Embed Size (px)
Citation preview

Métodos Analíticos na Resolução de Placas 3.1
Capítulo 3
Métodos Analíticos na Análise de Placas
3.1. Solução de Navier para Placas Simplesmente Apoiadas
3.1.1. Formulas Gerais
Considere-se uma placa simplesmente apoiada ao longo do contorno exterior como se
representa na figura 3.1 e submetida à acção de uma carga distribuída, )x,x(p 21 , a qual se
pode representar através de séries trigonométricas duplas de Fourier do seguinte modo:
( )bxnsen
axmsenpx,xp 21
mn1n1m
21ππ
∑∑=∞
=
∞
= 3.1
onde pmn são constantes e m e n são números inteiros. Esta série dupla permite a
representação de quaisquer casos de distribuição de carga aplicada.
Pretende-se resolver a equação de Lagrange:
( )2142
4
22
21
4
41
4
x,xpD1
xxx2
x−=
∂∂
+∂∂
∂+
∂∂
=∇∇ωωω
ω 3.2

Métodos Analíticos na Resolução de Placas 3.2
a
b
B
D
A
C
x2
x1
x3, W
Figura 3.1: Placa Simplesmente Apoiada.
sujeita às condições de fronteira que no caso da placa simplesmente apoiada, são:
bxe0x22
2
axe0x21
2
2211
0x
e0e0x
e0====
=
∂∂
=
=
∂∂
=ω
ωω
ω 3.3
Uma solução possível para a equação de Lagrange é a chamada solução de Navier
para a qual se considera ser ω(x1,x2) uma função tipo série dupla de senos que verifica
simultaneamente a equação de Lagrange e as condições de contorno, ou seja uma função
do tipo:
( )bxnsen
axmsenW
D1x,x 21
mn1n1m
21ππ
ω ∑∑−=∞
=
∞
= 3.4
O carregamento p(x1,x2) é nulo no contorno, multiplicando ambos os membros da
equação (3.1), por b
x´nsen 2π
e integrando entre 0 e b, obtém-se:
( )
∑∫
′
=∫ ∑=′
′′
∞
=
∞
= axmsenpdx
bxnsen
bxnsendx
bxnsenx,xp 1
nm1n
b0 2
22b0
1n2
221
ππππ 3.5

Métodos Analíticos na Resolução de Placas 3.3
onde n´ é um número inteiro e o integral entre 0 e b da expressão dentro de parentesis recto
é:
nnpara2b
nnpara0dx
bxn
senbxn
sen 222b
0 ′=
′≠=
′∫
ππ 3.6
consequentemente a expressão (3.5) toma a forma seguinte:
( )axmsenp
2b
bxnsenx,xp 1
nm1m
221
b0
ππ′
∞
=∑=
′∫ 3.7
se se multiplicar ambos os membros desta equação por sen (m´π x1/ a) e se integrar entre 0
e a, obtém-se:
( ) 111a
0nm2112
21b0
a0 dx
axm
senaxm
senp2bdxdx
axm
senbxn
senx,xpππππ ′
∫=′′
∫∫ ′ 3.8
ou seja tendo em conta o integral (3.6):
( ) nm2112
21b0
a0 p
4abdxdx
axm
senbxn
senx,xp ′′=′′
∫∫ππ
3.9
Resolvendo a equação (3.9) em ordem a pm´n´ obtém-se:
( ) 2122
21bo
a0nm dxdx
axmsen
bxnsenx,xp
ab4p ππ ′′
∫∫=′′ 3.10
Esta é a forma geral dos coeficientes pmn. Substituindo a forma geral da solução (3.4)
na equação de Lagrange (3.2) e tendo em conta a equação (3.1) obtém-se para Wmn:
Métodos Analíticos na Resolução de Placas 3.4
2
2
2
2
2
mn4mn
bn
am
p1W
+
=π
3.11
Substituindo a equação (3.11) na equação (3.4), obtém-se a equação da deformada
com a seguinte forma:
( )bxn
senaxm
sen
bn
am
pD
1x,x 212
2
2
2
2
mn
1n1m421
πππ
ω
+
∑∑−=∞
=
∞
= 3.12
onde m e n são números inteiros.
Os momentos M11, M22 e M12 são obtidos tendo em conta as expressões (3.12) e (2.12)
e são respectivamente:
bxnsen
axmsen
bn
am
bn
am
p1M 212
2
2
2
2
2
2
2
2
mn1n1m
211ππν
π
+
+∑∑=∞
=
∞
= 3.13
bxn
senaxm
sen
bn
am
am
bn
p1M 212
2
2
2
2
2
2
2
2
mn1n1m
222ππν
π
+
+∑∑=∞
=
∞
= 3.14
bxncos
axmcos
bn
am
abmn
p1M 212
2
2
2
2mn
1n1m212
πππ
ν
+
∑∑−
−=∞
=
∞
= 3.15
Os esforços transversos T1 e T2 são obtidos a partir das equações (3.12) e (2.20) e são
respectivamente:

Métodos Analíticos na Resolução de Placas 3.5
bxn
senaxm
cos
bn
am
am
p1T 21
2
2
2
2mn1n1m
1ππ
π+
∑∑=∞
=
∞
=
bxn
cosaxm
sen
bn
am
bn
p1T 21
2
2
2
2mn1n1m
2ππ
π+
∑∑=∞
=
∞
= 3.16
No caso das placas simplesmente apoiadas as reacções de apoio, R1 ao longo do lado
x1 = 0, R2 ao longo do lado x2 = 0, R´1 ao longo do lado x´1 = a e R´2 ao longo do lado
x= b, são de acordo com as formulas (3.15),(3.16) e (2.22), as seguintes:
( )
bxnsen
bn
am
bn2
am
am
p1R 22
2
2
2
2
2
2
2
2
mn1n1m
1π
ν
π
+
−+
∑∑=∞
=
∞
=
( )
axmsen
bn
am
am2
bn
bn
p1R 12
2
2
2
2
2
2
2
2
mn1n1m
2π
ν
π
+
−+
∑∑=∞
=
∞
=
( )( )
bxn
sen
bn
am
bn2
am
am
1p1R 22
2
2
2
2
2
2
2
2
1mmn
1n1m1
πν
π
+
−+
−∑∑=′ +∞
=
∞
=
( )( )
axm
sen
bn
am
am2
bn
bn
1p1R 12
2
2
2
2
2
2
2
2
1nmn
1n1m2
πν
π
+
−+
−∑∑=′ +∞
=
∞
= 3.17
As reacções concentradas no canto são de acordo com as formulas (3.15) e (2.24) as
seguintes:

Métodos Analíticos na Resolução de Placas 3.6
2
2
2
2
2mn1n1m
2A
bn
am
abmn
p12R
+
∑∑−
−=∞
=
∞
=πν
( )2
2
2
2
2
1m
mn1n1m
2B
bn
am
abmn1
p12R
+
−∑∑
−−=
+
∞
=
∞
=πν
( )2
2
2
2
2
1n
mn1n1m
2C
bn
am
abmn1
p12R
+
−∑∑
−−=
+
∞
=
∞
=πν
( )2
2
2
2
2
nm
mn1n1m
2D
bn
am
abmn1
p12R
+
−∑∑
−−=
+
∞
=
∞
=πν 3.18
Estas reacções concentradas impedem os cantos da placa de levantar. As séries
duplas que são utilizadas no cálculo dos momentos M1, M2 e M12 dos esforços transversos
T1 e T2, das reacções de apoio R1, R2, R´1 e R´2 e das reacções nos cantos RA, RB, RC e RD
convergem mais lentamente que a série ω (x1, x2) sendo portanto necessário o uso de um
maior número de termos para conseguir a convergência desejada.
3.1.2. Aplicações da Solução de Navier
3.1.2.1.Carga Uniformemente Repartida sobre um Rectângulo Arbitrariamente
Localizado sobre a Placa.
No caso de se considerar a placa sujeita a uma carga uniformemente repartida de
intensidade, p )x,x( 21 =p, sobre um rectângulo cujos lados têm dimensões,
´´xx´x;´´xx´x sendo ´´x´x;´´x´x 2221112211 ≥≥≥≥−− , como se representa na figura 3.2.Os

Métodos Analíticos na Resolução de Placas 3.7
lados do rectângulo são lados paralelos aos lados da placa. A fórmula (3.10), indica-nos o
modo de cálculo dos coeficientes pmn , ou seja:
pA A´
a
b
Secção A-A´
a´´x 1
´´x 2
´´x´x 11 −
´´x´x 22 −
x1
x2
Figura 3.2: Placa Rectangular Simplesmente Apoiada Sujeita a uma Carga
Uniformemente Distribuída numa área Rectangular.
2121x
xxxmn dxdx
bxn
senaxm
senabp4p 2
2
1
1
ππ∫∫= ′
′′′′′
ou seja calculando os integrais:
−
−=
bx´ncos
bx´´ncos
ax´mcos
ax´´mcos
mnp4p 2211
2mnππππ
π
Podem considerar-se alguns casos particulares da situação genérica referida
nomeadamente, o caso da carga Pontual, o caso da carga uniformemente distribuída em
toda a placa e o caso da carga distribuída num rectângulo concêntrico com a placa.

Métodos Analíticos na Resolução de Placas 3.8
3.1.2.1 Carga Concentrada
No caso da carga concentrada, P, no ponto de coordenadas (ξ, η) da placa, os
coeficientes pmn tomam a forma seguinte:
bnsen
amsen
abP4pmn
πηπξ= 3.19
Substituindo este valor na equação (3.12) obtém-se a solução seguinte para a
deformada:
( ) 2
2
2
2
2
21
1n1m421
bn
am
bxnsen
axmsen
bnsen
amsen
abDP4x,x
+
∑∑−=∞
=
∞
=
πππηπξ
πω 3.20
A série (3.20) permite a determinação de ω (x1, x2) e é sempre convergente. As séries
duplas que são obtidas por consideração da expressão (3.20) para efeitos de cálculo dos
esforços unitários são divergentes para x1 = ξ e x2 = η. À esquerda e à direita do ponto
(ξ, η) é necessário considerar-se que os esforços tendem para infinito.
3.1.2.2. Carga uniformemente Distribuída em Toda a Superfície da Placa
Neste caso a função p (x1, x 2) é constante e igual a p0, sendo os coeficientes pmn calculados a partir da expressão (3.10), obtendo-se para os referidos coeficientes a expresão:
( ) ( )πππ
ncos1mcos1mnp4
p 20
mn −−= 3.21
donde:

Métodos Analíticos na Resolução de Placas 3.9
mnp16
p 20
mn π= com m e n números inteiros impares 3.22
Substituindo a expressão de pmn, (3.22), na equação da deformada (3.14), obtém-se:
( )bxnsen
axmsen
bn
ammn
1´´Dp16x,x 21
2
2
2
2
21n1m621
πππ
ω
+
∑∑−=∞
=
∞
= 3.23
onde m e n são números inteiros impares.
A determinação da solução aproximada da deformada para este tipo de placas é
simples, considerando quatro termos da série por exemplo, a determinação dos esforços é
feita também rapidamente utilizando a expressão (3.23) e as expressões (3.15-3.18). Note-se
que na expressão (3.23) se utiliza o símbolo Σ´ para indicar somatório estendido números
impares.
3.1.2.3. Carga Uniformemente Distribuída num Rectângulo Concêntrico à Placa
Designe-se por u e v os lados do rectângulo de carga concêntrica com os lados da
placa. Introduzindo os limites apropriados na expressão (3.11) e considerando p (x1, x2) =
p0, obtém-se para os coeficientes pmn a formula seguinte:
b2vnsen
a2umsen
2nsen
2msen
mnp16
p 20
mnππππ
π= 3.24
sendo pmn igual a zero se m e n não são os dois números impares.
Por uso da expressão (3.24) pode deduzir-se a fórmula necessária ao cálculo do
deslocamento ω que é:

Métodos Analíticos na Resolução de Placas 3.10
( )bxnsen
axmsen
bn
ammn
b2vnsen
a2umsen
2nsen
2msen
´´Dp16x,x 21
2
2
2
2
21n1m621
ππππππ
πω
+
∑∑−=∞
=
∞
=
As expressões dos momentos podem ser facilmente obtidas a partir da expressão
anterior.
3.1.3.Método Energético
Para se considerar o método energético é preciso calcular a energia de deformação U
e a energia potencial V da densidade de carga p (x1, x2) aplicada à placa. A deformada da
placa pode ser definida pela expressão (3.4) sendo necessário determinar os coeficientes
ωmn.
A energia de deformação foi definida do seguinte modo:
( )
∂∂
∂−
∂∂
∂∂
−−
∂∂
+∂∂
∫∫=2
21
2
22
2
21
2
22
2
21
2 2b0
a0 xxxx
12xx
D21U ωωω
νωω 3.25
Calculando as segundas derivadas de ω, o qual é definido de acordo com a expressão
(3.4), obtém-se:
bxnsen
axmsen
amW
Dx21
2
2
mn1n1m
2
21
2 πππω∑∑−=
∂∂ ∞
=
∞
=
bxn
senaxm
senbnW
Dx21
2
2
mn1n1m
2
22
2 πππω∑∑−=
∂∂ ∞
=
∞
=
bxn
cosaxm
cosabmnW
Dxx21
mn1n1m
2
21
2 πππω∑∑−=
∂∂∂ ∞
=
∞
= 3.26
e utilizando as fórmulas:

Métodos Analíticos na Resolução de Placas 3.11
mmforse2/ammforse0
dxa
xmcosaxmcosdx
axmsen
axmsen 1
11a01
11a0 ′=
′≠=
′∫=
′∫
ππππ
nnforse2/bnnforse0
dxbxncos
bxncosdx
bxnsen
bxnsen 1
22a01
22a0 ′=
′≠=
′∫=
′∫
ππππ
3.27
a expressão da energia de deformação toma a forma seguinte: 2
2
2
2
22mn
1n1m
4
bn
amW
Dab
81U
+∑∑=
∞
=
∞
=π 3.28
Calculamos agora a energia potencial para a densidade de carga p (x1, x2), ou seja:
( ) 2121
21b0
a0mn
1n1m21
b0
a0 dxdx
bxnsen
axmsenx,xpW
D1dxdxpV ππ
ω ∫∫∑∑−=∫∫=∞
=
∞
=
3.29 Tendo em conta a fórmula (3.11) que determina coeficientes pmn, obtém-se a seguinte
fórmula para o trabalho realizado pela carga p, ou seja:
mnmn1n1m
pWD4
abV ∑∑−=∞
=
∞
= 3.30
A energia potencial total toma a forma:
−
+∑∑=+=Π
∞
=
∞
=mnmn
2mn
2
2
2
2
24
1n1mWpW
bn
am
21
D4abVU π 3.31
Derivando em ordem a W mn ,a energia potencial total e igualando a zero, obtém-se:
2
2
2
2
2
mn4mn
bn
am
p1W
+
=π
3.32

Métodos Analíticos na Resolução de Placas 3.12
Esta fórmula é análoga à que foi encontrada pelo processo conducente à equação (3.13).
3.1.4.Placas Simplesmente Apoiadas. Aplicações
A obtenção de soluções concretas para placas rectangulares simplesmente apoiadas é
simples desde que se recorra ao Excel ou à programação em Matlab, a obtenção de
soluções analíticas para vários tipos de carregamento é também possível.
Exemplo 1
Considere uma placa rectangular de dimensões a×b simplesmente apoiada ao longo do
contorno exterior e sujeita a uma carga uniformemente distribuida de intensiddade p ou a
uma carga pontual de grandeza P. Obtenha o deslocamento no ponto médio da placa em
função de a/b para a placa sujeita a uma carga uniformemente distribuida ou sujeita a
uma carga concentrada e para a/b entre 0 e 5.0.
É preferível considerar o valor adimensional do deslocamento, ω, que pode designar-se
por ϖ e cujo valor é:
ϖωωϖDpaou
paD o
4
o4
==
sendo ppo = para a carga uniformemente distribuida de intensidade p , )ba(Ppo ×= para
a carga concentrada e D o módulo de rigidez à flexão da placa.
O deslocamento adimensional no centro da placa simplesmente apoiada sujeita a uma
carga uniformemente repartida toma a forma:
( )( ) 2
nsen2
msenxnmmn
1´´16x,x 22221n1m621
πππ
ϖ+
∑∑=∞
=
∞
=
sendo x=a/b.
O deslocamento adimensional no centro da placa simplesmente apoiada sujeita a uma
carga concentrada toma a forma:

Métodos Analíticos na Resolução de Placas 3.13
( )( ) 2
nsen2
msenxnmmn
1´´4x,x 22221n1m421
πππ
ϖ+
∑∑=∞
=
∞
=
Consequentemente um programa em Matlab que permita o cálculo de ϖ em função de a/b
pode ter a forma:
%calculo do Deslocamento por series de Navier% %Calculo do Deslocamento numa Placa Simplesmente Apoiada% %sujeita a uma Carga Uniformemente Distribuida e % % sujeita a uma carga concentrada% for l=1:50; x(l)=l/10 const=16/(pi^6); const1=4/(pi^4); w(l)=0; wc(l)=0; for m=1:2:55; for n=1:2:55; coef1=1/(m*n); coef2(l)=1/(((m^2)+(n^2)*(x(l)*x(l)))^2); term1=sin(m*pi/2); term2=sin(n*pi/2); w1(l)=coef1*coef2(l)*term1*term2; w(l)=w(l)+w1(l); w2(l)=coef2(l)*term1*term2; wc(l)=wc(l)+w2(l); end; end; wreal(l)=const*w(l); wrealc(l)=const1*wc(l); end; plot(x,wreal,x,wrealc,'--'); xlabel('a/b'); ylabel('~w '); legend('carga distribuida','carga concentrada') x wreal wrealc Os valores tabelados permitem a construção da tabela seguinte: a/b .5 .7 0.9 1.0 1.5 2.0 3.0 5.0 ϖ 0.01013 0.007273 0.004957 0.004062 0.001526 0.000633 0.000151 0.000021ϖc 0.022758 0.017014 0.011731 0.009623 0.003555 0.001422 0.000308 0.000036Quadro 3.1: Deslocamento Adimensional para uma Placa Simplesmente Apoiada. O gráfico obtido tem a forma representada na figura 3.3.
Métodos Analíticos na Resolução de Placas 3.14
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.005
0.01
0.015
0.02
0.025
a/b
~W carga distribuida
carga concentrada
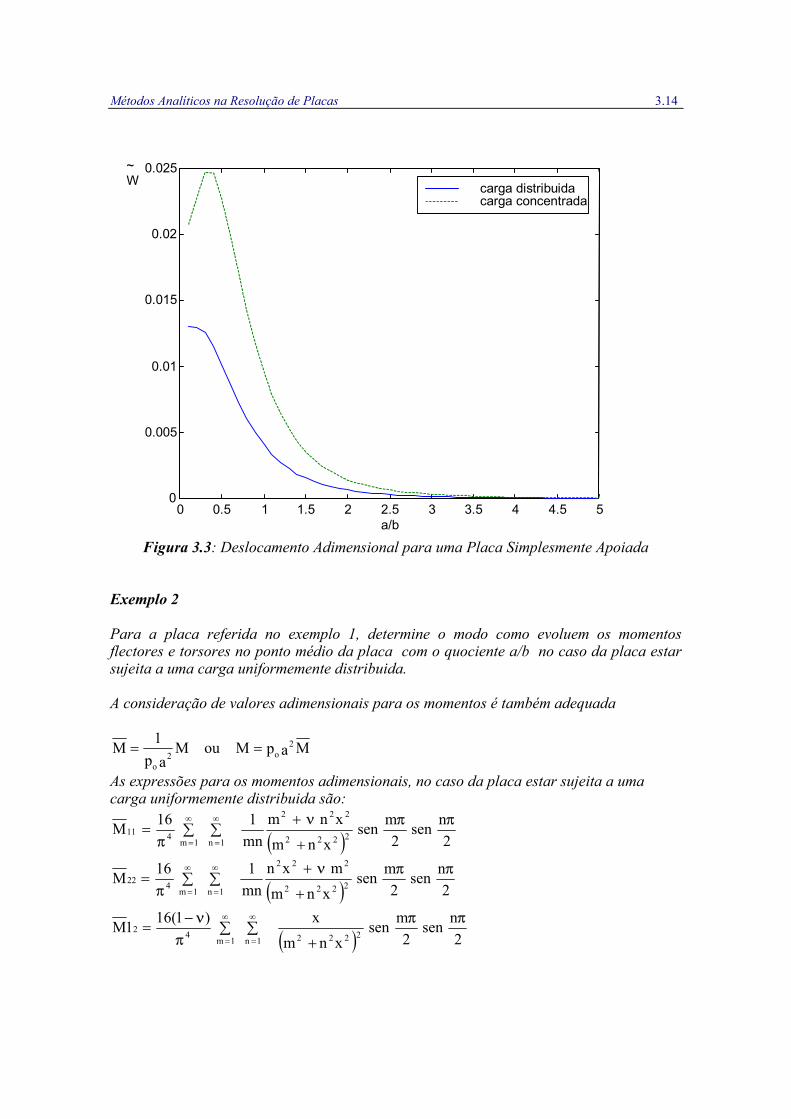
Figura 3.3: Deslocamento Adimensional para uma Placa Simplesmente Apoiada
Exemplo 2 Para a placa referida no exemplo 1, determine o modo como evoluem os momentos flectores e torsores no ponto médio da placa com o quociente a/b no caso da placa estar sujeita a uma carga uniformemente distribuida. A consideração de valores adimensionais para os momentos é também adequada
MapMouMap
1M 2o2
o
==
As expressões para os momentos adimensionais, no caso da placa estar sujeita a uma carga uniformemente distribuida são:
( ) 2nsen
2msen
xnm
xnmmn116M 2222
222
1n1m411
ππνπ +
+∑∑=∞
=
∞
=
( ) 2nsen
2msen
xnm
mxnmn116M 2222
222
1n1m422
ππνπ +
+∑∑=∞
=
∞
=
( ) 2nsen
2msen
xnm
x)1(161M 22221n1m42
πππ
ν
+∑∑
−=
∞
=
∞
=
Métodos Analíticos na Resolução de Placas 3.15
Para n=0.3, pode considerar-se o programa seguinte, feito por uso do Matlab para efeitos de obtenção de M em função de a/b. %calculo dos Momentos por series de Navier% %Calculo dos Momentos numa Placa Simplesmente Apoiada% %sujeita a uma Carga Uniformemente Distribuida % for l=1:50; x(l)=l/10 c=0.3 const=16/(pi^4); const1=16*(1-c)/(pi^4); m1(l)=0; m2(l)=0; m3(l)=0; for m=1:2:55; for n=1:2:55; coef1=1/(m*n); coef2(l)=m^2+(c*n^2)*(x(l)*x(l)); coef3(l)=(n^2)*(x(l)*x(l))+c*m^2; coef4(l)=1/(((m^2)+(n^2)*(x(l)*x(l)))^2); term1=sin(m*pi/2); term2=sin(n*pi/2); term3=cos(m*pi/2); term4=cos(m*pi/2); m11(l)=coef1*coef2(l)*coef4(l)*term1*term2; m22(l)=coef1*coef3(l)*coef4(l)*term1*term2; m33(l)=-x(l)*coef4(l)*term3*term4; m1(l)=m1(l)+m11(l); m2(l)=m2(l)+m22(l); m3(l)=m3(l)+m33(l); end; end; ma11(l)=const*m1(l); ma22(l)=const*m2(l); ma33(l)=const1*m3(l) end; plot(x,ma11,x,ma22,'--',x,ma33,':'); xlabel('a/b'); ylabel('~M '); legend('Momento segundo x','Momento segundo y ', 'Momento torsor') x ma11 ma22 ma33 O modo, como evoluem os momentos flectores e torsor com x=a/b, pertencente ao intervalo [0,5], está representado na figura 3.4.
Métodos Analíticos na Resolução de Placas 3.16
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
a/b
~M
Momento segundo xMomento segundo yMomento torsor
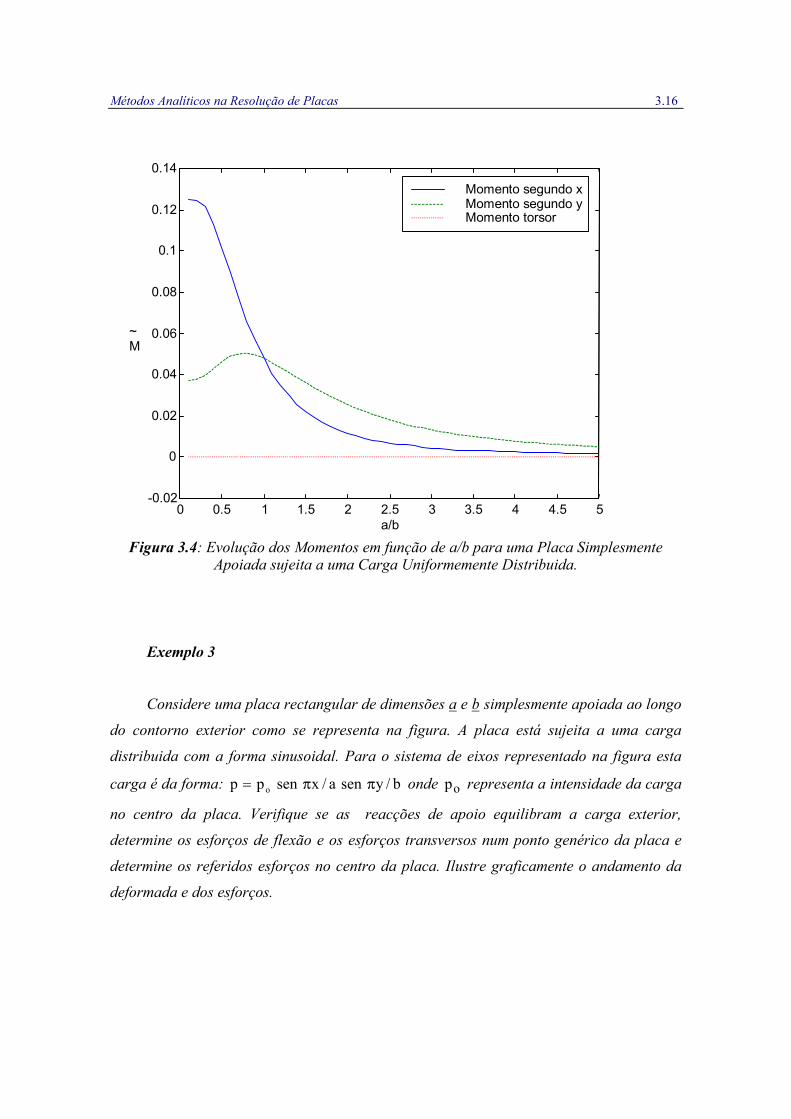
Figura 3.4: Evolução dos Momentos em função de a/b para uma Placa Simplesmente
Apoiada sujeita a uma Carga Uniformemente Distribuida.
Exemplo 3
Considere uma placa rectangular de dimensões a e b simplesmente apoiada ao longo
do contorno exterior como se representa na figura. A placa está sujeita a uma carga
distribuida com a forma sinusoidal. Para o sistema de eixos representado na figura esta
carga é da forma: b/ysena/xsenpp o ππ= onde op representa a intensidade da carga
no centro da placa. Verifique se as reacções de apoio equilibram a carga exterior,
determine os esforços de flexão e os esforços transversos num ponto genérico da placa e
determine os referidos esforços no centro da placa. Ilustre graficamente o andamento da
deformada e dos esforços.

Métodos Analíticos na Resolução de Placas 3.17
a
b
O
y
x
e
Figura 3.5:Placa Simplesmente Apoiada Sujeita a uma Carga Sinusoidal
A equação de Lagrange tem de ser verificada em todos os pontos da placa, isto é:
bysen
axsen
Dp
yyx2
xo
4
4
22
4
4
4 ππωωω=
∂∂
+∂∂
∂+
∂∂
e por outro lado têm de verificar-se as condições de fronteira que são:
bypara0y/e0eaxpara0x/e0 2222 ==∂∂===∂∂= ωωωω .
Admitindo que a função deformada ω tem de verificar as condições de fronteira,
pode considerar-se uma função da forma:
bysen
axsen0
ππωω =
onde ω0 é uma constante igual ao deslocamento transversal no ponto médio que pode ser
calculada fazendo uso da equação de Lagrange. As derivadas necessárias para efeitos de
substituição na equação de Lagrange são:

Métodos Analíticos na Resolução de Placas 3.18
bysen
axsen
ax 4
40
4
4 πππωω=
∂∂
bysen
axsen
by 4
40
4
4 πππωω=
∂∂
bysen
axsen
ba2
yx 22
40
22
4 πππωω=
∂∂
Substituindo estas expressões na equação de Lagrange obtém-se:
2
224
00
b1
a1D
p
+
=
π
ω
Substituindo esta expressão na função deformada, obtém-se:
bysen
axsen
b1
a1D
p2
224
0 ππ
π
ω
+
=
Uma vez determinada a forma da função deformada é possível calcular os momentos
flectores e torsores, que são:
bysen
axsen
ba1
b1
a1
pyx
DM 222
222
02
2
2
2
xππν
π
ων
ω
+
+
=
∂∂
+∂∂
−=
bysen
axsen
ab1
b1
a1
pxy
DM 222
222
02
2
2
2
yππν
π
ων
ω
+
+
=
∂∂
+∂∂
−=
( ) ( )bycos
axcos
b1
a1
1pyx
1DM 2
222
02
xyππ
π
νων
+
−−=
∂∂∂
−−=

Métodos Analíticos na Resolução de Placas 3.19
O deslocamento transversal máximo e os momentos flectores máximos ocorrem no
centro da placa e são:
[ ] 2
224
0max
b1
a1D
p
+
=
π
ω
[ ]
+
+
= 222
224
0maxx ba
1
b1
a1D
pM ν
π
[ ]
+
+
= 222
224
0maxy ab
1
b1
a1D
pM ν
π
No caso de se tratar de uma placa quadrangular como a que se representa na figura
3.6 o andamento dos momentos é do tipo representado na figura, sendo os valores do
deslocamento e dos momentos máximos os seguintes:
[ ] [ ] [ ] ( )2
20max
ymax
x4
40max
4ap1
MM;D4
apπ
νπ
ω+
===
As tensões normais máximas ocorrem no centro da placa e são, para a placa
quadrada, as seguintes:
( )22
20
2
max
yx e2a1p3
eM6
πν
σσ+
===
A tensão de corte máxima ocorre a meio do bordo e é:
e
R
23 y
max =τ

Métodos Analíticos na Resolução de Placas 3.20
My
Mx
σx
σy
Figura 3.6: Placa Quadrangular.
para se poder calcular esta tensão é necessário calcular as reacções no bordo.
Os esforços transversos são:
bysen
axcos
b1
a1a
pyxx
DT 2
22
02
2
2
2
xππ
π
ων
ω
+
=
∂∂
+∂∂
∂∂
−=
bycos
axsen
b1
a1b
pyxy
DT 2
22
02
2
2
2
yππ
π
ων
ω
+
=
∂∂
+∂∂
∂∂
−=
As reacções distribuídas ao longo dos bordos são:

Métodos Analíticos na Resolução de Placas 3.21
[ ]bysen
b2
a1
b1
a1a
py
MTR 222
22
0
ax
0xe
xyx
ax
0xex
πν
π
−
+
+
=
∂
∂+=
=
=
=
=
[ ]axsen
a2
b1
b1
a1b
px
MTR 222
22
0
ay
0ye
xyy
ay
0yey
πν
π
−
+
+
=
∂
∂+=
=
=
=
=
As reacções nos cantos são:
[ ] ( )2
222
0by;axxyDCBA
b1
a1ab
1p2M2VVVV
+
−−=====
==
π
ν
As reacções nos bordos e nos cantos estão representadas na figura 3.7. A resultante
das reacções distribuídas nos bordos com as reacções nos cantos é igual à resultante da
carga distribuída como se pode facilmente constatar.
a
A B x
D
VV
yC
b V
Figura 3.7: Reacções na Placa Simplesmente Apoiada.
Exemplo 4 Considere uma placa ortotrópica simplesmente apoiada ao longo do contorno e
sujeita a uma distribuição de cargas p (x, y). Determine a deformada da placa e os
esforços considerados relevantes. A placa tem de dimensões a segundo x e b segundo y.

Métodos Analíticos na Resolução de Placas 3.22
A carga distribuída p (x, y) pode ser representada através de séries duplas de
Fourier à semelhança do que acontecia com as placas isotrópicas, do seguinte modo.
( )b
ynsena
xmsenpy,xp mn1n1m
ππ= ∑∑
∞
=
∞
=
onde pmn são constantes e m e n são números inteiros.
Pretende-se resolver a equação de Lagrange:
( )y,xpD1
yD
yxD2
xD 4
4
222
4
34
4
1 −=∂∂
+∂∂
∂+
∂∂ ωωω
sujeita às condições de fronteira. Estas condições são: ao longo dos lados x = 0 e x = a:
0x
e0 2
2
=∂∂
=ω
ω
e ao longo dos lados y = 0 e y = b são:
0y
e0 2
2
=∂∂
=ω
ω
Uma solução possível para a equação de Lagrange é a chamada solução de Navier
para a qual se considera ser w (x, y) uma função tipo série dupla de senos que verifica
simultaneamente a equação de Lagrange e as condições de contorno, ou seja uma função
do tipo:
( )b
ynsena
xmsenWy,x mn1n1m
ππω ∑∑=
∞
=
∞
= (a)

Métodos Analíticos na Resolução de Placas 3.23
Os coeficientes pmn da série dupla de Fourier são calculados de forma análoga à
considerada nas placas isotrópicas e são determinados do seguinte modo:
( ) 2112
21b0
a0nm dxdx
axmsen
bxnsenx,xf
ab4p ππ ′′
∫∫=′
Esta é a forma geral dos coeficientes pmn. Substituindo a forma geral da solução
ω(x, y) na equação de Lagrange e tendo em conta o desenvolvimento em série dupla de
Fourier da função de carga p (x, y), obtém-se a equação seguinte:
=
+
+
∑∑∞
=
∞
=mn
4
mn2
22
mn3
4
mn11n1m
pb
mwDb
na
mwD2a
mwD ππππ
+
+
=4
2
22
3
4
1
mnmn
bmD
bn
amD2
amD
pW
ππππ
Substituindo estes coeficientes na equação (a), obtém-se:
( )b
ynsena
xmsen
bnD
bn
amD2
amD
p1y,x4
2
22
3
4
1
mn
1n1m4
πππ
ω
+
+
∑∑=∞
=
∞
=
Os momentos M11, M22 e M12 são obtidos tendo em conta a expressão da deformada
acabada de obter, e as expressões dos momentos em termos das curvaturas (2.12), ou
sejam:
bynsen
axmsen
bnD
bn
amD2
amD
bn
amp
DM4
2
22
3
4
1
2
2
212
2
mn
1n1m21
xππ
ν
π
+
+
+
∑∑−=∞
=
∞
=

Métodos Analíticos na Resolução de Placas 3.24
bynsen
axmsen
bnD
bn
amD2
amD
am
bnp
DM4
2
22
3
4
1
2
2
122
2
mn
1n1m22
yππ
ν
π
+
+
+
∑∑−=∞
=
∞
=
byncos
axmcos
bnD
bn
amD2
amD
abmnp
DM4
2
22
3
4
1
mn
1n1m23
xyππ
π
+
+
∑∑−=∞
=
∞
=
Os esforços transversos Tx e Ty são obtidos a partir dos momentos flectores considerando
as equações de equilíbrio de momentos. As reacções de apoio são calculadas a partir dos
esforços transversos e do momento Torsor, fazendo uso das fórmulas deduzidas no
Capítulo2.
3.2. Métodos de Levy. Placas Apoiadas em Dois Lados Opostos
3.2.1. Fórmulas Gerais
A equação de Lagrange:
( )2142
4
22
21
4
41
4
x,xpD1
xxx2
x−=
∂∂
+∂∂
∂+
∂∂
=∆∆ωωω
ω 3.33
tem de acordo com Levy soluções, para placas simplesmente apoiadas em dois lados
opostos, representadas por uma série trignométrica simples do tipo:
( ) ( )axmsenxF
D1x,x 1
2m1m
21π
ω ∑−=∞
= 3.34

Métodos Analíticos na Resolução de Placas 3.25
cujos coeficientes são Fm função de x2. A função carregamento, p(x1,x2), pode ser
desenvolvida em série simples da forma:
( ) ( )axm
senxpx,xp 12m
m21
π∑= 3.35
sendo o coeficiente pm(x2) determinado do seguinte modo:
( ) 11
2a0 12m dx
axm
sen)x,x(pa2xp
π∫= 3.36
com p = p (x1, x2).
Estas soluções, (3.34), verificam as seguintes condições de contorno:
axe0xpara0x
e0 1121
2
===∂∂
=ω
ω
ou seja as condições de contorno de uma placa rectangular simplesmente apoiada ao longo
de dois lados opostos. As funções ( )xF 2m podem ser calculadas de modo a verificar as
condições de contorno ao longo dos outros dois lados da placa e a equação de Lagrange,
figura 3.8a e 3.8b. O sistema de eixos da figura 3.8b pode não ser o mais adequado quando
se consideram condições de simetria, neste caso a consideração do sistema de eixos a
passar pelo centro é mais conveniente, tendo de considerar-se outra função trignométrica na
equação (3.34), por exemplo a função cos.
Considere-se a densidade de carga p (x1, x2), definida de acordo com a equação (3.35), os
desenvolvimentos em série de ω (x1, x2), definidos de acordo com a equação (3.34) e
substitua-se na equação de Lagrange. Nessas condições chega-se à conclusão que a
função ( )xF 2m , deve obedecer à serie de equações diferenciais seguintes:

Métodos Analíticos na Resolução de Placas 3.26
b
a
x2
x1O
x2
x1O
(a) (b)
Figura 3.8: Placa Rectangular.
( )2mm
4
22
m22
42
m4
xpFa
mxdFd
am2
xdFd
=
+
−
ππ 3.37
A forma geral da solução destas equações é:
Fm = (Fm)c + (Fm)p 3.38
onde (Fm)c é a solução geral da equação sem segundo membro e (Fm)p é uma solução
particular da equação que vai depender da forma do carregamento considerado. A solução
da equação sem segundo membro é do tipo exponencial, erx2 sendo r raiz da equação
característica:
0a
mra
m2r4
22
4 =
+
−
ππ 3.39
ou seja r = ± mπ /a.
A solução geral da equação sem segundo membro, tendo em conta a solução da
equação característica, é da forma:
Métodos Analíticos na Resolução de Placas 3.27
( ) ( ) ( ) ( ) ( ) ( ) ( ) 2222xa
m
2m4xa
m
2m3
xam
m2xa
m
m1compm exCexCeCeCF
−
−
+++=ππππ
3.40
sendo as constantes (C1)m, (C2)m, (C3)m, (C4)m, calculadas a partir das condições de
fronteira para x2 = 0 e x2 = b. Esta solução também pode ser considerada com a forma:
( ) ( ) +′+′=axmhcosC
axmhsenCF 2
m22
m1mππ
( ) ( )2 2 2 23 4m m
m x m x m x m xC senh C cos ha a a aπ π π π′ ′+ +
Existe uma relação1 entre as constantes C´e as constantes C.
A equação (3.37) conjuntamente com as condições de contorno estabelecidas em
função de Fm devem ser satisfeitas pela função Fm(x2). As condições de fronteira constituem
um sistema de equações a ser satisfeito pelas constantes da expressão (3.40).
3.2.2. Placa Simplesmente Apoiada em dois Lados Opostos e Encastrada nos outros
Dois e sujeita a uma Carga Distribuída p (x1, x2)
Para efeitos de ilustração do método de Levy considere-se uma placa rectangular de
dimensão a, segundo x1 e de dimensão b, segundo x2 que está simplesmente apoiada ao
longo dos lados x1 = 0 e x1 = b e encastrada ao longo dos lados x2 = b/2 e x2 = b/2, a escolha
deste sistema de eixos é adequada pela simetria existente em relação ao eixo x1 . Esta placa
está submetida a uma carga distribuída do tipo triangular como se representa na figura 3.9.
1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ;CCC;CCC;CCC m4m3m3m2m1m2m2m1m1 +=′+=′−=′
( ) ( ) ( )m4m3m4 CCC −=′

Métodos Analíticos na Resolução de Placas 3.28
b
a
x2
x1
O
p
Figura 3.9: Placa Simplesmente Apoiada em Dois Lados Opostos e Encastrada nos
Outros Dois.
As condições de fronteira referentes aos bordos simplesmente apoiados estão
automaticamente satisfeitos pelos termos em x1 da série (3.34), as condições que devem ser
satisfeitas pelos bordos encastrados são as seguintes:
( ) ( ) 2/bxe2/bxpara0xFxF 222m2m ===′= 3.41
O termo pm (x2) a ser utilizado na série (3.35) toma a forma seguinte, ou seja:
( ) 11
21a0m dx
axmsenx,xp
a2p π
∫= 3.42
Sendo ( )
=
ax
x,xp 121 no caso de se tratar de uma carga triangular, o integral
(3.42) toma, após integração, a forma seguinte:
( )πmp21p 1m
m+−= 3.43

Métodos Analíticos na Resolução de Placas 3.29
Substituindo o valor acabado de obter na equação de Lagrange (3.36), obtém-se:
( )π
ππm
p21Fa
mxdFd
am2
xdFd 1m
m
4
22
m22
42
4+−=
+
− 3.44
As soluções complementares são obtidas considerando uma solução do tipo exponencial,
como foi referido anteriormente, convertível numa solução em termos de senos e cossenos
hiperbólicos com a forma :
( ) ( ) +′+′=axmhcosC
axmhsenCF 2
m22
m1mππ
( ) ( )axmhcos
axmC
axmhsen
axmC 22
m222
m1ππππ ′+′+
a qual pode ser simplificada tendo em conta a simetria existente que obriga a que a função
Fm seja par, ou seja:
axm
hsenaxm
Caxm
hcosCF 22m2
2m1m
πππ+= 3.45
A solução particular da equação (3.44) pode ser considerada com a forma:
( ) ( )( )5
41m
partm map21F
π+−= 3.46
Consequentemente uma forma da solução geral da equação (3.37), é:
( ) ( ) =+= partmcompmm FFF ( )( )
++− +
axmsenh
axm
CaxmcoshC1
map21 22
m22
m15
41m πππ
π
3.47
Introduzindo as condições (3.41) na equação (3.47), obtém-se as equações seguintes
que constituem um sistema de equações por resolução do qual se obtém, as
constantes C,C 2m1m . As referidas equações, designando por Am o cociente a2bmπ ,são:

Métodos Analíticos na Resolução de Placas 3.30
2/bxe2/bxpara0F 22m −=== , ou seja: 0AsenhACAcoshC1 mmm2mm1 =++
2/bxe2/bxpara0F 22m −===′ , ou seja: ( ) 0AcoshACAsenhCC mmm2mm2m1 =++
3.48
Por resolução deste sistema de equações obtêm-se as constantes seguintes:
AAcoshAsenhAsenh
CeAAcoshAsenhAcoshAAsenh
Cmmm
mm2
mmm
mmmm1 +
=+
+−=
3.49 Substituindo estas constantes na equação (3.47) obtém-se para a deformada a expressão
seguinte:
( )( )
+
++
+−×
××−∑−= +∞
=
axmsenh
axm
AAcoshAsenhAsenh
axmcosh
AAcoshAsenhAcoshAsenhA1
axmsen
map21
D1
22
mmm
m2
mmm
mmm
15
41m
1m
πππ
ππ
ω
3.50
Para efeitos do cálculo de M11 ,M22 e M12 substituímos a expressão de ω (x1, x2) acabada
de obter nas equações (2.12).
3.2.3 Placa Sujeita a Momentos Distribuídos ao Longo de dois Lados Opostos
Considere-se uma placa simplesmente apoiada ao longo dos lados x1 = 0 e x1 = a e
sujeita a uma distribuição uniforme de momentos ao longo dos lados e simplesmente
apoiada ao longo dos lados x2 = b/2 e x2= -b/2, como se representa na figura 3.10.

Métodos Analíticos na Resolução de Placas 3.31
x 1
x2
M
M
Figura 3.10: Placa Sujeita a Momentos Distribuídos.
A equação de Lagrange é neste caso:
0xxx
2x 4
2
4
22
21
4
41
4
=∂∂
+∂∂
∂+
∂∂
=∇∇ωωω
ω 3.53
A deformada ω, obtém-se por resolução desta equação, sujeita às condições de
contorno
axe0xparax/e0 1121
2 ==∂∂= ωω
2/bxe2/bxparax/e0 2222
2 −==∂∂= ωω 3.54
A solução da equação (3.53), tem neste caso a forma já referida e que é:
( ) ( )axmsenxF
D1x,x 1
2m1m
21π
ω ∑−=∞
= 3.55
a qual satisfaz as condições de contorno para x1 = 0 e x1 = a. A função Fm de x2 é da forma
da função 3.40, a qual também pode ser escrita com a forma seguinte:
( ) ( ) ( ) +++=axmhsen
axmC
axmhcosC
axmhsenCF 22
m32
m22
m1mππππ

Métodos Analíticos na Resolução de Placas 3.32
( )axmhcos
axmC 22
m4ππ
+ 3.56
Como existe simetria segundo x2 a função Fm deve ser uma função par de x2, o que implica
que seja: (C1)m = (C4)m = 0. Portanto a deformada é da forma:
( ) ( )axm
senaxm
hsenaxm
Caxm
hcosC 122m3
2m2
1m
ππππω
+∑=
∞
= 3.57
Como ω = 0 para x2 = -b/2 e x2 = b/2, deve ser:
( ) ( ) 0AhsenACAhcosC mmm3mm2 =+ 3.58
onde Am = mπb/2a e
( ) ( ) mmm3m2 AtanhACC −= 3.59
Transformando-se a equação da deformada 3.57 em:
( )axm
senaxm
hcosAtanhAaxm
hsenaxm
C 12mm
22m3
1m
ππππω
−+∑=
∞
= 3.60
Dando à distribuição de momentos M a forma de desenvolvimento em série:
axmsenEM 1
m1m
π∑=∞
= 3.61
onde os coeficientes Em são calculados de modo análogo ao considerado para a carga p no
parágrafo 3.2.1, obtém-se para M22 a expressão seguinte:
Métodos Analíticos na Resolução de Placas 3.33
( )axmsen
m1M4
2bM 1
,...5,3,1m2/by22
ππ
∑=∞
== 3.62
Substituindo esta expressão na condição de fronteira, 3.54, obtém-se:
( )axmsenE
axmsenAhcosC
amD2 1
m1m
1mm32
22
1m
πππ∑=∑−∞
=
∞
= 3.63
donde:
( )m
22m
2
m3AhcosDm2
EaCπ
−= 3.64
A deformada é facilmente obtida, tendo em conta que Em = 4M / mπ, fazendo uso das
expressões 3.57, 3.59 e 3.64, ou seja:
axmsen
axmsenh
axm
axmhcosAtanhA
Acoshm1
DMa2 1222
mmm
3,...5,3,1m
3
2 πππππ
ω
−∑=
∞
=
3.64
Conhecida a expressão da deformada os esforços são facilmente calculados fazendo uso das
equações 2.12.
3.2.4. Método de Levy. Aplicações
A utilização do método de Levy para efeitos de obtenção de soluções analíticas da equação
de Lagrange para placas com dois lados opostos simplesmente apoiados e sujeitas a
condições de carga várias não oferece dificuldades. A utilização das expressões obtidas
para efeitos de resolução de problemas concretas é simples desde que se utilizem meios de
programação, nomeadamente folhas Excel e Matlab.

Métodos Analíticos na Resolução de Placas 3.34
Exemplo 5
Considere uma placa simplesmente apoiada em dois lados opostos, x=0 e x=a e
encastrada ao longo dos lados y=-b/2 e y=b/2, sujeita a uma carga uniformemente
distribuida. Determine uma expressão para a deformada ω.
A obtenção da solução para este caso, uma vez conhecida a solução para o caso estudado
em 3.2.2., resume-se ao cálculo da solução particular da equação
( )2mm
4
22
m22
42
m4
xpFa
mxdFd
am2
xdFd
=
+
−
ππ (a)
e á determinação de )x(p 2m tendo em conta que a carga aplicada é uma carga
uniformemente distribuida, ou seja
ππ
mp4
xda
xmpsena2)x(p 1
a0
12m =∫= com m=1,3,5,…
Uma solução particular da equação (a) é:
( )map4
F 55
4
m pπ
=
A solução da equação (a) é:
( ) ( ) ( )
++=+=
axmsenh
axm
Ca
xmcoshC1FFFF 22m2
2m1m pm pm compm
πππ
Tendo em conta que ( )Fm p é uma constante e que as condições de fronteira são análogas às
consideradas no caso 3.2.2., as constantes CeC m2m1 que se obtêm por imposição das
condições de fronteira são as que foram obtidas em 3.2.2.
Nestas condições a expressão da deformada é:
( )
+
++
+−×
××∑−=∞
=
axmsenh
axm
AAcoshAsenhAsenh
axmcosh
AAcoshAsenhAcoshAsenhA1
axmsen
map4
D1
22
mmm
m2
mmm
mmm
15
4
1m
πππ
ππ
ω
com Am =mπb/a e as constantes CeC m2m1 com a forma:

Métodos Analíticos na Resolução de Placas 3.35
AAcoshAsenhAsenh
CeAAcoshAsenhAcoshAAsenh
Cmmm
mm2
mmm
mmmm1 +
=+
+−=
Exemplo 6
Considere uma placa rectangular de dimensões a×b com as condições de apoio e
carregamento referidas no exemplo 5. Obtenha o deslocamento no ponto médio da placa
em função de a/b nas condições de carga referidas no exemplo 5 e nas condições de carga
referidas em 3.2.2 , para um mesmo valor de p máximo e para a/b entre 0 e 5.0.
É preferível considerar o valor adimensional do deslocamento ω,que pode designar-se por
ϖ e cujo valor é:
ϖωωϖDpaou
paD o
4
o4
==
Para a obtenção da deformada pode escrever-se um pequeno programa em Matlab, tendo
em conta que as expressões da deformada já são conhecidas, esse programa pode ter a
forma seguinte:
%calculo do Deslocamento pelo Método de Levy% %Calculo do Deslocamento numa Placa com dois lados Simplesmente % %Apoiados e Encastrada nos outros Dois sujeita a uma Carga % %Uniformemente Distribuida e a uma Carga Hidrostática% for l=1:50; x(l)=l/10; wd(l)=0; %Deslocamento devido à Carga Uniformemente Distribuida% for m=1:2:55; am(l)=(m*pi)/(2*x(l)); coef1=4/((m*pi)^5); c2m(l)=-(sinh(am(l))+am(l)*cosh(am(l))); c3m(l)=(sinh(am(l))*cosh(am(l))+am(l)); c1m(l)=c2m(l)/c3m(l); term1=sin(m*pi/2); w1(l)=coef1*term1*(1+c1m(l)); wd(l)=wd(l)+w1(l); end; end; for l=1:50; x(l)=l/10 wh(l)=0; %Deslocamento devido à Carga Hidrostática% for m=1:1:55;

Métodos Analíticos na Resolução de Placas 3.36
am(l)=(m*pi)/(2*x(l)); coef2=((-1)^(m+1))*2/((m*pi)^5); c2m(l)=-(sinh(am(l))+am(l)*cosh(am(l))); c3m(l)=(sinh(am(l))*cosh(am(l))+am(l)); c1m(l)=c2m(l)/c3m(l) term1=sin(m*pi/2); w2(l)=coef2*term1*(1+c1m(l)); wh(l)=wh(l)+w2(l); end; end; plot(x,wd,x,wh,'--'); xlabel('a/b'); ylabel('~w '); legend('carga distribuida','carga hidrostática') x wd wh O gráfico obtido é o que se representa na 3.11 .
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.002
0.004
0.006
0.008
0.01
0.012
0.014
a/b
~w
carga distribuidacarga hidrostática
Figura 3.11: Evolução da Deformada com a/b
3.3 Métodos de Solução Ditos Exactos
Métodos Analíticos na Resolução de Placas 3.37
Os métodos de solução da equação de Lagrange ditos exactos, são métodos que se
baseiam no uso de séries para efeitos de obtenção da solução e são exactos no sentido que
um conjunto infinito de equações algébricas não - lineares pode ser truncado a fim de obter
um certo grau de precisão na solução. As soluções referidas anteriormente, isto é, a solução
de Navier e a solução de Levy são soluções deste tipo. As soluções ditas exactas são
obtidas por consideração de séries duplas de Fourier, por séries duplas generalizadas de
Fourier ou por combinação dos dois tipos de séries. As séries são escolhidas de tal modo
que as condições de fronteira sejam satisfeitas.
O processo seguido na determinação da solução de equações diferenciais, no caso da
teoria das placas a equação deiferencial é a equação de Lagrange, consiste no caso de se
usarem séries duplas de Fourier, em exprimir as variáveis dependentes e a função
carregamento em séries duplas de Fourier, as quais podem ser séries duplas de senos, séries
duplas de senos - cossenos ou séries duplas de cossenos. No caso da equação de Lagrange a
variável dependente é o deslocamento transversal ω(x1,x2) e a função carregamento é
p(x1,x2). O critério de convergência das séries duplas de Fourier é análogo ao critério que
se considera nas séries simples1. Considerem-se as funções f1 (x1, x2), f2 (x1, x2) e f3(x1, x2)
que são funções continuas definidas nos domínios 0 ≤ x1 ≤ a e 0 ≤ x2 ≤ b e representadas
por:
( )bxnsen
axmsenAx,xf 21
mn1n1m
211ππ
∑∑=∞
=
∞
=
( )bxncos
axmsenBx,xf 21
mn1n1m
212ππ
∑∑=∞
=
∞
=
( )bxncos
axmcosCx,xf 21
mn1n1m
213ππ
∑∑=∞
=
∞
= 3.66
onde Amn, Bmn e Cmn são os coeficientes de Fourier das funções f1 (x1, x2), f2 (x1, x2) e
f3(x1, x2) respectivamente. As funções trignométricas consideradas nas séries possuem as
seguintes propriedades:
1 Zygmund A. , Trigonometric Series , Vol 1 ; Cambridge University Press , 1959.

Métodos Analíticos na Resolução de Placas 3.38
nnpara2b
nnpara0dx
bxn
senbxn
sen 222b
0 ′=
′≠=
′∫
ππ
nnpara2b
nnpara0dx
bxn
cosbxn
cos 222b
0 ′=
′≠=
′∫
ππ
( ) imparnncomnnparann
bn2parnncomnnounnpara0
dxbxnco
bxnsen
222
22b0 =′±′≠
′−
=′±′≠′==
′∫
π
ππ
3.67
Para uma função dada, por exemplo a função de carga, os coeficientes de Fourier
Amn podem ser calculados fazendo uso destas propriedades de ortogonalidade no caso da
integração termo a termo da respectiva série ser possível, como foi referido no caso da
solução de Navier. Os coeficientes Amn da série f1 (x1, x2), são obtidos do seguinte modo:
( ) 2112
21b0
a0mn dxdx
axm
senbxn
senx,xfab4A
ππ∫∫= 3.68
No caso de a variável dependente ser definida por uma destas funções, os
coeficientes de Fourier são calculados fazendo uso das condições de fronteira e da equação
de Lagrange, no caso da solução de Navier considerada anteriormente, escolheu-se uma
série de Fourier que verificava as condições de fronteira termo a termo e os coeficientes
foram calculados por uso da equação de Lagrange, no entanto as séries de Fourier nem
sempre verificam as condições de fronteira.
As funções senos e cossenos não são as únicas funções ortogonais e é possível
considerar séries duplas generalizadas de Fourier fazendo uso de outros conjuntos de
funções ortogonais. Considere-se a função f(x1, x2) definida no domínio a ≤ x1 ≤ b e
c≤x2≤d que pode ser representada, por um conjunto de funções ortogonais Xm(x1) e Yn(x2),
do seguinte modo:

Métodos Analíticos na Resolução de Placas 3.39
( ) ( ) ( )2n1mmn1n1m
21 xYxXfx,xf ∑∑=∞
=
∞
= 3.69
que é a chamada série dupla generalizada de Fourier correspondente à função f(x1,x2). Os
coeficientes fmn são chamados constantes de Fourier de f(x1,x2) com respeito às funções
ortogonais Xm(x) e Yn(x2). Estas funções gozam das propriedades de ortogonalidade, ou
seja:
nmparaXnmpara0
dxXX 2n
1nmba =
≠=∫
nmparaYnmpara0
dxYY 2n
1nmdc =
≠=∫ 3.70
onde nm YeX são as normas de nm XeX respectivamente.
No caso de f (x1, x2) ser uma função conhecida, por exemplo a função de carga, os
coeficientes fmn podem ser calculados fazendo uso da ortogonalidade dos termos da série
do seguinte modo:
( ) ( ) ( ) 212n1m21dc
ba2
m2
mmn dxdxxYxXx,xf
YX1f ∫∫= 3.71
No caso da função f (x1, x2) ter de ser determinada, como seria o caso do
deslocamento transversal, a representação desta função por séries de Fourier generalizadas
é feita em geral fazendo uso de funções que verifiquem as condições de fronteira. As
constantes de Fourier destas séries são determinadas através da equação ou equações
diferenciais em que intervenham as variáveis.
3.4. Método de Ritz

Métodos Analíticos na Resolução de Placas 3.40
3.4.1. Energia Potencial
O método de Ritz à semelhança do que acontece com o método energético referido
para efeitos de obtenção da solução de Navier, também considera a energia potencial Π,
que tem a forma seguinte:
( ) ( ) dSDp2
xxxx12
2D
22
2
21
22
21
22
S
−
∂∂
∂∂
−
∂∂
∂−+∇∫=∏
ωωωωνω 3.72
Esta expressão tem uma forma mais simplificada para o caso das placas rectangulares
encastradas ao longo do contorno cujas condições de fronteira são:
0x1
=∂∂
=ω
ω para ax1 ±=
0x 2
=∂∂
=ω
ω para bx 2 ±= 3.73
A segunda parcela do segundo membro da equação (3.72) é designada por curvatura
de Gauss, considerando o integral estendido a toda a superfície da placa encastrada
representada na figura 3.4. A curvatura de Gauss é:
dSxxxx 2
2
2
21
22
21
2
S
∂∂
∂∂
−
∂∂
∂∫
ωωω 3.74
Vamos proceder à integração por partes da 1ª parcela do integrando, ou seja:
dSxxxx
dSxx 2121
2
S
2
21
2
S
∂∂
∂∂
∂∂∂
∫=
∂∂
∂∫
ωωω
dSaxxx
dSxxx 1x
221
2
2221
3
S νωωωω
∂∂
∂∂∂
∫+∂∂
∂∂∂
∫−= 3.75

Métodos Analíticos na Resolução de Placas 3.41
Este integral toma a forma seguinte tendo em conta o teorema de Gauss:
2221
2
2221
32
21
2
dxxxx
dSxxx
dSxx ∂
∂∂∂
∂∫+
∂∂
∂∂∂
∫−=
∂∂
∂∫
ωωωωω 3.76
Proceda-se agora à integração do segundo termo do integrando da equação (3.74), ou
seja:
=∂∂
∂∂
∫− dSxx 2
2
2
21
2
Sωω
=∂∂
∂∂
∫−∂∂
∂∂∂
∫ dSaxx
dSxxx 2x
221
2
2212
3
νωωωω
12
21
2
2212
3
S dxxx
dSxxx ∂
∂∂∂
∫+∂∂
∂∂∂
∫=ωωωω 3.77
Substituindo (3.76) e (3.77) na equação (3.74), pode dar-se a esta equação a forma
seguinte:
=
∂∂
∂∂
−
∂∂
∂∫ dS
xxxx 22
2
21
22
21
2 ωωω
dsxds
dxx
dx
dxxx
dxxxx 1212
111
2122
∂∂
∂∂
∫=
∂∂
∂∂
∫=
∂∂
∂∂
+
∂∂
∂∂
∂∂
∫=ωωωωωωω
3.78
É agora imediatamente visível que no caso da placa rectangular encastrada ao longo
do contorno o valor de 2x/ ∂∂ ω é nulo para x1 = ± a e 1x/ ∂∂ ω é nulo para x2 = ± b.
Sendo assim, a curvatura de Gauss é nula na expressão (3.72) e a energia potencial toma a
forma seguinte:
( ) dSD
22D 2
S
−∇∫=Π
πωω 3.79

Métodos Analíticos na Resolução de Placas 3.42
É esta portanto a forma da energia potencial total para efeitos de aplicação do método
de Ritz ao estudo de placas rectangulares encastradas.
3.4.2 Formulação do Método de Ritz
Admitindo que o campo de deslocamentos transversais se pode escrever do seguinte
modo:
( )321ii
n
1ix,x,xNa∑=
=ω 3.80
sendo ai constantes desconhecidas e Ni funções das coordenadas x1, x2 e x3, que devem
satisfazer as condições de fronteira.
Uma vez escolhidas as funções ( )321i x,x,xN , as constantes ai são determinadas
de tal modo que a energia potencial Π seja mínima, isto é:
0ai
=∂
Π∂ 3.81
Esta minimização da energia potencial corresponde portanto a um sistema de n
equações a n incógnitas.
Para efeitos de ilustração do método de Ritz consideremos uma placa rectangular
encastrada como se representa ns figura 3.5 a qual está submetida a uma carga
uniformemente distribuída de intensidade p.
A placa tem dimensões 2a e 2b e as condições de fronteira são:
0x1
=∂∂
=ω
ω para ax1 ±=
0x2
=∂∂
=ω
ω para bx2 ±=
Considerando um parâmetro só o deslocamento transversal toma a forma seguinte:

Métodos Analíticos na Resolução de Placas 3.43
( ) ( )[ ]2222
221
211 bxaxx2C −−=ω 3.82
para o qual a função N satisfaz as condições de fronteira e é par.
p p
Figura 3.5: Placa rectangular encastrada submetida a uma carga
uniformemente distribuída.
A partir da equação (3.82) podem determinar-se facilmente as derivadas em ordem a
x1 e x2, obtendo-se para o quadrado do Laplaciano uma expressão com a forma seguinte:
( ) ( )[ ] ( ) ( )[ ] ( ){ }( )22221
22
222
222
221
2211
2 axx4bx2bxx4ax2C −+−+−+−=∇ ω 3.83
e para a energia potencial total uma expressão com a forma seguinte:
( ) ( ) ( ) ( )( ){ }( ) −−−+−−∫∫=Π −−
22222
222
222
22211
bb
aa axb2x6bxa2x6C
2D
( ) ( )21
2222
22211 xdx
DbxaxCp2 −−
− 3.84
Derivando em ordem a C1 a equação (3.84) e igualando a zero por forma a obter um
mínimo da energia potencial obtém-se:

Métodos Analíticos na Resolução de Placas 3.44
42241b7ba4a7
Dp
383.0C++
= 3.85
A solução aproximada da equação de Lagrange, considerando a função de
aproximação:
( ) ( )2222
221
2 bxaxN −−= 3.86
é
( ) ( )( )2222
221
24224 bxax
b7ba4a7D
p383.0−−
++=ω 3.87
No quadro 3.2 estão representadas, a solução tabelada e a solução de Ritz para uma
placa encastrada.
Solução Tabelada(Timoshenko) Solução de Ritz
0.02127 pa4 / D 0.0202 p a4 / D
Quadro 3.2: Solução de Obtida e Solução Timoshenko
A solução de Ritz pode ser melhorada por consideração das funções de forma
seguintes:
( ) ( )222
2221
21 bxaxN −−=
( ) ( )2222
2221
212 bxaxxN −−=
( ) ( )2222
2221
223 bxaxxN −−= 3.88
Sendo a solução ϖ
332211 NCNCNC ++=ϖ

Métodos Analíticos na Resolução de Placas 3.45
Neste caso as constantes C1, C2 e C3 são obtidas por minimização da funcional Π,
resultando desta minimização um sistema de três equações a três incógnitas.
3.4.3. Aplicações do Método de Ritz
A utilização do Método de Ritz é facilitada se se utilizar o programa MAPLE para
tratamento das expressões analíticas.
Exemplo 7
Determine a solução aproximada de Ritz para o deslocamento transversal no centro de
uma placa quadrangular simplesmente apoiada ao longo do contorno sujeita a uma carga
uniformemente distribuida. Use funções que satisfaçam as condições cinemáticas do
problema. Compare com a Solução Exacta.
O campo de deslocamentos pode escrever-se com a forma:
( )321ii
n
1ix,x,xNa∑=
=ω
sendo ai constantes desconhecidas e Ni funções que satisfaçam as condições de fronteira
que são:
0x
e02
2
=∂∂=
ωω para x=0 e x=a
0y
e0 2
2
=∂∂=
ωω para y=0 e y=a
A energia potencial total Π é:
( ) ( ) dSDp2
xxxx12
2D
22
2
21
22
21
22
S
−
∂∂
∂∂
−
∂∂
∂−+∇∫=∏
ωωωωνω (a)
Por minimização da energia potencial
0ai
=∂Π∂
podem calcular-se as constantes ai .

Métodos Analíticos na Resolução de Placas 3.46
As funções Ni a utilizar são, por exemplo
ay3sen
ax3senN;
aysen
ax3sen
ay3sen
axsenN;
aysen
axsenN 321
ππππππππ=+== (b)
sendo consequentemente
ay3sen
ax3sena
aysen
ax3sen
ay3sen
axsena
aysen
axsena 321
ππππππππω +
++=
Calculando as derivadas de w necessárias para efeitos de cálculo da energia potencial
(a), calculando a energia potencial e derivando em ordem às constantes ai , obtém-se:
Dap00000571.0
Dap
729040
a
Dap00005548.0
Dap
4500240
a
Dap004161.0
Dap
90360
a
44
63
44
62
44
61
==
==
==
π
π
π
As operações acabadas de referir podem ser efectuadas por uso do MAPLE, o que facilita
a resolução do problema.
Uma vez conhecidas as constantes obtém-se para a deformada a expressão seguinte:
[ +
++=
aysen
ax3sen
ay3sen
axsen000055.0
aysen
axsen00416.0 ππππππ
ω
]Da 4p
ay3sen
ax3sen0000057.0 ππ
+
Para x=a/2 e y=a/2, obtém-se o deslocamento no centro da placa que é:
Dap004111.0
4
=ω
Comparando este valor, com o valor tabelado no Timoshenko1que é:
Dap00406.0
4
=ω
Constata-se que por uso das funções (b) se obtém uma aproximação razoável, para a
deformada da placa simplesmente apoiada sujeita a uma carga uniformemente distribuida,
recorrendo ao método de Ritz.

Métodos Analíticos na Resolução de Placas 3.47
3.5. Método de Galerkin
3.5.1 Formulação do Método de Galerkin
Consideremos uma equação linear do tipo:
L u = f 3.89
onde L é um operador linear;
u é uma variável desconhecida ou conjunto de variáveis;
f é um vector conhecido.
Admitindo que as condições de fronteira são homogéneas, uma solução aproximada
da equação anterior é:
ii
n
1iau Φ∑=
= 3.90
onde iΦ são funções das coordenadas, isto é são funções de forma que satisfazem as
condições de fronteira.
ia são constantes a determinar impondo a condição:
( ) 0dvfuL iV =Φ−∫ ∫ ∫ 3.91
que representa o princípio variacional a satisfazer pelo vector u. Para o caso de se tratar da equação de Lagrange:
Dp2 =∇ ω ou 0D/p2 =−∇ ω 3.92
1 Stephen P. Timoshenko and S. Woinowski-Krieger, Theory of Plates and Shells , McGRAW-HILL

Métodos Analíticos na Resolução de Placas 3.48
admitindo uma solução aproximada:
ii
n
ia Φ∑=ϖ 3.93
e uma vez conhecidas as funções de forma iΦ , as constantes ai são determinadas por
solução do sistema de equações:
0dxdxDp
21i2b
ba
a =Φ
−∇∫∫ −− ϖ 3.94
para i = 1, 2, …, n
Este é portanto o sistema de equações que resulta da aplicação do método de Galerkin à
equação de Lagrange.
3.5.2. Aplicação a uma Placa Rectangular
Resolve-se agora o problema de uma placa encastrada de dimensões 2a e 2b e
submetida a uma carga uniformemente distribuída de intensidade p, como se representa na
figura 4.4, recorrendo ao método de Galerkin.
As condições de fronteira são:
0=ω e 0x
=∂∂ ω para
axax
=−=
0=ω e 0y
=∂∂ ω para
byby
=−=
3.95
Introduzindo as coordenadas adimensionais ξ e η definidas do seguinte modo:
ax
=ξ e by
=η 3.96

Métodos Analíticos na Resolução de Placas 3.49
As condições de fronteira neste sistema de coordenadas adimensionais será:
0=∂∂
=ξω
ω para 1±=ξ
0=∂∂
=ηω
ω para 1±=η 3.97
Considere-se o conjunto de funções seguinte:
( )221 1F −= ξ ; ( )23
2F ξξ −= ; ( )221 1H −= η ; ( )23
2H ηη −= 3.98
As funções de forma iΦ em termos das coordenadas adimensionais 3.97 podem
obter-se considerando produtos adequados das funções 3.98, sendo funções de forma
possíveis as seguintes:
( ) ( )2222111 11HF −−==Φ ηξ
( ) ( )2322212 1HF ηηξ −−==Φ
( ) ( )2223123 1HF −−==Φ ηξξ
( ) ( )2323224 HF ηηξξ −−==Φ 3.99
Por recurso às funções de forma acabadas de definir a equação 3.93 toma a forma
seguinte:
44332211 aaaa Φ+Φ+Φ+Φ=ϖ 3.100
As constantes ai são determinadas a partir da equação 3.94, de acordo com o método
de Galerkin. Note-se que em virtude da mudança de coordenadas efectuada se obtém:

Métodos Analíticos na Resolução de Placas 3.50
22
2
22
2
2
2
2
2
bayx ηω
ξωωω
ω∂
∂+
∂∂
=∂∂
+∂∂
=∇ 3.101
Atendendo à equação 3.100 e à equação 3.101 o sistema de equações 3.94 toma a
forma seguinte:
( ) 0ddD
pbaaaaab
1
4
44332211
2
2
2
2
2
2
210
10 =Φ
−Φ+Φ+Φ+Φ
∂∂
+∂∂
∫∫ ηξηξ
( ) 0ddD
pbaaaaab
2
4
44332211
2
2
2
2
2
2
210
10 =Φ
−Φ+Φ+Φ+Φ
∂∂
+∂∂
∫∫ ηξηξ
( ) 0ddD
pbaaaaab
3
4
44332211
2
2
2
2
2
2
210
10 =Φ
−Φ+Φ+Φ+Φ
∂∂
+∂∂
∫∫ ηξηξ
( ) 0ddD
pbaaaaab
4
4
44332211
2
2
2
2
2
2
210
10 =Φ
−Φ+Φ+Φ+Φ
∂∂
+∂∂
∫∫ ηξηξ
3.102
Para o caso de ser ( )ba1ab
2
2
== , obtém-se o sistema de equações seguinte:
=
005805.0040635.0040635.028444.0
Dpa
aaaa
118993.0218235.0218235.0135098.0218235.060843.2135098.021588.1218235.0135098.060843.221588.1135098.021588.121588.13747.13
4
4
3
2
1
3.103
Resolvendo o sistema de equações anterior:
( ) ( ) +
−
−
+
−
−
=
23222222
by
by1
ax00534806.01
by1
ax0202319.0ϖ

Métodos Analíticos na Resolução de Placas 3.51
( ) ( )D
paby
by
bx
bx00624451.01
by
bx
bx00534806.0
422232223
−
−
+
−
−
O deslocamento máximo obtido, (x = y = 0), é:
=
Dpa0202319.0
4
maxϖ 3.104
Comparando com o valor obtido por séries, que é:
=
Dpa0202.0
4
maxϖ
Verifica-se que os dois valores são de facto muito próximos.
Problemas Propostos
1. Considere uma placa rectangular de dimensões a segundo x1 e b segundo x2 e
sujeita a uma carga uniformemente distribuída de intensidade p. A placa considera-se
simplesmente apoiada ao longo dos lados x1 = 0, x1 = a e x2 = 0 e encastrada para x2 = b. A
placa é considerada isotrópica de espessura t. Determine:
a) A forma da deformada fazendo uso do Método de Levy.
b) As expressões para os momentos flectores e para o momento torsor.
c) Calcule o Momento no bordo encastrado.
Considere para a função Fm(x2) a seguinte expressão:

Métodos Analíticos na Resolução de Placas 3.52
( ) [ ]YcoshYDYsenhCYsenhBYcoshA1mapxF mmmm
4
m2m ++++
=
π
com m2 pe
axmY π
= os coeficientes do desenvolvimento em série de senos da carga p.
2. Considere uma placa rectangular de dimensões a segundo x1 e b segundo x2 e
sujeita a uma carga uniformemente distribuida de intensidade p. A placa considera-se
simplesmente apoiada ao longo dos lados x1 = 0, x1 = a e x2 = 0 e livre para x 2= b .A placa
é considerada isotrópica de espessura constante e igual a t. Determine:
a) A forma da deformada fazendo uso do Método de Levy.
b) As expressões para os momentos flectores e para o momento torsor.
Considere para a função Fm(x2) a seguinte expressão:
( ) [ ]YcoshYDYsenhCYsenhBYcoshA1mapxF mmmm
4
m2m ++++
=
π
com m2 pe
axmY π
= os coeficientes do desenvolvimento em série de senos da carga p.
3. Considere uma placa isotrópica rectangular de dimensões a segundo x1 e b
segundo x2 sendo encastrada ao longo do contorno exterior e sujeita a uma carga
uniformemente distribuída de intensidade p. Determine a Deformada e os momentos
considerando o princípio da Sobreposição de Efeitos.
4. Para uma placa simplesmente apoiada ao longo do contorno de dois lados opostos
e livre nos outros dois e para uma placa encastrada ao longo do contorno submetidas a
Métodos Analíticos na Resolução de Placas 3.53
cargas uniformemente repartidas, trace diagramas que mostrem como evoluem a deformada
e os momentos com o quociente a/b. Use o método de Levy.
5. Fazendo uso do Método de Ritz determine a deformada no ponto médio de uma
placa quadrangular, simplesmente apoiada em dois lados opostos e encastrada nos outros
dois, sujeita a uma carga uniformemente distribuida de intensidade p. Use funções de forma
que verifiquem as condições cinemáticas.





![Ζıı›Ωλλˆ∅Ξˆ}]Ξ}„Πλ Ξ〉 ∫λΖ„Ξℵ ] Ξð DOSSIÊ · poder dúplice da fotografia: gerar documentos e criar obras de arte visual. ” Susan Sontag . Desde](https://img.document.onl/doc/110x75/5e422cd345570f46da2cec2a/aaa-aaa-dossi-poder.jpg)





![ANPEC - Associação Nacional dos Centros de Pós ...€¦ · Web viewOnde v i é o distúrbio aleatório e ξ it é o nível de eficiência da firma i, tal que ξ it ϵ(0,1] . Se](https://img.document.onl/doc/110x75/5f38c50bc85ef739ad512a79/anpec-associao-nacional-dos-centros-de-ps-web-view-onde-v-i-o-distrbio.jpg)

















