Embed Size (px)
Citation preview
_____________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura”
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
DOUGLAS PÉRICLES DA SILVA
GUILHERME DOS SANTOS E SANTOS
AUTOMATIZAÇAO RESIDENCIAL CONTROLADA POR CLP:
MÉTODOS DE ECONOMIA E CONFORTO
Garça 2015

_____________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura”
CURSO EM TECNOLOGIA EM MECATRONICA INDUSTRIAL
DOUGLAS PERICLES DA SILVA
GUILHERME DOS SANTOS E SANTOS
AUTOMATIZAÇAO RESIDENCIAL CONTROLADA POR CLP:
MÉTODOS DE ECONOMIA E CONFORTO
Artigo científico apresentado à Faculdade de Tecnologia de Garça – FATEC, como requisito para a conclusão do Curso de Tecnologia em Mecatrônica industrial, examinado pela seguinte comissão de professores.
Data da aprovação:__/__/__
________________________________
Prof. Grad. Edson Mancuzo
FATEC Garça
________________________________
Prof. Dr. José Arnaldo Duarte
FATEC Garça
________________________________
Prof. Dr. Ulysses de Barros Fernandes
FATEC Garça
Garça 2015

AUTOMATIZAÇAO RESIDENCIAL CONTROLADA POR CLP: MÉTODOS DE
ECONOMIA E CONFORTO
Douglas Péricles da Silva¹ [email protected]
Guilherme dos Santos e Santos [email protected]
Prof. Grad. Edson Mancuzo²
Resumo- O tema para a elaboração do trabalho de pesquisa teve sua origem nos conteúdos trabalhados no curso de Tecnologia em Mecatrônica Industrial, quando estudamos o problema observamos o desperdício de energia e água potável, com implicações na diminuição da qualidade de vida das pessoas. O objetivo da pesquisa é minimizar o problema constatado por meio da implementação da automação residencial, domótica. A metodologia utilizada é o protótipo, um experimento com utilização de um Controlador Lógico Programável (CLP), em linguagem ladder; operando sistemas de iluminação, controles de eletro - eletrônicos, ventiladores, janelas, chuveiros, entre outros automatismos, que contribuam para melhorar a situação apresentada. O uso do CLP (compacto) e de sensores discretos devem proporcionar um custo mais acessível que os atuais sistemas de automação residencial, sem que haja a necessidade de interfaces gráficas mais elaboradas em um computador dedicado ao sistema em tempo integral, proporcionando economia e conforto. As questões postas justificam a relevância social da pesquisa e também acadêmica, pois contribui para agregar conhecimentos e o aprimoramento das tecnologias voltadas à automação residencial. Palavras-chave: Automação Residencial. Domótica. CLP. Ladder. Abstract - The theme for the development of research work had its origin in the contents worked in the course of Technology in Industrial Mechatronics, when we study the problem observed energy waste and drinking water, with implications for the decrease in people's quality of life. The research objective is to minimize the problem identified through the implementation of home automation, home automation. The methodology used is the prototype, an experiment using a Programmable Logic Controller (PLC) in ladder language; operating lighting systems, electrical controls - electronics, fans, windows, showers, and other control functions, which contribute to improving the situation presented. The use of PLC (compact) and discrete sensor should provide a more cost effective than the current home automation systems, without the need for more elaborate graphical user interface and a computer system dedicated to full-time, providing economy and recovery environment. The questions posed justify the social relevance of the research as well as academic as it contributes to aggregate knowledge and the improvement of technologies related to home automation. Key words: CLP. Residential Automation. Domótica. PLC. Ladder.
_____________________________ 1 Alunos do curso de Tecnologia em Mecatrônica Industrial – Fatec-Garça 2 Docente da Faculdade de Tecnologia de Garça - Fatec

1 INTRODUÇÃO
Com o desenvolvimento das tecnologias, tornou-se comum encontrar em
residências brasileiras, o uso de diversos sistemas independentes de
automação controlados por seus proprietários, o que tem gerado confusões e
esquecimentos quanto à forma de acionamento, implicando em desperdícios
de energia elétrica e de água potável.
O tema escolhido para a elaboração do trabalho de pesquisa encontra-se
relacionado aos conteúdos estudados durante o curso de Tecnologia em
Mecatrônica Industrial, o qual objetiva melhorar a qualidade de vida das
pessoas, por meio de implementação da automação residencial, domótica, com
uso da tecnologia Controlador Lógico Programável (CLP), instrumento que
pode ser aplicado a bem estar e a diminuição do desperdício de energia e água
potável.
O desperdício de água e de energia nas residências, segundo a Agência
Brasil (2013.),
São retirados dos rios e do subsolo no Brasil 840 mil litros
de água a cada segundo. Ao dividir esse número pela
população de 188,7 milhões de brasileiros, chega-se à
conclusão de que cada habitante consumiria, em média,
384 litros por dia.
Cerca de 10% dos 430 terawatt-hora (TWh) consumidos
no país a cada ano são desperdiçados, volume superior
ao consumido pelo total da população do estado do Rio
de Janeiro, que alcança cerca de 36 TWh.
Outro problema apresentado é o desperdício de energia elétrica no Brasil
onde vem aumentando de forma significativa, segundo a Agência Brasil novos
estudos indicam que além disso afirma José Starosta presidente da Abesco
(Associação Brasileira das Empresas de Serviços de Conservação de energia),
“com o desperdício de energia, são jogados fora, no Brasil, aproximadamente
R$ 15 bilhões ao ano”.
O objetivo geral do projeto é desenvolver um protótipo que simule e prove a
viabilidade e a eficácia, mostrando resultados que ajude a solucionar os
problemas de consumo de água, luz e segurança.
O objetivo especifico é desenvolver uma maquete que tenha semelhança
com uma residência real, em escala reduzida, sendo dividida em 4 cômodos,
onde cada um mostre uma solução para cada problema.
A escolha do tema justifica-se pela relevância social, uma contribuição para
a comunidade consumidora de energia e agua potável. Com a pesquisa
pretendemos possibilitar entender o processo de automação CLP e sua
aplicabilidade, o projeto visa resolver uma das situações mais difíceis que
estamos passando nos dias atuais. A falta de água, os grandes períodos de
seca, altas temperaturas, rios que abastecem grandes cidades como São
Paulo em estados precários de seca a níveis muito baixos, a economia da água
e energia é a única maneira que temos para tentarmos sobreviver com a
escassez de água.
A metodologia utilizada é o desenvolvimento experimental do protótipo foi
baseada em criar uma estrutura ou seja uma maquete que possa representar
uma pequena residência onde o experimento pudesse funcionar corretamente.
Onde será representado quatro cômodos de uma casa: sala, quarto, banheiro e
cozinha, onde cada cômodo terá sua função de controle feita através do
controlador lógico programável (CLP), que fará com que tudo funcione
conforme a entrada de dados lida pelos sensores.
2 REVISÃO BIBLIOGRÁFICA
Segundo o site da empresa ¹Sislite (2015), a domótica é uma tecnologia
recente, responsável pela gestão de todos os recursos habitacionais, cujo
objetivo é encontrar soluções para as necessidade com o mínimo de esforço
em suas atividades diárias. Nesse contexto, a domótica proporciona conforto e
comodidade, mas também, comunicação e segurança, voltados para a
melhoria de vida de seus utilizadores.

Este termo nasceu da fusão da palavra “Domus”, que significa casa, com a
palavra “Robótica”, que está ligada ao ato de automatizar, isto é, realizar ações
de forma automática. Para conseguir a gestão integrada dos diversos
equipamentos utilizados na automação residencial ou comercial, a domótica se
utiliza dos meios eletrônicos e informáticos, os quais contribuem para o
manuseamento do sistema, realizado de acordo com as suas próprias
necessidades, ou optar por um manuseamento automático. No funcionamento
passivo, um elemento reage só quando lhe é transmitida uma ordem, dada
diretamente pelo utilizador, utilizando por isso os recursos disponíveis: botão
de pressão, painéis, táteis, telecomandos.
No funcionamento automático, mais avançado e com mais inteligência, o
sistema não só interpreta parâmetros, como reage às circunstâncias
(informação que é transmitida pelos sensores). Por exemplo, assim que o
sensor detectar que uma janela está aberta se comunica com o utilizador, ou
que a temperatura está diminuindo e acionando o aquecimento. Por fim, a
facilidade do controle remoto e do acesso às funções vitais da casa, através da
Internet ou do telemóvel, deixa de ser uma utopia para ser uma realidade do
cotidiano das pessoas ( SISLITE, 2015 ).
Figura 1 - Sistema automático de residência
Fonte: pesenergia (2014)
¹ Sislite trabalha em conjunto com engenheiros, arquitetos, construtoras e clientes finais, na definição das melhores soluções em automação de ambientes e integração com sistemas audiovisuais.

A tecnologia utilizada para o controle da domótica é o Controlador
Programável (CP), também chamado de Controlador Lógico Programável
(CLP) e, pela sigla em inglês PLC (Programmable Logic Controller).
Segundo Zancan (2011, p. 15-16)
Surgiu em função das necessidades da indústria
automobilística. Os painéis eletromecânicos para controle
lógico utilizados anteriormente dificultavam as alterações
e ajustes de sua lógica de funcionamento, fazendo as
montadoras gastarem mais tempo e dinheiro a cada
alteração na linha de produção Desta forma, em 1968, a
General Motors desenvolveu o primeiro CLP, com grande
versatilidade de programação e fácil utilização, o qual vem
sendo aperfeiçoado constantemente, a fim de atender
suas diversas aplicações atuais em automação de
processos.
Conforme Casillo (2011) pode-se dividir os CLPs de acordo com o sistema de
programação utilizado :
1ª Geração : Programação em Assembly. Era necessário conhecer o
hardware do equipamento, ou seja, a eletrônica do projeto do CLP.
2ª Geração : Apareceram as linguagens de programação de nível médio. Foi
desenvolvido o “Programa monitor” que transformava para linguagem de
máquina o programa inserido pelo usuário.
3ª Geração : Os CLPs passam a ter uma entrada de programação que era
feita através de um teclado, ou programador portátil, conectado ao mesmo.
4ª Geração : É introduzida uma entrada para comunicação serial, e a
programação passa a ser feita através de micro-computadores. Com este
advento surgiu a possibilidade de testar o programa antes do mesmo ser
transferido ao módulo do CLP.
5ª Geração : Os CLPs de quinta geração vem com padrões de protocolo de
comunicação para facilitar a interface com equipamentos de outros fabricantes,
e também com Sistemas Supervisórios e Redes Internas de comunicação.
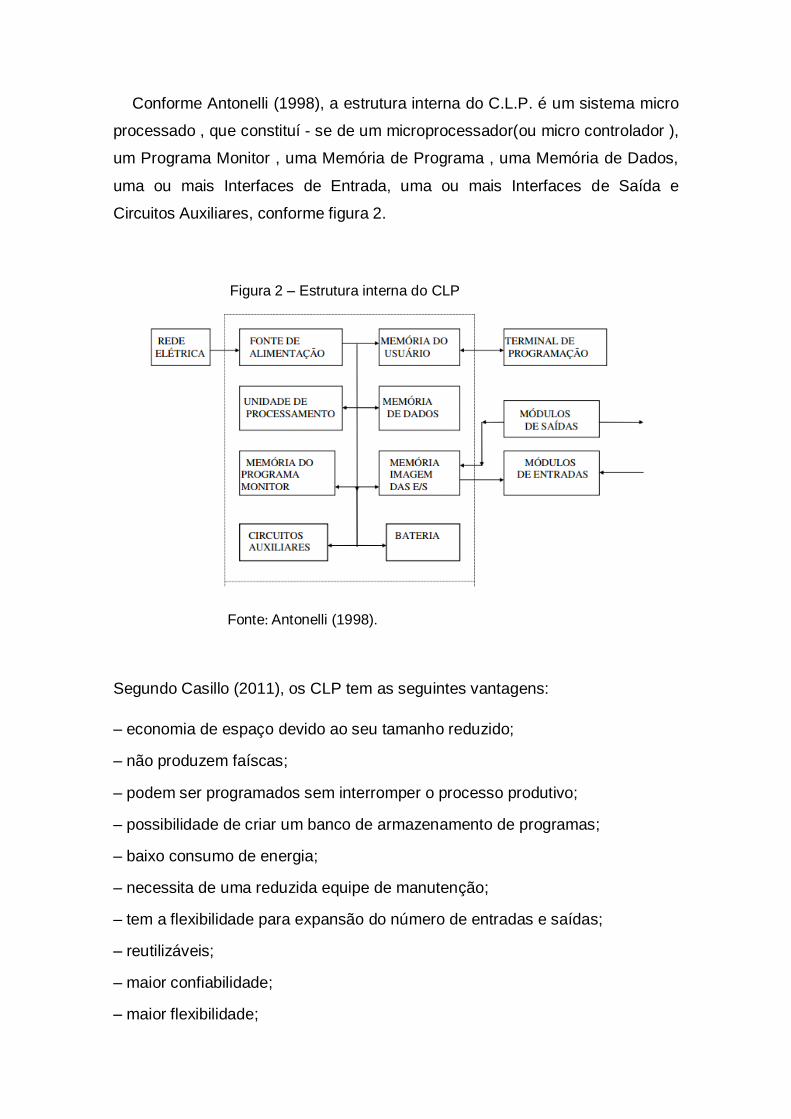
Conforme Antonelli (1998), a estrutura interna do C.L.P. é um sistema micro
processado , que constituí - se de um microprocessador(ou micro controlador ),
um Programa Monitor , uma Memória de Programa , uma Memória de Dados,
uma ou mais Interfaces de Entrada, uma ou mais Interfaces de Saída e
Circuitos Auxiliares, conforme figura 2.
Figura 2 – Estrutura interna do CLP
Fonte: Antonelli (1998).
Segundo Casillo (2011), os CLP tem as seguintes vantagens:
– economia de espaço devido ao seu tamanho reduzido;
– não produzem faíscas;
– podem ser programados sem interromper o processo produtivo;
– possibilidade de criar um banco de armazenamento de programas;
– baixo consumo de energia;
– necessita de uma reduzida equipe de manutenção;
– tem a flexibilidade para expansão do número de entradas e saídas;
– reutilizáveis;
– maior confiabilidade;
– maior flexibilidade;
– maior rapidez na elaboração dos projetos;
– interfaces de comunicação com outros CLPs e computadores.
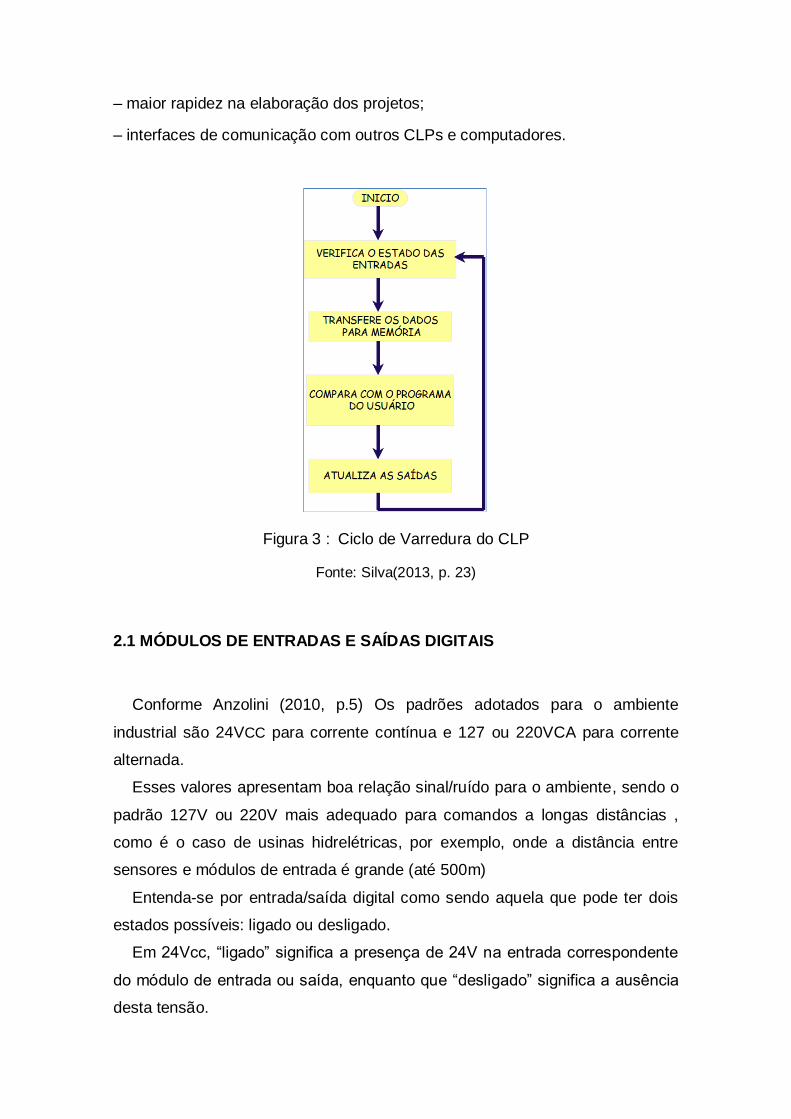
Figura 3 : Ciclo de Varredura do CLP
Fonte: Silva(2013, p. 23)
2.1 MÓDULOS DE ENTRADAS E SAÍDAS DIGITAIS
Conforme Anzolini (2010, p.5) Os padrões adotados para o ambiente
industrial são 24VCC para corrente contínua e 127 ou 220VCA para corrente
alternada.
Esses valores apresentam boa relação sinal/ruído para o ambiente, sendo o
padrão 127V ou 220V mais adequado para comandos a longas distâncias ,
como é o caso de usinas hidrelétricas, por exemplo, onde a distância entre
sensores e módulos de entrada é grande (até 500m)
Entenda-se por entrada/saída digital como sendo aquela que pode ter dois
estados possíveis: ligado ou desligado.
Em 24Vcc, “ligado” significa a presença de 24V na entrada correspondente
do módulo de entrada ou saída, enquanto que “desligado” significa a ausência
desta tensão.
Em 110 ou 220Vca, “ligado” significa a presença da tensão alternada na
entrada/saída correspondente do módulo de entrada ou saída, enquanto
que“desligado” significa a ausência desta tensão.Costuma-se atribuir à
condição “ligado” o nível lógico “1” e à condição “desligado” o nível lógico “0”
A fonte de alimentação tem como funções básicas converter a tensão da
rede elétrica (110 ou 220 VCA) para a tensão de alimentação dos circuitos
eletrônicos, ( + 5VCC para o microprocessador , memórias e circuitos auxiliares
e +/- 12 VCC para a comunicação com o programador ou computador ). Manter
a carga da bateria, nos sistemas que utilizam relógio em tempo real e Memória
do tipo R.A.M.; - Fornecer tensão para alimentação das entradas e saídas ( 12
ou 24 VCC ) Antonelli(1998)
Segundo Silva (2013, p. 23)
Unidade de processamento: Também conhecida por CPU, é
composta por microcontroladores ou microprocessadores (Intel
80xx, motorola 68xx, PIC 16xx). Endereçamento de memória
de até 1Mega Byte, velocidades de clock de 4 a 30 MHz,
manipulação de dados decimais, octais e hexadecimais.
No CLP existem 5 linguagens principais utilizadas para sua programação:
- Linguagem Ladder;
- Lista de Instruções;
- Texto Estruturado;
- Diagrama de Blocos de Funções;
- Sequenciamento Gráfico de Funções.
A Linguagem Ladder é uma linguagem gráfica baseada na lógica de relés e
contatos elétricos para a realização de circuitos de comandos de acionamentos
elétricos. Sendo a primeira linguagem utilizada pelos fabricantes, é a mais
difundida e encontrada em quase todos os CLPs da atual geração (FRANCHI,
CAMARGO, 2008).
3 METODOLOGIA DO PROTÓTIPO
Para o desenvolvimento prático do protótipo, foi decidido construir uma
maquete de madeira, de maneira que seja de fácil visualização para quem esta
observando o seu funcionamento.
Utilizamos a madeirite, pois sua espessura e de 5 mm e assim facilita seu
corte, furação e manuseio geral na construção da estrutura.
A estrutura foi montada de maneira que ficasse mais fácil para fazer a
ligação das fiações, e assim ficando 4 divisões que represente os quatro
cômodos de uma casa.
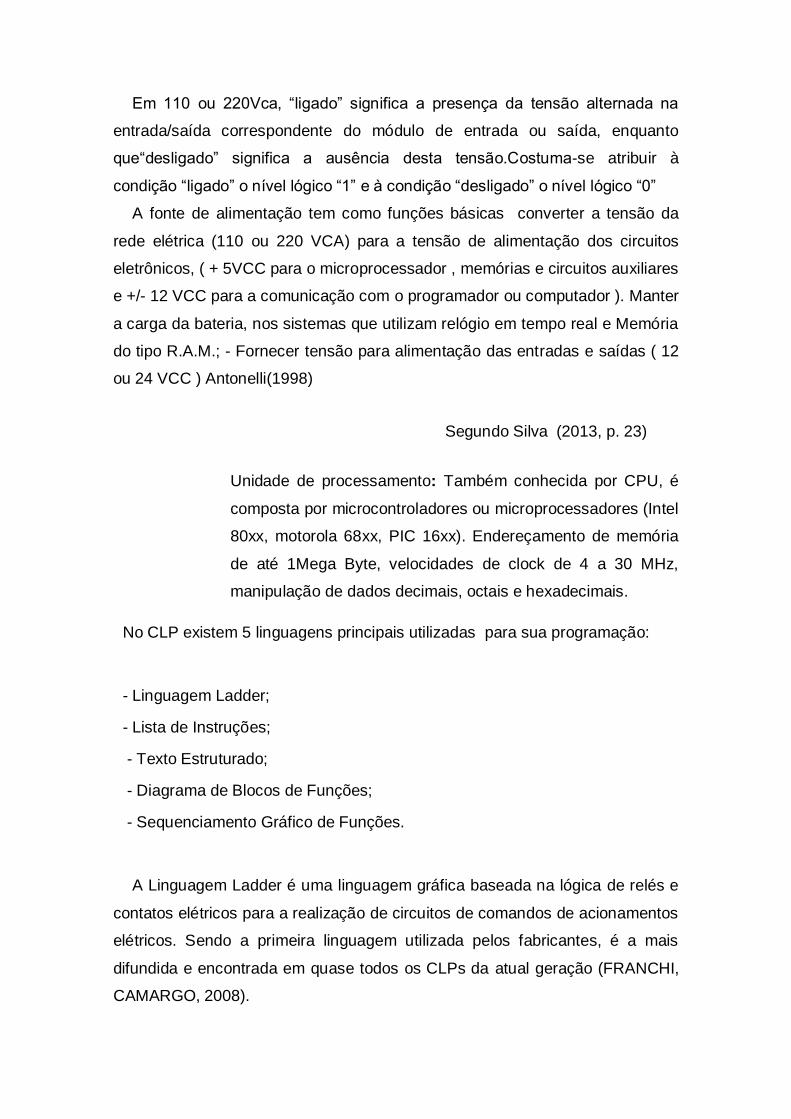
E após a construção da estrutura de madeira foi feito a aplicação de tinta
tanto para a proteção da madeira quanto para melhorar a aparência da
maquete.
E a partir dai começou a ser feita todas as ligação elétricas de saídas como:
leds para iluminação, motor para o ventilador e bomba na aplicação do
chuveiro.
Figura 4: Fase de acabamento da maquete. (2015)
Sinais de saída:
O sistema de domótica irá fazer o controle através de um programa
executado pelo CLP, onde leds de alto brilho na cor branca serão utilizados
para fazer a iluminação simulando lâmpadas de uma casa original.
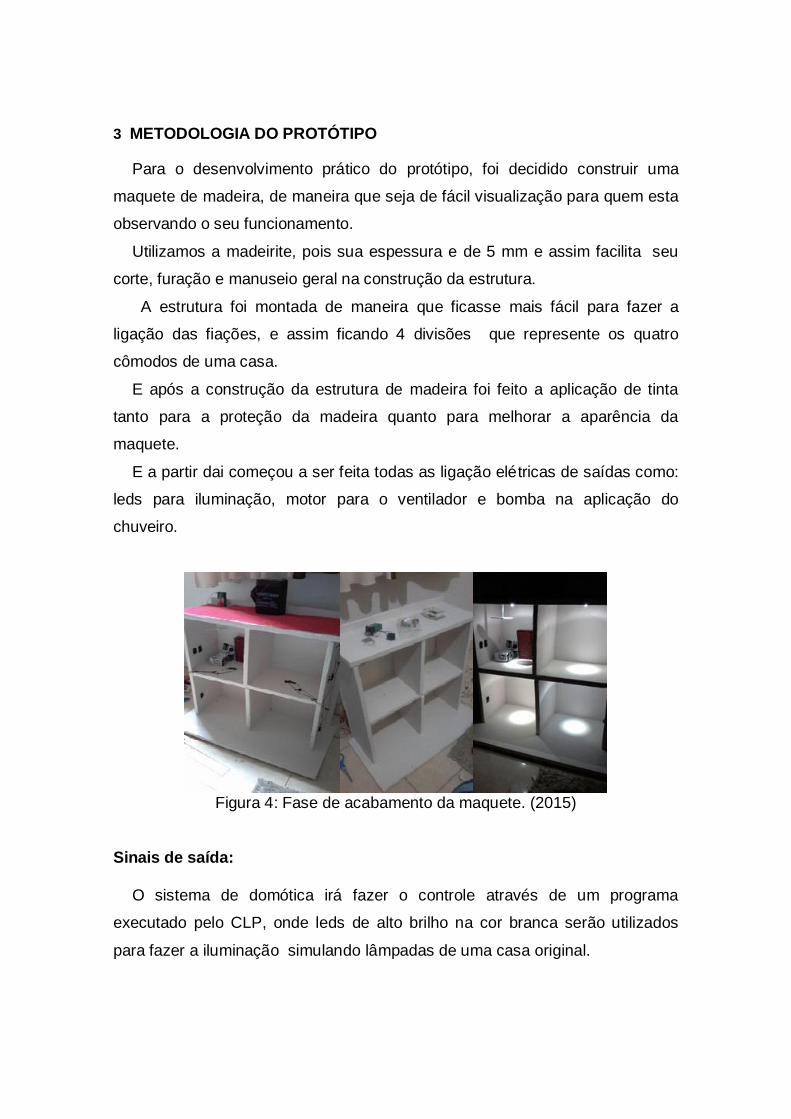
Foi utilizado um motor dc de 9v para simular o ventilador que aciona de
acordo com a temperatura do ambiente ficando localizado no quarto na
maquete.
Figura 5: Motor DC e sua implantação como ventilador. (2015)
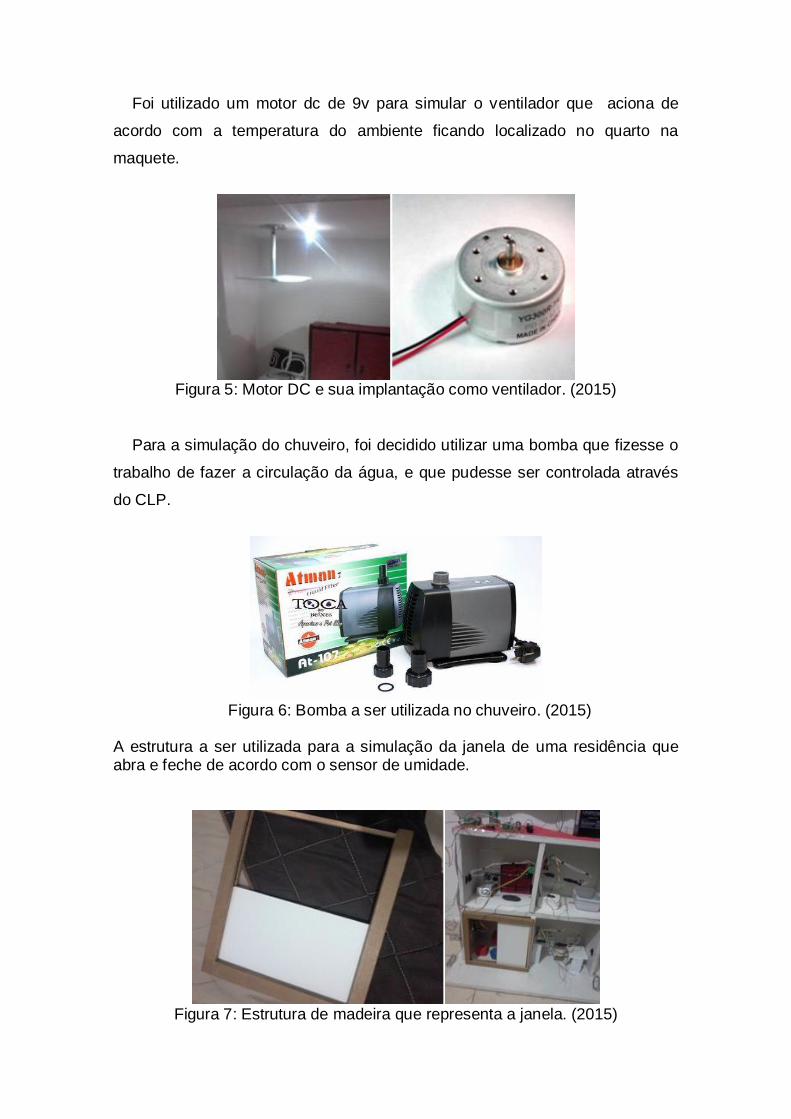
Para a simulação do chuveiro, foi decidido utilizar uma bomba que fizesse o
trabalho de fazer a circulação da água, e que pudesse ser controlada através
do CLP.
Figura 6: Bomba a ser utilizada no chuveiro. (2015) A estrutura a ser utilizada para a simulação da janela de uma residência que abra e feche de acordo com o sensor de umidade.
Figura 7: Estrutura de madeira que representa a janela. (2015)
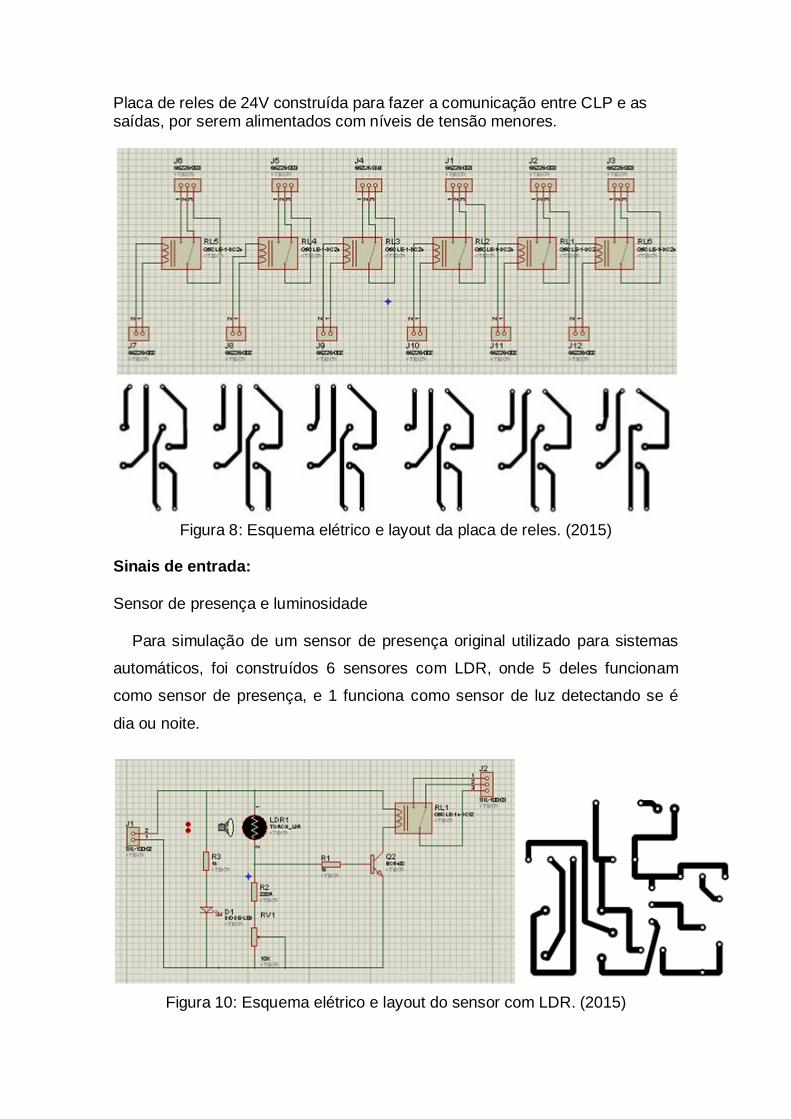
Placa de reles de 24V construída para fazer a comunicação entre CLP e as saídas, por serem alimentados com níveis de tensão menores.
Figura 8: Esquema elétrico e layout da placa de reles. (2015)
Sinais de entrada:
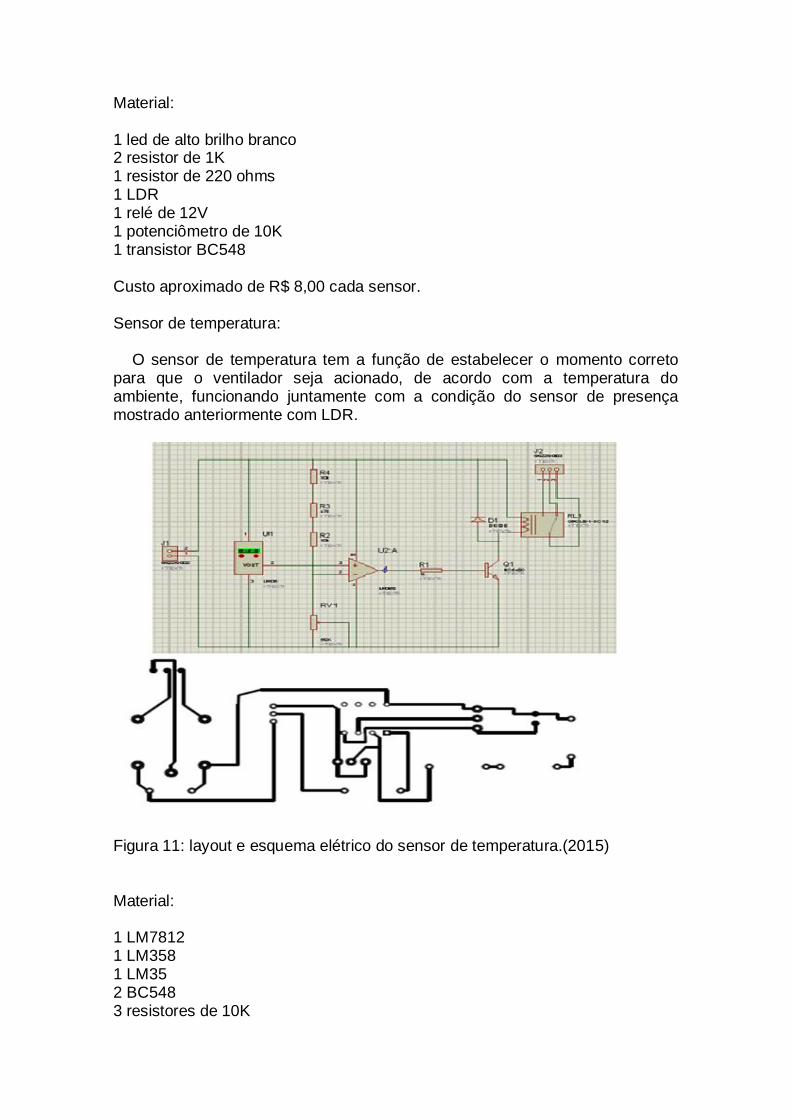
Sensor de presença e luminosidade
Para simulação de um sensor de presença original utilizado para sistemas
automáticos, foi construídos 6 sensores com LDR, onde 5 deles funcionam
como sensor de presença, e 1 funciona como sensor de luz detectando se é
dia ou noite.
Figura 10: Esquema elétrico e layout do sensor com LDR. (2015)
Material: 1 led de alto brilho branco 2 resistor de 1K 1 resistor de 220 ohms 1 LDR 1 relé de 12V 1 potenciômetro de 10K 1 transistor BC548 Custo aproximado de R$ 8,00 cada sensor. Sensor de temperatura:
O sensor de temperatura tem a função de estabelecer o momento correto para que o ventilador seja acionado, de acordo com a temperatura do ambiente, funcionando juntamente com a condição do sensor de presença mostrado anteriormente com LDR.
Figura 11: layout e esquema elétrico do sensor de temperatura.(2015) Material: 1 LM7812 1 LM358 1 LM35 2 BC548 3 resistores de 10K
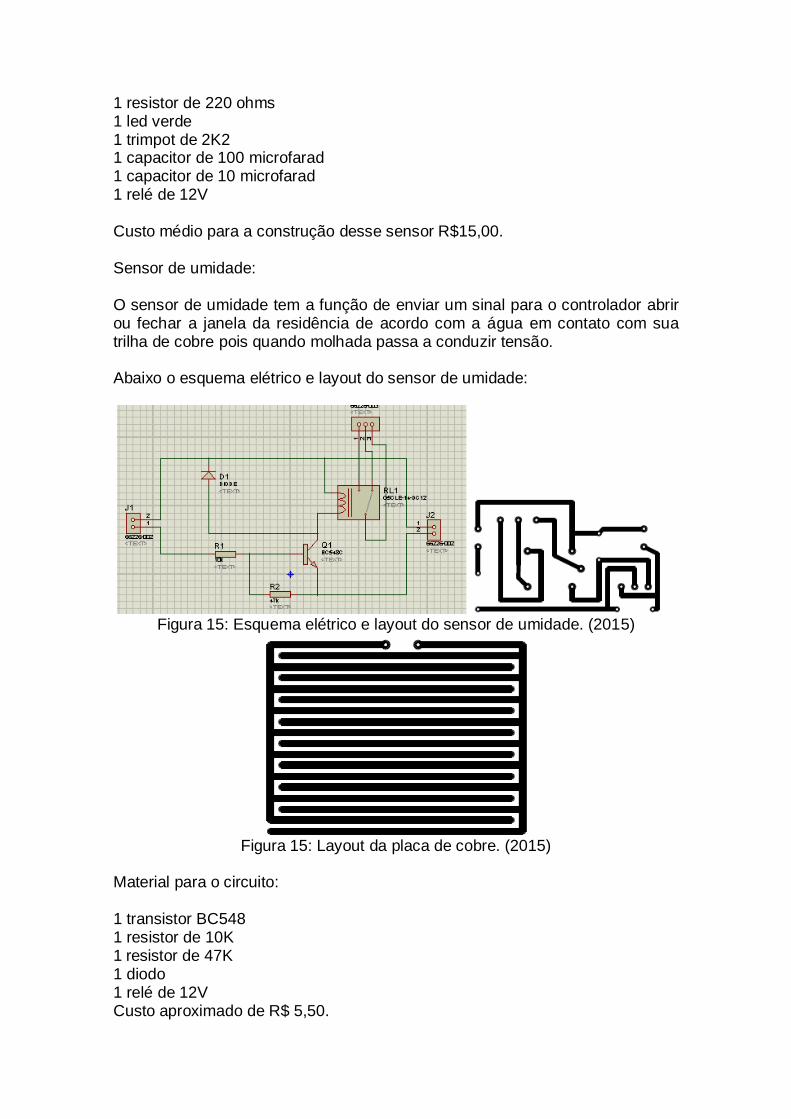
1 resistor de 220 ohms 1 led verde 1 trimpot de 2K2 1 capacitor de 100 microfarad 1 capacitor de 10 microfarad 1 relé de 12V Custo médio para a construção desse sensor R$15,00. Sensor de umidade: O sensor de umidade tem a função de enviar um sinal para o controlador abrir ou fechar a janela da residência de acordo com a água em contato com sua trilha de cobre pois quando molhada passa a conduzir tensão. Abaixo o esquema elétrico e layout do sensor de umidade:
Figura 15: Esquema elétrico e layout do sensor de umidade. (2015)
Figura 15: Layout da placa de cobre. (2015)
Material para o circuito: 1 transistor BC548 1 resistor de 10K 1 resistor de 47K 1 diodo 1 relé de 12V Custo aproximado de R$ 5,50.
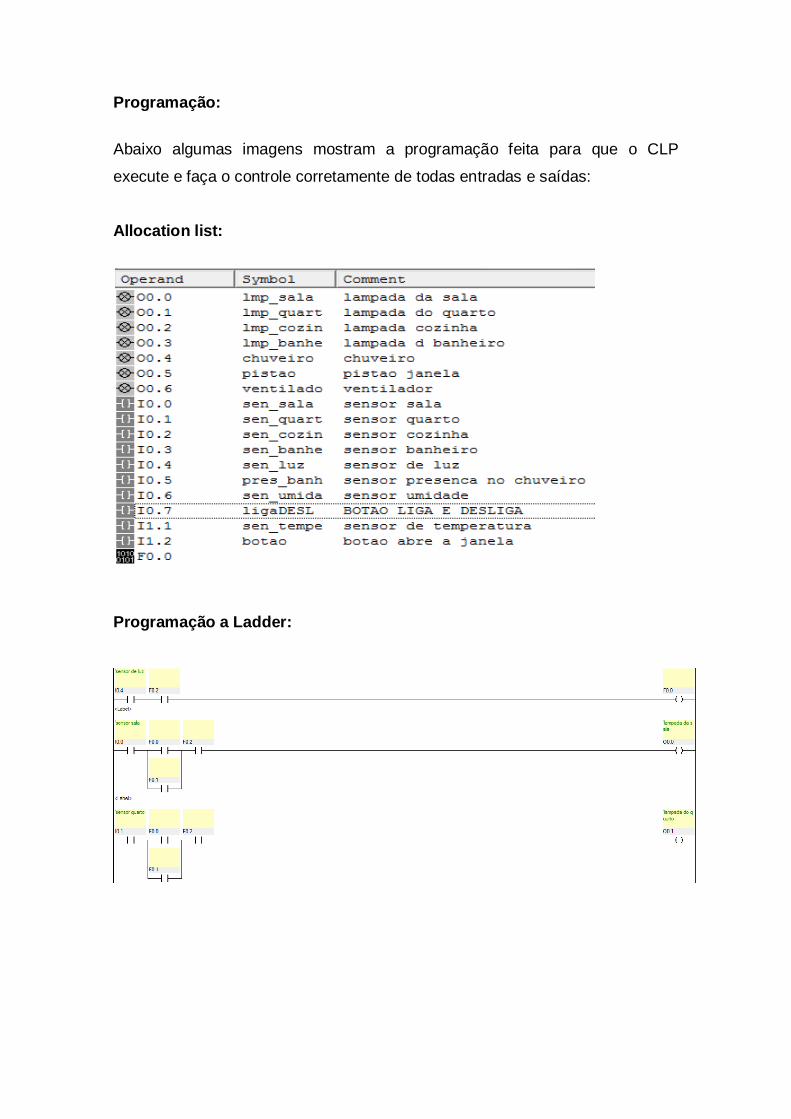
Programação:
Abaixo algumas imagens mostram a programação feita para que o CLP
execute e faça o controle corretamente de todas entradas e saídas:
Allocation list:
Programação a Ladder:
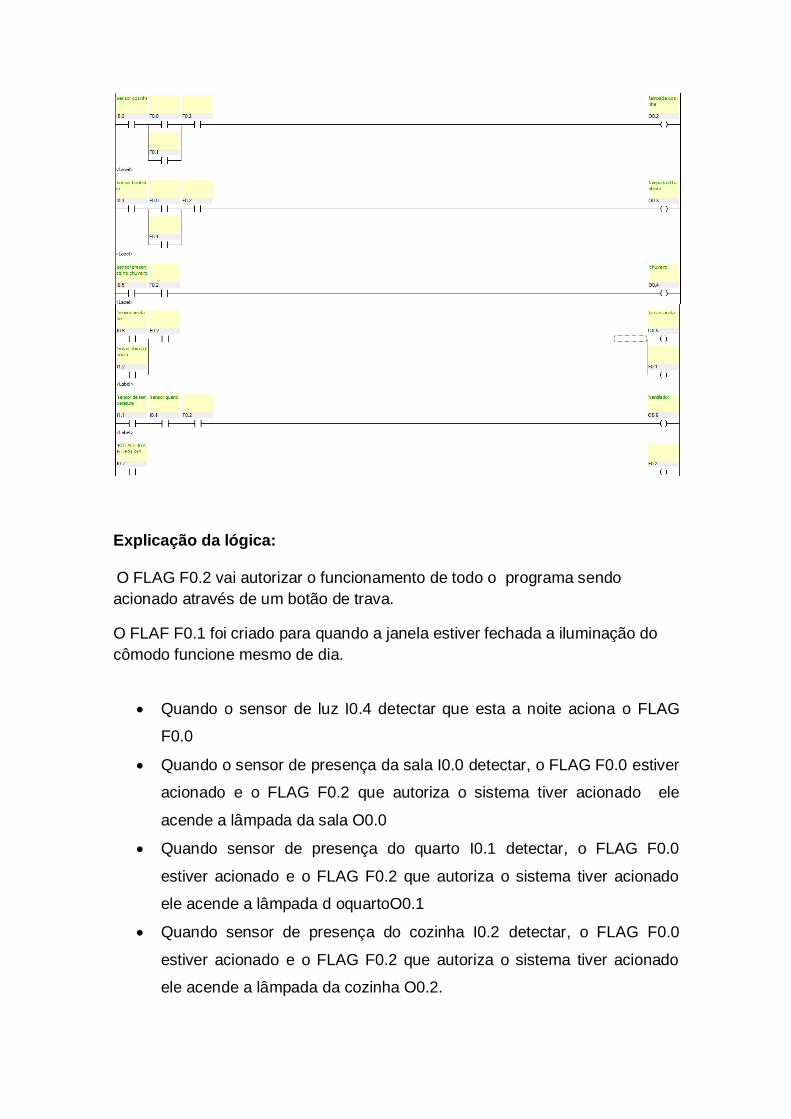
Explicação da lógica:
O FLAG F0.2 vai autorizar o funcionamento de todo o programa sendo
acionado através de um botão de trava.
O FLAF F0.1 foi criado para quando a janela estiver fechada a iluminação do
cômodo funcione mesmo de dia.
Quando o sensor de luz I0.4 detectar que esta a noite aciona o FLAG
F0.0
Quando o sensor de presença da sala I0.0 detectar, o FLAG F0.0 estiver
acionado e o FLAG F0.2 que autoriza o sistema tiver acionado ele
acende a lâmpada da sala O0.0
Quando sensor de presença do quarto I0.1 detectar, o FLAG F0.0
estiver acionado e o FLAG F0.2 que autoriza o sistema tiver acionado
ele acende a lâmpada d oquartoO0.1
Quando sensor de presença do cozinha I0.2 detectar, o FLAG F0.0
estiver acionado e o FLAG F0.2 que autoriza o sistema tiver acionado
ele acende a lâmpada da cozinha O0.2.
Quando sensor de presença do banheiro I0.3 detectar e o FLAG F0.0
estiver acionado e o FLAG F0.2 que autoriza o sistema tiver acionado
ele acende a lâmpada do banheiro O0.3
Quando sensor de presença do chuveiro I0.5 detectar e o FLAG F0.2
que autoriza o sistema tiver acionado ELE aciona o chuveiro O0.4.
Quando o sensor de umidade I0.6 passa a conduzir e o FLAG F0.2 que
autoriza o sistema tiver acionado aciona o pistão O0.5 para fecha a
janela e o FLAG F0.1.
Pressionando o botão I1.2 , aciona o pistão da janela O0.5 fechando ou
abrindo a janela.
Quando o sensor de temperatura I1.1 e o sensor de presença do quarto
I0.1 estiver em estado logico 1 e o FLAG F0.2 que autoriza o sistema
tiver acionado, aciona o ventilador O0.6
O botão I0.7 aciona o FLAG F0.2 , desligando ou ligando o sistema.
4 CONSIDERAÇÕES FINAIS
O proposito do protótipo automatização residencial controlada por CLP, foi
alcançado demonstrando o funcionamento do equipamento, aplicado a uma
maquete residencial, onde foi possível observar a eficácia na operacionalização
deste, e atender os objetivos de controle no uso energético e hídrico gerando
economia e conforto ao usuário.
Durante a pesquisa sobre o tema domótica e o desenvolvimento prático do
protótipo, houve a compreensão aprofundada sobre o assunto, permitindo
estabelecer sua funcionalidade e seus benefícios aos usuários, tornando
possível conceber controles que atendam adequadamente a implementação
deste sistema em uma residência real.
De acordo com dados levantados na pesquisa relacionada ao tema,
encontrou se um valor aproximado do custo médio para a implementação da
automatização residencial, a partir de “R$ 1 mil, para sistemas de iluminação,
até R$ 250 mil, para uma residência com todos os sistemas automatizados –
luz, portas, janelas, cortinas, portões, segurança, piscina, banheira, jardim,
home theater etc”(SANCHES, 2011).
Esse sistema demonstrou ser viável a sua aplicação como um sistema
domótico residencial, unindo o conforto proporcionado pela automatização dos
sistemas com a economia, sendo disponível e de grande interesse para
qualquer nível de classe social.
5 REFERÊNCIAS ANTONELLI, Pedro Luis. Introdução aos controladores Lógicos Programáveis (CLPs). Disponível em: <
www.ejm.com.br/download/Introducao%20CLP.pdf >. Acesso em: 17 mar. 2015. ANZOLINI, Lázaro Disponível em: <http://www.anzo.com.br/downloads/06072009-CLP-PARTE-1.pdf>. Acesso em: 04 maio. 2015.
ATOS, 2008. Órgão de divulgação da ATOS Automação Industrial - Maio/2000 - nº18. Disponível em: <http://www.atos.com.br/jornal/fatos18/fatos18.html>. Acesso em: 11 de dez 2014. BAND,Disponível.em:<http://noticias.band.uol.com.br/brasil/noticia/?id=1000005
66283>,Acesso em 03 mar. 2015.
CASSILO, Danielle - Automação e controle. São Paulo, 2011.
EJM, Disponível em: <http://www.ejm.com.br/download/Introducao%20CLP.pdf.> Acesso em: 17 mar. 2015.
Figura 1 – Disponível em: http://www.pesenergia.com.br/images/domotica-1.jpg.
Acesso em 06 abr. 2015.
FRANCHI, Claiton Moro; CAMARGO, Valter Luís Arlindo de. Controladores
lógicos programáveis - sistemas discretos. São Paulo: Érica, 2008.
GLOBO, Disponível em: http://oglobo.globo.com/sociedade/ciencia/desperdicio-
de-agua-no-brasil-chega-40-4193297, acesso em 03 mar.2015.
SANCHES - A tecnologia bate à porta > Disponível em:
http://www.lpaarquitetura.com.br/dicas/a-tecnologia-bate-a-porta>. Acesso em
18 maio. 2015.

SILVA, Marcelo Eurípedes da. Apostila Automação industrial. Piracicaba, SP.
2013 .Disponível em: <www.marceloeuripedes.com.br> Acesso em: 05 maio.
2015.
SISLITE, Disponível em: <http://www.sislite.pt/domus.htm>. Acesso em: 17
mar. 2015.