Embed Size (px)
Citation preview

CONTROLE DIGITAL ROBUSTO DE PRESSÃO E VAZÃO DE ESCOAMENTO EM RISER
SAULO CRNKOWISE*, MARCELO CARVALHO MINHOTO TEIXEIRA
*, JOSÉ PAULO FERNANDES GARCIA
*, UILIAM
NELSON LENDZION TOMAZ ALVES*, FERNANDO BARROS RODRIGUES
*
*Laboratório de Pesquisa em Controle, Departamento de Engenharia Elétrica, Faculdade de Engenharia de
Ilha Solteira, Universidade Estadual Paulista “Júlio de Mesquita Filho”
Av. Brasil 56, 15385-000, Ilha Solteira, SP, Brasil
Abstract This paper addresses the pressure control for flow in riser, more specifically focused to processes of primary produc-
tion of oil. A controller is proposed using variable structure with sliding mode, as an alternative to the most commonly used
method, which is the Proportional-Integral-Derivative control. By controlling of a valve located at the top of the riser, the design
goal is to keep the pressure following a reference, in order to minimize the occurrence of severe slugging in riser, keeping con-
stant the flow of the oil-gas-water mixture for the separators.
Keywords Flow in riser, sliding mode control, primary oil production.
Resumo Este trabalho aborda o controle de pressão para escoamento em “riser”, mais especificamente direcionado a proces-
sos de produção primária de petróleo. É proposto um controlador utilizando o método de estrutura variável com modos deslizan-
tes, como uma alternativa ao método mais comumente empregado, que é o controle Proporcional-Integral-Derivativo. Através do
controle de uma válvula no topo do riser, o objetivo do projeto é manter a pressão seguindo uma referência, de modo a minimi-
zar a ocorrência de golfadas severas no escoamento em riser, mantendo constante a vazão da mistura de óleo-gás-água para os
separadores.
Palavras-chave Escoamento em riser, controle com modos deslizantes, produção primária do petróleo.
1 Introdução
Na produção primária do petróleo tem-se como
objetivo separar o óleo, do gás e da água. Para esta
finalidade são utilizados os separadores que normal-
mente ficam distantes do local de extração. O petró-
leo é então conduzido por dutos através de escoa-
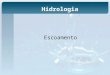
mento. De particular interesse tem-se o escoamento
slug. Trata-se de um escoamento induzido por gravi-
dade, resultante de um ponto inferior conectado a um
tubo inclinado, conforme ilustrado na Figura 1.
Figura 1. Processo de Produção em Riser.
A queda de pressão e a fricção interfacial no tre-
cho vertical da tubulação (riser), impedem o escoa-
mento do líquido, que se acumula na parte inferior,
formando um slug. Nesta configuração, nos trechos
verticais predominam os escoamentos intermitentes
ou em golfadas, e sob certas condições o escoamento
de gás e óleo poderá ocorrer em golfadas severas. O
regime de golfadas (ou intermitência) severas é osci-
latório com períodos de vários minutos, havendo
intervalos em que o escoamento no riser é muito bai-
xo ou nulo, caracterizando instabilidade na produção,
além de tornar o processo inseguro. Detalhes deste
fenômeno e seu equacionamento podem ser visto em
Storkaas (Storkaas, 2005).
Na configuração mostrada na Figura 1, haverá
condições para intermitência severa se a taxa de
acúmulo de líquido na base do riser tiver potencial
para elevar a pressão estática nesse ponto a uma taxa
superior à taxa de crescimento da pressão na linha de
produção, em virtude do acúmulo de gás bloqueado
pelo selo líquido. Assim, este selo age apenas tempo-
rariamente, uma vez que a pressão do gás acumulado
deverá vencer a carga hidrostática de líquido, impul-
sionando-a riser acima por meio de escoamento em
regime de intermitência severa (Nunes, 2010). Desta
forma, para evitar ou minimizar a intermitência seve-
ra, pode-se efetuar o controle da pressão a montante,
atuando-se na válvula vista na Figura 1, de forma a
impedir a ascensão de toda a coluna líquida no riser.
Ou seja, elevando-se a pressão a montante do riser,
seria possível forçar o líquido e o gás a escoarem em
slug flow ordinário, ou seja, com slugs de líquido
com comprimento moderado, evitando assim a inter-
mitência severa.
Assim, o controle estável e com bom desempe-
nho sobre a pressão no riser, com atuação na válvula,
é muito importante, pois dele dependerá o sucesso do
processo produtivo das etapas posteriores. Normal-
mente, a estratégia de controle utilizada é o Propor-
cional-Integral (PI) e tem por objetivo fazer com que
a pressão no riser siga uma referência estabelecida de
forma a evitar a ocorrência da intermitência severa.
Para efetuar a sintonia dos ganhos PI, de modo a ob-
ter estabilidade e robustez no desempenho, diversas
estratégias estão disponíveis (Nunes, 2010; Fontes,
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
4060

2010; Sausen, 2011). Também, diversos modelos
matemáticos para representar o sistema Encanamen-
to-Riser-Separador estão disponíveis na literatura
(Sausen, 2008; Storkaas, 2005).
O presente trabalho enfoca uma estratégia de
controle da pressão no riser pouco aplicada neste tipo
de processo (Reinsnes, 2009) . Trata-se do Controle
de Estrutura Variável com Modos Deslizantes
(CMD). Esta técnica, estabelecida desde a década de
setenta (Utkin, 1978), apresenta como principal van-
tagem a robustez em relação a determinados tipos de
incertezas, ditas casadas, ou seja, para certas condi-
ções o desempenho do sistema é pouco influenciado
diante de perturbações e/ou incertezas paramétricas
(Drazenovic, 1969). Para a aplicação de CMD, foi
utilizado um modelo matemático do encanamento em
riser obtido em Nunes (Nunes, 2010). Simulações
computacionais foram realizadas e os resultados ob-
tidos foram comparados ao desempenho de um proje-
to de controlador PI com malhas em cascada forneci-
do por Nunes (Nunes, 2010). Projetos de CMD con-
tínuo no tempo e discreto foram abordados.
2 Controle com Estrutura Variável e Modos Des-
lizantes (CMD)
A característica principal de um sistema de con-
trole com estrutura variável está na realimentação de
controle não-linear que possui descontinuidades so-
bre uma ou mais superfícies no espaço de estado.
Assim, a estrutura do sistema de realimentação é alte-
rada, ou chaveada, conforme os estados atravessam
cada superfície de deslizamento. Em consequência
deste fato, o sistema de malha fechada é descrito co-
mo sendo um sistema de controle com estrutura vari-
ável, considerado como a combinação de subsiste-
mas, cada qual com uma estrutura fixa e que opera
em uma região específica do espaço de estado.
O controle com estrutura variável é caracterizado
pela existência do modo deslizante. Isto ocorre quan-
do o estado do sistema cruza imediatamente e repeti-
damente a superfície de chaveamento, pois todos os
movimentos nas vizinhanças da superfície estão dire-
cionados a ela. Dependendo da forma da lei de con-
trole selecionada, o movimento deslizante pode ocor-
rer em superfícies de chaveamento individuais no
espaço de estado, sobre um conjunto de superfícies,
ou em todas as superfícies de chaveamento juntas.
Quando o último caso ocorrer, o sistema é dito estar
em modo deslizante.
A existência de um modo deslizante requer a es-
tabilidade da trajetória de estado para a superfície de
deslizamento, no mínimo em uma vizinhança de
( ) ( ) 0x t x , (1)
sendo ( ) nx t os estados do sistema e x a
superfície de deslizamento. A trajetória de estado
deve aproximar-se da superfície no mínimo assintoti-
camente, de modo que a derivada no tempo deste
deve apontar para a superfície de deslizamento. Isto
se assemelha a um problema de estabilidade generali-
zado, e o segundo método de Lyapunov fornece uma
ferramenta natural para a análise.
2.1 Projeto de controle com modos deslizantes contí-
nuo (CMDC)
Considere o seguinte sistema incerto:
( ) ( ) ( ) ( )x t A A x t Bu t Df t , (2)
em que ( ) nx t é o vetor de estado, ( ) mu t é o
veto de controle, ,nxn nxmA B são matrizes
constantes, nxnA e ( ) nDf t representam as
incertezas paramétricas e não linearidades do siste-
ma, as quais são desconhecidas mas limitadas. Para o
projeto da lei de controle, várias possibilidades de
estratégias são possíveis. Uma escolha para o contro-
le é (DeCarlo, 1988):
( ) ( ) ( )eq Nu t u t u t , (3)
sendo que equ é a componente do controle equiva-
lente (que é contínuo) e Nu é a parte descontínua ou
chaveada de (3).
A superfície de deslizamento é definida como,
( )x Sx t , (4)
sendo mx e mxnS uma matriz constante.
Para o sistema na condição de deslizamento,
tem-se 0x e 0x . Então, destas condi-
ções, pode-se chegar a uma expressão para a parcela
( )equ t . Da Eq. (2), desconsiderando-se as incertezas
tem-se que:
1( ) ( ) ( )eq
Feq
u t SB A x t . (5)
Observe que (5) em conjunto com a limitação
0x determina o movimento do sistema sobre a
superfície de chaveamento.
A parcela ( )Nu t é determinada utilizando-se a
função de Lyapunov definida como
1
, ( ) ( )2
TV x t x x , (6)
de tal maneira que ( )Nu t seja uma lei que satisfaz a
condição de alcançabilidade dada por , 0V x t .
Para satisfazer esta condição, os “m” sinais de con-
trole ( )iNu t são definidos como (DeCarlo, 1988)
( )( ) , 0, 0 , 1,.,
( )
iiN
i
xu t i m
x
.
(7)
Uma desvantagem do projeto CMD contínuo no
tempo é que ele não proporciona bom desempenho
ao sistema caso seja emulado em controladores digi-
tais, podendo até mesmo levar o sistema à instabili-
dade. A seguir, apresenta-se um projeto CMD que
leva em conta o período de amostragem e que pro-
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
4061

porciona bom desempenho ao sistema, mesmo para
grandes intervalos de amostragens.
2.2 Projeto de controle com modos deslizantes dis-
creto (CMDD)
Seja a representação do sistema (2) na forma
discretizada da forma
1k k k kx x u Df . (8)
A lei de controle discreta com modos deslizantes
é dada por:
( ) ( ) ; 1eq N
k ku t u t u u k t k , (9)
sendo que é o período de amostragem, eqk
u é a
componente do controle equivalente e Nku é a parte
descontínua ou chaveada de (8).
A superfície de deslizamento é definida como,
k kS Gx , (10)
sendo mkS e mxnG uma matriz constante.
Para o sistema na condição de deslizamento,
tem-se 1k kS S . Então, desta condição, pode-se
chegar a uma expressão para a parcela eqk
u , da Eq.
(9). Desprezando-se kf e tem-se que:
1
( )eq k
Feq
u t G G I x
. (11)
A parcela Nku é determinada utilizando-se a fun-
ção de Lyapunov definida como
Tk kV x , (12)
de tal maneira que a lei Nku satisfaça a condição de
alcançabilidade dada por 1k kV V . Para satisfazer
esta condição, os “m” sinais de controle N
i ku são
definidos como
, 0, 0 , 1,... .i kN
i ii ki k i
Su i m
S
(13)
2.3 Robustez em relação a incertezas/perturbações
do tipo casadas: condições de invariância
Considere o sistema incerto (2) com a superfície
de deslizamento (4), com as leis de controle (3), (5) e
(7). No deslizamento com a condição (1) no sistema
(2), chega-se a (Drazenovic, 1969).
1
( ) . ( ) ( ) ( )nx t I B SB S Ax t Ax t Df t
.(14)
Para que o sistema no modo deslizante não seja
influenciado pelas incertezas, então as seguintes con-
dições devem ser satisfeitas:
1
( ) ( )Df t B SB S Df t
, (15)
1
( ) ( )Ax t B SB S Ax t
. (16)
As condições (15) e (16) são satisfeitas se
rank B D rank B , (17)
ou seja, que todas as colunas de “ D ” sejam combi-
nações lineares das colunas de “ B ” e
rank B AT rank B , (18)
de modo que as colunas da matriz “ T ” sejam a base
do subespaço vetorial n mR
, ou seja rx Tx , sen-
do n mrx R
. Quando as condições (17) e (18)
ocorrem diz-se que as incertezas são do tipo casadas.
Esta análise é válida também quando se considera o
projeto de controle discreto com modos deslizantes
(CMDD), apresentado no item 3.3.
Esta robustez é uma característica que difere, de
forma vantajosa, o CMD do método de controle tra-
dicionalmente utilizado na maioria dos processos
industriais, o PID (Proporcional-Integral-Derivativo).
Esta característica será investigada no problema do
controle da pressão e vazão de escoamento em riser.
3 Controle da Pressão e Vazão de Escoamento
em Riser
Neste item serão apresentados três projetos de
controle aplicado no processo de escoamento em
riser. O objetivo principal dos controladores será o
controle da pressão, de modo a fazer com que esta
siga um sinal de referência. O primeiro projeto trata
da aplicação de dois controladores PID’s colocados
em cascata. No segundo e no terceiro projetos, os
controladores são com modos deslizantes, sendo que
um é contínuo no tempo (CMDC) e o outro é discreto
no tempo (CMDD).
3.1 Modelo Matemático do Sistema e Controle PID
em Cascata
O modelo matemático utilizado nesta seção, o
qual descreve a dinâmica da pressão superior no riser
e a vazão após a válvula, está descrito detalhadamen-
te em Storkaas (Storkaas, 2005) e em Nunes (Nunes,
2010).
A função de transferência da pressão em relação
à entrada de controle de uma planta específica é dada
por
2
( ) -0,00007*(s -3,249)(s -0,0142)
( ) (s+ 0,025)(s+6,112)[s -0,002s+0,00005)
P s
U s ,
(19)
sendo que P(s) é a transformada de Laplace da pres-
são no topo do riser, p(t); U(s) é a transformada de
Laplace do sinal de controle u(t), o qual comanda a
abertura ou fechamento da válvula (Figura 1).
A função de transferência da vazão na saída da
válvula (Figura 1) em relação à entrada de controle
da planta é dada por
2
( ) -0,00247*(s +4,117)(s +0,0042)(s +0,0004)
( ) (s+ 0,025)(s+6,112)[s -0,002s+0,00005)
Q s
U s ,
(20)
em que Q(s) é a transformada de Laplace da vazão,
q(t); U(s) é a transformada de Laplace do sinal de
controle u(t), o qual é o mesmo sinal de (19) e que
comanda a abertura ou fechamento da válvula.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
4062

Neste exemplo, o objeto de controle é a pressão
p(t) na entrada da válvula no topo do riser, a qual
deverá seguir uma pressão de referência, “gerada” de
forma a evitar a ocorrência de golfadas severas no
riser.
Como a Equação (19) apresenta polos e zeros no
semiplano direito de s, conclui-se que um controlador
PID, com realimentação da saída p(t), não será capaz
de estabilizar o processo atuando apenas nesta malha.
Uma solução muito utilizada é o controle em cascata
PID, com malhas de realimentação interna e externa
da vazão q(t) e da pressão p(t). Este esquema está
mostrado na Figura 2. Diversos métodos existem para
a sintonia dos ganhos dos PIDs e podem ser encon-
trados descritos em Nunes (Nunes, 2010).
Figura 2. Controle em cascata: medições na vazão (malha interna)
e na pressão (malha externa).
Para o exemplo das Equações (19) e (20), Nunes
(Nunes, 2010) propôs o esquema visto na Figura 3,
na qual também são mostrados os valores numéricos
dos ganhos dos PIDs sintonizados. Neste esquema,
utilizado para simulação numérica, a chave possibili-
ta a comutação do controle manual para o controle
automático com PIDs.
Figura 3. Controle cascata PID da pressão de escoamento em riser
exemplificado em Nunes (2010).
3.2 Projeto do controlador contínuo (CMDC)
A estratégia de controle CMDC utiliza os esta-
dos do sistema para compor a superfície de desliza-
mento, Eq. (4). Como o sistema da Eq. (19) possui
polos e zeros distintos, pode-se obter representações
no espaço de estados, controláveis e observáveis, da
forma.
( ) ( ) ( )
( ) ( ) ( )
x t Ax t Bu t
p t y t Cx t
(21)
com 4 4xA , 4 1xB , 1 4xC , matrizes cons-
tantes, sendo o sistema completamente controlável e
observável.
É possível estimar todas as variáveis de estado
através de um observador convencional, dado por
ˆ ˆ( ) ( ) ( ) ( )x Ax t Bu t L y t Cx t , (22)
sendo que ˆ( )x t é o vetor de estado estimados e a ma-
triz de ganhos 1 4xL é projetada de tal forma que
a dinâmica do erro
ˆ( ) ( ) ( )e t x t x A LC e t , (22)
tenha o comportamento adequado.
Uma realização para a Eq. (19) da forma (21) é:
-6,1354 -0,1430 -0,0001 0
1,0000 0 0 0A ,
0 1,0000 0 0
0 0 1,0000 0
1,0000
0,0000
0,0000
0,0000
B
0.0000
0,07003, 10 .0,2284
0,0032
TC
(24)
Com estas matrizes, projeta-se um observador
com autovalores alocados em [-10 ; -12 ; -20 ; -15].
Com estes autovalores, obtém-se a matriz de ganhos
1210 0,0000 0,0006 0,0412 2,9043L . (25)
No presente projeto usa-se a técnica de alocação
de autovalores no deslizamento em [-0,04 -0,07-
0,09]. Estes valores foram escolhidos de forma a não
ultrapassar os limites físicos do sinal de controle,
respeitando-se, portanto, as constantes de tempo do
processo, as quais são elevadas. Assim, os valores
numéricos obtidos para a matriz de ganhos S são
1,0000 0,2000 0,0127 0,0003S . (26)
Os valores numéricos obtidos para a matriz de
realimentação de estados Feq da Eq.(5) , são
3 5 6[-5,9354 -130,33x10 18,96x10 -7,64x10 ].Feq (27)
O valor numérico utilizado para o parâmetro
do controle chaveado, Eq. (7), é -1,0 e 0,01 .
O esquema de controle proposto está ilustrado na
Figura 4.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
4063

Figura 4. Esquema de Controle CEV/MD Proposto.
3.3 Projeto do controlador discreto (CMDD)
O projeto discreto para o controle com modos
deslizante (CMDD) foi feito levando em considera-
ção o período de amostragem como sendo igual a 6
milissegundos. A partir deste valor, foram calculadas
as matrizes referentes ao modelo discreto, Eq. (8). O
observador discreto alocou os autovalores aos cor-
respondentes contínuos [-10 ; -12 ; -20 ; -15], resul-
tando na matriz de ganhos do observador discreto
1010 0,0000 0,0003 0,0213 1,4980L . (28)
Usou-se a técnica de alocação de autovalores no
deslizamento nos equivalentes contínuos [-0,04 -
0,07-0,09], resultando na matriz de ganhos da super-
fície de deslizamento
169,6509 33,9303 2,1546 0,0428S . (29)
Os valores numéricos obtidos para a matriz de
realimentação de estados Feq da Eq.(11) , são
[5,9322 0,1301 -0,0002 0,0000]Feq . (30)
O valor numérico utilizado para o parâmetro
do controle chaveado, Eq. (13), é -5 e 0,01 .
O esquema de controle proposto está ilustrado na
Figura 4.
3.4 Simulações Realizadas e resultados obtidos
As simulações foram realizadas utilizando o sof-
tware MatLab/Simulink. Foram exploradas quatro
condições de operação, as quais são analisadas no
item seguinte. O objetivo é mostrar a influência das
perturbações casadas no desempenho do sistema para
cada um dos controladores utilizados: PID, CMDC e
CMDD. Também, em todas as simulações os contro-
ladores automáticos somente passam a atuar após um
período de tempo em que o controle manual está em
operação. Os resultados obtidos são apresentados nas
Figuras 5 a 18. Nestas figuras, na cor preta mostra-se
o desempenho do sistema com controle manual, em
azul com PID e em vermelho com CMDC ou
CMDD. Para evitar sobressinais, todos os controla-
dores tiveram seu sinal de controle com saturação em
50% da abertura ou fechamento da válvula.
Caso (i): Sistema sem incertezas/perturbações
controlado somente pelos PIDs ou somente por
CMDC, emulado para um período de amostragem
de 1 milissegundo
O objetivo deste caso é mostrar o desempenho
do controlador PID contínuo e do CMDC, para o
sistema controlado por dispositivos digitais, com
período de amostragem igual a 1 milissegundo. Foi
implementado um algoritmo de acordo com as Figu-
ras 2 e 3. Para o caso em que o CMDC atuou, foi
implementado um algoritmo segundo a Figura 4.
0 50 100 150 200 250 300 350 400 450 50045
50
55
60PRESSÃO SISTEMA NOMINAL: COMPARAÇÃO CEV COM PID
Tempo - minutos
Pre
ssão -
Bar
REFERÊNCIA
CMDC
PID
MANUAL
Figura 5. Sem perturbação, para 1 ms. Pressão: Controladores
Manual, CMDC e PID.
0 50 100 150 200 250 300 350 400 450 50027
28
29
30
31
32
33VAZÃO SISTEMA NOMINAL: COMPARAÇÃO CEV COM PID
Tempo - minutos
Vazão -
metr
os c
úbic
os p
or
hora
CMDC
PID
MANUAL
Figura 6. . Sem perturbação, para 1 ms. Vazão: Controladores
Manual, CMDC e PID.
Nas Figuras 5 e 6 pode ser observado que tanto o
controlador PID como o CMDC proporcionaram ao
sistema um bom desempenho: a pressão seguiu a
referência (pontilhado na Figura 5) e não houve vari-
ações de vazão, a não ser nos instantes da troca do
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
4064

“setpoint”. Pela Figura 7, pode-se comprovar que,
para o caso do CMDC, o sistema atinge o desliza-
mento e nele permanece. Na Figura 8 tem-se os es-
forços de controle, os quais foram nitidamente maio-
res para o caso do CMDC, atingindo, em algumas
ocasiões, o nível de saturação. No entanto este fato
não prejudicou seu desempenho.
0 50 100 150 200 250 300 350 400 450 500-800
-600
-400
-200
0
200
400
600
800SUPERFÍCIE DE DESLIZAMENTO PARA SISTEMA NOMINAL
Tempo - minutos
CMDC
MANUAL
Figura 7. Sem perturbação, para 1 ms. Superfície de deslizamento:
Controladores Manual e CMDC.
0 50 100 150 200 250 300 350 400 450 500-50
-40
-30
-20
-10
0
10
20
30
40
50SINAL DE CONTROLE: COMPARAÇÃO CEV COM PID
Tempo - minutos
Com
ando n
a V
álv
ula
CMDC
PID
MANUAL
Figura 8. . Sem perturbação, para 1 ms. Sinal de controle:
Controladores Manual, CMDC e PID.
Caso (ii): Sistema com incerte-
zas/perturbações, controlado somente pelos PIDs
ou somente por CMDC, emulado para um período
de amostragem de 1 milissegundo
O objetivo deste caso é mostrar o desempenho
do controlador PID contínuo e do CMDC, quando
existem incertezas e/ou perturbações na planta. Neste
caso, para representar estas perturbações e/ou incer-
tezas paramétricas casadas, adicionou-se ao sinal de
controle um sinal (indesejável) de onda quadrada, de
amplitude 2,0 e período 16,7 minutos.
Observando-se as Figuras 9 e 10, fica claro que o
desempenho do sistema controlado por PID deterio-
rou-se devido às perturbações: oscilações na pressão
e na vazão, provocando slugs. No caso do CMDC,
este foi completamente insensível às perturbações,
mantendo a pressão rigorosamente em seus valores
de referência e vazão constante, a não ser nos instan-
tes de troca do “setpoint”.
0 50 100 150 200 250 300 350 400 450 50025
30
35
40
45
50
55
60
65
70
75PRESSÃO: COMPARAÇÃO CEV COM PID A PERTURBAÇÃO NA ENTRADA
Tempo - minutos
Pre
ssão -
Bar
REFERÊNCIA
CMDC
PID
MANUAL
Figura 9. Com perturbação, para 1ms. Pressão: Controladores
Manual, CMDC e PID.
0 50 100 150 200 250 300 350 400 450 50026
27
28
29
30
31
32
33
34
35
36VAZÃO: COMPARAÇÃO CEV COM PID A PERTURBAÇÃO NA ENTRADA
Tempo - minutos
Vazão -
metr
os c
úbic
os p
or
hora
CMDC
PID
MANUAL
Figura 10. Com perturbação, para 1 ms. Vazão: Controladores
Manual, CMDC e PID.
Na Figura 11, percebe-se que o sistema manteve-
se na superfície de deslizamento e na Figura 12 nota-
se que o esforço de controle do CMDC permaneceu
dentro dos limites impostos pela saturação.
0 50 100 150 200 250 300 350 400 450 500-2000
-1500
-1000
-500
0
500
1000
1500ROBUSTEZ A PERTURBAÇÃO DA SUPERFÍCIE DE DESLIZAMENTO
Tempo - minutos
CMDC
MANUAL
Figura 11. Com perturbação. Superfície de deslizamento: Contro-
ladores Manual e CMDC.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
4065

0 50 100 150 200 250 300 350 400 450 500-50
-40
-30
-20
-10
0
10
20
30
40
50SINAL DE CONTROLE: COMPARAÇÃO CEV COM PID A PERTURBAÇÃO NA ENTRADA
Tempo - minutos
Com
ando n
a V
álv
ula
CMDC
PID
MANUAL
Figura 12. Com perturbação. Sinal de controle: Controladores
Manual, CMDC e PID.
Caso (iii): Sistema sem incerte-
zas/perturbações controlado somente pelos PIDs
ou somente por CMDC, emulado para um período
de amostragem de 6 milissegundo
O objetivo deste caso é mostrar o desempenho
do controlador PID contínuo e do CMDC, emulado
para o sistema controlado por dispositivos digitais,
com período de amostragem igual a 6 ms.
0 50 100 150 200 250 300 350 400 450 50045
50
55
60PRESSÃO SISTEMA NOMINAL: COMPARAÇÃO CEV COM PID
Tempo - minutos
Pre
ssão -
Bar
REFERÊNCIA
data2
PID
MANUAL
Figura 13. . Sem perturbação, para 6 ms. Pressão: Controladores
Manual, CMDC e PID.
0 50 100 150 200 250 300 350 400 450 50027
28
29
30
31
32
33VAZÃO SISTEMA NOMINAL: COMPARAÇÃO CEV COM PID
Tempo - minutos
Vazão -
metr
os c
úbic
os p
or
hora
CMDC
PID
REFERÊNCIA
Figura 14. . Sem perturbação, para 6 ms. Vazão: Controladores
Manual, CMDC e PID.
Pelas Figuras 13 e 14, observa-se que o contro-
lador PID contínuo foi capaz de manter o bom de-
sempenho, mesmo para período de amostragem gran-
de, porém o CMDC não teve o mesmo êxito. Isto
mostra que, apesar de sua robustez em relação a in-
certezas/perturbações casadas, o CMDC é muito sen-
sível em relação ao período de amostragem. Este fato
exige, portanto, que seu projeto leve em consideração
o período de amostragem.
Caso (iv): Sistema com incerte-
zas/perturbações, controlado somente pelos PIDs
ou somente por CMDD, para um período de
amostragem de 6 milissegundo
O objetivo deste caso é mostrar o desempenho
do CMDD, para o sistema controlado por dispositi-
vos digitais, com período de amostragem igual a 6
ms.
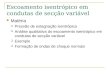
Pelas Figuras 15 e 16, observa-se que o projeto
de controle com modo deslizante discreto (CMDD)
proporcionou excelente desempenho ao sistema,
mesmo com grande período de amostragem, tendo
proporcionado ao sistema insensibilidade da saída em
relação às perturbações casadas. O mesmo não ocor-
reu para o PID.
0 50 100 150 200 250 300 350 400 450 50035
40
45
50
55
60
65
70
75PRESSÃO: COMPARAÇÃO CEV COM PID A PERTURBAÇÃO NA ENTRADA
Tempo - minutos
Pre
ssão -
Bar
REFERÊNCIA
CMDD
PID
MANUAL
Figura 15. Com perturbação, para 6 ms. Pressão: Controladores
Manual, CMDD e PID.
0 50 100 150 200 250 300 350 400 450 50025
26
27
28
29
30
31
32
33
34
35VAZÃO: COMPARAÇÃO CEV COM PID A PERTURBAÇÃO NA ENTRADA
Tempo - minutos
Vazão -
metr
os c
úbic
os p
or
hora
CMDD
PID
MANUAL
Figura 16. Com perturbação, para 6 ms. Vazão: Controladores
Manual, CMDD e PID.
Pela Figura 17, observa-se que o sistema perma-
neceu na região de deslizamento. Pela Figura 18,
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
4066

nota-se que os sinais de controle ficaram dentro da
região normal de operação.
Figura 17. Com perturbação, para 6 ms. Superfície de deslizamen-
to: Controladores Manual e CMDD.
0 50 100 150 200 250 300 350 400 450 500-50
-40
-30
-20
-10
0
10
20
30
40
50SINAL DE CONTROLE: COMPARAÇÃO CEV COM PID A PERTURBAÇÃO NA ENTRADA
Tempo - minutos
Com
ando n
a V
álv
ula
CMDD
PID
MANUAL
Figura 18. Com perturbação, para 6 ms. Sinal de controle: Contro-
ladores Manual, CMDD e PID.
4 Conclusão
Neste trabalho foi proposta a utilização do controle
com modos deslizantes (CMD) e sua comparação
com o controlador tradicional PID. Os resultados
obtidos em simulações mostraram que o CMD, proje-
to contínuo, consegue rejeitar perturbações do tipo
casadas, como esperado, enquanto o PID não foi ca-
paz de rejeitá-las. Por outro lado, o CMD contínuo
foi muito sensível em relação a grandes períodos de
amostragem, sendo que o PID mostrou-se mais ro-
busto neste aspecto. Para resolver o problema da sen-
sibilidade a grandes períodos de amostragem, foi
proposto um projeto utilizando o CMD discreto. Com
isto, o CMD tornou-se mais robusto em relação a
grandes períodos de amostragem, mantendo sua prin-
cipal característica que é a rejeição de incertezas e
perturbações do tipo casadas, proporcionando melhor
desempenho quando comparado com o método tradi-
cional PID.
Agradecimentos
Os autores agradecem ao CNPq e à FAPESP, proces-
so n. 2011/17610-0, pelo apoio financeiro.
Referências Bibliográficas
DeCarlo, R. A.; Zak, S. H.; Mattlews, G. P.(1988).
Variable structure control of nonlinear and
multivariable systems: a tutorial. In: Institute of
Electrical and Electronics Engineers, v. 76, n. 3,
pp. 212-232.
Drazenovic, B.(1969). The invariance conditions in
variable structure systems, Automatica, v. 5, pp.
287-295.
Fontes, A.B.; Souza, R.A.R.; Achy, A.R.A. (2010).
Um controlador PI não linear adaptativo
aplicado ao controle de golfadas em processo de
exploração e produção de petróleo. In: Anais do
XVIII Congresso Brasileiro de Automação. pp.
2982-2987.
Nunes, G. C.; Medeiros, J. L. ;Araújo, O. Q.
F.(2010). Modelagem e Controle da Produção de
Petróleo, Ed. Blucher.
Reinsnes, S. E. (2009). Stabilization of slugging by
sliding mode control. Master of Science in
Engineering Cybernetics. Norwegian University
of Science and Technology. Disponível em http://www.diva-
portal.org/smash/get/diva2:348885/FULLTEXT01.pdf.
105p. Saussen, A., Saussen, P.S. (2011). Aplicação de uma
metodologia de controle de nível PI para reduzir
os efeitos do fluxo com golfadas na produção do
petróleo. TEMA Tend. Mat. Apl. Comput., v.
12, No. 1, pp. 31-42.
Storkaas, E. (2005). Stabilizing control and
controllability: control solutions to avoid slug
flow in pipeline-riser systems. Phd. Thesis.
Department of Chemical Engineering Norwegian
University of Science and Technology.
Utkin, V. I. (1978). Sliding Modes and Their
Applications in Variable Structure Systems.
Moscow: Mir Publishers. 257p.
0 50 100 150 200 250 300 350 400 450 500 -2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2 x 10 5 ROBUSTEZ A PERTURBAÇÃO DA SUPERFÍCIE DE DESLIZAMENTO
Tempo - minutos
CMDD MANUAL
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
4067