Embed Size (px)
Citation preview
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 1/67
ELETROHIDROPNEUMÁTICA
CENTRO DE FORMAÇÃO PROFISSIONAL PEDRO MARTINS GUERRA
Itabira
2004
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 2/67
Presidente da FIEMGRobson Braga de Andrade
Gestor do SENAIPetrônio Machado Zica
Diretor Regional do SENAI e
Superintendente de Conhecimento e Tecnologia
Alexandre Magno Leão dos Santos
Gerente de Educação e Tecnologia
Edmar Fernando de Alcântara
Elaboração/Organização
Márcio Antônio Silveira
Maurício Mesquita Vieira Machado
Unidade Operacional
Centro de Formação Profissional Pedro Martins Guerra
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 3/67
SSuummáárriioo
APRESENTAÇÃO ........................................................................................... 04
1. PNEUMÁTICA ............................................................................................. 051.1Considerações Gerais ............................................................................ 051.2Compressores ........................................................................................ 07
1.2.1 Tipos ............................................................................................. 081.3Ar Comprimido ....................................................................................... 101.4Atuadores ............................................................................................... 191.5Válvulas de Controle Pneumático .......................................................... 281.6Comandos Básicos ................................................................................ 311.7Elementos Eletropneumáticos ............................................................... 331.8Circuitos Eletropneumáticos .................................................................. 34
2. HIDRÁULICA .............................................................................................. 382.1Princípios Básicos .................................................................................. 38
2.2Pressão .................................................................................................. 392.3Fluxo ...................................................................................................... 422.4Velocidade, Trabalho e Potência ........................................................... 432.5Válvulas .................................................................................................. 442.6Tubulações ............................................................................................. 482.7Atuadores ............................................................................................... 502.8Bombas .................................................................................................. 512.9Retentores .............................................................................................. 522.10 Elementos e Circuitos Eletrohidráulicos .............................................. 57
REFERÊNCIAS BIBLIOGRÁFICAS ............................................................... 67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 4/67
Elétrica ____________________________________________________________
____________________________________________________________ 4/4
Mantenedor Eletroeletrônico
AApprreesseennttaaççããoo
“Muda a forma de trabalhar, agir, sentir, pensar na chamada sociedade doconhecimento. “
Peter Drucker
O ingresso na sociedade da informação exige mudanças profundas em todos osperfis profissionais, especialmente naqueles diretamente envolvidos na produção,coleta, disseminação e uso da informação.
O SENAI, maior rede privada de educação profissional do país,sabe disso , e
,consciente do seu papel formativo , educa o trabalhador sob a égide do conceitoda competência:” formar o profissional com responsabilidade no processo produtivo,
com iniciativa na resolução de problemas, com conhecimentos técnicos aprofundados, flexibilidade e criatividade, empreendedorismo e consciência da necessidade deeducação continuada.”
Vivemos numa sociedade da informação. O conhecimento , na sua áreatecnológica, amplia-se e se multiplica a cada dia. Uma constante atualização sefaz necessária. Para o SENAI, cuidar do seu acervo bibliográfico, da sua infovia,da conexão de suas escolas à rede mundial de informações – internet- é tãoimportante quanto zelar pela produção de material didático.
Isto porque, nos embates diários,instrutores e alunos , nas diversas oficinas elaboratórios do SENAI, fazem com que as informações, contidas nos materiaisdidáticos, tomem sentido e se concretizem em múltiplos conhecimentos.
O SENAI deseja , por meio dos diversos materiais didáticos, aguçar a suacuriosidade, responder às suas demandas de informações e construir links entreos diversos conhecimentos, tão importantes para sua formação continuada !
Gerência de Educação e Tecnologia
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 5/67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 6/67
Elétrica ____________________________________________________________
____________________________________________________________ 6/6
Mantenedor Eletroeletrônico
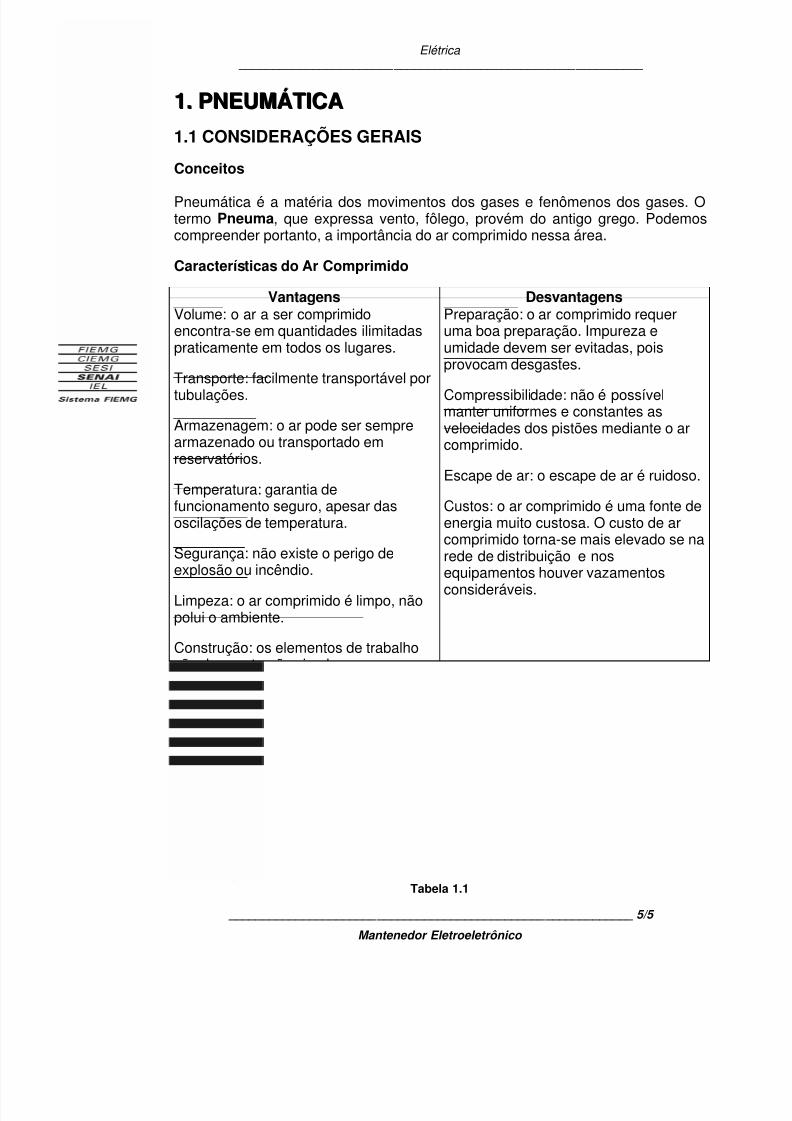
Os sistemas de medidas usados na pneumática são o internacional (SI) e otécnico.
Para uniformizar a linguagem utilizada nas medidas das diversas grandezasbásicas, o sistema de unidades utilizado é o SI (Sistema Internacional deUnidades).
Unidades do Sistema Internacional
Grandeza Unidade SímboloComprimento metro mMassa quilograma kgTempo segundo sIntensidade de corrente ampère ATemperatura kelvin kIntensidade Luminosa candela cd
Tabela 1.2
− Pressão absoluta = pressão atmosférica + sobrepressão;− Pressão relativa = sobrepressão (pressão fornecida pelo compressor);− O ar é compressível e expansível;− A lei de Boyle-Mariotte demonstra que:
P1 . V1 = P2 . V2 a uma temperatura constante
Fórmulas derivadas da lei de Boyle-Mariotte:
P2 . V2 P2 . V2 P1= _________ V1 = ________
V1 P1 P1 = V2 ____ ____
P2 V1
P1 . V1 P1 . V1 P2 = _________ V2 = _________
V2 P2
A lei de Guy-Lussac demonstra que:
V1 T1 ___ = ___ a uma pressão constanteV2 T2
Vt1 Vt2 = Vt1 + ________ . (T2 – T1)
273k
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 7/67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 8/67
Elétrica ____________________________________________________________
____________________________________________________________ 8/8
Mantenedor Eletroeletrônico
Estado normal do ar: é o estado do ar sob pressão e temperatura normal
O conceito técnico define:
temperatura normal = 293 k (20ºC)pressão normal = 0,980 bar
O conceito físico define:temperatura normal = 273 (0º)pressão normal = 1,013 bar
Conversões:1kgf/cm2 = 14,223 psi1bar = 14,503 psi1ATM = 14,7 psi1 litro de ar = 1,29 g
1.2.1 TIPOS
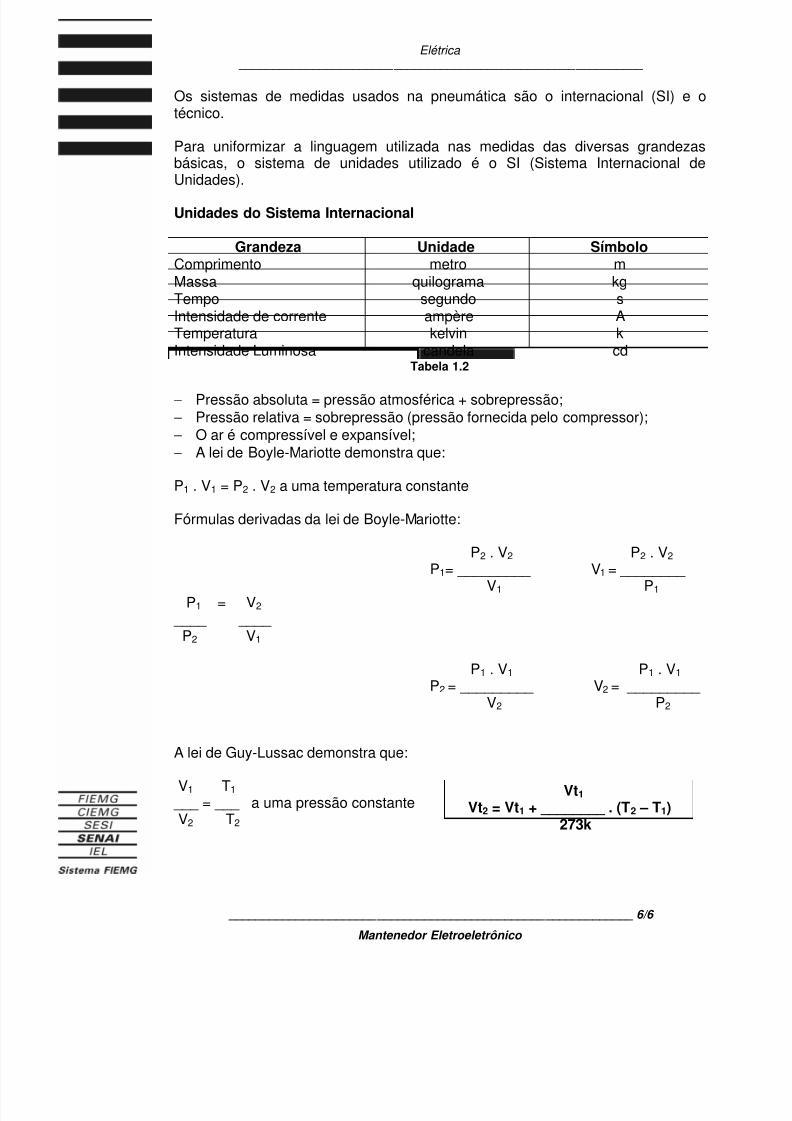
Para atender às necessidades, existem vários tipos de compressores.
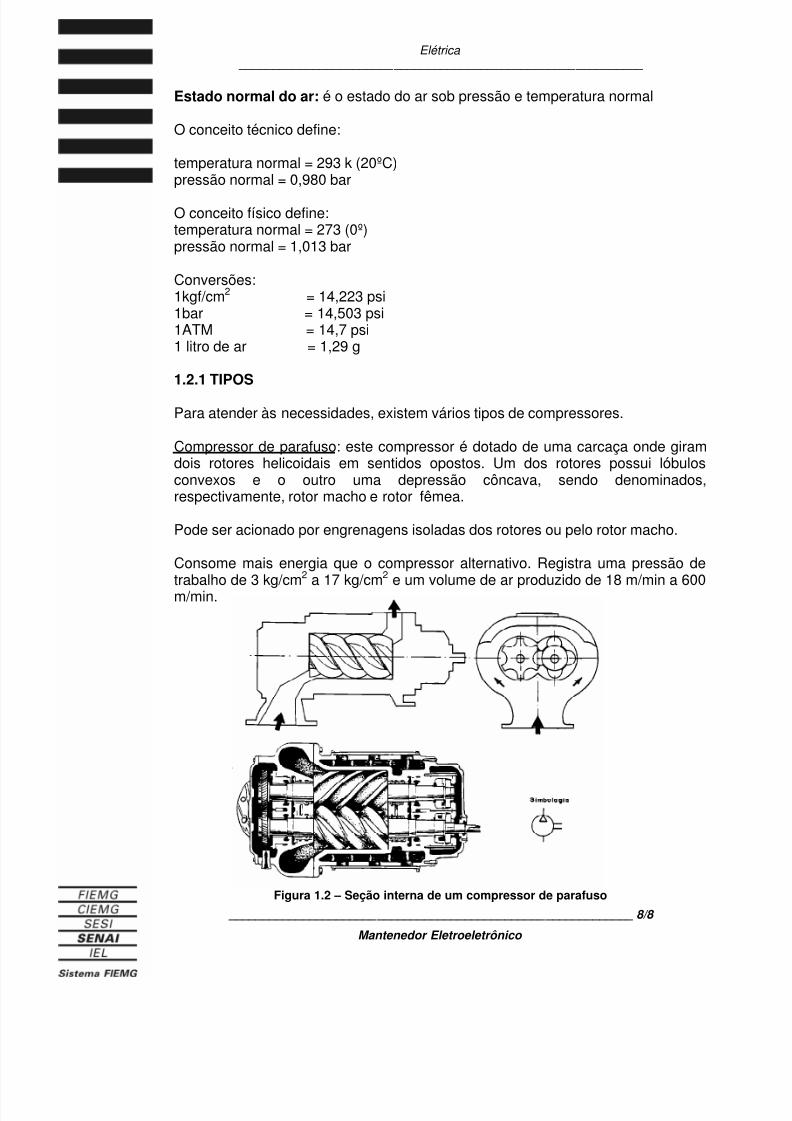
Compressor de parafuso: este compressor é dotado de uma carcaça onde giramdois rotores helicoidais em sentidos opostos. Um dos rotores possui lóbulosconvexos e o outro uma depressão côncava, sendo denominados,respectivamente, rotor macho e rotor fêmea.
Pode ser acionado por engrenagens isoladas dos rotores ou pelo rotor macho.
Consome mais energia que o compressor alternativo. Registra uma pressão detrabalho de 3 kg/cm2 a 17 kg/cm2 e um volume de ar produzido de 18 m/min a 600m/min.
Figura 1.2 – Seção interna de um compressor de parafuso
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 9/67
Elétrica ____________________________________________________________
____________________________________________________________ 9/9
Mantenedor Eletroeletrônico
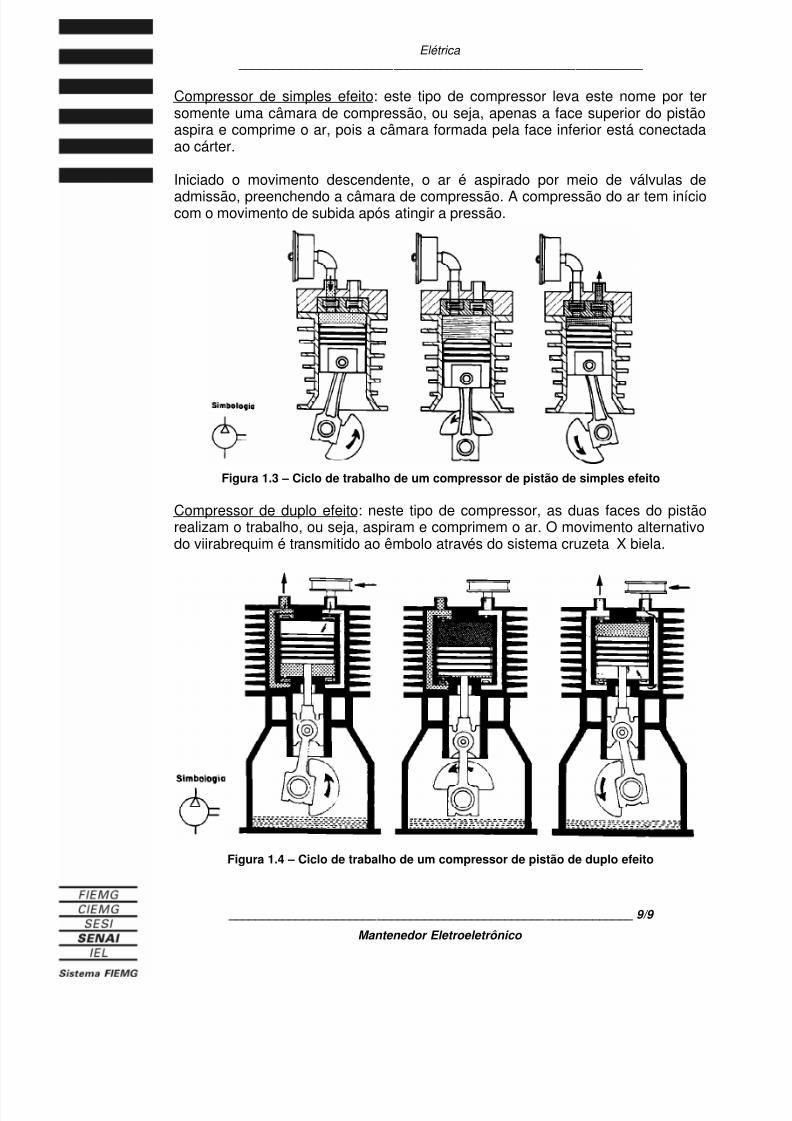
Compressor de simples efeito: este tipo de compressor leva este nome por tersomente uma câmara de compressão, ou seja, apenas a face superior do pistãoaspira e comprime o ar, pois a câmara formada pela face inferior está conectadaao cárter.
Iniciado o movimento descendente, o ar é aspirado por meio de válvulas de
admissão, preenchendo a câmara de compressão. A compressão do ar tem iníciocom o movimento de subida após atingir a pressão.
Figura 1.3 – Ciclo de trabalho de um compressor de pistão de simples efeito
Compressor de duplo efeito: neste tipo de compressor, as duas faces do pistãorealizam o trabalho, ou seja, aspiram e comprimem o ar. O movimento alternativodo viirabrequim é transmitido ao êmbolo através do sistema cruzeta X biela.
Figura 1.4 – Ciclo de trabalho de um compressor de pistão de duplo efeito
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 10/67
Elétrica ____________________________________________________________
____________________________________________________________ 10/10
Mantenedor Eletroeletrônico
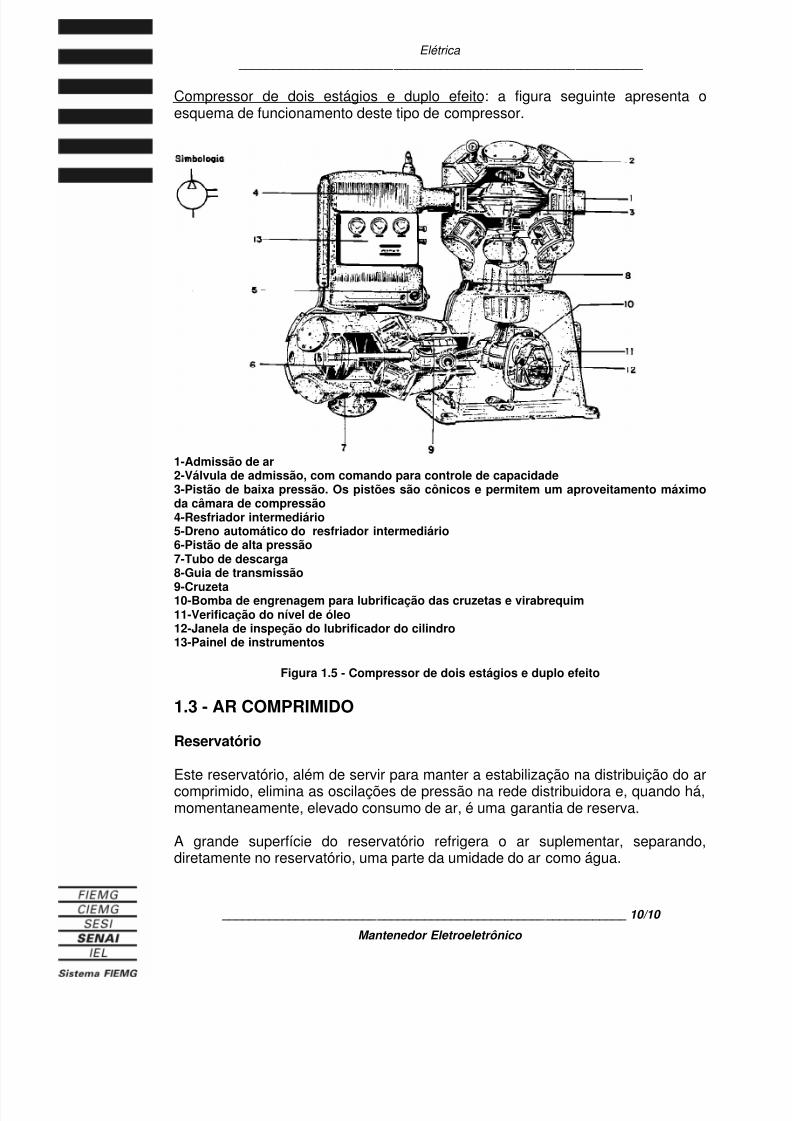
Compressor de dois estágios e duplo efeito: a figura seguinte apresenta oesquema de funcionamento deste tipo de compressor.
1-Admissão de ar2-Válvula de admissão, com comando para controle de capacidade3-Pistão de baixa pressão. Os pistões são cônicos e permitem um aproveitamento máximoda câmara de compressão4-Resfriador intermediário5-Dreno automático do resfriador intermediário6-Pistão de alta pressão7-Tubo de descarga8-Guia de transmissão
9-Cruzeta10-Bomba de engrenagem para lubrificação das cruzetas e virabrequim11-Verificação do nível de óleo12-Janela de inspeção do lubrificador do cilindro13-Painel de instrumentos
Figura 1.5 - Compressor de dois estágios e duplo efeito
1.3 - AR COMPRIMIDO
Reservatório
Este reservatório, além de servir para manter a estabilização na distribuição do arcomprimido, elimina as oscilações de pressão na rede distribuidora e, quando há,momentaneamente, elevado consumo de ar, é uma garantia de reserva.
A grande superfície do reservatório refrigera o ar suplementar, separando,diretamente no reservatório, uma parte da umidade do ar como água.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 11/67
Elétrica ____________________________________________________________
____________________________________________________________ 11/11
Mantenedor Eletroeletrônico
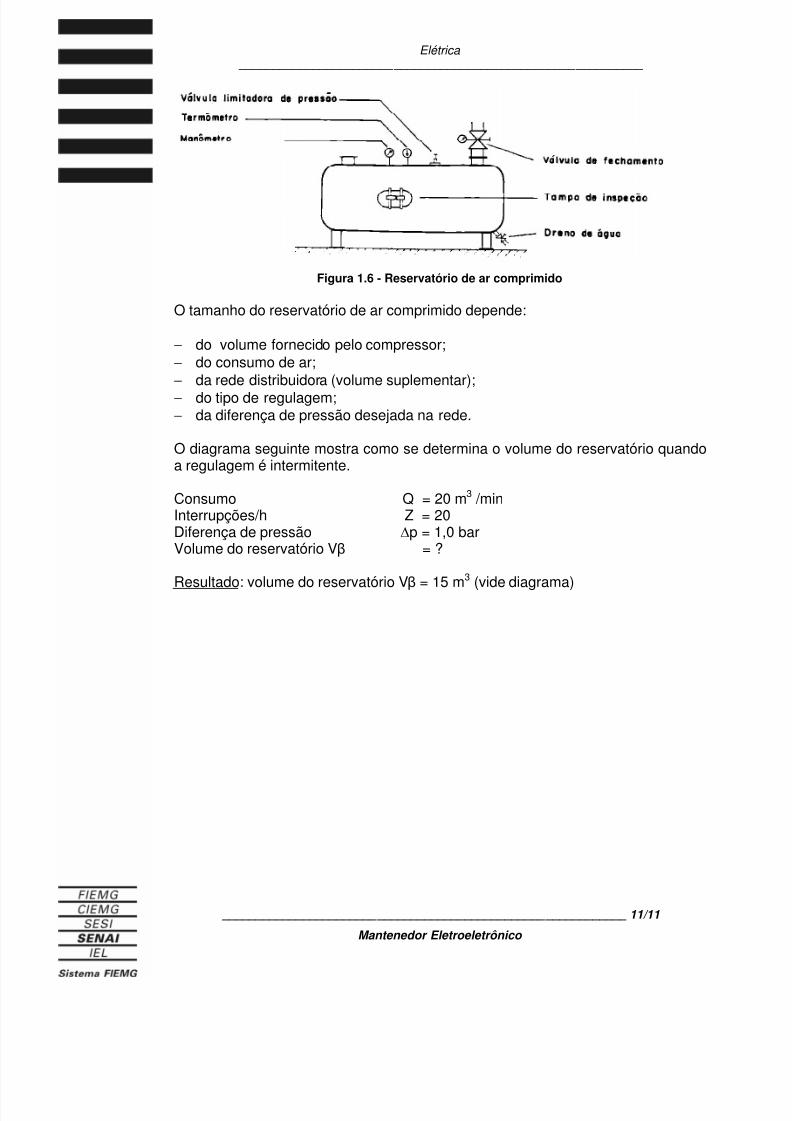
Figura 1.6 - Reservatório de ar comprimido
O tamanho do reservatório de ar comprimido depende:
− do volume fornecido pelo compressor;− do consumo de ar;− da rede distribuidora (volume suplementar);− do tipo de regulagem;− da diferença de pressão desejada na rede.
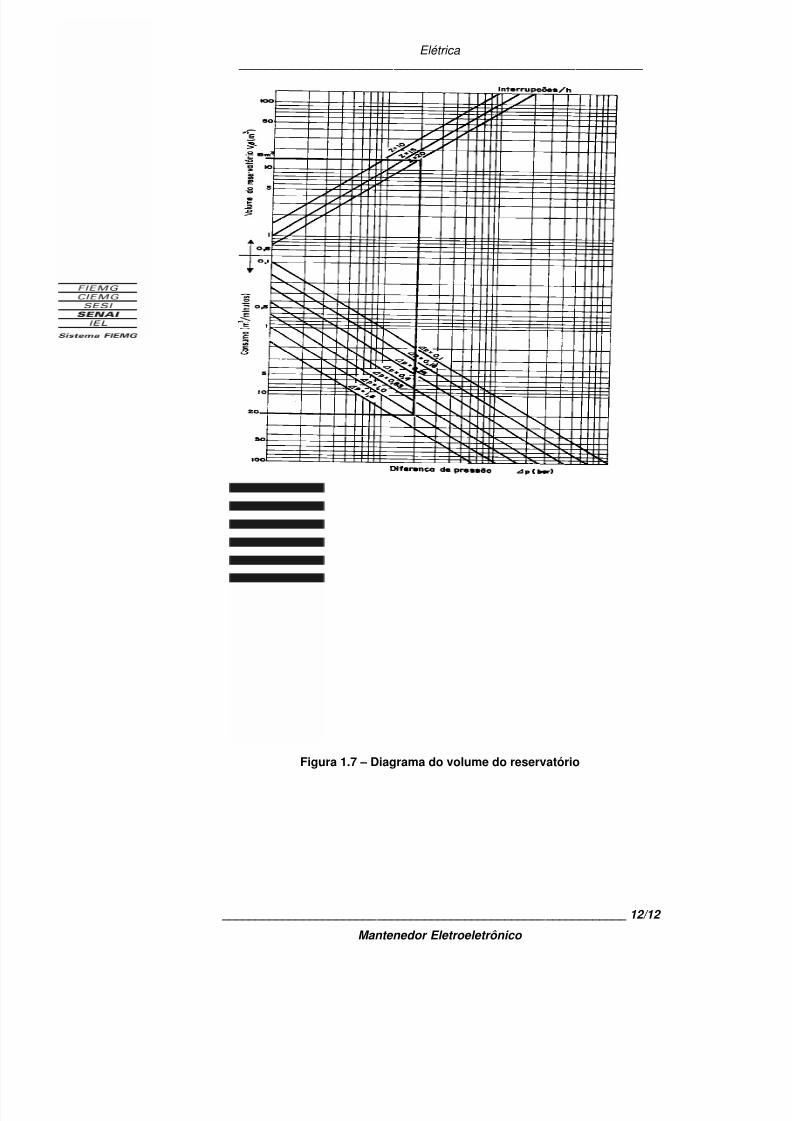
O diagrama seguinte mostra como se determina o volume do reservatório quandoa regulagem é intermitente.
Consumo Q = 20 m3 /minInterrupções/h Z = 20Diferença de pressão p = 1,0 barVolume do reservatório V = ?
Resultado: volume do reservatório V = 15 m
3
(vide diagrama)
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 12/67
Elétrica ____________________________________________________________
____________________________________________________________ 12/12
Mantenedor Eletroeletrônico
Figura 1.7 – Diagrama do volume do reservatório
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 13/67
Elétrica ____________________________________________________________
____________________________________________________________ 13/13
Mantenedor Eletroeletrônico
Dimensionamento da Rede Condutora
Provocada pela sempre crescente racionalização e automatização dasinstalações industriais, a necessidade de ar nas fábricas está crescendo. Cadamáquina e cada dispositivo requer sua quantidade de ar, que está sendo
fornecida pelo compressor através da rede distribuidora.
O diâmetro da tubulação, portanto, deve ser escolhido de maneira que, mesmocom um consumo de ar crescente, a queda de pressão – do reservatório até oconsumidor – não ultrapasse 0,1 bar. Uma queda maior de pressão prejudica arentabilidade do sistema e diminui consideravelmente sua capacidade.
Já no projeto da instalação de compressores deve ser prevista uma possívelampliação posterior e, conseqüentemente, maior demanda de ar, determinandodimensões maiores dos tubos da rede distribuidora.
A montagem posterior de uma rede distribuidora com dimensões maiores
(ampliação) acarreta despesas elevadas.
Escolha do Diâmetro da Tubulação
A escolha do diâmetro da tubulação não é realizada por quaisquer fórmulasempíricas ou para aproveitar tubos por acaso existentes no depósito, mas simconsiderando-se:
− o volume da corrente (vazão);− o comprimento da rede;− a queda de pressão admissível;−
a pressão de trabalho;− o número de pontos de estrangulamento na rede.
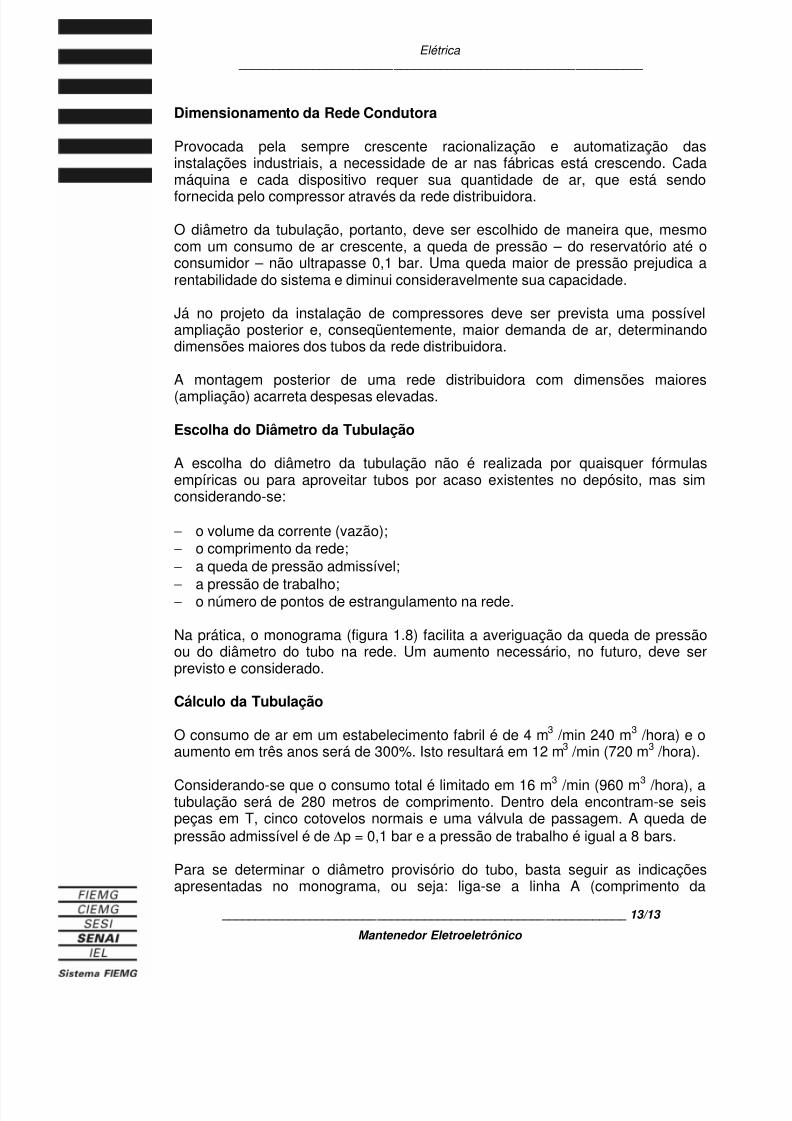
Na prática, o monograma (figura 1.8) facilita a averiguação da queda de pressãoou do diâmetro do tubo na rede. Um aumento necessário, no futuro, deve serprevisto e considerado.
Cálculo da Tubulação
O consumo de ar em um estabelecimento fabril é de 4 m3 /min 240 m3 /hora) e oaumento em três anos será de 300%. Isto resultará em 12 m3 /min (720 m3 /hora).
Considerando-se que o consumo total é limitado em 16 m3
/min (960 m3
/hora), atubulação será de 280 metros de comprimento. Dentro dela encontram-se seispeças em T, cinco cotovelos normais e uma válvula de passagem. A queda depressão admissível é de ∆p = 0,1 bar e a pressão de trabalho é igual a 8 bars.
Para se determinar o diâmetro provisório do tubo, basta seguir as indicaçõesapresentadas no monograma, ou seja: liga-se a linha A (comprimento da
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 14/67
Elétrica ____________________________________________________________
____________________________________________________________ 14/14
Mantenedor Eletroeletrônico
tubulação) à B, prolongando-se até C (eixo 1). A pressão de trabalho(linha E) seráligada com G (queda de pressão) obtendo, assim, em F (eixo 2), um ponto deinterseção.
Os pontos de interseção serão ligados entre si. Na linha D (diâmetro interno)obter-se-á um ponto de interseção, o qual fornece o diâmetro do tubo. O resultado
desse cálculo é aproximadamente 90 mm de diâmetro.
Figura 1.8 - Nomograma (diâmetro de tubo)
Segundo o monograma relativo ao comprimento equivalente, tem-se:
6 peças T (90 mm) = 6 . 10,5 m = 63 m1 válvula de passagem (90 mm) = 32 m5 cotovelos normais (90 mm) = 5 . 1 m = 5 m
100 m
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 15/67
Elétrica ____________________________________________________________
____________________________________________________________ 15/15
Mantenedor Eletroeletrônico
Comprimento da tubulação 280 mComprimento equivalente 100 mComprimento total 380 m
Com esse comprimento total da tubulação (380 m), o consumo de ar, a queda de
pressão e a pressão de trabalho, pode-se determinar o diâmetro real necessário.Para esse exemplo, o diâmetro do tubo é de 95 mm.
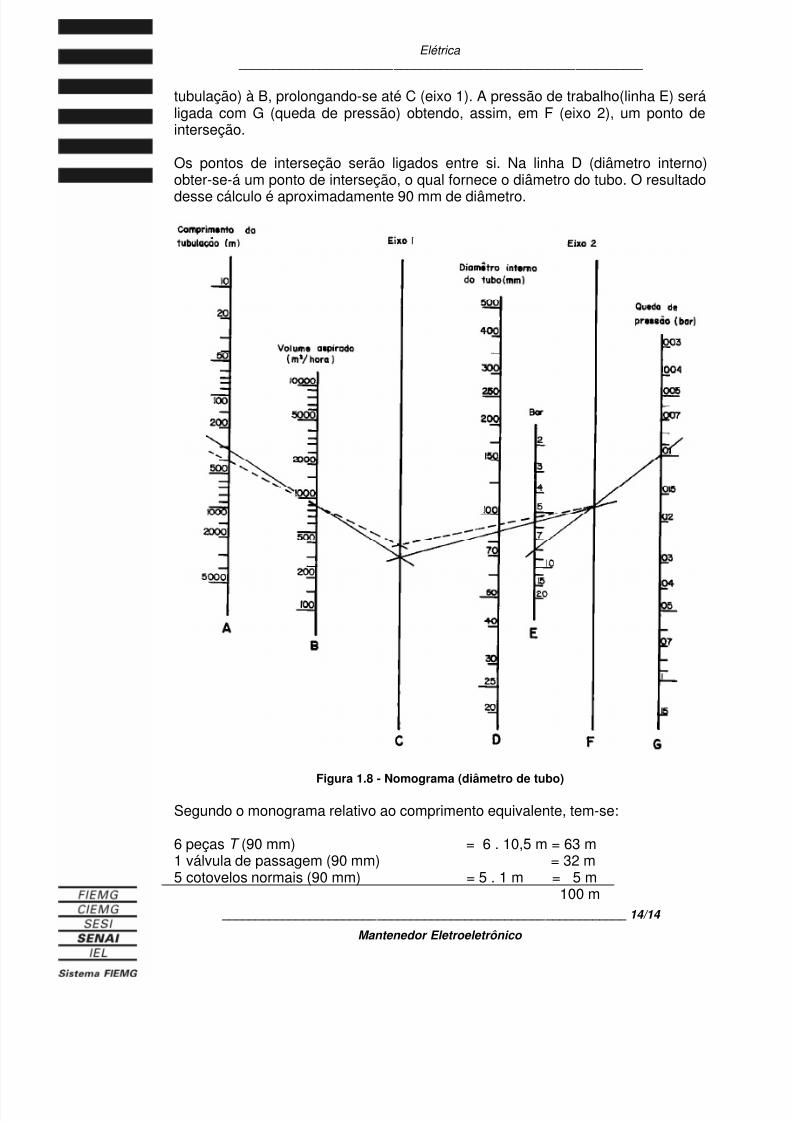
Para os elementos redutores do fluxo (válvulas de gaveta, de passagem, deassento, peças em T, cotovelos), as resistências são transformadas emcomprimento equivalente. Como comprimento equivalente compreende-se ocomprimento linear do tubo reto, cuja resistência à passagem do ar seja igual àresistência oferecida pelo elemento em questão. A seção transversal do tubo de“comprimento equivalente” é a mesma do tubo utilizado na rede. Por meio de umsegundo nomograma, pode-se determinar rapidamente os "comprimentosequivalentes”.
Figura 1.9 – Monograma (comprimento equivalente)
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 16/67
Elétrica ____________________________________________________________
____________________________________________________________ 16/16
Mantenedor Eletroeletrônico
Conexões de tubos - com anel de cortemetálicos - com anel de pressão
- conexão rebordada
Conexões de - conexão com porcatubulações - conexão espigão- conexões rápidas
Conexões de - para mangueiras demangueiras material artificial
(plástico)
Distribuição
Para distribuição do ar comprimido, o diâmetro da tubulação deve ser escolhidode maneira que a queda de pressão não ultrapasse 0,1 bar de pressão, mesmose houver um consumo de ar crescente.
Maior queda de pressão diminui a rentabilidade e a capacidade do sistema.
No dimensionamento da tubulação, devem ser previstos e considerados ocomprimento de reserva, bem como as instalações futuras.
São os seguintes tipos de redes distribuidoras de ar :
− rede em circuito aberto;− rede em circuito fechado;− rede combinada.
Na tubulação, é necessário considerar – especialmente em rede de circuito aberto – que tenha uma inclinação na direção do fluxo, de 1 a 2%, para facilitar oescoamento do condensado.
Sempre que o ambiente permitir, deve ser montada uma rede circulante, pois estetipo de instalação permite uma distribuição mais uniforme da pressão.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 17/67
Elétrica ____________________________________________________________
____________________________________________________________ 17/17
Mantenedor Eletroeletrônico
Tubulações
As tubulações subdividem-se em:
- cobre
- latão- aço refinadoMaterial - tubo de aço (preto, galvanizado)
Principais empregado - artificial (plástico)
Secundárias Material - à base de borracha (menos usado)empregado - à base de polietileno e poliamido (mais
usado)
Preparação
Estas são algumas considerações a serem observadas na preparação do arcomprimido:
a impureza no ar comprimido provoca, em muitos casos, a interrupção nasinstalações pneumáticas, podendo inclusive destruir os elementos pneumáticos;
é importante dar maior atenção à umidade presente no ar comprimido, pois elaé prejudicial aos elementos pneumáticos.
umidade absolutaUmidade relativa = 100%
quantidade de saturação
para eliminar o condensado na rede de condutores de ar comprimido, utilizam-se os refrigeradores intermediários e finais;
o ar comprimido, quando com umidade (água), deve ser secado, e, para isso,existem os seguintes processos:
− secagem por adsorção (processo químico);− secagem por adsorção (processo físico);− secagem por refrigeração.
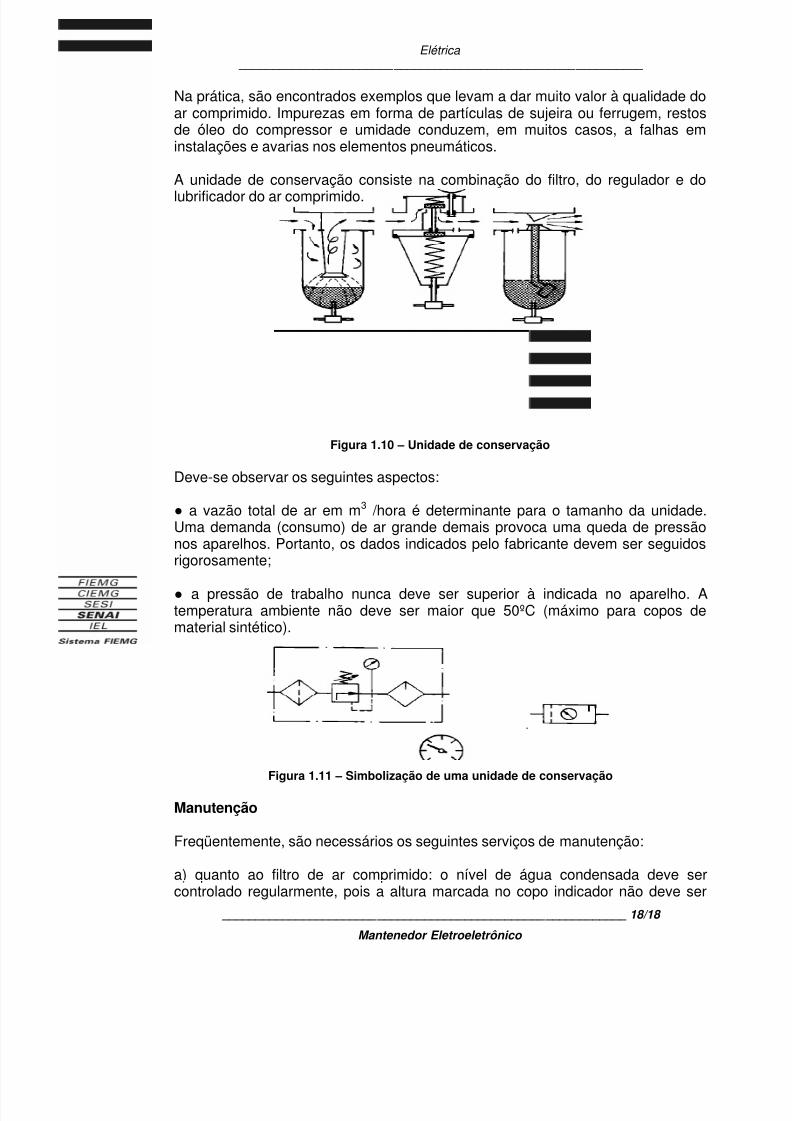
Unidades de Conservação
Após a separação primária das impurezas, através de secagem por absorção(processo químico), adsorção (processo físico) ou resfriamento, uma preparaçãofinal do ar comprimido se faz necessária no próprio local de consumo, comautilização da unidade de conservação.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 18/67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 19/67
Elétrica ____________________________________________________________
____________________________________________________________ 19/19
Mantenedor Eletroeletrônico
ultrapassada. A água condensada acumulada pode ser arrastada para atubulação de ar comprimido e para os equipamentos. Para drenar a águacondensada, deve-se abrir o parafuso de dreno no fundo do copo indicador.
O cartucho filtrante, quando sujo, também deve ser limpo ou substituído.
b) quanto ao regulador de pressão de ar comprimido: na existência de um filtro dear comprimido antes do regulador, este não necessita de manutenção;
c) quanto ao lubrificador de ar comprimido: deve-se controlar o nível de óleo nocopo indicador. Se necessário, completar o óleo até a marcação; limpar, somentecom querosene, os filtros de material plástico e o copo do lubrificador; e usarsomente óleos minerais de baixa viscosidade (3,15ºE a 20ºC) no lubrificador.
1.4 ATUADORES
A energia pneumática será transformada, por cilindros pneumáticos, emmovimentos retilíneos e pelos motores pneumáticos em movimentos rotativos.
A geração de um movimento retilíneo com elementos mecânicos, conjugados comacionamentos elétricos, é relativamente custosa e ligada a certas dificuldades defabricação e durabilidade.
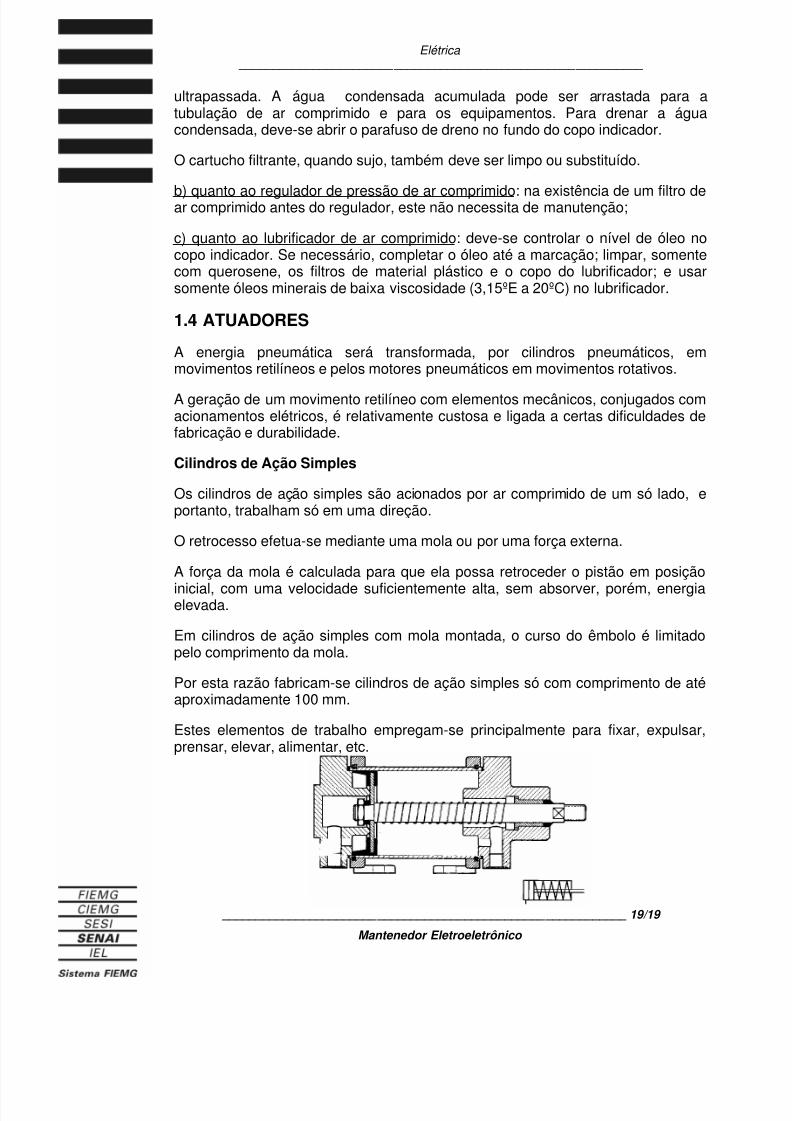
Cilindros de Ação Simples
Os cilindros de ação simples são acionados por ar comprimido de um só lado, eportanto, trabalham só em uma direção.
O retrocesso efetua-se mediante uma mola ou por uma força externa.
A força da mola é calculada para que ela possa retroceder o pistão em posição
inicial, com uma velocidade suficientemente alta, sem absorver, porém, energiaelevada.
Em cilindros de ação simples com mola montada, o curso do êmbolo é limitadopelo comprimento da mola.
Por esta razão fabricam-se cilindros de ação simples só com comprimento de atéaproximadamente 100 mm.
Estes elementos de trabalho empregam-se principalmente para fixar, expulsar,prensar, elevar, alimentar, etc.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 20/67
Elétrica ____________________________________________________________
____________________________________________________________ 20/20
Mantenedor Eletroeletrônico
Figura 1.12 – Cilindro de ação simples
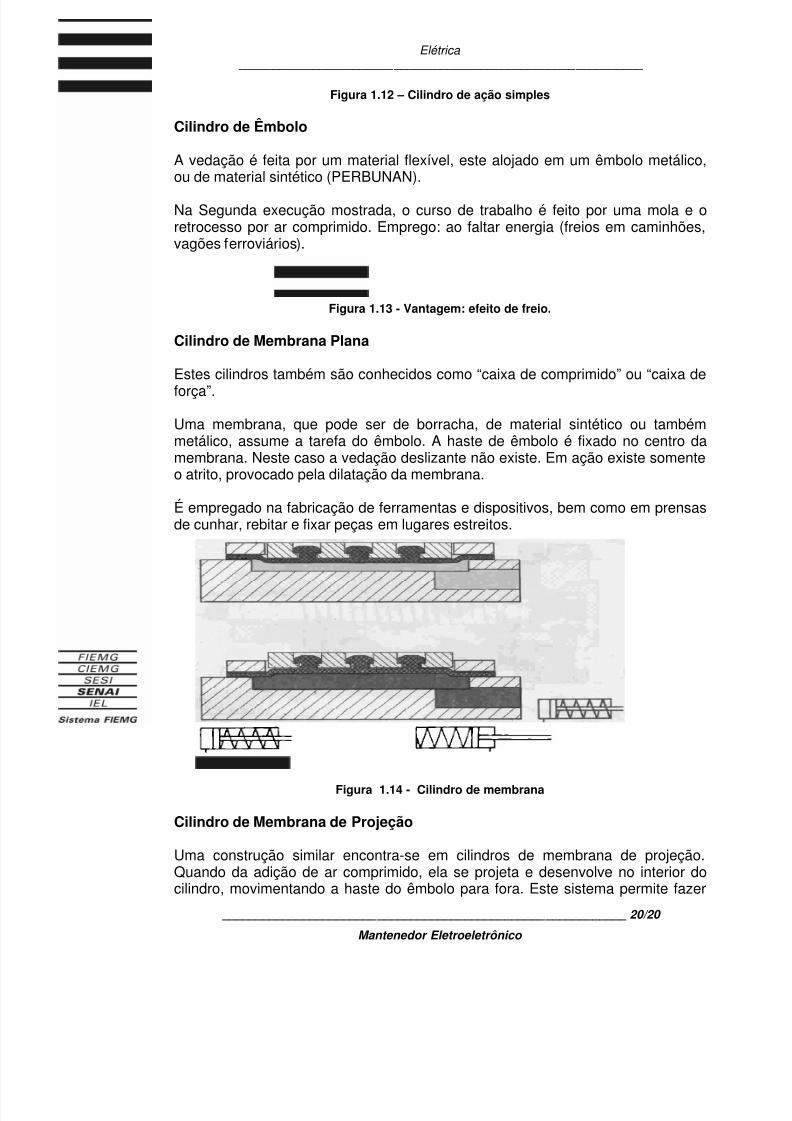
Cilindro de Êmbolo
A vedação é feita por um material flexível, este alojado em um êmbolo metálico,ou de material sintético (PERBUNAN).
Na Segunda execução mostrada, o curso de trabalho é feito por uma mola e oretrocesso por ar comprimido. Emprego: ao faltar energia (freios em caminhões,vagões ferroviários).
Figura 1.13 - Vantagem: efeito de freio.
Cilindro de Membrana Plana
Estes cilindros também são conhecidos como “caixa de comprimido” ou “caixa de
força”.
Uma membrana, que pode ser de borracha, de material sintético ou tambémmetálico, assume a tarefa do êmbolo. A haste de êmbolo é fixado no centro damembrana. Neste caso a vedação deslizante não existe. Em ação existe somenteo atrito, provocado pela dilatação da membrana.
É empregado na fabricação de ferramentas e dispositivos, bem como em prensasde cunhar, rebitar e fixar peças em lugares estreitos.
Figura 1.14 - Cilindro de membrana
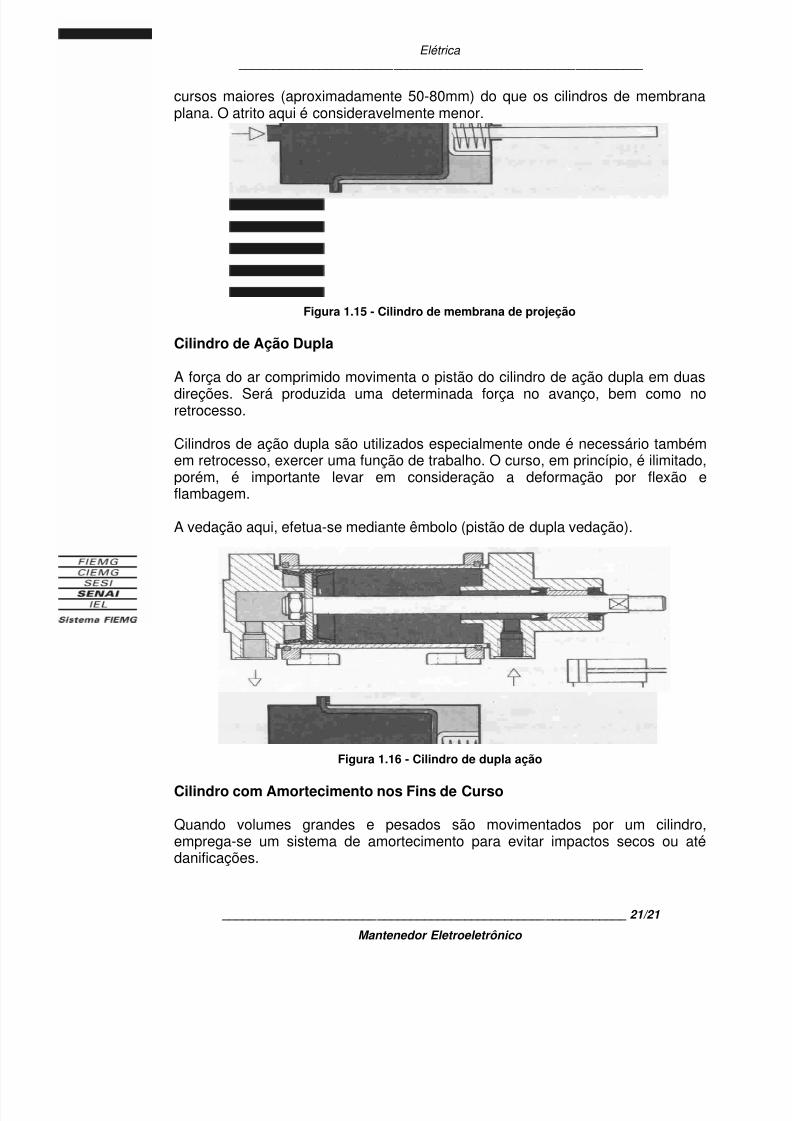
Cilindro de Membrana de Projeção
Uma construção similar encontra-se em cilindros de membrana de projeção.Quando da adição de ar comprimido, ela se projeta e desenvolve no interior docilindro, movimentando a haste do êmbolo para fora. Este sistema permite fazer
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 21/67
Elétrica ____________________________________________________________
____________________________________________________________ 21/21
Mantenedor Eletroeletrônico
cursos maiores (aproximadamente 50-80mm) do que os cilindros de membranaplana. O atrito aqui é consideravelmente menor.
Figura 1.15 - Cilindro de membrana de projeção
Cilindro de Ação Dupla
A força do ar comprimido movimenta o pistão do cilindro de ação dupla em duas
direções. Será produzida uma determinada força no avanço, bem como noretrocesso.
Cilindros de ação dupla são utilizados especialmente onde é necessário tambémem retrocesso, exercer uma função de trabalho. O curso, em princípio, é ilimitado,porém, é importante levar em consideração a deformação por flexão eflambagem.
A vedação aqui, efetua-se mediante êmbolo (pistão de dupla vedação).
Figura 1.16 - Cilindro de dupla ação
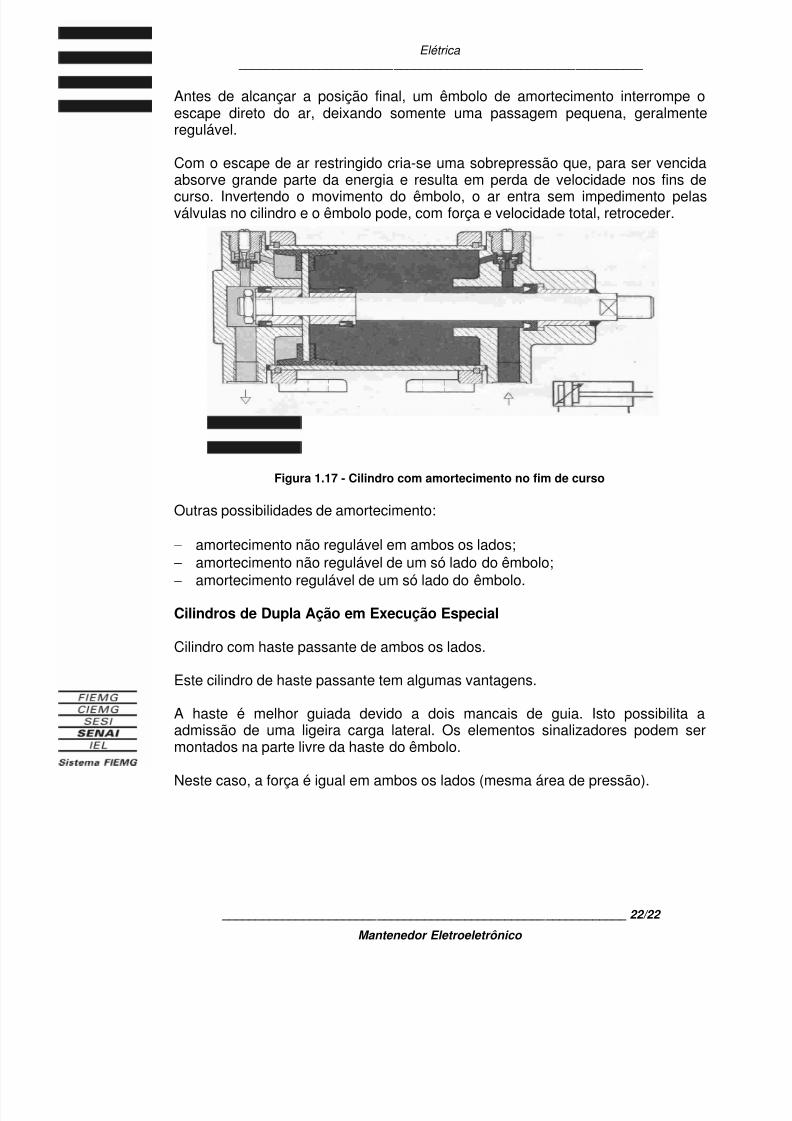
Cilindro com Amortecimento nos Fins de Curso
Quando volumes grandes e pesados são movimentados por um cilindro,emprega-se um sistema de amortecimento para evitar impactos secos ou atédanificações.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 22/67
Elétrica ____________________________________________________________
____________________________________________________________ 22/22
Mantenedor Eletroeletrônico
Antes de alcançar a posição final, um êmbolo de amortecimento interrompe oescape direto do ar, deixando somente uma passagem pequena, geralmenteregulável.
Com o escape de ar restringido cria-se uma sobrepressão que, para ser vencidaabsorve grande parte da energia e resulta em perda de velocidade nos fins de
curso. Invertendo o movimento do êmbolo, o ar entra sem impedimento pelasválvulas no cilindro e o êmbolo pode, com força e velocidade total, retroceder.
Figura 1.17 - Cilindro com amortecimento no fim de curso
Outras possibilidades de amortecimento:
− amortecimento não regulável em ambos os lados;− amortecimento não regulável de um só lado do êmbolo;− amortecimento regulável de um só lado do êmbolo.
Cilindros de Dupla Ação em Execução Especial
Cilindro com haste passante de ambos os lados.
Este cilindro de haste passante tem algumas vantagens.
A haste é melhor guiada devido a dois mancais de guia. Isto possibilita aadmissão de uma ligeira carga lateral. Os elementos sinalizadores podem sermontados na parte livre da haste do êmbolo.
Neste caso, a força é igual em ambos os lados (mesma área de pressão).
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 23/67
Elétrica ____________________________________________________________
____________________________________________________________ 23/23
Mantenedor Eletroeletrônico
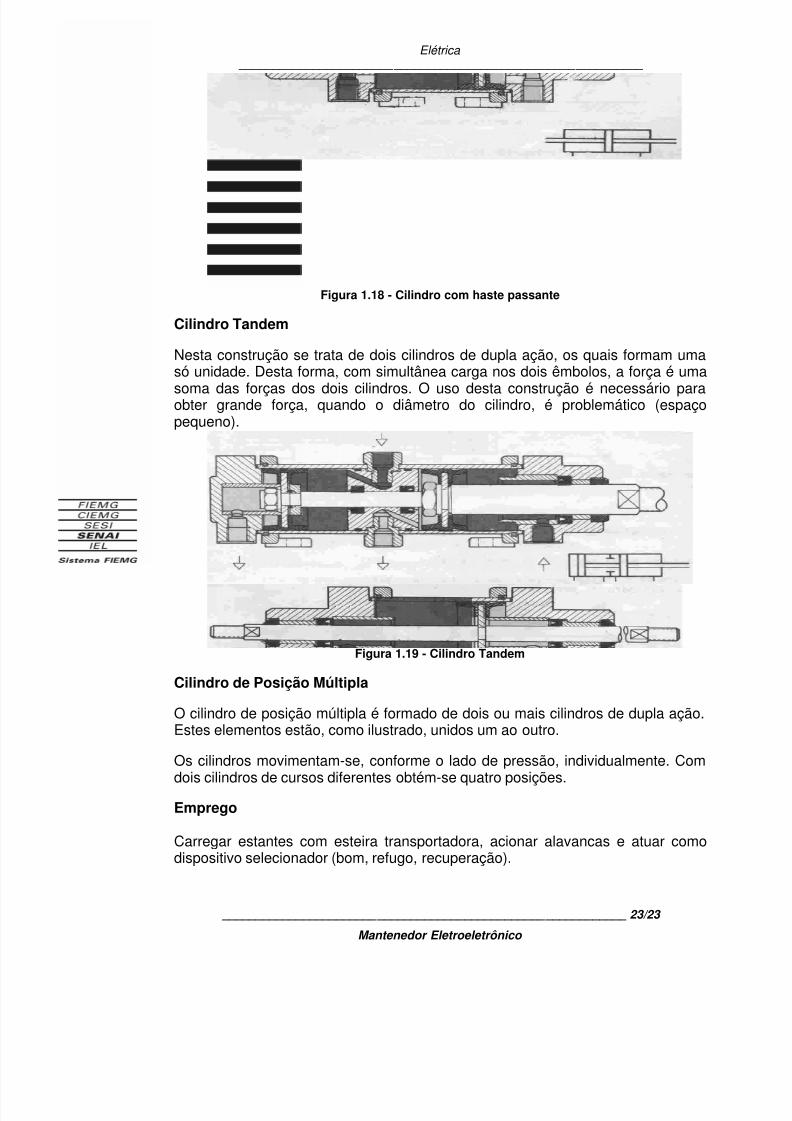
Figura 1.18 - Cilindro com haste passante
Cilindro Tandem
Nesta construção se trata de dois cilindros de dupla ação, os quais formam umasó unidade. Desta forma, com simultânea carga nos dois êmbolos, a força é uma
soma das forças dos dois cilindros. O uso desta construção é necessário paraobter grande força, quando o diâmetro do cilindro, é problemático (espaçopequeno).
Figura 1.19 - Cilindro Tandem
Cilindro de Posição Múltipla
O cilindro de posição múltipla é formado de dois ou mais cilindros de dupla ação.Estes elementos estão, como ilustrado, unidos um ao outro.
Os cilindros movimentam-se, conforme o lado de pressão, individualmente. Comdois cilindros de cursos diferentes obtém-se quatro posições.
Emprego
Carregar estantes com esteira transportadora, acionar alavancas e atuar comodispositivo selecionador (bom, refugo, recuperação).
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 24/67
Elétrica ____________________________________________________________
____________________________________________________________ 24/24
Mantenedor Eletroeletrônico
Figura 1.20 - Cilindro de posição múltipla
Cilindro de Impacto (percussor)
O uso dos cilindros pneumáticos normais na técnica de deformação é limitado.Um cilindro ideal para uma alta energia cinética é o cilindro de impacto. Segundoa fórmula para a energia cinética é o caminho lógico para altas energias deimpacto. Assim:
m . vE =
2
kg m2 E = Energia em Nm ~ Joule
s2
m = Massa em kg
v = velocidade em m/s
Cilindros percussores desenvolvem uma velocidade de 7,5-10 m/ seg. (velocidadenormal 1-2 m/ seg). Esta velocidade só pode ser alcançada por uma construçãoespecial.
A energia destes cilindros será empregada para prensar, rebordar, rebitar, cortar,etc.
A força de impacto é muito grande em relação ao tamanho de construção doscilindros. Geralmente empregam-se estes cilindros em pequenas prensas. Emrelação ao diâmetro do cilindro podem ser alcançadas energias de 25 0 500 Nm.
¡ £ ¥ § ©
¢ ¡ £ ¥ § © ¡ £ ¥ § ©
¢ ¡ £ ¥ § © § $ ¥ ' § 1 4 § ' 7 8 $ 9 © ¥ C E F $ $ ¥ $ F 1 F 8 7 F § 4 F $ 1 ¥ 8 S ¥ 9
£ £ F 1 E 1 ¥ 8 ¥ § Y F E F 8 ` S F E 9 § c 4 ¥ C f 7 C ¥ £ S ¥ E F C F 8 $ § 8 ` ¡ ¥ 1
4 § 4 § F $ 4 § ¥ £ S ¥ ' F 1 w
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 25/67
Elétrica ____________________________________________________________
____________________________________________________________ 25/25
Mantenedor Eletroeletrônico
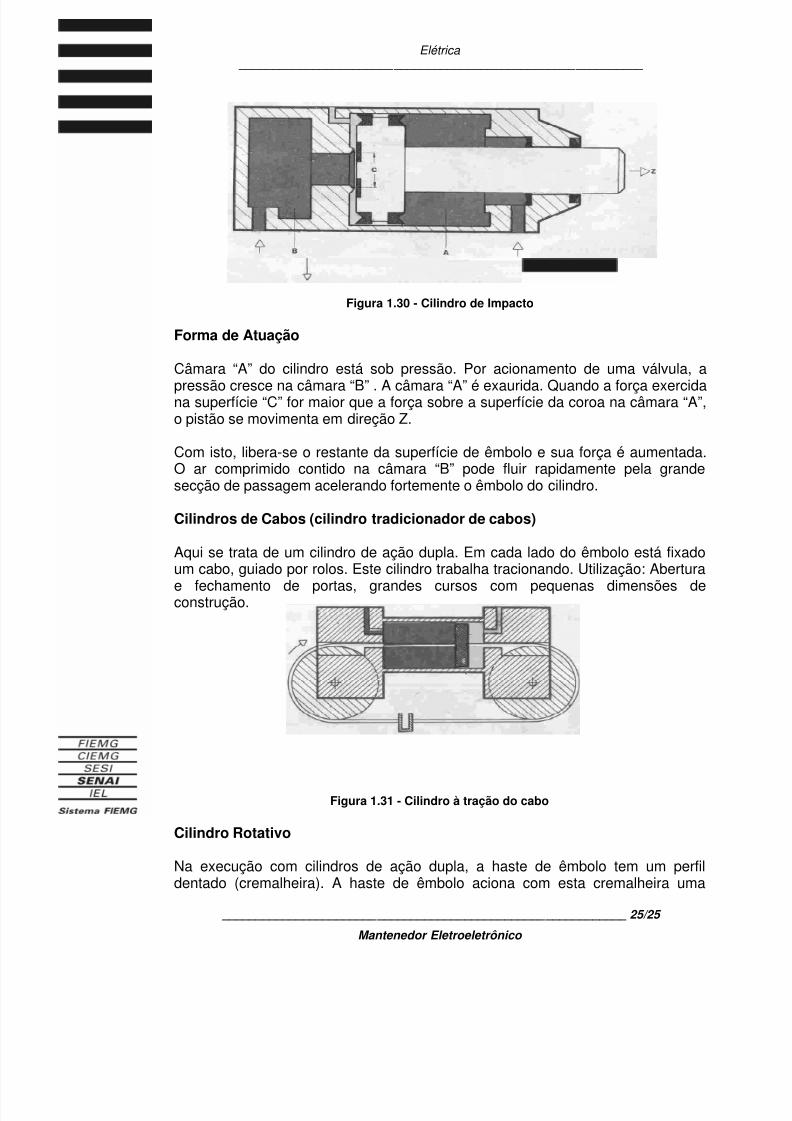
Figura 1.30 - Cilindro de Impacto
Forma de Atuação
Câmara “A” do cilindro está sob pressão. Por acionamento de uma válvula, a
pressão cresce na câmara “B” . A câmara “A” é exaurida. Quando a força exercidana superfície “C” for maior que a força sobre a superfície da coroa na câmara “A”,o pistão se movimenta em direção Z.
Com isto, libera-se o restante da superfície de êmbolo e sua força é aumentada.O ar comprimido contido na câmara “B” pode fluir rapidamente pela grandesecção de passagem acelerando fortemente o êmbolo do cilindro.
Cilindros de Cabos (cilindro tradicionador de cabos)
Aqui se trata de um cilindro de ação dupla. Em cada lado do êmbolo está fixadoum cabo, guiado por rolos. Este cilindro trabalha tracionando. Utilização: Abertura
e fechamento de portas, grandes cursos com pequenas dimensões deconstrução.
Figura 1.31 - Cilindro à tração do cabo
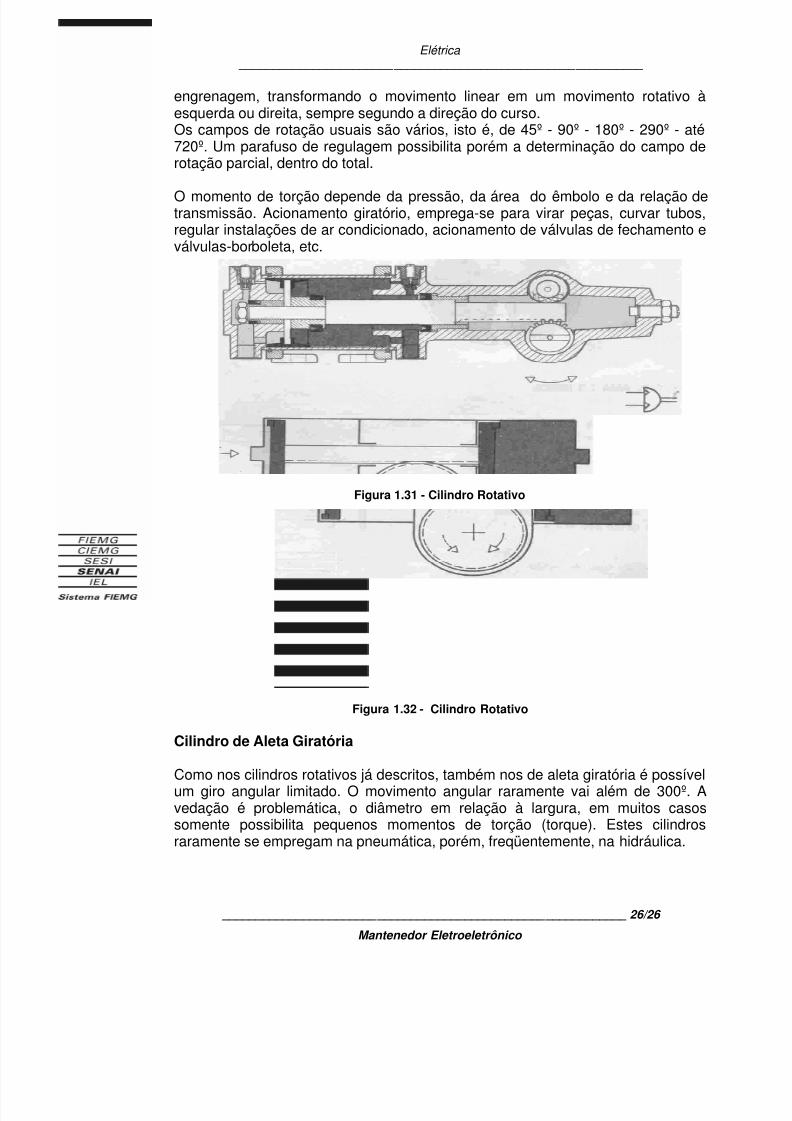
Cilindro Rotativo
Na execução com cilindros de ação dupla, a haste de êmbolo tem um perfildentado (cremalheira). A haste de êmbolo aciona com esta cremalheira uma
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 26/67
Elétrica ____________________________________________________________
____________________________________________________________ 26/26
Mantenedor Eletroeletrônico
engrenagem, transformando o movimento linear em um movimento rotativo àesquerda ou direita, sempre segundo a direção do curso.Os campos de rotação usuais são vários, isto é, de 45º - 90º - 180º - 290º - até720º. Um parafuso de regulagem possibilita porém a determinação do campo derotação parcial, dentro do total.
O momento de torção depende da pressão, da área do êmbolo e da relação detransmissão. Acionamento giratório, emprega-se para virar peças, curvar tubos,regular instalações de ar condicionado, acionamento de válvulas de fechamento eválvulas-borboleta, etc.
Figura 1.31 - Cilindro Rotativo
Figura 1.32 - Cilindro Rotativo
Cilindro de Aleta Giratória
Como nos cilindros rotativos já descritos, também nos de aleta giratória é possívelum giro angular limitado. O movimento angular raramente vai além de 300º. Avedação é problemática, o diâmetro em relação à largura, em muitos casossomente possibilita pequenos momentos de torção (torque). Estes cilindrosraramente se empregam na pneumática, porém, freqüentemente, na hidráulica.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 27/67
Elétrica ____________________________________________________________
____________________________________________________________ 27/27
Mantenedor Eletroeletrônico
Figura 1.33 - Cilindro de aleta giratória
Execuções Especiais para Cilindros
Figura 1.34 - Cilindro com haste do êmbolo reforçado
Figura 1.35 - Guarnição do êmbolo para pressão máxima de 25 bar
Figura 1.36 - Cilindro com guarnição (gaxetas) resistentes a calor até 473 k (+ 200ºC )
Figura 1.37 - Cilindro com tubo de latão
Figura 1.38 - Superfície interna do cilindro em cromo duro
Figura 1.39 - Haste do êmbolo em aço à prova de ácidos
Figura 1.40 - Superfície externa do cilindro com proteção de material sintético e haste doêmbolo em aço a prova de ácidos
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 28/67
Elétrica ____________________________________________________________
____________________________________________________________ 28/28
Mantenedor Eletroeletrônico
1.5 VÁLVULAS DE CONTROLE PNEUMÁTICO
Denominam-se válvulas os elementos emissores de sinal e de comando queinfluenciam os processos de trabalho.
Válvulas são aparelhos de comando ou de regulagem, de partida, parada edireção. São simbolizadas por quadrados que, unidos e de acordo com a suaquantidade, indicam o número de posições que podem assumir.
A função e o número de vias das válvulas são desenhados nos quadrados.
Figura 1.41 - Simbolização das válvulas
Para intensificação e uma ligação correta das válvulas, marcam-se as vias,considerando:
vias para utilização (saídas): A – B – C – D ou 2 – 4 – 6 – 8 linhas de alimentação (entrada): P ou 1 escapes (exaustão): R – S – T ou 3 – 5 – 7 linha de comando (pilotagem): Z – Y – X ou 12 – 14 – 16
Segundo as suas funções, as válvulas subdividem-se em:
direcionais de bloqueio de pressão de fluxo (vazão) de fechamento
Válvulas Direcionais
A denominação de uma válvula direcional depende do número de vias (conexões)e do número das posições de comando. As conexões de pilotagem não sãoconsideradas como vias.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 29/67
Elétrica ____________________________________________________________
____________________________________________________________ 29/29
Mantenedor Eletroeletrônico
Meios de Acionamento
- geralMuscular - por botão
- por alavanca- por pedal
- apalpadorMecânico - por mola
- por rolete- por rolete escamoteável (gatilho)
- por eletroímã (bobina- solenóide)Elétrico - com um enrolamento ativo
- com dois enrolamentos ativos no mesmo sentido
- com dois enrolamentos ativos em sentido contrário
Direto - por acréscimo de pressão (positivo)- por decréscimo de pressão (negativo)
PneumáticoIndireto - sevopiloto positivo
- servopiloto negativo
Combinado - por eletroímã e válvula de servocomando- por elétroímã ou váuvula servocomando
Segundo o tempo de acionamento, as válvulas direcionais são consideradas deacionamento contínuo e de acionamento momentâneo (impulso).
Válvulas de Bloqueio
Estas válvulas têm as seguintes características:
− alternadora (elemento OU )− retenção− escape rápido
− expulsor pneumático− de duas pressões (de simultaneidade; elemento E )
Válvulas de Pressão
Subdividem-se em:
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 30/67
Elétrica ____________________________________________________________
____________________________________________________________ 30/30
Mantenedor Eletroeletrônico
Válvula reguladora - sem escape mantém constantede pressão - com escape a pressão de trabalho
Válvula limitadora de válvula de segurança ou de alíviopressão
Válvula de seqüência comandos seqüenciais (pressostato)
Válvulas de Fluxo (vazão)
Estas válvulas apresentam-se de duas formas:
Com estrangulamento - de estrangulamentoconstante - de membrana (diafragma)
Com estrangulamento - reguladora de fluxo bidirecionalregulável - reguladora de fluxo unidirecional
- reguladora de fluxo com acionamentomecânico
Válvulas de Fechamento
As válvulas de fechamento abrem e fecham a passagem do fluxo.
Combinações de Válvulas
As combinações de válvulas são feitas para:
− bloco de comando pneumático− válvula de retardo (temporizador)− alimentador de avanço compassado, válvula com oito vias− emissor variável de impulsos (multivibrador)− divisor binário (flip-flop)
Os comandos , partindo de um ponto e ainda segundo um programa emdependência de tempo, podem ser feitos com um elemento de comandoprogramado.
Esta unidade pode ser formada de até 20 válvulas direcionais de 3/2 vias.
O comando programado é feito através de:
− programador com eixo de cames;− programador com esteiras porta-cames.

7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 31/67
Elétrica ____________________________________________________________
____________________________________________________________ 31/31
Mantenedor Eletroeletrônico
1.6 COMANDOS BÁSICOS
Comando Direto de Cilindros
Figura 1.42 - De ação simples Figura 1.43 - De dupla ação
Comandos de Duas Diferentes Posições
Figura 1.44 – Circuito em paralelo
Comando com Velocidade do Êmbolo Controlada no Avanço e no Retorno
Figura 1.45 - De ação simples Figura 1.46 - De dupla ação
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 32/67
Elétrica ____________________________________________________________
____________________________________________________________ 32/32
Mantenedor Eletroeletrônico
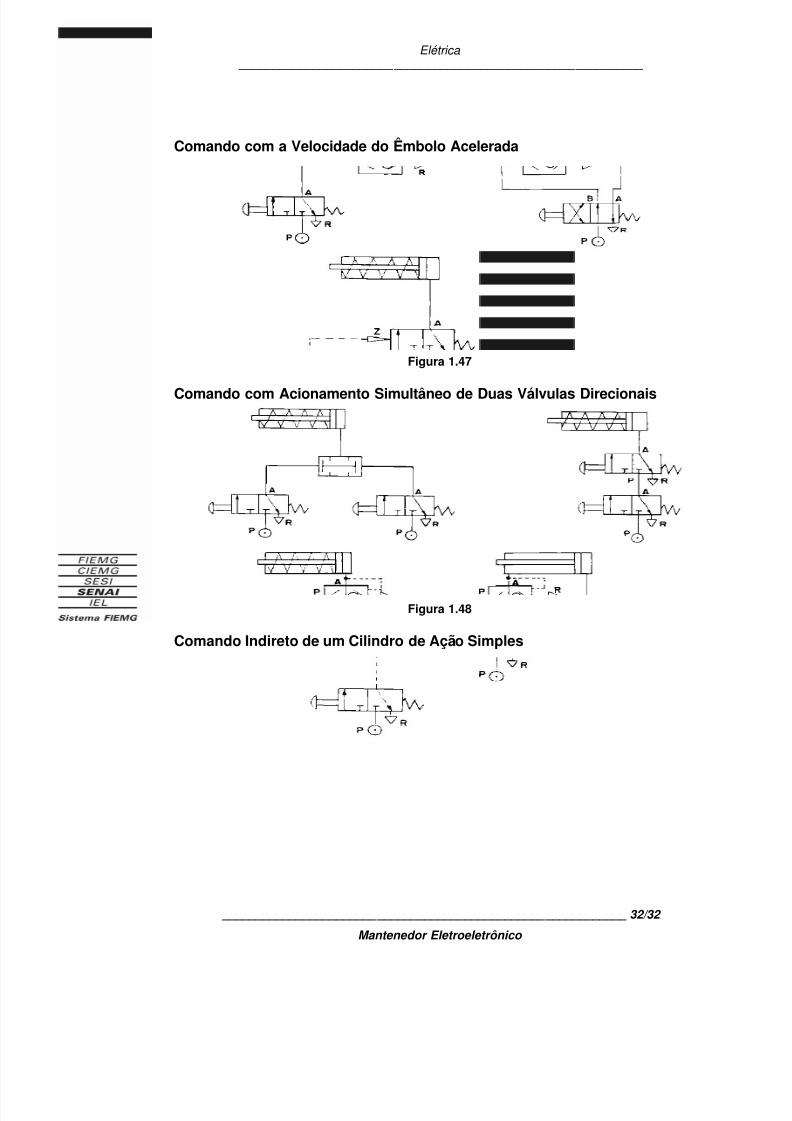
Comando com a Velocidade do Êmbolo Acelerada
Figura 1.47
Comando com Acionamento Simultâneo de Duas Válvulas Direcionais
Figura 1.48
Comando Indireto de um Cilindro de Ação Simples
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 33/67
Elétrica ____________________________________________________________
____________________________________________________________ 33/33
Mantenedor Eletroeletrônico
Saída de sinais
Processamentode sinais
Elementos decomando e de trabalho
Figura 1.49
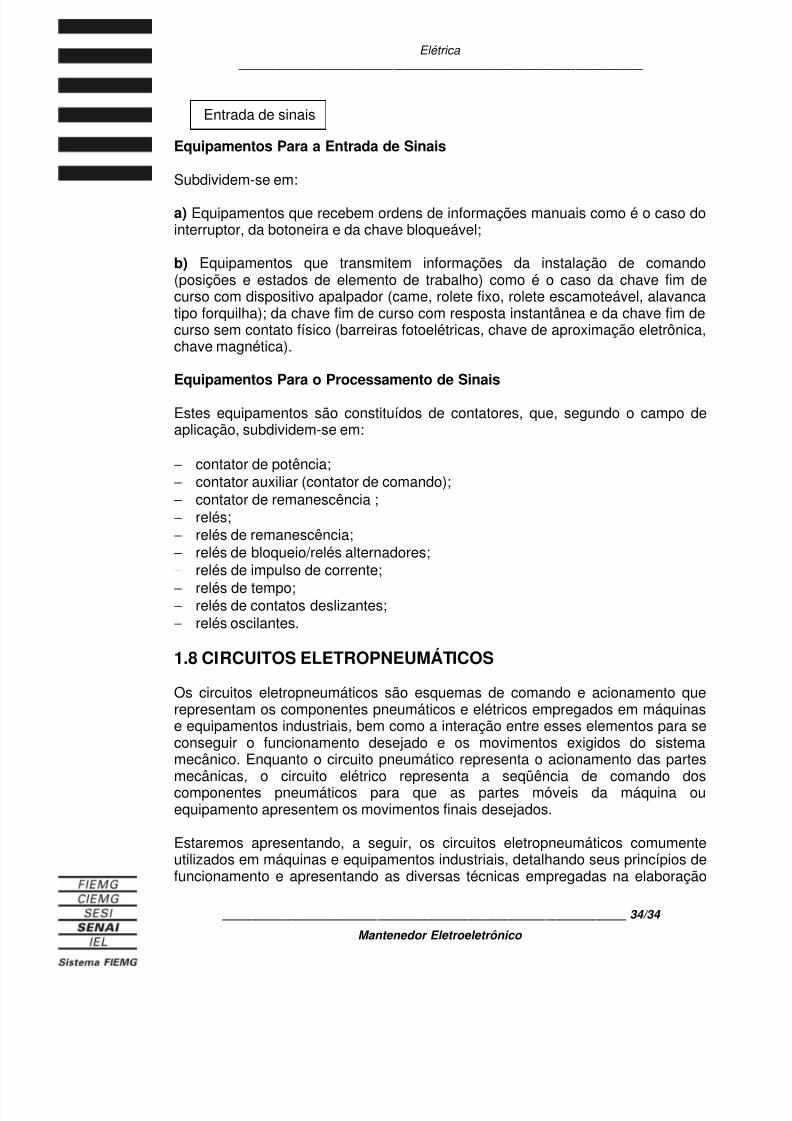
1.7 ELEMENTOS ELETROPNEUMÁTICOS
Os comandos eletropneumáticos compõem-se de uma parte pneumática e uma
parte de comando eletromecânico, porém é possível estabelecer parcialmenteuma posição inversa ou mista.
Para a combinação entre as partes pneumática e de eletricidade, o elemento deinterligação é o conversor de sinais, cuja combinação é uma chave elétricaacionada por um cilindro pneumático de ação simples. A pressão indicada paraesta combinação é de 0,6 a 10 bars.
Figura 1.50 – Conversor
Os sinais provenientes de comandos pneumáticos podem ser usados em formadireta para acionar contatores. O contator principal acionado pneumaticamente éformado por:
− câmara de ligações (parte elétrica);− cilindro de ação simples (parte pneumática);− pistão de comando.
Figura 1.51 - Contator-conversor de sinais
Os contatores-conversores de sinais podem ser aplicados no acionamento deelementos elétricos, controle de produção de peças, para desligar motores deacionamento, etc.
A decomposição dos comandos elétricos segundo a sistemática de fluxo de sinaisé a seguinte:
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 34/67
Elétrica ____________________________________________________________
____________________________________________________________ 34/34
Mantenedor Eletroeletrônico
Entrada de sinais
Equipamentos Para a Entrada de Sinais
Subdividem-se em:
a) Equipamentos que recebem ordens de informações manuais como é o caso dointerruptor, da botoneira e da chave bloqueável;
b) Equipamentos que transmitem informações da instalação de comando(posições e estados de elemento de trabalho) como é o caso da chave fim decurso com dispositivo apalpador (came, rolete fixo, rolete escamoteável, alavancatipo forquilha); da chave fim de curso com resposta instantânea e da chave fim decurso sem contato físico (barreiras fotoelétricas, chave de aproximação eletrônica,chave magnética).
Equipamentos Para o Processamento de Sinais
Estes equipamentos são constituídos de contatores, que, segundo o campo deaplicação, subdividem-se em:
− contator de potência;− contator auxiliar (contator de comando);− contator de remanescência ;− relés;− relés de remanescência;− relés de bloqueio/relés alternadores;− relés de impulso de corrente;
− relés de tempo;− relés de contatos deslizantes;− relés oscilantes.
1.8 CIRCUITOS ELETROPNEUMÁTICOS
Os circuitos eletropneumáticos são esquemas de comando e acionamento querepresentam os componentes pneumáticos e elétricos empregados em máquinase equipamentos industriais, bem como a interação entre esses elementos para seconseguir o funcionamento desejado e os movimentos exigidos do sistemamecânico. Enquanto o circuito pneumático representa o acionamento das partesmecânicas, o circuito elétrico representa a seqüência de comando doscomponentes pneumáticos para que as partes móveis da máquina ouequipamento apresentem os movimentos finais desejados.
Estaremos apresentando, a seguir, os circuitos eletropneumáticos comumenteutilizados em máquinas e equipamentos industriais, detalhando seus princípios defuncionamento e apresentando as diversas técnicas empregadas na elaboração
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 35/67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 36/67
Elétrica ____________________________________________________________
____________________________________________________________ 36/36
Mantenedor Eletroeletrônico
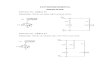
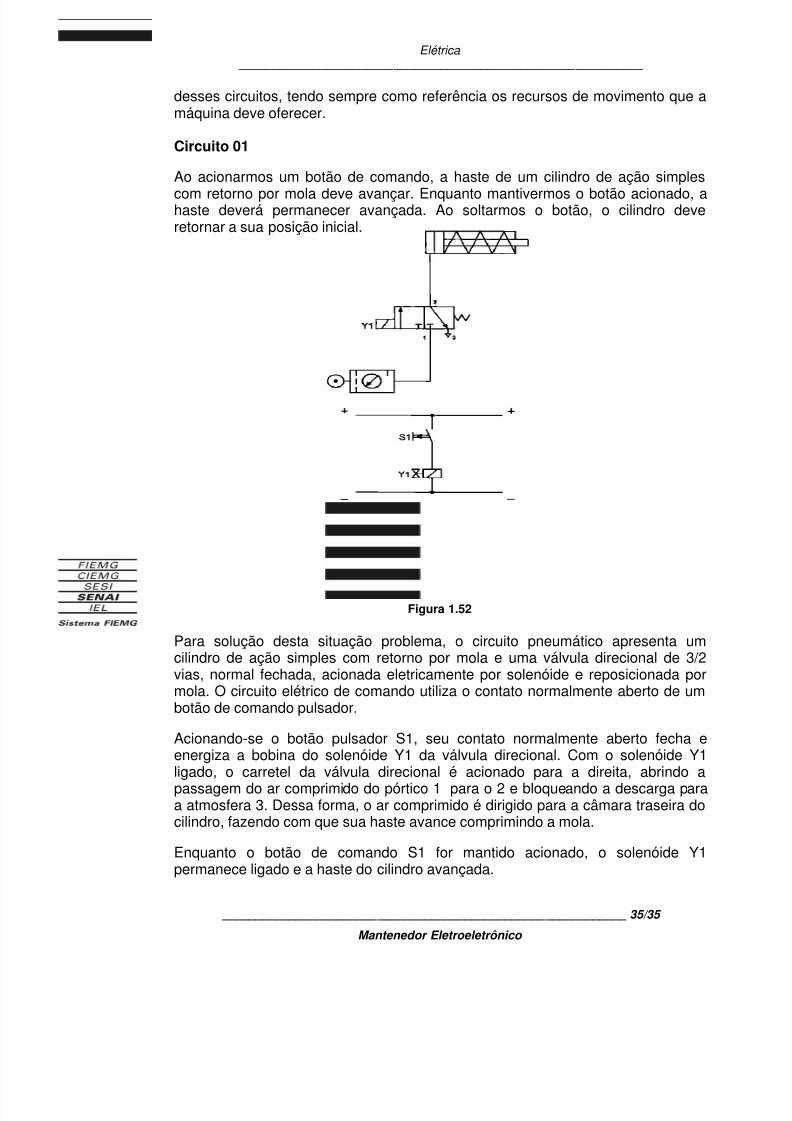
Soltando-se o botão pulsador S1, seu contato que havia fechado abreautomaticamente e interrompe a passagem da corrente elétrica, desligando abobina do solenóide Y1. Quando o solenóide Y1 é desativado, a mola da válvuladirecional empurra o carretel para a esquerda, bloqueando o pórtico 1 einterligando os pórticos 2 e 3. Dessa forma, o ar comprimido acumulado nacâmara traseira do cilindro escapa para a atmosfera e a mola do cilindro retorna a
haste para a sua posição inicial.
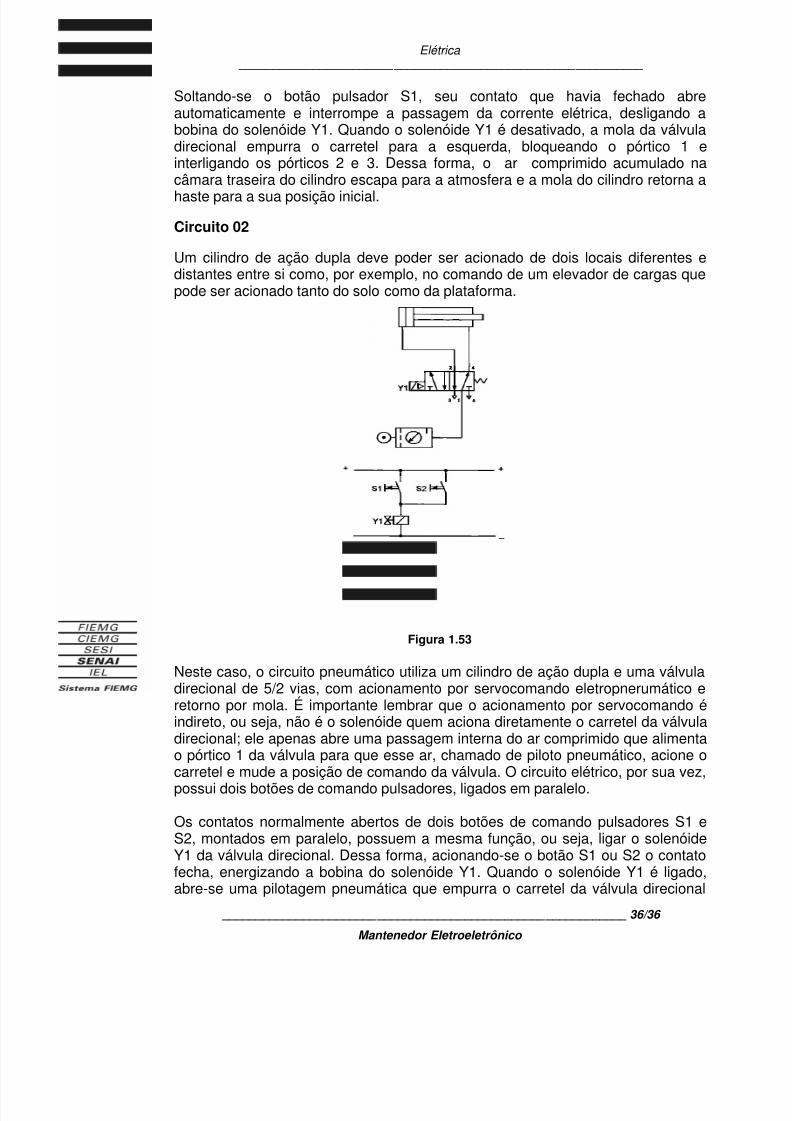
Circuito 02
Um cilindro de ação dupla deve poder ser acionado de dois locais diferentes edistantes entre si como, por exemplo, no comando de um elevador de cargas quepode ser acionado tanto do solo como da plataforma.
Figura 1.53
Neste caso, o circuito pneumático utiliza um cilindro de ação dupla e uma válvuladirecional de 5/2 vias, com acionamento por servocomando eletropnerumático eretorno por mola. É importante lembrar que o acionamento por servocomando éindireto, ou seja, não é o solenóide quem aciona diretamente o carretel da válvuladirecional; ele apenas abre uma passagem interna do ar comprimido que alimentao pórtico 1 da válvula para que esse ar, chamado de piloto pneumático, acione ocarretel e mude a posição de comando da válvula. O circuito elétrico, por sua vez,
possui dois botões de comando pulsadores, ligados em paralelo.
Os contatos normalmente abertos de dois botões de comando pulsadores S1 eS2, montados em paralelo, possuem a mesma função, ou seja, ligar o solenóideY1 da válvula direcional. Dessa forma, acionando-se o botão S1 ou S2 o contatofecha, energizando a bobina do solenóide Y1. Quando o solenóide Y1 é ligado,abre-se uma pilotagem pneumática que empurra o carretel da válvula direcional
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 37/67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 38/67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 39/67
Elétrica ____________________________________________________________
____________________________________________________________ 39/39
Mantenedor Eletroeletrônico
10 kgf 100kgf=
1cm2 10cm2
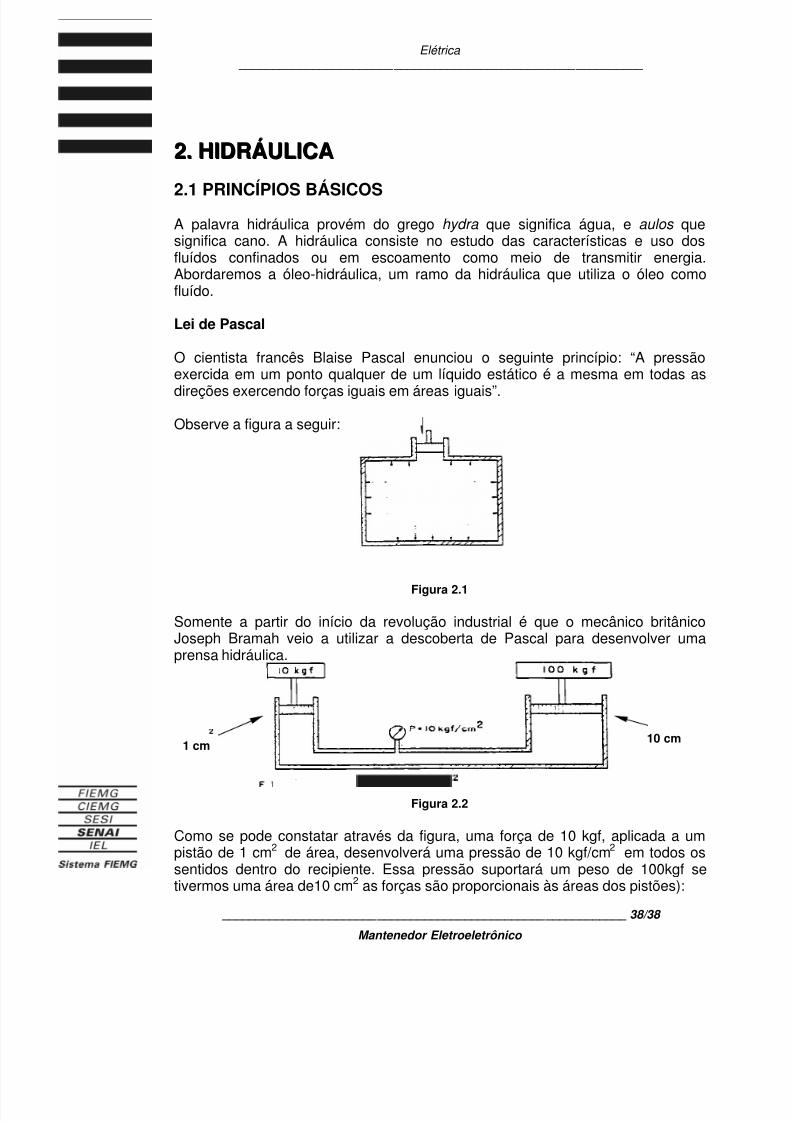
2.2 PRESSÃO
Pressão é a força exercida por unidade de área. Na hidráulica, é expressa emkgf/cm2 , Atm ou Bar.
P = kgf/cm2 F
P =A
F = kgf
A = cm2
¡ £ ¥ §
¢ ¡ £ ¥ § ¡ £ ¥ §
¢ ¡ £ ¥ § ©
© ©
© y 4 § S F E 9 E 8 £ F $ ¥ § 1 £ w
Conservação e Transmissão de Energia Hidráulica
A energia não pode ser criada e nem destruída. A multiplicação de força, nahidráulica não significa obter-se alguma coisa de nada. Como se vê na figura 2, opistão maior, movido pelo fluido deslocado do pistão menor, faz com que a
distância de cada pistão seja inversamente proporcional às suas áreas. O ganhoem relação à força tem que ser sacrificado em distância ou velocidade.
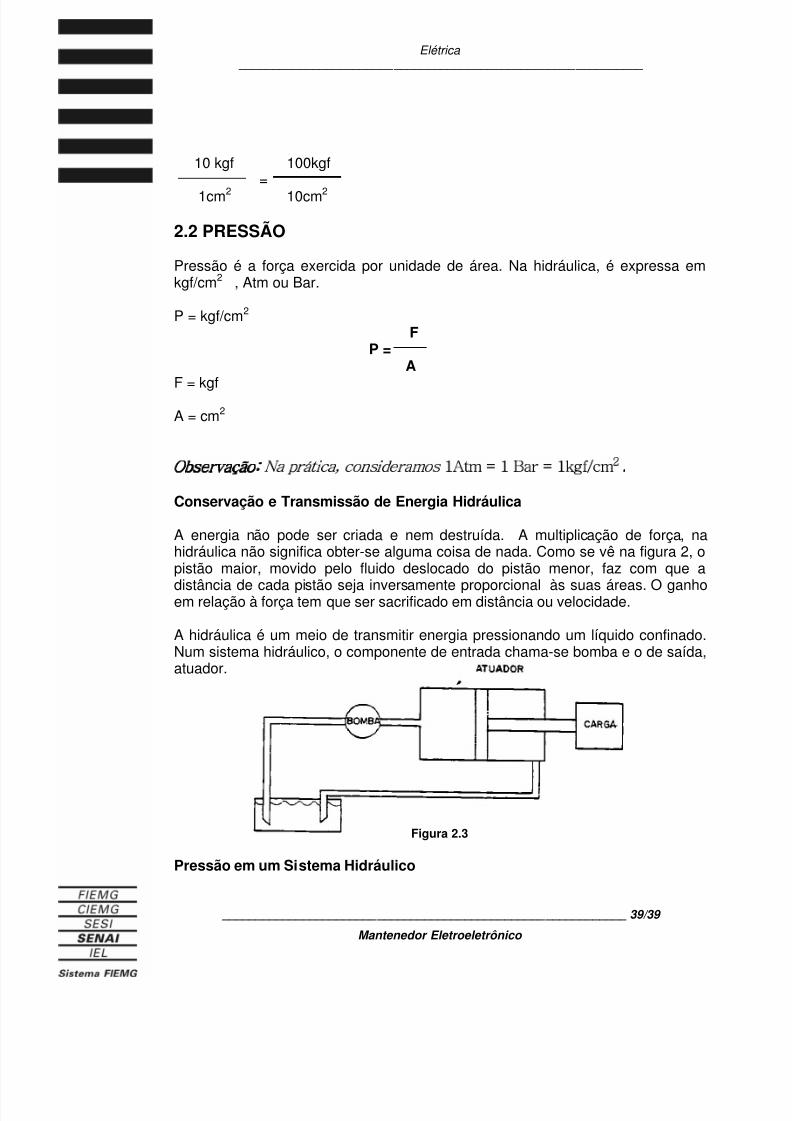
A hidráulica é um meio de transmitir energia pressionando um líquido confinado.Num sistema hidráulico, o componente de entrada chama-se bomba e o de saída,atuador.
Figura 2.3
Pressão em um Sistema Hidráulico
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 40/67
Elétrica ____________________________________________________________
____________________________________________________________ 40/40
Mantenedor Eletroeletrônico
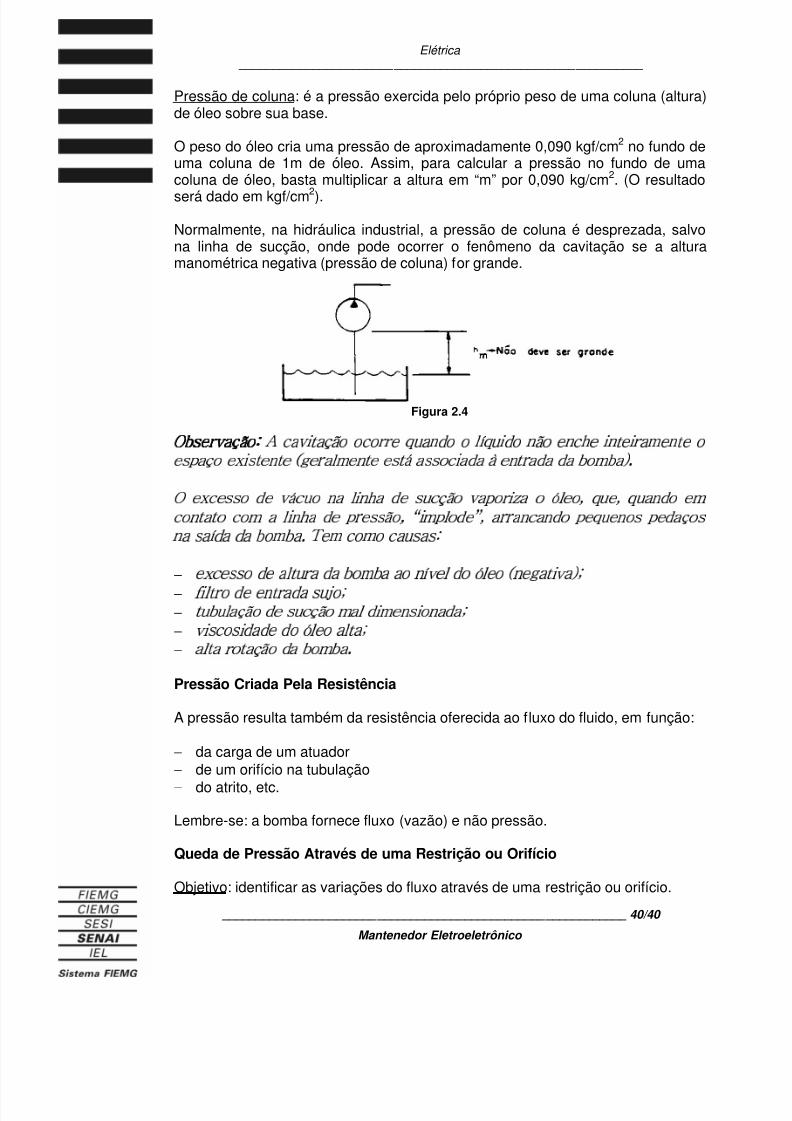
Pressão de coluna: é a pressão exercida pelo próprio peso de uma coluna (altura)de óleo sobre sua base.
O peso do óleo cria uma pressão de aproximadamente 0,090 kgf/cm2 no fundo deuma coluna de 1m de óleo. Assim, para calcular a pressão no fundo de umacoluna de óleo, basta multiplicar a altura em “m” por 0,090 kg/cm2. (O resultado
será dado em kgf/cm2).
Normalmente, na hidráulica industrial, a pressão de coluna é desprezada, salvona linha de sucção, onde pode ocorrer o fenômeno da cavitação se a alturamanométrica negativa (pressão de coluna) for grande.
Figura 2.4
¡ £ ¥ § ©
¢ ¡ £ ¥ § © ¡ £ ¥ § ©
¢ ¡ £ ¥ § © E © F S E § § ¥ f 7 8 $ C l f 7 F $ 8 ¥ 8 E n ¥ F 8 S ¥ F § 1 ¥ 8 S ¥
¥ £ 4 ¥ F £ S ¥ 8 S ¥ Y ¥ § C 1 ¥ 8 S ¥ ¥ £ S £ £ E F $ ¥ 8 S § $ $ ¡ 1 ¡ w
¥ E ¥ £ £ $ ¥ © E 7 8 C F 8 n $ ¥ £ 7 E © 4 § F c ~ C ¥ 9 f 7 ¥ 9 f 7 8 $ ¥ 1
E 8 S S E 1 C F 8 n $ ¥ 4 § ¥ £ £ 9 F 1 4 C $ ¥ 9 § § 8 E 8 $ 4 ¥ f 7 ¥ 8 £ 4 ¥ $ £
8 £ l $ $ ¡ 1 ¡ w ¥ 1 E 1 E 7 £ £
−¥ E ¥ £ £ $ ¥ C S 7 § $ ¡ 1 ¡ 8 l © ¥ C $ ~ C ¥ 8 ¥ Y S F ©
−' F C S § $ ¥ ¥ 8 S § $ £ 7
−S 7 ¡ 7 C $ ¥ £ 7 E 1 C $ F 1 ¥ 8 £ F 8 $
−© F £ E £ F $ $ ¥ $ ~ C ¥ C S
− C S § S $ ¡ 1 ¡ w
Pressão Criada Pela Resistência
A pressão resulta também da resistência oferecida ao fluxo do fluido, em função:
− da carga de um atuador− de um orifício na tubulação
− do atrito, etc.
Lembre-se: a bomba fornece fluxo (vazão) e não pressão.
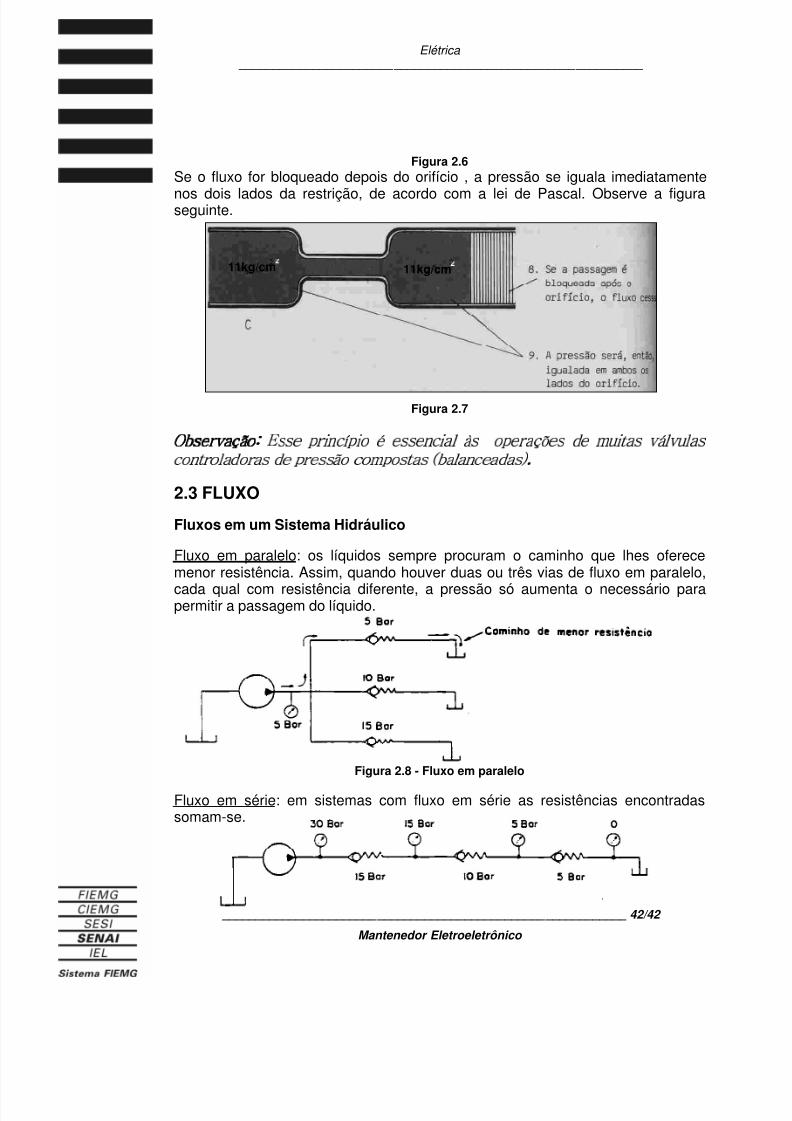
Queda de Pressão Através de uma Restrição ou Orifício
Objetivo: identificar as variações do fluxo através de uma restrição ou orifício.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 41/67
Elétrica ____________________________________________________________
____________________________________________________________ 41/41
Mantenedor Eletroeletrônico
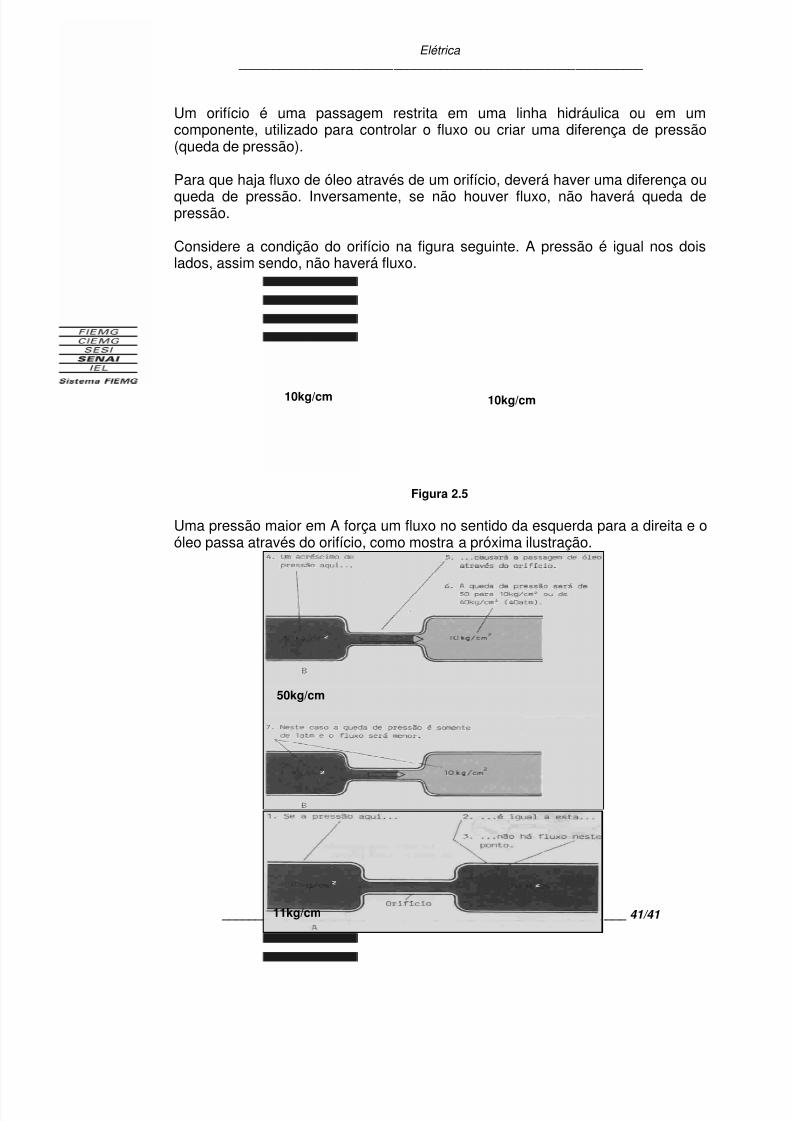
Um orifício é uma passagem restrita em uma linha hidráulica ou em umcomponente, utilizado para controlar o fluxo ou criar uma diferença de pressão(queda de pressão).
Para que haja fluxo de óleo através de um orifício, deverá haver uma diferença ou
queda de pressão. Inversamente, se não houver fluxo, não haverá queda depressão.
Considere a condição do orifício na figura seguinte. A pressão é igual nos doislados, assim sendo, não haverá fluxo.
Figura 2.5
Uma pressão maior em A força um fluxo no sentido da esquerda para a direita e oóleo passa através do orifício, como mostra a próxima ilustração.
10kg/cm 10kg/cm
50kg/cm
11kg/cm
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 42/67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 43/67
Elétrica ____________________________________________________________
____________________________________________________________ 43/43
Mantenedor Eletroeletrônico
F = P . A
QV =
A
N = 0,0007 . Q . P
Q . PV =
426
Figura 2.9 – Fluxo em série
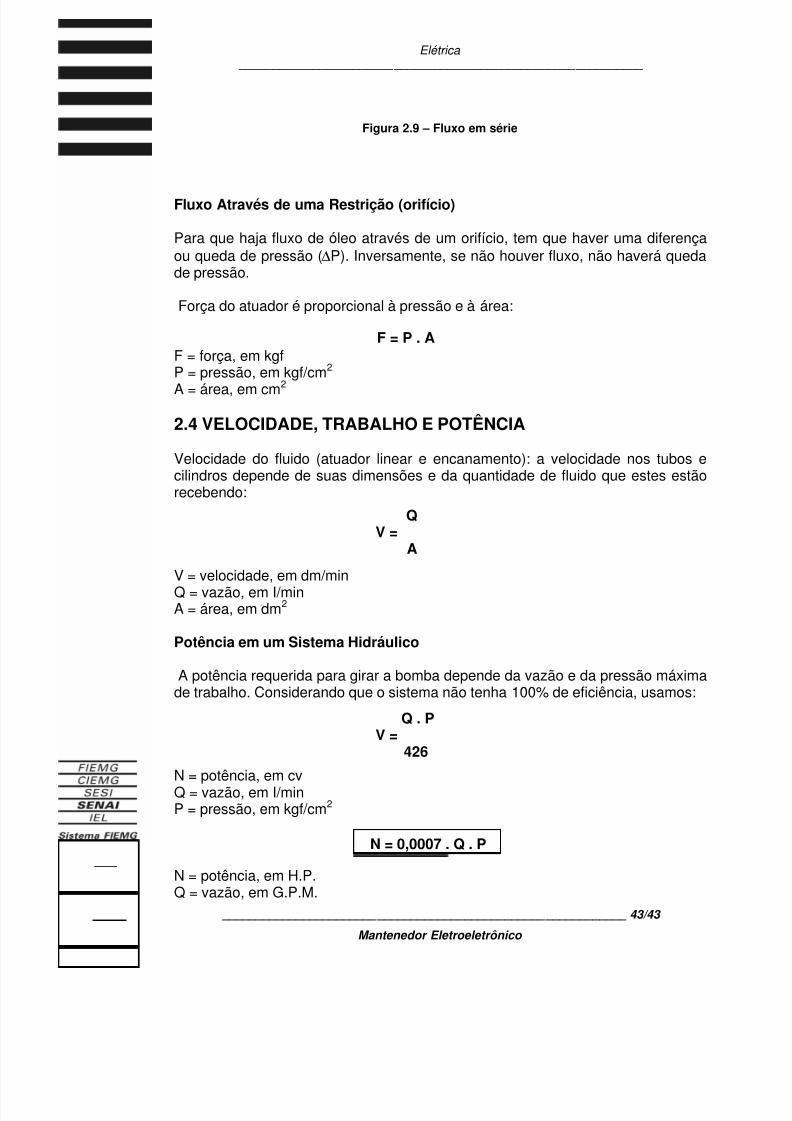
Fluxo Através de uma Restrição (orifício)
Para que haja fluxo de óleo através de um orifício, tem que haver uma diferençaou queda de pressão (∆P). Inversamente, se não houver fluxo, não haverá quedade pressão.
Força do atuador é proporcional à pressão e à área:
F = força, em kgfP = pressão, em kgf/cm2
A = área, em cm2
2.4 VELOCIDADE, TRABALHO E POTÊNCIA
Velocidade do fluido (atuador linear e encanamento): a velocidade nos tubos ecilindros depende de suas dimensões e da quantidade de fluido que estes estãorecebendo:
V = velocidade, em dm/min
Q = vazão, em I/minA = área, em dm2
Potência em um Sistema Hidráulico
A potência requerida para girar a bomba depende da vazão e da pressão máximade trabalho. Considerando que o sistema não tenha 100% de eficiência, usamos:
N = potência, em cvQ = vazão, em I/minP = pressão, em kgf/cm2
N = potência, em H.P.Q = vazão, em G.P.M.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 44/67
Elétrica ____________________________________________________________
____________________________________________________________ 44/44
Mantenedor Eletroeletrônico
P = pressão, em P.S.L.
¡ £ ¥ § ©
¢ ¡ £ ¥ § © ¡ £ ¥ § ©
¢ ¡ £ ¥ § © E © 9 w w
2.5 - VÁLVULAS
Válvulas Direcionais
Variando consideralvemente, tanto em construção como em operação, sãousadas para controlar a direção do fluxo e para que sejam obtidos os movimentosdesejados dos atuadores (cilindros, motores, etc.), de maneira a efetuar otrabalho exigido.
Existem vários tipos de válvulas direcionais. Vejamos:
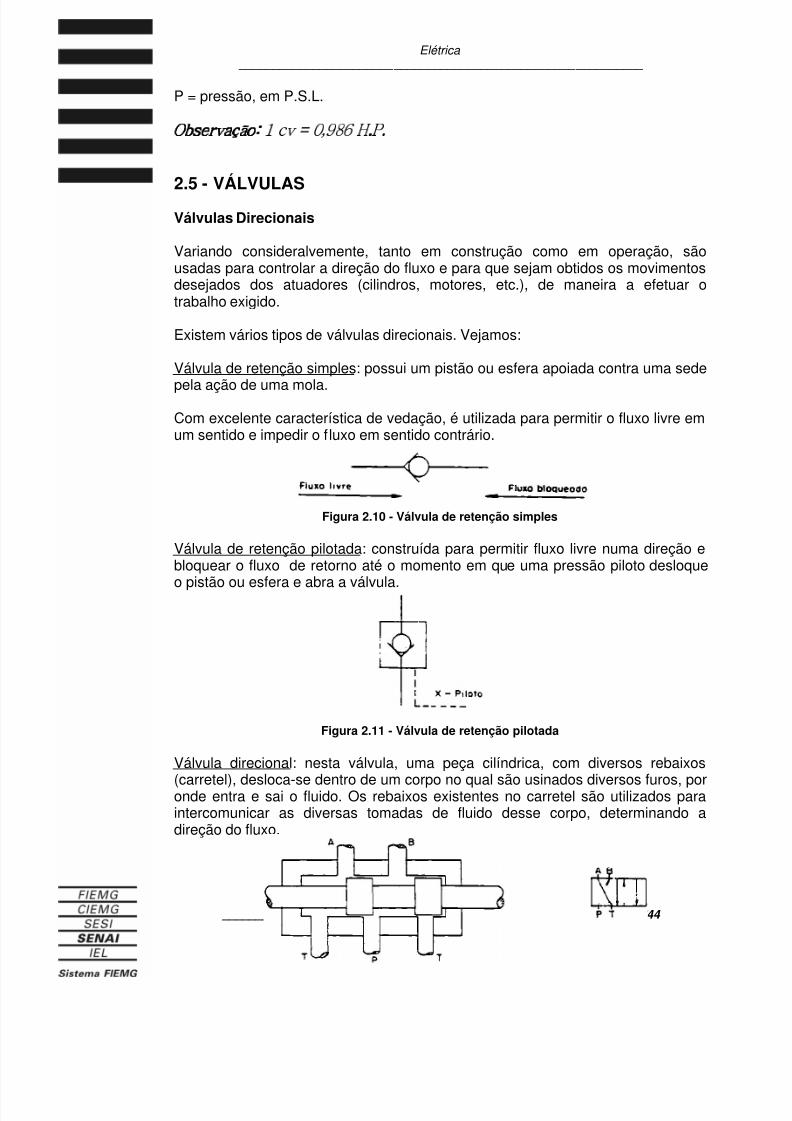
Válvula de retenção simples: possui um pistão ou esfera apoiada contra uma sede
pela ação de uma mola.Com excelente característica de vedação, é utilizada para permitir o fluxo livre emum sentido e impedir o f luxo em sentido contrário.
Figura 2.10 - Válvula de retenção simples
Válvula de retenção pilotada: construída para permitir fluxo livre numa direção ebloquear o fluxo de retorno até o momento em que uma pressão piloto desloque
o pistão ou esfera e abra a válvula.
Figura 2.11 - Válvula de retenção pilotada
Válvula direcional: nesta válvula, uma peça cilíndrica, com diversos rebaixos
(carretel), desloca-se dentro de um corpo no qual são usinados diversos furos, poronde entra e sai o fluido. Os rebaixos existentes no carretel são utilizados paraintercomunicar as diversas tomadas de fluido desse corpo, determinando adireção do fluxo.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 45/67
Elétrica ____________________________________________________________
____________________________________________________________ 45/45
Mantenedor Eletroeletrônico
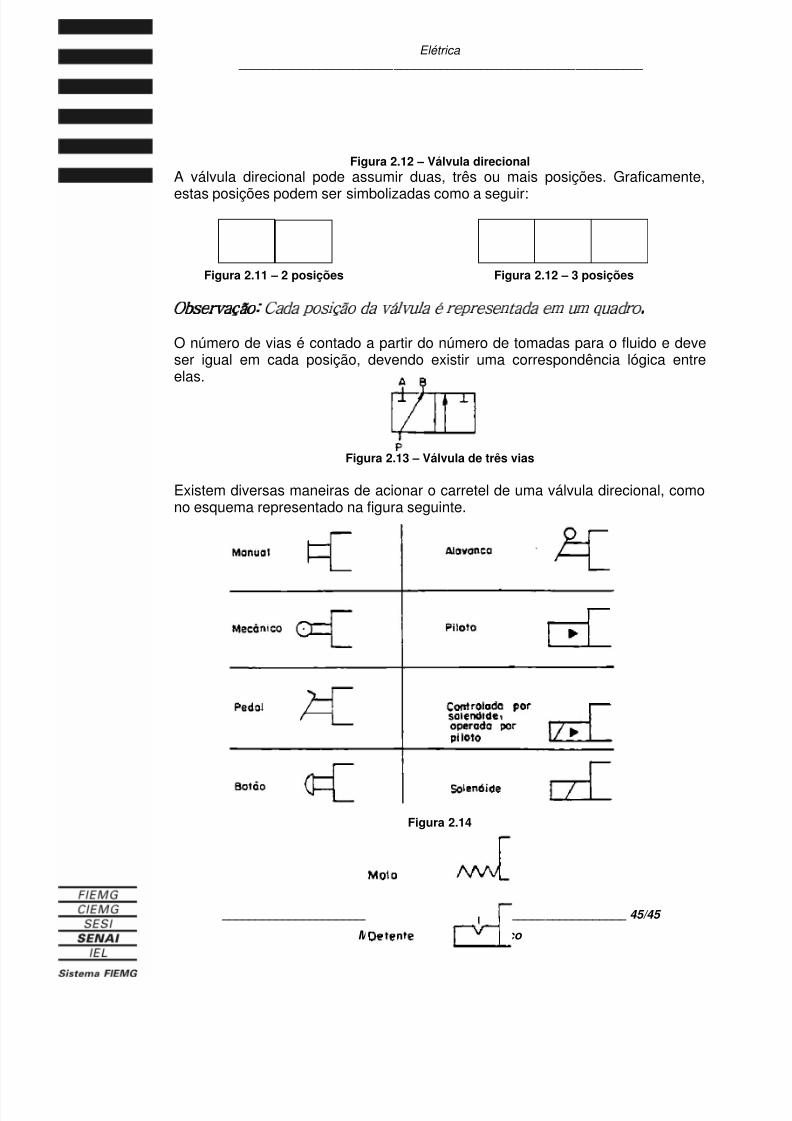
Figura 2.12 – Válvula direcionalA válvula direcional pode assumir duas, três ou mais posições. Graficamente,
estas posições podem ser simbolizadas como a seguir:
Figura 2.11 – 2 posições Figura 2.12 – 3 posições
¡ £ ¥ § ©
¢ ¡ £ ¥ § © ¡ £ ¥ § ©
¢ ¡ £ ¥ § © $ 4 £ F $ © C © 7 C ` § ¥ 4 § ¥ £ ¥ 8 S $ ¥ 1 7 1 f 7 $ § w
O número de vias é contado a partir do número de tomadas para o fluido e deveser igual em cada posição, devendo existir uma correspondência lógica entreelas.
Figura 2.13 – Válvula de três vias
Existem diversas maneiras de acionar o carretel de uma válvula direcional, comono esquema representado na figura seguinte.
Figura 2.14
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 46/67
Elétrica ____________________________________________________________
____________________________________________________________ 46/46
Mantenedor Eletroeletrônico
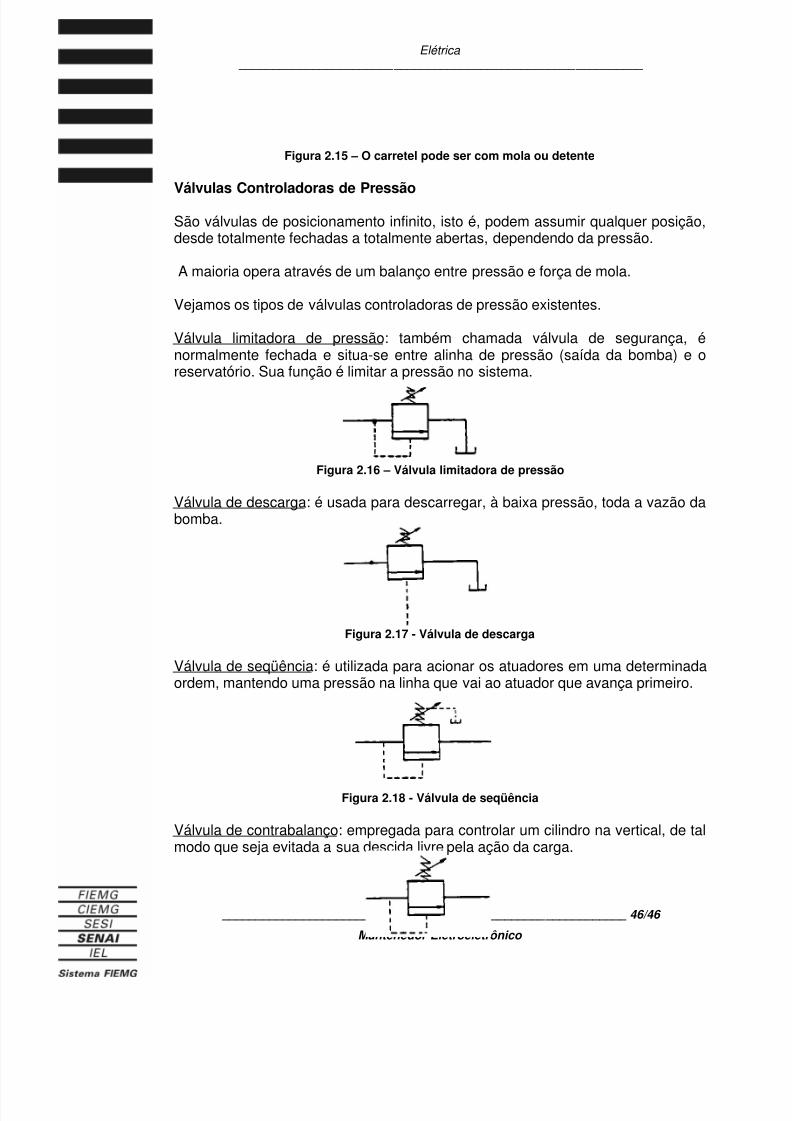
Figura 2.15 – O carretel pode ser com mola ou detente
Válvulas Controladoras de Pressão
São válvulas de posicionamento infinito, isto é, podem assumir qualquer posição,desde totalmente fechadas a totalmente abertas, dependendo da pressão.
A maioria opera através de um balanço entre pressão e força de mola.
Vejamos os tipos de válvulas controladoras de pressão existentes.
Válvula limitadora de pressão: também chamada válvula de segurança, énormalmente fechada e situa-se entre alinha de pressão (saída da bomba) e oreservatório. Sua função é limitar a pressão no sistema.
Figura 2.16 – Válvula limitadora de pressão
Válvula de descarga: é usada para descarregar, à baixa pressão, toda a vazão dabomba.
Figura 2.17 - Válvula de descarga
Válvula de seqüência: é utilizada para acionar os atuadores em uma determinadaordem, mantendo uma pressão na linha que vai ao atuador que avança primeiro.
Figura 2.18 - Válvula de seqüência
Válvula de contrabalanço: empregada para controlar um cilindro na vertical, de talmodo que seja evitada a sua descida livre pela ação da carga.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 47/67
Elétrica ____________________________________________________________
____________________________________________________________ 47/47
Mantenedor Eletroeletrônico
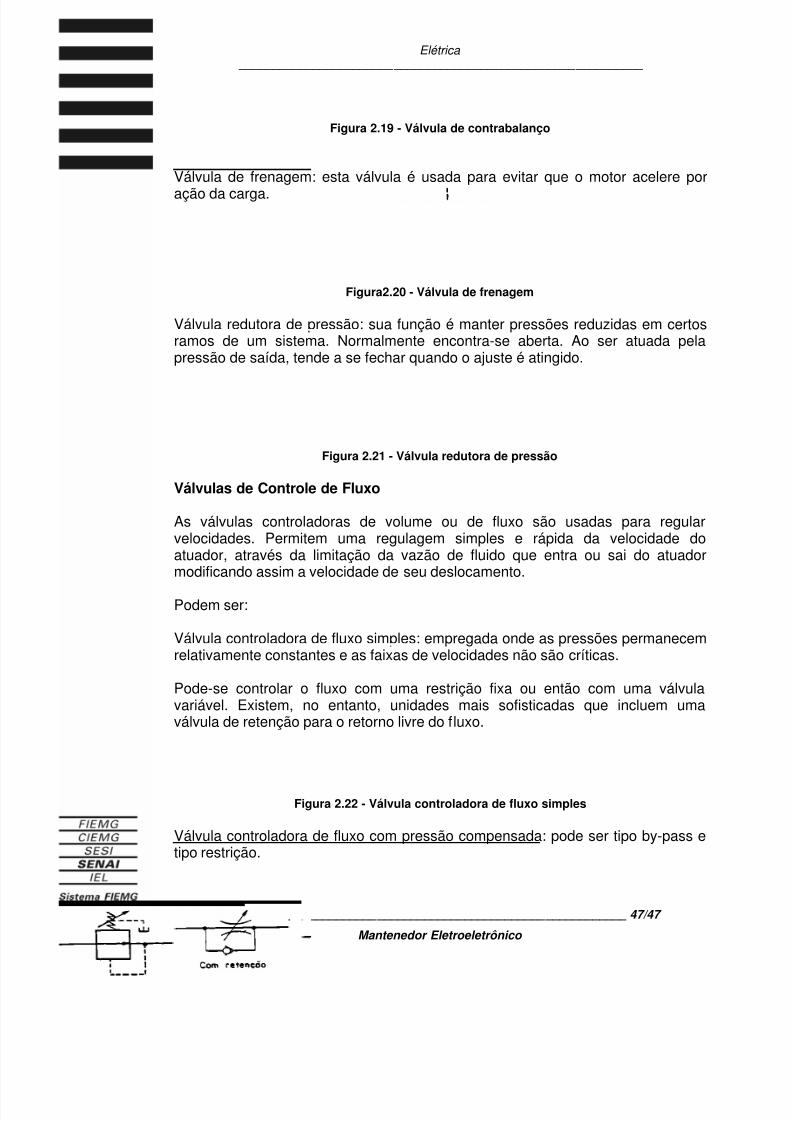
Figura 2.19 - Válvula de contrabalanço
Válvula de frenagem: esta válvula é usada para evitar que o motor acelere por
ação da carga.
Figura2.20 - Válvula de frenagem
Válvula redutora de pressão: sua função é manter pressões reduzidas em certosramos de um sistema. Normalmente encontra-se aberta. Ao ser atuada pelapressão de saída, tende a se fechar quando o ajuste é atingido.
Figura 2.21 - Válvula redutora de pressão
Válvulas de Controle de Fluxo
As válvulas controladoras de volume ou de fluxo são usadas para regularvelocidades. Permitem uma regulagem simples e rápida da velocidade doatuador, através da limitação da vazão de fluido que entra ou sai do atuadormodificando assim a velocidade de seu deslocamento.
Podem ser:
Válvula controladora de fluxo simples: empregada onde as pressões permanecemrelativamente constantes e as faixas de velocidades não são críticas.
Pode-se controlar o fluxo com uma restrição fixa ou então com uma válvulavariável. Existem, no entanto, unidades mais sofisticadas que incluem umaválvula de retenção para o retorno livre do fluxo.
Figura 2.22 - Válvula controladora de fluxo simples
Válvula controladora de fluxo com pressão compensada: pode ser tipo by-pass etipo restrição.
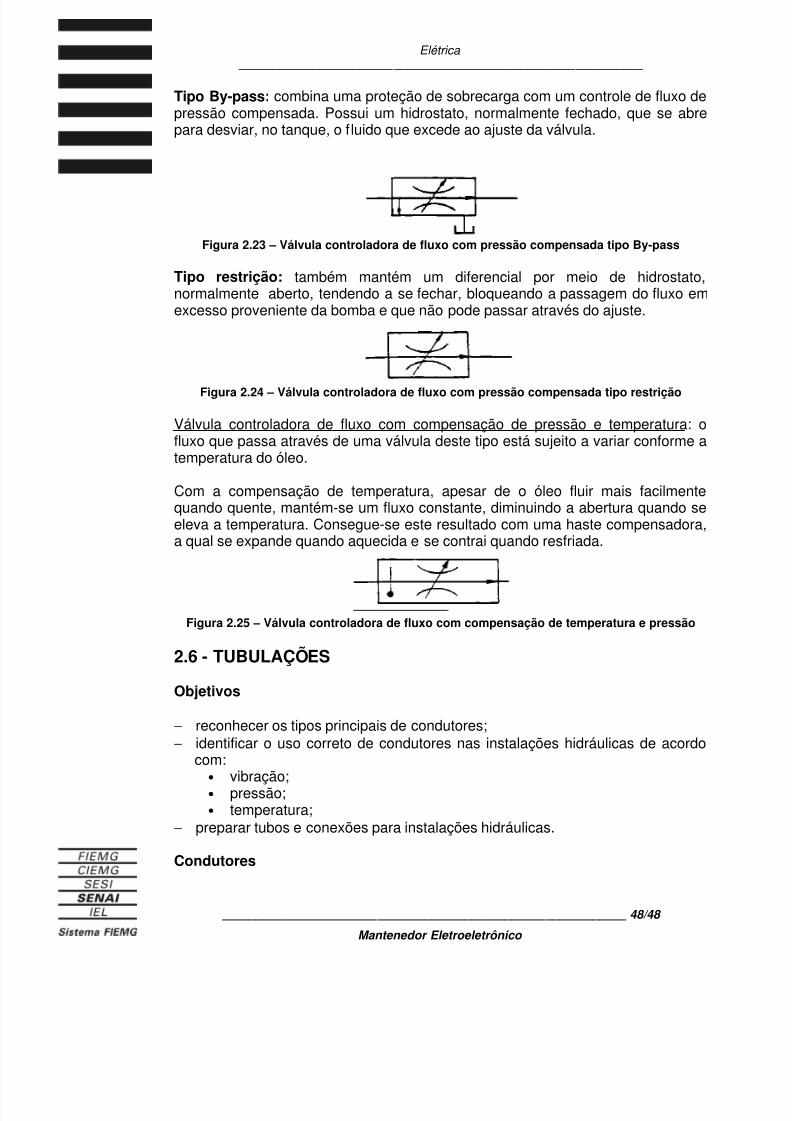
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 48/67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 49/67
Elétrica ____________________________________________________________
____________________________________________________________ 49/49
Mantenedor Eletroeletrônico
Condutor é o termo que engloba os vários tipos de tubos e conexões quetransportam o fluido hidráulico entre os componentes. Nos sistemas hidráulicosexistem três tipos principais de condutores:
− tubos de aço roscados (canos);− tubos de aço flangelados ou com anel;− tubos flexíveis ou mangueiras.
A seleção dos tubos para as redes condutoras, assim como a sua instalação, é deimportância primordial em circuitos hidráulicos. Por isso deve-se levar em conta oseguinte:
Tubulação estreita provocará cavitação da bomba, perda de eficiência esuperaquecimento do circuito inteiro,
Paredes demasiadamente finas estão sujeitas a quebras constantes. Paredesgrossas demais provocarão um acréscimo inútil no peso e no preço da instalação,
Tubos rígidos em instalações com máquinas que vibram estão sujeitos atrincas,
As mangueiras absorvem vibrações e oferecem facilidade de acompanhar osmovimentos, mas devem ser devidamente protegidas.
Presentemente, o tubo roscado é mais barato. Entretanto, os tubos flangelados eas mangueiras são mais convenientes para se conectarem, bem como facilitam amanutenção corretiva.
Objetivando baratear o custo da tubulação, os tubos de plástico vêm sendo
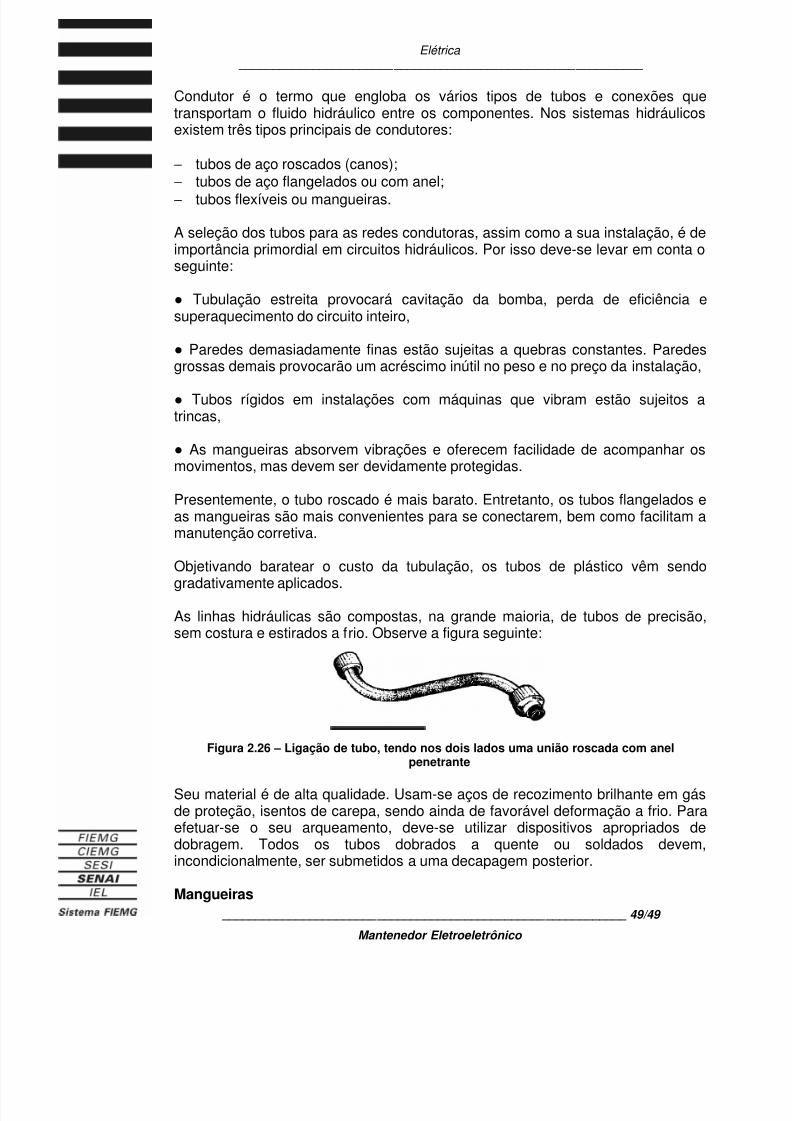
gradativamente aplicados.As linhas hidráulicas são compostas, na grande maioria, de tubos de precisão,sem costura e estirados a frio. Observe a figura seguinte:
Figura 2.26 – Ligação de tubo, tendo nos dois lados uma união roscada com anelpenetrante
Seu material é de alta qualidade. Usam-se aços de recozimento brilhante em gásde proteção, isentos de carepa, sendo ainda de favorável deformação a frio. Paraefetuar-se o seu arqueamento, deve-se utilizar dispositivos apropriados dedobragem. Todos os tubos dobrados a quente ou soldados devem,incondicionalmente, ser submetidos a uma decapagem posterior.
Mangueiras
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 50/67
Elétrica ____________________________________________________________
____________________________________________________________ 50/50
Mantenedor Eletroeletrônico
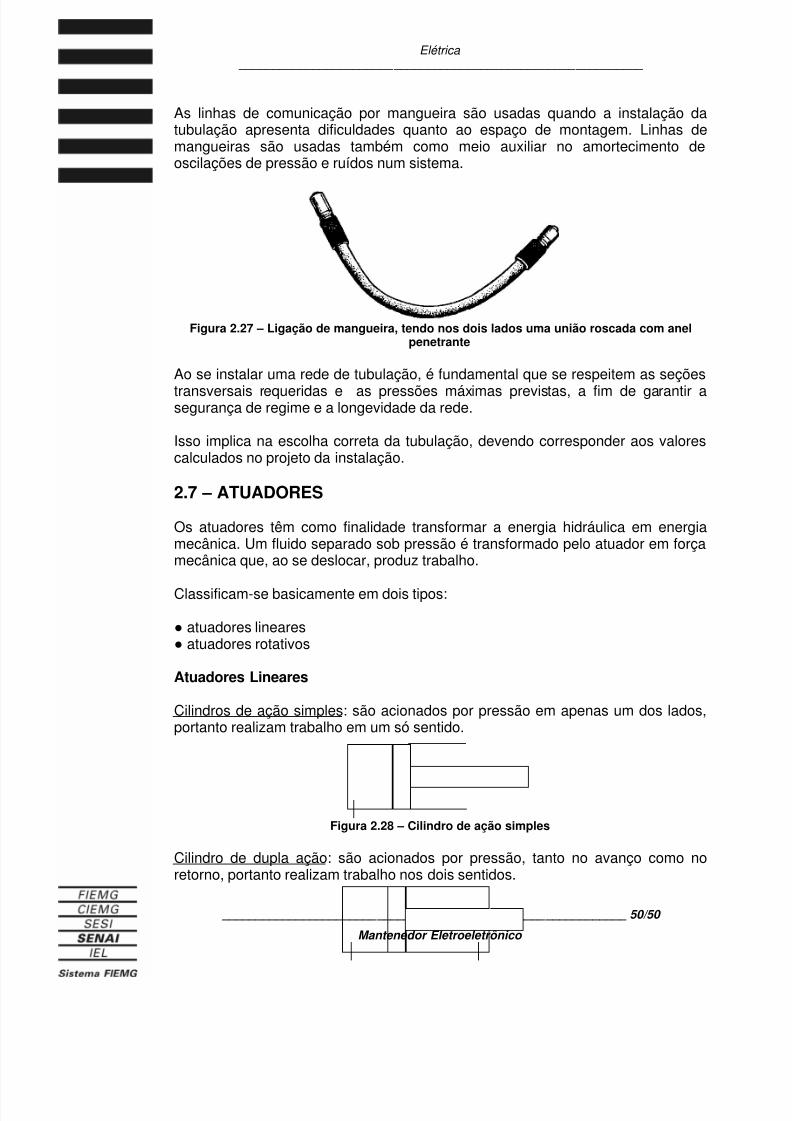
As linhas de comunicação por mangueira são usadas quando a instalação datubulação apresenta dificuldades quanto ao espaço de montagem. Linhas demangueiras são usadas também como meio auxiliar no amortecimento deoscilações de pressão e ruídos num sistema.
Figura 2.27 – Ligação de mangueira, tendo nos dois lados uma união roscada com anelpenetrante
Ao se instalar uma rede de tubulação, é fundamental que se respeitem as seções
transversais requeridas e as pressões máximas previstas, a fim de garantir asegurança de regime e a longevidade da rede.
Isso implica na escolha correta da tubulação, devendo corresponder aos valorescalculados no projeto da instalação.
2.7 – ATUADORES
Os atuadores têm como finalidade transformar a energia hidráulica em energiamecânica. Um fluido separado sob pressão é transformado pelo atuador em forçamecânica que, ao se deslocar, produz trabalho.
Classificam-se basicamente em dois tipos:
atuadores lineares atuadores rotativos
Atuadores Lineares
Cilindros de ação simples: são acionados por pressão em apenas um dos lados,portanto realizam trabalho em um só sentido.
Figura 2.28 – Cilindro de ação simples
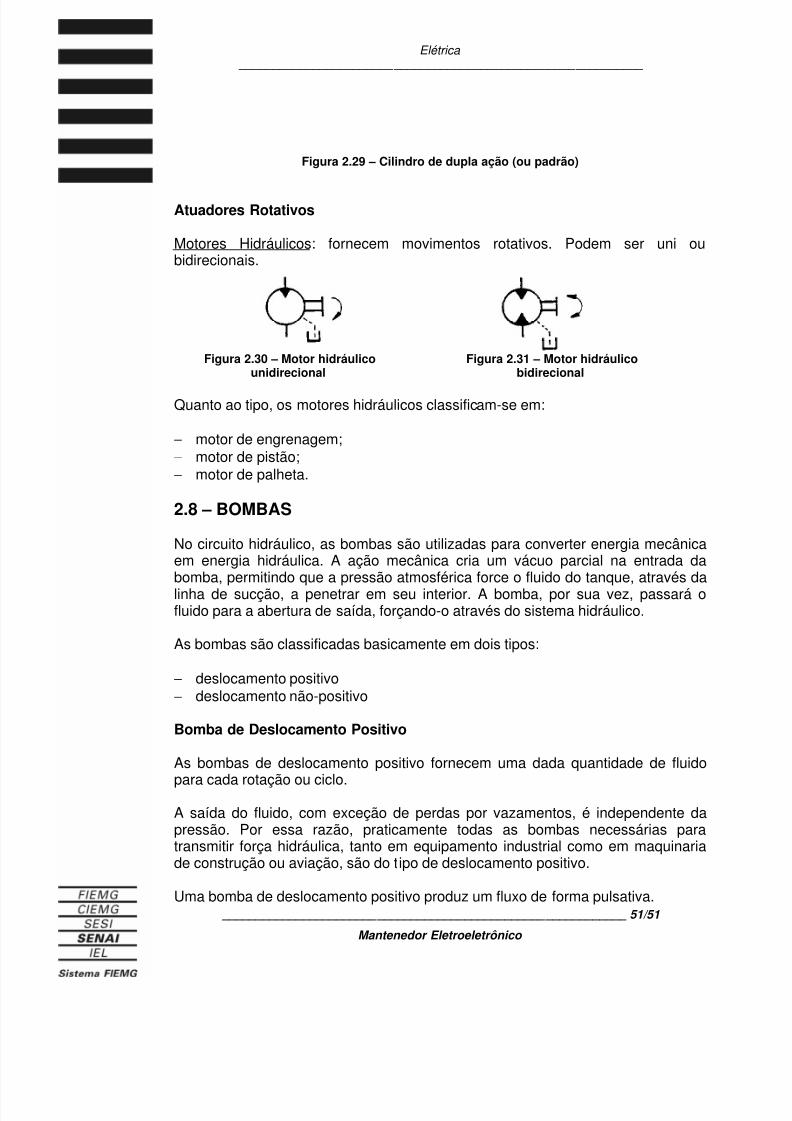
Cilindro de dupla ação: são acionados por pressão, tanto no avanço como noretorno, portanto realizam trabalho nos dois sentidos.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 51/67
Elétrica ____________________________________________________________
____________________________________________________________ 51/51
Mantenedor Eletroeletrônico
Figura 2.29 – Cilindro de dupla ação (ou padrão)
Atuadores Rotativos
Motores Hidráulicos: fornecem movimentos rotativos. Podem ser uni oubidirecionais.
Figura 2.30 – Motor hidráulico Figura 2.31 – Motor hidráulicounidirecional bidirecional
Quanto ao tipo, os motores hidráulicos classificam-se em:
− motor de engrenagem;− motor de pistão;− motor de palheta.
2.8 – BOMBAS
No circuito hidráulico, as bombas são utilizadas para converter energia mecânicaem energia hidráulica. A ação mecânica cria um vácuo parcial na entrada dabomba, permitindo que a pressão atmosférica force o fluido do tanque, através dalinha de sucção, a penetrar em seu interior. A bomba, por sua vez, passará ofluido para a abertura de saída, forçando-o através do sistema hidráulico.
As bombas são classificadas basicamente em dois tipos:
− deslocamento positivo− deslocamento não-positivo
Bomba de Deslocamento Positivo
As bombas de deslocamento positivo fornecem uma dada quantidade de fluido
para cada rotação ou ciclo.A saída do fluido, com exceção de perdas por vazamentos, é independente dapressão. Por essa razão, praticamente todas as bombas necessárias paratransmitir força hidráulica, tanto em equipamento industrial como em maquinariade construção ou aviação, são do tipo de deslocamento positivo.
Uma bomba de deslocamento positivo produz um fluxo de forma pulsativa.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 52/67
Elétrica ____________________________________________________________
____________________________________________________________ 52/52
Mantenedor Eletroeletrônico
São tipos de bombas positivas:
− engrenagens;− palhetas;− pistões;
Bomba de Deslocamento Não-positivo
As bombas de deslocamento não-positivo, tais como centrífuga ou de turbina, sãousadas para transferir os fluidos para onde a única resistência é aquela criadapelo peso do fluido e atrito.
Embora estas bombas forneçam fluxo suave e contínuo, seu deslocamento defluido é reduzido quando aumenta a resistência.
É possível bloquear completamente o pórtico da saída em pleno funcionamentoda bomba. Por isso, as bombas de deslocamento não-positivo são raramenteusadas em sistemas hidráulicos.
2.9 – RETENTORES
Objetivos
− identificar retentores dinâmicos;− distinguir retentores dinâmicos de retentores estáticos usando conhecimentos
anteriores.
Retentores Dinâmicos
Os retentores dinâmicos são instalados em peças que se movem uma em relaçãoà outra. Assim, pelo menos uma das peças fricciona o retentor. Este fato faz comque, naturalmente, torne sua construção e sua aplicação mais difíceis.
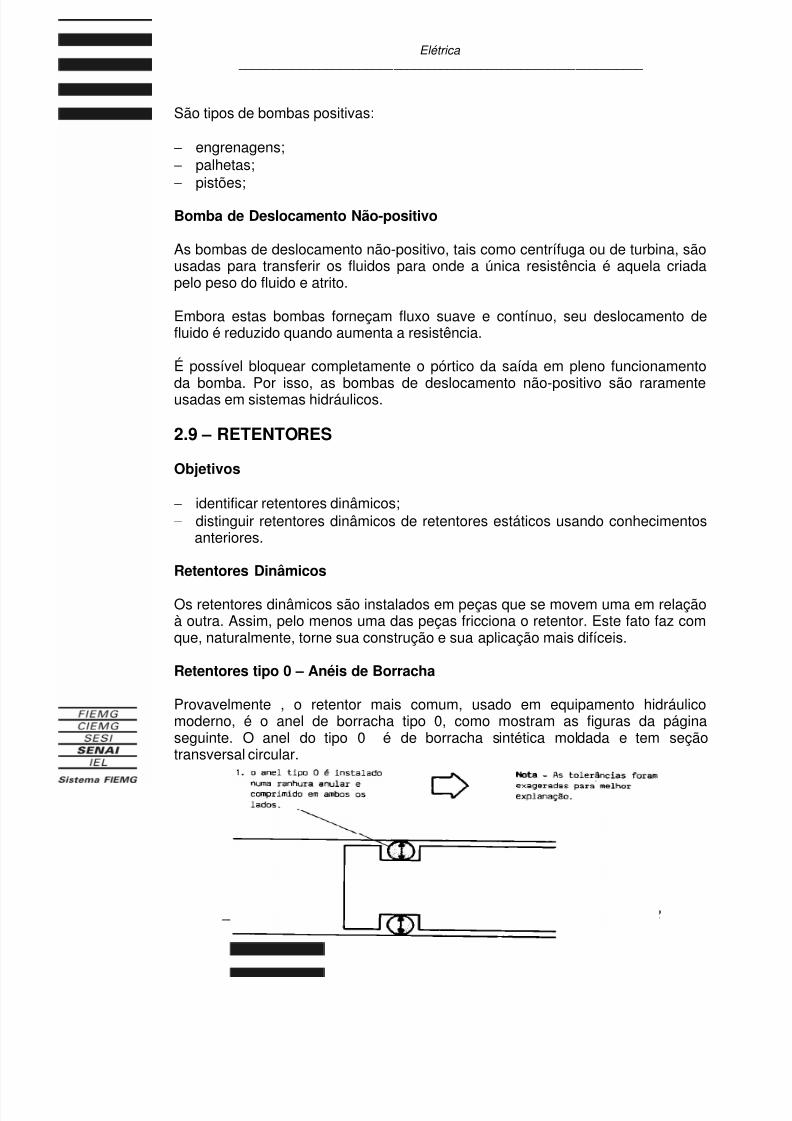
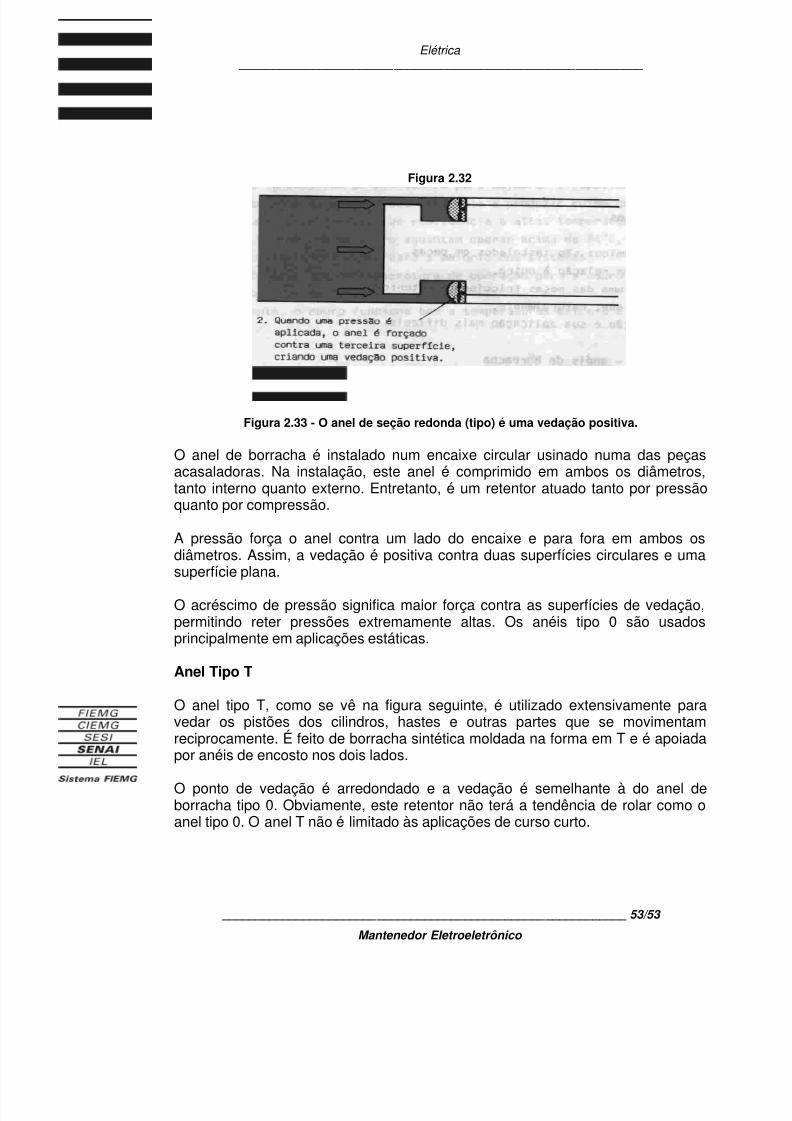
Retentores tipo 0 – Anéis de Borracha
Provavelmente , o retentor mais comum, usado em equipamento hidráulicomoderno, é o anel de borracha tipo 0, como mostram as figuras da páginaseguinte. O anel do tipo 0 é de borracha sintética moldada e tem seçãotransversal circular.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 53/67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 54/67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 55/67
Elétrica ____________________________________________________________
____________________________________________________________ 55/55
Mantenedor Eletroeletrônico
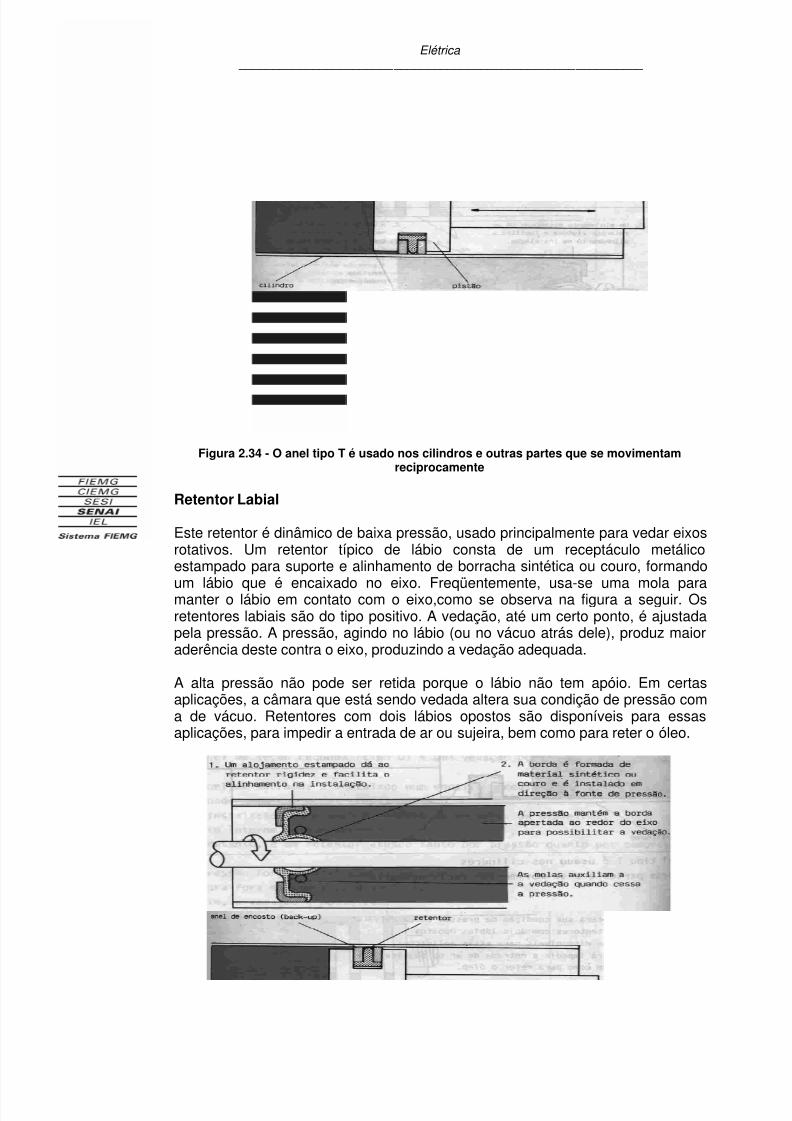
Figura 2.35 - Retentores labiais são usados em eixos rotativos
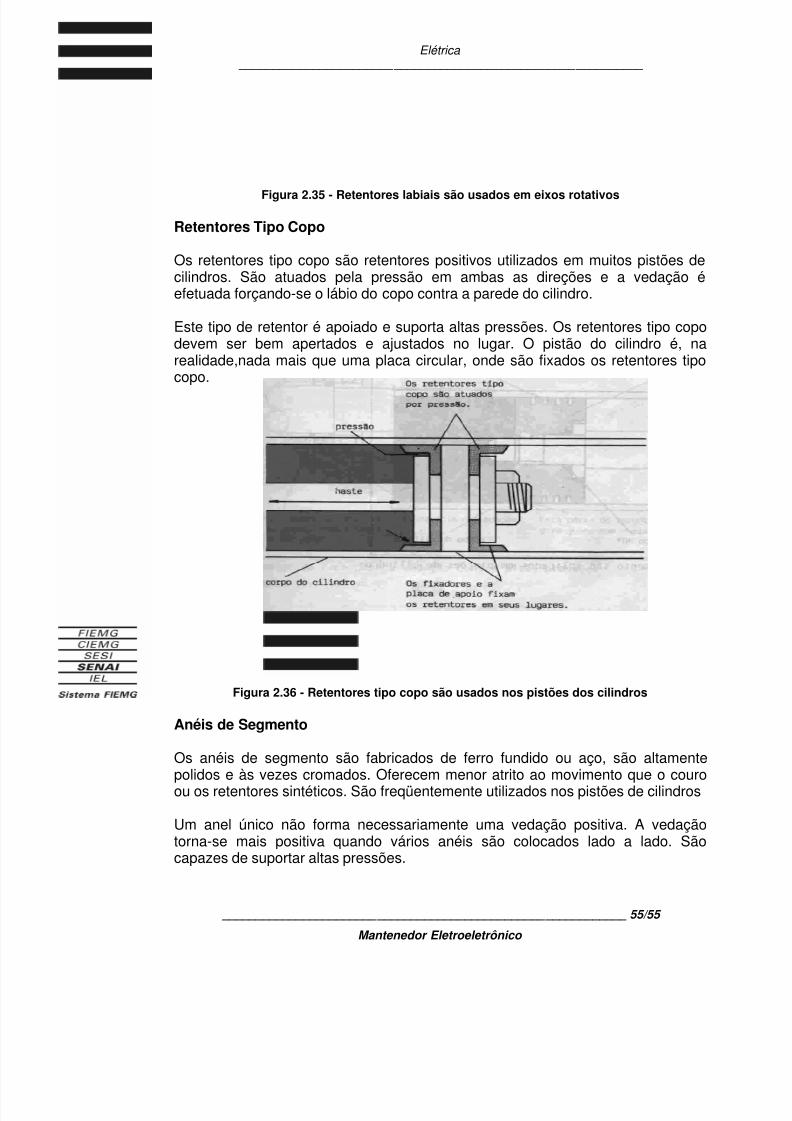
Retentores Tipo Copo
Os retentores tipo copo são retentores positivos utilizados em muitos pistões decilindros. São atuados pela pressão em ambas as direções e a vedação éefetuada forçando-se o lábio do copo contra a parede do cilindro.
Este tipo de retentor é apoiado e suporta altas pressões. Os retentores tipo copodevem ser bem apertados e ajustados no lugar. O pistão do cilindro é, narealidade,nada mais que uma placa circular, onde são fixados os retentores tipocopo.
Figura 2.36 - Retentores tipo copo são usados nos pistões dos cilindros
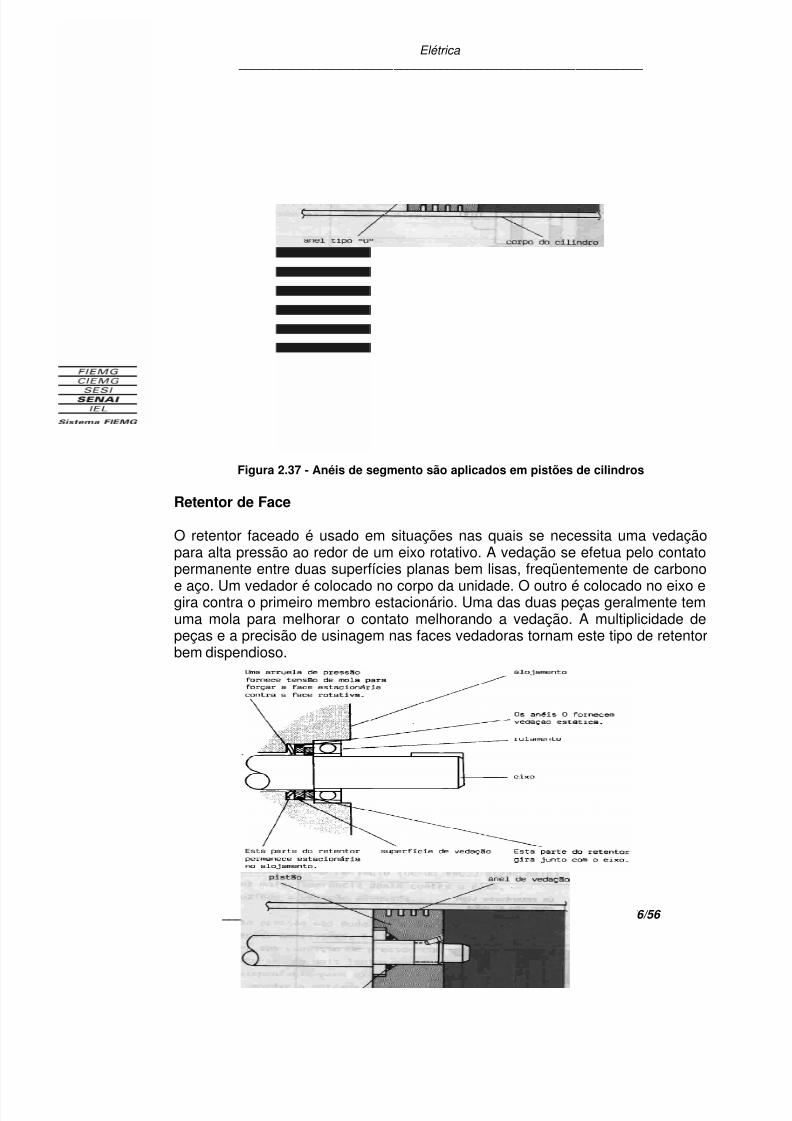
Anéis de Segmento
Os anéis de segmento são fabricados de ferro fundido ou aço, são altamentepolidos e às vezes cromados. Oferecem menor atrito ao movimento que o couroou os retentores sintéticos. São freqüentemente utilizados nos pistões de cilindros
Um anel único não forma necessariamente uma vedação positiva. A vedaçãotorna-se mais positiva quando vários anéis são colocados lado a lado. Sãocapazes de suportar altas pressões.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 56/67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 57/67
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 58/67
Elétrica ____________________________________________________________
____________________________________________________________ 58/58
Mantenedor Eletroeletrônico
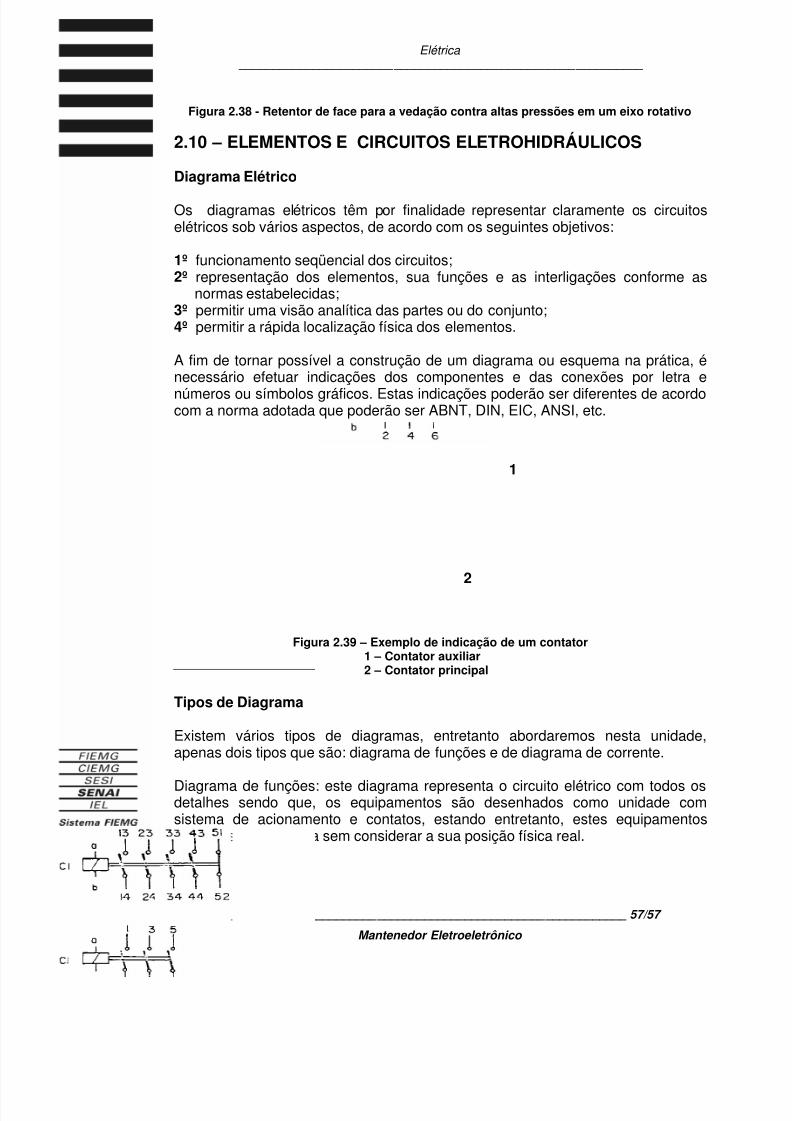
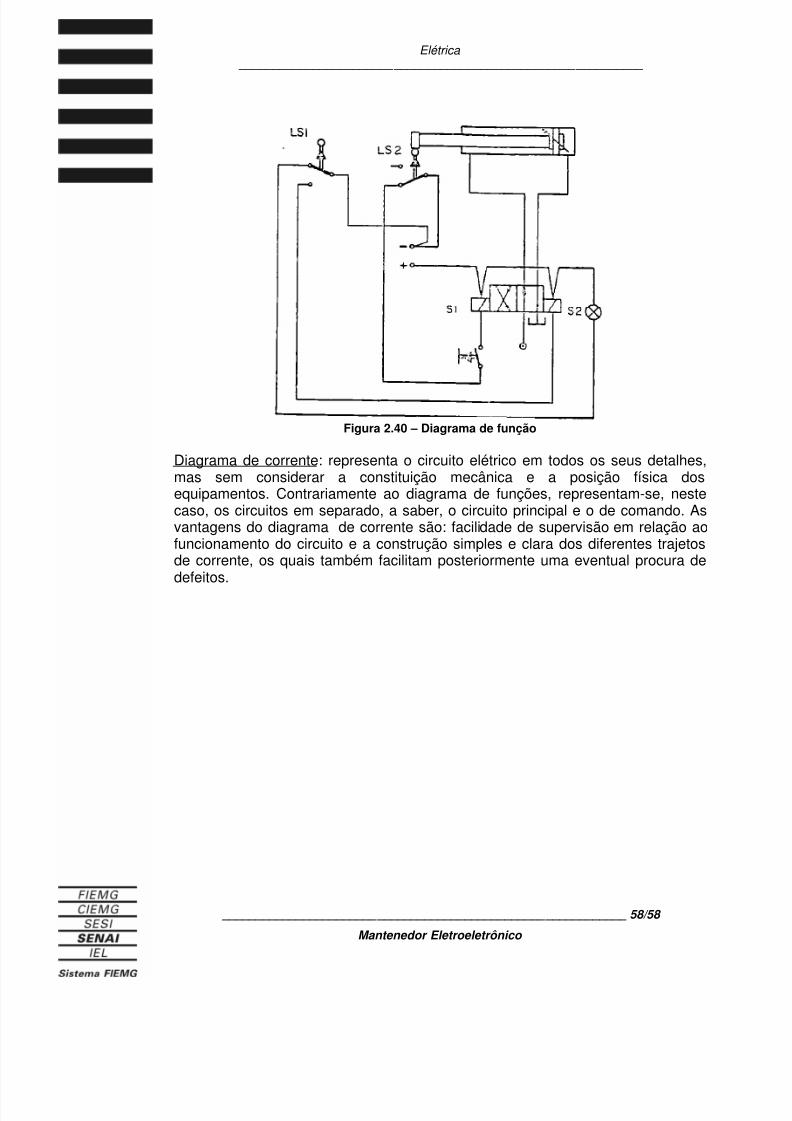
Figura 2.40 – Diagrama de função
Diagrama de corrente: representa o circuito elétrico em todos os seus detalhes,mas sem considerar a constituição mecânica e a posição física dosequipamentos. Contrariamente ao diagrama de funções, representam-se, nestecaso, os circuitos em separado, a saber, o circuito principal e o de comando. Asvantagens do diagrama de corrente são: facilidade de supervisão em relação aofuncionamento do circuito e a construção simples e clara dos diferentes trajetosde corrente, os quais também facilitam posteriormente uma eventual procura dedefeitos.
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 59/67
Elétrica ____________________________________________________________
____________________________________________________________ 59/59
Mantenedor Eletroeletrônico
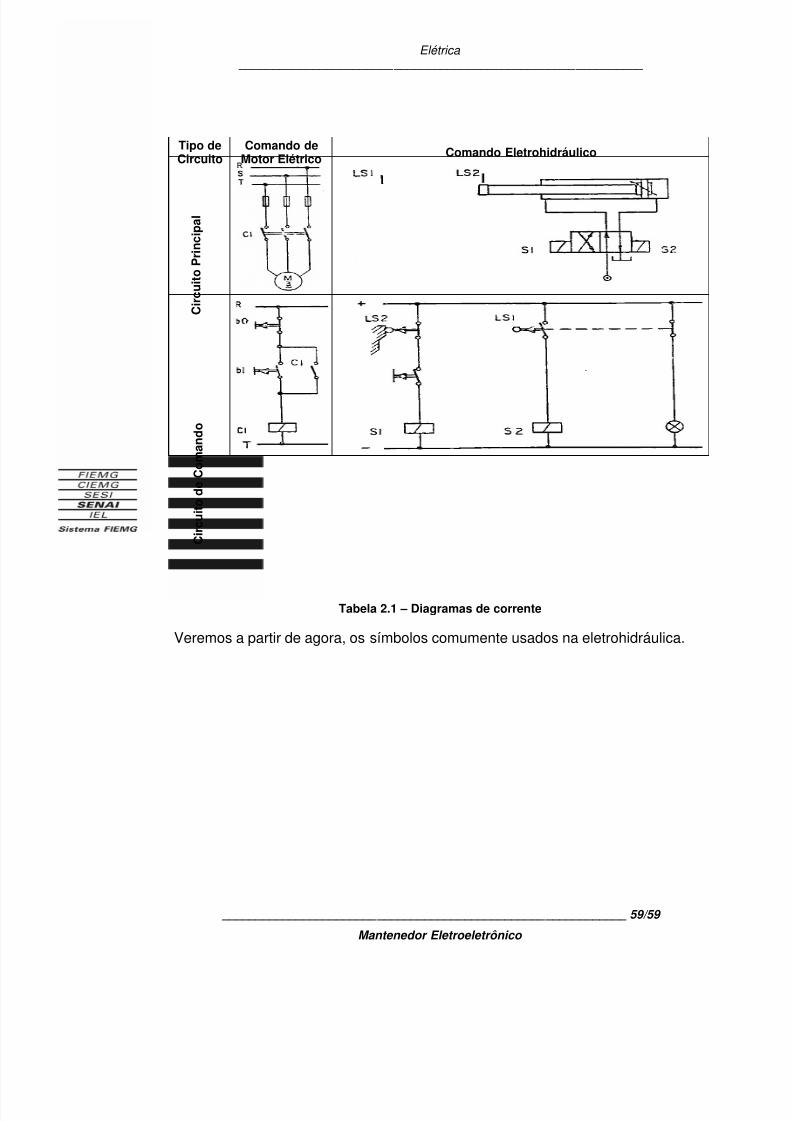
Tipo deCircuito
Comando deMotor Elétrico Comando Eletrohidráulico
Tabela 2.1 – Diagramas de corrente
Veremos a partir de agora, os símbolos comumente usados na eletrohidráulica.
C i r c u i t o P r i n c i p a l
C i r c u i t o d e C o m a n d o
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 60/67
Elétrica ____________________________________________________________
____________________________________________________________ 60/60
Mantenedor Eletroeletrônico
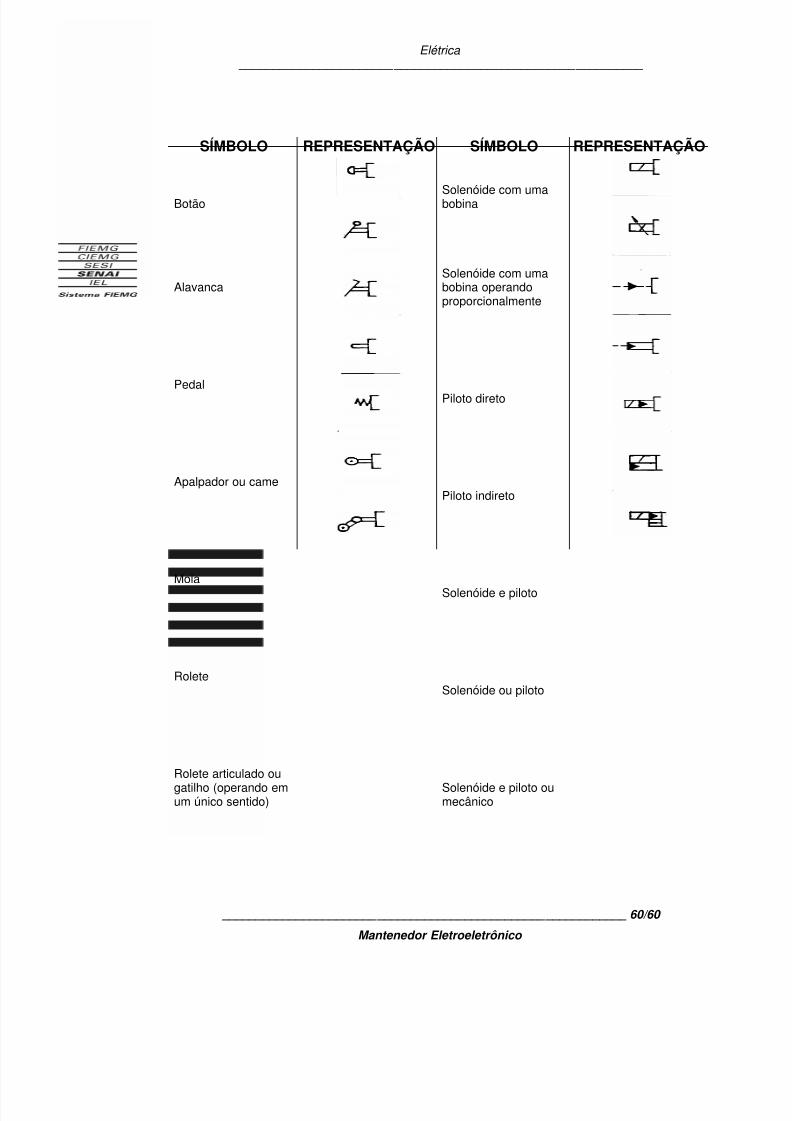
SÍMBOLO REPRESENTAÇÃO SÍMBOLO REPRESENTAÇÃO
Botão
Alavanca
Pedal
Apalpador ou came
Mola
Rolete
Rolete articulado ou
gatilho (operando emum único sentido)
Solenóide com umabobina
Solenóide com umabobina operandoproporcionalmente
Piloto direto
Piloto indireto
Solenóide e piloto
Solenóide ou piloto
Solenóide e piloto oumecânico
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 61/67
Elétrica ____________________________________________________________
____________________________________________________________ 61/61
Mantenedor Eletroeletrônico
SÍMBOLO REPRESENTAÇÃO SÍMBOLO REPRESENTAÇÃO
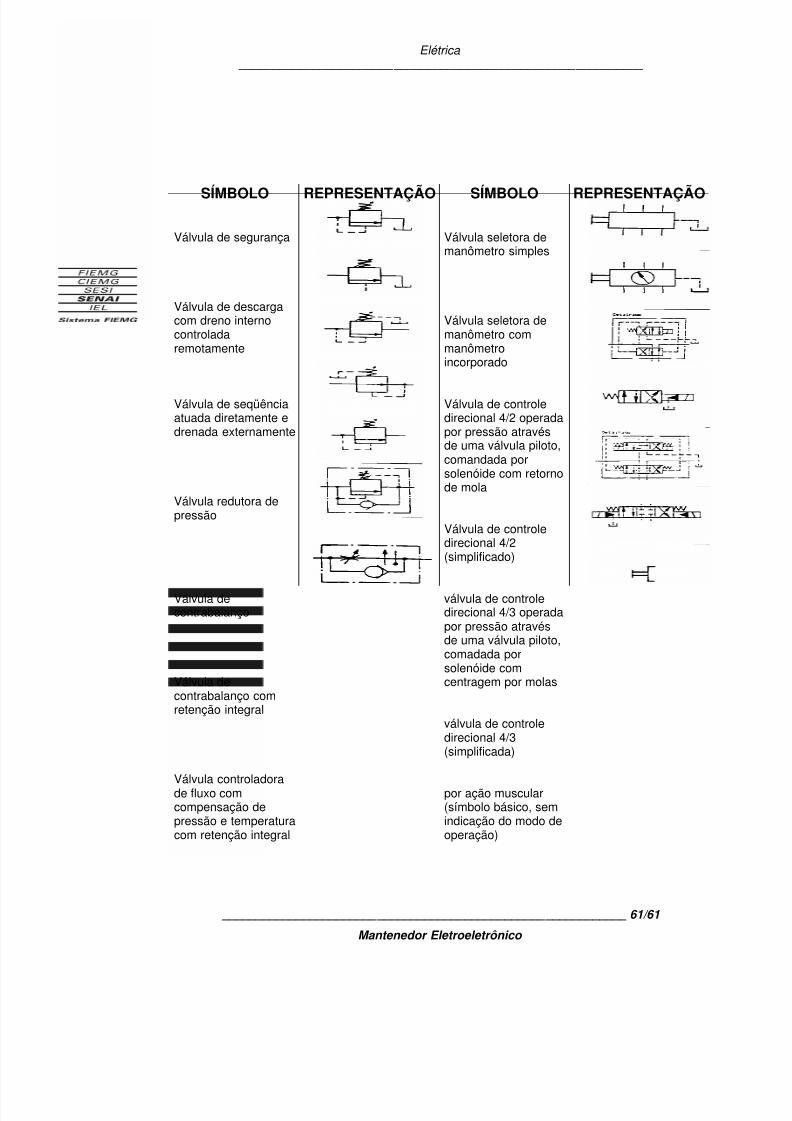
Válvula de segurança
Válvula de descargacom dreno internocontroladaremotamente
Válvula de seqüênciaatuada diretamente edrenada externamente
Válvula redutora depressão
Válvula decontrabalanço
Válvula decontrabalanço comretenção integral
Válvula controladorade fluxo comcompensação depressão e temperaturacom retenção integral
Válvula seletora demanômetro simples
Válvula seletora demanômetro commanômetroincorporado
Válvula de controledirecional 4/2 operadapor pressão atravésde uma válvula piloto,comandada porsolenóide com retornode mola
Válvula de controledirecional 4/2(simplificado)
válvula de controledirecional 4/3 operadapor pressão atravésde uma válvula piloto,comadada porsolenóide comcentragem por molas
válvula de controledirecional 4/3(simplificada)
por ação muscular(símbolo básico, semindicação do modo deoperação)
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 62/67
Elétrica ____________________________________________________________
____________________________________________________________ 62/62
Mantenedor Eletroeletrônico
SÍMBOLO REPRESENTAÇÃO SÍMBOLO REPRESENTAÇÃO
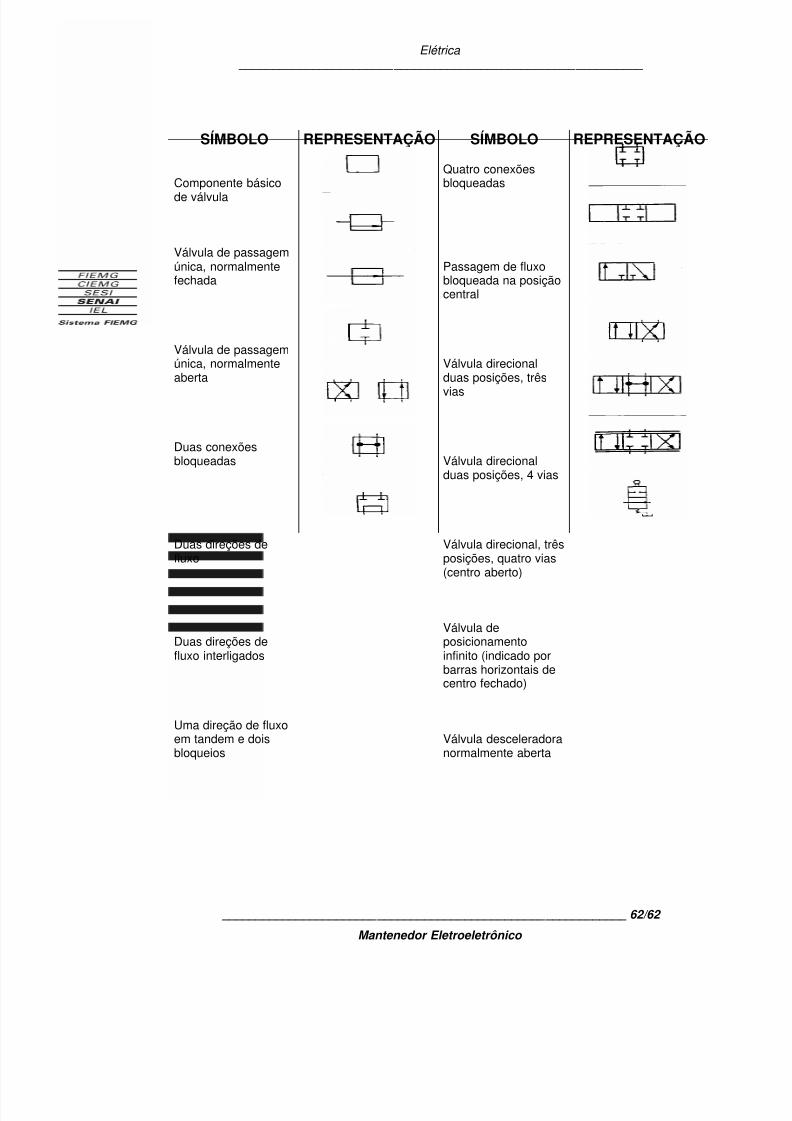
Componente básico
de válvula
Válvula de passagemúnica, normalmentefechada
Válvula de passagemúnica, normalmenteaberta
Duas conexõesbloqueadas
Duas direções defluxo
Duas direções defluxo interligados
Uma direção de fluxoem tandem e doisbloqueios
Quatro conexõesbloqueadas
Passagem de fluxobloqueada na posiçãocentral
Válvula direcionalduas posições, três
vias
Válvula direcionalduas posições, 4 vias
Válvula direcional, trêsposições, quatro vias(centro aberto)
Válvula deposicionamentoinfinito (indicado porbarras horizontais decentro fechado)
Válvula desceleradoranormalmente aberta
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 63/67
Elétrica ____________________________________________________________
____________________________________________________________ 63/63
Mantenedor Eletroeletrônico
SÍMBOLO REPRESENTAÇÃO SÍMBOLO REPRESENTAÇÃO
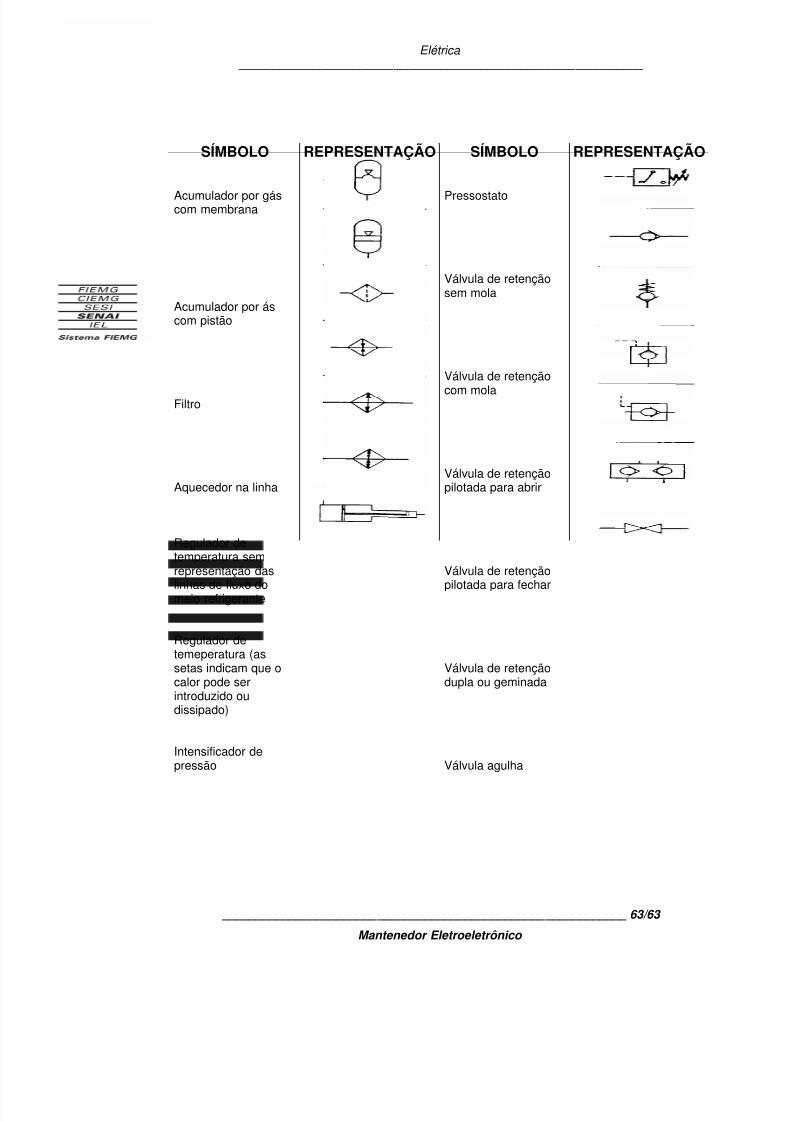
Acumulador por gáscom membrana
Acumulador por áscom pistão
Filtro
Aquecedor na linha
Regulador detemperatura semrepresentação das
linhas de fluxo domeio refrigerante
Regulador detemeperatura (assetas indicam que ocalor pode serintroduzido oudissipado)
Intensificador depressão
Pressostato
Válvula de retençãosem mola
Válvula de retenção
com mola
Válvula de retençãopilotada para abrir
Válvula de retenção
pilotada para fechar
Válvula de retençãodupla ou geminada
Válvula agulha
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 64/67
Elétrica ____________________________________________________________
____________________________________________________________ 64/64
Mantenedor Eletroeletrônico
SÍMBOLO REPRESENTAÇÃO SÍMBOLO REPRESENTAÇÃO
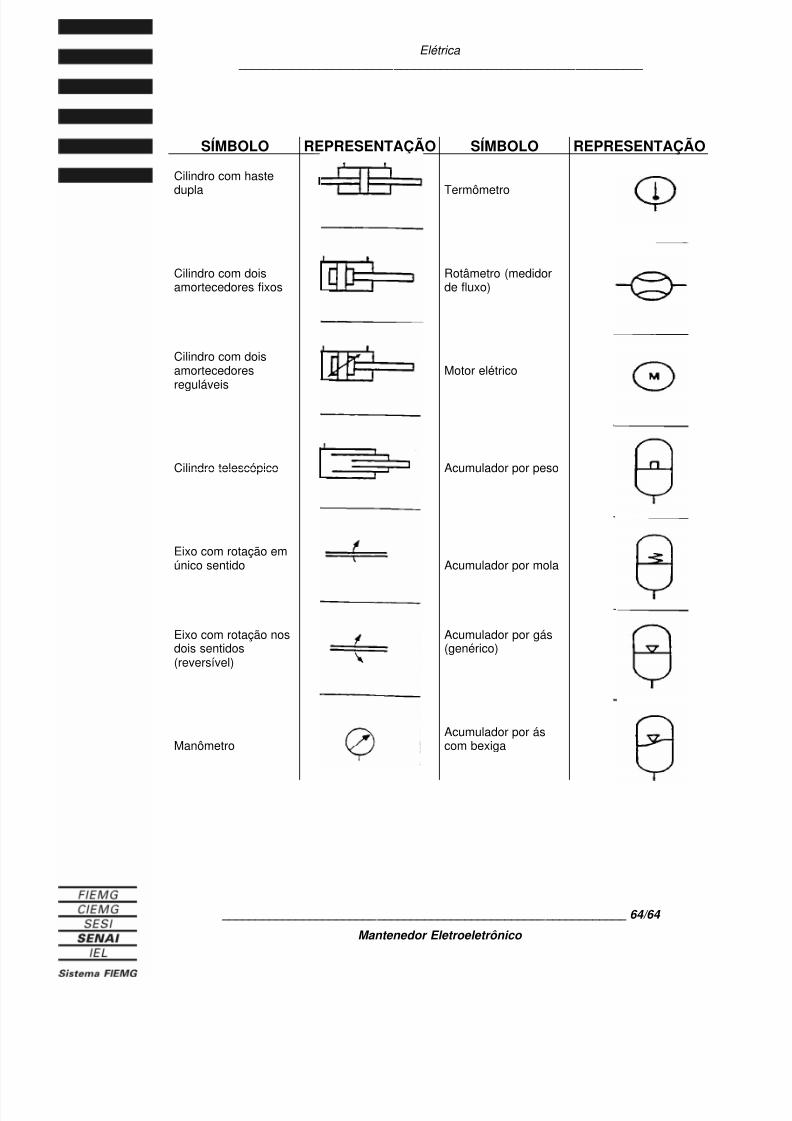
Cilindro com haste
dupla
Cilindro com doisamortecedores fixos
Cilindro com doisamortecedoresreguláveis
Cilindro telescópico
Eixo com rotação emúnico sentido
Eixo com rotação nosdois sentidos(reversível)
Manômetro
Termômetro
Rotâmetro (medidorde fluxo)
Motor elétrico
Acumulador por peso
Acumulador por mola
Acumulador por gás(genérico)
Acumulador por áscom bexiga
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 65/67
Elétrica ____________________________________________________________
____________________________________________________________ 65/65
Mantenedor Eletroeletrônico
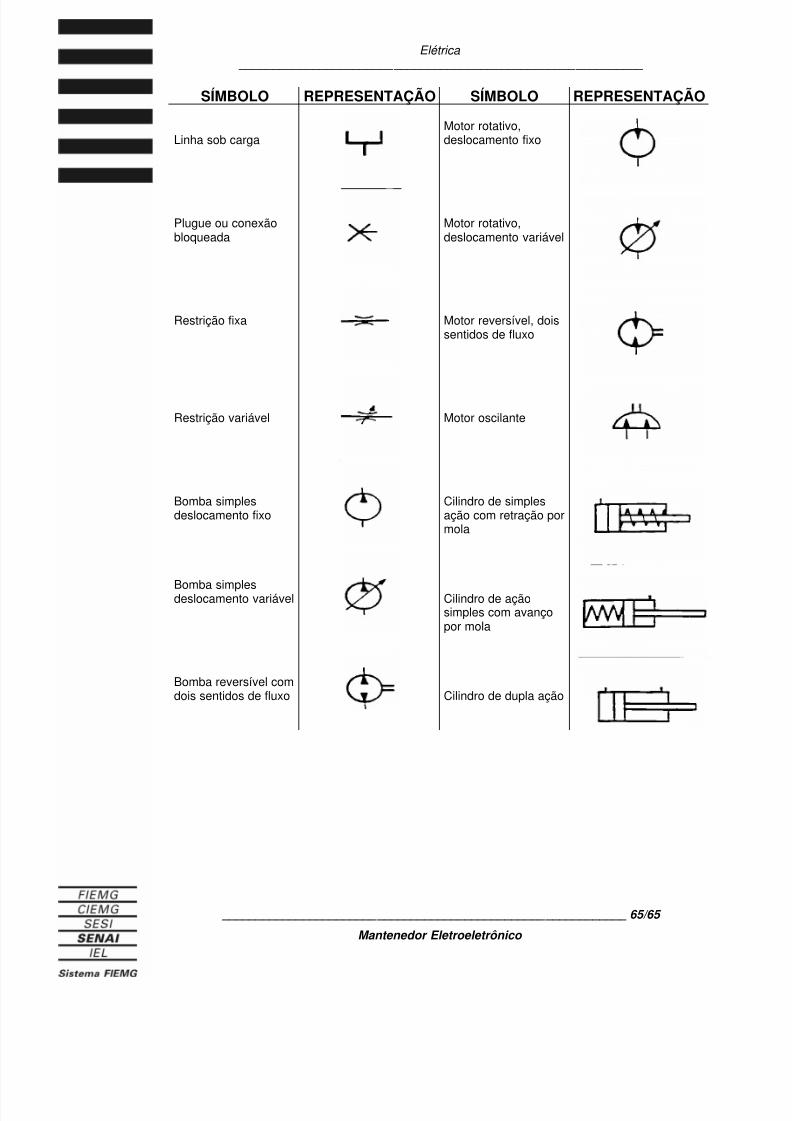
SÍMBOLO REPRESENTAÇÃO SÍMBOLO REPRESENTAÇÃO
Linha sob carga
Plugue ou conexãobloqueada
Restrição fixa
Restrição variável
Bomba simplesdeslocamento fixo
Bomba simplesdeslocamento variável
Bomba reversível comdois sentidos de fluxo
Motor rotativo,deslocamento fixo
Motor rotativo,deslocamento variável
Motor reversível, doissentidos de fluxo
Motor oscilante
Cilindro de simplesação com retração pormola
Cilindro de açãosimples com avançopor mola
Cilindro de dupla ação
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 66/67
Elétrica ____________________________________________________________
____________________________________________________________ 66/66
Mantenedor Eletroeletrônico
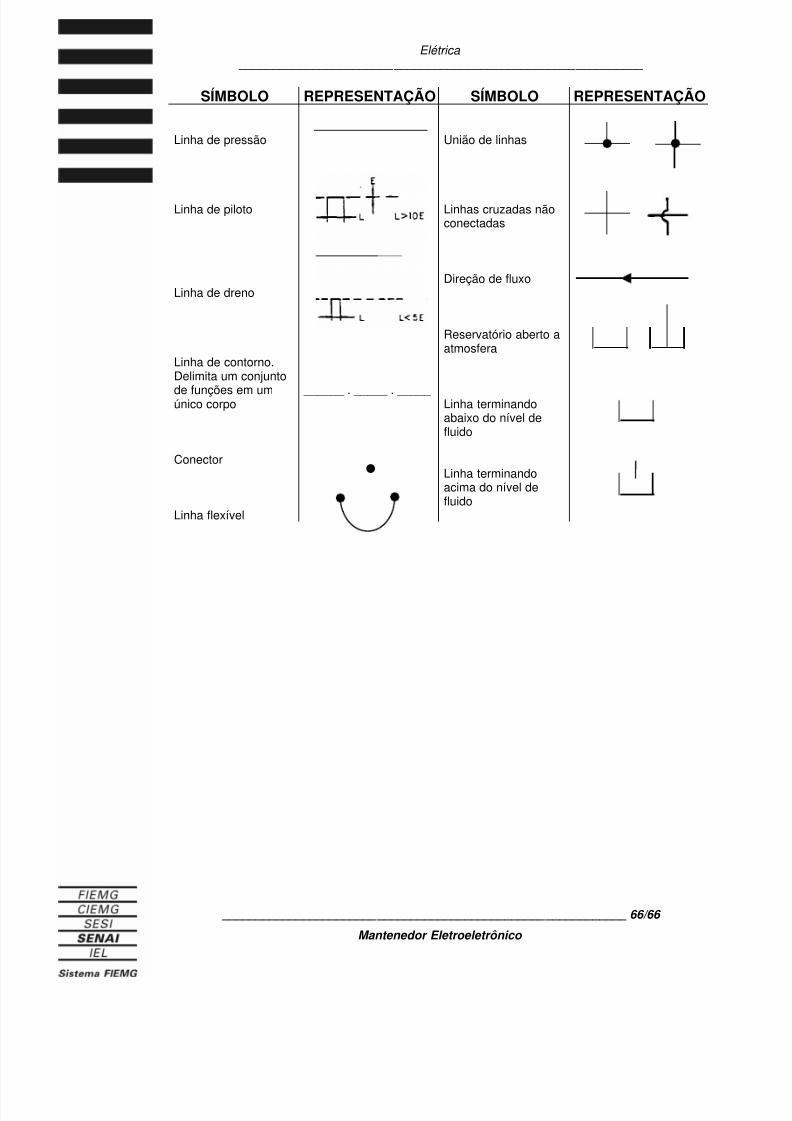
SÍMBOLO REPRESENTAÇÃO SÍMBOLO REPRESENTAÇÃO
Linha de pressão
Linha de piloto
Linha de dreno
Linha de contorno.Delimita um conjunto
de funções em umúnico corpo
Conector
Linha flexível
______ . _____ . _____
•
União de linhas
Linhas cruzadas nãoconectadas
Direção de fluxo
Reservatório aberto aatmosfera
Linha terminandoabaixo do nível defluido
Linha terminandoacima do nível defluido
7/28/2019 Automação ELETROPNEUMÁTICA
http://slidepdf.com/reader/full/automacao-eletropneumatica 67/67
Elétrica ____________________________________________________________
RReeffeerrêênncciiaass BBiibblliiooggrrááffiiccaass
1. SERVIÇO NACIONAL DE APRENDIZAGEM INDUSTRIAL – SENAI – FestoDidatic
2. SERVIÇO NACIONAL DE APRENDIZAGEM INDUSTRIAL – SENAI –Comandos Hidráulicos – Informações Tecnológicas - SP
3. AUTOMATIZAÇÃO ELETROPNEUMÁTICA – Núcleo de Automação Hidráulicae Pneumática
4. SERVIÇO NACIONAL DE APRENDIZAGEM INDUSTRIAL – SENAI –Módulo Eletrohidráulica