Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
Desenvolvimento de uma Nova Técnica para Otimização
de Circuitos Planares Inspirada no Comportamento
Social das Aranhas
Phelipe Sena Oliveira
Orientador: Prof. Dr. Adaildo Gomes D’Assunção
Número de Ordem do PPgEEC: D190
Natal, RN, fevereiro de 2017.

UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
Desenvolvimento de uma Nova Técnica para Otimização
de Circuitos Planares Inspirada no Comportamento
Social das Aranhas
Phelipe Sena Oliveira
Orientador: Prof. Dr. Adaildo Gomes D’Assunção
Tese de Doutorado apresentada ao Programa de
Pós-Graduação em Engenharia Elétrica e de
Computação da Universidade Federal do Rio Grande
do Norte (área de concentração: Telecomunicações)
como parte dos requisitos para obtenção do título de
Doutor em Ciências.
Natal, RN, fevereiro de 2017.

Universidade Federal do Rio Grande do Norte – UFRN
Sistema de Bibliotecas – SISBI
Catalogação da Publicação na Fonte - Biblioteca Central Zila Mamede
Oliveira, Phelipe Sena.
Desenvolvimento de uma nova técnica para otimização de circuitos
planares inspirada no comportamento social das aranhas / Phelipe Sena
Oliveira. - 2017.
71 f. : il.
Tese (doutorado) - Universidade Federal do Rio Grande do Norte,
Centro de Tecnologia, Programa de Pós-Graduação em Engenharia
Elétrica e Computação. Natal, RN, 2017.
Orientador: Prof. Dr. Adaildo Gomes D'Assunção.
1. Algoritmos bioinspirados - Tese. 2. Inteligência de enxame - Tese. 3.
Spider social optimization - Tese. 4. Framework - Tese. 5. Antena - Tese.
6. Frequency selective surface - Tese. I. D'Assunção, Adaildo Gomes. II.
Título.
RN/UF/BCZM CDU 621.396.67

Desenvolvimento de uma Nova Técnica para Otimização
de Circuitos Planares Inspirada no Comportamento
Social das Aranhas
Phelipe Sena Oliveira
Tese de doutorado aprovada em 06 de fevereiro de 2017 pela banca examinadora
composta pelos seguintes membros:

A todos os meus professores da academia e da vida.

Agradecimentos
A Deus por permitir a realização e conclusão desse trabalho.
Aos meus pais, Maria do Carmo e Djalma, ou simplesmente, Carminha e Dija,
pelos ensinamentos que integram a minha pessoa e toda a dedicação envolvida.
À minha esposa Ana Lúcia, pela convivência nos momentos bons e difíceis e pelos
incentivos.
Aos meus irmãos Caruza e Tarcísio, por tudo o que vivemos.
Aos meus tios José Antônio, Eulália, João Mário, Jorge e Edvã pelo
companheirismo.
Ao Prof. Dr. Adaildo Gomes D’Assunção, pela amizade e grandes ensinamentos
recebidos, além da confiança. Agradeço também, por sempre proporcionar um
agradável ambiente de trabalho.
Ao amigo Gustavo Cavalcante pelo apoio ao meu trabalho.
Ao Prof. Dr. Custódio Peixeiro e ao colega Antônio pela ajuda na realização das
medidas durante o trabalho.
Aos demais professores e funcionários do Programa de Pós-graduação em
Engenharia Elétrica e da Computação – PPgEEC e do Instituto Nacional de Ciência e
Tecnologia de Comunicações sem Fio – INCT/CSF.
Ao CNPq pelo suporte financeiro.

Resumo
As novas configurações de dispositivos e circuitos de micro-ondas resulta em aumento
de complexidade nos processos de desenvolvimento, particularmente nos casos de
síntese. Antenas e superfícies seletivas de frequência (Frequency Selective Surface - FSS)
são estruturas muito importantes nos sistemas de comunicações, que podem ser
otimizadas pela atuação dos algoritmos bioinspirados. Geralmente, para que os
algoritmos bioinspirados auxiliem na otimização dessas estruturas é necessária a
implementação de técnicas de análise numérica como o Método dos Momentos ou
Elementos Finitos. Diante da dificuldade de modelagem das técnicas descritas, é comum
a utilização de uma função de estimação, como as Redes Neurais Artificiais, para
substituir a análise numérica. Embora encontre soluções desejadas, as estimações são
realizadas após um processo de treinamento efetuado através de uma base de dados.
Cada estrutura de antena ou FSS exige uma base de dados específica. Este trabalho
propõe uma técnica de otimização baseado na utilização de um algoritmo bioinspirado
e um framework que realiza a integração do algoritmo ao software comercial ANSYS
HFSS. O propósito é realizar as simulações das possíveis soluções durante a execução do
algoritmo bioinspirado, e com isso, evitar o uso de uma base de dados, e assim, tornar
a técnica eficiente e flexível com relação às alterações nas estruturas de antenas ou FSS.
Outro objetivo original deste trabalho é a utilização do algoritmo Social Spider
Optimization – SSO para a solução de problemas na área de eletromagnetismo aplicado.
Para comprovar a eficácia da técnica proposta alguns projetos de antena e FSS são
otimizados através de variações em seus parâmetros estruturais. Os resultados obtidos
na otimização dos projetos dos circuitos são comparados com outras técnicas, tendo
sido observado uma boa concordância.
Palavras-chave: Algoritmos bioinspirados, inteligência de enxame, spider social
optimization, SSO, framework, antena, frequency selective surface, FSS.

Abstract
The new settings for devices and microwaves circuits result in an increase of complexity
in the processes of development, specially in regards to the process of synthesis.
Antennas and Frequency Selective Surfaces (FSS) are primordial in communication
systems. Alternatively, these structures may be optimized through the usage of bio-
inspired algorithms. Generally, in order for the bio-inspired algorithms to assist in the
optimization of FSS structures, it is necessary to implement several numerical analysis
techniques, such as the method of moments or finite elements. Because of the difficulty
to model such methods, it has been turned common the usage of a point estimation
function, such as artificial neural networks, to substitute the numerical analysis.
Although these procedures end up encountering desirable solutions, the estimations are
done after a training process conducted through a database. Additionally, every FSS
antenna demands a specific database. This work proposes an optimization technique
that relies on the usage of a bio-inspired algorithm and a framework (that provides the
integration between the algorithm and the commercial software ANSS HFSS). The
purpose of the work is to do simulations of possible solutions during the execution of
the bio-inspired algorithm; therefore, avoiding the usage of the database; and so, make
the technique flexible and efficient in relation to altering the antennas’ structures or
FSS. Furthermore, another objective of this work is the usage of the algorithm, namely
Social Spider Optimization - SSO in the search for solutions in the field of applied
electromagnetism. In order to prove the efficiency of the proposed techniques, some
FSS’ and antennas’ projects are optimized through the variation of their structural
parameters. In conclusion, the results that were obtained through the procedures
previously shown, are compared to other techniques, resulting in a satisfying agreement
rate.
Keywords: Bioinspired algorithms, Swarm intelligence, Spider social optimization, SSO
Framework, Antenna, Frequency selective surface, FSS.

Sumário
Resumo
Abstract
Lista de Figuras
Lista de Tabelas
Lista de Símbolos e Abreviaturas
1 Introdução 14
2 Algoritmos Bioinspirados 18
2.1 Introdução ........................................................................................................... 18
2.2 Algoritmos Genéticos .......................................................................................... 19
2.3 Otimização por Enxame de Partículas ................................................................. 22
2.4 Redes Neurais Artificiais ...................................................................................... 24
2.5 Sistemas Imunológicos Artificiais ........................................................................ 26
2.6 Conclusão ............................................................................................................. 28
3 Antenas de Microfita e FSS 30
3.1 Introdução ........................................................................................................... 30
3.2 Estrutura e Características ................................................................................... 30
3.3 Técnicas de Alimentação ..................................................................................... 32
3.2.1 Alimentação por Linha de Microfita ........................................................... 33
3.2.2 Alimentação por Cabo Coaxial .................................................................... 34
3.2.3 Alimentação por Acoplamento Direto ........................................................ 34
3.2.4 Alimentação por Acoplamento por Abertura ............................................. 35
3.4 Superfícies Seletivas de Frequências (FSS) .......................................................... 36
3.3.1 Estruturas e Características Principais ........................................................ 36

3.3.2 Elementos de FSS ........................................................................................ 36
3.3.3 Técnicas de Medição .................................................................................. 38
3.5 Métodos de Análise ............................................................................................ 38
3.6 Conclusão ............................................................................................................ 39
4 Modelo Desenvolvido ........................................................................................ 40
4.1 Introdução ........................................................................................................... 40
4.2 Comportamento dos Algoritmos Bioinspirados .................................................. 40
4.3 O Framework desenvolvido ................................................................................. 42
4.4 Spider Social Optimization ................................................................................... 44
4.5 Conclusão ............................................................................................................. 47
5 Resultados 49
5.1 Introdução ........................................................................................................... 49
5.2 Antena UWB ........................................................................................................ 49
5.3 FSS ........................................................................................................................ 52
5.4 Projeto de miniaturização de uma antena com aplicação de fractal e pino para
curso circuito............................................................................................................... 57
5.5 Conclusão ............................................................................................................. 61
6 Conclusão 62
Referências Bibliográficas 64
Apêndice 68
Lista de Figuras
2.1 Fluxograma de etapas do Algoritmo Genético .................................................... 21
2.2 Probabilidades de reprodução de 6 indivíduos com o uso de roleta aleatória e
roleta com ranking .......................................................................................................... 22
2.3 Representação do deslocamento de partículas no PSO ...................................... 24
2.4 Neurônio artificial desenvolvido por McCulloch e Pitts ...................................... 26
2.5 Pseudocódigo do algoritmo de seleção clonal ou CLONALG ............................... 28
3.1 Antena de microfita com patch retangular ......................................................... 31
3.2 Formas geométricas para o patch de microfita ................................................... 31
3.3 Geometria da antena alimentada por cabo coaxial ............................................ 34
3.4 Geometria da antena alimentada por acoplamento direto ................................ 35
3.5 Geometria da antena alimentada por meio de acoplamento por abertura ....... 35
3.6 Geometria de uma estrutura FSS ........................................................................ 36
3.7 Formas de representação dos elementos utilizados em FSS .............................. 37
4.1 Etapas comuns da maioria dos algoritmos bioinspirados ................................... 41
4.2 Interligação de componentes através de framework ......................................... 43
4.3 Fluxograma do algoritmo SSO ............................................................................. 45
5.1 Geometria da antena UWB .................................................................................. 49
5.2 Resultados medidos e simulados para coeficiente de reflexão da antena UWB
utilizando o AG e o algoritmo SSO ....................................................................... 49
5.3 Resultados simulados de radiação em 3 dimensões (escala de ganho) para o
monopolo em anel em (a) 4 GHz, (b) 6 GHz, e (c) 8 GHz ..................................... 50

5.4 Resultados simulados e medidos de radiação em 2 dimensões (escala de ganho)
em 6 GHz .............................................................................................................. 51
5.5 Geometria da FSS com variações no (a) nível do fractal, k, e (b) fator de iteração,
a ........................................................................................................................... 52
5.6 Comparação entre resultados simulados para coeficiente de transmissão usando
as técnicas PSO-RNA e algoritmo SSO ................................................................. 53
5.7 Comparação entre resultados medidos e simulados para FSS com fractal Vicsek
e parâmetros dados pela Tabela 5.3 ................................................................... 55
5.8 Antena de microfita com patch em fractal de Koch: nível k=0 (a); nível k=1; nível
k=2 ........................................................................................................................ 56
5.9 Resultados simulados para o coeficiente de reflexão das antenas com fractal de
Koch nos níveis, k = 0, k = 1 e k = 2, sem o pino de curto circuito ....................... 57
5.10 Resultados simulados para o coeficiente de reflexão da antena com fractal de
Koch nível k = 2, sem o pino e com o pino de curto circuito ............................... 58
5.11 Fotografia da antena proposta ............................................................................ 58
5.12 Resultado simulado e medido para o coeficiente de reflexão da antena otimizada
com algoritmo SSO .............................................................................................. 59
5.13 Comparação das convergências entre os algoritmos SSO e PSO ........................ 59

Lista de Tabelas
5.1 Comparação entre os resultados do AG e algoritmo SSO ................................... 50
5.2 Valores dos parâmetros obtidos com algoritmo SSO para FSS com patch fractal
de Vicsek e substrato FR-4 ................................................................................... 54
5.3 Comparação de frequência de ressonância e largura de banda entre resultados
medidos e simulados ........................................................................................... 55

Lista de Siglas e Abreviaturas
a Fator de iteração
ABC Artificial Bee Colony
ACO Ant Colony Optimization
AG Algoritmo Genético
CLONALG CLONal selection ALGorithm
CST Computer Simulation Technology
di,j Distância Euclidiana entre i e j
FEM Método dos Elementos Finitos (Finit Element Method)
FSS Superfície Seletiva de Frequência (Frequency Selective Surface)
h Altura do substrato
HFSS High Frequency Electromagnetic Field Simulation
IFS Iterated Function Systems
k Número de interação do fractal
L Comprimento do patch
MNM Multiport Network Model
MoM Método dos Momentos (Method of Moments)
N Número de aranhas na população
Nf Número de fêmeas
PSO Particle Swarm Optimization
Px Periodicidade no eixo x
Py Periodicidade no eixo y
RNA Redes Neurais Artificiais
Sb Aranha mais pesada de toda a teia
Sc Vizinho mais pesado
SSO Social Spider Optimization

TE Modo Transversal Elétrico
TEM Modo Transversal Eletromagnético
TM Modo Transversal Magnético
vib Vibração
w Largura da linha de microfita
W Largura do patch
WCIP Método Iterativo das Ondas (Wave Concept Iterative Procedure)
Z0 Impedância característica
λ Comprimento de onda
λ0 Comprimento de onda no espaço livre
λg Comprimento de onda guiada no dielétrico
ε Permissividade elétrica
εeff Constante dielétrica efetiva
εr Permissividade elétrica relativa

14
Capítulo 1
Introdução
Os sistemas de comunicações oferecem diversas possibilidades de interação e
acesso às informações. O avanço da tecnologia na área de telecomunicações é capaz de
mudar o modo de vida em sociedade, tanto no aspecto pessoal quanto profissional. A
demanda por sistemas que garantam mobilidade, rapidez e eficiência na troca de
informações é crescente e exige cada vez mais dispositivos móveis com desempenho
aprimorado e tamanhos reduzidos. Diante disso, o interesse por dispositivos com novas
configurações aumenta, o que acarreta, também, em aumento de complexidade em
seus processos de desenvolvimento [1]–[3].
Circuitos planares, tais como, antenas e superfícies seletivas de frequências são
importantes para o funcionamento dos sistemas de comunicações. Algumas
características são requeridas para aprimorar a utilização destes circuitos, tais como:
tamanho pequeno, leveza, novos materiais dielétricos, facilidade na construção, etc. O
projeto desses circuitos tem por objetivo obter comportamento desejado através da
manipulação de características físicas e mecânicas. A quantidade de parâmetros que
serão manipulados e a maneira como eles se relacionam pode tornar o projeto
complexo para ser modelado pelo método de tentativa e erro. Assim sendo, é desejado
a utilização de técnicas que automatizem a busca e ajuste de parâmetros e ao mesmo
tempo garanta comportamento desejado dos circuitos planares em termos de largura
de banda, ganho, frequência de operação, dentre outros.
Uma das técnicas utilizadas são os algoritmos bioinspirados. A aplicação desses
algoritmos para resolverem problemas de eletromagnetismo tem se tornado comum e
relevante em pesquisas atuais. Um dos algoritmos mais utilizados é o Particle Swarm
Optimization, PSO, introduzido no campo do eletromagnetismo por Robinson [4] e

CAPÍTULO 1. INTRODUÇÃO
15
amplamente utilizado na síntese de antenas [5] e superfícies seletivas de frequência
(FSS) [6].
Os primeiros algoritmos bioinspirados a ganharem destaque foram os algoritmos
evolutivos, como principal representante, o Algoritmo Genético (AG). Entretanto, o
comportamento social e coletivo de alguns animais e insetos têm chamado a atenção
de pesquisadores ao redor do mundo por vários anos. Diante dessa observação muitos
algoritmos de busca global têm sido desenvolvidos para resolverem problemas
complexos do cotidiano. É possível mencionar alguns algoritmos: o supracitado PSO [7],
Artificial Bee Colony (ABC) [8], Ant Colony Optimization (ACO) [9] e o Cuckoo Algorithm
[10]. A capacidade de encontrar soluções desejadas para problemas complexos do
mundo real pode ser explicada devido à auto-organização e divisão de trabalho pelos
agentes de um grupo que realizam tarefas simples. Este fenômeno é chamado de
inteligência de enxame [11].
Em um projeto desenvolvido com o auxílio dos algoritmos bioinspirados cada
conjunto de valores para os parâmetros otimizados é uma solução em potencial. As
soluções candidatas recebem nomes diferentes em cada algoritmo. Por exemplo, no
PSO são chamadas de partículas, no AG são nomeadas como cromossomos. Para avaliar
ou qualificar as soluções candidatas comumente é utilizada uma análise numérica, como
o Método do Momentos, o Método do Elementos Finitos ou algum método híbrido.
Como a implementação desses métodos não é uma tarefa trivial, é comum a utilização
de softwares comerciais com implementações já desenvolvidas.
Uma outra abordagem é a utilização de duas técnicas de algoritmos
bioinspirados atuando juntas. Uma técnica para buscar e aprimorar as soluções
candidatas, e a outra, geralmente as Redes Neurais Artificiais (RNA), para estimar as
avaliações das soluções candidatas [12]–[14]. Embora consiga obter bons resultados,
essa técnica de hibridização ainda depende de análise numérica para criar uma base de
dados formada por um conjunto representativo de entradas e saídas. Essa base de dados
é imprescindível para o treinamento da Rede Neural e cada vez que o projeto sofre
alterações ou necessite utilizar a RNA em um novo projeto precisa-se de uma nova base
de dados.
Neste trabalho, uma biblioteca ou conjunto de classes específicas para
determinada tarefa (framework) é desenvolvida com o intuito de facilitar a utilização de

CAPÍTULO 1. INTRODUÇÃO
16
algoritmos bioinspirados de otimização global em projetos de circuitos planares, como
antenas e FSS. Para isso, é realizada uma integração de algoritmos ao software comercial
ANSYS HFSS [15] e com isso, as avaliações das soluções candidatas são realizadas em
tempo de execução do algoritmo bioinspirado sem a necessidade da criação de uma
base de dados com conjuntos de entradas e saídas.
Outro objetivo deste trabalho, é propor o uso do algoritmo Social Spider
Optimization (SSO) [16] para resolver problemas complexos de eletromagnetismo, tais
como projeto de antenas e FSS. O algoritmo SSO foi recentemente desenvolvido por
Cuevas et al [16] e demonstra uma alta capacidade e robustez na busca de máximo ou
mínimo global em comparação com outros algoritmos bioinspirados. A maioria dos
algoritmos baseados em inteligência de enxame, como PSO, ABC e ACO mapeia os
indivíduos (ou agentes) como unissex, com um comportamento idêntico. A divisão entre
os sexos poderia trazer algumas vantagens, como uma maior diversidade na população
e uma melhor exploração do espaço de busca. O SSO é um mapeamento do
comportamento social de algumas espécies de aranhas que vivem em sociedade. A
modelagem em dois sexos, macho e fêmea, garante uma maior realidade em relação às
colônias de aranhas encontradas na natureza.
Para testar a técnica proposta, integração do algoritmo SSO com o ANSYS HFSS
via framework, alguns projetos são desenvolvidos. Primeiramente, a técnica é aplicada
em uma antena de banda ultra larga com o objetivo de melhorar a largura de banda da
antena. Comparações são realizadas com a otimização realizada por um algoritmo
genético desenvolvido em [17]. Outro projeto apresentado é a otimização de uma
estrutura FSS com elementos patches de fractal Vicsek [18]. O objetivo é construir uma
FSS para ressoar em 10.84 GHz com largura de banda de 894 MHz. As variáveis a serem
otimizadas são o número de iteração do fractal, o fator de iteração e a permissividade
relativa do substrato. Comparações são realizadas com o mesmo projeto desenvolvido
com uma técnica híbrida PSO – RNA [18]. Um projeto de miniaturização de uma antena
de microfita é realizado com duas técnicas de redução de tamanho, fractal e a inserção
de um pino de curto circuito. A técnica proposta é aplicada para otimizar as dimensões
de reentrância da antena, assim como a melhor posição e o melhor raio para o pino de
curto circuito. Um algoritmo PSO desenvolvido e integrado com o HFSS é utilizado para
fins de comparações com a técnica desenvolvida.

CAPÍTULO 1. INTRODUÇÃO
17
Este trabalho está dividido em seis capítulos, organizados da seguinte forma:
O Capítulo 2 apresenta os algoritmos bioinspirados. São descritos os Algoritmos
Genéticos, o PSO, as Redes Neurais Artificiais e os Sistemas Imunológicos Artificiais. É
discutida as diferenças entre algoritmos evolutivos e algoritmos baseados na
inteligência de enxame.
O Capítulo 3 apresenta as antenas de microfita e as superfícies seletivas de
frequência. São mostradas suas principais características, como estruturas, modo de
alimentação e métodos de análise.
O Capítulo 4 aborda o modelo desenvolvido. Destaca a maneira como é feita a
integração do algoritmo bioinspirado com o software ANSYS HFSS via framework.
Detalha o algoritmo bioinspirado baseado na inteligência de enxame: Social Spider
Optimization (SSO). Mostra também, as vantagens em utilizar o método em relação às
Redes Neurais Artificiais ou método de interpolação.
O Capítulo 5 mostra os resultados obtidos com a aplicação da técnica
desenvolvida, tanto em projetos de antenas como também nas Superfícies Seletivas de
Frequência. Comparações são realizadas com outras técnicas híbridas. Também é
utilizado o algoritmo PSO para fins de comparações com o algoritmo desenvolvido SSO.
Por fim, o Capítulo 6 apresenta as conclusões e as principais contribuições do
trabalho. Também são apresentadas algumas sugestões de trabalhos futuros para a
continuidade da pesquisa.

18
Capítulo 2
Algoritmos bioinspirados
2.1 Introdução
A Computação Natural por meio de observações e estudos de fenômenos
ocorridos na natureza realiza modelagens e simplificações de comportamentos com o
intuito de desenvolver novas ferramentas computacionais para resolver problemas
complexos das mais diversas áreas [19].
Os algoritmos bioinspirados ou computação inspirada na natureza é um dos
ramos da Computação Natural, e podem ser divididos da seguinte maneira:
▪ Evolutivos
o Algoritmos Evolutivos
o Inteligência de Enxame
▪ Neurocomputação
▪ Sistemas Imunológicos Artificiais
Embora sejam aplicados em diversos problemas, a utilização de algoritmos
bioinspirados nem sempre é a melhor alternativa. Estes algoritmos geralmente são
aplicados em situações onde as variáveis de projeto interagem entre si de maneira
complexa, o espaço de busca contém várias soluções ótimas, ou ainda em problemas
onde existe a possibilidade de encontrar mínimos locais ou soluções sub-ótimas.
Problemas em que seja possível encontrar soluções com a aplicação do método do
gradiente, métodos analíticos ou programação matemática, não se faz necessária a
utilização de algoritmos bioinspirados devido ao custo de desenvolvimento envolvido.
O funcionamento básico de um algoritmo bioinspirado que utiliza uma
população de indivíduos se inicia com a formação de uma população inicial, seguida de
algumas etapas realizadas em ciclos com o intuito de melhorar as soluções iniciais. Os

CAPÍTULO 2. ALGORITMOS BIOINSPIRADOS
19
ciclos, na maioria das vezes, são formados por operadores de evolução dos indivíduos
intercalados por avaliações em busca de uma solução ótima. A evolução dos indivíduos
caracteriza o algoritmo como pertencente à categoria de computação evolutiva.
A abordagem evolutiva que primeiro se destacou foi a dos algoritmos evolutivos.
O principal representante desta abordagem são os Algoritmos Genéticos. No entanto,
outros como, Programação Evolutiva, Programação Genética, Estratégias Evolutivas,
Algoritmos de Estimação e Distribuição e Algoritmos Genéticos Competentes também
fazem parte desta abordagem.
Outra vertente que também está em destaque nos últimos anos são os
algoritmos de enxame ou inteligência de enxame. Os principais representantes são
Otimização por Enxame de Partículas (Particle Swarm Optimization – PSO) [7],
Otimização por Colônia de Formigas [9] e algoritmos de colônia de abelhas [8].
Atualmente existem dezenas de algoritmos desenvolvidos com base na inteligência de
enxames. Um algoritmo desenvolvido recentemente e que apresenta características de
inteligência de enxame é o Spider Social Optimization (SSO). Um diferencial deste
algoritmo é a modelagem distinta para indivíduos de gênero sexual diferente. Isso
possibilita uma exploração do espaço de busca em conformidade com o que acontece
na realidade.
Neste Capítulo, são descritos inicialmente os Algoritmos Genéticos e o PSO. O
objetivo é demonstrar semelhanças e diferenças existentes entre algoritmos evolutivos
e inteligência de enxame. Em seguida serão apresentadas as redes neurais artificiais,
destacando a sua utilização na substituição de uma função de avaliação como método
de estimação. Também será abordada uma técnica que está crescente, que são os
Sistemas Imunológicos Artificiais. O SSO, algoritmo projetado e interligado a um
framework projetado durante este trabalho, será apresentado no Capítulo 4, na
descrição do modelo desenvolvido e utilizado neste trabalho.
2.2 Algoritmos Genéticos
Algoritmos Genéticos (AG) são inspirados na teoria da evolução Darwiniana e sua
metodologia baseia-se na seleção natural. São considerados algoritmos de otimização

CAPÍTULO 2. ALGORITMOS BIOINSPIRADOS
20
global e realizam busca paralela devido a utilização de um conjunto de soluções
candidatas de forma simultânea.
A primeira etapa a ser desenvolvida no AG é inicializar a população. São criadas
soluções candidatas, que posteriormente serão submetidas aos operadores de seleção
e reprodução em busca de uma solução adequada para o problema tratado.
Na seleção natural os mais adaptados têm maiores chances de sobrevivência e
de espalharem suas informações genéticas para gerações seguintes. Este
comportamento é mapeado para o AG por meio de seus operadores de seleção e
reprodução [19]. Um fluxograma das etapas realizadas pelo AG é apresentado na Figura
2.1 a seguir.
Através da seleção os indivíduos mais aptos recebem maiores chances de serem
escolhidos para reprodução. A aptidão de cada indivíduo é calculada de acordo com uma
função de avaliação ou função fitness. Vale ressaltar, que os indivíduos pouco adaptados
também têm chances de reproduzirem a fim de manter uma diversidade genética na
população. Os operadores de seleção mais utilizados são: Roleta com Ranking, Roleta
Aleatória e Torneio [20], [21].
Na reprodução, são aplicados dois operadores: cruzamento e mutação. O
cruzamento tem por objetivo criar novos indivíduos a partir de uma combinação
genética de indivíduos escolhidos pelo operador de seleção. O operador de mutação
insere novas informações genéticas na população, com o intuito de evitar a
convergência da população para ótimos locais. Normalmente, a probabilidade de
cruzamento é utilizada em torno de 65% da população e a probabilidade de acontecer
a mutação em torno de 1%. A mutação é pequena em relação ao cruzamento para que
o algoritmo não atue de forma totalmente aleatória.

CAPÍTULO 2. ALGORITMOS BIOINSPIRADOS
21
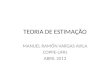
Figura 2.1 – Fluxograma de etapas do Algoritmo Genético.
O primeiro trabalho publicado sobre o tema de Algoritmos Genéticos foi
“Adaptation in Natural and Artificial Systems” em 1975 [22], desenvolvido pelo cientista
John Holland. Neste trabalho, Holland desenvolveu o conceito de AG em algumas
etapas. Na primeira etapa, é necessário iniciar uma população de soluções candidatas
para o problema tratado. Nas etapas seguintes, o objetivo é evoluir as soluções
candidatas até que uma resposta adequada seja encontrada. Cada ciclo de evolução é
denominado de geração.
No projeto de um Algoritmo Genético, uma dificuldade encontrada é definir e
sincronizar valores para taxas de cruzamento e mutação, tamanho da população e ainda,
escolher o tipo de seleção a ser utilizada. Por existir uma disputa pela sobrevivência os
indivíduos não trocam informações com toda a população, sendo assim, é
imprescindível um ajuste minucioso nas taxas de cruzamento e mutação para que o
algoritmo não fique preso numa região de máximo ou mínimo local. Estas taxas
geralmente são alteradas de acordo com a aplicação do algoritmo.
Um outro problema encontrado no AG é em relação ao operador de seleção,
quando existe um super indivíduo na população, ou seja, quando um indivíduo tem uma
avaliação muito superior aos demais. Acontece que este indivíduo pode ser escolhido
por várias vezes para realizar o cruzamento. Isto acarreta numa perda de diversidade da
população, o que pode causar uma convergência prematura. Este problema é bastante

CAPÍTULO 2. ALGORITMOS BIOINSPIRADOS
22
comum ao utilizar uma roleta aleatória ou viciada. E pode ser evitado com o uso de uma
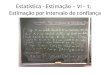
roleta com ranking [23]. Uma comparação da distribuição é mostrada na Figura 2.2.
Figura 2.2 – Probabilidades de reprodução de 6 indivíduos com o uso de roleta
aleatória e roleta com ranking.
Os conceitos descritos acima se baseia em um Algoritmo Genético simples.
Atualmente, existe outras implementações de AG para tratar problemas específicos.
2.3 Otimização por Enxame de Partícula
Kennedy e Eberhart inspirados por alguns estudos feitos por pesquisadores,
como o zoologista Heppner, a respeito de comportamentos de animais que vivem em
grupos, desenvolveram uma técnica computacional denominada de otimização por
enxame de partículas (Particle Swarm Optimization - PSO) no ano de 1995 [7].
Um conceito simples, mas fundamental para o desenvolvimento do algoritmo
PSO foi o compartilhamento de informações. Cada indivíduo, além de armazenar
conhecimento sobre sua própria trajetória, possui conhecimentos sobre
comportamentos dos seus vizinhos. Este é o diferencial dos algoritmos de enxame.
Apesar de existir uma luta pela sobrevivência, o compartilhamento de informações
fortalece o grupo, o que acaba ajudando a todos.
Cada indivíduo ou partícula do algoritmo PSO representa uma solução em
potencial, e sua posição em um espaço de busca diz respeito à qualidade da solução,
pois, informa o quão distante está da solução desejada. Diante do compartilhamento de
informações, as mudanças de posições de cada partícula serão em função de seu próprio
desempenho e do desempenho de seus vizinhos. A evolução neste caso, é relacionada

CAPÍTULO 2. ALGORITMOS BIOINSPIRADOS
23
com a mudança para melhores posições. Isto é feito com a aplicação de fórmulas
matemáticas simples, relacionadas tanto à posição quanto à velocidade das partículas.
Uma partícula 𝑝𝑖 movimenta-se com base em sua posição atual 𝑥𝑖(𝑡) e sua
velocidade 𝑣𝑖(𝑡 + 1), de acordo com a seguinte equação:
𝑥𝑖(𝑡 + 1) = 𝑥𝑖(𝑡) + 𝑣𝑖(𝑡 + 1) (2.1)
A velocidade leva em consideração o valor da melhor posição já visitada por 𝑝𝑖,
𝑃𝐵, e a melhor posição encontrada por todo o enxame, 𝐺𝐵, além do peso da inércia, 𝑤.
A velocidade é calculada de acordo com a seguinte equação:
𝑣𝑖(𝑡 + 1) = 𝑤 ∗ 𝑣𝑖(𝑡) + 𝜑1 ∗ (𝑃𝐵 − 𝑥𝑖(𝑡)) + 𝜑2 ∗ (𝐺𝐵 − 𝑥𝑖(𝑡)) (2.2)
onde 𝜑1 e 𝜑2 são constantes que influenciam a busca local e global, respectivamente,
também conhecidas como taxas de aprendizado. E 𝑡, representa a iteração do
momento. A inserção do parâmetro 𝑤, peso de inércia, foi introduzido com o objetivo
de controlar o impacto da velocidade e evitar convergências prematuras e exploração
falha do espaço de busca [24], o 𝑤 pode ser definido como uma constante estática ou
uma variável que modifica seu valor de acordo com o número de ciclo ou gerações do
algoritmo.
O deslocamento de cada partícula é realizado em função das taxas de
aprendizado e peso da inércia. Uma representação desse deslocamento pode ser
observada na Figura 2.3.
Estas são as fórmulas matemáticas responsáveis pela evolução das partículas no
algoritmo PSO. Durante a execução do algoritmo, em cada ciclo ou geração, elas
realizam o deslocamento das partículas, são intercaladas com uma função de avaliação
ou fitness e um critério de parada para definir o fim da execução do algoritmo.
Além da etapa que cria as soluções candidatas ou população inicial, no PSO é
necessário armazenar a melhor posição já visitada por todo o enxame e a melhor
posição já visitada por cada partícula, para que seja possível realizar os deslocamentos.

CAPÍTULO 2. ALGORITMOS BIOINSPIRADOS
24
Figura 2.3 – Representação do deslocamento de partículas no PSO.
O algoritmo PSO, é um dos algoritmos bioinspirados mais simples de ser
desenvolvido, uma vez que, possui fórmulas simples para a evolução das partículas. Em
sua formação original apresentava o problema de convergência prematura para
mínimos e máximos locais. Modificações foram feitas com a inserção do peso da inércia,
e hoje é um dos algoritmos mais utilizados para otimização de problemas das mais
diversas áreas.
2.4 Redes Neurais Artificiais
As Redes Neurais Artificiais (RNA), são técnicas que se baseiam no cérebro de
seres vivos, especialmente de humanos para criar modelos computacionais com
possibilidade de adquirir, armazenar e fazer uso do conhecimento. As RNA fazem parte
dos algoritmos bioinspirados na vertente de Neurocomputação e são bastante utilizadas
devido à capacidade de mapear sistemas não-lineares através de um conjunto de regras
(entradas e saídas, por exemplo) [25].
O neurônio é a unidade básica de uma rede neural. Os neurônios artificiais são
modelados a partir de conhecimentos adquiridos sobre os neurônios biológicos. Apesar
de se tratar de uma simplificação do neurônio biológico, as Redes Neurais Artificiais

CAPÍTULO 2. ALGORITMOS BIOINSPIRADOS
25
conseguem resolver problemas complexos do cotidiano devido a quantidade e alta
conectividade entre seus neurônios artificiais.
Além da alta conectividade, algumas características das RNA, tais como,
capacidade de aprendizado, adaptação por experiência, generalização de
conhecimento, tolerância a falhas e armazenamento distribuído fazem com que sejam
aptas para atuarem em diversas áreas do conhecimento.
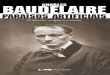
O primeiro mapeamento de um neurônio artificial realizado em 1943 foi
desenvolvido por dois profissionais, McCullock um neurofisiologista e Pitts um
matemático [26]. Os dois propuseram um modelo simples ilustrado na Figura 2.4, onde
sinais são apresentados à entrada, multiplicados pelos respectivos pesos, seguido de
uma soma ponderada que resulta num nível de atividade. Caso o nível de atividade
exceda um limite determinado pela função de ativação, uma saída é produzida.
Figura 2.4 – Neurônio artificial desenvolvido por McCullock e Pitts.
O ajuste dos pesos sinápticos de uma RNA é realizado por meio do treinamento.
No treinamento a rede recebe um conjunto regras bem definidas e ajusta cada peso
sináptico de acordo com o algoritmo de aprendizado utilizado. Os principais algoritmos
de aprendizado são:
• Aprendizado Supervisionado: as saídas são conhecidas, um sinal de erro
é gerado e os pesos são adaptados com base na realimentação do sinal.
• Aprendizado Não Supervisionado: as saídas são desconhecidas, não se
utiliza sinal de erro ou realimentação de sinal. Os pesos são adaptados
com base nos padrões identificados no conjunto de entradas.

CAPÍTULO 2. ALGORITMOS BIOINSPIRADOS
26
• Aprendizado por Reforço: as saídas são desconhecidas, mas geralmente
existe um valor escalar que indica a qualidade da rede para as próximas
regras. Os pesos são adaptados por tentativa e erro e reforço retardado.
A aprendizagem é principal parte de uma rede neural. É devido a aprendizagem
que a RNA será capaz de encontrar soluções para regras ainda não conhecida pela rede
por meio da generalização.
Em problemas complexos onde não seja possível ou que seja muito dispendioso
o mapeamento de uma função de avaliação ou função objetivo, a aplicação de Redes
Neurais Artificiais é uma alternativa em relação a outros algoritmos. Entretanto, para
utilizar uma RNA, além de desenvolver a rede e o conjunto de treinamento é necessário
definir as regras de treinamento para cada problema específico.
2.5 Sistemas Imunológicos Artificiais
Os Sistemas Imunológicos Artificiais (SIA) fazem parte dos algoritmos
bioinspirados e tem como característica relacionar as áreas da imunologia, matemática,
ciência da computação e engenharia. São utilizados desde a década de 90, aplicados
para resolverem diversos tipos de problemas, tais como, otimização e busca,
aprendizagem de máquina, segurança de redes, detecção de anomalias e robótica.
O Sistema Imunológico presente nos seres vivos baseia-se no reconhecimento,
ação e controle do organismo diante de agressões. Apesar de ser uma definição bem
simples, é um sistema biológico demasiadamente complexo, pois, detectar, identificar
e subtrair um organismo estranho exige o cumprimento de muitos processos [27]. Por
exemplo, os anticorpos oferecem resistência aos agentes ofensivos denominados
antígenos. Para que consiga neutralizar o princípio ativo do antígeno os anticorpos são
produzidos de acordo com o tipo de antígeno identificado, ou seja, para um
determinado antígeno existe um anticorpo específico [28].
Os algoritmos desenvolvidos com inspiração nos Sistemas Imunológicos são,
geralmente, classificados como:
• Algoritmos de seleção clonal
• Rede imunológica

CAPÍTULO 2. ALGORITMOS BIOINSPIRADOS
27
• Seleção negativa
• Teoria do perigo
• Células dendríticas
As técnicas desenvolvidas com base na seleção negativa, teoria do perigo ou
células dendríticas são mais direcionadas para resolverem problemas de detecção e
segurança. Por fugir do escopo de otimização e busca que é abordado nesse trabalho,
não serão detalhados. As classes mais estudadas são os algoritmos de seleção clonal e
rede imunológica, ambos tratam de problemas de otimização, buscas, problemas de
aprendizagem de máquina e reconhecimento de padrões [29].
O algoritmo de seleção clonal ou CLONALG (CLONal selection ALGorithm) [30]
busca soluções para problemas de otimização e aprendizagem de máquina por meio da
evolução de soluções candidatas com as etapas de clonagem das soluções,
hipermutação das novas células e seleção das células mais adaptadas no que diz respeito
ao antígeno. Logo abaixo, um pseudocódigo do CLONALG é mostrado. Cada solução
candidata é mapeada como um anticorpo. As entradas do usuário são: β o número de
clones por anticorpo, ρ a intensidade da hipermutação, o tamanho da população de
anticorpos, o número nAleatorio que será a quantidade de anticorpos descartados e
substituídos, e a quantidade nSelecao de anticorpos que serão selecionados para
clonagem.
Figura 2.5 – Pseudocódigo do algoritmo de seleção clonal ou CLONALG.

CAPÍTULO 2. ALGORITMOS BIOINSPIRADOS
28
As variáveis com a palavra afinidades correspondem as avaliações realizadas no
algoritmo. O pseudocódigo ainda mostra alguns métodos utilizados:
• inicializaPopulacao: cria uma população de anticorpos ou soluções
candidatas
• avalia: calcula a afinidade ou nota de cada anticorpo de acordo com o
objetivo
• normaliza: normaliza as afinidades no intervalo entre zero e um
• seleciona: seleciona anticorpos que serão clonados ou reproduzidos
• clona: clona os anticorpos selecionados, cria uma prole
• hipermuta: modifica os anticorpos gerados na clonagem, mesma função
do operador de mutação no Algoritmo Genético
• subsPopulacao: substitui os piores nSelecao anticorpos pelos melhores
anticorpos gerados na clonagem, cria nAleatorio novos anticorpos
O CLONALG é um algoritmo que se adapta a diversos tipos de problemas, não
exigindo grandes alterações para ser utilizado em situações diferentes. Esse é um dos
algoritmos inspirados nos sistemas imunológicos mais utilizados. Outro algoritmo do
ramo da seleção clonal bastante estudado é o opt-IMMALG e suas variações [31]–[33].
2.5 Conclusão
Foram apresentados neste capítulo alguns métodos de otimização,
especificamente alguns algoritmos bioinspirados. Os algoritmos evolutivos têm a
característica da luta pela sobrevivência. Os indivíduos mais fortes tendem a sobreviver
e assim, propagarem os seus materiais genéticos. Nos algoritmos de enxame também
existe a luta pela sobrevivência, mas com uma diferença em relação aos anteriores,
existe o compartilhamento de informações entre os indivíduos da população. A
característica da inteligência de enxame é fortalecer o grupo para que todos consigam
melhorar, assim, conseguem sobreviverem.
As redes neurais artificiais são boas alternativas em problemas que não seja
possível fazer uso de uma função de avaliação. As RNA conseguem ajustar seus pesos e
simular uma função de avaliação. O problema é o custo de desenvolvimento da rede e
da criação das regras de treinamento antes de utilizá-la.

CAPÍTULO 2. ALGORITMOS BIOINSPIRADOS
29
Os Sistemas Imunológicos Artificiais contêm uma boa variedade de algoritmos, e
são capazes de resolverem problemas diversos. Apesar de serem menos conhecidos,
estão crescendo nas áreas das engenharias.
O algoritmo SSO é baseado nas técnicas de inteligência de enxame, e faz o
mapeamento de dois indivíduos diferentes, machos e fêmeas. Utilizado neste trabalho
juntamente com um framework desenvolvido e finalmente interligado ao software
ANSYS HFSS para avaliar os indivíduos. Detalhes do SSO e do framework são
apresentados no Capítulo 4.

30
Capítulo 3
Antenas de Microfita e FSS
3.1 Introdução
Para atender às demandas advindas da evolução dos meios de comunicação são
construídas antenas de diversas formas e tamanhos. Devido ao baixo custo e facilidade
de integração em circuitos eletrônicos as antenas planares de microfita são bastante
utilizadas [1]. Essas antenas surgiram em 1953 nos Estados Unidos propostas por
Deschamps. Contudo, somente na década de 1970 foram fabricadas as primeiras
antenas para utilização prática [34].
Serão apresentados neste capítulo a fundamentação teórica de antenas planares
de microfita com ênfase para sua estrutura e características gerais e técnicas de
alimentação. Também serão descritos alguns conceitos das superfícies seletivas de
frequências. E finalmente, são destacados os métodos de análise para antenas e FSS.
3.2 Estrutura e Características
Uma antena de microfita consiste basicamente de uma camada metálica ou
patch, de espessura fina que opera como elemento irradiador, impressa sobre uma
camada de substrato dielétrico e separada de seu plano de terra situado sob o substrato,
como mostrado na Figura 3.1 [1].

CAPÍTULO 3. ANTENAS DE MICROFITA E FSS
31
Figura 3.1 – Antena de microfita com patch retangular [1].
A dimensão L do patch retangular é um pouco menor que 𝜆𝑔 2⁄ para o modo
fundamental de excitação TM10, sendo 𝜆𝑔 o comprimento de onda guiado no dielétrico,
calculado por 𝜆0 √휀𝑒𝑓𝑓⁄ . 𝜆0 é o comprimento de onda no espaço livre e 휀𝑒𝑓𝑓 a constante
dielétrica efetiva da linha de microfita de largura w. O valor de 휀𝑒𝑓𝑓 é ligeiramente
menor que 휀𝑟 uma vez que o campo espalhado também se propaga no ar e não apenas
no dielétrico [34], [35].
A geometria do elemento irradiador (patch) afeta na distribuição de corrente e
de modo consequente na distribuição do campo da superfície da antena. Geralmente
são utilizadas formas geométricas regulares para simplificar a análise e construção da
antena e geometrias derivadas, por exemplo: quadrada, circular, elíptica, triangular,
anel e fractais geométricos, como pode ser visto na Figura 3.2 [1].
Figura 3.2 – Formas geométricas para o patch de microfita.
A quantidade de materiais que podem ser utilizados como substrato é ampla,
mas geralmente, são materiais dielétricos isotrópicos, dielétricos anisotrópicos e

CAPÍTULO 3. ANTENAS DE MICROFITA E FSS
32
ferrimagnéticos com uma constante dielétrica no intervalo de 2,2 ≤ 휀𝑟 ≤ 12. Uma
constante dielétrica com valor baixo associada com um substrato espesso conduz a uma
maior eficiência e largura de banda. Já os substratos mais finos e com valores mais altos
para permissividade dielétrica são capazes de ter tamanhos reduzidos embora
apresentem maiores perdas.
As antenas de microfita apresentam algumas vantagens quando comparadas às
antenas convencionais [1], [34], tais como:
• Estrutura leve;
• Dimensões reduzidas e baixo custo;
• Facilidade de construção e instalação;
• Possibilidade de polarização linear e circular, conforme a posição da
alimentação;
• Possibilidade de serem integradas diretamente em equipamentos de
comunicação, reduzindo perdas na linha de alimentação.
Entretanto, algumas desvantagens também são percebidas em relação às
antenas convencionais de micro-ondas [1], [34], dentre elas:
• Largura de banda estreita e baixa eficiência de irradiação se construídas
em substratos com constantes dielétricas elevadas;
• Baixo ganho;
• Possibilidade de excitação por ondas de superfície e radiação em um
hemisfério;
As desvantagens descritas podem ser amenizadas ou totalmente eliminadas com
a utilização de algumas técnicas como, antena de banda ultra larga, arranjo de antenas,
empilhamento de patches, dentre outras [1], [34].
3.3 Técnicas de Alimentação
A escolha do método de alimentação deve condizer aos objetivos requeridos. As
antenas de microfita podem ser alimentadas de maneira direta ou indireta. Um cabo
coaxial conectado ao plano de terra e uma linha de microfita são exemplos de
alimentação direta. Já a alimentação indireta, quando não há contato entre a linha de
alimentação e o patch, é representada principalmente por acoplamento

CAPÍTULO 3. ANTENAS DE MICROFITA E FSS
33
eletromagnético, acoplamento por abertura, dentre outros. Alguns fatores, como,
casamento de impedâncias e radiação espúria devem ser observados na escolha da
técnica de alimentação.
3.3.1 Alimentação por Linha de Microfita
Alimentar uma antena por linha de microfita é o método mais simples. Isso é
feito com a conexão de uma linha de microfita na extremidade do elemento irradiador
ou patch, os dois no mesmo substrato de acordo com a Figura 3.1. O casamento de
impedância é obtido com ajustes na largura da linha de microfita quando a espessura
do substrato estiver definida. Um circuito casador externo com transformador 𝜆 4⁄ ou
uma reentrância (inset) também podem ser utilizados para alcançar o casamento de
impedância.
As dimensões da linha de microfita podem ser calculadas através de métodos
clássicos. A princípio, é realizado o cálculo da impedância característica, de acordo com
a Equação (3.1), e da permissividade relativa efetiva, através da Equação (3.2), para w/h
< 1, onde w é a largura da linha, h é a espessura do substrato e Z0 é a impedância
característica em função de w/h:
0 1/2
60 8ln 0,25
eff
h wZ
w h
, (3.1)
onde
1/2 21 1 12
1 0,041 12 2
r reff
h w
w h
(3.2)
Para w/h ≥ 1, tem-se:
0 1/2
120 1
1,393 0,667 ln 1,4444eff
Zw w
h h
, (3.3)
onde
1/21 1 12
12 2
r reff
h
w
(3.4)
Definindo o projeto, para A < 1,52, tem-se:

CAPÍTULO 3. ANTENAS DE MICROFITA E FSS
34
8exp( )
exp(2 ) 2
w A
h A
(3.5)
Já para A ≥ 1,52, tem-se:
12 0,61
1 ln 2 1 ln 1 0,392
r
r r
wB B B
h
, (3.6)
sendo A e B dados por:
1/2
0 1 1 0,110,23
60 2 1
r r
r r
ZA
(3.7)
1/2
0
377
2 r
BZ
(3.8)
3.3.2 Alimentação por Cabo Coaxial
A alimentação por meio do cabo coaxial, de acordo com a Figura 3.3 é realizada
por uma conexão do condutor interno diretamente ao patch e outro do condutor
externo ao plano de terra. A vantagem é a facilidade em obter o casamento de
impedância, o qual ocorre a depender da localização do cabo. Contudo, apresenta difícil
modelagem em substratos espessos pela necessidade de perfurá-lo [36].
Figura 3.3 – Geometria da antena alimentada por cabo coaxial.
3.3.3 Alimentação por Acoplamento Direto
A alimentação por acoplamento direto, de acordo com a Figura 3.4, é realizada
com a linha de alimentação posicionada entre o patch e o plano de terra. Isso é possível

CAPÍTULO 3. ANTENAS DE MICROFITA E FSS
35
com a utilização de duas camadas de substrato. A dupla camada dielétrica implica em
aumento da espessura do substrato, o que possibilita a abrangência de maiores larguras
de banda e pouca radiação espúria. As camadas podem ter espessuras diferentes,
entretanto, precisam ser alinhadas corretamente [37].
Figura 3.4 – Geometria da antena alimentada por acoplamento direto.
3.3.4 Alimentação por Acoplamento por Abertura
Assim como no acoplamento direto, esta técnica utiliza duas camadas dielétricas.
O plano de terra com uma abertura é posicionado entre os dois substratos dielétricos.
Sob o substrato inferior é posicionada a linha de microfita que fornece energia ao patch
por meio da fenda existente no plano de terra, vide a Figura 3.5.
O acoplamento por abertura é uma técnica de alimentação de difícil construção,
mas que causa pouca radiação espúria.
Figura 3.5 – Geometria da antena alimentada por meio de acoplamento por
abertura.

CAPÍTULO 3. ANTENAS DE MICROFITA E FSS
36
3.4 Superfícies Seletivas de Frequências (FSS)
3.4.1 Estrutura e Características Principais
As superfícies seletivas de frequência (Frequency Selective Surface - FSS) são
arranjos de elementos, geralmente, periódicos, bidimensionais impressos em uma ou
mais camadas de substrato dielétrico e que atuam como filtros espaciais. Esses
elementos podem ser patches condutores com o comportamento de um filtro rejeita-
faixa ou aberturas, quando a FSS se comporta como um filtro passa-faixa [3], [38]. A
Figura 3.6, mostra um arranjo de FSS de camada simples, onde Px e Py são as
periodicidades ao longo dos eixos x e y, respectivamente, sendo h a altura do substrato.
Figura 3.6 – Geometria de uma estrutura de FSS.
3.4.2 Elementos de FSS
A geometria dos elementos de uma FSS podem assumir formas variadas. O
formato do patch influencia na distribuição do campo na superfície da FSS. As formas
dos patches mais utilizadas são: retangular, circular, hexagonal, dipolo, dipolo cruzado,
espira quadrada, anéis circulares concêntricos e combinações. Ademais, estruturas com
complexidade mais elevada como elementos fractais também são utilizadas. Esses
elementos citados são separados em grupos de acordo com [38] e ilustrado na Figura
3.7 em seguida.

CAPÍTULO 3. ANTENAS DE MICROFITA E FSS
37
Figura 3.7 – Formas de representação dos elementos utilizados em FSS.
Uma FSS formada com os elementos do grupo 1 apresenta largura de banda
moderada. Os elementos do tipo espira, grupo 2, ressoam quando o perímetro médio
equivale a aproximadamente um comprimento de onda completa. O grupo 3, formado
por elementos do tipo patches, foi o primeiro a ser estudado e não apresenta boas
respostas mediante a variações no ângulo de incidência. O grupo 4, é o maior grupo
entre todos, formado pela combinação de elementos típicos possui uma infinidade de
possibilidades.
A utilização de elementos com fractais conduz a uma maior complexidade de
implementação e construção, no entanto, facilita o ajuste dos parâmetros
eletromagnéticos, o que garante desempenho superior em relação à geometria
euclidiana. Como exemplo, é possível diminuir a frequência de ressonância da FSS com
o aumento do número de iteração do fractal. Isso possibilita a construção de estruturas
mais compactas [39], [40]. Outra característica, é que a frequência ressoante de uma

CAPÍTULO 3. ANTENAS DE MICROFITA E FSS
38
FSS com elementos fractais é praticamente independente do ângulo de incidência das
ondas planas [41], [42].
São várias as formas de geração de fractais, como equações matemáticas
recursivas, transformações recursivas, movimento Browniano, dentre outras. Os
métodos recursivos mais representativos são: o sistema de funções iteradas (IFS) e o
sistema de Lindenmayer (sistema L). Dois parâmetros são extremamente importantes
para a geração recursiva de um fractal: número de iteração e fator de iteração. O
número de iteração corresponde ao número de iterações fractais que foram aplicadas
ao objeto. Um objeto em estado inicial tem número de iteração k=0. Já o fator de
iteração, refere-se à escala de redução aplicada a cada iteração fractal.
3.4.3 Técnicas de Medição
Diversas técnicas são utilizadas para medir as propriedades de reflexão e
transmissão de superfícies seletivas de frequência [3]. O ambiente considerado mais
adequado é o de uma câmara anecoica, em que absorvedores eliminam reflexões nas
paredes e no solo, além de eliminar difrações nas bordas da FSS.
Na montagem do setup de medição, duas cornetas são utilizadas como antena
transmissora e receptora, ambas com ganho padrão. A FSS é posicionada entre as duas
cornetas. Com isso, é possível medir características de transmissão TE e TM por meio de
mudança na polarização das antenas. Fora do ambiente de uma câmara anecoica, essa
estrutura não é capaz de medir as características de reflexão causadas pela FSS, devido
à forte difração originada pelas bordas da FSS medida, pois, geralmente utiliza-se uma
FSS com dimensões menores que a largura de banda das cornetas.
Para atenuar as difrações nas bordas, outro procedimento de medição adotado
utiliza cornetas associadas a lentes. Diante disso, é possível medir os coeficientes de
transmissão e reflexão nas duas polarizações [3].
3.5 Métodos de Análise
Para antenas e FSS, os métodos de análise mais comuns são os modelos
aproximados e os modelos de onda completa. Os modelos aproximados são baseados
em distribuição de corrente magnética equivalente ao redor da borda do campo,

CAPÍTULO 3. ANTENAS DE MICROFITA E FSS
39
enquanto os modelos de onda completa se baseiam na distribuição de corrente elétrica
no patch condutor e plano de terra [34].
Exemplos de modelos aproximados:
• Modelo da linha de transmissão;
• Modelo da cavidade ressoante;
• Modelo do circuito de multiporta (MNM – Multiport Network Model).
Exemplos de modelos de onda completa:
• Método dos momentos;
• Método dos Elementos Finitos;
• Método das Diferenças Finitas no Domínio do Tempo;
• Método Iterativo das Ondas (WCIP – Wave Concept Iterative Procedure).
Os modelos aproximados utilizam simplificações no mecanismo de radiação da
antena e são imprecisos conforme a frequência aumenta. Geralmente, são adotados
como solução inicial de projetos [43].
Os modelos de onda completa apresentam uma rigorosa formulação matemática
o que implica em maior custo computacional e esforço analítico, contudo, fornece
resultados precisos até em frequências elevadas [44], [45].
3.6 Conclusão
Nesse capítulo, foram apresentados os alguns conceitos de antenas e FSS,
principalmente, a respeito da estrutura e formatos dos patches. Algumas técnicas de
alimentação das antenas e setups de medições das FSS foram descritas. Por fim, os
métodos de análise mais utilizados foram expostos.

40
Capítulo 4
Modelo Desenvolvido
4.1 Introdução
Em um problema de busca, um método que realiza busca exaustiva testa todas
as soluções possíveis para um determinado problema e tem a garantia de encontrar a
melhor solução. Embora sempre encontre a melhor solução esse método não é
adequado para a maioria dos problemas reais devido ao tempo necessário para realizar
a busca. Uma alternativa para contornar tal dificuldade é a aplicação de algoritmos
bioinspirados, que são capazes de encontrar soluções desejadas em problemas
considerados intratáveis sem a necessidade de testar todas as soluções.
Em projetos de otimização, a implementação da função a ser minimizada ou
maximizada pode ser uma tarefa complexa. Redes Neurais Artificiais ou métodos de
interpolação podem ser utilizados para substituir em algum momento essa função que
é inerente ao problema.
Com o objetivo de reduzir os custos de desenvolvimento, no caso de otimização
de antenas e estruturas FSS, um framework é desenvolvido e integrado, inicialmente, ao
algoritmo projetado SSO. A função do framework é interligar o algoritmo bioinspirado
ao software comercial ANSYS HFSS, responsável pela análise numérica do
comportamento eletromagnético das FSS e das antenas, através do Método dos
Elementos Finitos.
4.2 Comportamento dos Algoritmos Bioinspirados
As principais técnicas de otimização baseadas nos métodos bioinspirados
realizam algumas etapas em comum:
1. Inicia uma população de indivíduos ou soluções candidatas

CAPÍTULO 4. MODELO DESENVOLVIDO
41
2. Avaliam todos os indivíduos com a função fitness
3. Verificam se a solução foi encontrada
• Caso positivo: salva a resposta
• Caso negativo: modificam os indivíduos e retorna para a etapa 2
Os ciclos são executados até que uma solução desejada seja encontrada ou outro
critério de parada seja satisfeito. A Figura 4.1, ilustra essas etapas.
Figura 4.1 – Etapas comuns da maioria dos algoritmos bioinspirados.
A etapa de modificação dos indivíduos, seja um cruzamento no Algoritmo
Genético, seja uma mudança de posição no algoritmo de Otimização por Enxame de
Partículas (PSO) ou SSO, é inerente a cada algoritmo bioinspirado. A função de avaliação
dos indivíduos é responsável por fazer a ligação do algoritmo ao problema tratado. O
mapeamento adequado desta função é fundamental para o bom desempenho do
algoritmo. Existem diversas situações em que o custo envolvido, em relação ao tempo,
para mapear uma função de avaliação é elevado e as vezes não é factível realizá-lo. Para
contornar problemas desse tipo, é comum a aplicação de métodos para estimar a
avaliação dos indivíduos. As Redes Neurais Artificiais e métodos de interpolação são os
mais utilizados.
Na área de telecomunicações, por exemplo, uma situação recorrente é otimizar
estruturas planares, como antenas e superfícies seletivas de frequência. Realizar a
modelagem de funções como Método dos Momentos e Elementos Finitos não é uma
tarefa trivial. E, mesmo quando algoritmos bioinspirados são utilizados, é habitual a

CAPÍTULO 4. MODELO DESENVOLVIDO
42
substituição da função de avaliação por uma RNA ou métodos de interpolação, como
pode-se notar em [12]–[14], [18], [46]. O acoplamento de mais de uma técnica de
otimização é denominada de hibridização.
Embora seja possível encontrar soluções desejadas através de estimativas, o
custo temporal e computacional envolvido no desenvolvimento desses métodos é alto.
No caso das RNA, por exemplo, a proximidade das estimativas com os valores reais
depende do conjunto de dados criados para o treinamento da rede. Na otimização do
comportamento da estrutura FSS em [18] o conjunto de treinamento é formado por 84
pares de entradas e saídas. As entradas são obtidas com algumas combinações de
valores para os parâmetros a serem otimizados, já as saídas são obtidas através de 84
simulações no Ansoft DesignerTM. Os valores dos parâmetros para entrada devem
apresentar alguma característica de espalhamento para proporcionar um bom ajuste
nos pesos sinápticos da RNA e consequentemente boas estimativas.
4.3 O Framework desenvolvido
Diante das dificuldades apresentadas na seção anterior, a proposta é diminuir o
custo temporal e computacional envolvido na avaliação dos indivíduos. Com isto, é
necessário evitar o uso de métodos de estimação (RNA ou interpolações) na avaliação
de soluções candidatas afim de auxiliar algoritmos bioinspirados. Desta forma, um
framework foi desenvolvido com o intuito de interligar algoritmos bioinspirados ao
software comercial que pode ser utilizado para simulações de antenas e FSS, o ANSYS
HFSS. Veja o esquema demonstrado na Figura 4.2.
Com a utilização deste modelo desenvolvido, não há necessidade de estimar a
qualidade das soluções candidatas. As avaliações dos indivíduos são realizadas em
tempo de execução do algoritmo bioinspirado da seguinte maneira: a estrutura da
antena ou FSS é projetada no HFSS; o algoritmo bioinspirado durante sua execução envia
os valores referente aos parâmetros a serem otimizados para o HFSS; o HFSS realiza a
simulação com os valores recebidos do algoritmo; finalizada a simulação, valores como
largura de banda e frequência de ressonância são extraídos pelo algoritmo das
simulações.

CAPÍTULO 4. MODELO DESENVOLVIDO
43
Figura 4.2 – Interligação de componentes através de framework.
O framework desenvolvido, criado com base no padrão de projeto adapter,
converte a saída de um algoritmo de otimização de modo que o software comercial
ANSYS HFSS consegue entender.
A independência dos componentes ilustrados na Figura 4.2 é fundamental para
o reuso do modelo. O algoritmo bioinspirado não está ligado a estrutura projetada no
HFSS que será otimizada. Isto significa que, para otimizar características
eletromagnéticas como frequência de ressonância e largura de banda de duas
estruturas diferentes, poucas alterações são exigidas. Alterar a quantidade de variáveis
a serem otimizadas, caso necessário, e os limites inferior e superior de cada variável é o
suficiente. Desta maneira, em alguns minutos o algoritmo bioinspirado juntamente com
o framework pode ser modificado para trabalhar com estruturas distintas.
A troca de um algoritmo bioinspirado por outro também é facilitada pela
independência dos componentes. A avaliação dos indivíduos realizada externamente ao
algoritmo simplifica a permuta e consequentemente amplia o reuso, o que é uma
característica desejada em projeto de software.
Entretanto, quando a avaliação do algoritmo bioinspirado é auxiliada por uma
RNA, modificações ou substituições da estrutura, seja uma antena ou FSS, reflete em
maiores impactos para o modelo, pois, cada antena ou FSS exige um conjunto
independente de dados (entradas e saídas) para o treinamento da rede. Outra
característica na otimização que pode dificultar a utilização de RNA ou torná-la inviável
é a quantidade de variáveis a serem otimizadas, uma vez que, o tamanho do conjunto
de treinamento é afetado diretamente pela quantidade e intervalo de valores dos
parâmetros otimizados. Com a utilização do framework a quantidade de parâmetros
otimizados modifica somente um vetor que armazena tais parâmetros, o que não afeta
no desempenho do modelo.

CAPÍTULO 4. MODELO DESENVOLVIDO
44
Neste trabalho, o principal algoritmo desenvolvido e utilizado para otimizar
estruturas de antenas e FSS é o SSO [47]. Para fins de comparações e validação do
método proposto, outro algoritmo, o PSO, foi projetado e interligado ao framework,
visto que, este é o primeiro trabalho que utiliza o algoritmo das aranhas em problemas
de eletromagnetismo.
4.4 Spider Social Optimization
O algoritmo Social Spider Optimization (SSO), proposto por Cuevas [16], consiste
num mapeamento do comportamento social das aranhas. Na modelagem do algoritmo,
dois sexos, macho e fêmea são assumidos, o que garante um melhor balanceamento
entre exploração local e global, além de evitar convergência prematura. A teia
desenvolvida pelas aranhas é considerada como um espaço de busca, ou seja, uma
região n-dimensional em que estejam localizadas as soluções em potencial, inclusive a
solução desejada. Cada variável a ser otimizada representa uma dimensão. As posições
das aranhas que integram a teia representam as soluções em potencial. O peso de cada
aranha condiz com a qualidade de sua posição. Quanto mais próxima da região da
solução desejada, mais pesada será a aranha.
Para utilizar o algoritmo SSO proposto em um problema de otimização, é
necessário definir os parâmetros a serem otimizados. Informações sobre a faixa de
valores de cada parâmetro e objetivos de otimização também são necessários. Diante
destes dados, é possível otimizar uma antena ou outra estrutura como uma FSS. No caso
da antena UWB (veja Figura 5.1), a aranha será formada pelos valores das dimensões da
fenda (Ls e Ws) inserida no plano de terra. Já no caso da otimização FSS (veja Figura 5.5),
as variáveis que compõem a aranha são: tamanho do elemento FSS (lado do quadrado
no nível k = 0), periodicidade da FSS, fator de iteração (a), número de interação do fractal
(k) e constante dielétrica (휀𝑟).
Nas teias das aranhas que vivem em sociedade, foi observada uma grande
concentração de fêmeas, geralmente, 70% ou mais. Com isso, o primeiro passo ao iniciar
o algoritmo SSO é o cálculo da quantidade de indivíduos por gênero. O número de
fêmeas, 𝑁𝑓, será escolhido aleatoriamente dentro da faixa de 65-90% de toda a
população (N), de acordo com

CAPÍTULO 4. MODELO DESENVOLVIDO
45
𝑁𝑓 = 𝑓𝑙𝑜𝑜𝑟[(0.9 − 𝑟𝑎𝑛𝑑 ∗ 0.25) ∗ 𝑁] (4.1)
onde 𝑟𝑎𝑛𝑑 é um número aleatório escolhido no intervalo [0,1] e 𝑓𝑙𝑜𝑜𝑟(. ) uma função
que arredonda um numero real para o menor inteiro mais próximo. Após definida a
quantidade de fêmeas que integrarão a teia, o número de machos será a quantidade
que resta para completar o total de indivíduos.
De acordo com o fluxograma apresentado na Figura 4.3, a primeira etapa do
algoritmo é a geração da população inicial. Neste momento, todas as aranhas recebem
suas posições na teia, onde cada variável é iniciada de maneira aleatória dentro de um
intervalo preestabelecido. Em seguida, uma avaliação é realizada por uma função fitness
ou função de avaliação que mostra quão distante a aranha se encontra da solução ótima.
No SSO proposto, o software ANSYS HFSSTM faz o papel da função fitness.
Figura 4.3 – Fluxograma do algoritmo SSO.
Diante da avaliação realizada com todas as aranhas, uma checagem é efetuada
para constatar se alguma delas apresenta os valores desejados, ou solução ótima. Caso
positivo, o algoritmo salva a solução e encerra sua execução. Caso contrário, os machos
e as fêmeas mudam suas posições de acordo com seus operadores em busca de
melhores posições. Para mudar de posição uma aranha se comunica com outras. A

CAPÍTULO 4. MODELO DESENVOLVIDO
46
comunicação entre as aranhas acontece por pequenas vibrações na teia, e a intensidade
da vibração depende do peso e da distância da aranha que gera a vibração. Para
reproduzir este processo, uma vibração efetuada por uma aranha 𝑗 recebida por uma
aranha 𝑖 é relacionada conforme
𝑣𝑖𝑏𝑖,𝑗 = 𝑤𝑗 ∗ 𝑒−𝑑𝑖,𝑗2
(4.2)
onde 𝑑𝑖,𝑗 é a distância Euclidiana entre as aranhas 𝑖 e 𝑗, e 𝑤𝑗 é o peso da aranha que
gerou a vibração.
A maneira como as aranhas mudam suas posições depende do sexo. As fêmeas
apresentam uma atração ou repulsão em relação a outras aranhas. A mudança de
posição de uma fêmea 𝑖 leva em consideração três elementos. O primeiro considera o
vizinho mais pesado próximo a 𝑖, nomeado como 𝑆𝑐, que produz uma vibração 𝑉𝑖𝑏𝑐𝑖. O
segundo leva em consideração a melhor aranha de toda a teia, denominada de 𝑆𝑏, que
gera a vibração 𝑉𝑖𝑏𝑏𝑖. O terceiro elemento incorpora um movimento aleatório. O
operador de deslocamento das fêmeas foi modelado conforme
𝑓𝑖𝑘+1 = 𝑓𝑖
𝑘 ± {𝛼 ∗ 𝑉𝑖𝑏𝑐𝑖(𝑆𝑐 − 𝑓𝑖𝑘) + [𝛽 ∗ 𝑉𝑖𝑏𝑏𝑖(𝑆𝑏 − 𝑓𝑖
𝑘) + 𝛿 (𝛾 −1
2)]} (4.3)
onde 𝛼, 𝛽, 𝛿 e 𝛾 são números aleatórios dentro do intervalo [0,1], 𝑘 representa o
número da interação.
Na equação acima os sinais (±) indicam a atração ou repulsão. Para esta
operação um número aleatório é gerado dentro do intervalo [0,1]. Se o número for
menor que um limite, 𝑃𝐹, previamente definido, o movimento será de atração (+), caso
contrário o movimento será de repulsão (−).
Os machos são divididos em duas classes: dominantes e não dominantes. Para
realizar a divisão das classes é calculado o peso médio (𝑀𝑑) entre os machos. Aqueles
que apresentam peso maior que a média serão dominantes. Os não dominantes são
aqueles que apresentam peso menor que a média calculada. Os dominantes são os mais
fortes e movimentam-se em busca das fêmeas mais próximas 𝑆𝑓, através das vibrações
𝑉𝑖𝑏𝑓𝑖. Os não dominantes concentram-se no meio da população masculina para
aproveitar as sobras dos machos dominantes. O movimento dos machos é realizado de
acordo com

CAPÍTULO 4. MODELO DESENVOLVIDO
47
𝑚𝑖𝑘+1 = {
𝑚𝑖𝑘 + 𝛼 ∗ 𝑉𝑖𝑏𝑓𝑖(𝑆𝑓 − 𝑚𝑖
𝑘) + 𝛿 (𝛾 −1
2) 𝑠𝑒 𝑑𝑜𝑚𝑖𝑛𝑎𝑛𝑡𝑒
𝑚𝑖𝑘 + 𝛼(𝑀𝑑 − 𝑚𝑖
𝑘) 𝑠𝑒 𝑛ã𝑜 − 𝑑𝑜𝑚𝑖𝑛𝑎𝑛𝑡𝑒 (4.4)
onde 𝑀𝑑 corresponde ao peso médio de toda a população masculina.
Após a mudança de posição das aranhas, espera-se que os machos dominantes
estejam mais próximos em relação às fêmeas, para facilitar o acasalamento. Cada macho
dominante tem uma área de atuação definida por um raio 𝑟. Se dentro dessa área for
encontrada uma ou mais fêmeas o acasalamento acontece. A nova aranha será criada a
partir do acasalamento entre o macho dominante e a(s) fêmea(s) encontrada(s). O raio
de atuação dos machos dominantes é calculado de acordo com
𝑟 =∑ (𝑝𝑗
ℎ𝑖𝑔ℎ− 𝑝𝑗
𝑙𝑜𝑤)𝑛𝑗=1
2 ∗ 𝑛 (4.5)
onde 𝑛 é a dimensão do problema, 𝑝𝑗ℎ𝑖𝑔ℎ
𝑒 𝑝𝑗𝑙𝑜𝑤 são os limites superior e inferior de
cada dimensão 𝑗 ou parâmetro a ser otimizado. A aranha gerada pode substituir a pior
aranha de toda a teia caso apresente uma posição melhor, ou então, será descartada. O
sexo da pior aranha será mantido com intuito de garantir o equilíbrio do número de
aranhas em cada gênero.
Depois do acasalamento, que é a última etapa de cada iteração, todas as aranhas
serão avaliadas novamente, dando início a um novo ciclo. O algoritmo continua sua
execução até que uma aranha consiga atingir uma posição desejada, ou seja, parâmetros
satisfatórios encontrados.
4.4 Conclusão
Com a utilização deste modelo desenvolvido, é possível otimizar características
eletromagnéticas, tais como, frequência de ressonância, perda de retorno, coeficiente
de reflexão, coeficiente de transmissão, largura de banda e ganho. Com o framework
não há necessidade de dispender tempo e custo computacional no desenvolvimento de
métodos de estimação, como as Redes Neurais Artificiais e métodos de interpolação. A
principal característica do modelo desenvolvido com framework é propor facilidade no
uso de algoritmos bioinspirados, como o SSO por exemplo, para otimização de
estruturas planares e melhorar o tempo de desenvolvimento. No capítulo a seguir, são

CAPÍTULO 4. MODELO DESENVOLVIDO
48
apresentados os resultados de simulações e experimentos projetados com o auxílio
desse modelo aqui descrito.

49
Capítulo 5
Resultados
5.1 Introdução
Os capítulos anteriores abordaram conteúdos importantes para o
desenvolvimento deste trabalho. No Capítulo 2, técnicas de otimização bioinspirada
foram descritas. O Capítulo 3, detalha conceitos de antenas e FSS. Em seguida, no
Capítulo 4, foi apresentado o modelo desenvolvido e utilizado neste trabalho para
otimizar estruturas de antenas e FSS. Nas próximas seções, os resultados de otimizações
realizadas em antenas e FSS, obtidos a partir do modelo desenvolvido serão
apresentados.
5.2 Antena UWB
O objetivo da otimização da antena monopolo em anel é aumentar a largura de
banda de atuação da antena que garanta um comportamento em banda ultra larga
(Ultra Wide Band - UWB). O modelo desenvolvido neste trabalho é comparado com
outro que utilizou o algoritmo genético.
A geometria da antena UWB utilizada é mostrada na Figura 5.1. O monopolo em
anel é alimentado por uma linha de microfita de 50 Ω. O substrato dielétrico é o FR-4
com permissividade relativa de r = 4,4, tangente de perda tan = 0,02, e espessura h =
1.5 mm. Um plano de terra truncado é utilizado para possibilitar uma resposta em banda
larga. Em adição, uma fenda é inserida para melhorar a impedância de entrada. As
dimensões principais da antena (em mm) são L = 33, L1 = 12,5, L2 = 12, W = 28, W1 = 2,7,
R = 8,8 e r = 5,0.
Além disso, observou-se que as variações na frequência de ressonância da
antena, no coeficiente de reflexão de entrada, e na largura de banda podem ser
modificados com alterações realizadas nas dimensões da fenda do plano de terra (Ls e

CAPÍTULO 5. RESULTADOS
50
Ws), e, portanto, permitindo melhorias de desempenho. Diante disso, as dimensões da
fenda serão os parâmetros otimizados. Ou seja, cada aranha no SSO será formada por
um valor para LS e outro para WS. A avaliação de cada aranha será a largura de banda
obtida na simulação.
Figura 5.1 – Geometria da antena UWB.
Para validar o procedimento de otimização pelo algoritmo SSO, foi fabricado um
protótipo da antena UWB, como mostrado na Figura 5.1. Para a antena UWB
considerada, o resultado obtido a partir do algoritmo SSO é bastante superior em
relação ao resultado apresentado pelo Algoritmo Genético [17] referente à largura de
banda. Resultados medidos e simulados são mostrados na Figura 5.2 e sintetizados na
Tabela 5.1. Na Figura 5.2 é incluída uma miniatura do resultado medido com SSO,
mostrando todo o intervalo obtido (até 16GHz).
Tabela 5.1 – Comparação entre os resultados do AG e algoritmo SSO.
Técnica de Otimização
Resultados 𝐵𝑊
(𝐺𝐻𝑧) 𝑆11
(𝑑𝐵) 𝐿𝑆
(𝑚𝑚) 𝑊𝑆
(𝑚𝑚)
AG [17]
Simulado 9,15 -31,25 1,52
3,81
Medido 5,68 -28,0
SSO [47]
Simulado 9,47 -43,60 2,70
3,08
Medido 12,22 -28,0

CAPÍTULO 5. RESULTADOS
51
Figura 5.2 – Resultados medidos e simulados para coeficiente de reflexão da antena
UWB utilizando o AG [17] e o algoritmo SSO [47].
Como mostrado na Figura 5.2 e na Tabela 5.1, existe consistência entre os
resultados do Algoritmo Genético e algoritmo SSO. Contudo, a comparação mostra que
o algoritmo SSO conduz a um melhor desempenho que a técnica do AG. Por exemplo,
uma largura de banda de 12,22 GHz é obtida nos resultados medidos realizados com o
algoritmo SSO, enquanto que para os resultados obtidos com o AG conseguiu uma
largura de 5,68 GHz.
Resultados simulados para radiação em 3 dimensões na escala de ganho para 4
GHz, 6 GHz e 8 GHz são mostrados na Figura 5.3.
(a) (b) (c)
Figura 5.3 – Resultados simulados de radiação em 3 dimensões (escala de ganho) para
o monopolo em anel em (a) 4 GHz, (b) 6 GHz, e (c) 8 GHz.

CAPÍTULO 5. RESULTADOS
52
Na Figura 5.3(a), um comportamento omnidirecional é observado. O diagrama
mostra que a Figura 5.3(b) tem o mesmo comportamento, com uma pequena variação
na direção x. Na Figura 5.3(c) um pequeno desvio no comportamento omnidirecional é
observado ao longo do eixo x.
A Figura 5.4, mostra a radiação em escala de ganho em duas dimensões para
resultado simulado e medido na frequência de 6 GHz. Os planos E e H são mostrados,
correspondentes aos planos yz (𝜙 = 90˚) e xz (𝜙 = 0˚), respectivamente.
Figura 5.4 – Resultados simulados e medidos de radiação em 2 dimensões (escala
de ganho) em 6 GHz.
Uma boa concordância entre resultados simulados e medidos é
observada na Figura 5.4. Particularmente, os ganhos máximos dos resultados simulados
e medidos são 1,98 dB e 2,39 dB, respectivamente.
5.3 FSS
O objetivo da otimização nesta estrutura de FSS, Figura 5.5, é garantir um
comportamento em relação à frequência de ressonância e largura de banda. Os
parâmetros manipulados para melhorar o comportamento da FSS são: número de

CAPÍTULO 5. RESULTADOS
53
interação k; fator de iteração e permissividade relativa do substrato εr. Os resultados
obtidos com o SSO integrado ao framework são comparados aos resultados com PSO –
RNA.
A Figura 5.5(a), mostra a geometria dos elementos fractais de Vicsek de níveis k
= 0, 1, 2. As dimensões da célula unitária do arranjo FSS são tx e ty, que correspondem à
periodicidade da FSS ao longo das direções x e y, respectivamente. As dimensões L, L1,
e L2 são os lados dos quadrados utilizados para formar os elementos do fractal de Vicsek
nos níveis k = 0, 1 e 2, respectivamente.
A formação do fractal inicia com um quadrado de lado L, definido como fractal
de Vicsek de nível k = 0. O fractal de Vicsek de nível k = 1 é gerado pela divisão do
quadrado de lado L em nove quadrados menores de lado L1 (L1 = L/3) e removendo-se
os quadrados posicionados nos cantos da nova geometria. A geometria remanescente
composta de cinco quadrados de lado L1 é definida como fractal de Vicsek de nível k = 1.
O processo é repetido iterativamente em cada quadrado remanescente, transformando
a geometria nos níveis k = 2 e k = 3 do fractal de Vicsek e assim sucessivamente. O
tamanho da similaridade deste fractal é 1.46, calculado através de log(N)/log(a), onde
N é o número de cópias formadas e a é o fator de iteração. Em adição, novas geometrias,
definidas como quase-fractais, são geradas pela mudança do fator de iteração como
mostrado na figura 5.5(b).
Figura 5.5 – Geometria da FSS com variações no (a) nível do fractal ,k, e (b) fator de
iteração, a.

CAPÍTULO 5. RESULTADOS
54
O tamanho do elemento FSS, a periodicidade do arranjo FSS, o fator de iteração
do fractal e o nível de interação do fractal são parâmetros que quando modificados
afetam diretamente a frequência de ressonância, o coeficiente de reflexão de entrada,
e largura de banda. Estas são características de um problema multiobjetivo. Contudo,
para obter uma resposta desejada, é possível ajustar os parâmetros com o auxílio dos
algoritmos bioinspirados.
Além disso, a fim de verificar o desempenho e a eficácia do algoritmo SSO
proposto, seus resultados são comparados com os obtidos em [18], que utiliza
Otimização de Enxame de Partícula (Particle Swarm Optimization - PSO) e Redes Neurais
Artificiais para uma estrutura FSS com elementos patches de fractal de Vicsek.
O objetivo específico em [18] é projetar uma FSS para ressoar em 10,84 GHz com
uma largura de banda de 894 MHz. As variáveis a serem otimizadas pelo PSO e RNA
juntamente com os valores utilizados para formarem o conjunto de treinamento são
número de interação k = [1, 2], fator de iteração = [3, 4, 5, 6, 7, 8, 9], e permissividade
relativa do substrato εr = [1; 2,2; 2,94; 4,4; 15,6; 10,2]. No algoritmo SSO os mesmos
parâmetros são utilizados, com uma modificação nos valores do fator de iteração (a)
que receberam números aleatórios com precisão de 2 dígitos dentro de uma faixa [3,0
– 9,0]. Os resultados simulados referentes ao coeficiente de transmissão tanto para o
SSO-Framework quanto para o PSO-RNA são mostrados na Figura 5.6. O PSO-RNA
encontrou os valores k=2, a=3 e εr=2,2 na 109ª geração. Já o SSO-Framework executou
88 gerações para encontrar k=2, a=3,06 e εr=2,2.
Na Figura 5.6, pode-se observar que o coeficiente de transmissão da FSS
utilizando PSO-RNA e utilizando o algoritmo SSO são concordantes. Contudo, o modelo
desenvolvido com o algoritmo SSO interligado ao framework não precisa de uma base
de dados e já se encontra pronto para ser utilizado em diversos projetos.

CAPÍTULO 5. RESULTADOS
55
Figura 5.6 – Comparação entre resultados simulados para coeficiente de
transmissão usando as técnicas PSO-RNA [18] e algoritmo SSO [47].
Para testar a versatilidade do modelo proposto nesse trabalho, foi sugerida um
novo comportamento da FSS com fractal de Vicsek. O principal objetivo deste caso é
projetar uma FSS ressonante em 9 GHz, usando um substrato dielétrico com
permissividade relativa εr = 4,4 e espessura h = 1,57 mm, com a manipulação de quatro
parâmetros de otimização. Nessa geometria FSS, o algoritmo SSO pode variar o tamanho
do elemento FSS, a periodicidade do arranjo FSS, o fator de iteração do fractal Vicsek
(a), e o número de interação do fractal (k). A quantidade de parâmetros a serem
otimizados não interfere diretamente no desempenho do algoritmo, pois, o número de
parâmetros altera apenas o tamanho do vetor que será passado do algoritmo para o
HFSS via framework.
Valores para os parâmetros encontrados pelo algoritmo são mostrados na Tabela
5.2. Os resultados obtidos são mostrados na Figura 5.7, e sintetizados na Tabela 5.3.
Tabela 5.2 – Valores dos parâmetros obtidos com algoritmo SSO para FSS com patch
fractal de Vicsek e substrato FR-4.
7 8 9 10 11 12 13 14-45
-40
-35
-30
-25
-20
-15
-10
-5
0
Frequência (GHz)
Co
efic
ien
te d
e T
ran
smis
são
(d
B)
PSO-RNA
SSO

CAPÍTULO 5. RESULTADOS
56
Parâmetro FSS Valor
Tamanho do elemento: L 8,30 mm
Periodicidade: tx = ty 9,61 mm
Fator de iteração: a 6,34
Número de iteração: k 2
Figura 5.7 – Comparação entre resultados medidos e simulados para Coeficiente de
Transmissão - FSS com fractal Vicsek com parâmetros dados pela Tabela 5.3.
Tabela 5.3 – Comparação de frequência de ressonância e largura de banda entre
resultados medidos e simulados.
SSO 𝑓𝑟 (𝐺𝐻𝑧) 𝐵𝑊 (𝐺𝐻𝑧)
Simulado 9,03 1,15 Medido 9,17 1,26
7 8 9 10 11 12 13 14-30
-25
-20
-15
-10
-5
0
Frequência (GHz)
Co
efic
ien
te d
e T
ran
smis
são
(d
B)
Simulado
Medido

CAPÍTULO 5. RESULTADOS
57
Como mostrado na Figura 5.7 e na Tabela 5.3, existe boa concordância entre
resultados simulados e medidos obtidos com o SSO-framework. A quantidade de
parâmetros não é empecilho para o bom funcionamento desse modelo. Somente
poucos ajustes referentes à quantidade de parâmetros e intervalo de valores para os
mesmos são necessários.
5.4 Projeto de miniaturização de uma antena com aplicação de fractal e
pino para curto circuito
Nesta etapa, são combinadas técnicas de miniaturização para obter uma redução
mais significativa no tamanho da antena. São utilizadas duas técnicas de miniaturização:
uso do fractal de Koch no contorno do patch e um curto circuito que conecta o patch ao
plano de terra [48]. A redução no tamanho da antena tem o intuito de possibilitar o uso
em baixas frequências, como no sistema de comunicação 4G, por exemplo.
Neste projeto, o algoritmo SSO é utilizado para encontrar o melhor raio e posição
do pino de curto circuito, assim como o tamanho da reentrância. A fim de comparações,
um algoritmo PSO também foi desenvolvido e integrado ao framework para o mesmo
propósito realizado pelo SSO.
O processo de geração do fractal de Koch é iniciado por modificar os lados
superior, esquerdo e direito da geometria inicial aplicando-se o fator de iteração, d.
Neste projeto, d = 1/3, o que resulta em W1= W/3 e L1= L/3, e assim sucessivamente. A
Figura 5.8 (a) mostra o fractal de Koch de nível k=0, seguida das duas figuras que
apresentam os níveis k=1 e k=2.
(a) (b) (c)
Figura 5.8 – Antena de microfita com patch em fractal de Koch: nível k=0 (a); nível k=1; nível k=2.

CAPÍTULO 5. RESULTADOS
58
O substrato dielétrico utilizado é o FR4, com permissividade relativa εr = 4,4,
tangente de perda tan = 0,02, espessura h = 1,5 mm. Os valores descritos a seguir, são
escolhidos para um bom casamento de impedância numa linha de microfita de 50 Ohm
em 2,45 GHz: W = 29,09 mm, L = 37,34 mm, WGP = 57,34 mm, LGP = 47,47 mm, WTL =
2,87 mm, LTL = 17,09 mm, X0 = 2,87 mm, e Y0 = 8,71 mm.
A utilização do fractal de Koch no contorno da antena de microfita garante uma
boa redução na frequência de ressonância da antena. Abaixo, a Figura 5.9 ilustra um
comparativo das frequências de atuação das antenas mostradas na Figura 5.8 (a), (b) e
(c) sem o uso do pino de curto circuito. As frequências encontradas são 2,43 GHz, 1,69
GHz e 1,37 GHz para os níveis do Koch fractal k = 0, k = 1 e k = 2, respectivamente.
Figura 5.9 – Resultados simulados para o coeficiente de reflexão das antenas com
fractal de Koch nos níveis, k = 0, k = 1 e k = 2, sem o pino de curto circuito.
A combinação do fractal no contorno do patch com o pino de curto circuito é
realizada para garantir uma redução mais expressiva, neste sentido, a antena com
fractal de Koch de nível k = 2, é escolhida para a inserção do pino.
O algoritmo SSO selecionou como melhor resposta os seguintes valores: raio do
pino com 0,04 mm, posição do pino no eixo y com -4,835 mm, reentrância com 3,805
0.5 1 1.5 2 2.5 3
-20
-15
-10
-5
0
Frequência (GHz)
|S11| (
dB
)
k = 0
k = 1
k = 2

CAPÍTULO 5. RESULTADOS
59
mm para X0 e 8,71 mm para Y0. A Figura 5.10 mostra resultados simulados para antena
com fractal de Koch nível k = 2 com o pino e sem o uso do pino.
Figura 5.10 – Resultados simulados para o coeficiente de reflexão da antena
com fractal de Koch nível k = 2, sem o pino e com o pino de curto circuito.
Após a etapa de simulações, uma antena com fractal de Koch nível k = 2 e pino
de curto circuito foi fabricada utilizando tecnologia convencional de circuito impresso.
Fotografias do protótipo da antena e configuração de medição na câmara anecoica são
mostradas na Figura 5.11.
Figura 5.11 – Fotografia da antena proposta.
A Figura 5.12 mostra uma comparação entre resultados simulado e medido para
o coeficiente de reflexão. Uma boa concordância pode ser observada. Os resultados

CAPÍTULO 5. RESULTADOS
60
para frequência de ressonância simulada e medida foram 730 MHz e 744 MHz,
respectivamente. A frequência medida de 744 MHz na geometria otimizada é
aproximadamente 70 % menor que a antena de microfita com patch retangular
mostrado na Figura 5.8 (a).
Figura 5.12 – Resultado simulado e medido para o coeficiente de reflexão da
antena otimizada com algoritmo SSO.
Um algoritmo PSO foi desenvolvido e integrado ao ANSYS HFSS. Para garantir
uma melhor equivalência na execução dos algoritmos um mesmo tamanho de
população foi adotado: 12 indivíduos. Para o PSO foi utilizado o valor de 2,05 para os
parâmetros social e cognitivo. A Figura 5.13 mostra uma comparação nas convergências
médias de 10 execuções para cada algoritmo. O tempo de execução é praticamente o
mesmo para os dois algoritmos, visto que aproximadamente 98% do tempo é gasto nas
simulações realizadas no software HFSS e somente 2% do tempo para as operações no
algoritmo. Para este projeto cada geração com 12 indivíduos gasta em média 40 minutos
em uma workstation com um processador Intel Xeon E5506 2.13 GHz e 24 GB de RAM.

CAPÍTULO 5. RESULTADOS
61
Figura 5.13 – Comparação das convergências médias entre os algoritmos SSO e
PSO para 10 execuções de cada algoritmo[48].
É possível notar um melhor comportamento do algoritmo SSO em relação ao PSO
no que diz respeito à convergência para uma solução desejada. Isto pode ser explicado
pelo fato do algoritmo SSO utilizar duas modelagens diferentes para os seus indivíduos
(aranhas macho e fêmea), obtendo ganho na exploração do espaço de busca.
5.5 Conclusão
Nesse capítulo foi apresentado os projetos executados com o modelo
desenvolvido através da integração do algoritmo bioinspirado SSO com o software
comercial ANSYS HFSS via framework. Resultados simulados e medidos foram exibidos
e o modelo desenvolvido mostra-se como alternativa para projetos de otimização de
circuitos planares diante da resolução adequada.
0 10 20 30 40 50 600
0.5
1
1.5
2
2.5
Iterações
Val
or
de
Fit
nes
s
SSO
PSO

62
Capítulo 6
Conclusão
Nesse trabalho, foi desenvolvida uma técnica para auxiliar a otimização de
circuitos planares como estruturas de antenas e FSS através da integração de um
algoritmo bioinspirado ao software comercial ANSYS HFSS que realiza análise de onda
completa por meio do Método dos Elementos Finitos.
A integração do algoritmo bioinspirado ao software comercial foi realizada por
meio de um framework desenvolvido durante esse trabalho. Ademais, foi projetado um
algoritmo bioinspirado baseado na inteligência de enxame, o Social Spider Optimization.
Sendo assim, esta é a primeira aplicação desse algoritmo na resolução de problemas de
eletromagnetismo.
O algoritmo SSO foi escolhido por apresentar características que o fazem varrer
o espaço de busca de uma maneira mais aprimorada em relação a outras técnicas de
algoritmos bioinspirados. Isso pode ser explicado pelo mapeamento de aranhas ou
agentes com comportamentos diferentes em relação ao gênero sexual. Além disso, o
SSO tem uma boa convergência quando comparado com outros algoritmos.
O modelo desenvolvido nesse trabalho, pode ser considerado como uma
alternativa aos projetos de otimização de estruturas, tais como, antenas, superfícies
seletivas de frequência e filtros que geralmente utilizam técnicas de hibridização, ao
integrar dois algoritmos bioinspirados. Um para melhorar as soluções candidatas e outro
para realizar estimativas de análises das estruturas. As Redes Neurais Artificiais são
bastante utilizadas para realizar estimativas.
Ao optar pelo modelo desenvolvido nesse trabalho no procedimento de
otimização de circuitos planares ao invés de escolher as técnicas híbridas, algumas
vantagens são adquiridas. A primeira delas, corresponde ao custo em relação ao tempo
de desenvolvimento. O SSO integrado ao software ANSYS HFSS encontra-se pronto para
otimizar qualquer estrutura, basta que esteja inserida no software. No entanto, com a

CAPÍTULO 6. CONCLUSÃO
63
utilização das Redes Neurais Artificiais, por exemplo, para cada estrutura se faz
necessário um conjunto de dados para o treinamento da rede. Outra vantagem diz
respeito ao uso de espaço na memória do computador, pois, a base de dados para
treinar a rede precisa ser armazenada, o que não acontece no modelo desenvolvido por
não fazer uso de base de dados. Além do mais, a quantidade de parâmetros a serem
otimizados pode aumentar significativamente o tamanho da base de dados necessária
para o treinamento da rede, o que implica em maior tempo de desenvolvimento e mais
espaço de armazenamento. Entretanto, no modelo desenvolvido, devido à ligação do
algoritmo diretamente com o software comercial, a quantidade de parâmetros
otimizados altera somente o tamanho do vetor de entrada, o que não afeta no tempo
de desenvolvimento e nem acarreta mais memória.
O SSO interligado ao ANSYS HFSS foi utilizado em alguns projetos distintos. Na
otimização da largura de banda de uma antena UWB. Na miniaturização de uma antena
de microfita com patch em fractal. Como também, na otimização de largura de banda e
frequência de operação de FSS.
Em todos os projetos descritos acima, foram fabricados protótipos e foram
realizadas comparações com outras técnicas de otimização. Assim como, foi
desenvolvido um algoritmo PSO e integrado ao ANSYS HFSS por meio do framework,
para fins de comparações. A boa concordância dos resultados, e o bom desempenho do
SSO mostra que o modelo desenvolvido pode ser utilizado em diversos projetos de
circuitos planares e com diferentes níveis de complexidade.
Na continuidade do trabalho, pode-se modificar o framework para que seja
possível integrar um algoritmo bioinspirado com outros softwares que realizam análises
de circuitos planares. Também pode-se aplicar esse modelo para otimizar filtros ou
filtennas. Em relação à interação com o usuário, é possível criar uma interface gráfica
para facilitar a manipulação.

64
Referências Bibliográficas
[1] C. A. Balanis, Antenna Theory: Analysis and Design, Third Edit. John Wiley & Sons,
Inc., 2005.
[2] R. C. Hansen and R. E. Collin, Small antenna handbook. John Wiley & Sons, 2011.
[3] T. K. Wu, Frequency Selective Surfaces and Grid Array. 1995.
[4] J. Robinson and Y. Rahmat-Samii, “Particle Swarm Optimization in
Electromagnetics,” IEEE Trans. Antennas Propag., vol. 52, no. 2, pp. 397–407, Feb.
2004.
[5] Y.-L. Li, W. Shao, L. You, and B.-Z. Wang, “An Improved PSO Algorithm and Its
Application to UWB Antenna Design,” IEEE Antennas Wirel. Propag. Lett., vol. 12,
no. 3, pp. 1236–1239, 2013.
[6] P. H. Da, R. M. S. Cruz, and A. G. D’Aassunção, “Blending PSO and ANN for optimal
design of FSS filters with koch Island patch elements,” IEEE Trans. Magn., vol. 46,
no. 8, pp. 3010–3013, 2010.
[7] J. Kennedy and R. Eberhart, “Particle swarm optimization,” in Proceedings of
ICNN’95 - International Conference on Neural Networks, 1995, vol. 4, pp. 1942–
1948.
[8] D. Karaboga, “An idea based on honey bee swarm for numerical optimization,”
Tech. REPORT-TR06 Eng. Fac. Comput. Eng. Dep. ERCIYES Univ., 2005.
[9] M. Dorigo, “Optimization, Learning and Natural Algorithms,” Politecnico di
Milano, Milano, Italy, 1992.
[10] Alcantra Neto M. C., J. P. L. Araújo, F. J. B. Barros, A. N. Silva, G. P. S. Cavalcante,
and A. G. D’Assunção, “Bioinspired multiobjective synthesis of X-Band FSS via
general regression neural network and cuckoo search algorithm,” Microw. Opt.
Technol. Lett., pp. 2400–2405, 2015.
[11] E. Bonabeau, G. Theraulaz, and M. Dorigo, Swarm Intelligence: From Natural to

REFERÊNCIAS BIBLIOGRÁFICAS
65
Artificial Systems, Edition 1. New York: Press, Oxford University, 1999.
[12] W. C. de Araújo, H. W. C. Lins, A. G. D’Assunção, J. L. G. Medeiros, and A. G.
D’Assunção, “A bioinspired hybrid optimization algorithm for designing
broadband frequency selective surfaces,” Microw. Opt. Technol. Lett., vol. 56, no.
2, pp. 329–333, 2014.
[13] M. R. da Silva, C. de L. Nóbrega, P. H. da F. Silva, and A. G. D’Assunção,
“Optimization of FSS with Sierpinski island fractal elements using population-
based search algorithms and MLP neural network,” Microw. Opt. Technol. Lett.,
vol. 56, no. 4, pp. 827–831, 2014.
[14] Anuradha, a. Patnaik, and S. N. Sinha, “Design of custom-made fractal multi-band
antennas using ANN-PSO,” IEEE Antennas Propag. Mag., vol. 53, no. 4, pp. 94–
101, 2011.
[15] “Ansoft Corporation (HFSS).” Pittsburgh.
[16] E. Cuevas, M. Cienfuegos, D. Zaldívar, and M. Pérez-Cisneros, “A swarm
optimization algorithm inspired in the behavior of the social-spider,” Expert Syst.
Appl., 2013.
[17] C. R. M. Silva, H. W. C. Lins, S. R. Martins, E. L. F. Barreto, and A. G. D’Assunção,
“A multiobjective optimization of a UWB antenna using a self organizing genetic
algorithm,” Microw. Opt. Technol. Lett., vol. 54, no. 8, pp. 1824–1828, Aug. 2012.
[18] P. H. D. F. Silva, C. D. L. Nóbrega, M. R. Da Silva, and A. G. D’Assunção, “Optimal
design of frequency selective surfaces with fractal motifs,” IET Microwaves,
Antennas Propag., vol. 8, no. 9, pp. 627–631, 2014.
[19] L. N. De Castro, Fundamentals of Natural Computing : Basic Concepts, Algorithms,
and Applications. CRC Press, 2006.
[20] M. (Computer scientist) Mitchell, An introduction to genetic algorithms. MIT
Press, 1998.
[21] W. Banzhaf, Genetic programming : an introduction on the automatic evolution
of computer programs and its applications. Morgan Kaufmann Publishers, 1998.
[22] J. H. Holland, Adaptation in natural and artificial systems. Ann Arbor, MI:
University of Michigan Press, 1975.
[23] R. L. Haupt, S. E. Haupt, and R. L. Haupt, Practical genetic algorithms. John Wiley,
2004.

REFERÊNCIAS BIBLIOGRÁFICAS
66
[24] Y. Shi and R. Eberhart, “A modified particle swarm optimizer,” in 1998 IEEE
International Conference on Evolutionary Computation Proceedings. IEEE World
Congress on Computational Intelligence (Cat. No.98TH8360), pp. 69–73.
[25] S. Haykin, Neural networks and learning machines. Prentice-Hall, 2009.
[26] W. S. McCulloch and W. Pitts, “A logical calculus of the ideas immanent in nervous
activity,” Bull. Math. Biophys., vol. 5, no. 4, pp. 115–133, Dec. 1943.
[27] C. Janeway, P. Travers, M. Walport, and M. Shlomchik, Imunobiologia : o sistema
imune na saude e na doenca. Artes Medicas, 2007.
[28] I. R. Tizard, Imunologia Veterinária: uma introdução. Rio de Janeiro: Elsevier,
2009.
[29] H. S. Bernardino and H. J. C. Barbosa, “Artificial Immune Systems for
Optimization,” Springer Berlin Heidelberg, 2009, pp. 389–411.
[30] L. N. De Castro and F. J. Von Zuben, “The Clonal Selection Algorithm with
Engineering Applications,” vol. 8, 2001.
[31] V. Cutello and G. Nicosia, “An Immunological Approach to Combinatorial
Optimization Problems,” Springer Berlin Heidelberg, 2002, pp. 361–370.
[32] V. Cutello, G. Nicosia, and M. Pavone, “A Hybrid Immune Algorithm with
Information Gain for the Graph Coloring Problem,” Springer Berlin Heidelberg,
2003, pp. 171–182.
[33] V. Cutello, G. Nicosia, and M. Pavone, “An immune algorithm with stochastic
aging and kullback entropy for the chromatic number problem,” J. Comb. Optim.,
vol. 14, no. 1, pp. 9–33, May 2007.
[34] G. Kumar and K. P. Ray, Broadband microstrip antennas. Artech House, 2003.
[35] K.-L. Wong, Compact and broadband microstrip antennas. John Wiley & Sons,
2002.
[36] P. L. da Silva, “Modelagem de Superfícies Seletivas de Freqüência e Antenas de
Microfita utilizando Redes Neurais Artificiais,” 2006.
[37] C. de L. Nóbrega, “Otimização dos parâmetros de monopolos planares de
microfita para aplicações em sistemas de banda ultra larga,” 2008.
[38] B. A. Munk, Frequency Selective Surfaces. Hoboken, NJ, USA: John Wiley & Sons,
Inc., 2000.
[39] P. H. da F. Silva, A. F. dos Santos, R. M. S. Cruz, and A. G. D’Assunção, “Dual-band

REFERÊNCIAS BIBLIOGRÁFICAS
67
bandstop frequency selective surfaces with gosper prefractal elements,” Microw.
Opt. Technol. Lett., vol. 54, no. 3, pp. 771–775, Mar. 2012.
[40] M. R. da Silva, A. G. D’Assunção, P. H. da Fonseca Silva, and C. de L. Nóbrega,
“Stable and compact multiband frequency selective surfaces with Peano pre-
fractal configurations,” IET Microwaves, Antennas Propag., vol. 7, no. 7, pp. 543–
551, May 2013.
[41] W. T. Wang, P. F. Zhang, S. X. Gong, B. Lu, J. Ling, and T. T. Wan, “Compact
angularly stable frequency selective surface using hexagonal fractal
configurations,” Microw. Opt. Technol. Lett., vol. 51, no. 11, pp. 2541–2544, Nov.
2009.
[42] J.-Y. Xue, S.-X. Gong, P.-F. Zhang, W. Wang, and F.-F. Zhang, “A NEW
MINIATURIZED FRACTAL FREQUENCY SELECTIVE SURFACE WITH EXCELLENT
ANGULAR STABILITY,” Prog. Electromagn. Res. Lett., vol. 13, pp. 131–138, 2010.
[43] J.-F. Zürcher and E. G. Fred, Broadband Patch Antennas. Artech House, 1995.
[44] C. de F. L. de Vasconcelos, “Antenas de microfita com patch em anel e múltiplas
camadas dielétricas anisotrópicas uniaxiais,” 2006.
[45] G. M. Feitoza, “Análise de antenas de microfita com patches circulares sobre
substratos anisotrópicos usando o método dos potenciais de Hertz,” 2005.
[46] Jian-feng Li, Bao-hua Sun, and Qi-zhong Liu, “PSO-based optimization of
broadband antenna array for space-division communication system,” in 2008 8th
International Symposium on Antennas, Propagation and EM Theory, 2008, pp.
309–312.
[47] P. S. Oliveira, A. G. D’Assunção, E. A. M. Souza, and C. Peixeiro, “A fast and
accurate technique for FSS and antenna designs based on the social spider
optimization algorithm,” Microw. Opt. Technol. Lett., vol. 58, no. 8, pp. 1912–
1917, Aug. 2016.
[48] E. A. M. Souza, P. S. Oliveira, A. G. D’Assunção, and C. Peixeiro, “Miniaturisation
of a microstrip patch antenna with a fractal contour and a shorting post using a
social spider optimisation algorithm,” IET Microwaves, Antennas Propag., 2017.

68
Apêndice A
A.1 Lista de algoritmos
• Amoeboid Organism Algorithm
• Artificial Bee Colony
• Artificial Beehive Algorithm
• Artificial Fish Swarm Algorithm
• Artificial Searching Swarm Algorithm
• Artificial Tribe Algorithm
• Backtracking Search Algorithm
• Bacterial Colony Chemotaxis
• Bacterial Colony Optimization
• Bacterial Foraging Algorithm
• Bar Systems
• Bat Algorithm
• Bat Intelligence
• Bean Optimization Algorithm
• Bee Colony Optimization
• Bee Colony-inpired Algorithm
• Bee Swarm Optimization
• Bee System
• BeeHive
• Bees Algorithm
• Bees Life Algorithm
• Biogeography-based optimization

APÊNDICE A
69
• Bioliminescent Swarm Optimization
• Bionic Optimization
• Blind Naked Mole-Rats
• Brain Storm Optimization
• Bumblebees Algorithm
• Cat Swarm Optimization
• Clonal Slection Algorithm
• Cockroach Swarm Optimization
• Collective Animal Behaviour
• Cuckoo Optimization Algorithm
• Cultural Algorithm
• Differential Search
• Dove Swarm Optimization
• Eagle Strategy
• Firefly Algorithm
• Fireworks Algorithm
• Fish School Search
• FlockbyLeader
• Flocking-based Algorithm
• Flower Pollinating Algorithm
• Frog Calling Algorithm
• Fruit Fly Optimization Algorithm
• Glowworm Swarm Optimization
• Goose Optimization Algorithm
• Great Deluge Algorithm
• Grenade Explosion Algorithm
• Group Escaping Algorithm
• Group Leaders Optimization Algorithm
• Group Search Optimizer
• Harmony Elements Algorithm
• Harmony Search

APÊNDICE A
70
• Honeybee Social Foraging
• Honeybees Mating Optimization
• Human Group formation
• Hunting Search
• Imperialist Competition Algorithm
• Invasive Weed Optimization
• Krill Herd
• League Championship Algorithm
• Melody Search
• Membrane Algorithm
• Method of Musical Composition
• Migrating Birds Optimization
• Mine Blast Algorithm
• Monkey Search
• Mosquito Host-Seeking Algorithm
• OptBees
• Oriented Search Algorithm
• Paddy Field Algorithm
• Photosyntetic Algorithm
• Populational Migration Algorithm
• Roach Infestation Optimization
• Saplings Growing Up Algorithm
• Seeker Optimization Algorithm
• Self-Organizing Migrating Algorithm
• Shark-Search Algorithm
• Sheep Flock Heredity Model
• Shuffled Flog Leaping Algorithm
• Simple Optimization
• Simulated Bee Colony
• Slime Mould Algorithm
• Social Emotional Optimization Algorithm

APÊNDICE A
71
• Social Spider Optimization Algorithm
• Society and Civilization Algorithm
• Stem Cells Algorithm
• Stochastic Focusing Search
• Superbug Algorithm
• Swallow Swarm Optimization
• Teaching-learning-based Optimization
• Termite-hill Algorithm
• Unconscious Search
• Viral System
• Virtual Bees Algorithm
• Wasp Swarm Optimization
• Wisdom of Artificial Crowds
• Wolf Colony Algorithm
• Wolf Pack Search