Embed Size (px)
Citation preview

Desempenho de computação paralela o paralelismo existente na aplicação
decomposição do problema em subproblemas menores
a alocação destes subproblemas aos processadores
o modo de acesso aos dados:
– a existência de uma memória global
– ou distribuída comunicação por trocas de mensagens
a estrutura de interconexão entre os processadores
a velocidade dos processadores, memórias e rede de interconexão.
Em ambientes distribuídos, a meta é de explorar e tirar proveito ao máximo do
potencial computacional, sendo assim questões relacionadas ao gerenciamento de recursos do sistema muito importante
1

Escalonamento de Aplicações
Um algoritmo que estabelece como executar um algoritmo paralelo em um determinado sistema de computadores
Para implementar um escalonador, o problema tem que ser especificado:
– As características da aplicação devem ser especificadas
– As características cruciais do sistema de processadores em questão devem ser estabelecidas
2
Modelagem
Representação do problema – Algoritmo paralelo composto por processos/threads que sincronizam
parcialmente (comunicação/dependência)
– Conjunto de threads/processos independentes
Representação do ambiente de solução
Simplificação, sem omitir as características que afetam o desempenho em geral
3

Qual o objetivo Escalonar aplicações em um sistema paralelo e distribuído tal que o tempo de execução seja minimizado
Escalonar aplicações em um número limitado de processadores tal que o tempo de execução seja minimizado, considerando custo de comunicação
Escalonar aplicações em um número limitado de processadores tal que o tempo de execução seja minimizado considerando tempos limites (deadline), considerando custo de comunicação
o objetivo deve estar especificado
4

Questões de projeto Alocação de processos a processadores
Processos podem ser alocados a certos processadores e não mudar até o seu término
– Exemplo: processo Px é associado ao núcleo Ny até o seu término
– Escalonador de curto prazo é aplicado (pode ser preemptivo ou não)
– Vantagem:
• menos overhead/sobrecarga
• Escalonamento meio que estático
5

Questões de projeto Alocação de processos a processadores
(alocação estática de processos a processadores)
– Desvantagem:
• Associar em um determinado momento vários processos a um processador (núcleo) e outro processador se tornar ocioso – não explora a ociosidade de processador
Solução para minimiza a ociosidade de processadores
– um processo pode ser alocado a diferentes processadores durante sua vida
– Pode ser vantajoso em um ambiente de memória compartilhada devido a uma menor sobrecarga na troca de contexto
– No entanto pode aumentar chache miss
• Por que?
6

Questões de projeto Paradigmas de alocação
De qualquer forma, quem associa? Como pode ser o modelo?
Duas abordagens: mestre/trabalhador e peer
7

Paradigmas de alocação Mestre/trabalhador
As funções de escalonamento executam em um processador: o mestre
Os outros processadores executam os processos de usuário (os trabalhadores)
Abordagem é simples e as políticas de uniprocessador podem ser mais facilmente adaptadas
Conflitos ficam mais fáceis de serem resolvidos pois o mestre tem visão de toda a memória e todos os dispositivos de I/O
Desvantagem:
– Falha do mestre
– Mestre pode ser tornar um gargalo
8

Paradigmas de alocação Mestre/trabalhador
As funções de escalonamento executam em um processador: o mestre
Os outros processadores executam os processos de usuário (os trabalhadores)
Abordagem é simples e as políticas de uniprocessador podem ser mais facilmente adaptadas
Conflitos ficam mais fáceis de serem resolvidos pois o mestre tem visão de toda a memória e todos os dispositivos de I/O
Desvantagem:
– Falha do mestre
– Mestre pode ser tornar um gargalo
9

Paradigmas de alocação Peer ou escalonador distribuído
O núcleo pode ser executado em qualquer processador
Cada processador faz self-scheduling de um pool de processos disponíveis
Vantagem:
– melhor otimização do problema e visão global
Desvantagem:
– complicação de implementação
– Necessidade de sincronização de diferentes processadores
10

Escalonamento de processos Escalonamento de processos em um processador
Base de sistemas operacionais
Baseado em estado de processos ao longo de sua vida em um sistema
11

Escalonamento de processos
IC - UFF
executando pronto
despacho
pausa
admissão
finalização
saída pronto suspenso
bloqueado
espera evento
evento ocorre
suspenso bloqueado
evento ocorre
carrega
suspende
admissão
novo
carrega
suspende
suspende
12

Escalonamento de processos prontos
Crucial para o desempenho dos processos nos Sistemas
Dois aspectos principais – seleção
• qual processo será selecionado para execução
• baseado em prioridade/necessidade de recurso/características de tempo de execução
– modo de decisão • Preemptivo ou não preemptivo
13

Escalonamento de processos prontos
Início
Parada
Busca nova instrução
Executa instrução
Verifica interrupção
Ciclo de busca Ciclo de execução Ciclo de interrupção
Interrupções inibidas
Interrupções permitidas
14

Escalonamento de processos prontos
First Come First Served (FCFS)
• seleção: primeiro da fila
• modo decisão: não preemtivo
Round-robin (RR)
• seleção: primeiro da fila
• modo decisão: preemtivo – precisa definir quantum
15

Escalonamento de processos prontos
Shortest process next (SPN)
• seleção: precisa saber tempo associado ao processo
• modo decisão: não preemtivo
Shortest remaining time (SRT)
• seleção: processo que precisa de menor tempo para terminar
• modo decisão: preemtivo – processo executando é interrompido com chegado de novo processo
16

Escalonamento de processos prontos
Feedback
– Seleção: sem cálculo do futuro (previsão de tempo de execução)
– Decisão: preemptivo - por chegada de processo ou por quantum
– especificação de n filas:
• P1 entra na fila RQ0 e é escolhido para execução
• interrupção: P1 vai para RQ1
• .... P1 saiu da fila RQi quando foi escolhido para execução
• interrupção: P1 vai para RQi+1
– um processo é escolhido da fila de menor índice que contem processos prontos para serem executados
– jobs curtos – pouco tempo no sistema
– se um job chegar a fila RQn, depois passará para RQ0
17

Escalonamento de processos Tradicionalmente em sistemas de multiprocessadores, processos não estão alocados exclusivamente a um processador
Em geral:
Fila única
P1
P2
P3
P4
18

19
Escalonamento de Processos
Exemplo de estudo comparativo
S1 - sistema com um processador
S2 - sistema duo-processador
Supondo
taxa de processamento de cada processador em S2 = ½ taxa processamento do processador de S1
Então, a pergunta é: é melhor ter dois processadores mais lentos do que um mais rápido?

20
comparação entre FCFS e round-robin
RR: quantum bem maior que tempo de troca de contexto
RR: quantum com valor pequeno quando comparado ao tempo médio de serviço dos processos
• resultado da análise: depende do coeficiente de variação em relação ao tempo de serviço
Cs =
ou seja, o quanto varia o tempo de serviço entre os diferentes processos
s
s
Tσ
Escalonamento de Processos

21
• σs - desvio padrão do tempo de serviço
• - tempo médio de serviço
• Cs
• se Zero: os tempos de serviços são similares
• pode ser alto: muita variação entre os tempos de serviço
sT
Escalonamento de Processos

22
• FCFS pode ser problemático quando comparado com RR em um processador. Mas....
• FCFS em S2 (duo processado) é amenizado:
• enquanto um processo longo que chegou primeiro está sendo executado por um processador, outros processos são executados no outro
• pode ser tão bom quanto round-robin, principalmente se o número de processadores aumentar
Escalonamento de Processos

23
• processo = conjunto de threads
• em um processador
• threads são vantajosas devido a E/S
• em vários processadores
• dividir a funcionalidade do processamento entre processadores leva a um maior ganho
• threads + multiprocessamento = exploração do grau de paralelismo da aplicação
– granularidade fina paralelismo não tão vantajoso
– alto grau de interação entre threads
Escalonamento de Threads

Escalonamento é mais complexo quando várias CPUs se tornam disponíveis
Processadores Homogêneos dentro de um mesmo multiprocessador
no entanto, já se inicia uma tendência de heterogeneidade: big and small CPUs
Escalonamento de Threads
24

Algumas classes de políticas:
Compartilhamento/balanceamento de carga Gang scheduling Alocação a processadores específicos Escalonamento dinâmico
Escalonamento de Threads
25

Balanceamento de carga
O escalonador supervisiona a carga dos processadores, e divide a carga
Não deixa processador ocioso toda vez que um processador está ocioso, a rotina do SO o seleciona
para executar a próxima thread
Uma fila global pode ser definida e as threads a serem executadas são incluídas Conforme a chegada do processo, as suas threads são inseridas na
ordem FCFS
Ordenadas de acordo com prioridade, ou pelo número de threads que cada processo tem
Escalonamento de Threads
26

Balanceamento de carga
Alguns problemas com uma fila única
Gargalo
Se as threads sofrerem preempção podem ser depois associadas a processadores diferentes com caches diferentes
Threads que compartilham informações podem ser associadas a processadores distintos com espaço de memória distinto (cache ou memória principal)
Escalonamento de Threads
27

Gang Scheduling
Tem sido aplicado ao conceito de escalonar simultaneamente um conjunto de threads que compõem um processo
O conceito é bastante vantajoso quando threads dependem uma das outras e não podem esperar sem perder desempenho de execução
Escalonamento de Threads
28

Gang Scheduling
Melhora a performance de uma aplicação se as threads correlatas estiverem em execução
T1 e T2 são duas threads de um mesmo processo
T1 está sendo executada: precisa sincronizar com T2
T1 fica em espera até que T2 seja executado em algum processador
seria melhor T2 já estar executando em outro processador
Escalonamento de Threads
29

30
Gang Scheduling
• N processadores, M aplicações com N ou menos threads cada aplicação
– cada aplicação poderia receber 1/M do tempo disponível, utilizando os N processadores
– nem sempre isso é eficiente
– alocação de tempo uniforme:
1 thread A2 4 threads A1 N = 4 ocioso
P1 P2 P3 P4
100%/8 = 12,5%
12,5% X 3 = 37,5% ocioso
½ ½
Escalonamento de Threads

31
Escalonamento de Threads
Gang Scheduling
• uma solução: dar pesos aos processos de acordo com o número de threads
– considerando todos os processos
– A1 tem 4/5 das threads – 80%
– A2 tem 1/5 das threads - 20%
– Cada thread tem 20% do tempo
ocioso
P1 P2 P3 P4
100%/20 = 5%
5% X 3 = 15% ocioso
4/5 1/5

32
Escalonamento de Threads e Processos
• Essas classes de escalonadores discutidos, tanto para processos como threads se encontram na maioria das vezes a nível de sistemas operacionais
• Pode-se definir um escalonador que gerencie a execução de uma aplicação paralela
• middleware

Escalonamento de Aplicações em Sistemas Distribuídos
classe de aplicações
– especificada pelo modelo da aplicação
a arquitetura enfocada constitui em um sistema de processadores de memória distribuída que se comunicam por trocas de mensagens
– modelo arquitetural apresenta as características importantes a serem consideradas
33

Escalonamento de Aplicações Alguns conceitos
Tarefa – uma unidade de computação
job = conj. de tarefas com objetivo comum
aplicação paralela tarefas que seguem uma ordem parcial
34

Escalonamento de Aplicações Escalonamento local X global
global tarefas são associadas a processadores
mapeamento, task placement, matching
local várias tarefas em um processador
No escalonamento global:
- migração – custoso e nem sempre usado (sala contexto, trasfere contexto para o novo processador, reinicializa tarefa)
- geralmente se refere a balanceamento de carga
35

Escalonamento de Aplicações preempção tarefas/jobs em execução podem ser transferidas (migradas)
– mais custos
não preempção geralmente em relação às tarefas
– tarefas não são interrompidas
– migração somente para tarefas ainda por executar
36

Escalonamento de Aplicações Estático
conhecimento de características associadas às aplicações antes da execução desta (estimativas)
relação de precedência entre os componentes da aplicação
Dinâmico
estimativas são conhecidas antes da execução e não as características reais.
a especificação do escalonamento é feita ao longo da execução da aplicação
– balanceamento de carga, por exemplo
37

Escalonamento Estático de Aplicações O Problema de Escalonamento de Tarefas em um conjunto de processadores é, em sua forma geral, NP-completo.
Uma variedade de heurísticas de escalonamento foram propostas, principalmente para um conjunto de processadores homogêneos, considerando ou não custo de comunicação associado à troca de mensagens
Alguns heurísticas que consideram um conjunto de processadores homogêneos foram analiticamente avaliadas, e foi concluído que escalonamento produzidos estão dentro de um fator do ótimo.
Algumas instâncias do problema possuem solução ótima
38

Modelo da Aplicação uma aplicação da classe de aplicações abordadas é constituída por um conjunto de tarefas, ordenadas parcialmente por uma relação de precedência
a classe de aplicações aqui discutida pode ser representada por um grafo acíclico direcionado (GAD) G = (V,E, , ), onde
– as tarefas da aplicação são representadas pelo conjunto de n vértices
V = { v1 , v2 , ... , vn }
– as relações de precedência que correspondem a dependência de dados são representadas pelo conjunto de dados
E = { (vi , vj ) }
39

Modelo da Aplicação
o peso de computação (vi) pode estar associado a cada tarefa de G (estimativa) correspondendo ao número de unidades de tempo necessários para executar a tarefa vi
o peso de comunicação (vi, vj ) pode estar associado a cada arco (vi,vj) de G (estimativa) correspondendo à quantidade de dados a serem enviados da tarefa vi para a vj
seja pred (vi) o conjunto de predecessores imediatos da tarefa vi , ou seja,
pred (vi) = {vj / (vj ,vi ) E }
seja succ (vi) o conjunto de sucessores imediatos da tarefa vi , ou seja,
succ (vi) = {vj / (vi , vj ) E }
40

Modelo da Arquitetura
definição de características que afetam o desempenho
processadores homogêneos e heterogêneos
número limitado ou não de processadores
memória distribuída ou compartilhada
topologia da rede de interconexão
modelo de comunicação
– latência de comunicação
– sobrecargas de envio e recebimento
– etc
41

Heurísticas de Escalonamento Heurísticas de Escalonamento Estático
heurísticas de construção: um algoritmo polinomial no tamanho da entrada que a cada iteração, especifica para uma tarefa o seu escalonamento
– tupla (tarefa, processador, tempo de início)
– ao final, uma só solução foi formada
– escalonamento deve ser válido (respeitar as relações de precedência e as características do modelo arquitetural)
difícil classificação
– técnica empregada
– modelo considerado
42

Heurísticas de Escalonamento
Heurísticas de Escalonamento Estático
List Scheduling
Algomeração de Tarefas
Minimização de Caminho Crítico
Replicação de Tarefas
43

Restrições de Escalonamento Seja um DAG: G(V,E) e uma modelo arquitetural
• Tempo de início (start time): st(vi , pk)
• Tempo de fim (finish time): ft(vi , pk) • Alocação do processador: proc (vi)
Restrições:
• De processador: duas tarefas não podem ter sobreposição de tempo no mesmo processador
pk = proc(vi)=proc(vj)
st (vi , pk) >= ft (vj , pk) OR st (vj , pk) >= ft (vi , pk)
44

Restrições de Escalonamento Seja um DAG: G(V,E) e uma modelo arquitetural
• Tempo de início (start time): st(vi , pk)
• Tempo de fim (finish time): ft(vi , pk) • Alocação do processador: proc (vi)
Restrições:
• de precedências: uma tarefa deve começar a ser executada depois que receber todas os dados de seus predecessores
vj pred( vj ), st (vj , pk) >= ft (vi , proc(vi)) + comm (vi, vj )
45

List Scheduling Estratégia (extremamente) gulosa
tradicional e bastante conhecida (utilizada) devido a sua simplicidade (baixa complexidade)
– escalonamento de instruções em unidades funcionais
– escalonamento em processadores heterogêneos (em número limitado)
Alguns conceitos importantes
tarefa livre - todos os seus predecessores imediatos já foram escalonados;
processador ocioso - em um determinado instante tk , não existe nenhuma tarefa sendo executada neste instante;
46

List Scheduling Framework
Definição da prioridade das tarefas vi V;
Enquanto ( existir vi não escalonado ) faça {
vi = a tarefa livre de maior prioridade;
pj = o processador ocioso onde vi começa mais cedo;
escalone vi no processador pj ;
determine as novas tarefas livres;
}
47
Prioridades associada às tarefas Caminho crítico
– Caminho no grafo com o maior “comprimento”
bottom-level, top-level, etc....
Medidas para definir a importância dum nó a ordem em que as tarefas são escalonadas é muito importante
48

Um Exemplo de GAD
6
3 2 1
0
pesos de execução em
pesos dos arcos em
5
4
4
5 2 7
6
6
3
2 4 8
1 3 2
5 4
49
Replicação de Tarefas Papadimitriou e Yannakakis (PY) – princípio da replicação
grafo acíclico direcionado G = (V, E) (UET-UCT)
– pesos de execução das tarefas: unitários
– pesos dos arcos: unitários
latência de comunicação L é o custo mais relevante
número ilimitado de processadores
A idéia é replicar para minimizar o tempo de execução
50

Replicação de Tarefas
Muitos algoritmos utilizaram a idéia de replicar tarefas para não ter que realizar comunicação entre processadores – Hoje seriam entre máquinas
Mas – quais custos associados a replicação de tarefas?
– O que significa replicar a tarefa?
51

Replicação de Tarefas O que o list scheduling faria?
4
3 2 1 0
52
L
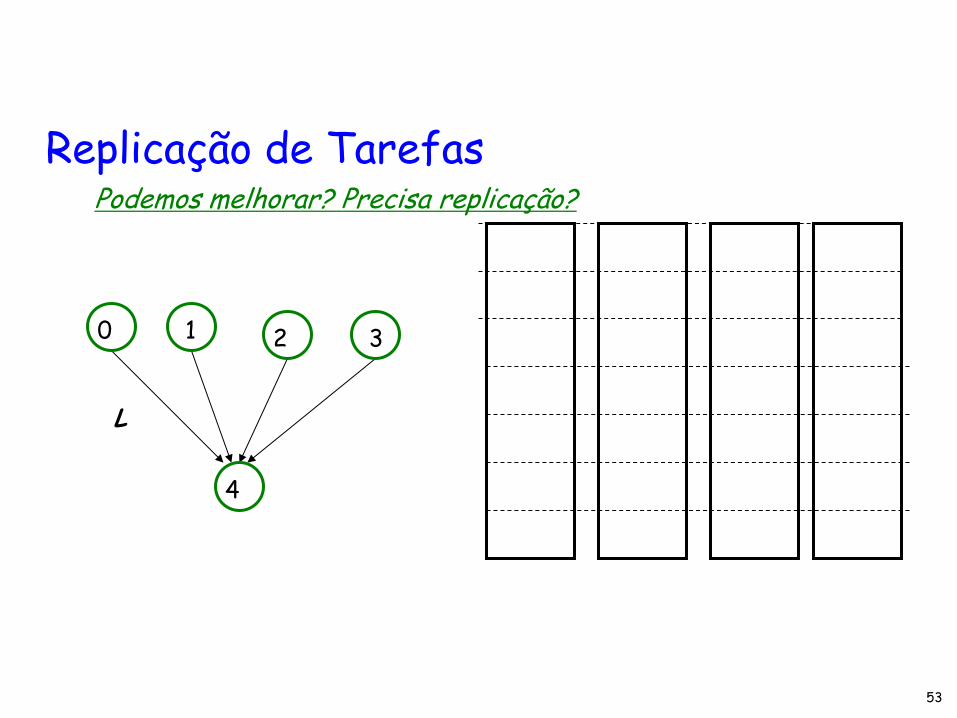
Replicação de Tarefas Podemos melhorar? Precisa replicação?
4
3 2 1 0
53
L

Replicação de Tarefas Melhor caso, não adianta replicar
4
3 2 1 0
0
1
2
3
4
L
54
L

Replicação de Tarefas Como o list scheduling faria?
4 3 2 1
0
55
L

Replicação de Tarefas Podemos fazer melhor com replicação?
4 3 2 1
0
56
L

57
Escalonamento em Tempo Real
Uma definição:
o resultado correto de um problema deve ser produzido, mas também, o tempo que leva para ser produzido é essencial
é um sistema composto de tarefas em que algumas são urgentes
Para esse classe de aplicações, o SO, e particularmente o escalonador são de crucial importância

58
Atualidade em Sistema de Tempo Real
laboratórios de controle
robótica
trafego aéreo
telecomunicações
sistemas de controle

59
Próxima geração de Sistema de Tempo Real
(... que já é atual)
carros autonômicos
controladores de robôs com juntas elásticas
fábricas inteligentes
exploração de águas profundas
etc.

60
Sistema de Tempo Real
as tarefas ou processos podem ser urgentes ou não
associado a cada tarefa
tempo de fim
deadline
hard real time task: deadline tem que ser respeitado
X
soft real time task: deseja-se atingir o deadline
61
SO para Sistema de Tempo Real
tempo de resposta de seus serviços
tempo contabilizado a partir de sua requisição
depende:
tempo da rotina de tratamento de interrupção
iniciar a rotina do serviço (troca de contexto)
tempo de execução do seviço
mais interrupções, se ocorrerem

62
SO para Sistema de Tempo Real
Controle do usuário
nestes sistemas, o usuário tem maior interação com o SO para alimentar dados da aplicação a ser executada
Confiabilidade
muito importante em Sistemas de Tempo Real
falhas devem ser tratadas de forma transparente ao usuário
tolerâncias a falhas via software
salvamento de dados para recuperação de processo
manter arquivos de entrada, etc

63
SO para Sistema de Tempo Real
Confiabilidade
com mecanismos de tolerância a falhas, problemas podem ser contornados e a execução continua
esta operação pode ter estabilidade
quando ainda com falha, os deadlines são atingidos

64
Escalonamento em Tempo Real
aspectos que podem ser considerados:
existe uma análise do comportamento do sistema
a análise pode ser estática ou dinâmica
de acordo com a análise, o escalonamento é produzido

65
Escalonamento em Tempo Real
análise estática
determina a alocação das tarefas em tempo de execução
não necessariamente determina o escalonamento, mas as prioridades entre as tarefas
o sistema pode ser preemptivo, realocar, de acordo com as essas prioridades
análise dinâmica
considerando as restrições do sistema para atingir o melhor desempenho
deadlines das tarefas são considerados
se um processo não atinge seu deadline é abortado

66
Escalonamento em Tempo Real
análise estática
bom para aplicações que são executadas repetidamente
problema: estimativas precisas
análise estática, que determina prioridades
uma análise a priori pode auxiliar na especificação da importância das tarefas
deadlines podem ser considerados
dinâmica
quando o sistema tem um caráter dinâmico, com tarefas chegando aleatoriamente
deadlines devem ser obedecidos

67
SO para Sistema de Tempo Real
Escalonador de curto prazo – papel crucial
importante que as tarefas críticas (hard real time tasks) sejam executadas não ultrapassando deadlines
o máximo de tarefas não críticas devem ser executadas
Maioria de Sistemas de Tempo real
dificuldade de atingir deadlines
quando um deadline está para ser atingido, a tarefa é rapidamente escalonada

68
Escalonamento baseado em Deadlines
Nos sistemas de tempo real, as seguintes informações são utilizadas:
tempo que o processo/tarefa fica pronta
caso de tarefas periódicas – esta seqüência de tempos pode ser pré-conhecida
deadline de início e de fim
tempo que uma tarefa tem que (a partir do qual deve) começar e tempo que a tarefa deve estar terminada
tempo de processamento
em caso de desconhecimento, o SO pode usar algum modelo de previsão

69
Escalonamento baseado em Deadlines
conjunto de recursos requisitados pelas tarefas (sem ser processadores)
prioridade
tarefas críticas podem ter prioridade absoluta (tem que ser executadas o mais rápido)
caso de falha: sistema aborta
se executado de qualquer modo, prioridades são reavaliadas
estrutura da tarefa
uma tarefa pode ser um conjunto de subtarefas, algumas sendo críticas e outras não

70
Escalonamento baseado em Deadlines
Seleção e decisões
qual tarefa deve ser a próxima a ser escalonada
mais do que acabar mais rápido, é mais importante que escalone as tarefas tal que as aplicações terminem de acordo com os deadlines
não preempção
quando deadline de início devem ser utilizados, faz mais sentido visto que preempção não é permitida. Assim, dá para assegurar que a data limite de início será atingida

71
Escalonamento baseado em Deadlines
Seleção e decisões
preempção ser permitida para atingir deadline
mais apropriado quando tarefas tem deadlines de fim
Processo X está sendo executado e Y está pronto – os dois tem deadlines de fim associados
dependendo, X sofre interrupção para que Y seja escalonado para atingir seu deadline, tal que X não perca seu deadline

72
Escalonamento baseado em Deadlines
Um exemplo: tarefas periódicas – se repetem com freqüência
Tarefa A
deadlines a cada 20ms
duração de 10ms (cada período)
chega a cada 20ms
Tarefa B
deadline a cada 50ms
duração de 25ms
chega a cada 50ms
preempção é permitida

73
Escalonamento baseado em Deadlines
Processo periódicos Chegada Tempo de
Execução Deadline de fim
A(1) 0 10 20
A(2) 20 10 40
A(3) 40 10 60
A(4) 60 10 80
A(5) 80 10 100
..... ..... ..... .....
B(1) 0 25 50
B(2) 50 25 100
..... ..... ..... .....

74
Escalonamento baseado em Deadlines
Decisões são efetuadas a cada 10ms, e escalonamento por prioridade
A tem prioridade
A1
B1
A2
B1
A3
B2
A4
B2
A5
B2
10
20
30
40
50
60
70
80
90
B1 atinge deadline

75
Escalonamento baseado em Deadlines
Decisões são efetuadas a cada 10ms, e escalonamento por prioridade
B tem prioridade
B1 A2
A3
B2 A5
10
20
30
40
50
60
70
80
90
A1 atinge deadline e nem foi executado
A4 atinge deadline, poderia ter executado por 5 ut

76
Escalonamento baseado em Deadlines
Decisões são efetuadas a cada 10ms, e escalonamento por prioridade: menor deadline de fim
Menor deadline de fim
A1
B1
A2
B1 A3
A4
B2 A5
B2
10
20
30
40
50
60
70
80
90

77
Escalonamento baseado em Deadlines
Tarefas Aperiódicas – sem preempção
earliest deadline:
A será logo escalonado e B não poderá ser executado
Processo Chegada Ts Deadline
início
A 10 20 110
B 20 20 20
C 40 20 50
D 50 20 90
E 60 20 70

78
Escalonamento baseado em Deadlines
Tarefas Aperiódicas – sem preempção
menor deadline, conhecimento a priori, mesmo que o processador fique ocioso:
B é escalonado antes, mas o processador fica ocioso até este ser submetido (pois senão não será atendido devido a não preempção)
Processo Chegada Ts Deadline
início
A 10 20 110
B 20 20 20
C 40 20 50
D 50 20 90
E 60 20 70

79
Escalonamento com taxa monotônica
Rate Monotonic Scheduling (RMS)
muito usado em escalonamento de tempo real em tarefas que acontecem periodicamente
Escalonar primeiro a tarefa de maior prioridade
Prioridade: escolha da tarefa com menor tempo de serviço
considerando todas as tarefas prontas, ao ordenarmos as tempos de serviço, se observa que este tempo cresce monotonicamente

80
Escalonamento com taxa monotônica
Em caso de tarefas periódicas, parâmetros relevantes para esse tipo de escalonamento:
tempo entre chegadas entre cada instância da tarefa = período T
o inverso deste período de tempo é a frequência (em Hz)
tempo de execução da tarefa C
C <= T
se a tarefa sempre é executada até seu término, a utilização do processador é
U = C/T

81
Escalonamento com taxa monotônica
a política garante ou não que tarefas críticas encontrem seus deadlines
Suponha que existam n tarefas. Para que todas encontrem seus deadlines é preciso que:
U(n) = C1/T1 + C2/T2 + .... + Cn/Tn <= 1
quer dizer, a soma de utilização de processador não pode ultrapassar de 1
quando igual a 1: o processador está sendo totalmente utilizado

82
Escalonamento com taxa monotônica
Limite superior UL(n)
Liu e Layland (1973) mostraram que para um conjunto de n tarefas periodas um escalonamento viável que alcança os deadlines é possível, se a utilização da CPU está de acordo com o limite
UL(n) = C1/T1 + C2/T2 + .... + Cn/Tn <= n (21/n – 1)
isso depende do número de tarefas

83
Escalonamento com taxa monotônica
UL(n) = C1/T1 + C2/T2 + .... + Cn/Tn <= n (21/n – 1)
n UL(n) = n (21/n – 1)
1 1.0
2 0,828
3 0,779
4 0,756
5 0,743
6 0,734
..... .....
∞ ln 2 = 0,693

84
Escalonamento com taxa monotônica
Suponha que existam três tarefas periódicas tal que Ui = Ci/Ti
O limite superior para que as três tarefas sejam escalonáves, usando escalonamento monotônico RMS, é :
UL(3) = C1/T1 + C2/T2 + C3/T3 <= 3 (21/3– 1) = 0,779
Como a utilização total de processador para as três tarefas é menor que o limite superior para o RMS então é possível executá-las de acordo com o RMS
Tarefa Ci Ti (período) Ui
P1 20 100 0,2
P2 40 150 0,267
P3 100 350 0,286
U(3) = 0,753

85
Escalonamento com taxa monotônica
Também pode ser comprovado que o limite superior da utilização de processador pode ser utilizado para escalonamento com a prioridade:
Deadline mais cedo

86
Escalonamento com taxa monotônica
Considere as tarefas Pi com (Ci , Ti) associados
{(1,3),(1,5),(1,6),(3,10)}
Qual a utilização de CPU:
Qual o limite superior
Conclusão?

87
Escalonamento com taxa monotônica
Considere as tarefas Pi com (Ci , Ti) associados
{(1,3),(1,5),(1,6),(3,10)}
Qual a utilização de CPU:
U (4) = 1/3 + 1/5 + 1/6 + 3/10 = 0.899
Qual o limite superior
UL(4) = 4 (21/4– 1) = 0.756
Conclusão?
as quatro tarefas não são escalonáveis

88
Escalonamento com taxa monotônica
Considere as tarefas Pi com (Ci , Ti) associados
{(1,3),(1,5),(1,6),(3,10)}
E as três primeiras tarefas?

89
Escalonamento com taxa monotônica
Considere as tarefas Pi com (Ci , Ti) associados
{(1,3),(1,5),(1,6),(3,10)}
E as três primeiras tarefas?
U(3)= 1/3 + 1/5 + 1/6 = 0.699
UL (3) = 0.779
Logo: as três primeiras tarefas são escalonáveis.