Mais apostilas, livros e programas em:
www.mecatronicadegaragem.blogspot.comAula de
Microcontrolador
Prof. Ms. Alcinei Moura Nunes
Curso: Ps-Graduao em Mecatrnica
Apostila de Microcontroladores PIC16F877A
Pgina 1
Mais apostilas, livros e programas em:
www.mecatronicadegaragem.blogspot.comAula de Microcontrolador
Metodologia - 3 primeiras aulas Expositivas e Prticas - 2 ltimas
Apresentao dos Trabalhos OBS.: O Aluno ter que despertar interesse
para alguma aplicao do Microcontrolador estudado e dever ao longo
do curso (4 primeiras aulas) tirar as dvidas com o professor. Na
ltima aula, far uma apresentao de seu desenvolvimento. Sua nota
final ser composta pela participao (presena) e apresentao do
projeto. Material de Apoio - Livros sobre microcontroladores da
Linha PIC (pesquisar pelo Google) - site: www.microchip.com
(datasheet e application note) - Gravadores (internet): ATM
(mercado livre) e Labtools (Mcflash ou ICD2BR) Aula 1 Conhecendo o
Processador Tpicos: Caractersticas Gerais do PIC16F877A Perifricos
Arquitetura Organizao da Memria Registrador STATUS Pinagem Ambiente
de Desenvolvimento (MPLAB) Organizao de um Programa Clock do PIC
(ciclo de mquina) Primeiro Programa: Acionamento de um Motor de
Passo
Caractersticas Gerais do PIC16F877A - Arquitetura RISC (set de
instrues reduzidas); - 35 instrues apenas; - Velocidade de Operao:
at 20MHz; - Memria de Programa (Flash): 8K x 14 words; - Memria de
Dados (RAM): 368 x 8 bytes; - Memria EEPROM: 256 x 8 bytes; - 8
nveis de STACK; - 14 tipos de interrupes; - WDT (WatchDogTimer);
Pgina 2
Mais apostilas, livros e programas em:
www.mecatronicadegaragem.blogspot.comAula de Microcontrolador -
Proteo do Cdigo; - In-Circuit Serial Programming (ICSP) atravs de 2
pinos; - Opo de selecionar o oscilador; - Ampla faixa de tenso de
Operao: 2,0V 5,5V; - Capacidade de corrente por pino: 25mA.
Perifricos Timer0: 8-bit timer/counter Timer1: 16-bit
timer/counter Timer2: 8-bit timer/counter Modo PWM (10-bit de
resoluo) 8 canais analgicos (10-bit de resoluo) Modo SSP
(Synchronous Serial Port) com protocolos SPI e I2C Modo de
Comunicao USART (Universal Synchronous Asynchronous Receiver
Transmitter) Comunicao Paralela (Parallel Slave Port PSP).
Arquitetura Pgina 6 do Datasheet PIC16F87X
Pgina 3
Aula de Microcontrolador Organizao da Memria Memria de
Programa
Pgina 4
Aula de Microcontrolador Memria de Dados
Pgina 5
Aula de Microcontrolador
Registrador STATUS
Pgina 6
Aula de Microcontrolador Pinagem
Pgina 7
Aula de Microcontrolador Ambiente de Desenvolvimento (MPLAB)
Gerenciador de projeto MPLAB
Liguagem C, Assembly ou Pascal.
Linguagem de Mquina
Um compilador converte o cdigo fonte em instrues de mquina.
Pgina 8
Aula de MicrocontroladorTodos os Projetos tero os seguintes
passos bsicos: Seleo do Dispositivo Criao do Projeto Seleo da
Ferramenta de Linguagem Criao do Cdigo-Fonte Construo do Projeto
(Montagem e Ligao) Teste do Cdigo com Simulador
Ambiente de Trabalho
Pgina 9
Aula de Microcontrolador
Configure> Select Device
Seleo do Dispositivo As luzes indicam quais componentes o MPLAB
IDE suporta para este dispositivo. Verde: indica suporte completo
Amarelo: indica suporte parcial Vermelho: indica nenhum suporte
para esse dispositivo.
Pgina 10
Aula de MicrocontroladorProject > Project Wizard
Criando um Novo projeto
Seleo do PIC
Pgina 11
Aula de Microcontrolador
Seleo da Linguagem
Nome do Projeto
Pgina 12
Aula de Microcontrolador
Adio de arquivos existentes para seu projeto
Resumo da criao do projeto
Pgina 13
Aula de MicrocontroladorCaso no tenha adicionado nenhum arquivo,
ento clique no File>New para escrever o cdigo fonte.
Janela para escrever o programa
Programa
Pgina 14
Aula de MicrocontroladorProject>Build All
Assembler do Programa
Neste passo, criamos os arquivos de sada (.HEX, .LST e .ERR) a
partir do arquivo .ASM. Quando aparecer a mensagem BUILD SUCCEEDED
no final da compilao, significa que os arquivo de sada foram
gerados corretamente, ou seja, as instrues do programa foram
compreendidas e convertidas em sistema binrio. Caso aparea a
mensagem BUILD FAILED, deve-se dar duplo clique sobre o erro na
janela de sada para o erro ser apontado na janela do cdigo-fonte.
Se o Construdo com Sucesso foi alcanado, pode-se realizar a simulao
do programa, funcionando no MPLAB como se estivesse gravado na
memria do CHIP.
Pgina 15
Aula de MicrocontroladorDebugger>Select Tool>MPLAB SIM
Simulao Na simulao podemos verificar como dever ser a execuo do
programa quando este estiver gravado na memria FLASH do PIC. Para
verificarmos os valores que so lidos ou escritos na memria de dados
ou outros componentes do microcontrolador clicamos no menu View.
View>Watch
Verificao dos valores dos registradores
Pgina 16
Aula de MicrocontroladorCom o Watch possvel verificar alguns
valores de alguns registradores especficos.
Organizao de um programa
;***************************************************************
#include ;regio para incluso de bibliotecas e macros.
;***************************************************************
__CONFIG ;regio de habilitao/desabilitao dos fusveis.
;***************************************************************
#define BANK1 BSF Status,RP0 ;regio para definio de mini-macros.
;***************************************************************
CBLOCK 0x20 ;regio para definio de variveis Tempo1 ;os
registradores de propsito geral Tempo2 ;comeam do endereo 0x20 da
RAM. Endc
;***************************************************************
tempo1_value EQU .10 ;regio para associao de valores nomes
tempo2_value EQU .50
;***************************************************************
ORG 0x0000 ;incio da memria de programa Goto INICIO
;***************************************************************
ORG 0X0004 ;incio da regio de interrupo Goto INT
;***************************************************************
DELAY_LCD ;regio de sub-rotinas chamadas pela .... ;instruo CALL
RETURN ATUALIZA_LCD .... RETURN MULTIPLICACAO .... RETURN
;***************************************************************
Inicio ;incio do programa BANK1 MOVLW B00000001 ;regio para
carregamento dos registradores MOVWF TRISA ;especiais conforme
aplicao prtica MOVLW B00000000 MOVWF TRISB BANK0 .... Pgina 17
Aula de Microcontrolador
Principal ....
;regio lgica do programa ;atuao dos registradores de ;entrada e
sada
Goto Principal
;***************************************************************
END ;Final do Programa
;***************************************************************
Clock do PIC (ciclo de mquina) O Pic16F877A possui dois osciladores
internos do tipo RC de 4MHz, com precises de 1 e 5, as quais
dependem das condies de tenso e temperatura do sistema. Estes
osciladores no so to precisos, mas dispensam a utilizao de
osciladores externos, liberando 2 pinos de I/Os. De um modo geral,
osciladores externos so utilizados, e sua escolha depender da
preciso e custos envolvidos; dentre eles podemos destacar: circuito
RC, ressoador, cristal e circuitos de oscilao. Abaixo temos a ligao
de um oscilador cristal.
Pgina 18
Aula de Microcontrolador
Nos microcontroladores da famlia PIC, o clock internamente
dividido por quatro. Sendo assim, para um cristal de 4MHz, teremos
um clock interno de 1MHz, ou seja, o tempo de execuo de cada
instruo ser de 1us (micro-segundo). Este tempo chamado de ciclo de
mquina e menor quanto maior for o cristal externo utilizado. Em
cada perodo de 1us (para o caso de um cristal de 4MHz), uma nova
informao buscada na memria de programa enquanto a informao anterior
executada. Essa caracterstica de buscar a informao em um ciclo de
mquina e execut-la no prximo conhecida como PIPELINE. De um modo
geral, as instrues so executadas no perodo de 1 ciclo de mquina;
apenas as instrues que indicam salto, tais como: CALL, RETURN e
GOTO, perdem 2 ciclos de mquina. Primeiro Programa: Acionamento de
um Motor de Passo Aprendizado - Estrutura de um Programa - Declarao
de variveis - Estrutura de Deciso (botes) - Carregamento de
Registradores - Delay - Deboucing (filtro para botes)
Pgina 19
Aula de Microcontrolador Funcionamento do Motor de Passo O motor
de passo se difere dos demais motores devido a duas caractersticas
principais: preciso (sem a necessidade sensores de final de curso)
e modo de acionamento. A maioria dos motores de passo so acionados
atravs de sinais seqenciais e independentes para cada uma de suas 4
bobinas. Sua velocidade dada atravs do delay entre um sinal e
outro. O ngulo do motor de passo pode variar de motor para motor,
mas no geral de 1,8 por passo. Dependendo do modo de acionamento
possvel reduzir este valor pela metade. Abaixo mostramos o modo de
acionamento, considerando um sinal de 1 byte (8 bits) para um motor
de 4 bobinas. Sinal 00000001 00000010 00000100 00001000 Bobinas
Bobina 1 Bobina 2 Bobina 3 Bobina 4
Em cada instante, apenas uma bobina est acionada. O sinal deve
ser seqencial para que o motor gire para o mesmo sentido. Se a
seqncia correta no for alcanado o motor girar um passo para um
sentido e outro para o sentido contrrio, ou seja, ele vibrar, mas
no sair do lugar. Identificao do Comum do Motor de passo
Normalmente os motores de passo possuem seis fios, sendo que dois
deles devem ser conectados no mesmo ponto. Estes dois devem ser
identificados e so chamados de comum. Quando temos a configurao a
cinco fios, quer dizer que os dois fios j esto conectados juntos no
interior do motor e, portanto, temos um fio comum.
Pgina 20
Aula de Microcontrolador
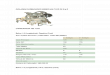
Para identificao dos comuns, devemos medir os fios de dois em
dois na escala de resistncia. Quando estivermos com o fio comum em
uma das pontas de prova do multmetro a resistncia dever ser lida
pela metade (vide figura abaixo). Motor de 5 fios Motor de 6
fios
Analisando o caso do motor a cinco fios acima, temos que a
medida entre quaisquer dois fios excluindo o fio 1, resultar sempre
o dobro da medida entre o fio 1 e qualquer outro fio (2, 3, 4 e 5).
O mesmo vale para o motor a seis fios, apenas que o comum, neste
caso, formado pela conexo dos fios 1 e 2. Identificao da seqncia
das Bobinas Tendo j descoberto o fio comum, para identificarmos a
seqncia das bobinas devemos aplicar 12 volts em seus terminas. O
positivo da fonte deve ser conectado ao comum do motor, e o
negativo deve ser triscado em cada uma das quatro bobinas at
alcanar uma combinao que resulte no giro do motor para um mesmo
sentido.
Pgina 21
Aula de Microcontrolador Drivers para acionamento do Motor de
Passo
ULN2803
Pgina 22
Aula de Microcontrolador
TIP31C
Pgina 23
Aula de Microcontrolador Esquema de Ligao utilizando
Transistores (TIP122 ou TIP31C)
Hardware do Boto
Programa #INCLUDE __CONFIG _CP_OFF & _CPD_OFF &
_DEBUG_OFF & _LVP_OFF & _WRT_OFF & _BODEN_OFF &
_WDT_OFF & _PWRTE_ON & _XT_OSC
Pgina 24
Aula de Microcontrolador #DEFINE #DEFINE #DEFINE #DEFINE BANK1
BANK0 BT_HOR BT_ANTIHOR BSF STATUS,RP0 BCF STATUS,RP0 PORTB,7
PORTB,6
CBLOCK 0X20 T1 T2 T3 FILTRO1 FILTRO2 ENDC FILTRO1_VALUE EQU .180
FILTRO2_VALUE EQU .20 ORG GOTO ORG GOTO 0X0000 CONFIGURA 0X0004
CONFIGURA
;******************************************** DELAY MOVLW .255
MOVWF T1 MOVLW .255 MOVWF T2 MOVLW .8 MOVWF T3 DELAYAUX DECFSZ GOTO
DECFSZ GOTO DECFSZ GOTO T1 DELAYAUX T2 DELAYAUX T3 DELAYAUX
RETURN ;******************************************** CONFIGURA
CLRF PORTA CLRF PORTB CLRF PORTC CLRF PORTD Pgina 25
Aula de Microcontrolador CLRF PORTE BANK1 MOVLW B'00000000'
MOVWF TRISA MOVLW B'11110000' MOVWF TRISB MOVLW B'00000000' MOVWF
TRISC MOVLW B'00000000' MOVWF TRISD MOVLW B'00000000' MOVWF TRISE
MOVLW B'10000100' MOVWF OPTION_REG MOVLW B'00000111' MOVWF ADCON1
BANK0 MOVLW B'00000000' MOVWF INTCON HORARIO BTFSS GOTO BSF CALL
BCF BSF CALL BCF BSF CALL BCF BSF CALL BCF MOVLW MOVWF MOVLW MOVWF
BT_ANTIHOR FILTRO_ANTIHOR PORTC,7 DELAY PORTC,7 PORTC,6 DELAY
PORTC,6 PORTC,5 DELAY PORTC,5 PORTC,4 DELAY PORTC,4 FILTRO1_VALUE
FILTRO1 FILTRO2_VALUE FILTRO2
GOTOHORARIO
Pgina 26
Aula de Microcontrolador FILTRO_ANTIHOR DECFSZ FILTRO1 GOTO
HORARIO MOVLW MOVWF DECFSZ GOTO MOVLW MOVWF FILTRO1_VALUE FILTRO1
FILTRO2 HORARIO FILTRO2_VALUE FILTRO2
GOTOANTI_HORARIO
ANTI_HORARIO BTFSS GOTO BSF CALL BCF BSF CALL BCF BSF CALL BCF
BSF CALL BCF MOVLW MOVWF MOVLW MOVWF GOTO FILTRO_HOR DECFSZ GOTO
MOVLW MOVWF
BT_HOR FILTRO_HOR PORTC,4 DELAY PORTC,4 PORTC,5 DELAY PORTC,5
PORTC,6 DELAY PORTC,6 PORTC,7 DELAY PORTC,7 FILTRO1_VALUE FILTRO1
FILTRO2_VALUE FILTRO2 ANTI_HORARIO FILTRO1 ANTI_HORARIO
FILTRO1_VALUE FILTRO1 Pgina 27
Aula de Microcontrolador
DECFSZ GOTO MOVLW MOVWF
FILTRO2 ANTI_HORARIO FILTRO2_VALUE FILTRO2
GOTOHORARIO END *********************************************FIM
AULA 1********************************************
Aula 2 Interrupes do PIC16F877A
Tpicos: Interrupes Timers (temporizadores) Temporizao de 1
segundo (TIMER1) Display de Cristal Lquido (LCD 2x16) Segundo
Programa: Relgio Digital
Interrupes Interrupo uma poderosa ferramenta dos
microcontroladores. Os registradores responsveis pela interrupo do
PIC16F877A so: INTCON, PIE1, PIE2, PIR1 e PIR2. O principal
Registrador o INTCON, pois os bits 6 (PEIE) e 7 (GIE) deste
registrador so responsveis pela habilitao da interrupo. Para este
microcontrolador especfico, todas interrupes so apontadas para o
endereo 0x0004 da Memria de Programa (FLASH). Portanto, quando uma
interrupo ocorrer o contador de programa (PCLATH:PCL) apontar para
a posio 0x0004, ficando por conta do programador a escolha das
prioridades.
Pgina 28
Aula de Microcontrolador REGISTRADOR INTCON 7 6 5 R/W R/W R/W
GIE PEIE T0IE
4 R/W INTE
3 R/W RBIE
2 R/W T0IF
1 R/W INTF
0 R/W RBIF
Chave Geral para interrupo de perifricos
{
Porta Paralela, Conversor A/D, USART (recepo e transmisso),
CCP1, CCP2, SSP (SPI ou I2C), Timer 1 (TMR1) e Timer 2 (TMR2).
GIE = Habilitao geral das interrupes. PEIE = Habilita/Desabilita
interrupo por perifricos. T0IE = Habilita/Desabilita interrupo por
Timer 0. INTE = Habilita/Desabilita interrupo pelo pino RB0/INT.
RBIE = Habilita/Desabilita interrupo por mudana de estado. T0IF =
Sinalizador de estouro do TMR0. INTF = Sinalizador de interrupo
pelo pino RB0/INT. RBIF = Sinalizador de interrupo por mudana de
estado.
REGISTRADOR PIE1 7 6 5 R/W R/W R/W PSPIE ADIE RCIE
4 R/W TXIE
3 R/W SSPIE
2 R/W CCP1IE
1 R/W TMR2IE
0 R/W TMR1IE
PSPIE = Habilita interrupo por Escrita/Leitura da Porta
Paralela. ADIE = Habilita interrupo por trmino da converso A/D.
RCIE = Habilita interrupo por dado recebido (USART) TXIE = Habilita
interrupo por dado transmitido(USART). SSPIE = Habilita interrupo
por dado recebido/transmitido por Porta Serial Sncrona CCP1IE =
Habilita interrupo do mdulo CCP1. TMR2IE = Habilita interrupo por
estouro do Timer 2. TMR1IE = Habilita interrupo por estouro do
Timer 1.
Pgina 29
Aula de Microcontrolador
REGISTRADOR PIE2 7 6 5 R/W R/W R/W
4 R/W EEIE
3 R/W BCLIE
2 R/W
1 R/W
0 R/W CCP2IE
EEIE = Habilita interrupo por Escrita/Leitura na EEPROM. BCLIE =
Habilita interrupo por Coliso no Barramento. CCP1IE = Habilita
interrupo do mdulo CCP2.
REGISTRADOR PIR1 7 6 5 R/W R/W R/W PSPIF ADIF RCIF
4 R/W TXIF
3 R/W SSPIF
2 R/W CCP1IF
1 R/W TMR2IF
0 R/W TMR1IF
PSPIF = Sinalizador de trmino de Escrita/Leitura na Porta
Paralela. ADIF = Sinalizador de trmino da converso A/D. RCIF =
Sinalizador de dado recebido (USART) TXIF = Sinalizador de dado
transmitido(USART). SSPIF = Sinalizador de dado
recebido/transmitido por Porta Serial Sncrona CCP1IF = Sinalizador
da interrupo do mdulo CCP1. TMR2IF = Sinalizador de estouro do
Timer 2. TMR1IF = Sinalizador de estouro do Timer 1. REGISTRADOR
PIR2 7 6 5 R/W R/W R/W
4 R/W EEIF
3 R/W BCLIF
2 R/W
1 R/W
0 R/W CCP2IF
EEIF = Sinalizador de trmino de Escrita/Leitura na EEPROM. BCLIF
= Sinalizador de Coliso no Barramento. CCP1IF = Sinalizador de
interrupo do mdulo CCP2. TIMERS (Temporizadores) Cada um dos Timers
possui uma capacidade de temporizao que se diferem uns dos outros
conforme a quantidade de bits, os registradores de controle e o
PRESCALER (divisor de freqncia). O Prescaler um divisor de freqncia
que torna possvel um aumento no tempo de incremento do registrador
(contador).
Pgina 30
Aula de Microcontrolador Os registradores dos TIMERS podem ser
incrementados de duas maneiras: atravs do clock interno (ciclo de
mquina) ou atravs da borda de subida ou descida de um sinal de
entrada externo. O tempo obtido atravs da multiplicao entre: a
contagem dos incrementos no registrador (da inicializao at o
estouro), o Prescaler, e, o clico de mquina ou o tempo do pulso
externo. TMR0 O TMR0 um contador automtico de 8bits (256 valores);
seu registrador de controle o OPTION_REG. O TMR0 incrementado em
cada ciclo de mquina quando o T0CS=0, ou incrementado em cada pulso
externo pelo pino RA4/T0CKI quando T0CS=1 (T0CS configurado no
registrador OPTION, onde tambm configurado se o incremento ser na
borda de subida, 0, ou descida, 1, atravs de T0SE). Se a interrupo
por estouro de TMR0 estiver habilitada no INTCON (T0IE=1), ao final
da contagem (255) o contador de programa (PCLATH:PCL) apontar para
a posio 0x0004. Atravs do PRESCALER, tambm configurado no OPTION,
possvel aumentar o tempo de estouro do TMR0 dividindo a freqncia,
isto , quanto menor a freqncia, maior o tempo. A tabela do
PRESCALER mostrada abaixo. PS 2 / 1 / 0 000 001 010 011 100 101 110
111 TMR0 1:2 1:4 1:8 1:16 1:32 1:64 1:128 1:256 WDT 1:1 1:2 1:4 1:8
1:16 1:32 1:64 1:128
Por exemplo, se utilizarmos a configurao 111, para os bits PS2,
PS1 e PS0, o TMR0 ser incrementado a cada 256s. Importante lembrar
que, o bit 3 (PSA) do OPTION seleciona o PRESCALER para WDT (PSA=1)
ou para TMR0 (PSA=0). O registrador OPTION mostrado abaixo.
Pgina 31
Aula de Microcontrolador REGISTRADOR OPTION 7 6 5 R/W R/W R/W
RBPU INTEDG T0CS
4 R/W T0SE
3 R/W PSA
2 R/W PS2
1 R/W PS1
0 R/W PS0
RBPU = Ativao dos resistores de pull-ups internos do PORTB. 0:
Resistores de pull-ups ativados (apenas para os pinos configurados
como entrada) 1: Resistores de pull-ups desativados INTEDG =
Configurao da borda que gerar a interrupo externa no RB0. 0:
Interrupo ocorrer na borda de descida. 1: Interrupo ocorrer na
borda de subida. T0CS = Configurao do incremento para o TMR0. 0:
TMR0 ser incrementado internamente pelo clock de mquina. 1: TMR0
ser incrementado externamente pelo pino RA4/T0CKI. T0SE =
Configurao da borda que incrementar o TMR0 no pino RA4/T0CK, quando
T0CS=1. 0: borda de subida 1: borda de descida PSA = Configurao de
aplicao do Pre-Scale 0: O Pre-Scale ser aplicado ao TMR0. 1: O
Pre-Scale ser aplicado ao WDT. PS2:PS0 = Configurao do valor do
Pre-Scale (a tabela j foi mostrada acima)
TMR1 O TMR1 um contador automtico de 16 bits; seu registrador de
controle o T1CON. No TMR1 so utilizados dois registradores (TMR1L e
TMR1H) para armazenar o valor de inicializao da contagem. Assim
como no Timer 0, o TMR1 pode trabalhar com o incremento pelo clock
interno ou externo, e tambm possui um prescaler independente,
configurado no registrador T1CON (T1CKPS1:T1CKPS0), o qual mostrado
abaixo.
Pgina 32
Aula de Microcontrolador REGISTRADOR T1CON 7 6 5 4 3 U U R/W R/W
R/W T1CKPS1 T1CKPS0 T1OSCEN
2 R/W /T1SYNC
1 R/W TMR1CS
0 R/W TMR1ON
T1CKPS1:T1CKPS0 = Ajuste do prescaler do Timer 1 (tabela
abaixo). PS1 / 0 00 01 10 11 TMR1 1:1 1:2 1:4 1:8
T1OSCEN = Habilitao de um oscilador externo para os pinos T1OSO
e T1OSI (12 e 13). 0: Oscilador desabilitado. 1: Oscilador externo
habilitado. /T1SYNC = Controle de sincronismo interno. Quando
TMR1CS=0 este bit ignorado. 0: Sincronismo ligado. 1: Sincronismo
desligado (modo assncrono). TMR1CS = Seleo da origem do clock para
Timer 1. 0: Clock interno 1: Clock externo no pino T1OSO/T1CKI
TMR1ON = Habilitao do Timer 1. 0: Timer 1 desabilitado. Paralisa o
contador do Timer 1. 1: Timer 1 habilitado. Temporizao de 1 segundo
(TIMER1) Os registradores que devem ser carregados com o valor
inicial da contagem so: TMR1L e TMR1H. Para podermos obter um tempo
de 1 segundo apresentaremos uma maneira das vrias possibilidades
possveis, isto depende dos valores iniciais de TMR1L e TMR1H, e do
Prescaler do Timer 1, configurado atravs do T1CON. Temporizao de 1
segundo: TMR1_HIGH EQU HIGH (.65536-.62500) TMR1_LOW EQU LOW
(.65536-.62500) ;parte alta do valor do temporizador ;parte baixa
do valor do temporizador
Pgina 33
Aula de Microcontrolador
MOVLW MOVWF
B00110000 T1CON
;Prescaler 1:8
Efetuando a configurao acima temos um tempo de 0,5 segundo, por
isto preciso um registrador auxiliar carregado com o valor 2 para
que somente na segunda interrupo esta rotina seja executada. Isto
obtido atravs das instrues abaixo. DECFSZ Goto INT_TMR1 .....
SAI_INT_TMR1 BCF RETFIE Display de Cristal Lquido (LCD 2x16)
Divisor_TMR1 SAI_INT_TMR1 ;rotina de interrupo por TMR1
PIR1,TMR1IF
O modelo de display que estaremos utilizando um de duas linhas
com 16 caracteres cada uma. Sua pinagem mostrada abaixo:
Pino Funo Pino Funo 1 VSS 9 DB2 2 VDD 10 DB3 3 V0 11 DB4 4 RS 12
DB5 5 R/W 13 DB6 6 E 14 DB7 7 DB0 15 A 8 DB1 16 K VSS e VDD:
alimentao do componente (5V) Vo: potencimetro de 10K (controle de
contraste) Pgina 34
Aula de Microcontrolador RS: Tipo de informao (0=comando;
1=dado) R/W: Leitura (0) / Escrita (1) - comando ou dado e
verificao do trmino de uma operao E: habilita leitura da informao
no barramento de dados DB0 a DB7: barramento de dados paralelo A e
K: usados para ligao do Backlight (iluminao de fundo) Existem
basicamente duas maneiras para se trabalhar com o LCD: uma a deteco
do instante exato no qual a operao j foi executada, onde fazemos a
leitura do BUSY FLAG utilizando o pino RW como leitura, atravs da
operao READ STATUS, e a outra a utilizao de rotinas de atraso que
garante o trmino das operaes internas do mdulo LCD. Apesar de o
barramento ser de 8 vias, possvel trabalhar com o mdulo com
comunicao de 4 vias, o que valoriza sua utilizao principalmente nos
PICs com quantidade pequena de pinos (18 pinos). Para enviarmos uma
informao ao LCD precisamos primeiramente ajustar RS para informar
se um comando ou um dado. Em seguida, devemos escrever a informao
no barramento de dados, e depois setar o pino E. Inicializao do LCD
Toda vez que a alimentao for ligada, deve ser executado o
procedimento de inicializao do LCD. 1. Aguardar 15ms 2. Com RS em
0, enviar 0x30 para o display (inicializao) 3. Aguardar pelo menos
4ms. 4. Com RS em 0, enviar 0x30 para o display (inicializao) 5.
Aguardar pelo menos 100s. 6. Com RS em 0, enviar 0x30 para o
display (inicializao) 7. Aguardar pelo menos 40s. 8. Com RS em 0,
enviar B00111000 (comunicao por 8 vias) 9. Aguardar pelo menos 40s.
10. Com RS em 0, enviar B00000001 (limpar display e posicionar o
cursor na 1linha/1coluna) 11. Aguardar pelo menos 1,8ms. 12. Com RS
em 0, enviar B00001100 (liga o display sem cursor) 13. Aguardar
pelo menos 40s. 14. Com RS em 0, enviar B00000110 (deslocamento
automtico do cursor para a direita) 15. Aguardar pelo menos
40s.
Pgina 35
Aula de Microcontrolador Lista de Comandos do LCD Tabela.
Comandos do LCD. RS RW D7 D6 D5 D4 D3 D2 D1 D0 Instruo/Descrio 4 5
14 13 12 11 10 9 8 7 Pinos Limpa Display e retorna a 1 0 0 0 0 0 0
0 0 0 1 posio Retorna Cursor a 1 posio 0 0 0 0 0 0 0 0 1 *
Estabelece sentido de 0 0 0 0 0 0 0 1 ID S deslocamento
Ativa/Desativa display, 0 0 0 0 0 0 1 D C B ativa/desativa cursor,
ativa/desativa cursor piscante. 0 0 0 0 0 1 SC RL * * Move
Cursor/Desloca Display Estabelece o n de bits da 0 0 0 0 1 DL N F *
* interface, estabelece o n de linhas, e tipo de informao dos
caracteres. 0 0 0 1 A A A A A A Enderea a CGRAM 0 0 1 1 0 1 0 1 1
BF D D A * D D A * D D A * D D A * D D A * D D A * D D A * D D
Enderea a DDRAM L o contedo do contador de endereos, e a Busy Flag.
Escreve dados na CG ou DDRAM. L dados da CG ou DDRAM.
ID 0: o cursor desloca-se automaticamente para a esquerda
(decremento) aps uma operao de escrita ou leitura. 1: o cursor
desloca-se automaticamente para a direita (incremento) aps uma
operao de escrita ou leitura. S 0: desliga o deslocamento da
mensagem. 1: Liga o deslocamento da mensagem. Serve para
implementar as funes de insert e backspace. D 0: Inibe a visualizao
dos caracteres no display. A memria interna do LCD permanece
inalterada. 1: Habilita a visualizao dos caracteres no display,
conforme os dados existentes na memria interna. C 0: o cursor no
visvel.
Pgina 36
Aula de Microcontrolador 1: o crusor visvel como uma linha
embaixo do caractere (oitava linha da matriz), como se fosse um
sublinhado. B 0: desativa o cursor piscante. 1: ativa o cursor
piscante.
SC e RL00: o cursor desloca-se para a esquerda. Decrementa o
endereo da memria interna DDRAM. 01: o cursor desloca-se para a
direita. Incrementa o endereo da memria interna DDRAM. 10:
desloca-se a mensagem e o cursor para a esquerda, em relao posio
atual do cursor. Funo Insert. 11: desloca-se a mensagem e o cursor
para a direita, em relao posio atual do cursor. Funo Backspace. DL
0: comunicao feita pelas 8 vias de dados, de DB0 DB7. 1: comunicao
feita em 4 vias de dados, de DB4 DB7. Inicialmente deve ser
enviado, a parte alta do byte e, em seguida, a parte baixa. N e F
00: 1 linha com matriz de 7x5 + cursor 01: 1 linha com matriz de
10x5 + cursor 1-: 2 linhas com matriz de 7x5 + cursor
Escrevendo Caracteres no Display Posicionamento do Cursor na
DDRAM: RS 0 DB7 1 DB6 A DB5 A DB4 A DB3 A DB2 A DB1 A DB0 A
O valor acima enviado com RS em 0. Para isto, basta posicionar
corretamente o cursor antes da operao de escrita do dado. Abaixo,
mostramos a tabela com os 32 caracteres do display e seus endereos
absolutos (em hexadecimal). Coluna 0 1 2 3 4 5 6 7 8 9 10 11 12 13
14 15 Linha0 80 81 82 83 84 85 86 87 88 89 8A 8B 8C 8D 8E 8F Linha1
C0 C1 C2 C3 C4 C5 C6 C7 C8 C9 CA CB CC CD CE CF Com o cursor na
posio correta, basta enviar a letra (cdigo ASCII) que se deseja
escrever para o display. Lembrando que neste caso, RS deve ser
igual a 1. RS 1 DB7 D DB6 D DB5 D DB4 D DB3 D DB2 D DB1 D DB0 D
Pgina 37
Aula de Microcontrolador No se pode esquecer tambm do pulso em E
(utilizado para efetivar a leitura da informao escrita no
barramento de dados).
Segundo Programa: Relgio Digital #include __CONFIG _CP_OFF &
_CPD_OFF & _DEBUG_OFF & _LVP_OFF & _WRT_OFF &
_BODEN_OFF & _WDT_ON & _PWRTE_ON & _XT_OSC ERRORLEVEL
-302 ERRORLEVEL -305 #DEFINE BANK1 BSF STATUS,RP0 #DEFINE BANK0 BCF
STATUS,RP0 #DEFINE BT_UP #DEFINE BT_DOWN #DEFINE BT_ZERO #DEFINE
BT_LIGA_DESLIGA #DEFINE DISP_LCD #DEFINE RS #DEFINE ENABLE #DEFINE
FLAG_TMR1 ;definies de bancos ;incremento do contador do Display ;
decremento do contador do Display ;boto para zerar relgio ;boto
para inicar relgio e parar relgio
PORTB,0 PORTB,1 PORTB,2 PORTB,3
PORTD PORTE,0 PORTE,1 PORTA,0
;define LCD ;RS=0 - comando, RS=1 - dado ;habilita o LCD para
pegar os dados ;aciona LED quando o relgio liga
CBLOCK 0X20 UNI_SEG DEZ_SEG UNI_MIN DEZ_MIN HORAS FILTRO_BOTOES
TEMPO_TURBO DIVISOR_TMR1 CONV_DEZ_HORAS CONV_UNI_HORAS TEMPO0
TEMPO1 AUX DISP_LCD_TEMP ENDC
;varivel auxiliar para contagem de 1 segundo exato ;delay do LCD
;delay do LCD ;varivel auxiliar usada na conv binrio para decimal
;varivel temporria que conter o valor do dado ou ;comando que ser
enviado ao LCD
Pgina 38
Aula de Microcontrolador
FILTRO_TECLA TURBO_TECLA TMR1_HIGH TMR1_LOW ORG GOTO ORG
INT_TMR1 MOVLW MOVWF MOVLW MOVWF DECFSZ GOTO MOVLW MOVWF
EQU .200 EQU .25
;filtro para evitar rudos dos botes ;parte alta do valor do
temporizador ;parte baixa do valor do temporizador
EQU HIGH (.65536-.62500) EQU LOW (.65536-.62500) 0x00 CONFIG
0X04 TMR1_HIGH TMR1H TMR1_LOW TMR1L DIVISOR_TMR1,F SAI_INT_TMR1 .2
DIVISOR_TMR1
;interrupo por TMR1 ;atualiza contadores alto e baixo referente
ao ;tempo do TMR1.
;varivel auxiliar (DIVISOR_TMR1) para dar ;1 segundo exato.
;DIVISOR_TMR1 = 0 ? ;NO ;SIM ;atualiza varivel auxiliar do TMR1
;chama rotina para incrementar contador
CALL INCREMENTA_TIMER CALL ATUALIZA_HORARIO SAI_INT_TMR1 BCF
RETFIE PIR1,TMR1IF
;nome da rotina ;Limpa flag para ocorrer interrupo por TMR1.
;rotina para incrementar displays ;incrementa o display referente
unidade ;teste para ver se chegou 10. ;UNIDADE=10? ;NO
INCREMENTA_TIMER INCF UNI_SEG,F MOVLW XORWF BTFSS RETURN CLRF
INCF .10 UNI_SEG,W STATUS,Z UNI_SEG DEZ_SEG,F
;SIM ;incrementa o display referente dezena
Pgina 39
Aula de Microcontrolador MOVLW XORWF BTFSS RETURN CLRF INCF
MOVLW XORWF BTFSS RETURN CLRF INCF MOVLW XORWF BTFSS RETURN CLRF
INCF MOVLW XORWF BTFSC CLRF RETURN .6 DEZ_SEG,W STATUS,Z DEZ_SEG
UNI_MIN,F .10 UNI_MIN,W STATUS,Z UNI_MIN DEZ_MIN,F .6 DEZ_MIN,W
STATUS,Z DEZ_MIN HORAS,F .24 HORAS,W STATUS,Z HORAS ;rotina para
decrementar contador ;teste para ver se chegou 10. ;DEZENA=10? ;NO
;SIM ;incrementa o display referente centena
;incrementa o display referente milhar
;incrementa o display referente milhar
DECREMENTA_TIMER
DECF UNI_SEG,F ;decrementa varivel UNI_SEG e guarda o valor nela
mesma ;daqui para baixo, preciso saber se o ltimo valor foi 0x00.
;Se foi 0x00, ento UNI_SEG vale 0xFF, onde fazendo a ;mscara
(XORWF) teremos, ;0x00 como resultado em W_REG, setando o bit Z do
STATUS. ;Com isto, o valor da UNI_SEG deve ser atualizado novamente
;para 0x09. MOVLW 0XFF ;teste para ver se UNIDADE j chegou ao 0xFF
XORWF UNI_SEG,W ;mascaramento. BTFSS STATUS,Z ;bit Z do STATUS
igual a 1 ? RETURN ;NO ;SIM MOVLW .9 ;atualiza UNIDADE para comear
do 0x09. MOVWF UNI_SEG
Pgina 40
Aula de Microcontrolador DECF MOVLW XORWF BTFSS RETURN MOVLW
MOVWF DECF MOVLW XORWF BTFSS RETURN MOVLW MOVWF DECF MOVLW XORWF
BTFSS RETURN MOVLW MOVWF DECF MOVLW XORWF BTFSS RETURN MOVLW MOVWF
RETURN DEZ_SEG,F 0XFF DEZ_SEG,W STATUS,Z .5 DEZ_SEG UNI_MIN,F 0XFF
UNI_MIN,W STATUS,Z .9 UNI_MIN DEZ_MIN,F 0XFF DEZ_MIN,W STATUS,Z .5
DEZ_MIN HORAS,F 0XFF HORAS,W STATUS,Z .23 HORAS ;decrementa varivel
MILHAR e guarda o valor ;nela mesma ;decrementa varivel DEZENA e
guarda o valor ;nela mesma ;teste para ver se DEZENA j chegou ao
0xFF ;mascaramento. ;bit Z do STATUS igual a 1 ? ;NO ;SIM ;atualiza
DEZENA para comear do 0x09. ;decrementa varivel CENTENA e guarda o
valor ;nela mesma
ATUALIZA_HORARIO MOVF HORAS,W CALL CONV_BIN8_DEC BCF MOVLW CALL
RS 0XC8 ATUALIZA ;display setado para comando ;dado ser atualizado
a partir do endereo 0xC3 ;atualiza LCD Pgina 41
Aula de Microcontrolador BSF MOVF ADDLW CALL MOVF ADDLW CALL
MOVLW CALL MOVF ADDLW CALL MOVF ADDLW CALL MOVLW CALL MOVF ADDLW
CALL MOVF ADDLW CALL RETURN CONV_BIN8_DEC MOVWF CLRF CLRF
BIN8_DEC_1 MOVLW SUBWF BTFSS GOTO MOVWF AUX CONV_UNI_HORAS
CONV_DEZ_HORAS .10 AUX,W STATUS,C BIN8_DEC_2 AUX Pgina 42 RS
;display setado para dados
CONV_DEZ_HORAS,W 0X30 ATUALIZA CONV_UNI_HORAS,W 0X30 ATUALIZA
':' ATUALIZA DEZ_MIN,W 0X30 ATUALIZA UNI_MIN,W 0X30 ATUALIZA ':'
ATUALIZA DEZ_SEG,W 0X30 ATUALIZA UNI_SEG,W 0X30 ATUALIZA ;CA
;resultado da converso binrio para decimal ;SOMA 0x30 ao resultado
para enviar o dado ;em cdigo ASCII para o LCD ;atualiza LCD ;CA
;resultado da converso binrio para ;decimal ;SOMA 0x30 ao resultado
para enviar ;o dado
Aula de Microcontrolador INCF GOTO BIN8_DEC_2 MOVF MOVWF RETURN
CONV_DEZ_HORAS,F BIN8_DEC_1 AUX,W CONV_UNI_HORAS
;atraso para garantir que uma operao do LCD termine DELAY_LCD
MOVWF TEMPO1 DELAY_ATU MOVLW .250 MOVWF TEMPO0 DELAY_ATU1 CLRWDT
DECFSZ TEMPO0,F GOTO DELAY_ATU1 DECFSZ GOTO RETURN ;atualiza dado
ou comando no LCD ATUALIZA BSF ENABLE MOVWF DISP_LCD_TEMP MOVLW
0X0F ANDWF DISP_LCD,F MOVLW 0XF0 ANDWF IORWF BCF NOP BSF SWAPF
MOVLW ANDWF MOVLW ANDWF IORWF BCF MOVLW TEMPO1,F DELAY_ATU
;habilita LCD para pegar info no barramento ;guarda informao
atual no temporrio ;zera o barramento de 4 vias (DB4 DB7) ;atualiza
LCD: zera o barramento ;mscara para informao de DB4 DB7 ;envia
parte alta primeiro ;atualiza LCD ;desabilita LCD ;atraso ;habilita
LCD para pegar info no barramento ;inverte parte alta com parte
baixa ;zera o barramento de 4 vias (DB4 DB7) ;atualiza LCD: zera o
barramento ;mscara para informao de DB4 DB7 ;envia parte baixa da
informao original ;atualiza LCD ;desabilita LCD
DISP_LCD_TEMP,W DISP_LCD,F ENABLE ENABLE DISP_LCD_TEMP,F 0X0F
DISP_LCD,F 0XF0 DISP_LCD_TEMP,W DISP_LCD,F ENABLE .1
Pgina 43
Aula de Microcontrolador CALL RETURN CONFIG CLRF CLRF CLRF CLRF
CLRF DELAY_LCD ;garante o trmino da operao no LCD
PORTA PORTB PORTC PORTD PORTE B'11111110' TRISA B'11111111'
TRISB B'11111111' TRISC B'00001111' TRISD B'00000100' TRISE
B'11011011' OPTION_REG B'01000000' INTCON B'00000001' PIE1
B'00000111' ADCON1 ;interrupes de perifricos sero tratadas ;liga
interrupo por TMR1 ;PORTA e PORTE configs como I/O's digitais
;conversor A-D desligado
BANK1 MOVLW MOVWF MOVLW MOVWF MOVLW MOVWF MOVLW MOVWF MOVLW
MOVWF MOVLW MOVWF MOVLW MOVWF MOVLW MOVWF MOVLW MOVWF BANK0 MOVLW
MOVWF BTFSC GOTO MOVLW
B'00110000' T1CON STATUS,NOT_TO $ 0X20 ;aguarda estouro do
watchdog timer ;limpa memrio RAM disponvel Pgina 44
Aula de Microcontrolador MOVWF LIMPA_RAM CLRF INCF MOVF XORLW
BTFSS GOTO MOVLW MOVWF BSF BCF FSR INDF FSR,F FSR,W 0X80 STATUS,Z
LIMPA_RAM .2 DIVISOR_TMR1 INTCON,GIE FLAG_TMR1 ;atualiza varivel
aux para contagem de 1 segundo ;habilita chave geral da interrupo
;apaga LED, pois o TMR1 no foi ainda habilitado
INICIALIZACAO_DISPLAY BCF MOVLW CALL MOVLW CALL MOVLW CALL MOVLW
CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL RS 0X30
ATUALIZA .3 DELAY_LCD 0X30 ATUALIZA 0X30 ATUALIZA 0X02 ATUALIZA
0X28 ATUALIZA B'00000001' ATUALIZA .1 DELAY_LCD B'00001100'
ATUALIZA ;display setado para comandos ;inicializao do display
;delay exigido pelo display ;inicializao do display ;inicializao
do display ;zera o contador de caracteres e retorna posio 0x80
;trabalhando com 4 vias de dados ;limpa todo o display ;delay de
1ms ;liga o display sem cursor
Pgina 45
Aula de Microcontrolador MOVLW CALL MOVLW CALL BSF MOVLW CALL
MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL
MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL
MOVLW CALL MOVLW CALL BCF MOVLW CALL BSF RS MOVLW CALL '0' ATUALIZA
B'00000110' ATUALIZA 0X81 ATUALIZA RS 'R' ATUALIZA 'E' ATUALIZA 'L'
ATUALIZA 'O' ATUALIZA 'G' ATUALIZA 'I' ATUALIZA 'O' ATUALIZA ''
ATUALIZA '' ATUALIZA '' ATUALIZA '' ATUALIZA '' ATUALIZA ''
ATUALIZA '' ATUALIZA '' ATUALIZA RS 0XC8 ATUALIZA ;incrementa
automtico direita ;endereo do LCD ;display setado para dados ;81
;82 ;83 ;84 ;85 ;86 ;87 ;88 ;89 ;8A ;8B ;8C ;8D ;8E ;8F
;endereo do LCD ;display setado para dados ;C8
Pgina 46
Aula de Microcontrolador MOVLW CALL MOVLW CALL MOVLW CALL MOVLW
CALL MOVLW CALL MOVLW CALL MOVLW CALL VARRE CLRWDT BTFSS GOTO BTFSS
GOTO BTFSS GOTO BTFSS GOTO MOVLW MOVWF MOVLW MOVWF GOTO TRATA_BT_UP
DECFSZ GOTO DECFSZ GOTO MOVLW BT_UP TRATA_BT_UP BT_DOWN
TRATA_BT_DOWN BT_ZERO TRATA_BT_ZERO BT_LIGA_DESLIGA
TRATA_BT_LIGA_DES FILTRO_TECLA FILTRO_BOTOES .40 TEMPO_TURBO VARRE
FILTRO_BOTOES,F VARRE TEMPO_TURBO,F VARRE TURBO_TECLA ;diminui a
velocidade do incremento Pgina 47 '0' ATUALIZA ':' ATUALIZA '0'
ATUALIZA '0' ATUALIZA ':' ATUALIZA '0' ATUALIZA '0' ATUALIZA ;C9
;CA ;CB ;CC ;CD ;CE ;CF ;testa botes ;limpa o WDT para o programa
no ser ;reinicializado em condies normais ;boto para incrementar
valor dos displays ;boto para decrementar valor dos displays ;boto
para zerar relgio ;liga/desliga Relgio ;deboucing
Aula de Microcontrolador MOVWF CALL CALL GOTO TEMPO_TURBO
INCREMENTA_TIMER ATUALIZA_HORARIO VARRE ;BT_UP permanecer
pressionado
TRATA_BT_DOWN DECFSZ FILTRO_BOTOES,F GOTO VARRE DECFSZ GOTO
MOVLW MOVWF CALL CALL GOTO TEMPO_TURBO,F VARRE TURBO_TECLA
TEMPO_TURBO DECREMENTA_TIMER ATUALIZA_HORARIO VARRE ;diminui a
velocidade do decremento ;BT_DOWN permanecer pressionado
TRATA_BT_LIGA_DES DECFSZ FILTRO_BOTOES,F GOTO VARRE DECFSZ GOTO
MOVLW MOVWF BTFSS GOTO DESLIGA_TMR1 BCF BCF GOTO LIGA_TMR1 BSF
MOVLW MOVWF TEMPO_TURBO,F VARRE TURBO_TECLA TEMPO_TURBO FLAG_TMR1
LIGA_TMR1 FLAG_TMR1 T1CON,TMR1ON VARRE FLAG_TMR1 TMR1_HIGH TMR1H
;ESTADO_TIMER=1? ;NO ;SIM ;desliga varivel referente ao TIMER
;desabilita a contagem ;volta para varredura de botes. ;liga
varivel referente ao TIMER ;atualiza valores do TMR1
Pgina 48
Aula de Microcontrolador MOVLW MOVWF MOVLW MOVWF BSF GOTO
TMR1_LOW TMR1L .2 DIVISOR_TMR1 T1CON,TMR1ON VARRE ;habilita a
contagem ;atualiza varivel auxiliar para contagem de ;1
segundo.
TRATA_BT_ZERO DECFSZ FILTRO_BOTOES,F GOTO VARRE DECFSZ GOTO
MOVLW MOVWF CLRF CLRF CLRF CLRF CLRF CALL GOTO END TEMPO_TURBO,F
VARRE TURBO_TECLA TEMPO_TURBO UNI_SEG DEZ_SEG UNI_MIN DEZ_MIN HORAS
ATUALIZA_HORARIO VARRE
Aula 3 Conversor Analgico Digital Tpicos: CAD (Conversor A/D)
Programao Tabela Terceiro Programa: Sensor de Temperatura
Pgina 49
Aula de Microcontrolador CAD (Conversor A/D) No mundo exterior
podemos dizer que tudo est na forma analgica, ou seja, utilizamos a
base 10 (decimal) para efetuarmos todos os clculos matemticos do
dia-adia, isto linguagem cotidiana. Para que o mundo dos
microprocessadores ou microcontroladores possam nos ajudar a
resolver problemas, tal como clculos necessrio converter sinais
analgicos em sinais digitais, ou seja, linguagem de mquina. O
Conversor Analgico/Digital tem a funo de pegar este nvel de tenso,
codificlo em base binria, e aps um certo tempo de processamento,
decodific-lo em decimal para podermos entend-lo. Nesta seo,
referiremos ao mdulo A/D do 16F877A, caractersticas e registradores
utilizados, sero discutidos em detalhe. As frmulas mais importantes
para este sistema de converso so mostradas abaixo. Resoluo = Vref
2n n = nmero de bits do conversor Vref = tenso de referncia m =
posio do bit (0 a 9) Bm = valor do bit m, 0 ou 1. Um ponto
importante, diz respeito velocidade e, conseqentemente, aos tempos
de amostragem para a converso A/D. Abaixo mostramos a tabela com os
tempos e etapas do sistema de converso A/D. Cdigo A B C D E Nome
Adequao do Capacitor Desligamento do Capacitor Converso Religamento
do Capacitor Nova adequao do Capacitor Tempo 40s 100ns 12TAD 2TAD
40s Ventrada = ( Bm 2(m) Vref ) 2n
TAD = tempo de converso de 1 bit. Para que o sistema de converso
funcione corretamente, um clock deve ser aplicado a ele. Cada
perodo deste clock ser chamado de TAD. Este clock escolhido por
software conforme configurao dos bits ADCS1 e ADCS0 do registrador
ADCON0; isto ser detalhado mais adiante.
Pgina 50
Aula de Microcontrolador Em PICs de 28 pinos (por exemplo:
16F873), temos 5 deles reservados para o mdulo A/D, so eles:
RA0/AN0, RA1/AN1, RA2/AN2, RA3/AN3 e RA5/AN4. No P16F877A (40
pinos) temos 8 pinos dedicados ao mdulo A/D, quais sejam: 2, 3, 4,
5, 7, 8, 9 e 10. Estes trs ltimos se referem ao PORTE (bits 0, 1 e
2), os 5 primeiros so os mesmos do PIC de 28 pinos citado. O mdulo
A/D possui 4 registradores: ADRESH, ADRESL, ADCON0 e ADCON1. Os
registradores: ADRESH e ADRESL contm o resultado dos 10 bits da
converso AD. Com isto, verificamos que 6 bits destes registradores
sero descartados. Quais bits sero descartados, pode ser escolhido
atravs do registrador ADCON1,ADFM, o qual ser mostrado na seqncia.
A figura abaixo mostra as duas maneiras de configurar os 10 bits
que contm o resultado da converso AD: justificado pela direita ou
justificado pela esquerda.
REGISTRADOR ADCON0 7 6 5 R/W R/W R/W ADCS1 ADCS0 CHS2
4 R/W CHS1
3 R/W CHS0
2 R/W GO/DONE\
1 U -
0 R/W ADON
ADCS1:ADCS0 Bit de seleo do clock de converso A/D ADCS1 / 0 00
01 10 11 Clock FOSC/2 FOSC/8 FOSC/32 FRC oscilador RC interno
(Sleep)
Pgina 51
Aula de Microcontrolador CHS2:CHS0 Bit de seleo do Canal
Analgico CHS2/0 000 001 010 011 100 101 110 111 Canal 0 1 2 3 4 5 6
7 PORT RA0/AN0 (pino 2) RA1/AN1 (pino 3) RA2/AN2 (pino 4) RA3/AN3
(pino 5) RA5/AN4 (pino 7) RE0/AN5 (pino 8) RE1/AN6 (pino 9) RE2/AN7
(pino 10)
GO/DONE\ - Bit de Status da Converso A/D 1: Converso A/D em
andamento 0: Converso A/D terminada/parada. ADON Bit de ligao do
Mdulo 1: Mdulo de converso AD est operando 0: Mdulo de converso AD
est desligado (no consome corrente). REGISTRADOR ADCON1 7 6 5 4 R/W
U U U ADFM -
3 R/W PCFG3
2 R/W PCFG2
1 R/W PCFG1
0 R/W PCFG0
ADFM Bit de seleo do formato do resultado de AD 1: Justificado
pela direita (os 6 bits mais significativos de ADRESH sero
descartados). 0: Justificado pela esquerda (os 6 bits menos
significativos de ADRESL sero descartados). PCFG3:PCFG0 Bits de
controle da configurao dos Pinos do Mdulo AD
Pgina 52
Aula de Microcontrolador
Aps termos verificado a configurao dos registradores referente
ao mdulo A/D, vamos discutir um pouco seu funcionamento. Como vimos
o ADCON1 o registrador responsvel por configurar os pinos do PORTA
e do PORTE como entradas analgicas ou digitais. Os pinos dos PORTs
que so escolhidos como entradas analgicas devem ter seu bit
correspondente do TRIS configurado como entrada. Basicamente temos
duas maneiras diferentes de operao do mdulo A/D: com interrupo ou
com verificao do Bit 0 (GO/DONE\) do registrador ADCON0. O modo de
verificao do bit GO/DONE\ muito mais simples, veja cdigo de exemplo
abaixo: LOOP BSF ADCON0,GO BTFSC ADCON0,GO GOTO $-1 MOVF ADRESH,W
... GOTO LOOP J no modo de funcionamento por interrupo (um pouco
mais minucioso) devemos proceder da seguinte forma:
Pgina 53
Aula de Microcontrolador CONFIG BCF MOVLW MOVWF BSF MOVLW MOVWF
BCF BSF ...
STATUS,RP0 B01000000 INTCON STATUS,RP0 B01000000 PIE1 STATUS,RP0
INTCON,GIE
;seleciona banco 0 ;chave geral para interrupo por perifricos
;seleciona banco 1 ;habilita interrupo por trmino de converso A/D
;ADIE habilitado ;seleciona banco 0 ;liga chave geral para tratar
interrupes
Aps ocorrer a interrupo, o contador de programa (PCL) ser
apontado para o endereo 0X04. No trmino do tratamento da interrupo,
no podemos esquecer de limpar o bit 6 (flag ADIF) do registrador
PIR1. O mdulo A/D aceita ainda uma operao durante SLEEP (economia
de energia), mas a seleo de clock deve ser FRC interno, ou seja, os
bits ADCS0 e ADCS1 do ADCON0 devem estar configurados com nvel 1
lgico. Uma observao importante vlida aqui, se utilizarmos a instruo
SLEEP com outra opo de clock (no RC), a converso ser abortada,
mdulo A/D desligado, embora o bit ADON esteja setado. Exemplo de
cdigo com SLEEP: Config ... MOVLW MOVWF ... B11000000 ;configura
clock FRC interno ADCON0
New_ad BSF ADCON0,GO ;inicia nova converso AD SLEEP MOVF
ADRESH,W ;quando a converso AD terminar, continuar daqui. ... GOTO
New_ad
Pgina 54
Aula de Microcontrolador Programao Tabela ORG 0X300 RADIX DEC
TABELA_TEMPERATURA MOVLW HIGH TABELA_TEMP MOVWF PCLATH MOVLW LOW
TABELA_TEMP ADDWF conv_bin_temp,W BTFSC STATUS,C INCF PCLATH,F
MOVWF PCL TABELA_TEMP DT
000,000,000,000,000,000,000,000,000,000,000,000,000,000,000,000 DT
004,004,004,004,004,004,004,004,004,004,004,004,004,004,004,004 DT
008,008,008,008,008,008,008,008,008,008,008,008,008,008,008,008 DT
012,012,012,012,012,012,012,012,012,012,012,012,012,012,012,012 DT
016,016,016,016,016,016,016,016,016,016,016,016,016,016,016,016 DT
020,020,020,020,020,020,020,020,020,020,020,020,020,020,020,020 DT
022,022,022,022,022,022,022,022,022,022,022,022,022,022,022,022 DT
024,024,024,024,024,024,024,024,024,024,024,024,024,024,024,024 DT
026,026,026,026,026,026,026,026,026,026,026,026,026,026,026,026 DT
028,028,028,028,028,028,028,028,028,028,028,028,028,028,028,028 DT
030,030,030,030,030,030,030,030,030,030,030,030,030,030,030,030 DT
031,031,031,031,031,031,031,031,031,031,031,031,031,031,031,031 DT
032,032,032,032,032,032,032,032,032,032,032,032,032,032,032,032 DT
033,033,033,033,033,033,033,033,033,033,033,033,033,033,033,033 DT
034,034,034,034,034,034,034,034,034,034,034,034,034,034,034,034 DT
035,035,035,035,035,035,035,035,035,035,035,035,035,035,035,035 ;15
;31 ;47 ;63 ;79 ;95 ;111 ;127 ;143 ;159 ;175 ;191 ;207 ;223 ;239
;255
Terceiro Programa: Sensor de Temperatura #include #include ;
inclui MACROs __CONFIG _CP_OFF & _CPD_OFF & _DEBUG_OFF
& _LVP_OFF & _WRT_OFF & _BODEN_OFF & _WDT_ON &
_PWRTE_ON & _XT_OSC ERRORLEVEL -302 ERRORLEVEL -305
Pgina 55
Aula de Microcontrolador #DEFINE BANK1 BSF STATUS,RP0 #DEFINE
BANK0 BCF STATUS,RP0 #DEFINE DISP_LCD #DEFINE RS #DEFINE ENABLE
;definies de bancos
PORTD ;define LCD PORTE,0 PORTE,1
#DEFINE BT1 PORTB,0 #DEFINE BT2 PORTB,1 #DEFINE BT3 PORTB,2
#DEFINE BT4 PORTB,3 CBLOCK 0X20 PARTE_ALTA PARTE_BAIXA
conv_bin_temp fator_multi TEMPO0 TEMPO1 AUX MOSTRADOR_AV
MOSTRADOR_DV DISP_LCD_TEMP AUX_DEC_DV AUX_DEC_AV TEMP_CELSIUS ENDC
ORG GOTO 0x00 INICIO ;parte alta do resultado da multiplicao ;parte
baixa do resultado da multiplicao ;resultado da converso A/D ;tenso
de referncia, neste caso, foi de 5V. ;delay do LCD ;delay do LCD
;varivel auxiliar usada na conv binrio para decimal ;varivel que
ser mostrada no LCD antes da vrgula ;varivel que ser mostrada no
LCD depois da vrgula ;varivel temporria que conter o valor do dado
ou ;comando que ser enviado ao LCD
;atraso para garantir que uma operao do LCD termine DELAY_MS
MOVWF TEMPO1 MOVLW .250 MOVWF TEMPO0 CLRWDT DECFSZ GOTO DECFSZ GOTO
RETURN Pgina 56 TEMPO0,F $-2 TEMPO1,F $-6
Aula de Microcontrolador
;atualiza dado ou comando no LCD ATUALIZA BSF ENABLE MOVWF
DISP_LCD_TEMP MOVLW 0X0F ANDWF DISP_LCD,F MOVLW 0XF0 ANDWF IORWF
BCF NOP BSF SWAPF MOVLW ANDWF MOVLW ANDWF IORWF BCF
;guarda informao atual no temporrio ;zera o barramento de 4 vias
(DB4 DB7) ;atualiza LCD: zera o barramento ;mscara para informao de
DB4 DB7 ;envia parte alta primeiro ;atualiza LCD ;desabilita LCD
;atraso ;habilita LCD para pegar info no barramento ;inverte para
alta com parte baixa no temp ;zera o barramento de 4 vias (DB4 DB7)
;atualiza LCD: zera o barramento ;mscara para informao de DB4 DB7
;envia parte baixa da informao original ;atualiza LCD ;desabilita
LCD
DISP_LCD_TEMP,W DISP_LCD,F ENABLE ENABLE DISP_LCD_TEMP,F 0X0F
DISP_LCD,F 0XF0 DISP_LCD_TEMP,W DISP_LCD,F ENABLE
MOVLW .1 CALL DELAY_MS RETURN CONV_BIN8_DEC MOVWF CLRF CLRF
BIN8_DEC_1 MOVLW SUBWF BTFSS GOTO MOVWF INCF GOTO BIN8_DEC_2 MOVF
MOVWF RETURN MULTIPLICA8X8 CLRF AUX AUX_DEC_DV AUX_DEC_AV .10 AUX,W
STATUS,C BIN8_DEC_2 AUX AUX_DEC_AV,F BIN8_DEC_1 AUX,W
AUX_DEC_DV
;garante o trmino da operao no LCD
PARTE_ALTA Pgina 57
Aula de Microcontrolador CLRF MOVF BCF MULT8 MULT8 MULT8 MULT8
MULT8 MULT8 MULT8 MULT8 RETURN INICIO CLRF CLRF CLRF CLRF CLRF
PARTE_BAIXA fator_multi,W STATUS,C 0 1 2 3 4 5 6 7
PORTA PORTB PORTC PORTD PORTE B'11111111' TRISA B'11101111'
TRISB B'00000000' TRISC B'00001111' TRISD B'00000100' TRISE
B'11011011' OPTION_REG B'00000000' INTCON B'00000100' ADCON1
;interrupes no sero tratadas ;ADFM justificado direita ;Canais
analgicos 1, 2 e 4
BANK1 MOVLW MOVWF MOVLW MOVWF MOVLW MOVWF MOVLW MOVWF MOVLW
MOVWF MOVLW MOVWF MOVLW MOVWF MOVLW MOVWF
Pgina 58
Aula de Microcontrolador BANK0 MOVLW MOVWF BTFSC GOTO$
B'00001001' ADCON0 STATUS,NOT_TO ;aguarda estouro do watchdog timer
;limpa memrio RAM disponvel
MOVLW 0X20 MOVWF FSR LIMPA_RAM CLRF INDF INCF FSR,F MOVF FSR,W
XORLW 0X80 BTFSS STATUS,Z GOTO LIMPA_RAM INICIALIZACAO_DISPLAY BCF
MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL
MOVLW CALL MOVLW CALL RS 0X30 ATUALIZA .3 DELAY_MS 0X30 ATUALIZA
0X30 ATUALIZA 0X02 ATUALIZA 0X28 ATUALIZA B'00000001' ATUALIZA .1
DELAY_MS
;display setado para comandos ;inicializao do display
;delay exigido pelo display ;inicializao do display ;inicializao
do display ;zera o contador de caracteres e retorna ;posio 0x80
;trabalhando com 4 vias de dados ;limpa todo o display ;delay de
1ms
Pgina 59
Aula de Microcontrolador
MOVLW CALL MOVLW CALL MOVLW CALL BSF MOVLW CALL MOVLW CALL MOVLW
CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW
CALL MOVLW CALL MOVLW CALL BCF MOVLW CALL BSF MOVLW CALL MOVLW CALL
MOVLW CALL
B'00001100' ATUALIZA B'00000110' ATUALIZA 0X82 ATUALIZA RS 'M'
ATUALIZA 'E' ATUALIZA 'D' ATUALIZA 'I' ATUALIZA 'D' ATUALIZA 'O'
ATUALIZA 'R' ATUALIZA '' ATUALIZA '' ATUALIZA 'D' ATUALIZA 'E'
ATUALIZA RS 0XC2 ATUALIZA RS 'T' ATUALIZA 'E' ATUALIZA 'M'
ATUALIZA
;liga o display sem cursor ;incrementa automtico direita
;endereo do LCD ;display setado para dados ;82 ;83 ;84 ;85 ;86 ;87
;88 ;89 ;8A ;8B ;8C
;C2 ;C3 ;C4
Pgina 60
Mais apostilas, livros e programas em:
www.mecatronicadegaragem.blogspot.comAula de Microcontrolador
MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL
MOVLW CALL MOVLW CALL LOOP CLRWDT BSF BTFSC GOTO MOVF MOVWF MOVLW
MOVWF CALL DIV_256 CALL MOVFW MOVWF MOVFW MOVWF CALL CALL MOVWF
CALL CONV_BIN8_DEC AUX_DEC_DV MOSTRADOR_DV AUX_DEC_AV MOSTRADOR_AV
MOSTRA_TENSAO_LCD TABELA_TEMPERATURA TEMP_CELSIUS CONV_BIN8_DEC
Pgina 61 ADCON0,GO ADCON0,GO $-1 ADRESH,W conv_bin_temp .50
fator_multi MULTIPLICA8X8 ;limpa WDT ;inicia converso 'P' ATUALIZA
'E' ATUALIZA 'R' ATUALIZA 'A' ATUALIZA 'T' ATUALIZA 'U' ATUALIZA
'R' ATUALIZA 'A' ATUALIZA ;C5 ;C6 ;C7 ;C8 ;C9 ;CA ;CB ;CC
;resultado da converso A/D ;varivel temporria ;tenso de
referncia de 5 Volts ;executa multiplicao ;macro de diviso por 256
;executa um ajuste decimal
Mais apostilas, livros e programas em:
www.mecatronicadegaragem.blogspot.comAula de Microcontrolador
CALL GOTO MOSTRA_TEMP_LCD LOOP
MOSTRA_TENSAO_LCD BCF RS MOVLW 0X80 CALL ATUALIZA BSF RS MOVLW
CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW
CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVF ADDLW CALL MOVLW CALL
MOVF ADDLW CALL MOVLW CALL MOVLW '' ATUALIZA 'T' ATUALIZA 'E'
ATUALIZA 'N' ATUALIZA 'S' ATUALIZA 'A' ATUALIZA '0' ATUALIZA ''
ATUALIZA '=' ATUALIZA '' ATUALIZA ;0 ;1 ;2 ;3 ;4 ;5 ;6 ;7 ;8 ;9
;resultado da conv binrio para decimal ;SOMA 0x30 ao resultado ;em
cdigo ASCII para o LCD ;atualiza LCD ;cdigo ASCII da vrgula
;resultado da conv binrio para decimal ;SOMA 0x30 ao resultado.
MOSTRADOR_AV,W 0X30 ATUALIZA ',' ATUALIZA MOSTRADOR_DV,W 0X30
ATUALIZA '' ATUALIZA 'V'
Pgina 62
Mais apostilas, livros e programas em:
www.mecatronicadegaragem.blogspot.comAula de Microcontrolador
CALL MOVLW CALL RETURN MOSTRA_TEMP_LCD BCF RS MOVLW 0XC0 CALL
ATUALIZA BSF RS MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW
CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVLW CALL MOVF
ADDLW CALL MOVF ADDLW CALL MOVLW CALL MOVLW CALL MOVLW 'T' ATUALIZA
'E' ATUALIZA 'M' ATUALIZA 'P' ATUALIZA '(' ATUALIZA 'o' ATUALIZA
'C' ATUALIZA ')' ATUALIZA '=' ATUALIZA '' ATUALIZA AUX_DEC_AV,W
0X30 ATUALIZA ;0 ;1 ;2 ;3 ;4 ;5 ;6 ;7 ;8 ;9 ;resultado da converso
binrio para decimal ;SOMA 0x30 ao resultado para enviar o dado ;em
cdigo ASCII para o LCD ;atualiza LCD ;display setado para comando
ATUALIZA '' ATUALIZA
AUX_DEC_DV,W ;resultado da converso binrio para decimal 0X30
;SOMA 0x30 ao resultado para enviar o dado ATUALIZA '' ATUALIZA 'o'
ATUALIZA 'C' ;cdigo ASCII da vrgula
Pgina 63
Mais apostilas, livros e programas em:
www.mecatronicadegaragem.blogspot.comAula de Microcontrolador
CALL MOVLW CALL RETURN ORG 0X300 RADIX DEC TABELA_TEMPERATURA MOVLW
HIGH TABELA_TEMP MOVWF PCLATH MOVLW LOW TABELA_TEMP ADDWF
conv_bin_temp,W BTFSC STATUS,C INCF PCLATH,F MOVWF PCL TABELA_TEMP
DT 000,000,000,000,000,000,000,000,000,000,000,000,000,000,000,000
DT 004,004,004,004,004,004,004,004,004,004,004,004,004,004,004,004
DT 008,008,008,008,008,008,008,008,008,008,008,008,008,008,008,008
DT 012,012,012,012,012,012,012,012,012,012,012,012,012,012,012,012
DT 016,016,016,016,016,016,016,016,016,016,016,016,016,016,016,016
DT 020,020,020,020,020,020,020,020,020,020,020,020,020,020,020,020
; DT
022,022,022,022,022,022,022,022,022,022,022,022,022,022,022,022 DT
024,024,024,024,024,024,024,024,024,024,024,024,024,024,024,024 DT
026,026,026,026,026,026,026,026,026,026,026,026,026,026,026,026 DT
028,028,028,028,028,028,028,028,028,028,028,028,028,028,028,028 DT
030,030,030,030,030,030,030,030,030,030,030,030,030,030,030,030 DT
031,031,031,031,031,031,031,031,031,031,031,031,031,031,031,031 DT
032,032,032,032,032,032,032,032,032,032,032,032,032,032,032,032 DT
033,033,033,033,033,033,033,033,033,033,033,033,033,033,033,033 DT
034,034,034,034,034,034,034,034,034,034,034,034,034,034,034,034 DT
035,035,035,035,035,035,035,035,035,035,035,035,035,035,035,035 END
;15 ;31 ;47 ;63 ;79 95 ;111 ;127 ;143 ;159 ;175 ;191 ;207 ;223 ;239
;255 ATUALIZA '' ATUALIZA
Pgina 64