Embed Size (px)
Citation preview

Robótica
Robótica: conceitos e aplicações

CEAAE - 2003 - IA - ROBÓTICA
Cenário atual
Ficção Científica
X
Sistemas Reais

CEAAE - 2003 - IA - ROBÓTICA
O que é um ROBÔ?
Uma máquina programável que imita as
ações ou aparências de uma criatura
inteligente, geralmente um humano.

CEAAE - 2003 - IA - ROBÓTICA
O que é um ROBÔ? (2)
Associação Australiana de Robótica Ele deve possuir alguma forma de
mobilidade; Ele pode ser programado para executar
uma grande variedade de tarefas; Após ser programado ele deve operar
automaticamente.

CEAAE - 2003 - IA - ROBÓTICA
O que é um ROBÔ? (3)
Federação Internacional de Robótica (IFR)
“uma máquina que pode ser programada para executar tarefas que envolvam ações de manipulação, e em alguns casos ações de locomoção, sob um controle automático”

CEAAE - 2003 - IA - ROBÓTICA
O que é robótica?
Área multidisciplinar, altamente ativa que busca o desenvolvimento e a integração de técnicas e algoritmos para a criação de robôs
A robótica tem como objetivo a automatização de tarefas que podem ou não serem executadas pelo homem.
CEAAE - 2003 - IA - ROBÓTICA
O que é robótica? (2)
Desenvolvimento Isaac Asimov romance de 1939 Três Leis da
Robótica
1.ª Lei -"Um robô não pode ferir um ser humano ou, permanecendo passivo, deixar um ser humano exposto ao perigo".
2.ª Lei - "O robô deve obedecer às ordens dadas pelos seres humanos, exceto se tais ordens estiverem em contradição com a primeira lei".
3.ª Lei - "Um robô deve proteger sua existência na medida em que essa proteção não estiver em contradição com a primeira e a segunda leis".
4.ª Lei - "Um robô não pode causar mal à humanidade nem permitir que ela própria o faça". (1984)
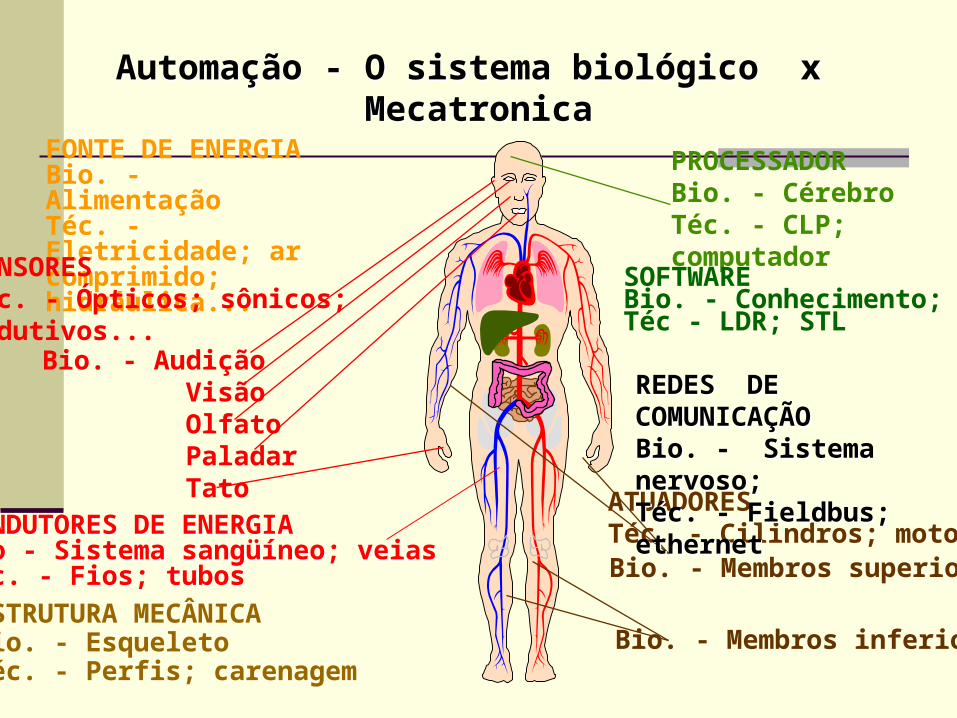
FONTE DE ENERGIABio. - AlimentaçãoTéc. - Eletricidade; ar comprimido; hidráulica...
Automação - O sistema biológico x MecatronicaAutomação - O sistema biológico x Mecatronica
ATUADORESTéc. - Cilindros; motores
Bio. - Membros inferiores
Bio. - Membros superiores
SENSORESTéc. - Ópticos; sônicos; Indutivos...
Bio. - Audição Visão Olfato Paladar Tato
PROCESSADORBio. - CérebroTéc. - CLP; computador
REDES DE COMUNICAÇÃOBio. - Sistema nervoso;Téc. - Fieldbus; ethernet
REDES DE COMUNICAÇÃOBio. - Sistema nervoso;Téc. - Fieldbus; ethernet
ESTRUTURA MECÂNICABio. - EsqueletoTéc. - Perfis; carenagem
CONDUTORES DE ENERGIABio - Sistema sangüíneo; veiasTéc. - Fios; tubos
CONDUTORES DE ENERGIABio - Sistema sangüíneo; veiasTéc. - Fios; tubos
SOFTWAREBio. - Conhecimento;Téc - LDR; STL

CEAAE - 2003 - IA - ROBÓTICA
Organização funcional do robô

CEAAE - 2003 - IA - ROBÓTICA
Padrões
ISO 8373:1994 - Manipulating industrial robots – vocabulary (International Organization for Standardization);
ANSI/RIA 15.06:1999 American National Standard for Industrial Robots and Robot Systems - Safety Requirements (RIA: Robotic Industries Association);
ANSI/UL 1740:1998 Standard for Robots and Robotic Equipment (Underwriters Laboratories Inc.);
ISO 10218:1992 Manipulating industrial robots – Safety;
ISO 15187:2000 Manipulating industrial robots - Graphical user interfaces for programming and operation of robots (GUI-R)

Robot Típico (manipulador)
Ligação
Junta
Base
Punho

Componentes Básicos de um Robot
Estrutura: Estrutura mecânica (ligações, juntas, base, etc.).
Atuadores: Motores, cilindros pneumáticos, etc., que
permitem o movimento das juntas do robot. Controle: Controla as juntas do robot e é a interface com o
utilizador.
Ferramenta: A ferramenta tem por objectivo a manipulação de objectos e é concebida de acordo com as necessidades de manipulação.
Teach pendant: Consola de controle manual e de programação do robot.

Vantagens da Utilização de Robots
Fatores técnicos flexibilidade na gama de produtos manufaturados incremento da precisão, robustez, rapidez, uniformidade e suporte a
ambientes hostis incremento dos índices de qualidade e de peças rejeitadas
Fatores econômicos utilização eficiente de unidades de produção intensiva aumento de produtividade (inexistência de interrupções, absentismos, etc.) redução do tempo do tempo de preparação de fabricação
Fatores sociológicos redução do número de acidentes afastamento do ser humano de locais perigosos para a saúde redução de horários de trabalho aumento do poder de compra

Movimento e Precisão Resolução Espacial
Menor incremento de movimento no qual o robot pode dividir a sua área de trabalho. Depende da resolução do sistema de controlo e das imprecisões mecânicas do robot.
PrecisãoCapacidade de o robot atingir um ponto desejado. Mede a distância entre a posição especificada e a posição real atingida pelo robot.
RepetibilidadeCapacidade de o robot se posicionar na mesma posição em que se
posicionou anteriormente.

Notação dos Movimentos do Punho
Roll (junta T)Rotação do punho em torno do braço (eixo zz).
Pitch (junta R)Rotação do punho para cima e para baixo (eixo yy).
Yaw (junta R)Rotação do punho para a esquerda e para a direita (eixo xx).
Classificação de um Robot
Classificação baseada na configuração física: Cartesiano ou retangulares Cilíndrico Polar ou esféricos Articulados
Classificação baseada no sistema de controle: Controlo Ponto a Ponto (PTP) Controlo Trajectória Contínua (CP) Controlo Trajectória Controlada
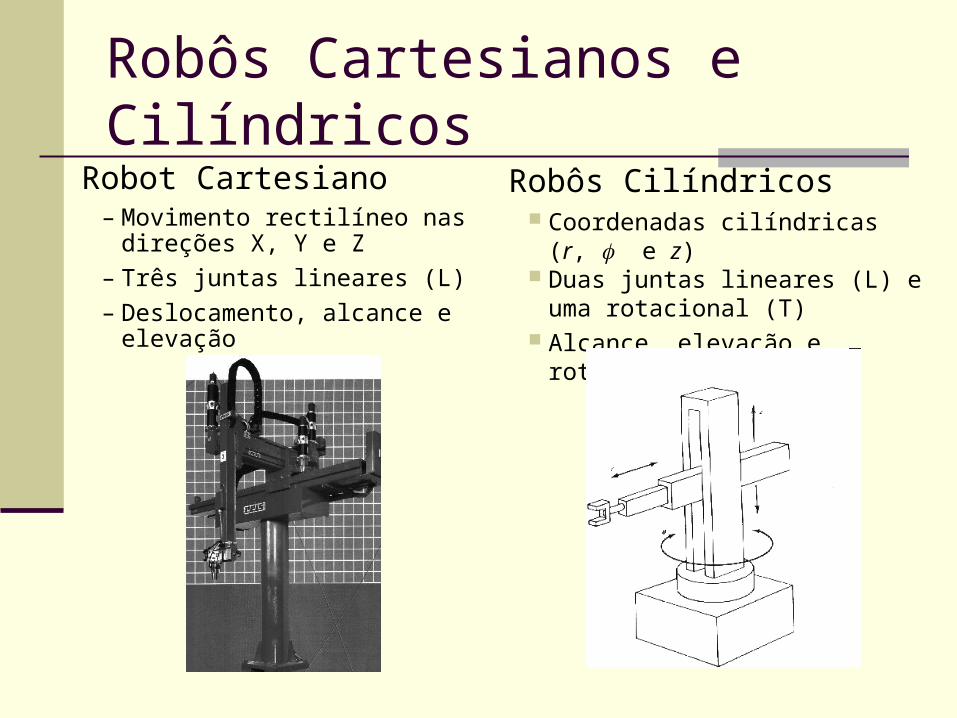
Robôs Cartesianos e Cilíndricos
Robôs Cilíndricos Coordenadas cilíndricas (r, e z) Duas juntas lineares (L) e uma
rotacional (T) Alcance, elevação e rotação
Robot Cartesiano– Movimento rectilíneo nas direções
X, Y e Z
– Três juntas lineares (L)
– Deslocamento, alcance e elevação
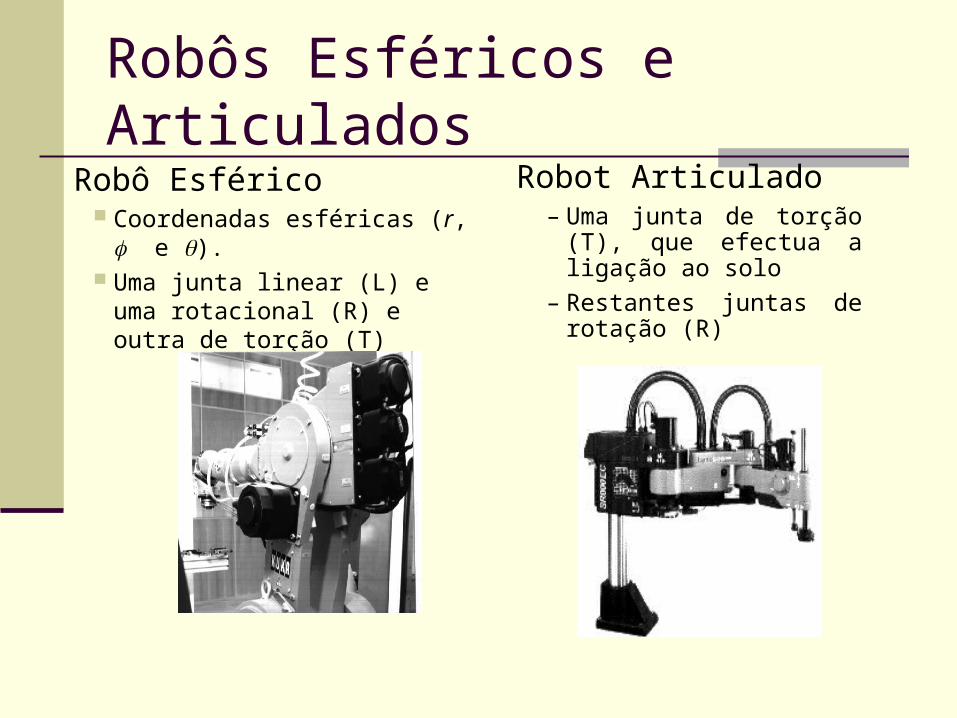
Robôs Esféricos e Articulados
Robô Esférico Coordenadas esféricas (r, e ). Uma junta linear (L) e uma
rotacional (R) e outra de torção (T)
Robot Articulado– Uma junta de torção (T),
que efectua a ligação ao solo
– Restantes juntas de rotação (R)

Exemplos Típicos
(a) Robot Cartesiano (c) Robot Polar
(b) Robot Cilíndrico (d) Robot Articulado
Tipos de Sistemas de Controle
Controlo Ponto a Ponto - PTP Neste tipo de controle, o robô é capaz de se deslocar de um ponto para
um qualquer outro ponto do seu volume de trabalho, sendo a trajetória e velocidade não controladas ao longo desse movimento.
Trajetória Contínua - CP Neste tipo de controle de movimento, a trajetória é total ou parcialmente
contínua. Isto permite o controlo do movimento e velocidade de cada eixo em simultâneo, sendo essencial esta característica para aplicações de pintura, soldadura, etc..
Trajetória Controlada Possibilidade de gerar trajectórias com geometrias diferentes, como
sejam linhas, círculos, curvas interpoladas. Apenas é necessário memorizar o ponto de início e o de fim da trajetória.
Controle Inteligente Este tipo de controlo de movimento permite ao robô ajustar as trajetórias
por interação com o meio ambiente. Estas tomadas de decisões lógicas baseiam-se na informação recebida por sensores.

AcionamentoAcionamento Hidráulico
Permitem valores elevados de velocidade e de força. A grande desvantagem é o seu elevado custo. Preferíveis em ambientes nos quais os drives elétricos poderão causar
incêndios, como seja na pintura.
Acionamento Elétrico Oferecem menor velocidade e força (comparativamente aos hidráulicos). Permitem maior precisão, maior repetibilidade e mais “limpos” na utilização. Dois tipos de acionadores eléctricos: motores passo a passo (controle em
malha fechada ou aberta) e servomotores DC (controle em malha fechada). Os servomotores são os mais utilizados, permitindo movimentos controláveis de forma contínua e suave.
Acionamento Pneumático Utilizado em robôs de pequeno porte e que possuam poucos graus de
liberdade. Baixo custo (mais económico que os anteriores).

Seleção de Robôs
Tamanho (x - máxima dimensão do volume de trabalho) Micro (x 1 m), Pequeno (1 x 2 m ), Médio (2 x 5 m ),
Grande (x 5 m)
Graus de Liberdade Velocidade Acionamento
Hidráulico, Elétrico ou Pneumático.
Sistema de controle Ponto a ponto (PTP), Trajetória Continua (CP), Trajetória controlada,
etc.
Capacidade de Carga Precisão e Repetibilidade Peso do robô
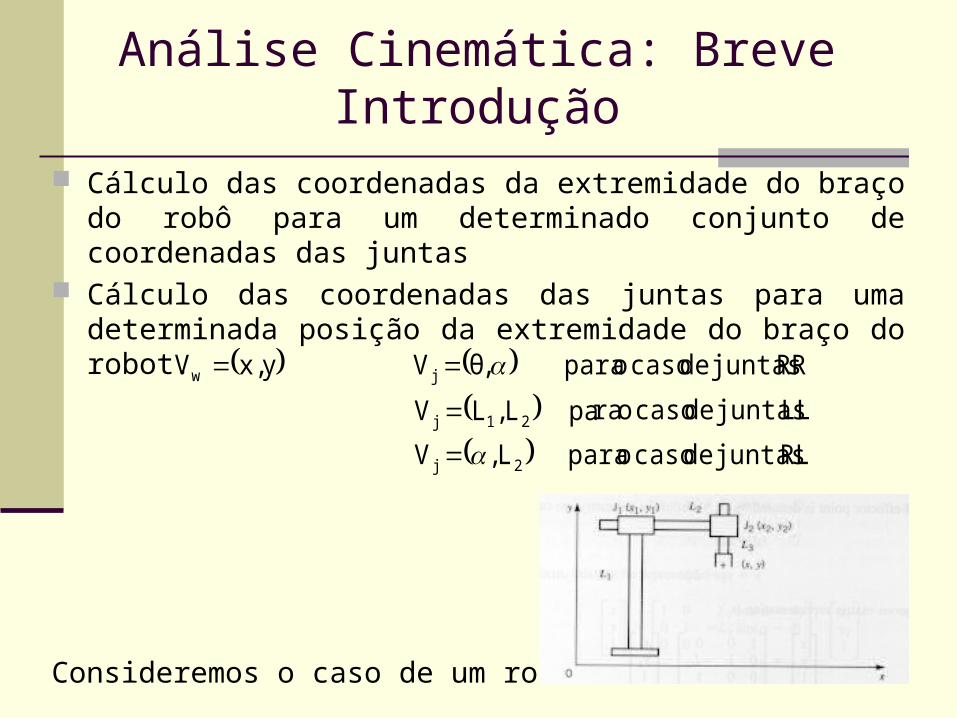
Análise Cinemática: Breve Introdução
Cálculo das coordenadas da extremidade do braço do robô para um determinado conjunto de coordenadas das juntas
Cálculo das coordenadas das juntas para uma determinada posição da extremidade do braço do robot.
Consideremos o caso de um robô LL
RL juntas de caso o para L,V
LL juntas de caso o rapa L,LV
RR juntas de caso o para ,θV yx,V
2j
21j
jw

Transformação Cinemática
Estabelecendo as relações entre as juntas J1 e J2,
Representando as relações na forma da matriz homogénea
ou
Calculando agora em relação à extremidade do braço,
ou
12212 yy e Lxx
1
y
x
.
100
010
L01
1
y
x
1
12
2
2112 X . TX
32
2
Lyy
xx
1
y
x
.
100
L10
001
1
y
x
2
2
3 22 X . TX
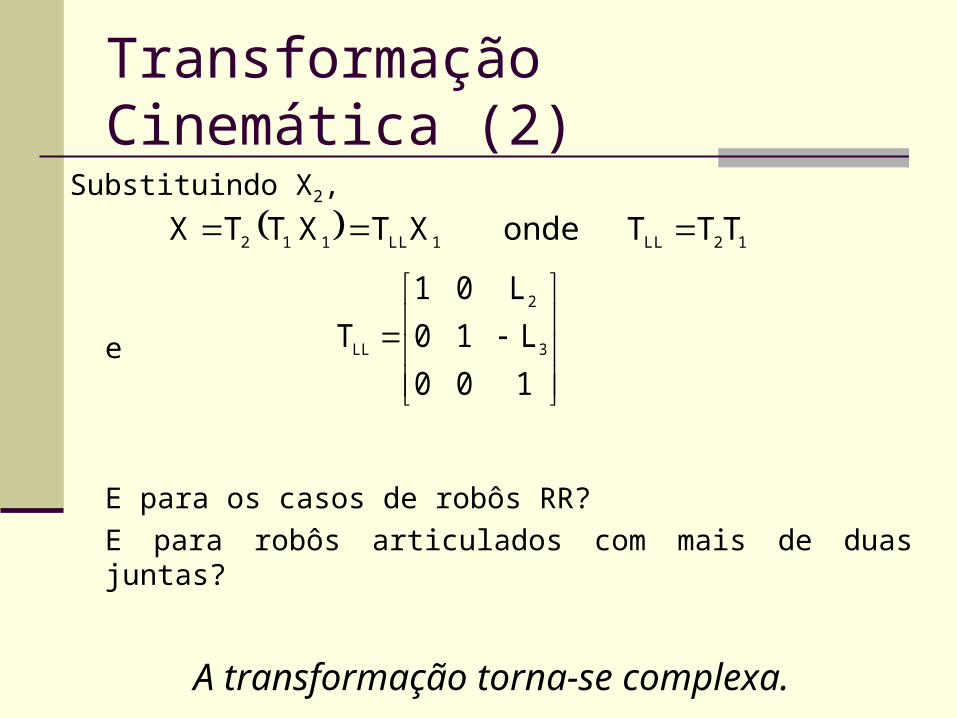
Transformação Cinemática (2)
Substituindo X2,
e
E para os casos de robôs RR?
E para robôs articulados com mais de duas juntas?
A transformação torna-se complexa.
TT T onde XTX T TX 12LL1LL112
100
L10
L01
T 3
2
LL
Sensores
Sensores de Tato Objetivo de determinarem o contato entre dois objectos, sendo um deles
a garra ou a ferramenta do robot, e o outro a peça sobre a qual o robô vai efetuar uma dada operação.
Sensores de Toque Utilizados para indicar que houve contacto entre dois objectos sem tomar
em consideração a amplitude da força desse contacto. Exemplos: interruptores de fim de curso, etc. Aplicações: quando se pretende saber se o robot tocou em algum
objecto.
Sensores de Força Indicam se existe contacto entre dois objectos e também a amplitude do
valor dessa força. Utilização de uma célula de carga entre o punho do robot e a garra ou
ferramenta. Aplicações: manipulação de peças frágeis e de montagem.
Sensores de Proximidade e Visão Artificial
Sensores de ProximidadeDeteção de objetos na proximidade de outros, podendo ainda fornecer uma medida dessa distância relativa entre os objectos.Exemplos: ópticos, acústicos, indutivos, etc.Aplicações: deteção da existência ou ausência de objectos nas proximidades do robot, detecção da distância a que um objeto se encontra do punho do robot, etc.
Visão Computacional ou ArtificialTratamento digital da imagem fornecida por uma câmara de vídeo, permitindo a identificação de objectos e determinação da sua localização e geometria.Constituição: câmara (matriz de CCD’s), hardware para digitalização dos valores das intensidades obtidos na matriz, hardware e software necessários para efectuar o interface entre estes dois equipamentos e entre o sistema e o utilizador.Aplicações: inspecção industrial, montagem e robótica móvel.

Garras Mecânicas Utilizadas para pegar e segurar em objetos, utilizando dedos
mecânicos atuados por um mecanismo para realizar o movimento de abertura e fecho dos dedos.
Os dedos, também designadas por pinças, são os terminais das garras que efectuam o contato com os objetos a agarrar.
O mecanismo das garras deve ser capaz de: abrir e fechar os dedos da garra; exercer uma força suficiente, quando fechado, para segurar as peças que
foram agarradas.
A energia para actuação dos dedos pode ser: pneumática; elétrica, de fácil controle do valor da força que exercem sobre as peças; mecânica; hidráulica, para aplicações que requerem a utilização de forças elevadas.

Garras Magnéticas
Manuseamento de materiais ferrosos, especialmente na forma de chapas ou placas metálicas.
Tipos de garras magnéticas: electroímans - necessitam de uma fonte de energia externa, mas são
mais fáceis de controlar e eliminam o magnetismo residual; ímans permanentes - não necessitam de fonte de energia externa, mas
apresentam uma menor facilidade de controlo.
Vantagens os tempos para pegar nas peças são muito rápidos; adaptação a variações nos tamanhos das peças a pegar;
Desvantagens magnetismo residual; deslizamento lateral das peças durante o transporte; impossibilidade de apanhar apenas uma chapa de uma pilha.

Outro Tipos de Garras
Garras de sucção Manuseamento de objectos planos, lisos e limpos (condições necessárias
para que se forme um vácuo satisfatório). Exemplo: placas de vidro. Garras adesivas
Indicadas para o manuseamento de têxteis e outros materiais leves.
Garras de agulhas Indicadas para manusear materiais macios e que possam ser perfurados,
ou pelo menos picados. Exemplo: têxteis, plásticos, borrachas, etc.
Garras com dedos articulados Indicados para o manuseamento de objectos frágeis.
Garra universal ou mão de Standford/JPL Desenvolvimento de uma garra que permita pegar e manusear uma
grande variedade de objectos com diferentes geometrias.
Ferramentas para RobôsAs ferramentas são atuadores finais cuja finalidade é realizar trabalho sobre uma peça em vez de pegar nelas.
Pinças de soldadura por pontosAs pinças de soldadura por pontos são constituídas por dois eléctrodos, que ao fechar provocam a passagem de corrente eléctrica num ponto da chapa a soldar, criando a fusão dos materiais.
Tochas de soldadura por arco eléctricoEsta é a aplicação em que os robôs são mais utilizados. A alimentação de energia elétrica gás e fio efectuada ao longo do braço do robô.
Pistolas de pinturaAs pistolas de pintura tem por função vaporizar a tinta, podendo ser do tipo elétrico ou pneumático.
Ferramentas rotativas As ferramentas rotativas necessitam de movimento para efectuar a sua função, estando a ferramenta fixa na extremidade do robô. Uma aplicação típica é o aparafusamento de parafusos.

Programação de Robôs Industriais
Geração de um programa de controle do robô, de uma forma simples e amigável para o utilizador.
Os movimentos do robô englobam duas tarefas básicas: alcançar uma posição alvo programada; mover-se ao longo de uma trajectória programada com velocidades
definidas.
Tarefa bastante dispendiosa e que consome muito tempo.
Métodos de Programação de Robôs
Programação “on-line”. Programação “off-line”.

Programação On-line e Off-line
Programação On-line• Este método envolve directamente o robô, cuja atividade principal da
programação “on-line” é a definição de trajetórias.• Vantagem: simplicidade de realizar a programação e a sua aprendizagem.• Desvantagem: parar o robô com as consequentes perdas de produtividade
que daí advêm.
Programação “off-line”• A programação “off-line” possibilita a programação do robô sem ser
necessário a sua utilização durante esta tarefa.• Sequência de tarefas na programação off-line:
- Calibração do modelo do robô e da célula. Geração do código para o robô: programas desenvolvidos na linguagem
nativa do robô e programas desenvolvidos em linguagem neutra. Descarga do programa para o robô.

Segurança na Robótica
Os robôs são máquinas potencialmente perigosas, sendo o número de acidentes reduzidos, ocorrendo durante a sua programação ou manutenção.
Normas internacionais: Norma ISO 10210; Norma ANSI/IRIA R15.06-1986; Norma Alemã DIN EN 775.
Causas dos erros: falha no sistema de controle, erros de software, interferências elétricas; entrada não autorizada de pessoas na área de trabalho; falhas eléctricas, pneumáticas ou hidráulicas; falhas mecânicas: fadiga, sobrecargas, corrosão; falhas ambientais: poeiras, fumos, radiações, etc; incêndios: salpicos por exemplo na soldadura.
Protecção Passiva e Activa
Medidas de Proteção passivas: Regras implementadas de forma a evitar a ocorrência de situações que possam levar a acidentes.
as marcações e os sinais que indicam as zonas de perigo devem diferir claramente de todas as outras marcações existentes na fábrica;
o robô só deve ser operado manualmente em condições de programação ou de erro;
a célula do robot devem ser mantidos numa condição ordeira e limpos; evitar roupas largas ou que possam facilmente ficar presas no robô.
Medidas de Proteção Ativas: destinam-se a limitar os efeitos da ocorrência de acidentes.
circuito de parada de emergência; prefixação das saídas e vedação das células robotizadas;
protecção contra colisões.

Participação de Fabricantes de Robôs no Mercado Brasileiro
Fabricante de Robô Robôs Instalados ParticipaçãoABB 1,700 34%FANUC 900 18%KUKA 800 16%Outros* 1,600 32%
* Motoman, Kawasaki, COMAU [vendas, 2000]
ABB
FANUC
KUKA
Outros*
Estimativa de Capital Investido em Robótica
Preço médio de um robô: US$ 60,000.00
Custos adicionais para condições operacionais: US$ 12,000.00 (20%)
- preparação da fundação do robô;
- instalação;
- unidades de potência (hidráulica, pneumática, elétrica etc.);
- garras e/ou ferramentas dedicadas;
- custos para treinamento de mão-de-obra (operação, manutenção);
- logística (integração com o sistema de produção);
- procedimentos de segurança;
- ajuste dos parâmetros operacionais;
- testes.
Número de Robôs: 5.000 unidades;
Capital investido (período 1995 - 2001*) : U$ 360 milhões
Distribuição de Robôs por Aplicação Industrial
. Robôs ABB instalados no Brasil
Aplicação Industrial (1250 unidades) Percentual
Soldagem por pontos 33 %
Soldagem a arco 18 %
Manipulação / “paletização” 25 %
Pintura 10 %
Outros (montagem, acabamento, corte jato d’água e oxigênio) 14 %
Soldagem a Arco [ABB, 2000]
Aplicação (225 unidades) Percentual
Indústria Automobilística 58 %
Fornecedores auto-peças 23 %Indústrias em geral 19 %

Algumas Aplicações Industriais de Robôs
Scania Latin America Ltda
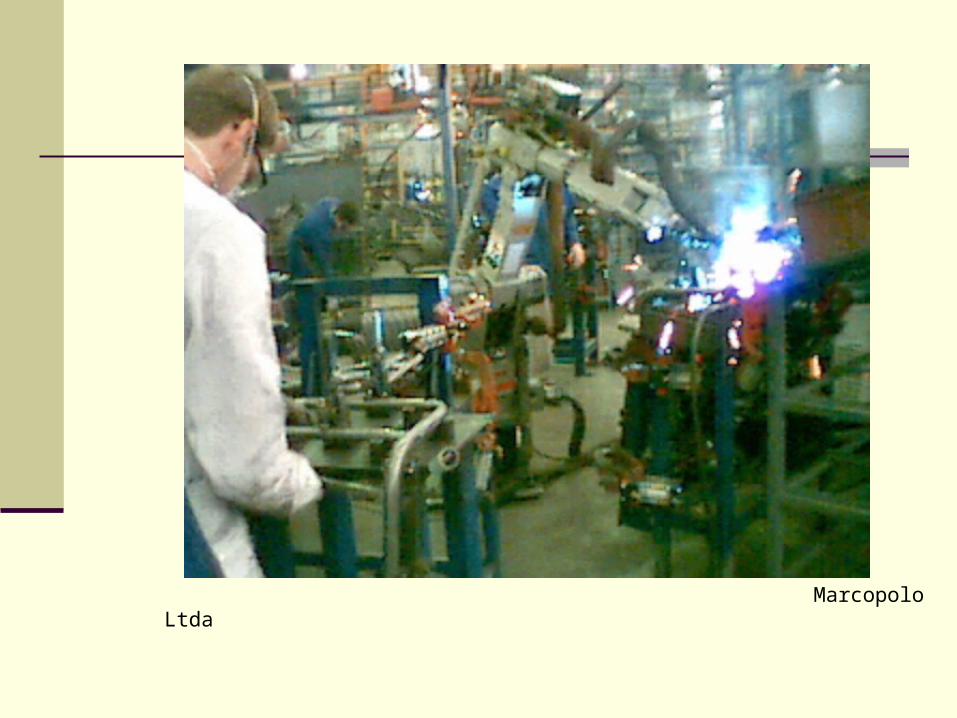
Marcopolo Ltda
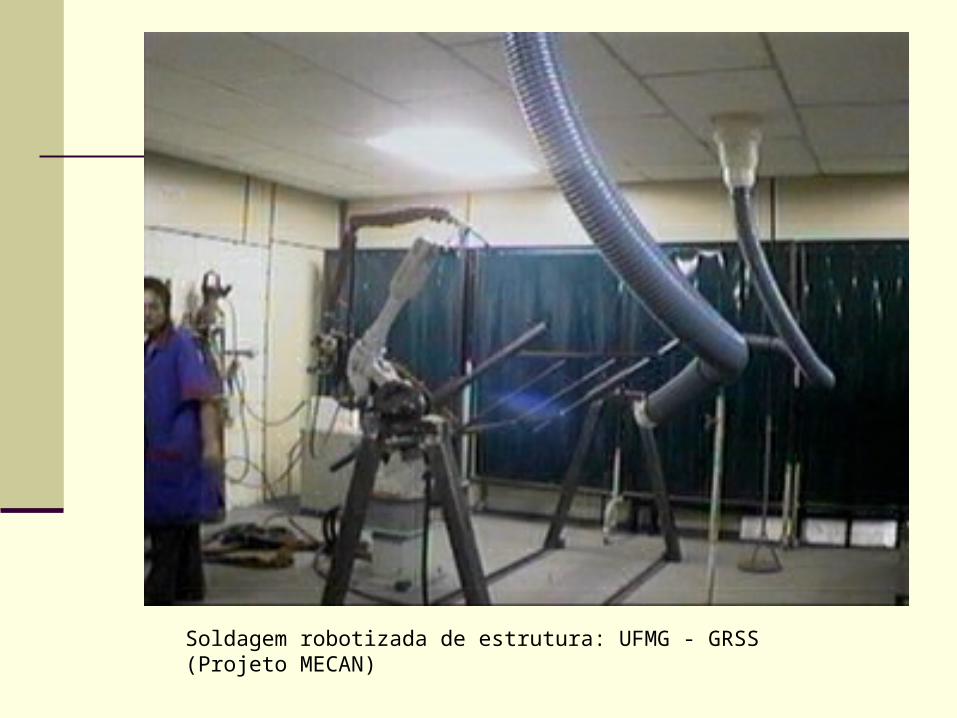
Soldagem robotizada de estrutura: UFMG - GRSS (Projeto MECAN)

Alimentador automático para máquina CNC
Laboratório CNC - SENAI São Caetano do Sul (SP)

Aplicações Industriais Manuseamento de Materiais
Vantagens: fatores de segurança acrescida na interface de operadores com máquinas; repetibilidade da tarefa a realizar; o ambiente de trabalho, é por vezes, prejudicial; evita-se a manipulação de cargas elevadas por parte de operadores.

Aplicações Industriais - Soldadura
Vantagens: racionalização do processo de soldadura; incremento da qualidade e segurança.
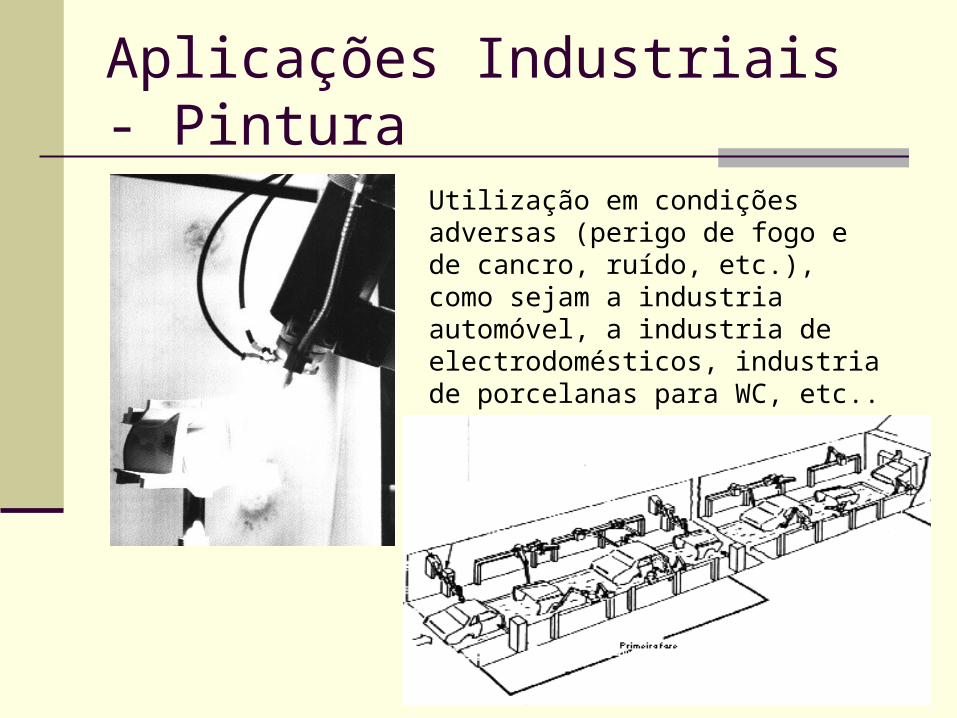
Aplicações Industriais - Pintura
Utilização em condições adversas (perigo de fogo e de cancro, ruído, etc.), como sejam a industria automóvel, a industria de electrodomésticos, industria de porcelanas para WC, etc..
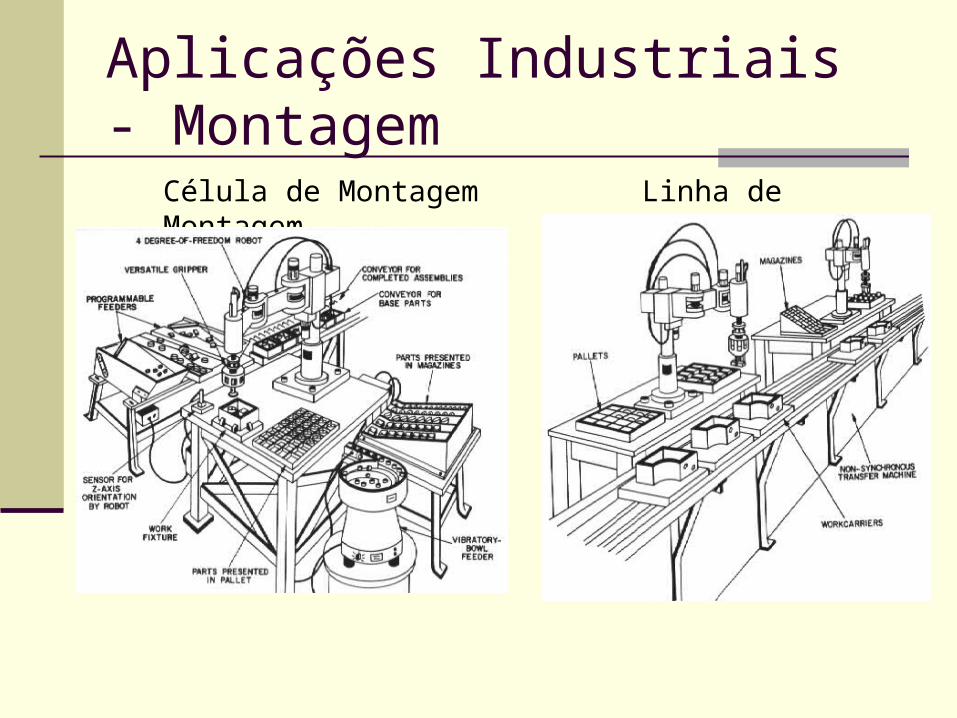
Aplicações Industriais - Montagem
Célula de Montagem Linha de Montagem

Programação off-line de Robôs – Industria Virtual

Programação off-line de Robôs – Industria Virtual

CÉLULA ROBOTIZADA PARA ESCOLHA DE CORES

SIMTIA – Sistema Integrado para Mistura de TIntas Automatizada
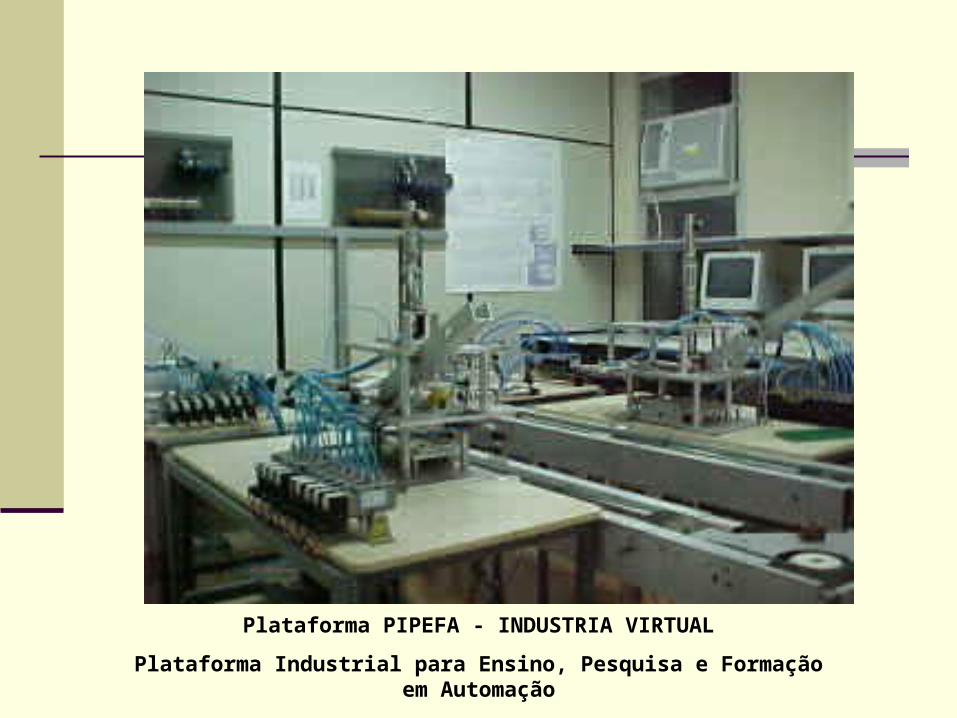
Plataforma PIPEFA - INDUSTRIA VIRTUAL
Plataforma Industrial para Ensino, Pesquisa e Formação em Automação

SistemasInteligentes
Power and Control Interface

Intervenção Submarina utilizando Robô – ROV (Veículo
de Operação Remota)

Intervenção Submarina utilizando Robô – ROV
ROV DAVID + Manipulador Manutec r3 (9 GL)

Aplicações não-convencionais de Robôs
Robótica Submarina;
Braço Passivo para Posicionamento Dinâmico ROV (CENPES / COPPE-PEE-PEM)

Projeto de ROV híbrido (Universidade Federal do Espirito Santo)

Manutenção de aeronaves;
VASP (Viação Aérea São Paulo) – Oficina de manutenção mecânica
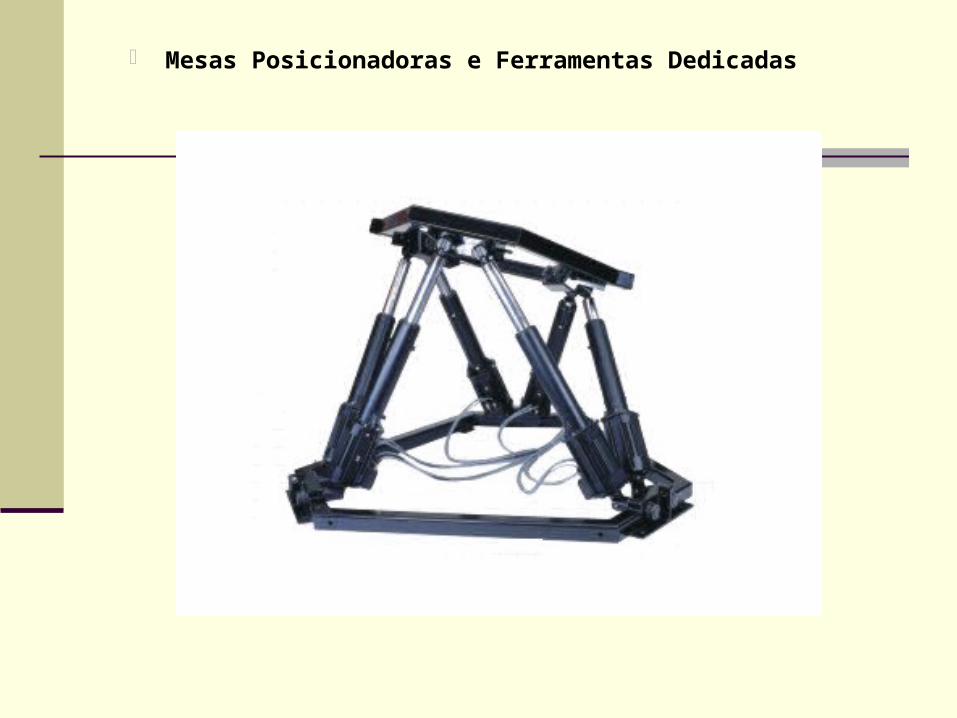
Mesas Posicionadoras e Ferramentas Dedicadas

Robótica Móvel – UFES – Espírito Santo
Robô Móvel Robô com 4 patas
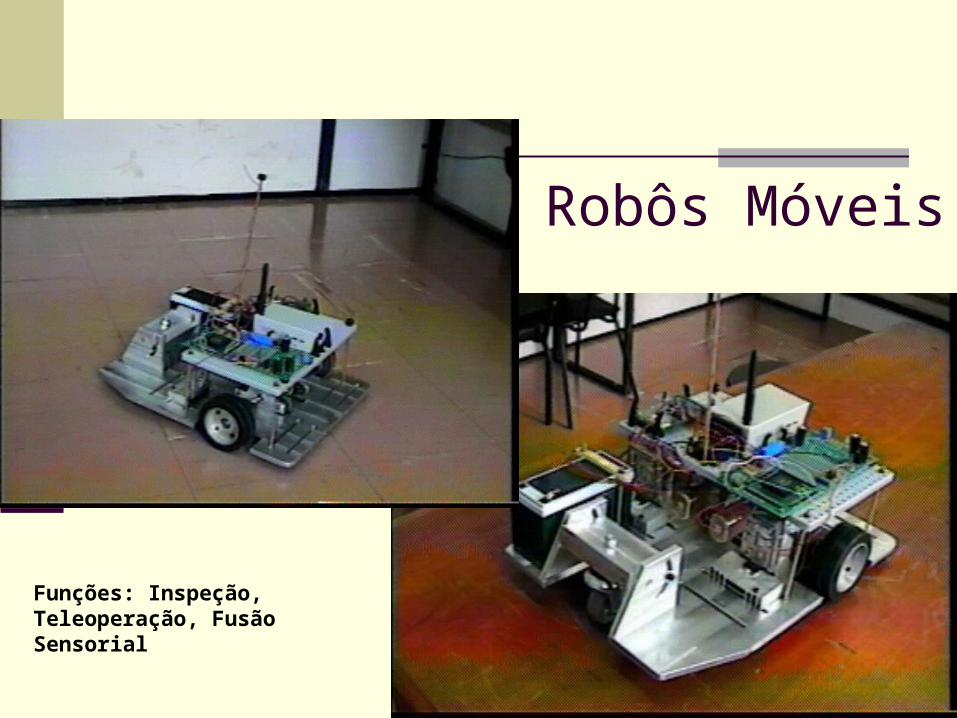
Robôs Móveis
Funções: Inspeção, Teleoperação, Fusão Sensorial

Robótica MóvelUNICAMP - LAR
Sistema Robótico Móvel Cadeira de Rodas

Robô móvel (inspeção de dutos);
DAVID (UNESP- Baurú / EPUSP)
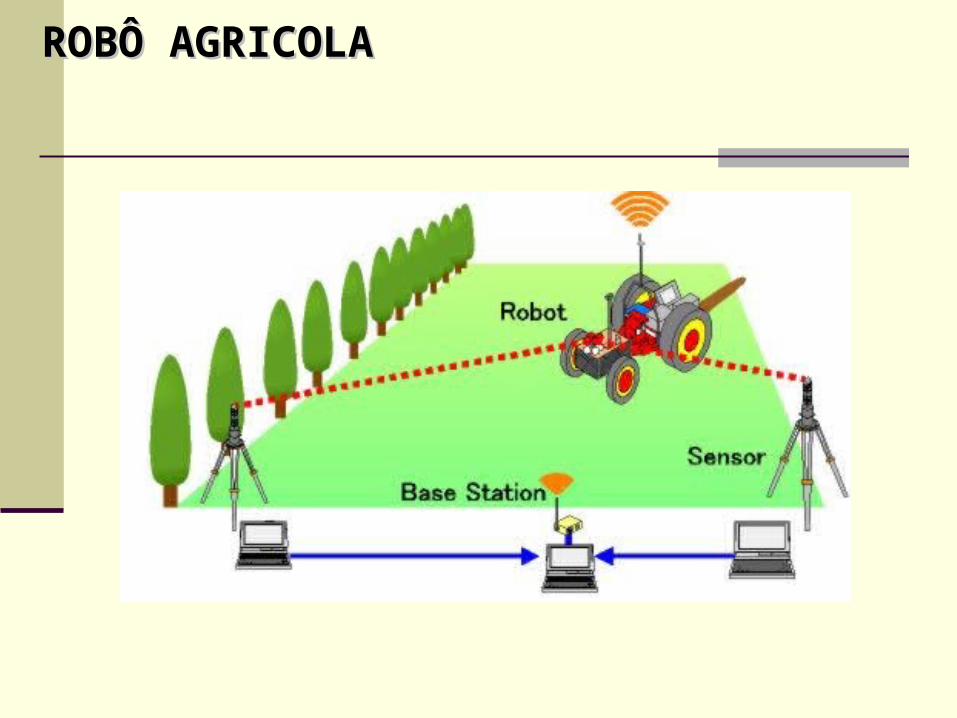
ROBÔ AGRICOLAROBÔ AGRICOLA
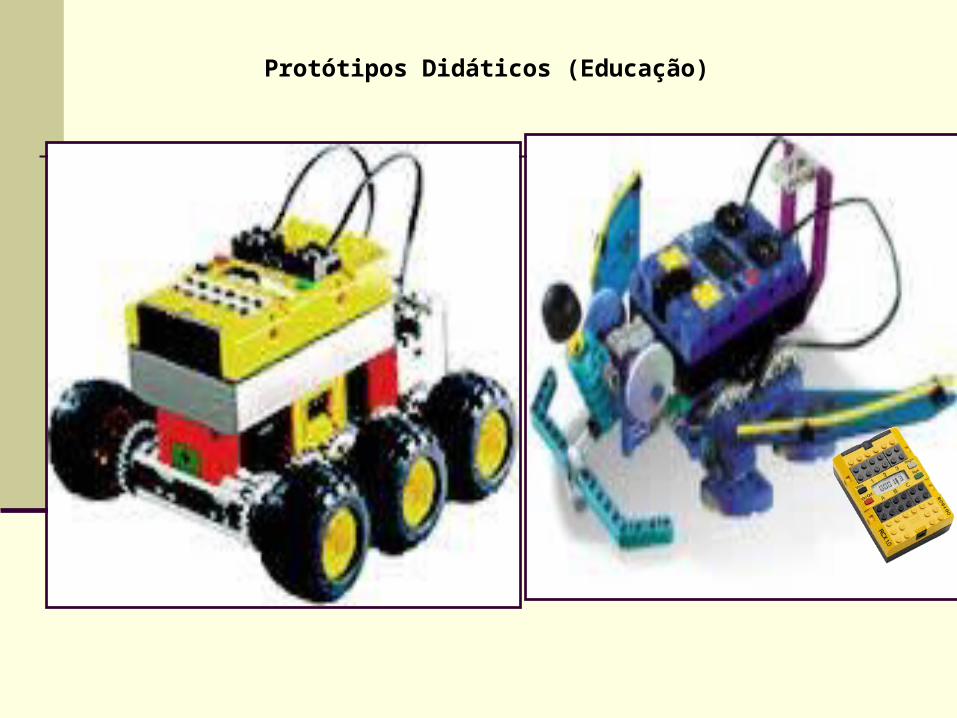
Protótipos Didáticos (Educação)

Automação de Presepio(entretenimento e lazer)

Casa Inteligente
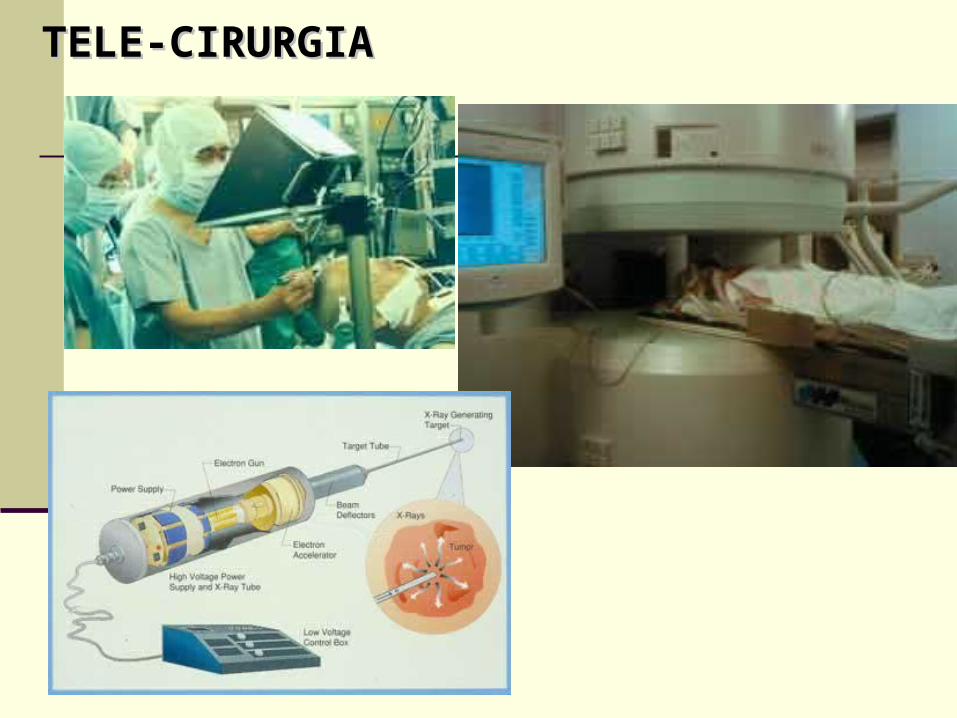
TELE-CIRURGIATELE-CIRURGIA
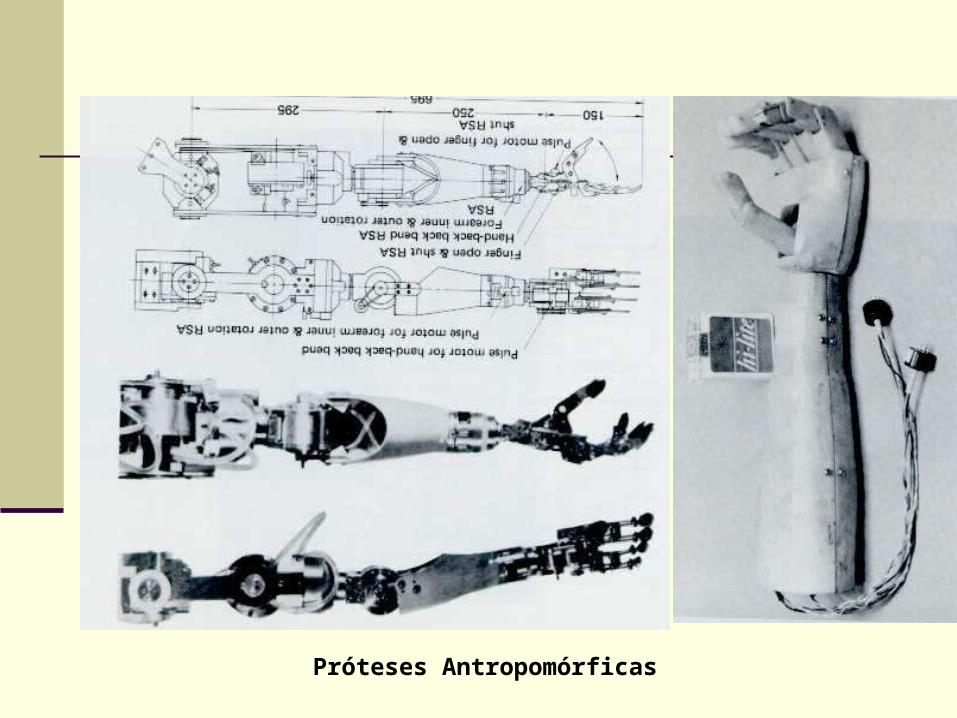
Próteses Antropomórficas

Próteses Antropomórficas

Kit Modular de Sistema Automatizado de Baixo Custo para Movimentação de Cadeira de Rodas Convencionais

CEAAE - 2003 - IA - ROBÓTICA
Aplicações

CEAAE - 2003 - IA - ROBÓTICA
Aplicações





























