Embed Size (px)
Citation preview
APLICAÇÃO DE REDES DE CONTROLE DISTRIBUIDO EM PROCESSO DE PESAGEM AUTOMATIZADO EINFORMATIZADO
Físico Miguel dos Santos Alves FilhoProf. Dr. Eduardo Mário Dias.
GAESE – Grupo de Automação Elétrica em Sistemas Industriais. E-mail: [email protected]
RESUMO
A atividade de projetar, implantar e manter umaautomação, seja ela para apenas uma máquina oupara uma planta de fábrica com várias máquinas emoperações sincronizadas, encontra dificuldades emconseguir atender à interoperabilidade entre oscircuitos atuadores, sensores, ou instrumentos demedição a serem tratados pelo sistema central decontrole e supervisão.A diversidade de possíveis soluções, por muitasvezes é enganosa, pois quando o sensor é adequado,pode acontecer de não ter condição de ser conectadoao sistema de controle. A solução final passa a ser autilização de outros circuitos auxiliares, para torná-loscompatíveis, uns com os outros, e assim, seremfinalmente ligados aos controladores.Em outros casos, um instrumento de mediçãodisponibiliza suas informações com protocoloproprietário, não dispondo os “drivers” para ocontrolador escolhido e já adequado às demaistarefas.Este trabalho demonstra, a pesquisa e odesenvolvimento de uma tecnologia de automação econtrole que propõe uma total interoperabilidade entrequalquer circuito, seja ele atuador, sensor ouinstrumentos que sejam desenvolvidos dentro dessatecnológica ou adequados à ela.Além da interoperabilidade, essa tecnologia tambémrevoluciona os conceitos tradicionais de automação,pois descentraliza todo o controle do processo. Cadaelemento atuador ou sensor trabalha de formaindependente, ao mesmo tempo em que estãointegrados com as atividades dos outros sensores eatuadores.Como exemplo de aplicação este trabalhoimplementou um Posto de Pesagem Automatizado eInformatizado para operar com altos índices deconfiabilidade e produtividade, compatíveis com asatuais tendências de globalização da economia.Neste trabalho de dissertação são apresentadas ametodologia e a modelagem para o desenvolvimentode qualquer sistema de controle com a novatecnologia de rede de controle distribuído, bem comocontribuições oferecidas.
ABSTRACT
The activity of projecting, implementing andmaintaining an automation process, for a singlemachine or for a whole plant with several machines insynchronized operations, could face problems with theoperations considering the performing circuits,sensors, or measurement instruments to be controlledby the central system of control and supervision.The diversity of possible solutions some timesdeceives, because when the sensor is appropriate, itmay cause difficulties to connect it to the controlsystem. The final solution comes from the use ofanother auxiliary circuits to become them compatibleone to each other, and finally be linked to thecontrollers.In other cases a measurement instrument provides itsinformation with protocol owner not disposing the“drivers” for the chosen controller and alreadyappropriate for the other tasks.This work demonstrates the research anddevelopment of an automation technology and controlthat proposes a total inter-relationship of theoperations among any circuit, being the performer,sensor or instruments that is developed in such atechnology or adapted to it.Besides the inter-relationship of the operations, thattechnology also revolutionizes the traditional conceptsof automation, because it decentralizes the wholecontrol of the process. Each performer element orsensor works at the same time in an independent waythat are integrated to the other sensors andperformers.As an example of application this work hasimplemented a Position of Automated andComputerized Weighing to operate with high reliabilityindexes and compatible productivity with the currenttendencies of globalization of the economy.In this work the methodology and the shape for thedevelopment of any control system with the newtechnology of net of distributed control. As well as theywere outstanding the contributions demonstrated inthis dissertation.
OBJETOA concepção fundamental deste trabalho está emimplementar e demostrar uma nova tecnologia deautomação, que distribui aos circuitos sensores eatuadores, integrantes de qualquer sistema decontrole de processo, inteligência e autonomia, paracompartilhar e interrelacionar todos os estadosinternos e externos a serem controlados, através deuma rede de comunicação especialmentedesenvolvida para essa inteligência distribuída.Tal tecnologia terá aplicação direta em projetos deautomação residencial, predial, industrial,automobilística e de movimentação de carga.Esta tecnologia cria novos componentes, atuadoresou sensores, dotados da capacidade de executartarefas específicas de qualquer natureza, no localfísico que estiver instalado, intertravando seuprocedimento e atividade com os estados lógicos ouvalores analógicos, presentes nesta mesma rede decontrole distribuído. Isso é possível pois, sãodotados da capacidade de se comunicar uns com osoutros, e desempenhar suas tarefas individuais
integradas ao todo, recebendo e enviandoinformações de forma atemporal e organizada,através de um protocolo de comunicação comtráfego adequado e eficiente.Para fins de exemplificação prática desta novatecnologia, este trabalho tomou como exemplo oPosto de Pesagem Informatizado e Automatizado.Entenda-se por Postos de Pesagem ao conjunto de
balanças rodoviárias ouferroviárias, (híbridasou eletrônicas),originais de fábricaassociadas àequipamentos paracontrolar e informatizaro processo depesagem.Esses Postos dePesagem são umamistura de circuitossensores, que formambarreiras ópticas,circuitos atuadorespara indicação visual esonora, e equipamentode indicação do pesosobre a plataforma dabalança eletrônica.Esses circuitos
atuadores e sensores são ligados a um sistemacentral CLP, que realiza a supervisão e controle dasoperações de estacionamento do veículo. Asinformações do peso é capturada pela interfaceserial do microcomputador que analisa e repassa aoCLP. Devido a essa sistemática adotada paraAutomação desses Postos de Pesagem, possui umsignificativo número de dados a serem tratados econtrolados em tempo real.O referido Posto de Pesagem foi desenvolvido com afilosofia de controle centralizado e é apresentadonessa dissertação como tecnologia tradicional. Nofinal do trabalho foi elaborado um comparativo entreas duas tecnologias, a tradicional e a agoraproposta, identificando as limitações e as facilidadede uma em relação a outra no capítulo IV, nacapacidade de expandir seus elementos de controle.No capítulo V foi feito um comparativo daconfiabilidade operacional do posto com a tecnologiatradicional já publicado na dissertação de mestradodo Eng. Rubens Rolin com os mesmos critérioscalculados os índices de confiabilidade para umposto implementados com a nova tecnologia.
Figura 1 - Áreas de aplicação da nova tecnologia
Figura 1 - Tendencias na tecnologia de Automação
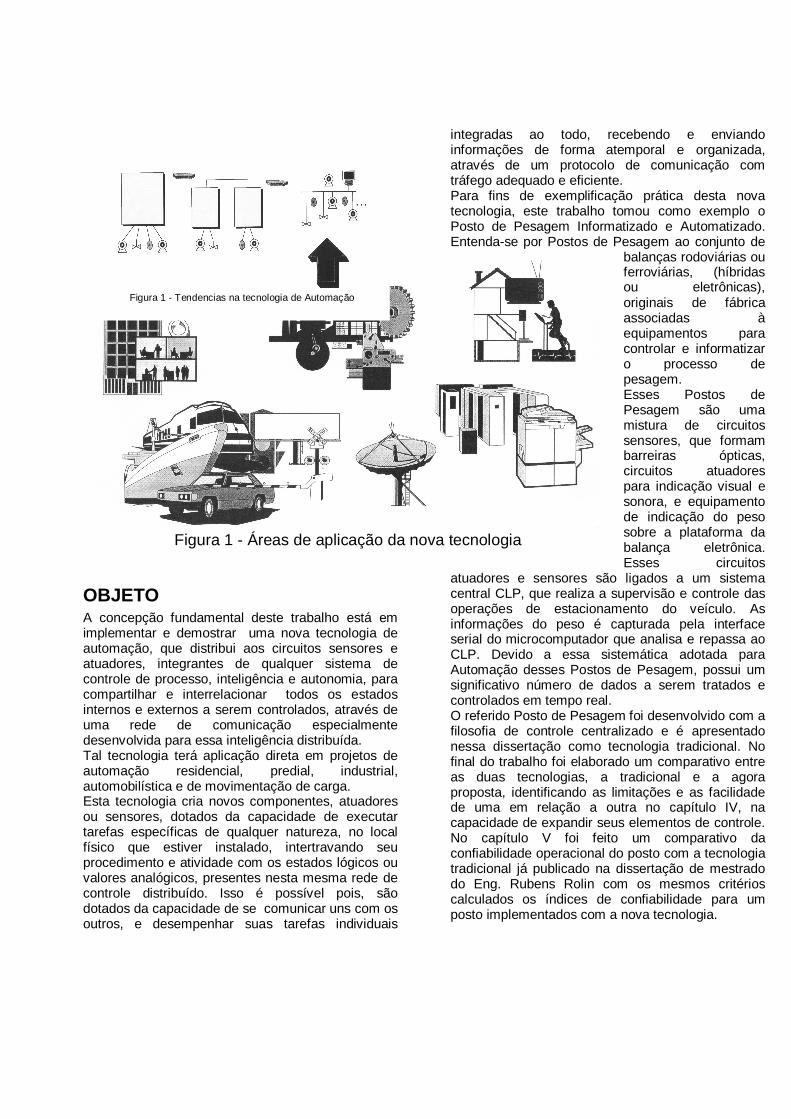
Além da implementação desta nova tecnologia naárea de pesagem de veículos, também nestadissertação foram dados mais dois passos
importantes na área de automação e informatizaçãode Postos de Pesagem, que são:
� No Capítulo II foi desenvolvido um modelo
matemático para executar simulações depesagens para qualquer tipo de veículo; e foidefinido como fazer o discretização de ummnemônico para cada veículo que passe paraser pesado em balança rodoviária.
� No Capítulo II e IV foi feito uma revisão e
alteração nos conceitos básicos do método deautomação usados nos Postos de Pesagensconvencionais, instalados e em operação naCompanhia Docas do Estado de São Paulo(CODESP), que atualizam o processo decontrole orientado para barreiras ópticas, e nestadissertação foi proposto um método usandosomente a curva de pesagem do veículo e ossensores de barreiras ópticas para informarem aautomação o sentido da pesagem.
Este trabalho esta em sintonia com a forte tendênciaatual, em transformar sinais analógicos em sinaisdigitais, pois são mais fáceis de tratar e controlar,proporcionando controle pleno da integridade dasinformações permitindo serem tratadas a distânciacom toda segurança.O que impulsiona essa tendência de migração, é aincrível velocidade no processamento deinformações digitais, aliadas aos encapsulamentoscada vez menores que, ao mesmo tempo queaumentam a quantidade de serviços, melhoram acapacitação desses componentes eletrônicos,possibilitando gerar circuitos com poucoscomponentes (figura 1).A mesma transformação que esta ocorrendo naárea de informática, passando dos computadorescentrais corporativos e estações terminais somentepara entrada e saída de dados, para
microcomputadores totalmente autônomos edotados de sistema operacional.
Assim descentralizando o processamento,deixando mais flexível ao mesmo tempo queabrindo as possibilidades de implementações desistemas remotos com gerenciamento de base dedados centralizado ou local.
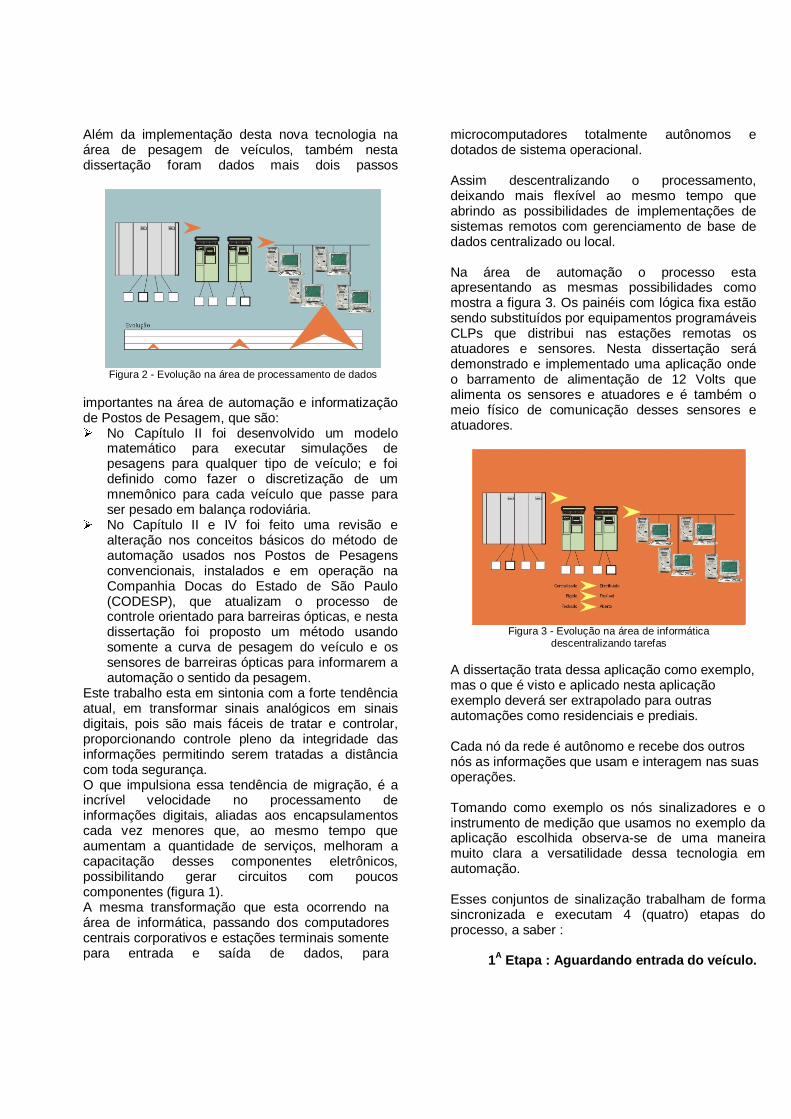
Na área de automação o processo estaapresentando as mesmas possibilidades comomostra a figura 3. Os painéis com lógica fixa estãosendo substituídos por equipamentos programáveisCLPs que distribui nas estações remotas osatuadores e sensores. Nesta dissertação serádemonstrado e implementado uma aplicação ondeo barramento de alimentação de 12 Volts quealimenta os sensores e atuadores e é também omeio físico de comunicação desses sensores eatuadores.
A dissertação trata dessa aplicação como exemplo,mas o que é visto e aplicado nesta aplicaçãoexemplo deverá ser extrapolado para outrasautomações como residenciais e prediais.
Cada nó da rede é autônomo e recebe dos outrosnós as informações que usam e interagem nas suasoperações.
Tomando como exemplo os nós sinalizadores e oinstrumento de medição que usamos no exemplo daaplicação escolhida observa-se de uma maneiramuito clara a versatilidade dessa tecnologia emautomação.
Esses conjuntos de sinalização trabalham de formasincronizada e executam 4 (quatro) etapas doprocesso, a saber :
1A Etapa : Aguardando entrada do veículo.
Figura 2 - Evolução na área de processamento de dados
Figura 3 - Evolução na área de informáticadescentralizando tarefas
Os semáforos de entrada permanecem indicandoVerde, para que o veículo entre na plataforma, e osde saída permanecem indicando Vermelho,alertando inicialmente para o limite da plataforma.
2A Etapa : Início de process o de
estacionamento.
O semáforo de entrada, ao confirmar o primeiro eixodo veículo sobre a plataforma, passa do estadoluminoso Verde para o Vermelho, indicando paraque o veículo seguinte aguarde até o final doprocesso. O semáforo de saída passa do estadoluminoso Vermelho para o estado luminoso Verde,indicando ao condutor do veículo, que siga em frenteaté posicionar-se totalmente sobre a plataforma.
No momento em que o primeiro eixo passa pelabarreira óptica central é calculada a velocidade doveículo. Sendo considerada dentro da normalidade,a sinalização permanece, caso contrário o semáforode saída passa a piscar indicando ao motorista doveículo para reduzir a velocidade, pois esta seencontra acima do desejável. Caso passe o segundoeixo ainda com indicação de velocidade acima dapermitida, além de piscar em intensidade maior,aciona também o alarme. Na maioria dasocorrências desse tipo de alerta, o veículo ainda seencontra com eixos fora da plataforma, de modo queo impacto da velocidade não é transferido aoconjunto da balança.
3A Etapa : Final do process o de
estacionamento.
O semáforo de entrada permanece na indicaçãoluminosa Vermelha e o semáforo de saída passa
para o sinal luminoso vermelhoindicando a parada do veículo. Oacionamento dessa indicação resulta daanálise do valor de velocidade doveículo, concluindo que o primeiro eixoatingiu o limite de saída da plataforma.
Caso o veículo ultrapasse esse limite,os semáforos permanecem com amesma sinalização e o alarme fica comsinal sonoro pulsante, até oposicionamento correto. Caso o veículosaía completamente da plataforma, ossinalizadores voltam ao estado da 1A
Etapa.
4A
Etapa :
Termino
da
pesagem.
Osemáforode saídadaplataformapassapara oestadoluminosoverde, epermanece nessa condição até a saída completa do veículo,retornando em seguida à situação da 1A Etapa.
Se o veículo sai no sentido contrário ao que entrou,o alarme soará de forma contínua, permanecendonessa condição até que o veículo retome o sentidocorreto de saída. Caso o veículo insista e resultesaindo totalmente da plataforma, o sistema impede oprocessamento de outra pesagem. O Posto sempreiniciará com alarme até que sejam tomadas asprovidencias de reinicialização e identificação domotivo da irregularidade dessa pesagem.
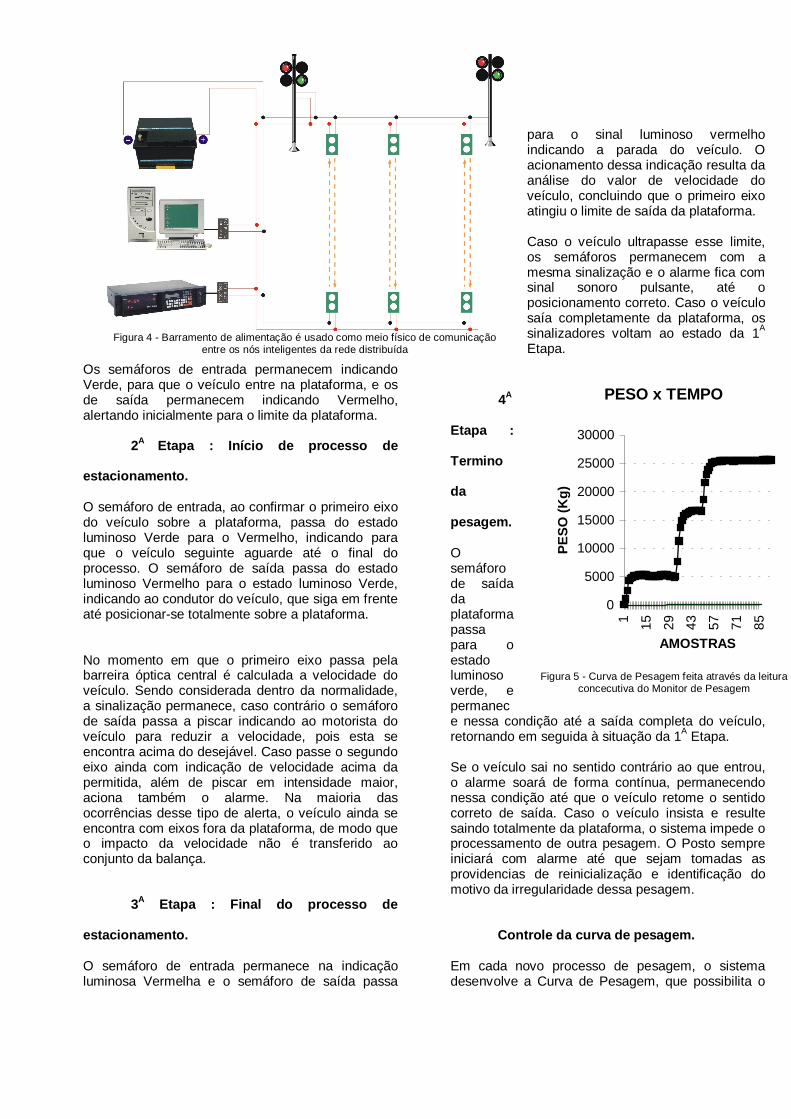
Controle da curva de pesagem.
Em cada novo processo de pesagem, o sistemadesenvolve a Curva de Pesagem, que possibilita o
Figura 4 - Barramento de alimentação é usado como meio físico de comunicaçãoentre os nós inteligentes da rede distribuída
PESO x TEMPO
0
5000
10000
15000
20000
25000
30000
1 15 29 43 57 71 85
AMOSTRAS
PE
SO
(K
g)
Figura 5 - Curva de Pesagem feita através da leituraconcecutiva do Monitor de Pesagem
controledo
processo
e odiagnostico deanormalidades,
porintermédio dedesvi
osdetectados no decorrer do posicionamento doveículo sobre a plataforma (entrada, parada e saídado veículo).
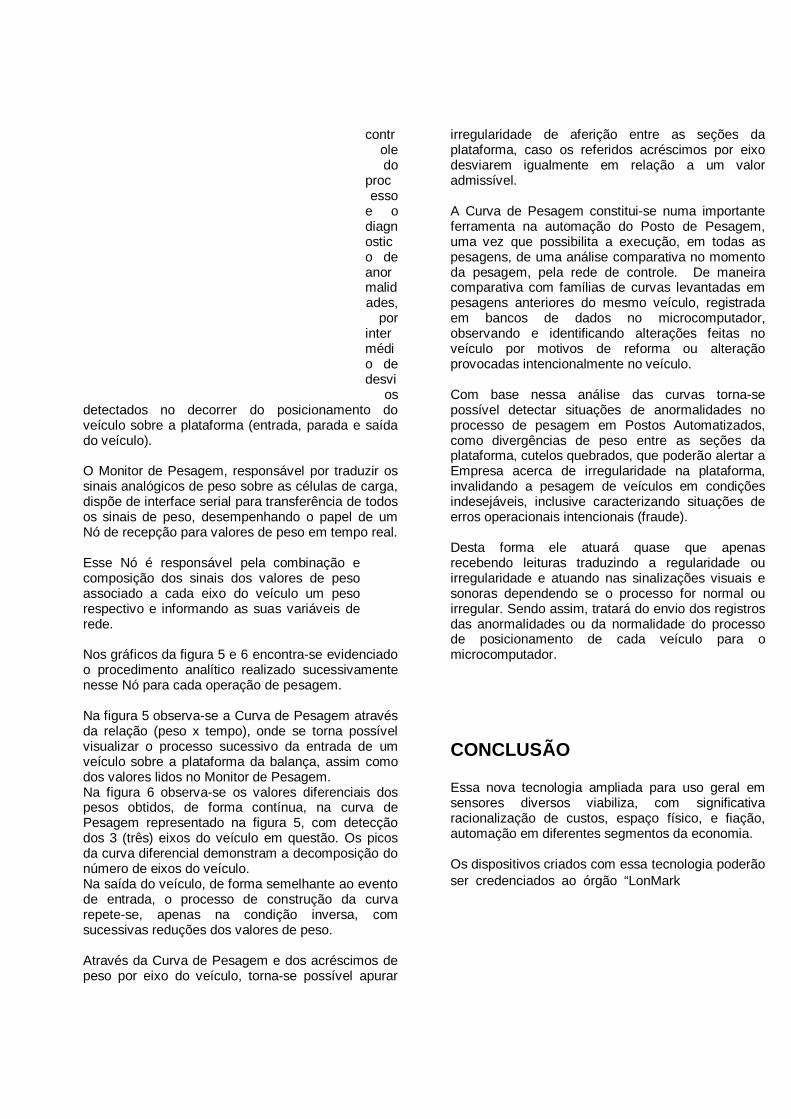
O Monitor de Pesagem, responsável por traduzir ossinais analógicos de peso sobre as células de carga,dispõe de interface serial para transferência de todosos sinais de peso, desempenhando o papel de umNó de recepção para valores de peso em tempo real.
Esse Nó é responsável pela combinação ecomposição dos sinais dos valores de pesoassociado a cada eixo do veículo um pesorespectivo e informando as suas variáveis derede.
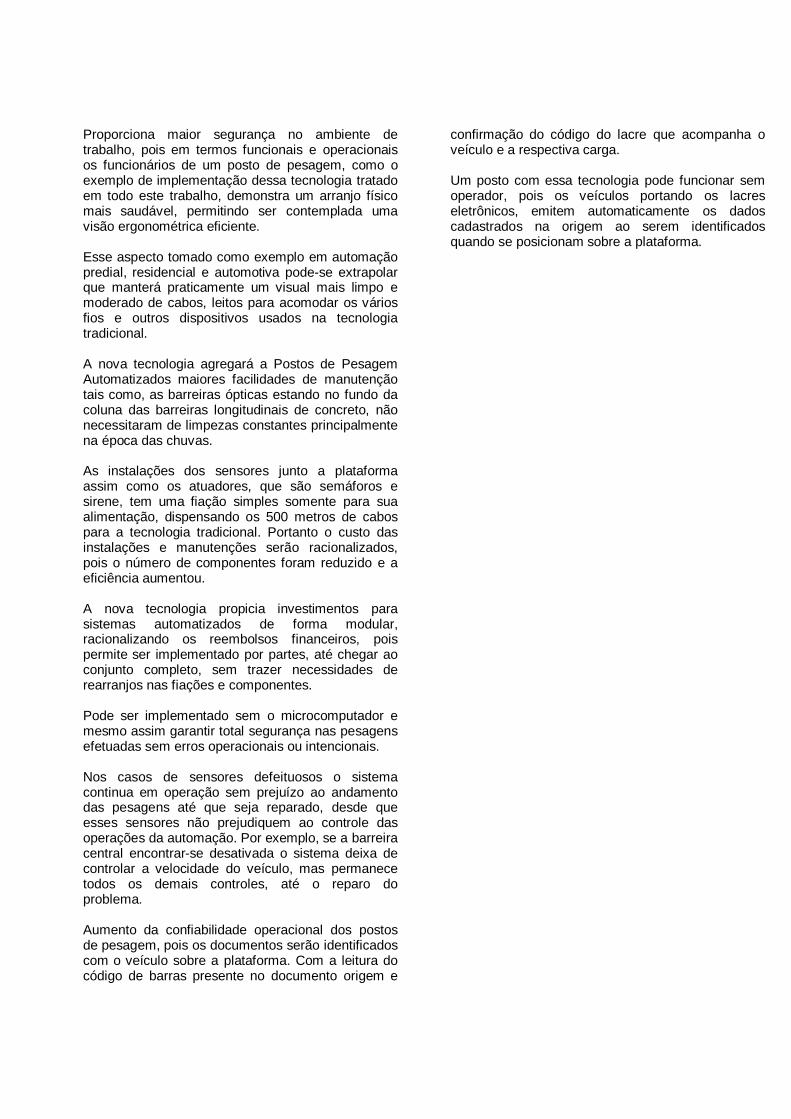
Nos gráficos da figura 5 e 6 encontra-se evidenciadoo procedimento analítico realizado sucessivamentenesse Nó para cada operação de pesagem.
Na figura 5 observa-se a Curva de Pesagem atravésda relação (peso x tempo), onde se torna possívelvisualizar o processo sucessivo da entrada de umveículo sobre a plataforma da balança, assim comodos valores lidos no Monitor de Pesagem.Na figura 6 observa-se os valores diferenciais dospesos obtidos, de forma contínua, na curva dePesagem representado na figura 5, com detecçãodos 3 (três) eixos do veículo em questão. Os picosda curva diferencial demonstram a decomposição donúmero de eixos do veículo.Na saída do veículo, de forma semelhante ao eventode entrada, o processo de construção da curvarepete-se, apenas na condição inversa, comsucessivas reduções dos valores de peso.
Através da Curva de Pesagem e dos acréscimos depeso por eixo do veículo, torna-se possível apurar
irregularidade de aferição entre as seções daplataforma, caso os referidos acréscimos por eixodesviarem igualmente em relação a um valoradmissível.
A Curva de Pesagem constitui-se numa importanteferramenta na automação do Posto de Pesagem,uma vez que possibilita a execução, em todas aspesagens, de uma análise comparativa no momentoda pesagem, pela rede de controle. De maneiracomparativa com famílias de curvas levantadas empesagens anteriores do mesmo veículo, registradaem bancos de dados no microcomputador,observando e identificando alterações feitas noveículo por motivos de reforma ou alteraçãoprovocadas intencionalmente no veículo.
Com base nessa análise das curvas torna-sepossível detectar situações de anormalidades noprocesso de pesagem em Postos Automatizados,como divergências de peso entre as seções daplataforma, cutelos quebrados, que poderão alertar aEmpresa acerca de irregularidade na plataforma,invalidando a pesagem de veículos em condiçõesindesejáveis, inclusive caracterizando situações deerros operacionais intencionais (fraude).
Desta forma ele atuará quase que apenasrecebendo leituras traduzindo a regularidade ouirregularidade e atuando nas sinalizações visuais esonoras dependendo se o processo for normal ouirregular. Sendo assim, tratará do envio dos registrosdas anormalidades ou da normalidade do processode posicionamento de cada veículo para omicrocomputador.
CONCLUSÃO
Essa nova tecnologia ampliada para uso geral emsensores diversos viabiliza, com significativaracionalização de custos, espaço físico, e fiação,automação em diferentes segmentos da economia.
Os dispositivos criados com essa tecnologia poderãoser credenciados ao órgão “LonMarkâ ”, e ter seuselo de interoperabilidade mundial, ou seja sensoresde inúmeros fabricantes serem utilizados em rede.Assim o leque de aplicações vai a númerosincalculáveis de soluções em automação dequalquer tipo.
DIFERENCIAL
-1000
0
1000
2000
3000
4000
1 14 27 40 53 66 79 92
AMOSTRAS
PE
SO
Figura 6Curva Diferencial em relação a Figura 5
Proporciona maior segurança no ambiente detrabalho, pois em termos funcionais e operacionaisos funcionários de um posto de pesagem, como oexemplo de implementação dessa tecnologia tratadoem todo este trabalho, demonstra um arranjo físicomais saudável, permitindo ser contemplada umavisão ergonométrica eficiente.
Esse aspecto tomado como exemplo em automaçãopredial, residencial e automotiva pode-se extrapolarque manterá praticamente um visual mais limpo emoderado de cabos, leitos para acomodar os váriosfios e outros dispositivos usados na tecnologiatradicional.
A nova tecnologia agregará a Postos de PesagemAutomatizados maiores facilidades de manutençãotais como, as barreiras ópticas estando no fundo dacoluna das barreiras longitudinais de concreto, nãonecessitaram de limpezas constantes principalmentena época das chuvas.
As instalações dos sensores junto a plataformaassim como os atuadores, que são semáforos esirene, tem uma fiação simples somente para suaalimentação, dispensando os 500 metros de cabospara a tecnologia tradicional. Portanto o custo dasinstalações e manutenções serão racionalizados,pois o número de componentes foram reduzido e aeficiência aumentou.
A nova tecnologia propicia investimentos parasistemas automatizados de forma modular,racionalizando os reembolsos financeiros, poispermite ser implementado por partes, até chegar aoconjunto completo, sem trazer necessidades derearranjos nas fiações e componentes.
Pode ser implementado sem o microcomputador emesmo assim garantir total segurança nas pesagensefetuadas sem erros operacionais ou intencionais.
Nos casos de sensores defeituosos o sistemacontinua em operação sem prejuízo ao andamentodas pesagens até que seja reparado, desde queesses sensores não prejudiquem ao controle dasoperações da automação. Por exemplo, se a barreiracentral encontrar-se desativada o sistema deixa decontrolar a velocidade do veículo, mas permanecetodos os demais controles, até o reparo doproblema.
Aumento da confiabilidade operacional dos postosde pesagem, pois os documentos serão identificadoscom o veículo sobre a plataforma. Com a leitura docódigo de barras presente no documento origem e
confirmação do código do lacre que acompanha oveículo e a respectiva carga.
Um posto com essa tecnologia pode funcionar semoperador, pois os veículos portando os lacreseletrônicos, emitem automaticamente os dadoscadastrados na origem ao serem identificadosquando se posicionam sobre a plataforma.


![ATUADORES INDUSTRIAIS JEFERSON [Somente leitura] …joinville.ifsc.edu.br/~jlcurzel/CLP/2 - Atuadores Industriais... · Tópicos 1. Atuadores Pneumáticos 2. Atuadores Hidráulicos](https://img.document.onl/doc/110x75/5bf5caed09d3f27c7c8bad8a/atuadores-industriais-jeferson-somente-leitura-jlcurzelclp2-atuadores-industriais.jpg)










![Atuadores Pneumáticos[1]](https://img.document.onl/doc/110x75/55cf99af550346d0339ea1d8/atuadores-pneumaticos1.jpg)














