da Liberdade ou da Rotunda da Boavista [2].
2.4 – A Informática e os Sistemas de Entretenimento e Informação
A informática invadiu todo o tipo de sistemas nos automóveis. Desde os novos sistemas de drive-by-wire, navegação, segurança ou entretenimento que as novas tecnologias comandam o nosso automóvel.
A quantidade de sistemas electrónicos a bordo dos automóveis é de tal ordem que os
actuais sistemas eléctricos de 12 volts terão de ser substituídos por soluções mais potentes. O drive-by-wire (substituição das ligações mecânicas por electrónicas) aliado à integração de sistemas de navegação e entretenimento exige mesmo o recurso a tecnologias como a multiplexagem que permite a instalação de diferentes redes independentes [2].
Uma grande quantidade de ecrãs e de novos interfaces de controlo, incluindo os
comandos por voz – que a BMW, por exemplo, já disponibiliza nas Séries 5, 6 e 7 – estão a ser utilizados para o acesso a sistemas tão diversos como os de ajudas à condução, navegação por GPS, leitores de DVD e vários dispositivos como os PDA’s e telemóveis. Para que o condutor possa aceder a estas funcionalidades facilmente e em segurança muitas marcas apostam no desenvolvimento de sistemas de controlo integrados. A Alfa Romeo, por exemplo, instalou no Alfa 166 o seu Integrated Control System. Este sistema permite o comando da climatização, do computador de bordo ou do auto-rádio através de um ecrã de 5

A Informática na Indústria Automóvel
21
polegadas instalado na consola central. O expoente máximo de integração é talvez o polémico iDrive da BMW, uma espécie de botão rotativo criado para comandar 700 funções.
No protótipo Seat Toledo Multimédia as inúmeras opções de áudio (CD, MP3, etc.),
navegação, comunicação (como o envio e recepção de SMS) e serviços são visualizados através de dois ecrãs e controladas através de um comando de voz. Um terceiro ecrã de 7 polegadas (formato 16:9) colocado no centro do tejadilho, assegura o entretenimento dos ocupantes de trás. Para suportar tudo isto este protótipo possui uma arquitectura avançada com um hardware modular e uma rede multimédia de fibra óptica [2].
Já em matéria de conforto surgem possibilidades de configurações quase infinitas, como
por exemplo os bancos aquecidos, ventilados ou com massagem ou mesmo soluções mais avançadas como o sistema de climatização 4-zone Thermotronic da Mercedes-Benz que permite o ajuste da temperatura individualmente para cada uma das áreas de passageiros.
Ainda que não seja provável que o automóvel se conduza sozinho nas próximas décadas,
a tecnologia tem uma importância cada vez maior no que toca às chamadas ajudas à condução. Sistemas de estacionamento assistido, sensores que facilitam a condução em caso de chuva e até um passageiro virtual para manter o condutor alerta e acordado, são soluções em desenvolvimento por empresas como a BMW ou a Volkswagen. Os BMW Séries 3, 5, 6 e 7 já estão equipados com faróis adaptativos que seguem o movimento de carro da forma a iluminar melhor as curvas. A Mercedes, por seu lado, aposta em sistemas como o Headlamp Assist, que liga automaticamente as luzes em caso de nevoeiro, chuva, neve, lusco-fusco ou entrada num túnel, algo que até já está disponível nos utilitários da Fiat. A Volkswagen está a desenvolver uma solução de reconhecimento de sinais de trânsito que utiliza o sistema de navegação e transmissores rádio instalados nos sinais para informar o condutor destes, através de um ecrã.
Saber onde se está por questões de segurança ou de orientação e saber como se pode
chegar ao destino pretendido é a grande vantagem dos sistemas de navegação que são cada vez mais usuais nos automóveis, até nas gamas mais baixas. A Nissan apresentou orgulhosamente o seu Bird View, um sistema GPS que dá uma perspectiva panorâmica das ruas e estradas até ao horizonte. A Toyota já disponibiliza no Japão o G-Book, um sistema inteligente que gera as informações de trânsito recebidas alterando a rota prevista pelo GPS da forma a evitar engarrafamentos [2].
Graças às soluções de telemática os carros serão cada vez mais elos de ligação entre o
condutor e o meio exterior. Acesso à Internet ou serviços de assistência das marcas e mesmo de diagnóstico remoto, são apenas algumas das hipóteses. Exemplo disso é o sistema Connect da Alfa Romeo ou o TeleAid da Mercedes, que em caso de acidente liga automaticamente para os serviços de emergência.

A Informática na Indústria Automóvel
22
Como ficou demonstrado, a informática e os sistemas informáticos hoje em dia são de uma extrema importância na indústria automóvel. Sem a informática nada disto que aqui foi retratado era possível e os carros continuariam quase tão rudimentares como o primeiro automóvel a ser fabricado numa linha de montagem, o famoso Ford T.
De seguida é descrito o funcionamento dos sistemas mais importantes acima referidos e
ainda novos sistemas que já estão presentes em alguns automóveis.
2.4.1 – O Integrated Control Sysytem (ICS) da Alfa Romeo O sistema Integrated Control System (ICS) da Alfa Romeo é constituído por um monitor de
5” instalado na consola central do automóvel. Este sistema permite ao condutor controlar todas as funções dos vários sistemas controlados pelo ICS, como por exemplo o sistema de climatização, o computador de bordo, o auto-rádio, o sistema GSM, navegador por satélite, amplificador digital de hi-fi (DSP) e leitor de CD’s. O ICS é de fácil utilização com comandos simples e claros, com símbolos intuitivos e de fácil acesso às funções [12].
Figura 8 – Monitor do ICS
O ICS simplifica a grande maioria das operações, diminuindo o número de botões necessários na consola central do automóvel. Construído com um ecrã LCD a cores de 8 cm e com a capacidade de se poder ligar um telemóvel. Assim o ICS tem um slot, na consola central para o telemóvel além de várias funções ligadas a este como sistema de mãos livres, guardar números de telefone e facilidade na marcação de números.

A Informática na Indústria Automóvel
23
2.4.2 – O iDrive da BMW
O sistema iDrive foi anunciado para as séries 6 e 7 da BMW e agora está
também disponível nas séries 5 e 3. Em vez de uma disposição espalhada dos vários botões e interruptores, o iDrive é dividido
em duas secções separadas, a zona de condução que contem todos os comandos essenciais para a condução e a zona de conforto onde uma consola central permite uma fácil e suave regulação de todas as funções de conforto do automóvel. O iDrive controla mais de 700 funções.
Todas as funções primárias de condução estão na área à volta do volante do automóvel, oferecendo ao condutor um acesso imediato aos controlos chave [13].
As funções do segundo nível são controladas por interruptores convencionais, situados no
painel de instrumentos, como por exemplo o interruptor das luzes ou o a regulação da temperatura do ar condicionado [13].
Muitos dos controlos são operados a partir de um botão multi-funções situado na consola
que existe no meio dos dois bancos da frente. O controlo consiste num dispositivo que funciona como botão e que roda para seleccionar funções, assim o dispositivo é um botão rotativo. A confirmação da opção seleccionada é visualizada num ecrã LCD montado na consola central.
Os utilizadores podem alternar de funções, indo do sistema de comunicações para o
sistema de climatização ou do sistema de navegação para o sistema de entretenimento, através do botão rotativo. Para realizar essas selecções basta empurrar o botão para frente, para trás ou ainda para os lados. Ao rodar o botão pode-se navegar entre os diferentes menus e ao carregar selecciona-se as funções.
O iDrive tem em consideração que existem funções raramente utilizadas quando se está a
conduzir, como as regulações de conforto, comunicações e assistência à condução. A unidade operacional que existente na consola central dá ao condutor acesso directo a muitas outras funções e a muitas opções de informação e de condução. Várias centenas de funções podem ser controladas com este dispositivo.
O monitor é posicionado directamente na frente da linha de visão do condutor, permitindo
assim ser visualizado enquanto o condutor contínua concentrado na estrada à sua frente. O largo monitor localizado no centro da consola central apresenta todas as informações que o condutor necessita, à parte do velocímetro e conta quilómetros que são instrumentos convencionais analógicos.

A Informática na Indústria Automóvel
24
A terceira geração de protocolos de comunicações móveis (Universal Mobile Telecommunications System – UMTS) permite a ligação sem fios de serviços usados pelo iDrive, com velocidades de transferências na ordem dos 2Mbps.
O iDrive entra em funcionamento mal o condutor entra no automóvel e insere a
sua chave electrónica no painel. O carro "reconhece" logo o condutor ajustando automaticamente a posição dos bancos e retrovisores utilizada por ele. A chave electrónica ainda permite abrir e fechar o carro à distância além de controlar o imobilizador do motor e uma bateria que se recarrega automaticamente. Se a bateria falhar, está disponível uma chave de emergência.
Figura 9 – Sistema iDrive da BMW
2.4.3 –Bird View A Nissan Motor Co. Desenvolveu um novo sistema de navegação, que dá pelo nome de
Bird ViewTM, o primeiro sistema de navegação automóvel do mundo em que o mapa que indica o caminho que se pretende seguir é mostrado com visualização panorâmica e até à linha de horizonte [14].
O novo sistema foi desenvolvido em conjunto com a Xanavi Informatics Corporation, uma
empresa associada da Nissan e especializada em projectos de comunicações para automóveis. A Nissan prevê oferecer este sistema original num dos seus novos modelos que será lançado num futuro próximo.
A tecnologia de navegação automóvel é para a Nissan um elo de ligação entre o Homem e
a máquina, proporcionando aos condutores informações importantes sobre o tráfego num formato de fácil e rápida compreensão e que se adapte à sua sensibilidade e intuição.

A Informática na Indústria Automóvel
25
Ao desenvolver o sistema de navegação Bird ViewTM, a Nissan questionou-se sobre que tipo de imagem seria importante e agradável para os condutores. O objectivo foi satisfazer simultaneamente duas exigências contraditórias dos utilizadores de sistemas de navegação automóvel que são: os condutores querem informações detalhadas da área que circunda a sua posição em cada momento, mas ao mesmo tempo querem estar aptos a obter uma informação global sobre a área que medeia entre a sua localização e o seu destino.
Para responder a estas duas exigências a Nissan criou este novo sistema de navegação,
que dá ao condutor uma perspectiva das ruas e das estradas até ao horizonte, semelhante ao que uma ave vê quando sobrevoa as nossas cabeças, facto que dá origem ao nome deste novo sistema de navegação.
Até agora visualizar imagens como as do sistema de navegação Bird ViewTM, requeria um
processador de grandes capacidades semelhantes às de um microcomputador. A Nissan conseguiu a mesma capacidade numa unidade de processamento para utilização em veículos, combinando um processador de 32 bits na unidade central de processamento (CPU) com uma técnica original de processamento de imagens a alta velocidade.
Os mapas que aparecem no ecrã oferecem uma visão ampla de toda a área que rodeia o
veículo, até ao horizonte, dando uma sensação de realidade e de espaço. Além disso o sistema também disponibiliza imagens em perspectiva como as que qualquer pessoa experimenta quando vê objectos reais. Assim, os condutores podem reconhecer e perceber instantaneamente a informação visualizada. Os mapas são mostrados em intervalos de 500 metros dando uma noção realista da distância.
A área circundante à localização do veículo é "explicada" detalhadamente, tornando-se a
escala do mapa progressivamente maior à medida que o veículo vai avançando. Esta técnica torna possível mostrar uma área restrita trinta vezes maior do que os mapas detalhados de outros sistemas de navegação.
À medida que o veículo avança os nomes das ruas, localizações e melhores acessos,
entre outras informações, aparecem no ecrã por prioridades. Esta visualização facilita muito a apreensão de informação pelo condutor, reduzindo os tempos de "consulta" e incrementando por isso a segurança de condução.
Neste sistema está incluído um modo para viagens nocturnas, aparecendo o ecrã com um
fundo negro que facilita a leitura e oferece uma paisagem nocturna, tanto quanto possível próxima da realidade apercebida pelo condutor.
A utilização de uma unidade de processamento de 32 bits é para se poder usar uma
técnica original de processamento de imagens de alta velocidade, o que diminuem substancialmente o tempo de conversão de uma imagem plana para a visualização Bird ViewTM.

A Informática na Indústria Automóvel
26
Este sistema é constituído por câmaras situadas na parte traseira do automóvel. O sistema de visualização traseira elimina o ângulo morto durante a realização de uma marcha-atrás, que é toda a visualização que está da janela traseira para baixo. Mas ainda existem mais dois ângulos mortos situados nos lados do automóvel. Para eliminar mais este problema a Nissan montou câmaras laterais. Agora a Nissan está a testar câmaras posicionadas na frente do automóvel. As imagens captadas pelas diversas câmaras são projectadas num ecrã montado na consola central do automóvel. São as câmaras que tiram as imagens que são depois sintetizadas por uma técnica que processa as várias imagens e as torna numa única vista.
Figura 10 – Imagem apresentada no ecrã do sistema Bird ViewTM
2.4.4 – G-Book
O maior fabricante automóvel japonês Toyota, revelou uma nova geração de ligação à Internet para automóveis. Esta nova ligação oferece uma ampla gama de serviços interactivos como download de músicas, jogos on-line, e-mail e comércio electrónico [4].
A nova rede chamada G-Book é um avanço em relação ao actual serviço chamado "Monet", que oferece informações básicas e serviços de navegação para automóveis [9].
Diferente do seu antecessor e de outros serviços de Internet convencionais para automóveis oferecidos por outras marcas, o G-Book não exige um telemóvel para conexão e em vez disso tem montado um módulo de comunicação de dados. Basicamente utiliza-se um terminal chamado DCM (espécie de telemóvel usado só para carregar informações) que pode ser conectado também ao telemóvel.
A Informática na Indústria Automóvel
27
Isso permite que a Toyota ofereça o serviço a um preço fixo, o que quer dizer que os consumidores não têm de se preocupar com os custos por hora de conexão.
Além de um terminal existente na consola central do automóvel, a rede também será acessível por telemóvel, computador ou através de uma agenda electrónica pessoal.
Além dos serviços fornecidos, o G- Book da Toyota oferece múltiplas informações, como por exemplo mapas. No ecrã situado na consola central são mostrados detalhes sobre o congestionamento, estacionamentos e localização de pontos comerciais. A rota e o destino podem ser alterados conforme essas informações. Ao pagar um serviço à parte é possível ter acesso a roteiros gastronómicos, dados financeiros, informações sobre cinema, entre outros. É possível também usar um serviço de karaoke.
O sistema G-Book também pode operar com o sistema operativo da Microsoft, desenvolvido especificamente para automóveis, que se chama Windows CE for Automotive. Este sistema operativo, como o próprio nome indica, foi desenvolvido sobre a tecnologia Windows CE e é uma nova plataforma para software automóvel que torna possível o aparecimento de novas categorias de sistemas de computação automóvel. Esta tecnologia tem capacidades que foram especialmente desenvolvidas para integrar com os sistemas de segurança e de diagnóstico existentes nos automóveis.
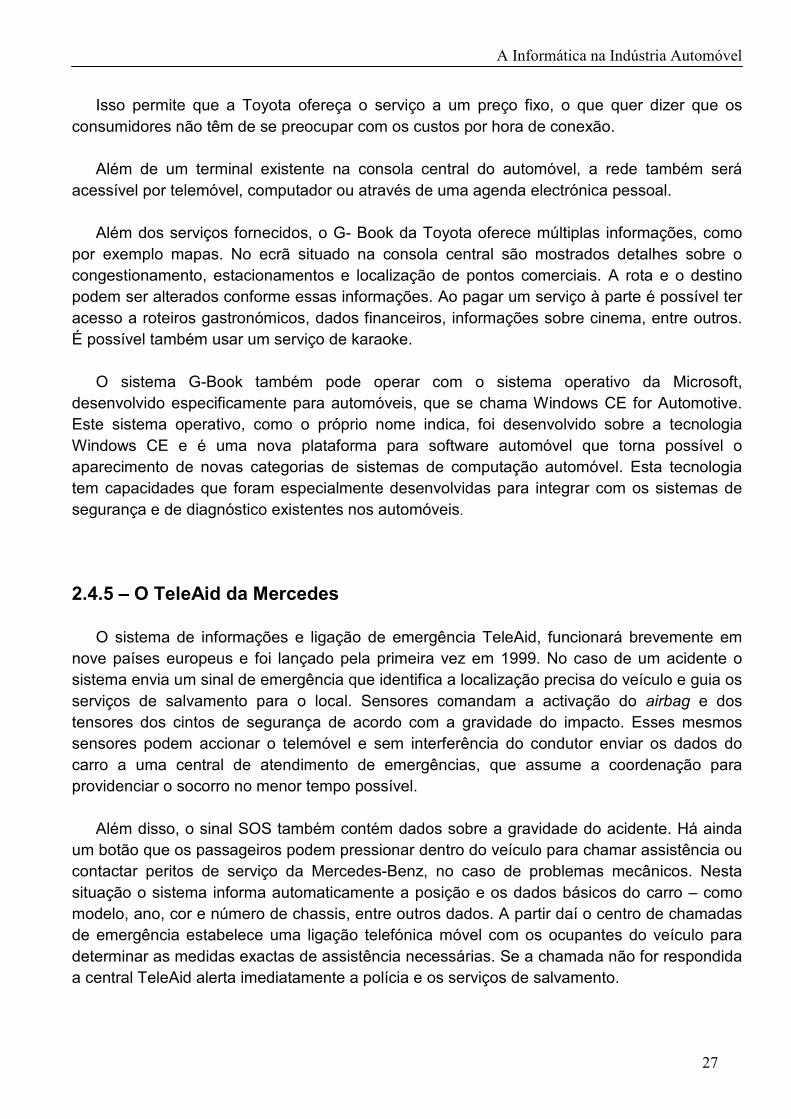
2.4.5 – O TeleAid da Mercedes
O sistema de informações e ligação de emergência TeleAid, funcionará brevemente em nove países europeus e foi lançado pela primeira vez em 1999. No caso de um acidente o sistema envia um sinal de emergência que identifica a localização precisa do veículo e guia os serviços de salvamento para o local. Sensores comandam a activação do airbag e dos tensores dos cintos de segurança de acordo com a gravidade do impacto. Esses mesmos sensores podem accionar o telemóvel e sem interferência do condutor enviar os dados do carro a uma central de atendimento de emergências, que assume a coordenação para providenciar o socorro no menor tempo possível.
Além disso, o sinal SOS também contém dados sobre a gravidade do acidente. Há ainda
um botão que os passageiros podem pressionar dentro do veículo para chamar assistência ou contactar peritos de serviço da Mercedes-Benz, no caso de problemas mecânicos. Nesta situação o sistema informa automaticamente a posição e os dados básicos do carro – como modelo, ano, cor e número de chassis, entre outros dados. A partir daí o centro de chamadas de emergência estabelece uma ligação telefónica móvel com os ocupantes do veículo para determinar as medidas exactas de assistência necessárias. Se a chamada não for respondida a central TeleAid alerta imediatamente a polícia e os serviços de salvamento.

A Informática na Indústria Automóvel
28
O sistema pode ser personalizado e nas informações enviadas podem constar dados como tipo sanguíneo do motorista e ocupantes e até mesmo eventuais alergias para que o atendimento possa ser o mais eficiente possível. O TeleAid também pode ser accionado manualmente. Há um botão de SOS próximo ao espelho retrovisor para que o motorista possa pedir ajuda no caso de acidentes envolvendo outros veículos.
Os ocupantes podem experimentar fazer ligações por comandos de voz, utilizando para
isso um telemóvel dentro do ambiente do automóvel. O aparelho de comunicação será controlado e operado por um esquema simplificado de hardware que consiste de um módulo receptor atrás do painel, um microfone embutido no espelho retrovisor interno e o telemóvel do condutor.
Ao entrar no carro o telemóvel é conectado à arquitectura electrónica do veículo utilizando
tecnologia Bluetooth. Uma vez que a conexão ao sistema é feita o áudio do telemóvel é alimentado através do sistema existente de altifalantes, com precedência sobre o rádio.
Para garantir uma condução segura ao usar o sistema de mãos livres o condutor só
precisa de carregar num botão para iniciar ou terminar uma chamada telefónica. Todas as outras funções são activadas por voz. As próprias ligações são feitas por voz. Além do reconhecimento de voz este novo sistema oferece serviços opcionais de informação por meio de assinatura da AT&T Wireless.
2.4.6 – HEAD-UP DISPLAY
Os Head Up Displays (HUD) são sistemas de projecção de ecrãs no pára-brisas, ou seja, à frente do condutor, importados da indústria aeronáutica. Já estão presentes nomeadamente em modelos da BMW (Séries 5, 6 e 7) e da General Motors (nove, incluindo 90% dos Chevrolet Corvette) que os introduziu em 1988. São desenvolvidos sobretudo a pensar na segurança exibindo alertas de proximidade do veículo da frente ou de pessoas e das velocidades máximas permitidas nas estradas que circulam. Mas servem também o controlo das várias funções do carro, desde a navegação à telemática ou ao entretenimento. O aparecimento de novas tecnologias ópticas e de LED’s pode dar origem a uma nova geração de HUD.

A Informática na Indústria Automóvel
29
Figura 11 – Os Head Up Displays
Os HUD têm uma grande diferença para outros tipos de displays, é que o equipamento do display está escondido. Estes tipos de dispositivos apareceram na aviação e começaram à relativamente pouco tempo a serem transportados para a indústria automóvel.
Nos HUD o utilizador não olha directamente para o dispositivo que converte o sinal
eléctrico em imagem. Em vez disso lentes e espelhos projectam a imagem, o que é uma opção ideal pois assim a imagem é a única coisa que aparece no campo de visão do utilizador. Assim a imagem aparenta estar a flutuar à frente do utilizador.
O display, outrora um tubo de raios catódicos (CRT – Cathode Ray Tube) é agora mais parecido com um ecrã de cristais líquidos (LCD). A revolução nos microdisplays, que contam com produtos tão diferentes como os PDA’s ou os telemóveis veio ajudar os HUDs, pois estes microdisplays tendem a ser optimizados para o uso móvel, ou seja, pequenos, com luz própria, baratos, robustos e mais eficientes a nível energético.
O grande benefício, dos sistemas HUD é que desta maneira o condutor não necessita de
desviar o olhar da estrada para olhar e ver as informações do painel de instrumentos. O inconveniente dos sistemas é que estes não podem ser fascinantes para não distraírem o condutor nem muito brilhantes para não interferirem com a visão do condutor

A Informática na Indústria Automóvel
30
. Figura 12 – Funcionamento de um sistema HUD
2.4.7 – BMW CONNECTEDDRIVE
É o conceito que reúne os serviços BMW Assist (serviço de assistência disponível em todos os modelos da marca), BMW Online (aceso a serviços online, já disponíveis nas Séries 5, 6 e 7) e Driver Assistance (ajudas à condução). A ideia é de uma rede “inteligente” entre o automóvel, condutor e o exterior com circulação de informação diversa, desde elementos de navegação por satélite, informações sobre o trânsito ou dados fornecidos pelos sensores do carro. O Driver Assistance funciona como uma espécie de co-piloto não intrusivo que alerta o condutor em caso de problemas, mas sem actuar sobre os sistemas do veículo.
Figura 13 - O BMW CONNECTEDDRIVE

A Informática na Indústria Automóvel
31
2.4.8 – O Automóvel Conectado
A Motorola, a Intel e a Microsoft são algumas das empresas de tecnologias que apostam no conceito do automóvel conectado, nomeadamente recorrendo a tecnologias sem fios como o Wi-Fi e o Bluetooth. A Microsoft em Janeiro do ano 2004 apresentou o seu primeiro Connected Concept Car com reconhecimento de voz avançado, integração de PDA e telemóveis, acesso a serviços de trânsito da Web, sistema GPS e função de alerta e diagnóstico remoto em caso de problemas.
2.4.9 – FUTURELIFE HOUSE
Este sistema existente na Suiça é uma casa digital experimental onde os habitantes podem controlar diversos sistemas eléctricos, como a iluminação, a abertura e fecho de portas e até o funcionamento do forno, a partir de um BMW Série 7 equipado com o serviço BMW Online. O projecto serve de banco de ensaios à iniciativa ConnectedDrive da marca bávara e pretende ilustrar o potencial dos serviços baseados na Internet para o “carro de amanhã”.
2.4.10 – VOLKSWAGEN RSE
A Volkswagen anunciou recentemente que vai começar a equipar as gamas Passat e Sharan com o seu novo sistema de entretenimento a bordo Rear Seat Entertainment (RSE). O Sharan será equipado com um máximo de dois ecrãs TFT, instalados nos encostos de cabeça dos bancos da frente. O leitor de DVD da consola central trás um controlo remoto por infravermelhos e fichas para auscultadores. É também possível ligar diversos equipamentos como consolas de jogos, leitores de MP3, câmaras digitais ou portáteis. No Passat, o DVD e o ecrã LCD então integrados numa consola situada no interior do tejadilho. Esta consola é do tipo Drop-Down.
Figura 14 - O sistema RSE da Volkswagen

A Informática na Indústria Automóvel
32
Os benefícios deste sistema são:
• Sistema de áudio integrado no veiculo • Compatibilidade com várias consolas de jogos de vídeo • Sistema completo e integrado, que inclui
⇒ Antena de rádio ⇒ Ecrãs ⇒ Leitor de DVD ⇒ Rádio
• Permite os utilizadores escolherem o sistema de entretenimento
As características do sistema são
• Ecrã LCD a cores com abertura e fecho fácil para visualização e arrumação • Controlo de vídeo e áudio que inclui controlo de volume e ligações de jogos de
vídeo • Leitor de DVD
• Controlo remoto
• Auscultadores sem fios
2.5 – A Informática nos Novos Sistemas de Segurança Automóvel
Além do design e da tecnologia de todos os sistemas de entretenimento e informação, a segurança é actualmente uma das principais preocupações dos construtores automóveis, o que fez com que na última década muito, ou quase tudo, tenha mudado nos sistemas de segurança aparecendo uma grande quantidade de novos sistemas de controlo automóvel.
A segurança tornou-se tão importante que foi criado um organismo europeu de avaliação
de segurança, que dá pelo nome de EuroNCAP. A pontuação dada aos automóveis é por estrelas que vão de 1 a 5 estrelas. Muitos carros são pensados de forma a obter o maior número de estrelas, visto que estas são um poderoso instrumento de marketing [7].
A própria concepção dos automóveis mudou radicalmente do ponto de vista estrutural. A
segurança não se mede apenas pela existência de cintos de segurança ou de um número maior ou menor de airbags, a face mais visível do investimento da segurança é na tecnologia dedicada à segurança dos passageiros.

A Informática na Indústria Automóvel
33
Do ponto de vista da estrutura tem-se apostado muito na construção de verdadeiras células de segurança desenvolvidas de forma a assegurar que em caso de choque (frontal ou lateral) ou capotanço a zona do habitáculo permaneça o mais intacta possível, preservando os ocupantes de ferimentos. Além disso a parte externa da estrutura (frontal e traseira) é desenhada de forma a absorver e dissipar o máximo de energia num choque.
Mas todas estas significativas melhorias tiveram ainda mais significado com todo um
conjunto de novos sistemas de controlo do automóvel. Os sistemas mais conhecidos de segurança são o ABS, ESP, Controlo de Cruzeiro Adaptativo, Airbag e o Cinto de Segurança. Todos estes sistemas são controlados por sensores, actuadores e microprocessadores.
Os computadores e sua tecnologia estão a ajudar os engenheiros automóveis a melhorar
significativamente a segurança. Isso está bem patente devido aos vários sistemas existentes, dedicados exclusivamente aos aspectos da segurança. Por exemplo, a posição do assento ajusta-se ao relevo da estrada e tamanho do condutor, assim como o ajuste do cinto de segurança.
O automóvel possui o módulo de controlo que recebe informações vindas dos sensores de
choque, em caso de acidente ou choque. Este sistema possui um microprocessador que analisa os parâmetros do choque para depois iniciar as acções mais apropriadas para atenuar ao condutor os efeitos do choque, como activar os actuadores dos pré tensores dos cintos de segurança ou activar os airbags. Estas sensíveis tarefas computacionais de decisão, iniciação e actuação para salvar a vida dos ocupantes do automóvel e ocorrem em menos que um piscar de olhos, em cerca de 1/10 de segundo
Os engenheiros da Daimler-Chrysler estão a experimentar um sistema de direcção por
joystick, instrumento semelhante àquele usado nos PC’s para controlar os jogos de computador. O sistema está a ser testado num Mercedes SL. O sistema permite controlar a aceleração, travagem e direcção através de uma única alavanca. Basta incliná-la para os lados para conduzir o carro. Para acelerar é só pressioná-la para a frente; para travar fazer pressão para trás. Se não houver pressão no sentido longitudinal o sistema manterá a velocidade constante, acelerando ou cortando o combustível sempre que necessário. Quando o carro estiver parado num semáforo os travões serão automaticamente accionados até que o automóvel acelere novamente. As mudanças são automáticas e os seus comandos tradicionais são accionados por botões no painel. A alavanca tem dois botões para os piscas e um gatilho para a accionar a buzina. O automóvel experimental tem dois joysticks, um deles colocado à esquerda para condutores destros. O joystick transmite ao condutor a resistência que as rodas encontram, assim por exemplo numa estrada molhada ele fica mais leve, se a roda estiver encostada na berma torna-se mais pesado, etc. Além do ganho de espaço devido à retirada dos comandos tradicionais a segurança passiva aumenta significativamente já que tanto o volante como os pedais podem causar ferimentos em caso de acidente, mesmo com a existência de airbags e de pedais retracteis. O condutor pode encontrar com mais facilidade a posição ideal de condução, seja qual for o seu tamanho. Do ponto de vista activo basta

A Informática na Indústria Automóvel
34
lembrar que as mãos são muito mais sensíveis e hábeis do que os pés, testes com grupos de condutores inexperientes feitos pela Mercedes comprovaram que é muito mais fácil, seguro e rápido aprender a guiar com o novo sistema do que com o tradicional.
Figura 15 – Sistema de Joystick da Mercedes
Pensando ainda na segurança, a Daimler Chrysler anda a desenvolver um novo sistema que identifica peões e outros obstáculos no meio da rua. O sistema baseia-se num sistema óptico tendo duas câmaras de filmar que transmitem imagens a um computador. Com base no tamanho, na silhueta e no movimento do que estiver à frente (o movimento das pernas humanas tem características únicas) o dispositivo além de mostrar as imagens captadas num ecrã também pode alertar o condutor para certos perigos. Também identifica semáforos e placas de sinalização podendo avisar aos distraídos quando estiverem prestes a avançar num sinal vermelho, entrar em sentido proibido ou ultrapassar o limite de velocidade. A previsão é de que numa primeira etapa isso diminua a necessidade de atenção do condutor ao trânsito, o carro encarregar-se-á do pára e arranca e de se manter sempre na mesma faixa de rodagem.
Se o condutor não for exactamente um bom condutor há boas notícias. Com os comandos
e sensores interligados os carros do futuro vão passar a assumir o controlo do carro sempre que o condutor agir erradamente ou demorar a reagir a alguma situação. Bater na traseira de outro carro, por exemplo, será quase impossível. Se o condutor entrar numa curva com excesso de velocidade ele primeiro irá accionar os travões depois o sistema de estabilização automática tentará corrigir a trajectória e a suspensão inteligente manterá o carro colado ao asfalto. Se ainda assim o carro derrapar, o sistema de direcção moverá as rodas dianteiras para corrigir. Tudo isso numa fracção de segundo sem que o condutor se aperceba que deixou de controlar o seu automóvel. A não ser por um aviso no painel aconselhando para aliviar um pouco o acelerador. Assim o sistema não atrapalha a atenção e a condução do condutor.

A Informática na Indústria Automóvel
35
Como ficou demonstrado a informática veio tornar os automóveis muito mais seguros e mais fáceis de conduzir. Todos estes sistemas de segurança só são possíveis devido ao grande avanço tecnológico que temos assistido nos últimos 20 anos.
2.5.1 – ABS
A firma alemã Bosh desde 1930 que andava a desenvolver um sistema de travagem anti bloqueio, o qual apareceu pela primeira vez em 1978. Primeiro o sistema foi montado em camiões e só depois foi aplicado em automóveis, sendo a Mercedes o primeiro construtor automóvel a faze-lo. Hoje é uma característica habitual e essencial num automóvel [18].
O sistema ABS é constituído por uma combinação de um sistema hidráulico com um
sistema eléctrico (computador do ABS) para controlar os travões e prevenir o seu bloqueio. O sistema consiste em sensores de velocidade nas rodas, um em cada roda, uma unidade de controlo hidráulica (UCH) e uma unidade de controlo eléctrica (UCE).
Estes sistemas têm micro controladores de 8 bits ou de 16 bits, da família C50x e C16x.
Esta tecnologia combina micro controladores, micro processadores e processamento de sinais digitais para ter a capacidade de aumentar a performance dos requisitos do processador do computador existente na UCE.
Numa travagem os sensores de velocidade das rodas medem a velocidade de rotação das rodas e enviam esta informação para o UCE. O computador da UCE está constantemente a monitorizar os valores enviados pelos sensores das rodas. Se o computador determina que uma roda está a desacelerar mais rapidamente do que outra roda (indicando que o travão está prestes a bloquear) a UCE manda a UCH libertar a pressão hidráulica do travão até a velocidade de rotação da roda ser a mesma do que as outras e prevenindo assim que ela bloqueie. Todo este controlo é realizado pelo computador da UCE.
Devido à complexidade do sistema quando o motor inicia o seu funcionamento ocorre uma
sequência de auto testes. Se os testes têm sucesso a luz de ABS é desligada. Se algum componente falha a luz de ABS continua acesa. Esta luz também pode ligar-se durante a condução indicando um problema num componente do sistema de ABS, mas o carro continua a poder realizar travagens.
Existem sistemas ABS de 3 e 4 canais. As características destes sistemas são as
seguintes:
• Sistema de 3 Canais – No sistema ABS de 3 canais a pressão hidráulica é fornecida individualmente aos travões da frente e é fornecida aos travões de trás como se eles fossem um só, embora exista um sensor por roda para medir a velocidade de

A Informática na Indústria Automóvel
36
rotação de cada roda em separado. Este sistema é menos complicado e mais barato na sua construção e aplicação que um sistema ABS de 4 canais, mas não fornece a mesma segurança que este.
• Sistema de 4 Canais – No sistema ABS de 4 canais a pressão hidráulica é fornecida
aos 4 travões individualmente e a velocidade de rotação das rodas também é medida individualmente. O bloqueio das rodas pode ser controlado e prevenido individualmente, o que melhora a segurança e o controlo de travagem.
2.5.2 – ESP
Depois de ter inventado o ABS, a Bosh não ficou satisfeita e passado 10 anos apresentou um novo sistema de controlo da estabilidade do automóvel, o qual foi baptizado de Programa de Estabilidade Electrónico (Electronic Stability Program – ESP) [6].
O ESP monitoriza e compara os valores gravados pelos vários sensores de condução e de comportamento do automóvel. Estes valores são enviados a um micro computador de alta performance, que tem guardado um modelo matemático de referência. Este modelo é constituído por todos os valores de referência do comportamento automóvel. O estado actual do veículo é comparado com os valores existentes no modelo referencial, para a mesma situação, identificando assim qualquer possível risco de perda de tracção do veículo (derrapagem).
Em termos físicos, uma derrapagem é simplesmente uma rotação do veículo sobre o seu
eixo vertical. Quanto maior for a rotação maior é a derrapagem e maior é o risco de acidente. Para medir com mais exactidão a velocidade de rotação é necessário um sensor especializado na medição de rotações, o que é uma tecnologia algo complexa e que antes só existia na indústria aeroespacial. Para o ESP os responsáveis da sua construção desenvolveram um dispositivo de medição semelhante, baseado num cilindro de aço oco. Cristais de quartzo geram oscilações definidas no cilindro e o padrão dessas oscilações sofrem a influência do movimento rotacional do automóvel. Este deslocamento pode ser anulado através uma tensão eléctrica e essa tensão pode ser usada para medir a velocidade de rotação do veículo naquele dado momento.
Conforme a velocidade de rotação, o microcomputador do ESP processa a informação dos
vários sensores adicionais, juntamente com o sentido pretendido pelo condutor e a via actual do carro. Esses sensores são:
• Sensor do Ângulo da Direcção – Este sensor mede o ângulo em que a direcção se
encontra, como indicação da intenção da direcção que o condutor quer seguir

A Informática na Indústria Automóvel
37
• Sensor da Velocidade da Roda – O sensor da velocidade da roda regista a velocidade que o carro se desloca
• Sensor de Aceleração Lateral – Este sensor detecta qualquer derrapagem lateral
• Sensor Rotacional – Este sensor é o coração do ESP. Mede a rotação, ou
derrapagem, do automóvel
• Sensor de Pressão – Mede a pressão do travão
O computador do ESP compara sem parar o comportamento actual do automóvel com os valores ideais pré programados. No momento em que o automóvel se desvia destes valores ideais um controlo especialmente desenvolvido faz com que o sistema actue numa velocidade impressionante, menos de meio segundo, trazendo o automóvel de novo para a estrada. O ESP controla a travagem de uma ou mais rodas e/ou reduz a potência do motor.
Desta maneira o ESP corrige os erros do condutor e estabiliza o automóvel em todo o tipo
de estrada (seca, molhada, de areia, etc.) e está operacional sob todas as condições, seja durante uma travagem, aceleração ou derrapagem.
A unidade de controlo central do ESP era no princípio composta por dois
microprocessadores de 48 KByts cada e por um sistema hidráulico. O sistema hidráulico é responsável pelo controlo de travagem e os microprocessadores são responsáveis pelo tratamento dos valores medidos pelos sensores e fazer com que o ESP actue. Estes microprocessadores foram depois substituídos por microprocessadores com 56 KByts de memória e ainda mais tarde por microprocessadores de 120 KByts.
2.5.3 – AIRBAG
O sistema de airbag é constituído por um saco de nylon insuflável, um módulo responsável pela insuflação do saco, sensores situados na frente da carroçaria do automóvel e conectores eléctricos.
Numa colisão frontal a uma velocidade mínima de 20 km/h o sistema de airbag é
accionado. A súbita desaceleração do automóvel faz com que 2 sensores enviem um sinal eléctrico ao módulo de diagnóstico, onde está situado o computador do sistema. O módulo de diagnóstico certifica-se que realmente está a acontecer uma colisão e depois disso faz com que o saco de nylon seja insuflado.
Quando o sistema do airbag é accionado a primeira coisa que acontece é o airbag ser
insuflado, de seguida existe o contacto do condutor com o airbag e por ultimo o tronco do

A Informática na Indústria Automóvel
38
condutor entra todo em contacto com o airbag e por fim o saco do airbag esvazia. Isto tudo acontece em 30 milissegundos aproximadamente. Aliás o airbag a encher e esvaziar leva menos de meio segundo. A velocidade de enchimento do airbag é de 320 km/h.
A principal função do computador do sistema de airbag é receber sinais/informações dos
vários sensores existentes e usar essa informação para determinar se o disparo do airbag é necessário ou não. Este computador também é responsável por realizar diagnósticos ao sistema de airbag, para no caso de uma avaria em algum componente do sistema acender uma luz no painel de instrumentos indicando a avaria e guardar o respectivo código da avaria na sua memória. 2.6 – A Informática nos Sistemas de Controlo de Motores Automóveis
Como já foi referido anteriormente, a informática também ajuda no controlo e funcionamento do motor do automóvel. Para tal efeito o motor possui a Unidade de Controlo do Motor ou UCM.
A UCM é um dos sistemas mais importantes do automóvel. Normalmente este sistema
possui o computador mais potente que existe no automóvel, isto porque este computador tem de tratar de uma grande quantidade de informação proveniente de vários sensores situados em quase todas as secções do motor. A maioria dos computadores mais potentes usados na UCM contêm processadores de 32 bits com uma velocidade de 56 MHz, que pode parecer não muito potente quando comparado com os processadores que as pessoas têm nos seus computadores pessoais que vão até 4000 MHz. No entanto, estes processadores não necessitam de lidar com processamentos supérfluos, como as imagens do ambiente de trabalho ou uma dúzia de aplicações a serem processadas todas ao mesmo tempo. O Seu processamento é realizado de uma maneira muito mais eficiente e muito bem definida, conseguindo assim gerir um considerável conjunto de programas e um grande número de tarefas isto tudo enquanto aguentam com grandes amplitudes térmicas e com as variadas condições do piso.
A UCM controla as coordenadas e tempo de ignição, a entrega de combustível, os
injectores de combustível, a mistura de ar, etc. Esta unidade monitoriza os vários componentes do motor recebendo informações de dezenas de sensores localizados por todo o automóvel. A UCM avalia as informações recebidas e realiza milhões de cálculos por segundo para atingir uma óptima performance do motor.
Mas como exactamente trabalha a UCM? Num motor (considerando apenas a sua
mecânica) existem vários sensores para sentirem os vários parâmetros necessários, como a posição do regulador de pressão, o tempo da faísca das velas, o modo de transmissão, a velocidade do automóvel e ainda muito mais. Também existem outros sensores num motor,

A Informática na Indústria Automóvel
39
mas estes bastante mais comuns como por exemplo o sensor da pressão do óleo, ou da temperatura. Todos estes sensores estão ligados à UCM que recolhe toda esta informação e toma as decisões para manter sempre as melhores definições. A maioria dos automóveis (para não dizer todos) que usa injecção de combustível tem uma UCM. O nível de injecção óptimo para todas as condições possíveis que o automóvel pode encontrar são programadas na UCM.
E para que serve a UCM? Esta pergunta é facilmente respondida. Para isso basta
lembrarmo-nos daquelas manhãs geladas de Inverno em que nos batemos com o automóvel para este trabalhar, rodando várias vezes a chave da ignição e nada acontece. Isto acontece porque é difícil fazer com que o combustível seja queimado com temperaturas muito baixas. Então, nos carros mais antigos que não possuíam a UCM o carro custava bastante a pegar, mas nos automóveis que têm a UCM o computador sabe que a temperatura do motor é bastante baixa, então vai fazer com que a faísca das velas esteja acesa durante um maior período de tempo. A UCM gera a sequência de faíscas necessárias para que o motor comece de imediato a trabalhar.
Um bom exemplo de uma UCM é o sistema que a Honda desenvolveu e que dá pelo nome
de VTEC (Variable Valve Timing and Lift Electronic Control). Esta UCM foi pioneira no controlo do motor. O sistema VTEC modifica o funcionamento das válvulas de acordo com a rotação do motor, para obter sempre a melhor performance possível e os injectores são programados para ter a certeza que o combustível é sempre usado da melhor maneira.
2.6.1 – Sistema VTEC da Honda
A Honda lançou o sistema VTEC em 1988, originalmente com um motor de 4 cilindros de 1.6 Cm3. Já existia na altura outros sistemas de controlo do motor, mas o sistema VTEC era o mais avançado e sofisticado da altura.
O princípio do sistema VTEC é a capacidade de mudar os perfis dos veios excêntricos ou
árvores de cames, responsáveis pela abertura e fecho das válvulas, dentro das várias gamas de rotação do motor.
O VTEC é um sistema eléctrico e mecânico que permite ao motor ter múltiplos eixos na
árvore de cames. À medida que o motor passa por diferentes rotações o computador do sistema VTEC pode activar a alternância dos lóbulos do eixo e alterar o sincronismo da abertura e fecho das válvulas. Desta maneira o motor adquire a melhor configuração do eixo da árvore de cames para velocidades baixas e altas, sendo isto tudo possível no mesmo motor. Isto quer dizer que o motor vai ter sempre o funcionamento das válvulas o mais optimizado possível.

A Informática na Indústria Automóvel
40
O computador do sistema VTEC além de ser o responsável pelo controlo dos eixos das válvulas, também monitoriza a pressão do distribuidor de entrada e as rotações do motor, parra assim comandar o actuador para a variação do tempo de abertura das válvulas.
2.7 – A Informática e Veículos Inteligentes
Todas as utilizações da informática nos automóveis faladas anteriormente leva a pensar em mais um paradigma do mundo de hoje que é “O automóvel inteligente”. Como já ficou demonstrado com tantos sistemas de controlo e entretenimento os automóveis estão cada vez mais inteligentes chegando mesmo a corrigir a condução do condutor.
Mas qual é o conceito de um automóvel inteligente? Definitivamente esta não é uma
pergunta com uma resposta simples. Para começar temos de olhar em redor e ver nos dias de hoje todos os sistemas usados num automóvel, como por exemplo o sistema de travões anti-bloqueio, controlo de velocidade, controlo da suspensão, controlo de tracção, etc [20].
A questão é saber exactamente como definimos um automóvel inteligente e se esse
automóvel inteligente no futuro vai chegar a andar sozinho Neste momento já existem sistemas de navegação juntamente com sistemas infravermelhos e de visão nocturna e com ligações a satélites. Companhias, como a Motorland e a Mercedes, estão a gastar grandes quantidades de dinheiro no conceito do carro inteligente. A Mercedes já lançou um novo sistema de Controlo de Cruzeiro, assim como a Jaguar, sistema esse chamado de Controlo de Cruzeiro Adaptativo. Este sistema calcula automaticamente a velocidade e a distância do carro da frente e ajusta automaticamente a velocidade do carro para que este se mantenha a uma distância segura do carro que circula à nossa frente [20].
Pesquisas recentes sobre este tópico deixam bastante claro que é obvio que o carro
inteligente do futuro deverá conduzir-se a ele próprio, assim como deverá haver uma “rede de transportes inteligentes” que inclui os nossos automóveis e todo o tráfego existente. Um artigo recente publicado na revista Times sugere que todos os grandes construtores automóveis acreditam que “mesmo ao virar da esquina” existem carros inteligentes que sentem todo o tráfego à sua volta. Eles dizem que num futuro, não muito distante, o carro irá sozinho à auto-estrada mais próxima, vai circular nesta a velocidades na ordem dos 190 – 200 km/h e com apenas alguns centímetros de distancia do carro da frente. Isto irá iniciar a primeira era dos automóveis totalmente independentes, que já tinha sido prevista em 1939 pela General Motors.
A necessidade realizar avanços nesta área já foi definida. É facto que mais uma vez vai
ser a informática a dar o maior contributo para o desenvolvimento desta área. Para além de todos os sistemas já existentes e referidos, a inteligência artificial usada nas redes neurais é a melhor maneira para se chegar ao automóvel inteligente. Isto quer dizer que agora temos um

A Informática na Indústria Automóvel
41
guia para nos levar ao objectivo que queremos atingir e converter os nossos automóveis em realmente automóveis inteligentes.
Como já referimos, os automóveis de hoje já possuem sistemas inteligentes. Para se ter
uma ideia de quais os principais sistemas inteligentes num automóvel, é apresentado o seguinte quadro:
Principais Sistemas Inteligentes num Automóvel
Nome Descrição Unidade de Controlo do Motor Controla as funções do motor, como a
monitorização e diagnóstico de avarias, ignição, injecção de combustível e ar, etc.
Modulo de Airbag Controla a abertura do airbag. Controlo da Carroçaria Controla o painel de instrumentos, luzes do interior,
fecho de portas, funcionamento das janelas, regulação dos bancos, etc.
Modulo da Porta do Condutor Comunicação entre os comandos dos interruptores existentes na porta do condutor e o Controlo da Carroçaria.
Modulo de Cruise Control Regula o Cruise Control em andamento. Painel de Instrumentos Controla alguns dispositivos e luzes indicadoras,
usando dados do barramento de dados de comunicação.
Modulo de controlo Climático Monitoriza a temperatura interior e controla o sistema de aquecimento e arrefecimento.
Modulo do ABS Controla os travões anti-bloqueio e pode também controlar o sistema de tracção e de estabilidade.
Controlo de Transmissão Controla o sistema de mudanças automáticas.
Tabela 1 – Principais Sistemas Inteligentes num automóvel
2.7.1 – Controlo de Cruzeiro Adaptativo
O controlo da velocidade com um regulador centrífugo foi usado num automóvel antes de 1910. Este sistema mantinha a velocidade do automóvel, quer o automóvel estivesse a subir uma estrada ou a descer. Esta tecnologia foi inventada por James Watt e Matthew Boulton em 1788 para ser usada em comboios e utilizava a força centrifuga para manter constante a posição do regulador de pressão [21].
O controlo de cruzeiro moderno foi inventado em 1945 por um inventor e engenheiro mecânico cego, chamado Ralph Teetor [21]. O primeiro carro com este sistema foi feito em 1958. Este sistema calculava a velocidade baseada na terra e na rotação do eixo do motor e

A Informática na Indústria Automóvel
42
usava uma Solenoid – é um laço de fio, envolvido em torno de um núcleo metálico, que produz um campo magnético quando uma corrente eléctrica é passada através dele – para variar a posição da pressão.
Para o sistema funcionar o condutor marca a velocidade que quer manter e tem de levar o automóvel até essa velocidade. O controlo de cruzeiro sabe a velocidade do automóvel a partir do cabo do velocímetro que vem do eixo do motor ou então a velocidade é calculada a partir das rotações do motor.
O Controlo de Cruzeiro Adaptativo (CCA) é constituído por um sensor com um radar de 3
feixes para controlar a estrada à frente do automóvel e ajustar a velocidade, desacelerando o motor ou travando sempre que necessário. O CCA é capaz de ajustar a velocidade do automóvel consoante as condições de trânsito à volta do automóvel.
Este olho electrónico vigia a estrada à frente do automóvel a uma distância máxima de 120 metros. Quando é detectado um automóvel na pista o sistema calcula a sua localização, movimento e velocidade relativa, usando para isso as ondas reflectoras do radar. As ondas enviadas pelo radar são apanhadas por sensores existentes no automóvel e assim o sistema é capaz de calcular se há a necessidade de abrandar/travar ou se pode continuar com a mesma velocidade. Assim o CCA é capaz de identificar se um determinado automóvel está a ocupar a estrada. Se o automóvel que vai à frente mudar de direcção então o CCA detecta que a estrada à sua frente está livre e o automóvel acelera até à velocidade pré programada no sistema e mantém-se constante nessa velocidade. O CCA ajusta a velocidade do automóvel ao fluxo de trânsito à sua volta, tendo para isso um controlo sobre o motor e travões do automóvel.
O CCA além de receber informações dos sensores do radar, também recebe informações
de outros sistemas como o ABS e o ESP e toda esta informação está constantemente a ser enviada para o computador do CCA. Com toda esta informação este é capaz de calcular qual a velocidade mais apropriada para o automóvel naquele momento.

A Informática na Indústria Automóvel
43
2.8 – Conclusão
Como ficou demonstrado neste capítulo, hoje em dia é totalmente impensável ter ou conceber um automóvel sem informática, ou seja, sem uma quantidade bastante relevante de sistemas informáticos. Quase todos os ramos da indústria automóvel usam sistemas informáticos em seu benefício. A informática está presente desde a concepção do automóvel até ao seu resultado final e posteriormente numa infinidade de sistemas que ajudam na utilização diária do automóvel.
Mas tanta tecnologia levanta contudo alguns problemas. Com toda esta tecnologia o condutor pode distrair-se da condução e ainda existem os problemas relacionados com a privacidade, com os automóveis a transformarem-se num autêntico informador dos hábitos de condução menos “legais” de cada um.

A Informática na Indústria Automóvel
44
3 – Os Barramentos de Dados e Redes nos Automóveis
Este capítulo fala da necessidade que os vários sistemas informáticos têm de comunicar entre si, utilizando para isso diferentes barramentos de dados. Alem disso ainda descreve o funcionamento e principais características dos principais barramentos de dados.
3.1 – Contextualização
Há muitos anos que a indústria automóvel tem feito uso de sistemas electrónicos e informáticos para o controlo das várias funções existentes nos automóveis. Como foi demonstrado no capítulo anterior o automóvel de hoje está repleto de sistemas electrónicos e computadores que controlam quase tudo no automóvel.
Observamos nos automóveis actualmente comercializados que uma boa parte destes
sistemas de controlo foram desenvolvidos de forma independente, no sentido que cada um é responsável por um determinado tipo de função no automóvel. Por esta razão a necessidade da interligação desses vários sistemas passou a ser cada vez maior.
O real domínio sobre os diversos dados electrónicos existentes num automóvel é
conseguido mais facilmente através de sistemas interligados, sendo na mesma cada um responsável por uma data função, mas partilhando informações entre si. Sistemas desenvolvidos dentro deste contexto têm sido disponibilizados pelos vários fornecedores de componentes automóveis e pelos vários construtores automóveis, dando a impressão ao condutor e passageiros que o controle do automóvel é totalmente integrado, muitas vezes deixando a sensação de existência de uma única unidade de controlo inteligente, uma espécie de cérebro.
Figura 16 – Relações entre informações e suas funções num automóvel

A Informática na Indústria Automóvel
45
Começou então a surgir um grande problema para os fabricantes de sistemas electrónicos de automóveis que foi:
• Apenas um barramento de dados no automóvel não consegue tratar adequadamente
os diferentes dispositivos de entretenimento, segurança e controlo inteligente, que os automóveis passaram a possuir.
Começaram a aparecer vários barramentos distintos num automóvel, com os construtores
automóveis a adoptarem por soluções completamente distintas. Começou-se a verificar que a escolha do barramento de dados mais correcto podia conduzir a uma grande vantagem competitiva.
A electrónica é a grande responsável pela inovação na indústria automóvel, tendo nos
últimos anos um forte crescimento e utilização nos automóveis. As tradicionais funções de controlo da carroçaria e de motor, assim como os novos sistemas de ajuda à condução e de telemática têm sofrido um crescimento anual na ordem dos 16%. Nos dias de hoje os componentes electrónicos e a electrónica são 25% do custo total de um automóvel de gama média.
A área que teve um maior crescimento foi a dos sistemas de telemática, onde houve uma
convergência das telecomunicações móveis e da informação processada no automóvel. As aplicações de telemática exibem características similares aos produtos de consumo, como por exemplo, pouco tempo no mercado e constantes mudanças nos seus protocolos. Estas características de mercado são justamente o oposto da fiabilidade dos longos ciclos de design da electrónica tradicional existente nos automóveis, que são muitas vezes ditados pela segurança e custo de ferramentas.
Sistemas tradicionais como o CAN (Controler Area Network) e J1850 foram usados
durante muitos anos no controlo da estrutura e carroçaria do automóvel. Mas as restrições da sua largura de banda e velocidade tornaram estes sistemas um pouco desadequados das suas funções e com dificuldades em suportarem as novas aplicações de tempo real.

A Informática na Indústria Automóvel
46
3.2 – Arquitecturas dos Sistemas Electrónicos
No sector automóvel existem duas arquitecturas de destaque na montagem dos vários sistemas electrónicos num automóvel. Essas arquitecturas são a Arquitectura Centralizada e a Arquitectura Distribuída.
Em ambas as arquitecturas existe uma Unidade Electrónica de Controle (Electronic Control
Unit - ECU). Uma ECU é um módulo electrónico responsável por realizar um determinado controle. Dentro da chamada “ECU Central” são encontrados Hardware e Software que realizam a leitura dos dados de entrada, processam esses dados e por fim realizam a acção correspondente (actuar segundo os dados de saída).
3.2.1 – Arquitectura Centralizada
Quando analizamos determinadas aplicações encontramos uma única unidade ECU, responsável por receber todas as informações e sinais de entrada (como os sensores e chaves de comando), processa-los e comandar as respectivas saidas de controle do sistema (como válvulas e relés).
Como vantagens desta arquitectura podemos destacar:
• Simplicidade do Hardware utilizado na implementação do sistema, sendo
constituído basicamente por sensores e actuadores, uma ECU para o devido controle do sistema e obviamente a cablagem que os conecta.
• Todos os dados de entrada estarão disponíveis à ECU durante toda a operação do
sistema, não sendo crítica a lógica de varredura e colecta de informações de cada um dos sensores existentes.
Como desvantagens podemos destacar:
• Grande quantidade de cablagem requerida para conectar os sensores e actuadores
à ECU, especialmente em grandes aplicações, o que dificulta a manufactura do automóvel e a sua eventual manutenção.
• Limitação das possibilidades de expansão do sistema, uma vez que qualquer
alteração na ECU significará a modificação do seu Hardware e/ou Software e eventualmente na condição de trabalho das funções originais do sistema.

A Informática na Indústria Automóvel
47
Figura 17 – Representação da Arquitectura Centralizada
3.2.2 – Arquitectura Distribuída
Neste tipo de arquitectura em vez de se utilizar um único sistema de controle, utiliza-se várias ECU’s interligadas dividindo entre elas a execução das diversas funções existentes no automóvel.
Figura 18 – Representação da Arquitectura Distribuída
Na Figura.18 as ECU´s 1, 2 e 3 são responsáveis pela leitura directa das entradas do sistema, enquanto que as ECU´s 4 e 5 são responsáveis pelo comando das saídas. Além disso no diagrama apresentado qualquer uma das ECU´s, dependendo das funções existentes neste sistema de controle, poderá participar do processamento dos dados e da actuação das saídas.
Como vantagens desta arquitectura podemos destacar:
• Quantidade reduzida de cablagem do sistema, uma vez que tendo várias ECU´s
disponíveis poderemos instalá-las bem próximas aos sensores e actuadores, reduzindo a cablagem mais pesada da implementação que assim será formada basicamente por pares de fios utilizados na conexão das entradas e saídas das ECU´s.

A Informática na Indústria Automóvel
48
• Menor tempo de montagem do veículo (exactamente pela menor quantidade de cablagem necessária).
• Maior robustez do sistema de controlo por termos reduzido as possibilidades de
quebra de um dos circuitos ou o aparecimento de um mau contacto em determinado conector (novamente pela menor quantidade de cablagem necessária).
• Permite a ampliação do sistema com significativa facilidade, garantindo que
alterações numa determinada função do veículo tenham impacto apenas em uma ou em parte das ECU´s.
• Facilita a criação do software para aplicar em cada ECU, uma vez que possibilita a
sua modularização e distribuição de responsabilidades entre elas.
• Possibilita a modularização do projecto do sistema e da execução dos testes de validação aumentando a confiança da implementação e reduzindo os prazos envolvidos no desenvolvimento.
Como desvantagens podemos destacar: • Obriga a utilização de um meio de comunicação entre as ECU´s, meio este
chamado de Protocolo de Comunicação. • Implica a existência de um software de controlo para a rede de comunicação que
interliga as ECU´s, cuja dificuldade de desenvolvimento depende directamente da escolha do protocolo de comunicação.
• Difícil determinação da taxa de transmissão ideal para uma dada aplicação, o que
tem um impacto directo nos tempos internos do software de controlo e na escolha dos componentes electrónicos a serem utilizados no projecto das ECU´s.
3.2.3 – Considerações
Explicadas as vantagens e desvantagens fundamentais dos dois tipos de arquitecturas normalmente utilizadas, devemos acrescentar que a decisão de escolha de uma delas para uma dada aplicação, depende da ponderação de diversos factores. Entre eles podemos destacar:
• A complexidade do sistema a ser controlado (quantidade de variáveis de entrada e
saída e o tamanho físico do sistema).

A Informática na Indústria Automóvel
49
• A disponibilidade dos componentes electrónicos requeridos à montagem das ECU´s e à medição e actuação do sistema.
• A robustez mecânica (como as vibrações) e eléctrica (como as interferências
electromagnéticas), requerida pelo sistema a ser controlado.
• O tempo necessário à implementação da arquitectura (projecto, construção de protótipos e validação).
• O custo desejado do sistema final (limitações inerentes ao orçamento).
O relacionamento entre os factores anteriormente descritos, considerando-se uma determinada aplicação, é que determinará a arquitectura mais apropriada ao sistema a ser controlado. Tal desafio é enfrentado quase que diariamente pelas empresas construtoras de automóveis.
Uma das maiores dificuldades das empresas construtoras de automóveis é determinar a
arquitectura electrónica de um novo modelo; garantindo o mínimo de funções desejadas pelos futuros clientes, dentro dos limites de custo de projecto e produto final determinados pela empresa.
Normalmente os produtos têm o início do seu desenvolvimento com três ou quatro anos de
antecedência ao seu lançamento, o que dificulta ainda mais a tomada de decisão sobre qual seria a melhor solução de engenharia para determinado projecto. Tal trabalho precisa de relacionar as visões da Engenharia Avançada (tecnologia), Marketing Estratégico (mercado) e Política Económica (orçamento) da região a que se destina o novo produto. A Figura 19 ilustra a tendência da relação entre a responsabilidade de cada ECU de um determinado sistema de controlo e a complexidade desse sistema como um todo, nas duas alternativas – Centralizada e Distribuída.
Figura 19 – Relação entre a responsabilidade de cada ECU, de um determinado sistema de controlo e a complexidade desse sistema como um todo

A Informática na Indústria Automóvel
50
Analisando friamente cada um dos conceitos de arquitectura apresentados, não só do ponto de vista da evolução tecnológica, mas também das possibilidades futuras de expansão de funções com o mínimo de alterações no sistema de controle do veículo como um todo, podemos considerar a Arquitectura Distribuída a mais interessante.
Houve então o aparecimento de novos barramentos de dados standard os quais têm a
capacidade de lidar com protocolos que disparam por tempo (Time-Triggered) e com barramentos de dados ópticos. Estes novos barramentos de dados e redes existentes nos automóveis podem dividir-se em 4 categorias:
� Barramentos de Controlo da Carroçaria – Painel de instrumentos, espelhos, cintos
de segurança, fecho de portas e airbags. � Barramentos de Controlo e Informação – Rádios, browsers de Internet, leitores de
CD e DVD, sistemas de informação e entretenimento e de telemática.
� Barramentos sobre o chassis – Travões anti-bloqueio, controlo de tracção e transmissão.
� Avançados Dispositivos de Segurança – Travões e condução controlados por
ligações electrónicas e sistemas de assistência à condução. 3.3 – Principais Barramento de Dados Automóveis
Para satisfazer os desejos dos consumidores, como ter mais segurança e conforto, e para cumprir as fortes normas governamentais de redução da poluição e consumo de combustíveis a indústria automóvel desenvolveu vários sistemas electrónicos. O ABS, sistemas de controlo do motor, controlo de tracção, ar condicionado, fecho central das portas e regulamento eléctrico dos retrovisores e bancos são alguns exemplos.
A complexidade destes sistemas de controlo e a necessidade de troca de informações
entre os vários sistemas levou à necessidade do aparecimento de vários barramentos presentes num automóvel.

A Informática na Indústria Automóvel
51
3.3.1 – CONTROLLER AREA NETWORK (CAN)
O barramento de dados CAN foi um dos primeiros e mais duradouros na indústria automóvel, sendo ainda o barramento mais usado com mais de 100 milhões de nós instalados. Um automóvel de baixa/média gama contém duas ou três redes do tipo CAN que trabalham a diferentes velocidades.
O CAN foi desenvolvido pela empresa alemã Robert BOSCH, em 1986, quando lhe foi
pedido pela Mercedes, para desenvolver um sistema de comunicação entre 3 ECU’s num automóvel. A sua aplicação inicial foi em autocarros e camiões e actualmente é utilizado na indústria em automóveis, navios e tractores entre outros.
O CAN é um protocolo de comunicação em série síncrono. O sincronismo entre os
módulos conectados à rede é feito em relação ao início de cada mensagem lançada na rede (evento que ocorre em intervalos de tempo conhecidos e regulares).
Trabalha baseado no conceito multi-master (vários módulos principais), onde todos os
módulos se podem tornar masters em determinado momento e slaves em outro, além das suas mensagens serem enviadas em multicast, ou seja, as mensagens são enviadas para todos os módulos existentes na rede.
Outro ponto forte deste protocolo é o facto de ser fundamentado no conceito CSMA/CD
com NDA (Carrier Sense Multiple Access / Collision Detection with Non-Destructive Arbitration). Isto significa que todos os módulos verificam o estado da rede analisando se outro módulo está ou não a enviar mensagens com maior prioridade. Caso isto se verifique o módulo cuja mensagem tiver menor prioridade interrompe a sua transmissão e o de maior prioridade continua a enviar a sua mensagem do ponto em que estava, sem ter a necessidade de reiniciá-la. Este barramento ainda tem outra propriedade bastante interessante que é o NRZ (Non Return to Zero), onde cada bit (0 ou 1) é transmitido por um valor de tensão específico e constante.
A velocidade de transmissão de dados é inversamente proporcional ao comprimento do
cabo. A maior taxa de transmissão especificada é de 1Mbps considerando-se um cabo de 40 metros de comprimento. A Figura 20 representa a relação entre o comprimento do cabo e a taxa de transmissão de dados.

A Informática na Indústria Automóvel
52
Figura 20 – Relação entre o comprimento de rede e a taxa de transmissão de dados
Considerando-se fios eléctricos como meio de transmissão dos dados, existem três formas de se constituir uma rede CAN, dependendo directamente da quantidade de fios utilizada. Existem redes baseadas em 1, 2 e 4 fios. As redes com 2 e 4 fios trabalham com os sinais de dados CAN_H (CAN High) e CAN_L (CAN Low). No caso dos barramentos com 4 fios, além dos sinais de dados existe um fio com o VCC (alimentação) e outro com o GND (referência). Estes fios levam a alimentação às duas terminações activas da rede. As redes com apenas 1 fio têm o fio de dados, chamado exclusivamente de linha CAN.
Considerando o CAN composto por 2 e 4 fios os seus condutores eléctricos devem ser
entrançados e não blindados. Os dados enviados através da rede devem ser interpretados pela análise da diferença de potencial entre os fios CAN_H e CAN_L. Por isso, o barramento CAN é classificado como Par Entrançado Diferencial. Este conceito atenua fortemente os efeitos causados por interferências electromagnéticas, uma vez que qualquer acção sobre um dos fios será sentida também pelo outro causando flutuação em ambos os sinais para o mesmo sentido e com a mesma intensidade. Como o que vale para os módulos que recebem as mensagens é a diferença de potencial entre os condutores CAN_H e CAN_L (e esta permanecerá inalterada) a comunicação não é prejudicada.
No CAN os dados não são representados por bits em nível “0” ou nível “1”. São
representados por bits Dominantes e bits Recessivos, criados em função da condição presente nos fios CAN_H e CAN_L. A figura 21 ilustra os níveis de tensão numa rede CAN, assim como os bits Dominantes e Recessivos.

A Informática na Indústria Automóvel
53
Figura 21 – Níveis de tensão de uma rede CAN
Como já foi mencionado no início, todos os módulos podem ser masters e enviar as suas mensagens. Por isso o protocolo é suficientemente robusto para evitar a colisão entre mensagens, usando para isso uma arbitragem bit a bit não destrutiva. Pode-se exemplificar essa situação analisando o comportamento de dois módulos que estão a enviar duas mensagens diferentes ao mesmo tempo. Após enviar um bit cada módulo analisa a rede e verifica se outro módulo na rede o sob rescreveu (um bit Dominante sob rescreve electricamente um Recessivo). Um módulo interromperá imediatamente a sua transmissão caso perceba que existe outro módulo a transmitir uma mensagem com maior prioridade (quando o seu bit recessivo é sobrescrito por um dominante). O módulo com maior prioridade continuará normalmente a sua transmissão.
Os dados transmitidos por qualquer nó numa rede CAN, não contêm o endereço do nó
transmissor nem do nó receptor. Em vez disso o conteúdo da mensagem é etiquetado com um identificador único durante todo o seu percurso na rede. Todos os outros nós da rede recebem a mensagem e cada um deles realiza um teste no identificador para determinar se o conteúdo da mensagem é relevante para esse mesmo nó. Se a mensagem for relevante é aceite caso contrário é ignorada.
O identificador único também determina a prioridade da mensagem. Quanto menor for o
valor numérico do identificador maior é a prioridade. Deste modo é permitido que mais do que um nó tenha acesso à rede ao mesmo tempo, para enviar mensagens. A mensagem que tem maior prioridade tem a garantia que vai ganhar o acesso ao barramento, como se fosse a única mensagem a ser transmitida. As mensagens de menor prioridade são retransmitidas no próximo ciclo de rede ou num ciclo subsequente se ainda existirem outras mensagens de prioridade elevada à espera de serem enviadas.
Cada mensagem CAN tem um identificador de 11 bits no caso de mensagens do tipo 2.0A,
ou um identificador de 29 bits no caso de mensagens do tipo 2.0B. Este identificador é a parte principal do campo de prioridades, o qual está situado no inicio de cada mensagem CAN. O identificador presente em cada mensagem identifica o tipo de mensagem e também a prioridade da mensagem.

A Informática na Indústria Automóvel
54
Os bits numa mensagem CAN podem ser enviados com um valor numérico alto ou com um valor numérico baixo. Os bits com valor numérico baixo são sempre dominantes o que significa que se um nó de numeração baixa e outro de numeração alta tentarem enviar uma mensagem ao mesmo tempo o resultado é que a mensagem enviada vai ser a do nó de numeração baixa. Quando um nó está a transmitir uma mensagem, está sempre a ouvir o barramento. Se um nó com um identificador alto está a transmitir uma mensagem e detecta que um nó com um identificador baixo também o está a fazer ele como tem menos prioridade para a transmissão e deixa que o outro nó continue a enviar a sua mensagem.
Não é permitido que dois nós numa mesma rede enviem mensagens com o mesmo
identificador. Se dois nós tentarem enviar ao mesmo tempo uma mensagem com o mesmo identificador a prioridade não vai funcionar. Em vez de isso um dos nós vai detectar que a sua mensagem está distorcida e fora do campo de prioridade. Por isso o nó vai usar a detecção de erros existente na rede CAN, o que neste caso vai conduzir a que um dos nós transmissores se desligue (modo de barramento desligado), deixando o outro nó transmitir.
3.3.1.1 – Standards CAN
As especificações originais do CAN são as especificações da Bosh. Neste momento o barramento CAN vai na versão 2.0 e tem dois formatos de mensagem:
• Standard CAN versão 2.0A, usa um identificador de 11 bits • Standard CAN versão 2.0B, usa um identificador de 29 bits
A diferença entre os dois standards CAN é na camada física, onde o standard CAN 2.0B trata aplicações de alta velocidade até 1 Mbps e o standard CAN 2.0A tem um limite de 125 Kbps.
Existem 3 tipos de controladores CAN. Controlador do tipo A, B passivo e B. A maioria dos
controladores 2.0A apenas transmitem e recebem mensagens de formato standard enquanto os controladores 2.0B passivo recebem mensagens de formato standard e longo, mas ele ignora as mensagens de formato longo. O controlador 2.0B recebe e transmite mensagens nos dois formatos. É preciso notar que se forem utilizados identificadores de 29 bits num barramento que contem controladores do tipo A, o barramento não vai funcionar.
O CAN 2.0A tem mensagens com identificador de 11 bits. É possível ter até 2048
mensagens em uma rede constituída sob este formato, o que pode caracterizar uma limitação em determinadas aplicações. A Figura 22 apresenta a constituição de uma mensagem do tipo 2.0A.

A Informática na Indústria Automóvel
55
Figura 22 – Mensagens do tipo CAN 2.0A
Assim pode-se observar que a constituição de uma mensagem CAN do tipo 2.0A é constituída pelos seguintes campos:
• Start Bit – É um bit dominante (lógico 0), que indica o inicio da mensagem • Identificador – É o identificador da mensagem e contém 11 bits
• RTF – Remote Transmission Request é um bit dominante (lógico 0). RTF de valor 0
indica que a mensagem foi enviada por um nó enquanto o valor 1 indica que a mensagem é um pedido de transmissão remoto. Neste caso é um nó que pede que outro nó lhe envie informação. Estes tipos de mensagens não contêm dados.
• Campo de Controlo com 6 bits – Dois bits são o IDE, bits dominantes (lógicos r0 e
r1) que são reservados para uso futuro. Os restantes quatro bits representam o campo DLC (Data Length Code) que indica o número de bytes usado no campo de dados (campo seguinte).
• Dados – Contem de 0 a 8 bytes. Contem os dados da mensagem.
• CRC – Contem um código de verificação de redundância cíclica de quinze 15 bits
• ACK – Campo de confirmação que consiste em 2 bits. O primeiro é um bit de slot,
que é transmitido como um bit recessivo e é constantemente reescrito por bits dominantes transmitidos por outros nós que recebem a mensagem com sucesso. O segundo bit é um bit delimitador de recepção
• EOF – Indica o fim da mensagem e é constituído por 7 bits recessivos
• IFS – Consiste em 3 bits recessivos. Depois destes 3 bits é indicado ao barramento
que este está livre
O CAN 2.0B tem mensagens com identificador de 29 bits. É possível ter aproximadamente 537 milhões de mensagens em uma rede constituída sob este formato. Percebe-se que neste tipo de rede a limitação da quantidade de mensagens não existe. Por outro lado o que pode ser observado em alguns casos é que os 18 bits adicionais no identificador aumentam o

A Informática na Indústria Automóvel
56
tempo de transmissão de cada mensagem, o que pode caracterizar um problema em determinadas aplicações que trabalhem em tempo-real (problema conhecido como overhead). Esta versão foi desenvolvida para fornecer compatibilidade com outros protocolos de comunicação usados nos Estados Unidos. O objectivo era poder comunicar com os outros barramentos e manter a compatibilidade com a versão CAN 2.0A, por isso a versão 2.0B tem um formato maior que a versão 2.0A. A Figura 23 apresenta a constituição de uma mensagem do tipo 2.0B.
Figura 23 - Mensagens do tipo CAN 2.0B
As principais diferenças entra as duas versões são:
• Na versão 2.0B existe dois campos de identificação. O primeiro é um campo de 11 bits, para assim manter a compatibilidade com a versão 2.0A. O segundo é uma extensão sobre o anterior e tem 18 bits, fornecendo assim um comprimento total de 29 bits
• A distinção entre os dois formatos é feita usando uma extensão do identificador, o
bit IDE
• É inserido um novo bit entre os dois campos de identificação que é o SRR (Substitute Remote Request). Este bit é sempre enviado como um bit recessivo o que garante que no caso de uma mensagem do tipo 2.0A e outra do tipo 2.0B sejam concorrentes, a versão 2.0A tem sempre prioridade se as suas bases (11 bits) forem iguais.
Todos os outros campos existentes na versão 2.0B são idênticos aos existentes na versão 2.0A.
Os controladores que operam na versão 2.0B são totalmente compatíveis com os
controladores que operam na versão 2.0A e conseguem enviar e receber mensagens nos dois formatos.
No entanto existem dois tipos de controladores 2.0A. Um apenas consegue transmitir e
receber mensagens do tipo 2.0A, se receber alguma mensagem do tipo 2.0B vai acontecer um erro. O outro é chamado de controlador do tipo 2.0B passivo em que também apenas

A Informática na Indústria Automóvel
57
envia e recebe mensagens do tipo 2.0A, mas quando recebe uma mensagem 2.0B ele aceita-a e ignora-a não gerando nenhum erro.
Sendo assim depois das características mencionadas é possível utilizar numa mesma rede
controladores da versão 2.0A de ambos os tipos e controladores da versão 2.0B. Embora devido à incompatibilidade dos controladores 2.0A com os controladores 2.0B apenas mensagens com o formato 2.0A fazem sentido num sistema que utiliza todo o tipo de controladores.
O número de identificadores únicos disponíveis para serem usados numa rede 2.0A é de
2,032, enquanto numa rede 2.0B excede os 500 milhões.
3.3.1.2 – Padrões do CAN
Existem duas normas principais no CAN que são a ISO11898 e a ISO11519-2. A primeira, ISO11898, determina as características de uma rede que trabalha com velocidades de transmissão de dados elevadas (de 125Kbps a 1Mbps). A segunda, ISO11519-2, determina as características de uma rede que trabalha com velocidades mais baixas (de 10Kbps a 125Kbps). Ambos os padrões especificam as camadas de rede física e de dados, se considerarmos o padrão de comunicação OSI de 7 camadas (ISO7498). As outras camadas, da 3 à 7 também são especificadas, mas por outros padrões CAN, cada um relacionado a uma aplicação específica.
Os outros padrões existentes numa rede CAN são:
• NMEA 2000: Baseado no CAN 2.0B e utilizado em aplicações navais e aéreas. • SAE J1939: Baseado no CAN 2.0B e utilizado em aplicações automóveis,
especialmente autocarros e camiões.
• DIN 9684 – LBS: Baseado no CAN 2.0A e utilizado em aplicações agrícolas.
• ISO 11783: Baseado no CAN 2.0B e também utilizado em aplicações agrícolas.
Estes padrões especificam o equivalente às camadas de Rede (3), Transporte (4), Sessão (5), Apresentação (6) e Aplicação (7), do padrão OSI, incluindo-se as mensagens pertencentes ao dicionário de dados de cada aplicação em especial.

A Informática na Indústria Automóvel
58
3.3.1.3 – Detecção de Falhas
Uma das maiores vantagens do CAN é a sua robustez e a capacidade de se adaptar às condições de falha temporárias e/ou permanentes. Podemos classificar as falhas de uma rede CAN em três categorias ou níveis: Nível de Bit, Nível de Mensagem e Nível Físico.
Na seguinte tabela são apresentados os erros existentes em cada nível.
Níveis de Falhas Tipos de Erros
Bit Monitoring: Após a escrita de um bit dominante o módulo transmissor verifica o estado da rede. Se o bit lido for recessivo significará que existe um erro no barramento.
Nível de Bit
Bit Stuffing: Apenas cinco bits consecutivos podem ter o mesmo valor (dominante ou recessivo). Caso seja necessário transmitir sequencialmente seis ou mais bits com o mesmo valor, o módulo transmissor insere imediatamente após cada grupo de cinco bits consecutivos iguais um bit de valor contrário. O módulo receptor ficará encarregado de durante a leitura retirar esse bit, chamado de Stuff Bit. Caso uma mensagem seja recebida com pelo menos seis bits consecutivos iguais, algo de errado terá ocorrido na rede. CRC ou Cyclic Redundancy Check: Funciona como um checksum. O módulo transmissor calcula um valor em função dos bits da mensagem e transmite-o juntamente com ela. Os módulos receptores recalculam este CRC e verificam se este é igual ao transmitido com a mensagem. Frame Check: Os módulos receptores analisam o conteúdo de alguns bits da mensagem recebida. Esses bits (os seus valores) não mudam de mensagem para mensagem e são determinados pelo padrão CAN.
Nível de Mensagem
Acknowledgment Error Check: Os módulos receptores respondem a cada mensagem íntegra recebida, escrevendo um bit dominante no campo ACK de uma mensagem. A resposta é enviada ao módulo transmissor. Caso esta mensagem resposta não seja recebida pelo transmissor da mensagem significará que ou a mensagem de dados transmitida estava corrompida ou nenhum módulo a recebeu. Curto (de Circuito) do CAN_H (ou CAN_L) para GND (ou VCC). Curto (de Circuito) entre os fios de dados CAN_H e CAN_L. Nível Físico Ruptura do CAN_H (ou CAN_L).
Tabela 2 – Erros existentes em cada nível
No Nível de Mensagem todas as falhas mencionadas, quando detectadas por um ou mais módulos receptores, farão com que estes coloquem uma mensagem de erro na rede avisando toda a rede de que aquela mensagem continha um erro e que o transmissor deverá reenviá-la. Além disso a cada mensagem erroneamente transmitida ou recebida um contador de erros é incrementado em uma unidade nos módulos receptores e em oito unidades no transmissor.

A Informática na Indústria Automóvel
59
Módulos com estes contadores iguais a zero são considerados Normais. Para os casos em que os contadores contêm valores entre 1 e 127, os módulos são considerados Error Active. Contadores contendo valores entre 128 e 255 colocam os módulos em condição de Error Passive. Finalmente, para contadores contendo valores superiores a 255 os módulos serão considerados em Bus Off e passarão a não actuar mais na rede. Estes contadores também são decrementados à medida que mensagens correctas são recebidas, o que reduz o grau de confiança em relação à actividade dos módulos que tenham contadores com valores diferentes de zero e possibilita novamente a plena participação deles na rede.
No Nível Físico, para redes com 2 e 4 fios, caso algo de errado venha a ocorrer com os
fios de dados CAN_H e CAN_L, a rede continuará operando sob uma espécie de modo de segurança.
3.3.1.4 – Aspectos de Implementação
Uma rede CAN, dependendo da sua aplicação, poderá ter até centenas de nós conectados. O valor máximo para a conexão de nós numa rede CAN depende do standard que se utiliza na dada aplicação.
Todas a redes CAN possuem 2 terminadores. Esses terminadores são resistências com
valores entre 120 e 124 ohms, conectados à rede para garantir a perfeita propagação dos sinais eléctricos pelos fios da mesma. Estas resistências, uma em cada ponta da rede, garantem a repetição dos sinais na rede e o correcto funcionamento da rede CAN.
Outra característica importante de determinadas aplicações fundamentadas no CAN é que
estas poderão ter duas ou mais sub redes. Estas sub redes podem trabalhar em diferentes velocidades. Os dados são transferidos de uma sub rede para outra, através de módulos que actuam nas duas sub redes. Estes módulos são chamados de Gateways. A Figura 24 ilustra a rede CAN de um sistema automóvel com duas sub redes e dois terminadores. O Gateway desta aplicação é o Painel de Instrumentos.
Figura 24 – Rede CAN com duas sub redes

A Informática na Indústria Automóvel
60
Barramento é o termo técnico que representa os condutores eléctricos das linhas de comunicação e a forma como eles são montados. Apesar de parecer simples, o acto de interligar os módulos requer bastante atenção.
Sobre a cablagem necessária, considerando-se uma aplicação CAN de dois fios, deve-se
utilizar par entrançado onde a secção transversal de cada um dos fios deve ser de no mínimo 0,35mm².
As duas terminações (resistências de aproximadamente 120 ohms) do ponto de vista
teórico, podem ser instaladas nas extremidades do cabo directamente nos fios de dados CAN_H e CAN_L. Do ponto de vista prático isto é extremamente complexo. O que deve ser feito é adicionar as terminações nas duas ECUs conectadas aos extremos da rede.
No momento de se projectar os trajectos do barramento é preciso respeitar algumas regras
em relação ao comprimento dos cabos. O sincronismo das operações das ECUs no CAN é fundamentado no tempo de propagação física das mensagens no barramento. Assim, a relação do comprimento de determinados intervalos do cabo no barramento são fundamentais ao bom funcionamento da rede.
A Figura 25 mostra um diagrama que ilustra as medidas que devem ser consideradas no
desenvolvimento dos cabos.
Figura 25 – Medidas no desenvolvimento de um cabo
Destacamos que após o barramento ser montado, caso seja necessário qualquer reajustamento no mesmo, é aconselhável a troca do cabo eléctrico a ser reajustado. Emendas poderão alterar a morfologia da rede e com isso afectar o seu funcionamento.

A Informática na Indústria Automóvel
61
O barramento CAN tornou-se um standard nas ligações existentes sobre a carroçaria dos automóveis. Uma importante característica deste barramento é a sua alta fiabilidade de transmissões.
A parte do barramento mais dedicada à aplicação é o Dicionário de Dados (ou Data
Dictionary). O Dicionário de Dados é o conjunto de mensagens que podem ser transmitidas numa determinada rede.
A forma mais interessante de se organizar um dicionário de dados é criando uma matriz
com todos os nós da rede. Essa matriz mostrará cada mensagem sob a responsabilidade de cada nó, relacionando quem a transmite e quem a recebe. Outros dados importantes nesta matriz são o tempo de actualização dos valores da mensagem, o intervalo de transmissão da mesma e o valor relativo ao seu identificador. Além desta matriz a documentação referente ao Dicionário de Dados deverá conter uma descrição detalhada de cada mensagem. Esta descrição deve ser realizada bit a bit.
O Dicionário de Dados é implementado numa rede CAN via software e deverá ser o
mesmo (ter a mesma versão de actualização inclusive) em todos os módulos conectados à rede. Isto garantirá total compatibilidade entre os participantes da rede. 3.3.1.5 – Implementações CAN
Não existe um standard para a implementação dos controladores CAN e para as comunicações com os seus micro controladores. Existem duas implementações para os controladores CAN que são o BasicCan e o FullCan.
A principal diferença entre estas duas implementações é como é feito o filtro de
mensagens, ou seja, como é que realizada a decisão de classificar umas mensagem como interessantes e outras como dispensáveis. Outras das diferenças é como são respondidas as mensagens remotas e como as mensagens são colocadas num buffer.
BasicCan Esta implementação é mais usada em controladores CAN mais baratos ou em pequenos
microcontroladores integrados em controladores CAN. Um controlador BasicCan tem normalmente dois buffers receptores e um buffer de
transmissão. Os buffers receptores estão organizados numa estrutura FIFO e uma mensagem pode ser recebida por um buffer enquanto o microcontrolador está a ler a informação pelo outro buffer. Se os dois buffers receptores estão cheios e uma mensagem é recebida, as

A Informática na Indústria Automóvel
62
mensagens mais antigas são mantidas. Assim mensagens mais recentes podem ser perdidas, caso o microcontrolador não leia as mensagens com a rapidez suficiente.
Mensagens interessantes são filtradas usando dois registos que operam no identificador
da mensagem. Cada bit do identificador é visto e comparado com o filtro. Caso a mensagem coincida com o filtro é guardada num dos buffers receptores.
Cada bit do filtro do identificador pode ser marcado com ‘1’, ‘0’ ou ‘não interessa’. Assim o
filtro só vai operar em 8 dos 11 bits do identificador (CAN 2.0A). Isto significa que os restantes 3 bits do identificador são sempre ‘não interessa’.
Quando o BasicCan é usado é importante escolher os identificadores com muito cuidado,
para assim a janela do filtro se manter o mais pequena possível. Todas as mensagens que o filtro deixa passar têm de ser lidas e verificadas pelo microcontrolador. Isto significa que o filtro final é feito por software.
O quadro seguinte apresenta um resumo das características do BasicCan.
Transmissão A aplicação preenche o registo completo de Tx incluindo a identificação, o RTR e o tamanho dos dados. Cada ID pode ser transmitido
Recepção Qualquer mensagem CAN pode ser recebida Normalmente existem dois buffers receptores Filtro de mensagens global. Normalmente não é possível realizar um filtro que apenas deixe passar as mensagens que interessam. O filtro final tem de ser realizado pela aplicação
Tratamento de mensagens remotas
As mensagens remotas são respondidas pela aplicação
Filosofia de Overrun As mensagens mais antigas são mantidas (mensagens mais recentes podem ser perdidas)
Tabela 3 – Resumo das características do BasicCan
FullCan O FullCan é usado em controladores e microcontroladores CAN, mais dispendiosos e de
alta performance. O controlador FullCan tem um conjunto de buffers chamados de caixas do correio. Na inicialização é atribuído a cada caixa do correio um identificador e é ajustado para transmitir ou receber.
Quando um controlador CAN recebe uma mensagem vai verificar todas as caixas do
correio por ordem, para encontrar uma caixa do correio receptora e com o mesmo identificador da mensagem. Se tal caixa do correio é encontrada a mensagem é guardada nesta e o controlador é notificado. Caso contrário a mensagem é deitada fora.
Se uma mensagem remota é recebida o controlador compara o identificador remoto com a
caixa do correio emissora. Se estes forem iguais o controlador envia automaticamente uma

A Informática na Indústria Automóvel
63
mensagem com o identificador e os dados contidos na caixa do correio. Isto significa que o software não tem de lidar com mensagens remotas. No entanto se a caixa do correio não tiver sido actualizada já há algum tempo a informação enviada para a rede será antiga. Tem de se ter em atenção esta situação quando se estiver a escrever o software. Com um controlador FullCan é possível filtrar só as mensagens que interessam.
Com alguns controladores é possível reconfigurar as caixas do correio dinamicamente.
Mas alguns controladores CAN são mistos, ou seja, têm caixas de correio mas também contêm buffers.
Os controladores FullCan têm suporte para responderem automaticamente às mensagens
remotas. Isto vai diminuir a leitura nos microcontroladores, mas também pode significar que informação mais antiga é enviada. Mais uma vez é muito importante ter esta situação em consideração quando se está a desenvolver a aplicação.
O quadro seguinte apresenta um resumo das características do FullCan.
Transmissão As caixas de correio transmissoras apenas iniciam uma vez Apenas são escritos bytes de dados antes da transmissão
Recepção Apenas mensagens com os identificadores definidos nas caixas de correio receptoras podem ser recebidos Não existe um buffer duplo nas caixas de correio Filtro pode ser específico. Apenas as mensagens com o ID exacto é que passam
Tratamento de mensagens remotas
Controlador responde automaticamente a mensagens remotas
Filosofia de overrun A mensagem mais nova é guardada (mensagens mais antigas com o mesmo ID vão ser perdidas)
Tabela 4 – Resumo das características do FullCan

A Informática na Indústria Automóvel
64
3.3.1.6 – Aplicações CAN
As redes CAN podem ser usadas como sistemas de comunicação embebidos por microcontroladores ou como um sistema de comunicações aberto para dispositivos inteligentes. O barramento CAN foi desenvolvido para ser usado em automóveis, mas o seu uso começou a diversificar-se e assim começou a ser usado em ambientes industriais. Nos dois casos alguns dos principais requisitos são o baixo custo, a habilidade de funcionar num ambiente com dificuldades eléctricas, uma grande capacidade de trabalho em tempo real e uma grande facilidade de uso.
Alguns utilizadores no campo da engenharia médica optaram pelo uso do barramento
CAN, porque tinham de respeitar requisitos de segurança muito particulares. Problemas similares foram encontrados por fabricantes de outros equipamentos com requisitos de segurança e fiabilidade bastante elevados (robôs, sistemas de transporte e cargas).
O barramento CAN é utilizado para o controlo dos seguintes sistemas:
• Controlo do movimento das janelas e bancos • Controlo do motor
• ABS
• Controlo de cruzeiro
3.3.2 – MEDIA ORIENTED SYSTEM TRANSPORT (MOST)
A tecnologia MOST (Media Oriented System Transport) foi desenvolvida originalmente pela Oasis SiliconSystems AG em cooperação com a BMW, Becker Rádio e DaimlerChrysler, com o propósito de assegurar aplicações multimédia num ambiente automóvel. A intenção foi de substituir sistemas bastante dispendiosos que os fabricantes automóveis estavam a usar para responder às necessidades dos sistemas multimédia. A rede MOST é baseada em fibra óptica plástica que fornece uma alta performance a baixos preços.
Com inicio em 1997, MOST Cooperation começou com um esforço de cooperação
informal. Desde que essa cooperação foi fundada em 1998, 17 fabricantes de automóveis e mais de 50 fornecedores de componentes chaves trabalham agora com a tecnologia MOST e contribuem para a sua inovação e desenvolvimento. A rede MOST tem a capacidade de ligar vários periféricos e de suportar standards como o MPEG, o rádio do carro, televisão e sistemas com vários barramentos.
Os dispositivos automóveis de informação, entretenimento e telemática, especialmente os
sistemas de navegação, requerem sistemas de alto funcionamento e conectividade. Até agora
A Informática na Indústria Automóvel
65
ambas as propriedades destes barramentos coexistem de uma forma independente e pacifica, mas devido a pressões de convergência os futuros sistemas requerem subsistemas de electrónica integrados.
As redes automóveis de informação e entretenimento transmitem dados de 3 tipos: • Dados Fonte – Dados de som digitais provenientes de um leitor de CD’s. Estes dados
são tratados pelo próprio hardware do dispositivo. • Dados Assíncronos – Dados de sistemas de tempo real (sistemas de telemática) ou
informações de navegação. Isto pode ser uma quantidade de dados bastante grande que é controlada por um microcontrolador.
• Dados de Controlo – São dados usados para controlar os dispositivos existentes na
rede. Esta informação requer baixa largura de banda e é controlada por um microcontrolador.
Os automóveis deixaram de ter apenas um simples rádio com leitor de cassetes, ou por
ventura CD´s e passaram a ter uma variedade de sofisticados sistemas de informação e entretenimento que para além de necessitarem de interagir uns com os outros também necessitam de interagir com um utilizador humano.
Os automóveis de hoje em dia incluem sistemas de navegação por GPS que podem
trabalhar em conjunto com sistemas de segurança para realizar a localização de um carro roubado. A segurança dos ocupantes de um automóvel requer que o condutor esteja concentrado no controlo do automóvel, em vez de estar concentrado noutros componentes individuais. O telefone do automóvel necessita de interagir com o sistema áudio, para desligar o som deste quando se está a realizar uma chamada. Os sistemas de controlo por voz e os kits mãos livres dos telemóveis, requerem um microfone para digitalizar a voz. Os sistemas de display são necessários para a informação de navegação e reprodução de DVD’s.
As redes com barramento de dados do tipo MOST ligam múltiplos dispositivos como por
exemplo dispositivos de navegação automóvel, rádios digitais, mostradores digitais, telemóveis e leitores de CD e DVD. O barramento MOST oferece suporte para áudio e compressão de vídeo em tempo real. É muito utilizado por fabricantes e fornecedores alemães. Os principais representantes deste barramento são a BMW, DaimlerChrysler, Harman/Becker e a OASIS Silicon Systems. O mais recente e notável exemplo de uma implementação MOST é usada pela Harman/Becker no último BMW Série 7.

A Informática na Indústria Automóvel
66
Figura 26 – Dispositivos que o barramento MOST liga
Para esta interacção entre os vários sistemas funcionar todos eles necessitam de interagir com o condutor do automóvel, apresentando informações visuais e auditivas em vários formatos para informar o condutor e/ou para entreter os passageiros. Para além disso esses sistemas têm de ser capazes de controlar todas as informações que chegam dos vários componentes, para estas serem disponibilizadas com segurança aos seus utilizadores.
A maneira mais eficiente e eficaz, em custos, de continuar com todas estas inovações em
todas estas áreas, é permitir que os diferentes dispositivos sejam desenvolvidos independentes uns dos outros e depois que sejam todos ligados em rede usando interfaces padrão de hardware e software. Para isto é necessário que exista uma interoperabilidade digital.
Novas opções serão fáceis de adicionar, pois a rede fornece as infra-estruturas
necessárias para transferir informações de um dispositivo para outro. Os automóveis vão-se habituar às diferentes preferências dos diferentes compradores e não serão dependentes de uma lista pré seleccionada. A segurança passou a ser composta por diferentes componentes, componentes estes com os seus interfaces bem definidos para poderem operar uns com os outros e para serem controlados mais facilmente pelos interfaces do utilizador.
Media Oriented Systems Transport é uma rede multimédia de fibra óptica optimizada para
aplicações automóveis. É uma rede desenvolvida pela indústria automóvel para a indústria automóvel. O seu projecto permitiu um custo geral de desenvolvimento baixo e interfaces também de baixo custo, como por exemplo microfones e colunas de som. Para além disso, dispositivos mais avançados e “inteligentes” podem determinar automaticamente as características e funções fornecidas pelos outros dispositivos existentes na rede e estabelecer sofisticados mecanismos de controlo para eliminar as distracções do condutor, enquanto estes diferentes subsistemas tentam comunicar e transmitir as suas informações ao condutor. A tecnologia MOST é optimizada para o uso de fibra óptica plástica e suporta transferências

A Informática na Indústria Automóvel
67
de dados a velocidades superiores a 24.8 Mbps, tendo uma alta fiabilidade e sendo bastante escalável ao nível dos dispositivos.
As características do MOST tornam-no apropriado para qualquer aplicação, dentro ou fora
do automóvel, que necessite de uma rede de informação multimédia juntamente com dados e funções de controlo.
3.3.2.1 – A rede MOST Como já foi referido o objectivo da rede MOST é fornecer uma rede e interface de baixo
custo com uma grande facilidade de uso. Suporta desde dispositivos simples e de pouca capacidade até dispositivos mais complexos e sofisticados que tenham a necessidade de grandes mecanismos de controlo e de capacidades de multimédia. Estes princípios implementação e maximizam a flexibilidade de todo o sistema.
Como a maioria dos vários equipamentos ligam-se com este tipo de rede, o MOST tem a
capacidade de processar sinais digitais e a estrutura da rede fornece mecanismos que permitem a eficiente implementação das várias aplicações. As características relacionadas com a multimédia, como uma grande largura de banda e comunicação ponto a ponto, fazem do MOST o barramento ideal para uma rede multimédia com dispositivos em série. Sendo assim a rede MOST pode ser implementada com uma topologia em rede, estrela ou em série (corrente). Os diferentes dispositivos partilham diferentes canais de dados para transmissões síncronas e assíncronas.
O barramento MOST pode realizar tarefas administrativas quer por uma abordagem
centralizada ou descentralizada. Numa rede centralizada um nó, ao acaso, é responsável pela execução das tarefas administrativas. Os outros nós que necessitam deste serviço têm de contactar este nó central. Numa rede descentralizada não há a necessidade de haver um nó central.
A rede MOST é uma rede síncrona. Um mestre em sincronismo fornece um relógio para a
rede e todos os outros dispositivos sincronizam as suas operações por esse relógio. Esta tecnologia elimina a necessidade da existência de um buffer e de uma taxa de conversão da amostra, de modo que os dispositivos simples e baratos possam ser conectados. A tecnologia é similar à rede pública de telefones. Existem canais de dados e canais de controlo definidos. Os canais de controlo são usados para definir que canais de envio e recepção de dados vão ser usados. Estando a ligação estabelecida os dados podem fluir continuamente sem ser necessário processar mais informação adicional do pacote. Este é o melhor mecanismo para a entrega de dados contínua.

A Informática na Indústria Automóvel
68
A informação enviada aos computadores, como o tráfico da Internet ou a informação de um sistema de navegação, é tipicamente enviada em curtas descargas e geralmente esta informação vai para diferentes lugares. A rede MOST definiu mecanismos eficientes para o envio de pacotes de dados assíncrono.
Figura 27 – Diferentes transmissões de dados numa rede MOST
O canal de controlo permite aos dispositivos enviarem mensagens de controlo enquanto os canais de dados estão a ser usados para todos os dispositivos poderem ligar-se e/ou desligar-se dos dados que estão a utilizar.
Tão importante como o hardware, o software dos sistemas e os interfaces das aplicações
de programação (API) são cruciais para assegurar que os dispositivos de diferentes construtores possam interagir uns com os outros. Essas API’s necessitam de ser orientadas a objectos (OO) para as aplicações se poderem concentrar nas funcionalidades que fornecem. Elas têm de ser capazes de controlar as diferentes características que os dispositivos fornecem na rede, sejam estas de equipamentos de climatização, sistemas de navegação GPS, telefones ou dos sistemas de telemática. As especificações da rede MOST precisam do hardware e software necessário para implementar uma rede multimédia. A rede MOST define as 7 camadas do modelo de referência de rede OSI, para que assim os responsáveis pelo desenvolvimento de aplicações possam concentrar-se nas funções que afectam directamente o utilizador, em vez de se preocuparem na complexidade da rede. Todos os dispositivos a operam na rede MOST foram desenvolvidos sob esta API, para assim a sua compatibilidade estar assegurada.
A uniformização dos interfaces simplifica a implementação do protocolo MOST, nos
dispositivos multimédia. Para o desenvolvimento da aplicação o MOST serve primeiro como uma definição de protocolo. O utilizador tem disponível um interface orientado a objectos (API) que permite a utilização completa das funcionalidades do dispositivo.
A funcionalidade de comunicação é fornecida pelos serviços do sistema MOST. Esses
serviços são:

A Informática na Indústria Automóvel
69
• Serviços de Sistema de Baixo Nível • Serviços de Sistema de Nível Básico
• O Socket da aplicação
Os serviços de baixo nível (camada com 2 serviços) são implementados nos transceivers MOST e são baseados na camada Física. Envolvidos entre o transceiver MOST e a API (camada 7) estão os MOST NetServices, que consistem nos serviços de nível básico (camadas 3, 4 e 5) e no socket da aplicação (camada 6) do protocolo MOST. Para se ter uma visão mais clara das camadas de rede, é apresentado o seguinte quadro:
Camada de Rede Constituição
7 – Aplicação Interfaces de Programação de Aplicações 6 – Apresentação Camada 2 de serviços de rede 5 – Sessão Camada 1 de serviços de rede 4 – Transporte Camada 1 de serviços de rede 3 – Rede Camada 1 de serviços de rede 2 – Ligação de dados MOST transceiver 1 – Física Fibra óptica plástica e conectores
Tabela 5 – Camadas de rede do barramento MOST
Uma rede MOST tem usualmente a forma de um anel (Figura 25) e pode incluir até 64
dispositivos. Devido à sua funcionalidade de plug&play (Ligar e utilizar) não é muito difícil acrescentar ou remover um dispositivo MOST. Por vezes também é possível observar redes MOST com a forma de estrela ou de um anel duplo, esta última para aplicações criticas de segurança.
Numa rede MOST um único dispositivo tem a capacidade de controlar o nó responsável pela sincronização da rede, nó este que alimenta continuamente a rede com mensagens. O início de cada transmissão permite que os nós secundários se sincronizem. Os nós secundários podem voltar a sincronizarem-se autonomamente, cada vez que seja necessário.
No total, a largura de banda disponível para a transmissão de dados contínuos
(transmissão síncrona de dados) e pacotes de dados (transmissão de dados assíncrona) é aproximadamente de 23 MBaud. Este valor é subdividido em 60 canais físicos, os quais o utilizador pode seleccionar e configurar. O protocolo MOST fornece variados serviços e mecanismos para a alocação e desalocação de canais físicos.
O barramento MOST suporta até 15 canais de áudio stereo não comprimidos, com
qualidade de CD, ou 15 canais de MPEG1 com transmissão de áudio e vídeo. No entanto
A Informática na Indústria Automóvel
70
continua a não ser possível transmitir vídeo não comprimido de alta resolução, num barramento MOST.
Além do suporte acima descrito, o barramento MOST oferece um canal para transmitir
mensagens de controlo. Uma largura de banda de 768 KBaud está disponível para este efeito, o que quer dizer que podem ser transmitidas 3000 mensagens de controlo por segundo. Estas mensagens de controlo podem ser usadas para configurar dispositivos MOST ou para realizar transmissões síncronas e assíncronas.
A rede MOST é de uma simplicidade de uso bastante grande. Isto deve-se às seguintes
características:
• Conectores simples
• Sistema de plug&play. Capacidade de identificar dispositivos que são ligados e de auto inicia-los.
• Dispositivos dinamicamente anexados e reconfigurados
• Controlo da rede virtual, incluindo alocações de canais, monitorização de
endereçamento do sistema e controlo da alimentação
As aplicações da rede MOST são bastante extensas, ou seja, o seu uso num ambiente automóvel é bastante grande, isto é devido a características específicas da rede. Essas características são:
• Capacidade de tratar de aplicações com transferências de dados baixas, até aplicações com transferências de dados superiores a 24.8 Mbps.
• Elevado grau de integridade de dados e baixo jitter
• Suporte de transferências de dados síncronos e assíncronas
• Suporte de vários mestres
• Suporte para mais de 64 dispositivos
• Transmissão simultânea de múltiplos fluxos de dados, como informações de
controlo e pacotes de tempo real
• Os dispositivos podem ser construídos fora das suas variadas funções

A Informática na Indústria Automóvel
71
Ao ser muito utilizado o MOST tem de ser algo flexível para poder interagir com diferentes dispositivos e sistemas. Assim o MOST tem uma larga escala de tamanhos de canais de tempo real, tem a capacidade de realizar operações remotas e controlo de fluxo, possui mecanismos de variação de arbitragem e lida com vários protocolos que são independentes.
3.3.3 – Restantes barramentos Existentes
Para além dos barramentos descritos, os automóveis possuem um leque de variados barramentos. O barramento CAN e MOST são os mais importantes nos automóveis, pois são os responsáveis por assegurar os sistemas e funções mais importantes num automóvel. Mas para se poder ficar com um maior conhecimento nesta área, são apresentados de seguida os restantes barramentos. Para cada um deles apenas são referidas as suas características gerais. Pode-se considerar que os barramentos de seguida apresentados (a maioria) são um complemento dos barramentos CAN e/ou MOST.
3.3.3.1 – INTELLIGENT TRANSPORT SYSTEM DATA BUS (IDB)
O IDB Fórum controla os barramentos IDB-C e IDB-1394 e ainda interfaces standards para OEM’s que desenvolvem dispositivos portáteis.
O IDB-C é baseado no barramento CAN e gere vários dispositivos com transferências de
dados na ordem dos 250 Kbps. O IDB-1394 (baseado no IEEE-1394 Firewire TM) é desenhado para aplicações
multimédia de alta velocidade. O IDB-1394 tem transferências de dados a uma velocidade de 400 Mbps, usando tecnologia de fibra óptica. Este tipo de redes inclui a visualização e troca de CD’s e DVD’S, assim como sistemas de áudio e vídeo.
O IDB-1394 também permite que aparelhos electrónicos portáteis com o mesmo tipo de
rede, possam ligar-se e interagir com a rede interna do automóvel. Uma recente demonstração, com a companhia automóvel Ford, incluiu a ligação de uma câmara de vídeo digital, uma Sony Playstation TM 2, dois leitores de vídeo e um leitor de DVD com um automóvel.
A Informática na Indústria Automóvel
72
3.3.3.2 – DIGITAL DATA BUS (D2B)
O Digital Data Bus (D2B) é um protocolo de rede para comunicação multimédia que interage com som digital, vídeo e outras transferências de dados de alta velocidade síncronas e assíncronas. Pode aguentar velocidades de 11.2 Mbps e pode ser montada à volta de Smartwire TM ou de uma ligação de fibra óptica simples.
Este protocolo de comunicação de rede está a ser fornecido pela C&C Electronics no
Reino unido, tendo desde já utilizada a aceitação da Jaguar e Mercedes-Benz. Os sistemas de comunicação multimédia integrados, montados no Jaguar X-Type, S-Type e o no novo XJ usam o protocolo D2B.
Os sistemas ópticos multimédia D2B são desenvolvidos para envolver sistemas em linha
com novas tecnologias, conseguindo que todos os sistemas sejam compatíveis uns com os outros. O D2B é baseado numa arquitectura aberta que simplifica a expansão, porque não é necessário mudanças no anel de rede quando se adiciona um novo dispositivo. Este barramento usa um polímero de fibra óptica para lidar com os sistemas multimédia existentes no automóvel e controlar a informação. Isto oferece uma maior fiabilidade com componentes e conectores externos, o que reduz substancialmente o peso.
3.3.3.3 – BLUETOOTH
A tecnologia Bluetooth é de baixo custo, consumo e é um protocolo de rádio com uma frequência de curto alcance para dispositivos móveis e para pontos de acesso a WAN/LAN. As suas especificações descrevem como vários dispositivos móveis (por exemplo telemóveis, computadores e PDA’s) podem interligar-se uns com os outros muito facilmente e ainda com dispositivos um pouco maiores, como computadores pessoais. O seu objectivo é substituir os cabos de conexão por uma conexão universal, sem fios.
A ideia original surgiu em 1994, quando a empresa Ericsson iniciou um estudo que visava
substituir os cabos que ligavam os seus telemóveis aos diversos acessórios existentes por meio de uma tecnologia sem fios. Quatro anos depois, a Ericsson, IBM, Intel, Nokia e Toshiba uniram-se para desenvolver um padrão que passaria a ser conhecido como Bluetooth. A este grupo original, denominado SIG (Special Interest Group, ou Grupo de Interesse Especial), foram-se juntando novas empresas. Actualmente, o SIG conta com centenas de empresas.
O nome Bluetooth é uma homenagem ao Rei Viking Harald Blaatand "BlueTooth" II, Rei da Dinamarca entre os anos 940 e 981. Filho de Gorm "O Velho", rei da Dinamarca, e de Thyra Danebod, filha do rei Ethelred da Inglaterra, Harald conseguiu controlar os reinos da Dinamarca e da Noruega. O fato de um rei, no século X, conseguir controlar dois reinos distantes fez com que ele fosse escolhido como personagem inspiradora da nova tecnologia.

A Informática na Indústria Automóvel
73
A arquitectura Bluetooth e as suas principais características técnicas estão definidas nas suas especificações denominadas de Core (Núcleo) e Profiles (Perfis), definidas pelo SIG. Enquanto a especificação do núcleo define como o sistema funciona (protocolos, camadas, especificações técnicas, etc.), o documento que define os perfis determina como os diversos elementos que compõe o sistema podem ser empregues para a realização das funções desejadas. Ao contrário de outros padrões, a especificação Bluetooth compreende não apenas as camadas mais baixas da rede, mas também a camada da aplicação. Entre as várias aplicação previstas pode-se citar transferências de arquivos, walkie-talkies digitais, auscultadores sem fios, acesso a redes locais, entre outros.
A Bluetooth SIG inclui membros como a AMIC, BMW, DaimerChrysler, Ford, General
Motors, Toyota e Volkswagen. Um exemplo do desenvolvimento da tecnologia Bluetooth nos automóveis é a Johnson Controls BluetoothConnect TM, que implementa um sistema de mãos livres para telemóveis, o qual permite manter o condutor atento à condução e ao mesmo tempo conectado, por Bluetooth, a um telemóvel.
3.3.3.4 – ZIGBEE
O ZigBee TM é uma rede sem fios de baixa transferência de dados (868MHz a 2.4Ghz), de baixa potência e de baixo custo, tendo sido a Philips a sua pioneira. O ZigBee tem um alcance superior a 75 metros e comporta-se muito bem num ambiente industrial e possibilita aplicações auto motrizes.
O padrão ZigBee foi desenvolvido para se tornar uma alternativa de comunicação em
redes que não necessitem de soluções mais complexas para o seu controlo, tornando assim os seus custos mais baratos com a aquisição, instalação de equipamentos, manutenção e mão-de-obra mais baratos. Trata-se de uma tecnologia relativamente simples, que utiliza um protocolo de pacotes de dados com características específicas, sendo projectado para oferecer flexibilidade quanto aos tipos de dispositivos que pode controlar.
Os dispositivos baseados na tecnologia ZigBee operam na banda ISM, que não requer
licença para funcionamento e que inclui as bandas de 2,4GHz (Global), 915MHz (América) e 868MHz (Europa). As suas taxas de transferência de dados são de 250kbps em 2,4GHz, 40kbps em 915MHz e 20kbps em 868MHz.
O padrão oferece actualmente interfaces com velocidades de conexão compreendidas
entre 10Kbps e 115Kbps e com um alcance de transmissão entre 10m e 100m, dependendo directamente da potência dos equipamentos e de características ambientais (obstáculos físicos, interferência electromagnética, etc).

A Informática na Indústria Automóvel
74
Quanto ao problema de alimentação dos dispositivos, os módulos de controlo dotados com esta nova tecnologia podem ser alimentados até mesmo por baterias (pilhas) comuns, sendo que a sua vida útil está relacionada directamente com a capacidade da bateria e a aplicação a que se destina. Nesse aspecto, o protocolo ZigBee foi projectado para suportar aplicações com o mínimo de consumo (com pilhas comuns, um dispositivo pode funcionar até 6 meses).
3.3.3.5 – LOCAL INTERCONNECT NETWORK (LIN)
Este tipo de barramento de dados foi desenvolvido como um suplemento do barramento CAN, sendo usado em aplicações onde o custo é crítico e as taxas de transmissão de dados são baixas. O barramento de dados LIN é um barramento barato destinado aos vários dispositivos distribuídos sobre o chassis de um automóvel. Permite uma comunicação efectiva entre os vários sensores e actuadores inteligentes e é usado onde a largura de banda e versatilidade do CAN não são necessárias. As típicas aplicações deste barramento são o controlo de portas, janelas, espelhos, assentos, regulações climáticas, luzes e sensores de chuva.
O barramento LIN é baseado numa arquitectura com um único master e vários slaves,
num máximo de 16 nós por rede, originalmente desenvolvido para aplicações de rede com sensores e actuadores automóveis. O nó principal liga a rede LIN com redes de nível superior, como redes do tipo CAN, estendendo os benefícios de trabalhar em rede por todos os seus componentes, inclusive aos sensores e actuadores. 3.3.3.6 – FLEXRAY
A rede de comunicação FlexRay está apontada para a próxima geração de aplicações automóveis by-wire. Estas aplicações exigem barramentos de dados de alta velocidade que são determinantes para a capacidade de suportar sistemas de controlo distribuído. O protocolo FlexRay foi desenvolvido para se tornar um novo standard oferecendo grande largura da banda, comportamento determinístico e tolerância a falhas. Estas características foram implementadas como uma base para aplicações automóveis futuras, como direcção sem ligações mecânicas e travões também sem ligações mecânicas. Com uma velocidade de transmissão superior a 10 Mbps trouxe uma nova dimensão na comunicação automóvel. Dois canais de comunicação com redundância suportam a tolerância a falhas.
O protocolo FlexRay é baseado numa arquitectura que é disparada por tempo onde as
comunicações estão organizadas em fatias de tempo predefinidas. Isto assegura um comportamento determinístico com latências predefinidas e evita a sobrecarga do barramento.

A Informática na Indústria Automóvel
75
A BMW, DaimlerChrysler, Philips, Motorola e Bosh, estão a desenvolver um standard de FlexRay para a próxima geração de aplicações.
O Sistema FlexRay é mais do que um protocolo de comunicação. Também inclui uma
especialidade desenhada para transmissões de alta velocidade e definições de interfaces de hardware e software, entre os vários componentes de um nó FlexRay. O protocolo FlexRay define o formato e funcionamento do processo de comunicação entre os sistemas de redes no automóvel. É desenhado para complementar as redes CAN, LIN e MOST.
3.3.3.7 – TIME-TRIGGERED PROTOCOL (TTP)
Desenhado para tolerância a falhas e sistemas distribuídos de tempo real, o Time-Triggered Protocol (TTP) assegura que não haja um único ponto de falha.
TTP é uma solução madura de baixo custo que pode lidar com aplicações criticas e
seguras. A segunda geração suporta uma comunicação a velocidades superiores a 25 Mbps. O TTA Group, corpo governamental do TTP, inclui empresas como a Audi, SA, Renault, NEC, TTChip, Delphi e a Visteon.
3.3.3.8 – TIME-TRIGGERED CAN (TTCAN)
O Time-Triggered CAN é um standard e uma extensão do protocolo CAN. Adiciona uma camada de sessão por cima da camada de ligação de dados e camada física já existentes, para garantir que todos os prazos de transmissão são cumpridos, mesmo quando as leituras do barramento de dados estão no seu máximo. O protocolo implementa um time-triggered híbrido, TDMA (TIME-DIVISION MULTIPLEXED ACESS) que também suporta comunicações que são disparadas por eventos (event-triggered). O TTCAN é usado no controlo de sistemas do motor, chassis e transmissão, com espaço para aplicações by-wire.

A Informática na Indústria Automóvel
76
3.4 - Conclusão Como ficou demonstrado neste capítulo, os barramentos de dados foram indispensáveis
para o aparecimento dos vários sistemas informáticos nos automóveis. Só as várias redes existentes é que permitem com que os vários sistemas possam comunicar entre si e possam receber informações dos seus leitores de dados (sensores).
Os barramentos falados foram o CAN e o MOST devido à sua grande importância. O CAN
porque é este o barramento responsável pelo funcionamento dos sistemas mais críticos de um automóvel, como os sistemas de segurança ou os sistemas de controlo do motor. O MOST devido a este ser o principal barramento para as aplicações de informação e entretenimento. Como a área de sistemas de diversão e de informação é neste momento uma das áreas com que os fabricantes automóveis mais se preocupam era de extrema importância referir o funcionamento do barramento com mais destaque nesta área.
Pela pequena descrição dos outros barramentos existentes, ficou também demonstrado
que alguns deles funcionam como complemento do CAN e MOST.

A Informática na Indústria Automóvel
77
4 – O Futuro
Desde a invenção do automóvel, até aos dias de hoje, este evoluiu de uma forma espantosa. O automóvel fabricado hoje traz consigo um elevado número de sistemas electrónicos que controlam quase tudo, ou mesmo tudo. Mas, como sempre, para a mente humana isto ainda é pouco, ainda há hipótese de ir mais além.
Como se pôde ver pele evolução dos sistemas electrónicos no automóvel é desejado que
o homem tenha cada vez menos controlo sobre o veículo e sejam os sistemas electrónicos a realizar essa tarefa. Quem é que não queria um automóvel que se conduzisse sozinho, ou que detectasse automaticamente avarias, ou ainda que planasse em vez de andar sobre rodas.
Todo um conjunto de novos sistemas já estão pensados e outros ainda estão por pensar,
mas uma coisa é certa, todos eles vão aparecer mais tarde ou mais cedo num automóvel.
4.1 – Novos Sistemas A cada dia que passa pode ver-se a evolução automóvel. Muitos novos sistemas já estão
prontos para entrar em produção, outros já estão mesmo a ser desenvolvidos e produzidos, mas todos eles têm como base alguns sistemas já existentes.
Um dos sistema que já está em produção permite que um automóvel se mantenha a uma
certa distância de outro veículo numa auto-estrada. Assim prevê-se que sistemas de travagem com radares de curto alcance irão aparecer brevemente no mercado. Eventualmente automóveis que não vão precisar de piloto vão permitir aos condutores dormirem, lerem ou realizarem outras tarefas enquanto viajam em auto estradas.
Sistemas que estão para chegar vão aumentar a necessidade do GPS nos próximos 10
anos. Certos reajustamentos no habitáculo vão levar à eliminação do leitor de CD’s e algum hardware vai ficar obsoleto à medida que as ligações por satélite vão ficando cada vez mais acessíveis. Sistemas de reconhecimento por voz vão ser banais devido a serem seguros e bastante convenientes.
Aqui fica uma previsão de novos sistemas que irão aparecer nos automóveis durante os
próximos anos: � 2006 – Sistemas de auto diagnóstico vão ser apresentados por alguns fabricantes de
automóveis. Todas as madrugadas (por exemplo às 4 da manhã) o automóvel realizará um diagnóstico mecânico, incluindo pressão dos pneus e o desgaste de pneus e

A Informática na Indústria Automóvel
78
travões. Se algum problema é detectado o sistema enviará um e-mail para o proprietário do veículo com um relatório da avaria.
� 2013 – Por esta altura irá ser comercializado o primeiro veiculo a ser movido totalmente
por células de combustível (fuel cell). Esta tecnologia utiliza hidrogénio e oxigénio para gerar electricidade, tendo vapor de água como único resultante desse processo químico.
� 2017 – Os automóveis híbridos são os mais utilizados no mundo.
� 2022 – Os vendedores de automóveis vão começar a sentir dificuldades nas vendas
devido à grande utilização da Internet para compra de automóveis. Os sistemas de realidade virtual permitem o comprador realizar testes a qualquer modelo automóvel. Por estas razões, os vendedores de automóveis vão ser cada vez menos procurados, podendo até levar ai seu desaparecimento.
� 2028 – Aparecimento de automóveis programáveis e que não necessitam de condutor.
Utilizando uma combinação de radares com o GPS, vão ser auto guiados, sem necessitaram da intervenção humana. É possível entrar no carro e programar o destino que este vai até lá no menor tempo e da maneira mais eficiente possível.
� 2036 – A maioria dos componentes dos automóveis vão ser reciclados.
� 2058 – Os automóveis autónomos são agora um standard. Se uma pessoa desejar ter
controlo manual do automóvel tem de ter uma autorização especial, para esse efeito
4.1.1 – Sistemas de Segurança Os futuros sistemas de segurança vão ser capazes de eliminar as principais causas de
acidentes de automóveis. Muitos acidentes têm causa no excesso de álcool, por isso no futuro os automóveis podem estar equipados com sensores que detectem que o condutor bebeu demais e assim um sistema impeça o automóvel de andar.
Outra causa de acidentes deve-se ao facto de os condutores seguirem perto demais o
carro que vai à sua frente. Um sistema que mantém a distância do carro da frente já existe, mas o pretendido é tornar este sistema ainda mais perfeito ou completo. Radares vão avisar com uma grande antecedência que o carro que vai à frente realizou uma travagem brusca e que tem de se travar de imediato ou o sistema pode até travar pelo condutor.
Sistemas que avisem que existe um carro ao lado, cada vez que se liga o pisca. Claro que
se não se ligar o pisca o sistema não vai funcionar, mas nem mesmo a tecnologia pode ser perfeita.

A Informática na Indústria Automóvel
79
Muitos dos acidentes à noite acontecem devido ao condutor não ver muito bem. Isto acontece muito com condutores idosos. Por essa razão a GM inventou um dispositivo que usa a tecnologia de infravermelhos e mede a variação da temperatura entre a estrada, pessoas, animais e objectos. Este sistema já está a ser testado em carros de polícia e pode estar disponível daqui a 5 ou 10 anos. Por agora está em desenvolvimento um sistema que usa um radar para localizar objectos que estão pouco visíveis, devido a chuvas, neve ou nevoeiro. O sistema projecta esses objectos no pára-brisas e assim o condutor é avisado que existe um objecto naquele lugar.
No futuro pode haver um sistema constituído por um sensor que monitoriza a temperatura
do corpo do condutor. Se a temperatura baixar consideravelmente, o que pode indicar sonolência, o sistema pode disparar um alarme para avisar o condutor. A Nissan desenvolveu um sistema um pouco diferente, que é constituído por uma pequena câmara montada no painel de instrumentos que analisa a face do condutor. Quando o piscar dos olhos é mais prolongado e acontece com uma maior frequência, é um sinal de sonolência e o sistema avisa o condutor através de um sinal sonoro.
Outro sistema de segurança que poderá ser realizado é o de uma chave inteligente que
poderá conter toda a informação sobre as habituais práticas de condução do condutor. Se o condutor se desvia destas práticas, por exemplo está a guiar erradamente, o sistema dispara um aviso. Chaves similares podem limitar as capacidades do veículo em caso de o condutor ser muito novo ou inexperiente.
4.1.2 – Sistemas de Navegação
Outra área em que se podem esperar grandes desenvolvimentos futuros é a dos sistemas de navegação. Nós hoje já podemos comprar carros equipados com sistemas GPS, que sabem a exacta localização do veículo a qualquer instante.
No futuro os sistemas de GPS além de serem capazes de avisar a localização de
engarrafamentos, vão ser capazes de avisar acidentes acontecidos, indicando alternativas ao trajecto. Além disso ao acontecer uma avaria o condutor vai poder telefonar a pedir ajuda (os carros estarão equipados com telefone) e os veículos de emergência vão ser capazes de localizar o veículo com grande facilidade.
Sistemas futuros vão permitir os automóveis andar sozinhos em auto estradas inteligentes.
Carros inteligentes vão interagir com essas auto estradas, as quais vão monitorizar o tráfego através de sinais eléctricos e eventualmente comunicar directamente com o computador principal do automóvel, guiando e gerindo o trânsito para eliminar ou minimizar os engarrafamentos de trânsito.

A Informática na Indústria Automóvel
80
4.2 – O Automóvel Inteligente
Desenvolvendo a ideia de automóveis inteligentes, até onde a tecnologia pode chegar? Mesmo utilizando toda a imaginação humana só se consegue imaginar um carro com mais 25 anos do que agora. No futuro os automóveis realizaram a mudança de óleo sozinhos enquanto viajamos, poderão avisar se um passageiro se está a sentir mal e até encontrar um lugar de estacionamento sozinho.
É inevitável que no futuro as partes mecânicas no automóvel sejam substituídas por
motores eléctricos, sensores e actuadores. Estes têm de ser controlados e a resposta óbvia para esse controlo é através de softwares e hardwares. A melhor maneira de o automóvel tomar decisões baseadas em informações recebidas dos sensores é através de um rede neural. A necessidade de haver avanços na área da inteligência artificial automóvel é cada vez maior. O facto é que a utilização da inteligência artificial através de redes neurais é a melhor maneira de chegar ao automóvel inteligente.
Existem muitas razões para justificar o porquê da existência de automóveis inteligentes. A
principal razão é que pode aumentar muito a segurança e a prevenção de acidentes. Um estudo realizado no Japão concluiu que apenas 10% dos acidentes no Japão foram por falha mecânica. Isto quer dizer que 90% dos acidentes são causados por erro humano. A inteligência artificial pode reduzir este número drasticamente. Um rápido exemplo disso é a utilização de radares que medem a distância para o carro que circula à frente e mantém essa distância constante. Os radares detectam se o carro da frente está a aproximar demasiado rápido e nesse caso os travões são accionados mesmo antes do condutor travar, evitando assim um choque. A segunda razão para se utilizar a inteligência artificial nos automóveis é porque esta pode ajudar a aumentar a eficiência. A última razão é que a inteligência artificial nos automóveis pode aumentar o prazer de condução
Um exemplo disso está a ser realizado um estudo sobre os Sistemas de Transportes
Inteligentes (STI). Estes sistemas são uma coordenação entres vários sistemas, recebendo dados de várias fontes. Existem câmaras e sensores nas auto-estradas que monitorizam o tráfego e as condições da estrada. Além disso através de GPS cada automóvel pode fornecer informações do seu estado, como posição e velocidade. Todas estas informações são processadas por um centro que as usa para fazer o tráfego fluir. Primeiro estes sistemas podem fornecer informações em tempo real sobre o trânsito e controlar o tráfego e as emissões de gases, desligando ou ligando os automóveis, diminuindo também o consumo de combustível. No futuro estas informações podem permitir controlar remotamente o automóvel e assim o tráfego pode ser controlado de uma maneira mais segura e eficiente.
O GPS nos automóveis pode ser muito útil em caso de acidente. Quando acontece um
acidente o GPS pode transmitir a posição do automóvel e a sua condição. Assim de acordo com o acidente são chamados os serviços mais correctos (como uma ambulância).

A Informática na Indústria Automóvel
81
Outra das áreas automóveis onde a inteligência artificial também está a ser desenvolvimento é nos sistemas de controlo do motor. Um chip para controlar a emissão de combustível está a ser desenvolvido. Este chip está a ser desenvolvido para controlar os sistemas de diagnóstico já existentes nos automóveis. O chip não irá necessitar de software normal, pois ele irá aprender as tarefas necessárias dos sistemas de diagnósticos. Este chip vai diagnosticar e controlar continuamente as emissões de combustível. Ele também irá avisar o condutor quando as emissões de combustível foram altas. Como o chip tem a capacidade de controlar estas emissões ele consegue melhorar a distribuição de combustível aumentando assim a eficiência de combustão.
Outros sistemas a utilizarem a inteligência artificial são os sistemas de ajuda de
estacionamento. O sistema ajuda os condutores a circularem em segurança nos parques automóveis. Este sistema pode ser uma grande ajuda em grandes cidades onde estes sítios podem ser bastante pequenos. O condutor ao aproximar-se de um possível lugar com a largura de 0,5m a 1,5m, sensores ultra sónicos determinam se o lugar é suficiente para o automóvel. Se o lugar servir o sistema realiza todos os cálculos necessários para a realização da manobra em segurança. Começa por mostrar ao condutor o melhor sitio para começar a manobra e depois guia o condutor na realização de toda a manobra de estacionamento. O sistema também tem um ecrã no interior do automóvel e controla o ângulo de viragem para se certificar que o automóvel está a realizar a manobra correctamente, embora o condutor continue a ter o controlo sobre o acelerador e travão.
Para além das aplicações da inteligência artificial em sistemas de segurança e ajudas de
manobras estão também a ser desenvolvidos sistemas na área do entretenimento que podem ajudar a aumentar o prazer de condução. Existem neste momento sistemas a serem desenvolvidos os quais vão permitir o condutor falar com o seu automóvel, como o carro futurista “Kit” na antiga série de televisão “Night Rider”. Através do uso do GPS e da Internet, os automóveis serão capazes de encontrar qualquer informação que se queira. Imagine-se por exemplo que o condutor quer comprar uma televisão não muito cara. O condutor pede ao automóvel para realizar uma pesquisa pela Internet e se encontrar alguma loja que preencha os requisitos da sua busca o automóvel indica onde é a loja e qual o caminho a seguir para lá chegar. Embora este sistema pareça um simples sistema de introdução de dados e resposta ele trabalha como um verdadeiro sistema inteligente. A aplicação recebe dados e através deles tem de decidir se as soluções encontradas servem ou não para serem apresentadas ao condutor. Toda esta pesquisa é efectuada através de um complexo algoritmo de pesquisa.
Além desta aplicação um automóvel que possua ligação à Internet pode ler para o
condutor o seu e-mail e até artigos publicados na Internet. Todas estas funcionalidades são muito convenientes quando o condutor está a conduzir o automóvel, porque assim ele não se distrai, pois está apenas a ouvir enquanto a sua visão contínua concentrada na estrada.
Como se pode ver a inteligência artificial nos automóveis vai ser cada vez maior e mais
utilizada. Os automóveis vão tornar-se totalmente dependentes de sistemas inteligentes, pois

A Informática na Indústria Automóvel
82
estes são uma ajuda indispensável para o controlo automóvel e a implementação de tais sistemas vão ser de tal ordem que um dia o automóvel vai tornar-se totalmente independente. Todos os sistemas que estão em desenvolvimento deixam antever que realmente um dia o automóvel vai conduzir-se a si próprio e deixará de haver condutores para passar a haver só passageiros.
4.3 – O Automóvel do Futuro
Tudo isto faz parecer os automóveis muito inteligentes e a ideia é essa. Para isso os automóveis são equipados com computadores cada vez mais potentes e especializados no controlo dos sistemas que têm aparecido e que estão para aparecer.
Será que um dia os automóveis serão capazes de andar sozinhos? Não há razão para
pensar o contrário. A Mercedes está a desenvolver um sistema em que o automóvel tem um piloto automático capaz de travar, acelerar e virar por uma auto-estrada. Este sistema é constituído por duas câmaras de vídeo, as quais fornecem 12 imagens por segundo ao computador central e verificam constantemente os lados e a parte de trás do automóvel em busca de potenciais obstáculos. Ninguém espera que as pessoas deixem todo o controlo do automóvel nas mãos de um sistema, mas implementar esse sistema para manter o automóvel na estrada e faze-lo parar em segurança em caso de os sistemas de segurança falharem, ou o condutor ficar incapacitado, é uma hipótese bastante viável.
Mas o que fornecerá energia a estes carros inteligentes do futuro? Durante os próximos
anos, a gasolina continuará a ser o combustível mais utilizado embora o uso de veículos eléctricos, apenas para circuitos citadinos, será mais utilizado e os automóveis híbridos também serão mais frequentes. Mas a forma de energia mais plausível para o futuro será o hidrogénio. Esta será a favorita, porque quando se dá a combustão em vez de libertar gazes tóxicos e poluentes, como o fumo e o dióxido de carbono, a única coisa libertada é vapor de água.
Os automóveis vão começar a ser feitos com materiais mais exóticos, como alumínio e
fibra de carbono. O problema do uso destes materiais é o seu elevado custo e é o custo que também limita o desenvolvimento de todas as novas tecnologias.
Uma forma de imaginar o automóvel do futuro é tentar resolver os problemas do presente.
Obtém-se, neste caso, uma visão mais incremental do automóvel, mais perto do que conhecemos hoje. É o que fazem a maioria dos departamentos de I&D das empresas que produzem automóveis, acessórios ou outros produtos relacionados com o automóvel. É o que costumam fazer os organismos públicos responsáveis pela infra-estrutura de transportes urbanos e as organizações com poder de decisão a nível nacional e internacional. E as

A Informática na Indústria Automóvel
83
soluções existem estão a ser desenvolvidos e tenta-se a sua aplicação no mercado, com mais ou menos sucesso.
Uma outra forma de imaginar o automóvel do futuro que leva a soluções mais radicais é
contrariar os paradigmas actuais ou pelo menos ignorá-los, enquanto se cria o modelo conceptual do automóvel que queremos ter no futuro.
A utilização do brainstorming em equipas multidisciplinares, com especialistas e não
especialistas no automóvel pode levar a soluções surpreendentes. A utilização desta técnica em discussões individuais e informais também resulta muito bem. Procura-se, neste caso, identificar as funcionalidades que o automóvel do futuro deverá ter.
Aliás, uma das grandes surpresas que surge depois de se criar um modelo conceptual
futurista utilizando este tipo de abordagem é que há tecnologia e até produtos que viabilizam o modelo conceptual e potenciam a sua expressão num protótipo. Muitas vezes o futuro está mais perto do que se pensa.
As principais funcionalidades do automóvel do futuro, com a ajuda de novos sistemas
especialmente desenvolvidos para essas mesmas funcionalidades, são as seguintes: � Adaptação e Flexibilidade Face ao Condutor – O automóvel do futuro deve
proporcionar soluções de condução, entretenimento, comunicação, conforto, segurança etc, a cada passageiro. Estas soluções devem ser rápidas e fáceis de utilizar e devem ser automáticas ou manuais
� Optimização do Conforto – Cada passageiro deverá ter o conforto de que necessita e
que quer, sem incomodar outros passageiros
� Amigo do Ambiente – Os automóveis não devem poluir, devem ser construídos com materiais recicláveis e assim pode ajudar a melhorar a qualidade do ar urbano
� Integração no Sistema de Transportes Urbanos – O automóvel do futuro dever ser
pensado como parte de um sistema de transportes, que respeita os outros participantes no transito e que se desloca de forma inteligente, evitando as zonas de maior transito
� Entretenimento, Educação e Bem Estar – O automóvel do futuro irá ter um espaço
com condições, não só de transporte, mas também para viver. Deve proporcionar condições impares de entretenimento e bem estar para cada passageiro
� Protecção dos Ocupantes – O automóvel do futuro deve evitar que a integridade
física dos passageiros seja afectada, tanto evitando acidentes de viação como evitando pequenos acidentes no seu espaço interior

A Informática na Indústria Automóvel
84
� Manutenção Fácil e Automática – No futuro os automóveis devem evitar que hajam avarias e quando estas não podem ser evitadas, a sua reparação deve fazer-se automaticamente ou pelos próprios utilizadores sem recorrer a especialistas
� Ubiquidade – A tecnologia dos automóveis do futuro deve ser omnipresente, mas não
visível. Os automóveis do futuro não são uma mostra de tecnologia, mas um artefacto funcional
A simples descrição dos princípios funcionais do automóvel não permite imaginar a sua utilização e não permite, às vezes, aos especialistas visualizar este modelo como um automóvel funcional. Recorre-se então à utilização de cenários, para transmitir melhor as ideias contidas no modelo conceptual.
Assume-se que no futuro os automóveis devem possuir sistemas que confiram as
seguintes funcionalidades aos automóveis: � O automóvel respeita os outros participantes no trânsito, minimiza o espaço que utiliza
e evita as zonas de possível engarrafamento � O automóvel e os outros meios de transporte estão equipados com a tecnologia
necessária para encontrar o seu caminho sozinhos, para comunicar com o exterior e para reconhecer os cidadãos. Todas as interfaces são intuitivas
� O automóvel e os outros meios de transporte têm a capacidade de se auto guiar em
tempo útil para um destino estabelecido. Esta função é realizada por um sistema central que envia instruções para guiar o automóvel pelo seu caminho
4.4 - Conclusão
Como ficou demonstrado nesta capítulo o futuro do automóvel é cheio de inovações e novos sistemas de controlo. Desde a segurança até a sistemas de navegação o futuro dos automóveis assenta principalmente no desenvolvimento de novos sistemas que vão permitir tornar a condução cada vez mais agradável até se chegar ao limite de já não haver condução.
Por todas as áreas automóveis os sistemas informáticos vão revolucionar os automóveis.
Mas as áreas com maior desenvolvimento serão a segurança, sistemas de navegação e entretenimento. Nessas áreas o aparecimento de sistemas vai ser tal que tudo vai ser completamente diferente e os condutores de automóveis vão ficar totalmente dependentes desses novos sistemas. Mas as outras áreas não serão esquecidas e também terão novos sistemas.

A Informática na Indústria Automóvel
85
Na segurança os sistemas vão controlar os automóveis de maneira a que todas as principais causas de acidentes vão ser abrangidas por novos sistemas, os quais vão eliminar os erros de condução ou distracção, responsáveis pelos acidentes.
Os novos sistemas de navegação vão permitir aos condutores andar por toda a parte
como se conhecessem todas as ruas, ou seja, vão dar a conhecer ao condutor todos os pormenores do caminho a seguir, como do transito que condiciona as estradas e qual o melhor caminho a seguir para se chegar ao destino pretendido.
Mas a principal ideia é do aparecimento e da necessidade da inteligência artificial, em
todos esses novos sistemas informáticos. Os automóveis vão ficar totalmente dependentes de sistemas com inteligência. Eles vão tomar todas as decisões pelo condutor tornando os automóveis mais seguros e fiáveis.

A Informática na Indústria Automóvel
86
5 – Conclusão
O automóvel foi um dos marcos mais importantes na história da humanidade. Desde o seu aparecimento até aos dias de hoje o automóvel foi-se modificando tornando-se cada vez mais indispensável na vida das pessoas. Hoje esta invenção é muito mais do que um simples meio de transporte sendo para muitos quase como uma segunda casa.
O Homem ao longo dos tempos e à medida que a tecnologia ia avançando verificou que esta aliada à indústria automóvel era uma mais valia muito significativa. Assim, hoje os automóveis são uma das maiores montras tecnológicas existentes recorrendo a variados sistemas para ajudar a controlar quase tudo no automóvel. Desde a segurança, controlo de motores, entretenimento e navegação a informática está presente, melhorando e muito o conforto e o bem estar dos ocupantes de um automóvel de hoje.
O primeiro capítulo aborda a necessidade de aliar a informática aos automóveis através da a invenção de vários sistemas que iriam ajudar o condutor a controlar mais facilmente e com mais segurança o seu automóvel. Ficou presente a ideia que com a ajuda da informática os carros podiam ir mais além, podiam tornar-se mais perfeitos, mais agradáveis de usar e mais amigos das pessoas devido a tornarem-se mais seguros, menos poluentes e menos dispendiosos em reparações.
O segundo capítulo mostra a importância de todos os sistemas informáticos nas várias áreas da indústria automóvel. Com novos sistemas de controlo do motor houve uma melhoria no controlo da emissão de gases e no controlo de avarias dos motores (o que ajudou a baixar os custos de reparações e manutenção).
A informática ajuda na concepção dos automóveis diminuindo significativamente os tempos de saída ao público de um automóvel e diminuindo também os gastos com a produção dos automóveis. Os fabricantes automóveis viram a necessidade destes sistemas para tornar a concepção de um automóvel mais rápida, perfeita e muito mais rentável.
Dado que as pessoas passam muito tempo dentro dos automóveis houve a necessidade do aparecimento de sistemas de entretenimento e de informação. Hoje há veículos pensados para uma família numerosa, como as monovolumes e carrinhas. Para tornar a estadia no automóvel agradável apareceram sistemas de entretenimento bastante complexos, compostos por sofisticados sistemas de áudio e vídeo (leitores de CD’s e DVD’s) e até por consolas de vídeo jogos. Tudo isto foi pensado para que a vida no interior de um automóvel fosse cada vez mais agradável e aproveitada com imensos divertimentos e distracções. Os sistemas de informação também foram largamente explorados, aparecendo cada fabricante automóvel com uma solução diferente. Embora cada fabricante apresentasse a sua visão de sistemas de informação, todas elas têm objectivos em comum, como fornecer o maior número

A Informática na Indústria Automóvel
87
possível de informações ao condutor e provocar neste a menor distracção possível fazendo com que este desvie cada vez menos os olhos e a concentração da estrada.
Uma das grandes preocupações dos fabricantes automóveis é a segurança. Por isso apareceram muitos sistemas de segurança automóvel todos eles possíveis devido ao avanço tecnológico. Assim mais uma vez ficou claro que sem a informática todos os sistemas de segurança não eram possíveis de existir, ou pelo menos o seu funcionamento iria ser mais difícil e não tão completo como são alguns deles.
Fala-se de muitos sistemas informáticos para controlar situações que são mais perceptíveis ao olhar das pessoas, esquecendo muitas vezes de sistemas de extrema importância que parecem não existir. Esses sistemas são os que controlam o próprio funcionamento mecânico do motor dos automóveis. Variados fabricantes automóveis desenvolveram sistemas complexos de controlo do funcionamento interno do motor. Estes sistemas são de uma importância extrema, pois são eles os responsáveis pela boa performance, consumos de combustível e de um correcto funcionamento nos variados regimes de rotações do motor. Os motores passaram a ter a “inteligência” para perceber quando é necessário disponibilizar toda a capacidade do motor ou quando apenas é necessário um trabalhar calmo e normal.
Por ultimo no segundo capítulo é demonstrado a importância dos sistemas “inteligentes” nos automóveis. Estes sistemas realizam as suas funções de um modo inteligente não necessitando de um supervisionamento por parte do condutor. Com a crescente utilização destes sistemas percebe-se cada vez mais que eles vão ser ainda mais utilizados no futuro, permitindo um dia os automóveis serem completamente “inteligentes” e autónomos
Depois de se ter a visualização da importância de todos os sistemas informáticos nos automóveis fica perceptível que estes necessitam de comunicar entre si e que existe a necessidade do aparecimento de estruturas físicas que permitissem essa capacidade. Assim deu-se o aparecimento dos barramentos desenvolvidos para o ambiente automóvel. O terceiro capítulo aborda essa temática. Foram desenvolvidos vários barramentos de comunicação, isto porque cada um foi desenvolvido com um tipo de comunicação especifica. Assim há barramentos especializados na transmissão de dados multimédia e barramentos especializados na transmissão de dados de controle e informação. A interligação dos variados sistemas é fundamental para o bom funcionamento destes, pois muitos desses sistemas estão interligados e são condicionados pela informação de outros sistemas. Outra funcionalidade importante e fundamental na interligação de todos os sistemas é que assim aos olhos do condutor parece que tudo é apenas um sistema, sendo menos complexo para quem utiliza todos os sistemas do automóvel.
No último capítulo constata-se que o futuro dos automóveis estará repleto de novos sistemas informáticos. A tendência é para que se utilize cada vez mais sistemas nos automóveis tornando estes cada vez mais “inteligentes” e autónomos. Os novos sistemas

A Informática na Indústria Automóvel
88
ajudarão os automóveis a serem mais perfeitos tornando-os mais seguros, mais agradáveis de conduzir, menos poluentes e também mais divertidos. Através de um complexo conjunto de sistemas informáticos podemos esperar no futuro que o trânsito seja regulado por estes, evitando assim os desesperantes engarrafamentos dos dias de hoje.
Pode-se então concluir que no futuro os automóveis ficarão totalmente dependentes da informática e electrónica, mas que essa dependência vai trazer muitos benefícios para as pessoas e a sua vida.
Como conclusão geral e pessoal do projecto posso dizer que fiquei ainda mais a gostar do tema e de automóveis, compreendendo melhor o funcionamento de certos sistemas que o automóvel possuiu. De início estava com algum receio sobre o tema, visto ele ser algo vasto e eu ter um completo desconhecimento sobre tudo isto, mas à medida que ia reunindo informação e realizando o projecto foi-se tornando cada vez mais gratificante e enriquecedor.
Neste tema é muito fácil nos dispersarmos, por isso tentei ser o mais objectivo possível e
falar apenas dos automóveis no que diz respeito à informática e no que ela esteja ligada. Penso que consegui reunir todas, ou quase todas, as soluções tecnológicas mais importantes ou com maior destaque na indústria automóvel abordando também como se processava toda a troca de informações no interior dos automóveis.
O avanço tecnológico permitiu que os automóveis se tornassem cada vez mais completos, perfeitos e com uma qualidade cada vez maior, tirando a indústria automóvel grandes benefícios da informática, não só em sistemas de controlo do automóvel mas também na sua concepção e na comunicação desses sistemas.
Fica então patente que hoje e amanhã o mundo automóvel não sobrevive sem o mundo informático e electrónico.

A Informática na Indústria Automóvel
89
Bibliografia [1] Bordoff , Fred (2005),[www.familycar.com] [2] Crespo, Miguel (2004), Especial Tecnologia Automóvel, Revista T3, 17, páginas 45, 46,
47 [3] Ferreira, Rita Hasse (2004), Especial Tecnologia Automóvel, Revista T3, 17, páginas
42, 43 [4] Gibbs, Edwina (2002), [info.abril.com.br] [5] Jäger, Alexandra (2002), [www.human-solutions.com] [6] Kimberley, William 2005, [www.autofieldguide.com] [7] Marques, Mónica Hasse (2004), Especial Tecnologia Automóvel, Revista T3, 17,
página 50 [8] Meditsch, Jorge (2003), [www.terra.com.br] [9] Reuters (2002), [www1.folha.uol.com.br] [10] Shosteck, Eron (2004), [www.autoalliance.org]
Além das referências acima mencionadas foram também utilizados para pesquisa de informação os seguintes sítio na Internet.
� http://auto.howstuffworks.com � http://windowsfordevices.com/ � http://www.4x4abc.com � http://www.alfaromeo.pt � http://www.algonet.se � http://www.bmwworld.com � http://www.gta.ufrj.br � http://www.johncglennon.com � http://www.lemurzone.com

A Informática na Indústria Automóvel
90
� http://www.mjschofield.com/ � http://www.mostcooperation.com � http://www.nissan.pt � http://www.pcs.usp.br � http://www.semiconductors.bosch.de � http://www.wikipedia.com � http://www2.uol.com.br