Embed Size (px)
Citation preview

Encontro Nacional BETÃO ESTRUTURAL - BE2016 FCTUC – 2 a 4 de novembro de 2016
Análise do desempenho de um sistema para monitorização de deslocamentos em estruturas baseado em GNSS e em técnicas de
fusão multisensor
Rui Seabra1 Daniel Magalhães2 Carlos Félix3 Carlos Rodrigues4
Resumo A medição de deslocamentos, absolutos e relativos, de forma autónoma e com rigor submilimétrico, tem sido objeto de investigação no domínio da monitorização estrutural. Os sistemas globais de navegação por satélite (GNSS) apresentam, nesse contexto, características particularmente apelativas das quais se destaca a dispensa de qualquer tipo de referência terrestre. Estes sistemas estão, no entanto, geralmente, associados a limitações de precisão que acabam por comprometer a sua aplicação efetiva na monitorização de estruturas da engenharia civil. Neste trabalho, procurando caracterizar e melhorar o campo de aplicação dos sistemas GNSS na monitorização estrutural, recorre-se a algoritmos de processamento do respetivo sinal baseados na integração do GNSS com observações multissensoriais também recolhidas na estrutura. Fundamenta-se a avaliação do desempenho de um sistema para monitorização de deslocamentos baseado no GNSS e em técnicas de fusão multisensor com um modelo laboratorial preparado para o efeito e munido de diferentes tipos de sensores: i) recetores GNSS, ii) acelerómetros, iii) inclinómetros, iv) extensómetros, e v) LVDTs. Sujeita-se o modelo a um conjunto de ensaios em diferentes condições e aplica-se uma técnica de fusão multisensor. Apresenta-se aqui a comparação dos respetivos resultados com outros sistemas de medição de rigor comprovado. Palavras-chave: Monitorização estrutural; Medição de deslocamentos; GNSS; Fusão multisensor 1. INTRODUÇÃO A monitorização estrutural tem o seu fundamento no acompanhamento do desempenho das estruturas com recurso a técnicas de análise experimental assentes na medição de grandezas selecionadas. Das várias grandezas de interesse, a medição de deslocamentos da estrutura revela ser um dos indicadores mais efetivos e mais almejados [1]. Pese embora a sua importância, esta medição tem sido, no entanto, fortemente afetada pela complexidade e falta de rigor dos meios de medição, o que dificulta a sua execução na maioria das estruturas.
1 Universidade do Porto, Faculdade de Engenharia, CONSTRUCT, Porto, Portugal; e-mail: [email protected] 2 Universidade do Porto, Faculdade de Engenharia, CONSTRUCT, Porto, Portugal; e-mail: [email protected] 3 Instituto Politécnico do Porto, Instituto Superior de Engenharia, CONSTRUCT, Porto, Portugal; e-mail: [email protected] 4 Instituto Politécnico do Porto, Instituto Superior de Engenharia, CONSTRUCT, Porto, Portugal; e-mail: [email protected]

Seabra, Magalhães, Félix e Rodrigues
2
Ao longo dos últimos anos, os sistemas de posicionamento por satélite (GNSS) têm despertado interesse para esse fim, debelando alguns dos entraves anteriores. As vantagens da utilização do GNSS estendem-se ao facto de utilizarem um referencial espacial tridimensional exterior à estrutura, assegurarem o estabelecimento de um referencial temporal de elevada qualidade, operarem em praticamente todas as condições atmosféricas e envolverem equipamentos de fácil instalação e robustez [2]. Verifica-se, porém, que as medidas GNSS são afetadas por um conjunto de erros provocados por fenómenos naturais e artificiais. Por conseguinte, a precisão hoje obtida diretamente a partir da recolha das coordenadas fornecidas pelo sistema, de ordem centimétrica, fica aquém da maioria dos requisitos inerentes à monitorização de deslocamentos na engenharia de estruturas. Procurando mitigar esta limitação, a combinação do GNSS com os sensores convencionais apresenta-se como uma ferramenta com elevado potencial. Recorrendo a técnicas de fusão multisensor, torna-se possível potenciar as melhores características de cada sensor e, assim, melhorar a qualidade dos resultados obtidos. A obtenção da componente estática do deslocamento a partir do GNSS e o seu complemento com os deslocamentos dinâmicos estimados a partir de acelerações medidas é um exemplo paradigmático desta abordagem. Neste momento são já vários os exemplos da aplicação do GNSS na monitorização estrutural por todo o mundo. A título ilustrativo, destaca-se a utilização de recetores GNSS com o objetivo de monitorizar os deslocamentos dinâmicos da Calgary Tower; os ensaios realizados na Humber Bridge, no Reino Unido, e a monitorização experimental de um dos pilares do Viaduto do Corgo [3, 4]. 2. SISTEMAS GNSS E FUSÃO MULTISENSOR PARA MEDIÇÃO DE DESLOCAMENTOS A medição de deslocamentos com recurso ao GNSS, assente em técnicas diferenciais de posicionamento (por exemplo, DGNSS-RTK), tem revelado um desempenho superior quando em causa está a caracterização de movimentos quasi-estáticos. Em condições ideais, os respetivos erros de medição situam-se abaixo do milímetro. Porém, estas mesmas técnicas não são capazes de caracterizar com o mesmo rigor alterações rápidas de posição. Vários estudos relevam um incremento muito significativo dos erros de medição quando a frequência dos deslocamentos ultrapassa os 2 Hz [5]. Por sua vez, verifica-se que os acelerómetros de precisão revelam o seu melhor desempenho precisamente na gama de frequências onde o GNSS é limitado. Por esta via, a componente dinâmica dos deslocamentos pode ser estimada a partir da dupla integração, no domínio do tempo, das acelerações medidas com recurso a acelerómetros. A Eq. (1) traduz a obtenção dos deslocamentos dinâmicos a partir da aceleração:
= + ⋅ +
(1)
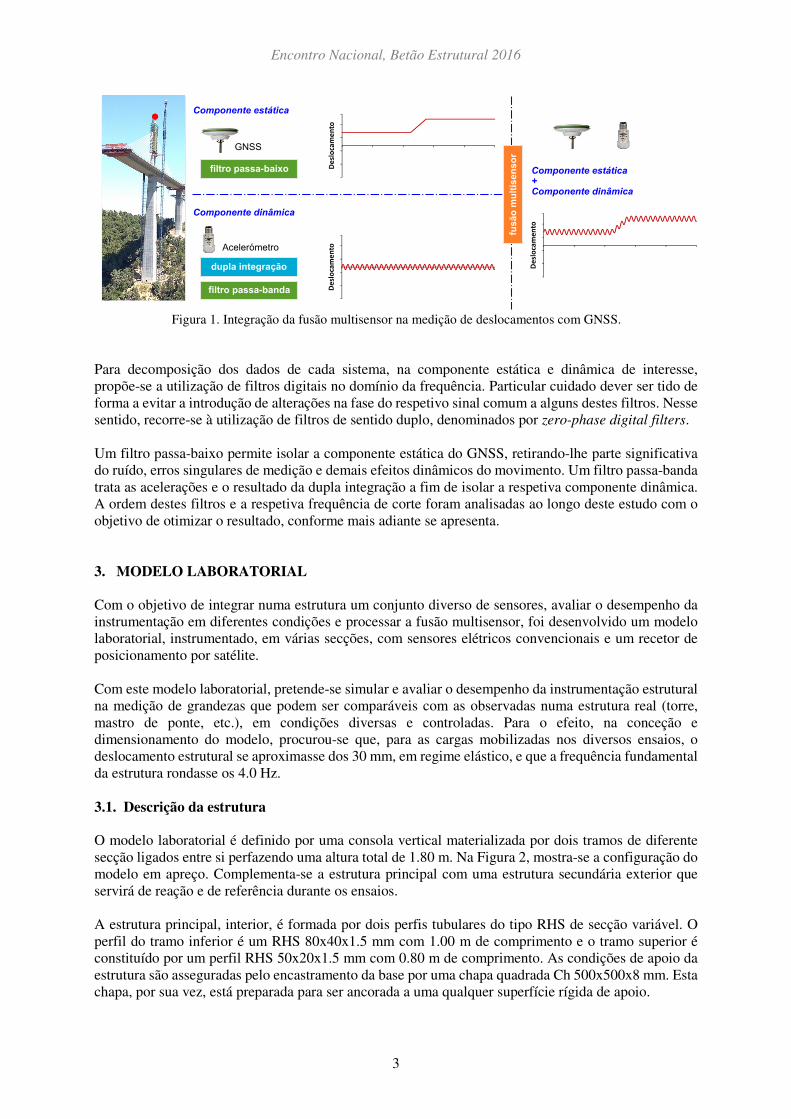
onde e representam o deslocamento e a aceleração no instante , respetivamente, e e expressam a posição inicial e a velocidade inicial, respetivamente. Estes dois últimos parâmetros não podem ser determinados por via dos acelerómetros e são geralmente eliminados da equação, limitando assim o resultado, exclusivamente, à componente dinâmica do deslocamento. Neste trabalho, os dados provenientes dos acelerómetros e do GNSS combinam-se depois num algoritmo de fusão multisensor. A Figura 1 revela, de forma esquemática, a base deste algoritmo. De forma a tirar partido do melhor de cada sistema, os deslocamentos de baixa frequência são extraídos do GNSS e os deslocamentos de mais elevada frequência são determinados a partir das acelerações medidas. No final, estas duas componentes do deslocamento são combinadas, resultando na caracterização do deslocamento total.
Encontro Nacional, Betão Estrutural 2016
3
Figura 1. Integração da fusão multisensor na medição de deslocamentos com GNSS.
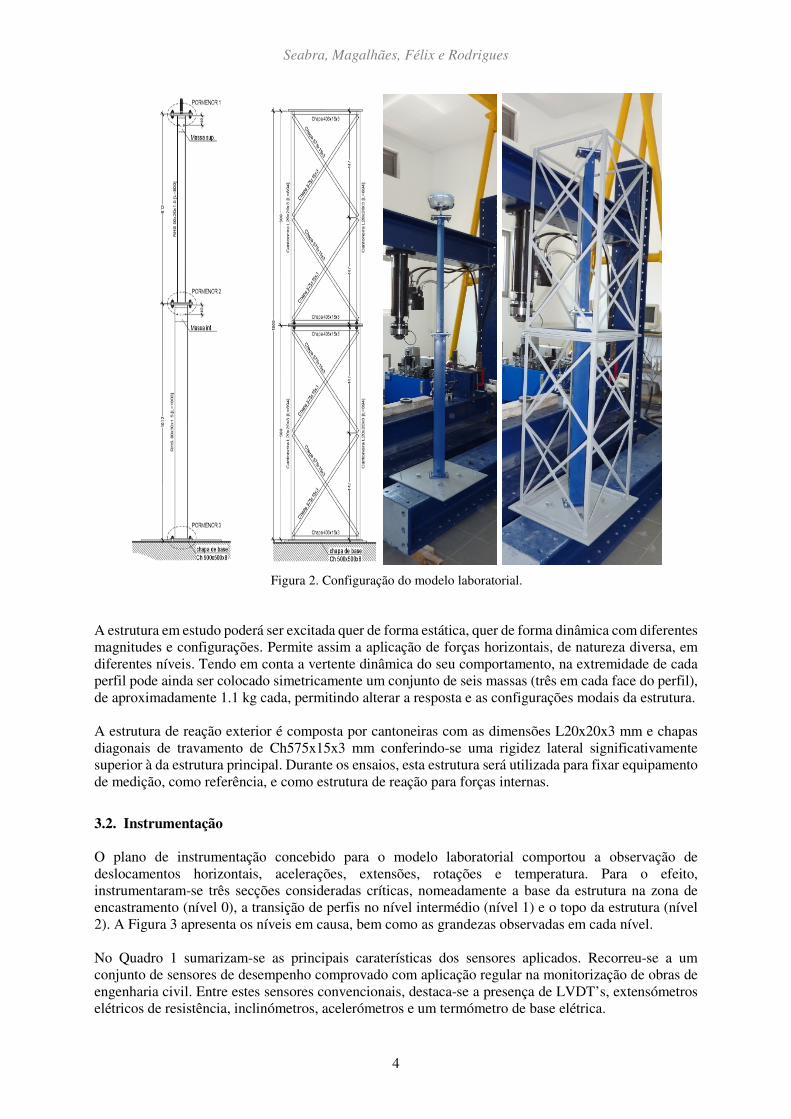
Para decomposição dos dados de cada sistema, na componente estática e dinâmica de interesse, propõe-se a utilização de filtros digitais no domínio da frequência. Particular cuidado dever ser tido de forma a evitar a introdução de alterações na fase do respetivo sinal comum a alguns destes filtros. Nesse sentido, recorre-se à utilização de filtros de sentido duplo, denominados por zero-phase digital filters. Um filtro passa-baixo permite isolar a componente estática do GNSS, retirando-lhe parte significativa do ruído, erros singulares de medição e demais efeitos dinâmicos do movimento. Um filtro passa-banda trata as acelerações e o resultado da dupla integração a fim de isolar a respetiva componente dinâmica. A ordem destes filtros e a respetiva frequência de corte foram analisadas ao longo deste estudo com o objetivo de otimizar o resultado, conforme mais adiante se apresenta. 3. MODELO LABORATORIAL Com o objetivo de integrar numa estrutura um conjunto diverso de sensores, avaliar o desempenho da instrumentação em diferentes condições e processar a fusão multisensor, foi desenvolvido um modelo laboratorial, instrumentado, em várias secções, com sensores elétricos convencionais e um recetor de posicionamento por satélite. Com este modelo laboratorial, pretende-se simular e avaliar o desempenho da instrumentação estrutural na medição de grandezas que podem ser comparáveis com as observadas numa estrutura real (torre, mastro de ponte, etc.), em condições diversas e controladas. Para o efeito, na conceção e dimensionamento do modelo, procurou-se que, para as cargas mobilizadas nos diversos ensaios, o deslocamento estrutural se aproximasse dos 30 mm, em regime elástico, e que a frequência fundamental da estrutura rondasse os 4.0 Hz. 3.1. Descrição da estrutura O modelo laboratorial é definido por uma consola vertical materializada por dois tramos de diferente secção ligados entre si perfazendo uma altura total de 1.80 m. Na Figura 2, mostra-se a configuração do modelo em apreço. Complementa-se a estrutura principal com uma estrutura secundária exterior que servirá de reação e de referência durante os ensaios. A estrutura principal, interior, é formada por dois perfis tubulares do tipo RHS de secção variável. O perfil do tramo inferior é um RHS 80x40x1.5 mm com 1.00 m de comprimento e o tramo superior é constituído por um perfil RHS 50x20x1.5 mm com 0.80 m de comprimento. As condições de apoio da estrutura são asseguradas pelo encastramento da base por uma chapa quadrada Ch 500x500x8 mm. Esta chapa, por sua vez, está preparada para ser ancorada a uma qualquer superfície rígida de apoio.
GNSS
Acelerómetro
dupla integração
filtro passa-baixo
filtro passa-banda
Componente dinâmica
Componente estática
fusão
mu
ltis
en
so
r
-12
-7
-2
3
8
Deslocamento
-12
-7
-2
3
8
Deslocamento
-12
-7
-2
3
8
Deslocamento
Componente estática+Componente dinâmica
Seabra, Magalhães, Félix e Rodrigues
4
Figura 2. Configuração do modelo laboratorial.
A estrutura em estudo poderá ser excitada quer de forma estática, quer de forma dinâmica com diferentes magnitudes e configurações. Permite assim a aplicação de forças horizontais, de natureza diversa, em diferentes níveis. Tendo em conta a vertente dinâmica do seu comportamento, na extremidade de cada perfil pode ainda ser colocado simetricamente um conjunto de seis massas (três em cada face do perfil), de aproximadamente 1.1 kg cada, permitindo alterar a resposta e as configurações modais da estrutura. A estrutura de reação exterior é composta por cantoneiras com as dimensões L20x20x3 mm e chapas diagonais de travamento de Ch575x15x3 mm conferindo-se uma rigidez lateral significativamente superior à da estrutura principal. Durante os ensaios, esta estrutura será utilizada para fixar equipamento de medição, como referência, e como estrutura de reação para forças internas.
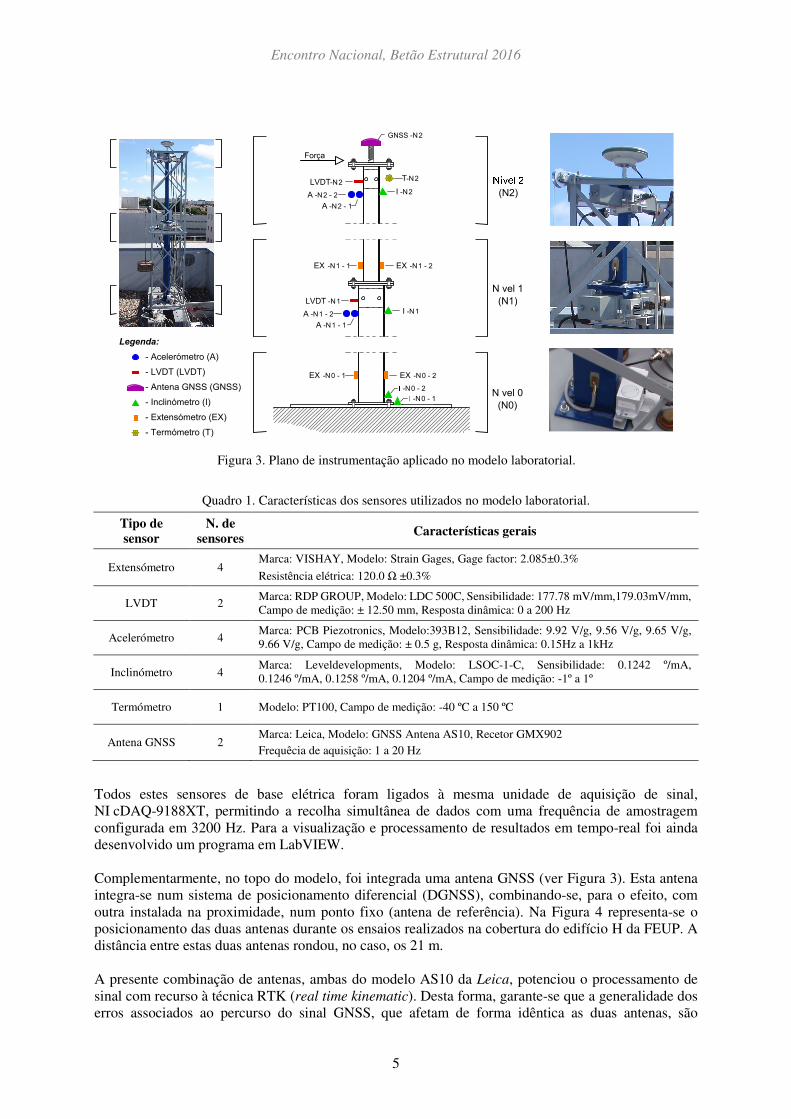
3.2. Instrumentação O plano de instrumentação concebido para o modelo laboratorial comportou a observação de deslocamentos horizontais, acelerações, extensões, rotações e temperatura. Para o efeito, instrumentaram-se três secções consideradas críticas, nomeadamente a base da estrutura na zona de encastramento (nível 0), a transição de perfis no nível intermédio (nível 1) e o topo da estrutura (nível 2). A Figura 3 apresenta os níveis em causa, bem como as grandezas observadas em cada nível. No Quadro 1 sumarizam-se as principais caraterísticas dos sensores aplicados. Recorreu-se a um conjunto de sensores de desempenho comprovado com aplicação regular na monitorização de obras de engenharia civil. Entre estes sensores convencionais, destaca-se a presença de LVDT’s, extensómetros elétricos de resistência, inclinómetros, acelerómetros e um termómetro de base elétrica.
Encontro Nacional, Betão Estrutural 2016
5
Figura 3. Plano de instrumentação aplicado no modelo laboratorial.
Quadro 1. Características dos sensores utilizados no modelo laboratorial.
Tipo de sensor
N. de sensores
Características gerais
Extensómetro 4 Marca: VISHAY, Modelo: Strain Gages, Gage factor: 2.085±0.3%
Resistência elétrica: 120.0 Ω ±0.3%
LVDT 2 Marca: RDP GROUP, Modelo: LDC 500C, Sensibilidade: 177.78 mV/mm,179.03mV/mm, Campo de medição: ± 12.50 mm, Resposta dinâmica: 0 a 200 Hz
Acelerómetro 4 Marca: PCB Piezotronics, Modelo:393B12, Sensibilidade: 9.92 V/g, 9.56 V/g, 9.65 V/g, 9.66 V/g, Campo de medição: ± 0.5 g, Resposta dinâmica: 0.15Hz a 1kHz
Inclinómetro 4 Marca: Leveldevelopments, Modelo: LSOC-1-C, Sensibilidade: 0.1242 º/mA, 0.1246 º/mA, 0.1258 º/mA, 0.1204 º/mA, Campo de medição: -1º a 1º
Termómetro 1 Modelo: PT100, Campo de medição: -40 ºC a 150 ºC
Antena GNSS 2 Marca: Leica, Modelo: GNSS Antena AS10, Recetor GMX902 Frequêcia de aquisição: 1 a 20 Hz
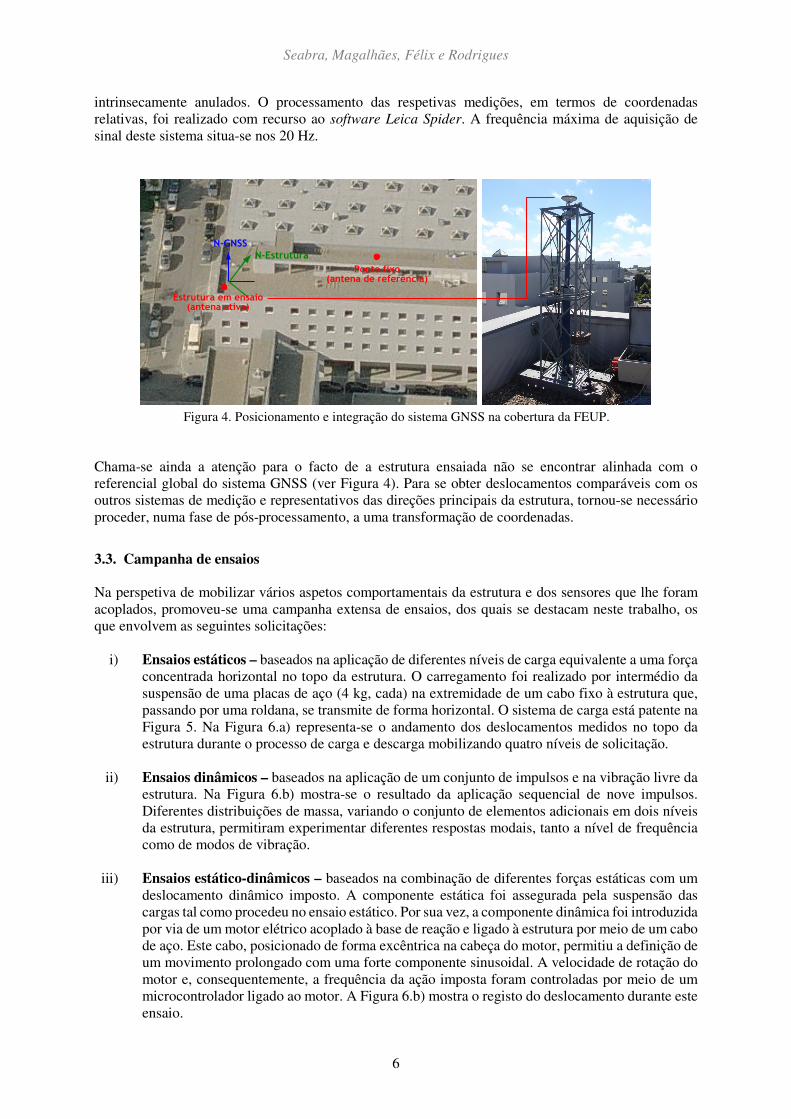
Todos estes sensores de base elétrica foram ligados à mesma unidade de aquisição de sinal, NI cDAQ-9188XT, permitindo a recolha simultânea de dados com uma frequência de amostragem configurada em 3200 Hz. Para a visualização e processamento de resultados em tempo-real foi ainda desenvolvido um programa em LabVIEW. Complementarmente, no topo do modelo, foi integrada uma antena GNSS (ver Figura 3). Esta antena integra-se num sistema de posicionamento diferencial (DGNSS), combinando-se, para o efeito, com outra instalada na proximidade, num ponto fixo (antena de referência). Na Figura 4 representa-se o posicionamento das duas antenas durante os ensaios realizados na cobertura do edifício H da FEUP. A distância entre estas duas antenas rondou, no caso, os 21 m. A presente combinação de antenas, ambas do modelo AS10 da Leica, potenciou o processamento de sinal com recurso à técnica RTK (real time kinematic). Desta forma, garante-se que a generalidade dos erros associados ao percurso do sinal GNSS, que afetam de forma idêntica as duas antenas, são
N
(N2)
N í vel 1
(N1)
N í vel 0
(N0)I - N0 - 1
I - N0 - 2
EX - N0 - 2EX - N0 - 1
I - N1
LVDT - N1
EX - N1 - 1
A - N1 - 2
A - N1 - 1
EX - N1 - 2
Força
A - N2 - 2
A - N2 - 1
I - N2
T- N2
GNSS - N2
LVDT- N2
- Inclinómetro (I)
- Extensómetro (EX)
- Antena GNSS (GNSS)
- Acelerómetro (A)
- LVDT (LVDT)
- Termómetro (T)
Legenda:
Seabra, Magalhães, Félix e Rodrigues
6
intrinsecamente anulados. O processamento das respetivas medições, em termos de coordenadas relativas, foi realizado com recurso ao software Leica Spider. A frequência máxima de aquisição de sinal deste sistema situa-se nos 20 Hz.
Figura 4. Posicionamento e integração do sistema GNSS na cobertura da FEUP.
Chama-se ainda a atenção para o facto de a estrutura ensaiada não se encontrar alinhada com o referencial global do sistema GNSS (ver Figura 4). Para se obter deslocamentos comparáveis com os outros sistemas de medição e representativos das direções principais da estrutura, tornou-se necessário proceder, numa fase de pós-processamento, a uma transformação de coordenadas.
3.3. Campanha de ensaios Na perspetiva de mobilizar vários aspetos comportamentais da estrutura e dos sensores que lhe foram acoplados, promoveu-se uma campanha extensa de ensaios, dos quais se destacam neste trabalho, os que envolvem as seguintes solicitações:
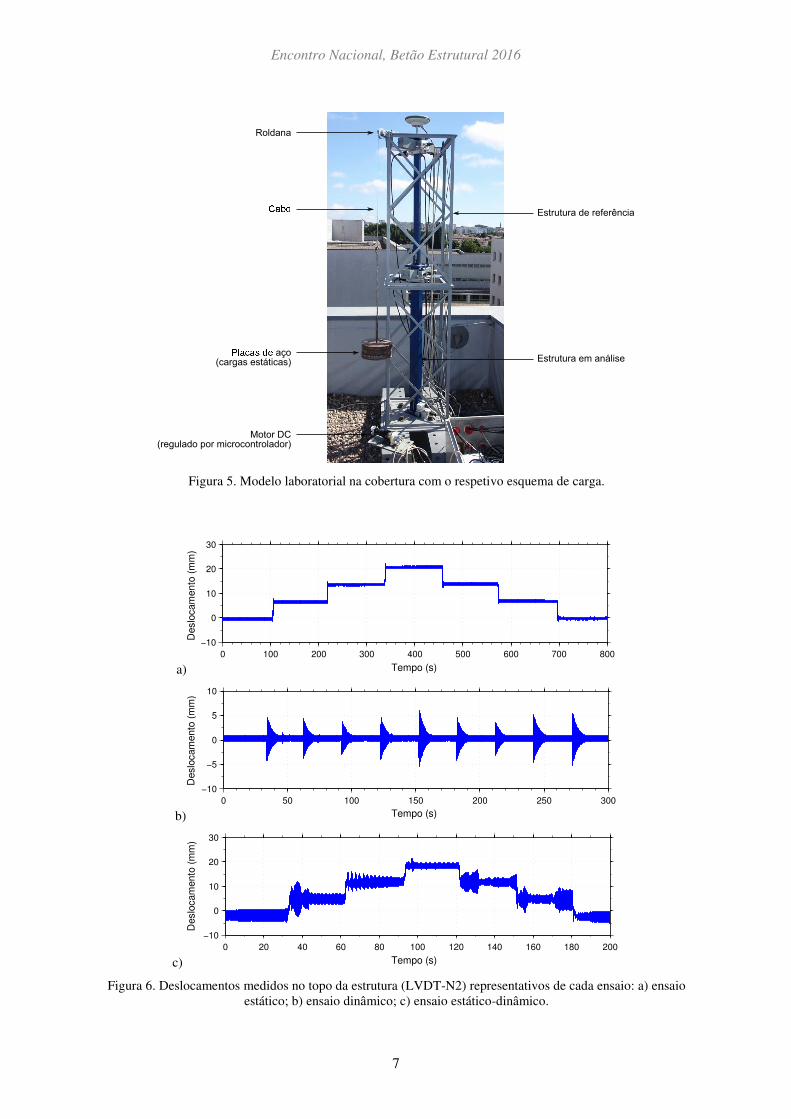
i) Ensaios estáticos – baseados na aplicação de diferentes níveis de carga equivalente a uma força concentrada horizontal no topo da estrutura. O carregamento foi realizado por intermédio da suspensão de uma placas de aço (4 kg, cada) na extremidade de um cabo fixo à estrutura que, passando por uma roldana, se transmite de forma horizontal. O sistema de carga está patente na Figura 5. Na Figura 6.a) representa-se o andamento dos deslocamentos medidos no topo da estrutura durante o processo de carga e descarga mobilizando quatro níveis de solicitação.
ii) Ensaios dinâmicos – baseados na aplicação de um conjunto de impulsos e na vibração livre da estrutura. Na Figura 6.b) mostra-se o resultado da aplicação sequencial de nove impulsos. Diferentes distribuições de massa, variando o conjunto de elementos adicionais em dois níveis da estrutura, permitiram experimentar diferentes respostas modais, tanto a nível de frequência como de modos de vibração.
iii) Ensaios estático-dinâmicos – baseados na combinação de diferentes forças estáticas com um deslocamento dinâmico imposto. A componente estática foi assegurada pela suspensão das cargas tal como procedeu no ensaio estático. Por sua vez, a componente dinâmica foi introduzida por via de um motor elétrico acoplado à base de reação e ligado à estrutura por meio de um cabo de aço. Este cabo, posicionado de forma excêntrica na cabeça do motor, permitiu a definição de um movimento prolongado com uma forte componente sinusoidal. A velocidade de rotação do motor e, consequentemente, a frequência da ação imposta foram controladas por meio de um microcontrolador ligado ao motor. A Figura 6.b) mostra o registo do deslocamento durante este ensaio.
Ponto fixo(antena de referência)
N-GNSSN-Estrutura
Estrutura em ensaio(antena ativa)
Encontro Nacional, Betão Estrutural 2016
7
Figura 5. Modelo laboratorial na cobertura com o respetivo esquema de carga.
a)
b)
c)
Figura 6. Deslocamentos medidos no topo da estrutura (LVDT-N2) representativos de cada ensaio: a) ensaio estático; b) ensaio dinâmico; c) ensaio estático-dinâmico.
C
P aço(cargas estáticas)
Motor DC(regulado por microcontrolador)
Roldana
Estrutura em análise
Estrutura de referência
0 100 200 300 400 500 600 700 800
−10
0
10
20
30
Elapsed time (s)
Dis
pla
ce
me
nt
(mm
)
0 50 100 150 200 250 300
−10
−5
0
5
10
Elapsed time (s)
Dis
pla
ce
me
nt
(mm
)
0 20 40 60 80 100 120 140 160 180 200
−10
0
10
20
30
Elapsed time (s)
Dis
pla
cem
ent (m
m)
Deslo
cam
ento
(m
m)
Deslo
cam
ento
(m
m)
Deslo
cam
ento
(m
m)
Tempo (s)
Tempo (s)
Tempo (s)
Seabra, Magalhães, Félix e Rodrigues
8
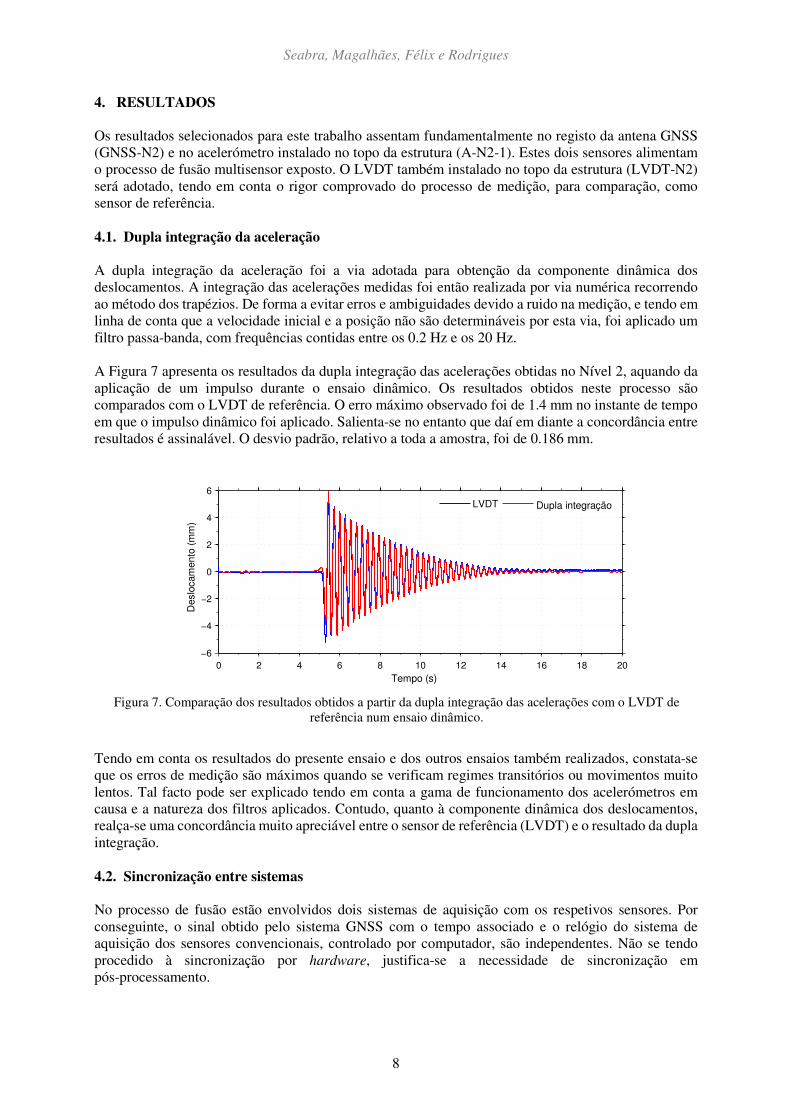
4. RESULTADOS Os resultados selecionados para este trabalho assentam fundamentalmente no registo da antena GNSS (GNSS-N2) e no acelerómetro instalado no topo da estrutura (A-N2-1). Estes dois sensores alimentam o processo de fusão multisensor exposto. O LVDT também instalado no topo da estrutura (LVDT-N2) será adotado, tendo em conta o rigor comprovado do processo de medição, para comparação, como sensor de referência. 4.1. Dupla integração da aceleração A dupla integração da aceleração foi a via adotada para obtenção da componente dinâmica dos deslocamentos. A integração das acelerações medidas foi então realizada por via numérica recorrendo ao método dos trapézios. De forma a evitar erros e ambiguidades devido a ruido na medição, e tendo em linha de conta que a velocidade inicial e a posição não são determináveis por esta via, foi aplicado um filtro passa-banda, com frequências contidas entre os 0.2 Hz e os 20 Hz. A Figura 7 apresenta os resultados da dupla integração das acelerações obtidas no Nível 2, aquando da aplicação de um impulso durante o ensaio dinâmico. Os resultados obtidos neste processo são comparados com o LVDT de referência. O erro máximo observado foi de 1.4 mm no instante de tempo em que o impulso dinâmico foi aplicado. Salienta-se no entanto que daí em diante a concordância entre resultados é assinalável. O desvio padrão, relativo a toda a amostra, foi de 0.186 mm.
Figura 7. Comparação dos resultados obtidos a partir da dupla integração das acelerações com o LVDT de referência num ensaio dinâmico.
Tendo em conta os resultados do presente ensaio e dos outros ensaios também realizados, constata-se que os erros de medição são máximos quando se verificam regimes transitórios ou movimentos muito lentos. Tal facto pode ser explicado tendo em conta a gama de funcionamento dos acelerómetros em causa e a natureza dos filtros aplicados. Contudo, quanto à componente dinâmica dos deslocamentos, realça-se uma concordância muito apreciável entre o sensor de referência (LVDT) e o resultado da dupla integração. 4.2. Sincronização entre sistemas No processo de fusão estão envolvidos dois sistemas de aquisição com os respetivos sensores. Por conseguinte, o sinal obtido pelo sistema GNSS com o tempo associado e o relógio do sistema de aquisição dos sensores convencionais, controlado por computador, são independentes. Não se tendo procedido à sincronização por hardware, justifica-se a necessidade de sincronização em pós-processamento.
0 2 4 6 8 10 12 14 16 18 20
−6
−4
−2
0
2
4
6
Elapsed time (s)
Dis
pla
ce
me
nt
(mm
)
LVDT double integration
Deslo
cam
ento
(m
m)
Tempo (s)
LVDT Dupla integração
Encontro Nacional, Betão Estrutural 2016
9
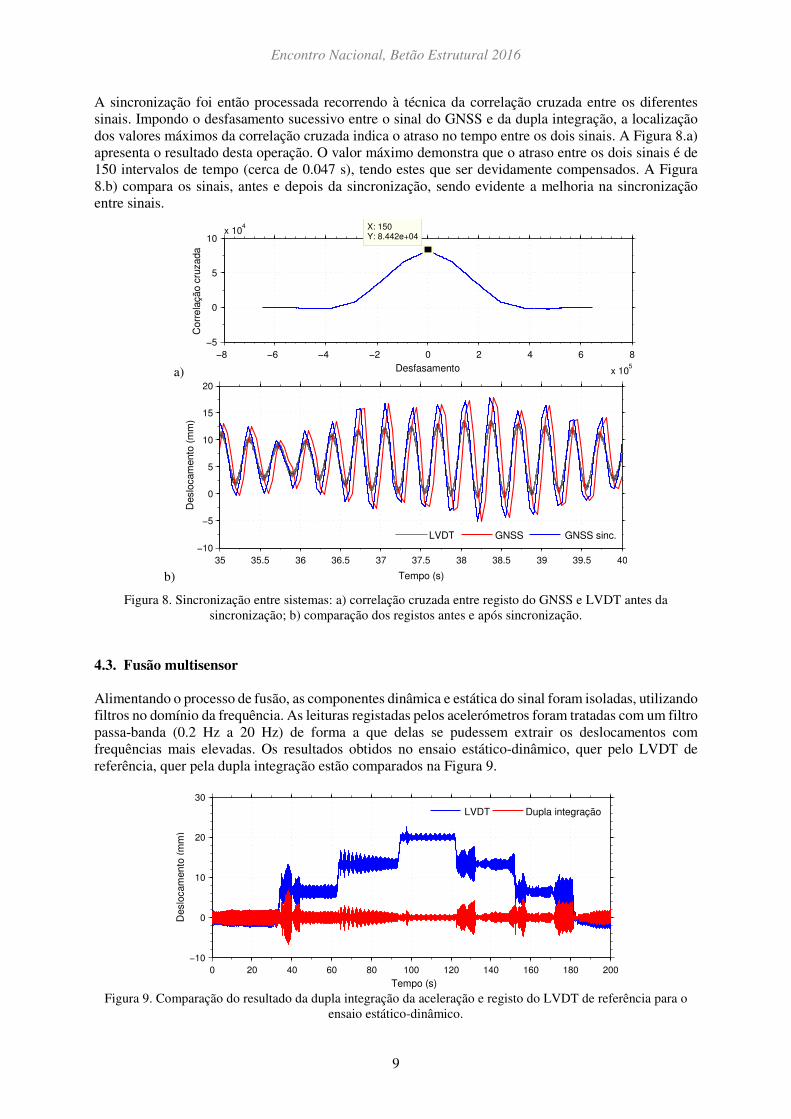
A sincronização foi então processada recorrendo à técnica da correlação cruzada entre os diferentes sinais. Impondo o desfasamento sucessivo entre o sinal do GNSS e da dupla integração, a localização dos valores máximos da correlação cruzada indica o atraso no tempo entre os dois sinais. A Figura 8.a) apresenta o resultado desta operação. O valor máximo demonstra que o atraso entre os dois sinais é de 150 intervalos de tempo (cerca de 0.047 s), tendo estes que ser devidamente compensados. A Figura 8.b) compara os sinais, antes e depois da sincronização, sendo evidente a melhoria na sincronização entre sinais.
a)
b)
Figura 8. Sincronização entre sistemas: a) correlação cruzada entre registo do GNSS e LVDT antes da sincronização; b) comparação dos registos antes e após sincronização.
4.3. Fusão multisensor
Alimentando o processo de fusão, as componentes dinâmica e estática do sinal foram isoladas, utilizando filtros no domínio da frequência. As leituras registadas pelos acelerómetros foram tratadas com um filtro passa-banda (0.2 Hz a 20 Hz) de forma a que delas se pudessem extrair os deslocamentos com frequências mais elevadas. Os resultados obtidos no ensaio estático-dinâmico, quer pelo LVDT de referência, quer pela dupla integração estão comparados na Figura 9.
Figura 9. Comparação do resultado da dupla integração da aceleração e registo do LVDT de referência para o
ensaio estático-dinâmico.
−8 −6 −4 −2 0 2 4 6 8
x 105
−5
0
5
10x 10
4 X: 150Y: 8.442e+04
Lag
Cro
ss−
corr
ela
tion
35 35.5 36 36.5 37 37.5 38 38.5 39 39.5 40
−10
−5
0
5
10
15
20
Elapsed time (s)
Dis
pla
ce
me
nt
(mm
)
LVDT GNSS GNSS sync
0 20 40 60 80 100 120 140 160 180 200
−10
0
10
20
30
Elapsed time (s)
Dis
pla
cem
ent (m
m)
LVDT double integration
Deslo
cam
ento
(m
m)
Corr
ela
ção c
ruzada
Tempo (s)
Desfasamento
Deslo
cam
ento
(m
m)
Tempo (s)
LVDT Dupla integração
LVDT GNSS GNSS sinc.
Seabra, Magalhães, Félix e Rodrigues
10
Por sua vez, ao sinal do GNSS foi aplicado um filtro passa-baixo (limitado a 0.2 Hz), que permitiu extrair a componente estática do sinal. A Figura 10 apresenta o sinal do GNSS comparado com o LVDT de referência.
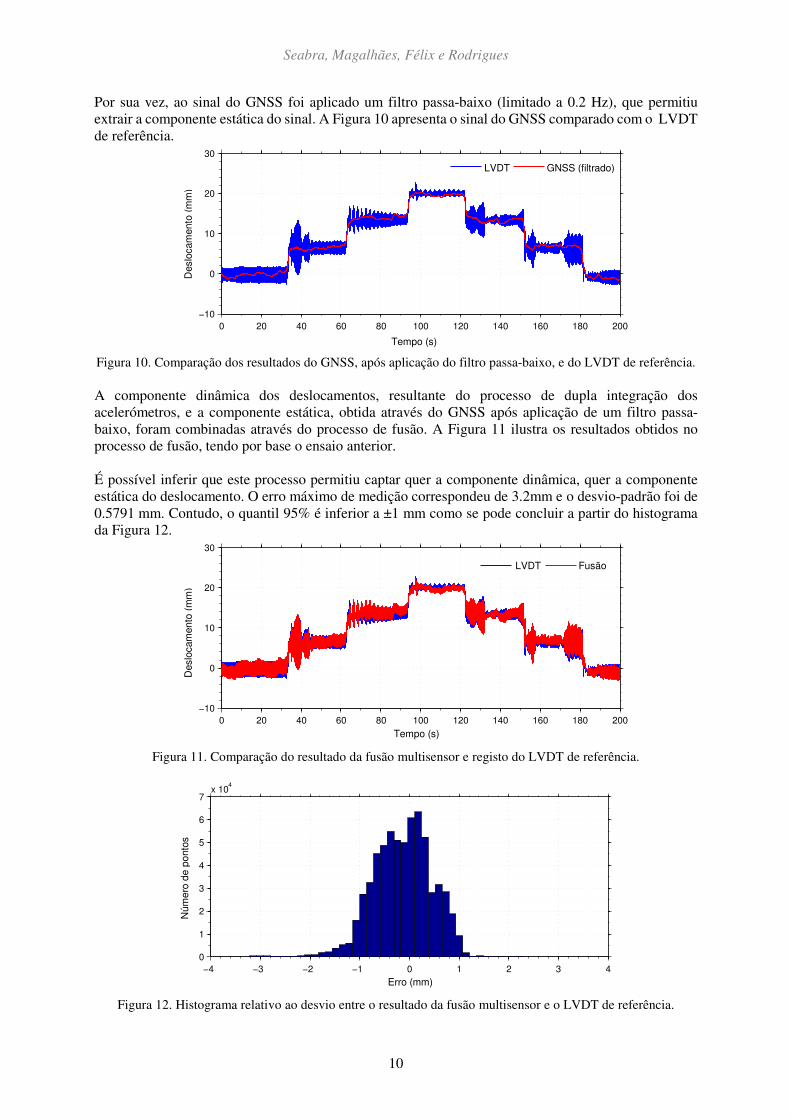
Figura 10. Comparação dos resultados do GNSS, após aplicação do filtro passa-baixo, e do LVDT de referência. A componente dinâmica dos deslocamentos, resultante do processo de dupla integração dos acelerómetros, e a componente estática, obtida através do GNSS após aplicação de um filtro passa-baixo, foram combinadas através do processo de fusão. A Figura 11 ilustra os resultados obtidos no processo de fusão, tendo por base o ensaio anterior. É possível inferir que este processo permitiu captar quer a componente dinâmica, quer a componente estática do deslocamento. O erro máximo de medição correspondeu de 3.2mm e o desvio-padrão foi de 0.5791 mm. Contudo, o quantil 95% é inferior a ±1 mm como se pode concluir a partir do histograma da Figura 12.
Figura 11. Comparação do resultado da fusão multisensor e registo do LVDT de referência.
Figura 12. Histograma relativo ao desvio entre o resultado da fusão multisensor e o LVDT de referência.
0 20 40 60 80 100 120 140 160 180 200
−10
0
10
20
30
Elapsed time (s)
Dis
pla
cem
ent (m
m)
LVDT GNSS (filtered)
0 20 40 60 80 100 120 140 160 180 200
−10
0
10
20
30
Elapsed time (s)
Dis
pla
cem
ent (m
m)
LVDT Fusion
−4 −3 −2 −1 0 1 2 3 4
0
1
2
3
4
5
6
7x 10
4
Number of points
Err
or
(mm
)D
eslo
cam
ento
(m
m)
Tempo (s)
Deslo
cam
ento
(m
m)
Tempo (s)
LVDT Fusão
LVDT GNSS (filtrado)
Núm
ero
de p
onto
s
Erro (mm)
Encontro Nacional, Betão Estrutural 2016
11
5. CONCLUSÕES Com recurso a um modelo laboratorial, procurou-se avaliar o desempenho de instrumentação com aplicação comum na monitorização de estruturas de engenharia civil. Neste trabalho, deu-se destaque aos resultados do GNSS e dos acelerómetros. As respetivas características complementares potenciam a sua combinação motivando a fusão multisensor. Propôs-se um algoritmo de fusão multisensor, entre o GNSS e acelerómetros, baseado na capacidade de isolar a componente estática e dinâmica de cada um. O recurso a filtros digitais no domínio da frequência, aplicados em sentido duplo (dando origem aos denominados zero-phase digital filters) permitiu a realização desta decomposição com sucesso. A dupla integração das acelerações medidas provou ser adequada para estimar a componente dinâmica do respetivo deslocamento. Ficou, contudo, patente a perda do conteúdo estático inerente à capacidade de medição dos acelerómetros e do próprio processo de integração. O exemplo do ensaio estático-dinâmico apresentado é paradigmático. A fusão multisensor, entre o GNSS e o acelerómetro, revelou ser capaz de juntar o melhor dos dois sistemas. Os deslocamentos estáticos foram muito satisfatoriamente capturados pelo GNSS e isolados com a aplicação de um filtro passa-banda. Os deslocamentos dinâmicos foram estimados a partir das acelerações medidas pelo acelerómetro e isolados com recurso a um filtro passa-banda. Ao longo dos vários ensaios, realizados em condições diversas e controladas, os erros de medição associados à fusão multisensor revelaram ser inferiores a 1 mm dentro de um intervalo de confiança de 95%. Considera-se que estes são resultados promissores tendo em conta a aplicação do GNSS, aliado à fusão multisensor, na monitorização estrutural.
6. AGRADECIMENTOS Este trabalho foi financiado por: Projeto POCI-01-0145-FEDER-007457 - CONSTRUCT - Instituto de I&D em Estruturas e Construções - financiado pelo Fundo Europeu de Desenvolvimento Regional (FEDER), através do COMPETE2020 – Programa Operacional Competitividade e Internacionalização (POCI) e por fundos nacionais através da Fundação para a Ciência e a Tecnologia I.P.; e Projeto "Integração de dados GNSS e de acelerómetros na monitorização de grandes estruturas”, PTDC/ECM-EST/2131/2012, FCOMP-01-0124-FEDER-028861, cofinanciado pela Fundação para a Ciência e a Tecnologia I.P. (PIDDAC) e pelo Fundo Europeu de Desenvolvimento Regional (FEDER) através do COMPETE - Programa Operacional Fatores de Competitividade.
REFERÊNCIAS [1] Rodrigues, C.; Félix, C.; Figueiras, J. (2012). Fiber-Optic-Based Displacement Transducer to
Measure Bridge Deflections. Structural Health Monitoring - An International Journal, vol. 10 (2), pp. 147-156.
[2] Hoffman-Wellenhof, B.; Lichtenegger, B.; Wasle, E. (2008). GNSS Global Navigation Satellite Systems GPS, GLONASS, Galileo & more. Springer ISBN: 978-3-211-73012-6.
[3] Yu, J. et. al. (2014). Identification of dynamic displacements and modal frequencies of a medium-span suspension bridge using multimode GNSS processing. Engineering Structures, vol. 81, pp. 432-443.
[4] Pestana, A.; Lage, A.; Figueiredo, E.; Félix, C.; Figueiras, J. (2012). Monitorização GNSS de um pilar do Viaduto do Corgo. Encontro Nacional de Betão Estrutural BE2012.
[5] Hwang, J.; Yun, H.; Park, S.; Lee, D.; Hong, S. (2012). Optimal Methods of RTK-GPS/Accelerometer Integration to Monitor the Displacement of Structures. Sensors, vol. 12, pp. 1014–34.





























