Embed Size (px)
DESCRIPTION
Descrição
Citation preview

1
O que é um sensor?
� Algo que detecta o estado do ambiente.– Um sensor é um aparelho para detectar e sinalizar uma condição que se
altera. Pode ser a presença ou ausência de um objecto ou material. Podeainda ser uma quantidade mensurável como uma distância, tamanho oucor. Esta informação que se obtém a partir da saída de um sensor é a base para a monitoração e controlo dos processos de manufactura.
� Serão sensores? – Positioning devices – Encoders– Visão
– Detectores de minas (detector vs. sensor)

2
Sensores
� Fotoeléctricos / infravermelhos� Capacitivos � Indutivos� Contacto mecânico� Sensores de força� Encoders� Sensores de posicionamento� Sensores de corrente� Sensores por ultrasons� Sensores de Cor
� Ladar (laser distance and ranging)– Tempo de trânsito da onda– Deslocamento de fase
� Radar – Radio Detection and Range� Visão� Temperatura� GPS� Sistemas Inerciais� Bússolas

3
Sensores
� Binários ou discretos– Respondem à questão “O objecto existe ou não?”– O seu output é um sinal binário 0 ou 1.– São simples
� Analógicos– Respondem à questão “Onde está?” ou “Qual a
quantidade?”– O output é uma quantidade que tanto pode ser
representada analógicamente como digitalmente– Podem estar associados a controladores complexos

4
Sensores� Sensores de Contacto
– componentes electromecânicos que detectam alterações através de contacto físico com o objecto que pretendem detectar
– mais fáceis de perceber– suportam correntes superiores e toleram melhor distúrbios da rede– não necessitam de ser alimentados– Ex:
» encoders, sensores de fim de curso e sensores de segurança
� Sensores sem Contacto
– componentes electrónicos que criam um campo eléctrico que é alterado pelo objecto a detectar
– maior flexibilidade, menor manutenção e são mais rápidos– Não se desgastam mecanicamente– Ex:
» fotoeléctricos, indutivos, ultra-sons e capacitivos

5
Escolha de Sensores
� Determinar onde o sensor pode ser necessário– identificar as funções do sistema
» que condições devem ocorrer para que a função seja realizada
» que feedback é necessário durante a ocorrência da função
» que condições devem ocorrer, após a função, para garantir que a função foi realizada com êxito
– identificar sub-funções de cada uma das funções
� Verificar se o sensor pode ser aplicado– condições de carga
– alimentação disponível
– características do alvo
– condições ambientais
� Determinar as propriedades físicas do objecto a detectar

6
Escolha de Sensores - Factores
� Precisão - valor estatístico da variação das leituras� Calibração - Necessário uma vez que as leituras poderão
alterar-se com o tempo� Custo – Podem ser bastante caros� Ambientais - Limites de humidade e temperatura.Podem
funcionar bem em ambientes indoor mas bastante mal em ambientes outdoor.
� Raio de acção - Limites da medida do sensor. Se o alvo estiver muito perto podem não detectar nada, ou mesmo se passando quando estiver muito longe. Repetitibilidade - Variação dos valores do sensor para uma mesma condição
� Resolução - menor incremento que o sensor pode detectar

7
Sensores – Algumas características importantes
� Nominal sensing distance - is the rated operating distance for which a sensor is designed
�Hysteresis - is the difference between the operate (switch on) and release (switch off) points when the target is moving away from the sensor face. Without sufficient hysteresis a proximity sensor will continuously switch on and off, or “chatter,” when there is excessive vibration applied to the target or sensor. It can also be made adjustable through added circuitry.

8
Sensores – Algumas características importantes
� Repeatability – Capacidade do sensor repetir a medida debaixo das mesmas condições.
� Switching Frequency - is the number of switching operations per second achievable under standardized conditions. In more general terms, it is the relative speed of the sensor.
� Response Time - is the amount of time that elapses between the detection of a target and the change of state of the output device (ON to OFF or OFF to ON). It is also the amount of time it takes for the output device to change state once the target is no longer detected by the sensor.
9
Sensores
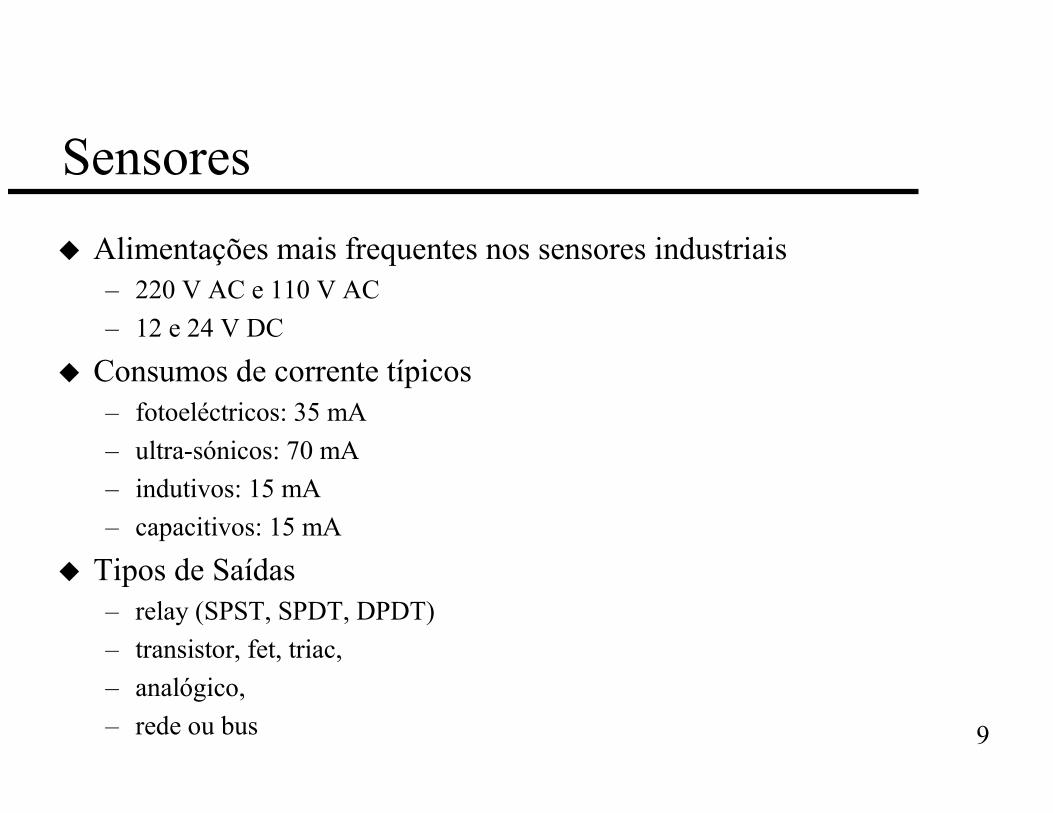
� Alimentações mais frequentes nos sensores industriais– 220 V AC e 110 V AC
– 12 e 24 V DC
� Consumos de corrente típicos– fotoeléctricos: 35 mA
– ultra-sónicos: 70 mA
– indutivos: 15 mA
– capacitivos: 15 mA
� Tipos de Saídas– relay (SPST, SPDT, DPDT)
– transistor, fet, triac,
– analógico,
– rede ou bus

10
Sensores
Sensor NPN
carga
+
-
Sensor PNP
carga
+
-

11
Sensores de Fim de Curso
Até 20 A

12
Sensores Indutivos

13
Sensores Capacitivos

14
Sensores Fotoeléctricos
�Componentes– fonte (pode ser modulada)
» lâmpadas incandescentes
» leds da gama visível
» infravermelhos
– receptor» se a fonte for modulada o receptor tem de estar sintonizado.
– Saídas» relay, triac, FET, PNP e NPN

15
Sensores Fotoeléctricos
Modo de Oposição� 2 objectos: emissor e receptor
� detecção ocorre quando o feixe é
interrompido
� Tem um custo inicial mais alto e
é por vezes difícil de alinhar
� Apresenta grandes vantagens na
detecção de produtos opacos
� É bastante fiável na presença de
condições ambientais adversas
como pó, fuligem, fumo,
humidade, ...

16
Sensores Fotoeléctricos
Modo de Reflexão
� 1 objecto: emissor e receptor
� Baixo custo e fácil instalação
� Atenção aos objectos brilhantes que passem junto do reflector (proxing)
� Não é muito recomendados para detecção de componentes pequenos
� Para resolver o proxing pode-se utilizar luz polarizada que reduz o alcance do sensor
� É um dos sensores mais utilizados na indústria, nomeadamente na movimentação de materiais

17
Sensores Fotoeléctricos
Modo de Proximidade
� 1 objecto: emissor e receptor
� A recepção ocorre através da reflexão do feixe do emissor na superfície a detectar
� Ideal para situações em que o feixe de luz não possa passar pelos objectos
� Tem de se resolver o problema de quando a luz natural reflectida pela superfície é quase tanta como a reflectida pelo emissor
� Existe um conjunto variado de lentes que permitem diversas aplicações
18
Sensores Fotoeléctricos
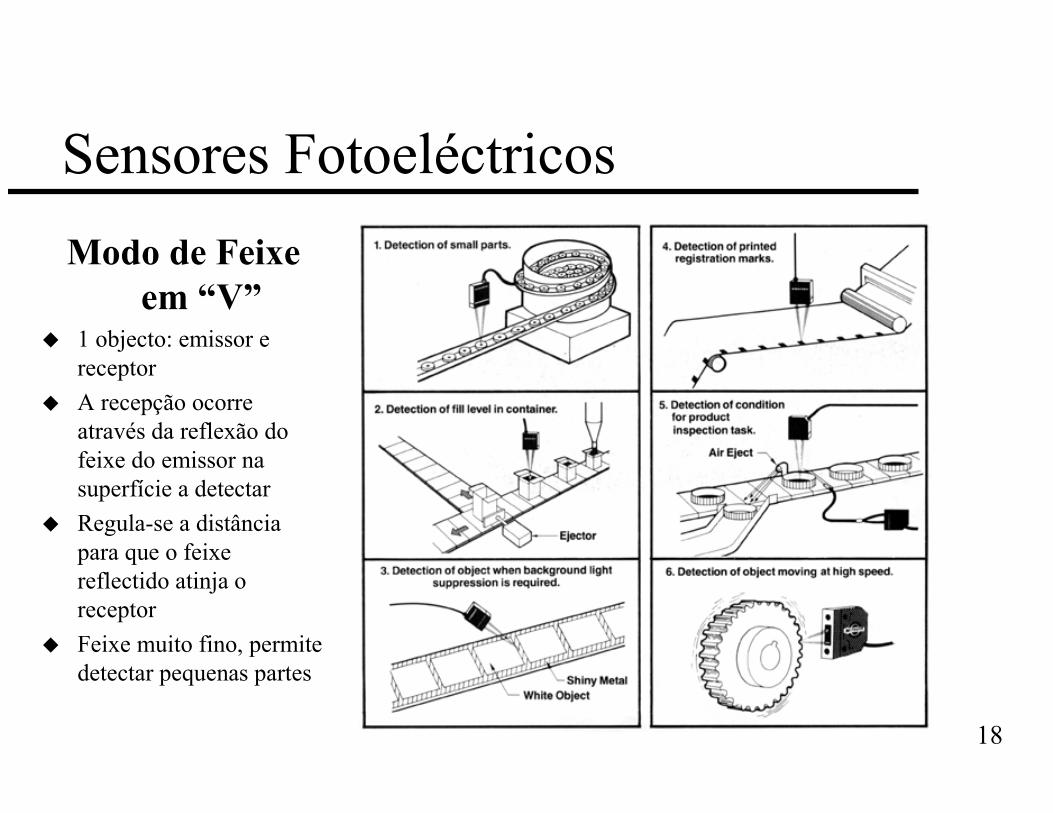
Modo de Feixe
em “V”
� 1 objecto: emissor e receptor
� A recepção ocorre através da reflexão do feixe do emissor na superfície a detectar
� Regula-se a distância para que o feixe reflectido atinja o receptor
� Feixe muito fino, permite detectar pequenas partes

19
Sensores Fotoeléctricos

20
Fontes
INVISIBLE INFRARED LIGHT SOURCE(880 NM)
• Melhor escolha para situações em que os materiais são opacos.
• Aumenta o grau de alcance.
• Boas escolha para situações ambientais hostis.
• Preferível para usar com guias de fibra óptica de vidro. Não usar com guias
de fibra óptica de plástico
• Preferível na detecção de objectos coloridos escuros, usando modo de
proximidade (ex: preto, azul, verde, ...)
• Muito interessante para verificação se as vasilhas estão ou não cheias.
• Percepção de Cor; tende a favorecer os objectos azuis.

21
Fontes -
Vermelho : (660nm)• Boa escolha para utilização com guias de fibra óptica de plástico
• Bom para detectar objectos translúcidos no modo de proximidade
• Bom para detectar objectos transparentes usando fibra óptica (bifurcada) no modo por reflexão
• Bom para polarizar - reduzir proxing
Blue : (480nm)• Funciona bastante bem para combinações difíceis de cores, tais como amarelo sobre branco,
cor de rosa sobre branco e “labels” brancas em cartão
• A melhor escolha para detectar objectos translúcidos ou transparentes, plástico ou vidro, em modo de reflexão

22
Fontes
Green : (550nm)
• Bom para situações em que o verde funcione como um bom filtro
• Bom para descriminar objectos vermelhos/cor de rosa com luz de fundo colorida
Luz Branca
• A melhor escolha para detectar todo o tipo de impressões em materiais de embrulho
• Recomendado para detectar objectos coloridos escuros quando em modo de proximidade
• Melhor escolha para a escolha de objectos coloridos

23
Sensores Deslocamento e Movimento� Resistivo (potenciometrico)
– excitação em corrente
– linear
� Reluctive LVDT (linear variable transformer) – Core movement through transformer
– Excitação AC
– Mudança de fase da tensão
� Encoders– Saída por impulsos
– Quadratura
� Podem-se medir deslocamentos lineares usando sensores potenciometricos ou um LVDT
� Podem-se medir deslocamentos angulares ou rotações usando um RVDT (rotational variable differential transformer) ou um encoder.

24
LVDT

25
Encoders

26
Encoders

27
Wireless Sensors ?

28Solar Cell
Digital Infrared Ranging
Compass
Touch Switch
Pressure Switch
Limit Switch
Magnetic Reed Switch
Magnetic Sensor
Miniature Polaroid Sensor
Polaroid Sensor Board
Piezo Ultrasonic Transducers
Pyroelectric Detector
Thyristor
Gas Sensor
Gieger-MullerRadiation Sensor
Piezo Bend Sensor
Resistive Bend Sensors
Mechanical Tilt Sensors
Pendulum Resistive Tilt Sensors
CDS Cell Resistive Light Sensor
Hall EffectMagnetic Field
Sensors
Compass
IRDA Transceiver
IR Amplifier Sensor
IR ModulatorReceiverLite-On IR
Remote Receiver
Radio ShackRemote Receiver
IR Sensor w/lens
GyroAccelerometer
IR ReflectionSensor
IR Pin Diode
UV Detector
Metal Detector