Embed Size (px)
Citation preview

INPE-8982-TDI/813
DESENVOLVIMENTO DE UM NAVEGADOR AUTÔNOMO, USANDO GPS, APLICADO AO CONTROLE AUTÔNOMO
DE ÓRBITA
Roberto Luiz Galski
Dissertação de Mestrado do Curso de Pós-Graduação em Engenharia e Tecnologia Espaciais/Mecânica Espacial e Controle, orientada pelos Drs. Valcir Orlando e Hélio
Hoiti Kuga, aprovada em 14 de fevereiro de 2001.
INPE São José dos Campos
2002

629.7.062.2 GALSKI, R. L. Desenvolvimento de um navegador autônomo, usando GPS, aplicado ao controle autônomo de órbita/ R. L. Galski. – São José dos Campos: INPE, 2001. 162p. – (INPE-8982-TDI/813). 1.Navegação autônoma. 2.Controle automático de vôo. 3.Guiagem de satélite. 4.Órbitas heliosíncronas. 5.Sistema de posicionamento global. 6.Órbita baixa terrestre. I.Título.



A meus Pais, que sempre valorizaram minha dedicação aos estudos e me apoiaram, mesmo quando isto significou a eles se privarem da companhia do filho.


AGRADECIMENTOS
Ao Dr. Valcir Orlando, que orientou este trabalho de modo seguro, demonstrando sempre conhecimento, experiência e, principalmente, comprometimento e disposição para levar a bom termo as metas estabelecidas. Além disso, como colega de trabalho no INPE, o considero um exemplo a ser seguido, em termos de profissionalismo e dedicação ao trabalho.
Ao Dr. Hélio Koiti Kuga, que deu contribuições importantes, principalmente na parte de implementação computacional, sendo inclusive de sua autoria grande parte das rotinas utilizadas nesta dissertação.
Ao Dr. Pawel Rozenfeld, chefe do Centro de Rastreio e Controle de
Satélites (CRC), pelo apoio e boa vontade demonstrada, permitindo assim, o desenvolvimento deste trabalho.
A todos os professores e colegas que, direta ou indiretamente, contribuíram para a realização deste objetivo.
E em especial, à Luciana Ribeiro Monteiro, a companheira que me apoiou
ao longo desta jornada deste o início.


RESUMO
O aparecimento de sistemas globais de posicionamento modernos motivou o estudo e desenvolvimento de sistemas precisos e confiáveis de determinação autônoma de órbita (navegadores) de satélites artificiais. Estes sistemas mantêm, de forma totalmente independente de intervenções humanas, um conhecimento preciso do estado orbital do satélite, através do processamento autônomo das informações geradas a bordo, por um receptor do sistema de posicionamento utilizado. Uma das principais motivações que levaram à pesquisa e desenvolvimento de navegadores autônomos, foi a possibilidade de manter disponível, em tempo real, informações sobre a posição e velocidade do satélite, requeridas, por exemplo, no caso de missões de observação da Terra, para a interpretação e análise das imagens geradas. O surgimento de navegadores autônomos, por gerarem a bordo estimativas orbitais atualizadas e precisas, viabilizou a pesquisa e desenvolvimento de procedimentos de controle autônomo de órbita, permitindo que o processo de execução de manobras orbitais seja feito de forma independente de intervenções humanas de solo. Enquanto o controle de atitude de satélites atingiu um nível bastante alto de autonomia, devido ao fato de que as medidas de atitude são, originariamente, geradas a bordo do veículo espacial, o controle de órbita é, ainda hoje, quase que totalmente planejado e executado a partir de ações comandadas de solo. O trabalho proposto consiste do estudo, desenvolvimento, simulação e análise de um navegador simplificado acoplado a um sistema de controle autônomo de órbita, aplicado aos satélites da série China-Brazil Earth Resources Satellites (CBERS). Em uma primeira etapa é desenvolvido e analisado um procedimento de determinação autônoma de órbita. O objetivo deste procedimento é refinar a solução geométrica grosseira fornecida por receptores do sistema Global Positioning System (GPS) através da utilização direta desta solução como entrada (observação) para um processo de estimação de estado em tempo real via filtragem de Kalman. O vetor de estado orbital será estendido de modo a incorporar o erro sistemático que é imposto à solução geométrica do GPS pela mudança do conjunto de satélites do sistema de posicionamento visíveis ao receptor. Em uma segunda etapa, as saídas refinadas deste processo são então utilizadas na implementação de um sistema de controle autônomo do desvio de fase no Equador da órbita do satélite (parâmetro que apresenta a maior freqüência de manobras corretivas em satélites com órbita heliosíncrona em fase com a rotação da Terra, como é o caso dos satélites da série CBERS). O desempenho do controle autônomo proposto será analisado comparativamente com resultados disponíveis no Inpe, obtidos por sistemas de controle autônomo de órbita que utilizam diretamente a solução geométrica grosseira de navegação do GPS.


AUTONOMOUS ORBIT NAVIGATOR DEVELOPMENT, USING GPS, APPLIED TO AUTONOMOUS ORBIT CONTROL
ABSTRACT
The appearance of modern global positioning systems motivated the study and development of precise and robust systems for autonomous orbit determination of artificial satellites. These systems maintain, independently from human intervention from the ground, a precise knowledge of the satellite orbital state, through the processing of the information, autonomously generated on-board, by a receiver of the positioning system used. One of the major motivations for the research and development of autonomous navigators, is the availability of real time information about the position and velocity of the satellite, required, for instance, in earth observation missions, for interpretation and analysis of the generated images. The appearance of global positioning systems and the consequent development of autonomous navigators, by making available onboard space vehicles, updated orbit estimations, with good accuracy level, made feasible the research and development of orbit autonomous control procedures. It allowed the orbital maneuvers execution process to be performed in a way totally independent from ground human intervention. Whereas the satellite attitude control reached a high level of autonomy, due to the fact that the attitude measurements are, in general, naturally generated on-board the spacecraft, the orbit control is still now almost totally planned and executed from ground commanded actions. The proposed work consists of the study, development, simulation and analysis of a simplified navigator coupled to an autonomous orbit control system, applied to the China-Brazil Earth Resources Satellites (CBERS). At first, an autonomous orbit determination procedure is developed and analyzed. Its objective is to improve the coarse geometric solution provided by Global Positioning System (GPS) receivers. This will be done by directly using this solution as input (observation) for a real time Kalman filtering process. The orbital state vector will be extended in order to include the systematic error imposed to the GPS geometric solution due to changes in the set of satellites which are visible to the receiver. The improved outputs of this process will then be used in the implementation of an autonomous control system for the Longitude Phase Drift of the spacecraft orbit (parameter which presents the higher frequency of corrective maneuvers application for heliosynchronous orbits in phase with the earth’s rotation, as is the case for the CBERS serie satellites. Finally, the performance of the proposed autonomous control procedure will be analyzed and comparated with the other results achieved by autonomous control systems previously studied at Instituto Nacional de Pesquisas Espaciais (INPE), that directly use the coarse GPS navigation solution.


SUMÁRIO Pág.
LISTA DE FIGURAS
LISTA DE TABELAS
LISTA DE SÍMBOLOS
CAPÍTULO 1 - INTRODUÇÃO ........................................................................... 29 CAPÍTULO 2 - NAVEGADOR SIMPLIFICADO ............................................. 35 2.1 – Conceito ........................................................................................................... 35 2.2 – Fundamentos Teóricos e Equacionamento ...................................................... 36 2.3 – Simulador de Órbita ........................................................................................ 41 2.4 – Simulação da Solução Geométrica de Navegação do GPS ............................. 42 CAPÍTULO 3 – RESULTADOS PARA O NAVEGADOR SIMPLIFICADO . 45 3.1 – Implementação Computacional ....................................................................... 45 3.2 – Parâmetros para Análise .................................................................................. 50 3.3 – Resultados......................................................................................................... 56 3.4 – Considerações Finais ........................................................................................ 86 CAPÍTULO 4 – CONTROLE AUTÔNOMO ...................................................... 91 4.1 – Conceito ........................................................................................................... 91 4.2 – Cálculo de Elementos Orbitais (Keplerianos e de Referência) ........................ 92 4.3 – Cálculo de Observações de ∆L0....................................................................... 94 4.4 – Pré-Processamento .......................................................................................... 95
4.5 – Cálculo de Observações de 0∆L•
e 0L••
∆ .......................................................... 99 4.6 – Determinação de Manobras ............................................................................. 99 4.6.1 – Determinação de Manobras para Atividade Solar Normal (ASNOR) ............. 100 4.6.2 – Determinação de Manobras para Atividade Solar Crítica (ASCRÍ) ............... 101 4.7 – Execução de Manobras .................................................................................... 101 CAPÍTULO 5 – RESULTADOS PARA O CONTROLE AUTÔNOMO ......... 107 5.1 – Implementação Computacional ....................................................................... 107 5.2 – Parâmetros para Análise .................................................................................. 111 5.3 – Resultados ........................................................................................................ 113 5.3.1 – Atividade Solar Normal (ASNOR) .................................................................. 113 5.3.2 – Atividade Solar Crítica (ASCRÍ) .................................................................... 129 5.4 – Considerações Finais ....................................................................................... 143 CAPÍTULO 6 - CONCLUSÕES E SUGESTÕES ............................................... 151 REFERÊNCIAS BIBLIOGRÁFICAS ................................................................. 155

LISTA DE FIGURAS
Pág.
3.1 Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV ................................................ 56
3.2 Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV ............................................... 57
3.3 Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3 ............ 58
3.4 Freqüência relativa dos resíduos normalizados: a) rn1; b) rn2; c) rn3 .. 59
3.5 Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV ................................................ 59
3.6 Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV ............................................... 60
3.7 Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3 ............ 62
3.8 Freqüência relativa dos resíduos normalizados: a) rn1; b) rn2; c) rn3 .. 62
3.9 Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV ................................................ 63
3.10 Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV ............................................... 64
3.11 Erros tendenciosos: a) eGPS1, ∆eNAV1 e ∆ e NAV1; b) eGPS2, ∆eNAV2 e
∆ e NAV2; c) eGPS3, ∆eNAV3 e ∆ e NAV3 ............................................................... 65
3.12 Vetor erro tendencioso: eGPS, ∆eNAV e ∆ e NAV ............................................. 65
3.13 Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3 ............ 66
3.14 Freqüência relativa dos resíduos normalizados: a) rn1; b) rn2; c) rn3 .. 67
3.15 Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV ................................................ 68
3.16 Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV ............................................... 69
3.17 Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3 ............ 70
3.18 Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV ................................................ 70
3.19 Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV ............................................... 71
3.20 Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3 ............ 72
3.21 Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV ................................................ 73
3.22 Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV ............................................... 74
3.23 Erros tendenciosos: a) eGPS1, ∆eNAV1 e ∆ e NAV1; b) eGPS2, ∆eNAV2 e
∆ e NAV2; c) eGPS3, ∆eNAV3 e ∆ e NAV3 .............................................................. 75
3.24 Vetor erro tendencioso: eGPS, ∆eNAV e ∆ e NAV ............................................ 75
3.25 Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3 ............ 76
3.26 Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV ................................................ 77
3.27 Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV ............................................... 78
3.28 Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3 ............ 79
3.29 Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV ................................................ 79
3.30 Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV ............................................... 80
3.31 Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3 ............ 81
3.32 Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV ................................................ 82
3.33 Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV ............................................... 83
3.34 Erros tendenciosos a) eGPS1, ∆eNAV1 e ∆ e NAV1; b) eGPS2, ∆eNAV2 e ∆ e NAV2;
c) eGPS3, ∆eNAV3 e ∆ e NAV3 ................................................................................ 84
3.35 Vetor erro tendencioso: eGPS, ∆eNAV e ∆ e NAV ............................................ 84
3.36 Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3 ............ 85
3.37 r∆ NAV ............................................................................................................. 88
3.38 v∆ NAV ............................................................................................................ 88
3.39 Erro tendencioso médio ................................................................................... 89
4.1 Diagrama de Blocos ....................................................................................... 91
4.2 Atraso de Transporte na Suavização .............................................................. 97
4.3 Execução de Manobra e Evolução de ∆L0 .................................................... 102
5.1 Fluxo Solar: a) ASNOR; b) ASCRÍ ................................................... 108
5.2 Evolução no tempo de ∆L0 (ASNOR , TAC1/3 , TCC1/100) ................................ 113
5.3 Manobras corretivas aplicadas (ASNOR , TAC1/3 , TCC1/100) ........................... 114
5.4 Evolução no tempo de ∆L0 (ASNOR , TAC1/3 , TCC1/720)................................. 115
5.5 Manobras corretivas aplicadas (ASNOR , TAC1/3 , TCC1/720) ........................... 116
5.6 Evolução no tempo de ∆L0 (ASNOR , TAC1/3 , TCC1/1440) ............................... 117
5.7 Manobras corretivas aplicadas (ASNOR , TAC1/3 , TCC1/1440) .......................... 117
5.8 Evolução no tempo de ∆L0 (ASNOR , TAC1/9 , TCC1/100) ................................ 119
5.9 Manobras corretivas aplicadas (ASNOR , TAC1/9 , TCC1/100) ........................... 120
5.10 Evolução no tempo de ∆L0 (ASNOR, TAC1/9 , TCC1/720).................................. 120
5.11 Manobras corretivas aplicadas (ASNOR , TAC1/9 , TCC1/720) ........................... 121
5.12 Evolução no tempo de ∆L0 (ASNOR , TAC1/9 , TCC1/1440) ............................... 122
5.13 Manobras corretivas aplicadas (ASNOR , TAC1/9 , TCC1/1440) .......................... 123

5.14 Evolução no tempo de ∆L0 (ASNOR , TAC1/27 , TCC1/100) ............................... 124
5.15 Manobras corretivas aplicadas (ASNOR , TAC1/27 , TCC1/100) .......................... 125
5.16 Evolução no tempo de ∆L0 (ASNOR , TAC1/27 , TCC1/720) ............................... 125
5.17 Manobras corretivas aplicadas (ASNOR , TAC1/27 , TCC1/720) .......................... 126
5.18 Evolução no tempo de ∆L0 (ASNOR , TAC1/27 , TCC1/1440) ............................. 127
5.19 Manobras corretivas aplicadas (ASNOR , TAC1/27 , TCC1/1440) ........................ 128
5.20 Evolução no tempo de ∆L0 (ASCRÍ , TAC1/3 , TCC1/100) ................................. 129
5.21 Manobras corretivas aplicadas (ASCRÍ , TAC1/3 , TCC1/100) ............................ 130
5.22 Evolução no tempo de ∆L0 (ASCRÍ , TAC1/3 , TCC1/720) .................................. 131
5.23 Manobras corretivas aplicadas (ASCRÍ , TAC1/3 , TCC1/720) ............................ 132
5.24 Evolução no tempo de ∆L0 (ASCRÍ , TAC1/3 , TCC1/1440) ................................ 132
5.25 Manobras corretivas aplicadas (ASCRÍ , TAC1/3 , TCC1/1440) ........................... 133
5.26 Evolução no tempo de ∆L0 (ASCRÍ , TAC1/9 , TCC1/100) ................................. 134
5.27 Manobras corretivas aplicadas (ASCRÍ , TAC1/9 , TCC1/100) ............................ 135
5.28 Evolução no tempo de ∆L0 (ASCRÍ , TAC1/9 , TCC1/720) .................................. 135
5.29 Manobras corretivas aplicadas (ASCRÍ , TAC1/9 , TCC1/720) ............................ 136
5.30 Evolução no tempo de ∆L0 (ASCRÍ , TAC1/9 , TCC1/1440) ................................ 137
5.31 Manobras corretivas aplicadas (ASCRÍ , TAC1/9 , TCC1/1440) ........................... 138
5.32 Evolução no tempo de ∆L0 (ASCRÍ , TAC1/27 , TCC1/100) ................................ 139
5.33 Manobras corretivas aplicadas (ASCRÍ , TAC1/27 , TCC1/100) ........................... 140
5.34 Evolução no tempo de ∆L0 (ASCRÍ , TAC1/27 , TCC1/720)................................. 140
5.35 Manobras corretivas aplicadas (ASCRÍ , TAC1/27 , TCC1/720) ........................... 141
5.36 Evolução no tempo de ∆L0 (ASCRÍ , TAC1/27 , TCC1/1440) .............................. 142
5.37 Manobras corretivas aplicadas (ASCRÍ , TAC1/27 , TCC1/1440) .......................... 143
5.38 0L∆ (ASNOR) .................................................................................................. 145
5.39 0L∆σ (ASNOR) ................................................................................................. 145
5.40 0L∆ (ASCRÍ) ................................................................................................... 146
5.41 0L∆σ (ASCRÍ) .................................................................................................. 146


LISTA DE TABELAS
Pág.
3.1 Resultados para os Erros em Posição .............................................................. 86
3.2 Resultados para os Erros em Velocidade ....................................................... 86
3.3 Resultados para os Erros Tendenciosos em Posição........................................ 87
5.1 Parâmetros do Controle Autônomo para ASNOR ............................................. 110
5.2 Parâmetros do Controle Autônomo para ASCRÍ .............................................. 110
5.3 Resultados para 0L∆ e 0L∆σ com ASNOR ....................................................... 144
5.4 Resultados para 0L∆ e 0L∆σ com ASCRÍ ....................................................... 144
5.5 Número de Manobras/∆aTotal para ASNOR ........................................................ 148
5.6 Número de Manobras/∆aTotal para ASCRÍ ........................................................ 148
5.7 Incremento de Velocidade, Duração e Consumo por Manobra ...................... 149
5.8 Consumo Total de Combustível (∆mT) ........................................................... 149


LISTA DE SÍMBOLOS
Latinos
a - semi-eixo maior da órbita do satélite
ae - raio equatorial terrestre médio
aR - semi-eixo maior da órbita de referência
c - resultado do produto escalar n~ . r~ Diag(a,b,...) - matriz diagonal, com a diagonal principal formada por a,b,... e os demais
elementos nulos
e - vetor de dimensão 3 contendo os erros tendenciosos presentes nas observações
e - vetor de dimensão 3 contendo os erros tendenciosos estimados pelo navegador simplificado
e& - derivada do vetor e em relação ao tempo
eGPS - módulo do erro tendencioso real contido nas coordenadas de posição fornecidas pelo receptor GPS simulado
eGPS(i) - erro tendencioso verdadeiro presente na i-ésima componente do vetor de observações (fornecido pelo receptor GPS simulado)
GPSe - média do módulo do erro tendencioso real contido nas coordenadas de posição fornecidas pelo receptor GPS simulado
exR - componente de referência do vetor excentricidade na direção X
eyR - componente de referência do vetor excentricidade na direção Y
E[.] - operador esperança
f - vetor de dimensão 6 contendo funções não lineares que modelam a dinâmica conhecida do estado do satélite
fA - vetor de dimensão 9 contendo funções não lineares que modelam a dinâmica conhecida do estado aumentado do satélite
frac(T) - parte fracionária de T
G - matriz 6x3, cujos elementos são funções contínuas no tempo GA - matriz aumentada 9x6, cujos elementos são funções contínuas no tempo
h - vetor de dimensão 3 contendo funções não lineares do vetor de estado que modelam a dinâmica conhecida das observações (medidas)
hA - vetor de dimensão 6 contendo funções não lineares do vetor de estado aumentado que modelam a dinâmica conhecida das observações (medidas)

H - matriz 3x6 obtida linearizando h
HA - matriz 3x9 obtida linearizando hA
HNR - instante de passagem do satélite pelo nodo de referência, expresso em horas locais
i - inclinação do plano da órbita do satélite
iR - inclinação de referência
Inxn - matriz identidade de dimensão n
J - número inteiro que define a taxa de compressão do pré-processamento
J - matriz jacobiana
J2 - coeficiente do segundo harmônico zonal do geopotencial
K - matriz de ganho do filtro de Kalman
k0 - parâmetro de ajuste do controle autônomo
k1 - parâmetro de ajuste do controle autônomo
k2 - parâmetro de ajuste do controle autônomo
M - anomalia média da órbita do satélite
MG - matriz gradiente 3x3 n - número real previamente escolhido
n~ - versor eixo de rotação da Terra
ns - número real previamente escolhido
N - número de observações
N - número inteiro de revoluções orbitais diárias do satélite
N - número inteiro e constante, previamente escolhido
NMA - número de manobras aplicadas
P - número inteiro, numerador da razão P/Q determina a fração de órbita adicional completada pelo satélite em um dia
P - matriz de covariância do vetor de estado x
PA - matriz de covariância do vetor de estado aumentado xA
PA(ii) - elemento na linha i e coluna i da matriz PA
PA(6+i,6+i) - elemento na linha 6+i e coluna 6+i da matriz PA
Pe - matriz de covariância do vetor de erros tendenciosos e
Q - número inteiro, denominador da razão P/Q, que determina a fração de órbita adicional completada pelo satélite em um dia
Q - matriz 3x3 contendo a densidade espectral de potência do vetor ω, ou seja, a matriz de covariância do sistema dinâmico (modelo)
QA - matriz 3x3 contendo a densidade espectral de potência do vetor ωA, ou seja, a matriz de covariância do sistema dinâmico aumentado (modelo)
Qe - matriz de covariância do vetor ωe
QETE - razão percentual entre a média do erro tendencioso real cometido pelo navegador simplificado e a média do erro tendencioso real cometido pelo receptor GPS
QPOS - razão percentual entre a média do erro real em posição cometido pelo navegador simplificado e a média do erro real em posição cometido pelo receptor GPS
QVEL - razão percentual entre a média do erro real em velocidade cometido pelo navegador simplificado e a média do erro real em velocidade cometido pelo receptor GPS
r - módulo do vetor posição do satélite
nr - vetor de dimensão 3 contendo o resíduo normalizado das observações
(i)nr - elemento na posição i do vetor nr
(i)nr - média dos valores dos resíduos (i)nr
r~ - versor posição do satélite
R - raio equatorial da Terra
R - matriz 3x3 contendo as covariâncias de υ
t - tempo
tman - instante de aplicação da manobra
tk - instante de ocorrência da k-ésima observação GPS
tk+1 - instante de ocorrência da k-ésima primeira observação GPS
T - data juliana modificada atual
TR - data de passagem pelo nodo de referência em dias julianos modificados
Tte - dia solar médio (86400 s)
V - valor absoluto da velocidade orbital do satélite
w - valor do peso associado à observação y
x - vetor de dimensão 6 contendo as variáveis de estado do satélite
x - estimativa do navegador simplificado para x

x& - derivada temporal de x
xA - vetor de dimensão 9 contendo o vetor de estado aumentado do satélite
xGPS - vetor de dimensão 3 contendo as coordenadas de posição fornecidas pelo receptor GPS embarcado
xGPS(i) - elemento na posição i do vetor xGPS
x A - estimativa do navegador simplificado para xA
x& A - derivada temporal de xA
x(i) - elemento na posição i do vetor x
x A(i) - elemento na posição i do vetor x A
x A(6+i) - elemento na posição 6+i do vetor x A
y - vetor de dimensão 3 contendo as observações
y - vetor de dimensão 3 contendo os valores esperados das observações
(i)y - elemento na posição i do vetor y
(i)y - elemento na posição i do vetor y
iy - valor médio para yi após o pré-processamento
0nxn - matriz nxn de zeros
Gregos
α - argumento de latitude do satélite
αR - argumento de latitude de referência
αM - argumento de latitude médio de referência
ΓA - matriz gama aumentada
∆a - desvio do semi-eixo maior da órbita do satélite em relação ao semi-eixo maior de referência
∆a - amplitude de correção do semi-eixo maior da órbita do satélite
∆aTotal - amplitude de correção total do semi-eixo maior da órbita do satélite
∆eNAV - módulo do erro real cometido pelo navegador simplificado nas estimativas dos erros tendenciosos
∆eNAV(i) - valor absoluto do erro real cometido pelo navegador simplificado ao estimar eGPS(i)
NAVe∆ - desvio padrão calculado pelo navegador simplificado para suas estimativas dos erros tendenciosos
NAV(i)e∆ - desvio padrão calculado pelo navegador simplificado para x A(6+i)
NAVe∆ - média do módulo do erro real cometido pelo navegador simplificado nas estimativas dos erros tendenciosos
NAVe∆ - média do desvio padrão calculado pelo navegador simplificado para suas estimativas dos erros tendenciosos
∆m - consumo de combustível por manobra
∆mT - consumo total de combustível
∆i - desvio da inclinação do plano da órbita do satélite em relação à inclinação de referência
∆L0 - desvio de fase no equador ∧
L∆ - desvio de fase no equador estimado pelo controle autônomo
∆L0sup - limite de controle previamente definido para ∆L0
∆L0sup nom - limite de controle previamente definido para ∆L0
0L∆ - média do desvio de fase no equador
0L•
∆ - taxa de variação temporal de ∆L0
L∆
0
••
- taxa de variação temporal de segunda ordem de ∆L0 ∧•
L∆ 0 - taxa de variação temporal do desvio de fase no equador estimado pelo controle autônomo
0L•
∆ sup - limite de controle previamente definido para 0L•
∆
∆rGPS - módulo do erro real em posição cometido pelo receptor GPS
GPSr∆ - erro real médio em posição cometido pelo receptor GPS simulado
∆rNAV - módulo do erro real em posição cometido pelo navegador
NAVr∆ - módulo do erro em posição estimado pelo navegador através da matriz de covariância aumentada PA
NAVr∆ - erro real médio em posição cometido pelo navegador simplificado
NAVr∆ - erro médio em posição estimado pelo navegador simplificado através da matriz de covariância aumentada PA
∆tJAN - intervalo de tempo para a "janela" de suavização
∆tTAC - intervalo de tempo entre duas observações consecutivas de ∆L0
∆T - duração da manobra
∆vGPS - módulo do erro real em velocidade cometido pelo receptor GPS simulado
∆vNAV - módulo do erro real em velocidade cometido pelo navegador simplificado
∆VT - incremento de velocidade tangencial correspondente à manobra do semi-eixo maior do satélite
GPSv∆ - erro real médio em velocidade cometido pelo receptor GPS simulado
NAVv∆ - módulo do erro em velocidade estimado pelo navegador simplificado através da matriz de covariância aumentada PA
NAVv∆ - erro real médio em velocidade cometido pelo navegador simplificado
NAVv∆ - erro médio em velocidade estimado pelo navegador simplificado através da matriz de covariância aumentada PA
∆α - desvio de α em relação a αR
∆Ω - desvio de Ω em relação a ΩR
ε - variável auxiliar no cálculo de •
L∆ 0
η - variável auxiliar no cálculo de •
L∆ 0
θ - tempo sideral
µ - constante gravitacional
υ - vetor de dimensão 3 contendo os erros aleatórios presentes nas observações
σ - desvio padrão
σ - vetor de dimensão 3 contendo o desvio padrão do vetor de observações
σ(i) - elemento na posição i do vetor σ
σp - desvio padrão em posição
(i)nrσ - desvio padrão dos valores de (i)nr
σs - desvio padrão de
∧•
L∆ 0

σv - desvio padrão em velocidade
0L∆σ - desvio padrão da média dada por 0L∆
φ - matriz de transição de estado
φA - matriz de transição de estado aumentada
ω - argumento do perigeu da órbita do satélite
ω - vetor de 3 componentes com as incertezas do modelo adotado
ωA - vetor de 6 componentes com as incertezas do modelo aumentado
ωe - vetor de 3 componentes com as incertezas do modelo adotado para os erros tendenciosos
Ω - ascenção reta do nodo ascendente do satélite
ΩM - ascenção reta média do nodo ascendente de referência
ΩR - ascenção reta do nodo ascendente de referência


LISTA DE SIGLAS E ABREVIATURAS
AS - Atividade Solar ASNOR - Atividade Solar Normal ASCRÍ - Atividade Solar Crítica CBERS - China-Brazil Earth Resources Satellites CNES - Centre National d'Études Spatiales DIODE - Determination Immédiate d'Orbite à l'aid de Measures DORIS
Embarquées DORIS - Doppler Orbitography and Radiopositioning Integrated by Satellite DJM - Data Juliana Modificada GEODE - GPS Enhanced Orbit Determination Experiment GPS - Global Positioning System INPE - Instituto Nacional de Pesquisas Espaciais JPO - Joint Program Office NAVSTAR - NAVigation System with Timing And Ranging PAGODE - Pillotage Autonome et Guidage d'Orbite via DORIS Embarqué SPOT - Système Opèrationnel D'Observation de la Terre SPS - Standard Positioning Service TAC - Taxa de Amostragem para o Controle TAC1/3 - 1 Amostra/3 min TAC1/9 - 1 Amostra/9 min TAC1/27 - 1 Amostra/27 min TCC - Taxa de Compressão para o Controle TCC1/100 - 1 valor/100 min TCC1/720 - 1 valor/720 min TCC1/1440 - 1 valor/1440 min

29
CAPÍTULO 1
INTRODUÇÃO
O aparecimento de modernos sistemas globais de posicionamento motivou o estudo
e desenvolvimento de sistemas de determinação autônoma de órbita de satélites artificiais
precisos e confiáveis - Albertelli et al. (1995); Berthias et al. (1992, 1993, 1997); Carrou et
al. (1996); Di Girolamo et al. (1995); Dow (1991); Gill (1997); Gill et al. (1996);
Gramiling et al. (1993); Hart et al. (1996, 1997); Jayles (1989); Negreiros de Paiva (1989);
Sommer et al. (1989); Xing e Parvez (1998). Estes sistemas mantêm, de forma totalmente
independente de intervenções humanas a partir de solo, um conhecimento preciso do
estado orbital do satélite, através do processamento de informações geradas a bordo,
também de forma autônoma, por um receptor do sistema de posicionamento utilizado.
Uma das principais motivações que levaram à pesquisa e desenvolvimento de
navegadores autônomos, foi a possibilidade de se passar a dispor a bordo, em tempo real,
de informações sobre a posição e velocidade do satélite, requeridas, por exemplo, por
usuários de missões de observação da Terra, para interpretação e análise das imagens
geradas. A disponibilização a bordo de veículos espaciais de estimativas orbitais
atualizadas e com bom nível de precisão, por sua vez, viabilizou a pesquisa e
desenvolvimento de procedimentos de controle autônomo de órbita, permitindo que o
processo de execução de manobras orbitais pudesse ser feito de forma independente de
intervenções humanas de solo. Enquanto o controle de atitude de satélites atingiu um nível
bastante alto de autonomia, devido ao fato das medidas de atitude terem sido desde o
princípio naturalmente geradas a bordo, o controle de órbita é, ainda hoje, quase que
totalmente planejado e executado a partir de ações comandadas de solo.
O trabalho proposto consiste do estudo, desenvolvimento, simulação e análise de
um navegador simplificado acoplado a um sistema de controle autônomo de órbita,
aplicado aos satélites da série China-Brazil Earth Resources Satellites (CBERS). O
navegador simplificado consiste, basicamente de um procedimento de determinação
autônoma de órbita, cujo objetivo é refinar as estimativas de órbita correspondentes à
solução geométrica grosseira fornecida por receptores Global Positioning System (GPS).
30
As componentes de posição desta solução são utilizadas diretamente como entradas
(observações) para um processo de estimação de estado em tempo real via filtragem de
Kalman. O vetor de estado orbital é estendido de modo a incorporar os erros sistemáticos
que são impostos às componentes de posição da solução geométrica do GPS. As saídas
refinadas deste estimador recursivo são então utilizadas na implementação de um sistema
de controle autônomo do desvio de fase da órbita do satélite no equador. Este parâmetro
foi escolhido por apresentar a maior frequência de manobras corretivas em satélites com
órbita heliosíncrona em fase com a rotação da Terra, como é o caso dos satélites da série
CBERS. Não são consideradas as manobras para os demais parâmetros da órbita
(excentricidade, argumento do perigeu e inclinação, por exemplo), por apresentarem baixa
freqüência de execução, que são realizadas do modo convencional, a partir de solo. Por
fim, o desempenho do controle autônomo proposto será analisado comparativamente com
os resultados obtidos em trabalho anterior (Orlando e Kuga, 1999) onde a solução
geométrica grosseira de navegação do GPS é diretamente empregada para o controle
autônomo de órbita.
Dentre os sistemas globais de posicionamento destacam-se o francês DORIS
(Doppler Orbitography and Radiopositioning Integrated by Satellite) - Berthias e Houry
(1998); Berthias et al. (1997); Jayles et al. (1989) - desenvolvido pelo CNES (Centre
National d'Études Spatiales), e o americano NAVSTAR/GPS (NAVigation System with
Timing And Ranging / Global Posiotining System) - Enderle et al. (1998); Mur e Martínea
(1998); Hofmann-Wellenhof et al. (1996); Osório e Rebordão (1996); Parkinson e Spilker
(1996); Marshal et al. (1995); Dow (1991) - desenvolvido sob responsabilidade do JPO
(Joint Program Office). O objetivo de ambos é oferecer uma cobertura global do planeta,
permitindo a localização de receptores do sistema, colocados a bordo de satélites artificiais
em órbita. O GPS em adição, permite a localização não só de receptores que estejam em
órbita da Terra, mas também na sua superfície. Embora possuam objetivos semelhantes,
DORIS e GPS foram desenvolvidos a partir de conceitos opostos. Enquanto no primeiro a
cobertura global do planeta é gerada através do emprego de uma rede de balizas
distribuídas na superfície terrestre, no segundo a cobertura global é obtida a partir do uso
de uma constelação de satélites de posicionamento, inseridos em órbitas adequadas.
31
O sistema DORIS foi desenvolvido com o objetivo de atingir uma precisão inferior
a 10 cm (rms) na estimativa da componente radial de posição, requisito imposto pela
missão do satélite oceanográfico franco-americano TOPEX/POSEIDON - Berthias et al.
(1998), Putney et al. (1992) - lançado em 1992. Um satélite equipado com um receptor
DORIS capta, ao longo de sua órbita, os sinais das balizas que se encontram, a cada
instante, sob a região de visibilidade de suas antenas. O receptor, a bordo do satélite,
executa medidas do desvio Doppler de freqüência sofrido pelo sinal recebido de cada
baliza. Estas medidas são armazenadas a bordo do satélite e transmitidas ao solo a cada 12
horas. Graças à excelente cobertura oferecida pela rede de balizas (~85% de cada órbita,
no caso do TOPEX/POSEIDON) foi possível atingir os rigorosos requisitos de precisão,
impostos pela citada missão oceanográfica ao processo de determinação, em solo, da órbita
do satélite - Nouël et al (1991, 1993). O bom desempenho do sistema DORIS foi também
comprovado nos satélites SPOT2, SPOT3 e SPOT4, lançados, respectivamente em 1990,
1993 e 1998.
Embora a determinação de órbita, com auxílio do sistema DORIS fosse executada
apenas em solo, as medidas Doppler que alimentavam este processo eram geradas
autonomamente a bordo do satélite, pelo receptor DORIS embarcado, e, apenas
posteriormente transmitidas ao solo. Para aproveitar esta disponibilidade, o CNES
desenvolveu um navegador que determina a órbita do satélite autonomamente, em tempo
real, a bordo do satélite. Este sistema de restituição autônoma de órbita foi denominado
DIODE (Determination Immédiate d'Orbite à l'aid de Measures DORIS Embarquées) -
Carrou et al. (1996); Berthias et al (1992, 1993, 1997, 1998). O navegador DIODE foi
integrado experimentalmente ao satélite SPOT4, e fornece estimativas com erros da ordem
de 5 m rms em posição e 5 mm/s rms em velocidade. Consiste basicamente de um filtro de
Kalman com reforçadas características de robustez: Produz uma estimativa da órbita
osculadora do satélite a cada 10 segundos, a partir do processamento das medidas geradas
pelo receptor DORIS embarcado. Embora a principal motivação para o desenvolvimento
do sistema DIODE tenha sido o aperfeiçoamento do serviço de exploração da carga útil do
SPOT, o bom desempenho apresentado em testes realizados em solo despertaram, no
CNES, o interesse de incrementar a autonomia do controle de órbita em relação às
operações de solo. Com este objetivo foram efetuados estudos de procedimentos de

32
controle autônomo de órbita à partir de boletins de estimativas autônomas geradas pelo
sistema DIODE - Orlando et al. (1997); Orlando e Micheau (1996); Carrou et al. (1996);
Orlando (1995). O estudo mostrou a viabilidade do conceito proposto de controle
autônomo do desvio de fase no equador da órbita do satélite (parâmetro que apresenta a
maior freqüência de manobras corretivas em satélites de observação da Terra) e permitiram
ao CNES a proposição de um experimento que consistiria do teste em vôo, em satélite
futuro, de um sistema de controle autônomo de órbita, com base no conceito analisado.
Este experimento foi denominado PAGODE (Pillotage Autonome et Guidage d'Orbite via
DORIS Embarqué) e deveria ser embarcado no satélite SPOT5.
O sistema americano GPS é o mais avançado dentre os sistemas de posicionamento
atualmente existentes, e seus receptores atingiram uma escala de exploração comercial.
Receptores GPS que produzem diretamente em suas saídas estimativas de posição e
velocidade com precisão da ordem de 100 m em posição e 1 m/s em velocidade - Gill et al.
(1996) - encontram-se disponíveis no mercado, a preços relativamente acessíveis. Estes
receptores tem sido empregados em experimentos variados dentro da área espacial
(determinação de atitude de satélites artificiais, inclusive), encorajando, em particular,
pesquisas de sistemas de controle autônomo de órbita - Xing e Parvez (1998); Gill (1997);
Kang et al. (1997); Gill et al. (1996); Hart et al. (1996); Tello et al. (1995); Albertelli et al.
(1995). Navegadores baseados neste sistema são atualmente objeto de estudo nas mais
avançadas instituições de pesquisas espaciais, como por exemplo a NASA - Truong
(1998); Hart et al. (1996, 1997), DLR Enderle et al. (1998); Gill (1997); Jochim et al.
(1996), ESA - Martín-Mur e Dow (1997), entre outros. O GPS foi concebido como um
sistema de localização, cujo objetivo era a determinação da posição e velocidade inerciais
de receptores do sistema, estivessem estes na superfície da Terra, no ar ou no espaço, com
auxílio de satélites de uma constelação própria, cujas órbitas são conhecidas com grande
precisão (Marshall et al.,1995). Foi inicialmente concebido para aplicações militares pelo
Departamento de Defesa dos Estados Unidos e a seguir foi direcionado para aplicações
civis. Sua primeira aplicação real consistiu de seu uso para o estabelecimento de redes
geodésicas de alta precisão. O sistema consiste de uma constelação de 24 satélites
operacionais inseridos em 6 planos orbitais com 55º de inclinação em relação ao plano do
equador, espaçados de 60º em longitude. Cada plano orbital contém 4 satélites, em órbitas

33
quase circulares de 20200 km de altitude, o que implica em um período orbital de
aproximadamente 12 horas. Esta constelação foi projetada de modo que em qualquer ponto
da Terra pelo menos quatro satélites da constelação sejam sempre visíveis. O sistema GPS
compõe-se de três segmentos:
• Segmento espacial que consiste da constelação de satélites propriamente dita;
• Segmento de controle que controla todos os satélites do sistema, mantendo o
conhecimento de suas órbitas atualizado:
• Segmento usuário composto por todos os receptores do sistema, distribuídos por
usuários de todo o mundo, apresentando uma grande variedade de aplicações.
O princípio de funcionamento do GPS baseia-se na medida do tempo de
propagação de um sinal codificado, emitido pelos satélites da constelação no percurso
entre um satélite e um receptor do sistema, ou ainda na medição da fase deste sinal. A
distância é obtida pelo produto do tempo de propagação medido pela velocidade de
propagação da luz no vácuo. A precisão das medidas é afetada pelo grau de sincronização
entre o relógio de cada satélite GPS e o do receptor. Como a sincronização nunca é
perfeita, a distância medida não é, obviamente, a distância real entre o receptor e o satélite
GPS considerado. Por este motivo estas medidas são chamadas de pseudo-distância
(pseudorange). O erro de sincronização é considerado como uma incógnita e acrescido às
três coordenadas de posição do receptor a serem determinadas. Para que estas quatro
variáveis possam ser determinadas em um instante específico seriam necessárias 4
equações relacionando, simultaneamente, as coordenadas do receptor e o erro de
sincronização dos relógios. Isto justifica o conceito do sistema GPS que supõe a existência
de pelo menos 4 satélites GPS em visibilidade durante 24 horas do dia, em qualquer ponto
do planeta. Os receptores do chamado Serviço de Posicionamento Padrão, SPS - Standard
Positioning Service calculam as três componentes de seu vetor posição e o erro de
sincronização através da resolução do citado sistema de equações. As componentes de
velocidade são também calculadas através da resolução de um sistema semelhante, obtido
a partir da execução simultânea de medidas do chamado pseudo range rate (velocidade
radial relativa entre satélite e receptor). Estas estimativas, fornecidas diretamente pelos
receptores GPS, são normalmente chamadas de solução de navegação, solução não filtrada,
solução geométrica, ou, ainda de solução pontual. A solução geométrica, ou de navegação,

34
apresenta erros rms na faixa de 100 m em posição e 1 m/s em velocidade. A precisão das
estimativas de velocidade é relativamente pobre, devido ao fato de terem sido obtidas a
partir de medidas referentes a um único instante (Hart et al.,1997). Também deve ser
mencionado o fato de que esta solução geométrica pode sofrer descontinuidades
significativas quando muda o conjunto de satélites GPS visíveis ao receptor, usado no
cálculo das estimativas. Estas descontinuidades tomam a forma de variações sistemáticas
com valores da ordem de 100 m em posição e 0,5 m/s em velocidade, com duração entre 1
e 15 minutos.
O Goddard Space Flight Center, da NASA, qualificou recentemente para
aplicações espaciais a bordo, um receptor GPS - SPS com um algoritmo de navegação
desenvolvido pela NASA chamado GPS Enhanced Orbit Determination Experiment
(GEODE). Este experimento foi desenvolvido para ser executado em processadores de vôo
atualmente disponíveis para aplicações espaciais, com limitada capacidade de
processamento: memória menor que 500 Kbytes e velocidade de processamento menor que
0,5 milhões de instruções por segundo. Com processamento de medidas (pseudorange)
obtidos a partir dos receptores GPS instalados nos satélites TOPEX/POSEIDON e
EP/EUVE foram obtidas precisões da ordem de 10 m em posição e 0,01 m/s em
velocidade, (1σ) (Hart et al., 1997).
35
CAPÍTULO 2
NAVEGADOR SIMPLIFICADO
2.1. Conceito
Conforme mencionado na seção precedente, Orlando e Kuga (1999) analisaram o
desempenho de um conceito de controle autônomo do desvio de fase no equador, ∆L0 ,
considerando a utilização direta da solução geométrica grosseira de navegação do GPS
para a geração de observações de ∆L0 e 0L•
∆ , necessárias à malha de realimentação do
controlador. Os resultados obtidos mantiveram o valor de ∆L0 restrito a uma faixa de
–1000 m a +2000 m. Embora considerados satisfatórios, em relação aos limites impostos
ao controle deste parâmetro, efetuado atualmente a partir do solo para o satélite CBERS1
(±10.000 m), julgou-se que estes resultados poderiam ser aprimorados através do emprego
de um processo de determinação autônoma de órbita (navegador), que permita a obtenção
em tempo real de um refinamento direto da citada solução de navegação do GPS. Além
disto, no caso dos estudos citados, foi utilizado um procedimento no qual a amplitude de
uma dada correção do semi-eixo maior da órbita (para causar a mudança do sentido de
evolução de ∆L0) era adaptativamente escolhida em função da atividade solar vigente. A
amplitude de correção era, neste processo, inferida a partir de estimativas da derivada
segunda de ∆L0, que, por sua vez, eram obtidas através de um processo paralelo de
filtragem de Kalman. Uma segunda versão do procedimento, que consiste da aplicação de
uma mesma amplitude de correção predefinida sempre que uma necessidade de correção
de órbita é detectada, apresentou um desempenho menos satisfatório, quando do uso direto
da solução de navegação do GPS. Esta segunda versão, por ser mais simples e adequada ao
processamento a bordo, é considerada no presente trabalho. O incremento de precisão das
observações, a ser alcançado com a inclusão do navegador, deverá permitir a obtenção de
um desempenho satisfatório para esta versão do controlador. Além disto, a carga
computacional acrescentada pela incorporação do navegador será ao menos parcialmente
compensada pela ausência do processo paralelo de filtragem de Kalman para estimação da
derivada segunda do desvio de fase no equador.

36
2.2. Fundamentos Teóricos e Equacionamento
Como os procedimentos em estudo devem ser executados a bordo de satélites
artificiais, onde os recursos computacionais são geralmente exíguos, optou-se pelo
desenvolvimento de uma versão simplificada de navegador, que permita atingir aos
objetivos propostos sem impor uma carga computacional elevada ao processador. O
navegador consiste, deste modo, de um processo de estimação recursiva seqüencial de
órbita, via filtragem de Kalman, com compensação automática de tendenciosidades nas
observações (Orlando, 1983; Orlando e Rios Neto, 1986). A idéia básica do método é a
criação de um sistema de equações diferenciais aumentado, em relação ao sistema original,
onde as equações diferenciais adicionais modelam os erros tendenciosos em cada uma das
componentes do vetor de observações. Desta forma, durante o processo de filtragem, o
vetor de estado aumentado incorpora estimativas dos erros tendenciosos do vetor de
observações, compensando automaticamente o efeito destes erros nas estimativas das
componentes de posição e velocidade do satélite. Na fase de propagação do filtro é
utilizado um modelo do movimento orbital do satélite que inclui apenas a força devida ao
geopotencial, considerando harmônicos esféricos até o coeficiente zonal J2 (Kuga, 1982):
x& 1(t) = x4(t)
x& 2(t) = x5(t)
x& 3(t) = x6(t)
x& 4(t) =
−+− 2
23
2
22
31
r(t)51RJ
231(t) x
rrxµ
(1)
x& 5(t) = [ x2(t) / x1(t) ] x& 4(t)
x& 6(t) =
−+− 2
23
2
22
33
rx
rrxµ (t)53RJ
231(t)
onde µ é a constante gravitacional; J2 é o coeficiente do segundo harmônico zonal; r é o
módulo do vetor posição do satélite; R é o raio equatorial da Terra e x1(t), ... , x6(t) são as
componentes do vetor de estado do satélite, x(t), sendo as três primeiras de posição e as
três últimas de velocidade.
37
Em forma vetorial a equação diferencial estocástica do movimento orbital em
coordenadas cartesianas é dada por:
x& (t) = f[x(t), t] + G(t) ω(t) (2)
onde x(t) = [ x1(t) x2(t) x3(t) x4(t) x5(t) x6(t) ]T é o vetor de estado do sistema,
composto pelas componentes de posição (x1, x2 e x3) e de velocidade (x4, x5 e x6) do
satélite, com dimensão 6; f[x(t), t] é um vetor de dimensão 6 cujas componentes,
definidas na equação 1, são funções não lineares do estado do sistema; G(t) é uma matriz
6x3 contínua no tempo; ω(t) é um vetor de dimensão três contendo as incertezas no
conhecimento das forças que atuam sobre o satélite. O vetor ω(t) constitui-se, por
hipótese, de um ruído branco gaussiano com média nula e densidade espectral de potência
dada pela matriz Q(t). Para o caso proposto, G(t) = G (constante) e vale:
G =
3x3
3x3
I0
(3)
A equação algébrica genérica para as observações será:
y(tk+1) = h[ x(tk+1), tk+1 ] + e(tk+1) + ν(tk+1) (4)
onde y(tk+1) é o vetor de dimensão três contendo as observações disponíveis no instante
tk+1; e(tk+1) é um vetor de dimensão 3; cujas componentes representam os erros
tendenciosos do vetor de observações no instante tk+1; ν(tk+1) é um vetor de três
componentes, que representa erros aleatórios nas observações, considerados como ruídos
brancos gaussianos com média nula e covariância dada pela matriz R(tk+1). Somente serão
utilizadas como observações as coordenadas de posição fornecidas pelo receptor GPS
embarcado, desconsiderando as coordenadas de velocidade, por possuírem precisão muito
inferior (Gill et al., 1996). Sendo assim, a função de observação é linear em x e fica dada
por:
y(tk+1) = H(tk+1) x(tk+1) + e(tk+1) + ν(tk+1) (5)
com H(tk+1) = [ I3x3 03x3 ] pois as observações constituem-se das coordenadas de
posição.

38
São consideradas como verdadeiras as hipóteses de não correlação entre ω(t) e
ν(tk), entre ν(tk) e x(t), e que o vetor de estado inicial x(t0) é uma variável aleatória
gaussiana, com média x (t0) e matriz de covariância P(t0), onde x (t0) e P(t0) são
estimativas a priori.
Os erros tendenciosos das observações GPS, como comentado anteriormente,
variam em função do conjunto de satélites GPS visíveis. Mantêm-se constante por períodos
entre 1 a 15 minutos, mudando de valor quando um satélite GPS sai de visibilidade ou
outro se torna visível. Por este motivo é considerada para modelar estes erros tendenciosos
a equação abaixo:
e& (t) = ωe(t) (6)
onde e(t) é um vetor de três dimensões, cujos elementos constituem-se dos erros
tendenciosos que afetam as respectivas componentes do vetor de observações; ωe(t) é um
vetor de três componentes contendo a faixa de incerteza do modelo matemático (valor
constante) adotado para os erros tendenciosos. Em resumo, supõe-se que as
tendenciosidades são constantes por trechos, a menos do ruído, caracterizando um
estimador de parâmetros. Supõe-se que ωe(t) possua uma distribuição gaussiana com
média nula e covariância dada pela matriz 3x3 Qe, positiva semi-definida. O valor inicial
e(t0) é considerado como sendo um vetor de variáveis aleatórias gaussianas com média
e (t0) e matriz de covariância Pe(t0), onde e (t0) e Pe(t0) são estimativas a priori.
Supõe-se ainda como verdadeiras as hipóteses de não correlação entre ωe(t) e
ν(tk) e entre e (t0) e ν(tk).
Definindo-se agora:
xA(t) ≡
e(t)x(t)
; (7)
fA [xA(t), t] ≡
3x10t]f[x(t),
; (8)

39
ωA(t) ≡
(t)(t)
eωω
; (9)
GA ≡
3x33x3
6x3
I00G
(10)
Pode-se escrever:
x& A(t) = f A [x A(t), t] + G A(t) ωA(t) (11)
y(tk+1) = H(tk+1) x(tk+1) + e(tk+1) + ν(tk+1) = HA xA(tk+1) + ν(tk+1) (12)
onde,
H A = [ I3x3 03x3 I3x3 ] (13)
A partir das definições anteriores, define-se a matriz de covariância do sistema
dinâmico (modelo) aumentado, QA, e a matriz de covariância do estado aumentado, PA,
como sendo:
QA =
3x33x3
3x33x3
eQ00Q
; PA =
3x33x6
6x36x6
eP00P
(14)
Agora, o sistema aumentado está completamente equacionado de forma compatível
com a exigida para uso do filtro estendido de Kalman, sendo as observações afetadas
apenas por erros aleatórios gaussianos de média nula e matriz de covariância R(tk+1). O
sistema original de seis equações foi aumentado por mais três equações para modelar os
erros tendenciosos existentes nas observações das coordenadas de posição (estimativas
grosseiras correspondentes à solução de navegação do GPS).
Aplicando-se o filtro estendido de Kalman ao sistema aumentado definido acima,
obtém-se as seguintes equações:
-Fase de propagação:
x A(tk+1/tk) = x A(tk/tk) + ∫ +1k t
k t f A [xA(t/tk)] dt (15)
PA(tk+1/tk) = φA [ tk+1/tk ; x A(tk/tk)] . PA(tk/tk) . φAT[ tk+1/tk ; x A(tk/tk)] +

40
+ ΓA(tk) . QA(tk) . ΓAT(tk) (16)
Onde,
ΓA (tk) = ∫ +1k t
k t φA [ tk+1 , τ ] GA (τ) dτ (17)
φA [ tk+1/tk ; x A(tk/tk)] =
φ
3x33x6
6x36x6
I00
(18)
-Fase de atualização:
x A(tk+1/tk+1) = x A(tk+1/tk) + K[ tk+1 ; x A(tk+1/tk)]. y(k+1) - HA x A(tk+1/tk) (19)
PA(tk+1/tk+1) = I - K[ tk+1 ; x A(tk+1/tk)] . HA . PA(tk+1/tk) (20)
Onde,
K[ tk+1 ; x A(tk+1/tk)] = PA(tk+1/tk) . HAT. HA . PA(tk+1/tk) . HA
T + R(k+1) -1 (21)
Para o cálculo da matriz de transição de estado do sistema dinâmico original, φ,
utilizar-se-á um modelo analítico simplificado Markley (1986), baseado em uma expansão
em série de Taylor e considerando apenas a força devida ao geopotencial até o segundo
harmônico zonal. Este modelo fornece uma aproximação com cinco dígitos significativos,
para intervalos de até um minuto. A matriz de transição fica, então, dada por:
φ [ tk+1/tk ; x (tk/tk)] =
φφ
φφ
vvvr
rvrr (22)
onde,
φrr = I + [ 2 MG(tk) + MG(tk+1) ] (∆t)2 / 6 (23)
φrv = I ∆t + [MG(tk) + MG(tk+1) ] (∆t)3 / 12 (24)
φvr = [MG(tk) + MG(tk+1) ] ∆t / 2 (25)
φvv = I + [MG(tk) + 2 MG(tk+1) ] (∆t)2 / 6 (26)
com,
41
I = matriz identidade 3x3; (27)
∆t = tk+1 - tk (28)
MG(t) ≅ (µ / r3) (3 r~ Tr~ - I ) + ( 3/2 ) J2 ( R /r )2 [ 5 ( 1 - 7 c2 ) r~ Tr~ -
- (1-5 c2 ) I + 10 c ( r~ Tn~ + n~ Tr~ - 2 n~ Tn~ ) ] (29)
onde µ é a constante gravitacional; J2 é o coeficiente do segundo harmônico zonal; r é o
módulo do vetor posição do satélite; R é o raio equatorial da Terra, r~ é um versor para o
vetor posição do satélite, n~ é um versor para o eixo de simetria (rotação) da Terra e
c ≡ n~ . r~ .
2.3. Simulador de Órbita
As principais forças perturbadoras que agem sobre um satélite artificial são devidas
à não uniformidade do geopotencial, ao arrasto atmosférico, à atração luni-solar, à pressão
de radiação solar direta e indireta e às marés devidas ao Sol e à Lua. No caso de um
satélite artificial de baixa altitude (abaixo de 1000 km), as forças mais importantes são as
devidas ao campo gravitacional terrestre e ao arrasto atmosférico, os quais são descritos
qualitativamente a seguir.
O geopotencial é representado através de coeficientes denominados harmônicos
esféricos, caracterizados pelas deformações que a Terra apresenta em relação a uma Terra
perfeitamente esférica e à maneira como a massa é distribuída (simetrias e assimetrias) em
relação aos três eixos principais de inércia. Esses coeficientes classificam-se em:
• Zonais: onde a distribuição de massa independe da longitude, sendo simétrica
em relação ao eixo de rotação;
• Setoriais: onde não existe simetria pois a distribuição depende da longitude;
• Tesserais: onde a distribuição que gera tais harmônicos é completamente não
simétrica.
Depois do geopotencial, o arrasto atmosférico é, para satélites de baixa altitude, a
perturbação mais significativa. A força de arrasto pode ser entendida como uma força de
atrito experimentada por um satélite ao se mover através das camadas mais densas da

42
atmosfera. Esta força tem sentido contrário ao movimento do satélite e depende do
quadrado da velocidade.
Nesta dissertação, as observações para o navegador são geradas a partir da
simulação da órbita de um satélite artificial, no caso o CBERS, com a utilização de um
modelo que inclui efeitos de perturbações zonais, setoriais e tesserais devidas ao
geopotencial (até o grau e ordem 15), perturbações devidas ao arrasto atmosférico (modelo
Jacchia 70), pressão de radiação e lunissolares conforme Negreiros de Paiva (1980), Kuga
(1982) e Kuga e Gill (1995). Este simulador permite também incluir manobras impulsivas
ou não impulsivas, permitindo simular manobras de controle de órbita em tempo real. A
órbita assim simulada é considerada como a órbita real do satélite para efeito de testes, o
que permite avaliar o desempenho do navegador simplificado através do cálculo do erro
real das estimativas.
2.4. Simulação da Solução Geométrica de Navegação do GPS
Cada satélite GPS transmite dois sinais para o posicionamento, modulados com
dois tipos de código: P e C/A. O código C/A (Coarse/Aquisition) é de uso civil e é sempre
transmitido, estando sujeito a degradações. O código P (Precise) é de uso militar e para
usuários autorizados. Os operadores militares do sistema podem degradar intencionalmente
a precisão do sinal C/A dessincronizando o relógio do satélite ou incorporando pequenos
erros nas efemérides transmitidas (Chiaradia, 2000). Embora essa degradação, designada
Disponibilidade Seletiva (Selective Availability – SA) tenha sido desativada pelo
Departamento de Defesa dos EUA no início de 2000, neste trabalho optou-se por simular
as observações GPS considerando a Disponibilidade Seletiva ativada, por entender-se que
esta é a situação de pior caso. Sendo assim, foram utilizados os valores de 100 m e 1 m/s
para o desvio padrão (1σ) dos erros aleatórios (média nula) em posição e velocidade,
respectivamente, nas observações GPS simuladas. Para o erro tendencioso em posição e
velocidade, foram utilizados os valores de 100 m e 0,5 m/s para a média e de 25 m e 0,125
m/s para o desvio padrão (1σ) dos erros tendenciosos em posição e velocidade,
respectivamente.
A cada componente do vetor de estado gerado pelo simulador de órbita são
somados erros aleatórios e tendenciosos, a fim de simular os dados (observações) que na

43
prática serão fornecidos pelo receptor GPS embarcado. Todos os erros aleatórios utilizados
obedecem a uma distribuição gaussiana com média nula e desvio padrão pré-determinado,
de 100/ 3 m para as componentes de posição e 1/ 3 m/s para as componentes de
velocidade. Estes erros aleatórios são somados aos dados oriundos do simulador de órbita a
cada instante de amostragem/atualização do navegador (filtro de Kalman). O erro aleatório
resultante em posição e velocidade, possui distribuição típica de receptores GPS
comerciais disponíveis (Gill et al., 1996). Os erros tendenciosos são gerados com média e
desvio padrão, em cada componente de posição, iguais a 100/ 3 m e 25/ 3 m,
respectivamente. Para as componentes de velocidade, os erros tendenciosos são gerados
com média e desvio padrão iguais a 0,5/ 3 m/s e 0,125/ 3 m/s, respectivamente. É
utilizado como limite de saturação para a amplitude dos erros tendenciosos simulados em
cada componente de posição e velocidade o valor ±3σ. Novos valores para os erros
tendenciosos são gerados a cada 15 minutos, independente do intervalo de amostragem
utilizado para o navegador (filtro de Kalman).

44

45
CAPÍTULO 3
RESULTADOS PARA O NAVEGADOR SIMPLIFICADO
3.1. Implementação Computacional
O navegador simplificado descrito no item 2.2 foi implementado e testado usando-se a
órbita do satélite CBERS através de simulação em computador digital. Isto foi feito em três
Etapas. Na primeira Etapa, o navegador foi implementado sem considerar os erros
tendenciosos nas observações GPS. Obviamente, nesse caso não foi necessário utilizar o vetor
de estado aumentado e o filtro estendido de Kalman “comum” (sem estimador de
tendenciosidades) foi utilizado. A primeira Etapa tem por finalidade gerar resultados do filtro de
Kalman “comum” para observações GPS isentas de tendenciosidades, para compará-los,
posteriormente, com os resultados obtidos com a inclusão do processo de compensação de
tendenciosidades nas observações. Na segunda Etapa, o navegador foi implementado
considerando os erros tendenciosos, porém sem a aplicação do procedimento de tratamento
automático de tendenciosidades, ou seja, foi utilizado novamente o filtro de Kalman “comum”,
também com o objetivo de gerar resultados comparativos. Consequentemente, também nesta
Etapa não foi utilizada a formulação do estimador com vetor de estado aumentado. Esta
segunda Etapa tem por finalidade mostrar que o desempenho do filtro de Kalman “comum” é
insatisfatório quando as observações GPS possuem erros tendenciosos consideráveis. Na terceira
Etapa, foi implementado o navegador simplificado descrito no item 2.2, onde o filtro de Kalman
“modificado” incorpora o estimador de tendenciosidades. O objetivo da terceira Etapa é
verificar se há melhora significativa de desempenho, em relação ao obtido na segunda Etapa.
Resumindo, cada Etapa consiste basicamente de:
• 1ª Etapa: filtro de Kalman “comum” e observações GPS sem tendenciosidades;
• 2ª Etapa: filtro de Kalman “comum” e observações GPS com tendenciosidades;
• 3ª Etapa: filtro de Kalman “modificado” e observações GPS com tendenciosidades.
A fim de avaliar o efeito da taxa de amostragem das observações GPS, três Casos
distintos foram considerados:
46
• Caso 1: intervalo de amostragem igual a 3 segundos;
• Caso 2: intervalo de amostragem igual a 9 segundos e;
• Caso 3: intervalo de amostragem igual a 27 segundos.
Os valores escolhidos são representativos dos limites supostos para a capacidade de
processamento disponível a bordo (Caso 1) e para a validade das equações simplificadas
da dinâmica, equações 1 do Capítulo 2 (Caso 3).
Para a propagação do vetor de estado original (órbita do satélite), optou-se pelo
algoritmo de integração Runge-Kutta de quarta ordem, com passo de integração de 3 segundos
para o Caso 1 e passo de 9 segundos para os Casos 2 e 3. Os valores dos passos de integração
foram estabelecidos por meio de testes preliminares envolvendo apenas o valor do passo, o
tempo de execução e o erro médio resultante para o vetor posição (num período de 36 horas).
Este último foi calculado com o auxílio do integrador de grande precisão presente no simulador
de órbita (seção 2.3), cuja solução foi adotada como referência (solução exata). Para passos de
integração de 3 s e 9 s, o erro médio citado foi praticamente o mesmo, enquanto para 27 s
aumentou duas ordens de grandeza, motivo pelo qual o mesmo não foi usado. Em termos do
tempo de execução, os passos de integração de 9 s e 27 s foram, respectivamente, cerca de
quatro vezes e vinte vezes mais rápidos do que o passo de integração de 3 s.
Para o cálculo da matriz ΓA (tk) (definida na equação 17 do Capítulo 2), com GA
constante (equação 10 do Capítulo 2), ter-se-ia que efetuar a integração no tempo de 9x6= 54
das 9x9= 81 componentes da matriz de transição do sistema dinâmico aumentado, φA. A
aplicação de um processo preciso de integração nesta tarefa implicaria em calcular valores
intermediários para φA. Lembrando que φA é composta basicamente pela matriz de transição do
sistema dinâmico original φ, conforme mostra a equação 18 do Capítulo 2, então a integração
precisa da equação 17 do Capítulo 2 implicaria em calcular valores intermediários para a matriz
φ. Lembrando também que a matriz φ não será integrada, mas sim calculada de maneira analítica
aproximada em função dos vetores de estado x(tk) e x(tk+1) apenas, conclui-se que a integração
precisa da equação 17 do Capítulo 2 implica em calcular/armazenar vetores de estado
intermediários x(tk<t<tk+1) a fim de calcular os valores intermediários para φ, via equação 22
47
do Capítulo 2. Outra possibilidade seria abandonar o cálculo aproximado para a matriz φ e
integrar conjuntamente as equações diferenciais do estado x(t), da matriz de transição φ e da
matriz ΓA . Em ambas as situações, a carga de processamento seria relativamente grande,
podendo tornar-se incompatível com os recursos computacionais disponíveis a bordo. Em vista
disso e considerando que o intervalo a ser propagado, definido pela taxa de amostragem do
navegador, é relativamente pequeno, optou-se por realizar uma integração aproximada pela regra
do trapézio para o cálculo de ΓA . Esta decisão traz duas vantagens. A primeira é a de necessitar
apenas da matriz de transição φ já calculada de maneira aproximada nos instantes tk e tk+1. A
segunda é a manutenção de uma taxa de amostragem alta das observações geradas pelo receptor
GPS embarcado. Uma taxa de amostragem elevada gera efeitos secundários benéficos:
• Redução da incerteza do valor do vetor de estado no final da fase de propagação
e, consequentemente, redução na incerteza do valor do vetor de estado atualizado;
• Convergência temporal mais rápida do filtro de Kalman;
• Diminuição dos erros cometidos no cálculo aproximado da matriz de transição φ e
da matriz ΓA.
Estes efeitos justificam a estratégia adotada no cálculo de φ e ΓA.
Para o processamento do vetor de observações na equação 19 do Capítulo 2, foi
considerada como verdadeira a hipótese de não correlação entre suas componentes.
Matematicamente:
y(i)(tk+1) = HA(i) xA(tk+1) + ν(i)(tk+1) (1)
E[ ν(tk+1) νT(tk+1) ] = Diag(R11, R22, R33) (2)
onde y(i) representa a i-ésima componente do vetor y; HA(i) é a i-ésima linha da matriz
HA; ν(i) é a i-ésima componente do vetor ν; Diag(R11, R22, R33) representa uma matriz
diagonal cujos elementos da diagonal principal são R11, R22, R33.
Isto permite o processamento seqüencial do vetor de observações de cada instante,
componente a componente, conforme Sorenson (1966). Além disso, evita a inversão matricial
que existe na equação 21 do Capítulo 2, transformando-a em inversões escalares. Este fato gera

48
ganhos em tempo de processamento e precisão, altamente desejáveis em um navegador
simplificado embarcado.
As condições iniciais para o navegador foram calculadas a partir das condições iniciais
utilizadas no simulador de órbita e das características estatísticas dos erros aleatórios envolvidos.
Assim, a estimativa a priori do vetor de estado x (t0) da órbita do satélite para o navegador, foi
calculada a partir do vetor de estado inicial x(t0) utilizado no simulador de órbita ao qual foram
somados os erros aleatórios e tendenciosos descritos anteriormente (item 2.3). Neste ponto vale
mencionar que o sistema de coordenadas de referência utilizado é o sistema inercial geocêntrico
(J2000), cuja origem coincide com o centro de massa da Terra, o plano x-y é coplanar ao plano
equatorial, o eixo x aponta para o ponto vernal, o eixo z é normal ao plano equatorial e aponta
para o pólo norte e o eixo y é perpendicular aos outros dois e obedece à regra da mão direita.
Numericamente, x(t0) vale (época = 01/set/1999 0h 0min 0s = DJM 18140):
X(1) = -5251249,0586 m
X(2) = 4859467,818 m
X(3) = -180,2851 m
X(4) = 743,652 m/s
X(5) = 815,2747 m/s
X(6) = -7383,7051 m/s
A estimativa a priori do vetor erro tendencioso e (t0), foi definida como um vetor
nulo de três componentes. Numericamente:
e (t0) = 03x1 m
A estimativa a priori da matriz de covariância do estado P(t0), foi definida como
uma matriz diagonal 6x6, cuja diagonal principal é formada, dependendo da Etapa, por
seis vezes (~2,5σ) ou por nove vezes (3σ) o quadrado dos desvios padrões utilizados na
geração dos erros aleatórios presentes em cada uma das componentes de posição e
velocidade das observações GPS, simuladas conforme visto na seção 2.4. Numericamente:
P(t0) = Diag( 9σp2 , 9σv
2 )6x6 , com σp = 58 m e σv = 0,58 m/s (1ª e 2ª Etapas)
P(t0) = Diag( 6σp2 , 6σv
2 )6x6 , com σp = 58 m e σv = 0,58 m/s (3ª Etapa)

49
A estimativa a priori para a matriz de covariância do erro tendencioso Pe(t0), foi
definida como sendo uma matriz diagonal 3x3, cuja diagonal principal é formada por três
vezes (~1,7σ) o quadrado dos desvios padrões utilizados na geração dos erros aleatórios
presentes em cada uma das componentes de posição das observações GPS, simuladas
conforme visto na seção 2.4. Numericamente:
Pe(t0) = Diag(3σ2)3x3 , com σ = 58 m
A matriz de covariância do ruído do estado Q(t), foi definida como sendo uma
matriz diagonal 3x3 constante no tempo, cuja diagonal principal é formada por:
Q(t) = Q = Diag(σ2)3x3 , com σ = 0,00316228 m/s (σ2 = 10-5 m2/s2)
A matriz de covariância do ruído do vetor erro tendencioso Qe(t), foi definida
como sendo uma matriz diagonal 3x3 constante no tempo, cuja diagonal principal é
formada por:
Qe(t) = Qe = Diag(σ2)3x3 , com σ = 0,00054772 m/s (σ2 = 3x10-7 m2/s2)
A matriz de covariância das observações GPS de posição R(tk+1), foi definida
como sendo uma matriz diagonal 3x3 constante no tempo, cuja diagonal principal é
formada por:
R(tk+1) = R = Diag(1,1σ2)3x3 , com σ = 58 m
Cabe mencionar que os valores de Q(t) e Qe(t) foram estabelecidos por meio de
múltiplas tentativas. Cabe ainda mencionar que, durante a simulação da 3ª Etapa, onde se
utiliza o filtro de Kalman “modificado”, as matrizes de covariância P(t) e Pe(t), bem como
o vetor e (t) são reinicializados, tendo seus valores igualados respectivamente à P(t0),
Pe(t0) e e (t0), sempre que ocorre uma mudança no conjunto de satélites GPS visíveis ao
receptor de bordo. Numa aplicação real, a informação necessária para determinar a
reinicialização será fornecida pelo parâmetro PDOP (Position Dilution Of Precision) que
faz parte do conjunto de informações disponibilizadas pelo receptor GPS (Parkinson e
Spilker, 1996) e apresenta variação brusca com a mudança do conjunto de satélites visíveis
(geometria da constelação).

50
3.2. Parâmetros para Análise
Esta seção tem por finalidade estabelecer o conjunto de parâmetros a ser utilizado
na análise dos resultados obtidos pela implementação computacional descrita na seção 3.1.
Inicialmente, serão definidos três parâmetros utilizados para análise do erro no
módulo do vetor posição do satélite. O primeiro, representado por ∆rGPS(tk), é o módulo
do erro real em posição cometido pelo receptor GPS; o segundo, representado por
∆rNAV(tk), é o módulo do erro real em posição cometido pelo navegador e o terceiro,
representado por ∆ r NAV(tk), é o módulo do erro em posição estimado pelo navegador no
instante tk através da matriz de covariância aumentada PA. Matematicamente:
[ ]2/13
1
2
kk(i)GPSk(i)kGPS )/t(t )(t )(t xxr
−=∆ ∑=
∆
i (3)
[ ]2/13
1
2
kk(i)Ak(i)kNAV )/t(t )(t )(t xxr
−=∆ ∑=
∆
i (4)
2/1 3
1kk(ii)AkNAV )/t(tP )(t r
=∆ ∑=
∆
i (5)
onde x(i)(tk), i = 1, 2, 3 representam as três primeiras componentes (coordenadas de
posição) do vetor de estado orbital do satélite, obtidos através do simulador de órbita e
considerados nos testes como a órbita real; xGPS(i)(tk/tk), i = 1, 2, 3 representam as
coordenadas de posição fornecidas pelo receptor GPS simulado; x A(i)(tk/tk), i = 1, 2, 3 são
as três primeiras componentes do vetor de estado aumentado e representam as coordenadas
de posição estimadas pelo navegador e PA(ii)(tk/tk), i = 1, 2, 3 são os três primeiros
elementos da diagonal principal da matriz de covariância aumentada do erro de estimação
do navegador. Todas as grandezas descritas são relativas ao instante tk.
Serão apresentados gráficos que mostram resultados obtidos nos testes, nos quais os
três parâmetros definidos serão traçados em função do tempo de maneira superposta, para
um conjunto de N observações fornecidas pelo receptor GPS simulado. Um bom
desempenho do navegador se configura quando os parâmetros dados pelas equações 4 e 5

51
convergem para valores próximos e pequenos e se mantêm assim indefinidamente, sendo
sempre menores do que o erro do receptor GPS, dado pela equação 3.
Para avaliação global do resultado no conjunto de N observações, usar-se-á a média
do erro real em posição, cometido pelo receptor GPS simulado e pelo navegador
simplificado, além da média estimada pelo próprio navegador simplificado.
Matematicamente:
[ ]∑=
∆
∆=∆N
k 1
kGPSGPS )(t
N1 rr (6)
[ ]∑=
∆
∆=∆N
k 1
kNAVNAV )(t
N1 rr (7)
[ ]∑=
∆
∆=∆N
k 1
kNAVNAV )(t
N1 rr (8)
Em relação a estes parâmetros, quanto menores os valores de média real e estimada
pelo navegador, melhor o desempenho do mesmo.
Outra forma de avaliação é calcular a razão percentual entre a média do erro real
em posição cometido pelo navegador e a média do erro real em posição cometido pelo
receptor GPS. Quanto menor a razão, menor o erro médio do navegador em relação ao
receptor GPS e, portanto, melhor é o desempenho do navegador. Matematicamente:
( ) 100* % QGPS
NAVPOS r
r
∆∆=
∆
(9)
Analogamente às definições dos parâmetros dados nas equações 3 a 5, definem-se
três outros parâmetros para avaliação do erro em velocidade por:
[ ]2/16
4
2
kk(i)Ak(i)kGPS )/t(t )(t )(t xxv
−=∆ ∑=
∆
i (10)
[ ]2/16
4
2
kk(i)Ak(i)kNAV )/t(t )(t )(t xxv
−=∆ ∑=
∆
i (11)
2/1 6
4kk(ii)AkNAV )/t(tP )(t v
=∆ ∑=
∆
i (12)
onde ∆vGPS(tk), é o módulo do erro real em velocidade cometido pelo receptor GPS
simulado; ∆vNAV(tk), é o módulo do erro real em velocidade cometido pelo navegador;

52
∆ v NAV(tk), é o módulo do erro em velocidade estimado pelo navegador através da matriz
de covariância aumentada PA; x(i)(tk), i = 4, 5, 6 representam as componentes de
velocidade do vetor de estado orbital do satélite, obtidos através do simulador de órbita e
considerados nos testes como a órbita real; x A(i)(tk/tk), i = 4, 5, 6 são as componentes de
velocidade do vetor de estado aumentado, estimadas pelo navegador; PA(ii)(tk/tk), i = 4, 5,
6 são os elementos da diagonal principal da matriz de covariância aumentada do erro de
estimação do navegador associados às componentes de velocidade do vetor de estado
aumentado. Todas as grandezas descritas são relativas ao instante tk.
A avaliação dos resultados é feita de maneira análoga à descrita para os erros em
posição.
Para avaliação global do resultado no conjunto de N observações, usar-se-á a média
do erro real em velocidade, cometido pelo receptor GPS simulado e pelo navegador
simplificado, além da média estimada pelo próprio navegador simplificado.
Matematicamente:
[ ]∑=
∆
∆=∆N
k 1
kGPSGPS )(t
N1 vv (13)
[ ]∑=
∆
∆=∆N
k 1
kNAVNAV )(t
N1 vv (14)
[ ]∑=
∆
∆=∆N
k 1
kNAVNAV )(t
N1 vv (15)
Em relação a estes parâmetros, novamente, quanto menores os valores de média
real e estimada pelo navegador, melhor o desempenho do mesmo.
Para a velocidade também é válido calcular a razão percentual entre a média do
erro real em velocidade cometido pelo navegador e a média do erro real em velocidade
cometido pelo receptor GPS. Quanto menor a razão, menor o erro médio do navegador em
relação ao receptor GPS e, portanto, melhor é o desempenho do navegador.
Matematicamente:
( ) 100* % QGPS
NAVv
vVEL
∆∆=
∆
(16)

53
Para análise do erro nas estimativas das tendenciosidades das observações, os
parâmetros utilizados são definidos por:
)/t(t )(t )(t kki)(6AkGPS(i)kNAV(i) xee +
∆
−=∆ , i = 1, 2, 3 (17)
2/1 kki)i,6(6AkNAV(i) )/t(t P )(te ++
∆
=∆ , i = 1, 2, 3 (18)
onde eGPS(i)(tk) é o erro tendencioso verdadeiro presente na i-ésima componente do vetor
de observações (fornecido pelo receptor GPS); x A(6+i)(tk/tk) é a estimativa do navegador
para o valor deste erro; ∆eNAV(i)(tk) é o valor absoluto do erro real cometido nesta
estimativa; ∆ e NAV(i)(tk) é o desvio padrão desta estimativa, dado pelo navegador através
da matriz de covariância aumentada PA. Todas as grandezas descritas são relativas ao
instante tk.
Além disto, define-se mais três parâmetros para análise conjunta do erro cometido
nas estimativas das tendenciosidades das observações:
[ ] 1/23
1i
2
kGPS(i)kGPS )(t )(t ee
= ∑=
∆
(19)
[ ] 1/23
1i
2
kki)(6AkGPS(i)kNAV )/t(t )(t )(t xee
−=∆ ∑=
+
∆
(20)
2/1 3
1ikki)i,6(6AkNAV )/t(tP )(te
=∆ ∑=
++
∆
(21)
onde eGPS(tk) é o módulo do erro tendencioso real contido nas coordenadas de posição
fornecidas pelo receptor GPS simulado; ∆eNAV(tk) é o módulo do erro real cometido nas
estimativas dos erros tendenciosos; ∆ e NAV(tk) é o módulo deste mesmo erro, dado pelo
navegador através da matriz de covariância aumentada PA. Todas as grandezas descritas
são relativas ao instante tk.
Serão apresentados gráficos que mostram resultados obtidos nos testes, nos quais os
três parâmetros definidos serão traçados em função do tempo de maneira superposta, para
um conjunto de N observações fornecidas pelo receptor GPS simulado. Um bom
desempenho do navegador se configura quando os parâmetros dados pelas equações 20 e

54
21 convergem para valores próximos e pequenos e se mantêm assim indefinidamente,
sendo sempre menores do que o erro do receptor GPS, dado pela equação 19.
Para avaliação global do resultado no conjunto de N observações, usar-se-á a média
do módulo do erro tendencioso real contido nas coordenadas de posição do receptor GPS
simulado e do navegador simplificado, além da média estimada pelo próprio navegador
simplificado. Matematicamente:
[ ]∑=
∆
=N
k 1
kGPSGPS )(t
N1 ee (22)
[ ]∑=
∆
∆=∆N
k 1
kNAVNAV )(t
N1 ee (23)
[ ]∑=
∆
∆=∆N
k 1
kNAVNAV )(t
N1 ee (24)
Em relação a estes parâmetros, novamente, quanto menores os valores de média
real e estimada pelo navegador, melhor o desempenho do mesmo.
Para o erro tendencioso também é válido calcular a razão percentual entre a média
do erro tendencioso real cometido pelo navegador e a média do erro tendencioso real
cometido pelo receptor GPS. Quanto menor a razão, menor o erro médio do navegador em
relação ao receptor GPS e, portanto, melhor é o desempenho do navegador.
Matematicamente:
( ) 100 * ee % Q
GPSNAV
ETE
= ∆∆
(25)
Defina-se, finalmente, o resíduo normalizado das observações (obtidas pelo
receptor GPS embarcado) das coordenadas de posição do satélite por:
( )(i)
k(i)k(i)k(i)n σ
)(ty )(ty )(tr
−=∆
, i = 1, 2, 3 (26)
onde y(i)(tk) é o valor da observação da i-ésima coordenada de posição do satélite;
y (i)(tk) é o valor calculado/esperado para a respectiva observação, a partir do estado
propagado; σ(i) é o desvio padrão da observação y(i)(tk). As grandezas descritas são
relativas ao instante tk.
55
Note-se que o cálculo de y (i)(tk) é feito a partir do valor estimado do estado por:
)(tx )(tx )(ty ki)(6Ak(i)Ak(i) ++=∆
, i = 1, 2, 3 (27)
Os cálculos dos resíduos normalizados das coordenadas de posição pela equação 26
fornecem valores em unidades σ(i). Isto facilita a visualização por ocasião da análise dos
resultados, visto que se deseja que o resíduo permaneça na faixa de -3σ(i) a +3σ(i), o que é
um indício de convergência do estimador.
Para avaliação global do resultado no conjunto de N observações, usar-se-á a média
e o desvio padrão dos resíduos normalizados obtidos. Matematicamente:
[ ]∑=
=N
1kk(i)n(i)n )t(r
N1 r
∆ (28)
2/1N
1k
2(i)nk(i)n
n ) r )t(r (
1-N1
(i)r
−= ∑
=
∆σ (29)
Em relação a estes parâmetros, para qualquer conjunto de observações, se o valor
da média tender a zero, isto caracterizará um estimador não tendencioso. Por outro lado, se
o valor do desvio padrão tender a 1, isto caracterizará a consistência estatística do
navegador, que poderá ser comprovado através de gráficos de freqüência relativa dos
resíduos normalizados.
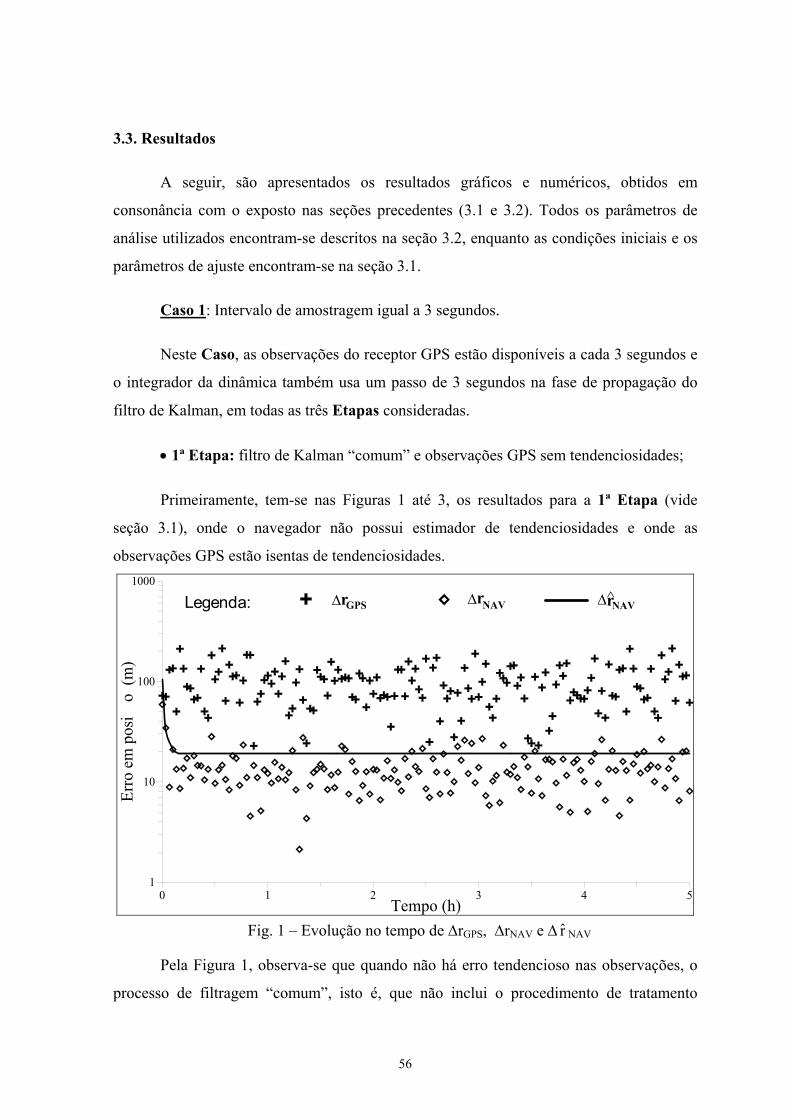
56
3.3. Resultados
A seguir, são apresentados os resultados gráficos e numéricos, obtidos em
consonância com o exposto nas seções precedentes (3.1 e 3.2). Todos os parâmetros de
análise utilizados encontram-se descritos na seção 3.2, enquanto as condições iniciais e os
parâmetros de ajuste encontram-se na seção 3.1.
Caso 1: Intervalo de amostragem igual a 3 segundos.
Neste Caso, as observações do receptor GPS estão disponíveis a cada 3 segundos e
o integrador da dinâmica também usa um passo de 3 segundos na fase de propagação do
filtro de Kalman, em todas as três Etapas consideradas.
• 1ª Etapa: filtro de Kalman “comum” e observações GPS sem tendenciosidades;
Primeiramente, tem-se nas Figuras 1 até 3, os resultados para a 1ª Etapa (vide
seção 3.1), onde o navegador não possui estimador de tendenciosidades e onde as
observações GPS estão isentas de tendenciosidades.
0 1 2 3 4 5Tempo (h)
1
10
100
1000
Erro
em
pos
io
(m)
Legenda: ∆r ^∆rGPS NAV ∆rNAV
Fig. 1 – Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV
Pela Figura 1, observa-se que quando não há erro tendencioso nas observações, o
processo de filtragem “comum”, isto é, que não inclui o procedimento de tratamento

57
automático de tendenciosidades apresenta, como era esperado, um desempenho
amplamente satisfatório. O erro real em posição foi reduzido de aproximadamente uma
ordem de grandeza em relação ao correspondente à solução de navegação do GPS.
Observa-se também que o filtro não apresenta nenhum sinal de divergência durante todo o
período simulado (5 horas).
Numericamente, os resultados globais em posição que condensam as informações
gráficas da Figura 1 foram os seguintes:
GPSr∆ = 92,4 m; NAVr∆ = 13,1 m; NAVr∆ = 19,2 m; QPOS = 14,2 %
O valor de QPOS significa que a magnitude do erro em posição cometido pelo
navegador simplificado é de 14,2 % da magnitude do erro em posição presente nas
observações GPS, em média. Este resultado traduz, de modo compacto, o bom
desempenho do filtro de Kalman "comum" na tarefa de filtrar o erro aleatório presente nas
observações GPS.
0 1 2 3 4 5Tempo (h)
0.010
0.100
1.000
10.000
Erro
em
vel
ocid
ade
(m/s)
Legenda: ∆v ^∆vGPS NAV ∆vNAV
Fig. 2 – Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV
Pela Figura 2, observa-se que os resultados relativos às estimativas das
componentes de velocidade, atestam um desempenho do estimador bastante semelhante ao
obtido para as componentes de posição, recém apresentados. Os erros também foram
reduzidos em aproximadamente uma ordem de grandeza.
Os resultados globais em velocidade foram os seguintes:

58
GPSv∆ = 9,29.10-1 m/s; NAVv∆ = 6,89.10-2 m/s; NAVv∆ = 1,45.10-1 m/s; QVEL = 7,4 %
Analogamente ao parâmetro de análise QPOS, o valor de QVEL significa que a
magnitude do erro em velocidade cometido pelo navegador simplificado é de 7,4 % da
magnitude do erro em velocidade presente nas observações GPS, em média.
A Figura 3 apresenta as curvas obtidas, no presente caso (Caso 1, 1ª Etapa), para o
resíduo normalizado nas observações de posição (componentes x, y e z da solução de
navegação do GPS). Observe-se que todos os resíduos apresentaram comportamento
bastante regular, permanecendo em uma faixa de ±3σ, como esperado. Os valores globais
de média dos resíduos normalizados ficaram próximos a zero, como esperado,
caracterizando um estimador não tendencioso. Da mesma forma, os valores globais de
desvio padrão ficaram próximos de 1, conferindo consistência estatística ao navegador.
0 1 2 3 4 5Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em X
(sig
ma) Legenda: r
3σn1
= 0,0059 0,93
0 1 2 3 4 5
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Y
(sig
ma) Legenda: r
3σn2
= 0,0038 0,92
0 1 2 3 4 5
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Z
(sig
ma) Legenda: r
3σn3
= 0,0053 0,92
a) b) c)
Fig. 3 – Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3
Adicionalmente, é apresentado na Figura 4 a seguir, os gráficos de frequência
relativa (linha contínua) dos resíduos normalizados. Comprova-se, através dos mesmos,
que os resíduos seguem uma distribuição gaussiana (pontos "x" do gráfico), o que é
esperado, tendo em vista que as observações só possuem erros aleatórios com distribuição
gaussiana nesta 1ª Etapa.

59
-5 0 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
S I G M A -5 0 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
S I G M A -5 0 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
S I G M A a) b) c)
Fig. 4 – Freqüência relativa dos resíduos normalizados: a) rn1; b) rn2; c) rn3
• 2ª Etapa: filtro de Kalman “comum” e observações GPS com tendenciosidades;
A título de análise, nas Figuras 5 até 7, são apresentados os resultados para a 2ª
Etapa (vide seção 3.1), onde as observações GPS são afetadas por erros tendenciosos.
Como esclarecido na seção 3.1, na 2ª Etapa o navegador não possui tratamento automático
de tendenciosidades.
0 1 2 3 4 5Tempo (h)
10
100
1000
Erro
em
pos
io
(m)
Legenda: ∆r ^∆rGPS NAV ∆rNAV
Fig. 5 – Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV
Nesta Etapa, os resultados globais em posição, que condensam as informações
gráficas apresentadas, foram os seguintes:

60
GPSr∆ = 133,7 m; NAVr∆ = 104,6 m; NAVr∆ = 19,2 m; QPOS = 78,2 %
A magnitude do erro em posição cometido pelo navegador simplificado foi 78,2 % da
magnitude do erro em posição presente nas observações GPS, em média. Este resultado revela o
baixo desempenho do Filtro de Kalman "comum" (sem estimador de tendenciosidades), na tarefa
de filtrar os erros aleatórios e compensar os erros tendenciosos presentes conjuntamente nesta 2ª
Etapa nas observações GPS. Conforme se observa pela Figura 5, não se conseguiu evitar a
divergência do filtro, uma vez que o erro estimado pelo navegador é muito menor do que o valor
real do erro em posição cometido pelo navegador, este último praticamente da ordem do erro na
solução de navegação do GPS, utilizada como observação. Numericamente, os valores de
NAVr∆ = 19,2 m e NAVr∆ = 104,6 m, traduzem o desempenho insatisfatório do processo de
filtragem “comum”, quando em presença de erros tendenciosos de observação, já que o filtro de
Kalman "comum" pressupõe a existência apenas de erros aleatórios nas observações, não
conseguindo compensar, por si só, erros tendenciosos. Entretanto, nota-se uma curva contínua e
mais suave no erro NAVr∆ , comparativamente à curva do erro GPSr∆ , com oscilações devido às
tendências (bias) introduzidas. Ao menos, o navegador atuou no sentido de suavizar o estado.
0 1 2 3 4 5Tempo (h)
0.010
0.100
1.000
10.000
Erro
em
vel
ocid
ade
(m/s)
Legenda: ∆v ^∆vGPS NAV ∆vNAV
Fig. 6 – Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV
Pela Figura 6, observa-se que as estimativas das componentes de velocidade,
embora apresentando um comportamento melhor que as de posição, mostram certa

61
degradação do desempenho do filtro de Kalman, em relação à Etapa anterior. Este
comportamento melhor deve-se ao fato de só serem utilizadas observações de posição e as
tendenciosidades, sendo constantes enquanto não há variações no conjunto de satélites
GPS visíveis, não afetam, nestes períodos, a velocidade do satélite. A degradação das
estimativas de velocidade só ocorre quando há mudança de valor das tendenciosidades das
observações de posição, conforme se observa pela figura.
Os resultados globais em velocidade foram:
GPSv∆ = 1,05.100 m/s; NAVv∆ = 2,00.10-1 m/s; NAVv∆ = 1,45.10-1 m/s; QVEL = 19,1 %
O valor de QVEL significa que a magnitude do erro em velocidade cometido pelo
navegador simplificado é de 19,1 % da magnitude do erro em velocidade presente nas
observações GPS, em média.
A Figura 7 apresenta as curvas obtidas neste caso (Caso 1, 2ª Etapa), para os
resíduos normalizados nas observações. Em amplitude de variação os resíduos
permaneceram na faixa de ±3σ. Isto era esperado, pois a ausência da compensação das
tendenciosidades nas observações faz com que estas sejam incorporadas, como erros, às
estimativas, não afetando significativamente a estimativa dos resíduos em cada intervalo
em que as tendenciosidades são constantes. Em outras palavras, as observações calculadas
a partir das estimativas tendem a ficar próximas ao valor medido, já que as estimativas
absorveram, como erro, o valor das tendenciosidades, fazendo com que a média dos
resíduos seja próxima a zero e os valores dentro da faixa de ±3σ. Notou-se apenas que
agora alguns resíduos escaparam da faixa de ±3σ, o que não acontecia na Etapa anterior.
Analisando os valores globais de desvio padrão dos resíduos e comparando-os com os
valores obtidos na Etapa anterior, percebe-se que houve um aumento dos valores de
desvio padrão, com cerca de 0,98 contra cerca de 0,92.
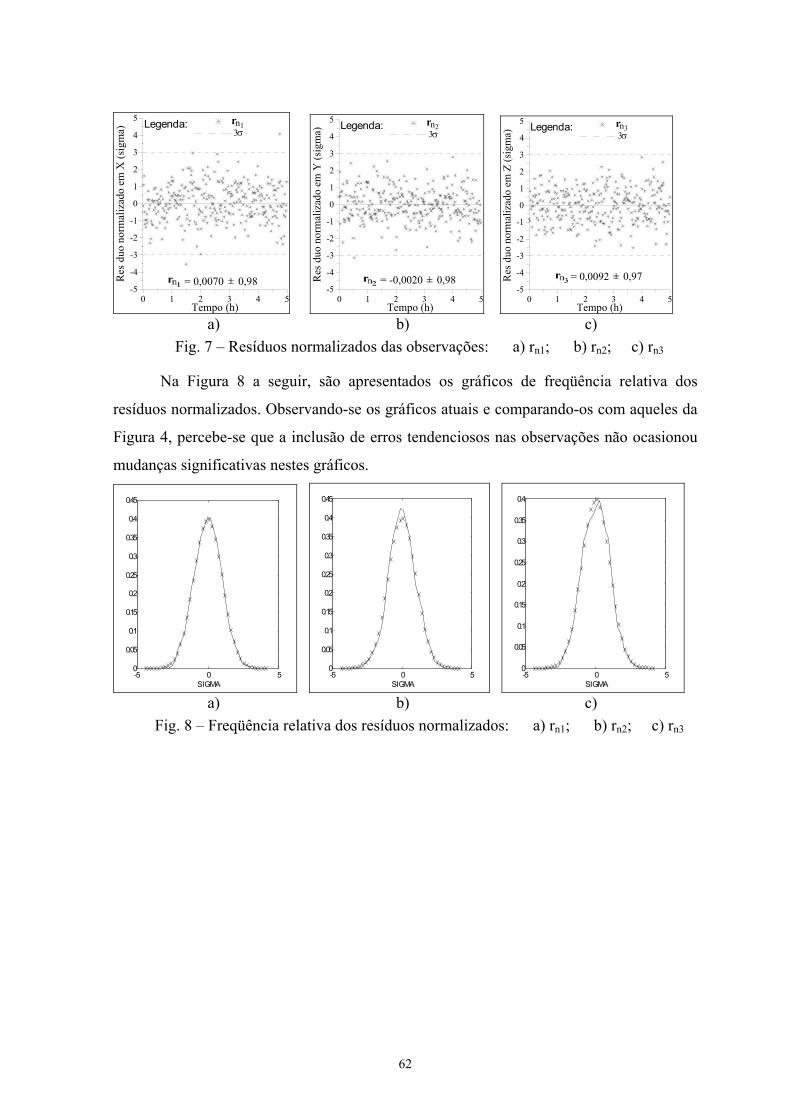
62
0 1 2 3 4 5Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5R
esdu
o no
rmal
izad
o em
X (s
igm
a) Legenda: r3σn1
= 0,0070 0,98
0 1 2 3 4 5
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Y
(sig
ma) Legenda: r
3σn2
= -0,0020 0,98
0 1 2 3 4 5
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Z
(sig
ma) Legenda: r
3σn3
= 0,0092 0,97
a) b) c)
Fig. 7 – Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3
Na Figura 8 a seguir, são apresentados os gráficos de freqüência relativa dos
resíduos normalizados. Observando-se os gráficos atuais e comparando-os com aqueles da
Figura 4, percebe-se que a inclusão de erros tendenciosos nas observações não ocasionou
mudanças significativas nestes gráficos.
-5 0 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
S I G M A -5 0 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
S I G M A -5 0 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
S I G M A a) b) c)
Fig. 8 – Freqüência relativa dos resíduos normalizados: a) rn1; b) rn2; c) rn3

63
• 3ª Etapa: filtro de Kalman “modificado” e observações GPS com tendenciosidades.
Em seguida, finalizando o Caso 1, tem-se nas Figuras 9 até 13 os resultados para a
3ª Etapa (vide seção 3.1), onde o navegador possui compensação automática de
tendenciosidades.
0 1 2 3 4 5Tempo (h)
1
10
100
1000
Erro
em
pos
io
(m)
Legenda: ∆r ^∆rGPS NAV ∆rNAV
Fig. 9 – Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV
Os resultados globais em posição para a 3ª Etapa do Caso 1 foram:
GPSr∆ = 133,7 m; NAVr∆ = 46,0 m; NAVr∆ = 93,9 m; QPOS = 34,4 %
A magnitude do erro médio em posição cometido pelo navegador simplificado
(QPOS) foi, agora, 34,4 % da magnitude do erro em posição presente nas observações GPS,
ou seja, situou-se, coerentemente, em um valor intermediário entre o obtido para o filtro de
Kalman "comum", sem tendenciosidades nas observações (14,2 %, como visto) e o filtro
de Kalman "comum" suprido por observações impregnadas de erros tendenciosos
(78,2 %).
A introdução do procedimento de tratamento automático de tendenciosidades
reverteu o desempenho insatisfatório do filtro de Kalman “comum” na estimação das
componentes orbitais, quando observações estão contaminadas por erros tendenciosos. O
filtro modificado apresentou um desempenho bastante satisfatório conseguindo (ver

64
Figura 9) reduzir o erro médio das estimativas em aproximadamente três vezes. Este filtro
apresentou também características satisfatórias de robustez, não mostrando sinais de
divergência nem mesmo após as ocorrências de variações no erro tendencioso das
observações (causadas pela mudança do conjunto de satélites GPS visíveis ao receptor do
sistema). Os picos apresentados pela curva de ∆ r NAV devem-se à reinicialização da matriz
de covariância do erro nas estimativas quando da ocorrência destas variações.
0 1 2 3 4 5Tempo (h)
0.010
0.100
1.000
10.000
Erro
em
vel
ocid
ade
(m/s)
Legenda: ∆v ^∆vGPS NAV ∆vNAV
Fig. 10 – Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV
Os resultados relativos as estimativas das componentes de velocidade do vetor de
estado, conforme pode ser observado pela Figura 10, confirmam o bom desempenho do
procedimento de estimação com tratamento automático de tendenciosidades nas
observações. Os picos observados na curva de ∆ v NAV devem-se, como explicado acima
para as estimativas de posição, à imposição de valores constantes à matriz de covariância
do vetor de estado aumentado para reinicialização do processo de filtragem.
Os resultados globais em velocidade para a 3ª Etapa do Caso 1 foram:
GPSv∆ = 1,05.100 m/s; NAVv∆ = 1,37.10-1 m/s; NAVv∆ = 2,51.10-1 m/s; QVEL = 13,1 %
A magnitude do erro em velocidade cometido pelo navegador simplificado foi, em
média, de 13,1 % da magnitude do erro em velocidade presente nas observações GPS. Este
resultado confirma o bom desempenho apresentado pelo procedimento proposto na

65
estimação das componentes de posição. Houve uma melhora significativa em relação ao
valor obtido no caso de aplicação do filtro sem compensação dos erros tendenciosos das
observações, que foi de 19,1 %.
A Figura 11 apresenta as curvas correspondentes às estimativas das
tendenciosidades nas observações das componentes x, y e z, respectivamente. Em média, o
erro na estimativa das tendenciosidades foi da ordem de 40 % . Considerando-se apenas a
média após a convergência do filtro em cada intervalo, o erro reduz-se a aproximadamente
30 % .
0 1 2 3 4 5Tempo (h)
0
20
40
60
80
100
120
| Er
ro te
nden
cios
o em
X |
(m) Legenda: e
^∆e
GPS1
NAV1
∆e NAV1
0 1 2 3 4 5Tempo (h)
0
20
40
60
80
100
120
| Er
ro te
nden
cios
o em
Y |
(m) Legenda: e
^∆e
GPS2
NAV2
∆e NAV2
0 1 2 3 4 5Tempo (h)
0
20
40
60
80
100
120
| Er
ro te
nden
cios
o em
Z |
(m) Legenda: e
^∆e
GPS3
NAV3
∆eNAV3
a) b) c)
Fig. 11 – Erros tendenciosos: a) eGPS1, ∆eNAV1 e ∆ e NAV1; b) eGPS2, ∆eNAV2 e ∆ e NAV2; c) eGPS3, ∆eNAV3 e ∆ e NAV3
A Figura 12 apresenta as curvas correspondentes às estimativas do módulo do erro
tendencioso em posição, presente nas observações GPS, que condensam as informações
sobre os erros tendenciosos individuais apresentados na Figura 11.
0 1 2 3 4 5Tempo (h)
0
20
40
60
80
100
120
140
160
| V
etor
err
o te
nden
cios
o |
(m) Legenda: e
^∆e
GPS
NAV
∆eNAV
Fig. 12 – Vetor erro tendencioso: eGPS, ∆eNAV e ∆ e NAV

66
Os resultados globais para os erros tendenciosos foram:
GPSe = 99,97 m; NAVe∆ = 41,7 m; NAVe∆ = 90,5 m; QETE = 41,7 %
Analogamente aos parâmetros QPOS e QVEL, o valor de QETE estabelece que a
magnitude do erro tendencioso em posição cometido pelo navegador simplificado é de
41,7 % da magnitude do erro tendencioso em posição presente nas observações GPS, em
média. Este resultado confirma os comentários feitos em relação à Figura 11, sintetizando
numericamente o bom desempenho do Filtro de Kalman “modificado”, na tarefa de
compensar os erros tendenciosos presentes nas observações GPS.
Quanto aos resíduos normalizados, nota-se pelas curvas da Figura 13 a seguir que
estes mantiveram-se na faixa de ±3σ. Comparando os valores globais de desvio padrão dos
resíduos com os valores obtidos anteriormente, percebe-se que os valores atuais são
intermediários àqueles obtidos nas duas Etapas anteriores, com cerca de 0,94 para os
valores de desvio padrão, ante cerca de 0,92 e 0,98, respectivamente, para a 1ª e a 2ª
Etapa.
0 1 2 3 4 5Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em X
(sig
ma) Legenda: r
3σn1
= 0,0077 0,94
0 1 2 3 4 5
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Y
(sig
ma) Legenda: r
3σn2
= 0,0038 0,93
0 1 2 3 4 5
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5R
esdu
o no
rmal
izad
o em
Z (s
igm
a) Legenda: r3σn3
= 0,0022 0,94
a) b) c)
Fig. 13 – Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3
A Figura 14 a seguir, apresenta os gráficos de freqüência relativa dos resíduos
normalizados. Comparando os gráficoss atuais com aqueles das Figuras 4 e 8, percebe-se
que, novamente, não houve mudança significativa nestes gráficos. Menciona-se, neste
ponto, que não serão apresentados gráficos de freqüência relativa para os Casos 2 e 3 a
seguir, por entender-se que os resultados seriam qualitativamente os mesmos já obtidos no
Caso 1 e que as conclusões obtidas com base na sua análise valem também para os Casos
2 e 3. Evita-se, assim, tornar o presente trabalho desnecessariamente extenso e repetitivo.

67
-5 0 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
S I G M A -5 0 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
S I G M A -5 0 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
S I G M A a) b) c)
Fig. 14 – Freqüência relativa dos resíduos normalizados: a) rn1; b) rn2; c) rn3

68
Caso 2: Intervalo de amostragem igual a 9 segundos.
As observações do receptor GPS estão disponíveis a cada 9 segundos e o integrador da
dinâmica também usa, em todas as três Etapas consideradas, um passo de 9 segundos na fase de
propagação do filtro de Kalman.
• 1ª Etapa: filtro de Kalman “comum” e observações GPS sem tendenciosidades;
Primeiramente, apresenta-se nas Figuras 15 até 17, os resultados para a 1ª Etapa (vide
seção 3.1), onde o navegador não possui estimador de tendenciosidades (filtro de Kalman
“comum”) e onde as observações GPS são simuladas sem a incorporação de erros tendenciosos
compatíveis aos que afetam a solução de navegação do GPS.
Comparando-se as curvas de ∆rGPS, ∆rNAV e ∆ r NAV, apresentadas superpostas no gráfico
da Figura 15, com os resultados correspondentes ao Caso 1 (intervalo de amostragem de três
segundos) apresentados na Figura 1, observa-se que, como esperado, houve uma pequena
degradação da precisão das estimativas em decorrência da menor quantidade de informação para o
processo de filtragem, causado pela redução da taxa de amostragem de observações. Os resultados,
no entanto, continuam satisfatórios, tanto em termos de precisão das estimativas quanto da robustez
do filtro, já que não se observa quaisquer sinais de divergência.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15Tempo (h)
1
10
100
1000
Erro
em
pos
io
(m)
Legenda: ∆r ^∆rGPS NAV ∆rNAV
Fig. 15 – Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV

69
Os resultados globais em posição para a 1ª Etapa do Caso 2 foram:
GPSr∆ = 92,4 m; NAVr∆ = 24,8 m; NAVr∆ = 32,5 m; QPOS = 26,8 %
O valor de QPOS de 26,8 %, embora pior do que o obtido na 1ª Etapa do Caso 1
(14,2 %), ainda traduz um bom desempenho do Filtro de Kalman "comum", na tarefa de
filtrar o erro aleatório presente nas observações GPS.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15Tempo (h)
0.001
0.010
0.100
1.000
10.000
Erro
em
vel
ocid
ade
(m/s
)
Legenda: ∆v ^∆vGPS NAV ∆vNAV
Fig. 16 – Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV
Para o caso das estimativas das componentes de velocidade, conforme se constata da
comparação direta das curvas de ∆vGPS, ∆vNAV e ∆ v NAV, com as correspondentes apresentadas na
Figura 2, valem os mesmos comentários recém efetuados para as estimativas de posição.
Os resultados globais em velocidade para a 1ª Etapa do Caso 2 foram:
GPSv∆ = 9,29.10-1 m/s; NAVv∆ = 1,13.10-1 m/s; NAVv∆ = 2,35.10-1 m/s; QVEL = 12,2 %
O valor de QVEL confirma numericamente os comentários feitos acima, dado que
houve acréscimo no seu valor em relação à mesma Etapa do Caso 1.
A Figura 17 apresenta as curvas obtidas, no presente caso (Caso 2, 1ª Etapa), para
o resíduo normalizado nas observações de posição (componentes x, y e z da solução de
navegação do GPS). Analogamente ao Caso 1, observa-se que todos os resíduos
apresentaram comportamento bastante regular, permanecendo em uma faixa de ±3σ, como

70
esperado. Em termos dos valores globais dos resíduos, percebe-se, em relação à 1ª Etapa
do Caso 1, que houve um pequeno aumento dos valores de desvio padrão, cerca de 0,94
contra cerca de 0,92.
0 3 6 9 12 15Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em X
(sig
ma)
Legenda: r3σn1
= 0,0052 0,95
0 3 6 9 12 15
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Y
(sig
ma)
Legenda: r3σn2
= 0,0039 0,94
0 3 6 9 12 15
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Resd
uo n
orm
aliz
ado
em Z
(sig
ma)
Legenda: r3σn3
= -0,0005 0,94
a) b) c)
Fig. 17 – Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3
• 2ª Etapa: filtro de Kalman “comum” e observações GPS com tendenciosidades;
As Figuras 18 até 20 apresentam os resultados para a 2ª Etapa do Caso 2, com as
observações possuindo tendenciosidades. Note-se que na 2ª Etapa o navegador não possui
estimador de tendenciosidades.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15Tempo (h)
10
100
1000
Erro
em
pos
io
(m)
Legenda: ∆r ^∆rGPS NAV ∆rNAV
Fig. 18 – Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV
Os resultados globais em posição para a 2ª Etapa do Caso 2 foram:
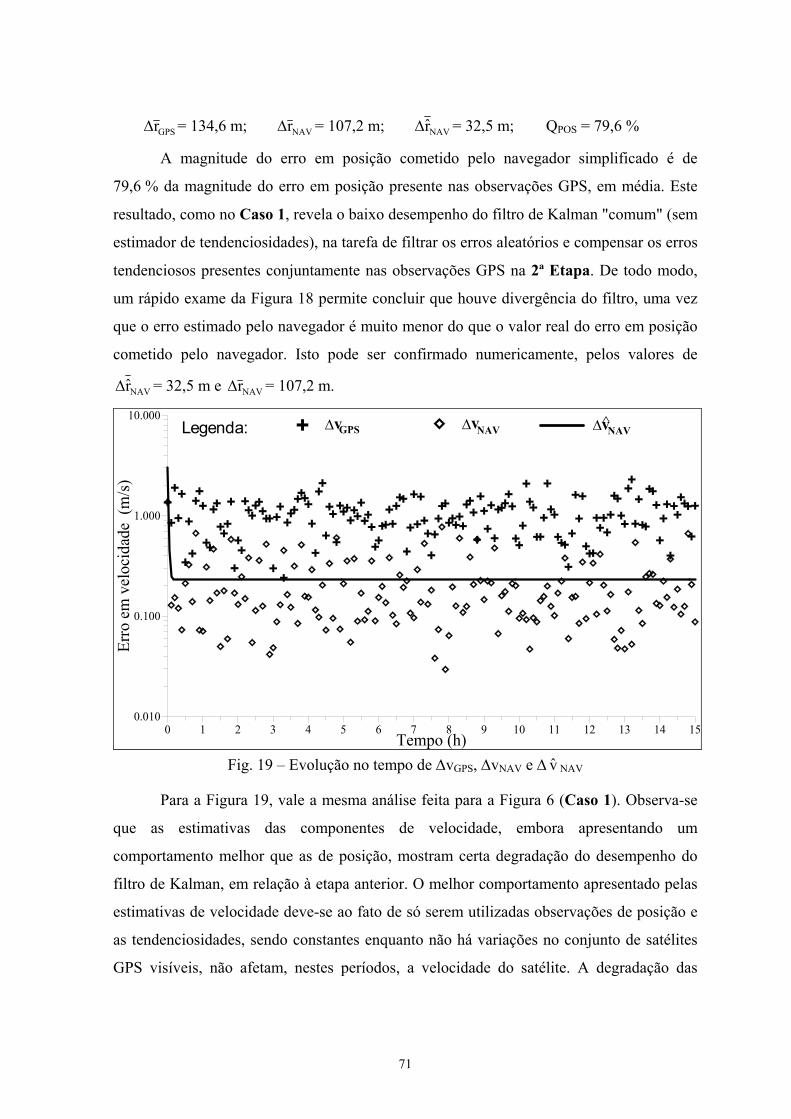
71
GPSr∆ = 134,6 m; NAVr∆ = 107,2 m; NAVr∆ = 32,5 m; QPOS = 79,6 %
A magnitude do erro em posição cometido pelo navegador simplificado é de
79,6 % da magnitude do erro em posição presente nas observações GPS, em média. Este
resultado, como no Caso 1, revela o baixo desempenho do filtro de Kalman "comum" (sem
estimador de tendenciosidades), na tarefa de filtrar os erros aleatórios e compensar os erros
tendenciosos presentes conjuntamente nas observações GPS na 2ª Etapa. De todo modo,
um rápido exame da Figura 18 permite concluir que houve divergência do filtro, uma vez
que o erro estimado pelo navegador é muito menor do que o valor real do erro em posição
cometido pelo navegador. Isto pode ser confirmado numericamente, pelos valores de
NAVr∆ = 32,5 m e NAVr∆ = 107,2 m.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15Tempo (h)
0.010
0.100
1.000
10.000
Erro
em
vel
ocid
ade
(m/s)
Legenda: ∆v ^∆vGPS NAV ∆vNAV
Fig. 19 – Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV
Para a Figura 19, vale a mesma análise feita para a Figura 6 (Caso 1). Observa-se
que as estimativas das componentes de velocidade, embora apresentando um
comportamento melhor que as de posição, mostram certa degradação do desempenho do
filtro de Kalman, em relação à etapa anterior. O melhor comportamento apresentado pelas
estimativas de velocidade deve-se ao fato de só serem utilizadas observações de posição e
as tendenciosidades, sendo constantes enquanto não há variações no conjunto de satélites
GPS visíveis, não afetam, nestes períodos, a velocidade do satélite. A degradação das
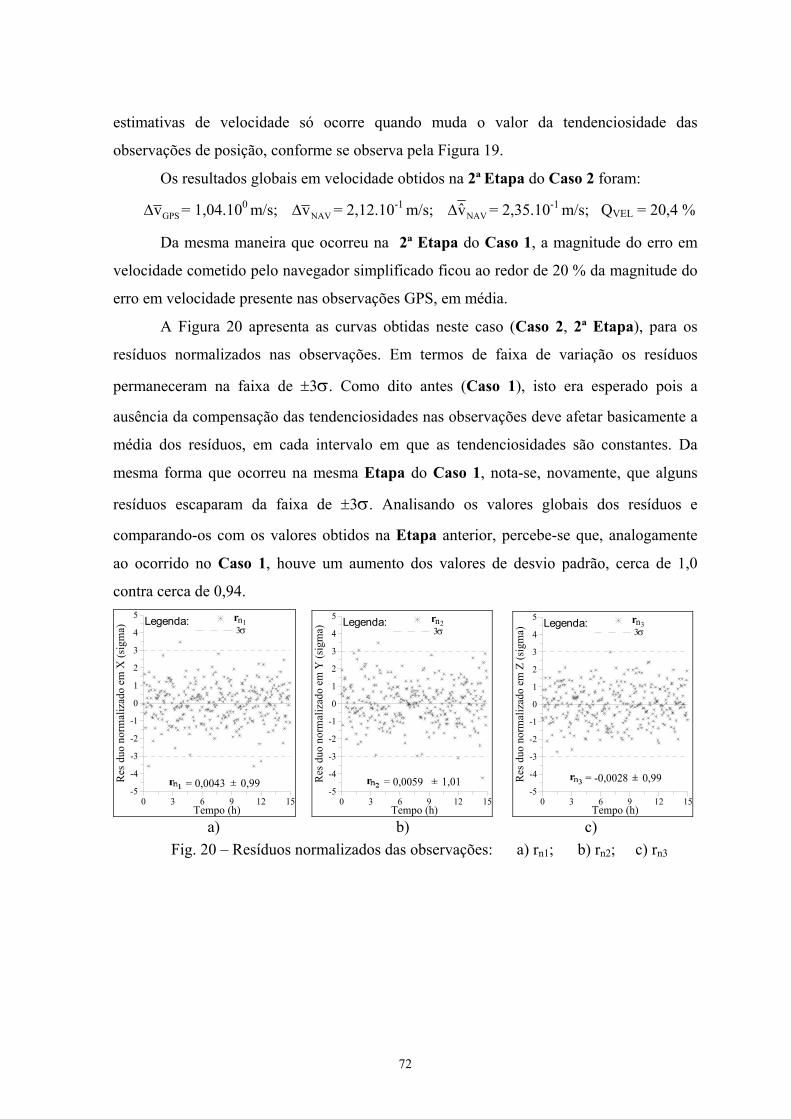
72
estimativas de velocidade só ocorre quando muda o valor da tendenciosidade das
observações de posição, conforme se observa pela Figura 19.
Os resultados globais em velocidade obtidos na 2ª Etapa do Caso 2 foram:
GPSv∆ = 1,04.100 m/s; NAVv∆ = 2,12.10-1 m/s; NAVv∆ = 2,35.10-1 m/s; QVEL = 20,4 %
Da mesma maneira que ocorreu na 2ª Etapa do Caso 1, a magnitude do erro em
velocidade cometido pelo navegador simplificado ficou ao redor de 20 % da magnitude do
erro em velocidade presente nas observações GPS, em média.
A Figura 20 apresenta as curvas obtidas neste caso (Caso 2, 2ª Etapa), para os
resíduos normalizados nas observações. Em termos de faixa de variação os resíduos
permaneceram na faixa de ±3σ. Como dito antes (Caso 1), isto era esperado pois a
ausência da compensação das tendenciosidades nas observações deve afetar basicamente a
média dos resíduos, em cada intervalo em que as tendenciosidades são constantes. Da
mesma forma que ocorreu na mesma Etapa do Caso 1, nota-se, novamente, que alguns
resíduos escaparam da faixa de ±3σ. Analisando os valores globais dos resíduos e
comparando-os com os valores obtidos na Etapa anterior, percebe-se que, analogamente
ao ocorrido no Caso 1, houve um aumento dos valores de desvio padrão, cerca de 1,0
contra cerca de 0,94.
0 3 6 9 12 15Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em X
(sig
ma)
Legenda: r3σn1
= 0,0043 0,99
0 3 6 9 12 15
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Y
(sig
ma)
Legenda: r3σn2
= 0,0059 1,01
0 3 6 9 12 15
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Resd
uo n
orm
aliz
ado
em Z
(sig
ma)
Legenda: r3σn3
= -0,0028 0,99
a) b) c)
Fig. 20 – Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3
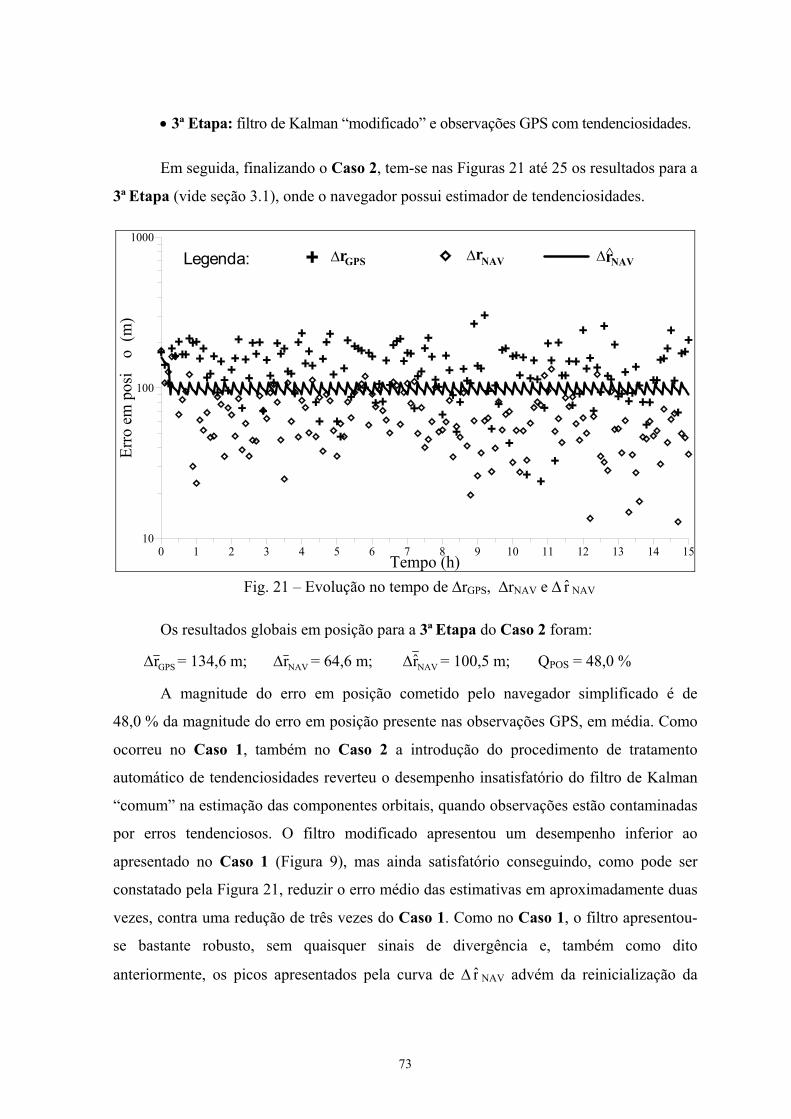
73
• 3ª Etapa: filtro de Kalman “modificado” e observações GPS com tendenciosidades.
Em seguida, finalizando o Caso 2, tem-se nas Figuras 21 até 25 os resultados para a
3ª Etapa (vide seção 3.1), onde o navegador possui estimador de tendenciosidades.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15Tempo (h)
10
100
1000
Erro
em
pos
io
(m)
Legenda: ∆r ^∆rGPS NAV ∆rNAV
Fig. 21 – Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV
Os resultados globais em posição para a 3ª Etapa do Caso 2 foram:
GPSr∆ = 134,6 m; NAVr∆ = 64,6 m; NAVr∆ = 100,5 m; QPOS = 48,0 %
A magnitude do erro em posição cometido pelo navegador simplificado é de
48,0 % da magnitude do erro em posição presente nas observações GPS, em média. Como
ocorreu no Caso 1, também no Caso 2 a introdução do procedimento de tratamento
automático de tendenciosidades reverteu o desempenho insatisfatório do filtro de Kalman
“comum” na estimação das componentes orbitais, quando observações estão contaminadas
por erros tendenciosos. O filtro modificado apresentou um desempenho inferior ao
apresentado no Caso 1 (Figura 9), mas ainda satisfatório conseguindo, como pode ser
constatado pela Figura 21, reduzir o erro médio das estimativas em aproximadamente duas
vezes, contra uma redução de três vezes do Caso 1. Como no Caso 1, o filtro apresentou-
se bastante robusto, sem quaisquer sinais de divergência e, também como dito
anteriormente, os picos apresentados pela curva de ∆ r NAV advém da reinicialização da

74
matriz de covariância do erro nas estimativas quando ocorrem mudanças de valor do erro
tendencioso nas observações, em função da mudança do conjunto de satélites GPS visíveis
ao receptor de bordo.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15Tempo (h)
0.010
0.100
1.000
10.000
Erro
em
vel
ocid
ade
(m/s)
Legenda: ∆v ^∆vGPS NAV ∆vNAV
Fig. 22 – Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV
Analogamente ao que foi dito para a mesma etapa (3ª Etapa) do Caso 1, os
resultados observados na Figura 22 para as estimativas das componentes de velocidade do
vetor de estado confirmam o bom desempenho do procedimento de estimação com
tratamento automático de tendenciosidades nas observações. Mais uma vez, observam-se
os picos na curva de ∆ v NAV devidos à reinicialização do processo de filtragem.
Os resultados globais em velocidade para a 3ª Etapa do Caso 2 foram:
GPSv∆ = 1,04.100 m/s; NAVv∆ = 1,82.10-1 m/s; NAVv∆ = 3,56.10-1 m/s; QVEL = 17,5 %
Aqui, a magnitude do erro em velocidade cometido pelo navegador simplificado é
de 17,5 % da magnitude do erro em velocidade presente nas observações GPS, em média.
Este resultado, como esperado, foi melhor do que o obtido na etapa anterior (2ª Etapa,
Caso 2), quando o filtro de Kalman “comum” obteve QVEL = 20,4 % .
A Figura 23 apresenta as curvas correspondentes às estimativas das
tendenciosidades nas observações das componentes x, y e z, respectivamente. Observa-se
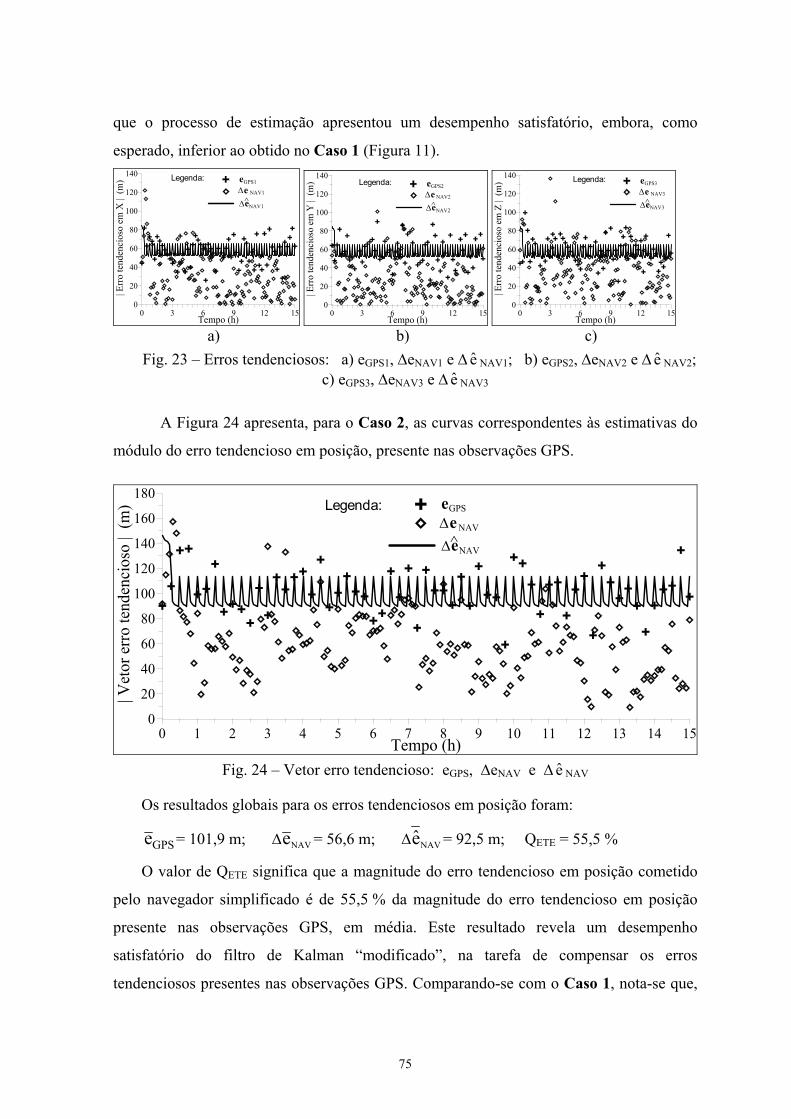
75
que o processo de estimação apresentou um desempenho satisfatório, embora, como
esperado, inferior ao obtido no Caso 1 (Figura 11).
0 3 6 9 12 15Tempo (h)
0
20
40
60
80
100
120
140
| Er
ro te
nden
cios
o em
X |
(m) Legenda: e
^∆e
GPS1
NAV1
∆e NAV1
0 3 6 9 12 15Tempo (h)
0
20
40
60
80
100
120
140
| Er
ro te
nden
cios
o em
Y |
(m) Legenda: e
^∆e
GPS2
NAV2
∆e NAV2
0 3 6 9 12 15Tempo (h)
0
20
40
60
80
100
120
140
| Er
ro te
nden
cios
o em
Z |
(m) Legenda: e
^∆e
GPS3
NAV3
∆e NAV3
a) b) c)
Fig. 23 – Erros tendenciosos: a) eGPS1, ∆eNAV1 e ∆ e NAV1; b) eGPS2, ∆eNAV2 e ∆ e NAV2; c) eGPS3, ∆eNAV3 e ∆ e NAV3
A Figura 24 apresenta, para o Caso 2, as curvas correspondentes às estimativas do
módulo do erro tendencioso em posição, presente nas observações GPS.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15Tempo (h)
0
20
40
60
80
100
120
140
160
180
| V
etor
err
o te
nden
cios
o |
(m) Legenda: e
^∆e
GPS
NAV
∆eNAV
Fig. 24 – Vetor erro tendencioso: eGPS, ∆eNAV e ∆ e NAV
Os resultados globais para os erros tendenciosos em posição foram:
GPSe = 101,9 m; NAVe∆ = 56,6 m; NAVe∆ = 92,5 m; QETE = 55,5 %
O valor de QETE significa que a magnitude do erro tendencioso em posição cometido
pelo navegador simplificado é de 55,5 % da magnitude do erro tendencioso em posição
presente nas observações GPS, em média. Este resultado revela um desempenho
satisfatório do filtro de Kalman “modificado”, na tarefa de compensar os erros
tendenciosos presentes nas observações GPS. Comparando-se com o Caso 1, nota-se que,

76
como esperado, o aumento do intervalo de amostragem das observações GPS de 3 s para
9 s, ocasionou uma perda no desempenho do filtro (no Caso 1 QETE = 41,7 %), devido à
redução na quantidade de informação gerada pela redução da taxa de amostragem.
Quanto aos resíduos normalizados, nota-se pelas curvas da Figura 25 a seguir que
estes, mais uma vez, mantiveram-se coerentemente na faixa de ±3σ. Ao comparar os
valores globais de desvio padrão dos resíduos com os valores obtidos anteriormente,
percebe-se que, analogamente ao ocorrido para o Caso 1, os valores atuais são
intermediários àqueles obtidos nas duas Etapas anteriores, com cerca de 0,97 ante cerca de
0,94 e 1,0, respectivamente, para a 1ª e a 2ª Etapa.
0 3 6 9 12 15Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em X
(sig
ma)
Legenda: r3σn1
= 0,0045 0,97
0 3 6 9 12 15
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Y
(sig
ma)
Legenda: r3σn2
= 0,0024 0,97
0 3 6 9 12 15
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Z
(sig
ma)
Legenda: r3σn3
= 0,0001 0,97
a) b) c)
Fig. 25 – Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3

77
Caso 3: Intervalo de amostragem igual a 27 segundos.
Aqui as observações do receptor GPS estão disponíveis a cada 27 segundos e o
integrador da dinâmica usa um passo de 9 segundos na fase de propagação do filtro de Kalman,
em todas as três Etapas consideradas. Conforme visto na seção 3.1, o passo de integração foi
mantido em 9 segundos a fim de manter a precisão da integração dentro de níveis aceitáveis.
• 1ª Etapa: filtro de Kalman “comum” e observações GPS sem tendenciosidades;
Primeiramente, apresenta-se nas Figuras 26 até 28, os resultados para a 1ª Etapa (vide
seção 3.1), onde é utilizado o filtro de Kalman “comum” e onde as observações GPS são simuladas
sem a incorporação de erros tendenciosos compatíveis aos que afetam a solução de navegação do
GPS.
Comparando-se as curvas de ∆rGPS, ∆rNAV e ∆ r NAV, apresentadas superpostas no gráfico
da Figura 26, com os resultados correspondentes ao Caso 1 (intervalo de amostragem de três
segundos) e ao Caso 2 (intervalo de amostragem de nove segundos) apresentados, respectivamente,
nas Figuras 1 e 15, observa-se que, como esperado devido à redução da taxa de amostragem das
observações GPS, houve uma degradação significativa da precisão das estimativas. Os resultados,
no entanto, continuam razoavelmente satisfatórios, tanto em termos de precisão das estimativas
quanto da robustez do filtro, já que não se observa quaisquer sinais de divergência.
0 3 6 9 12 15 18 21 24 27 30 33 36 39 42 45Tempo (h)
1
10
100
1000
Erro
em
pos
io
(m)
Legenda: ∆r ^∆rGPS NAV ∆rNAV
Fig. 26 – Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV

78
Os resultados globais em posição para a 1ª Etapa do Caso 3 foram:
GPSr∆ = 92,4 m; NAVr∆ = 40,6 m; NAVr∆ = 53,7 m; QPOS = 43,9 %
A magnitude do erro em posição cometido pelo navegador simplificado é de 43,9 % da
magnitude do erro em posição presente nas observações GPS, em média. Lembrando que para os
Casos 1 e 2 o resultado foi de 14,2 % e 26,8 %, respectivamente, percebe-se que à taxa de
amostragem de 27 s houve piora significativa no desempenho do filtro de Kalman "comum".
0 3 6 9 12 15 18 21 24 27 30 33 36 39 42 45Tempo (h)
0.010
0.100
1.000
10.000
Erro
em
vel
ocid
ade
(m/s
)
Legenda: ∆v ^∆vGPS NAV ∆vNAV
Fig. 27 – Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV
Os resultados globais em velocidade para a 1ª Etapa do Caso 3 foram:
GPSv∆ = 9,29.10-1 m/s; NAVv∆ = 1,75.10-1 m/s; NAVv∆ = 3,92.10-1 m/s; QVEL = 18,8 %
Para o caso das estimativas das componentes de velocidade, conforme se constata da
comparação direta das curvas de ∆vGPS, ∆vNAV e ∆ v NAV, com as correspondentes apresentadas nas
Figuras 2 e 16, valem os mesmos comentários recém efetuados para as estimativas de posição.
Numericamente, a magnitude do erro em velocidade cometido pelo navegador simplificado é de
(QVEL = ) 18,8 % da magnitude do erro em velocidade presente nas observações GPS, em média,
sendo que os resultados obtidos para os Casos 1 e 2 foram QVEL = 7,4 % e QVEL = 12,2 %,
respectivamente.
A Figura 28 apresenta as curvas obtidas, no presente caso (Caso 3, 1ª Etapa), para o
resíduo normalizado nas observações de posição (componentes x, y e z da solução de navegação do
GPS). Analogamente aos Casos 1 e 2 na 1ª Etapa, observa-se que todos os resíduos apresentaram

79
comportamento bastante regular, permanecendo em uma faixa de ±3σ, como esperado. Os valores
globais obtidos apresentam pequeno acréscimo, em termos de valor do desvio padrão, cerca de
0,99, se comparados aos valores dos Casos 1 e 2 (0,92 e 0,94 respectivamente).
0 5 10 15 20 25 30 35 40 45Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em X
(sig
ma) Legenda: r
3σn1
= 0,0023 1,01
0 5 10 15 20 25 30 35 40 45
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Y
(sig
ma) Legenda: r
3σn2
= 0,0015 1,00
0 5 10 15 20 25 30 35 40 45
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Z
(sig
ma) Legenda: r
3σn3
= 0,0092 0,97
a) b) c)
Fig. 28 – Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3
• 2ª Etapa: filtro de Kalman “comum” e observações GPS com tendenciosidades;
As Figuras 29 até 31 apresentam os resultados para a 2ª Etapa do Caso 3, onde as
observações possuem tendenciosidades e utiliza-se o filtro de Kalman "comum" para o
navegador.
0 3 6 9 12 15 18 21 24 27 30 33 36 39 42 45Tempo (h)
10
100
1000
Erro
em
pos
io
(m)
Legenda: ∆r ^∆rGPS NAV ∆rNAV
Fig. 29 – Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV
Os resultados globais em posição para a 2ª Etapa do Caso 3 foram:

80
GPSr∆ = 133,2 m; NAVr∆ = 109,4 m; NAVr∆ = 53,7 m; QPOS = 82,1 %
A magnitude do erro em posição cometido pelo navegador simplificado é de
82,1 % da magnitude do erro em posição presente nas observações GPS, em média. Este
resultado, como nos Casos 1 e 2, revela o desempenho insatisfatório do filtro de Kalman
"comum" (sem estimador de tendenciosidades), na tarefa de filtrar os erros aleatórios e
compensar os erros tendenciosos presentes conjuntamente nas observações GPS na 2ª
Etapa. A Figura 29 permite concluir que houve divergência do filtro, uma vez que o erro
estimado pelo navegador é muito menor do que o valor real do erro em posição cometido
pelo navegador. Isto pode ser confirmado numericamente, pelos valores de NAVr∆ = 53,7 m
e NAVr∆ = 109,4 m.
0 3 6 9 12 15 18 21 24 27 30 33 36 39 42 45Tempo (h)
0.01
0.10
1.00
10.00
Erro
em
vel
ocid
ade
(m/s)
Legenda: ∆v ^∆vGPS NAV ∆vNAV
Fig. 30 – Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV
Para a Figura 30, vale a mesma análise feita para as Figuras 6 (Caso 1) e 18
(Caso 2), onde observa-se que as estimativas das componentes de velocidade,
embora apresentando um comportamento melhor que as de posição para o caso
presente, mostram certa degradação do desempenho do filtro de Kalman, em relação
à etapa anterior. Os resultados globais em velocidade obtidos na 2ª Etapa do Caso
3 foram:

81
GPSv∆ = 1,04.100 m/s; NAVv∆ = 2,60.10-1 m/s; NAVv∆ = 3,92.10-1 m/s; QVEL = 25,0 %
Da mesma maneira que ocorreu na 2ª Etapa dos Casos 1 e 2, quando a magnitude do erro
em velocidade cometido pelo navegador simplificado ficou ao redor de 20 % da magnitude do erro
em velocidade presente nas observações GPS, em média, tem-se para o Caso 3 o valor de 25 % .
A Figura 31 apresenta as curvas obtidas neste caso (Caso 3, 2ª Etapa) para os resíduos
normalizados nas observações. Em termos de faixa de variação os resíduos permaneceram na faixa
de ±3σ. Como dito anteriormente (Casos 1 e 2), isto era esperado pois a ausência da compensação
das tendenciosidades nas observações deve afetar basicamente a média dos resíduos, em cada
intervalo em que as tendenciosidades são constantes. Da mesma forma que ocorreu nos Casos 1 e
2, nota-se, mais uma vez, que alguns resíduos escaparam da faixa de ±3σ. Os valores globais de
desvio padrão, de cerca de 1,06, foram maiores do que os ocorridos antes (0,98 e 1,0).
0 5 10 15 20 25 30 35 40 45Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em X
(sig
ma) Legenda: r
3σn1
= -0,0022 1,07
0 5 10 15 20 25 30 35 40 45
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Y
(sig
ma) Legenda: r
3σn2
= 0,0018 1,06
0 5 10 15 20 25 30 35 40 45
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Z
(sig
ma) Legenda: r
3σn3
= -0,0001 1,06
a) b) c)
Fig. 31 – Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3
• 3ª Etapa: filtro de Kalman “modificado” e observações GPS com tendenciosidades.
Em seguida, finalizando o Caso 3, tem-se nas Figuras 32 até 36 os resultados para a
3ª Etapa (vide seção 3.1), onde o navegador utiliza o processo proposto de filtragem de
Kalman, que inclui o procedimento de compensação automática dos erros tendenciosos nas
observações.

82
0 3 6 9 12 15 18 21 24 27 30 33 36 39 42 45Tempo (h)
10
100
1000Er
ro e
m p
osi
o (m
)Legenda: ∆r ^∆rGPS NAV ∆rNAV
Fig. 32 – Evolução no tempo de ∆rGPS, ∆rNAV e ∆ r NAV
Os resultados globais em posição para a 3ª Etapa do Caso 3 foram:
GPSr∆ = 133,2 m; NAVr∆ = 85,2 m; NAVr∆ = 116,2 m; QPOS = 64,0 %
A magnitude do erro em posição cometido pelo navegador simplificado é de
64,0 % da magnitude do erro em posição presente nas observações GPS, em média. Como
ocorreu nos Casos 1 e 2, também no Caso 3 a introdução do procedimento de tratamento
automático de tendenciosidades trouxe benefícios ao processo de filtragem, quando
comparado ao filtro de Kalman “comum”. O filtro modificado apresentou um desempenho
inferior ao apresentado nos Casos 1 e 2, conseguindo, como pode ser constatado pela
Figura 32, reduzir o erro médio das estimativas em aproximadamente 1,5 vezes, contra
uma redução de três vezes do Caso 1 e duas vezes no Caso 2. Esta redução no
desempenho reflete as conseqüências da diminuição da taxa de amostragem, que agora é
de uma a cada 27 s, impondo um intervalo de 27 s para a fase de propagação do filtro de
Kalman “modificado”, com um aumento correspondente na incerteza associada ao valor
esperado para a próxima observação ( = estado propagado pelo filtro) e a conseqüente
redução da “capacidade filtrante” durante a fase de atualização, sem mencionar o aumento
correspondente dos erros devidos às demais hipóteses simplificadoras adotadas. Como nos
Casos 1 e 2, o filtro apresentou-se bastante robusto, sem quaisquer sinais de divergência.
Como nos Casos anteriores, os picos na curva de ∆ r NAV, são resultantes do processo de

83
reinicialização da matriz de covariância do erro nas estimativas em função da mudança do
conjunto de satélites GPS visíveis ao receptor de bordo.
0 3 6 9 12 15 18 21 24 27 30 33 36 39 42 45Tempo (h)
0.010
0.100
1.000
10.000
Erro
em
vel
ocid
ade
(m/s)
Legenda: ∆v ^∆vGPS NAV ∆vNAV
Fig. 33 – Evolução no tempo de ∆vGPS, ∆vNAV e ∆ v NAV
Os resultados observados na Figura 33 para as estimativas das componentes de
velocidade do vetor de estado confirmam a robustez do procedimento de estimação com
tratamento automático de tendenciosidades nas observações. Os resultados globais em
velocidade foram:
GPSv∆ = 1,04.100 m/s; NAVv∆ = 2,40.10-1 m/s; NAVv∆ = 5,09.10-1 m/s; QVEL =
23,1 %
A magnitude do erro em velocidade cometido pelo navegador simplificado é de
23,1 % da magnitude do erro em velocidade presente nas observações GPS, em média.
Este resultado, como esperado, foi melhor do que o obtido na Etapa anterior (2ª Etapa,
Caso 3), quando o filtro de Kalman “comum” obteve QVEL = 25,0 % .
A Figura 34 apresenta as curvas correspondentes às estimativas das
tendenciosidades nas observações das componentes x, y e z, respectivamente. Observa-se
que o processo de estimação apresentou um desempenho, como esperado, inferior ao
obtido nos Casos 1 e 2 (Figuras 11 e 23, respectivamente).

84
0 5 10 15 20 25 30 35 40 45Tempo (h)
0
20
40
60
80
100
120
140
160 |
Erro
tend
enci
oso
em X
| (m
) Legenda: e
^∆e
GPS1
NAV1
∆eNAV1
0 5 10 15 20 25 30 35 40 45Tempo (h)
0
20
40
60
80
100
120
140
160
| Er
ro te
nden
cios
o em
Y |
(m) Legenda: e
^∆e
GPS2
NAV2
∆e NAV2
0 5 10 15 20 25 30 35 40 45Tempo (h)
0
20
40
60
80
100
120
140
160
| Er
ro te
nden
cios
o em
Z |
(m) Legenda: e
^∆e
GPS3
NAV3
∆eNAV3
a) b) c)
Fig. 34 – Erros tendenciosos: a) eGPS1, ∆eNAV1 e ∆ e NAV1; b) eGPS2, ∆eNAV2 e ∆ e NAV2; c) eGPS3, ∆eNAV3 e ∆ e NAV3
0 3 6 9 12 15 18 21 24 27 30 33 36 39 42 45Tempo (h)
0
20
40
60
80
100
120
140
160
180
| V
etor
err
o te
nden
cios
o |
(m) Legenda: e
^∆e
GPS
NAV
∆eNAV
Fig. 35 – Vetor erro tendencioso: eGPS, ∆eNAV e ∆ e NAV
A Figura 35 apresenta, para o Caso 3, as curvas correspondentes às estimativas do
módulo do erro tendencioso em posição, presente nas observações GPS.
Os resultados globais para os erros tendenciosos em posição foram:
GPSe = 100,3 m; NAVe∆ = 71,5 m; NAVe∆ = 99,5 m; QETE = 71,3 %
A magnitude do erro tendencioso em posição cometido pelo navegador simplificado é
de 71,3 % da magnitude do erro tendencioso em posição presente nas observações GPS,
em média. Este resultado revela um desempenho regular do filtro de Kalman
“modificado”, na tarefa de compensar os erros tendenciosos presentes nas observações
GPS. Comparando-se com os Casos 1 e 2, nota-se que, como esperado, o aumento do
intervalo de amostragem para 27 s e a conseqüente redução da quantidade de informação
passada ao filtro, ocasionou uma perda no desempenho do filtro (no Caso 1 QETE = 41,7 %
e no Caso 2 QETE = 55,5 %).
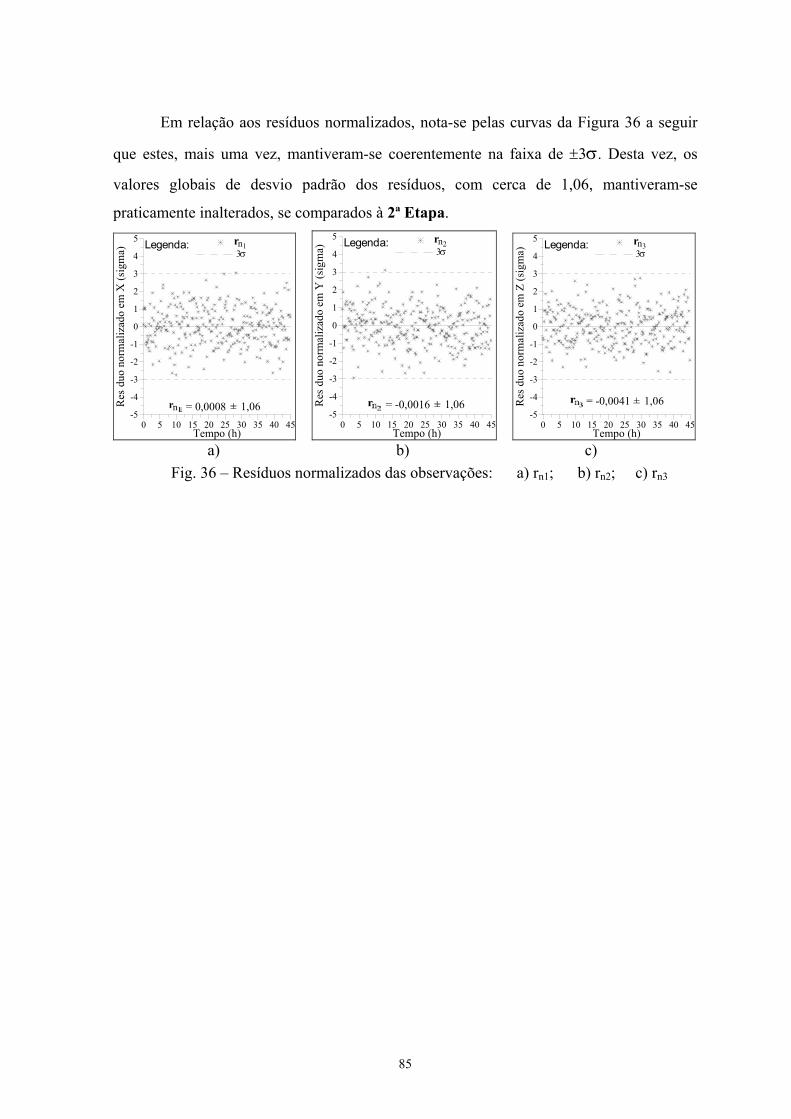
85
Em relação aos resíduos normalizados, nota-se pelas curvas da Figura 36 a seguir
que estes, mais uma vez, mantiveram-se coerentemente na faixa de ±3σ. Desta vez, os
valores globais de desvio padrão dos resíduos, com cerca de 1,06, mantiveram-se
praticamente inalterados, se comparados à 2ª Etapa.
0 5 10 15 20 25 30 35 40 45Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em X
(sig
ma) Legenda: r
3σn1
= 0,0008 1,06
0 5 10 15 20 25 30 35 40 45
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Y
(sig
ma) Legenda: r
3σn2
= -0,0016 1,06
0 5 10 15 20 25 30 35 40 45
Tempo (h)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Res
duo
norm
aliz
ado
em Z
(sig
ma) Legenda: r
3σn3
= -0,0041 1,06
a) b) c)
Fig. 36 – Resíduos normalizados das observações: a) rn1; b) rn2; c) rn3

86
3.4. Considerações Finais
As Tabelas 1, 2 e 3 a seguir oferecem um quadro comparativo condensado dos
resultados obtidos nos três Casos estudados em termos de posição, velocidade e erro
tendencioso. Na seqüência, serão apresentados e comentados gráficos elaborados com base
nos valores tabelados.
TABELA 1 – RESULTADOS PARA OS ERROS EM POSIÇÃO
Filtro de Kalman "comum"
1ª. Etapa (observações sem erros
tendenciosos)
2ª. Etapa (observações com erros
tendenciosos)
Filtro de Kalman "modificado"
3ª. Etapa (observações com erros
tendenciosos)
Caso 1 Caso 2 Caso 3 Caso 1 Caso 2 Caso 3 Caso 1 Caso 2 Caso 3
GPSr∆ (m)
92,4 92,4 92,4 133,7 134,6 133,2 133,7 134,6 133,2
NAVr∆ (m)
13,1 24,8 40,6 104,6 107,2 109,4 46,0 64,6 85,2
NAVr∆ (m)
19,2 32,5 53,7 19,2 32,5 53,7 93,9 100,5 116,2
QPOS (%)
14,2 26,8 43,9 78,2 79,6 82,1 34,4 48,0 64,0
OBS.: Taxas de Amostragem: Caso 1 = 3 s; Caso 2 = 9 s; Caso 3 = 27 s;
TABELA 2 – RESULTADOS PARA OS ERROS EM VELOCIDADE
Filtro de Kalman "comum"
1ª. Etapa (observações sem erros
tendenciosos)
2ª. Etapa (observações com erros
tendenciosos)
Filtro de Kalman "modificado"
3ª. Etapa (observações com erros
tendenciosos)
Caso 1 Caso 2 Caso 3 Caso 1 Caso 2 Caso 3 Caso 1 Caso 2 Caso 3
GPSv∆ (m/s)
0,929 0,929 0,929 1,05 1,04 1,04 1,05 1,04 1,04
NAVv∆ (m/s)
0,069 0,113 0,175 0,200 0,212 0,260 0,137 0,182 0,240
NAVv∆ (m/s)
0,145 0,235 0,392 0,145 0,235 0,392 0,251 0,356 0,509
QVEL (%)
7,4 12,2 18,8 19,1 20,4 25,0 13,1 17,5 23,1
OBS.: Taxas de Amostragem: Caso 1 = 3 s; Caso 2 = 9 s; Caso 3 = 27 s;
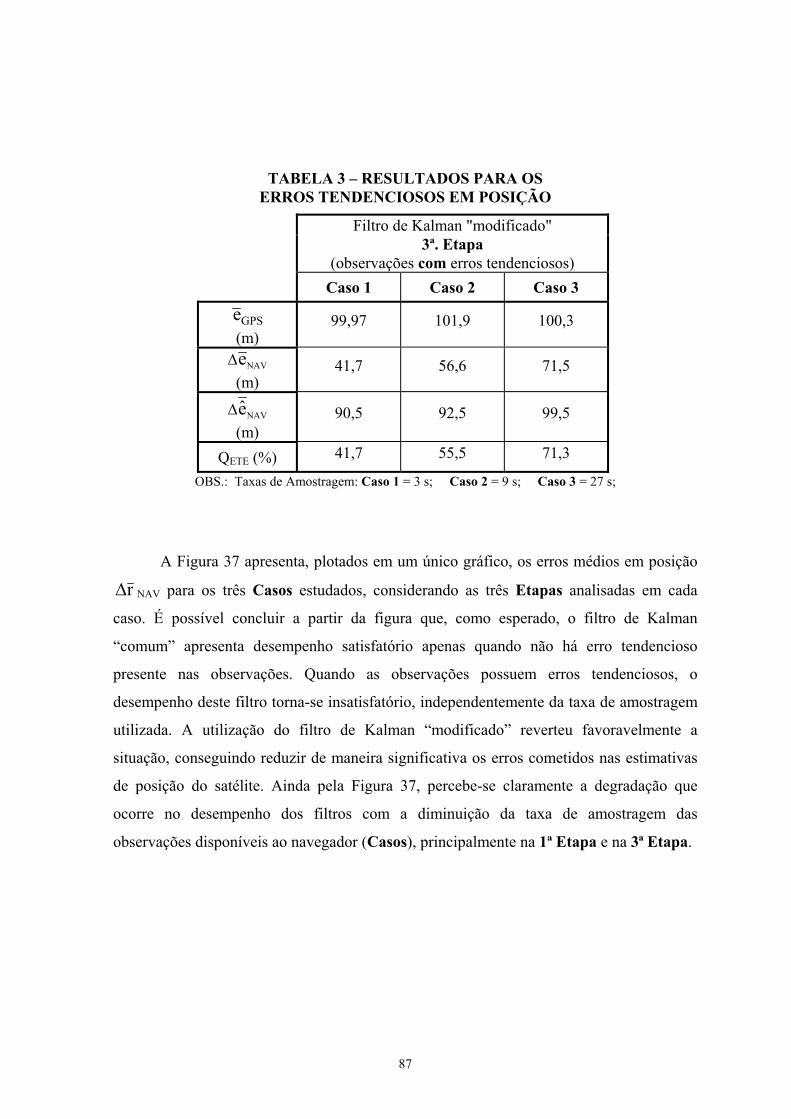
87
TABELA 3 – RESULTADOS PARA OS ERROS TENDENCIOSOS EM POSIÇÃO
Filtro de Kalman "modificado" 3ª. Etapa
(observações com erros tendenciosos)
Caso 1 Caso 2 Caso 3
GPSe (m)
99,97 101,9 100,3
NAVe∆ (m)
41,7 56,6 71,5
NAVe∆ (m)
90,5 92,5 99,5
QETE (%) 41,7 55,5 71,3
OBS.: Taxas de Amostragem: Caso 1 = 3 s; Caso 2 = 9 s; Caso 3 = 27 s;
A Figura 37 apresenta, plotados em um único gráfico, os erros médios em posição
r∆ NAV para os três Casos estudados, considerando as três Etapas analisadas em cada
caso. É possível concluir a partir da figura que, como esperado, o filtro de Kalman
“comum” apresenta desempenho satisfatório apenas quando não há erro tendencioso
presente nas observações. Quando as observações possuem erros tendenciosos, o
desempenho deste filtro torna-se insatisfatório, independentemente da taxa de amostragem
utilizada. A utilização do filtro de Kalman “modificado” reverteu favoravelmente a
situação, conseguindo reduzir de maneira significativa os erros cometidos nas estimativas
de posição do satélite. Ainda pela Figura 37, percebe-se claramente a degradação que
ocorre no desempenho dos filtros com a diminuição da taxa de amostragem das
observações disponíveis ao navegador (Casos), principalmente na 1ª Etapa e na 3ª Etapa.

88
1 2 3Casos
0
20
40
60
80
100
120
Err
o em
pos
io
(m)
Fig. 37 – r∆ NAV:
= 1ª. Etapa (Filtro de Kalman "comum" e observações sem erro tendencioso); = 2ª. Etapa (Filtro de Kalman "comum" e observações com erro tendencioso);
∆ = 3ª. Etapa (Filtro de Kalman "modificado" e observações com erro tendencioso);
A Figura 38 apresenta, também plotados em um único gráfico, os erros em
velocidade médios v∆ NAV para os três Casos estudados e considerando as três Etapas
analisadas em cada caso. Praticamente todos os comentários feitos para a Figura 37
também são válidos aqui. A degradação que ocorre no desempenho dos filtros com a
diminuição da taxa de amostragem das observações disponíveis ao navegador (Casos), é
agora claramente perceptível para todas as três Etapas.
1 2 3Casos
0.0
0.1
0.2
0.3
Err
o em
vel
ocid
ade
(m/s
)
Fig. 38 – v∆ NAV:
= 1ª. Etapa (Filtro de Kalman "comum" e observações sem erro tendencioso); = 2ª. Etapa (Filtro de Kalman "comum" e observações com erro tendencioso);
∆ = 3ª. Etapa (Filtro de Kalman "modificado" e observações com erro tendencioso);
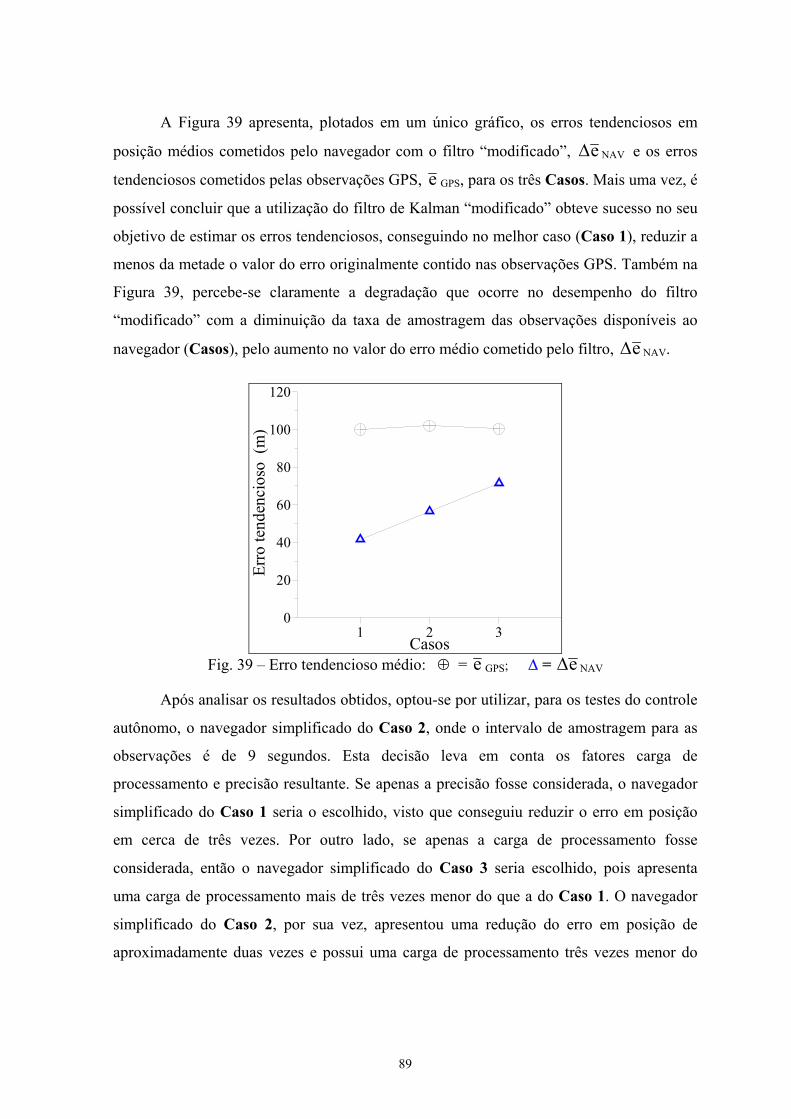
89
A Figura 39 apresenta, plotados em um único gráfico, os erros tendenciosos em
posição médios cometidos pelo navegador com o filtro “modificado”, e∆ NAV e os erros
tendenciosos cometidos pelas observações GPS, e GPS, para os três Casos. Mais uma vez, é
possível concluir que a utilização do filtro de Kalman “modificado” obteve sucesso no seu
objetivo de estimar os erros tendenciosos, conseguindo no melhor caso (Caso 1), reduzir a
menos da metade o valor do erro originalmente contido nas observações GPS. Também na
Figura 39, percebe-se claramente a degradação que ocorre no desempenho do filtro
“modificado” com a diminuição da taxa de amostragem das observações disponíveis ao
navegador (Casos), pelo aumento no valor do erro médio cometido pelo filtro, e∆ NAV.
1 2 3Casos
0
20
40
60
80
100
120
Err
o te
nden
cios
o (m
)
Fig. 39 – Erro tendencioso médio: ⊕ = e GPS; ∆ = e∆ NAV
Após analisar os resultados obtidos, optou-se por utilizar, para os testes do controle
autônomo, o navegador simplificado do Caso 2, onde o intervalo de amostragem para as
observações é de 9 segundos. Esta decisão leva em conta os fatores carga de
processamento e precisão resultante. Se apenas a precisão fosse considerada, o navegador
simplificado do Caso 1 seria o escolhido, visto que conseguiu reduzir o erro em posição
em cerca de três vezes. Por outro lado, se apenas a carga de processamento fosse
considerada, então o navegador simplificado do Caso 3 seria escolhido, pois apresenta
uma carga de processamento mais de três vezes menor do que a do Caso 1. O navegador
simplificado do Caso 2, por sua vez, apresentou uma redução do erro em posição de
aproximadamente duas vezes e possui uma carga de processamento três vezes menor do

90
que a do Caso 1, razão pela qual constitui-se na alternativa de melhor relação
custo/benefício.

91
CAPÍTULO 4
CONTROLE AUTÔNOMO
4.1. Conceito
A Figura 1 apresenta o diagrama de blocos do conceito de controle autônomo do
desvio de fase no equador, ∆L0, analisado no presente trabalho. Na malha de
realimentação foi incluído o Navegador Simplificado exposto no Capítulo 2 para fins de
análise de desempenho.
Simulador de
Órbita
Execução de Manobras
Cálculo de
Observações
de ∆L0
Simulação da Solução Geométricade Navegação do GPS
Limites de Controle
Navegador
Simplificado
Cálculo de Elementos Orbitais(Keplerianos e de Referência)
Pré-processamento
Determinação de Manobras
Cálculo de Observações
de 0L•
∆ e 0L••
∆
z z,y y,x x,
&
&
&
Fig. 1. Diagrama de Blocos
A simulação completa do sistema integrado (navegador mais controlador
autônomo) inicia-se no Simulador de Órbita, a partir do qual é simulada a Solução
Geométrica de Navegação do GPS. As estimativas grosseiras que compõem esta solução
são simuladas através da incorporação de erros aleatórios e tendenciosos às componentes
osculadoras do vetor de estado orbital geradas pelo Simulador de Órbita. Estas medidas
são utilizadas como observações para o processo de estimação autônoma de órbita a bordo
(Navegador Simplificado), cuja finalidade é refinar a solução geométrica de navegação
do GPS. O Simulador de Órbita e a Simulação da Solução Geométrica de Navegação
do GPS são descritos no Capítulo 2, juntamente com o Navegador Simplificado.
O próximo passo é o Cálculo de Elementos Orbitais (Keplerianos e de
Referência). A partir das estimativas geradas pelo Navegador Simplificado são
calculados os elementos orbitais keplerianos, através da conversão das estimativas de

92
coordenadas cartesianas para elementos keplerianos osculadores. Os elementos orbitais de
referência (osculadores), são obtidos analiticamente, em função apenas do instante de
tempo atual. O Cálculo de Observações de ∆L0 é então efetuado diretamente a partir dos
elementos orbitais keplerianos osculadores e de referência recém computados. Estas
observações são, em seguida, submetidas a um Pré-Processamento que consiste
basicamente da aplicação, a cada conjunto de J observações consecutivas de ∆L0, de um
procedimento de cálculo, em tempo real, do seu valor médio, ponderado estatisticamente.
Os valores pré-processados de ∆L0 são, tão logo gerados, utilizados para o Cálculo de
Observações de 0∆L•
e 0L••
∆ , que são computadas numericamente. Os valores de ∆L0
após o pré-processamento, de 0L•
∆ e 0L••
∆ são, na seqüência, utilizados conjuntamente
pelo bloco Determinação de Manobras. Este bloco diz respeito ao monitoramento
autônomo, a bordo do satélite, da evolução com o tempo do desvio de fase no equador,
causado pela deriva em longitude do traço orbital. Este acompanhamento permite a
determinação de instantes nos quais há necessidade de aplicação de uma correção do semi-
eixo maior da órbita para alterar a evolução de ∆L0(t), de modo a minimizar seu valor
absoluto.
No processo de controle autônomo a Execução de Manobras é feita sempre que se
constate sua necessidade, considerando os resultados do bloco Determinação de
Manobras. Finalmente, fechando a malha do sistema de controle autônomo, a informação
sobre a necessidade de execução de cada manobra, gerada no bloco Determinação de
Manobras, é passada ao Simulador de Órbita, de modo que seu efeito seja incorporado à
simulação.
4.2. Cálculo de Elementos Orbitais (Keplerianos e de Referência)
O vetor de estado do satélite em coordenadas cartesianas, gerado pelo Simulador
de Órbita, é convertido para elementos keplerianos osculadores. O processo de conversão
de coordenadas cartesianas para keplerianas e vice-versa é matéria básica de Mecânica
Celeste. Procedimentos e equacionamentos para realizar esta conversão já foram
amplamente estudados e difundidos, sendo encontrados em Bate et all (1971), Brouwer e
93
Clemence (1961), bem como em diversos outros livros de introdução à Mecânica Celeste,
razão pela qual não serão descritos neste trabalho.
Os elementos orbitais de referência são obtidos considerando-se apenas o
movimento orbital descrito por Kepler (movimento elíptico) e o movimento modelado pelo
termo harmônico zonal J2 do geopotencial (Micheau,1995), permitindo assim a geração
analítica da grade de órbitas de referência, abrangendo um período de cobertura global
(revisita – 26 dias no caso do CBERS). Desta forma, quando são calculados os desvios da
órbita atual osculadora em relação à órbita de referência atual, os efeitos do segundo
harmônico zonal, por estarem presentes em ambas, são automaticamente eliminados. Na
seção 4.3 é apresentada a equação que permite calcular as observações de ∆L0 a partir
destes desvios.
A órbita nominal de referência para o CBERS, já incorporando os efeitos do
segundo harmônico zonal, é dada por:
aR = 7148875,6 + 9031,0 cos(2αΜ) [m] (1)
exR = 0,000736 cos(3αΜ) - 0,000286 cos(αΜ) [adim.] (2)
eyR = 0,0011069 + 0,000736 sen(3αΜ) - 0,000917 sen(αΜ) [adim.] (3)
iR = 98,5005264 - 0,005532 cos(2αΜ) [°] (4)
ΩR = ΩM - 0,005597 sen(2αΜ) [°] (5)
αR = αM + 0,0538 sen(2αΜ) [°] (6)
com:
αM = 180,0 + (360 . 373).(T-TR)/26 [°] (7)
ΩM = 180,0 + θ(t) + 10,5/24 – frac(T) . 360 [°] (8)
onde aR é o semi-eixo maior de referência; exR é a componente de referência do vetor
excentricidade na direção X; eyR é a componente de referência do vetor excentricidade na
direção Y; iR é a inclinação de referência; ΩR é a ascensão reta do nodo ascendente de
referência; αR é o argumento de latitude de referência; αM é o argumento de latitude
médio de referência; T é a data juliana modificada atual; TR é a data de passagem pelo

94
nodo de referência em dias julianos modificados; ΩM é a ascensão reta média do nodo
ascendente de referência; θ(t) é o tempo sideral; frac(T) é a parte fracionária de T.
É importante ressaltar que o cálculo da órbita de referência da forma ora descrita, é
extremamente econômico do ponto de vista computacional, sendo, por este motivo,
altamente recomendável para aplicações a bordo de satélites com recursos computacionais
escassos.
4.3. Cálculo de Observações de ∆L0
A seguinte equação é utilizada neste cálculo (Micheau, 1995):
( )]P/QN
)(t∆)(t∆[ea)(tL∆ kkk0
α+
+⋅= Ω (9)
onde ∆(.) representa o desvio, em relação à órbita de referência, do respectivo parâmetro,
Ω é a ascensão reta do nodo ascendente, N é o número inteiro de revoluções orbitais
diárias do satélite, P e Q são dois números inteiros cuja razão determina a fração de órbita
adicional completada pelo satélite em um dia, ae é o raio médio do equador e tk é o instante
da observação atual. Ademais, tem-se que,
M ωα += (10)
onde α é denominado argumento de latitude, ω é o argumento do perigeu e M é a
anomalia média da órbita do satélite.
A variância σ2(tk) associada à observação ∆L0(tk) é dada por (Orlando, 1995):
σ2(tk) = A J(tk) P(tk) JT(tk) AT (11)
onde P(tk) é a matriz de covariância das estimativas do vetor de estado em coordenadas
cartesianas; descrita no Capítulo 2. Além disso:
A = [ 0 0 0 0 ae ( )P/QNa e
+ ] (12)
95
kttyx
yx
yx
yx
yx
yx
k
αzz
iz
ez
ez
az
αyy
iy
ey
ey
ay
αxx
ix
ex
ex
ax
αzz
iz
ez
ez
az
αyy
iy
ey
ey
ay
αxx
ix
ex
ex
ax
)J(t
=
=
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
&&&&&&
&&&&&&
&&&&&&
Ω
Ω
Ω
Ω
Ω
Ω
(13)
A matriz J(tk) é a matriz Jacobiana (derivadas parciais) da transformação do vetor
de estado orbital de coordenadas cartesianas para elementos keplerianos.
4.4. Pré-Processamento
O termo pré-processamento é comumente empregado para designar o tratamento
preliminar aplicado aos dados, resultantes de medições de alguma grandeza física de
interesse em um sistema dinâmico, com a finalidade de adequá-los ao processamento
posterior, através do qual deverão ser atingidos os objetivos últimos que motivaram as
medições. Especificamente, o pré-processamento em questão visa reduzir o volume de
dados (compressão) e suavizar as observações osculadoras de ∆L0, obtidas como descrito
na seção 4.3. O procedimento a ser utilizado consiste de uma versão modificada do
procedimento exposto em Orlando (1995). Este, por sua vez, resultou de uma aplicação
particular do método geral originalmente apresentado em Orlando (1984), adaptado para
utilização em tempo real (processamento seqüencial). A seguir, está descrito o
procedimento exposto em Orlando (1995) e, na seqüência, o procedimento modificado
usado nesta dissertação.
O procedimento consiste basicamente da aplicação de um procedimento de ajuste
polinomial de mínimos quadrados, a cada conjunto sucessivo de J observações consecutivas de
∆L0. O valor de J é definido previamente, em função do nível de compressão desejado. No caso

96
em questão, foi suficiente um ajuste de grau zero, que corresponde ao cálculo do valor médio do
conjunto de J observações. Cada uma das J observações é ponderada pelo inverso da covariância
a ela associada. Matematicamente:
)t( w )t(w
)t(y )t( w)t(y )t(w)t(y
k
1k
0jj
kk
1k
0jjj
ki
+
+
=
∑
∑−
=
−
=; k = 1, 2, ..., J (14)
onde i = 1, 2, ... representa o conjunto de J observações atualmente sendo processado;
)t(y ki é o valor médio resultante para o instante tk; )t(y ki é o valor da observação
obtida no instante tk; )( ktw é o valor do peso associado à observação obtida no instante
tk. O valor de )( ktw é tomado como:
( ) 2 k
k)(t
1tw )(σ
= (15)
onde σ(tk) é a incerteza associada à observação do instante tk.
A variância do valor médio calculado pela equação 14, é determinada por:
( )∑=
= k
j 0
2 j
k2
i)(t
1t )(σ
σ (16)
As equações de 14 até 16 são utilizadas para obtenção do valor médio para cada conjunto
contendo J observações de ∆L0. Cabe ressaltar que, na equação 14, o numerador obtido no
instante tk é armazenado para o instante tk+1, onde corresponde apenas à parcela definida pela
somatória (∑). O mesmo ocorre com o denominador, ou seja, o denominador obtido no instante
tk é armazenado e vale a somatória (∑) do denominador no instante tk+1. Quando começa o
processamento de um novo conjunto de J observações, representado na equação 16 por uma
mudança no valor de i, os valores armazenados são zerados. Cabe ainda mencionar que a taxa
de compressão resultante, denominada Taxa de Compressão do Controle (TCC), é obtida pelo
inverso de J, ou seja, TCC = 1 / J .
O procedimento modificado surge da constatação que o procedimento original vincula o
grau de suavização à taxa de compressão, através do número de observações, J. Este vínculo faz

97
com que o nível de suavização seja variável, em função da taxa de compressão utilizada. Em
outras palavras, quanto maior a taxa de compressão, maior o número de observações utilizado no
cálculo do valor médio (suavização) e, por conseqüência, menor a influência da observação atual
no cálculo da média atual, ou seja, maior o nível de suavização. No contexto do presente
trabalho, o termo nível de suavização (baixo/menor ou alto/maior) é utilizado com o significado
de amplitude de oscilação da curva suavizada relativamente à curva original. Sendo assim, para
uma mesma curva original, suavização de nível baixo/menor denota amplitude de oscilação
maior, enquanto suavização de nível alto/maior denota amplitude de oscilação menor, em termos
das respectivas curvas suavizadas obtidas. O efeito colateral de um nível de suavização maior é
um atraso de transporte maior. Atraso de transporte aqui, significa a distância temporal que se
necessita retroceder para que o valor médio atual seja igual ao valor médio correto. Dito de outro
modo, ocorre uma defasagem temporal entre o valor médio obtido num determinado instante e o
valor médio correto para o mesmo instante, fazendo com que o valor médio obtido no instante
atual seja o valor médio correto não para o instante atual, mas sim para um instante no passado.
O lapso de tempo entre estes dois instantes define o atraso de transporte. A Figura 2, a seguir,
ilustra o fato. Na Figura 2a, tem-se uma curva (linha fina) senoidal com média (linha pontilhada)
linear crescente e a curva correspondente à uma suavização de nível baixo (linha grossa). Na
Figura 2b, tem-se a mesma curva e a curva correspondente à uma suavização de nível alto. Em
ambos os casos, estão indicados o tamanho da "janela" utilizada e o efeito em termos do erro e
do atraso de transporte.
18140 18142 18144 18146 18148 18150 18152TEMPO (DJM)
120
140
160
180
200
220
240
ERRO
ATRASO
"JANELA"
18140 18142 18144 18146 18148 18150 18152
TEMPO (DJM)
120
140
160
180
200
220
240
ERRO
ATRASO
"JANELA"
a) Suavização de nível baixo b) Suavização de nível alto
Fig. 2. Atraso de Transporte na Suavização

98
Como o objetivo da suavização é filtrar as perturbações e as mesmas são
predominantemente cíclicas, então o ideal é aplicar uma suavização de nível constante e
independente da taxa de compressão. O nível de suavização é escolhido em função dos
períodos das perturbações cíclicas que se deseja filtrar. Tendo isto em mente, procede-se a
modificação do procedimento original, de modo a obter tal efeito. Matematicamente:
)t( w )t(w
)t(y )t( w)t(y )t(w)t(y
k
1k
0jj
kk
1k
0jjj
ki
+
+
=
∑
∑−
=
−
=; k = 1, 2, ..., N (17)
)t(wty
k
ki
)t(wN
1)(N
)t( y)t( w)t( y)t(wN
1)(N
)(
1k
Nkjj
kk
1k
Nkjjj
+
−
+
−
∑
∑−
−=
−
−== ; k = N+1, N+2, ... (18)
onde N é um número inteiro e constante, representando o número de pontos usado na
“janela”, cujo valor é escolhido previamente em função da taxa de amostragem utilizada,
de modo a representar sempre o mesmo intervalo, a mesma "janela" de tempo e, assim, o
mesmo grau de suavização. Matematicamente:
N= INT( ∆tJAN / ∆tTAC ) (19)
onde INT(.) representa a função arredondar para o inteiro mais próximo, ∆tJAN é o
intervalo de tempo desejado para a “janela” de suavização e ∆tTAC é o intervalo de tempo
entre duas observações consecutivas de ∆L0. Cabe salientar que a equação 17 é a mesma
que a equação 14 e é utilizada no início, quando o número de observações processadas
ainda é menor ou igual a N, enquanto a equação 18 é utilizada dali em diante. O efeito
matemático da modificação introduzida é o descarte, no caso da somatória do numerador,
de um valor igual à média obtida no instante tk-1. Para o denominador o descarte
corresponde ao valor médio dos pesos até o instante tk-1. O efeito prático é a obtenção de
um procedimento de suavização que usa os dados contidos numa "janela" de tempo de
tamanho fixo. Esta janela é também móvel, pois, embora tenha tamanho fixo, parte sempre
do instante atual e estende-se até um instante no passado, definido em função do seu
tamanho. É importante notar, da mesma forma que ocorre com o procedimento original,

99
que não há necessidade de armazenar valores passados, mas tão somente os valores das
somatórias atuais do numerador e denominador. Desta forma, sua utilização em ambientes
com recursos computacionais escassos, como é o caso a bordo de satélites, é altamente
recomendável. As equações 15 e 16 do procedimento original não foram modificadas,
sendo utilizadas no procedimento modificado da mesma forma que no procedimento
original.
4.5. Cálculo de Observações de 0∆L•
e 0L••
∆
As seguintes equações são utilizadas neste cálculo:
1-kk
1-k0k0k
0 tt )(tL∆ - )(tL∆ )(tL∆ −
=• (20)
1-kk
1-k0
k0
k0 tt
)(tL∆ - )(tL∆ )(tL∆ −
=
••
•• (21)
as mesmas são derivadas numéricas, obtidas a partir do valor pré-processado de ∆L0 em
instantes consecutivos. Além disto, tk é o instante da observação mais recente (atual), tk-1 é
o instante da observação imediatamente anterior.
4.6. Determinação de Manobras
Este bloco diz respeito ao acompanhamento autônomo, a bordo do satélite, da
evolução com o tempo do desvio de fase no equador, causado pela deriva em longitude. A
determinação de instantes nos quais há necessidade de aplicação de uma correção do semi-
eixo maior da órbita para corrigir a evolução de ∆L0(t) tem como objetivo anular a
tendência natural de evolução crescente deste parâmetro, fazendo isto ao mesmo tempo em
que tenta minimizar seu valor absoluto.
O decaimento orbital no caso de satélites recorrentes de baixa altitude, como é o
caso do CBERS (altitude média de 778 km), deve-se principalmente à força de arrasto
atmosférico, cuja variação é fortemente influenciada pelas condições vigentes de atividade
solar. Este decaimento faz com que o traço da órbita do satélite apresente uma deriva em
direção ao leste. O movimento médio apresentado pelo desvio de fase se desenvolve, em
100
caso de atividade solar constante, segundo uma curva aproximadamente parabólica. Uma
manobra orbital para corrigir a evolução no tempo de ∆L0 é necessária sempre que seu
valor se aproxime do limite superior da faixa de controle estabelecida para variação deste
parâmetro. Manobras só são aplicadas quando da aproximação do limite superior. Dado
que a evolução de ∆L0 se desenvolve segundo uma parábola, uma vez atingido o valor
mínimo há uma mudança natural de direção sem necessidade de qualquer impulsão
adicional. Para minimizar o consumo de combustível, deste modo, só se considera a
aplicação de manobras para corrigir a evolução de ∆L0 quando seu valor se aproxima do
limite superior, estabelecido pelos requisitos da missão.
Inicialmente, tinha-se a intenção de usar apenas um método de determinação de
manobras, descrito em Orlando (1995). No entanto, os resultados obtidos para o caso de
Atividade Solar Crítica (ASCRÍ – vide seção 5.1) ficaram aquém do previsto. Sendo assim,
um novo método foi desenvolvido e aplicado, tendo sido obtidos resultados considerados
satisfatórios. Os dois métodos utilizados encontram-se descritos a seguir.
4.6.1. Determinação de Manobras para Atividade Solar Normal (ASNOR)
A determinação da necessidade de aplicação de uma manobra de controle de órbita
é feita com auxílio das estimativas de ∆L0 e 0L•
∆ . Sempre que o desvio de fase e sua
primeira derivada em relação ao tempo satisfizerem, simultaneamente, a condições de
controle específicas, previamente estabelecidas, ficará determinada a necessidade de uma
manobra. Traduzindo matematicamente, uma manobra para correção do semi-eixo maior
da órbita e, consequentemente, da evolução de ∆L0, será necessária quando as duas
condições abaixo forem simultaneamente satisfeitas:
∧
L∆ 0(tk) > ∆L0sup - n.σ(tk) (22) ∧•
L∆ 0(tk) > 0L•
∆ sup + ns.σs(tk), (23)

101
onde ∆L0sup and 0L•
∆ sup são limites de controle (não são limites operacionais)
previamente escolhidos; σ(tk) e σs(tk) são os desvios padrões das estimativas ∧
L∆ 0(tk) e ∧•
L∆ 0(tk); n e ns são dois números reais (pesos) previamente escolhidos.
4.6.2. Determinação de Manobras para Atividade Solar Crítica (ASCRÍ)
A determinação da necessidade de aplicação de uma manobra de controle de órbita
é feita com auxílio das estimativas de ∆L0 , 0L•
∆ e 0L••
∆ .
Matematicamente, uma manobra para correção do semi-eixo maior da órbita e,
consequentemente, da evolução de ∆L0, será necessária quando a condição abaixo for
satisfeita: ∧
L∆ 0(tk) > ∆L0sup - n.σ(tk) (24)
onde,
∆L0sup = ∆L0sup nom . [ k0 – k1 . ∧•
L∆ 0(tk) - k2 . ∧••
L∆ 0(tk) ] (25)
onde ∆L0sup nom é um limite de controle (não é limite operacional) fixo, previamente
escolhido; σ(tk) é o desvio padrão da estimativa ∧
L∆ 0(tk); n, k0, k1 e k2 são números
reais (pesos) previamente escolhidos.
4.7. Execução de Manobras
A Figura 3 ilustra o processo de execução de uma manobra de correção de órbita e
a conseqüente evolução no tempo do parâmetro controlado ∆L0, considerando o método
de controle utilizado para Atividade Solar Normal (ASNOR), descrito em 4.6.1.
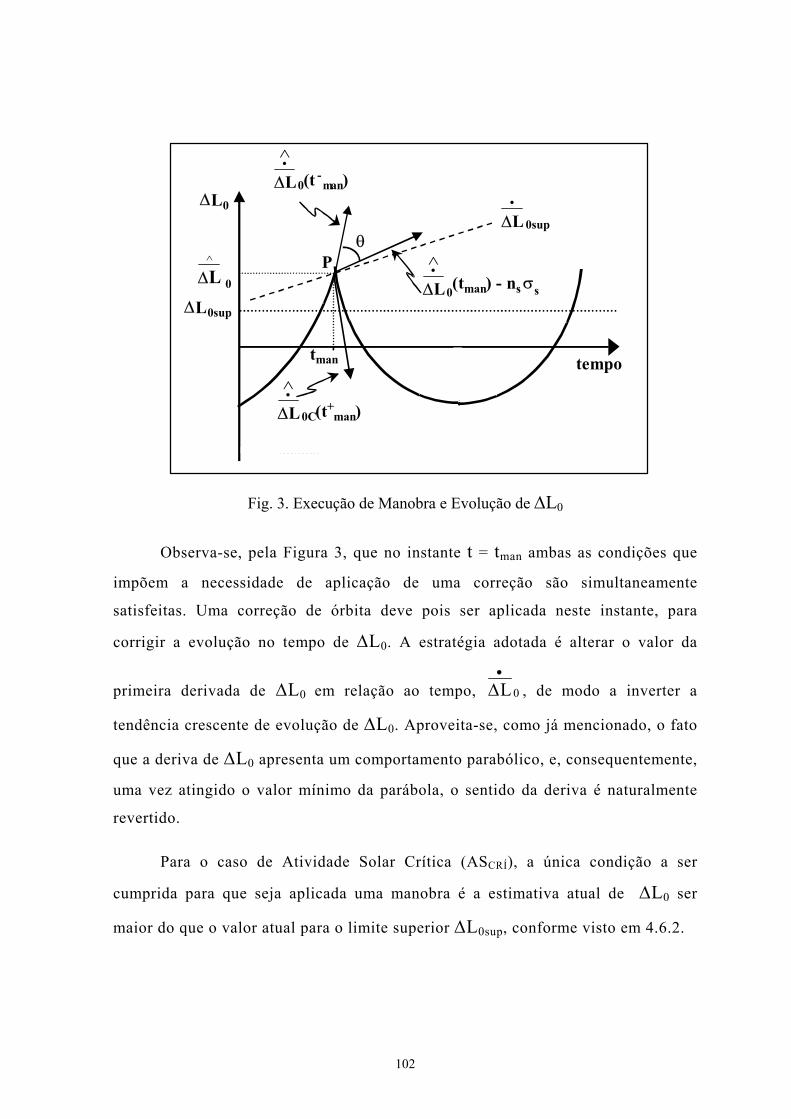
102
∧•
∆L0(t -man)
•
∆L 0sup
∧•
∆L0(tman) - ns σs
∧•
∆L0C(t+man)
tman
∆L0sup
∧
∆L 0
tempo
Pθ
∆L0
Fig. 3. Execução de Manobra e Evolução de ∆L0
Observa-se, pela Figura 3, que no instante t = tman ambas as condições que
impõem a necessidade de aplicação de uma correção são simultaneamente
satisfeitas. Uma correção de órbita deve pois ser aplicada neste instante, para
corrigir a evolução no tempo de ∆L0. A estratégia adotada é alterar o valor da
primeira derivada de ∆L0 em relação ao tempo, 0L•
∆ , de modo a inverter a
tendência crescente de evolução de ∆L0. Aproveita-se, como já mencionado, o fato
que a deriva de ∆L0 apresenta um comportamento parabólico, e, consequentemente,
uma vez atingido o valor mínimo da parábola, o sentido da deriva é naturalmente
revertido.
Para o caso de Atividade Solar Crítica (ASCRÍ), a única condição a ser
cumprida para que seja aplicada uma manobra é a estimativa atual de ∆L0 ser
maior do que o valor atual para o limite superior ∆L0sup, conforme visto em 4.6.2.

103
A expressão matemática de 0L•
∆ , simplificada para órbitas circulares
heliosíncronas (i ≅ 90° e e ≅ 0) é dada por (Micheau, 1995):
( )
−+−=• i∆
didaa∆1
aa
Tπ3
pR
e
teεL∆ 0
(26)
onde ∆(.) representa o desvio do respectivo parâmetro em relação à órbita de referência, a é o
semi-eixo maior, i é a inclinação do plano orbital, Tte é o dia solar médio (86400 s); ae é o raio
médio do equador e aR é o semi-eixo maior da órbita de referência. Tem-se ainda que:
1])(cos2[42e2
7
sote
3
7 i)aa(J
TT
2ε −+= ; (27)
)(1
)(1 te ) tan(
3
2 pd
d
εη
soTTia)
ia(
+
+−= ; (28)
onde: TSO = 1 ano e
)(2cos2)/e()te/so(2 iaaTTJ12η = ; (29)
ainda de Micheau (1995), sabe-se que 0ε ≅ e assim 1 1 ε ≅+ . Considerando ainda que
para altitudes típicas de satélites de observação da Terra o arrasto atmosférico, depois do
geopotencial, possui influência perturbadora dominante na órbita, pode-se desprezar a
dependência de 0L•
∆ em relação à inclinação do plano da órbita. Com isto a derivada em
relação ao tempo da equação 26 assume a forma:
≅••
L∆
0 dtda
aa
T R
e
te
π 3− (30)
Supondo agora que da/dt permanece constante no intervalo de tempo entre a
aplicação de duas manobras sucessivas de correção do semi-eixo maior, a integração da
equação acima fornece:
( )RRte
0 aaaa
T 3L∆ eπ
−
−≅
•
(31)

104
Vê-se por esta equação que uma variação do semi-eixo maior causa uma variação
proporcional na derivada primeira de ∆L0. Se for imposto um incremento ao semi-eixo
maior, é provocada uma diminuição do valor de 0L•
∆ , ou seja, exatamente o efeito
buscado para anular a tendência natural de evolução crescente ( 0L•
∆ >0) de ∆L0.
A Equação de Gauss (Carrou et al., 1995) que relaciona um incremento no semi-
eixo maior da órbita com o incremento de velocidade tangencial correspondente, ∆vT , é,
para orbitas circulares, dada por:
VVa 2a T∆
∆ ≅ (32)
ou
V a 2aVT
∆∆ ≅ (33)
onde V é o valor absoluto da velocidade orbital do satélite e ∆vT é o incremento
tangencial de velocidade necessário para corrigir a deriva de ∆L0 . Como mencionado
anteriormente é considerado no presente trabalho, o procedimento de controle autônomo
que assume um valor constante da amplitude de correção do semi-eixo maior da órbita,
∆a, em todas as manobras.
A amplitude de correções é escolhida previamente, na fase de implementação do
sistema, e todas as correções terão sempre esta mesma amplitude, independente da
magnitude de ∆L0, e das condições vigentes de atividade solar. Sempre que as condições
dadas pelas equações 22 e 23 ou pela equação 24 são simultaneamente satisfeitas, um
incremento do semi-eixo maior da órbita é automaticamente aplicado a fim de corrigir a
deriva de ∆L0. O incremento de velocidade tangencial correspondente é calculado através
da equação 33. Como o valor constante da amplitude deve ser suficientemente pequeno, de
modo a que o valor mínimo a ser atingido por ∆L0 após a manobra não ultrapasse o limite
inferior de controle, a aplicação de apenas uma correção pode não ser suficiente para
corrigir convenientemente a deriva, invertendo o sentido de sua evolução. Como as

105
condições para aplicação de manobras são testados em cada ciclo de controle, enquanto
estas condições permanecerem válidas uma nova correção continuará a ser aplicada. Deste
modo, a insuficiência de amplitude de correções é automaticamente compensada por um
incremento da taxa de aplicação de manobras. Duas condições básicas devem ser
satisfeitas para que este tipo de controle autônomo tenha desempenho eficiente:
• Considerando um determinado valor para a amplitude, a taxa máxima permitida para
aplicação de correções deve ser alta o suficiente para reverter a evolução da deriva
do desvio de fase no equador, mesmo sob condições de alta atividade solar;
• O valor constante escolhido para a amplitude deve ser suficientemente pequeno para
que o limite inferior da faixa de controle não seja ultrapassado após a manobra,
mesmo sob condições de baixa atividade solar.

106

107
CAPÍTULO 5
RESULTADOS PARA O CONTROLE AUTÔNOMO 5.1. Implementação Computacional
A aplicação do procedimento de controle autônomo descrito no item 3.1 foi
simulada em computador digital. As seguintes situações foram consideradas:
• Atividade Solar (AS):
ASNOR = Normal;
ASCRÍ = Crítica;
• Taxa de Amostragem para o Controle (TAC):
TAC1/3 = 1 Amostra/3 min
TAC1/9 = 1 Amostra/9 min
TAC1/27 = 1 Amostra/27 min
• Taxa de Compressão para o Controle (TCC):
TCC1/100 = 1 valor/100 min (~1 valor/órbita)
TCC1/720 = 1 valor/720 min (1 valor/ ½ dia)
TCC1/1440 = 1 valor/1440 min (1 valor/dia)
A atividade solar é simulada, para o caso de atividade normal (ASNOR), com a
soma de um valor constante mais duas senóides, uma com período de dois anos e a outra
com período de 27 dias. Para o caso de atividade crítica (ASCRÍ), a simulação é feita com a
soma de um valor constante mais duas senóides, uma com período de um ano e a outra
com período de 27 dias. O período de 27 dias corresponde à rotação solar e o período de
um ano, no caso ASCRÍ, representa um ciclo de 11 anos da atividade solar comprimido em
um ano. As amplitudes dos valores simulados são, aproximadamente, de 110 até 170 sfu,
para ASNOR e de 20 até 360 sfu, para ASCRÍ, onde sfu = solar flux unit e vale 10-22 W/m2. A
Figura 1, a seguir, ilustra a evolução no tempo do fluxo solar nos dois casos considerados.
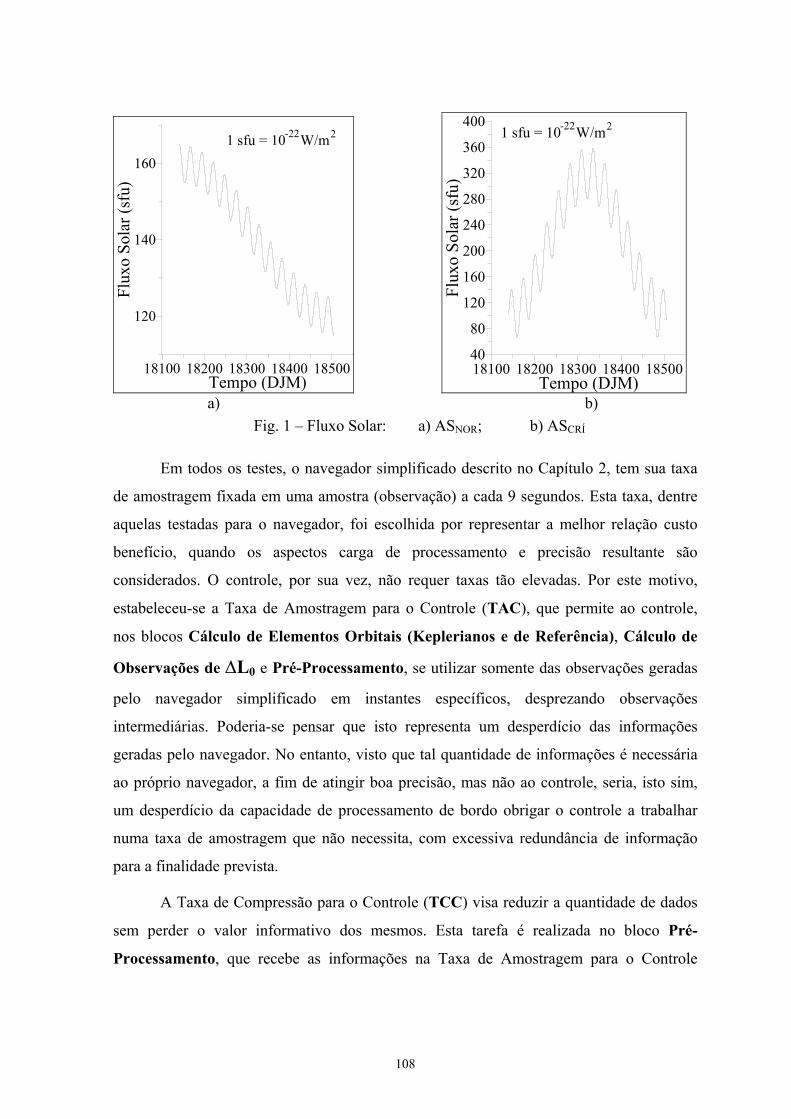
108
18100 18200 18300 18400 18500Tempo (DJM)
120
140
160
Flux
o So
lar (
sfu)
1 sfu = 10 W/m-22 2
18100 18200 18300 18400 18500
Tempo (DJM)
40
80
120
160
200
240
280
320
360
400
Flux
o So
lar (
sfu)
1 sfu = 10 W/m-22 2
a) b)
Fig. 1 – Fluxo Solar: a) ASNOR; b) ASCRÍ
Em todos os testes, o navegador simplificado descrito no Capítulo 2, tem sua taxa
de amostragem fixada em uma amostra (observação) a cada 9 segundos. Esta taxa, dentre
aquelas testadas para o navegador, foi escolhida por representar a melhor relação custo
benefício, quando os aspectos carga de processamento e precisão resultante são
considerados. O controle, por sua vez, não requer taxas tão elevadas. Por este motivo,
estabeleceu-se a Taxa de Amostragem para o Controle (TAC), que permite ao controle,
nos blocos Cálculo de Elementos Orbitais (Keplerianos e de Referência), Cálculo de
Observações de ∆L0 e Pré-Processamento, se utilizar somente das observações geradas
pelo navegador simplificado em instantes específicos, desprezando observações
intermediárias. Poderia-se pensar que isto representa um desperdício das informações
geradas pelo navegador. No entanto, visto que tal quantidade de informações é necessária
ao próprio navegador, a fim de atingir boa precisão, mas não ao controle, seria, isto sim,
um desperdício da capacidade de processamento de bordo obrigar o controle a trabalhar
numa taxa de amostragem que não necessita, com excessiva redundância de informação
para a finalidade prevista.
A Taxa de Compressão para o Controle (TCC) visa reduzir a quantidade de dados
sem perder o valor informativo dos mesmos. Esta tarefa é realizada no bloco Pré-
Processamento, que recebe as informações na Taxa de Amostragem para o Controle
109
(TAC) e gera informações para os blocos Cálculo de Observações de 0∆L•
e 0L••
∆ ,
Determinação de Manobras e Execução de Manobras numa taxa que é de 3,7 a 480
vezes menor, nos casos estudados neste trabalho. A Taxa de Compressão para o Controle
(TCC) determina também a taxa máxima de aplicação de manobras, visto que as
informações passadas para os blocos Determinação de Manobras e Execução de
Manobras ocorrem nesta mesma taxa (TCC).
As condições iniciais para o controle autônomo são obtidas diretamente a partir das
condições iniciais utilizadas pelo navegador simplificado, descritas na seção 3.1.
Durante a fase de implementação, para evitar os cálculos envolvidos na obtenção
do desvio padrão de cada observação de ∆L0, já que o procedimento de controle autônomo
deve operar a bordo, optou-se por não utilizar o valor de σ2 (vide equação 11 do Capítulo
4) na ponderação (pesos) das observações de ∆L0, durante o processo de suavização. Os
bons resultados obtidos nas simulações encorajaram esta decisão. Matematicamente, em
relação ao equacionamento apresentado, equivale a considerar o peso w, na equação 15 do
Capítulo 4, igual à unidade.
Os parâmetros do controle autônomo que foram ajustados para cada caso estudado
estão relacionados nas Tabelas 1 e 2, apresentadas na página a seguir, em função da
atividade solar considerada (ASNOR ou ASCRÍ). Estes valores foram obtidos através de
múltiplas tentativas.
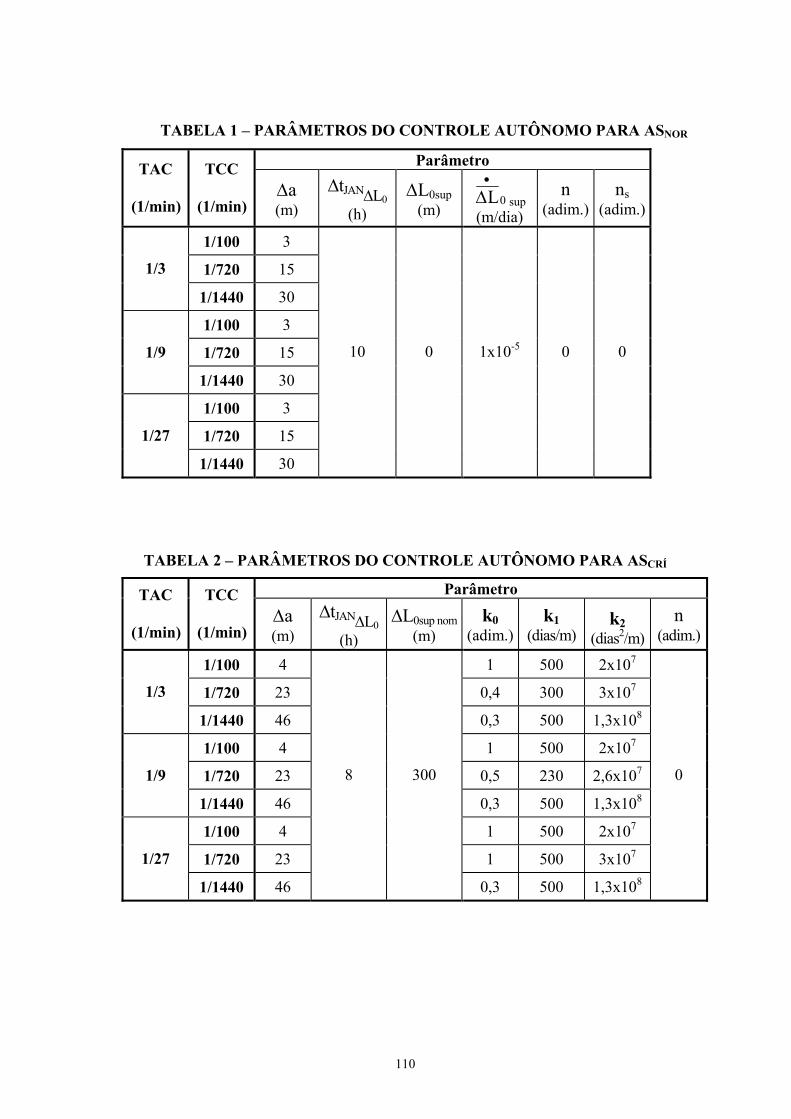
110
TABELA 1 – PARÂMETROS DO CONTROLE AUTÔNOMO PARA ASNOR
Parâmetro TAC (1/min)
TCC (1/min)
∆a (m)
∆tJAN∆L0 (h)
∆L0sup (m)
0L•
∆ sup (m/dia)
n (adim.)
ns (adim.)
1/100 3
1/720 15 1/3
1/1440 30
1/100 3
1/720 15 1/9
1/1440 30
1/100 3
1/720 15 1/27
1/1440 30
10 0 1x10-5 0 0
TABELA 2 – PARÂMETROS DO CONTROLE AUTÔNOMO PARA ASCRÍ
Parâmetro TAC
(1/min)
TCC (1/min)
∆a (m)
∆tJAN∆L0 (h)
∆L0sup nom(m)
k0 (adim.)
k1 (dias/m)
k2 (dias2/m)
n (adim.)
1/100 4 1 500 2x107
1/720 23 0,4 300 3x107 1/3
1/1440 46 0,3 500 1,3x108
1/100 4 1 500 2x107
1/720 23 0,5 230 2,6x107 1/9
1/1440 46 0,3 500 1,3x108
1/100 4 1 500 2x107
1/720 23 1 500 3x107 1/27
1/1440 46
8 300
0,3 500 1,3x108
0

111
5.2. Parâmetros para Análise
O principal parâmetro de análise do controle é o resultado obtido, em termos da
curva de evolução no tempo da variável controlada, ou seja, do desvio de fase no equador
da órbita do satélite, ∆L0. Serão apresentadas curvas mostrando a evolução de ∆L0 no
intervalo de um ano e em todas as situações de teste apresentadas na seção 5.1.
Para avaliação global do resultado, usar-se-á a média e o desvio-padrão do desvio
de fase no equador, dentro do intervalo de um ano. Matematicamente:
[ ]∑=
=N
k 1
k00 )(tL
N1 L ∆∆
∆ (1)
[ ]∑=
=N
k 1
2
0k00L L -)(tL N1 ∆∆
∆
∆σ (2)
Em relação a estes parâmetros, quanto menores os valores de média e desvio
padrão, melhor o desempenho do controle.
Outros dois parâmetros a serem utilizados para análise comparativa dos casos
testados é o número de manobras aplicadas, NMA, e o valor de correção total resultante
para o semi-eixo maior, ∆aTotal, definido por:
∆aTotal = NMA . ∆a (3)
onde ∆a é a amplitude, em metros, de cada manobra corretiva aplicada. É importante notar
que o valor de ∆a é constante ao longo de uma simulação particular, um caso de teste, mas
é variável de uma simulação para outra, em função das taxas de compressão (TAC) e da
atividade solar (AS) sendo utilizada.
Os resultados obtidos em termos de ∆a, NMA e ∆aTotal serão apresentados, de
forma tabular, para todos os casos testados.
Também serão apresentados em tabela, em função de ∆a, os parâmetros consumo
de combustível por manobra, ∆m, e duração da manobra, ∆T, definidos a seguir

112
O parâmetro consumo de combustível, ∆m, pode ser calculado de forma
aproximada por (Wertz e Larson, 1991):
( )
−
−≅ Sg . IV
e1mm
T
0
∆
∆ (4)
onde m0 é a massa inicial do satélite e vale 1540 kg para o CBERS, gS ≅ 9,8 m/s2 é a aceleração
gravitacional na superfície terrestre e I = 220 s é o impulso específico para o combustível
hidrazina (utilizado no CBERS) e relembrando que ∆vT é o incremento na velocidade
tangencial do satélite, calculado pela equação 33 do Capítulo 4, reproduzida abaixo:
V a 2a
TV ∆∆ ≅
A razão V/(2 a) na equação acima vale aproximadamente 5,2149x10-4s-1 para o
CBERS, logo:
a TV 4-,2149x105 ∆∆ ≅ (5)
O parâmetro duração da manobra, ∆T, pode ser calculado de forma aproximada
por:
FTV∆
0mT ≅∆ (6)
onde m0 é a massa inicial do satélite (1540 kg), ∆vT é calculado pela equação 30 do
Capítulo 4 e F é a força de empuxo produzida pelos propulsores do satélite e vale 20 N
para o CBERS, assim:
TV∆ 77T ≅∆ (7)
A partir dos valores de NMA e ∆m, pode ser calculado o consumo total de
combustível, ∆mT:
m .NMA mT ∆∆ ≅ (8)
O parâmetro consumo total de combustível, ∆mT, será calculado e apresentado em
forma tabular, em função da atividade solar e da taxa de compressão (TCC).
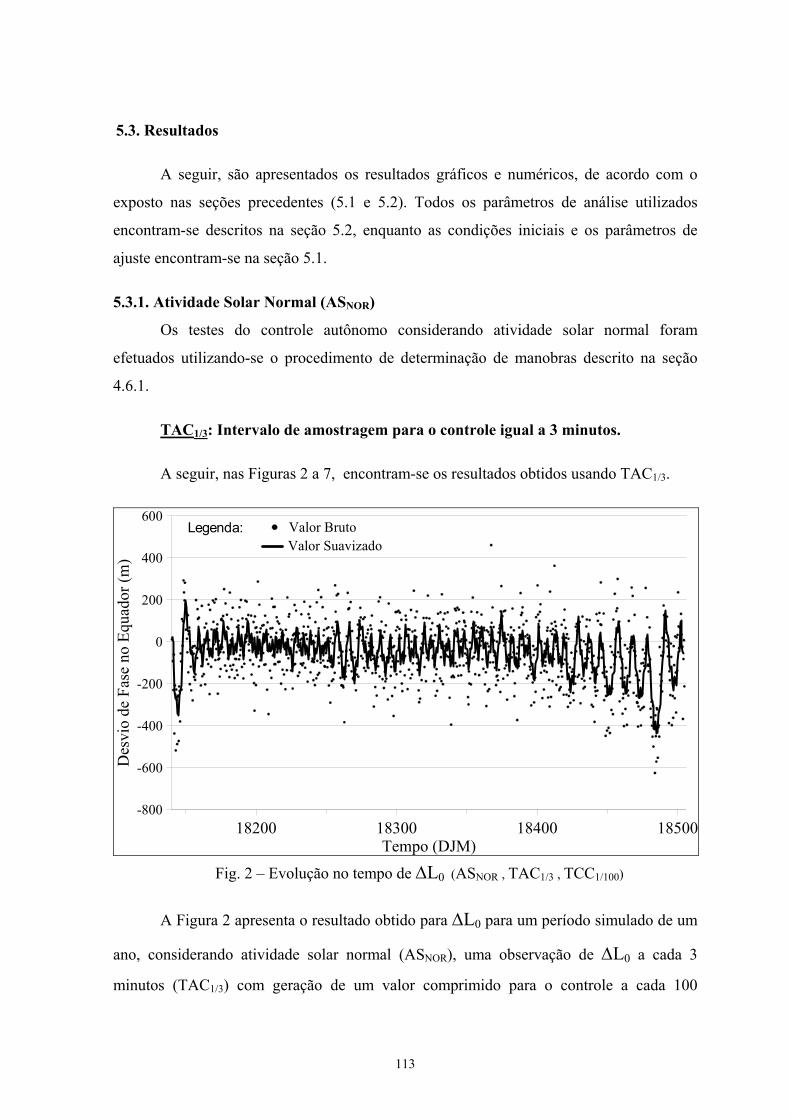
113
5.3. Resultados
A seguir, são apresentados os resultados gráficos e numéricos, de acordo com o
exposto nas seções precedentes (5.1 e 5.2). Todos os parâmetros de análise utilizados
encontram-se descritos na seção 5.2, enquanto as condições iniciais e os parâmetros de
ajuste encontram-se na seção 5.1.
5.3.1. Atividade Solar Normal (ASNOR)
Os testes do controle autônomo considerando atividade solar normal foram
efetuados utilizando-se o procedimento de determinação de manobras descrito na seção
4.6.1.
TAC1/3: Intervalo de amostragem para o controle igual a 3 minutos.
A seguir, nas Figuras 2 a 7, encontram-se os resultados obtidos usando TAC1/3.
18200 18300 18400 18500Tempo (DJM)
-800
-600
-400
-200
0
200
400
600
Des
vio
de F
ase
no E
quad
or (m
)
Legenda: Valor BrutoValor Suavizado
Fig. 2 – Evolução no tempo de ∆L0 (ASNOR , TAC1/3 , TCC1/100)
A Figura 2 apresenta o resultado obtido para ∆L0 para um período simulado de um
ano, considerando atividade solar normal (ASNOR), uma observação de ∆L0 a cada 3
minutos (TAC1/3) com geração de um valor comprimido para o controle a cada 100
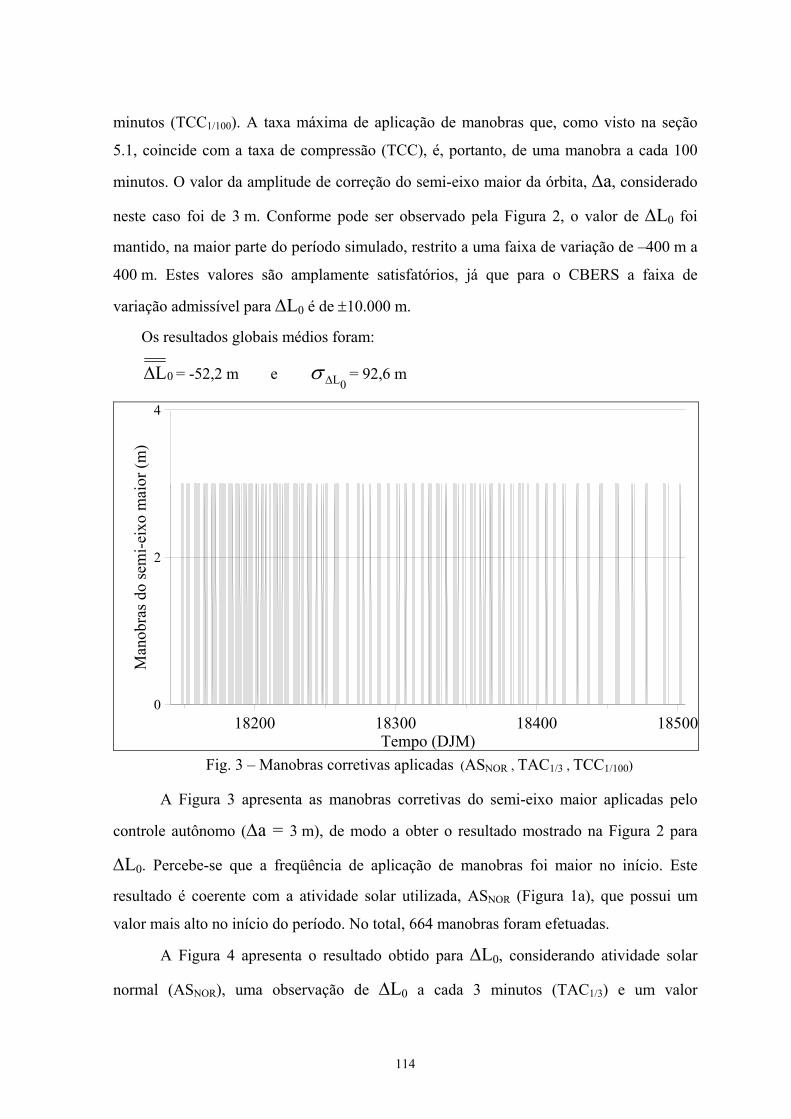
114
minutos (TCC1/100). A taxa máxima de aplicação de manobras que, como visto na seção
5.1, coincide com a taxa de compressão (TCC), é, portanto, de uma manobra a cada 100
minutos. O valor da amplitude de correção do semi-eixo maior da órbita, ∆a, considerado
neste caso foi de 3 m. Conforme pode ser observado pela Figura 2, o valor de ∆L0 foi
mantido, na maior parte do período simulado, restrito a uma faixa de variação de –400 m a
400 m. Estes valores são amplamente satisfatórios, já que para o CBERS a faixa de
variação admissível para ∆L0 é de ±10.000 m.
Os resultados globais médios foram:
0L∆ = -52,2 m e 0L∆σ = 92,6 m
18200 18300 18400 18500Tempo (DJM)
0
2
4
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 3 – Manobras corretivas aplicadas (ASNOR , TAC1/3 , TCC1/100)
A Figura 3 apresenta as manobras corretivas do semi-eixo maior aplicadas pelo
controle autônomo (∆a = 3 m), de modo a obter o resultado mostrado na Figura 2 para
∆L0. Percebe-se que a freqüência de aplicação de manobras foi maior no início. Este
resultado é coerente com a atividade solar utilizada, ASNOR (Figura 1a), que possui um
valor mais alto no início do período. No total, 664 manobras foram efetuadas.
A Figura 4 apresenta o resultado obtido para ∆L0, considerando atividade solar
normal (ASNOR), uma observação de ∆L0 a cada 3 minutos (TAC1/3) e um valor

115
comprimido para o controle a cada 720 minutos (TCC1/720). Isto implica, como já
mencionado, em uma taxa máxima de aplicação de manobras de uma a cada 12 horas. O
valor da amplitude de correção do semi-eixo maior da órbita, ∆a, foi fixado em 15 m.
Percebe-se, por esta figura, que não houve uma degradação significativa do controle, se
comparada à Figura 2. Comparando-se porém os valores médios, constata-se uma pequena
degradação. Isto era esperado, já que a taxa de compressão para o controle (TCC) é, neste
caso, menor.
18200 18300 18400 18500Tempo (DJM)
-800
-600
-400
-200
0
200
400
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 4 – Evolução no tempo de ∆L0 (ASNOR , TAC1/3 , TCC1/720)
Os resultados globais médios foram:
0L∆ = -77,2 m e 0L∆σ = 179,1 m
A Figura 5 apresenta as manobras corretivas do semi-eixo maior aplicadas pelo
controle autônomo (∆a = 15 m), de modo a obter o resultado mostrado na Figura 4 para
∆L0. O valor da amplitude de correção ∆a teve que ser aumentado, neste caso, em relação
ao anterior (Figura 2) para compensar a redução da máxima taxa de aplicação de
manobras, que caiu de uma a cada uma hora e quarenta minutos para uma a cada 12 horas.
A amplitude considerada no caso anterior é, na taxa atual, insuficiente para reverter a
tendência crescente de ∆L0, quando a curva do fluxo solar considerada no teste apresenta
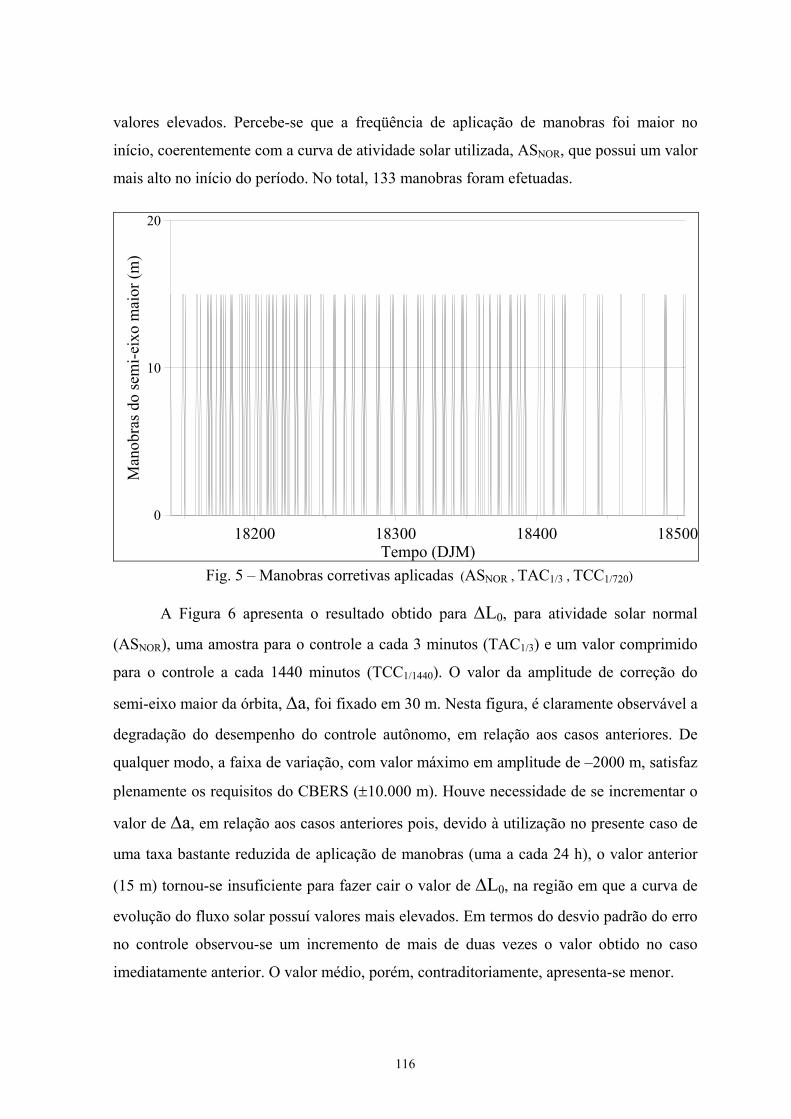
116
valores elevados. Percebe-se que a freqüência de aplicação de manobras foi maior no
início, coerentemente com a curva de atividade solar utilizada, ASNOR, que possui um valor
mais alto no início do período. No total, 133 manobras foram efetuadas.
18200 18300 18400 18500Tempo (DJM)
0
10
20
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 5 – Manobras corretivas aplicadas (ASNOR , TAC1/3 , TCC1/720)
A Figura 6 apresenta o resultado obtido para ∆L0, para atividade solar normal
(ASNOR), uma amostra para o controle a cada 3 minutos (TAC1/3) e um valor comprimido
para o controle a cada 1440 minutos (TCC1/1440). O valor da amplitude de correção do
semi-eixo maior da órbita, ∆a, foi fixado em 30 m. Nesta figura, é claramente observável a
degradação do desempenho do controle autônomo, em relação aos casos anteriores. De
qualquer modo, a faixa de variação, com valor máximo em amplitude de –2000 m, satisfaz
plenamente os requisitos do CBERS (±10.000 m). Houve necessidade de se incrementar o
valor de ∆a, em relação aos casos anteriores pois, devido à utilização no presente caso de
uma taxa bastante reduzida de aplicação de manobras (uma a cada 24 h), o valor anterior
(15 m) tornou-se insuficiente para fazer cair o valor de ∆L0, na região em que a curva de
evolução do fluxo solar possuí valores mais elevados. Em termos do desvio padrão do erro
no controle observou-se um incremento de mais de duas vezes o valor obtido no caso
imediatamente anterior. O valor médio, porém, contraditoriamente, apresenta-se menor.
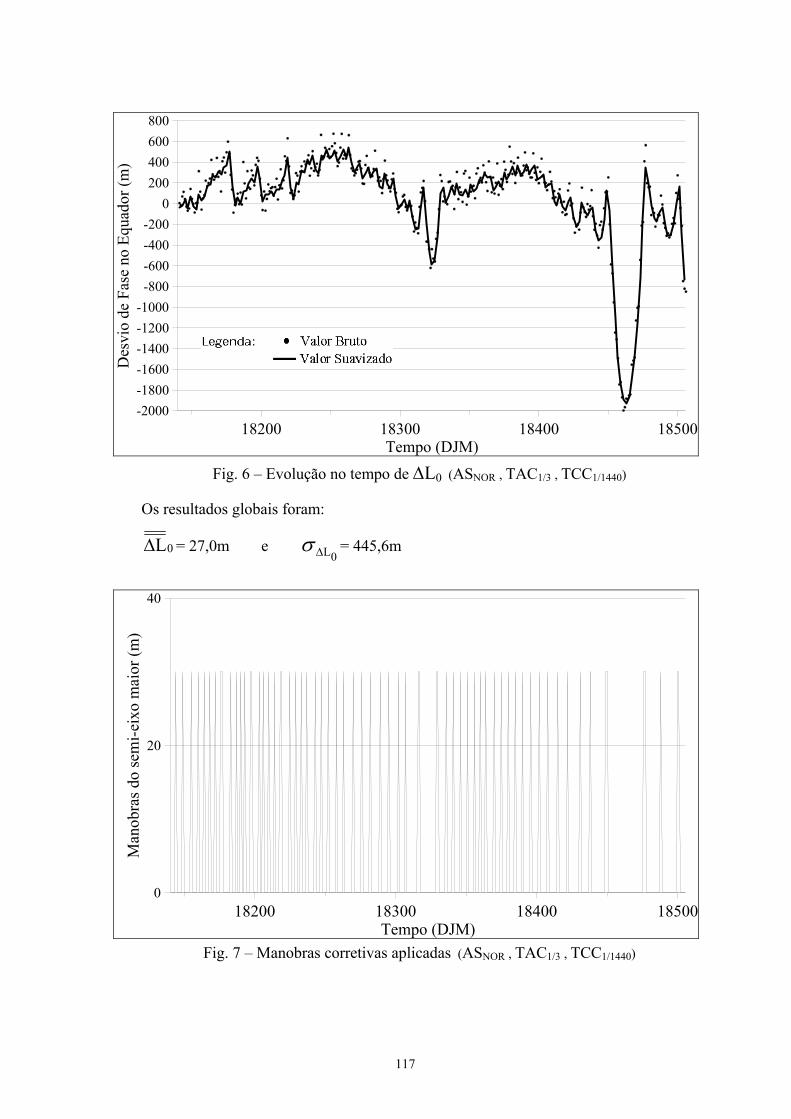
117
18200 18300 18400 18500Tempo (DJM)
-2000-1800-1600-1400-1200-1000
-800-600-400-200
0200400600800
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 6 – Evolução no tempo de ∆L0 (ASNOR , TAC1/3 , TCC1/1440)
Os resultados globais foram:
0L∆ = 27,0m e 0L∆σ = 445,6m
18200 18300 18400 18500Tempo (DJM)
0
20
40
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 7 – Manobras corretivas aplicadas (ASNOR , TAC1/3 , TCC1/1440)

118
As manobras corretivas do semi-eixo maior, aplicadas pelo controle autônomo
(∆a = 30 m), correspondentes ao resultado mostrado na Figura 6, são apresentadas
graficamente na Figura 7. Novamente a freqüência de aplicação de manobras foi maior no
início, conforme esperado. No total, 67 manobras foram efetuadas.

119
TAC1/9: Intervalo de amostragem para o controle igual a 9 minutos.
A seguir, nas Figuras 8 a 13, encontram-se os resultados obtidos usando TAC1/9.
Na Figura 8 apresenta-se o resultado obtido para a evolução de ∆L0 com o tempo,
considerando atividade solar normal (ASNOR), considerando a taxa de observação de ∆L0 de
uma a cada 9 minutos (TAC1/9) e o cálculo de um valor comprimido para o controle a cada 100
minutos (TCC1/100). O valor da amplitude de correção do semi-eixo maior da órbita, ∆a, foi
fixado em 3 m. Conforme se observa pela figura, valem aqui os mesmos comentários feitos
quando da apresentação dos resultados para a taxa de amostragem de observações de ∆L0 de
uma observação a cada três minutos. Comparando-se os resultados da Figura 8 com os da Figura
2 nota-se, porém, que para a taxa máxima permitida de aplicação de manobras considerada (uma
a cada 100 minutos), não há variação significativa de desempenho quando a taxa de amostragem
de observações de ∆L0 muda de uma a cada três minutos para uma a cada 9 minutos.
18200 18300 18400 18500Tempo (DJM)
-800
-600
-400
-200
0
200
400
600
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 8 – Evolução no tempo de ∆L0 (ASNOR , TAC1/9 , TCC1/100)
Os resultados globais foram:
0L∆ = -50,3 m e 0L∆σ = 93,7 m

120
As correções do semi-eixo maior aplicadas pelo controle autônomo (∆a = 3 m) são
apresentadas na Figura 9. Esta figura mostra, como nos casos anteriores, que houve coerência
entre a taxa de aplicação de manobras com a curva de variação do fluxo solar (ASNOR)
considerada no teste (Figura 1a). No total, 666 manobras foram efetuadas.
18200 18300 18400 18500Tempo (DJM)
0
2
4
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 9 – Manobras corretivas aplicadas (ASNOR , TAC1/9 , TCC1/100)
18200 18300 18400 18500Tempo (DJM)
-800
-600
-400
-200
0
200
400
600
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 10 – Evolução no tempo de ∆L0 (ASNOR, TAC1/9 , TCC1/720)

121
A Figura 10 apresenta o resultado obtido para ∆L0, considerando atividade solar
normal (ASNOR), uma amostra para o controle a cada 9 minutos (TAC1/9) e um valor
comprimido para o controle a cada 720 minutos (TCC1/720). O valor da amplitude de
correção do semi-eixo maior da órbita, ∆a, foi fixado em 15 m. Também neste caso os
resultados foram semelhantes aos obtidos para a taxa de amostragem de observações de
∆L0 de uma a cada três minutos, valendo os mesmos comentários.
Os resultados globais foram:
0L∆ = -58,4 m e 0L∆σ = 169,1 m
A Figura 11 apresenta as manobras corretivas do semi-eixo maior aplicadas pelo
controle autônomo (∆a = 15 m), de modo a obter o resultado mostrado na Figura 10 para
∆L0. No total, 134 manobras foram efetuadas. Comparando com o teste equivalente, em
termos de TCC, feito com taxa de amostragem de observações de ∆L0 de uma a cada três
minutos (TAC1/3), onde 133 manobras foram efetuadas, conclui-se que a mudança da taxa
de amostragem (TAC) de uma a cada três minutos para uma a cada nove minutos não é
significativa em termos de alteração no número de manobras aplicadas pelo controle.
18200 18300 18400 18500Tempo (DJM)
0
10
20
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 11 – Manobras corretivas aplicadas (ASNOR , TAC1/9 , TCC1/720)

122
A Figura 12 mostra o resultado obtido para ∆L0, considerando atividade solar
normal (ASNOR), uma amostra para o controle a cada 9 minutos (TAC1/9) e um valor
comprimido para o controle a cada 1440 minutos (TCC1/1440). O valor da amplitude de
correção do semi-eixo maior da órbita, ∆a, foi fixado em 30 m. Como no caso anterior
equivalente ao atual em termos de taxa de compressão (TAC1/3, TCC1/1440), é claramente
observável na figura a degradação do desempenho do controle autônomo, em relação aos
casos anteriores para TAC1/9. Também aqui, a faixa de variação, com valor máximo em
amplitude de –2000 m, continua satisfazendo plenamente os requisitos do CBERS
(±10.000 m). O desvio padrão do erro no parâmetro controlado é mais de duas vezes o
valor obtido no caso imediatamente anterior (TAC1/9, TCC1/720) e, contraditoriamente,
cerca de 10 % menor do que o valor obtido no teste anterior de mesma taxa de compressão
(TAC1/3, TCC1/1440). O valor médio apresenta-se mais uma vez, contraditoriamente, menor
do que o obtido no caso imediatamente anterior mas, apresenta-se coerentemente maior do
que o teste anterior de mesma taxa de compressão (TAC1/3, TCC1/1440). Ressalta-se mais
uma vez, que a taxa de compressão das observações de ∆L0 para o controle (TCC) define
também a máxima taxa de aplicação de manobras, sendo ambas sempre idênticas .
18200 18300 18400 18500Tempo (DJM)
-2000-1800-1600-1400-1200-1000
-800-600-400-200
0200400600800
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 12 – Evolução no tempo de ∆L0 (ASNOR , TAC1/9 , TCC1/1440)

123
Os resultados globais foram:
0L∆ = 32,7 m e 0L∆σ = 410,9 m
Apresenta-se na Figura 13 as manobras corretivas do semi-eixo maior aplicadas
pelo controle autônomo (∆a = 30 m), que ocasionaram o resultado mostrado na Figura 12
para ∆L0. Novamente, de modo coerente com a atividade solar utilizada (ASNOR), percebe-
se que a freqüência de aplicação de manobras foi maior no início. No total, 66 manobras
foram efetuadas.
18200 18300 18400 18500Tempo (DJM)
0
20
40
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 13 – Manobras corretivas aplicadas (ASNOR , TAC1/9 , TCC1/1440)

124
TAC1/27: Intervalo de amostragem para o controle igual a 27 minutos.
A seguir, nas Figuras 14 a 19, encontram-se os resultados obtidos usando TAC1/27.
A Figura 14 apresenta o resultado obtido para ∆L0, considerando atividade solar
normal (ASNOR), uma amostra para o controle a cada 27 minutos (TAC1/27) e um valor
comprimido para o controle a cada 100 minutos (TCC1/100). O valor da amplitude de
correção do semi-eixo maior da órbita, ∆a, foi fixado em 3 m. Comparando-se os
resultados da Figura 14 com os das Figuras 2 e 8 nota-se que, para a taxa máxima de
aplicação de manobras considerada (uma a cada 100 minutos), não há variação
significativa de desempenho quando a taxa de amostragem de observações de ∆L0 muda
de uma a cada três minutos para uma a cada 27 minutos, passando por uma a cada nove
minutos. Os resultados numéricos obtidos confirmam esta avaliação.
18200 18300 18400 18500Tempo (DJM)
-800
-600
-400
-200
0
200
400
600
800
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 14 – Evolução no tempo de ∆L0 (ASNOR , TAC1/27 , TCC1/100)
Os resultados globais foram:
0L∆ = -40,3 m e 0L∆σ = 89,6 m
A Figura 15 a seguir apresenta as manobras corretivas do semi-eixo maior
aplicadas pelo controle autônomo (∆a = 3 m). Esta figura mostra, como nos casos

125
anteriores, que houve coerência entre a taxa de aplicação de manobras com a variação de
atividade solar considerada no teste (ASNOR, Figura 1a). No total, 667 manobras foram
efetuadas.
18200 18300 18400 18500Tempo (DJM)
0
2
4
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 15 – Manobras corretivas aplicadas (ASNOR , TAC1/27 , TCC1/100)
18200 18300 18400 18500Tempo (DJM)
-1600
-1400
-1200
-1000
-800
-600
-400
-200
0
200
400
600
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 16 – Evolução no tempo de ∆L0 (ASNOR , TAC1/27 , TCC1/720)
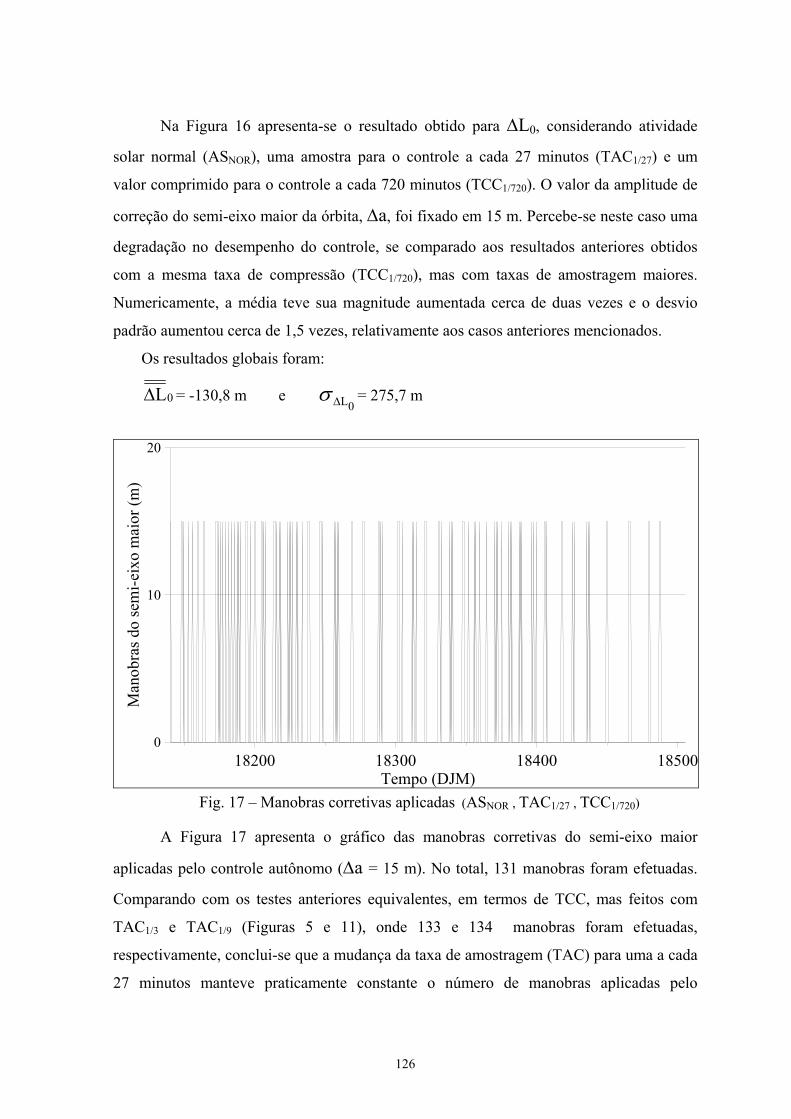
126
Na Figura 16 apresenta-se o resultado obtido para ∆L0, considerando atividade
solar normal (ASNOR), uma amostra para o controle a cada 27 minutos (TAC1/27) e um
valor comprimido para o controle a cada 720 minutos (TCC1/720). O valor da amplitude de
correção do semi-eixo maior da órbita, ∆a, foi fixado em 15 m. Percebe-se neste caso uma
degradação no desempenho do controle, se comparado aos resultados anteriores obtidos
com a mesma taxa de compressão (TCC1/720), mas com taxas de amostragem maiores.
Numericamente, a média teve sua magnitude aumentada cerca de duas vezes e o desvio
padrão aumentou cerca de 1,5 vezes, relativamente aos casos anteriores mencionados.
Os resultados globais foram:
0L∆ = -130,8 m e 0L∆σ = 275,7 m
18200 18300 18400 18500Tempo (DJM)
0
10
20
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 17 – Manobras corretivas aplicadas (ASNOR , TAC1/27 , TCC1/720)
A Figura 17 apresenta o gráfico das manobras corretivas do semi-eixo maior
aplicadas pelo controle autônomo (∆a = 15 m). No total, 131 manobras foram efetuadas.
Comparando com os testes anteriores equivalentes, em termos de TCC, mas feitos com
TAC1/3 e TAC1/9 (Figuras 5 e 11), onde 133 e 134 manobras foram efetuadas,
respectivamente, conclui-se que a mudança da taxa de amostragem (TAC) para uma a cada
27 minutos manteve praticamente constante o número de manobras aplicadas pelo

127
controle, já que considera-se o mesmo valor de TCC e as mesmas condições de atividade
solar. Isto implica em um decaimento similar da órbita e, consequentemente, mesmo
número de manobras (= mesmo consumo de energia).
A Figura 18 mostra a seguir o resultado obtido para ∆L0, considerando atividade
solar normal (ASNOR), uma amostra para o controle a cada 27 minutos (TAC1/27) e um
valor comprimido para o controle a cada 1440 minutos (TCC1/1440). O valor da amplitude
de correção do semi-eixo maior da órbita, ∆a, foi fixado em 30 m. Como nos casos
anteriores equivalentes ao atual em termos de TCC (TAC1/3, TCC1/1440 e TAC1/9, TCC1/1440
- Figuras 6 e 12), é observável na figura, embora de forma menos evidente, a degradação
do desempenho do controle autônomo, em relação aos casos anteriores para TAC1/27.
Também como antes, a faixa de variação, com valor máximo em amplitude de –2000 m,
continua satisfazendo plenamente os requisitos do CBERS (±10.000 m). O desvio padrão
do erro no parâmetro controlado é cerca de 1,7 vezes o valor obtido no caso imediatamente
anterior (TAC1/27, TCC1/720 - Figura 16) e cerca de 20 % maior do que o valor obtido no
teste anterior de mesma taxa de compressão (TAC1/9, TCC1/1440 – Figura 12). O valor
médio apresenta-se com magnitude cerca de duas vezes maior do que o obtido no caso
imediatamente anterior e cerca de oito vezes maior do que o teste anterior de mesma taxa
de compressão (TAC1/9, TCC1/1440).
18200 18300 18400 18500Tempo (DJM)
-2000-1800-1600-1400-1200-1000
-800-600-400-200
0200400600800
Des
vio
de F
ase
no E
quad
or (m
)

128
Fig. 18 – Evolução no tempo de ∆L0 (ASNOR , TAC1/27 , TCC1/1440)
Os resultados globais foram:
0L∆ = -251,9 m e 0L∆σ = 479,2 m
A Figura 19, na seqüência, apresenta as manobras corretivas do semi-eixo maior
aplicadas pelo controle autônomo (∆a = 30 m), de modo a obter o resultado mostrado na
Figura 18 para ∆L0. No total, 66 manobras foram efetuadas. Comparando-se com o
número de manobras aplicadas nos casos anteriores de mesma taxa de compressão (TCC)
e, por conseqüência, de mesma taxa máxima de aplicação de manobras, percebe-se que não
houve variação significativa deste parâmetro, pois os valores foram 67, 66 e 66 para
TAC1/3, TAC1/9 e TAC1/27, respectivamente.
18200 18300 18400 18500Tempo (DJM)
0
20
40
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 19 – Manobras corretivas aplicadas (ASNOR , TAC1/27 , TCC1/1440)

129
5.3.2. Atividade Solar Crítica (ASCRÍ)
Os testes do controle autônomo considerando atividade solar crítica foram
efetuados, conforme mencionado anteriormente, utilizando-se o procedimento de
determinação de manobras especialmente desenvolvido para este caso, descrito na seção
4.6.2.
TAC1/3: Intervalo de amostragem para o controle igual a 3 minutos.
A seguir, nas Figuras 20 a 25, encontram-se os resultados obtidos usando TAC1/3.
18200 18300 18400 18500Tempo (DJM)
-800
-600
-400
-200
0
200
400
600
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 20 – Evolução no tempo de ∆L0 (ASCRÍ , TAC1/3 , TCC1/100)
Apresenta-se na Figura 20 o resultado obtido para ∆L0, considerando atividade
solar crítica (ASCRÍ), uma amostra para o controle a cada 3 minutos (TAC1/3) e um valor
comprimido para o controle a cada 100 minutos (TCC1/100). O valor da amplitude de
correção do semi-eixo maior da órbita, ∆a, foi fixado em 4 m. Este valor é maior do que
aquele utilizado para o mesmo caso (Figura 2) mas com atividade solar normal. Este
aumento na amplitude de correção de ∆a em cada manobra foi necessário para permitir
reverter a tendência de evolução crescente de ∆L0 nos trechos em que a curva de atividade
solar crítica (ASCRÍ) apresenta valores bastante elevados (Figura 1b). Observa-se pela

130
Figura 20, que o valor de ∆L0 foi mantido, na maior parte do período simulado, restrito a
uma faixa de variação de –400 m a 400 m. Estes valores são altamente satisfatórios, já que
praticamente repetem o resultado obtido para atividade solar normal, muito embora no
caso atual a condição de atividade solar seja muito mais desfavorável.
Os resultados globais foram:
0L∆ = -28,6 m e 0L∆σ = 112,7 m
A Figura 21 apresenta as manobras corretivas do semi-eixo maior aplicadas pelo
controle autônomo (∆a = 4 m). Nota-se que a freqüência de aplicação de manobras foi
maior no meio do intervalo. Este resultado é coerente com a atividade solar utilizada,
ASCRÍ, que possui um valor bem mais alto na metade do período (Figura 1b), enquanto no
início e no fim do período os níveis de atividade solar são bem mais baixos. No total, 1144
manobras foram efetuadas. Este valor é quase duas vezes maior do que o ocorrido para o
mesmo caso considerando atividade solar normal. Isto, junto com o fato de ∆a ter sido
aumentado de 3 para 4 metros, mostra claramente que a atividade solar crítica impôs uma
condição bem mais difícil para o controle autônomo.
18200 18300 18400 18500Tempo (DJM)
0
3
6
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 21 – Manobras corretivas aplicadas (ASCRÍ , TAC1/3 , TCC1/100)
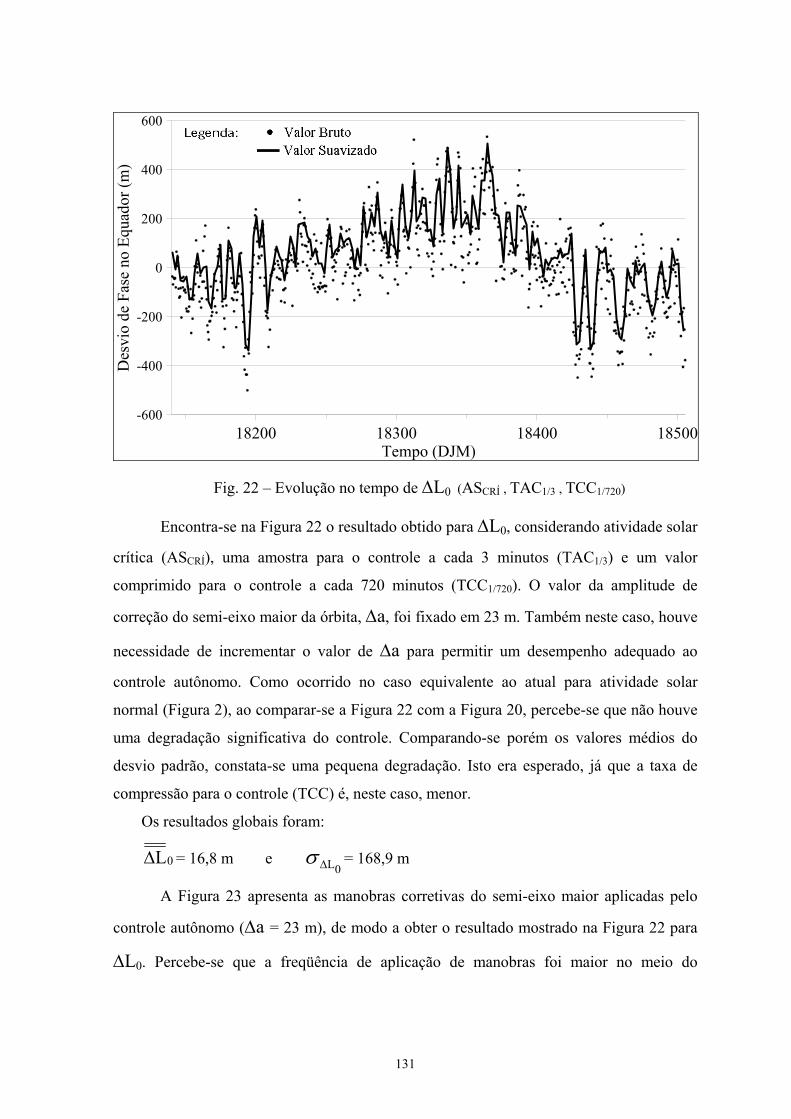
131
18200 18300 18400 18500Tempo (DJM)
-600
-400
-200
0
200
400
600D
esvi
o de
Fas
e no
Equ
ador
(m)
Fig. 22 – Evolução no tempo de ∆L0 (ASCRÍ , TAC1/3 , TCC1/720)
Encontra-se na Figura 22 o resultado obtido para ∆L0, considerando atividade solar
crítica (ASCRÍ), uma amostra para o controle a cada 3 minutos (TAC1/3) e um valor
comprimido para o controle a cada 720 minutos (TCC1/720). O valor da amplitude de
correção do semi-eixo maior da órbita, ∆a, foi fixado em 23 m. Também neste caso, houve
necessidade de incrementar o valor de ∆a para permitir um desempenho adequado ao
controle autônomo. Como ocorrido no caso equivalente ao atual para atividade solar
normal (Figura 2), ao comparar-se a Figura 22 com a Figura 20, percebe-se que não houve
uma degradação significativa do controle. Comparando-se porém os valores médios do
desvio padrão, constata-se uma pequena degradação. Isto era esperado, já que a taxa de
compressão para o controle (TCC) é, neste caso, menor.
Os resultados globais foram:
0L∆ = 16,8 m e 0L∆σ = 168,9 m
A Figura 23 apresenta as manobras corretivas do semi-eixo maior aplicadas pelo
controle autônomo (∆a = 23 m), de modo a obter o resultado mostrado na Figura 22 para
∆L0. Percebe-se que a freqüência de aplicação de manobras foi maior no meio do

132
intervalo, como era de se esperar, já que a atividade solar utilizada, ASCRÍ, possui um valor
bem mais alto na metade do período simulado. No total, 199 manobras foram efetuadas.
18200 18300 18400 18500Tempo (DJM)
0
10
20
30
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 23 – Manobras corretivas aplicadas (ASCRÍ , TAC1/3 , TCC1/720)
18200 18300 18400 18500Tempo (DJM)
-1000
-800
-600
-400
-200
0
200
400
600
800
1000
1200
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 24 – Evolução no tempo de ∆L0 (ASCRÍ , TAC1/3 , TCC1/1440)
Na Figura 24 é apresentado o resultado obtido para ∆L0, considerando atividade
solar crítica (ASCRÍ), uma amostra para o controle a cada 3 minutos (TAC1/3) e um valor

133
comprimido para o controle a cada 1440 minutos (TCC1/1440). O valor da amplitude de
correção do semi-eixo maior da órbita, ∆a, foi fixado em 46 m. Nesta figura, é perceptível
a degradação do desempenho do controle autônomo, em relação aos casos anteriores. De
qualquer modo, a faixa de variação em amplitude de cerca de ±1000 m, satisfaz
plenamente os requisitos do CBERS (±10.000 m). Numericamente, o desvio padrão do
erro no controle aumentou de mais de duas vezes o valor obtido no caso imediatamente
anterior e o valor médio do desvio de fase teve sua magnitude aumentada em cerca de oito
vezes.
Os resultados globais foram:
0L∆ = 141,1 m e 0L∆σ = 388,6 m
As manobras corretivas do semi-eixo maior aplicadas pelo controle autônomo (∆a
= 46 m), correspondentes ao resultado mostrado na Figura 24 para ∆L0, são apresentadas
na Figura 25. Como nos casos precedentes, percebe-se que a freqüência de aplicação de
manobras mantém-se coerente com o perfil de atividade solar considerado. No total, 99
manobras foram efetuadas.
18200 18300 18400 18500Tempo (DJM)
0
10
20
30
40
50
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 25 – Manobras corretivas aplicadas (ASCRÍ , TAC1/3 , TCC1/1440)

134
TAC1/9: Intervalo de amostragem para o controle igual a 9 minutos.
A seguir, nas Figuras 26 a 31, encontram-se os resultados obtidos usando TAC1/9.
A Figura 26 apresenta a curva obtida para ∆L0, considerando atividade solar crítica
(ASCRÍ), uma amostra para o controle a cada 9 minutos (TAC1/9) e um valor comprimido
para o controle a cada 100 minutos (TCC1/100). O valor da amplitude de correção do semi-
eixo maior da órbita, ∆a, foi fixado em 4 m. Comparando-se as curvas da Figura 26 com as
da Figura 20 nota-se que para a taxa máxima de aplicação de manobras considerada (uma a
cada 100 minutos), não há variação significativa de desempenho quando a taxa de
amostragem de observações de ∆L0 muda de uma a cada três minutos para uma a cada 9
minutos.
18200 18300 18400 18500Tempo (DJM)
-600
-400
-200
0
200
400
600
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 26 – Evolução no tempo de ∆L0 (ASCRÍ , TAC1/9 , TCC1/100)
Os resultados globais foram:
0L∆ = -29,5 m e 0L∆σ = 114,3 m
Encontram-se plotadas na Figura 27 as manobras corretivas do semi-eixo maior
aplicadas pelo controle autônomo (∆a = 4 m), de forma a obter o resultado mostrado na
Figura 26 para ∆L0. Observa-se pela figura que, mais uma vez, houve coerência entre a

135
taxa de aplicação de manobras com a curva de variação do fluxo solar (ASCRÍ) considerada
no teste (Figura 1b). No total, 1145 manobras foram efetuadas.
18200 18300 18400 18500Tempo (DJM)
0
3
6
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 27 – Manobras corretivas aplicadas (ASCRÍ , TAC1/9 , TCC1/100)
18200 18300 18400 18500Tempo (DJM)
-1000
-800
-600
-400
-200
0
200
400
600
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 28 – Evolução no tempo de ∆L0 (ASCRÍ , TAC1/9 , TCC1/720)
A Figura 28 apresenta o resultado obtido para ∆L0, considerando atividade solar
crítica (ASCRÍ), uma amostra para o controle a cada 9 minutos (TAC1/9) e um valor

136
comprimido para o controle a cada 720 minutos (TCC1/720). O valor da amplitude de
correção do semi-eixo maior da órbita, ∆a, foi fixado em 23 m. Percebe-se, pela figura,
que neste caso houve degradação do desempenho do controle autônomo, se comparado ao
desempenho obtido no caso imediatamente anterior (Figura 26), onde a taxa de compressão
foi de um para 100 (TCC1/100). Numericamente, a faixa de variação do desvio de fase tinha
sido de ±400 m e agora foi de –700 m a 500 m. O valor do desvio padrão também confirma
esta avaliação, tendo aumentado cerca de 1,7 vezes.
Os resultados globais foram:
0L∆ = -9,6 m e 0L∆σ = 196,7 m
A Figura 29 apresenta as manobras corretivas do semi-eixo maior aplicadas pelo
controle autônomo (∆a = 23 m), de modo a obter a curva de ∆L0 mostrada na Figura 28.
No total, 199 manobras foram efetuadas. Comparando com o teste anterior equivalente ao
atual em termos de taxa de compressão (TAC1/3, TCC1/720 – Figura 22), onde obteve-se
exatamente o mesmo número de manobras efetuadas, conclui-se que a mudança da taxa de
amostragem (TAC) de uma a cada três minutos para uma a cada nove minutos não é
significativa em termos de alteração no número de manobras aplicadas pelo controle.
18200 18300 18400 18500Tempo (DJM)
0
10
20
30
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 29 – Manobras corretivas aplicadas (ASCRÍ , TAC1/9 , TCC1/720)

137
Na seqüência, é apresentado na Figura 30 o resultado obtido para ∆L0,
considerando atividade solar crítica (ASCRÍ), uma amostra para o controle a cada 9 minutos
(TAC1/9) e um valor comprimido para o controle a cada 1440 minutos (TCC1/1440). O valor
da amplitude de correção do semi-eixo maior da órbita, ∆a, foi fixado em 46 m. Como no
caso anterior equivalente ao atual em termos de taxa de compressão (TAC1/3, TCC1/1440 –
Figura 24), é claramente observável na figura a degradação do desempenho do controle
autônomo, em relação aos casos anteriores para TAC1/9. A faixa de variação do desvio de
fase situa-se novamente em cerca de ±1000 m e satisfaz com grande margem os requisitos
do CBERS. O desvio padrão do erro no parâmetro controlado é aproximadamente duas
vezes o valor obtido no caso imediatamente anterior (TAC1/9, TCC1/720 – Figura 28) e,
coerentemente, cerca de 5 % maior do que o valor obtido no teste anterior de mesma taxa
de compressão (TAC1/3, TCC1/1440 – Figura 24).
18200 18300 18400 18500Tempo (DJM)
-1200
-1000
-800
-600
-400
-200
0
200
400
600
800
1000
1200
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 30 – Evolução no tempo de ∆L0 (ASCRÍ , TAC1/9 , TCC1/1440)
Os resultados globais foram:
0L∆ = 122,0 m e 0L∆σ = 408,0 m
A Figura 31 apresenta as manobras corretivas do semi-eixo maior aplicadas pelo
controle autônomo (∆a = 46 m). Mais uma vez, percebe-se que a freqüência de aplicação

138
de manobras foi coerente com a atividade solar utilizada (ASCRÍ), tendo sido maior no meio
do intervalo. No total, 99 manobras foram efetuadas.
18200 18300 18400 18500Tempo (DJM)
0
10
20
30
40
50
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 31 – Manobras corretivas aplicadas (ASCRÍ , TAC1/9 , TCC1/1440)

139
TAC1/27: Intervalo de amostragem para o controle igual a 27 minutos.
A seguir, nas Figuras 32 a 37, encontram-se os resultados obtidos usando TAC1/27.
A Figura 32 apresenta o resultado obtido para ∆L0, considerando atividade solar
crítica (ASCRÍ), uma amostra para o controle a cada 27 minutos (TAC1/27) e um valor
comprimido para o controle a cada 100 minutos (TCC1/100). O valor da amplitude de
correção do semi-eixo maior da órbita, ∆a, foi fixado em 4 m. Comparando-se os
resultados da Figura 32 com aqueles das Figuras 20 e 26 nota-se que, para a taxa máxima
de aplicação de manobras considerada (uma a cada 100 minutos), não há variação
significativa de desempenho em função da mudança da taxa de amostragem de
observações de ∆L0. Os resultados numéricos obtidos confirmam esta avaliação.
18200 18300 18400 18500Tempo (DJM)
-800
-600
-400
-200
0
200
400
600
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 32 – Evolução no tempo de ∆L0 (ASCRÍ , TAC1/27 , TCC1/100)
Os resultados globais foram:
0L∆ = -18,4 m e 0L∆σ = 128,1 m
Na Figura 33 estão apresentadas as manobras corretivas do semi-eixo maior aplicadas pelo
controle autônomo (∆a = 4 m). Esta figura mostra, como nos casos anteriores, que houve coerência

140
entre a taxa de aplicação de manobras com a variação de atividade solar considerada no teste
(ASCRÍ, Figura 1b). No total, 1146 manobras foram efetuadas.
18200 18300 18400 18500Tempo (DJM)
0
3
6
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 33 – Manobras corretivas aplicadas (ASCRÍ , TAC1/27 , TCC1/100)
18200 18300 18400 18500Tempo (DJM)
-1000
-800
-600
-400
-200
0
200
400
600
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 34 – Evolução no tempo de ∆L0 (ASCRÍ , TAC1/27 , TCC1/720)
Na Figura 34 a seguir encontra-se a curva obtida para ∆L0, considerando atividade solar
crítica (ASCRÍ), uma amostra para o controle a cada 27 minutos (TAC1/27) e um valor comprimido

141
para o controle a cada 720 minutos (TCC1/720). O valor da amplitude de correção do semi-eixo
maior da órbita, ∆a, foi fixado em 23 m. Percebe-se neste caso uma degradação no desempenho do
controle, se comparado ao resultado anterior obtido com a mesma taxa de compressão (TCC1/720),
mas com taxa de amostragem TAC1/9, mostrado na Figura 28. Numericamente, a média teve sua
magnitude aumentada cerca de três vezes e o desvio padrão aumentou cerca de 10 %, relativamente
ao caso anterior mencionado (TAC1/9, TCC1/720 – Figura 28). Apenas a faixa de variação do desvio
de fase manteve-se inalterada, em relação ao caso anterior, tendo sido novamente de –700 m a 500
m.
Os resultados globais foram:
0L∆ = -27,3 m e 0L∆σ = 228,5 m
A Figura 35 apresenta as manobras corretivas do semi-eixo maior aplicadas pelo controle
autônomo (∆a = 23 m), de modo a gerar o resultado mostrado na Figura 34. No total, 199
manobras foram efetuadas. Comparando com os testes anteriores equivalentes, em termos de TCC,
mas feitos com TAC1/3 e TAC1/9 (Figuras 23 e 29), onde também foram efetuadas 199 manobras,
conclui-se que as mudanças ocasionadas pelas três taxas de amostragem (TAC) utilizadas nos testes
não foram significativas em termos de alteração no número de manobras aplicadas pelo controle.
18200 18300 18400 18500Tempo (DJM)
0
10
20
30
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 35 – Manobras corretivas aplicadas (ASCRÍ , TAC1/27 , TCC1/720)

142
A Figura 36 apresenta, em seguida, o resultado obtido para ∆L0 considerando atividade
solar crítica (ASCRÍ), uma amostra para o controle a cada 27 minutos (TAC1/27) e um valor
comprimido para o controle a cada 1440 minutos (TCC1/1440). O valor da amplitude de correção do
semi-eixo maior da órbita, ∆a, foi fixado em 46 m. Como nos casos anteriores equivalentes ao atual
em termos de TCC (TAC1/3, TCC1/1440 e TAC1/9, TCC1/1440 – Figuras 24 e 30), é observável na
figura a degradação do desempenho do controle autônomo, em relação aos casos anteriores para
TAC1/27. Também como antes, a faixa de variação, com valor máximo em amplitude de –1600 m a
1000 m, continua satisfazendo plenamente os requisitos do CBERS (±10.000 m). O desvio padrão
do erro no parâmetro controlado é cerca de duas vezes o valor obtido no caso imediatamente
anterior (TAC1/27, TCC1/720 – Figura 34) e cerca de 30 % maior do que o valor obtido no teste
anterior de mesma taxa de compressão (TAC1/9, TCC1/1440 – Figura 30). O valor médio apresenta-se
com magnitude cerca de dez vezes maior do que o obtido no caso imediatamente anterior (TAC1/27,
TCC1/720) e cerca de três vezes maior do que o teste anterior de mesma taxa de compressão (TAC1/9,
TCC1/1440).
18200 18300 18400 18500Tempo (DJM)
-1800-1600-1400-1200-1000
-800-600-400-200
0200400600800
1000
Des
vio
de F
ase
no E
quad
or (m
)
Fig. 36 – Evolução no tempo de ∆L0 (ASCRÍ , TAC1/27 , TCC1/1440)
Os resultados globais foram:
0L∆ = -297,3 m e 0L∆σ = 519,7 m

143
A Figura 37 apresenta as manobras corretivas do semi-eixo maior aplicadas pelo controle
autônomo (∆a = 46 m). Percebe-se que a freqüência de manobras foi maior no meio do intervalo.
Novamente, percebe-se que a freqüência de aplicação de manobras foi coerente com a atividade
solar utilizada (ASCRÍ), tendo sido maior no meio do intervalo. No total, 99 manobras foram
efetuadas.
18200 18300 18400 18500Tempo (DJM)
0
10
20
30
40
50
Man
obra
s do
sem
i-eix
o m
aior
(m)
Fig. 37 – Manobras corretivas aplicadas (ASCRÍ , TAC1/27 , TCC1/1440)
5.4. Considerações Finais
As Tabelas 3 e 4, a seguir, condensam os resultados apresentados graficamente para o
desvio de fase no equador, para os testes que consideram condições normais e críticas do fluxo
solar, respectivamente. São apresentados, nestas tabelas, os valores da média e do desvio padrão de
cada curva de evolução no tempo de ∆L0 gerada nos testes. Nota-se, pela Tabela 3, que os valores
de 0L∆ e de 0L∆σ , para cada valor considerado de TAC, aumentam quando TCC diminui. Isto
reflete um comportamento esperado, já que TCC representa também a taxa máxima de aplicação de
manobras considerada. Quanto menor esta taxa, maior será o intervalo entre duas manobras
consecutivas e, consequentemente, maior a amplitude de variação livre (aproximadamente
parabólica) de ∆L0, o que impõe um valor maior à dispersão global da curva no período simulado,
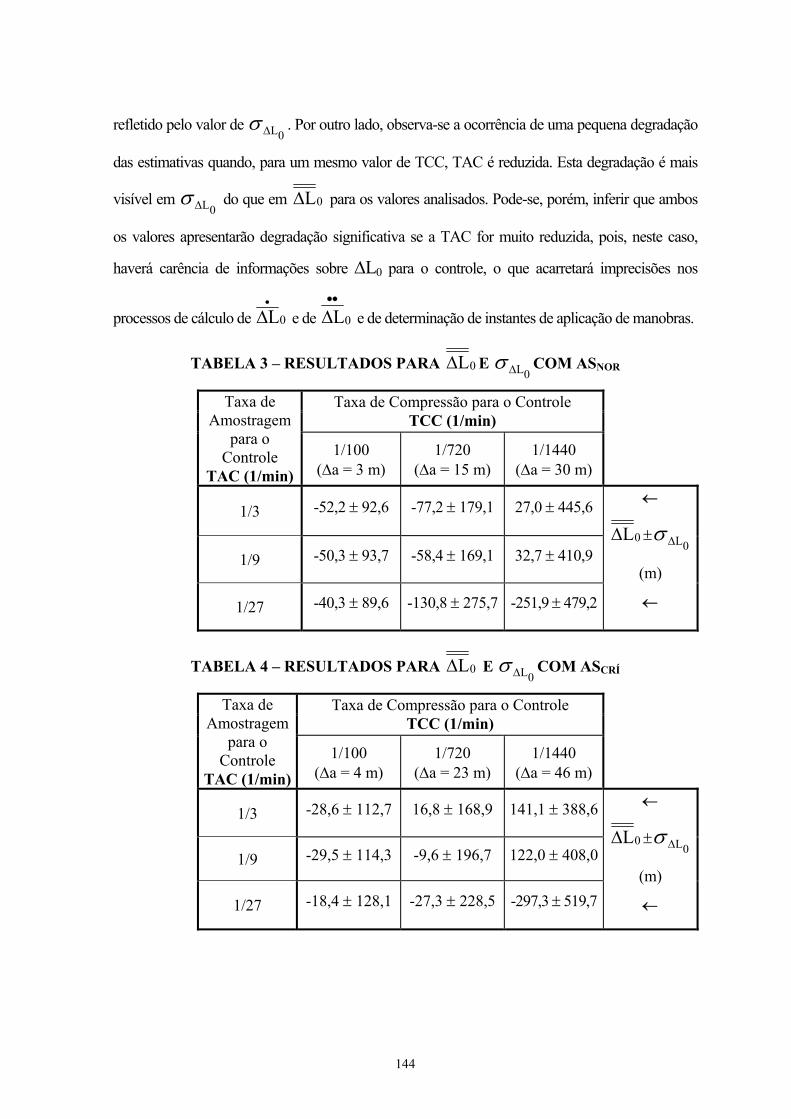
144
refletido pelo valor de 0L∆σ . Por outro lado, observa-se a ocorrência de uma pequena degradação
das estimativas quando, para um mesmo valor de TCC, TAC é reduzida. Esta degradação é mais
visível em 0L∆σ do que em 0L∆ para os valores analisados. Pode-se, porém, inferir que ambos
os valores apresentarão degradação significativa se a TAC for muito reduzida, pois, neste caso,
haverá carência de informações sobre ∆L0 para o controle, o que acarretará imprecisões nos
processos de cálculo de 0L•
∆ e de 0L••
∆ e de determinação de instantes de aplicação de manobras.
TABELA 3 – RESULTADOS PARA 0L∆ E 0L∆σ COM ASNOR
Taxa de Compressão para o Controle TCC (1/min)
Taxa de Amostragem
para o Controle
TAC (1/min)
1/100 (∆a = 3 m)
1/720 (∆a = 15 m)
1/1440 (∆a = 30 m)
1/3 -52,2 ± 92,6 -77,2 ± 179,1 27,0 ± 445,6
1/9 -50,3 ± 93,7 -58,4 ± 169,1 32,7 ± 410,9
1/27 -40,3 ± 89,6 -130,8 ± 275,7 -251,9 ± 479,2
←
0L∆ ±0L∆σ
(m)
←
TABELA 4 – RESULTADOS PARA 0L∆ E 0L∆σ COM ASCRÍ
Taxa de Compressão para o Controle TCC (1/min)
Taxa de Amostragem
para o Controle
TAC (1/min)
1/100 (∆a = 4 m)
1/720 (∆a = 23 m)
1/1440 (∆a = 46 m)
1/3 -28,6 ± 112,7 16,8 ± 168,9 141,1 ± 388,6
1/9 -29,5 ± 114,3 -9,6 ± 196,7 122,0 ± 408,0
1/27 -18,4 ± 128,1 -27,3 ± 228,5 -297,3 ± 519,7
←
0L∆ ±0L∆σ
(m)
←

145
As Figuras 38 e 39 apresentam, sobrepostas em um mesmo gráfico, as curvas de 0L∆ e de
0L∆σ , respectivamente. As mesmas estão em função de TAC, para cada valor de TCC
considerado, obtidas sob condições normais do fluxo solar. Pela Figura 38, nota-se que a amplitude
de variação do valor médio de ∆L0 aumenta conforme TCC diminui, ou seja, aumenta com o
aumento do intervalo mínimo entre duas manobras consecutivas, conforme já analisado acima.
Observa-se nesta figura, que as amplitudes correspondentes aos valores de TCC de 1/(100 min),
1/(720 min) e 1/(1440 min) são, respectivamente, da ordem de 10 m, 70 m e 280 m. As curvas de
0L∆σ (Figura 39), mostram uma clara tendência de aumento de valor deste parâmetro (e,
consequentemente, da dispersão da curva de evolução no tempo de ∆L0) quando TCC diminui.
3 6 9 12 15 18 21 24 271/TAC (min)
-280
-240
-200
-160
-120
-80
-40
0
40
Des
vio
de F
ase
mdi
o (m
)
Fig. 38 – 0L∆ (ASNOR):
= TCC1/100 (100 min); = TCC1/720 (720 min); ∆ = TCC1/1440 (1440 min);
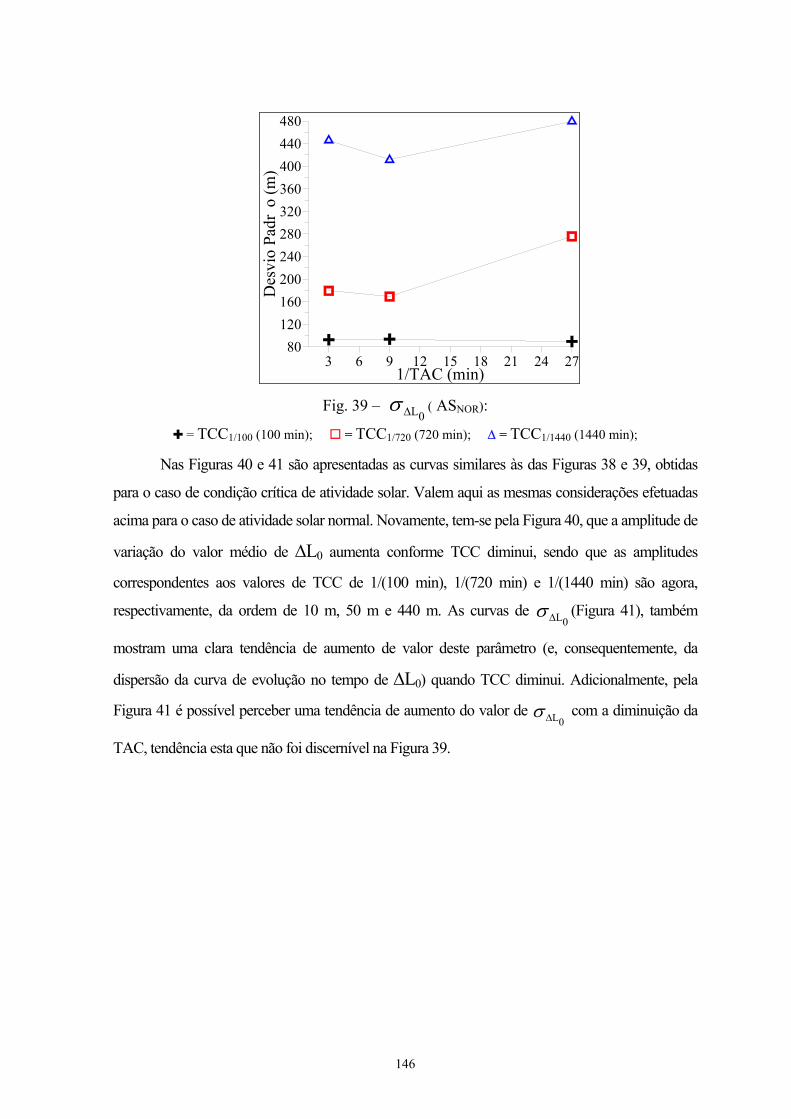
146
3 6 9 12 15 18 21 24 271/TAC (min)
80120160200240280320360400440480
Des
vio
Padr
o (m
)
Fig. 39 – 0L∆σ ( ASNOR):
= TCC1/100 (100 min); = TCC1/720 (720 min); ∆ = TCC1/1440 (1440 min);
Nas Figuras 40 e 41 são apresentadas as curvas similares às das Figuras 38 e 39, obtidas
para o caso de condição crítica de atividade solar. Valem aqui as mesmas considerações efetuadas
acima para o caso de atividade solar normal. Novamente, tem-se pela Figura 40, que a amplitude de
variação do valor médio de ∆L0 aumenta conforme TCC diminui, sendo que as amplitudes
correspondentes aos valores de TCC de 1/(100 min), 1/(720 min) e 1/(1440 min) são agora,
respectivamente, da ordem de 10 m, 50 m e 440 m. As curvas de 0L∆σ (Figura 41), também
mostram uma clara tendência de aumento de valor deste parâmetro (e, consequentemente, da
dispersão da curva de evolução no tempo de ∆L0) quando TCC diminui. Adicionalmente, pela
Figura 41 é possível perceber uma tendência de aumento do valor de 0L∆σ com a diminuição da
TAC, tendência esta que não foi discernível na Figura 39.
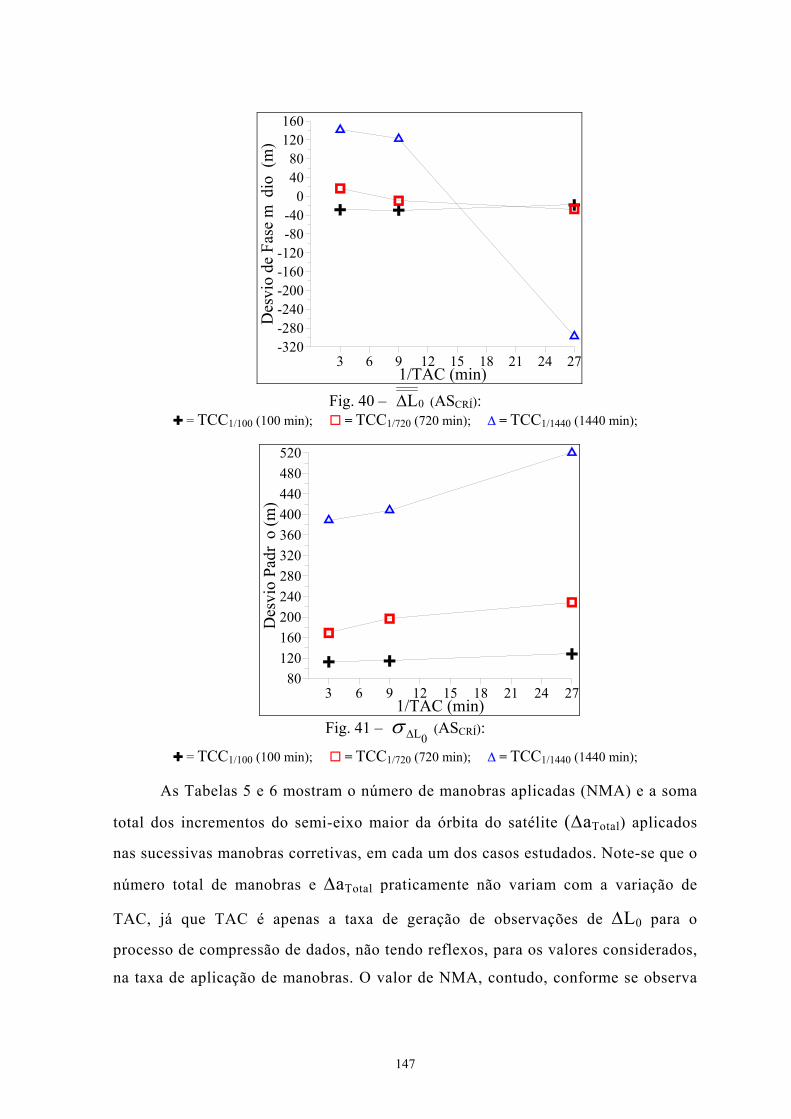
147
3 6 9 12 15 18 21 24 271/TAC (min)
-320-280-240-200-160-120
-80-40
04080
120160
Des
vio
de F
ase
mdi
o (m
)
Fig. 40 – 0L∆ (ASCRÍ):
= TCC1/100 (100 min); = TCC1/720 (720 min); ∆ = TCC1/1440 (1440 min);
3 6 9 12 15 18 21 24 271/TAC (min)
80120160200240280320360400440480520
Des
vio
Padr
o (m
)
Fig. 41 –
0L∆σ (ASCRÍ):
= TCC1/100 (100 min); = TCC1/720 (720 min); ∆ = TCC1/1440 (1440 min);
As Tabelas 5 e 6 mostram o número de manobras aplicadas (NMA) e a soma
total dos incrementos do semi-eixo maior da órbita do satélite (∆aTotal) aplicados
nas sucessivas manobras corretivas, em cada um dos casos estudados. Note-se que o
número total de manobras e ∆aTotal praticamente não variam com a variação de
TAC, já que TAC é apenas a taxa de geração de observações de ∆L0 para o
processo de compressão de dados, não tendo reflexos, para os valores considerados,
na taxa de aplicação de manobras. O valor de NMA, contudo, conforme se observa

148
pelas tabelas, varia significativa e diretamente com a variação da TCC, já que esta
taxa reflete a taxa máxima de aplicação de manobras considerada no processo de
controle autônomo. Quanto menor o valor de TCC, menor é o valor de NMA.
Apesar disto, em qualquer caso, observa-se que os valores de ∆aTotal permaneceram
próximos, independentemente dos valores de TAC e TCC. Como cada tabela reflete
sempre a mesma condição, em termos de atividade solar e um mesmo período de
simulação (um ano), então, em cada teste (dentro de cada tabela) o decaimento do
semi-eixo maior é o mesmo. Como as manobras visam corrigir este decaimento de
modo a manter a defasagem em longitude dentro dos limites toleráveis de variação,
as correções totais (∆aTotal) devem realmente possuir o mesmo valor,
independentemente da taxa de aplicação de manobras. Conforme se verificou
anteriormente, quando se reduz a taxa de aplicação de manobras é necessário
considerar uma maior amplitude de manobra (∆a), de modo a obter um mesmo
efeito global. As pequenas variações de valores nas amplitudes globais, dentro de
uma mesma tabela, devem-se ao efeito da quantização decorrente das variações do
intervalo entre duas manobras sucessivas.
Comparando-se os valores da Tabela 6 (Atividade Solar Crítica, ASCRÍ,
Figura 1b) com os da Tabela 5 (Atividade Solar Normal, ASNOR, Figura 1a), nota-se
que em qualquer caso, como esperado, tanto o número total de manobras aplicadas
quanto os valores de ∆aTotal são maiores no caso de atividade solar crítica, em que,
na média, a atividade solar considerada é bem maior.

149
TABELA 5 – NÚMERO DE MANOBRAS/∆aTotal PARA ASNOR
Taxa de Compressão para o Controle TCC (1/min)
1/100 (∆a = 3 m)
1/720 (∆a = 15 m)
1/1440 (∆a = 30 m)
Taxa de Amostragem
para o Controle
TAC (1/min) NMA ∆aTotal(m)
NMA ∆aTotal(m)
NMA ∆aTotal (m)
1/3 664 1992 133 1995 67 2010
1/9 666 1998 134 2010 66 1980
1/27 667 2001 131 1965 66 1980
OBS.:NMA = Número de Manobras Aplicadas
TABELA 6 – NÚMERO DE MANOBRAS/∆aTotal PARA ASCRÍ
Taxa de Compressão para o Controle TCC (1/min)
1/100 (∆a = 4 m)
1/720 (∆a = 23 m)
1/1440 (∆a = 46 m)
Taxa de Amostragem
para o Controle
TAC (1/min) NMA ∆aTotal(m)
NMA ∆aTotal(m)
NMA ∆aTotal (m)
1/3 1144 4576 199 4577 99 4554
1/9 1145 4580 199 4577 99 4554
1/27 1146 4584 199 4577 99 4554
OBS.:NMA = Número de Manobras Aplicadas
A Tabela 7 a seguir, apresenta, em função dos valores de ∆a utilizados nos casos
estudados, os valores correspondentes para o incremento de velocidade tangencial do
satélite, ∆vT, a duração da manobra, ∆T e o consumo de massa de combustível, ∆m. Os
resultados apresentados foram obtidos utilizando-se as equações 4, 5 e 7 definidas na seção
5.2. É possível concluir a partir desta tabela, que as durações das manobras consideradas
são bastante pequenas, relativamente às taxas máximas de aplicação de manobras (=TCC),
mesmo quando considera-se a maior delas, de uma a cada 100 minutos.

150
E CONSUMO POR MANOBRA.
∆a (m)
3 4 15 23 30 46
∆vT (m/s) 1,5x10-3 2,1x10-3 7,8x10-3 1,2x10-2 1,6x10-2 2,4x10-2
∆T (s) 0,12 0,16 0,6 0,92 1,2 1,9
∆m (kg) 1,1x10-3 1,5x10-3 5,6x10-3 8,6x10-3 1,1x10-2 1,7x10-2
Na Tabela 8 a seguir, apresenta-se o consumo total de combustível ∆mT, em
função da atividade solar (AS) e da taxa de compressão (TCC), Os resultados apresentados
foram obtidos utilizando-se a equação 8 definida na seção 5.2. Nesta equação, utilizou-se o
valor médio de NMA para cada TCC, calculado a partir das Tabelas 5 e 6, bem como o
valor de consumo por manobra, ∆m, dado na Tabela 7. Como esperado, os consumos
totais de combustível variaram muito pouco com TCC, para cada condição de AS, sendo
que, tanto para ASNOR quanto para ASCRÍ, a TCC1/1440 se apresenta ilusoriamente um pouco
mais econômica. Na verdade, isto se deve a um efeito de quantização devido ao maior
intervalo mínimo de aplicação de manobras considerado. A ocorrência de uma próxima
manobra, provavelmente iminente e com uma amplitude maior que nos outros dois casos,
equilibraria novamente o consumo desigual. Só a mudança das condições de atividade
solar poderia provocar uma variação significativa no consumo, pois, como já discutido
anteriormente, esta mudança influi diretamente no ∆aTotal e este, por sua vez, no consumo
de combustível. Em relação à AS, por outro lado, o consumo total de combustível foi
quase 2,5 vezes maior para ASCRÍ do que para ASNOR, o que também era esperado.
TABELA 8 – CONSUMO TOTAL DE COMBUSTÍVEL, ∆mT (kg)
Taxa de Compressão para o Controle TCC (1/min)
Atividade Solar (AS) 1/100 1/720 1/1440
Normal (ASNOR)
0,732
(∆a = 3 m)
0,743
(∆a = 15 m)
0,729
(∆a = 30 m)
Crítica (ASCRÍ)
1,72
(∆a = 4 m)
1,71
(∆a = 23 m)
1,68
(∆a = 46 m)

151
CAPÍTULO 6
CONCLUSÕES E SUGESTÕES
Foi desenvolvido e analisado um sistema simplificado de determinação autônoma, a
bordo, de órbitas de satélites artificiais, via GPS (navegador simplificado). A seguir, este
navegador foi incorporado a um procedimento de controle autônomo de órbita,
desenvolvido a partir de um conceito previamente estudado em cooperação entre o INPE e
o CNES (França). Os resultados globais foram bastante satisfatórios, tendo atingido
plenamente aos objetivos propostos. A simulação do conjunto aplicado ao satélite CBERS
permitiu a realização de uma análise realística de como seria seu desempenho em um
satélite real.
A meta de desempenho para o navegador GPS simplificado era a obtenção de
estimativas autônomas, a partir do refinamento direto da solução geométrica de navegação
do GPS, com erros médios quadráticos da ordem de 10 m no vetor posição e de 0,1 m/s no
vetor velocidade. Obteve-se, no melhor caso, estimativas autônomas com erros médios
quadráticos da ordem de 40 m no vetor posição e de 0,15 m/s no vetor velocidade. A partir
da estimação conjunta, via filtro de Kalman, do vetor de estado e do erro sistemático que
afeta, como citado anteriormente a solução geométrica do GPS usada como observação,
esperava-se reduzir em, pelo menos, uma ordem de grandeza (90 %) o erro tendencioso
nas estimativas refinadas do navegador. Obteve-se, no melhor caso, uma redução da
ordem de 60 % para o erro tendencioso presente nas estimativas refinadas pelo navegador.
Para os erros de posição a redução foi da ordem de 60 % e para os erros de velocidade da
ordem de 85 %. Conclui-se que chegou-se bem próximo dos valores inicialmente previstos
como metas. Quanto à robustez, o navegador mostrou-se bastante satisfatório, não
apresentando quaisquer sinais de divergência nos testes de longa duração efetuados. O
processo de reinicialização do filtro de Kalman após as variações bruscas dos erros
tendenciosos das observações, que ocorrem devido à mudança do conjunto de satélites
GPS visíveis ao receptor, também se mostrou bastante eficiente, levando o filtro a
convergir para os novos valores.
Quanto ao desempenho do sistema de controle autônomo aplicado ao satélite
CBERS, esperava-se atingir, em uma primeira etapa, a manutenção do desvio de fase no

152
equador, parâmetro a ser controlado, numa faixa de, no máximo, ±1 km. Isto significa a
redução em uma ordem de grandeza da faixa nominalmente especificada á manutenção, via
controle de solo, para o citado parâmetro orbital, no caso dos satélites da série CBERS
(±10 km). Esta meta de controle deveria ser obtida considerando condições de pior caso
em termos de variação de atividade solar, e para um período simulado de pelo menos um
ano. No caso de condições mais realísticas (e amenas) de variação de atividade solar,
esperava-se que esta faixa fosse reduzida a pelo menos metade dos citados valores. Estas
metas foram plenamente atingidas. Para condição de pior caso, em termos de atividade
solar, obteve-se, nos melhores casos, a manutenção do desvio de fase no equador numa
faixa de ±400 m. Para condições mais realísticas, em termos de atividade solar, obteve-se,
nos melhores casos, a manutenção do desvio de fase no equador numa faixa de –400 m a
+200 m, sendo que em ¾ do período simulado, o desvio se manteve numa faixa de
±200 m. Comparando-se com os resultados obtidos por Orlando e Kuga (1999), onde foi
considerado o uso direto da solução grosseira de navegação do GPS no sistema de controle
autônomo, o ganho em precisão obtido fica bastante evidente, já que, no melhor caso
obtido por estes autores o valor de ∆L0 ficou restrito a uma faixa da ordem de –1000 m a
+2000 m.
Em continuidade ao trabalho desenvolvido sugere-se as seguintes possibilidades de
trabalhos futuros:
• Analisar a influência do uso do navegador simplificado no comportamento de uma
versão do controlador autônomo (Orlando, 1999) na qual a amplitude da manobra é
calculada adaptativamente em função da atividade solar atual, cuja magnitude é
inferida através de estimativas da derivada segunda em relação ao tempo do desvio
de fase no equador;
• Analisar a influência do navegador simplificado no comportamento de uma versão
do procedimento de controle autônomo na qual a amplitude de manobra é calculada
de modo que o valor mínimo do desvio de fase seja igual a um limite pré-
estabelecido;

153
• Aprofundar o estudo do desempenho do navegador simplificado isoladamente e do
sistema de controle autônomo com o navegador simplificado incorporado, em
função da taxa de amostragem de observações GPS;
• Aprofundar o estudo do desempenho do controlador autônomo em função da taxa de
aplicação de manobras;
• Analisar a influência de vínculos de missão e aqueles impostos pelos equipamentos
físicos no desempenho do sistema de controle autônomo;
• Implementar um procedimento de ruído adaptativo (por exemplo, Rios Neto e Kuga,
1985), de modo a verificar se este recurso pode evitar a necessidade de
reinicialização do navegador simplificado cada vez que muda o conjunto de
satélites GPS simultaneamente observados, o que causa mudança brusca nos
valores dos erros tendenciosos das observações;
• Considerar outros modelos para o erro tendencioso, como, por exemplo, um
processo de Gauss-markov de primeira ordem em lugar de simplesmente modelá-lo
como um ruído branco gaussiano, como feito no trabalho.

154
155
REFERÊNCIAS BIBLIOGRÁFICAS
Albertelli, B.; Garavelli, B.; Marradi, L. Space qualified GPS receiver and INS for an
autonomous on-board guidance and navigation package. In: International Symposium
on Space Flight Dynamics, Toulouse, França, 1995, Proceedings. Toulouse, França:
Cépadues-Éditions, 1995. p. 645-649.
Bate, R. R.; Mueller, D.D.; White, J.E. Fundamentals of astrodynamics. Nova Iorque:
Dover Publications, 1971. 455 p.
Berthias, J. P.; Jayles C.; Pradines, D. Real-time on-board orbit determination with
DORIS. In: International Symposium on Ground Data Systems for Space Missions
Operations, 2., Pasadena, California, EUA, 1992. Proceedings. Pasadena: JPL, 1992.
p. 579-583.
Berthias, J.; Jayles C.; Pradines, D. DIODE: a DORIS based real-time on-board orbit
determination system for SPOT 4. In: AAS/GSFC International Symposium on Space
Flight Dynamics, Greenbelt, Maryland, EUA, 1993. Proceedings. San Diego,
California, EUA: Univelt Publishers, 1993. p.125-138.
Berthias, J. P.; Houry, Sabine, D. Next day precise orbits for TOPEX/POSEIDON using
DORIS. In: AAS/GSFC International Symposium on Space Flight Dynamics,
Greenbelt, Maryland, EUA, 1998. Proceedings. San Diego, California, EUA: Univelt
Publishers, 1998. v. 100, Part 1, p. 173-183.
Berthias, J. P.; Broca, P.; Fourcade, J.; Jayles, C.; Pradines, D.; Laurichesse, D. General
characteristic of real-time on-board orbit determination. In: International Symposium
on Space Flight Dynamics, 12., Darmstadt, Alemanha, 1997. Proceedings. Darmstadt:
ESA, 1997. p. 267-274.
Brouwer, D.; Clemence, G.M. Methods of celestial mechanics. Nova Iorque, EUA:
Academic Press, 1961. 598 p.

156
Carrou, J. P. Spaceflight dynamics. Toulouse, França: Cépadues-Éditions, 1995. 1966 p.
Carrou, J. P.; Darrigan, C.; Foliard, J.; Jayles, C.; Micheau, P.; Tello, M. Ground and on-
board autonomous flight dynamics subsystems at CNES. In: International
Astrodynamics Symposium, 11./International Symposium on Space Technology and
Science, 20., Gifu, Japão, 1996. Proceedings. Gifu: ISAS, 1996. p. 137-142.
Chiaradia, A. P. M. Determinação e manobras autônomas de órbitas de satélites
artificiais em tempo real usando medidas GPS de uma frequência. São José dos
Campos. 202 p. (INPE-8755-TDI/758). Tese (Doutorado em Mecânica Espacial e
Controle) - INPE, 2000.
Dow, J. M. Current activities and future plans for GPS applications. In: International
Symposium on Spacecraft Flight Dynamics, Darmstadt, Alemanha, 1991. Proceedings
Darmstadt: ESA, 1991. p. 105-111.
Di Girolamo, S.; Perrota, G.; Carollo, R.; Tomei, P. Study of the orbit in an autonomous
orbit keeping of small satellites in LEO, using low-power electric thrusters aided by a
GPS receiver and an orbital propagator. In: International Symposium on Space
Dynamics, Toulouse, França, 1995. Proceedings. Toulouse, França: Cépadues-
Éditions, 1995. p. 45-61.
Eckstein, M.C.; Hechler, F. A reliable derivation of the perturbations due to any zonal
and tesseral harmonics of the geopotential for nearly-circular satellite orbits.
Darmstadt, Alemanha: European Space Research Organization, 1970. (ESRO SR-13).
Enderle, W.; Schmidhuber, M.; Gill, E.; Montenbruck, O.; Braun, A.; Eisfeller, B.;
Balbach, O.; Lemke, N. GPS performance for GEO’s and HEO’s of the Equator-S
spacecraft mission. In: AAS/GSFC International Symposium on Space Flight
Dynamics, Greenbelt, Maryland, EUA, 1998. Proceedings. San Diego, California,
EUA: Univelt Publishers, 1998. v. 100, Part 1, p. 315-327.

157
Gill, E. Orbit determination of the MIR space station from GPS navigation data. In:
International Symposium on Space Flight Dynamics, 12., Darmstadt, Alemanha, 1997.
Proceedings. Darmstadt: ESA, 1997. p. 79-84.
Gill, E.; Montenbruck, O.; Fraile-Ordonez, J. M. Orbit determination of the MIR space
station using MOMSNAV GPS measurements. In: International Astrodynamics
Symposium,11.,/International Symposium on Space Technology and Science, 20., Gifu,
Japão, 1996. Proceedings. Gifu: ISAS, 1996. p. 295-300.
Gramiling, C. J.; Hart, R. C.; Teles, J.; Long, A. C.; Maher, M. J. Performance assessment
of the TDRSS onboard navigation system (TONS) experiment on EP/EUVE. In:
AAS/GSFC International Symposium on Space Flight Dynamics, Greenbelt, Maryland,
EUA, 1993. Proceedings. San Diego, California, EUA: Univelt Publishers, 1993.
p. 256-1 256-16.
Hart, R. C.; Gramling, C. J.; Long, A. C.; Oza, D. H. Autonomous navigation initiatives at
the NASA GSFC flight dynamics division. In: International Astrodynamics
Symposium,11.,/International Symposium on Space Technology and Science, 20., Gifu,
Japão, 1996. Proceedings. Gifu: ISAS, 1996. p. 125-130.
Hart, R. C.; Truong, S.; Long, A. C.; Lee, T.; Chan, J.; Oza, D. H. GPS navigation
iniatives at Goddard Space Flight Center Flight Dynamics Division. In: AAS/AIAA
Spaceflight Mechanics Meeting, Huntsville, AL, EUA, 1997. Proceedings. San Diego,
California, EUA: Univelt Publishers, 1997. v. 95, part 1, p. 315-327.
Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. GPS theory and practice. 3 ed.
Nova Iorque, EUA: Springer-Verlag Wien, 1996. 355 p.
Jayles, C.; Renault, H.; Jahier, J. P. Autonomous low earth navigation. In: International
Symposium on Space Dynamics, Toulouse, França, 1989. Proceedings. Toulouse,
França: Cépadues-Éditions, 1989, p.671-684.

158
Jochim, E. F.; Gill, E.; Montenbruck, O.; Kirschner, M. GPS based onboard and
onground orbit operations for small satellites. In: IAA Symposium on Small Satellite
for Earth Observation, Berlim, Alemanha, 1996. Proceedings. Berlim: IAA, 1996.
ACTA Astronautica 39, no 9-12, p. 917-922.
Kang, Z.; Schwintzer, P.; Reigber, C.; Zhu, S. Y. Precise orbit determination for GPS/Met
using GPS/SST data. In: International Symposium on Space Flight Dynamics, 12.,
Darmstadt, Alemanha, 1997. Proceedings. Darmstadt: ESA, 1997. p. 127-130.
Kreyszig, E. Advanced engineering mathematics. 7 ed. Singapura: John Wiley & Sons,
1993. 1271 p.
Kuga, H. K. Estimação adaptativa de órbitas aplicada a satélites a baixa altitude. São
José dos Campos. 128 p. (INPE-2316-TDL/079). Dissertação (Mestrado em Ciência
Espacial) - INPE, 1982.
Kuga, H. K.; Gill, E. A mathematical description of the ODEM orbit determination
software. Oberpfaffenhofen, Alemanha: German Aerospace Research Establishment
(DLR), 1994. 59 p. (DLR-GSOC IB 94-06).
Markley, F. L. Approximate cartesian state transition matrix. The Journal of the
Astronautical Sciences, v. 34, n. 2, p. 161-169, April-June 1986.
Marshall, J. A.; Nerem, R.S.; Lerch, F.J.; Zelensky, N. P.; Chinn, S. M.; Luthcke, S. B.;
Rachlin, K. E.; Williamson, R. G. TOPEX-POSEIDON precise orbit determination. In:
International Symposium on Space Dynamics, Toulouse, França, 1995. Proceedings.
Toulouse, França: Cépadues-Éditions, 1995. p. 569-570.
Martín-Mur, T. J.; Dow, J. M. Absolute and relative navigation of spacecraft using GPS:
the ATV rendezvous predevelopment flight demontrations. In: International
Symposium on Space Flight Dynamics, 12., Darmstadt, Alemanha, 1997. Proceedings.
Darmstadt: ESA, 1997. p. 93-96.

159
Micheau, P. Les techniques de maintien sur orbite de satellites défilants. In: Carrou, J. P.
ed. Mécanique Spatiale. Toulouse, França: Cépadues Editions, 1995. v. 1, Cap. 13, p.
903-978.
Mur, T. J. M.; Martínez, C. G. Data analysis of space based relative GPS experiments. In:
AAS/GSFC International Symposium on Space Flight Dynamics, Greenbelt, Maryland,
EUA, 1998. Proceedings. San Diego, California, EUA: Univelt Publishers, 1998. v.
100, part 1, p. 329-338.
Nascimento, J. M.; Kuga, H. K.; Prado, A. F. B. A. Utilização da solução de navegação
do GPS para determinação de orbita de satélites a baixa altitude. São José dos
Campos: INPE, 1997. 08 p. (INPE-6719-PRE/2741).
Negreiros de Paiva, R. Determinação de órbita de satélites artificiais através de um
estimador, na presença de acelerações não modeladas, usando a transformação
KS. São José dos Campos. (INPE-1998-TDL/040). Dissertação (Mestrado em Ciência
Espacial) - INPE, 1980.
Negreiros de Paiva, R. Determinação autônoma de órbita usando GPS. São José dos
Campos. (INPE-4815-TDL/361). Tese (Doutorado em Ciência Espacial) - INPE, 1989.
Nouël, F.; Berthias, J. P.; Broca, P.; Comps, A. Deleuse, M.; Guitart, A.; Jayles, C.;
Laudet, P.; Pierret, C.; Piuzzi, C.; Pradines, D.; Taburiau, D.; Valorge, C. Precise orbit
determination with the DORIS/SPOT2 system first results. In: ESA Symposium on
Spacecraft Flight Dynamics, Darmstadt, Alemanha, 1991. Proceedings. Darmstadt:
ESA, 1991.
Nouël, F.; Deleuze, M.; Laudet,P.; Valorge, C. Operational aspects of precise orbit
determination of SPOT and TOPEX/POSEIDON satellites with DORIS. In: AAS/GSFC
International Symposium on Space Flight Dynamics, Greenbelt, Maryland, EUA, 1993.
Proceedings. San Diego, California, EUA: Univelt Publishers, 1993. p. 269-1 269-12.

160
Orlando, V. Técnicas estocásticas aplicadas à suavização, tratamento de tendencio-
sidades e compressão de dados de rastreamento ou telemetria de satélites
artificiais. São José dos Campos. (INPE-2909-TDL/148). Tese (Doutorado em Ciência
Espacial) - INPE, 1983.
Orlando, V. Analyse d'une methode de compression des donnees de localisation.
Toulouse, França: CNES, 1984. 23 p. (CNES-C/DTI/MS/MN/088).
Orlando, V. Étude d'un controle d'orbite autonome du satellite SPOT. Toulouse,
França: CNES, 1995. 156 p. (CNES-C-NT-633-2981-CN-v. 1).
Orlando, V. Étude d'un controle d'orbite autonome du satellite SPOT. Toulouse,
França: CNES, 1995. 79 p. (CNES-C-NT-633-2983-CN-v. 2).
Orlando, V.; Kuga, H. K. Analysis of an autonomous orbit control concept using GPS.
Revista Brasileira de Ciências Mecânicas. v. 21, p. 52-59, 1999. Special Issue on the
Second International Symposium on Spacecraft Ground Control and Data Systems
(SCDII).
Orlando, V.; Kuga, H. K. Effect analysis of the maximal allowable maneuver application
rate for an autonomous orbit control procedure using GPS. In: International
Symposium on Space Dynamics, Biarritz, França, 2000. Proceedings Toulouse,
França: Cépadues-Éditions, 2000. (MS00/12).
Orlando, V.; Micheau, P. Autonomous orbit control system for phased LEO satellites. In:
International Astrodynamics Symposium, 11., / International Symposium on Space
Technology and Science, 20., Gifu, Japão, 1996. Proceedings. Gifu: ISAS, 1996.
p. 143-148.
Orlando, V.; Rios Neto, A. Procedimento para tratamento automático de tendenciosidades
em observação de estado de sistemas dinâmicos. In: Congresso Latino Americano de
Controle Automático, 2., Buenos Aires, 1986. Proceedings. Buenos Aires: AADECA,
1986. A. 2.5, v. 1, p. 47-52.

161
Orlando, V.; Kuga, H. K.; Lopes, R. V. F. Reducing the geopotential tesseral harmonic
effects on autonomous longitude drift control of sun-synchronous satellites. In:
AAS/AIAA Spaceflight Mechanics Meeting, Huntsville, AL, EUA, 1997.
Proceedings. San Diego, California, EUA: Univelt Publishers, 1997. v. 95, part 1, p.
361-374.
Osório, I; Osório, J. P.; Rebordão, J. M. The orbit of PoSAT-1 from on board GPS
measurements. . In: International Astrodynamics Symposium, 11., / International
Symposium on Space Technology and Science, 20., Gifu, Japão, 1996. Proceedings.
Gifu: ISAS, 1996. p. 301-307.
Parkinson, B. W.; Spilker Jr., J. J. Global positioning system: theory and applications.
Washington, EUA: 1996. 781 p. AIAA, Progress in Astronautics and Aeronautics, v.
163.
Putney, B.; Zelensky, N.; Klosko, S. TOPEX/POSEIDON precision orbit determination
production and expert system. In: International Symposium on Ground Data Systems
for Space Missions Operations, 2., Pasadena, California, EUA, 1992. Proceedings.
Pasadena: JPL, 1992. p. 585-590.
Rios Neto, A.; Kuga, H. K. Kalman filtering state noise adaptative estimation. In:
IASTED - International Conference on Telecommunication and Control TELECON'85,
2., Rio de Janeiro, 1985. Proceedings. Calgary, Canada: ACTA Press, 1985. p. 210-
213.
Sommer, J. C.; Pallaschke, S., Wilde, D. Study of onboard orbit determination. In:
International Symposium on Space Dynamics, Toulouse, França, 1989. Proceedings.
Toulouse, França: Cépadues-Éditions, 1989, p. 655-670.
Sorenson, H. W. Kalman filtering techniques. Advances in Control Systems, v. 3,
p. 219-292, 1966.
162
Tello, M.; Sebbag, I.; Issler, J. L.; Mehlen, C. Experience de navigation en orbite avec un
recepteur GPS. In: International Symposium on Space Dynamics, Toulouse, França,
1995. Proceedings. Toulouse, França: Cépadues-Éditions, 1995. p. 23-34.
Truong, S. H. A self-tuning Kalman filter for autonomous spacecraft navigation. Revista
Brasileira de Ciências Mecânicas. v. 21, p. 220-226, 1999. Special Issue on the 14th
International Symposium on Space Flight Dynamics (ISSFD XIV).
Wertz, J.R.; Larson, W.J. Space mission analysis and design. Dordrecht, Netherlands:
Kluwer Academic Press, 1991. 832 p.
Xing, G. Q.; Parvez, S., A. Autonomous acquisition and maintenance of a satellite
constellation using LQR/LTR optimal controller with GPS measurements. In:
AAS/GSFC International Symposium on Space Flight Dynamics, Greenbelt, Maryland,
EUA, 1998. Proceedings. San Diego, California, EUA: Univelt Publishers, 1998. v.
100, Part 1, p. 671-684.





























