Embed Size (px)
Citation preview
iii
Agradecimentos
Ao meu orientador, Manuel João Sepúlveda Mesquita de Freitas, pelo apoio e
disponibilidade demonstrados durante o trabalho.
Aos meus colegas de laboratório, Alcides Gonçalves, Ricardo Sá e Carlos Silva,
pela amizade, companheirismo e cooperação em diversos momentos da realização do
trabalho.
Aos meus colegas Bruno Matos e Carlos Ribeiro pela ajuda na programação do
microcontrolador.
Ao meu colega Rogério Pereira pela ajuda na resolução de alguns problemas
informáticos.
Aos colegas do Laboratório de Potência que contribuíram com a sua experiência,
dando sugestões úteis para a realização do trabalho.
A todos os colegas que me apoiaram e me deram ânimo para trabalhar.
Aos técnicos do Departamento de Electrónica Industrial pela sua disponibilidade
e simpatia.
Às empresas Microchip, OnSemiconductor e ST pelo fornecimento de amostras
gratuitas, que foram indispensáveis na implementação do trabalho.
Aos meus Pais e restantes familiares pelo estímulo e apoio dado ao longo do
curso.

iv
v
Resumo
Actualmente, devido à grande utilização de cargas não lineares, a qualidade da
energia eléctrica tem-se degradado, surgindo o aparecimento de harmónicos que causam
vários problemas tanto a curto como a longo prazo. Os Filtros Activos de Potência
Paralelos vieram resolver grande parte desses problemas. Estes filtros funcionam em
paralelo com a rede injectando corrente nas linhas de modo a que estas fiquem
sinusoidais, conseguindo ainda compensar o factor de potência e desequilíbrios nas
correntes.
O inversor de um Filtro Activo Paralelo funciona como uma fonte de corrente
controlada. Dos vários métodos de controlo existentes para a sua implementação,
aqueles que melhor se adequam são os que utilizam uma frequência de comutação fixa.
A vantagem deste método consiste num melhor conhecimento sobre os harmónicos que
deverão surgir e na maior facilidade de filtragem dos harmónicos resultantes das
comutações.
Neste trabalho, foi realizado um estudo sobre vários tipos de controlo para
inversores, apresentando as principais características de cada um. É também
apresentada, uma simulação de um inversor trifásico com o respectivo controlo em
malha fechada, assim como, a sua implementação. A implementação inclui o
desenvolvimento do software no microcontrolador e também a realização de um filtro
LC (indutivo e capacitivo) para filtrar a tensão de saída.
Serão apresentados os diversos esquemas dos circuitos de controlo e de potência,
bem como, alguns resultados experimentais obtidos.
Palavras-Chave: Harmónicos, Filtro Activo Paralelo, Inversor controlado por corrente.

vi

vii
Abstract
Nowadays, due to the great use of non-linear loads, the power quality has been
degrading, which has lead to the appearing of harmonics that cause several problems,
both in short-term and in the long-term. The Active Parallel Power Filters have emerged
as a way to solve a big part of those problems. These filters work in parallel with the
network by injecting electric current into the lines so that they become sinusoidal, being
also able to compensate for the power factor and unbalances in the currents.
An Active Parallel Filter inverter works as a controlled current source. Of the
several existing control methods for its implementation, those which fit better are the
ones that use a fixed switching frequency. The advantage of this method consists in a
better understanding of the harmonics that will result and in an easier filtering of the
commutations resulting harmonics.
In this work, thesis a study of several types of control for inverters was
conducted, presenting the main characteristics of each. A simulation of a three phase
inverter with its respective closed-loop control is also presented here, as well as its
implementation, which includes the software development in the microcontroller and
also the performance of an LC (inductive and capacitive) filter, to filter the output
voltage.
The schematics of the various control and power circuits will be presented, as
well as some of the obtained experimental results.
Keywords: Harmonics, Active Parallel Power Filters, Current controlled Inverter.

viii
ix
Índice
Agradecimentos ................................................................................................... iii
Resumo ................................................................................................................. v
Abstract ............................................................................................................... vii
Índice ................................................................................................................... ix
Índice de Figuras ................................................................................................ xiii
Lista de siglas e acrónimos ............................................................................... xvii
Capítulo 1 - Introdução ......................................................................................... 1
1.1 Enquadramento ....................................................................................... 1
1.2 Motivações .............................................................................................. 2
1.3 Objectivos da Dissertação ....................................................................... 3
1.4 Organização da Dissertação .................................................................... 3
Capítulo 2 - Os Harmónicos na Rede Eléctrica ..................................................... 5
2.1 Definição de harmónicos ........................................................................ 5
2.2 Como se formam os harmónicos ............................................................ 7
2.3 Quantificação dos harmónicos ................................................................ 8
2.3.1 Análise espectral da onda .................................................................. 8
2.3.2 Taxa de Distorção Harmónica ........................................................... 9
2.3.3 Factor de Crista ................................................................................. 9
2.3.4 Factor de Potência ........................................................................... 10
2.4 Cargas que provocam harmónicos ........................................................ 10
2.4.1 Transformadores ............................................................................. 11
2.4.2 Variador de velocidade ................................................................... 12
2.4.3 Rectificador monofásico com filtro capacitivo ............................... 13
2.4.4 Lâmpadas fluorescentes .................................................................. 13
2.4.5 Outros aparelhos ............................................................................. 14
x
2.5 Cargas afectadas pelos harmónicos ...................................................... 16
2.5.1 Cabos de alimentação ...................................................................... 16
2.5.2 Transformadores ............................................................................. 16
2.5.3 Condensadores ................................................................................ 17
2.5.4 Motores ........................................................................................... 17
2.5.5 Equipamentos eléctricos em geral ................................................... 18
2.5.6 Relés de protecção, disjuntores e fusíveis ....................................... 18
2.5.7 Sistemas informáticos ..................................................................... 18
2.5.8 Aparelhos de medida ....................................................................... 19
Capítulo 3 - Filtros Activos Paralelos e Topologias dos Inversores Trifásicos .. 21
3.1 Filtros Activos de Potência Paralelos ................................................... 21
3.1.1 Problemas causados pelas cargas não lineares ................................ 21
3.1.2 Actuação do filtro ............................................................................ 22
3.1.3 Constituição do filtro ...................................................................... 23
3.2 Filtro Activo Paralelo Monofásico ....................................................... 24
3.3 Interface do filtro activo com a rede eléctrica ...................................... 25
3.4 Inversores trifásicos .............................................................................. 25
3.4.1 Topologia VSI de 2 níveis .............................................................. 26
3.4.2 Topologia VSI de 3 níveis .............................................................. 27
3.4.3 Topologia VSI de pontes monofásicas ............................................ 28
3.4.4 Topologia utilizada neste trabalho .................................................. 29
3.5 Tipos de controlo de inversores ............................................................ 30
3.5.1 Comparador com histerese .............................................................. 30
3.5.2 Amostragem periódica .................................................................... 32
3.5.3 PWM ............................................................................................... 32
3.5.4 Técnica de controlo utilizada na implementação ............................ 36
3.6 Filtro de saída do andar de potência ..................................................... 36
xi
Capítulo 4 - Simulação do Inversor Controlado por Corrente ............................ 41
4.1 Vantagens da utilização de ferramentas de simulação .......................... 41
4.2 Matlab / Simulink e SimPowerSystems ................................................. 42
4.3 Diagrama de blocos do sistema simulado ............................................. 43
4.4 Simulação do inversor .......................................................................... 44
4.4.1 Simulação em malha aberta ............................................................ 44
4.4.2 Simulação em malha fechada .......................................................... 46
Capítulo 5 - Implementação do Inversor Controlado por Corrente .................... 61
5.1 Circuito rectificador .............................................................................. 61
5.1.1 Esquema do circuito utilizado ......................................................... 62
5.2 Inversor ................................................................................................. 62
5.2.1 Esquema do circuito utilizado ......................................................... 63
5.3 Sistema de controlo ............................................................................... 64
5.3.1 Configuração do PWM ................................................................... 69
5.3.2 Configuração do ADC .................................................................... 70
5.3.3 Esquema do circuito utilizado ......................................................... 71
5.4 Interface do microcontrolador com o inversor ..................................... 72
5.4.1 Acoplamento óptico ........................................................................ 72
5.4.2 Circuito de drive .............................................................................. 73
5.4.3 Esquema do circuito utilizado ......................................................... 74
5.5 Circuito de medição das correntes ........................................................ 76
5.5.1 Sensor de efeito Hall ....................................................................... 76
5.5.2 Circuito de condicionamento do sinal ............................................. 77
5.5.3 Esquema do circuito utilizado ......................................................... 79
5.6 Filtro LC ............................................................................................... 80
5.6.1 Esquema do circuito utilizado ......................................................... 81
5.7 Diagrama de blocos completo da implementação ................................ 81

xii
Capítulo 6 - Resultados Experimentais ............................................................... 83
6.1 Resultados em malha aberta.................................................................. 83
6.2 Resultados em malha fechada ............................................................... 86
Capítulo 7 - Conclusões e Propostas de Trabalho Futuro ................................... 91
7.1 Conclusões ............................................................................................ 91
7.2 Propostas de trabalho futuro ................................................................. 93
Referências ......................................................................................................... 95
xiii
Índice de Figuras
Figura 2.1 – Onda fundamental e 5º harmónico [3] ......................................................... 5
Figura 2.2 – Soma da fundamental com o 5º harmónico [3] ............................................ 6
Figura 2.3 – Tensão e corrente numa carga não linear [2] ............................................... 8
Figura 2.4 – Onda de corrente e respectivo espectro harmónico [7] ................................ 9
Figura 2.5 – Curva de magnetização típica de um transformador [11] .......................... 11
Figura 2.6 – Corrente do lado do primário de um transformador com núcleo saturado 12
Figura 2.7 – Corrente consumida por um variador de velocidade [4] ............................ 12
Figura 2.8 – Espectro harmónico da corrente consumida por um variador de velocidade
[4] ................................................................................................................................... 13
Figura 2.9 – Tensão e corrente de um rectificador monofásico com filtro capacitivo [12]
........................................................................................................................................ 13
Figura 2.10 – Corrente de uma lâmpada fluorescente com balastro electromagnético
[13] ................................................................................................................................. 14
Figura 2.11 – Corrente de uma lâmpada fluorescente com balastro electrónico [13] .... 14
Figura 2.12 – Corrente de uma televisão [13] ................................................................ 15
Figura 2.13 – Corrente de um sistema de ar condicionado [13] ..................................... 15
Figura 2.14 – Corrente de um microondas [13].............................................................. 15
Figura 3.1 – Sistema com uma carga equilibrada e outra desequilibrada [1] ................. 22
Figura 3.2 – Sistema desequilibrado com filtro activo paralelo a actuar [1] .................. 22
Figura 3.3 – Esquema de ligações de um filtro activo paralelo [2] ................................ 23
Figura 3.4 – Sistema monofásico com filtro activo paralelo a actuar [2] ....................... 24
Figura 3.5 – Esquema da ligação de fontes de energia renovável à rede através de um
filtro activo [15] .............................................................................................................. 25
Figura 3.6 – Topologia VSI ............................................................................................ 26
Figura 3.7 – Topologia CSI ............................................................................................ 26
Figura 3.8 – Esquema de um inversor VSI de 3 níveis [18] ........................................... 27
Figura 3.9 - Esquema de um inversor VSI de pontes monofásicas [18] ........................ 29
Figura 3.10 – Exemplo do funcionamento de um comparador com histerese [21] ........ 31
Figura 3.11 – Diagrama de blocos de um comparador com histerese [21] .................... 31
Figura 3.12 – Esquema de um controlador com amostragem periódica [18] ................. 32
Figura 3.13 – Funcionamento do PWM [23] .................................................................. 33
xiv
Figura 3.14 – Modulação num inversor trifásico [23] .................................................... 34
Figura 3.15 – Zonas de operação do PWM [23]............................................................. 36
Figura 3.16 – Esquema de um filtro LC [20] ................................................................. 37
Figura 3.17 – Esquema de um filtro LCL [20] ............................................................... 37
Figura 3.18 – Resposta em frequência de um filtro LC [24] .......................................... 38
Figura 3.19 - Fase do filtro em função da frequência [24] ............................................. 39
Figura 4.1 – Ambiente do Matlab/Simulink ................................................................... 42
Figura 4.2 – Diagrama de blocos do sistema simulado .................................................. 43
Figura 4.3 – Sistema de controlo em malha aberta ........................................................ 45
Figura 4.4 – Simulações em malha aberta com diferentes índices de modulação .......... 45
Figura 4.5 – Simulações em malha aberta com diferentes cargas .................................. 46
Figura 4.6 – Sistema de controlo com ganho unitário .................................................... 47
Figura 4.7 – Simulação com cargas de 10Ω em triângulo .............................................. 47
Figura 4.8 – Simulação com cargas de 10Ω em estrela .................................................. 48
Figura 4.9 – Simulações com cargas de 20Ω ................................................................. 48
Figura 4.10 – Simulações com cargas de 30Ω ............................................................... 49
Figura 4.11 – Simulações com tensão de 565V do lado CC .......................................... 49
Figura 4.12 – Simulação com carga desequilibrada em triângulo .................................. 50
Figura 4.13 – Simulação com carga desequilibrada em estrela ...................................... 50
Figura 4.14 – Sistema com controlo proporcional ......................................................... 51
Figura 4.15 – Simulações com cargas de 30Ω ............................................................... 51
Figura 4.16 – Simulações com cargas de 50Ω ............................................................... 52
Figura 4.17 – Simulações com tensão de 565V do lado CC .......................................... 52
Figura 4.18 – Simulação com carga desequilibrada em triângulo .................................. 53
Figura 4.19 – Simulação com carga desequilibrada em estrela ...................................... 53
Figura 4.20 – Sistema com controlo PI .......................................................................... 54
Figura 4.21 – Simulações com cargas de 30Ω ............................................................... 54
Figura 4.22 – Simulações com cargas de 150Ω (triângulo) e 50Ω (estrela) .................. 55
Figura 4.23 – Simulações com tensão de 565V do lado CC .......................................... 55
Figura 4.24 – Simulação com carga desequilibrada em triângulo .................................. 56
Figura 4.25 – Simulação com carga desequilibrada em estrela ...................................... 56
Figura 4.26 – Simulação com carga indutiva ................................................................. 57
Figura 4.27 – Simulação com carga capacitiva .............................................................. 57
Figura 4.28 – Sinal de referência não sinusoidal ............................................................ 58
xv
Figura 4.29 – Simulações com cargas de 50Ω ............................................................... 58
Figura 4.30 – Simulação com carga indutiva ................................................................. 59
Figura 4.31 – Simulação com carga capacitiva .............................................................. 59
Figura 5.1 – Diagrama de blocos do circuito rectificador .............................................. 61
Figura 5.2 – Esquema do circuito rectificador ............................................................... 62
Figura 5.3 – Diagrama de blocos do inversor ................................................................. 63
Figura 5.4 – Esquema do circuito inversor ..................................................................... 63
Figura 5.5 – Diagrama de blocos do sistema de controlo ............................................... 64
Figura 5.6 - Programador ............................................................................................... 66
Figura 5.7 – Ambiente do MPLAB IDE......................................................................... 67
Figura 5.8 – Fluxograma do algoritmo de controlo ........................................................ 68
Figura 5.9 – Esquema do circuito de controlo ................................................................ 71
Figura 5.10 – Diagrama de blocos do circuito de interface ............................................ 72
Figura 5.11 – Esquema típico de um circuito de acoplamento óptico ............................ 72
Figura 5.12 – Esquema do circuito de interface ............................................................. 75
Figura 5.13 – Diagrama de blocos do circuito de medição das correntes ...................... 76
Figura 5.14 – Circuito somador ...................................................................................... 77
Figura 5.15 – Esquema do circuito de medição das correntes........................................ 79
Figura 5.16 – Diagrama de blocos do filtro LC .............................................................. 80
Figura 5.17 – Esquema do filtro LC ............................................................................... 81
Figura 5.18 – Diagrama de blocos da implementação.................................................... 82
Figura 6.1 – Tensões compostas em vazio ..................................................................... 83
Figura 6.2 – Diagrama fasorial das tensões .................................................................... 84
Figura 6.3 – Espectro harmónico da tensão em vazio .................................................... 84
Figura 6.4 – Tensões de saída com carga de 100Ω em estrela ....................................... 85
Figura 6.5 – Tensões de saída com carga de 50Ω em estrela ......................................... 85
Figura 6.6 – Tensões de saída com carga de 30Ω em estrela ......................................... 86
Figura 6.7 – Espectro harmónico da tensão em malha fechada...................................... 87
Figura 6.8 – Tensões de saída com carga de 45Ω em estrela ......................................... 87
Figura 6.9 – Tensões de saída com carga de 60Ω em estrela ......................................... 88
Figura 6.10 – Tensões de saída com carga desequilibrada ............................................. 88
Figura 6.11 - Tensões de saída com carga desequilibrada ............................................. 89

xvi
xvii
Lista de siglas e acrónimos
R Resistência
L Indutância
C Capacidade
v Tensão
Vcc Tensão do lado CC
V Tensão eficaz
Tensão de pico
i Corrente
I Corrente eficaz
Corrente de pico
f Frequência
0 Frequência de corte
cos(ø) Desfasamento entre a
tensão e a corrente
V Volt
A Ampere
Ω Ohm
W Watt
H Henry
F Faraday
Hz Hertz
s Segundo
rad/s Radianos por segundo
º Graus
dB Decibéis
n Nano (10-9)
µ Micro (10-6)
m Mili (10-3)
k Kilo (103)
M Mega (106)
THD Taxa de Distorção
Harmónica
FC Factor de Crista
FP Factor de Potência
P Potência activa
S Potência aparente
PWM Pulse With Modulation
VSI Voltage Source Inverter
CSI Current Source Inverter
CC Corrente Contínua
NPC Neutral Point Clamped
VCI Voltage-Controlled
Inverter
CCI Current-Controlled
Inverter
PI Proporcional Integral
ADC Analog to Digital
Converter
USB Universal Serial Bus
LC Indutivo e Capacitivo
xviii
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 1
Capítulo 1
Introdução
Neste capítulo introdutório é efectuada uma abordagem aos vários métodos
existentes para reduzir o conteúdo harmónico da rede eléctrica, tendo em especial
atenção, os filtros activos paralelos, de modo a enquadrar o trabalho no seu âmbito.
Pretende-se assim, perceber melhor quais as motivações e a importância de fazer um
inversor de tensão controlado por corrente. Serão também apresentados os objectivos
principais da dissertação e a sua estrutura, para se compreender melhor como serão
abordados os diversos capítulos.
1.1 Enquadramento
Até há pouco tempo atrás, pouco ou nada se discutia sobre o problema dos
harmónicos. As cargas na sua grande maioria eram lineares e desta forma as correntes
consumidas eram sinusoidais. Quando se falava em problemas da qualidade de energia,
tratava-se essencialmente da compensação do factor de potência e continuidade do
serviço de distribuição. No entanto, nos dias de hoje, o uso cada vez intensivo de cargas
não lineares, tem provocado o aumento do conteúdo harmónico na rede eléctrica, o que
causa diversos problemas tanto no transporte como na distribuição da energia.
O aumento das perdas de energia, o aparecimento de correntes onde elas não
deveriam existir, um mau funcionamento de alguns dispositivos de protecção, o
sobreaquecimento de alguns componentes e a diminuição do seu tempo de vida útil, são
alguns exemplos de problemas causados pelos harmónicos que merecem alguma
atenção. Existem essencialmente duas formas de resolver o problema dos harmónicos.
As soluções passam pela utilização de filtros passivos ou de filtros activos.
Os filtros passivos são os mais utilizados actualmente. No entanto, apesar de
serem mais simples de implementar e mais económicos apresentam várias
desvantagens. Estes filtros consistem num circuito LC (indutivo e capacitivo)
sintonizado de modo a que a sua impedância tenha o valor mais baixo possível à
frequência de um harmónico. Isto significa que estes filtros apenas filtram as
frequências para as quais foram sintonizados. Para além dessa desvantagem, estes filtros
Introdução
2 Departamento de Electrónica Industrial
devem ser sobredimensionados porque não é possível limitar a potência que irão
suportar. Podem também provocar fenómenos de ressonância com outras cargas e o seu
dimensionamento deve ter em atenção as necessidades de potência reactiva da carga.
Devido a todos estes factores, a utilização de filtros activos torna-se na maioria dos
casos mais vantajosa do que a utilização de filtros passivos [1].
Os filtros activos, funcionam de forma dinâmica, o que lhes permite operar
mesmo com uma constante alteração das cargas onde estão inseridos. Como só
fornecem a energia que lhes é permitida, de acordo com as suas características técnicas,
não sofrem danos ao compensar os harmónicos. Estes filtros dividem-se em dois tipos,
os filtros activos série e os filtros activos paralelos. Existe ainda a possibilidade de
combinar ambos. O filtro activo série como o seu nome indica é utilizado em série com
a carga e tem como principal objectivo compensar tensões distorcidas, isto é, adicionar
às fontes ou à rede eléctrica as tensões de compensação de modo a que estas fiquem
sinusoidais. O filtro activo paralelo por sua vez funciona em paralelo com a carga e tem
como objectivo injectar correntes nas linhas de modo a compensar as distorções. A
energia reactiva é fornecida pelo filtro tal como os harmónicos. Para além disso, o filtro
também redistribui as correntes pelas fases e pelo neutro de forma a equilibrar a carga.
O inversor desenvolvido neste trabalho adequa-se a este tipo de filtros podendo trazer
algumas vantagens em relação aos inversores mais utilizados [2].
1.2 Motivações
Com o aumento da utilização das cargas não lineares e, consequentemente, o
agravamento dos problemas de qualidade da energia, torna-se necessário o estudo e
desenvolvimento de novas tecnologias capazes de suprimir ou, pelo menos, minimizar
os seus efeitos indesejáveis, contribuindo, desta forma, para uma melhor distribuição de
energia aos consumidores.
Neste trabalho, dá-se especial atenção ao problema dos harmónicos, uma vez
que, são eles que motivam o estudo desenvolvido. Devido à necessidade de diminuir a
presença dos harmónicos na rede, evitando danos nas cargas e instalações, foram criadas
normas relativamente ao seu conteúdo máximo permitido em diversas situações. O
respeito dessas normas ajuda a controlar a quantidade de harmónicos na rede, na medida
em que obriga a maiores cuidados no fabrico de novos aparelhos e à busca de soluções
para reduzir os efeitos indesejados das cargas já instaladas.
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 3
Actualmente, as soluções existentes para resolver os problemas causados pelos
harmónicos são pouco utilizadas e passam, na maioria dos casos, pela utilização de
filtros passivos. No entanto, esta solução é a mais barata mas não é a melhor. A melhor
solução, nos dias de hoje, é a utilização de filtros activos, em especial o filtro activo
paralelo. Deste modo, é importante apostar no desenvolvimento destes filtros para que
se tornem mais eficazes e para que passem a ser uma aposta sólida no futuro, tanto nas
empresas como nas casas particulares. Os filtros activos paralelos actuais utilizam, na
maioria das vezes, inversores com uma frequência de comutação variável. No entanto,
um inversor com frequência de comutação fixa pode acrescentar algumas vantagens ao
filtro, uma vez que, permite um melhor conhecimento sobre os harmónicos que surgem
devido às comutações do inversor, facilitando a sua filtragem. Este aspecto foi o
principal motivo que levou à realização deste trabalho porque utilizando inversores mais
adequados às necessidades existentes os filtros activos poder-se-ão tornar ainda mais
eficientes.
1.3 Objectivos da Dissertação
Esta dissertação tem como principais objectivos:
Estudo comparativo das diversas topologias e algoritmos de controlo dos
inversores controlados por corrente.
Desenvolvimento de modelos computacionais de inversores fontes de tensão
controlados por corrente com os respectivos sistemas de controlo em malha
fechada.
Implementação de um inversor fonte de corrente trifásico, para aplicação em
filtros activos paralelos.
Implementação de um sistema de controlo baseado em microcontrolador e
respectivas interfaces.
1.4 Organização da Dissertação
Esta dissertação encontra-se dividida em sete capítulos. Cada capítulo descreve
uma etapa diferente da realização do trabalho. Desta forma, a dissertação encontra-se
organizada da seguinte forma:
Introdução
4 Departamento de Electrónica Industrial
No capítulo introdutório é feita uma abordagem aos Filtros Activos Paralelos e
as suas aplicações. Deste modo fica-se a compreender melhor o contexto em que os
Inversores controlados por corrente se inserem.
No segundo capítulo é feito um estudo sobre os harmónicos. Explica-se, em que
consistem os harmónicos, como se formam e como se quantificam. São dados também
vários exemplos de cargas que provocam harmónicos, assim como, cargas que são
tipicamente afectadas por eles.
O terceiro capítulo apresenta vários temas. Em primeiro lugar é feita uma
abordagem a vários aspectos importantes relacionados com os filtros activos paralelos.
São explicados os seus princípios de funcionamento, assim como, a sua constituição.
Depois, segue-se um estudo sobre várias topologias de inversores e algumas técnicas de
controlo que se podem aplicar. Por último, faz-se uma abordagem aos filtros LC e suas
principais características.
No quarto capítulo encontra-se a simulação do trabalho feita em
Matlab/Simulink. Neste capítulo pode-se ver o comportamento do inversor e do filtro
LC em termos teóricos, assim como o seu diagrama de blocos que serve de base à sua
implementação.
No capítulo cinco descreve-se a implementação do trabalho. São abordadas
detalhadamente todas as etapas realizadas, tal como, os cálculos efectuados. São
também apresentados os circuitos montados.
O capítulo seis contém os resultados experimentais. Neste capítulo podem-se
visualizar as principais formas de onda obtidas e algumas medições efectuadas.
Por último, no sétimo capítulo apresentam-se as conclusões relativamente ao
trabalho realizado, incluindo também a análise dos resultados obtidos
experimentalmente. São ainda descritas algumas propostas de trabalho futuro que visam
um melhoramento das características do inversor implementado.
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 5
Capítulo 2
Os Harmónicos na Rede Eléctrica
Este capítulo apresenta vários tópicos sobre os harmónicos de modo a obter-se
uma melhor percepção sobre o funcionamento dos filtros activos e dos inversores
controlados por corrente em particular. Assim, começa-se por explicar o que são os
harmónicos e como é que estes se formam. Depois analisam-se os principais indicadores
sobre a quantidade de harmónicos existentes. Por último são dados vários exemplos de
cargas que provocam elevado conteúdo harmónico e aquelas que são particularmente
afectadas por eles.
2.1 Definição de harmónicos
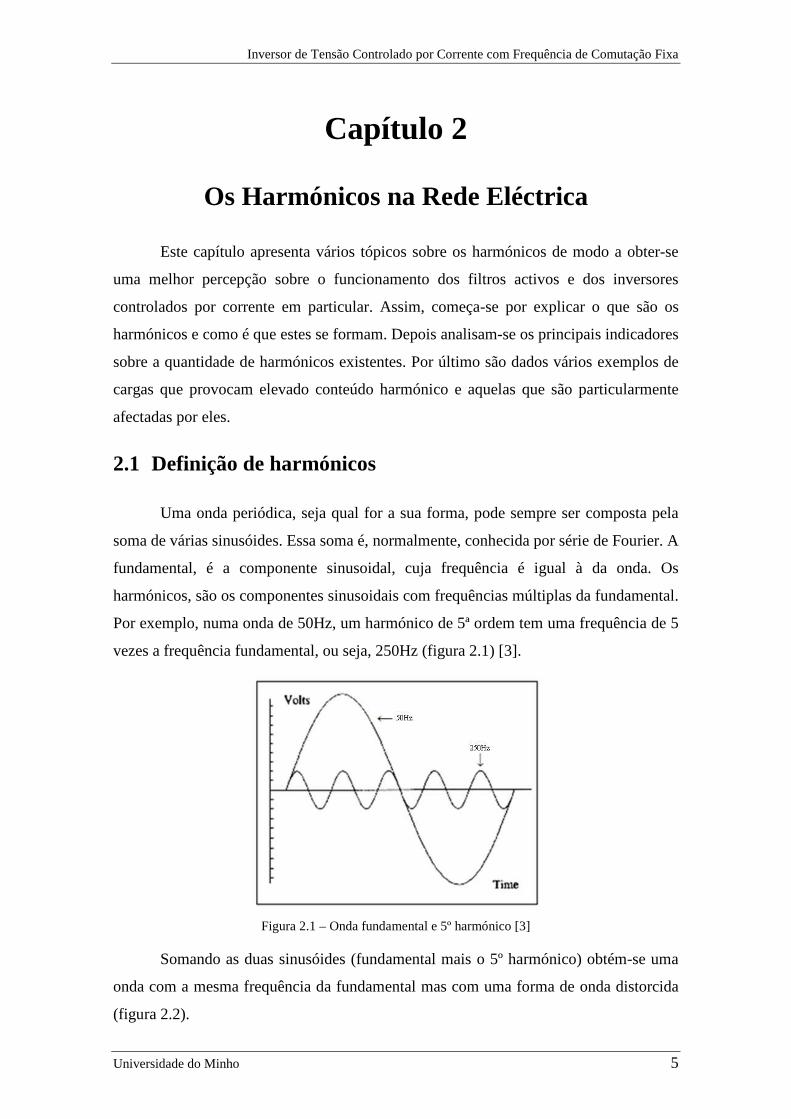
Uma onda periódica, seja qual for a sua forma, pode sempre ser composta pela
soma de várias sinusóides. Essa soma é, normalmente, conhecida por série de Fourier. A
fundamental, é a componente sinusoidal, cuja frequência é igual à da onda. Os
harmónicos, são os componentes sinusoidais com frequências múltiplas da fundamental.
Por exemplo, numa onda de 50Hz, um harmónico de 5ª ordem tem uma frequência de 5
vezes a frequência fundamental, ou seja, 250Hz (figura 2.1) [3].
Figura 2.1 – Onda fundamental e 5º harmónico [3]
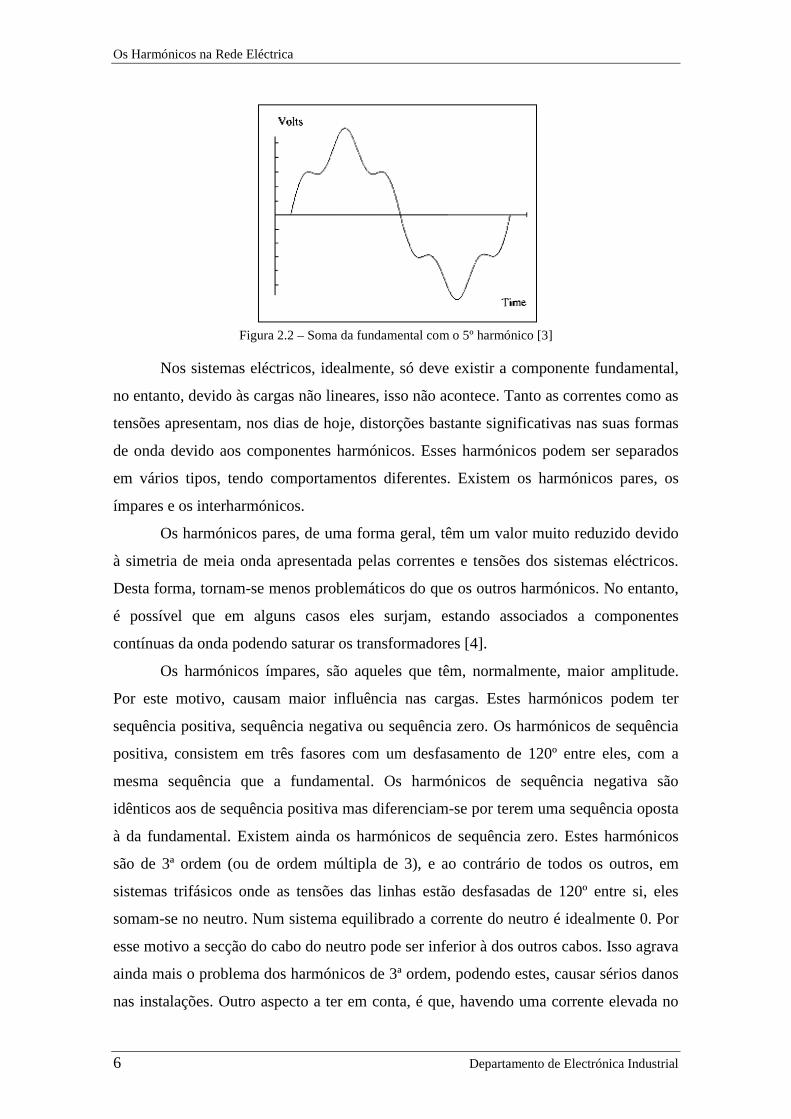
Somando as duas sinusóides (fundamental mais o 5º harmónico) obtém-se uma
onda com a mesma frequência da fundamental mas com uma forma de onda distorcida
(figura 2.2).
Os Harmónicos na Rede Eléctrica
6 Departamento de Electrónica Industrial
Figura 2.2 – Soma da fundamental com o 5º harmónico [3]
Nos sistemas eléctricos, idealmente, só deve existir a componente fundamental,
no entanto, devido às cargas não lineares, isso não acontece. Tanto as correntes como as
tensões apresentam, nos dias de hoje, distorções bastante significativas nas suas formas
de onda devido aos componentes harmónicos. Esses harmónicos podem ser separados
em vários tipos, tendo comportamentos diferentes. Existem os harmónicos pares, os
ímpares e os interharmónicos.
Os harmónicos pares, de uma forma geral, têm um valor muito reduzido devido
à simetria de meia onda apresentada pelas correntes e tensões dos sistemas eléctricos.
Desta forma, tornam-se menos problemáticos do que os outros harmónicos. No entanto,
é possível que em alguns casos eles surjam, estando associados a componentes
contínuas da onda podendo saturar os transformadores [4].
Os harmónicos ímpares, são aqueles que têm, normalmente, maior amplitude.
Por este motivo, causam maior influência nas cargas. Estes harmónicos podem ter
sequência positiva, sequência negativa ou sequência zero. Os harmónicos de sequência
positiva, consistem em três fasores com um desfasamento de 120º entre eles, com a
mesma sequência que a fundamental. Os harmónicos de sequência negativa são
idênticos aos de sequência positiva mas diferenciam-se por terem uma sequência oposta
à da fundamental. Existem ainda os harmónicos de sequência zero. Estes harmónicos
são de 3ª ordem (ou de ordem múltipla de 3), e ao contrário de todos os outros, em
sistemas trifásicos onde as tensões das linhas estão desfasadas de 120º entre si, eles
somam-se no neutro. Num sistema equilibrado a corrente do neutro é idealmente 0. Por
esse motivo a secção do cabo do neutro pode ser inferior à dos outros cabos. Isso agrava
ainda mais o problema dos harmónicos de 3ª ordem, podendo estes, causar sérios danos
nas instalações. Outro aspecto a ter em conta, é que, havendo uma corrente elevada no
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 7
neutro, as quedas de tensão nas reactâncias do cabo, principalmente em caso deste ser
longo, podem-se tornar bastante significativas. Os harmónicos de sequência zero, são
normalmente produzidos, por cargas não lineares ligadas entre fase e neutro, como é o
caso dos computadores e balastros electrónicos para lâmpadas fluorescentes [5].
Os interharmónicos, ao contrário dos anteriores, não se relacionam com a
componente fundamental. Eles surgem quando há componentes de corrente que não se
relacionam com a frequência fundamental. São, normalmente, provocados por
conversores estáticos de potência, cicloconversores, motores de indução e fornos a arco.
Os seus efeitos são flickers visuais em displays de alguns aparelhos e na iluminação [3]
[6].
2.2 Como se formam os harmónicos
Num sistema eléctrico ideal, onde só operam cargas lineares, tanto a forma de
onda da tensão como da corrente são sinusoidais. Isto porque, uma carga linear quando
é alimentada por uma tensão sinusoidal consome uma corrente também sinusoidal,
mesmo que as duas não estejam em fase. O mesmo não se sucede quando se trata de
uma carga não linear. Estas cargas consomem correntes com formas de onda diferentes
da forma de onda da tensão, não havendo uma relação proporcional entre elas, dando
assim origem aos harmónicos [7].
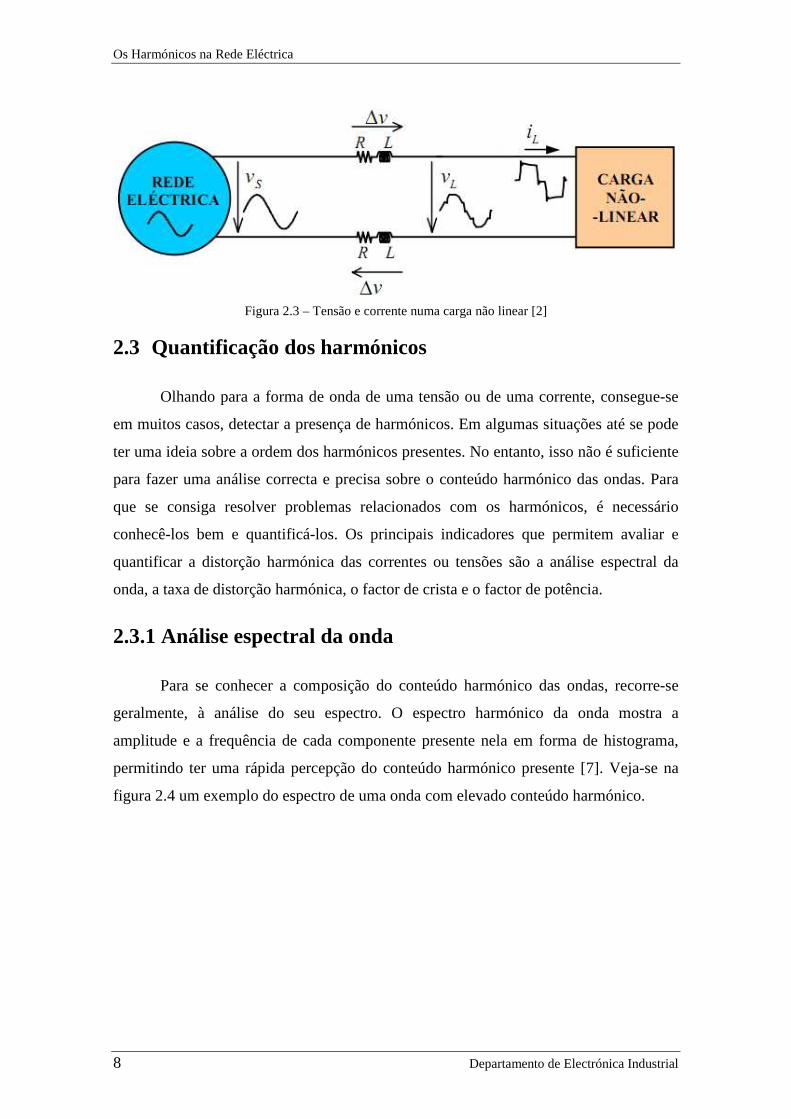
A distorção na forma de onda da tensão deve-se aos harmónicos da corrente.
Cada harmónico associado a uma corrente, causa um harmónico de ordem igual na
tensão. Isto acontece devido às impedâncias das linhas. Observando a figura 2.3, que
mostra uma carga não linear ligada à rede eléctrica, é possível observar que, a corrente
que percorre o circuito (iL), causa quedas de tensão nas impedâncias das linhas (∆v). Se
a corrente for sinusoidal a queda de tensão também será sinusoidal, no entanto, no caso
de uma corrente distorcida, cada harmónico causa uma queda de tensão nas
impedâncias, fazendo com que a tensão aos terminais da carga (vL) fique distorcida. A
amplitude da distorção na tensão depende da corrente consumida pela carga e da
impedância da linha [5].
Os Harmónicos na Rede Eléctrica
8 Departamento de Electrónica Industrial
Figura 2.3 – Tensão e corrente numa carga não linear [2]
2.3 Quantificação dos harmónicos
Olhando para a forma de onda de uma tensão ou de uma corrente, consegue-se
em muitos casos, detectar a presença de harmónicos. Em algumas situações até se pode
ter uma ideia sobre a ordem dos harmónicos presentes. No entanto, isso não é suficiente
para fazer uma análise correcta e precisa sobre o conteúdo harmónico das ondas. Para
que se consiga resolver problemas relacionados com os harmónicos, é necessário
conhecê-los bem e quantificá-los. Os principais indicadores que permitem avaliar e
quantificar a distorção harmónica das correntes ou tensões são a análise espectral da
onda, a taxa de distorção harmónica, o factor de crista e o factor de potência.
2.3.1 Análise espectral da onda
Para se conhecer a composição do conteúdo harmónico das ondas, recorre-se
geralmente, à análise do seu espectro. O espectro harmónico da onda mostra a
amplitude e a frequência de cada componente presente nela em forma de histograma,
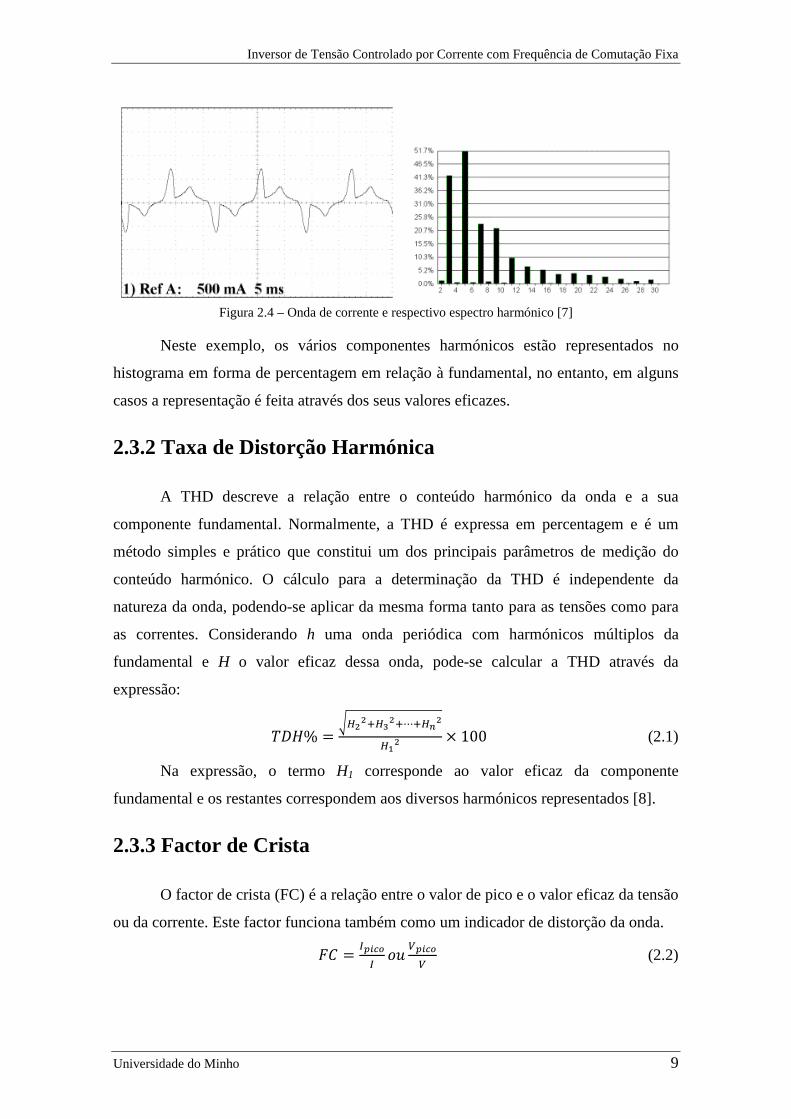
permitindo ter uma rápida percepção do conteúdo harmónico presente [7]. Veja-se na
figura 2.4 um exemplo do espectro de uma onda com elevado conteúdo harmónico.
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 9
Figura 2.4 – Onda de corrente e respectivo espectro harmónico [7]
Neste exemplo, os vários componentes harmónicos estão representados no
histograma em forma de percentagem em relação à fundamental, no entanto, em alguns
casos a representação é feita através dos seus valores eficazes.
2.3.2 Taxa de Distorção Harmónica
A THD descreve a relação entre o conteúdo harmónico da onda e a sua
componente fundamental. Normalmente, a THD é expressa em percentagem e é um
método simples e prático que constitui um dos principais parâmetros de medição do
conteúdo harmónico. O cálculo para a determinação da THD é independente da
natureza da onda, podendo-se aplicar da mesma forma tanto para as tensões como para
as correntes. Considerando h uma onda periódica com harmónicos múltiplos da
fundamental e H o valor eficaz dessa onda, pode-se calcular a THD através da
expressão:
%
100 (2.1)
Na expressão, o termo H1 corresponde ao valor eficaz da componente
fundamental e os restantes correspondem aos diversos harmónicos representados [8].
2.3.3 Factor de Crista
O factor de crista (FC) é a relação entre o valor de pico e o valor eficaz da tensão
ou da corrente. Este factor funciona também como um indicador de distorção da onda.
!
! (2.2)
Os Harmónicos na Rede Eléctrica
10 Departamento de Electrónica Industrial
Numa onda sinusoidal perfeita, o factor de crista é igual a √2. Havendo
distorção, esse valor altera-se. Nas ondas quadradas, o factor de crista é baixo. No
entanto, a maioria das cargas não lineares produz ondas com um factor de crista
superior às ondas sinusoidais. Os valores típicos estão entre 1,5 e 2 mas por vezes
podem atingir valores os 5 em alguns casos específicos o que se pode tornar bastante
inconveniente [9].
2.3.4 Factor de Potência
O factor de potência é a relação entre a potência activa e a potência aparente de
um determinado sistema. Quanto maior for o factor de potência, menor será a potência
reactiva e menores serão as perdas. Quando não existe conteúdo harmónico e
consequentemente, tanto a tensão como a corrente apresentam uma forma de onda
sinusoidal, o factor de potência é igual ao cos(ø), sendo ø o ângulo de desfasamento
entre a tensão e a corrente.
$%&' )* +&ê-%.$ /01 23ê45 5365 /2123ê45 5578438 /91 (2.3)
0 . . cos > (2.4)
? . (2.5)
Quando existem distorções na corrente, o valor eficaz dessa corrente será maior.
Isso traduz-se numa maior potência aparente. No entanto, o valor da potência activa
pouco se altera baixando assim, o factor de potência. Neste caso, o factor de potência
passa a ser diferente de cos(ø), uma vez que ø é o ângulo de desfasamento entre a tensão
e a corrente fundamentais. Desta forma, pode concluir-se que quanto maior for a
diferença entre o factor de potência e cos(ø) maior é a distorção da corrente [10].
2.4 Cargas que provocam harmónicos
As cargas não lineares, devido ao forte desenvolvimento da electrónica de
potência, começaram a ser largamente utilizadas nos últimos tempos, principalmente,
com o objectivo de optimizar o consumo de energia e controlar de forma mais eficaz a
tensão ou a corrente de determinados sistemas. No entanto, estas cargas influenciam as
instalações, podendo até causar danos em diversos equipamentos, aumentando também
as perdas de energia [3].
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 11
A seguir, estão exemplificados vários casos de cargas geradoras de harmónicos
que são muito utilizadas. Pode-se também, ver algumas formas de onda típicas das
correntes consumidas por essas cargas.
2.4.1 Transformadores
Os transformadores costumam ser considerados componentes lineares. Isso é
verdade quando estes operam em condições onde não se verifica saturação do fluxo
magnético no seu núcleo. Caso contrário, apresentam um comportamento não linear,
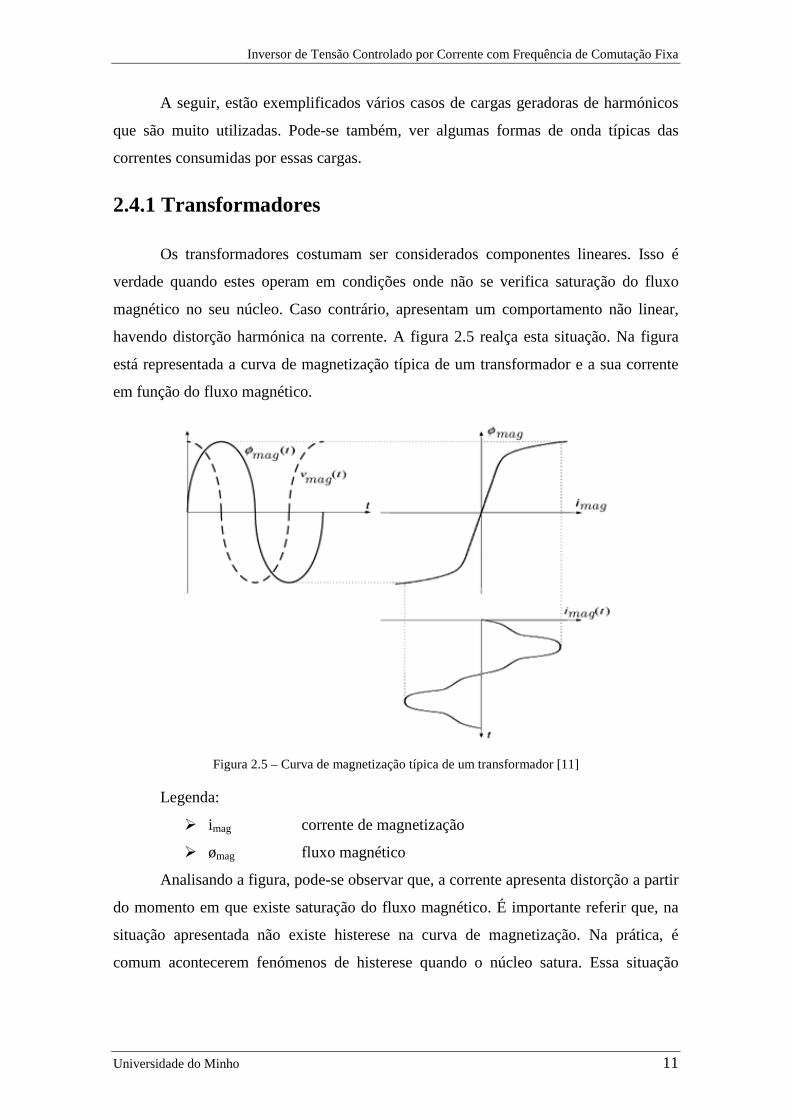
havendo distorção harmónica na corrente. A figura 2.5 realça esta situação. Na figura
está representada a curva de magnetização típica de um transformador e a sua corrente
em função do fluxo magnético.
Figura 2.5 – Curva de magnetização típica de um transformador [11]
Legenda:
imag corrente de magnetização
ømag fluxo magnético
Analisando a figura, pode-se observar que, a corrente apresenta distorção a partir
do momento em que existe saturação do fluxo magnético. É importante referir que, na
situação apresentada não existe histerese na curva de magnetização. Na prática, é
comum acontecerem fenómenos de histerese quando o núcleo satura. Essa situação
Os Harmónicos na Rede Eléctrica
12 Departamento de Electrónica Industrial
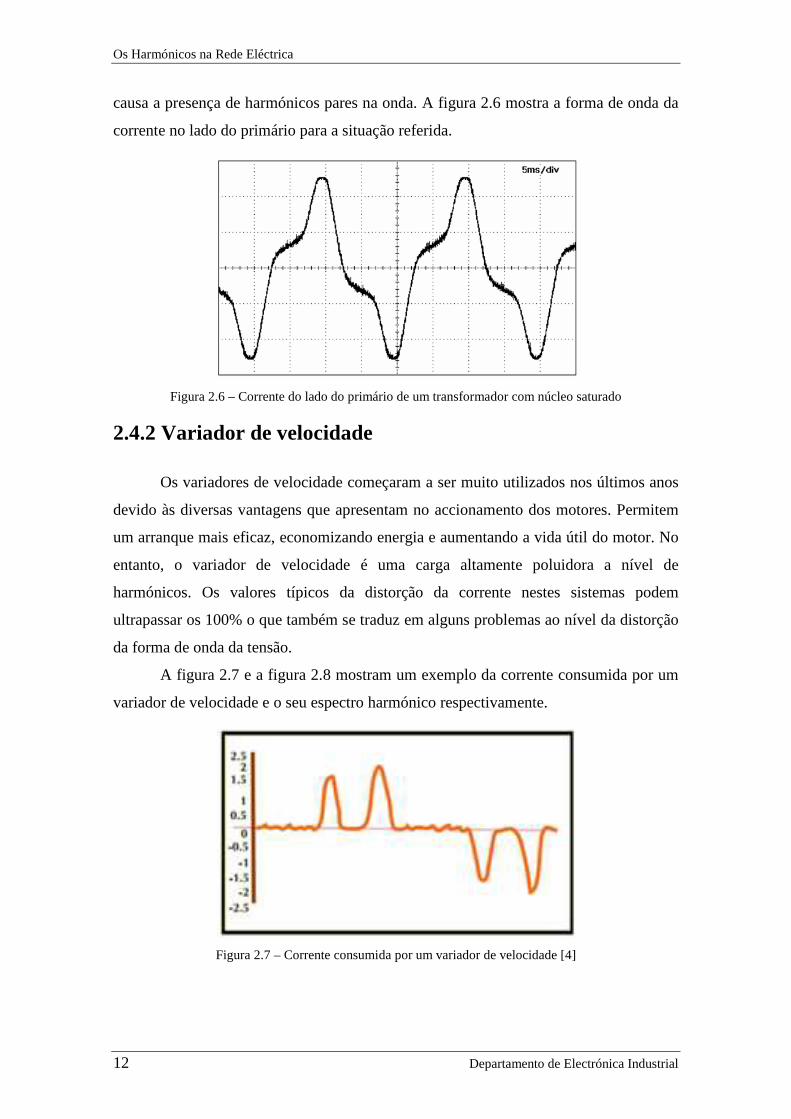
causa a presença de harmónicos pares na onda. A figura 2.6 mostra a forma de onda da
corrente no lado do primário para a situação referida.
Figura 2.6 – Corrente do lado do primário de um transformador com núcleo saturado
2.4.2 Variador de velocidade
Os variadores de velocidade começaram a ser muito utilizados nos últimos anos
devido às diversas vantagens que apresentam no accionamento dos motores. Permitem
um arranque mais eficaz, economizando energia e aumentando a vida útil do motor. No
entanto, o variador de velocidade é uma carga altamente poluidora a nível de
harmónicos. Os valores típicos da distorção da corrente nestes sistemas podem
ultrapassar os 100% o que também se traduz em alguns problemas ao nível da distorção
da forma de onda da tensão.
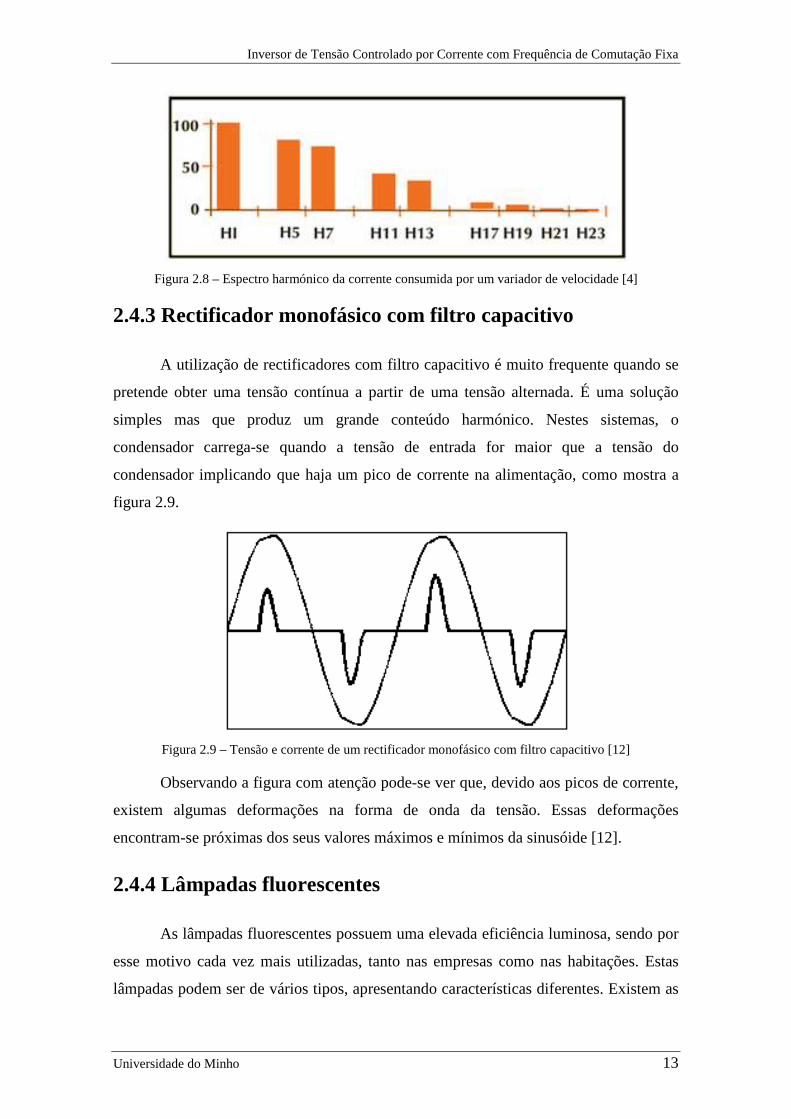
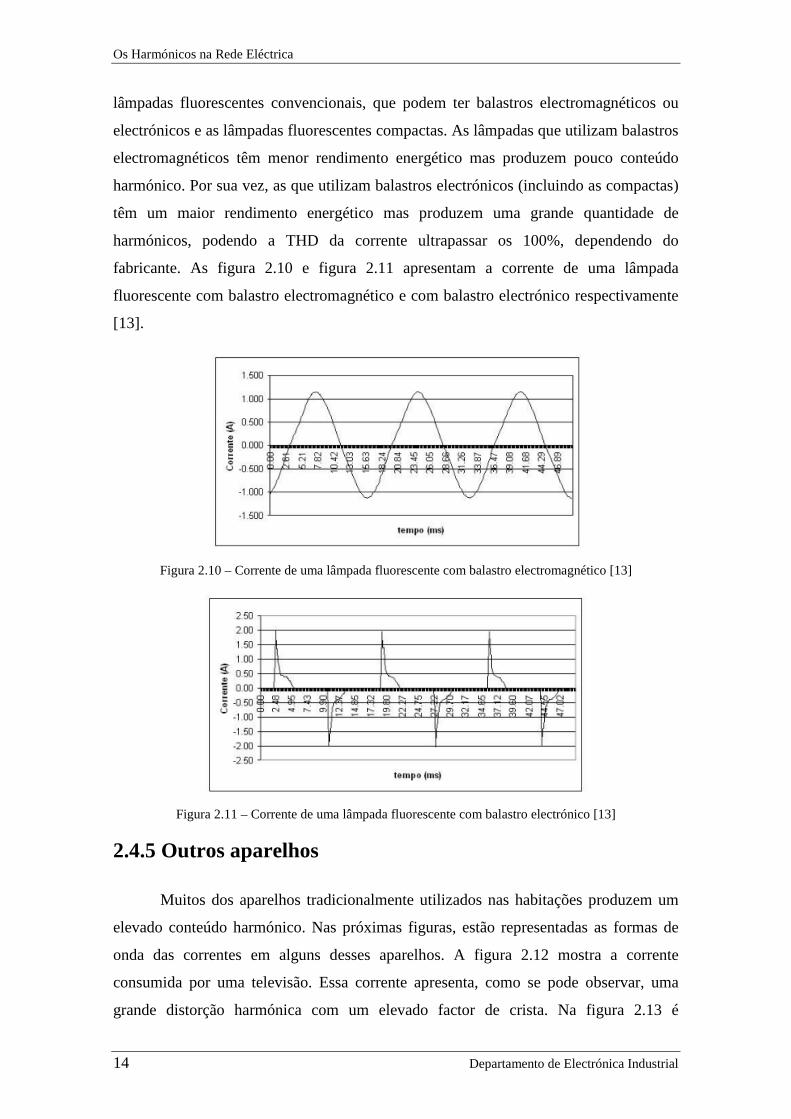
A figura 2.7 e a figura 2.8 mostram um exemplo da corrente consumida por um
variador de velocidade e o seu espectro harmónico respectivamente.
Figura 2.7 – Corrente consumida por um variador de velocidade [4]
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 13
Figura 2.8 – Espectro harmónico da corrente consumida por um variador de velocidade [4]
2.4.3 Rectificador monofásico com filtro capacitivo
A utilização de rectificadores com filtro capacitivo é muito frequente quando se
pretende obter uma tensão contínua a partir de uma tensão alternada. É uma solução
simples mas que produz um grande conteúdo harmónico. Nestes sistemas, o
condensador carrega-se quando a tensão de entrada for maior que a tensão do
condensador implicando que haja um pico de corrente na alimentação, como mostra a
figura 2.9.
Figura 2.9 – Tensão e corrente de um rectificador monofásico com filtro capacitivo [12]
Observando a figura com atenção pode-se ver que, devido aos picos de corrente,
existem algumas deformações na forma de onda da tensão. Essas deformações
encontram-se próximas dos seus valores máximos e mínimos da sinusóide [12].
2.4.4 Lâmpadas fluorescentes
As lâmpadas fluorescentes possuem uma elevada eficiência luminosa, sendo por
esse motivo cada vez mais utilizadas, tanto nas empresas como nas habitações. Estas
lâmpadas podem ser de vários tipos, apresentando características diferentes. Existem as
Os Harmónicos na Rede Eléctrica
14 Departamento de Electrónica Industrial
lâmpadas fluorescentes convencionais, que podem ter balastros electromagnéticos ou
electrónicos e as lâmpadas fluorescentes compactas. As lâmpadas que utilizam balastros
electromagnéticos têm menor rendimento energético mas produzem pouco conteúdo
harmónico. Por sua vez, as que utilizam balastros electrónicos (incluindo as compactas)
têm um maior rendimento energético mas produzem uma grande quantidade de
harmónicos, podendo a THD da corrente ultrapassar os 100%, dependendo do
fabricante. As figura 2.10 e figura 2.11 apresentam a corrente de uma lâmpada
fluorescente com balastro electromagnético e com balastro electrónico respectivamente
[13].
Figura 2.10 – Corrente de uma lâmpada fluorescente com balastro electromagnético [13]
Figura 2.11 – Corrente de uma lâmpada fluorescente com balastro electrónico [13]
2.4.5 Outros aparelhos
Muitos dos aparelhos tradicionalmente utilizados nas habitações produzem um
elevado conteúdo harmónico. Nas próximas figuras, estão representadas as formas de
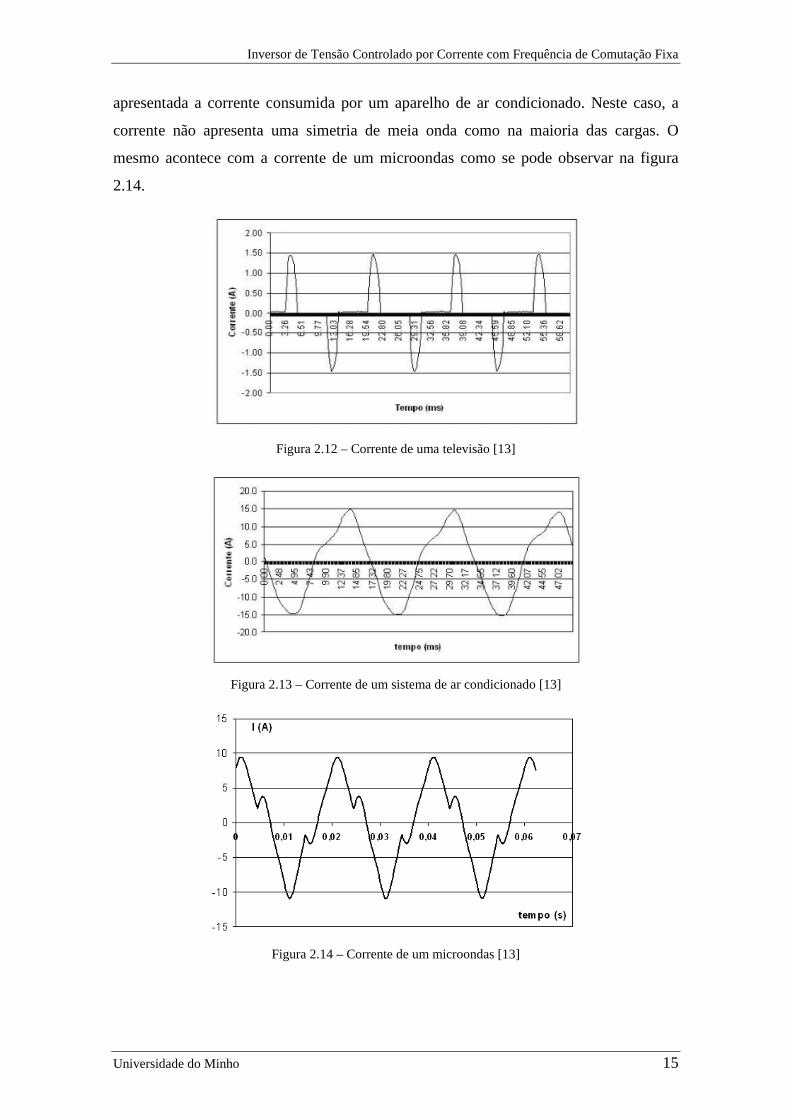
onda das correntes em alguns desses aparelhos. A figura 2.12 mostra a corrente
consumida por uma televisão. Essa corrente apresenta, como se pode observar, uma
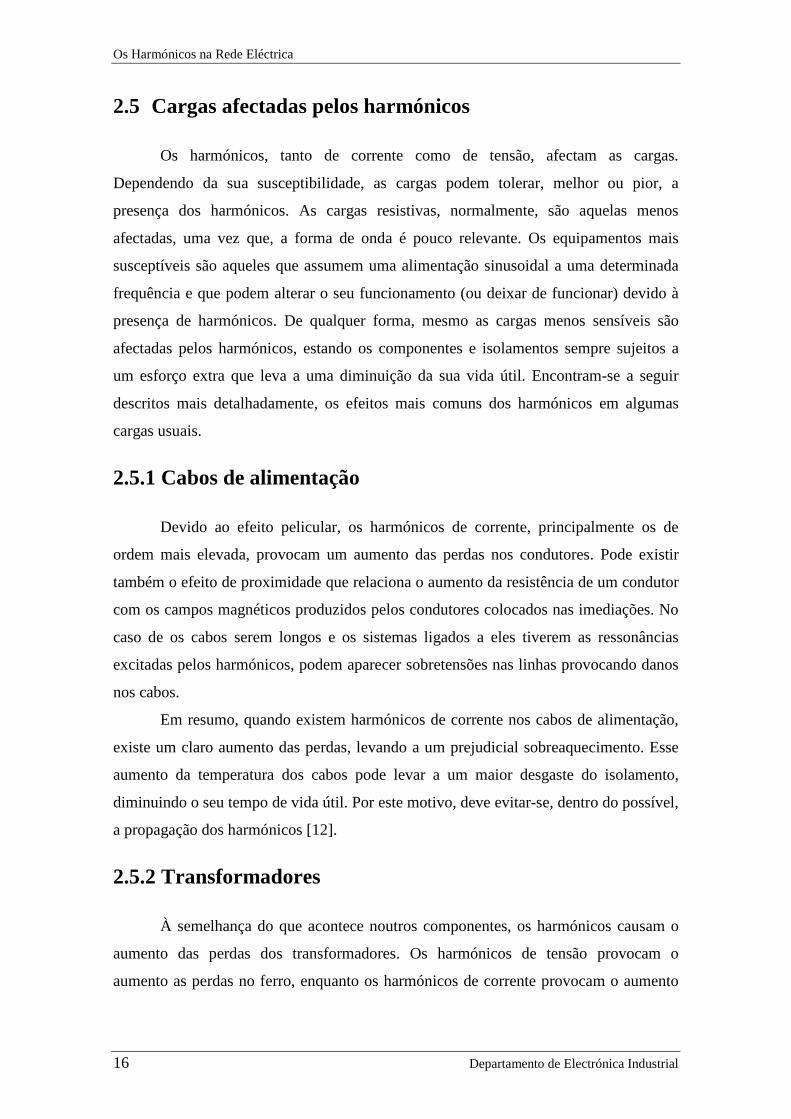
grande distorção harmónica com um elevado factor de crista. Na figura 2.13 é
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 15
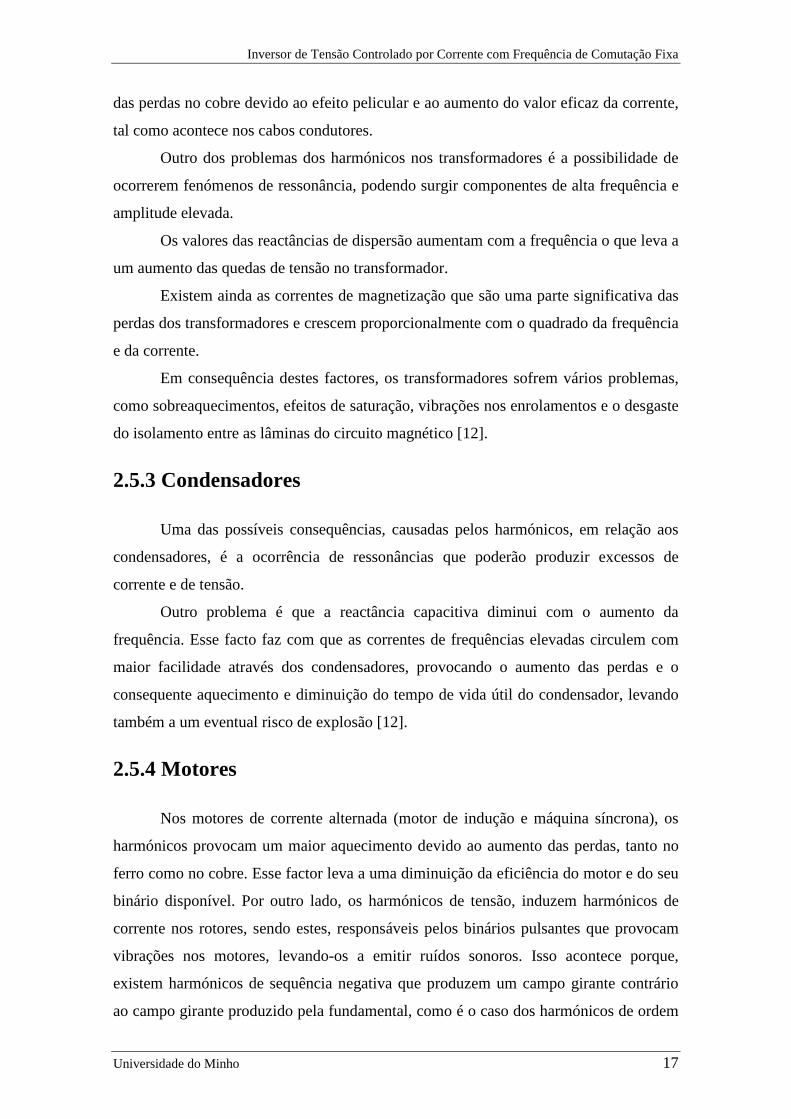
apresentada a corrente consumida por um aparelho de ar condicionado. Neste caso, a
corrente não apresenta uma simetria de meia onda como na maioria das cargas. O
mesmo acontece com a corrente de um microondas como se pode observar na figura
2.14.
Figura 2.12 – Corrente de uma televisão [13]
Figura 2.13 – Corrente de um sistema de ar condicionado [13]
Figura 2.14 – Corrente de um microondas [13]
Os Harmónicos na Rede Eléctrica
16 Departamento de Electrónica Industrial
2.5 Cargas afectadas pelos harmónicos
Os harmónicos, tanto de corrente como de tensão, afectam as cargas.
Dependendo da sua susceptibilidade, as cargas podem tolerar, melhor ou pior, a
presença dos harmónicos. As cargas resistivas, normalmente, são aquelas menos
afectadas, uma vez que, a forma de onda é pouco relevante. Os equipamentos mais
susceptíveis são aqueles que assumem uma alimentação sinusoidal a uma determinada
frequência e que podem alterar o seu funcionamento (ou deixar de funcionar) devido à
presença de harmónicos. De qualquer forma, mesmo as cargas menos sensíveis são
afectadas pelos harmónicos, estando os componentes e isolamentos sempre sujeitos a
um esforço extra que leva a uma diminuição da sua vida útil. Encontram-se a seguir
descritos mais detalhadamente, os efeitos mais comuns dos harmónicos em algumas
cargas usuais.
2.5.1 Cabos de alimentação
Devido ao efeito pelicular, os harmónicos de corrente, principalmente os de
ordem mais elevada, provocam um aumento das perdas nos condutores. Pode existir
também o efeito de proximidade que relaciona o aumento da resistência de um condutor
com os campos magnéticos produzidos pelos condutores colocados nas imediações. No
caso de os cabos serem longos e os sistemas ligados a eles tiverem as ressonâncias
excitadas pelos harmónicos, podem aparecer sobretensões nas linhas provocando danos
nos cabos.
Em resumo, quando existem harmónicos de corrente nos cabos de alimentação,
existe um claro aumento das perdas, levando a um prejudicial sobreaquecimento. Esse
aumento da temperatura dos cabos pode levar a um maior desgaste do isolamento,
diminuindo o seu tempo de vida útil. Por este motivo, deve evitar-se, dentro do possível,
a propagação dos harmónicos [12].
2.5.2 Transformadores
À semelhança do que acontece noutros componentes, os harmónicos causam o
aumento das perdas dos transformadores. Os harmónicos de tensão provocam o
aumento as perdas no ferro, enquanto os harmónicos de corrente provocam o aumento
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 17
das perdas no cobre devido ao efeito pelicular e ao aumento do valor eficaz da corrente,
tal como acontece nos cabos condutores.
Outro dos problemas dos harmónicos nos transformadores é a possibilidade de
ocorrerem fenómenos de ressonância, podendo surgir componentes de alta frequência e
amplitude elevada.
Os valores das reactâncias de dispersão aumentam com a frequência o que leva a
um aumento das quedas de tensão no transformador.
Existem ainda as correntes de magnetização que são uma parte significativa das
perdas dos transformadores e crescem proporcionalmente com o quadrado da frequência
e da corrente.
Em consequência destes factores, os transformadores sofrem vários problemas,
como sobreaquecimentos, efeitos de saturação, vibrações nos enrolamentos e o desgaste
do isolamento entre as lâminas do circuito magnético [12].
2.5.3 Condensadores
Uma das possíveis consequências, causadas pelos harmónicos, em relação aos
condensadores, é a ocorrência de ressonâncias que poderão produzir excessos de
corrente e de tensão.
Outro problema é que a reactância capacitiva diminui com o aumento da
frequência. Esse facto faz com que as correntes de frequências elevadas circulem com
maior facilidade através dos condensadores, provocando o aumento das perdas e o
consequente aquecimento e diminuição do tempo de vida útil do condensador, levando
também a um eventual risco de explosão [12].
2.5.4 Motores
Nos motores de corrente alternada (motor de indução e máquina síncrona), os
harmónicos provocam um maior aquecimento devido ao aumento das perdas, tanto no
ferro como no cobre. Esse factor leva a uma diminuição da eficiência do motor e do seu
binário disponível. Por outro lado, os harmónicos de tensão, induzem harmónicos de
corrente nos rotores, sendo estes, responsáveis pelos binários pulsantes que provocam
vibrações nos motores, levando-os a emitir ruídos sonoros. Isso acontece porque,
existem harmónicos de sequência negativa que produzem um campo girante contrário
ao campo girante produzido pela fundamental, como é o caso dos harmónicos de ordem
Os Harmónicos na Rede Eléctrica
18 Departamento de Electrónica Industrial
5, 11, 17, etc. Por exemplo, os harmónicos de 5ª ordem em conjunto com os de 7ª,
produzem no rotor, um binário equivalente a um harmónico de 6ª ordem, pois o motor
roda aproximadamente sincronizado com a fundamental.
É importante referir que os efeitos provocados pelos harmónicos não se
manifestam com a mesma intensidade em todos os motores. Os aspectos da construção
e constituição dos motores são relevantes e alteram a forma como são afectados [12].
2.5.5 Equipamentos eléctricos em geral
Existem muitos equipamentos sensíveis à presença de harmónicos de tensão. Um
exemplo disso é o caso dos aparelhos que utilizam a detecção de passagem por zero da
tensão, ou outro aspecto da onda, para desempenhar uma tarefa. Com as distorções na
forma de onda da tensão, isso pode-se tornar inviável. Outro exemplo, que se pode
demonstrar, é o caso em que os harmónicos penetram na alimentação de um
equipamento por meio de acoplamentos indutivos e capacitivos. Com o aumento da
frequência alteram-se as reactâncias, podendo ser alterado o funcionamento desses
equipamentos [12].
2.5.6 Relés de protecção, disjuntores e fusíveis
A corrente eficaz que passa nos dispositivos aumenta com a presença dos
harmónicos, provocando nestes, um maior aquecimento. Isso levará a uma diminuição
do seu tempo de vida útil e poderá também fazer com que possam actuar, em alguns
casos, de forma inadequada.
No caso dos relés de protecção, as distorções nas formas de onda, podem dar
origem a que operem indevidamente ou até impedir que entrem em funcionamento. Em
relação aos disjuntores e fusíveis, os harmónicos podem alterar as suas capacidades de
interrupção [12].
2.5.7 Sistemas informáticos
Nos sistemas informáticos, a presença de harmónicos pode provocar o aumento
de erros na transmissão de dados, reduzindo a velocidade de comunicação. Na indústria,
podem ser afectados os sinais de processos levando a medições erradas e perturbando os
sistemas de controlo dos processos.
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 19
No caso dos aparelhos que usam a rede como sinal de sincronismo, os
harmónicos de tensão podem, naturalmente, provocar falhas de sincronismo que por
vezes originam o reset do sistema [14].
2.5.8 Aparelhos de medida
Os aparelhos de medida podem ser afectados pelos harmónicos no caso, por
exemplo, de haver ressonâncias que afectem as medições. Outro aspecto a ter em conta
é o facto de os harmónicos de corrente contribuírem para um aumento do valor eficaz.
Desse modo a potência aparente será mais elevada, facto que pode não se traduzir numa
maior potência activa. Assim para se conhecer o verdadeiro factor de potência é
necessário ter em conta a distorção da corrente [12].

Os Harmónicos na Rede Eléctrica
20 Departamento de Electrónica Industrial
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 21
Capítulo 3
Filtros Activos Paralelos e Topologias dos
Inversores Trifásicos
Neste capítulo são abordados em primeiro lugar vários aspectos relacionados
com os filtros activos paralelos. Com isso pretende-se analisar a sua constituição e o seu
funcionamento de modo a perceber-se a importância do inversor para o filtro. Em
relação ao inversor propriamente dito, são comparadas várias topologias usuais e
também algumas técnicas de controlo com diferentes princípios de funcionamento. Para
terminar é feita uma abordagem sobre os filtros LC tipicamente aplicados na saída dos
inversores.
3.1 Filtros Activos de Potência Paralelos
Como foi mencionado no primeiro capítulo, os filtros activos de potência
paralelos têm como principal objectivo filtrar as correntes das linhas eliminando os
harmónicos a montante. Esse factor é por si só muito importante, no entanto, os filtros
não se limitam a filtrar os harmónicos. Como se verá mais à frente, têm também, a
capacidade de fornecer a energia reactiva necessária para corrigir o factor de potência e
a de compensar os desequilíbrios nas correntes (nos sistemas trifásicos), eliminado
assim a corrente do neutro. Desta forma, a rede eléctrica passa a ver o conjunto formado
pelas cargas mais o filtro como uma carga linear e equilibrada [2].
3.1.1 Problemas causados pelas cargas não lineares
Para se perceber bem o funcionamento de um filtro activo paralelo, é importante
em primeiro lugar, perceber de que forma as cargas lineares são afectadas pelas cargas
não lineares. Como foi visto anteriormente, as correntes distorcidas consumidas por
algumas cargas, provocam distorções nas formas de onda da tensão. Essa tensão, ao
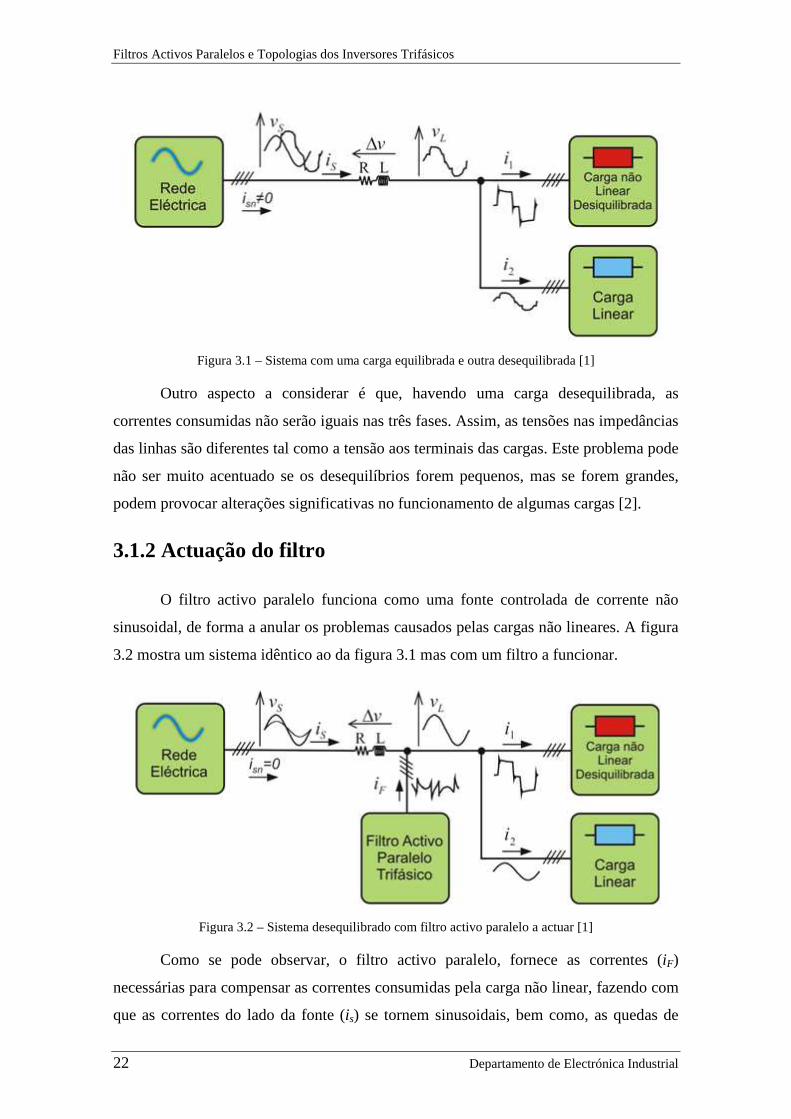
alimentar outras cargas, estará a induzir harmónicos nelas. A figura 3.1 ilustra esta
situação.
Filtros Activos Paralelos e Topologias dos Inversores Trifásicos
22 Departamento de Electrónica Industrial
Figura 3.1 – Sistema com uma carga equilibrada e outra desequilibrada [1]
Outro aspecto a considerar é que, havendo uma carga desequilibrada, as
correntes consumidas não serão iguais nas três fases. Assim, as tensões nas impedâncias
das linhas são diferentes tal como a tensão aos terminais das cargas. Este problema pode
não ser muito acentuado se os desequilíbrios forem pequenos, mas se forem grandes,
podem provocar alterações significativas no funcionamento de algumas cargas [2].
3.1.2 Actuação do filtro
O filtro activo paralelo funciona como uma fonte controlada de corrente não
sinusoidal, de forma a anular os problemas causados pelas cargas não lineares. A figura
3.2 mostra um sistema idêntico ao da figura 3.1 mas com um filtro a funcionar.
Figura 3.2 – Sistema desequilibrado com filtro activo paralelo a actuar [1]
Como se pode observar, o filtro activo paralelo, fornece as correntes (iF)
necessárias para compensar as correntes consumidas pela carga não linear, fazendo com
que as correntes do lado da fonte (is) se tornem sinusoidais, bem como, as quedas de
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 23
tensão nas impedâncias das linhas (∆v), não causando desta forma harmónicos nas
tensões. Além disso o filtro compensa os desequilíbrios nas correntes. Evita-se assim
que as outras cargas sejam afectadas pelas cargas não lineares.
3.1.3 Constituição do filtro
Um filtro activo paralelo é constituído essencialmente por duas partes: o circuito
de controlo com os respectivos sistemas de leitura de dados e o andar de potência. Na
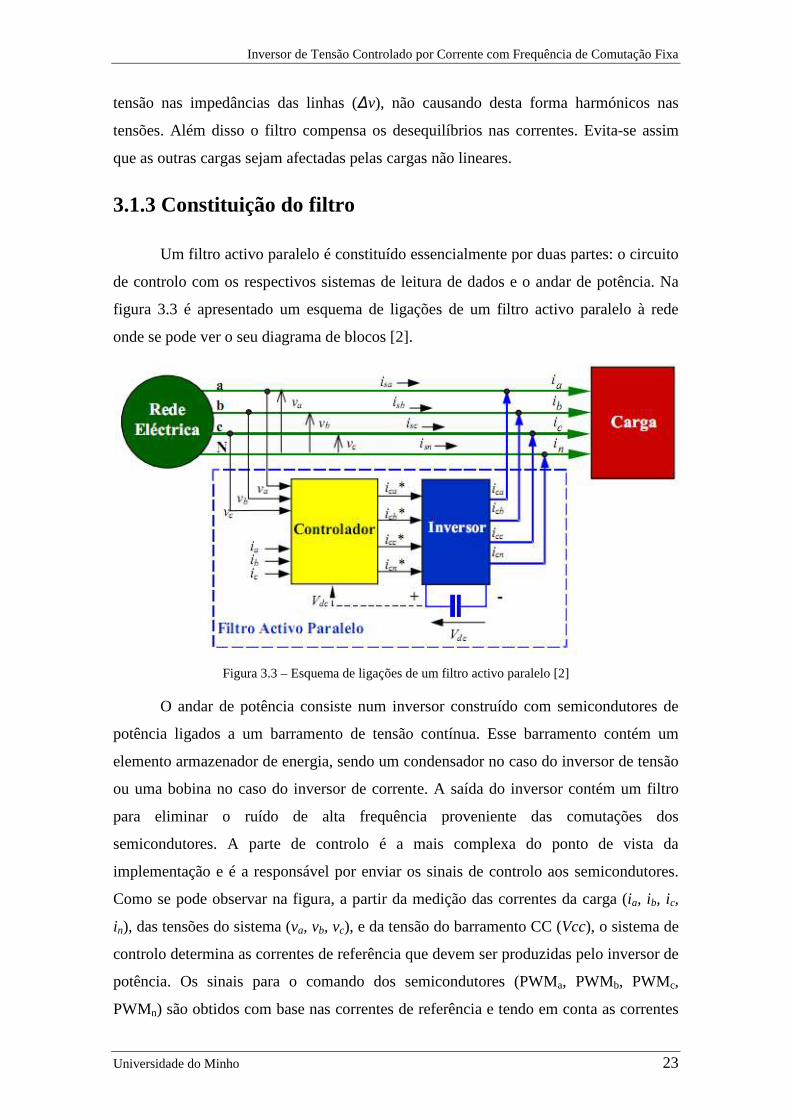
figura 3.3 é apresentado um esquema de ligações de um filtro activo paralelo à rede
onde se pode ver o seu diagrama de blocos [2].
Figura 3.3 – Esquema de ligações de um filtro activo paralelo [2]
O andar de potência consiste num inversor construído com semicondutores de
potência ligados a um barramento de tensão contínua. Esse barramento contém um
elemento armazenador de energia, sendo um condensador no caso do inversor de tensão
ou uma bobina no caso do inversor de corrente. A saída do inversor contém um filtro
para eliminar o ruído de alta frequência proveniente das comutações dos
semicondutores. A parte de controlo é a mais complexa do ponto de vista da
implementação e é a responsável por enviar os sinais de controlo aos semicondutores.
Como se pode observar na figura, a partir da medição das correntes da carga (ia, ib, ic,
in), das tensões do sistema (va, vb, vc), e da tensão do barramento CC (Vcc), o sistema de
controlo determina as correntes de referência que devem ser produzidas pelo inversor de
potência. Os sinais para o comando dos semicondutores (PWMa, PWMb, PWMc,
PWMn) são obtidos com base nas correntes de referência e tendo em conta as correntes
Filtros Activos Paralelos e Topologias dos Inversores Trifásicos
24 Departamento de Electrónica Industrial
de compensação produzidas pelo inversor (ica, icb, icc, icn). É desta forma que a produção
destas correntes pelo inversor faz com que as correntes do sistema (isa, isb, isc) fiquem
em fase com as tensões, e se tornem sinusoidais e equilibradas, eliminando a corrente de
neutro (isn). Assim, através deste procedimento, consegue-se compensar o factor de
potência. Isso torna-se bastante importante porque com a utilização destes filtros,
evita-se o uso de bancos de condensadores que para além de não fazerem uma
compensação dinâmica do factor de potência, podem provocar sobretensões transitórias
durante as comutações e podem também ser danificados por causa dos harmónicos [1].
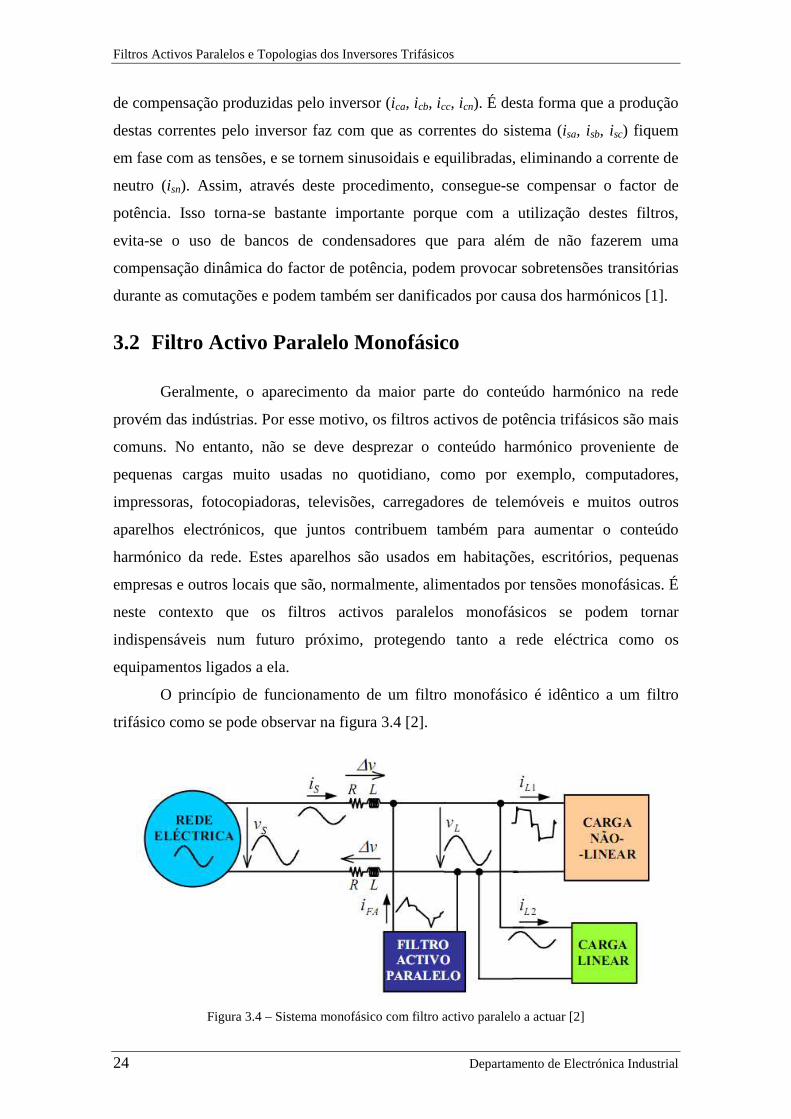
3.2 Filtro Activo Paralelo Monofásico
Geralmente, o aparecimento da maior parte do conteúdo harmónico na rede
provém das indústrias. Por esse motivo, os filtros activos de potência trifásicos são mais
comuns. No entanto, não se deve desprezar o conteúdo harmónico proveniente de
pequenas cargas muito usadas no quotidiano, como por exemplo, computadores,
impressoras, fotocopiadoras, televisões, carregadores de telemóveis e muitos outros
aparelhos electrónicos, que juntos contribuem também para aumentar o conteúdo
harmónico da rede. Estes aparelhos são usados em habitações, escritórios, pequenas
empresas e outros locais que são, normalmente, alimentados por tensões monofásicas. É
neste contexto que os filtros activos paralelos monofásicos se podem tornar
indispensáveis num futuro próximo, protegendo tanto a rede eléctrica como os
equipamentos ligados a ela.
O princípio de funcionamento de um filtro monofásico é idêntico a um filtro
trifásico como se pode observar na figura 3.4 [2].
Figura 3.4 – Sistema monofásico com filtro activo paralelo a actuar [2]
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 25
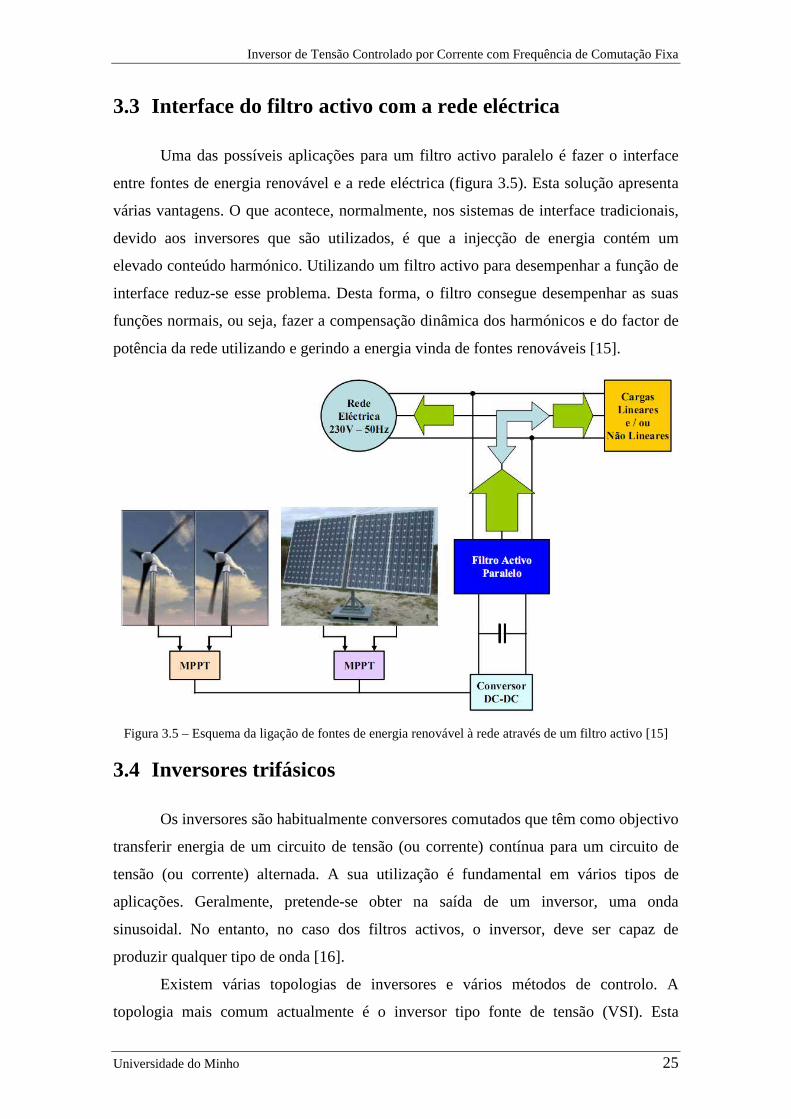
3.3 Interface do filtro activo com a rede eléctrica
Uma das possíveis aplicações para um filtro activo paralelo é fazer o interface
entre fontes de energia renovável e a rede eléctrica (figura 3.5). Esta solução apresenta
várias vantagens. O que acontece, normalmente, nos sistemas de interface tradicionais,
devido aos inversores que são utilizados, é que a injecção de energia contém um
elevado conteúdo harmónico. Utilizando um filtro activo para desempenhar a função de
interface reduz-se esse problema. Desta forma, o filtro consegue desempenhar as suas
funções normais, ou seja, fazer a compensação dinâmica dos harmónicos e do factor de
potência da rede utilizando e gerindo a energia vinda de fontes renováveis [15].
Figura 3.5 – Esquema da ligação de fontes de energia renovável à rede através de um filtro activo [15]
3.4 Inversores trifásicos
Os inversores são habitualmente conversores comutados que têm como objectivo
transferir energia de um circuito de tensão (ou corrente) contínua para um circuito de
tensão (ou corrente) alternada. A sua utilização é fundamental em vários tipos de
aplicações. Geralmente, pretende-se obter na saída de um inversor, uma onda
sinusoidal. No entanto, no caso dos filtros activos, o inversor, deve ser capaz de
produzir qualquer tipo de onda [16].
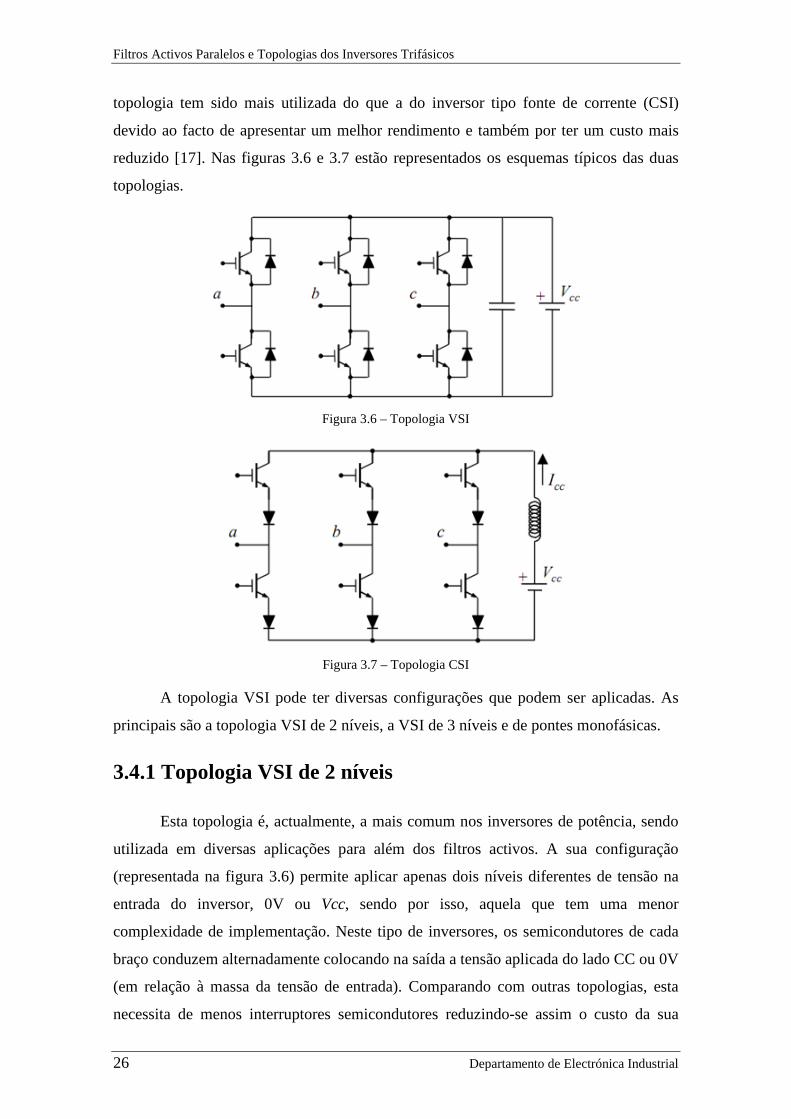
Existem várias topologias de inversores e vários métodos de controlo. A
topologia mais comum actualmente é o inversor tipo fonte de tensão (VSI). Esta
Filtros Activos Paralelos e Topologias dos Inversores Trifásicos
26 Departamento de Electrónica Industrial
topologia tem sido mais utilizada do que a do inversor tipo fonte de corrente (CSI)
devido ao facto de apresentar um melhor rendimento e também por ter um custo mais
reduzido [17]. Nas figuras 3.6 e 3.7 estão representados os esquemas típicos das duas
topologias.
Figura 3.6 – Topologia VSI
Figura 3.7 – Topologia CSI
A topologia VSI pode ter diversas configurações que podem ser aplicadas. As
principais são a topologia VSI de 2 níveis, a VSI de 3 níveis e de pontes monofásicas.
3.4.1 Topologia VSI de 2 níveis
Esta topologia é, actualmente, a mais comum nos inversores de potência, sendo
utilizada em diversas aplicações para além dos filtros activos. A sua configuração
(representada na figura 3.6) permite aplicar apenas dois níveis diferentes de tensão na
entrada do inversor, 0V ou Vcc, sendo por isso, aquela que tem uma menor
complexidade de implementação. Neste tipo de inversores, os semicondutores de cada
braço conduzem alternadamente colocando na saída a tensão aplicada do lado CC ou 0V
(em relação à massa da tensão de entrada). Comparando com outras topologias, esta
necessita de menos interruptores semicondutores reduzindo-se assim o custo da sua
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 27
implementação, no entanto, isso leva a que estes sejam obrigados a suportar uma tensão
mais elevada, dificultando a sua utilização em sistemas de média e alta potência [18].
3.4.2 Topologia VSI de 3 níveis
Os princípios de funcionamento da topologia VSI de 3 níveis, assim como das
restantes topologias multi-nível, são os mesmos da topologia VSI de 2 níveis, no
entanto numa topologia multi-nível, a tensão de saída de cada braço do inversor pode
apresentar vários níveis de tensão diferentes. Desta forma, o ripple das tensões e
correntes será menor para a mesma frequência de comutação. Outro aspecto importante
é que, nestas topologias, a tensão directa aplicada nos semicondutores é menor do que
na topologia VSI de 2 níveis se se considerar a mesma alimentação do lado CC. Esse
factor contribui para que estas topologias sejam mais vantajosas em sistemas de média e
alta potência.
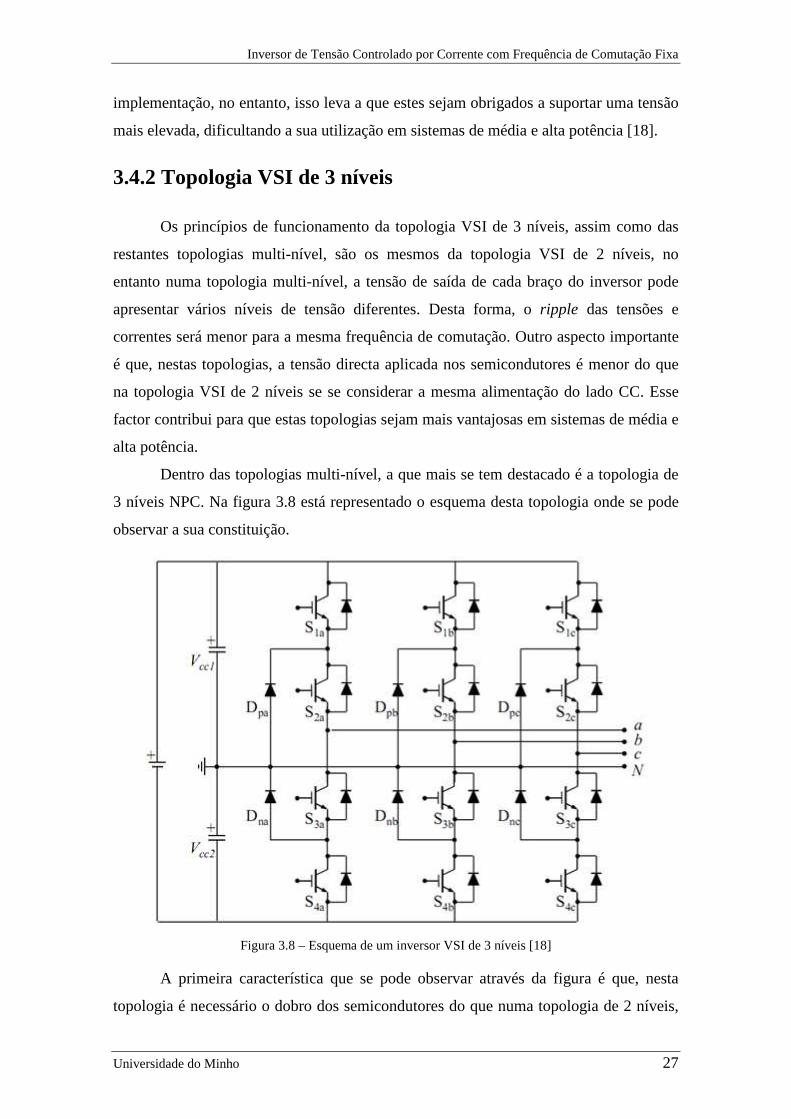
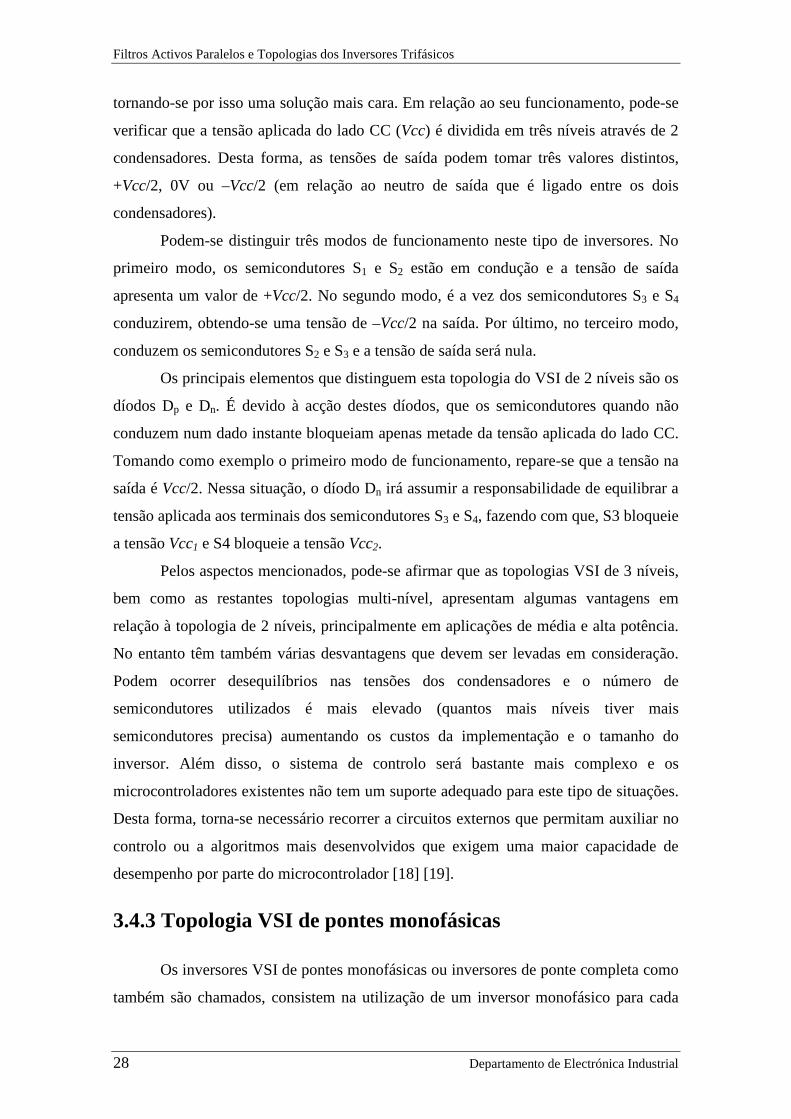
Dentro das topologias multi-nível, a que mais se tem destacado é a topologia de
3 níveis NPC. Na figura 3.8 está representado o esquema desta topologia onde se pode
observar a sua constituição.
Figura 3.8 – Esquema de um inversor VSI de 3 níveis [18]
A primeira característica que se pode observar através da figura é que, nesta
topologia é necessário o dobro dos semicondutores do que numa topologia de 2 níveis,
Filtros Activos Paralelos e Topologias dos Inversores Trifásicos
28 Departamento de Electrónica Industrial
tornando-se por isso uma solução mais cara. Em relação ao seu funcionamento, pode-se
verificar que a tensão aplicada do lado CC (Vcc) é dividida em três níveis através de 2
condensadores. Desta forma, as tensões de saída podem tomar três valores distintos,
+Vcc/2, 0V ou –Vcc/2 (em relação ao neutro de saída que é ligado entre os dois
condensadores).
Podem-se distinguir três modos de funcionamento neste tipo de inversores. No
primeiro modo, os semicondutores S1 e S2 estão em condução e a tensão de saída
apresenta um valor de +Vcc/2. No segundo modo, é a vez dos semicondutores S3 e S4
conduzirem, obtendo-se uma tensão de –Vcc/2 na saída. Por último, no terceiro modo,
conduzem os semicondutores S2 e S3 e a tensão de saída será nula.
Os principais elementos que distinguem esta topologia do VSI de 2 níveis são os
díodos Dp e Dn. É devido à acção destes díodos, que os semicondutores quando não
conduzem num dado instante bloqueiam apenas metade da tensão aplicada do lado CC.
Tomando como exemplo o primeiro modo de funcionamento, repare-se que a tensão na
saída é Vcc/2. Nessa situação, o díodo Dn irá assumir a responsabilidade de equilibrar a
tensão aplicada aos terminais dos semicondutores S3 e S4, fazendo com que, S3 bloqueie
a tensão Vcc1 e S4 bloqueie a tensão Vcc2.
Pelos aspectos mencionados, pode-se afirmar que as topologias VSI de 3 níveis,
bem como as restantes topologias multi-nível, apresentam algumas vantagens em
relação à topologia de 2 níveis, principalmente em aplicações de média e alta potência.
No entanto têm também várias desvantagens que devem ser levadas em consideração.
Podem ocorrer desequilíbrios nas tensões dos condensadores e o número de
semicondutores utilizados é mais elevado (quantos mais níveis tiver mais
semicondutores precisa) aumentando os custos da implementação e o tamanho do
inversor. Além disso, o sistema de controlo será bastante mais complexo e os
microcontroladores existentes não tem um suporte adequado para este tipo de situações.
Desta forma, torna-se necessário recorrer a circuitos externos que permitam auxiliar no
controlo ou a algoritmos mais desenvolvidos que exigem uma maior capacidade de
desempenho por parte do microcontrolador [18] [19].
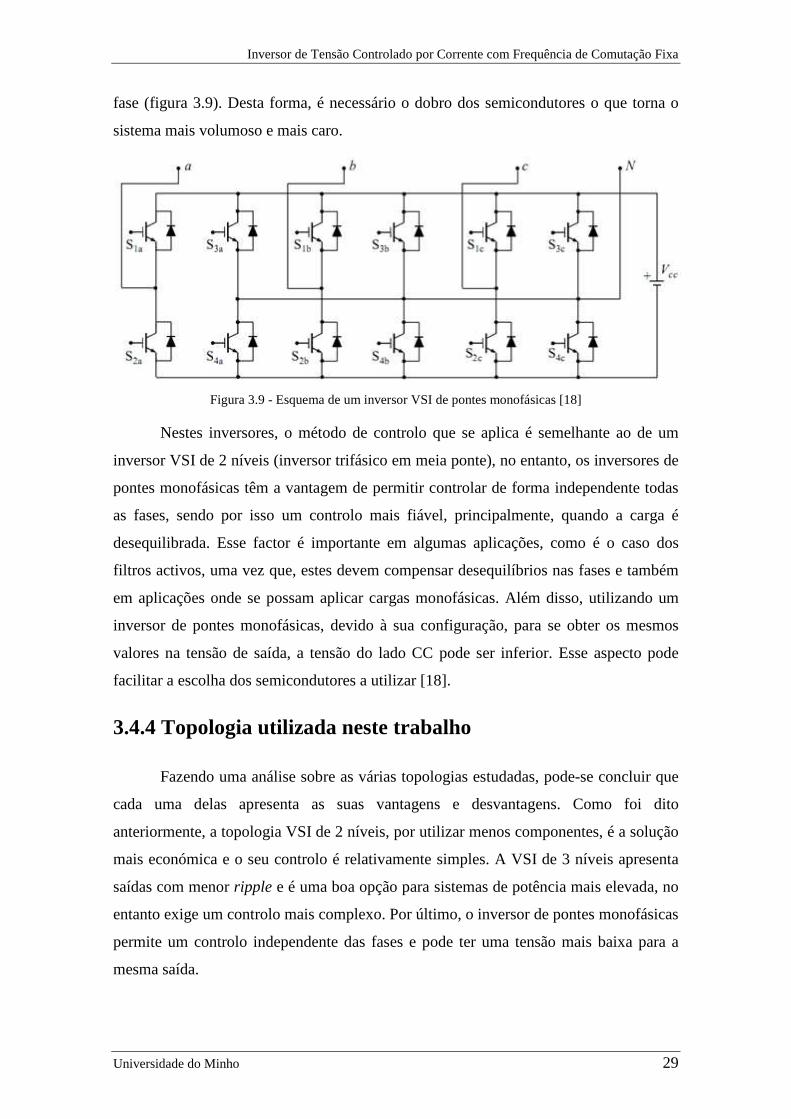
3.4.3 Topologia VSI de pontes monofásicas
Os inversores VSI de pontes monofásicas ou inversores de ponte completa como
também são chamados, consistem na utilização de um inversor monofásico para cada
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 29
fase (figura 3.9). Desta forma, é necessário o dobro dos semicondutores o que torna o
sistema mais volumoso e mais caro.
Figura 3.9 - Esquema de um inversor VSI de pontes monofásicas [18]
Nestes inversores, o método de controlo que se aplica é semelhante ao de um
inversor VSI de 2 níveis (inversor trifásico em meia ponte), no entanto, os inversores de
pontes monofásicas têm a vantagem de permitir controlar de forma independente todas
as fases, sendo por isso um controlo mais fiável, principalmente, quando a carga é
desequilibrada. Esse factor é importante em algumas aplicações, como é o caso dos
filtros activos, uma vez que, estes devem compensar desequilíbrios nas fases e também
em aplicações onde se possam aplicar cargas monofásicas. Além disso, utilizando um
inversor de pontes monofásicas, devido à sua configuração, para se obter os mesmos
valores na tensão de saída, a tensão do lado CC pode ser inferior. Esse aspecto pode
facilitar a escolha dos semicondutores a utilizar [18].
3.4.4 Topologia utilizada neste trabalho
Fazendo uma análise sobre as várias topologias estudadas, pode-se concluir que
cada uma delas apresenta as suas vantagens e desvantagens. Como foi dito
anteriormente, a topologia VSI de 2 níveis, por utilizar menos componentes, é a solução
mais económica e o seu controlo é relativamente simples. A VSI de 3 níveis apresenta
saídas com menor ripple e é uma boa opção para sistemas de potência mais elevada, no
entanto exige um controlo mais complexo. Por último, o inversor de pontes monofásicas
permite um controlo independente das fases e pode ter uma tensão mais baixa para a
mesma saída.
Filtros Activos Paralelos e Topologias dos Inversores Trifásicos
30 Departamento de Electrónica Industrial
Ponderando os vários aspectos relacionados com as exigências do trabalho, ao
nível do cumprimento dos objectivos e dos resultados esperados, e tendo também em
conta os recursos matérias disponíveis, considerou-se que a melhor solução, neste caso,
seria a implementação de um inversor VSI de 2 níveis. Isto não significa que se
considere esta opção como sendo a melhor para aplicar em qualquer filtro activo de
potência paralelo, uma vez que, isso irá sempre depender de vários factores como os
recursos económicos, a potência do filtro e o tempo disponível para o seu
desenvolvimento e implementação.
3.5 Tipos de controlo de inversores
Tal como acontece em relação às topologias, também os tipos de controlo dos
inversores se podem dividir em dois grupos. Existem os inversores controlados por
tensão (VCI) e os inversores controlados por corrente (CCI). Os inversores controlados
por tensão são mais utilizados e mais simples de implementar. No entanto, no caso dos
filtros activos paralelos, como o objectivo é seguir uma corrente de referência, torna-se
indispensável optar por um inversor controlado por corrente.
Independentemente do tipo de controlo escolhido, existem diversas técnicas de
modulação que permitem enviar os sinais de comando para os semicondutores do
inversor. Cada uma delas apresenta as suas vantagens e desvantagens, sendo necessário
analisar cuidadosamente as suas características de modo a fazer a melhor escolha
possível para cada caso. A qualidade da forma de onda da corrente injectada pelo filtro
depende muito da técnica de modulação escolhida. Assim, para uma boa escolha, deve-
se ter em atenção vários factores como os recursos computacionais necessários, a
complexidade de implementação e o conteúdo harmónico provocado. De seguida são
apresentados alguns dos métodos de controlo mais utilizados actualmente [20].
3.5.1 Comparador com histerese
Este método é um dos mais simples de implementar e tem sido, por esse motivo,
bastante utilizado. A sua estratégia consiste em comparar um sinal de referência com a
corrente produzida pelo inversor a cada instante, existindo uma banda de histerese
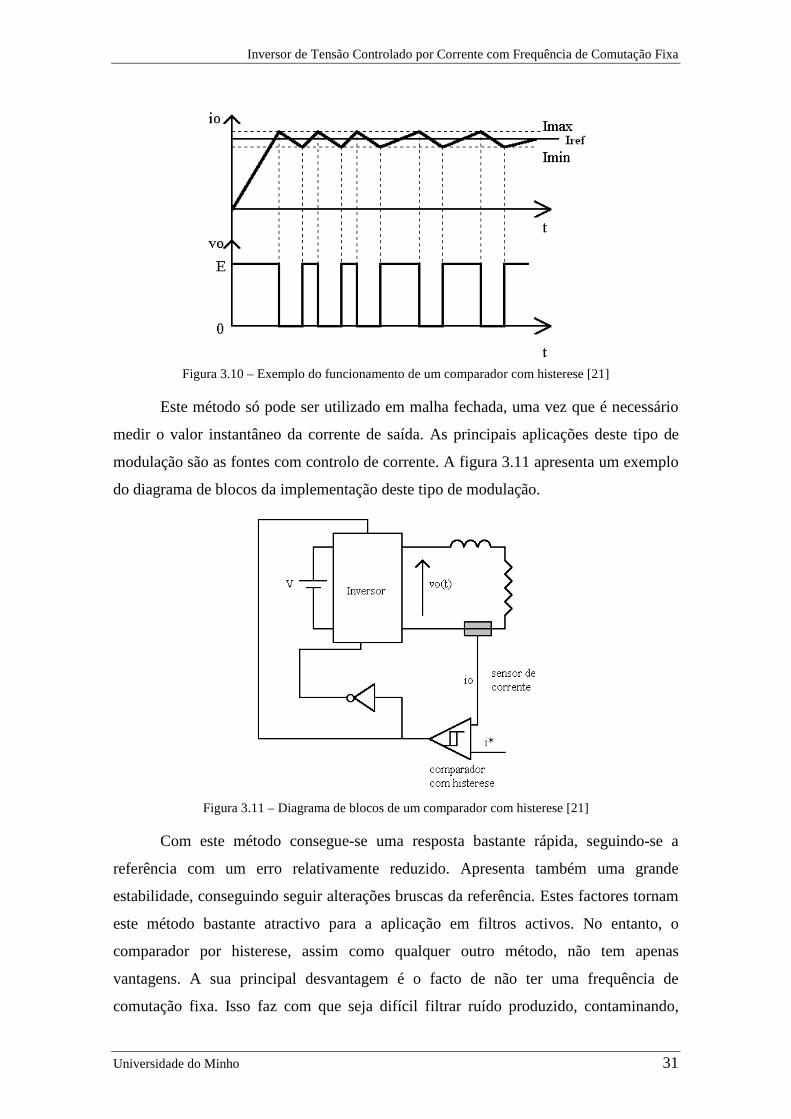
dentro da qual se deve manter a corrente. Na figura 3.10 pode-se observar um exemplo
do funcionamento deste método onde se pretende obter uma corrente constante [21].
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 31
Figura 3.10 – Exemplo do funcionamento de um comparador com histerese [21]
Este método só pode ser utilizado em malha fechada, uma vez que é necessário
medir o valor instantâneo da corrente de saída. As principais aplicações deste tipo de
modulação são as fontes com controlo de corrente. A figura 3.11 apresenta um exemplo
do diagrama de blocos da implementação deste tipo de modulação.
Figura 3.11 – Diagrama de blocos de um comparador com histerese [21]
Com este método consegue-se uma resposta bastante rápida, seguindo-se a
referência com um erro relativamente reduzido. Apresenta também uma grande
estabilidade, conseguindo seguir alterações bruscas da referência. Estes factores tornam
este método bastante atractivo para a aplicação em filtros activos. No entanto, o
comparador por histerese, assim como qualquer outro método, não tem apenas
vantagens. A sua principal desvantagem é o facto de não ter uma frequência de
comutação fixa. Isso faz com que seja difícil filtrar ruído produzido, contaminando,
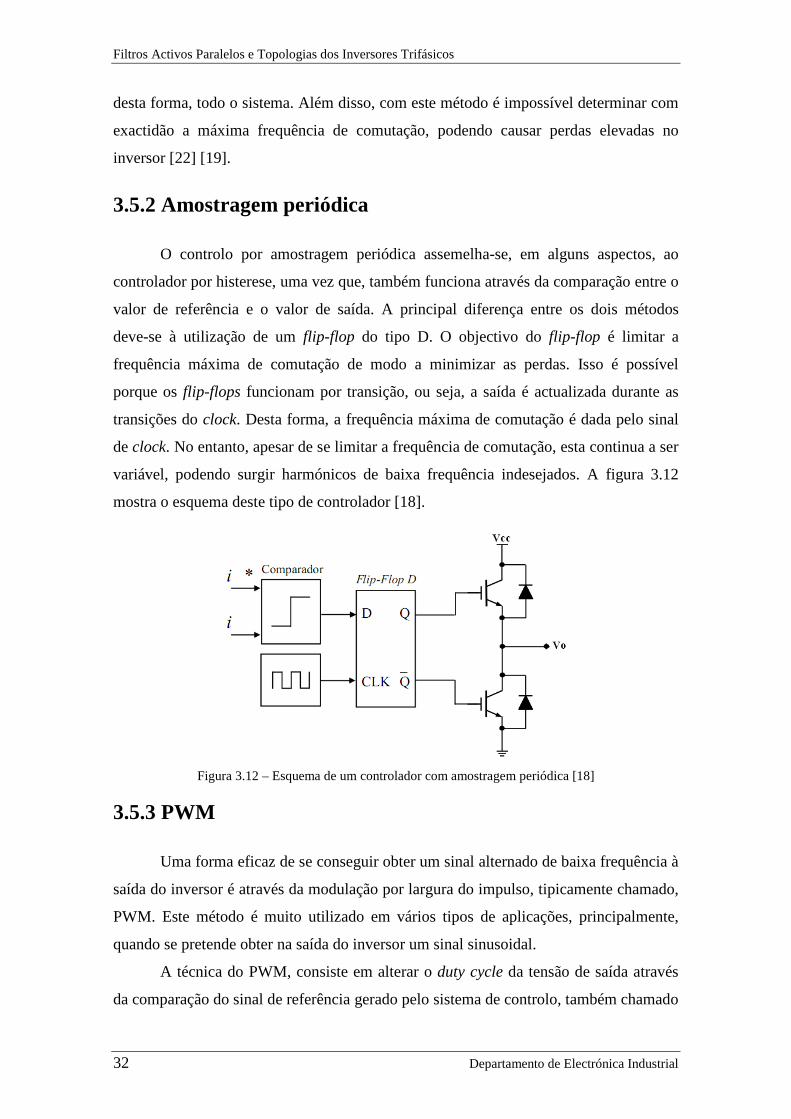
Filtros Activos Paralelos e Topologias dos Inversores Trifásicos
32 Departamento de Electrónica Industrial
desta forma, todo o sistema. Além disso, com este método é impossível determinar com
exactidão a máxima frequência de comutação, podendo causar perdas elevadas no
inversor [22] [19].
3.5.2 Amostragem periódica
O controlo por amostragem periódica assemelha-se, em alguns aspectos, ao
controlador por histerese, uma vez que, também funciona através da comparação entre o
valor de referência e o valor de saída. A principal diferença entre os dois métodos
deve-se à utilização de um flip-flop do tipo D. O objectivo do flip-flop é limitar a
frequência máxima de comutação de modo a minimizar as perdas. Isso é possível
porque os flip-flops funcionam por transição, ou seja, a saída é actualizada durante as
transições do clock. Desta forma, a frequência máxima de comutação é dada pelo sinal
de clock. No entanto, apesar de se limitar a frequência de comutação, esta continua a ser
variável, podendo surgir harmónicos de baixa frequência indesejados. A figura 3.12
mostra o esquema deste tipo de controlador [18].
Figura 3.12 – Esquema de um controlador com amostragem periódica [18]
3.5.3 PWM
Uma forma eficaz de se conseguir obter um sinal alternado de baixa frequência à
saída do inversor é através da modulação por largura do impulso, tipicamente chamado,
PWM. Este método é muito utilizado em vários tipos de aplicações, principalmente,
quando se pretende obter na saída do inversor um sinal sinusoidal.
A técnica do PWM, consiste em alterar o duty cycle da tensão de saída através
da comparação do sinal de referência gerado pelo sistema de controlo, também chamado
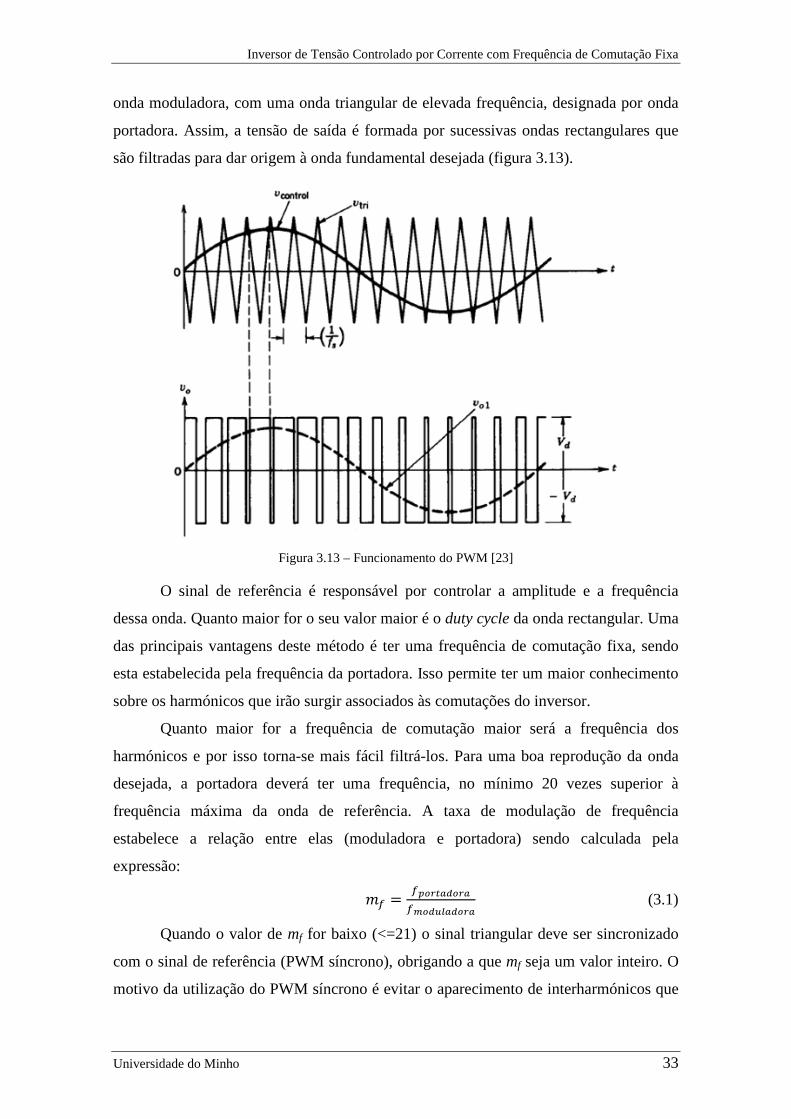
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 33
onda moduladora, com uma onda triangular de elevada frequência, designada por onda
portadora. Assim, a tensão de saída é formada por sucessivas ondas rectangulares que
são filtradas para dar origem à onda fundamental desejada (figura 3.13).
Figura 3.13 – Funcionamento do PWM [23]
O sinal de referência é responsável por controlar a amplitude e a frequência
dessa onda. Quanto maior for o seu valor maior é o duty cycle da onda rectangular. Uma
das principais vantagens deste método é ter uma frequência de comutação fixa, sendo
esta estabelecida pela frequência da portadora. Isso permite ter um maior conhecimento
sobre os harmónicos que irão surgir associados às comutações do inversor.
Quanto maior for a frequência de comutação maior será a frequência dos
harmónicos e por isso torna-se mais fácil filtrá-los. Para uma boa reprodução da onda
desejada, a portadora deverá ter uma frequência, no mínimo 20 vezes superior à
frequência máxima da onda de referência. A taxa de modulação de frequência
estabelece a relação entre elas (moduladora e portadora) sendo calculada pela
expressão:
@A ABCDEBDAFEGHDEBD
(3.1)
Quando o valor de mf for baixo (<=21) o sinal triangular deve ser sincronizado
com o sinal de referência (PWM síncrono), obrigando a que mf seja um valor inteiro. O
motivo da utilização do PWM síncrono é evitar o aparecimento de interharmónicos que
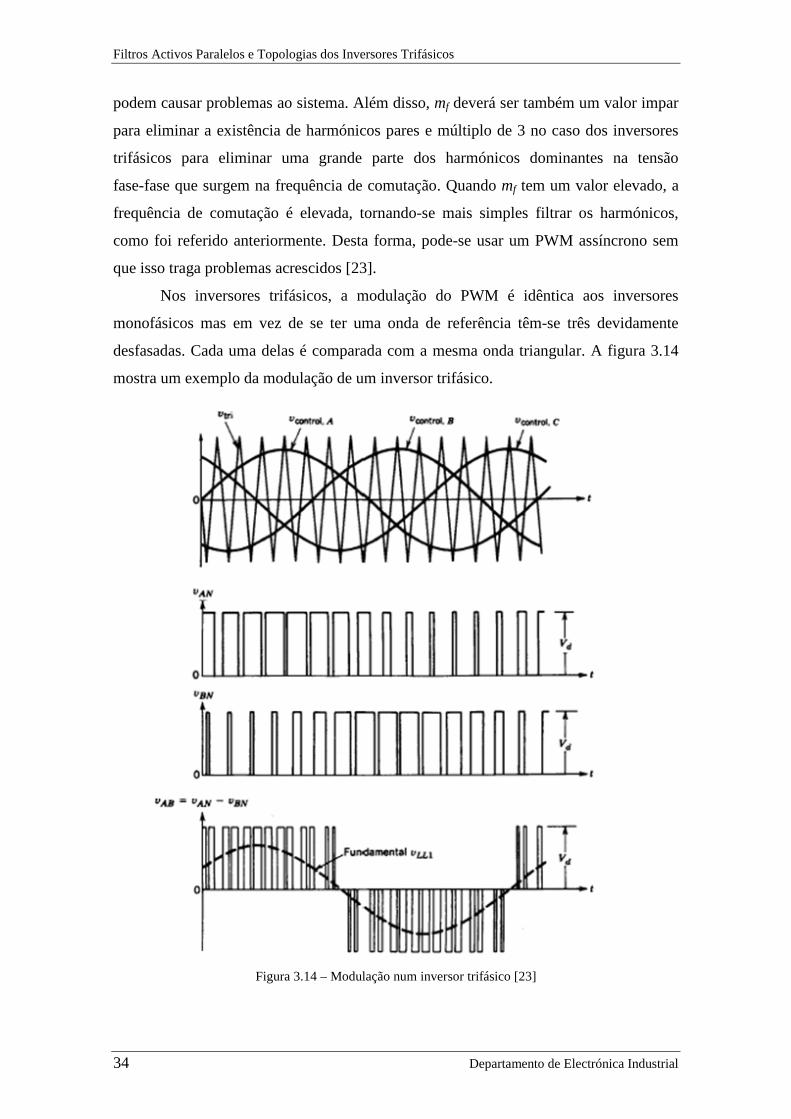
Filtros Activos Paralelos e Topologias dos Inversores Trifásicos
34 Departamento de Electrónica Industrial
podem causar problemas ao sistema. Além disso, mf deverá ser também um valor impar
para eliminar a existência de harmónicos pares e múltiplo de 3 no caso dos inversores
trifásicos para eliminar uma grande parte dos harmónicos dominantes na tensão
fase-fase que surgem na frequência de comutação. Quando mf tem um valor elevado, a
frequência de comutação é elevada, tornando-se mais simples filtrar os harmónicos,
como foi referido anteriormente. Desta forma, pode-se usar um PWM assíncrono sem
que isso traga problemas acrescidos [23].
Nos inversores trifásicos, a modulação do PWM é idêntica aos inversores
monofásicos mas em vez de se ter uma onda de referência têm-se três devidamente
desfasadas. Cada uma delas é comparada com a mesma onda triangular. A figura 3.14
mostra um exemplo da modulação de um inversor trifásico.
Figura 3.14 – Modulação num inversor trifásico [23]

Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 35
A onda fundamental de saída do inversor depende de vários factores. Um desses
factores é o índice de modulação que é dado pela relação entre a amplitude da
moduladora e a amplitude da portadora.
@5 !FEGHDEBD!BCDEBD
(3.2)
Onde:
ma Índice de modulação
Vmoduladora Amplitude da onda moduladora
Vportadora Amplitude da onda portadora
Quando o índice de modulação está compreendido entre 0 e 1 diz-se que a
modulação é linear. Neste caso, a amplitude da onda fundamental de saída do inversor é
proporcional ao índice de modulação, sendo o seu valor de pico dado pela seguinte
expressão:
@5 !EI (3.3)
Onde:
Vpico Pico da tensão simples da onda fundamental de saída
Vd Tensão contínua de entrada do inversor
Através da expressão anterior pode-se calcular o valor da tensão composta
fundamental de saída.
/7JK1 √L√I (3.4)
Onde:
Vc(rms) Valor eficaz da tensão composta na saída do inversor
Substituindo as expressões obtém-se (para o caso da modulação sinusoidal):
/7JK1 √LI√I M @5 M N O 0,612 M @5 M N (3.5)
Quando o índice de modulação é superior a 1 diz-se que se está a operar na zona
de sobremodulação. Nesta zona o comportamento do PWM difere da zona de operação
linear, assemelhando-se à modulação de onda quadrada [23]. Esta situação pode ser
visualizada na figura 3.15.
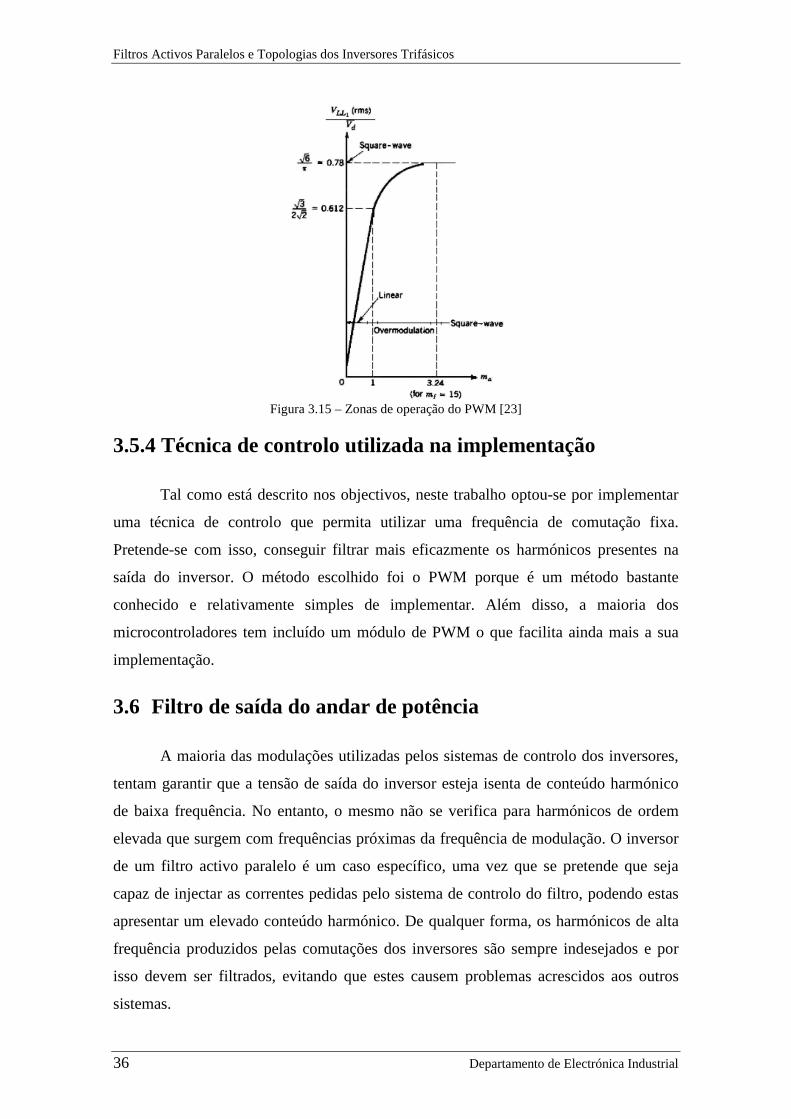
Filtros Activos Paralelos e Topologias dos Inversores Trifásicos
36 Departamento de Electrónica Industrial
Figura 3.15 – Zonas de operação do PWM [23]
3.5.4 Técnica de controlo utilizada na implementação
Tal como está descrito nos objectivos, neste trabalho optou-se por implementar
uma técnica de controlo que permita utilizar uma frequência de comutação fixa.
Pretende-se com isso, conseguir filtrar mais eficazmente os harmónicos presentes na
saída do inversor. O método escolhido foi o PWM porque é um método bastante
conhecido e relativamente simples de implementar. Além disso, a maioria dos
microcontroladores tem incluído um módulo de PWM o que facilita ainda mais a sua
implementação.
3.6 Filtro de saída do andar de potência
A maioria das modulações utilizadas pelos sistemas de controlo dos inversores,
tentam garantir que a tensão de saída do inversor esteja isenta de conteúdo harmónico
de baixa frequência. No entanto, o mesmo não se verifica para harmónicos de ordem
elevada que surgem com frequências próximas da frequência de modulação. O inversor
de um filtro activo paralelo é um caso específico, uma vez que se pretende que seja
capaz de injectar as correntes pedidas pelo sistema de controlo do filtro, podendo estas
apresentar um elevado conteúdo harmónico. De qualquer forma, os harmónicos de alta
frequência produzidos pelas comutações dos inversores são sempre indesejados e por
isso devem ser filtrados, evitando que estes causem problemas acrescidos aos outros
sistemas.
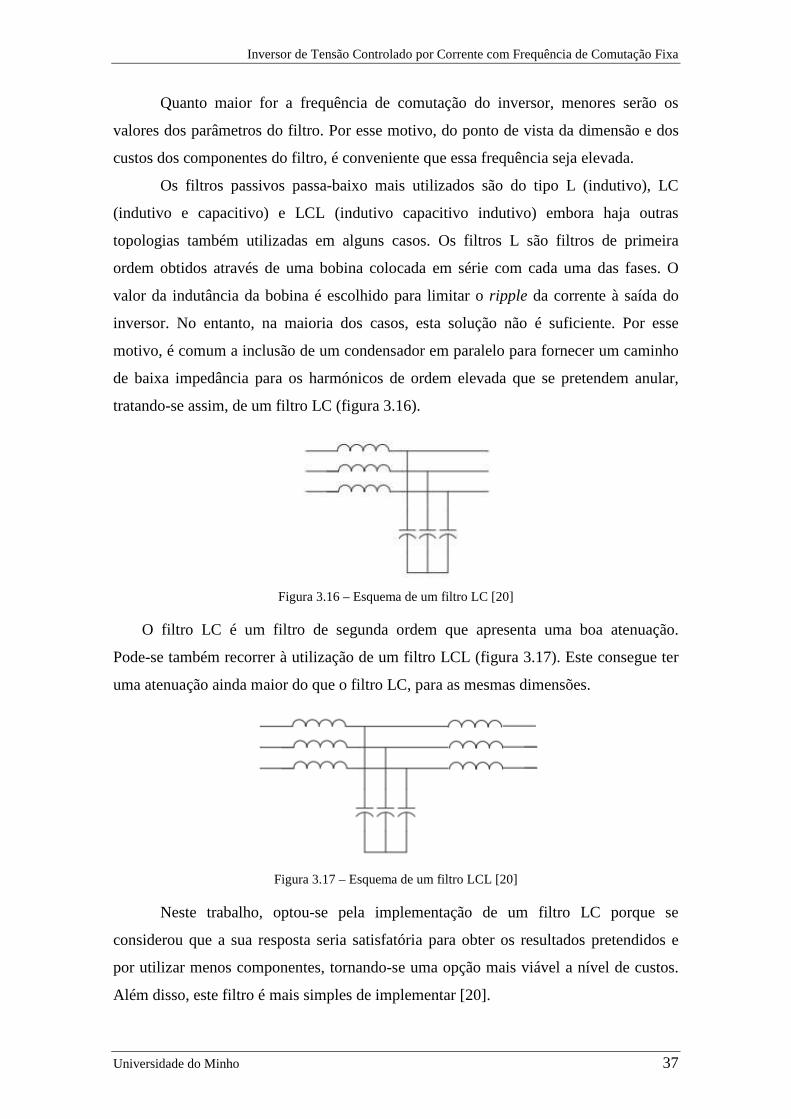
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 37
Quanto maior for a frequência de comutação do inversor, menores serão os
valores dos parâmetros do filtro. Por esse motivo, do ponto de vista da dimensão e dos
custos dos componentes do filtro, é conveniente que essa frequência seja elevada.
Os filtros passivos passa-baixo mais utilizados são do tipo L (indutivo), LC
(indutivo e capacitivo) e LCL (indutivo capacitivo indutivo) embora haja outras
topologias também utilizadas em alguns casos. Os filtros L são filtros de primeira
ordem obtidos através de uma bobina colocada em série com cada uma das fases. O
valor da indutância da bobina é escolhido para limitar o ripple da corrente à saída do
inversor. No entanto, na maioria dos casos, esta solução não é suficiente. Por esse
motivo, é comum a inclusão de um condensador em paralelo para fornecer um caminho
de baixa impedância para os harmónicos de ordem elevada que se pretendem anular,
tratando-se assim, de um filtro LC (figura 3.16).
Figura 3.16 – Esquema de um filtro LC [20]
O filtro LC é um filtro de segunda ordem que apresenta uma boa atenuação.
Pode-se também recorrer à utilização de um filtro LCL (figura 3.17). Este consegue ter
uma atenuação ainda maior do que o filtro LC, para as mesmas dimensões.
Figura 3.17 – Esquema de um filtro LCL [20]
Neste trabalho, optou-se pela implementação de um filtro LC porque se
considerou que a sua resposta seria satisfatória para obter os resultados pretendidos e
por utilizar menos componentes, tornando-se uma opção mais viável a nível de custos.
Além disso, este filtro é mais simples de implementar [20].

Filtros Activos Paralelos e Topologias dos Inversores Trifásicos
38 Departamento de Electrónica Industrial
A função de transferência do filtro LC é dada pela equação:
!R/K1!/K1
ST
K UTK
STV !R
! WR
KXWRKWR (3.6)
Onde:
YZ [√\] (3.7)
^ [I_ \
] (3.8)
Legenda:
V0 Tensão de saída do filtro
Vi Tensão de entrada do filtro
0 Frequência de corte
^ Coeficiente de amortecimento
R Resistência de carga
O ganho do filtro é unitário para baixas frequências e após a frequência de corte
sofre uma atenuação de 40dB por década. Para frequências perto da zona de corte, o
ganho depende do coeficiente de amortecimento, sendo mais elevado para coeficientes
mais baixos. A figura 3.18 mostra a resposta do filtro em frequência para vários
coeficientes de amortecimento.
Figura 3.18 – Resposta em frequência de um filtro LC [24]
Um aspecto importante na implementação dos filtros passivos, principalmente
quando se aplicam à saída de um filtro activo, é o desfasamento que existe entre o sinal
de entrada e o sinal de saída. Se esse desfasamento for muito elevado o filtro activo não
irá funcionar correctamente.
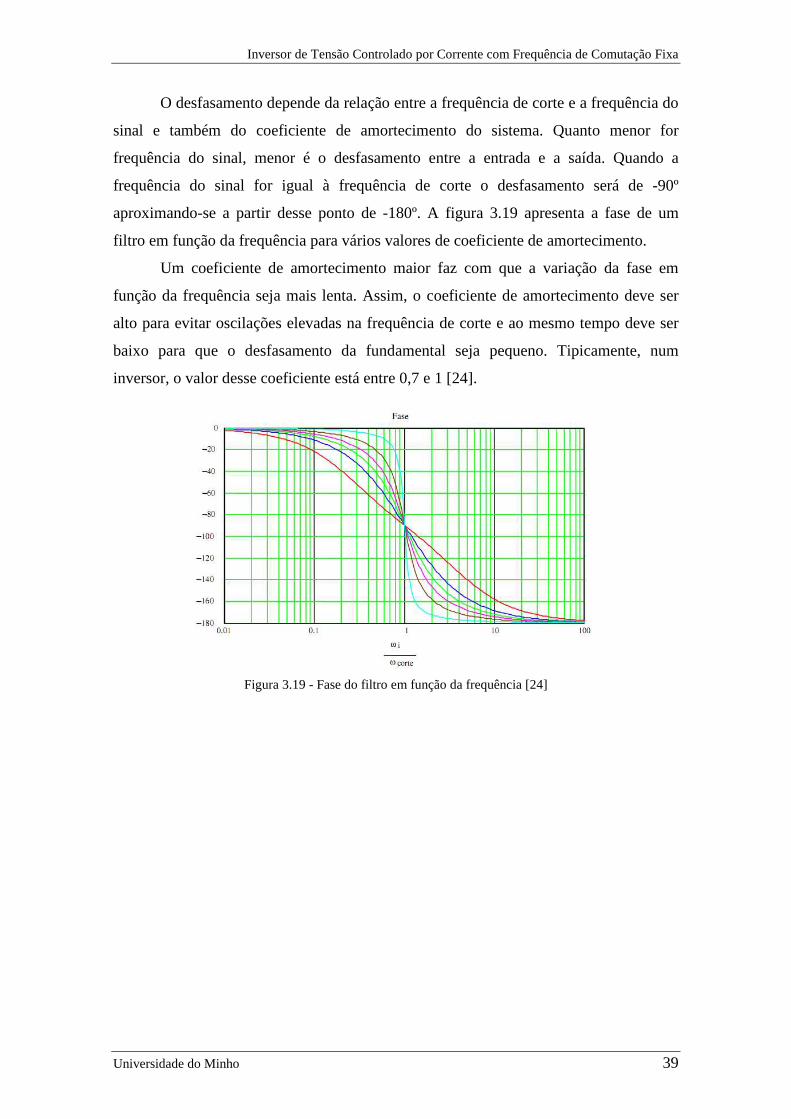
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 39
O desfasamento depende da relação entre a frequência de corte e a frequência do
sinal e também do coeficiente de amortecimento do sistema. Quanto menor for
frequência do sinal, menor é o desfasamento entre a entrada e a saída. Quando a
frequência do sinal for igual à frequência de corte o desfasamento será de -90º
aproximando-se a partir desse ponto de -180º. A figura 3.19 apresenta a fase de um
filtro em função da frequência para vários valores de coeficiente de amortecimento.
Um coeficiente de amortecimento maior faz com que a variação da fase em
função da frequência seja mais lenta. Assim, o coeficiente de amortecimento deve ser
alto para evitar oscilações elevadas na frequência de corte e ao mesmo tempo deve ser
baixo para que o desfasamento da fundamental seja pequeno. Tipicamente, num
inversor, o valor desse coeficiente está entre 0,7 e 1 [24].
Figura 3.19 - Fase do filtro em função da frequência [24]

Filtros Activos Paralelos e Topologias dos Inversores Trifásicos
40 Departamento de Electrónica Industrial
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 41
Capítulo 4
Simulação do Inversor Controlado por Corrente
Neste capítulo, são abordadas as vantagens da realização da simulação antes de
se implementar o sistema. É feita uma breve descrição do simulador utilizado
(Matlab/Simulink), descrevendo algumas vantagens e desvantagens deste. Segue-se a
simulação do inversor, com o respectivo filtro LC, em várias condições de teste, tanto
em malha aberta como em malha fechada, que permitiram tomar consciência de alguns
pormenores importantes na realização do trabalho.
4.1 Vantagens da utilização de ferramentas de simulação
A utilização de ferramentas de simulação tem-se tornado um hábito cada vez
mais frequente no desenvolvimento de diversos sistemas, principalmente quando estes
têm um grau de complexidade elevado. Estas ferramentas permitem fazer uma análise
do comportamento dos sistemas, possibilitando o ajuste dos diversos parâmetros, para
que se obtenham os resultados pretendidos. Numa simulação tem-se a vantagem de se
poder testar o sistema em qualquer tipo de situação, sem que isso possa causar danos ao
material usado ou à pessoa que está a desenvolver o trabalho. Além disso, permite ter a
percepção de possíveis problemas que, sendo descobertos apenas na fase de
implementação, poderiam ser mais difíceis de resolver e por vezes implicariam gastos
acrescidos. Desta forma, pode-se concluir que as ferramentas de simulação são um
auxílio muito importante no desenvolvimento de um sistema, permitindo reduzir o
tempo e os custos da investigação e aumentando a segurança do trabalho.
Para que se consigam obter resultados credíveis na simulação, é importante que
o modelo se consiga aproximar o mais possível da realidade. O facto de estas
ferramentas serem muito utilizadas, tem potenciado um forte desenvolvimento nesse
sentido. De um modo geral, as actuais ferramentas de simulação permitem ajustar os
parâmetros dos componentes para que a aproximação à realidade seja possível.
Dentro das ferramentas de simulação, existem algumas que são dedicadas para
um certo tipo de aplicações e outras que são mais gerais e têm uma gama maior de
aplicações. As ferramentas dedicadas, geralmente, conseguem melhores desempenhos e
Simulação do Inversor Controlado por Corrente
42 Departamento de Electrónica Industrial
uma maior aproximação à realidade, embora haja ferramentas não dedicadas que
também consigam bons resultados. [18]
4.2 Matlab / Simulink e SimPowerSystems
Dentro das ferramentas disponíveis para fazer a simulação do inversor, optou-se
pela utilização do Matlab / Simulink com a toolbox SimPowerSystems. A sua escolha
deve-se ao seu bom desempenho e também aos conhecimentos anteriormente adquiridos
em relação a esta ferramenta que facilitaram a realização das simulações.
O Matlab é um ambiente de análise e desenvolvimento de sistemas que combina
uma grande capacidade de cálculo com uma linguagem de programação de alto nível,
sendo orientada a aplicações científicas e de engenharia. O Simulink é uma extensão do
Matlab que permite construir modelos de sistemas, com rapidez e simplicidade, através
de diagramas de blocos. Permite também alterar diversos parâmetros de modo a ajustar
a simulação e aproximá-la da realidade.
O Simulink disponibiliza várias toolboxes, sendo estas, livrarias dedicadas a
várias áreas específicas. Neste caso foi utilizada a toolbox SimPowerSystems que
permite a criação de modelos de electrónica de potência. Na figura 4.1 está representado
o ambiente do simulador.
Figura 4.1 – Ambiente do Matlab/Simulink
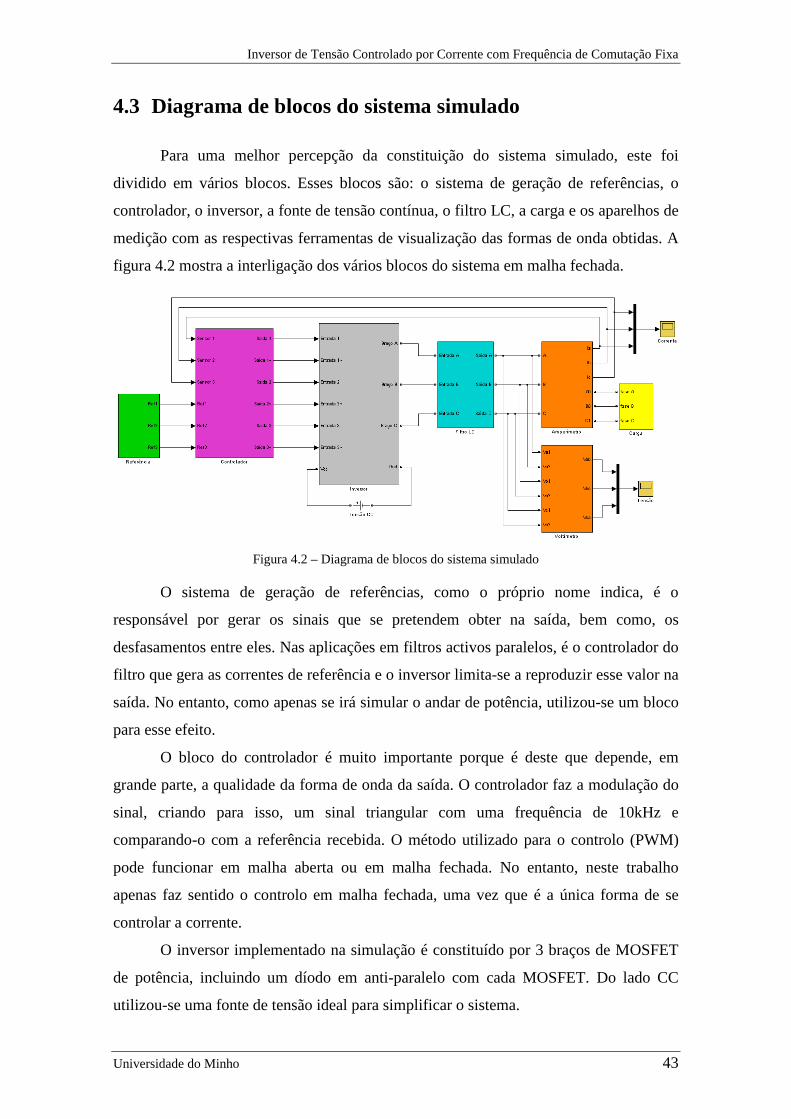
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 43
4.3 Diagrama de blocos do sistema simulado
Para uma melhor percepção da constituição do sistema simulado, este foi
dividido em vários blocos. Esses blocos são: o sistema de geração de referências, o
controlador, o inversor, a fonte de tensão contínua, o filtro LC, a carga e os aparelhos de
medição com as respectivas ferramentas de visualização das formas de onda obtidas. A
figura 4.2 mostra a interligação dos vários blocos do sistema em malha fechada.
Figura 4.2 – Diagrama de blocos do sistema simulado
O sistema de geração de referências, como o próprio nome indica, é o
responsável por gerar os sinais que se pretendem obter na saída, bem como, os
desfasamentos entre eles. Nas aplicações em filtros activos paralelos, é o controlador do
filtro que gera as correntes de referência e o inversor limita-se a reproduzir esse valor na
saída. No entanto, como apenas se irá simular o andar de potência, utilizou-se um bloco
para esse efeito.
O bloco do controlador é muito importante porque é deste que depende, em
grande parte, a qualidade da forma de onda da saída. O controlador faz a modulação do
sinal, criando para isso, um sinal triangular com uma frequência de 10kHz e
comparando-o com a referência recebida. O método utilizado para o controlo (PWM)
pode funcionar em malha aberta ou em malha fechada. No entanto, neste trabalho
apenas faz sentido o controlo em malha fechada, uma vez que é a única forma de se
controlar a corrente.
O inversor implementado na simulação é constituído por 3 braços de MOSFET
de potência, incluindo um díodo em anti-paralelo com cada MOSFET. Do lado CC
utilizou-se uma fonte de tensão ideal para simplificar o sistema.
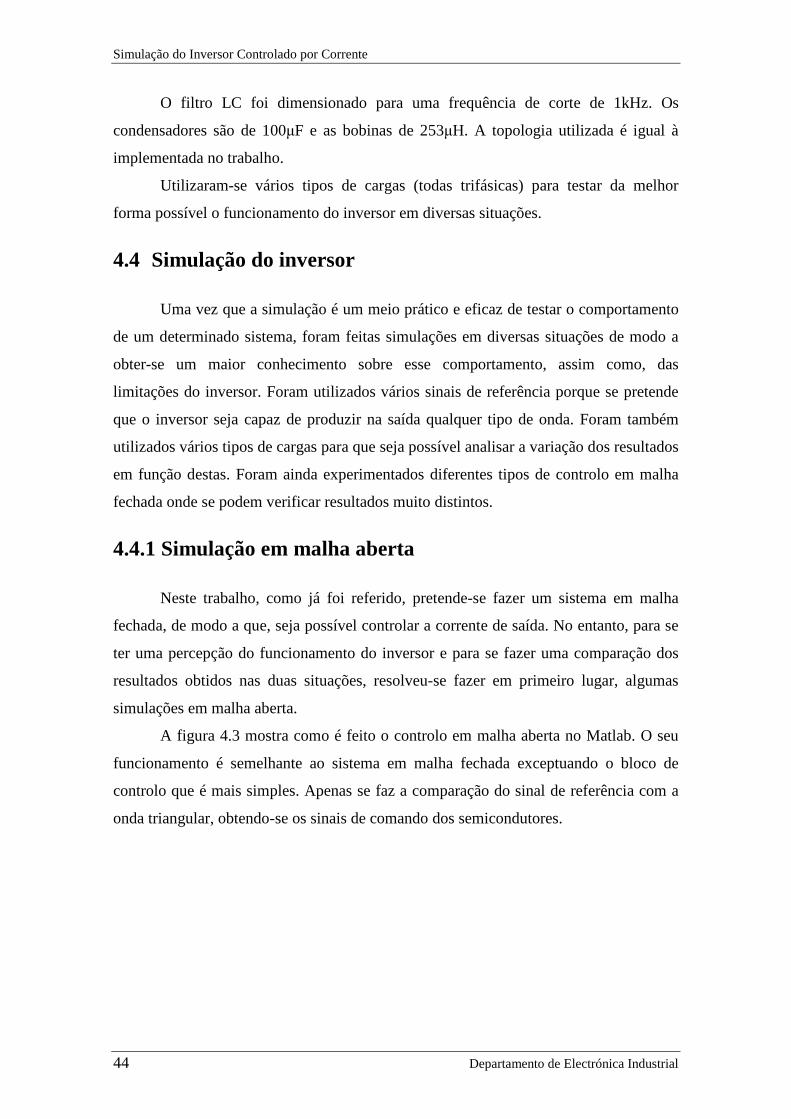
Simulação do Inversor Controlado por Corrente
44 Departamento de Electrónica Industrial
O filtro LC foi dimensionado para uma frequência de corte de 1kHz. Os
condensadores são de 100µF e as bobinas de 253µH. A topologia utilizada é igual à
implementada no trabalho.
Utilizaram-se vários tipos de cargas (todas trifásicas) para testar da melhor
forma possível o funcionamento do inversor em diversas situações.
4.4 Simulação do inversor
Uma vez que a simulação é um meio prático e eficaz de testar o comportamento
de um determinado sistema, foram feitas simulações em diversas situações de modo a
obter-se um maior conhecimento sobre esse comportamento, assim como, das
limitações do inversor. Foram utilizados vários sinais de referência porque se pretende
que o inversor seja capaz de produzir na saída qualquer tipo de onda. Foram também
utilizados vários tipos de cargas para que seja possível analisar a variação dos resultados
em função destas. Foram ainda experimentados diferentes tipos de controlo em malha
fechada onde se podem verificar resultados muito distintos.
4.4.1 Simulação em malha aberta
Neste trabalho, como já foi referido, pretende-se fazer um sistema em malha
fechada, de modo a que, seja possível controlar a corrente de saída. No entanto, para se
ter uma percepção do funcionamento do inversor e para se fazer uma comparação dos
resultados obtidos nas duas situações, resolveu-se fazer em primeiro lugar, algumas
simulações em malha aberta.
A figura 4.3 mostra como é feito o controlo em malha aberta no Matlab. O seu
funcionamento é semelhante ao sistema em malha fechada exceptuando o bloco de
controlo que é mais simples. Apenas se faz a comparação do sinal de referência com a
onda triangular, obtendo-se os sinais de comando dos semicondutores.
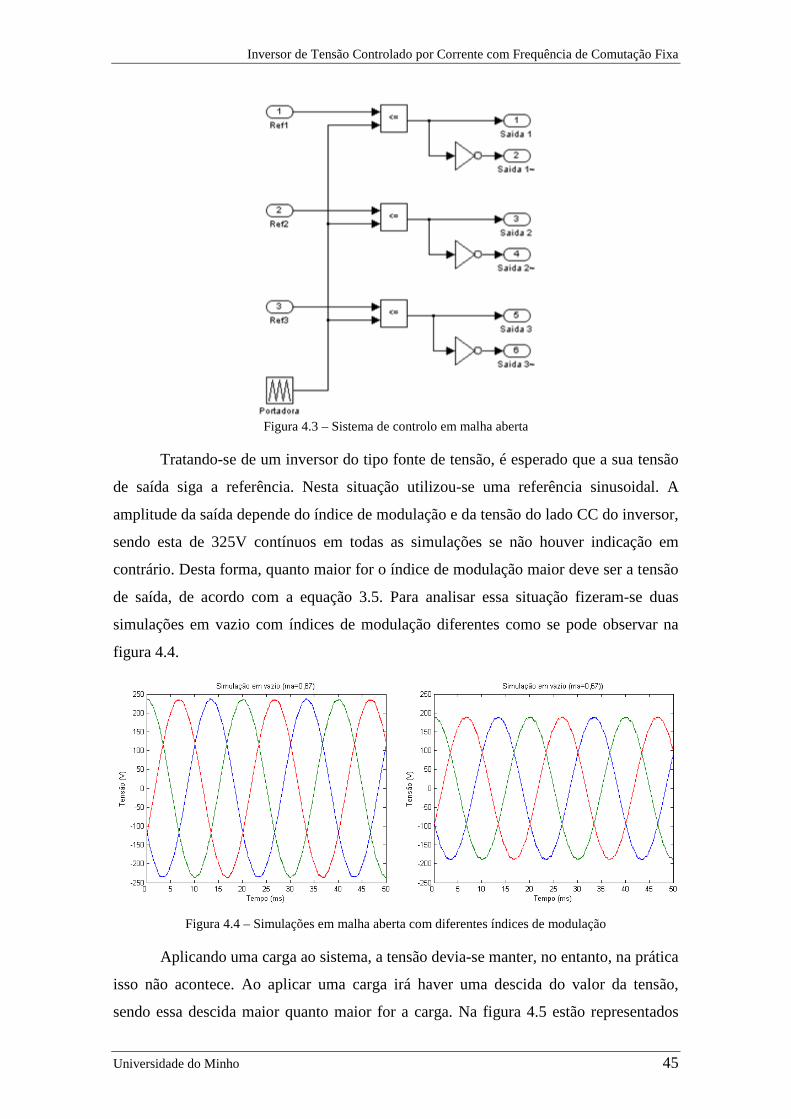
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 45
Figura 4.3 – Sistema de controlo em malha aberta
Tratando-se de um inversor do tipo fonte de tensão, é esperado que a sua tensão
de saída siga a referência. Nesta situação utilizou-se uma referência sinusoidal. A
amplitude da saída depende do índice de modulação e da tensão do lado CC do inversor,
sendo esta de 325V contínuos em todas as simulações se não houver indicação em
contrário. Desta forma, quanto maior for o índice de modulação maior deve ser a tensão
de saída, de acordo com a equação 3.5. Para analisar essa situação fizeram-se duas
simulações em vazio com índices de modulação diferentes como se pode observar na
figura 4.4.
Figura 4.4 – Simulações em malha aberta com diferentes índices de modulação
Aplicando uma carga ao sistema, a tensão devia-se manter, no entanto, na prática
isso não acontece. Ao aplicar uma carga irá haver uma descida do valor da tensão,
sendo essa descida maior quanto maior for a carga. Na figura 4.5 estão representados

Simulação do Inversor Controlado por Corrente
46 Departamento de Electrónica Industrial
dois exemplos onde são aplicadas diferentes cargas resistivas. No primeiro caso foi
utilizada uma carga trifásica de 50Ω e no segundo caso de 10Ω. Em ambos os casos a
ligação foi feita em triângulo e o índice de modulação é de 0,87. Pela figura pode-se
observar que a tensão desce consideravelmente em função da carga.
Figura 4.5 – Simulações em malha aberta com diferentes cargas
4.4.2 Simulação em malha fechada
Como se pôde verificar anteriormente, num sistema em malha aberta, a corrente
depende exclusivamente da carga. É por esse motivo que se torna fundamental para este
trabalho, a realização de um controlo em malha fechada.
Para que um inversor controlado por corrente consiga ter um correcto
funcionamento em qualquer tipo de situação, é necessário ter bastante atenção ao tipo de
controlo utilizado, bem como, o cálculo dos seus parâmetros. Isso torna-se, em muitos
casos, uma tarefa bastante complicada. Neste trabalho, optou-se por simular em
primeiro lugar, um inversor com controlo unitário por ser mais simples. Depois
passou-se para um controlo proporcional, tendo este apresentado melhores resultados do
que o anterior mas ainda assim insuficientes para aquilo que se esperava. Por último,
aplicou-se um controlo PI (Proporcional Integral). Com este controlo conseguiu-se obter
os resultados esperados na simulação.
4.4.2.1 Sistema de controlo em malha fechada com ganho
unitário
Nesta situação, é subtraída à referência gerada, o valor da corrente de saída. O
resultado dessa subtracção (sinal de erro) é depois comparado com a portadora, criando
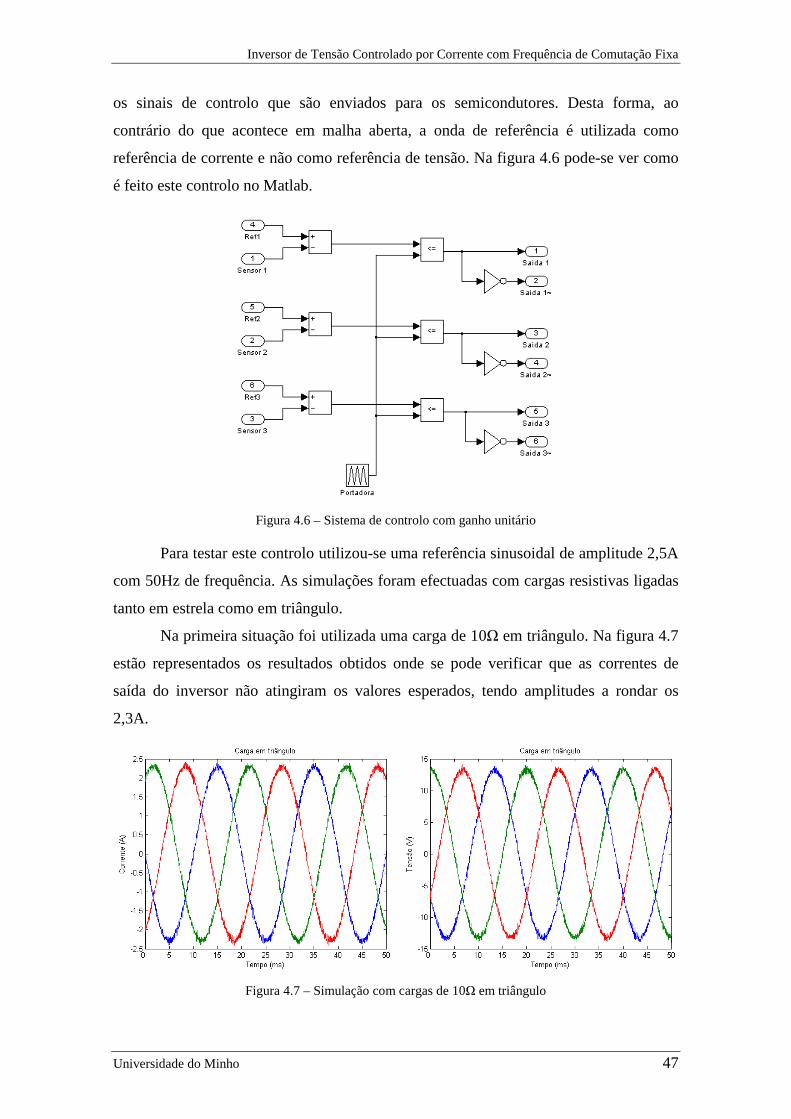
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 47
os sinais de controlo que são enviados para os semicondutores. Desta forma, ao
contrário do que acontece em malha aberta, a onda de referência é utilizada como
referência de corrente e não como referência de tensão. Na figura 4.6 pode-se ver como
é feito este controlo no Matlab.
Figura 4.6 – Sistema de controlo com ganho unitário
Para testar este controlo utilizou-se uma referência sinusoidal de amplitude 2,5A
com 50Hz de frequência. As simulações foram efectuadas com cargas resistivas ligadas
tanto em estrela como em triângulo.
Na primeira situação foi utilizada uma carga de 10Ω em triângulo. Na figura 4.7
estão representados os resultados obtidos onde se pode verificar que as correntes de
saída do inversor não atingiram os valores esperados, tendo amplitudes a rondar os
2,3A.
Figura 4.7 – Simulação com cargas de 10Ω em triângulo
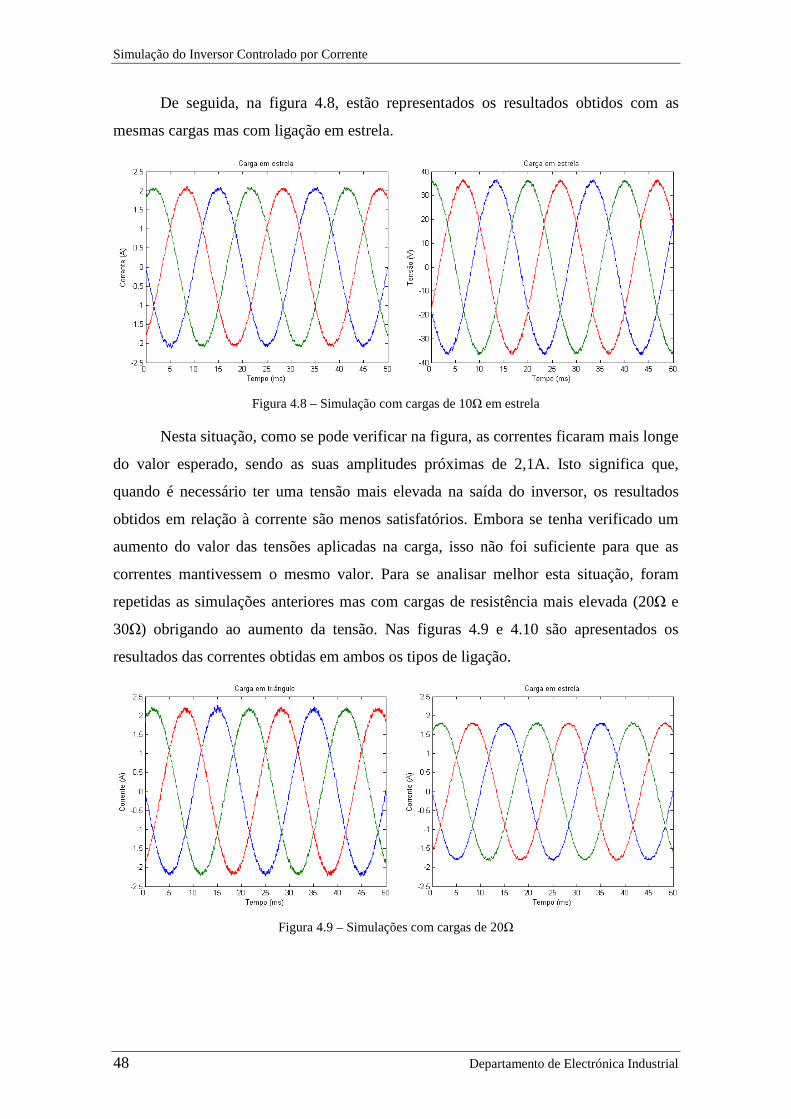
Simulação do Inversor Controlado por Corrente
48 Departamento de Electrónica Industrial
De seguida, na figura 4.8, estão representados os resultados obtidos com as
mesmas cargas mas com ligação em estrela.
Figura 4.8 – Simulação com cargas de 10Ω em estrela
Nesta situação, como se pode verificar na figura, as correntes ficaram mais longe
do valor esperado, sendo as suas amplitudes próximas de 2,1A. Isto significa que,
quando é necessário ter uma tensão mais elevada na saída do inversor, os resultados
obtidos em relação à corrente são menos satisfatórios. Embora se tenha verificado um
aumento do valor das tensões aplicadas na carga, isso não foi suficiente para que as
correntes mantivessem o mesmo valor. Para se analisar melhor esta situação, foram
repetidas as simulações anteriores mas com cargas de resistência mais elevada (20Ω e
30Ω) obrigando ao aumento da tensão. Nas figuras 4.9 e 4.10 são apresentados os
resultados das correntes obtidas em ambos os tipos de ligação.
Figura 4.9 – Simulações com cargas de 20Ω

Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 49
Figura 4.10 – Simulações com cargas de 30Ω
Como se pode observar, há uma clara diminuição dos valores das correntes
quando se aumenta os valores das resistências. Com a carga em triângulo, os valores das
correntes atingiram os 2,15A de amplitude quando se utilizou uma carga de 20Ω e
2,05A com uma carga de 30Ω. No caso da ligação em estrela os valores das correntes
foram mais baixos, como era esperado, tendo 1,8A e 1,6A de amplitude.
Segue-se uma simulação onde se utilizaram novamente cargas de 30Ω mas agora
com uma tenção de 565V do lado CC. Pretendia-se com esta simulação, verificar se as
tensões aplicadas na carga se mantinham de forma a manter também os mesmos valores
de corrente. Como se pode ver na figura 4.11 isso não aconteceu. Obteve-se, neste caso,
uma corrente de 2,25A de amplitude com a ligação das cargas em triângulo e 1,9A com
a ligação em estrela, valores que são consideravelmente superiores em relação aos
obtidos para uma tensão mais baixa do lado CC.
Figura 4.11 – Simulações com tensão de 565V do lado CC
Para finalizar as simulações com este tipo de controlo, testou-se o
comportamento do inversor quando se aplica uma carga desequilibrada. As cargas
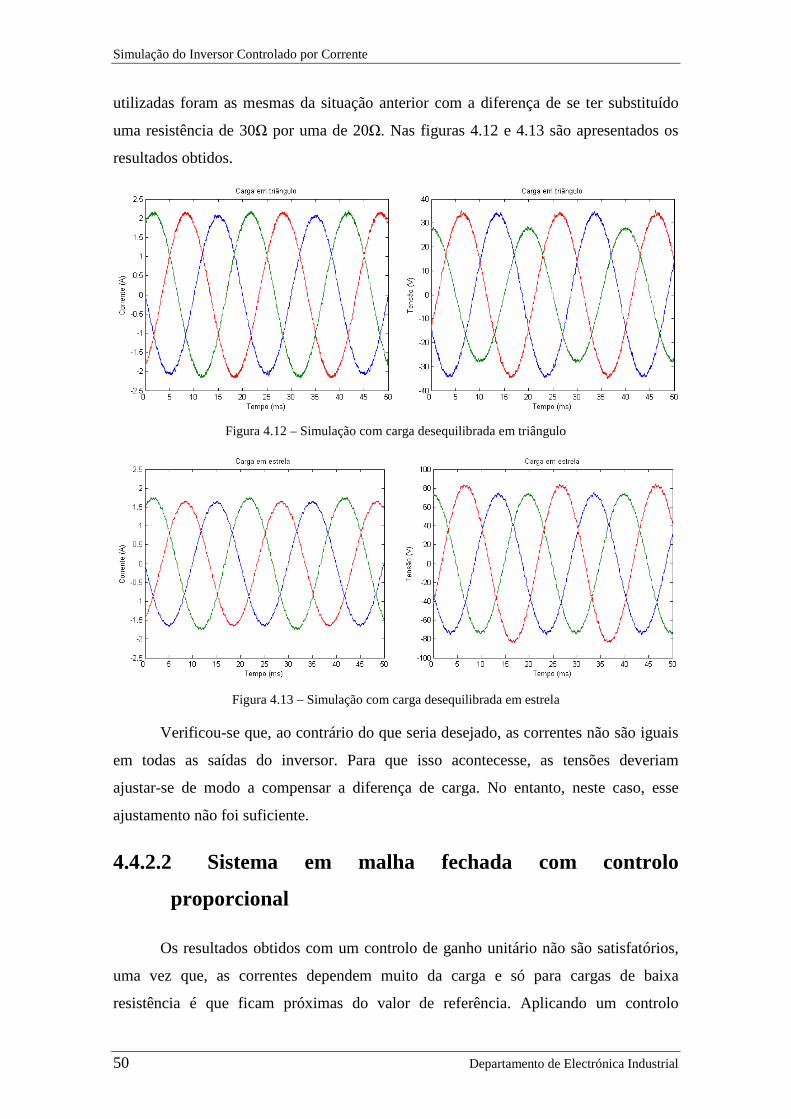
Simulação do Inversor Controlado por Corrente
50 Departamento de Electrónica Industrial
utilizadas foram as mesmas da situação anterior com a diferença de se ter substituído
uma resistência de 30Ω por uma de 20Ω. Nas figuras 4.12 e 4.13 são apresentados os
resultados obtidos.
Figura 4.12 – Simulação com carga desequilibrada em triângulo
Figura 4.13 – Simulação com carga desequilibrada em estrela
Verificou-se que, ao contrário do que seria desejado, as correntes não são iguais
em todas as saídas do inversor. Para que isso acontecesse, as tensões deveriam
ajustar-se de modo a compensar a diferença de carga. No entanto, neste caso, esse
ajustamento não foi suficiente.
4.4.2.2 Sistema em malha fechada com controlo
proporcional
Os resultados obtidos com um controlo de ganho unitário não são satisfatórios,
uma vez que, as correntes dependem muito da carga e só para cargas de baixa
resistência é que ficam próximas do valor de referência. Aplicando um controlo
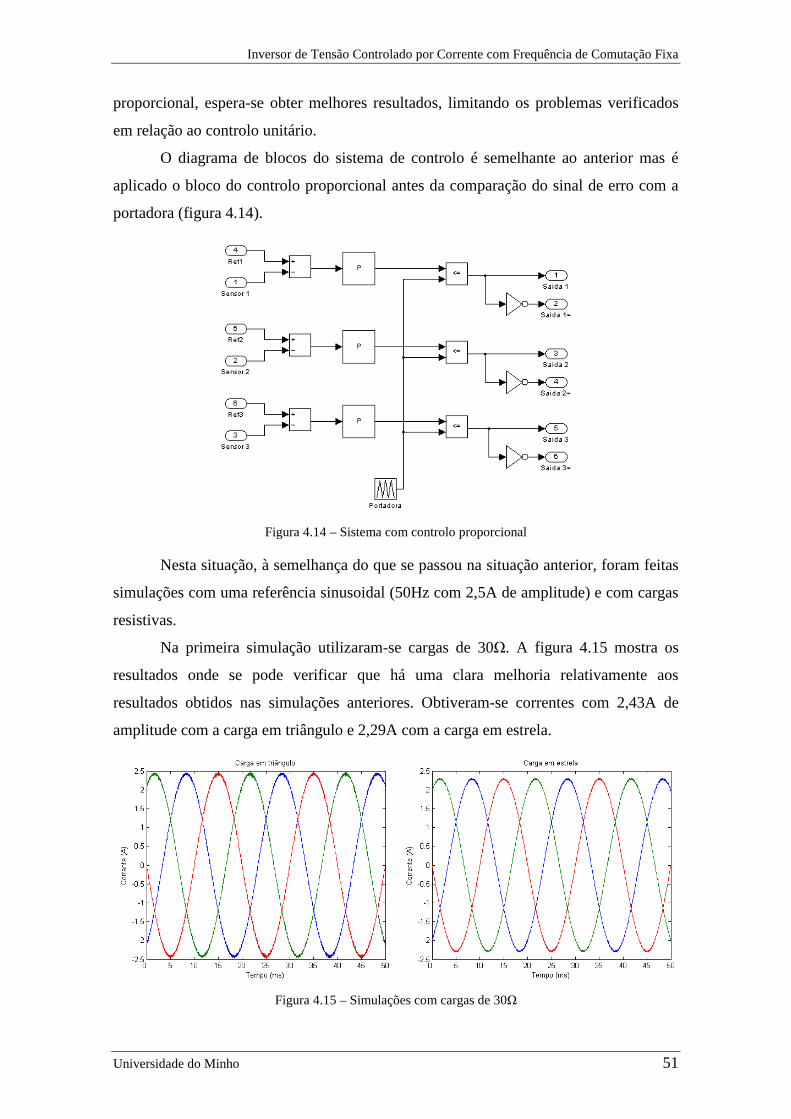
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 51
proporcional, espera-se obter melhores resultados, limitando os problemas verificados
em relação ao controlo unitário.
O diagrama de blocos do sistema de controlo é semelhante ao anterior mas é
aplicado o bloco do controlo proporcional antes da comparação do sinal de erro com a
portadora (figura 4.14).
Figura 4.14 – Sistema com controlo proporcional
Nesta situação, à semelhança do que se passou na situação anterior, foram feitas
simulações com uma referência sinusoidal (50Hz com 2,5A de amplitude) e com cargas
resistivas.
Na primeira simulação utilizaram-se cargas de 30Ω. A figura 4.15 mostra os
resultados onde se pode verificar que há uma clara melhoria relativamente aos
resultados obtidos nas simulações anteriores. Obtiveram-se correntes com 2,43A de
amplitude com a carga em triângulo e 2,29A com a carga em estrela.
Figura 4.15 – Simulações com cargas de 30Ω
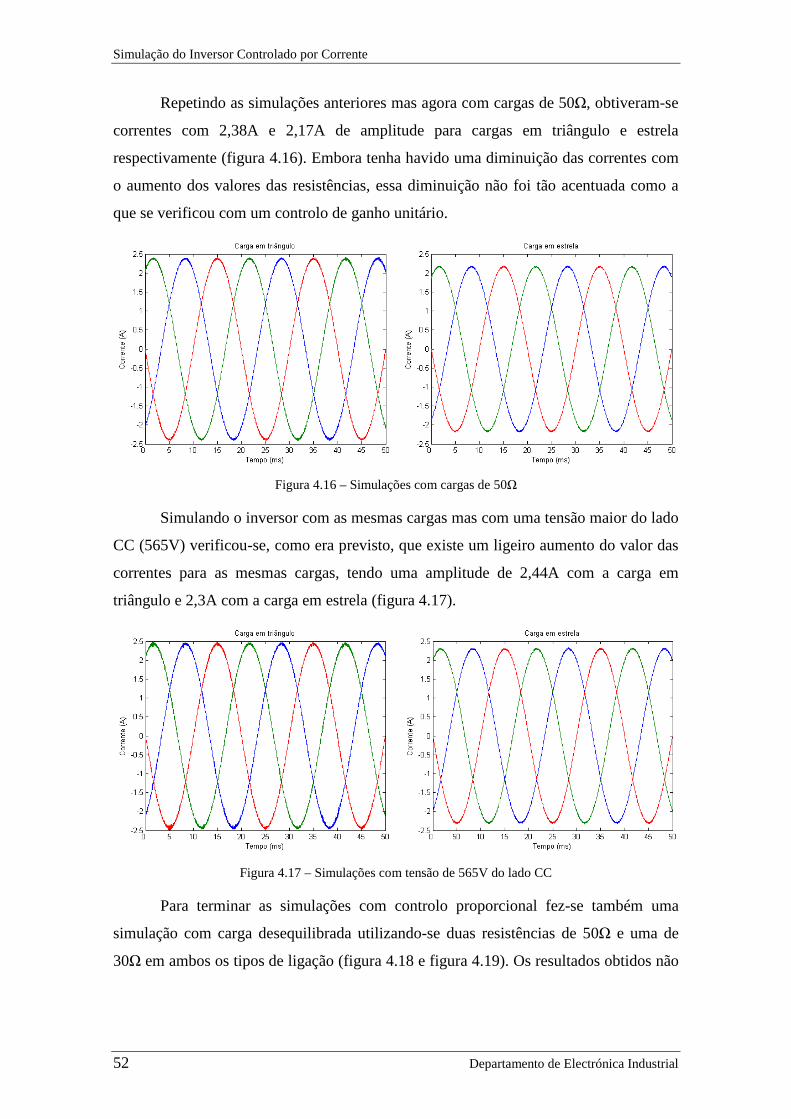
Simulação do Inversor Controlado por Corrente
52 Departamento de Electrónica Industrial
Repetindo as simulações anteriores mas agora com cargas de 50Ω, obtiveram-se
correntes com 2,38A e 2,17A de amplitude para cargas em triângulo e estrela
respectivamente (figura 4.16). Embora tenha havido uma diminuição das correntes com
o aumento dos valores das resistências, essa diminuição não foi tão acentuada como a
que se verificou com um controlo de ganho unitário.
Figura 4.16 – Simulações com cargas de 50Ω
Simulando o inversor com as mesmas cargas mas com uma tensão maior do lado
CC (565V) verificou-se, como era previsto, que existe um ligeiro aumento do valor das
correntes para as mesmas cargas, tendo uma amplitude de 2,44A com a carga em
triângulo e 2,3A com a carga em estrela (figura 4.17).
Figura 4.17 – Simulações com tensão de 565V do lado CC
Para terminar as simulações com controlo proporcional fez-se também uma
simulação com carga desequilibrada utilizando-se duas resistências de 50Ω e uma de
30Ω em ambos os tipos de ligação (figura 4.18 e figura 4.19). Os resultados obtidos não
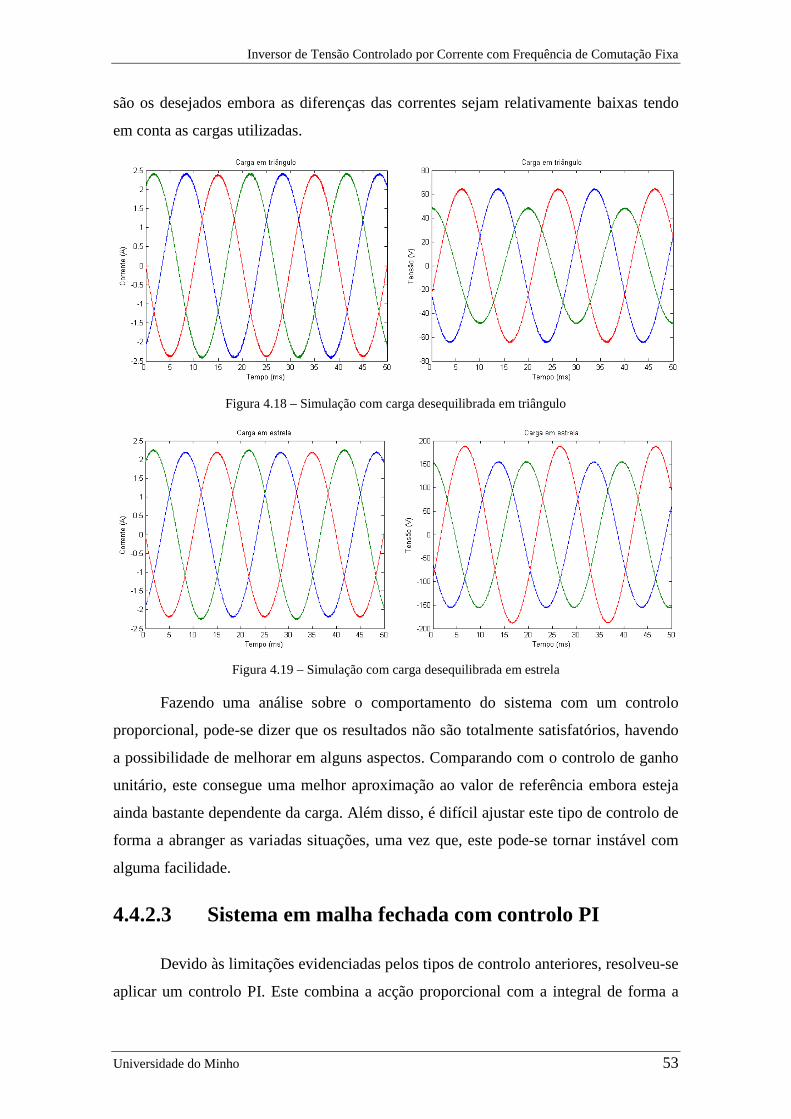
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 53
são os desejados embora as diferenças das correntes sejam relativamente baixas tendo
em conta as cargas utilizadas.
Figura 4.18 – Simulação com carga desequilibrada em triângulo
Figura 4.19 – Simulação com carga desequilibrada em estrela
Fazendo uma análise sobre o comportamento do sistema com um controlo
proporcional, pode-se dizer que os resultados não são totalmente satisfatórios, havendo
a possibilidade de melhorar em alguns aspectos. Comparando com o controlo de ganho
unitário, este consegue uma melhor aproximação ao valor de referência embora esteja
ainda bastante dependente da carga. Além disso, é difícil ajustar este tipo de controlo de
forma a abranger as variadas situações, uma vez que, este pode-se tornar instável com
alguma facilidade.
4.4.2.3 Sistema em malha fechada com controlo PI
Devido às limitações evidenciadas pelos tipos de controlo anteriores, resolveu-se
aplicar um controlo PI. Este combina a acção proporcional com a integral de forma a
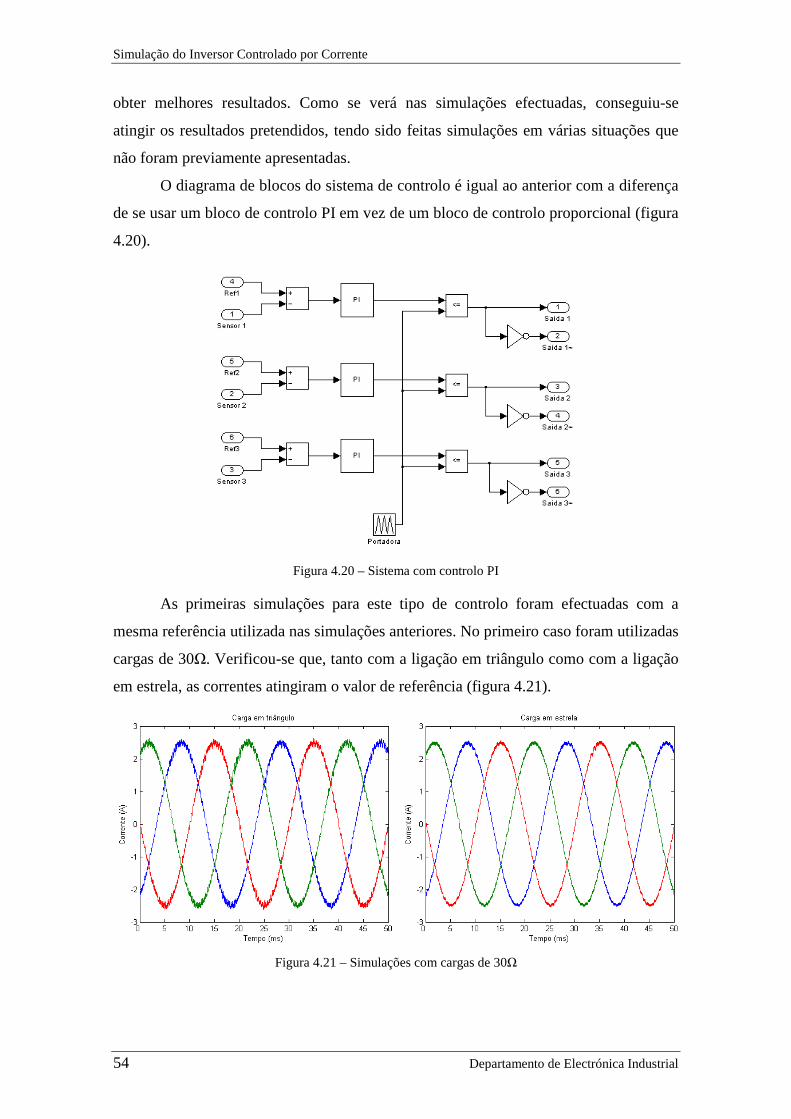
Simulação do Inversor Controlado por Corrente
54 Departamento de Electrónica Industrial
obter melhores resultados. Como se verá nas simulações efectuadas, conseguiu-se
atingir os resultados pretendidos, tendo sido feitas simulações em várias situações que
não foram previamente apresentadas.
O diagrama de blocos do sistema de controlo é igual ao anterior com a diferença
de se usar um bloco de controlo PI em vez de um bloco de controlo proporcional (figura
4.20).
Figura 4.20 – Sistema com controlo PI
As primeiras simulações para este tipo de controlo foram efectuadas com a
mesma referência utilizada nas simulações anteriores. No primeiro caso foram utilizadas
cargas de 30Ω. Verificou-se que, tanto com a ligação em triângulo como com a ligação
em estrela, as correntes atingiram o valor de referência (figura 4.21).
Figura 4.21 – Simulações com cargas de 30Ω
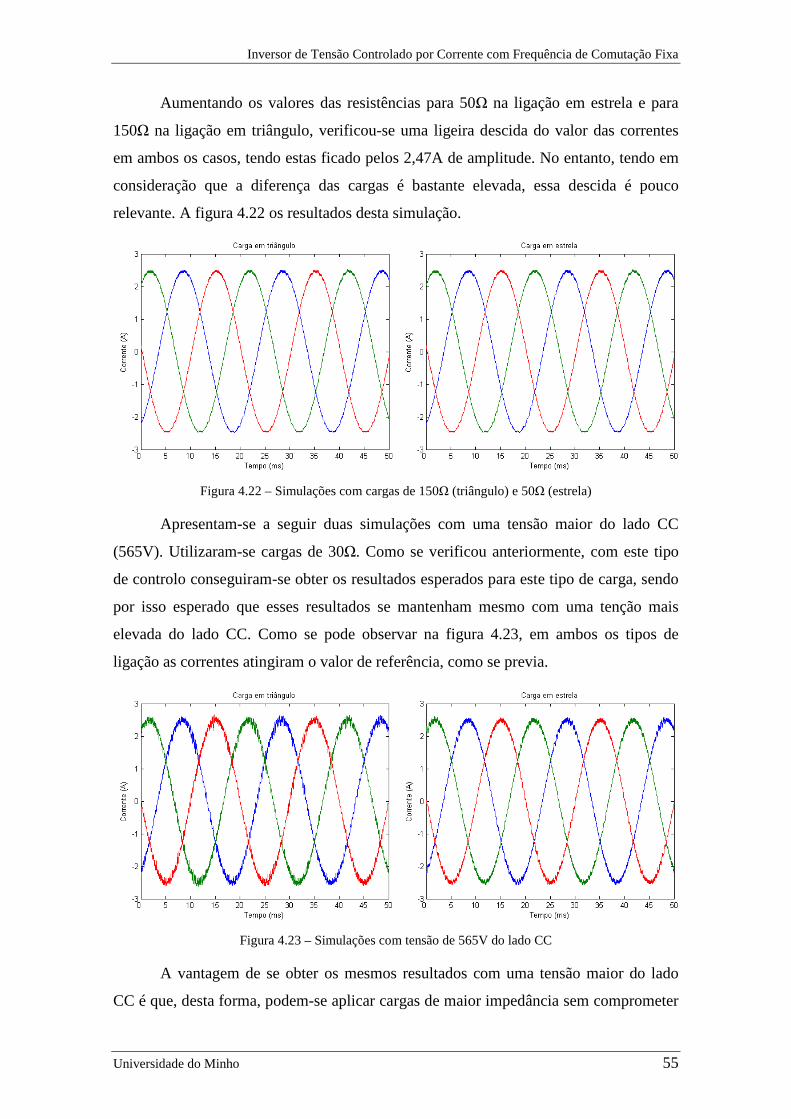
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 55
Aumentando os valores das resistências para 50Ω na ligação em estrela e para
150Ω na ligação em triângulo, verificou-se uma ligeira descida do valor das correntes
em ambos os casos, tendo estas ficado pelos 2,47A de amplitude. No entanto, tendo em
consideração que a diferença das cargas é bastante elevada, essa descida é pouco
relevante. A figura 4.22 os resultados desta simulação.
Figura 4.22 – Simulações com cargas de 150Ω (triângulo) e 50Ω (estrela)
Apresentam-se a seguir duas simulações com uma tensão maior do lado CC
(565V). Utilizaram-se cargas de 30Ω. Como se verificou anteriormente, com este tipo
de controlo conseguiram-se obter os resultados esperados para este tipo de carga, sendo
por isso esperado que esses resultados se mantenham mesmo com uma tenção mais
elevada do lado CC. Como se pode observar na figura 4.23, em ambos os tipos de
ligação as correntes atingiram o valor de referência, como se previa.
Figura 4.23 – Simulações com tensão de 565V do lado CC
A vantagem de se obter os mesmos resultados com uma tensão maior do lado
CC é que, desta forma, podem-se aplicar cargas de maior impedância sem comprometer
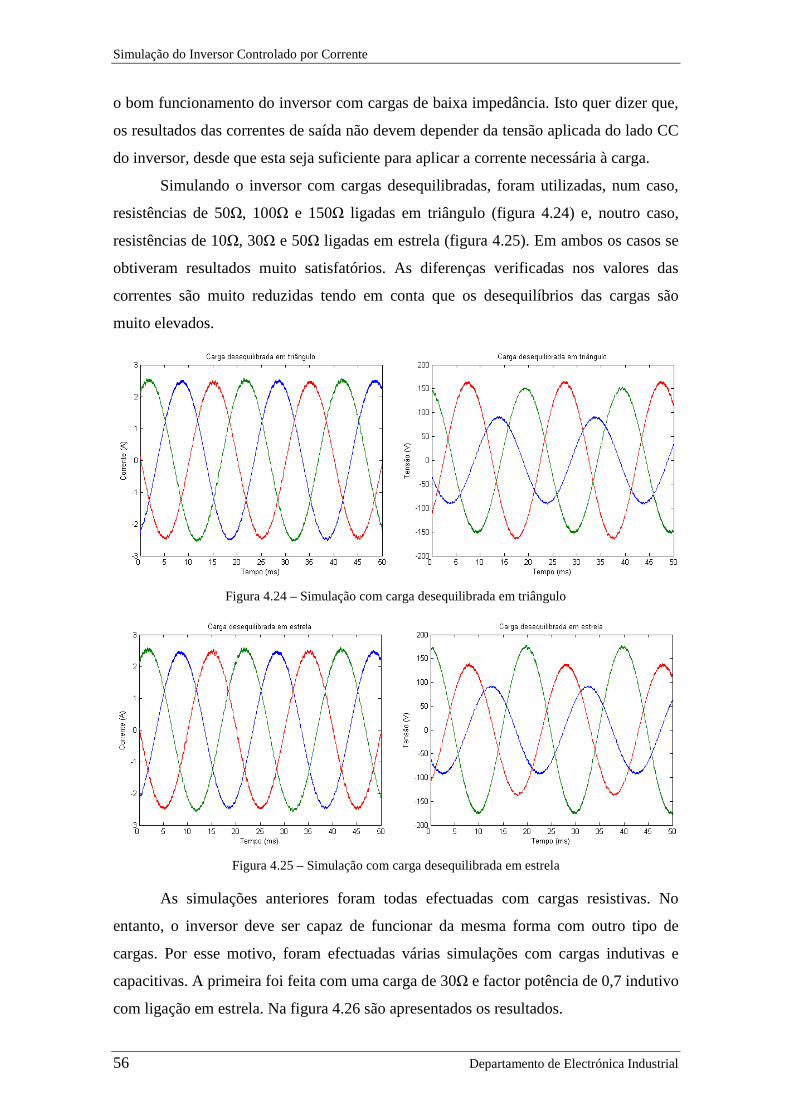
Simulação do Inversor Controlado por Corrente
56 Departamento de Electrónica Industrial
o bom funcionamento do inversor com cargas de baixa impedância. Isto quer dizer que,
os resultados das correntes de saída não devem depender da tensão aplicada do lado CC
do inversor, desde que esta seja suficiente para aplicar a corrente necessária à carga.
Simulando o inversor com cargas desequilibradas, foram utilizadas, num caso,
resistências de 50Ω, 100Ω e 150Ω ligadas em triângulo (figura 4.24) e, noutro caso,
resistências de 10Ω, 30Ω e 50Ω ligadas em estrela (figura 4.25). Em ambos os casos se
obtiveram resultados muito satisfatórios. As diferenças verificadas nos valores das
correntes são muito reduzidas tendo em conta que os desequilíbrios das cargas são
muito elevados.
Figura 4.24 – Simulação com carga desequilibrada em triângulo
Figura 4.25 – Simulação com carga desequilibrada em estrela
As simulações anteriores foram todas efectuadas com cargas resistivas. No
entanto, o inversor deve ser capaz de funcionar da mesma forma com outro tipo de
cargas. Por esse motivo, foram efectuadas várias simulações com cargas indutivas e
capacitivas. A primeira foi feita com uma carga de 30Ω e factor potência de 0,7 indutivo
com ligação em estrela. Na figura 4.26 são apresentados os resultados.
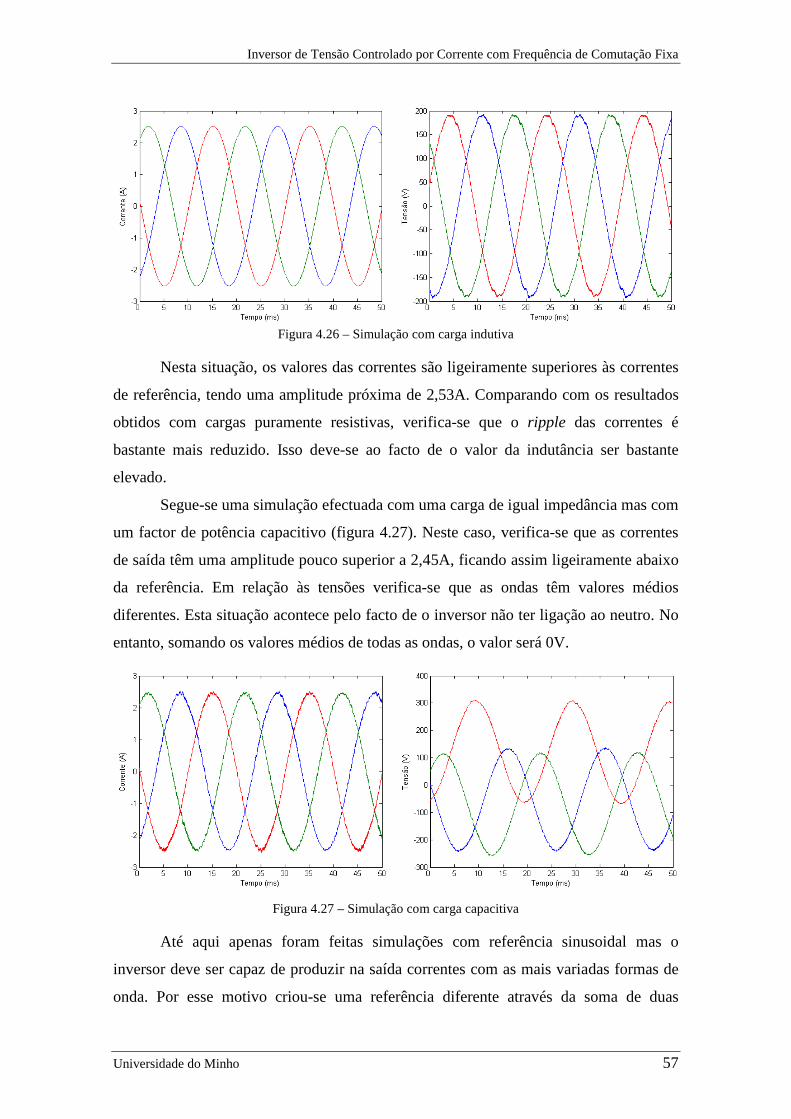
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 57
Figura 4.26 – Simulação com carga indutiva
Nesta situação, os valores das correntes são ligeiramente superiores às correntes
de referência, tendo uma amplitude próxima de 2,53A. Comparando com os resultados
obtidos com cargas puramente resistivas, verifica-se que o ripple das correntes é
bastante mais reduzido. Isso deve-se ao facto de o valor da indutância ser bastante
elevado.
Segue-se uma simulação efectuada com uma carga de igual impedância mas com
um factor de potência capacitivo (figura 4.27). Neste caso, verifica-se que as correntes
de saída têm uma amplitude pouco superior a 2,45A, ficando assim ligeiramente abaixo
da referência. Em relação às tensões verifica-se que as ondas têm valores médios
diferentes. Esta situação acontece pelo facto de o inversor não ter ligação ao neutro. No
entanto, somando os valores médios de todas as ondas, o valor será 0V.
Figura 4.27 – Simulação com carga capacitiva
Até aqui apenas foram feitas simulações com referência sinusoidal mas o
inversor deve ser capaz de produzir na saída correntes com as mais variadas formas de
onda. Por esse motivo criou-se uma referência diferente através da soma de duas
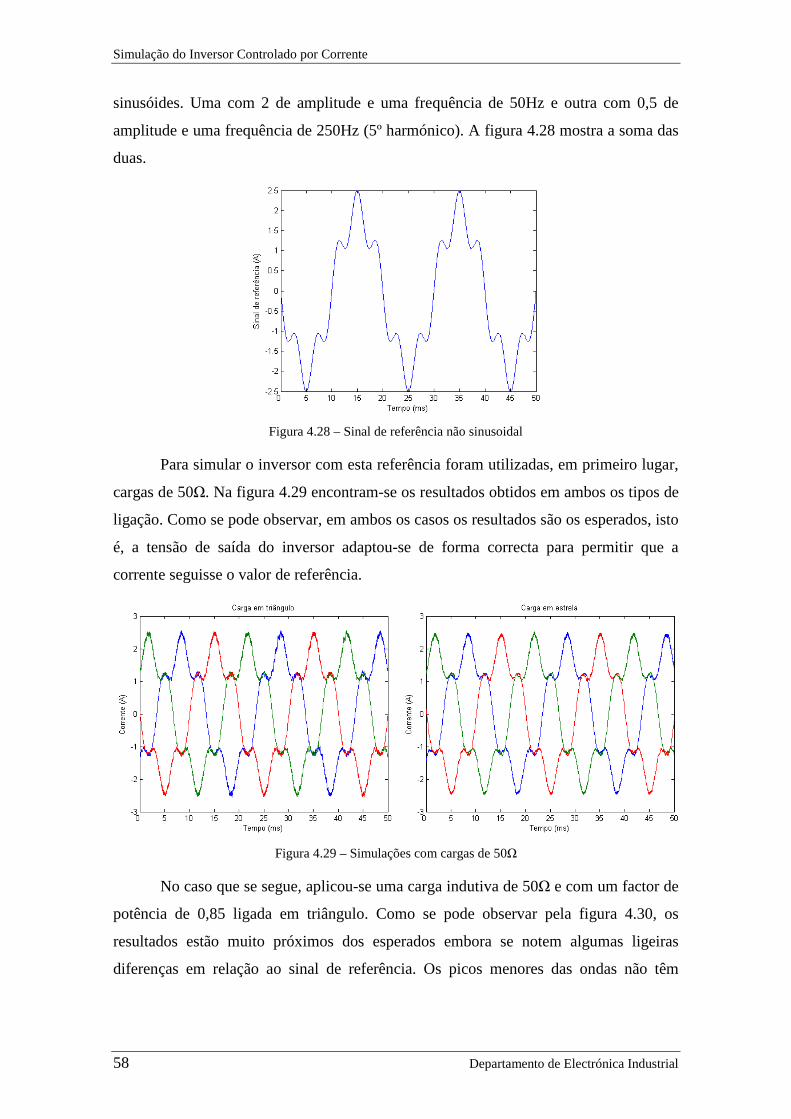
Simulação do Inversor Controlado por Corrente
58 Departamento de Electrónica Industrial
sinusóides. Uma com 2 de amplitude e uma frequência de 50Hz e outra com 0,5 de
amplitude e uma frequência de 250Hz (5º harmónico). A figura 4.28 mostra a soma das
duas.
Figura 4.28 – Sinal de referência não sinusoidal
Para simular o inversor com esta referência foram utilizadas, em primeiro lugar,
cargas de 50Ω. Na figura 4.29 encontram-se os resultados obtidos em ambos os tipos de
ligação. Como se pode observar, em ambos os casos os resultados são os esperados, isto
é, a tensão de saída do inversor adaptou-se de forma correcta para permitir que a
corrente seguisse o valor de referência.
Figura 4.29 – Simulações com cargas de 50Ω
No caso que se segue, aplicou-se uma carga indutiva de 50Ω e com um factor de
potência de 0,85 ligada em triângulo. Como se pode observar pela figura 4.30, os
resultados estão muito próximos dos esperados embora se notem algumas ligeiras
diferenças em relação ao sinal de referência. Os picos menores das ondas não têm
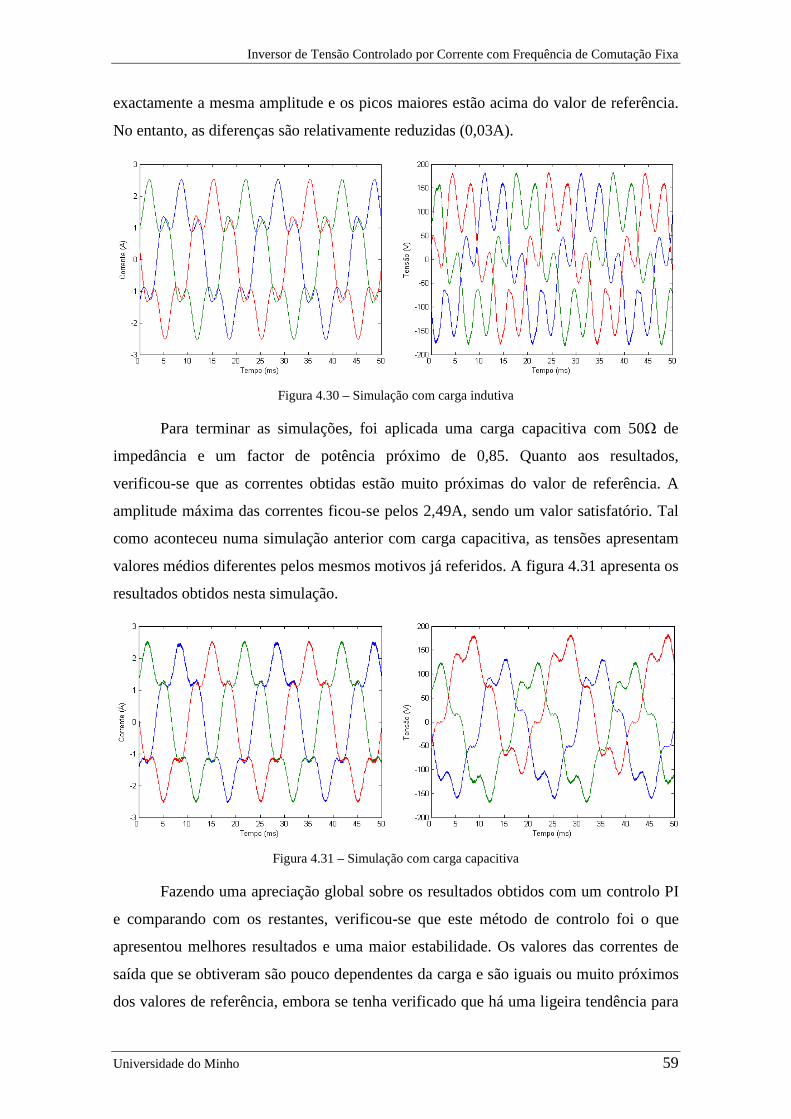
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 59
exactamente a mesma amplitude e os picos maiores estão acima do valor de referência.
No entanto, as diferenças são relativamente reduzidas (0,03A).
Figura 4.30 – Simulação com carga indutiva
Para terminar as simulações, foi aplicada uma carga capacitiva com 50Ω de
impedância e um factor de potência próximo de 0,85. Quanto aos resultados,
verificou-se que as correntes obtidas estão muito próximas do valor de referência. A
amplitude máxima das correntes ficou-se pelos 2,49A, sendo um valor satisfatório. Tal
como aconteceu numa simulação anterior com carga capacitiva, as tensões apresentam
valores médios diferentes pelos mesmos motivos já referidos. A figura 4.31 apresenta os
resultados obtidos nesta simulação.
Figura 4.31 – Simulação com carga capacitiva
Fazendo uma apreciação global sobre os resultados obtidos com um controlo PI
e comparando com os restantes, verificou-se que este método de controlo foi o que
apresentou melhores resultados e uma maior estabilidade. Os valores das correntes de
saída que se obtiveram são pouco dependentes da carga e são iguais ou muito próximos
dos valores de referência, embora se tenha verificado que há uma ligeira tendência para

Simulação do Inversor Controlado por Corrente
60 Departamento de Electrónica Industrial
as correntes serem mais elevadas quando se utilizam cargas indutivas e uma tendência
inversa no caso das cargas capacitivas. No entanto, essas tendências não são muito
acentuadas e não comprometem o bom funcionamento do inversor. Verificou-se
também que, o ripple das correntes é mais elevado quando a carga tem menor
impedância, seja qual for o tipo de controlo utilizado. A principal desvantagem que este
método apresenta em relação aos anteriores é a maior complexidade de cálculo e na
afinação dos parâmetros do controlo.
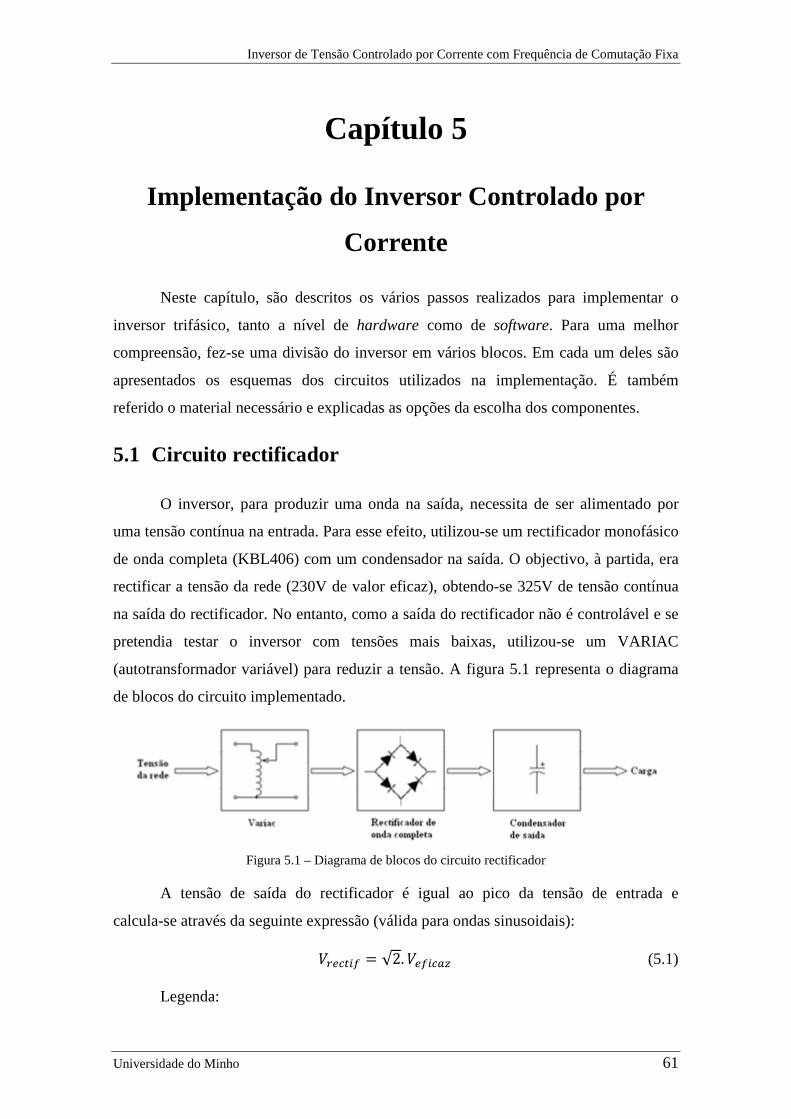
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 61
Capítulo 5
Implementação do Inversor Controlado por
Corrente
Neste capítulo, são descritos os vários passos realizados para implementar o
inversor trifásico, tanto a nível de hardware como de software. Para uma melhor
compreensão, fez-se uma divisão do inversor em vários blocos. Em cada um deles são
apresentados os esquemas dos circuitos utilizados na implementação. É também
referido o material necessário e explicadas as opções da escolha dos componentes.
5.1 Circuito rectificador
O inversor, para produzir uma onda na saída, necessita de ser alimentado por
uma tensão contínua na entrada. Para esse efeito, utilizou-se um rectificador monofásico
de onda completa (KBL406) com um condensador na saída. O objectivo, à partida, era
rectificar a tensão da rede (230V de valor eficaz), obtendo-se 325V de tensão contínua
na saída do rectificador. No entanto, como a saída do rectificador não é controlável e se
pretendia testar o inversor com tensões mais baixas, utilizou-se um VARIAC
(autotransformador variável) para reduzir a tensão. A figura 5.1 representa o diagrama
de blocos do circuito implementado.
Figura 5.1 – Diagrama de blocos do circuito rectificador
A tensão de saída do rectificador é igual ao pico da tensão de entrada e
calcula-se através da seguinte expressão (válida para ondas sinusoidais):
783A √2. 8A5` (5.1)
Legenda:
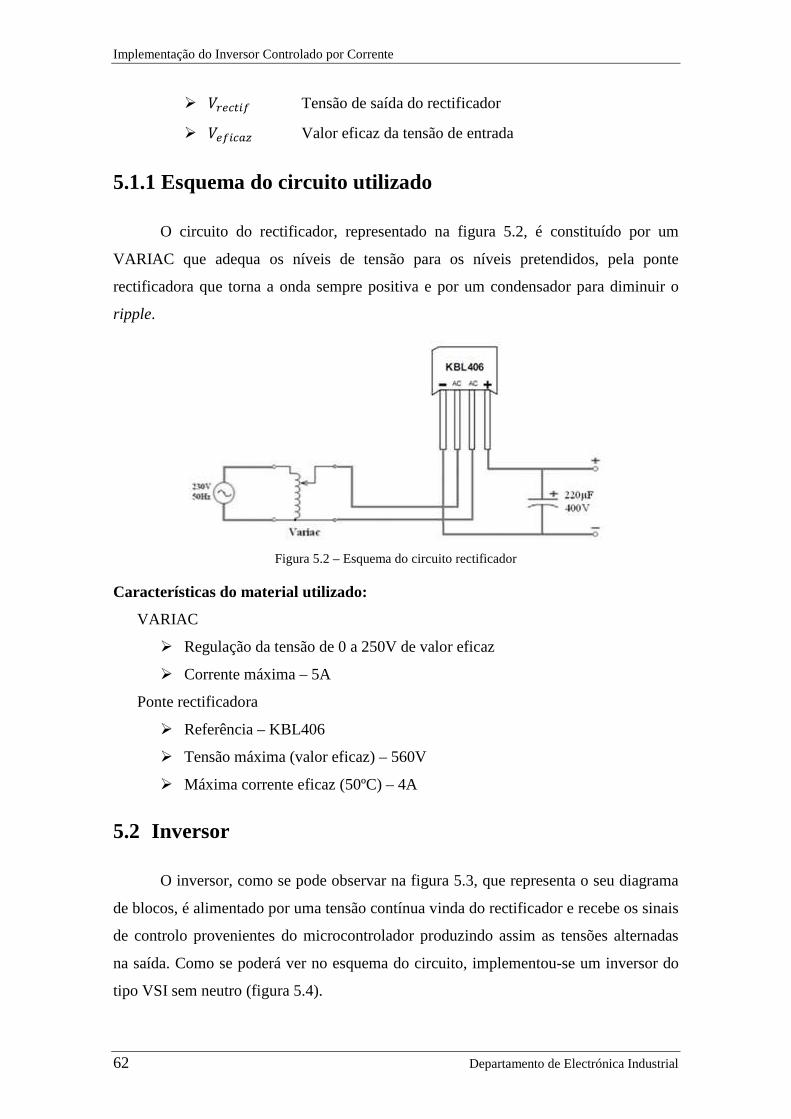
Implementação do Inversor Controlado por Corrente
62 Departamento de Electrónica Industrial
783A Tensão de saída do rectificador
8A5` Valor eficaz da tensão de entrada
5.1.1 Esquema do circuito utilizado
O circuito do rectificador, representado na figura 5.2, é constituído por um
VARIAC que adequa os níveis de tensão para os níveis pretendidos, pela ponte
rectificadora que torna a onda sempre positiva e por um condensador para diminuir o
ripple.
Figura 5.2 – Esquema do circuito rectificador
Características do material utilizado:
VARIAC
Regulação da tensão de 0 a 250V de valor eficaz
Corrente máxima – 5A
Ponte rectificadora
Referência – KBL406
Tensão máxima (valor eficaz) – 560V
Máxima corrente eficaz (50ºC) – 4A
5.2 Inversor
O inversor, como se pode observar na figura 5.3, que representa o seu diagrama
de blocos, é alimentado por uma tensão contínua vinda do rectificador e recebe os sinais
de controlo provenientes do microcontrolador produzindo assim as tensões alternadas
na saída. Como se poderá ver no esquema do circuito, implementou-se um inversor do
tipo VSI sem neutro (figura 5.4).
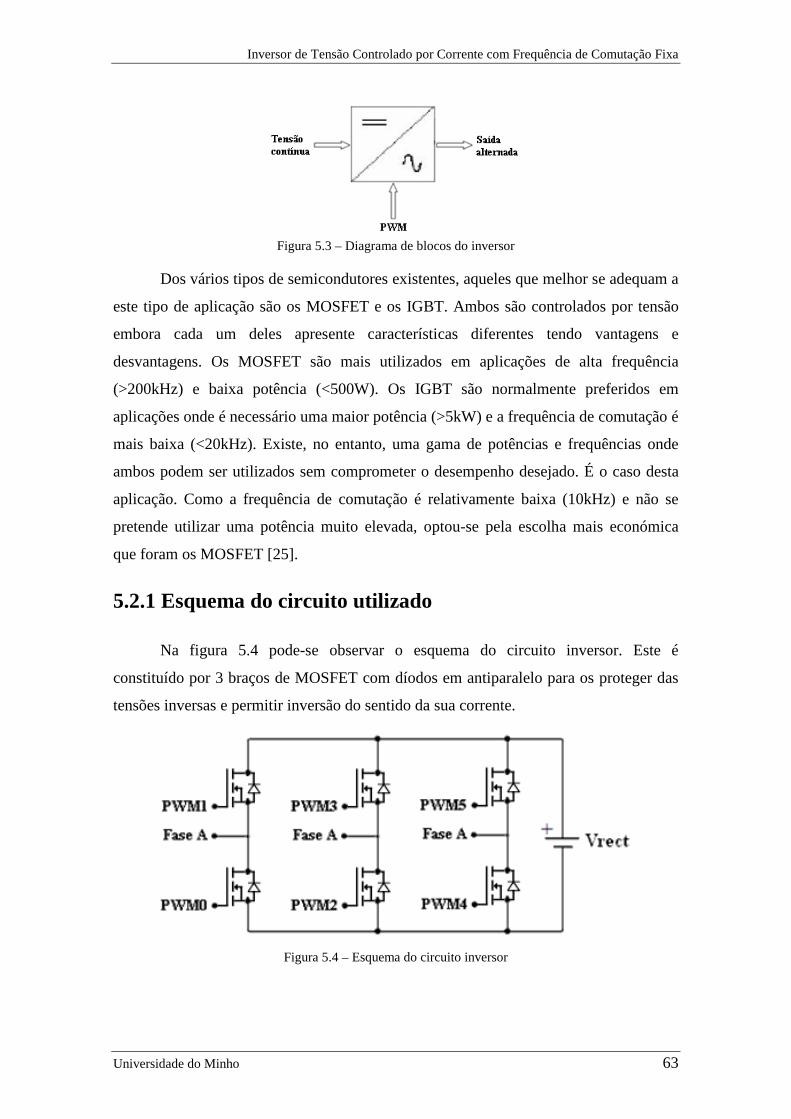
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 63
Figura 5.3 – Diagrama de blocos do inversor
Dos vários tipos de semicondutores existentes, aqueles que melhor se adequam a
este tipo de aplicação são os MOSFET e os IGBT. Ambos são controlados por tensão
embora cada um deles apresente características diferentes tendo vantagens e
desvantagens. Os MOSFET são mais utilizados em aplicações de alta frequência
(>200kHz) e baixa potência (<500W). Os IGBT são normalmente preferidos em
aplicações onde é necessário uma maior potência (>5kW) e a frequência de comutação é
mais baixa (<20kHz). Existe, no entanto, uma gama de potências e frequências onde
ambos podem ser utilizados sem comprometer o desempenho desejado. É o caso desta
aplicação. Como a frequência de comutação é relativamente baixa (10kHz) e não se
pretende utilizar uma potência muito elevada, optou-se pela escolha mais económica
que foram os MOSFET [25].
5.2.1 Esquema do circuito utilizado
Na figura 5.4 pode-se observar o esquema do circuito inversor. Este é
constituído por 3 braços de MOSFET com díodos em antiparalelo para os proteger das
tensões inversas e permitir inversão do sentido da sua corrente.
Figura 5.4 – Esquema do circuito inversor
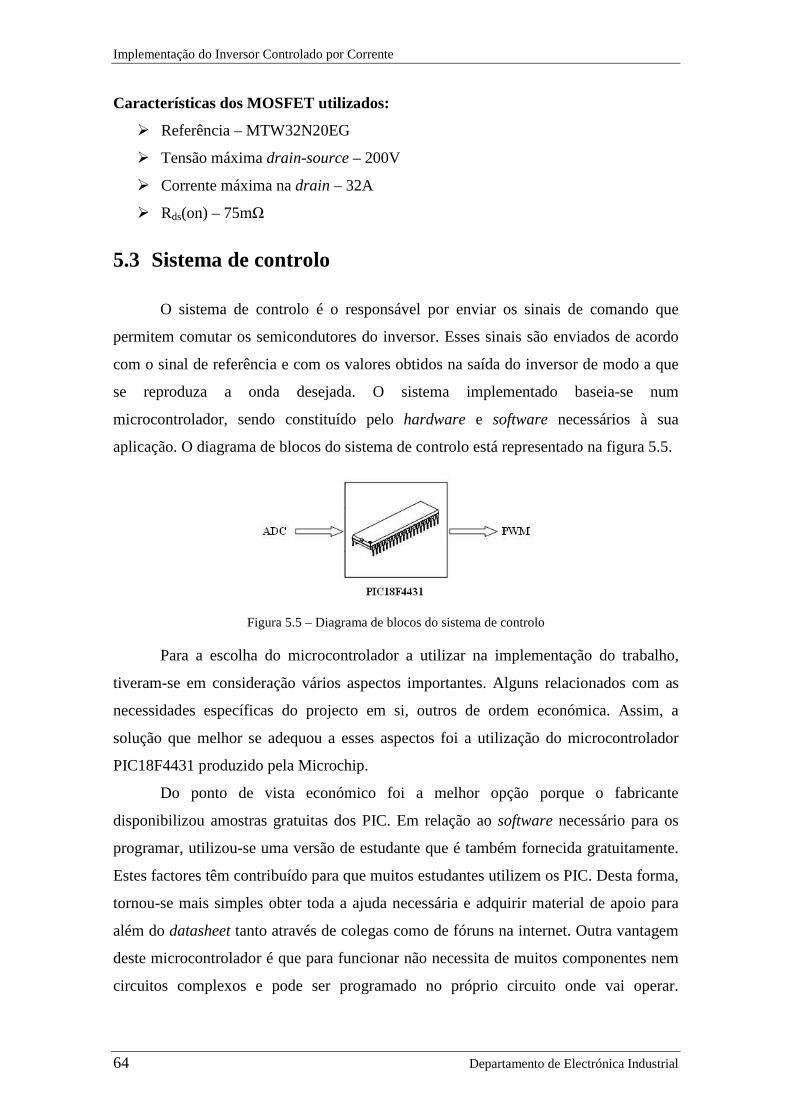
Implementação do Inversor Controlado por Corrente
64 Departamento de Electrónica Industrial
Características dos MOSFET utilizados:
Referência – MTW32N20EG
Tensão máxima drain-source – 200V
Corrente máxima na drain – 32A
Rds(on) – 75mΩ
5.3 Sistema de controlo
O sistema de controlo é o responsável por enviar os sinais de comando que
permitem comutar os semicondutores do inversor. Esses sinais são enviados de acordo
com o sinal de referência e com os valores obtidos na saída do inversor de modo a que
se reproduza a onda desejada. O sistema implementado baseia-se num
microcontrolador, sendo constituído pelo hardware e software necessários à sua
aplicação. O diagrama de blocos do sistema de controlo está representado na figura 5.5.
Figura 5.5 – Diagrama de blocos do sistema de controlo
Para a escolha do microcontrolador a utilizar na implementação do trabalho,
tiveram-se em consideração vários aspectos importantes. Alguns relacionados com as
necessidades específicas do projecto em si, outros de ordem económica. Assim, a
solução que melhor se adequou a esses aspectos foi a utilização do microcontrolador
PIC18F4431 produzido pela Microchip.
Do ponto de vista económico foi a melhor opção porque o fabricante
disponibilizou amostras gratuitas dos PIC. Em relação ao software necessário para os
programar, utilizou-se uma versão de estudante que é também fornecida gratuitamente.
Estes factores têm contribuído para que muitos estudantes utilizem os PIC. Desta forma,
tornou-se mais simples obter toda a ajuda necessária e adquirir material de apoio para
além do datasheet tanto através de colegas como de fóruns na internet. Outra vantagem
deste microcontrolador é que para funcionar não necessita de muitos componentes nem
circuitos complexos e pode ser programado no próprio circuito onde vai operar.
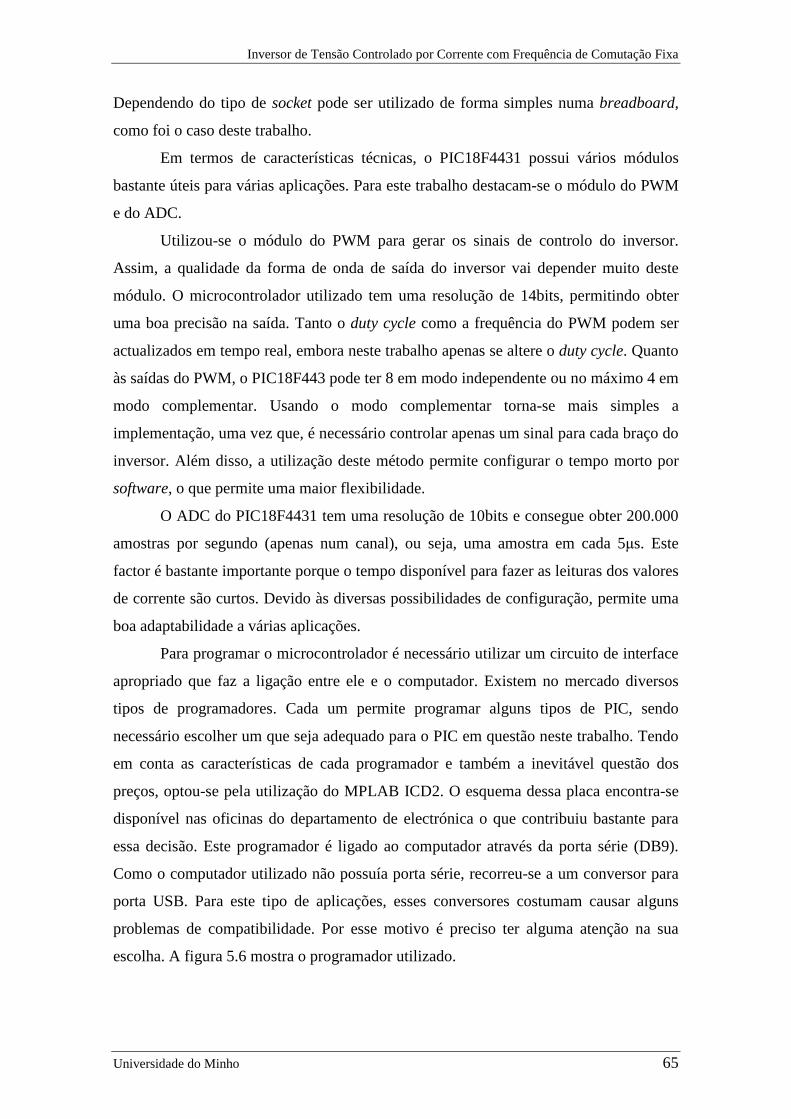
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 65
Dependendo do tipo de socket pode ser utilizado de forma simples numa breadboard,
como foi o caso deste trabalho.
Em termos de características técnicas, o PIC18F4431 possui vários módulos
bastante úteis para várias aplicações. Para este trabalho destacam-se o módulo do PWM
e do ADC.
Utilizou-se o módulo do PWM para gerar os sinais de controlo do inversor.
Assim, a qualidade da forma de onda de saída do inversor vai depender muito deste
módulo. O microcontrolador utilizado tem uma resolução de 14bits, permitindo obter
uma boa precisão na saída. Tanto o duty cycle como a frequência do PWM podem ser
actualizados em tempo real, embora neste trabalho apenas se altere o duty cycle. Quanto
às saídas do PWM, o PIC18F443 pode ter 8 em modo independente ou no máximo 4 em
modo complementar. Usando o modo complementar torna-se mais simples a
implementação, uma vez que, é necessário controlar apenas um sinal para cada braço do
inversor. Além disso, a utilização deste método permite configurar o tempo morto por
software, o que permite uma maior flexibilidade.
O ADC do PIC18F4431 tem uma resolução de 10bits e consegue obter 200.000
amostras por segundo (apenas num canal), ou seja, uma amostra em cada 5µs. Este
factor é bastante importante porque o tempo disponível para fazer as leituras dos valores
de corrente são curtos. Devido às diversas possibilidades de configuração, permite uma
boa adaptabilidade a várias aplicações.
Para programar o microcontrolador é necessário utilizar um circuito de interface
apropriado que faz a ligação entre ele e o computador. Existem no mercado diversos
tipos de programadores. Cada um permite programar alguns tipos de PIC, sendo
necessário escolher um que seja adequado para o PIC em questão neste trabalho. Tendo
em conta as características de cada programador e também a inevitável questão dos
preços, optou-se pela utilização do MPLAB ICD2. O esquema dessa placa encontra-se
disponível nas oficinas do departamento de electrónica o que contribuiu bastante para
essa decisão. Este programador é ligado ao computador através da porta série (DB9).
Como o computador utilizado não possuía porta série, recorreu-se a um conversor para
porta USB. Para este tipo de aplicações, esses conversores costumam causar alguns
problemas de compatibilidade. Por esse motivo é preciso ter alguma atenção na sua
escolha. A figura 5.6 mostra o programador utilizado.
Implementação do Inversor Controlado por Corrente
66 Departamento de Electrónica Industrial
Figura 5.6 - Programador
Para além do programador, é necessário também um software apropriado para se
poder desenvolver os programas e enviá-los para o microcontrolador. Utilizou-se o
MPLAB IDE que é fornecido pelo fabricante.
Os PIC podem ser programados em linguagem C ou em Assembly. Neste
trabalho, optou-se pela primeira hipótese por ser uma linguagem de alto nível,
aumentando a rapidez de implementação. Além disso torna-se mais fácil fazer
alterações, uma vez que, o código fica mais perceptível. Para utilizar esta linguagem é
necessário ter um compilador adequado para além do MPLAB. Usou-se, para isso, o
MPLAB C18 versão de estudante.
O MPLAB permite o desenvolvimento de código num ambiente amigável para o
utilizador. Para além disso, permite também simular o comportamento do
microcontrolador através de algumas ferramentas úteis de que dispõe. Destaca-se o
“Logic Analyzer” que funciona como osciloscópio, onde se pode ver o estado das saídas
desejadas, o “Watch” que permite observar o estado das variáveis e o “StopWatch” que
possibilita, por exemplo, fazer a contagem do tempo que demora um certo número de
instruções. Estas ferramentas permitiram desenvolver mais rapidamente o código, uma
vez que, é menos moroso e mais prático fazer testes na simulação do que enviar
constantemente o código para o microcontrolador. Na figura 5.7 pode-se observar um
projecto aberto no MPLAB.
Na figura 5.8 está representado o fluxograma do software desenvolvido no
microcontrolador onde se pode ver de forma resumida o procedimento utilizado para
controlar o inversor.
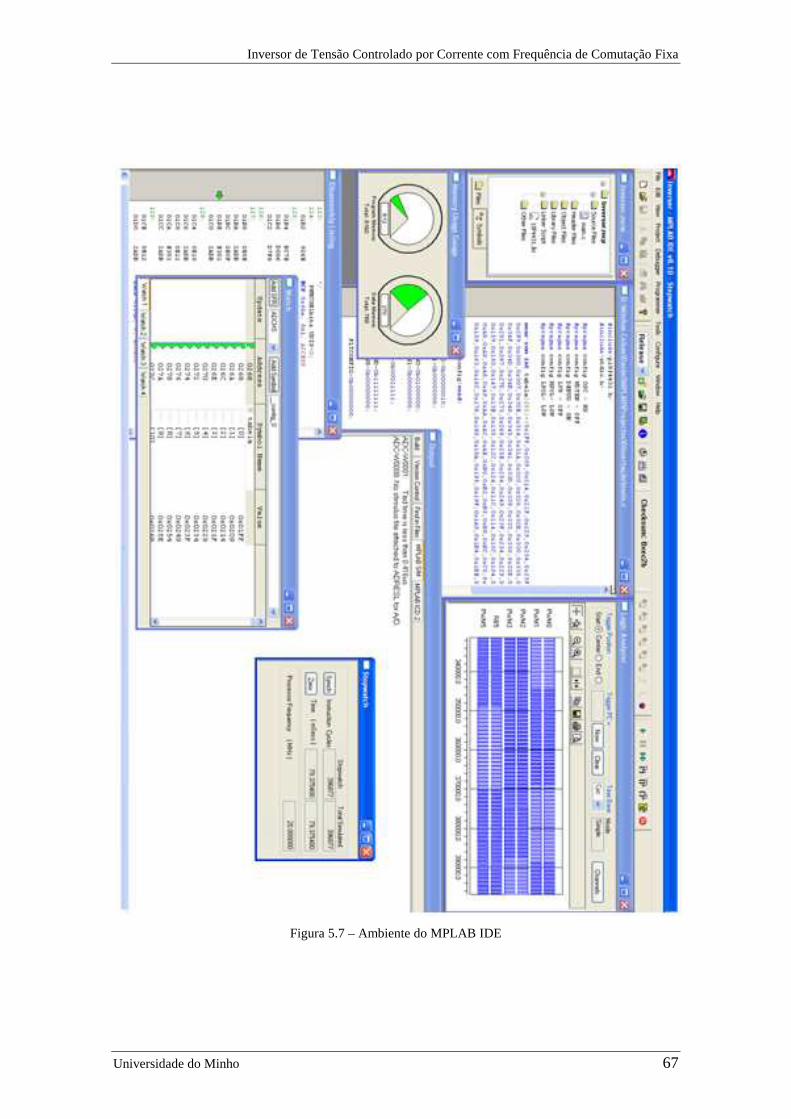
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 67
Figura 5.7 – Ambiente do MPLAB IDE
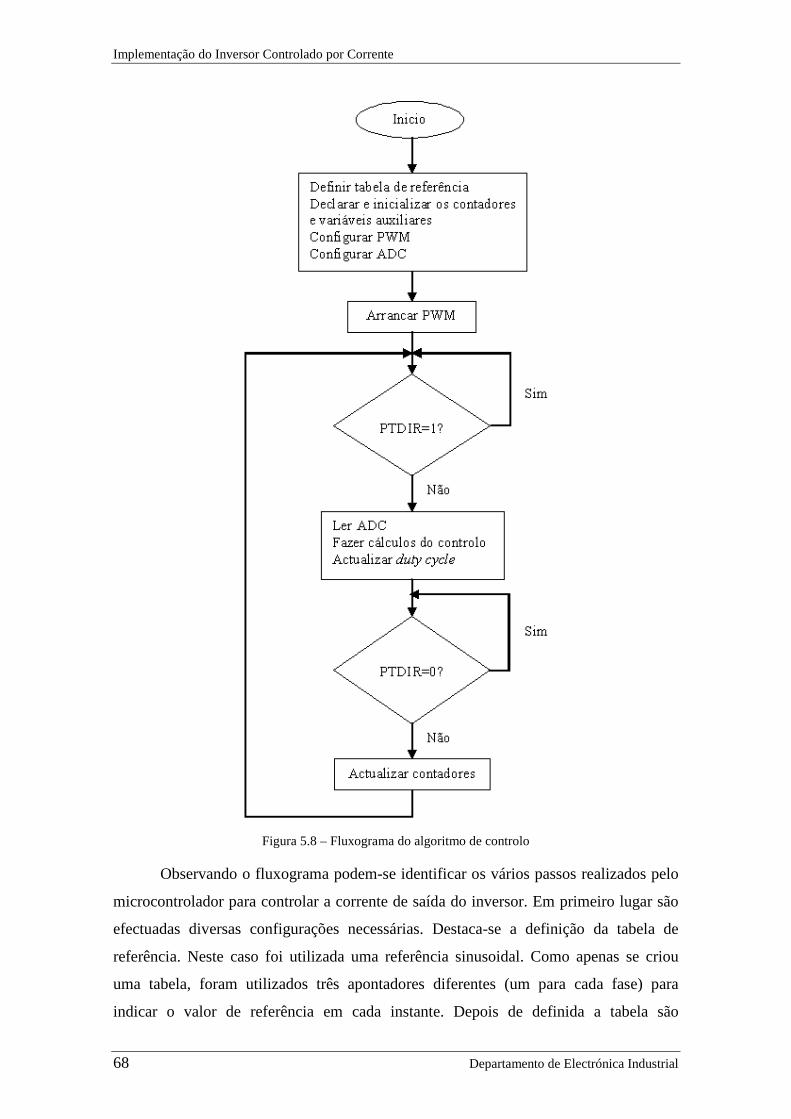
Implementação do Inversor Controlado por Corrente
68 Departamento de Electrónica Industrial
Figura 5.8 – Fluxograma do algoritmo de controlo
Observando o fluxograma podem-se identificar os vários passos realizados pelo
microcontrolador para controlar a corrente de saída do inversor. Em primeiro lugar são
efectuadas diversas configurações necessárias. Destaca-se a definição da tabela de
referência. Neste caso foi utilizada uma referência sinusoidal. Como apenas se criou
uma tabela, foram utilizados três apontadores diferentes (um para cada fase) para
indicar o valor de referência em cada instante. Depois de definida a tabela são
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 69
configurados o PWM e o ADC. Mais à frente serão explicados os passos necessários
para os configurar. A seguir às configurações e inicializações é activado o PWM. É
utilizado o registo PTDIR como forma de sincronização para garantir que o duty cycle é
actualizado correctamente. Este registo indica se o contador do PWM está em fase
crescente ou decrescente. O duty cycle só é actualizado quando o contador chega a 0,
sendo necessário esperar que ele seja actualizado para calcular o valor seguinte. Caso
contrário seria impossível controlar a frequência da onda fundamental da corrente de
saída. Para calcular o duty cycle faz-se a leitura da medição do valor da corrente de
saída através do ADC. Com base no valor de referência e no valor do ADC é então
calculado o novo valor do duty cycle que será guardado no buffer até ser actualizado
novamente no PWM. Note-se que este procedimento é válido para todas as fases do
inversor e os vários sinais de PWM são actualizados todos ao mesmo tempo. A
diferença encontra-se nos apontadores que apontam para valores diferentes da tabela de
forma a criarem um desfasamento de 120º na saída do inversor. Estes apontadores são
actualizados no final e volta-se a repetir o mesmo procedimento.
5.3.1 Configuração do PWM
Existem diversas configurações que podem ser feitas em relação ao PWM. É
fundamental conhecer bem as várias possibilidades e saber quais se adequam melhor na
aplicação pretendida. Neste trabalho, utilizaram-se 6 saídas de PWM. Como os sinais
enviados para os MOSFET de cada braço do inversor são simétricos (exceptuando o
tempo morto), utilizou-se o modo complementar para facilitar a implementação. Desta
forma, apenas se utilizam 3 registos do duty cycle.
Em relação à frequência de comutação, sabe-se que quanto maior for maiores
serão as perdas nos semicondutores. Por outro lado, se a frequência for baixa torna-se
mais difícil filtrar os harmónicos de baixa frequência. Ponderando estes dois aspectos
optou-se pela utilização de uma frequência de comutação de 10kHz. Como se pretende
obter uma frequência de 50Hz na saída, o duty cycle será actualizado 200 vezes em cada
período da onda. Uma vez que a referência da saída está contida no microcontrolador,
torna-se vantajoso utilizar uma tabela com o mesmo número de valores que o número de
actualizações do duty cycle feitas num período, ou seja, 200 valores. No entanto, como a
referência é igual para todas as fases, acrescentou-se um valor à tabela para o número de
valores ser divisível por 3. O objectivo é conseguir um desfasamento de 120º entre as
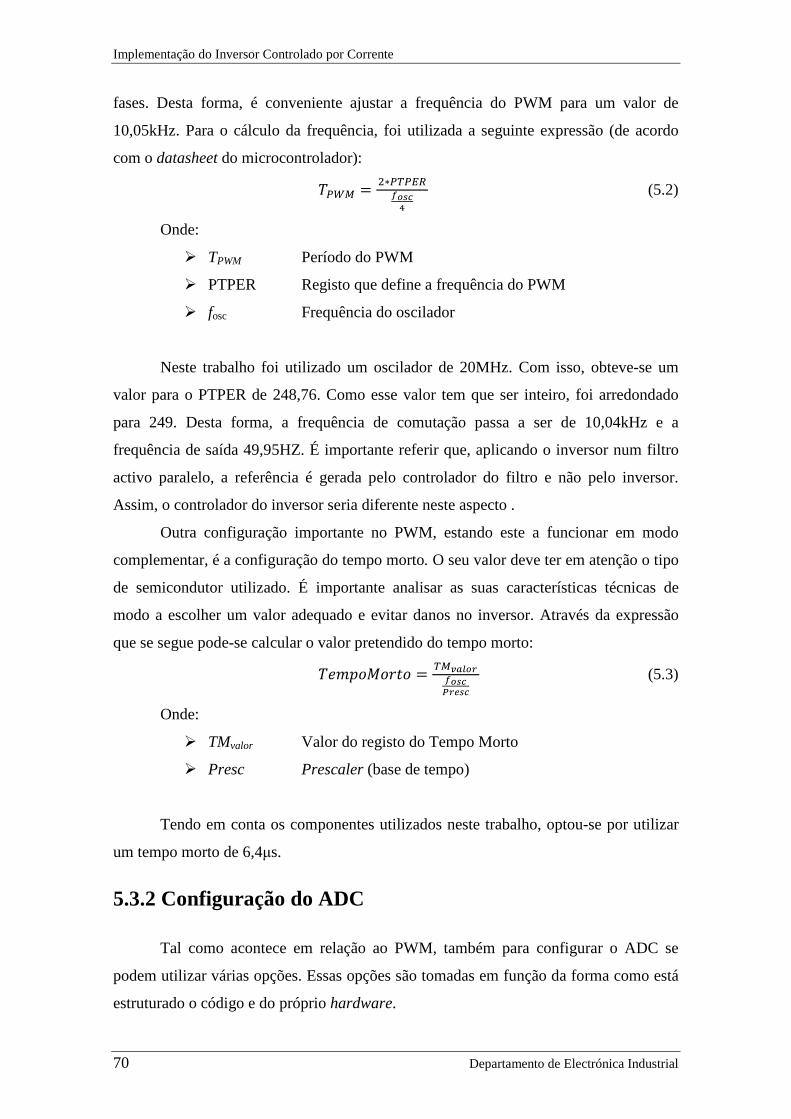
Implementação do Inversor Controlado por Corrente
70 Departamento de Electrónica Industrial
fases. Desta forma, é conveniente ajustar a frequência do PWM para um valor de
10,05kHz. Para o cálculo da frequência, foi utilizada a seguinte expressão (de acordo
com o datasheet do microcontrolador):
2ab IM2c2d_ef
g (5.2)
Onde:
TPWM Período do PWM
PTPER Registo que define a frequência do PWM
fosc Frequência do oscilador
Neste trabalho foi utilizado um oscilador de 20MHz. Com isso, obteve-se um
valor para o PTPER de 248,76. Como esse valor tem que ser inteiro, foi arredondado
para 249. Desta forma, a frequência de comutação passa a ser de 10,04kHz e a
frequência de saída 49,95HZ. É importante referir que, aplicando o inversor num filtro
activo paralelo, a referência é gerada pelo controlador do filtro e não pelo inversor.
Assim, o controlador do inversor seria diferente neste aspecto .
Outra configuração importante no PWM, estando este a funcionar em modo
complementar, é a configuração do tempo morto. O seu valor deve ter em atenção o tipo
de semicondutor utilizado. É importante analisar as suas características técnicas de
modo a escolher um valor adequado e evitar danos no inversor. Através da expressão
que se segue pode-se calcular o valor pretendido do tempo morto:
*@+h'& cbiDHBef
jBkf (5.3)
Onde:
TMvalor Valor do registo do Tempo Morto
Presc Prescaler (base de tempo)
Tendo em conta os componentes utilizados neste trabalho, optou-se por utilizar
um tempo morto de 6,4µs.
5.3.2 Configuração do ADC
Tal como acontece em relação ao PWM, também para configurar o ADC se
podem utilizar várias opções. Essas opções são tomadas em função da forma como está
estruturado o código e do próprio hardware.
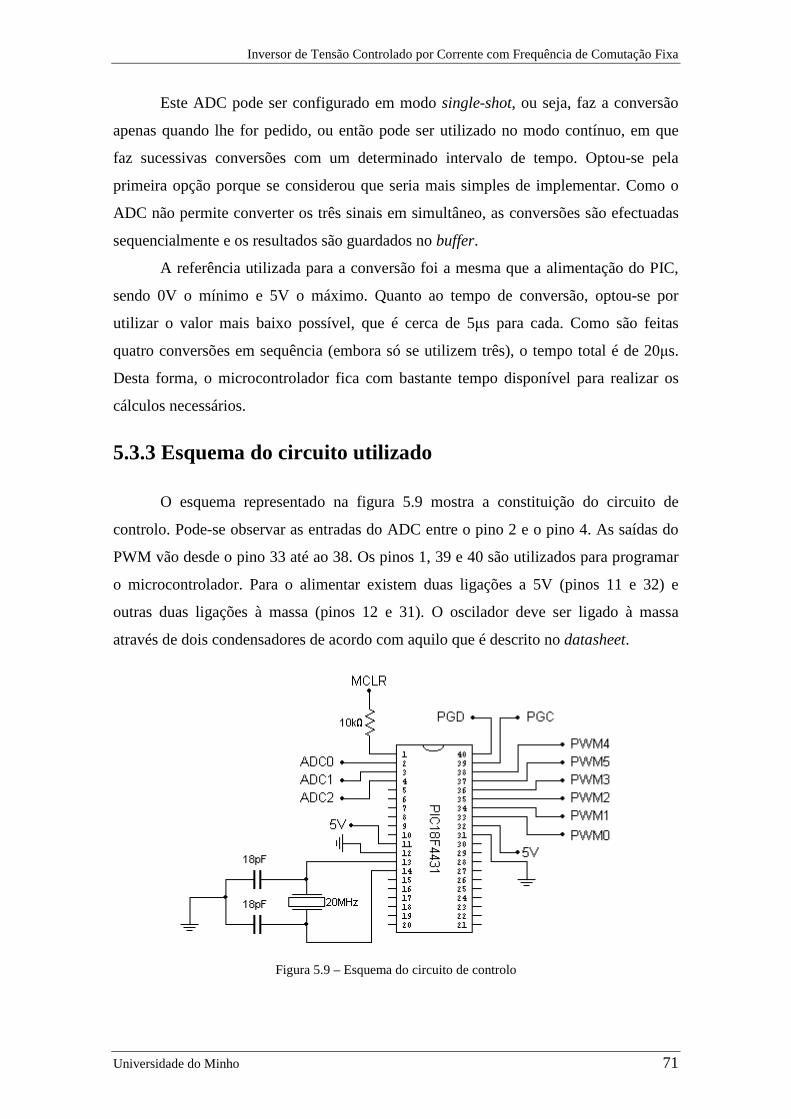
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 71
Este ADC pode ser configurado em modo single-shot, ou seja, faz a conversão
apenas quando lhe for pedido, ou então pode ser utilizado no modo contínuo, em que
faz sucessivas conversões com um determinado intervalo de tempo. Optou-se pela
primeira opção porque se considerou que seria mais simples de implementar. Como o
ADC não permite converter os três sinais em simultâneo, as conversões são efectuadas
sequencialmente e os resultados são guardados no buffer.
A referência utilizada para a conversão foi a mesma que a alimentação do PIC,
sendo 0V o mínimo e 5V o máximo. Quanto ao tempo de conversão, optou-se por
utilizar o valor mais baixo possível, que é cerca de 5µs para cada. Como são feitas
quatro conversões em sequência (embora só se utilizem três), o tempo total é de 20µs.
Desta forma, o microcontrolador fica com bastante tempo disponível para realizar os
cálculos necessários.
5.3.3 Esquema do circuito utilizado
O esquema representado na figura 5.9 mostra a constituição do circuito de
controlo. Pode-se observar as entradas do ADC entre o pino 2 e o pino 4. As saídas do
PWM vão desde o pino 33 até ao 38. Os pinos 1, 39 e 40 são utilizados para programar
o microcontrolador. Para o alimentar existem duas ligações a 5V (pinos 11 e 32) e
outras duas ligações à massa (pinos 12 e 31). O oscilador deve ser ligado à massa
através de dois condensadores de acordo com aquilo que é descrito no datasheet.
Figura 5.9 – Esquema do circuito de controlo
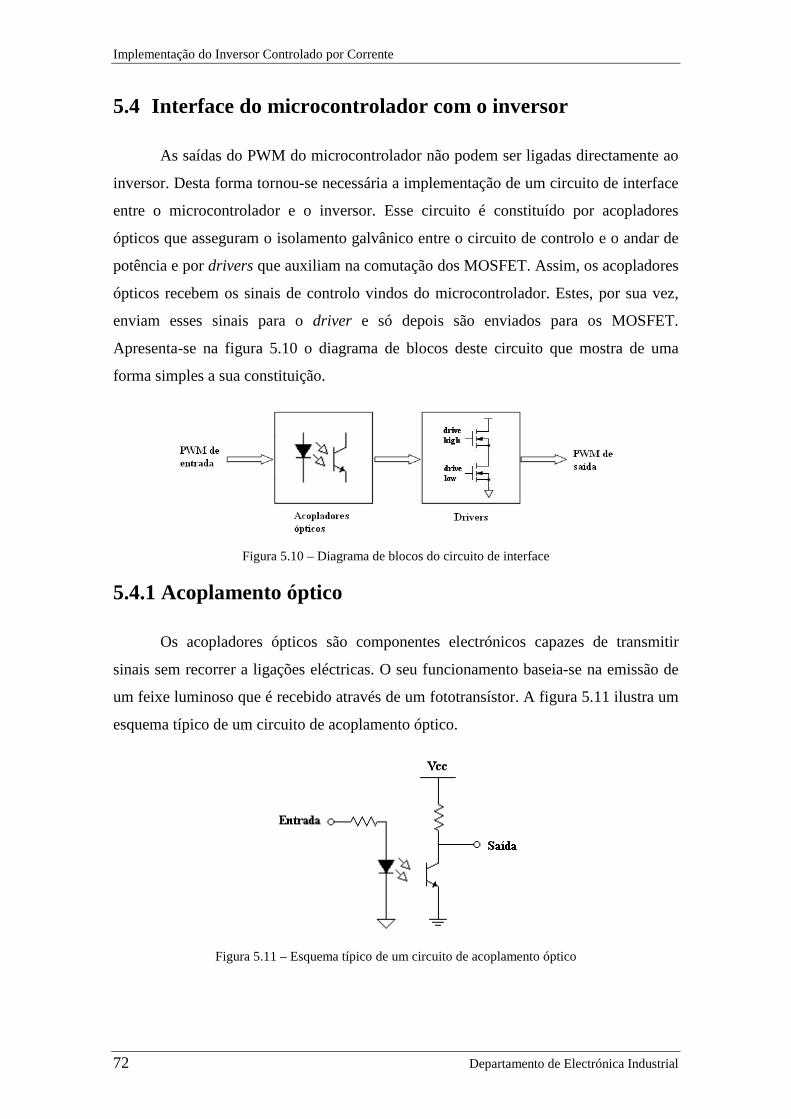
Implementação do Inversor Controlado por Corrente
72 Departamento de Electrónica Industrial
5.4 Interface do microcontrolador com o inversor
As saídas do PWM do microcontrolador não podem ser ligadas directamente ao
inversor. Desta forma tornou-se necessária a implementação de um circuito de interface
entre o microcontrolador e o inversor. Esse circuito é constituído por acopladores
ópticos que asseguram o isolamento galvânico entre o circuito de controlo e o andar de
potência e por drivers que auxiliam na comutação dos MOSFET. Assim, os acopladores
ópticos recebem os sinais de controlo vindos do microcontrolador. Estes, por sua vez,
enviam esses sinais para o driver e só depois são enviados para os MOSFET.
Apresenta-se na figura 5.10 o diagrama de blocos deste circuito que mostra de uma
forma simples a sua constituição.
Figura 5.10 – Diagrama de blocos do circuito de interface
5.4.1 Acoplamento óptico
Os acopladores ópticos são componentes electrónicos capazes de transmitir
sinais sem recorrer a ligações eléctricas. O seu funcionamento baseia-se na emissão de
um feixe luminoso que é recebido através de um fototransístor. A figura 5.11 ilustra um
esquema típico de um circuito de acoplamento óptico.
Figura 5.11 – Esquema típico de um circuito de acoplamento óptico
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 73
O funcionamento do circuito ilustrado é simples: quando o fototransístor recebe
o feixe luminoso entra em condução e a queda de tensão será na resistência; assim, a
saída estará a 0V. Quando não receber o feixe luminoso, o fototransístor não conduz e
deste modo a tensão de saída será Vcc. Desta forma, reproduz-se o sinal de entrada,
embora este seja invertido na saída. Este isolamento é indispensável para isolar sinais de
referência a potenciais diferentes e permite que o circuito de controlo esteja protegido
em caso de um possível curto-circuito no andar de potência.
Neste trabalho, uma vez que, a frequência do PWM enviado pelo
microcontrolador é relativamente elevada (próximo de 10kHz) torna-se necessário que
os acopladores consigam também transmitir o sinal rapidamente. Um acoplador lento
tornaria impossível a sua boa transmissão devido aos atrasos, levando
consequentemente, a um mau funcionamento de todo o sistema. Este ponto foi
fundamental na decisão de escolha dos acopladores ópticos.
Uma das características do acoplador utilizado, é inverter o sinal de entrada. À
partida, isso não parece relevante, uma vez que, para cada braço do inversor são
enviados dois sinais em modo complementar, ou seja, um é o inverso do outro. No
entanto, na prática não é assim. Os sinais de controlo não são absolutamente
complementares devido ao tempo morto. O que acontece é que em alguns instantes os
sinais de PWM enviados pelo microcontrolador estão ambos no nível baixo. Como os
acopladores invertem os sinais, ficam ambos no nível alto, fazendo com que os dois
MOSFET do braço conduzam. Como se poderá ver posteriormente, os drivers utilizados
têm protecção para evitar que estas situações causem danos aos semicondutores,
colocando as saídas a 0V se as entradas forem iguais, mas dessa forma o inversor não
funciona. A forma mais simples, encontrada para resolver o problema, foi configurar o
microcontrolador de modo a inverter as saídas do PWM.
5.4.2 Circuito de drive
O microcontrolador não tem capacidade para fornecer os níveis de tensão
adequados para comutar eficazmente os MOSFET. Por esse motivo recorre-se à
utilização de um circuito de drive apropriado para desempenhar essa função.
Dependendo desse circuito, o desempenho do inversor pode ser diferente.
Um aspecto relevante no funcionamento dos MOSFET é o facto de ser
necessário que a tensão da gate seja superior à tensão da source. Como os braços do
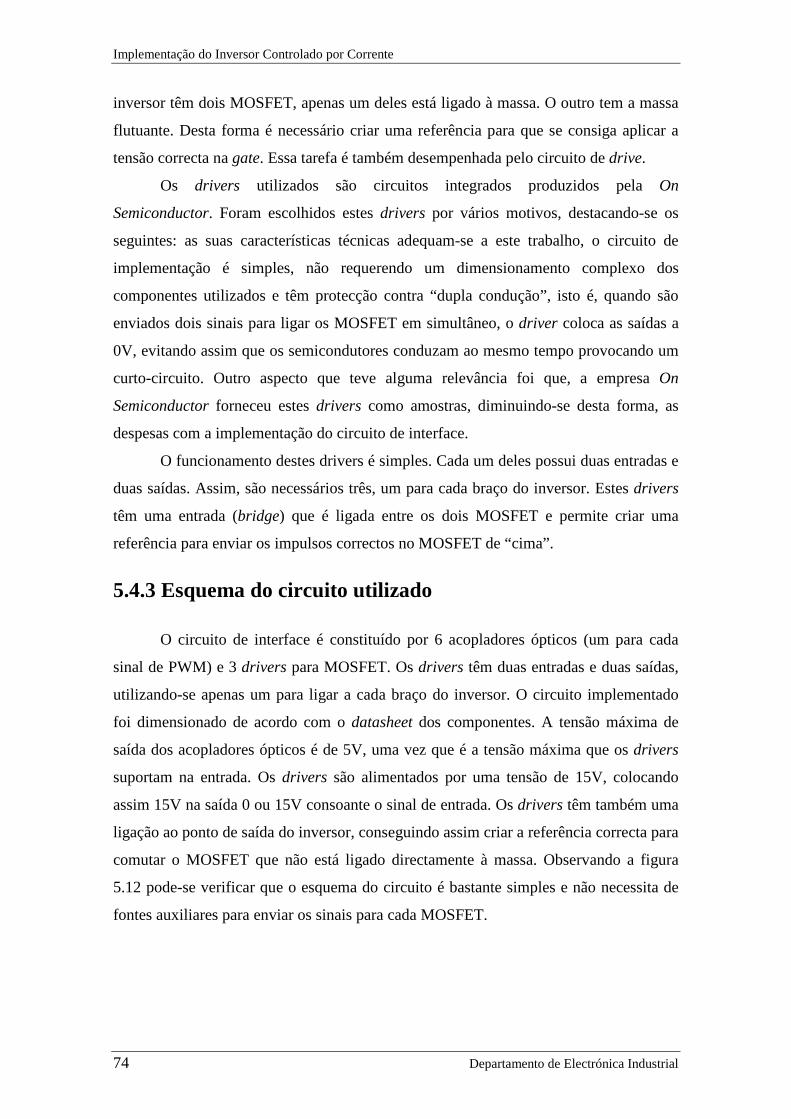
Implementação do Inversor Controlado por Corrente
74 Departamento de Electrónica Industrial
inversor têm dois MOSFET, apenas um deles está ligado à massa. O outro tem a massa
flutuante. Desta forma é necessário criar uma referência para que se consiga aplicar a
tensão correcta na gate. Essa tarefa é também desempenhada pelo circuito de drive.
Os drivers utilizados são circuitos integrados produzidos pela On
Semiconductor. Foram escolhidos estes drivers por vários motivos, destacando-se os
seguintes: as suas características técnicas adequam-se a este trabalho, o circuito de
implementação é simples, não requerendo um dimensionamento complexo dos
componentes utilizados e têm protecção contra “dupla condução”, isto é, quando são
enviados dois sinais para ligar os MOSFET em simultâneo, o driver coloca as saídas a
0V, evitando assim que os semicondutores conduzam ao mesmo tempo provocando um
curto-circuito. Outro aspecto que teve alguma relevância foi que, a empresa On
Semiconductor forneceu estes drivers como amostras, diminuindo-se desta forma, as
despesas com a implementação do circuito de interface.
O funcionamento destes drivers é simples. Cada um deles possui duas entradas e
duas saídas. Assim, são necessários três, um para cada braço do inversor. Estes drivers
têm uma entrada (bridge) que é ligada entre os dois MOSFET e permite criar uma
referência para enviar os impulsos correctos no MOSFET de “cima”.
5.4.3 Esquema do circuito utilizado
O circuito de interface é constituído por 6 acopladores ópticos (um para cada
sinal de PWM) e 3 drivers para MOSFET. Os drivers têm duas entradas e duas saídas,
utilizando-se apenas um para ligar a cada braço do inversor. O circuito implementado
foi dimensionado de acordo com o datasheet dos componentes. A tensão máxima de
saída dos acopladores ópticos é de 5V, uma vez que é a tensão máxima que os drivers
suportam na entrada. Os drivers são alimentados por uma tensão de 15V, colocando
assim 15V na saída 0 ou 15V consoante o sinal de entrada. Os drivers têm também uma
ligação ao ponto de saída do inversor, conseguindo assim criar a referência correcta para
comutar o MOSFET que não está ligado directamente à massa. Observando a figura
5.12 pode-se verificar que o esquema do circuito é bastante simples e não necessita de
fontes auxiliares para enviar os sinais para cada MOSFET.
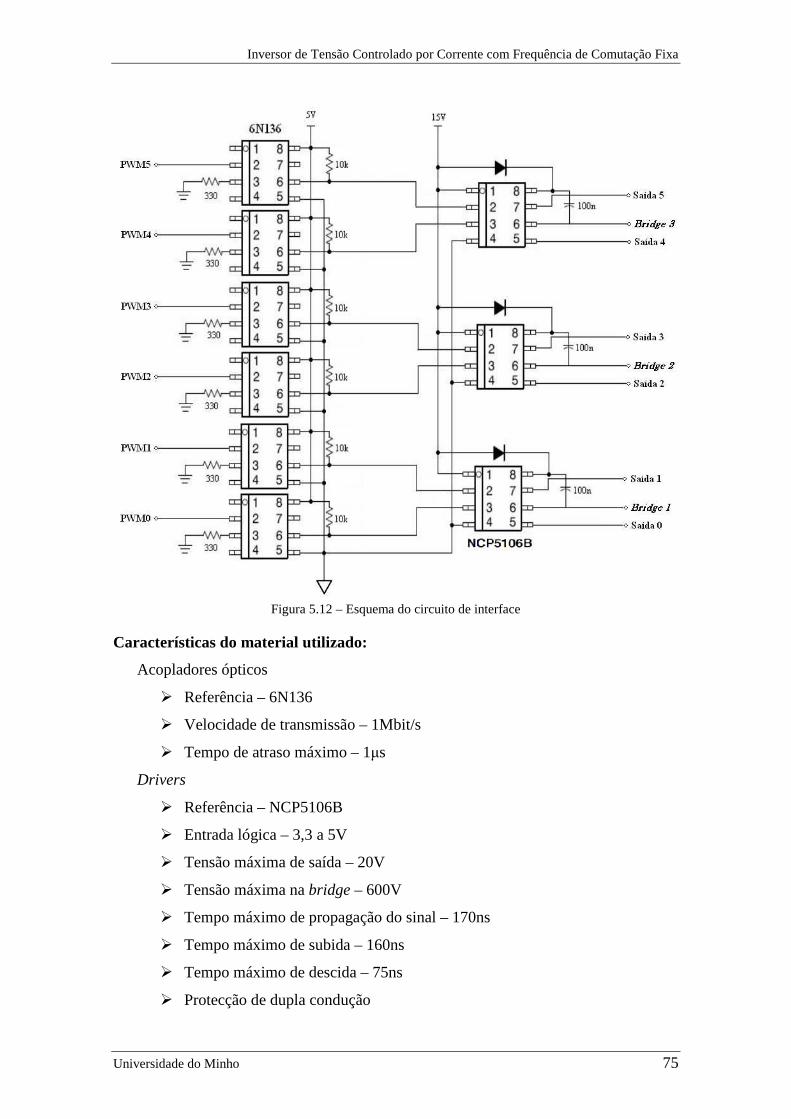
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 75
Figura 5.12 – Esquema do circuito de interface
Características do material utilizado:
Acopladores ópticos
Referência – 6N136
Velocidade de transmissão – 1Mbit/s
Tempo de atraso máximo – 1µs
Drivers
Referência – NCP5106B
Entrada lógica – 3,3 a 5V
Tensão máxima de saída – 20V
Tensão máxima na bridge – 600V
Tempo máximo de propagação do sinal – 170ns
Tempo máximo de subida – 160ns
Tempo máximo de descida – 75ns
Protecção de dupla condução
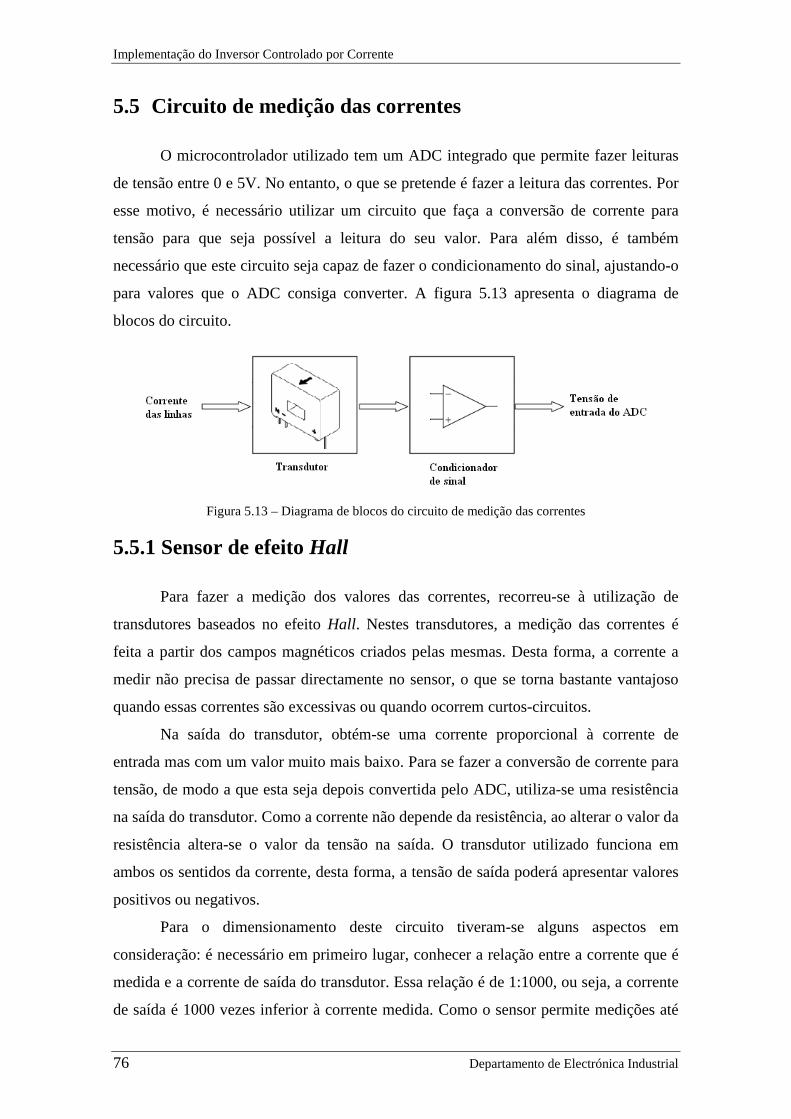
Implementação do Inversor Controlado por Corrente
76 Departamento de Electrónica Industrial
5.5 Circuito de medição das correntes
O microcontrolador utilizado tem um ADC integrado que permite fazer leituras
de tensão entre 0 e 5V. No entanto, o que se pretende é fazer a leitura das correntes. Por
esse motivo, é necessário utilizar um circuito que faça a conversão de corrente para
tensão para que seja possível a leitura do seu valor. Para além disso, é também
necessário que este circuito seja capaz de fazer o condicionamento do sinal, ajustando-o
para valores que o ADC consiga converter. A figura 5.13 apresenta o diagrama de
blocos do circuito.
Figura 5.13 – Diagrama de blocos do circuito de medição das correntes
5.5.1 Sensor de efeito Hall
Para fazer a medição dos valores das correntes, recorreu-se à utilização de
transdutores baseados no efeito Hall. Nestes transdutores, a medição das correntes é
feita a partir dos campos magnéticos criados pelas mesmas. Desta forma, a corrente a
medir não precisa de passar directamente no sensor, o que se torna bastante vantajoso
quando essas correntes são excessivas ou quando ocorrem curtos-circuitos.
Na saída do transdutor, obtém-se uma corrente proporcional à corrente de
entrada mas com um valor muito mais baixo. Para se fazer a conversão de corrente para
tensão, de modo a que esta seja depois convertida pelo ADC, utiliza-se uma resistência
na saída do transdutor. Como a corrente não depende da resistência, ao alterar o valor da
resistência altera-se o valor da tensão na saída. O transdutor utilizado funciona em
ambos os sentidos da corrente, desta forma, a tensão de saída poderá apresentar valores
positivos ou negativos.
Para o dimensionamento deste circuito tiveram-se alguns aspectos em
consideração: é necessário em primeiro lugar, conhecer a relação entre a corrente que é
medida e a corrente de saída do transdutor. Essa relação é de 1:1000, ou seja, a corrente
de saída é 1000 vezes inferior à corrente medida. Como o sensor permite medições até
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 77
55A e não se pretendia obter correntes dessa ordem de grandeza, optou-se por fazer
passar várias vezes o fio no transdutor (5 vezes – equivale a uma corrente 5 vezes
maior) de modo a que a leitura tivesse maior resolução. Assim a relação passa a ser de
1:200. Tendo essa relação, dimensionou-se a resistência de modo a que, para uma
corrente de 1A de valor eficaz a sua tensão máxima fosse de 15V (ou -15V dependendo
do sentido da corrente). Foram então efectuados os seguintes cálculos:
Para achar a corrente máxima que passa na resistência,
[√IIZZ 7,07@m (5.4)
Usando a lei de Ohm calcula-se o valor da resistência pretendido,
[no,ZoJ 2121Ω (5.5)
Utilizou-se uma resistência de 2kΩ, obtendo-se assim, uma tensão máxima de 14,14V
em vez de 15V.
5.5.2 Circuito de condicionamento do sinal
Como já foi mencionado, é necessário adaptar os valores de tensão obtidos no
transdutor para valores que possam ser convertidos pelo ADC. O motivo que leva a essa
necessidade é o facto de o ADC só fazer conversões de valores positivos, sendo deste
modo indispensável fazer a deslocação do sinal, uma vez que na saída do transdutor, os
valores podem ser positivos ou negativos, dependendo do sentido da corrente. O método
escolhido para o fazer é bastante simples de implementar e eficaz. Consiste na
implementação de um circuito somador. Este circuito é constituído por um amplificador
operacional e várias resistências dimensionadas de modo a que a saída esteja dentro dos
valores pretendidos. A figura 5.14 ilustra um esquema do circuito mencionado.
Figura 5.14 – Circuito somador

Implementação do Inversor Controlado por Corrente
78 Departamento de Electrónica Industrial
O circuito apresentado possui duas entradas (v1 e v2). A saída (v0) depende das
entradas e dos valores das resistências (R1, R2 e Rf). São elas as responsáveis pelo ganho
do somador. Sabe-se que neste caso, a entrada inversora é um ponto de terra virtual.
Assim, podem-se calcular as correntes do circuito (i1, i2 e if) através da lei de Ohm:
.[ 6_ , .I 6
_ (5.6)
Somando as correntes, obtém-se:
.A .[ q .I (5.7)
A tensão de saída é dada pela expressão:
rZ stA.A (5.8)
Substituindo as expressões obtém-se:
rZ s u_e_ r[ q _e
_ rIv (5.9)
A tensão na saída é a soma pesada das tensões de entrada. O peso de cada parcela dessa
soma pode ser ajustado pelo valor da resistência correspondente. Este método torna os
cálculos de dimensionamento do circuito bastante simples, uma vez que se pode ajustar
o ganho de cada entrada de forma separada. [26]
O maior problema na implementação deste circuito deve-se ao facto de ser uma
configuração inversora, fazendo com que o sinal de saída seja negativo para entradas
positivas. No entanto, como já foi referido anteriormente, o transdutor funciona nos dois
sentidos. Desta forma, invertendo as ligações, elimina-se o problema da inversão do
sinal devido ao circuito somador. Quanto ao deslocamento, soma-se um valor negativo
em vez de positivo.
Para dimensionar este circuito teve-se em conta que o valor máximo da tensão
de saída deveria ser 5V e o valor correspondente a uma corrente de 0A deveria ser
metade do valor máximo, ou seja, 2,5V. Para começar, escolheu-se um valor de 10kΩ
para a resistência Rf. De seguida, dimensionou-se a resistência R1, para ajustar o valor
contínuo que se pretendia somar na saída. Na entrada (v1), colocou-se uma tensão igual
à tensão de alimentação negativa do AmpOp, evitando assim, o uso de uma fonte
auxiliar. Efectuaram-se os seguintes cálculos:
r[ s15 (5.10)
2,5 s us15 [Zx_ v (5.11)
Desta forma, obteve-se uma resistência de 60kΩ. O valor utilizado foi, no entanto, de
62kΩ. Com esta resistência, o deslocamento do sinal será de 2,42V em vez de 2,5V.
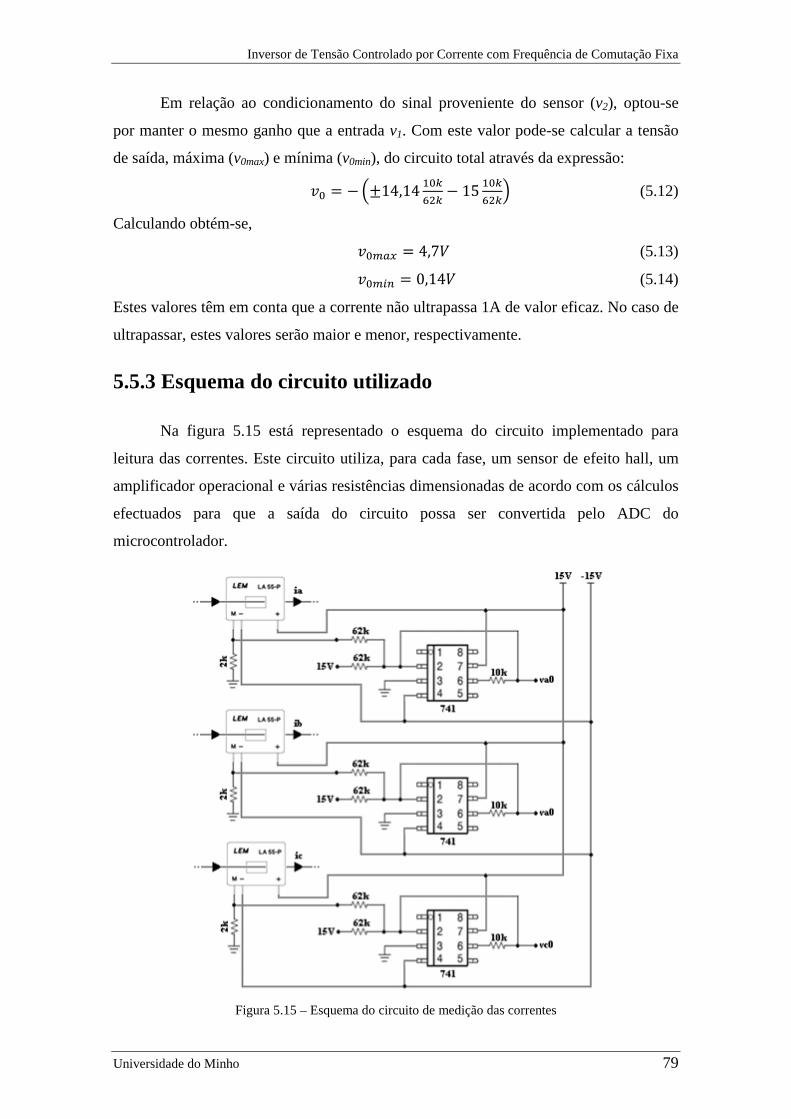
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 79
Em relação ao condicionamento do sinal proveniente do sensor (v2), optou-se
por manter o mesmo ganho que a entrada v1. Com este valor pode-se calcular a tensão
de saída, máxima (v0max) e mínima (v0min), do circuito total através da expressão:
rZ s uy14,14 [ZxIx s 15 [Zx
Ixv (5.12)
Calculando obtém-se,
rZJ5| 4,7 (5.13)
rZJ4 0,14 (5.14)
Estes valores têm em conta que a corrente não ultrapassa 1A de valor eficaz. No caso de
ultrapassar, estes valores serão maior e menor, respectivamente.
5.5.3 Esquema do circuito utilizado
Na figura 5.15 está representado o esquema do circuito implementado para
leitura das correntes. Este circuito utiliza, para cada fase, um sensor de efeito hall, um
amplificador operacional e várias resistências dimensionadas de acordo com os cálculos
efectuados para que a saída do circuito possa ser convertida pelo ADC do
microcontrolador.
Figura 5.15 – Esquema do circuito de medição das correntes
Implementação do Inversor Controlado por Corrente
80 Departamento de Electrónica Industrial
Características do transdutor utilizado:
Referência – LA 55-P
Corrente nominal no primário – 50A
Taxa de conversão – 1:1000
Tempo de resposta – Inferior a 1µs
Gama de frequências – 0 a 200kHz
5.6 Filtro LC
Como foi referido no capítulo 3, optou-se pela implementação de um filtro LC
para filtrar os harmónicos de alta frequência produzidos pelo inversor. Na figura 5.16
está representado o seu diagrama de blocos.
Figura 5.16 – Diagrama de blocos do filtro LC
Analisando as características deste tipo de filtro, existem vários aspectos a ter
em consideração para um correcto dimensionamento dos componentes. Em primeiro
lugar, é necessário fazer a escolha da frequência de corte pretendida. Para isso, deve-se
ter em conta que, o coeficiente de amortecimento depende da carga e por esse motivo é
difícil de controlar. Para que esse factor não afecte o desempenho do sistema, deve
escolher-se uma frequência de corte elevada. Idealmente essa frequência deveria ser 30
vezes superior à frequência da fundamental (no caso de se pretender uma onda
sinusoidal na saída) para que o desfasamento do sinal seja desprezável. Por outro lado, a
frequência de corte do filtro deve estar uma década abaixo da frequência de comutação
do inversor para que haja uma atenuação suficiente.
Foi utilizada a seguinte equação para determinar a frequência de corte:
YZ 2 AFGCDçã[Z (5.15)
Legenda:
0 Frequência de corte do filtro
fcomutação Frequência de comutação do inversor
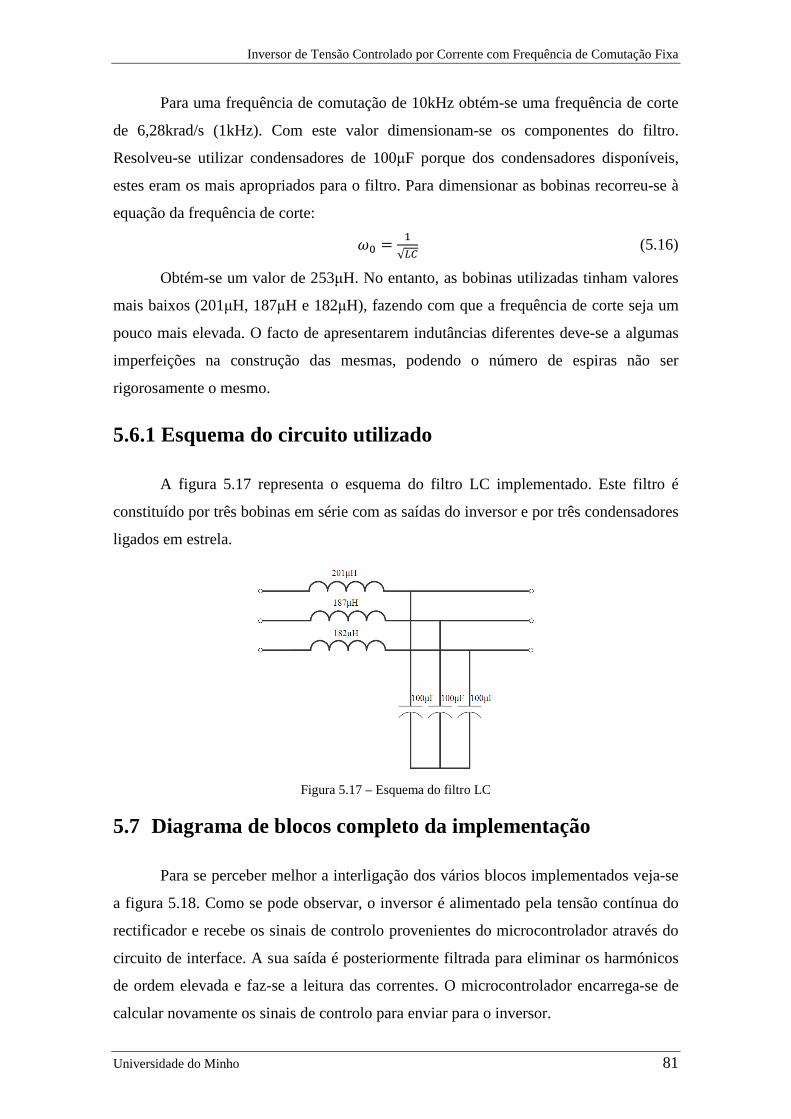
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 81
Para uma frequência de comutação de 10kHz obtém-se uma frequência de corte
de 6,28krad/s (1kHz). Com este valor dimensionam-se os componentes do filtro.
Resolveu-se utilizar condensadores de 100µF porque dos condensadores disponíveis,
estes eram os mais apropriados para o filtro. Para dimensionar as bobinas recorreu-se à
equação da frequência de corte:
YZ [
√\] (5.16)
Obtém-se um valor de 253µH. No entanto, as bobinas utilizadas tinham valores
mais baixos (201µH, 187µH e 182µH), fazendo com que a frequência de corte seja um
pouco mais elevada. O facto de apresentarem indutâncias diferentes deve-se a algumas
imperfeições na construção das mesmas, podendo o número de espiras não ser
rigorosamente o mesmo.
5.6.1 Esquema do circuito utilizado
A figura 5.17 representa o esquema do filtro LC implementado. Este filtro é
constituído por três bobinas em série com as saídas do inversor e por três condensadores
ligados em estrela.
Figura 5.17 – Esquema do filtro LC
5.7 Diagrama de blocos completo da implementação
Para se perceber melhor a interligação dos vários blocos implementados veja-se
a figura 5.18. Como se pode observar, o inversor é alimentado pela tensão contínua do
rectificador e recebe os sinais de controlo provenientes do microcontrolador através do
circuito de interface. A sua saída é posteriormente filtrada para eliminar os harmónicos
de ordem elevada e faz-se a leitura das correntes. O microcontrolador encarrega-se de
calcular novamente os sinais de controlo para enviar para o inversor.
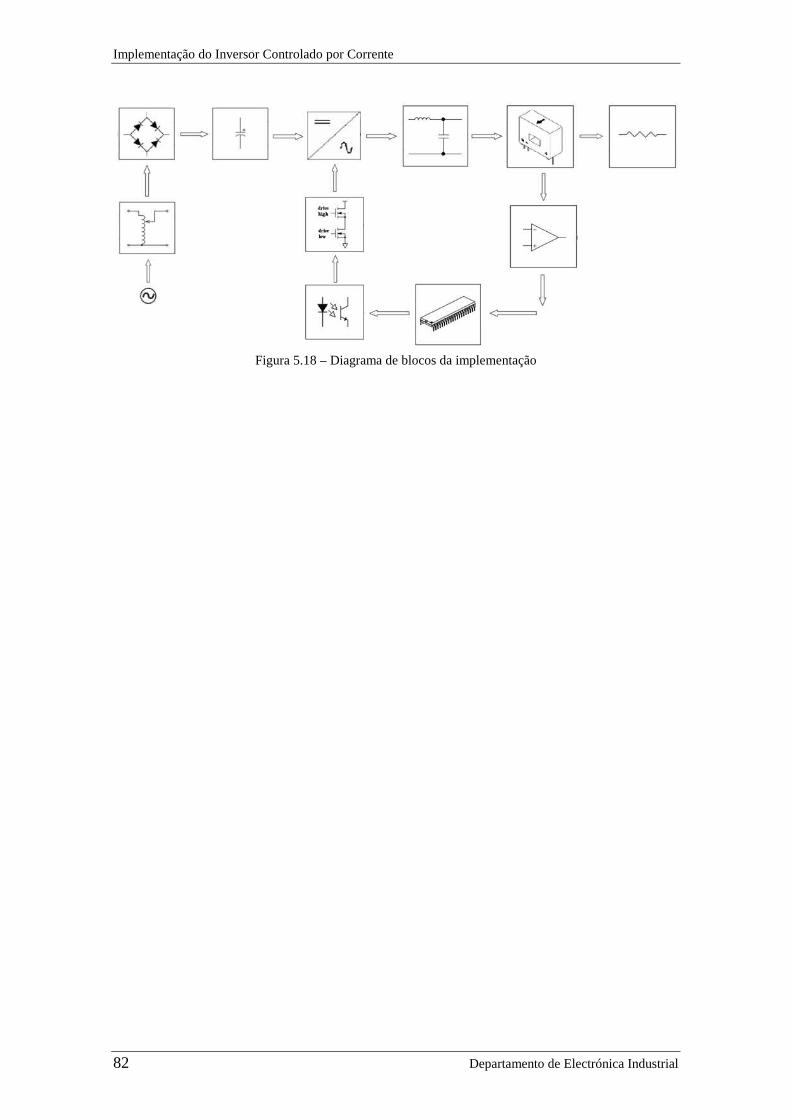
Implementação do Inversor Controlado por Corrente
82 Departamento de Electrónica Industrial
Figura 5.18 – Diagrama de blocos da implementação
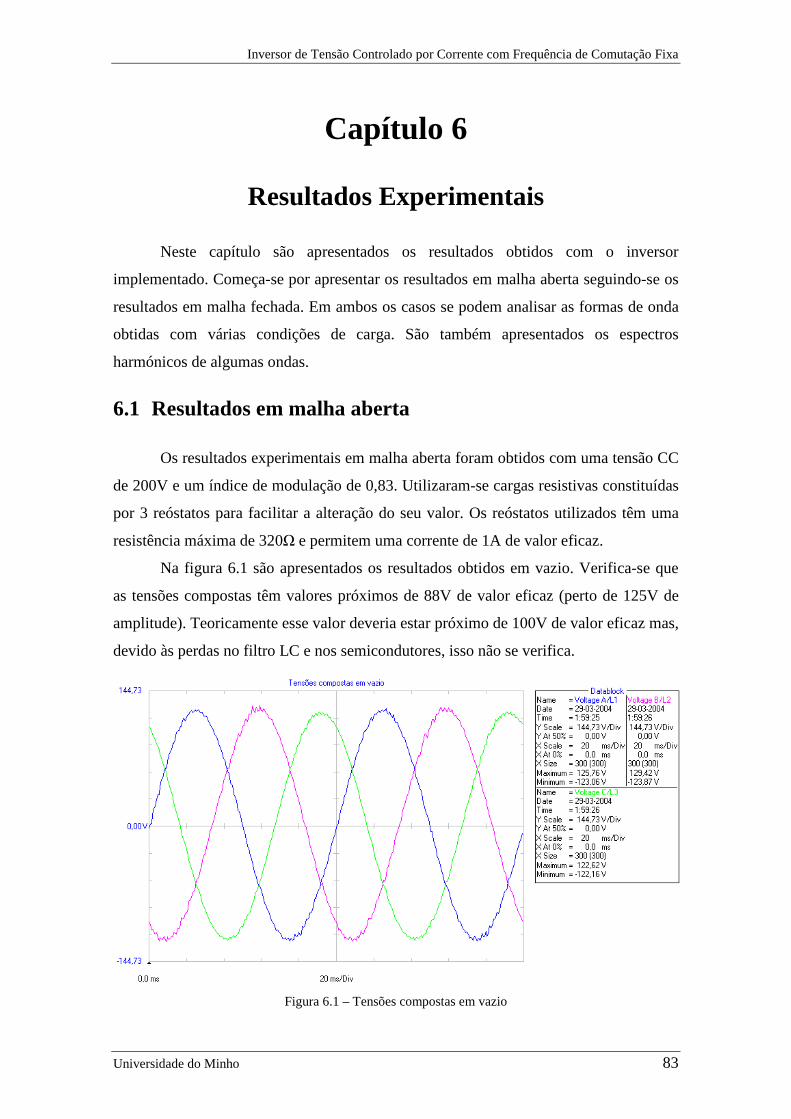
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 83
Capítulo 6
Resultados Experimentais
Neste capítulo são apresentados os resultados obtidos com o inversor
implementado. Começa-se por apresentar os resultados em malha aberta seguindo-se os
resultados em malha fechada. Em ambos os casos se podem analisar as formas de onda
obtidas com várias condições de carga. São também apresentados os espectros
harmónicos de algumas ondas.
6.1 Resultados em malha aberta
Os resultados experimentais em malha aberta foram obtidos com uma tensão CC
de 200V e um índice de modulação de 0,83. Utilizaram-se cargas resistivas constituídas
por 3 reóstatos para facilitar a alteração do seu valor. Os reóstatos utilizados têm uma
resistência máxima de 320Ω e permitem uma corrente de 1A de valor eficaz.
Na figura 6.1 são apresentados os resultados obtidos em vazio. Verifica-se que
as tensões compostas têm valores próximos de 88V de valor eficaz (perto de 125V de
amplitude). Teoricamente esse valor deveria estar próximo de 100V de valor eficaz mas,
devido às perdas no filtro LC e nos semicondutores, isso não se verifica.
Figura 6.1 – Tensões compostas em vazio
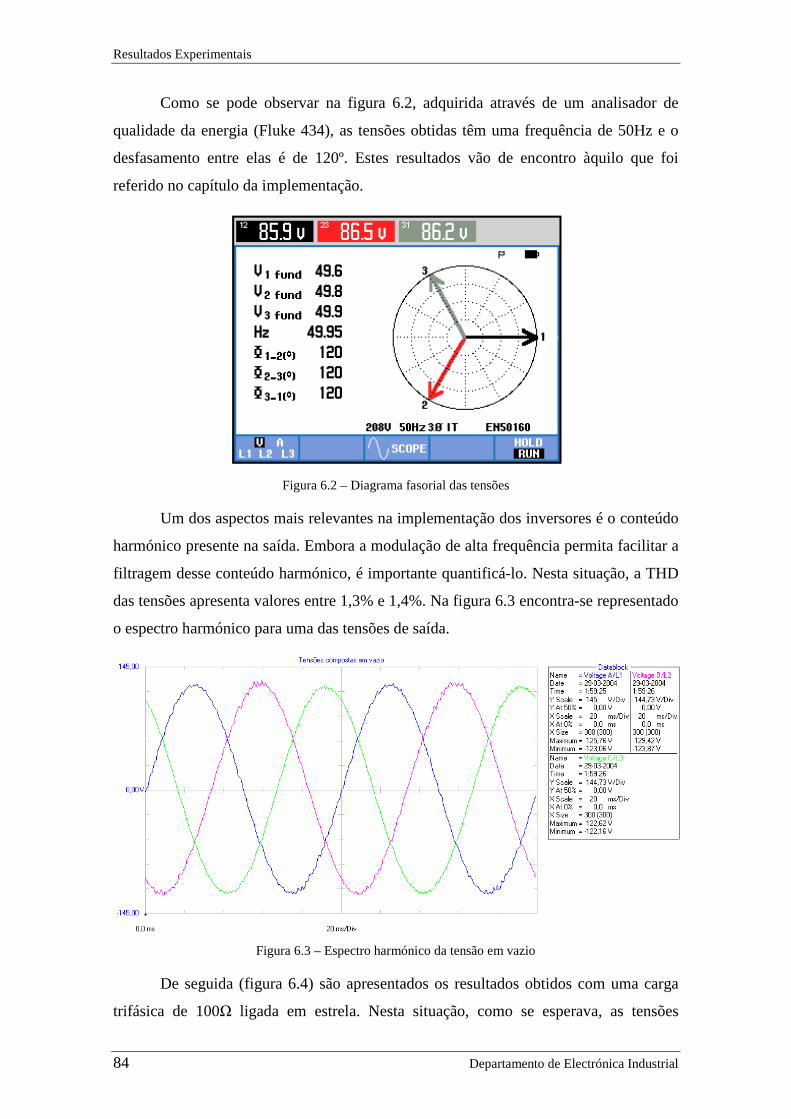
Resultados Experimentais
84 Departamento de Electrónica Industrial
Como se pode observar na figura 6.2, adquirida através de um analisador de
qualidade da energia (Fluke 434), as tensões obtidas têm uma frequência de 50Hz e o
desfasamento entre elas é de 120º. Estes resultados vão de encontro àquilo que foi
referido no capítulo da implementação.
Figura 6.2 – Diagrama fasorial das tensões
Um dos aspectos mais relevantes na implementação dos inversores é o conteúdo
harmónico presente na saída. Embora a modulação de alta frequência permita facilitar a
filtragem desse conteúdo harmónico, é importante quantificá-lo. Nesta situação, a THD
das tensões apresenta valores entre 1,3% e 1,4%. Na figura 6.3 encontra-se representado
o espectro harmónico para uma das tensões de saída.
Figura 6.3 – Espectro harmónico da tensão em vazio
De seguida (figura 6.4) são apresentados os resultados obtidos com uma carga
trifásica de 100Ω ligada em estrela. Nesta situação, como se esperava, as tensões
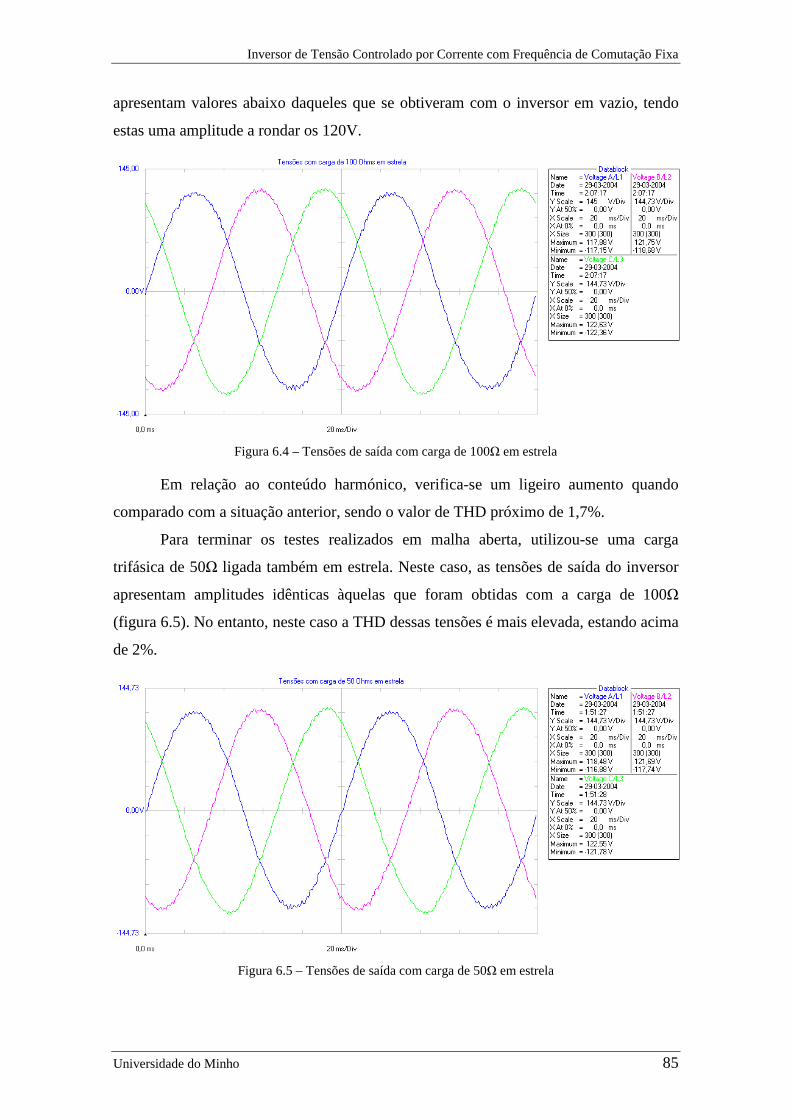
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 85
apresentam valores abaixo daqueles que se obtiveram com o inversor em vazio, tendo
estas uma amplitude a rondar os 120V.
Figura 6.4 – Tensões de saída com carga de 100Ω em estrela
Em relação ao conteúdo harmónico, verifica-se um ligeiro aumento quando
comparado com a situação anterior, sendo o valor de THD próximo de 1,7%.
Para terminar os testes realizados em malha aberta, utilizou-se uma carga
trifásica de 50Ω ligada também em estrela. Neste caso, as tensões de saída do inversor
apresentam amplitudes idênticas àquelas que foram obtidas com a carga de 100Ω
(figura 6.5). No entanto, neste caso a THD dessas tensões é mais elevada, estando acima
de 2%.
Figura 6.5 – Tensões de saída com carga de 50Ω em estrela
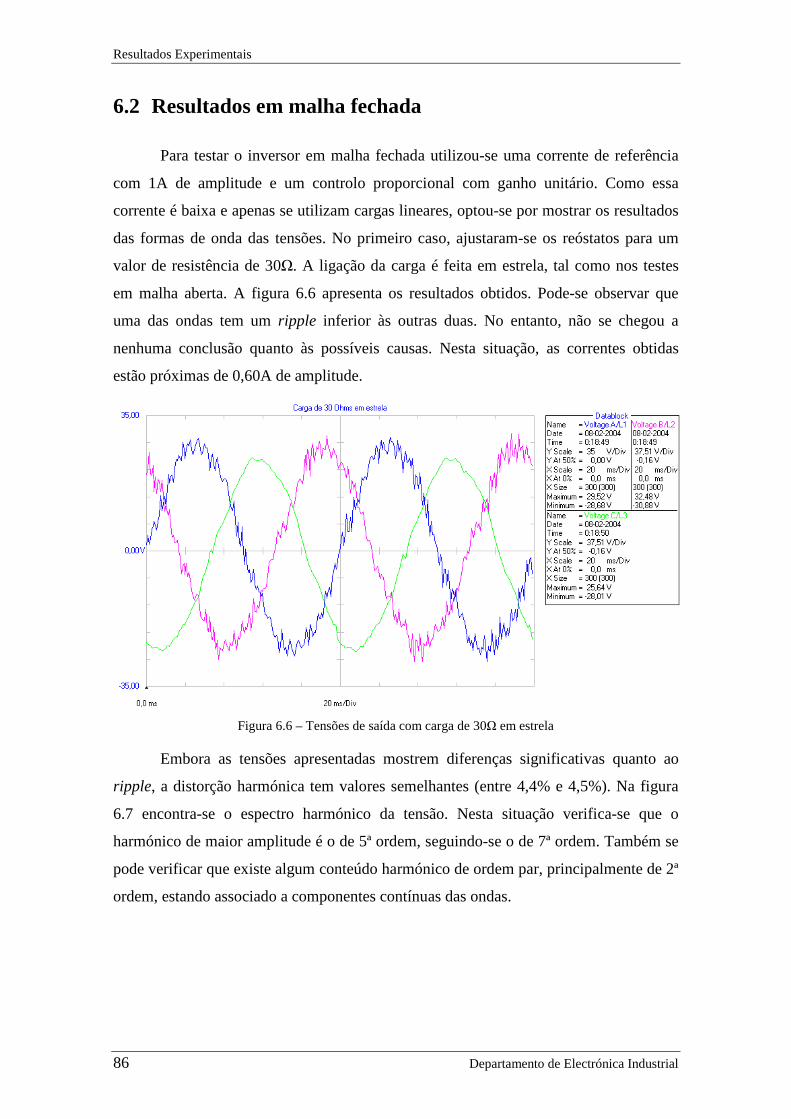
Resultados Experimentais
86 Departamento de Electrónica Industrial
6.2 Resultados em malha fechada
Para testar o inversor em malha fechada utilizou-se uma corrente de referência
com 1A de amplitude e um controlo proporcional com ganho unitário. Como essa
corrente é baixa e apenas se utilizam cargas lineares, optou-se por mostrar os resultados
das formas de onda das tensões. No primeiro caso, ajustaram-se os reóstatos para um
valor de resistência de 30Ω. A ligação da carga é feita em estrela, tal como nos testes
em malha aberta. A figura 6.6 apresenta os resultados obtidos. Pode-se observar que
uma das ondas tem um ripple inferior às outras duas. No entanto, não se chegou a
nenhuma conclusão quanto às possíveis causas. Nesta situação, as correntes obtidas
estão próximas de 0,60A de amplitude.
Figura 6.6 – Tensões de saída com carga de 30Ω em estrela
Embora as tensões apresentadas mostrem diferenças significativas quanto ao
ripple, a distorção harmónica tem valores semelhantes (entre 4,4% e 4,5%). Na figura
6.7 encontra-se o espectro harmónico da tensão. Nesta situação verifica-se que o
harmónico de maior amplitude é o de 5ª ordem, seguindo-se o de 7ª ordem. Também se
pode verificar que existe algum conteúdo harmónico de ordem par, principalmente de 2ª
ordem, estando associado a componentes contínuas das ondas.
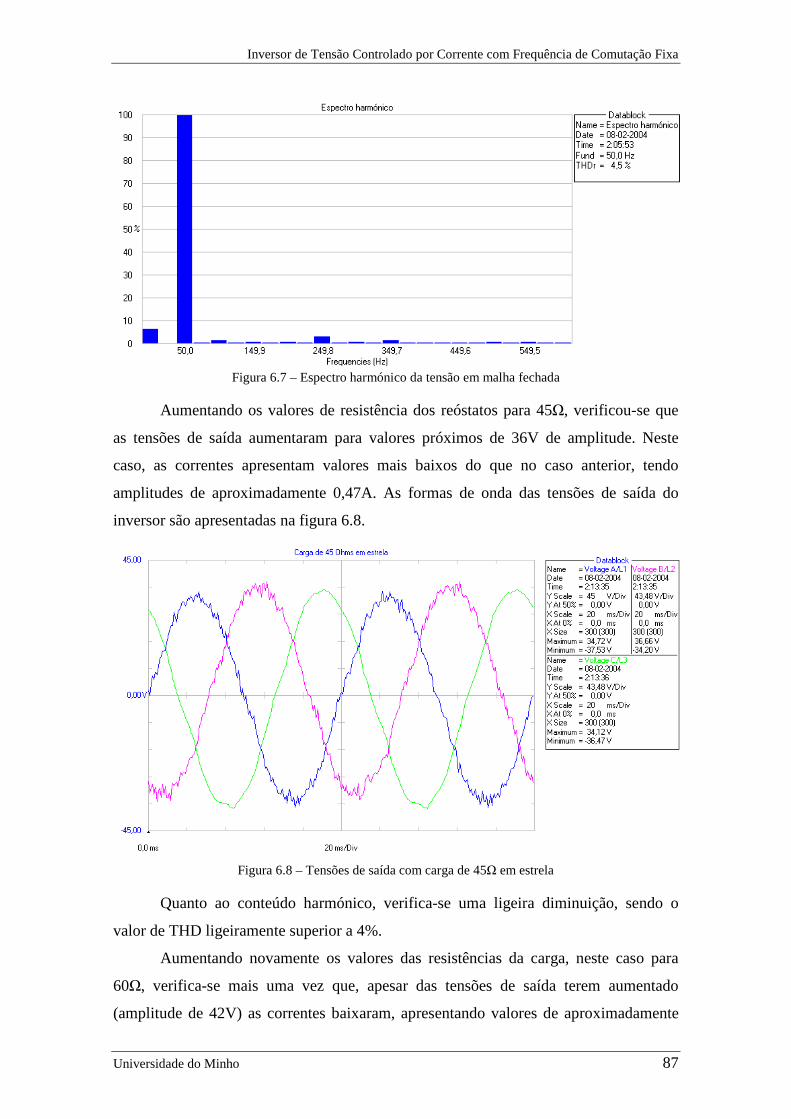
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 87
Figura 6.7 – Espectro harmónico da tensão em malha fechada
Aumentando os valores de resistência dos reóstatos para 45Ω, verificou-se que
as tensões de saída aumentaram para valores próximos de 36V de amplitude. Neste
caso, as correntes apresentam valores mais baixos do que no caso anterior, tendo
amplitudes de aproximadamente 0,47A. As formas de onda das tensões de saída do
inversor são apresentadas na figura 6.8.
Figura 6.8 – Tensões de saída com carga de 45Ω em estrela
Quanto ao conteúdo harmónico, verifica-se uma ligeira diminuição, sendo o
valor de THD ligeiramente superior a 4%.
Aumentando novamente os valores das resistências da carga, neste caso para
60Ω, verifica-se mais uma vez que, apesar das tensões de saída terem aumentado
(amplitude de 42V) as correntes baixaram, apresentando valores de aproximadamente
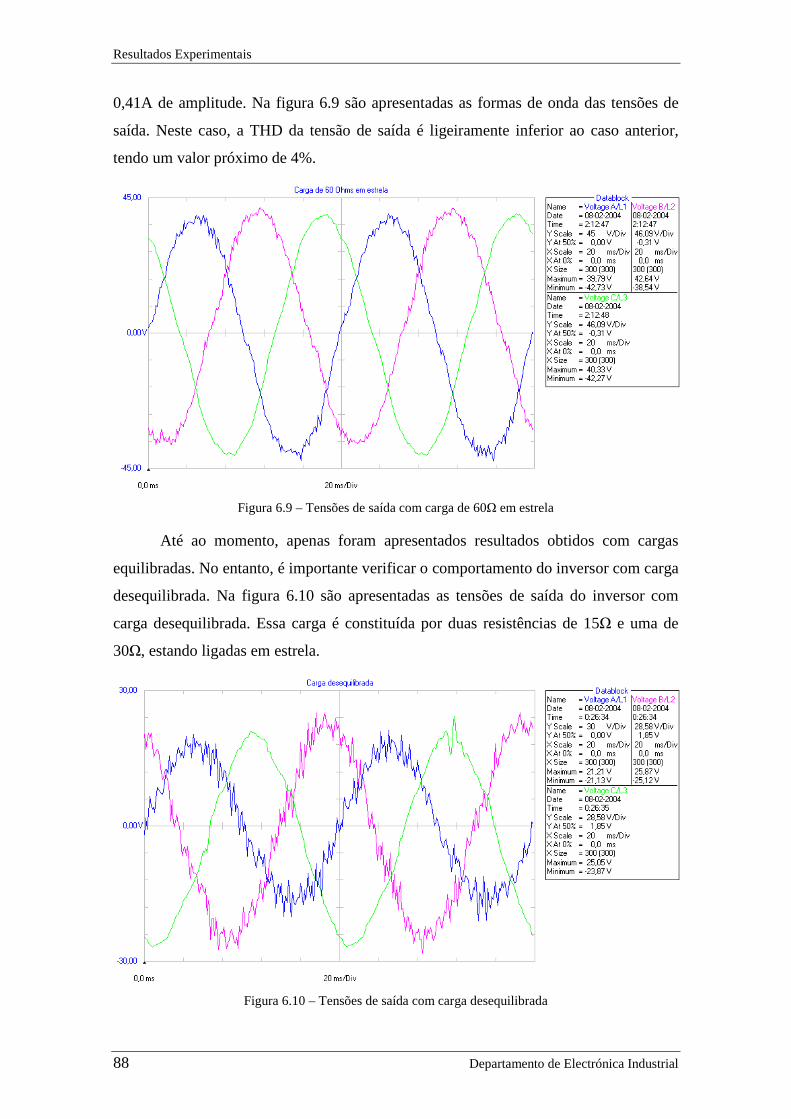
Resultados Experimentais
88 Departamento de Electrónica Industrial
0,41A de amplitude. Na figura 6.9 são apresentadas as formas de onda das tensões de
saída. Neste caso, a THD da tensão de saída é ligeiramente inferior ao caso anterior,
tendo um valor próximo de 4%.
Figura 6.9 – Tensões de saída com carga de 60Ω em estrela
Até ao momento, apenas foram apresentados resultados obtidos com cargas
equilibradas. No entanto, é importante verificar o comportamento do inversor com carga
desequilibrada. Na figura 6.10 são apresentadas as tensões de saída do inversor com
carga desequilibrada. Essa carga é constituída por duas resistências de 15Ω e uma de
30Ω, estando ligadas em estrela.
Figura 6.10 – Tensões de saída com carga desequilibrada
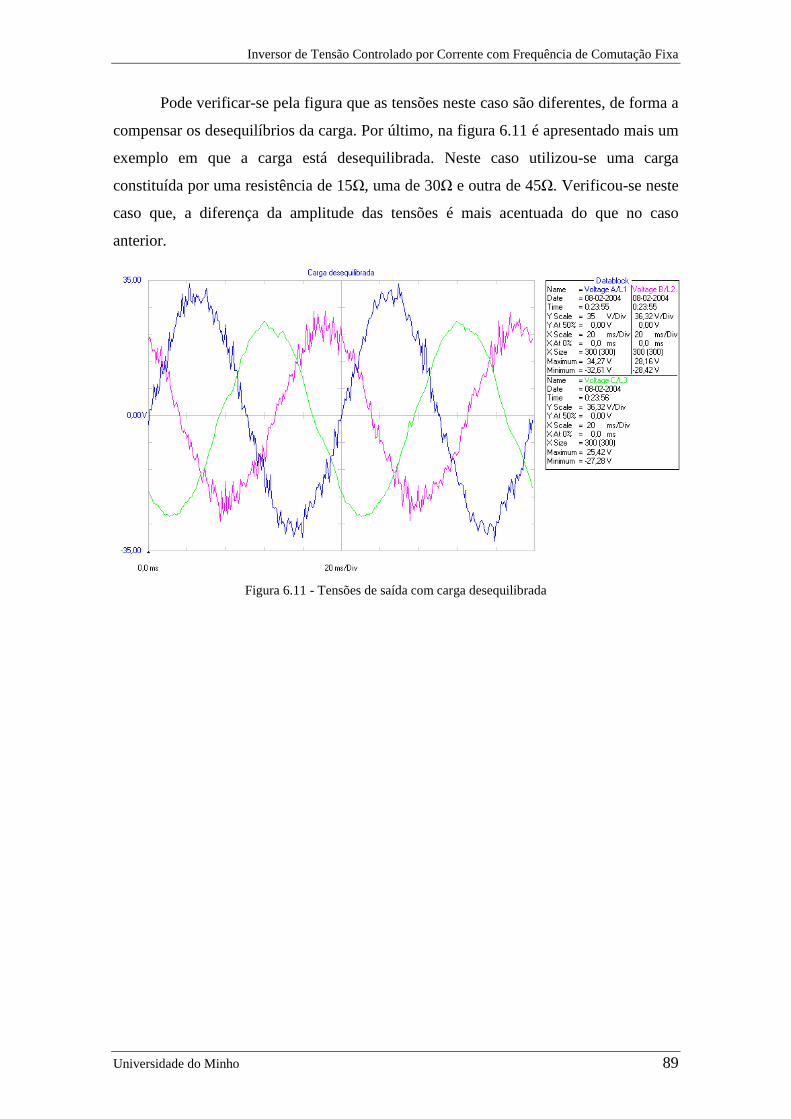
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 89
Pode verificar-se pela figura que as tensões neste caso são diferentes, de forma a
compensar os desequilíbrios da carga. Por último, na figura 6.11 é apresentado mais um
exemplo em que a carga está desequilibrada. Neste caso utilizou-se uma carga
constituída por uma resistência de 15Ω, uma de 30Ω e outra de 45Ω. Verificou-se neste
caso que, a diferença da amplitude das tensões é mais acentuada do que no caso
anterior.
Figura 6.11 - Tensões de saída com carga desequilibrada

Resultados Experimentais
90 Departamento de Electrónica Industrial
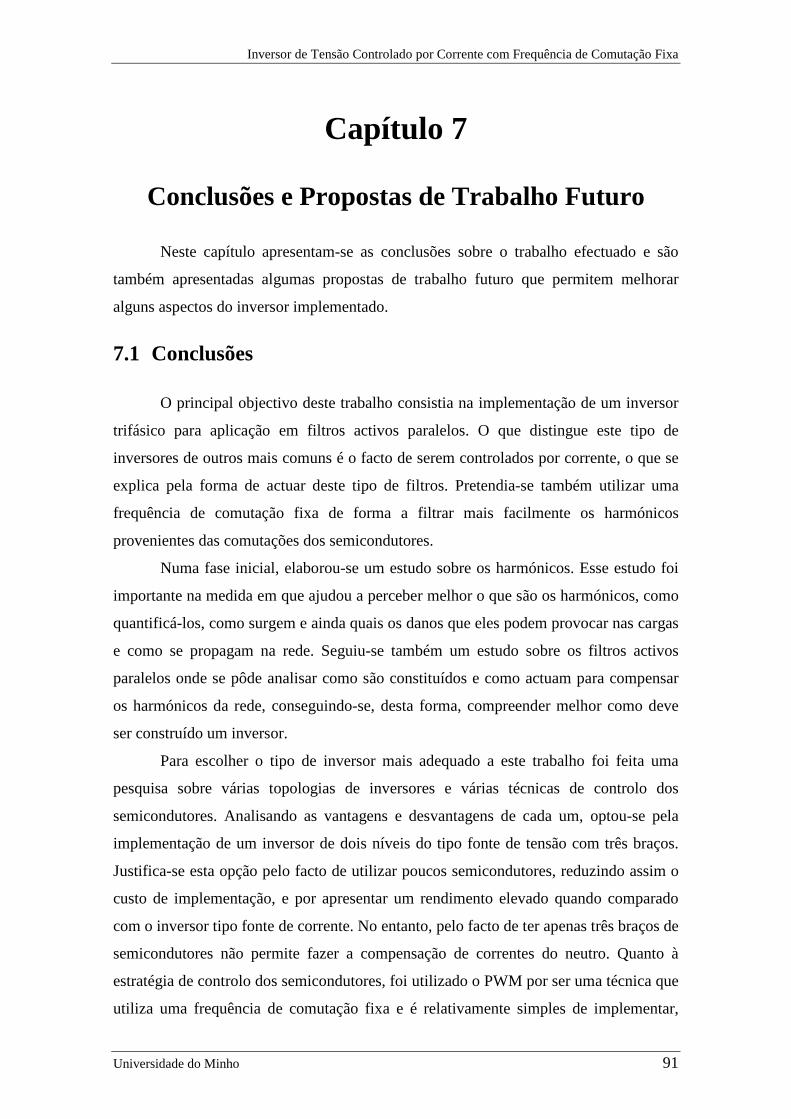
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 91
Capítulo 7
Conclusões e Propostas de Trabalho Futuro
Neste capítulo apresentam-se as conclusões sobre o trabalho efectuado e são
também apresentadas algumas propostas de trabalho futuro que permitem melhorar
alguns aspectos do inversor implementado.
7.1 Conclusões
O principal objectivo deste trabalho consistia na implementação de um inversor
trifásico para aplicação em filtros activos paralelos. O que distingue este tipo de
inversores de outros mais comuns é o facto de serem controlados por corrente, o que se
explica pela forma de actuar deste tipo de filtros. Pretendia-se também utilizar uma
frequência de comutação fixa de forma a filtrar mais facilmente os harmónicos
provenientes das comutações dos semicondutores.
Numa fase inicial, elaborou-se um estudo sobre os harmónicos. Esse estudo foi
importante na medida em que ajudou a perceber melhor o que são os harmónicos, como
quantificá-los, como surgem e ainda quais os danos que eles podem provocar nas cargas
e como se propagam na rede. Seguiu-se também um estudo sobre os filtros activos
paralelos onde se pôde analisar como são constituídos e como actuam para compensar
os harmónicos da rede, conseguindo-se, desta forma, compreender melhor como deve
ser construído um inversor.
Para escolher o tipo de inversor mais adequado a este trabalho foi feita uma
pesquisa sobre várias topologias de inversores e várias técnicas de controlo dos
semicondutores. Analisando as vantagens e desvantagens de cada um, optou-se pela
implementação de um inversor de dois níveis do tipo fonte de tensão com três braços.
Justifica-se esta opção pelo facto de utilizar poucos semicondutores, reduzindo assim o
custo de implementação, e por apresentar um rendimento elevado quando comparado
com o inversor tipo fonte de corrente. No entanto, pelo facto de ter apenas três braços de
semicondutores não permite fazer a compensação de correntes do neutro. Quanto à
estratégia de controlo dos semicondutores, foi utilizado o PWM por ser uma técnica que
utiliza uma frequência de comutação fixa e é relativamente simples de implementar,
Conclusões e Propostas de Trabalho Futuro
92 Departamento de Electrónica Industrial
uma vez que o microcontrolador utilizado possui um módulo de PWM integrado. Foi
ainda analisada teoricamente a resposta do filtro de saída do inversor (filtro LC) o que
permitiu dimensionar correctamente os seus componentes.
As simulações efectuadas em MATLAB permitiram criar um modelo
computacional do inversor de forma a testá-lo em diversas condições, tendo-se poupado
muito trabalho na bancada. Através das simulações verificou-se que o tipo de controlo
que se aplica ao inversor influencia muito os resultados obtidos. Com um controlo
proporcional os resultados mostram-se muito dependentes da carga e nunca atingem o
valor de referência. Além disso, são também influenciados pela tensão contínua que lhe
é aplicada. Com um controlo PI os resultados são mais satisfatórios. São pouco
influenciados pela tensão do barramento e pela carga (mesmo com carga
desequilibrada), atingindo o valor de referência. Com este controlo obtém-se também
uma maior estabilidade. A principal desvantagem deste controlo é a maior
complexidade de cálculo. Este factor não é relevante em modelos computacionais
devido à grande velocidade e capacidade de cálculo que possui um computador, no
entanto, deve-se ter em consideração quando se implementa num microcontrolador.
O inversor implementado permite uma tensão de entrada máxima (tensão
contínua) de apenas 200V devido às limitações dos semicondutores utilizados. Esse
factor limita também a tensão máxima de saída. Quanto ao sistema de controlo dos
semicondutores, mostrou-se bastante eficaz e simples de utilizar. O módulo PWM do
microcontrolador permitiu fazer todas as configurações necessárias para o seu bom
funcionamento, tornando-se simples de aplicar e evitando o uso de circuitos externos
que aumentariam a complexidade do sistema. A utilização de drivers apropriados para
fazer o interface entre os sinais de controlo e os sinais de potência foi também
importante porque permitiu que os semicondutores comutassem eficazmente, tendo-se
evitado o uso de fontes auxiliares. O sistema de leitura das correntes funcionou como
era desejado e mostrou ter uma elevada precisão e rapidez, tanto por parte do ADC
como do circuito de condicionamento de sinal e sensores de corrente. Em relação ao
filtro de saída, embora a frequência de corte seja um pouco diferente da calculada
teoricamente, este funcionou como era desejado.
Os resultados obtidos com o inversor em malha aberta serviram para testar o
sistema de controlo dos semicondutores bem como o filtro de saída. Os resultados
foram os esperados, sendo a saída dependente do índice de modulação e também da
carga. Quanto aos resultados em malha fechada, que foram obtidos com um controlo
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 93
proporcional e uma referência sinusoidal, verificou-se que a tensão de saída se adapta
em função da carga de forma a controlar a corrente. Mesmo quando foram aplicadas
cargas de resistência muito baixa (inferior a 10Ω), o inversor não perdeu a estabilidade.
No entanto, tal como se verificou nas simulações efectuadas com o mesmo tipo de
controlo, a corrente ficou abaixo do valor de referência e mostrou-se dependente da
carga. Com carga desequilibrada os resultados foram também os previstos. Neste caso
as tensões apresentaram valores diferentes de modo a compensar o desequilíbrio da
carga embora não seja o suficiente para manter as correntes todas iguais. Em relação ao
conteúdo harmónico obtido nas várias situações, verificou-se que predominam os
harmónicos de 5ª e 7ª ordem embora estes apresentem valores relativamente baixos,
sendo que a distorção harmónica total apresenta valores abaixo dos 5% em todas as
situações.
Fazendo uma análise global sobre todo o trabalho realizado, pode-se concluir
que foram atingidos os principais objectivos propostos. Tanto as simulações efectuadas
como o inversor implementado permitiram obter resultados satisfatórios validando,
desta forma, as várias teorias que serviram de base ao trabalho. Conseguiu-se
demonstrar que utilizando uma frequência de comutação fixa é possível obter bons
resultados e eliminar com relativa facilidade os harmónicos provenientes dessas
comutações. No entanto, é importante ter em consideração que este tipo de inversores
deve ser capaz de fornecer correntes com harmónicos, tendo estes uma frequência mais
elevada do que a fundamental. Este facto pode fazer com que seja necessário aumentar a
frequência de comutação e dimensionar o filtro de acordo com essa frequência.
7.2 Propostas de trabalho futuro
O inversor implementado tem apenas três braços de semicondutores. No entanto,
torna-se vantajoso, na maior parte dos casos, a utilização de um quarto braço para
aplicações onde se utilize o neutro, como é o caso dos filtros activos paralelos. Desta
forma, sugere-se como proposta de trabalho e desenvolvimento futuro, a implementação
de um inversor de quatro braços. Sugere-se também a utilização de semicondutores
(MOSFET ou IGBT) que suportem tensões e correntes mais elevadas, permitindo, desta
forma, a sua utilização em aplicações de maior potência. Propõe-se ainda que se
dimensionem os respectivos circuitos de snubber e que se apliquem dissipadores
adequados.

Conclusões e Propostas de Trabalho Futuro
94 Departamento de Electrónica Industrial
Outro possível melhoramento do trabalho é o sistema de controlo, uma vez que,
com o controlo utilizado as correntes de saída mostraram-se bastante dependentes da
carga. Sugere-se, por este motivo, o estudo e implementação de um controlo mais eficaz
para resolver as lacunas evidenciadas pelo controlo utilizado. No caso de ser necessária
uma capacidade de cálculo maior do que aquela que o microcontrolador possui,
propõe-se a utilização de um DSPIC, sendo este do mesmo fabricante do
microcontrolador utilizado, ou outro de características semelhantes.
Por último, sugere-se a aplicação do inversor num filtro activo paralelo. Para
isso deve-se ter em atenção que a referência da corrente deixa de ser gerada pelo próprio
inversor e passa a ser gerada pelo sistema de controlo do filtro, sendo necessário aplicar
algumas alterações no código do microcontrolador. Propõe-se também que o sistema de
controlo do inversor (incluindo o circuito de interface e o circuito de medição das
correntes) seja implementado numa placa de circuito impresso para se tornar mais
simples a sua utilização facilitando as ligações com outros elementos.
Inversor de Tensão Controlado por Corrente com Frequência de Comutação Fixa
Universidade do Minho 95
Referências
[1] J. L. Afonso. SINUS - Quality on Electric Power. [Online]. Consultado em Março
de 2008. http://www.sinus.ccg.pt/
[2] J. Afonso, J. Sepúlveda, and J. Martins, "Filtros Activos de Potência para Melhoria
da Qualidade de Energia Eléctrica", Universidade do Minho, 2000.
[3] E. Franco. Qualidade de Energia - Causas, Efeitos e Soluções. [Online].
Consultado em Março de 2008. www.engecomp.com.br/pow_qual.htm
[4] H. Moreno, "Harmônicas nas Instalações Eléctricas", Instituto Brasileiro do Cobre,
2001.
[5] M. R. Araujo and S. R. Naidu, "Sistema Computadorizado para Monitoramento de
Harmônicos em Sistemas Eléctricos".
[6] E. F. Couto, "Simulações e Análise de um Filtro Activo Paralelo Trifásico com
Controlo Baseado na Teoria p-q", Universidade do Minho Tese de Mestrado, 2003.
[7] C. G. Herrera, "Qualidade da Energia em Sistemas de Sonorização – Harmônicos
na Rede", UFMG - Departamento de Engenharia Eléctrica, 2006.
[8] D. A. Paice, Power Electronic Converter Harmonics, 1st ed. Nova Iorque, Estados
Unidos da América: IEEE Press, 1995.
[9] J. A. Maia and J. R. Pinheiro, "Harmônicos de Corrente e Tensão", Congresso de
Iniciação Científica e Tecnológica em Engenharia, 2006.
[10] F. Fernandes, J. A. Grimoni, and M. T. Fagá, "Impactos no Fator de Potência e
Harmônicas na Substituição da Eletrotermia por Gás Natural", ABPG, 2007.
[11] A. M. Variz, S. Carneiro, J. L. Pereira, and P. Barbosa, "Cálculo do fluxo de
harmônicos em sistemas de potência trifásicos utilizando o método de injeção de
correntes com solução iterativa", Sociedade Brasileira de Automática, 2009.
[12] J. A. Pomilio. (1997, Jul.) Faculdade de Engenharia Elétrica e de Computação.
[Online]. Consultado em Abril de 2008.
www.dsce.fee.unicamp.br/~antenor/htmlfile/harmo/fpcap4/cap4.html
[13] I. A. Pires, "Caracterização de harmônicos causados por equipamentos eletro-
eletrônicos residenciais e comerciais no sistema de distribuição de energia
Referências
96 Departamento de Electrónica Industrial
elétrica", UFMG Dissertação, 2006.
[14] H. Jorge, "Qualidade de Energia", Mestrado em Engenharia Electrotécnica e de
Computadores, 2008.
[15] R. L. Pregitzer, T. N. Sousa, J. S. Martins, and J. L. Afonso, "Interface entre Fontes
de Energia Renovável e a Rede Eléctrica", Conferência sobre Energias Renováveis
e Ambiente em Portugal, vol. ENER, pp. 1143-1148, 2005.
[16] F. Labrique and J. J. Santana, Electrónica de Potência, 1ªth ed. Lisboa, Portugal:
Fundação Calouste Gulbenkian, 1991.
[17] H. Akagi, "Trends in Active Power Line Conditioners", IEEE Transactions on
Power Electronics, vol. 9, pp. 263-268, 1994.
[18] R. L. Pregitzer, "Simulações Computacionais de Filtros Activos de Potência em
Condições Reais de Operação", Universidade do Minho Tese de Mestrado, 2006.
[19] J. A. Pomilio, "Electrônica de Potência", UNICAMP - Faculdade de Engenharia
Elétrica e de Computação, 2009.
[20] J. Carvalheiro and R. Castro, "Power Conditioning Performance Analysis for a
Fuel Cell Power Plant", Instituto Politécnico de Tomar / Instituto Superior Técnico,
2008.
[21] J. A. Pomilio. (1997, Jul.) Faculdade de Engenharia Elétrica e de Computação.
[Online]. Consultado em Abril de 2008.
www.dsce.fee.unicamp.br/~antenor/htmlfile/harmo/fpCAP7/cap7.html
[22] S. Buso, L. Malesani, and P. Mattavelli, "Comparison of Current Control
Techniques for Active Filter Applications", IEEE Transactions on Industrial
Electronics, vol. 45, pp. 722-729, 1998.
[23] N. Mohan, T. Undeland, and W. Robbins, Power Electronics, 2ªth ed. Nova Iorque,
Estados Unidos da América: John Wiley & Sons, Inc., 1995.
[24] C. Rech, "Electrônica de Potência", Universidade do Estado de Santa Catarina,
2008.
[25] C. Blake and C. Bull, "IGBT or MOSFET: Choose Wisely", International Rectifier,
2008.
[26] J. G. Rocha, MOSFETS e Amplificadores Operacionais, 1ªth ed. Porto, Portugal:
Netmove Comunicação Global, Lda., 2005.





























