Embed Size (px)
Citation preview

Aplicações Avançadas de
Microprocessadores
Professor: Marco Shawn Meireles Machado

Iniciação aos sistemas microcontrolados

Objetivos da Aula:
•Descrever os itens que compõem uma CPU;
•Detalhar a estrutura interna de um microcontrolador;
•Enumerar alguns periféricos internos e externos do
microcontrolador;
•Conhecer a estrutura interna de um
microcontrolador.

Conteúdos da Aula:
•Conceitos básicos
•Estrutura de um microcontrolador
• CPU
• Barramentos
• Memória
• Entrada
• Saída
• Periféricos

Sabemos o que são microcontroladores e
como eles surgiram, mas para entender o
funcionamento, temos que conhecer sua
estrutura interna.
1. Iniciação aos sistemas
microcontrolados
Os microcontroladores são circuitos capazes
de processar uma informação. O processador
é o circuito integrado capaz de realizar
funções de cálculo e tomada de decisão.
2. Conceitos básicos

Entende-se por eletrônica embarcada o
sistema que possui eletrônica com
capacidade computacional, ou seja,
basicamente são os sistemas que possuem
algum tipo de microcontrolador ou
processador
2. Conceitos básicos

Estima-se que atualmente o mercado de sistemas embarcados é cem vezes mais promissor que o mercado de sistemas
computacionais. A grande maioria dos equipamentos eletrônicos
que possuímos em casa possui quase um computador no seu interior, como aparelhos de
DVD, som, jogos, televisores e outros equipamentos modernos.
2. Conceitos básicos
Os microcontroladores possuem
características distintas, segundo o
fabricante e o modelo, mas basicamente
operam da mesma forma e sua estrutura
interna é bastante semelhante.
3. Estrutura de um microcontrolador

CPU significa Central Processor Unit, ou unidade de processamento central. A CPU é o cérebro de
um computador, controlando todo o processamento da máquina.
3.1. CPU

As principais partes de uma CPU são a ULA, o registrador de instrução, o contador de programa,
o acumulador e a unidade de controle.
3.1. CPU

ULA significa Unidade Lógica e Aritmética. Em inglês, ALU (Aritmetics and Logic Unit). A ULA é
responsável pelas operações matemáticas e lógicas executadas pelo processador.
3.2. ULA
O símbolo genérico da ULA possui duas entradas de dados (A e B), uma saída para o resultado (R),
uma entrada para a função que deve ser executada (F) e saídas de estado do processador
após o último cálculo (D). Esse estado nada
mais é do que uma informação sobre o
resultado da operação.
3.2. ULA

Exemplo
• nulo – quando a operação resulta em
zero;
• overflow – quando a operação resulta em
um número maior que a capacidade de
saída de dados;
• negativo – quando a operação resulta em
um número negativo, etc.

Símbolo genérico da ULA


O acumulador é um registrador onde são armazenados os resultados das operações da ULA. Este registrador também é utilizado em algumas
arquiteturas no lugar do registrador B.
3.3. Acumulador

Acumulador no lugar do registrador B

O registrador de instrução (IR) registra a instrução a ser executada. Esta instrução informa a ULA qual
operação deve ser feita.
3.4. Registrador de Instrução

O contador de programa (PC) guarda o endereço da próxima instrução que deve ser executada. Este
registrador é usado para determinar a ordem de execução do programa.
3.5. Contador de programa

A unidade de controle controla todos os componentes da CPU. As três funções de uma
unidade de controle são: busca, decodificação e execução.
3.6. Unidade de Controle

A busca, também conhecida como fetch, é o ato de ler o endereço apontado pelo contador de programa.
É simplesmente ler a próxima instrução.Decodificação é extrair da instrução as informações a respeito de qual instrução deve ser executada e quais
são os seus parâmetros.Execução é processar a informação através da ULA.
3.6. Unidade de Controle

A memória é o elemento responsável por
armazenar informações.
A memória pode armazenar dados, enquanto
estão sendo processados, a isso chamamos
memória de dados.
3.7. Memória

• A memória possui inúmeras posições que
podem conter um dado diferente, cada
uma. Para identificar essas posições
dentro da memória, é dado um
identificador chamado endereço, que
corresponde a um byte – conjunto de bits
que forma a informação.

As operações com a memória podem ser:
• de “escrita” - quando estamos
armazenando um dado na memória,
• de “leitura” - quando estamos
recuperando um dado da memória.
A memória também pode armazenar
programas, que são a lógica do processo
enquanto está sendo executado. O
programa diz para a CPU o que deve
acontecer e como.

• Na memória de programas também
existem endereços. Dentro da CPU, o
contador de programas os usa para
informar à CPU qual a próxima instrução
que deve ser executada, pois o
processamento é contínuo e sequencial.

Modelo didático da memória

Para que haja comunicação entre as diversas partes de uma CPU é preciso haver um caminho.
Chamamos de barramento o caminho usado pelas informações dentro de um equipamento digital.
3.8. Barramentos

Os dois principais barramentos de um processador são o barramento de dados e o barramento de
instruções.O barramento de dados é o caminho usado para
transferência de dados da memória de dados para a CPU e o barramento de instruções é o caminho
usado para transferência das instruções da memória de programas para a CPU.
3.8. Barramentos


Na arquitetura Von Neumann, existe um único barramento compartilhado pela memória, que é única para dados e programas, fazendo com que instruções e dados sejam acessados em tempos
diferentes, pois o caminho é único.
3.8. Barramentos


Na arquitetura Harvard, a memória de dados é separada da memória de programas e existem
dois barramentos distintos. Desta forma, o processador pode acessar dados e instruções simultaneamente, ganhando muito tempo no
processamento.
3.8. Barramentos


São os pinos dos microcontrolador usados para obter ou fornecer dados externos.
Também chamado de I/O, os pinos de entrada/saída servem para o controle de
dispositivos. Basicamente, estes pinos são a comunicação do microcontrolador com o mundo
exterior.
4. Entradas/saídas

• Para executar determinada tarefa, ligamosum botão em um pino de entrada, capaz deobter informação externa e transferir para amemória do processador, para posteriorprocessamento. São dois os tipos deentradas:
• Entrada digital - lê valores booleanos, como0V e 5V, no caso da lógica TTL, ou seja, estepino lê verdadeiro (nível lógico alto) ou falso(nível lógico baixo).
• Entrada analógica - é um pino capaz de lero nível de tensão e realizar a conversão paraum valor binário proporcional a esse valor detensão.

• As entradas podem ser ligadas a
qualquer dispositivo externo que forneça
ao microcontrolador um sinal de controle,
desde que respeitadas as tensões e
correntes do microcontrolador. São
exemplos de dispositivos de entrada:
botões, sensores (temperatura, vazão,
pressão, massa, etc.), circuitos digitais,
aparelhos de áudio, encoders e todo tipo
de equipamento que o programador
deseja ler.

• As saídas são usadas para comandar
fisicamente os dispositivos, como motores,
lâmpadas, LEDs, eletroválvulas, solenoides
e outros equipamentos que o programador
deseja comandar.
É muito importante diferenciar entrada de
saída para poder fazer o programa certo.
• Sinal de entrada - entra no uC,
normalmente para informar uma
condição.
• Sinal de saída - sai do uC para acionar os
dispositivos.

Os periféricos são dispositivos específicos que enviam ou recebem informações do
microcontrolador. Estes dispositivos podem ser externos ou internos.
Exemplos de periféricos são as portas de comunicação serial, o conversor A/D e D/A, os
temporizadores, o módulo PWM, controladores de motores, teclados, displays e outros.
5. Periféricos

5.1. Comunicação Série

5.2. Unidade de Temporização

5.3. Watchdog
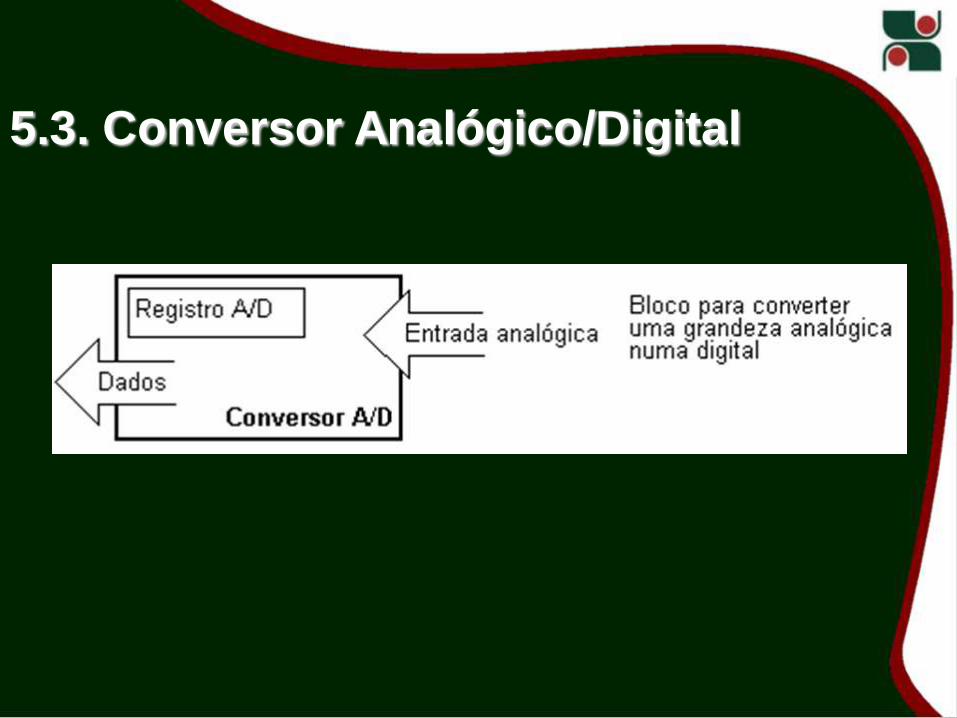
5.3. Conversor Analógico/Digital


Glossário de termos relacionados ao
microcontrolador
• PORT : Agrupamento de pinos. Ex :
PORT A : Pinos RA0 a RA5. PORT B :
Pinos RB0 a RB7.
• PWM : Modulação por largura de pulso.
Permite simular uma saída analógica
através de pulsos digitais rápidos e de
tamanho regulável.
• ADC : Conversor digital / analógico.

• ICSP : Recurso de programação serial
embutida, permitindo que um gravador
seja construído com custo relativamente
baixo.
• RAM : Memória de acesso aleatório,
volátil e de alta velocidade de acesso.
• ROM : Memória de programa, gravada
quando se transfere o programa para o
microcontrolador.
Glossário de termos relacionados ao microcontrolador

• EEPROM : Memória fixa que pode ser
gravada e apagada em tempo de execução.
• SERIAL : Dispositivo de comunicação onde
um bit é enviado de cada vez.
• I2C : Padrão de comunicação serial
desenvolvido pela PHILIPS.
• SPI : Serial Peripheral Interface – Interface
periférica serial : Padrão de comunicação
serial que usa 4 fios.
Glossário de termos relacionados ao microcontrolador

Encapsulamentos

As interrupções são um mecanismo que o microcontrolador possui e que torna possível
responder a alguns acontecimentos no momento em que eles ocorrem, qualquer que seja a tarefa
que o microcontrolador esteja executando no momento.
6.1. Interrupções

RTCC Estouro no temporizador timer0 usando o nome RTCC
RB mudança de estado no PORTB, pinos B4-B7
EXT Interrupção Externa, pino RB0
AD Conversão A/D completa
TBE Buffer de transmissão RS232 vazio
RDA Dado na recepção RS232 disponível
TIMER1 Estouro no temporizador Timer 1
TIMER2 Estouro no temporizador Timer 2
CCP1 Captura ou Compação na unidade 1
SSP Atividade SPI ou I2C
PSP Dados de entrada na porta paralela escrava
BUSCOL Colisão de barramento
EEPROM Escrita completa
TIMER0 Estouro no temporizador timer0 usando o nome TIMER0
COMP Evento do Comparador
CCP2 Captura ou Compação na unidade 2

Rotina de interrupção

Para o funcionamento do microcontrolador, é necessário prover um mínimo de recursos de
hardware.
6.6. Hardware mínimo

É necessário energizar todos os pinos VSS com a tensão mais negativa (terra) e os pinos VDD com a
tensão mais positiva (+5V). O pino MCLR deve receber uma tensão igual a da fonte para o
funcionamento normal e zero volt para resetar o microcontrolador.
6.6. Hardware mínimo

6.6. Hardware mínimo


6.6. Hardware mínimo


6.7. Reset

Síntese da Aula:
Nesta aula estudamos sobre:
•Conceitos básicos
•Estrutura de um microcontrolador
• CPU
• Barramentos
• Memória
• Entrada
• Saída
• Periféricos