Embed Size (px)
Citation preview
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Avaliação do Desempenho de Técnicasde Localização Relativa de Robôs
Móveis Baseada no RSS em AmbientesInteriores
Ana Cristina Carvalho da Ponte
VERSÃO PROVISÓRIA
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
Orientador: António Paulo Gomes Mendes Moreira (Professor Auxiliar)
Co-orientador: Luís Miguel Pinho de Almeida (Professor Associado)
Junho de 2010

c© Ana Ponte, 2010
Resumo
O interesse por aplicações realizadas por equipas de robôs móveis autónomos tem vindo acrescer, muito em parte pela possibilidade de estas desempenharem funções complexas como asde busca e salvamento, permitindo assim complementar a intervenção humana em ambientes ondeela não é possível, desejável ou eficaz. Porém, funções como as de busca e salvamento requeremum tempo de resposta curto, pelo que, constitui um problema frequente, a impossibilidade dese planear e implementar uma infraestrutura de apoio. Outros casos que são atingidos por esteproblema são os exemplos, dos campos de minas e os escombros que, pela natureza da zona,se torna impraticável penetrar ou trabalhar nela; ou ainda, o exemplo de centros comerciaisque, por serem de acesso livre, se mostra inviável a possibilidade de restringir a passagem depessoas. Desta forma, torna-se imprescindível a utilização de métodos de localização que nãodependam de pontos conhecidos. Com vista a assegurar uma cooperação fiável entre os robôsde uma equipa, é necessário garantir também uma boa comunicação entre eles, certificando-sede que esta não perturba a mobilidade da equipa. Assim, a comunicação por radiofrequênciaapresenta-se como uma boa solução, na qual cada robô da equipa se torna um nó constituinte darede sem fios. Como tal, é não só necessária como também fundamental conhecer a localizaçãodos vários nós da rede. No âmbito desta dissertação foram estudados métodos de localizaçãoe navegação baseados no sinal RF das comunicações sem fio, a diferentes frequências, e emdiferentes ambientes interiores. O trabalho desenvolvido relativamente à localização incidiu sobreum método baseado em triangulação com balizas RF e outro baseado na estimativa da distânciarelativa entre os robôs, ao passo que, relativamente à navegação o método implementado foi ooblívio. Estes permitiram estudar o impacto do meio de propagação no desempenho das tarefasde localização e navegação, bem como, a influência do hardware escolhido e desenvolvido, emparticular as antenas que servem o método de localização, no desempenho das tarefas a que osrobôs são propostos.
i

ii
Versão 1.10 (14 de Julho de 2010)

Abstract
Interest in applications carried out by teams of autonomous mobile robots has been growing,much in part by the possibility that perform complex functions such as rescue, thus further humanintervention in environments where it is not possible, desirable or effective. However, functionssuch as rescue require a short response time, so that is a frequent problem, failure to plan andimplement a supporting infrastructure. Other cases that are affected by this problem are examplesof minefields, and the debris that by the nature of the area, it becomes impractical to enter orwork in it, or even the example of shopping centers which, being freely accessible proves feasiblethe possibility of restricting the passage of people. Thus, it becomes essential to use localizationmethods that do not depend of known points. To ensure a reliable cooperation between the robotsof a team, we need to assure also a good communication between them, making sure that thisdoes not disturb the mobility of the team. Thus, the RF communication is presented as a goodsolution, in which each robot team becomes a constituent node of the wireless network. As such,it is not only necessary but also crucial to know localization of the various network nodes. Aspart of this thesis were studied methods of localization and navigation based on the RF signalof wireless communications at different frequencies in different indoor environments. The workfocused on the localization on a method based on triangulation with RF beacons and another basedon the estimate of the relative distance between the robots, while, for navigation was implementedthe oblivious method. This allowed to study the impact of the medium to spread in the tasks oflocalization and navigation, and the influence of the selected and developed hardware, in particularthe antennas serving the localization method, on the performance of the tasks of the robots.
iii
iv
Versão 1.10 (14 de Julho de 2010)
Agradecimentos
É com muita satisfação que expresso aqui o mais profundo agradecimento a todos aqueles quetornaram a realização deste trabalho possível.
Ao Prof. Dr. António Paulo Moreira, meu orientador, e ao Prof. Dr. Luís Miguel Almeida,meu co-orientador, agradeço pela disponibilidade no apoio e cooperação para o sucesso nodesenvolvimento desta dissertação.
Aos meus colegas de laboratório pelo constante apoio e ajuda oferecida durante este semestre.Aos professores do ramo de Telecomunicações do DEEC, Artur Moura e Joaquim Costa,
pela ajuda prestada no estudo e desenvolvimento das antenas,e ao técnico também da área detelecomunicações Carlos Graf, e pela ajuda e empenho na concepção das mesmas.
Queria deixar ainda uma palavra de agradecimento às minhas colegas de casa, pelo óptimoambiente criado ao longo destes anos. Um muito obrigada aos meus amigos que, ainda quenão interferido directamente no desenvolvimento desta dissertação, sempre me apoiaram e meproporcionaram bons momentos.
Ao André pelo apoio e carinho prestado durante estes anos.E por fim, mas nem por isso menos importante,um agradecimento especial à minha família
pelo constante apoio e incentivo.
Ana Cristina Carvalho da Ponte
v

vi
Versão 1.10 (14 de Julho de 2010)

“... E viu-se a terra inteira, de repente,surgir, redonda, do azul profundo.”
Fernando Pessoa, A Mensagem
vii

viii
Versão 1.10 (14 de Julho de 2010)
Conteúdo
1 Introdução 11.1 Enquadramento Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Objectivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Estrutura da Dissertação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Estado da Arte 32.1 Motivação para a comunicação . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 Comunicação sem fios . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Cooperação entre agentes de uma equipa . . . . . . . . . . . . . . . . . . . . . . 72.3 Comunicação entre agentes de uma equipa . . . . . . . . . . . . . . . . . . . . . 82.4 Localização Relativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.5 Localização Relativa Baseada no RSSI . . . . . . . . . . . . . . . . . . . . . . . 11
2.5.1 Localização relativa baseada no MDS . . . . . . . . . . . . . . . . . . . 12
3 Aspectos Físicos da Comunicação por Radiofrequência 153.1 Espectro Electromagnético . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2 Antenas e Radiação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.3 Propagação de Ondas de Rádio . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.4 Propagação de Ondas de Rádio em Interiores . . . . . . . . . . . . . . . . . . . 193.5 Received Signal Strengh Indicator . . . . . . . . . . . . . . . . . . . . . . . . . 23
4 Estrutura Experimental 254.1 Frequência 433-434 MHz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.1.1 Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.1.2 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2 Frequência 2.4 GHz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.2.1 Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.2.2 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.3 Clever Robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.4 Rede Desenvolvida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5 Localização 455.1 Definição do Problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.2 Frequência 433MHz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.3 Frequência 2.4Ghz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6 Resultados Experimentais 496.1 Resultados Obtidos à Frequência de 433MHZ . . . . . . . . . . . . . . . . . . . 496.2 Resultados Obtidos à Frequência de 2.4GHZ . . . . . . . . . . . . . . . . . . . . 54
ix
x CONTEÚDO
7 Conclusões e Trabalho Futuro 677.1 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 677.2 Trabalho Futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Referências 69
Versão 1.10 (14 de Julho de 2010)
Lista de Figuras
2.1 Ciclo de actualização da informação da equipa [1] . . . . . . . . . . . . . . . . 92.2 Alsok efectuando patrulhamento num centro comercial [2] . . . . . . . . . . . . 102.3 OFRO efectuando patrulhamento num jardim residencial [2] . . . . . . . . . . . 102.4 Sistema de auto brake evitando colisões . . . . . . . . . . . . . . . . . . . . . . 112.5 Detecção de peões [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.6 Matriz de Conectividade e respectiva topologia da rede . . . . . . . . . . . . . . 132.7 Matriz de Conectividade Estendida e respectiva topologia da rede . . . . . . . . . 13
3.1 Diagrama de Radiação de uma Antena Isotrópica [3] . . . . . . . . . . . . . . . 173.2 Tipos de Antenas: Dipolo; Corneta; Arranjo de Antenas (da esquerda para a
direita) [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.3 Variação do RSSI com a distância em ambiente indoor [4] . . . . . . . . . . . . 213.4 Representação da Zona de Fresnel [5] . . . . . . . . . . . . . . . . . . . . . . . 223.5 Relação do RSSI com a distância . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1 Módulo RF04 [6] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.2 Módulo CM02 [6] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.3 Transceiver ER400TRS [7] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.4 Aspecto físico, com vistas de topo e lateral, do transceiver ER400TRS [7] . . . . 274.5 Relação entre a tensão de saída e a potência recebida, disponibilizada pela saída
RSSI do ER400TRS [7] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.6 Variação do RDF com o comprimento dos dipolos em função do tipo de condutor,
com o espaçamento entre os dipolos constante e igual a 12cm . . . . . . . . . . . 294.7 Variação do RDF com o comprimento dos dipolos em função do tipo de condutor,
com o espaçamento entre os dipolos constante e igual a 18cm . . . . . . . . . . . 304.8 Variação da eficiência de radiação da antena com o comprimento dos dipolos em
função do tipo de condutor, com o espaçamento entre os dipolos constante e iguala 12cm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.9 Variação da eficiência de radiação da antena com o comprimento dos dipolos emfunção do tipo de condutor, com o espaçamento entre os dipolos constante e iguala 18cm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.10 Dipolo de comprimento λ/2 orientado sob o eixo dos zz . . . . . . . . . . . . . 324.11 Diagrama de radiação do dipolo da figura 4.10 com cortes horizontal (esquerda)
e vertical (direita) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.12 Pormenor do diagrama de radiação do dipolo da figura 4.10 nos planos horizontal
(esquerda) e vertical (direita) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.13 Exemplo de diagrama de radiação em cardióide . . . . . . . . . . . . . . . . . . 334.14 PCB do splitter/combiner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
xi

xii LISTA DE FIGURAS
4.15 Representação espacial do agrupamento linear uniforme de dois dipolos construído 354.16 Representação tridimensional do diagrama de radiação da antena da figura 4.15
com cortes nos planos horizontal (esquerda) e vertical (direita) . . . . . . . . . . 354.17 Planos horizontal (esquerda) e vertical (direita) do diagrama de radiação da antena
apresentada na figura 4.15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.18 Agrupamento Linear Uniforme - Dipolo . . . . . . . . . . . . . . . . . . . . . . 354.19 Representação espacial do monopolo construído . . . . . . . . . . . . . . . . . . 364.20 Representação tridimensional do diagrama de radiação da antena da figura 4.19
com cortes nos planos horizontal (esquerda) e vertical (direita) . . . . . . . . . . 364.21 Planos horizontal (esquerda) e vertical (direita) do diagrama de radiação da antena
apresentada na figura 4.19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.22 Aspecto do monopolo construído . . . . . . . . . . . . . . . . . . . . . . . . . . 374.23 Access Point DLink R© DWL - 900 AP+ [8] . . . . . . . . . . . . . . . . . . . . 384.24 Access Point ASUS R© WL - 320 gE [9] . . . . . . . . . . . . . . . . . . . . . . 384.25 PC Acer R© Aspire 2930Z [10] . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.26 Logotipo Wireshark [11] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.27 Aspecto do robô utilizado - Clever Robot [12] . . . . . . . . . . . . . . . . . . . 424.28 Esquema da disposição do hardware utilizado no Clever Robot [12] . . . . . . . 434.29 Componentes de uma rede wireless [5] . . . . . . . . . . . . . . . . . . . . . . 43
5.1 Algoritmo do Método Oblívio . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6.1 Vista de topo dos diagramas de radiação das antenas . . . . . . . . . . . . . . . . 506.2 Arquitectura do modelo de testes para o algoritmo de localização implementado . 506.3 Interface para a comunicação rádio em Lazarus . . . . . . . . . . . . . . . . . . 516.4 Mensagem enviada pelo módulo RF04 para o módulo CM02 . . . . . . . . . . . 516.5 Variação da potência esperada consoante a orientação da antena direccional . . . 526.6 Variação da tensão esperada consoante a orientação da antena direccional . . . . 526.7 Sinal RSSI com diferentes amplitudes recolhido em diferentes direcções . . . . . 536.8 Módulo generic ATMega8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 536.9 Representação dos da média e do máximo dos valores de tensão capturados para
as diferentes orientações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 546.10 Corredor -175 do Piso -1, do Edifício I da FEUP . . . . . . . . . . . . . . . . . . 556.11 Relação RSSI-Distância obtida com o DLink R© DWL - 900 AP+ no corredor -175
do Piso -1, do Edifício I da FEUP . . . . . . . . . . . . . . . . . . . . . . . . . 566.12 Relação Desvio Padrão-Distância obtida com o DLink R© DWL - 900 AP+ no
corredor -175 do Piso -1, do Edifício I da FEUP . . . . . . . . . . . . . . . . . . 566.13 Relação RSSI-Distância obtida com o ASUS R© WL - 320 gE no corredor -175 do
Piso -1, do Edifício I da FEUP . . . . . . . . . . . . . . . . . . . . . . . . . . . 566.14 Relação Desvio Padrão-Distância obtida com o ASUS R© WL - 320 gE no corredor
-175 do Piso -1, do Edifício I da FEUP . . . . . . . . . . . . . . . . . . . . . . . 576.15 Relação RSSI-Distância obtida com o DLink R© DWL - 900 AP+ no Pavilhão de
Ginástica da FADEUP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 576.16 Relação Desvio Padrão-Distância obtida com o DLink R© DWL - 900 AP+ no
Pavilhão de Ginástica da FADEUP . . . . . . . . . . . . . . . . . . . . . . . . . 586.17 Relação RSSI-Distância obtida com o ASUS R© WL - 320 gE no Pavilhão de
Ginástica da FADEUP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 586.18 Relação Desvio Padrão-Distância obtida com o ASUS R© WL - 320 gE no Pavilhão
de Ginástica da FADEUP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Versão 1.10 (14 de Julho de 2010)
LISTA DE FIGURAS xiii
6.19 Comparação entre os resultados teóricos e práticos das experiências realizadascom o AP DLink R© DWL - 900 AP+ . . . . . . . . . . . . . . . . . . . . . . . . 59
6.20 Comparação entre os resultados teóricos e práticos das experiências realizadascom o AP ASUS R© WL - 320 gE . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6.21 Trajectória do robô quando aplicado um filtro de média de 5 amostras e um passode 1 metro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
6.22 Trajectória do robô quando aplicado um filtro de média de 5 amostras e um passode 1,5 metros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6.23 Trajectória do robô quando aplicado um filtro de média de 7 amostras e um passode 1 metro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6.24 Trajectória do robô quando aplicado um filtro de média de 7 amostras e um passode 1,5 metros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.25 Trajectória do robô quando aplicado um filtro especial de 5 amostras e um passode 1 metro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.26 Trajectória do robô quando aplicado um filtro especial de 5 amostras e um passode 1,5 metros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.27 Trajectória do robô quando aplicado um filtro especial de 7 amostras e um passode 1 metro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.28 Trajectória do robô quando aplicado um filtro especial de 7 amostras e um passode 1,5 metros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Versão 1.10 (14 de Julho de 2010)

xiv LISTA DE FIGURAS
Versão 1.10 (14 de Julho de 2010)
Lista de Tabelas
3.1 Gamas de frequência definidas no espectro electromagnético . . . . . . . . . . . 16
4.1 Lista dos condutores considerados no estudo, e respectivos valores de condutividade 284.2 Tabela comparativa das características entre os AP’s DLink R© DWL - 900 AP+ e
ASUS R© WL - 320 gE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.3 Campos do radiotap . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
xv

xvi LISTA DE TABELAS
Versão 1.10 (14 de Julho de 2010)
Abreviaturas e Símbolos
AP Access PointGPS Global Positioning SystemIEEE Institute of Electrical and Electronics EngineersIrDA Infrared Data AssociationLAN Local Area NetworkLOS Line-Of-SightMAC Medium Access ControlMANET Mobile Ad-Hoc NetworkMDS Multidimensional ScalingMIEEC Mestrado Integrado em Engenharia Electrotécnica e de ComputadoresPC Personal ComputerRDF Receiving Directivity FactorRF RadiofrequênciaRSS Received Signal StrengthRSSI Received Signal Strength IndicatorTDMA Time Division Multiple AccessWLAN Wireless Local Area Network
xvii

xviii ABREVIATURAS E SÍMBOLOS
Versão 1.10 (14 de Julho de 2010)
Capítulo 1
Introdução
Esta dissertação baseou-se inicialmente nos estudos [13], [14], [15], [1], bem como na
avaliação comparativa experimental de algoritmos de localização relativa baseada no RSSI. Este
capítulo contém uma pequena introdução ao tema desta dissertação, referindo o crescente interesse
que se tem vindo a fazer notar por equipas formadas por robôs cooperantes. Além disso, é
abordado o RSSI como solução para a determinação da localização absoluta ou relativa dos
elementos da equipa.
1.1 Enquadramento Geral
O recente avanço no desenvolvimento da tecnologia, despoletou o crescente interesse na
utilização de robôs móveis, devido à sua capacidade de cooperar. Uma equipa de robôs móveis
possui mobilidade e autonomia suficiente para desempenhar tarefas, que não seriam possíveis de
serem realizadas por um robô apenas. Um dos factores que motivou o desenvolvimento de equipas
de robôs móveis cooperantes foi o facto de este permitir o afastamento da intervenção humana
em tarefas potencialmente perigosas, como são o caso de situações de desminagem de campos,
combate a incêndios, operações de busca e salvamento, manobras em campos contaminados,
entre outras. Em qualquer uma destas aplicações, a utilização da tecnologia autónoma, possibilita
a redução do risco para os humanos. Em aplicações de outro tipo, como por exemplo, em
sistemas de manufactura, além disso é possível o aumento da eficiência do trabalho [15] [16].
A localização relativa de robôs autónomos mas comunicantes é um desafio de grande interesse,
devido à sua grande mobilidade e constante mudança de topologia que caracteriza as redes Mobile
Ad-hoc Network (MANET). Estas características requerem uma comunicação eficaz, para a
difusão da informação acerca do estado individual do agente e algoritmos rápidos capazes de
calcular as posições relativas dos restantes elementos de equipa.
1
2 Introdução
1.2 Objectivos
O principal objectivo desta tese é a formulação e implementação de algoritmos de localização
e navegação a serem aplicado em robôs móveis, com o intuito de desempenharem estas funções
em ambientes interiores. Ciente dos problemas associados à comunicação em espaços interiores,
é também desejável, analisá-los e perceber o seu impacto no desempenho final. É ainda de
particular interesse que a solução proposta seja de baixo custo, e que implique uma quantidade
de hardware adicionado reduzida, conduzindo assim a que a dimensão física do robô não seja
muito afectada. Como tal, a solução deverá ser desenvolvida através de uma utilização óptima dos
recursos disponíveis.
1.3 Estrutura da Dissertação
Nesta secção é apresentada a estrutura e organização deste documento, bem como o conteúdo
apresentado em cada um dos capítulos que o constituem.
No seguimento deste primeiro capítulo que constitui uma introdução ao tema desta dissertação,
surge o capítulo 2 onde é apresentada a análise do estado da arte. Neste são, inicialmente, e com
o intuito de introduzir alguns conceitos fundamentais à compreensão do que se segue, abordados
os temas da comunicação e da cooperação. Estes termos, embora muito distintos, encontram-se
intimamente ligados quando associados à robótica móvel. E por fim, o tema que caracteriza o
desenvolvimento deste trabalho, a localização.
No capítulo 3, é realizada uma análise aos aspectos físicos da comunicação por radiofrequência,
com vista a construir uma base de conhecimentos na qual se encontram definidas uma série de
características e a influência das mesmas no desempenho das tarefas de localização e navegação.
Posteriormente, no capítulo 4, é apresentada a estrutura experimental desenvolvida e utilizada
no decorrer deste trabalho, como base para os estudos relativos à localização e à navegação. Neste
são ainda tecidas algumas considerações respeitantes a decisões tomadas, com influência directa
no desempenho das tarefas supracitadas.
O capítulo 5, descreve os algoritmos desenvolvidos: quanto à localização, esta é realizada
baseada em triangulação por duas balizas, enquanto que na navegação é desenvolvido um método
oblívio.
De seguida, no capítulo 6, são apresentados os resultados extraídos das experiências
efectuadas, acompanhados da respectiva análise.
Finalmente é chegado o capítulo 7, onde são expostas as últimas conclusões, e apresentadas
algumas ideias para trabalho futuro.
Versão 1.0 (14 de Julho de 2010)
Capítulo 2
Estado da Arte
Neste capítulo, além de apresentado o trabalho científico desenvolvido anteriormente, e que
suporta o desenvolvimento deste trabalho, é feita uma contextualização com alguns conceitos
teóricos que deverão ser consolidados antes de se dar início ao tema da localização.
2.1 Motivação para a comunicação
O avanço tecnológico tornou os robôs cada vez mais inteligentes, robustos e eficientes do
ponto de vista energético. Um dos factores que motivou o desenvolvimento de equipas de robôs
móveis cooperantes foi o facto de este permitir o afastamento da intervenção humana em tarefas
potencialmente perigosas, como são o caso de situações de desminagem de campos, combate a
incêndios, operações de busca e salvamento, manobras em campos contaminados, entre outras.
Em qualquer uma destas aplicações, a utilização da tecnologia autónoma, possibilita a redução
do risco para os humanos. Em aplicações de outro tipo, como por exemplo, em sistemas de
manufactura, além disso é possível o aumento da eficiência do trabalho [15].
2.1.1 Comunicação sem fios
Desde há cerca de uma década, a sociedade tem vindo a tornar-se mais móvel, e como resultado
as formas de comunicações tradicionais até essa data revelaram-se inadequadas para enfrentar os
desafios da nova era. Se para que um conjunto de utilizadores se possa encontrar conectado em
rede é necessária a utilização de cabos, a mobilidade do mesmo é drasticamente afectada. Se, ao
invés disto, os utilizadores se conectarem em rede através de uma tecnologia sem fios, não existe
nenhuma restrição à mobilidade dos mesmos, admitindo que estes se mantêm dentro do alcance
de comunicação, permitindo, desta forma, uma livre circulação por parte dos utilizadores da rede.
Como resultado destes factos a tecnologia sem fios tem vindo a emergir. A tecnologia de rede sem
fio de maior sucesso até à data é o padrão IEEE 802.11 [17].
3
4 Estado da Arte
Para os sistemas de robôs móveis realizarem tarefas cooperantes de forma eficiente é
necessário garantir uma comunicação fiável entre eles. Na escolha da tecnologia a ser utilizada
para realizar a tarefa da comunicação, um dos requisitos a ter em conta é que a tecnologia
escolhida não deverá interferir com a mobilidade dos mesmos. Desta forma, é, à partida, excluída
a tecnologia cablada, sendo então a tecnologia sem fios a solução para estes sistemas. Ainda no
âmbito da tecnologia sem fios (comummente designada pelo termo em inglês, wireless) existe
uma série de formas através das quais a informação pode ser trocada. A tecnologia wireless
oferece uma série de vantagens, independentemente do protocolo utilizado ou do tipo de dados
que é trocado. A vantagem mais óbvia é, sem dúvida, a mobilidade. Os utilizadores de uma
rede sem fios podem-se conectar a uma rede deste tipo já existente e encontram-se aptos para se
moverem livremente. Uma outra vantagem oferecida pela tecnologia wireless é a flexibilidade e
facilidade de instalação por não ser necessário instalar cablagem.
Tal como todas as redes, as redes sem fios transmitem os seus dados através de um meio, que
neste caso é uma forma de radiação electromagnética. Para ser bem adequada para uso em redes
móveis, o meio deve ser capaz de cobrir uma área ampla para que os clientes se possam mover
ao longo de uma determinada área. Os dois meios de comunicação que têm vindo a ser mais
utilizados são os de infravermelho e de ondas de rádio. A maioria dos computadores portáteis
comercializados actualmente possuem portas de infravermelho que permitem estabelecer rápidas
conexões com uma série de periféricos. No entanto, a luz infravermelha tem limitações já que,
é facilmente bloqueado por paredes, divisórias e demais obstáculos. Já as ondas de rádio podem
penetrar mais obstáculos e têm a capacidade de oferecer uma gama mais ampla de cobertura.
Assim, não é surpresa nenhuma o facto de a maioria, senão todos, os produtos IEEE 802.11
disponíveis no mercado usarem ondas de rádio.
2.1.1.1 Comunicação sem fios por infravermelhos
Segundo a definição enunciada em [18] a comunicação sem fios por infravermelhos refere-
se à utilização propagação num espaço livre de ondas que, no espectro electromagnético, se
encontram próximas do vermelho visível, como meio de transmissão para a comunicação. A
comunicação pode ser efectuada entre dois dispositivos de comunicação portáteis ou entre ou
dispositivo de comunicação portátil e um terceiro dispositivo, denominado ponto de acesso ou
estação base (vulgarmente referido pela sua denominação em inglês, acess point ou base station).
Tipicamente os dispositivos de comunicação portáteis incluem, computadores portáteis, PDA’s
ou telemóveis, enquanto os acess points encontram-se, normalmente, conectados ao computador
por rede. Embora seja comummente utilizada a luz infravermelha, existem outras regiões do
espectro óptico que podem ser usadas, daí referenciar "comunicações sem fio ópticas"ao invés de
"comunicações sem fio por infravermelhos".
Os sistemas de comunicações sem fio por infravermelhos podem ser caracterizados pela
aplicação para a qual foram concebidos ou pelo tipo de ligação, isto é, pelo arranjo exigido pelo
receptor e pelo transmissor.
Quanto às aplicações, destacam-se as seguintes [18]:
Versão 1.0 (14 de Julho de 2010)
2.1 Motivação para a comunicação 5
• Conectividade de curto-prazo, sem fio, para troca de informação (agendas, compartilhamento
de arquivos) entre dois utilizadores. O principal exemplo deste tipo de aplicação é os
sistemas IrDA.
• Redes locais sem fio (WLAN) com o objectivo de estabelecer a conectividade dentro de
edifícios. Isto pode constituir uma extensão às redes locais (LANs) já existentes, com o
intuito de facilitar a mobilidade ou de estabelecer redes ad-hoc onde não existe nenhuma
LAN. O principal exemplo deste tipo de aplicação é o padrão IEEE 802.11.
• Ligações building-to-building para um acesso à rede de alta velocidade redes metropolitanas
ou de campus.
• Entradas e dispositivos de controlo sem fio, tais como, ratos, teclados e controladores de
videojogos sem fios e controladores remotos (exemplo, comando televisivo).
Quanto ao tipo de ligação existem duas configurações típicas possíveis: ligação directa, ou
ponto-a-ponto, e ligação difusa. O tipo de ligação mais simples é o estabelecido nos sistemas
ponto-a-ponto. Nestes, o receptor e o emissor deverão estar apontados um para o outro, de forma
a estabelecer a ligação. Além disso, o caminho que os une (linha de visão, ou line-of-sight -
LOS) deve-se encontrar livre de obstáculos, e a maior parte da luz emitida deverá ser direccionada
para o receptor. Como tal, os sistemas ponto-a-ponto são também denominados "sistemas LOS
directos". As ligações podem ser criadas temporariamente para uma sessão de troca de dados entre
dois utilizadores, ou estabelecidas de forma permanente, definindo uma rede local.
Nos sistemas difusos, a ligação é permanentemente mantida entre uns quaisquer transmissor e
receptor que se encontrem na mesma vizinhança, reflectindo a luz portadora de informação através
de superfícies reflectoras, como o são os tectos, paredes ou mobiliário, existentes no meio. Nestes
sistemas, a ligação entre o emissor e o receptor não é directa; aqui, o emissor emite um feixe
largo, e o receptor provém de um amplo campo de visão. Além disso, nos sistemas difusos não é
necessária a existência de um caminho LOS. Assim, estes sistemas são também denominados de
sistemas não-directos não-LOS. Estes sistemas são adequados para aplicações em LANs sem fios,
libertando assim o utilizador do cuidado em conhecer o posicionamento e respectivo alinhamento
dos vários dispositivos de comunicação.
Existem duas tecnologias de sistemas de comunicação sem fio por infravermelhos disponíveis
no mercado que se revelam predominantes, IrDA e IEEE802.11, e que, como tal, merecem ser
analisadas com algum detalhe.
O IrDA (Infrared Data Association) é uma associação que normalizou as ligações de dados
ópticas de baixo custo. A maioria dos padrões de transmissão é relativa a ligações directas e de
curto alcance (até 1m).
O IEEE (Institute of Electrical and Electronics Engineers) publicou um conjunto de normas
relativas às redes sem fio locais, o IEEE 802.11. O padrão 802.11 constitui um membro da família
IEEE 802, a qual é definida como um conjunto de especificações para as tecnologias de redes
locais (LANs). As especificações definidas no IEEE 802 encontram-se focadas nas duas camadas
Versão 1.0 (14 de Julho de 2010)
6 Estado da Arte
inferiores do modelo OSI, a física (PHY) e a de ligação de dados (conjunto das sub-camadas
MAC e LLC). O IEEE 802.11 possui as componentes PHY e MAC. O IEEE 802.2 especifica uma
camada de ligação comum, o LLC (Logical Link Control), o qual pode ser usado por qualquer
outra tecnologia LAN de camada inferior. O MAC (Medium Access Control) constitui um
conjunto de regras que determina o modo como é feito o acesso ao meio e como os dados são
enviados, enquanto os detalhes relativos à transmissão e à recepção ficam ao cabo da camada
PHY. O padrão original oferece suporte às camadas físicas tanto de rádio como óptica como uma
taxa de transmissão de dados máxima de 1 Mb/s.
Além das duas tecnologias descritas anteriormente existem ainda os sistemas building-to-
building. As ligações de infravermelhos de longo alcance (superior a 10 metros) deverão ser
sistemas LOS directos, com vista a assegurar a existência de um caminho razoável. Os produtos
emergentes desenvolvidos para ligações de elevado alcance encontram-se projectados para serem
colocados em telhados, já que desta forma oferecem maior facilidade em definir uma linha de
visão (LOS) entre um ponto e outro num ambiente urbano. Estas elevadas de transmissão de
dados podem ser utilizadas em redes de empresas, metropolitanas ou de campus. Estes sistemas
possuem, no entanto uma série de especificações de design, próprias deste tipo de sistemas: a
perda do caminho atmosférico, resultante da combinação de absorção de ar limpo e de absorção
e dispersão de partículas no ar, tais como, chuva, nebelina e partículas poluentes; um efeito
denominado cintilação, que é causado por variações de temperatura ao longo do caminho LOS,
que, por sua vez, causa flutuações rápidas na qualidade do canal; e, por fim, a construção pode
afectar o alinhamento e resultar na perda de sinal, a menos que os transceivers se encontrem
mecanicamente isolados ou seja utilizado uma compensação para alinhamento activa.
Por fim, um outro campo de aplicação no qual a comunicação sem fio por radiação
infravermelha, tem encontrado diversos mercados em locais como, dentro e fora de casa,
carro e escritório, em vez dos tradicionais mercados de telecomunicações, voz e redes de dados.
Estes podem ser classificados como dispositivos de entrada sem fio ou de controlo sem fio.
Exemplos deste tipo de dispositivos incluem os ratos e teclados de computador sem fios, controles
remotos para equipamentos de entretenimento, controladores de videojogos sem fio, e chaves de
acesso a casa ou a veículos sem fio. Todos esses dispositivos utilizam sistemas de comunicação
via infravermelho, devido a uma atraente combinação entre os factores de baixo custo, fiabilidade
e peso num par transmissor/receptor que atinge o alcance necessário, cumprindo também com a
taxa de transmissão de dados e a integridade dos mesmos exigidos.
2.1.1.2 Comunicação sem fios por radiofrequência
Inicialmente, as comunicações sem fio eram realizadas através da tecnologia de infravermelhos,
muito pelo baixo custo associado à mesma. Porém esta apresenta uma série de inconvenientes,
como o são o facto de uma onda de infravermelhos não ser capaz de atravessar obstáculos, e
apresentar uma taxa de transmissão baixa. Assim, a tecnologia radiofrequência (RF) tem vindo a
seu a escolhida para realizar a tarefa de comunicação entre os robôs. Estes podem comunicar por
RF através de ligações ponto-a-ponto ou por uma tecnologia de broadcast.
Versão 1.0 (14 de Julho de 2010)
2.2 Cooperação entre agentes de uma equipa 7
O padrão IEEE 802.11, sobre LANs sem fios foi desenvolvido para estender as funcionalidades
fornecidas pelo IEEE 802.3 de WLAN (wired LAN). A interface de rádio acrescenta considerável
complexidade, no entanto, os avanços nos circuitos integrados de rádio tornaram possível a
redução do custo dos dispositivos sem fio a níveis razoáveis. O ETSI BRAN HiperLAN / 2
é uma especificação alternativa para WLAN, com serviços mais extensivos, mas com menor
apoio comercial. A radiofrequência (RF) opera de um modo similar ao definido no padrão IEEE
802.11a, no entanto, a alocação do tempo de transmissão das slots é bem diferente. Actualmente,
tem-se notado uma crescente colaboração e envolvimento entre os dois padrões.
Enquanto as LANs com fios já usava numerosas técnicas para lidar com a existência de vários
utilizadores acedendo a um servidor central, medidas adicionais tiveram que ser desenvolvidas
com vista a lidar com as necessidades impostas ao desenvolvimento das ligações sem fios. As
características de uma ligação wireless ficam muito à quem daquelas que são consideradas as
características de transmissão ideais. Exemplos disso são a dependência dos erros de sinal da
posição física e a capacidade de dispositivos próximos RF para "escutar"ou interferir.
2.2 Cooperação entre agentes de uma equipa
O interesse na utilização de robôs móveis autónomos tem vindo a crescer, devido à sua
capacidade de cooperar, com vista a realizar uma série de propósitos, desde tarefas de salvamento
em situações de catástrofe, passando por operações de desminagem, manobras em campos
contaminados, até à segurança [15].
Tal cooperação normalmente exige a troca de dados de estado que é sensível ao tempo e,
como tal, as aplicações devem estar cientes da coerência de dados temporal. A fim de fornecer tais
informações em tempo real, deverá ser utilizado um protocolo de comunicação com vista a evitar
a latência ilimitada de entrega de mensagens. Esta, no entanto, não é uma tarefa trivial quando
são utilizadas ligações sem fios devido às suas propriedades de pouca fiabilidade, apresentando
elevadas taxas de erro na transmissão dos dados devido às interferências (p. e. com outros
equipamentos), e baixa largura de banda devido a limitações na transmissão de rádio [15].
A dificuldade em assegurar a comunicação através de ligações sem fios também foi motivou,
ultimamente, uma substancial actividade de investigação, quer no âmbito das redes móveis ad-
hoc, redes de sensores e acesso à Internet baseado em comunicações multimédia sem fios. Apesar
da existência de algumas soluções para cada um dos estes âmbitos de aplicação, o problema,
em geral, encontra-se ainda em aberto e com um grande número de possibilidades em termos de
funcionamento, flexibilidade, consumo de energia, uso da largura de banda e de coordenação de
comunicação, enquanto, ao mesmo tempo, há falta de uma solução comercial de prateleira (COTS
- commercial off the shelf ) que entregue qualquer tipo de garantias em tempo real [15].
Versão 1.0 (14 de Julho de 2010)
8 Estado da Arte
2.3 Comunicação entre agentes de uma equipa
Na maioria das aplicações reais, existem agentes externos que não podem ser controlados,
restando, assim, aos agentes da mesma equipa manterem uma comunicação o mais eficaz
possível de forma a cooperarem em tempo-real [2]. Existe uma série de protocolos de tempo-
real que podem ser aplicados. Em [14] é proposto um protocolo de comunicação MAC
para o escalonamento das mensagens que cada agente pretende transmitir. Estes sugerem
a implementação de um algoritmo Earliest Deadline First global. Para tal, é necessária a
construção de uma Tabela de Requisitos de Comunicação (CRT), na qual se encontram contidas
as informações relativas á identidade dos agentes, tempo de comunicação, período de transmissão,
deadline e offset do agente emissor, a qual é preenchida pelos elementos da equipa e é difundida
entre eles. Os autores sugerem ainda, com esta tabela e um sincronismo de relógio preciso, a
implementação do algoritmo Earliest Deadline First, em simultâneo, em todos os agentes da
equipa, correspondendo a uma implementação global do algoritmo, o que se poderá revelar uma
tarefa de difícil concretização.
Em [1] é sugerido um método que constitui uma optimização do método sugerido em [15],
que permite uma utilização mais eficaz do meio de transmissão, uma vez que apresenta menos
overhead. Já que a carga da rede não pede ser totalmente controlada pela equipa a alternativa é que
esta se adapte as condições do canal de comunicação, reduzindo assim o número de colisões entre
os membros a equipa. Para tal, é implementado um controlo de transmissão do tipo Time Division
Multiple Access (TDMA) adaptativo. Este método necessita os agentes tenham conhecimento
acerca do número actual de elementos que formam a equipa. Esta informação pode ser extraída da
matriz de conectividade local, a qual descreverei mais à frente. A comunicação caracteriza-se pelo
conceito de Período de Actualização da Equipa, Team Update Period (Ttup). Todos os agentes têm
de comunicar o seu estado e o estado da missão individual no Período de Actualização da Equipa,
o qual é ajustado de forma a permitir uma comunicação e colaboração em tempo-real entre agentes
da mesma equipa. O Ttup é, então, dividido em tantas janelas de transmissão quantos os elementos
activos que constituírem a equipa, sendo, portanto, um parâmetro global. Posteriormente os
mesmos autores apresentam um método dinâmico e auto-configurável que permite a entrada e
saída de robôs na equipa, logo, ajustável à constante mudança de topologia que caracteriza as
MANETs. As colisões entre agentes da equipa são resolvidas com o espaçamento adequado entre
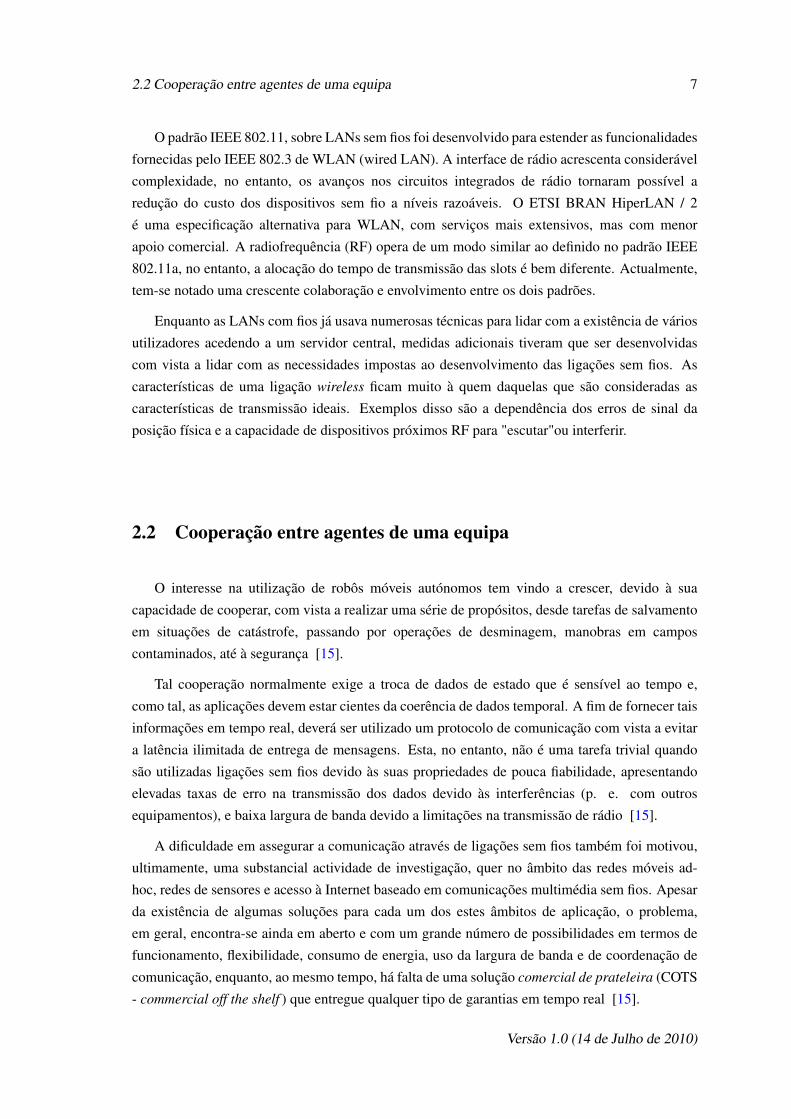
janelas de transmissão. A figura 2.1 na página 9 apresenta o período de actualização da equipa
Ttup com quatro janelas de transmissão (o que indica que a equipa é formada por quatro agentes)
espaçadas o mais possível entre elas minimizando, assim, a possibilidade de uma colisão entre
agentes da equipa.
2.4 Localização Relativa
A localização pode ser definida como o processo de determinar as relações espaciais entre
os diversos objectos. Esta pode ser de dois tipos: absoluta ou relativa. Enquanto a localização
Versão 1.0 (14 de Julho de 2010)
2.4 Localização Relativa 9
Figura 2.1: Ciclo de actualização da informação da equipa [1]
absoluta oferece a informação sobre a localização exacta do objecto, a localização relativa
apenas disponibiliza a informação da localização do objecto relativamente a algo que pertence
ao ambiente em que este se encontra. Isto pode ser facilmente entendido através de um exemplo
simples; dizer que um veículo se encontra no quilómetro 27 da auto-estrada é fornecer a
localização absoluta acerca do posicionamento do mesmo, mas se a informação fornecida é que
este se encontra a 27 quilómetros de distância do ponto de partida, então esta informação é sobre a
localização relativa do veículo (localização relativamente ao ponto de partida) [19]. Este conceito
de localização relativa é exigido pelas equipas de robôs móveis, na ausência de referenciais fixos
ou âncoras, por exemplo, na manutenção da conectividade entre agentes [2].
Quanto à localização absoluta, alguns dos métodos utilizados implicam a construção de uma
infra-estrutura de referência, ou então o uso de GPS (Global Positioning System). Mas, tal como
mencionado em [13], a construção da infra-estrutura é dispendiosa, até impossível em situações
de emergência, como em busca e salvamento. Quanto ao GPS, sendo este dependente de satélite e
fornecendo informações sobre a localização grosseiras, não se revela um bom método.
Assim, derivar as posições relativas através das comunicações locais apresenta-se como sendo
a solução mais elegante [13]. A localização relativa não implica a construção de nenhuma infra-
estrutura, e como tal pode ser aplicada em qualquer lugar rapidamente e com menores custos
associados. O acto de este tipo de localização ser independente do meio exterior permite que
seja utilizado em qualquer local, utilizando mudanças da topologia da MANET, para cobrir áreas
maiores [13] [2].
As aplicações deste tipo de localização são vastas devido à sua versatilidade, proveniente
do facto de não exigir nenhum tipo de ancoragem ou de rede de sensores estruturada. A
localização relativa é utilizada para uma série de propósitos, como sendo o patrulhamento,
interior e exterior, de espaços residenciais, centros comerciais, portos marítimos, aeroportos,
armazéns, entre outros. As figuras 2.2 e 2.3 nas páginas 10 e 10, respectivamente, mostram
dois tipos de robôs, actualmente comercializados, que efectuam patrulhamento comercial e
residencial, respectivamente. Existem, também, outras aplicações: em habitats animais como
jardins zoológicos para, por exemplo, patrulhar o estado das vedações, e em reservas protegidas
para observação e identificação de caçadores furtivos ou localização e primeira intervenção no
caso de incêndio [2]. A característica de versatilidade permite que robôs munidos de interfaces
RF, poderão posicionar-se de acordo com as diferentes capacidades de que dispõem, e mantendo
a comunicação entre agentes com equipamento especial. No caso da aplicação em questão ser o
combate a incêndios este equipamento especial seria um extintor, e a comunicação eficaz entre os
Versão 1.0 (14 de Julho de 2010)
10 Estado da Arte
agentes ditaria qual o procedimento de cada um dos agentes, de acordo com as necessidades [19]
[2].
Figura 2.2: Alsok efectuando patrulhamento num centro comercial [2]
Figura 2.3: OFRO efectuando patrulhamento num jardim residencial [2]
Embora as aplicações descritas anteriormente sejam realizadas com o apoio de robôs, a
localização relativa não se encontra limitada a estes. Igualmente, a localização relativa pode
ser utilizada pelos humanos, e um exemplo de uma aplicação deste género é o FINDER [20].
O FINDER é um sistema portátil de localização de bombeiros no interior de edifícios. O seu
princípio de funcionamento consiste no envio de um sinal de rádio por parte de um bombeiro que
necessite de ajuda, o qual será recebido pelo FINDER’s dos outros bombeiros, permitindo assim
conduzi-los até ao colega que enviou o pedido de auxílio.
Outra área onde a localização relativa também pode ter uma aplicação útil é na IVC (Inter-
Vehicle Communication). Nesta área, existem uma vasta quantidade de aplicações, as quais se
encontram divididas em quatro categorias de acordo com as características da informação que
é trocada entre os veículos: informação genérica (exemplo, estado do tráfego), informação de
gestão/monitorização do veículo, informação pessoal e informação para uma condução segura
[21]. Algumas das aplicações existentes, são o cruise control adaptativo, o aviso de colisão
Versão 1.0 (14 de Julho de 2010)
2.5 Localização Relativa Baseada no RSSI 11
com travagem automática, figura 2.4 na página 11, e até mesmo um protótipo para detecção de
peões,figura 2.5 na página 11.
Figura 2.4: Sistema de auto brake evitando colisões
Figura 2.5: Detecção de peões [2]
2.5 Localização Relativa Baseada no RSSI
Um tipo de informação possível de ser trocada na estimativa da localização relativa dos
objectos é o RSSI (Received Signal Streght Indicator). Isto é possível já que, o RSSI é um valor
dependente da distância, que embora um pouco grosseiro, é facilmente obtido pelas mensagens
trocadas entre os elementos de uma equipa de robôs.
Esta informação pode ser utilizada tanto em redes de robôs móveis como estáticas para
diversos fins. Um deles é extrapolar a topologia de uma rede de sensores estáticos para optimizar
a sequência de comunicação, e até mesmo, quando possuem a propriedade de auto-reconfiguração,
Versão 1.0 (14 de Julho de 2010)
12 Estado da Arte
permitir optimizações nas entradas e saídas de nós. Outra aplicação na qual esta informação pode
ser utilizada, e desta vez com uma equipa de robôs móveis, é a obtenção da topologia da rede,
[13], permitindo a possibilidade de movimento para manter a conectividade entre os robôs ou para
executar uma determinada tarefa como, [13] [2] [22].
Assim, o trabalho desenvolvido no âmbito desta tese baseia-se na técnica do cálculo da
estimativa da localização, que utiliza a força do sinal recebido (RSSI) de uma mensagem como
parâmetro para calcular a distância entre dois nós. O uso desta técnica resolve dois problemas
supracitados: reduz o custo envolvido e elimina a necessidade de acrescentar hardware, mantendo
assim o tamanho físico dos robôs inalterado.
Embora o RSSI seja apresentado como a solução ideal a ser aplicada em sistemas de baixo
custo, esta técnica acarreta a desvantagem da imprecisão. Como tal, esta técnica não é a ideal
para ser utilizada em longas distâncias, já que, associados às longas distâncias surgem os factores
como, interferências e perda de sinal ao longo do percurso.
Uma informação fiável sobre a localização de cada um dos robôs constitui um elemento
essencial à construção de uma equipa de robôs móveis cooperantes.
O facto de o RSSI ser uma informação que, normalmente, é facilmente medida pelos sistemas
sem fio, faz com que os algoritmos de localização baseados no RSSI sejam os escolhidos [23].
Antes de passarmos à apresentação dos algoritmos de localização, é apresentada a definição
do termo RSSI segundo [24].
”RSSI representa a medição da potência do sinal recebido. Este indicador é
amplamente utilizado em sistemas que se apoiam na tecnologia IEEE802.11. A
potência recebida pode ser calculada através do RSSI.”
Na secção seguinte é apresentada a análise do trabalho previamente elaborado relativamente
aos métodos utilizados na localização relativa.
2.5.1 Localização relativa baseada no MDS
O Multidimensional Scaling (MDS), escalonamento multidimensional, é uma técnica
amplamente utilizada na análise de divergência de dados, a partir da qual é possível obter a
distribuição espacial do conjunto de dados. Este método pode ser utilizado como uma abordagem
analítica com vista a determinar as dimensões que são subjacentes aos dados presentes na estrutura
espacial obtida [25] [26] [19].
A principal vantagem na utilização do MDS na estimativa da posição é que este, geralmente,
fornece um resultado bastante preciso, ainda que baseado em informações sobre a distância
limitadas e propensas à existência de erros [25].
Este algoritmo utiliza uma matriz simétrica de dimensão n× n, na qual cada elemento
representa a distância entre cada dois nós. Esta matriz é, então, utilizada para obter uma matriz de
configuração compatível num espaço p-dimensional, para p < n. Para este trabalho apenas duas
dimensões foram consideradas.
Versão 1.0 (14 de Julho de 2010)
2.5 Localização Relativa Baseada no RSSI 13
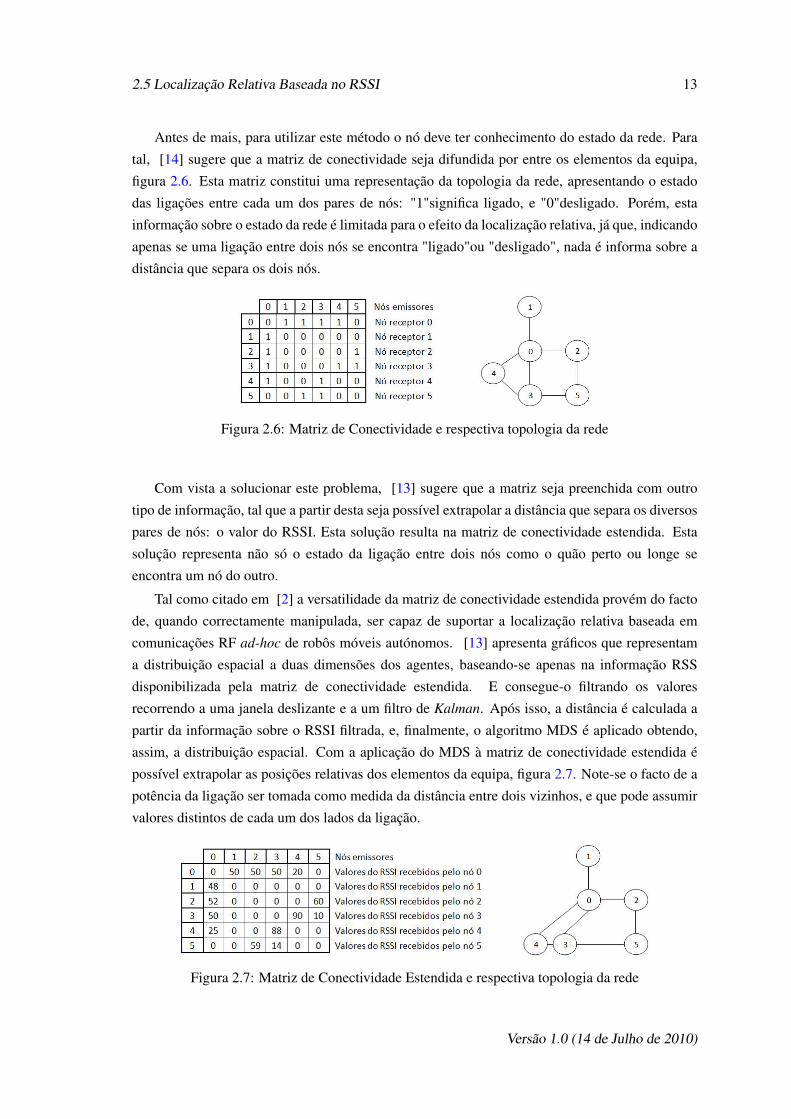
Antes de mais, para utilizar este método o nó deve ter conhecimento do estado da rede. Para
tal, [14] sugere que a matriz de conectividade seja difundida por entre os elementos da equipa,
figura 2.6. Esta matriz constitui uma representação da topologia da rede, apresentando o estado
das ligações entre cada um dos pares de nós: "1"significa ligado, e "0"desligado. Porém, esta
informação sobre o estado da rede é limitada para o efeito da localização relativa, já que, indicando
apenas se uma ligação entre dois nós se encontra "ligado"ou "desligado", nada é informa sobre a
distância que separa os dois nós.
Figura 2.6: Matriz de Conectividade e respectiva topologia da rede
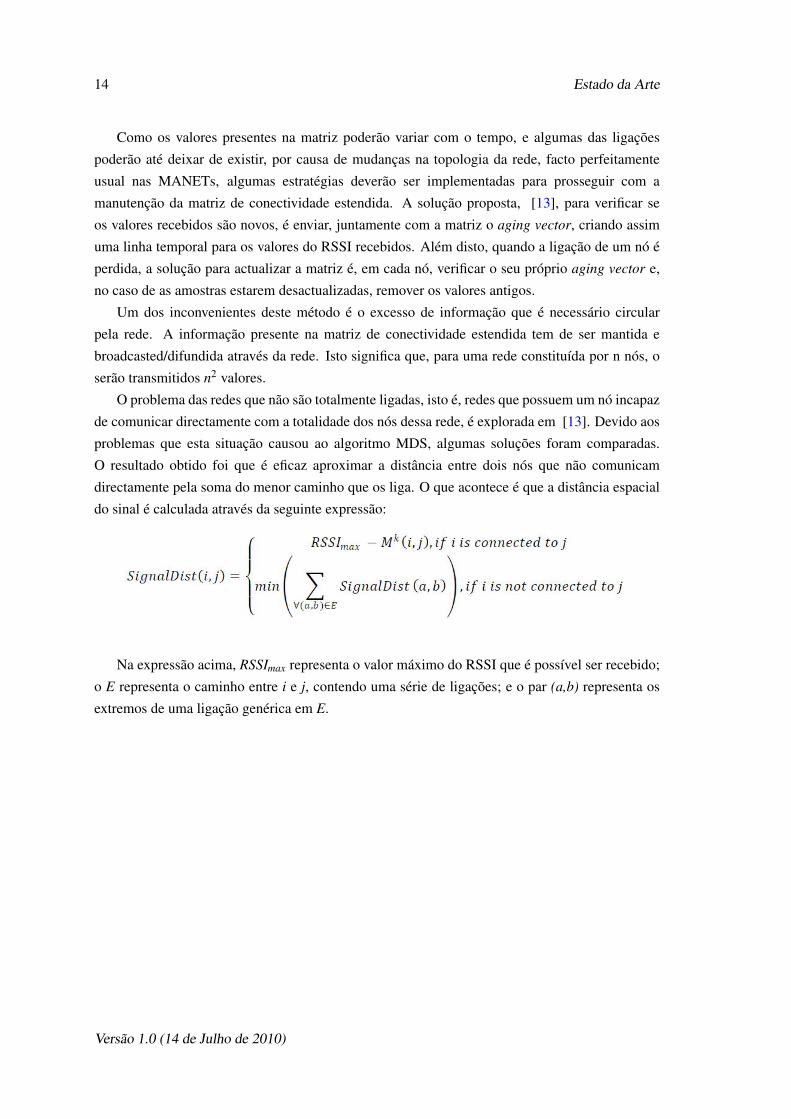
Com vista a solucionar este problema, [13] sugere que a matriz seja preenchida com outro
tipo de informação, tal que a partir desta seja possível extrapolar a distância que separa os diversos
pares de nós: o valor do RSSI. Esta solução resulta na matriz de conectividade estendida. Esta
solução representa não só o estado da ligação entre dois nós como o quão perto ou longe se
encontra um nó do outro.
Tal como citado em [2] a versatilidade da matriz de conectividade estendida provém do facto
de, quando correctamente manipulada, ser capaz de suportar a localização relativa baseada em
comunicações RF ad-hoc de robôs móveis autónomos. [13] apresenta gráficos que representam
a distribuição espacial a duas dimensões dos agentes, baseando-se apenas na informação RSS
disponibilizada pela matriz de conectividade estendida. E consegue-o filtrando os valores
recorrendo a uma janela deslizante e a um filtro de Kalman. Após isso, a distância é calculada a
partir da informação sobre o RSSI filtrada, e, finalmente, o algoritmo MDS é aplicado obtendo,
assim, a distribuição espacial. Com a aplicação do MDS à matriz de conectividade estendida é
possível extrapolar as posições relativas dos elementos da equipa, figura 2.7. Note-se o facto de a
potência da ligação ser tomada como medida da distância entre dois vizinhos, e que pode assumir
valores distintos de cada um dos lados da ligação.
Figura 2.7: Matriz de Conectividade Estendida e respectiva topologia da rede
Versão 1.0 (14 de Julho de 2010)
14 Estado da Arte
Como os valores presentes na matriz poderão variar com o tempo, e algumas das ligações
poderão até deixar de existir, por causa de mudanças na topologia da rede, facto perfeitamente
usual nas MANETs, algumas estratégias deverão ser implementadas para prosseguir com a
manutenção da matriz de conectividade estendida. A solução proposta, [13], para verificar se
os valores recebidos são novos, é enviar, juntamente com a matriz o aging vector, criando assim
uma linha temporal para os valores do RSSI recebidos. Além disto, quando a ligação de um nó é
perdida, a solução para actualizar a matriz é, em cada nó, verificar o seu próprio aging vector e,
no caso de as amostras estarem desactualizadas, remover os valores antigos.
Um dos inconvenientes deste método é o excesso de informação que é necessário circular
pela rede. A informação presente na matriz de conectividade estendida tem de ser mantida e
broadcasted/difundida através da rede. Isto significa que, para uma rede constituída por n nós, o
serão transmitidos n2 valores.
O problema das redes que não são totalmente ligadas, isto é, redes que possuem um nó incapaz
de comunicar directamente com a totalidade dos nós dessa rede, é explorada em [13]. Devido aos
problemas que esta situação causou ao algoritmo MDS, algumas soluções foram comparadas.
O resultado obtido foi que é eficaz aproximar a distância entre dois nós que não comunicam
directamente pela soma do menor caminho que os liga. O que acontece é que a distância espacial
do sinal é calculada através da seguinte expressão:
Na expressão acima, RSSImax representa o valor máximo do RSSI que é possível ser recebido;
o E representa o caminho entre i e j, contendo uma série de ligações; e o par (a,b) representa os
extremos de uma ligação genérica em E.
Versão 1.0 (14 de Julho de 2010)
Capítulo 3
Aspectos Físicos da Comunicação porRadiofrequência
O universo físico é governado por quatro grandes forças: força nuclear, a mais forte das quatro,
porém limitada a sistema submicroscópicos; força electromagnética, cuja intensidade é da ordem
de 10−2 da força nuclear, e constitui a força dominante em sistemas microscópicos, tais como,
átomos e moléculas; força de interacção fraca, cuja intensidade é de apenas 10−14 da força nuclear,
e desempenha um papel na interacção que envolve partículas radioactivas; e a força gravítica, que
constitui a mais fraca das forças, mas ainda assim é a dominante em sistemas macroscópicos,
como é o exemplo do sistema solar.
O interesse deste trabalho foca-se na força electromagnética, pelo que, de seguida serão
apresentados alguns conceitos teóricos que propiciam um visão geral da estrutura do electromagnetismo
e, consequentemente, permitem um enquadramento nas temáticas descritas mais à frente.
3.1 Espectro Electromagnético
O espectro eletromagnético é uma vasta banda de frequências de energia que se estende desde
as ondas de rádio, passando pelas microondas, infravermelho, luz visível, ultravioleta e raios X,
até às ondas gama, desde frequências muito baixas até às maiores frequências possíveis. Este
encontra-se organizado de acordo com a frequência das ondas, desde as mais longas, equivalente
ao nível de energia mais baixo, para as mais curtas, ondas de maior energia. De uma forma
geral, os constituintes do espectro são denominados ondas electromagnéticas, já que partilham
das mesmas características fundamentais:
• uma onda electromagnética consiste no conjunto de intensidades de campo eléctrico e
magnético oscilando à mesma frequência;
15
16 Aspectos Físicos da Comunicação por Radiofrequência
• a velocidade de fase de uma onda electromagnética que se propaga no vácuo é uma constante
universal dada pela velocidade da luz c, definida na equação ??;
• no vácuo, o comprimento de onda λ de uma onda electromagnética está relacionado com a
sua frequência de oscilação f por
λ =cf
(3.1)
Desta forma, cada onda é diferenciada pelo próprio comprimento de onda, ou, equivalentemente,
pela sua frequência de oscilação.
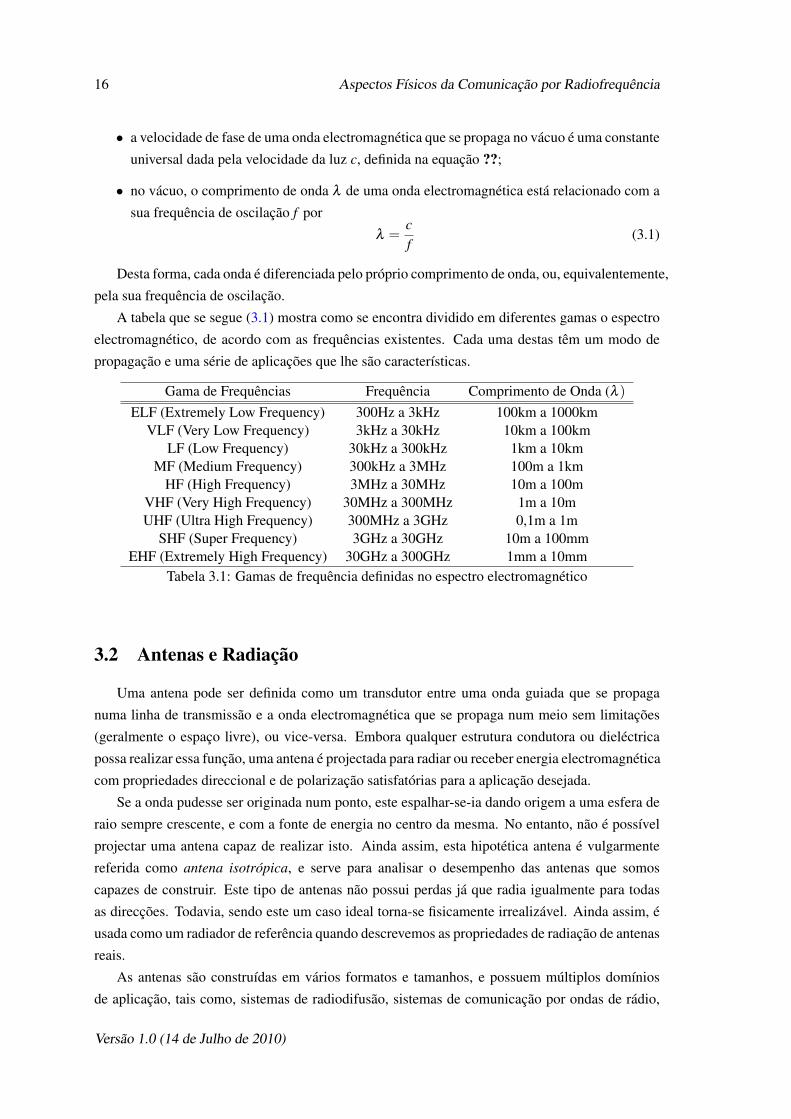
A tabela que se segue (3.1) mostra como se encontra dividido em diferentes gamas o espectro
electromagnético, de acordo com as frequências existentes. Cada uma destas têm um modo de
propagação e uma série de aplicações que lhe são características.
Gama de Frequências Frequência Comprimento de Onda (λ )ELF (Extremely Low Frequency) 300Hz a 3kHz 100km a 1000km
VLF (Very Low Frequency) 3kHz a 30kHz 10km a 100kmLF (Low Frequency) 30kHz a 300kHz 1km a 10km
MF (Medium Frequency) 300kHz a 3MHz 100m a 1kmHF (High Frequency) 3MHz a 30MHz 10m a 100m
VHF (Very High Frequency) 30MHz a 300MHz 1m a 10mUHF (Ultra High Frequency) 300MHz a 3GHz 0,1m a 1m
SHF (Super Frequency) 3GHz a 30GHz 10m a 100mmEHF (Extremely High Frequency) 30GHz a 300GHz 1mm a 10mm
Tabela 3.1: Gamas de frequência definidas no espectro electromagnético
3.2 Antenas e Radiação
Uma antena pode ser definida como um transdutor entre uma onda guiada que se propaga
numa linha de transmissão e a onda electromagnética que se propaga num meio sem limitações
(geralmente o espaço livre), ou vice-versa. Embora qualquer estrutura condutora ou dieléctrica
possa realizar essa função, uma antena é projectada para radiar ou receber energia electromagnética
com propriedades direccional e de polarização satisfatórias para a aplicação desejada.
Se a onda pudesse ser originada num ponto, este espalhar-se-ia dando origem a uma esfera de
raio sempre crescente, e com a fonte de energia no centro da mesma. No entanto, não é possível
projectar uma antena capaz de realizar isto. Ainda assim, esta hipotética antena é vulgarmente
referida como antena isotrópica, e serve para analisar o desempenho das antenas que somos
capazes de construir. Este tipo de antenas não possui perdas já que radia igualmente para todas
as direcções. Todavia, sendo este um caso ideal torna-se fisicamente irrealizável. Ainda assim, é
usada como um radiador de referência quando descrevemos as propriedades de radiação de antenas
reais.
As antenas são construídas em vários formatos e tamanhos, e possuem múltiplos domínios
de aplicação, tais como, sistemas de radiodifusão, sistemas de comunicação por ondas de rádio,
Versão 1.0 (14 de Julho de 2010)
3.2 Antenas e Radiação 17
telecomunicações, sistemas de radar e sensores automóveis de anti-colisão, entre muitas outras. As
propriedades de radiação e impedância de uma antena são determinadas pelas suas características
físicas: formato, tamanho e material com a qual é construída. As dimensões de uma antena são
geralmente expressas em unidades de comprimento de onda que recebe ou emite.
A maioria das antenas são dispositivos recíprocos, isto é, apresentam as mesmas características
quer no acto da recepção, quer no da transmissão. Esta propriedade de reciprocidade é muito
conveniente já que esta permite determinar o padrão de radiação de uma antena no modo de
transmissão, mesmo quando esta opera como um receptor.
O desempenho da antena depende das suas características, das quais se podem destacar quatro:
o diagrama de radiação, já descrito anteriormente, a directividade, a eficiência e o ganho.
A função direccional caracteriza a distribuição relativa da potência radiada pela antena, sendo
conhecida como padrão de radiação da antena ou, simplesmente, padrão da antena, ou ainda, e
talvez o termo mais comumente utilizado, diagrama de radiação.
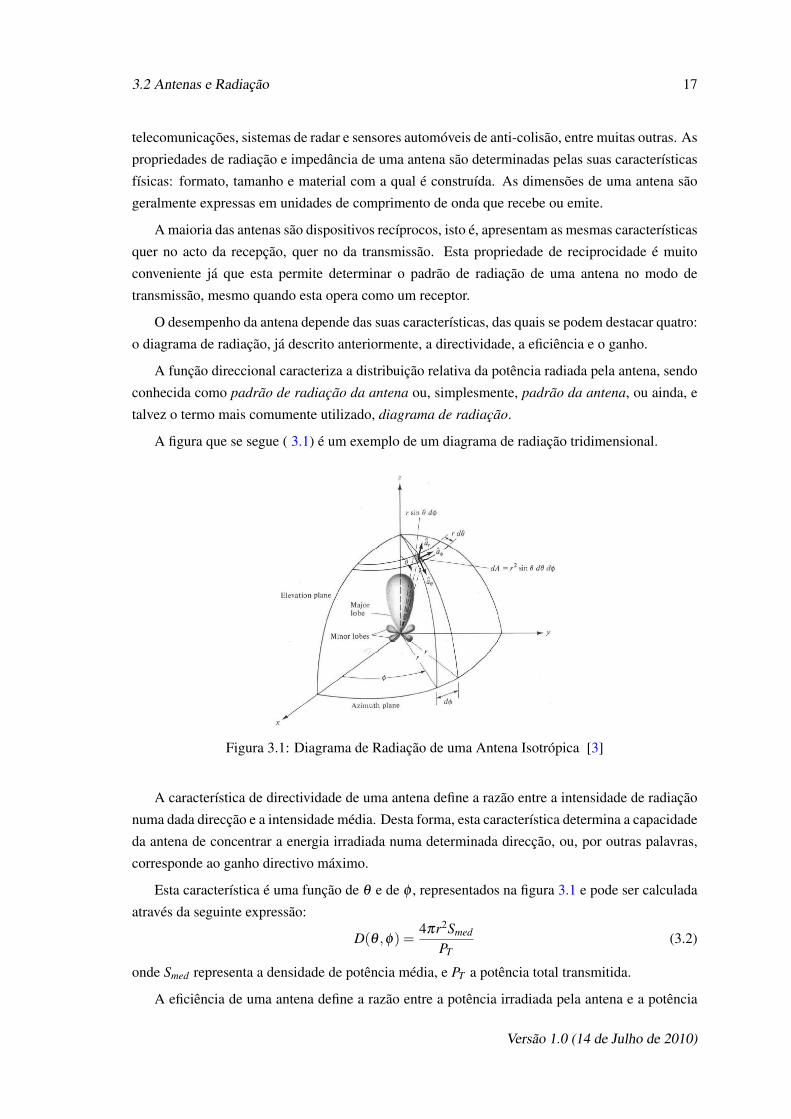
A figura que se segue ( 3.1) é um exemplo de um diagrama de radiação tridimensional.
Figura 3.1: Diagrama de Radiação de uma Antena Isotrópica [3]
A característica de directividade de uma antena define a razão entre a intensidade de radiação
numa dada direcção e a intensidade média. Desta forma, esta característica determina a capacidade
da antena de concentrar a energia irradiada numa determinada direcção, ou, por outras palavras,
corresponde ao ganho directivo máximo.
Esta característica é uma função de θ e de φ , representados na figura 3.1 e pode ser calculada
através da seguinte expressão:
D(θ ,φ) =4πr2Smed
PT(3.2)
onde Smed representa a densidade de potência média, e PT a potência total transmitida.
A eficiência de uma antena define a razão entre a potência irradiada pela antena e a potência
Versão 1.0 (14 de Julho de 2010)
18 Aspectos Físicos da Comunicação por Radiofrequência
entregue à mesma. Como tal, esta é calculada com recurso à expressão:
η =Pot.Irradiada
Pot.TotalAplicada(3.3)
Para entender o conceito de ganho de uma antena, poder-se-á começar por pensar na hipotética
antena isotrópica que consiste numa fonte pontual a irradiar energia igualmente em todas as
direcções. Qualquer antena real irá irradiar mais energia sob umas direcções que outras. Como não
poderá ser criada energia adicional , a potência total irradiada é a mesma que uma antena isotrópica
irradiaria, contudo, em algumas direcções, a antena real irradia mais que a isotrópica, e noutras
menos. O ganho de uma antena numa dada direcção é a quantidade de energia iradiada nessa
direcção comparada com a energia que uma antena isotrópica iradiaria nessa mesma direcção,
quando submetida a mesma potência de entrada. Normalmente, interessámo-nos apenas no ganho
máximo, ou seja, na direcção sob a qual a antena se encontra a radiar a maior parte energia.
O ganho, sendo uma função da directividade e eficiência na radiação da antena, pode ser
calculado através da aplicação da equação
G = η ·D (3.4)
onde η representa a eficiência na radiação e D a directividade da antena.
Para uma antena sem perdas, o que corresponde a uma eficiência na radiação, ou rendimento,
igual a 1, temos que, pela equação 3.4, o ganho da antena é igual ao seu valor de directividade.
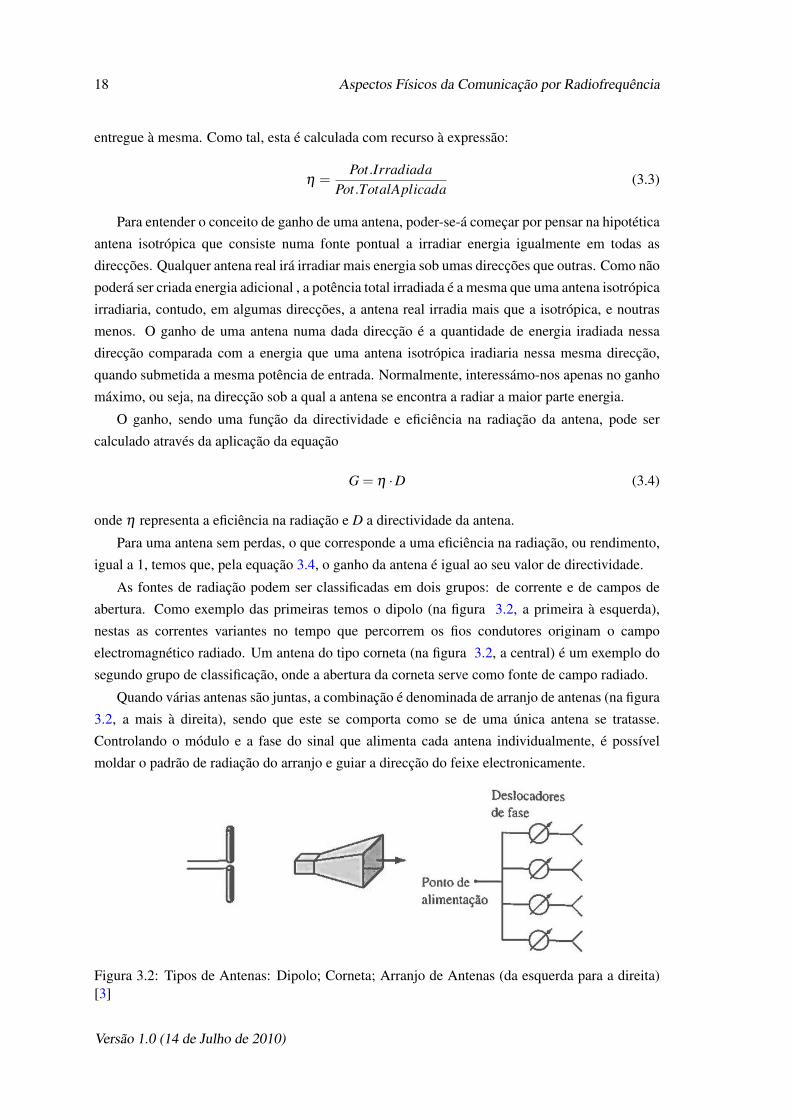
As fontes de radiação podem ser classificadas em dois grupos: de corrente e de campos de
abertura. Como exemplo das primeiras temos o dipolo (na figura 3.2, a primeira à esquerda),
nestas as correntes variantes no tempo que percorrem os fios condutores originam o campo
electromagnético radiado. Um antena do tipo corneta (na figura 3.2, a central) é um exemplo do
segundo grupo de classificação, onde a abertura da corneta serve como fonte de campo radiado.
Quando várias antenas são juntas, a combinação é denominada de arranjo de antenas (na figura
3.2, a mais à direita), sendo que este se comporta como se de uma única antena se tratasse.
Controlando o módulo e a fase do sinal que alimenta cada antena individualmente, é possível
moldar o padrão de radiação do arranjo e guiar a direcção do feixe electronicamente.
Figura 3.2: Tipos de Antenas: Dipolo; Corneta; Arranjo de Antenas (da esquerda para a direita)[3]
Versão 1.0 (14 de Julho de 2010)
3.3 Propagação de Ondas de Rádio 19
3.3 Propagação de Ondas de Rádio
O engenheiro dinamarquês Harald T. Friis contribuiu activamente no desenvolvimento da
engenharia no campo da propagação de ondas de rádio, tendo desenvolvido duas equações,
comummente utilizadas no âmbito da radiação. A equação de transmissão de Friis (3.5) é
utilizada na prática da engenharia das comunicações como ferramenta para calcular a potência
recebida por uma antena, sob condições ideais, dada uma segunda antena a transmitir a uma
determinada distância da primeira.
Pr
Pt= GtGr(
λ
4πR)2 (3.5)
Aqui, Pr corresponde à potência recebida em dBm, Pt corresponde à potência transmitida em
dBm, Gr ao ganho da antena receptora em dBi, Gt ao ganho da antena transmissora em dBi, λ
ao comprimento de onda e R à distância que separa as duas antenas. Estas duas últimas variáveis
deverão estar na mesma unidade de medida.
Há quatro modos de propagação de ondas electromagnéticas, os quais se fazem notar
consoante a frequência de operação:
• Ground Wave Propagation - recorre à superfície terrestre e à ionosfera;
• Sky Wave Propagation - utiliza a ionosfera para reflectir ou refractar as ondas de rádio de
volta para a terra;
• Space Wave Propagation - utiliza as técnicas de propagação em linha de vista modificadas
por reflexões na terra, refracções na atmosfera e difracções em obstáculos;
• Scatter Propagation - utiliza a dispersão da onda na troposfera; embora na ionosfera também
seja possível, é menos utilizado.
As frequências às quais se operou no âmbito deste trabalho encontram-se na gama das Ultra
High Frequencies. Nesta gama de frequência, tal como na antecedente, VHF, a ionosfera já não
se apresenta útil à propagação, pelo que esta é feita em linha de vista (LOS). Encontramo-nos,
portanto, perante do modo de propagação denominado Space Wave Propagation. Esta gama de
frequências é comummente utilizada, por exemplo, para a radiodifusão de sinais de TV. Neste
caso é necessário tomar em atenção uma série de situações que poderão afectar a propagação,
nomeadamente, reflexões na terra, refracções na troposfera, difracções em obstáculos, dispersão
da energia radiada em ambientes urbanos e desvanecimento do sinal [27].
3.4 Propagação de Ondas de Rádio em Interiores
A utilização de sistemas wireless representa um dos maiores desafios de design, já que a
tentativa de quantificar e de estabelecer limites para a utilização de redes sem fios no interior
de edifícios não se revela um aspecto trivial.
Versão 1.0 (14 de Julho de 2010)

20 Aspectos Físicos da Comunicação por Radiofrequência
O modelo mais básico de propagação de ondas de rádio envolve o chamado "espaço livre".
Neste modelo, as ondas de rádio partem de uma fonte pontual de energia, viajando em todas as
direcções sob uma linha recta, preenchendo todo o volume esférico no espaço com a energia de
rádio, cuja força varia inversamente ao quadrado do raio da esfera ( 1r2 ).
Porém, no mundo real a propagação das ondas raramente segue o modelo simplificado. Os
três mecanismos básicos da propagação de rádio são atribuídos à reflexão, difracção e à dispersão.
A reflexão pode ser definido como o fenómeno que ocorre quando se dá a colisão de ondas
eletromagnéticas propagadas num objeto que tem dimensões demasiado grandes relativamente ao
comprimento de onda de propagação. Isto é, a ocorrência deste fenómeno resulta numa mudança
de direcção de uma onda numa interface entre dois meios distintos, fazendo com que esta retorne
ao meio do qual foi emitida. Isto ocorrem, por exemplo, a partir da superfície terrestre e de prédios
e muros.
A difracção ocorre quando o caminho de rádio entre o transmissor e o receptor é obstruído
por uma superfície possui irregularidades aguçadas (arestas). As ondas secundárias resultantes
da obstrução da superfície estão presentes em todo o espaço inclusivé atrás do obstáculo, dando
origem a uma flexão das ondas em torno do obstáculo, mesmo quando uma linha de vista entre o
emissor e o receptor não existe. Às altas frequências, a difracção, tal como a reflexão, depende da
geometria do objecto, bem como, da amplitude, fase e polarização da onda incidente no ponto de
difracção.
A dispersão ocorre quando o meio através do qual a onda viaja é constituído por objectos
de pequenas dimensões quando comparados com o comprimento de onda, e estes se encontram
presentes em elevada quantidade. Desta forma, a presença de superfícies ásperas, pequenos
objectos, ou outras irregularidades no canal, induzem dispersão no sistema de comunicação. Desta
forma, as ondas que inicialmente seguiam em linha recta, são forçadas a seguir uma ou mais
trajectórias ditadas pelas uniformidades presentes no meio através do qual se deslocam.
Uma outra consequência da propagação das ondas num meio que não é o ideal é a atenuação.
Este fenómeno é definido como a diminuição da intensidade da onda com a distância. Da Física,
sabemos que a intensidade do campo varia inversamente com o quadrado da distância.
E =K· | Q |
d2
E é essa diminuição da intensidade que é denominada atenuação. Quanto mais distante do emissor,
mais fraco é o campo electromagnético.
A propagação de ondas através de qualquer meio que não o vácuo é sempre acompanhada de
perdas causadas pela absorção de potência pelas partículas do meio. Assim, apenas se as ondas
electromagnéticas se propagarem no vácuo é que não serão atenuadas pela absorção. Estas, ao se
propagarem na atmosfera, são afectadas pela absorção, sendo o vapor de água e as moléculas de
oxigénio existentes nela os principais responsáveis pela absorção de energia. Estes efeitos crescem
com o aumento da frequência.
Todos estes fenómenos acima referido provocam distorções do sinal de rádio e originam o
Versão 1.0 (14 de Julho de 2010)
3.4 Propagação de Ondas de Rádio em Interiores 21
desvanecimento do sinal, bem como, perdas de propagação de sinal adicional. A realização de
movimentos em distâncias muito curtas, por unidades móveis, em espaços exteriores provocam
flutuações na força do sinal, porque este é formado por uma série de componentes provenientes das
diversas fontes de reflexão (denominados sinais multipath) a partir de diferentes direcções, bem
como componentes dispersos e/ou difractados do sinal. Essas variações na intensidade do sinal
representam 30-40 dB nas faixas de frequências utilizadas nas comunicações móveis e representam
algumas das dificuldades apresentadas no design de sistemas de comunicações de rádio confiáveis.
A atenuação do sinal de base, observado no mundo real, origina os denominados efeitos de "grande
escala", enquanto as flutuações de intensidade do sinal, com movimento, são denominados efeitos
de "pequena escala".
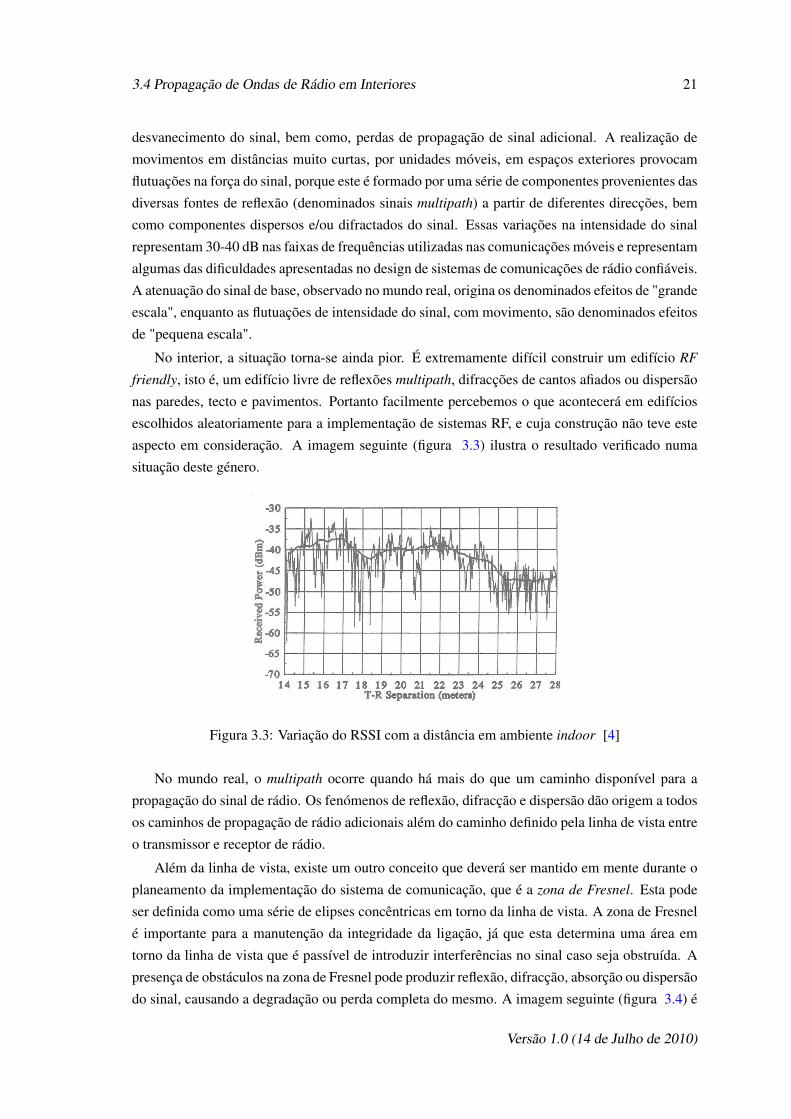
No interior, a situação torna-se ainda pior. É extremamente difícil construir um edifício RF
friendly, isto é, um edifício livre de reflexões multipath, difracções de cantos afiados ou dispersão
nas paredes, tecto e pavimentos. Portanto facilmente percebemos o que acontecerá em edifícios
escolhidos aleatoriamente para a implementação de sistemas RF, e cuja construção não teve este
aspecto em consideração. A imagem seguinte (figura 3.3) ilustra o resultado verificado numa
situação deste género.
Figura 3.3: Variação do RSSI com a distância em ambiente indoor [4]
No mundo real, o multipath ocorre quando há mais do que um caminho disponível para a
propagação do sinal de rádio. Os fenómenos de reflexão, difracção e dispersão dão origem a todos
os caminhos de propagação de rádio adicionais além do caminho definido pela linha de vista entre
o transmissor e receptor de rádio.
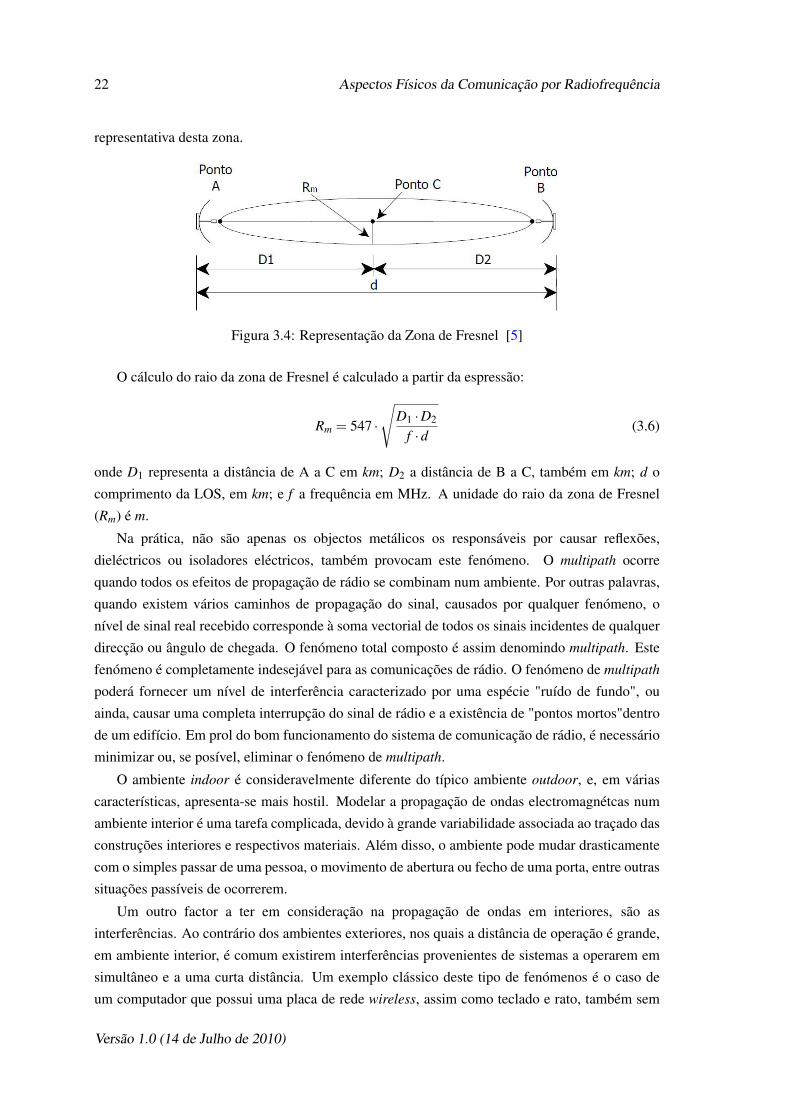
Além da linha de vista, existe um outro conceito que deverá ser mantido em mente durante o
planeamento da implementação do sistema de comunicação, que é a zona de Fresnel. Esta pode
ser definida como uma série de elipses concêntricas em torno da linha de vista. A zona de Fresnel
é importante para a manutenção da integridade da ligação, já que esta determina uma área em
torno da linha de vista que é passível de introduzir interferências no sinal caso seja obstruída. A
presença de obstáculos na zona de Fresnel pode produzir reflexão, difracção, absorção ou dispersão
do sinal, causando a degradação ou perda completa do mesmo. A imagem seguinte (figura 3.4) é
Versão 1.0 (14 de Julho de 2010)
22 Aspectos Físicos da Comunicação por Radiofrequência
representativa desta zona.
Figura 3.4: Representação da Zona de Fresnel [5]
O cálculo do raio da zona de Fresnel é calculado a partir da espressão:
Rm = 547 ·
√D1 ·D2
f ·d(3.6)
onde D1 representa a distância de A a C em km; D2 a distância de B a C, também em km; d o
comprimento da LOS, em km; e f a frequência em MHz. A unidade do raio da zona de Fresnel
(Rm) é m.
Na prática, não são apenas os objectos metálicos os responsáveis por causar reflexões,
dieléctricos ou isoladores eléctricos, também provocam este fenómeno. O multipath ocorre
quando todos os efeitos de propagação de rádio se combinam num ambiente. Por outras palavras,
quando existem vários caminhos de propagação do sinal, causados por qualquer fenómeno, o
nível de sinal real recebido corresponde à soma vectorial de todos os sinais incidentes de qualquer
direcção ou ângulo de chegada. O fenómeno total composto é assim denomindo multipath. Este
fenómeno é completamente indesejável para as comunicações de rádio. O fenómeno de multipath
poderá fornecer um nível de interferência caracterizado por uma espécie "ruído de fundo", ou
ainda, causar uma completa interrupção do sinal de rádio e a existência de "pontos mortos"dentro
de um edifício. Em prol do bom funcionamento do sistema de comunicação de rádio, é necessário
minimizar ou, se posível, eliminar o fenómeno de multipath.
O ambiente indoor é consideravelmente diferente do típico ambiente outdoor, e, em várias
características, apresenta-se mais hostil. Modelar a propagação de ondas electromagnétcas num
ambiente interior é uma tarefa complicada, devido à grande variabilidade associada ao traçado das
construções interiores e respectivos materiais. Além disso, o ambiente pode mudar drasticamente
com o simples passar de uma pessoa, o movimento de abertura ou fecho de uma porta, entre outras
situações passíveis de ocorrerem.
Um outro factor a ter em consideração na propagação de ondas em interiores, são as
interferências. Ao contrário dos ambientes exteriores, nos quais a distância de operação é grande,
em ambiente interior, é comum existirem interferências provenientes de sistemas a operarem em
simultâneo e a uma curta distância. Um exemplo clássico deste tipo de fenómenos é o caso de
um computador que possui uma placa de rede wireless, assim como teclado e rato, também sem
Versão 1.0 (14 de Julho de 2010)
3.5 Received Signal Strengh Indicator 23
fios. Estes últimos comunicam por bluetooth, à frequência de 2.4GHz. Estando a placa WLAN
conectada através do protocolo IEEE802.11b ou IEEE802.11g, estes encontram-se a operar à
mesma frequência, existindo, portanto, a hipótese de interferências. É então importante ter em
conta que em ambiente indoor os problemas de comunicação poder-se-ão dever, não a quesstões
de propagação das ondas de rádio, mas sim a interferências deste género. Nestes casos, por vezes
o simples acto de afastar minimamente o equipamento de onde este se encontrava originamente,
pode resolver os problemas de comunicação.
Em diversos casos de propagação em interiores, não existe line-of-sight directa entre o
transmissor e o receptor. Nestes casos a propagação apenas depende dos fenómenos de reflexão,
difracção, penetração e ainda de espalhamento. Além do desvanecimento do sinal, estes
fenómenos também provocam a sua degradação.
As principais características que distinguem o ambiente indoor do outdoor, são o efeito severo
do fenómeno de multipath, o facto de poder não existir line-of-sight, e de as características do
ambiente poderem mudar drasticamente num curto espaço de tempo e distância. Além disto, os
alcances providos tendem também a ser mais reduzidos.
3.5 Received Signal Strengh Indicator
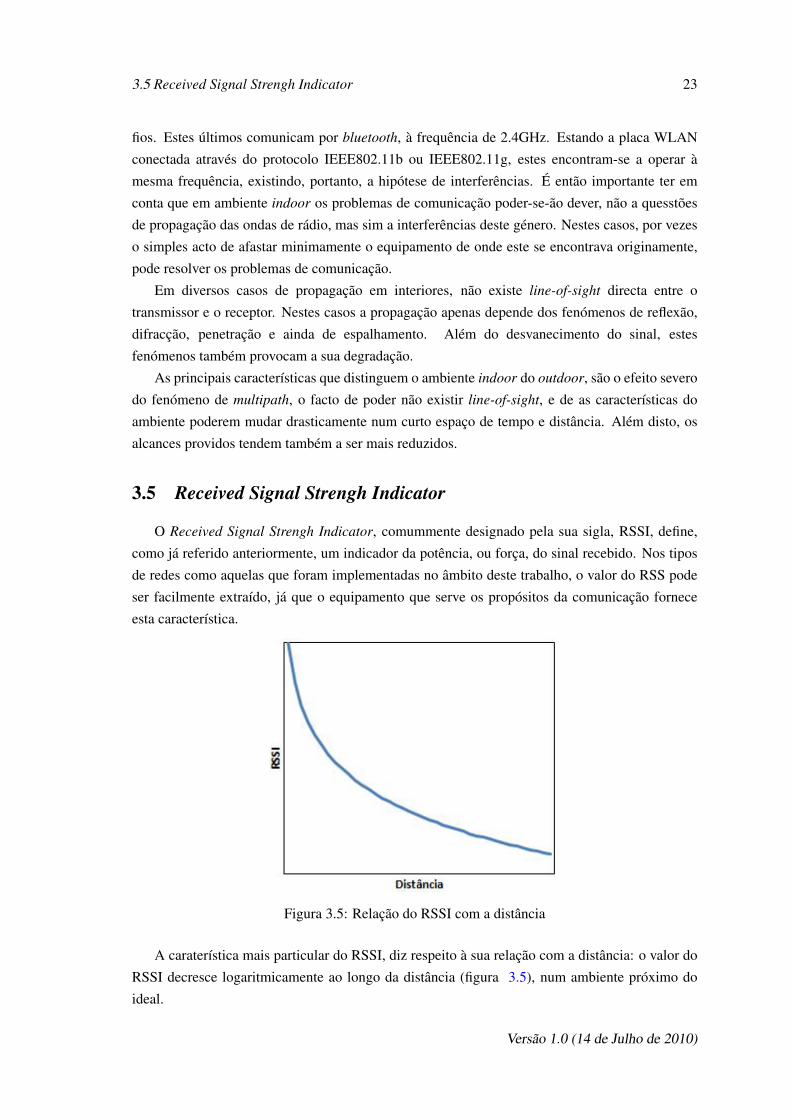
O Received Signal Strengh Indicator, comummente designado pela sua sigla, RSSI, define,
como já referido anteriormente, um indicador da potência, ou força, do sinal recebido. Nos tipos
de redes como aquelas que foram implementadas no âmbito deste trabalho, o valor do RSS pode
ser facilmente extraído, já que o equipamento que serve os propósitos da comunicação fornece
esta característica.
Figura 3.5: Relação do RSSI com a distância
A caraterística mais particular do RSSI, diz respeito à sua relação com a distância: o valor do
RSSI decresce logaritmicamente ao longo da distância (figura 3.5), num ambiente próximo do
ideal.
Versão 1.0 (14 de Julho de 2010)
24 Aspectos Físicos da Comunicação por Radiofrequência
Sendo o RSS uma medida de potência a unidade é o decibel (dB). O dBm ou dBmW representa
a potência do sinal RF em dB, referente a um mW.
O dB é uma escala usada para representar a relação entre duas potências:
P(dB) = 10logPmedida
Pre f erencia(3.7)
Sendo que a unidade de referência para representar o valor do RSSI é o mW, surge o dBm, que
analogamente à equação 3.7, é descrito da forma:
P(dBm) = 10logPmedida(mW )
1mW(3.8)
e, consequentemente
P(mW ) = 10P(dBm)
10 (3.9)
Ao longo do trabalho, a unidade utilizada para expressar o RSSI foi o dBm.
Versão 1.0 (14 de Julho de 2010)

Capítulo 4
Estrutura Experimental
Neste capítulo é abordado e discutido o modo como a estrutura experimental foi concebida,
bem como todo o hardware e software do qual a mesma é dotada.
Tendo o estudo sobre a localização relativa baseada na potência do sinal recebido sido
realizado em duas gamas de frequência, que embora se encontrem incluídas na mesma
banda, Ultra High Frequency, são bastante distintas, os 433-434 MHz e os 2.4 GHz, foram
necesariamente desenvolvidos dois modelos experimentais distintos. Inicialmente será feita a
descrição da estrutura experimental desenvolvida no âmbito da gama de frequências 433-434
MHz, e posteriormente, a desenvolvida para a gama de frequências mais elevada.
4.1 Frequência 433-434 MHz
4.1.1 Hardware
Para exercer a tarefa da comunicação sem fios à frequência de 433-434 MHz, foram utilizados
dois módulos de rádio: RF04 e CM02. Estes módulos são distribuídos pela Acroname Inc. e juntos
fornecem a interface completa entre o PC e uma série de módulos I2C, dos quais se destacam os
sonares com as referências SRF08 e SRF10.
4.1.1.1 Módulo RF04
O módulo de rádio RF04, figura 4.1, é a interface de comunicação que é conectada ao PC, e
é alimentada através do barramento USB não requerendo, assim, nenhuma fonte de alimentação
externa ou bateria. Uma vez conectado ao PC, o RF04 é reconhecido como uma porta COM [28].
O RF04 é comercializado em duas versões: RF04/400 e RF04/900. O primeiro utiliza o LPRS
EasyRadio ER400TRS que opera à frequência de 433-4 MHz, e o segundo o LPRS EasyRadio
ER900TRS que opera a 868-870 MHz ou a 902-920 MHz dependendo da localização. Sendo a
primeira gama de frequências europeia, é esta versão a utilizada.
25
26 Estrutura Experimental
Figura 4.1: Módulo RF04 [6]
O componente fundamental deste módulo é o ER400TRS que é um transceiver que permite a
troca de informação até uma distância de 250m de LOS (Line Of Sight). Este também se encontra
presente no módulo CM02, e a apresentação deste será feita mais à frente.
4.1.1.2 Módulo CM02
O módulo CM02, figura 4.2, em conjunto com o RF04 constitui uma interface completa entre
o PC e robô que pretendemos controlar.
Figura 4.2: Módulo CM02 [6]
Este módulo responde a comandos vindos do PC via rádio, e constituí uma extensão do I2C,
possuíndo dois comandos primários que permitem que este escreva o leia do barramento I2C ao
qual poderão ser conectados uma série de módulos, comando I2CCMD−0x55;eocomandoCM02CMD−0x5A,quepermiteade f iniodeumasriedecomandosparaomduloCM02.
Tal como o RF04, este módulo também é comercializado em duas versões, CM02/400 e
CM02/900, de acordo com a frequência de operação aplicável ao país onde o mesmo irá ser
utilizado. Analogamente, no âmbito deste trabalho foi utilizada a primeira versão deste módulo.
Este módulo recebe comandos provenientes do PC e responde a estes via rádio. Tal como referido
anteriormente este dispõe de um transceiver (ER400TRS), figura 4.3.
Figura 4.3: Transceiver ER400TRS [7]
Versão 1.0 (14 de Julho de 2010)
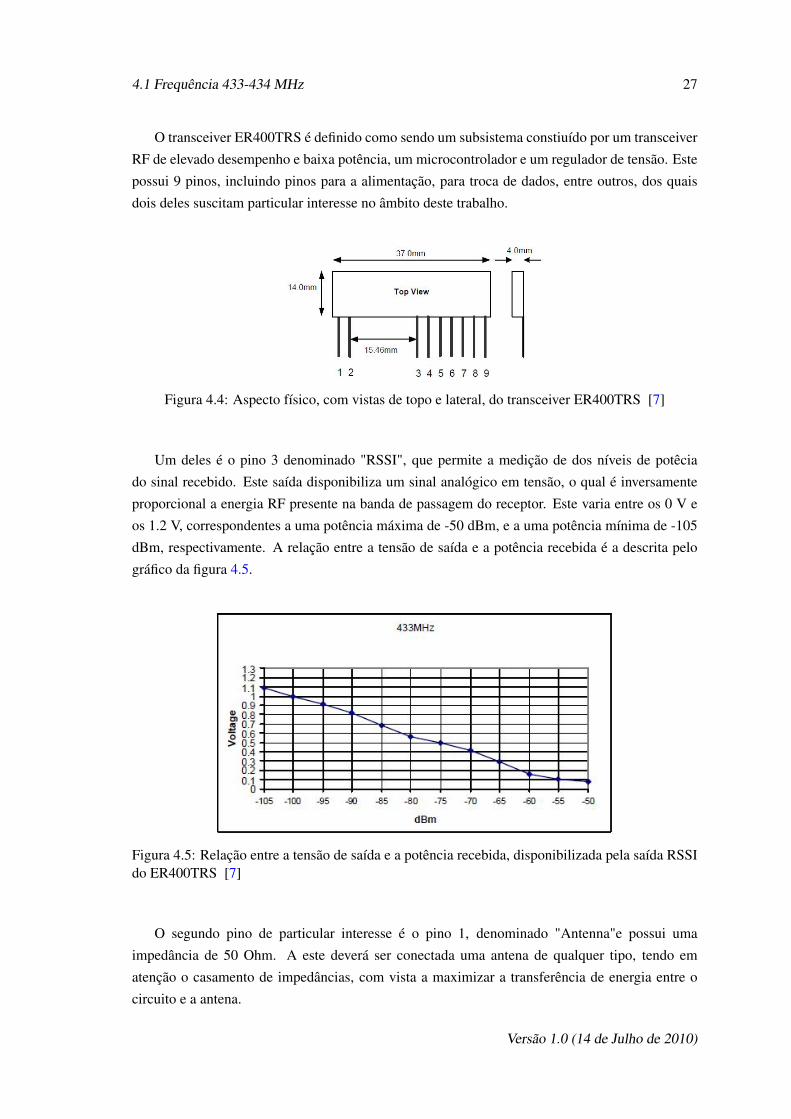
4.1 Frequência 433-434 MHz 27
O transceiver ER400TRS é definido como sendo um subsistema constiuído por um transceiver
RF de elevado desempenho e baixa potência, um microcontrolador e um regulador de tensão. Este
possui 9 pinos, incluindo pinos para a alimentação, para troca de dados, entre outros, dos quais
dois deles suscitam particular interesse no âmbito deste trabalho.
Figura 4.4: Aspecto físico, com vistas de topo e lateral, do transceiver ER400TRS [7]
Um deles é o pino 3 denominado "RSSI", que permite a medição de dos níveis de potêcia
do sinal recebido. Este saída disponibiliza um sinal analógico em tensão, o qual é inversamente
proporcional a energia RF presente na banda de passagem do receptor. Este varia entre os 0 V e
os 1.2 V, correspondentes a uma potência máxima de -50 dBm, e a uma potência mínima de -105
dBm, respectivamente. A relação entre a tensão de saída e a potência recebida é a descrita pelo
gráfico da figura 4.5.
Figura 4.5: Relação entre a tensão de saída e a potência recebida, disponibilizada pela saída RSSIdo ER400TRS [7]
O segundo pino de particular interesse é o pino 1, denominado "Antenna"e possui uma
impedância de 50 Ohm. A este deverá ser conectada uma antena de qualquer tipo, tendo em
atenção o casamento de impedâncias, com vista a maximizar a transferência de energia entre o
circuito e a antena.
Versão 1.0 (14 de Julho de 2010)
28 Estrutura Experimental
4.1.1.3 Antenas
Para desempenhar a tarefa de localização relativa baseada na informação do RSSI foi
necessária a construção de dois tipos de antenas: direccional, aquela que é colocada no robô, e
omnidireccional, que serve de baliza no âmbito da localização. As antenas foram simuladas num
software apropriado, que permitiu a validação das mesmas, e, posteriormente, implementadas.
Estes assuntos, software e construção das antenas, serão abordados de seguida.
Com vista a implementar a antena que melhor respondesse ao requisitos impostos, foram
simuladas uma série de agrupamentos de dois dipolos com diferentes comprimentos dos mesmos,
diferentes espaçamentos entre eles, e diferentes condutores. A tabela seguinte mostra os diferentes
tipos de condutores disponibilizados pelo software onde foi realizada a simulação, e respectiva
condutividade.
Tipo de Condutor Condutividade, σ (S/m)Prata 6,29E+07Cobre 5,80E+07
Alumínio 3,77E+07Alumínio-T832 3,08E+07
Alumínio-T6 2,49E+07Latão 1,56E+07
Bronze 9,09E+06Aço 1,39E+06
Tabela 4.1: Lista dos condutores considerados no estudo, e respectivos valores de condutividade
Antena DireccionalEm diversas aplicações pretende-se obter diagramas de radiação mais directivos ou com
máximos e/ou nulos em direcções específicas, o que não é possível recorrendo a um elemento
radiante apenas. É nestes casos que são utilizados os agrupamentos de antenas idênticas. O
diagrama obtido para o agrupamento de antenas depende de:
• tipo de elemento radiante utilizado;
• configuração geométrica do agrupamento (exemplos: linear, circular, planar, entre outros);
• distância entre os elementos do agrupamento;
• amplitudes e fases das correntes de alimentação de cada elemento.
A antena direccional construída é definida como sendo um agrupamento linear uniforme. As
antenas deste tipo possuem as seguintes características:
• Os N elementos constituintes são colocados na mesma direcção, igualmente espaçados entre
si de d, alimentados por correntes de igual amplitude I0 e cada elemento tem um avanço de
fase constante de valor β sobre o seu precedente no agrupamento.
Versão 1.0 (14 de Julho de 2010)

4.1 Frequência 433-434 MHz 29
• A distância d e o desvio progressivo de fases β constituem as variáveis de controlo do factor
de agrupamento.
• O campo distante total, num dado ponto do espaço, é obtido pela soma dos campos distantes
devidos a cada elemento do agrupamento.
As várias simulações efectuadas tiveram por objectivo a análise de uma série de características
que, devidamente analisadas e poderada a sua importância no desempenho final das antenas,
definiram as características da antena construída.
Sendo esta antena do tipo direccional, um parâmetro que deverá ser tido muito em conta é,
precisamente a directividade da mesma. Para analisar esta característica da antena existe a variável
RDF (Receiving Directivity Factor). A directividade de uma antena é a razão entre a intensidade
de radiação numa dada direcção e a intensidade média. Como tal, de seguida serão apresentados
os gráficos que caracterizam a directividade da antena de acordo com o comprimento dos dipolos,
e o espaçamento entre os mesmos.
Figura 4.6: Variação do RDF com o comprimento dos dipolos em função do tipo de condutor, como espaçamento entre os dipolos constante e igual a 12cm
Este primeiro gráfico ( 4.6) considera uma espaçamento entre as duas antenas constante
e igual a 12 cm, aproximadamente λ/6, e vai variando o comprimento dos dipolos, os
quais são aproximações a razões do comprimento de onda, de tal forma que, 7cm equivale
a, aproximadamente, λ/10; 9cm a λ/8; 12cm a λ/6; 18cm a λ/4; e 35cm a λ/2.
O valor do comprimento de onda é facilmente calculado, através da equação 3.1, de tal modo
que
λ =299,792458×106
433,5×106 ⇐⇒ λ = 0,6916m (4.1)
O comprimento de onda é igual à velocidade da onda dividida pela frequência da onda.
Quando se lida com radiação electromagnética no vácuo, essa velocidade é igual à velocidade
da luz c, para sinais (ondas) no ar, e representa a velocidade à qual a onda viaja. A frequência a
que estamos a operar, é dita na datasheet dos módulos de rádio utilizados, é de 433-434 MHz, e
como tal, para os cálculos foi considerada uma frequência de 433,5 MHz. Quanto à velocidade da
luz, no vácuo, esta equivale a 299.792,458 km/s.
Versão 1.0 (14 de Julho de 2010)
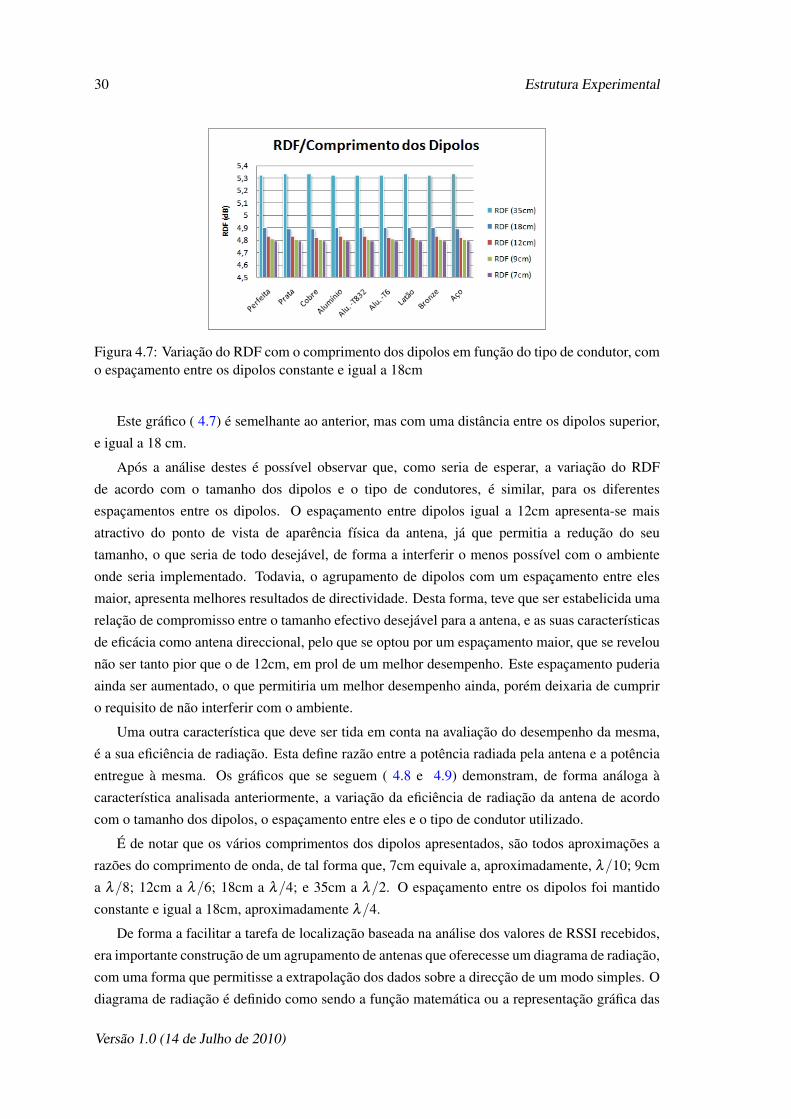
30 Estrutura Experimental
Figura 4.7: Variação do RDF com o comprimento dos dipolos em função do tipo de condutor, como espaçamento entre os dipolos constante e igual a 18cm
Este gráfico ( 4.7) é semelhante ao anterior, mas com uma distância entre os dipolos superior,
e igual a 18 cm.
Após a análise destes é possível observar que, como seria de esperar, a variação do RDF
de acordo com o tamanho dos dipolos e o tipo de condutores, é similar, para os diferentes
espaçamentos entre os dipolos. O espaçamento entre dipolos igual a 12cm apresenta-se mais
atractivo do ponto de vista de aparência física da antena, já que permitia a redução do seu
tamanho, o que seria de todo desejável, de forma a interferir o menos possível com o ambiente
onde seria implementado. Todavia, o agrupamento de dipolos com um espaçamento entre eles
maior, apresenta melhores resultados de directividade. Desta forma, teve que ser estabelicida uma
relação de compromisso entre o tamanho efectivo desejável para a antena, e as suas características
de eficácia como antena direccional, pelo que se optou por um espaçamento maior, que se revelou
não ser tanto pior que o de 12cm, em prol de um melhor desempenho. Este espaçamento puderia
ainda ser aumentado, o que permitiria um melhor desempenho ainda, porém deixaria de cumprir
o requisito de não interferir com o ambiente.
Uma outra característica que deve ser tida em conta na avaliação do desempenho da mesma,
é a sua eficiência de radiação. Esta define razão entre a potência radiada pela antena e a potência
entregue à mesma. Os gráficos que se seguem ( 4.8 e 4.9) demonstram, de forma análoga à
característica analisada anteriormente, a variação da eficiência de radiação da antena de acordo
com o tamanho dos dipolos, o espaçamento entre eles e o tipo de condutor utilizado.
É de notar que os vários comprimentos dos dipolos apresentados, são todos aproximações a
razões do comprimento de onda, de tal forma que, 7cm equivale a, aproximadamente, λ/10; 9cm
a λ/8; 12cm a λ/6; 18cm a λ/4; e 35cm a λ/2. O espaçamento entre os dipolos foi mantido
constante e igual a 18cm, aproximadamente λ/4.
De forma a facilitar a tarefa de localização baseada na análise dos valores de RSSI recebidos,
era importante construção de um agrupamento de antenas que oferecesse um diagrama de radiação,
com uma forma que permitisse a extrapolação dos dados sobre a direcção de um modo simples. O
diagrama de radiação é definido como sendo a função matemática ou a representação gráfica das
Versão 1.0 (14 de Julho de 2010)
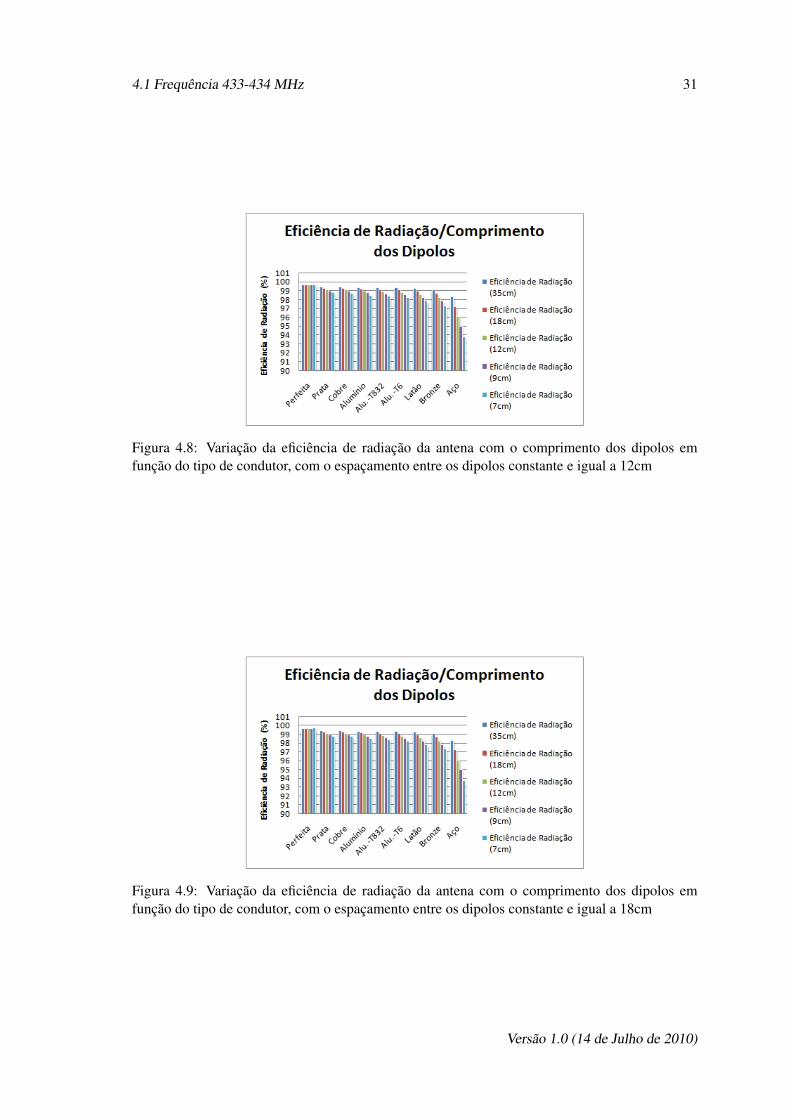
4.1 Frequência 433-434 MHz 31
Figura 4.8: Variação da eficiência de radiação da antena com o comprimento dos dipolos emfunção do tipo de condutor, com o espaçamento entre os dipolos constante e igual a 12cm
Figura 4.9: Variação da eficiência de radiação da antena com o comprimento dos dipolos emfunção do tipo de condutor, com o espaçamento entre os dipolos constante e igual a 18cm
Versão 1.0 (14 de Julho de 2010)

32 Estrutura Experimental
propriedades de radiação da antena em função das coordenadas espaciais.
O dipolo representado a seguir (figura 4.10), é um exemplo de uma antena que, a ser
implementada, acarretaria a realização de cálculos adicionais, de forma a determinar de qual dos
lados estaria, já que este apresenta um diagrama de radiação perfeitamente simétrico, tanto no
plano horizontal como no vertical.
Figura 4.10: Dipolo de comprimento λ/2 orientado sob o eixo dos zz
Figura 4.11: Diagrama de radiação do dipolo da figura 4.10 com cortes horizontal (esquerda) evertical (direita)
Figura 4.12: Pormenor do diagrama de radiação do dipolo da figura 4.10 nos planos horizontal(esquerda) e vertical (direita)
Desta forma, uma antena com um diagrama de radiação, em um dos planos, do tipo carióide
(figura 4.13) auxiliaria na tarefa de localização.
Versão 1.0 (14 de Julho de 2010)
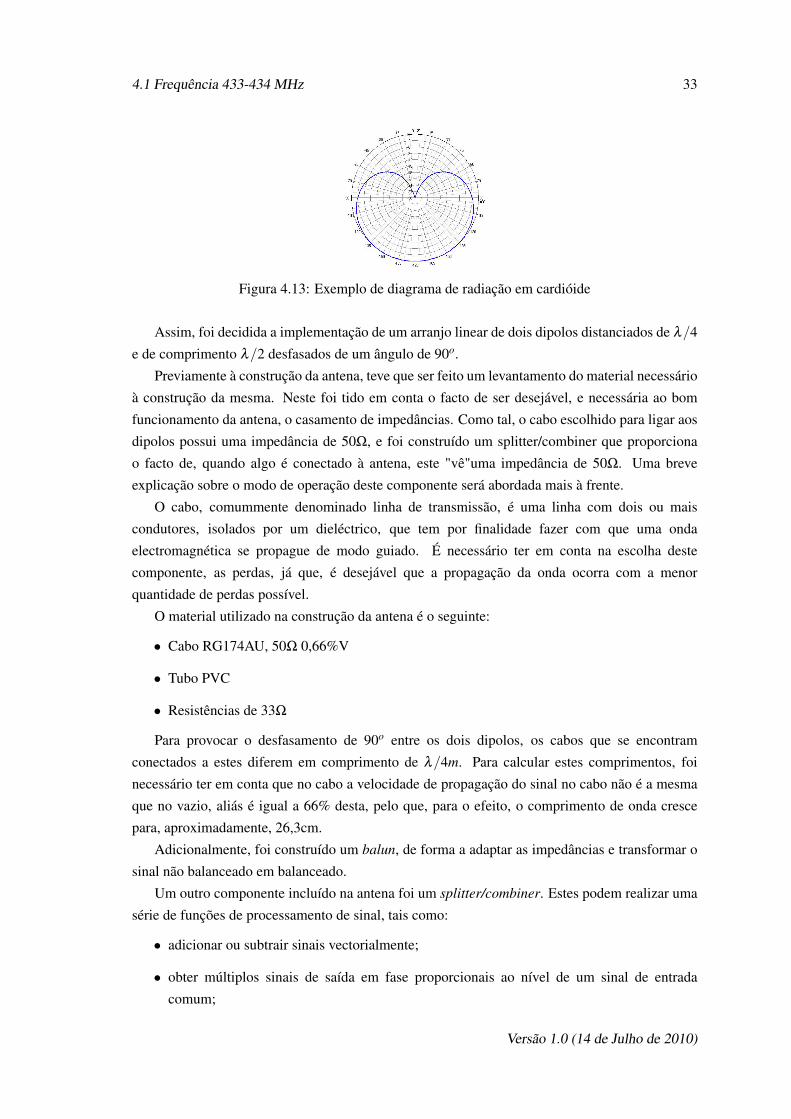
4.1 Frequência 433-434 MHz 33
Figura 4.13: Exemplo de diagrama de radiação em cardióide
Assim, foi decidida a implementação de um arranjo linear de dois dipolos distanciados de λ/4
e de comprimento λ/2 desfasados de um ângulo de 90o.
Previamente à construção da antena, teve que ser feito um levantamento do material necessário
à construção da mesma. Neste foi tido em conta o facto de ser desejável, e necessária ao bom
funcionamento da antena, o casamento de impedâncias. Como tal, o cabo escolhido para ligar aos
dipolos possui uma impedância de 50Ω, e foi construído um splitter/combiner que proporciona
o facto de, quando algo é conectado à antena, este "vê"uma impedância de 50Ω. Uma breve
explicação sobre o modo de operação deste componente será abordada mais à frente.
O cabo, comummente denominado linha de transmissão, é uma linha com dois ou mais
condutores, isolados por um dieléctrico, que tem por finalidade fazer com que uma onda
electromagnética se propague de modo guiado. É necessário ter em conta na escolha deste
componente, as perdas, já que, é desejável que a propagação da onda ocorra com a menor
quantidade de perdas possível.
O material utilizado na construção da antena é o seguinte:
• Cabo RG174AU, 50Ω 0,66%V
• Tubo PVC
• Resistências de 33Ω
Para provocar o desfasamento de 90o entre os dois dipolos, os cabos que se encontram
conectados a estes diferem em comprimento de λ/4m. Para calcular estes comprimentos, foi
necessário ter em conta que no cabo a velocidade de propagação do sinal no cabo não é a mesma
que no vazio, aliás é igual a 66% desta, pelo que, para o efeito, o comprimento de onda cresce
para, aproximadamente, 26,3cm.
Adicionalmente, foi construído um balun, de forma a adaptar as impedâncias e transformar o
sinal não balanceado em balanceado.
Um outro componente incluído na antena foi um splitter/combiner. Estes podem realizar uma
série de funções de processamento de sinal, tais como:
• adicionar ou subtrair sinais vectorialmente;
• obter múltiplos sinais de saída em fase proporcionais ao nível de um sinal de entrada
comum;
Versão 1.0 (14 de Julho de 2010)
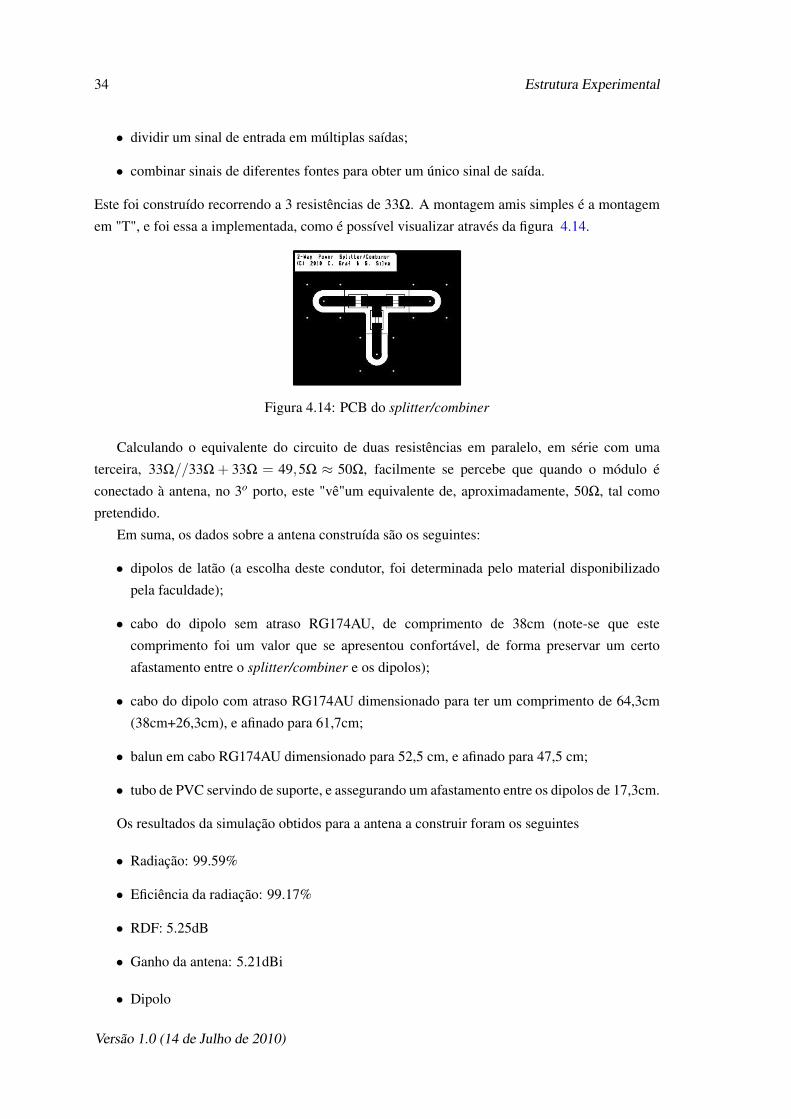
34 Estrutura Experimental
• dividir um sinal de entrada em múltiplas saídas;
• combinar sinais de diferentes fontes para obter um único sinal de saída.
Este foi construído recorrendo a 3 resistências de 33Ω. A montagem amis simples é a montagem
em "T", e foi essa a implementada, como é possível visualizar através da figura 4.14.
Figura 4.14: PCB do splitter/combiner
Calculando o equivalente do circuito de duas resistências em paralelo, em série com uma
terceira, 33Ω//33Ω + 33Ω = 49,5Ω ≈ 50Ω, facilmente se percebe que quando o módulo é
conectado à antena, no 3o porto, este "vê"um equivalente de, aproximadamente, 50Ω, tal como
pretendido.
Em suma, os dados sobre a antena construída são os seguintes:
• dipolos de latão (a escolha deste condutor, foi determinada pelo material disponibilizado
pela faculdade);
• cabo do dipolo sem atraso RG174AU, de comprimento de 38cm (note-se que este
comprimento foi um valor que se apresentou confortável, de forma preservar um certo
afastamento entre o splitter/combiner e os dipolos);
• cabo do dipolo com atraso RG174AU dimensionado para ter um comprimento de 64,3cm
(38cm+26,3cm), e afinado para 61,7cm;
• balun em cabo RG174AU dimensionado para 52,5 cm, e afinado para 47,5 cm;
• tubo de PVC servindo de suporte, e assegurando um afastamento entre os dipolos de 17,3cm.
Os resultados da simulação obtidos para a antena a construir foram os seguintes
• Radiação: 99.59%
• Eficiência da radiação: 99.17%
• RDF: 5.25dB
• Ganho da antena: 5.21dBi
• Dipolo
Versão 1.0 (14 de Julho de 2010)

4.1 Frequência 433-434 MHz 35
Figura 4.15: Representação espacial do agrupamento linear uniforme de dois dipolos construído
Figura 4.16: Representação tridimensional do diagrama de radiação da antena da figura 4.15 comcortes nos planos horizontal (esquerda) e vertical (direita)
Figura 4.17: Planos horizontal (esquerda) e vertical (direita) do diagrama de radiação da antenaapresentada na figura 4.15
Figura 4.18: Agrupamento Linear Uniforme - Dipolo
Versão 1.0 (14 de Julho de 2010)

36 Estrutura Experimental
e os resultados obtidos na simulação com estes parâmetros são
O aspecto final da antena é o apresentado na figura 4.18
Antena OmnidireccionalAs antenas omnidireccionais cobrem uma amplitude de 360o no plano horizontal. A forma
mais simples de uma antena deste tipo é monopolo. E foi esta a solução implementada, mais
precisamente, um monopolo de meio comprimento de onda e em latão , tal como os dipolos.
Os resultados da simulação efectuada relativamente a esta antena são os apresentados nas
figuras 4.19, 4.16 e 4.21.
Figura 4.19: Representação espacial do monopolo construído
Figura 4.20: Representação tridimensional do diagrama de radiação da antena da figura 4.19 comcortes nos planos horizontal (esquerda) e vertical (direita)
O aspecto final da antena é o apresentado na figura 4.22
4.1.2 Software
De seguida é apresentado o software que suportou a realização deste trabalho.
4.1.2.1 4NEC2
O 4NEC2 (lê-se "for NEC too") é uma ferramenta para NEC (Numerical Electromagnetic
Code) de utilização completamente livre, desenvolvida para executada no sistema operativo
Windows. Este permite simular e projectar diversos tipos de antenas. Além dos parâmetros de
Versão 1.0 (14 de Julho de 2010)
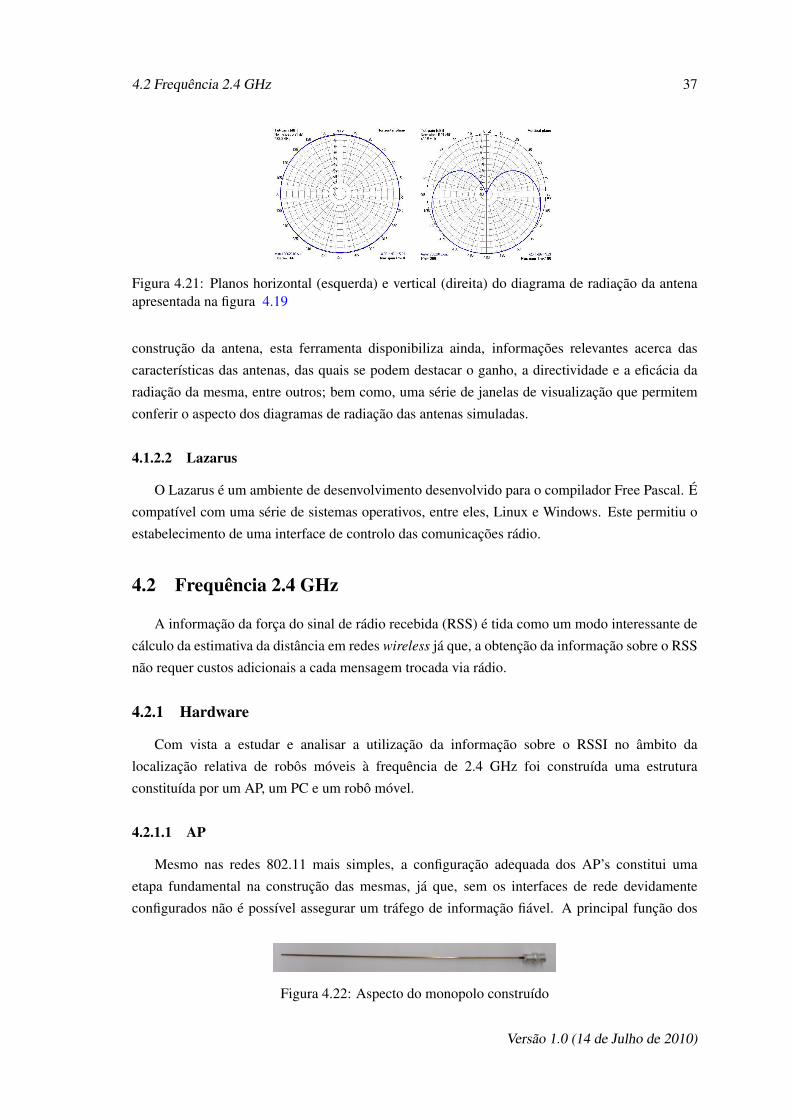
4.2 Frequência 2.4 GHz 37
Figura 4.21: Planos horizontal (esquerda) e vertical (direita) do diagrama de radiação da antenaapresentada na figura 4.19
construção da antena, esta ferramenta disponibiliza ainda, informações relevantes acerca das
características das antenas, das quais se podem destacar o ganho, a directividade e a eficácia da
radiação da mesma, entre outros; bem como, uma série de janelas de visualização que permitem
conferir o aspecto dos diagramas de radiação das antenas simuladas.
4.1.2.2 Lazarus
O Lazarus é um ambiente de desenvolvimento desenvolvido para o compilador Free Pascal. É
compatível com uma série de sistemas operativos, entre eles, Linux e Windows. Este permitiu o
estabelecimento de uma interface de controlo das comunicações rádio.
4.2 Frequência 2.4 GHz
A informação da força do sinal de rádio recebida (RSS) é tida como um modo interessante de
cálculo da estimativa da distância em redes wireless já que, a obtenção da informação sobre o RSS
não requer custos adicionais a cada mensagem trocada via rádio.
4.2.1 Hardware
Com vista a estudar e analisar a utilização da informação sobre o RSSI no âmbito da
localização relativa de robôs móveis à frequência de 2.4 GHz foi construída uma estrutura
constituída por um AP, um PC e um robô móvel.
4.2.1.1 AP
Mesmo nas redes 802.11 mais simples, a configuração adequada dos AP’s constitui uma
etapa fundamental na construção das mesmas, já que, sem os interfaces de rede devidamente
configurados não é possível assegurar um tráfego de informação fiável. A principal função dos
Figura 4.22: Aspecto do monopolo construído
Versão 1.0 (14 de Julho de 2010)
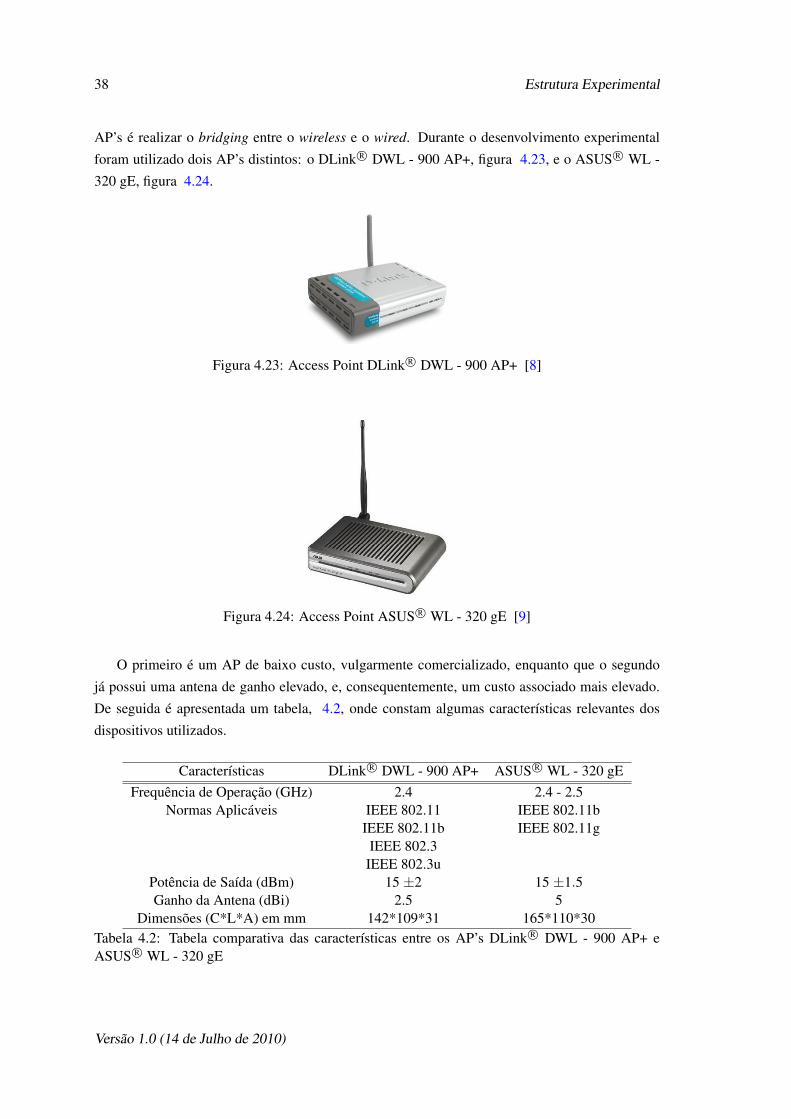
38 Estrutura Experimental
AP’s é realizar o bridging entre o wireless e o wired. Durante o desenvolvimento experimental
foram utilizado dois AP’s distintos: o DLink R© DWL - 900 AP+, figura 4.23, e o ASUS R© WL -
320 gE, figura 4.24.
Figura 4.23: Access Point DLink R© DWL - 900 AP+ [8]
Figura 4.24: Access Point ASUS R© WL - 320 gE [9]
O primeiro é um AP de baixo custo, vulgarmente comercializado, enquanto que o segundo
já possui uma antena de ganho elevado, e, consequentemente, um custo associado mais elevado.
De seguida é apresentada um tabela, 4.2, onde constam algumas características relevantes dos
dispositivos utilizados.
Características DLink R© DWL - 900 AP+ ASUS R© WL - 320 gEFrequência de Operação (GHz) 2.4 2.4 - 2.5
Normas Aplicáveis IEEE 802.11 IEEE 802.11bIEEE 802.11b IEEE 802.11gIEEE 802.3
IEEE 802.3uPotência de Saída (dBm) 15 ±2 15 ±1.5Ganho da Antena (dBi) 2.5 5
Dimensões (C*L*A) em mm 142*109*31 165*110*30Tabela 4.2: Tabela comparativa das características entre os AP’s DLink R© DWL - 900 AP+ eASUS R© WL - 320 gE
Versão 1.0 (14 de Julho de 2010)

4.2 Frequência 2.4 GHz 39
4.2.1.2 PC
Quanto ao PC, foi utilizado um Acer R© Aspire 2930Z, figura 4.25. Este possui uma placa de
rede da marca Atheros R©, modelo AR5001.
Figura 4.25: PC Acer R© Aspire 2930Z [10]
Este PC tem instalado o sistema operativo Ubuntu 9.10.
Após certificação de que o wireless se encontra a funcionar sem problemas no computador, é
possível o desenvolvimento de uma aplicação que deisponibilize os valores de RSSI necessários à
execução da tarefa da localização.
4.2.2 Software
O primeiro passo é a criação de uma placa de rede virtual a funcionar em modo monitor.
Este modo de funcionamento permite a monitorização de todo o tráfego presente na rede, sem
necessitar de, previamente, se associar a um ponto de acesso ou uma rede ad-hoc. Este modo de
funcionamento apenas é possível em redes wireless, enquanto que o modo promíscuo pode ser
utilizado também em redes cabladas. O modo promíscuo é o comummente utilizado no sniff de
pacotes de rede, e é configurado de modo a receber todos os pacotes que trafegam no segmento de
rede ao qual o receptor se encontra conectado.
Com o modo monitor activado já é possivel fazer a captura dos pacotes, para destes extrair
a informação sobre o RSSI. A captura dos pacotes de informação é feita através de um software
denomidado Wireshark.
4.2.2.1 Wireshark
O Wireshark é uma das ferramentas mais populares para o sniff de redes, já que este suporta
a maior parte dos protocolos utilizados. Consiste num analisador de pacotes de rede, que capta
os pacotes e apresenta-os com tanto detalhe quanto possível. Este dispõe de uma série de
característica, que o tornam um software interessante neste contexto, das quais se destacam:
captura de pacotes de rede através de um determinado interface de rede; apresentação dos pacotes
capturados com informação detalhada; e possibilidade de inclusão de filtros.
Embora o Wireshark seja muito útil na extracção de informação relativa aos pacotes que
circulam na rede, este apenas pôde ser utilizado nalguns testes, já que, no âmbito da localização
Versão 1.0 (14 de Julho de 2010)

40 Estrutura Experimental
Figura 4.26: Logotipo Wireshark [11]
relativa é necessário que a captura e respectiva análise da informação seja efectuada online.
Assim, foi necessária a construção de uma aplicação capaz de extrair a informação directamente
do interface de rede. Para tal, reccorreu-se à livraria libpcap que inclui funções que permitem
descodificar o formato de arquivo utilizado no Wireshark.
4.2.2.2 Libpcap
A libpcap é uma livraria em C open-source para a captura dos pacotes que circulam numa rede.
Esta encontra-se disponível para uma série de plataformas, incluindo a maioria das plataformas
Unix e Windows [29].
Embora a libpcap seja, essencialmente, uma ferramenta de captura de pacotes, esta também
permite criar e manipular os pacotes, podendo ser utilizado numa grande variedade de ferramentas
que suportam o formato libpcap.
A grande motivação para a utilização da libpcap é o facto de esta omitir grande parte da
complexidade inerente à captura de pacotes do sistema operativo.
A arquitectura desenvolvida consiste em 5 passos: o primeiro consiste em identificar o
interface de rede através do qual será realizada a captura; de seguida é aberto o interface de
rede; em terceiro lugar é realizada a configuração das opções de captura dos pacotes; após isto é
iniciada a captura e processamento dos pacotes; e finalmente é terminada a conexão.
Para capturar pacotes é necessário fornecer à libpcap uma interface de rede. Neste ponto é
então introduzido um novo conceito: radiotap. O radiotap constitui uma norma para a injecção e
recepção de tramas IEEE802.11.
O formato de cabeçalho radiotap é um mecanismo que permite fornecer informação adicional
sobre os pacotes em aplicações que recorram à libpcap. Desenvolvido inicialmente para sistemas
NetBSD por David Young, o formato de cabeçalho radiotap oferece maior flexibilidade que os
formatos de cabeçalho Prism ou AVS. Desta forma, com este formato de cabeçalho é possível
obter uma série de características [30]
O formato de uma captura com o radiotap, inicia-se com o cabeçalho do tipo:
struct ieee80211_radiotap_header
u_int8_t it_version; /* set to 0 */
u_int8_t it_pad;
u_int16_t it_len; /* entire length */
u_int32_t it_present; /* fields present */
__attribute__((__packed__));
Versão 1.0 (14 de Julho de 2010)
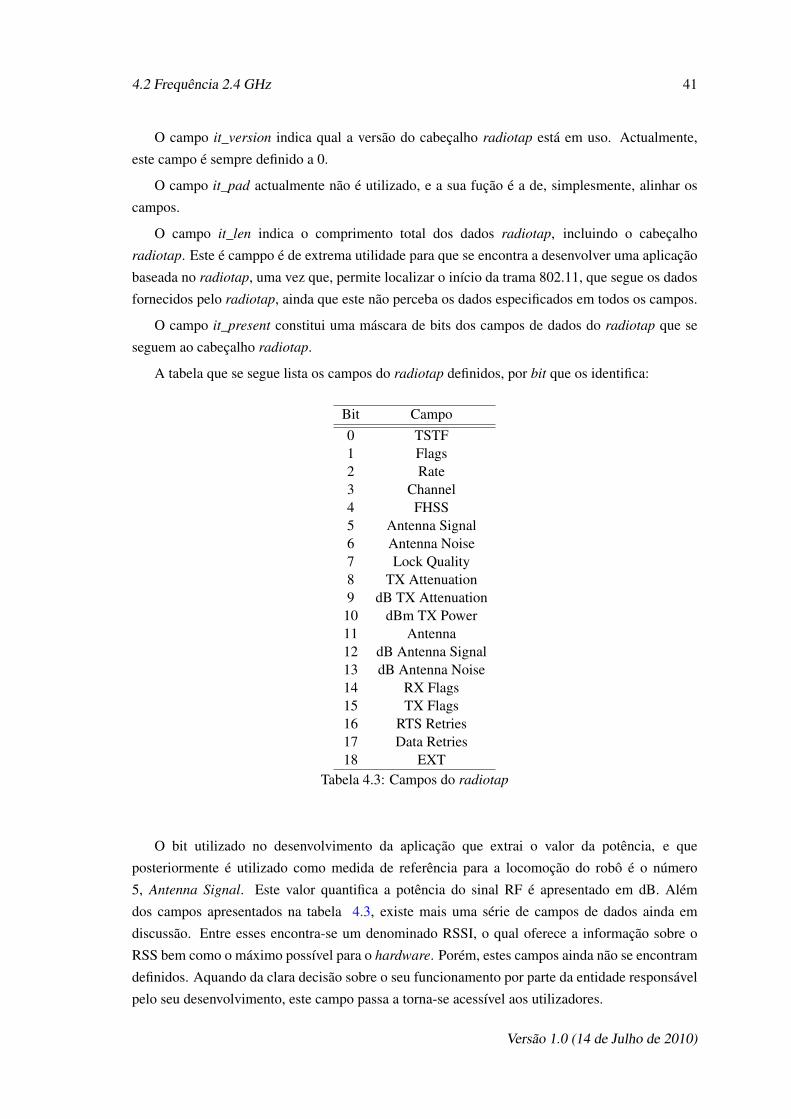
4.2 Frequência 2.4 GHz 41
O campo it_version indica qual a versão do cabeçalho radiotap está em uso. Actualmente,
este campo é sempre definido a 0.
O campo it_pad actualmente não é utilizado, e a sua fução é a de, simplesmente, alinhar os
campos.
O campo it_len indica o comprimento total dos dados radiotap, incluindo o cabeçalho
radiotap. Este é camppo é de extrema utilidade para que se encontra a desenvolver uma aplicação
baseada no radiotap, uma vez que, permite localizar o início da trama 802.11, que segue os dados
fornecidos pelo radiotap, ainda que este não perceba os dados especificados em todos os campos.
O campo it_present constitui uma máscara de bits dos campos de dados do radiotap que se
seguem ao cabeçalho radiotap.
A tabela que se segue lista os campos do radiotap definidos, por bit que os identifica:
Bit Campo0 TSTF1 Flags2 Rate3 Channel4 FHSS5 Antenna Signal6 Antenna Noise7 Lock Quality8 TX Attenuation9 dB TX Attenuation
10 dBm TX Power11 Antenna12 dB Antenna Signal13 dB Antenna Noise14 RX Flags15 TX Flags16 RTS Retries17 Data Retries18 EXT
Tabela 4.3: Campos do radiotap
O bit utilizado no desenvolvimento da aplicação que extrai o valor da potência, e que
posteriormente é utilizado como medida de referência para a locomoção do robô é o número
5, Antenna Signal. Este valor quantifica a potência do sinal RF é apresentado em dB. Além
dos campos apresentados na tabela 4.3, existe mais uma série de campos de dados ainda em
discussão. Entre esses encontra-se um denominado RSSI, o qual oferece a informação sobre o
RSS bem como o máximo possível para o hardware. Porém, estes campos ainda não se encontram
definidos. Aquando da clara decisão sobre o seu funcionamento por parte da entidade responsável
pelo seu desenvolvimento, este campo passa a torna-se acessível aos utilizadores.
Versão 1.0 (14 de Julho de 2010)
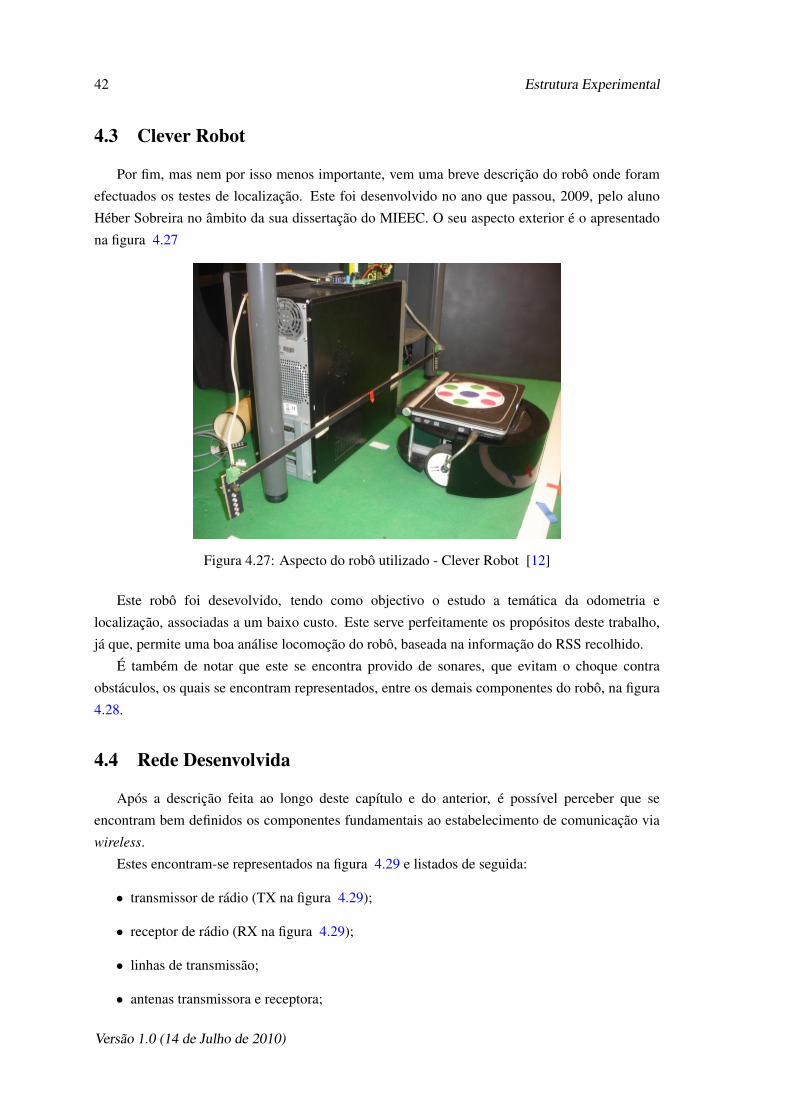
42 Estrutura Experimental
4.3 Clever Robot
Por fim, mas nem por isso menos importante, vem uma breve descrição do robô onde foram
efectuados os testes de localização. Este foi desenvolvido no ano que passou, 2009, pelo aluno
Héber Sobreira no âmbito da sua dissertação do MIEEC. O seu aspecto exterior é o apresentado
na figura 4.27
Figura 4.27: Aspecto do robô utilizado - Clever Robot [12]
Este robô foi desevolvido, tendo como objectivo o estudo a temática da odometria e
localização, associadas a um baixo custo. Este serve perfeitamente os propósitos deste trabalho,
já que, permite uma boa análise locomoção do robô, baseada na informação do RSS recolhido.
É também de notar que este se encontra provido de sonares, que evitam o choque contra
obstáculos, os quais se encontram representados, entre os demais componentes do robô, na figura
4.28.
4.4 Rede Desenvolvida
Após a descrição feita ao longo deste capítulo e do anterior, é possível perceber que se
encontram bem definidos os componentes fundamentais ao estabelecimento de comunicação via
wireless.
Estes encontram-se representados na figura 4.29 e listados de seguida:
• transmissor de rádio (TX na figura 4.29);
• receptor de rádio (RX na figura 4.29);
• linhas de transmissão;
• antenas transmissora e receptora;
Versão 1.0 (14 de Julho de 2010)
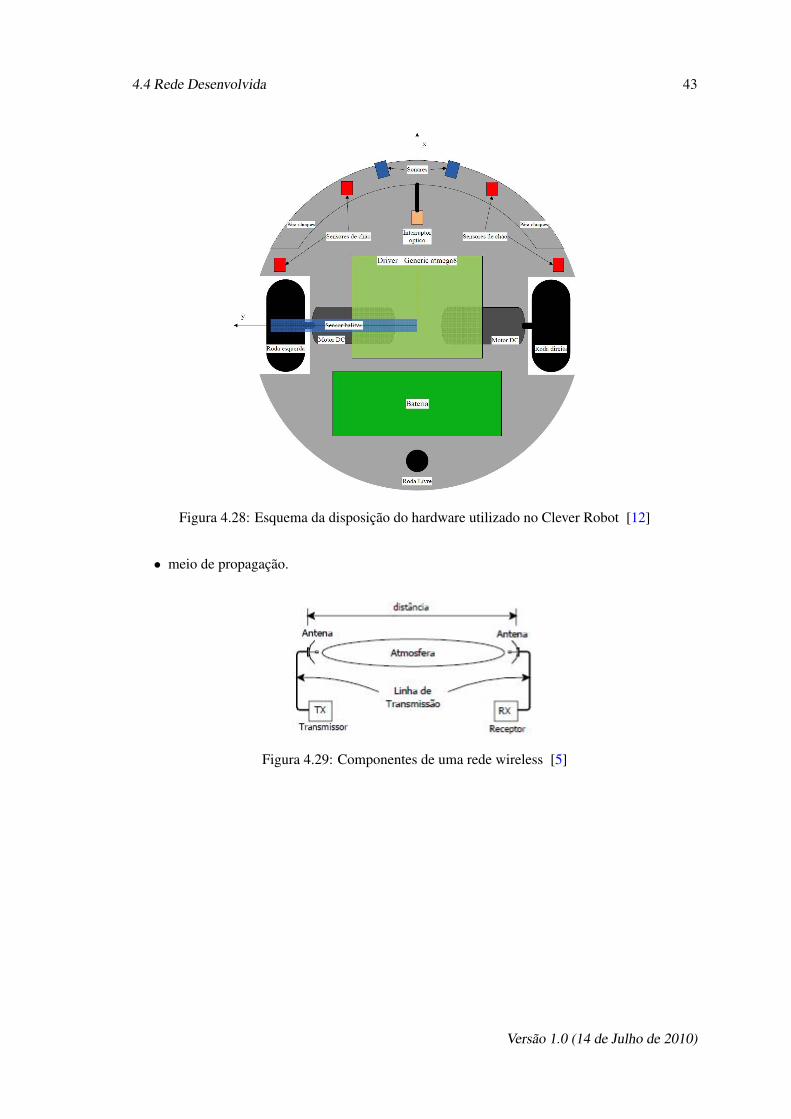
4.4 Rede Desenvolvida 43
Figura 4.28: Esquema da disposição do hardware utilizado no Clever Robot [12]
• meio de propagação.
Figura 4.29: Componentes de uma rede wireless [5]
Versão 1.0 (14 de Julho de 2010)

44 Estrutura Experimental
Versão 1.0 (14 de Julho de 2010)
Capítulo 5
Localização
O problema da localização do robô consiste em responder às perguntas "Onde estou?"e "Para
onde vou?", do ponto de vista do robô. Isso significa que o robô tem que calcular a sua localização
em relação ao meio ambiente.
O problema da localização é um problema importante. Aliás, é um componente essencial
para o sucesso de muitos sistemas robóticos autónomos, uma vez que, se o robô não possui
conhecimento da sua posição relativamente ao ambiente, é difícil para este decidir a sua próxima
tarefa. O robô muito provavelmente precisará ter, pelo menos alguma ideia da sua localização
para ser capaz de operar e agir com sucesso. O problema da localização é apontado como
sendo o fundamental para fornecer ao robô as capacidades que o tornam verdadeiramente
autónomo. Ainda assim, esta não tem necessariamente que oferecer uma informação precisa
sobre a localização do robô, desde que possibilite que o robô consiga ir de encontro com a baliza
(ou beacon), ou seja, de seguir ao encontro de uma localização previamente conhecida, e, desta
forma, realizar a tarefa da navegação.
5.1 Definição do Problema
O problema consiste em determinar a posição, coordenadas x e y, e a orientação θ do robô,
relativamente a um referencial definido por duas balizas. Estas, apesar de se encontrarem a operar
à mesma frequência, possuem endereços diferentes, possibilitando assim a sua distinção.
5.2 Frequência 433MHz
À frequência de 433MHz o algoritmo de localização testado foi o proposto em [12].
Em suma, este consiste na medição simultânea de duas grandezas: o ângulo formado entre os
segmentos que unem o robô e as duas balizas, e a distância do robô às próprias balizas. Todavia,
como o robô apenas consegue medir o ângulo relativo a que se encontra uma baliza, a medição da
45

46 Localização
distância é realizada de forma indirecta. Cada uma dessas medidas irá definir o lugar geométrico
de todos os pontos nos quais o robô se poderá encontrar. Quando a localização é feita a duas
dimensões (2D), esse lugar geométrico é geralmente uma linha denominada linha de posição. A
determinação da posição do robô efectua-se mediante o resultado da intersecção de várias linhas
de posição.
O algoritmo de localização desenvolvido consiste em colocar o robô a girar sobre si próprio
360, e ir guardando a informação fornecida pelo módulo RF04 sobre o RSSI. Findada a volta é
feita uma análise da informação recolhida, por forma a extrapolar qual a direcção na qual o nulo
fornecido pelo diagrama de radiação da antena direccional foi obtido. Este procedimento é feito à
vez com cada uma das balizas.
5.3 Frequência 2.4Ghz
À frequência de 2.4GHz foi testado, não um algoritmo de localização mas um de navegação.
Com vista a estudar o comportamento do robô na tarefa de navegação, foi utilizado um método
muito simples, denominado Método Oblívio. Este algoritmo utiliza a informação relativa aos
valores actual e anterior do RSSI, para decidir sobre qual a direcção a seguir. Este é um método
muito simples, e, como tal, é aplicado em robôs igualmente simples. O funcionamento deste é
baseado nas decisões de três premissas: "o robô aproximou-se"; "o robô afastou-se"; ou "o robô
não se aproximou nem afastou". O algoritmo é ilustrado a seguir (figura 5.1) [19].
Devido à natureza da informação, inconstância dos valores de potência capturados, foram
aplicados alguns filtros. Com estes, ao invés do algoritmo apresentado anteriormente, não é
analisado apenas um valor de cada vez, mas sim uma série destes. Os filtros utilizados foram:
o cálculo da média de uma série de 5 e 7 leituras consecutivas; e ainda um método que ordena
de forma crescente a série de leituras, elimina os extremos desta série, e calcula a média sobre os
restantes valores. Este último algoritmo, é designado ao longo do documento por filtro especial.
Quando colocado em movimento durante cerca de 2 minutos, não foi perceptível ma clara
tendência para a fonte emissora de sinal. Este facto pode ser explicado pela dificuldade em definir
um valor de threshold conveniente, uma vez que a própria variação do valor médio do RSSI é
inconstante ao longo das várias distâncias.
Versão 1.0 (14 de Julho de 2010)
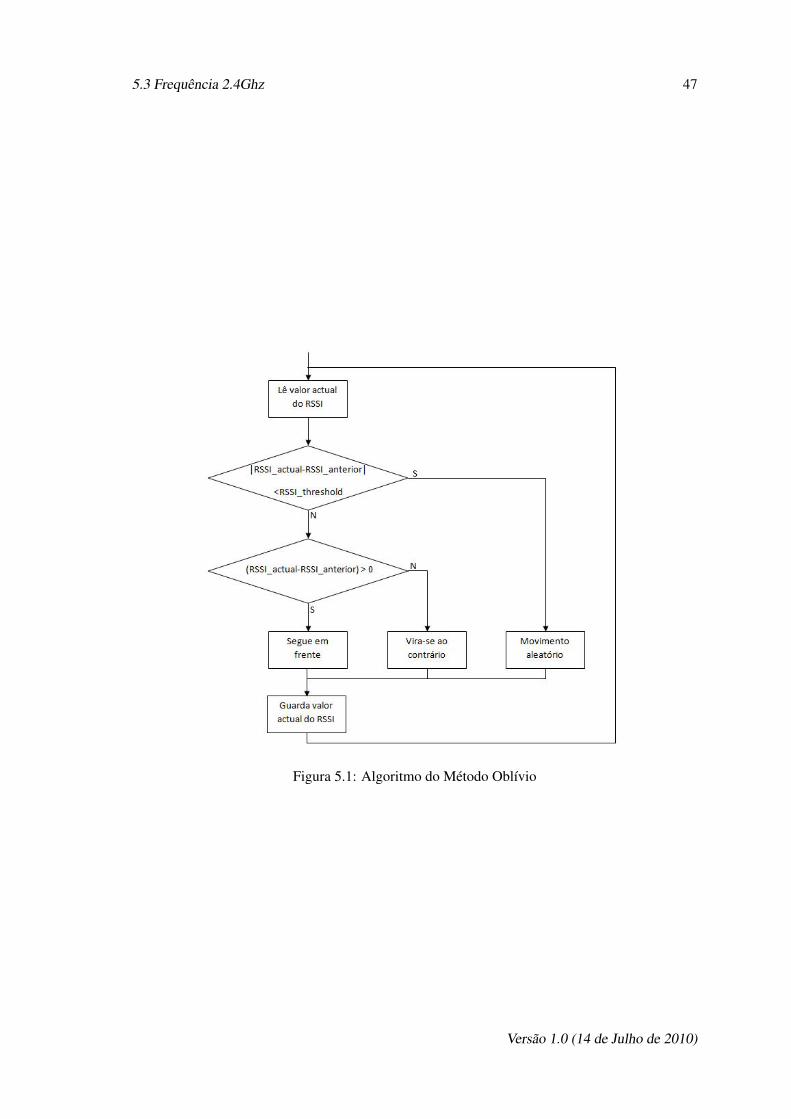
5.3 Frequência 2.4Ghz 47
Figura 5.1: Algoritmo do Método Oblívio
Versão 1.0 (14 de Julho de 2010)

48 Localização
Versão 1.0 (14 de Julho de 2010)
Capítulo 6
Resultados Experimentais
6.1 Resultados Obtidos à Frequência de 433MHZ
A captura de dados sobre o RSSI à frequência de 433MHz requereu o desenvolvimento de
hardware adicional.
Após a validação da utilização das antenas direccional (arranjo linear uniforme de dois dipolos
de meia onda) e omnidireccional (monopolo de meia onda), a partir da simulação com o software
4Nec2, foi necessária a validação das mesmas em ambiente real.
Com vista a definir os resultados expectáveis foi necessário, numa primeira fase, descobrir a
orientação do diagrama de radiação da antena direccional, com vista a encontrar o "nulo"presente
no cardióde característico desta antena. Com esta informação pode ser, facilmente, determinada a
forma sob a qual a potência recebida variará de acordo com a orientação da antena.
Seguidamente, projectou-se a estrutura a ser construída para servir o propósito da validação
do método de definição da orientação do robô relativamente às balizas, com estas antenas,
para posteriormente, no caso de este método se apresentar válido, seguir para a implementação
do método de localização. Desta forma, os módulos, RF04 e CM02, foram colocados em
comunicação, e com as respectivas antenas, direccional e omnidireccional, acopladas para que
seja possível a leitura do RSSI resultante desta comunicação para diferentes orientações da antena
direccional. Para tal, as antenas foram colocadas sob a vertical, distantes uma da outra, a 1,3
metros do solo e em line-of-sight. Considerando a antena direccional colocada sob a vertical
e com a face onde se encontram os cabos de ligação entre os dipolos voltada para a antena
omnidireccional a orientação de 0, os diagramas de radiação das antenas, apresentam-se com
esta forma (figura 6.1), sob uma vista de topo. O sentido de rotação adoptado foi o anti-horário.
De forma a melhor expôr a arquitectura da estrutura definida é apresentada na figura 6.2, na
qual se encontram representadas todo o hardware utilizado e as ligações entre todos os elementos.
Como é possível visualizar através desta figura, o módulo RF04 encontra-se conectado ao PC
via USB, já que é desta forma que este é alimentado, e possibilitando assim, o estabelecimento da
49
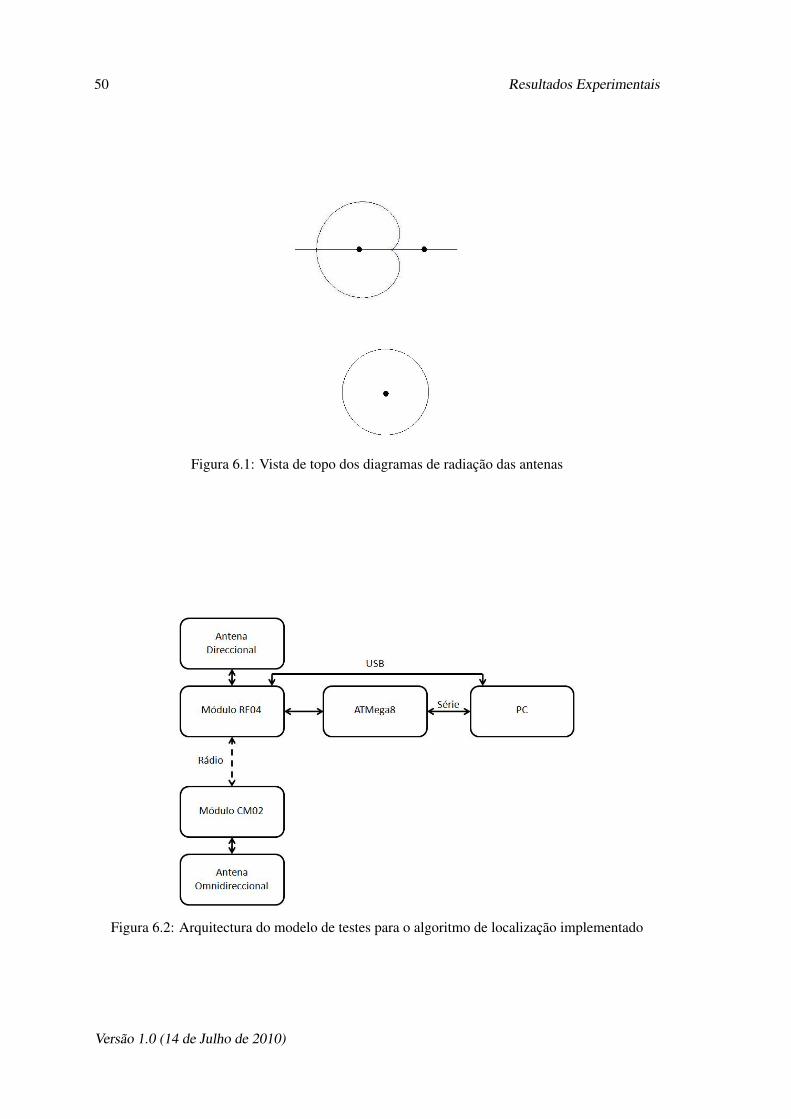
50 Resultados Experimentais
Figura 6.1: Vista de topo dos diagramas de radiação das antenas
Figura 6.2: Arquitectura do modelo de testes para o algoritmo de localização implementado
Versão 1.0 (14 de Julho de 2010)
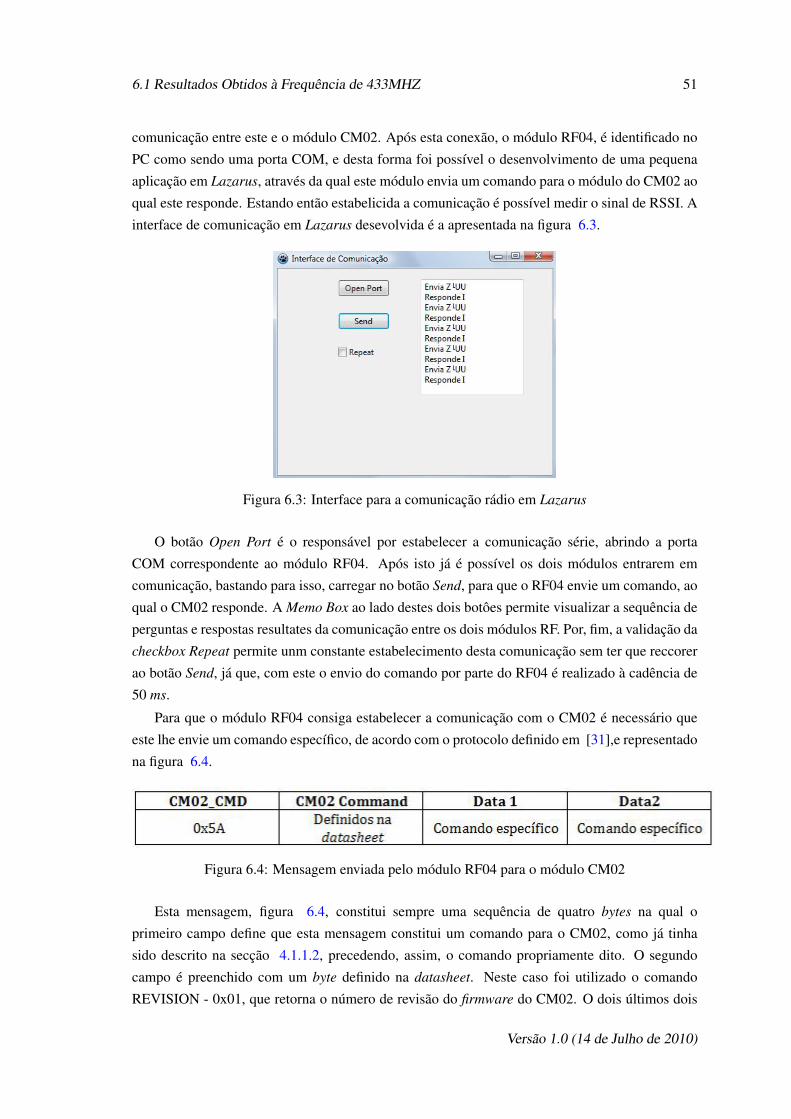
6.1 Resultados Obtidos à Frequência de 433MHZ 51
comunicação entre este e o módulo CM02. Após esta conexão, o módulo RF04, é identificado no
PC como sendo uma porta COM, e desta forma foi possível o desenvolvimento de uma pequena
aplicação em Lazarus, através da qual este módulo envia um comando para o módulo do CM02 ao
qual este responde. Estando então estabelicida a comunicação é possível medir o sinal de RSSI. A
interface de comunicação em Lazarus desevolvida é a apresentada na figura 6.3.
Figura 6.3: Interface para a comunicação rádio em Lazarus
O botão Open Port é o responsável por estabelecer a comunicação série, abrindo a porta
COM correspondente ao módulo RF04. Após isto já é possível os dois módulos entrarem em
comunicação, bastando para isso, carregar no botão Send, para que o RF04 envie um comando, ao
qual o CM02 responde. A Memo Box ao lado destes dois botôes permite visualizar a sequência de
perguntas e respostas resultates da comunicação entre os dois módulos RF. Por, fim, a validação da
checkbox Repeat permite unm constante estabelecimento desta comunicação sem ter que reccorer
ao botão Send, já que, com este o envio do comando por parte do RF04 é realizado à cadência de
50 ms.
Para que o módulo RF04 consiga estabelecer a comunicação com o CM02 é necessário que
este lhe envie um comando específico, de acordo com o protocolo definido em [31],e representado
na figura 6.4.
Figura 6.4: Mensagem enviada pelo módulo RF04 para o módulo CM02
Esta mensagem, figura 6.4, constitui sempre uma sequência de quatro bytes na qual o
primeiro campo define que esta mensagem constitui um comando para o CM02, como já tinha
sido descrito na secção 4.1.1.2, precedendo, assim, o comando propriamente dito. O segundo
campo é preenchido com um byte definido na datasheet. Neste caso foi utilizado o comando
REVISION - 0x01, que retorna o número de revisão do firmware do CM02. O dois últimos dois
Versão 1.0 (14 de Julho de 2010)
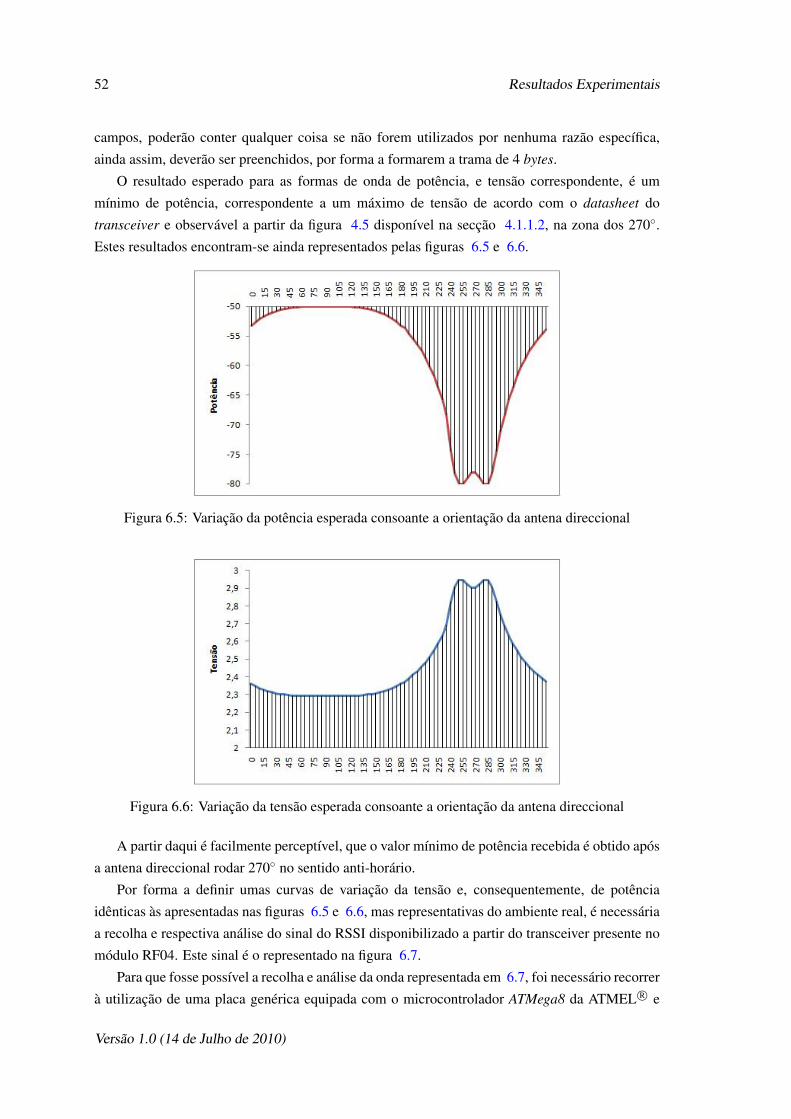
52 Resultados Experimentais
campos, poderão conter qualquer coisa se não forem utilizados por nenhuma razão específica,
ainda assim, deverão ser preenchidos, por forma a formarem a trama de 4 bytes.
O resultado esperado para as formas de onda de potência, e tensão correspondente, é um
mínimo de potência, correspondente a um máximo de tensão de acordo com o datasheet do
transceiver e observável a partir da figura 4.5 disponível na secção 4.1.1.2, na zona dos 270.
Estes resultados encontram-se ainda representados pelas figuras 6.5 e 6.6.
Figura 6.5: Variação da potência esperada consoante a orientação da antena direccional
Figura 6.6: Variação da tensão esperada consoante a orientação da antena direccional
A partir daqui é facilmente perceptível, que o valor mínimo de potência recebida é obtido após
a antena direccional rodar 270 no sentido anti-horário.
Por forma a definir umas curvas de variação da tensão e, consequentemente, de potência
idênticas às apresentadas nas figuras 6.5 e 6.6, mas representativas do ambiente real, é necessária
a recolha e respectiva análise do sinal do RSSI disponibilizado a partir do transceiver presente no
módulo RF04. Este sinal é o representado na figura 6.7.
Para que fosse possível a recolha e análise da onda representada em 6.7, foi necessário recorrer
à utilização de uma placa genérica equipada com o microcontrolador ATMega8 da ATMEL R© e
Versão 1.0 (14 de Julho de 2010)
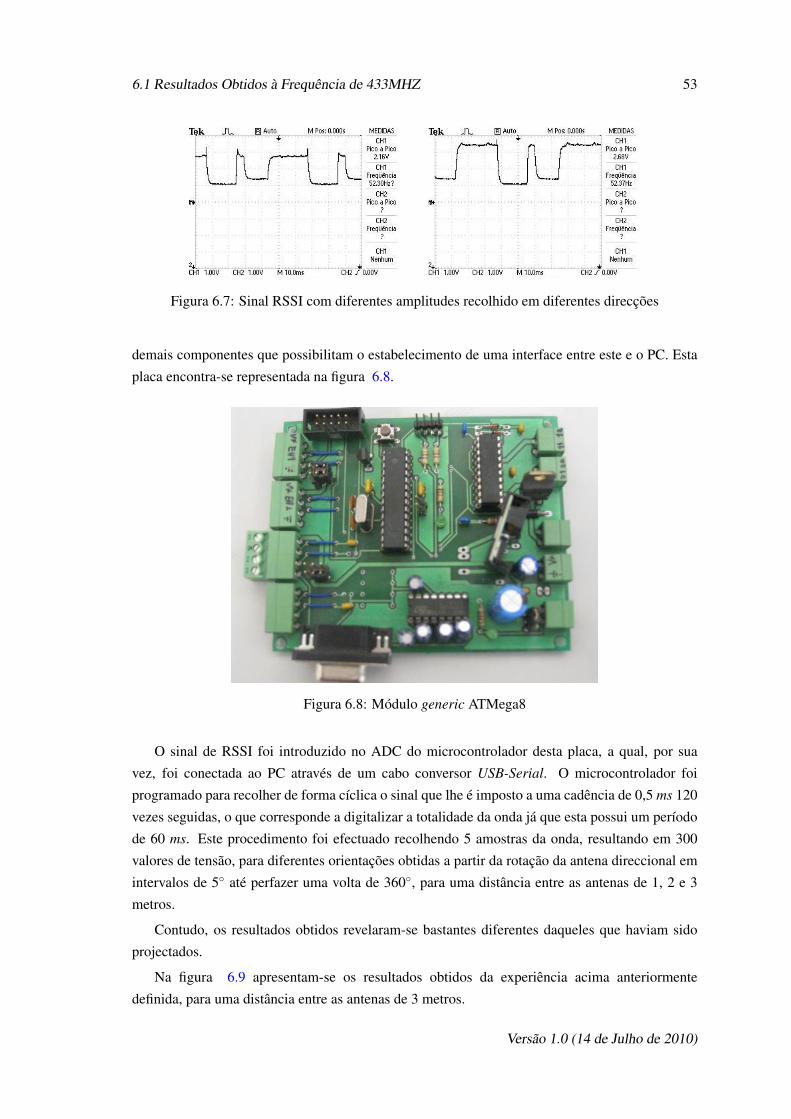
6.1 Resultados Obtidos à Frequência de 433MHZ 53
Figura 6.7: Sinal RSSI com diferentes amplitudes recolhido em diferentes direcções
demais componentes que possibilitam o estabelecimento de uma interface entre este e o PC. Esta
placa encontra-se representada na figura 6.8.
Figura 6.8: Módulo generic ATMega8
O sinal de RSSI foi introduzido no ADC do microcontrolador desta placa, a qual, por sua
vez, foi conectada ao PC através de um cabo conversor USB-Serial. O microcontrolador foi
programado para recolher de forma cíclica o sinal que lhe é imposto a uma cadência de 0,5 ms 120
vezes seguidas, o que corresponde a digitalizar a totalidade da onda já que esta possui um período
de 60 ms. Este procedimento foi efectuado recolhendo 5 amostras da onda, resultando em 300
valores de tensão, para diferentes orientações obtidas a partir da rotação da antena direccional em
intervalos de 5 até perfazer uma volta de 360, para uma distância entre as antenas de 1, 2 e 3
metros.
Contudo, os resultados obtidos revelaram-se bastantes diferentes daqueles que haviam sido
projectados.
Na figura 6.9 apresentam-se os resultados obtidos da experiência acima anteriormente
definida, para uma distância entre as antenas de 3 metros.
Versão 1.0 (14 de Julho de 2010)
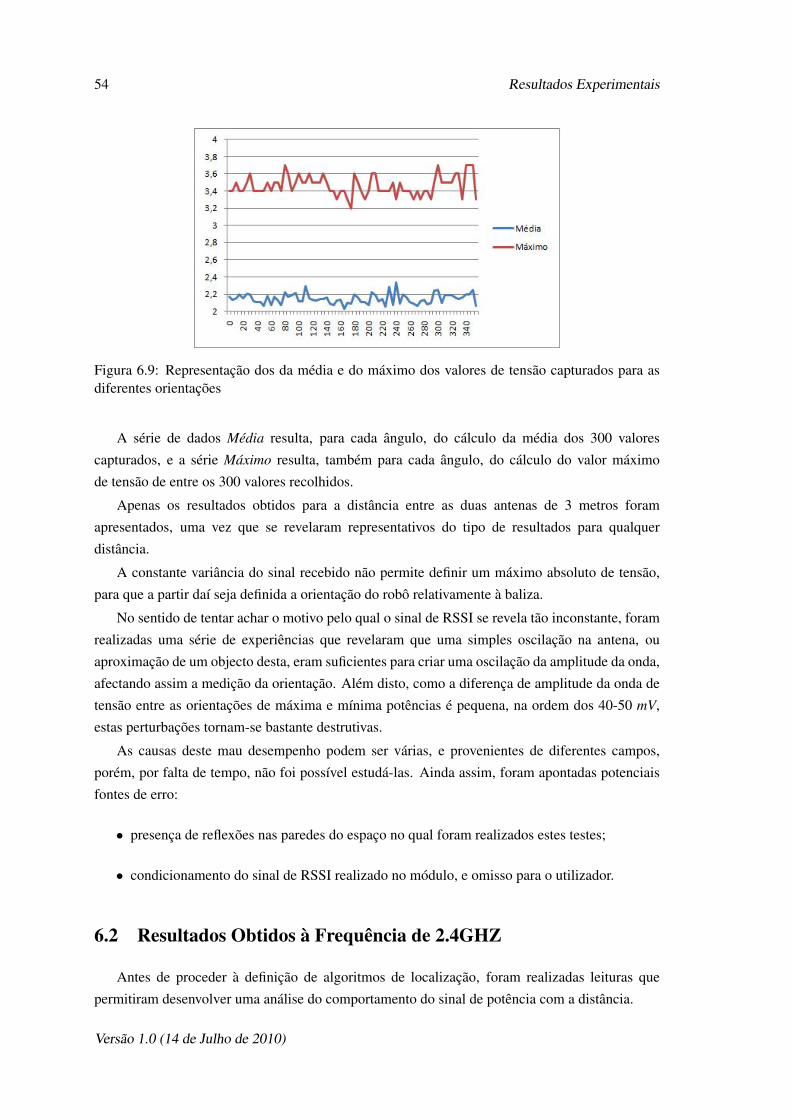
54 Resultados Experimentais
Figura 6.9: Representação dos da média e do máximo dos valores de tensão capturados para asdiferentes orientações
A série de dados Média resulta, para cada ângulo, do cálculo da média dos 300 valores
capturados, e a série Máximo resulta, também para cada ângulo, do cálculo do valor máximo
de tensão de entre os 300 valores recolhidos.
Apenas os resultados obtidos para a distância entre as duas antenas de 3 metros foram
apresentados, uma vez que se revelaram representativos do tipo de resultados para qualquer
distância.
A constante variância do sinal recebido não permite definir um máximo absoluto de tensão,
para que a partir daí seja definida a orientação do robô relativamente à baliza.
No sentido de tentar achar o motivo pelo qual o sinal de RSSI se revela tão inconstante, foram
realizadas uma série de experiências que revelaram que uma simples oscilação na antena, ou
aproximação de um objecto desta, eram suficientes para criar uma oscilação da amplitude da onda,
afectando assim a medição da orientação. Além disto, como a diferença de amplitude da onda de
tensão entre as orientações de máxima e mínima potências é pequena, na ordem dos 40-50 mV,
estas perturbações tornam-se bastante destrutivas.
As causas deste mau desempenho podem ser várias, e provenientes de diferentes campos,
porém, por falta de tempo, não foi possível estudá-las. Ainda assim, foram apontadas potenciais
fontes de erro:
• presença de reflexões nas paredes do espaço no qual foram realizados estes testes;
• condicionamento do sinal de RSSI realizado no módulo, e omisso para o utilizador.
6.2 Resultados Obtidos à Frequência de 2.4GHZ
Antes de proceder à definição de algoritmos de localização, foram realizadas leituras que
permitiram desenvolver uma análise do comportamento do sinal de potência com a distância.
Versão 1.0 (14 de Julho de 2010)
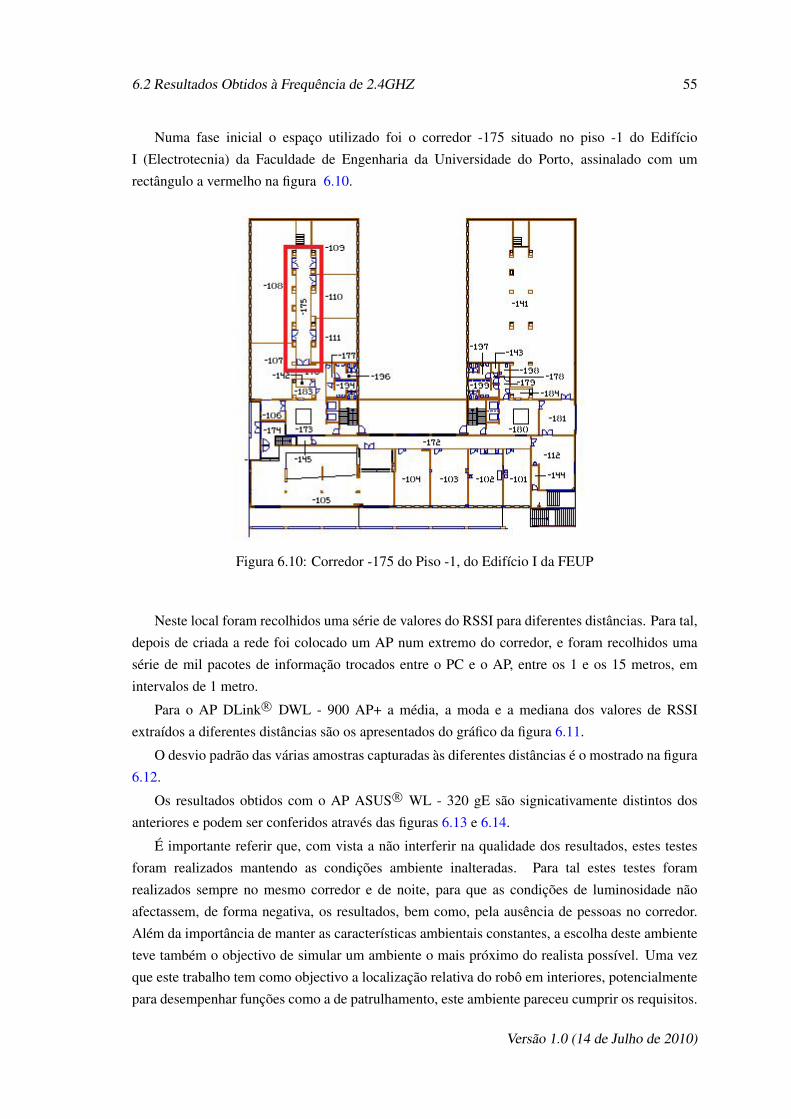
6.2 Resultados Obtidos à Frequência de 2.4GHZ 55
Numa fase inicial o espaço utilizado foi o corredor -175 situado no piso -1 do Edifício
I (Electrotecnia) da Faculdade de Engenharia da Universidade do Porto, assinalado com um
rectângulo a vermelho na figura 6.10.
Figura 6.10: Corredor -175 do Piso -1, do Edifício I da FEUP
Neste local foram recolhidos uma série de valores do RSSI para diferentes distâncias. Para tal,
depois de criada a rede foi colocado um AP num extremo do corredor, e foram recolhidos uma
série de mil pacotes de informação trocados entre o PC e o AP, entre os 1 e os 15 metros, em
intervalos de 1 metro.
Para o AP DLink R© DWL - 900 AP+ a média, a moda e a mediana dos valores de RSSI
extraídos a diferentes distâncias são os apresentados do gráfico da figura 6.11.
O desvio padrão das várias amostras capturadas às diferentes distâncias é o mostrado na figura
6.12.
Os resultados obtidos com o AP ASUS R© WL - 320 gE são signicativamente distintos dos
anteriores e podem ser conferidos através das figuras 6.13 e 6.14.
É importante referir que, com vista a não interferir na qualidade dos resultados, estes testes
foram realizados mantendo as condições ambiente inalteradas. Para tal estes testes foram
realizados sempre no mesmo corredor e de noite, para que as condições de luminosidade não
afectassem, de forma negativa, os resultados, bem como, pela ausência de pessoas no corredor.
Além da importância de manter as características ambientais constantes, a escolha deste ambiente
teve também o objectivo de simular um ambiente o mais próximo do realista possível. Uma vez
que este trabalho tem como objectivo a localização relativa do robô em interiores, potencialmente
para desempenhar funções como a de patrulhamento, este ambiente pareceu cumprir os requisitos.
Versão 1.0 (14 de Julho de 2010)

56 Resultados Experimentais
Figura 6.11: Relação RSSI-Distância obtida com o DLink R© DWL - 900 AP+ no corredor -175 doPiso -1, do Edifício I da FEUP
Figura 6.12: Relação Desvio Padrão-Distância obtida com o DLink R© DWL - 900 AP+ no corredor-175 do Piso -1, do Edifício I da FEUP
Figura 6.13: Relação RSSI-Distância obtida com o ASUS R© WL - 320 gE no corredor -175 doPiso -1, do Edifício I da FEUP
Versão 1.0 (14 de Julho de 2010)
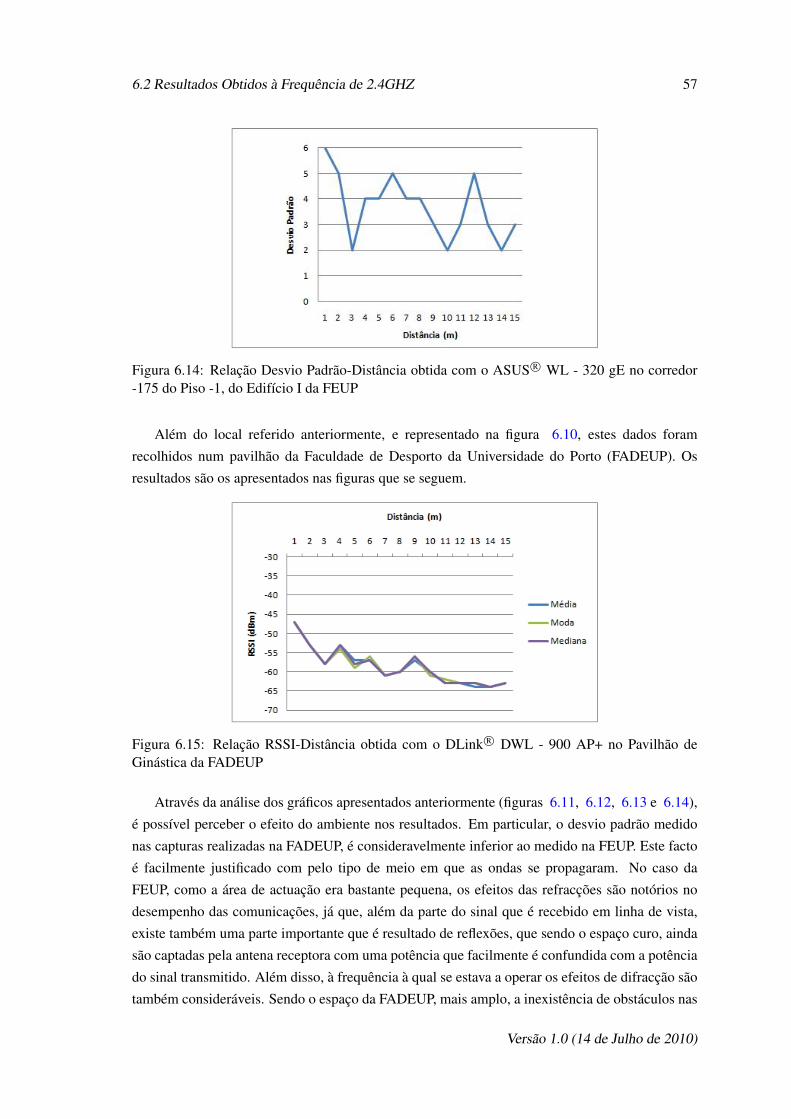
6.2 Resultados Obtidos à Frequência de 2.4GHZ 57
Figura 6.14: Relação Desvio Padrão-Distância obtida com o ASUS R© WL - 320 gE no corredor-175 do Piso -1, do Edifício I da FEUP
Além do local referido anteriormente, e representado na figura 6.10, estes dados foram
recolhidos num pavilhão da Faculdade de Desporto da Universidade do Porto (FADEUP). Os
resultados são os apresentados nas figuras que se seguem.
Figura 6.15: Relação RSSI-Distância obtida com o DLink R© DWL - 900 AP+ no Pavilhão deGinástica da FADEUP
Através da análise dos gráficos apresentados anteriormente (figuras 6.11, 6.12, 6.13 e 6.14),
é possível perceber o efeito do ambiente nos resultados. Em particular, o desvio padrão medido
nas capturas realizadas na FADEUP, é consideravelmente inferior ao medido na FEUP. Este facto
é facilmente justificado com pelo tipo de meio em que as ondas se propagaram. No caso da
FEUP, como a área de actuação era bastante pequena, os efeitos das refracções são notórios no
desempenho das comunicações, já que, além da parte do sinal que é recebido em linha de vista,
existe também uma parte importante que é resultado de reflexões, que sendo o espaço curo, ainda
são captadas pela antena receptora com uma potência que facilmente é confundida com a potência
do sinal transmitido. Além disso, à frequência à qual se estava a operar os efeitos de difracção são
também consideráveis. Sendo o espaço da FADEUP, mais amplo, a inexistência de obstáculos nas
Versão 1.0 (14 de Julho de 2010)
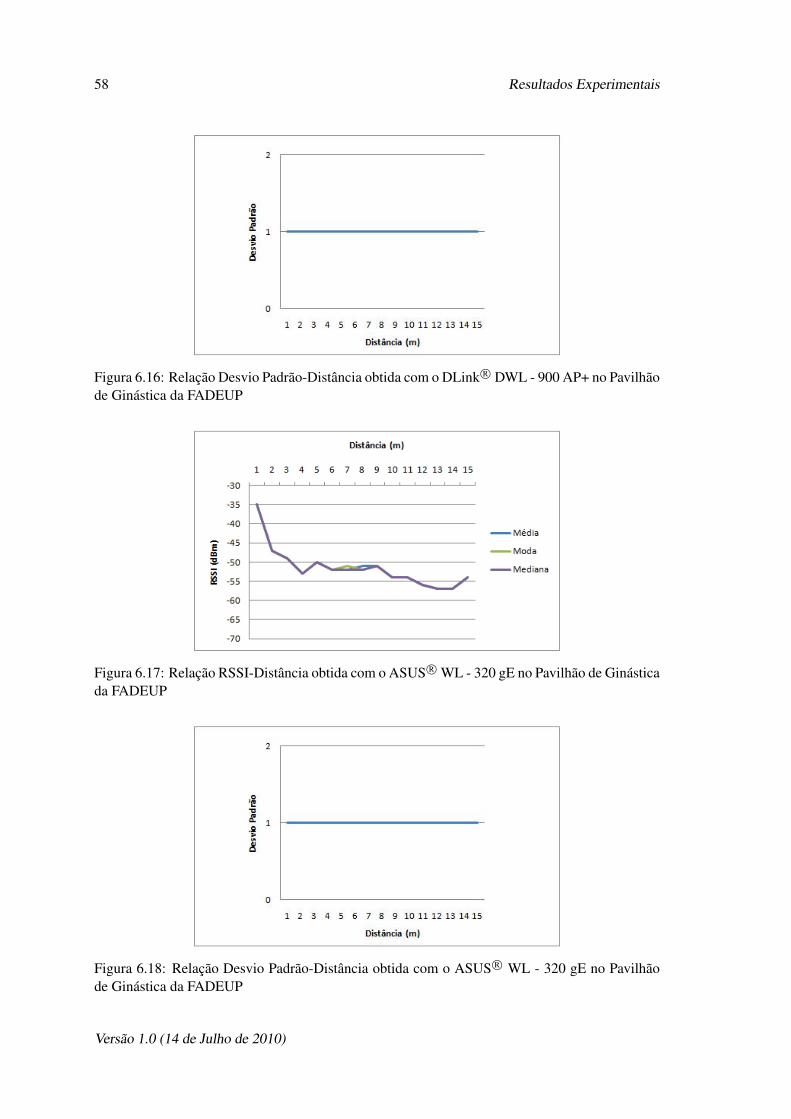
58 Resultados Experimentais
Figura 6.16: Relação Desvio Padrão-Distância obtida com o DLink R© DWL - 900 AP+ no Pavilhãode Ginástica da FADEUP
Figura 6.17: Relação RSSI-Distância obtida com o ASUS R© WL - 320 gE no Pavilhão de Ginásticada FADEUP
Figura 6.18: Relação Desvio Padrão-Distância obtida com o ASUS R© WL - 320 gE no Pavilhãode Ginástica da FADEUP
Versão 1.0 (14 de Julho de 2010)
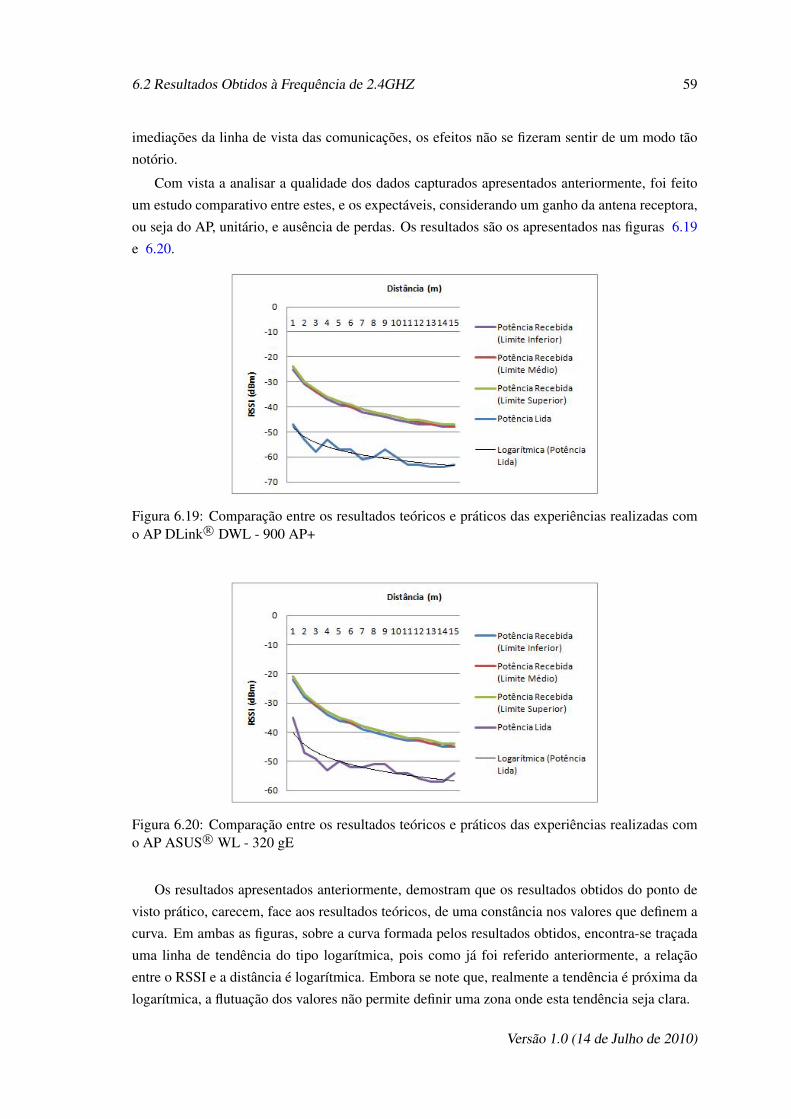
6.2 Resultados Obtidos à Frequência de 2.4GHZ 59
imediações da linha de vista das comunicações, os efeitos não se fizeram sentir de um modo tão
notório.
Com vista a analisar a qualidade dos dados capturados apresentados anteriormente, foi feito
um estudo comparativo entre estes, e os expectáveis, considerando um ganho da antena receptora,
ou seja do AP, unitário, e ausência de perdas. Os resultados são os apresentados nas figuras 6.19
e 6.20.
Figura 6.19: Comparação entre os resultados teóricos e práticos das experiências realizadas como AP DLink R© DWL - 900 AP+
Figura 6.20: Comparação entre os resultados teóricos e práticos das experiências realizadas como AP ASUS R© WL - 320 gE
Os resultados apresentados anteriormente, demostram que os resultados obtidos do ponto de
visto prático, carecem, face aos resultados teóricos, de uma constância nos valores que definem a
curva. Em ambas as figuras, sobre a curva formada pelos resultados obtidos, encontra-se traçada
uma linha de tendência do tipo logarítmica, pois como já foi referido anteriormente, a relação
entre o RSSI e a distância é logarítmica. Embora se note que, realmente a tendência é próxima da
logarítmica, a flutuação dos valores não permite definir uma zona onde esta tendência seja clara.
Versão 1.0 (14 de Julho de 2010)
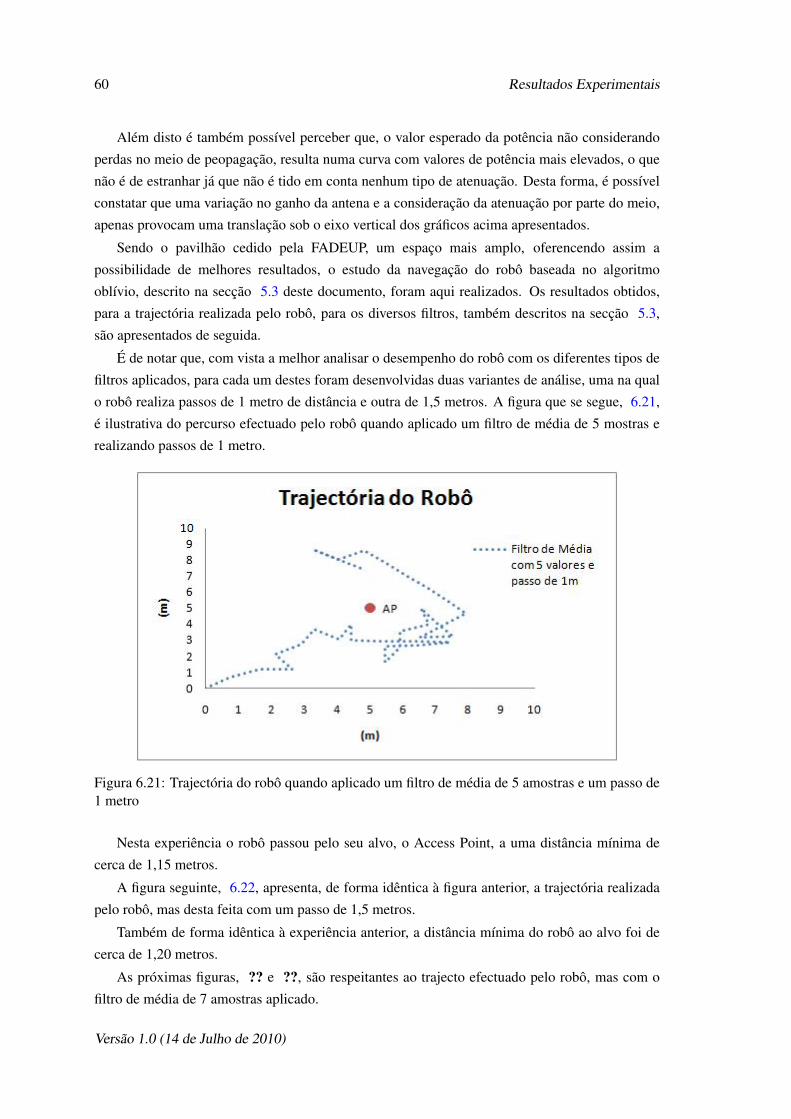
60 Resultados Experimentais
Além disto é também possível perceber que, o valor esperado da potência não considerando
perdas no meio de peopagação, resulta numa curva com valores de potência mais elevados, o que
não é de estranhar já que não é tido em conta nenhum tipo de atenuação. Desta forma, é possível
constatar que uma variação no ganho da antena e a consideração da atenuação por parte do meio,
apenas provocam uma translação sob o eixo vertical dos gráficos acima apresentados.
Sendo o pavilhão cedido pela FADEUP, um espaço mais amplo, oferencendo assim a
possibilidade de melhores resultados, o estudo da navegação do robô baseada no algoritmo
oblívio, descrito na secção 5.3 deste documento, foram aqui realizados. Os resultados obtidos,
para a trajectória realizada pelo robô, para os diversos filtros, também descritos na secção 5.3,
são apresentados de seguida.
É de notar que, com vista a melhor analisar o desempenho do robô com os diferentes tipos de
filtros aplicados, para cada um destes foram desenvolvidas duas variantes de análise, uma na qual
o robô realiza passos de 1 metro de distância e outra de 1,5 metros. A figura que se segue, 6.21,
é ilustrativa do percurso efectuado pelo robô quando aplicado um filtro de média de 5 mostras e
realizando passos de 1 metro.
Figura 6.21: Trajectória do robô quando aplicado um filtro de média de 5 amostras e um passo de1 metro
Nesta experiência o robô passou pelo seu alvo, o Access Point, a uma distância mínima de
cerca de 1,15 metros.
A figura seguinte, 6.22, apresenta, de forma idêntica à figura anterior, a trajectória realizada
pelo robô, mas desta feita com um passo de 1,5 metros.
Também de forma idêntica à experiência anterior, a distância mínima do robô ao alvo foi de
cerca de 1,20 metros.
As próximas figuras, ?? e ??, são respeitantes ao trajecto efectuado pelo robô, mas com o
filtro de média de 7 amostras aplicado.
Versão 1.0 (14 de Julho de 2010)
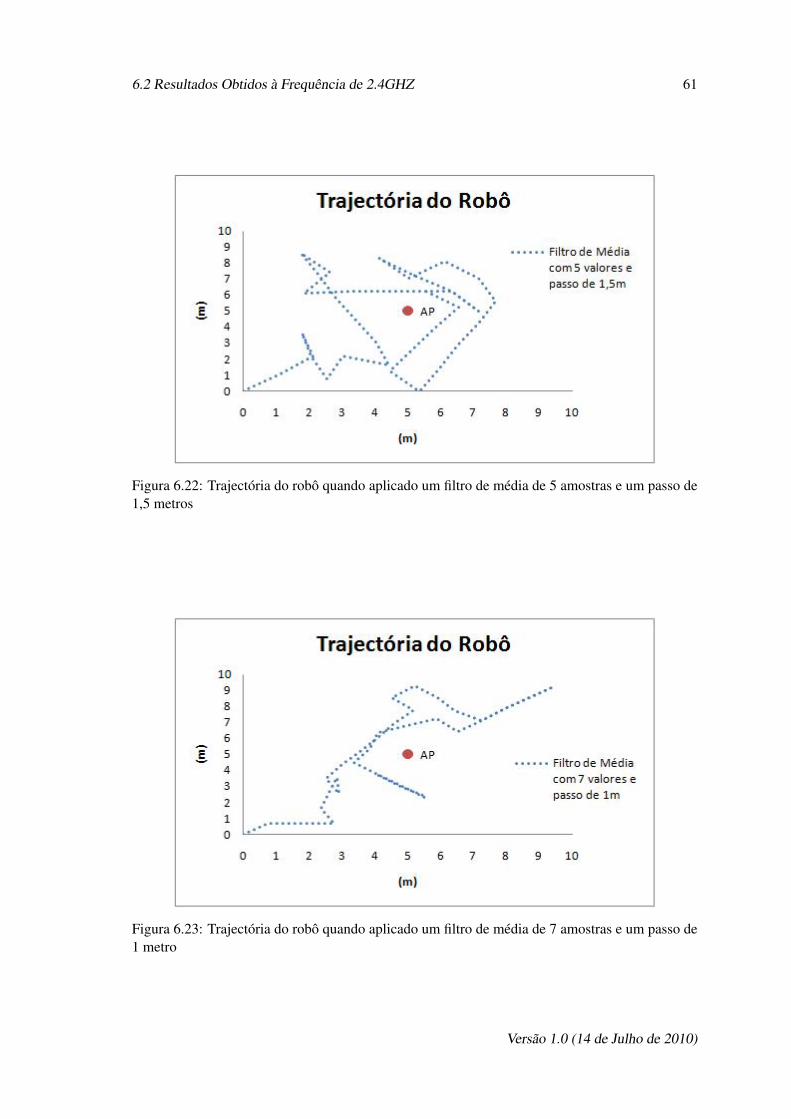
6.2 Resultados Obtidos à Frequência de 2.4GHZ 61
Figura 6.22: Trajectória do robô quando aplicado um filtro de média de 5 amostras e um passo de1,5 metros
Figura 6.23: Trajectória do robô quando aplicado um filtro de média de 7 amostras e um passo de1 metro
Versão 1.0 (14 de Julho de 2010)
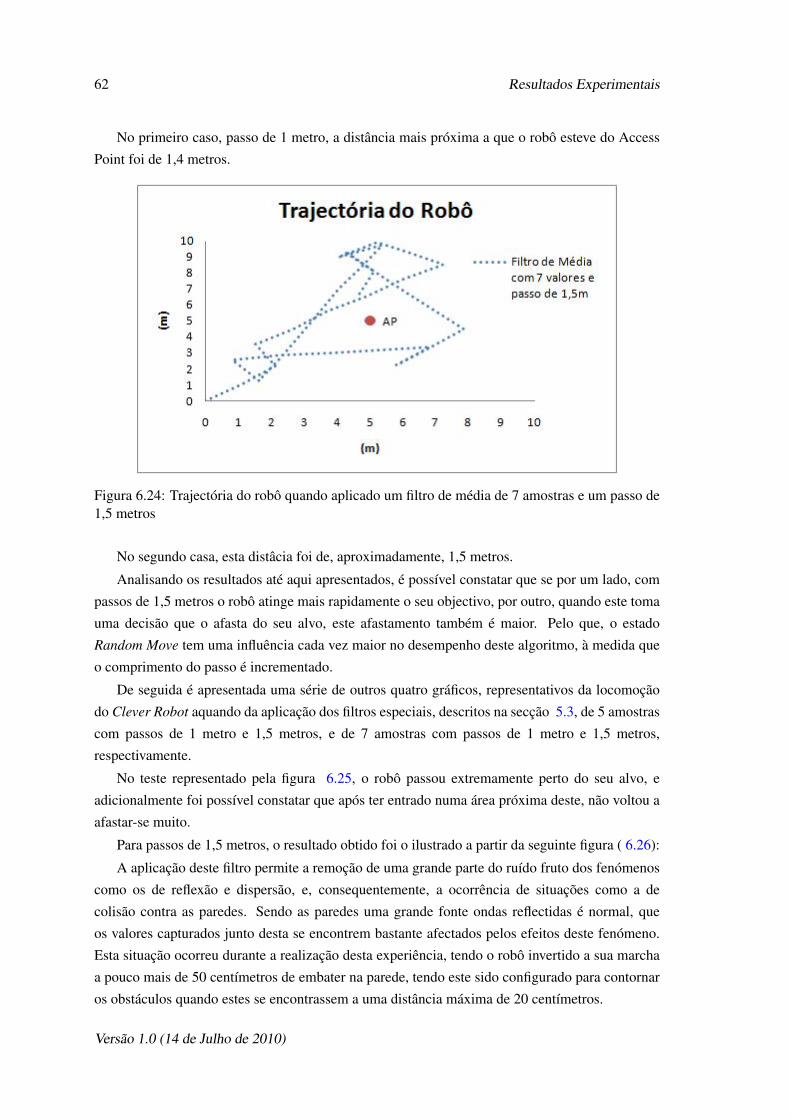
62 Resultados Experimentais
No primeiro caso, passo de 1 metro, a distância mais próxima a que o robô esteve do Access
Point foi de 1,4 metros.
Figura 6.24: Trajectória do robô quando aplicado um filtro de média de 7 amostras e um passo de1,5 metros
No segundo casa, esta distâcia foi de, aproximadamente, 1,5 metros.
Analisando os resultados até aqui apresentados, é possível constatar que se por um lado, com
passos de 1,5 metros o robô atinge mais rapidamente o seu objectivo, por outro, quando este toma
uma decisão que o afasta do seu alvo, este afastamento também é maior. Pelo que, o estado
Random Move tem uma influência cada vez maior no desempenho deste algoritmo, à medida que
o comprimento do passo é incrementado.
De seguida é apresentada uma série de outros quatro gráficos, representativos da locomoção
do Clever Robot aquando da aplicação dos filtros especiais, descritos na secção 5.3, de 5 amostras
com passos de 1 metro e 1,5 metros, e de 7 amostras com passos de 1 metro e 1,5 metros,
respectivamente.
No teste representado pela figura 6.25, o robô passou extremamente perto do seu alvo, e
adicionalmente foi possível constatar que após ter entrado numa área próxima deste, não voltou a
afastar-se muito.
Para passos de 1,5 metros, o resultado obtido foi o ilustrado a partir da seguinte figura ( 6.26):
A aplicação deste filtro permite a remoção de uma grande parte do ruído fruto dos fenómenos
como os de reflexão e dispersão, e, consequentemente, a ocorrência de situações como a de
colisão contra as paredes. Sendo as paredes uma grande fonte ondas reflectidas é normal, que
os valores capturados junto desta se encontrem bastante afectados pelos efeitos deste fenómeno.
Esta situação ocorreu durante a realização desta experiência, tendo o robô invertido a sua marcha
a pouco mais de 50 centímetros de embater na parede, tendo este sido configurado para contornar
os obstáculos quando estes se encontrassem a uma distância máxima de 20 centímetros.
Versão 1.0 (14 de Julho de 2010)
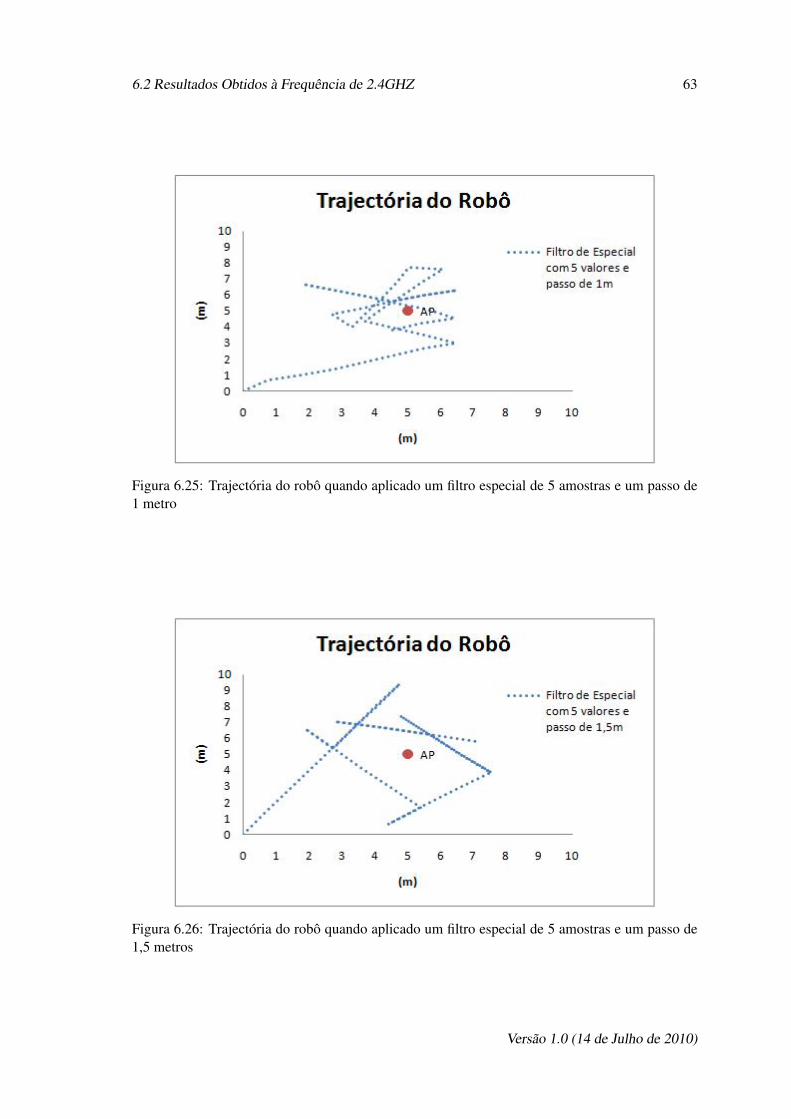
6.2 Resultados Obtidos à Frequência de 2.4GHZ 63
Figura 6.25: Trajectória do robô quando aplicado um filtro especial de 5 amostras e um passo de1 metro
Figura 6.26: Trajectória do robô quando aplicado um filtro especial de 5 amostras e um passo de1,5 metros
Versão 1.0 (14 de Julho de 2010)
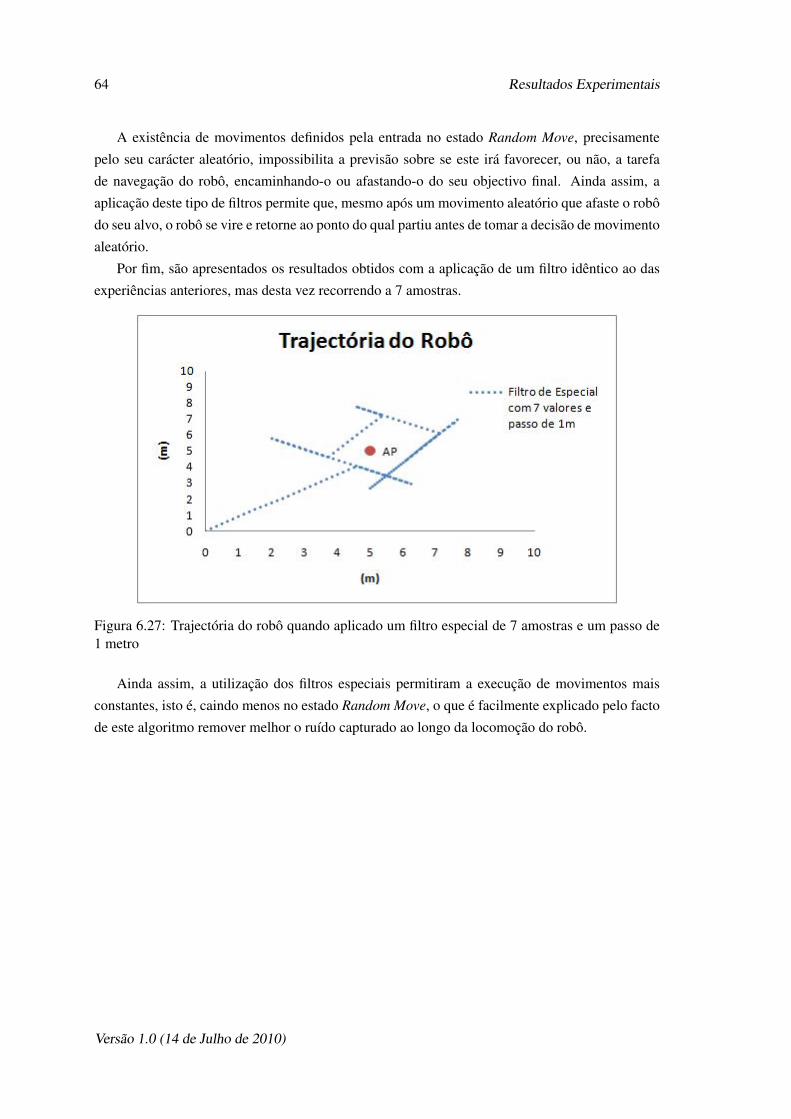
64 Resultados Experimentais
A existência de movimentos definidos pela entrada no estado Random Move, precisamente
pelo seu carácter aleatório, impossibilita a previsão sobre se este irá favorecer, ou não, a tarefa
de navegação do robô, encaminhando-o ou afastando-o do seu objectivo final. Ainda assim, a
aplicação deste tipo de filtros permite que, mesmo após um movimento aleatório que afaste o robô
do seu alvo, o robô se vire e retorne ao ponto do qual partiu antes de tomar a decisão de movimento
aleatório.
Por fim, são apresentados os resultados obtidos com a aplicação de um filtro idêntico ao das
experiências anteriores, mas desta vez recorrendo a 7 amostras.
Figura 6.27: Trajectória do robô quando aplicado um filtro especial de 7 amostras e um passo de1 metro
Ainda assim, a utilização dos filtros especiais permitiram a execução de movimentos mais
constantes, isto é, caindo menos no estado Random Move, o que é facilmente explicado pelo facto
de este algoritmo remover melhor o ruído capturado ao longo da locomoção do robô.
Versão 1.0 (14 de Julho de 2010)
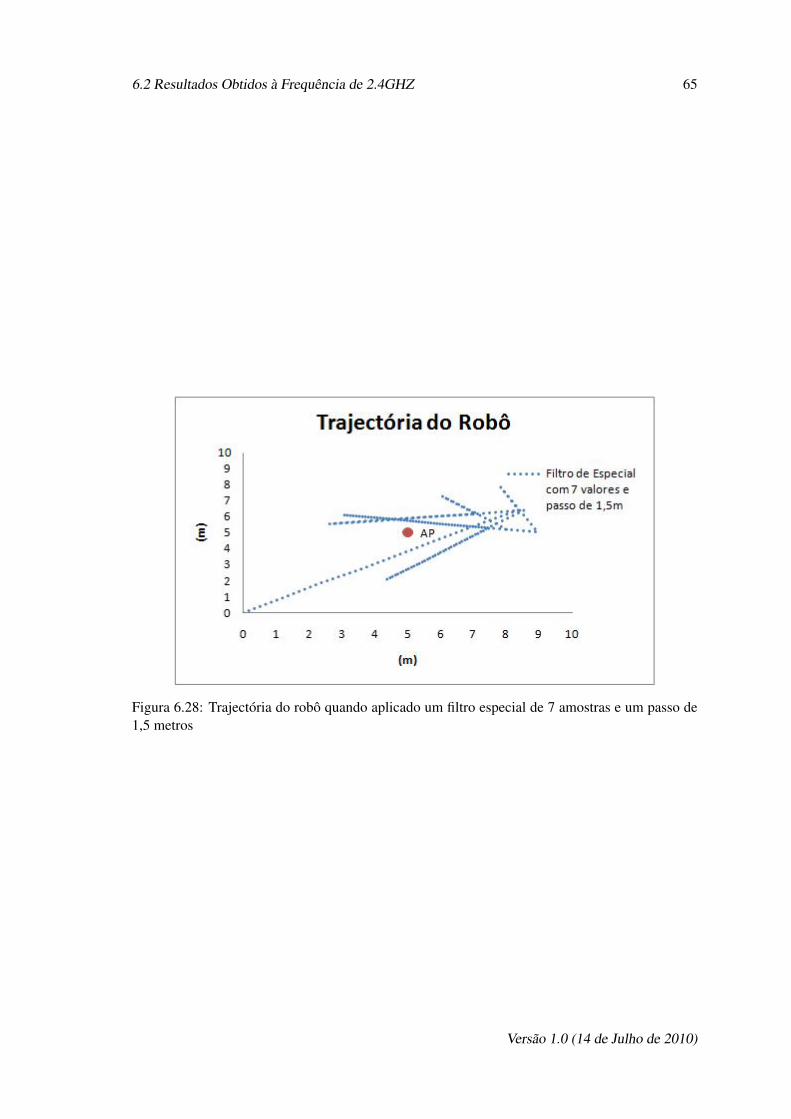
6.2 Resultados Obtidos à Frequência de 2.4GHZ 65
Figura 6.28: Trajectória do robô quando aplicado um filtro especial de 7 amostras e um passo de1,5 metros
Versão 1.0 (14 de Julho de 2010)

66 Resultados Experimentais
Versão 1.0 (14 de Julho de 2010)
Capítulo 7
Conclusões e Trabalho Futuro
7.1 Conclusões
Este trabalho incidiu sobre o estudo e implementação de algoritmos de localização relativa
e navegação de robôs móveis baseados apenas em informação sobre o RSS. Devido à natureza
flutuante do RSS, foram aplicados diversos filtros com o objectivo de poder ser utilizado oo RSS
nas referidas aplicações. O método implementado é baseado na execução de um passo com um
determinado comprimento e uma dada direcção, e em duas medidas do RSS, uma no início e outra
no fim do movimento. Durante as experiências verificou-se a existência de vários factores que
influenciam a performance do sistema, entre os quais devem ser destacados o passo dos robôs e o
ruído do RSS.
No quinto capítulo sugerimos uma forma de localização baseada em trilateração. Esta forma
de localização é mais precisa. Concluí-se a inviabilidade da implementação de um sistema
de localização relativa e/ou navegação em ambientes indoor por WiFi, isto é, à frequência de
2.4GHz. A esta frequência os efeitos associado ao multipath tornam-se demasiado destrutivos,
impossibilitando assim, a utilização não só da potência do sinal recebido como da sua variação ao
longo do tempo, como indicador da posição e/ou dos movimentos do robô.
7.2 Trabalho Futuro
No decorrer da realização deste trabalho foram surgindo algumas ideias que, por falta de
meios ou por falta de tempo, não poderam ser postas em prática. Quanto à frequência mais
baixa, 433MHz, aquando da escolha das antenas, embora esta tenha sido feita com base no
propósito de estas permitirem a realização da tarefa da localização com sucesso, houve um factor
que teve também que ter sido bastante em conta: o tempo. Desta forma, não poderam ser
experimentadas antenas com uma melhor caracterítica de directividade, como é o caso das antenas
Yagi. Além deste tipo de antenas, existe um outro, capaz de surtir resultados interessantes, que
67

68 Conclusões e Trabalho Futuro
são as antenas de Doppler. Este tipo de antenas é definido como um arranjo de antenas dipostas
circularmente, e o seu princípio de funcionamento é baseado no efeito de Doppler. Desta forma, a
antena que "escutar"um sinal mais forte indica, a orientação da fonte que se encontra a emitir
o sinal. Assim sendo, entende-se que seria interessante repetir o processo, com antenas que
apresentassem características de directividade mais apelativas. Além disto, seria interessante, com
vista a mitigar os efeitos destrutivos do multipath, a implementação de planos de massa para as
antenas, reduzindo assim o efeito das reflexões. Quanto à frequência de 2,4GHZ, seria também
desejável experimentar a aquisição do sinal de RSSI a partir de duas placas de rede distintas e
conectadas ao mesmo computador, e tomar como referência para valor do RSSI, por exemplo, a
média dos dois valores capturados.
Versão 1.0 (14 de Julho de 2010)
Referências
[1] Luis Almeida Frederico Santos e Luis Seabra Lopes. Self configuration of an adaptive tdmawireless communication protocol for teams of mobile robots. ?
[2] Fausto Carramate. Localizacao relativa de robos moveis baseada no rss de comunicacoes rf.Tese de mestrado, Universidade de Aveiro - Departamento de Electronica, Telecomunicacoese Informatica, 2008.
[3] Fawwaz T. Ulaby. Eletromagnetismo para Engenheiros. Artmed, 2007.
[4] Endereco acedido de onde foram retiradas algumas imagens com relevancia para adissertacao, http://www.sss-mag.com/indoor.htmltutorial.
[5] Endereco acedido de onde foram retiradas algumas imagens com relevancia para adissertacao, http://professores.unisanta.br/santana/downloadsm
[6] Modulos de Radio, RF04 e CM02 da Acroname, acedido emhttp://www.acroname.com/robotics/parts/R235-CM02-RF04.html.
[7] Datasheet do Transceiver ER400TRS, acedido em http://www.robot-electronics.co.uk/datasheets/Easy-Radiof.
[8] AP DLink R© DWL - 900 AP+, acedido em http://www.dlink.com/products/?pid=22.
[9] Access Point ASUS R© WL - 320 gE, acedido em http://www.comx-computers.co.za/computer-store-specifications.php?products=14141.
[10] Endereco acedido de onde foram retiradas algumas imagens com relevancia para adissertacao, http://www.reogshop.com/images/Acer
[11] Endereco acedido de onde foram retiradas algumas imagens com relevancia para adissertacao, http://www.wireshark.org/l.
[12] Heber Sobreira. Clever robot. Tese de mestrado, Faculdade de Engenharia da Universidadedo Porto, 2009.
[13] Zhi Wang Hongbin Li, Luis Almeida e Youxian Sun. Managing relative positions for smallscale mobile units. ?, 2007.
[14] Giorgio Buttazzo Tullio Facchietti e Luis Almeida. Dynamic resource reservation andconnectivity tracking to support real-time communication among mobile units. EURASIPJournal on Wireless Communications and Networking, 2005.
69
70 REFERÊNCIAS
[15] Paulo Pedreiras Luis S.Lopes Frederico Santos, Luis Almeida e Tullio Facchietti. Anadaptive tdma protocol for soft real-time wireless communication among mobile autonomousagents. ?
[16] Rui Rocha. Building Volumetric Maps With Cooperative Mobile Robots and UsefulInformation Sharing â A Distributed Control Approach Based On Entropy. Tese dedoutoramento, Faculdade de Engenharia da Universidade do Porto, 2005.
[17] Matthew S. Gast. 802.11 Wireless Network The Definitive Guide. O’Reilly, 2002.
[18] Jeffrey B. Carruthers. Wireless infrared communications. ?, 2002.
[19] Luis Oliveira. Mobile robot navigation based on ad-hoc rf communication.Tese de mestrado, Universidade de Aveiro - Departamento de Electronica,TelecomunicaçõeseIn f ormatica,2009.
[20] Finder system for fire-fighter location, acedido em http://www.i-a-i.com/view.asp?aid=105.
[21] Seikei University Masayoshi Aoki e Haruki Fujii. Inter-vehicle communication: Technical issueson vehicle control application. IEEE Communications Magazine, 1996.
[22] Fausto Carramate Zhi Wang Hongbin Li, Luis Almeida e Youxian Sun. Using low-power radiosfor mobile robots navigation. ?
[23] Xinrong Li. Collaborative localization with received signal strength in wireless sensor network,2007. IEEE Transactions On Vehicular Technology, Vol. 56, No. 6,.
[24] P. Planinsic K. Benkic, M. Malajner e Z. Cucej. Using rssi value for distance estimation in wirelesssensor networks based on zigbee, 2000.
[25] Xiang Ji e Hongyuan Zha. Sensor positioning in wireless ad-hoc sensor networks usingmutidimensional scaling. ?, 2004.
[26] Fausto Carramate Zhi Wang Hongbin Li, Luis Almeida e Youxian Sun. Connectivity-aware motioncontrol among autonomous mobile units. ?, 2008.
[27] Artur Moura. Antenas e propagacao. 5 diaporamas. Acessivel na Faculdade de Engenharia daUniversidade do Porto.
[28] Datasheet do Modulo RF04, acedido em http://www.robot-electronics.co.uk/htm/rf04tech.htm.
[29] Tutorial sobre Libpcap, acedido em http://networksecurity.org.ua/0596007949/networkst-chp-10-sect-1.html.
[30] Página Oficial do Radiotap, acedido em http://www.radiotap.org/.
[31] Datasheet do Modulo CM02, acedido em http://www.robot-electronics.co.uk/htm/cm02tech.htm.
Versão 1.0 (14 de Julho de 2010)





























