Embed Size (px)
Citation preview

Controlador Universal de Trânsito de Energia com Conversor Matricial Esparso
João Filipe Gaspar Ferreira
Dissertação para obtenção do grau de mestre em
Engenharia Electrotécnica e de Computadores
Júri
Presidente: Prof. Doutor Gil Domingos Marques
Orientador: Prof. Doutora Sónia Maria Nunes dos Santos Paulo Ferreira Pinto
Vogais: Prof. Doutor José Fernando Alves da Silva
Setembro de 2007

1
Agradecimentos
O meu mais sincero agradecimento à Professora Doutora Sónia Pinto, não só pela orientação
deste trabalho, como pela confiança em mim depositada para a sua concretização e pelo entusiasmo
e disponibilidade que sempre me dispensou.
De maneira especial, quero também agradecer à Ana pelo incentivo, apoio e amizade
demonstrados ao longo deste trabalho.
Aos meus pais agradeço todo o apoio e paciência que me permitiram abraçar esta tese de
forma mais exigente e dedicada.
A todos, os meus mais profundos agradecimentos, nunca esquecendo que a ajuda por vós
prestada foi imprescindível para alcançar o sucesso neste trabalho.

2
Resumo
Neste trabalho é realizado um estudo do Conversor Matricial Esparso, comprovando-se
posteriormente a sua utilização para controlo das potências activa e reactiva, na realização de um
Controlador Universal do Trânsito de Energia (UPFC). O Conversor Matricial Esparso permite uma
funcionalidade idêntica ao Conversor Matricial Clássico, utilizando menos três semicondutores que
este último. O controlo do conversor é realizado recorrendo ao método de controlo por modo de
deslizamento, associado à representação dos vectores espaciais dos estados do sistema, garantindo
um controlo robusto com tempos de resposta reduzidos. Os resultados das simulações são
apresentados e discutidos.
Palavras-chave: Conversor Matricial Clássico; Conversor Matricial Indirecto; Conversor
Matricial Esparso; Controlo por Modo de Deslizamento; Controlador Universal de Trânsito de Energia.

3
Abstract
Sparse Matrix Converters are presented, and their use on active and reactive power controllers
as Unified Power Flow Controllers (UPFC) is exploited. Sparse Matrix Converters allow functionality
identical to the Conventional Matrix Converters; however they need less three IGBTs. In this paper
their control is guaranteed using the Sliding Mode Control Method, associated to the state-space
vectors representation. As a result robustness and fast response times are assured. Simulation results
are presented and discussed.
Keywords: Conventional Matrix Converter; Indirect Matrix Converter; Sparse Matrix Converter;
Sliding Mode Control; Unified Power Flow Controller.

4
ÍNDICE
1. INTRODUÇÃO ............................................................................................................................... 10 2. CONVERSORES MATRICIAIS ...................................................................................................... 13
2.1. Conversor Matricial Clássico ................................................................................................... 13 2.1.1. Modelo do Conversor Matricial Clássico ideal .................................................................. 13 2.1.2. Determinação dos vectores espaciais do Conversor Matricial Clássico ........................... 16
2.2. Conversor Matricial Indirecto ................................................................................................... 18 2.2.1. Modelo do Rectificador ideal ............................................................................................ 19 2.2.2. Modelo do Inversor ideal .................................................................................................. 21 2.2.3. Modelo do Conversor Matricial Indirecto ideal .................................................................. 24 2.2.4. Topologia do Conversor Matricial Indirecto ...................................................................... 28
2.3. Conversor Matricial Esparso.................................................................................................... 28 2.3.1. Topologia do Conversor Matricial Esparso ....................................................................... 29 2.3.2. Obtenção dos vectores espaciais das tensões simples de saída do Conversor Matricial Esparso...................................................................................................................................... 32
2.4. Filtro de Ligação à Rede Eléctrica ........................................................................................... 32 3. CONTROLO DO CONVERSOR MATRICIAL ESPARSO .............................................................. 34
3.1. Controlo das Correntes de Saída ............................................................................................ 34 3.2. Controlo do Factor de Potência de Entrada............................................................................. 38
4. SISTEMA DE CONTROLO DO TRÂNSITO DE ENERGIA ............................................................ 44 5. SIMULAÇÕES EM MATLAB/SIMULINK ....................................................................................... 48
5.1. Simulação do Conversor Matricial Esparso ............................................................................. 48 5.2. Simulação do UPFC com Conversor Matricial Esparso........................................................... 54
5.2.1. Introdução ........................................................................................................................ 54 5.2.2. Resultados de simulação ................................................................................................. 56
6. CONCLUSÃO................................................................................................................................. 60 BIBLIOGRAFIA.................................................................................................................................. 61 A. LOCALIZAÇÃO DOS VECTORES DE TENSÃO SIMPLES DE SAÍDA........................................ 63 B. LOCALIZAÇÃO DOS VECTORES DE CORRENTE DE ENTRADA. ............................................ 65 C. LOCALIZAÇÃO DOS EIXOS dq REFERENTES À ZONA I1 DE CORRENTE.............................. 67 D. COMBINAÇÕES DOS ESTADOS DO RECTIFICADOR E DO INVERSOR.................................. 68 E. SIMULAÇÃO DO CONVERSOR MATRICIAL ESPARSO............................................................. 69
E.1. Solução 1 ................................................................................................................................ 69 E.1.1. Bloco Rede ...................................................................................................................... 70 E.1.2. Bloco Filtro....................................................................................................................... 71 E.1.3. Bloco Carga ..................................................................................................................... 73 E.1.4. Bloco Conversor Matricial Esparso .................................................................................. 75 E.1.4.1. Bloco Rectificador ......................................................................................................... 76 E.1.4.2. Bloco Inversor ............................................................................................................... 77 E.1.5. Bloco Controlo ................................................................................................................. 78 E.1.5.1. Bloco Detector de Zona de Tensão............................................................................... 79 E.1.5.2. Bloco Detector de Zona de Corrente............................................................................. 80 E.1.5.3. Bloco Transformada de Concordia de Correntes .......................................................... 81 E.1.5.4. Bloco Transformada de Blondel-Park............................................................................ 82 E.1.5.5. Bloco Determinação do Erro das Correntes de Saída................................................... 83 E.1.5.6. Bloco Determinação do Erro das Correntes de Entrada................................................ 84 E.1.5.7. Bloco Gerador das Correntes de Referência ................................................................ 84 E.1.5.8. Bloco Tabela de Estados .............................................................................................. 85
E.2. Solução 2 ............................................................................................................................... 86 E.2.1. Bloco Rede ...................................................................................................................... 87 E.2.2. Bloco Carga ..................................................................................................................... 87 E.1.3. Bloco Conversor Matricial Esparso .................................................................................. 88
E.3. Solução 3 ............................................................................................................................... 89 E.3.1. Bloco Filtro....................................................................................................................... 90

5
E.3.2. Bloco Conversor Matricial Esparso .................................................................................. 90 F. SIMULAÇÃO DO UPFC ................................................................................................................. 92

6
LISTA DE FIGURAS
Figura 1.1 – Topologias de conversão matricial existentes. ............................................................... 12 Figura 2.1 – Esquema do Conversor Matricial Clássico (CMC). ........................................................ 13 Figura 2.2 – Interruptor Bidireccional Sij. ............................................................................................ 14 Figura 2.3 – Esquema do Conversor Matricial Indirecto..................................................................... 19 Figura 2.4 – Representação espacial no plano αβ dos vectores correspondentes às correntes de entrada do Rectificador: a) iDC > 0; b) iDC < 0. ...................................................................................... 21 Figura 2.5 – Representação espacial no plano α e β dos vectores correspondentes às tensões compostas de saída do Inversor: a) vDC > 0; b) vDC < 0. ...................................................................... 24 Figura 2.6 – Topologia do Conversor Matricial Indirecto (IMC). ......................................................... 28 Figura 2.7 – Circulação da corrente ia com polaridade positiva num dos braços do rectificador do IMC, considerando que a corrente iDC pode ser positiva ou negativa: a) ia = iDC ; b) ia = -iDC........................ 29 Figura 2.8 – Circulação da corrente ia com polaridade negativa num dos braços do rectificador do IMC: a) ia = iDC ; b) ia = -iDC .................................................................................................................. 30 Figura 2.9 – Circulação da corrente ia com polaridade positiva num dos braços do rectificador do SMC: a) ia = iDC ; b) ia = -iDC ................................................................................................................. 30 Figura 2.10 – Circulação da corrente ia com polaridade negativa num dos braços do rectificador do SMC: a) ia = iDC ; b) ia = -iDC ................................................................................................................. 31 Figura 2.11 – Topologia do Conversor Matricial Esparso (SMC). ...................................................... 31 Figura 2.12 – Esquema do filtro de entrada do Conversor Matricial Esparso..................................... 32 Figura 3.1 – Representação temporal e respectiva divisão por zonas das tensões compostas de entrada. .............................................................................................................................................. 36 Figura 3.2 – Representação espacial dos vectores correspondentes da tensão simples de saída referentes às zonas 1 e 12 das tensões compostas de entrada. ........................................................ 36 Figura 3.3 – Representação temporal e respectiva divisão por zonas das correntes de saída. ......... 40 Figura 3.4 – Representação espacial dos vectores da corrente de entrada referentes às zonas 1 e 12 das correntes de saída e possíveis localizações dos eixos d e q para a zona V1 de tensão............... 41 Figura 4.1 – Esquema de implementação do UPFC com uma associação de dois conversores. ...... 44 Figura 4.2 – Princípio de compensação do trânsito de energia numa linha de transmissão. ............. 45 Figura 4.3 – Diagrama vectorial representativo das tensões das tensões do circuito eléctrico equivalente do sistema de controlo do trânsito de energia. ................................................................ 46 Figura 4.4 – Esquema de implementação do UPFC com um Conversor Matricial Esparso. .............. 47 Figura 5.1 – Esquema do sistema a implementar constituída pela Rede, Conversor Matricial Esparso, Carga, e respectivo controlo. .............................................................................................................. 48 Figura 5.2 – Correntes de referência à saída do conversor. .............................................................. 49 Figura 5.3 – Correntes à saída do conversor: a) Solução 1; b) Solução 2; c) Solução 3.................... 50 Figura 5.4 – Tensão no andar intermédio “DC” do conversor: a) Solução 1; b) Solução 2; c) Solução 3. ........................................................................................................................................................ 51 Figura 5.5 – Tensão e corrente na fase “a” de entrada: a) Modo 1; b) Modo 2; c) Modo 3. ............... 53 Figura 5.6 – Esquema do sistema a implementar na realização do UPFC com um Conversor Matricial Esparso. ............................................................................................................................................. 54 Figura 5.7 – Potências de referência na linha eléctrica: a) Potência activa; b) Potência reactiva. ..... 56 Figura 5.8 – Correntes de referência na linha, geradas para controlo do trânsito de potências. ........ 57 Figura 5.9 – Correntes impostas na linha para o controlo do trânsito de potências. .......................... 57 Figura 5.10 – a) Tensão e corrente na fase “a” à entrada do filtro do conversor; b) Tensão no andar intermédio “DC” do conversor. ............................................................................................................ 58 Figura 5.11 – Potências na linha eléctrica: a) Activa; b) Reactiva...................................................... 59 Figura E.1 – Dados Utilizados nas Simulações do Conversor Matricial Esparso. .............................. 69 Figura E.2 – Modelo da Simulação do Conversor Matricial Esparso Referentes à Solução 1............ 70 Figura E.3 – Modelo do bloco Rede................................................................................................... 71 Figura E.4 – Modelo do bloco Filtro. .................................................................................................. 72 Figura E.5 – Carga associada à saída do conversor.......................................................................... 73 Figura E.6 – Modelo do bloco Carga.................................................................................................. 74 Figura E.7 – Modelo do bloco Conversor Matricial Esparso............................................................... 75

7
Figura E.8 – Modelo do bloco Rectificador......................................................................................... 76 Figura E.9 – Modelo do bloco Inversor. ............................................................................................. 77 Figura E.10 – Modelo do bloco Controlo. ........................................................................................... 78 Figura E.11 – Modelo do bloco Detector de Zona de Tensão. ........................................................... 79 Figura E.12 – Modelo do bloco Controlo. ........................................................................................... 80 Figura E.13 – Modelo do bloco Transformada de Concordia de Correntes........................................ 81 Figura E.14 – Modelo do bloco Transformada de Blondel-Park. ........................................................ 82 Figura E.15 – Modelo do bloco Determinação do erro das correntes de saída. ................................. 83 Figura E.16 – Modelo do bloco Determinação do Erro das Correntes de Entrada. ............................ 84 Figura E.17 – Modelo do bloco Gerador das Correntes de Referência. ............................................. 84 Figura E.18 – Modelo do bloco Controlador dos interruptores. .......................................................... 85 Figura E.19 – Modelo da Simulação do Conversor Matricial Esparso Referente à Solução 2. .......... 86 Figura E.20 – Modelo do bloco Rede................................................................................................. 87 Figura E.21 – Modelo do bloco Carga................................................................................................ 88 Figura E.22 – Modelo do bloco Conversor Matricial Esparso............................................................. 88 Figura E.23 – Modelo da Simulação do Conversor Matricial Esparso Referente à Solução 3. .......... 89 Figura E.24 – Modelo do bloco Filtro. ................................................................................................ 90 Figura E.25 – Modelo do blco Conversor Matricial Esparso............................................................... 91 Figura F.1 – Dados utilizados nas simulações do UPFC. .................................................................. 92 Figura F.2 – Modelo de simulação do UPFC. .................................................................................... 93 Figura F.3 – Modelo do bloco Gerador das Correntes de Referência. ............................................... 94

8
LISTA DE TABELAS
Tabela 2.1 – Combinações de estados dos interruptores e relações entre entradas e saídas do Conversor Matricial Clássico. ............................................................................................................. 16 Tabela 2.2 – Vectores de estado das tensões compostas de saída e das correntes de entrada do Conversor Matricial Clássico. ............................................................................................................. 18 Tabela 2.3 – Combinações de estados dos interruptores e relações entre entradas e saídas do Rectificador......................................................................................................................................... 20 Tabela 2.4 – Combinações de estados dos interruptores e relações entre entradas e saídas do Inversor............................................................................................................................................... 23 Tabela 2.5 – Combinações de estados dos interruptores e relações entre entradas e saídas do Conversor Matricial Indirecto .............................................................................................................. 26 Tabela 2.6 – Vectores de estados do Conversor Matricial Indirecto. .................................................. 27 Tabela 2.7 – Vectores de estado das tensões simples de saída do Conversor Matricial Esparso...... 33 Tabela 3.1 – Vectores seleccionados para as várias zonas de tensão, consoante os resultados das funções de comutação........................................................................................................................ 37 Tabela 3.2 – Estados a aplicar consoante os resultados das funções de comutação, para as várias zonas de tensão. ................................................................................................................................ 38 Tabela 3.3 – Combinações de estados entre rectificador e inversor, a aplicar consoante os resultados das funções de comutação, para as várias zonas de tensão.............................................................. 38 Tabela 3.4 – Vectores a aplicar no controlo das correntes de saída e do factor de potência à entrada do Conversor Matricial Esparso, consoante as zonas de tensão e corrente....................................... 42 Tabela 3.5 – Estados a aplicar no controlo das correntes de saída e do factor de potência à entrada, do Conversor Matricial Esparso, consoante as zonas de tensão e corrente em causa....................... 43 Tabela D.1 – Estados do Rectificador e Inversor a aplicar no controlo das correntes de saída e do factor de potência à entrada, do Conversor Matricial Esparso, consoante as zonas de tensão e corrente em causa. ............................................................................................................................. 68

9
LISTA DE ABREVIAÇÕES
UPFC Controlador Universal de Trânsito de Energia CMC Conversor Matricial Clássico IMC Conversor Matricial Indirecto SMC Conversor Matricial Esparso VSMC Conversor Matricial Muito Esparso USMC Conversor Matricial Ultra Esparso IGBT Insulated Gate Bipolar Transistor

10
1. INTRODUÇÃO
A liberalização do sector energético e a generalização da geração descentralizada têm
colocado crescentes dificuldades ao transporte de energia eléctrica. Problemas como a regulação de
tensão e o carregamento de linhas paralelas de diferentes impedâncias, motivaram estudos, na
tentativa de se descobrirem novas técnicas que proporcionem o controlo rápido e eficaz do trânsito de
energia em linhas de transmissão (Watanabe, Aredes, 1998).
Com o objectivo de resolver estes problemas, Lazlo Gyugyi, no início dos anos 90, propôs um
compensador versátil, utilizando conversores electrónicos de potência, capaz de controlar o trânsito
de energia, actuando de forma rápida e dinâmica sobre determinados parâmetros da rede eléctrica,
tais como a tensão e o ângulo de fase (Gyugyi, 1992). Este compensador, conhecido por UPFC
(Unified Power Flow Controller ou Controlador Universal de Trânsito de Energia), é constituído pela
associação de dois conversores electrónicos comutados, realizando a conversão AC/DC – DC/AC,
sendo estes ligados pelo andar intermédio “DC” através de um banco de condensadores. No entanto,
a existência deste banco de condensadores dá origem a perdas adicionais, aumento de peso, custo e
volume do conversor e limita também o seu tempo de vida útil. Por esse motivo, nas últimas décadas
surgiu um crescente interesse num novo tipo de conversores, que permita a realização da conversão
AC/AC, praticamente sem recorrer a componentes armazenadores de energia.
Em 1976 Lazlo Gyugyi e Brian Pelly deram a conhecer um novo tipo conversor AC/AC,
habitualmente designado por Cicloconversor (Gyugyi, Pelly, 1976). Uma das suas principais
vantagens era a não utilização de qualquer malha intermédia de componentes armazenadores de
energia reactiva, realizando a conversão directa AC/AC.
Posteriormente, Alesina e Venturini, apresentaram uma primeira estratégia de modulação por
largura de impulso (Pulse With Modulation – PWM), realizada com comutação a alta frequência
(Alesina, Venturini, 1981). O conversor AC/AC utilizado, designado Conversor Matricial, passou a ser
construído recorrendo a semicondutores comandados à condução e ao corte, permitindo a obtenção
de reduzidos conteúdos harmónicos nas variáveis de entrada e de saída (Alesina, Venturini, 1981).
Inicialmente, a estratégia de modulação proposta por Alesina e Venturini não permitia obter
ganhos da relação entrada saída superiores a 0,5 (Alesina, Venturini, 1981). Posteriormente, os
mesmos autores conseguiram maximizar a relação de ganho do Conversor Matricial, para 0,866
(Alesina, Venturini, 1989). Porém, o cálculo dos índices de modulação torna necessária a introdução
de uma terceira harmónica da frequência de entrada e uma terceira harmónica da frequência de
saída, com diferentes pesos (Alesina, Venturini, 1989).
O aparecimento da modulação utilizando a representação dos estados do sistema através de
vectores espaciais (Space Vector Modulation – SVM), veio permitir garantir o ganho máximo do

11
conversor de 0,866 (Huber, Borojevic, Burany, 1992), evitando a adição de terceiras harmónicas e
colocando nas suas entradas uma corrente praticamente sinusoidal; à excepção das harmónicas
resultantes da elevada frequência de comutação imposta. Esta estratégia de modulação permite
ainda uma simplificação do algoritmo de controlo, bem como a garantia de que a rede veja a carga,
independentemente das suas características, como se de resistiva pura se tratasse, assegurando
assim, um factor de potência quase unitário na entrada do conversor.
Todavia, o Conversor Matricial ou CMC (Conventional Matrix Converter) apresenta algumas
desvantagens, nomeadamente o elevado número de semicondutores que constituem os interruptores
(habitualmente 36 semicondutores - 18 semicondutores comandados à condução e ao corte e 18
díodos) e o facto de estar mais vulnerável a perturbações vindas da rede, devido à quase ausência
de elementos reactivos (Menino, Antunes, 2002).
No sentido de reduzir o número de semicondutores, nos últimos anos têm surgido novas
topologias de conversores AC/AC. O Conversor Matricial Indirecto (Indirect Matrix Converter - IMC)
(Kolar, Baumann, Schafmeister, Ertl, 2002), construído com base na associação Rectificador –
Inversor, mas sem componentes armazenadores de energia reactiva no andar intermédio “DC”, surge
como a primeira alternativa ao CMC, contemplando ambos, idênticos esforços de realização.
Os mesmos autores (Kolar, Baumann, Schafmeister, Ertl, 2002) concluíram que a conversão
pode ser igualmente garantida com a redução do número de semicondutores, sem que, com isso,
haja qualquer perda de funcionalidade. Deste modo, surge o Conversor Matricial Esparso (Sparse
Matrix Converter - SMC), que permite realizar a conversão AC/AC, utilizando menos três
semicondutores comandados à condução e ao corte, do que os habitualmente utilizados no
Conversor Matricial Clássico. Ainda com o objectivo de reduzir o número de semicondutores na
conversão indirecta AC/AC, surgiram o Conversor Matricial Muito Esparso (Very Sparse Matrix
Converter - VSMC) e o Conversor Matricial Ultra Esparso (Ultra Sparse Matrix Converter - USMC)
(Kolar, Baumann, Schafmeister, Ertl, 2002).
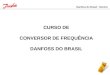
De uma forma genérica, as topologias de conversão matricial actualmente existentes podem
dividir-se em dois grupos (Figura 1.1): o grupo de conversão directa e o grupo de conversão indirecta.
Nos últimos anos, o sistemático desenvolvimento da electrónica de potência, que permitiu a
integração de semicondutores de potência e o desenvolvimento de novas estratégias de comutação e
de controlo, tem tornado muito mais atractiva a utilização de conversores matriciais, nomeadamente
em aplicações relacionadas com a melhoria da qualidade de energia (UPFC) (Strzelecki, Noculak,
Tunia, Sozannski, Fedyczak, 2001), em substituição da clássica associação Rectificador - Inversor
com andar intermédio de armazenamento de energia.

12
Figura 1.1 – Topologias de conversão matricial existentes.
Este trabalho tem como objectivo realizar um estudo teórico do Conversor Matricial Esparso,
comprovando-se, posteriormente, por meio de simulação em Matlab/Simulink, as suas características,
bem como o seu desempenho sobre a rede eléctrica, em funcionamento como UPFC.
Nesse sentido, ir-se-á começar por estudar o Conversor Matricial Clássico. Posteriormente, o
Conversor Matricial Esparso será controlado utilizando uma abordagem semelhante à do Conversor
Matricial Clássico. Para garantir o controlo robusto do sistema e obter tempos de resposta reduzidos
às variações das referências, opta-se pelo uso do controlo por modo de deslizamento, associado à
representação dos vectores espaciais.
No capítulo 2 é elaborado o estudo teórico do Conversor Matricial Esparso, partindo da análise
do Conversor Matricial Clássico. Este capítulo tem como objectivo evidenciar as vantagens desta
nova topologia. Ainda no mesmo capítulo (secção 2.4), é apresentado o filtro de entrada do
conversor.
Posteriormente, no capítulo 3 é apresentado o controlo por modo de deslizamento do
conversor. Nas duas secções existentes neste capítulo são explicados respectivamente, o controlo
das correntes na saída do conversor (secção 3.1) e o controlo do factor de potência na entrada do
filtro (secção 3.2).
No quarto capítulo é elaborado o estudo do Controlador Universal de Trânsito de Energia
(UPFC), composto por um Conversor Matricial Esparso, partindo do estudo do UPFC clássico
proposto por Lazlo Gyugyi.
O capítulo 5 é dedicado às simulações em Matlab/Simulink. Na primeira secção (secção 5.1)
são tratadas três soluções para a simulação do Conversor Matricial Esparso, sendo realizada uma
introdução e apresentados os resultados e respectivas análises. A secção 5.2, é dedicada à
simulação do UPFC, composto por um Conversor Matricial Esparso, sendo também efectuada uma
introdução (subsecção 5.2.1) e apresentados os resultados obtidos e respectivas análises (subsecção
5.2.2).
As conclusões do trabalho encontram-se presentes no último capítulo (capítulo 6).

13
2. CONVERSORES MATRICIAIS
2.1. Conversor Matricial Clássico
Este capítulo começa por apresentar o Conversor Matricial Clássico. O Conversor Matricial
Esparso será analisado utilizando uma abordagem semelhante.
2.1.1. Modelo do Conversor Matricial Clássico ideal
O Conversor Matricial Clássico (CMC), cujo esquema se encontra representado na figura 2.1,
apresenta nove interruptores bidireccionais em tensão e em corrente (garantindo o funcionamento
nos quatro quadrantes), que possibilitam que cada fase de saída possa, em qualquer instante, ser
ligada a uma das três fases de entrada, de acordo com determinadas restrições topológicas.
Figura 2.1 – Esquema do Conversor Matricial Clássico (CMC).
Por norma, cada interruptor do CMC é constituído por dois semicondutores comandados à
condução e ao corte, utilizando-se geralmente transístores bipolares de porta isolada (Insulated Gate
Bipolar Transistor - IGBT), com díodos em antiparalelo (figura 2.2). Por esse motivo, o CMC
habitualmente é formado por dezoito semicondutores comandados à condução e ao corte e por
dezoito díodos.
A bidireccionalidade dos interruptores fornece ao conversor uma característica regenerativa,
permitindo o trânsito de energia, quer da fonte para a carga, quer da carga para a fonte.

14
Figura 2.2 – Interruptor Bidireccional Sij.
Ignorando qualquer tipo de perdas, e assumindo que os interruptores são ideais, o estado dos
interruptores do conversor pode ser representado pela variável Sij (i e j representam a posição do
interruptor no conversor), apresentando esta o valor lógico “1” para o estado de condução (“ON”) e o
valor lógico “0” para o estado de corte (“OFF”) (2.1).
1 ( )
i,j 1,2,30 ( )
ij
ij
S Condução
S Corte
=⎧⎪ ∈⎨ =⎪⎩ (2.1)
Esta representação, permite caracterizar os estados dos interruptores do CMC por intermédio
da matriz SD, definida em (2.2). No entanto, há que considerar restrições para o correcto
funcionamento do conversor. O facto de se assumir que a carga tem características de fonte de
corrente, deverá implicar sempre a existência de um caminho que possibilite a respectiva circulação,
de modo a ser garantida a continuidade da mesma. Desta forma, impõe-se que, pelo menos um
interruptor em cada linha de SD deva estar no estado de condução. Por outro lado, com o intuito de se
evitar curto-circuitos entre as fases da rede, para cada linha de SD, só um interruptor deverá estar no
estado de condução. Deste modo, a condição definida em (2.3) terá de ser garantida.
11 12 13
21 22 23
31 32 33
S S SS S SS S S
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
DS (2.2)
∑=
=3
1
1j
ijS i 1, 2,3∈ (2.3)
Com estas restrições de ordem topológica, os estados possíveis do CMC reduzem-se a 33 = 27
(tabela 2.1) e não a 29 = 512, como se poderia inicialmente prever.
Recorrendo à matriz (2.2) torna-se possível estabelecer relações entre as tensões de entrada e
de saída, assim como entre as correntes de entrada e de saída, do Conversor Matricial.
Representando as variáveis de entrada por índices de letra minúscula (“a”, “b” e “c”) e as
variáveis de saída por índices de letra maiúscula (“A”, “B” e “C”), através da equação (2.4), são
relacionadas as tensões simples de saída com as tensões simples de entrada, em função dos
estados dos interruptores do CMC.

15
A a
B b
C c
v vv vv v
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
DS (2.4)
Por outro lado, a transposta da matriz (2.2), permite estabelecer a relação entre as correntes
de entrada e as correntes de saída (2.5).
a A
b B
c C
i ii ii i
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
TDS (2.5)
Recorrendo à matriz SDC (2.6), determinada com base na matriz (2.2), é também possível
relacionar as tensões compostas de saída com as tensões simples de entrada.
11 21 12 22 13 23
21 31 22 32 23 33
31 11 32 12 33 13
S S S S S SS S S S S SS S S S S S
− − −⎡ ⎤⎢ ⎥= − − −⎢ ⎥⎢ ⎥− − −⎣ ⎦
DCS (2.6)
Essa relação é dada pela equação matricial (2.7).
AB a
BC b
CA c
v vv vv v
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
DCS (2.7)
Na tabela 2.1 encontram-se representadas as 27 combinações possíveis de ligação dos
interruptores, juntamente com as tensões simples de saída que resultam de (2.4), as correntes de
entrada que resultam de (2.5) e as tensões compostas de saída calculadas a partir de (2.7).
Verifica-se a existência de três grupos de combinações de ligação dos interruptores: 1) nas
seis primeiras combinações (estados 1 a 6) as três fases de saída estão ligadas a três fases distintas
de entrada; 2) nas dezoito combinações seguintes (estados 7 a 24), as três fases de saída estão
ligadas a duas fases de entrada (uma das fases de entrada encontra-se em aberto); 3) nas últimas
combinações da tabela (estados 25 a 27), as três fases de saída encontram-se ligadas à mesma fase
de entrada.

16
Tabela 2.1 – Combinações de estados dos interruptores e relações entre entradas e saídas do Conversor Matricial Clássico.
Estados S11 S12 S13 S21 S22 S23 S31 S32 S33 vA vB vC vAB vBC vCA ia ib ic
1 1 0 0 0 1 0 0 0 1 va vb vc vab vbc vca iA iB iC 2 1 0 0 0 0 1 0 1 0 va vc vb -vca -vbc -vab iA iC iB 3 0 1 0 1 0 0 0 0 1 vb va vc -vab -vca -vbc iB iA iC 4 0 1 0 0 0 1 1 0 0 vb vc va vbc vca vab iC iA iB 5 0 0 1 1 0 0 0 1 0 vc va vb vca vab vbc iB iC iA 6 0 0 1 0 1 0 1 0 0 vc vb va -vbc -vab -vca iC iB iA 7 1 0 0 0 1 0 0 1 0 va vb vb vab 0 -vab iA -iA 0 8 0 1 0 1 0 0 1 0 0 vb va va -vab 0 vab -iA iA 0 9 0 1 0 0 0 1 0 0 1 vb vc vc vbc 0 -vbc 0 iA -iA
10 0 0 1 0 1 0 0 1 0 vc vb vb -vbc 0 vbc 0 -iA iA 11 0 0 1 1 0 0 1 0 0 vc va va vca 0 -vca -iA 0 iA 12 1 0 0 0 0 1 0 0 1 va vc vc -vca 0 vca iA 0 -iA
13 0 1 0 1 0 0 0 1 0 vb va vb -vab vab 0 iB -iB 0 14 1 0 0 0 1 0 1 0 0 va vb va vab -vab 0 -iB iB 0 15 0 0 1 0 1 0 0 0 1 vc vb vc -vbc vbc 0 0 iB -iB16 0 1 0 0 0 1 0 1 0 vb vc vb vbc -vbc 0 0 -iB iB 17 1 0 0 0 0 1 1 0 0 va vc va -vca vca 0 -iB 0 iB 18 0 0 1 1 0 0 0 0 1 vc va vc vca -vca 0 iB 0 -iB
19 0 1 0 0 1 0 1 0 0 vb vb va 0 -vab vab iC -iC 0 20 1 0 0 1 0 0 0 1 0 va va vb 0 vab -vab -iC iC 0 21 0 0 1 0 0 1 0 1 0 vc vc vb 0 -vbc vbc 0 iC -iC22 0 1 0 0 1 0 0 0 1 vb vb vc 0 vbc -vbc 0 -iC iC 23 1 0 0 1 0 0 0 0 1 va va vc 0 -vca vca -iC 0 iC 24 0 0 1 0 0 1 1 0 0 vc vc va 0 vca -vca iC 0 -iC
25 1 0 0 1 0 0 1 0 0 va va va 0 0 0 0 0 0 26 0 1 0 0 1 0 0 1 0 vb vb vb 0 0 0 0 0 0 27 0 0 1 0 0 1 0 0 1 vc vc vc 0 0 0 0 0 0
2.1.2. Determinação dos vectores espaciais do Conversor Matricial Clássico
Considerando um sistema de tensões trifásico equilibrado (2.8), sem neutro acessível, e
ligando à saída do conversor uma carga igualmente trifásica e equilibrada, a soma das grandezas
eléctricas (tensões e correntes) à entrada e à saída do CMC irá ser sempre nula.
2V cos( t)22V cos( t )3
22V cos( t )3
a
b
c
v
v
v
⎧⎪ = ω⎪
π⎪ = ω −⎨⎪
π⎪= ω +⎪⎩
(2.8)

17
A aplicação da transformação de Concordia (2.9) às tensões compostas de saída e às
correntes de entrada que resultam de cada um dos 27 estados do conversor matricial, torna possível
representar através de vectores no plano αβ (o valor da componente homopolar resultante da
transformação é sempre nulo), respectivamente, os vectores espaciais de tensão composta e os
vectores espaciais de corrente.
Esta representação é uma ferramenta útil para o efectuar o controlo do conversor por
modulação vectorial.
11 02
2 1 3 13 2 2 2
1 3 12 2 2
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥− −⎢ ⎥⎣ ⎦
C = (2.9)
Os vectores espaciais de tensão composta (2.10) determinam-se aplicando a transposta da
matriz de Concordia às tensões compostas de saída, procedendo-se, desta forma, à passagem de
um sistema de coordenadas “abc” para o sistema “αβ0”
AB
BC
CA0
v vv vv v
α
β
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
TC (2.10)
Da mesma forma, aplicando às correntes de entrada do CMC a transposta da matriz de
Concordia (2.11), obtêm-se os vectores espaciais de corrente.
a
b
c0
i ii ii i
α
β
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
TC (2.11)
Os resultados obtidos para cada um dos 27 estados possíveis do CMC são apresentados na
tabela 2.2, sendo os vectores espaciais representados pelo respectivo módulo e argumento.
Na tabela 2.2 verifica-se a existência de três grupos de vectores: seis vectores girantes, dezoito
vectores pulsantes e três vectores nulos. Os seis primeiros, vectores girantes, têm amplitude fixa mas
fase variável – não apresentam direcção definida no plano αβ e o seu argumento depende da fase
das tensões da rede. Os dezoito vectores seguintes, vectores pulsantes, apresentam um argumento
fixo, mas uma amplitude variável. Os três vectores nulos apresentam amplitude nula.

18
Tabela 2.2 – Vectores de estado das tensões compostas de saída e das correntes de entrada do Conversor Matricial Clássico.
Grupo Estados Identificação V0 δ0 Ii µi
1 1g vi δi i0 µ0 2 2g -vi -δi+4π/3 i0 -µ0 3 3g -vi -δi i0 -µ0+2π/3 4 4g vi δi+4π/3 i0 µ0+2π/3 5 5g vi δi+2π/3 i0 µ0+4π/3
Vectores Girantes
6 6g -vi -δi+2π/3 i0 -µ0+4π/3 7 +1 2 vab π/6 2 iA -π/6 8 -1 - 2 vab π/6 - 2 iA -π/6 9 +2 2 vbc π/6 2 iA π/2 10 -2 - 2 vbc π/6 - 2 iA π/2 11 +3 2 vca π/6 2 iA 7π/6 12 -3 - 2 vca π/6 - 2 iA 7π/6 13 +4 2 vab 5π/6 2 iB -π/6 14 -4 - 2 vab 5π/6 - 2 iB -π/6 15 +5 2 vbc 5π/6 2 iB π/2 16 -5 - 2 vbc 5π/6 - 2 iB π/2 17 +6 2 vca 5π/6 2 iB 7π/6 18 -6 - 2 vca 5π/6 - 2 iB 7π/6 19 +7 2 vab 3π/2 2 iC -π/6 20 -7 - 2 vab 3π/2 - 2 iC -π/6 21 +8 2 vbc 3π/2 2 iC π/2 22 -8 - 2 vbc 3π/2 - 2 iC π/2 23 +9 2 vca 3π/2 2 iC 7π/6
Vectores Pulsantes
24 -9 - 2 vca 3π/2 - 2 iC 7π/6 25 0 0 - 0 - 26 0 0 - 0 -
Vectores Nulos
27 0 0 - 0 -
2.2. Conversor Matricial Indirecto
As topologias de conversão matricial indirecta apresentam como base a associação
Rectificador – Inversor (figura 2.3) (Kolar, Baumann, Schafmeister, Ertl, 2002). Para estudar a
associação destes dois conversores será elaborada uma análise individual de cada um deles, de
modo a caracterizar os seus aspectos mais relevantes, facilitando o estudo do Conversor Matricial
Indirecto (IMC) e a posterior introdução e análise do Conversor Matricial Esparso (SMC).

19
Figura 2.3 – Esquema do Conversor Matricial Indirecto (IMC).
2.2.1. Modelo do Rectificador ideal
À semelhança do CMC, as relações entre as variáveis de entrada e de saída do Rectificador
podem também ser descritas sob a forma de equações matriciais (Holmes, Lipo, 1992). Assume-se
que o Rectificador é constituído por interruptores ideais, representados pela variável Sij (i e j
representam a posição do interruptor no conversor), que pode tomar o valor lógico “1” para o estado
de condução (“ON”) e o valor lógico “0” para o estado de corte (“OFF”) (2.1).
Os estados deste conversor são definidos de forma a prevenir curto-circuitos nas fases da
rede, salvaguardando a continuidade da corrente na carga (saída do Inversor). Deste modo, em cada
uma das linhas da matriz (2.12) só deverá haver um interruptor ligado (2.13).
11 21 31
12 22 32
S S SS S S⎡ ⎤
= ⎢ ⎥⎣ ⎦
RS (2.12)
3
iji 1
S 1 j 1, 2=
= ∈∑ (2.13)
As tensões no andar de saída do Rectificador (2.14) relacionam-se com as tensões simples de
entrada em função da matriz dos estados dos interruptores (2.12).
a
Db
Cc
vv
vv
v
⎡ ⎤⎡ ⎤ ⎢ ⎥=⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎢ ⎥⎣ ⎦
RS (2.14)

20
De (2.12) e (2.14) é ainda possível definir a matriz (2.15):
11 12 21 22 31 32S S S S S S= − − −⎡ ⎤⎣ ⎦RcS (2.15)
Partindo de (2.15) é possível determinar a dependência da tensão composta no andar
intermédio em função das tensões de entrada (2.16).
a
DC b
c
vv v
v
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
RcS (2.16)
As correntes de entrada do Rectificador também podem ser determinadas (2.17), em função da
corrente no andar intermédio, utilizando a matriz (2.15).
a
Tb DC
c
ii ii
⎡ ⎤⎢ ⎥ =⎢ ⎥⎢ ⎥⎣ ⎦
RcS (2.17)
Na tabela 2.3 estão representadas as correntes de entrada e as tensões no andar intermédio
“DC”, para todas as combinações possíveis de ligação dos interruptores do Rectificador. São também
apresentados os vectores espaciais de corrente, que são obtidos aplicando a transformação de
Concordia (2.9) (2.11) às correntes de entrada.
Tabela 2.3 – Combinações de estados dos interruptores e relações entre entradas e saídas do Rectificador.
Estados S11 S12 S21 S22 S31 S32 vD vC vDC ia ib ic |I| µ
R1 1 0 0 0 0 1 va vc -vca iDC 0 -iDC - 2 iDC 7π/6 R2 0 0 1 0 0 1 vb vc vbc 0 iDC -iDC 2 iDC π/2 R3 0 1 1 0 0 0 vb va -vab -iDC iDC 0 - 2 iDC -π/6 R4 0 1 0 0 1 0 vc va vca -iDC 0 iDC 2 iDC 7π/6 R5 0 0 0 1 1 0 vc vb -vbc 0 -iDC iDC - 2 iDC π/2 R6 1 0 0 1 0 0 va vb vab iDC -iDC 0 2 iDC -π/6 R7 1 1 0 0 0 0 va va 0 0 0 0 - - R8 0 0 1 1 0 0 vb vb 0 0 0 0 - - R9 0 0 0 0 1 1 vc vc 0 0 0 0 - -
Os vectores espaciais apresentados nesta tabela irão ser utilizados para controlar o factor de
potência de entrada do conversor. A sua representação no plano αβ, encontra-se na figura 2.4, para
os casos em que a corrente iDC apresenta polaridade positiva (figura 2.4 a) e negativa (figura 2.4 b).

21
a) b)
Figura 2.4 – Representação espacial no plano αβ dos vectores correspondentes às correntes de entrada do Rectificador: a) iDC > 0; b) iDC < 0.
2.2.2. Modelo do Inversor ideal
Tal como foi efectuado para o Rectificador, também as relações entre as variáveis de entrada e
de saída do Inversor podem ser descritas sob a forma de equações matriciais. Assume-se que o
Inversor é constituído por interruptores ideais, representados pela variável Gij (i e j representam a
posição do interruptor no conversor), que pode tomar o valor lógico “1” quando os interruptores
estiverem no estado de condução (“ON”) e o valor lógico “0” quando os interruptores estiverem no
estado de corte (“OFF”) (2.1).
Desta forma, as combinações dos estados dos interruptores do Inversor devem ser obtidas de
modo a evitar não só curto-circuitos das fases da rede, como também garantir a continuidade da
corrente que circula na carga. Consequentemente, em cada uma das linhas da matriz (2.18) só
deverá haver um interruptor ligado (2.19).
11 12
21 22
31 32
G GG GG G
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
IS (2.18)
2
ijj 1
G 1 i 1, 2,3=
= ∈∑ (2.19)
Estas restrições permitem que os estados dos interruptores do Inversor possam ser
representados apenas pelas variáveis γ1, γ2 e γ3, tomando estas os valores lógicos “1” quando os
interruptores ligados ao ponto “D” do andar de entrada estão no estado de condução (“ON”), e o valor
lógico “0” quando os interruptores ligados ao ponto “C” estão no estado de corte (“OFF”).

22
Assim, γ1 define-se segundo (2.20).
1 11 12
1 11 12
1 (G ) (G )0 (G ) (G )
Condução CorteCorte Condução
= → ∧ →⎧⎨ = → ∧ →⎩
γγ
(2.20)
No segundo braço do inversor, os estados de G21 e G22 definem o valor de γ2 (2.21).
2 21 22
2 21 22
1 (G ) (G )0 (G ) (G )
Condução CorteCorte Condução
= → ∧ →⎧⎨ = → ∧ →⎩
γγ
(2.21)
O mesmo se passa no terceiro braço, sendo o valor de γ3 definido consoante os estados dos
interruptores G31 e G32 (2.22).
3 31 32
3 31 32
1 (G ) (G )0 (G ) (G )
Condução CorteCorte Condução
= → ∧ →⎧⎨ = → ∧ →⎩
γγ
(2.22)
Considerando (2.20), (2.21) e (2.22), a matriz de interruptores do Inversor (2.18) também pode
ser definida por (2.23).
1 1
2 2
3 3
111
γ − γ⎡ ⎤⎢ ⎥= γ − γ⎢ ⎥⎢ ⎥γ − γ⎣ ⎦
IS (2.23)
Com base na matriz (2.18) ou (2.23), é possível representar a relação entre as tensões de
saída e as tensões vD e vC no andar de entrada do Inversor (2.24):
A
DB
CC
vv
vv
v
⎡ ⎤⎡ ⎤⎢ ⎥ = ⎢ ⎥⎢ ⎥⎣ ⎦⎢ ⎥⎣ ⎦
IS (2.24)
Da matriz (2.18) ou (2.23) é ainda possível, à semelhança do que foi feito no Conversor
Matricial, obter uma nova matriz (2.25) com a qual se possam calcular as tensões compostas de
saída:
( )( )( )
11 21 12 22 1 2 1 2
21 31 22 32 2 3 2 3
31 11 32 12 3 1 3 1
G G G GG G G GG G G G
⎡ ⎤− − γ − γ − γ − γ⎡ ⎤⎢ ⎥⎢ ⎥= − − = γ − γ − γ − γ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥− − γ − γ − γ − γ⎣ ⎦ ⎣ ⎦
IcS (2.25)
Com base na matriz anterior, as tensões compostas de saída serão dadas por (2.26).
AB
DBC
CCA
vv
vv
v
⎡ ⎤⎡ ⎤⎢ ⎥
= ⎢ ⎥⎢ ⎥⎣ ⎦⎢ ⎥
⎣ ⎦
IcS (2.26)

23
Reescrevendo (2.26) em função da tensão vDC obtém-se (2.27).
AB 1 2
BC 2 3 DC
CA 3 1
v
v vv
⎡ ⎤ γ − γ⎡ ⎤⎢ ⎥ ⎢ ⎥= γ − γ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥γ − γ⎣ ⎦⎣ ⎦
(2.27)
As correntes que circulam no andar “DC” de entrada (2.28) podem ser obtidas com base nas
correntes de saída do Inversor recorrendo à transposta da matriz (2.23).
A
DCB
DCC
ii
ii
i
⎡ ⎤⎡ ⎤ ⎢ ⎥=⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎢ ⎥⎣ ⎦
TIS (2.28)
De (2.28) a corrente no andar “DC” de entrada será dada por (2.29).
DC 1 A 2 B 3 Ci i i i= γ + γ + γ (2.29)
Na tabela 2.4, encontram-se representadas as 8 combinações possíveis de ligação dos
interruptores do Inversor. Para cada um desses estados, apresentam-se as tensões simples e
compostas de saída e a corrente no andar “DC” de entrada, resultantes, respectivamente, das
equações (2.24), (2.27) e (2.29). Na mesma tabela são também obtidos os vectores espaciais de
tensão composta, que resultam da aplicação da transformação de Concordia às tensões compostas
de saída.
Tabela 2.4 – Combinações de estados dos interruptores e relações entre entradas e saídas do
Inversor.
Estados γ1 γ2 γ3 vA vB vC vAB vBC vCA iDC |V| δ
I1 1 0 0 vD vC vC vDC 0 -vDC iA 2 vDC π/6 I2 1 1 0 vD vD vC 0 vDC -vDC -iC - 2 vDC 3π/2 I3 0 1 0 vC vD vC -vDC vDC 0 iB 2 vDC 5π/6 I4 0 1 1 vC vD vD -vDC 0 vDC -iA - 2 vDC π/6 I5 0 0 1 vC vC vD 0 -vDC vDC iC 2 vDC 3π/2 I6 1 0 1 vD vC vD vDC -vDC 0 -iB - 2 vDC 5π/6 I7 0 0 0 vC vC vC 0 0 0 0 - - I8 1 1 1 vD vD vD 0 0 0 0 - -
A representação dos vectores de tensão composta no plano αβ, encontra-se na figura 2.5, para
os casos em que a tensão vDC apresenta polaridade positiva (figura 2.5 a) e negativa (figura 2.5 b).
Estes vectores permitem o controlo das tensões compostas, na saída do Inversor.

24
α
I1
I6
I5
I4
I3
I2
0
β
a) b)
Figura 2.5 – Representação espacial no plano α e β dos vectores correspondentes às tensões
compostas de saída do Inversor: a) vDC > 0; b) vDC < 0.
A associação do Rectificador e do Inversor permite obter o Conversor Matricial Indirecto. Os
estados possíveis do conversor resultam da combinação dos estados do Rectificador e do Inversor.
2.2.3. Modelo do Conversor Matricial Indirecto ideal
A combinação das equações matriciais do Rectificador e do Inversor permite obter a matriz
SIMC (2.30), possibilitando relacionar directamente tensões e correntes de entrada do Rectificador com
as tensões e correntes de saída do Inversor em função dos estados dos interruptores do IMC.
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
1 111 21 31
IMC I R 2 212 22 32
3 3
1 11 1 12 1 21 1 22 1 31 1 32
2 11 2 12 2 21 2 22 2 31 2 32
3 11 3 12 3 21 3 22 3 31 3 32
1S S S
S S S 1S S S
1
S 1 S S 1 S S 1 SS 1 S S 1 S S 1 SS 1 S S 1 S S 1 S
γ − γ⎡ ⎤⎡ ⎤⎢ ⎥= ⋅ = γ − γ =⎢ ⎥⎢ ⎥ ⎣ ⎦⎢ ⎥γ − γ⎣ ⎦
⎡ ⎤γ + − γ γ + − γ γ + − γ⎢ ⎥= γ + − γ γ + − γ γ + − γ⎢ ⎥⎢ ⎥γ + − γ γ + − γ γ + − γ⎣ ⎦
(2.30)
Assim, as tensões simples de saída relacionam-se com as tensões simples de entrada (2.31)
através de (2.30).
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
c
b
a
C
B
A
vvv
vvv
IMCS (2.31)

25
A transposta de SIMC permite representar as dependências das correntes de entrada do IMC
em função das correntes de saída (2.32).
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
C
B
A
c
b
a
iii
iii
TIMCS (2.32)
Através da matriz SIMC obtém-se a matriz SIC (2.33).
1 2 11 2 1 12 1 2 21 2 1 22 1 2 31 2 1 32
IC 2 3 11 3 2 12 2 1 21 1 2 22 2 3 31 3 2 32
3 1 11 1 3 12 3 1 21 1 3 22 3 1 31 1 3 32
( )S ( )S ( )S ( )S ( )S ( )SS ( )S ( )S ( )S ( )S ( )S ( )S
( )S ( )S ( )S ( )S ( )S ( )S
γ − γ + γ − γ γ − γ + γ − γ γ − γ − γ − γ⎡ ⎤⎢= γ − γ + γ − γ γ − γ + γ − γ γ − γ + γ − γ⎢⎢ γ − γ + γ − γ γ − γ + γ − γ γ − γ + γ − γ⎣ ⎦
⎥⎥⎥
(2.33)
A matriz SIC, permite relacionar as tensões compostas de saída do IMC em função das
respectivas tensões simples de entrada (2.34).
AB a
BC b
CA c
v vv vv v
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
ICS (2.34)
Na tabela 2.5 encontram-se representados os 72 estados possíveis de ligação dos
interruptores do Conversor Matricial Indirecto, assim como as tensões de saída, as correntes de
entrada e a tensão no andar intermédio que daí resultam.
Comparando esta tabela com a obtida para o Conversor Matricial Clássico (tabela 2.1), é
possível verificar que, na conversão indirecta, não se conseguem obter estados em que as tensões
de saída dependam simultaneamente das três tensões de entrada, bem como estados em que as
correntes de entrada dependam simultaneamente das três correntes de saída. No entanto, esta
limitação do Conversor Matricial Indirecto face ao Conversor Matricial Clássico não representa uma
grande desvantagem uma vez que, para não aumentar a complexidade da estratégia de comando, os
vectores que resultam destas combinações de ligação dos interruptores não são utilizadas pela
maioria dos autores (estes vectores não apresentam argumento fixo, sendo necessário localizar as
suas posições no plano αβ, em cada instante de tempo).
Os restantes estados encontram equivalência em ambos os conversores, destacando-se a
existência de estados, conseguidos com diferentes combinações de ligação dos interruptores do IMC,
que conduzem a idênticas tensões compostas de saída e correntes de entrada.

26
Tabela 2.5 – Combinações de estados dos interruptores e relações entre entradas e saídas do Conversor Matricial Indirecto
Est
ados
S11 S12 S21 S22 S31 S32
Est
ado
do
Rec
tific
ador
γ1 γ2 γ3
Est
ado
do
Inve
rsor
VDC vA vB vC vAB vBC vCA ia ib ic
1 1 0 0 1 0 0 R6 1 0 0 I1 vab va vb vb vab 0 -vab iA -iA 0 2 0 1 1 0 0 0 R3 0 1 1 I4 -vab va vb vb vab 0 -vab iA -iA 0 3 1 0 0 1 0 0 R6 0 1 1 I4 vab vb va va -vab 0 vab -iA iA 0 4 0 1 1 0 0 0 R3 1 0 0 I1 -vab vb va va -vab 0 vab -iA iA 0 5 0 0 1 0 0 1 R2 1 0 0 I1 vbc vb vc vc vbc 0 -vbc 0 iA -iA 6 0 0 0 1 1 0 R5 0 1 1 I4 -vbc vb vc vc vbc 0 -vbc 0 iA -iA 7 0 0 1 0 0 1 R2 0 1 1 I4 vbc vc vb vb -vbc 0 vbc 0 -iA iA 8 0 0 0 1 1 0 R5 1 0 0 I1 -vbc vc vb vb -vbc 0 vbc 0 -iA iA 9 1 0 0 0 0 1 R1 0 1 1 I4 -vca vc va va vca 0 -vca -iA 0 iA 10 0 1 0 0 1 0 R4 1 0 0 I1 vca vc va va vca 0 -vca -iA 0 iA 11 1 0 0 0 0 1 R1 1 0 0 I1 -vca va vc vc -vca 0 vca iA 0 -iA 12 0 1 0 0 1 0 R4 0 1 1 I4 vca va vc vc -vca 0 vca iA 0 -iA 13 1 0 0 1 0 0 R6 0 1 0 I3 vab vb va vb -vab vab 0 iB -iB 0 14 0 1 1 0 0 0 R3 1 0 1 I6 -vab vb va vb -vab vab 0 iB -iB 0 15 1 0 0 1 0 0 R6 1 0 1 I6 vab va vb va vab -vab 0 -iB iB 0 16 0 1 1 0 0 0 R3 0 1 0 I3 -vab va vb va vab -vab 0 -iB iB 0 17 0 0 1 0 0 1 R2 0 1 0 I3 vbc vc vb vc -vbc vbc 0 0 iB -iB 18 0 0 0 1 1 0 R5 1 0 1 I6 -vbc vc vb vc -vbc vbc 0 0 iB -iB 19 0 0 1 0 0 1 R2 1 0 1 I6 vbc vb vc vb vbc -vbc 0 0 -iB iB 20 0 0 0 1 1 0 R5 0 1 0 I3 -vbc vb vc vb vbc -vbc 0 0 -iB iB 21 1 0 0 0 0 1 R1 1 0 1 I6 -vca va vc va -vca vca 0 -iB 0 iB 22 0 1 0 0 1 0 R4 0 1 0 I3 vca va vc va -vca vca 0 -iB 0 iB 23 1 0 0 0 0 1 R1 0 1 0 I3 -vca vc va vc vca -vca 0 iB 0 -iB 24 0 1 0 0 1 0 R4 1 0 1 I6 vca vc va vc vca -vca 0 iB 0 -iB 25 1 0 0 1 0 0 R6 0 0 1 I5 vab vb vb va 0 -vab vab iC -iC 0 26 0 1 1 0 0 0 R3 1 1 0 I2 -vab vb vb va 0 -vab vab iC -iC 0 27 1 0 0 1 0 0 R6 1 1 0 I2 vab va va vb 0 vab -vab -iC iC 0 28 0 1 1 0 0 0 R3 0 0 1 I5 -vab va va vb 0 vab -vab -iC iC 0 29 0 0 1 0 0 1 R2 0 0 1 I5 vbc vc vc vb 0 -vbc vbc 0 iC -iC 30 0 0 0 1 1 0 R5 1 1 0 I2 -vbc vc vc vb 0 -vbc vbc 0 iC -iC 31 0 0 1 0 0 1 R2 1 1 0 I2 vbc vb vb vc 0 vbc -vbc 0 -iC iC 32 0 0 0 1 1 0 R5 0 0 1 I5 -vbc vb vb vc 0 vbc -vbc 0 -iC iC 33 1 0 0 0 0 1 R1 1 1 0 I2 -vca va va vc 0 -vca vca -iC 0 iC 34 0 1 0 0 1 0 R4 0 0 1 I5 vca va va vc 0 -vca vca -iC 0 iC 35 1 0 0 0 0 1 R1 0 0 1 I5 -vca vc vc va 0 vca -vca iC 0 -iC 36 0 1 0 0 1 0 R4 1 1 0 I2 vca vc vc va 0 vca -vca iC 0 -iC 37 1 0 0 1 0 0 R6 1 1 1 I8 vab va va va 0 0 0 0 0 0 38 0 1 1 0 0 0 R3 1 1 1 I8 -vab vb vb vb 0 0 0 0 0 0 39 1 0 0 1 0 0 R6 0 0 0 I7 vab vb vb vb 0 0 0 0 0 0 40 0 1 1 0 0 0 R3 0 0 0 I7 -vab va va va 0 0 0 0 0 0 41 0 0 1 0 0 1 R2 1 1 1 I8 vbc vb vb vb 0 0 0 0 0 0 42 0 0 0 1 1 0 R5 1 1 1 I8 -vbc vc vc vc 0 0 0 0 0 0 43 0 0 1 0 0 1 R2 0 0 0 I7 vbc vc vc vc 0 0 0 0 0 0 44 0 0 0 1 1 0 R5 0 0 0 I7 -vbc vb vb vb 0 0 0 0 0 0 45 1 0 0 0 0 1 R1 1 1 1 I8 -vca va va va 0 0 0 0 0 0 46 0 1 0 0 1 0 R4 1 1 1 I8 vca vc vc vc 0 0 0 0 0 0 47 1 0 0 0 0 1 R1 0 0 0 I7 -vca vc vc vc 0 0 0 0 0 0 48 0 1 0 0 1 0 R4 0 0 0 I7 vca va va va 0 0 0 0 0 0 49 1 1 0 0 0 0 R7 1 0 0 I1 0 0 0 0 0 0 0 0 0 0 50 1 1 0 0 0 0 R7 1 1 0 I2 0 0 0 0 0 0 0 0 0 0 51 1 1 0 0 0 0 R7 0 1 0 I3 0 0 0 0 0 0 0 0 0 0 52 1 1 0 0 0 0 R7 0 1 1 I4 0 0 0 0 0 0 0 0 0 0 53 1 1 0 0 0 0 R7 0 0 1 I5 0 0 0 0 0 0 0 0 0 0 54 1 1 0 0 0 0 R7 1 0 1 I6 0 0 0 0 0 0 0 0 0 0 55 1 1 0 0 0 0 R7 0 0 0 I7 0 0 0 0 0 0 0 0 0 0 56 1 1 0 0 0 0 R7 1 1 1 I8 0 0 0 0 0 0 0 0 0 0 57 0 0 1 1 0 0 R8 1 0 0 I1 0 0 0 0 0 0 0 0 0 0 58 0 0 1 1 0 0 R8 1 1 0 I2 0 0 0 0 0 0 0 0 0 0 59 0 0 1 1 0 0 R8 0 1 0 I3 0 0 0 0 0 0 0 0 0 0 60 0 0 1 1 0 0 R8 0 1 1 I4 0 0 0 0 0 0 0 0 0 0 61 0 0 1 1 0 0 R8 0 0 1 I5 0 0 0 0 0 0 0 0 0 0 62 0 0 1 1 0 0 R8 1 0 1 I6 0 0 0 0 0 0 0 0 0 0 63 0 0 1 1 0 0 R8 0 0 0 I7 0 0 0 0 0 0 0 0 0 0 64 0 0 1 1 0 0 R8 1 1 1 I8 0 0 0 0 0 0 0 0 0 0 65 0 0 0 0 1 1 R9 1 0 0 I1 0 0 0 0 0 0 0 0 0 0 66 0 0 0 0 1 1 R9 1 1 0 I2 0 0 0 0 0 0 0 0 0 0 67 0 0 0 0 1 1 R9 0 1 0 I3 0 0 0 0 0 0 0 0 0 0 68 0 0 0 0 1 1 R9 0 1 1 I4 0 0 0 0 0 0 0 0 0 0 69 0 0 0 0 1 1 R9 0 0 1 I5 0 0 0 0 0 0 0 0 0 0 70 0 0 0 0 1 1 R9 1 0 1 I6 0 0 0 0 0 0 0 0 0 0 71 0 0 0 0 1 1 R9 0 0 0 I7 0 0 0 0 0 0 0 0 0 0 72 0 0 0 0 1 1 R9 1 1 1 I8 0 0 0 0 0 0 0 0 0 0

27
Na tabela 2.6 apresentam-se os vectores espaciais de tensão composta e de corrente, que
resultam da aplicação da transformação de Concordia às tensões de saída (2.10) e às correntes de
entrada (2.11), para os vários estados do IMC. Verifica-se que, ao contrário do Conversor Matricial
Clássico, no conversor Matricial Indirecto só existem vectores pulsantes e nulos.
Tabela 2.6 – Vectores de estados do Conversor Matricial Indirecto.
Gru
po
Est
ados
Iden
tific
ação
VDC V0 δ0 Ii µi
Gru
po
Est
ados
Iden
tific
ação
VDC V0 δ0 Ii µi
1 +1 vab 2 vab π/6 2 iA -π/6 37 0 vab 0 - 0 - 2 +1 -vab 2 vab π/6 2 iA -π/6 38 0 -vab 0 - 0 - 3 -1 vab - 2 vab π/6 - 2 iA -π/6 39 0 vab 0 - 0 - 4 -1 -vab - 2 vab π/6 - 2 iA -π/6 40 0 -vab 0 - 0 - 5 +2 vbc 2 vbc π/6 2 iA π/2 41 0 vbc 0 - 0 - 6 +2 -vbc 2 vbc π/6 2 iA π/2 42 0 -vbc 0 - 0 - 7 -2 vbc - 2 vbc π/6 - 2 iA π/2 43 0 vbc 0 - 0 - 8 -2 -vbc - 2 vbc π/6 - 2 iA π/2 44 0 -vbc 0 - 0 - 9 +3 -vca 2 vca π/6 2 iA 7π/6 45 0 -vca 0 - 0 - 10 +3 vca 2 vca π/6 2 iA 7π/6 46 0 vca 0 - 0 - 11 -3 -vca - 2 vca π/6 - 2 iA 7π/6 47 0 -vca 0 - 0 - 12 -3 vca - 2 vca π/6 - 2 iA 7π/6 48 0 vca 0 - 0 - 13 +4 vab 2 vab 5π/6 2 iB -π/6 49 0 0 0 - 0 - 14 +4 -vab 2 vab 5π/6 2 iB -π/6 50 0 0 0 - 0 - 15 -4 vab - 2 vab 5π/6 - 2 iB -π/6 51 0 0 0 - 0 - 16 -4 -vab - 2 vab 5π/6 - 2 iB -π/6 52 0 0 0 - 0 - 17 +5 vbc 2 vbc 5π/6 2 iB π/2 53 0 0 0 - 0 - 18 +5 -vbc 2 vbc 5π/6 2 iB π/2 54 0 0 0 - 0 - 19 -5 vbc - 2 vbc 5π/6 - 2 iB π/2 55 0 0 0 - 0 - 20 -5 -vbc - 2 vbc 5π/6 - 2 iB π/2 56 0 0 0 - 0 - 21 +6 -vca 2 vca 5π/6 2 iB 7π/6 57 0 0 0 - 0 - 22 +6 vca 2 vca 5π/6 2 iB 7π/6 58 0 0 0 - 0 - 23 -6 -vca - 2 vca 5π/6 - 2 iB 7π/6 59 0 0 0 - 0 - 24 -6 vca - 2 vca 5π/6 - 2 iB 7π/6 60 0 0 0 - 0 - 25 +7 vab 2 vab 3π/2 2 iC -π/6 61 0 0 0 - 0 - 26 +7 -vab 2 vab 3π/2 2 iC -π/6 62 0 0 0 - 0 - 27 -7 vab - 2 vab 3π/2 - 2 iC -π/6 63 0 0 0 - 0 - 28 -7 -vab - 2 vab 3π/2 - 2 iC -π/6 64 0 0 0 - 0 - 29 +8 vbc 2 vbc 3π/2 2 iC π/2 65 0 0 0 - 0 - 30 +8 -vbc 2 vbc 3π/2 2 iC π/2 66 0 0 0 - 0 - 31 -8 vbc - 2 vbc 3π/2 - 2 iC π/2 67 0 0 0 - 0 - 32 -8 -vbc - 2 vbc 3π/2 - 2 iC π/2 68 0 0 0 - 0 - 33 +9 -vca 2 vca 3π/2 2 iC 7π/6 69 0 0 0 - 0 - 34 +9 vca 2 vca 3π/2 2 iC 7π/6 70 0 0 0 - 0 - 35 -9 -vca - 2 vca 3π/2 - 2 iC 7π/6 71 0 0 0 - 0 -
Vec
tore
s Pul
sant
es
36 -9 vca - 2 vca 3π/2 - 2 iC 7π/6
Vec
tore
s Nul
os
72 0 0 0 - 0 -

28
2.2.4. Topologia do Conversor Matricial Indirecto
Para garantir o controlo das variáveis de entrada e de saída possibilitando, simultaneamente, a
bidireccionalidade do trânsito de energia, a estrutura do IMC apresenta dois tipos de interruptores: os
Sij do Rectificador, idênticos aos interruptores do CMC, e os interruptores Gij do Inversor, constituídos
por apenas um semicondutor comandado à condução e ao corte (também aqui o IGBT é o mais
utilizado) com um díodo em antiparalelo. Esta topologia (figura 2.6), implica necessariamente uma
tensão com polaridade fixa no andar intermédio “DC” (Kolar, Baumann, Schafmeister, Ertl, 2002).
Figura 2.6 – Topologia do Conversor Matricial Indirecto (IMC).
Nestas condições, o Conversor Matricial Indirecto é habitualmente formado por dezoito
semicondutores comandados à condução e ao corte e dezoito díodos, característica que lhe confere
um esforço de realização idêntico e, como tal, nenhuma vantagem face ao Conversor Matricial
Clássico.
2.3. Conversor Matricial Esparso
Depois de terem sido efectuadas as comparações entre o Conversor Matricial Clássico e o
Conversor Matricial Indirecto, nesta secção será apresentado o Conversor Matricial Esparso, com
funcionalidade idêntica à do Conversor Matricial Indirecto, mas com um menor número de
semicondutores.

29
2.3.1. Topologia do Conversor Matricial Esparso
Nas figuras 2.7 e 2.8 estão representadas, respectivamente, as possíveis circulações da
corrente ia com polaridade positiva e negativa, num braço do Rectificador, considerando que o sentido
da corrente iDC no andar intermédio também pode variar.
a) b)
Figura 2.7 – Circulação da corrente ia com polaridade positiva num dos braços do rectificador do IMC, considerando que a corrente iDC pode ser positiva ou negativa: a) ia = iDC ; b) ia = -iDC
Analisando as figuras 2.7 a) e 2.7 b), é possível verificar que quando ia apresenta polaridade
positiva, tanto no caso de ia = iDC (figura 2.7 a) em que é necessário o bloqueio de tensão por parte do
semicondutor SaC se a tensão vDC (tensão no andar intermédio “DC”) tiver polaridade positiva, como
no caso ia = -iDC (figura 2.7 b), a utilização do semicondutor SCa é perfeitamente dispensável.
Situação idêntica ocorre para o semicondutor SaD quando a polaridade da corrente ia é negativa
(figura 2.8), verificando-se que a utilização deste em nada influencia qualquer uma das situações (ia =
iDC e ia = -iDC) de circulação de corrente, se a tensão vDC apresentar igualmente polaridade positiva.

30
Va
iDC
ia
iDC
SDa
SaC
SCa
SaD
D
C
Va
iDC
ia
iDC
SDa
SaC
SCa
SaD
D
C
a) b)
Figura 2.8 – Circulação da corrente ia com polaridade negativa num dos braços do rectificador
do IMC: a) ia = iDC ; b) ia = -iDC
Considerando as situações anteriores, verifica-se que quando a tensão no andar intermédio
apresenta polaridade positiva, é possível combinar as funcionalidades dos semicondutores SCa e SaD
num só (semicondutor Sa), sendo este activado para ambas as polaridades de corrente, como se
mostra nas figuras 2.9 e 2.10.
Va
iDC
ia
iDC
SDa
SaC
Sa
D
C
Va
iDC
ia
iDC
SDa
SaC
Sa
D
C
a) b)
Figura 2.9 – Circulação da corrente ia com polaridade positiva num dos braços do rectificador do SMC: a) ia = iDC ; b) ia = -iDC

31
Va
iDC
ia
iDC
SDa
SaC
Sa
D
C
Va
iDC
ia
iDC
SDa
SaC
Sa
D
C
a) b)
Figura 2.10 – Circulação da corrente ia com polaridade negativa num dos braços do rectificador do SMC: a) ia = iDC ; b) ia = -iDC
Utilizando três braços iguais aos apresentados nas figuras 2.9 e 2.10, associados a um
Inversor trifásico idêntico ao utilizado no IMC, obtém-se o conversor indirecto AC/AC representado na
figura 2.11, designado na literatura por Conversor Matricial Esparso (SMC – Sparse Matrix Converter)
(Kolar, Baumann, Schafmeister, Ertl, 2002).
Com esta simplificação, consegue-se reduzir em três o número de semicondutores sem que,
para isso, haja qualquer perda de funcionalidade relativamente ao Conversor Matricial Indirecto
(IMC).
Figura 2.11 – Topologia do Conversor Matricial Esparso (SMC).

32
2.3.2. Obtenção dos vectores espaciais das tensões simples de saída do Conversor Matricial Esparso
Devido às suas características funcionais, os vectores espaciais do Conversor Matricial
Esparso são idênticos ao do Conversor Matricial Indirecto. No entanto, uma vez que se irá realizar o
controlo em corrente do conversor, é de toda a conveniência determinar os vectores espaciais das
tensões simples, uma vez que estes permitem estabelecer uma relação mais directa com as
correntes nas fases de saída do conversor.
Conhecendo as relações existentes entre as tensões simples e as tensões compostas (2.35), é
possível, a partir da tabela 2.6, determinar os vectores de tensão simples de saída (tabela 2.7).
AB CAA
BC ABB
C A B
3
3
v vv
v vv
v v v
−⎧=⎪
⎪−⎪ =⎨
⎪= − −⎪
⎪⎩
(2.35)
2.4. Filtro de Ligação à Rede Eléctrica
Devido ao processo de comutação a alta frequência do conversor matricial, é fundamental a
introdução de um filtro, entre o conversor e a rede eléctrica, de modo a eliminar o conteúdo
harmónico de alta frequência presente nas correntes de entrada do conversor. Deste modo,
consegue-se dotar o Conversor Matricial Esparso com característica praticamente não poluente da
rede eléctrica.
Uma das topologias de filtro mais utilizadas é o filtro trifásico LC de segunda ordem com uma
resistência em paralelo com uma bobina, representado na figura 2.12 (Pinto, 2003).
Figura 2.12 – Esquema do filtro de entrada do Conversor Matricial Esparso.

33
Este filtro, definido pelas equações determinadas em (Pinto, 2003), será posteriormente
utilizado nas simulações do conversor.
Tabela 2.7 – Vectores de estado das tensões simples de saída do Conversor Matricial Esparso.
Gru
po
Est
ados
Iden
tific
ação
VDC V0s δ0s
Gru
po
Est
ados
Iden
tific
ação
VDC V0s δ0s
1 +1 vab 2 / 3 vab 0 37 0 vab 0 - 2 +1 -vab 2 / 3 vab 0 38 0 -vab 0 - 3 -1 vab - 2 / 3 vab 0 39 0 vab 0 - 4 -1 -vab - 2 / 3 vab 0 40 0 -vab 0 - 5 +2 vbc 2 / 3 vbc 0 41 0 vbc 0 - 6 +2 -vbc 2 / 3 vbc 0 42 0 -vbc 0 - 7 -2 vbc - 2 / 3 vbc 0 43 0 vbc 0 - 8 -2 -vbc - 2 / 3 vbc 0 44 0 -vbc 0 - 9 +3 -vca 2 / 3 vca 0 45 0 -vca 0 - 10 +3 vca 2 / 3 vca 0 46 0 vca 0 - 11 -3 -vca - 2 / 3 vca 0 47 0 -vca 0 - 12 -3 vca - 2 / 3 vca 0 48 0 vca 0 - 13 +4 vab 2 / 3 vab 4π/6 49 0 0 0 - 14 +4 -vab 2 / 3 vab 4π/6 50 0 0 0 - 15 -4 vab - 2 / 3 vab 4π/6 51 0 0 0 - 16 -4 -vab - 2 / 3 vab 4π/6 52 0 0 0 - 17 +5 vbc 2 / 3 vbc 4π/6 53 0 0 0 - 18 +5 -vbc 2 / 3 vbc 4π/6 54 0 0 0 - 19 -5 vbc - 2 / 3 vbc 4π/6 55 0 0 0 - 20 -5 -vbc - 2 / 3 vbc 4π/6 56 0 0 0 - 21 +6 -vca 2 / 3 vca 4π/6 57 0 0 0 - 22 +6 vca 2 / 3 vca 4π/6 58 0 0 0 - 23 -6 -vca - 2 / 3 vca 4π/6 59 0 0 0 - 24 -6 vca - 2 / 3 vca 4π/6 60 0 0 0 - 25 +7 vab 2 / 3 vab 4π/3 61 0 0 0 - 26 +7 -vab 2 / 3 vab 4π/3 62 0 0 0 - 27 -7 vab - 2 / 3 vab 4π/3 63 0 0 0 - 28 -7 -vab - 2 / 3 vab 4π/3 64 0 0 0 - 29 +8 vbc 2 / 3 vbc 4π/3 65 0 0 0 - 30 +8 -vbc 2 / 3 vbc 4π/3 66 0 0 0 - 31 -8 vbc - 2 / 3 vbc 4π/3 67 0 0 0 - 32 -8 -vbc - 2 / 3 vbc 4π/3 68 0 0 0 - 33 +9 -vca 2 / 3 vca 4π/3 69 0 0 0 - 34 +9 vca 2 / 3 vca 4π/3 70 0 0 0 - 35 -9 -vca - 2 / 3 vca 4π/3 71 0 0 0 -
Puls
ante
s
36 -9 vca - 2 / 3 vca 4π/3
Nul
os
72 0 0 0 -

34
3. CONTROLO DO CONVERSOR MATRICIAL ESPARSO
O controlo do Conversor Matricial Esparso (SMC) será efectuado utilizando a técnica de
controlo por modo de deslizamento (Utkin, 1987), (Hung, Gao, 1993).
Este tipo de controlo não linear, associado à representação dos vectores espaciais dos estados
do conversor, permite reduzir a ordem do sistema, bem como aumentar a robustez face a variações
de parâmetros e condições de operação, aumentando assim o desempenho dos conversores
electrónicos de potência. Estas vantagens compensam largamente a necessidade de se obter maior
informação sobre o sistema e a dificuldade em projectar filtros devido à forte variação da frequência
de comutação (Silva, Pires, Pinto, Barros, 2003).
No controlo por modo de deslizamento os interruptores do conversor são comutados a alta
frequência, de acordo com os vectores espaciais seleccionados, que melhor garantem que a
grandeza a controlar segue a referência imposta ao sistema.
Neste trabalho optou-se pelo controlo das correntes de saída do conversor, controlando-se
simultaneamente o factor de potência à entrada do filtro.
3.1. Controlo das Correntes de Saída
Assumindo que o conversor se encontra ligado a um receptor de carácter indutivo (carga RL),
as derivadas das correntes (3.1) relacionam-se com a própria corrente e com a tensão simples de
saída do conversor, que depende directamente dos estados dos interruptores.
di v R + idt L Ldi v R + idt L L
α αα
β ββ
⎧=⎪⎪
⎨⎪ =⎪⎩
(3.1)
Deste modo, uma vez que as derivadas das correntes dependem directamente das variáveis
de comando (os estados do interruptores), as funções de comutação Sα(e,t) e Sβ(e,t) (3.2) (kα>0,
kβ>0) que estabelecem as superfícies de deslizamento (Silva, Pires, Pinto, Barros, 2003) serão de
ordem inferior e, como tal, dependerão unicamente das correntes iα e iβ.
ref
ref
(e, t) ( ) e
(e, t) ( ) e
S = k i i = k
S = k i i = kα α α α α α
β β β β β β
−⎧⎪⎨ −⎪⎩
(3.2)

35
As funções de comutação não podem, no entanto, ter valor sempre nulo, uma vez que a
frequência da comutação não é infinita, porque se encontra limitada pelos tempos de comutação dos
semicondutores. Deste modo, às funções de comutação são associados comparadores de histerese
que dão origem a uma determinada banda de erro em torno dos valores de referência, permitindo
quantificar, não o valor exacto do erro, mas sim a banda ou nível lógico em que este se encontra.
A introdução de três níveis lógicos para cada uma das funções de comutação (“-1” sempre que
a variável a controlar seja superior ao valor de referência, “+1” quando a variável a controlar for
inferior ao valor de referência e “0” sempre que o valor da variável a controlar for sensivelmente igual
à referência) permite obter nove combinações de erro. Uma vez que existem sempre vectores em
sete localizações distintas no plano αβ (incluindo os vectores nulos), com estas nove combinações de
erro é possível garantir a selecção de todos os vectores.
Para que o sistema se encontre em modo de deslizamento é necessário garantir a condição de
estabilidade (3.3) (Silva, 1998):
(e, t)(e, t) 0
(e, t)(e, t) 0
dSS
dtdS
Sdt
αα
ββ
⎧<⎪⎪
⎨⎪ <⎪⎩
(3.3)
De acordo com (3.2) e (3.3) conclui-se que:
a) No caso de a função de comutação Sα(e,t) apresentar valores positivos, isso significa
que o valor da componente “α” das correntes na saída do conversor, se encontra
abaixo do valor da referência (Sα(e,t) > 0 → iα ref > iα). Deste modo, o sistema deverá
reagir de maneira a fazer decrescer Sα(e,t) devendo, para isso, o valor da derivada da
função de comutação ser negativo ((e, t)
0dS
dtα < ) para contrariar o erro.
b) Se a função de comutação Sα(e,t) for negativa, o valor da componente “α” das
correntes na saída do conversor é superior ao da referência (Sα < 0 → iα ref < iα). Neste
caso, a reacção do sistema deverá ser de modo a fazer aumentar o valor da função
de comutação, devendo a derivada desta ser positiva ((e, t)
0dS
dtα > ) para contrariar o
erro.
A mesma análise é válida para a função de comutação Sβ (e,t).
Definidos os vectores (tabela 2.7), é possível seleccionar, para os vários valores lógicos das
funções de comutação, os que melhor desempenho garantem no controlo das correntes de saída do
Conversor Matricial Esparso. No entanto, deve ser considerada a variação no tempo da amplitude

36
dos vectores pulsantes, pelo que deverá ser feita a divisão do período das tensões compostas de
entrada em 12 zonas distintas, como mostra a figura 3.1.
Figura 3.1 – Representação temporal e respectiva divisão por zonas das tensões compostas de entrada.
Na figura 3.2, representam-se os vectores das tensões simples de saída, referentes às zonas 1
e 12, constando no anexo A as representações dos vectores para as restantes zonas.
a) Zona 1 (0 < Фu < π/6) b) Zona 12 (11π/6 < Фu < 2π)
Figura 3.2 – Representação espacial dos vectores correspondentes da tensão simples de saída referentes às zonas 1 e 12 das tensões compostas de entrada.

37
Assim, como exemplo, se as saídas dos comparadores de histerese associados às funções de
comutação Sα(e,t) e Sβ(e,t), apresentarem ambos o valor lógico “+1”, os vectores a escolher seriam o
“+9” ou “-7” tanto para a zona 1 como para a zona 12. Note-se que é fundamental esta hipótese de
escolha de dois vectores, porque sem este grau de liberdade não seria possível controlar também o
factor de potência à entrada do filtro do conversor.
Considerando todas as outras combinações possíveis de erro das correntes de saída e de
localização das tensões de entrada, construiu-se a tabela 3.1. Nesta tabela, uma vez que os vectores
de amplitude máxima são os mesmos na zona 1 e 12, estas duas zonas foram agrupadas numa só,
definida como Zona V1. O mesmo se fez para as zonas “2 e 3”, “4 e 5”, “6 e 7”, “8 e 9” e “10 e 11”, que
se agruparam, respectivamente, nas zonas “V2”, “V3”, “V4”, “V5” e “V6” de tensão (tabela 3.1).
Tabela 3.1 – Vectores seleccionados para as várias zonas de tensão, consoante os resultados
das funções de comutação.
Sα Sβ Zona V1 Zona V2 Zona V3 Zona V4 Zona V5 Zona V6
-1 -1 -9; +7 -9; +8 +8; -7 -7; +9 +9; -8 -8; +7 -1 0 +3; -1 +3; -2 -2; +1 +1; -3 -3; +2 +2; -1 -1 +1 -6; +4 -6; +5 +5; -4 -4; +6 +6; -5 -5; +4 0 -1 +6; -4; -9; +7 +6; -5; -9; +8 -5; +4; +8; -7 +4; -6; -7; +9 -6; +5; +9; -8 +5; -4; -8; +70 0 0 0 0 0 0 0 0 +1 +9; -7; -6; +4 +9; -8; -6; +5 -8; +7; +5; -4 +7; -9; -4; +6 -9; +8; +6; -5 +8; -7; -5; +4
+1 -1 +6; -4 +6; -5 -5; +4 +4; -6 -6; +5 +5; -4 +1 0 -3; +1 -3; +2 +2; -1 -1; +3 +3; -2 -2; +1 +1 +1 +9; -7 +9; -8 -8; +7 +7; -9 -9; +8 +8; -7
Seleccionados os vectores, importa descobrir que estados deverão ser colocados em
funcionamento, uma vez que existem vectores equivalentes mas que correspondem a estados
diferentes. A escolha terá como objectivo, não só garantir uma polaridade fixa (positiva) no andar
intermédio “DC”, indispensável ao correcto funcionamento do SMC, como também tentar garantir os
valores máximos para essa tensão.
Na tabela 3.2 são apresentados os estados do SMC seleccionados da tabela 2.7. Na tabela 3.3
encontra-se as correspondências com os vectores espaciais da associação Rectificador e Inversor.
As tabelas 2.7 e 3.1 permitem seleccionar os vectores que, de acordo com os resultados das
funções de comutação, possibilitam controlar as correntes de saída (do lado inversor) do Conversor
Matricial Esparso. No entanto, não garantem o controlo do factor de potência de entrada (do lado
rectificador).

38
Tabela 3.2 – Estados a aplicar consoante os resultados das funções de comutação, para as várias zonas de tensão.
Sα Sβ Zona V1 Zona V2 Zona V3 Zona V4 Zona V5 Zona V6 -1 -1 35; 25 35; 29 29; 28 28; 34 34; 32 32; 25 -1 0 9; 3 9; 7 7; 2 2; 12 12; 6 6; 3 -1 +1 23; 13 23; 17 17; 16 16; 22 22; 20 20; 13 0 -1 21; 15; 35; 25 21; 19; 35; 29 19; 14; 29; 28 14; 24; 28; 34 24; 18; 34; 32 18; 15; 32; 250 0 37; 39; 45; 47 41; 43; 45; 47 38; 40; 41; 43 38; 40; 46; 48 42; 44; 46; 48 37; 39; 42; 440 +1 33; 27; 23; 13 33; 31; 23; 17 31; 26; 17; 16 26; 36; 16; 22 36; 30; 22; 20 30; 27; 20; 13
+1 -1 21; 15 21; 19 19; 14 14; 24 24; 18 18; 15 +1 0 11; 1 11; 5 5; 4 4; 10 +3; -2 8; 1 +1 +1 33; 27 33; 31 31; 26 26; 36 36; 30 30; 27
Tabela 3.3 – Combinações de estados entre rectificador e inversor, a aplicar consoante os resultados das funções de comutação, para as várias zonas de tensão.
Sα Sβ Zona V1 Zona V2 Zona V3 Zona V4 Zona V5 Zona V6 -1 -1 R1I5; R6I5 R1I5; R2I5 R2I5; R3I5 R3I5; R4I5 R4I5; R5I5 R5I5; R6I5 -1 0 R1I4; R6I4 R1I4; R2I4 R2I4; R3I4 R3I4; R4I4 R4I4; R5I4 R5I4; R6I4 -1 +1 R1I3; R6I3 R1I3; R2I3 R2I3; R3I3 R3I3; R4I3 R4I3; R5I3 R5I3; R6I3
0 -1 R1I6; R6I6; R1I5; R6I5
R1I6; R2I6; R1I5; R2I5
R2I6; R3I6; R2I5; R3I5
R3I6; R4I6; R3I5; R4I5
R4I6; R5I6; R4I5; R5I5
R5I6; R6I6; R5I5; R6I6
0 0 R6I8; R6I7; R1I8; R1I7
R2I8; R2I7; R1I8; R1I7
R3I8; R3I7; R2I8; R2I7
R3I8; R3I7; R4I8; R4I7
R5I8; R5I7; R4I8; R4I7
R6I8; R6I7; R5I8; R5I7
0 +1 R1I2; R6I2; R1I3; R6I3
R1I2; R2I2; R1I3; R2I3
R2I2; R3I2; R2I3; R3I3
R3I2; R4I2; R3I3; R4I3
R4I2; R5I2; R4I3; R5I3
R5I2; R6I2; R5I3; R6I3
+1 -1 R1I6; R6I6 R1I6; R2I6 R2I6; R3I6 R3I6; R4I6 R4I6; R5I6 R5I6; R6I6 +1 0 R1I1; R6I1 R1I1; R2I1 R2I1; R3I1 R3I1; R4I1 R4I1; R5I1 R5I1; R6I1 +1 +1 R1I2; R6I2 R1I2; R2I2 R2I2; R3I2 R3I2; R4I2 R4I2; R5I2 R5I2; R6I2
3.2. Controlo do Factor de Potência de Entrada
Aplicando a transformação de Concordia (2.9) ao sistema de tensões simples (2.8) de entrada
do filtro do conversor, [viα viβ vi0]T=CT[va vb vc]T obtém-se (3.4).
3V cos( t)
3Vsin( t)
00
v
v
v
α
β
⎧ = ω⎪⎪ = ω⎨⎪ =⎪⎩
(3.4)
Recorrendo à transformação de Blondel-Park (3.5), em que se considera θ = ωt.

39
cos sin 0sin cos 00 0 1
θ θ⎡ ⎤⎢ ⎥= − θ θ⎢ ⎥⎢ ⎥⎣ ⎦
BP (3.5)
Procede-se à transformação do sistema de coordenadas de “αβ0” (3.4) para “dq0” [vd vq
v0]T=PBT[viα viβ vi0]T, obtendo-se (3.6).
d
q
0
3V0
0
vv
v
⎧ =⎪
=⎨⎪ =⎩
(3.6)
De (3.6) conclui-se, que para que as correntes de entrada estejam em fase com as respectivas
tensões é necessário garantir que a componente “q “ das correntes, seja também nula.
À semelhança do que se fez para as correntes de saída, em que se definiu um erro de
seguimento, também para a corrente iq, que se vai controlar, se define o erro de seguimento
relativamente à referência (3.7).
q refi q qe i i= − (3.7)
Devido à existência do filtro de entrada, as correntes consumidas ou injectadas na rede
eléctrica não dependem directamente dos estados dos interruptores. De acordo com (Pinto, 2003), a
função de comutação que permite controlar o factor de potência (3.8) dependerá directamente do erro
das correntes (Pinto, 2003).
q ref qq i q q q i(e, t) ( ) eS = k i i = k − (3.8)
Uma vez que só se pode escolher um de dois vectores (que são os que garantem,
simultaneamente, o controlo das correntes de saída), à função de comutação do controlo do factor de
potência, é suficiente a aplicação de um comparador de histerese de dois níveis, “-1” e “+1”. De
acordo com (3.7) considera-se que o valor lógico “-1” representa a situação em que é necessário
diminuir o valor de iq e que o valor “+1” representa a situação em que é necessário aumentar o valor
de iq.
O grau de liberdade apresentado no controlo das correntes à saída do SMC, concede sempre a
hipótese de escolha entre dois vectores, apresentando um deles componente “q” positiva e o outro
componente “q” negativa, seleccionando-se aquele que melhor se adeqúe ao controlo da fase das
correntes de entrada.
À semelhança dos vectores representativos das tensões simples de saída do conversor,
também a amplitude dos vectores pulsantes das correntes de entrada no plano αβ (tabela 2.6) varia

40
no tempo, neste caso em função das correntes da saída. Na figura 3.3, encontram-se a
representação temporal e respectiva divisão por 12 zonas das correntes de saída.
Os vectores das correntes de entrada referentes às zonas 1 e 12 das correntes de saída são
apresentados na figura 3.4, constando no anexo B os vectores relativos a todas as outras zonas.
Outro aspecto a considerar é o facto, de ao contrário do sistema αβ, os eixos “d” e “q” não têm
uma posição fixa, girando no plano αβ consoante a fase apresentada pela fase “a” de entrada.
Encontra-se igualmente representado na figura 3.4, a posição ocupada pelos eixos “d” e “q”, alusivos
à zona V1 de tensão, podendo o eixo “d” ocupar qualquer posição da área delimitada pelos traços a
amarelo (-π/6 < Фu < π/6). No anexo C encontram-se representadas todas as possíveis posições
ocupadas pelos eixos “d” e “q”, consoante as zonas de tensão, para a zona 1 das correntes de saída.
Figura 3.3 – Representação temporal e respectiva divisão por zonas das correntes de saída.
Tomando como referência o exemplo já apresentado, em que ambas as funções de comutação
Sα(e,t) e Sβ(e,t) associadas aos comparadores de histerese, apresentam o valor lógico “+1”, os
vectores seleccionados para o controlo das correntes à saída do SMC, seriam o “+9” ou “-7” para a
zona V1 de tensão.
Observando as figuras 3.4 a) e 3.4 b), verifica-se que para ambas, o vector “+9”, tem
componente “q” positiva e o “-7”, componente negativa. Desta forma, caso o valor lógico apresentado
à saída do comparador de histerese associado a Sq(e,t) seja “+1”, a escolha recairá sobre o vector
“+9”, caso o valor lógico apresentado à saída do comparador de histerese associado a Sq(e,t) seja “-
1”, deverá ser escolhido o vector “-7”.

41
a) Zona 1 (0 < Фi < π/6) b) Zona 12 (11π/6 < Фi < 2π)
Figura 3.4 – Representação espacial dos vectores da corrente de entrada referentes às zonas 1 e 12 das correntes de saída e possíveis localizações dos eixos d e q para a zona V1 de tensão.
Verifica-se que, para as duas zonas consideradas na figura 3.4, os mesmos vectores
apresentam componentes “q” com igual sinal, diferindo apenas no valor da sua amplitude. Uma vez
que o objectivo é verificar se as componentes segundo o eixo “q” são positivas ou negativas, estas
duas zonas de corrente, podem ser agrupadas numa só, definindo-se a Zona I1 de corrente. O
mesmo acontece em relação às zonas “2 e 3”, “4 e 5”, “6 e 7”, “8 e 9” e “10 e 11”, que se agrupam
respectivamente nas zonas “I2”, “I3”, “I4”, “I5” e “I6” de corrente.
Visto não ser possível prever qual o tipo de carga que irá ser ligada à saída do conversor, é
importante que sejam salvaguardadas todas as combinações entre zonas de corrente e de tensão,
representando-se na tabela 3.4, todas as possíveis escolhas de vectores, no controlo das correntes à
saída do SMC e do factor de potência de entrada.
Seleccionados os vectores, o próximo passo será a escolha dos estados que irão ser postos
em funcionamento, de modo a garantir polaridade positiva e os valores máximos da tensão no andar
intermédio. Na tabela 3.5 encontram-se essas escolhas, estando no anexo D as correspondentes
combinações entre Rectificador e Inversor.

42
Tabela 3.4 – Vectores a aplicar no controlo das correntes de saída e do factor de potência à entrada do Conversor Matricial Esparso, consoante as zonas de tensão e corrente
Sα; Sβ -1; -1 -1; 0 -1; +1 0; -1 0; 0 0; +1 +1; -1 +1; 0 +1; +1
Sq Sq Sq Sq Sq Sq Sq Sq Sq Z
ona
T
ensã
o
Zon
a C
orre
nte
-1 +1 -1 +1 -1 +1 -1 +1 -1 +1 -1 +1 -1 +1 -1 +1 -1 +1
V1 I1 -9 +7 +3 -1 -6 +4 -9 +7 0 0 -7 +9 -4 +6 +1 -3 -7 +9 V1 I2 -9 +7 +3 -1 +4 -6 -9 +7 0 0 -7 +9 +6 -4 +1 -3 -7 +9 V1 I3 -9 +7 -1 +3 +4 -6 -9 +7 0 0 -7 +9 +6 -4 -3 +1 -7 +9 V1 I4 +7 -9 -1 +3 +4 -6 +7 -9 0 0 +9 -7 +6 -4 -3 +1 +9 -7 V1 I5 +7 -9 -1 +3 -6 +4 +7 -9 0 0 +9 -7 -4 +6 -3 +1 +9 -7 V1 I6 +7 -9 +3 -1 -6 +4 +7 -9 0 0 +9 -7 -4 +6 +1 -3 +9 -7
V2 I1 +8 -9 -2 +3 +5 -6 +8 -9 0 0 +9 -8 +6 -5 -3 +2 +9 -8 V2 I2 +8 -9 -2 +3 -6 +5 +8 -9 0 0 +9 -8 -5 +6 -3 +2 +9 -8 V2 I3 +8 -9 +3 -2 -6 +5 +8 -9 0 0 +9 -8 -5 +6 +2 -3 +9 -8 V2 I4 -9 +8 +3 -2 -6 +5 -9 +8 0 0 -8 +9 -5 +6 +2 -3 -8 +9 V2 I5 -9 +8 +3 -2 +5 -6 -9 +8 0 0 -8 +9 +6 -5 +2 -3 -8 +9 V2 I6 -9 +8 -2 +3 +5 -6 -9 +8 0 0 -8 +9 +6 -5 -3 +2 -8 +9
V3 I1 -7 +8 +1 -2 -4 +5 -7 +8 0 0 -8 +7 -5 +4 +2 -1 -8 26 V3 I2 -7 +8 +1 -2 +5 -4 -7 +8 0 0 -8 +7 +4 -5 +2 -1 -8 26 V3 I3 -7 +8 -2 +1 +5 -4 -7 +8 0 0 -8 +7 +4 -5 -1 +2 -8 26 V3 I4 +8 -7 -2 +1 +5 -4 +8 -7 0 0 +7 -8 +4 -5 -1 +2 26 -8 V3 I5 +8 -7 -2 +1 -4 +5 +8 -7 0 0 +7 -8 -5 +4 -1 +2 26 -8 V3 I6 +8 -7 +1 -2 -4 +5 +8 -7 0 0 +7 -8 -5 +4 +2 -1 26 -8
V4 I1 +9 -7 -3 +1 +6 -4 +9 -7 0 0 +7 -9 +4 -6 -1 +3 +7 -9 V4 I2 +9 -7 -3 +1 -4 +6 +9 -7 0 0 +7 -9 -6 +4 -1 +3 +7 -9 V4 I3 +9 -7 +1 -3 -4 +6 +9 -7 0 0 +7 -9 -6 +4 +3 -1 +7 -9 V4 I4 -7 +9 +1 -3 -4 +6 -7 +9 0 0 -9 +7 -6 +4 +3 -1 -9 +7 V4 I5 -7 +9 +1 -3 +6 -4 -7 +9 0 0 -9 +7 +4 -6 +3 -1 -9 +7 V4 I6 -7 +9 -3 +1 +6 -4 -7 +9 0 0 -9 +7 +4 -6 -1 +3 -9 +7
V5 I1 -8 +9 +2 -3 -5 +6 -8 +9 0 0 -9 +8 -6 +5 +3 -2 -9 +8 V5 I2 -8 +9 +2 -3 +6 -5 -8 +9 0 0 -9 +8 +5 -6 +3 -2 -9 +8 V5 I3 -8 +9 -3 +2 +6 -5 -8 +9 0 0 -9 +8 +5 -6 -2 +3 -9 +8 V5 I4 +9 -8 -3 +2 +6 -5 +9 -8 0 0 +8 -9 +5 -6 -2 +3 +8 -9 V5 I5 +9 -8 -3 +2 -5 +6 +9 -8 0 0 +8 -9 -6 +5 -2 +3 +8 -9 V5 I6 +9 -8 +2 -3 -5 +6 +9 -8 0 0 +8 -9 -6 +5 +3 -2 +8 -9
V6 I1 +7 -8 -1 +2 +4 -5 +7 -8 0 0 +8 -7 +5 -4 -2 +1 +8 -7 V6 I2 +7 -8 -1 +2 -5 +4 +7 -8 0 0 +8 -7 -4 +5 -2 +1 +8 -7 V6 I3 +7 -8 +2 -1 -5 +4 +7 -8 0 0 +8 -7 -4 +5 +1 -2 +8 -7 V6 I4 -8 +7 +2 -1 -5 +4 -8 +7 0 0 -7 +8 -4 +5 +1 -2 -7 +8 V6 I5 -8 +7 +2 -1 +4 -5 -8 +7 0 0 -7 +8 +5 -4 +1 -2 -7 +8 V6 I6 -8 +7 -1 +2 +4 -5 -8 +7 0 0 -7 +8 +5 -4 -2 +1 -7 +8

43
Tabela 3.5 – Estados a aplicar no controlo das correntes de saída e do factor de potência à entrada, do Conversor Matricial Esparso, consoante as zonas de tensão e corrente em causa.
Sα; Sβ -1; -1 -1; 0 -1; +1 0; -1 0; 0 0; +1 +1; -1 +1; 0 +1; +1
Sq Sq Sq Sq Sq Sq Sq Sq Sq Z
ona
T
ensã
o
Zon
a C
orre
nte
-1 +1 -1 +1 -1 +1 -1 +1 -1 +1 -1 +1 -1 +1 -1 +1 -1 +1
V1 I1 35 25 9 3 23 13 35 25 45 45 27 33 15 21 1 11 27 33 V1 I2 35 25 9 3 13 23 35 25 45 45 27 33 21 15 1 11 27 33 V1 I3 35 25 3 9 13 23 35 25 45 45 27 33 21 15 11 1 27 33 V1 I4 25 35 3 9 13 23 25 35 45 45 33 27 21 15 11 1 33 27 V1 I5 25 35 3 9 23 13 25 35 45 45 33 27 15 21 11 1 33 27 V1 I6 25 35 9 3 23 13 25 35 45 45 33 27 15 21 1 11 33 27
V2 I1 29 35 7 9 17 23 29 35 41 41 33 31 21 19 11 5 33 31 V2 I2 29 35 7 9 23 17 29 35 41 41 33 31 19 21 11 5 33 31 V2 I3 29 35 9 7 23 17 29 35 41 41 33 31 19 21 5 11 33 31 V2 I4 35 29 9 7 23 17 35 29 41 41 31 33 19 21 5 11 31 33 V2 I5 35 29 9 7 17 23 35 29 41 41 31 33 21 19 5 11 31 33 V2 I6 35 29 7 9 17 23 35 29 41 41 31 33 21 19 11 5 31 33
V3 I1 28 29 2 7 16 17 28 29 38 38 31 26 19 14 5 4 31 26 V3 I2 28 29 2 7 17 16 28 29 38 38 31 26 14 19 5 4 31 26 V3 I3 28 29 7 2 17 16 28 29 38 38 31 26 14 19 4 5 31 26 V3 I4 29 28 7 2 17 16 29 28 38 38 26 31 14 19 4 5 26 31 V3 I5 29 28 7 2 16 17 29 28 38 38 26 31 19 14 4 5 26 31 V3 I6 29 28 2 7 16 17 29 28 38 38 26 31 19 14 5 4 26 31
V4 I1 34 28 12 2 22 16 34 28 46 46 26 36 14 24 4 10 26 36 V4 I2 34 28 12 2 16 22 34 28 46 46 26 36 24 14 4 10 26 36 V4 I3 34 28 2 12 16 22 34 28 46 46 26 36 24 14 10 4 26 36 V4 I4 28 34 2 12 16 22 28 34 46 46 36 26 24 14 10 4 36 26 V4 I5 28 34 2 12 22 16 28 34 46 46 36 26 14 24 10 4 36 26 V4 I6 28 34 12 2 22 16 28 34 46 46 36 26 14 24 4 10 36 26
V5 I1 32 34 6 12 20 22 32 34 42 42 36 30 24 18 10 8 36 30 V5 I2 32 34 6 12 22 20 32 34 42 42 36 30 18 24 10 8 36 30 V5 I3 32 34 12 6 22 20 32 34 42 42 36 30 18 24 8 10 36 30 V5 I4 34 32 12 6 22 20 34 32 42 42 30 36 18 24 8 10 30 36 V5 I5 34 32 12 6 20 22 34 32 42 42 30 36 24 18 8 10 30 36 V5 I6 34 32 6 12 20 22 34 32 42 42 30 36 24 18 10 8 30 36
V6 I1 25 32 3 6 13 20 25 32 37 37 30 27 18 15 8 1 30 27 V6 I2 25 32 3 6 20 13 25 32 37 37 30 27 15 18 8 1 30 27 V6 I3 25 32 6 3 20 13 25 32 37 37 30 27 15 18 1 8 30 27 V6 I4 32 25 6 3 20 13 32 25 37 37 27 30 15 18 1 8 27 30 V6 I5 32 25 6 3 13 20 32 25 37 37 27 30 18 15 1 8 27 30 V6 I6 32 25 3 6 13 20 32 25 37 37 27 30 18 15 8 1 27 30

44
4. SISTEMA DE CONTROLO DO TRÂNSITO DE ENERGIA
O Controlador Universal de Trânsito de Energia (Unified Power Flow Controller, UPFC)
proposto por Lazlo Gyugyi, constituído por dois conversores electrónicos comutados, ligados pelo
andar intermédio “DC” (associação Rectificado – Inversor) por meio de armazenadores de energia
(banco de condensadores), encontra-se representado na figura 4.1.
O objectivo do UPFC, consiste em garantir o nível de potência activa e reactiva desejados
numa linha, inserindo em série com esta uma tensão alternada controlada (EC), de forma a criar uma
compensação dinâmica do sistema que permita ajustar a corrente “I” (figura 4.1).
Figura 4.1 – Esquema de implementação do UPFC com uma associação de dois conversores.
O Conversor 1, ligado em paralelo com a rede, tem como objectivo fornecer ou absorver a
potência activa necessária ao barramento de tensão contínua, de modo a dotar o conversor 2 com
capacidade de colocar em série na linha uma tensão alternada com amplitude e fase controladas.
A ligação dos conversores à rede é feita por intermédio de transformadores, que garantem o
isolamento galvânico e permitem fazer a adaptação aos níveis de tensão dos conversores.
Na figura 4.2 encontra-se o circuito monofásico equivalente do sistema de controlo do trânsito
de potências (Madeira, Silva, 2003), composto por duas fontes de tensão alternadas sinusoidais (E1 e
E2) e por uma outra fonte (EC) com amplitude e fase controláveis representativa do UPFC, inserida
em série com o esquema equivalente de uma linha de transmissão curta.
As impedâncias das fontes são desprezadas face à impedância da linha, e tanto conversor
como transformadores (relação de transformação unitária) são vistos como ideais.

45
I
U1E1 E2
XEC
Figura 4.2 – Princípio de compensação do trânsito de energia numa linha de transmissão.
A corrente do circuito equivalente em função das restantes grandezas é representada em (4.1).
1 C 2E E EI
X =
j+ − (4.1)
A potência complexa do lado da fonte “E1” é dada por (4.2).
*
1S E I= (4.2)
Introduzindo (4.1) na expressão da potência complexa (4.2), obtém-se (4.3):
**
C1 21 1
EE ES E E
X X =
j j⎛ ⎞⎛ ⎞−
+ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(4.3)
Assume-se que a fase na origem da tensão E1 é nula:
1 1E E= (4.4)
A tensão E2 é definida de acordo com (4.5).
2 2E E e j− δ= (4.5)
A tensão Ec imposta pelo UPFC é definida de acordo com (4.6)
C CE E e jρ= (4.6)
Na figura 4.3 encontra-se o diagrama vectorial representativo das tensões do circuito eléctrico
equivalente.

46
Figura 4.3 – Diagrama vectorial representativo das tensões das tensões do circuito eléctrico equivalente do sistema de controlo do trânsito de energia.
Introduzindo (4.4), (4.5) e (4.6) na potência complexa dada por (4.3), obtém-se uma nova
expressão para a potência complexa, expressa por (4.7).
2
1 C 1 C1 2 1 1 2E E E E cosE E E E E cosS sin sin
X X X X = j
⎛ ⎞ρ− δδ + ρ+ +⎜ ⎟⎜ ⎟
⎝ ⎠ (4.7)
A equação anterior pode ser escrita segundo (4.8).
( )0 C 0 CS P P Q Q = j+ + + (4.8)
Onde P0 e Q0 (4.9) representam, respectivamente, a potência activa e reactiva na linha não
compensada.
1 20
21 1 2
0
E EP sin
XE E E cos
QX
= ⎧ δ⎪⎪⎨
− δ⎪ =⎪⎩
(4.9)
Os valores de PC e QC (4.10) somados respectivamente a P0 e Q0, permitem ajustar as
potências aos níveis desejados. O controlo da potência complexa é assim conseguido à custa das
variações do valor eficaz “EC” e da desfasagem “ρ”.
1 CC
1 CC
E EP sin
XE E
Q cosX
=⎧ρ⎪⎪
⎨⎪ = ρ⎪⎩
(4.10)
A existência do Conversor Matricial Esparso (SMC) como alternativa à topologia utilizada no
UPFC clássico proposto por Lazlo Gyugyi, motiva o estudo do desempenho do SMC sobre a rede de
energia eléctrica.

47
Na figura 4.4, encontra-se representada uma rede, semelhante à utilizada na simulação, e na
qual se pretende estudar a implementação de um UPFC.
A tensão “EC” irá ser gerada através da saída do SMC, de modo a compensar a queda de
tensão na linha de transmissão de energia e assim regular o trânsito de energia. Associada à linha,
encontra-se uma carga “Z0”, a qual se considera ser resistiva de modo a absorver potência vinda da
rede.
O conversor encontra-se ligado à rede eléctrica, por intermédio de transformadores, adaptados
aos níveis de tensão utilizados.
Figura 4.4 – Esquema de implementação do UPFC com um Conversor Matricial Esparso.
No capítulo seguinte (secção 5.2) apresentam-se as simulações do UPFC, realizadas com
base no esquema representado na figura 4.4.

48
5. SIMULAÇÕES EM MATLAB/SIMULINK
Neste capítulo são apresentadas as simulações e os respectivos resultados referentes ao
conversor matricial esparso e ao UPFC.
5.1. Simulação do Conversor Matricial Esparso
Nesta secção pretende dar-se continuidade ao estudo do Conversor Matricial Esparso, com a
sua simulação no programa Matlab/Simulink. O esquema a implementar encontra-se representado na
figura 5.1.
Figura 5.1 – Esquema do sistema a implementar constituída pela Rede, Conversor Matricial
Esparso, Carga, e respectivo controlo.

49
A entrada do conversor encontra-se ligada à rede eléctrica de baixa tensão, através do filtro
apresentado na secção 2.4. Na saída do conversor é ligada uma carga trifásica equilibrada RL, onde
se pretende ver impostas as formas de onda das correntes de referência apresentadas na figura 5.2,
controlando-se simultaneamente o factor de potência de entrada.
Todos os modelos utilizados na simulação são apresentados e explicados no anexo E.
Figura 5.2 – Correntes de referência à saída do conversor.
De maneira a conferir uma maior compreensão dos vários aspectos relacionados com o
funcionamento do conversor, a simulação é efectuada utilizando três abordagens diferentes:
Solução 1 – Neste modo, todos os modelos são implementados através de blocos de Simulink,
sendo efectuada uma análise ideal de todo sistema, não se considerando, por isso, as perdas de
condução e de comutação dos semicondutores bem como o ruído produzido pela comutação.
Solução 2 – Utilizando os mesmos blocos de controlo utilizados na solução 1, implementam-se
os módulos da rede, conversor e carga, com recurso a blocos da toolbox “PowerSystems”. O
conversor é simulado recorrendo a interruptores não ideais, de modo a conseguir-se uma simulação
mais próxima da realidade.
Solução 3 – Neste modo simula-se o Conversor Matricial Esparso, com todos os
semicondutores (transistores IGBT e díodos) que o constituem. Esta simulação é também realizada
com recurso a blocos da “Power Systems” toolbox.

50
Nas figuras 5.3 a), 5.3 b) e 5.3 c) apresentam-se as formas de onda das correntes, obtidas nas
três fases de saída do conversor, para as três abordagens de simulação do conversor utilizadas.
a) b)
c)
Figura 5.3 – Correntes à saída do conversor: a) Solução 1; b) Solução 2; c) Solução 3.

51
É possível verificar que as correntes à saída do conversor formam um sistema trifásico
equilibrado com característica quase perfeitamente sinusoidal. Estas exibem amplitudes e
frequências iguais às das referências, não se visualizando praticamente nenhum ruído resultante da
elevada frequência de comutação dos interruptores ideais.
a) b)
c)
Figura 5.4 – Tensão no andar intermédio “DC” do conversor: a) Solução 1; b) Solução 2; c) Solução 3.

52
As formas de onda das tensões no andar intermédio são representadas nas figuras 5.4 a) 5.4
b) e 5.4 c). A análise da solução 1 (figura 5.4 a) e da solução 2 (figura 5.4 b), permitem concluir que o
controlo do sistema garante não só polaridade positiva da tensão no andar intermédio “DC”, como
também garante a utilização das máximas tensões de entrada em cada instante de tempo.
Já a tensão vDC correspondente à solução 3 (figura 5.4 c) apresenta um comportamento
bastante irregular, existindo picos de tensão, alguns deles apresentando valor negativo, o que sugere
a ocorrência de estados não previstos teoricamente e, eventualmente, curto-circuitos não desejados.
Este comportamento deve-se, em grande parte, ao facto de não ter sido tomada nenhuma precaução
específica no processo de comutação dos semicondutores. Para não sobrecarregar ainda mais a
simulação (dando origem a problemas de convergência), não foram tomadas nenhumas precauções
no processo de comutação dos semicondutores, dando origem à indesejada condução simultânea de
alguns deles.
Ainda nesta última abordagem (solução 3), a presença de semicondutores da toolbox
“PowerSystems”, torna necessária a utilização de um método de passo de cálculo variável para
resolução das equações do sistema. Este facto faz aumentar em muito o tempo de simulação (várias
horas de simulação), exigindo uma maior disponibilidade de memória por parte do computador.
Nas figuras 5.5 a) e 5.5 c) representam-se as formas onda da tensão afectada de um ganho de
1/50 (curva a vermelho) juntamente com a corrente (curva a azul), obtidas na fase “a” à entrada do
filtro.
Na figura 5.5 b) são representadas as formas de onda da tensão de entrada e da corrente,
obtidas directamente na fase “a” à entrada do conversor, para a solução 2. Nesta solução, o conteúdo
harmónico de alta-frequência das correntes de entrada é atenuado graças à utilização de um filtro
externo.
Facilmente se observa que, para todas as soluções apresentadas, a corrente de entrada se
encontra em fase com a tensão, garantindo, por conseguinte, um factor de potência praticamente
unitário. Verifica-se, assim, o controlo da fase das correntes de entrada, o que permite fornecer ao
conversor uma característica não poluente da rede eléctrica.
Contrariamente às formas de onda da corrente de entrada obtidas nas soluções 1 e 2, que
revelam comportamentos praticamente sinusoidais, a forma de onda referente à solução 3, não só
apresenta maior valor de amplitude, como também exibe maior distorção aquando da passagem por
esses mesmos máximos de amplitude. De salientar que a causa para este comportamento se deve,
muito provavelmente, à distorção da tensão no andar intermédio “DC”.

53
a) b)
c)
Figura 5.5 – Tensão e corrente na fase “a” de entrada: a) Modo 1; b) Modo 2; c) Modo 3.
Os resultados apresentados para as três soluções testadas permitem verificar que o controlo
do sistema é efectivamente realizado do modo correcto, pois para além de se obterem as correntes
de saída desejadas, é também garantida alguma estabilidade da tensão vDC com polaridade positiva,
e é ainda garantido o controlo das fases das correntes de entrada. Os tempos de simulação são
totalmente díspares para as três soluções apresentadas, sendo a solução 1 a mais rápida (poucos
segundos de simulação) e a solução 3 a mais lenta e mais pesada (várias horas de simulação).
Para evitar problemas de convergência, na simulação do UPFC utilizou-se a solução 1.

54
5.2. Simulação do UPFC com Conversor Matricial Esparso
5.2.1. Introdução
Na simulação do UPFC, desenvolvida nesta secção, a implementação do Conversor Matricial
Esparso e o seu controlo, são feitos tal como na solução 1 apresentada na secção anterior, não se
contabilizando quaisquer tipos de perdas relacionadas com a operacionalidade dos semicondutores
bem como ao ruído produzido pela comutação.
De maneira a obter resultados mais próximos da realidade, a implementação dos elementos
constituintes da rede eléctrica (Fontes, linha, carga, transformadores), foi conseguida com o recurso a
blocos da toolbox “PowerSystems”.
O esquema ilustrativo da simulação encontra-se na figura 5.6.
Figura 5.6 – Esquema do sistema a implementar na realização do UPFC com um Conversor Matricial Esparso.

55
A ideia implementada para o controlo do trânsito de potências é em tudo muito semelhante às
simulações já desenvolvias desenvolvidas, onde se pretendeu controlar a corrente numa carga RL à
saída do SMC. Neste caso a carga será o primário do transformador T2 e a corrente que nele
circulará irá impor no secundário, que se encontra em série com a linha, uma corrente proporcional
(dependente da relação de transformação) e a consequente tensão EC, de forma a garantir o trânsito
de potências desejado.
A dependência da potência activa e reactiva com as tensões e correntes em coordenadas dq é
expressa pelas equações definidas em (5.1).
d d q q
d q q d
P
Q
v i v i
v i v i
= +⎧⎪⎨ = −⎪⎩
(5.1)
Conhecidas as tensões da fonte E1 e as potências a impor, facilmente se retiram as correntes
(5.2) que deverão circular na linha, de forma a conseguir alcançar os objectivos propostos.
ref
ref
ref ref2 2
ref ref2 2
P Q
P Q
d qd
d q
q dq
d q
v vi
v v
v vi
v v
−⎧=⎪
+⎪⎨ +⎪ =⎪ +⎩
(5.2)
A adaptação ao controlo já existente é feita recorrendo à transformação inversa de Blondel-
Park, como mostra a equação matricial (5.3), obtendo-se assim as correntes de referência na linha
em coordenadas αβ.
cos sinsin cos
ref
ref
d
q
i iii
α
β
⎡ ⎤ ⎡ ⎤θ − θ⎡ ⎤⎢ ⎥ = ⎢ ⎥⎢ ⎥θ θ⎢ ⎥ ⎣ ⎦ ⎣ ⎦⎣ ⎦
(5.3)
Para os parâmetros da linha, foram tomados os valores de 150 kV para a tensão composta das
fases das fontes e 100MVA para potência de base da linha com resistência e reactância
respectivamente de 4,3429Ω e 11,4362Ω, referentes à linha LRAED 1 da REN, SA (Madeira, 2003). A
impedância ligada à rede, apresenta apenas comportamento resistivo com o valor de 1kΩ.
A adaptação das tensões da rede ao conversor foi conseguida através da relação 1:10 dos
transformadores.
No anexo F estão patentes a apresentação e descrição dos modelos utilizados na simulação.

56
5.2.2. Resultados de simulação
Para facilitar a análise dos resultados apresentados, utilizaram-se como unidades das
grandezas eléctricas valores por unidade (pu).
As referências das potências impostas ao sistema são apresentadas na figura 5.7 a) (potência
activa) e figura 5.7 b) (potência reactiva).
A simulação começa por impor os valores de 0,75 pu e 0.1 pu, respectivamente para a
potência activa e reactiva. No instante t=0,03s, aplicou-se uma variação de 0,75 pu para 0,9 pu da
potência activa permanecendo igual o valor da potência reactiva. No instante t=0,05s é provocada
uma variação na referência da potência reactiva de 0,1 pu para 0,2 pu.
a) b)
Figura 5.7 – Potências de referência na linha eléctrica: a) Potência activa; b) Potência reactiva.
As correspondentes formas de onda das correntes de referência na linha encontram-se
representadas na figura 5.8 (as formas de onda de referência na saída do conversor são iguais em
valores pu).

57
Figura 5.8 – Correntes de referência na linha, geradas para controlo do trânsito de potências.
A figura 5.9 mostra as formas de onda (afectadas pelas naturais oscilações de frequência
elevada) das correntes controladas obtidas na linha, constatando-se que seguem invariavelmente as
referências. Na mesma figura, é ainda possível observar, as alterações das correntes quando
ocorrem variações das potências, verificando-se que em t=0,03s (variação da potência activa) ocorre
um aumento mais acentuado das correntes, comparativamente com o registado em t=0,05s (variação
da potência reactiva) em que alteração praticamente não é visível.
Figura 5.9 – Correntes impostas na linha para o controlo do trânsito de potências.

58
As figuras 5.10 a) e 5.10 b) apresentam de acordo com a ordem enunciada, as formas de onda
da tensão juntamente com corrente na fase “a” à entrada do filtro e a tensão vDC no andar intermédio
do conversor, comprovando-se deste modo o controlo global do sistema, uma vez controladas as
correntes e garantido um factor de potência unitário na entrada, juntamente com a utilização das
máximas tensões de entrada, garantindo a polaridade positiva da tensão vDC. É ainda possível
observar, ligeiros picos nas formas de onda da corrente de entrada do filtro e na tensão no andar
intermédio, a quando da variação da potência reactiva (t=0,03s) não se observando praticamente
nenhuma alteração a quando da variação da potência reactiva (t=0,05s).
a) b)
Figura 5.10 – a) Tensão e corrente na fase “a” à entrada do filtro do conversor; b) Tensão no
andar intermédio “DC” do conversor.
As formas de onda das potências activa e reactiva na linha (afectadas pelas naturais
oscilações de frequência elevada) são apresentadas respectivamente na figura 5.11 a) e 5.11 b),
comprovando-se o controlo do trânsito de potências, uma vez que tanto a potência activa como a
potência reactiva seguem as referências impostas, sendo a resposta do sistema extremamente
rápida.

59
a) b)
Figura 5.11 – Potências na linha eléctrica: a) Activa; b) Reactiva.

60
6. CONCLUSÃO
Neste trabalho foi, numa primeira fase estudada, a topologia do Conversor Matricial Esparso
(SMC), como alternativa aos conversores matriciais já existentes.
O estudo desenvolvido, permitiu verificar que a conversão indirecta AC/AC pode ser garantida,
sem qualquer perda de funcionalidade, reduzindo-se o número de semicondutores comandados à
condução a ao corte utilizados, para 15, comparativamente aos 18 que constituem tanto o Conversor
Matricial Clássico (CMC) como o Conversor Matricial Indirecto (IMC).
Na segunda parte do trabalho, foi estudada a aplicação do SMC no controlo da potência activa
e reactiva de uma rede eléctrica, em alternativa à topologia utilizada no UPFC clássico proposto por
Lazlo Gyugyi.
O UPFC constituído por este tipo de conversor, permite obter, para além das vantagens já
conhecidas dos conversores matriciais devido à ausência de qualquer malha intermédia de
armazenadores de energia reactiva, um esforço de realização menor no controlo do trânsito de
energia.
Na implementação do UPFC, foi necessária a introdução de um transformador na entrada e
outro na saída do conversor, de maneira a adaptar os valores de tensão apresentados, aos níveis de
tensão exigidos pelo conversor para o seu correcto funcionamento.
A utilização do controlo por modo de deslizamento associado à representação dos vectores
espaciais, revelou-se uma óptima opção, no controlo das correntes à saída e no controlo do factor de
potência de entrada do conversor, conduzindo a respostas extremamente rápidas e eficazes por parte
do sistema.
Para futuros trabalhos, fica a sugestão de se desenvolver o estudo económico dos conversores
apresentados ao longo deste trabalho, de maneira a possibilitar um conhecimento mais aprofundado
das situações que melhor se coadunam às suas utilizações.

61
BIBLIOGRAFIA
Alesina, A.; Venturini, M.; “Solid State Power Conversion: A Fourier Analysis Approach to
Generalized Transformer Synthesis”; IEEE Transactions on Circuits and Systems,
Vol. CAS-28, No 4, April 1981, pp. 319-330.
Alesina, A.; Venturini, M.; “Analysis and Design of Optimum-Amplitude Nine-Switch Direct AC-AC
Converters”; IEEE Transactions on Power Electronics, Vol. 4, No 1, January 1989,
pp. 101-112.
Hung, J.; Gao, W.; “Variable Structure Control: A Survey”; IEEE Transactions on Industrial
Electronics, Vol. 40, No 1, February 1993, pp. 2-22.
Gyugyi, L.; Pelly, B.; “Static Power Frequency Changers – Theory, Performance & Application”, John
Wiley & Sons, 1976, ISBN 0-471-67800-7.
Gyugyi, L.; “Unified Power Flow Control Concept for Flexible AC Transmission Systems” IEE
PROCEEDINGS-C, Vol. 139, Nº 4, July 1992.
Holmes, D. G.; Lipo, T. A.; “Implemation of a Controlled Rectifier Using AC-AC Matrix Converter
Theory”; IEEE Transactions on Power Electronics, Vol. 7, Nº 1, January 1992, pp.
240-250.
Huber, L.; Borojevic, D.; Burany, N.; “Analysis, Design and Implementation of the Space-Vector
Modulator for Forced-Commutated Cycloconverters”; IEE Proceedings-B Electric
Power Applications, Vol.139, No 2, March 1992, pp. 103-113.
Kolar, J. W.; Baumann, M.; Schafmeister, F.; Ertl, H.; “Novel Three-Phase AC-DC-AC Sparse
Matrix Converter”; Proc. IEEE Conference APEC’2002, Volume 2, pp 777-791,
2002.
Madeira, B.; Silva, J.; “Conversores multinível na optimização da capacidade de transporte de redes
de energia eléctrica”; LEEC Projecto Final de Curso 2002/2003, 3º Prémio REN
2003.
Menino, A.; Antunes, J.; “Processamento Electricamente não Poluente de Energia Eléctrica:
Conversor Matricial Trifásico”, Projecto Final de Curso da Licenciatura em
Engenharia Electrotécnica e de Computadores, Instituto Superior Técnico,
Universidade Técnica de Lisboa, Portugal, Julho 2002.

62
Pinto, S.; “Conversores Matriciais Trifásicos: Generalização do Comando Vectorial Directo”; Tese de
Doutoramento, Instituto Superior Técnico, Universidade Técnica de Lisboa,
Portugal, Julho 2003.
Silva, J. F.; “Electrónica Industrial”; Fundação Calouste Gulbenkian, Lisboa, Portugal, 1998.
Silva, J.; Pires, V.; Pinto, S.; Barros, J.; “Advanced Control Methods for Power Electronics
Systems”; Mathematics and Computers in Simulation, IMACS, Elsevier, Vol. 63 3-
5, pp.281-295, November 2003.
Strzelecki, R.; Noculak, A.; Tunia, H.; Sozannski, K.; Fedyczak, Z.; “UPFC with Matrix Converter”;
Proc. Conference EPE 2001, Graz, Austria, September 2001.
Utkin, V.; “Discontinuous Control Systems: State of Art in Theory and Applications”; Proc. IFAC,
Munich, July 1987, pp.75 – 94.
Watanabe, E. ; Aredes, M.; “Teoria de potência ativa e reativa instantânea e aplicações – filtros
ativos e FACTS”; CBA 98 – XII Conferência Brasileira de Automática, volume 1,
pages 81-122, Uberlândia, Brasil, 1998.

63
A. LOCALIZAÇÃO DOS VECTORES DE TENSÃO SIMPLES DE SAÍDA
a) Zona 1 (0 < Фu < π/6) b) Zona 2 (π/6 < Фu < π/3)
c) Zona 3 (2π/6 < Фu < π/2) d) Zona 4 (3π/6 < Фu < 2π/3)
e) Zona 5 (2π/3 < Фu < 5π/6) f) Zona 6 (5π/6 < Фu < π)

64
g) Zona 7 (π < Фu < 7π/6) h) Zona 8 (7π/6 < Фu < 4π/3)
i) Zona 9 (4π/3 < Фu < 3π/2) j) Zona 10 (3π/2 < Фu < 5π/3)
k) Zona 11 (5π/3 < Фu < 11π/6) l) Zona 12 (11π/6 < Фu < 2π)

65
B. LOCALIZAÇÃO DOS VECTORES DE CORRENTE DE ENTRADA.
a) Zona 1 (0 < Фi < π/6) b) Zona 2 (π/6 < Фi < π/3)
c) Zona 3 (π/3 < Фi < π/2) d) Zona 4 (π/2 < Фi < 2π/3)
e) Zona 5 (2π/3 < Фi < 5π/6) f) Zona 6 (5π/6 < Фi < π)

66
g) Zona 7 (π < Фi < 7π/6) h) Zona 8 (7π/6 < Фi < 4π/3)
i) Zona 9 (4π/3 < Фi < 3π/2) j) Zona 10 (3π/2 < Фi < 5π/3)
k) Zona 11 (5π/3 < Фi < 11π/6) l) Zona 12 (11π/6 < Фi < 2π)

67
C. LOCALIZAÇÃO DOS EIXOS dq REFERENTES À ZONA I1 DE CORRENTE.
a) Zona V1 tensão (-π/6 < Фu < π/6) b) Zona V2 tensão (π/6 < Фu < π/2)
c) Zona V3 tensão (2π/3 < Фu < 5π/6) d) Zona V4 tensão (5π/6 < Фu < 7π/6)
e) Zona V5 tensão (7π/6 < Фu < 3π/2) f) Zona V6 tensão (3π/2 < Фu < 11π/6)

68
D. COMBINAÇÕES DOS ESTADOS DO RECTIFICADOR E DO INVERSOR
Tabela D.1 – Estados do Rectificador e Inversor a aplicar no controlo das correntes de saída e do factor de potência à entrada, do Conversor Matricial Esparso, consoante as zonas de
tensão e corrente em causa.
Sα; Sβ -1; -1 -1; 0 -1; +1 0; -1 0; 0 0; +1 +1; -1 +1; 0 +1; +1
Sq Sq Sq Sq Sq Sq Sq Sq Sq
Zona
T
ensã
o
Zona
C
orre
nte
-1 +1 -1 +1 -1 +1 -1 +1 -1 +1 -1 +1 -1 +1 -1 +1 -1 +1
V1 I1 R1I5 R6I5 R1I4 R6I4 R1I3 R6I3 R1I5 R6I5 R1I8 R1I8 R6I2 R1I2 R6I6 R1I6 R6I1 R1I1 R6I2 R1I2
V1 I2 R1I5 R6I5 R1I4 R6I4 R6I3 R1I3 R1I5 R6I5 R1I8 R1I8 R6I2 R1I2 R1I6 R6I6 R6I1 R1I1 R6I2 R1I2 V1 I3 R1I5 R6I5 R6I4 R1I4 R6I3 R1I3 R1I5 R6I5 R1I8 R1I8 R6I2 R1I2 R1I6 R6I6 R1I1 R6I1 R6I2 R1I2 V1 I4 R6I5 R1I5 R6I4 R1I4 R6I3 R1I3 R6I5 R1I5 R1I8 R1I8 R1I2 R6I2 R1I6 R6I6 R1I1 R6I1 R1I2 R6I2 V1 I5 R6I5 R1I5 R6I4 R1I4 R1I3 R6I3 R6I5 R1I5 R1I8 R1I8 R1I2 R6I2 R6I6 R1I6 R1I1 R6I1 R1I2 R6I2 V1 I6 R6I5 R1I5 R1I4 R6I4 R1I3 R6I3 R6I5 R1I5 R1I8 R1I8 R1I2 R6I2 R6I6 R1I6 R6I1 R1I1 R1I2 R6I2 V2 I1 R2I5 R1I5 R2I4 R1I4 R2I3 R1I3 R2I5 R1I5 R2I8 R2I8 R1I2 R2I2 R1I6 R2I6 R1I1 R2I1 R1I2 R2I2 V2 I2 R2I5 R1I5 R2I4 R1I4 R1I3 R2I3 R2I5 R1I5 R2I8 R2I8 R1I2 R2I2 R2I6 R1I6 R1I1 R2I1 R1I2 R2I2 V2 I3 R2I5 R1I5 R1I4 R2I4 R1I3 R2I3 R2I5 R1I5 R2I8 R2I8 R1I2 R2I2 R2I6 R1I6 R2I1 R1I1 R1I2 R2I2 V2 I4 R1I5 R2I5 R1I4 R2I4 R1I3 R2I3 R1I5 R2I5 R2I8 R2I8 R2I2 R1I2 R2I6 R1I6 R2I1 R1I1 R2I2 R1I2 V2 I5 R1I5 R2I5 R1I4 R2I4 R2I3 R1I3 R1I5 R2I5 R2I8 R2I8 R2I2 R1I2 R1I6 R2I6 R2I1 R1I1 R2I2 R1I2 V2 I6 R1I5 R2I5 R2I4 R1I4 R2I3 R1I3 R1I5 R2I5 R2I8 R2I8 R2I2 R1I2 R1I6 R2I6 R1I1 R2I1 R2I2 R1I2 V3 I1 R3I5 R2I5 R3I4 R2I4 R3I3 R2I3 R3I5 R2I5 R3I8 R3I8 R2I2 R3I2 R2I6 R3I6 R2I1 R3I1 R2I2 R3I2
V3 I2 R3I5 R2I5 R3I4 R2I4 R2I3 R3I3 R3I5 R2I5 R3I8 R3I8 R2I2 R3I2 R3I6 R2I6 R2I1 R3I1 R2I2 R3I2 V3 I3 R3I5 R2I5 R2I4 R3I4 R2I3 R3I3 R3I5 R2I5 R3I8 R3I8 R2I2 R3I2 R3I6 R2I6 R3I1 R2I1 R2I2 R3I2 V3 I4 R2I5 R3I5 R2I4 R3I4 R2I3 R3I3 R2I5 R3I5 R3I8 R3I8 R3I2 R2I2 R3I6 R2I6 R3I1 R2I1 R3I2 R2I2 V3 I5 R2I5 R3I5 R2I4 R3I4 R3I3 R2I3 R2I5 R3I5 R3I8 R3I8 R3I2 R2I2 R2I6 R3I6 R3I1 R2I1 R3I2 R2I2 V3 I6 R2I5 R3I5 R3I4 R2I4 R3I3 R2I3 R2I5 R3I5 R3I8 R3I8 R3I2 R2I2 R2I6 R3I6 R2I1 R3I1 R3I2 R2I2 V4 I1 R4I5 R3I5 R4I4 R3I4 R4I3 R3I3 R4I5 R3I5 R4I8 R4I8 R3I2 R4I2 R3I6 R4I6 R3I1 R4I1 R3I2 R4I2 V4 I2 R4I5 R3I5 R4I4 R3I4 R3I3 R4I3 R4I5 R3I5 R4I8 R4I8 R3I2 R4I2 R4I6 R3I6 R3I1 R4I1 R3I2 R4I2 V4 I3 R4I5 R3I5 R3I4 R4I4 R3I3 R4I3 R4I5 R3I5 R4I8 R4I8 R3I2 R4I2 R4I6 R3I6 R4I1 R3I1 R3I2 R4I2 V4 I4 R3I5 R4I5 R3I4 R4I4 R3I3 R4I3 R3I5 R4I5 R4I8 R4I8 R4I2 R3I2 R4I6 R3I6 R4I1 R3I1 R4I2 R3I2 V4 I5 R3I5 R4I5 R3I4 R4I4 R4I3 R3I3 R3I5 R4I5 R4I8 R4I8 R4I2 R3I2 R3I6 R4I6 R4I1 R3I1 R4I2 R3I2 V4 I6 R3I5 R4I5 R4I4 R3I4 R4I3 R3I3 R3I5 R4I5 R4I8 R4I8 R4I2 R3I2 R3I6 R4I6 R3I1 R4I1 R4I2 R3I2 V5 I1 R5I5 R4I5 R5I4 R4I4 R5I3 R4I3 R5I5 R4I5 R5I8 R5I8 R4I2 R5I2 R4I6 R5I6 R4I1 R5I1 R4I2 R5I2 V5 I2 R5I5 R4I5 R5I4 R4I4 R4I3 R5I3 R5I5 R4I5 R5I8 R5I8 R4I2 R5I2 R5I6 R4I6 R4I1 R5I1 R4I2 R5I2 V5 I3 R5I5 R4I5 R4I4 R5I4 R4I3 R5I3 R5I5 R4I5 R5I8 R5I8 R4I2 R5I2 R5I6 R4I6 R5I1 R4I1 R4I2 R5I2 V5 I4 R4I5 R5I5 R4I4 R5I4 R4I3 R5I3 R4I5 R5I5 R5I8 R5I8 R5I2 R4I2 R5I6 R4I6 R5I1 R4I1 R5I2 R4I2 V5 I5 R4I5 R5I5 R4I4 R5I4 R5I3 R4I3 R4I5 R5I5 R5I8 R5I8 R5I2 R4I2 R4I6 R5I6 R5I1 R4I1 R5I2 R4I2 V5 I6 R4I5 R5I5 R5I4 R4I4 R5I3 R4I3 R4I5 R5I5 R5I8 R5I8 R5I2 R4I2 R4I6 R5I6 R4I1 R5I1 R5I2 R4I2 V6 I1 R6I5 R5I5 R6I4 R5I4 R6I3 R5I3 R6I5 R5I5 R6I8 R6I8 R5I2 R6I2 R5I6 R6I6 R5I1 R6I1 R5I2 R6I2 V6 I2 R6I5 R5I5 R6I4 R5I4 R5I3 R6I3 R6I5 R5I5 R6I8 R6I8 R5I2 R6I2 R6I6 R5I6 R5I1 R6I1 R5I2 R6I2 V6 I3 R6I5 R5I5 R5I4 R6I4 R5I3 R6I3 R6I5 R5I5 R6I8 R6I8 R5I2 R6I2 R6I6 R5I6 R6I1 R5I1 R5I2 R6I2 V6 I4 R5I5 R6I5 R5I4 R6I4 R5I3 R6I3 R5I5 R6I5 R6I8 R6I8 R6I2 R5I2 R6I6 R5I6 R6I1 R5I1 R6I2 R5I2 V6 I5 R5I5 R6I5 R5I4 R6I4 R6I3 R5I3 R5I5 R6I5 R6I8 R6I8 R6I2 R5I2 R5I6 R6I6 R6I1 R5I1 R6I2 R5I2 V6 I6 R5I5 R6I5 R6I4 R5I4 R6I3 R5I3 R5I5 R6I5 R6I8 R6I8 R6I2 R5I2 R5I6 R6I6 R5I1 R6I1 R6I2 R5I2

69
E. SIMULAÇÃO DO CONVERSOR MATRICIAL ESPARSO
Neste anexo são explicados os modelos utilizados nas simulações do Conversor Matricial
Esparso, referentes às três soluções apresentadas na secção 5.1.
O ficheiro de dados (Dados_Matricial.m) utilizado nas simulações encontra-se representado na
figura E.1.
Figura E.1 – Dados Utilizados nas Simulações do Conversor Matricial Esparso.
E.1. Solução 1
O modelo global da simulação (Matricial1.mdl) referente à solução 1 é representado na figura
E.2, sendo este constituído pelos blocos Rede, Filtro, Carga, Conversor Matricial Esparso e Controlo.

70
Figura E.2 – Modelo da Simulação do Conversor Matricial Esparso Referentes à Solução 1.
E.1.1. Bloco Rede
O modelo do bloco Rede, ilustrado na figura E.3, simula a rede eléctrica de baixa tensão. Este
sistema fornece na sua saída três tensões sinusoidais (via, vib e vic), que formam um sistema trifásico
equilibrado semelhante ao apresentado em (2.8).
Entradas: Não tem ;
Saídas: via, vib e vic.

71
Figura E.3 – Modelo do bloco Rede.
E.1.2. Bloco Filtro
O bloco de filtro simula o filtro que é colocado na entrada do Conversor Matricial Esparso,
apresentado na secção 2.4.
Visto estarmos na presença de sistemas eléctricos trifásicos e equilibrados, apenas serão
tratadas duas variáveis linearmente independentes para as tensões (vc = - va - vb) e correntes (ic = - ia -
ib). O bloco recebe nas suas entradas, as tensões da rede (via e vib) e as correntes de entrada do
Conversor Matricial Esparso (ia e ib), fornecendo como resultado as tensões de saída (va, vb e vc) e as
correntes na entrada (iia, iib e iic), do filtro.
Do estudo desenvolvido por (Pinto, 2003), são retiradas as equações que permitem criar o
modelo representado na figura E.4.
As correntes que circulam nas bobinas do filtro (ila e ilb) são conseguidas através das equações:
T
la bc ca ia0T
lb bc ca ib0
1 2 1( )3 3
2 1 1( )3 3
i v v v dtl l l
i v v v dtl l l
⎧⎪ = + +⎪⎪⎨⎪
= − − +⎪⎪⎩
∫
∫ (E.1)
Através de (E.1) é possível obter as correntes que circulam nas resistências (ira e irb) que se
encontram em paralelo com as bobinas:
lara bc ca ia
lbrb bc ca ib
1 2 1( )3 3
2 1 1( )3 3
dil li v v vr dt r l l l
dil li v v vr dt r l l l
⎧ = = + +⎪⎪⎨⎪ = = − − +⎪⎩
(E.2)

72
Somando as correntes das bobinas (E.1) com as correntes nas resistências do filtro (E.2),
obtêm-se as correntes de entrada do filtro:
ia la ra
ib lb rb
ic ia ib
i i ii i ii i i
= +⎧⎪ = +⎨⎪ = − −⎩
(E.3)
Figura E.4 – Modelo do bloco Filtro.
As tensões compostas à saída do filtro são dadas por:
T
bc la lb bc a b0T
ca la lb ca a b0
1 2 1 1 2( )3 3 3 3
2 1 1 2 1( )3 3 3 3
v i i v i i dtc c 3cr c c
v i i v i i dtc c 3cr c c
⎧⎪ = + − − −⎪⎪⎨⎪
= − − − + +⎪⎪⎩
∫
∫ (E.4)
Através de (E.4) são retiradas as tensões simples de saída (E.5).

73
a bc ca
b bc ca
c a b
1 ( 2 )31 (2 )3
v v v
v v v
v v v
⎧ = − −⎪⎪⎪ = +⎨⎪
= − −⎪⎪⎩
(E.5)
Entradas: via, vib, ia e ib ;
Saídas: va , vb , vc , iia , iib e iic .
E.1.3. Bloco Carga
Este bloco simula a carga trifásica equilibrada RL (figura E.5), que é associada à saída do
conversor. O modelo apresentado na figura E.6, recebe como entradas as tensões de saída do
Conversor Matricial Esparso (vA, vB e vC), fornecendo como resultado as respectivas correntes que
circulam na carga (iA, iB e iC).
Seguidamente são apresentadas as equações representativas do modelo.
Figura E.5 – Carga associada à saída do conversor.
Aplicando a lei das malhas ao circuito da carga, obtêm-se as equações (E.6).
A BAB A B
B CBC B C
C ACA C A
( )R( ) L
( )R( ) L
( )R( ) L
d i iv i i
dtd i i
v i idt
d i iv i i
dt
−⎧ = − +⎪⎪
−⎪ = − +⎨⎪
−⎪= − +⎪
⎩
(E.6)

74
Considerando:
AB A B
BC B C
CA C A
i i ii i ii i i
= −⎧⎪ = −⎨⎪ = −⎩
(E.7)
obtêm-se as equações apresentadas em (E.8).
T
AB A B AB AB0T
BC B C BC BC0T
CA C A CA CA0
1 R (0)L
1 R (0)L
1 R (0)L
i v v i dt i
i v v i dt i
i v v i dt i
⎧⎪ = − − +⎪⎪⎪⎪ = − − +⎨⎪⎪⎪
= − − +⎪⎪⎩
∫
∫
∫
(E.8)
Tratando-se de uma carga trifásica equilibrada: A B C A B C0i i i i i i+ + = ⇔ = − − , as correntes
na saída do conversor são dadas por:
AB CAA
BC ABB
C A B
3
3
i ii
i ii
i i i
−⎧ =⎪⎪
−⎪ =⎨⎪
= − −⎪⎪⎩
(E.9)
Figura E.6 – Modelo do bloco Carga.

75
Entradas: vA , vB e vC ;
Saídas: iA , iB e iC .
E.1.4. Bloco Conversor Matricial Esparso
Este bloco simula o Conversor Matricial Esparso, através das relações de tensões e de
correntes entre as entradas e saídas, em função dos estados dos interruptores do rectificador e do
inversor. Deste modo o modelo ilustrado na figura E.7, é formado pelo bloco Rectificador e pelo bloco
Inversor.
O modelo recebe como entradas as tensões à saída do filtro (va, vb e vc), as correntes que
circulam na carga (iA, iB e iC) e os estados dos interruptores do Rectificador (S11, S21, S31, S12, S22 e
S32) e do Inversor (γ1, γ2 e γ3). Como resultado, são fornecidas as correntes de entrada (ia e ib) e as
tensões de saída (vA, vB e vC), do conversor.
Figura E.7 – Modelo do bloco Conversor Matricial Esparso.
Entradas: va , vb , vc , iA , iB , iC , S11 , S21 , S31 , S12 , S22 , S32 , γ1 , γ2 e γ3 ;
Saídas: ia , ib , vA , vB e vC .

76
E.1.4.1. Bloco Rectificador
O modelo do bloco Rectificador ilustrado na figura E.8, implementa as equações matriciais
(2.16) e (2.17). Este recebe como entradas, para além dos estados dos interruptores do rectificador
(S11, S21, S31, S12, S22 e S32), as tensões de saída do filtro (va, vb e vc) e a corrente no andar intermédio
“DC” (iDC), fornecendo como resultado a tensão vDC (tensão no andar intermédio “DC”) dada pela
equação matricial (2.16) e as correntes de entrada do Conversor Matricial Esparso (ia e ib) como
resultado da equação (2.17).
Figura E.8 – Modelo do bloco Rectificador.
Entradas: va , vb , vc , iDC , iB , iC , S11 , S21, S31, S12 , S22 e S32 ;
Saídas: ia, ib e vDC ;

77
E.1.4.2. Bloco Inversor
O modelo do bloco Inversor presente na figura E.9, implementa a equação matricial (2.20) e as
equações definidas em (E.10), obtidas através da equação (2.24), que relacionam as tensões simples
de saída e a tensão vDC.
A DC 1 2 3
B DC 1 2 3
C DC 1 2 3
2 1 1( )3 3 3
1 2 1( )3 3 31 1 2( )3 3 3
v v
v v
v v
⎧ = γ − γ − γ⎪⎪⎪ = − γ + γ − γ⎨⎪⎪
= − γ − γ + γ⎪⎩
(E.10)
O bloco recebe como entradas os estados dos interruptores (γ1, γ2 e γ3), as correntes na carga
(iA, iB, iC) e a tensão a tensão vDC (tensão no andar intermédio “DC”), fornecendo como resultado a
corrente iDC (corrente no andar intermédio “DC”) dada por (2.20) e as tensões de saída do conversor
(vA, vB e vC) dadas por (E.10)
Figura E.9 – Modelo do bloco Inversor.
Entradas: vDC , iA, iB, iC, γ1, γ2 e γ3 ;
Saídas: iDC, vA , vB e vC .

78
E.1.5. Bloco Controlo
Este bloco executa o controlo total do conversor, permitindo obter as correntes de saída,
polaridade da tensão vDC e factor de potência de entrada desejados. Com o objectivo de facilitar a sua
compreensão, o modelo global do bloco Controlo apresentado na figura E.10, é constituído pelos
blocos: Detector de Zona de Tensão, Detector de Zona de Corrente, Transformada de Concordia de
Correntes, Transformada de Blondel-Park, Determinação do Erro das Correntes de Saída,
Determinação do erro das correntes de entrada, Gerador das correntes de referência e Tabela de
Estados.
Este bloco recebe como entradas as tensões da rede (vla, vlb e vlc), as correntes na entrada do
filtro (iia, iib e iic) e as correntes de saída do conversor matricial esparso (iA, iB e iC), activando os
interruptores do conversor (S11, S21, S31, S12, S22, S32, γ1, γ2 e γ3) consoante os estados seleccionados.
Entradas: vla , vlb, vlc, iia, iib, iic, iA, iB e iC ;
Saídas: S11, S21, S31, S12, S22, S32, γ1, γ2 e γ3.
Figura E.10 – Modelo do bloco Controlo.

79
E.1.5.1. Bloco Detector de Zona de Tensão
O modelo representado na figura E.11, executa uma leitura das tensões à entrada do filtro (vla,
vlb e vlc) e calcula as respectivas tensões compostas, fornecendo como resultado, o agrupamento de
zonas de tensão (“V1”, “V2”, “V3”, “V4”, “V5” e “V6”) apresentadas na secção 3.1, em que estas se
inserem.
Os possíveis resultados à saída são:
→ 1 (Zona V1 de tensão) ;
→ 2 (Zona V2 de tensão) ;
→ 3 (Zona V3 de tensão) ;
→ 4 (Zona V4 de tensão) ;
→ 5 (Zona V5 de tensão) ;
→ 6 (Zona V6 de tensão) .
Figura E.11 – Modelo do bloco Detector de Zona de Tensão.

80
Entradas: vla, vlb e vlc ;
Saídas: Zona_V .
E.1.5.2. Bloco Detector de Zona de Corrente
O modelo do bloco Detector de Zona de corrente apresentado na figura E.12, recebe como
entradas as correntes à saída do conversor (iA, iB e iC), fornecendo como resultado o agrupamento de
zonas de corrente (“I1”, “I2”, “I3”, “I4”, “I5” e “I6”) apresentadas na secção 3.2, em que estas estão
inseridas.
Figura E.12 – Modelo do bloco Controlo.
Os possíveis resultados de saída são:
→ 1 (Zona I1 de corrente) ;
→ 2 (Zona I2 de corrente) ;

81
→ 3 (Zona I3 de corrente) ;
→ 4 (Zona I4 de corrente) ;
→ 5 (Zona I5 de corrente) ;
→ 6 (Zona I6 de corrente) .
Entradas: iA, iB e iC ;
Saídas: Zona_I .
E.1.5.3. Bloco Transformada de Concordia de Correntes
O bloco Transformada de Concordia de Correntes, tal como o nome indica, aplica a
transformação de Concordia às correntes que são colocadas nas suas entradas, procedendo à
transformação de um sistema de coordenadas “abc” para o sistema “αβ”. Deste modo, o modelo, que
se encontra representado na figura E.13, implementa a equação (2.11).
Este bloco é aplicado às: correntes de entrada do filtro; correntes de saída do conversor e
correntes que servirão de referência ao controlo.
Figura E.13 – Modelo do bloco Transformada de Concordia de Correntes.

82
Entradas: i1, i2 e i3 ;
Saídas: i1α e i1β.
E.1.5.4. Bloco Transformada de Blondel-Park
Este bloco permite obter a componente “q” das correntes (iq), resultante da aplicação da
transformada de Blondel-Park caracterizada em (E.11), às correntes de entrada do filtro em
coordenadas “αβ” (iα e iβ), permitindo deste modo o controlo do factor de potência de entrada.
d
q
cos( t) sin( t)sin( t) cos( t)
i ii i
α
β
⎡ ⎤ ⎡ ⎤ω ω⎡ ⎤=⎢ ⎥ ⎢ ⎥⎢ ⎥− ω ω⎣ ⎦ ⎣ ⎦⎣ ⎦
(E.11)
O modelo encontra-se representado na figura E.14.
Figura E.14 – Modelo do bloco Transformada de Blondel-Park.
Entradas: iα e iβ ;
Saídas: iq .

83
E.1.5.5. Bloco Determinação do Erro das Correntes de Saída
O modelo que se encontra representado na figura E.15, Bloco Determinação do Erro das
Correntes de Saída, recebe como entradas as correntes de saída do Conversor Matricial Esparso (iα e
iβ) juntamente com as respectivas referências (iα ref e iβ ref), determinando o resultado das funções de
comutação Sα(e,t) e Sβ(e,t) apresentadas em (3.3), associadas a comparadores de histerese de três
níveis.
Tratando-se de comparadores de três níveis, a sua implementação foi conseguida, colocando
em paralelo dois comparadores de histerese de dois níveis, tendo um deles uma janela de erro 1,5
vezes superior à janela de erro do outro.
Entradas: iα ref , iβ ref , iα e iβ ;
Saídas: Sα e Sβ .
Figura E.15 – Modelo do bloco Determinação do erro das correntes de saída.

84
E.1.5.6. Bloco Determinação do Erro das Correntes de Entrada
O modelo presente na figura E.16, recebe como entrada a componente iq, resultante da
aplicação da transformação de Blondel-Park às correntes de entrada do filtro em coordenadas αβ.
Esta é comparada com o valor de referência (0), obtendo-se o valor da função de comutação Sq
apresentada em (3.9), associada com um comparador de histerese de dois níveis.
Figura E.16 – Modelo do bloco Determinação do Erro das Correntes de Entrada.
Entradas: iq ;
Saídas: Sq .
E.1.5.7. Bloco Gerador das Correntes de Referência
Figura E.17 – Modelo do bloco Gerador das Correntes de Referência.

85
Para gerar as correntes (iα ref e iβ ref) em coordenadas αβ, que servirão de referência ao controlo
das correntes de saída do conversor utilizou-se o modelo cuja representação consta na figura E.17.
Entradas: Não tem ;
Saídas: iα ref e iβ ref .
E.1.5.8. Bloco Tabela de Estados
O bloco Tabela de Estados, coloca os interruptores do Conversor Matricial Esparso à condução
e ao corte consoante os estados seleccionados. O Modelo representado na figura E.18, recebe as
entradas da tabela 3.6 (Zona_V , Zona_I , Sα , Sβ e Sq), fornecendo o correspondente resultado e
activando os respectivos interruptores.
Entradas: Zona_V , Zona_I , Sα , Sβ e Sq ;
Saídas: S11, S21, S31, S12, S22, S32, γ1, γ2 e γ3.
Figura E.18 – Modelo do bloco Controlador dos interruptores.

86
E.2. Solução 2
O modelo global da simulação (Matricial2.mdl) referente à solução 2, encontra-se representado
na figura E.2. Este é constituído pelos blocos Rede, Carga, Conversor Matricial Esparso cujos
modelos são implementados com recurso a blocos da toolbox “PowerSystems”. O bloco Controlo,
também constituinte do modelo, é igual ao apresentado na secção E.5.1, do anexo E.
O filtro utilizado nesta simulação, apenas tem a função de permitir a leitura da corrente na fase
“a” na entrada do conversor sem conteúdo harmónico de alta frequência. A sua função de
transferência é dada por (E.12) (Menino, Antunes, 2002).
rede SMC2
1( ) ( )
1
L sRi s i s
LLCs sR
+=
+ + (E.12)
Figura E.19 – Modelo da Simulação do Conversor Matricial Esparso Referente à Solução 2.

87
E.2.1. Bloco Rede
Este bloco, à semelhança com o bloco apresentado na subsecção E.1.1, simula também a rede
eléctrica de baixa tensão, fornecendo nas suas saídas um sistema de tensões trifásico equilibrado (va,
vb e vc) semelhante ao apresentado em (2.8) e as correspondentes correntes fornecidas (ia , ib e ic).
Entradas: Não tem ;
Saídas: ia , ib , ic , va, vb e vc .
Figura E.20 – Modelo do bloco Rede.
E.2.2. Bloco Carga
O modelo do bloco carga utilizado na implementação da solução 2, encontra-se presente na
figura E.21. Este bloco simula igualmente a carga equilibrada de carácter indutivo apresentada na
figura E.5, recebendo como entradas as tensões de saída do Conversor Matricial Esparso (vA, vB e
vC), fornecendo como resultado as correntes que nela circulam (iA, iB e iC).
Entradas: vA, vB e vC ;
Saídas: iA, iB e iC .

88
Figura E.21 – Modelo do bloco Carga.
E.1.3. Bloco Conversor Matricial Esparso
Este bloco simula o Conversor Matricial Esparso, implementando a associação Rectificador –
Inversor, com todos os interruptores constituídos por blocos de interruptores ideais.
Figura E.22 – Modelo do bloco Conversor Matricial Esparso.

89
O modelo, apresentado na figura E.22, recebe como entradas as tensões da rede (va, vb e vc) e
os estados dos interruptores do rectificador (S11, S21, S31, S12, S22 e S32) e do inversor (γ1, γ2 e γ3),
fornecendo como resultado as tensões de saída (vA, vB e vC).
Entradas: va, vb, vc, S11, S21, S31, S12, S22, S32, γ1, γ2 e γ3 ;
Saídas: vA, vB e vC .
E.3. Solução 3
Relativamente à solução 2, apresentada na secção E.2, o modelo global da simulação
(Matricial3.mdl) referente à solução 3 (figura E.23), apenas difere no bloco Conversor Matricial
Esparso utilizado e na introdução do bloco Filtro.
i_ABC
V_ic
V_ib
V_ia ; i_ia
V_ia
i_ia
i_ib
i_ic
V_ia
V_ib
V_ic
Rede
-K-
V_ia
V_ib
V_ic
Va
Vb
Vc
Filtro
S11
S21
S31
S12
S22
S32
Gama1
Gama2
Gama3
Va
Vb
Vc
VA
VB
VC
ConversorMatricial Esparso
iA
iB
iC
VA
VB
VC
Carga
iA
iB
iC
V_ia
V_ib
V_ic
i_ia
i_ib
i_ic
S11
S21
S31
S12
S22
S32
Gama1
Gama2
Gama3
Bloco de Controlo
Figura E.23 – Modelo da Simulação do Conversor Matricial Esparso Referente à Solução 3.

90
E.3.1. Bloco Filtro
O bloco filtro representado na figura E.24 implementa a topologia do filtro de entrada do
Conversor Matricial Esparso apresentada na secção 2.4. O modelo recebe como entradas as tensões
da rede (via, vib e vic) fornecendo como resultado as tensões à saída do filtro (va, vb e vc).
6
V_ic
5
Vc
4
V_ib
3
Vb
2
V_ia
1
Va
rc
rb
ra
lc
lb
la
CcaCbc
Cab
Figura E.24 – Modelo do bloco Filtro.
Entradas: via, vib e vic ;
Saídas: va, vb e vc .
E.3.2. Bloco Conversor Matricial Esparso
Este bloco, cujo modelo se encontra representado na figura E.25, simula a topologia do
Conversor Matricial Esparso apresentada na subsecção 2.3.1, com todos os semicondutores que
constituem os seus interruptores. O modelo recebe como entradas as tensões à saída do filtro (va, vb
e vc) fornecendo como resultado as tensões de saída do conversor matricial esparso (vA, vB e vC).
Entradas: va, vb, vc, S11, S21, S31, S12, S22, S32, γ1, γ2 e γ3 ;
Saídas: vA, vB e vC .

91
6
VC
5
VB
4
VA
3
Vc
2
Vb1
Va
V_DC
v+-
gm
CE
gm
CE
gm
CE
gm
CE
gm
CE
gm
CE
gm
CE
gm
CE
gm
CE
gm
CE
gm
CE
gm
CE
gm
CE
gm
CE
gm
CE
111
9Gama3
8Gama2
7Gama1
6S32
5S22
4S12
3S31
2S21
1S11
Figura E.25 – Modelo do bloco Conversor Matricial Esparso.

92
F. SIMULAÇÃO DO UPFC
Neste anexo são apresentados e explicados os modelos utilizados na simulação do UPFC
apresentado na secção 5.2.
O ficheiro de dados (Dados_UPFC.m) utilizado encontra-se representado na figura F.1.
Figura F.1 – Dados utilizados nas simulações do UPFC.

93
O modelo global da simulação (UPFC.mdl) explicado na subsecção 5.2.1, encontra-se
representado na figura F.2.
Os blocos Filtro e Conversor Matricial Esparso utilizados, são idênticos aos apresentados,
respectivamente, nas subsecções E.1.2 e E.1.4, do anexo E. O bloco Controlo é igualmente
semelhante ao também apresentado na subsecção E.1.5 (anexo E), diferindo apenas, no bloco
Gerador das Correntes que servirão de referência ao controlo das correntes de saída do conversor.
Figura F.2 – Modelo de simulação do UPFC.

94
O modelo que gera as correntes de referência à saída do conversor, encontra-se representado
na figura F.3. Este implementa as equações (5.2) e (5.3), obtendo as correntes de referência na linha
em coordenadas αβ, uma vez conhecidas que são as tensões da fonte E1 e as potências a impor. As
correntes de referência na saída do conversor são 10 vezes superiores às da linha, dada a relação
dos transformadores utilizada, ser de 1:10.
Entradas: Não tem;
Saídas: iα ref e iβ ref.
Figura F.3 – Modelo do bloco Gerador das Correntes de Referência.