Embed Size (px)
Citation preview
TRABALHO DE CONCLUSÃO DO CURSO TÉCNICO EM MECATRÔNICA
PROJETO ARMATRON
CAIO SADAO GONÇALVES OKIMOTO FELIPE GONZALES
IGOR NEGRI RAFAEL HONORIO DA SILVA
RENAN GERVATOSKY WESLEY ELYDIO GUIMARÃES
Professor(es) Orientador(es): EDUARDO
São Caetano do Sul / SP 2013
Centro Estadual de Educação Tecnológica Paula Souza
GOVERNO DO ESTADO DE SÃO PAULO
Etec “JORGE STREET”

ARMATRON
Trabalho de Conclusão de Curso apresentado como pré-requisito para obtenção do Diploma de Técnico em Mecatrônica
São Caetano do Sul / SP 2013
AGRADECIMENTOS
Sr. Denis da manutenção
Grupo do Claudio
Prof. Nubas
Prof. Nilson
Sr. José do almoxarifado
Prof. Carnielli
RESUMO O nosso projeto tem como objetivo economizar espaço em locais com uso de
armário, tendo assim um melhor aproveitamento de uma área.
Palavras-chave:
-Armário
-espaço
-automação

LISTA DE FIGURAS
Figura 1 – Motor e Engrenagem ................................................................................ 10
Figura 2 – Primeira Tabela de Custos ....................................................................... 11
Figura 3 – Previsão de Custos- Eletrônica................................................................. 12
Figura 4 – Croqui ....................................................................................................... 12
Figura 5 – Previsão de Custos- Mecânica..................................................................13
Figura 6 – Desenho do funcionamento dos Armários................................................ 13
Figura 7 – Fluxograma............................................................................................... 14
Figura 8 – Cronograma.............................................................................................. 15
Figura 9 – Testes Finais do projeto antes da parte de acabamento.......................... 18
Sumário
Introdução ................................................................................................................... 8
1 – Fundamentação Teórica ...................................................................................... 10
1.1 – Pesquisa de Campo ......................................................................................... 11
1.2 – Pesquisa de Materiais da parte Elétrica ........................................................... 11
1.3 – Pesquisa de Materiais da parte Mecânica ...................................................... 121
2 – Planejamento do Projeto ..................................................................................... 12
3 – Desenvolvimento do Projeto ................................................................................ 16
4 – Resultados Obtidos.............................................................................................. 18
Conclusão ............................................................................................................... 199
Anexo A ..................................................................................................................... 20
8
Introdução
O nosso trabalho (Armatron) consiste num sistema automatizado envolvendo
partes mecânicas e eletrônicas para a movimentação de um conjunto de armários,
com isso ocupando espaço e sendo mais pratico para seu uso.
O projeto utiliza inúmeros circuitos eletrônicos e programação em C além da
presença de um sistema mecânico de cremalheiras, engrenagens e motores para o
seu funcionamento.
Objetivos
Nosso objetivo primário é fazer o trabalho funcionar, e fazer com que ele seja
útil e funcional para o que foi proposto.
Outros objetivos específicos que nós traçamos foram abranger conhecimento
adquirido no curso colocando em pratica o que foi aprendido, aprender a lidar com
pressão de tempo e trabalho em grupo.
Justificativa
Após um brainstorm esta idéia surgiu e achamos que seria algo interessante a
se fazer, pois envolvia praticamente todas as áreas do curso e após uma troca de
idéias com o professor recebemos algumas outras sugestões de como refinar o
nosso trabalho.
Metodologia
Irá ser realizada uma pesquisa de campo e após isso iremos por em prática a
execução do trabalho.
Iniciaremos fazendo a base em que o projeto estará apoiado e onde será
encontrada a parte elétrica e o motor que serão utilizados e o próximo passo será a
fabricação dos armários, seguida da instalação das cremalheiras e união do circuito
elétrico com parte mecânica. Após a conclusão dessas etapas, serão efetuados
diversos teste gerais do projeto para excute.
Nosso projeto e todas as nossas decisão serão discutidas pelo grupo em
geral, e na aparição de problemas, tentaremos achar uma solução e colocá-la em
pratica com o consenso de todos.

9
No primeiro momento, trabalharemos em sala de aula para o planejamento do
projeto, e quando a hora chegar nosso grupo trabalhara dividido entre partes
mecânica, eletrônica e programação.

10
1 – Fundamentação Teórica
Com a escolha de nosso projeto derivado da automação de um elemento
presente em bibliotecas, por exemplo, coletamos medidas para o dimensionamento
de nosso trabalho, com medidas de livros e armários convencionais.
Após isso, criamos uma lista de materiais que seriam usados, contendo por
exemplo os motores que iríamos usar.
Figura 1 – Motor e Engrenagem
11
1.1 – Pesquisa de campo
Fomos a estabelecimentos que poderiam se aproveitar de nosso projeto que,
após explicarmos ser funcionamento, acharam que seria uma boa idéia mas se
mostraram pessimistas em relação ao seu uso em larga escala pois disseram que
seria muito complicado e caro aplicar em 10 ou 20 prateleiras de uma farmácia, por
exemplo.
1.2 – Pesquisa de materiais da parte elétrica
Ao planejarmos o uso do arduíno, também planejamos a compra de alguns outros
aparatos elétricos, como uma placa de baquelite e alguns diodos.Também
utilizaremos uma fonte de computador para a alimentação dos motores e do arduíno.
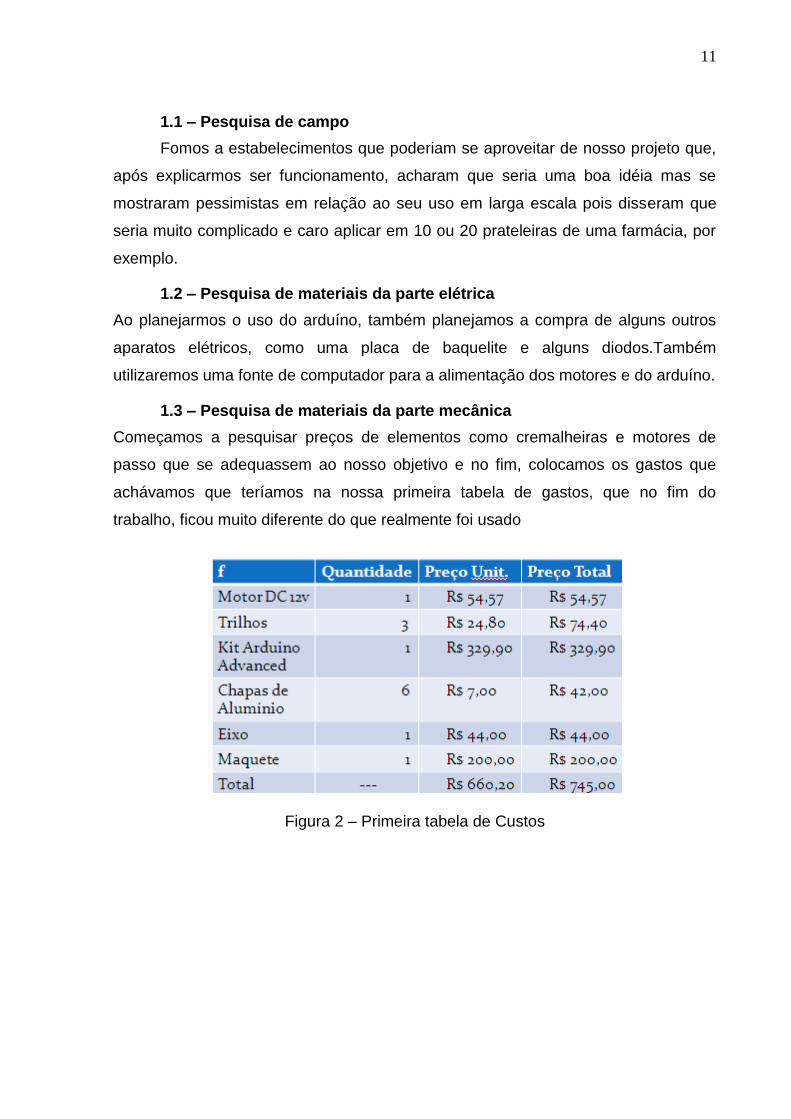
1.3 – Pesquisa de materiais da parte mecânica
Começamos a pesquisar preços de elementos como cremalheiras e motores de
passo que se adequassem ao nosso objetivo e no fim, colocamos os gastos que
achávamos que teríamos na nossa primeira tabela de gastos, que no fim do
trabalho, ficou muito diferente do que realmente foi usado
Figura 2 – Primeira tabela de Custos
12
2 – Planejamento do Projeto
Parte elétrica/eletrônica/eletropneumática:
Previsão de Custos
Figura 3 – Previsão de Custos – Eletrônica
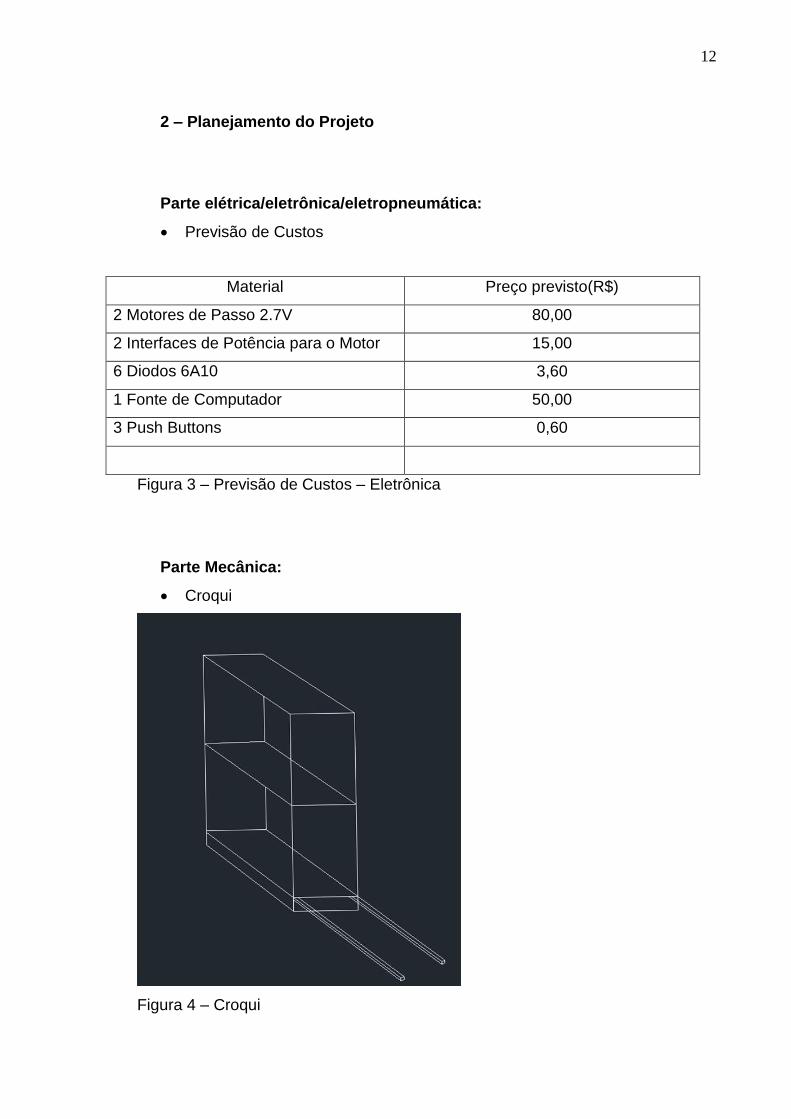
Parte Mecânica:
Croqui
Figura 4 – Croqui
Material Preço previsto(R$)
2 Motores de Passo 2.7V 80,00
2 Interfaces de Potência para o Motor 15,00
6 Diodos 6A10 3,60
1 Fonte de Computador 50,00
3 Push Buttons 0,60
13
Previsão de Custos
Figura 5 – Previsão de Custos - Mecânica
Desenho
Figura 6 – Desenho do funcionamento dos armários
Material Preço previsto(R$)
Acrílico 60,00
Tábuas de madeirite 50,00
2 motores de passo 3.3A 2.7V 12kgf 80,00 cada
2 pares de trilhos telescópicos 20,00 cada
2 engrenagens 10,00 cada
2 cremalheiras 10,00 cada
14
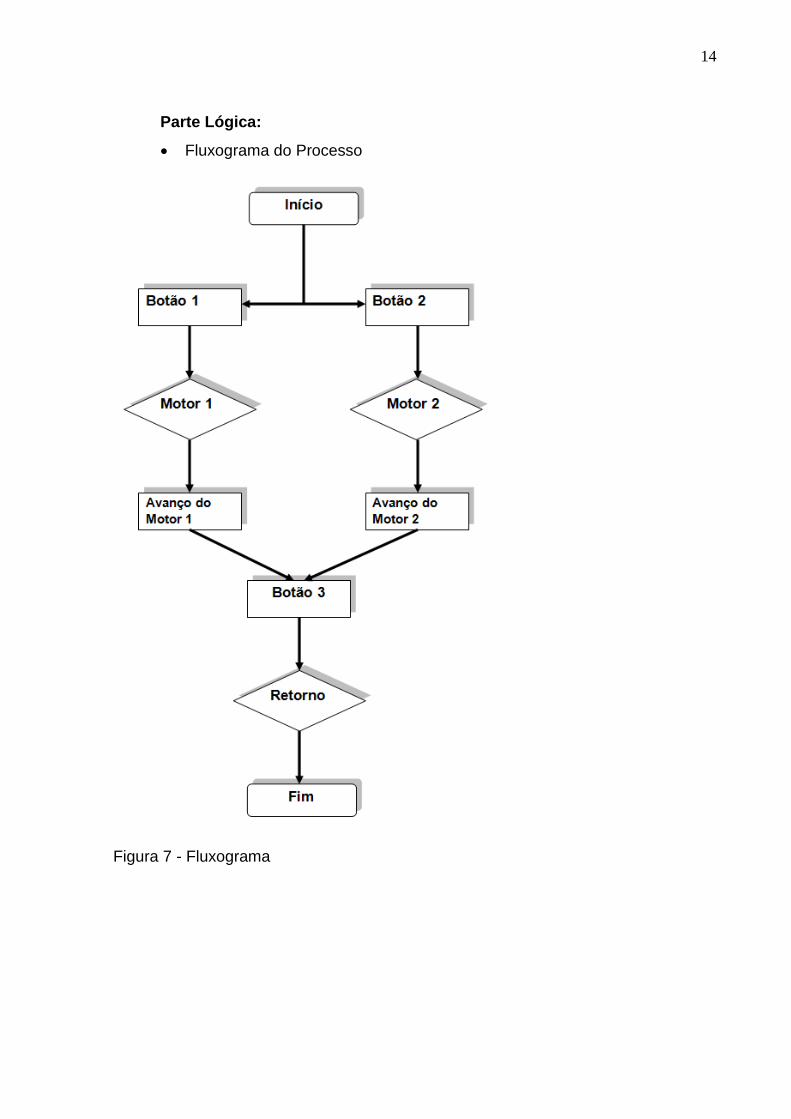
Parte Lógica:
Fluxograma do Processo
Figura 7 - Fluxograma

15
Cronograma Geral
Figura 8 - Cronograma
16
3 – Desenvolvimento do Projeto
Começamos adquirindo o acrílico, e após algumas semanas, constatamos
que este material não era apropriado para o projeto, nos dando prejuízo. Enquanto
isso, uma parte do grupo foi à Sta. Ifigênia comprar os 2 motores de passo que
seriam usados.
Após isso, fomos à compra de madeira para substituir o uso do acrílico na
construção das bases e dos armários. Ficamos algumas semanas montando todas
essas estruturas com a utilização de pregos, martelo e com a ajuda do Sr. Denis da
manutenção, que serrou as tábuas de madeira que havíamos comprado.
Simultaneamente, compramos o arduíno Uno, equipamento que será usado para o
controle eletrônico dos motores, na Robocore.
Ao terminarmos de montar as bases, dimensionamos os armários em função
disso, mas tivemos um problema: a falta de madeira. Como a loja que havíamos
comprado a matéria-prima da primeira vez fechou, tivemos que pedir emprestado o
excedente de madeira do grupo do Cláudio.
Depois de montarmos os armários, juntando as partes de madeira cortadas
préviamente e pregando-as, fomos a procura de engrenagens, cremalheiras e trilhos
para facilitarem a movimentação e funcionalidade de nosso projeto.
Caio, integrante do nosso grupo, comprou um par de engrenagens e
cremalheiras, além de trilhos simples para a montagem. No entanto, problemas
surgiram quando os trilhos foram colocados na base: trilhos comuns não
funcionariam em nosso projeto então recorremos ao uso de trilhos telescópicos,
comprados pelo integrante Rafael, que funcionaram perfeitamente.
Era necessário fazer uma adaptação, pois o diâmetro do furo das
engrenagens era maior do que o eixo do motor, então fabricamos buchas
dimensionadas especialmente para este fim e, com a ajuda do prof. Nilson,
prendemos as engrenagens nos dois motores, uma furando e colocando um
parafuso como sua trava e outra limando até que a bucha e engrenagem
encaixassem perfeitamente.
Na parte elétrica, integrantes do grupo trouxeram fontes para testes
envolvendo o multímetro, com apenas a do integrante Rafael funcionando. Com a
ajuda do Prof. Eduardo para o desenvolvimento do circuito eletrônico, a parte do

17
grupo responsável pela parte elétrica consistente de Renan e Wesley compraram 3
diodos 6A10, uma placa de baquelite e duas interfaces de potência.
Ao constatarmos que haveria um problema na hora em que os armários
fossem movimentados, pois eles estariam baseados apenas nos trilhos telescópicos,
criamos “bordas de madeira” para sua sustentação.
Com a ajuda do prof. Carnielli, usinamos pequenas barras em formato de L
para sustentação dos motores e conseguimos deixá-los alinhados com a
cremalheira.
Após essa data, o grupo continuou o desenvolvimento da parte elétrica,
comprando itens elétricos para o trabalho. Com a parte elétrica finalizada, entramos
em fase de testes para assegurar o bom funcionamento do TCC.
Neste primeiro teste sem a adição dos armários, com apenas a rotação do
motor, as coisas não ocorreram como esperado. Depois que estiver funcionando
corretamente, prendermos os armários nos trilhos telescópicos na base e
finalizaremos com um segundo teste. Então terminamos nosso TCC.
18
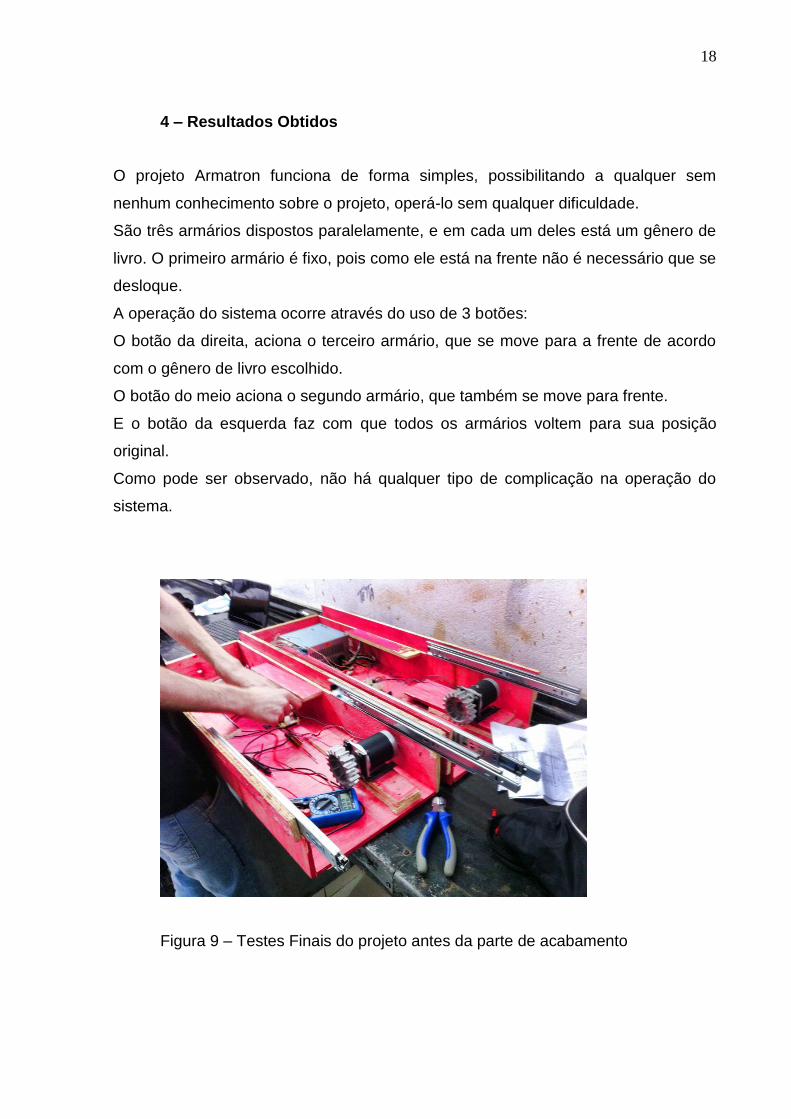
4 – Resultados Obtidos
O projeto Armatron funciona de forma simples, possibilitando a qualquer sem
nenhum conhecimento sobre o projeto, operá-lo sem qualquer dificuldade.
São três armários dispostos paralelamente, e em cada um deles está um gênero de
livro. O primeiro armário é fixo, pois como ele está na frente não é necessário que se
desloque.
A operação do sistema ocorre através do uso de 3 botões:
O botão da direita, aciona o terceiro armário, que se move para a frente de acordo
com o gênero de livro escolhido.
O botão do meio aciona o segundo armário, que também se move para frente.
E o botão da esquerda faz com que todos os armários voltem para sua posição
original.
Como pode ser observado, não há qualquer tipo de complicação na operação do
sistema.
Figura 9 – Testes Finais do projeto antes da parte de acabamento

19
Conclusão
Encontramos vários problemas em nosso projeto mas o principal foi o
convívio entre os integrantes, alguns não tem comprometimento com as tarefas
propostas, outro grande problema que encontramos pelo caminho, foi do material
utilizado para o desenvolvimento da parte mecânica do projeto primeiramente
tentamos utilizar acrílico como matéria prima, mas com o desenvolvimento das
demais funções foi constatado que não seria possível a utilização do mesmo, e com
isso houve um pequeno atraso porem esse erro logo foi solucionado e substituímos
a por madeira, a partir daí tudo correu bem, a parte mecânica foi sendo desenvolvida
de uma maneira bem rápida, o que ficou mais para trás foi a parte elétrica do
trabalho por falta de comprometimento dos integrantes responsáveis desta área,
outro problema encontrado foi nos trilhos para dar movimento aos armários,
compramos um trilho normal porem não deu certo por que não sustentaria o armário
na base então compramos um trilho telescópico solucionando nosso problema.
Com nosso projeto podemos concluir que é essencial que haja cooperação
entre os integrantes e comprometimento geral, por que é muito difícil realizar uma
tarefa tão importante como um tcc com apenas 50% do grupo focado.
Nosso objetivo inicial, que era fazer os armários moverem, foi alcançado com
algumas semanas de atraso mas com algumas modificações ao plano inicial como
na matéria usada e modo de movimentar os motores.
Recomendaríamos maior planejamento e teste para que não houvessem
imprevistos na hora da montagem do projeto, escolher sabiamente os integrantes do
grupo e escolher um projeto coerente com o que foi aprendido e que faça aprimorar
nosso conhecimento técnico.

20
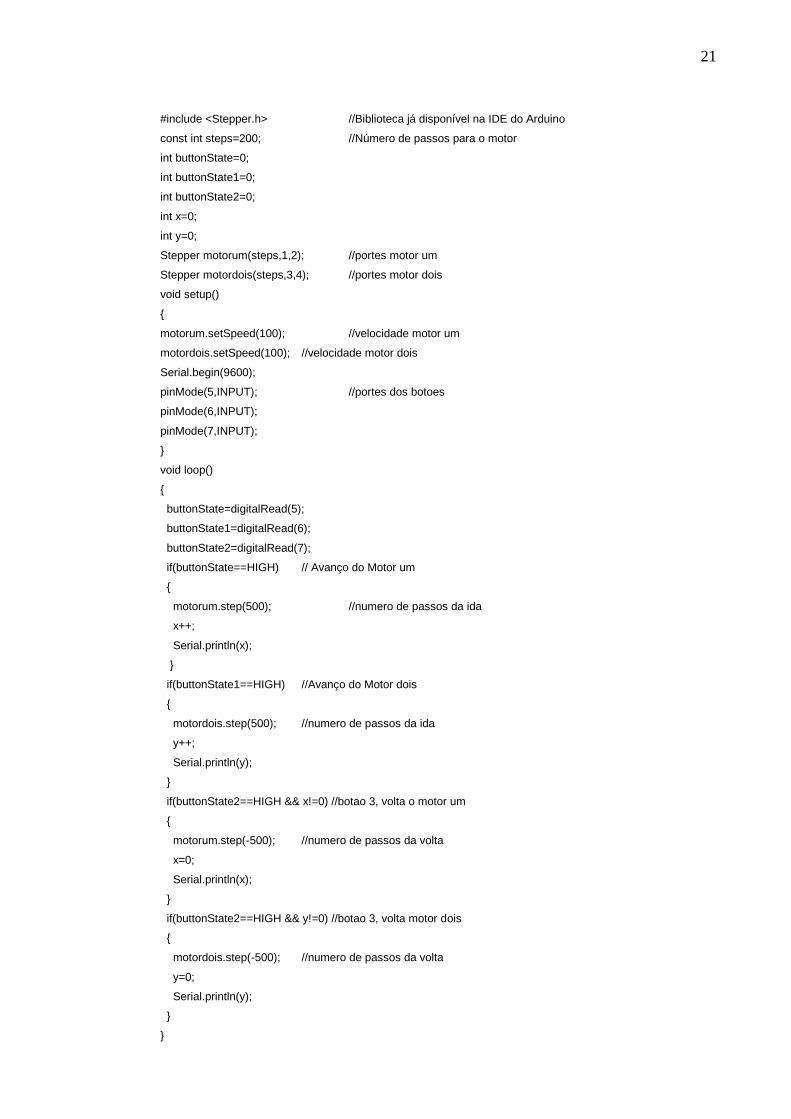
Anexo A
Programação C
21
#include <Stepper.h> //Biblioteca já disponível na IDE do Arduino
const int steps=200; //Número de passos para o motor
int buttonState=0;
int buttonState1=0;
int buttonState2=0;
int x=0;
int y=0;
Stepper motorum(steps,1,2); //portes motor um
Stepper motordois(steps,3,4); //portes motor dois
void setup()
{
motorum.setSpeed(100); //velocidade motor um
motordois.setSpeed(100); //velocidade motor dois
Serial.begin(9600);
pinMode(5,INPUT); //portes dos botoes
pinMode(6,INPUT);
pinMode(7,INPUT);
}
void loop()
{
buttonState=digitalRead(5);
buttonState1=digitalRead(6);
buttonState2=digitalRead(7);
if(buttonState==HIGH) // Avanço do Motor um
{
motorum.step(500); //numero de passos da ida
x++;
Serial.println(x);
}
if(buttonState1==HIGH) //Avanço do Motor dois
{
motordois.step(500); //numero de passos da ida
y++;
Serial.println(y);
}
if(buttonState2==HIGH && x!=0) //botao 3, volta o motor um
{
motorum.step(-500); //numero de passos da volta
x=0;
Serial.println(x);
}
if(buttonState2==HIGH && y!=0) //botao 3, volta motor dois
{
motordois.step(-500); //numero de passos da volta
y=0;
Serial.println(y);
}
}





























