Embed Size (px)
Citation preview

PORTO ALEGRE
2010
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL INSTITUDO DE GEOCIÊNCIAS
CURSO DE ENGENHARIA CARTOGRÁFICA
MÁRIO LUIZ LOPES REISS PROFESSOR (ADJUNTO), DEPTO DE GEODÉSIA
ALGUNS FUNDAMENTOS MATEMÁTICOS PARA A FOTOGRAMETRIA
MÁRIO LUIZ LOPES REISS

MÁRIO LUIZ LOPES REISS
ALGUNS FUNDAMENTOS MATEMÁTICOS PARA A FOTOGRAMETRIA
- REVISÃO -
PORTO ALEGRE
2010

MATEMÁTICA PARA FOTOGRAMETRIA
iii Mário Luiz Lopes Reiss
CONTEÚDO
CONTEÚDO ___________________________________________________________________________iii
LISTA DE FIGURAS ____________________________________________________________________ v
CAPÍTULO I
1 INTRODUÇÃO ______________________________________________________________________ 1
1.1 CONSIDERAÇÕES INICIAIS ________________________________________________________ 1
1.2 ESTRUTURA DO TRABALHO ______________________________________________________ 2
CAPÍTULO II
2 SISTEMAS DE COORDENADAS _______________________________________________________ 3
2.1 SISTEMAS DE COORDENADAS BIDIMENSIONAIS ____________________________________ 3
2.2 SISTEMAS DE COORDENADAS TRIDIMENSIONAIS ___________________________________ 4
CAPÍTULO III
3 ÁLGEBRA VETORIAL ________________________________________________________________ 6
3.1 INTRODUÇÃO ___________________________________________________________________ 6
3.2 OPERAÇÕES COM VETORES ______________________________________________________ 8
3.3 PRODUTOS DE VETORES ________________________________________________________ 10
3.3.1 PRODUTO PONTO OU PRODUTO ESCALAR ______________________________________ 10
3.3.2 PRODUTO CRUZ OU PRODUTO VETORIAL _______________________________________ 11
3.3.3 PRODUTO TRIPLO ESCALAR ___________________________________________________ 12
3.3.4 PLANOS E LINHAS ____________________________________________________________ 12
CAPÍTULO IV
4 ÁLGEBRA MATRICIAL ______________________________________________________________ 15
4.1 DEFINIÇÕES ___________________________________________________________________ 15
4.2 TIPOS DE MATRIZES ____________________________________________________________ 16
4.3 OPERAÇÕES BÁSICAS COM MATRIZES ____________________________________________ 19
4.4 MATRIZ INVERSA _______________________________________________________________ 24
4.5 MATRIZ INVERSA POR PARTICINAMENTO __________________________________________ 28
4.6 AUTOVALOR E AUTOVETOR _____________________________________________________ 30
4.7 FORMAS BILINEAR E QUADRÁTICAS ______________________________________________ 33

MATEMÁTICA PARA FOTOGRAMETRIA
iv Mário Luiz Lopes Reiss
CAPÍTULO V
5 TRANSFORMAÇÕES LINEARES ______________________________________________________ 35
5.1 DEFINIÇÃO ____________________________________________________________________ 35
5.2 TRANSFORMAÇÃO LINEAR BIDIMENSIONAL _______________________________________ 35
5.2.1 TRANSFORMAÇÕES ELEMENTARES ____________________________________________ 36
5.2.1.1 TRANSLAÇÃO ____________________________________________________________ 36
5.2.1.2 ESCALA UNIFORME _______________________________________________________ 37
5.2.1.3 ROTAÇÃO _______________________________________________________________ 37
5.2.1.4 REFLEXÃO ______________________________________________________________ 39
5.2.1.5 FATOR DE ESCALA NÃO UNIFORME ________________________________________ 39
5.2.1.6 TORÇÃO ________________________________________________________________ 40
5.2.2 TRANSFORMAÇÃO DE QUATRO PARÂMETROS ___________________________________ 41
5.2.3 TRANSFORMAÇÃO DE SEIS PARÂMETROS ______________________________________ 42
5.3 TRANSFORMAÇÃO LINEAR TRIDIMENSIONAL ______________________________________ 42
5.3.1 ROTAÇÕES DE UM SISTEMA DE COORDENADAS TRIDIMENSIONAIS ________________ 43
5.3.2 TRANSFORMAÇÃO DE SETE PARÂMETROS ______________________________________ 46
5.3.2.1 CONSTRUINDO M POR UMA ROTAÇÃO SOBRE UMA LINHA ___________________ 46
5.3.2.2 UMA DERIVAÇÃO DE M PURAMENTE ALGÉBRICA ___________________________ 46
CAPÍTULO VI
6 TRANSFORMAÇÕES NÃO-LINEARES _________________________________________________ 48
6.1 CONSIDERAÇÕES INICIAIS _______________________________________________________ 48
6.2 TRANSFORMAÇÃO DE OITO PARÂMETROS ________________________________________ 48
6.3 POLINOMIAIS GERAIS BIDIMENSIONAIS ___________________________________________ 48
6.4 POLINÔMIOS GERAIS TRIDIMENSIONAIS ___________________________________________ 49
CAPÍTULO VII
7 LINEARIZAÇÃO DE FUNÇÕES NÃO-LINEARES _________________________________________ 51
7.1 CONSIDERAÇÕES INICIAIS _______________________________________________________ 51
7.2 UMA FUNÇÃO PARA DUAS VARIÁVEIS ____________________________________________ 52
7.3 DUAS FUNÇÕES PARA UMA VARIÁVEL ____________________________________________ 53
7.4 DUAS FUNÇÕES PARA DUAS VARIÁVEIS __________________________________________ 54
7.5 CASO GERAL DE m FUNÇÕES PARA n VARIÁVEIS __________________________________ 54
7.6 DERIVAÇÃO DE UM DETERMINANTE ______________________________________________ 55
7.7 DERIVAÇÃO DE UM QUOCIENTE __________________________________________________ 56
BIBLIOGRAFIA _______________________________________________________________________ 57

MATEMÁTICA PARA FOTOGRAMETRIA
v Mário Luiz Lopes Reiss
LISTA DE FIGURAS
Figura 2-1 – Coordenadas polares e Cartesianas bidimensionais ______________________________ 3
Figura 2-2 – Coordenadas polares e Cartesianas bidimensionais ______________________________ 4
Figura 3-1 – Vetores no plano ____________________________________________________________ 6
Figura 5-1 – Translação ________________________________________________________________ 36
Figura 5-2 – Escala Uniforme ___________________________________________________________ 37
Figura 5-3 – Rotação __________________________________________________________________ 38
Figura 5-4 – Reflexão __________________________________________________________________ 39
Figura 5-5 – Fator de Escala Não-Uniforme ________________________________________________ 40
Figura 5-6 – Torção ____________________________________________________________________ 41
Figura 5-7 – Rotações em um sistema Cartesiano __________________________________________ 44
Figura 7-1 – Linearização _______________________________________________________________ 51

MATEMÁTICA PARA FOTOGRAMETRIA
1 Mário Luiz Lopes Reiss
CAPÍTULO I
1 INTRODUÇÃO
1.1 CONSIDERAÇÕES INICIAIS
A Fotogrametria é definida como uma tecnologia de obtenção de medidas
confiáveis de corpos tridimensionais em um dado referencial, por meio da utilização de
fotografias tiradas desses corpos. Na Fotogrametria, a extração das medidas dos corpos
é feita indiretamente por meio de fotografias dos objetos e relações geométricas
estabelecidas entre o sistema de referência da(s) foto(s) e o espaço objeto.
Muitas das operações utilizadas na Fotogrametria são baseadas em conceitos
matemáticos básicos, cuja compreensão e estudo são fundamentais para o domínio,
entendimento e aplicação adequada das técnicas fotogramétricas.
Essa revisão foi baseada na tradução de parte do Apêndice A do livro Introduction
to Modern Photogrammetry de Edward M. Mickhail, James S. Bethel e J. Chris McGlone
publicado pela editora John Wiley & Sons, Inc em 2001 nos EUA.
Compreende-se que os tópicos abordados aqui são, dentre muitos, alguns dos
mais fundamentais utilizados na Fotogrametria, sendo eles: Sistemas de Coordenadas,
Álgebra Vetorial, Álgebra Matricial, Transformações Lineares, Transformações Não-
Lineares, e Linearização de Funções Não-Lineares.

MATEMÁTICA PARA FOTOGRAMETRIA
2 Mário Luiz Lopes Reiss
1.2 ESTRUTURA
Esta revisão está dividida em sete capítulos. Dos quais, no primeiro, é dada a
introdução e considerações iniciais.
No capítulo seguinte é abordado o assunto Sistema de Coordenadas,
discorrendo-se sobre os sistemas bi e tridimensionais.
No terceiro capítulo, tem-se o assunto Álgebra Vetorial, com definições,
operações e produtos com vetores.
No capítulo seguinte, é trata sobre Álgebra Matricial, com definições e tipos de
matrizes, operações básicas, matriz inversa, autovalor e autovetor, e formas bilinear e
quadráticas.
O capítulo quinto aborda os principais conceitos envolvidos em transformações
lineares, sendo no capítulo seguinte abordadas as não-lineares.
No sétimo e último capítulo trata do assunto Linearização de Funções Não-
Lineares, preparando-se e auxiliando na compreensão dos processos de ajustamento.

MATEMÁTICA PARA FOTOGRAMETRIA
3 Mário Luiz Lopes Reiss
CAPÍTULO II
2 SISTEMAS DE COORDENADAS
2.1 SISTEMAS DE COORDENADAS BIDIMENSIONAIS
Um sistema de referência de coordenadas em um plano é definido um conjunto
mínimo de requisitos, sendo eles dados por um terno de elementos, dois associados a um
ponto origem e um à uma direção. A unidade de medida, que representa a escala, pode
também ser incluída, assim compondo um conjunto total de quatro elementos.
x
y
O
P
r
X
Y
Figura 2-1 – Coordenadas polares e Cartesianas bidimensionais
Qualquer ponto pode ser localizado em um sistema de referência por duas
coordenadas. Na Figura 2.1 são representados dois sistemas de coordenadas muito
usados: polar e o Cartesiano ou retangular . Um ponto pode ser localizado
por um ângulo de , medido a partir da direção , e pela distância , medida a partir do
MATEMÁTICA PARA FOTOGRAMETRIA
4 Mário Luiz Lopes Reiss
ponto de referência. De forma alternativa, a posição do ponto pode ser determinada
por suas duas distâncias a partir de dois eixos perpendiculares, e . Estas distâncias
são chamadas coordenadas Cartesianas de um ponto qualquer. As coordenadas
Cartesianas podem ser obtidas a partir de coordenadas polares por:
(2.1)
Inversamente, ,r pode ser derivada a partir de 21 , xx usando:
(2.2)
2.2 SISTEMAS DE COORDENADAS TRIDIMENSIONAIS
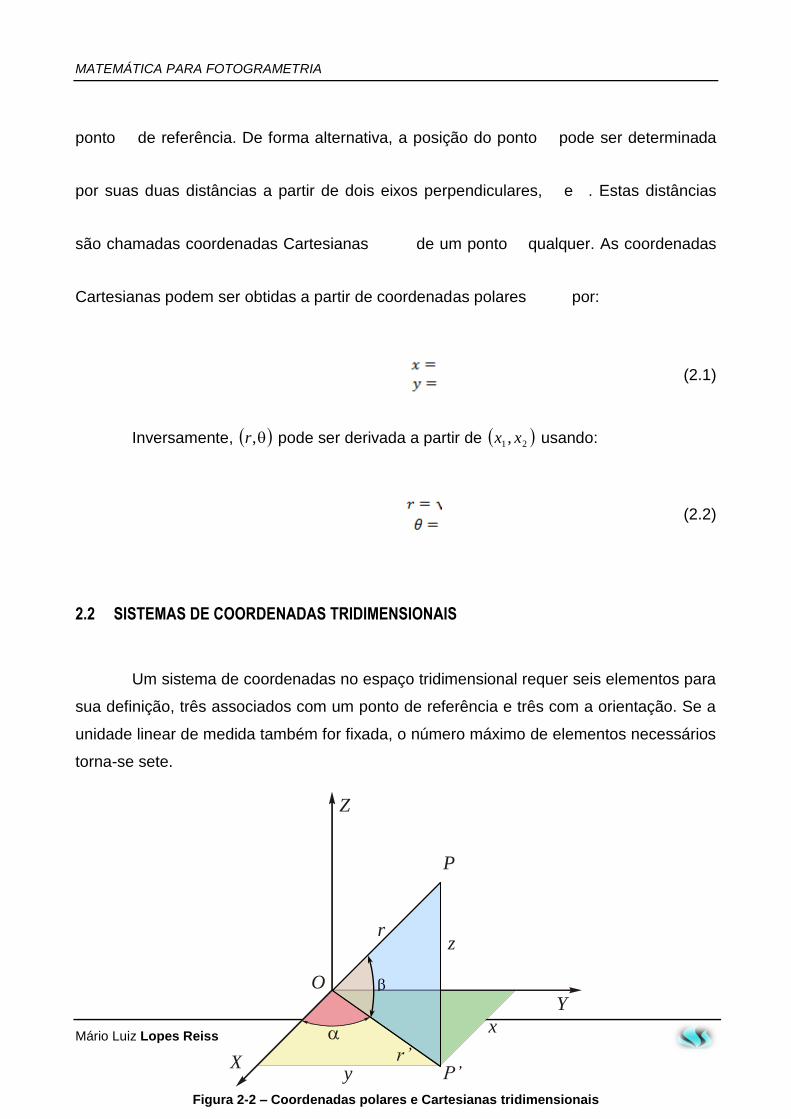
Um sistema de coordenadas no espaço tridimensional requer seis elementos para
sua definição, três associados com um ponto de referência e três com a orientação. Se a
unidade linear de medida também for fixada, o número máximo de elementos necessários
torna-se sete.
Figura 2-2 – Coordenadas polares e Cartesianas tridimensionais
Z
P
r
r’
z
P’
OY
Xy
x

MATEMÁTICA PARA FOTOGRAMETRIA
5 Mário Luiz Lopes Reiss
A Figura 2.2 mostra dois sistemas tridimensionais de coordenadas: esférico
e Cartesiano ou retangular . No sistema esférico, qualquer ponto é
posicionado por sua distância a partir da origem, o ângulo entre o eixo e (a
projeção de sobre o plano ), e o ângulo entre e . O sistema de coordenadas
Cartesianas é composto por três eixos mutuamente perpendiculares , e . Em geral,
qualquer ponto pode ser descrito no espaço por três coordenadas . As relações
entre os sistemas de coordenadas esféricas e o Cartesiano são as seguintes
:
(2.3)
r
zsen
x
y
zyxr
1
1
222
tan
(2.4)

MATEMÁTICA PARA FOTOGRAMETRIA
6 Mário Luiz Lopes Reiss
CAPÍTULO III
3 ÁLGEBRA VETORIAL
3.1 INTRODUÇÃO
Um vetor é uma entidade que tem uma magnitude e uma direção. Em espaços bi
ou tridimensionais, ele é um segmento de linha direcionado partido de um ponto até outro.
Um vetor pode ser representado por uma única letra minúscula, por exemplo, a , ou por
PQ que representa o vetor partindo de um ponto P à um ponto Q . Um exemplo é
mostrado na Figura 3.1. A projeção de um vetor a nos eixos x e y são ax e ay ,
respectivamente, que são chamados de componentes do vetor. A representação das
componentes do vetor pode ser feita em uma matriz coluna:
a
a
y
xa
Y
ay
Xax
Qx
Qy
Px
Py
q
a
p
i
j
Q
P
O
Figura 3-1 – Vetores no plano

MATEMÁTICA PARA FOTOGRAMETRIA
7 Mário Luiz Lopes Reiss
É evidente, pela representação da Figura 3.1, que PQa xxx e PQa yyy .
Portanto, as componentes de um vetor podem ser obtidas pela subtração das
coordenadas de seu ponto inicial P das coordenadas de seu ponto final Q . Assim os
vetores p e q na Figura 3.1 começam nas respectivas origens:
P
P
y
xp
e
Q
Q
y
xq
e o vetor a é dado por:
ou
pqa (3.1)
Expandindo para tridimensional, pode-se escrever:
a
a
a
z
y
x
a
O comprimento do vetor é designado por a e é dado por
222
aaa zyx a (3.2)
Uma direção do vetor é dada por qualquer ângulo formado entre ele com os eixos,
, e , ou por seus cossenos. Estes últimos são chamados cossenos diretores e são
dados por:
a
a
a
a
a
a
z
z
y
y
x
x coscoscos (3.3)
P
P
Q
Q
a
a
y
x
y
x
y
x

MATEMÁTICA PARA FOTOGRAMETRIA
8 Mário Luiz Lopes Reiss
Desta forma, uma direção no espaço é completamente determinada por apenas
dois ângulos (na Figura 2.2, OP é obtido por e ), somente se os dois cossenos
diretores forem independentes. Conseqüentemente, os cossenos diretores são
relacionados pela seguinte equação:
1coscoscos 222 (3.4)
que pode ser prontamente provada por meio das Equações 3.2 e 3.3. Pode-se generalizar
agora um vetor para n dimensões, ou seja:
na
a
a
2
1
a
3.2 OPERAÇÕES COM VETORES
Dois vetores são iguais, ba , quando todos os componentes dos vetores são
iguais, nn bababa ,,, 2211 .
Vetores são adicionados ou subtraídos pela adição ou subtração de cada
componente individual. Desta forma, bac significa que
nnn bacbacbac ,,, 222111 .
A adição e a subtração de vetores são:
Comutativas:
abba ;
Associativa:
cbacba ;

MATEMÁTICA PARA FOTOGRAMETRIA
9 Mário Luiz Lopes Reiss
Transitiva:
ba e ca cb .
As operações de adição e subtração somente podem ser realizadas com vetores
de mesmas dimensões.
Um escalar é uma quantidade que tem somente uma magnitude, mas nenhuma
direção, assim como massa, temperatura, tempo, etc., e geralmente é designado por uma
letra grega. Vetores de qualquer número de componentes podem ser multiplicados por um
escalar através da multiplicação do escalar por cada componente do vetor:
na
a
a
2
1
a
A multiplicação de vetores por escalares também tem as seguintes propriedades:
aa
baba
aaa
aaa
λλ
λλλ
μλμλ
λμμλμλ
(3.5)
Qualquer vetor a é reduzido a um vetor unitário 0a quando seus componentes
forem divididos por seu comprimento, que é um escalar:
a
aa 0 (3.6)
Os componentes de 0a são os cossenos diretores de a . Vetores unitários ao
longo dos eixos coordenados são chamados vetores base e são dados por:
1
0
0
0
1
0
0
0
1
kji (3.7)

MATEMÁTICA PARA FOTOGRAMETRIA
10 Mário Luiz Lopes Reiss
(ver a representação para i e j na Figura 3.1). Qualquer vetor no espaço tridimensional
é unicamente expresso como:
kjia aaa zyx (3.8)
O sistema dextrógiro introduzido na Seção 2.2 pode ser generalizado para três
vetores ba, e c . Se eles forem não coplanares, e tiverem o mesmo ponto inicial, então
eles estarão na forma de um sistema dextrógiro se como algo semelhante a um parafuso
de rosca direita fosse rotado em um ângulo menor que 180º de a para b e avançasse na
direção c .
3.3 PRODUTOS DE VETORES
3.3.1 PRODUTO PONTO OU PRODUTO ESCALAR
O produto ponto ou produto escalar de dois vetores é
n
p
nnpp babababa1
2211 ba (3.9)
Ele é também chamado de produto interno. Ele é um escalar que tem as
seguintes propriedades:
0
1
ikkjji
kkjjii
babababa
cabacba
abba
(3.10)
O produto escalar de um vetor com ele mesmo é igual ao quadrado de sua
distância, ou seja:
222
2
2
1 aaa naaa (3.11)

MATEMÁTICA PARA FOTOGRAMETRIA
11 Mário Luiz Lopes Reiss
Se é o ângulo entre dois vetores a e b (em um espaço bi ou tridimensional),
ele pode ser dado por:
cosbaba (3.12)
Se a e b forem perpendiculares, então 0ba .
ba
baarccos
3.3.2 PRODUTO CRUZ OU PRODUTO VETORIAL
O produto cruz ou produto vetorial de dois vetores, ba (lê-se “ a cruz b ”), é um
outro vetor c que é perpendicular a ambos os vetores a e b e em uma direção na qual
ba, e c (nesta ordem) formam um sistema dextrógiro. O comprimento de c é dado por:
senbabac (3.13)
onde é o ângulo entre a e b . Esta quantidade é a área do paralelogramo determinada
por a e b . Se kjia aaa zyx e kjib bbb zyx , então c é dado pelo
determinante:
abba
abba
abba
bbb
aaa
yxyx
xzxz
zyzy
zyx
zyx
kji
bac (3.14)
O produto vetorial tem as seguintes propriedades:
jiki,kjk,ji
0kkjjii
bababa
caa
cabacba
abba
2222
0 (3.15)

MATEMÁTICA PARA FOTOGRAMETRIA
12 Mário Luiz Lopes Reiss
Para dois vetores não nulos, se 0ba , então a e b são paralelos.
3.3.3 PRODUTO TRIPLO ESCALAR
O produto triplo escalar de três vetores ba, e c é um escalar dado pelo
determinante
ccc
bbb
aaa
zyx
zyx
zyx
cba (3.16)
que é igual ao volume do paralelogramo determinado por ba, e c . Se o produto triplo
escalar é zero, então os três vetores são coplanares. Ele tem a seguintes propriedades:
cbacba
bacacbcba
(3.17)
3.3.4 PLANOS E LINHAS
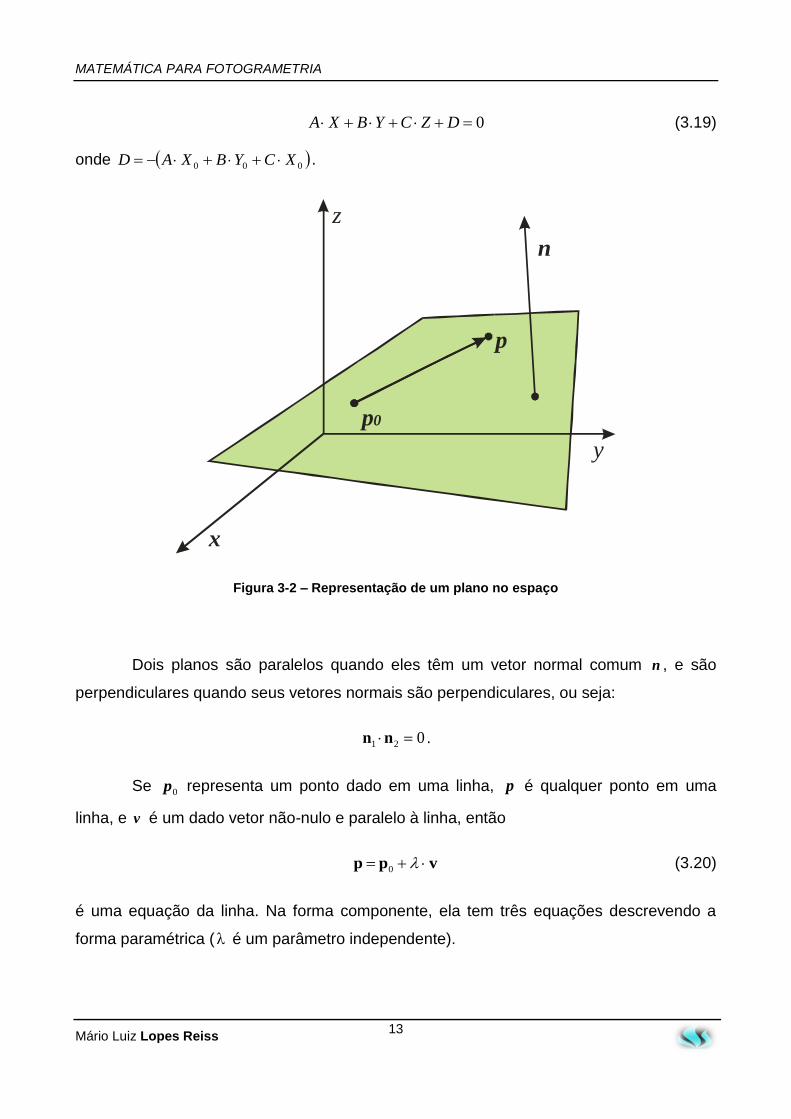
Se n é um vetor não-nulo normal a um plano, e 0p é um vetor pertencente ao
plano; tomando outro ponto p pertencente ao plano, então a equação do plano tem a
seguinte forma:
0 npp 0 ou 0 npnp 0 (3.18)
Fazendo
kjin CBA , kjip 0000 ZYX , e kjip ZYX
então a Equação 3.18 torna-se
0000 YYCYYBXXA
ou
MATEMÁTICA PARA FOTOGRAMETRIA
13 Mário Luiz Lopes Reiss
0 DZCYBXA (3.19)
onde 000 XCYBXAD .
p0
p
n
x
y
z
Figura 3-2 – Representação de um plano no espaço
Dois planos são paralelos quando eles têm um vetor normal comum n , e são
perpendiculares quando seus vetores normais são perpendiculares, ou seja:
021 nn .
Se 0p representa um ponto dado em uma linha, p é qualquer ponto em uma
linha, e v é um dado vetor não-nulo e paralelo à linha, então
vpp 0 (3.20)
é uma equação da linha. Na forma componente, ela tem três equações descrevendo a
forma paramétrica ( é um parâmetro independente).

MATEMÁTICA PARA FOTOGRAMETRIA
14 Mário Luiz Lopes Reiss
z
y
x
vZZ
vYY
vXX
0
0
0
(3.21)

MATEMÁTICA PARA FOTOGRAMETRIA
15 Mário Luiz Lopes Reiss
CAPÍTULO IV
4 ÁLGEBRA MATRICIAL
4.1 DEFINIÇÕES
Uma matriz é um grupo de números ou funções escalares armazenadas em um
arranjo retangular bidimensional. Os exemplos seguintes são exemplos de matrizes:
dcba
dc
ba
397
5
1,
346
021
.
Toda matriz tem um número específico de linhas e colunas. Desta forma o
exemplo de matriz a tem 2 linhas e 3 colunas e é dito ser uma matriz 2 x 3 (lê-se “dois
por três”). De forma similar, b é uma matriz 2 x 1, c é uma matriz 1 x 3, e d é uma
matriz 2 x 2. Os dois números representando as linhas e as colunas são referenciados
como as dimensões da matriz.
Uma matriz é denotada por uma letra maiúscula. Assim uma matriz nm pode
ser simbolicamente escrita como:
mnmm
n
n
nm
aaa
aaa
aaa
21
22221
11211
A .
Uma letra minúscula com dois números subscritos representa os elementos da matriz.
Assim ija representa um elemento típico da matriz A . O primeiro subscrito, i , refere-se
ao número da linha que contém ija , iniciando com 1 até na parte superior até o valor m
na parte inferior da matriz. O segundo subscrito, j , refere-se ao número da coluna que

MATEMÁTICA PARA FOTOGRAMETRIA
16 Mário Luiz Lopes Reiss
contém ija , iniciando com 1 à direita até n à esquerda. Desta forma ija esta na
intersecção da ésimai linha com a ésimaj coluna. Por exemplo, a no exemplo anterior de
matriz a é 3, enquanto 12a na matriz c é 9. A menor matriz tem dimensão 1 x 1.
4.2 TIPOS DE MATRIZES
Uma matriz quadrada é uma matriz na qual o número de linhas é igual ao número
de colunas. Se A é uma matriz quadrada com m linhas e m colunas, A é de ordem m .
A diagonal principal de uma matriz quadrada é composta de todos os elementos ija nos
quais ji . As seguintes matrizes são exemplos de matrizes quadradas:
khg
fed
cba
BA ,43
21.
A diagonal principal de A é composta dos elementos 1 e 4; a diagonal principal
de B é composta dos elementos ea, e k .
Uma matriz linha é uma matriz composta de somente linhas. Sua notação é
realizada por uma letra minúscula. Os seguintes são exemplos de matrizes linhas:
421,31
211
da n
naaa .
Uma matriz coluna, ou vetor coluna, é uma matriz composta de somente uma
coluna. Por exemplo,
3
1,
12
2
1
1cb
m
m
b
b
b
.
Esta é a mesma definição dada para um vetor, introduzida na Seção 3.

MATEMÁTICA PARA FOTOGRAMETRIA
17 Mário Luiz Lopes Reiss
Uma matriz diagonal é uma matriz quadrada cujos elementos que não estão na
diagonal principal são zero. Por exemplo:
mmd
d
d
00
00
00
12
11
D
onde
0ijd para todo ji
0ijd para alguns ou todos ji
Os seguintes são exemplos de matrizes diagonais:
r
q
p
00
00
00
,
300
000
001
BA
Uma matriz escalar é uma matriz diagonal cujos elementos da diagonal principal
são todos iguais a um mesmo escalar. Por exemplo,
a
a
a
00
00
00
A ,
onde 0ija para todo ji e aaaij | para alguns ou todos ji , e
200
020
002
B
são matrizes escalares.
Uma matriz unidade ou matriz identidade é uma matriz diagonal cujos elementos
da diagonal principal são iguais a 1. Uma matriz unidade é referida por I . Assim,

MATEMÁTICA PARA FOTOGRAMETRIA
18 Mário Luiz Lopes Reiss
100
010
001
I
na qual 0ija para todo ji e 1ija para alguns ou todos ji . Uma matriz nula ou
matriz zero é a matriz cujos elementos são todos zeros. Ela é denotada por 0 .
Uma matriz triangular é a matriz cujos elementos abaixo (ou acima), mas não
incluindo, da diagonal principal são todos nulos. Uma matriz triangular superior tem a
forma
mm
m
m
a
aa
aaa
00
0 212
11211
A
na qual 0ija para ji . A matriz
300
010
421
A
é um exemplo de uma matriz triangular superior de ordem 3. A matriz triangular inferior é
de forma
mmmm aaa
a
a
21
12
11
00
00
A
onde 0ija para ji . A matriz
112
018B

MATEMÁTICA PARA FOTOGRAMETRIA
19 Mário Luiz Lopes Reiss
é um exemplo de matriz triangular inferior de ordem 2.
4.3 OPERAÇÕES BÁSICAS COM MATRIZES
Muitas operações com matrizes são similares ou equivalentes aos escalares:
igualdade, adição, subtração e multiplicação. Divisão não existe em álgebra matricial; no
entanto, uma outra operação, a inversão, a substitui. Operações adicionais são
específicas para as matrizes sem haver equivalência aos escalares: transposição,
multiplicação por um escalar, e traço.
Duas matrizes A e B são iguais se elas forem de mesma dimensão e cada
elemento ijij ba para todo i e j . Matrizes de dimensões diferentes não podem ser
iguais.
A soma de duas matrizes A e B é possível somente se elas forem de dimensões
iguais, e os elementos da matriz de resultado C são ijijij bac para todo i e j . As
seguintes relações são aplicáveis para a adição e subtração de matrizes:
0AA
CBACBACBA
ABBA
(4.1)
onde 0 é a matriz nula e A é a matriz composta de ija elementos. Por exemplo, se
wvu
zyxCBA ,
620
231,
640
021
e ABC , para computar os valores dos seis elementos vuzyx ,,,, e w de C , primeiro
computa-se AB :
020
210
640
021
620
231
e então forma-se:

MATEMÁTICA PARA FOTOGRAMETRIA
20 Mário Luiz Lopes Reiss
020
210
wvu
zyxC .
Assim, ,2,0,2,1,0 vuzyx e 0w .
A multiplicação de uma matriz por um escalar resulta em uma outra matriz
AB cujos elementos são ijij ab para todo i e j . As seguintes relações são
aplicadas para a multiplicação por escalar ( e são escalares):
AAA
BABABA
AAA
BABA
(4.2)
A multiplicação de duas matrizes é outra matriz. As duas matrizes devem ser
compatíveis para serem multiplicadas, de forma que o número de colunas da primeira
matriz deve ser igual ao número de linhas da segunda matriz. Assim, se A é uma matriz
de dimensão qm e B é uma matriz de dimensão nq , o produto BA , nesta ordem, é
outra matriz C com m linhas e (como em A ) e n colunas (como em B ). Cada elemento
ijc em C é obtido pela multiplicação de cada um dos q elementos nas ésimasi linhas da
matriz A pelos elementos correspondentes nas ésimasj colunas de B e adição.
Algebricamente, esta operação é escrita como:
q
k
kiikqiiqjijiij babababac1
2211 (4.3)
Para ilustrar a multiplicação de matrizes:
7
7
305112
325011
3
5
1
012
201
133212BAC .
A multiplicação de matrizes não é comutativa. Em geral sempre FGGF se a
dimensão das matrizes permitir a multiplicação em ambas as direções, ou seja, se as

MATEMÁTICA PARA FOTOGRAMETRIA
21 Mário Luiz Lopes Reiss
matrizes forem respectivamente de dimensões nm e mn , ou quando as matrizes
forem quadradas e de mesma ordem. Por exemplo:
010
623
05
21
20
43
2015
83
20
43
05
21FGGF .
as seguintes relações são presentes às multiplicações de matrizes:
vadistributilei
vadistributilei
aassociativlei
CBCACBA
CABACBA
CBACBACBA
ABBA
AAIIA
(4.4)
Uma importante propriedade da multiplicação de matrizes que se distingue da
multiplicação de escalares é que o produto matricial pode ser uma matriz nula ou zero
sem que qualquer matriz seja uma matriz nula, ou 0BA com 0B0,A , como por
exemplo:
00
00
32
32
00
11BA .
Também, CABA não implica que CB .
A transposta da matriz A de dimensão nm é uma matriz mn formada a partir
de A pelo intercâmbio das linhas e colunas de forma que as ésimasi linhas de A torna-se
as ésimasi colunas da matriz transposta. A notação da transposta de A é dada por T
A . Se
TAB , segue que jiij ab para todo i e j . Por exemplo, se
05
30
61
B , então
036
501T
B .
As seguintes relações são aplicadas à transposta de uma matriz:

MATEMÁTICA PARA FOTOGRAMETRIA
22 Mário Luiz Lopes Reiss
TTT
TT
TT
TTT
A
ABBA
A
AA
BABA
(4.5)
Destaca-se a ordem inversa na relação de multiplicação.
Uma matriz quadrada é simétrica se ela é igual à sua transposta; A é simétrica
se AA T. Como a transposição de uma matriz quadrada não altera os elementos da
diagonal principal, os elementos acima dela são uma imagem espelho daqueles abaixo da
diagonal. Por exemplo:
461
602
123
e
cb
ba são matrizes simétricas.
As matrizes, diagonal, escalar e identidade são matrizes simétricas, tendo em
vista que elas são iguais às suas transpostas. Para uma matriz A (não necessariamente
quadrada), ambas T
AA e AA T são simétricas. Se B é uma matriz simétrica de
dimensão compatível, então para qualquer matriz A , ambos T
ABA e ABA T são
simétricas.
Se a é uma matriz colunas (ou um vetor), então aa T é um escalar positivo que é
igual à soma dos quadrados dos seus elementos, por exemplo
2
3
2
2
2
1
3
2
1
321 aaa
a
a
a
aaaT
aa
Isto é igual ao produto interno do vetor a com ele mesmo, que é igual ao quadrado de
seu comprimento.
Uma matriz quadrada é de torção simétrica se ela é igual ao negativo de sua
transposta, ou AA T e jiij aa para todo i e j . Os elementos da diagonal de uma

MATEMÁTICA PARA FOTOGRAMETRIA
23 Mário Luiz Lopes Reiss
matriz de torção simétrica são todos zero, e eles única matriz que é ao mesmo tempo
simétrica e de torção simétrica é a matriz nula. Um exemplo de matriz de torção simétrica
é
063
601
310
.
Para qualquer matriz quadrada A , a matriz TAA é simétrica e T
AA é de torção
simétrica.
O traço de uma matriz quadrada é um escalar que é igual à soma dos elementos
de sua diagonal principal. Ele é denotado por Atr . Por exemplo, o traço de
963
852
741
A
é
15951tr A .
As seguintes são as propriedades do traço:
AFAF
BA
BABA
AA
AA
trtr
trtr
trtrtr
trtr
trtr
1
AB
T
(4.6)
onde F é uma matriz não singular.

MATEMÁTICA PARA FOTOGRAMETRIA
24 Mário Luiz Lopes Reiss
4.4 MATRIZ INVERSA
Como aludido anteriormente, a divisão de matrizes não é definida, e CABA
não implica CB . Em substituição à divisão, é usado o conceito de matriz inversa. A
inversa de uma matriz quadrada A , se ela existir, é a única matriz 1A com a seguinte
propriedade:
IAAAA 11 (4.7)
onde I é a matriz identidade. Assim, para:
12
13A
a matriz
32
111
A
é a matriz inversa porque
10
01
32
11
12
13
e
10
01
12
13
32
11.
As propriedades da inversa são:
11
11
11
111
1
AA
AA
AA
ABBA
TT (4.8)

MATEMÁTICA PARA FOTOGRAMETRIA
25 Mário Luiz Lopes Reiss
Destaca-se a reversão da ordem de distribuição sobre um produto, assim como para a
transposta. Uma matriz que tem uma inversa é chamada de não-singular. Uma matriz que
não tem inversa e chamada singular.
Mostrou-se anteriormente que BA pode ser igual a 0 sem, no entanto,
0B0A ou . Se, entretanto, BA ou for não singular, então a outra matriz deve ser uma
matriz nula. Conseqüentemente, o produto de duas matrizes não-singulares não pode ser
uma matriz nula.
Para apresentar um método de cálculo de uma matriz inversa o conceito de
determinante será inicialmente introduzido. Associado com cada matriz quadrada A tem-
se um único valor escalar chamado de determinante de A . Ele é denotado ou por Adet
ou por A . Assim, para:
12
13A
o determinante é expresso como
12
13A .
O determinante de ordem n (para uma matriz quadrada nn ) pode ser definido
recursivamente em termos de determinantes de ordem 1n . Para a aplicação deste
procedimento, o determinante de uma matriz 11 deve ser definido. Adequadamente,
para uma matriz que consiste de um único elemento, o determinante é definido como o
valor do elemento, que é, para 1111 det, aa AAA .
Se A é uma matriz nn , e uma linha e uma coluna de A são apagada, a matriz
resultante é uma sub-matriz 11 nn de A . O determinante dessa matriz é chamado
secundário de A , e ele é denotado por ijm , onde i e j correspondem às linhas e colunas
apagadas, respectivamente. Mais especificamente, ijm é conhecida como o secundária do
elemento ija em A . Por exemplo, considerando-se:

MATEMÁTICA PARA FOTOGRAMETRIA
26 Mário Luiz Lopes Reiss
333231
232221
131211
aaa
aaa
aaa
A .
Cada elemento de A tem uma secundária. A secundária de 11a , por exemplo, é obtida ao
apagar a primeira linha e primeira coluna de A e tomando o determinante da sub-matriz
22 que resta,
3332
2322
11aa
aam .
O cofator ijc de um elemento ija é definido como
ij
ji
ij mc
1 (4.9)
Obviamente, quando a soma do número da linha i e coluna j é par, ijij mc , e quando
ji é impar, ijij mc .
O determinante de uma matriz A nn é definido então como
nn cacaca 1112121111 A (4.10)
que estabelece que o determinante de A é a soma dos produtos dos elementos da
primeira linha de A e seus correspondentes cofatores. (É possível também definir A
baseado em uma outra linha ou coluna, mas para simplificação foi usada a primeira linha.)
Com base na definição, a matriz 22
2221
1211
aa
aaA
tem cofatores 222211 aac , e 121212 aac , o determinante de A é
2112221122221111 aaaacaca A .

MATEMÁTICA PARA FOTOGRAMETRIA
27 Mário Luiz Lopes Reiss
Assim, por exemplo,
14214343
21
.
A matriz cofatora C de uma matriz A é a matriz quadrada de mesma ordem de
A na qual cada elemento ija é substituído por seus cofatores ijc . Por exemplo, a matriz
cofatora de
43
21A
é
12
34C .
A matriz adjunta de A , denotada por Aadj , é a transposta de sua matriz cofatora,
TCA adj (4.11)
Pode ser demonstrado que
I AAAAA adjadj (4.12)
A comparação das Equações 4.7 e 4.11 conduz diretamente a um procedimento
de determinação da inversa a partir da matriz adjunta, isto é,
A
AA
adj1 (4.13)
Por exemplo,
32
11adj,
31
21,1,
12
13ACAA
e a inversa de A é
32
11adj1
A
AA .

MATEMÁTICA PARA FOTOGRAMETRIA
28 Mário Luiz Lopes Reiss
Se observa que para uma matriz 22 , a adjunta é simplesmente:
1121
1222
aa
aa.
Uma matriz é chamada ortogonal se sua inversa é igual à sua transposta, ou
TAA 1 . Assim, a matriz M é ortogonal quando:
ITT MMMM (4.14)
As colunas de uma matriz ortogonal são mutuamente vetores ortogonais de comprimento
unitário. Também, para uma matriz ortogonal,
1M (4.15)
Quando 1M , então M é chamada ortogonal própria; caso contrário ela é
denominada ortogonal imprópria. O produto de duas matrizes ortogonais é também uma
matriz ortogonal.
4.5 MATRIZ INVERSA POR PARTICINAMENTO
Sendo A uma matriz quadrada nn não-singular cuja inversa não pode ser
determinada, pode-se particionar A na forma:
m
s
ms
2221
1211
AA
AAA
onde 11A é ss , 12A é ms , 21A é sm , 22A é mm , e nsm . A inversa 1
A existe
(desde que A seja não-singular) e dever ser particionada na forma correspondente por
2221
12111
BB
BBBA .

MATEMÁTICA PARA FOTOGRAMETRIA
29 Mário Luiz Lopes Reiss
Por meio da definição básica de uma inversa tem-se IBAAA 1 , ou na
forma particionada:
m
s
I0
0I
BB
BB
AA
AA
2221
1211
2221
1211
onde mII e s são matrizes identidade de ordem ms e , respectivamente. Isto leva a
mIBABA
0BABA
0BABA
IBABA s
22221221
21221121
22121211
21121111
(4.16)
A solução das Equações 4.16 quando 1
11
A existe é dada por
1
12
1
11212222
1
11212221
2212
1
1112
2112
1
11
1
1111
AAAAB
AABB
BAAB
BAAAB
(4.17)
De forma alternativa, quando 1
22
A existe, a solução é
1221
1
22
1
2222
1121
1
2221
1
22121112
1
21
1
22121111
BAAAB
BAAB
AABB
AAAAB
(4.18)
Se A é originalmente uma matriz simétrica, então T
1221 AA e, correspondentemente,
T
1221 BB .
Em inversão por partição computa-se diretamente a inversa de matrizes de uma
ordem menor que a matriz original. A inversão por partição pode ser realizada em mais de
um passo. Ela é geralmente usada quando uma as sub-matrizes de A tem estrutura que
pode ser facilmente invertida, assim como uma estrutura diagonal ou bloco-diagonal.

MATEMÁTICA PARA FOTOGRAMETRIA
30 Mário Luiz Lopes Reiss
O ranque de uma matriz é a ordem do maior determinante não-zero que pode ser
formado a partir de elementos da matriz pela eliminação apropriada de linhas e colunas
(ou ambos). Desta forma a matriz é dita ser de ranque m se e somente se tiver pelo
menos uma sub-matriz não-singular de ordem m , e não tiver nenhuma sub-matriz de
ordem maior que m . A matriz não-singular de ordem n tem um ranque n . A matriz com
ranque zero tem elementos que devem ser todos nulos.
A inversa 1
A é definida somente para matrizes quadradas, e existe quando o
ranque de A é igual à sua ordem. A inversa mais geral pode ser definida para matrizes
com ranque arbitrário. Ela é chamada de inversa generalizada, com notação
A , e
satisfaz a relação,
AAAA (4.20)
Esta condição não é suficiente para definir uma única
A . Condições adicionais são
necessárias para
A , tais como:
AAAA
AAAA
AAAA
T
T (4.19)
Se impostas todas as quatro condições nas Equações 4.18 e 4.19, a inversa é chamada
uma pseudo-inversa e é denotada por
A .
4.6 AUTOVALOR E AUTOVETOR
Para uma matriz quadrada A de ordem n , busca-se um vetor não-nulo x e um
escalar de forma que,
xxA (4.20)
Isto é chamado de problema do autovalor. A solução 00 x e para este problema é
chamada autovalor (ou valor próprio ou valor característico) e o correspondente autovetor

MATEMÁTICA PARA FOTOGRAMETRIA
31 Mário Luiz Lopes Reiss
(ou vetor próprio ou vetor característico) da matriz A . Um autovetor, se ele existe, pode
ser determinado somente se um múltiplo escalar se 00 x e satisfazem a Equação 4.20,
então 00 , x , onde é um escalar arbitrário, também irá satisfazer.
A Equação 4.20 pode ser reescrita como
0xIA (4.21)
que representa um conjunto de equações lineares homogêneas. Para uma solução não-
trivial para este conjunto de equações, a seguinte condição deve ser satisfeita:
0IA (4.22)
A equação 4.22 representa uma equação polinomial real de grau n :
0
0
1
1 bbbn
n
n
n (4.23)
onde:
AA
A
AA
de tedeterminan
de ordem de principais menores as todas de soma
de traço
0
1
22111 tr
1
b
rb
aaaab
b
rn
n
i
iinnn
n
(4.24)
A Equação 4.23 é chamada de equação característica de A , ou de equação de
autovalor. A matriz IA é chamada de matriz característica. Há n raízes para a
Equação 4.23, contando a multiplicidade. Estas são os n autovalores de A , n ,, 2 .
Para um autovalor i soluciona-se o conjunto de equações lineares (homogêneas)

MATEMÁTICA PARA FOTOGRAMETRIA
32 Mário Luiz Lopes Reiss
0xIA para determinar os componentes de autovetor ix correspondente. Em
geral, i e ix são números e vetores ou reais ou complexos, respectivamente.
Se a matriz A é simétrica, então:
1. Os autovalores são reais;
2. Os autovetores são todos mutuamente ortogonais, isto é, 0 i
T
jj
T
i xxxx .
Como exemplo, a polinômio característico da matriz:
12
21A
é
2
12
21
do qual
13 e
são os autovalores. Nota-se que ambos os autovalores são reais. Para 3 , tem-se:
2
1
2
1
3
3
12
21
x
x
x
x
ou 111 ,x é um autovetor. Para 12 , tem-se:
2
1
2
1
12
21
x
x
x
x
ou 112 ,x é um autovetor. Testes dois vetores são ortogonais, se forma que
01121 xxT

MATEMÁTICA PARA FOTOGRAMETRIA
33 Mário Luiz Lopes Reiss
4.7 FORMAS BILINEAR E QUADRÁTICAS
Se A é uma matriz quadra de ordem n e yx e são dois vetores ns-dimensionais
arbitrários, então o escalar:
yAx Tu (4.25)
é chamado de forma bilinear. Se, entretanto, a matriz A é também simétrica, então,
xAx Tv (2.26)
é chamado de forma quadrática como núcleo A .
A matriz A é chamada positiva definida se 0x todo para 0v , e escreve-se
0A . Se x todo para 0v e nele existe um vetor x para o qual é assegurada igualdade,
é dito que A é positiva semi-definida (ou definida não-negativa) e indica-se por 0A . Há
definições correspondentes para negativa definida e não-positiva definida. Se existem
vetores 21 xx e tais que 2211 0 xAxxAx TT e , diz-se que A é indefinida.
Para uma matriz positiva definida A é necessário e suficiente que
0,,0,02221
1211
11 Aaa
aaa (4.27)
Assim a matriz
411
131
123
B
é positiva definida, pois 03 e
054932
23
e

MATEMÁTICA PARA FOTOGRAMETRIA
34 Mário Luiz Lopes Reiss
0105192113 B .
A forma quadrática representa, em geral, uma seção cônica de algum tipo.
Considerando o caso bi-dimensional por simplicidade, tem-se xAx T com A simétrica,
ou
bxaxxaxa 2
2222112
2
111 2
que é a equação de uma elipse.

MATEMÁTICA PARA FOTOGRAMETRIA
35 Mário Luiz Lopes Reiss
CAPÍTULO V
5 TRANSFORMAÇÕES LINEARES
5.1 DEFINIÇÃO
Uma transformação linear geral de um vetor x para um outro vetor x tem a
forma:
txMx . (5.1)
Cada elemento do vetor x é uma combinação linear dos elementos de x mais uma
translação representada por um elemento do vetor t . A matriz M é chamada de matriz
de transformação, que em geral é retangular, e t é chamado vetor de translação. Por
simplificação, a matriz M será restrita como sendo quadrada e não singular, sendo que,
desta forma, existe relação inversa, ou seja,
txMx 1 (5.2)
Neste caso, é chamada transformação afim. Embora ambas as Equações 5.1 e 5.2 serem
aplicadas para vetores de grandes dimensões, neste texto a discussão será limitada, sem
deixar a generalidade, para os casos mais práticos de espaços bi e tridimensionais onde
os elementos da transformação podem ser descritos geometricamente.
5.2 TRANSFORMAÇÃO LINEAR BIDIMENSIONAL
Há seis transformações elementares, cada uma representado um simples efeito,
que são geometricamente representados nas Figuras 5.1-6. Inicialmente, quatro vetores
representando os cantos de um quadrado são referenciados pelo sistema de coordenadas
yx, (linhas sólidas nas Figuras 5.1-6). Todas as seis transformações elementares são
realizadas sobre o quadrado e as coordenadas resultantes yx , são desenhadas para
mostrar o efeito de cada transformação na posição, orientação, tamanho e forma do

MATEMÁTICA PARA FOTOGRAMETRIA
36 Mário Luiz Lopes Reiss
quadrado (linhas pontilhadas nas Figuras 5.1-6). Os efeitos da transformação podem ser
observados ou pela visualização da nova figura no mesmo sistema de coordenadas, ou
pelo movimento do sistema de coordenadas.
5.2.1 TRANSFORMAÇÕES ELEMENTARES
5.2.1.1 TRANSLAÇÃO
IMtxMx (5.3)
O quadrado é transladado na direção x e na direção y , como mostrado na Figura
5.1. De outra forma, o quadrado sólido permanece e os eixos coordenados são
transladados na direção positiva, como mostrado pelos eixos pontilhados na Figura 5.1.
y y’,
x x’,
Figura 5-1 – Translação
MATEMÁTICA PARA FOTOGRAMETRIA
37 Mário Luiz Lopes Reiss
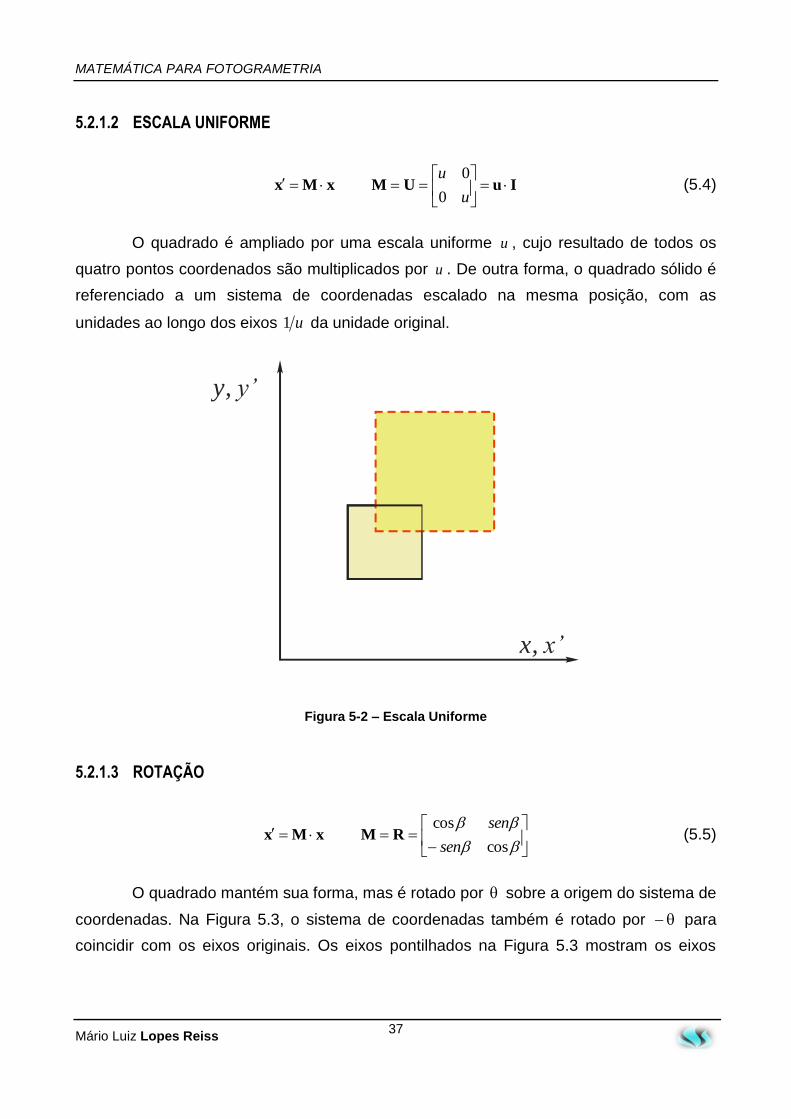
5.2.1.2 ESCALA UNIFORME
IuUMxMx
u
u
0
0 (5.4)
O quadrado é ampliado por uma escala uniforme u , cujo resultado de todos os
quatro pontos coordenados são multiplicados por u . De outra forma, o quadrado sólido é
referenciado a um sistema de coordenadas escalado na mesma posição, com as
unidades ao longo dos eixos u1 da unidade original.
y y’,
x x’,
Figura 5-2 – Escala Uniforme
5.2.1.3 ROTAÇÃO
cos
cos
sen
senRMxMx (5.5)
O quadrado mantém sua forma, mas é rotado por sobre a origem do sistema de
coordenadas. Na Figura 5.3, o sistema de coordenadas também é rotado por para
coincidir com os eixos originais. Os eixos pontilhados na Figura 5.3 mostram os eixos

MATEMÁTICA PARA FOTOGRAMETRIA
38 Mário Luiz Lopes Reiss
transformados que se refere ao quadrado sólido original. Os elementos de R são
derivados da figura inserida no canto superior direito da Figura 5.3 como segue:
senrsenrsenry
sensenrrrx
coscos
coscoscos
y y’,
x x’,45º
P
y’y
x
x
y’
y
x
x’
r
Figura 5-3 – Rotação
ou
cos
cos
ysenxy
senyxx
ou
y
x
sen
sen
y
x
cos
cos
A matriz R é ortogonal própria, 1 e 1 RRR
T. Matrizes de rotação não
alteram o comprimento do vetor, assim yx . Considerando quadrado do comprimento
do vetor
xxxMMxxMxMxxTT TTT

MATEMÁTICA PARA FOTOGRAMETRIA
39 Mário Luiz Lopes Reiss
ou
0IMMxTT
que para uma solução não trivial significa que IMMT , assim mostrando que M é
uma matriz ortogonal.
5.2.1.4 REFLEXÃO
10
01FMxMx (5.6)
A Figura 5.4 mostra a reflexão do eixo x (isto é, sobre o exio y ). F é ortogonal
imprópria, 11 FFF e .
y y’,
x x’,
Figura 5-4 – Reflexão
5.2.1.5 FATOR DE ESCALA NÃO UNIFORME
2
1
0
0
s
sSMxMx (5.7)
MATEMÁTICA PARA FOTOGRAMETRIA
40 Mário Luiz Lopes Reiss
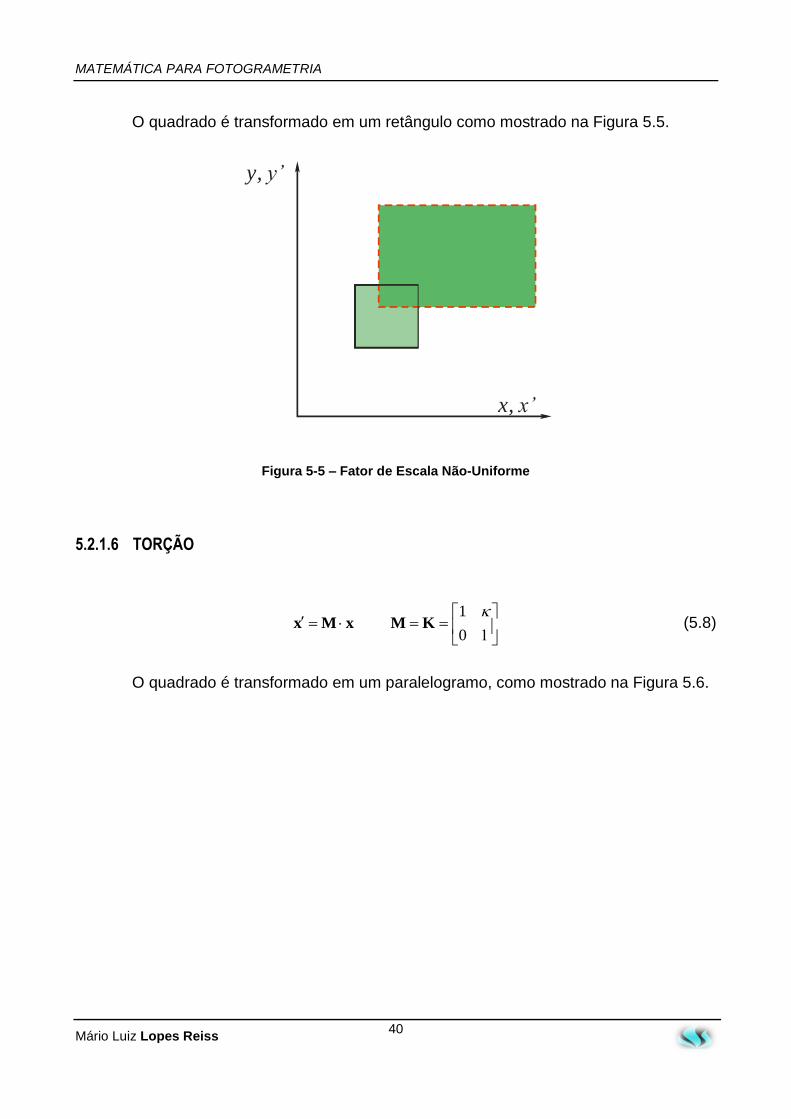
O quadrado é transformado em um retângulo como mostrado na Figura 5.5.
y y’,
x x’,
Figura 5-5 – Fator de Escala Não-Uniforme
5.2.1.6 TORÇÃO
0
1 KMxMx (5.8)
O quadrado é transformado em um paralelogramo, como mostrado na Figura 5.6.

MATEMÁTICA PARA FOTOGRAMETRIA
41 Mário Luiz Lopes Reiss
y y’,
x x’,
Figura 5-6 – Torção
5.2.2 TRANSFORMAÇÃO DE QUATRO PARÂMETROS
y
x
t
t
y
x
sen
sen
u
u
y
x
cos
cos
0
0 (5.9)
ou
y
x
tyuxsenuy
tysenuxux
cos
cos (5.10)
ou
y
x
t
t
y
x
ab
ba
y
x (5.11)
A transformação inversa é dada por:
y
x
ty
tx
sen
sen
uy
x
cos
cos1 (5.12)
ou

MATEMÁTICA PARA FOTOGRAMETRIA
42 Mário Luiz Lopes Reiss
y
x
ty
tx
ab
ba
bay
x22
1 (5.13)
Esta transformação tem quatro parâmetros: uma escala uniforme, uma rotação e duas
translações.
5.2.3 TRANSFORMAÇÃO DE SEIS PARÂMETROS
y
x
y
x
t
t
y
x
sen
senk
s
s
y
x
cos
cos
10
1
0
0 (5.14)
y
x
yy
xx
t
t
y
x
ssens
ksks
y
x
cos
cossinsincos
ou
y
x
t
t
y
x
dc
ba
y
x (5.15)
Os seis parâmetros desta transformação são: duas escalas, um fator de torção
(afinidade), uma rotação, e duas translações. A transformação inversa é dada por
2
11
ty
tx
ac
bd
cbday
x (5.16)
5.3 TRANSFORMAÇÃO LINEAR TRIDIMENSIONAL
Similar ao caso bidimensional, a transformação afim em três dimensões pode ser
dividida em várias transformações elementares: translação, escala uniforme, rotação,
reflexão, escala não uniforme, etc. A abordagem será limitada, entretanto, à
transformação de sete parâmetros, que é amplamente empregada na Fotogrametria. Ela
é composta de uma mudança de escala uniforme, três translações e três rotações. Serão
abordadas primeiramente as rotações em um espaço tridimensional.

MATEMÁTICA PARA FOTOGRAMETRIA
43 Mário Luiz Lopes Reiss
5.3.1 ROTAÇÕES DE UM SISTEMA DE COORDENADAS TRIDIMENSIONAIS
Existem três rotações elementares, uma sobre cada um dos três eixos
coordenados. Elas são freqüentemente executadas em seqüência, um após a outra. Um
conjunto de três destas seqüências de rotações é mostrada na Figura 5.7, onde x é o
sistema original, x é o sistema rotacionado uma vez e x é o sistema rotacionado duas
vazes. A convenção é a seguinte:
111... x sobre o eixo x , rotação positiva avançando de zy para ;
222... y sobre o eixo y , rotação positiva avançando de xz para ;
333... z sobre o eixo z , rotação positiva avançando de yx para .

MATEMÁTICA PARA FOTOGRAMETRIA
44 Mário Luiz Lopes Reiss
Figura 5-7 – Rotações em um sistema Cartesiano
Cada uma das rotações elementares é representada na forma matricial como segue:
z
y
x
z
y
x
z
y
x
x
xx
xx
M
cossin0
sincos0
001
(5.17)

MATEMÁTICA PARA FOTOGRAMETRIA
45 Mário Luiz Lopes Reiss
onde zyx e , são as coordenadas anteriores à rotação, e zyx e , são as coordenadas
após a rotação. De forma similar, a rotação de y sobre o eixo y e z sobre o eixo
z são dadas por:
z
y
x
z
y
x
sen
sen
z
y
x
y
yy
yy
M
cos0
010
0cos
(5.18)
z
y
x
z
y
x
sen
sen
z
y
x
z
y
x
z
zz
zz
M
cos0
cos0
001
(5.19)
As três rotações das Equações 5.17-19 são geralmente referidas com rotações
elementares. Elas podem ser usadas para construir qualquer conjunto de seqüência
rotações. A matriz total de rotação é obtida pela substituição sucessiva:
xMxMMMx XYZ (5.20)
na qual M é uma função de três ângulos de rotação ZYX e , . O conjunto de rotações
mais comumente usado é dado pelos símbolos e , onde ZYX ,, .
Neste caso, a matriz M , cujas rotações do sistema de coordenadas do espaço objeto
ZYX ,, paralelo ao sistema de coordenadas da foto zyx ,, é dado por:
coscoscos
coscoscoscoscos
coscoscoscoscoscos
sensen
sensensensensensensen
sensensensensensen
Rk (5.21)
na qual é a rotação sobre o eixo X , é a rotação sobre o eixo Y e é a rotação
sobre o eixo Z . A matriz M é ortogonal, uma vez que MMM e , são todas
ortogonais.

MATEMÁTICA PARA FOTOGRAMETRIA
46 Mário Luiz Lopes Reiss
5.3.2 TRANSFORMAÇÃO DE SETE PARÂMETROS
Esta transformação contém sete parâmetros: um mudança de escala uniforme,
três rotações e , , e três translações 321, ttt e . Ela tem a forma geral
txMx (5.22)
A matriz ortogonal M é uma função de somente três parâmetros independentes,
no caso, os ângulos ZYX e , . Esta transformação é útil para diferentes aplicações
como, orientação absoluta, conexão de modelos, etc. A matriz ortogonal M pode ser
construída por outros métodos além das rotações seqüências. Dois destes métodos são
abordados a seguir.
5.3.2.1 CONSTRUINDO M POR UMA ROTAÇÃO SOBRE UMA LINHA
Esse método é também denominado de rotação de corpo sólido. Dado um objeto
tridimensional em duas orientações diferentes, há uma linha no espaço sobre a qual o
objeto pode ser rotacionado por um ângulo finito para mudá-lo de uma orientação para
outra. Se essa linha tem cossenos diretores e e o ângulo de rotação , a matriz de
rotação é dada por:
coscos1sencossencos
sencoscoscos1sencos
sencossencoscoscos1
M (5.23)
5.3.2.2 UMA DERIVAÇÃO DE M PURAMENTE ALGÉBRICA
Os métodos de obtenção de M envolvem funções trigonométricas de ângulos
que podem ser incômodos por não serem lineares. O método seguinte evita essa

MATEMÁTICA PARA FOTOGRAMETRIA
47 Mário Luiz Lopes Reiss
desvantagem e permite a construção de M pela computação de seus elementos como
funções racionais de três parâmetros independentes. A seguinte matriz de torção
simétrica contém somente três parâmetros, cba e ,, :
0
0
0
ab
ac
bc
S (5.24)
Uma matriz ortogonal M pode ser obtida a partir de S usando:
SISISISIM 11
(5.25)
na qual I é a matriz independente. Pode-se provar que M é ortogonal mostrando que
IMM T. Usando o método da adjunta, 1
SI é calculado como
2
2
2
222
1
1
1
1
1
1
cacbbca
acbbcba
bcacbaa
cbaSI (5.26)
e então
222
222
222
222
1
12
212
221
1
1
cbaacbbca
acbcbacba
bcacbacba
cbaSISIM (5.27)

MATEMÁTICA PARA FOTOGRAMETRIA
48 Mário Luiz Lopes Reiss
CAPÍTULO VI
6 TRANSFORMAÇÕES NÃO-LINEARES
6.1 CONSIDERAÇÕES INICIAIS
Além das transformações lineares discutidas anteriormente, na Fotogrametria são
utilizadas transformações não lineares, em ambos os casos de bi e tridimensionais. Em
suas dimensões são usadas: a transformação de oito parâmetros e a transformação
polinomial.
6.2 TRANSFORMAÇÃO DE OITO PARÂMETROS
11 00
222
00
111
ybxa
cybxay
ybxa
cybxax (6.1)
Esta transformação projetiva do sistema de coordenadas x para o x tem os oito
parâmetros de transformação 2100 ,,,, caba . Sua inversa é dada por:
10222010
12202210
102222010
102201
bxbayabybaxa
xcayaycaxay
bxbayabybaxa
bxbycbybxcx
(6.2)
6.3 POLINOMIAIS GERAIS BIDIMENSIONAIS
2
5
2
43210
2
5
2
43210
ybxbyxbybxbby
yaxayxayaxaax
(6.3)

MATEMÁTICA PARA FOTOGRAMETRIA
49 Mário Luiz Lopes Reiss
Estas polinomiais podem ser estendidas para potências superiores em yx e . Um
caso especial disto é a forma conforme.
A propriedade conforme preserva ângulos entre interseção de linhas após a
transformação. Se for imposto as duas condições
x
y
y
x
y
y
x
x
e (6.4)
nas equações polinomiais gerais, têm-se
yxAyxAyAxABy
yxAyxAyAxAAx
2
2
3
22
4120
4
22
3210 (6.5)
Nota-se que os primeiros três termos depois do sinal de igual são os similares aos quatro
parâmetros da transformação dada nas Equações 5.9-13.
6.4 POLINÔMIOS GERAIS TRIDIMENSIONAIS
zxczycyxcycxczcycxccz
zxbzybyxbybxbzbybxbby
zxazyayxayaxazayaxaax
876
2
5
2
43210
876
2
5
2
43210
876
2
5
2
43210
(6.6)
Podem-se estender estes polinômios para ordens superiores. De forma contrária
ao caso bidimensional, a transformação conforme não existe em três dimensões além da
primeira ordem (ou linear) que é o caso da transformação de sete parâmetros, Equação
5.22. Uma aproximação que só existe para termos de segundo-grau é obtida impondo
condições semelhantes àquelas na Equação 6.4 em todo par de coordenadas na
Equação 6.6. Isto faz com que a projeção do espaço tridimensional em cada um dos três
planos seja conforme. Impondo

MATEMÁTICA PARA FOTOGRAMETRIA
50 Mário Luiz Lopes Reiss
x
z
z
x
y
z
z
y
x
y
y
x
z
z
y
y
x
x
e ,
(6.8)
nos polinômios gerais da Equação 6.7 tem-se
022
202
220
222
0
222
0
222
0
xzEzyFzyxGzAyDxCCz
yxEzyGzyxFzDyAxBBy
yxFxzGzyxEzCyBxAAx
(6.9)

MATEMÁTICA PARA FOTOGRAMETRIA
51 Mário Luiz Lopes Reiss
CAPÍTULO VII
7 LINEARIZAÇÃO DE FUNÇÕES NÃO-LINEARES
7.1 CONSIDERAÇÕES INICIAIS
As equações que expressam as condições geométrica e física da um problema de
fotogrametria são freqüentemente não lineares, tornando sua solução direta difícil e
onerosa. Estas equações são linearizadas usando expansão de séries, usualmente séries
de Taylor, que em geral é dada como segue:
n
x
n
n
xx
xdx
yd
nx
dx
ydx
dx
dfxfxf
000 !
1
!2
1 2
2
20
(7.1)
Isto dá o valor de y em xx 0 dando o valor da função 0xf em 0x . A
Equação 7.1 inclui ainda termos de ordem superior, e por esta razão costuma-se eliminar
0
y
x
a
b
c
x
f x + x( )
0
0 ( )y +j x
y
0x
y=f x( )
y=y +j x0
Figura 7-1 – Linearização

MATEMÁTICA PARA FOTOGRAMETRIA
52 Mário Luiz Lopes Reiss
os termos superiores a segunda ordem usando-se a aproximação com correspondência
nos termos.
xjyxdx
dfxfxf
x
00
0
(7.2)
A técnica de linearização é demonstrada na Figura 7.1. A curva representa a
função não linear original xf , considerando que a linha reta representa a forma
linearizada dada pela Equação 7.2. A linha é tangente à curva num dado ponto a ,
00 , yx . Quando x é dada (ou calculado), o valor da função pode ser aproximado pele
ponto b , cuja ordenada é xjy 0 , e o valor exato da função não linear é o ponto c ,
com ordenada xxf 0 . O erro que surge ao se usar a forma linear é o segmento de
linha bc .
7.2 UMA FUNÇÃO PARA DUAS VARIÁVEIS
A expansão da série de Taylor de uma função de duas variáveis é:
21
,2,1
2
2
,
2
2
22
1
,
2
1
2
2
,2
1
,1
0
2
0
12102
01
02
01
02
01
02
01
02
01
02
01
!2
1
!2
1,, xx
x
y
x
yx
x
yx
x
yx
x
yx
x
yxxfxxfy
xxxxxxxxxxxx
(7.3)
Pela forma linearizada da Equação 7.3 é truncada em
2211
0 xjxjyy (7.4)
onde
02
01
02
01
,2
2
,1
1
0
2
0
1
0 ,
xx
xx
x
yj
x
yj
xxfy

MATEMÁTICA PARA FOTOGRAMETRIA
53 Mário Luiz Lopes Reiss
A Equação 7.4 pode ser reescrita na forma matricial como
2
1
21
0
x
xjjyy
ou
xJ yxyy 0 (7.5)
onde
21 x
y
x
yyyx
xJ
é a Jacobiana de y com respeito à x .
7.3 DUAS FUNÇÕES PARA UMA VARIÁVEL
A primeira ordem das aproximações das séries de Taylor para duas funções de x
são dadas por
xjyxfy
xjyxfy
2
0
222
1
0
111 (7.6)
ou
xyx Jyy0
onde
0
0
2
1
2
1
0
2
0
2
0
1
0
1
x
xyx
dx
dy
dx
dy
j
j
xfy
xfy
J

MATEMÁTICA PARA FOTOGRAMETRIA
54 Mário Luiz Lopes Reiss
7.4 DUAS FUNÇÕES PARA DUAS VARIÁVEIS
Duas funções para duas variáveis podem ser linearizadas por
222121
0
22122
212111
0
12111
,
,
xx
xx
jjyxxfy
jjyxxfy (7.7)
ou
2
1
2221
1211
0
2
0
1
2
1
x
x
jj
jj
y
y
y
y (7.8)
ou
xyx Jyy0
(7.9)
onde
02
01
02
01
02
01
02
01
,2
2
,1
2
,2
1
,1
1
0
2
0
12
0
2
0
11
0
2
0
10
,
,
xxxx
xxxx
yx
x
y
x
y
x
y
x
y
xxf
xxf
y
y
x
yJ
y
7.5 CASO GERAL DE m FUNÇÕES PARA n VARIÁVEIS
As linearizações apresentadas previamente podem ser generalizadas para m
funções de n variáveis por
nn
n
n
xxxfy
xxxfy
xxxfy
,,,
,,,
,,,
212
2122
2111
(7.10)

MATEMÁTICA PARA FOTOGRAMETRIA
55 Mário Luiz Lopes Reiss
A forma generalizada da Equação 7.10 torna-se
xJyy yx
0 (7.11)
onde
n
n
mmm
n
yx
nm
n
n
m
x
x
x
x
y
x
y
x
y
x
y
x
y
x
y
xxxf
xxxf
xxxf
y
y
y
2
1
21
1
2
1
1
1
00
2
0
1
00
2
0
12
00
2
0
11
0
0
2
0
1
0
000
000
,,,
,,,
,,,
x
x
yJ
y
xxx
xxx
A Equação 7.11 representa a forma geral com 0, yy sendo vetores 1m , J uma
matriz Jacobiana nm , e x um vetor 1n . As Equações 7.2, 7.5 e 7.7-9 são casos
especiais da Equação 7.11.
7.6 DERIVAÇÃO DE UM DETERMINANTE
Algumas condições fotogramétricas ou estão na forma de um determinante, ou
contém determinantes. A derivada parcial de um determinante pp em relação a um
escalar é composta da soma de p determinantes, cada um tendo os elementos de
somente um linha ou uma coluna substituídos por suas derivadas. Assim, dado o
determinante pd DDD 21 no qual pii ,,2,1, D , representam suas p colunas,
então

MATEMÁTICA PARA FOTOGRAMETRIA
56 Mário Luiz Lopes Reiss
xxxx
d p
pp
DDDD
DDDD
D 21
212
1 (7.12)
Uma expressão similar à Equação 7.12 pode ser escrita na qual são derivadas
parcialmente as linhas ao invés das colunas de d .
7.7 DERIVAÇÃO DE UM QUOCIENTE
Um quociente de uma função assim como WUg / aplica-se em muitas
equações de condição fotogramétricas. A derivada parcial de g com relação à uma
variável x é dada por
x
W
W
U
x
U
Wx
g 1 (7.13)
Ambos, WU e podem ser funções gerais, incluindo determinantes, de várias variáveis.
MATEMÁTICA PARA FOTOGRAMETRIA
57 Mário Luiz Lopes Reiss
BIBLIOGRAFIA
JACKOWSKI, A. J.; SBREGA, J. B.; Fundamenals of Modern Matematics. Prentice-Hall, Inc., Englewood Cliffs, New Jersey, 1970.
KARLSON, P.; A Magia dos Número. Tradução de Henrique Carlos Pfeifer, Eugênio Brito e Frederico Porta, Editora Globo, Rio de Janeiro, 1961.
LIPSCHUTZ, S.; Álgebra Linear. Departamento de Matemática, Temple University, Traduzido por Ribeiro Baldino, Instituto de Matemática da Universidade do Rio Grande do Sul, Editora McGraw-Hill do Brasil, LTDA, São Paulo, 1974.
MIKHAIL, E. M.; BETHEL, J. S.; MCCLONE, J. C.; Introduction to Modern Photogrammetry. John Wiley & Sons, Inc. New York, 2001





























