Embed Size (px)
Citation preview
Departamento de Engenharia Mecânica
DESENVOLVIMENTO DE UM DINAMÔMETRO PARA MOTORES ELÉTRICOS EMPREGADOS EM VEÍCULOS EM ESCALA
Aluno: Alessandro Soares da Silva Junior
Orientador: Mauro Speranza Neto
1. Introdução
1.1 Motivação
A eficiência dos testes de um projeto de engenharia é o divisor de águas entre um projeto bem sucedido e um projeto ruim. Atualmente, muitas empresas dedicam mais de 50% do custo do projeto para a fase de teste [1], além de um produto final mais confiável, obtêm-se a confiança do cliente, pois hoje em dia controle de qualidade é um dos critérios chaves na hora de comparar o produto de duas concorrentes.
Na engenharia automotiva não é diferente. Empresas como a Ford e a Mercedes testam constantemente e ininterruptamente seus carros e caminhões em várias situações reais diferentes. E para isso, utilizam ambientes especiais controlados por computadores que administram e processam todos os testes.
Para a academia, teste de motores é igualmente importante. O modelo matemático dos motores utilizados neste projeto (Motores DC brushed) foi determinado via grafo de ligação (Ver seção 1.2), portanto, é possível estimar o comportamento dinâmico de qualquer motor do mesmo tipo sabendo suas características internas de fabricação, pois o modelo é conhecido. Ou seja, neste caso, teoricamente, testar os motores geraria dados redundantes. Porém, pode-se dizer que esta teoria não é verdadeira, a informação redundante pode servir para validar o modelo matemático desenvolvido, e uma vez validado, torna-se confiável descobrir as características internas de qualquer motor desconhecido pelos testes realizados no dinamômetro construído neste trabalho.
1.2 Equacionamento do modelo teórico
Para que seja possível obter os parâmetros internos de um motor DC, é necessário que se saiba todas as equações que governam seu funcionamento, isto é, saber o modelo matemático do mesmo. Desta forma, ao calcular experimentalmente seu comportamento, basta comparar os dados numéricos experimentais com os dados teóricos e a partir disso extrair os parâmetros característicos. Ou seja, dispondo-se das curvas características do motor, é matematicamente possível obter os parâmetros internos do mesmo (Kv, Kω, Ke, Ki, Kt e R). O Objetivo desta seção é modelar um motor DC convencional e provar esta última afirmativa.
A figura 1 representa um modelo físico simplificado para um motor DC convencional. Este modelo ajudará a obter as equações matemáticas via a técnica de modelagem Grafo de Ligação [2]. A partir disso, será empregado técnicas sugeridas por [2] para construir o grafo que representa o modelo, e em seguida, equacioná-lo para extrair as informações requeridas.

Departamento de Engenharia Mecânica
Figura 1 modelo físico de um motor
O grafo de ligação encontra-se na figura 2 já com as devidas simplificações e enumerações sugeridas por [2].
Figura 2 Grafo de Ligação do Sistema
A partir disso, e utilizando os métodos sistemáticos de equacionamento também sugeridos por [2], obtemos o seguinte sistema de equações: = = =− − − = 0
= =− − = 0 == ==

Departamento de Engenharia Mecânica
== 1 == 1 Sendo “e” os esforços, “f” os fluxos, “p” a quantidade de movimento, “Ke” uma constante interna do motor, “r” as resistências e “I” as inércias. Simplificando as equações para algo do tipo : = += +
Considerando que = , = , = , = , = e = tem-se que:
= − −− + 1 00 −1 (1)
Analisando o modelo do sistema, percebe-se que existe uma dinâmica elétrica envolvida devido às características indutivas do motor, porém, essa dinâmica é muito rápida, isto é, o autovalor envolvido neste modo é muito negativo, deforma a torná-lo praticamente “invisível” na prática, portanto, para este trabalho, a dinâmica elétrica será desprezada
fazendo = 0, obtendo-se assim:
= 1 −
E conforme modelado, = − = − +
= − (2)
Logo, = e =
Departamento de Engenharia Mecânica
Organizando as equações, pode-se ainda obter a corrente em função do torque no disco: = + − +
= + (3)
Logo, = e =
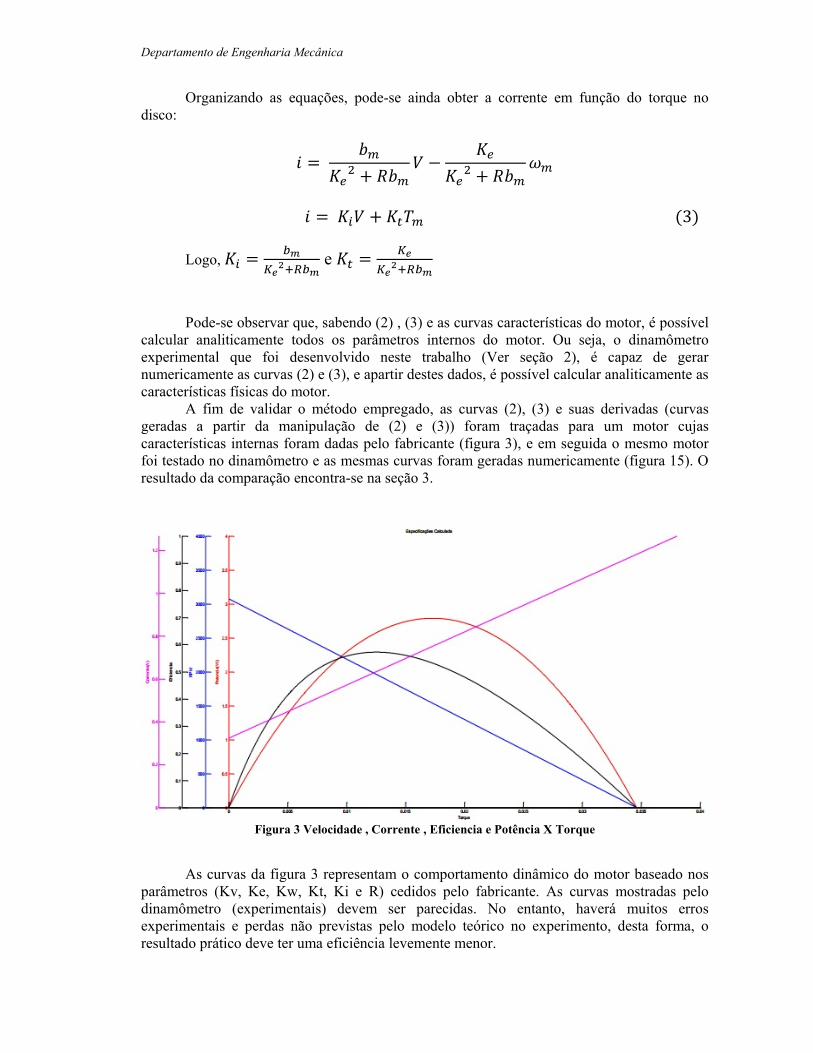
Pode-se observar que, sabendo (2) , (3) e as curvas características do motor, é possível calcular analiticamente todos os parâmetros internos do motor. Ou seja, o dinamômetro experimental que foi desenvolvido neste trabalho (Ver seção 2), é capaz de gerar numericamente as curvas (2) e (3), e apartir destes dados, é possível calcular analiticamente as características físicas do motor. A fim de validar o método empregado, as curvas (2), (3) e suas derivadas (curvas geradas a partir da manipulação de (2) e (3)) foram traçadas para um motor cujas características internas foram dadas pelo fabricante (figura 3), e em seguida o mesmo motor foi testado no dinamômetro e as mesmas curvas foram geradas numericamente (figura 15). O resultado da comparação encontra-se na seção 3.
Figura 3 Velocidade , Corrente , Eficiencia e Potência X Torque
As curvas da figura 3 representam o comportamento dinâmico do motor baseado nos parâmetros (Kv, Ke, Kw, Kt, Ki e R) cedidos pelo fabricante. As curvas mostradas pelo dinamômetro (experimentais) devem ser parecidas. No entanto, haverá muitos erros experimentais e perdas não previstas pelo modelo teórico no experimento, desta forma, o resultado prático deve ter uma eficiência levemente menor.

Departamento de Engenharia Mecânica
As curvas da figura 3 foram feitas considerando que o motor estivesse sendo alimentado por um sinal DC 12V, ou seja, na parte experimental do projeto, para possibilitar a comparação da teoria com a prática, o motor deve ser chaveado com uma fonte de 12V.
2. O dinamômetro
2.1 Parte Elétrica
Para colocar em prática o experimento sugerido na seção 1, deve-se montar um sistema elétrico capaz de medir a corrente, tensão, velocidade angular e torque do motor. Para isso, será utilizado algumas técnicas de processamento de sinais, sugeridas por [3], para tratar ruídos, e sensores vendidos comercialmente.
2.1.1 Tensão
A tensão nos polos do motor foi adquirida através do módulo A/D da National Instruments NI USB 6009 que permite a aquisição de sinais de tensão em tempo real e tratamento dos mesmo em software desenvolvido no ambiente LabView. As entradas A/D do hardware adquirem medidas de tensão, desta forma, não foi necessário nenhum sensor para medir a tensão do motor. Todos os outros sensores são conectados à esse driver para que se possa tratar os sinais em software.
Neste trabalho, o motor será simplesmente chaveado com uma fonte de 12V, desta forma, o sinal que chega no motor é DC e não precisa de nenhum tratamento extra para que seja medido pelo driver. A figura 4 mostra o hardware utilizado.
Figura 4 DAQ - Data Acquisition
2.1.2 Corrente
Para medir a corrente foi utilizado o sensor ACS714 (Figura 5) da Allegro. O mesmo possui um range de medição entre -5 A e 5 A, considerando suficiente para a maioria dos

Departamento de Engenharia Mecânica
motores em escala. A tensão de saída do mesmo corresponde a 185 , ou seja, a cada 1 A de variação, a saída do sensor varia 185mV. Para que a medição seja possível, o sensor de corrente foi posto em série com a alimentação do motor. Assim como a tensão, como o sinal de entrada do sistema é um DC 12V, não é necessário nenhuma eletrônica extra para realizar as medidas de corrente.
Figura 5 Sensor de corrente ACS714
2.1.3 Velocidade Angular
A medição da velocidade angular foi feita através de um sensor de efeito hall posicionado atrás de um disco de inércia (conforme é mostrado nas figuras 6 e 7), e dois imãs diametralmente opostos colados no mesmo.
Figura 6 Hall atrás dos imãs Figura 7 Posicionamento do sensor

Departamento de Engenharia Mecânica
Entretanto, em alguns testes realizados, a medição da velocidade apresentou ruídos, pois apesar do projeto ser estruturalmente eficiente, dependendo do motor, a estrutura vibra consideravelmente. Para resolver este tipo de problema, foi implementando um filtro passa baixa digital sugerido por [3].
O sinal de saída do sensor de efeito hall é uma onda quadrada cuja frequência está intimamente ligada à rotação pela formula = 2 , pois a frequência do sinal é a frequência da rotação do eixo do motor, portanto, para medir a velocidade, a frequência do sinal do hall é calculada digitalmente (através do hardware da National Intruments) e multiplicada por 2 .
2.1.4 Torque do Motor
Neste trabalho, o torque do motor será calculado e não medido por um sensor, pois tendo-se a curva da velocidade angular, calcular o torque é simples.
O disco acoplado ao eixo do motor tem um momento de inércia conhecido (pois pode-se medir o raio e a massa do mesmo e calcular a sua inércia com essas informações), portanto, para calcular o torque basta fazer a seguinte conta:
=
A figura 8 mostra um exemplo obtido em um dos testes realizados. Pode-se observar que a derivação numérica da curva da velocidade ocorreu sem problemas, e a medição do torque também.
Figura 8 Velocidade x Tempo, Torque x Tempo
2.1.5 Processamento dos Sinais
Conforme dito na seção 2.1.1, todos os sensores são conectados no Hardware da national intruments para possibilitar a leitura dos mesmos, após isso, todos os parâmetros relevantes são calculados no software desenvolvido no LabView (mostrado na figura 9) a partir do sinal de saída dos sensores, conforme explicado nas seções anteriores.
0 1 2 3 4 5 60
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.01Torque x Tempo
Tempo (s)
Tor
que
(N.m
)
0 1 2 3 4 5 6200
400
600
800
1000
1200
1400Velocidade x Tempo
Tempo (s)
RP
M

Departamento de Engenharia Mecânica
O Software desenvolvido implementa todas as contas explicadas, além de calcular, a partir dos 4 parâmetros listados acima, a potência mecânica, potência elétrica e eficiência do motor. Após este cálculo, todas essas curvas são mostradas gráficamente por um script desenvolvido no Matlab, e conforme explicado na seção 1.2, tendo essas curvas, o mesmo script é capaz de calcular todos os parâmetros internos do motor. Desta forma, o objetivo final do projeto é concluido, pois todas as características do motor estarão sendo mostrada por este script.
A seção 3 fará uma comparação dos resultados obtidos experimentalmente com os obtidos com o fabricante. Será calculado o erro percentual na medida dos parâmetros internos do motor a fim de quantificar a precisão do dinamômetro construído neste trabalho.
2.2 Parte Mecânica
Para desenvolver toda a parte elétrica explicada na seção 2.1 com o menor ruído possivel, uma eficiente estrutura mecânica foi construída. Além de diminuir ruído, a mesma foi projetada para englobar a parte elétrica e deixar visível somente o que necessita de comunicação externa, como por exemplo, o cabo USB necessário para a comunicação com o hardware da labview e a chave mecânica para chavear o motor (figura 10).
Figura 10 Switch mecânico para chavear o motor
Além disso, foi construído uma proteção de acrílico envolvendo o disco acoplado ao motor, conforme a figura 11 ilustra, pois dependendo do motor, o disco pode girar em altas
Figura 9 Programa desenvolvido no labview para processar o sinal dos sensores

Departamento de Engenharia Mecânica
velocidades tornando o sistema perigoso para quem estiver próximo, portanto, envolvendo-se o disco, minimiza-se os incidentes ocorridos caso haja alguma falha no acoplamento do disco com o eixo do motor.
Figura 11 Proteção de Acrílico
O sistema mecânico também foi pensado de forma a ser genérico, ou seja, é possível testar motores DC de diversos tamanhos diferentes e discos com inércias diferentes. Essa adaptação está sendo mostrada na figura 12 (Para diferentes motores) e 13 (Posicionamento do hall para diferentes discos de inércia)
Figura 12 Adaptação para diferente motores

Departamento de Engenharia Mecânica
Figura 13 Adaptação do sensor para discos diferentes
Portanto, conclui-se que a parte mecânica do dinamômetro foi desenvolvida para minimizar os erros experimentais, facilitar o uso, maximizar a segurança e possibilitar o teste de diversas combinações de motor + disco de inércia possíveis. A figura 14 dá uma visão geral do dinamômetro.
Figura 14 Visão geral do dinamômetro

Departamento de Engenharia Mecânica
3. Comparação dos Resultados
Na figura 3 foram mostradas as curvas características de um motor da Bosch. Segundo o fabricante, os parâmetros internos do motor valem: = 46 ×10 . /
= 10,7 × 10 . /
= 35,3 ×10 . = 42,6 × 10 Ω
= 24,8 .
= 7,2 ×10 . /
= 7,3Ω
Implementando o processo descrito na seção 2.1.5 no mesmo motor, será possível extrair as mesmas curvas e os mesmos parâmetros experimentalmentes.
A figura 15 mostra o resultado obtido pelo dinamômetro.
Figura 15 Curvas característica de um motor obtidas por um método experimental

Departamento de Engenharia Mecânica
Comparando as figuras 3 e 15, é possível observar que elas são extremamente parecidas, o que obviamente já era esperado, pois representam o mesmo motor. As curvas experimentais possuem pequenas variações numéricas devido a erros experimentais, além disso a eficiência (Curva preta) é levemente menor quando comparada a eficiência prevista pelo fabricante.
Além das curvas, foi calculado os parâmetros internos do motor obtidos experimentalmente, os mesmos são mostrados abaixo:
= 42,6 × 10 . /
= 10,1 × 10 . /
= 37,5 ×10 . = 40,9 × 10 Ω
= 27,6 .
= 9,8 ×10 . /
= 9,5Ω
Comparando os parâmetros obtidos, os erros experimentais dos mesmos variam de 5 a 10%.
Os erros encontrados são referentes às perdas de energia mecânica não prevista no modelo teórico, vibrações e imprecisão nas medidas dos sensores. Porém, mesmo assim, os erros são pequenos os suficientes para estimar as características internas de um motor desconhecido com uma precisão relativamente boa (no caso, 10%).
4. Conclusão
Portanto, pode-se concluir que, o dinamômetro desenvolvido neste trabalho é capaz de estimar com uma precisão de 90% as características internas de qualquer motor DC e mostrar suas curvas características. Para a maioria das aplicações, caso se tenha vários motores sem especificação, este dinamômetro é muito útil para ajudar na escolha do motor para um determinado fim.
Uma possível aplicação deste dinamômetro é em competições de veículos elétricos em escala (Autoramas). A escolha do melhor motor para o carrinho é extremamente importante para que o mesmo possa obter sucesso nas corridas, a utilização do dinamômetro para a comparação prática de diversos motores diferentes pode ser conclusiva na escolha do motor a ser utilizado.
Além disso, independente dos erros, foi verificado que o modelo desenvolvido na seção 1.2 é válido, pois as curvas mostradas experimentalmente e teoricamente são extremamente parecidas. As diferenças devem-se às perdas mecânicas desprezadas pelo

Departamento de Engenharia Mecânica
modelo. Pode-se afirmar que, numa situação hipotética ideal, o modelo regido pela equação (1) é de fato um modelo matemático característico de motores DC Brushed.
Como forma de melhorar o projeto futuramente, pode-se considerar a aquisição de sensores com maior precisão, driver A/D com maior velocidade de processamento, um transdutor de torque para medi-lo e não calculá-lo em função de outra variável (Evita propagação de erros) e medidas mais eficientes para evitar a vibração da estrutura mecânica que prende o motor e o disco de inércia.
Referências
1 - BLACK, Rex. Investing in Software Testing: The Cost of Software Quality. 2000. Massachusetts: Computer Aid, Inc. Disponível em <http://www.compaid.com/caiinternet/ezine/cost_of_quality_1.pdf> . Acesso em: 06 de junho de 2014.
2 – SPERANZA NETO, M. ; RIBEIRO, F. Modelagem e análise de sistemas dinâmicos. Rio de Janeiro, 2005. Projeto final de curso – Departamento de engenharia mecânica, Pontifícia Universidade Católica.
3 – OPPENHEIM ,A. V. ; WILLSKY, A.S. SINAIS E SISTEMAS. 2.ed. São Paulo: Pearson Education do Brasil, 2010. 568p.
4 - MACHADO, Josélio Alves. Modelagem e simulação de um dinamômetro para motores elétricos empregados nos veículos terrestres em escala. Rio de Janeiro: PUC-Rio, 2001. 118 p. Tese (Mestrado)
5 - National Instruments – Lab View Graphical Programming for Instrumentation





























