Embed Size (px)
Citation preview

Caracterização do Funcionamento de uma Cadeia de
Tração com Motor Síncrono Alimentado através de um
Conversor Electrónico Comercial
Vítor Manuel Pereira Dionísio Machado dos Reis
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Júri
Presidente: Professora Doutora Maria Eduarda de Sampaio Pinto de Almeida Pedro
Orientador: Professor Doutor Duarte de Mesquita e Sousa
Vogal: Professora Doutora Sónia Maria Nunes dos Santos Paulo Ferreira Pinto
Maio de 2013

ii

iii
Agradecimentos
Dedico este trabalho de dissertação e o curso de Engenharia Electrotécnica e de Computadores a
todos os que me ajudaram a vencer esta etapa na minha vida, sobretudo nos momentos mais difíceis.
Entre todos destaco principalmente a minha mãe Maria José Pereira Dionísio e os meus avós Manuel
Jacinto Dionísio e Custódia Maria Pereira Carapinha pelo acompanhamento, empenho e dedicação a
todos os níveis, sem os quais esta missão teria sido impossível.
Nunca me poderei esquecer dos meus irmãos electrotécnicos Sandro Neto, Guilherme Fernandes e
Diogo Quirino pela camaradagem, trabalho de equipa e espírito de sacrifício conjunto ao longo do
percurso académico.
Agradeço ao Professor Doutor Duarte de Mesquita e Sousa pelo tema do trabalho que me propôs,
pela orientação e motivação para concluir este trabalho.

iv
Resumo
Na última década foram desenvolvidos novas aplicações na área dos veículos eléctricos e
automação, através do desenvolvimento tecnológico da electrónica de potência e de controlo [1].
Para acompanhar o crescimento dessas áreas, foram dimensionados e construídos novas gerações
de variadores de velocidade e de motores eléctricos, mais eficientes, flexíveis e eficazes.
O objectivo deste trabalho é o estudo de um sistema composto por um variador de velocidade com
controlo vectorial e um motor síncrono a magnetos permanentes de duplo estator, para aplicações em
veículos eléctricos. Ao longo deste trabalho, o novo conceito de duplo estator é estudado, juntamente
com a unidade que o controla, incluindo esquemáticos, características e vantagens, comparando com
sistemas convencionais e clássicos, baseados em máquinas de Corrente Contínua e de Indução.
Serão apresentados os modelos do variador de velocidade com o algoritmo RFOC (Rotor Field
Oriented Control) e o do motor. Para o estudo e análise do comportamento do sistema, usa-se o
ambiente de simulação MATLAB®/Simulink, com um conjunto de testes sob várias condições.
A configuração de duplo estator é validada tecnicamente para várias respostas a comandos de
velocidade, com condições variadas em termos de binário de carga, além de permitir o teste em
condições muito semelhantes a situações reais, onde os enrolamentos do estator exterior e interior
são testados separadamente com perturbações externas. O motor síncrono a magnetos permanentes
de duplo estator é uma solução viável e adequada para a mobilidade eléctrica, mais eficiente, eficaz e
com maior densidade de binário.
Palavras-Chave: Veículos Eléctricos, Motor Síncrono a Magnetos Permanentes de Duplo Estator,
RFOC (Rotor Field Oriented Control), Variador de Velocidade, Controlo Vectorial

v
Abstract
In the last decade, new applications in the area of electric vehicles and automation have been
developed, due to the technology development in power and control electronics [1]. In order to match
the rising of those applications areas, more effective, flexible and efficient new generation of electric
drive control systems as well as electric motors were conceived.
The purpose of this work is to study a system constituted by a vector control electric variable speed
drive controlling a double stator permanent magnet synchronous motor, for electric vehicle
applications. Throughout this paper the new concept of the double stator will be studied, combined
with the electronic control unit. This approach includes the discussion about topologies, characteristics
and advantages, comparison between old and conventional control systems having as reference
conventional DC (Direct Current) machines and AC (Alternating Current) induction machines. A model
of the speed drive with the RFOC (Rotor Field Oriented Control) algorithm and the motor will be
introduced. To study and understand the system’s functionality and dynamics with a set of load and
test conditions, the MATLAB®/Simulink simulation environment is used.
The double stator configuration is technically approved and validated not only with constant and
dynamic torque and speed responses to mechanical loads, but also the possibility to test the outer
stator and inner stator separately with external perturbations, in order to get test conditions similar to
real situations. Since this solution would be seen a conjunction between high efficiency and torque
density, the double stator permanent magnet synchronous motor will be a viable and adequate
solution for the electric mobility.
Keywords: Electric Vehicle, Double Stator Permanent Magnet Synchronous Motor, RFOC (Rotor Field
Oriented Control), Variable Speed Drive, Vector Control

vi
Índice
Agradecimentos ....................................................................................................................................... iii
Resumo ................................................................................................................................................... iv
Abstract..................................................................................................................................................... v
Índice ....................................................................................................................................................... vi
Lista de Figuras ..................................................................................................................................... viii
Lista de Tabelas ...................................................................................................................................... ix
Lista de Abreviações ................................................................................................................................ x
1. Introdução ......................................................................................................................................... 1
1.1 Enquadramento .......................................................................................................................... 1
1.2 Estado de Arte ............................................................................................................................ 2
1.3 Motores Eléctricos AC ................................................................................................................ 2
1.3.1 Motor de Indução ou Assíncrono ..................................................................................... 2
1.3.2 Motor Síncrono ................................................................................................................ 4
1.4 Sistemas e Metodologias de Controlo de Motores Eléctricos AC .............................................. 6
1.4.1 Métodos de Controlo de Motores Eléctricos AC ............................................................. 6
1.4.2 Conversores Electrónicos Comerciais de Velocidade Variável (Adjustable Speed Drives) 8
1.5 Estrutura da dissertação ............................................................................................................. 9
2. Motor Síncrono de Duplo Estator a Magnetos Permanentes .........................................................11
2.1 Introdução ................................................................................................................................. 11
2.2 Motor Síncrono a Magnetos Permanentes de Duplo Estator ................................................... 11
2.3 Modelo Matemático da Máquina Síncrona a Magnetos Permanentes Convencional ............. 15
2.4 Modelo Matemático da Máquina Síncrona a Magnetos Permanentes de Duplo Estator ........ 17
3. Unidade de Controlo .......................................................................................................................23
3.1 Introdução ................................................................................................................................. 23
3.2 Aplicações ................................................................................................................................ 24
3.2.1 Eficiência Energética e Considerações Ambientais ...................................................... 24
3.2.2 Compatibilidade com Normas e Certificados Internacionais ......................................... 24
3.2.3 Compatibilidade Eletromagnética .................................................................................. 25
3.3 Características Técnicas do ATV 71 ........................................................................................ 25
3.4 Controlo de Motores Síncronos ................................................................................................ 26
3.4.1 Princípio de Orientação de Campo (Vector Control) ..................................................... 28
4. Modelização do Sistema em Matlab®/Simulink .............................................................................35
4.1 Objectivo ................................................................................................................................... 35
4.2 Introdução ................................................................................................................................. 35
4.3 Componentes do Sistema de Controlo ..................................................................................... 36
vii
4.3.1 Controlador de Velocidade ............................................................................................ 36
4.3.2 Bloco de Controlo Vectorial (Vector Controller) ............................................................ 36
4.3.3 Inversor Trifásico ........................................................................................................... 38
4.3.4 Motor Síncrono a Magnetos Permanentes de Duplo Estator ........................................ 39
5. Simulações em Matlab®/Simulink ..................................................................................................43
5.1 Resposta do Sistema a Comandos em forma de Escalão para Baixas Velocidades .............. 43
5.1.1 Comando em Escalão com Arranque para 30 rpm ....................................................... 43
5.1.2 Inversão de Marcha com Comando em Escalão de – 30 rpm ...................................... 45
5.2 Resposta do Sistema a Variações no Comando de Velocidade em forma de Rampa para Médias e Altas Velocidades .................................................................................................................. 47
5.2.1 Comando em Rampa com Arranque para 50 rpm, Aumento de Velocidade para 100 rpm e Posterior Paragem .............................................................................................................. 47
5.2.2 Comando em Rampa com Arranque para 100 rpm, Aumento de Velocidade para 500 rpm e Posterior Aumento para 1000 rpm ...................................................................................... 50
5.3 Resposta do Sistema a Perturbações Electromagnéticas e Electricas ................................... 52
5.3.1 Perturbações Electromagnéticas no Controlo Vectorial aplicado a ambos os Estatores 52
5.3.2 Curto-Circuito nos Enrolamentos do Estator Exterior ................................................... 54
5.3.3 Curto-Circuito nos Enrolamentos do Estator Interior ..................................................... 57
6. Conclusões .....................................................................................................................................61
6.1 Conclusões ............................................................................................................................... 61
6.2 Comentários finais .................................................................................................................... 62
6.2.1 Aplicações de Velocidade Elevada ............................................................................... 62
6.2.2 Travagem Regenerativa ................................................................................................ 63
Referências Bibliográficas ......................................................................................................................65
Anexos ....................................................................................................................................................67
Anexo 1 – Inicialização de Variáveis e Parâmetros do Modelo do Sistema em Matlab®/Simulink ....... 67
Anexo 2 – Diagrama de Blocos do Sistema em Matlab®/Simulink ...................................................... 70
2.1 Transformação de Park inversa. ....................................................................................... 70
2.2 Controlador de Binário (Current Regulator) ...................................................................... 70
2.3 Comparador de Correntes ................................................................................................. 71
2.4 Inversor PWM .................................................................................................................... 71
Anexo 3 – Ficha Técnica da Série de Variadores de Velocidade Schneider Electric ATV 71 .............. 72

viii
Lista de Figuras
Figura 1.1 - Corte de motor de indução trifásico com rotor em gaiola (RockwellAutomation/RelianceElectric) [3]. 3 Figura 1.2 - Corte de motor de indução trifásico com rotor bobinado (General Electric Company) [3]. 3 Figura 1.3 - Esquema de um motor síncrono trifásico a magnetos permanentes [3]. 4 Figura 1.4 - Motor Síncrono Trifásico a Magnetos Permanentes [3]. 5 Figura 1.5 - Máquina Síncrona com magnetos permanentes instalados à superfície (esquerda) e no interior (direita) do rotor [3]. 5 Figura 1.6 - Inversor Trifásico alimentado por retificador trifásico em ponto [3]. 6 Figura 1.7 - Regimes de funcionamento para um motor síncrono com variação de velocidade [3]. 7 Figura 1.8 - Diagrama de blocos de um sistema de controlo de binário, para um motor síncrono a magnetos permanentes [3]. 7 Figura 2.1 - Ilustração com o corte transversal do motor síncrono de duplo estator [6]. 12 Figura 2.2 - Corte radial de um motor de duplo estator trifásico de 22 polos [6]. 13 Figura 2.3 - Corte radial do motor de 22 pólos, com a distribuição do campo magnético [6]. 13 Figura 2.4 - Distribuição do campo Magnético à carga máxima [6]. 14 Figura 2.5 - Ilustração com corte radial. (a) Motor de estator simples; (b) Motor de duplo estator [7]. 14 Figura 2.6 - Diagrama do estator do motor síncrono de duplo estator. 17 Figura 2.7 - Máquina síncrona ideal trifásica em componentes dq [3]. 19 Figura 3.1- Fotografia de uma unidade ATV71 [8]. 23 Figura 3.2 - Esquema do controlo de binário do princípio de orientação de campo [3]. 27 Figura 3.3 - Esquema do controlo de velocidade do princípio de orientação de campo [3]. 27 Figura 3.4 - Diagrama de blocos do controlo da componente mecânica [2]. 28 Figura 3.5 - Esquema de base do controlo directo [2]. 31 Figura 3.6 - Diagrama de Controlo Directo RFOC para a máquina em estudo [9]. 32 Figura 3.7 - Esquema vetorial do RFOC aplicado à máquina em estudo [9]. 32 Figura 3.8 - Diagrama de blocos do controlador de binário [2]. 33 Figura 4.1 - Diagrama de blocos do sistema. 35 Figura 4.2 - Diagrama de blocos do controlador de velocidade. 36 Figura 4.3 - Diagrama de blocos do controlador vectorial do sistema. 37 Figura 4.4 - Modelo do bloco inversor PWM. 38 Figura 4.5 - Modelo da máquina síncrona a magnetos permanentes de duplo estator. 39 Figura 4.6 - Bloco que traduz a equação eléctrica do estator exterior. 40 Figura 4.7 - Bloco que traduz a equação eléctrica do estator interior. 41 Figura 4.8 - Bloco que traduz a equação mecânica. 41 Figura 5.1 - Velocidade do motor. 43 Figura 5.2 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul). 44 Figura 5.3 - Potência desenvolvida pelo motor. 44 Figura 5.4 - Sistema de correntes eléctricas que percorrem o estator exterior. 44 Figura 5.5 - Sistema de correntes eléctricas que percorrem o estator interior. 45 Figura 5.6 - Velocidade do motor. 45 Figura 5.7 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul). 46 Figura 5.8 - Potência desenvolvida pelo motor. 46 Figura 5.9 - Sistema de correntes eléctricas que percorrem o estator exterior. 46 Figura 5.10 - Sistema de correntes eléctricas que percorrem o estator interior. 47 Figura 5.11 - Velocidade do motor. 48 Figura 5.12 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul). 48 Figura 5.13 - Potência desenvolvida pelo motor. 49

ix
Figura 5.14 - Sistema de correntes eléctricas que percorrem o estator exterior. 49 Figura 5.15 - Sistema de correntes eléctricas que percorrem o estator interior. 49 Figura 5.16 - Velocidade do motor. 50 Figura 5.17 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul). 50 Figura 5.18 - Potência desenvolvida pelo motor. 51 Figura 5.19 - Sistema de correntes eléctricas que percorrem o estator exterior. 51 Figura 5.20 - Sistema de correntes eléctricas que percorrem o estator interior. 51 Figura 5.21 - Velocidade do motor. 53 Figura 5.22 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul). 53 Figura 5.23 - Potência desenvolvida pelo motor. 53 Figura 5.24 - Sistema de correntes eléctricas que percorrem o estator exterior. 54 Figura 5.25 - Sistema de correntes eléctricas que percorrem o estator interior. 54 Figura 5.26 - Velocidade do motor. 55 Figura 5.27 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul). 55 Figura 5.28 - Potência desenvolvida pelo motor. 56 Figura 5.29 - Sistema de correntes eléctricas que percorrem o estator exterior. 56 Figura 5.30 - Sistema de correntes eléctricas que percorrem o estator interior. 56 Figura 5.31 - Velocidade do motor. 57 Figura 5.32 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul). 57 Figura 5.33 - Potência desenvolvida pelo motor. 58 Figura 5.34 - Sistema de correntes eléctricas que percorrem o estator exterior. 58 Figura 5.35 - Sistema de correntes eléctricas que percorrem o estator interior. 58
Lista de Tabelas
Tabela 4.1 - Parâmetros do controlador de velocidade. 36 Tabela 4.2 - Parâmetros do controlador vectorial. 37 Tabela 4.3 - Parâmetros para a modelização do motor síncrono a magnetos permanentes de duplo estator. 40

x
Lista de Abreviações
A Grandeza Eléctrica Estatórica Genérica
Componente Directa da Grandeza Eléctrica Estatórica Genérica
Grandeza Eléctrica Estatórica Genérica da Fase i
Componente em Quadratura da Grandeza Eléctrica Estatórica Genérica
Componente Homopolar da Grandeza Eléctrica Estatórica Genérica
AC Alternating Current
dq Direct and Quadrature
dq0 Direct, Quadrature and Zero
DC Direct Current
EMC Electromagnetic Compatibility
Eem Força Electromotriz
f Frequência Eléctrica
hp Horsepower
HVAC Heat, Ventilation and Air Conditioning
IGBT Insulated Gate Bipolar Transistor
Componente Directa da Corrente do Rotor
Componente Directa da Corrente do Estator
ii Corrente Eléctrica da Fase i do Estator
Componente em Quadratura da Corrente do Rotor
Componente em Quadratura da Corrente do Estator
i_abc_u Correntes Estatóricas do Estator u
iq_u_ref Componente em Quadratura da Corrente de Referência do Estator u
J Momento de Inércia Total da Componente Mecânica

xi
k Constante Genérica
kg Kilogram
Ganho Integral do Controlador de Velocidade
Ganho Proporcional do Controlador de Velocidade
kHz Kilohertz
kW Kilowatt
L Coeficiente de Auto-indução
Ld Componente Directa do Coeficiente de Auto-indução
Lq Componente em Quadratura do Coeficiente de Auto-indução
_ Coeficiente de Indução para a Componente q dos Enrolamentos Interiores do Estator
_ Coeficiente de Indução para a Componente q dos Enrolamentos Exteriores do Estator
LS Indutância Síncrona
Coeficiente de Auto-indução da Fase i do Estator u
mm Milímetro
ms Milissegundo
M Coeficiente de Indução Mútua
MW Megawatt
Binário de Carga
Binário Electromagnético
Coeficiente de Indução Mútua entre as Fases i e j do Estator u e v respectivamente
∗ Binário Electromagnético de Referência
Velocidade de Rotação Nominal
p Par de Pólos
Phi Fluxo Magnético Gerado pelos Magnetos Permanentes

xii
PI Proporcional Integral
PWM Pulse Width Modulation
R Resistência Eléctrica
Resistência Eléctrica dos Enrolamentos/Fase do Estator Interior
Resistência Eléctrica dos Enrolamentos/Fase do Estator Exterior
Resistência Eléctrica dos Enrolamentos do Rotor
RFOC Rotor Field Oriented Control
Resistência Eléctrica dos Enrolamentos do Estator u
Ganho Integral do Controlador de Binário
Constante de Tempo dos Comparadores de Corrente
Ganho Proporcional do Controlador de Binário
Tensão Eléctrica da Fase i do Estator
Binário Electromagnético
_ Limite Máximo para o Binário Electromagnético de Referência
_ Limite Mínimo para o Binário Electromagnético de Referência
Binário de Carga
Binário Nominal
V Tensão Eléctrica
Vi_j Tensão Eléctrica da Fase i do Estator j
! Velocidade Mecânica do Rotor
ɵ Ângulo Mecânico do Rotor
ɵ Ângulo Eléctrico do Rotor
# Componente Directa do Fluxo Magnético Ligado do Rotor
# Componente Directa do Fluxo Magnético Ligado do Estator

xiii
# Componente em Quadratura do Fluxo Magnético Ligado do Rotor
# Componente em Quadratura do Fluxo Magnético Ligado do Estator
# Fluxo Magnético Ligado com a Fase i do Estator
#_ Fluxo Magnético Ligado com a Fase i do Estator u
#$ Fluxo Magnético Gerado pelos Magnetos Permanentes
#∗ Fluxo Magnético Ligado de Referência
% Constante de Tempo da Cadeia de Controlo do Controlador de Binário

xiv

1
1. Introdução
1.1 Enquadramento
Na última década, com o desenvolvimento tecnológico nas áreas da eletrónica de potência e de
controlo, os sistemas electromecânicos têm evoluído incorporando as evoluções tecnológicas nas
novas aplicações que tem correspondido, em alguns casos, a alterações consideráveis. Os sistemas
eletromecânicos mais recentes têm-se tornando mais fiáveis, eficientes e simultaneamente menos
dispendiosos que os sistemas clássicos, sobretudo em novas áreas como a dos veículos eléctricos ou
a da automação [1].
Para acompanhar o avanço tecnológico destes sistemas e os requisitos das aplicações emergentes,
houve a necessidade de ultrapassar aspetos limitativos dos motores eléctricos convencionais e mais
vulgarmente utilizados, particularmente os modelos a corrente contínua e os de indução, dado que
conduzem a desperdícios de energia, à falta de desempenho do sistema e ao menor tempo de vida
de todos os equipamentos envolvidos. Por esse motivo, novas gerações tecnológicas de motores
eléctricos foram desenvolvidos e implementados, entre os quais os motores síncronos, especialmente
as variantes equipadas a magnetos permanentes [1].
Este trabalho de dissertação tem como objetivo principal o estudo de um sistema de controlo de um
motor síncrono a magnetos permanentes de duplo estator, através de um conversor de velocidade
variável baseado num conversor comercial da Schneider Electric, da série Altivar 71, dimensionado
para aplicações especiais, mas adaptado neste trabalho para veículos eléctricos. Apresentam-se ao
longo deste trabalho as características principais de um motor desta natureza, com as suas
vantagens e particularidades, assim como a unidade que o alimenta e controla. Para simular o
funcionamento do sistema e para obter conclusões, usa-se o ambiente de simulação do programa
MATLAB®/Simulink.
Futuramente, sistemas eléctricos deste género vão ter um papel cada vez mais importante nas mais
variadas soluções tecnológicas, sobretudo na mobilidade eléctrica, garantindo elevados critérios de
eficiência energética e sustentabilidade, com a ambição de um crescimento tecnológico cada vez
maior, versatilidade e inovação [1].

2
1.2 Estado de Arte
Os accionamentos eléctricos, particularmente os que se enquadram na gama de motores eléctricos
rotativos, têm um impacto considerável em todos os aspetos do modo de vida moderno, sendo
responsáveis por uma larga gama de processos industriais, independentemente do sector de
atividade, mas mais do que nunca indispensável e com um papel fundamental na área sobre a qual
este trabalho diz respeito, a mobilidade eléctrica. Para além da necessidade de melhorar a tecnologia
que envolve a propulsão de veículos eléctricos, é também imprescindível não só melhores métodos
de controlo como também elevados níveis de sustentabilidade e eficiência energética [1].
Nas secções seguintes apresenta-se um conjunto de tecnologias que se encontram largamente
difundidas no mercado e na indústria, mas que são importantes para o entendimento do fundamento
deste trabalho.
1.3 Motores Eléctricos AC
1.3.1 Motor de Indução ou Assíncrono
A máquina de indução é o motor eléctrico mais comum dos nossos dias, tendo evoluído bastante ao
longo das últimas décadas, sobretudo em aplicações onde são controladas por sistemas de
velocidade variável. As suas vantagens em relação a outras máquinas são sobretudo a sua robustez,
fiabilidade, simplicidade e baixo preço, apesar do seu controlo ser muitas vezes complicado para
certas aplicações, sobretudo quando se requer alta precisão na rotação da própria máquina [2].
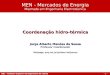
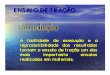
No entanto, existem duas variantes deste tipo de máquinas, que se distinguem pelo tipo de rotor
que se encontra instalado, nomeadamente as de rotor em gaiola de esquilo e as de rotor bobinado.
Na figura 1.1 e 1.2, podem ser visualizadas um exemplar deste tipo de máquinas respetivamente.
3
Figura 1.1 - Corte de motor de indução trifásico com rotor em gaiola (RockwellAutomation/RelianceElectric) [3].
Figura 1.2 - Corte de motor de indução trifásico com rotor bobinado (General Electric Company) [3].
Em comparação com a máquina de rotor em gaiola, a de rotor bobinado apresenta uma impedância
mais baixa, o que a torna mais eficiente. Além deste facto, devido à possibilidade de alimentar os
enrolamentos do rotor e de ajustar a relação eletromagnética entre os enrolamentos das duas
componentes, também temos um controlo muito mais preciso através da utilização de sistema de
controlo com variadores de velocidade [3].

4
1.3.2 Motor Síncrono
A grande maioria dos motores eléctricos usados atualmente, são motores de indução trifásicos. No
entanto, com o desenvolvimento tecnológico e o aparecimento de novas e complexas aplicações,
nomeadamente veículos eléctricos e sistemas de automação, este tipo de motores apresentam
algumas limitações técnicas e de funcionamento [1].
A máquina síncrona é o gerador AC por excelência, ou seja, é a máquina eléctrica que funciona
tipicamente como gerador, operando em sistemas de velocidade variável e normalmente de elevada
potência ao nível das centenas de MW. Por outro lado, com o aparecimento de aplicações modernas,
tais como a que diz respeito a este trabalho, sistemas de pequena potência da ordem das unidades e
dezenas de kW, têm vindo cada vez mais a utilizar variantes destas máquinas a funcionar como
motor em sistemas de velocidade variável de elevada eficiência e precisão. Na figura 1.3 encontra-se
ilustrado o esquema em corte de um motor síncrono trifásico a magnetos permanentes, com a
ilustração do eixo magnético proveniente da excitação dos magnetos permanentes e o sistema
trifásico de enrolamentos do estator. Na figura 1.4 é possível visualizar uma fotografia de um
exemplar de um motor síncrono a magnetos permanentes.
Figura 1.3 - Esquema de um motor síncrono trifásico a magnetos permanentes [3].

5
Figura 1.4 - Motor Síncrono Trifásico a Magnetos Permanentes [3].
As principais vantagens da variante equipada com magnetos permanentes relativamente à de
excitação convencional, são a sua elevada eficiência, baixa manutenção, maior autonomia em termos
de vida útil, baixo ruído, baixo peso e construção compacta, requisitos fundamentais no sector dos
veículos eléctricos [3].
As máquinas síncronas a magnetos permanentes, independentemente do nº de fases, podem ser
classificadas de acordo com o tipo de magneto permanente instalado (ferrite, ceramic, alnico or rare
earth), a forma de onda da Eem induzida (trapezoidal ou sinusoidal), o tipo de instalação dos
magnetos permanentes (instalados na superfície ou embutidos no rotor) tal como ilustrado na figura
1.5, a configuração dos enrolamentos (instalados em cavas ou na superfície), a configuração e
disposição do estator e do rotor e o conversor electrónico (unipolar ou bipolar).
Figura 1.5 - Máquina Síncrona com magnetos permanentes instalados à superfície (esquerda) e no interior (direita) do rotor [3].

6
1.4 Sistemas e Metodologias de Controlo de Motores Eléctricos AC
No passado, os sistemas de controlo eléctricos eram constituídos por equipamentos dispendiosos e
de elevadas dimensões, na maioria dos casos eram sistemas em corrente contínua ineficientes e
limitados somente à tarefa para qual foram desenvolvidos. Hoje em dia, o sistema eléctrico e
electrónico associado a motores AC não se limita somente a alimentar o motor eléctrico, mas também
tem de o controlar, tanto em regime permanente como em regime dinâmico, tendo ainda em atenção
o tipo de carga mecânica a acionar e as condições de operação [1].
1.4.1 Métodos de Controlo de Motores Eléctricos AC
Para se efetuar o controlo mais simples do tipo de motor eléctrico AC que é proposto neste trabalho,
o motor síncrono a magnetos permanentes de duplo estator, recorre-se por exemplo ao controlo de
velocidade via o ajuste da frequência das tensões aplicadas no estator da máquina, em que a
alimentação é obtida a partir do inversor trifásico típico, cujo esquema eléctrico é ilustrado na figura
1.6. Este controlo é tipicamente designado por V/f.
Figura 1.6 - Inversor Trifásico alimentado por retificador trifásico em ponto [3].

7
Na figura 1.7 apresentam-se as características de binário-velocidade e de potência-velocidade para
um motor síncrono típico:
Figura 1.7 - Regimes de funcionamento para um motor síncrono com variação de velocidade [3].
No contexto deste trabalho e para metodologias de controlo mais eficazes e eficientes, onde o rigor
e a precisão são elevados, pretende-se controlar a velocidade e o binário electromagnético
desenvolvido pela máquina. Para tal recorre-se ao método designado por princípio de orientação de
campo ou controlo vetorial, em que são usadas transformações de variáveis para as grandezas do
estator, nomeadamente o fluxo, a corrente e a tensão, de tal modo que se consideram num
referencial girante em sincronismo com o rotor.
Na figura 1.8 encontra-se ilustrado o diagrama de blocos de um sistema de controlo de binário, que
se baseia no princípio de orientação de campo, aplicado a um motor síncrono a magnetos
permanentes genérico.
Figura 1.8 - Diagrama de blocos de um sistema de controlo de binário, para um motor síncrono a magnetos permanentes [3].

8
1.4.2 Conversores Electrónicos Comerciais de Velocidade Variável (Adjustable
Speed Drives)
Os conversores electrónicos de velocidade variável, vulgarmente designados por variadores de
velocidade são unidades eléctricas complexas, que melhoraram significativamente a eficiência e o
desempenho dos motores que controlam, reduzindo consideravelmente o custo associado ao
consumo de energia e simultaneamente reduzem o nível de manutenções necessárias e o custo do
hardware envolvido. Os variadores de velocidade são utilizados em qualquer cenário onde a variação
de velocidade e de binário é necessária. Atualmente são utilizados em motores e geradores,
nomeadamente em elevadores, bombas de água, HVAC, aerogeradores, centrais hidroeléctricas,
indústria automóvel, etc.
Para além das vantagens enunciadas, a evolução tecnológica da eletrónica de potência, levou à
incorporação de novos dispositivos semicondutores comandados, possibilitando o desenvolvimento
de técnicas muito eficientes de controlo de velocidade e de binário a custo reduzido, para todas as
áreas em que as máquinas eléctricas são usadas, entre as quais o que diz respeito a este trabalho,
em aplicações de veículos eléctricos.
Com a utilização de variadores de velocidade, é possível controlar e ajustar a velocidade de uma
determinada máquina eléctrica à velocidade de referência desejada, independentemente da variação
da carga e de outras perturbações externas ao sistema. No passado, devido a limitações
tecnológicas, os sistemas tradicionais de controlo permitiam apenas dois estados possíveis, ou a
máquina se encontrava parada ou à velocidade nominal; com o inconveniente da diminuição da
velocidade com o aumento de carga, reduzindo significativamente o desempenho do sistema. No
entanto, com a integração de um variador de velocidade, é possível ajustar a máquina à velocidade
desejada, independentemente da variação de carga e simultaneamente reduzir a energia total
consumida pelo sistema [1].
No que diz respeito à constituição de um variador de velocidade, é típico identificar componentes
diferentes, entre os quais a componente contínua do andar intermédio DC obtida a partir de um
retificador trifásico em ponte comandado, que por sua vez alimenta um inversor trifásico com
modulação tipo PWM, componente esta que se encontra eletricamente ligada aos terminais do estator
do motor. Por outro lado, no sentido de controlar o motor, a componente de comando através do
controlador, gera os sinais de comando dos dispositivos semicondutores existentes no bloco
retificador e no inversor, de modo a se atingir o objetivo de funcionamento requerido por determinada
aplicação.

9
A tecnologia de accionamento e controlo de motores eléctricos, particularmente de variadores de
velocidade está em constante evolução. Os variadores de velocidade de última geração, possuem um
desempenho superior face a unidades mais antigas, utilizando métodos de comutação mais
eficientes. Estão disponíveis para uma larga gama de potências, permitindo a utilização de motores
mais leves e de dimensões reduzidas, tais como os motores síncronos a magnetos permanentes, o
que permite compactar todo o sistema electrónico de potência, com a consequente expansão a novas
áreas de aplicação [1].
1.5 Estrutura da dissertação
Este trabalho encontra-se dividido em seis capítulos, de modo a proporcionar uma melhor
compreensão do mesmo.
No primeiro capítulo é realizada a introdução ao trabalho, onde se apresenta o enquadramento do
tema em estudo, são abordados os vários componentes do sistema de controlo que levaram ao seu
desenvolvimento, os objetivos a serem alcançados e a estrutura da dissertação. O segundo capítulo
expõe os princípios teóricos fundamentais e as particularidades que levam a apresentar o modelo
final da máquina síncrona a magnetos permanentes de duplo estator, a incorporar no sistema de
controlo. No terceiro capítulo são apresentadas as características técnicas e gerais do variador de
velocidade Schneider Electric ATV71, as suas vantagens e a descrição pormenorizada dos métodos
de controlo que utiliza. Por sua vez, o quarto capítulo apresenta-se o modelo de simulação
desenvolvido no âmbito deste trabalho de dissertação, em ambiente Matlab®/Simulink, onde se
descrevem todos os blocos que constituem o sistema de controlo e o modelo da própria máquina. No
quinto capítulo são analisados e expostos os resultados obtidos através da simulação do modelo
desenvolvido e descrita pormenorizadamente no capítulo anterior. Por último, no sexto capítulo são
apresentadas as conclusões obtidas neste trabalho de dissertação, destacando também alguns
comentários e aspetos que poderão ser importantes para a realização de trabalhos posteriores ao
tema em estudo.

10

11
2. Motor Síncrono de Duplo Estator a Magnetos Permanentes
2.1 Introdução
Os motores síncronos a magnetos permanentes estão cada vez a ser mais utilizados em vários
sectores de actividade, tais como na defesa, agricultura, indústria e também nos equipamentos
eléctricos usados no dia-a-dia, apresentando melhorias tecnológicas significativas em termos de
desempenho e um nível superior de eficiência energética, em relação a outros tipo de motores
eléctricos convencionais [4].
O controlador de um motor eléctrico desta natureza, é uma componente tão importante como o
próprio motor, tendo de ser capaz de responder rapidamente a alterações no comando por parte do
utilizador e em simultâneo suficientemente robusto para apresentar respostas dinâmicas adequadas a
perturbações [5].
Este capítulo descreve a configuração proposta para o motor síncrono a magnetos permanentes,
designado por motor síncrono de duplo estator, que tal como o nome indica é constituído por dois
estatores. Dadas as suas características técnicas únicas, apresenta um conjunto de vantagens em
relação a tecnologias convencionais, tais como, maior eficiência energética, densidade de potência
superior, baixo ruído e alta precisão de controlo [2].
2.2 Motor Síncrono a Magnetos Permanentes de Duplo Estator
Este trabalho tem como principal objectivo o estudo de um sistema baseado no motor eléctrico
síncrono a magnetos permanentes de duplo estator a ser integrado num veículo eléctrico [7]. Uma
máquina síncrona a magnetos permanentes convencional é constituída principalmente por duas
componentes principais, o estator e o rotor, tipicamente constituídos por uma estrutura de aço
laminado. O rotor deste tipo de máquina, é por sua vez equipado com um conjunto de magnetos
permanentes de alto desempenho, instalados na superfície ou no interior do primeiro. A interação
entre o campo do estator e o do rotor gera por sua vez o binário electromagnético, responsável pelo
accionamento do rotor e de toda a carga mecânica [4].
O conceito do motor eléctrico a magnetos permanentes de duplo estator é criado e proposto, no
sentido de aumentar a versatilidade da conversão eletromecânica e controlabilidade do sistema e
consequentemente a densidade de binário electromagnético disponível. O entreferro de um motor
eléctrico é a fronteira física onde ocorre a transferência de energia da componente eléctrica para a
mecânica, realizando deste modo a dita conversão eletromecânica. Para melhorar o desempenho

12
desta transferência de energia, em vez do entreferro convencional entre o estator e o rotor, dois
entreferros são combinados no interior do motor [6].
Deste modo, a componente fixa do motor proposto é constituído por dois estatores concêntricos,
enquanto a peça móvel é um rotor com uma estrutura cilíndrica tipo copo, instalada entre os dois
estatores. O binário electromagnético disponível é assim produzido a partir das correntes de ambos
os estatores. Um ponto importante que deve ser referido, é o facto de a permeabilidade magnética
dos magnetos permanentes instalados ser praticamente igual à do ar, o que leva a que a indução
mútua entre o estator interior e o exterior seja desprezável, o que implica um aumento da
controlabilidade do sistema. A seguir é ilustrado na figura 2.1 o corte transversal do motor proposto.
Figura 2.1 - Ilustração com o corte transversal do motor síncrono de duplo estator [6].
Na figura 2.2 mostra-se em corte radial um motor de duplo estator trifásico de 22 polos, em que se
podemos observar a distribuição dos enrolamentos em ambos os estatores (interior e exterior), assim
como a distribuição dos magnetos permanentes no rotor, a peça intermédia visível.

13
Figura 2.2 - Corte radial de um motor de duplo estator trifásico de 22 polos [6].
Quando apenas uma fase da máquina é alimentada, a distribuição resultante das linhas do campo
electromagnético é ilustrada na seguinte figura.
Figura 2.3 - Corte radial do motor de 22 pólos, com a distribuição do campo magnético [6].

14
Para a carga máxima, temos a seguinte distribuição do campo.
Figura 2.4 - Distribuição do campo Magnético à carga máxima [6].
No sentido de se comparar um motor síncrono convencional e um de duplo estator, com o mesmo
número de polos e de cavas, a mesma potência nominal e dimensões exteriores, apresentam-se nas
figuras 2.5 (a) e 2.5 (b) estas soluções, respectivamente.
Figura 2.5 - Ilustração com corte radial. (a) Motor de estator simples; (b) Motor de duplo estator [7].

15
A distribuição do sistema trifásico de enrolamentos no estator de um motor síncrono de duplo
estator encontra-se otimizada em comparação com a de um motor de estator simples. Com a nova
configuração de um motor de duplo estator, é possível aumentar a secção da cablagem e a sua
extensão por fase, otimizando a maior área disponível nas cavas dos estatores, com a consequente
diminuição da resistência eléctrica. Com esta particularidade e vantagem construtiva, aumentam-se a
dissipação térmica, obtendo-se menores perdas no cobre, sendo menor a densidade de corrente
necessária para produzir o mesmo binário electromagnético. Deste modo em relação a uma solução
convencional, tem-se não só um maior desempenho, mas também um aumento significativo da
eficiência energética do motor, em quaisquer condições de funcionamento.
A relação do número de espiras entre os enrolamentos dos estatores exterior e do interior é o fator
principal e com influência directa no desempenho deste tipo de motor eléctrico.
A alimentação de um motor síncrono a magnetos permanentes de duplo estator a partir de um
variador de velocidade pode ser efetuado de diferentes modos: ou se alimenta o conjunto de
enrolamentos de cada estator independentemente, ou seja, como se a alimentação fosse de seis
fases, ou a alimentação dos dois estatores é efectuada em conjunto, o que significa que os
enrolamentos do estator exterior e os do estator interior encontram-se ligados em série, para uma
ligação trifásica convencional. Para facilitar a análise e o controlo da máquina, assumiu-se neste
trabalho o segundo caso, em que os enrolamentos estão ligados em série [7].
2.3 Modelo Matemático da Máquina Síncrona a Magnetos Permanentes
Convencional
Em primeiro lugar, apresenta-se o modelo matemático de uma máquina síncrona a magnetos
permanentes convencional, ou seja de estator simples, para que seja a base e o ponto de partida da
máquina proposta e estudada neste trabalho.
Para facilitar o estudo do comportamento de um motor desta natureza, assumiram-se os seguintes
pressupostos: distribuição uniforme para os enrolamentos trifásicos instalados nas cavas do estator,
entreferro uniforme, desprezar o efeito da saturação magnética e as perdas no ferro, o circuito
magnético é linear, o variador de velocidade comporta-se como uma fonte trifásica ideal, desprezar o
conteúdo harmónico, ou seja, considerar apenas a componente fundamental das tensões e correntes
estatóricas, e desprezar o atrito no veio do rotor.

16
Deste modo e admitindo alimentação trifásica equilibrada, usaram-se os seguintes sistemas de
equações.
• Tensões aplicadas às fases do estator do motor:
&'( = & 0 00 00 0 ( &'( +-.../010203 455
56 (2.1)
• Fluxo magnético ligado com as fases do estator:
&##'#( = & cos 0 cos 120 cos 240cos 240 cos 0 cos 120cos 120 cos 240 cos 0 ( & 0 00 00 0 ( &'( + > #$ cos ?#$ cos@? − 120B#$ cos@? − 240BC (2.2)
• Expressão para o binário electromagnético:
= DE ' F G > #$ cos ?#$ cos@? − 120B#$ cos@? − 240BC (2.3)
• Equação mecânica da rotação do motor:
H IJ = − (2.4)
Grandezas eléctricas:
• Ua, Ub, Uc as tensões estatóricas;
• ia, ib, ic as correntes estatóricas;
• ψa, ψb, ψc os fluxos ligados com as fases a, b e c;
• R, L e #$ a resistência, a indutância dos enrolamentos das fases, e o fluxo magnético
gerado pelos magnetos permanentes instalados no rotor respetivamente.
Grandezas mecânicas:
• Tload, J, wL , binário de carga, o momento de inércia do conjunto motor + carga mecânica
acoplada e a velocidade de rotação do rotor respetivamente [4].

17
2.4 Modelo Matemático da Máquina Síncrona a Magnetos Permanentes
de Duplo Estator
Tal como enunciado anteriormente e no sentido de facilitar o estudo do comportamento do motor
eléctrico proposto, admitiu-se que os enrolamentos trifásicos instalados no estator encontram-se
uniformemente distribuídos, o entreferro é uniforme, despreza-se a saturação magnética e as perdas
no ferro, o circuito magnético é linear e apenas são consideradas as componentes fundamentais da
tensão e da corrente estatóricas. Em termos mecânicos despreza-se o atrito existente no veio do
rotor.
De acordo com o indicado anteriormente e para simplificar a análise do modelo, admite-se que para
cada fase, os enrolamentos exteriores e os interiores estão ligados eletricamente em série, isto é, ter-
se-á uma alimentação com 3 fases a alimentar os respetivos circuitos. Deste modo, os eixos
magnéticos gerados pelo sistema trifásico de enrolamentos encontram-se separados entre si de 120
.
Na figura 2.6 apresenta-se um diagrama representativo da componente eléctrica do estator do
motor em estudo.
Figura 2.6 - Diagrama do estator do motor síncrono de duplo estator.

18
Para desenvolver o modelo simplificado do motor, consideram-se as seguintes equações:
• Tensões estatóricas:
MNONP = @ + B +Q01_RSQ + Q01_TUVQ' = @ + B' +Q02_RSQ + Q02_TUVQ = @ + B +Q03_RSQ + Q03_TUVQ
(2.5)
• Fluxos magnéticos ligados com os diversos enrolamentos do estator, em forma
matricial:
-...../ #_ #_#'_ #'_#_ #_455
5556=
-....../ @ + B W' + ' X @ + B@ + B W' + 'X @ + BW' + ' X W'' + '' X W' + ' XW' + 'X W'' + '' X W' + 'X@ + B W' + ' X @ + B@ + B W' + 'X @ + B 455
55556&'( +
+-...../ #$ cos ?#$ cos ?#$ cos@? − 120B#$ cos@? − 120B#$ cos@? − 240B#$ cos@? − 240B45
55556 (2.6)
• Expressão do binário electromagnético:
= DE ' F G > #$ cos ?#$ cos@? − 120B#$ cos@? − 240BC (2.7)
• Equação mecânica da rotação do motor é dada pela expressão (2.4).
Com o objetivo principal efetuar a análise do funcionamento da máquina em estudo e a interação
entre as forças magneto motrizes geradas no rotor e no estator, além de uma ferramenta
indispensável de análise, houve a necessidade de criar o conceito das grandezas estatóricas
representada num referencial bifásico que roda em sincronismo com o rotor, mais concretamente com
o eixo magnético proveniente da excitação, que se designa como componente directa (d); a restante
componente, a que se encontra em quadratura com a anterior, designa-se por componente em
quadratura (q). Esta transformação tem a designação de Blondel-Park, ou simplesmente a
transformação de Park.

19
A representação da máquina em estudo através da transformação de Park admite as seguintes
hipóteses simplificativas [3]:
• O circuito magnético é considerado linear, isto é, despreza-se a saturação magnética e o
fenómeno de histerese;
• Considera-se que a forma de onda da força magneto motriz e a distribuição dos próprios
enrolamentos estatóricos são sinusoidais;
• Desprezam-se as perdas no ferro;
• Desprezam-se os efeitos de saliência;
Do ponto de vista de um observador presente nesse referencial girante e para um determinado
regime permanente de funcionamento, os fluxos magnéticos ligados com o estator e com o rotor são
constantes, apenas desfasados por um ângulo espacial. Na figura 2.7 representa-se uma máquina
síncrona ideal em componentes dq.
Figura 2.7 - Máquina síncrona ideal trifásica em componentes dq [3].

20
A transformação de Park directa é dada pela seguinte forma matricial, cuja grandeza estatórica
genérica a transformar designada por A, pode ser a corrente, a tensão ou o fluxo ligado [2]:
>C = YZ[ \ ]^_@ɵB ]^_@ɵ − 120B ]^_@ɵ + 120B−_`@ɵB −_`@ɵ − 120B −_`@ɵ + 120Ba√Z a√Z a√Zc &'( (2.8)
No caso da transformação de Park inversa, em que se passa do referencial girante do rotor e das
componentes dq0 para as componentes estatóricas abc, efetua-se o seguinte cálculo:
&'( = YZ[ -.../ ]^_@ɵB −_`@ɵB a√Z]^_@ɵ − 120B −_`@ɵ − 120B a√Z]^_@ɵ + 120B −_`@ɵ + 120B a√Z455
56 >C (2.9)
Onde ɵLd é o angulo eléctrico entre o eixo da componente directa e o eixo da fase a do estator, e
em que a sua relação com o ângulo mecânico espacial é dada por:
ɵ = Dɵ (2.10)
A terceira componente representada por A0 é designada por componente homopolar e corresponde
à componente da corrente estatórica que não contribui para o fluxo magnético no entreferro. Para
além deste facto, tem-se que para um sistema trifásico equilibrado de correntes, esta componente é
nula, logo para efeitos deste trabalho pode ser desprezada.
Cabe referir que a transformação dq0 aplica-se aos valores instantâneos e não aos valores eficazes
das grandezas estatóricas, sejam elas as correntes, as tensões ou os fluxos ligados [3].
Para simplificar a modelização e controlo da máquina a magnetos permanentes de duplo estator em
estudo, admite-se que esta é composta por magnetos permanentes exteriores, sendo caracterizada
pelos coeficientes de indução Lf e Lg que são praticamente iguais e de valores relativamente baixos.
Para este caso, o fluxo ψLij é aproximadamente constante e obtém-se a condição if = 0, o que
reflete uma relação de proporcionalidade máxima entre o binário electromagnético e a componente ig
da corrente. O sistema de controlo para as máquinas síncronas em especial e também para o caso
deste trabalho, é frequentemente designado por Controlo por Orientação de Campo do Rotor, método
que será descrito no capítulo seguinte [2].

21
No seguimento da modelização da máquina síncrona convencional e em coordenadas dq,
obtiveram-se as seguintes expressões:
• Fluxo ligado
l# = +#$ # = #$ = m (2.11)
, em que k é uma constante que depende das características dos magnetos permanentes
instalados e da sua configuração;
• Coeficientes de indução (desprezando a componente das fugas e os efeitos de saliência)
n = = oo − p`qrsâ`]uví`]^`u (2.12)
• Tensões estatóricas
lx = W_ + _X +Q0yQ −!# x = W_ + _X +Q0zQ +!# (2.13)
, em que ! = @DB! (2.14)
é a relação entre a velocidade angular eléctrica e a velocidade angular mecânica do rotor do motor;
• Binário electromagnético = DW#$ + @ − BX (2.15)
Para uma máquina síncrona convencional de polos não salientes, o valor eficaz da força
electromotriz, também designada por tensão induzida em circuito aberto, é dada pela seguinte
expressão: = |~1√Z (2.16)
No caso da máquina em estudo, o enrolamento de excitação DC é substituído por magnetos
permanentes instalados no rotor, e neste caso o termo coincide com o fluxo #$. Assim deste
modo ter-se-á: = |~0~1√Z (2.17)

22
Com base nos pressupostos acima mencionados, obtém-se as seguintes expressões:
• Fluxos ligados
n# = #$ # = (2.18)
• Tensões estatóricas
lx = W_ + _X +Q0~1Q −!#x = W_ + _X +Q0zQ +!#$ (2.19)
• Binário electromagnético = DW#$X (2.20)
• A equação mecânica do rotor é dada pela expressão (2.4).

23
3. Unidade de Controlo
3.1 Introdução
Os controladores comerciais da Schneider Electric permitem aumentar a eficiência energética e
otimizar o desempenho do conjunto sistema de controlo + motor, com o objetivo principal de reduzir o
consumo de energia eléctrica face a uma solução de controlo convencional, e simultaneamente
melhorar a precisão e controlo do funcionamento do motor eléctrico.
A gama de produtos da Schneider Electric escolhida para este trabalho é a designada por Altivar 71,
particularmente dimensionada para simplificar aplicações complexas e especiais. A sua elevada
versatilidade e adaptabilidade a inúmeras aplicações, levam à escolha deste sistema. Em termos de
funcionamento, os critérios de escolha passam pelo funcionamento a binário constante e resposta
dinâmica, para qualquer variante de motores síncronos a magnetos permanentes. Os Altivar 71
apresentam um controlo do tipo vector control ou também designado por princípio de orientação de
campo, com regulação de velocidade ou de binário, de elevado desempenho.
Na figura 3.1 apresenta-se uma fotografia de um exemplar deste equipamento.
Figura 3.1 - Fotografia de uma unidade ATV71 [8].

24
3.2 Aplicações
Com os diferentes tipos de controlo de motores eléctricos e as suas várias funções, os variadores
de velocidade da série Altivar 71 estão de acordo com os requisitos técnicos mais exigentes e são
utilizadas nas mais variadas aplicações, entre as quais:
• Alta precisão de binário e para velocidades baixas, com elevado desempenho dinâmico
através de controlo vetorial do fluxo, com ou sem sensor de velocidade;
• Larga gama de frequências de funcionamento para motores eléctricos de alta velocidade;
• Possibilidade da ligação de vários motores eléctricos em paralelo, assim como unidades
especiais de accionamento, usando técnicas de controlo V/f;
• Alta precisão de velocidade e redução do consumo de energia para motores síncronos;
Os sistemas Altivar 71 estão configurados para controlar motores eléctricos assíncronos e síncronos
para as potências compreendidas entre 0,37 kW a 630 kW. Esta unidade possui várias funções
avançadas que melhoram significativamente o desempenho da máquina, tornando-as mais versáteis
e adaptáveis, aumentando consequentemente o número de aplicações possíveis relativamente aos
sistemas convencionais.
3.2.1 Eficiência Energética e Considerações Ambientais
Para além das vantagens tecnológicas, os Altivar 71 têm em consideração as questões ambientais,
com destaque sobretudo na redução do consumo de energia eléctrica em processos industriais e na
utilização de certa de 90% de materiais recicláveis na construção das unidades, de acordo com a
norma ambiental ISO 14040.
3.2.2 Compatibilidade com Normas e Certificados Internacionais
Como comprovativo de qualidade, esta gama encontra-se dentro dos conformes no que diz respeito
a normas e certificados internacionais, nomeadamente o IEC/EN 61800-5-1, IEC/EN 61800-2, IEC/EN
61800-3, is UL, CSA, DNV, C-Tick, NOM 117 and GOST, respeitando as diretivas de proteção
ambiental (RoHS, WEEE, etc.) assim como as diretivas europeias (marca CE).

25
3.2.3 Compatibilidade Eletromagnética
Os sistemas da série ATV 71 foram concebidos desde a sua fase de dimensionamento, com
compatibilidade eletromagnética, reduzindo significativamente o conteúdo harmónico da corrente,
através da incorporação de filtros EMC (Electromagnetic Compatibility).
3.3 Características Técnicas do ATV 71
Dentro da série ATV 71, a gama de produtos que faz sentido abordar neste estudo é a que se
encontra enquadrada no leque de potências entre os 22 e os 75 kW, designadas por ATV71HD (22 a
75) N4, dado que coincidem com as potências das unidades eléctricas motrizes mais encontradas no
mercado de veículos eléctricos. Dentro destas, para representar a série ATV71 ao longo deste
trabalho, considera-se a unidade ATV71HD45N4, de 45 kW ou 60 hp, o valor mais comum
encontrado em aplicações reais. Os parâmetros nominais principais do conversor comercial
ATV71HD45N4 são apresentados na seguinte tabela:
Parâmetros Nominais Unidades
Tensão de Alimentação
Trifásica
380 V (-15%) a
480 V (+10%)
Potência Aparente de
Alimentação 68.5 kVA
Potência Indicada na
Chapa de Identificação 45 kW (60 hp)
Corrente Contínua
Máxima 94 A
Corrente Transitória
Máxima (durante 2 s) 155 A
Binário de Sobrecarga
Transitório (durante 2 s) 220 % do Binário Nominal
Frequência de Comutação
Ajustável dos IGBTs 1 a 16 kHz
Método de Controlo Vector Control com Pulse
Width Modulation (PWM)
Peso 44 kg
Dimensões 320 x 630 x 290 mm
Tabela 3.1 - Parâmetros nominais principais do ATV71HD45N4 [8].

26
3.4 Controlo de Motores Síncronos
Os motores síncronos são essencialmente máquinas de velocidade constante, em que a sua
velocidade de sincronismo é determinada pela frequência eléctrica das correntes que alimentam a
máquina.
O método mais convencional de controlo de um motor síncrono é pela sua velocidade de rotação,
via o controlo da frequência das tensões estatóricas. Estas são gerados através de um conversor
AC/DC/AC, sendo uma das componentes que constitui internamente um variador de velocidade, cujo
esquema eléctrico genérico se apresenta na figura 1.6.
A frequência das tensões de saída do conversor descrito são ajustadas para atingir o objetivo
desejado, pelo controlo da frequência de comutação dos semicondutores que constituem os blocos
retificador e inversor. Quando se ajusta a frequência é também necessário controlar a amplitude das
próprias tensões, para manter constante o seguinte rácio:
1 = ST~RS1ST~RS1 (3.1)
O método é designado por controlo V/f, o que implica necessariamente que o controlo seja
implementado a fluxo constante. Nestas condições, esta zona de operação permite ter disponível o
binário electromagnético máximo.
Para um controlo mais preciso e complexo da máquina, pode recorrer-se ao princípio de orientação
de campo, também designado na literatura internacional por vector control, em que as grandezas
estatóricas, tais como o fluxo magnético, as correntes e tensões estatóricas, etc., são transformadas
em componentes que se encontram num referencial girante síncrono com a rotação do rotor,
designadas por componentes dq0, introduzidas no capítulo anterior.
Para este trabalho e de acordo com o tipo de aplicação, o objetivo final do variador de velocidade
não é controlar o binário desenvolvido pelo motor, mas sim o controlo da velocidade deste, para
qualquer regime de carga.
Como o motor síncrono em estudo neste trabalho é composto por magnetos permanentes, a
excitação é constante, o que conduz a um grau de liberdade a menos no algoritmo de controlo pelo
princípio de orientação de campo. Para a máquina em estudo, a componente em quadratura da
corrente iq, é determinada directamente pelo binário de referência desejado.

27
Na figura 3.2 apresenta-se um diagrama de blocos de um sistema de controlo pelo princípio de
orientação de campo, para um motor síncrono a magnetos permanentes.
Figura 3.2 - Esquema do controlo de binário do princípio de orientação de campo [3].
Por sua vez, o sistema anterior (figura 3.2) com controlo de binário é subordinado ao controlo de
velocidade apresentado na figura 3.3.
Figura 3.3 - Esquema do controlo de velocidade do princípio de orientação de campo [3].
Em termos mecânicos, o sistema e o método de controlo têm de obedecer à segunda lei de Newton
aplicada a sistemas rotativos dada pela expressão 2.4.
O é o binário electromagnético desenvolvido pelo motor, o binário de carga, H o coeficiente
de inércia do motor e ! a velocidade de rotação mecânica do conjunto motor + carga. Tendo em
conta o comportamento mecânico da máquina assim como o algoritmo de funcionamento do variador
de velocidade, para controlar o movimento atua-se no binário electromagnético.

28
Na figura 3.4 apresenta-se o diagrama de blocos que traduz o controlo da componente mecânica do
sistema, para o princípio de orientação de campo.
Figura 3.4 - Diagrama de blocos do controlo da componente mecânica [2].
O fluxo de referência designado por #∗, pode ser o fluxo ligado com os enrolamentos do estator, o
fluxo ligado com os enrolamentos do rotor ou o fluxo no entreferro. Apesar destes apresentarem
valores diferentes, são da mesma ordem de grandeza [2].
3.4.1 Princípio de Orientação de Campo (Vector Control)
O algoritmo de controlo da unidade ATV71 tem por base o método vector control ou também
designado por princípio de orientação de campo.
A máquina eléctrica proposta neste trabalho é um sistema eletromecânico em que se pretende
controlar o seu movimento de rotação através do binário de referência ∗ .
Nos sistemas de controlo pelo princípio de orientação de campo, tem-se as seguintes
particularidades [2]:
• A influência da velocidade no sistema em cadeia fechada é mínima ou praticamente nula;
• O sistema apresenta desacoplamento entre o binário de referência e as correntes em
componentes dq;
• A relação entre o binário electromagnético desenvolvido e a corrente consumida é máxima;
• Admite-se o sistema a funcionar na zona de fluxo constante — isto é, na zona de binário
máximo disponível e para velocidades de rotação até à nominal;
Em termos do modo de controlo, a máquina será controlada em corrente, ou seja, através de uma
cadeia interior de regulação de corrente. Deste modo, o sistema de controlo da unidade ATV71
deverá fornecer as correntes de referência para que a motor síncrono se comporte do modo
desejado.
29
O desacoplamento do sistema de controlo para o caso do sistema em estudo, é obtido pela
decomposição da corrente do estator em duas componentes: a componente que produz o fluxo
magnético, que nosso caso é nula visto que o fluxo é gerado por magnetos permanentes e não por
correntes eléctricas; a restante componente é a responsável pelo binário electromagnético.
No que diz respeito a métodos de controlo utilizando o princípio de orientação de campo, existem
três métodos principais de controlo, nomeadamente [2]:
• Orientação de campo do rotor;
• Orientação de campo do estator;
• Orientação de campo do entreferro;
A principal diferença e mais óbvia entre os métodos enunciados acima, é o facto do referencial
síncrono com o campo girante, se encontrar alinhado com os vetores do fluxo ligado com o rotor,
estator e entreferro respetivamente. Em termos de implementação, a grande diferença entre os
sistemas de controlo vetorial por orientação de campo do estator e por orientação de campo do
entreferro em relação ao por orientação de campo do rotor, é o sistema de desacoplamento. No caso
da orientação de campo do rotor, não é necessário o sistema auxiliar de desacoplamento para o
controlo separado do fluxo e do binário, visto que já o apresenta naturalmente sem a necessidade de
cálculos auxiliares adicionais.
No caso dos sistemas de controlo directo, que são de facto o que nos interessa para a aplicação em
estudo, utilizados normalmente para velocidades médias e altas, dado que são insensíveis
particularmente à variação de parâmetros, nomeadamente os coeficientes de indução da máquina.
Das variantes mencionadas do princípio de orientação de campo, o método RFOC é tecnicamente
de desempenho superior e simultaneamente mais complexo de implementar que os restantes.
Em termos genéricos para uma máquina polifásica AC, as equações para um referencial girante
comum tanto ao estator como ao rotor, rodando à velocidade ! em relação ao rotor [2], em que se
baseia este princípio de controlo são as seguintes:
0 = +y −!# (3.2)
0 = + z + !# (3.3)

30
Por sua vez, a relação entre os fluxos e as correntes é a seguinte:
# = + (3.4) # = + (3.5)
Quanto ao binário electromagnético desenvolvido pelo motor, será expresso do seguinte modo:
= D W# −#X (3.6)
3.4.1.1 Método de Controlo por Orientação de Campo do Rotor (RFOC)
O RFOC utiliza o referencial comum alinhado com o vetor espacial do fluxo do rotor, e deste modo
obtém-se o seguinte conjunto de equações simplificadas [2]:
# = 0 (3.7) # =#$ (3.8)
0 = +~1 (3.9) 0 = +!#$ (3.10) = D #$ (3.11)
Para a máquina em estudo, o fluxo #$ é aproximadamente constante e com a condição = 0, que origina uma relação de perpendicularidade entre o vector fluxo e a corrente , o que
corresponde a uma situação óptima no que toca à relação de proporcionalidade entre o binário
electromagnético desenvolvido e a corrente consumida pelo motor [2].
Como a geração do campo magnético é efetuada a partir de magnetos permanentes instalados no
rotor, não existem correntes eléctricas no mesmo, o que implica que as equações anteriores se
simplifiquem: #$ = m (3.12) = 0 (3.13) = 0 (3.14) = 0 (3.15)
Com o fluxo #$ constante, o binário electromagnético será unicamente proporcional à
componente da corrente do estator segundo o eixo q, designada por .

31
3.4.1.2 Controlo Directo do RFOC
As unidades de variadores de velocidade ATV71 são denominados sensorless, ou seja, sem
sensores, o que leva ao fluxo e ao binário serem estimados/calculados em vez de medidos
directamente, através do processamento de sinais obtidos a partir dos terminais da máquina.
Na figura 3.5 apresenta-se um diagrama de blocos que ilustra o princípio do controlo directo por
orientação de campo do rotor para uma máquina polifásica AC.
Figura 3.5 - Esquema de base do controlo directo [2].
Para a máquina em estudo apenas é necessário controlar o binário electromagnético, pelas razões
apresentadas anteriormente. Por outro lado, como o fluxo do rotor é constante e fixo, a componente
id será nula o que elimina também a componente de controlo do fluxo, assim como o regulador PI que
é alimentado com o erro de fluxo e que determina a corrente id* (valor de referência), diminuindo
deste modo a complexidade do sistema [2].
Deste modo, utiliza-se um esquema de controlo do tipo como o ilustrado na figura 3.6.

32
Figura 3.6 - Diagrama de Controlo Directo RFOC para a máquina em estudo [9].
O esquema vetorial que traduz o princípio de controlo aplicado à situação em estudo é o seguinte:
Figura 3.7 - Esquema vetorial do RFOC aplicado à máquina em estudo [9].

33
O sinal de referência do binário é adquirido e comparado com o respetivo valor estimado através do
bloco estimador/calculador, o que constitui a entrada do regulador PI que posteriormente determinará
a componente q da corrente de referência do estator. A componente iq por sua vez é transformada
para coordenadas abc, através de um bloco que realiza a transformação de Park, utilizando para tal o
ângulo eléctrico do rotor.
Posteriormente, depois de conhecidas as correntes estatóricas de referência, estas são comparadas
com as correntes reais que percorrem o sistema trifásico de enrolamentos do estator, resultando em
três sinais de erro que traduzem a diferença entre o real e o comando. Com o recurso a
comparadores de histerese, são gerados os sinais de controlo do bloco inversor, que por sua vez
alimenta a máquina em estudo.
Tal como enunciado acima, o sistema terá apenas de ter controlador de binário subordinado ao de
velocidade. Na figura 3.8 apresenta-se o diagrama de blocos do controlador de binário:
Figura 3.8 - Diagrama de blocos do controlador de binário [2].
Do diagrama de blocos resulta: = 0 (3.16) = D 0 % (3.17)
, sendo % a constante de tempo desejada para a cadeia de controlo de binário.

34
35
4. Modelização do Sistema em Matlab®/Simulink
4.1 Objectivo
Para analisar o comportamento do sistema em estudo, utiliza-se o programa de simulação
Matlab®/Simulink. Neste ambiente de simulação, é definido o modelo completo em componentes dq
do motor síncrono a magnetos permanentes de duplo estator com destaque para a modelização dos
dois estatores; assim como um modelo equivalente baseado no funcionamento do conversor
electrónico comercial Altivar 71. A partir da modelização pormenorizada destas duas componentes
principais, é possível analisar tanto o regime permanente, como a resposta dinâmica do motor
síncrono proposto.
4.2 Introdução
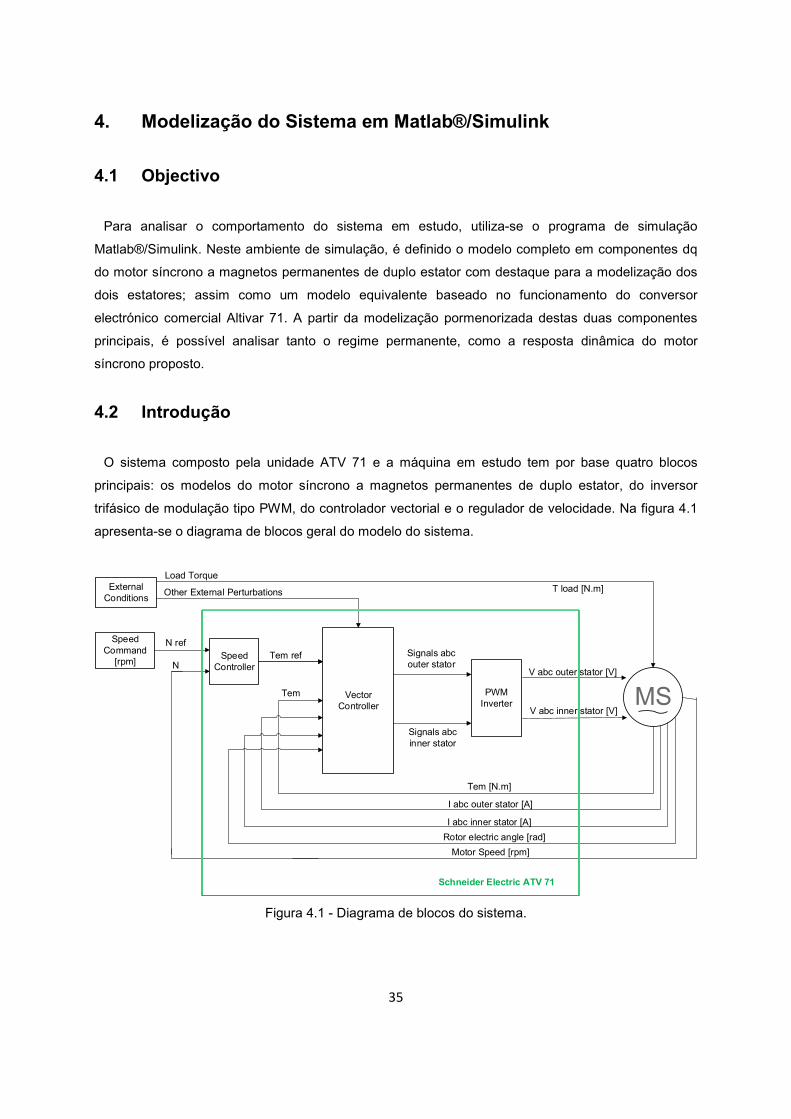
O sistema composto pela unidade ATV 71 e a máquina em estudo tem por base quatro blocos
principais: os modelos do motor síncrono a magnetos permanentes de duplo estator, do inversor
trifásico de modulação tipo PWM, do controlador vectorial e o regulador de velocidade. Na figura 4.1
apresenta-se o diagrama de blocos geral do modelo do sistema.
Speed Controller
Vector Controller
PWM Inverter
Tem refN ref
Signals abc outer stator
MS
SpeedCommand
[rpm]
ExternalConditions
T load [N.m]
Load Torque
Tem [N.m]
I abc inner stator [A]
Rotor electric angle [rad]
Tem
I abc outer stator [A]
N
Other External Perturbations
Signals abc inner stator
V abc outer stator [V]
V abc inner stator [V]
Motor Speed [rpm]
Schneider Electric ATV 71
Figura 4.1 - Diagrama de blocos do sistema.

36
4.3 Componentes do Sistema de Controlo
4.3.1 Controlador de Velocidade
Esta componente é baseada no regulador PI (Proporcional Integral) com o respectivo diagrama de
blocos apresentado na figura 4.2 e os parâmetros apresentados na tabela 4.1. A entrada deste
subsistema são a velocidade de rotação de referência (comando do utilizador) e a velocidade real do
motor, enquanto a saída é o binário electromagnético de referência a aplicar.
Figura 4.2 - Diagrama de blocos do controlador de velocidade.
Designação Expressão
Ganho Integral = @×B@ ×B a@@ZBB (4.1)
Ganho Proporcional = aZ @|ó×@ZBB (4.2)
Limite Máximo para o Binário
Electromagnético de Referência _ = 2,2 × E.F (4.3)
Limite Mínimo para o Binário
Electromagnético de Referência _ = −2,2 × E.F (4.4)
Tabela 4.1 - Parâmetros do controlador de velocidade.
4.3.2 Bloco de Controlo Vectorial (Vector Controller)
Esta componente do sistema de controlo, é baseada no princípio de orientação de campo ou mais
conhecida pela designação internacional vector control, método utilizado pelo conversor comercial
ATV 71, cujo diagrama pode ser visualizado na figura 4.3 e os parâmetros principais são
apresentados na tabela 4.2. Este bloco é responsável pela geração dos sinais de comando dos
semicondutores presentes no bloco inversor trifásico, que por sua vez alimenta os enrolamentos dos
dois estatores do motor síncrono em estudo. O conjunto de sinais designados na simulação por
signal_abc_out e signal_abc_in (saídas do Vector Controller) são definidos a partir do estado de
carga e da velocidade do sistema. Este bloco é constituído por três sub-blocos descritos em baixo:

37
CurrentComparator
Current Regulator
Inverse Park
Transform
Inverse Park
Transform
Id = 0
CurrentComparator
Tem_ref
Tem
Iq_outer stator_ref
Iq_inner_stator_ref
Rotor electric angle
Iabc_outer_ref
Iabc_inner_ref
Signal_abc_outer
Signal_abc_inner
Iabc_outer stator
Iabc_inner_stator
Figura 4.3 - Diagrama de blocos do controlador vectorial do sistema.
Designação Expressão
Ganho Integral do Current Regulator = [ Dó^_ × #u × sur_ (4.5)
Ganho Proporcional do Current Regulator = 10 (4.6)
Constante de Tempo dos Comparadores
de Corrente = a_ E_F (4.7)
Tabela 4.2 - Parâmetros do controlador vectorial.
4.3.2.1 Bloco de Transformação de Park inversa.
Este bloco cujo diagrama detalhado é apresentado no ponto 2.1 em Anexos, é responsável pela
transformação das componentes dq da corrente, em componentes estatóricas abc. A transformação
de Park tal como a sua inversa encontram-se enunciadas no capítulo 2.
4.3.2.2 Controlador de Binário (Current Regulator)
O objectivo do controlador de binário é determinar as componentes iq_out_ref e iq_in_ref, a partir do
binário electromagnético de referência (Te_ref), o binário electromagnético estimado (Te) e as
respetivas perturbações externas, ilustrado no diagrama de blocos no ponto 2.2 em Anexos. As

38
saídas deste bloco serão posteriormente transformadas nas correntes estatóricas i_abc_out e
i_abc_in, que alimentam o estator exterior e o interior respetivamente do motor em estudo.
4.3.2.3 Comparador de Correntes
A partir do erro gerado entre as correntes estatóricas de referência e as efetivamente medidas, para
o estator exterior e o interior do motor, o respetivo comparador de correntes gera os sinais de
comando que ativam o conjunto de semicondutores comandados do inversor trifásico PWM,
modulando as tensões estatóricas para cada estator, conforme o estado de carga do sistema; para
além de limitar a frequência máxima de comutação do inversor, de acordo com os parâmetros da
unidade ATV 71. No ponto 2.3 em Anexos apresenta-se o diagrama de blocos desta componente.
4.3.3 Inversor Trifásico
Esta unidade encontra-se instalada no ATV 71 e baseia-se na modulação PWM, sendo a
componente que está ligada eletricamente aos enrolamentos do estator exterior e interior do motor
síncrono a magnetos permanentes de duplo estator em estudo. É equipada com semicondutores
comandados IGBT, que são controlados a partir do bloco apresentado acima. Apresenta-se na figura
4.4 o diagrama de blocos geral que modela esta componente. No ponto 2.4 em Anexos ilustra-se o
modelo detalhado desta componente.
Figura 4.4 - Modelo do bloco inversor PWM.

39
4.3.4 Motor Síncrono a Magnetos Permanentes de Duplo Estator
O motor síncrono a magnetos permanentes de duplo estator em estudo é representado por um
modelo no Simulink, de acordo com o diagrama de blocos da figura 4.5. Para a modelização desta
componente apresenta-se a tabela 4.3 com os parâmetros utilizados.
Park Transform
OuterStatorq axis Block
mech block
Inverse Park
Transform
Va_out
Vb_out
Vc_out
Tload
Vq_out 60/2π wr N
wr
theta
Va_in
Vb_in
Vc_in
Park Transform
InnerStatorq axis Block
Vq_in
Inverse Park
Transform
Iq_out
Iq_in
theta
theta
Iq_out
Iq_in
Id = 0
I_abc_out
I_abc_in
Tem
theta
Figura 4.5 - Modelo da máquina síncrona a magnetos permanentes de duplo estator.
40
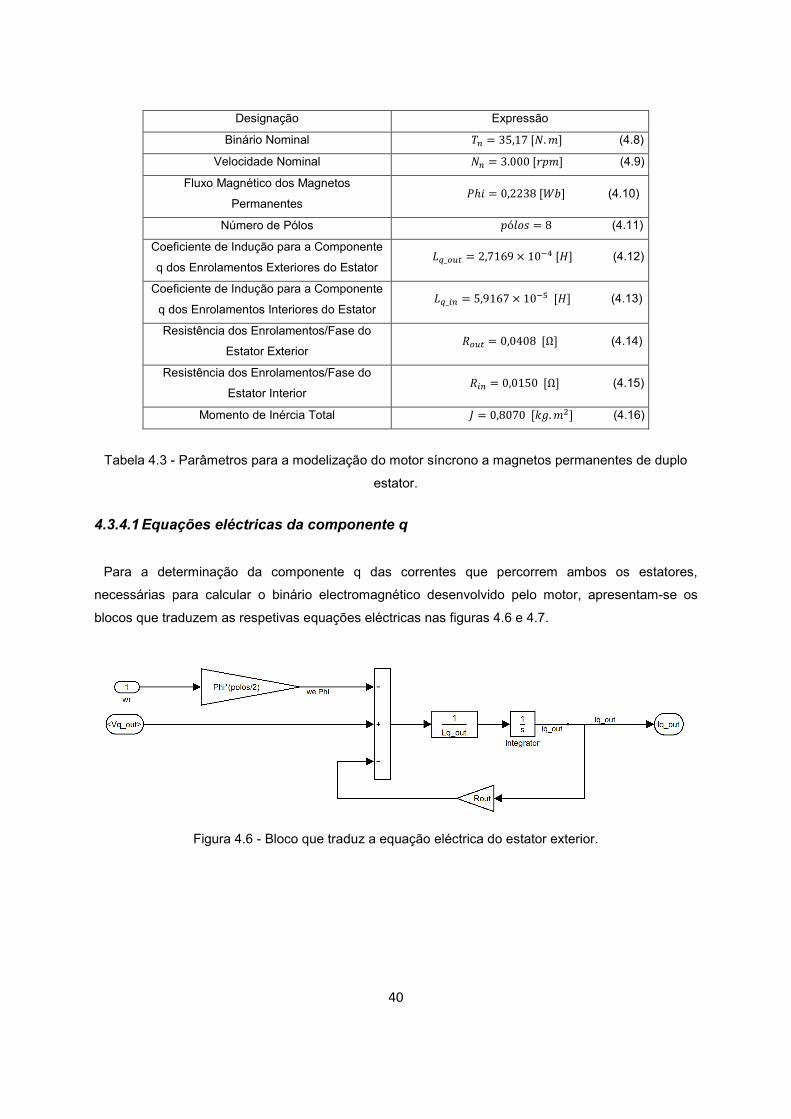
Designação Expressão
Binário Nominal = 35,17E.F (4.8)
Velocidade Nominal = 3.000EDF (4.9)
Fluxo Magnético dos Magnetos
Permanentes ¤ℎ = 0,2238E§¨F (4.10)
Número de Pólos Dó^_ = 8 (4.11)
Coeficiente de Indução para a Componente
q dos Enrolamentos Exteriores do Estator _ = 2,7169 × 10E«F (4.12)
Coeficiente de Indução para a Componente
q dos Enrolamentos Interiores do Estator _ = 5,9167 × 10¬E«F (4.13)
Resistência dos Enrolamentos/Fase do
Estator Exterior = 0,0408EΩF (4.14)
Resistência dos Enrolamentos/Fase do
Estator Interior = 0,0150EΩF (4.15)
Momento de Inércia Total H = 0,8070Em.ZF (4.16)
Tabela 4.3 - Parâmetros para a modelização do motor síncrono a magnetos permanentes de duplo
estator.
4.3.4.1 Equações eléctricas da componente q
Para a determinação da componente q das correntes que percorrem ambos os estatores,
necessárias para calcular o binário electromagnético desenvolvido pelo motor, apresentam-se os
blocos que traduzem as respetivas equações eléctricas nas figuras 4.6 e 4.7.
Figura 4.6 - Bloco que traduz a equação eléctrica do estator exterior.

41
Figura 4.7 - Bloco que traduz a equação eléctrica do estator interior.
4.3.4.2 Equação mecânica do motor
A equação mecânica do motor síncrono em estudo é por seu lado modelizada pelo bloco mech
block indicado na figura 4.8, a partir do qual é determinado o binário electromagnético desenvolvido
pelo motor, assim como é calculada a velocidade de rotação angular do rotor e o respetivo o ângulo
eléctrico, necessário em todos os blocos de transformação de Park usados na modelização do
sistema de controlo e do próprio motor eléctrico.
Figura 4.8 - Bloco que traduz a equação mecânica.
No capítulo seguinte, apresentam-se vários testes de simulação para analisar o comportamento do
sistema de controlo e o motor em estudo, usando como referência situações típicas de funcionamento
a que este sistema poderá ser submetido em condições de teste reais.

42

43
5. Simulações em Matlab®/Simulink
Neste capítulo apresentam-se um conjunto de resultados de testes de simulação efectuados ao
sistema em estudo em ambiente de simulação Matlab®/Simulink, com a caracterização das grandezas
relevantes para a análise do funcionamento e comportamento do sistema, nomeadamente a
velocidade do motor, o binário electromagnético desenvolvido e o de referência, a potência
desenvolvida pelo motor e as correntes que percorrem os enrolamentos do estator exterior e do
interior, respectivamente.
5.1 Resposta do Sistema a Comandos em forma de Escalão para
Baixas Velocidades
Uma das funcionalidades estudadas foi a resposta do sistema a comandos de velocidade e de
binários de carga em forma de escalão, cujos resultados se descrevem nas secções seguintes.
5.1.1 Comando em Escalão com Arranque para 30 rpm
Uma das situações analisadas corresponde à aplicação de um comando de 30 rpm aos 50 ms,
seguida da resposta ao binário de carga nominal aos 500 ms, ambos em forma de escalão. Para esta
situação observa-se o andamento da velocidade do motor (figura 5.1), o binário electromagnético
desenvolvido e o de referência (figura 5.2), a potência desenvolvida pelo motor (figura 5.3) e as
correntes eléctricas que percorrem os enrolamentos do estator exterior (figura 5.4) e do interior (figura
5.5).
Figura 5.1 - Velocidade do motor.
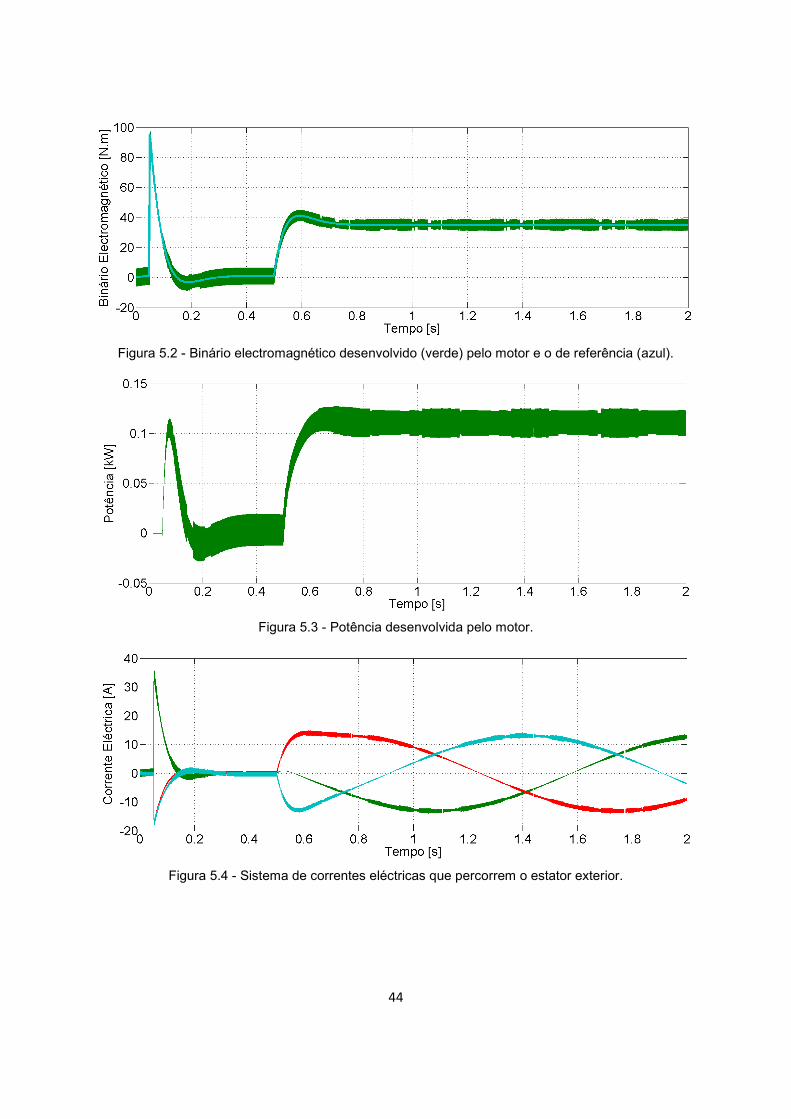
44
Figura 5.2 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul).
Figura 5.3 - Potência desenvolvida pelo motor.
Figura 5.4 - Sistema de correntes eléctricas que percorrem o estator exterior.
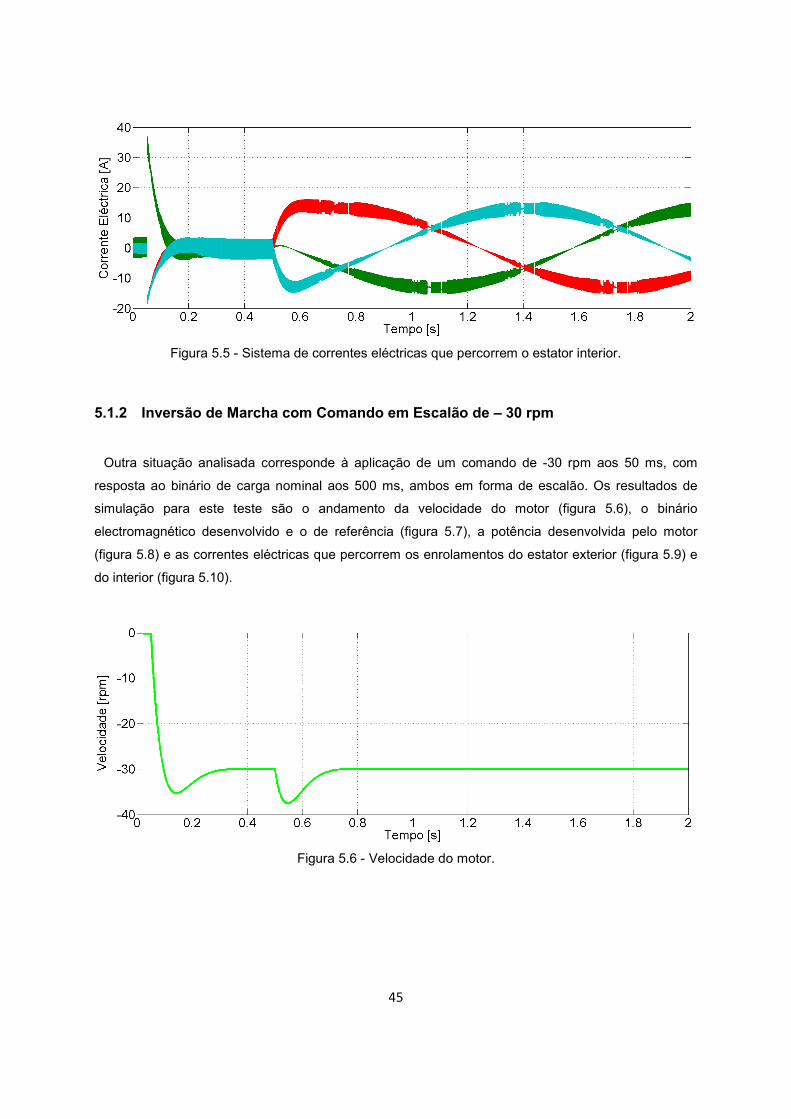
45
Figura 5.5 - Sistema de correntes eléctricas que percorrem o estator interior.
5.1.2 Inversão de Marcha com Comando em Escalão de – 30 rpm
Outra situação analisada corresponde à aplicação de um comando de -30 rpm aos 50 ms, com
resposta ao binário de carga nominal aos 500 ms, ambos em forma de escalão. Os resultados de
simulação para este teste são o andamento da velocidade do motor (figura 5.6), o binário
electromagnético desenvolvido e o de referência (figura 5.7), a potência desenvolvida pelo motor
(figura 5.8) e as correntes eléctricas que percorrem os enrolamentos do estator exterior (figura 5.9) e
do interior (figura 5.10).
Figura 5.6 - Velocidade do motor.
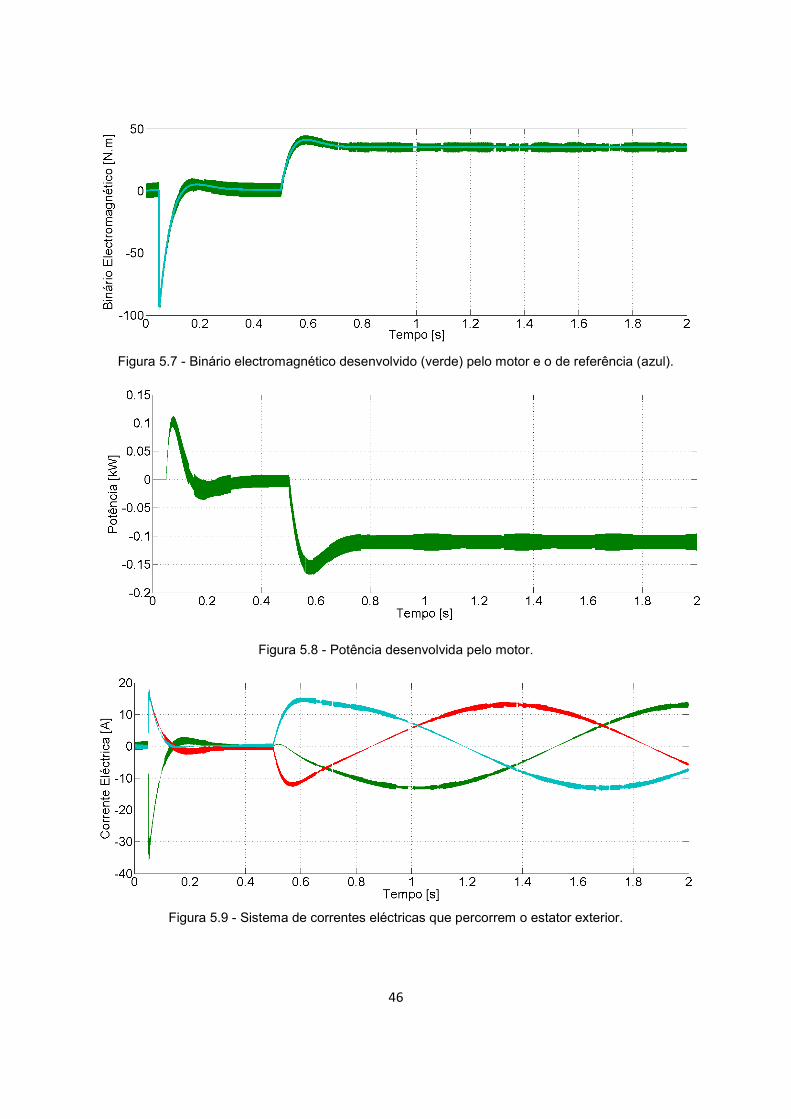
46
Figura 5.7 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul).
Figura 5.8 - Potência desenvolvida pelo motor.
Figura 5.9 - Sistema de correntes eléctricas que percorrem o estator exterior.

47
Figura 5.10 - Sistema de correntes eléctricas que percorrem o estator interior.
Independentemente do comando de velocidade em termos do sentido do movimento, quer directo
ou em inversão de marcha, o sistema reage rapidamente e suavemente no arranque e quando é
aplicada a carga de valor nominal, sem erro estático ou infringir os limites de saturação quer para o
binário quer para a corrente eléctrica. No caso específico do teste com inversão de marcha, o binário
de carga aumenta a aceleração do sistema no sentido negativo, mas rapidamente o sistema
responde e garante o comando de -30 rpm ao fim de aproximadamente 250 ms depois da aplicação
do escalão de binário.
5.2 Resposta do Sistema a Variações no Comando de Velocidade em
forma de Rampa para Médias e Altas Velocidades
Para se estudar a resposta do sistema de controlo e do motor síncrono a magnetos permanentes de
duplo estator a comandos de velocidade em forma de rampa, com vários binários de carga, são
apresentados os resultados nas secções seguintes.
5.2.1 Comando em Rampa com Arranque para 50 rpm, Aumento de Velocidade para
100 rpm e Posterior Paragem
Um dos testes ao sistema estudado é a aplicação de um comando em forma de rampa, com
arranque para 50 rpm dos 100 ms aos 500 ms, com aumento sucessivo para os 100 rpm dos 750 ms
aos 1000 ms, com posterior ordem de paragem dos 1,5 s aos 2 s. O binário de carga aplicado tem
forma de onda quadrada com valor nominal, dos 100 ms aos 500 ms, e 50% do valor nominal de 1 s
aos 2 s. Para esta situação observa-se o andamento da velocidade do motor (figura 5.11), o binário
electromagnético desenvolvido e o de referência (figura 5.12), a potência desenvolvida pelo motor

48
(figura 5.13) e as correntes eléctricas que percorrem os enrolamentos do estator exterior (figura 5.14)
e do interior (figura 5.15).
Figura 5.11 - Velocidade do motor.
Figura 5.12 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul).
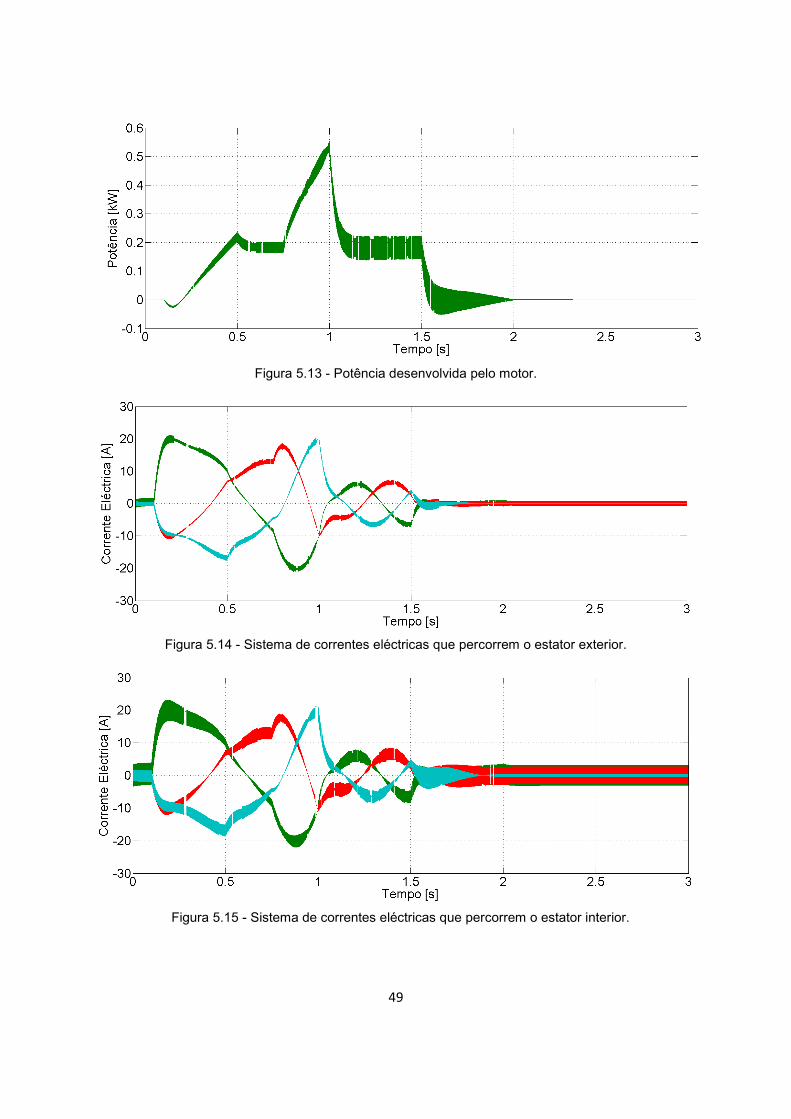
49
Figura 5.13 - Potência desenvolvida pelo motor.
Figura 5.14 - Sistema de correntes eléctricas que percorrem o estator exterior.
Figura 5.15 - Sistema de correntes eléctricas que percorrem o estator interior.

50
5.2.2 Comando em Rampa com Arranque para 100 rpm, Aumento de Velocidade para
500 rpm e Posterior Aumento para 1000 rpm
Outra situação testada é a aplicação de um comando em forma de rampa, com arranque para 100
rpm dos 100 ms aos 1000 ms, aumento seguinte para os 500 rpm dos 2 s aos 2,5 s, com aumento
final para 1000 rpm dos 3,5 s aos 4 s, suportando continuamente um binário de carga nominal. Os
resultados de simulação para esta situação são o andamento da velocidade do motor (figura 5.16), o
binário electromagnético desenvolvido e o de referência (figura 5.17), a potência desenvolvida pelo
motor (figura 5.18) e as correntes eléctricas que percorrem os enrolamentos do estator exterior
(Figura 5.19) e do interior (Figura 5.20).
Figura 5.16 - Velocidade do motor.
Figura 5.17 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul).
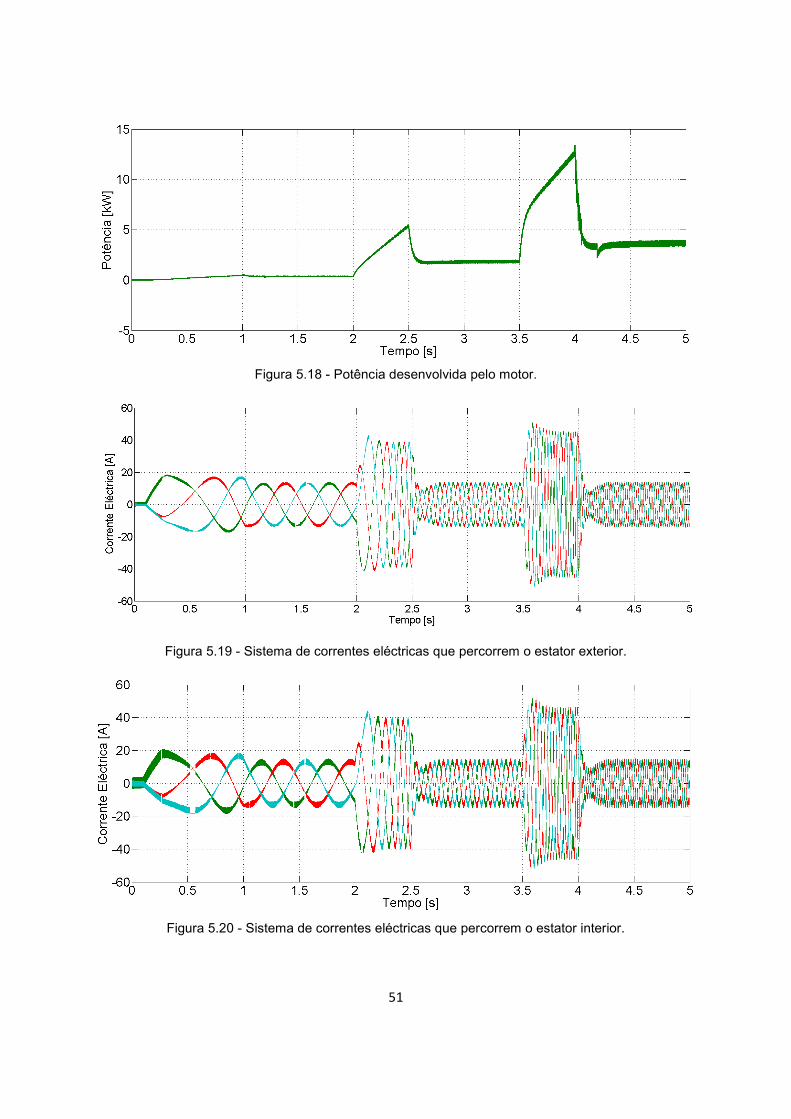
51
Figura 5.18 - Potência desenvolvida pelo motor.
Figura 5.19 - Sistema de correntes eléctricas que percorrem o estator exterior.
Figura 5.20 - Sistema de correntes eléctricas que percorrem o estator interior.

52
Para comandos de velocidades com fortes variações, o sistema reage rapidamente e suavemente a
binários de carga com valor nominal, quer no arranque ou durante qualquer período de
funcionamento, sem se observar qualquer erro estático tanto para a velocidade desejada como para o
binário electromagnético, e também, sem infringir os limites de saturação para o binário ou para a
corrente eléctrica.
5.3 Resposta do Sistema a Perturbações Electromagnéticas e
Eléctricas
Para se estudar a resposta do sistema de controlo e do motor síncrono a magnetos permanentes de
duplo estator a possíveis perturbações exteriores e/ou interiores de forma similar ao que acontece
num sistema real, apresentam-se nas secções seguintes os resultados de simulação de situações em
que são forçadas perturbações de natureza electromagnética e eléctrica.
5.3.1 Perturbações Electromagnéticas no Controlo Vectorial aplicado a ambos os
Estatores
Uma das situações analisadas corresponde à aplicação de um comando em forma de rampa, com
arranque para 60 rpm dos 50 ms aos 100 ms; aumento sucessivo para os 100 rpm dos 250 ms aos
500 ms, com aplicação de binário de carga igual a 100% do nominal durante o arranque. A
perturbação electromagnética forçada no controlo vectorial aplicado ao estator exterior tem forma de
onda quadrada, com uma amplitude de 50% do binário nominal e uma duração de 200 ms, ocorrendo
de 1 s aos 1,2 s. Posteriormente, a perturbação electromagnética forçada no controlo vectorial
aplicado ao estator interior, também de forma de onda quadrada, com a mesma amplitude e duração
que a primeira, ocorre dos 2 s aos 2,2 s. Para esta situação observa-se o andamento da velocidade
do motor (Figura 5.21), o binário electromagnético desenvolvido e o de referência (figura 5.22), a
potência desenvolvida pelo motor (figura 5.23) e as correntes eléctricas que percorrem os
enrolamentos do estator exterior (figura 5.24) e do interior (figura 5.25).

53
Figura 5.21 - Velocidade do motor.
Figura 5.22 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul).
Figura 5.23 - Potência desenvolvida pelo motor.

54
Figura 5.24 - Sistema de correntes eléctricas que percorrem o estator exterior.
Figura 5.25 - Sistema de correntes eléctricas que percorrem o estator interior.
A consequência da perturbação cria um fenómeno de sobrecarga gobal, como se pode verificar pela
observação das correntes eléctricas em ambos os estatores. Quanto ao comportamento da
componente mecânica, observa-se apenas uma pequena flutuação na velocidade e no binário
electromagnético desenvolvidos pelo motor, o que significa que o controlador de velocidade que
comanda por sua vez o controlo vectorial, exige um nível elevado de corrente eléctrica para ambos os
estatores, por forma a minimizar o efeito negativo da perturbação no controlo de velocidade.
5.3.2 Curto-Circuito nos Enrolamentos do Estator Exterior
Outra das situações analisadas corresponde à aplicação de um comando em forma de rampa, com
arranque para 60 rpm dos 100 ms aos 500 ms; aumento sucessivo para os 120 rpm de 1,5 s até aos
2 s, com aplicação de binário de carga igual ao nominal durante o arranque. O curto-circuito nos
enrolamentos do estator exterior é executado aos 1000 ms. Para esta situação observa-se o

55
andamento da velocidade do motor (figura 5.26), o binário electromagnético desenvolvido e o de
referência (figura 5.27), a potência desenvolvida pelo motor (figura 5.28) e as correntes eléctricas que
percorrem os enrolamentos do estator exterior (figura 5.29) e do interior (figura 5.30).
Figura 5.26 - Velocidade do motor.
Figura 5.27 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul).
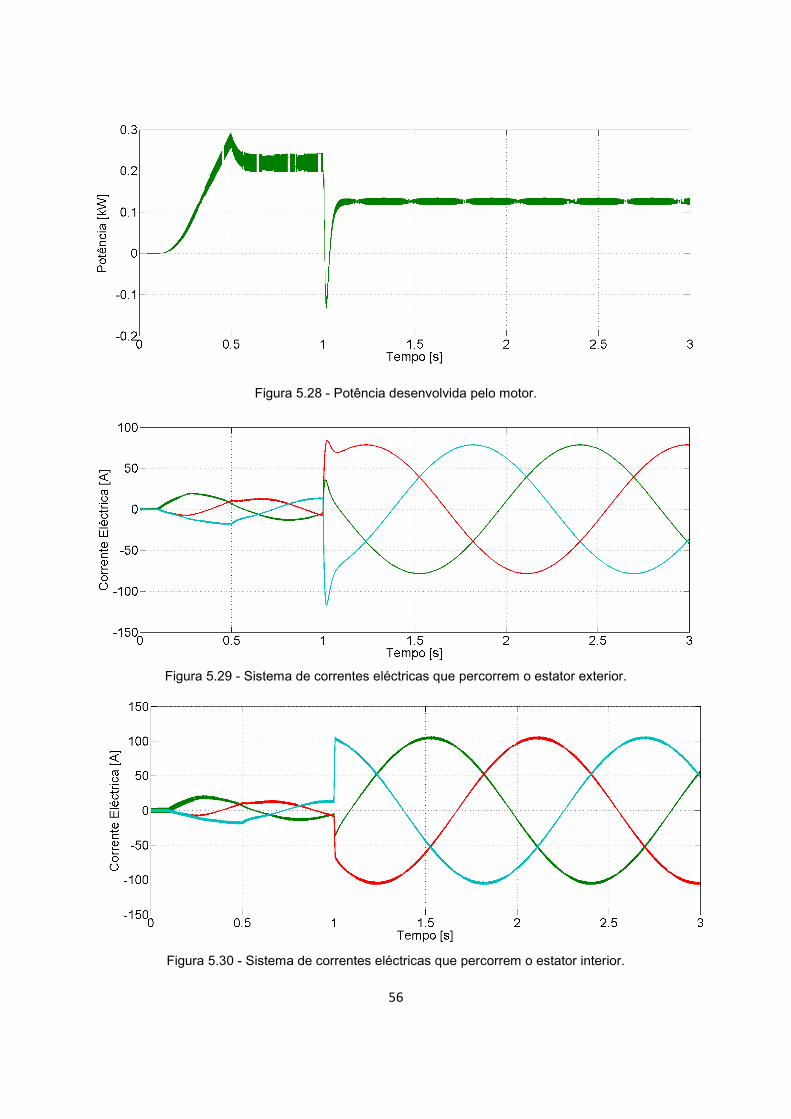
56
Figura 5.28 - Potência desenvolvida pelo motor.
Figura 5.29 - Sistema de correntes eléctricas que percorrem o estator exterior.
Figura 5.30 - Sistema de correntes eléctricas que percorrem o estator interior.
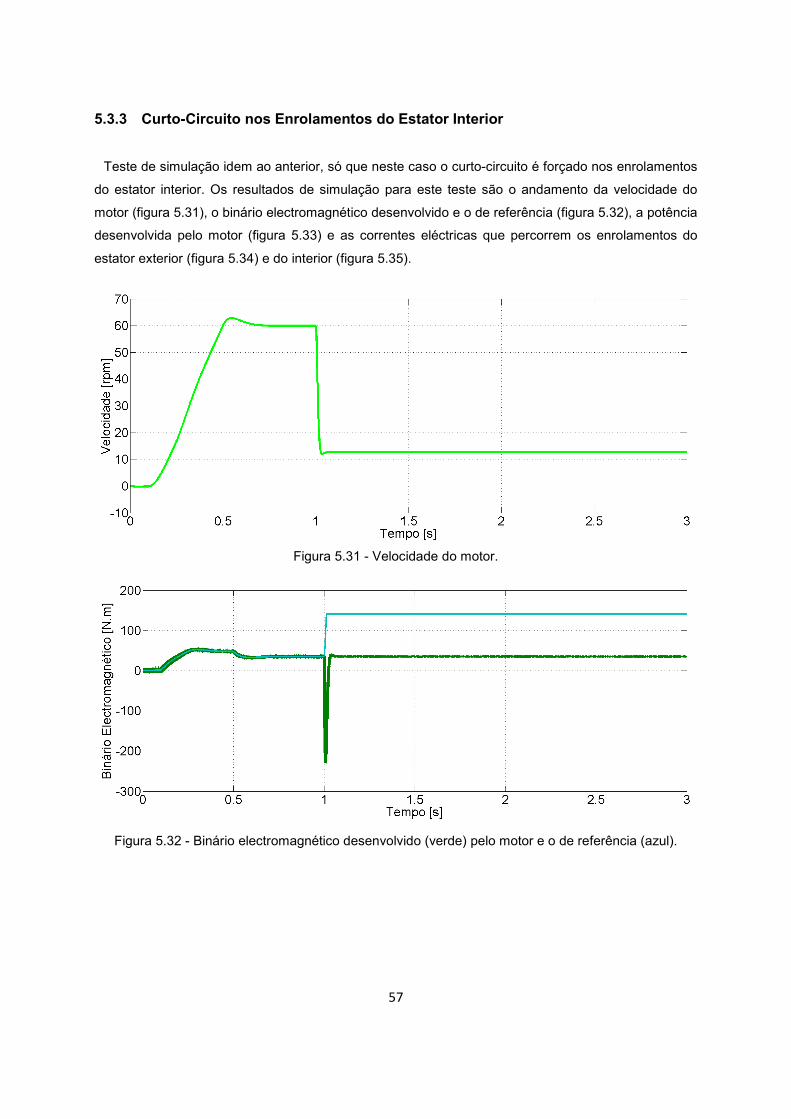
57
5.3.3 Curto-Circuito nos Enrolamentos do Estator Interior
Teste de simulação idem ao anterior, só que neste caso o curto-circuito é forçado nos enrolamentos
do estator interior. Os resultados de simulação para este teste são o andamento da velocidade do
motor (figura 5.31), o binário electromagnético desenvolvido e o de referência (figura 5.32), a potência
desenvolvida pelo motor (figura 5.33) e as correntes eléctricas que percorrem os enrolamentos do
estator exterior (figura 5.34) e do interior (figura 5.35).
Figura 5.31 - Velocidade do motor.
Figura 5.32 - Binário electromagnético desenvolvido (verde) pelo motor e o de referência (azul).
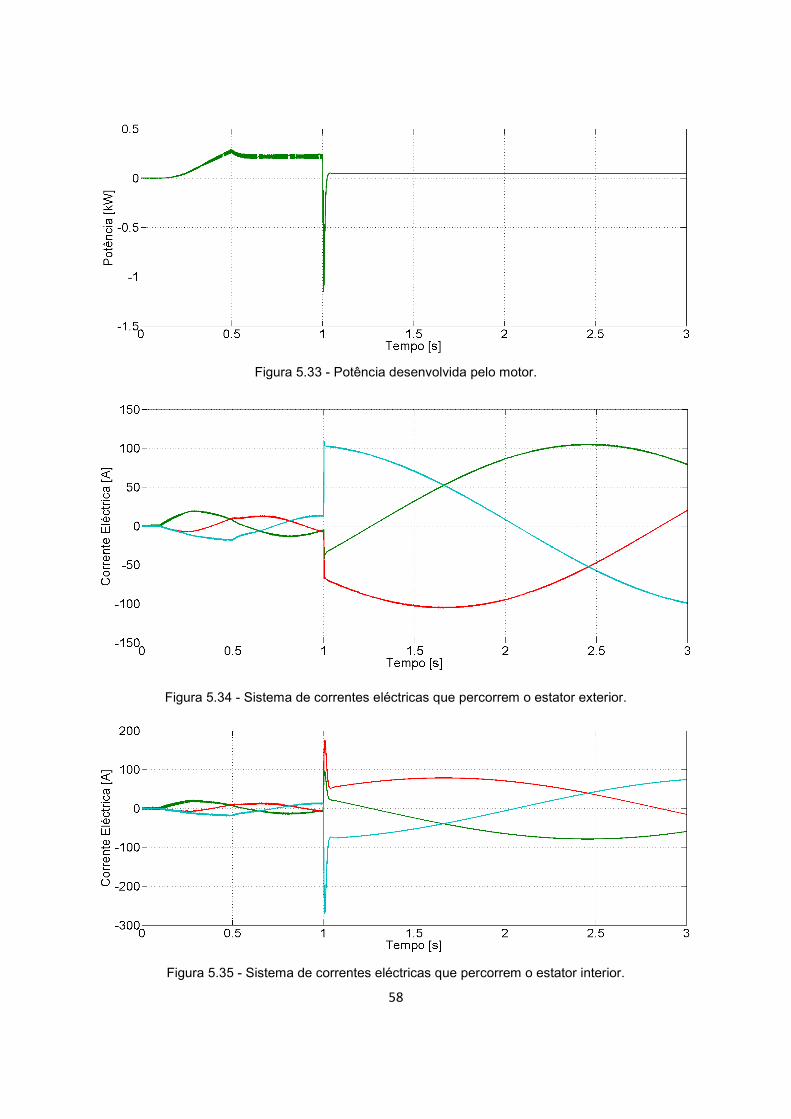
58
Figura 5.33 - Potência desenvolvida pelo motor.
Figura 5.34 - Sistema de correntes eléctricas que percorrem o estator exterior.
Figura 5.35 - Sistema de correntes eléctricas que percorrem o estator interior.
59
Entre os dois testes de curto-circuito, o que apresenta o maior impacto no desempenho do sistema
é o teste com curto-circuito nos enrolamentos do estator interior, com um valor de pico bastante
elevado para a corrente eléctrica e para o binário electromagnético no instante do curto-circuito e a
maior queda na velocidade do motor, em comparação com o curto-circuito nos enrolamentos dos
enrolamentos do estator exterior. Neste último a corrente eléctrica no instante da perturbação não
atinge o valor máximo admissível.
Para os dois testes de curto-circuito, o enrolamento que continua em operação e contribui para o
binário electromagnético desenvolvido pelo motor vai compensar de modo ao sistema continuar a
tentar a seguir a referência, mesmo com um erro estático bastante elevado dada a incapacidade do
sistema de funcionar em condições nominais apenas com um estator em condições normais de
funcionamento.

60

61
6. Conclusões
6.1 Conclusões
Com este trabalho estudaram-se um conjunto de tecnologias de motores eléctricos e respectivos
métodos de controlo para aplicações em veículos eléctricos. Deste modo, foi possível apresentar um
modelo matemático para o motor síncrono a magnetos permanentes de duplo estator, juntamente
como as suas vantagens face a soluções convencionais. Apresentaram-se também as vantagens,
particularidades e características técnicas do variador de velocidade comercial escolhido para este
trabalho. Para simular o sistema proposto foi desenvolvido um modelo em Matlab®/Simulink para o
sistema eléctrico composto pelas duas unidades atrás especificadas. Através de vários testes de
simulação ao sistema, para condições semelhantes ao que teríamos numa situação real, conclui-se
que o sistema comporta-se adequadamente e de forma muito estável aos comandos de velocidade.
Também foram testadas algumas perturbações de origem electromagnética e eléctrica, por forma a
simular avarias mecânicas e/ou eléctricas, podendo afectar negativamente o desempenho e a própria
segurança do sistema numa situação real.
Para condições normais de funcionamento testadas, semelhantes ao que aconteceria num cenário
real, ou seja, para binários de carga na ordem dos 50% a 100% do binário nominal da unidade
motora, o sistema responde adequadamente a comandos de velocidade, quer para baixas em forma
de escalão, como para médias ou altas em forma de rampa, sem qualquer erro estático associado.
Desta forma e admitindo os pressupostos utilizados para o desenvolvimento dos modelos do
conversor electrónico e do motor síncrono a magnetos permanentes de duplo estator estudado e
proposto, o sistema testado é viável e exequível num caso prático.
Uma particularidade importante no funcionamento deste sistema, que representaria uma vantagem
clara numa situação real, é o facto de operando para velocidades de comando baixas e binários de
carga na ordem do nominal, gama de velocidades razoáveis e realistas numa situação de arranque
real, os valores de corrente e de binário electromagnético desenvolvido pelo motor não chegam a
atingir os valores de saturação. Deste modo, não se iria exigir valores muito elevados de corrente
eléctrica da fonte de energia do sistema, ou seja, do banco de baterias existente que alimentaria o
veículo. Seria um ponto positivo em caso da necessidade de muitos arranques sucessivos a baixas
velocidades o que é bastante comum numa situação real para veículos eléctricos, prolongando a
autonomia global do veículo em questão.
Outra vantagem deste sistema é em caso de ocorrerem perturbações no mesmo, quer seja de
natureza exterior ou interior, em que como visualizado nos resultados de simulação, o sistema reage
com a componente eléctrica de ambos os estatores, para compensar e minimizar ao máximo as
implicações na componente mecânica, que é a mais importante para o utilizador, não só porque a
velocidade do motor e consequentemente do veículo é o interface entre o utilizador e o sistema, mas

62
sim é a que está relacionada directamente com a sua segurança. Por exemplo, numa situação onde
poderíamos perder completamente a componente eléctrica de um dos estatores, tal como nos testes
de curto-circuito realizados em simulação, o sistema continua a funcionar parcialmente. Por outro
lado, caso fosse um sistema com um motor eléctrico convencional de apenas um estator, teríamos a
perda completa do sistema, com implicações bastante negativas e incertas para o utilizador.
O princípio de orientação de campo do rotor minimiza a corrente necessária para produzir o binário
desejado, constituindo assim um ponto fundamental no dimensionamento de um sistema de controlo
aplicado a veículos eléctricos, em que fonte de energia é normalmente um banco de baterias. Com a
optimização do motor utilizando uma configuração de duplo estator em simultâneo com o tipo controlo
apresentado, é possível não só aumentar a autonomia do veículo eléctrico, tornando-o mais eficiente
e sustentáveis, como também prolongar o tempo de vida de toda a cadeia eléctrica, e em particular o
banco de baterias.
6.2 Comentários finais
Para aumentar o desempenho e de certa forma complementar as particularidades e vantagens do
sistema eléctrico estudado neste trabalho, outras áreas tecnológicas para aplicações em veículos
eléctricos podiam ter sido abordadas. A seguir e a título de exemplo, apresentam-se duas que
serviriam para aumentar a sustentabilidade e eficiência energética global do veículo eléctrico com
consequente aumento do desempenho, flexibilidade e autonomia, respectivos.
6.2.1 Aplicações de Velocidade Elevada
Para aplicações em que sejam necessárias gamas de velocidade na ordem de por exemplo 3000 a
10000 rpm será necessário outras abordagens em termos de algoritmo de controlo e alterações
construtivas do motor síncrono a magnetos permanentes de duplo estator em relação ao
apresentado. O controlo vectorial RFOC teria de permitir o controlo da componente id, com a
possibilidade de operação na zona de enfraquecimento de campo e potência máxima. Os magnetos
permanentes de alto desempenho teriam de ser instalados no interior do rotor em vez de na sua
superfície, para prevenir que estes se deslocassem devido à alta rotação. Com estas particularidades
o sistema seria mais complexo e detalhado do que a variante apresentada neste trabalho.

63
6.2.2 Travagem Regenerativa
Um dos métodos para aproveitar a energia dissipada durante desacelerações e travagens é
designado por travagem regenerativa [10], utilizada em muitos veículos eléctricos e híbridos. Este
método é concretizado pela mudança de funcionamento da unidade eléctrica motriz de motor para
gerador durante as desacelerações e travagens, em que o trânsito de energia flui do sistema
electromecânico e através do conversor electrónico e por fim vai carregar o banco de baterias que é a
fonte de energia do veículo eléctrico. Pela integração desta capacidade no sistema em estudo neste
trabalho, aumentava-se ainda mais a eficiência energética do sistema, assim como a sua
sustentabilidade energética.

64
65
Referências Bibliográficas
[1] Ali Emadi, Energy-Efficient Electric Motors, Third Edition, Revised and Expanded, Illinois Institute
of Technology Chicago, Illinois, Marcel Dekker, Inc. 2005, New York.
[2] Gil Marques, Controlo de Motores Eléctricos, Instituto Superior Técnico, 2007.
[3] A. E. Fitzgerald, Charles Kingsley, Jr., Stephen D. Umans, Electric Machinery, Sixth Edition,
McGraw-Hill, 2003.
[4] Zhonghui Zhang, Jiao Shu, “Matlab-based Permanent Magnet Synchronous Motor Vector Control
Simulation.
[5] Basim Alsayid, Abdel-Karim Daud, Arafat Zaidan. (2012). Simulation and Digital Control of Speed
for Permanent Magnet Synchronous Motor with Space Vector Modulation. European Journal of
Scientific Research ISSN 1450-216X Vol.68 No.2 (2012), pp. 235-245 © EuroJournals
Publishing, Inc. 2012. Available: http://www.europeanjournalofscientificresearch.com.
[6] Shuangxia Niu, K. T. Chau, Dong Zhang, J. Z. Jiang, Zheng Wang, “Design and Control of a
Double-Stator Permanent Magnet Motor Drive for Electric Vehicles.
[7] Chai Feng, Xia Jing, Guo Bin, Cheng Shukang, and Zhang Jiange, “Double-Stator Permanent
Magnet Synchronous in Wheel Motor for Hybrid Electric Drive System” IEEE TRANSACTIONS
ON MAGNETICS, VOL 45, NO. 1, JANUARY 2009.
[8] Schneider Electric Variable Speed Drives Altivar 71 ad Altivar 71 Plus Catalogue, September
2011.
[9] SimPowerSystems For Use with Simulink®, Hydro-Québec TransÉnergie Technologies, The
MathWorks, 2003.
[10] Disponível: http://www.mitsubishicars.com/MMNA/jsp/imiev/12/showroom/performance.do

66
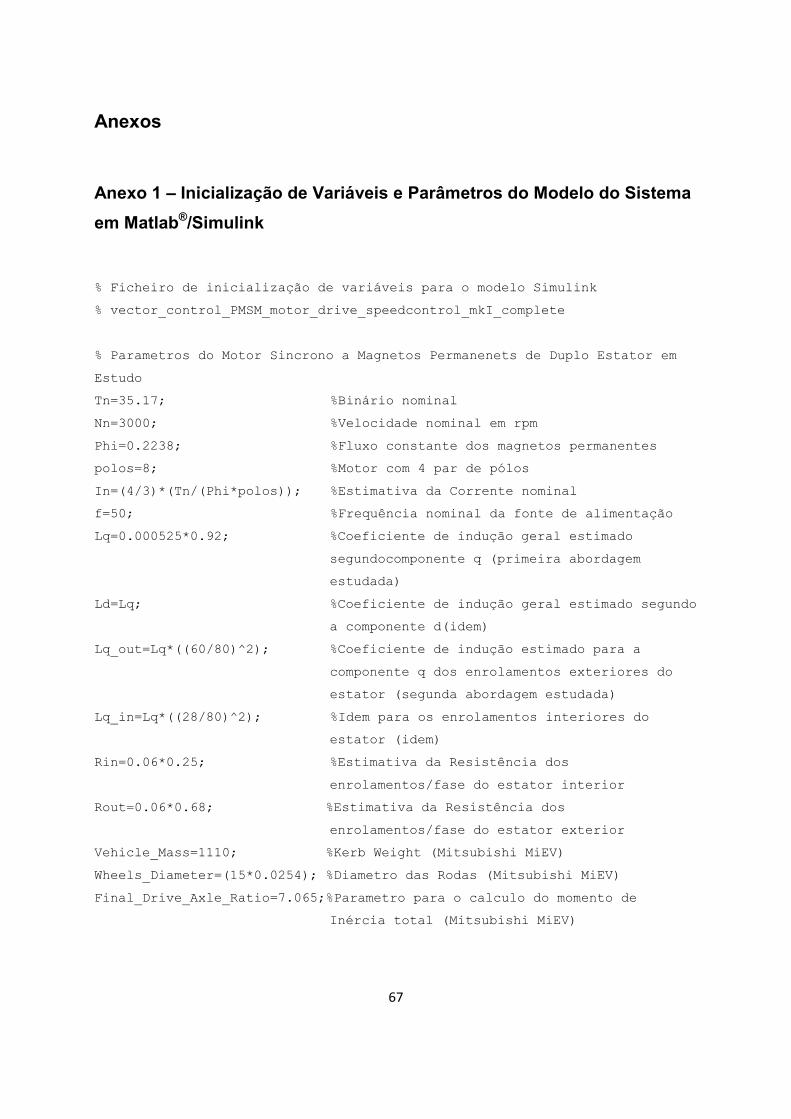
67
Anexos
Anexo 1 – Inicialização de Variáveis e Parâmetros do Modelo do Sistema
em Matlab®/Simulink
% Ficheiro de inicialização de variáveis para o modelo Simulink
% vector_control_PMSM_motor_drive_speedcontrol_mkI_complete
% Parametros do Motor Sincrono a Magnetos Permanenets de Duplo Estator em
Estudo
Tn=35.17; %Binário nominal
Nn=3000; %Velocidade nominal em rpm
Phi=0.2238; %Fluxo constante dos magnetos permanentes
polos=8; %Motor com 4 par de pólos
In=(4/3)*(Tn/(Phi*polos)); %Estimativa da Corrente nominal
f=50; %Frequência nominal da fonte de alimentação
Lq=0.000525*0.92; %Coeficiente de indução geral estimado
segundocomponente q (primeira abordagem
estudada)
Ld=Lq; %Coeficiente de indução geral estimado segundo
a componente d(idem)
Lq_out=Lq*((60/80)^2); %Coeficiente de indução estimado para a
componente q dos enrolamentos exteriores do
estator (segunda abordagem estudada)
Lq_in=Lq*((28/80)^2); %Idem para os enrolamentos interiores do
estator (idem)
Rin=0.06*0.25; %Estimativa da Resistência dos
enrolamentos/fase do estator interior
Rout=0.06*0.68; %Estimativa da Resistência dos
enrolamentos/fase do estator exterior
Vehicle_Mass=1110; %Kerb Weight (Mitsubishi MiEV)
Wheels_Diameter=(15*0.0254); %Diametro das Rodas (Mitsubishi MiEV)
Final_Drive_Axle_Ratio=7.065;%Parametro para o calculo do momento de
Inércia total (Mitsubishi MiEV)

68
J=(Vehicle_Mass*(Wheels_Diameter/2)^2)/(Final_Drive_Axle_Ratio)^2;
%Momento de Inércia Total, ou seja, a componente mecânica acoplada ao rotor
da máquina (rotor, veio, sistema automático de transmissão e rodas)
Jrotor=0.0022; %Coeficiente de Inércia do rotor da máquina
%Comandos de Velocidade
Speed=100;
Speed2=500;
Speed3=1000;
Speed4=500;
Speed5=0;
% Binário de Carga
Tload_start=1; %Atrito na componente mecânica antes da
aplicação da Carga
Tload=Tn; %Binário de carga aplicado
Tload_time=0.10; %Instante de aplicação do binário de carga
%Perturbações Eléctricas e Electromagnéticas aplicadas ao sistema em estudo
V_error=1; %Teste de curto-circuito
V_error_time=1; %Instante de aplicação do curto-circuito
Tperturb=Tn*(0.5); % Teste de perturbação no binário
electromagnetico causado por fenómeno
mecânico, electromagnético ou eléctrico
Tperturb_time=1; %Instante de aplicação da perturbação
%Paramentros do Regulador de Velocidade
T=1/f; %Período nominal
p=6; %Índice de pulsação do conversor interno do
variador de velocidade
Udc=10; %Tensão contínua do sensor velocidade e do de
corrente
ktn=Udc/(Nn*(2*(pi)/60)); %Ganho do sensor de velocidade
kti=Udc/(2*In); %Ganho do sensor de corrente
Km=Tn/In; %Constante de binário (N.m/A)
Tcm=(1/2)*(T/p); %Constante tempo do Sistema Comando
Kp=(1/2)*(J/((3/4)*polos*Phi*(1E-3)));
%Ganho Proporcional do Controlador PI

69
Ki=((kti*J)/(ktn*Km))*(1/(8*(2*Tcm)^2));
%Ganho Integral do Controlador PI
Kp=Kp/10; %Ajuste no Ganho Proporcional
Ki=Ki/100; %Ajuste no Ganho Integral
Te_max=4*Tn; %Binário Electromagnético Máximo de saída do
regulador
Te_min=-4*Tn; %Binário Electromagnético Mínimo de saída do
regulador
%Parametros do Regulador de Binário e Corrente "Vector Controller"
tau_eq=1E-3; %Constante de tempo para a Cadeia de Binário
Tp=1; %Ganho Proporcional do Regulador de Binário
Ti=(3/4)*polos*Phi*tau_eq; %Ganho Integral do Regulador de Binário
iq_max=4*In; %Limite Máximo de Corrente
iq_min=-4*In; %Limite Mínimo de Corrente
fc_i=10E3;
Tii=(1/fc_i); %Constante de Tempo do comparador de correntes
%Parametros do PWM Inverter
Relay_on=1E-5; %Condição para o disparo do relé no sentido
directo
Relay_off=-1E-5; %Condição para o disparo do relé no sentido
inverso
Relay_max=0.10; %Valor máximo para o comando dos relés
Relay_min=-0.10; %Valor mínimo para o comando dos relés
Von=400; %Tensão Eléctrica Considerada para o Andar DC
do Inversor PWM
Voff=(-1)*Von;

70
Anexo 2 – Diagrama de Blocos do Sistema em Matlab®/Simulink
2.1 Transformação de Park inversa.
2.2 Controlador de Binário (Current Regulator)
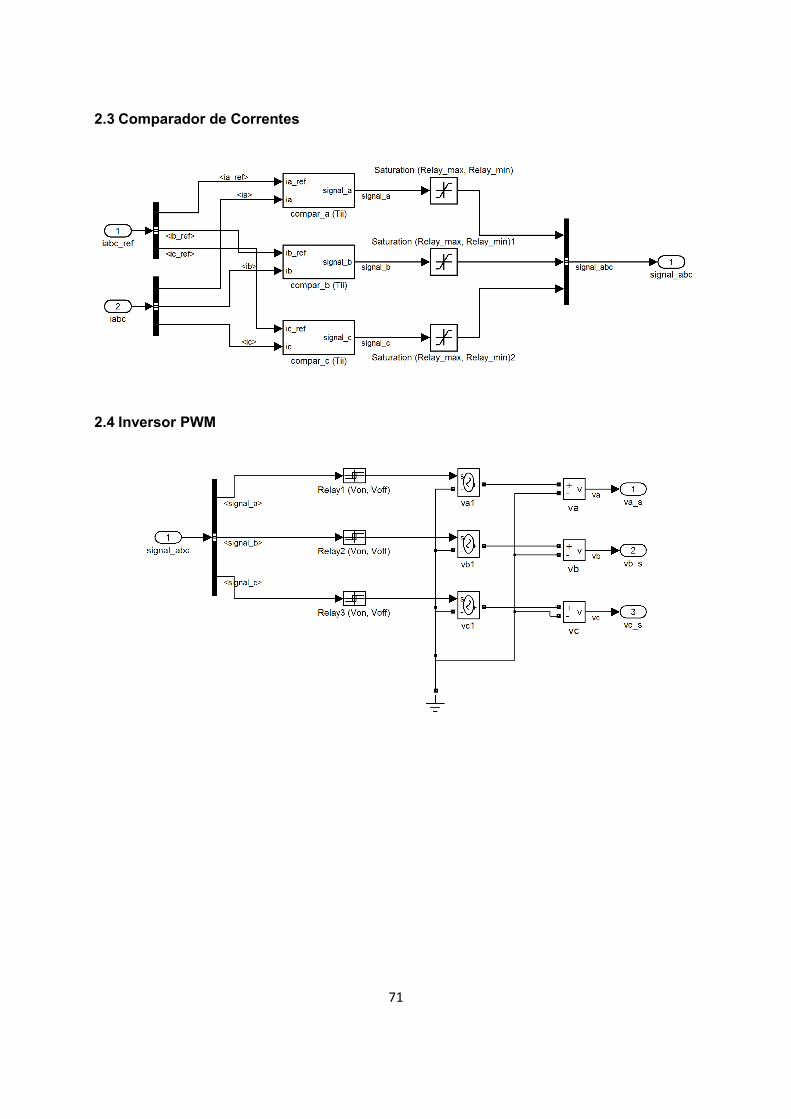
71
2.3 Comparador de Correntes
2.4 Inversor PWM

72
Anexo 3 – Ficha Técnica da Série de Variadores de Velocidade Schneider Electric ATV 71

73