Embed Size (px)
Citation preview
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 1/96
MICROCONTROLADORES
Prof. Carlos Henrique [email protected]
Periféricos
Universidade Federal de Santa Maria
Departamento de Processamento
de Energia Elétrica
Engenharia de Controle e Automação
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 2/96
Microcontroladores 2
Objetivos• Compreender como é feita a interface
entre microcontrolador e o mundo externo
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 3/96
Microcontroladores 3
Tema e conteúdo• UNIDADE 3 – MODOS DE ENTRADA E SAÍDA
3.1 – Modos de I/O.3.2 – Barramento.3.3 – Dispositivos periféricos.3.4 – Interrupções.
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 4/96
Microcontroladores 4
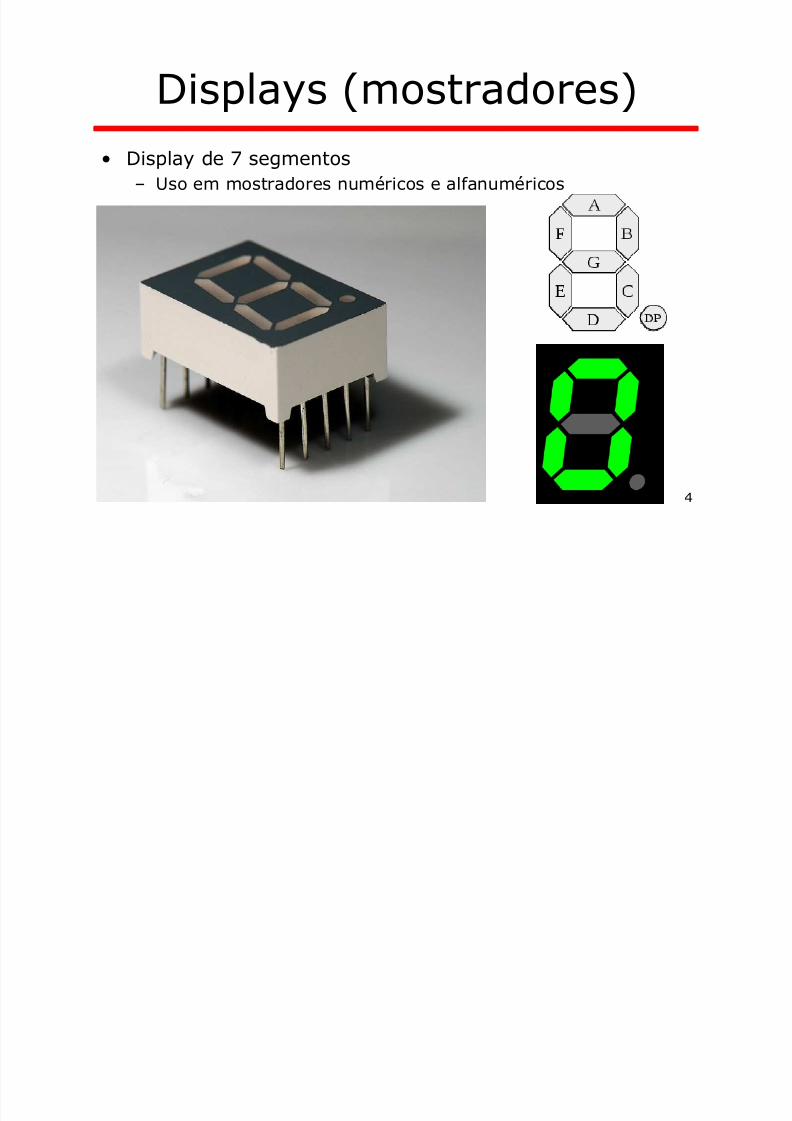
Displays (mostradores)• Display de 7 segmentos
– Uso em mostradores numéricos e alfanuméricos
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 5/96
Microcontroladores 5
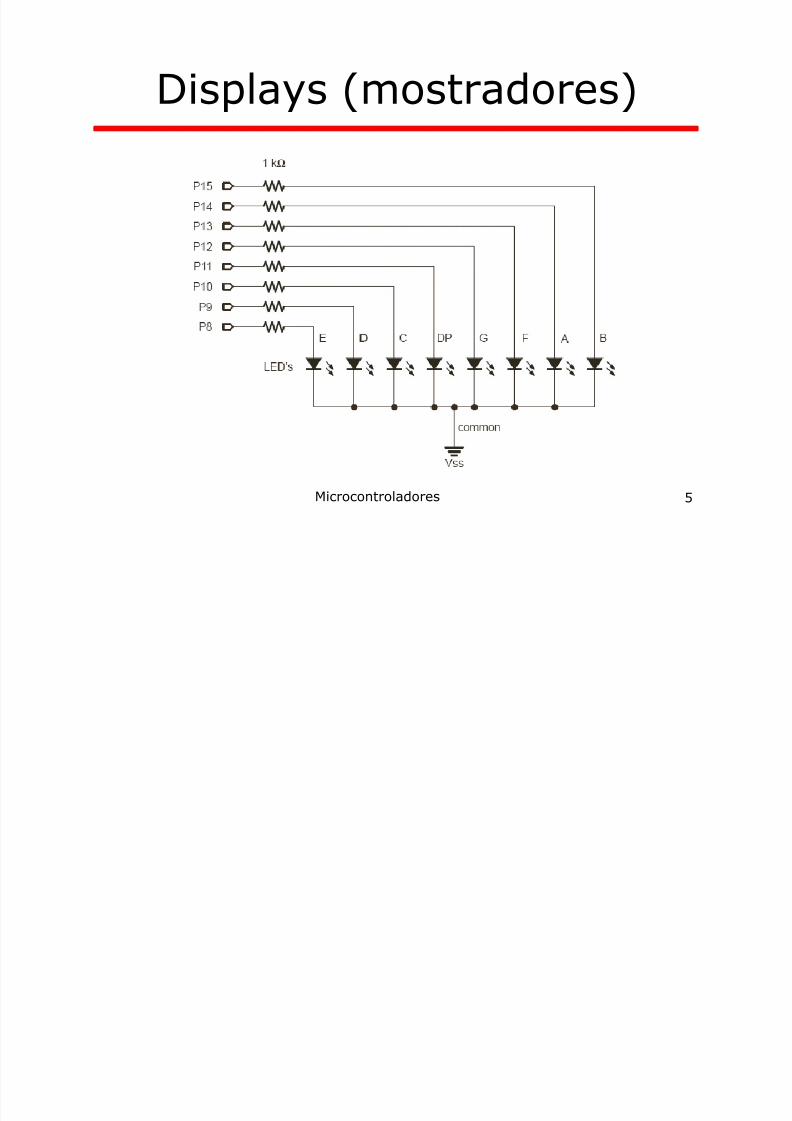
Displays (mostradores)
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 6/96
Microcontroladores 6
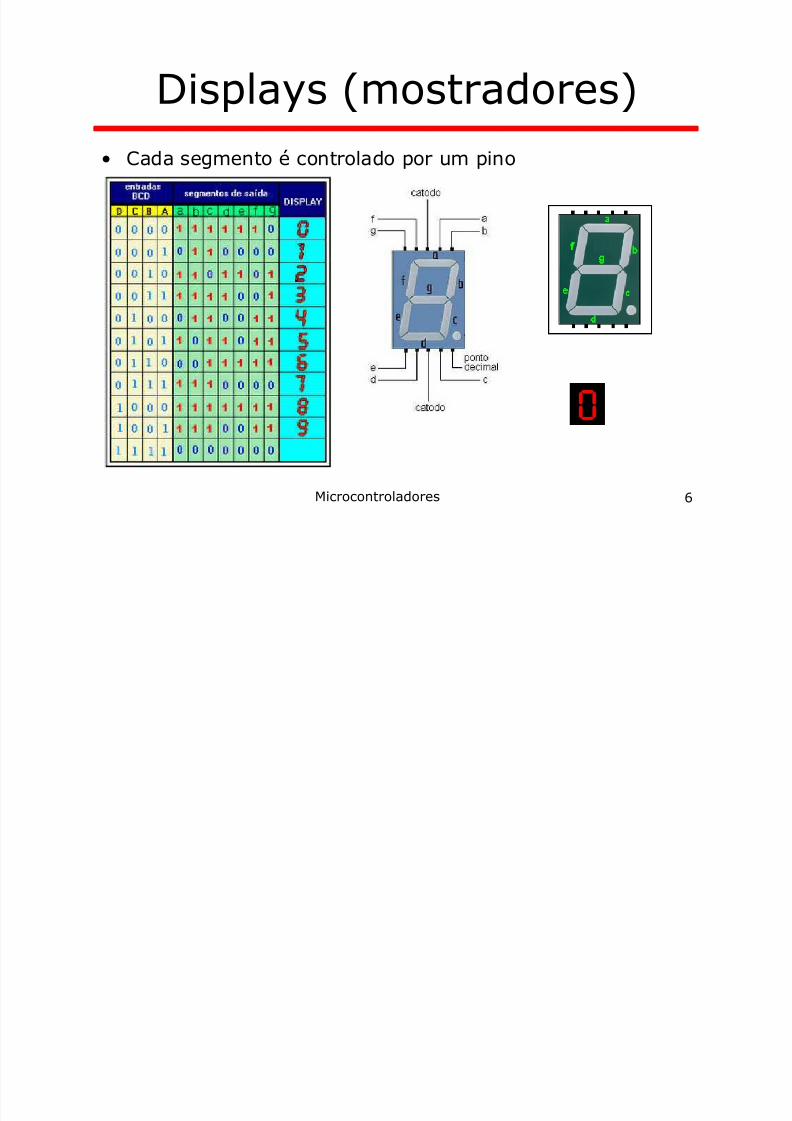
Displays (mostradores)• Cada segmento é controlado por um pino
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 7/96
Microcontroladores 7
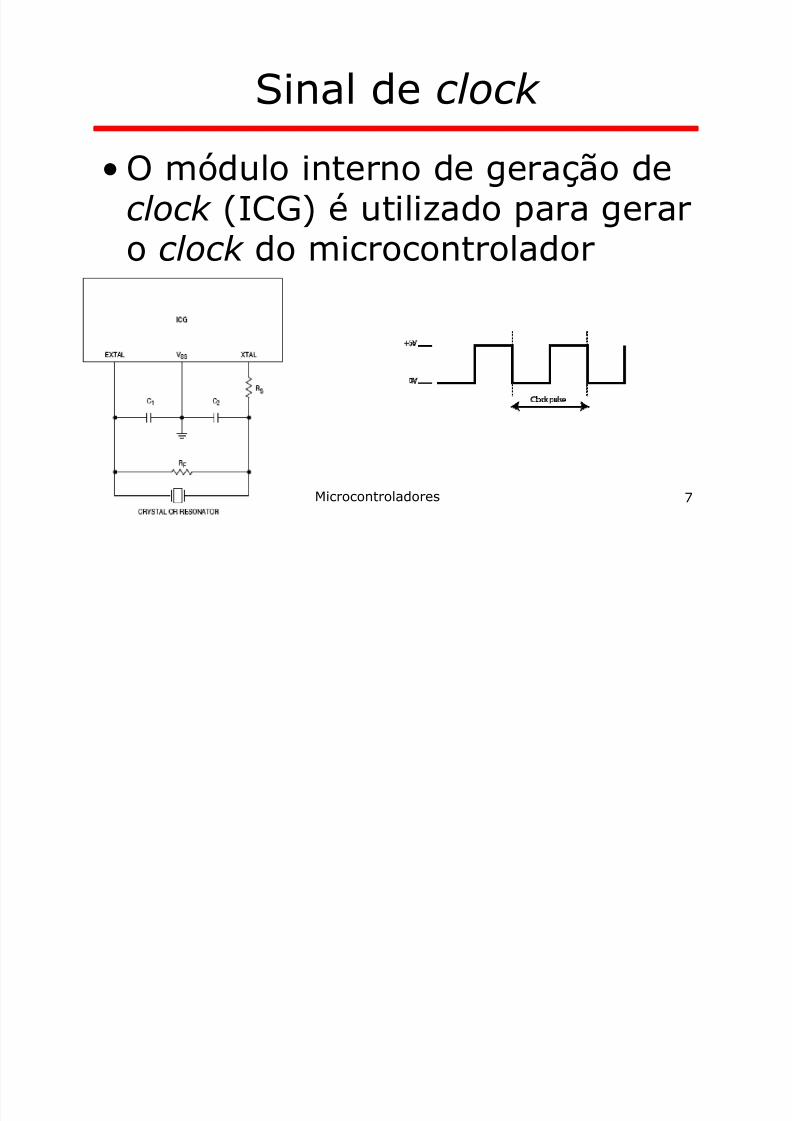
Sinal de clock
• O módulo interno de geração declock (ICG) é utilizado para geraro clock do microcontrolador

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 8/96
Microcontroladores 8
Sinal de clock • Várias possibilidades de fonte primária
para o clock :– Cristal ou ressonador entre 32 kHz e 100 kHz– Cristal ou ressonador entre 1 MHz e 16 MHz– Clock Externo
– Gerador de referência interna
• A configuração padrão do modulo ICGutiliza a referência interna de clock .
• Possui FLL (Frequency-locked loop) paragerar clock de barramento entre 4 MHz e25 MHz

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 9/96
Microcontroladores 9
Sinal de clock
• Configuração

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 10/96
Microcontroladores 10
Sinal de clock
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 11/96
Microcontroladores 11
Temporizador (TPM)• Existem três funções principais para o módulo temporizador
de um microcontrolador:
–Estouro de Tempo
–Modo Captura de Entrada
–PWM (Modulação por largura de pulso)
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 12/96
Microcontroladores 12
Estouro de Tempo• Esta função do periférico de temporização possibilita criar
tempos determinados para um certa tarefa ser realizada.
– Ex: Contagem de tempo de um relógio, atualização de display,varredura de portas, etc
• A configuração dessa função é realizada através dosregistradores TPMxSC, TPMxMODH e TPMxMODL.
Alguns microcontroladores possuem mais de um módulo temporizador.Neste caso, o “X” deve ser substituído pelo número do módulo TPM.Ex.: TPM1SC, TPM2SC, …

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 13/96
Microcontroladores 13
Estouro de Tempo• Registradores TPMxSC, TPMxMODH e TPMxMODL.

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 14/96
Microcontroladores 14
Estouro de Tempo• Registrador TPMxSC
O VALOR CONTADO PELO TEMPORIZADOR FICA ARMAZENADO EMTPMxCNT (TPMxCNTH:TPMxCNTL)

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 15/96
Microcontroladores 15
Estouro de Tempo• Registradores TPMxMODH e TPMxMODL.
O valor contado fica armazaenado emTPMxCNT (TPMxCNTH:TPMxCNTL)
TPMxCNT é comparado com TPMxMOD
Quando TPMxCNT == TPMxMOD, bit TOF = 1
TOF Timer overflow

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 16/96
Microcontroladores 16
Estouro de Tempo• Exemplo

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 17/96
Microcontroladores 17
PWM• Modulação por largura de pulso:
Razão cíclica:razão entre tempo que o sinal permanece alto (lógico 1) pelo tempo total de um período

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 18/96
Microcontroladores 18
PWM assimétrico
Contador
Período
Comparador
Sinal de saída
TPWM
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 19/96
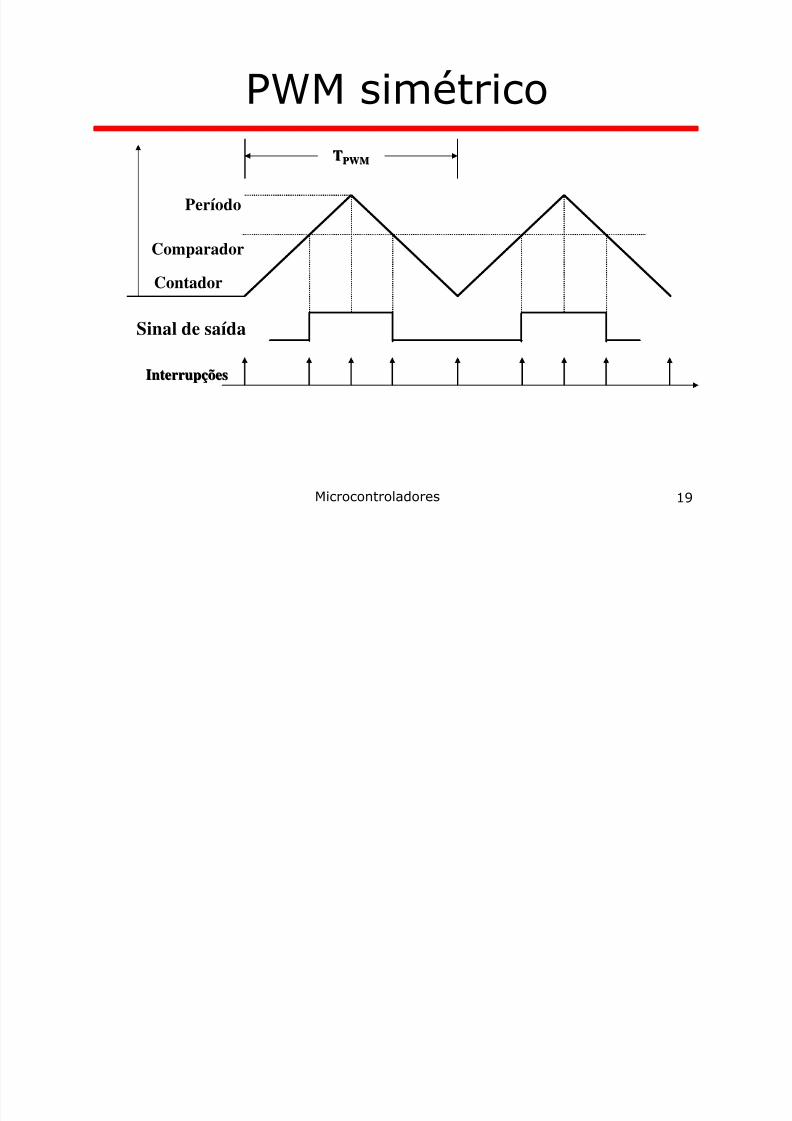
Microcontroladores 19
PWM simétricoTTPWMPWM
InterrupInterrupççõesões
Contador
Período
Comparador
Sinal de saída
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 20/96
Microcontroladores 20
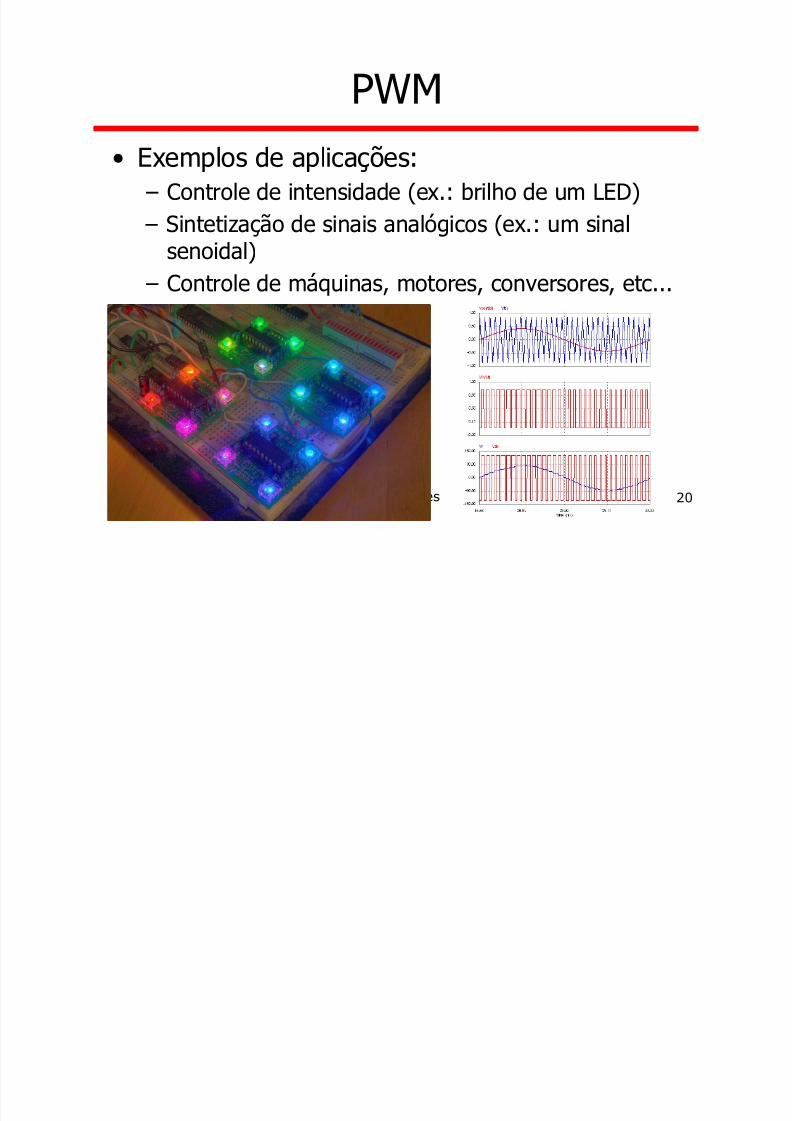
PWM• Exemplos de aplicações:
– Controle de intensidade (ex.: brilho de um LED) – Sintetização de sinais analógicos (ex.: um sinal
senoidal)
– Controle de máquinas, motores, conversores, etc...
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 21/96
Microcontroladores 21
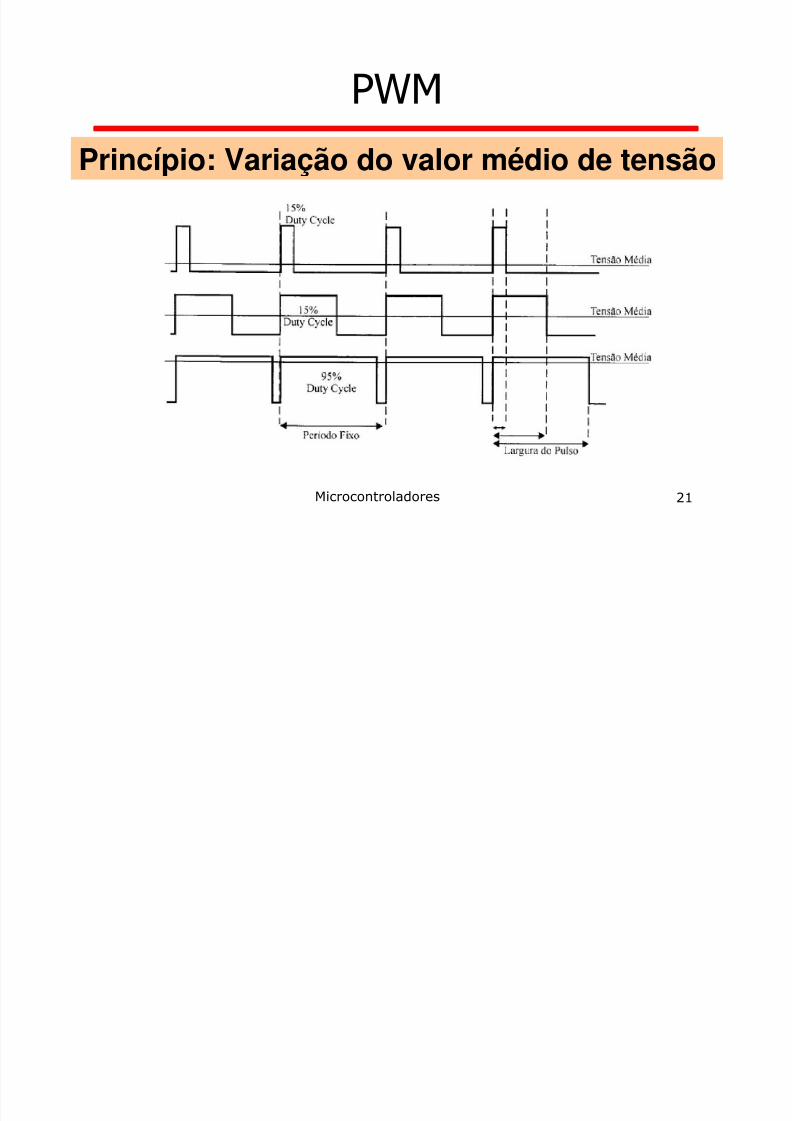
PWMPrincípio: Variação do valor médio de tensão
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 22/96
Microcontroladores 22
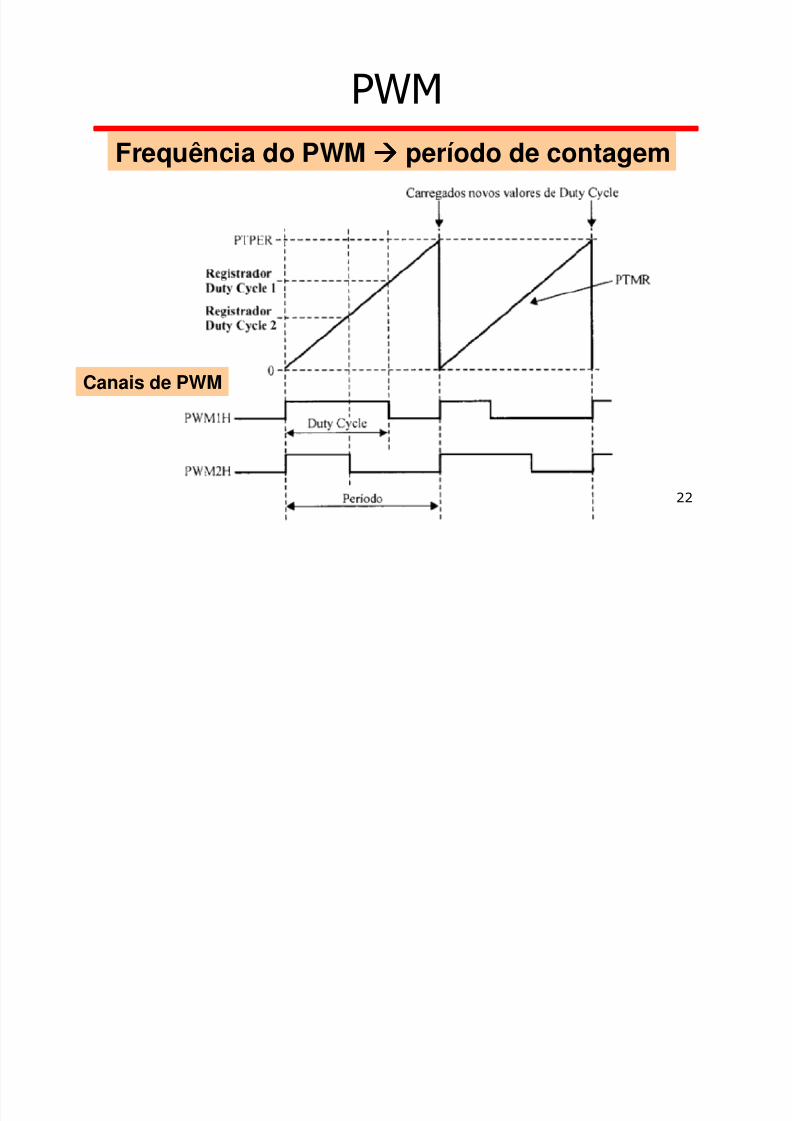
PWMFrequência do PWM período de contagem
Canais de PWM
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 23/96
Microcontroladores 23
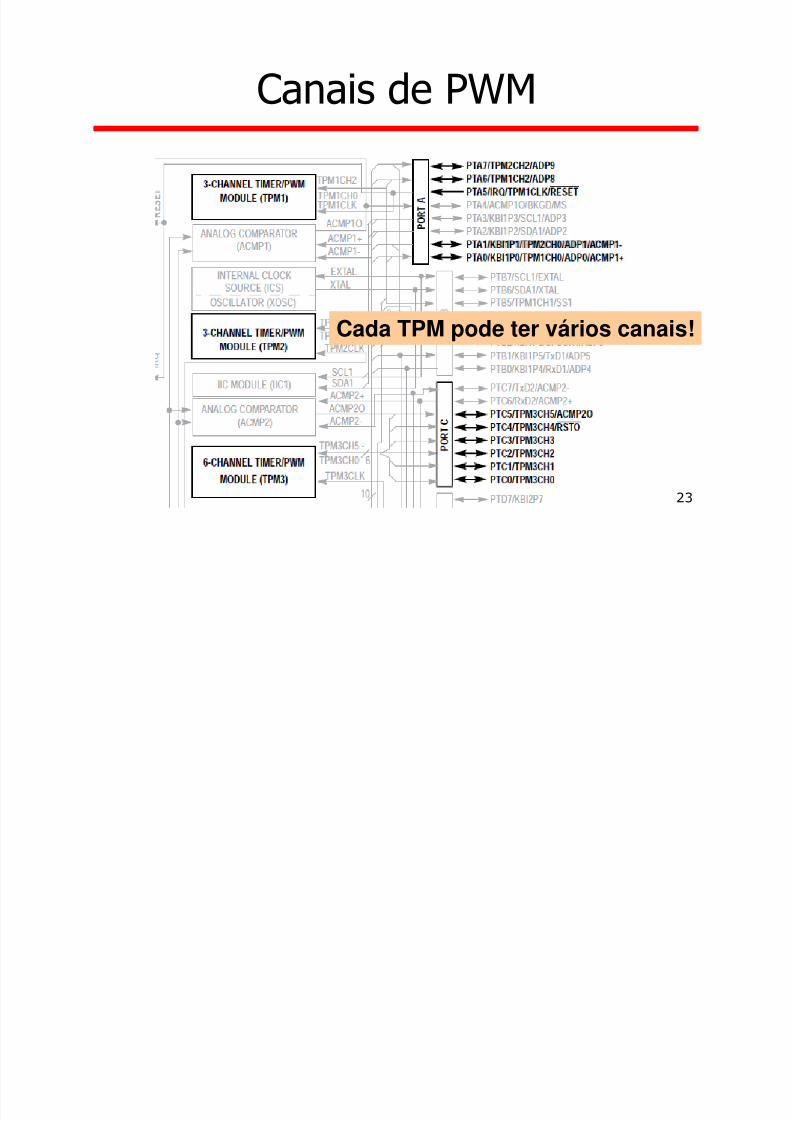
Canais de PWM
Cada TPM pode ter vários canais!

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 24/96
Microcontroladores 24
Configuração de PWM

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 25/96
Microcontroladores 25
Configuração de PWM
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 26/96
Microcontroladores 26
Registradores de PWM• Registradores do temporizador:
– Controle : TPMxSC– Contador : TPMxCNT– Período (módulo) : TPMxMOD
• Mais registradores de configuração doscanais:– Controle: TPMxCnSC
– Comparador: TPMxCnV– Pino de saída: TPMxCHn
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 27/96
Microcontroladores 27
Captura de entrada• Neste modo, quando ocorre uma borda de
descida, borda de subida ou ambas (dependendoda configuração), o microcontrolador copia oconteúdo do registrador de contagemTPMxCNTH:TPMxCNTL
para os registradoresdo canal, TPMxCnVH:TPMxCnVL
• Exemplos de aplicação: Decodificação de temposem controles RF, determinação de velocidadeatravés de sensores na roda, etc.
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 28/96
Microcontroladores 28
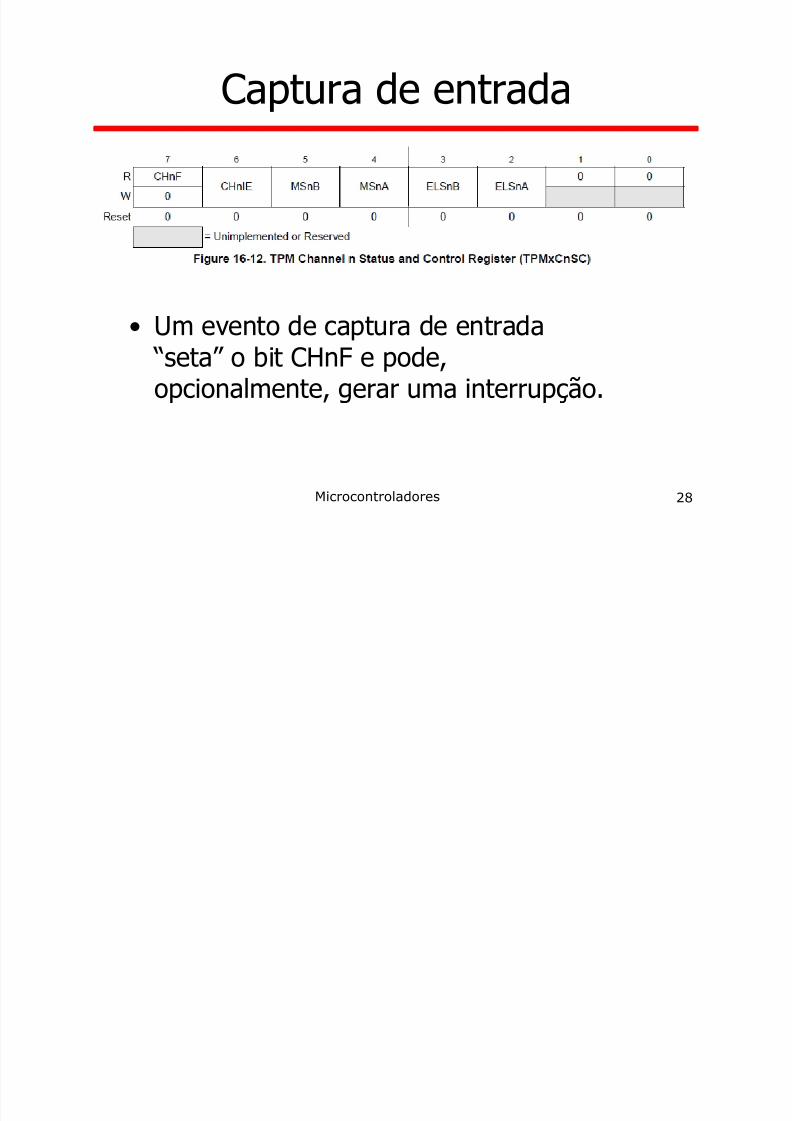
Captura de entrada
• Um evento de captura de entrada “seta” o bit CHnF e pode,
opcionalmente, gerar uma interrupção.

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 29/96
Microcontroladores 29
Teclado
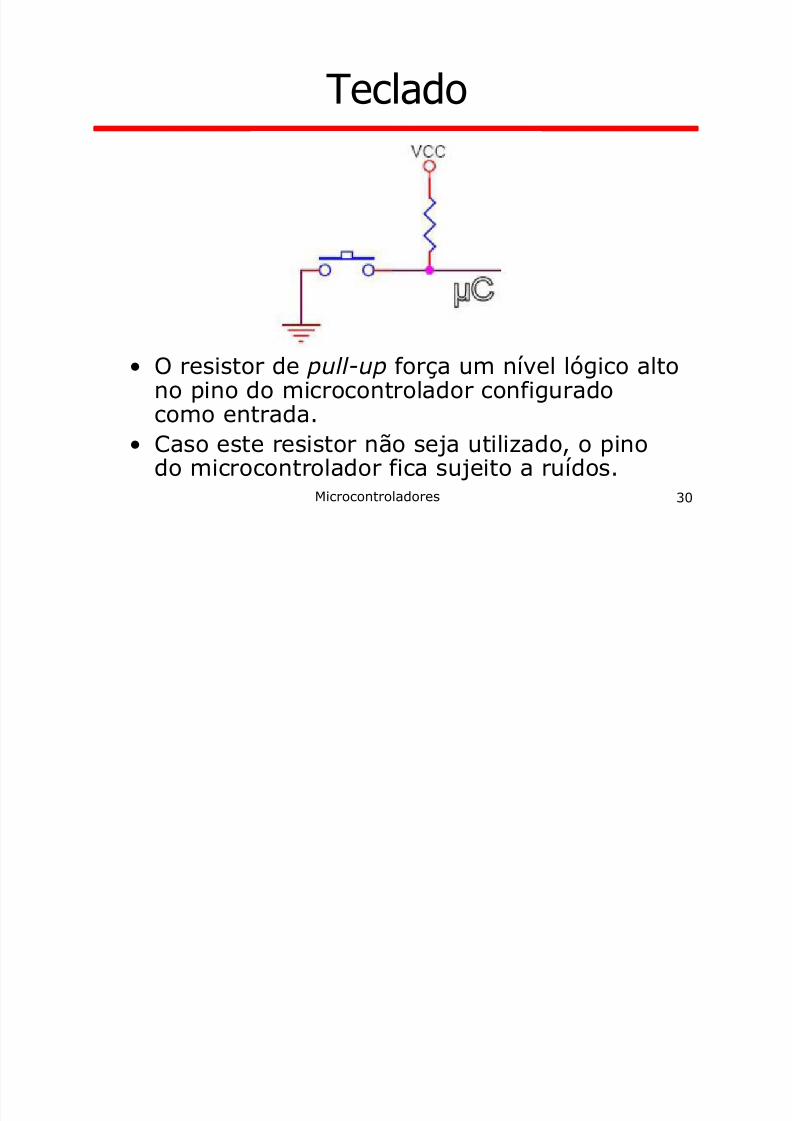
• As chaves mecânicas normalmenteapresentam a configuração demonstrada aoserem conectadas ao pino de ummicrocontrolador
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 30/96
Microcontroladores 30
Teclado
• O resistor de pull-up força um nível lógico alto
no pino do microcontrolador configuradocomo entrada.• Caso este resistor não seja utilizado, o pino
do microcontrolador fica sujeito a ruídos.

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 31/96
Microcontroladores 31
Teclado

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 32/96
Microcontroladores 32
Teclado
• Pinos de teclado são identificados por KBIxPn

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 33/96
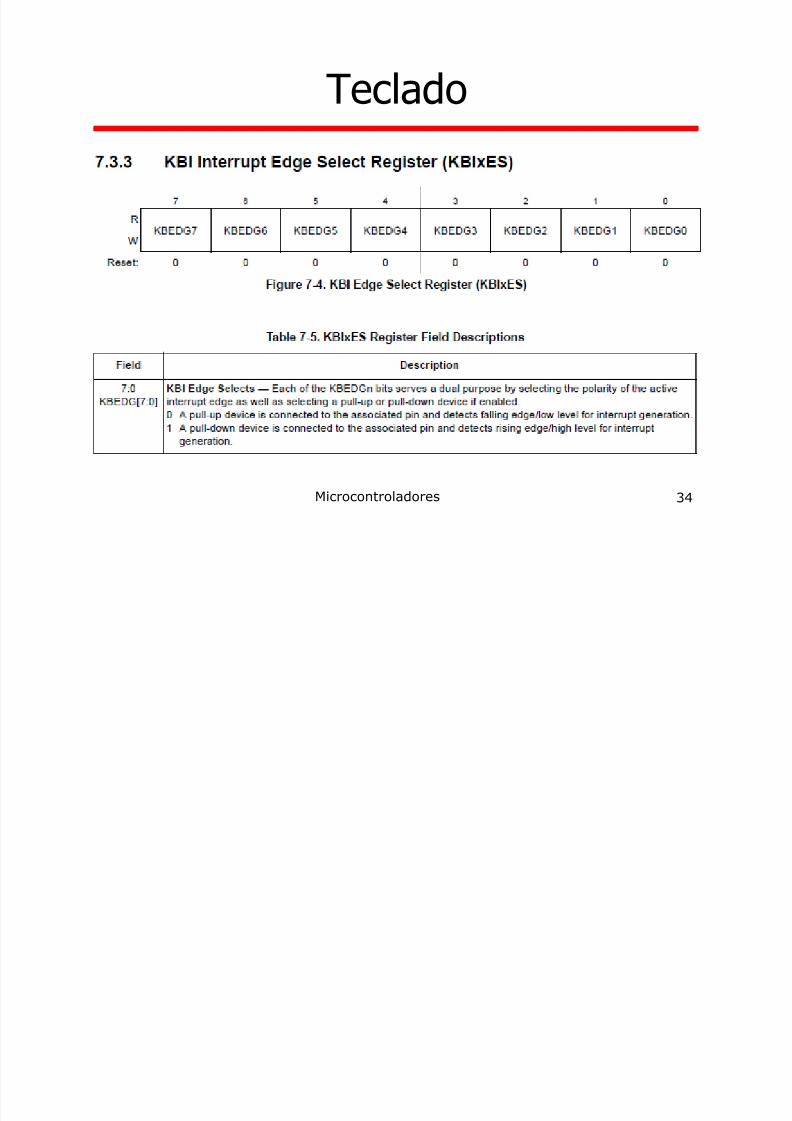
Microcontroladores 33
Teclado
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 34/96
Microcontroladores 34
Teclado
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 35/96
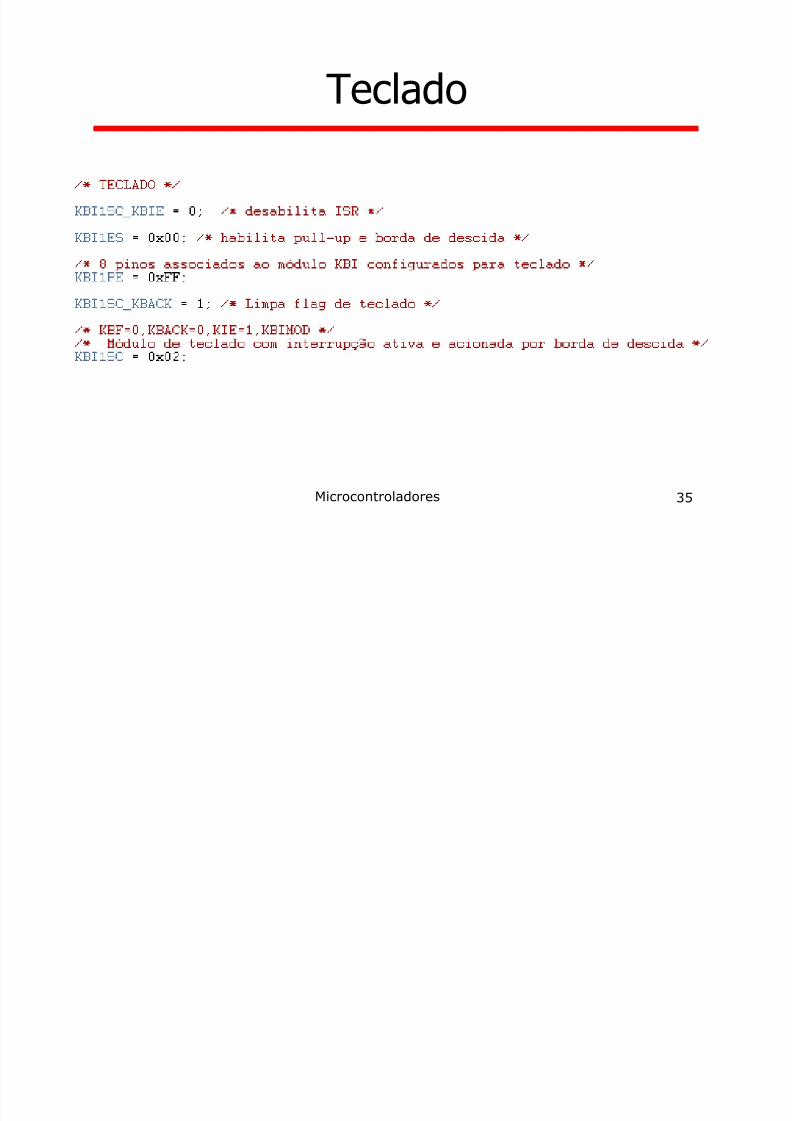
Microcontroladores 35
Teclado
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 36/96
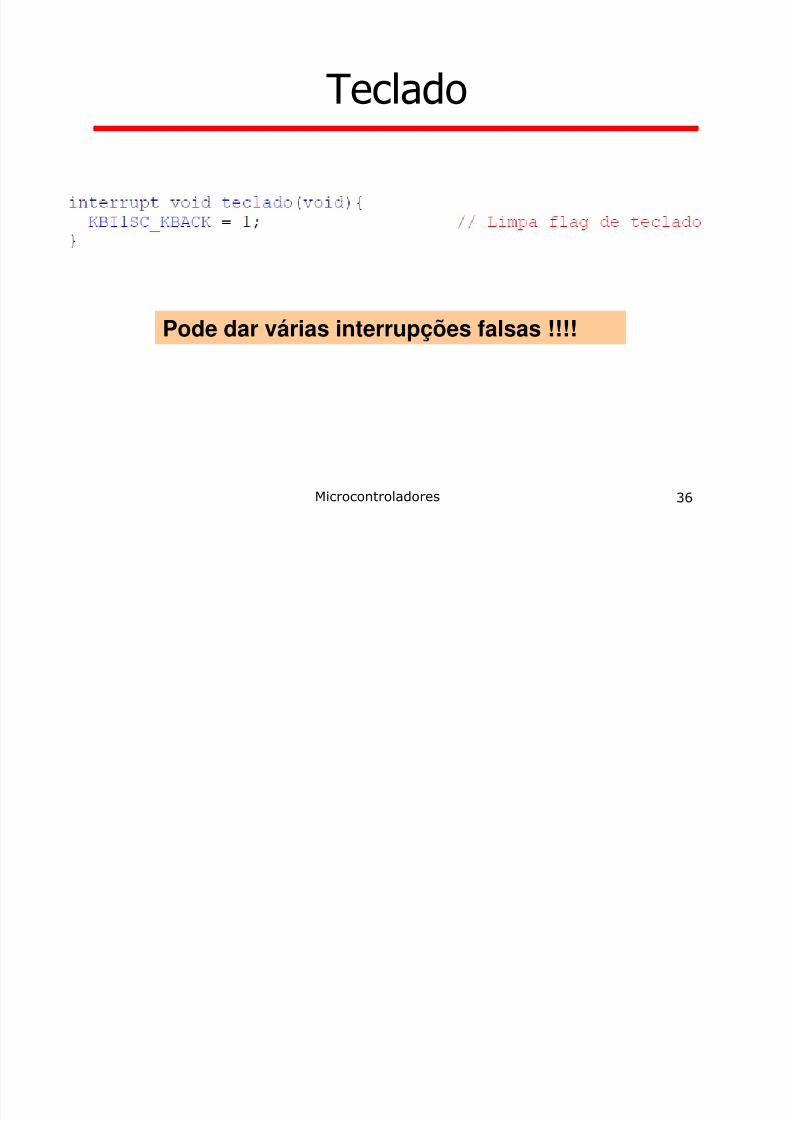
Microcontroladores 36
Teclado
Pode dar várias interrupções falsas !!!!

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 37/96
Microcontroladores 37
Teclado
• As chaves mecânicas estãosujeitas a vibrações quepodem resultar emmúltiplos sinais deacionamento falsos.

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 38/96
Microcontroladores 38
TecladoUsando um temporizador é possível “filtrar”
as falsas interrupções !!!! (deboucing )
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 39/96
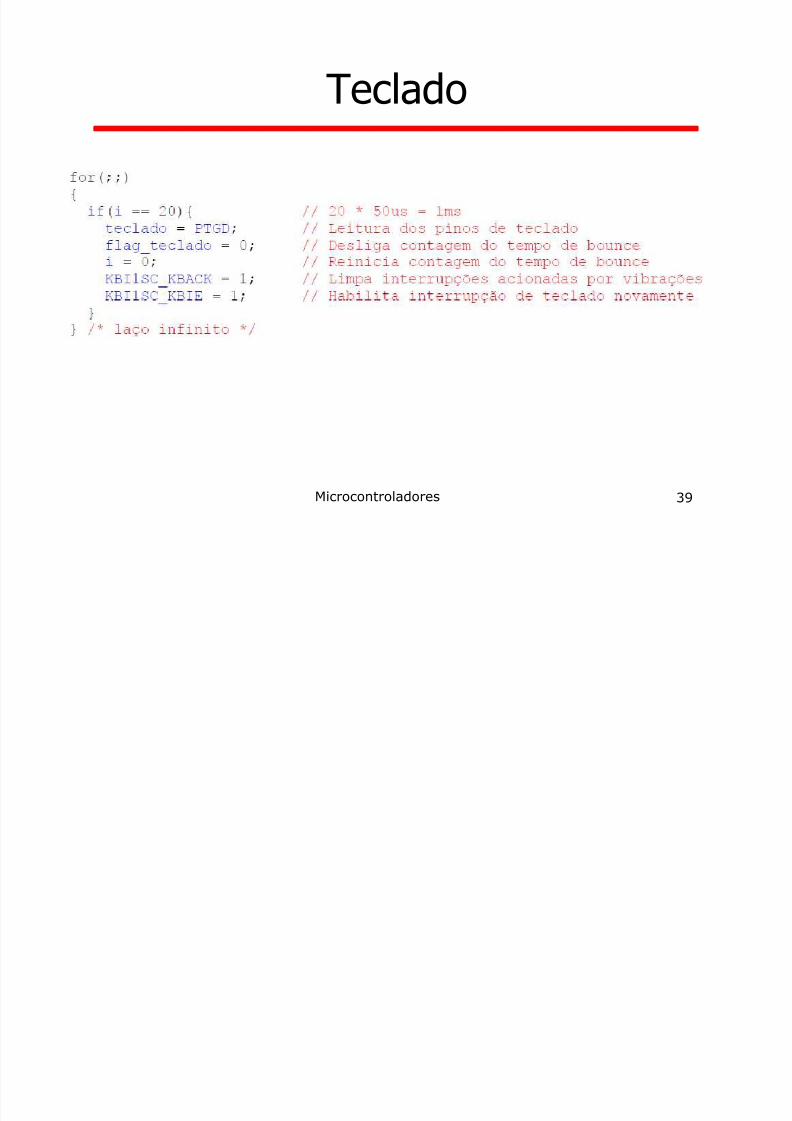
Microcontroladores 39
Teclado
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 40/96
Microcontroladores 40
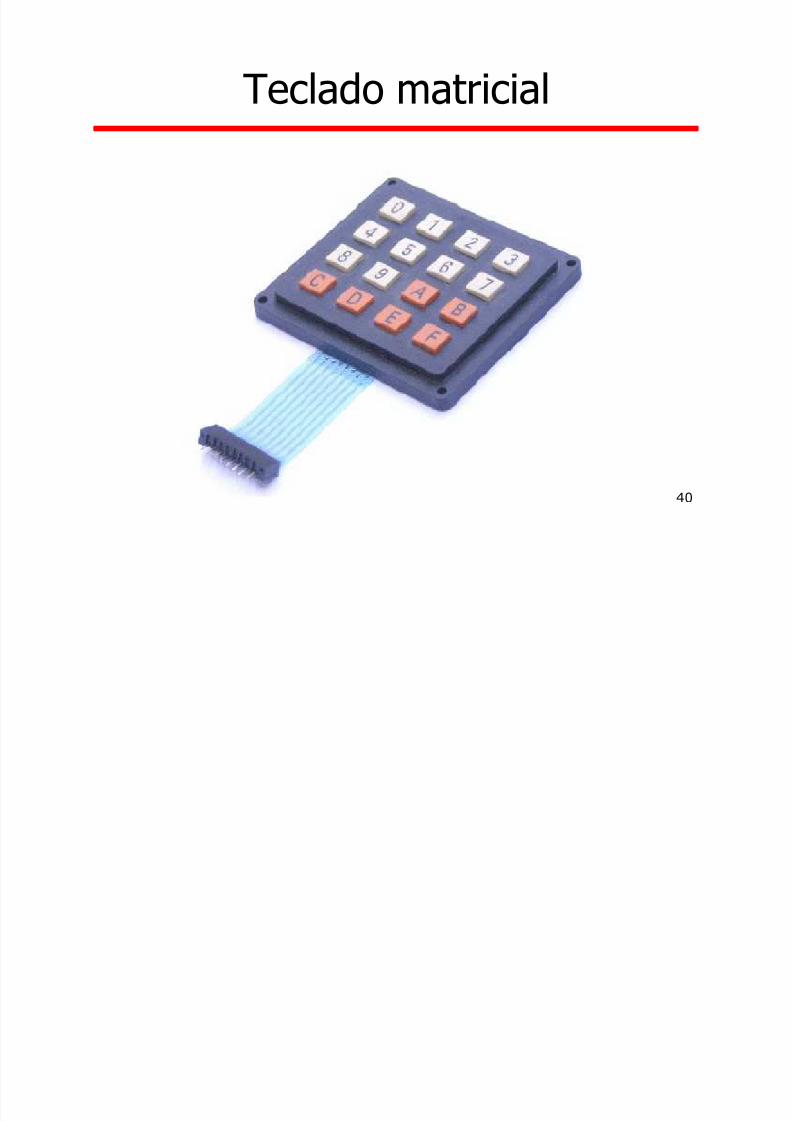
Teclado matricial

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 41/96
Microcontroladores 41
Teclado matricial

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 42/96
Microcontroladores 42
Teclado matricial
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 43/96
Microcontroladores 43
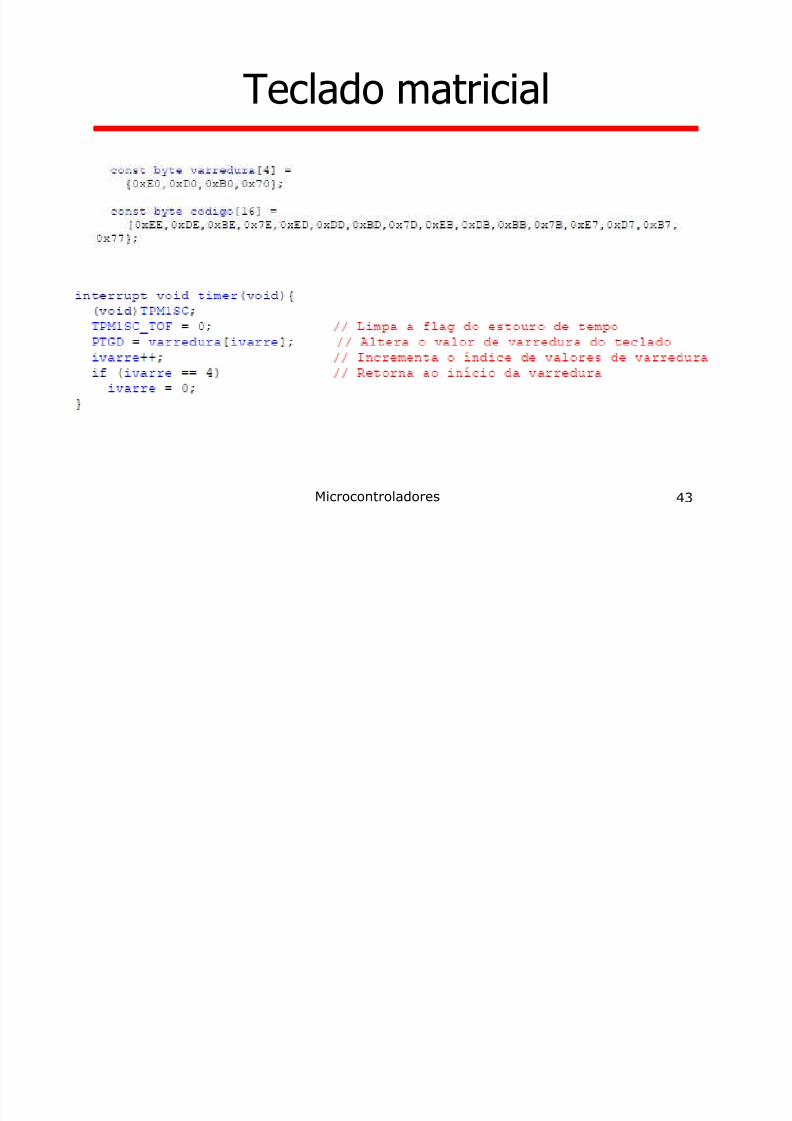
Teclado matricial
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 44/96
Microcontroladores 44
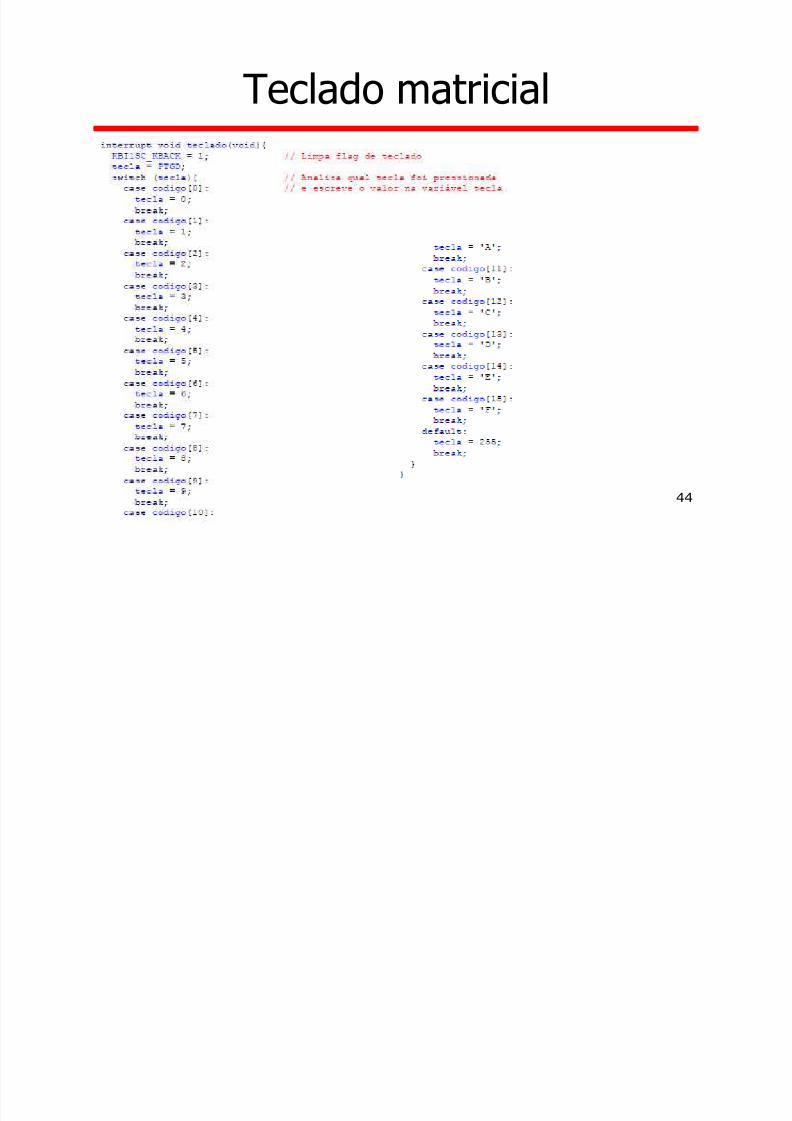
Teclado matricial
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 45/96
Microcontroladores 45
Conversor analógico-digital (A/D)• Os sinais encontrados no mundo real
são contínuos (ou analógicos, poisvariam no tempo de forma contínua),como, por exemplo: a intensidade
luminosa de um ambiente que semodifica com a distância, a aceleraçãode um carro de corrida, a temperaturaem um ambiente, etc.
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 46/96
Microcontroladores 46
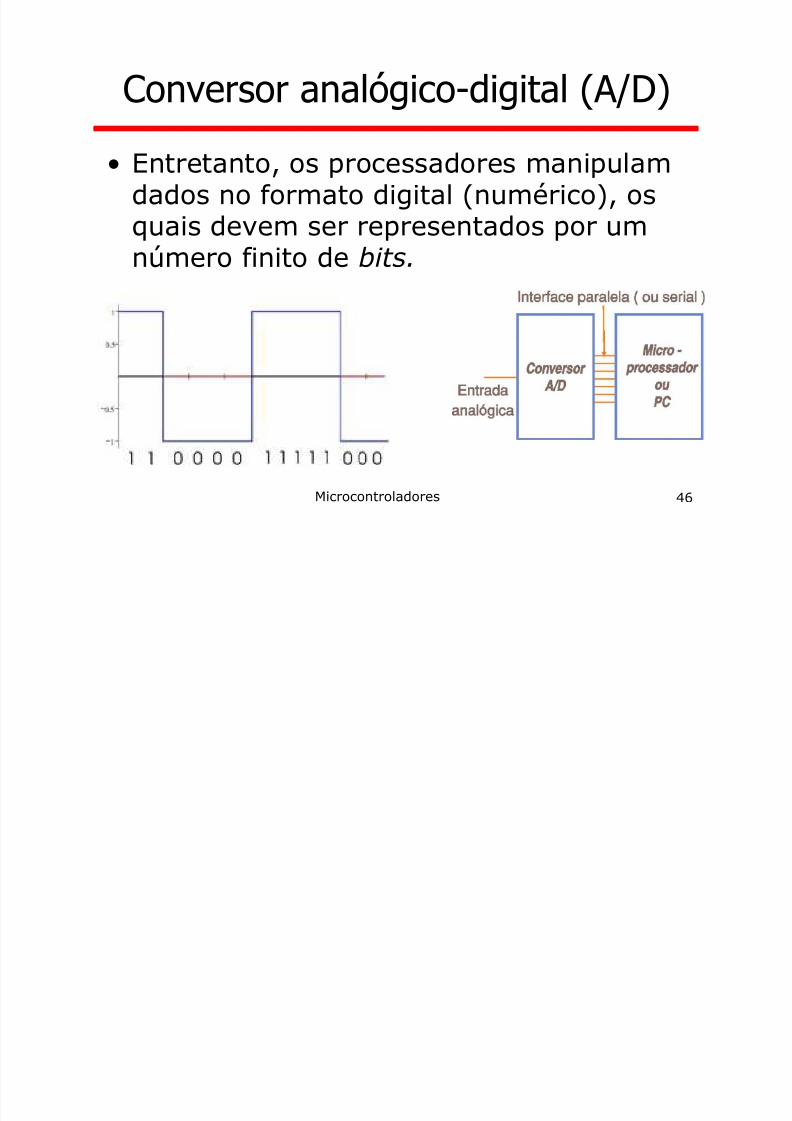
Conversor analógico-digital (A/D)• Entretanto, os processadores manipulam
dados no formato digital (numérico), osquais devem ser representados por umnúmero finito de bits.
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 47/96
Microcontroladores 47
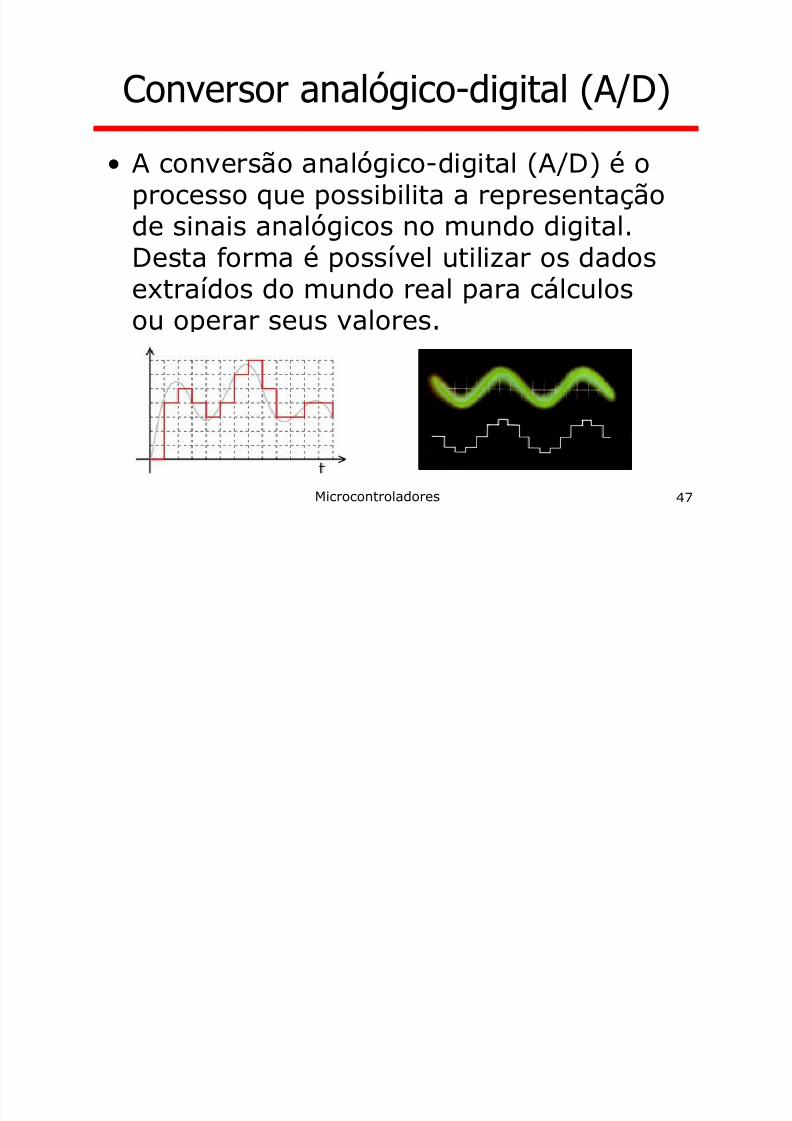
Conversor analógico-digital (A/D)• A conversão analógico-digital (A/D) é o
processo que possibilita a representaçãode sinais analógicos no mundo digital.Desta forma é possível utilizar os dadosextraídos do mundo real para cálculosou operar seus valores.
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 48/96
Microcontroladores 48
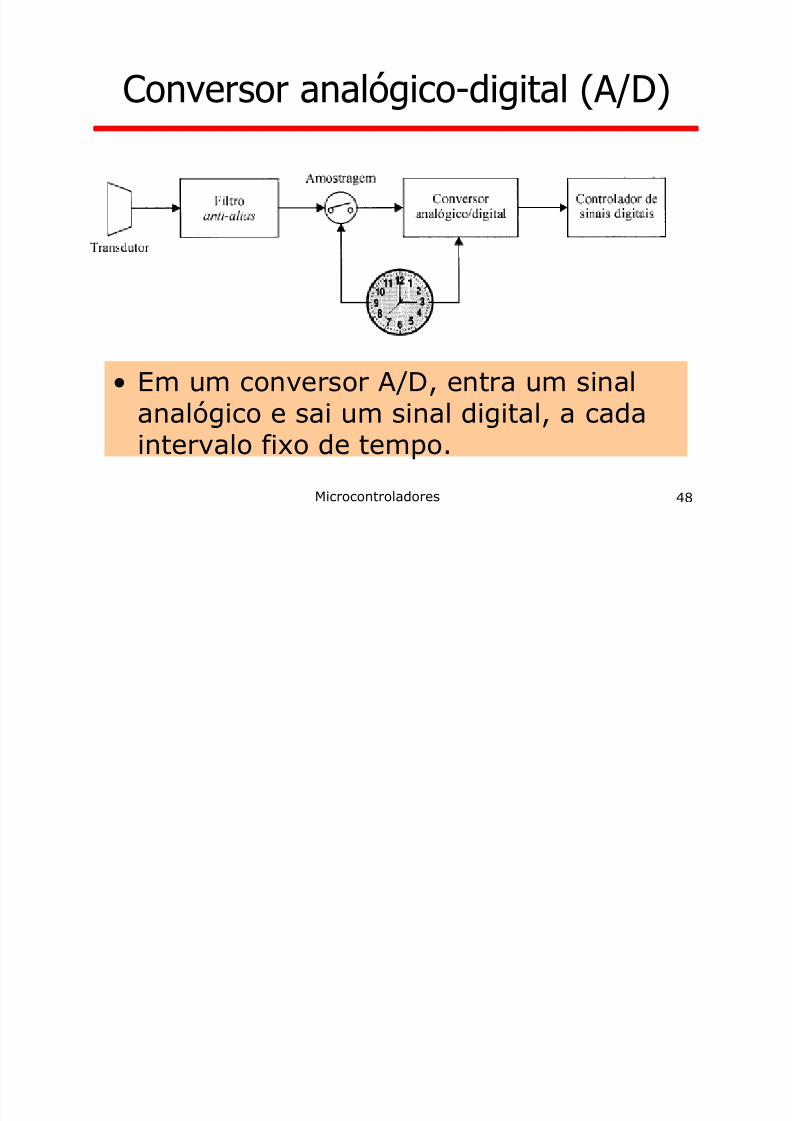
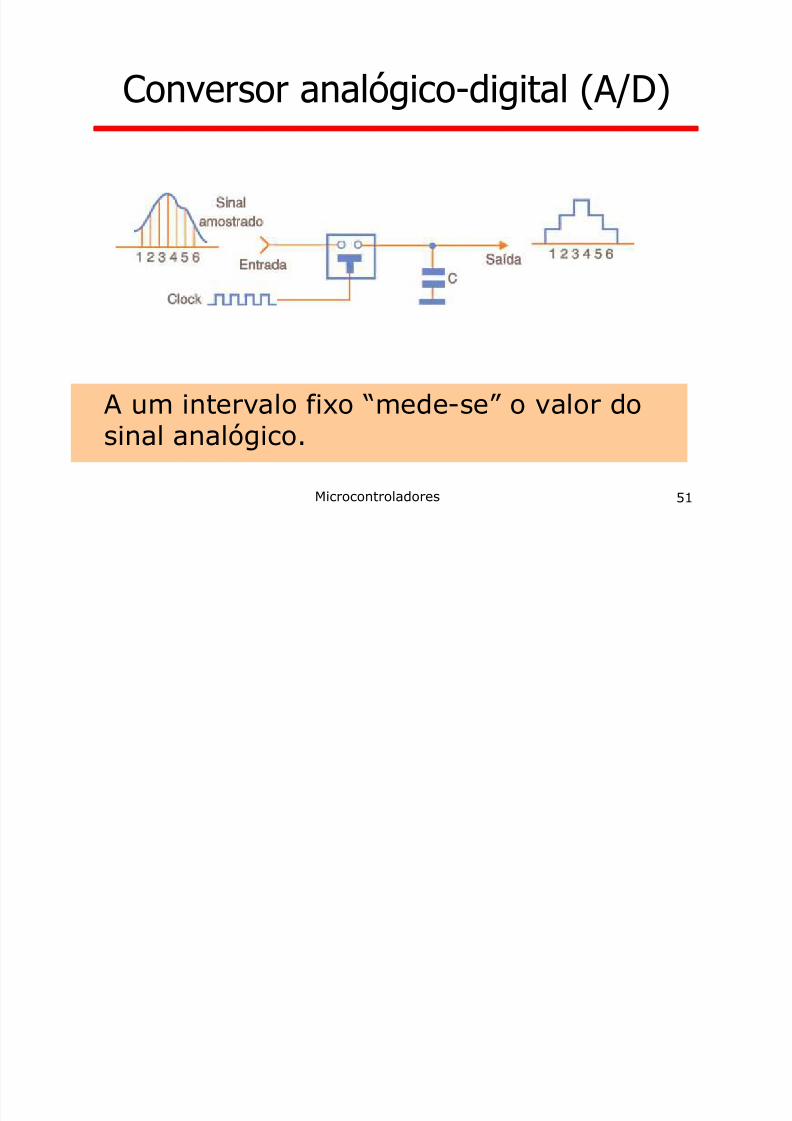
Conversor analógico-digital (A/D)
• Em um conversor A/D, entra um sinalanalógico e sai um sinal digital, a cadaintervalo fixo de tempo.
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 49/96
Microcontroladores 49
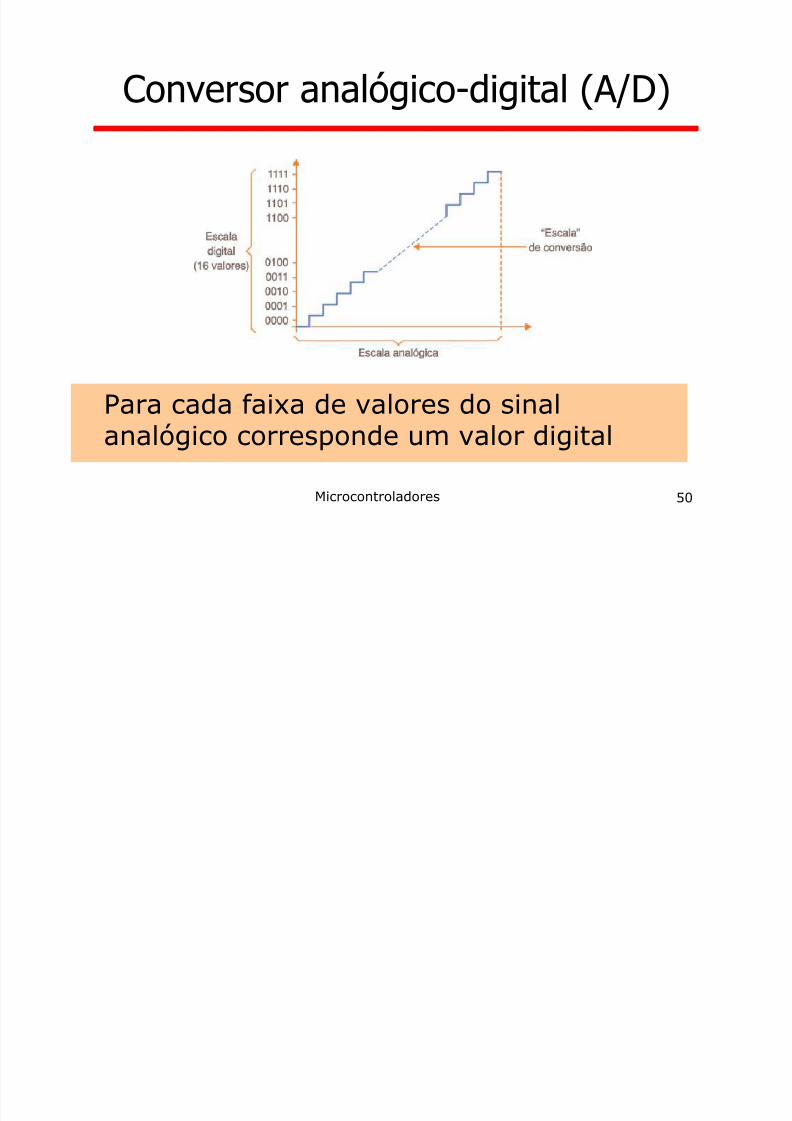
Conversor analógico-digital (A/D)A informação digital é diferente de sua forma
original contínua em dois aspectosfundamentais:
● É amostrada porque é baseada em amostragens,ou seja, são realizadas leituras em um intervalo fixode tempo no sinal contínuo;
● É quantizada porque é atribuído um valorproporcional a cada amostra.
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 50/96
Microcontroladores 50
Conversor analógico-digital (A/D)
Para cada faixa de valores do sinalanalógico corresponde um valor digital
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 51/96
Microcontroladores 51
Conversor analógico-digital (A/D)
A um intervalo fixo “mede-se” o valor dosinal analógico.

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 52/96
Microcontroladores 52
Conversor analógico-digital (A/D)• Características importantes de um
conversor A/D:
– Freqüência de amostragem (Hertz - Hz )
• Define o intervalo de tempo entre amostrasconsecutivas
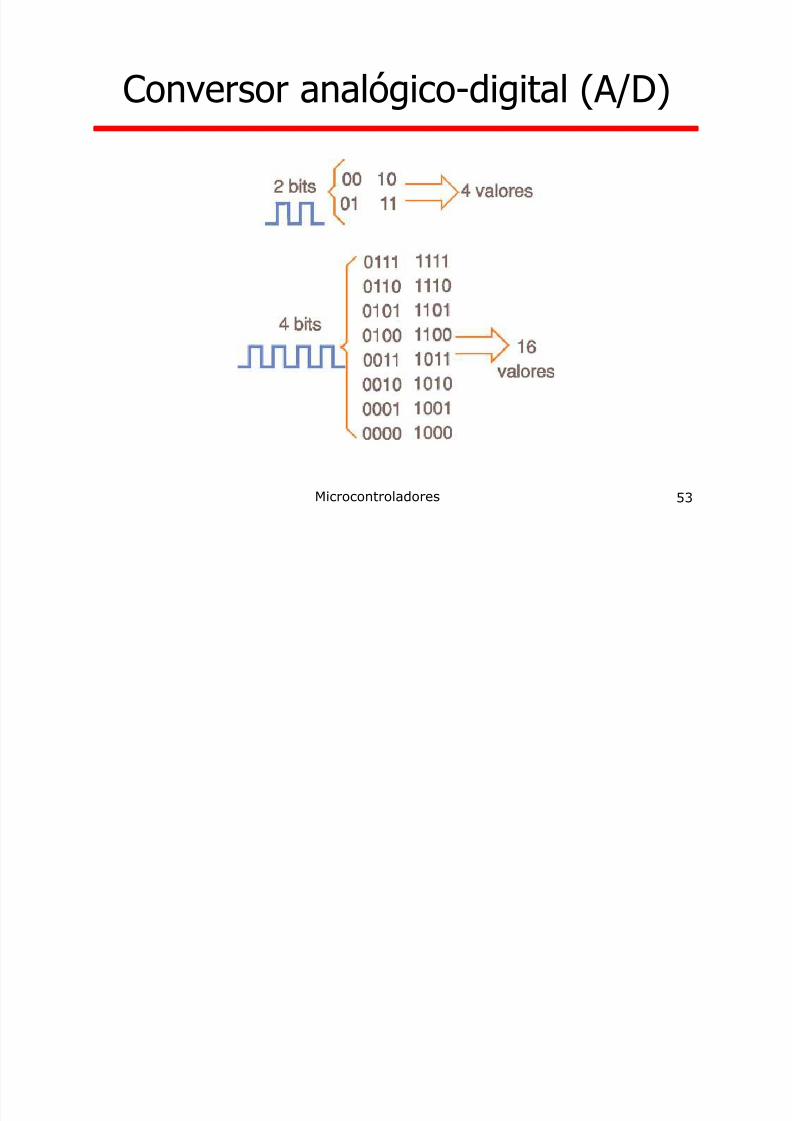
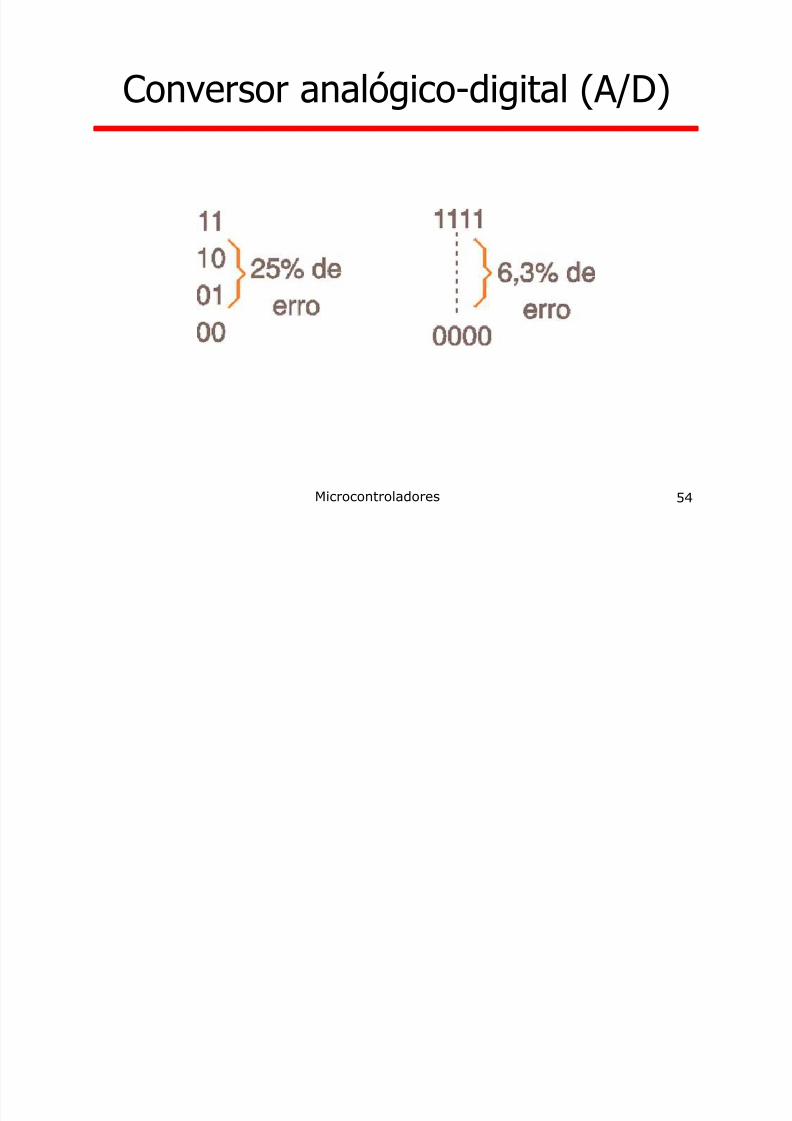
– Resolução (número de bits)• Define a capacidade de representação do valor
quantizado em um valor numérico.
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 53/96
Microcontroladores 53
Conversor analógico-digital (A/D)
ó
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 54/96
Microcontroladores 54
Conversor analógico-digital (A/D)
ló d l ( / )

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 55/96
Microcontroladores 55
Conversor analógico-digital (A/D)
C ló i di i l (A/D)
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 56/96
Microcontroladores 56
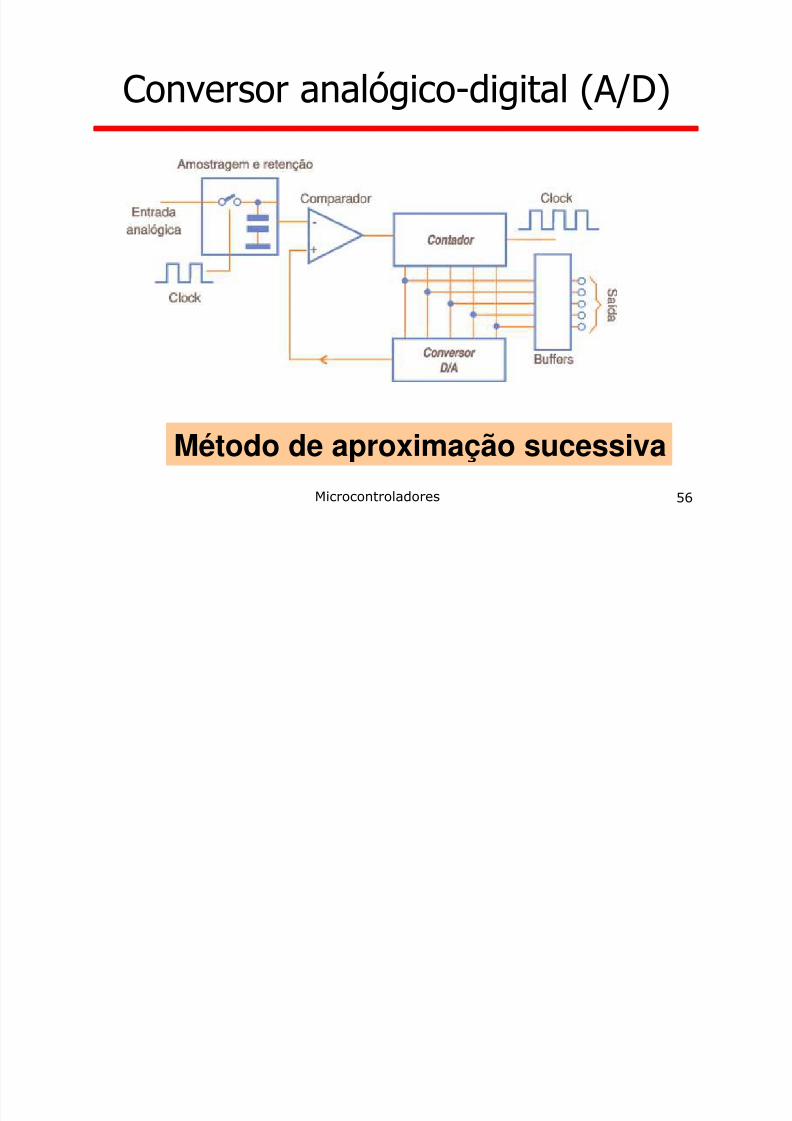
Conversor analógico-digital (A/D)
Método de aproximação sucessiva

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 57/96
Microcontroladores 57
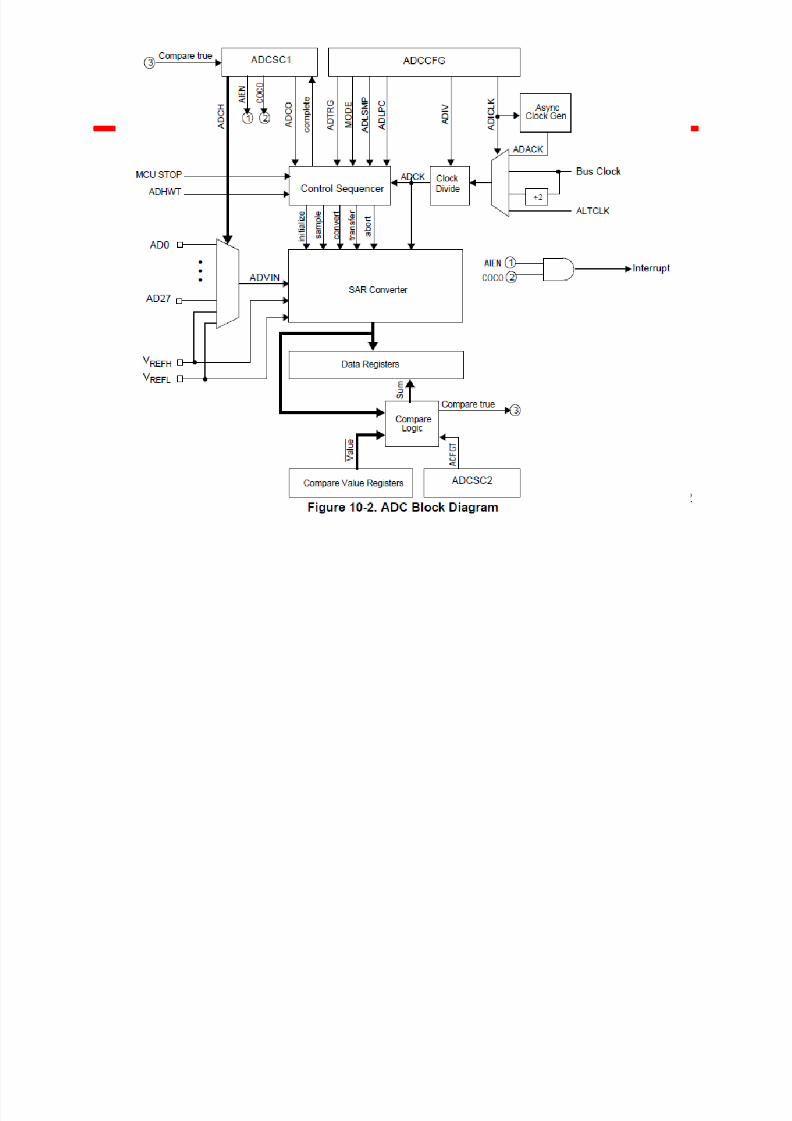
Conversor A/D – HCS08• Cada microcontrolador normalmente
possui um conversor A/D (pode ter mais).
• Este conversor é compartilhado por
diversas entradas analógicas (canais)
• Porém apenas um canal pode ser
convertido de cada vez (usa-se um MUX).

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 58/96
Microcontroladores 58
Conversor A/D – HCS08
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 59/96
Microcontroladores 59
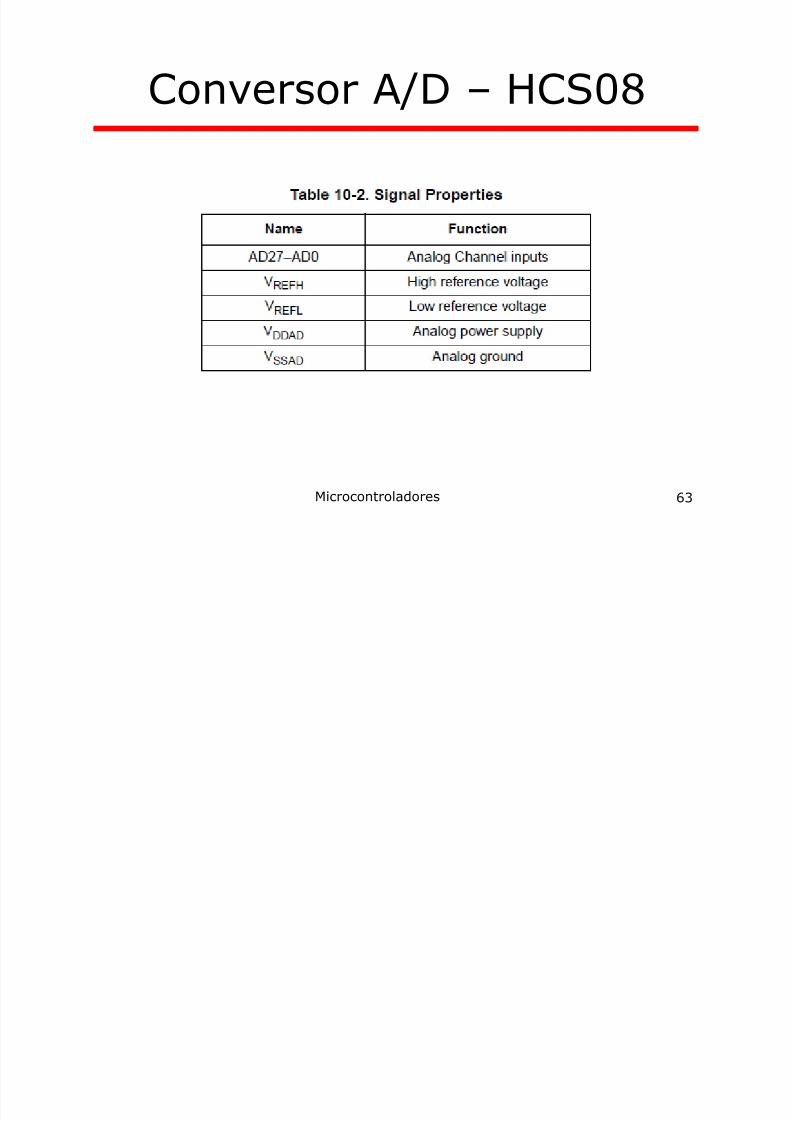
Conversor A/D – HCS08• Características do módulo A/D:
– Algoritmo de aproximação linear sucessivacom resolução de 12 bits
– até 28 entradas analógicas
– Saída formatada em 12, 10 ou 8 bits comformação justificado a direita
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 60/96
Microcontroladores 60
Conversor A/D – HCS08• Características do módulo A/D:
– Conversão simples ou contínua
– Tempo de amostragem configurável
– Configuração para velocidade ou baixoconsumo de energia
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 61/96
Microcontroladores 61
Conversor A/D – HCS08• Características do módulo A/D:
– Interrupção associada ao final de umaconversão
– Fonte de clock assíncrono para operação combaixo nível de ruído
– Registrador de comparação com interrupçãoassociada
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 62/96
Microcontroladores 62
Conversor A/D – HCS08
Conversor A/D HCS08
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 63/96
Microcontroladores 63
Conversor A/D – HCS08
Registradores
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 64/96
Microcontroladores 64
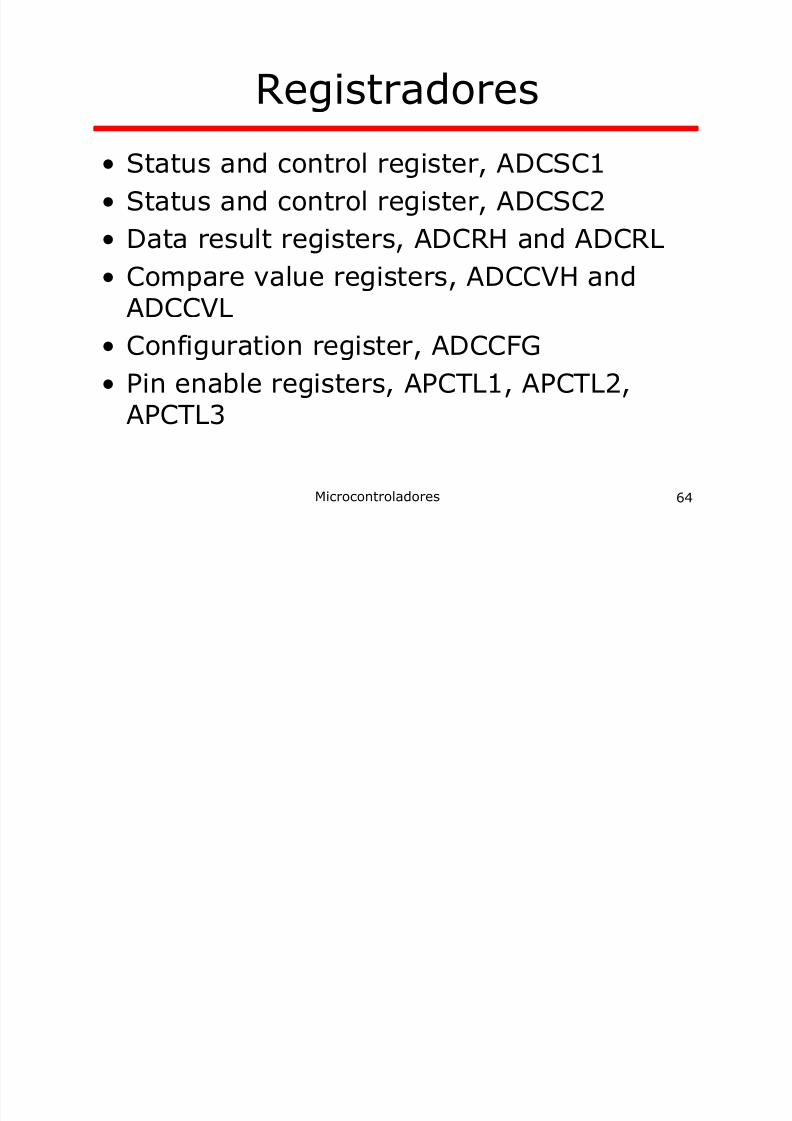
Registradores
• Status and control register, ADCSC1
• Status and control register, ADCSC2• Data result registers, ADCRH and ADCRL• Compare value registers, ADCCVH and
ADCCVL• Configuration register, ADCCFG• Pin enable registers, APCTL1, APCTL2,
APCTL3
Conversor A/D HCS08

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 65/96
Microcontroladores 65
Conversor A/D – HCS08
COCO (Conversion Complete Flag )
AIEN (Interrupt Enable )
ADCO (Continuos Conversion Enable )
ADCH (Input Channel Select )

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 66/96
Microcontroladores 66
Conversor A/D – HCS08

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 67/96
Microcontroladores 67
Conversor A/D – HCS08
Conversor A/D – HCS08

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 68/96
Microcontroladores68
Conversor A/D HCS08
Programando o Conversor A/D

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 69/96
Microcontroladores69
Programando o Conversor A/D
Comunicação serial (SCI)

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 70/96
Microcontroladores70
Comunicação serial (SCI)• Comunicações de dados seriais são
muito empregadas em sistemas com
microcontroladores, pois permitem usarum número menor de pinos do que ascomunicações paralelas.
Comunicação serial (SCI)

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 71/96
Microcontroladores71
Comunicação serial (SCI)• Comunicações seriais podem ser:
– Assíncronas (ex.: UART)
– Síncronas (ex.: SPI e I2C)
A diferença está no uso de um sinaladicional de sincronização (clock)
Comunicação serial assíncrona

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 72/96
Microcontroladores 72
Comunicação serial assíncrona
• Comunicações serial assíncrona:– Também chamada UART: Transmissor /
Receptor Universal Assíncrono (U niversal Asynchronous Receiver/ T ransmitters)
– Tipicamente, são utilizados para conectarportas de entrada / saída RS232 de umcomputador (PC), mas também podem serutilizados para comunicar com outros
dispositivos embarcados.
Comunicação serial RS-232

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 73/96
Microcontroladores 73
Comunicação serial RS 232
Comunicação de dados seriais

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 74/96
Microcontroladores 74
Comunicação de dados seriais
• Dados binários (0s e 1s) são transmitidose recebidos serialmente (isto é, um de
cada vez, seqüencialmente)
• Geralmente, a informação étransmitida/recebida byte a byte
Comunicação serial UART

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 75/96
Microcontroladores 75
Comunicação serial UART• As UARTs se “entendem” por seguir um
protocolo.
• O protocolo das UARTs define que cada
mensagem (quadro) inicia um bit de início (start bit ) e termina com um bit de fim (stop bit )
Comunicação serial UART

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 76/96
Microcontroladores 76
Co u cação se a U
• O start bit tem sempre o valor lógico zero(0) e o stop bit tem valor lógico um (1)
• Após o start bit são transmitidos os bits de
dados (que formam o byte)
• Opcionalmente, pode-se transmitir um bit
de verificação (bit de paridade)
Comunicação serial UART

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 77/96
Microcontroladores 77
ç
• Na comunicação UART cada bit tem umaduração pré-estabelecida.
• Contando-se o tempo de bit, pode-se
determinar o valor de cada bit (0 ou 1)
Comunicação serial UART

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 78/96
Microcontroladores 78
ç
• Em sistemas de comunicação de dados,símbolos (bauds) representam um ou
mais bits.
• O tempo de duração do símbolo define a
taxa de símbolos (baudrate)
• E o tempo de cada bit define a taxa de
bits (bitrate)
Comunicação serial UART
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 79/96
Microcontroladores 79
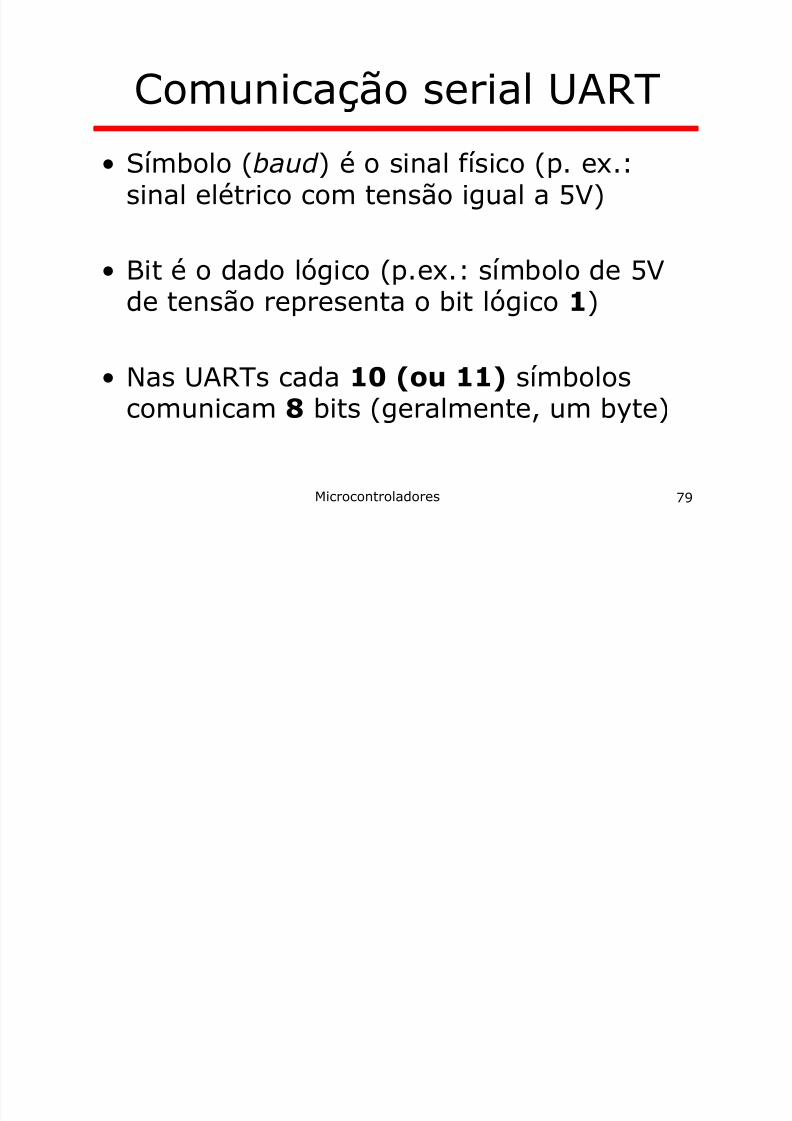
ç
• Símbolo (baud ) é o sinal físico (p. ex.:sinal elétrico com tensão igual a 5V)
• Bit é o dado lógico (p.ex.: símbolo de 5V
de tensão representa o bit lógico 1)
• Nas UARTs cada 10 (ou 11) símbolos
comunicam 8 bits (geralmente, um byte)
Comunicação serial UART

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 80/96
Microcontroladores 80
ç
• O tempo de símbolo (baudrate) écontrolado pelo periférico de comunicaçãoSCI do microcontrolador.
A SCI possui um gerador de baud rate flexívelde 13 bits, que suporta baudrates de até 115,2
kbps.
A transmissão (Tx) e a recepcão (Rx) dentro de
um mesmo módulo SCI utilizam o mesmobaudrate.
Cada módulo SCI possui um gerador de
baudrate separado.
Comunicação de dados seriais

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 81/96
Microcontroladores 81
Comunicação serial SCI

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 82/96
Microcontroladores 82
Programando a SCI

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 83/96
Microcontroladores 83
• Os módulos SCI do HCS08 possuem 8registradores.
– 2 reg. para configurar baudrate (SCIxBDH, SCIxBDL)
– 3 reg. de configuração de opções (ex.: interrupções,erros, ...) (SCIxC1, SCIxC2)
– 2 reg. de estado (ex.: flags) (SCIxS1, SCIxS2)
– 1 reg. de dados (SCIxD) (escrita p/ TX e leitura p/ RX)
Programando a SCI

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 84/96
Microcontroladores 84
• Para configurar baudrate (SCIxBDH,SCIxBDL)
Programando a SCI
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 85/96
Microcontroladores 85
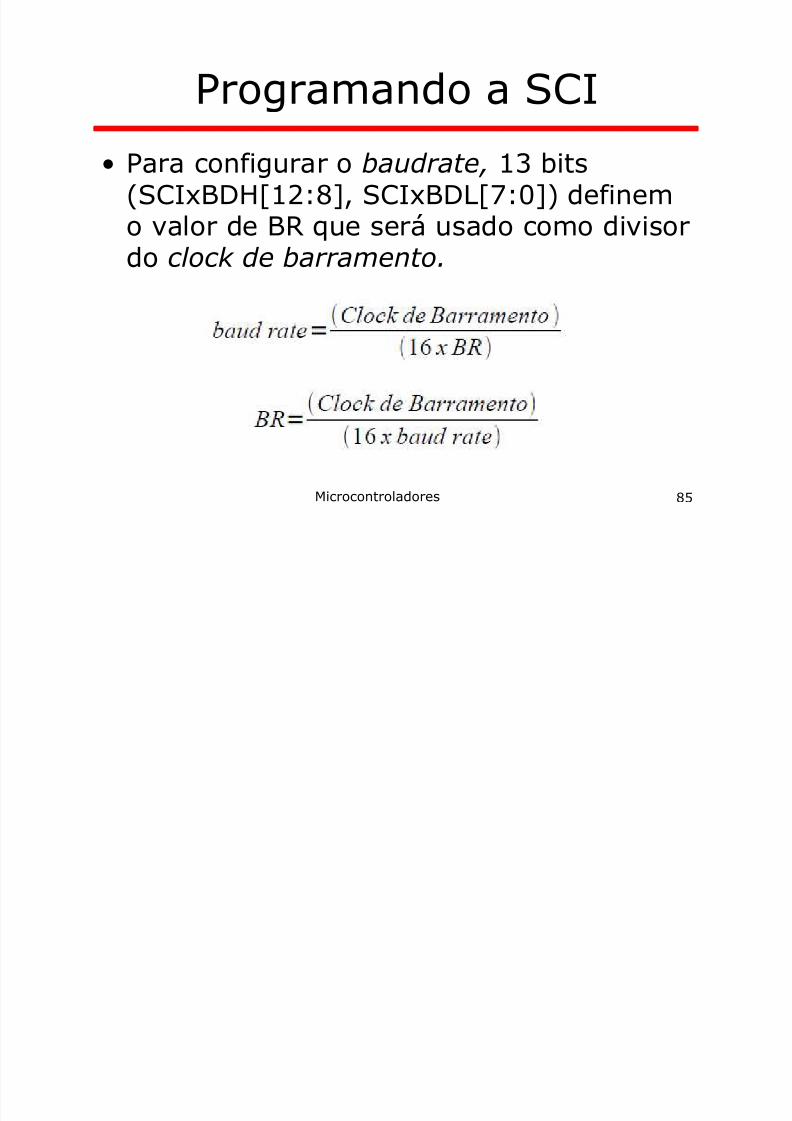
• Para configurar o baudrate, 13 bits(SCIxBDH[12:8], SCIxBDL[7:0]) definemo valor de BR que será usado como divisordo clock de barramento.
Programando a SCI

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 86/96
Microcontroladores 86
• Dicas:
– BR = 0, desabilita o módulo SCI
– Dificilmente iremos conseguir baudrates
exatos. Porém, existe uma tolerância de até3,5% no baudrate gerado.
– Com o intuito de minimizar os erros de TX/RXé interessante evitar erros maiores que 2% nobaudrate.
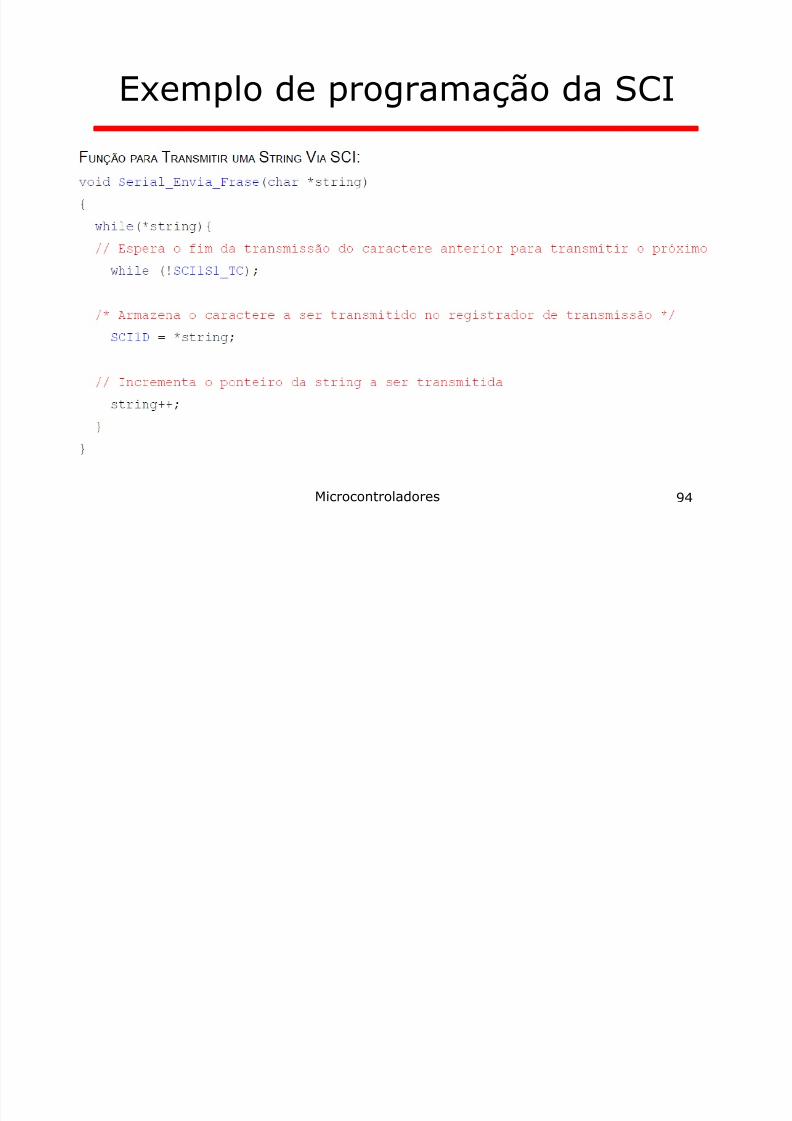
Exemplo de programação da SCI

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 87/96
Microcontroladores 87
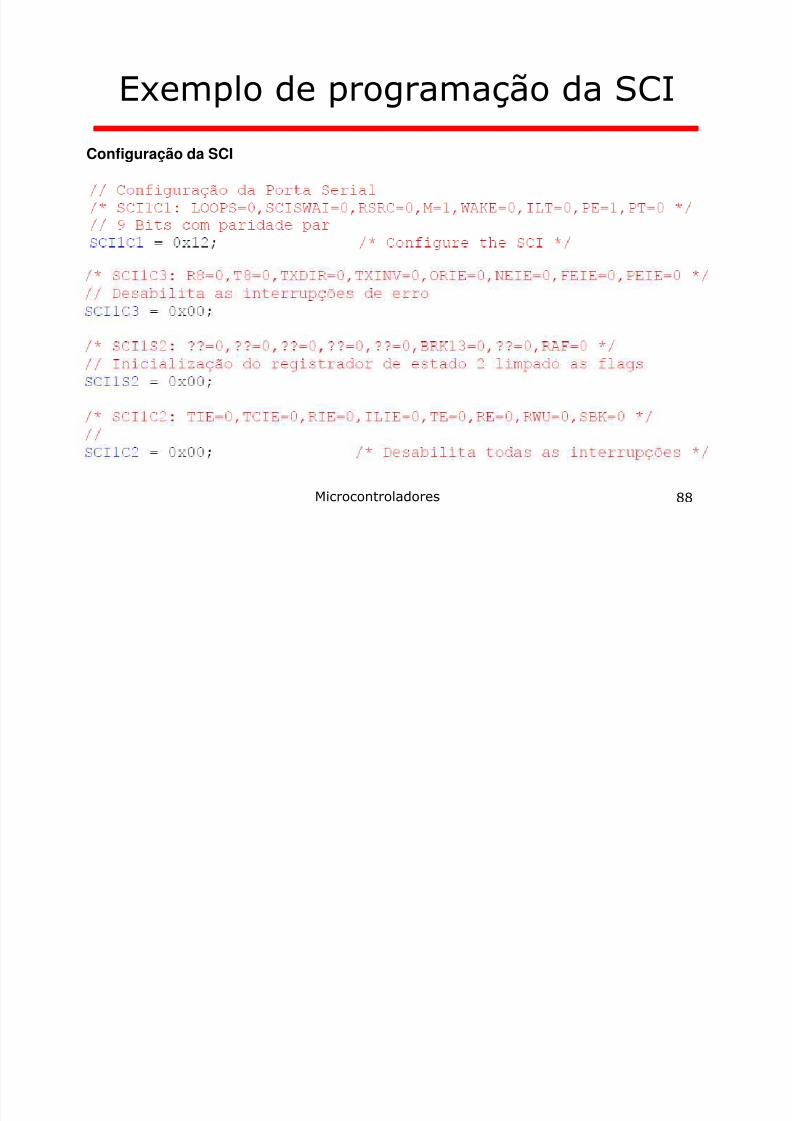
• Parâmetros:
– Clock de barramento igual a 20MHz
– Paridade par
– 9 bits de tamanho de caractere (devido à paridade)
– Interrupção de recepção
– Interrupção de erros ativa
– Baudrate 57600 bps.
Exemplo de programação da SCI
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 88/96
Microcontroladores 88
Configuração da SCI
Exemplo de programação da SCI

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 89/96
Microcontroladores 89
Configuração da SCI
Exemplo de programação da SCI
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 90/96
Microcontroladores 90
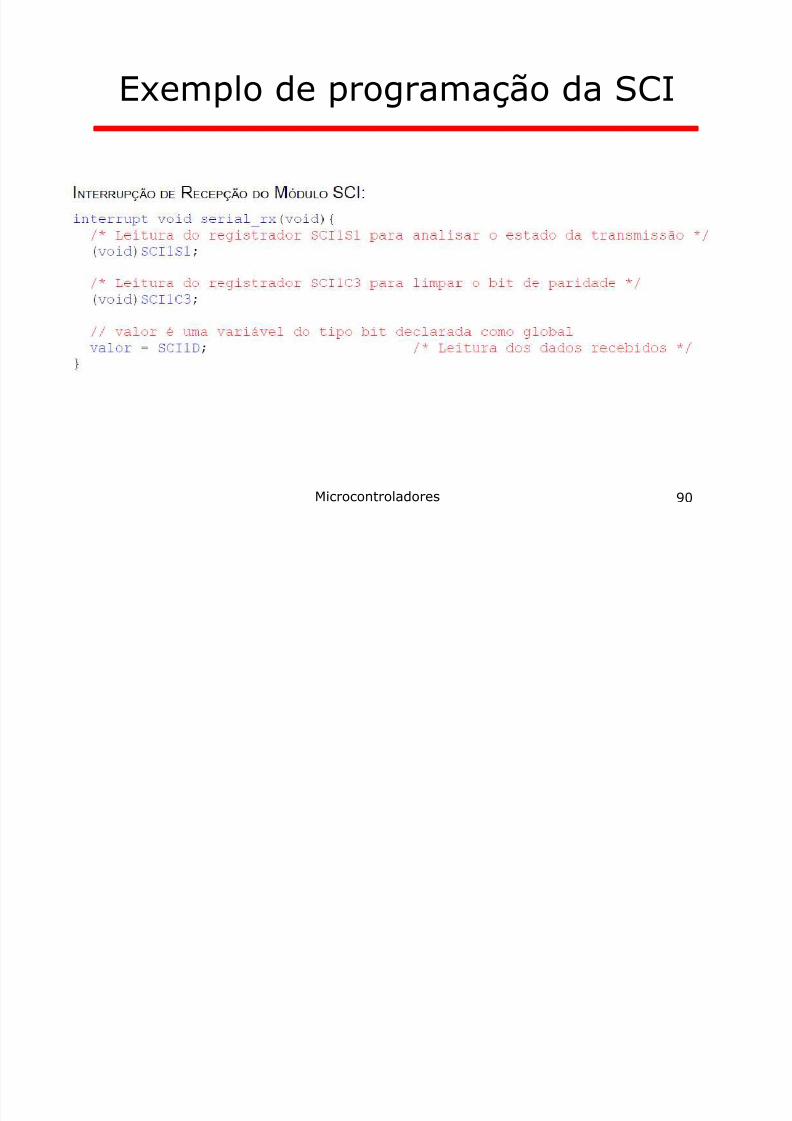
Exemplo de programação da SCI

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 91/96
Microcontroladores 91
Exemplo de programação da SCI
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 92/96
Microcontroladores 92
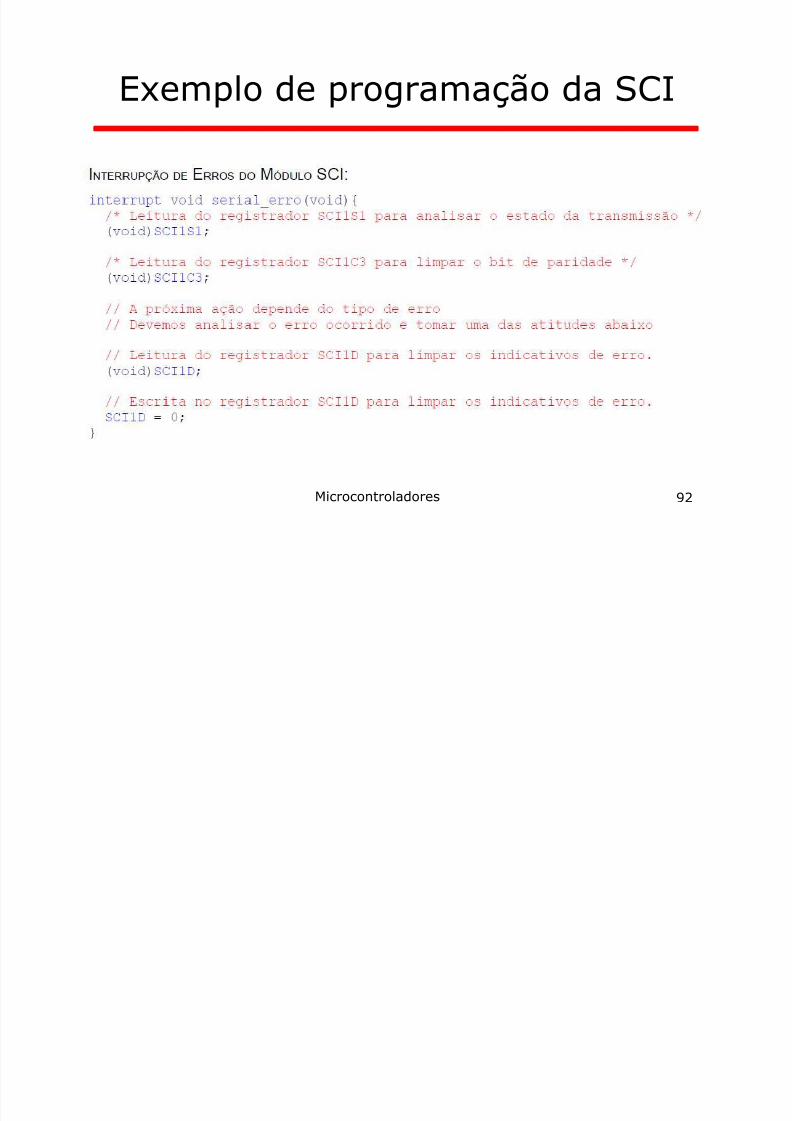
Exemplo de programação da SCI

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 93/96
Microcontroladores 93
Exemplo de programação da SCI
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 94/96
Microcontroladores 94
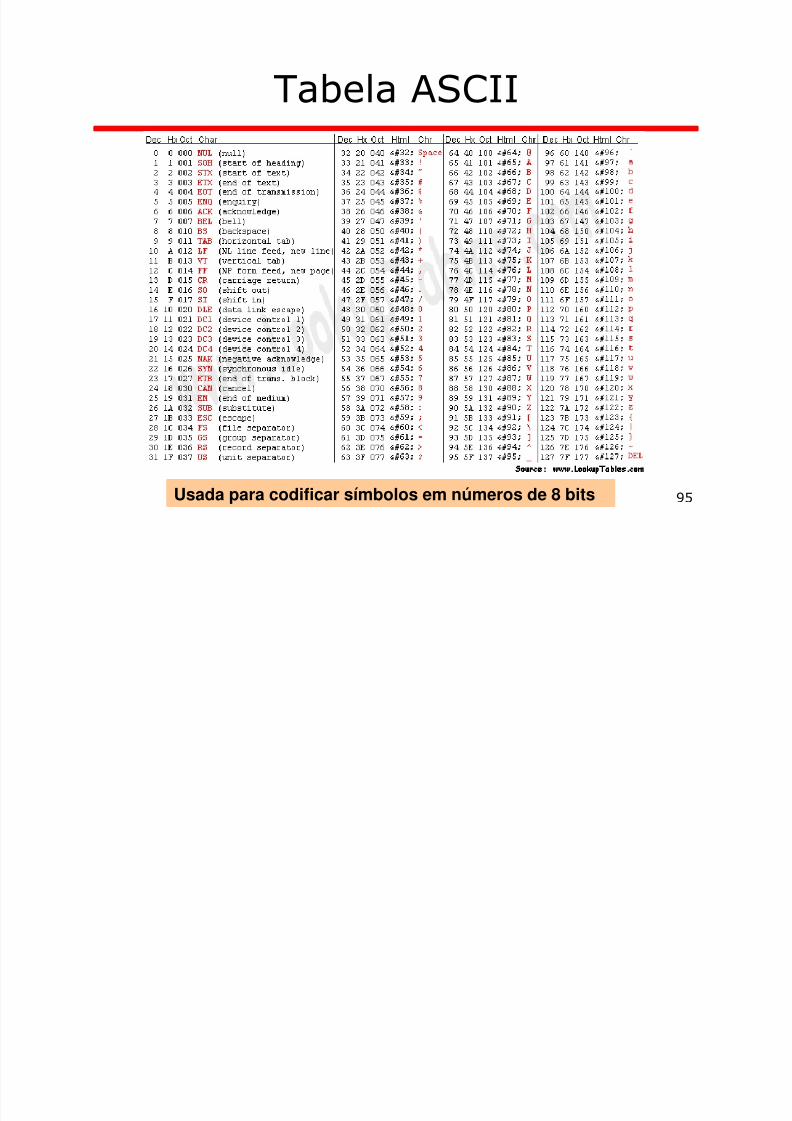
Tabela ASCII
8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 95/96
Microcontroladores 95Usada para codificar símbolos em números de 8 bits
Bibliografia e sugestões de leitura

8/3/2019 AULA_PERIFÉRICOS
http://slidepdf.com/reader/full/aulaperifericos 96/96
Microcontroladores 96
• Tutoriais para aplicações práticas com microcontrolador de8 bits HCS08 (fabricado pela empresa Freescale):
– Apostilas do prof. Gustavo Denardin. Disponível em:http://pessoal.utfpr.edu.br/gustavo/
– Tutorial para programação de microcontroladoresFreescale HCS08 baseado no MC9S08AW60.
http://pessoal.utfpr.edu.br/gustavo/tutorial_MC9S08AW60.pdf
– Apostila de Microcontroladores.http://pessoal.utfpr.edu.br/gustavo/apostila_micro.pdf