-
Pedro Magalhes, Nicolas Pacheco, Daniel Resende
CONTROLE DE ESTABILIDADE DE AEROMODELO TIPO QUADCOPTER
AUTMATO EM VOO PAIRADO POR LEI DE CONTROLE PID
Magalhes Jnior, Pedro Amrico Almeida
[email protected]
Pontifcia Universidade Catlica de Minas Gerais
Minas Gerais, Belo Horizonte, Brasil
Pacheco, Nicolas Ives Roque
[email protected]
Pontifcia Universidade Catlica de Minas Gerais
Minas Gerais, Belo Horizonte, Brasil
Resende, Daniel de Castro Ribeiro
[email protected]
Pontifcia Universidade Catlica de Minas Gerais
Minas Gerais, Belo Horizonte, Brasil
Resumo. Nos ltimos anos, os veculos areos no tripulados do tipo
quadrirotor ou
quadcopter, tm tido destaque especial nas pesquisas de sistemas
robticos, principalmente
devido a versatilidade de sua navegao poder ser tanto em
ambientes externos ou internos.
Para que um aeromodelo impulsionado por quatro rotores possa se
manter em equilbrio
com relativa preciso, mesmo que em voo pairado, necessrio um
algoritmo de controle
que estabilize o sistema dinamicamente, impedindo que ele
colapse devido a uma
perturbao ou devido ao somatrio de dinmicas geradas por seu
prprio peso. Existem
vrias tcnicas de controle para o voo dos quadcopters, para o
trabalho proposto elabora-se
uma malha fechada utilizando um algoritmo equacionado pela lei
de controle PID. Para o
feedback da planta, utiliza-se circuito integrado de
mensuramento inercial, composto de
acelermetro, giroscpio e magnetmetro para monitorar-se a
orientao angular, e utiliza-
se sonar para monitorar-se a altitude. Dentro destes parmetros
estruturais e tericos,
prope-se passar pela pesquisa, simulao, projeto, construo, e,
prtica.
Palavras-chave: UAV, VANT, Quadcopter, Controle, PID, IMU.
-
CONTROLE DE ESTABILIDADE DE AEROMODELO TIPO QUADCOPTER AUTMATO
EM VOO
PAIRADO POR LEI DE CONTROLE
ABSTRACT: In recent years, UAVs (Unmanned Aerial Vehicles), type
quadcopter, have had
special attention in the research of robotic systems, mainly due
to the versatility of its
navigation can be either external as internal environments. For
a model airplane propelled
by four rotors to can still in balance with relative accuracy,
even in hovering flight (proposal
of this work), one control algorithm to stabilize the system
dynamically is necessary,
preventing it from collapsing due to a disturbance or due the
sum of dynamics generated by
its own weight. There are several techniques to control the
flight of quadcopters for the
proposed work we undertake a closed loop using an algorithm
solved by the law of PID
control, because it is a level of theory, which is well within
the menus of the disciplines
contained in graduation in the degree of mechanical engineering
witch specialization in
mechatronics. For feedback plant, it uses inertial measurement
integrated circuits (IMUs),
composed of accelerometer, gyroscope, magnetometer and
barometer. In monitoring the
angular and translational orientation of the Quadcopter, are
used digital filters, and sensor
fusion to optimize these readings. For the development of this
work was carried out studies:
mathematical modeling of the system dynamics, the
electro-electronic circuit, the sensing, the
mechanical design, the computer simulation and the
implementation of the control algorithm.
Keywords: VANT, UAV, Quadcopter, Control, PID, IMU.
-
Pedro Magalhes, Nicolas Pacheco, Daniel Resende
1 METODOLOGIA
Pelo fato deste trabalho tratar de um objetivo que solicita
relativa interdisciplinaridade de
conhecimentos, partimos das conceituaes tericas, matemtica e
computacional, como
forma de nortear a sequncia de opes mais adequadas a um bom
resultado. Deste ponto em
diante, os esforos esto na transposio das solues tericas e
virtuais para o sistema real,
atravs das seguintes etapas:
a) Diagramao mecnica e cinemtica da estrutura fsica do
aeromodelo, suas
caractersticas sobre capacidade de sustentao e estabilidade;
b) Equacionamento matemtico do somatrio de dinmicas fsicas
envolvidas no voo de
uma aeronave em seus 6 graus de liberdade;
c) Parametrizao do algoritmo de interfaceamento
sensores-microcontrolador;
d) Construo do circuito de desenvolvimento agregado ao
microcontrolador, estrutura
parcial do aeromodelo com apenas 2 rotores e seus respectivos
ESCs (Electronic Speed
Controllers) e da plataforma de teste para sustentao em modelo
de balana;
e) Simulao em ambiente computacional e otimizao das equaes
dinmicas e seus
referentes coeficientes de ganho;
f) Implementao do algoritmo de controle e sua utilizao em
plataforma de um grau de
liberdade para captura de dados dos sensores, clculo dos
parmetros do filtro digital de
Kalman e das respostas parciais da planta;
g) Complementao da estrutura fsica para seus quatro rotores,
implementao da malha
fechada para voo pairado e novo estgio de otimizao;
h) Anlise de resultados e concluses.
A metodologia empregada em cada etapa ser descrita a seguir.
1.1 Cinemtica e mecnica
Pr requisito ao equilbrio do conjunto, h a capacidade de
sustentabilidade da altitude do
voo. No caso do quadcopter, esta sustentao alcanada atravs das
hlices. So
equipamentos de propulso acoplados aos motores que convertem a
energia da rotao em
translao, empurrando o fluido sua volta. As hlices so formadas
por conjuntos de asas,
que ao serem rotacionadas geram uma diferena de presso entre
suas superfcies superior e
inferior, segundo explicitam a 3 lei de Newton e o princpio de
Bernoulli.
O comportamento de uma hlice pode ser baseado em 3 parmetros; o
coeficiente de
thrust cT (coeficiente de sustenao), coeficiente de potncia cP e
raio da hlice r, a densidade do ar e w a velocidade angular, que
permitem calcular as seguintes equaes 1 e 2
(RODRIGUES, 1964).
T = ( cT 4 r4 w2 ) / 2 (1)
Pp = ( cP 4 r5 w3 ) / 3 (2)
-
CONTROLE DE ESTABILIDADE DE AEROMODELO TIPO QUADCOPTER AUTMATO
EM VOO
PAIRADO POR LEI DE CONTROLE
Atravs destas equaes possvel observar que (fora de impulso) e
(potncia de propulso) aumentam consideravelmente com o aumento do
dimetro, e por consequncia o
consumo de energia tambm, diminuindo a autonomia do sistema. A
anlise da melhor
configurao para as hlices deve ser baseada em particularidades
do aeromodelo, como,
potncia e faixa de eficincia dos motores, tipo de bateria, tempo
de resposta e peso. Abaixo,
uma estimativa do peso do conjunto na tabela 1:
Tabela 1: Peso estimado do prottipo
Componentes
estruturais: Peso [g]: Quantidade: Conjunto [g]:
Motores 39 4 156
ESCs 34 4 136
Hlices 10 4 40
Spinners (trava
hlices) 12 4 48
Bateria 400 1 400
Microcontrolador 130 1 130
Sensores 140 1 140
Circuito 100 1 100
Hastes 140 2 280
Juno estrutural
(frame) 200 1 200
Junes estruturais
(motores) 30 4 120
Total [g]: 1750
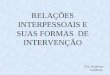
Sendo assim toda a estrutura do prottipo poder alcanar 1750
gramas, peso adequado
capacidade dos motores CF2822 equipados com hlices de 10
polegadas de dimetro por 5
polegadas de passo, segundo recomendaes do fabricante, como
visto na figura 1.
-
Pedro Magalhes, Nicolas Pacheco, Daniel Resende
Figura 1. Especificaes dos motores: Yin Yan Model, 2014
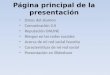
Uma anlise mais completa das condies de funcionamento do
conjunto de propulsores,
tanto para modo de voo em sustentao quanto para regime de empuxo
mximo, foi feita pelo
site eCalc, com ndice de incerteza de dez por cento. Quanto
autonomia, cerca de trs a 8
minutos de voo ao aeromodelo, dependendo do tipo de voo (eCalc,
2014). Eficincia,
temperatura, corrente e demais dados constantes na figura 2.
-
CONTROLE DE ESTABILIDADE DE AEROMODELO TIPO QUADCOPTER AUTMATO
EM VOO
PAIRADO POR LEI DE CONTROLE
Figura 2. Simulao de parmetros eCalc : Site eCalc
-
Pedro Magalhes, Nicolas Pacheco, Daniel Resende
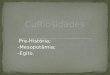
A estrutura de um quadcopter baseada em dois eixos cruzados
contendo um propulsor
em cada extremidade. Sendo que, seu centro de massa deve estar
coincidente ao seu centro
geomtrico. O par de rotores de um eixo gira em sentido contrrio
ao par do eixo transverso.
De forma que os momentos de reao gerados pelo giro dos motores
tendem a se anular e
aumenta-se a estabilidade, como na figura 3.
Figura 3. Somatrio de momentos (guinada): Elaborado pelos
autores
No caso da rotao da estrutura em Z, por guinada, possvel alterar
o somatrio de
empuxo entre os pares de propulsores e gerar um momento total
resultante.
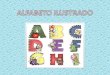
Rotaes em torno de seus prprios eixos, por arfagem (eixo Y) ou
rolagem (eixo X),
podem ser obtidas pela variao do empuxo mdio em apenas um dos
pares de rotores (figura
4).
Figura 4. Rolagem ou arfagem: Elaborado pelos autores
-
CONTROLE DE ESTABILIDADE DE AEROMODELO TIPO QUADCOPTER AUTMATO
EM VOO
PAIRADO POR LEI DE CONTROLE
Os movimentos de translao, ou, mudanas de velocidade linear
podem ser obtidos pela
inclinao do conjunto seguida do incremento do empuxo total.
Como forma de se iniciar os estudos da cinemtica do sistema, uma
estrutura que modela
um grau de liberdade, foi estudada de forma a propiciar a obteno
das respostas do sistema
contendo apenas dois propulsores (figura 5).
Figura 5. Estrutura de modelamento em um grau de liberdade:
Elaborado pelos autores
1.2 Equacionamento matemtico
O equacionamento da dinmica de um corpo rgido, mesmo que em voo
pairado, envolve
mltiplos nveis de interpretao. Em seus seis graus de liberdade,
um corpo rgido, pode
transladar ao longo de seus eixos referenciais e rotacionar em
torno destes mesmos eixos.
Quanto rotao, uma das formas mais simples de se descrever a
posio de um corpo,
atravs de trs ngulos independentes que fazem referncia ao espao
Euclidiano
tridimensional, estes so os ngulos de Euler.
Definindo como origem de um sistema de coordenadas fixo, tambm
chamado de
inercial, um ponto na superfcie da Terra (desconsiderando seu
movimento orbital), e, um
outro sistema de coordenadas mvel (vehicle frame), que se
desloca em translao junto ao
corpo rgido, pode-se obter o vetor posio do corpo em relao ao
sistema inercial. Um
terceiro frame acompanha as rotaes do corpo em relao ao sistema
mvel, o body frame
(figura 6).
-
Pedro Magalhes, Nicolas Pacheco, Daniel Resende
Figura 6. Coordenadas de mltiplos corpos: Elaborado pelos
autores
A relao, entre as coordenadas do sistema mvel e do sistema fixo,
definida atravs de
transformaes lineares de translao e rotao.
Como parmetros para os eixos de rotao, os ngulos so (em Z), (em
X) e (em Y) (figura 7).
Figura 7: ngulos de Euler: McCormick, 1995
Sendo um ngulo qualquer dentre os trs ngulos de rotao, o vetor
posio e R a matriz de rotao, a equao geral de transformao das
rotaes :
' = R() (3)
-
CONTROLE DE ESTABILIDADE DE AEROMODELO TIPO QUADCOPTER AUTMATO
EM VOO
PAIRADO POR LEI DE CONTROLE
Assim, a e matriz de representao da rotao para (guinada)
fica:
R()= (4)
A matriz de representao da rotao para (arfagem) fica:
R()= (5)
A matriz de representao da rotao para (rolagem) fica:
R()= (6)
Finalmente, considerando os trs eixos, tem-se a relao entre o
frame do corpo e o frame
do veculo:
R(, , ) = R()*R()*R() (7)
Sendo a matriz de rotao:
R(,,) = (7)
Sendo p, q e r, as taxas de rotao do corpo ao longo de x, y e z
do frame do corpo. Sendo
u, v e w as velocidades do corpo em x, y e z do frame do corpo.
Sendo x', y' e z' no frame
inercial. A equao da posio em relao velocidade fica
(BOUABDALLAH, 2007):
= Rbv
(8)
-
Pedro Magalhes, Nicolas Pacheco, Daniel Resende
= (8)
A transformao das magnitudes dos ngulos absolutos , e , em taxas
de variao angulares p, q e r, no trivial, pelo fato dessas
quantidades serem definidas em diferentes
sistemas de coordenadas. As velocidades angulares esto frame do
corpo, enquanto as
posies angulares esto no frame do veculo. Considerando que as
velocidades angulares so
pequenas, pode-se relacionar p, q e r s derivadas no tempo de ,
e , atravs da matriz de rotao, vista na equao 9 (BEARD, 2008):
Rbv(d/dt) = Rb
v(d/dt) = Rb
v(d/dt) = T (9)
= (9)
Quanto ao empuxo, a fora efetiva T, ou Thrust Force, sentida
pelo quadcopter, o
somatrio das quatro foras de seus rotores. Sendo essa fora
consequncia das caractersticas
do conjunto propulsor, ou fator de Thrust, tido como cT, e da
velocidade angular (equao
10).
T = F(1,2,3,4) = cT*(w(1,2,3,4))2
(10)
Decompondo T em funo das direes dos eixos, pode-se discretizar
as equaes de
foras (equaes 11, 12 e 13).
m(dw/dt) = mg - ( ) T (11)
m(du/dt) = mg - ( ) T (12)
m(dv/dt) = mg - ( ) T (13)
-
CONTROLE DE ESTABILIDADE DE AEROMODELO TIPO QUADCOPTER AUTMATO
EM VOO
PAIRADO POR LEI DE CONTROLE
1.3 Simulao em ambiente computacional
Como passo inicial, foi implementado diretamente ao compilador
Arduino,
disponibilizado pela Atmel, um algoritmo de controle PID
clssico, estrutura composta por
apenas dois propulsores. De forma a se obter um sistema pouco
agressivo e capaz de se
estabilizar, em seu um grau de liberdade, os coeficientes de
proporcionalidade, integrativo e
derivativo, foram de 0.03 (todos os trs). Na figura 8, pode-se
perceber o set-point de zero
grau como a reta horizontal, a resposta como inclinao variando
em torno do set-point, e, a
escala de sada em um dos motores.
Figura 8: Curvas de entrada e sada: dados experimentais
Uma resposta melhor veio atravs da ferramenta computacional
Simulink, contida no
software MatLab, aps a filtragem mais sintonizada de leitura do
sensor e da equalizao dos
motores, feita por uma funo exponencial em um dos motores, foi
possvel o alcance de um
sistema rpido, que nos trouxe apenas uma oscilao aps cada
entrada degrau. O diagrama
no Simulink pode ser visto na figura 9.
-
Pedro Magalhes, Nicolas Pacheco, Daniel Resende
Figura 9. Diagrama em um grau Simulink: Elaborado pelos
autores
A partir da mesma disposio de simulao, foram obtidas respostas
satisfatrias para o
controle das respostas na rotao em torno do eixo "Z" (somatrio
de momentos) e propulso
(somatrio de empuxos dos atuadores).
1.4 Parametrizao do algoritmo de sensoriamento
Neste projeto, se optou pelo mdulo de voo 10DOF (Ten Degrees Of
Freedom) modelo
GY80, como equipamento de sensoriamento principal. O GY80 uma
pequena placa de
circuito eletrnico SMC (Surface Mounted Components), que conta
com acelermetro,
giroscpio, magnetmetro e barmetro. Devido relevante quantidade
de sensores
acomodados em uma mesma plataforma, a comunicao deste
equipamento com o MCU
(Micro Controller Unit) feita atravs do protocolo I2C (Inter
Integrated Circuits).
Basicamente, este cdigo trabalha com dois tipos de sinais entre
os CIs, o sinal de clock
(gerado pelo CI mestre) que sincroniza a troca de informaes, e o
sinal de dados, este
bidirecional.
Para estimativas de posicionamento, o sistema deve ser
realimentado com sinais de
rotao e translao. Neste caso, a fuso de sensores entre
acelermetro e giroscpio uma
boa opo para leitura angular. A principal inteno, em uma fuso de
sensores, promover a
iterao entre as magnitudes medidas por cada sensor
individualmente, e correlacion-las de
forma a manter uma resposta aceitvel, mesmo que ocorram erros em
alguma leitura,
tornando o sistema menos sensvel e mais preciso.
-
CONTROLE DE ESTABILIDADE DE AEROMODELO TIPO QUADCOPTER AUTMATO
EM VOO
PAIRADO POR LEI DE CONTROLE
Integrado ao mdulo de voo h o acelermetro digital de trs eixos
ADXL345, com
capacidade para perceber aceleraes de -g +g (acelerao da
gravidade). Tomando como
premissa que o acelermetro esteja exatamente ao centro da
estrutura, pode-se dizer que
variaes de ngulo em torno de seus prprios eixos no seriam
percebidas pelo mesmo. Mas
devido ao alto ndice de vibraes do sistema, gerado pelos
motores, h ainda medies
indesejadas sendo captadas. Considerando ento, que filtros
digitais (assunto que abordado
em outro tpico) sero aplicados de forma reduzir as leituras
equivocadas, podemos teorizar
sobre um clculo que descarta estas vibraes.
Sabendo-se que a acelerao da gravidade de 9.81 m/s2, o somatrio
das componentes
trigonomtricas deste vetor pode estimar a inclinao.
(ax2(t) + az
2(t))
1/2 = g (14)
O giroscpio (Angular Rate Sensor), modelo L3G4200D, faz medidas
da velocidade de
rotao. Devido necessidade de contnuas integrais no tempo, para
transformar a leitura da
velocidade de angular em deslocamento angular, pequenos desvios
so incorporados leitura,
o que torna o giroscpio pouco preciso ao longo do tempo.
n+1 = n (d/dt) dt (15)
Como forma de superao de grande parte das fontes de impreciso
caractersticas de
cada sensor, a fuso sensorial pode ser entendida com um grau
mnimo de complexidade,
como na figura 9:
Figura 9: Diagrama de tratamento de sinal: Elaborado pelos
autores
Auxiliando o acelermetro e o giroscpio, temos a bussola digital
MCS (Magnetic
Compass Sensor), modelo HMC5883L, pode-se obter o ngulo de
Azimute, pela sua
percepo do campo magntico da Terra (equao 16).
Heading = arctag (Yh/Xh) (16)
-
Pedro Magalhes, Nicolas Pacheco, Daniel Resende
Como feedback da altitude, pode-se ainda, com o sensor de
presso, modelo BMP085
(Pressure sensor), estimar a altitude com relativa preciso.
Tendo como off-set a altitude a
memria da presso do ponto de decolagem, possvel gerar um
parmetro de altitude da
aeronave a cada tempo.
1.5 Circuito de desenvolvimento
O esquema eltrico-eletrnico de um aero-modelo do tipo
quadrirotor, como na maioria
dos sistemas autmatos, construdo basicamente em prol da
interface entre controlador,
atuadores, sensores e bateria. O circuito de desenvolvimento
deste prottipo se assemelha a
este modelo. A bateria fornece energia ao regulador de tenso,
que alimenta o
microcontrolador com 5 volts, este por sua vez, energiza os
sensores. Esta mesma bateria
fornece energia aos motores atravs dos ESCs (Electronic Speed
Controllers) (figura 10):
Figura 10. Circuito de desenvolvimento: Elaborado pelos
autores
Os motores brushless necessitam de uma alimentao caracterizada
pela sobreposio de
trs ondas senoidais defasadas de 120 graus uma da outra. De
forma que, cada uma destas
ondas alimente um grupo diferente de enrolamentos. Esses motores
no possuem sensores que
facilitem o monitoramento de sua posio angular ou velocidade, de
forma, que sua
alimentao eficiente se torna uma tarefa bastante complexa.
-
CONTROLE DE ESTABILIDADE DE AEROMODELO TIPO QUADCOPTER AUTMATO
EM VOO
PAIRADO POR LEI DE CONTROLE
Os ESCs se encarregam de alimentar os motores, conforme recebem
o sinal de controle
do microcontrolador, atravs do fio chamado data. Este sinal
feito atravs do cdigo PWM
(Pulse-Width Modulation), que ao ter seu duty-cicle variado,
varia a resposta do ESC.
O Arduino Mega, um microcontrolador de 8 bits da Atmel, 16MHz de
clock e 256KB
de memria flash. Possui ainda, 54 pinos de comunicao com o
exterior, dos quais, 15
podem ser sadas PWM, e 16 entradas analgicas. Sua comunicao com
o mdulo de voo, ou
IMU, feita travs do cdigo serial I2C, sendo realizada por apenas
dois fios. Onde, um destes
utilizado para determinao do clock de comunicao, feito pelo
dispositivo master, e o
outro utilizado para troca de comandos e dados. Assim, o
microcontrolador pode determinar
os parmetros de sensoriamento e receber as magnitudes das
leituras sensoriais.
1.6 Algoritmo de controle
O cdigo de controle foi fundamentado com base nas simulaes e
aplicado em prol da
estrutura fsica em sua ntegra, composta de seis graus de
liberdade. Este algoritmo encontra-
se ainda em fase de reviso, por estar sendo "transcrito" do
formato em diagrama de blocos do
ambiente Simulink para a linguagem C.
Destaca-se nesta fase a importncia de se considerar os
movimentos translacionais em
funo de "X" e "Y", devido ao drift gerado pelo processo de
equilbrio do voo pairado. Este
assunto de interesse destes autores para uma reviso futura,
quando possivelmente ser
tratado de forma a se realizar estimativas dos deslocamentos em
funo das inclinaes e da
propulso em cada somatrio de momentos.
1.7 Estgio de otimizao
A otimizao de um sistema, est relacionada a diversos fatores de
anlise e estudo.
Dentre estes fatores, para este projeto relevam-se, as
determinaes, dos parmetros das
equaes de controle e suas curvas de resposta, dos coeficientes
de controle, dos coeficientes
dos filtros de sinais de sensoriamento, da repetio das simulaes
em ambiente
computacional e dos testes de campo.
Como forma de facilitar o ajuste em campo das variveis que fazem
parte do controle,
foram instalados potencimetros s entradas analgicas do
microcontrolador, em que suas
leituras representavam estas variveis, em suas devidas
escalas.
No houve necessidade de variar o equacionamento em prol da queda
de energia
armazenada na bateria.
A equalizao dos motores, de forma a deix-los com respostas
semelhantes em funo
das amplitudes das entradas aplicadas e das faixas de potncia
variadas, foi o estgio de
otimizao de mais primordial importncia para garantir o controle
do prottipo.
-
Pedro Magalhes, Nicolas Pacheco, Daniel Resende
2 CONCLUSO
A pesquisa da teoria e o entendimento, de boa parte de todo
assunto cientfico abordado
neste trabalho, no garantem alcanar um resultado timo do
sistema. Trata-se de um sistema
em que seu nico amortecimento a viscosidade dinmica do ar
atmosfrico se opondo aos
graus de liberdade da estreita estrutura. Sendo sua estabilizao
quase que exclusivamente
dependente do conjunto de variaes conjugadas dos impulsos de
seus quatro propulsores.
As longas hastes metlicas, equipadas por motores que chegam a
sete mil rotaes por
minuto, trazem para estrutura uma magnitudes de frequncias de
excitao e natural que
podem ser aproximadas pelos harmnicos gerados pelos motores, em
diversas de suas faixas
de rotao. Esta semelhana entre as frequncias natural e de
excitao, geram ressonncia. A
amplificao das oscilaes do corpo rgido dificultam relevantemente
a leitura dos sinais de
interesse do acelermetro, pois este o fenmeno de que se trata
sua sensibilidade, a taxa de
variao da velocidade. O que gera um nvel relevante de
dificuldade ao controle, pois o
funcionamento do sistema interfere em seu prprio sensoriamento.
Tema que est entre as
maiores dificuldades deste trabalho.
A iterao entre filtragem dos sinais, equacionamentos das
transformadas de unidades e
as aplicaes das tcnicas de fuso das leituras atravs de um filtro
dinmico, integram o
tratamento dos sinais. A aplicao do filtro de Kalman, por si s,
um desafio considervel.
Alcanar uma boa relao entre seus parmetros e sua implementao, no
tarefa trivial.
Outra desvantagem que se percebe ao analisar o algoritmo o tempo
computacional gasto,
sendo sua aplicabilidade a um sistema limitada pelo tempo de
processamento da unidade de
controle digital. Pois, os tempos de clculo, sada e atuao, devem
ser menores que o tempo
entre uma perturbao exgena e sua alterao real do sistema. Um
loop lento do controlador
pode inviabilizar a necessria resposta a um sistema
agressivo.
De forma geral, a desenvoltura no alcance de solues, que foi
estabelecida durante o
processo de confeco deste prottipo, indica que h possibilidade
de sucesso no tema de
enfoque do ttulo. Pois foi possvel o controle de voo pairado
para quatro graus de liberdade
utilizando-se a Teoria de Controle Clssica (PID). Contudo, o
resultado um sistema que
contm uma faixa de atuao em voo limitada se comparado um
quadcopter implementado
sob um controle no estacionrio, como Lgicas Fuzzy ou Redes
Neurais.
-
CONTROLE DE ESTABILIDADE DE AEROMODELO TIPO QUADCOPTER AUTMATO
EM VOO
PAIRADO POR LEI DE CONTROLE
REFERNCIAS
Abbasi E., Mahjoob M. J. & Yazdanpanah R., 2013. Controlling
of Quadrirotor UAV Using a
Fuzzy System for Tuning the PID Gains in Hovering Mode. School
of Mechanical
Engineering, University of Tehran, Iran.
Beard, R. W, 2008. Quadrirotor dynamics and control. Brigham
Young University.
Bouabdallah, Samir, 2007. Design and Control of Quadrirotors
with Application to
Autonomous Flying. cole Polytechnique Fdrale de Lausanne.
Lausanne.
eCalc. Multicopter Calculator. Diponvel em:
. Acesso em: 19 apr. 2014.
Mccormick, W. Barnes, 1995. Aeronautics and Flight Mechanics.
New York, Wiley, 2 ed.
Rodrigues, Jos, 1964. Aeromodelismo terico e prtico. Servio de
Publicaes da
Mocidade Portuguesa.
Yin Yan Model 2014. Manual E-Max CF2822. Disponvel em:
. Acesso em: 20 apr
2014.