Embed Size (px)
Citation preview

CADEIRA DE RODAS INTELIGENTEIntelligent Wheelchairs
Nome: Rodrigo Antonio Marques Braga
Orientadores:
Luís Paulo Reis – FEUP/ LIACC
António Paulo Moreira – FEUP/ ISR - P
NIAD&R - Distributed Artificial Intelligence & Robotics Group
Mestrado Integrado em Engenharia Informática e Computação
Seminário de Sistemas Inteligentes, Interacção e Multimédia

SUM
ÁRIO
Introdução
Estado da Arte
Plataforma
Simulador
Arquitectura SMA
Planeamento
3
8
12
17
21
24
2
Interface Multimodal 29
Conclusões 33
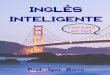
INTRODUÇÃO• Motivação
Aumento na faixa etária da populaçãoIncremento na taxa de idosos
Nos últimos 20 anos dobraram a quantidade de idosos em Portugal (fonte: noticiário SIC -19/10/2006)
Auxiliar indivíduos com deficiências motoras severas
Indivíduos com paralisia cerebralIndivíduos tetraplégicos
5 milhões de indivíduos nos EUA possuem limitações fisicas[22]
3Rodrigo Antonio Marques Braga
SUM
ÁRIO
IntroduçãoEstado da ArtePlataformaSimuladorArquitecturacontinuação…………..
38
121721….
Índice de envelhecimento da população no Estado de São Paulo e no Brasil(1970-2000).
1970 1980 1991 2000São Paulo 16,6 19,3 25,1 34,2Brasil 12,6 16,1 21,0 28,9Fonte: Censo Demográfico IBGE (1970, 1980, 1991 e 2000).

INTRO
DU
ÇÃO
Continuação...
4Rodrigo Antonio Marques Braga
Interesse dos clínicos nos serviços que uma CRI pode oferecer (6):
9 a 10% 9 a 10% dosdos pacientes pacientes que recebem treino para o uso das cadeiras de rodas motorizadas frequentemente encontram encontram grandegrande dificuldade dificuldade ououimpossibilidadeimpossibilidade de usar este equipamento no ADQ
Quando perguntado especificamente sobre pilotar ou a tarefa de manobrar, 40% 40% dosdos pacientespacientes relatam dificuldade dificuldade ouou impossibilidadeimpossibilidade
85% 85% dosdos clínicos clínicos entrevistados relataram que atendem atendem algunsalguns pacientes/ pacientes/ anosanos quem nãonão pode pode usarusar uma uma cadeiracadeira de rodas motorizada porque falta a falta a habilidadehabilidade motora, motora, forçaforça, , ouou precisão precisão visualvisual. . 32% 32% (27% 27% de todos os entrevistados) relataram: nºnº dos não dos não podem=podem= Nº Nº dosdospodempodem
±± 1/2 dos pacientes 1/2 dos pacientes incapazes incapazes de controlar uma cadeira de rodas motorizada por métodos convencionais, poderiampoderiam beneficiarbeneficiar--se se dede um um sistemasistema de de navegaçãonavegação automatizadoautomatizado

INTRO
DU
ÇÃO
Continuação...
Hipótese:Cadeira de rodas inteligente (CRI):
• Capaz de tornar mais prático e seguro odeslocamentos de pessoas que possuam dificuldadesmotoras (idosos e pessoas portadoras de deficiênciafísica)
Definição:CRI é um robô autônomo que possuem algumas funçõescomo o comportamento [32]:
• autónomo com desvio de obstáculo• cooperativo entre um grupo de CRI• colaborativo entre usuário e outros sistemas
5Rodrigo Antonio Marques Braga

Características desejáveis para as cadeiras de rodas inteligentes: Sistema Sensorial e de Actuação
Cadeira motorizada
Metodologias para criação trajectórias
Metodologias de Localização, Visão e Navegação
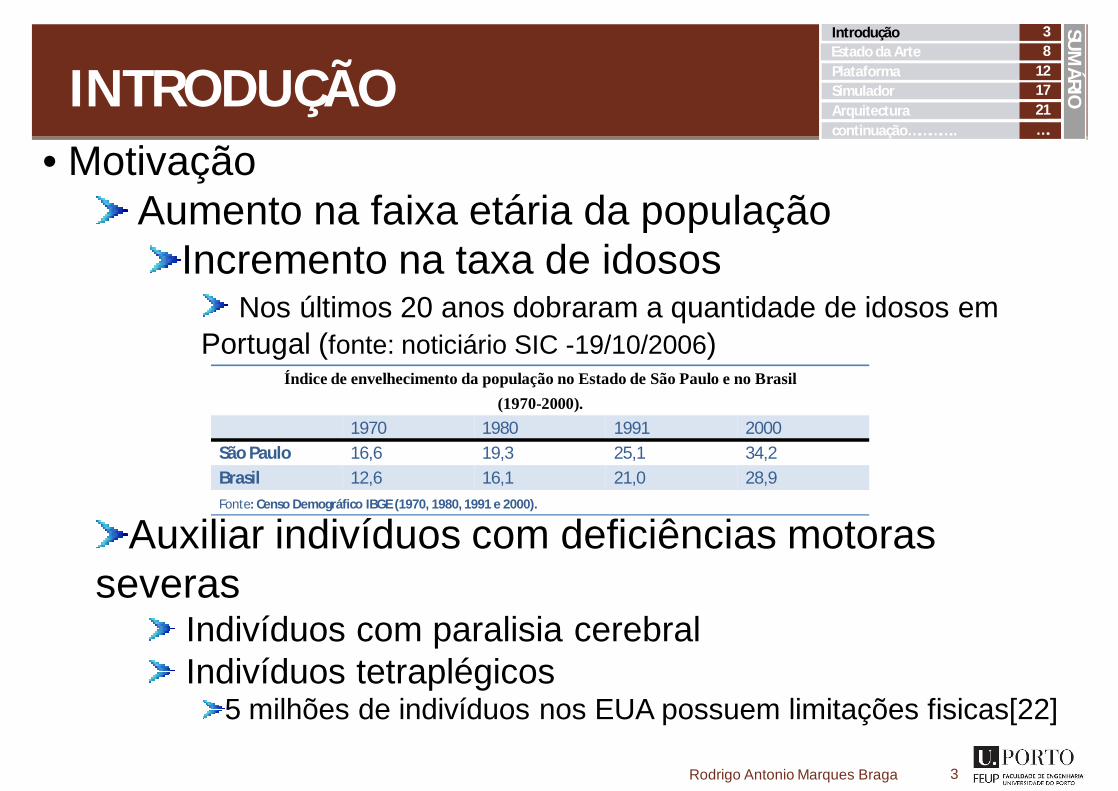
Modos de operação (Automático, Controlo compartilhado)
Planeamento inteligente
Sistema Multi-Agente (cooperativo, colaborativo)
INTRO
DU
ÇÃO
Continuação.....
6Rodrigo Antonio Marques Braga

INTRO
DU
ÇÃO
Continuação.....
Investigar e desenvolver novas metodologias de navegação, planeamento inteligente com o paradigma de multi-agentes para resolver problemas associados as cadeiras de rodas inteligentes
O trabalho deverá centrar-se no desenvolvimento de uma plataforma de desenvolvimento que permita desenvolver o controle semi-automático de acções de uma cadeira de rodas inteligente, simulação e aplicação numa cadeira de rodas real para testar e validar as metodologias
• Objectivos (Intellwheels – Projecto LIACC)
7Rodrigo Antonio Marques Braga

Estado da Arte
Nos últimos anos, muitas cadeiras de rodas inteligentes têmsido desenvolvidas (em 2006 mais de 30 publicações na IEEErelacionadas as CRI)
O primeiro projecto conceito de uma cadeira de rodasautónoma para deficiente físicos foi proposto por Madarasz em [6]
Hoyer e Holper [5] apresentaram uma arquitectura de umcontrole modular para uma cadeira de rodas omni-direcional
NavChair é descrita em [1] e suas funções características dedesvio de obstáculos, seguir paredes e passar por portas
8Rodrigo Antonio Marques Braga
SUM
ÁRIO
IntroduçãoEstado da Arte PlataformaSimuladorArquitecturacontinuação…………..
38
121721….

Estado da Arte
Cadeira de Rodas Inteligentes
Miller e Slak [8] projectaram o sistema Tin Man I (com três modosde operação):
• Humano a dirigir com desvio automático de obstáculo• mover-se ao longo de uma trajetória• mover para (x,y)
Funções ampliadas no Tin Man II:• Armazenar informações de viagens• retornar ao ponto de partida• seguir parede• passar por portas• ir para recarga de bateria
Wellman [15] propôs uma cadeira de rodas híbrida que éequipada com duas pernas adicionais a suas quatro rodas, parapermitir a mesma subir degraus e mover-se em terrenosacidentados.
FRIEND é um robô para reabilitação que consiste em uma cadeirade rodas motorizada e um MANUS manipulador [2]. Ambos,veiculo e manipulador são controlados por comandos de voz
9

10Rodrigo Antonio Marques Braga
Estado da Arte
Cadeira de Rodas Inteligentes
Alguns projectos apresentam uma solução para pessoastetraplégicas, onde é utilizado o reconhecimento das expressõesfaciais para guiar a cadeira de rodas [33]
Uma outra forma para controlar as CRI apresentada porinvestigadores é com o pensamento, esta tecnologia utilizasensores que captam as ondas electromagnéticas do cérebro[22][25]
ACCoMo[31] protótipo de uma cadeira de rodas inteligente parapermitir a movimentação segura em ambientes fechados para osdeficientes físicos. ACCoMo é um agente com comportamentoautónomo, cooperativo e colaborativo

Resumo das Principais CRI
Principais projectos de CRI apresentados no meio científico (30).
Cadeiras de rodas “inteligentes” comerciaisCadeiras de rodas “conceito”

Plataforma IntellWheels
12Rodrigo Antonio Marques Braga
Desenvolvida usando o paradigma de sistemas Multi-agentes
Flexibilidade, conceito modulariedade
Fácil integração de distintos sensores, actuadores
Integração com múltiplos dispositivos de interface com o utilizador
Estudo de novas metodologia de navegação, técnicas de planeamento automático
Metodologias de cooperação e colaboração
Kit para integrar em cadeiras de rodas motorizadas comercial com poucas modificações buscando manter o aspecto original da cadeira.
SUM
ÁRIO
IntroduçãoEstado da ArtePlataformaSimuladorArquitecturacontinuação…………..
38
121721….

Conceito de ModularidadeP
LATA
FORM
ASistema Modular
Rodrigo Antonio Marques Braga 13
PLA
TAFO
RMA
Conceito dos modos de funcionamento
14Rodrigo Antonio Marques Braga
Modos de operação

PLA
TAFO
RMA
Hardware
15Rodrigo Antonio Marques Braga
Hardware padrão
Hardware

PLA
TAFO
RMA
Controlo
16Rodrigo Antonio Marques Braga
Controlo
-Controlo Multi-camadas
-Distribuído
-Cooperativo
-Colaborativo

SIMULADOR
Rodrigo Antonio Marques Braga 17
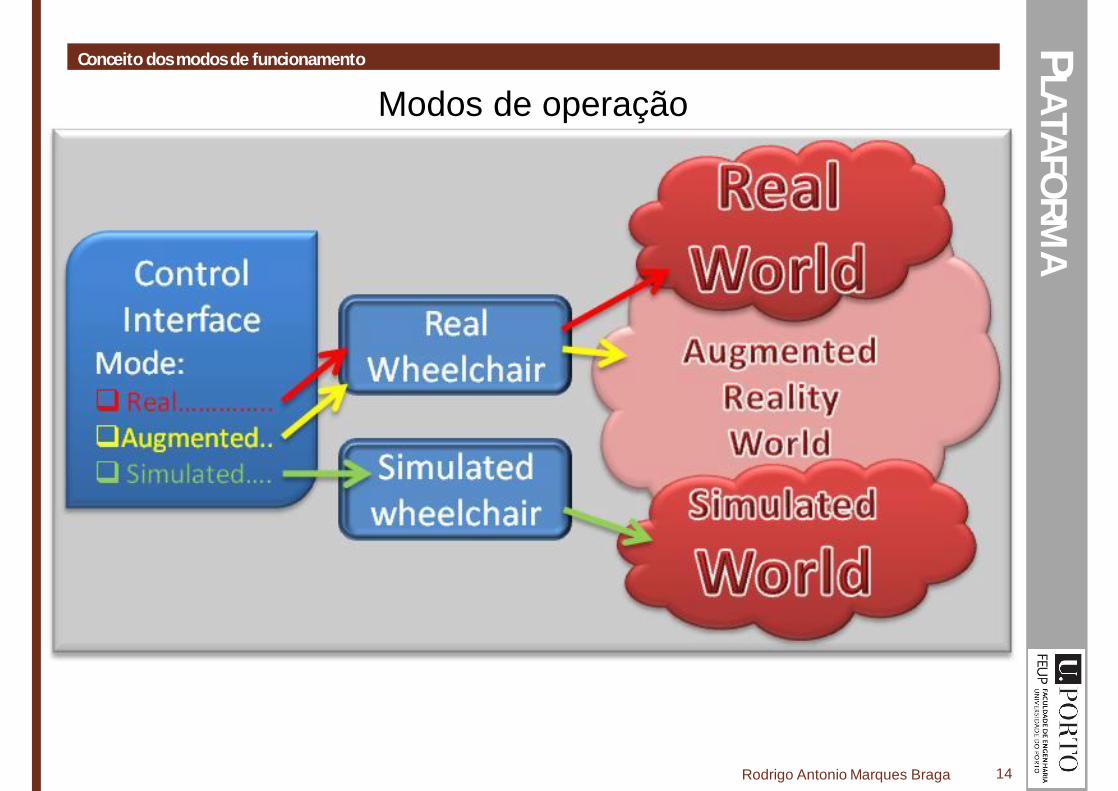
Objectivo é criar um mundo virtual para testar os algoritmos das cadeiras de rodas inteligente
Simulador baseado no simulador Ciber-Rato da Universidade de Aveiro
Criar modelo realístico de uma cadeira de rodas
Permitir diferentes tamanhos de CRI
Visualização em primeira pessoa
Realidade aumentada
Representação dos mapas
Simulação dos sensores de uma CRI
17Rodrigo Antonio Marques Braga
Simulador
SUM
ÁRIO
…. anteriorSimuladorArquitecturaPlaneamentoInterfaceConclusões
…1721242933
SIM
ULA
DO
RArquitectura do simulador
18Rodrigo Antonio Marques Braga
Sim
ulat
ion
Serv
er

SIM
ULA
DO
RModificações no Ciber-Rato
19Rodrigo Antonio Marques Braga

SIM
ULA
DO
RFilme Simulador
20Rodrigo Antonio Marques Braga

Arquitectura SMA
21Rodrigo Antonio Marques Braga
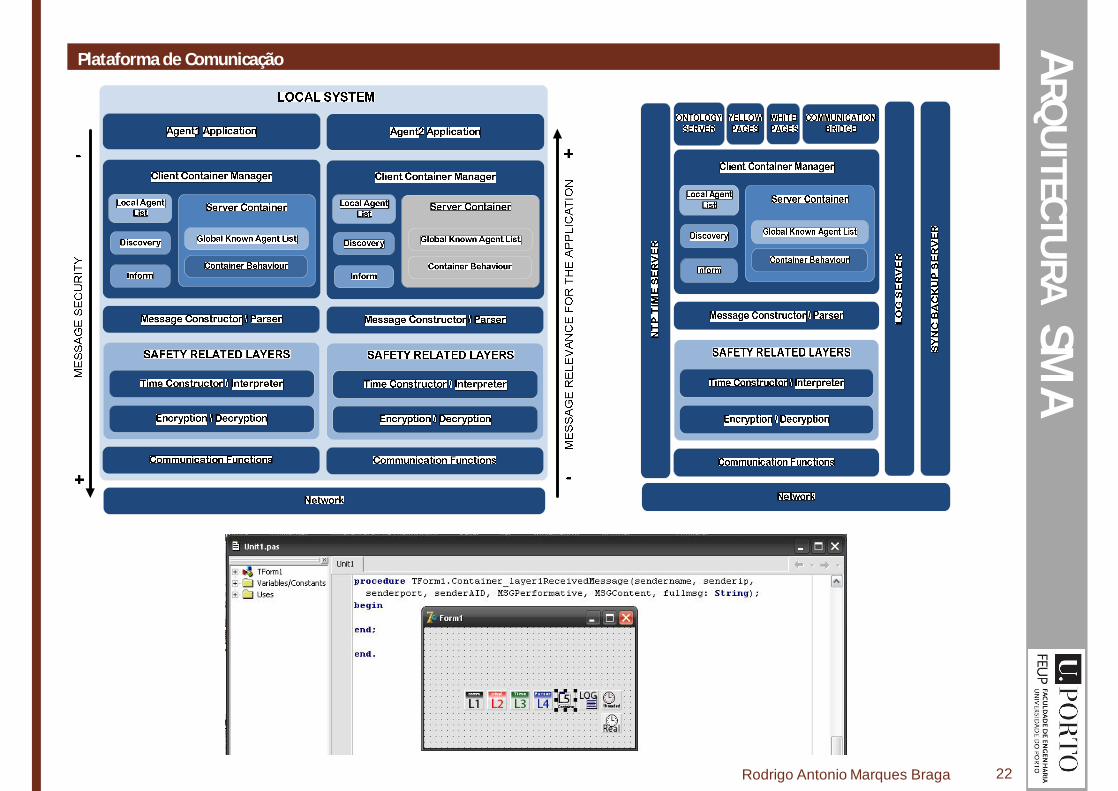
Esta arquitectura SMA foi desenvolvida objectivando facilitar e flexibilizaro uso dos diversos módulos projectados para CRI. Comunicação entre agentes Cooperação Colaboração
SUM
ÁRIO
…. anteriorSimuladorArquitecturaPlaneamentoInterfaceConclusões
…1721242933
ARQ
UITECTU
RASM
APlataforma de Comunicação
22Rodrigo Antonio Marques Braga

ARQ
UITECTU
RASM
ASMA
23Rodrigo Antonio Marques Braga

Planeamento Inteligente
24Rodrigo Antonio Marques Braga
O problema é encontrar de forma automática a sequências de acçõestipicamente executadas por agentes inteligentes, robôs autónomos ouveículos autónomos.
Um planeador típico recebe três entradas: estado inicial do mundo uma descrição do objectivo um conjunto de acções possíveis (e respectivas pré-condições eefeitos no mundo).
Em domínios mais realistas é necessário decompor o plano, surgindo oplaneamento hierárquico em que uma dada tarefa ou pode ser realizadapor uma acção primitiva ou é decomposta num conjunto de tarefas de maisbaixo nível.
SUM
ÁRIO
…. anteriorSimuladorArquitecturaPlaneamentoInterfaceConclusões
…1721242933

Características desejáveis: Eficiência – conduzir para uma solução satisfatória.Desempenho – não perder tempo em buscas e tentativas frustradas.
O STRIPS (Stanford Research Institute Problem Solver) marca o início do estudo de planeamento automático a partir da ideia dos operadores ADD-DEL-PRE.
PLA
NEA
MEN
TOPlaneamento automático
Rodrigo Antonio Marques Braga 25

PLA
NEA
MEN
TOPlaneador STRIPS
26Rodrigo Antonio Marques Braga
GET(O):Pre: EMPTY & CLEAR(O) & NEAR(O)Add: HOLDS(O)Del: EMPTY & CLEAR(O)
PUT(O):Pre: HOLDS(O) & NEAR(P) & CLEAR(P)Add: ON(O,P) & EMPTYDel: HOLDS(O) & CLEAR(P)
MOVE(P1, P2):Pre: NEAR(P1) & CLEAR(P2)Add: NEAR(P2)Del: NEAR(P1)
PLANEAR(G):S <- S0Enquanto G não estiver satisfeito em S fazer
g <- sub-objectivo de G ainda não satisfeito em Sf <- operador cuja Add-list tenha um literal unificável com gp <- pre-condições de fPLANEAR(p)S <- resultado da aplicação de f a S

PLA
NEA
MEN
TOGraphplan
27Rodrigo Antonio Marques Braga
Planeamento com grafos (Planning-graph) – Técnica que utiliza estruturaspoderosas de alcançabilidade para organizar e restringir o espaço de busca.

PLA
NEA
MEN
TOPDDL
28Rodrigo Antonio Marques Braga
PDDL (Planning Domain Description Language),• linguagem de descrição de domínios • definir um modelo comum para que os planejadores pudessem ser comparados entre si.• possível medir o desempenho de um planejador, • estabelecidos critérios e escolhidos problemas exigentes para a realização de uma competição de planejadores automáticos, a AIPS (Artificial IntelligencePlanning Systems) e o IPC (International Planning Competition) em 1998
;; IntellWheels Domain: domain3_IWC ;; Authors: Rodrigo Braga 11-12-2008
(define (domain I_WChair)(:requirements :strips :typing)(:types patient place wchair)(:predicates (clear ?ch - wchair)
(on-chair ?pt - patient ?ch - wchair)(at ?c - wchair ?p - place)(on ?pt - patient ?p - place)(free ?pt - patient) )
(:action move:parameters (?ch - wchair ?p1 - place ?p2 - place):precondition (and (clear ?ch ) (at ?ch ?p1)):effect (and (not (at ?ch ?p1))
(at ?ch ?p2)))
;; IntellWheels Domain: domain2_IWC ;; Authors: Rodrigo Braga 29-01-2009(define (problem I_WChair2-p1)(:domain I_WChair)(:objects ch1 – wchairpt1 - patientpt2 - patientr1 - placer2 - placer6 - place)(:init (at ch1 r1)
(clear ch1)(on pt1 r2)(free pt1) )
(:goal (and (on pt1 r6)(free pt1) )
))

Interface Multimodal
29Rodrigo Antonio Marques Braga
Modo gráfico
• Informações sobre as acções e modulo de inputs
• Possibilidade de definir a sequencia de inputs para cada acção Usabilidade • Facil de usar• adaptabilidade para distintos utilizadores• segurança
Acessibilidade• Intuitivo • Simples
SUM
ÁRIO
…. anteriorSimuladorArquitecturaPlaneamentoInterfaceConclusões
…1721242933

Multimodal interface
Multimodal interfaceM
MI –
INTERA
CTION
30
• Components
Actions and inputs list
Configuration menu
Textual Information of selected action
Graphics information of introduction sequences
Sequence list Sequence configuration menu
Graphics itens

Multimodal interface - Inputs UsedM
MI –
INPU
TS
31
• Modulos de Inputs
Joystick Movimento da cabeça Voz
Inputs utilizado inicialmente:
Esses inputs permitem diferentes sequencias para cada output (acção)

RESU
LTAD
OS
PRELIM
INA
RESPublicações referentes a tese
32Rodrigo Antonio Marques Braga
1 - Braga, R. A. M. ; Faria, P. M. ; Valgôde E. ; Reis L. P. . Platform to Drive an Intelligent Wheelchair using Facial Expressions. In: Proceedings 9th International Conference on Enterprise Information Systems - Human-ComputerInteraction (ICEIS 2007), 2007, Funchal Madeira. Proceedings 9th International Conference on EnterpriseInformation Systems - Human-Computer Interaction (ICEIS 2007), 2007. p. 164-169.
2 - Braga, R. A. M. ; Faria, P. M. ; Valgôde E. ; Reis L. P. . Interface Framework to Drive an Intelligent WheelchairUsing Facial Expressions. In: IEEE International Symposium on Industrial Electronics, 2007, Vigo. IEEE International Symposium on Industrial Electronics, 2007. p. 1791-1796.
3 - Rodrigo A. M. Braga, Rosaldo J. F. Rossetti, Luis Paulo Reis, Eugénio C. Oliveira (2008). “Applying multi-agentsystems to simulate dynamic control in flexible manufacturing scenarios”, in Agent-Based Modeling and SimulationSymposium, 19th European Meeting on Cybernetics and Systems Research. Vienna, March 25-28, 2008. Trappl, R. (Ed.) Cybernetics and Systems. Vienna: Austrian Society for Cybernetic Studies. v.2, pp.488-493
4 - Braga, A.M.R., Petry, M.R., Moreira, A.P., Reis, L.P. (2008)."Intellwheels: A Development PlatForm for intelligentwheelchairs for disabled people". 5th International Conference on Informatics in Control, Automation and Robotics. ISBN: 978-989-8111-31-9.Vol I. pp.115-121. Funchal, Madeira, Portugal. May 11–15,2008.
5 - Braga, A.M.R., Petry, M.R., Reis, L.P, Oliveira, E. (2008)."Multi-Level Control of an Intelligent Wheelchair in a Hospital Environment using a Cyber-Mouse Simulation System". 5th International Conference on Informatics inControl, Automation and Robotics. ISBN: 978-989-8111-31-9. Vol II. pp.179-182.Funchal, Madeira, Portugal. May11–15, 2008.
6 - Braga, A.M.R., Petry, M.R., Moreira, A.P., Reis, L.P. (2008)."PLATFORM FOR INTELLIGENT WHEELCHAIRSUSING MULTI-LEVEL CONTROL AND PROBABILISTIC MOTION MODEL". 8th Portuguese Conference onAutomatic Control, Controlo 2008, pp.833-838, Vila Real, Portugal. July 21–23,2008.ISBN 978-972-669-877-7
7 - Braga, A.M.R., Petry, M.R., Reis, L.P, Oliveira, E. (2008).”Concept and design of the Intellwheels development platform for intelligent wheelchairs” Lecture Notes in Electrical Engineering" (LNEE) published bySpringer-Verlag, 2008.
Contribuição
Contribuir em novas metodologias e técnicas que possam trazer às CRI: Capacidades de planeamento inteligente de acções Navegação autónoma Mecanismos que permitam realizar de forma semi-autónoma a execução dos desejos dos seus utilizadores expressados por linguagem de comando de alto-nível Comportamento cooperativo entre um grupo de CRI Colaborativo entre utilizador e outros sistemas inteligentes, etc.
Enfrentar os desafios relacionados a sistemas multi-agentes e planeamento: Representação e geração de planos Alocação de tarefas Coordenação Comunicação
Para além das metodologias espera-se ter como resultados:Plataforma de desenvolvimento de CRI
Simulador Testar as metodologias Facilitar o desenvolvimento de novos algoritmos/técnicas/metodologias
Protótipo real de uma CRI33Rodrigo Antonio Marques Braga
SUM
ÁRIO
…. anteriorSimuladorArquitecturaPlaneamentoInterfaceConclusões
…1721242933

CONCLUSÕES
Rodrigo Antonio Marques Braga 34
CRIs podem contribuir na mobilidade e independênciade pessoas com limitações motoras.
Diversas abordagens têm sido propostas para resolveros problemas de mobilidade.
Novas metodologias e novos sensores têm permitido umdeslocamento mais robusto e confiável.
Os conceitos aplicados em CRIs têm sido utilizadostambém em outras aplicações.

Referências
[1] D.A. Bell, J. Borenstein, S.P. Levine, Y. Koren, and L. Jaros, “An assistive navigation system for wheelchairs based upon mobile robot obstacle avoidance,” in Proc. 1994 IEEE Int. Conf. on Robotics and Automation, San Diego, CA, 1994.[2] B. Borgerding, O. Ivlev, C. Martens, N. Ruchel, and A. Gräser, “FRIEND: Functional robot arm with user friendly interface for disabled people,” in Proc. 5th European Conf. for the Advancement of Assistive Technology, 1999.[3] Bergasa, L. et al. (1999). Guidance of a Wheelchair for Handicapped People by Face Tracking. In: Fuertes (Ed.): Proc. of the 7th Int. Conference on Emergent Technologies and Factory Automation. 105-111. [4] Borenstein, J. and Koren, Y. (1991). The Vector Field Histogram –Fast Obstacle-Avoidance for Mobile Robots. In: IEEE Journal ofRobotics and Automation. Vol. 7. No. 3. 278-288. [5] H. Hoyer and R. Hölper, “Open control architecture for an intelligent omnidirectional wheelchair,” in Proc.1st TIDE Congress, Brussels, pp. 93-97, IOS Press, 1993.[6] R.L. Madarasz, L.C. Heiny, R.F. Cromp, and N.M. Mazur, “The design of an autonomous vehicle for the disabled,” IEEE J. Robotics and Automat., vol. RA-2, no. 3, 1986.[7] Borgerding et al. (1999). FRIEND – Functional Robot Arm with User Friendly Interface for Disabled People. In: Proc. of the 5th European Conference for the Advancement of Assistive Technology. Düsseldorf, Germany. [8] D. Miller and M. Slack, “Design and testing of a low-cost robotic wheelchair prototype,” Autonomous Robots, vol. 2, pp. 77-88, 1995.[9] Buttelmann, M. et al. (1999). Trajektoriengenerierung und Bahnregelung für nichtholonome autonome Fahrzeuge. In: Schmidt, G. et al. (Eds.): Autonome Mobile Systeme 1999. Informatik aktuell. Springer. 303-312. [10] Crisman, J. and Cleary, M. (1998). Progress on the Deictically Controlled Wheelchair. In: Mittal et al. (Eds.): Assistive Technology and AI. LNAI 1458. Springer-Verlag. 137-149. [11] Gomi, T. and Griffith, A. (1998). Developing Intelligent Wheelchairs for the Handicapped. In: Mittal et al. (Eds.): Assistive Technology and AI. LNAI 1458. Springer-Verlag. 150-178. [12] Hoyer, H. et al. (1999). The OMNI-Wheelchair – State of the Art. In: Proc. of the 14th Annual Int. Conf. On Technology and Persons with Disabilities. Los Angeles. Online version at: http://www.dinf.org/csun_99/session0274.html [13] Miller, D. (1998). Assistive Robotics: An Overview. In: In: Mittal et al. (Eds.): Assistive Technology and AI. LNAI 1458. Springer-Verlag. 126-136. [14] Odor, P. (1995). The CALL Centre Smart Wheelchair. ISBN 1 898042 06 3. [15] P. Wellman, V. Krovi, and V. Kumar, “An adaptive mobility system for the disabled,” in Proc. 1994 IEEE Int. Conf. on Robotics and Automation, SanDiego, CA, 1994.[16] Pires, G. et al. (1998). ROBCHAIR – A Powered Wheelchair Using a Behaviour-Based Navigation. In: Proceedings of AMC'98, 5th Int. Workshop on Advanced Motion Control. Coimbra, Portugal. 536-541. [17] Röfer, T., Lankenau, A. (1998). Architecture and Applications of the Bremen Autonomous Wheelchair. In: Wang, P. P. (Ed.): Proc. of the Fourth Joint Conference on Information Systems 1. Association for Intelligent Machinery. 365-368.
SUM
ÁRIO
IntroduçãoEstado da ArteMetodologiaCronogramaResultados PreliminaresReferências
38
13141517
35Rodrigo Antonio Marques Braga

1/9/2007
36Rodrigo Antonio Marques Braga
REFERÊN
CIAS
Continuação.....
[18] Schilling, K. and Roth, H. (1998). Convoy Driving and Obstacle Avoidance Systems for Electrical Wheelchairs. In: Wang, P. P. (Ed.): Proc. of the Fourth Joint Conference on Information Systems. Association for Intelligent Machinery. 353-356. [19] Simpson, R. et al. (1998). NavChair: An Assistive Wheelchair Navigation System with Automatic Adaptation. In: Mittal et al. (Eds.): Assistive Technology and AI. LNAI 1458. Springer-Verlag. 235-255.[20] Katevas et al. (1997). The Autonomous Mobile Robot SENARIO: A Sensor-Aided Intelligent Navigation System for Powered Wheelchairs. IEEE Robotics & Automation Magazine. Vol. 4. No. 4. 60-70.[21] (1) Brad E. Dicianno; Donald M. Spaeth; Rory A. Cooper; Shirley G. Fitzgerald; Michael L. Boninger; Karl W. Brown: Force Control Strategies While Driving Electric Powered Wheelchairs With Isometric and Movement-Sensing Joysticks. Neural Systems and Rehabilitation Engineering, IEEE Transactions on [see also IEEE Trans. on Rehabilitation Engineering, Volume 15, Issue 1, March 2007 Page(s):144 - 150
[22] (3) Sarangi P. Parikh; Valdir Grassi Jr.; Vijay Kumar; Jun Okamoto Jr.: Integrating Human Inputs with Autonomous Behaviors on an Intelligent Wheelchair Platform. Intelligent Systems, IEEE [see also IEEE Intelligent Systems and Their Applications, Volume 22, Issue 2, March-April 2007 Page(s):33 - 41 [23] Yanco, H. (1998). Wheelesley: A Robotic Wheelchair System: Indoor Navigation and User Interface. In: Mittal et al. (Eds.): Assistive Technology and AI. LNAI 1458. Springer-Verlag. 256-268. [24] (4) Sixto Ortiz Jr.: Brain-Computer Interfaces: Where Human and Machine Meet. IEEE Computer, Volume 40, Issue 1, Jan. 2007 Page(s):17 – 21.[25] (5) Brice Rebsamen; Etienne Burdet; Cuntai Guan; Haihong Zhang; Chee Leong Teo; Qiang Zeng; Christian Laugier; Marcelo H. Ang Jr.: Controlling a Wheelchair Indoors Using Thought. Intelligent Systems, IEEE [see also IEEE Intelligent Systems and Their Applications, Volume 22, Issue 2, March-April 2007 Page(s):18 – 24. [26] (7) Lidozzi, A.; Solero, L.; Crescimbini, F.; Di Napoli, A.: SVM PMSM Drive With Low Resolution Hall-Effect Sensors. Power Electronics, IEEE Transactions on, Volume 22, Issue 1, Jan. 2007 Page(s):282 – 290.[27] (12) Katsura, S.; Ohnishi, K.: Semiautonomous Wheelchair Based on Quarry of Environmental Information, Industrial Electronics, IEEE Transactions on Volume 53, Issue 4, June 2006 Page(s):1373 – 1382.[28] (43) Yi-Hui Wu; Bing-Yuh Lu; Heng-Yin Chen; Yao Ou-Yang; Jin-shin Lai; Te-Son Kuo; Fok-Ching Chong: The Development of M3S-Based GPS Navchair and Tele-Monitor System. Engineering in Medicine and Biology Society, 2005. IEEE-EMBS 2005. 27th Annual International Conference of the 2005 Page(s):4052 – 4055. [29] (46) Parikh, S.P.; Grassi, V., Jr.; Kumar, V.; Jun Okamoto, Jr.: Usability Study of a Control Framework for an Intelligent Wheelchair. Robotics and Automation, 2005. ICRA 2005. Proceedings of the 2005 IEEE International Conference on 18-22 April 2005 Page(s):4745 – 4750. [30] (50) Pacnik, G.; Benkic, K.; Brecko, B.: Voice operated intelligent wheelchair – VOIC, Industrial Electronics, 2005. ISIE 2005. Proceedings of the IEEE International Symposium on Volume 3, 20-23 June 2005 Page(s):1221 - 1226 vol. 3. [31] (51) Lakany, H.: Steering a wheelchair by thought. Intelligent Environments, 2005. The IEE International Workshop on (Ref. No. 2005/11059)29 June 2005 Page(s):199 - 202 .[32] (A) Hamagami, T.; Hirata, H.: Development of intelligent wheelchair acquiring autonomous, cooperative, and collaborative behavior. Systems, Man and Cybernetics, 2004 IEEE International Conference on Volume 4, 10-13 Oct. 2004 Page(s):3525 - 3530 vol.4.[33] Adachi,Y.; Kuno, Y.; Shimada, N.; Shirai, Y.: Intelligent wheelchair using visual information on human faces. Intelligent Robots and Systems, 1998. Proceedings., 1998 IEEE/RSJ International Conference on Volume 1, 13-17 Oct. 1998 Page(s):354 - 359 vol.1.