Embed Size (px)
Citation preview

MINISTÉRIO DA CIÊNCIA E TECNOLOGIA
INSTITUTO NACIONAL DE PESQUISAS ESPACIAIS
INPE-5975-PUD/025
CONCEITOS BÁSICOS DA REALIDADE VIRTUAL
Liliane dos Santos Machado
INPESão José dos Campos
Novembro de 1995

2
RESUMO
Levando em conta o desenvolvimento da Realidade Virtual nos últimos
anos, este trabalho procura enfocar os principais conceitos ligados à Realidade
Virtual através de uma visão geral da área. São abordados assuntos como tipos de
Realidade Virtual, tecnologia de hardware disponível, softwares desenvolvidos
especialmente para criação de aplicativos, bem como outros conceitos importantes
relacionados à área. Através de exemplos são enfocadas duas aplicações existentes
de Realidade Virtual, permitindo observar a aplicabilidade da mesma em diversas
áreas.

3
CONCEPTS OF VIRTUAL REALITY
ABSTRACT
Because Virtual Reality have been in great development, this paper
hang the main concepts related to Virtual Reality through a general view of this area.
Are broached some subjects as forms of Virtual Reality, available hardware
technology, specific software’s developed to create applications, and some important
related concepts. Two actual Virtual Reality applications are showed, allowing see
this area application.

4
SUMÁRIO
Pág.
LISTA DE FIGURAS......................................................................................... ix
INTRODUÇÃO.................................................................................................. 1
1 HISTÓRICO................................................................................................... 2
2 CONCEITOS BÁSICOS................................................................................. 5
2.1 - O que é Realidade Virtual (RV).................................................................. 5
2.1.1 - Formas de RV................................................................................ 6
2.2 - Espaço Cibernético..................................................................................... 9
2.3 - Estereoscopia............................................................................................. 9
2.4 - Graus de Liberdade..................................................................................... 10
2.5 - Som 3D....................................................................................................... 11
3 DISPOSITIVOS DE SAÍDA DE DADOS...................................................... 12
3.1 - Dispositivos Visuais.................................................................................... 12
3.2 - Dispositivos Auditivos................................................................................. 16
3.3 - Dispositivos Físicos..................................................................................... 16
4 DISPOSITIVOS DE ENTRADA DE DADOS................................................ 19
4.1 - Dispositivos de Interação............................................................................ 19
4.2 - Dispositivos de Trajetória............................................................................ 23
5 FERRAMENTAS PARA CRIAÇÃO DE RV.................................................. 25
6 APLICAÇÕES................................................................................................ 29

5
7 CONSIDERAÇÕES FINAIS.......................................................................... 32
GLOSSÁRIO...................................................................................................... 33
REFERÊNCIAS BIBLIOGRÁFICAS................................................................. 35
APÊNDICE A - BIBLIOGRAFIA COMPLEMENTAR...................................... 36
APÊNDICE B - FIGURAS COMPLEMENTARES............................................ 37

6
LISTA DE FIGURAS
Pág.
2.1 - Esquema mostrando as diferentes posições em que um objeto podemover-se no espaço 3D: três translações e três rotações........................... 10
3.1 - Esquema com os elementos básicos de um sistema de head-coupleddisplay suspenso.......................................................................................... 14
4.1 - Esquema de uma luva de dados baseada em fibra ótica............................. 20
4.2 - Esquema de uma bola isométrica................................................................ 21
4.3 - Diagrama de bloco de um sistema de detecção de trajetória típico............. 23
6.1 - Visão recortada do simulador de vôo do Boeing 777 mostrando o sistemade display sobre a cabine e o espelho esférico que envolve a cabinerefletindo a imagem exibida para o piloto.................................................... 29
B.1 - Foto promocional de um protótipo do Sensorama....................................... 37
B.2 - Piloto usando o capacete do projeto Super Cockpit de Tom Furness......... 38
B.3 - Visão do usuário do Super Cockpit............................................................. 38
B.4 - A luva de dados “DataGlove” desenvolvida pela VPL com sensores defibra ótica..................................................................................................... 39
B.5 - Simulador Sega R360 para entretenimento com rotação de 360 graus...... 39
B.6 - HMD desenvolvido na primeira geração de HMDs da NASA..................... 39
B.7 - Sistema de RV de Projeção com câmeras de vídeo capturando osmovimentos dos participantes e combinando essas imagens com omundo gerado pelo computador.................................................................. 40
B.8 - HMD sendo utilizado para imersão no mundo virtual.................................. 40
B.9 - Óculos obturadores CrystalEyes da StereoGraphics Corp.......................... 41
B.10 - Anúncio do CrystalEyes da StereoGraphics Corp. mostrando umsistema de RV de Mesa baseado no uso de óculos obturadores.............. 41
B.11 - Capuz de visualização Cyberhood da Simsalabim preso a um monitorconvencional.............................................................................................. 42
B.12 - O sistema de display estereocópico BOOM utilizado com umaworkstation de alta resolução.................................................................... 42
B.13 - Exemplo de um sistema de feedback de força para mão e braço............. 43

7
B.14 - Luva de dados desenvolvida em 1976 pela Universidade de Illinoisbaseada no uso de tubos flexíveis e fotocélulas....................................... 43
B.15 - Dispositivo de trajetória ultrassônico utilizado com um mouse parapermitir movimentos de 6DOF.................................................................. 44
B.16 - Sensor biológico que através de eletrodos colocados nos óculos captama movimentação ocular do usuário pela atividade elétrica muscular dosolhos......................................................................................................... 44
B.17 - O simulador de vôo do Boeing 777 considerado a mais sofisticadaaplicação de RV........................................................................................ 45

1
INTRODUÇÃO
Apesar de existir há mais de duas décadas a Realidade Virtual tem
emergido consideravelmente nos últimos anos. Por utilizar sofisticados
equipamentos seu custo permaneceu alto por muito tempo. Atualmente, com o
grande avanço tecnológico e o crescimento da indústria de computadores, a
Realidade Virtual deixou de ser inviável e empresas de produtos eletrônicos
passaram a desenvolver produtos para serem utilizados por ela, fazendo com que as
pesquisas nesta área deixassem de ser exclusividade de instituições de pesquisa
e/ou governamentais.
Este trabalho fala sobre a evolução da Realidade Virtual ao longo dos
últimos anos e procura definir Realidade Virtual tendo como base alguns
pesquisadores e autores da área. Dispositivos de hardware encontrados no mercado
e conceitos que ajudam a entender como esses dispositivos funcionam também são
tratados aqui.
Finalmente, são citadas duas aplicações da Realidade Virtual
mostrando a utilização desta nova área por diferentes ramos da ciência. O glossário
no final do trabalho contém termos comumentes encontrados em computação e
eletrônica.
Este trabalho foi apresentado como Exame Integrado no curso de
mestrado em computação aplicada.

2
CAPÍTULO 1
HISTÓRICO
Diane Ackerman afirma em seu livro A Natural History of the Senses,
que 70% dos receptores do sentido humano encontram-se nos olhos, tornando-os
os grandes “monopolistas dos sentidos” (citado por Jacobson, 1994). A maioria das
informações recebidas pelo ser humano tem a forma de imagens visuais, e estas
são interpretadas por um computador extremamente eficiente: o cérebro. Por outro
lado, os computadores digitais também podem interpretar informações desde que
estas sejam fornecidas através de algum dispositivo, como por exemplo um mouse
ou um teclado. Atualmente, com a Realidade Virtual, computadores e mente humana
entram numa esfera onde ambos podem atuar num nível cada vez mais íntimo.
A Realidade Virtual começou na indústria de simulação, com os
simuladores de vôo que a Força Aérea dos Estados Unidos passou a construir
depois da Segunda Guerra Mundial (Jacobson, 1994).
A indústria de entretenimento também teve um papel importante no
surgimento da Realidade Virtual através do simulador Sensorama (Fig. B.1 em
Apêndice B) (Jacobson, 1994). O Sensorama era um equipamento, uma espécie de
cabine, que combinava filmes 3D, som estéreo, vibrações mecânicas, aromas, e ar
movimentado por ventiladores; tudo isto para que o espectador tivesse uma viagem
multisensorial. Patenteado em 1962 por Morton Heilig, o Sensorama já utilizava-se
de um dispositivo para visão estereoscópica (Pimentel, 1995).
Alguns anos depois, por volta de 1965, Ivan Sutherland apresentou à
comunidade científica a idéia de usar computadores para desenhar projetos
diretamente na tela de um computador através do uso de uma caneta ótica - foi o
início dos gráficos computadorizados (computação gráfica). Sutherland tornou-se o
precursor da atual indústria de CAD e desenvolveu o primeiro videocapacete
totalmente funcional para gráficos de computador no projeto “The Ultimate Display”.
Com o uso deste videocapacete era possível ao usuário ver, através da

3
movimentação de sua cabeça, os diferentes lados de uma estrutura de arame na
forma de um cubo flutuando no espaço (Pimentel, 1995).
Na mesma época em que Sutherland criava na Universidade de Utah
seu videocapacete, Myron Krueger experimentava combinar computadores e
sistemas de vídeo, criando Realidade Artificial na Universidade de Wisconsin
(Pimentel, 1995). Em 1975 Krueger criou o VIDEOPLACE, onde uma câmera de
vídeo capturava a imagem dos participantes e projetava-a em 2D numa grande tela.
Os participantes podiam interagir uns com os outros e com objetos projetados nessa
tela, sendo que seus movimentos eram constantemente capturados e processados.
Essa técnica tornou-se também conhecida como Realidade Virtual de Projeção
(Jacobson, 1994).
Em 1982, Thomas Furness demonstrava para a Força Aérea
Americana o VCASS (Visually Coupled Airborne Systems Simulator), conhecido
como “Super Cockpit” - um simulador que imitava a cabine de um avião através do
uso de computadores e videocapacetes interligados representando um espaço
gráfico 3D (Fig. B.2 e Fig. B.3 em Apêndice B) (Pimentel, 1995). Os videocapacetes
integravam a parte de áudio e vídeo. Assim, os pilotos podiam aprender a voar e
lutar em trajetórias com 6 graus de liberdade (6DOF), sem decolar verdadeiramente,
ficando praticamente isolados do mundo ao seu redor. O VCASS possuía uma alta
qualidade de resolução nas imagens e era bastante rápido no rendering de imagens
complexas. No entanto apresentava um problema: milhões de dólares eram
necessários apenas para o capacete (Pimentel, 1995).
Através do uso de uma nova tecnologia de visores de cristal líquido
(LCD) Michael McGreevy começou a trabalhar no projeto VIVED (Virtual Visual
Environment Display) em 1984 na NASA, no qual as imagens seriam
estereoscópicas (Pimentel, 1995). A resolução das imagens era limitada em
comparação ao VCASS mas o custo era bastante atrativo (Rheingold, 1991). A parte
de áudio e vídeo foi então montada sobre uma máscara de mergulho utilizando dois
visores de cristal líquido com pequenos auto-falantes acoplados. Scott Fisher junta-
se a esse projeto no ano de 1985 com o objetivo de incluir nele: luvas de dados,

4
reconhecimento de voz, síntese de som 3D, e dispositivos de feedback tátil
(Pimentel, 1995).
Thomas Zimmerman e Jaron Lanier fundam em 1985 a VPL Research
tendo como primeiro produto uma luva de dados, chamada DataGlove (Fig. B.4 em
Apêndice B), desenvolvida por Zimmerman e capaz de captar a movimentação e
inclinação dos dedos da mão (Jacobson, 1994). No mesmo ano uma dessas luvas
foi comprada para o projeto VIVED.
No final de 1986 a equipe da NASA já possuía um ambiente virtual que
permitia aos usuários ordenar comandos pela voz, escutar fala sintetizada e som 3D,
e manipular objetos virtuais diretamente através do movimento das mãos. O mais
importante é que através deste trabalho foi possível verificar a possibilidade de
comercialização de um conjunto de novas tecnologias, sendo que o preço de
aquisição e desenvolvimento tornava-se mais acessível (Pimentel, 1995).
A conscientização de que os empreendimentos da NASA baseavam-se
em equipamentos comercializáveis deu início a inúmeros programas de pesquisa em
Realidade Virtual no mundo inteiro (Pimentel, 1995). Organizações variando de
firmas de software até grandes corporações de informática começaram a
desenvolver e vender produtos e serviços ligados à Realidade Virtual (Jacobson,
1994).
Em 1989 a AutoDesk apresentava o primeiro sistema de Realidade
Virtual baseado num computador pessoal (PC) (Jacobson, 1994).

5
CAPÍTULO 2
CONCEITOS BÁSICOS
2.1 O que é Realidade Virtual (RV)
O termo Realidade Virtual é creditado a Jaron Lanier, que nos anos 80
sentiu a necessidade de um termo para diferenciar as simulações tradicionais por
computação dos mundos digitais que ele tentava criar (Machover, 1994). O termo é
bastante abrangente, e por isto acadêmicos, desenvolvedores de software e
principalmente pesquisadores procuram definir Realidade Virtual baseados em suas
próprias experiências.
Pimentel (1995, p.15 e 17) define Realidade Virtual como o uso da alta
tecnologia para convencer o usuário de que ele está em outra realidade - um novo
meio de “estar” e “tocar” em informações : “Virtual Reality is the place where humans
and computers make contact”.
Latta (1994, p.23) cita Realidade Virtual como uma avançada interface
homem-máquina que simula um ambiente realístico e permite que participantes
interajam com ele: “Virtual Reality involves the creation and experience of
environments”.
Em geral, o termo Realidade Virtual refere-se a uma experiência
imersiva e interativa baseada em imagens gráficas 3D geradas em tempo-real por
computador (Pimentel, 1995) . Machover (1994, p.15) afirma que a qualidade dessa
experiência em RV é crucial, pois deve estimular ao máximo e de forma criativa e
produtiva o usuário - a “realidade” precisa reagir de forma coerente aos movimentos
do participante, tornando a experiência consistente. O principal objetivo desta nova
tecnologia é fazer com que o participante desfrute de uma sensação de presença no
mundo virtual (Jacobson, 1994). Para propiciar esta sensação de presença o
sistema de RV integra sofisticados dispositivos. Estes dispositivos podem ser luvas
de dados, óculos, capacetes, etc.

6
Dois fatores bastante importantes em sistemas de RV são imersão e
interatividade. A imersão pelo seu poder de prender a atenção do usuário, e a
interatividade no que diz respeito à comunicação usuário-sistema (Pimentel, 1995).
2.1.1 Formas de RV
Os sistemas de RV diferem entre si levando em conta o nível de
imersão e de interatividade proporcionado ao participante. Ambos são determinados
de acordo com os tipos de dispositivos de entrada e saída de dados usados no
sistema de RV além da velocidade e potência do computador que suporta o sistema
de RV (Jacobson, 1994). É claro que tudo vai depender da finalidade do sistema.
De acordo com Pimentel (1995) estes estilos de RV poderiam ser
classificados como: RV de Simulação, RV de Projeção, Augmented Reality
(Realidade Realçada), Telepresença, Visually Coupled Displays (“Displays
Visualmente Casados”) e RV de Mesa.
a) RV de Simulação
A RV de Simulação representa o tipo mais antigo de sistema de RV
porque se originou com os simuladores de vôo desenvolvidos pelos militares
americanos depois da Segunda Guerra Mundial (Jacobson, 1994).
Um sistema de RV de Simulação basicamente imita o interior de um
carro, avião ou jato, colocando o participante dentro de uma cabine com controles.
Dentro dessa cabine, telas de vídeo e monitores apresentam um mundo virtual que
reage aos comandos do usuário. Uma vez que o sistema de RV de Simulação não
processa imagens em estéreo, as imagens aparecem de forma bastante rápida
(Jacobson, 1994). Em alguns sistemas as cabines são montadas sobre plataformas
móveis (Pimentel, 1995), além de dispor de controles com feedback tátil e auditivo
(Fig. B.5 em Apêndice B) (Jacobson, 1994).

7
b) RV de Projeção
Também conhecida como Realidade Artificial, esta categoria de RV foi
criada nos anos 70 por Myron Krueger. Na RV de Projeção o usuário está fora do
mundo virtual, mas pode se comunicar com personagens ou objetos dentro dele
(Fig. B.7 em Apêndice B) (Jacobson, 1994).
O sistema de RV de Projeção VIDEOPLACE criado por Krueger nesta
época capturava a imagem do(s) usuário(s) e projetava-a numa grande tela que
representava um mundo virtual. Nesse mundo virtual usuários podiam interagir uns
com os outros ou com objetos. Krueger criou o termo Realidade Artificial para
descrever o tipo de ambiente criado pelo seu sistema, que poderia ser utilizado sem
a necessidade do participante vestir ou usar dispositivos de entrada de dados
(Jacobson, 1994).
Um outro sistema de RV de Projeção conhecido é o Mandala. Neste
sistema um ou mais usuários podem dançar, jogar, tocar música, criar arte visual e
até comunicarem-se dentro do mundo virtual (Jacobson, 1994), obtendo respostas
instantâneas através de gráficos, efeitos visuais e som sintetizado (Pimentel, 1995).
c) Augmented Reality (“Realidade Realçada”)
A Augmented Reality utiliza dispositivos visuais transparentes presos à
cabeça nos quais os dados são projetados. Pelo fato desses displays serem
transparentes, o usuário pode ver dados, diagramas, animações e gráficos 3D sem
deixar de enxergar o mundo real, tendo informações sobrepostas ao mundo real.
Estes displays transparentes são chamados heads-up-displays (HUDs) pois
permitirem essa visão através das informações geradas pelo computador. O usuário
pode, por exemplo, estar consertando algo e visualizando nos óculos os dados
necessários a esta operação (Pimentel, 1995).

8
d) Telepresença
Este tipo de RV utiliza câmeras de vídeo e microfones remotos para
envolver e projetar o usuário profundamente no mundo virtual. Controle de robôs e
exploração planetária são exemplos de pesquisas em desenvolvimento. No entanto,
existe um grande campo de pesquisa no uso de telepresença em aplicações
médicas. Em intervenções cirúrgicas, médicos já utilizam camêras de vídeo e cabos
de fibra óptica para visualizar os corpos de seus pacientes. Através da RV ele
podem literalmente “entrar” no paciente indo direto ao ponto de interesse e/ou
vistoriar a operação feita por outros (Fig. B.8 em Apêndice B) (Pimentel, 1995).
e) Visually Coupled Displays (“Displays Visualmente Casados”)
Esta é a classe de sistemas geralmente mais associada à RV. Nos
sistemas desta classe as imagens são exibidas diretamente ao usuário, sendo que
este está olhando em um dispositivo que deve acompanhar os movimentos de sua
cabeça. Este dispositivo geralmente permite imagens e sons estéreo, além de conter
sensores especiais ligados a ele que detectam a movimentação da cabeça do
usuário, usando esta informação para realimentação da imagem exibida (Fig. B.6 e
Fig. B.8 em Apêndice B) (Pimentel, 1995).
f) RV de Mesa (Desktop VR)
Pimentel (1995) vê a RV de Mesa como um subconjunto dos sistemas
tradicionais de RV. Ao invés do uso de head-mounted displays (HMDs), são
utilizados grandes monitores ou algum sistema de projeção para apresentação do
mundo virtual (Fig. B.11 em Apêndice B). Alguns sistemas permitem ao usuário ver
imagens 3D no monitor através do uso de óculos lightweight (baixo peso) ou
obturadores de cristal líquido (LCD) (Fig. B.10 em Apêndice B).

9
2.2 Espaço Cibernético
Espaço Cibernético (cyberspace) foi o termo utilizado por William
Gibson em seu livro Neuromancer (Gibson, 1984) para designar “uma representação
gráfica de dados abstraídos dos bancos de dados de todos os computadores do
sistema humano. Uma complexidade impensável. Linhas de luz alinhadas que
abrangem o universo não-espaço da mente; nebulosas e constelações infindáveis
de dados. Como luzes de cidades, retrocedendo”. Gibson descreveu uma rede de
computadores universal contendo todo tipo de informações, na qual seria possível
“entrar” e explorar os dados de forma multisensorial (Pimentel, 1995), e onde
pessoas com implantes nos seus corpos podiam transmitir informações diretamente
para o computador.
Na verdade, o Espaço Cibernético é uma simulação 4D do espaço-
tempo controlada pela interface de RV; é um espaço imaginário (Adams, 1994).
Vince (1995 p.15) afirma que desde que os sistemas de RV criem o Espaço
Cibernético é possível interagir com tudo e com todos num nível virtual.
2.3 Estereoscopia
A Estereoscopia é uma ciência que lida com o fato de que cada um dos
olhos humanos, devido à sua localização na face, vê imagens ligeiramente
diferentes quando olha para algo (Pimentel, 1995). Ao contrário das imagens 3D que
dão a noção de profundidade, as imagens estereoscópicas parecem flutuar no
espaço diante da superfície na qual estão apresentadas (Jacobson, 1994).
Nas imagens estereoscópicas geradas por computador, a quantidade
de paralaxe - distância entre imagens esquerda e direita - determina a distância
aparente dos objetos virtuais em relação ao observador. O cérebro reúne as duas
imagens em uma, sendo que esta parece ter características de profundidade,
distância, posição e tamanho. Uma paralaxe menor, por exemplo, resulta na ilusão
de que o objeto está distante (Jacobson, 1994).

10
Em Realidade Virtual, a visão estereoscópica é um importante fator na
determinação do nível de imersão do sistema (Pimentel, 1995). No entanto, deve-se
levar em conta que, na maioria dos sistemas, exibir imagens separadas para olho
esquerdo e direito, exige do hardware o dobro de potência de processamento de
imagem (Jacobson, 1994).
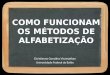
2.4 Graus de Liberdade (DOF)
Os graus de liberdade determinam flexibilidade de movimentação e/ou
observação de algo. Objetos normalmente possuem 6 (seis) diferentes direções
entre rotações e translações através das quais eles podem se mover no espaço
(Pimentel, 1995). Isto pode ser observado na Fig. 2.1.
Fig. 2.1 - Esquema mostrando as diferentes direções em que um objeto pode
mover-se no espaço 3D: três translações e três rotações.
FONTE: Pimentel (1995) p.186.
Objetos podem se movimentar para frente ou para trás (eixo X), para
cima ou para baixo (eixo Y) ou para esquerda ou direita (eixo Z) - movimentos
conhecidos como translação. Adicionalmente, os objetos também podem girar ao
redor desses eixos principais, sendo esses movimentos chamados de rotação e
conhecidos como: Roll (rotação ao redor de X), Yaw (rotação ao redor de Y) e Pitch
(rotação ao redor de Z) (Pimentel, 1995).

11
Grande parte dos sistemas de RV utilizam dispositivos de entrada de
dados que permitem movimentos de até 6DOF, proporcionando uma maior
sensação de imersão no mundo virtual (Jacobson, 1994).
2.5 Som 3D
Também conhecido como som binaural, o som 3D tem o objetivo de
proporcionar uma sensação de imersão (Pimentel, 1995). Da mesma forma que o
ser humano possui visão estereoscópica, também possui audição estéreo, e apesar
dos sistemas de som 3D funcionarem de maneiras diversas, compartilham o mesmo
objetivo: enganar o cérebro (Jacobson, 1994) visto que num sistema perfeito de som
3D não é possível diferenciar realidade e simulação: o som pode vir de toda e
qualquer direção (Pimentel, 1995).
As gravações de som tridimensional baseiam-se em um processo de
manipulação auditiva que permite que o artista ou o engenheiro de gravação
“posicione” os sons no espaço, controlando sua direção, distância e profundidade
(Jacobson, 1994).

12
CAPÍTULO 3
DISPOSITIVOS DE SAÍDA DE DADOS
A maioria das aplicações de RV é baseada no isolamento dos sentidos.
Quase sempre, penetrar num mundo virtual requer o uso de um equipamento,
parecido com uma máscara de mergulho, que procura isolar o usuário do mundo
real. (Pimentel, 1995).
O hardware de RV estimula principalmente a visão e a audição,
enquanto o sentido do tato está apenas começando a ser explorado (Pimentel,
1995).
3.1 Dispositivos Visuais
Uma grande porção do cérebro é dedicada ao processamento e
organização dos estímulos visuais. Devido a isto, os dispositivos visuais e o tipo de
imagem gerada por um sistema de RV influenciam na determinação do nível de
imersão de um sistema de RV (Pimentel, 1995).
Os sistemas de RV podem ser monoscópicos ou estereoscópicos, ou
seja, cada um dos olhos pode visualizar ou não imagens diferentes. No caso de um
sistema monoscópico, a mesma imagem será exibida para os dois olhos: apenas
uma imagem passa pelo processo de rendering e é exibida para os dois olhos. Já no
sistema estereoscópico, cada olho verá uma imagem ligeiramente diferente, sendo
necessário um processo de rendering separado para cada uma das imagens
(Pimentel, 1995).
Um outro fator importante quanto à parte visual da RV refere-se ao
número de quadros por segundo que aparecem no vídeo, ou seja, a velocidade da
simulação. Filmes projetados para o cinema apresentam aproximadamente 24
quadros por segundo, enquanto os projetados para TV apresentam

13
aproximadamente 30 quadros por segundo (Foley (1990) em Apêndice A). Em RV,
busca-se entre 15 e 22 quadros por segundo (Jacobson, 1994).
Existem duas classes de dispositivos visuais, a primeira é composta
pelos videocapacetes (HMDs) e head-coupled displays (dispositivos que utilizam-se
de braços mecânicos para permanecerem diante do usuário), e a segunda é
composta pelos monitores de computador e sistemas de projeção. O que diferencia
estas duas classes é que na primeira existem sensores para os movimentos do
usuário ligados ao dispositivo visual, enquanto que na segunda isso não ocorre e
tudo vai depender dos comandos do usuário via outro dispositivo de entrada
(Pimentel, 1995).
a) Videocapacetes (HMDs)
O videocapacete (HMD) é o dispositivo de saída de dados que mais
isola o usuário do mundo real (Fig. B.6 e Fig. B.8 em Apêndice B). Ele é constituido
basicamente de duas minúsculas telas de TV e um conjunto de lentes especiais. As
lentes ajudam a focalizar imagens que estão a alguns milímetros dos olhos do
usuário, ajudando também a estender o campo de visão do vídeo. O vídeocapacete
funciona também como um dispositivo de entrada de dados porque contém sensores
de rastreamento que medem a posição e orientação da cabeça transmitindo esses
dados para o computador. Conseqüentemente, o computador gera uma sequência
de imagens por quadro, correspondentes às ações e perspectiva do usuário
(Jacobson, 1994).
b) Head-Coupled Display
Este dispositivo basicamente constitui-se de um display montado sobre
um braço mecânico com um contra-peso, fazendo com que o display possua “peso
zero”. Sensores ligados ao braço mecânico mais os controles presentes próximos ao
display permitem movimentos com 6DOF (Pimentel, 1995).

14
O formato do head-coupled display permite uma transição fácil entre a
visualização do mundo virtual e a interação com teclados, monitores e outros
dispositivos que possam estar controlando a simulação. Além disso, o fato deste
dispositivo utilizar sensores de posição mecânicos e não eletromagnéticos diminui o
tempo de latência das imagens (Rheingold, 1991). Devido a essas características e
ao seu preço ser inferior ao dos HMDs, os head-coupled displays são bastante
populares entre a comunidade científica (Fig. B.12 em Apêndice B) (Rheingold,
1991; Pimentel, 1995). A Fig. 3.1 mostra os componentes básicos de um head-
coupled display.
Fig. 3.1 - Esquema com os elementos básicos de um sistema head-coupled display
suspenso.
FONTE: Pimentel (1995) p.166.

15
c) Monitores e Sistemas de Projeção
Dispositivos visuais baseados em monitores e sistemas de projeção
não constumam oferecer um alto nível de imersão. Além disso o usuário precisa
estar constantemente olhando para a tela e utilizar algum dispositivo de entrada para
fazer sua movimentação pelo mundo virtual (Jacobson, 1994).
Mas isso não quer dizer que as imagens não podem ser vistas em
estéreo. Uma técnica básica utiliza óculos polarizadores/obturadores para filtrar as
duplas de imagens geradas pelo computador. Ou seja, o computador exibe
alternadamente as imagens direita e esquerda sincronizadas com óculos que
bloqueiam cada um dos olhos, permitindo que o usuário visualize uma imagem que
“sai” da tela (Fig. B.9 e Fig. B.10 em Apêndice B) (Jacobson, 1994).
Existe ainda a técnica dos filtros coloridos, onde as imagens de cada
olho são exibidas em cores complementares, como vermelho e azul (ou vermelho e
verde). As imagens são observadas por óculos que tem a mesma correspondência
de cores (são os filtros), permitindo a cada olho ver a sua respectiva imagem. No
entanto, estes óculos cansam os olhos após algum tempo de uso, além de só
poderem ser usados com monitores coloridos (Vince, 1995).
Uma vantagem dos óculos na visualização baseada em monitores ou
sistemas de projeção é que eles permitem que várias pessoas participem da
experiência de RV, além do custo ser inferior ao de um HMD (Jacobson, 1994).
Um outro dispositivo utilizado é o chamado “capuz” de visualização:
uma peça plástica anexada à superfície frontal do monitor. Neste sistema o
computador exibe as imagens esquerda e direita ao mesmo tempo e lado a lado no
monitor, sendo que o “capuz” separa e reflete a dupla de imagens de forma que o
usuário só percebe um único objeto flutuando à sua frente (Fig. B.11 em Apêndice
B) (Jacobson, 1994).

16
3.2 Dispositivos Auditivos
Os dois ouvidos captam ondas sonoras provenientes de todas as
direções. O formato de concha do ouvido externo capacita-o para o trabalho de
coletar ondas sonoras e direcioná-las para os vários caminhos através do canal
auditivo. O cérebro então recebe e processa as características deste som para
determinar ou localizar o local exato da fonte sonora. Os sistemas de som 3D
duplicam artificialmente os ativadores naturais que auxiliam o cérebro a localizar o
som, além de recriar eletronicamente esses efeitos em tempo-real (Jacobson, 1994).
Existem diversas placas de som projetadas para trabalhar com
conjuntos de ferramentas que constróem mundos em RV. Algumas dessas placas
permitem trabalhar com diversas fontes de som simultâneas (Schweber, 1995). O
método mais popular para criar e controlar sons é o MIDI (musical instrument digital
interface) (Pimentel, 1995).
3.3 Dispositivos Físicos
Os dispositivos físicos procuram estimular as sensações físicas, como
o tato, tensão muscular e temperatura (Gradecki, 1994). Diferente dos dispositivos
de saída de visão e audição, os dispositivos físicos requerem uma sofisticada
interação eletromecânica com o corpo do usuário. A tecnologia existente atualmente
não é capaz de estimular os sentidos físicos com o nível de realismo que atinge os
sentidos visuais e auditivos: o problema está além da criação de dispositivos de
feedback, pois envolve também a compreensão e simulação das forças apropriadas
(Pimentel, 1995).
a) Feedback tátil
Feedback tátil é o nome dado a sistemas que transmitem sensações
que atuam sobre a pele. O feedback tátil deve fornecer não apenas a sensação do
toque mas também permitir ao usuário perceber se está tocando uma superfície lisa
ou rugosa (Gradecki, 1994). Existem atualmente duas diferentes formas de fazer

17
essa simulação tátil: através de pressão de ar e através de vibrações (Pimentel,
1995).
b) Feedback de força
Sistemas que permitem as sensações de pressão ou peso oferecem
feedback de força. Uma maneira de construção de um sistema de feedback de força
seria através de uma espécie de exoesqueleto mecânico que se encaixa no corpo
do usuário, fazendo com que determinados movimentos possam permitir-lhe sentir o
peso ou a resistência do material de um objeto no mundo virtual (Gradecki, 1994).
Alguns sistemas transmitem feedback de força apenas para as mãos e
braços (Fig. B.13 em Apêndice B). Através do uso de pistões, por exemplo, é
possível controlar a quantidade de resistência do braço e/ou da mão do usuário. No
entanto, este tipo de sistema limita a faixa de possíveis situações de feedback, além
de ser demasiadamente caro (Gradecki, 1994).
c) Feedback térmico
Um tipo de feedback que também pode ser fornecido por um sistema
de RV é o feedback térmico. Este feedback poderia ser fornecido, por exemplo,
quando o usuário se aproximasse de uma fogueira no mundo virtual (Gradecki,
1994).
O feedback térmico não é muito utilizado em sistemas de RV devido ao
seu alto custo, mas já existem algumas pesquisas neste campo sendo
desenvolvidas. Uma dessas pesquisas fez uma empresa do Texas desenvolver um
sistema que aquece parte do corpo através de um pequeno dispositivo que reúne
um aquecedor, um sensor de temperatura e um inversor de calor (Gradecki, 1994).

18
d) Plataformas móveis
As plataformas móveis também são consideradas um dispositivo de
feedback físico, pois fornecem a sensação de movimento. Normalmente são
utilizadas em caros videogames, simuladores de vôo e simuladores de movimento.
Segundo Pimentel (1995) são facilmente controladas pelo computador de um
sistema de RV (Fig. B.5 em Apêndice B).

19
CAPÍTULO 4
DISPOSITIVOS DE ENTRADA DE DADOS
O participante da experiência de RV pode “entrar” no mundo virtual
através dos dispositivos de saída de dados. Os dispositivos de entrada de dados,
por outro lado, permitem a movimentação e interação do usuário com o mundo
virtual. Sem o dispositivo de entrada de dados o usuário participa da experiência em
RV apenas de forma passiva (Pimentel, 1995).
Pimentel (1995) divide estes dispositivos de entrada de dados em duas
categorias: dispositivos de interação e dispositivos de trajetória. Os dispositivos de
interação permitem ao usuário a movimentação e manipulação de objetos no mundo
virtual. Os dispositivos de trajetória, por sua vez, monitoram partes do corpo do
usuário, detectando os movimentos, para criar a sensação de presença no mundo
virtual.
4.1 Dispositivos de Interação
Existem diferentes dispositivos de interação com diferentes finalidades:
é importante escolher o mais adequado para a aplicação de RV em questão. A
escolha do dispositivo de interação mais adequado leva em conta não apenas a
finalidade do sistema, mas também o software utilizado, pois a eficiência do sistema
vai depender da capacidade do software aproveitar as características do dispositivo
(Pimentel, 1995).
Existe uma série de dispositivos de interação disponíveis atualmente,
variando desde luvas de dados até dispositivos chamados de sensores biológicos
(Pimentel, 1995).

20
a) Luvas de dados
Através das luvas de dados o sistema de RV pode reconhecer os
movimentos da mão do usuário que veste a luva (Sturman, 1994).
Para a determinação dos movimentos dos dedos são utilizados na
maioria dos projetos sensores mecânicos ou de fibra ótica. Os sensores de fibra
ótica são utilizados atualmente nas versões mais populares de luvas de dados. Seu
uso consiste em um fio de fibra ótica com junções. Quando a junta é movida o cabo
dobra-se reduzindo a passagem de luz por ele. Essas variações de luz são
resumidas e transmitidas para o computador (Pimentel, 1995). O esquema básico
deste tipo de luva pode ser na Fig. 4.1.
Fig. 4.1 - Esquema de uma luva de dados baseada em fibra ótica.
FONTE: Pimentel (1995) p.183.
O uso de luvas de dados ajuda a aumentar a sensação de presença no
mundo virtual (Pimentel, 1995). Atualmente existem diversos modelos de luvas
disponíveis no mercado de RV (Sturman, 1994), e estão sendo utilizados em
sistemas de diferentes finalidades (Fig. B.4 e Fig. B.14 em Apêndice B) (Pimentel,
1995).

21
b) Dispositivos com 6DOF
Os dispositivos de interação com 6DOF permitem uma movimentação
bastante ampla quando utilizados em sistemas de RV. Apesar de parecidos com
joysticks, esses dispositivos apresentam uma diferença crucial em relação a estes,
pois são capazes de medir a quantidade de força aplicada a eles (Pimentel, 1995).
Os dispositivos chamados isométricos, ou bolas isométricas (ver Fig.
4.2), são bastante fáceis de manipular, costumam constituir-se de uma bola sobre
uma plataforma com botões (normalmente um deles é utilizado para o reset
(reinicialização) do sistema) que são configurados via software (Pimentel, 1995;
Schweber, 1995).
Fig. 4.2 - Esquema de uma bola isométrica.
FONTE: Pimentel (1995) p.188.
Algumas empresas procuram modificar o projeto do mouse padrão
para que este possa funcionar com sensores de trajetória de 6DOF ou 3DOF. Esses
mouses (o plural correto seria mice) passam então a utilizar dispositivos de
rastreamento ultrassônicos ou eletromagnéticos, por exemplo (ver dispositivos de
trajetória em 4.2), passando a funcionar da mesma forma que os bastões e ficando
sua eficiência dependente da qualidade do sistema de rastreamento dos
movimentos (Fig. B.15 em Apêndice B) (Pimentel, 1995).

22
c) Dispositivos com 2DOF
Interagir com um mundo virtual nem sempre requer o uso de um
complicado e/ou caro dispositivo. Muitas tarefas podem ser executadas com simples
dispositivos com 2DOF, como um mouse ou um joystick. Apesar de limitar as
possibilidades de movimento, estes dispositivos reduzem o tempo de latência e são
fáceis de serem utilizados (Pimentel, 1995).
d) Sensores de Entrada Biológicos
Sensores de entrada biológicos processam atividades chamadas de
indiretas, como comando de voz e sinais elétricos musculares (Pimentel, 1995).
Estudos sobre reconhecimento de voz existem há mais de vinte anos, e
em sistemas de RV o reconhecimento de comandos de voz pode facilitar a execução
de tarefas no mundo virtual, principalmente quando as mãos estiverem ocupadas em
outra tarefa e não possam acessar o teclado (Pimentel, 1995).
Já os dispositivos que utilizam sinais elétricos musculares são
utilizados para, através de eletrodos colocados sobre a pele, detectar a atividade
muscular, permitindo ao usuário movimentar-se pelo mundo virtual através do
simples movimento dos olhos, por exemplo (Fig. B.16 em Apêndice B) (Pimentel,
1995).
e) Outros dispositivos de interação
Existe uma série de diferentes dispositivos de interação além dos
citados acima. Muitos são criados a cada ano, enriquecendo a possibilidade de
hardware para RV (Pimentel, 1995).
É claro que entre tantos dispositivos de entrada de dados o teclado não
pode ser esquecido, ele também é capaz de emitir comandos para um sistema de
RV (Pimentel, 1995).

23
4.2 Dispositivos de Trajetória
Muitos dos dispositivos de interação mencionados acima contam com
um dispositivo responsável pela tarefa de detecção ou rastreamento da trajetória,
conhecido como dispositivo de trajetória ou tracking (Pimentel, 1995).
Os dispositivos de trajetória trabalham baseados na diferença de
posição ou orientação em relação a um ponto ou estado de referência. Basicamente
existe uma fonte que emite o sinal (que pode estar localizada no dispositivo de
interação), um sensor que recebe este sinal e uma caixa controladora que processa
o sinal e faz a comunicação com o computador (Pimentel, 1995). Veja a Fig. 4.3.
Fig. 4.3 - Diagrama de bloco de um sistema de detecção de trajetória típico.
FONTE: Pimentel (1995) p.194.
A maioria das aplicações que utilizam detecção de trajetória fazem uso
de pequenos sensores colocados sobre as partes do corpo ou sobre o objeto (se for
o caso), técnica conhecida como tracking ativo. Dispositivos de trajetória de
dispositivos de interação com 6DOF utilizam técnicas eletromagnéticas,
ultrassônicas, mecânicas ou óticas para fazer a medida dos movimentos. Como
alternativa, o tracking passivo utiliza câmeras ou sensores óticos ou de inércia para
“observar” o objeto e determinar sua posição e orientação. Diferente dos dispositivos

24
que utilizam tracking ativo, os dispositivos de tracking passivo utilizam apenas um
sensor para rastrear o objeto (Pimentel, 1995).
Como exemplo, para o desenvolvimento de luvas de dados existem
três tecnologias predominantes no que diz respeito à localização da mão no espaço
e orientação da palma da mão. A primeira baseia-se no uso de câmeras para
monitorar a luva a uma certa distância (tracking passivo), a segunda trabalha com a
radiação de pulsos magnéticos emitidos pela luva (tracking ativo), e a terceira
baseia-se na acústica (tracking ativo), onde dispositivos ultrassônicos transmitem a
posição da mão (Sturman, 1994).

25
CAPÍTULO 5
FERRAMENTAS PARA A CRIAÇÃO DE RV
Para a criação de um mundo virtual interativo é necessário criar um
ambiente e habilitá-lo com objetos e características virtuais. O aplicativo de
Realidade Virtual é uma simulação animada que permite definir e exibir um objeto
3D, alterar seu ponto de referência e campo de visão, manipular e interagir com os
objetos, e fazer com que esses objetos afetem uns aos outros (Jacobson, 1994). O
software de Realidade Virtual permite permear objetos com comportamentos
(propriedades físicas) e programá-los para ativar algum tipo de feedback visual,
auditivo ou tátil quando um evento específico acontece, além de gerenciar toda a
sequência de eventos. A maioria dos sistemas de construção de mundos virtuais
compartilham alguns conceitos básicos que caracterizam o desenvolvimento da
Realidade Virtual e que permitem aos desenvolvedores a criação de uma simulação
bastante realística. Segundo Jacobson (1994), estes conceitos básicos poderiam
ser: o Universo e seus Objetos, técnicas de apresentação e dinâmicas e feedback.
O Universo representa o lugar onde ocorrerá a experiência de RV, o
lugar a ser modelado. Este Universo contém Objetos que são caracterizados por
geometria (formato do objeto), aparência (tamanho, cor, composição, iluminação e
sombreamento aplicados à geometria do objeto) e comportamento (reações do
objeto frente a eventos). Estes Objetos são vinculados entre si por hierarquias, ou
seja, um Objeto complexo do Universo pode incorporar muitos Objetos. Qualquer
objeto é formado por um conjunto de polígonos e suas técnicas de apresentação
envolvem conceitos de computação gráfica. Alguns desses conceitos são:
perspectiva linear (o tamanho do objeto diminui conforme aumenta a distância do
usuário), iluminação (intensidade da luz que incide sobre um objeto), sombreamento
(sombra causada pelo posicionamento de um outro objeto entre a fonte de luz e o
objeto) e sobreposição (objetos encobrindo outros objetos ou partes deles)
(Jacobson, 1994; Foley, 1990 em Apêndice A).

26
Além de compartilharem os conceitos acima citados, os softwares para
criação de RV também costumam oferecer recursos para determinados tipos de
dispositivos de interação, permitindo programá-los para ativar algum tipo de
feedback visual, auditivo ou tátil (Jacobson, 1994).
A maioria dos softwares para criação de aplicativos de RV permite a
importação e exportação de geometrias tridimensionais, ou seja, é possível utilizar
um programa de modelagem 3D para a criação dos objetos e cenários do mundo
virtual e importá-los para o software que cria a RV. A modelagem normalmente
baseia-se em primitivas chamadas polígonos, sendo que um objeto do mundo virtual
é composto de vários polígonos combinados. Então, os programas de modelagem
3D irão combinar modelagem (criação dos objetos), representação visual (aplicação
de propriedades aos objetos, como textura e iluminação) e animação (movimentação
dos objetos na cena), tornando a apresentação das cenas e dos objetos o mais
próximo do real possível (Jacobson, 1994).
Os objetos do mundo virtual costumam “nascer” de um modelo
wireframe (modelo com contorno básico - contém todas as linhas do objeto)
transparente. Esse modelo passa por um processo que faz a remoção das linhas
que devem ficar ocultas. A partir daí a representação visual manuseia a superfície
do objeto criando efeitos realísticos com a atribuição de cores, iluminação,
sombreamento e textura. O toque final fica por conta da animação, onde os objetos
e luzes serão movimentados conforme os comandos ou movimentos do usuário
alterando as cenas seguintes a serem apresentadas. A animação é feita em tempo
real a uma taxa que faz com que tudo pareça se deslocar com perfeição, numa
média de 15 a 22 quadros por segundo (Jacobson, 1994).
Atualmente, existem diversos softwares para o desenvolvimento da RV,
alguns permitem apenas a criação de RV exploratória onde o participante não pode
alterar nem interagir com o cenário e seus componentes; outros permitem a criação
de sofisticadas cenas com recursos de interação através de dispositivos compatíveis
(Jacobson, 1994). A seguir, vamos examinar rapidamente alguns desses softwares
para criação de aplicativos de RV.

27
a) Cyberspace Development Kit
O Cyberspace Development Kit da Autodesk é um software bastante
potente. É um conjunto de bibliotecas para programadores C++ que permite
interface com os dispositivos mais comuns de RV e geração de imagens em estéreo.
Além de poder ser utilizado em diferentes plataformas, ainda reconhece arquivos
com extensão DXF (modelados em CAD) (Pimentel, 1995; Isdale, 1993).
b) REND386
Este software foi desenvolvido por Dave Stampe e Bernie Roehl na
Universidade de Waterloo no Canadá. É uma ferramenta para programadores, pois
exige conhecimentos da linguagem C e de geometria tridimensional. Na verdade o
REND386 é um conjunto de bibliotecas para C que oferece suporte para imagens
estéreo, óculos estereoscópicos (com obturadores) e PowerGlove (um tipo de luva
de dados), além dos dispositivos convencionais (monitor, mouse e teclado). Com o
REND386 é possível desenvolver mundos, difinir superfícies e atribuir cores.
Programado para ser veloz, sua característica de animação permite a sensação
virtual de tempo real. É distribuído gratuitamente via FTP pela universidade de
Waterloo (Isdale, 1993) e atualmente é uma importante ferramenta para o
desenvolvimento de RV (Jacobson, 1994).
c) Virtual Reality Studio
Desenvolvido por uma empresa européia de jogos interativos, o Virtual
Reality Studio permite modelar e visualizar paisagens 3D e interagir com objetos 3D
animados nos cenários. Este software permite o uso de placas de som para
produção de som interativo e seu preço é diretamente proporcional à resolução de
suas imagens: baixo (Jacobson, 1994).

28
d) VREAM
A VREAM, Inc. desenvolvedora do VREAM (Virtual Dream) foi a
primeira empresa de software de RV que não exigiu habilidades de programação
para construir um mundo virtual. O VREAM possui uma boa interface gráfica com o
usuário e a capacidade de criar, mudar e apagar objetos, além de suportar som
interativo e imagens em estéreo. O VREAM permite também não só criar mas
também visitar e interagir com mundos vituais em tempo real, usando um mouse ou
joystick, bem como dispositivos de entrada e saída de dados mais exóticos. Com
ele, é possível “caminhar” ou “voar” para qualquer ponto do espaço criado, além dos
objetos deste espaço poderem possuir propriedades elásticas e de gravidade
embutidas (Jacobson, 1994).
e) WalkThrough
Projetado pela Virtus Corporation, o WalkThrough é um programa de
modelagem e visualização 3D. Apesar de não suportar imagens em estéreo nem
som interativo, o WalkThrough é considerado RV pelo fato de permitir que através
dos dispositivos de entrada e saída convencionais (monitor, teclado e mouse) possa-
se caminhar pela cena criada. Seu principal objetivo é auxiliar no desenvolvimento
conceitual de estruturas e construções civis (Jacobson, 1994).
f) WorldToolKit para Windows
A Sense8 foi fundada por uma dupla de hackers americanos que
pretendia fornecer aos seus companheiros programadores ferramentas de RV de
tempo real, independentes de plataforma (máquina utilizada). Surgiu então o
WorldToolKit para Windows, um software bastante potente que oferece vídeo em
tempo real, suporte para som interativo e exige sólidos conhecimentos de
programação. Basicamente, o pacote é uma vasta biblioteca em C com funções que
simplificam o processo de criação de simulações 3D interativas em tempo real
(Jacobson, 1994).

29
CAPÍTULO 6
APLICAÇÕES
Através da RV a forma de interação homem-máquina mudou. Com a
evolução do hardware e software, o uso de recursos de RV deixou de ser algo
dispendioso, e hoje em dia proporciona à empresas de todos os setores uma forma
mais eficiente de agilizar e/ou enriquecer seus projetos (Gradecki, 1994).
Aplicações de RV em simuladores de vôo são utilizadas há mais de
duas décadas e mostram diversas (e diferentes) vantagens em relação ao modelo
“não virtual” tradicional. Aplicações nas áreas de engenharia, entretenimento,
ciências e treinamento, como subdivide Vince (1995), também são cada vez mais
comuns.
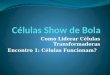
a) O Boeing 777 (Vince, 1995 p.338-340)
Um importante projeto de simulador de vôo que foi desenvolvido
recentemente é o do Boeing 777. Através deste simulador, um piloto familiarizado
com um outro avião pode facilmente aprender a pilotar o Boeing 777. O projeto
incorpora o uso de plataforma móvel com 6DOF, controles de vôo com feedback tátil
e sistema de som 3D (Fig. B.16 em Apêndice B).
Neste projeto, o mundo virtual foi modelado para permitir que o piloto
treine em aeroportos famosos. As imagens aparecem sobre uma grande tela curva
sobre a cabine, e são refletidas para o piloto através de espelhos oferecendo uma
visão bastante ampla e semelhante à de uma cabine real de avião (observe a Fig.
6.1). A interação piloto-sistema é feita de forma bastante precisa, uma vez que os
objetos modelados no mundo virtual possuem propriedades e reagem de acordo
com os comandos do piloto. As imagens são bastante realísticas e possuem
inclusive objetos animados ilustrativos (como o tráfego de carrinhos de bagagem
pela pista do aeroporto). Os dispositivos auditivos transmitem informações durante
determinados períodos do vôo, como condições climáticas, direção do vento, etc.

30
O custo de um sistema como este é extremamente alto tornando
projetos deste tipo viáveis apenas para empresas que necessitem de elevada
garantia de segurança.
Fig. 6.1 - Visão recortada do simulador de vôo do Boeing 777 mostrando o sistema
de display sobre a cabine e o espelho esférico que envolve a cabine
refletindo a imagem exibida para o piloto.
FONTE: Vince (1995), p. 340.
b) Terapias Virtuais
O tratamento de fobias como medo de altura ou profundidade tem sido
auxiliado por aplicações de RV. Aplicações desse tipo procuram envolver o usuário
no mundo virtual através do uso de HMDs (Hodges, 1995). O mundo virtual consiste
de lugares altos, como pontes e outros panoramas que despertem a fobia do
usuário. Um dispositivo de entrada de dados irá permitir que o usuário passeie pelo
ambiente, tendo diferentes ângulos de visão (Mahoney, 1994).

31
A terapia virtual consiste basicamente de sessões onde o paciente
utiliza um HMD e imerge num mundo virtual onde situações são simuladas. No caso
do medo de alturas, essa situação simulada pode ser um elevador sem paredes,
sem chão e sem teto visíveis. O elevador sobe gradativamente a cada sessão de
terapia (Hodges, 1995). Durante a sessão o médico monitora os batimentos
cardíacos e pressão arterial do paciente (Mahoney, 1994).
As aplicações de terapia virtual mostram elevadas taxas de
recuperação dos pacientes, sendo que o desconforto (medo) sentido pelos pacientes
nas sessões iniciais praticamente desaparece nas últimas sessões. As alterações de
batimentos cardíacos e pressão arterial tornam-se menos acentuadas para uma
mesma situação no decorrer das sessões (Mahoney, 1994).

32
CAPÍTULO 7
CONSIDERAÇÕES FINAIS
As aplicações de RV evoluíram bastante em relação às primeiras dos
anos 50. A evolução dos dispositivos de entrada e saída de dados dos últimos anos,
aliada à grande evolução dos computadores digitais colaborou para a criação de
aplicações de RV mais robustas e dirigidas para diversas áreas.
Apesar da grande evolução do hardware, sistemas de RV que fazem
uso de dispositivos de visualização estereoscópios e mundos virtuais com imagens
complexas mostram um intervalo de tempo significativo entre a ação do usuário e a
resposta do sistema a esta. Já existem sistemas de RV que utilizam processadores
separados para o rendering das imagens referentes a cada olho com o objetivo de
diminuir este intervalo de tempo (Pimentel, 1995).
Características como estereoscopia, interatividade, uso de dispositivos
de feedback, uso de HMD, etc. influenciam no nível de imersão do usuário do
sistema de RV. Essas características também encarecem o sistema e portanto
exigem uma análise de custo-benefício.

33
GLOSSÁRIO
binaural Refere-se à utilização de dois ouvidos; uma gravação binaural é uma
gravação estéreo realizada com dois microfones posicionados de maneira a
emular a sensibilidade e espaçamento dos dois ouvidos humanos [Jacobson
(1994)].
CRT Tubo de Raios Catódicos. Tubo em vidro cuja parte revestida de fósforo é a
tela do terminal de vídeo. As imagens são produzidas através de elétrons
provenientes de um canhão eletrônico [Tori (1987)].
feedback Mudança como resposta à manipulação de um dispositivo de entrada de
dados. Dispositivos de saída que oferecem feedback transmitem pressão,
força ou vibração para fornecer ao participante da RV a sensação do tato. O
feedback tátil simula a sensação ligada à pele. O feedback de força simula
peso ou resistência ao movimento [Jacobson (1994)].
hacker Pessoa que escreve software ou faz experiências com as engrenagens
internas de um sistema de computador [Jacobson (1994)].
HMD (head-mounted display) Óculos ou capacetes com pequenos monitores que
emitem imagens, posicionando cada monitor diante de cada olho do usuário
[Pimentel (1995)].
joystick Dispositivo de entrada de dados capaz de realizar movimentos em duas
dimensões: para frente, para trás e para os lados.
LCD Display de cristal líquido. O cristal líquido é fixado entre dois pedaços de vidro
e polarizadores, sendo ativado por uma fonte externa. A corrente elétrica
alterna o cristal entre transparente e opaco [Jacobson (1994)].
MIDI Musical Instrument Digital Interface. Uma linguagem simples de computador
que permite que instrumentos de música digital, como sintetizadores,
comuniquem-se com computadores e entre si [Jacobson (1994)].

34
mundo virtual Mundo digital. “Mundo” criado a partir de técnicas de computação
gráfica. Através de dispositivos de saída de dados que estimulam os
sentidos do participante, este mundo transforma-se num ambiente de RV
[Vince (1995)].
tempo de latência Intervalo de tempo entre um movimento executado pelo usuário
e o resultado deste movimento [Pimentel (1995)].
tempo real Pouco ou nenhum atraso no tempo de resposta, dando a impressão de
resposta instantânea [Jacobson (1994)].
rendering Processo de criação de imagens a partir de modelos [Foley (1990)].
Utiliza técnicas de computação gráfica para o cálculo e desenho dessas
imagens [Pimentel (1995)].

35
REFERENCIAS BIBLIOGRÁFICAS
Adams, L. Windows visualization programming with C/C++. New York, McGraw-Hill, 1994.
Virtual reality. Computer Graphics World, s.d. Reprinted from a series of articlesfrom Computer Graphics World. PennWell Publishing Company.
Gibson, W. Neuromancer. New York, ACE Books, 1984.
Gradecki, J. Kit de montagem da realidade virtual. São Paulo, Berkeley, 1994.
Hodges, L.F. et al. Virtual environments for treating the fear of heights. IEEEComputer, (7):27-34, July 1995.
Isdale, J. What is virtual reality? A homebrew introduction and informationresource list (Isdale Engineering). s.l. Version 2.1, 1993. Obtido pela Internet viaftp em sunee.uwaterloo.ca .
Jacobson, L. Realidade virtual em casa. Rio de Janeiro, Berkeley, 1994.
Latta, J.N.; Oberg, D.J. A conceptual virtual reality model. IEEE Computer Graphics&Applications, 14(1): 23-29, Jan. 1994.
Machover, C.; Tice, S.E. Virtual reality. IEEE Computer Graphics &Applications,14(1):15-16, Jan. 1994.
Mahoney, D.P. High expectations for virtual therapy. Computer Graphics World,(9):14-16, Sep. 1994.
Pimentel, K.; Teixeira, K. Virtual reality - through the new looking glass. 2.ed.New York, McGraw-Hill, 1995.
Rheingold, H. Virtual reality. New York, Touchstone, 1991.
Schweber, L; Schweber, E. Realidade virtual. PC Magazine Brasil 5(6):50-72, Jun.1995.
Sturman, D.J.; Zeltzer, D. A survey of glove-based input. IEEE Computer Graphics&Applications, 14(1):30-39, Jan. 1994.
Vince, J. Virtual reality systems. Cambridge, Addison-Wesley, 1995.
Woolley, B. Virtual worlds. Oxford, BlackWell, 1992.

36
APÊNDICE A
BIBLIOGRAFIA COMPLEMENTAR
Bolas, M. Human factors in the design of an immersive display. IEEE Computer
Graphics &Applications, 14(1): 55-59, Jan. 1994.
Cruz-Neira, C. Virtual reality overview. Electronic Visualization Laboratory -
University of Illinois. Chicago, s.d.
Foley, J.D. et al. Computer graphics, principles and practice. 2.ed. New York,
Addison Wesley, 1990.
King, D. Heads up. Computer Graphics World, (11): 41-46, Nov. 1993.
Tori, R. et al. Fundamentos de computação gráfica. Compugrafia. Rio de Janeiro,
Livros Técnicos e Científicos Editora, 1987.
Kalawsky, R.S. The science of virtual reality and virtual environments. New York,
Addison Wesley, 1993.

37
APÊNDICE B
FIGURAS
Fig. B.1 - Foto promocional de um protótipo do Sensorama.
FONTE: Pimentel (1994), p.39.

38
Fig. B.2 - Piloto usando o capacete do projeto “Super Cockpit” de Tom Furness.
FONTE: Pimentel (1995), p.54.
Fig. B.3 - Visão do usuário do “Super Cockpit”.
FONTE: Pimentel (1995), p.55.

39

1
Fig. B.4 - A luva de dados DataGlove
desenvolvida pela VPL com
sensores de fibra ótica.
FONTE: Sturman (1994),
p.33.
Fig. B.5 - Simulador Sega R360 para
entretenimento com rotação de
360 graus.
FONTE: Virtual (s.d.) contra-
capa.
Fig. B.6 - HMD desenvolvido na primeira
geração de HMDs da NASA.
FONTE: Kalawski (1993), plate 2.

1
Fig. B.7 - Sistema de RV de Projeção com câmeras de vídeo capturando os
movimentos dos participantes e combinando essas imagens com o mundo
gerado pelo computador.
FONTE: Pimentel (1995) p.13.
Fig. B.8 - HMD sendo utilizado para
imersão no mundo virtual.
Sensores captam os
movimentos da cabeça do
usuário permitindo que o
computador gere a imagem
apropriada.
FONTE: Pimentel (1995) p.15.

1
Fig. B.9 - Óculos obturadores da
StereoGraphics Corp.
FONTE: Schweber (1995)
p.64).
Fig. B.10 - Anúncio dos óculos CrystalEyes da StereoGraphics Corp. mostrando um
sistema de RV de Mesa baseado no uso de óculos obturadores.
FONTE: Anúncio publicitário.

2
Fig. B.11 - Capuz de visualização Cyberhood da Simsalabim preso a um monitor
convencional.
FONTE: King (1993) p.43 em Apêndice A.
Fig. B.12 O sistema de display estereoscópico BOOM utilizado com uma
workstation de alta resolução. Montado sobre um braço articulado com
contra-peso, o display permite movimentos com 6DOF.
FONTE: Bolas (1994) p.57 em Apêndice A.

3
Fig. B.13 - Exemplo de sistema de feedback de força para mão e braço. O usuário
pode “sentir” o peso e o cabo do martelo, enquanto um braço mecânico
executa a mesma ação com o martelo real.
FONTE: Pimentel (1995) C-4.
Fig. B.14 - Luva de dados desenvolvida em 1976 na Universidade de Illinois
baseada no uso de tubos flexíveis e fotocélulas.
FONTE: Sturman (1994) p.32.

4
Fig. B.15 - Dispositivo de trajetória ultrassônico
utilizado com um mouse para permitir
movimentos de 6DOF.
FONTE: Pimentel (1995) p.105.
Fig. B.16 - Sensor biológico que através de eletrodos colocados nos óculos captam a
movimentação ocular do usuário pela atividade elétrica muscular dos
olhos. FONTE: Pimentel (1994) p.190.

5
Fig. B.17 - O simulador de vôo do Boeing 777 considerado a mais sofisticada
aplicação de RV. O simulador possui plataforma móvel com 6DOF, sistema
de som 3D e controles com feedback de força dentre outros recursos.
FONTE: Vince (1995) plate1.