Embed Size (px)
Citation preview

EES-20: Sistemas de Controle II
06 Setembro 2017
1 / 56

Recapitulando: Observador de Estado
Modelo da planta:x = Ax + Bu
y = Cx
Observador de estado:
˙x = Ax + Bu + L(y − y)
y = Cx
Erro de estimacao do estado:
x = x − x
Dinamica do erro de estimacao:
˙x = (A− LC )x
2 / 56

Recapitulando: Observador de Estado
˙x = (A− LC )x
Pergunta 1: Como escolher as posicoes para os autovalores de (A− LC ) ?
Resposta: Se for adotada uma lei de controle da forma u = −Kx + Fr , ospolos de malha fechada corresponderao a uniao dos autovalores de(A− BK ) e (A− LC ). Desse modo, se os autovalores de (A− BK )tiverem sido alocados com vistas a obtencao de um modo dominante emmalha fechada, convem que os autovalores de (A− LC ) estejam afastadospara a esquerda, com relacao ao(s) polo(s) desse modo dominante.
3 / 56

Recapitulando: Observador de Estado
˙x = (A− LC )x
Pergunta 2: Tendo-se escolhido posicoes para os autovalores de (A− LC ),e sempre possıvel obter L de modo a realizar a alocacao desejada ?
4 / 56

Observabilidade
Um sistema com modelo da forma
x = Ax + Bu
y = Cx
e dito observavel se for possıvel alocar os autovalores de (A− LC ) emposicoes arbitrarias do plano complexo por meio de escolha da matriz L.
De forma resumida, diz-se que o par (A,C ) e observavel.
Vale notar que a observabilidade do sistema nao esta relacionada com amatriz B.
Pergunta 2 reformulada: Como determinar se o par (A,C ) e ou nao eobservavel ?
5 / 56

Forma canonica observavel
Vamos considerar inicialmente o caso em que o modelo esta na chamadaforma canonica observavel:
A =
0 0 · · · 0 −an1 0 · · · 0 −an−1...
. . ....
......
0 0. . . 0 −a2
0 0 · · · 1 −a1
, B =
bnbn−1
...b2b1
C =
[0 0 · · · 0 1
]Pode-se mostrar que essa e uma realizacao da seguinte funcao detransferencia:
G (s) =Y (s)
U(s)=
b1sn−1 + · · ·+ bn−1s + bn
sn + a1sn−1 + · · ·+ an−1s + an
6 / 56

Forma canonica observavel
A =
0 0 · · · 0 −an1 0 · · · 0 −an−1...
. . ....
......
0 0. . . 0 −a2
0 0 · · · 1 −a1
, B =
bnbn−1
...b2b1
C =
[0 0 · · · 0 1
]Com efeito, como G (s) e escalar, pode-se escrever
G (s) = GT (s) = [C (sI − A)−1B]T = BT (sI − AT )−1CT
com AT , CT e BT correspondendo as matrizes “A”, “B” e “C” darealizacao canonica controlavel.
7 / 56

Forma canonica observavel
A =
0 0 · · · 0 −an1 0 · · · 0 −an−1...
. . ....
......
0 0. . . 0 −a2
0 0 · · · 1 −a1
, C =[
0 0 · · · 0 1]
Com (A,C ) na forma canonica observavel, tem-se
(A−LC ) =
0 0 · · · 0 −an1 0 · · · 0 −an−1...
. . ....
......
0 0. . . 0 −a2
0 0 · · · 1 −a1
−
l1l2...
ln−1
ln
[
0 0 · · · 0 1]
8 / 56

Forma canonica observavel
(A− LC ) =
0 0 · · · 0 −(an + l1)1 0 · · · 0 −(an−1 + l2)...
. . ....
......
0 0. . . 0 −(a2 + ln−1)
0 0 · · · 1 −(a1 + ln)
Basta escolher l1, l2, . . . , ln de modo que o polinomio caracterıstico de(A− LC ) corresponda ao desejado.
9 / 56

Conversao para forma canonica observavel
Considere-se agora a chamada matriz de observabilidade Po ∈ Rn×n
definida como
Po =
CCA
...CAn−1
Se a matriz Po for inversıvel, e possıvel converter o modelo para a formacanonica observavel por meio de uma transformacao de similaridade.
10 / 56

Conversao para forma canonica observavel
Com efeito, seja h a ultima coluna de P−1o , isto e:
P−1o =
[• • · · · h
]e defina-se a seguinte matriz de transformacao de similaridade:
P =[h Ah · · · An−1h
]−1
Como resultado da transformacao, tem-se A = PAP−1 , ou seja
P−1A = AP−1
Portanto:[h Ah · · · An−1h
]A = A
[h Ah · · · An−1h
]=[Ah A2h · · · Anh
]11 / 56

Conversao para forma canonica observavel
[h Ah · · · An−1h
]A =
[Ah A2h · · · Anh
]Conclui-se que A tem a seguinte forma:
A =
0 0 · · · 0 −an1 0 · · · 0 −an−1...
. . ....
......
0 0. . . 0 −a2
0 0 · · · 1 −a1
12 / 56

Conversao para forma canonica observavel
Com respeito a matriz C , tem-se
C = CP−1 = C[h Ah · · · An−1h
]=[Ch CAh · · · CAn−1h
]Por outro lado, como PoP
−1o = I , pode-se escrever
CCA
...CAn−1
[ • • · · · h]
=
1 0 · · · 00 1 · · · 0...
.... . .
...0 0 · · · 1
Logo, conclui-se que
ChCAh
...CAn−1h
=
00...1
13 / 56

Conversao para forma canonica observavel
C =[Ch CAh · · · CAn−1h
]
ChCAh
...CAn−1h
=
00...1
Portanto:
C =[Ch CAh · · · CAn−1h
]=[
0 0 · · · 1]
Desenvolvimento similar ao empregado na conversao para forma canonicacontrolavel (aula de 18 de agosto), adaptado de A. C. Faleiros e T. Yoneyama,Teoria Matematica de Sistemas, 2002.
14 / 56

Conversao para forma canonica observavel
Com (A, C ) na forma canonica observavel, pode-se facilmente obter umamatriz L de modo a alocar os autovalores de (A− LC ) nas posicoesdesejadas.
Uma vez que
A− LC = PAP−1 − LCP−1 = P(A− P−1LC )P−1
basta tomar L = P−1L para que os autovalores de (A− LC ) estejam nasposicoes desejadas.
15 / 56

Observabilidade: Condicao suficiente
Portanto, conclui-se que a inversibilidade da matriz Po ∈ Rn×n e condicaosuficiente para a observabilidade do par (A,C ).
16 / 56

Interpretacao alternativa para a propriedade deobservabilidade
Desenvolvimento similar ao apresentado na aula de 21 de agosto, parao caso da controlabilidade. Vide tambem Geromel e Korogui (2001),paginas 201 e 202.
17 / 56

Observabilidade: Interpretacao alternativa
Se o sistema for observavel, pode-se determinar o valor de x(0) com basenos sinais de entrada u(t) e saıda y(t) ao longo de um dado intervalo detempo [0, tf ].
Com efeito, adotando a notacao x0 , x(0), pode-se escrever
y(t) = Cx(t) = C[eAtx0 +
∫ t
0eA(t−τ)Bu(τ)dτ
]e, portanto,
CeAtx0 = y(t)− C
∫ t
0eA(t−τ)Bu(τ)dτ
Multiplicando os dois lados dessa expressao por eAT tCT , obtem-se[
eAT tCTCeAt
]x0 = eA
T tCT[y(t)− C
∫ t
0eA(t−τ)Bu(τ)dτ
]18 / 56

[eA
T tCTCeAt]x0 = eA
T tCT[y(t)− C
∫ t
0eA(t−τ)Bu(τ)dτ
]Integrando os dois lados dessa expressao para t entre 0 e tf , chega-se a
[∫ tf
0eA
T tCTCeAtdt
]x0 =
∫ tf
0eA
T tCT
[y(t)−C
∫ t
0eA(t−τ)Bu(τ)
]dτ
]dt
Seja o “Gramiano de Observabilidade”Wo ∈ Rn×n definido como
Wo =
∫ tf
0eA
T tCTCeAtdt
Se Wo for inversıvel, obtem-se x0 como
x0 = W−1o
{∫ tf
0eA
T tCT
[y(t)− C
∫ t
0eA(t−τ)Bu(τ)
]dτ
]dt
}19 / 56

Observabilidade: Interpretacao alternativa
Wo =
∫ tf
0eA
T tCTCeAtdt
Se o par (A,C ) for observavel, pode-se mostrar que Wo e positivo definidae, portanto, inversıvel.
20 / 56

Inversibilidade de Wo
Wo =
∫ tf
0eA
T tCTCeAtdt
Inicialmente, deve-se notar que
W To =
(∫ tf
0eA
T tCTCeAtdt
)T
=
∫ tf
0
(eA
T tCTCeAt)T
dt
=
∫ tf
0eA
T tCTCeAtdt = Wo
e, portanto, Wo e simetrica.
21 / 56

Inversibilidade de Wo
Wo =
∫ tf
0eA
T tCTCeAtdt
Considerando agora uma dada condicao inicial x0 ∈ Rn, tem-se
xT0 Wox0 =
∫ tf
0xT0 eA
T tCT︸ ︷︷ ︸zT (t)
CeAtx0︸ ︷︷ ︸z(t)
dt =
∫ tf
0z2(t)dt ≥ 0, ∀tf > 0
em que z(t) = CeAtx0 e escalar.
22 / 56

Inversibilidade de Wo
xT0 Wox0 =
∫ tf
0z2(t)dt ≥ 0, ∀tf > 0
z(t) = CeAtx0
Uma vez que z(t) e funcao contınua do tempo, a integral
∫ tf
0z2(t)dt
somente sera nula se z(t) = 0, ∀t ∈ [0, tf ].
Se for esse o caso, entao z(0) = z(0) = · · · = z(n−1)(0) = 0, isto e,
z(t)z(t)
...
z(n−1)(t)
t=0
=
CeAtx0CAeAtx0
...CAn−1eAtx0
t=0
=
CCA
...CAn−1
︸ ︷︷ ︸
Po
x0 =
00...0
ou seja, Pox0 = 0.
23 / 56

Inversibilidade de Wo
Pox0 = 0
Se (A,C ) for controlavel, entao Po sera inversıvel e a equacao Pox0 = 0 soadmitira a solucao x0 = 0.
Portanto, xT0 Wox0 somente sera igual a zero se x0 = 0.
Tendo-se ja provado que xT0 Wox0 ≥ 0, ∀x0 ∈ Rn, conclui-se que
xT0 Wox0 > 0,∀x0 6= 0
ou seja, Wo e positivo definida.
24 / 56

Controlabilidade: Condicao necessaria
Pode-se tambem mostrar que a inversibilidade de Po e condicao necessariapara que o par (A,C ) seja observavel.
Com efeito, suponha que Po nao seja inversıvel, ou seja, que Po tenhaposto n1 < n.
Tomem-se entao n1 linhas linearmente independentes de Po , aquidenotadas por q1, q2, . . . , qn1 .
A parte nao observavel do modelo e isoladaempregando uma matriz de transformacao daforma ao lado, com as ultimas (n − n1) linhasescolhidas de modo que P tenha posto completo.
Demonstracao: Vide C. T. Chen, Linear SystemTheory and Design, 1984 (pagina 203).
P =
q1q2...
qn1••...•
25 / 56

Exemplo 1
R1
L
R2 Cu
iL = x1
vC = x2
y = x2
Exemplo adaptado de C. T. Chen, Linear System Theory and Design, 1984(pagina 193).
26 / 56

Exemplo 1
R1
L
R2 Cu
u
iL = x1
vC = x2
y = x2
u x1
vL
iCx2 R2
vL = Lx1
vL = R1(u − x1)
}x1 =
R1
L(u − x1)
iC = Cx2
iC = u − x2/R2
}x2 =
1
C
(u − x2
R2
)27 / 56

Exemplo 1
x1 =R1
L(u − x1) , x2 =
1
C
(u − x2
R2
), y = x2
x =
−R1
L0
0 − 1
R2C
x +
R1
L
1
C
u, y =[
0 1]x
Tem-se, portanto:
A =
−R1
L0
0 − 1
R2C
, B =
R1
L
1
C
, C =[
0 1]
28 / 56

Exemplo 1
A =
−R1
L0
0 − 1
R2C
, B =
R1
L
1
C
, C =[
0 1]
A matriz de observabilidade Po e dada por
Po =
C
CA
=
0 1
0 − 1
RC
Como detPo = 0, conclui-se que o sistema nao e observavel.
29 / 56

Exemplo 1: Interpretacao
R1
L
R2 Cu
u
iL = x1
vC = x2
y = x2
u x1
vL
iCx2 R2
→ Monitorando apenas u(t) e y(t), nao e possıvel determinar qual afracao da corrente u(t) que passa pelo indutor.
30 / 56

Exemplo 1: Interpretacao
R1
L
R2 Cu
u
iL = x1
vC = x2
y = x2
u x1
vL
iCx2 R2
x1
x2
=
−R1
L0
0 − 1
R2C
x1
x2
+
R1
L
1
C
u, y =[
0 1]x
→ O estado x1 nao afeta a saıda (nem diretamente, nem por meio deacoplamento com o estado x2)
31 / 56

Exemplo 2
Considere um sistema descrito pelo seguinte modelo:
x1 = −x1 + 3x2 + 2u
x2 = 2x2 + u
y = x1 − x2
ou seja, x = Ax + Bu, y = Cx com
A =
[−1 30 2
], B =
[21
], C =
[1 −1
]Nesse caso, tem-se
Po =
[CCA
]=
[1 −1−1 1
]
Como detPo = 0, conclui-se que o sistema nao e observavel.32 / 56
Exemplo 2
A =
[−1 30 2
], B =
[21
], C =
[1 −1
]Po =
[CCA
]=
[1 −1−1 1
]
A parte nao observavel do modelo pode ser isolada empregando a seguintematriz de transformacao de similaridade:
P =
[1 −11 0
]e sua inversa:
P−1 =
[0 1−1 1
]
33 / 56

Exemplo 2
A =
[−1 30 2
], B =
[21
], C =
[1 −1
]P =
[1 −11 0
], P−1 =
[0 1−1 1
]Tem-se, entao:
A = PAP−1 =
[−1 0−3 2
], B = PB =
[12
], C = CP−1 =
[1 0
]Empregando as novas variaveis de estado w = Px , pode-se escreverw = Aw + Bu e y = Cw , isto e:
w1 = −w1 + 0w2 + u
w2 = −3w1 + 2w2 + 2u
y = w1 + 0w234 / 56

Exemplo 2
w1 = −w1 + 0w2 + u
w2 = −3w1 + 2w2 + 2u
y = w1 + 0w2
→ O estado w2 nao afeta a saıda (nem diretamente, nem por meio deacoplamento com w1).
35 / 56

Controlabilidade e Observabilidade
Vale notar que um sistema pode ser controlavel, mas nao observavel, evice-versa.
Neste ultimo exemplo:
A =
[−1 30 2
], B =
[21
], C =
[1 −1
]Pc =
[B AB
]=
[2 11 2
]
Como detPc 6= 0, constata-se que o sistema e controlavel.
36 / 56

Decomposicao canonica de Kalman
u y
37 / 56
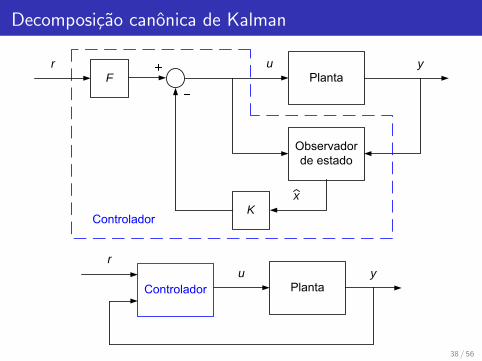
Decomposicao canonica de Kalman
r u yF
Kx
ru y
38 / 56

Decomposicao canonica de Kalman
ru y
39 / 56

Decomposicao canonica de Kalman
ru y
O controlador so pode alterar as caracterısticas dinamicas dos modoscontrolaveis e observaveis da planta.
40 / 56
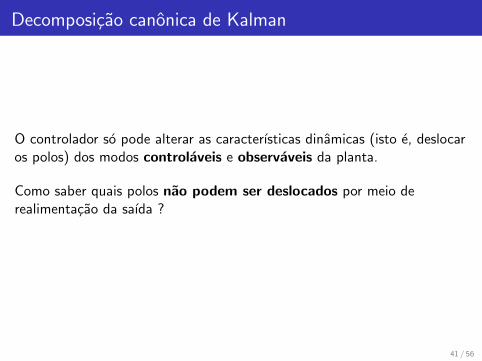
Decomposicao canonica de Kalman
O controlador so pode alterar as caracterısticas dinamicas (isto e, deslocaros polos) dos modos controlaveis e observaveis da planta.
Como saber quais polos nao podem ser deslocados por meio derealimentacao da saıda ?
41 / 56

Como saber quais polos nao podem ser deslocados pormeio de realimentacao da saıda ?
ru y
Possibilidade 1: Isolar as partes nao controlavel e/ou nao observavel domodelo por meio de transformacoes de similaridade (como ja visto).
42 / 56
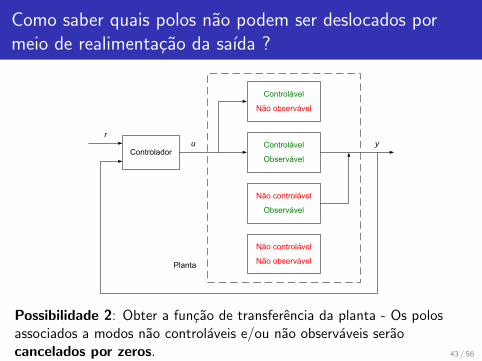
Como saber quais polos nao podem ser deslocados pormeio de realimentacao da saıda ?
ru y
Possibilidade 2: Obter a funcao de transferencia da planta - Os polosassociados a modos nao controlaveis e/ou nao observaveis seraocancelados por zeros. 43 / 56

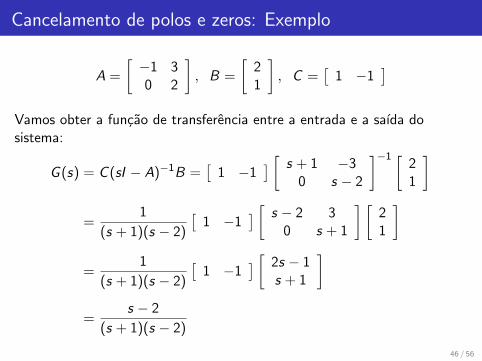
Cancelamento de polos e zeros: Exemplo
A =
[−1 30 2
], B =
[21
], C =
[1 −1
]Nesse caso, tem-se
Pc =[B AB
]=
[2 11 2
], Po =
[CCA
]=
[1 −1−1 1
]
Como detPc 6= 0 e detPo = 0, conclui-se que o sistema e controlavel, masnao e observavel.
44 / 56

Cancelamento de polos e zeros: Exemplo
Por meio de transformacao de similaridade, chegou-se a um modelo daforma w = Aw + Bu e y = Cw , com
A =
[−1 0−3 2
], B =
[12
], C =
[1 0
]A matriz A tem autovalores em −1 e +2.
O autovalor em +2 nao pode ser deslocado por meio de realimentacao dasaıda, pois o modo associado nao e observavel.
45 / 56
Cancelamento de polos e zeros: Exemplo
A =
[−1 30 2
], B =
[21
], C =
[1 −1
]Vamos obter a funcao de transferencia entre a entrada e a saıda dosistema:
G (s) = C (sI − A)−1B =[
1 −1] [ s + 1 −3
0 s − 2
]−1 [21
]
=1
(s + 1)(s − 2)
[1 −1
] [ s − 2 30 s + 1
] [21
]
=1
(s + 1)(s − 2)
[1 −1
] [ 2s − 1s + 1
]=
s − 2
(s + 1)(s − 2)
46 / 56

Cancelamento de polos e zeros: Exemplo
G (s) =���s − 2
(s + 1)����(s − 2)=
1
s + 1
Houve cancelamento do polo em s = +2, o que e consistente com oresultado obtido por meio do isolamento da parte nao observavel domodelo.
Vale notar que o sistema e estavel no sentido BIBO, mas nao temestabilidade interna (devido a presenca de um modo instavel que nao afetaa dinamica entre a entrada e a saıda).
Esse modo nao pode ser estabilizado por realimentacao da saıda.
Que problemas podem surgir na pratica ?
47 / 56
Terminologia: Estabilizabilidade e detectabilidade
• Se os modos nao controlaveis forem estaveis, diz-se que a planta eestabilizavel.
• Se os modos nao observaveis forem estaveis, diz-se que a planta edetectavel.
Desse modo, se a planta nao for controlavel e observavel, e importanteque seja pelo menos estabilizavel e detectavel.
No exemplo apresentado, a planta nao era detectavel.
48 / 56

Terminologia: Realizacao mınima
u y
Um modelo no espaco deestados que descreva apenasos modos controlaveis eobservaveis e dito ser umarealizacao mınima para afuncao de transferenciaG (s) = Y (s)/U(s).
49 / 56

Matlab: Funcao obsvf
obsvf Observability staircase form.
[ABAR,BBAR,CBAR,T] = obsvf(A,B,C) returns a decomposition
into the observable/unobservable subspaces.
If Ob=OBSV(A,C) has rank r <= n = SIZE(A,1), then
there is a similarity transformation T such that
Abar = T * A * T’ , Bbar = T * B , Cbar = C * T’
and the transformed system has the form
| Ano A12| |Bno|
Abar = ---------- , Bbar = --- , Cbar = [ 0 | Co]
| 0 Ao | |Bo |
50 / 56

Funcao obsvf: Exemplo
>> A = [-1 3;0 2]; B = [2;1]; C = [1 -1];
>> [ABAR,BBAR,CBAR] = obsvf(A,B,C)
ABAR =
2.0000 -3.0000
-0.0000 -1.0000
BBAR =
2.1213
0.7071
CBAR =
0 1.4142
51 / 56

Matlab: Funcao ctrbf
ctrbf Controllability staircase form.
[ABAR,BBAR,CBAR,T] = ctrbf(A,B,C) returns a decomposition
into the controllable/uncontrollable subspaces.
If Co=CTRB(A,B) has rank r <= n = SIZE(A,1), then
there is a similarity transformation T such that
Abar = T * A * T’ , Bbar = T * B , Cbar = C * T’
and the transformed system has the form
| Anc 0 | | 0 |
Abar = ---------- , Bbar = --- , Cbar = [Cnc| Cc]
| A21 Ac | |Bc |
52 / 56

Matlab: Funcao minreal
minreal Minimal realization and pole-zero cancellation.
MSYS = minreal(SYS) produces, for a given LTI model SYS,
an equivalent model MSYS where all cancelling pole/zero
pairs or non minimal state dynamics are eliminated.
For state-space models, minreal produces a minimal
realization MSYS of SYS where all uncontrollable or
unobservable modes have been removed.
For a state-space model SYS=SS(A,B,C,D),
[MSYS,U] = minreal(SYS)
also returns an orthogonal matrix U such that
(U*A*U’,U*B,C*U’) is a Kalman decomposition of (A,B,C).
53 / 56

Funcao minreal: Exemplo
>> A = [-1 3;0 2]; B = [2;1]; C = [1 -1]; D = 0;
>> SYS = ss(A,B,C,D);
>> MSYS = minreal(SYS)
1 state removed.
54 / 56

Funcao minreal: Exemplo
a =
x1
x1 -1
b =
u1
x1 -0.7071
c =
x1
y1 -1.414
d =
u1
y1 0
55 / 56

Proxima aula
Filtro de Kalman
56 / 56





























