Embed Size (px)
Citation preview

1
Capítulo – II
MECÂNICA DO CAMPO CONTÍNUO DE
POTENCIAIS GENERALIZADOS SEM
IRREGULARIDADES
Mas agora quebrarei o seu jugo de sobre ti, e romperei as tuas cadeias (Naum 1, 13)
RESUMO Neste capítulo será visto a fundamentação matemática básica da teoria do campo
escalar, vetorial e tensorial em um meio material regular, onde desenvolvemos o cálculo
analítico das equações dos fluxos em termos dos volumes, das superfícies e dos contornos
sem a presença da irregularidades no contorno e sem a presença da porosidade no domínio
geométrico do problema.
2. 1 – Objetivos do Capítulo
i) Apresentar a transição da Mecânica de Newton do Discreto para a Mecânica do Contínuo.
ii) Estabelecer a conexão entre o Meio Discreto e o Contínuo.
iii) Estabelecer as transformações das equações do meio discreto para o contínuo
iv) Descrever a Mecânica do Continuo Clássica apresentando os conceitos e os teoremas
fundamentais, as principais equações diferenciais e integrais básicas de potencial, fluxo e
continuidade.
v) Obter a partir das leis de Newton da Mecânica a Equação de Movimento de um Meio
Contínuo sem irregularidades.

2
vi) Fundamentar os resultados desta teoria para se fazer uma ampliação dos conceitos
utilizados neste capítulo com a presença de porosidade do volume e rugosidade das
superfícies.
2. 2 – Introdução
Embora os primórdios de um estudo da mecânica dos corpos e das partículas
datam desde a Grécia antiga com os trabalhos de Aristóteles, uma descrição consistente de
uma equação de movimento para partículas e corpos sólidos iniciou-se com os trabalhos de
Galileu, seguido por Newton, Leibnitz e Lê Chatelier. Após inúmeros desenvolvimentos
matemáticos que levaram em conta o sistema de coordenadas utilizados na descrição de um
movimento, D’Alambert, Euler e Lagrange também obtiveram as mesmas equações de
Newton, na sua forma generalizada, utilizando princípios variacionais. Estas equações
passaram a se chamar de equações de Euler-Lagrange. O desenvolvimento matemático
realizado até então, demonstrou que determinados princípios gerais estão subtendidos no
movimento de corpos e partículas, entre eles o princípio da mínima ação. Gibbs e Onsager
estenderam as generalizações da mecânica de Euler-Lagrange para leis de fluxos na
termodinâmica de processo irreversíveis incluindo a formulação do contínuo.
A transição da Mecânica Clássica para a Mecânica do Contínuo se deu graças ao
estudo dos corpos deformáveis onde se aplicou os princípios utilizados na Mecânica das
Partículas Discretas extendo-as para o Campo Contínuo. Uma generalização análoga as
equações de Euler-Lagrange foi feita por Elsheby na qual o tensor de Elsheby-Rice foi pela
primeira vez obtido.
Para se iniciar uma descrição matemática do problema do movimento de uma
partícula, pode-se optar pela linha histórica ou cronológica dos desenvolvimentos que se
seguiram desde Aristóteles até a idade moderna com Laplace, Poincaré, Lorenz, etc, ou optar
pela linha de descrição conceitual que se inicia com o conceito de momento linear, energia,
ação, etc. Contudo, o surgimento desses conceitos mais fundamentais como o de ação,
momento linear, energia, e de lagrangeano só apareceram muito tempo depois do
desenvolvimento inicial dado por Newton. Desta forma, tanto a linha histórica e cronológica
do desenvolvimento da mecânica parecem ter suas vantagens e desvantagens. Portanto, vamos
procurar mesclar as duas linhas de descrição de forma a se obter uma ascendência linear no
desenvolvimento do raciocínio lógico que deu origem a mecânica.
3
2. 3 – As Leis de Newton para o Meio Discreto (Partículas e
Sistema de Partículas)
Vamos iniciar esta secção apresentando a descrição do movimento de uma
partícula a partir da postulação das três Leis de Newton, mas sem fazer quaisquer
considerações sobre a sua origem matemática ou histórica.
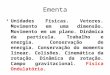
Em resumo as três leis de Newton podem ser formalizadas nas seguintes
expressões matemáticas para o caso do movimento discreto de um sistema de partículas ou do
centro de massa de um corpo rígido, conforme mostra a Figura - 2. 1.
2.3.1 - 1ª Lei de Newton
A primeira lei estabelece um princípio de inércia a partir do qual “nenhum corpo
inicia ou cessa seu estado de movimento sem que sobre ele atue uma força”. Observe que para
enunciar este principio recorreu-se ao conceito de estado de movimento, o qual pode ser
representado pela seguinte expressão:
p mv (2. 1)
Nesta equação (2. 1) a letra p representa o momento linear da partícula, e m a massa e v a
sua velocidade. Também devemos observar que o princípio da inércia admite também a
existência de um outro conceito, o de força, cuja relação com o momento linear é dado pela
chamada 2ª lei de Newton:
2.3.2 - 2ª Lei de Newton
Na segunda proposição feita por Newton estabelece-se que a força resultante que
atua sobre um determinado corpo ou partícula possui um valor dado pela derivada temporal
do momento linear resultante do sistema, de acordo com a seguinte expressão:
dpFdt
(2. 2)
Esta expressão constitui-se de fato em uma equação de movimento, considerando-se os
conceitos anteriormente estabelecidos.

4
2.3.3 - 3ª Lei de Newton
Na terceira e última proposição considera-se que as forças atuantes sobre os
corpos possuem sua origem nos campos (como o campo gravitacional, elétrico, magnético,
etc) e nos contatos entre superfícies (forças de pressão, choques ou colisões, etc). Neste
sentido a complementaridade das forças que atuam a partir de um mesma linha de ação, segue
o seguinte postulado:
Quando corpos são submetidos a forças, estas possuem ação e reação iguais e
opostas e de mesma intensidade que não se anulam entre-si, porque atuam em corpos
diferentes, ou seja:
ação reaçãoF F
(2. 3)
Esta proposição também está relacionada com a interação entre corpos que pode se dar por
campo ou por contatos.
Neste ponto é preciso ressaltar a diferença da natureza desses dois tipos de
interação que dão origem as forças de campo e de superfície (geradas pelo contato, pressão,
colisão, etc). Portanto, para uma descrição mais acurada do movimento de um corpo ou
partícula, deve-se distinguir na equação (2. 2) a natureza das força de campo e de superfícies
da seguinte forma:
dtpdFF sc
(2. 4)
Esta distinção ficará mais clara e útil no contexto da mecânica do contínuo quando se utilizar
o Princípio de Pascal.
A aplicação das leis de Newton ganhou grande abrangência na física e na
engenharia pela sua capacidade de explicar uma variedade enorme de fenômenos mecânicos
que vão desde o movimento de partículas, corpos celestes até sólidos e fluidos. Neste último
contexto essas leis obtiveram uma nova roupagem matemática que se iniciou com a hipótese
do contínuo.
5
Figura - 2. 1. Movimento descrito pelas Leis de Newton para o caso discreto a) um sistema de partículas; b) o centro de massa de um corpo rígido .
2. 4 – A Hipótese do Contínuo
A hipótese do contínuo assume que os materiais, sólidos e fluidos (que podem ser
líquidos ou gases), são distribuídos continuamente pela região de interesse do espaço, isto é,
tanto um quanto o outro, no caso sólido ou fluido, por exemplo, são tratados como um meio
contínuo sem recorrer a uma descrição atomística discreta.
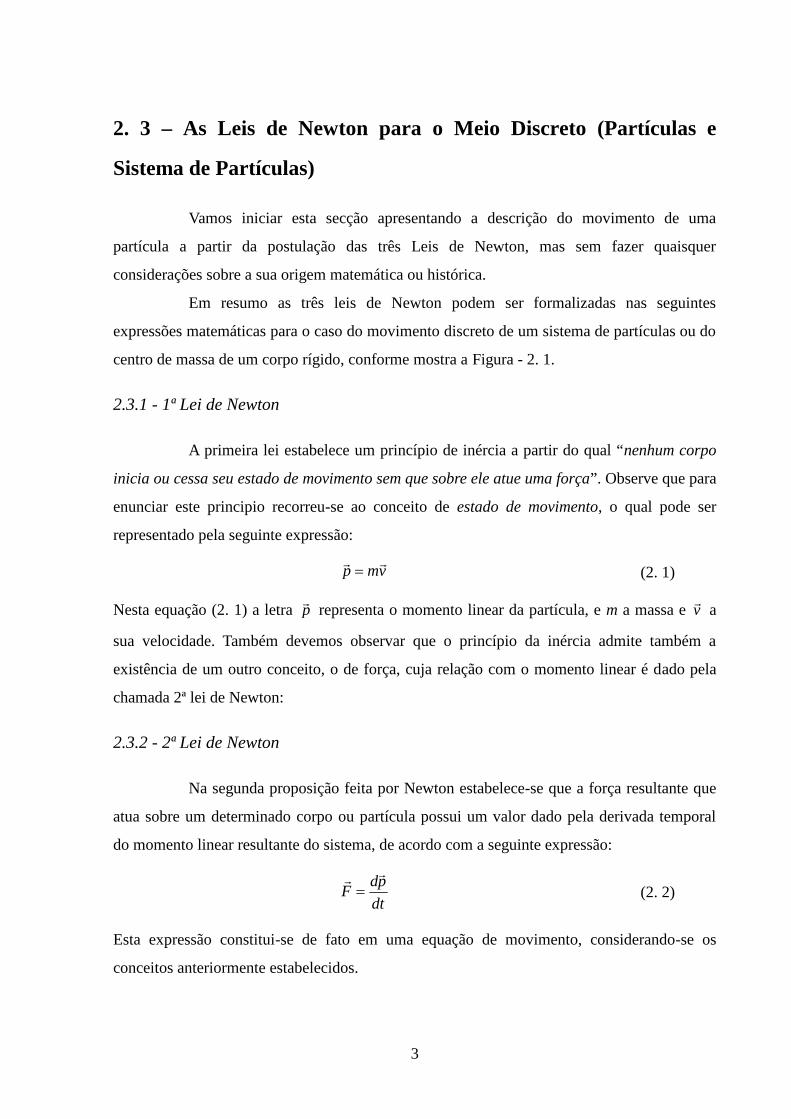
Consideremos um material sólido formado por átomos como um metal, por
exemplo. O espaço percorrido por um elétron entre duas colisões consecutivas com o núcleo
dos átomos é chamado de caminho livre médio, l, ( Figura - 2. 2).
Figura - 2. 2. Caminho livre médio, l, entre duas colisões consecutivas de um elétron com os núcleos de um sólido atômico.
Consideremos o caso onde o caminho livre médio, l, é da mesma ordem de

6
grandeza do volume de controle, L, isto é, L l. Neste caso, os fenômenos físicos existentes
não fazem parte do âmbito da Mecânica do Contínuo (1) e sim da Mecânica Estatística.
Contudo, se o caminho livre médio(2), l, entre duas colisões consecutivas for
muito menor do que a extensão física do volume de controle considerado, L, ou seja, quando
L >> l, a ciência capaz de tratar os fenômenos envolvidos neste volume de observação é a
Mecânica do Contínuo. Por exemplo, para os gases, o caminho livre médio é
aproximadamente 10-7mm. Logo, qualquer volume de controle da ordem de milímetros está
dentro do intervalo de conceituação dada pela Mecânica do Contínuo. Portanto, a propriedade
usada para determinar se a idéia de contínuo é apropriada, ou não, é a massa específica, ou
densidade, , definida por:
Vm
V
0lim
(2. 5)
Onde, m, é a massa incremental contida no volume, incremental, V . Isto significa que a
densidade do sólido contido neste volume sofre flutuações desprezíveis para a descrição
matemática da Mecânica do Contínuo de tal forma que esta pode ser calculada pela equação
(2. 5).
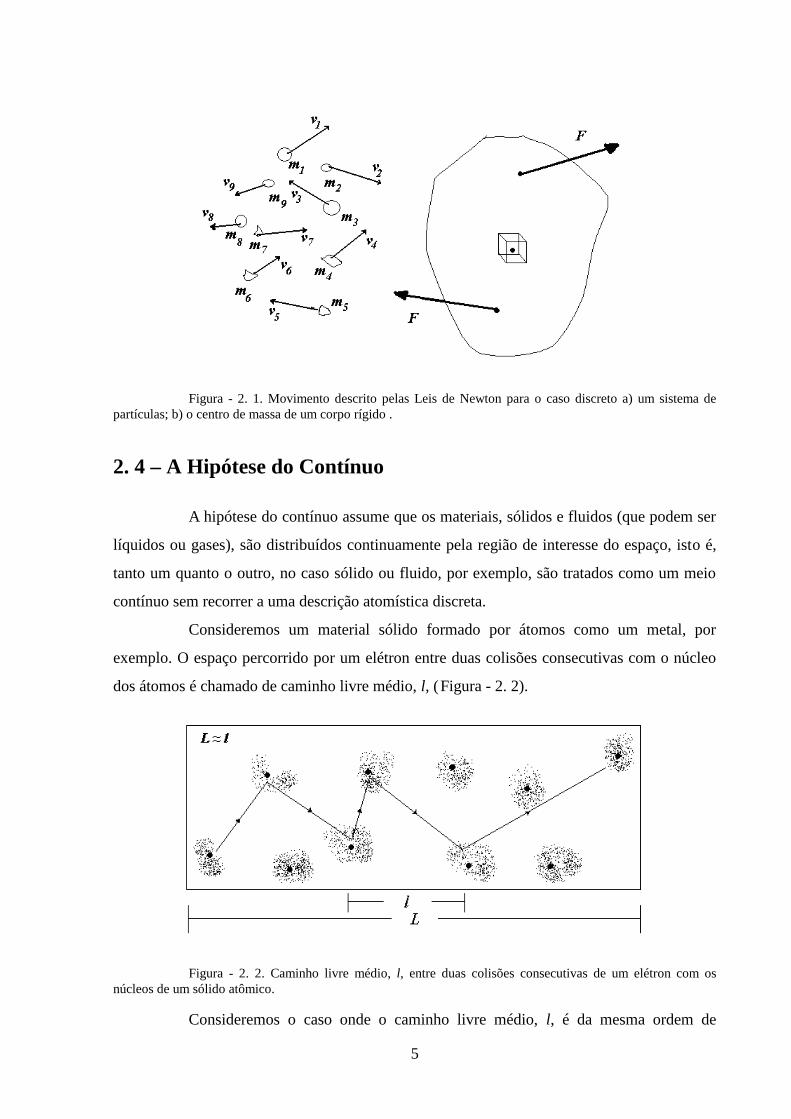
Figura - 2. 3. Hipótese do contínuo para o limite infinitesimal do volume de controle de um fluido. a) Medida da densidade em um ponto. b) Variação desta medida com o volume considerado.
Fisicamente não se pode fazer 0V , já que, quando V fica extremamente
pequeno a massa contida nele varia descontinuamente de pendendo do número de átomos em
1 Teoria do Calor, Mecânica dos Sólidos ou Fluidos
7
V . Na prática, existe um volume pequeno abaixo do qual a idéia de contínuo falha, como
pode-se ver na Figura - 2. 3, pois abaixo desse volume, , tem-se um valor no qual as
distâncias lineares são da ordem do livre caminho percorrido pelas moléculas. Sendo assim, a
hipótese do contínuo é válida quando tem-se, L l , ou seja, a distância linear (L) é maior
que o livre caminho médio ( l ) como já foi dito anteriormente, e não é válida para L l .
Conforme o gráfico da Figura - 2. 3, a partir do ponto A entramos na região de
domínio da Mecânica do Contínuo, onde não depende mais da escala de observação do
volume de controle, ou seja, esta é a condição de continuidade da matéria. Nesta figura
mostra-se como uma medida é aceitável dentro da hipótese do contínuo. Termodinamicamente
falando este volume equivale àquele que contém um mínimo de 1015 partículas, pois coincide
com o limite termodinâmico, veja por exemplo, a representação mostrada na Figura - 2. 3a.
O limite superior da hipótese do contínuo, para acima do qual não é válida, é o
tamanho do próprio sistema que está sendo analisado, pois se analisarmos uma grandeza com
dimensões maiores que o tamanho do sistema este se torna insignificante. Por exemplo,
assumindo-se um rio como um sistema fluido, se for tomado um volume suficientemente
pequeno, abaixo de , teremos L l e assim, a hipótese do contínuo não é válida. Porém, se
tomarmos um volume muito grande para analisar o sistema fluido rio, como o planeta terra,
por exemplo, como se estivéssemos sobrevoando-o em um avião a grande altitude,
observando a terra, o rio será considerado e visto como uma linha e não como um fluido em
movimento.
2. 5 – Transformação do Discreto para o Contínuo
A transformação da descrição matemática da Mecânica das Partículas para a
Mecânica do Contínuo, se dá quase que naturalmente com o surgimento do conceito de
“densidade generalizada” ou grandeza específica. Esse conceito é dado pela quantidade de
uma determinada grandeza contida em um volume infinitesimal do contínuo, ou seja, para o
caso de um meio onde vale a hipótese do contínuo, precisamos transformar as grandezas de
partículas discretas em densidades que serão, nada mais nada menos, que suas respectivas
grandezas por unidade de volume.
A transição da forma matemática das leis de Newton do caso discreto para o
2 alguns livros trazem os termos “livre caminho médio”, “caminho médio livre de colisões”, que são todo

8
contínuo é feito por meio das seguintes transformações matemáticas, de massa, momento
linear, força, etc:
:
p
F
X
m dm dVp dp dV
F dF dV
X dX dV
. (2. 6)
onde utiliza-se as respectivas densidades generalizadas.
:
:
:
:
:
p
F
dmm massadV
dpp J momentodVdFF f forçadV
d outrasdV
XXX
. (2. 7)
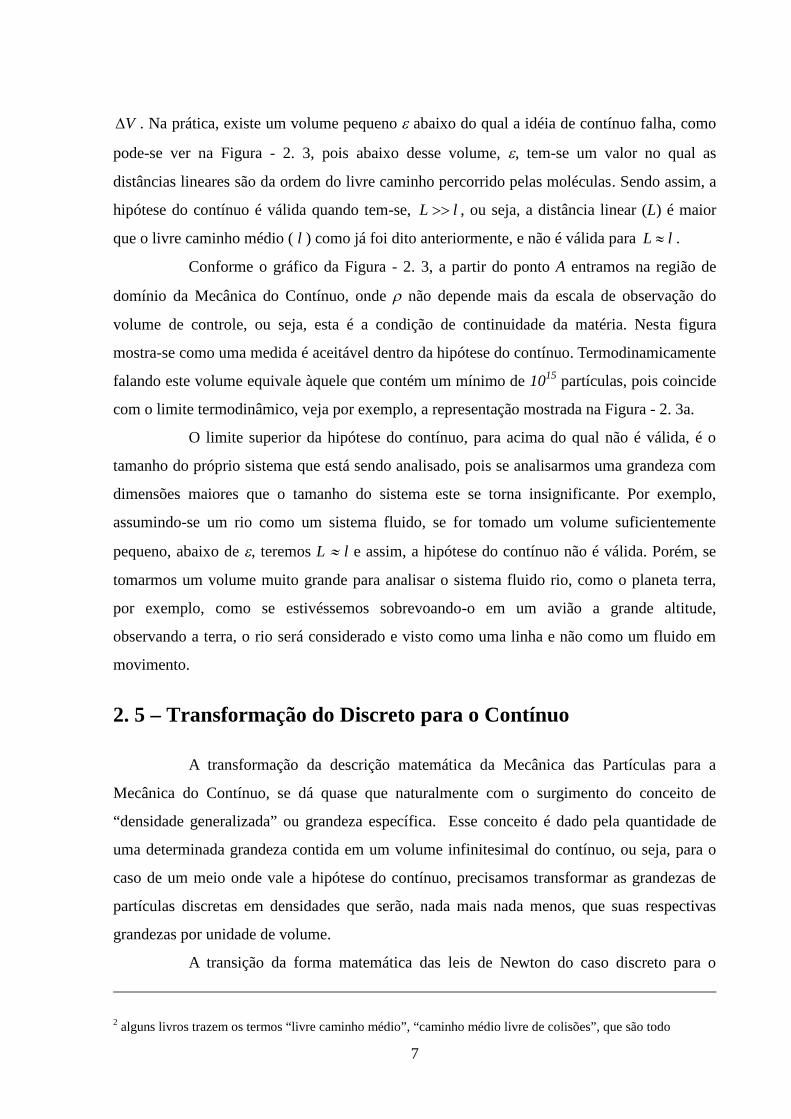
A escala necessária para que essa transição seja válida é mostrada
esquematicamente na Figura - 2. 4.
i) Massa (Lei de Conservação da Massa)
Logo a transformação matemática destas grandezas fica estabelecida como:
dVdmm . (2. 8)
onde,
ii) Momento Linear (1ª Lei de Newton para o Meio Contínuo)
De forma análoga a transformação do momento linear segue o mesmo raciocínio
da transformação da massa, ou seja, a densidade de momento corresponde a quantidade de
momento contida em um volume infinitesimal do contínuo, ou seja:
equivalentes

9
vdV
pdJp mm . (2. 9)
iii) Força (2ª Lei de Newton para o Meio Contínuo)
Por último a equação de movimento segue das transformações anteriores em que a
densidade de forças é dada pela variação temporal da densidade dos momentos lineares.
R Rdp dFF fdt dV
. (2. 10)
onde
d dp d dpdV dt dt dV
. (2. 11)
Logo
R
d vf
dt
. (2. 12)
iv) Forças de Ação e Reação (3ª Lei de Newton para o Meio Contínuo)
Naturalmente tem-se que a densidade de força de ação ( ijf
) possui mesma
intensidade e sinal oposto a força de reação ( jif
), da seguinte forma:
jiijjiij ffFF
. (2. 13)
ou
ação reaçãof f
. (2. 14)
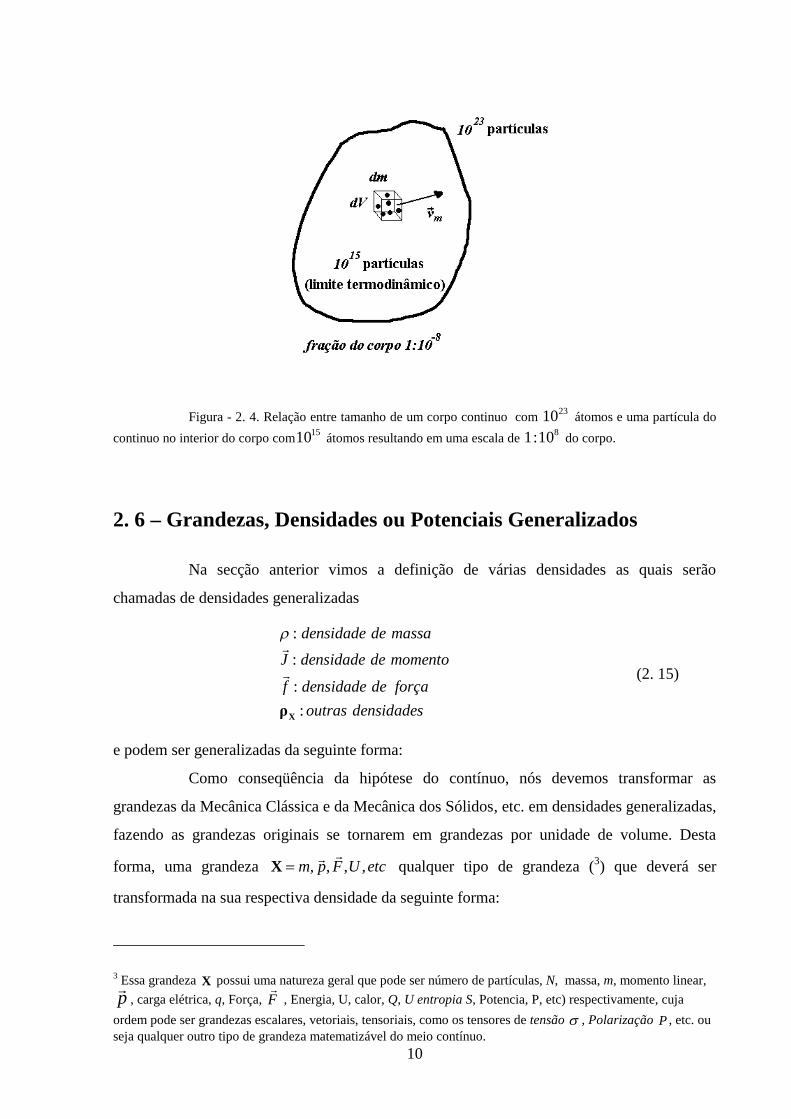
10
Figura - 2. 4. Relação entre tamanho de um corpo continuo com 2310 átomos e uma partícula do continuo no interior do corpo com 1510 átomos resultando em uma escala de 81:10 do corpo.
2. 6 – Grandezas, Densidades ou Potenciais Generalizados
Na secção anterior vimos a definição de várias densidades as quais serão
chamadas de densidades generalizadas
:
:
::
densidade de massaJ densidade de momento
f densidade de forçaoutras densidades
Xρ
(2. 15)
e podem ser generalizadas da seguinte forma:
Como conseqüência da hipótese do contínuo, nós devemos transformar as
grandezas da Mecânica Clássica e da Mecânica dos Sólidos, etc. em densidades generalizadas,
fazendo as grandezas originais se tornarem em grandezas por unidade de volume. Desta
forma, uma grandeza , , , ,m p F U etcX qualquer tipo de grandeza (3) que deverá ser
transformada na sua respectiva densidade da seguinte forma:
3 Essa grandeza X possui uma natureza geral que pode ser número de partículas, N, massa, m, momento linear, p , carga elétrica, q, Força, F
, Energia, U, calor, Q, U entropia S, Potencia, P, etc) respectivamente, cuja
ordem pode ser grandezas escalares, vetoriais, tensoriais, como os tensores de tensão , Polarização P , etc. ou seja qualquer outro tipo de grandeza matematizável do meio contínuo.
11
VX
VX
0lim
. (2. 16)
esta densidade pode ser utilizada para definir uma densidade generalizada. Logo podemos
escrever:
d d dm ddV dm dV dm
X XX X X . (2. 17)
Observe que de forma geral a densidade generalizada depende da densidade de massa do meio
e da relação da grandeza X com a massa do elemento de infinitesimal de volume que a
contém.
2.6.1 - Densidades ou Potenciais Generalizados (em termos da Geometria Euclidiana)
Para a descrição das grandezas físicas as quais foram historicamente generalizadas
no contexto da Mecânica do Continuo e da Termodinâmica, vamos utilizar como base a
geometria euclidiana. Dentro desta geometria o sistema de coordenadas adotado será o
sistema cartesiano, podendo ser utilizado o sistema de coordenadas curvilíneo que se fizer
necessário e adequado à descrições que se seguirem.
Dentro da Mecânica do Contínuo define-se uma densidade generalizada de uma
grandeza X , em termos da geometria euclidiana, associada ao meio e a essa grandeza X ,
como sendo:
oXo dV
dXρ . (2. 18)
Onde X é a densidade generalizada pode ser rescrita como:
ooXo dV
dMdMd
dVd XXρ . (2. 19)
logo
dMd
MoXoXρ . (2. 20)
onde M é a densidade de massa ou a massa especifica.
O uso de densidades generalizadas ficará claro quando invocarmos a equação da

12
continuidade. Para título de ilustração exemplificaremos o cálculo da densidade generalizada
para o fluxo de calor, para o fluxo de deformações elásticas e para o fluxo de massa fluida.
2.6.2 – Densidade ou Potencial Generalizado para um Potencial Escalar
Definindo a densidade volumétrica de calor em termos da geometria euclidiana
temos:
oQo dV
dQ . (2. 21)
onde esta densidade generalizada para o calor é dada por:
ooQo dV
dmdmdQ
dVdQ
. (2. 22)
ou
dmdQ
moQo . (2. 23)
onde é a densidade de massa ou a massa especifica.
Para calcular o termo que falta, podemos determiná-lo pela definição do calor
específico, de onde sabemos que:
TmcQ (2. 24)
e m é a massa do corpo c é o calor específico a pressão constante. Logo
TcdmdQ . (2. 25)
Retornando (2. 25) em (2. 23) temos:
TcmoQ . (2. 26)
Observe que a densidade generalizada do fluxo de calor é uma grandeza escalar e
possui dimensão de unidade de energia por unidade de volume.

13
2.6.3 – Densidade ou Potencial Generalizado para um Potencial Vetorial
A densidade volumétrica generalizada de energia sob a forma de deformação é
dada pela transferência de momento na deformação elástica cuja densidade generalizada
termos da geometria euclidiana é pode ser expressa como:
ouo dV
Ud
. (2. 27)
ou
oouo dV
dmdmUd
dVUd
. (2. 28)
ou
dmUd
mouo
. (2. 29)
onde é a densidade de massa ou a massa especifica. Sendo a quantidade de momento linear
transmitido pelas deformações dadas por:
dtudmcU
(2. 30)
e m é a massa da deformação do corpo c é uma constante de acoplamento elástico. Mas a taxa
de deformação pode ser escrita como:
dtudc
dmUd
(2. 31)
logo, substituindo (2. 31) em (2. 29) temos:
dtudcmouo
. (2. 32)
considerando a constante 1c temos:
uo mou . (2. 33)
A densidade generalizada de energia de deformação uo possui caráter vetorial e
sua dimensão é dada em momento linear por unidade de volume.

14
2.6.4 – Densidade ou Potencial Generalizado para a Massa Fluida
Definindo a densidade volumétrica de momento em termos da geometria
euclidiana temos:
opo dV
pd . (2. 34)
onde esta densidade generalizada para fluido.
A densidade de energia sob a forma de taxa de deformação é dada pela
transferência de momento na deformação do fluido cuja densidade generalizada é dada por:
po mo o
dp dp dm JdV dm dV
. (2. 35)
ou
dmpd
mopo
. (2. 36)
onde mo é a densidade de massa ou a massa especifica do fluido.
Para calcular o termo que falta podemos determiná-lo pela definição do momento
de uma partícula.
vmp (2. 37)
e m é a massa do corpo. Logo
vdm
pd . (2. 38)
Retornando (2. 38) em (2. 36) temos:
vmpo . (2. 39)
Esta densidade generalizada de momento linear possui caráter vetorial de forma
semelhante a densidade volumétrica de força que é uma grandeza de força bem conhecida da
Mecânica do Contínuo.

15
2. 7 – Taxas Generalizadas (em termos da Geometria Euclidiana)
Na natureza algumas grandezas dinâmicas podem ser representadas por meio de
taxas e fluxos generalizados. Entre eles está a taxa e o fluxo de massa, o fluxo de calor, o
fluxo de momento linear, etc., que atravessa um corpo, por exemplo.
Definimos a taxa de uma determinada grandeza X como sendo:
ddt
XX . (2. 40)
a derivada temporal de uma grandeza X define uma grandeza chamada de derivada material
no contínuo a qual é descrita a seguir:
2.7.1 - Conservação de uma Grandeza Generalizada e a sua Derivada Material
A quantificação de uma grandeza, XG , de um meio contínuo deve levar em conta
o volume de controle na qual esta grandeza se encontra imersa. Normalmente ao se deslocar
de um ponto a outro um meio contínuo pode-se sofrer variação de volume, mas a grandeza
XG como um todo pode permanecer constante, se o sistema não for dissipativo. Contudo, em
relação a uma região delimitada do espaço, denominada volume de controle, esta grandeza
XG pode está variando e por isso torna-se necessário equacioná-la de forma a saber quanta
dessa grandeza atravessa (chega e sai) por unidade de tempo, conforme mostra a Figura - 2. 5.
Logo, de uma forma geral, se , , ,X XG G x y z t temos:
( , , )X X X X XdG x y z G G G Gx y zdt x t y t z t t
(2. 41)
ou
X X X X Xx y z
dG G G G Gv v vdt x y z t
(2. 42)
Simplificando temos:
.X X
X
TranspoteLocal
dG Gv Gdt t
(2. 43)
Portanto, vamos considerar a derivada material de qualquer grandeza

16
generalizada, denominada, XG como sendo dada por (2. 43). Esta expressão é absolutamente
geral para as grandezas GX = Q (calor), q (carga elétrica), C (concentração), p (momento), etc.
e suas respectivas densidades, X, de, calor, carga elétrica, concentração, momento, etc.
Figura - 2. 5. Volume e superfície de controle na qual atravessa uma massa fluida, dm = dV, em um intervalo infinitesimal de tempo, dt, com velocidade, v.
2. 8 – Fluxos Generalizados (em termos da Geometria Euclidiana)
De forma geral o fluxo de uma grandeza generalizada X que atravessa uma área
infinitesimal, odA
, em um intervalo infinitesimal de tempo, dt, é definido como:
Xoo o
d d ddtdA dA
X XJ . (2. 44)
O sobrescrito “ o ” indica que a geometria considerada é a geometria euclidiana regular.
2.8.1 – Fluxo Generalizado de Massa
O primeiro fluxo a ser considerado é o fluxo de massa a partir de (2. 44)
mo o
dm d dmJdtdA dA
. (2. 45)
usando a regra da cadeia podemos escrever:
17
0
00m
dVd dmJdV dtdA
. (2. 46)
ou
00m
o
dVdJdtdA
. (2. 47)
onde /dV dt é uma espécie de vazão. Logo,
0 0 0m
o o
d dV dVdJdt dtdA dA
. (2. 48)
como a densidade não depende da área temos:
0o
ddA . (2. 49)
então
0m
o
dVdJdtdA
. (2. 50)
mas 0 .odV dA dx
Figura - 2. 6. Fluxo de massa atravessando uma região infinitesimal do espaço com volume dV e
área superficial dA
.
Logo,
18
.om
o
dA dxdJdtdA
. (2. 51)
de forma óbvia, temos que:
mdxJdt
. (2. 52)
ou finalmente
m mJ v . (2. 53)
observe que o fluxo de massa é igual ao escoamento ou a densidade de momento definidos
anteriormente.
.Fluxo Generalizado Densidade Associada Velocidade Associada . (2. 54)
Concluímos que para alguns casos o fluxo de massa equivale a densidade de
momento ou a taxa de escoamento. Observe que sempre haverá uma relação entre fluxos de
uma grandeza com a densidade associada.
2. 9 – Equações Diferenciais e Integrais Básicas da Mecânica dos
Meios Contínuos
2.9.1 – Teorema de Gauss e o Teorema do Transporte de Reynolds para o Fluxo de
uma Grandeza GX
Para derivar as equações que governam o escoamento de um meio contínuo
compressível, nós precisamos considerar integrais de qualquer função de posição e tempo
),( trX sobre um volume de meio contínuo. Este volume se moverá com o meio contínuo
mas consiste das mesmas partículas. Tal volume é chamado de um volume material e será
denotado por VX(t). Logo, considerando-se a definição da grandeza GX como sendo dada por
meio de uma densidade generalizada, X, temos:
( )
( ) ,X
X XV t
G t r t dV ρ (2. 55)
A qual define a função de t. O teorema de transporte de Reynolds’s nos diz como calcular a

19
derivada de ( )XG t em relação ao tempo.
( )
,X
XX
V t
dG t d r t dVdt dt
(2. 56)
Note que por causa do volume V t
variar com o tempo e mover-se com o meio contínuo,
não é possível tomar a derivada sob o sinal de integração, porque este volume V t
está na
posição de limite de integração e não está expresso explicítamente como uma variável de
integração na função densidade ,X r t . Contudo, é necessário usar a derivada material de
( )XG t em (2. 43) e usar a equação (2. 55). Portanto o teorema pode ser escrito como:
.X X X
X X XV V V
d dV v dV dVdt t
ρ ρ ρ (2. 57)
A equação (2. 43) torna-se:
( ) ( )
,X
XX X
V t V t
d r t dV v dVdt t
ρρ ρ (2. 58)
Onde v é a velocidade da partícula fluida.
Retornando a derivada material dada em (2. 43) podemos escrever a versão
integral desta equação. Para realizarmos este cálculo devemos considerar o fato que sendo
XX
dGdV
ρ , onde Xρ é a densidade volumétrica associada a grandeza X , a partir de (2. 55).
Logo, tomando o primeiro termo do lado direito de (2. 57) temos:
. .X
X XV
v G dV v ρ (2. 59)
Passando o operador gradiente para dentro da integral, temos:
. .X X
X X X XV V
v G v dV v v dV ρ ρ ρ (2. 60)
Mas dV = dxdydz, logo:
.X
X X X XV
v G v v v dVx x x ρ ρ ρ (2. 61)
Então

20
.X
X X X XV
v G v dydz v dxdz v dxdz ρ ρ ρ (2. 62)
Logo
ˆ ˆ ˆ. . . .X
X X x X y X zS
v G v n dydz v n dxdz v n dxdy ρ ρ ρ (2. 63)
Ou
ˆ ˆ ˆ. .. .. .X
X X x x X y y X z zS
v G v n dA v n dA v n dA ρ ρ ρ (2. 64)
Portanto
. .X
X XS
v G v dA ρ (2. 65)
Por outro lado, tomando o segundo termo do lado direito de (2. 43) ou (2. 57) temos que a
taxa de variação temporal de G é:
X X
X XX
V V
G dV dVt t t
ρρ (2. 66)
Aplicando o teorema (2. 65) a equação (2. 58) ou substituindo de volta (2. 55), (2.
65) e (2. 66) em (2. 43) nós obtemos a seguinte forma equivalente do teorema de transporte:
( ) ( ) ( )
, .X X X
XX X
V t S t V t
d r t dV v ndA dVdt t
ρρ ρ (2. 67)
Onde SX(t) é a superfície de VX(t) e n̂ é o vetor unitário normal dirigido para fóra de SX(t).
Fisicamente, a equação (2. 67) estabelece que a taxa de variação da integral de
,X r tρ é igual a integral da taxa de variação de ,X r tρ
sobre uma região fixada mais a
resultante do fluxo de através da superfície SX(t). O resultado permanece para qualquer função
escalar, vetorial ou tensorial.
Chamando de X X vJ ρ ao fluxo de uma grandeza que atravessa a superfície do
volume de controle temos o seguinte resultado geral:
.X X
X XX
S V
dG dA dVdt t
ρJ
(2. 68)
Para o caso em que a grandeza total se conserva, ou quando o volume de controle não envolve
21
a fonte de massa, temos que / 0XdG dt , logo
. 0X X
XX
S V
dA dVt
ρJ
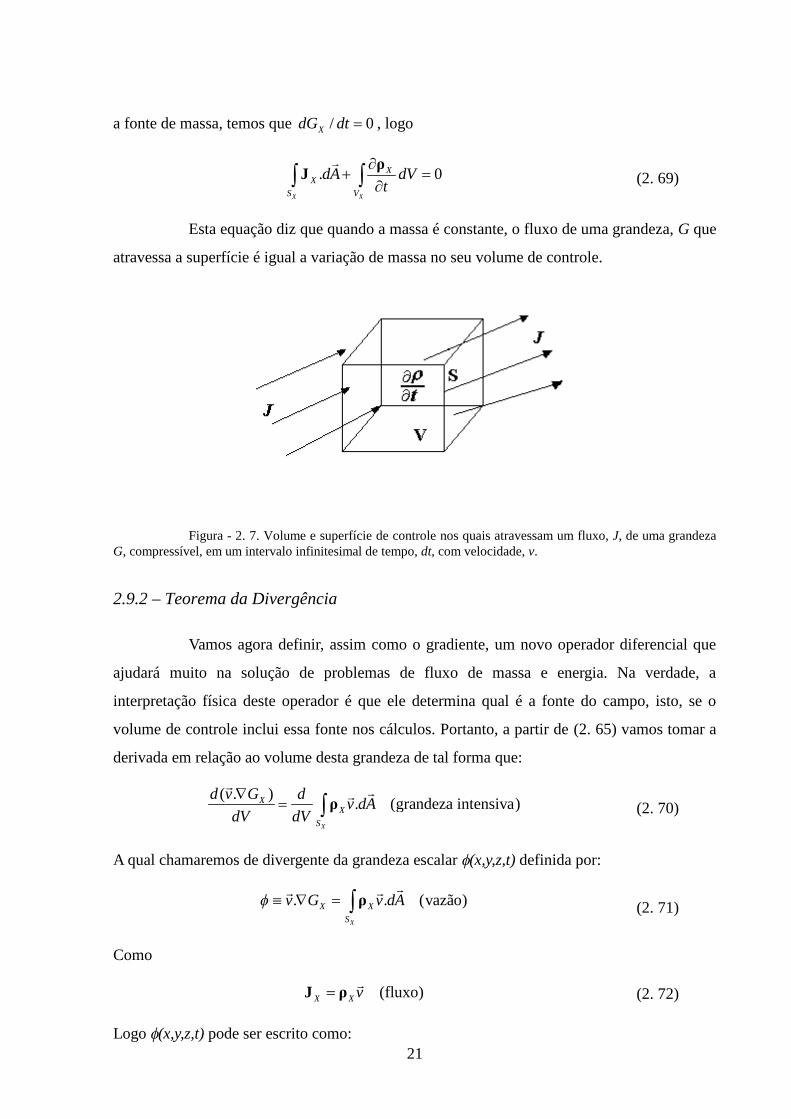
(2. 69)
Esta equação diz que quando a massa é constante, o fluxo de uma grandeza, G que
atravessa a superfície é igual a variação de massa no seu volume de controle.
Figura - 2. 7. Volume e superfície de controle nos quais atravessam um fluxo, J, de uma grandeza G, compressível, em um intervalo infinitesimal de tempo, dt, com velocidade, v.
2.9.2 – Teorema da Divergência
Vamos agora definir, assim como o gradiente, um novo operador diferencial que
ajudará muito na solução de problemas de fluxo de massa e energia. Na verdade, a
interpretação física deste operador é que ele determina qual é a fonte do campo, isto, se o
volume de controle inclui essa fonte nos cálculos. Portanto, a partir de (2. 65) vamos tomar a
derivada em relação ao volume desta grandeza de tal forma que:
( . ) . (grandeza intensiva)X
XX
S
d v G d v dAdV dV
ρ (2. 70)
A qual chamaremos de divergente da grandeza escalar (x,y,z,t) definida por:
. . (vazão)X
X XS
v G v dA ρ (2. 71)
Como
(fluxo)X X vJ ρ (2. 72)
Logo (x,y,z,t) pode ser escrito como:

22
.X
XS
dA J
(2. 73)
Podemos chamar de divergente de XJ a equação:
0. limX V
dV dV
J (2. 74)
logo
. .X
X XS
d dAdV
J J
(2. 75)
Do qual podemos escolher o volume do cálculo do divergente coincidente com o volume de
controle da área utilizada no cálculo da vazão, e escrever:
. .X
X XS
dV d dA
J J
(2. 76)
ou integrando no volume:
. .X X X
X XV V S
dV d dA
J J
(2. 77)
Finalmente temos:
. .X X
X XV S
dV dA J J
(2. 78)
Desde que a superfície de controle, S, contenha o volume de controle, V.
Este teorema da divergência, de uma forma geral, relaciona integral de volume
com a integral de superfície.
2.9.3 - O Teorema da Divergência Generalizado
Seja XoJ o fluxo generalizado da grandeza X que atravessa uma superfície
euclidiana sem rugosidade, onde oA
é a área de projeção euclidiana que o fluxo XoJ
atravessa. Mantendo-se a relação entre as taxas temporais da grandeza X inalterada, a
equação (2. 44) pode ser reescrita como:

23
oXo Addtd
JX. (2. 79)
Tomando a derivada volumétrica dos dois lados da equação (2. 79) temos:
oXo AddVd
dtd
dVd
JX. (2. 80)
dependendo da natureza da grandeza X temos a seguinte consideração geral a fazer. Pode-se
definir de forma absolutamente geral que, o lado direito da equação (2. 80) corresponde a uma
operação sobre o fluxo XoJ . Como este fluxo é de natureza tensorial generalizada e ele pode
ser também uma grandeza escalar, ou um vetor, vale ressaltar que:
oXoXoi
AddVd
x
JJ (2. 81)
ou
Siijk
i
ijk dAnJdVd
xJ
...... (2. 82)
observe que a operação do lado esquerdo de (2. 81) envolve uma somatória (índices repetidos
– notação de Einstein) que pode ser representado de forma mais direta pelo operador nabla.
oXoXo AddVd
JJ. (2. 83)
A natureza da operação de nabla sobre o campo XoJ dependerá da sua natureza
tensorial. Pois se este pode ser um escalar (tensor de ordem zero), um vetor (tensor de ordem
um) ou um tensor como usualmente conhecemos. Logo, teremos:
( : )
( : )
Xo Xo o Xo
o
ddiv J J dA J Vetor EscalardVddiv dA Tensor Vetor
dV
Xo Xo XoJ J J
. (2. 84)
Aqui é importante observar como o Teorema de Gauss pode ser escrito a partir de
(2. 79) em termos de volumes, como:

24
...... ...( : n n 1)ijk
ijk i ijkiV S
JdV J n dA Tensor ordem ordem
x
J (2. 85)
onde , , ,... 1, 2,3,...i j k
2.9.4 - O Divergente e os Teoremas Correlatos
Se acontecer que:
( )
ˆ ( )X X XS t
dJ é Escalar J J ndA gradientede um escalardV
(2. 86)
e
( )
( )
( )
ˆ ( )
ˆ ( )
ˆ ( )
X XS t
X X XS t
X XS t
dJ J ndA gradiente de um vetordV
dJ é um vetor J J ndA divergente de um vetordV
dJ J ndA rotacional de um vetordV
(2. 87)
e
( )
( )
( )
ˆ ( )
ˆ. . ( )
ˆ ( )
X XS t
X X XS t
X XS t
dJ J ndA gradiente de um tensordV
dJ é um tensor J J ndA divergente de um tensordV
dJ J ndA rotacional de um tensordV
(2. 88)
Observe que estas definições dão origem aos principais teoremas integrais do
contínuo:
( )
ˆ ( )X X XV S t
J é Escalar J dV J ndA Teorema do gradientede um escalar
(2. 89)
e
25
( )
( )
( )
ˆ ( )
ˆ ( )
ˆ ( )
( )
X XV S t
X XV S tX
X XV S t
J dV J ndA Teorema do gradiente de um vetor
J dV J ndA Teorema do divergente de um vetorJ é um vetor
J dV J ndA Teorema do rotacional de um vetor
Teorema de Stokes
(2. 90)
e
( )
( )
( )
ˆ ( )
ˆ. . ( )
ˆ ( )
X XV S t
X X XV S t
X XV S t
J dV J ndA gradiente de um tensor
J é um tensor J dV J ndA divergente de um tensor
J dV J ndA rotacional de um tensor
(2. 91)
Esta é uma forma de unififcar todos os pincipais teoremas integrais do contínuo.
2. 10 – Leis Fundamentais Básicas da Mecânica dos Meios
Contínuos
A equação que agora vamos deduzir é chamada de equação da continuidade e na
sua forma generalizada, pode servir como equação de massa, energia, entropia, momento, etc.
2.10.1 – Equação da Continuidade para o Potencial Generalizado
Equações de potencias e fluxos que atravessam superfícies euclidianas lisas ou
não-rugosas podem ser escritas em termos da geometria euclidiana.
Vejamos agora a utilidade do teorema da divergência para transformar a equação
integral dada em (2. 68) em uma equação diferencial. Portanto substituindo (2. 78) em (2. 68)
temos que:
.X X
X XX
V V
dG dV dVdt t
ρJ (2. 92)
Tomando-se os mesmo volume de controle tanto para o divergente como para o

26
fluxo temos que:
( ) .X XX
dGddV dt t
ρJ (2. 93)
Ou trocando a ordem das derivadas totais temos:
( ) .X XX
dGddt dV t
ρJ (2. 94)
Substituindo (2. 55) em (2. 94) temos:
. X XX
dt dt
ρ ρJ (2. 95)
Essa é a forma da equação da continuidade. Ela retrata um balanço espaço-temporal da
grandezagenralizada em Xρ onde essa é a densidade volumétrica associada a grandeza X .
Neste conjunto de fenomenologias que seguem a equação da continuidade estão os
fenômenos, da difusão, transferência de calor, escoamento viscoso, deformação de sólidos,
mecânica da fratura, eletromagnetismo, etc. A título de laboratório teórico e para os propósitos
deste trabalho vamos formular os fenômenos de potencial escalar como a temperatura, e nos
fenômenos de potencial vetorial como a teoria da elasticidade e a mecânica da fratura.
Sendo oX uma grandeza que se conserva absolutamente no tempo, ela estará
sujeito a uma lei de conservação do tipo:
. 0XXJ
t
. (2. 96)
Esta é a forma da equação da continuidade, para a maioria dos sistemas.
Para a situação de fluxo generalizado, XJ
, temos:
0)(.
tJ X
X
(2. 97)
Explicitando, JX, temos:
0)().(
tv X
X
(2. 98)
Usando a identidade diferencial temos:

27
XXX vvv .).().( (2. 99)
Logo
0)(.).(
tvv X
XX
(2. 100)
Esta equação explicita a equação da continuidade em termos da densidade
generalizada, X, e da velocidade, v .
Considerando o caso em que a massa total se conserva (d/dt = 0) temos:
0 (escoamento "incompressível" e permanente). 0
0 (escoamento "compressível" não permanente)t
X
XX
X
tt
ρρJ
ρ (2. 101)
Esta equação diz a mesma coisa que a equação (2. 92), porém em uma linguagem
diferencial, ou seja, quando a massa é constante, o que variação volumétrica do fluxo de
massa que atravessa a superfície é igual a variação temporal da massa no seu volume de
controle. Esta equação decide se o escoamento é incompressível ou não.
2.10.2 - Equação da Continuidade e Conservação da Massa
A densidade é definida como:
dMdV
(2. 102)
Como o volume V em geometria cartesianas é dado por:
d d diV L dV dr dx
(2. 103)
onde d é a dimensão topológica do espaço euclidiano. Logo,
d d
d di
d M d Mdr dx
(2. 104)
Considerando a massa total do sistema constante temos:
0dMdt
(2. 105)
donde, derivada material temos:

28
dM Mv Mdt t
(2. 106)
sendo
M dV (2. 107)
nos leva a:
d vdt t
(2. 108)
Como não há criação de massa
0ddt (2. 109)
logo
0vt
(2. 110)
Como
mJ v (2. 111)
fica
. mim
i
JJx
(2. 112)
Então
. 0mJt
(2. 113)

29
2. 11 – Equação do Movimento Generalizada para a Mecânica dos
Meios Contínuos
A partir das transformações matemáticas feitas anteriormente podemos iniciar a
descrição da Mecânica do Contínuo, a qual pode ser aplicada aos fenômenos de calor,
elasticidade, viscosidade, fratura, etc., em sólidos e fluidos.
2.11.1 – Equações da Quantidade de Movimento
A 2ª Lei de Newton estabelece que:
RdpFdt
(2. 114)
E a força resultante é dada pela somatória das forças externas aplicadas ao corpo contínuo. A
força externa total é dada pelo Princípio de Pascal por:
R ext C SF F F F
(2. 115)
A fim de se obter uma descrição mais acurada do movimento de um corpo
deformável, deve-se obter uma versão da equação (2. 2), para o caso do contínuo. Na
mecânica do contínuo precisamos observar o Principio de Pascal (4) para separar somatória
das forças sobre o corpo em dois tipos principais. Logo, neste ponto, é preciso ressaltar a
diferença da natureza desses dois tipos de força de interação que dão origem as forças de
campo. Estas são de campo (gravitacional, campo elétrico, etc,) e de superfície (geradas pelo
contato, pressão, colisão, etc) as quais compõem a força resultante sobre um corpo contínuo
da seguinte forma:
R C SdpF F Fdt
(2. 116)
As forças externas que atuam sobre VX incluem ambas as forças de massa (devido
a gravidade) e as de superfície (devido as tensões). A força de massa total, f, é dada por:
4 O Principio de Pascal establece que as que as forças de volume e de superfícies se comunicam através do meio contínuo

30
( )
( , )CV t
F r t gdV (2. 117)
Onde g é a força total por unidade de massa. Usualmente g é devido a efeitos
gravitacionais.
Derivando a equação (2. 116) em relação ao volume temos:
C SdF dF d dpdV dV dV dt
(2. 118)
Como /C Cf dF dV
e /S Sf dF dV
, então, de forma mais sintética podemos escrever:
C Sd dpf f
dV dt
(2. 119)
considerando as derivadas no volume e no tempo são contínuas, podemos pela regra de
Schwartz trocar os suas ordem de operação obtendo:
C Sd dpf fdt dV
(2. 120)
Portanto se quisermos utilizar a 2a Lei de Newton para analisar o estado geral de
movimento em um meio contínuo devemos conhecer todas as forças de corpo ou de volume e
as forças superficiais encontradas no mesmo. A partir de (2. 9) temos:
C SdJf fdt
(2. 121)
sendo p dado por (2. 1) temos que:
mdp d mvdV dV
(2. 122)
onde
mm
dvdmJ v mdV dV
(2. 123)
considerando que a velocidade média mv dentro de um elemento infinitesimal de volume é
uniforme, isto é 0mdvdV
para o volume infinitesimal considerado, podemos escrever:
31
m mJ v (2. 124)
A conservação do momento requer que a taxa de variação do momento de uma
partícula em um meio continuo no tempo em um volume material, VX(t) dever ser igual a
soma das forças externas que atuam sobre VX(t).
dVvtrdtdF
tVXext
X
),(
)( (2. 125)
Portanto, a expressão geral da 2ª lei de Newton para o contínuo é dada
substituindo (2. 124) em (2. 121):
C S mdf f vdt
(2. 126)
O termo mv pode ser chamado de escoamento; cf
é a densidade de forças de corpo; sf
é a
densidade de forças de superfície.
A densidade de força externa total é dada pelo Princípio de Pascal por:
R ext C Sf f f f
(2. 127)
logo (2. 126) fica
C S mdf f vdt
(2. 128)
A equação (2. 128) é a equação fundamental para o movimento de uma partícula
no contínuo, chamada de Equação de Movimento de Cauchy. Ela será a base das equações de
movimento que se seguirão na descrição dos diferentes fenômenos a serem abordados neste
trabalho. Uma das generalizações das leis de Newton para o contínuo pode ser feita de forma
mais rigorosa usando-se o teorema do transporte de Reynolds, o qual é descrito na secção
2.9.1. Um dos objetivos deste capítulo é criar subsídios para uma teoria do contínuo que
envolva a rugosidade da superfície de contorno e a porosidade do interior do volume do corpo.
Observe que a expressão da lei de Newton para o contínuo é geral e não envolve a
descrição matemática da rugosidade, a qual será incluída na equação constitutiva. Porque ela
será considerada uma característica para cada material e que será descrita no Capitulo III.
Vamos agora analisar as forças de superfícies e as forças internas.
32
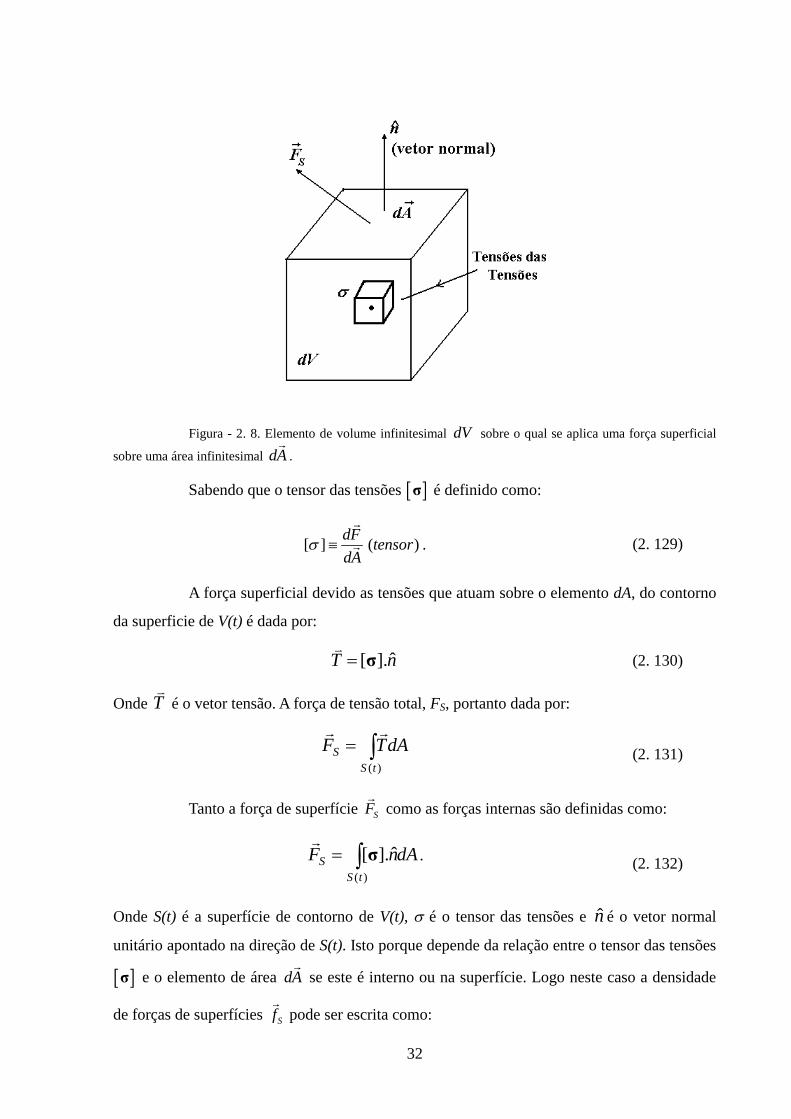
Figura - 2. 8. Elemento de volume infinitesimal dV sobre o qual se aplica uma força superficial
sobre uma área infinitesimal dA
.
Sabendo que o tensor das tensões σ é definido como:
[ ] ( )dF tensordA
. (2. 129)
A força superficial devido as tensões que atuam sobre o elemento dA, do contorno
da superficie de V(t) é dada por:
nT ˆ].[σ
(2. 130)
Onde T
é o vetor tensão. A força de tensão total, FS, portanto dada por:
dATFtS
S )(
(2. 131)
Tanto a força de superfície SF
como as forças internas são definidas como:
dAnFtS
S )(
ˆ].[σ
. (2. 132)
Onde S(t) é a superfície de contorno de V(t), é o tensor das tensões e n̂ é o vetor normal
unitário apontado na direção de S(t). Isto porque depende da relação entre o tensor das tensões
σ e o elemento de área dA
se este é interno ou na superfície. Logo neste caso a densidade
de forças de superfícies Sf
pode ser escrita como:

33
ˆ.SS
S t
dF df ndAdV dV
σ
. (2. 133)
e pode ser relacionada com a variação temporal do momento linear como:
~SdpFdt
. (2. 134)
e de uma forma geral temos que essas forças são responsáveis pelo escoamento do material,
ou seja:
~V SV S
dF dF d dpf fdV dV dV dt
. (2. 135)
trocando a ordem das derivadas temos, uma relação da densidades das forças com a densidade
de momento linear ou o fluxo de massa, dado por:
~V Sd dpf fdt dV
. (2. 136)
observe que essa densidade de força geral está relacionada a derivada temporal do fluxo de
massa ou a densidade de momento, ou seja:
mV S
dJf fdt
. (2. 137)
usando (2. 9) em (2. 137) temos:
V Sdf f vdt
. (2. 138)
Se existe uma força superficial ou interna então existe uma tensão superficial ou
interna definida por (2. 129). Como as tensões internas representam um fluxo de momento
para dentro do corpo, usando (2. 134) em (2. 129) temos:
[ ] ~ d dpdtdA
. (2. 139)
logo a tensão está relacionada na verdade com um fluxo de momento, ou seja:
[ ] ~ p J . (2. 140)
concluímos que:

34
~Tensão Fluxo de Momento . (2. 141)
Concluímos, portanto a partir de (2. 133), que existe estreitas relações entre:
~ ~Tensão Fluxo Densidade . (2. 142)
Retornando a 2ª lei de Newton para o contínuo dada em (2. 126) temos:
C S mdf f vdt
(2. 143)
ou
SC m
dF df vdV dt
(2. 144)
a partir de (2. 132) temos:
dAnFtS
S )(
ˆ].[σ
(2. 145)
com ˆdA ndA
. Substituindo (2. 145) em (2. 144) temos:
( )
ˆ[ ].C mS t
d df ndA vdV dt
σ
(2. 146)
Observe que a 2ª lei de Newton é uma espécie de lei de fluxo. A partir do segundo termos da
equação (2. 146) e de (2. 135) temos:
( )
ˆ[ ] . ~S
SS F
S t fluxodensidade taxa
dF d d dpf ndAdV dV dV dt
σ
(2. 147)
Observe que a densidade de forças superficiais é também o divergente das tensões:
.[ ]S Ff
. (2. 148)
que é definido por:
( )
ˆ.[ ] [ ].S t
d ndAdV
σ σ (2. 149)
Aplicando o teorema da divergência nós obtemos:

35
dVFtV
S )(
).( σ
(2. 150)
logo
.[ ]Sf σ
(2. 151)
e ainda temos como conseqüência o teorema da divergência:
dAndVftSV
S )(
ˆ].[. σ
(2. 152)
Esta é a expressão do teorema da divergência para um campo de tensão produzido por forças
superficiais.
A partir das equações (2. 117) e (2. 150) a força externa total em (2. 115) é dada
por:
dVdVgtrFtVtV
ext )()(
).(),( σ (2. 153)
Substituindo este resultado em (2. 125)
dVdVgtrdVvtrdtd
tVtVtVX
X
)()()(
).(),(),( σ (2. 154)
Aplicando o teorema do transporte de Reynolds (2. 58) na equação (2. 154) acima nós
obtemos:
( ) ( ) ( )
,. , , .
X
XX
V t V t V t
r tv r t dV r t gdV dV
t
σ
(2. 155)
para o caso particular em que ,X r t v e desde que V(t) é arbitrário, nós temos depois
de rearranjado os termos e eliminando a integral no volume temos que:
.[ ]d v
gdt
σ
(2. 156)
Esta equação é chamada de equação do momento. Portanto, usando-se a definição de derivada
material a equação de movimento de um meio contínuo é dada por:

36
( )( , ) . vr t g vt
σ (2. 157)
Como conseqüência da generalização do teorema da divergência mostrada na
secção - 2.9.3, veja que, de uma forma geral, podemos definir uma operação sobre
conforme for a ordem do tensor σ ou a natureza dessa grandeza, ou seja, é escalar, vetor
ou tensor, temos:
( )
ˆS t
d ndAdV
(2. 158)
O símbolo
representa uma operação do operador nabla sobre a grandeza generalizada
Reescrevendo a 2ª lei de Newton para o contínuo temos:
c mdf vdt
(2. 159)
Esta é uma equação geral para o contínuo que não depende do material, e é independente da
ordem do tensor .
2. 12 –Equação Constitutivas dos Potenciais Generalizados em
termos da Geometria Euclidiana
Vários fenômenos de transporte em meios contínuos podem ser unificados em
equações de potenciais (escalares ou vetoriais) e de fluxos. Entre eles se encontram a
Mecânica dos Sólidos, dos Fluidos e do Calor, Mecânica da Fratura, etc. Essa generalização é
devida a J. W. Gibbs, pois ele identificou que vários problemas de transporte podem ser
escritos em termos do gradiente de grandezas escalares ou vetoriais juntos com a equação da
continuidade. Essa unificação deu avanço a chamada Mecânica do Contínuo e a
Termodinâmica dos Processos Irreversíveis.
Até agora as deduções feitas não envolveram nenhum tipo de material. Para
descrever o comportamento particular de um tipo de material é preciso utilizar um tipo de
equação característica chamada de equação de consistência ou constitutiva. Vamos
exemplificar o uso de uma equação constitutiva para o problema do calor e da elasticidade.

37
2.12.1 – Fenomenologias da Mecânica do Contínuo descritas no Espaço Euclidiano
A Mecânica do Contínuo considera, ao invés de partículas, uma nova roupagem
para a 2ª Lei de Newton em termos de volumes distribuído no espaço. Nesta situação as
massas são substituídas por densidades generalizadas, as forças são substituídas por fluxos
generalizados. A equação de movimento aparece na forma da equação da continuidade. Desta
forma, diferentes fenomenologias de fluxos apresentam a mesma estrutura matemática a qual
está resumida na equação (2. 160) cujas leis fenomenológicas de fluxos são proporcionais aos
gradientes de suas respectivas grandezas
...
.
d d dm ddV dm dV dm
Leis de Fluxo
FickP Stevinv Newton
cte T Fourier kPol ElétricaPol Magnética
etc
d dX vdtdA
X
X
X
X X X
JEB
J
.
(2. 160)
Uma mesma equação, chamada de “equação da continuidade”, dada por
dtd
tJ XX
X
. . (2. 161)
quando aplicada sob a visão de cada uma das equações fenomenológicas listadas na (2. 160)
gera diferentes equações de movimento para as fenomenologias contidas no mesmo grupo
estrutural de equações matemáticas. Portanto, um dos objetivos deste capítulo é mostrar o uso
de equações e teoremas da Mecânica do Contínuo de forma generalizar essas equações para
abordar fenomenologias mais complexas envolvendo rugosidade de superfícies. Portanto,
vamos mostrar a seguir como diferentes fenomenologias que podem ser descritas a partir de
uma única estrutura matemática de densidades, leis de fluxos e potenciais generalizados.

38
2.12.2 – O Fluxo de Generalizado, JX, através de uma Superfície
Vamos a partir de agora definir o fluxo generalizado, JX, das grandezas
generalizadas, MX, consideradas anteriormente, como sendo:
dtdX
dAdJ X (2. 162)
Desde que dX/dt é uma derivada material para as grandezas X = Q (calor), q
(carga elétrica), C (concentração), p (momento), etc. O fluxos correspondentes podem ser
definidos como JX = JQ (fluxo de calor), Jq (fluxo de corrente elétrica), J (fluxo de massa), Jp
(fluxo de momento = pressão + tensão tangencial), etc, dados respectivamente pelas lei de
Fourier, Ohm, Fick, Newton, etc.
XXXX vJdtdX
AddJ
. (2. 163)
Onde etcUFpmX ,,,,
.
pFX Jf
. (2. 164)
e
XX kJ
. (2. 165)
Portanto, a partir da equação da derivada material dada em (2. 43) a equação (2.
162) fica:
).(tXXv
dAdJ X
(2. 166)
Reescrevendo o primeiro termo do lado direito da equação acima temos:
xX
vXdAdXv
dAd
.).( (2. 167)
Logo
tXvX
dAdJ x
XX
. (2. 168)
39
Chamando de kX a constante de acoplamento dada por:
vXdAdk
XX
(2. 169)
Ficamos com:
tX
dAdkJ xXX (2. 170)
Para uma grandeza X que não varia explicitamente no tempo, temos que 0 tX , ficamos
finalmente com:
xXX kJ (2. 171)
Observe que, para as grandezas X = T (temperatura), (potencial elétrico), C
(concentração), v (velocidade), etc, correspondem aos fluxos JX = JQ (fluxo de calor), Jq
(fluxo de corrente elétrica), J (fluxo de massa), Jp (fluxo de momento = pressão + tensão
tangencial), etc, dados respectivamente pelas lei de Fourier, Ohm, Fick, Newton, etc. Onde em
cada caso temos kX = -k (condutividade térmica), - (condutividade elétrica), -D (coeficiente
de difusão), (coeficiente de viscosidade), etc.
2. 13 – A Equação de Distribuição do Potencial Escalar
Generalizado e a Densidade Volumétrica Associada
James Williard Gibbs descobriu que os fluxos derivados de potenciais podem ser
geralmente expressos em temos de gradiente de grandezas escalares ou vetoriais. Por
exemplo, vários processos naturais seguem uma lei de condutividade da grandeza oX , dada
pela seguinte relação:
XoXoJ
. (2. 172)
onde é uma constante física associada ao fenômeno que no caso é a condutividade térmica
do material. Entre as equações dadas por (2. 172) estão a Lei de Fourier para o Calor, a Lei de
Fick para a Difusão, a Lei de Ohm para a Eletrodinâmica Clássica, etc. Observe que para cada
fluxo da grandeza X, existe uma densidade volumétrica associada dessa grandeza.
Seguindo a descrição matemática acima podemos escrever uma equação para a

40
distribuição da grandeza X por unidade de volume, como :
0 00
. X Xo X
dt dt
. (2. 173)
Para o caso conservativo temos:
00
. 0Xo o X t
. (2. 174)
Observe que neste tipo de problema nenhuma relação com a dimensionalidade do
espaço foi feita, pois nas equações acima considera-se que os fluxos atravessam superfícies
euclidianas regulares. Contudo, quando uma superfície ou um volume irregular são
considerados as equações descritas acima precisam ser revisadas sob o ponto de vista da
dimensionalidade topológica destas superfícies e volumes.
2.13.1 – Equação do Potencial Generalizado em termos da Geometria Euclidiana
A partir da equação da continuidade (2. 161) temos:
0 0
0. X X
X
dJ
t dt
. (2. 175)
Usando as considerações de Gibbs para os fluxos derivados de potenciais os quase
são geralmente expressos em temos de gradiente de grandezas escalares ou vetoriais podemos
substituir (2. 172) em (2. 161) e obter:
0. XXo Xo
dt dt
. (2. 176)
Para = cte, temos:
02 XXo Xo
dt dt
. (2. 177)
Onde a derivada material de X é dada por:
. XoXo Xo
ddt t
. (2. 178)
Logo

41
02 .X XoXo Xot t
. (2. 179)
Caso I)
Para campos com fluxos conservativos temos:
02 0XXo t
. (2. 180)
Caso II)
Para fluxos estacionários temos:
2 1 . 0Xo Xo
. (2. 181)
Caso III)
Para regimes onde os fluxos são perpendiculares aos gradientes( ) temos:
2 0Xo . (2. 182)
Onde . 0
Por outro lado, substituindo (2. 20) em (2. 176) temos:
. M M MdX dX d dXdM t dM dt dM
. (2. 183)
Considerando a densidade de massa M e cte são constantes, não dependem da posição
temos:
2M M M
dX dX d dXdM t dM dt dM
. (2. 184)
ou finalmente
2M
dX dX d dXdM t dM dt dM
. (2. 185)
Observe que para cada uma das equações anteriores dada em (2. 25),(2. 31) e (2. 38) teremos
uma fenomenologia diferente representadas pelas equações de difusão térmica, elástica e
fluídica.
42
2.13.2 - Equação Constitutiva para o Fluxo do Potencial Escalar (Fluxo de Calor nos
Sólidos – Lei de Fourier)
A equação fenomenológica geral proposta por Gibbs para os fluxos derivados de
potenciais e que são geralmente expressos em temos de gradiente de grandezas escalares ou
vetoriais, no caso do fluxo de calor é dado pela lei de Fourier da seguinte forma:
QQJ
. (2. 186)
Substituindo (2. 26) em (2. 186) temos:
][ TcJ MQ
. (2. 187)
Sendo a difusividade térmica é definida em termos da condutividade térmica da seguinte
forma:
ckM
. (2. 188)
Portanto, temos a conhecida expressão para a Lei de Fourier que fornece o fluxo de calor em
um material sólido, com condutividade térmica, k , a qual especifica o tipo de material, dado
por:
QJ k T (2. 189)
2.13.3 - Equação de Distribuição do Potencial Escalar Generalizado para a Teoria do
Calor
Usando as considerações de Gibbs para os fluxos derivados de potenciais os quais
podem ser geralmente expressos em temos de gradiente de grandezas escalares ou vetoriais.
temos finalmente que:
. QoQo Qo
dt dt
. (2. 190)
Agora substituindo (2. 189) e utilizando a densidade generalizada para o fluxo de
calor dado por (2. 26) em (2. 175) para X = Q temos:

43
0. QM M
dc T c T
t dt
. (2. 191)
Observe que esta é a equação tradicional de calor.
Considerando M , e c constantes temos:
2M M
dc T c Tdt
. (2. 192)
ou
2 1 dT Tdt
. (2. 193)
finalmente,
dtdTT
12 . (2. 194)
Esta é a clássica equação de difusão térmica para os sólidos.
Para casos onde a condutividade térmica é uma constante e o fluxo de calor é
estacionário podemos escrever:
0. T . (2. 195)
Executando as derivadas temos:
02 T . (2. 196)
Esta equação será a base para a dedução da equação integral de contorno.

44
2. 14 - Teoria Elastodinâmica Linear
2.14.1 – Equação Constitutiva para o Fluxo do Potencial Vetorial (Fluxo de
Deformações em um Material Sólido Elástico-Linear – Lei de Hooke)
A série das equações fundamentais de campo que governam o movimento de um
corpo elástico isotrópico e homogêneo consiste da relação do deslocamento da deformação
para pequenas deformações. Portanto, considere o deslocamento u conforme mostrado na
Figura - 2. 9.
Figura - 2. 9. Vetor deslocamento u provocado por uma deformação elástica.
O deslocamento do corpo é dado por:
x X u (2. 197)
sendo
udrurdru . (2. 198)
logo
rurdruud . (2. 199)
e a diferencial de x

45
dx dX du (2. 200)
ou seja
rdrdudud . (2. 201)
e a velocidade é:
dx dX duvdt dt dt
(2. 202)
E a aceleração é então:
2 2 2
2 2 2
d x d X d uadt dt dt
(2. 203)
E o estiramento é dado por:
dx udX
F I (2. 204)
Definindo a deformação E e a torção W , como sendo:
uu 21E ou na notação indicial jiij uu ,,2
1 E (2. 205)
e
uu 21W ou jiij uu ,,2
1 W (2. 206)
onde
WE u (2. 207)
O u é definido como:
i
u u u uux x y z
(2. 208)
Observe que se o tensor das deformações é simétrico o tensor das torções é nulo,
ou seja, se
uu (2. 209)
46
logo
0W (2. 210)
Sendo a deformação definida como:
12
Tij u u
(2. 211)
2.14.2 – A Lei de Hooke Generalizada para Sólidos Elásticos Lineares
A Lei de Hooke na sua forma generalizada é dada por:
ij ijkl klC , (2. 212)
Esta equação matricial dá origem a uma matriz Cijkl de 9 linhas e 9 colunas em um
total de 81 elementos na matriz. Porém por simetria temos que:
klijijklijlkijkljiklijkl CCCCCC ;; , (2. 213)
Logo reduzimos os elementos para o número de 21, os quais escritos de forma explicita
temos;
xy
zx
yz
zz
yy
xx
xy
zx
yz
zz
yy
xx
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
666564636261
565554535251
464544434241
363534333231
262524232221
161514131211
, (2. 214)
Definindo o módulo de cisalhamento, G, como sendo dado por:
yzyz G , (2. 215)
e
zxzx G , (2. 216)
e
yzyz G , (2. 217)
47
logo
klij G , (2. 218)
e o módulo de Poisson para i j ,como
jj
iiijv
, (2. 219)
As equações de tensões podem ser escritas em termos do módulo elástico, E,
como:
zzyyxxxx vEvEE , (2. 220)
e
zzyyxxyy vEEvE , (2. 221)
e
zzyyxxzz EvEvE , (2. 222)
A matiz anterior pode ser escrita como:
xy
zx
yz
zz
yy
xx
xy
zx
yz
zz
yy
xx
GG
GEvEvEvEEvEvEvEE
000000000000000000000000
, (2. 223)
De uma forma geral, isto é, para um material isotrópico as equações de tensão
podem escritas como:
2ij ij ij kk , (2. 224)
ou para 2 / 1 2v v temos:
)21
(2 kkijijij vv
, (2. 225)
onde G : é o módulo de cisalhamento
48
As equações de deformação podem ser escritas em termos do módulo elástico, E,
como:
)]([1zzyyxxxx v
E , (2. 226)
e
)]([1zzxxyyyy v
E , (2. 227)
e
)]([1zzxxzzxzz v
E , (2. 228)
Sabendo que:
GvE )1(2 , (2. 229)
È possível também montar a matriz inversa da matriz de rigidez da equação (2.
223) acima e esta passa a se chamar de matriz de flexibilidade onde:
ij ijkl klS , (2. 230)
Com 1ijkl ijklC S , ou seja:
1 0 0 0
1 0 0 0
1 0 0 0
10 0 0 0 0
10 0 0 0 0
10 0 0 0 0
xx xx
yy yy
zz zz
yz yz
zx zx
xy xy
v vE E Ev vE E Ev vE E E
G
G
G
, (2. 231)
De uma forma geral, isto é, para um material isotrópico as equações de tensão
podem escritas como:

49
1 ( )2 1ij ij ij kk
vv
, (2. 232)
Onde G : é o módulo de cisalhamento
2.14.3 – Equação Constitutiva o Fluxo de Deformações em um Material Sólido
Elástico-Linear
Mais uma vez usando as mesmas considerações de Gibbs para os fluxos derivados
de potenciais os quais podem ser geralmente expressos em temos de gradiente de grandezas
escalares ou vetoriais, no calo da teoria da elasticidade temos a lei de Hooke generalizada a
qual é dada por:
ijkkUo IJ γε 2
. (2. 233)
como o tensor deformação é dado por (2. 205) ou (2. 211):
uu 21E . (2. 234)
logo (2. 233) torna-se:
uuuJUo
. . (2. 235)
ou finalmente na notação tensorial temos:
EE 2 trJUo
. (2. 236)
Observe que as notações (2. 205), (2. 211), assim como as notações (2. 225) (2. 233), (2. 235)
e (2. 236) são todas equivalentes.
A equação de fluxo (2. 233) ou (2. 235) também pode ser escrita em termos da
equação geral (2. 172) proposta por Gibbs usando-se a seguinte relação:
2(1 )E
v
. (2. 237)
e obtendo-se
1.2(1 )UoJ u u u
v
I
(2. 238)
50
como 1. . .2
Tu u u , pode-se definir o Tensor de Eshelby-Rice como sendo:
1 1. .2 (1 )
TvT u u u u
v
I (2. 239)
temos:
Uo vJ T
. (2. 240)
2.14.5 - Densidade de Energia de Deformação na Elasticidade
A densidade de energia de deformação, W = W(kl), é uma função potencial das
deformações definida como:
ijijij dWkl
0
)( , (2. 241)
Cuja convexidade e condição de estabilidade é dada por:
)''()()''( klklkl
ijij
ij
WWW
, (2. 242)
Usando (2. 241) temos:
ijijij ddW )( , (2. 243)
onde
klij ijkl kl
ij
WC
, (2. 244)
Logo
)''()()''( klklijijij WW , (2. 245)
Essa equação expressa a concavidade da energia potencial de deformação elástica,
mostrando que essa concavidade representa um processo reversível ao equilíbrio.

51
2.14.6 - Equações de compatibilidade
A partir da regra de Schwartz temos que:
ijklklij
WW
22
, (2. 246)
Portanto
kl
ij
ij
kl
, (2. 247)
Desta forma o Jacobiano fica:
2
22
2
2
2
2
klijkl
klijij
klij WW
WWW
, (2. 248)
Logo
022
2
2
2
2
ijklklijklij
WWWW
, (2. 249)
Estas equações definem o tipo de deformações são compativeis com o espaço
euclidiano.
2.14.7 – Equação Constitutiva dos Materiais Elásticos Lineares
Considerando o caso de materiais elásticos lineares a densidade de energia de
deformação pode ser expandida em série de Taylor da seguinte forma:
...)(
21)0()(
klij
klij
ijkl
WWW
, (2. 250)
Considerando que o primeiro termo da expansão acima se anula por ser uma posição de
equilíbrio, nível zero da densidade de energia potencial, temos:
52
klijijklkl CW 21)( , (2. 251)
Combinando as equações (2. 251) e (2. 212) ou (2. 244) temos:
ijijW 21
, (2. 252)
Substituindo a equação (2. 225) em (2. 252) temos:
)21
()( jjiijiijij vvW
, (2. 253)
2.14.8 - Complementaridade da Densidade da Energia de Deformação
A existência de uma única inversa da relação constitutiva (2. 247)
ij
kl
kl
ij
, (2. 254)
Assegura a existência da complementaridade da densidade de energia de deformação, W* =
W*(ij), definida por transformada de Legendre como:
WW ijij * , (2. 255)
A partir da regra da cadeia derivando a equação (2. 255) temos:
ij
ij
ijij
ij
WW
*
, (2. 256)
Substituindo a equação (2. 212) ou (2. 244), para 0
ij
ij
temos:
ij
ijijij
ij
W
*
, (2. 257)
Portanto,
53
ijij
W
*
, (2. 258)
É direta a tarefa de mostrar que a convexidade de W* segue da convexidade de W.
Para um material frágil elástico linear a combinação de (2. 252) com (2. 255)
fornece:
ijijWW 21* , (2. 259)
Pode-se escrever para este caso que:
klijijklkl CW **
21)( , (2. 260)
Onde o tensor C*ijkl é o inverso do tensor Cijkl e da mesma forma:
klijijklijlkijkljiklijkl CCCCCC ****** ;; , (2. 261)
Segue de (2. 258) e (2. 260) que:
klijklij
klij CW
** )(
, (2. 262)
Para um material isotrópico a equação (2. 262) se reduz a
kkijijij Ev
Ev
1, (2. 263)
e W* torna-se:
llkkklklkl Ev
EvW
221)(*
, (2. 264)
Se uma lei de potência entre tensão e deformação existe, dada pela equação (2.
212), de tal forma que a deformação é uma função homogênea de grau n da tensão (equação
(2. 262)), então a equação (2. 259) implica que W* deve ser uma função homogênea das
componentes da tensão de grau n+1. Isto segue do teorema de Euler para funções
homogêneas, portanto:
54
ijijijij n
Wn
W 1
11
1 **
, (2. 265)
Combinado (2. 255) com (2. 265) temos:
1 ij ijnW
n
, (2. 266)
Quando a tensão é proporcional a deformação (n = 1) então as equações (2. 259),
(2. 265) e (2. 266) tornam-se idênticas a equação (2. 252) e (2. 259).
2.14.9 – Equação do Potencial Vetorial Generalizado para a Deformação Elástica
Dada a equação da continuidade:
XoXo dtdJ . . (2. 267)
Substituindo (2. 238) em (2. 267) temos:
1. .2(1 )
d uu u u
v dt
I
. (2. 268)
Para cte , temos:
2 1. .2(1 )
d uu u u
v dt
I
. (2. 269)
Onde a derivada material de X é dada por:
d u uv u
dt t
. (2. 270)
Logo
2 1. .2(1 )
uu u u v u
v t
I
. (2. 271)
Caso I)
Para fluxos estacionários temos:

55
2 1. .2(1 )
u u u v uv
I . (2. 272)
Caso II) Para regimes onde os fluxos são perpendiculares aos gradientes( v u ) temos:
2 1. . 02(1 )
u u uv
I . (2. 273)
Onde . 0v u
2.14.12 – A Equação de Movimento Elastodinâmico Linear
A partir de condições de equilíbrio nós temos que:
0. SV
SdTdVf
(2. 274)
ou seja, o campo das tensões aplicado sobre a superfície de um sólido em equilíbrio é igual a
densidade volumétrica de força armazenada por este sólido.
Da condição de não-rotação temos:
0. SV
SdTrdVfr
(2. 275)
As equações (2. 211) e (2. 212) constituem a base matemática para a teoria da
elasticidade linear. Contudo, considerando que o deslocamento u se propaga no espaço e no
tempo temos:
tu
dtrd
rdud
dtud
(2. 276)
ou
tu
dtrdu
dtud
(2. 277)
ou
tu
dtrduu
(2. 278)
As equações de equilíbrio podem a partir de agora serem expressos de forma a

56
incluir a propagação dinâmica da deformação u , de acordo com a 2ª e 3ª Leis de Newton.
VSV
dVuSddVf .T (2. 279)
Para o caso estático temos:
. 0V S
fdV dS T
(2. 280)
Aplicando o teorema da divergência no segundo termo do lado esquerdo da equação (2. 279)
temos:
VS
dVSd TT ..
(2. 281)
Substituindo (2. 281) em (2. 279) temos:
VVV
dVudVdVf T. (2. 282)
Como o volume em (2. 282) é arbitrário ele pode ser escolhido igual ao volume de controle V
ficando portanto, as equações do balanço do momentum (2. 279)
ufTouudVf jiij
,.T (2. 283)
onde é a densidade do corpo.
Observe que de uma forma geral temos:
Tnn
TT .ˆˆ. (2. 284)
A relação tensão-deformação linear é dada a partir da Lei de Hooke, na forma
tensorial, onde:
EEIT 2 tr (2. 285)
ou
ijkkijij EET 2 (2. 286)
onde

57
vE
12
e vvvE
211 (2. 287)
onde e são as constantes elásticas do sólido e E é o módulo elástico de Young e v é o
módulo de Poisson.
Substituindo (2. 285) em (2. 283) temos:
utrf EEI 2. (2. 288)
ou
utrf EEI .2. (2. 289)
Substituindo (2. 285) em (2. 284) temos:
Tntr
ˆ2 EEI (2. 290)
logo
Tnntr
ˆ2ˆ EEI (2. 291)
Mas a partir de (2. 211) temos:
uu 21E (2. 292)
Substituindo (2. 211) ou (2. 292) em (2. 289) e (2. 291) temos:
uuuuutrf
21.2
21. I (2. 293)
e
Tnuunuutr
ˆ
212ˆ
2I (2. 294)
ou logicamente para a equação (2. 293) temos:
uuuuuf
.....2
(2. 295)
Reescrevendo (2. 295) temos:

58
uuuf .. (2. 296)
ou
uuuf .2 (2. 297)
e para a equação (2. 295) temos:
Tuunuun
.ˆ
2.ˆ (2. 298)
sendo
ununuun ˆ.ˆ2.ˆ (2. 299)
temos:
Tununun ˆ.ˆ2..ˆ (2. 300)
ou
Tununun ˆ.ˆ2..ˆ (2. 301)
Portanto,
uuuf .2 (2. 302)
e
Tununun ˆ.ˆ2..ˆ (2. 303)
como
kf
(2. 304)
Ficamos com,
uuuk .2 (2. 305)
e
Tununun ˆ.ˆ2.ˆ (2. 306)
Esta é a equação diferencial parcial dependente do tempo para problemas em elasticidade em
59
um corpo de volume V, onde k
é a densidade volumétrica de força (força por unidade de
volume) em alguma função da posição e do tempo sujeita a condição (2. 306), sobre a
superfície S ligada ao volume V.
No Capítulo – III a seguir, as equações (2. 296) e (2. 298) serão reformuladas para
inserir irregularidades geométricas (rugosidade e porosidade) no campo de tensão elástico.