Embed Size (px)
Citation preview


ii
AGUIAR, CRISTIANO SANTOS DE
Interação solo-estrutura de fundações
offshore do tipo estaca. [Rio de Janeiro]. 2007
XIV, 135 p. 29,7 cm (COPPE/UFRJ,
M.Sc, Engenharia Civil, 2007)
Dissertação – Universidade Federal do Rio
de Janeiro, COPPE
1. Fundações
2. Interação solo-estrutura
3. Método dos elementos finitos
I. COPPE/UFRJ II. Título (série)

iii
Aos meus pais, Lourdes e Geraldo;
aos meus irmãos Luciano e Suzana;
e à Karinna.
iv
AGRADECIMENTOS
Aos professores Gilberto Bruno Ellwanger e Luis Volnei Sudati Sagrilo, pela
orientação, apoio e amizade durante toda elaboração da dissertação.
Ao Dr. José Renato Mendes de Sousa, pelos conselhos e ensinamentos ao longo
toda esta dissertação.
Aos Engenheiros da PETROBRAS que forneceram informações sobre as estacas
utilizadas em unidades flutuantes da Bacia de Campos: Cipriano, Rogério e Gustavo
Castro.
À toda equipe do LACEO, pelo incentivo e pelos momentos de descontração que
sempre ajudaram a superar as dificuldades.
Aos amigos de graduação e mestrado, Fernanda e Thiago, pelos longos
momentos de estudos.
À Karinna pelo imenso incentivo e companheirismo durante todos os momentos
ao longo deste trabalho.
Aos meus pais, Geraldo e Lourdes, e meus irmãos Luciano e Suzana, pelo apoio
e carinho durante toda a minha vida.
A ANP (Agência Nacional do Petróleo) pelo apoio financeiro através do PRH02.

v
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
INTERAÇÃO SOLO-ESTRUTURA DE FUNDAÇÕES OFFSHORE DO TIPO
ESTACA
Cristiano Santos de Aguiar
Maio/2007
Orientadores: Gilberto Bruno Ellwanger
Luís Volnei Sudati Sagrilo
Programa Engenharia Civil
Este trabalho busca estudar o comportamento estático da interação solo-estrutura
de fundações do tipo estaca para plataformas offshore. Os estudos apresentados
englobam desde metodologias clássicas simplificadas até modelos complexos
envolvendo o método dos elementos finitos com modelagem sólida. Os casos estudados
neste trabalho correspondem aos principais exemplos de fundações tipo estaca utilizada
atualmente na prática. Serão apresentados resultados referentes à estacas longas típicas
de plataformas flutuantes e fixas tipo jaquetas. Outro exemplo importante apresentado é
o estudo de uma estaca do tipo torpedo, que vem ganhando importância em projetos de
ancoragem de plataformas flutuantes marítimas. Também é analisado o efeito de grupo
de estacas através do método dos elementos finitos, sendo os resultados comparados
com as metodologias clássicas. Finalmente, os resultados obtidos sugerem que ensaios
geotécnicos experimentais em escala real podem melhorar o conhecimento dos
parâmetros da interação solo-estrutura das metodologias apresentadas.

vi
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
PILE-SOIL INTERACTION IN OFFSHORE FOUNDATIONS
Cristiano Santos de Aguiar
May/2007
Advisors: Gilberto Bruno Ellwanger
Luís Volnei Sudati Sagrilo
Department: Civil Engineering
This dissertation aims at analyzing the static behavior of pile foundations of
offshore structures. The studies presented involve the using of the classic methodologies
and 3-D finite element method. The examples presented in this work are concerned with
the most common application of pile foundations in offshore engineering. Here, it will
be presented results regarding to floating and fixed platforms piles. Another important
example shown is related to the study of torpedo piles. This type of pile foundation has
been used as the anchoring for many mooring systems. In this work, the behavior of
piles groups is analyzed using finite element method models, and then compared with
classic methodologies. Finally, the results obtained suggest that geotechnical
experiments in real scale will improve the knowledge about the soil-structure interaction
parameters of the methodologies presented.
vii
Sumário
1 INTRODUÇÃO E MOTIVAÇÃO........................................................................ 1
1.1 OBJETIVOS DESTE TRABALHO ............................................................................ 3
1.2 DESCRIÇÃO DOS CAPÍTULOS .............................................................................. 4
2 TIPOS DE FUNDAÇÕES OFFSHORE............................................................... 5
2.1 ESTACAS TRADICIONAIS CRAVADAS .................................................................. 5
2.2 ESTACA DE SUCÇÃO........................................................................................... 7
2.3 VERTICAL LOAD ANCHOR (VLA) ........................................................................ 9
2.4 ESTACA TORPEDO............................................................................................ 10
2.5 ESTACA ESCAVADA ......................................................................................... 11
3 METODOLOGIA CLÁSSICA ........................................................................... 13
3.1 ANÁLISE ELÁSTICA LINEAR.............................................................................. 13
3.1.1 Solução elástica linear para uma estaca isolada .................................................... 14 3.1.2 Formulação pelo método da rigidez ...................................................................... 15 3.1.3 Formulação pelo método das diferenças finitas .................................................... 17 3.1.4 Verificação dos modelos propostos....................................................................... 19
3.2 MODELO DE WINKLER..................................................................................... 21
3.3 DETERMINAÇÃO DAS CURVAS NÃO LINEARES REPRESENTATIVAS DO SOLO ..... 27
3.3.1 Curvas P-Y em argila ............................................................................................ 28 3.3.2 Curva P-Y em areias.............................................................................................. 30 3.3.3 Curva T-Z em argilas............................................................................................. 33 3.3.4 Curva T-Z em areias.............................................................................................. 34 3.3.5 Observações sobre as curvas P-Y e T-Z................................................................ 35 3.3.6 Reação de ponta em argilas ................................................................................... 35 3.3.7 Reação de ponta em areias .................................................................................... 37 3.3.8 Resistência axial limite da estaca .......................................................................... 38
3.4 ANÁLISE DO EFEITO DE GRUPO ........................................................................ 39
3.4.1 Modelo elástico linear de Poulos para duas estacas .............................................. 41 3.4.2 Método de Focht & Koch ...................................................................................... 43
3.5 COMENTÁRIOS REFERENTES ÀS METODOLOGIAS CLÁSSICAS............................ 45
4 MÉTODO DOS ELEMENTOS FINITOS COM MODELAGEM SÓLIDA . 46

viii
4.1 MODELAGEM DA INTERAÇÃO SOLO-ESTACA.................................................... 47
4.2 MODELAGEM DO SOLO .................................................................................... 48
4.2.1 Conceitos de plasticidade ...................................................................................... 52
5 APLICAÇÕES...................................................................................................... 59
5.1 PROCEDIMENTOS DAS ANÁLISES...................................................................... 59
5.1.1 Solo com comportamento linear............................................................................ 59 5.1.2 Solo com comportamento não linear ..................................................................... 60
5.2 ANÁLISE DE UMA ESTACA LONGA.................................................................... 60
5.2.1 Validação do programa PILEMICRO ................................................................... 62 5.2.2 Solo com comportamento linear............................................................................ 63 5.2.3 Solo com comportamento não-linear..................................................................... 70 5.2.4 Análise do efeito de grupo com solo elástico linear .............................................. 74 5.2.5 Análise dos resultados da estaca longa.................................................................. 85
5.3 SOLUÇÃO CLÁSSICA PARA UMA ESTACA GRAUTEADA...................................... 87
5.3.1 Resultados obtidos................................................................................................. 91 5.3.2 Análise dos resultados ........................................................................................... 92
5.4 ANÁLISE DE UMA ESTACA DE PLATAFORMA FIXA ............................................ 93
5.4.1 Análise do efeito de grupo..................................................................................... 98
5.5 ANÁLISE DE UMA ESTACA TIPO TORPEDO ...................................................... 101
6 CONCLUSÕES................................................................................................... 108
6.1 CONSIDERAÇÕES FINAIS ................................................................................ 108
6.2 SUGESTÕES PARA TRABALHOS FUTUROS ....................................................... 109
REFERÊNCIAS BIBLIOGRÁFICAS ..................................................................... 111
APÊNDICES
A - OBTENÇÃO DA MATRIZ DE FLEXIBILIDADE DO SOLO ...................... 116
B – PLANILHA MATHCAD COM A SOLUÇÃO FECHADA DE HETENYI .. 121
C – PLANILHA MATHCAD PARA CÁLCULO DA CAPACIDADE AXIAL DE
UMA ESTACA ........................................................................................................... 126
D - CÁLCULO DA CAPACIDADE LATERAL DE UMA ESTACA EMBEBIDA
EM SOLO ARGILOSO ............................................................................................. 129

ix
E - CÁLCULO DA CAPACIDADE LATERAL DE UMA ESTACA EMBEBIDA
EM SOLO ARENOSO............................................................................................... 133
Índice de figuras
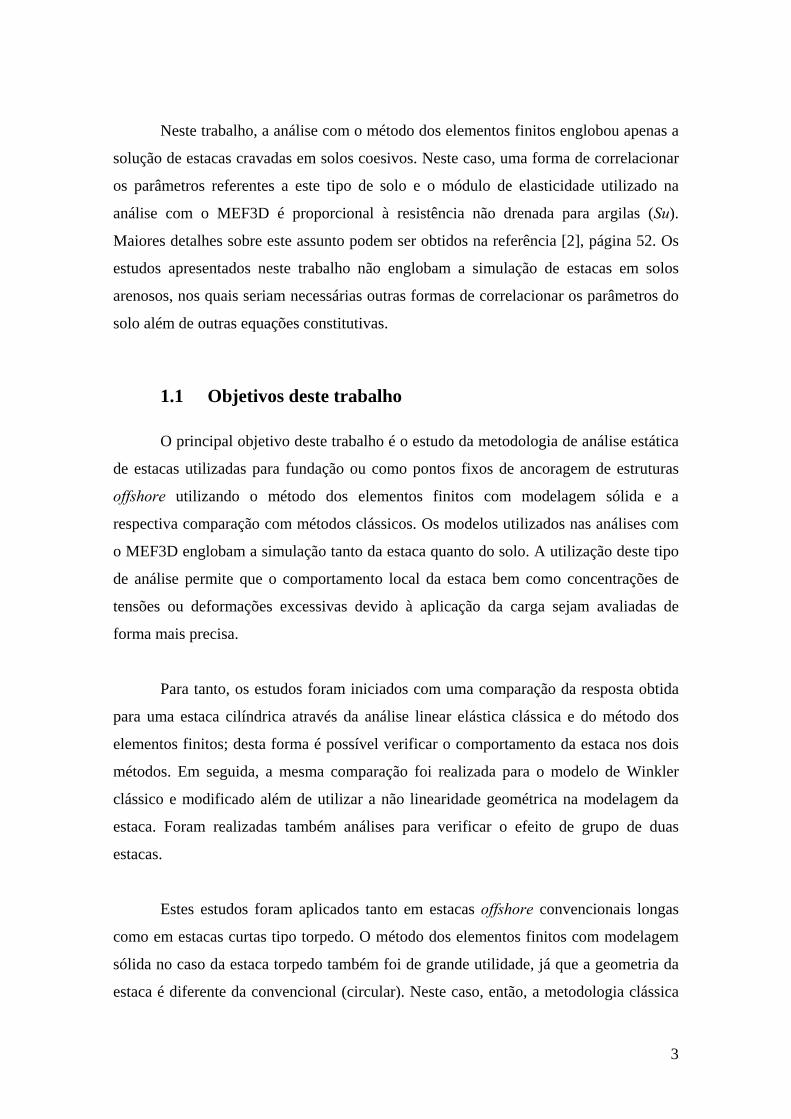
Figura 2.1 - Representação de uma estaca de jaqueta [5]................................................. 6
Figura 2.2 - Comportamento global de uma estaca longa submetida a um carregamento
lateral [6]. ......................................................................................................................... 6
Figura 2.3 - Estaca de sucção. .......................................................................................... 7
Figura 2.4 - Componentes básicos da estaca de sucção [9].............................................. 7
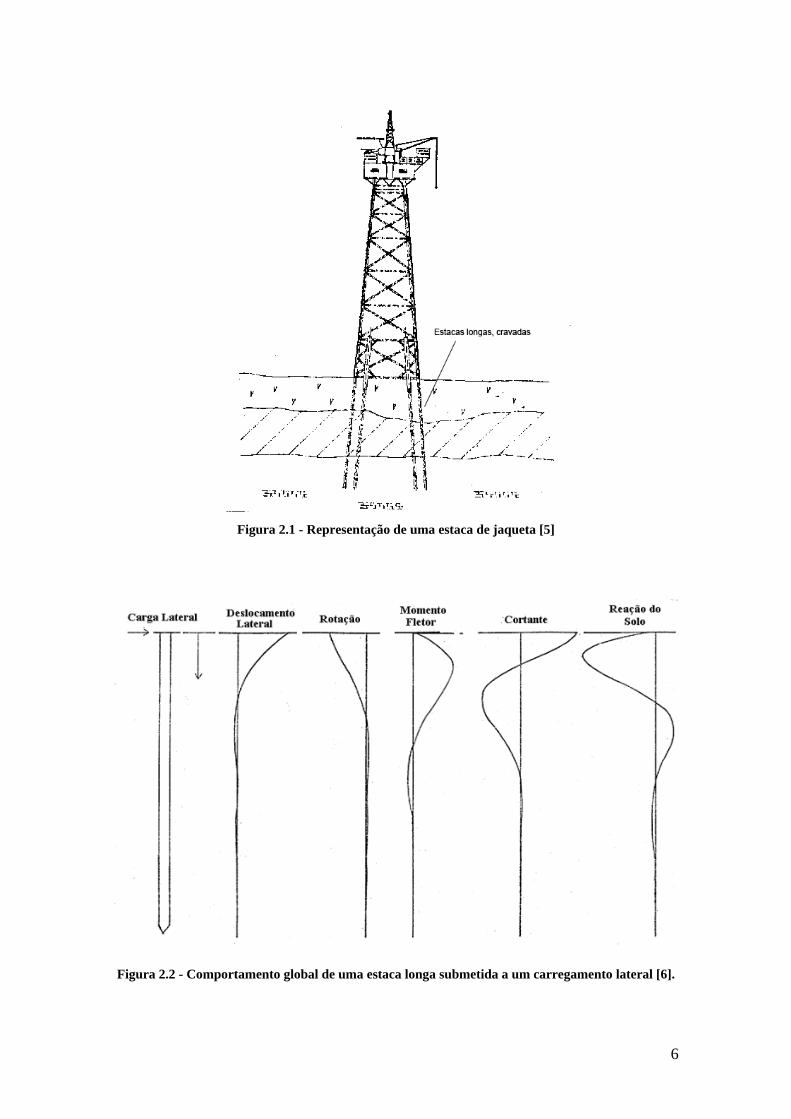
Figura 2.5 - Forças que atuam na estaca de sucção durante o processo de instalação
(SANTOS, 1997) .............................................................................................................. 8
Figura 2.6 - Exemplo de VLA. ......................................................................................... 9
Figura 2.7 - Procedimento de instalação de uma VLA [12]............................................. 9
Figura 2.8 - Exemplo de estaca torpedo. ........................................................................ 10
Figura 2.9 - Seção da estaca torpedo na região das aletas.............................................. 11
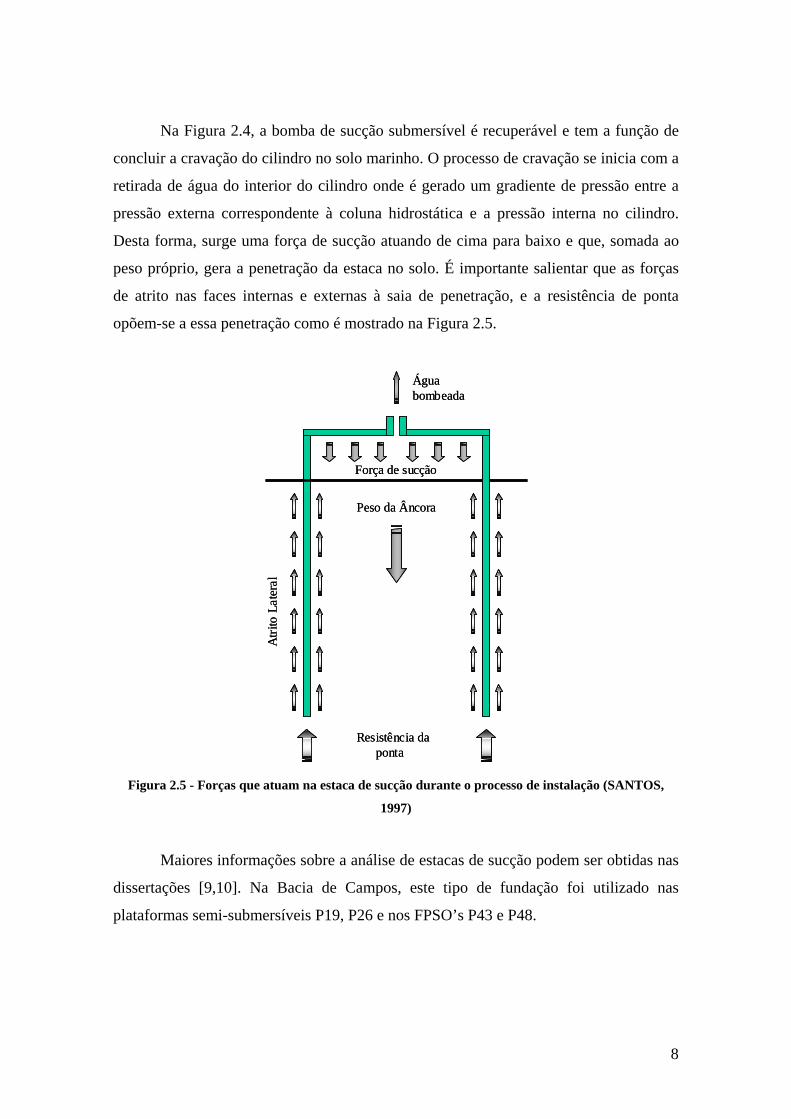
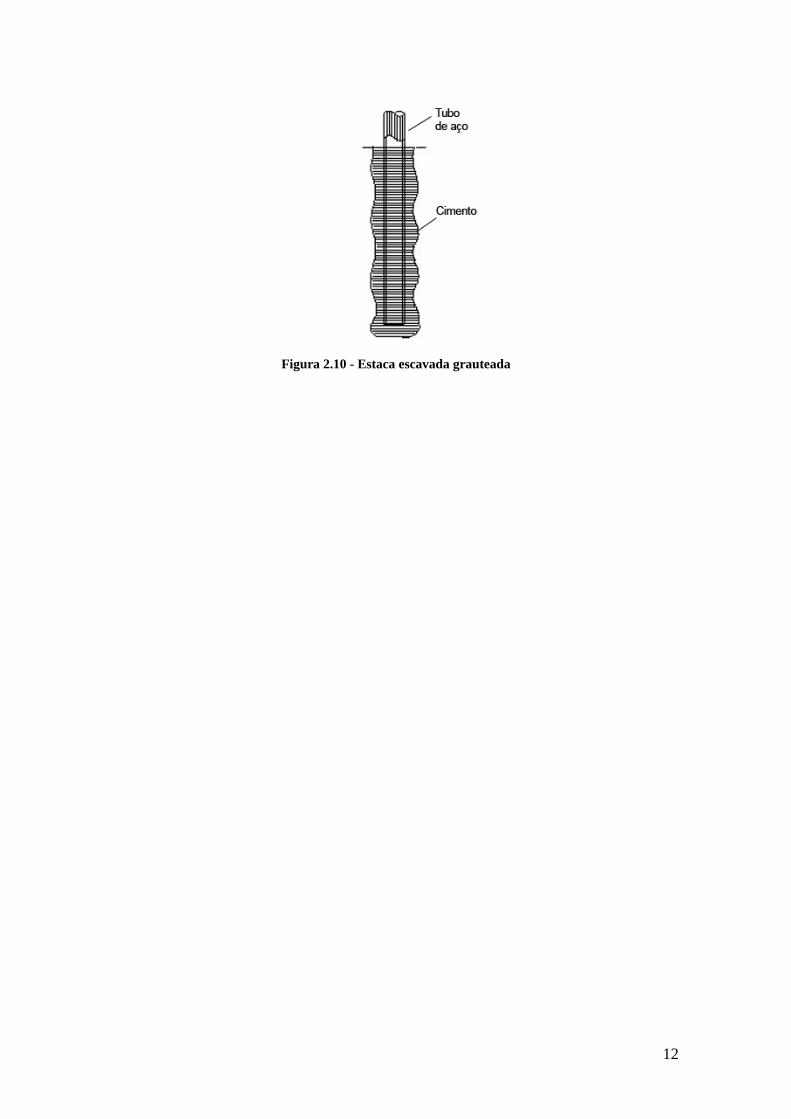
Figura 2.10 - Estaca escavada grauteada ........................................................................ 12
Figura 3.1 – Esquema estrutural de uma estaca livre (a) e uma estaca com o topo
restringido (b) ................................................................................................................. 14
Figura 3.2 – Modelo de Poulos para uma estaca isolada................................................ 16
Figura 3.3 – Exemplos de validação do programa de análise elástica ........................... 20
Figura 3.4 - Estaca vertical discretizada pelo Método de Winkler................................. 23
Figura 3.5 Comprimento de influência........................................................................... 24
Figura 3.6 - Elemento de pórtico espacial. ..................................................................... 25
Figura 3.7 - Matriz de rigidez de pórtico espacial. ......................................................... 25
Figura 3.8 - Matriz de rigidez não linear geométrica ..................................................... 26
Figura 3.9 - Estaca para FPSO utlizada em [30]. ........................................................... 28
Figura 3.10 - Curvas P-Y da API-RP-2A....................................................................... 29
Figura 3.11 - Curva P-Y em areias (API-RP-2A) .......................................................... 31
Figura 3.12 - Valor do módulo de reação lateral k [29]. ................................................ 31
Figura 3.13 - Valores de C1, C2 e C3 (fonte: API-RP-2A).............................................. 32
Figura 3.14 -Curva T-Z (Fonte API-RP-2A [29]) .......................................................... 33
Figura 3.15 - Curva típica de reação de ponta e de topo ................................................ 36

x
Figura 3.16 - Plataforma PRA-1..................................................................................... 40
Figura 3.17 - Esquema de um grupo de estacas ............................................................. 41
Figura 3.18 - Grupo de duas estacas............................................................................... 42
Figura 4.1- Elemento sólido de 8 nós [41] ..................................................................... 47
Figura 4.2 - Esquema do comportamento dos elementos de contato [41]...................... 48
Figura 4.3 - Diâmetro do modelo de estaca isolada ....................................................... 49
Figura 4.4 - Dimensão do modelo da estaca em grupo .................................................. 50
Figura 4.5 - Configuração da curva tensão-deformação do solo.................................... 53
Figura 4.6 - Configuração da curva tensão-deformação de um solo (“Strain-softening”).
........................................................................................................................................ 54
Figura 4.7 - Modelos elasto-plásticos utilizados na teoria da plasticidade clássica. ...... 55
Figura 4.8 - Superfícies de escoamento no espaço das tensões principais:.................... 56
Figura 4.9 - Diagrama tensão-deformação utilizado. ..................................................... 58
Figura 5.1 - Esquema da estaca longa estudada ............................................................. 61
Figura 5.2 - Comparação do PILEMICRO com a solução fechada de Hetenyi............. 62
Figura 5.3 - Comparativo do modelo de Winkler e a análise elástica ............................ 64
Figura 5.4 - Comparação entre uma estaca de 100 metros e outra de 500 metros ......... 65
Figura 5.5 - Distribuição de momentos e cortantes ao longo da estaca.......................... 66
Figura 5.6 – Vista do modelo de elementos finitos da estaca e o solo. .......................... 67
Figura 5.7 - Detalhe do modelo incluindo a estaca e o solo........................................... 67
Figura 5.8 - Modelo da estaca e o solo elaborado com elementos axissimétricos. ........ 68
Figura 5.9 - Comparação entre os métodos - comportamento linear - estaca longa....... 69
Figura 5.10 - Deslocamentos horizontais do solo........................................................... 70
Figura 5.11 - Comportamento não-linear sem separação solo-estaca - Estaca longa..... 71
Figura 5.12 - Momentos e cortantes ao longo da estaca (solo não linear) ..................... 71
Figura 5.13 - Nível de plastificação do solo na região do topo da estaca ...................... 72
Figura 5.14 - Malha utilizada na análise com separação solo-estaca ............................. 73
Figura 5.15 - Comportamento não-linear com a separação solo-estaca ......................... 73
Figura 5.16 - Vista superior da estaca em grupo afastadas de uma distâcia s ................ 74
Figura 5.17 - Visão do modelo da estaca em grupo ....................................................... 75
Figura 5.18 - Detalhe da estaca em grupo ...................................................................... 75
Figura 5.19 - Resposta para a estaca em grupo - metodologia clássica (carga 980,6 kN)
........................................................................................................................................ 76
Figura 5.20 - Resposta para a estaca em grupo – MEF3D (carga 980,6 kN) ................. 77

xi
Figura 5.21 - Tensões no solo s/d = 2............................................................................. 78
Figura 5.22 - Tensões no solo s/d = 3............................................................................. 78
Figura 5.23 - Tensões no solo s/d = 10........................................................................... 79
Figura 5.24 - Análise do efeito de grupo sem separação solo-estaca ............................. 79
Figura 5.25 - Deslocamentos da estaca em grupo (MEF3D) ......................................... 80
Figura 5.26 - Deslocamentos da estaca em grupo (métodologia clássica) ..................... 80
Figura 5.27 - Índice de plastificação para S/D = 2 e sem separação solo-estaca. .......... 81
Figura 5.28 - Índice de plastificação para S/D = 3 e sem separação solo-estaca ........... 82
Figura 5.29 – Índice de plastificação para S/D = 10 e sem separação solo-estaca......... 82
Figura 5.30 - Tensões (em kPa) no solo para s/d = 2 ..................................................... 83
Figura 5.31 - Tensões (em kPa) no solo para s/d = 3 ..................................................... 83
Figura 5.32 - Tensões (em kPa) no solo para s/d = 10 .................................................. 84
Figura 5.33 - Mapa dos deslocamentos (em metros) para s/d = 2.................................. 84
Figura 5.34 - Mapa dos deslocamentos (em metros) para s/d = 3.................................. 85
Figura 5.35 - Mapa dos deslocamentos (em metros) para s/d = 10................................ 85
Figura 5.36 - Comparação das tensões nos modelos com e sem separação solo estaca. 87
Figura 5.37 - Riser híbrido auto-sustentável .................................................................. 88
Figura 5.38 - Esquema do RHAS empregado pela PETROBRAS [4]........................... 88
Figura 5.39 - Esquema da estaca e do solo..................................................................... 89
Figura 5.40 - Detalhe da região próximo à superfície do solo ....................................... 89
Figura 5.41 - Esquema do gap da curva P-Y.................................................................. 90
Figura 5.42 - Deslocamentos ao longo da estaca (Rig. linear vs. Rig. não linear
geométrica) ..................................................................................................................... 91
Figura 5.43 - Esforços na estaca para a rigidez linear e gemétrica ................................ 92
Figura 5.44 - Esquema do efeito de grupo ..................................................................... 93
Figura 5.45 - Esquema do exemplo de estaca para plataforma fixa ............................... 94
Figura 5.46 - Modelo em MEF 3D da estaca e do solo .................................................. 95
Figura 5.47 - Detalhe do topo da estaca (azul) e o pórtico onde a carga foi aplicada
(verde)............................................................................................................................. 96
Figura 5.48 - Comparação entre o modelo de Winkler e o MEF 3D ............................. 96
Figura 5.49 - Tensões no topo da estaca......................................................................... 97
Figura 5.50 - Momentos e cortantes ao longo da estaca................................................. 98
Figura 5.51 - Malha da estaca em grupo ........................................................................ 98
Figura 5.52 - Detalhe do topo da estaca em grupo ......................................................... 99

xii
Figura 5.53 - Deslocamentos da estaca isolada e em grupo para MEF3D ................... 100
Figura 5.54 - Comparação MEF3D x PILEMICRO, com efeito de grupo. ................. 101
Figura 5.55 - Direção da aplicação da carga a 45 graus. .............................................. 102
Figura 5.56 - Estaca torpedo modelada. ....................................................................... 102
Figura 5.57 - Seção da estaca torpedo .......................................................................... 103
Figura 5.58 - Modelo da estaca torpedo ....................................................................... 104
Figura 5.59 - Modelo do solo e estaca.......................................................................... 104
Figura 5.60 - Diagrama de deslocamento no topo da estaca ........................................ 105
Figura 5.61 - Distribuição do índica de plastificação: (a) 550,0 x Su; (b) 123,17 x Su106
Figura 5.62 - Tensões na estaca nos dois casos estudados: (a) 550,0 x Su; (b) 123,17 x
Su.................................................................................................................................. 106
Figura 5.63 - Deslocamentos da estaca torpedo pelo modelo de Winkler ................... 107
Índice de tabelas
Tabela 3.1 - Curva T-Z em areias................................................................................... 34
Tabela 3.2 - Valores típicos de fmax ................................................................................ 35
Tabela 3.3 - Curva de reação de ponta e de topo............................................................ 36
Tabela 3.4 - Valores típicos de Nq.................................................................................. 38
Tabela 5.1 - Dados da estaca longa para análise pela metodologia clássica .................. 63
Tabela 5.2 - Dados da malha em elementos finitos (Elemento sólido) - estaca longa
linear ............................................................................................................................... 67
Tabela 5.3 - Dados da malha em elementos finitos (Elemento plano axissimétrico)-
estaca longa linear .......................................................................................................... 68
Tabela 5.4 - Dados da malha utilizada na análise não linear.......................................... 72
Tabela 5.5 - Dados das malhas utlizadas nas análises de grupo..................................... 75
Tabela 5.6 - Fatores de grupo utlizando o MEF com modelagem sólida e a metodologia
clássica............................................................................................................................ 76
Tabela 5.7 - Fatores de grupo utlizando o MEF 3D com separação solo-estaca e a
metodologia clássica....................................................................................................... 81
Tabela 5.8 - Dados do solo (da superfície para o fundo)................................................ 94
Tabela 5.9 - Dados da malha utilizada no exemplo de estaca para plataforma fixa....... 95
Tabela 5.10 - Dados da malha da estaca de plataforma fixa em grupo .......................... 99
xiii
Tabela 5.11 - Dados das malhas utilizadas nas análises da estaca torpedo .................. 104
Nomenclatura
a - Fator de grupo dp - Diâmetro da estaca e - Excentricidade de aplicação da carga EAp - Rigidez axial da estaca ec - Deformação associada à metade da pressão de ruptura do solo EIy - Rigidez de flexão em torno do eixo y da seção transversal da estaca EIz - Rigidez de flexão em torno do eixo z da seção transversal da estaca Ep - Módulo de elasticidade da estaca f' - Ângulo de atrito FS - Matriz de flexibilidade do solo G - Módulo de Elasticidade transversal da estaca g - Peso específico do solo H - Força horizontal Ip - Momento de inércia da estaca Is - Matriz de influência do solo Ix - Momento de inércia polar da seção transversal da estaca Kg - Matriz de Rigidez não linear geométrica kh - Coeficiente de reação lateral Kp - Matriz de rigidez da estaca KR - Fator de flexibilidade da estaca Ks - Matriz de rigidez do solo kv - Coeficiente de reação vertical l - Comprimento de elemento L - Comprimento da estaca Li - Comprimento de influência p - Pressão lateral P - Reação lateral (curva P-Y) P0 - Pressão efetiva do solo pu - Pressão última do solo Q - Resistência axial da estaca Rmax - Reação de ponta ou topo máxima Su - Resistência não drenada T - Reação axial do solo (curva T-Z) tmax - Adesão lateral limite

xiv
XR - Zona de resistência reduzida Y - Deslocamento lateral Y - Deslocamento horizontal (curva P-Y) Z - Deslocamento vertica (curva T-Z) Zmax - Deslocamento de ponta ou topo máximo

1
1 Introdução e motivação
Nas últimas décadas, a indústria do petróleo vem se destacando como uma das
principais formas de acelerar o desenvolvimento do Brasil, tanto na economia quanto
em suas áreas tecnológicas. O avanço da explotação de petróleo em águas cada vez
mais profundas é um exemplo do crescimento tecnológico da engenharia [1].
Nestas situações, as solicitações nas plataformas atingem o seu extremo, um
exemplo disto é a utilização de novos sistemas de ancoragem que tornam as cargas
transmitidas à fundação cada vez mais elevadas. Isto tudo aumenta a importância da
busca por formas de avaliar não só o comportamento geotécnico como também o
comportamento estrutural das fundações para estruturas marítimas.
Desde que as fundações para plataformas de petróleo offshore começaram a ser
instaladas em grande número na década de 1950, os engenheiros perceberam que
deveriam adotar modelos de análise diferentes dos simples métodos lineares disponíveis
[2]. Assim, vários ensaios experimentais foram executados, utilizando-se estacas de
seção circular de pequenos diâmetros com o objetivo de determinar características do
solo que representam o comportamento não linear da reação do mesmo, tanto na direção
lateral quanto axial. Estes estudos conduziram a modelar o comportamento do solo
através de curvas características, chamadas P-Y e T-Z, que são utilizadas na análise da
estaca através de um modelo de viga sobre base elástica. A forma mais simplificada
deste modelo e que existe solução analítica é sem a consideração do descolamento da
viga, ou seja, as molas possuem resistência à tração.
Este modelo de viga sobre base elástica foi proposto inicialmente por Winkler
em 1867 através da introdução de um coeficiente de reação lateral do solo. Assim, com
o uso das curvas P-Y e T-Z, foi utilizada a mesma metodologia, sendo que as curvas ou
molas representativas do solo são não lineares, dando origem assim ao modelo de
Winkler modificado. Este modelo será utilizado neste trabalho como base das
comparações do método dos elementos finitos tridimensional com a metodologia
clássica.

2
As curvas P-Y e T-Z são determinadas através da instrumentação de estacas e
assim obtendo-se curvas de deslocamentos vs. reação do solo em diversos pontos da
fundação. Atualmente, com a utilização de estacas de grande diâmetro e com outros
tipos de seções, além das circulares, são necessários novos ensaios de tal forma a
aprimorar as curvas P-Y e T-Z existentes.
Outra alternativa em estudo para a determinação das curvas P-Y é através da
consideração da resposta do solo, ao invés da resposta da estaca. Dentro deste contexto,
métodos numéricos que permitem a discretização do solo e também leve em
consideração toda a complexidade do problema geotécnico da interação solo-estrutura
tornam-se importantes. Um destes é o método dos elementos finitos, que vem sendo
usado freqüentemente em análises geotécnicas [3].
Um dos principais motivos do crescimento da importância dos métodos
numéricos nestas análises é que, a indústria da informática está em constante evolução,
permitindo o fácil acesso a computadores com grande poder de processamento. Assim,
não só problemas planos ou axissimétricos podem ser empregados, como também
modelos completos tridimensionais, englobando a simulação numérica computacional
tanto da estaca quanto do solo que circunda a mesma.
O uso de modelos complexos através do método dos elementos finitos
tridimensional com modelagem sólida (MEF3D) em análises de fundações permite que
sejam verificados detalhes antes não compreendidos em metodologias clássicas, bem
como concentrações de tensões e a consideração de modelos constitutivos que podem se
aproximar da realidade do comportamento geotécnico de alguns tipos de solos.
No entanto, é importante observar que os parâmetros do solo que alimentam
análises baseadas no modelo clássico de Winkler modificado e no método dos
elementos finitos são diferentes e que as correlações entre eles não são diretas podendo
conduzir a resultados completamente diferentes, tanto em termos de deslocamentos
quanto de esforços. Neste trabalho, a utilização do modelo de Winkler para comparação
com o Método dos elementos finitos tridimensional é devido à falta de ensaios
experimentais para que seja realizada uma retroanálise para obtenção dos parâmetros do
MEF3D.
3
Neste trabalho, a análise com o método dos elementos finitos englobou apenas a
solução de estacas cravadas em solos coesivos. Neste caso, uma forma de correlacionar
os parâmetros referentes a este tipo de solo e o módulo de elasticidade utilizado na
análise com o MEF3D é proporcional à resistência não drenada para argilas (Su).
Maiores detalhes sobre este assunto podem ser obtidos na referência [2], página 52. Os
estudos apresentados neste trabalho não englobam a simulação de estacas em solos
arenosos, nos quais seriam necessárias outras formas de correlacionar os parâmetros do
solo além de outras equações constitutivas.
1.1 Objetivos deste trabalho
O principal objetivo deste trabalho é o estudo da metodologia de análise estática
de estacas utilizadas para fundação ou como pontos fixos de ancoragem de estruturas
offshore utilizando o método dos elementos finitos com modelagem sólida e a
respectiva comparação com métodos clássicos. Os modelos utilizados nas análises com
o MEF3D englobam a simulação tanto da estaca quanto do solo. A utilização deste tipo
de análise permite que o comportamento local da estaca bem como concentrações de
tensões ou deformações excessivas devido à aplicação da carga sejam avaliadas de
forma mais precisa.
Para tanto, os estudos foram iniciados com uma comparação da resposta obtida
para uma estaca cilíndrica através da análise linear elástica clássica e do método dos
elementos finitos; desta forma é possível verificar o comportamento da estaca nos dois
métodos. Em seguida, a mesma comparação foi realizada para o modelo de Winkler
clássico e modificado além de utilizar a não linearidade geométrica na modelagem da
estaca. Foram realizadas também análises para verificar o efeito de grupo de duas
estacas.
Estes estudos foram aplicados tanto em estacas offshore convencionais longas
como em estacas curtas tipo torpedo. O método dos elementos finitos com modelagem
sólida no caso da estaca torpedo também foi de grande utilidade, já que a geometria da
estaca é diferente da convencional (circular). Neste caso, então, a metodologia clássica

4
pode não representar o problema de forma adequada, tornando-se assim, o estudo com o
MEF3D importante para o entendimento do comportamento deste tipo de estaca.
1.2 Descrição dos capítulos
Esta dissertação está dividida da seguinte forma: No Capítulo 2, serão
apresentados os diferentes tipos de fundação para sistemas offshore bem como suas
principais características.
A seguir, no Capítulo 3, é apresentada uma descrição das metodologias clássicas
empregadas. Serão abordadas desde a elástica linear ao modelo de Winkler modificado.
No Capítulo 4, será mostrada uma breve descrição da modelagem em elementos finitos
empregada, bem como as premissas adotadas para modelagem do solo.
No Capítulo 5 são apresentadas a metodologia de análise empregada e as
aplicações.
Finalmente, no Capítulo 6, são descritas as conclusões e recomendações para
trabalhos futuros, seguido das referências bibliográficas.
Na seqüência da tese são apresentados alguns Anexos que são importantes para
o desenvolvimento do trabalho, conforme ficará mais claro ao longo desta dissertação.

5
2 Tipos de fundações offshore
À medida que as pesquisas em torno da utilização das estacas para estruturas
offshore avançam, novas concepções vêm tomando grande importância. Neste capítulo,
serão apresentadas das simples estacas cravadas, utilizadas em fundações de jaquetas até
as estacas torpedo, utilizadas atualmente pela PETROBRAS em unidades flutuantes.
Serão apresentadas também estacas grauteadas (escavadas) utilizadas na fundação de
estacas para ancorar risers tipo torre, denominados risers híbridos auto sustentáveis
(RHAS) [4] e estacas de sucção.
2.1 Estacas tradicionais cravadas
As fundações de plataformas fixas como as jaquetas são executas com estacas
regulares, cilíndricas cravadas por impacto, através de martelos hidráulicos, por
exemplo. A Figura 2.1 apresenta um desenho esquemático de uma fundação para
jaqueta.
Geralmente, este tipo de estaca possui pequeno diâmetro em relação ao
comprimento. Assim, possui boa resistência à carga lateral. Como a estaca é longa, seu
comportamento global é dominado pela flexão, até que em certa profundidade se torne
praticamente engastada. A Figura 2.2 mostra a resposta deste tipo de estaca quando
submetida a um carregamento lateral. Este comportamento ocorre com estacas com
relação comprimento/diâmetro maior do que 50, como pode ser visto nas referencias
[5,6,7,8].
6
Figura 2.1 - Representação de uma estaca de jaqueta [5]
Figura 2.2 - Comportamento global de uma estaca longa submetida a um carregamento lateral [6].

7
2.2 Estaca de sucção
A estaca de sucção (do inglês suction pile) é um elemento de fixação cilíndrico
utilizado em instalações marítimas offshore como fundação ou como âncora. A
extremidade superior da estaca de sucção é normalmente fechada e a inferior é aberta,
semelhante a um copo invertido. A relação comprimento/diâmetro deste tipo de estaca
fica geralmente em torno de 5. Na Figura 2.3, é mostrada uma estaca de sucção, já na
Figura 2.4 são mostrados os seus componentes básicos.
Figura 2.3 - Estaca de sucção.
Comprimento
Tampa superior
Diámetro
Saia de Penetração
Bomba de SucçãoSubmersível e recuperável
Comprimento
Tampa superior
Diámetro
Saia de Penetração
Bomba de SucçãoSubmersível e recuperável
Figura 2.4 - Componentes básicos da estaca de sucção [9].
8
Na Figura 2.4, a bomba de sucção submersível é recuperável e tem a função de
concluir a cravação do cilindro no solo marinho. O processo de cravação se inicia com a
retirada de água do interior do cilindro onde é gerado um gradiente de pressão entre a
pressão externa correspondente à coluna hidrostática e a pressão interna no cilindro.
Desta forma, surge uma força de sucção atuando de cima para baixo e que, somada ao
peso próprio, gera a penetração da estaca no solo. É importante salientar que as forças
de atrito nas faces internas e externas à saia de penetração, e a resistência de ponta
opõem-se a essa penetração como é mostrado na Figura 2.5.
Água bombeada
Força de sucção
Peso da Âncora
Resistência da ponta
Atri
to L
ater
al
Água bombeada
Força de sucção
Peso da Âncora
Resistência da ponta
Atri
to L
ater
al
Figura 2.5 - Forças que atuam na estaca de sucção durante o processo de instalação (SANTOS,
1997)
Maiores informações sobre a análise de estacas de sucção podem ser obtidas nas
dissertações [9,10]. Na Bacia de Campos, este tipo de fundação foi utilizado nas
plataformas semi-submersíveis P19, P26 e nos FPSO’s P43 e P48.

9
2.3 Vertical Load Anchor (VLA)
Este é um tipo de âncora que pode suportar o carregamento vertical, além do
horizontal. Esta característica é devida a sua geometria que penetra no solo quando
instalada através do arrasto. Na Figura 2.6, é mostrada uma imagem deste tipo de
âncora. Já na Figura 2.7, é apresentada uma seqüência de instalação de um tipo de VLA
[11].
Figura 2.6 - Exemplo de VLA.
Figura 2.7 - Procedimento de instalação de uma VLA [12].

10
Em [12] encontram-se outras formas de VLA e seus respectivos sistemas de
instalação. Na Bacia de Campos, este tipo de fundação foi instalado nas plataformas
P27, P36 e P40.
2.4 Estaca torpedo
Inicialmente, a estaca torpedo era utilizada apenas para a ancoragem de linhas
flexíveis, impedindo que esforços de tração chegassem até a árvore de natal molhada
[13]. Atualmente, este tipo de estaca tem sido utilizada em larga escala pela
PETROBRAS também em fundações do sistema de ancoragem da unidade flutuante,
tanto em MODUs (Mobile Offshore Drilling Unit) quanto em semi-submersível de
produção e FPSO (Floating Production Storage and Offloading). A Figura 2.8 mostra
um exemplo de estaca torpedo.
Figura 2.8 - Exemplo de estaca torpedo.
A cravação deste tipo de estaca é por gravidade, através do lançamento em
queda livre de certa profundidade como se fosse um torpedo sem explosivos. Devido a
sua simplicidade de construção e instalação, a estaca torpedo tem-se mostrado uma
ótima solução de baixo custo no caso brasileiro.
Por ser considerada uma estaca curta, com a razão entre o comprimento e o
diâmetro em torno de 10, o tipo torpedo basicamente funciona como um corpo rígido.
Neste caso, a presença das aletas ajuda a minimizar o problema da redução de
resistência, tanto lateral quanto axial, proporcionando maior área de contato da estaca

11
com o solo. Na Figura 2.9, está representada uma seção típica de uma estaca torpedo na
região com aletas utilizada em unidades flutuantes de produção.
Figura 2.9 - Seção da estaca torpedo na região das aletas.
No Brasil, este tipo de fundação foi utilizado ou está previsto para ser utilizado
pela PETROBRAS nas seguintes plataformas P50, P51, P53, P57, FPSO Vitória e
FPSO Rio de Janeiro.
2.5 Estaca escavada
A estaca escavada é um tipo de fundação profunda executada “in situ” através da
perfuração do terreno com remoção do solo. Este tipo pode ser executado totalmente em
concreto armado ou através de um tubo de aço inserido na perfuração e o vazio entre a
estaca e o solo preenchido com cimento sem contribuição estrutural. Neste caso, chama-
se comumente de estaca grauteada (ver Figura 2.10). Mais adiante neste trabalho, será
apresentado um exemplo de utilização da estaca grauteada na fundação de um riser tipo
torre, também denominado riser híbrido auto-sustentável (RHAS).
12
Figura 2.10 - Estaca escavada grauteada

13
3 Metodologia clássica
Neste capítulo, serão apresentados os principais métodos clássicos utilizados na
análise de uma estaca isolada ou em grupo. Estas metodologias serão utilizadas para
posterior comparação e validação do método dos elementos finitos com modelagem
sólida. Os métodos para análise de uma estaca isolada são: o modelo elástico linear
proposto por Poulos [17] e o modelo de Winkler linear descrito por Poulos [17] e o não
linear descrito por Reese & Matlock [2]. Já o método apresentado para análise de estaca
em grupo com solo elástico linear é descrito por Poulos [17] e o não linear por Focht &
Koch [5, 7,18].
3.1 Análise elástica linear
No modelo elástico linear originalmente proposto por Poulos [17] para uma
estaca embebida num solo homogêneo, isotrópico e semi-infinito, as soluções são
restringidas aos casos de estacas com a cabeça livre ou com a rotação restringida. No
caso da cabeça livre (Figura 3.1), tem-se a estaca carregada lateralmente por uma força
H agindo numa excentricidade (e) sobre a linha de corte. O solo é representado por um
único módulo de elasticidade Es e por um coeficiente de Poisson ν. Na solução, não é
considerado o escoamento do solo nos pontos de adjacência, nem a separação solo-
estaca.
Este modelo foi introduzido neste trabalho com o objetivo de validar a utilização
do MEF 3D na forma mais simples (análise elástica linear de uma estaca embebida num
solo uniforme homogêneo).
Este problema foi resolvido por Poulos [17] apresentado através de gráficos que
ilustram o deslocamento no topo a partir dos dados da estaca e do solo. Neste trabalho,
foi aprimorado o programa em Fortran primeiramente apresentado em [7,8] e
desenvolvida uma planilha em MathCAD [19] utilizando tanto o método das diferenças
finitas quanto o método dos elementos finitos para a solução de uma estaca embebida
em solo homogêneo elástico linear.

14
Figura 3.1 – Esquema estrutural de uma estaca livre (a) e uma estaca com o topo restringido (b)
Nos sub-itens seguintes, apresenta-se a equação diferencial que rege o problema,
a solução original de Poulos por diferenças finitas e a solução mais geral utilizando-se o
método da rigidez.
3.1.1 Solução elástica linear para uma estaca isolada
A equação diferencial que rege o problema elástico linear de uma estaca
embebida num meio homogêneo, sugerida por Poulos [17] é:
ppp dzpdz
ydIE ).(.. 4
4
−= (3-1)
onde : z = profundidade a partir do topo;
Ep = módulo de elasticidade longitudinal da estaca;
Ip = momento de inércia da seção transversal da estaca;
y = deslocamento lateral da estaca;
p(z) = pressão lateral do solo sobre a estaca;
dp = diâmetro da estaca;

15
A equação diferencial (3-1) foi resolvida por Poulos [17] pelo Método das
Diferenças Finitas para os dois casos da Figura 3.1, sendo que os resultados são
apresentados na forma adimensional através de gráficos log-log. A utilização destes
gráficos fornece uma solução aproximada dos resultados e está limitada a dois tipos de
condição de contorno do topo da estaca isolada: livre e com rotação restringida. Além
disso, os únicos resultados correspondem ao deslocamento e a rotação no topo. Mais
adiante, neste capítulo será apresentada a formulação utilizada por Poulos [17] para a
solução através do método das diferenças finitas.
A seguir será apresentada a solução do problema linear proposto neste item
através do método da rigidez.
3.1.2 Formulação pelo método da rigidez
A solução matricial descrita a seguir permite que se obtenham deslocamentos,
esforços e pressões em qualquer ponto da estaca. Além disso, permite a solução de
problemas com condições de contorno diferentes dos dois casos apresentados na Figura
3.1.
Basicamente, esta formulação consiste na divisão da estaca em elementos de
viga (ver Figura 3.2), sendo a rigidez total do sistema igual a soma da rigidez da estaca
com a rigidez do solo. Assim, a formulação matricial do método da rigidez apresentado
em [7] tem o seguinte aspecto:
[ ] { } { }PyKK sp =⋅+ (3-2)
onde :
Kp = matriz de rigidez da estaca resultante do acoplamento da rigidez de cada elemento,
onde são considerados dois graus de liberdade: deslocamento lateral e a rotação.
Ks = Matriz de rigidez do solo, obtida através da inversão da matriz de flexibilidade, da
seguinte forma:
[ ] [ ] 1−= FSKs (3-3)

16
[FS] = Matriz de flexibilidade do solo obtida a partir das expressões de Douglas &
Davis [20] (ver apêndice A)
{P} = vetor de cargas nodais aplicado.
A matriz de rigidez da estaca possui o seguinte aspecto:
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
=
2
23
2
2323
4
612Simétrica
264
612612
lIE
lIE
lIE
lIE
lIE
lIE
lIE
lIE
lIE
lIE
K
pp
pppp
pppppp
pppppppp
p (3-4)
onde :
l = comprimento do elemento da estaca, conforme Figura 3.2.
Ep, Ip = Módulo de elasticidade e momento de inércia da estaca;
Figura 3.2 – Modelo de Poulos para uma estaca isolada

17
A partir da solução da equação matricial (3-2), obtêm-se diretamente os
deslocamentos laterais e as rotações. A partir da matriz de rigidez do segmento de
estaca (3-4) os esforços cortantes e momentos fletores nas extremidades de cada
segmento são obtidos na forma clássica do método da rigidez. E através dos cortantes
pode-se obter as reações do solo ao longo da estaca.
Este procedimento proposto para a Solução Elástica Linear é o mais próximo da
análise empregando-se o Método dos Elementos Finitos. No entanto, quando se trata de
solos não homogêneos ou de comportamento não linear, este método não pode ser
empregado, pois a obtenção da matriz de flexibilidade tem como hipótese a
homogeneidade do solo que circunda a estaca.
3.1.3 Formulação pelo método das diferenças finitas
Neste item, será comentada a solução pelo método das diferenças finitas
apresentada em Poulos [17]. Não é o escopo deste trabalho a descrição detalhada do
método das diferenças finitas. Para maiores informações sobre o método, as referências
já citadas anteriormente [2,17] são sugeridas como fonte de consulta.
O problema de uma estaca embebida em um solo homogêneo linear foi resolvido
por Poulos [17] para a condição de contorno referente ao topo livre, sendo a estaca
submetida a um momento M e uma força horizontal H no topo.
[ ] { } { }BpIsDnKI R =⋅⋅+ ][][][ 4 (3-5)
onde, [I] é a matriz identidade
n é o número de elementos da discretização da estaca
[Is] é a matriz de influência do solo. Esta matriz foi determinada em [7] através da
relação de Douglas & Davis (ver apêndice A, item A.1).
{p} é o vetor de pressões
{B} é definido por:

18
{ }
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧⋅⋅
−
=
00..00
2
2
LdnM
B
p
L é o comprimento da estaca
dp é o diâmetro da estaca
KR é o fator de flexibilidade da estaca, definido por:
4LEIE
Ks
ppR = (3-6)
onde: Ep = Módulo de elasticidade da estaca;
Ip = Momento de inércia da seção transversal da estaca;
Es = Módulo de elasticidade do solo;
L = comprimento da estaca.
A matriz D dos coeficientes do método das diferenças finitas é:
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−
−−−−
−−
=
25410.....00000014641.....000000................................00000.....14641000000.....01464100000.....001452
D
O sistema da equação (3-5) fornece n-1 equações, e para as duas equações que
faltam para resolver o problema, são utilizadas as equações de equilíbrio de força e
momento.
{ } { }Ld
nHpEp
=⋅ (3-7)

19
O produto da equação acima representa o somatório das pressões em cada nó
multiplicado pelo diâmetro da estaca e o comprimento de influência. Assim, o vetor E
fica:
0,1=jE , para 1 < j < n+1 5,0=jE , para j = 1, n+1 (3-8)
A equação de equilíbrio de momentos pode ser representada por:
{ } { } 2
2
LdMnpF
p
−=⋅ (3-9)
onde,
1−= jFj , para 1 < j < n+1 125,01 =F
125,05,01 −=+ nFn (3-10)
Assim, a partir do sistema formado pelas equações (3-5), (3-7) e (3-9)
determinam-se as pressões do solo e então os deslocamentos da estaca.
3.1.4 Verificação dos modelos propostos
Foi elaborado um programa em FORTAN [21] com o procedimento pelo método
da rigidez, além de uma planilha em MathCAD [19] com a solução pelo método das
diferenças finitas e também pelo método da rigidez. Então para a validação do
programa, apresenta-se a seguir os resultados de dois exemplos propostos em Poulos
[17]. Nestes exemplos, busca-se mostrar a diferença do comportamento de duas estacas
distintas. O comportamento das estacas é avaliado pelo fator de flexibilidade (KR),
definido na equação (3-6).
Em Poulos [17], a solução da equação (3-1) é realizada através do método das
diferenças finitas. A estaca analisada possui 20 metros de comprimento com diâmetro
igual a 0,8 metros e a espessura do tubo igual a 3,75 cm a mudança do fator KR foi
realizada através da variação do módulo de elasticidade do solo. Num caso com KR
igual 10 (estaca com comportamento de corpo rígido) e em outro com KR igual a 10-5

20
(estaca bastante flexível). A seguir, são apresentados os resultados obtidos sendo a
distância vertical normalizada pelo comprimento da estaca e o deslocamento em termo
de IyH, como em Poulos. O deslocamento é apresentado em Poulos desta forma a fim de
se obter gráficos para a obtenção do resultado apenas dependente de fatores geométricos
da estaca e da carga aplicada. Assim, o fator IyH é:
HLE
yI syH
⋅⋅= (3-11)
sendo: y = deslocamento lateral obtido;
Es = Módulo de elasticidade do solo.
-2.00 0.00 2.00 4.00 6.00 8.00 10.00 12.00 14.00
IyH
0.0
0.2
0.4
0.6
0.8
1.0
Dis
tânc
ia a
par
tir d
a ba
se n
orm
aliz
ada
KR = 10-5
KR = 10
Figura 3.3 – Exemplos de validação do programa de análise elástica
Os resultados obtidos tanto pela planilha em MathCAD [19] quanto pelo
programa em FORTRAN [21] são coincidentes e o gráfico obtido pelo MathCAD [19]
é apresentado na Figura 3.3. Nota-se que a curva representativa do KR igual a 10-5
mostra uma estaca longa, por exemplo, com um comportamento dominado pela flexão.
21
Já o outro exemplo apresentado representa uma estaca curta com um comportamento de
corpo rígido, ou seja, sem flexão e com rotação da estaca em torno de um ponto.
3.2 Modelo de Winkler
Este método parte da hipótese simplificada de que a reação por unidade de
comprimento resultante do solo sobre a estaca é função única e exclusiva do
deslocamento daquele ponto na correspondente direção. Desta forma, o solo passa a ser
representado por um “coeficiente de reação” que pode ser constante ou variável ao
longo da profundidade. Esse coeficiente é equivalente a uma mola linear que representa
fisicamente a reação do solo na face da estaca. Estes coeficientes são determinados a
partir de ensaios com placas ou de valores típicos encontrados em normas e da
experiência prática.
No modelo de Winkler, a pressão p e o deslocamento lateral y são relacionados,
através de um coeficiente de reação lateral kh da seguinte forma:
ykp h .= (3-12)
Já no caso de uma carga vertical (coeficiente de reação vertical kv), a relação é a
seguinte:
wkq v .= (3-13)
sendo q a pressão da reação de ponta e do atrito estaca-solo e w o deslocamento vertical.
Assumindo que a estaca, quando submetida a uma carga lateral, apresenta um
comportamento de viga governado pela seguinte equação:
ppp pddz
ydIE −=4
(3-14)
onde : Ep = módulo de elasticidade da estaca
Ip = momento de inércia da seção transversal estaca

22
z = profundidade no solo
dp = largura ou diâmetro da estaca
a equação (3-14) escrita para um carregamento lateral e com base na equação (3-12), é
da seguinte forma:
04
=+ ydkdz
ydIE phpp (3-15)
A equação acima pode ser resolvida analiticamente ou numericamente. A
solução analítica é possível apenas para o caso de uma distribuição uniforme de kh e foi
determinada por Hetenyi [22] e está descrita em Poulos [17] para uma carga horizontal
no topo. No caso de um kh variável ao longo da profundidade, a equação (3-15) deve ser
resolvida por algum método numérico, como o método dos elementos finitos.
Uma das principais vantagens da utilização do modelo de Winkler associado ao
método dos elementos finitos é que se pode representar várias camadas de solo através
da mudança do kh ao longo da profundidade. Além disso, pode-se utilizar uma estaca
com propriedades físicas e geométricas variáveis ao longo da profundidade bem como
aplicar diversas condições de contorno. As cargas podem ser aplicadas ao longo da
estaca e não em um ponto específico, como o topo, por exemplo.
Outro grande atrativo na área offshore é que o modelo de Winkler original pode
ser modificado de tal forma a representar a não linearidade física do solo. A maioria das
fundações offshore que utilizam estacas longas foram projetadas utilizando esta
metodologia [2], denominada de método de Winkler modificado com utilização de
curvas experimentais que representam o comportamento não linear do solo: P-Y, para a
reação lateral; T-Z, para o atrito solo-estaca no carregamento axial; e Q-U, para a reação
de ponta. [2, 7, 8, 29].
Na modelagem que utiliza o método de Winkler (ver Figura 3.4), a estaca é
dividida em segmentos conectados por nós e associando-se a cada nó uma mola linear
com rigidez (K) igual a:
23
iph LdkK ..= (3-16)
onde: kh = coeficiente ou módulo de reação horizontal do solo que relaciona a pressão
de um ponto com o deslocamento deste mesmo ponto;
dp = diâmetro da estaca;
Li = comprimento de influência de cada mola (distância entre os centros dos
elementos adjacentes);
Figura 3.4 - Estaca vertical discretizada pelo Método de Winkler
O comprimento de influência Li, é determinado de acordo com a posição do nó
analisado, como pode ser visto na Figura 3.5.

24
Figura 3.5 Comprimento de influência
Neste trabalho, a aplicação do modelo de Winkler é realizada através do
programa PILEMICRO [23], desenvolvido pela COPPE/UFRJ e de propriedade da
PETROBRAS. Este programa faz a análise da estaca e do solo através dos parâmetros
definidos na norma API-RP-2A [29]. A estaca é modelada por elementos de pórtico
espacial com não linearidade geométrica.
A solução através do método dos elementos finitos utilizando elementos de
pórtico tridimensionais como é implementado no programa PILEMICRO [23] permite
também a introdução de molas não-lineares, para simular este tipo de efeito do solo.
Neste caso, a solução requer um algoritmo não-linear do tipo Newton-Raphson [24].
Conforme mencionado anteriormente, esta metodologia de aplicação é, geralmente,
chamada de modelo de Winkler modificado.
Basicamente, o programa PILEMICRO resolve um sistema do tipo:
{ } { }PyyKK sp =+ )].([ (3-17)
onde :
y = vetor de deslocamentos nodais;
Kp = matriz de rigidez da estaca, considerando elemento de pórtico espacial (ver figuras
3.6 e 3.7 );
25
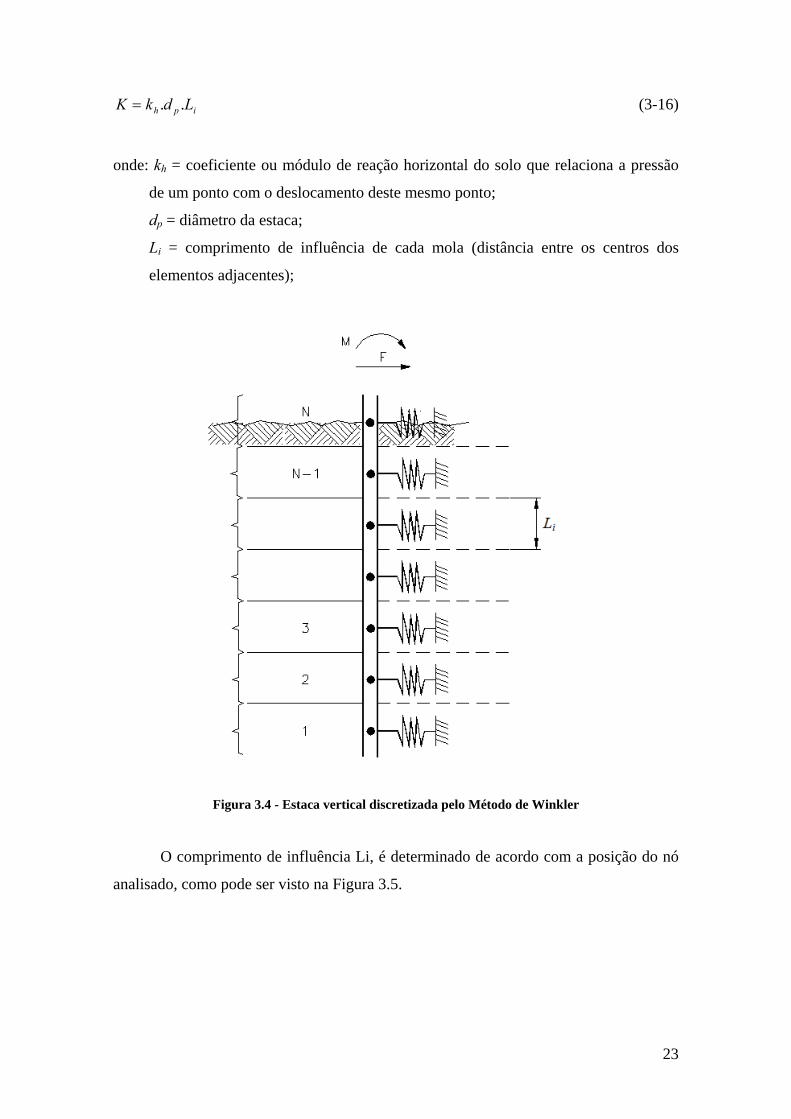
Ks(y) = rigidez não linear do solo, aplicada nas direções correspondentes às reações do
solo. Curvas P-Y para representar o comportamento lateral do solo e curvas T-Z e Q-U
para representar o comportamento axial ao longo da estaca e de ponta, respectivamente;
P = vetor de cargas aplicadas.
Figura 3.6 - Elemento de pórtico espacial.
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
−
−−
−
−
−
=
lEI
lEI
lEI
lEI
lEI
lEI
lEI
lEI
lGI
lGI
lEI
lEI
lEI
lEI
lEI
lEI
lEA
lEA
lEI
lEI
lEI
lEI
lGI
lEI
lEI
lEA
K
ZZZZ
YYYY
xx
YYY
ZZZ
pp
ZZ
YY
x
Y
Z
p
p
400060200060
40600020600
00000000
12000601200
1206000120
00000
400060
40600
000
1200
120
22
22
323
323
2
2
3
3
Figura 3.7 - Matriz de rigidez de pórtico espacial.
onde: EAp = Rigidez axial da estaca;
EIy = Rigidez de flexão em torno do eixo y (ver Figura 3.6) da seção transversal
da estaca;

26
EIz = Rigidez de flexão em torno do eixo z da seção transversal da estaca;
l = Comprimento do elemento;
G = Módulo de Elasticidade transversal da estaca;
Ix = Momento de inércia polar da seção transversal da estaca.
Na versão atual do programa PILEMICRO, é possível a consideração da rigidez
não linear geométrica do elemento através da introdução da matriz de rigidez não linear
geométrica, como descrito em [25]. Esta matriz é apresentada na Figura 3.8.
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
12,12
11,11
12,1011,1010,10
11,910,99,9
12,810,88,8
12,711,79,78,77,7
12,610,68,67,66,6
11,510,59,57,55,5
12,411,410,49,48,46,45,44,4
11,310,39,37,35,34,33,3
12,210,28,27,26,24,22,2
12,111,19,18,17,16,15,13,12,11,1
0
0
00
0
00
000
0
000
0000
00
Kg
Kg
KgKgKg
KgKgKg
KgKgKg
KgKgKgKgKg
KgKgKgKgKg
KgKgKgKgKg
KgKgKgKgKgKgKgKg
KgKgKgKgKgKgKg
KgKgKgKgKgKgKg
KgKgKgKgKgKgKgKgKgKg
Kg
Figura 3.8 - Matriz de rigidez não linear geométrica
onde:
lFKg 1
1,1 −=
lFKg 5
5,1 −=
2,18,1 KgKg −=
lFFKg 6
211,1 +−=
lFKg 2
2,1 −=
lFKg 6
6,1 −=
3,19,1 KgKg −=
lFKg 3
3,1 −=
1,17,1 KgKg −=
lFFKg 5
311,1 +=
5l6F
AlF12IKgx
z 13
12,2 −−=
8,17,2 KgKg =
6,212,2 KgKg =
lF
2FKg 53
4,2 +=
2,28,2 KgKg −= 10F
AlF6IKgx
z 12
16,2 −−=
4,210,2 KgKg −=

27
5l6F
AlF12I
Kgx
y 13
13,3 −−=
9,17,3 KgKg =
5,311,3 KgKg =
lF
2FKg 62
4,3 +−=
3,39,3 KgKg −= 10F
AlF6IKgx
z 12
15,3 +=
4,310,3 KgKg −=
lAFIKgx
x 14,4 −=
10,28,4 KgKg =
5,411,4 KgKg −=
12lFKg 2
5,4 =
10,39,4 KgKg =
6,412,4 KgKg −=
12lFKg 3
6,4 =
4,410,4 KgKg −=
152lF
lAF4I
Kgx
y 115,5 −−=
5,410,5 KgKg −=
5,17,5 KgKg −=
30lF
lAF2I
Kgx
y 1111,5 +−=
5,39,5 KgKg −=
152lF
lAF4IKgx
z 116,6 +−=
6,410,6 KgKg −=
6,17,6 KgKg −=
30lF
lAF2IKgx
z 1112,6 +−=
6,28,6 KgKg −=
1,17,7 KgKg =
11,111,7 KgKg −= 2,18,7 KgKg =
12,112,7 KgKg −= 3,19,7 KgKg =
2,28,8 KgKg = 4,210,8 KgKg = 12,212,8 KgKg −=
3,39,9 KgKg = 4,310,9 KgKg = 9,511,9 KgKg =
4,410,10 KgKg = 5,411,10 KgKg = 6,412,10 KgKg =
5,511,11 KgKg = 6,612,12 KgKg =
sendo, L = comprimento do elemento;
Ix, Iy e Iz = Momentos de inércia em torno dos eixos x, y e z, respectivamente;
Ax = Área da seção transversal;
F1, F2, F3 e F5 = Esforços nas direções numeradas, de acordo com a Figura 3.6.
3.3 Determinação das curvas não lineares representativas do
solo
O programa PILEMICRO, referente ao modelo de Winkler é baseado na análise
estática não-linear da estaca apoiada pelas molas P-Y (comportamento lateral), T-Z
(axial, atrito lateral) e Q-U (resistência de ponta) para a determinação dos
deslocamentos da estaca. Estas curvas de força-deslocamento são determinadas de
acordo com a API-RP-2A [29]. Estas curvas têm sido aprimoradas ao longo dos anos

28
como resultado de ensaios experimentais conduzidos principalmente por Reese [2, 26,
27] e Matlock [28].
Existem três formas de consideração da curva P-Y implementada no
PILEMICRO, duas delas determinadas a partir da API-RP-2A: uma estática e outra
cíclica. A diferença entre as duas está no fato da curva cíclica levar em consideração o
efeito de deterioração do solo devido às cargas de caráter dinâmico provocadas,
principalmente pelas ondas. Este efeito faz com que haja uma redução da resistência
última do solo, principalmente no fundo do mar.
A seguir serão apresentas as curvas características do solo tanto em argilas
quanto em areias.
3.3.1 Curvas P-Y em argila
Além das curvas definidas na API-RP-2A [29], outra curva foi implementada no
PILEMICRO. Esta curva é baseada numa modificação sugerida pela empresa Fugro
[30] para aplicações em estacas de ancoragem de FPSO’s (ver Figura 3.9) e está
baseado em ensaios realizados por Matlock em 1970 [31]. A Figura 3.10 mostra as
curvas implementadas no PILEMICRO.
Figura 3.9 - Estaca para FPSO utlizada em [30].
29
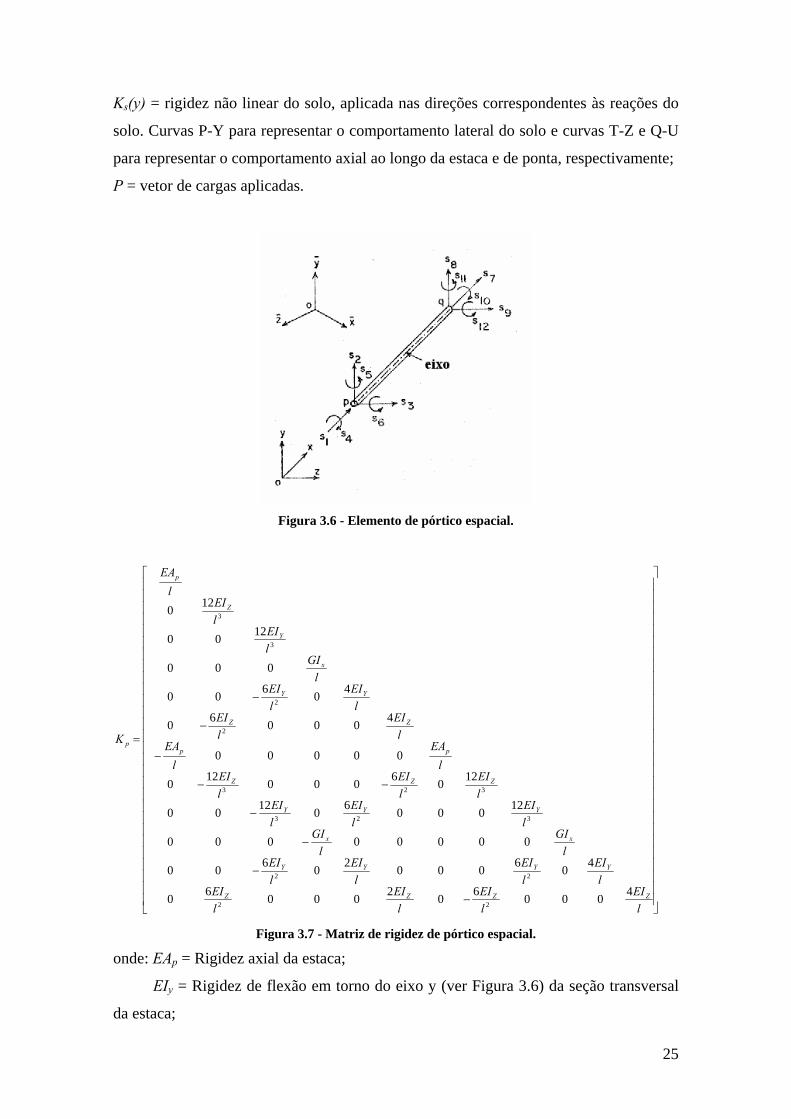
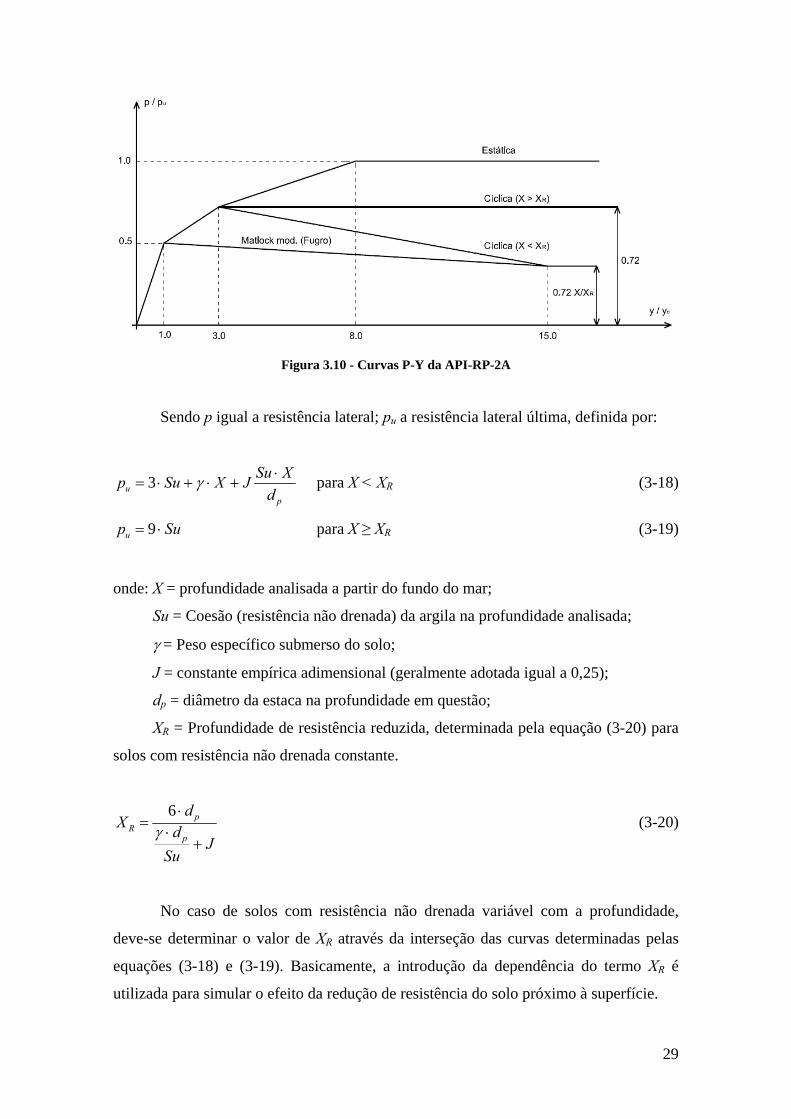
Figura 3.10 - Curvas P-Y da API-RP-2A
Sendo p igual a resistência lateral; pu a resistência lateral última, definida por:
pu d
XSuJXSup ⋅+⋅+⋅= γ3 para X < XR (3-18)
Supu ⋅= 9 para X ≥ XR (3-19)
onde: X = profundidade analisada a partir do fundo do mar;
Su = Coesão (resistência não drenada) da argila na profundidade analisada;
γ = Peso específico submerso do solo;
J = constante empírica adimensional (geralmente adotada igual a 0,25);
dp = diâmetro da estaca na profundidade em questão;
XR = Profundidade de resistência reduzida, determinada pela equação (3-20) para
solos com resistência não drenada constante.
JSu
dd
Xp
pR
+⋅
⋅= γ
6 (3-20)
No caso de solos com resistência não drenada variável com a profundidade,
deve-se determinar o valor de XR através da interseção das curvas determinadas pelas
equações (3-18) e (3-19). Basicamente, a introdução da dependência do termo XR é
utilizada para simular o efeito da redução de resistência do solo próximo à superfície.

30
Já o valor de yc, que é mostrado no gráfico da Figura 3.10, é dado como o limite
do regime linear do comportamento da curva P-Y da API-RP-2A [29]. Na norma citada,
este valor é estimado por:
pcc dy ⋅⋅= ε5,2 (3-21)
onde εc é a deformação limite do regime linear, tomado como a deformação associada à
metade da pressão de ruptura do solo, determinada em laboratórios através de ensaios de
compressão não drenada. Este é um parâmetro de ajuste, definido a partir de ensaios ou
de valores tipicamente utilizados na prática. Para argila média, que é o solo analisado
neste trabalho, o valor adotado é de 0,01. Para argila mole, adota-se geralmente εc igual
a 0,02, enquanto que para argilas consideradas rijas adota-se 0,05 [2].
3.3.2 Curva P-Y em areias
No programa PILEMICRO, a curva P-Y implementada para solos arenosos é
baseada na API-RP-2A [29]. Nesta curva, a pressão lateral de resistência do solo é dada
por:
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
⋅⋅
⋅⋅= ypAXkpAp
uu tanh (3-22)
onde, A = fator para levar em consideração se o carregamento é estático ou cíclico;
k = módulo de reação lateral inicial do solo (ver Figura 3.11);
pu = resistência lateral última, que será definido mais adiante;
X = profundidade em questão a partir do leito marinho;
y = deslocamento lateral.

31
Figura 3.11 - Curva P-Y em areias (API-RP-2A)
O fator A é igual a 0,9 para carregamentos estáticos. Para carregamentos cíclicos
é dado por [29]:
9,08,00,3 ≤⎟⎠⎞
⎜⎝⎛ −=
DHA (3-23)
Já o módulo de reação lateral do solo (k) é dependente do ângulo de atrito ´φ . A
Figura 3.12 mostra o gráfico onde pode ser obtido o valor de k.
Figura 3.12 - Valor do módulo de reação lateral k [29].

32
O valor da resistência lateral última é dado pelo menor dos valores apresentados
nas equações (3-24) e (3-25).
XdCXCp pus ⋅⋅+= γ)( 21 (3-24)
XdCp pud ⋅⋅⋅= γ3 (3-25)
onde o índice “s” significa shallow (raso) e “d” vem de deep (profundo), γ o peso
específico submerso do solo e C1, C2 e C3 constantes obtidas com o gráfico da Figura
3.13 de acordo com o ângulo de atrito ´φ .
Figura 3.13 - Valores de C1, C2 e C3 (fonte: API-RP-2A)
Diversos métodos clássicos são utilizados para o cálculo da resistência lateral de
uma estaca em solo arenoso. Mais adiante, no Apêndice E, é apresentado o cálculo da
resistência lateral de uma estaca torpedo em areia utilizando o método de Poulos [17].
Neste apêndice, os gráficos das figuras 3.12 e 3.13 são substituídos pelas equações
originais que deram origem a este gráfico. Em [2], estas equações também aparecem
explicitamente.
33
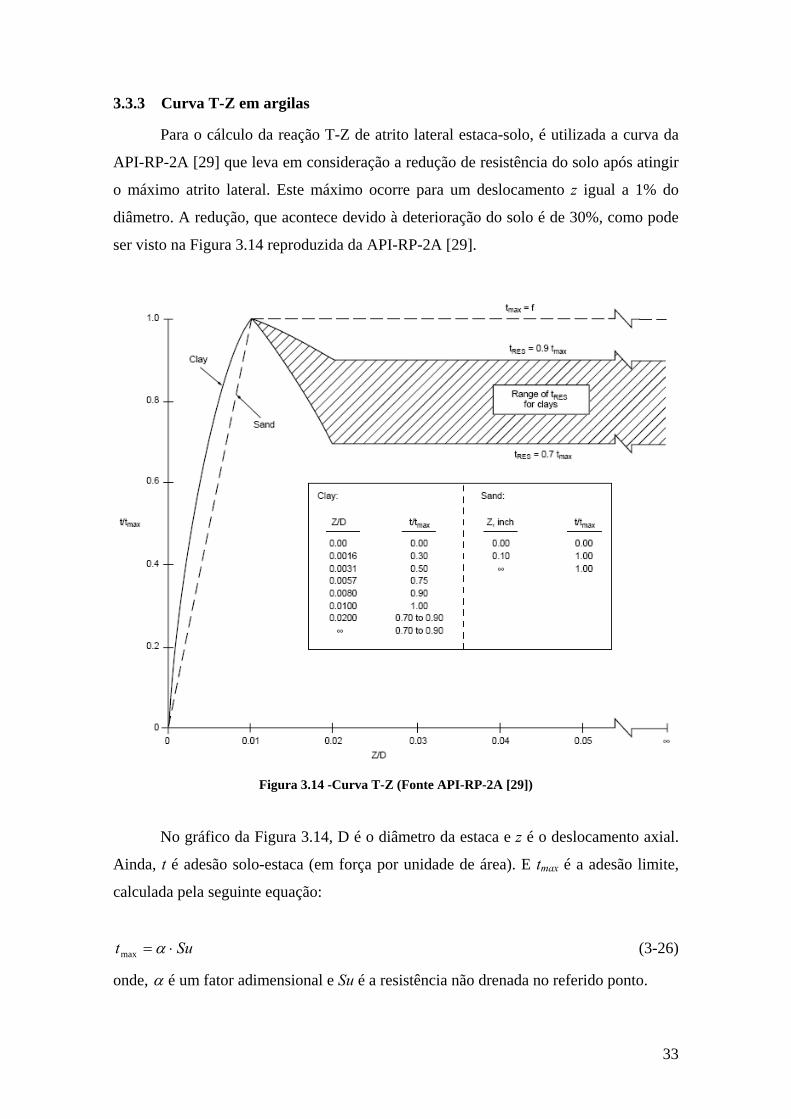
3.3.3 Curva T-Z em argilas
Para o cálculo da reação T-Z de atrito lateral estaca-solo, é utilizada a curva da
API-RP-2A [29] que leva em consideração a redução de resistência do solo após atingir
o máximo atrito lateral. Este máximo ocorre para um deslocamento z igual a 1% do
diâmetro. A redução, que acontece devido à deterioração do solo é de 30%, como pode
ser visto na Figura 3.14 reproduzida da API-RP-2A [29].
Figura 3.14 -Curva T-Z (Fonte API-RP-2A [29])
No gráfico da Figura 3.14, D é o diâmetro da estaca e z é o deslocamento axial.
Ainda, t é adesão solo-estaca (em força por unidade de área). E tmax é a adesão limite,
calculada pela seguinte equação:
Sut ⋅= αmax (3-26)
onde, α é um fator adimensional e Su é a resistência não drenada no referido ponto.

34
O fator α tem um valor limite igual a 1,0 e é calculado pela equação a seguir: 5.05,0 −= ψα , para 0,1≤ψ 25.05,0 −= ψα , para 0,1>ψ
(3-27)
Com a constante ψ calculada por:
0P
Su=ψ (3-28)
sendo P0 a pressão efetiva no ponto em questão, dada por:
XP ⋅= γ0 (3-29)
3.3.4 Curva T-Z em areias
A curva T-Z disponível na API-RP-2A (também mostrada na Figura 3.14) para
areias é definida pelos seguintes pontos:
Tabela 3.1 - Curva T-Z em areias
z (m) t/tmax
0,00 0,00
0,00254 (0,1 pol) 1,00
∞ 1,00
O valor de tmax é o atrito lateral estaca-solo, determinado pela equação a seguir:
)tan(0max δ⋅⋅== PKft (3-30)
onde, K é o coeficiente de pressão de solo, usualmente adotado igual a 0,8;
P0 é a pressão efetiva na respectiva profundidade;
δ é o ângulo de atrito entre o solo e a estaca, geralmente adotado como °−5´φ .
O valor limite do atrito lateral estaca-solo (fmax) possui valores usuais, de acordo
com o ângulo de atrito estaca-solo (δ ) em questão. A Tabela 3.2 apresenta estes valores
típicos de fmax.

35
Tabela 3.2 - Valores típicos de fmax
δ fmax (kPa)
35° 114,8
30° 95,7
25° 81,3
20° 67,0
15° 47,8
3.3.5 Observações sobre as curvas P-Y e T-Z
É importante observar que as curvas P-Y em argilas e T-Z em argilas e areias,
citadas neste item, possuem unidade de força pelo quadrado do comprimento vs.
deslocamento. A transformação destas curvas em força vs. deslocamento utilizada na
análise estrutural se dá através da multiplicação da ordenada da seguinte forma:
ip LdpP ⋅⋅=
iLStT ⋅⋅= (3-31)
onde t e p são as ordenadas das curvas, dp é o diâmetro da estaca, Li é o comprimento de
influência de cada nó (ver Figura 3.5) e S é o perímetro de contato solo-estaca.
As curvas P-Y em areias apresentadas anteriormente tem unidade de força por
comprimento, ou seja, não há necessidade de multiplicar pelo diâmetro.
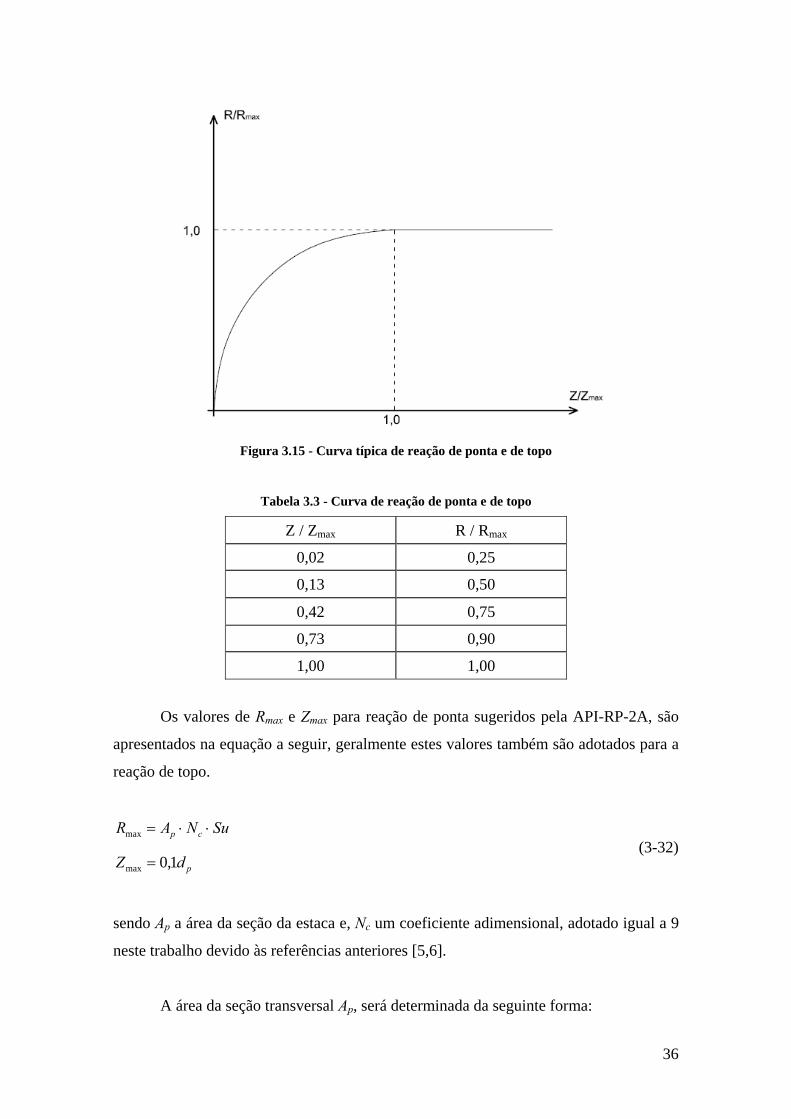
3.3.6 Reação de ponta em argilas
Outra curva característica do solo utilizada é a de reação de ponta para estacas
comprimidas e de topo para estacas tracionadas, estas curvas são definidas na Figura
3.15 e Tabela 3.3, onde Rmax e Zmax são a reação máxima de ponta e o deslocamento
máximo, respectivamente.
36
Figura 3.15 - Curva típica de reação de ponta e de topo
Tabela 3.3 - Curva de reação de ponta e de topo
Z / Zmax R / Rmax
0,02 0,25
0,13 0,50
0,42 0,75
0,73 0,90
1,00 1,00
Os valores de Rmax e Zmax para reação de ponta sugeridos pela API-RP-2A, são
apresentados na equação a seguir, geralmente estes valores também são adotados para a
reação de topo.
SuNAR cp ⋅⋅=max
pdZ 1,0max = (3-32)
sendo Ap a área da seção da estaca e, Nc um coeficiente adimensional, adotado igual a 9
neste trabalho devido às referências anteriores [5,6].
A área da seção transversal Ap, será determinada da seguinte forma:

37
- Caso o atrito interno solo-estaca seja maior do que a reação de ponta referente à área
interna da mesma, significa que houve um “embuchamento” da ponta, sendo assim, a
área Ap será igual a área total da seção transversal:
4
2p
p
dA
π= (3-33)
- Caso o atrito interno não seja suficiente para a ocorrência do “embuchamento” da
seção da estaca, a área Ap será igual à área do anel da estaca:
4)( pip
p
ddA
−=
π (3-34)
sendo, dpi igual ao diâmetro interno da estaca. O atrito interno solo-estaca é calculado
exatamente como descrito anteriormente, na equação (3-31), sendo o perímetro S
referente ao diâmetro interno.
3.3.7 Reação de ponta em areias
A curva de reação de ponta em areias é similar à curva obtida para as argilas e
mostrada na Figura 3.15. Sendo que a reação máxima (Rmax) é calculada por:
qp NPAR ⋅⋅= 0max (3-35)
onde, Nq é um coeficiente adimensional que determina a reação de ponta em areias, os
valores típicos de Nq de acordo com o ângulo de atrito estaca-solo são apresentados na
Tabela 3.4. Ap é a área da seção da estaca, levando em consideração as mesmas
observações da reação de ponta em argilas, descritas anteriormente. P0 é a pressão
efetiva na profundidade em questão.

38
Tabela 3.4 - Valores típicos de Nq
δ Nq
35° 50
30° 40
25° 20
20° 12
15° 8
3.3.8 Resistência axial limite da estaca
Entende-se por resistência axial máxima de uma estaca a carga vertical limite
que uma estaca pode suportar sem que haja ruptura do solo. Esta carga pode ser de
tração ou compressão. Neste trabalho foi adotado que, o sentido da carga não importa,
já que as curvas descritas anteriormente funcionam tanto para a ponta quanto para o
topo. Salvo, é claro, no caso de estacas tracionadas e com o topo coincidente com a
superfície do solo, onde esta reação não existirá. Este será o caso das estacas tracionadas
estudadas no capítulo de aplicações, que será visto mais adiante.
No caso de estacas enterradas e tracionadas, não foi realizado nenhum estudo
para verificação da profundidade mínima do topo para que a reação de topo seja
considerada integralmente.
Sendo assim, a resistência axial máxima da estaca é dada por:
cp QQQ +=max (3-36)
onde, Qp é a resistência de ponta ou topo, e Qc é a resistência lateral, dada pela integral
de todas as resistências laterais ao longo da profundidade.
Nota-se que a capacidade axial da estaca pode ser determinada facilmente pela
soma da reação de ponta, com o somatório de tmax (adesão estaca solo máxima) ao longo
da estaca. Esta hipótese só é admitida caso as duas formas de ruptura ocorram
simultaneamente, ou seja, em certos casos, a resistência última pode ser menor do que a
apresentada na (3-36).

39
No Apêndice C, é apresentada uma planilha em MathCAD [19] com o cálculo
típico desta capacidade axial para uma estaca em argila de acordo com a API-RP-2A
[29].
3.4 Análise do efeito de grupo
O conceito da utilização de uma única estaca por perna de uma jaqueta, começou
a mudar à medida que estas estruturas partiram para águas mais profundas. Desta forma,
novas configurações das fundações foram desenvolvidas, valendo-se inclusive do uso
do grupo de várias estacas em uma perna. Então, para estas novas configurações, a
análise do efeito de grupo de estacas se tornou indispensável, principalmente para
carregamentos laterais.
O efeito de grupo em estacas ocorre por que há uma superposição das tensões na
massa de solo devido ao carregamento das duas estacas adjacentes. O aumento destas
tensões causa maiores deslocamentos das estacas em comparação ao comportamento
isolado.
Existem diversos métodos de determinação do efeito de grupo em estacas, boa
parte deles está descrita em [5, 8]. Alguns deles são:
- Métodos baseados na teoria da Elasticidade, que empregam as equações de Mindlin
ou similares, considerando o solo como um semi-espaço infinito.
- Métodos que combinam o modelo Winkler Modificado e a teoria da Elasticidade,
como o método simplificado de Focht & Koch [18] e de O’Neil [35].
- Métodos baseados em resultados experimentais.
- Métodos numéricos como o método dos elementos finitos, método dos elementos de
contorno etc..
40
Aqui neste trabalho, apenas os métodos baseado na teoria da elasticidade e o
método de Focht & Koch [18] serão apresentados para a comparação com o método dos
elementos finitos com modelagem sólida. Além disso, somente foram considerados
exemplos reais de duas estacas. A metodologia utilizada neste trabalho baseada no MEF
pode perfeitamente ser estendida para um grupo constituído por várias estacas, como na
plataforma PRA-1, instalada na Bacia de Campos no final de 2006 (ver Figura 3.16). Na
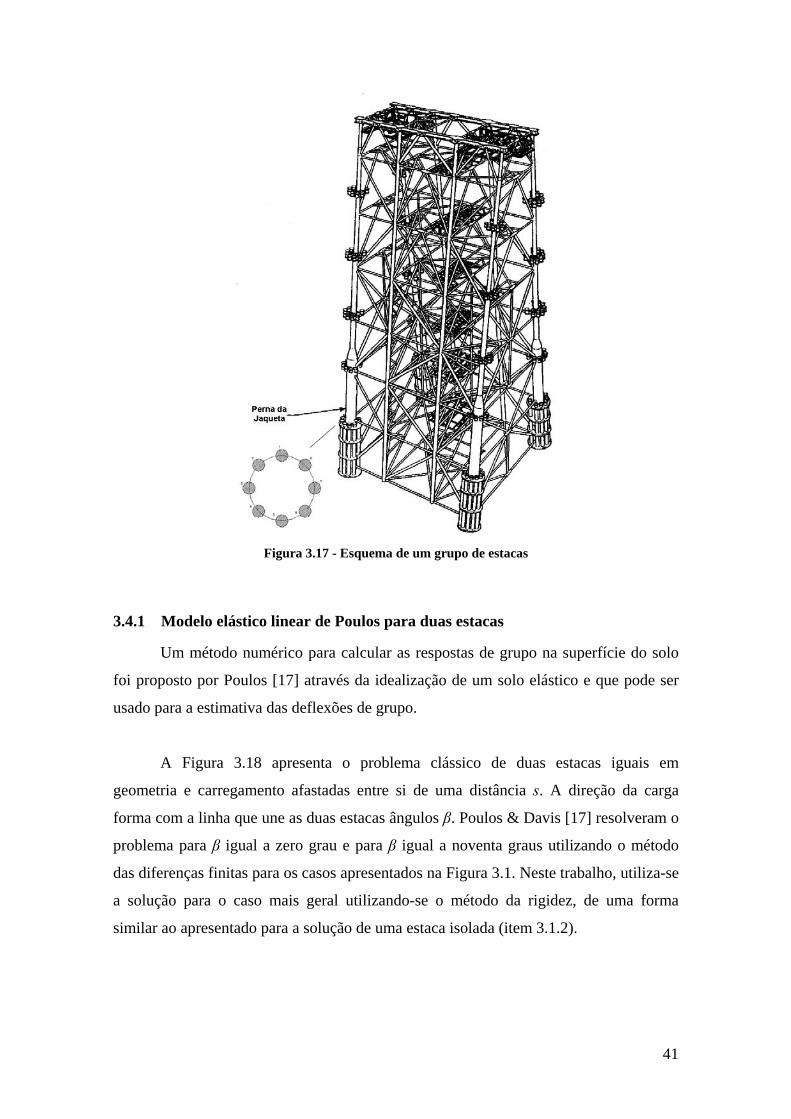
Figura 3.17, é mostrado um esquema do grupo de estacas de uma jaqueta.
Figura 3.16 - Plataforma PRA-1
41
Figura 3.17 - Esquema de um grupo de estacas
3.4.1 Modelo elástico linear de Poulos para duas estacas
Um método numérico para calcular as respostas de grupo na superfície do solo
foi proposto por Poulos [17] através da idealização de um solo elástico e que pode ser
usado para a estimativa das deflexões de grupo.
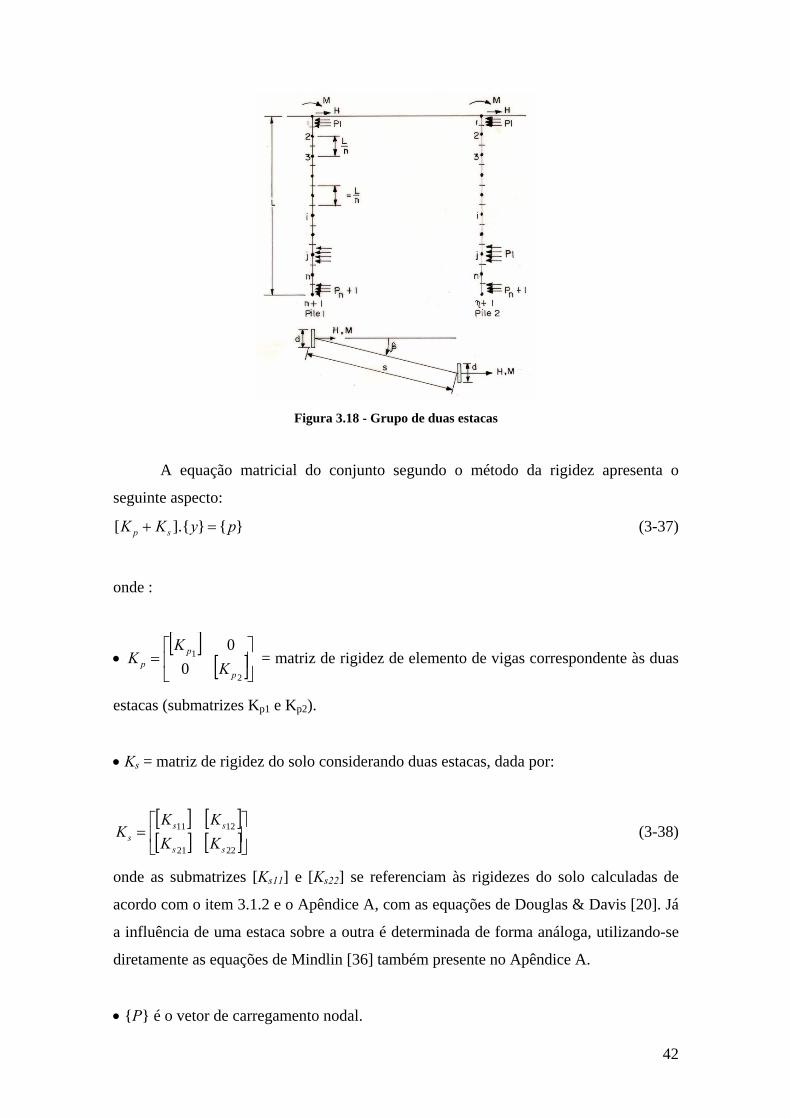
A Figura 3.18 apresenta o problema clássico de duas estacas iguais em
geometria e carregamento afastadas entre si de uma distância s. A direção da carga
forma com a linha que une as duas estacas ângulos β. Poulos & Davis [17] resolveram o
problema para β igual a zero grau e para β igual a noventa graus utilizando o método
das diferenças finitas para os casos apresentados na Figura 3.1. Neste trabalho, utiliza-se
a solução para o caso mais geral utilizando-se o método da rigidez, de uma forma
similar ao apresentado para a solução de uma estaca isolada (item 3.1.2).
42
Figura 3.18 - Grupo de duas estacas
A equação matricial do conjunto segundo o método da rigidez apresenta o
seguinte aspecto:
}{}].{[ pyKK sp =+ (3-37)
onde :
• [ ]
[ ]⎥⎦⎤
⎢⎣
⎡=
2
1
00
p
pp K
KK = matriz de rigidez de elemento de vigas correspondente às duas
estacas (submatrizes Kp1 e Kp2).
• Ks = matriz de rigidez do solo considerando duas estacas, dada por:
[ ] [ ][ ] [ ]⎥⎦
⎤⎢⎣
⎡=
2221
1211
ss
sss KK
KKK (3-38)
onde as submatrizes [Ks11] e [Ks22] se referenciam às rigidezes do solo calculadas de
acordo com o item 3.1.2 e o Apêndice A, com as equações de Douglas & Davis [20]. Já
a influência de uma estaca sobre a outra é determinada de forma análoga, utilizando-se
diretamente as equações de Mindlin [36] também presente no Apêndice A.
• {P} é o vetor de carregamento nodal.

43
Com base na análise do grupo de estacas pela solução da equação (3-37), é
definido o fator de grupo a dado por:
isoladayyΔ
=α (3-39)
onde: yΔ = deslocamento horizontal no topo adicional devido ao efeito de grupo;
isoladay = deslocamento no topo da estaca isolada com a carga média do conjunto.
3.4.2 Método de Focht & Koch
O método de Focht & Koch [18] utiliza as mesmas equações do modelo de
Poulos [17] para várias estacas, com a diferença de que são considerados os
deslocamentos horizontais obtidos pelo modelo de Winkler Modificado para uma estaca
isolada, de tal forma a incorporar o efeito não linear do conjunto. Assim, este método
mescla um modelo linear (modelo de Poulos) com um modelo não-linear (modelo de
Winkler modificado).
Este método propõe a consideração do efeito de grupo em estacas vizinhas, por
meio de uma redução das constantes de mola representativas do solo. Essa redução é
proposta com base na relação entre o deslocamento lateral que a cabeça da estaca
sofreria se fosse isolada e aquela que sofre no grupo, calculadas a partir do
procedimento proposto por Poulos para várias estacas.
Equações básicas propostas de Focht & Koch [18] para o deslocamento de uma
estaca k num grupo de n estacas são:
( )⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+= ∑
≠=
n
kjj
kkjjHk HRHyy1
.α , nk ,...2,1= (3-40)
onde:
• p
s
yyR = (3-41)
44
• ys = deslocamento horizontal da cabeça da estaca com o modelo de Winkler
Modificado aplicando-se a carga média, isto é, a carga total dividida pelo número de
estacas.
• yp = deslocamento horizontal da cabeça da estaca com o modelo elástico de Poulos,
aplicando-se a carga média, ou seja, a carga total dividida entre o número de estacas. Ou
seja, de acordo com o método linear estudado neste trabalho, apenas será possível
aplicar este método no caso de um solo homogêneo.
• Hi = Força horizontal no topo da estaca i.
• yH = deslocamento devido a uma força horizontal unitária no topo da estaca
• αkj = fator de grupo, calculado como no item anterior considerando as estacas k e j.
Para compatibilizar o cálculo linear elástico com o comportamento não-linear no
modelo de Focht & Koch, foi proposta uma alteração na equação do modelo de Poulos.
Este método utiliza as mesmas equações de Poulos com a diferença de que Hk é
multiplicado por um fator R, que indica a razão entre o deslocamento obtido de uma
análise não linear e o obtido de uma análise linear.
É importante ressaltar que o fator R deve ser maior do que a unidade, pois é o
quociente de uma análise não linear e uma análise linear. Valores de R menores do que
a unidade podem conduzir a resultados totalmente desprovidos de significado físico.
Para tanto, o módulo de elasticidade da análise elástica linear deve ser determinado de
uma forma consistente com os demais parâmetros do solo utilizados na construção das
curvas P-Y.
A equação apresentada anteriormente representa o problema do grupo de várias
estacas submetidas a cargas iguais. Neste trabalho, serão analisados apenas grupos de
duas estacas somente. Então, a equação (3-40) fica resumida a:
45
[ ]RHyy lHg +⋅= α (3-42)
onde, αl é o fator de grupo de acordo considerando o solo linear, descrito no item
anterior e yg é o deslocamento da estaca em grupo.
3.5 Comentários referentes às metodologias clássicas
Observações importantes sobre a utilização dos métodos clássicos descritos
anteriormente em estruturas offshore:
- Em exemplos reais raramente o solo pode ser assumido homogêneo o que
inviabiliza diretamente a utilização do modelo elástico linear de Poulos [17]. Desta
forma, este método passa a ser útil somente na consideração do efeito de grupo em
modelos que combinam a teoria da elasticidade e o modelo de Winkler modificado.
- As metodologias clássicas servem também como uma indicação inicial para a
geração da malha de elementos finitos quando esta metodologia é empregada numa
análise mais sofisticada considerando a plasticidade do solo.
- Os níveis de carga nas condições extremas conduzem a um descolamento maior
entre a estaca e o solo na parte superior. Além disso, o nível de deslocamentos
elevados implica num comportamento não-linear do solo. Desta forma, há a
necessidade de se utilizar o modelo de Winkler modificado com curvas
recomendadas pela API-RP-2A ou obtidas através de ensaios experimentais
confiáveis, de tal forma a melhor representar os comportamentos lateral, axial e de
ponta do solo.
- Apesar da solução elástica linear de Poulos não ser utilizada diretamente em
exemplos reais de estruturas offshore, este método é base dos conceitos da interação
solo-estrutura. Devendo, assim, ser corretamente entendido antes de partir-se para a
utilização de modelos mais sofisticados, tais como a consideração do efeito de grupo
de estacas e a utilização do Método dos Elementos Finitos com comportamento
linear ou não-linear.

46
4 Método dos elementos finitos com modelagem sólida
O método dos elementos finitos (MEF) tridimensional [37,38] vem ganhando
grande importância no contexto geotécnico. A versatilidade do método para resolver
problemas de engenharia permite que sejam representadas estacas com geometrias não
convencionais, solos não homogêneos e com a consideração da plasticidade [3, 39, 40].
Basicamente, o método dos elementos finitos consiste em dividir o contínuo em
uma série de elementos discretos conectados por nós. Este trabalho não tem como
finalidade descrever todo o MEF, apenas esclarecer alguns dos parâmetros utilizados na
discretização do problema abordado, bem como critérios de ruptura utilizados e
modelagem da interação solo-estrutura.
Neste trabalho foram considerados dois tipos de elementos na análise dos
problemas apresentados: sólidos tridimensionais e planos axissimétricos, quando
possível. Modelos sólidos tridimensionais utilizando o método dos elementos finitos
possuem um número muito grande de graus de liberdade. Assim, alguns problemas
geotécnicos podem ser resolvidos através de modelos planos axissimétricos com o
intuito de reduzir o tempo computacional. No entanto, estes casos estão restritos a solos
com comportamento linear físico e estaca circular isolada.
O programa utilizado nas análises com o MEF tridimensional foi o software
comercial ANSYS® [41]. Nele foram elaboradas as malhas e realizadas as análises.
Neste programa, foram desenvolvidos modelos com elementos axissimétricos
harmônicos, que permitem a utilização de carregamento não simétrico. Como este tipo
de elemento está limitado à utilização de materiais lineares, então ele pode ser utilizado
apenas em parte dos problemas estudados. Outro tipo de elementos utilizado para a
representação do solo e da estaca foram os elementos sólidos de 8 nós com três graus de
liberdade por nó (deslocamentos x, y e z, ver Figura 4.1). Com este tipo de elemento é
possível o estudo de solos com não linearidade física e com geometria não
axissimétrica.
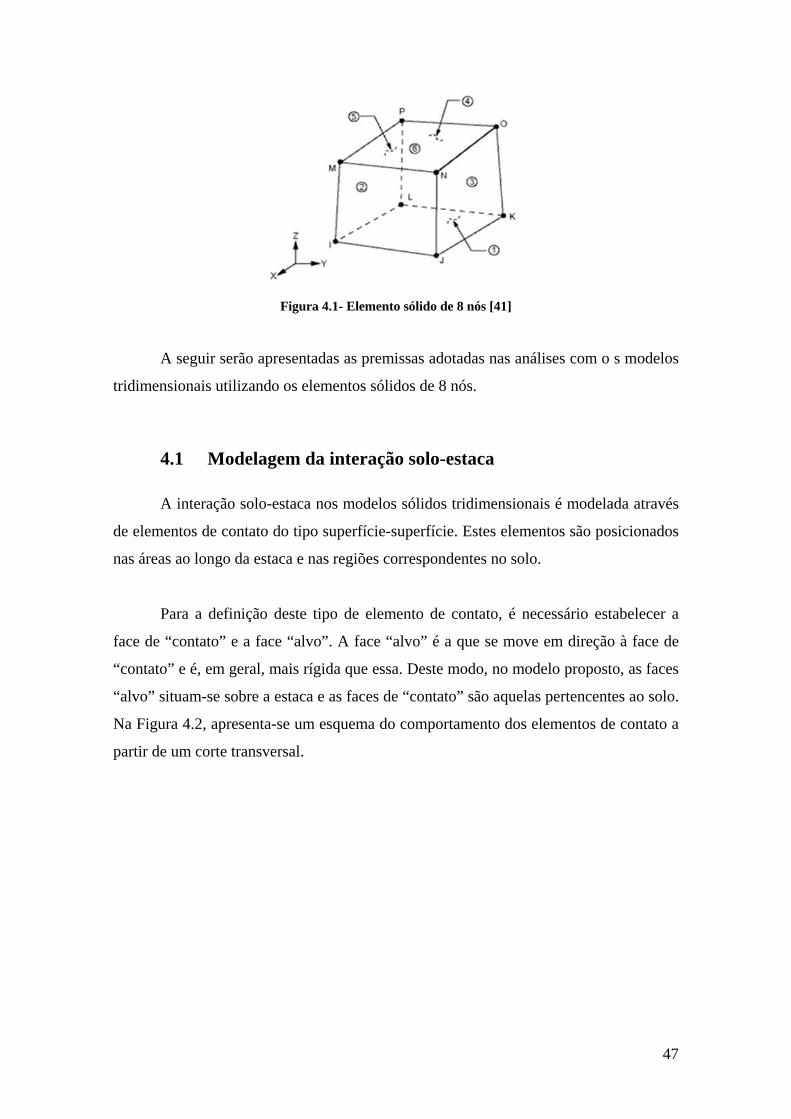
47
Figura 4.1- Elemento sólido de 8 nós [41]
A seguir serão apresentadas as premissas adotadas nas análises com o s modelos
tridimensionais utilizando os elementos sólidos de 8 nós.
4.1 Modelagem da interação solo-estaca
A interação solo-estaca nos modelos sólidos tridimensionais é modelada através
de elementos de contato do tipo superfície-superfície. Estes elementos são posicionados
nas áreas ao longo da estaca e nas regiões correspondentes no solo.
Para a definição deste tipo de elemento de contato, é necessário estabelecer a
face de “contato” e a face “alvo”. A face “alvo” é a que se move em direção à face de
“contato” e é, em geral, mais rígida que essa. Deste modo, no modelo proposto, as faces
“alvo” situam-se sobre a estaca e as faces de “contato” são aquelas pertencentes ao solo.
Na Figura 4.2, apresenta-se um esquema do comportamento dos elementos de contato a
partir de um corte transversal.
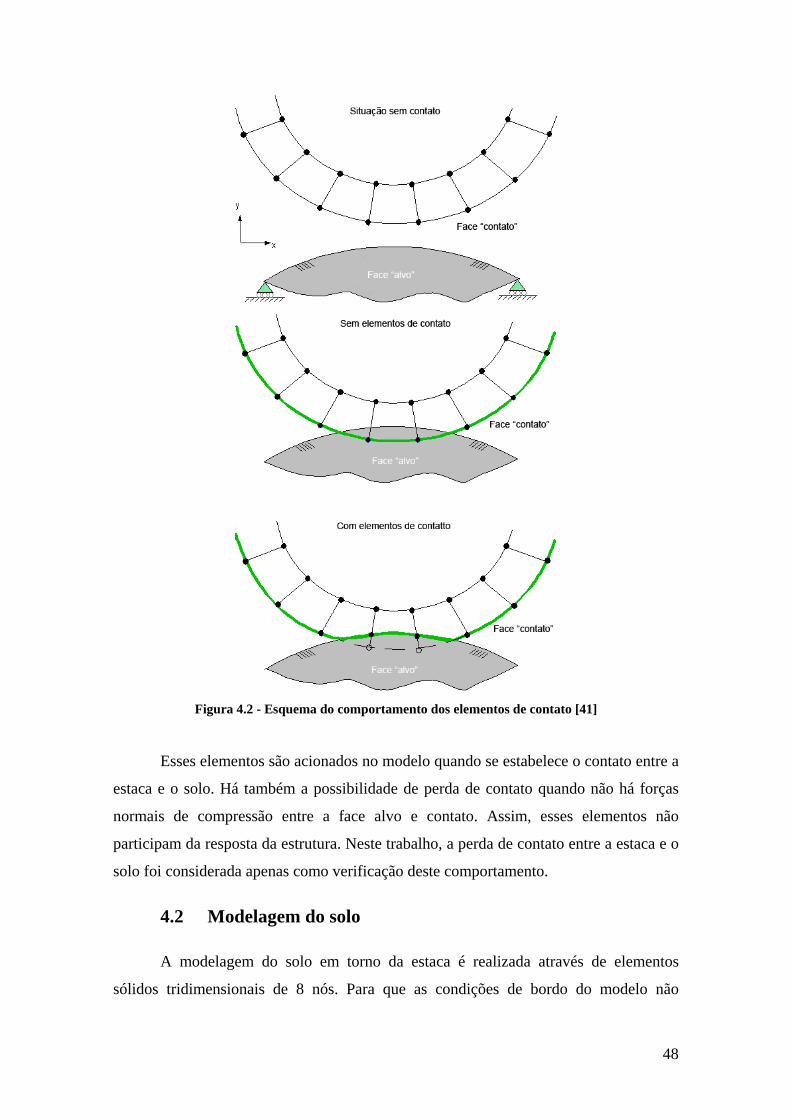
48
Figura 4.2 - Esquema do comportamento dos elementos de contato [41]
Esses elementos são acionados no modelo quando se estabelece o contato entre a
estaca e o solo. Há também a possibilidade de perda de contato quando não há forças
normais de compressão entre a face alvo e contato. Assim, esses elementos não
participam da resposta da estrutura. Neste trabalho, a perda de contato entre a estaca e o
solo foi considerada apenas como verificação deste comportamento.
4.2 Modelagem do solo
A modelagem do solo em torno da estaca é realizada através de elementos
sólidos tridimensionais de 8 nós. Para que as condições de bordo do modelo não

49
interfiram significativamente na resposta, adota-se uma distância Rmax entre o centro da
estaca e a borda do modelo geralmente é igual a 10 vezes o diâmetro da estaca [45].
Como alguns casos estudados neste trabalho são referentes às estacas longas ao
contrário das referências estudadas, optou-se por um valor maior do que 0,3 vezes o
comprimento da estaca sendo um valor diferente para cada caso. No caso da estaca
isolada, o solo que a circunda é de formato cilíndrico (ver Figura 4.3), já na estaca em
grupo, o solo é um prisma retangular (ver Figura 4.4).
A modelagem do solo abaixo da estaca é variável, dependendo do tipo de estaca
analisada e será descrita em cada item correspondente. Nos bordos limites do modelo,
todos os deslocamentos são restringidos, assim como a base do modelo. A restrição do
bordo do modelo na direção vertical (direção y da Figura 3.4) deve ser aplicada apenas
em análises onde não há influência do peso do solo, caso contrário, a direção vertical
deve estar livre. Como os modelos acoplados solo-estaca exigem muitos elementos, os
exemplos foram estudados utilizando a simetria do problema e no plano de simetria
foram restringidos os deslocamentos na direção z (ver figuras seguintes).
Figura 4.3 - Diâmetro do modelo de estaca isolada
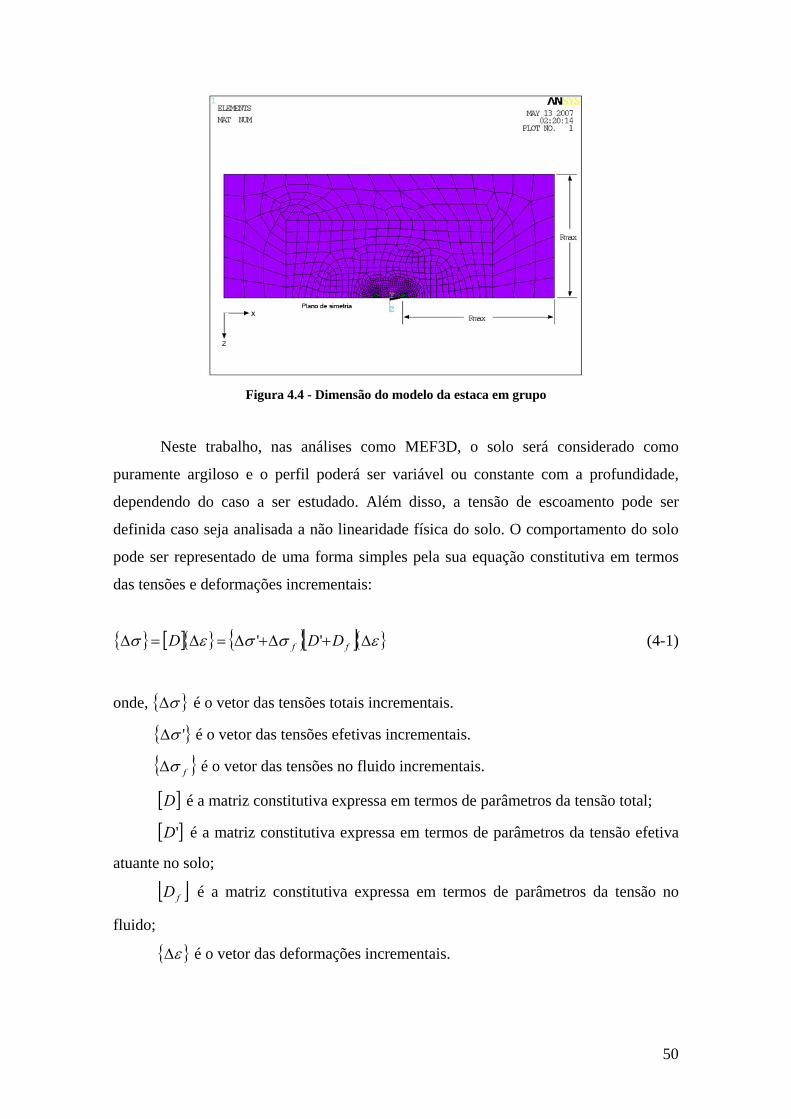
50
Figura 4.4 - Dimensão do modelo da estaca em grupo
Neste trabalho, nas análises como MEF3D, o solo será considerado como
puramente argiloso e o perfil poderá ser variável ou constante com a profundidade,
dependendo do caso a ser estudado. Além disso, a tensão de escoamento pode ser
definida caso seja analisada a não linearidade física do solo. O comportamento do solo
pode ser representado de uma forma simples pela sua equação constitutiva em termos
das tensões e deformações incrementais:
{ } [ ]{ } { }[ ]{ }εσσεσ Δ+Δ+Δ=Δ=Δ ff DDD '' (4-1)
onde, { }σΔ é o vetor das tensões totais incrementais.
{ }'σΔ é o vetor das tensões efetivas incrementais.
{ }fσΔ é o vetor das tensões no fluido incrementais.
[ ]D é a matriz constitutiva expressa em termos de parâmetros da tensão total;
[ ]'D é a matriz constitutiva expressa em termos de parâmetros da tensão efetiva
atuante no solo;
[ ]fD é a matriz constitutiva expressa em termos de parâmetros da tensão no
fluido;
{ }εΔ é o vetor das deformações incrementais.

51
Com base na formulação apresentada pode-se descrever dois problemas
distintos. Num primeiro, o solo possui comportamento totalmente drenado, onde a
tensão total existente é a tensão efetiva no solo. Isto ocorre já que a água é expulsa do
solo, ou seja a resistência que existe é apenas a resistência do solo, ou a tensão efetiva.
Assim, pode-se dizer que:
{ } { } ' σσ Δ=Δ e [ ] [ ]DD =' (4-2)
Neste caso, para um solo isotrópico linear, este passa a ser representado pelo
módulo de elasticidade drenado E’ e o coeficiente de Poisson drenado n’.
Em outro tipo de problema, o solo está em condições totalmente não drenado,
que é o caso da argila estudada neste trabalho. Assim, a matriz constitutiva do solo
utilizada é referente aos parâmetros da tensão total e o solo é representado por um
módulo de elasticidade não drenado Eu e um coeficiente de Poisson não drenado nu.
No caso de argila não drenada saturada, não deve haver variação de volume do
solo, já que a água não permite este comportamento, assim, o coeficiente de Poisson não
drenado deve ser igual a 0,5. Porém, a adoção deste valor conduz a problemas
numéricos devido à configuração da matriz constitutiva. Isto pode ser visto pela matriz
constitutiva para material isotrópico linear mostrada a seguir.
( )( )
( )( )
( )( )⎥
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
−
−
−
=
υ
υ
υ
υυυ
υυυ
υυυ
2100000
0210000
0021000
0001
0001
0001
D
Assim, é conveniente que seja adotado uma valor para o coeficiente de Poisson
não drenado entre 0,49 e 0,50, nunca chegando neste valor. Neste trabalho, o valor
52
adotado foi de 0,49 e é definido por n. Já módulo de elasticidade do solo Es será
definido como:
SuKEs ⋅= (4-3)
onde: K = constante de proporcionalidade
Su = resistência não drenada do solo
É importante observar que a correlação direta entre Su e Es é, na verdade, uma
aproximação que representa mais um fator que contribui para a discrepância obtida
entre os resultados com o modelo de Winkler modificado e o método dos elementos
finitos considerando a plasticidade ou não.
A consideração da não linearidade física do solo será apresentada a seguir.
4.2.1 Conceitos de plasticidade
Algumas das análises realizadas neste trabalho utilizando o método dos
elementos finitos e outros métodos clássicos são resolvidas através da teoria da
elasticidade linear. Estes modelos são relativamente simples e não representam o
comportamento real da interação solo-estaca, principalmente em situações onde o
carregamento atinge níveis elevados. Desta forma, o uso da teoria da plasticidade
permite a melhor representação do solo utilizando o método dos elementos finitos.
Inicialmente, para melhor ilustrar o comportamento tensão-deformação de
materiais eslasto-plásticos, a Figura 4.5 mostra o estado de tensões uniaxial de um solo
submetido a uma compressão simples. Neste diagrama, pode-se perceber a existência de
três níveis de tensão: tensão limite de proporcionalidade σprop; tensão de escoamento
σesc e tensão de ruptura σrupt.

53
σprop
σesc
σrup
A
B
C F
σEur
E
O G D H
εP εe
σrup Tensão de ruptura
σesc Tensão de escoamento inicial
σprop Limite de proporcionalidade
ε
σprop
σesc
σrup
A
B
C F
σEur
E
O G D H
εP εe
σrup Tensão de ruptura
σesc Tensão de escoamento inicial
σprop Limite de proporcionalidade
ε
Figura 4.5 - Configuração da curva tensão-deformação do solo
No início da aplicação da carga, para valores abaixo de σprop, as tensões e
deformações permanecem proporcionais até atingir o ponto A, chamado limite de
proporcionalidade. O domínio elástico estende-se geralmente até o ponto B o qual é
caracterizado pelo início das deformações plásticas ou irreversíveis. É importante
salientar que até o ponto B, as equações da teoria da elasticidade podem ser válidas,
porém entre σprop e σesc a proporcionalidade deixa de existir sendo o material elástico
não linear, portanto, deve ser considerada a variação do módulo de elasticidade neste
intervalo. A tensão correspondente ao ponto B é chamada de tensão de escoamento
inicial. A partir do ponto B, tem início o escoamento do material ou domínio plástico
dando início às grandes deformações.
No caso em que o corpo de prova seja descarregado a partir do ponto C, de
acordo com a configuração, a curva seguirá a linha descendente CD. Neste sentido, no
final do descarregamento pode ser obtida a deformação plástica OD. Recarregando-se o
corpo a partir do ponto D, obtém-se uma trajetória que se desvia da anterior; neste caso,
o módulo elástico de descarregamento-recarregamento Eur pode ser sensivelmente
maior que o módulo elástico inicial E.

54
Ao continuar o carregamento, a tensão de escoamento continua aumentando,
sendo atingida a máxima tensão no ponto F correspondente à ruptura ou colapso do
material. O aumento das tensões após o início do escoamento é chamado de
encruamento ou endurecimento (strain-hardening).
A configuração da curva tensão-deformação vai depender do tipo de solo, do
tipo de carregamento aplicado e de sua velocidade, além de outros fatores inerentes aos
ensaios. Na Figura 4.6, é mostrada outra curva típica dos solos onde ocorre uma
diminuição de tensões após a resistência de pico, sendo seu comportamento chamado de
enfraquecimento ou amolecimento (strain-softening).
σprop
σesc
σrup
A
B
F
σ
E
O G ε
σprop
σesc
σrup
A
B
F
σ
E
O G ε Figura 4.6 - Configuração da curva tensão-deformação de um solo (“Strain-softening”).
Geralmente, a representação da plasticidade em solos não engloba o
endurecimento ou o amolecimento do material. Assim, pode-se concluir que o
comportamento do solo é de um modo geral elástico e plástico. Na teoria de plasticidade
clássica, o solo é representado como sendo elasto-plástico perfeito ou rígido plástico
(Figura 4.7).

55
σ
ε
σ
ε
σ
ε
σ
ε (a) (b)
Figura 4.7 - Modelos elasto-plásticos utilizados na teoria da plasticidade clássica.
(a) elasto-plástico perfeito; (b) rígido-plástico
Nas situações uniaxiais representadas até aqui, a tensão de escoamento é
facilmente visualizada, já que existe apenas uma direção. No caso multi-axial, como é
na representação tridimensional estudada neste trabalho, o escoamento é definido por
uma função de escoamento ( ) 0~F =σ que é dependente do estado de tensões σ~ . Um
estado de tensões é comumente representado por suas três tensões principais
( 321 ,, σσσ ). Quando um material se encontra na região elástica significa que, de acordo
com o seu estado de tensões, ( ) 0~F <σ . Neste caso, o critério de escoamento representa
uma superfície no espaço das tensões principais, ou seja, ( ) 0,, 321 =σσσF . As
superfícies de escoamento dos principais critérios de escoamento estão representadas na
Figura 4.8. Para a definição de um material elasto-plástico, alem da função de
escoamento, é necessário a definição de uma lei de fluxo para a determinação da direção
da deformação plástica do material para cada estado de tensão. Esta direção das
deformações plásticas incrementais em cada estado de tensões é definida a partir de uma
lei de fluxo que pode ser expressa em função de um potencial plástico. Quando a
superfície deste potencial plástico coincide com a superfície do critério de escoamento,
a lei de fluxo é dita associativa, caso contrário esta é chamada de não associativa.

56
σ2
σ3
σ1
Drucker-Prager
Von Mises
σ2
σ3
σ1
Drucker-Prager
Von Mises
σ2
σ3
σ1
Mohr-Coulomb
Tresca
σ2
σ3
σ1
Mohr-Coulomb
Tresca
(a) (b) Figura 4.8 - Superfícies de escoamento no espaço das tensões principais:
(a) Drucker-Prager e Von Mises; (b) Mohr-Coulomb e Tresca
Neste trabalho, a modelagem não linear do solo será realizada através de um
comportamento elasto-plástico perfeito. Os critérios de escoamento mais utilizados em
mecânica dos solos são [3,42]: o de Drucker-Prager; Huber-Von Mises; Mohr-Coulomb
e Tresca. O critério de escoamento adotado é o de Drucker-Prager. Mas como adota-se o
solo argiloso, este critério se equivale ao de Huber-Von Mises. Há várias formas de
aproximação da superfície de ruptura de Drucker-Prager pela de Huber-Von Mises, uma
delas é descrita a seguir [42].
A superfície de escoamento no critério de Drucker-Prager é definida por um
cone dado pela seguinte expressão:
021 =−+⋅= YJIF α (4-4)
onde: 3211I σ+σ+σ= = o primeiro invariante das tensões principais;
( ) ( ) ( )[ ]213
232
2212 6
1J σ−σ+σ−σ+σ−σ= = o segundo invariante dos desvios
das tensões principais;
α e Y são constantes dependentes da coesão e do ângulo de atrito interno, dadas
por:
[ ]φ
φα
sensen−
=33
2 (4-5)

57
[ ]φ
φ
senS
Y u
−=
33cos6
(4-6)
Como o solo é argiloso, o ângulo de atrito interno é nulo e, em condições não
drenadas, a coesão é igual à resistência do solo. Então:
0=α (4-7)
3
2 uSY
⋅= (4-8)
Logo, o critério se torna:
03
22 =
⋅−= uSJF (4-9)
Já o critério de Huber-Von Mises, definido por:
032 =−= yJF
σ (4-10)
onde: yσ é a tensão de escoamento na tração ou compressão simples.
Assim, o critério de Drucker-Prager e o de Huber-Von Mises se equivalem
quando:
uy S⋅= 2σ (4-11)
Logo, a curva elasto-plástica adotada para o solo argiloso deste trabalho é
apresentada na Figura 4.9.

58
Figura 4.9 - Diagrama tensão-deformação utilizado.
A análise não linear é realizada no ANSYS [41] através do método iterativo de
Newton-Raphson padrão.
59
5 Aplicações
Neste capítulo, serão apresentados alguns exemplos de estacas analisadas através
de metodologias clássicas e pelo método dos elementos finitos tridimensional
(MEF3D). Os exemplos estudados englobam além de estacas tradicionais longas
cravadas e grauteadas, uma estaca torpedo analisada através do MEF3D e do método de
Winkler. A seguir, serão apresentados os procedimentos adotados nas análises clássicas
e pelo MEF3D.
5.1 Procedimentos das análises
Nos itens seguintes, serão apresentados os resultados e comparações das análises
realizadas através dos métodos clássicos e o MEF3D. Neste, serão mostrados os
procedimentos adotados para esta comparação.
A principal dificuldade existente na comparação entre o método dos elementos
finitos e os métodos clássicos. O modelo de Winkler utilizado neste trabalho se baseia
na API-RP-2A [29] para a determinação das molas de reação do solo, e a partir deste
modelo será determinado o módulo de elasticidade do solo para as análises elástica e
com o MEF3D.
A seguir, apresentam-se as metodologias adotadas para a análise considerando o
comportamento linear e não linear do solo.
5.1.1 Solo com comportamento linear
A base de comparação dos métodos clássicos é o modelo de Winkler,
implementado no programa PILEMICRO [23]. A entrada deste programa é basicamente
composta dos dados estruturais da estaca (propriedades do material e geometria) e o tipo
de solo onde a estaca se encontra. O programa permite a consideração de várias
camadas de solo e variação das propriedades do solo com a profundidade.
Como as curvas características do solo possuem uma região linear como
definido no item 3.3, para o comportamento linear foi necessário a aplicação de uma
carga que não permita um deslocamento maior do que yc.
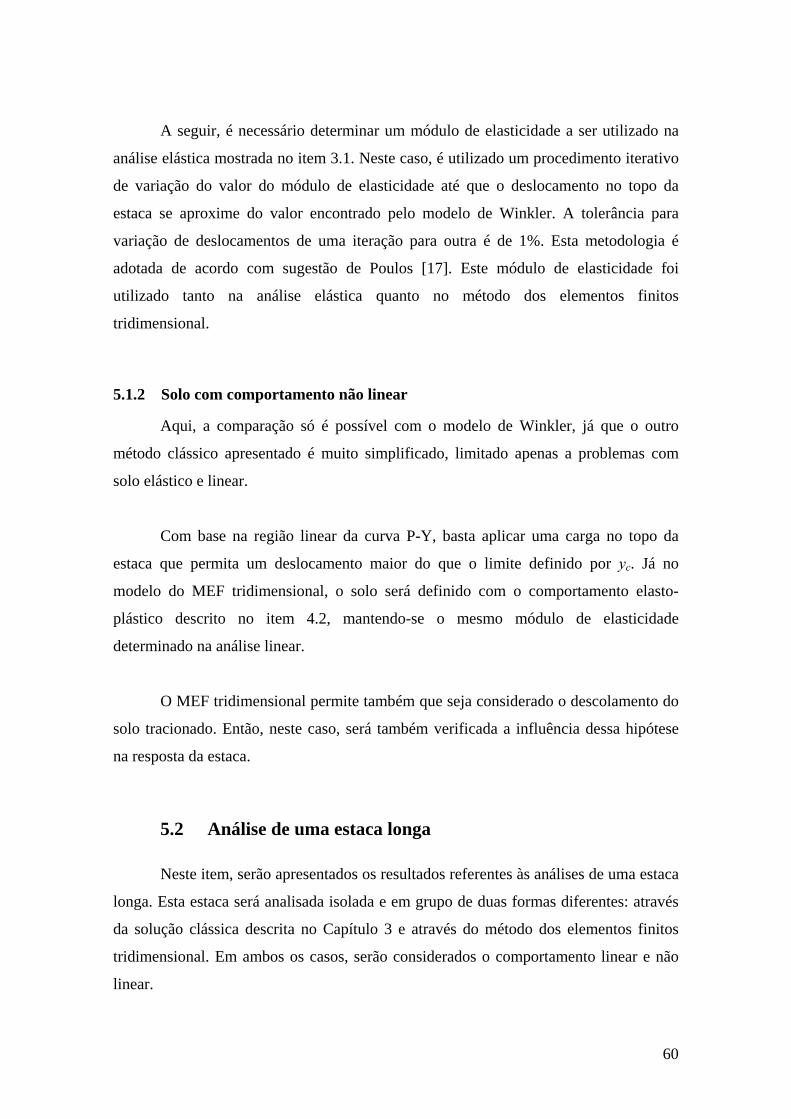
60
A seguir, é necessário determinar um módulo de elasticidade a ser utilizado na
análise elástica mostrada no item 3.1. Neste caso, é utilizado um procedimento iterativo
de variação do valor do módulo de elasticidade até que o deslocamento no topo da
estaca se aproxime do valor encontrado pelo modelo de Winkler. A tolerância para
variação de deslocamentos de uma iteração para outra é de 1%. Esta metodologia é
adotada de acordo com sugestão de Poulos [17]. Este módulo de elasticidade foi
utilizado tanto na análise elástica quanto no método dos elementos finitos
tridimensional.
5.1.2 Solo com comportamento não linear
Aqui, a comparação só é possível com o modelo de Winkler, já que o outro
método clássico apresentado é muito simplificado, limitado apenas a problemas com
solo elástico e linear.
Com base na região linear da curva P-Y, basta aplicar uma carga no topo da
estaca que permita um deslocamento maior do que o limite definido por yc. Já no
modelo do MEF tridimensional, o solo será definido com o comportamento elasto-
plástico descrito no item 4.2, mantendo-se o mesmo módulo de elasticidade
determinado na análise linear.
O MEF tridimensional permite também que seja considerado o descolamento do
solo tracionado. Então, neste caso, será também verificada a influência dessa hipótese
na resposta da estaca.
5.2 Análise de uma estaca longa
Neste item, serão apresentados os resultados referentes às análises de uma estaca
longa. Esta estaca será analisada isolada e em grupo de duas formas diferentes: através
da solução clássica descrita no Capítulo 3 e através do método dos elementos finitos
tridimensional. Em ambos os casos, serão considerados o comportamento linear e não
linear.

61
A estaca utilizada nestas análises é a mesma apresentada em Pereira [6]
possuindo um comprimento de 100 metros e diâmetro de 2,13 metros (84 polegadas) e
espessura da parede igual a 0,05 metros (2 polegadas). A estaca está imersa em um solo
argiloso com resistência não drenada constante ao longo da profundidade e igual a 17,0
kPa. O peso específico submerso do solo é 7,35 kN/m3. O material da estaca é um aço
com módulo de elasticidade igual a 2,05 x 108 kPa. A Figura 5.1 mostra um esquema do
exemplo estudado.
Figura 5.1 - Esquema da estaca longa estudada
A carga aplicada é uma força horizontal H de 980,6 kN no topo para análise
linear e 1961,2 kN para a análise não linear. O aspecto interessante da apresentação
desta estaca com uma carga horizontal é que ela apresenta um comportamento
predominantemente de flexão como poderá ser observado.
Na dissertação apresentada por Pereira [6], o enfoque deste problema foi a
determinação e comparação dos deslocamentos da estaca nos métodos clássicos e o
MEF tridimensional. Os resultados aqui apresentados estão de acordo com o realizado
naquele trabalho e serão mostrados apenas para ilustrar a solução da estaca em grupo.

62
5.2.1 Validação do programa PILEMICRO
Neste item, busca-se a comparação da análise da estaca isolada estudada neste
capítulo com a solução linear fechada de Hetenyi [22] descrita em Poulos [17] e
apresentada no Apêndice B.
Para que se possam comparar as duas soluções, foi necessário determinar o
coeficiente de reação lateral (kh) a partir da curva P-Y com a seguinte expressão:
ch y
Suk 5,4= (5-1)
sendo Su a resistência não drenada e yc o limite da região linear definido pela equação
(3-21). Assim, kh é igual a 1434,2 kN/m3. Sendo a carga no topo igual a 980,6 kN, os
deslocamentos utilizando a solução de Hetenyi e o PILEMICRO são apresentados na
Figura 5.2.
-0.01 0.00 0.01 0.02 0.03 0.04 0.05
Deslocamento horizontal (m)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se (m
)
HetenyiPilemicro
Figura 5.2 - Comparação do PILEMICRO com a solução fechada de Hetenyi

63
Nota-se que o comportamento global da estaca é bastante coerente, mostrando
que os resultados do programa PILEMICRO são válidos.
5.2.2 Solo com comportamento linear
Neste item, serão apresentados os resultados das análises utilizando os métodos
clássicos e o MEF3D descritos nos capítulo 3 e 4 para o comportamento linear do solo.
Inicialmente, a estaca será analisada utilizando o programa PILEMICRO [23] baseado
na API-RP-2A. Neste caso, os parâmetros utilizados encontram-se na Tabela 5.1.
Tabela 5.1 - Dados da estaca longa para análise pela metodologia clássica
ε50 0.01
Carga horizontal no topo 980,6 kN
Profundidade do topo da estaca 20 metros
Número de elementos 100
Este caso apresenta a seguinte profundidade de resistência reduzida, definida
pela API-RP-2A e mostrado na equação (3-20):
mX R 81,1025,0
735,11336,275,011336,26
=+
⋅⋅
= (5-2)
Este valor é menor, portanto, do que o adotado para a profundidade do topo que
foi de 20 metros, significando que a estaca não se encontra em nenhuma região de
resistência reduzida.
Já a carga de 980,6 kN foi aplicada por conduzir a deslocamentos dentro da faixa
linear mostrada na Figura 3.10. Com base no resultado com o modelo de Winkler, a
análise elástica descrita no item 3.1 apresentou o mesmo deslocamento no topo para o
módulo de elasticidade do solo igual a 2093,9 kPa, ou seja 123,17 vezes o Su. Este valor
enquadra-se dentro do intervalo sugerido em [43] que é de 40 a 200 vezes Su, como
pode ser visto ma referência [2], página 52. Esta constante pode chegar a altos valores,
até 2000, se forem consideradas pequenos deslocamentos da estaca.

64
Comparando os dois métodos clássicos obtém-se o gráfico da Figura 5.3.
-1.0x10-2 0.0x100 1.0x10-2 2.0x10-2 3.0x10-2 4.0x10-2 5.0x10-2
Deslocamentos ao longo da estaca (m)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Modelo de WinklerModelo de Poulos
Figura 5.3 - Comparativo do modelo de Winkler e a análise elástica
Observa-se que os dois métodos apresentam um comportamento diferenciado,
sendo o modelo de Winkler mais flexível. Esta diferença pode ser devida à formulação
da análise elástica, que é baseada nas equações de Douglas & Davis [20] para uma
placa. Desta forma, a área de contato solo-estaca pode oferecer maior resistência do que
a formulação proposta pela API-RP-2A.
Observa-se também que a análise elástica apresenta um deslocamento no final da
estaca que não aparece na solução pelo modelo de Winkler. Este comportamento pode
se explicado pela determinação da matriz de flexibilidade do solo. Esta formulação
conduz a uma lenta redução da flexibilidade ao longo da estaca. Ou seja, a aplicação de
uma pressão na altura do topo da estaca resulta em deslocamento no final do modelo e
este comportamento é levado em consideração até a composição da matriz de rigidez do
solo. Caso seja modelada uma estaca de grande comprimento, este deslocamento no
final tenderá a zero, conforme o esperado. Isto pode ser verificado na Figura 5.4.
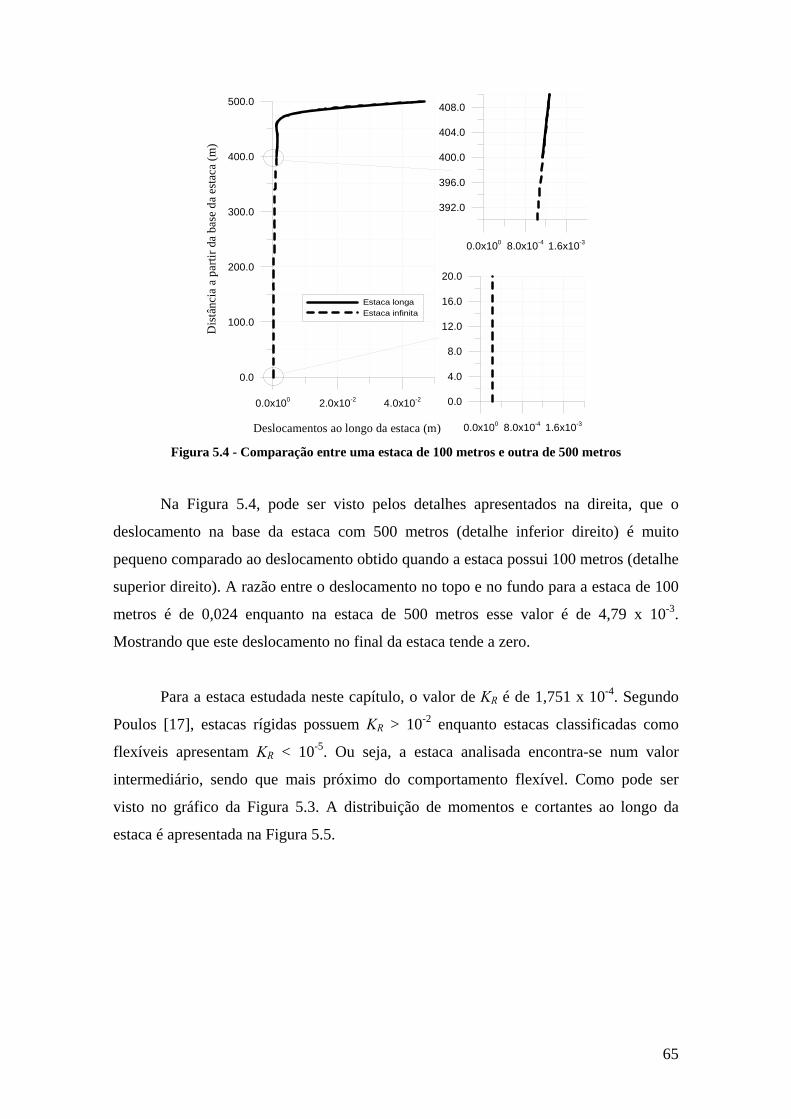
65
0.0x100 2.0x10-2 4.0x10-2
Deslocamentos ao longo da estaca (m)
0.0
100.0
200.0
300.0
400.0
500.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Estaca longaEstaca infinita
0.0x100 8.0x10-4 1.6x10-3
392.0
396.0
400.0
404.0
408.0
0.0x100 8.0x10-4 1.6x10-3
0.0
4.0
8.0
12.0
16.0
20.0
Figura 5.4 - Comparação entre uma estaca de 100 metros e outra de 500 metros
Na Figura 5.4, pode ser visto pelos detalhes apresentados na direita, que o
deslocamento na base da estaca com 500 metros (detalhe inferior direito) é muito
pequeno comparado ao deslocamento obtido quando a estaca possui 100 metros (detalhe
superior direito). A razão entre o deslocamento no topo e no fundo para a estaca de 100
metros é de 0,024 enquanto na estaca de 500 metros esse valor é de 4,79 x 10-3.
Mostrando que este deslocamento no final da estaca tende a zero.
Para a estaca estudada neste capítulo, o valor de KR é de 1,751 x 10-4. Segundo
Poulos [17], estacas rígidas possuem KR > 10-2 enquanto estacas classificadas como
flexíveis apresentam KR < 10-5. Ou seja, a estaca analisada encontra-se num valor
intermediário, sendo que mais próximo do comportamento flexível. Como pode ser
visto no gráfico da Figura 5.3. A distribuição de momentos e cortantes ao longo da
estaca é apresentada na Figura 5.5.
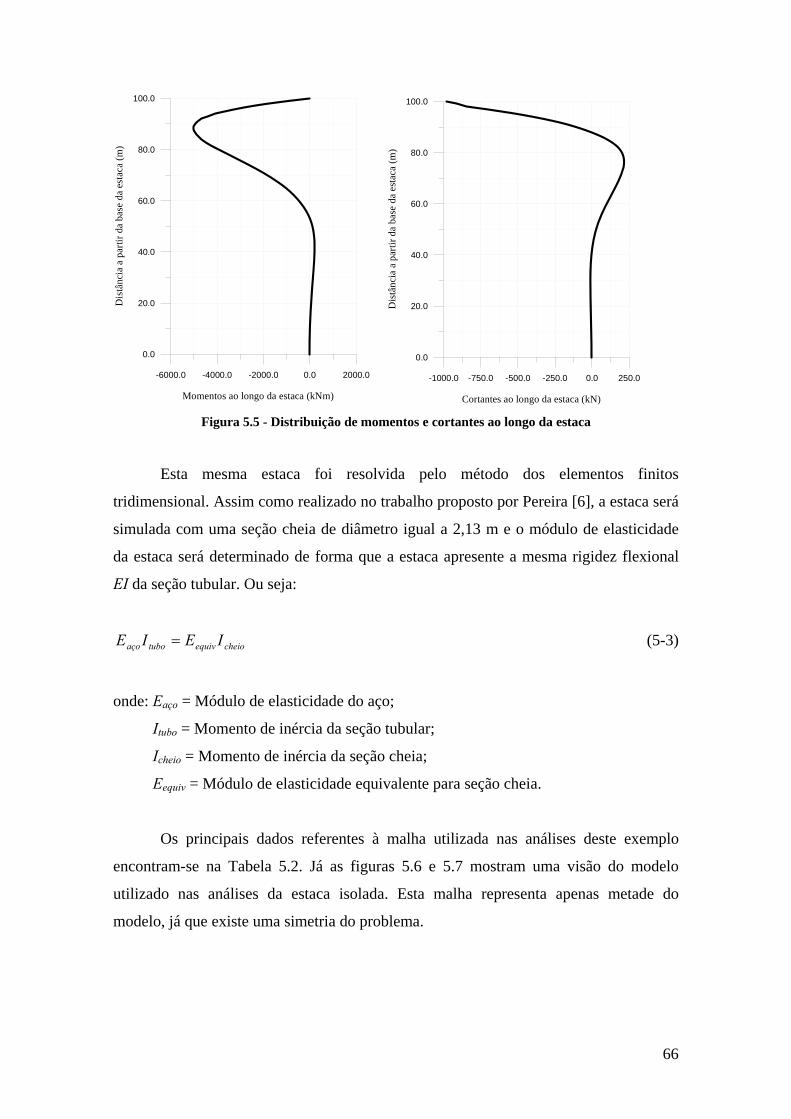
66
-6000.0 -4000.0 -2000.0 0.0 2000.0
Momentos ao longo da estaca (kNm)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
-1000.0 -750.0 -500.0 -250.0 0.0 250.0
Cortantes ao longo da estaca (kN)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Figura 5.5 - Distribuição de momentos e cortantes ao longo da estaca
Esta mesma estaca foi resolvida pelo método dos elementos finitos
tridimensional. Assim como realizado no trabalho proposto por Pereira [6], a estaca será
simulada com uma seção cheia de diâmetro igual a 2,13 m e o módulo de elasticidade
da estaca será determinado de forma que a estaca apresente a mesma rigidez flexional
EI da seção tubular. Ou seja:
cheioequivtuboaço IEIE = (5-3)
onde: Eaço = Módulo de elasticidade do aço;
Itubo = Momento de inércia da seção tubular;
Icheio = Momento de inércia da seção cheia;
Eequiv = Módulo de elasticidade equivalente para seção cheia.
Os principais dados referentes à malha utilizada nas análises deste exemplo
encontram-se na Tabela 5.2. Já as figuras 5.6 e 5.7 mostram uma visão do modelo
utilizado nas análises da estaca isolada. Esta malha representa apenas metade do
modelo, já que existe uma simetria do problema.

67
Tabela 5.2 - Dados da malha em elementos finitos (Elemento sólido) - estaca longa linear
Número de nós Número de elementos Núm. de graus de liberdade
100.583 97.758 301.749
Figura 5.6 – Vista do modelo de elementos finitos da estaca e o solo.
Figura 5.7 - Detalhe do modelo incluindo a estaca e o solo.

68
O raio do modelo para consideração do maciço do solo foi de 36 metros e a base
da estaca fica a 10 metros da base do modelo. Esta consideração é suficiente, já que esta
estaca longa está submetida a um carregamento lateral e não haverá mobilização de solo
abaixo da estaca. Da mesma forma, foi elaborado um modelo utilizando elementos
axissimétricos harmônicos, que permitem a aplicação de uma carga não axissimétrica. A
Figura 5.8 apresenta uma visão deste modelo desenvolvido.
Figura 5.8 - Modelo da estaca e o solo elaborado com elementos axissimétricos.
Tabela 5.3 - Dados da malha em elementos finitos (Elemento plano axissimétrico)- estaca longa
linear
Número de nós Número de elementos Núm. de graus de liberdade
3.080 2.943 6.160
Utilizando o valor do módulo de elasticidade do solo igual a 2093,9 kPa (123,17
x Su), como na análise elástica pela metodologia clássica, obtém-se os deslocamentos da
Figura 5.9. Os modelos sólido de 8 nós e o plano axissimétrico harmônico apresentaram
a mesma resposta, conforme esperado e apenas um deles está representado no gráfico.
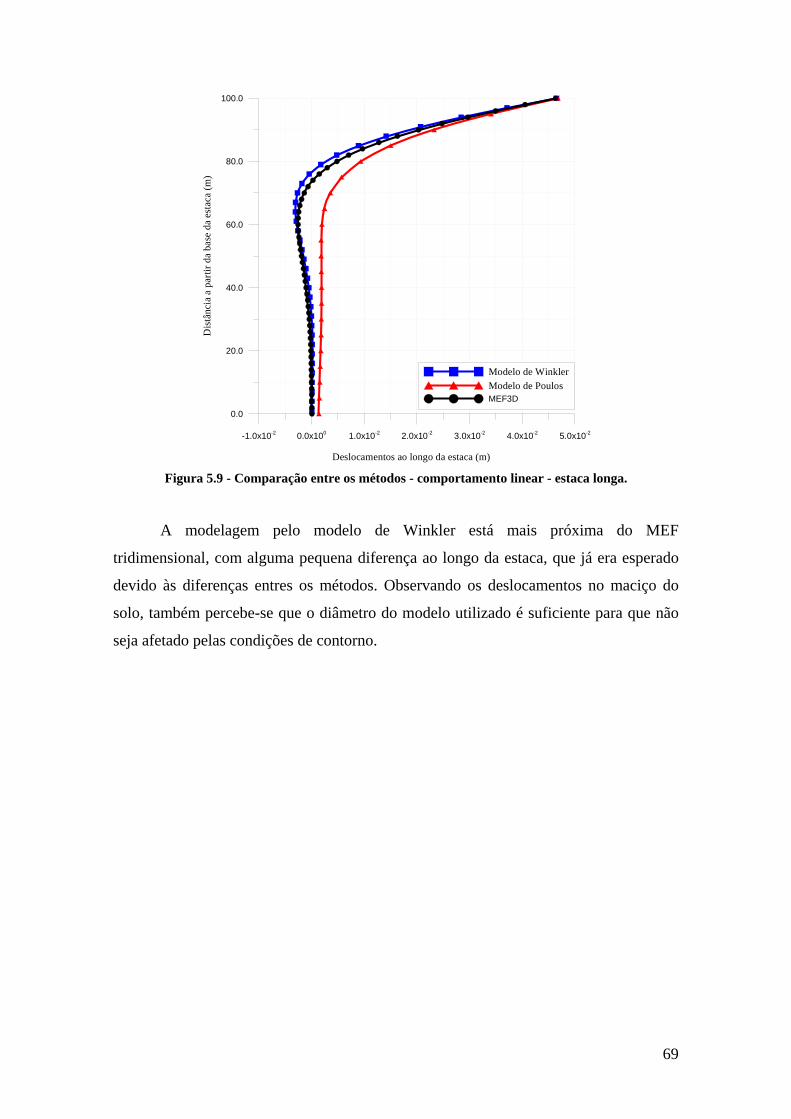
69
-1.0x10-2 0.0x100 1.0x10-2 2.0x10-2 3.0x10-2 4.0x10-2 5.0x10-2
Deslocamentos ao longo da estaca (m)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Modelo de WinklerModelo de PoulosMEF3D
Figura 5.9 - Comparação entre os métodos - comportamento linear - estaca longa.
A modelagem pelo modelo de Winkler está mais próxima do MEF
tridimensional, com alguma pequena diferença ao longo da estaca, que já era esperado
devido às diferenças entres os métodos. Observando os deslocamentos no maciço do
solo, também percebe-se que o diâmetro do modelo utilizado é suficiente para que não
seja afetado pelas condições de contorno.
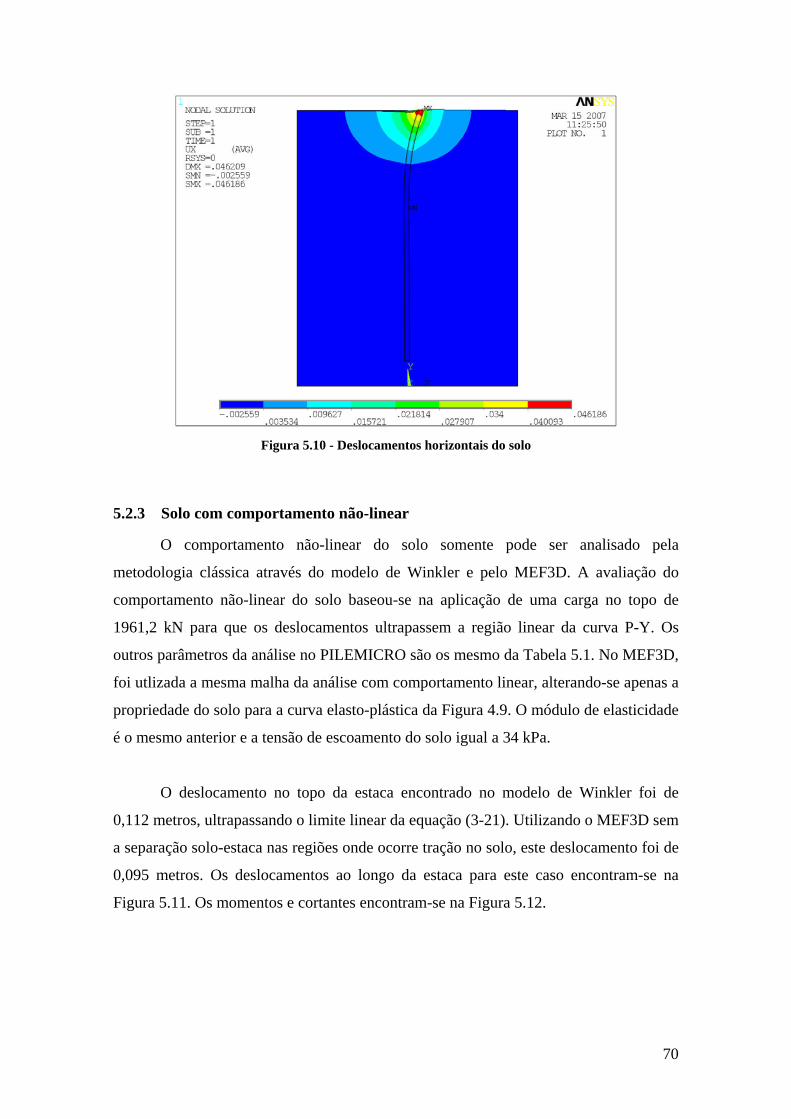
70
Figura 5.10 - Deslocamentos horizontais do solo
5.2.3 Solo com comportamento não-linear
O comportamento não-linear do solo somente pode ser analisado pela
metodologia clássica através do modelo de Winkler e pelo MEF3D. A avaliação do
comportamento não-linear do solo baseou-se na aplicação de uma carga no topo de
1961,2 kN para que os deslocamentos ultrapassem a região linear da curva P-Y. Os
outros parâmetros da análise no PILEMICRO são os mesmo da Tabela 5.1. No MEF3D,
foi utlizada a mesma malha da análise com comportamento linear, alterando-se apenas a
propriedade do solo para a curva elasto-plástica da Figura 4.9. O módulo de elasticidade
é o mesmo anterior e a tensão de escoamento do solo igual a 34 kPa.
O deslocamento no topo da estaca encontrado no modelo de Winkler foi de
0,112 metros, ultrapassando o limite linear da equação (3-21). Utilizando o MEF3D sem
a separação solo-estaca nas regiões onde ocorre tração no solo, este deslocamento foi de
0,095 metros. Os deslocamentos ao longo da estaca para este caso encontram-se na
Figura 5.11. Os momentos e cortantes encontram-se na Figura 5.12.

71
-5.0x10-2 0.0x100 5.0x10-2 1.0x10-1 1.5x10-1
Deslocamentos ao longo da estaca (m)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Modelo de WinklerMEF3D
Figura 5.11 - Comportamento não-linear sem separação solo-estaca - Estaca longa
-12000.0 -9000.0 -6000.0 -3000.0 0.0 3000.0
Momentos ao longo da estaca (kNm)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
-2000.0 -1000.0 0.0 1000.0
Cortantes ao longo da estaca (kN)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Figura 5.12 - Momentos e cortantes ao longo da estaca (solo não linear)
No MEF3D, neste caso estudado, a plastificação do solo ocorre em uma região
próxima ao topo da estaca, como se pode perceber pelo gráfico da Figura 5.13 que
mostra o nível de plastificação. Valores iguais a 1,0 significam plastificação.

72
Figura 5.13 - Nível de plastificação do solo na região do topo da estaca
Apenas com o intuito de verificar o comportamento do modelo, foi realizada
uma análise com o MEF3D utilizando a característica de separação solo-estaca nas
regiões de tracionamento do solo. Como este tipo de análise possui um custo
computacional elevado, a malha utilizada foi diferente das anteriores neste exemplo. A
Figura 5.14 mostra uma visão da malha utilizada nestas análises. As dimensões da
malha são as mesmas utilizadas anteriormente.
Tabela 5.4 - Dados da malha utilizada na análise não linear
Número de nós Número de elementos Num. de graus de liberdade
95.450 92.640 286.350
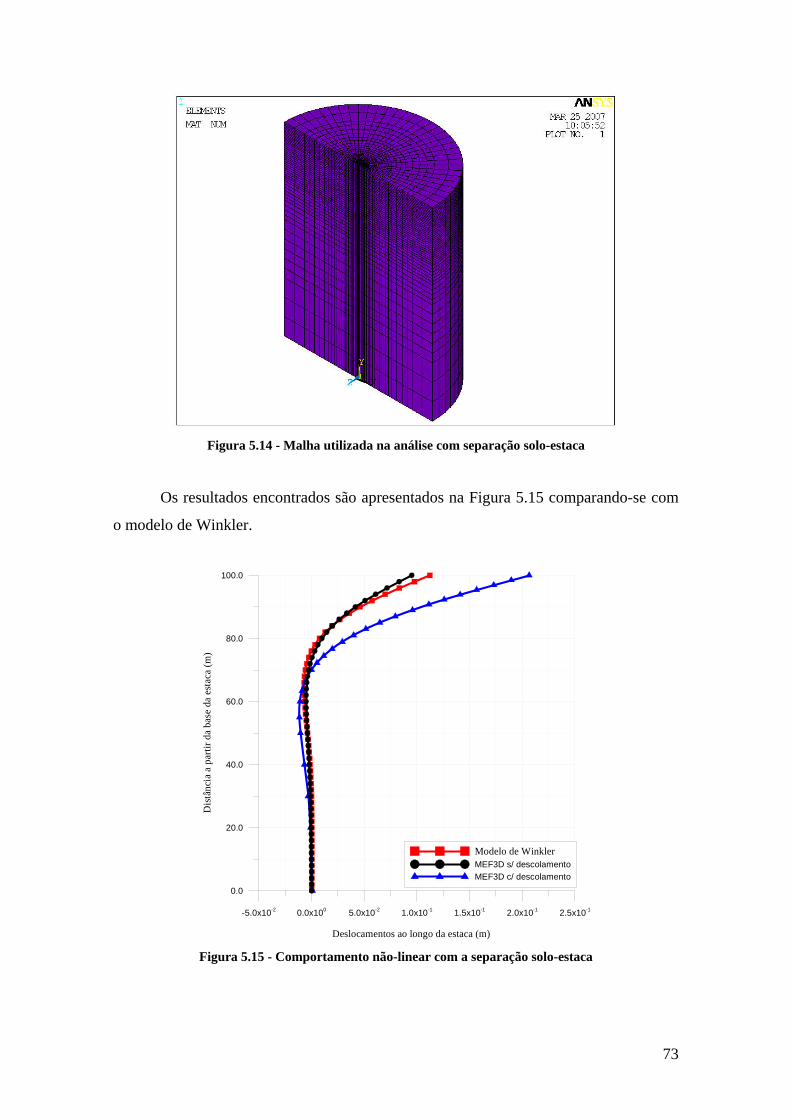
73
Figura 5.14 - Malha utilizada na análise com separação solo-estaca
Os resultados encontrados são apresentados na Figura 5.15 comparando-se com
o modelo de Winkler.
-5.0x10-2 0.0x100 5.0x10-2 1.0x10-1 1.5x10-1 2.0x10-1 2.5x10-1
Deslocamentos ao longo da estaca (m)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Modelo de WinklerMEF3D s/ descolamentoMEF3D c/ descolamento
Figura 5.15 - Comportamento não-linear com a separação solo-estaca
74
A análise com a separação solo-estaca nas regiões onde ocorre o tracionamento
do solo resulta em deslocamentos bem maiores do que o modelo de Winkler. A adoção
de modelos que permitam a separação entre a estaca e o solo deve ser criteriosa,
embasada em ensaios experimentais que comprovem tal comportamento.
5.2.4 Análise do efeito de grupo com solo elástico linear
A análise do comportamento de grupo da estaca estudada neste capítulo foi
realizada para um arranjo composto por duas estacas alinhadas na direção da carga
aplicada. O grupo de estacas foi analisado para os valores da razão s/d (distância entre
as estacas e diâmetro das estacas) iguais a 2, 3 e 10. Todas as propriedades do solo e da
estaca são as mesmas utilizadas anteriormente na estaca isolada. Assim como a estaca
isolada, o topo é livre, permitindo a rotação. A Figura 5.16 mostra o arranjo típico do
estudo deste exemplo.
Figura 5.16 - Vista superior da estaca em grupo afastadas de uma distâcia s
O modelo clássico utilizado foi o descrito no item 3.4.1. Já o MEF3D foi
desenvolvido utilizando-se uma malha com as características da Tabela 5.5, já nas
figuras 5.17 e 5.18 verifica-se o modelo para s/d igual a 3 adotado nas análises. O valor
de Rmax, de acordo com a Figura 4.4 é igual a 36 metros, e a distância entre a base das
estacas e a base do modelo é igual a 10 metros. Assim como a estaca isolada, foi
utilizada a simetria do modelo.
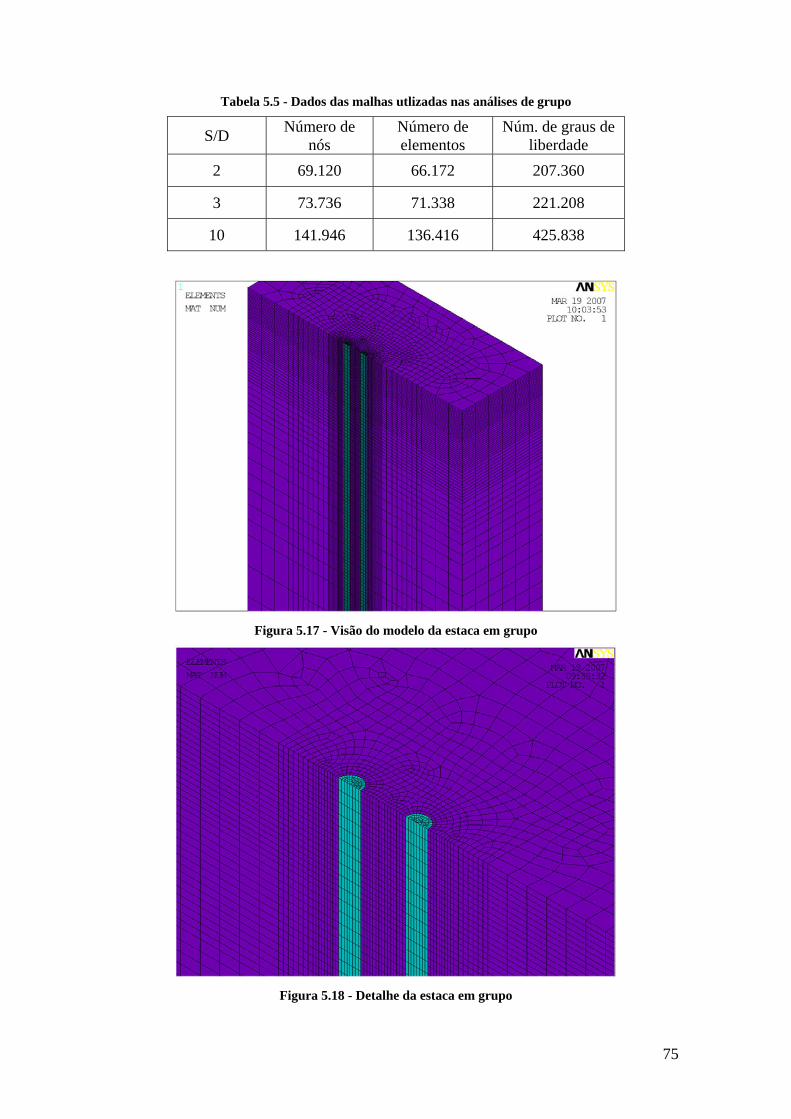
75
Tabela 5.5 - Dados das malhas utlizadas nas análises de grupo
S/D Número de nós
Número de elementos
Núm. de graus de liberdade
2 69.120 66.172 207.360
3 73.736 71.338 221.208
10 141.946 136.416 425.838
Figura 5.17 - Visão do modelo da estaca em grupo
Figura 5.18 - Detalhe da estaca em grupo
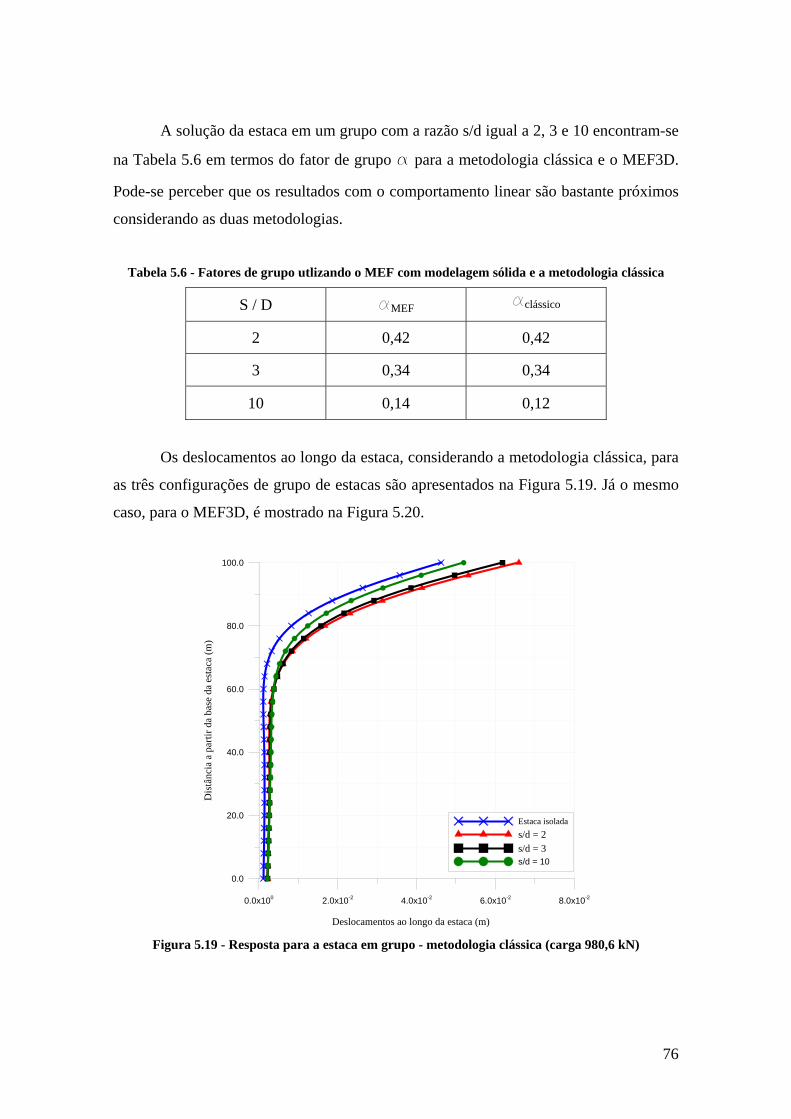
76
A solução da estaca em um grupo com a razão s/d igual a 2, 3 e 10 encontram-se
na Tabela 5.6 em termos do fator de grupo a para a metodologia clássica e o MEF3D.
Pode-se perceber que os resultados com o comportamento linear são bastante próximos
considerando as duas metodologias.
Tabela 5.6 - Fatores de grupo utlizando o MEF com modelagem sólida e a metodologia clássica
S / D aMEF aclássico
2 0,42 0,42
3 0,34 0,34
10 0,14 0,12
Os deslocamentos ao longo da estaca, considerando a metodologia clássica, para
as três configurações de grupo de estacas são apresentados na Figura 5.19. Já o mesmo
caso, para o MEF3D, é mostrado na Figura 5.20.
0.0x100 2.0x10-2 4.0x10-2 6.0x10-2 8.0x10-2
Deslocamentos ao longo da estaca (m)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Estaca isoladas/d = 2s/d = 3s/d = 10
Figura 5.19 - Resposta para a estaca em grupo - metodologia clássica (carga 980,6 kN)
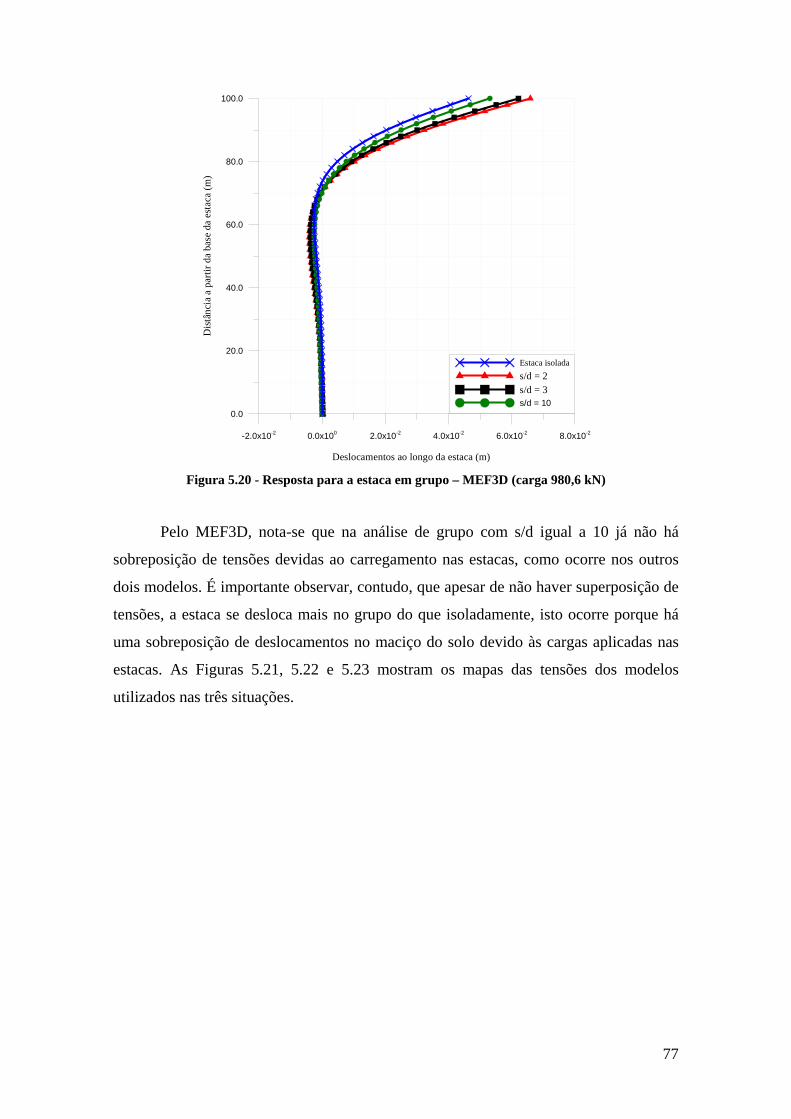
77
-2.0x10-2 0.0x100 2.0x10-2 4.0x10-2 6.0x10-2 8.0x10-2
Deslocamentos ao longo da estaca (m)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Estaca isoladas/d = 2s/d = 3s/d = 10
Figura 5.20 - Resposta para a estaca em grupo – MEF3D (carga 980,6 kN)
Pelo MEF3D, nota-se que na análise de grupo com s/d igual a 10 já não há
sobreposição de tensões devidas ao carregamento nas estacas, como ocorre nos outros
dois modelos. É importante observar, contudo, que apesar de não haver superposição de
tensões, a estaca se desloca mais no grupo do que isoladamente, isto ocorre porque há
uma sobreposição de deslocamentos no maciço do solo devido às cargas aplicadas nas
estacas. As Figuras 5.21, 5.22 e 5.23 mostram os mapas das tensões dos modelos
utilizados nas três situações.

78
Figura 5.21 - Tensões no solo s/d = 2
Figura 5.22 - Tensões no solo s/d = 3

79
Figura 5.23 - Tensões no solo s/d = 10
Estas mesmas configurações foram analisadas considerando a não linearidade do
solo, exatamente como na solução da estaca isolada. Com o intuito de verificar a
influência da separação solo-estaca foram considerados e não esta característica.
Utilizando um modelo sem separação solo estaca, obtém-se a solução da Figura 5.24.
-4.0x10-2 0.0x100 4.0x10-2 8.0x10-2 1.2x10-1 1.6x10-1
Deslocamentos ao longo da estaca (m)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Estaca isoladas/d = 2s/d = 3s/d = 10
Figura 5.24 - Análise do efeito de grupo sem separação solo-estaca

80
Já na Figura 5.25, são apresentados os deslocamentos da estaca com o MEF3D
com separação solo-estaca e na Figura 5.26 os deslocamentos com o método de Focht &
Koch.
-1.0x10-1 0.0x100 1.0x10-1 2.0x10-1 3.0x10-1
Deslocamentos ao longo da estaca (m)
0.0
20.0
40.0
60.0
80.0
100.0D
istâ
ncia
a p
artir
da
base
da
esta
ca (m
)
Estaca isoladas/d = 2s/d = 3s/d = 10
Figura 5.25 - Deslocamentos da estaca em grupo (MEF3D)
-4.0x10-2 0.0x100 4.0x10-2 8.0x10-2 1.2x10-1 1.6x10-1
Deslocamentos ao longo da estaca (m)
0.0
20.0
40.0
60.0
80.0
100.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Isoladas/d = 2s/d = 3s/d = 10
Figura 5.26 - Deslocamentos da estaca em grupo (métodologia clássica)
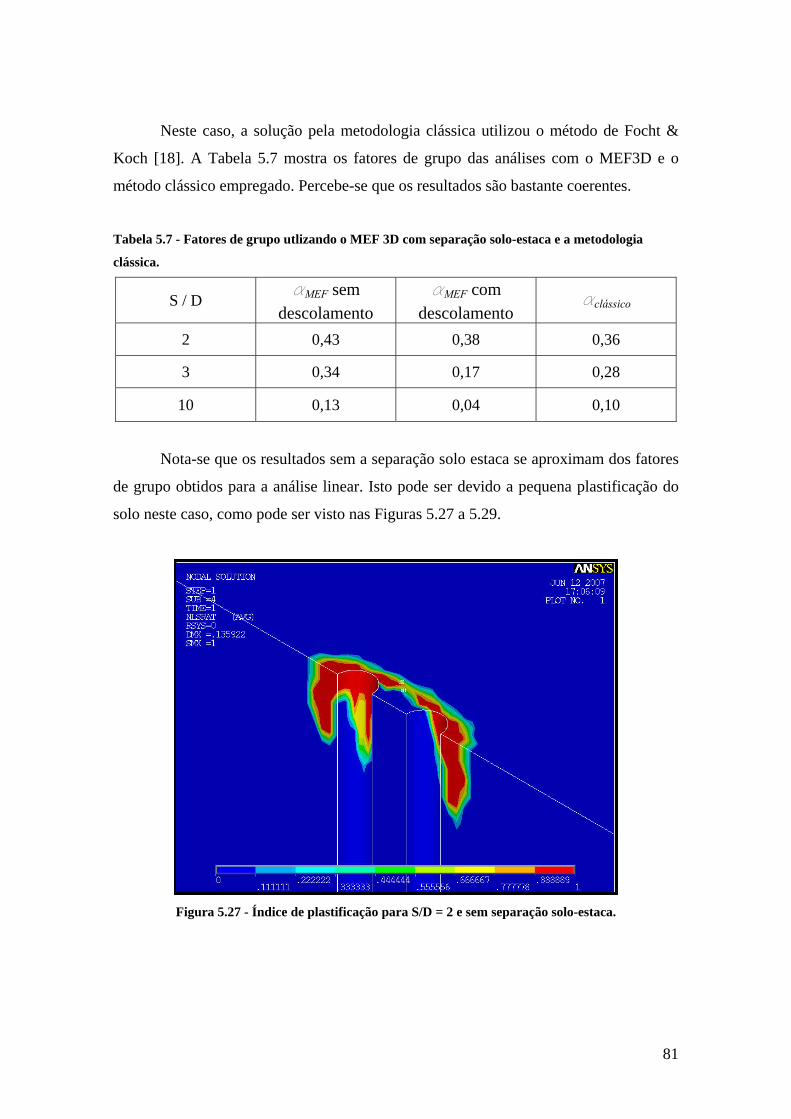
81
Neste caso, a solução pela metodologia clássica utilizou o método de Focht &
Koch [18]. A Tabela 5.7 mostra os fatores de grupo das análises com o MEF3D e o
método clássico empregado. Percebe-se que os resultados são bastante coerentes.
Tabela 5.7 - Fatores de grupo utlizando o MEF 3D com separação solo-estaca e a metodologia
clássica.
S / D aMEF sem
descolamento aMEF com
descolamento aclássico
2 0,43 0,38 0,36
3 0,34 0,17 0,28
10 0,13 0,04 0,10
Nota-se que os resultados sem a separação solo estaca se aproximam dos fatores
de grupo obtidos para a análise linear. Isto pode ser devido a pequena plastificação do
solo neste caso, como pode ser visto nas Figuras 5.27 a 5.29.
Figura 5.27 - Índice de plastificação para S/D = 2 e sem separação solo-estaca.
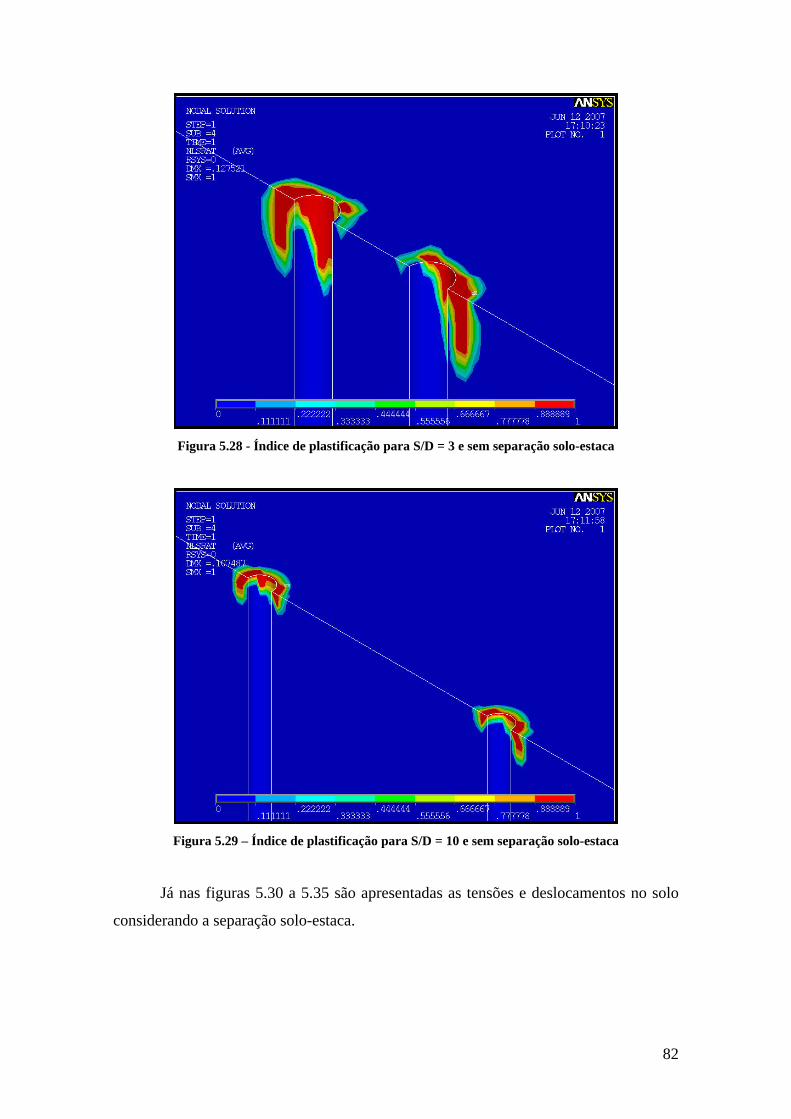
82
Figura 5.28 - Índice de plastificação para S/D = 3 e sem separação solo-estaca
Figura 5.29 – Índice de plastificação para S/D = 10 e sem separação solo-estaca
Já nas figuras 5.30 a 5.35 são apresentadas as tensões e deslocamentos no solo
considerando a separação solo-estaca.

83
Figura 5.30 - Tensões (em kPa) no solo para s/d = 2
Figura 5.31 - Tensões (em kPa) no solo para s/d = 3
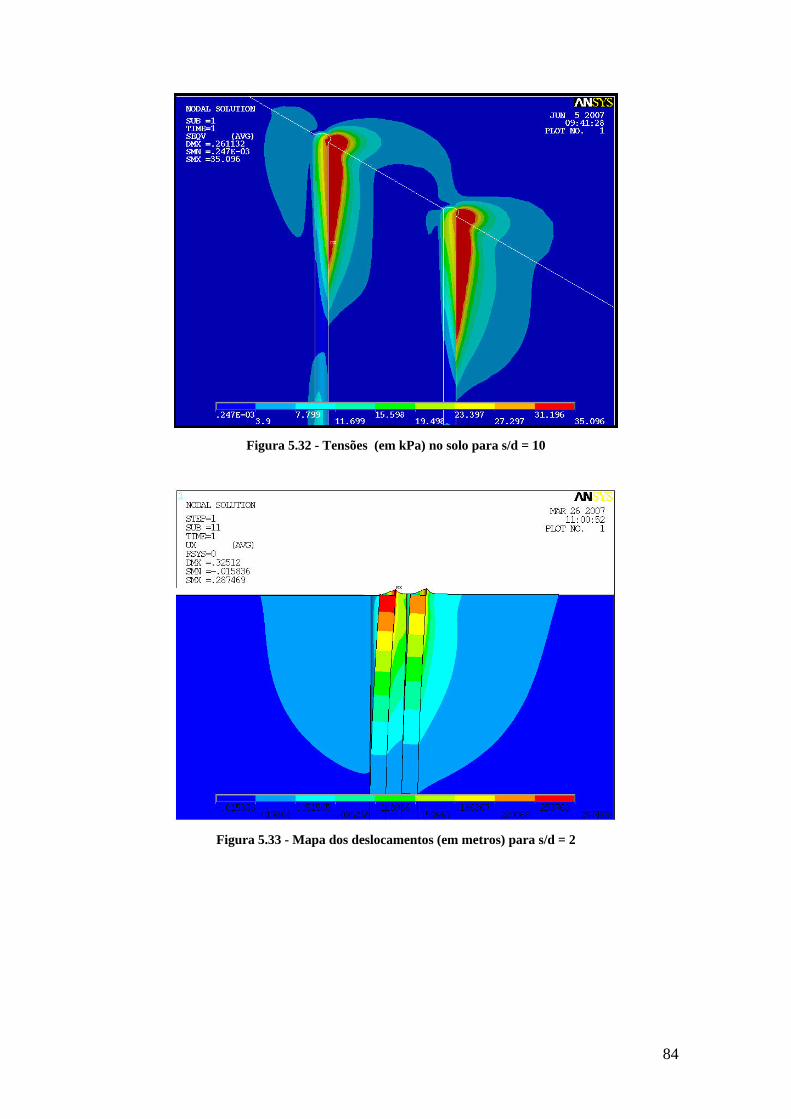
84
Figura 5.32 - Tensões (em kPa) no solo para s/d = 10
Figura 5.33 - Mapa dos deslocamentos (em metros) para s/d = 2

85
Figura 5.34 - Mapa dos deslocamentos (em metros) para s/d = 3
Figura 5.35 - Mapa dos deslocamentos (em metros) para s/d = 10
5.2.5 Análise dos resultados da estaca longa
Neste item, foram apresentados os resultados referentes à analise de uma estaca
longa submetida a uma carga horizontal no topo. Por se tratar de uma estaca longa,
mostrou-se que seu comportamento é dominado pela flexão.

86
A análise do comportamento linear do solo conduziu a resultados satisfatórios
comparando-se o MEF 3D com a metodologia clássica. Apesar das diferentes
formulações, o método dos elementos finitos tridimensional apresentou o mesmo
deslocamento no topo da análise elástica descrita em Poulos [17] para um mesmo
módulo de elasticidade.
A diferença das duas análises foi o fato da análise elástica possuir um
deslocamento na base da estaca, o que não ocorre com o MEF 3D. Isto se deve, como
dito anteriormente à formulação da matriz de flexibilidade do solo, que possui um
decaimento lento da influência dos deslocamentos ao longo da estaca. Ou seja, termos
da matriz de flexibilidade do solo longe da diagonal principal apresentam um valor
ainda considerável. Este comportamento não foi verificado em uma estaca infinitamente
longa, como se deve esperar.
É interessante observar também que a análise de grupo com o comportamento
linear do solo também apresentou grande coerência com a metodologia clássica. Pode-
se observar também que os deslocamentos obtidos para as duas estacas do grupo eram
idênticos.
A análise do comportamento não linear físico do solo apresentou um resultado
próximo do modelo de Winkler com molas P-Y. O modelo de Winkler foi 15,4 % maior
do que o MEF tridimensional. O resultado idêntico não é esperado neste caso, já que o
método de análise nos dois casos são diferentes, sendo o MEF 3D muito mais complexo
do que o modelo de Winkler.
Já no caso onde é considerada a separação solo-estaca, as diferenças são bem
maiores. Este caso é apenas ilustrativo já que o deslocamento obtido foi superior a 20
cm. A conclusão é que esta metodologia de análise deve ser utilizada apenas se for
embasada por ensaios experimentais que comprovem tal comportamento de separação
solo-estaca.

87
A hipótese de tracionamento do solo deve ser revista com cuidado, já que a
consideração ou não desta capacidade conduz a diferentes distribuições de tensões no
maciço do solo como pode ser visto na Figura 5.36.
(a) sem separação solo-estaca (b) com separação solo-estaca Figura 5.36 - Comparação das tensões nos modelos com e sem separação solo estaca
A análise do efeito de grupo de estacas considerando a separação solo-estaca
também apresentou grandes deslocamentos, mas percebe-se que a influência de uma
estaca sobre a outra é menor do que a análise linear, como visto na Tabela 5.7. Na
análise do efeito de grupo com o solo não linear, os resultado com a separação solo-
estaca apresentaram maior concordância com a metodologia clássica, isto é devido à
maior plastificação que ocorre neste caso quando comparado à situação sem separação
solo-estaca.
5.3 Solução clássica para uma estaca grauteada
Neste item será apresentado um exemplo de estaca escavada grauteada utilizada
na fundação de um riser tipo torre, também conhecido como RHAS. Na Figura 5.37,
apresenta-se um exemplo deste tipo de riser utilizado no campo de Girassol em Angola.
Maiores informações sobre este tipo de riser podem ser obtidas nos trabalhos
[4,14,15,16]. Já na Figura 5.38, é apresentada a alternativa da PETROBRAS a ser
utilizada na plataforma semi-submersível P-52 como riser de exportação.

88
Figura 5.37 - Riser híbrido auto-sustentável
Figura 5.38 - Esquema do RHAS empregado pela PETROBRAS [4]
A modelagem deste tipo de estaca depende da cimentação em torno da fundação.
Em alguns casos, esta cimentação não chega até o topo da estaca, fazendo com que
exista um vazio entre a estaca e o solo, chamado “gap”. Nesta modelagem, também é
considerada uma região próximo à superfície do solo onde a resistência é desprezada.
A estaca analisada possui 130 metros de comprimento, com diâmetro externo
igual a 0,91 metros (36 pol) e espessura de parede do tubo igual a 0,05 metros (2 pol). O
material da estaca é um aço com módulo de elasticidade igual a 2,05 x 108 kPa. Um
esquema representativo da estaca e das propriedades do solo encontra-se na Figura 5.39.
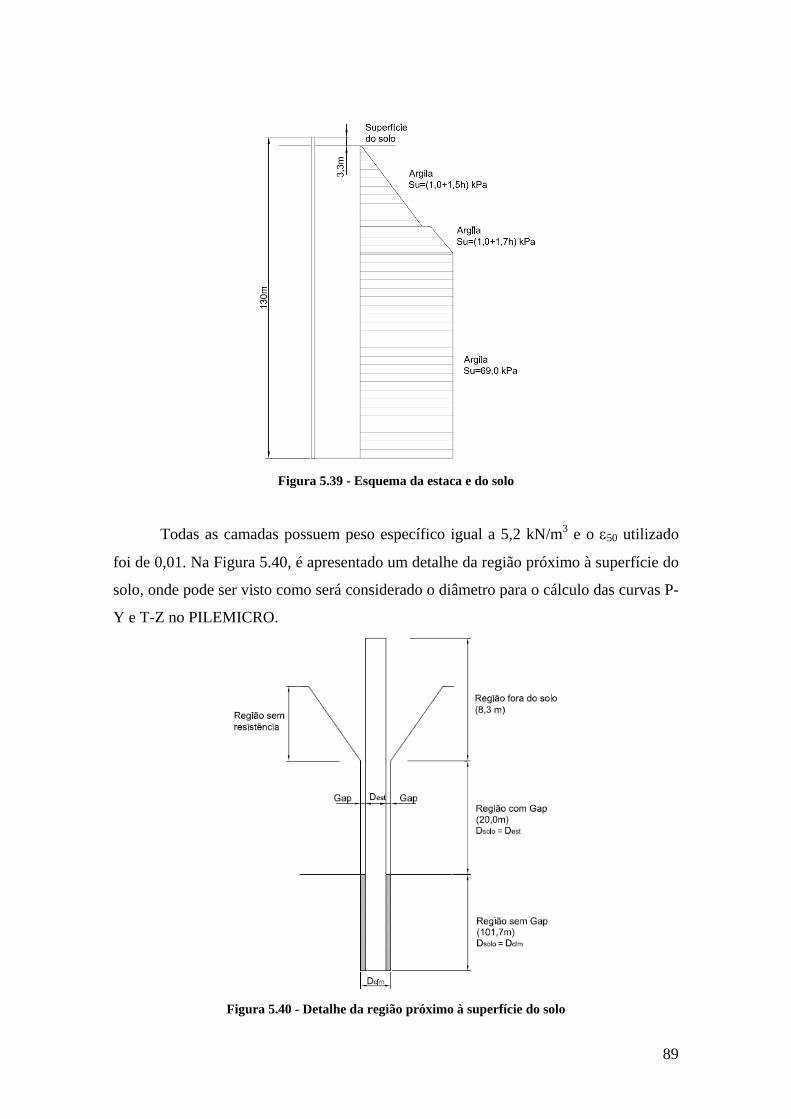
89
Figura 5.39 - Esquema da estaca e do solo
Todas as camadas possuem peso específico igual a 5,2 kN/m3 e o ε50 utilizado
foi de 0,01. Na Figura 5.40, é apresentado um detalhe da região próximo à superfície do
solo, onde pode ser visto como será considerado o diâmetro para o cálculo das curvas P-
Y e T-Z no PILEMICRO.
Figura 5.40 - Detalhe da região próximo à superfície do solo
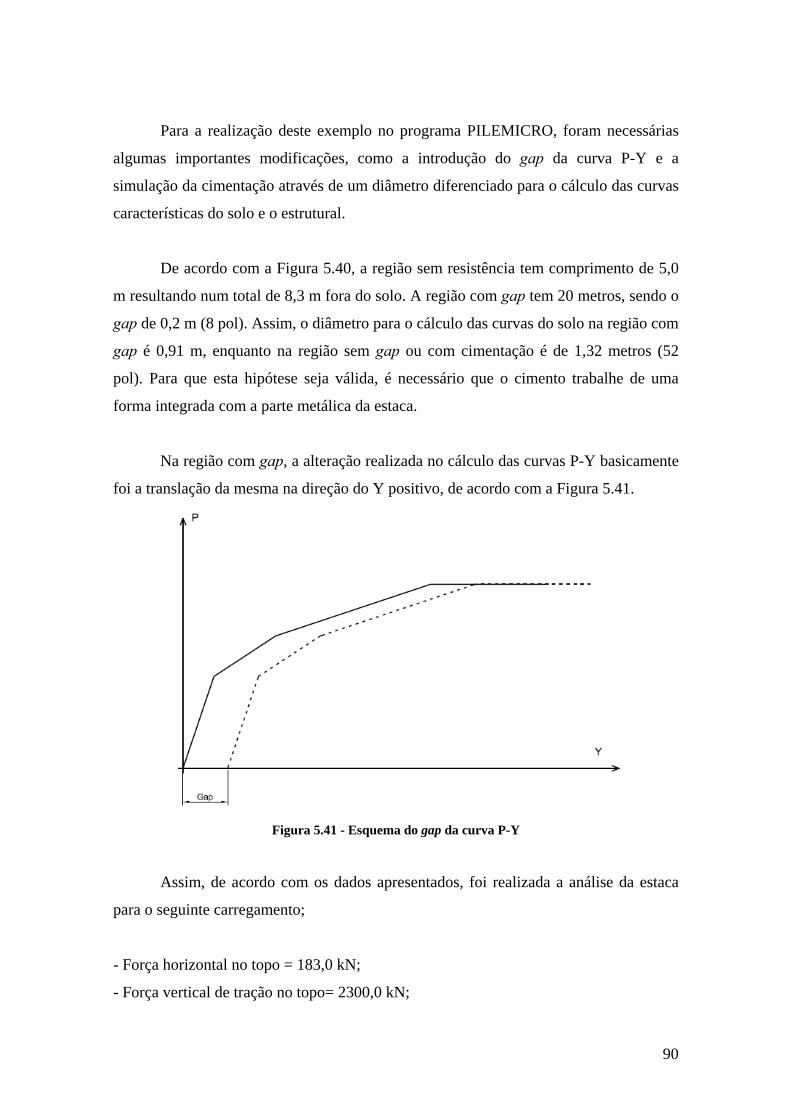
90
Para a realização deste exemplo no programa PILEMICRO, foram necessárias
algumas importantes modificações, como a introdução do gap da curva P-Y e a
simulação da cimentação através de um diâmetro diferenciado para o cálculo das curvas
características do solo e o estrutural.
De acordo com a Figura 5.40, a região sem resistência tem comprimento de 5,0
m resultando num total de 8,3 m fora do solo. A região com gap tem 20 metros, sendo o
gap de 0,2 m (8 pol). Assim, o diâmetro para o cálculo das curvas do solo na região com
gap é 0,91 m, enquanto na região sem gap ou com cimentação é de 1,32 metros (52
pol). Para que esta hipótese seja válida, é necessário que o cimento trabalhe de uma
forma integrada com a parte metálica da estaca.
Na região com gap, a alteração realizada no cálculo das curvas P-Y basicamente
foi a translação da mesma na direção do Y positivo, de acordo com a Figura 5.41.
Figura 5.41 - Esquema do gap da curva P-Y
Assim, de acordo com os dados apresentados, foi realizada a análise da estaca
para o seguinte carregamento;
- Força horizontal no topo = 183,0 kN;
- Força vertical de tração no topo= 2300,0 kN;

91
- Momento fletor aplicado no topo = 3886,0 kNm.
- Peso próprio, com o peso específico igual a 77 kN/m3.
A seguir, serão apresentados os resultados referentes à análise da estaca,
considerando e não considerando a não linearidade geométrica conforme apresentado no
item 3.2.
5.3.1 Resultados obtidos
Foram realizadas duas análises distintas uma considerando a não linearidade
geométrica e outra desprezando esta hipótese. Esta análise foi realizada desta forma
para verificar a influência deste comportamento, já que neste caso, a carga vertical
aplicada é elevada. Na Figura 5.42, são apresentados os deslocamentos horizontais e
axiais nos dois casos.
-0.20 0.00 0.20 0.40 0.60 0.80 1.00 1.20
Desl. horizontais ao longo da estaca (m)
0.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
80.0
90.0
100.0
110.0
120.0
130.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Rigidez não linear geom.Rigidez linear
0.00x100 2.00x10-3 4.00x10-3
Desl. axiais ao longo da estaca (m)
0.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
80.0
90.0
100.0
110.0
120.0
130.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Rigidez não linear geom.Rigidez linear
Figura 5.42 - Deslocamentos ao longo da estaca (Rig. linear vs. Rig. não linear geométrica)
O deslocamento horizontal no topo para o modelo com rigidez não linear
geométrica foi de 0,90 metros enquanto no outro modelo, sem consideração da não
linearidade, este resultado foi de 1,12 metros. Isto significa um aumento de 20 % no

92
deslocamento, mostrando que o aumento de rigidez provocado pela carga de tração no
topo é significativa. Os resultados referentes ao momento fletor, o esforço cortante e o
esforço axial ao longo da estaca encontra-se na Figura 5.43.
-10000.0 -5000.0 0.0 5000.0
Momentos ao longo da estaca (kNm)
0.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
80.0
90.0
100.0
110.0
120.0
130.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Rigidez não linear geom.Rigidez linear
-500.0 -250.0 0.0 250.0 500.0
Cortantes ao longo da estaca (kN)
0.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
80.0
90.0
100.0
110.0
120.0
130.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
-1000.0 0.0 1000.0 2000.0 3000.0
Esforço axial ao longo da estaca (kN)
0.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
80.0
90.0
100.0
110.0
120.0
130.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Figura 5.43 - Esforços na estaca para a rigidez linear e gemétrica
Nota-se pela variação de cortante entre 112 e 120 metros que neste trecho ocorre
contato com o solo, ou seja, o deslocamento é maior do que o gap. Já entre 100 e 110
metros os deslocamentos não ultrapassam o gap, não havendo reação do solo e
consequentemente variação do cortante.
5.3.2 Análise dos resultados
Este item objetivava a análise de uma estaca escavada com a presença de gap
entre a estaca e o solo. A implementação da translação da curva P-Y no programa
PILEMICRO, além da introdução da matriz de rigidez não linear geométrica obtida em
Benjamin [25] permitiu esta análise.
Os resultados obtidos com estas análises determinaram grandes deslocamentos
no topo da estaca, podendo-se concluir que a não consideração da não linearidade
geométrica conduz a resultados ainda piores. Isto demonstra a importância desta
característica para análise estruturais das estacas. Além disso, o gap entre a estaca e o
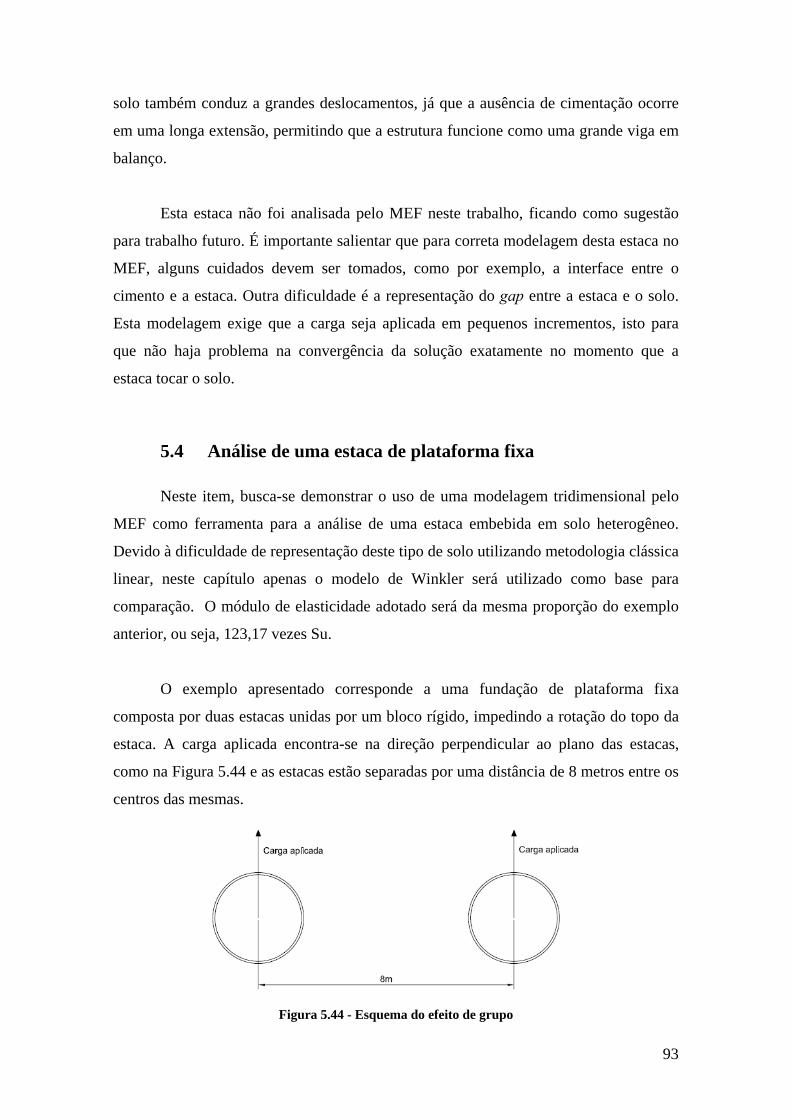
93
solo também conduz a grandes deslocamentos, já que a ausência de cimentação ocorre
em uma longa extensão, permitindo que a estrutura funcione como uma grande viga em
balanço.
Esta estaca não foi analisada pelo MEF neste trabalho, ficando como sugestão
para trabalho futuro. É importante salientar que para correta modelagem desta estaca no
MEF, alguns cuidados devem ser tomados, como por exemplo, a interface entre o
cimento e a estaca. Outra dificuldade é a representação do gap entre a estaca e o solo.
Esta modelagem exige que a carga seja aplicada em pequenos incrementos, isto para
que não haja problema na convergência da solução exatamente no momento que a
estaca tocar o solo.
5.4 Análise de uma estaca de plataforma fixa
Neste item, busca-se demonstrar o uso de uma modelagem tridimensional pelo
MEF como ferramenta para a análise de uma estaca embebida em solo heterogêneo.
Devido à dificuldade de representação deste tipo de solo utilizando metodologia clássica
linear, neste capítulo apenas o modelo de Winkler será utilizado como base para
comparação. O módulo de elasticidade adotado será da mesma proporção do exemplo
anterior, ou seja, 123,17 vezes Su.
O exemplo apresentado corresponde a uma fundação de plataforma fixa
composta por duas estacas unidas por um bloco rígido, impedindo a rotação do topo da
estaca. A carga aplicada encontra-se na direção perpendicular ao plano das estacas,
como na Figura 5.44 e as estacas estão separadas por uma distância de 8 metros entre os
centros das mesmas.
Figura 5.44 - Esquema do efeito de grupo

94
A estaca possui 120 metros de comprimento com um diâmetro de 2,59 metros
(102 pol.) e espessura de parede igual a 0,05 (2 pol.). O aço utilizado na estaca tem
módulo de elasticidade igual a 2.0594 x 108 kN/m2. Os dados da argila encontram-se na
Tabela 5.8 e na Figura 5.45.
Tabela 5.8 - Dados do solo (da superfície para o fundo)
Camada Comprimento (m)
Resistência não drenada no início da camada (kPa)
Resistência não drenada no fim
da camada (kPa)e50
1 4 0,5 10 0,01 2 8 10 50 0,01 3 42 50 100 0,01 4 40 100 300 0,01 5 26 250 250 0,01
Figura 5.45 - Esquema do exemplo de estaca para plataforma fixa
O carregamento corresponde a uma força vertical de compressão da estaca de
54750 kN e uma carga horizontal de 4967.5 kN. O modelo de Winkler no PILEMICRO
teve o nó do topo com a rotação restringida para simular o bloco rígido que une as duas
estacas, foram utilizados 120 elementos de 1 metro cada um.

95
O modelo em MEF3D utilizado nesta análise foi considerado sem a separação
solo-estaca e como utilizado anteriormente, o módulo de elasticidade do solo é 127,13
vezes a coesão do solo. Neste caso, a estaca foi modelada com a correta espessura das
paredes. A Figura 5.46e a Tabela 5.9 mostram as características da malha utilizada. O
raio do modelo é igual a 36 metros e a distância entre a base da estaca e a base do
modelo é igual a 10 metros. Como o problema é simétrico, foi simulado apenas metade
do modelo.
Figura 5.46 - Modelo em MEF 3D da estaca e do solo
Tabela 5.9 - Dados da malha utilizada no exemplo de estaca para plataforma fixa
Número de nós Número de elementos
Num. de graus de liberdade
56.341 53.927 169.023
Para que o comportamento da estaca seja similar ao considerado pelo modelo de
Winkler, o topo da estaca foi modelado através de um pórtico rígido onde o nó central
do mesmo teve a rotação restringida. Assim, a carga foi aplicada neste nó central do
pórtico. Para que não haja grande deformação no topo da estaca na conexão entre o
pórtico e o tubo da mesma, o topo foi modelado totalmente fechado. Estas
características podem ser observadas na Figura 5.47.

96
Figura 5.47 - Detalhe do topo da estaca (azul) e o pórtico onde a carga foi aplicada (verde)
O pórtico do topo da estaca tem rigidez flexional EI igual a 2,059 x 108 kN.m4,
já a rigidez axial EA é igual a 2,059 x 108 kN. Com esta malha, os deslocamentos
horizontais encontrados são apresentados na Figura 5.48 comparando-se com o modelo
de Winkler.
-5.0x10-2 0.0x100 5.0x10-2 1.0x10-1 1.5x10-1
Deslocamentos ao longo da estaca (m)
0.0
40.0
80.0
120.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Modelo de WinklerMEF3D
Figura 5.48 - Comparação entre o modelo de Winkler e o MEF 3D

97
Os resultados se mostraram bastante compatíveis nas duas metodologias, sendo
o deslocamento no topo pelo modelo de Winkler 5,8% maior do que o MEF 3D. O
deslocamento horizontal no topo foi de 9,42 cm e o deslocamento vertical de 9,63 cm.
Já no modelo de Winkler, estes valores foram de 10,0 cm e 4,4 cm mostrando que as
duas metodologias não se equivalem no comportamento axial. Isto ocorre porque, no
caso do modelo de Winkler adotado, as equações da norma API-RP-2A que determinam
as curvas T-Z do solo levam em consideração o atrito lateral estaca-solo, ao contrário da
análise aqui realizada do MEF3D.
Na Figura 5.49, observa-se o gráfico das tensões no topo da estaca. A média dos
valores de tensões obtida logo abaixo do enrijecedor do topo é de 333,14 MPa. Os
momentos fletores e os cortantes ao longo da estaca encontram-se na Figura 5.50. O
momento no topo encontrado foi de 49419.33 kNm, somado à carga axial aplicada a
tensão resultante é de 336.7 MPa, valor muito próximo do obtido com o MEF3D.
Figura 5.49 - Tensões no topo da estaca
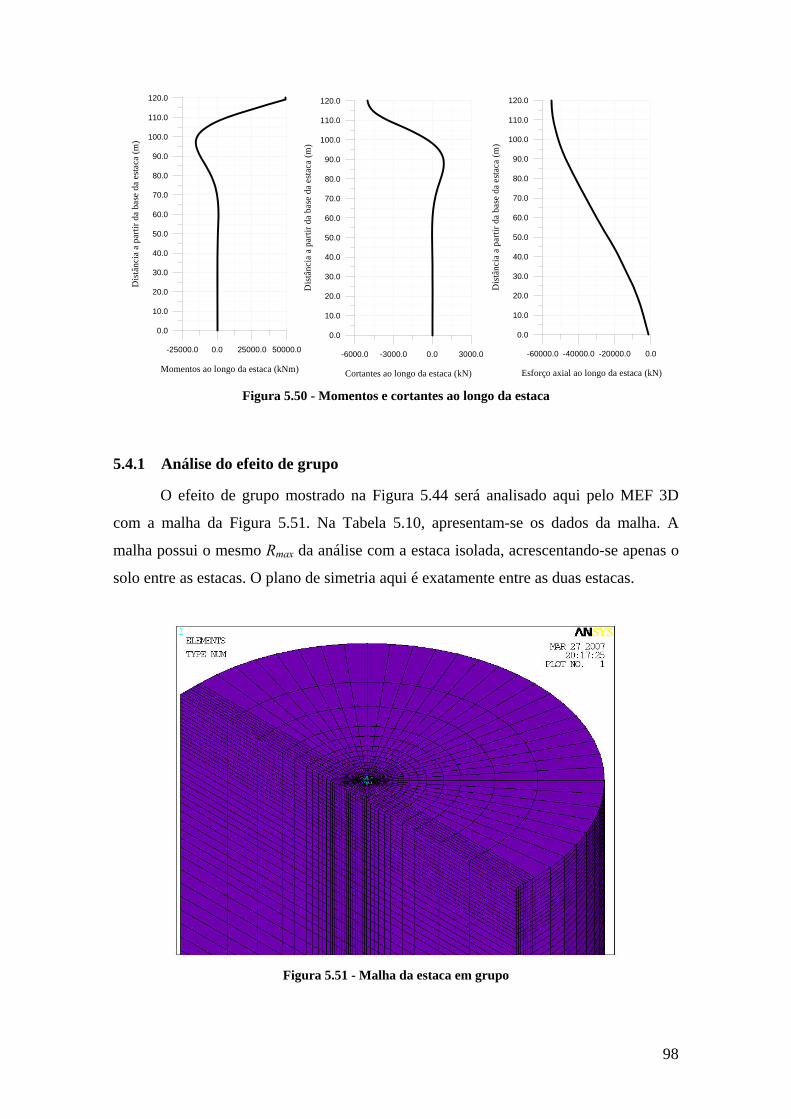
98
-25000.0 0.0 25000.0 50000.0
Momentos ao longo da estaca (kNm)
0.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
80.0
90.0
100.0
110.0
120.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
-6000.0 -3000.0 0.0 3000.0
Cortantes ao longo da estaca (kN)
0.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
80.0
90.0
100.0
110.0
120.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
-60000.0 -40000.0 -20000.0 0.0
Esforço axial ao longo da estaca (kN)
0.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
80.0
90.0
100.0
110.0
120.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Figura 5.50 - Momentos e cortantes ao longo da estaca
5.4.1 Análise do efeito de grupo
O efeito de grupo mostrado na Figura 5.44 será analisado aqui pelo MEF 3D
com a malha da Figura 5.51. Na Tabela 5.10, apresentam-se os dados da malha. A
malha possui o mesmo Rmax da análise com a estaca isolada, acrescentando-se apenas o
solo entre as estacas. O plano de simetria aqui é exatamente entre as duas estacas.
Figura 5.51 - Malha da estaca em grupo
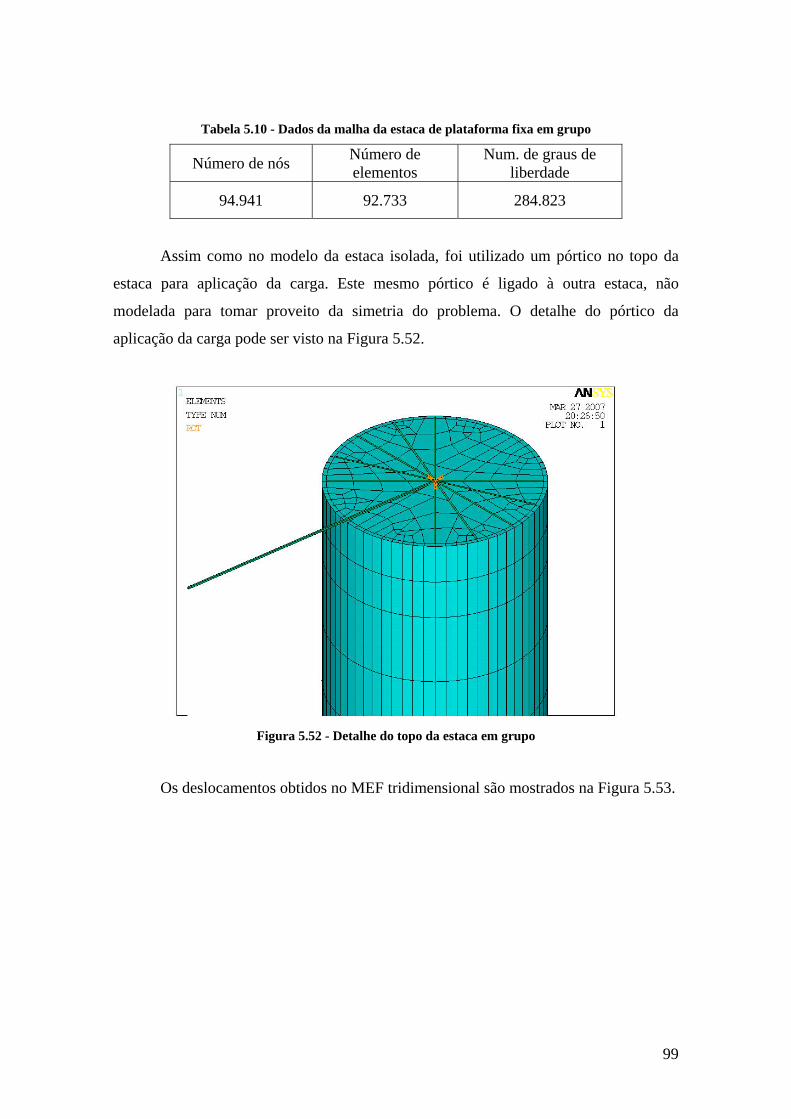
99
Tabela 5.10 - Dados da malha da estaca de plataforma fixa em grupo
Número de nós Número de elementos
Num. de graus de liberdade
94.941 92.733 284.823
Assim como no modelo da estaca isolada, foi utilizado um pórtico no topo da
estaca para aplicação da carga. Este mesmo pórtico é ligado à outra estaca, não
modelada para tomar proveito da simetria do problema. O detalhe do pórtico da
aplicação da carga pode ser visto na Figura 5.52.
Figura 5.52 - Detalhe do topo da estaca em grupo
Os deslocamentos obtidos no MEF tridimensional são mostrados na Figura 5.53.
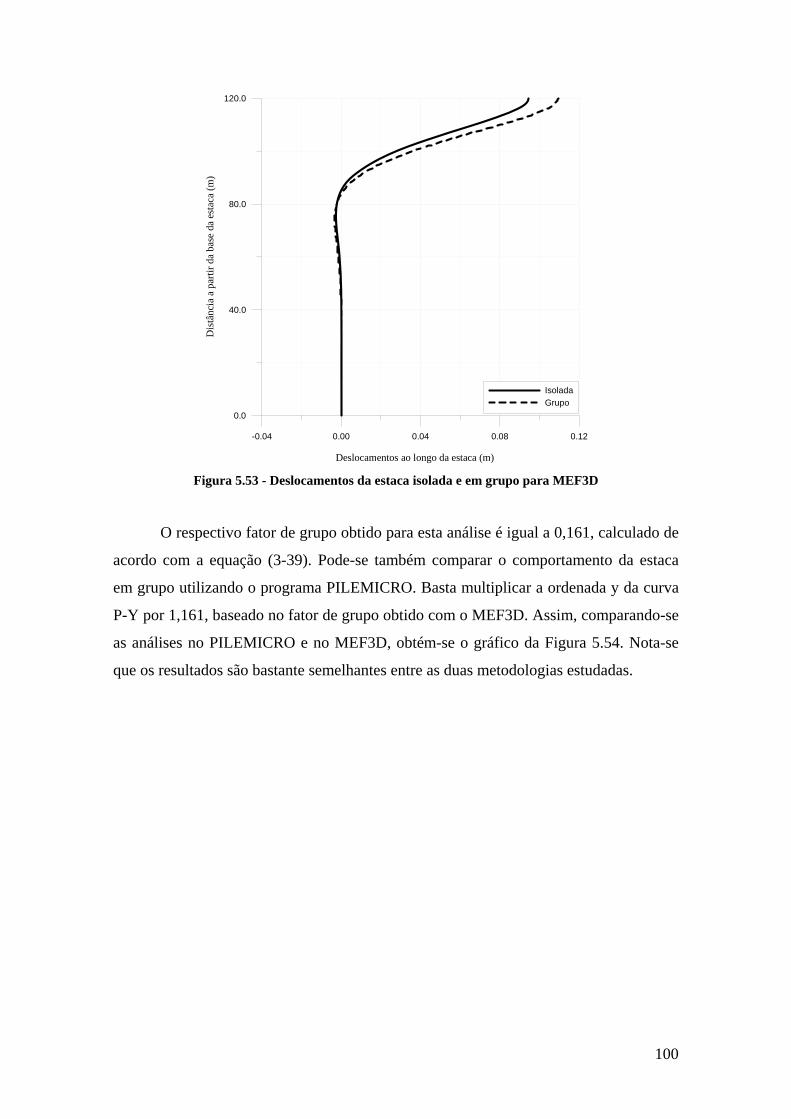
100
-0.04 0.00 0.04 0.08 0.12
Deslocamentos ao longo da estaca (m)
0.0
40.0
80.0
120.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
IsoladaGrupo
Figura 5.53 - Deslocamentos da estaca isolada e em grupo para MEF3D
O respectivo fator de grupo obtido para esta análise é igual a 0,161, calculado de
acordo com a equação (3-39). Pode-se também comparar o comportamento da estaca
em grupo utilizando o programa PILEMICRO. Basta multiplicar a ordenada y da curva
P-Y por 1,161, baseado no fator de grupo obtido com o MEF3D. Assim, comparando-se
as análises no PILEMICRO e no MEF3D, obtém-se o gráfico da Figura 5.54. Nota-se
que os resultados são bastante semelhantes entre as duas metodologias estudadas.
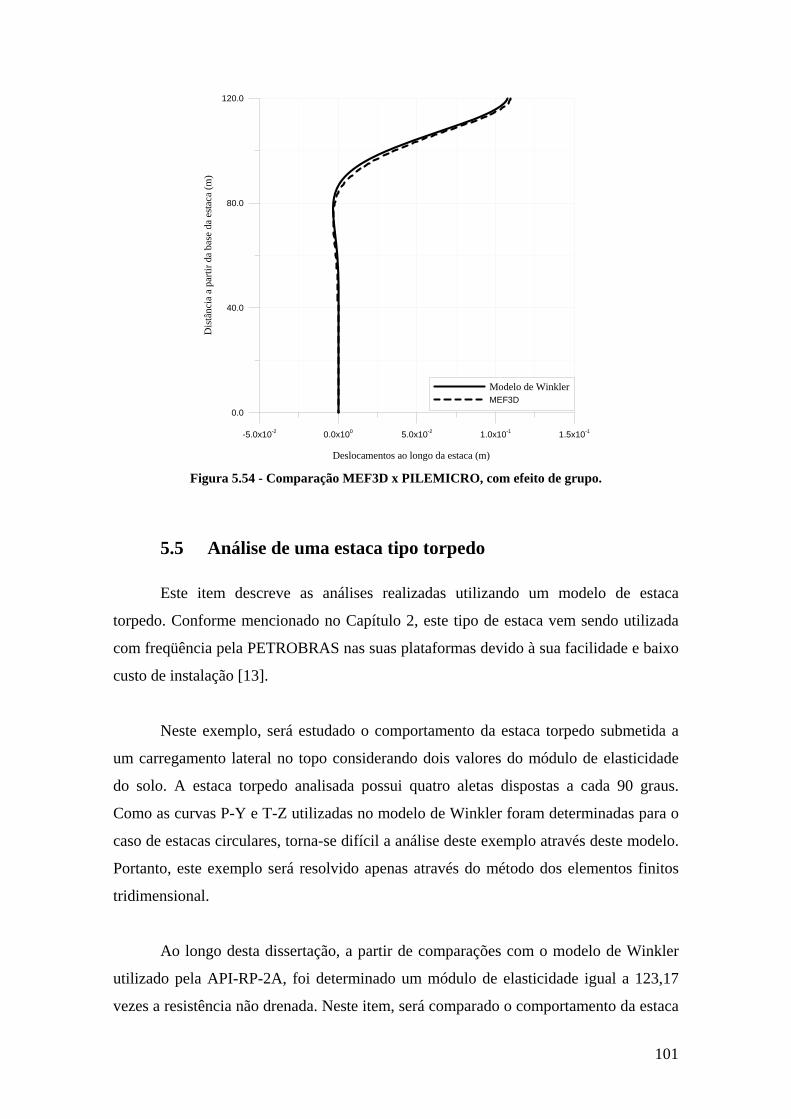
101
-5.0x10-2 0.0x100 5.0x10-2 1.0x10-1 1.5x10-1
Deslocamentos ao longo da estaca (m)
0.0
40.0
80.0
120.0
Dis
tânc
ia a
par
tir d
a ba
se d
a es
taca
(m)
Modelo de WinklerMEF3D
Figura 5.54 - Comparação MEF3D x PILEMICRO, com efeito de grupo.
5.5 Análise de uma estaca tipo torpedo
Este item descreve as análises realizadas utilizando um modelo de estaca
torpedo. Conforme mencionado no Capítulo 2, este tipo de estaca vem sendo utilizada
com freqüência pela PETROBRAS nas suas plataformas devido à sua facilidade e baixo
custo de instalação [13].
Neste exemplo, será estudado o comportamento da estaca torpedo submetida a
um carregamento lateral no topo considerando dois valores do módulo de elasticidade
do solo. A estaca torpedo analisada possui quatro aletas dispostas a cada 90 graus.
Como as curvas P-Y e T-Z utilizadas no modelo de Winkler foram determinadas para o
caso de estacas circulares, torna-se difícil a análise deste exemplo através deste modelo.
Portanto, este exemplo será resolvido apenas através do método dos elementos finitos
tridimensional.
Ao longo desta dissertação, a partir de comparações com o modelo de Winkler
utilizado pela API-RP-2A, foi determinado um módulo de elasticidade igual a 123,17
vezes a resistência não drenada. Neste item, será comparado o comportamento da estaca

102
torpedo quando imersa nestes dois tipos de solos argilosos diferentes. Para isto, além do
valor já utilizado nos outros exemplos ao longo da dissertação, será adotado um valor
maior, igual a 550,0 vezes a resistência não drenada. A direção da carga horizontal
aplicada é a 45 graus com o plano das aletas, conforme Figura 5.55.
Figura 5.55 - Direção da aplicação da carga a 45 graus.
A estaca modelada possui 14,58 metros de comprimento e diâmetro de 1,07
metros. As Figuras 5.56 e 5.57 mostram as dimensões da estaca torpedo modelada. O
módulo de elasticidade da estaca adotado nas análises é igual a 2,07 x 108 kPa.
Figura 5.56 - Estaca torpedo modelada.
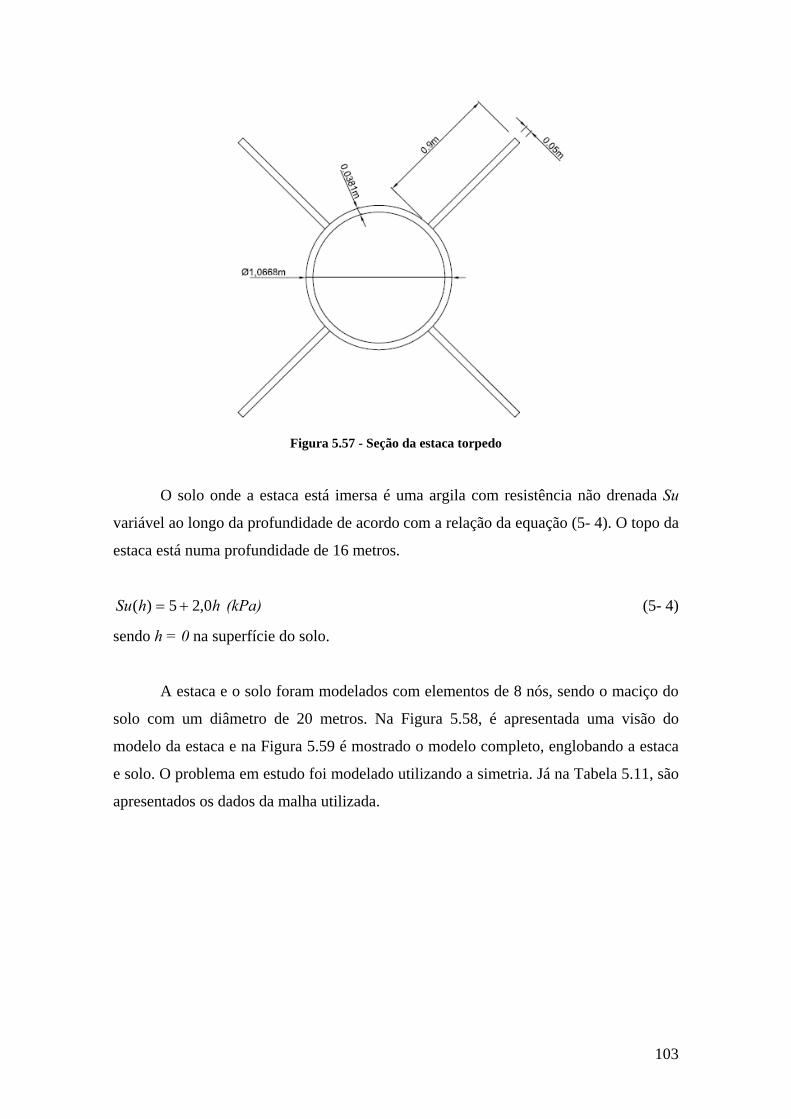
103
Figura 5.57 - Seção da estaca torpedo
O solo onde a estaca está imersa é uma argila com resistência não drenada Su
variável ao longo da profundidade de acordo com a relação da equação (5- 4). O topo da
estaca está numa profundidade de 16 metros.
hhSu 0,25)( += (kPa) (5- 4)
sendo h = 0 na superfície do solo.
A estaca e o solo foram modelados com elementos de 8 nós, sendo o maciço do
solo com um diâmetro de 20 metros. Na Figura 5.58, é apresentada uma visão do
modelo da estaca e na Figura 5.59 é mostrado o modelo completo, englobando a estaca
e solo. O problema em estudo foi modelado utilizando a simetria. Já na Tabela 5.11, são
apresentados os dados da malha utilizada.
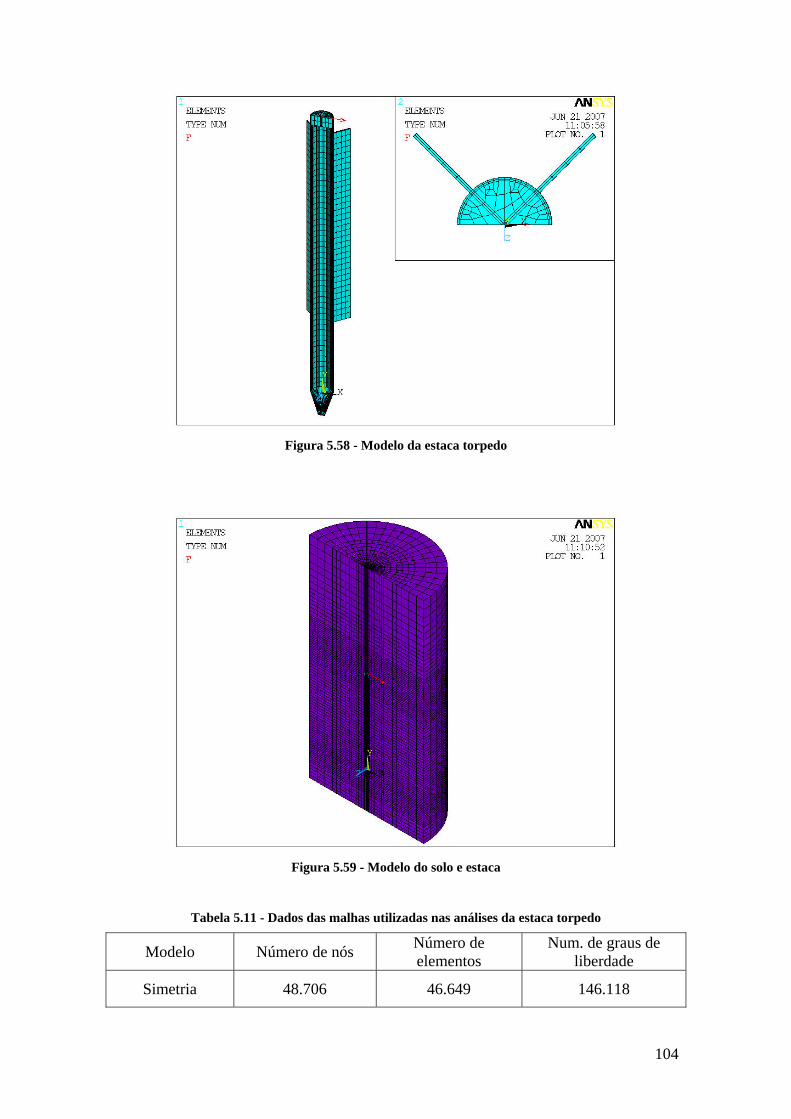
104
Figura 5.58 - Modelo da estaca torpedo
Figura 5.59 - Modelo do solo e estaca
Tabela 5.11 - Dados das malhas utilizadas nas análises da estaca torpedo
Modelo Número de nós Número de elementos
Num. de graus de liberdade
Simetria 48.706 46.649 146.118

105
No modelo estudado, a carga aplicada no topo foi variável até a não
convergência do programa. E a seguir, na Figura 5.60 é mostrado o diagrama de carga
vs. deslocamento no topo da estaca para os dois casos de módulo de elasticidade do
solo.
0.00 0.05 0.10 0.15 0.20 0.25
Deslocamentos no topo da estaca (m)
0.0
1000.0
2000.0
3000.0
4000.0
5000.0
6000.0
7000.0
8000.0
9000.0
Car
ga a
plic
ada
(kN
)
Es=550,0 x SuEs=123.17 x Su
Figura 5.60 - Diagrama de deslocamento no topo da estaca
Os resultados demonstram a importância da calibração do módulo de
elasticidade do solo para um caso de estaca com seção não circular como é a estaca
torpedo. O módulo de elasticidade do solo de acordo com a literatura [44] possui uma
faixa de variação muito grande, resultando numa incerteza na utilização deste valor.
Este estudo mostra a importância de realização de ensaios experimentais com a
finalidade de obtenção de parâmetros corretos para uma análise geotécnica e estruturas
de uma estaca torpedo.
Na Figura 5.61, observa-se o nível de plastificação (regiões em vermelho
indicam plastificação do solo) para os dois casos estudados. Optou-se pela apresentação
de resultados com carregamentos próximos, sendo 4691 kN para o módulo de
elasticidade igual a 550,0 x Su e 4649 kN para o outro caso. Nota-se que os dois casos
apresentam praticamente a mesma região de plastificação, sendo que os deslocamentos

106
no topo se diferenciam significativamente, com 4,5 cm para o maior módulo de
elasticidade e 12,7 cm para o módulo de elasticidade igual a 123,17 Su.
(a) (b)
Figura 5.61 - Distribuição do índica de plastificação: (a) 550,0 x Su; (b) 123,17 x Su
O maior deslocamento do topo da estaca resulta também em maiores tensões na
estaca, como é possível verificar pelos resultados mostrados na Figura 5.62. No menor
módulo de elasticidade, a tensão na região do contato da aleta com o tubo ficou em
torno de 395 MPa, já no módulo de elasticiade igual a 550,0 x Su este valor foi de 355
MPa.
(a) (b)
Figura 5.62 - Tensões na estaca nos dois casos estudados: (a) 550,0 x Su; (b) 123,17 x Su
Como dito anteriormente, este exemplo não pode ser resolvido através da
metodologia clássica devido à formulação das curvas P-Y, T-Z e Q-U utilizadas
atualmente. As curvas disponíveis foram desenvolvidas para estacas circulares e longas,
com comportamento predominante de flexão ao contrário da estaca torpedo que possui

107
comportamento tendendo a corpo rígido, como pode ser verificado pela Figura 5.63,
onde são mostrados os deslocamentos ao longo da estaca para os dois casos de módulo
de elasticidade e com os respectivos carregamentos já descritos.
-5.0x10-2 0.0x100 5.0x10-2 1.0x10-1 1.5x10-1
Deslocamentos ao longo da estaca (m)
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
8.0
9.0
10.0
11.0
12.0
13.0
14.0
15.0
16.0D
istâ
ncia
a p
artir
da
base
da
esta
ca (m
)
Es=550,0 x SuEs=123,17 x Su
Figura 5.63 - Deslocamentos da estaca torpedo pelo modelo de Winkler
A realização de ensaios experimentais com a estaca torpedo para determinação
das curvas P-Y é importante, já que um método mais simplificado permite análises mais
velozes agilizando o processo de desenvolvimento de novas estacas, para então
prosseguir com uma análise mais precisa, principalmente do comportamento estrutural,
da fundação estudada. Neste caso, o MEF3D desenvolve um papel importante na análise
local da estrutura de uma estaca.

108
6 Conclusões
Neste trabalho, buscou-se mostrar uma metodologia de análise de estacas de
fundações de plataformas offshore através de metodologias clássicas e o método dos
elementos finitos com modelagem sólida. Foram apresentados vários exemplos práticos
de estacas utilizados atualmente.
Inicialmente, através de modelos simples de comportamento linear, foram
ajustados parâmetros como módulo de elasticidade do solo e malha do modelo em
elementos finitos. A partir daí, foram realizadas comparações de modelos com não
linearidade física do solo.
6.1 Considerações finais
A partir dos resultados obtidos nas várias análises realizadas, algumas
conclusões são consideradas.
- O método dos elementos finitos apresentou resultados bastante coerentes com a
metodologia clássica no que diz respeito aos deslocamentos ao longo da estaca a partir
do momento que o módulo de elasticidade do solo foi ajustado;
- A análise de grupo também apresentou bons resultados, tanto na análise linear da
estaca longa, quanto na não linear obtida com o modelo da estaca de plataforma fixa.
Este resultado encoraja a utilização da modelagem sólida em outras situações mais
complexas, como no caso de grupo de estacas distintas, difícil de ser analisado através
de métodos clássicos.
- A análise do efeito de grupo com a consideração da não linearidade do solo e o
descolamento solo-estaca conduziu a uma menor influência de uma estaca sobre a outra,
como pode ser visto pelos menores fatores de grupo da Tabela 5.7.
- Apesar disto, pode-se perceber que, a adoção de modelos que permitem a separação
entre o solo e a estaca conduz a grandes deslocamentos. Mas esta hipótese ainda não

109
pode ser totalmente confirmada, já que este comportamento deve ser estudado de forma
criteriosa para, enfim, adotar-se ou não tais modelos.
- A não linearidade geométrica da estaca é determinante nos casos com elevada carga
vertical sobre a fundação, como no caso estudado da estaca para o riser tipo torre. Esta
conclusão pode ser percebida mesmo com a análise através do modelo de Winkler. O
aumento de rigidez devido à carga de tração elevada conduziu a uma diminuição de
20% do deslocamento no topo da estaca.
- Pode-se perceber também que para as mesmas condições de argila (Su, ε50) em
exemplos diferentes foi obtida boa concordância usando-se o mesmo Ksu (E=Ksu x Su).
Isto foi verificado no modelo da estaca longa e da estaca para plataforma fixa.
- Para análise da estaca tipo torpedo via metodologia clássica devem ser realizados
ensaios para a determinação de outras curvas P-Y específicas para este caso.
- A grande vantagem a ser observada pela modelagem tridimensional via MEF é o fato
da possibilidade de analisar localmente as tensões e deformações ao longo da estaca.
Desta forma, pode-se estudar com maior precisão os atuais casos da indústria offshore,
com cargas elevadas e diferentes pontos de conexão da estaca e linha de ancoragem.
6.2 Sugestões para trabalhos futuros
Pode-se sugerir para continuação deste trabalho alguns tópicos interessantes:
- Análise do efeito de grupo de várias estacas via MEF 3D. Pode-se também considerar
estacas de diferentes geometrias e a forma de instalação destas estacas na hora de
atribuir os respectivos parâmetros do solo;
- Introdução do modelos de estacas em areia no MEF, incluído plasticidade associativa e
não associativa;
- Estudo da interação solo-riser com ênfase no caso de SCR (Steel Catenary Riser);
- Introdução da plasticidade do material componente da estaca;
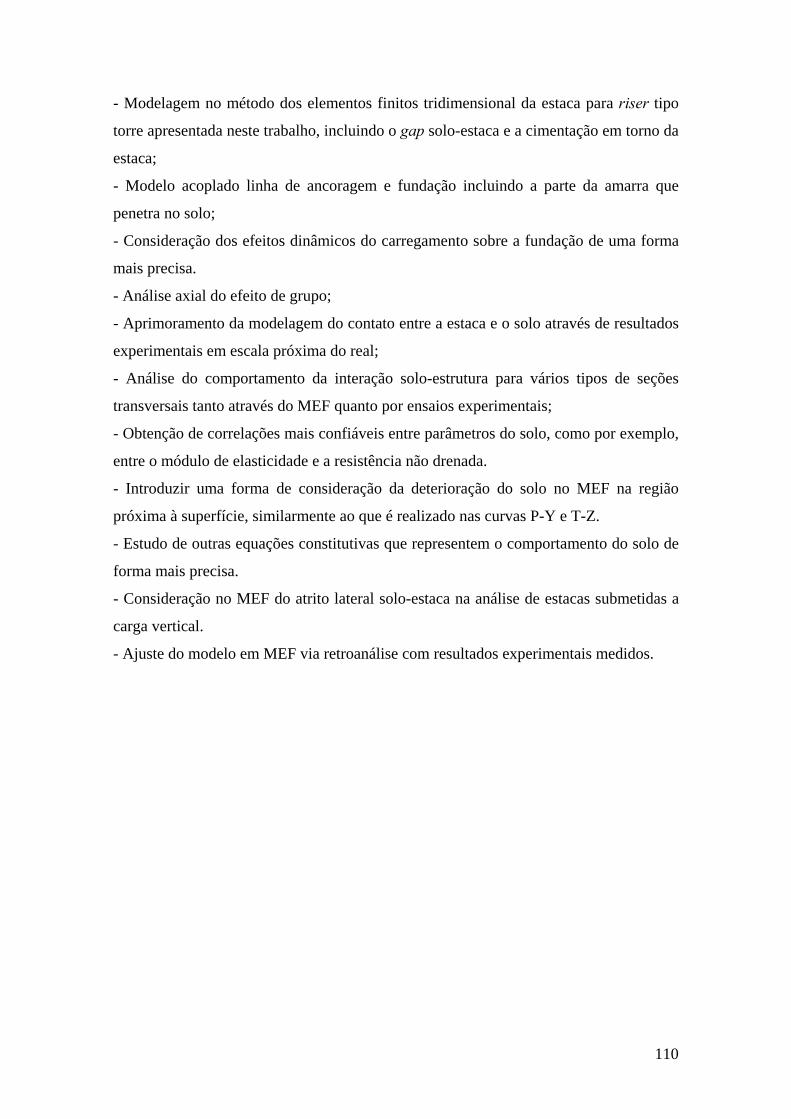
110
- Modelagem no método dos elementos finitos tridimensional da estaca para riser tipo
torre apresentada neste trabalho, incluindo o gap solo-estaca e a cimentação em torno da
estaca;
- Modelo acoplado linha de ancoragem e fundação incluindo a parte da amarra que
penetra no solo;
- Consideração dos efeitos dinâmicos do carregamento sobre a fundação de uma forma
mais precisa.
- Análise axial do efeito de grupo;
- Aprimoramento da modelagem do contato entre a estaca e o solo através de resultados
experimentais em escala próxima do real;
- Análise do comportamento da interação solo-estrutura para vários tipos de seções
transversais tanto através do MEF quanto por ensaios experimentais;
- Obtenção de correlações mais confiáveis entre parâmetros do solo, como por exemplo,
entre o módulo de elasticidade e a resistência não drenada.
- Introduzir uma forma de consideração da deterioração do solo no MEF na região
próxima à superfície, similarmente ao que é realizado nas curvas P-Y e T-Z.
- Estudo de outras equações constitutivas que representem o comportamento do solo de
forma mais precisa.
- Consideração no MEF do atrito lateral solo-estaca na análise de estacas submetidas a
carga vertical.
- Ajuste do modelo em MEF via retroanálise com resultados experimentais medidos.
111
Referências bibliográficas
[1] Petróleo, Scientific American Brasil – Edição Especial Nº 3, 2004
[2] REESE, C. L., VAN IMPE, W. F. Single piles and pile groups under lateral
loadings. Rotterdam. A.A. Balkema. 2001.
[3] POTTS, D. M., ZDRAVKOVIC, L. Finite element analysis in geotechnical
engineering. Vol. 1. London, Thomas Telford, 1999.
[4] INFORME PROCAP 3000. “Riser Híbrido Auto-sustentável para águas profundas”.
Nº 27, 2006.
[5] CUNHA, J. S. Análise do Efeito de Grupo de Estacas em Estruturas Offshore.
Dissertação de M.Sc. COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 1998.
[6] PEREIRA, P. S. D. Análise de Estacas em Estruturas Offshore. Dissertação de
M.Sc. COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 1999.
[7] ELLWANGER, G. B., “Análise de Estacas Metálicas Utilizadas em Instalações de
Plataformas Marítimas”. RBE (Revista Brasileira de Engenharia) vol. 8, no 1 pág. 59-
67. 1992.
[8] ELLWANGER, G. B., “Consideração do Efeito de Grupo de Estacas de Plataformas
Fixas de Aço em Águas Profundas.” Anais do V Simpósio sobre Métodos
Computacionais. Salvador. 1984
[9] SANTOS, A. L. F. Âncoras de Sucção. Dissertação de MSc. COPPE/UFRJ, Rio de
Janeiro, RJ, Brasil, 1997.
[10] MORENO, J. S. Proposta de Metodologia para Critério de Projeto de Fundações
de Estacas de Sucção para TLP. Tese de D.Sc. COPPE/UFRJ, Rio de Janeiro, RJ,
Brasil, 2005.
112
[11] VRYHOF. Anchors Manual. 2005
[12] THE BRUCE ANCHOR GROUP. http://www.bruceanchor.co.uk. Consultado em
23 de Dezembro de 2006.
[13] MEDEIROS JR, C. J. “Low Cost Anchor System for Flexible Risers in Deep
Waters”. Offshore Technology Conference, 2002.
[14] RODRIGUES, G .J. O., CARDOSO, D. C. T., LIMA, B. S. L. P., JACOB, B. P.
FERNANDES, A. C. “An analytical/numerical procedure for structural analysis of
hybrid riser systems”. 24th International Conference on Offshore Mechanics and Arctic
Engineering. 2005.
[15] SELE, A., LOKEN, K. P, THOMAS, R., KLÁSEN, B.. “All-Metal Hybrid Riser
for Ultradeepwater and Harsh Environments”. Offshore Technology Conference. 2005.
[16] CHAUDHURI, J., MCNAMARA, J.F.; O'BRIEN, P.J. “Nonlinear Dynamic
Analysis of Hybrid Riser System for Deepwater Application”. Offshore Technology
Conference. 1987
[17] POULOS, H. G., DAVIS, E. H. Pile foundation analysis and design. New York.
John Willey & Sons, 1980.
[18] FOCHT JR, J. A., KOCH, K. J. “Rational analysis of the lateral performance of
offshore pile groups. Offshore Technology Conference. 1973.
[19] MATHCAD. Mathsoft Engineering & Education, Inc., 2002
[20] DOUGLAS, D. I., DAVIS, E. H. The movement of buried footings due to moment
and horizontal load and the movement of anchor plotes. Vol. 14, pp. 115-132, 1964.
[21] FORTRAN. Compaq Visual Fortran6, Compaq Computer Corporation, 2000.

113
[22] HETENYI, M. Beams on elastic foundation. The University of Michigan Press.
1946.
[23] ELLWANGER, G. B., CUNHA, J. S., AGUIAR, C. S. Manual do programa
PILEMICRO - Interação solo-estrutura de estruturas marítimas. Relatório interno.
COPPE/UFRJ, 1998.
[24] BATHE, K. J. Finite Element Procedures. New Jersey, Prentice-Hall. 1996.
[25] BENJAMIN, A. C. Análise do Comportamento Não-Linear Físico e Geométrico de
Cascas Enrijecidas. Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 1991
[26] REESE, L. C., COX, W. R., KOOP, F. D. “Analysis of laterally loaded piles in
sand”. Offshore Technology Conference. 1974.
[27] REESE, L. C., COX, W. R., KOOP, F. D. “Field testing and analysis of laterally
loaded piles in stiff clay”. Offshore Technology Conference. 1975.
[28] MATLOCK, H., RIPPERGER, E. A. “Measurement of soil pressure on a laterally
loaded pile.” ASTM. 1958.
[29] API, Recommended Practice for Planning, Designing and Constructing Fixed
Offshore Platforms. 21ª edição. 2000.
[30] BHATTECHARYA,S., CARRINGTON, T. M., ALDRIDGE, T. R. “Design of
FPSO piles against storm loading”. Offshore Technology Conference. 2005
[31] MATLOCK, H. “Correlations for Design of Laterally Loaded Piles in Soft Clay”.
Offshore Technology Conference. 1970
[32] O’NEILL, M. W., MURCHINSON J. M. Fan Evaluation of p-y Relationships in
Sands. American Petroleum Institute, 1983.

114
[33] BROMS, B. B., “Lateral resistance of piles in cohesive soils”. Journal of the Soil
Mechanics and Foundations Division, ASCE. 1964.
[34] BROMS, B. B., “Lateral resistance of piles in cohesionless soils”. Journal of the
Soil Mechanics and Foundations Division, ASCE. 1964.
[35] O’NEIL, M. W. “Group Action in offshore piles”. Proceedings of the Specialty
Conference on Geotechnical Engineering in Offshore Practice, ASCE. 1983
[36] MINDLIN, R. D., Force at a point in the interior of a semi-infinite solid. Physics
7: 195. 1936.
[37] VAZ, L.E. Notas de aula da disciplina Método dos Elementos Finitos. EP/UFRJ.
2004.
[38] RIBEIRO, F. L. B. Notas de Aula da Disciplina Elementos Finitos I.
COPPE/UFRJ. 2005
[39] POTTS, D. M., ZDRAVKOVIC, L. Finite element analysis in geotechnical
engineering. Vol. 2. London, Thomas Telford, 1999.
[40] RANDOLPH, M., CASSIDY, M., GOURVENEC, S., ERBRICH, C.. “Challenges
of Offshore Geotechnical Engineering”. The 16th International Conference on Soil
Mechanics and Geotechnical Engineering. 2005
[41] ANSYS, INC. ANSYS, Inc. Theory Reference (version 10.0). 2005
[42] WANG, G., SITAR, N. “Numerical analysis of piles in elasto-plastic soils under
axial loading”. 17th ASCE Engineering Mechanics Conference. 2004.
[43] MATLOCK, H., RIPPERGER, E. A. “Procedures and instrumentation for tests on
a laterally loaded pile.” VII Texas Conference on Soil Mechanics and Foundation
Engineering. 1956.

115
[44] REESE, L. C., COX, W.R. “Soil behavior from analysis of tests of uninstrumented
piles under lateral loading.” Performance of Deep Foundations, ASTM. 1968.
[45] PRATES DE LIMA, E.C, ELLWANGER, G.B., SAGRILO, L.V.S., SIQUEIRA,
M.Q., SOUSA, J.R.M. Comparação entre duas Concepções para Estaca Torpedo para
a P-50. Relatório Interno COPPE/UFRJ, 2005.
[46] BOWLES, J. E. Foundation Analysis and Design. Nova Yorque, McGraw-Hill.
1996.
[47] POULOS, H. G. Marine Geotechnics. Londres, Unwin Hyman. 1988.

116
A - Obtenção da matriz de flexibilidade do solo
A matriz de flexibilidade do solo é determinada a partir da utilização das
expressões de Mindlin [36]; esta equação está representada abaixo e seus termos
mostrados na Figura A. 1.
( )( ) ( ) ( )( )
( ) ⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛++
−++−−
+⎟⎟⎠
⎞⎜⎜⎝
⎛−+
−+++
−−
=czRR
xczRR
xRcz
Rx
Rx
RRGQ
sx
22
2
22
2
2
32
32
2
31
2
21
1211431243143116
νννννπ
ρ
Figura A. 1 - Definições da equação de Mindlin
onde
rx = deslocamento horizontal no ponto da aplicação da carga;
Gs = módulo de elasticidade transversal do solo, definido por:
( )υ+=
12s
sE
G ;
n = Coeficiente de Poisson.

117
Douglas & Davis [20] integraram a solução de Mindlin para o caso horizontal
sobre uma área retangular, conforme Figura A. 2, obtendo-se a seguinte solução:
Figura A. 2 - Solução de Douglas & Davis para uma placa retangular
- Descolamento para os pontos inferiores do retângulo C e D
[ ]541 )1)(21(4)43()1(32
. FFFG
bp
sCD υυυ
υρ −−++−
−= (A - 1)
e para os pontos superiores do retângulo A e B
[ ]321 )1)(21(4)43()1(32
. FFFG
bp
sAB υυυ
υρ −−++−
−= (A - 2)
onde:
Gs = módulo de elasticidade transversal do solo;
ν = coeficiente de Poisson do solo;
ρAB e ρCD = deslocamentos horizontais;
As constantes F1 a F5 são determinadas da seguinte forma:

118
⎥⎥⎦
⎤
⎢⎢⎣
⎡
−++−−
⎥⎥⎦
⎤
⎢⎢⎣
⎡
−++
−−−=
22121
221
21211
)(4)(2ln.2
)(42
)(ln).(KKKKKK
KKKKF (A - 3)
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡ +−
+++
−
−⎥⎥⎦
⎤
⎢⎢⎣
⎡
++++
−+⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
++++
++=
1
21
21
2212
1
21
221
2122121
211
2
1)(
)(4.
)()(42
ln).()(4)(
)1(2ln.2
KK
KKKK
K
KKKK
KKKKKK
KKF
(A - 4)
[ ])1(
)()(4.4
)(
)1(2
)(4)(ln
)(42
)(ln).(11
ln..2
211
212
2121
211
22121
221
21212
1
113
KKK
KKKKKK
KK
KKKK
KK
KKKKK
KKF
−+−
−+−+++
+⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
++
++++−
−⎥⎥⎦
⎤
⎢⎢⎣
⎡
+++
+++⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛
++−=
(A - 5)
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡ +−
+++
+⎥⎥⎦
⎤
⎢⎢⎣
⎡
++++
−+⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
++++
++−=
2
22
21
2212
221
221
2122121
222
4
1)(
)(4)(
)(42ln.
).()(4)(
)1(2ln.2
KK
KKKK
KKK
KK
KKKKKK
KKF
(A - 6)
( )
( ) ( ) ( ) ( )
⎟⎠⎞⎜
⎝⎛ +−−
−⎥⎦⎤
⎢⎣⎡ +−++⎟
⎠⎞
⎜⎝⎛ +
−⎟⎠⎞⎜
⎝⎛ ++
+++++
+⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
+++
++−⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛
++=
2222
21
2
2121
222
22121
2
21
21212
2
225
1
4412
4ln
42ln).(
11ln..2
KKK
KKKKKK
KK
KKKK
KK
KKKKK
KKF
(A - 7)
bCK 1
12
= (A - 8)
bCK 2
22
= (A - 9)

119
O termo FSi,j da matriz de flexibilidade é dado pelo deslocamento na direção i
devido a uma força unitária na direção j. Assim, utilizando-se as equações (A - 1) e (A -
2) determina-se os termos da diagonal principal a partir da média dos deslocamentos no
topo e na base da placa como na Figura A. 3. A, pressão aplicada é equivalente à força
unitária distribuída na placa.
Figura A. 3 - Esquema da pressão aplicada para determinação do termo FSi,i da matriz de
flexibilidade.
2,CDAB
iiFSρρ +
= (A - 10)
Para determinação dos termos fora da diagonal principal, é utilizada a
superposição de efeitos de acordo com a Figura A. 4.
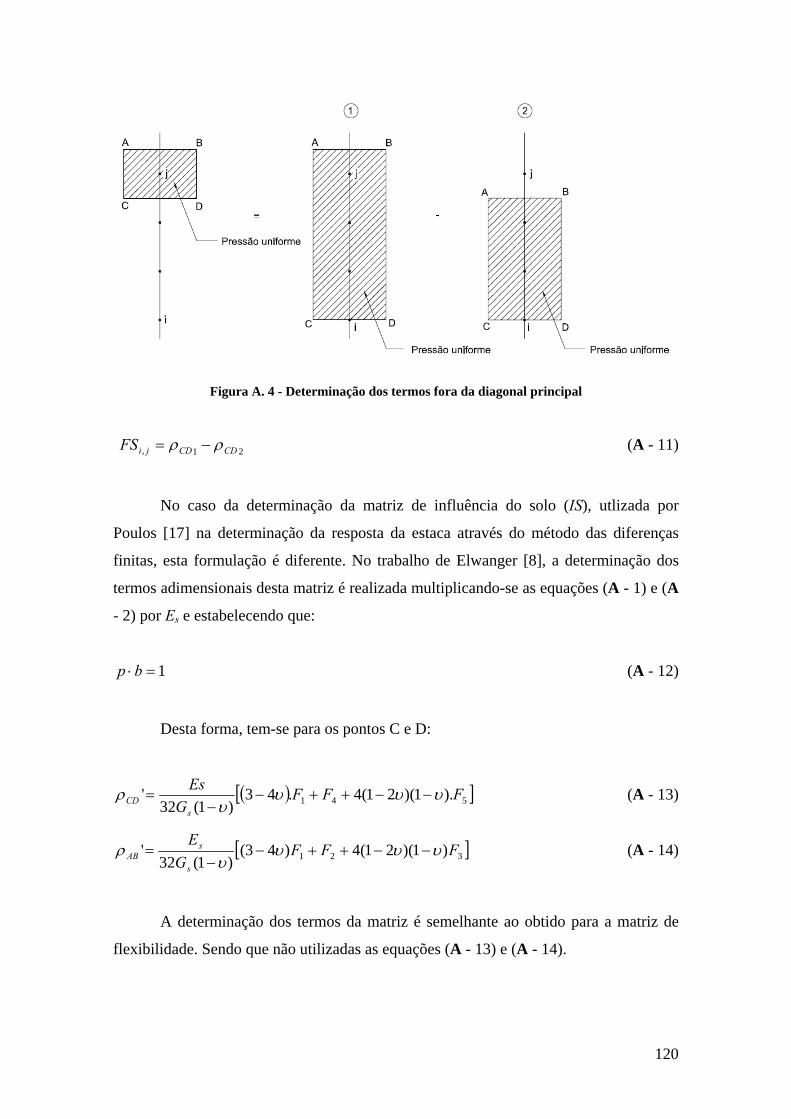
120
Figura A. 4 - Determinação dos termos fora da diagonal principal
21, CDCDjiFS ρρ −= (A - 11)
No caso da determinação da matriz de influência do solo (IS), utlizada por
Poulos [17] na determinação da resposta da estaca através do método das diferenças
finitas, esta formulação é diferente. No trabalho de Elwanger [8], a determinação dos
termos adimensionais desta matriz é realizada multiplicando-se as equações (A - 1) e (A
- 2) por Es e estabelecendo que:
1=⋅bp (A - 12)
Desta forma, tem-se para os pontos C e D:
( )[ ]541 ).1)(21(4.43)1(32
' FFFG
Es
sCD υυυ
υρ −−++−
−= (A - 13)
[ ]321 )1)(21(4)43()1(32
' FFFG
E
s
sAB υυυ
υρ −−++−
−= (A - 14)
A determinação dos termos da matriz é semelhante ao obtido para a matriz de
flexibilidade. Sendo que não utilizadas as equações (A - 13) e (A - 14).

121
B – Planilha MathCAD com a solução fechada de Hetenyi
Momento de inércia da seção da estaca: Ip πd4 di4−
64⋅:=
Ip 0.18035m4=
Área da seção tranversal: Ax πd2 di2−
4⋅:=
Ax 0.3324m2=
Número de segmentos da estaca: Nseg 100:=
3. Dados do solo:
O solo é composto por uma única camada unifome de argila média com os seguintes dados:
Peso específico submerso: γ 7.35kN
m3⋅:=
Coesão não drenada: Cu 17kN
m2⋅:=
Deformação que ocorre para metade da carga última: ε50 0.010:=
Tomando com base a resistência última igual a 9 vezes a resistência não drenada. O coeficiente de reação do solo, considerando a região linear (limitado pelo ε50) é igual a:
kh0.5 9⋅ Cu⋅
2.5 ε50⋅ d⋅:= kh 146.24726
tf
m3=
Análise de uma estaca simples em argila
Definições: tf kgf 1000⋅:= kN 1000N:=
1. Introdução
A estaca estudada apresenta 100 metros de comprimento e o seu topo coincide com o leito marinho. A seção é circular, constante, de diametro igual a 2.1336 metros e espessura da parede igual a 5.08 cm. A solução é apresentada no livro Pile Foundation Analysis and Design de H.G. Poulos, no capítulo 8, item 8.2.2.
2. Dados da estaca:
Comprimento da estaca: Lp 100 m⋅:=
Diâmetro: d 2.1336m⋅:= d 84in=
Espessura da parede: e 0.0508m⋅:=
Diâmetro interno: di d 2 e⋅−:=
di 2.032m=
Módulo de elasticidade da estaca: Ep 2.05 108⋅
kN
m2⋅:=

122
KρHjsinh β Li⋅( ) cos β zj⋅( )⋅ cosh β Li zj−( )⋅⎡⎣ ⎤⎦⋅ sin β Li⋅( ) cosh β zj⋅( )⋅ cos β Li zj−( )⋅⎡⎣ ⎤⎦⋅−
sinh β Li⋅( )2sin β Li⋅( )2
−
:=
O valor de KρH em cada trecho é dado por:
z1 1m=zjj
Nseg
⎛⎜⎝
⎞⎟⎠
Li⋅:=
j 0 Nseg..:=
trechosNseg 100=Sendo a estaca dividida em
Li Lp:=i 0:=
Gerando a curva com os deslocamentos ao longo da estaca de comprimento L.
β 0.06744m-1=
Com os dados apresentados, o valor de β será:
Ep = Módulo de eslasticidade da estacaIp = Momento de inércia da estaca
, sendo:βkh d⋅
4 Ep⋅ Ip⋅⎛⎜⎝
⎞⎟⎠
.25:=A constante β é dada por:
β = constante, que será dada abaixokh = Coeficiente de reação do solod = Diâmetro da estacaKXX = Coeficientes adimensionais de acordo com o esforço ou deslocamento desejado, apresentados a seguir.
Sendo:
MM M0 KMM⋅
θM4 M0⋅ β
3⋅
kh d⋅KθM⋅
ρM2 M0⋅ β
2⋅
kh d⋅KρM⋅Deslocamentos e momento devido ao momento M0:
MHH−
βKMH⋅
θH2 H⋅ β
2⋅
kh d⋅KθH⋅
ρH2 H⋅ β⋅
kh d⋅KρH⋅Deslocamentos e momento devido à força H:
4. Solução fechada de Hetenyi (Poulos - Pile Foundation Analyis and Design - 8.2.2 - Pág. 166)

123
KρMjα5j α6j+
sinh β Li⋅( )2sin β Li⋅( )2
−
:=
α6j sin β Li⋅( ) sinh β zj⋅( ) cos β Li zj−( )⋅⎡⎣ ⎤⎦⋅ cosh β zj⋅( ) sin β zj Li−( )⋅⎡⎣ ⎤⎦⋅−⎡⎣ ⎤⎦⋅:=
α5j sinh β Li⋅( ) cosh β Li zj−( )⋅⎡⎣ ⎤⎦ sin β zj⋅( )⋅ sinh β Li zj−( )⋅⎡⎣ ⎤⎦ cos β zj⋅( )⋅−⎡⎣ ⎤⎦⋅:=Cálculo do KρM:
Qj H− KQHj⋅:=Cortante ao longo da estaca:
KQHjα3j α4j−
sinh β Li⋅( )2sin β Li⋅( )2
−
:=
α4j sin β Li⋅( ) cosh β zj⋅( ) sin β Li zj−( )⋅⎡⎣ ⎤⎦⋅ sinh β zj⋅( ) cos β Li zj−( )⋅⎡⎣ ⎤⎦⋅−⎡⎣ ⎤⎦⋅:=
α3j sinh β Li⋅( ) cos β zj⋅( ) sinh β Li zj−( )⋅⎡⎣ ⎤⎦⋅ sin β zj⋅( ) cosh β Li zj−( )⋅⎡⎣ ⎤⎦⋅−⎡⎣ ⎤⎦⋅:=Cálculo do KQH:
M0 0mA-2 tf m⋅=MjHβ
− KMHj⋅:=
KMHj
sinh β Li⋅( ) sin β zj⋅( )⋅ sinh β Li zj−( )⋅⎡⎣ ⎤⎦⋅ sin β Li⋅( ) sinh β zj⋅( )⋅ sin β Li zj−( )⋅⎡⎣ ⎤⎦⋅−
sinh β Li⋅( )2sin β Li⋅( )2
−
:=Cálculo do KMH:
θ j2 H⋅ β
2⋅
kh d⋅KθHj⋅
180π
⋅:=As rotações serão:
KθH1 0.99565=
KθHj1
sinh β Li⋅( )2sin β Li⋅( )2
−
α1j α2j+( )⋅:=Assim, temos:
α2j sin β Li⋅( ) sinh β zj⋅( ) cos β Li zj−( )⋅⎡⎣ ⎤⎦⋅ cosh β zj⋅( ) sin β Li zj−( )⋅⎡⎣ ⎤⎦⋅+⎡⎣ ⎤⎦⋅:=
α1j sinh β Li⋅( ) sin β zj⋅( ) cosh β Li zj−( )⋅⎡⎣ ⎤⎦⋅ cos β zj⋅( ) sinh β Li zj−( )⋅⎡⎣ ⎤⎦⋅+⎡⎣ ⎤⎦⋅:=
Para o cálculo de KθH, serão definidos os seguintes termos:
ρ j2 H⋅ β⋅
kh d⋅KρHj⋅:=Assim, o deslocamento será:

124
MomLp
2⎛⎜⎝
⎞⎟⎠
113.78788kN m⋅=Rot Lp( ) 2.91536 10 3−×=Desl Lp( ) 0.04323m=
Mom h( ) linterp z Mm, h,( ):=Rot h( ) linterp z θm, h,( ):=Desl h( ) linterp z ρm, h,( ):=Interpolando os pontos:
Mmj Auxj:=AuxNseg j− Mmj:=
Aux 0:=θmj Auxj:=AuxNseg j− θmj:=
Aux 0:=ρmj Auxj:=AuxNseg j− ρmj:=Invertendo, para o gráfico:
Calculo do KθM: KθMjsinh β Li⋅( ) cosh β Li zj−( )⋅⎡⎣ ⎤⎦⋅ cos β zj⋅( )⋅ sin β Li⋅( ) cosh β zj⋅( )⋅ cos β Li zj−( )⋅⎡⎣ ⎤⎦⋅+
sinh β Li⋅( )2sin β Li⋅( )2
−
:=
Cálculo do KMM: α1j sinh β Li⋅( ) sinh β Li zj−( )⋅⎡⎣ ⎤⎦ cos β zj⋅( )⋅ cosh β Li zj−( )⋅⎡⎣ ⎤⎦ sin β zj⋅( )⋅+⎡⎣ ⎤⎦⋅:=
α2j sin β Li⋅( ) sinh β zj⋅( ) cos β Li zj−( )⋅⎡⎣ ⎤⎦⋅ cosh β zj⋅( ) sin β Li zj−( )⋅⎡⎣ ⎤⎦⋅+⎡⎣ ⎤⎦⋅:=
KMMα1 α2−
sinh β Li⋅( )2sin β Li⋅( )2
−
:=
Cálculo do KQM: KQMj
sin β Li⋅( ) sin β Li zj−( )⋅⎡⎣ ⎤⎦⋅ sin β zj⋅( )⋅ sin β Li⋅( ) sinh β zj⋅( )⋅ sin β Li zj−( )⋅⎡⎣ ⎤⎦⋅+
sinh β Li⋅( )2sin β Li⋅( )2
−
:=
4.1. Solução para uma estaca livre, submetida a uma carga horizontal H
Forca horizontal: H 980.6kN:=
Deslocamentos ao longo da estaca: ρmj2 H⋅ β⋅
kh d⋅KρHj⋅:=
Rotações ao longo da estaca: θmj2 H⋅ β
2⋅
kh d⋅KθHj⋅:=
Momentos ao longo da estaca: MmjH−
βKMHj⋅:=
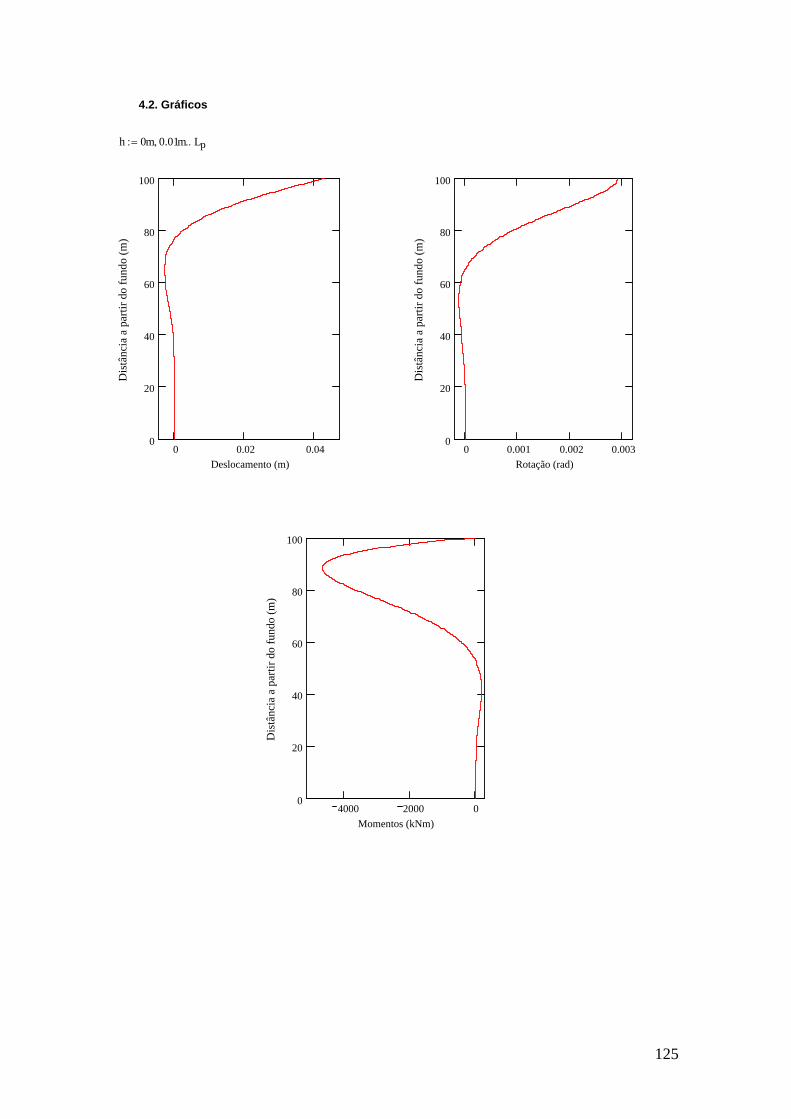
125
4.2. Gráficos
h 0m 0.01m, Lp..:=
0 0.02 0.040
20
40
60
80
100
Deslocamento (m)
Dis
tânc
ia a
par
tir d
o fu
ndo
(m)
0 0.001 0.002 0.0030
20
40
60
80
100
Rotação (rad)
Dis
tânc
ia a
par
tir d
o fu
ndo
(m)
4000 2000 00
20
40
60
80
100
Momentos (kNm)
Dis
tânc
ia a
par
tir d
o fu
ndo
(m)

126
C – Planilha MathCAD para cálculo da capacidade axial de uma estaca
flim z( ) α z( ) Su z( )⋅:=
O Atrito lateral limite é obtido usando a equação 6.4.2-1 da API-RP2A (Pág. 57):
α z( ) α z( ) α z( ) 1≤if
1 otherwise
:=
α z( ) 0.5 ψ z( ) 0.25−⋅ ψ z( ) 1>if
0.5 ψ z( ) 0.5−⋅ ψ z( ) 1≤if
:=
ψ z( )Su z( )Po z( )
:=
O fator α pode ser determinado pela equação 6.4.2-2 da API-RP2A (Pág. 57):
Cálculo da resistência última
Po z( ) γ z( ) z⋅:=- Pressão efetiva:
Su z( ) 4m 1.5z+( ) kPam
:=
- Resistência não-drenada (coesão aparente), sendo z = 0 no topo da estaca
γ z( ) 7 kN
m3:=
- Peso específico submerso (no nosso caso o peso específico submerso não varia com a profundidade, só a a resistência não drenada) :
Dados do Solo: argila com coesão variável
Di De 2e−:=- Diâmetro interno da estaca:
e 0.0381m:=- Espessura da parede:
De 1.0668 m⋅:=- Diâmetro externo da estaca:
L 20 m⋅:=- Comprimento da estaca:
Dados da estaca:
kPa 1 kN
m2:=kN 1000N:=tf 1000kgf:=
A estaca possui um comprimento de 20,0 metros, diâmetro de 1,0668 metros com espessura de parede igual a 0,0381 metros. O solo é uma argila com variação linear igual a (4+1,5h)kPa, sendo h a partir da superfície do solo. O topo da estaca coincide com a superfície do solo.
Capacidade axial última de uma estaca circular em solo argiloso de acordo com a API-RP-2A, considerando o embuchamento
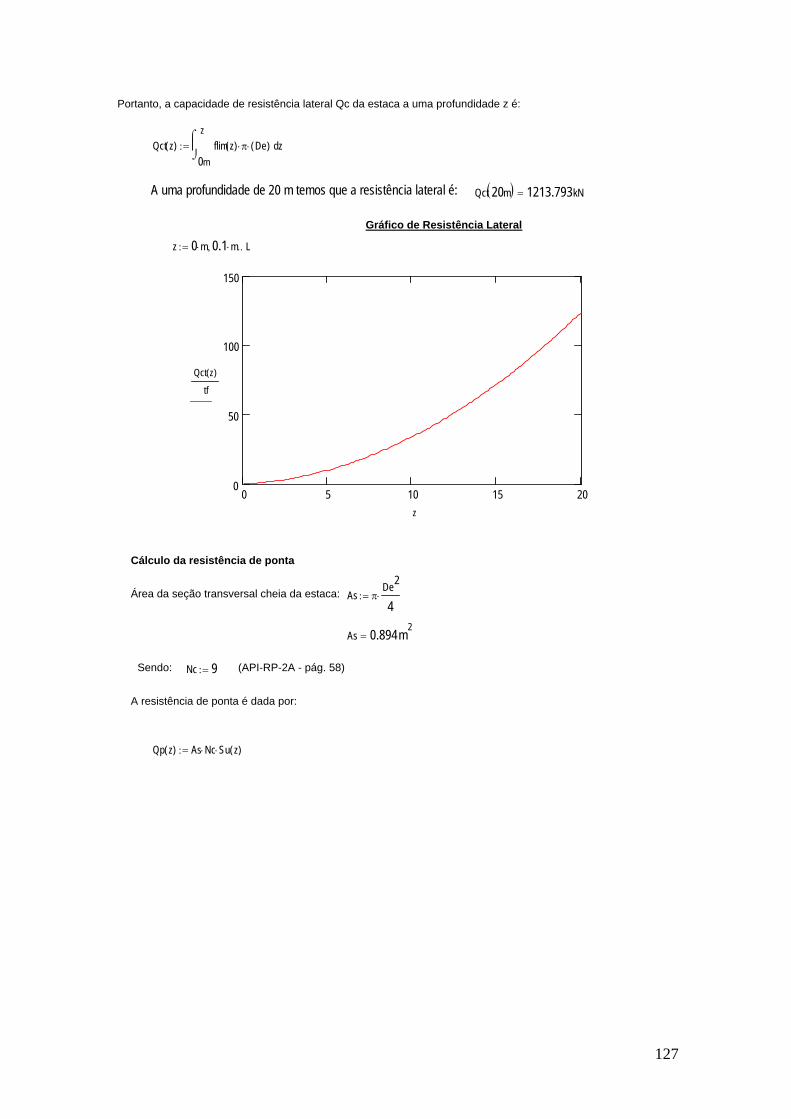
127
Portanto, a capacidade de resistência lateral Qc da estaca a uma profundidade z é:
Qct z( )0m
zzflim z( ) π⋅ De( )⋅
⌠⎮⌡
d:=
A uma profundidade de 20 m temos que a resistência lateral é: Qct 20m( ) 1213.793kN=
Gráfico de Resistência Lateral
z 0 m⋅ 0.1 m⋅, L..:=
0 5 10 15 200
50
100
150
Qct z( )
tf
z
Cálculo da resistência de ponta
Área da seção transversal cheia da estaca: As πDe2
4⋅:=
As 0.894m2=
Sendo: Nc 9:= (API-RP-2A - pág. 58)
A resistência de ponta é dada por:
Qp z( ) As Nc⋅ Su z( )⋅:=

128
Rt 20m( ) 1487.306kN=
Rt z( ) Qct z( ) Qp z( )+ Qic z( ) Qpi z( )>if
Qct z( ) Qic z( )+ RANEL z( )+( ) otherwise
:=
A Resistência total Rt é obtida como
RANEL 20m( ) 37.678kN=
RANEL z( ) Qp z( ) Qpi z( )−:=
Determinação da Resistência de Ponta do Anel:
Qpi 20m( ) 235.835kN=
Qpi z( ) Qp z( )DiDe
⎛⎜⎝
⎞⎟⎠
2⋅:=
Determinação da Resistência de Ponta da Área Interna Qpi
Qic 20m( ) 1127.1kN=
Qic z( ) Qct z( ) fr⋅DiDe
⎛⎜⎝
⎞⎟⎠
⋅:=
pela equação
fr 1:=
O fator de redução de Qc para o atrito estaca/solo interno à estaca, fr, é igual a 1
Cálculo da Resistência Lateral Interna à Compressão, Qic
Qp 20m( ) 273.513kN=
Na profundidade de 20 m temos que a resistência de ponta é:
0 5 .104 1 .105 1.5 .105 2 .105 2.5 .105 3 .1050
5
10
15
20
z
Qp z( )
Gráfico de Resistência de Ponta

129
D - Cálculo da capacidade lateral de uma estaca embebida em solo argiloso
x4 14.58m:=ax3 11m:=Trecho 3:
x3 11m:=ax2 1m:=Trecho 2:
x2 1m:=ax1 0m:=Trecho 1:
- A estaca é dividida em três trechos, dois sem aletas e um com aleta.
Daleta 2.867m=
(Diâmetro equivalente da estaca com aleta)Daleta 2 bDt2
+⎛⎜⎝
⎞⎟⎠
⋅:=
(Comprimento da aleta)b 0.9m:=
(espessura das paredes)e 0.05m:=
(comprimento da estaca)L 14.58m:=
(Diâmetro da estaca sem aleta)Dt 1.0668m:=
Dados da estaca e do carregamento
kPa 1kN
m2:=kN 1000N:=tf 1000kgf:=
A estaca possui um comprimento de 14,58 metros, diâmetro de 1,0668 metros com espessura de parede igual a 0,0381 metros e aletas com 0,9 metros por 10 metros (ver figura). O solo é uma argila com Su=(5+2h)kPa, sendo h a partir da superfície do solo, e os dados fornecidos mais adiante .
O topo da estaca coincide com a superfície do solo. O método aqui apresentado é extremamente simplificado, servindo apenas para fase inicial de projeto.
Capacidade lateral última de uma estaca torpedo
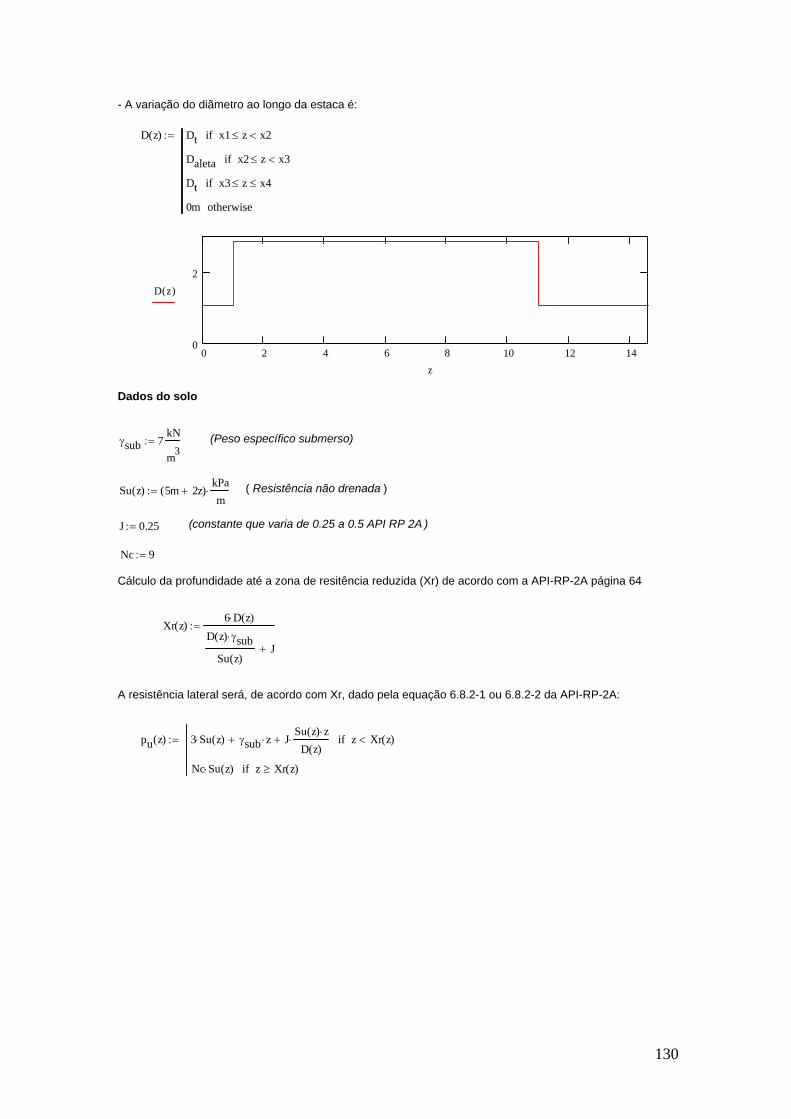
130
- A variação do diãmetro ao longo da estaca é:
D z( ) Dt x1 z≤ x2<if
Daleta x2 z≤ x3<if
Dt x3 z≤ x4≤if
0m otherwise
:=
0 2 4 6 8 10 12 140
2D z( )
z
Dados do solo
γsub 7kN
m3:= (Peso específico submerso)
Su z( ) 5m 2z+( )kPam
⋅:= ( Resistência não drenada )
J 0.25:= (constante que varia de 0.25 a 0.5 API RP 2A )
Nc 9:=
Cálculo da profundidade até a zona de resitência reduzida (Xr) de acordo com a API-RP-2A página 64
Xr z( )6 D z( )⋅
D z( ) γsub⋅
Su z( )J+
:=
A resistência lateral será, de acordo com Xr, dado pela equação 6.8.2-1 ou 6.8.2-2 da API-RP-2A:
pu z( ) 3 Su z( )⋅ γsub z⋅+ JSu z( ) z⋅
D z( )⋅+ z Xr z( )<if
Nc Su z( )⋅ z Xr z( )≥if
:=

131
Gráficos:
0 5 100
200
400
pu z( )
kPa
z0 5 10
0
5
10Xr z( )
z
z
Esta integral é o somatório de todas as resistências últimas ao longo da estaca. Caso a estaca possuísse um deslocamento lateral de corpo rígido.
Fux1
x4zpu z( ) D z( )⋅
⌠⎮⌡
d:=
Fu 4019.842kN=
Determinação da carga máxima no topo de acordo com Poulos
Aqui são tomadas as duas equações de equilíbrio: de forças e momentos. A suposição adotada é que todo o solo atinge a reação máxima Pu. O valor de Zr dá o ponto de giro da estaca a partir do topo (ver figura abaixo).

132
Solução:
Given
Pt0m
Zrzpu z( ) D z( )⋅
⌠⎮⌡
dZr
Lzpu z( ) D z( )⋅
⌠⎮⎮⌡
d− (Equiliíbrio de forças)
Pt1L
0m
Zrzpu z( ) D z( )⋅ L z−( )⋅
⌠⎮⌡
dZr
Lzpu z( ) D z( )⋅ L z−( )⋅
⌠⎮⎮⌡
d−
⎡⎢⎢⎢⎣
⎤⎥⎥⎥⎦
(Equilíbrio de momentos)
Sol Find Pt Zr,( ):=
assim, a força aplicada no topo Pt e o ponto de giro Zr são:
Pt Sol1:= Zr Sol2:=
Pt 1182.283kN= Zr 10.242m=
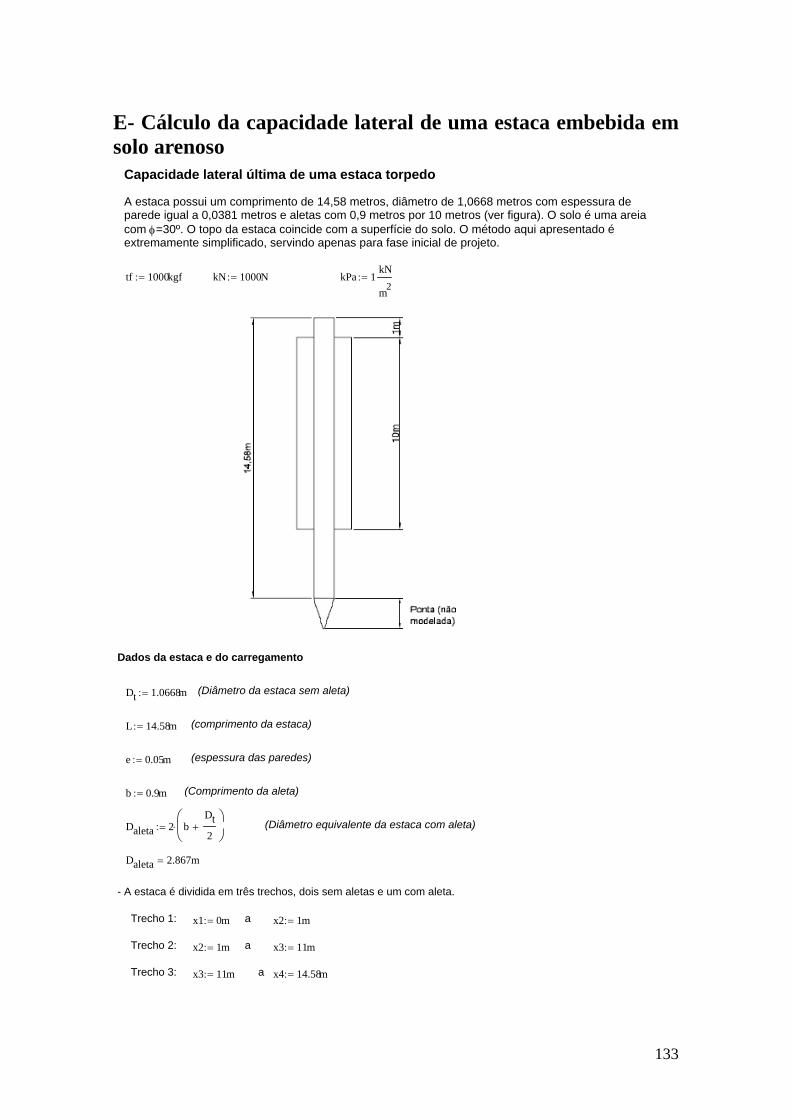
133
E- Cálculo da capacidade lateral de uma estaca embebida em solo arenoso
x4 14.58m:=ax3 11m:=Trecho 3:
x3 11m:=ax2 1m:=Trecho 2:
x2 1m:=ax1 0m:=Trecho 1:
- A estaca é dividida em três trechos, dois sem aletas e um com aleta.
Daleta 2.867m=
(Diâmetro equivalente da estaca com aleta)Daleta 2 bDt2
+⎛⎜⎝
⎞⎟⎠
⋅:=
(Comprimento da aleta)b 0.9m:=
(espessura das paredes)e 0.05m:=
(comprimento da estaca)L 14.58m:=
(Diâmetro da estaca sem aleta)Dt 1.0668m:=
Dados da estaca e do carregamento
kPa 1kN
m2:=kN 1000N:=tf 1000kgf:=
A estaca possui um comprimento de 14,58 metros, diâmetro de 1,0668 metros com espessura de parede igual a 0,0381 metros e aletas com 0,9 metros por 10 metros (ver figura). O solo é uma areia com φ=30º. O topo da estaca coincide com a superfície do solo. O método aqui apresentado é extremamente simplificado, servindo apenas para fase inicial de projeto.
Capacidade lateral última de uma estaca torpedo
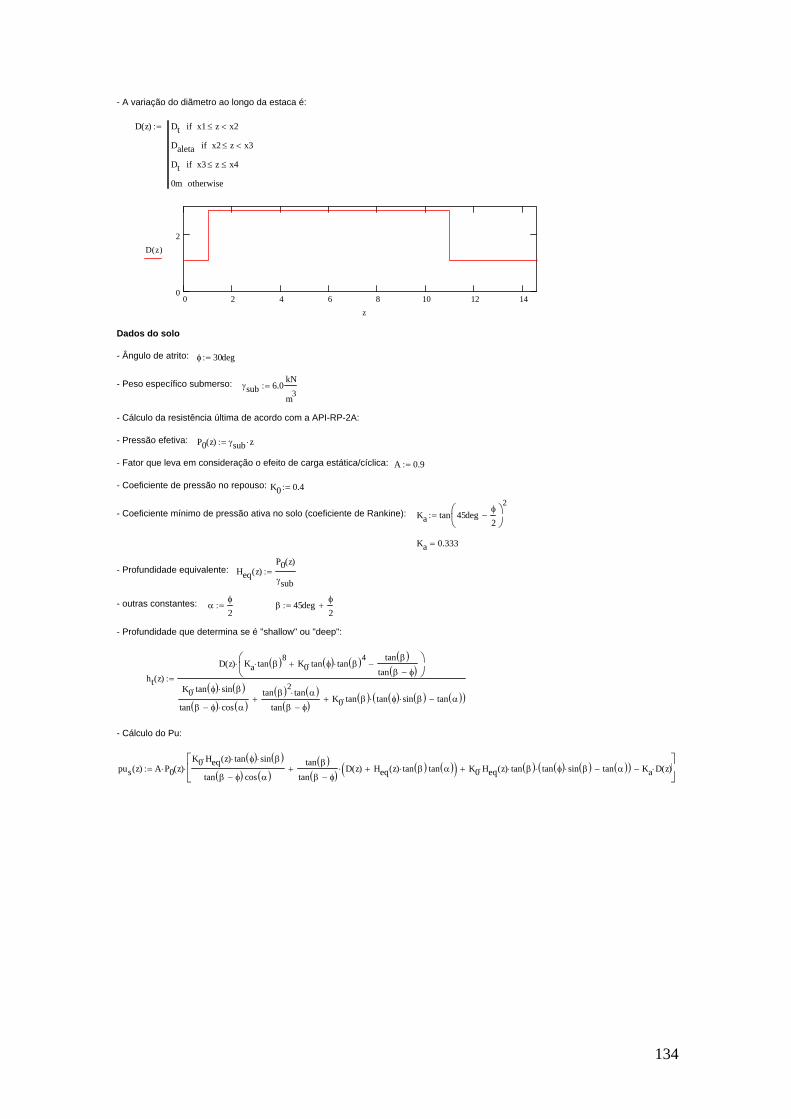
134
pus z( ) A P0 z( )⋅K0 Heq z( )⋅ tan φ( )⋅ sin β( )⋅
tan β φ−( ) cos α( )tan β( )
tan β φ−( ) D z( ) Heq z( ) tan β( )⋅ tan α( )+( )⋅+ K0 Heq z( )⋅ tan β( )⋅ tan φ( ) sin β( )⋅ tan α( )−( )⋅+ Ka D z( )⋅−⎡⎢⎣
⎤⎥⎦
⋅:=
- Cálculo do Pu:
ht z( )D z( ) Ka tan β( )8
⋅ K0 tan φ( )⋅ tan β( )4⋅+
tan β( )tan β φ−( )−⎛
⎜⎝
⎞⎟⎠
⋅
K0 tan φ( )⋅ sin β( )⋅
tan β φ−( ) cos α( )⋅
tan β( )2tan α( )⋅
tan β φ−( )+ K0 tan β( )⋅ tan φ( ) sin β( )⋅ tan α( )−( )⋅+
:=
- Profundidade que determina se é "shallow" ou "deep":
β 45degφ
2+:=α
φ
2:=- outras constantes:
Heq z( )P0 z( )
γsub:=- Profundidade equivalente:
Ka 0.333=
Ka tan 45degφ
2−⎛⎜
⎝⎞⎟⎠
2:=- Coeficiente mínimo de pressão ativa no solo (coeficiente de Rankine):
K0 0.4:=- Coeficiente de pressão no repouso:
A 0.9:=- Fator que leva em consideração o efeito de carga estática/cíclica:
P0 z( ) γsub z⋅:=- Pressão efetiva:
- Cálculo da resistência última de acordo com a API-RP-2A:
γsub 6.0kN
m3:=- Peso específico submerso:
φ 30deg:=- Ângulo de atrito:
Dados do solo
0 2 4 6 8 10 12 140
2D z( )
z
D z( ) Dt x1 z≤ x2<if
Daleta x2 z≤ x3<if
Dt x3 z≤ x4≤if
0m otherwise
:=
- A variação do diãmetro ao longo da estaca é:
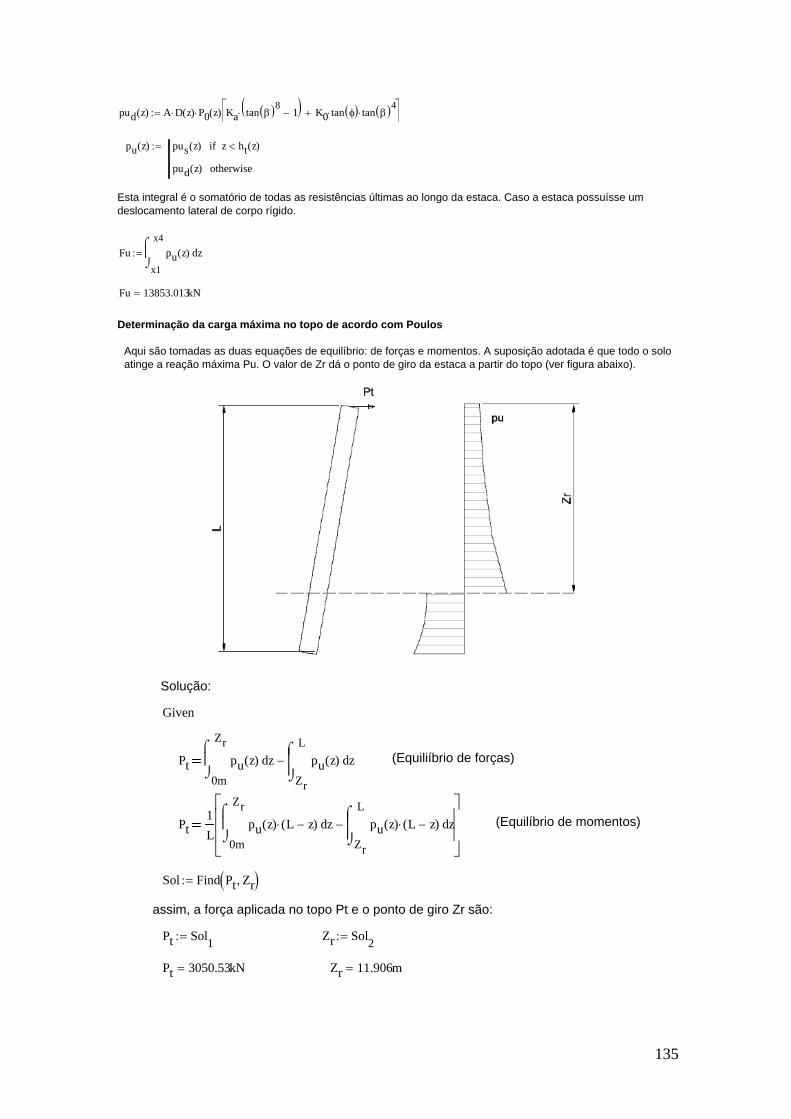
135
pud z( ) A D z( )⋅ P0 z( )⋅ Ka tan β( )81−( )⋅ K0 tan φ( )⋅ tan β( )4
⋅+⎡⎣
⎤⎦:=
pu z( ) pus z( ) z ht z( )<if
pud z( ) otherwise
:=
Esta integral é o somatório de todas as resistências últimas ao longo da estaca. Caso a estaca possuísse um deslocamento lateral de corpo rígido.
Fux1
x4zpu z( )
⌠⎮⌡
d:=
Fu 13853.013kN=
Determinação da carga máxima no topo de acordo com Poulos
Aqui são tomadas as duas equações de equilíbrio: de forças e momentos. A suposição adotada é que todo o solo atinge a reação máxima Pu. O valor de Zr dá o ponto de giro da estaca a partir do topo (ver figura abaixo).
Solução:
Given
Pt0m
Zrzpu z( )
⌠⎮⌡
dZr
Lzpu z( )
⌠⎮⎮⌡
d− (Equiliíbrio de forças)
Pt1L
0m
Zrzpu z( ) L z−( )⋅
⌠⎮⌡
dZr
Lzpu z( ) L z−( )⋅
⌠⎮⎮⌡
d−
⎡⎢⎢⎢⎣
⎤⎥⎥⎥⎦
(Equilíbrio de momentos)
Sol Find Pt Zr,( ):=
assim, a força aplicada no topo Pt e o ponto de giro Zr são:
Pt Sol1:= Zr Sol2:=
Pt 3050.53kN= Zr 11.906m=