Embed Size (px)
Citation preview

55Matemática Universitária nº45
Artigo
Álgebra linear e o problema das quatro retas do cálculo de SchubertJacqueline Rojas (UFPB)
Ramón Mendoza (UFPE)
Dado um sistema de equações algébricas que pos-
sui um número finito de soluções, podemos di-
zer que contar o número destas soluções é o objetivo
da geometria enumerativa. De fato, um problema típico
em geometria enumerativa é determinar o número de
objetos geométricos de um determinado tipo que satis-
fazem a um dado conjunto de condições. Por exemplo,
dados dois pontos distintos no plano projetivo, quantas
retas passam por esses dois pontos?
Em 1870, Hermann Cäsar Hannibal Schubert obteve
seu grau de Doutor na Universidade de Halle com uma
tese em geometria enumerativa intitulada “Zur Theo-
rie der Charakteristiken”. Apesar disto, nunca lecionou
numa universidade, dedicando sua vida ao magisté-
rio no Andreanum Gymnasium em Hildesheim (1872–
1876) e no Johanneum (uma famosa escola humanista),
em Hamburgo (1877–1908). Schubert introduziu o que
hoje chamamos, em sua homenagem, cálculo de Schu-
bert1. A estratégia deste cálculo consistia em transfor-
mar um dado sistema de equações algébricas em um
novo sistema, cujas soluções seriam mais fáceis de se
determinar. Segundo Schubert, deveria ser possível efe-
tuar esta transformação fazendo uma mudança contí-
nua das constantes envolvidas de modo que a quan-
tidade de soluções fosse preservada, processo que ele
chamava de princípio de conservação do número.
O método de Schubert não possuía uma fundamen-
tação teórica rigorosa, mas funcionava muito bem. Jus-
tificar seus resultados foi o tema do 15o Problema da fa-
1 Ver, por exemplo, [5].
mosa lista proposta por Hilbert, em 1900, no Congresso
Internacional de Matemáticos, realizado em Paris. No
século XX, a geometria enumerativa foi reconceituali-
zada e definida de maneira mais rigorosa em termos de
teoria de intersecção sobre espaço de parâmetros. Um
clássico neste assunto é o livro de Fulton ([2])2.
O objetivo deste trabalho é apresentar e resolver, no
contexto da álgebra linear, um dos problemas enumera-
tivos clássicos do cálculo de Schubert, que chamaremos
de problema das quatro retas:
Dadas quatro retas disjuntas duas a duas no es-
paço projetivo complexo tridimensional (denotado
por P3), determinar o número de retas que as in-
tersectam simultaneamente.
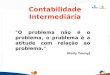
A figura 1 ilustra uma solução genérica deste pro-
blema, num desenho em R3. As quatro retas dadas
são 1, 2, 3, 4, e as retas encontradas como solução são
m1 e m2. O hiperboloide serve como ilustração de um
passo importante da solução, que é o estudo da relação
entre as retas e as superfícies quádricas em P3.
Evidentemente, a compreensão do problema envolve
o conhecimento do que vem a ser uma reta em P3 e do
próprio P3. Tudo isso será explicado ao longo deste ar-
tigo. Para tanto, é recomendável ter, principalmente,
conhecimentos básicos de álgebra linear e, ainda, um
pouco de álgebra em nível introdutório (ver, por exem-
plo, [6] e [4], respectivamente). Uma ótima referência
para iniciar uma exploração pela geometria algébrica
é o livro “Introdução às curvas algébricas planas”, de
Vainsencher ([9]).
2 Recomendamos ver [10] para uma apresentacao mais acessıvel de
[2].
1

56 Matemática Universitária nº45
{Artigo}
1
2
3
4
m1
m2
Figura 1:
Uma das fontes de inspiração deste trabalho foi o ar-
tigo de Ronga ([7]), onde é apresentada uma justifica-
tiva do cálculo de Schubert seguindo os resultados ex-
postos por Schubert em [8].
A partir desta seção serão introduzidos conceitos e re-
sultados necessários para a compreensão e a solução do
problema das quatro retas.
A ideia de espaço projetivo está relacionada à de
perspectiva (do latim perspicere, percepção visual) num
desenho gráfico, numa pintura etc. Uma das modali-
dades mais utilizadas é a perspectiva linear, tipicamente
usada no desenho de estradas e trilhos de trens que pa-
recem, relativamente a um observador nelas situado,
convergir para um único ponto, denominado ponto de
fuga.
Como no plano real R2 (ou complexo C2) duas retas
distintas se encontram num único ponto ou são parale-
las, surgiu a necessidade de se construir um objeto ma-
temático em que quaisquer duas retas se intersectem,
como tentativa de se dar uma fundamentação matemá-
tica aos métodos de perspectiva empregados pelos pin-
tores e arquitetos. Desargues aparece, em 1639, como o
primeiro a considerar as ideias que expomos a seguir,
para motivar as definições e o desenvolvimento deste
texto.
Tome Π o plano de equação z = 1 no espaço tridi-
mensional real. Observe que
1. Cada ponto p no plano Π determina uma reta Up
passando pela origem e por p, ou seja, um subes-
paço unidimensional que contém p; no entanto, nem
todo subespaço unidimensional intersecta o plano
Π: esse é o caso (exatamente) dos subespaços con-
tidos no plano {z = 0}.
2. Cada reta ⊂ Π é a intersecção de um plano W
que passa pela origem, isto é, um subespaço bidi-
mensional, com o plano Π; o único subespaço bidi-
mensional que não intersecta Π é o plano {z = 0}.
3. Se as retas 1, 2 ⊂ Π se intersectam no ponto p,
então os subespaços bidimensionais W1 e W2 têm
por intersecção o subespaço unidimensional Up.
4. Se as retas 1, 2 ⊂ Π são disjuntas (neste caso, pa-
ralelas, pois estão no mesmo plano) então a inter-
secção dos subespaços bidimensionais W1 e W2
2
O plano projetivo real: motivação

57Matemática Universitária nº45
{Artigo}
é um subespaço unidimensional contido no plano
{z = 0}.
O plano projetivo real é definido como sendo o conjunto
dos subespaços unidimensionais de R3. Veja que, pelo ex-
posto acima, o plano Π se identifica naturalmente com
um subconjunto do plano projetivo real pela aplicação
injetiva Π p → Up. No entanto, essa aplicação não é
sobrejetiva, pois não atinge os subespaços horizontais.
Tudo funciona como se o plano projetivo real fosse um
plano real (no caso, Π), “acrescido” de outros elementos
(os subespaços horizontais), que podem ser interpreta-
dos como “pontos no infinito do plano Π”.
Essa interpretação faz mais sentido quando defini-
mos o que é uma reta no plano projetivo real. Veja que
qualquer reta contida no plano Π é a intersecção de
Π com um subespaço bidimensional W. Esse subes-
paço bidimensional é, por sua vez, formado pela cole-
ção de subespaços unidimensionais, que são elementos
do plano projetivo. Então pode-se associar a ⊂ Π um
subconjunto do plano projetivo real que é a coleção dos
subespaços unidimensionais contidos em W. Essa as-
sociação motiva a seguinte definição: um subconjunto
do plano projetivo é uma reta se e somente se a união de
seus elementos é um subespaço bidimensional de R3.
Note que as retas em Π “ganham” um elemento a
mais no plano projetivo: a cada ponto p ∈ se associa
o subespaço unidimensional Up contido em W, mas há
ainda um subespaço unidimensional em W contido em
{z = 0} que não vem de nenhum ponto de . Esse é o
“ponto no infinito” da reta . Além disso, o conjunto
de retas do plano projetivo tem um elemento a mais do
que as retas do plano π: é a “reta no infinito”, que é o
subconjunto do plano projetivo real formado por todos
os subespaços unidimensionais contidos em {z = 0}.
Veja também que se 1, 2 ⊂ Π são paralelas, ainda
assim W1 e W2 têm um elemento em comum, que é
um subespaço unidimensional contido no plano {z =
0}. Então, no plano projetivo, as retas supostamente
paralelas se intersectam no infinito.
Essas definições em tom coloquial servem como moti-
vação para o tratamento mais cuidadoso que faremos a
seguir. No entanto, daremos ênfase ao caso complexo
(em vez de real) e, posteriormente, ao caso tridimensio-
nal (em vez de bidimensional), pois é aí que se insere o
problema que queremos resolver.
Para passar ao caso complexo sem mudar a dimen-
são, observe primeiro que toda reta que passa pela ori-
gem em C3 é um subespaço vetorial de dimensão 1 de
C3, isto é, é o subconjunto [v], onde [v] denota o su-
bespaço vetorial gerado pelo vetor v. Então define-se o
plano projetivo complexo por
P2 =[v] ⊂ C3 | v ∈ C3, v = 0
.
De maneira análoga, se V é um espaço vetorial qual-
quer sobre C (poderia também ser sobre R), podemos
definir a projetivização de V ou espaço projetivo determi-
nado por V, que denotaremos por P(V), por
P(V) = {[v] ⊂ V | v ∈ V, v = 0} .
Por simplicidade, denotaremos Pn = P(Cn+1). Veja
que P0 = {[1]} consiste de um único ponto, pois
C = [1] é o único subespaço de C de dimensão 1. Veja
também que P1 = {[(1, t)] | t ∈ C} ∪ {[(0, 1)]} (a
reta complexa, i.e. C, acrescida de um ponto, o “in-
finito”), pois todo subespaço de dimensão 1 de C2 é
gerado por um vetor não nulo v = (a, b) ∈ C2, e
[v] = [(a, b)] = [(1, b/a)] se a = 0, caso contrário
[v] = [(0, b)] = [(0, 1)].
A definição de espaço projetivo é, de fato, um caso
particular de grassmaniana. A k-grassmaniana de V, de-
notada por G(k, V), é simplesmente o conjunto dos su-
bespaços vetoriais de dimensão k de V. Assim, todo es-
paço projetivo é uma 1-grassmanniana, já que P(V) =
G(1, V). Neste trabalho, a definição de G(k, V) nos será
útil apenas por uma questão de simplicidade da nota-
ção.
3
Espaços projetivos

58 Matemática Universitária nº45
{Artigo}
Na notação que apresentamos (com R como corpo
de escalares), o plano projetivo real é definido como
P(R3). Fica mais simples, além disso, definir as retas
do plano projetivo real: é uma reta em P(R3) se existe
um subespaço W ⊂ R3 de dimensão 2 tal que = P(W)
(isto é, é a coleção de todos os subespaços unidimen-
sionais contidos em W). É exatamente dessa forma que
são definidos retas, planos, k-planos e hiperplanos em
qualquer espaço projetivo P(V).
Sejam V um espaço vetorial sobre C de dimensão
n + 1 e k um inteiro, com 0 ≤ k ≤ n. Diremos que
⊂ P(V) é uma reta se existir W ∈ G(2, V) tal que
= P(W). Mais geralmente, diremos que π ⊂ P(V)
é um k–plano se existir W ∈ G(k + 1, V) tal que π =
P(W). Os 0–planos são pontos e os 1–planos são re-
tas em P(V). Os 2–planos e (n− 1)–planos serão cha-
mados simplesmente de planos e hiperplanos, respectiva-
mente.
Na geometria dos espaços projetivos, duas retas con-
tidas num plano sempre se intersectam, como justifi-
caremos a seguir. Usaremos agora e mais adiante que
a dimensão da intersecção de dois subespaços V, W é
dada pela fórmula
dim V ∩W = dim V + dim W − dim(V + W) . (1)
Fato 1 (Retas num plano). Seja o plano π = P(W) ⊂P(V), com W ∈ G(3, V), e sejam 1 = P(W1) e 2 =
P(W2) retas contidas em π. Então ou 1 ∩ 2 consiste de um
único ponto ou 1 = 2.
Demonstração. Note que a condição 1 = 2 se traduz
em W1 + W2 = W. Como dim W1 = dim W2 = 2 e
dim W = 3, então dim(W1 ∩W2) = 1, pela equação (1).
Portanto, 1 ∩ 2 consiste de um único ponto, porque
1 ∩ 2 = P(W1 ∩W2).
De maneira mais geral, dois hiperplanos distintos se
intersectam em um (n− 2)–plano. A justificativa é aná-
loga ao caso anterior.
Fato 2 (Hiperplanos em P(V)). Sejam H1 = P(W1) e
H2 = P(W2) hiperplanos em P(V) com dim V = n + 1 ≥3. Então H1 ∩ H2 é um (n− 2)–plano ou H1 = H2.
Seja Sd, com d ≥ 0, o espaço vetorial sobre C dos po-
linômios homogêneos de grau d (ou formas de grau d) nas
variáveis x, y, z, w. Esses são os polinômios que têm to-
dos os termos de grau exatamente d, isto é, todo F ∈ Sd
pode ser escrito na forma
F = ∑i, j, k, l ≥ 0
i + j + k + l = d
fi,j,k,l xiyjzkwl ,
com fi,j,k,l ∈ C. Em particular, esse espaço tem como
base o conjunto de monômios
xiyjzkwl | i, j, k, l ≥ 0, i + j + k + l = d
.
Por simplicidade, pensaremos em todo polinômio de
Sd como função de C4 em C, quando for conveniente.
Em particular, S1 se identifica naturalmente com o es-
paço dos funcionais lineares de C4.
Note também que se F ∈ Sd então F(λv) = λdF(v),
para quaisquer λ ∈ C e v ∈ C4. Em particular, se
F(v) = 0 então F(λv) = 0, para todo λ ∈ C. Isto mos-
tra que se v é raiz de F então todo vetor de [v] é também
raiz de F. Portanto está bem definido o conjunto
Z(F) =[v] ∈ P3 | F(v) = 0
,
que será chamado de superfície algébrica de grau d em P3,
se F for não nulo.
No caso d = 0, se F é não nulo então Z(F) = ∅. Por-
tanto o conjunto vazio é (a única) superfície algébrica
de grau zero. Na seção seguinte veremos, em particu-
lar, que as superfícies algébricas de grau 1 são os planos
de P3. As superfícies algébricas de grau 2, 3, 4, 5, etc.
são chamadas de superfícies quádricas, cúbicas, quárti-
cas, quínticas etc., respectivamente.
Um subconjunto Y de P3 é um conjunto algébrico se Y
for uma intersecção finita de superfícies algébricas, ou
o próprio P3. Note que P3 não é superfície algébrica
4
Retas, planos, . . . , e hiperplanos
Superfícies e conjuntos algébricos

59Matemática Universitária nº45
{Artigo}
porque não permitimos que F fosse um polinômio nulo
na definição. Usaremos a notação
Z(F1, . . . , Fk) = Z(F1) ∩ . . . ∩ Z(Fk)
para denotar um conjunto algébrico em que se conhe-
cem as superfícies algébricas que o geram por intersec-
ção.
Entre os exemplos mais simples de conjuntos algébri-
cos, podemos citar os pontos, retas e planos, também
chamados conjuntos algébricos lineares pois, como vere-
mos a seguir, são determinados pela intersecção de su-
perfícies algébricas de grau 1.
Observacao. Pode-se também mostrar que a união fi-
nita e a intersecção arbitrária de conjuntos algébricos é
um conjunto algébrico. Para intersecções finitas é a pró-
pria definição e para uniões finitas é um exercício. Já
para intersecções arbitrárias, a demonstração envolve
generalizar o conceito de conjunto algébrico para ideais
de C[x, y, z, w] e usar o fato de que C[x, y, z, w] é um anel
noetheriano, isto é, todo ideal contido em C[x, y, z, w] é
gerado por um número finito de polinômios.
Aqui vamos explorar um pouco mais a identificação de
S1 com o conjunto de funcionais lineares de C4, isto é, o
conjunto de aplicações lineares de C4 em C, para carac-
terizar os conjuntos algébricos lineares de P3. Veja que
se L ∈ S1 então
Z(L) = P(ker(L)) , (2)
diretamente da definição de Z(L), onde ker(L) denota
o núcleo de L, isto é, o subespaço vetorial de vetores de
C4 que têm imagem nula por L.
As três proposições seguintes caracterizam planos,
retas e pontos em P3 como conjuntos algébricos gera-
dos por superfícies algébricas de grau 1.
Proposição 1 (Planos). π é um plano em P3 se e somente
se π = Z(L) para alguma L ∈ S1 não nula.
Proposição 2 (Retas). é uma reta em P3 se e somente
se = Z(L1, L2) para algum {L1, L2} ⊂ S1 linearmente
independente.
Proposição 3 (Pontos). Se {L1, L2, L3} ⊂ S1 é linear-
mente independente então Z(L1, L2, L3) é formado por um
único ponto de P3. Reciprocamente, para todo p ∈ P3
existe {L1, L2, L3} ⊂ S1 linearmente independente tal que
{p} = Z(L1, L2, L3).
Antes de demonstrarmos essas proposições, enunci-
aremos e demonstraremos o lema seguinte, que trata
da intersecção de núcleos de formas de grau 1 em C4.
Daqui em diante, denotaremos por [u1, . . . , uk] o subes-
paço gerado pelos vetores u1, . . . , uk.
Lema 1. Seja {Li}4i=1 uma base de S1. Sejam Wi =
ker(Li), Wij = Wi ∩Wj e Wijk = Wi ∩Wj ∩Wk, para
1 ≤ i < j < k ≤ 4, e W1234 = ∩4i=1Wi. Denotando por |I|
o comprimento da sequência I, então dim WI = 4− |I|.
Demonstração. A prova será feita em quatro etapas, de
acordo com o valor assumido por |I|.|I| = 1: Como Li ∈ S1, 1 ≤ i ≤ 4, é uma aplica-
ção linear de C4 em C e, por hipótese, é não nula, então
sua imagem tem ao menos dimensão 1. Mas o contra-
domínio tem dimensão 1, então a imagem de Li tem
exatamente dimensão 1. Pelo Teorema do Núcleo e da
Imagem, ker(Li) é um subespaço de dimensão 3.
|I| = 2: Sem perda de generalidade, vamos verifi-
car apenas que dim(W1 ∩W2) = 2. Primeiro vamos
mostrar que W1 = W2. Se fossem iguais, e já que
dim W1 = 3, fixada uma base de W1 poderíamos ob-
ter uma base de C4 acrescentado um vetor, digamos
w. Assim teríamos Lr(w) = λr = 0 para r = 1, 2, de
onde concluiríamos que L1 = λ1λ2
L2, isto é, L1 e L2 se-
riam linearmente dependentes, contradizendo a hipó-
tese. Mas W1 = W2 implica W1 + W2 = C4, e assim, por
(1), dim W1 ∩W2 = 3 + 3− 4 = 2.
|I| = 3: Fixe I = 123, sem perda de generalidade.
Bastará mostrarmos que W12 + W3 = C4, pois aí, por
(1), dim W123 = dim W12 + dim W3 − dim[W12 + W3] =
2 + 3− 4 = 1.
5
Conjuntos algébricos lineares

60 Matemática Universitária nº45
{Artigo}
Suponha, por absurdo, que W12 + W3 = C4. Então
W12 +W3 = W3, pois dim W3 = 3. Segue que W12 ⊂ Wi,
para 1 ≤ i ≤ 3. Como W12 tem dimensão 2 e Wi tem
dimensão 3, podemos escolher uma base {u, v, wi} de
Wi para 1 ≤ i ≤ 3, de maneira que W12 = [u, v].
Agora tome i, j distintos entre 1 e 3. Se Li(wj) fosse
nulo, teríamos wj ∈ Wi = ker(Li) e aí Wj = [u, v, wj] ⊂Wi. Como ambos têm dimensão 3, teríamos Wi = Wj.
Mas isso implicaria, como no parágrafo anterior, que Li
e Lj são linearmente dependentes, o que é uma contra-
dição com a hipótese. Portanto Li(wj) = λij = 0, se
i = j e i, j ∈ {1, 2, 3} (de fato, só iremos precisar de λ12
e λ21 não nulos).
Observe também que {u, v, w1, w2} é uma base de
C4 (pois w2 ∈ W1 = [u, v, w1]). Usando-se essa base,
verifica-se sem dificuldade que L3 = λ32λ12
L1 + λ31λ21
L2, de
onde se conclui que {Li}3i=1 são linearmente dependen-
tes, o que é mais uma vez uma contradição.
|I| = 4: Por raciocínio análogo aos casos anteriores,
pode-se concluir que dim W1234 = 0.
Demonstração da Proposição 1. Se L ∈ S1 for uma forma
linear não nula, então segue do Lema 1 (para |I| = 1)
que ker(L) é um subespaço de dimensão 3 de C4. Por-
tanto Z(L) é um plano em P3.
Reciprocamente, se π = P([v1, v2, v3]) for um plano
em P3, então seja L ∈ S1 a forma de grau 1 definida
por L(vi) = 0, para 1 ≤ i ≤ 3, e L(v) = 1, em que v
é um vetor de C4 tal que {v, v1, v2, v3} é uma base de
C4. Assim, ker(L) = [v1, v2, v3] e π = P(ker(L)) =
Z(L).
Demonstração da Proposição 2. Sejam L1, L2 ∈ S1 linear-
mente independentes e Wi = ker(Li), i = 1, 2. Pelas
definições, Z(L1, L2) = Z(L1) ∩ Z(L2) = P(W1) ∩P(W2) = P(W1 ∩W2). Como dim W1 ∩W2 = 2, pelo
Lema 1, segue que Z(L1, L2) é uma reta em P3.
Agora vamos verificar que toda reta em P3 é determi-
nada pela intersecção de dois planos distintos. De fato,
seja = P([u1, u2]) uma reta em P3. Estenda {u1, u2}para uma base de C4, digamos {u1, u2, v1, v2}. Defina
L1 e L2 em S1 de forma que ker(L1) = [u1, u2, v2] e
L1(v1) = 1, e ker(L2) = [u1, u2, v1] e L2(v2) = 1. Essa
definição implica que L1 e L2 são linearmente indepen-
dentes e que ker(L1)∩ker(L2) = [u1, u2]. LogoZ(L1)∩Z(L2) = P(ker(L1)) ∩ P(ker(L2)) = P(ker(L1) ∩ker(L2)) = P([u1, u2]) = .
Demonstração da Proposição 3. Se L1, L2, L3 ∈ S1 são
linearmente independentes segue diretamente do
Lema 1, como nos casos anteriores, que ker(L1) ∩ker(L2)∩ker(L3) é um subespaço de dimensão 1 e, por-
tanto, que Z(L1, L2, L3) é um ponto.
Pode-se também usar um argumento análogo ao
acima utilizado para planos e retas, para concluir que
um ponto em P3 é determinado pela intersecção de três
planos em P3. Outra maneira é assumir, sem perda
de generalidade, que p = [(a1, a2, a3, a4)] com a1 = 0,
e verificar que {p} = Z(a1y − a2x) ∩ Z(a1z − a3x) ∩Z(a1w− a4x).
Essa outra maneira de demonstrar a Proposição 3
é um caso particular de um fato mais geral. Note
que, sendo p = [(a1, a2, a3, a4)], então {a1y− a2x, a1z−a3x, a1w− a4x} é uma base do subespaço
S1(p) = {F ∈ S1 | F(v) = 0, se [v] = p} .
De maneira mais geral, podemos definir o subespaço
de formas de um dado grau que se anulam num de-
terminado conjunto de pontos no espaço projetivo. Por
exemplo, quem é o conjunto de formas de grau 1 que se
anulam em três pontos dados, não colineares? Se os três
pontos são p1 = [v1], p2 = [v2] e p3 = [v3], a hipótese
de não colinearidade implica que {v1, v2, v3} são linear-
mente independentes e que P([v1, v2, v3]) é um plano,
contendo os três pontos. Esse plano é também, como
vimos, o conjunto de anulamento de um subespaço uni-
dimensional de formas lineares.
Fixemos os pontos p1, ..., pk em P3 e denotemos por
Sd(p1, ..., pk) o subespaço vetorial de Sd definido por
Sd(p1, ..., pk) = {F ∈ Sd | F(vi) = 0, se pi = [vi], ∀i} .
Seja nd = dimSd (que, pode-se mostrar, é igual a (3+dd ),
ou seja, n0 = 1, n1 = 4, n2 = 10 etc.). Observe que
dimSd(p1, ..., pk) ≥ nd − k, (3)
6

61Matemática Universitária nº45
{Artigo}
porque, para cada v = (x1, x2, x3, x4) ∈ C4 não
nulo, a condição F(v) = 0, ou mais precisamente
F(x1, x2, x3, x4) = 0 = ∑ fi,j,k,l x1ix2
jx3kx4
l , impõe exa-
tamente uma condição linear sobre F.
Observacao. A igualdade em (3) admite a seguinte ca-
racterização. Seja S∗d o dual de Sd, isto é, o espaço ve-
torial de funcionais lineares de Sd em C. Para cada v ∈C4, não nulo, considere a aplicação linear Ev ∈ S∗d defi-
nida por Ev(F) = F(v). Seja Hv = {F ∈ Sd | F(v) = 0}o núcleo de Ev, e observe que a imagem de Ev é igual
a C (como v = (a1, a2, a3, a4) é um vetor não nulo em
C4, podemos assumir que a1 = 0, logo G(v) = 1 para
G = 1ad
1xd). Então temos que dim Hv = nd − 1. Levando
em consideração que Sd(p1, ..., pk) = ∩ki=1Hvi (pi = [vi],
1 ≤ i ≤ k), pode-se verificar que dimSd(p1, ..., pk) =
nd − k se e somente se {Evi}ki=1 é um conjunto linear-
mente independente no espaço dual S∗d .
Uma superfície algébrica Z(F) ⊂ P3 definida por um
polinômio F ∈ C[x, y, z, w] homogêneo de grau d ≥ 1
é chamada de irredutível se F é um polinômio irredutí-
vel sobre C (um polinômio F é irredutível sobre C se só
admite fatorações triviais, ou seja, em qualquer fatora-
ção de F um dos fatores é um polinômio constante). Do
contrário a superfície é chamada redutível.
Como todo polinômio de grau 1 é irredutível, então
os planos são superfícies algébricas irredutíveis.
Já se F tem grau 2 há duas opções: ou F é irredutível
sobre C (por exemplo, as superfícies definidas por F3 e
F4 no Exemplo 1 mais abaixo) ou F = L1L2 com L1 e L2
formas de grau 1 não nulas. No segundo caso, há ainda
duas possibilidades: {L1, L2} pode ser linearmente de-
pendente ou linearmente independente. No primeiro
caso, Z(F) = Z(L2) = Z(L), com L = L1 = λL2 para
algum λ ∈ C não nulo; isto é, Z(F) é um plano. No
segundo caso, Z(F) = Z(L1L2) = Z(L1) ∪ Z(L2), em
que Z(L1) e Z(L2) são planos distintos (que se inter-
sectam em uma reta, pela Proposição 2).
A seguir verificaremos que uma superfície irredutível
de grau maior que 1 em P3 não pode conter nenhum
plano.
Proposição 4. Sejam F ∈ Sd um polinômio irredutível de
grau d ≥ 2 e π = Z(L) um plano em P3. Então π ⊂ Z(F).
Demonstração. Sem perda de generalidade, iremos su-
por que o coeficiente de z em L é não nulo, de forma
que L pode ser escrita sob a forma L = ax + by + z + cw.
Note que L é um polinômio mônico de grau 1 no anel
A[z], com A = C[x, y, w]. Assim, segue-se do algo-
ritmo da divisão que existem G, R ∈ A[z] tais que
F = LG + R, com G ∈ A[z] necessariamente homo-
gêneo de grau 1, e R ∈ A[z] nulo ou constante, isto é, R
homogêneo de grau 2 nas variáveis x, y, w.
Agora mostraremos que π = Z(L) ⊂ Z(F) impli-
caria em R = 0, o que seria uma contradição com a
hipótese de que F é irredutível. De fato, Z(L) ⊂ Z(F)
implica que F([(v1, v2,−av1− bv2− cv4, v4)]) = 0, para
todo [(v1, v2, v4)] ∈ P2. Logo, avaliando a igualdade
F = LG + R nos pontos [(v1, v2,−av1− bv2− cv4, v4)] ∈Z(L), obtemos que R([(v1, v2, v4)]) = 0, para todo
[(v1, v2, v4)] ∈ P2. Então R(v1, v2, v4) = 0 para todo
(v1, v2, v4) ∈ C3 não nulo. Sendo R um polinômio ho-
mogêneo, também R(0, 0, 0) = 0, o que nos faz concluir
que R é nulo.
Seja H = Z(F) uma superfície de grau d ≥ 1 em P3.
Denotemos por Fξ a derivada parcial de F em relação
a ξ, ξ ∈ {x, y, z, w} (note que Fξ é um polinômio ho-
mogêneo de grau d − 1). H é chamada de superfície
não singular se e somente se
ξ∈{x,y,z,w} Z(Fξ) = ∅.
Do contrário, diremos que H é singular e os pontos de
ξ∈{x,y,z,w} Z(Fξ) serão chamados de pontos singulares.
Em outras palavras, os pontos singulares são os pontos
onde o gradiente de F se anula.
Veja que não é preciso pedir que os pontos singulares
estejam em H, porque todo vetor em que o gradiente de
F se anula tem que ser um vetor onde F se anula. Basta
7
Superfícies singulares e não singulares
Superfícies irredutíveis

62 Matemática Universitária nº45
{Artigo}
usar o fato de que F é polinômio homogêneo de grau d
e mostrar que
F =1d(xFx + yFy + zFz + wFw) .
Note que o conceito de superfície algébrica singular
fica mal definido se olharmos apenas para o conjunto
Z(F). A singularidade é, de fato, uma propriedade de
F.
A título de exemplo, os planos em P3 são super-
fícies (de grau 1) não singulares. A partir de grau
d ≥ 2 temos muitos exemplos de superfícies singulares
(por exemplo, Z(xd)) e não singulares (por exemplo,
Z(xd + yd + zd + wd)).
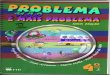
Exemplo 1. Seja Z(Fk) a superfície quádrica definida por
Fk =
x2 se k = 1
x2 + y2 se k = 2
x2 + y2 + z2 se k = 3
x2 + y2 + z2 + w2 se k = 4 .
Observe que, do ponto de vista de conjuntos, Z(F1)
é igual ao plano Z(x) = {[(x1, x2, x3, x4)] ∈ P3 | x1 =
0} = P([e2, e3, e4]). No entanto, F1 define uma superfí-
cie quádrica singular, pois
ξ∈{x,y,z,w} Z(F1ξ) = Z(x).
Assim todo ponto da superfície quádrica Z(F1) é sin-
gular.
Figura 2:
Z(F1) Z(F2)
Z(F3) Z(F4)
Note que F2 = x2 + y2 = (x + iy)(x− iy), logo Z(F2)
é a união dos planos Z(x ± iy) = P([±ie1 + e2, e3, e4])
onde os ei’s denotam os vetores da base canônica de
C4. Como
ξ∈{x,y,z,w} Z(F2ξ) = Z(x) ∩ Z(y), Z(F2) é
uma superfície quádrica singular, cujos pontos singula-
res são os pontos da reta de intersecção dos planos que
determinam Z(F2).
Ao contrário de F1 e F2, os polinômios F3 e F4 são irre-
dutíveis. Para ver isso, observa-se primeiro que se eles
fossem redutíveis então F3 = G3H3 e F4 = G4H4, com
G3, G4, H3, H4 polinômios homogêneos de grau 1 (ou-
tras possibilidades são descartadas pelo fato de F3 e F4
serem homogêneos). Em seguida, deve-se comparar os
coeficientes das igualdades polinomiais e, após alguma
manipulação, chegar-se a uma contradição entre essas
igualdades.
Então as superfícies quádricas Z(F3) e Z(F4) são
irredutíveis. A diferença fundamental entre elas
é o fato de que Z(F4) é uma quádrica não sin-
gular, pois
ζ∈{x,y,z,w} Z(F4ζ) = ∅, enquanto que
Z(F3) possui um (único) ponto singular, posto que
ζ∈{x,y,z,w} Z(F3ζ) = {[(0, 0, 0, 1)]}.
A figura 2 mostra ilustrações dos quatro casos do
Exemplo 1, com analogias de quádricas do espaço eu-
clidiano tridimensional que têm algumas propriedades
semelhantes.
Seja T : V −→ V um isomorfismo linear. É fácil ver que
T preserva subespaços de V, isto é, se W é subespaço
de dimensão k então T(W) também é. Então T induz
uma bijeção em P(V), que denotaremos por T e cha-
maremos de mudança de coordenadas projetivas, definida
por T([v]) = [T(v)].
O fato de T preservar subespaços também implica
que um k-plano P(W) em P(V) é transformado no k-
-plano T(P(W)) = P(T(W)), em P(V), pela mudança
de coordenadas projetivas T. Ou seja, retas, planos etc.,
são aplicados respectivamente em retas, planos etc., por
uma mudança de coordenadas projetivas T.
8
Mudanças de coordenadas projetivas

63Matemática Universitária nº45
{Artigo}
A seguir continuaremos nossa exploração sobre mu-
danças de coordenadas projetivas no caso específico de
P3 (deixando ao leitor interessado a tarefa de fazer as
adaptações para P(V)).
Mudanças de coordenadas projetivas preservam conjuntos
algébricos. Sejam F ∈ Sd e T : C4 −→ C4 um isomor-
fismo linear. Então T(Z(F)) = {[T(v)] | [v] ∈ Z(F)} =
{[T(v)] | F(v) = 0} =[w] | F(T−1(w)) = 0
. Essa úl-
tima igualdade nos sugere olhar para o isomorfismo li-
near Td : Sd −→ Sd definido por (TdF)(x, y, z, w) =
F(T−1(x, y, z, w)) (ver [3], p. 228; a definição de Td(F)
corresponde a dizer que o grupo dos isomorfismos li-
neares de C4 opera sobre o conjunto Sd). Assim, temos
que
T(Z(F)) =[w] | F(T−1(w)) = 0
= {[w] | TdF(w) = 0} (4)
= Z(TdF) .
Isto diz que superfícies algébricas são aplicadas em su-
perfícies algébricas.
Do fato acima podemos também concluir que se X =
∩si=1Z(Fi), em que Fi é homogêneo de grau di para 1 ≤
i ≤ s, então T(X) = ∩si=1Z(Tdi
Fi), ou seja, conjuntos
algébricos são aplicados em conjuntos algébricos.
Uma das utilidades das mudanças de coordenadas
projetivas é permitir transformar um dado conjunto al-
gébrico em outro, definido por equações mais simples
ou com um determinado padrão. Isso será explicitado
na próxima seção, no caso das superfícies quádricas.
Mudanças de coordenadas projetivas preservam o grau de
superfícies. De fato, sejam H = Z(F) ⊂ P3 uma super-
fície de grau d. Então, segue-se de (4) que T(Z(F)) =
Z(TdF) e, como Td é um isomorfismo linear em Sd, con-
cluímos que T(Z(F)) é uma superfície de grau d em P3.
Em particular os planos em P3 são transformados em
planos por qualquer mudança de coordenadas projeti-
vas.
Mudanças de coordenadas projetivas preservam intersec-
ções. Sejam Z(F) e Z(G), superfícies em P3 de grau
d1 e d2, respectivamente. Se p ∈ Z(F) ∩ Z(G), então
T(p) ∈ T(Z(F)) ∩ T(Z(G)) = Z(Td1 F) ∩ Z(Td2 G).
De fato, suponha que p = [v]. Então F(v) = G(v) =
0. Por outro lado, Td1 F(T(p)) = F(T−1(T(p))) =
F(T−1(T(v))) = F(v) = 0. Analogamente, concluímos
que Td2 G(T(p)) = 0.
O mesmo raciocínio mostra que se Y1 e Y2 são con-
juntos algébricos em P3 tais que p ∈ Y1 ∩ Y2, então
T(p) ∈ T(Y1) ∩ T(Y2). Em particular, se duas retas
em P3 se intersectam, então suas imagens sob uma mu-
dança de coordenadas projetivas também serão retas
que têm um ponto em comum.
Além disso, se p ∈ P3 for definido pelas formas line-
ares L1, L2 e L3, então sabemos que T(p) será um ponto
de P3 definido pelas formas lineares T1L1, T1L2 e T1L3.
Mudanças de coordenadas projetivas preservam pontos
singulares. É possível mostrar, sem grande dificuldade,
que se Z(F) é uma superfície de grau d em P3 e p ∈Z(F) um ponto singular, então T(p) é um ponto sin-
gular de T(Z(F)). Deixamos a demonstração para o
leitor.
Iniciamos esta seção apresentado um exemplo da utili-
zação de uma mudança de coordenadas projetivas para
transformar uma superfície quádrica em Z(F2) (ver
Exemplo 1).
Exemplo 2. Seja F = x2 + xy + y2 ∈ S2. Seja T o iso-
morfismo linear de C4 definido por T(x, y, z, w) = (x +y2 ,√
32 y, z, w), cuja inversa é dada por T−1(x, y, z, w) =
(x− 1√3
y, 2√3
y, z, w)). Então T2F = x2 + y2 e T(Z(F)) =
Z(T2F).
O teorema seguinte afirma que em P3 só existem, em
essência, as superfícies quádricas do Exemplo 1. Sua
demonstração é simples e conhecida, mas a colocamos
aqui (no caso geral de superfícies quádricas em Pn) por
completeza desta exposição.
Teorema 1. Se Q for uma superfície quádrica em Pn defi-
nida pela forma
F = ∑0≤i≤j≤n
aijxixj ∈ C[x0, ..., xn] ,
9
Classificação das superfícies quádricas

64 Matemática Universitária nº45
{Artigo}
então existe uma mudança de coordenadas projetivas T tal
que T(Q) = Z(Fk), para algum 1 ≤ k ≤ n + 1, em que
Fk = x20 + x2
1 + · · ·+ x2k−1, isto é, Fk é a soma dos quadrados
das primeiras k variáveis.
Demonstração. A prova pode ser feita por indução. O
passo indutivo e também o primeiro passo consistem
em demonstrar que se F tem a forma
∑l<k
x2l + ∑
k≤l≤j≤naljxl xj , (5)
para algum k = 0, 1, . . . , n, e algum dos alj é não nulo,
então existe um isomorfismo linear T tal que F ◦ T−1
tem a forma
∑l≤k
x2l + ∑
k<l≤j≤naljxl xj . (6)
Note que para k = 0 (o primeiro passo da indução) a
primeira soma de (5) é vazia.
Para provar isso, construiremos T como composição
dos seguintes tipos de isomorfismos: (i) T(l,j), em que
T(l,j)(el) = ej, T(l,j)(ej) = el e T(l,j)(ei) = ei, para todo
i diferente de l ou j (se l = j esse isomorfismo é a iden-
tidade); (ii) T(j)a , em que a ∈ C \ {0}, T(j)
a (ej) = aej
e T(j)a (el) = el , para todo l = j; e (iii) T(l,j) tal que
T(l,j)(ej) = ej − el e T(l,j)(ei) = ei, para todo i = j.
Veja que o inverso de T(l,j) é ele próprio, o inverso de
T(j)a é T(j)
a−1 e o inverso de T(l,j) é dado por ej → ej + el e
ei → ei, para todo i = j.
Suponha que F tenha a forma (5). Se existe l entre k e
n tal que all = 0, então componha F com o inverso de
T(l)√all
e, depois, componha o resultado disso com T(k,l),
para obter
∑l<k
x2l + x2
k + ∑k≤l≤j≤n(l,j) =(k,k)
aljxl xj . (7)
Se não houver all = 0 para l = k, . . . , n então há pelo
menos um alj = 0, com l = j. Então a composição de F
com o inverso de T(l,j) conterá o termo
aljxl(xl + xj) ,
sem que apareça nenhum outro termo em x2l . Essa ex-
pressão recai no caso anterior e, assim, (7) pode ser ob-
tida em qualquer caso.
Resta mostrar que existe um isomorfismo linear Ttal que o polinômio em (7) composto com T−1 tenha a
forma dada em (6). Essa parte da demonstração é feita
por completamento de quadrados.
O polinômio em (7) pode ser escrito na forma
∑l<k
x2l + x2
k +
n
∑l=k+1
2bl xl
xk + ∑
k<l≤j≤naljxl xj ,
com 2bl = akl ; completando quadrados, a expressão fica
∑l<k
x2l +
xk +
n
∑l=k+1
bl xl
2
+ ∑k<l≤j≤n
aljxl xj ,
em que no último somatório são incorporados os ter-
mos de�∑n
l=k+1 bl xl2. Então define-se T por T(el) = el ,
para l ≤ k e T(el) = el + blek, para l = k + 1, . . . , n,
que tem inversa dada por T−1(el) = el , para l ≤ k, eT−1(el) = el − blek, para l = k + 1, . . . , n. É fácil veri-
ficar que essa última expressão composta com T−1 fica
na forma (6).
O seguinte resultado trata da intersecção entre uma su-
perfície de grau d e uma reta em P3.
Proposição 5. Sejam F ∈ Sd não nulo, com d ≥ 1, e =
P(W) uma reta em P3. Então Z(F) ∩ = ∅. Além disso,
ou ⊂ Z(F) ou Z(F) ∩ tem no máximo d pontos.
Demonstração. Se ⊂ Z(F) então podemos escolher
uma base {w1, w2} de W tal que [w2] /∈ Z(F) e pode-
mos escrever
= {[w1 + tw2] | t ∈ C} ∪ {[w2]} .
Se escrevermos w1 = (a1, a2, a3, a4), w2 = (b1, b2, b3, b4)
e
F = ∑i, j, k, l ≥ 0
i + j + k + l = d
fi,j,k,l xiyjzkwl ,
então [w1 + tw2] ∈ Z(F) se e somente se
∑ fi,j,k,l(a1 + b1t)i(a2 + b2t)j(a3 + b3t)k(a4 + b4t)l
é igual a zero. Mas essa expressão pode ser agrupada
por potências de t, isto é, pode ser escrita como p(t) =
10
Relações entre retas e superfícies quádricas

65Matemática Universitária nº45
{Artigo}
∑dµ=0 fµtµ, em que cada fµ ∈ C é uma expressão poli-
nomial nos ai’s e bj’s, de forma que [w1 + tw2] ∈ Z(F)
se e somente se p(t) = 0. Como o coeficiente de grau
d de p é exatamente F(w2), e F(w2) = 0, então p não
é constante e, pelo Teorema Fundamental da Álgebra,
tem pelo menos uma raiz. Isso mostra que a interse-
ção de com Z(F) tem que ser não nula. Além disso,
como p tem grau d então há no máximo d raízes, isto é,
d pontos de intersecção.
Agora apresentaremos alguns fatos que dizem res-
peito à existência de retas disjuntas nas superfícies quá-
dricas Z(Fk) apresentadas no Exemplo 1. Essas consi-
derações têm âmbito geral pelo fato de que essas são as
únicas superfícies quádricas, a menos de mudanças de
coordenadas projetivas.
Fato 3 (Retas em Z(F1) e Z(F2)). As superfícies quádricas
Z(F1) e Z(F2) não podem conter três ou mais retas disjun-
tas.
Demonstração. Como foi comentado logo após o Exem-
plo 1, Z(F1) é um plano e Z(F2) é a união de dois pla-
nos distintos. Logo, se tivermos três ou mais retas conti-
das na quádrica Z(Fi), para 1 ≤ i ≤ 2, necessariamente
um par estará contido num plano. Assim, decorre do
Fato 1 que estas superfícies quádricas não podem con-
ter três ou mais retas disjuntas.
O lema seguinte entrará na prova do Fato 4, mas é
interessante por si só. Para melhor entender seu enun-
ciado, lembramos que [e4] é o único ponto singular de
Z(F3).
Lema 2. Se π é um plano em P3 que contém [e4] então π ∩Z(F3) = m1 ∪m2, em que m1 e m2 são retas contendo [e4]
(não necessariamente distintas).
Demonstração. Seja H forma linear não nula em S1 tal
que π = Z(H). Como [e4] ∈ π, então na expressão
de H não aparece a variável w. Logo, sem perda de
generalidade, iremos assumir que o coeficiente de z em
H é não nulo (de fato, igual a 1), de forma que H =
ax + by + z com a, b ∈ C. Assim,
π ∩ Z(F3) = Z(H, F3) = Z(ax + by + z, f ) ,
com f = (1 + a2)x2 + (1 + b2)y2 + 2abxy (a variável z
foi eliminada de F3 = 0 usando-se H = 0). Observe que
f é uma forma de grau 2 não nula, porque 1 + a2, 1 + b2
e ab não podem ser nulos simultaneamente.
Se a, b ∈ {i,−i} então f = ±2xy, de onde concluímos
que π ∩ Z(F3) = Z(ax + by + z, 2xy) = Z(by + z, x) ∪Z(ax + z, y). Como m1 = Z(by + z, x) e m2 = Z(ax +
z, y) são retas (distintas), o lema segue neste caso.
Agora suponha que a = ±i e seja λ = 1 + a2. Neste
caso f pode ser escrita na forma
f = λ
x +abλ
y2
+ µy2 ,
com µ = 1+a2+b2
λ , que pode ser fatorada na forma f =
h1h2, com
h1 =√
λx +
√λabλ
+ i√
µ
y
e
h2 =√
λx +
√λabλ
− i√
µ
y ,
de forma que
π ∩ Z(F3) = Z(H, h1h2) = Z(H, h1) ∪ Z(H, h2) .
Então definimos mi = Z(H, hi), para i = 1, 2, e observa-
mos que mi é, de fato, uma reta, usando a Proposição 2:
como H tem termo em z e hi não tem, H e hi são linear-
mente independentes. É fácil verificar que as retas m1 e
m2 são iguais se e somente se µ = 0.
Fato 4 (Retas em Z(F3)). Na quádrica Z(F3) não existem
retas disjuntas.
Demonstração. Bastará mostrarmos que p = [e4], o
único ponto singular deZ(F3), pertence a qualquer reta
contida em Z(F3).
Suponha = P([u, v]) ⊂ Z(F3) e p = [e4] /∈ . As-
sim, [u, v, e4] tem dimensão 3 e π = P([u, v, e4]) é um
plano, que contém a reta e o ponto [e4]. Então
⊂ π ∩ Z(F3) = m1 ∪m2 ,
pelo Lema 2. Assim, = ( ∩ m1) ∪ ( ∩ m2) ⊂ π.
Portanto = m1 ou = m2, pois cada intersecção ∩mi
ou é igual a mi ou é igual a um ponto, segundo o Fato 1.
11

66 Matemática Universitária nº45
{Artigo}
Mas o Lema 2 diz que as retas m1 e m2 contêm p, logo
p ∈ , o que é uma contradição.
Em Z(F4), existem duas famílias de retas que jogarão
um papel importante na solução do problema das qua-
tro retas. Para cada a = [(a1, a2)] ∈ P1, sejam as retas
La = P(Ua) e Ma = P(Va), em que Ua = [u1(a), u2(a)],
Va = [v1(a), v2(a)], u1(a) = (ia1, a1, ia2, a2), u2(a) =
(ia2,−a2,−ia1, a1), v1(a) = (ia1, a1,−ia2, a2) e v2(a) =
(ia2,−a2, ia1, a1).
Deixamos ao leitor a verificação de que, para qual-
quer escolha de a = [(a1, a2)] ∈ P1, u1(a) não é colinear
com u2(a) nem v1(a) é colinear com v2(a), para garantir
que os subespaços Ua e Va tenham dimensão 2 e La, Ma
sejam realmente retas.
Além disso, é fácil mostrar que La e Ma estão contidos
em Z(F4), para qualquer a ∈ P1. Por exemplo, mostrar
que La ⊂ Z(F4) consiste em tomar qualquer u ∈ Ua,
isto é, u = αu1(a) + βu2(a), e verificar que F4(u) = 0.
Nos Fatos 5, 6, 7 e 8 reunimos propriedades dessas
famílias, que nos serão úteis em seguida.
Fato 5. La ∩ Lb = ∅ e Ma ∩Mb = ∅, se a = b ∈ P1.
Demonstração. Seja M a matriz cujas colunas são as co-
ordenadas dos vetores u1(a), u2(a), u1(b) e u2(b), para
a = [(a1, a2)], b = [(b1, b2)] ∈ P1. Verifica-se que o de-
terminante de M é igual a −4(a1b2 − a2b1)2, de onde se
conclui que os vetores acima formam uma base de C4
se, e somente se, a1b2 − a2b1 = 0, e essa última desi-
gualdade é equivalente a a = b. Portanto, se a = b en-
tão os subespaços Ua e Ub, que determinam as retas La
e Lb, respectivamente, só têm como vetor comum o ve-
tor nulo, o que implica La ∩ Lb = ∅. Usando o mesmo
raciocínio verifica-se que Ma ∩Mb = ∅ se e somente se
a = b ∈ P1.
Fato 6. Para quaisquer a = [(a1, a2)], b = [(b1, b2)] ∈ P1,
a intersecção de retas La ∩ Mb é formada pelo, e apenas pelo,
ponto
[b1(ia1, a1, ia2, a2) + b2(ia2,−a2,−ia1, a1)] .
Demonstração. Note também que [b1u1(a) + b2u2(a)] ∈La, [a1v1(b) + a2v2(b)] ∈ Mb e que b1u1(a) + b2u2(a) =
a1v1(b)+ a2v2(b). Assim [b1u1(a)+ b2u2(a)] ∈ La ∩Mb,
isto é, La e Mb se intersectam para quaisquer a e b.
Para vermos que esse é o único ponto de intersecção,
verificaremos que Ua = Vb.
Caso 1: Se b1 = 0, então Vb = [(0, 0,−i, 1), (i,−1, 0, 0)].
Logo u1(a) /∈ Vb, do contrário existiriam α e β ∈ C tais
que ia1 = iβ, a1 = −β, ia2 = −iα e a2 = α, de onde
concluímos que a1 = a2 = 0, o que contradiz a ∈ P1.
Caso 2: Se b1 = 0, então, supondo b1 = 1
sem perda de generalidade, temos Vb =
[(i, 1,−ib2, b2), (ib2,−b2, i, 1)]. E, neste caso, temos
que u2(a) /∈ Ub, pois do contrário teríamos que
ia2 = iα + iβb2
−a2 = α− βb2
−ia1 = −iαb2 + iβ
a1 = αb2 + β
Multiplicando a segunda equação por i e somando-a à
primeira obtemos que α = 0. Aplicando o mesmo pro-
cedimento à terceira e à quarta equações chegamos à
conclusão que β = 0. Mas isso implica a1 = a2 = 0, o
que é uma contradição novamente.
Fato 7. Dado q ∈ Z(F4), existem únicas retas Laq e Mbq
tais que Laq ∩Mbq = {q}.
Demonstração. A seguir vamos exibir as retas Laq e Mbq
tais que Laq ∩ Mbq = {q}. Seja q = [(x1, x2, x3, x4)] ∈Z(F4), o que implica x1
2 + x22 + x3
2 + x42 = 0. Temos
duas possibilidades:
(I) x1 + ix2 = x3 + ix4 = 0;
(II) x1 + ix2 = 0 ou x3 + ix4 = 0.
No caso (I), tome aq = [(x4,−x2)] e bq = [(0, 1)]. Assim
Uaq = [(ix4, x4,−ix2,−x2), (−ix2, x2,−ix4, x4)]
e
Vbq = [(0, 0,−i, 1), (i,−1, 0, 0)] .
Observe que (x1, x2, x3, x4) = (−ix2, x2,−ix4, x4), logo
pertence a Uaq . Além disso,
(−ix2, x2,−ix4, x4)
= x4(0, 0,−i, 1)− x2(i,−1, 0, 0) ∈ Vbq ,
12

67Matemática Universitária nº45
{Artigo}
de onde concluímos que Laq ∩Mbq = {q}.
No caso (I I), tome aq = [(x1 + ix2, x3 + ix4)] e bq =
[(x2− ix1, x4 + ix3)]. Não esquecendo de usar x21 + x2
2 +
x23 + x2
4 = 0, observe que
(−x1 − ix2) · u1(aq) + (x3 − ix4) · u2(aq)
= 2(x2 − ix1)(x1, x2, x3, x4) ∈ Uaq
e
(x1 + ix2) · v1(bq) + (x3 + ix4) · v2(bq)
= 2(x1 + ix2)(x1, x2, x3, x4) ∈ Vbq .
Portanto q ∈ Laq ∩ Mbq e, pelo Fato 6, é o único ponto
na intersecção.
Fato 8. Se for uma reta contida em Z(F4), então = La
ou = Ma, para algum a ∈ P1.
Demonstração. Tomemos a reta ⊂ Z(F4). Sejam
p = [x] e q = [y], com x = (x1, x2, x3, x4) e y =
(y1, y2, y3, y4), pontos distintos na reta . Então os ve-
tores x e y são linearmente independentes e = P(W),
com W = [x, y].
Seja Hx o plano definido pela forma linear
h(x, y, z, w) = x1x + x2y + x3z + x4w (ou seja,
Hx = Z(h)). Primeiro verificamos que ⊂ Hx.
De fato, se [v] ∈ então v = tx + sy, para certos
t, s ∈ C, e vale
h(v) = tF4(x) + s(x1y1 + x2y2 + x3y3 + x4y4) .
O primeiro termo da soma é nulo porque p ∈ Z(F4).
Por outro lado, como p e q pertencem aZ(F4) e [x+y] ∈ ⊂ Z(F4), então
0 = F4(x + y)
= F4(x) + F4(y) + 2x1y1 + 2x2y2 + 2x3y3 + 2x4y4
= 2(x1y1 + x2y2 + x3y3 + x4y4) ,
implicando que h(v) = 0.
Nosso objetivo será mostrar que
Hx ∩ Z(F4) = Lap ∪Mbp . (8)
Como ⊂ Z(F4) (por hipótese) e ⊂ Hx (pelo pará-
grafo anterior), então ⊂ Lap ∪ Mbp . Usando o Fato 1,
conclui-se que = Lap ou = Mbp , como queríamos
demonstrar.
A intersecção em (8) é o conjunto algébrico Z(h, F4),
e z = [(z1, z2, z3, z4)] ∈ Z(h, F4) se e somente se
h(z) = x1z1 + x2z2 + x3z3 + x4z4 = 0
F4(z) = z21 + z2
2 + z23 + z2
4 = 0.
Como o plano Hx é definido pela forma linear h não
nula, podemos supor, sem perda de generalidade, que
x4 = 0. Assim, Hx = Z(h) = Z(h1), com h1 = α1x +
α2y + α3z + w e αi = xix4
, para 1 ≤ i ≤ 3. Logo z =
(z1, z2, z3, z4) ∈ Z(h, F4) se, e somente se,
α1z1 + α2z2 + α3z3 + z4 = 0
f = 0 ,
em que f = (1 + α21)x2 + (1 + α2
2)y2 + (1 + α23)z2 +
2α1α2xy + 2α1α3xz + 2α2α3yz ∈ C[x, y, z]. Portanto
Z(h, F4) = Z(h1, f ).
Os coeficientes 1 + α2i , 1 ≤ i ≤ 3, não podem ser
todos nulos, pois 1 + α2i = 0 para 1 ≤ i ≤ 3 im-
plica α21 + α2
2 + α23 = −3, o que é uma contradição com
p = [x] = [(α1, α2, α3, 1)] ∈ Z(F4), pois isto implica
α21 + α2
2 + α23 = −1. Assim vamos supor, sem perda de
generalidade, que 1 + α21 = 0. Façamos λ = 1 + α2
1
e tomemos µ tal que µ2 = λ, para simplificar a no-
tação. É uma simples conta verificar que f = L1L2,
com L1 = µx + ( µα1α2λ + α3
µ )y + ( µα1α3λ − α2
µ )z e L2 =
µx + ( µα1α2λ − α3
µ )y + ( µα1α3λ + α2
µ )z. Então Z(h, F4) =
Z(h1, f ) = Z(h1, L1L2) = Z(h1, L1) ∪ Z(h1, L2). Além
disso, L1 e L2, por não terem termo em w, não são múl-
tiplos de h1, implicando que 1 = Z(h1, L1) e 2 =
Z(h1, L2) são retas.
Sabemos que o ponto p = [x] está contido nas re-
tas Lap e Mbp e, assim como mostramos que ⊂ Hx,
mostra-se que Lap e Mbp estão contidas no plano Hx.
Como essas retas também estão em Z(F4),
Lap ∪Mbp ⊂ Z(h, F4) = 1 ∪ 2 .
Assim, Lap ⊂ 1 ∪ 2 e Mbp ⊂ 1 ∪ 2 e, portanto, Lap ⊂(Lap ∩ 1)∪ (Lap ∩ 2) e Mbp ⊂ (Mbp ∩ 1)∪ (Mbp ∩ 2).
Como as retas Lap , Mbp , 1 e 2 estão contidas no plano
13

68 Matemática Universitária nº45
{Artigo}
Hx, segue-se do Fato 1 que Lap ∩ 1 consiste de um único
ponto ou Lap = 1. Por outro lado, todas essas retas
passam pelo ponto p = [x], assim a intersecção de qual-
quer par dessas retas, no caso de serem distintas, será
o ponto p. Como Lap ⊂ (Lap ∩ 1) ∪ (Lap ∩ 2), en-
tão não pode acontecer que Lap = 1 e Lap = 2, pois
neste caso teríamos que Lap ⊂ (Lap ∩ 1) ∪ (Lap ∩ 2) =
{p} ∪ {p} = {p}, o que é um absurdo, pois uma reta
consiste de infinitos pontos. Assim, podemos afirmar
que i = Lap , para i = 1 ou i = 2. Da mesma forma,
i = Mbp , para i = 1 ou i = 2. Além disso, i não pode
ser o mesmo nos dois casos, já que Lap e Mbp são retas
distintas. Portanto 1 ∪ 2 = Lap ∪ Mbp , e isto encerra a
demonstração de (8).
Sejam 1, 2, 3, 4 quatro retas disjuntas duas a duas em
P3. O primeiro passo será associar às três primeiras re-
tas disjuntas uma superfície quádrica que as contenha.
Escolhendo três pontos distintos p1i , p2
i e p3i em cada
reta i, para 1 ≤ i ≤ 3, segue-se de (3) que existe pelo
menos uma superfície quádrica Q = Z(F) com F ∈ S2,
não nulo, contendo esses 9 pontos. Assim, temos que
{p1i , p2
i , p3i } ⊂ Q ∩ i para 1 ≤ i ≤ 3, e consequente-
mente, da Proposição 5, as três retas estão contidas em
Q.
Por outro lado, sabemos que existe uma mudança de
coordenadas projetivas T tal que T(Q) = Z(Fk), para
algum 1 ≤ k ≤ 4. Ademais, convém lembrar que uma
mudança de coordenadas projetivas transforma retas
em retas, e que pares de retas disjuntas são aplicados
em pares de retas disjuntas.
Finalmente, a partir dos Fatos 3 e 4, concluímos que
T(Q) só pode ser Z(F4), em particular, não singular
(por simplicidade, iremos supor que essa mudança de
coordenadas já foi feita e que Q = Z(F4)). Já os Fa-
tos 8 e 6 nos dizem que essas retas são todas de, e
apenas de, uma das famílias L = {La | a ∈ P1} ou
M = {Ma | a ∈ P1}. Iremos supor, sem perda de gene-
ralidade, que i ∈ L, para 1 ≤ i ≤ 3.
O segundo passo é verificar que uma reta que inter-
secta 1, 2, 3 e 4 deve estar contida em Q. Se é uma
tal reta, definimos {pi} = ∩ i, para 1 ≤ i ≤ 3. Como
as retas i, para 1 ≤ i ≤ 3, são duas a duas disjuntas,
e estão contidas na quádrica Q, temos que os pontos
pi, para 1 ≤ i ≤ 3, têm que ser distintos e pertencer à
quádrica Q. Logo, da Proposição 5, segue que ⊂ Q.
Assim será necessariamente uma reta contida em Q
que intersecta as retas i ∈ L, para 1 ≤ i ≤ 3. Portanto,
pelos Fatos 5 e 8, será necessariamente da família M.
O passo final é considerar a quarta reta. Usando no-
vamente a Proposição 5, 4 está contida em Q ou Q ∩ 4
consiste de dois pontos (não necessariamente distintos).
Analisemos esses dois casos.
Caso 4 ⊂ Q. Como 4 é disjunta de i, para 1 ≤ i ≤ 3,
então, pelos Fatos 5, 6 e 8, 4 também pertence à família
L. Neste caso todas as retas da família M intersectam 1,
2, 3 e 4, simultaneamente. Portanto, as infinitas retas
da família M são soluções do problema em questão.
Caso 4 ⊂ Q. Pela Proposição 5, Q ∩ 4 = {q1} ∪ {q2},
com q1 e q2 não necessariamente distintos. Sejam Mb1 e
Mb2 as únicas retas da família M que passam por q1 e q2,
respectivamente, pelos Fatos 7 e 5. Então Mb1 e Mb2 in-
tersectam 1, 2, 3 e 4, simultaneamente, pelo Fato 6.
Como as soluções que estamos procurando são neces-
sariamente retas da família M, concluímos que Mb1 e
Mb2 são as únicas soluções. Teremos, então, exatamente
duas soluções se 4 não for uma reta “tangente” a Q,
isto é, q1 = q2, e, caso contrário, uma única solução.
Em resumo, a solução do problema proposto é: dadas
as quatro retas disjuntas, seja Q uma quádrica contendo
três delas. Se a quarta reta está contida em Q, então há
infinitas retas que intersectam as retas dadas. Se não,
pode haver duas ou uma, dependendo da posição rela-
tiva dessa quarta reta com respeito a Q.
Agradecimentos. Agradecemos ao Prof. Frank Sot-
tile, a gentileza de ter nos fornecido a figura 1, aos pa-
14
A solução do problema

69Matemática Universitária nº45
{Artigo}
receristas e editores da Matemática Universitária (em es-
pecial ao Prof. Eduardo Colli) e ao Prof. Nelson Nery
de Oliveira Castro (DM-UFPB), pela leitura e sugestões,
que tiveram um papel imprescindível na reformulação
do texto original. Durante a elaboração do texto o pri-
meiro autor (Jacqueline Rojas) teve o apoio parcial do
CNPq, processo número 620108/2008-8 (Edital Casadi-
nho).
[1] COX, D.; LITTLE, J.; O’SHEA, D. Ideals, varie-
ties and algorithms. An introduction to computatio-
nal algebraic geometry and commutative algebra. 3.ed.
New York: Springer, 2007. (Undergraduate Texts
in Mathematics)
[2] FULTON, W. Intersection theory. 2.ed. Berlin: Sprin-
ger, 1998. (A Series of Modern Surveys in Mathe-
matics)
[3] GARCIA, A.; LEQUAIN, Y. Elementos de álgebra. Rio
de Janeiro: IMPA, 2003. (Projeto Euclides)
[4] GONÇALVES, A. Introdução à álgebra. Rio de Ja-
neiro: IMPA, 1999. (Projeto Euclides)
[5] KLEIMAN, S. L.; LAKSOV, D. Schubert calculus.
The American Mathematical Monthly, v. 79, n. 10, p.
1061–1082, 1972.
[6] LIMA, E. L. Álgebra linear. Rio de Janeiro: IMPA,
2004. (Coleção Matemática Universitária)
[7] RONGA, F. Schubert calculus according to Schubert.
arXiv:math.AG/0608784 (08-2006).
[8] SCHUBERT, H. Kalkül der abzählenden geometrie.
Leipzig: Teubner, 1879.
[9] VAINSENCHER, I. Introdução às curvas algébricas pla-
nas. Rio de Janeiro: IMPA, 1996. (Coleção Matemá-
tica Universitária)
[10] VAINSENCHER, I. Classes características em geome-
tria algébrica. Rio de Janeiro: IMPA, 1985. (Publica-
ções do 15o Colóquio Brasileiro de Matemática)
Jacqueline Rojas
CCEN - Departamento de Matemática - UFPB
Cidade Universitária - João Pessoa - PB
CEP: 58051-900
Ramón Mendoza
CCEN - Departamento de Matemática - UFPE
Cidade Universitária - Recife - PE
CEP: 50740-540
15
Referências