Embed Size (px)
Citation preview
ANÁLISE VARIACIONAL DE SEGUNDA ORDEM NÃO-LINEAR EM PILARES
DE CONCRETO ARMADO COM USO DE RELAÇÃO MOMENTO-CURVATURA
ANALITICAMENTE AJUSTADA
Felipe Miranda da Silva
Projeto de Graduação apresentado ao curso
de Engenharia Civil da Escola Politécnica,
Universidade Federal do Rio de Janeiro,
como parte dos requisitos necessários à
obtenção do título de Engenheiro.
Orientador:
Sérgio Hampshire de Carvalho Santos
Rio de Janeiro
Fevereiro de 2017

ANÁLISE VARIACIONAL DE SEGUNDA ORDEM NÃO-LINEAR EM PILARES
DE CONCRETO ARMADO COM USO DE RELAÇÃO MOMENTO-CURVATURA
ANALITICAMENTE AJUSTADA
Felipe Miranda da Silva
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO DE ENGENHARIA CIVIL DA ESCOLA POLITÉCNICA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISISTOS NECESSÁRIOS PARA OBTENÇÃO DO GRAU DE ENGENHEIRO CIVIL.
Examinado por:
__________________________________________________
Prof. Sérgio Hampshire de Carvalho Santos, D. Sc., EP/UFRJ
__________________________________________________
Prof. Silvio de Souza Lima, D. Sc., EP/UFRJ
__________________________________________________
Prof. Bruno Martins Jacovazzo, D. Sc., EP/UFRJ
RIO DE JANEIRO, RJ – BRASIL
FEVEREIRO de 2017
iii
Da Silva, Felipe Miranda
Análise Variacional de Segunda Ordem Não-Linear
em Pilares de Concreto Armado com uso de Relação
Momento-Curvatura Analiticamente Ajustada / Felipe
Miranda da Silva. – Rio de Janeiro: UFRJ / Escola
Politécnica, 2017.
XII, 89 p.: il.; 29,7
Orientador: Sérgio Hampshire de Carvalho Santos
Projeto de Graduação – UFRJ/ Escola Politécnica/
Curso de Engenharia Civil, 2017.
Referências Bibliográficas: p. 89.
1. Efeitos de Segunda Ordem em Pilares de Concreto
Armado, 2. Análise Variacional, 3. Estudo da Relação
Momento-Curvatura, 4. Ajuste da Relação Momento-
Curvatura. I. Santos, Sérgio Hampshire de Carvalho. II.
Universidade Federal do Rio de Janeiro, Escola Politécnica,
Curso de Engenharia Civil. III. Título.

iv
« Dixitque Deus: “Fiat lux”. Et facta est lux. »
Genesis 1,3
v
Agradecimentos
Agradeço, primeiramente, a Deus, razão da minha vida e existência.
Agradeço, igualmente, a minha mãe Lucineide e meu pai José Ramos, pelo grande amor
e esmero com o qual me criaram, e sem os quais nada do que hoje conquistei seria
possível.
Agradeço, também, ao meu irmão, Matheus, meus familiares e amigos, pela imensa
força, amizade e companheirismo que me devotam nos bons e maus momentos de
minha vida.
Agradeço, finalmente, aos professores Rosa Maria, minha primeira e grande professora
de língua portuguesa, Sérgio Hampshire, meu orientador, Cláudia Éboli e Ricardo
Valeriano, meus mestres na Escola Politécnica da UFRJ, pela honra de poder ter sido
seu aluno e terem sido, para mim, grandes modelos daquilo que quero me tornar
enquanto profissional e ser humano.

vi
Resumo do Projeto de Graduação apresentado à Escola Politécnica/UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Civil
Análise Variacional de Segunda Ordem Não-Linear em Pilares de Concreto Armado
com uso de Relação Momento-Curvatura Analiticamente Ajustada
Felipe Miranda da Silva
Fevereiro/2017
Orientador: Sérgio Hampshire de Carvalho Santos
Curso: Engenharia Civil
Nas estruturas de concreto armado, os pilares desempenham papel fundamental na transmissão dos esforços solicitantes no sentido vertical, de forma que seu estudo particular e detalhamento são imprescindíveis para o bom funcionamento dos sistemas estruturais concebidos, seja em nível global ou local. Diferentemente de vigas e lajes, pilares, estando sujeitos a forças de compressão, devem ter necessariamente verificados os efeitos de segunda ordem, bem como seu comportamento em termos de estabilidade.
Usualmente, os métodos normativos para se proceder à análise de segunda ordem, que gera momentos adicionais a serem levados em consideração no dimensionamento destas estruturas, consideram abordagens aproximadas, onde são estimadas as propriedades do concreto constituinte e a configuração deformada do mesmo. As abordagens normativas são realizadas dessa maneira, pois as não-linearidades físicas e geométricas intrínsecas deste problema são de ordem tal que esse se torna muito difícil de tratar de forma analítica.
Neste trabalho, propõe-se a realização de um estudo dos efeitos não-lineares físicos e geométricos em pilares através de uma abordagem variacional simplificada, com vista a se obter o campo de deslocamentos no pilar. Buscou-se obter a relação momento-curvatura no âmbito da flexão composta reta, que foi tratada através do método de mínimos quadrados, provendo, assim, uma relação analítica aproximada entre ambos. Então, procedeu-se à análise variacional do problema via Método dos Elementos Finitos em utilizando a relação momento-curvatura aproximada na estimativa das rigidezes médias dos elementos finitos.
Palavras-chave: Efeitos de segunda ordem, Análise Variacional, Pilares de Concreto Armado, Relação Momento-Curvatura, Elasticidade Não-Linear.

vii
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Engineer.
Non Linear Second Order Variational Analysis of Columns of Reinforced Concrete
using an Analytical Adjustment for the Bending Moment – Curvature Relationship
Felipe Miranda da Silva
February/2017
Advisor: Sérgio Hampshire de Carvalho Santos
Course: Civil Engineering
In many structures of reinforced concrete, columns are essential parts which are responsible for the transfer of external loads in the vertical direction; therefore its correct detailing is an essential point to achieve a well behaved structural system. Unlike in beams or slabs, second order effects shall be necessarily verified for they are generally subjected to compression along with flexion, and column’s instability effects might become also an issue to its safety.
Usually, the methods within Brazilian standard for the design of reinforced concrete structures leading to this analysis consider adding additional bending moment to the column so to represent this effect the design. The approaches used to obtain the value of this additional bending moment are generally very simplified, and mostly consider approximation of the properties of the concrete itself or the use of approximated deformed configuration fields along the column. These approaches are carried out in such way because the physical and geometric non-linearity intrinsic to this problem, make the search for any analytical solution impractical.
In this work, we will study the physical and geometrical non-linear effects in columns using a simplified variational analysis, in order to obtain as final result their real displacement field. Firstly, is studied of the adjustment of the bending moment – curvature curve of the column section by the method of the least squares. Then, the variational formulation of the problem using the Finite Elements Method with that approximate relation in order to estimate the mean stiffness of the finite elements is done.
Keywords: Second order effects, Variational Analysis, Columns of Reinforced Concrete, Bending Moment-Curvature Relation, Non-Linear Elasticity.
viii
Índice
1. Introdução.................................................................................................................. 1
2. Fundamentos da mecânica do contínuo .................................................................... 5
2.1. Derivação do tensor de Green para deslocamentos finitos ................................ 5
2.2. Definição do sistema global ............................................................................... 8
2.3. Obtenção da energia de deformação interna ...................................................... 9
2.4. Obtenção da energia potencial das cargas ....................................................... 11
2.5. Formulação variacional completa .................................................................... 11
2.6. Equações diferenciais de equilíbrio ................................................................. 12
2.7. Primeira variação: o princípio dos trabalhos virtuais ...................................... 14
2.8. Observações adicionais .................................................................................... 15
3. Obtenção da relação M-k ........................................................................................ 17
3.1. Definição da seção-tipo de estudo ................................................................... 17
3.1.1. Pilar 1 ........................................................................................................ 17
3.1.2. Pilar 2: ...................................................................................................... 19
3.1.3. Pilar 3: ...................................................................................................... 20
3.2. Equação de equilíbrio na seção ........................................................................ 21
3.3. Definição da rotina ........................................................................................... 23
3.4. Estudo comparativo ......................................................................................... 24
3.4.1. Resultados do pilar 1 ................................................................................ 25
3.4.2. Resultados do pilar 2 ................................................................................ 25
3.4.3. Resultados do pilar 3 ................................................................................ 26
4. Definição das propriedades dos materiais ............................................................... 29
4.1. Concreto ........................................................................................................... 29
4.1.1. Consideração da fluência .......................................................................... 32
4.2. Aço ................................................................................................................... 33
5. Ajuste da relação M-k ............................................................................................. 35
5.1. Relação M-k no espaço log .............................................................................. 35
5.2. Definição da curva de ajuste ............................................................................ 36

ix
5.3. Rigidez flexional aproximada .......................................................................... 37
5.4. Equações de equilíbrio ..................................................................................... 38
5.5. Obtenção dos parâmetros da curva de ajuste ................................................... 40
5.6. Resultados ........................................................................................................ 41
5.6.1. Pilar 1 ........................................................................................................ 41
5.6.2. Pilar 2 ........................................................................................................ 43
5.6.3. Pilar 3 ........................................................................................................ 44
6. Estudo via método dos elementos finitos ................................................................ 47
6.1. Determinação do funcional .............................................................................. 48
6.2. Construção da matriz de rigidez ...................................................................... 52
6.3. Resolução do problema .................................................................................... 61
Sendo os valores da tolerância e demais “inputs” definidos na seção 7.4. ................. 62
6.4. Apoios .............................................................................................................. 62
6.5. Resultados adicionais ....................................................................................... 63
6.5.1. Reações de apoio ...................................................................................... 63
6.5.2. Esforços solicitantes internos ................................................................... 63
6.5.3. Deslocamentos de primeira ordem ........................................................... 63
6.5.4. Reações de apoio de primeira ordem ........................................................ 64
6.5.5. Esforços solicitantes de primeira ordem ................................................... 64
6.6. Resultados ........................................................................................................ 64
6.6.1. Pilar 1 ........................................................................................................ 64
6.6.2. Pilar 2 ........................................................................................................ 66
6.6.3. Pilar 3 ........................................................................................................ 68
7. O programa em “Matlab” ........................................................................................ 71
7.1. Rotina principal ................................................................................................ 71
7.2. Sub-rotinas de INPUT ..................................................................................... 72
7.3. Sub-rotina M-k ................................................................................................. 73
7.4. Sub-rotina do MEF .......................................................................................... 75
8. Análise comparativa dos resultados ........................................................................ 77
8.1. Métodos de avaliação da norma ....................................................................... 77
8.2. Resultados ........................................................................................................ 79
8.2.1. Resultados para o pilar 1 .......................................................................... 79

x
8.2.2. Resultados para o pilar 2 .......................................................................... 80
8.2.3. Resultados para o pilar 3 .......................................................................... 82
9. Conclusões .............................................................................................................. 85
10. Referências Bibliográficas ................................................................................... 89

xi
Índice de figuras
Figura 1: Modelo de análise genérico............................................................................... 8
Figura 2: Detalhe do sistema de eixos na seção ............................................................... 8
Figura 3: Esquematização da seção do pilar 1 ................................................................ 18
Figura 4: Esquematização da seção do pilar 2 ................................................................ 19
Figura 5: Esquematização da seção do pilar 3 ................................................................ 21
Figura 6: Relação momento-curvatura para o pilar 1 ..................................................... 25
Figura 7: Relação momento-curvatura para o pilar 1 ..................................................... 26
Figura 8: Relação momento-curvatura para o pilar 3 ..................................................... 27
Figura 9: Relação M-k para o pilar 3 com propriedades atualizadas do concreto .......... 27
Figura 10: Relação M-k para o pilar 3 com consideração da fluência ........................... 28
Figura 11: Diagrama de tensão-deformação do concreto ............................................... 29
Figura 12: Deformações características do concreto em função do fck ......................... 30
Figura 13: Diagrama tensão-deformação genérico para o aço ....................................... 33
Figura 14: Relação M-k no espaço logaritmizado para o pilar 1.................................... 41
Figura 15: Evolução das deformações na seção para o pilar 1 ....................................... 42
Figura 16: Relação M-k no espaço logaritmizado para o pilar 2.................................... 43
Figura 17: Evolução das deformações na seção para o pilar 2 ....................................... 44
Figura 18: Relação M-k no espaço logaritmizado para o pilar 3.................................... 44
Figura 19: Evolução das deformações na seção para o pilar 3 ....................................... 45
Figura 20: Relação M-k no espaço logaritmizado para o pilar 3 com fluência .............. 46
Figura 21: Evolução das deformações na seção para o pilar 3 com fluência ................. 46
Figura 22: Modelo de análise para uso do MEF ............................................................. 48
Figura 23: Esquematização de um elemento finito ........................................................ 50
Figura 24: Campo de deslocamentos v(x) do pilar 1 ...................................................... 65
Figura 25: Diagrama de momentos fletores do pilar 1 ................................................... 66
Figura 27: Campo de deslocamentos v(x) do pilar 2 ...................................................... 67
Figura 28: Diagrama de momentos fletores do pilar 2 ................................................... 68
Figura 30: Campo de deslocamentos v(x) do pilar 3 ...................................................... 69
Figura 31: Diagrama de momentos fletores do pilar 3 ................................................... 70
Figura 33: Sequenciamento de atividades do programa ................................................. 71
Figura 34: Fluxograma da rotina CURVA_MK (parte 1) .............................................. 73
Figura 35: Fluxograma da rotina CURVA_MK (parte 2) .............................................. 74
Figura 36: Fluxograma da rotina do cálculo de MEF ..................................................... 76
xii
Índice de tabelas
Tabela 1: Propriedades do pilar 1 ................................................................................... 18
Tabela 2: Propriedades do pilar 2 ................................................................................... 19
Tabela 3: Propriedades do pilar 3 ................................................................................... 20
Tabela 4: Coeficientes de fluência e retração (extraída da NBR6118) .......................... 32
Tabela 5: Parâmetros do aço (extraído de SANTOS) .................................................... 33
Tabela 6: Parâmetros de ajuste para o pilar 1 ................................................................. 42
Tabela 7: Parâmetros de ajuste para o pilar 2 ................................................................. 43
Tabela 8: Parâmetros de ajuste para o pilar 3 ................................................................. 45
Tabela 9: Resultados de momento fletor e deslocamento no pilar 1 .............................. 64
Tabela 10: Resultados de momento fletor e deslocamento no pilar 2 ............................ 66
Tabela 11: Resultados de momento fletor e deslocamento no pilar 3 ............................ 68
Tabela 12: Propriedades do pilar 1 ................................................................................. 79
Tabela 13: Esforços solicitantes do pilar 1 ..................................................................... 79
Tabela 14: Resultados do método CA para o pilar 1 ...................................................... 80
Tabela 15: Resultados do método RA para o pilar 1 ...................................................... 80
Tabela 16: Quadro-resumo dos resultados para o pilar 1 ............................................... 80
Tabela 17: Propriedades do pilar 2 ................................................................................. 81
Tabela 18: Esforços solicitantes do pilar 2 ..................................................................... 81
Tabela 19: Resultados do método CA para o pilar 2 ...................................................... 81
Tabela 20: Resultados do método RA para o pilar 2 ...................................................... 81
Tabela 21: Quadro-resumo dos resultados para o pilar 2 ............................................... 82
Tabela 22: Propriedades do pilar 3 ................................................................................. 82
Tabela 23: Esforços solicitantes do pilar 3 ..................................................................... 82
Tabela 24: Consideração da fluência no pilar 3 ............................................................. 83
Tabela 25: Resultados do método CA para o pilar 3 ...................................................... 83
Tabela 26: Resultados do método RA para o pilar 3 ...................................................... 83
Tabela 27: Quadro-resumo dos resultados para o pilar 3 ............................................... 84
Tabela 28: Quadro-resumo com discrepâncias relativas para pilar 1 ............................. 86
Tabela 29: Quadro-resumo com discrepâncias relativas para pilar 2 ............................. 87
Tabela 30: Quadro-resumo com discrepâncias relativas para pilar 3 ............................. 87
1
1. Introdução
O estudo de pilares é uma das verificações essenciais quando do dimensionamento de
muitas estruturas de concreto armado. Em múltiplas obras da engenharia civil, como
edifícios e pontes, a consideração destes elementos estruturais é uma peça chave para se
garantir o bom funcionamento da estrutura como um todo. De fato, por exemplo, o mau
funcionamento de um pilar em uma ponte pode comprometer a funcionalidade da
mesma e provocar acidentes graves, além de perda de grandes somas de investimento
em reparação, ou, eventualmente, sacrifício de toda a obra de arte. Sendo responsáveis
pela transmissão de cargas verticais, os pilares estão geralmente sujeitos, em particular,
à condição de flexo-compressão, portanto a necessidade da consideração de efeitos de
segunda ordem e de análise de estabilidade do pilar como um todo.
Esta análise, que deve ser feita levando em consideração a não-linearidade física
oriunda das propriedades do concreto armado e as não-linearidades geométricas que
surgem com os deslocamentos de ordem finita (WASHIZU,1975), é sumariamente
difícil de ser executada de forma analítica, fechada. Desta forma, as abordagens
normativas para a definição destes efeitos a ser considerada nos projetos de engenharia
civil passa por métodos normativos aproximados, que definem momentos fletores
adicionais a serem considerados no dimensionamento dos pilares, oriundos destes
efeitos. A obtenção destes valores pode ser feita através do método do pilar padrão, que
utiliza uma deformada senoidal para o pilar, considerado bi-rotulado, avaliado de
diferentes formas, isto é, segundo o método do pilar padrão com a curvatura
aproximada, com a rigidez aproximada, e ainda o método do pilar padrão melhorado
para pilares esbeltos segundo a ABNT NBR 6118:2014.
As análises propostas pela norma brasileira são em si seguras, e permitem o
dimensionamento igualmente seguro destes elementos estruturais. Entretanto, os
métodos oferecidos são desenvolvidos semi-empiricamente e de forma simplificada,
com limites de aplicação não tão amplos, de forma que uma análise mais realista e,
quiçá, mais genérica, destes efeitos, deveria passar por uma formulação teórica mais
robusta que é, como se disse, deveras difícil de ser realizada diretamente.
2
Em diversas áreas da engenharia e da física aplicada, onde problemas de alta
complexidade de resolução, seja numérica ou analítica, surgem, dá-se vazão ao uso do
instrumental que é conferido pelo cálculo variacional. O início do estudo e aplicação do
mesmo remete ao problema da braquistócrona, a curva que minimiza o tempo de queda
de um objeto entre dois pontos distintos do espaço no campo gravitacional terrestre.
Como exemplificado, a variável a ser encontrada não é mais finita, como uma incógnita
algébrica ou vetor de um espaço vetorial igualmente finito, mas sim um campo (e.g. a
curva que minimiza o tempo de queda), e esta deve ser tal que satisfaça a um princípio,
geralmente expresso através de uma equação integral (e que, naquele exemplo, é
minimizar o tempo de queda). O atendimento deste princípio resulta num sistema de
equações diferenciais que permitem obter o campo, com as condições de contorno dadas
(BUTKOV, 1973).
O uso do cálculo variacional em sistema estruturais pode ser feito através da
consideração do funcional da energia potencial total (ALVES, 2016), o qual, escrito em
função do campo de deslocamentos e de suas derivadas, contém a energia potencial do
carregamento externo e a energia de deformação do sistema em si. Contudo, o que mais
interessa neste é o fato de que o mesmo deve satisfazer a um princípio de minimização
da energia, e o uso desta informação pode ser usado para aproximação do campo de
deslocamentos. Em outras palavras, sendo a energia um escalar, obtido por integração
no domínio e que deve ser minimizado, ganha-se um ferramental poderoso de análise no
contínuo de problemas que outrora só se poderiam resolver (ou não) discretamente, com
alto custo analítico de desenvolvimento e solução das equações.
Neste trabalho, o capítulo 2, chamado Fundamentos da Mecânica do Contínuo, tem por
objetivo prestar uma formulação teórica inicial para os cálculos que serão desenvolvidos
aqui. Inicialmente, ele recapitula alguns conceitos de elasticidade finita, e apresenta a
derivação do tensor de deformações de Green, o qual considera os efeitos de segunda
ordem. Então, evoca-se a definição de energia potencial total, e são definidos, de forma
genérica, o cálculo dos seus elementos constituintes, isto é, a energia potencial interna e
das cargas externas. Apresentam-se, então, alguns resultados notáveis oriundos dos
princípios variacionais, como o princípio dos trabalhos virtuais e as equações de
equilíbrio do sistema. A derivação apresentada está calcada na Lei de Hooke de tensões
e de deformações, de modo que o funcional com o qual trabalharemos é o funcional

3
elástico. Apesar de o concreto armado não se comportar de forma elástica, esta
abordagem é usual na engenharia de estruturas, isto é, de que a forma do funcional seja
a mesma (ALVES, 2016) e o concreto seja considerado como um material
aproximadamente elástico, em certas condições. Neste trabalho, porém, o que se propõe
é um refinamento, e que o concreto obedeça a lei de Hooke, mas seja não-linear, de
forma a se poder usar o mesmo funcional.
No capítulo 3, chamado Obtenção da Relação Momento – Curvatura, apresentamos a
formulação de um programa desenvolvido em ambiente “Matlab” para obtenção da
relação referida, bem como as seções de estudo que serão usadas neste trabalho. Serão
apresentadas as equações de equilíbrio a serem resolvidas na seção, as quais definirão,
assim, pelo método de Newton-Raphson, os valores aqui procurados. Os resultados
obtidos para as seções aqui estudadas serão validados com auxílio do programa M-k
UFRJ (FABIO ORSINI, Projeto de graduação), e apresentados ao final. Em sequência,
no capítulo 4, chamado Definição das propriedades dos materiais apresentar-se-ão as
propriedades gerais dos materiais considerados aqui, isto é, o aço e o concreto, bem
como as disposições a respeito da fluência do concreto.
Em sequência, no capítulo 5, chamado Ajuste da Relação M–k , apresentaremos os
procedimentos usados para a realização do ajuste não-linear da relação momento-
curvatura da seção, e exporemos os resultados desta análise para as seções de estudo
deste trabalho. Então, no capítulo 6, chamado Estudo via Método dos Elementos Finitos
(M.E.F.), iniciaremos a análise dos pilares via M.E.F.; inicialmente apresentaremos a
formulação teórica do método com as devidas implicações, e então discorreremos sobre
a construção dos elementos constitutivos do sistema algébrico a ser solucionado nos
parâmetros de deslocamento incógnitos. Finalmente, com auxílio de uma rotina que será
explicitada no capítulo, obteremos iterativamente o campo de deslocamentos para as
seções aqui estudadas.
Então, no capítulo 7, chamado O Programa em “Matlab”, será exposto um tutorial para
uso da rotina desenvolvida em “Matlab”, bem como a inserção dos inputs, a estrutura
interna do programa e a leitura dos “outputs” por ele oferecida. Então, no capítulo 8,
chamado Análise comparativa dos resultados, serão apresentados os métodos dispostos
em norma, e, então, a comparação dos resultados obtidos com as análises aqui

4
realizadas e os resultados obtidos com aqueles. Procederemos, finalmente, às devidas
conclusões no capítulo final (nove) do trabalho.

5
2. Fundamentos da mecânica do contínuo
Este capítulo dedica-se à explanação dos fundamentos teóricos básicos utilizados na
formulação matemática desenvolvida nesse trabalho, no âmbito da aplicação da teoria
da mecânica do contínuo a elementos unidimensionais, isto é, considerando as
simplificações da teoria de vigas.
Inicialmente, iremos considerar a não linearidade geométrica obtendo o tensor de
deformações de Green, que considera em si deformações de segunda ordem, não
capturadas pela teoria da elasticidade infinitesimal usual através do tensor de
deformações de Cauchy.
Assim, será possível se calcular a energia de deformação interna do sistema, que nesta
abordagem de mais alta ordem envolverá termos adicionais aos clássicos. Poder-se-á
definir também a energia potencial externa inerente às cargas diretamente aplicadas ao
mesmo, e obteremos, finalmente, o funcional da energia potencial total.
Cabe ressaltar que proporemos uma derivação puramente elástica, pois o objetivo final é
usar o funcional elástico com a relação momento-curvatura do concreto armado sendo
não-linear, isto é, consideraremos a mesma forma energética para o sistema aqui
estudado que a de um sistema elástico não-linear ideal.
Ademais, dois resultados notáveis da análise variacional serão aqui derivados: o
princípio dos trabalhos virtuais e as equações de equilíbrio elementares do sistema, isto
é, a versão forte, ou seja, diferencial, das leis regentes do mesmo.
2.1. Derivação do tensor de Green para deslocamentos finitos
No âmbito da análise de segunda ordem, a Teoria da Elasticidade toma contornos em
que a relação tensão-deformação deve considerar os deslocamentos, agora finitos, do
sistema, para obtenção de tensões e deformações mais verossímeis no campo de
deslocamentos de fato.
Suponhamos uma transformação do estado do corpo desde um estado deformado inicial
�� para um estado deformado �. Um elemento volumétrico infinitesimal de lados

6
���(�)
, ���(�)
, ���(�)
, se transforma num paralelepípedo degenerado de lados com ��(�),
��(�), ��(�) com faces planas.
Entre as bases �� e �, pode-se escrever a regra de Leibniz e re-expressar os elementos
diferenciais na forma:
���(�)
= ��,�(�)��(�) ; � → ��
(2.1)
Ou também:
��(�) = �,�(�)���
(�); �� → � (2.2)
Onde �,�(�)
e ��,�(�) são as matrizes jacobianas das transformações acima.
Definimos os comprimentos das diagonais dos elementos de volume antes e depois da
deformação do mesmo escrevendo as relações:
��� = ��(�) ∙ ��(�) = ���(�) ∙ �,�
(�)∙ �,�
(�)∙ ���
(�)
= �,�(�)
∙ �,�(�)
∙ ���(�) ∙ ���
(�)
(2.3)
Seja, ainda:
���� = ���
(�) ∙ ��� ∙ ���(�)
(2.4)
A diferença quadrática entre ��� e ���� permite estabelecer um parâmetro para medida
das deformações normalizadas no elemento (ODGEN, 1997). Temos então a diferença
quadrática dada por:
��� − ���� = ���
(�) ∙ (�,�(�)
∙ �,�(�)
− ���)∙ ���(�)
(2.5)
Que permite escrever (ODGEN, 1997):
��� =
1
2(�,�
(�)∙ �,�
(�)− ���)
(2.6)

7
Fazendo ainda que, para �(�) (ou ainda ��) o vetor de deslocamentos no centro de
gravidade da seção, isto é, na curva �(�)= (�, 0,0) , cujas componentes são:
�� = �(�(�))
(2.7)
�� = ���(�)�
(2.8)
�� = �(�(�))
(2.9)
Temos:
�(�) = ��(�)
+ �(�)
(2.10)
�,�(�)
= ��,�(�)
+ �,�(�)
= ��� + �,�(�)
(2.11)
Teremos então:
2��� = �,�(�)
∙ �,�(�)
− ���
= ���� + �,�(�)� ∙ (��� + �,�
(�))− ���
(2.12)
Que se expressa ainda como
2��� = ��� ∙ ��� + ��� ∙ �,�(�)
+ �,�(�)
∙ ��� + �,�(�)
∙ �,�(�)
− ���
(2.13)
Sendo ��� o delta de Kronecker. Assim:
2��� = ��� + �,�(�)+ �,�
(�)+ �,�
(�)∙ �,�
(�)− ���
(2.14)
Utiliza-se então, para o estudo das deformações nos elementos de volume infinitesimais,
o tensor de tensões de Green, expresso ainda conforme:
��� =
1
2���,� + ��,� + ��,� ∙ ��,��
= ���(������)
+ ���(�� �����)
(2.15)

8
Sendo o tensor de deformações de Cauchy expresso segundo:
���������
=1
2���,� + ��,��
(2.16)
2.2. Definição do sistema global
As análises realizadas a seguir serão feitas no âmbito da teoria de vigas, no plano � = 0,
para estruturas retas e contínuas. Assim, o campo de deslocamentos e a base global de
estudo serão entendidos, neste projeto, conforme ilustrados na imagem abaixo.
Figura 1: Modelo de análise genérico
Figura 2: Detalhe do sistema de eixos na seção

9
Admitimos que, para uma viga de seção constante, o centro de gravidade da seção bruta
coincide com o eixo x.
Além disso, apenas os dois campos de deslocamento u e v exibidos na figura 1 serão
considerados ao longo da viga, isto é, realizaremos uma análise dos deslocamentos no
eixo passante pelo centroide da seção, sendo estes funções apenas da coordenada
�, �(�) e �(�).
2.3. Obtenção da energia de deformação interna
Considerando as simplificações da teoria de vigas, podemos escrever o tensor de
deformações, admitindo-se a hipótese de Navier-Bernoulli para a seção, isto é, que o
deslocamento mais genérico da mesma pode ser escrito como uma composição de uma
translação mais uma rotação, ambas mantendo a face reta, e ignorando as demais
deformações em outras direções, de modo que (VENÂNCIO, 1975):
���(�, �)= �,� − � ∙ �,�� +
1
2�,��
(2.17)
De forma geral, a energia de deformação se dá por:
� =�� ��� ∙ ����
���
��
��
(2.18)
Sendo válida a lei de Hooke generalizada na forma tensorial:
��� = ����� ∙ ���
(2.19)
Onde ��� é o tensor de tensões, ��� o tensor de deformações e ����� o tensor de quarta
ordem com as propriedades do meio contínuo analisado. Temos que:

10
� =�� ����� ∙ ��� ∙ ����
���
��
��
=�� ����� ∙ ��� ∙ ����
���
��
��
(2.20)
E, neste caso:
������ ∙ ���
�
2�
�� =������ ∙ ��� ∙ ���
2�
�� =������ ∙ ��� ∙ ���
2�
��
Donde:
� =���� ∙ ���
2�
��
(2.21)
Neste caso, com as simplificações aqui consideradas:
� =�� ∙ ���
�
2�
�� =�� ∙ ��,� +
12 �,�
� − � ∙ �,����
2�
��
(2.22)
Donde:
� =1
2�� ∙ ���,� +
1
2�,���
�
− 2 ∙ � ∙ �,�� ∙ ��,� +1
2�,��� + �� ∙ �,��
� �
�
��
=1
2��� ∙ ���,� +
1
2�,���
�
− 2 ∙ � ∙ �,�� ∙ ��,� +1
2�,��� + �� ∙ �,��
� � ����
=1
2� ��� ∙ ��,� +
1
2�,���
�
�� −�2 ∙ � ∙ �,�� ∙ ��,� +1
2�,��� ��
+�� ∙ �� ∙ �,��� ��� ��
(2.23)

11
Tomando-se � como sendo o módulo de elasticidade equivalente da seção,
representativo e constante na mesma, � seu momento de inércia em torno do eixo z e � a
sua área, termos:
� =1
2� �� ∙ ��,� +
1
2�,���
�
��� + � ∙ �,��� ��� ��� ��
� =
1
2��� ∙ ��,�
� + �,� ∙ �,�� +
1
4�,��� + �� ∙ �,��
� �� (2.24)
Desprezando-se a contribuição dos termos de ordem mais alta (ALVES, 1995), teremos
que:
� =
1
2��� ∙ �,��
� �� +1
2��� ∙ �,�
� �� +1
2��� ∙ �,� ∙ �,�
� ��
(2.25)
2.4. Obtenção da energia potencial das cargas
Considerando a ação de cargas pontuais dadas conforme abaixo em determinadas
posições ��, ao longo do pilar, a energia potencial das cargas externa se escreve como:
��: vetor de momentos fletores pontuais externos;
���: vetor de forças pontuais externas na direção x;
���: vetor de forças pontuais externas na direção y;
Ω = �� ∙ �,�(�)
+ ��� ∙ �(�)
+ ��� ∙ �(�)
(2.26)
Ou ainda:
Ω = �� ∙ �(��),� + ��� ∙ �(��)+ ��� ∙ �(��)
(2.27)
2.5. Formulação variacional completa
Com os resultados das seções 2.3 e 2.4, é possível escrever a energia potencial total do
sistema aqui considerado através da expressão abaixo:

12
Π = � − Ω =
1
2��� ∙ �,��
� �� +1
2��� ∙ �,�
� ��
+1
2��� ∙ �,� ∙ �,�
� ��
− ��� ∙ �(��),� + ��� ∙ �(��)+ ��� ∙ �(��)�
(2.28)
2.6. Equações diferenciais de equilíbrio
O funcional da energia potencial total pode ainda ser convenientemente escrito na forma
seguinte:
Р= � ���,�, �,�, �,�����
�
(2.29)
Onde Γ é o domínio de estudo. Para que o mesmo seja estacionário, ele deve satisfazer
as equações de Euller-Lagrange (BUTKOV, 1973), que aportam as equações de
equilíbrio:
��
������
��,��� −
�
�����
��,�� +
��
��= 0
(2.30)
−
�
�����
��,�� +
��
��= 0
(2.31)
Resolvendo essas equações num subdomínio Γ� ⊆ Γ “longe” dos pontos de aplicação das
cargas externas, o funcional deve conduzir às seguintes relações de equilíbrio:
��� ∙ �,���,�� − ��� ∙ �,� ∙ �,��,� = 0 (2.32)
(�� ∙ (�,� +
�,��
2)),� = 0
(2.33)
Cabe ressaltar que a inclusão dos termos relacionados à energia potencial das cargas
externas, isto é, a resolução das equações diferenciais acima na vizinhança das cargas
aplicadas, conduz a uma heterogeneização das mesmas, e na introdução de soluções
particulares à equação. Não obstante, estas equações são precisamente as equações de

13
campo quando as cargas externas são aplicadas nas extremidades, condição em que as
mesmas podem ser entendidas como condições de contorno.
Analogamente, a subdivisão do sistema em subdomínios limitados pelas cargas internas
aplicadas, mas sem conter cargas em si, possui, também, as equações acima como
regentes de seu campo de deslocamentos, com os efeitos das cargas podendo ser
entendidos como condição de contorno nestes subdomínios. Elas são, portanto,
sobremaneira úteis no estudo de pilares, sujeitos em geral à ação de cargas pontuais em
suas extremidades, e permitem exprimir, em muitos casos, o campo de deslocamentos
pretendido.
Ademais, a segunda equação conduz à seguinte relação:
�� ∙ ��,� +
�,��
2� = �
(2.34)
Onde � é uma constante. Considerando rotações de pequena magnitude ao longo do
pilar, o termo quadrático pode ser desprezado; ele poderia ser entendido como um alívio
no esforço normal clássico associado à configuração deformada, e é tanto mais
importante quanto maiores forem as rotações. Teremos simplesmente que:
�� ∙ �,� = �
(2.35)
O esforço normal no pilar, como resultado clássico da resistência dos materiais. E, se
� = −�, um esforço de compressão:
�� ∙ �,� = −�
(2.36)
O que nos conduz à relação:
Π = � − Ω =
1
2��� ∙ �,��
� �� +1
2���
���� −
1
2�� ∙ �,�
� ��
− ��� ∙ �(��),� + ��� ∙ �(��)+ ��� ∙ �(��)�
(2.37)
A simplificação realizada na segunda equação de equilíbrio nos levou ao
desacoplamento as equações diferenciais de equilíbrio, de modo que se pode obter a

14
seguinte equação diferencial para deslocamentos em y do pilar, em termos apenas de � e
suas derivadas:
��� ∙ �,���,�� + �� ∙ �,��,� = 0
(2.38)
2.7. Primeira variação: o princípio dos trabalhos virtuais
A primeira variação do funcional da energia potencial total é o princípio dos trabalhos
virtuais (WASHIZU, 1975). Calculando-a, obtém-se o resultado notável da resistência
dos materiais:
δΠ = ��� ∙ �,�� ∙ δ�,���� + ��� ∙ �,� ∙ ��,���
+ ��� ∙ �,� ∙ �,� ∙ δ�,� �� + ��� ∙�,��
2∙ δ�,� ��
− ��� ∙ ��(��),� + ��� ∙ ��(��)+ ��� ∙ ��(��)�
(2.39)
Realizando integração por parte ao longo do pilar, teremos prontamente as seguintes
relações, para um pilar de comprimento �:
� �� ∙ �,�� ∙ δ�,�����
�
= �� ∙ �,�� ∙ δ�,����− � ��� ∙ �,���,� ∙ δ�,���
�
�
= �� ∙ �,�� ∙ δ�,����− ��� ∙ �,���,�∙ ��
⌋�� + � ��� ∙ �,���,�� ∙ �� ��
�
�
� ��� ∙ �,� +�,��
2� ∙ ��,���
�
�
= ��� ∙ �,� +�,��
2� ∙ ���
�
�
− � ��� ∙ �,� +�,��
2�,�
∙ �� ���
�
� �� ∙ �,� ∙ �,� ∙ δ�,�
�
�
�� = �� ∙ �,� ∙ �,� ∙ δ����− � ��� ∙ �,� ∙ �,��,� ∙ δ� ��
�
�
Supondo-se a presença de momentos fletores apenas no contorno, teremos as relações
seguintes:

15
��,�(0)∙ �−�� ∙ �,��(0)−�(0)� + ��,�(�)∙ ��� ∙ �,��(�)−�(�)�
+ ��� ∙ �,�(�)+�,��(�)
2− �� ∙ ��(�)
+ ����� ∙ �,���,�� − ��� ∙ �,� ∙ �,��,�� ∙ �� ��
− ���� ∙ �,� +�,��
2�,�
∙ �� ��
O que leva às seguintes equações a serem obedecidas no contorno, sendo os
deslocamentos virtuais arbitrários:
−�� ∙ �,��(0)−�(0)= 0 (2.40)
�� ∙ �,��(�)−�(�)= 0 (2.41)
�� ∙ �,�(�)+
�,��(�)
2− � = 0
(2.42)
E às seguintes equações diferenciais a serem verificadas em todo o domínio:
��� ∙ �,���,�� − ��� ∙ �,� ∙ �,��,� = 0 (2.43)
��� ∙ �,� +�,��
2�,�
= 0 (2.44)
Conforme havíamos encontrado nas seções anteriores.
2.8. Observações adicionais
O objetivo desse trabalho é obter o campo de deslocamentos e curvaturas numa coluna
de concreto armado em flexo-compressão, considerando as não-linearidades
geométricas e do material. Todavia, como expusemos anteriormente, o concreto armado
não é um material que se comporta elasticamente, além de perder energia com outros
efeitos como reações químicas inerentes à cura, exsudação e fissuração, de forma que
uma análise teórica o mais geral possível se mostraria pouco viável.
Portanto, todo o trabalho aqui desenvolvido está calcado na hipótese fundamental
simplificadora de que o concreto possui um comportamento elástico não-linear, e, por

16
conseguinte, permite ser estudado usando a formulação variacional elástica clássica,
mas, agora, não-linear.
Assim, uma consequência direta dessa hipótese fundamental é que o funcional da
energia potencial total derivado acima no âmbito da teoria de vigas para meio elástico
homogêneo pode ser aplicado. Além disso, o efeito da fissuração do concreto, que
dissipa energia, será abarcado no funcional de forma equivalente considerando-se uma
rigidez equivalente da seção, que será obtida fazendo-se o equilíbrio da seção com o
concreto em sua região tracionada totalmente fissurado, e com sua parte fissurada não
contribuinte no equilíbrio, o que diminui rigidez da seção.

17
3. Obtenção da relação M-k
No âmbito da flexão composta reta, para uma dada seção de viga ou pilar em concreto
armado, pode-se definir a interação entre a flexão e a curvatura através da resolução das
equações de equilíbrio na seção.
A obtenção dessa relação é particularmente útil para definição da rigidez flexional da
seção, a qual apresenta um comportamento não-linear que depende no nível de esforço
normal da seção, das propriedades do concreto usado e da disposição das armaduras na
mesma.
Neste trabalho, serão definidas seções tipo de estudo, com disposição dada de
armaduras e dimensões de referência. Serão calculados então, para a seção, diversos
pares de valores de momento fletor e curvatura autoequilibrados, os quais determinarão
a relação procurada, utilizando-se o método de Newton-Raphson (ANTIA, 1995).
Proceder-se-á então a uma análise comparativa entre os resultados obtidos segundo a
rotina aqui desenvolvida e a mesma desenvolvida no programa M-k-UFRJ,
desenvolvido pelo engenheiro Fábio Orsini, de forma a validar os resultados da rotina
aqui desenvolvida para as seções.
3.1. Definição da seção-tipo de estudo
As análises aqui realizadas o serão em três seções-tipo de pilares de concreto armado.
Estas seções típicas foram escolhidas com base na apostila da disciplina de Concreto
Armado 3, ministrada na Escola Politécnica da UFRJ (SANTOS, 2016), de forma que
fossem representativas dos efeitos que se deseja investigar. Elas serão definidas nos
itens abaixo:
3.1.1. Pilar 1
Escolhemos para o primeiro pilar uma seção retangular classificada na apostila do curso
de concreto armado 3 como do tipo 1, constante ao longo do pilar, com dimensões
20x40, e comprimento equivalente � = 4,0�, com concreto de ��� = 20��� e aço
CA-50. Ele está submetido a um momento de primeira ordem de cálculo em torno do
18
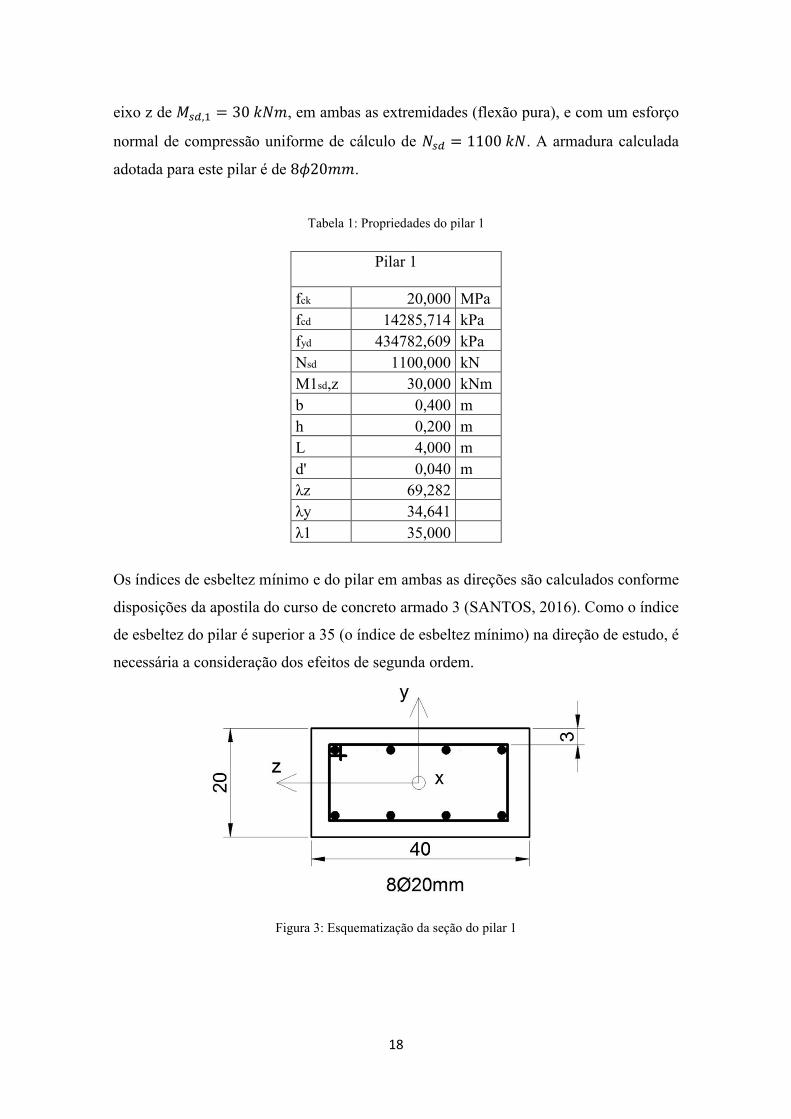
eixo z de ���,� = 30 ���, em ambas as extremidades (flexão pura), e com um esforço
normal de compressão uniforme de cálculo de ��� = 1100 ��. A armadura calculada
adotada para este pilar é de 8�20��.
Tabela 1: Propriedades do pilar 1
Pilar 1
fck 20,000 MPa
fcd 14285,714 kPa
fyd 434782,609 kPa
Nsd 1100,000 kN
M1sd,z 30,000 kNm
b 0,400 m
h 0,200 m
L 4,000 m
d' 0,040 m
λz 69,282
λy 34,641
λ1 35,000
Os índices de esbeltez mínimo e do pilar em ambas as direções são calculados conforme
disposições da apostila do curso de concreto armado 3 (SANTOS, 2016). Como o índice
de esbeltez do pilar é superior a 35 (o índice de esbeltez mínimo) na direção de estudo, é
necessária a consideração dos efeitos de segunda ordem.
Figura 3: Esquematização da seção do pilar 1

19
3.1.2. Pilar 2:
Consideraremos o mesmo pilar do item anterior, agora com comprimento � = 4,5 �,
mas as verificações de segunda ordem serão feitas em torno do outro eixo principal da
seção, caracterizando-o como pilar do tipo 3. Teremos então a seguinte seção a analisar,
com momento de primeira ordem de ���,� = 30 ��� em torno do eixo z, esforço de
compressão de cálculo de ��� = 1100 �� e armadura de 8�20��. Como explicitado
no item anterior, é necessária a verificação dos efeitos de segunda ordem.
Tabela 2: Propriedades do pilar 2
Pilar 2
fck 20,000 MPa
fcd 14285,714 kPa
fyd 434782,609 kPa
Nsd 1100,000 kN
M1sd,z 30,000 kNm
b 0,200 m
h 0,400 m
L 4,500 m
d' 0,040 m
λz 38,971
λy 69,282
λ1 35,000
Figura 4: Esquematização da seção do pilar 2

20
3.1.3. Pilar 3:
Escolhemos para o terceiro pilar uma seção quadrada classificada na apostila do curso
de concreto armado 3 como do tipo 2, constante ao longo do pilar, com dimensões
18x18, e comprimento equivalente L=4,7m, com concreto de ��� = 60��� e aço CA-
50. Ele está submetido a um momento de primeira ordem de cálculo em torno do eixo z
de ���,� = 15 ���, em ambas as extremidades (flexão pura), e a um esforço normal de
compressão uniforme de cálculo de ��� = 330 ��. A armadura calculada adotada para
este pilar é de 8�20��.
Neste pilar, a esbeltez é superior a 90, sendo classificado como pilar esbelto. É,
portanto, necessária a consideração da fluência (ABNT NBR 6118:2014). Para respeitar
a prescrição normativa de que peças com menor dimensão b inferior a 20 cm devem ter
seus esforços majorados de um coeficiente γn, dado por γn=1,95-0,05b, este mesmo foi
calculado abaixo.
Tabela 3: Propriedades do pilar 3
Pilar 3
fck 60 MPa
fcd 42857,1 kPa
fyd 434783 kPa
Nsd 330 kN
M1sd,z 15 kNm
b 0,18 m
h 0,18 m
L 4,7 m
d' 0,04 m
γn 1,05
λz 90,4515
λy 90,4515
21
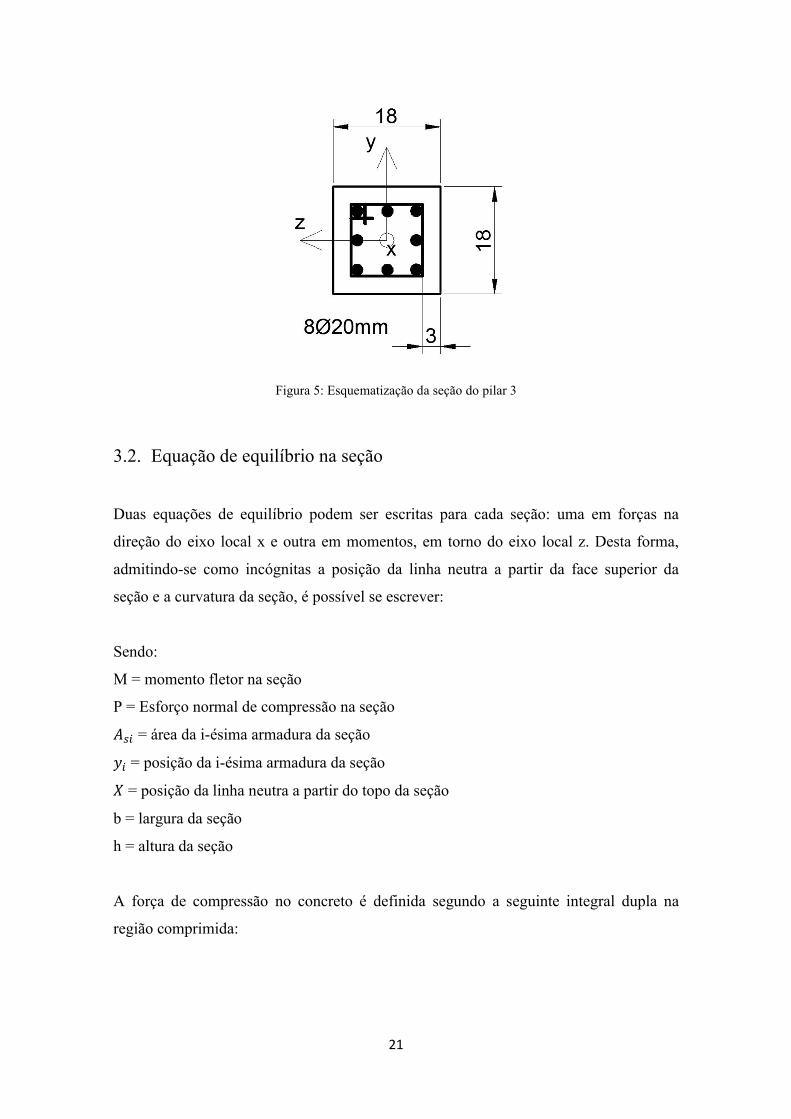
Figura 5: Esquematização da seção do pilar 3
3.2. Equação de equilíbrio na seção
Duas equações de equilíbrio podem ser escritas para cada seção: uma em forças na
direção do eixo local x e outra em momentos, em torno do eixo local z. Desta forma,
admitindo-se como incógnitas a posição da linha neutra a partir da face superior da
seção e a curvatura da seção, é possível se escrever:
Sendo:
M = momento fletor na seção
P = Esforço normal de compressão na seção
��� = área da i-ésima armadura da seção
�� = posição da i-ésima armadura da seção
� = posição da linha neutra a partir do topo da seção
b = largura da seção
h = altura da seção
A força de compressão no concreto é definida segundo a seguinte integral dupla na
região comprimida:

22
�� = ��� ���� = ����(�)�� = �� ��(�)��
�/�
����
(3.1)
Assim como a força atuante na i-ésima armadura de aço:
��� = ��(�(��))∙ ���
(3.2)
Sendo �(��) a deformação específica na armadura considerada
�� e �� são definidos conforme o capítulo 4.
Admitindo-se um campo de deformações que atende à hipótese de Navier-Bernoulli da
teoria de vigas clássica, isto é, que tenha uma distribuição linear na seção, podemos
fazer a seguinte mudança de variáveis:
�� = −� ∙ �� − ��
�− ��� (3.3)
Onde � = �,��. Seja:
�� = −
����
(3.4)
Isto equivale a desconsiderar a contribuição quadrática de segunda ordem que aparece
na expressão de ��, assim como dado na equação 2.17, dado que esta considera o
quadrado de rotações, que já são pequenas nos casos de estudo práticos. Deveremos ter
então que:
�� = �−��
�����(�)�����
��
�
� = � �������(�)����
�
��
�
�
(3.5)
Devemos, igualmente, ter o momento produzido por Fc, em módulo, dado por:
�� = �� �
�����(�)�����
��
�
= �� ��ℎ
2− �� −
���������(�)����
�
��
�
(3.6)

23
Que permitem escrever as equações de equilíbrio seguintes:
Equilíbrio de forças:
� = ��(�, �)− ����(�, �)
(3.7)
Equilíbrio de momentos:
� = ��(�, �)− �� ∙ ���(�, �)
(3.8)
Estas equações serão usadas para a determinação da relação momento-curvatura a partir
de uma rotina que será explicitada nos itens subsequentes deste capítulo.
3.3. Definição da rotina
A criação de uma rotina de cálculo em ambiente “Matlab” seguiu a metódica definida a
seguir:
Definem-se as propriedades físicas e geométricas da seção, bem como o esforço
de compressão atuante P.
Abre-se um looping onde é gerada uma posição de linha neutra ��
Abre-se um looping onde se busca a raiz � da equação (de equilíbrio de forças)
para �� utilizando-se o método de Newton-Raphson:
�1(�)= ��(�, ��)− ����(�, ��)− �
(3.9)
O método de Newton-Raphson clássico aqui utilizado permite a resolução de um
sistema de equações algébricas ��(��)= 0 em um conjunto de parâmetros �� através de
uma relação de recorrência nestes parâmetros, a qual é estabelecida através da expansão
da função em série de Taylor em torno dos mesmos. A relação de recorrência fica
estabelecida pela expressão geral:
��
(���) = ��(�)−
������
���
(�)
∙ �����(�)�
(3.10)
24
A qual estabelece convergência quando �� converge para um valor inferior a uma dada
tolerância sob alguma norma pré-estabelecida (ANTIA, 1995) e onde ���
������
(�)é a
chamada matriz jacobiana da ��, avaliados na iteração �. No nosso caso, essa relação se
reescreve como:
�(���)
= �(�)
−��1
����(�)
∙ �1��(�)
�
(3.11)
De posse do valor de �, agora chamado ��, isto é, curvatura para a posição de linha
neutra correspondente ��, obtém-se o momento equilibrante através da segunda
equação:
�� = ��(��, ��)− �� ∙ ���(��, ��)
(3.12)
Com o conjunto de pares (��,��), pode-se construir a curva M-k da seção.
Mais detalhes sobre o desenvolvimento da rotina estão expostos no capítulo 7.4.
3.4. Estudo comparativo
Nesta seção apresentaremos os resultados obtidos para a relação momento-curvatura das
três seções de estudo deste trabalho. Apresentaremos os resultados obtidos com o
programa escrito em “Matlab” em comparação com aqueles obtidos com o M-k-UFRJ.
A explicação mais detalhada da metódica do algoritmo do programa é explicitada no
capítulo 7.4 deste trabalho. Ressaltamos que todas as análises são feitas minimizando-se
os esforços normais do fator 1,1 com vistas a atender as disposições do item 15.3.1 da
ABNT NBR 6118:2014.
Além disto, para geração da relação momento-curvatura é necessária a multiplicação da
resistência de cálculo do concreto pelo fator 1,1/0,85, conforme disposto na NBR
6118:2014.

25
3.4.1. Resultados do pilar 1
Os seguintes resultados para a relação momento-curvatura no primeiro pilar foram
obtidos com auxílio da rotina desenvolvida em “Matlab”, bem como com auxílio do
programa M-K-UFRJ, desenvolvido pelo engenheiro Fábio Orsini. Constatamos que
ambos os resultados se assemelham satisfatoriamente.
Figura 6: Relação momento-curvatura para o pilar 1
3.4.2. Resultados do pilar 2
Analogamente aos resultados do pilar 1, verificamos alta similitude entre as análises
realizadas segundo ambos os métodos de obtenção da relação momento-curvatura.

26
Figura 7: Relação momento-curvatura para o pilar 1
3.4.3. Resultados do pilar 3
Neste pilar, obtivemos a relação momento-curvatura em três situações distintas,
considerando a mesma seção de análise. Fá-lo-emos pois o programa M-K-UFRJ não
possui implementados em si os parâmetros atualizados de acordo com a ABNT NBR
6118:2014 para as propriedades do concreto com ��� ≥ 50���.
Assim, primeiramente, apresentamos as análises considerando-se os valores de � = 2
(figura 11), ��� = 2‰e ��� = 3,5‰, dado ��� = 60��� para as propriedades do
concreto (item 4.1 deste trabalho). Então, compararemos os resultados obtidos do M-K-
UFRJ com aqueles obtidos na rotina desenvolvida, na qual é considerado o valor correto
das propriedades do concreto.
Cabe também ressaltar que a consideração do coeficiente de majoração γn, resulta num
esforço normal de cálculo de ��� = 346,5 ��.
Neste caso não foi feita a correção normativa de multiplicação da tensão de cálculo do
concreto pelo fator 1,1/0,85.

27
Figura 8: Relação momento-curvatura para o pilar 3
Figura 9: Relação M-k para o pilar 3 com propriedades atualizadas do concreto
Como podemos ver, a consideração das propriedades atualizadas do concreto de alta
resistência altera ligeiramente a relação momento-curvatura da seção.

28
Em seguida, para atender à exigência normativa de que pilares esbeltos devem ter
considerada a fluência, adotando-se um coeficiente de fluência de � = 2, temos os
seguintes resultados:
Figura 10: Relação M-k para o pilar 3 com consideração da fluência
29
4. Definição das propriedades dos materiais
Nesta seção exporemos as principais propriedades dos materiais constituintes dos
pilares em conformidade ao disposto na ABNT NBR 6118:2014 no seu item 8.
Exporemos, primeiramente, as propriedades concernentes ao concreto e, em seguida, ao
aço, levando-se em consideração as disposições do anexo A.2.2 da mesma norma no
que tange à fluência do concreto.
4.1. Concreto
Conforme o disposto por SANTOS (2016), temos que a resistência característica do
concreto à compressão é determinada a partir de ensaios em corpos de prova cilíndricos,
de 15 cm de diâmetro e 30 cm de altura, moldados de acordo com a ABNT NBR 5738,
com a idade de 28 dias, com procedimento estatístico de acordo com a ABNT NBR
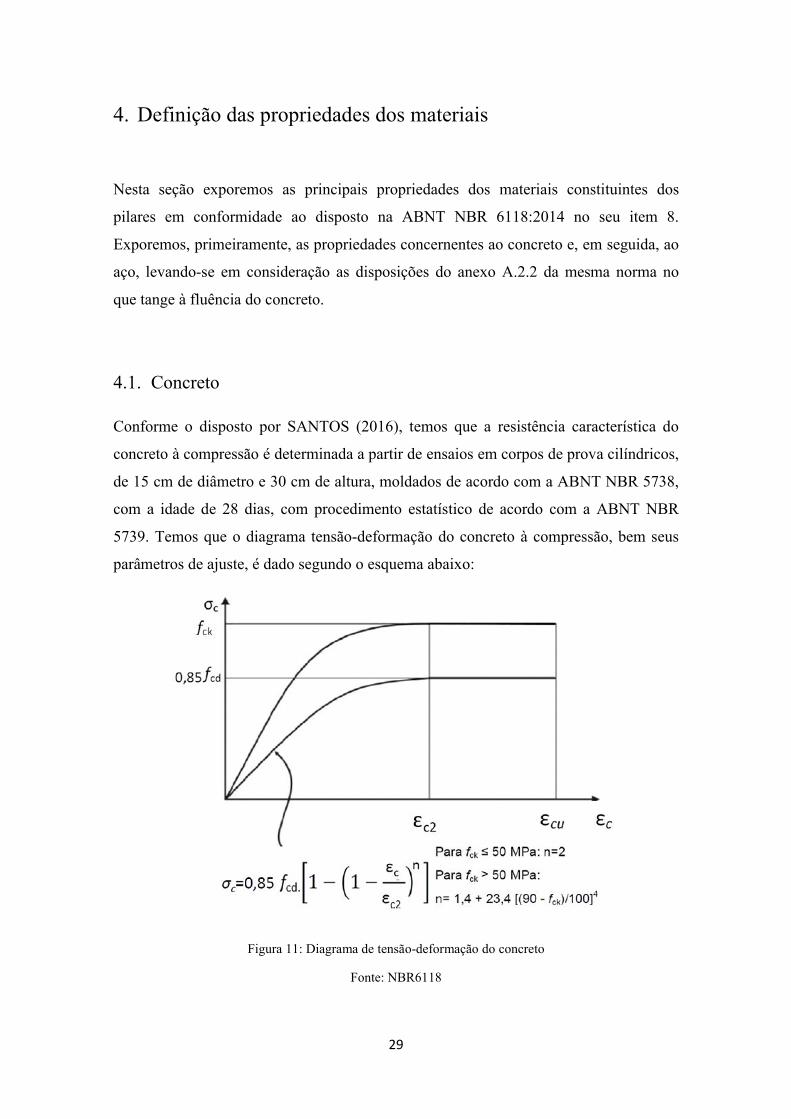
5739. Temos que o diagrama tensão-deformação do concreto à compressão, bem seus
parâmetros de ajuste, é dado segundo o esquema abaixo:
Figura 11: Diagrama de tensão-deformação do concreto
Fonte: NBR6118

30
Consideramos que, sem o efeito da fluência, as deformações limites acima são dadas
segundo as expressões abaixo:
- Para concretos de classes até C50, em módulo:
��� = 2,0 ‰ (4.1)
��� = 3,5 ‰
(4.2)
- Para concretos de classes superiores a C50 até C90, em módulo:
��� = 2,0 ‰+ 0,085 ‰(��� − 50)�,�� (4.3)
��� = 2,6 ‰+ 35 ‰�
90 − ���100
��
(4.4)
A expressão gráfica destes coeficientes é proposta, ainda, por SANTOS (2016),
conforme o gráfico abaixo.
Figura 12: Deformações características do concreto em função do fck
Fonte: SANTOS, 2016
Admite-se ainda o valor do coeficiente de Poisson médio do concreto como sendo de
� = 0,2.

31
O módulo de elasticidade inicial do concreto é dado segundo as expressões abaixo, em
MPa:
- Para ��� entre 20 e 50 MPa:
��� = �� ∙ 5600���� (4.5)
- Para ��� entre 55 e 90 MPa:
��� = �� ∙ 21500 �
���10
+ 1,25��/�
(4.6)
O parâmetro �� depende da rocha matriz da brita empregada, a saber:
�� = 1,2: basalto e diabásio;
�� = 1,0: granito e gnaisse;
�� = 0,9: calcário;
�� = 0,7: arenito.
Temos também que, com o módulo de elasticidade inicial podemos estimar o módulo de
elasticidade secante com auxílio da expressão abaixo:
��� = ����� (4.7)
Aqui o parâmetro �� é dado segundo a expressão seguinte:
�� = 0,8 + 0,2
���80
≤ 1,0
(4.8)
Os parâmetros de resistência à tração não foram considerados neste trabalho uma vez
que restaremos sob a hipótese de que a seção fissurada não contribuirá no equilíbrio da
seção quando da obtenção da relação momento-curvatura.
32
4.1.1. Consideração da fluência
A consideração do efeito do tempo nas deformações do concreto armado inclui a
fluência do concreto, sendo obrigatória a sua consideração nos casos de pilares esbeltos
(isto é, com esbeltez superior a 90), segundo a ABNT NBR 6118:2014 no item 15.8.3.1.
As disposições para sua determinação são feitas no item A.2.2 da mesma norma, através
da definição de um coeficiente de fluência �, composto da seguinte forma:
� = �� + �� + �� (4.9)
Onde:
��: coeficiente de deformação rápida;
��: coeficiente de deformação lenta irreversível;
��: coeficiente de deformação lenta reversível.
Assim, as deformações totais a serem consideradas no concreto são tais que:
��,��� = ��(1 + �)
(4.10)
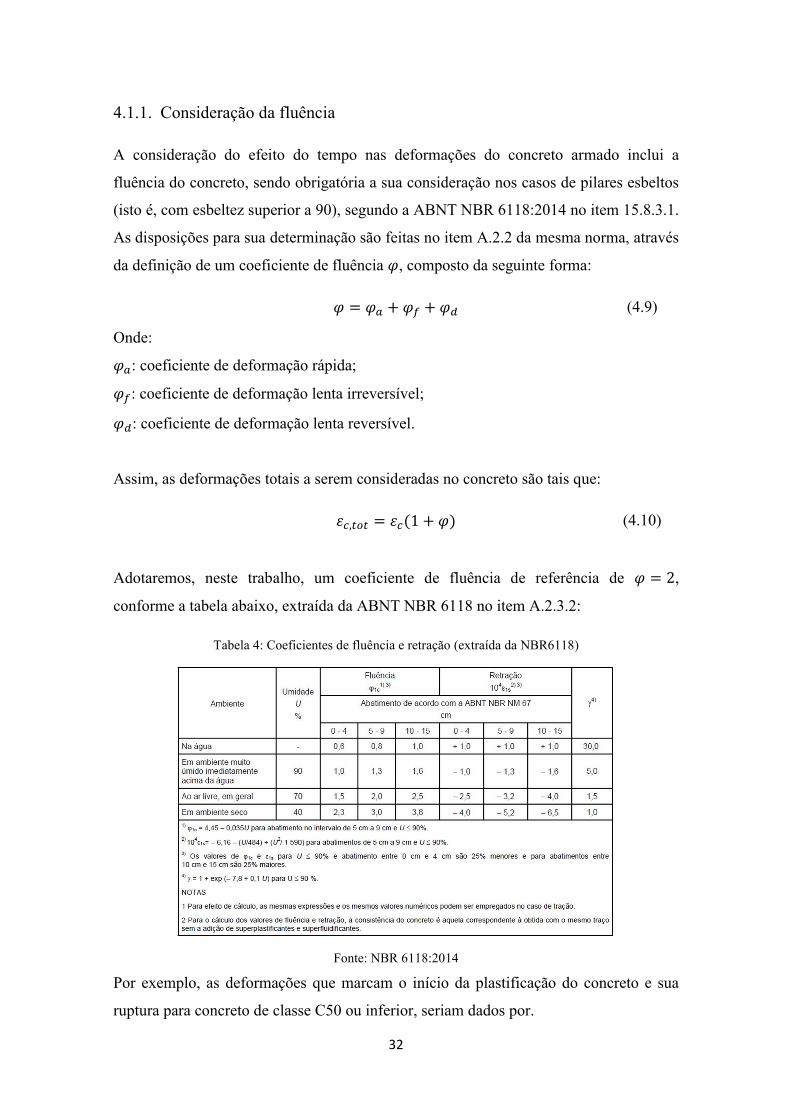
Adotaremos, neste trabalho, um coeficiente de fluência de referência de � = 2,
conforme a tabela abaixo, extraída da ABNT NBR 6118 no item A.2.3.2:
Tabela 4: Coeficientes de fluência e retração (extraída da NBR6118)
Fonte: NBR 6118:2014
Por exemplo, as deformações que marcam o início da plastificação do concreto e sua
ruptura para concreto de classe C50 ou inferior, seriam dados por.

33
��� = 2,0 ‰(1 + �)= 2,0 ‰(1 + 2)= 6,0 ‰ (4.11)
��� = 3,5 ‰(1 + �)= 10,5 ‰
(4.12)
Sendo estas correções introduzidas no diagrama tensão deformação do concreto.
4.2. Aço
As barras de aço consideradas neste trabalho são tais que seu diagrama de tensão-
deformação bi-linear genérico é da seguinte forma, sendo definido pela ABNT NBR
6118:2004 em seu item 8.3.6:
Figura 13: Diagrama tensão-deformação genérico para o aço
O módulo de elasticidade do aço é tomado como �� = 210 ���, e as resistências
últimas dependem do tipo de aço considerado, bem como as deformações que marcam o
início do trecho plástico no mesmo. O seguinte quadro resumo abaixo pode ser
encontrado em SANTOS (2016):
Tabela 5: Parâmetros do aço (extraído de SANTOS)
34
Fonte : SANTOS, 2016
Em todos os casos, toma-se a deformação última à tração do aço como sendo de
ε� = 10‰.

35
5. Ajuste da relação M-k
Neste tópico, explica-se como foi buscado um ajuste da relação momento-curvatura
para uma seção dada. O objetivo final desta análise é determinar uma aproximação
analítica para a rigidez à flexão da seção, que será usada mais adiante na definição das
rigidezes para o método dos elementos finitos.
5.1. Relação M-k no espaço log
Quando da busca de curvas de ajuste para as seções de estudo aqui consideradas,
observou-se que a logaritmização dos dados de entrada, isto é, momentos e curvaturas,
obedecia a um comportamento aproximadamente linear, em alguns trechos. Estes
trechos são separados por descontinuidades no diagrama logaritmizado, e são definidos
conforme a progressiva plastificação dos elementos constituintes da seção, isto é,
quando ocorre a plastificação do concreto ou de alguma das faixas horizontais de
armadura da seção, e há tantas inflexões quantos forem os elementos constituintes
passíveis de plastificação (ver figura 16).
Por exemplo, na condição de flexo-compressão aqui analisada, o incremento sucessivo
do valor do momento fletor em uma seção do tipo 1 pode produzir no máximo três
inflexões no diagrama M-k: o concreto plastifica à compressão (inflexão 1), então a
armadura superior plastifica à compressão (inflexão 2) e, finalmente, a armadura
inferior plastifica à tração (inflexão 3), seguindo-se a ruptura por compressão excessiva
no concreto. Havendo, portanto, N inflexões, haverá N+1 trechos a analisar.
Notou-se durante a execução das análises que, em geral, apenas o início da plastificação
do concreto e das armaduras superior e inferior seriam preponderantes para
determinação da relação momento-curvatura, até acontecer a ruptura do concreto por
compressão excessiva, independentemente do tipo da seção. Assim, o programa
desenvolvido em “Matlab” considera a formação possível de três trechos, tomando-se
como referência as máximas deformações na seção, negativas e positivas, naqueles
termos de referência.

36
Trecho inicial, elástico, que se estende até o início da plastificação da armadura
de aço mais inferior à tração ou do concreto à compressão. Na rotina desenvolvida, o
momento fletor que marca o final deste trecho é chamado de ���, momento elástico;
Trecho intermediário: é o trecho que surge quando da plastificação ou do aço
inferior ou do concreto e termina com a plastificação do concreto, caso o aço inferior
tenha sido o primeiro a plastificar, ou com a plastificação do aço inferior, caso o
concreto tenha plastificado, ou com a plastificação do aço superior, caso o concreto
tenha plastificado. O momento fletor que marca o final deste trecho é chamado de ���,
momento plástico.
Trecho final: começa ou com armadura inferior e concreto plastificados, ou com
armadura superior e concreto plastificados. Este trecho é terminado com a ruptura do
concreto à compressão.
Vê-se que a plastificação crítica na condição de flexo-compressão é a da região
superior, à compressão, no sentido de que é ela que determinará, em última análise, a
forma da relação momento-curvatura mesma. Eventualmente, pode acontecer que a
ruptura do concreto aconteça sem a plastificação da armadura superior ou inferior. Isto
caracterizaria a simplificação do diagrama momento-curvatura a apenas dois trechos de
interesse.
5.2. Definição da curva de ajuste
Conforme exposto no item anterior, buscou-se um ajuste linear no espaço de dados
logaritmizados, de modo que se verificasse, em cada trecho, a relação definida
conforme a expressão abaixo:
ln��(�)� = �� ∙ ln(�)+ �� (5.1)
Sendo os coeficientes �� e �� a serem ajustados conformemente a cada trecho analisado
(elástico, intermediário e final). Assim, podemos expressar essa relação, ainda, no
espaço original � � � exponenciando ambos os lados da equação acima, de forma a
obter:

37
�(�)= ���∙��(�)���= �����
������= � ∙ �� (5.2)
Sendo � = ��� e � = ��.
Observando-se que esta transformação linear é invertível, podemos escrever, ainda, que
deve ser verificada a relação abaixo:
�(�)= ��
��
��
(5.3)
Ou seja, pode-se determinar uma transformação bi-unívoca entre os valores de momento
fletor e curvatura através dessa relação.
Outro resultado notável deste ajuste, o qual concorda com a experiência, é que no
limite, sendo � e � diferentes de zero, deve-se verificar o seguinte estado de equilíbrio:
lim�→�
�(�)= lim�→�
� ∙ �� =0, �, � ≠ 0
(5.4)
Isto é na ausência de momentos fletores, a seção não sofre curvatura alguma, estando
uniformemente comprimida e uniformemente deformada.
5.3. Rigidez flexional aproximada
É possível se aproximar a rigidez flexional lembrando-se da relação clássica da
Resistência dos Materiais, verificada no regime elástico de pequenos deslocamentos,
dada por:
�(�)= �� ∙ �,�� = �� ∙ � (5.5)
Assim, levando em conta esta relação e a substituindo na relação momento-curvatura de
ajuste proposta no item anterior, verifica-se prontamente que existe uma relação rigidez-
curvatura não-linear elástica, que pode ser expressa conforme:

38
��(�)=
�
�= � ∙
��
�= � ∙ ����
(5.6)
Assim, podemos, usando da invertibilidade da relação, definir a curvatura em função da
rigidez ainda, conforme:
� = ���
��
����
(5.7)
Vale ressaltar que os parâmetros � � � devem ser determinados conforme o trecho de
estudo em cada seção analisada.
5.4. Equações de equilíbrio
A definição da relação momento-curvatura aproximada com auxílio da função acima
permite reescrever o funcional da energia potencial total conforme a expressão abaixo.
Π = � − Ω =
1
2�� ∙ �,��
��� ∙ �,��� �� +
1
2�� ∙ �,�
� �� +
− ��� ∙ ��,� + ��� ∙ ���
(5.8)
Ou ainda:
Π = � − Ω =
1
2�� ∙ �,��
����� +1
2�� ∙ �,�
� �� +
− ��� ∙ ��,� + ��� ∙ ���
(5.9)
Como anteriormente exposto no item 2.6, o funcional deve satisfazer às equações de
Euler-Lagrange, as quais aportam as relações diferenciais de equilíbrio. Nesta situação,
verifica-se que em regiões das cargas pontuais, as quais podem ser compreendidas no
problema como condições de contorno locais, em regiões tais deve-se verificar a
seguinte equação diferencial de equilíbrio:

39
�
����
�����
��,��� − �
��
��,��� = 0
(5.10)
O que implica que:
�
�����
��,��� − �
��
��,�� = �
(5.11)
Para C uma constante real. Deste modo, teremos:
�
���
�
��,���� ∙ �,��
���
2�� − �
�
��,�� ∙
�,��
2� = �
(5.12)
Admitindo o esforço normal de compressão P constante no pilar, teremos:
�
���� ∙ (� + 1)∙ �,��
�
2� + �� ∙ �,� � = �
(5.13)
Ou ainda, tendo que a e b são constantes de ajuste, as quais são constantes em sub-
trechos do domínio (ainda que mudando de valor), a expressão acima se torna:
� ∙ � ∙ (� + 1)
2�,����� ∙ �,��� + � ∙ �,� = �
(5.14)
Teremos, também, derivando-se essa expressão acima, e escrevendo que �,�� = �(�), a
equação diferencial seguinte a verificar o equilíbrio na direção y no pilar:
(� − 1)∙ ���� ∙ �,�
� + ���� ∙ �,�� +2 ∙ �
� ∙ � ∙ (� + 1)= 0
(5.15)
A resolução dessa equação diferencial permite obter o campo de deslocamentos no pilar
de forma exata, considerando a relação momento-curvatura aproximada conforme o
disposto neste trabalho. Dada a significância desta equação para o fenômeno de estudo,
bem como seu alto grau de complexidade e não-linearidade, o estudo matemático futuro

40
dessa equação pode se tornar um facilitador do entendimento do comportamento de
pilares de concreto armado.
Finalmente, acrescentamos que no caso particular em que � = 1, �� = � é constante.
Assim equação se simplifica ao caso clássico (TIMOSHENKO, 1985):
� ∙ �,�� + � ∙ � = 0
(5.16)
5.5. Obtenção dos parâmetros da curva de ajuste
A obtenção dos parâmetros da curva de ajuste pode ser feita através do método dos
mínimos quadrados clássico, a partir da nuvem de dados gerada na rotina utilizada para
o cálculo da relação M-k. Assim, seja um conjunto de dados (��, ��), que deve verificar
a seguinte relação, para todo i:
ln(��)= �� ∙ ln(��)+ ��� ∙ �� + ��
(5.17)
Onde �� corresponde ao erro da curva de aproximação no ponto i. A minimização do
erro quadrático em função dos parâmetros �� e �� estabelece que:
��� = �ln(��)− �� ∙ ln(��)− ��� ∙ ���
�
(5.18)
����
���= 0 → �ln(��)− �� ∙ ln(��)− ��� ∙ ��� ∙ ln(��)= 0
(5.19)
����
���= 0 → �ln(��)− �� ∙ ln(��)− ��� ∙ ��� ∙ ��� = 0
(5.20)
Seja o sistema de equações:
�ln(��)∙ ln(��) ln(��)
ln(��) ��� ∙ ���� ������ = �
ln(��)∙ ln(��)
ln(��)�
(5.21)
41
Sendo o determinante da matriz que multiplica o vetor de parâmetros diferente de zero,
a matriz é invertível e o sistema possui uma única solução admissível, ou seja, é um
sistema algébrico determinado.
5.6. Resultados
Neste seção apresentaremos os resultados do ajuste das curvas M-k utilizando-se a
aproximação proposta acima, bem como a noção de sub-trechos do diagrama referido,
segundo o item 5.1 deste trabalho. Fá-lo-emos para as três seções de estudo.
Realizaremos, ainda, observações a respeito das deformações atingidas em cada
inflexão da curva buscada, e a plastificação do elemento resistivo na seção que se lhe é
correspondente.
5.6.1. Pilar 1
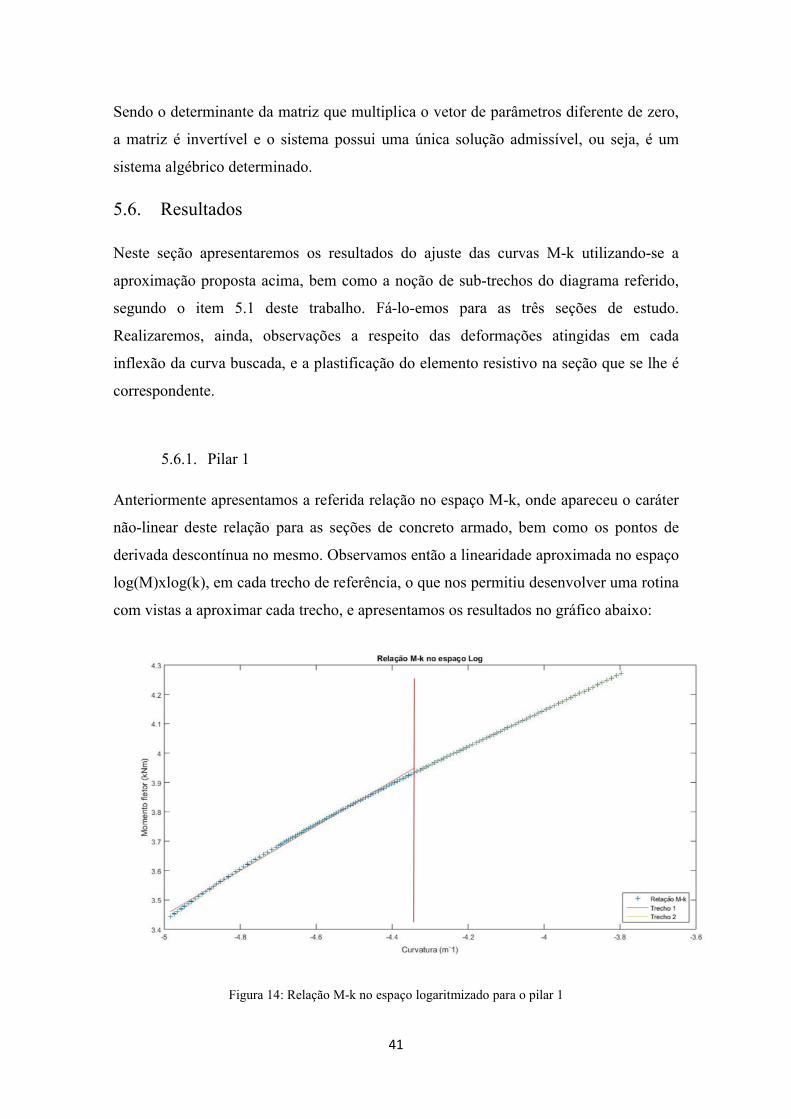
Anteriormente apresentamos a referida relação no espaço M-k, onde apareceu o caráter
não-linear deste relação para as seções de concreto armado, bem como os pontos de
derivada descontínua no mesmo. Observamos então a linearidade aproximada no espaço
log(M)xlog(k), em cada trecho de referência, o que nos permitiu desenvolver uma rotina
com vistas a aproximar cada trecho, e apresentamos os resultados no gráfico abaixo:
Figura 14: Relação M-k no espaço logaritmizado para o pilar 1

42
Cujos parâmetros de ajuste são:
Tabela 6: Parâmetros de ajuste para o pilar 1
Trecho a b
1 0,761 1412,900
2 0,618 749,047
A presença de apenas dois trechos até o colapso do concreto deve indicar que apenas
houve plastificação em um elemento antes da ruptura. Veremos, mais adiante, no
gráfico de evoluções das deformações, que este elemento é o concreto, que é o primeiro
a plastificar, a despeito das armaduras inferiores e superiores, e o programa diverge
antes da plastificação das demais.
Observamos ainda, a evolução da deformação nas três regiões de referência citadas no
item 5.1, com as iterações da rotina. O termo Nel representa o limite do primeiro trecho,
e Npl o limite do segundo; eles são, também, pontos de plastificação responsáveis pela
introjeção das descontinuidades na relação M-k.
Figura 15: Evolução das deformações na seção para o pilar 1
43
5.6.2. Pilar 2
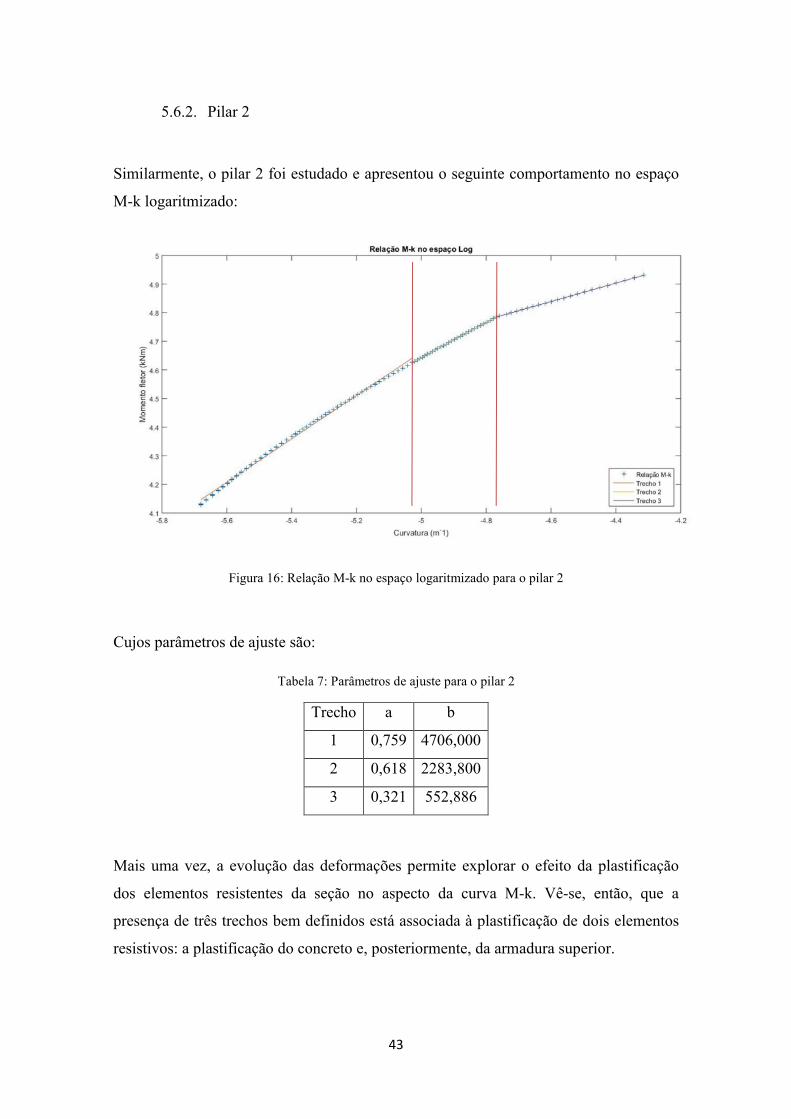
Similarmente, o pilar 2 foi estudado e apresentou o seguinte comportamento no espaço
M-k logaritmizado:
Figura 16: Relação M-k no espaço logaritmizado para o pilar 2
Cujos parâmetros de ajuste são:
Tabela 7: Parâmetros de ajuste para o pilar 2
Trecho a b
1 0,759 4706,000
2 0,618 2283,800
3 0,321 552,886
Mais uma vez, a evolução das deformações permite explorar o efeito da plastificação
dos elementos resistentes da seção no aspecto da curva M-k. Vê-se, então, que a
presença de três trechos bem definidos está associada à plastificação de dois elementos
resistivos: a plastificação do concreto e, posteriormente, da armadura superior.

44
Figura 17: Evolução das deformações na seção para o pilar 2
5.6.3. Pilar 3
Similarmente, o pilar 3 foi estudado e apresentou o seguinte comportamento no espaço
M-k logaritmizado, dados os parâmetros adequados para concretos de resistência
característica acima de 50MPa e se não considerarmos a fluência:
Figura 18: Relação M-k no espaço logaritmizado para o pilar 3
45
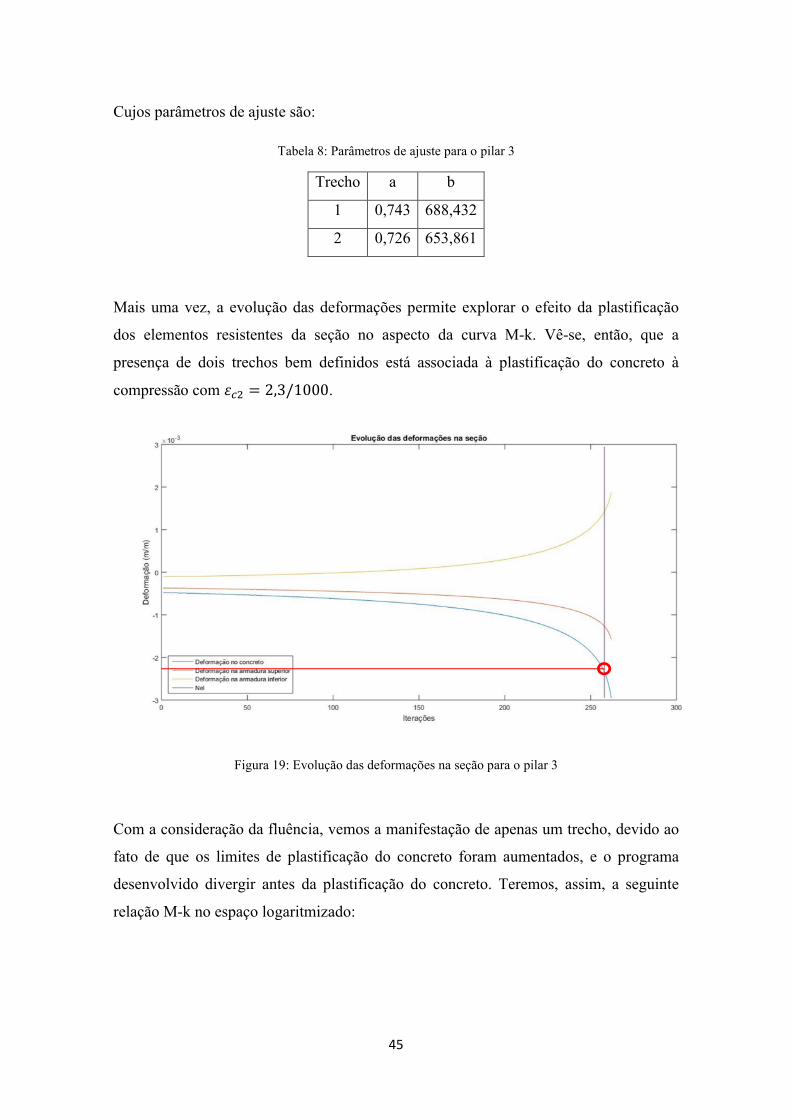
Cujos parâmetros de ajuste são:
Tabela 8: Parâmetros de ajuste para o pilar 3
Trecho a b
1 0,743 688,432
2 0,726 653,861
Mais uma vez, a evolução das deformações permite explorar o efeito da plastificação
dos elementos resistentes da seção no aspecto da curva M-k. Vê-se, então, que a
presença de dois trechos bem definidos está associada à plastificação do concreto à
compressão com ��� = 2,3/1000.
Figura 19: Evolução das deformações na seção para o pilar 3
Com a consideração da fluência, vemos a manifestação de apenas um trecho, devido ao
fato de que os limites de plastificação do concreto foram aumentados, e o programa
desenvolvido divergir antes da plastificação do concreto. Teremos, assim, a seguinte
relação M-k no espaço logaritmizado:
46
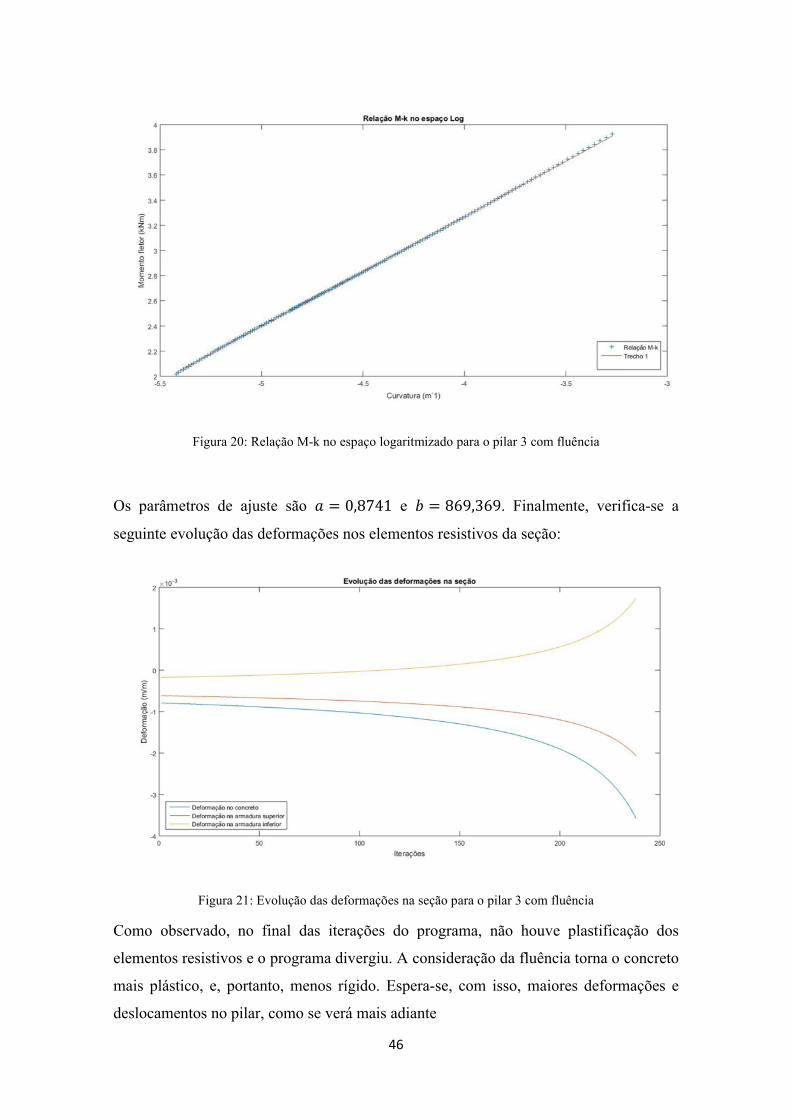
Figura 20: Relação M-k no espaço logaritmizado para o pilar 3 com fluência
Os parâmetros de ajuste são � = 0,8741 e � = 869,369. Finalmente, verifica-se a
seguinte evolução das deformações nos elementos resistivos da seção:
Figura 21: Evolução das deformações na seção para o pilar 3 com fluência
Como observado, no final das iterações do programa, não houve plastificação dos
elementos resistivos e o programa divergiu. A consideração da fluência torna o concreto
mais plástico, e, portanto, menos rígido. Espera-se, com isso, maiores deformações e
deslocamentos no pilar, como se verá mais adiante
47
6. Estudo via método dos elementos finitos
A aplicação do método dos elementos finitos consiste na subdivisão do pilar em sub-
trechos elementares, os chamados elementos finitos, onde o campo de deslocamentos é
aproximado com auxílio de funções de forma em função dos deslocamentos nodais nos
extremos desses elementos.
Desta forma, a determinação do campo de deslocamentos e de suas derivadas, em todo o
sistema, fica estabelecida com o conhecimento dos deslocamentos nodais, os quais
formam uma base matemática para determinação do campo acima referido.
Assim, para determinação dos deslocamentos nodais, uma abordagem energética pode
ser realizada. Como em WASHIZU (1975), podemos escrever o funcional da energia
potencial total para o sistema estrutural analisado, cuja primeira variação deve ser nula,
de modo que aquele seja estacionário.
�Π = �� − �Ω = 0
(6.1)
Por conseguinte, com base neste princípio, o método de Rayleigh-Ritz (BUTKOV,
1973) preconiza que, reescrevendo o funcional da energia potencial total com auxílio
das funções de campo de deslocamentos aproximadas no domínio de estudo, este pode
ser definido como função direta dos deslocamentos nodais, com relação aos quais o
funcional é minimizado. Isto significa a construção de um sistema nas incógnitas de
deslocamento, que pode ser resolvido nestas incógnitas. Matematicamente:
∂Π�
∂��= 0
(6.2)
∂Π�
∂��,�= 0
(6.3)
Onde Π� é o funcional aproximado.
Neste capítulo, inicialmente explicitaremos a formalização do sistema e do
funcional que deve ser verificado no mesmo, com auxílio do método de elementos
finitos. Em seguida, aplicaremos o método de Rayleigh-Ritz e construiremos um
sistema algébrico a ser resolvido, onde serão escritas as matrizes de rigidez
convencional, geométrica e de molas, bem como será considerado o efeito das cargas
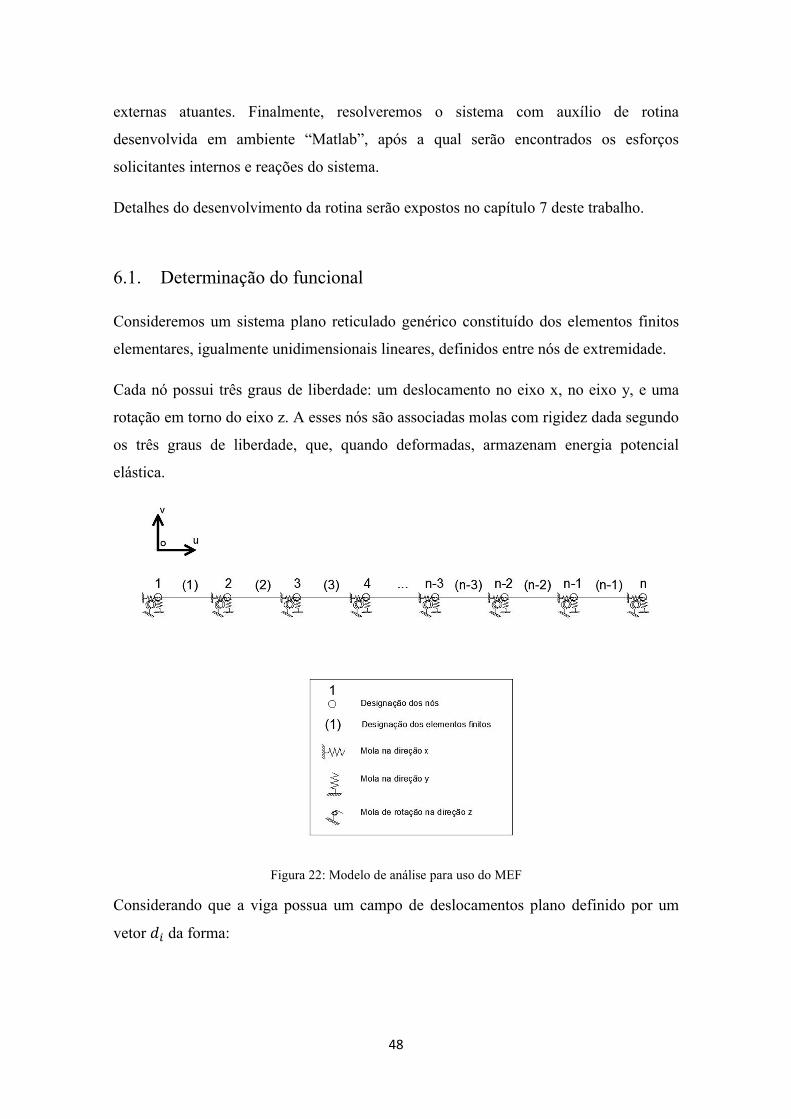
48
externas atuantes. Finalmente, resolveremos o sistema com auxílio de rotina
desenvolvida em ambiente “Matlab”, após a qual serão encontrados os esforços
solicitantes internos e reações do sistema.
Detalhes do desenvolvimento da rotina serão expostos no capítulo 7 deste trabalho.
6.1. Determinação do funcional
Consideremos um sistema plano reticulado genérico constituído dos elementos finitos
elementares, igualmente unidimensionais lineares, definidos entre nós de extremidade.
Cada nó possui três graus de liberdade: um deslocamento no eixo x, no eixo y, e uma
rotação em torno do eixo z. A esses nós são associadas molas com rigidez dada segundo
os três graus de liberdade, que, quando deformadas, armazenam energia potencial
elástica.
Figura 22: Modelo de análise para uso do MEF
Considerando que a viga possua um campo de deslocamentos plano definido por um
vetor �� da forma:

49
�� = �(�) (6.4)
�� = �(�)
(6.5)
Desconsideraremos a análise dos deslocamentos horizontais a partir das considerações
feitas na seção 2.6, já que o sistema pode ser desacoplado em dois subsistemas: um em
deslocamentos verticais, com 2N incógnitas, e outro em deslocamentos horizontais, que
não será analisado.
Pode-se escrever o funcional da energia potencial total do sistema segundo a expressão
abaixo, considerando apenas a ação de forças externas nodais, orientadas positivamente
conforme o sentido positivo dos eixos coordenados globais:
Π = � − Ω =
1
2��� ∙ �,��
� �� +1
2���
���� +
1
2�� ∙ �,�
� ��
+��(�)
∙��
�
2+ ��
(�)∙��
�
2+ ��
(�)∙��,�
�
2
−��� ∙ �,�(�)
+ ��� ∙ �(�)
+ ��� ∙ �(�)�
(6.6)
Sendo:
��: momento nodal externo aplicado ao nó j
���: força nodal externa aplicado ao nó j segundo a direção x
���: força nodal externa aplicado ao nó j segundo a direção y
��(�)
: rigidez da j-ésima mola no nó j segundo a direção x.
��(�)
: rigidez da j-ésima mola no nó j segundo a direção y.
��(�)
: rigidez flexional da j-ésima mola no nó j segundo a direção z.
Em cada elemento finito podemos escrever o campo de deslocamentos em x e em y em
função dos deslocamentos nodais das extremidades, utilizando para isso funções de
interpolação que, determinadas segundo o sistema de eixos locais do elemento, permite
escrever de maneira aproximada o valor dos deslocamentos dentro do elemento em si.

50
Campo de deslocamentos vertical
O campo de deslocamentos vertical pode ser aproximado com as clássicas funções de
Hermite (ALVES, 2016), dadas segundo as expressões abaixo. Considera-se aqui �� o
comprimento do elemento finito �, e (��, �′) o sistema de eixos locais, determinados a
partir do nó inicial do elemento finito, aqui tomado como o nó i.
Figura 23: Esquematização de um elemento finito
�(�)(�′)= 1 − 3 ∙ �
��
���
�
+ 2 ∙ ���
���
�
(6.7)
�(�)(�′)= �� ∙ �
��
��− 2 ∙ �
��
���
�
+ ���
���
�
� (6.8)
�(�)(�′)= 3 ∙ �
��
���
�
− 2 ∙ ���
���
�
(6.9)
�(�)(�′)= �� ∙ �−�
��
���
�
+ ���
���
�
�
(6.10)
Assim, o campo de deslocamentos em cada elemento finito pode ser aproximado pela
relação abaixo:
��(�′)= �(�) ∙ �(�)(�′)+ �,�(�) ∙ �(�)(�′)+ �(���) ∙ �(�)(�′)
+ �,�(���) ∙ �(�)(�′)
(6.11)

51
Campo de deslocamentos horizontal
Neste trabalho, temos por objetivo a análise flexional dos pilares. Portanto, o
comportamento de treliça associado aos deslocamentos normais ao plano da seção não
será analisado.
Além disso, consideramos o termo:
1
2���
����
(6.12)
Este sendo independente dos deslocamentos nodais e aproximadamente constante
(ALVES, 1995) nos permite desconsiderar seus efeitos quando da minimização do
funcional da energia potencial total da viga.
Avaliação da rigidez no elemento
A rigidez em cada elemento será avaliada em uma das extremidades do mesmo, e este
valor será considerado como de referência do elemento. Na rotina aqui desenvolvida,
ele será calculado em cada iteração para resolução do sistema não-linear que determina
o campo de deslocamentos, conforme os itens subsequentes.
Funcional completo
Pode-se reescrever o funcional de forma aproximada substituindo-se as expressões do
mesmo com os termos acima definidos. Assim, a energia de deformação no contínuo se
transforma na soma de energias de deformação aproximadas em cada elemento finito
com raciocínio análogo para os demais termos, de forma que, havendo n nós e n-1
elementos finitos, teremos:

52
Π� =
1
2���� � �(�′)�
,��� ��′
��
�
���
���
+1
2���
����
+1
2��� � �(�′)�
,�� ��′
��
�
���
���
+
+��(�)
∙��
�
2+ ��
(�)∙��
�
2+ ��
(�)∙��,�
�
2
−��� ∙ �,�(�)
+ ��� ∙ �(�)
+ ��� ∙ �(�)�
(6.13)
Onde:
���: é a rigidez flexional de referência no elemento j, tomada como a rigidez num
extremo do elemento finito;
��: é o esforço normal de referência no elemento j, tomado como o esforço normal num
extremo do elemento finito.
6.2. Construção da matriz de rigidez
A minimização do funcional, agora função dos deslocamentos nodais, conduz a um
sistema de equações não-linear de tamanho 2n x 2n, sendo n o número de nós, que
permite definir o campo de deslocamentos do pilar. Assim, devem ser verificadas as
seguintes relações:
∂Π�
∂�(�)= 0
(6.14)
∂Π�
∂�,�(�)
= 0 (6.15)
Em todos os nós. A primeira equação estabelece a seguinte relação
∂Π�
∂�(�)= ���� � �(��)�
,�� ∙��(��)�
,��
��(�)���
��
�
���
���
+��� � �(��)�,� ∙
��(��)�,�
��(�)���
��
�
���
���
+ ��(�)
−���
(6.16)

53
Ou ainda:
∂Π�
∂�(�)= ����� � �(��)�
,�� ∙��(��)�
,��
��(�)���
����
�
+ ��� � �(��)�,�� ∙
��(��)�,��
��(�)���
��
�
+ ���� � �(��)�,� ∙
��(��)�,�
��(�)���
��
�
+ �� � �(��)�,� ∙
��(��)�,�
��(�)���
��
�
+��(�)− ��� = 0
(6.17)
Analisando os termos separadamente, teremos:
(1) ∫ �(��)�,�� ∙
��(��)�,��
��(�)���
�����
Sendo ��(�′)= �(���) ∙ �(�)(�′)+ �,�(���) ∙ �(�)(�′)+ �(�) ∙ �(�)(�′)+ �,�
(�) ∙ �(�)(�′),
teremos:
� �(��)�,�� ∙
��(��)�,��
��(�)���
����
�
= � ��(���) ∙ �(�)(��),�� + �,�(���) ∙ �(�)(��),�� + �(�) ∙ �(�)(��),��
����
�
+ �,�(�) ∙ �(�)(��),��� ∙ �
(�)(��),�����
A integral, quando calculada, resulta nos seguintes valores:
� �(��)�,�� ∙
��(��)�,��
��(�)���
����
�
= �(���) ∙ −12
����� + �,�
(���) ∙ −6
����� + �(�) ∙
12
����� + �,�
(�) ∙ −6
�����

54
(2) ∫ �(��)�,�� ∙
��(��)�,��
��(�)���
���
Sendo ��(�′)= �(�) ∙ �(�)(�′)+ �,�(�) ∙ �(�)(�′)+ �(���) ∙ �(�)(�′)+ �,�
(���) ∙ �(�)(�′),
teremos:
� �(��)�,�� ∙
��(��)�,��
��(�)���
��
�
= � ��(�) ∙ �(�)(��),�� + �,�(�) ∙ �(�)(��),�� + �(���) ∙ �(�)(��),��
��
�
+ �,�(���) ∙ �(�)(��),��� ∙ �
(�)(��),�����
A integral, quando calculada, resulta nos seguintes valores:
� �(��)�,�� ∙
��(��)�,��
��(�)���
��
�
= �(�) ∙12
��� + �,�
(�) ∙6
��� + �(���) ∙ −
12
��� + �,�
(���) ∙6
���
(3) ∫ �(��)�,� ∙
��(��)�,�
��(�)���
�����
Sendo ��(�′)= �(���) ∙ �(�)(��)+ �,�(���) ∙ �(�)(��)+ �(�) ∙ �(�)(��)+ �,�
(�) ∙ �(�)(�′),
teremos
� �(��)�,� ∙
��(��)�,�
��(�)���
����
�
= � ��(���) ∙ �(�)(��),� + �,�(���) ∙ �(�)(��),� + �(�) ∙ �(�)(��),� + �,�
(�)��
�
∙ �(�)(��),�� ∙ �(�)(��),���
�
A integral, quando calculada, resulta nos seguintes valores:
� �(��)�,� ∙
��(��)�,�
��(�)���
����
�
= �(�) ∙−6
5 ∙ ����+ �,�
(�) ∙−1
10+ �(���) ∙
6
5 ∙ ����+ �,�
(���) ∙−1
10

55
(4) ∫ �(��)�,� ∙
��(��)�,�
��(�)���
���
Sendo ��(�′)= �(�) ∙ �(�)(�′)+ �,�(�) ∙ �(�)(�′)+ �(���) ∙ �(�)(�′)+ �,�
(���) ∙ �(�)(�′),
teremos:
� �(��)�,� ∙
��(��)�,�
��(�)���
��
�
= � ��(�) ∙ �(�)(��),� + �,�(�) ∙ �(�)(��),� + �(���) ∙ �(�)(��),� + �,�
(���)��
�
∙ �(�)(��),�� ∙ �(�)(��),���
�
A integral, quando calculada, resulta nos seguintes valores:
� �(��)�,� ∙
��(��)�,�
������
��
�
= �(�) ∙6
5 ∙ ��+ �,�
(�) ∙1
10+ �(���) ∙ −
6
5 ∙ ��+ �,�
(���) ∙1
10
O que permite escrever, para cada nó i, as seguintes equações de equilíbrio nodal em
forças:

56
������ ∙ ��
(���) ∙ −12
����� + �,�
(���) ∙ −6
������
+ ��(�) ∙ ������ ∙12
����� + ��� ∙
12
���� + �,�
(�)
∙ ������ ∙ −6
����� + ��� ∙
6
����� + ���
∙ ��(���) ∙ −12
��� + �,�
(���) ∙6
�����
+ ����� ∙ ��(�) ∙
−6
5 ∙ ����+ �,�
(�) ∙−1
10�
+ ��(�) ∙ ����� ∙−6
5 ∙ ����+ �� ∙
6
5 ∙ ��� + �,�
(�)
∙ ����� ∙ −1
10+ �� ∙
1
10�� + ��
∙ ��(���) ∙ −6
5 ∙ ��+ �,�
(���) ∙1
10�� + ��
(�)
−��� = 0, � = 0…�
(6.18)
Um procedimento análogo pode ser feito para a segunda equação de equilíbrio, o que
permite definir as seguintes equações de equilíbrio nodal em momentos:

57
������ ∙ ��
(���) ∙6
����� + �,�
(���) ∙2
�����
+ ��(�) ∙ ������ ∙−6
����� + ��� ∙
6
���� + �,�
(�)
∙ ������ ∙4
����+ ��� ∙
4
���� + ���
∙ ��(���) ∙ −6
��� + �,�
(���) ∙2
����
+ ����� ∙ ��(�) ∙
1
10+ �,�
(�) ∙−����30
�
+ ��(�) ∙ ����� ∙−1
10+ �� ∙
1
10� + �,�
(�)
∙ ����� ∙2����15
+ �� ∙2��15
�� + ��
∙ ��(���) ∙ −1
10+ �,�
(���) ∙−��30
�� + ��(�)
−�� = 0, � = 0…�
(6.19)
Juntas, essas equações definem, como explicitado anteriormente, um sistema não-linear
a ser determinado iterativamente. Estudando cada termo das equações acima, definem-
se as seguintes propriedades:
Os termos associados a EJ dão origem à matriz de rigidez convencional do
sistema, expressa por � e dada conforme disposição abaixo. Esta matriz não é
invertível, o que reflete a impossibilidade de haver equilíbrio na ausência de vínculos
que produzam reações de apoio equilibrantes;
Os termos associados ao esforço normal dão origem à matriz de rigidez
geométrica do sistema, expressa por ��, e aparece, pois estamos considerando os efeitos
de segunda ordem no mesmo. Esta matriz não é invertível, o que reflete a
impossibilidade de haver equilíbrio na ausência de vínculos que produzam reações de
apoio equilibrantes;
58
Os termos ��(�)
e ��(�)
geram uma matriz diagonal de rigidezes de mola, expressa
por ����, que, adicionadas às matrizes de rigidez convencional e geométrica, permite
determinar o equilíbrio do sistema, pois reflete as reações de apoio. Se o sistema for
hipostático, isto é, possuir menos vínculos que os necessários para estabelecimento do
equilíbrio, a matriz de rigidez molar será tal que a obtenção das reações de apoio e
deslocamentos não será possível;
Os termos ��� e �� determinam o vetor de forças e momentos nodais
diretamente aplicados aos nós, expresso por �����.
A seguir apresentaremos cada um destes elementos escritos na forma matricial
conveniente:

59
Matriz de rigidez convencional
⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡ ���
12
��� ���
6
��� −���
12
��� ���
6
��� 0 0 0 0
���6
��� ���
4
��−���
6
��� ���
2
��0 0 0 0
−���12
��� −���
6
��� ���
12
��� + ���
12
��� −���
6
��� + ���
6
��� −���
12
��� ���
6
��� 0 0
���6
��� ���
2
�����
−6
��� + ���
6
��� ���
4
��+ ���
4
��−���
6
��� ���
2
��0 0
0 0 −���12
��� −���
6
��� ���
12
��� + ���
12
��� −���
6
��� + ���
6
��� −���
12
��� ���
6
���
0 0 ���6
��� ���
2
�����
−6
��� + ���
6
��� ���
4
��+ ���
4
�����
6
��� ���
2
��⋯
⋮ ⋱ ⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤

60
Mariz de rigidez geométrica
⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡ ��
6
5����
1
10−��
6
5����
1
100 0 0 0
��1
10��
2��15
−��1
10��
−��30
0 0 0 0
−��6
5��−��
1
10��
−6
5��+ ��
6
5����
−1
10+ ��
1
10��
−6
5����
1
100 0
��1
10��
−��30
��−1
10+ ��
1
10��
2��15
+ ��2��15
��−1
10��
−��30
0 0
0 0 ��−6
5����
−1
10��
−6
5��+ ��
6
5����
−1
10+ ��
1
10��
−6
5����
1
10
0 0 ��1
10��
−��30
��−1
10+ ��
1
10��
2��15
+ ��2��15
��−1
10��
−��30
⋯
⋮ ⋱ ⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤

61
Matriz de molas
⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡��� 0 0 0 0 0
0 ��� 0 0 0 0
0 0 ��� 0 0 0
0 0 0 ��� 0 0
0 0 0 0 ��� 0
0 0 0 0 0 ��� ⋯
⋮ ⋱⋱ ⋮⋯ ��
��� 0 0 0
0 0 ����� 0 0
0 0 0 ��� 0
0 0 0 0 ���⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤
Vetor de forças nodais externas
⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡ �����
�����
�����
⋮���������
����� ⎦
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤
6.3. Resolução do problema
As equações de equilíbrio determinadas com a minimização do funcional da energia potencial
total aproximado permitiram a construção do seguinte sistema de equações:
����(��)+ ���� + ������� ∙ �� − ����� = 0
(6.20)
62
Onde as matrizes, em sistema ao menos isostático, são tais que existe inversa para a matriz
que resulta da soma ��� + ���� + ������ e �� é o vetor de deslocamentos nodais, onde as
entradas ímpares são os deslocamentos verticais dos nós e as entradas pares as suas rotações.
A solução do sistema, no caso linear elástico homogêneo, pode ser obtida então da seguinte
forma:
�� = ���� + ���� + ���������
∙ �����
(6.21)
Entretanto, a não-linearidade física do material será levada em consideração, de modo que o
sistema deverá ser resolvido de forma iterativa, tratando a equação de equilíbrio como uma
relação de recorrência tal que, em uma dada iteração �:
��(���) = ����(��
(�))+ ���� + ���������
∙ �����
(6.22)
A convergência dos resultados será avaliada através da convergência do máximo
deslocamento vertical em módulo obtido em cada iteração, de modo que a rotina desenvolvida
e explanada no capítulo 7.3 considera que, no cálculo do campo de deslocamentos, para uma
dada tolerância, há convergência quando se verifica:
max����(���)− ��
(�)�� < �������� (6.23)
Sendo os valores da tolerância e demais “inputs” definidos na seção 7.4.
6.4. Apoios
A matriz de molas foi inserida para simular a ação de apoios quaisquer. Assim, a presença de
apoios fixos corresponde à inserção de molas suficientemente rígidas, bem como a sua
ausência representa condição de ausência de apoio, isto é, rigidez nula. Para o primeiro caso,
considerou-se nas análises molas de rigidez flexional de 10e50 kN/m para as rigidezes ao
deslocamento e 10e50 kNm/m para as rigidezes à rotação. Ademais, na análise de pilares, a
NBR 6118:2014 preconiza que estes sejam considerados como birrotulados.

63
6.5. Resultados adicionais
Listamos abaixo os demais resultados interessantes à análise, que podem ser obtidos após a
determinação dos deslocamentos do sistema, isto é, o vetor ��.
6.5.1. Reações de apoio
As reações de apoio podem ser obtidas com auxílio da matriz de molas, dado que a força
atuante na mola é a reação de apoio, por definição e construção, neste modelo. Teremos que,
sendo a reação de apoio dada por �, verifica-se:
�� = ������ ∙ ��
(6.24)
6.5.2. Esforços solicitantes internos
Os esforços solicitantes internos podem ser definidos com auxílio da matriz de rigidez própria
da estrutura (VENÂNCIO, 1975), de modo que, sendo �� o vetor de solicitações internas em
cada nó, deve-se verificar:
�� = −(���(��)+ ����)∙ �� (6.25)
6.5.3. Deslocamentos de primeira ordem
Os deslocamentos de primeira ordem podem ser estimados, sabendo-se o campo de
deslocamentos do sistema ��, em se resolvendo o sistema, mais uma vez, mas considerando-
se o esforço normal como sendo nulo. Assim, pode-se escrever que:
��(�� �����) = ����(��)+ �������
��∙ ��
���
(6.26)
Com este campo de deslocamentos, poder-se-á definir os efeitos analisados nos próximos
itens.

64
6.5.4. Reações de apoio de primeira ordem
Com os deslocamentos de primeira ordem anteriormente calculados, é possível determinar as
reações de primeira ordem segundo:
��(�� �����) = ������ ∙ ��
(�� �����)
(6.27)
6.5.5. Esforços solicitantes de primeira ordem
Com os deslocamentos de primeira ordem anteriormente calculados, é possível determinar os
esforços solicitantes nodais de primeira ordem segundo:
��(�� �����) = −(���(��)+ ����)∙ ��
(�� �����)
(6.28)
6.6. Resultados
Os seguintes resultados foram obtidos para os casos de pilar aqui analisados. Apresentaremos
os resultados em deslocamento e os esforços solicitantes internos ao longo do pilar para cada
caso de carga considerado, que serão rememorados. Todos os pilares aqui estudados são
considerados como bi-rotulados.
6.6.1. Pilar 1
O primeiro pilar apresentou os seguintes resultados nos nós após a análise de elementos
finitos. Apresentamos, em seguida, os resultados gráficos do mesmo.
Tabela 9: Resultados de momento fletor e deslocamento no pilar 1
Nó Momento
fletor (kNm)
Deslocamento
(mm)
1 30,0000 -0,0000
2 34,6372 -4,6372
3 38,9749 -8,9749
4 42,9616 -12,9616
5 46,5483 -16,5483

65
6 49,6894 -19,6894
7 52,3440 -22,3440
8 54,4693 -24,4693
9 56,0252 -26,0252
10 56,9832 -26,9832
11 57,3244 -27,3244
12 57,0409 -27,0409
13 56,1355 -26,1355
14 54,6220 -24,6220
15 52,5246 -22,5246
16 49,8771 -19,8771
17 46,7244 -16,7244
18 43,1136 -13,1136
19 39,0896 -9,0896
20 34,7012 -4,7012
21 30,0000 -0.0000
Figura 24: Campo de deslocamentos v(x) do pilar 1

66
Figura 25: Diagrama de momentos fletores do pilar 1
Cabe ressaltar que o campo de esforços e deslocamentos acima deve ser multiplicado pelo
fator 1,1 para atendimento das exigências normativas da NBR 6118:2014.
6.6.2. Pilar 2
O segundo pilar apresentou os seguintes resultados nos nós após a análise de elementos
finitos. Apresentamos, em seguida, os resultados gráficos do mesmo.
Tabela 10: Resultados de momento fletor e deslocamento no pilar 2
Nó Momento
fletor (kNm)
Deslocamento
(mm)
1 30,0000 0,0000
2 30,6841 -0,6841
3 31,3017 -1,3017
4 31,8511 -1,8511
5 32,3307 -2,3307
6 32,7391 -2,7391

67
7 33,0750 -3,0750
8 33,3374 -3,3374
9 33,5256 -3,5256
10 33,6389 -3,6389
11 33,6770 -3,6770
12 33,6398 -3,6398
13 33,5273 -3,5273
14 33,3399 -3,3399
15 33,0780 -3,0780
16 32,7424 -2,7424
17 32,3341 -2,3341
18 31,8543 -1,8543
19 31,3042 -1,3042
20 30,6856 -0,6856
21 30,0000 -0,0000
Figura 26: Campo de deslocamentos v(x) do pilar 2

68
Figura 27: Diagrama de momentos fletores do pilar 2
Cabe ressaltar que o campo de esforços e deslocamentos acima deve ser multiplicado pelo
fator 1,1 para atendimento das exigências normativas da NBR 6118:2014.
6.6.3. Pilar 3
O terceiro pilar apresentou os seguintes resultados nos nós após a análise de elementos finitos.
Apresentamos, em seguida, os resultados gráficos do mesmo.
Tabela 11: Resultados de momento fletor e deslocamento no pilar 3
Nó Momento
fletor (kNm)
Deslocamento
(mm)
1 15,0000 0,0000
2 18,2208 -10,2248
3 21.2356 -19,7955
4 24,0042 -28,5847
5 26,4891 -36,4732
6 28,6558 -43,3518
7 30,4741 -49,1241
8 31,9180 -53,7080

69
9 32,9668 -57,0375
10 33,6052 -59,0641
11 33,8237 -59,7578
12 33,6188 -59,1072
13 32,9930 -57,1207
14 31,9549 -53,8252
15 30,5190 -49,2667
16 28,7052 -43,5086
17 26,5387 -36,6308
18 24,0493 -28,7280
19 21,2711 -19,9082
20 18,2413 -10,2898
21 15,0000 0,0000
Figura 28: Campo de deslocamentos v(x) do pilar 3

70
Figura 29: Diagrama de momentos fletores do pilar 3
Cabe ressaltar que o campo de esforços e deslocamentos acima deve ser multiplicado pelo
fator 1,1 para atendimento das exigências normativas da NBR 6118:2014.

71
7. O programa em “Matlab”
O programa desenvolvido em “Matlab” conta com uma série de sub-rotinas que são chamadas
em uma rotina principal através do comando run. Estas sub-rotinas podem ou bem realizar
análises importantes ao sistema como servir da inserção de dados de “input” necessários às
análises.
7.1. Rotina principal
O sequenciamento de atividades desta rotina é apresentado no organograma abaixo:
Figura 30: Sequenciamento de atividades do programa
As chamadas das sub-rotinas é feita no “Matlab”, pois as mesmas estão inseridas no mesmo
diretório do programa principal.

72
7.2. Sub-rotinas de INPUT
Os dados de INPUT são obtidos através da chamada de três rotinas:
DADOS_MATERIAIS.m, para inserção dos dados relativos às propriedades dos materiais,
DADOS_SECAO.m, para inserção dos dados iniciais da seção,
DADOS_CARREGAMENTO.m, para inserção dos dados de carregamento externo.
A primeira, DADOS_MATERIAIS.m, é dada da forma seguinte:
Definição do coeficiente de Poisson;
Definição do valor de ��� (com cálculo automático do valor ���);
Cálculo das deformações e do coeficiente n da relação tensão-deformação do concreto;
Definição do coeficiente de fluência e calculo dos parâmetros de deformação do
concreto;
Definição dos parâmetros de deformação do aço e do valor característico ���;
Cálculo do módulo de elasticidade do aço.
A segunda, DADOS_SECAO.m, considerando apenas seções retangulares, é dada da forma
seguinte:
Definição das dimensões de base (b) e altura da seção (h);
Definição da posição da distância das armaduras superiores às faces, d’ e d’’;
Definição da quantidade de faixas de armaduras;
Definição do vetor com a posição das faixas de armaduras;
Definição do vetor com a área de aço de cada armadura.
A terceira, DADOS_CARREGAMENTO.m, é dada da forma seguinte:
Definição da força normal de cálculo de compressão para a análise M-k;
Definição do vetor de forças normais nos nós da análise de elementos finitos, tomados
como 21 por default;
Divisão automática da força normal de compressão pelo coeficiente 1,1;
Definição dos vetores de forças e momentos nodais nos nós da análise de elementos
finitos, tomados como 21 por default;
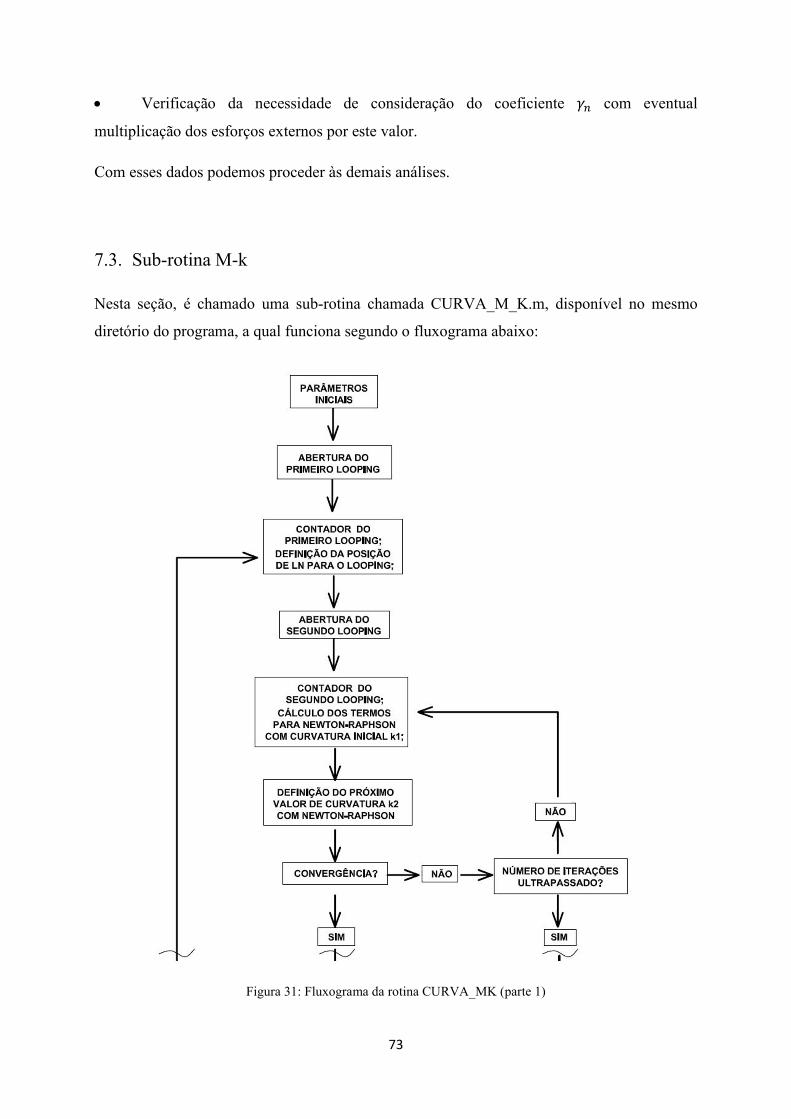
73
Verificação da necessidade de consideração do coeficiente �� com eventual
multiplicação dos esforços externos por este valor.
Com esses dados podemos proceder às demais análises.
7.3. Sub-rotina M-k
Nesta seção, é chamado uma sub-rotina chamada CURVA_M_K.m, disponível no mesmo
diretório do programa, a qual funciona segundo o fluxograma abaixo:
Figura 31: Fluxograma da rotina CURVA_MK (parte 1)

74
Figura 32: Fluxograma da rotina CURVA_MK (parte 2)
No que tange aos parâmetros iniciais, definidos fora do looping, são definidos:
O número máximo de iterações até a convergência, de 500;
A curvatura máxima admissível de ser gerada, dada por 0,014/h;
Uma primeira estimativa da curvatura (de 0,01 1/m);
O número de iterações esperadas para a convergência em cada posição da linha neutra,
de 2500;
O tamanho do passo para estimativa do jacobiano, de 0,00001;
A tolerância para convergência do sub-looping da análise da curvatura para cada
posição de linha neutra, de 0,00005.

75
A seguir, o ajuste das curvas M-k é feito conforme o disposto no item 5.4 deste trabalho. São
definidos os valores de Npl, Nel, Mpl, Mel, anteriormente referidos no capítulo 3 deste
trabalho.
7.4. Sub-rotina do MEF
Alguns parâmetros de entrada são determinados, inicialmente, para depois se proceder à
analise de elementos finitos. Teremos:
Definição do comprimento da pilar, L;
Definição das condições de apoio (viga bi-rrotulada, bi-engastada, engastada e
rotulada ou engastada e livre);
Definição no número de elementos finitos e de nós;
Definição da tolerância para o critério de parada do looping a seguir, com valor de
0,00001;
Vetor de deslocamentos inicial para a resolução do sistema não linear em
deslocamentos a ser resolvido. Adotou-se uma curva senoidal em condição de deslocamento
nulo nas extremidades do pilar, e deslocamento máximo de 10 cm, a meia altura do pilar;
Definição do vetor de momentos fletores inicial, estimado como o produto da carga P
pelo campo de deslocamentos definido anteriormente.
Definidos os parâmetros iniciais de análise, entra-se no looping para resolução do sistema
não-linear de deslocamentos tal qual definido no item 6.3 deste trabalho. Teremos então o
seguinte sequenciamento de atividades no looping:

76
Figura 33: Fluxograma da rotina do cálculo de MEF
O programa auxiliar RESOLVE_VIGA_2a_ORDEM.m é chamado dentro do looping, e é
responsável por calcular as matrizes de rigidez convencional, geométrica e de molas, bem
como os esforços solicitantes internos na viga para as rigidezes consideradas através da
resolução do sistema de equações de equilíbrio obtido com o método dos elementos finitos.
Ele calcula, também, as reações de apoio do pilar.
SIM

77
8. Análise comparativa dos resultados
Nesta seção buscamos validar os resultados obtidos aqui em utilizando as abordagens
tradicionais disponibilizadas pela ABNT NBR 6118:2014. Apresentaremos, primeiramente,
alguns métodos de avaliação corrente disponibilizados, e ao final compararemos estes
resultados com aqueles obtidos neste trabalho.
8.1. Métodos de avaliação da norma
A ABNT NBR 6118:2014 no item 15.8.3.3 define métodos de avaliação dos efeitos de
segunda ordem em pilares de concreto armado. Para pilares medianamente esbeltos (pilares 1
e 2), admite-se o método do pilar-padrão, em duas versões: com curvatura aproximada e com
rigidez aproximada. Já para pilares esbeltos, pode-se usar o método do pilar padrão
melhorado, conforme item 15.8.3.3.4 da ABNT NBR 6118:2014, o qual considera a fluência
do concreto (pilar 3).
O método do pilar padrão toma uma deformada senoidal associada aos efeitos de segunda
ordem, de modo que o campo de deslocamentos seja dado por:
�(�)= ���� ∙ ���(��
��)
(8.1)
Sendo ���� a maior flecha do pilar e �� = � para pilares considerados como bi-rotulados. No
que tange a aplicação deste método com curvatura aproximada, pode-se então definir o
momento total de cálculo do pilar segundo a expressão (ABNT, 2014) em um pilar sujeito à
flexão pura ��,�� oriunda dos momentos de primeira ordem:
��,��� = ��,�� + ��
��
10
1
�
(8.2)
Onde a curvatura �
� é aproximada segundo a expressão abaixo:

78
1
�=
0,005
ℎ(� + 0,5)≤0,005
ℎ, ��� � =
�������
Analogamente, pode-se obter este momento total através do método do pilar padrão com
rigidez aproximada, de modo que a resolução da seguinte equação de segundo grau conduz à
obtenção de ��,��� (ABNT, 2014):
� ∙ ��,���� + � ∙ ��,��� + � = 0
(8.3)
Sendo os parâmetros A, B e C dados por:
� = 5 ∙ ℎ (8.4)
� = �ℎ� −
��
320� |��| − 5 ∙ ℎ ∙ ��,��
(8.5)
� = −|��| ∙ ℎ� ∙ ��,��
(8.6)
Como supracitamos, em pilares esbeltos é ainda imprescindível a consideração da fluência,
segundo o item 15.8.3.1, que pode ser feita através do método do pilar padrão melhorado.
Teremos, assim, que acrescentar uma excentricidade adicional devida à fluência ��� àquela de
primeira ordem (aqui inclui, também, o efeito das imperfeições locais), avaliada
anteriormente, sendo agora a excentricidade inicial corrigida dada por:
��
���� = �� + ��� = �� + �� ∙ �exp ����
�� − ��� − 1�
= �� ∙ exp ����
�� − ���
(8.7)
Considerando-se que, nas análises realizadas neste trabalho:
�� =
��,��
��
(8.8)
�� =
10 ∙ ��� ∙ ����
(8.9)
E o coeficiente de fluência é de � = 2, correntemente utilizado (SANTOS, 2016).

79
8.2. Resultados
Os resultados obtidos para momento fletor máximo e deslocamento máximo são apresentados
nas tabelas abaixo; são incluídos os resultados obtidos com os métodos do pilar padrão com
rigidez e curvatura aproximadas, e a abordagem variacional aqui realizada. Além disso, para
consideração da fluência no pilar 3, o método do pilar padrão melhorado é utilizado.
8.2.1. Resultados para o pilar 1
Relembramos nas tabelas seguintes as propriedades físicas do pilar 1, bem como os esforços
solicitantes ao mesmo.
Tabela 12: Propriedades do pilar 1
Propriedades
h 0,200 m
b 0,400 m
Ac 0,080 m²
Izz 0,000 m^4
L 4,000 m
λ 69,282
fck 20,000 mPa
fcd 14285,714 kPa
Eci 25043,961 mPa
Tabela 13: Esforços solicitantes do pilar 1
Esforços solicitantes
Nsd 1100,000 kN
Msd1,0 30,000 kN
Msd1 30,000 kN
Sendo que Msd1,0 é o valor original do momento fletor de primeira ordem, sem correção para
consideração da fluência, neste caso. Apresentamos, agora, os resultados para o valor do
momento total solicitante segundo o método do pilar padrão com curvatura aproxima e com
rigidez aproximada, respectivamente.

80
Tabela 14: Resultados do método CA para o pilar 1
Curvatura aproximada
υ 0,963
1/r 0,017 1/m
Mtot 60,085 kNm
Tabela 15: Resultados do método RA para o pilar 1
Rigidez aproximada
A 1,000
B -41,000
C -1320,000
Mdtot,1 62,216 kNm
Mdtot,2 -21,216 kNm
Mdtot 62,216 kNm
Finalmente, apresentamos os resultados em um quadro-resumo.
Tabela 16: Quadro-resumo dos resultados para o pilar 1
RESULTADOS PARA O PILAR 1
Método de análise Deslocamento
máximo em mm
Momento fletor máximo em
kNm
Programa via Elementos Finitos (MEF) 30,056 63,056
Pilar padrão com curvatura aproximada (CA)
27,350 60,085
Pilar padrão com rigidez aproximada (RA) 29,288 62,216
O cálculo dos deslocamentos produzidos pelo método do pilar padrão é calculado dividindo-
se o momento de segunda ordem pelo esforço normal de cálculo.
8.2.2. Resultados para o pilar 2
Relembramos nas tabelas seguintes as propriedades físicas do pilar 2, bem como os esforços
solicitantes ao mesmo.
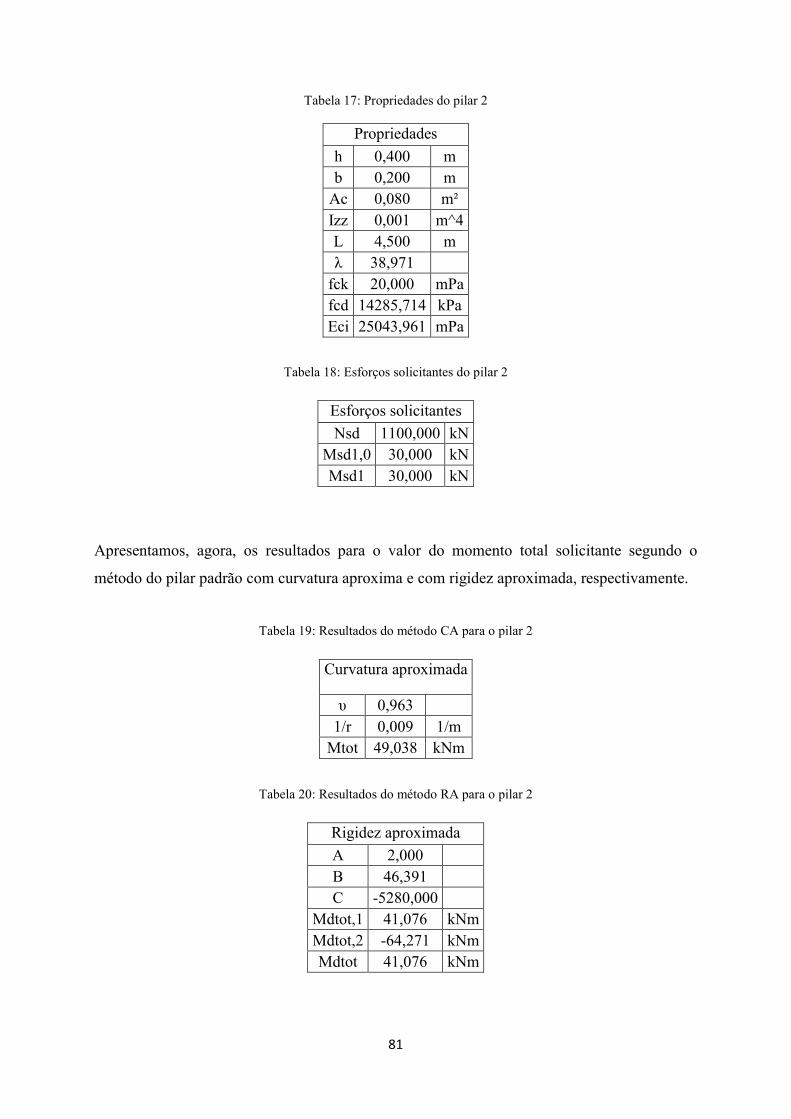
81
Tabela 17: Propriedades do pilar 2
Propriedades
h 0,400 m
b 0,200 m
Ac 0,080 m²
Izz 0,001 m^4
L 4,500 m
λ 38,971
fck 20,000 mPa
fcd 14285,714 kPa
Eci 25043,961 mPa
Tabela 18: Esforços solicitantes do pilar 2
Esforços solicitantes
Nsd 1100,000 kN
Msd1,0 30,000 kN
Msd1 30,000 kN
Apresentamos, agora, os resultados para o valor do momento total solicitante segundo o
método do pilar padrão com curvatura aproxima e com rigidez aproximada, respectivamente.
Tabela 19: Resultados do método CA para o pilar 2
Curvatura aproximada
υ 0,963
1/r 0,009 1/m
Mtot 49,038 kNm
Tabela 20: Resultados do método RA para o pilar 2
Rigidez aproximada
A 2,000
B 46,391
C -5280,000
Mdtot,1 41,076 kNm
Mdtot,2 -64,271 kNm
Mdtot 41,076 kNm

82
Finalmente, apresentamos os resultados em um quadro-resumo.
Tabela 21: Quadro-resumo dos resultados para o pilar 2
RESULTADOS PARA O PILAR 2
Método de análise Deslocamento
máximo em mm
Momento fletor máximo em
kNm
Programa via Elementos Finitos (MEF) 4,045 37,045
Pilar padrão com curvatura aproximada (CA)
17,308 49,038
Pilar padrão com rigidez aproximada (RA) 10,069 41,076
8.2.3. Resultados para o pilar 3
Relembramos nas tabelas seguintes as propriedades físicas do pilar 3, bem como os esforços
solicitantes ao mesmo.
Tabela 22: Propriedades do pilar 3
Propriedades
h 0,180 m
b 0,180 m
Ac 0,032 m²
Izz 0,000 m^4
L 4,700 m
λ 90,452
fck 60,000 mPa
fcd 42857,143 kPa
Eci 51958,333 mPa
Tabela 23: Esforços solicitantes do pilar 3
Esforços solicitantes
Nsd 346,500 kN
Msd1,0 15,000 kN
Msd1 22,489 kN
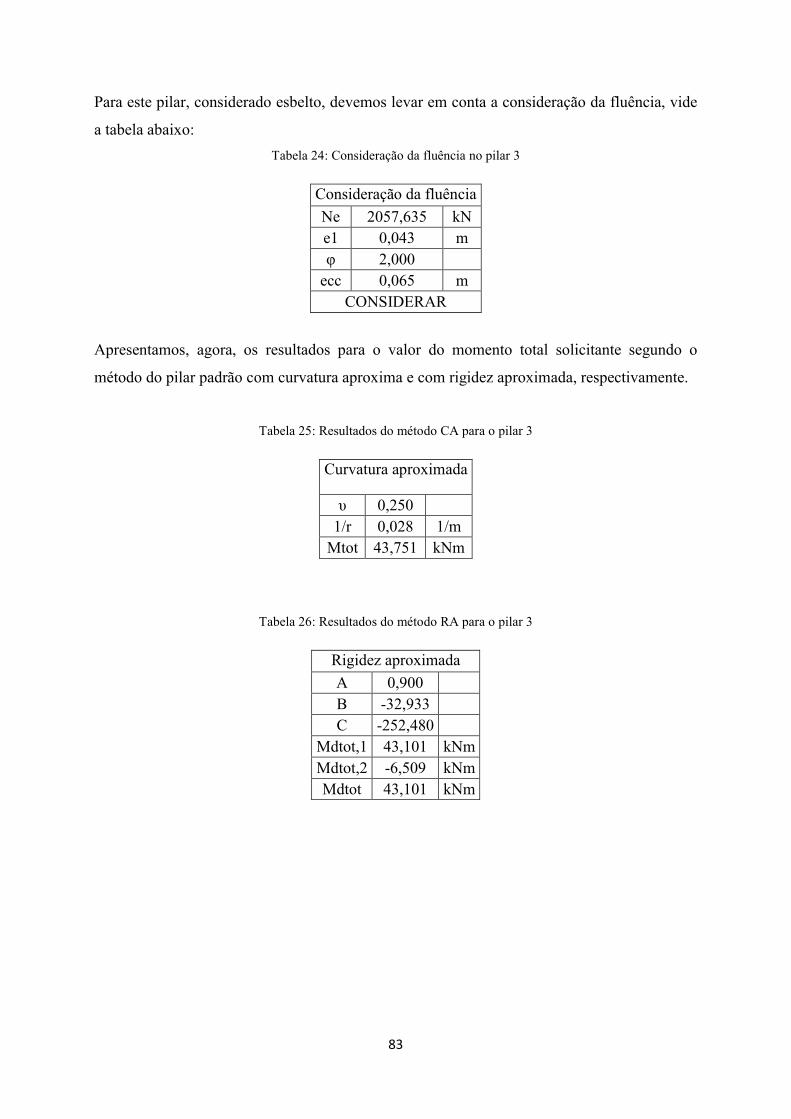
83
Para este pilar, considerado esbelto, devemos levar em conta a consideração da fluência, vide
a tabela abaixo:
Tabela 24: Consideração da fluência no pilar 3
Consideração da fluência
Ne 2057,635 kN
e1 0,043 m
φ 2,000
ecc 0,065 m
CONSIDERAR
Apresentamos, agora, os resultados para o valor do momento total solicitante segundo o
método do pilar padrão com curvatura aproxima e com rigidez aproximada, respectivamente.
Tabela 25: Resultados do método CA para o pilar 3
Curvatura aproximada
υ 0,250
1/r 0,028 1/m
Mtot 43,751 kNm
Tabela 26: Resultados do método RA para o pilar 3
Rigidez aproximada
A 0,900
B -32,933
C -252,480
Mdtot,1 43,101 kNm
Mdtot,2 -6,509 kNm
Mdtot 43,101 kNm
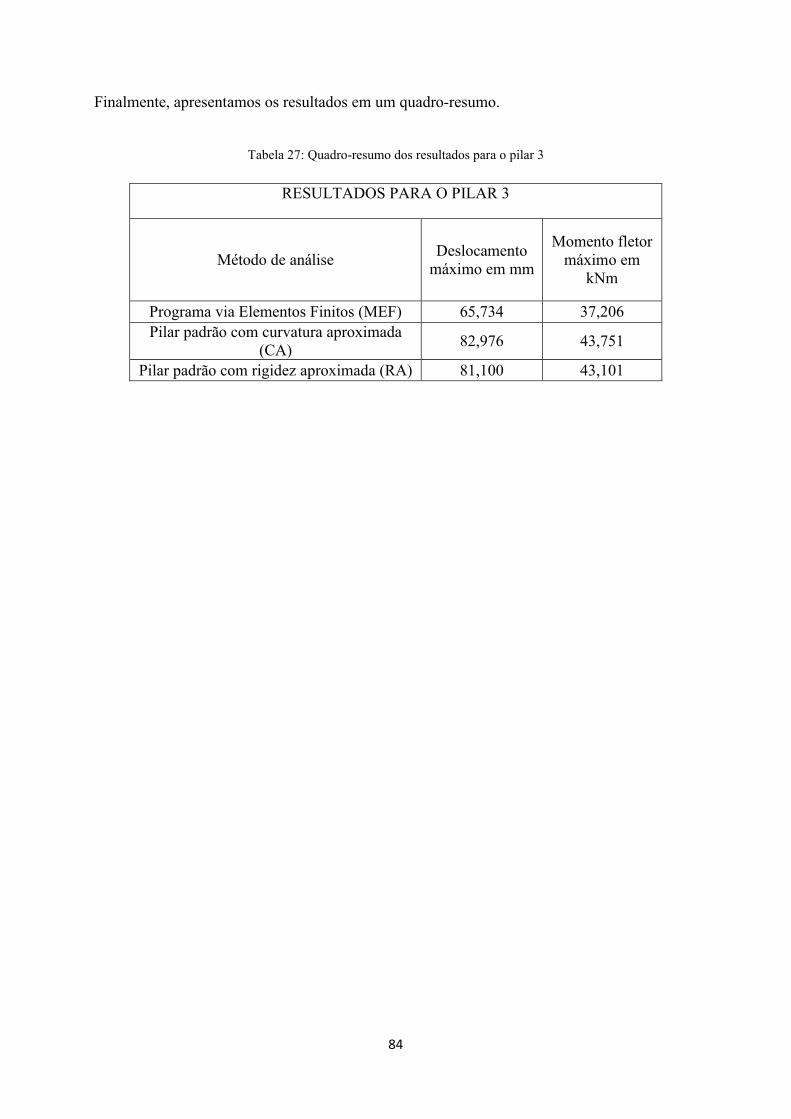
84
Finalmente, apresentamos os resultados em um quadro-resumo.
Tabela 27: Quadro-resumo dos resultados para o pilar 3
RESULTADOS PARA O PILAR 3
Método de análise Deslocamento
máximo em mm
Momento fletor máximo em
kNm
Programa via Elementos Finitos (MEF) 65,734 37,206
Pilar padrão com curvatura aproximada (CA)
82,976 43,751
Pilar padrão com rigidez aproximada (RA) 81,100 43,101

85
9. Conclusões
Neste capítulo final, buscaremos rememorar todos os principais resultados obtidos neste
trabalho. Comentaremos, em especifico, resultados referentes aos capítulos 3, 5, 6 e 8.
Assim, no que diz respeito à obtenção da relação momento-curvatura, referente ao capítulo
três, dois pontos podem ser evocados: a eficiência do método de busca da relação Momento-
Curvatura e o efeito da fluência no comportamento desta relação.
No que tange o primeiro, observou-se que a rotina desenvolvida em “Matlab” para cálculo da
relação momento-curvatura demorou menos de um segundo nas diversas análises aqui
realizadas. Isto se deve ao fato de que o algoritmo de Newton-Raphson tal qual implementado
avalia o jacobiano numericamente, e resolve um sistema de duas equações não lineares
assumindo inicialmente um valor conhecido para uma das incógnitas (neste caso a posição da
linha neutra na seção) em cada iteração, o que reduz um sistema de duas equações a apenas
uma.
Já no que tange o segundo, a implementação do coeficiente de fluência provocou diminuição
da rigidez das seções, evidenciada pelo abatimento da curva M-k, como apresentado na Figura
10, aumentando consideravelmente o efeito de segunda ordem a ser considerado.
No capítulo cinco, vale ressaltar que aquilo que provoca pontos de descontinuidade na relação
M-k, introduzindo sub-trechos no diagrama, é a plastificação dos elementos constituintes
resistivos, e aparecerão tantos “inflexões” no diagrama quanto forem os elementos que, no
incremento do momento fletor da seção, forem atingido a plastificação.
Mostramos também que, definindo um critério de parada da construção do diagrama na rotina
desenvolvida como sendo a ruptura do concreto à compressão na seção, em geral, no máximo
se manifestarão três trechos no diagrama com dois “inflexões”, os quais serão definidos
conforme o início da plastificação de dois dentre estes elementos resistivos: concreto,
armadura superior e armadura inferior, e exploramos todas as possibilidades.
Igualmente, o ajuste definido conforme o item 5.2 da relação em cada trecho revelou
excelentes aproximações da relação M-k em cada um dos trechos manifestados no diagrama,
conforme se pode ver no item 5.6. Esta forma de se entender a relação momento-curvatura na
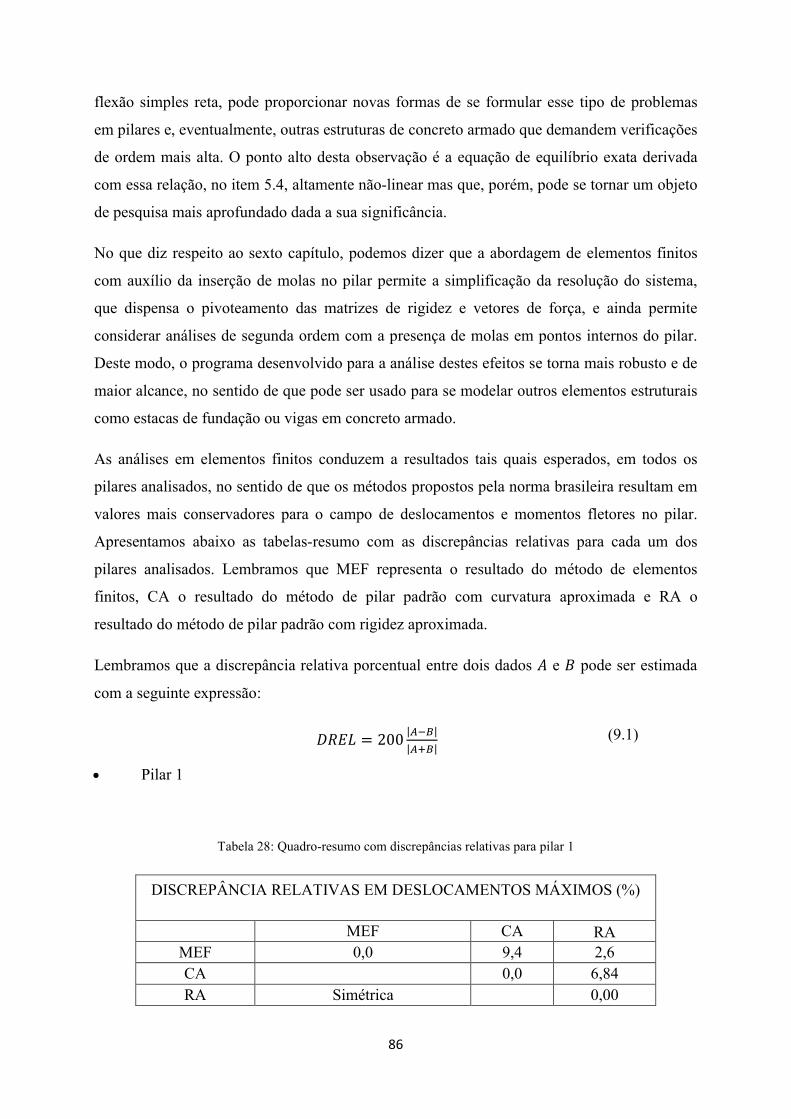
86
flexão simples reta, pode proporcionar novas formas de se formular esse tipo de problemas
em pilares e, eventualmente, outras estruturas de concreto armado que demandem verificações
de ordem mais alta. O ponto alto desta observação é a equação de equilíbrio exata derivada
com essa relação, no item 5.4, altamente não-linear mas que, porém, pode se tornar um objeto
de pesquisa mais aprofundado dada a sua significância.
No que diz respeito ao sexto capítulo, podemos dizer que a abordagem de elementos finitos
com auxílio da inserção de molas no pilar permite a simplificação da resolução do sistema,
que dispensa o pivoteamento das matrizes de rigidez e vetores de força, e ainda permite
considerar análises de segunda ordem com a presença de molas em pontos internos do pilar.
Deste modo, o programa desenvolvido para a análise destes efeitos se torna mais robusto e de
maior alcance, no sentido de que pode ser usado para se modelar outros elementos estruturais
como estacas de fundação ou vigas em concreto armado.
As análises em elementos finitos conduzem a resultados tais quais esperados, em todos os
pilares analisados, no sentido de que os métodos propostos pela norma brasileira resultam em
valores mais conservadores para o campo de deslocamentos e momentos fletores no pilar.
Apresentamos abaixo as tabelas-resumo com as discrepâncias relativas para cada um dos
pilares analisados. Lembramos que MEF representa o resultado do método de elementos
finitos, CA o resultado do método de pilar padrão com curvatura aproximada e RA o
resultado do método de pilar padrão com rigidez aproximada.
Lembramos que a discrepância relativa porcentual entre dois dados � e � pode ser estimada
com a seguinte expressão:
���� = 200|���|
|���| (9.1)
Pilar 1
Tabela 28: Quadro-resumo com discrepâncias relativas para pilar 1
DISCREPÂNCIA RELATIVAS EM DESLOCAMENTOS MÁXIMOS (%)
MEF CA RA
MEF 0,0 9,4 2,6
CA 0,0 6,84
RA Simétrica 0,00
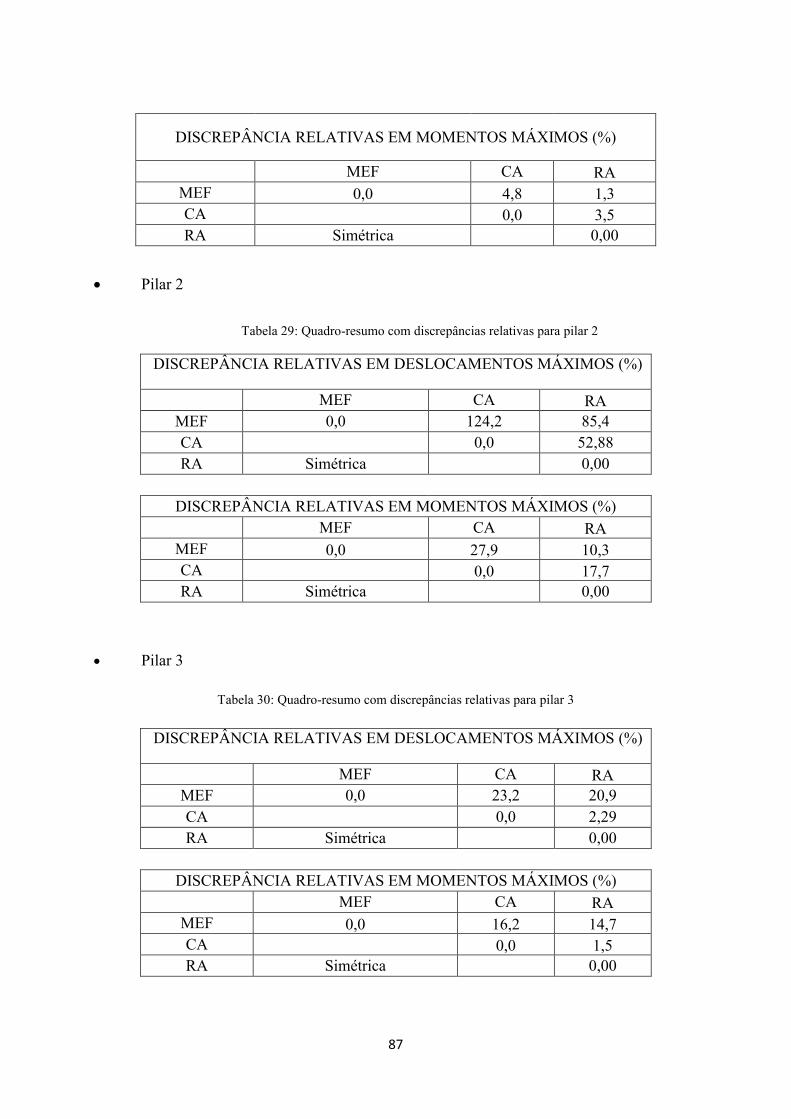
87
DISCREPÂNCIA RELATIVAS EM MOMENTOS MÁXIMOS (%)
MEF CA RA
MEF 0,0 4,8 1,3
CA 0,0 3,5
RA Simétrica 0,00
Pilar 2
Tabela 29: Quadro-resumo com discrepâncias relativas para pilar 2
DISCREPÂNCIA RELATIVAS EM DESLOCAMENTOS MÁXIMOS (%)
MEF CA RA
MEF 0,0 124,2 85,4
CA 0,0 52,88
RA Simétrica 0,00
DISCREPÂNCIA RELATIVAS EM MOMENTOS MÁXIMOS (%)
MEF CA RA
MEF 0,0 27,9 10,3
CA 0,0 17,7
RA Simétrica 0,00
Pilar 3
Tabela 30: Quadro-resumo com discrepâncias relativas para pilar 3
DISCREPÂNCIA RELATIVAS EM DESLOCAMENTOS MÁXIMOS (%)
MEF CA RA
MEF 0,0 23,2 20,9
CA 0,0 2,29
RA Simétrica 0,00
DISCREPÂNCIA RELATIVAS EM MOMENTOS MÁXIMOS (%)
MEF CA RA
MEF 0,0 16,2 14,7
CA 0,0 1,5
RA Simétrica 0,00
88
Finalmente, observamos que o uso de métodos variacionais para análise de problemas físicos
pode se mostrar extremamente útil em suas análises, às vezes impossível de ser realizada de
forma direta. Além disso, ele proporciona outros resultados que não são triviais nestes
problemas (como as equações de equilíbrio mesmas), os quais podem ser usados,
eventualmente, para reinterpretação daqueles para se conseguir novas formas de solucioná-
los. É uma ferramenta muito poderosa, como se vê, e que não deve ser ignorada pelos
engenheiros.
Como recomendação para trabalhos futuros, sugerimos algumas investigações nos tópicos
elucidados abaixo:
Investigação matemática das propriedades da equação 5.15;
Investigar formas de ajuste mais refinadas para a relação M-k, dado que ajustes
polinomiais no espaço logaritmizado se mostraram promissores;
Formulação variacional do campo de deslocamentos com auxílio de funções de
aproximação no contínuo;
Análise de estabilidade no pilar a partir das propriedades da equação 5.15;
Consideração de outras normas estrangeiras no desenvolvimento do programa em
“Matlab”;
Construção de uma interface gráfica amigável para rotina desenvolvida em ambiente
“Matlab”.
89
10. Referências Bibliográficas
ABNT, NBR 6118:2014 – Projeto de estruturas de concreto – Procedimento, Rio de Janeiro,
2014.
ALVES, R.V., 1995, Instabilidade Não-Linear Elástica em estruturas reticuladas espaciais.
Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
ALVES, R.V., 2016, Notas de Aula do Curso de Métodos Aproximados. Rio de Janeiro.
ANTIA, H.M., 1995, Numerical Methods for Scientists and Engineers. Delhi, Tata
McGraw-Hill.
BUTKOV, E.,1973, Mathematical Physics. New York, Addison-Wesley.
MATHWORKS, 2016, MATLAB®
ODGEN, R.W., 1997, Non-Linear Elastic Deformations. New York, Dover Publications.
SANTOS, S.H.C, 2016, Apostila de Concreto Armado III. Rio de Janeiro.
TIMOSHENKO, S.P., GERE, J.M, 1985, Theory of Elastic Stability. 2 ed. London,
McGraw-Hill.
VENÂNCIO, F.V., 1975, Análise Matricial de Estruturas. Rio de Janeiro, GB, Almeida
Neves – Editores.
WASHIZU, K., 1975, Variational Methods in Elasticity and Plasticity. 2 ed. Oxford,
Pergamom Press.
![Análise Inelástica de Segunda Ordem de Estruturas ......Análise inelástica de segunda ordem de estruturas metálicas com ligações semi-rígidas [manuscrito]. / Paulo Anderson](https://img.document.onl/doc/110x75/61158360e002703c9d3e5184/anlise-inelstica-de-segunda-ordem-de-estruturas-anlise-inelstica.jpg)

![Metaconhecimento e ceticismo de segunda ordem · 2016. 12. 8. · O48m Oliveira, Rogel Esteves de Metaconhecimento e ceticismo de segunda ordem [recurso eletrônico] / Rogel Esteves](https://img.document.onl/doc/110x75/6003a3b48a99563daf4e9bc7/metaconhecimento-e-ceticismo-de-segunda-ordem-2016-12-8-o48m-oliveira-rogel.jpg)


























