Embed Size (px)
Citation preview
UNIVERSIDADE FEDERAL DA BAHIA ESCOLA POLITÉCNICA
CURSO DE GRADUAÇÃO EM ENGENHARIA ELÉTRICA
EFICIÊNCIA ENERGÉTICA EM
PROCESSOS DE BOMBEAMENTO D’ÁGUA.
RAMON LAGO REGIS
2010
ii
UNIVERSIDADE FEDERAL DA BAHIA ESCOLA POLITÉCNICA
CURSO DE GRADUAÇÃO EM ENGENHARIA ELÉTRICA
RAMON LAGO REGIS
EFICIÊNCIA ENERGÉTICA EM
PROCESSOS DE BOMBEAMENTO D’ÁGUA.
Trabalho apresentado ao Curso de Graduação em Engenharia Elétrica da Universidade Federal da Bahia como parte dos requisitos para a obtenção do título de Engenheiro Eletricista. Orientador: Prof. Dr. Caiuby Alves da Costa.
SALVADOR – 2010

iii
RAMON LAGO REGIS
EFICIÊNCIA ENERGÉTICA EM
PROCESSOS DE BOMBEAMENTO D’ÁGUA.
Este Trabalho de Graduação foi julgado adequado para a obtenção do grau de Engenheiro Eletricista e aprovado em sua forma final pela Comissão Examinadora e pelo Colegiado do Curso de Graduação em Engenharia Elétrica da Universidade Federal da Bahia.
_____________________________
Cristiane Corrêa Paim Coordenadora do Colegiado do
Curso de Engenharia Elétrica
Comissão Examinadora
______________________________________ Prof. Orientador: Caiuby Alves da Costa.
______________________________________ Prof. Bernardo Gustavo Paez Ortega.
______________________________________ Prof. Francisco Ribeiro Lisboa.

iv
Dedicatória
Aos meus pais.
v
Agradecimentos
Ao professor Caiuby Alves da Costa pela orientação e ensinamentos.
Aos colaboradores do Laboratório de Eficiência Energética e
Ambiental da UFBA pelo apoio fornecido.
Aos companheiros de jornada Lázaro Mendes e Washington Rocha
pelo auxílio nas medições e levantamentos de dados.
Aos professores da Escola Politécnica da UFBA que me forneceram
fundamentações teóricas ao longo do curso de Engenharia Elétrica.
Aos amigos que diretamente ou indiretamente contribuíram para a
realização deste trabalho.

vi
“Every day I remind myself
that my inner and outer life are
based on the labors of other men,
living and dead, and that I must
exert myself in order to give in the
same measure as I have received
and am still receiving”.
Albert Einstein

vii
RESUMO
As bombas hidráulicas são equipamentos responsáveis por grande
parte do consumo de energia elétrica na grande maioria das indústrias. Estas
são acionadas geralmente por motores de indução trifásicos que são
máquinas robustas e de elevado rendimento. No entanto, existem formas de
aumentar o rendimento global do sistema através de modificações
executadas no processo. Uma alteração comum em sistemas de
bombeamento visando a eficiência energética é a utilização de conversores
de freqüência no acionamento dos motores elétricos. No entanto, essa
medida muitas vezes não é viável devido ao alto custo do conversor. Os
catálogos de fabricantes fornecem informações que para alguns casos são
suficientes para a realização de um estudo energético no sistema. Em outros
casos, este estudo necessita de realizações de ensaios na planta para
completar as informações. Este trabalho apresenta ensaios realizados em
uma elevatória dentro do Laboratório de Eficiência Energética da UFBA.
Além disso, o trabalho define uma metodologia de operação de elevatórias
com baixas perdas energéticas. Este método foi aplicado em uma elevatória
real através de simulações em software. A viabilidade dessa metodologia
pode ser alcançada em algumas estações elevatórias devido ao baixo
custo inicial da solução proposta.
Palavras-chave: Bombas, eficiência energética, motores de indução
trifásicos, elevatória.
viii
LISTA SÍMBOLOS E SIGLAS
LABEFEA – Laboratório de Eficiência Energética e Ambiental – UFBA.
Vs – Tensão no estator do motor de indução trifásico.
Rs – Resistência dos enrolamentos do estator por fase.
Xs – Reatância de dispersão dos enrolamentos do estator por fase.
Rm – Resistência que representa as perdas por excitação ou no
núcleo.
Xm – Reatância de magnetização.
Rr – Resistência rotórica referida ao circuito do estator por fase.
Xr – Reatância de dispersão rotórica referida ao circuito do estator por
fase.
s - Escorregamento do motor.
ws – Velocidade síncrona.
Vmax – Valor máximo entre as tensões trifásicas.
Vmed - Valor médio entre as tensões trifásicas.
Td – Torque desenvolvido.
Eg – Energia Potencial gravitacinal.
Ep – Energia perdida por atrito na tubulação.
He – Head Estático (Altura geométrica).
Pe – Potência Elétrica.
Ph – Potência hidráulica.
hsu – Perdas de carga na tubulação de sucção.
Pm - Potência no eixo do motor.
HMT – Altura manométrica Total.
HG - Altura geométrica.
hs – Perda de carga localizada.
Ks – Constante específica para cada singularidade.
V – Velocidade do fluido.
g – Aceleração da gravidade.
Re - Número de Reynolds.
V - Velocidade do fluido.

ix
Q – Vazão.
H – Head (Altura manométrica).
N – Potência mecânica absorvida pela bomba.
n – Rotação da bomba.
CMH – Metro cúbico por hora.
EVTE – Estudo de Viabilidade Técnica-Economica.
NPSH - Valor mínimo de pressão a ser garantido na entrada do
impelidor visando evitar o fenômeno de cavitação.
ρρρρ - Densidade do fluido.
µµµµ -Viscosidade absoluta do fluido.
hf - Perda de carga.
∆∆∆∆t - Intervalo de tempo.
γγγγ - Peso específico do fluído.
ηηηη - Rendimento.
x
LISTA DE FIGURAS
Figura 1.1 – Distribuição no consumo de energia elétrica no Brasil. Fonte: Procel. ............................................................................................................................ 3
Figura 2.1 – Comparação entre rendimentos de motores convencionais e de alto rendimento. Fonte: Procel. ................................................................................. 8
Figura 2.2 – Curva típica de rendimento de um motor de indução. Fonte: Procel. .......................................................................................................................... 15
Figura 2.3 – Curva típica de fator de potência de um motor de indução. Fonte: Procel. .............................................................................................................. 16
Figura 2.4 - Curvas características de motores de indução segundo norma NBR 17094-1. Fonte: Procel. ...................................................................................... 17
Figura 2.5 - Modelo de circuito por fase de uma máquina de indução.......... 24
Figura 2.6 – Curva característica de um motor de indução trifásico. Fonte: Pomilio.......................................................................................................................... 25
Figura 2.7 – Variação da curva de torque do motor de indução com a tensão. Fonte: Pomilio. .............................................................................................. 26
Figura 2.8 – Curvas de torque de motor de indução trifásico para fluxo constante. Fonte: Pomilio. ........................................................................................ 27
Figura 2.9 - Arranjo típico de circuito para conversores de frequência........... 28
Figura 3.1 – Tubulação. ............................................................................................. 30
Figura 3.2 – Conduto ecoando fluido em regime laminar.................................. 31
Figura 3.3 – Equação do número de Reynolds ..................................................... 31
Figura 3.4 – Curva de sistema. Fonte: Tamaki. ...................................................... 36
Figura 3.5 – Componentes de uma bomba centrífuga. Fonte: Schineider Moto-bombas. ............................................................................................................ 39
Figura 3.6 – Ponto de operação de um sistema. Fonte: Monachesi................. 40
Figura 3.7 - Curva: rendimento x vazão. Fonte: Monachesi. .............................. 41
Figura 3.8 – Curva: Rendimento x vazão. Fonte: Monachesi.............................. 42
Figura 3.9 – Pontos de operação para variação de rotação da bomba e para utilização de válvula de controle. Fonte: Procel. ....................................... 44
Figura 3.10 – Comparação do controle de vazão com válvula de by-pass e com conversor de freqüência. Fonte: Haddad (adaptado)............................. 45
Figura 3.11 – Balanço típico de energia. ............................................................... 46
Figura 3.12 - Chave de nível bóia pera. Fonte: Nivetec...................................... 48
Figura 3.13 – Sistema Elevatório. Fonte: Takami .................................................... 50
Figura 4.1 -Layout da Planta-LABEFEA. .................................................................. 53
Figura 4.2 –Diagrama de comando das bombas. ............................................... 54
Figura 4.3 - Curvas das bombas do LABEFEA. Fonte: Fabricante. ..................... 55
Figura 4.4 – Curva do sistema para a Planta LABEFEA. ....................................... 59
Figura 4.5 – Curva altura manométrica x vazão da bomba. ............................. 60
Figura 5.1- Elevatória Padrão ................................................................................... 63
Figura 5.2 - Elevatória proposta ............................................................................... 64
Figura 5.3 – Diagrama de comando utilizando chaves bóia lateral................. 66
Figura 5.4 – Acionamento dos motores elétricos.................................................. 67
Figura 5.5 – Diagrama de comando para utilização de chaves de nível bóia pera. ............................................................................................................................. 68
xi
Figura 5.6 – Curvas das bombas da Planta-Politécnia. Fonte: Catálogo de Fabricante (adaptado) ............................................................................................ 69
Figura 5.7 – Consumo de água da Escola Politécnica no período de 07/10/09 até 10/11/09. Fonte: Projeto Água Pura (adaptado). ......................................... 72
Figura 5.8 – Curvas da bomba de menor porte do sistema proposto na Planta-Politécnica. Fonte: Catálogo de fabricante (adaptado)...................... 74
Figura 5.9 – Sistema atual simulado em EPANET ................................................... 75
Figura 5.10 – (a) Perfil de vazão nos dias de semana (b) Perfil de vazão nos finais de semana. ....................................................................................................... 75
Figura 5.11 - Sistema proposto simulado em EPANET ........................................... 77
Figura 5.12 - Vazão fornecida pelas bombas no sistema proposto. ................. 79
Figura 5.13 – Variação do volume do tanque superior. ...................................... 80
Figura 5.14 – Perfis de demanda de vazão considerando um crescimento vegetativo. (a) Dia de Semana. (b) Final de Semana. ....................................... 81
Figura A.1 - Vazão fornecida pelas bombas no sistema proposto, considerando crescimento vegetativo.................................................................86 Figura A.2 – Variação do volume do tanque superior, considerando crescimento vegetativo..........................................................................................87 Figura B.1 – (a) Elevatória do LABEFEA. (b) Instrumentos de medição e controle da Planta LABEFEA...................................................................................88 Figura B.2 – Planta-LABEFEA. (a) Moto- bombas. (b) – Medição de grandezas elétrica. (c) Painel Elétrico. ....................................................................................89 Figura B.3 – Planta-Politécnica. (a) Moto-bomba. (b) Casa de máquinas. (c) Medição de diâmetro de tubulação de recalque... ........................................ 90
xii
LISTA DE TABELAS
Tabela 3.1 - Valores de ‘Ks’. Fonte: Takami. .......................................................... 33
Tabela 3.2 – Comprimentos equivalentes em diâmetros de tubulação retilínea. Fonte: Takami ............................................................................................. 34
Tabela 3.3 – Valores do coeficiente C. Fonte: Tamaki. ....................................... 35
Tabela 4.1 – Dados dos motores de alto rendimento da Planta-LABEFEA....... 56
Tabela 4.2 - Dados dos motores convencionais da Planta-LABEFEA................ 56
Tabela 4.3 – Dados para levantamento de curva altura manométrica x vazão. .......................................................................................................................... 58
Tabela 4.4 – Dados para levantamento da curva da bomba. ......................... 60
Tabela 4.5 – Controle com válvula de restrição e com conversor de freqüência................................................................................................................... 61
Tabela 4.6 - Controle com válvula de restrição e com válvula de by-pass. ... 61
Tabela 5.1 – Tabela indicativa das posições das chaves de nível bóia lateral........................................................................................................................................ 66
Tabela 5.2 - Características das bombas da Planta-Politécnia........................ 69
Tabela 5.3 - Medições nos motores da Planta-Politécnica ................................ 70
Tabela 5.4 – Resumo da Simulação do sistema atual ......................................... 76
Tabela 5.5 – Energia hidráulica fornecida pela bomba. .................................... 77
Tabela 5.6 - Resultados da simulação do sistema proposto. ............................. 78
Tabela 5.7 - Energia hidráulica fornecida pela bomba. ..................................... 78
Tabela 5.8 – Resultados da simulação do sistema atual considerando crescimento vegetativo............................................................................................ 81
Tabela 5.9 - Resultados da simulação do sistema proposto considerando crescimento vegetativo............................................................................................ 82
xiii
SUMÁRIO
1 INTRODUÇÃO.............................................................................................. 1
1.1 OBJETIVOS ....................................................................................................1 1.1.1 Objetivos Específicos...................................................................... 1
1.2 A IMPORTÂNCIA DA EFICIÊNCIA ENERGÉTICA. .................................................3 1.3 ESTRUTURA DO TRABALHO..............................................................................5
2 MOTOR DE INDUÇÃO TRIFÁSICO .............................................................. 6
2.1 PERDAS EM UM MOTOR DE INDUÇÃO TRIFÁSICO..............................................8 2.1.1 Perdas nos Núcleos. ....................................................................... 8 2.1.2 Perdas Mecânicas.......................................................................... 9 2.1.3 Perdas por Efeito Joule no Estator ................................................ 9 2.1.4 Perdas por Efeito Joule no Rotor ................................................ 10 2.1.5 Perdas Suplementares ................................................................. 11
2.2 CONSIDERAÇÕES SOBRE MOTORES CONVENCIONAIS E DE ALTO RENDIMENTO.12 2.2.1 Benefícios Econômicos do Motor de Alto Rendimento........... 12 2.2.2 Especificação ............................................................................... 12 2.2.3 Dimensionamento do Motor....................................................... 13 2.2.4 Rendimento................................................................................... 14 2.2.5 Fator de Potência......................................................................... 15 2.2.6 Fator de Serviço............................................................................ 16 2.2.7 Características de Aceleração .................................................. 17 2.2.8 Características da Rede de Alimentação................................ 18 2.2.9 Características Construtivas........................................................ 19 2.2.10 Vida Útil do Motor......................................................................... 19 2.2.11 Os Cuidados na Limpeza do Motor ........................................... 20 2.2.12 A Lubrificação do Rolamento e do Mancal............................. 20 2.2.13 Vibração........................................................................................ 21 2.2.14 Efeitos da variação da amplitude da tensão. ......................... 21 2.2.15 Efeitos do desequilíbrio da rede elétrica................................... 22 2.2.16 Efeitos dos harmônicos. ............................................................... 22 2.2.17 Reparo de motores. ..................................................................... 23
2.3 PRINCÍPIOS DE UM CONVERSOR DE FREQUÊNCIA...........................................23
3 PROCESSO DE BOMBEAMENTO D'ÁGUA................................................ 29
3.1 ESTUDO DE PERDA DE CARGA ......................................................................29 3.1.1 Estudo da Perda de Carga Distribuída...................................... 29 3.1.2 Estudo da Perda de Carga Localizada ou Singular ................ 32 3.1.3 Fórmulas Práticas para Cálculo de Perda de Carga em Tubulações. .............................................................................................. 34
3.2 ALTURA MANOMÉTRICA...............................................................................35 3.3 CURVAS DE SISTEMA....................................................................................36 3.4 BOMBAS HIDRÁULICAS. ...............................................................................37
xiv
3.4.1 Componentes principais ............................................................. 38 3.4.2 Curvas de desempenho das bombas centrífugas .................. 39 3.4.3 Alteração das curvas características de bombas................... 42
3.5 UTILIZAÇÃO DE VARIADORES DE VELOCIDADE EM BOMBAS CENTRÍFUGAS........43 3.6 TEMPO DE VIDA ÚTIL DA BOMBA. ..................................................................45 3.7 BALANÇO DE ENERGIA ................................................................................46 3.8 PRINCIPAIS INSTRUMENTOS UTILIZADOS EM UMA ELEVATÓRIA. .........................47 3.9 SOFTWARES PARA SIMULAÇÃO DE SISTEMAS HIDRÁULICOS..............................48 3.10 SISTEMA ELEVATÓRIO ..................................................................................49
4 PLANTA DE BOMBEAMENTO D’ÁGUA DO LABEFEA. .............................. 52
4.1 DESCRIÇÃO DA PLANTA. .............................................................................52 4.2 LENVANTAMENTO DE CURVA DO SISTEMA DA PLANTA-LABEFEA: ALTURA
MANOMÉTRICA X VAZÃO. ....................................................................................57 4.3 LEVANTAMENTO DE CURVAS DAS BOMBAS DA PLANTA-LABEFEA: ALTURA
MANOMÉTRICA X VAZÃO. ....................................................................................59 4.4 COMPARAÇÃO ENTRE DIFERENTES FORMAS DE CONTROLE DE VAZÃO. ...........60
5 PROPOSTA DE ESTAÇÃO ELEVATÓRIA EFICIENTE................................... 62
5.1 PRINCÍPIO DE FUNCIONAMENTO DA ESTAÇÃO. .............................................63 5.2 SISTEMA DE COMANDO DAS BOMBAS ...........................................................65 5.2.1 Diagrama de comando para sistema com chaves de nível bóia lateral. .............................................................................................. 65 5.2.2 Diagrama de comando para sistema com chaves de nível bóia pera.................................................................................................. 67
5.3 APLICAÇÃO DA PROPOSTA NA PLANTA-POLITÉCNICA. .................................68 5.3.1 Características do Sistema.......................................................... 68 5.3.2 Perfil de demanda de vazão da Escola Politécnica. .............. 71 5.3.3 Seleção das bombas para aplicação da solução. ................ 72 5.3.4 Simulação do Sistema em EPANET............................................. 74
6 CONSIDERAÇÕES FINAIS ......................................................................... 83
7 REFERÊNCIAS BIBLIOGRÁFICAS............................................................... 84
APÊNDICE A – GRÁFICOS DO SOFTWARE EPANET. ..................................... 86
APÊNDICE B - FOTOS...................................................................................... 88

1
1 INTRODUÇÃO
1.1 OBJETIVOS
O trabalho tem a finalidade de analisar o consumo energético de
processos de bombeamento d’água sob diferentes formas de controle. Seja
o processo baseado em controle de vazão, de pressão ou de nível. Esta
análise será realizada através de ensaios e simulações em uma planta que
consiste em um sistema elevatório de água utilizando bombas centrífugas
acionadas por motores de indução trifásicos.
Os sistemas elevatórios consistem em uma das principais aplicações de
sistemas de bombeamento. Uma elevatória objetiva suprir um reservatório
elevado que alimenta uma quantidade de consumidores. Em grande parte
dos sistemas de bombeamento, a água flui das bombas diretamente para os
consumidores, sem uso de reservatórios elevados. Neste caso, o sistema visa
atender a demanda de vazão de consumidores sendo a rotação da bomba
mantida constante, variando-se o ponto de operação em função da
demanda de vazão.
Após analisar os dados dos ensaios e simulações, será proposta uma
solução para operação de sistemas elevatórios de água.
1.1.1 Objetivos Específicos
Os trabalhos experimentais foram realizados em duas plantas de
bombeamento d’água:
Planta-LABEFEA: Protótipo de sistema de bombeamento acrescido de
instrumentos de medição e controle que permitem a realização de diversos
ensaios.
Planta-Politécnica: Sistema Elevatório da Escola Politécnica da
Universidade Federal da Bahia que atende a totalidade da demanda de
água da escola.
A seguir são citados os objetivos específicos do presente trabalho:
2
• Realização de levantamento de curvas experimentais dos
componentes da Planta-LABEFEA, pois alguns dados fundamentais
para análise deste sistema não se encontram em catálogos e mesmo
os contidos em catálogos podem sofrer variação com o tempo.
O motivo para esses levantamentos é que o conhecimento das
características das bombas, da planta, dos motores e das
peculiaridades inerentes a cada tipo de máquina fornece uma base
de informações confiável para o desenvolvimento de metodologias
de operação de sistemas de bombeamento. E, este trabalho visa,
também, propor uma metodologia de operação.
• Avaliação de configurações de sistemas de bombeamento
d‘água de forma experimental, e através de análise teórica dos
parâmetros característicos de bombas centrífugas, motores de
indução, sistema de acionamento dos motores, sensores e planta com
a proposição de otimização de suas características funcionais.
• Após o conhecimento detalhado do sistema, efetuar simulações
de operação da Planta-LABEFEA em diferentes configurações
registrando para cada uma delas o consumo de energia elétrica e
verificando suas vantagens e desvantagens.
• Propor uma solução eficiente e economicamente viável para
operação de sistemas elevatórios de água, justificando suas
vantagens analiticamente e por dados obtidos através de ensaios.
Mostrar como se configura os dispositivos utilizados na solução.
• Simular em software a aplicação da solução proposta na Planta-
Politécnica e quantificar os ganhos energéticos da solução.
3
1.2 A IMPORTÂNCIA DA EFICIÊNCIA ENERGÉTICA.
Utilizar as fontes de energia com responsabilidade constitui um novo
parâmetro a ser considerado no exercício da Cidadania.
O consumo de Energia Elétrica, no Brasil, foi de 306 TWh em 2000 e em
2008 de 393 TWh. Um aumento de 28% em 8 anos [10].
O Brasil é o 10º maior consumidor mundial de energia elétrica, mas o
seu consumo deve dobrar até 2030 [4].
O aumento do consumo de energia elétrica pode gerar uma
necessidade de expansão do sistema elétrico, ou ainda ocasionar um
possível racionamento de energia elétrica como ocorrido no Brasil em 2001 e
2002. Influenciado por este crescimento no consumo torna-se cada vez mais
necessário criação de projetos visando à eficiência energética. Além dos
fatores sociais e econômicos a Eficiência Energética é uma medida
ambiental; pois, ao diminuir o consumo de energia, se reduz os impactos
ambientais.
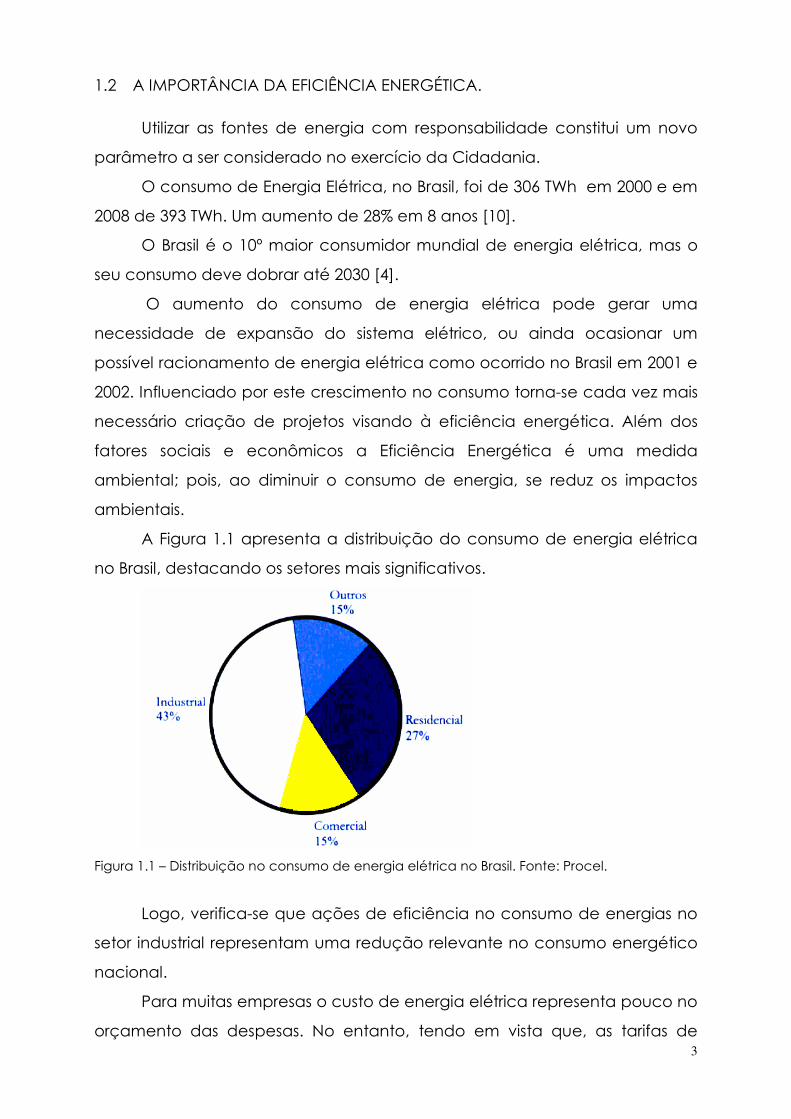
A Figura 1.1 apresenta a distribuição do consumo de energia elétrica
no Brasil, destacando os setores mais significativos.
Figura 1.1 – Distribuição no consumo de energia elétrica no Brasil. Fonte: Procel.
Logo, verifica-se que ações de eficiência no consumo de energias no
setor industrial representam uma redução relevante no consumo energético
nacional.
Para muitas empresas o custo de energia elétrica representa pouco no
orçamento das despesas. No entanto, tendo em vista que, as tarifas de
4
energia elétrica têm aumentado acima dos índices Inflacionários, o consumo
de energia elétrica está tornando-se significativo na economia das
organizações.
Os processos que trabalham com bombas centrífugas possuem, em
geral, uma demanda de vazão variável. O controle da vazão pode ser feito
de várias maneiras, sendo uma das mais usuais aquela em que se utiliza uma
válvula de restrição para manipular a perda de carga do sistema. Desta
maneira, a diminuição da vazão é acompanhada por um aumento da
perda de carga. Uma alternativa a este método seria utilizar um conversor
de freqüência que, reduzindo a rotação de trabalho do motor, alteraria a
curva da bomba. Desta maneira, a diminuição da vazão conduz também a
um menor valor da perda de carga, gerando uma economia de energia,
quando comparada ao método que utiliza válvula de restrição.
Uma grande aplicação de sistemas elevatórios de água ocorre nas
unidades de tratamento de água. Para empresas do setor de
abastecimento de água, em geral empresas públicas, um dos principais
insumos é a energia elétrica que representa grande parte do seu custo de
produção.
Para a SABESP (Companhia de Saneamento Básico do Estado de São
Paulo), em 1977, o custo de energia elétrica representava 4% do orçamento
de despesas. Embora a utilização de energia elétrica para o fornecimento
de 1 m3 de água tenha se mantido na ordem de 0,6 kWh, as despesas em
1995, aumentaram para 8%, transformando o custo de energia elétrica no
terceiro item mais importante do orçamento. As instalações administrativas
da SABESP representam 2% do custo total de energia elétrica e as instalações
operacionais de água e esgoto 98%. Estima-se que, atualmente 93% do custo
são devidos às estações elevatórias de água. [1].
Em geral, todos os prédios de uma cidade possuem um sistema
elevatório de água que operam através de uma ou mais bombas
centrífugas acionadas por motores de indução; logo, o desenvolvimento de
modificações no processo que aumentem a eficiência demandando um
investimento inicial razoável teria uma abrangência grande.
5
Embora os motores de indução sejam máquinas intrinsecamente
eficientes, esses se constituem um grande potencial de conservação de
energia. Tal fenômeno é explicado devido à grande quantidade de motores
instalados e aplicação ineficiente dos mesmos.
1.3 ESTRUTURA DO TRABALHO. O trabalho é estruturado em 7 capítulos.
O capítulo 1 apresenta uma introdução, descrevendo os objetivos do
trabalho e também as justificativas para a realização do mesmo.
Os capítulos 2 e 3 fornecem uma fundamentação teórica necessária
para a compreensão dos processos de bombeamento d’água. Nestes
capítulos, disserta-se sobre os principais equipamentos e instrumentos
relacionados a sistemas de bombeamento, comentando, em alguns casos,
formas de melhoria de rendimentos destes. Além disso, é descrito alguns
processos usuais na área de bombeamento e quais as possíveis melhorias do
ponto de vista energético.
O capítulo 4 descreve o sistema de bombeamento d’água do
Laboratório de Eficiência Energética da UFBA. Também é apresentado
alguns dos ensaios realizados.
O capítulo 5 descreve uma metodologia proposta para operação de
elevatórias de forma eficiente. Esta metodologia foi aplicada em uma
estação de bombeamento real e calculou-se o ganho energético da
solução proposta.
O capítulo 6 correspondente às considerações finais, argumenta
acerca dos principais conceitos e resultados apresentados no trabalho.
O capítulo 7 apresenta as referências bibliográficas.

6
2 MOTOR DE INDUÇÃO TRIFÁSICO
O motor elétrico de indução do tipo gaiola de esquilo é o mais
importante uso final de energia elétrica no País. No Brasil, a quantidade de
energia por ele processada é superior a 30% da energia elétrica total gerada
[5]. Diante disto, qualquer iniciativa que se desenvolva para aumentar o
rendimento destes equipamentos trará grande economia ao País.
Existem no mercado motores classificados como "standard" (motores
da linha padrão ou convencional), também uma linha de produtos
denominada Motor de Alto Rendimento.
No Motor de Alto Rendimento, a redução das perdas, com o
conseqüente aumento da eficiência, foi obtida com o aumento dos custos
de fabricação. Assim, motores de alto rendimento são mais caros do que os
motores da linha padrão. No entanto, por serem mais eficientes, gastam
menos energia que os motores da linha padrão para a mesma aplicação.
Em conseqüência, este custo adicional de aquisição é compensado pelo
menor custo operacional.
Os tempos de retorno do capital investido geralmente são baixos e os
seus beneficias econômicos se evidenciam nas economias estáveis, já que,
em condições normais de operação, o motor pode durar mais de 12 anos
[5].
Em resumo, o uso de motores de alto rendimento deve ser
considerado, analisando-se também os custos de operação e não apenas o
custo inicial.
As principais vantagens, quando comparados com os motores da linha
padrão, são:
· Reduzem o consumo de energia elétrica;
· A maioria deles apresenta um fator de potência mais alto;
· Menores temperaturas de operação;
· O rendimento decai menos para baixas cargas. Essa característica
minimiza o superdimensionamento nas situações em que não se possam
corrigir a potência do motor.
7
Mediante os benefícios citados, o uso do Motor de Alto Rendimento
torna-se bastante econômico nos seguintes casos:
· Para as novas plantas industriais e comerciais;
· Para a maioria das expansões ou alterações das plantas industriais e
comerciais existentes;
· Para a compra de novos equipamentos que contêm motores
elétricos, como as bombas hidráulicas em estações elevatórias.
· Quando trocar o motor usado;
· Quando comprar motor para estoque;
· Para trocar motores superdimensionados que operam com baixo
rendimento;
· Como parte do programa de gerência de energia;
· Para obter vantagens em descontos especiais, quando incentivados
pelo Governo Federal.
O Motor de Alto Rendimento difere do Convencional com melhor
rendimento devido a modificações no projeto, além de materiais e
processos de fabricação melhores.
A Equação 2.1 apresenta como se calcula o rendimento de um motor.
Equação 2.1 – Equação do Rendimento do Motor.
Pm – Potência Mecânica no eixo do motor. Pe - Potência Elétrica consumida pelo motor.
- Rendimento no motor.
O Motor de Alto Rendimento apresenta menor consumo de energia
elétrica que o Motor Convencional para uma mesma potência mecânica
fornecida. Desta, maneira o Motor de Alto Rendimento possui um custo de
operação menor.
8
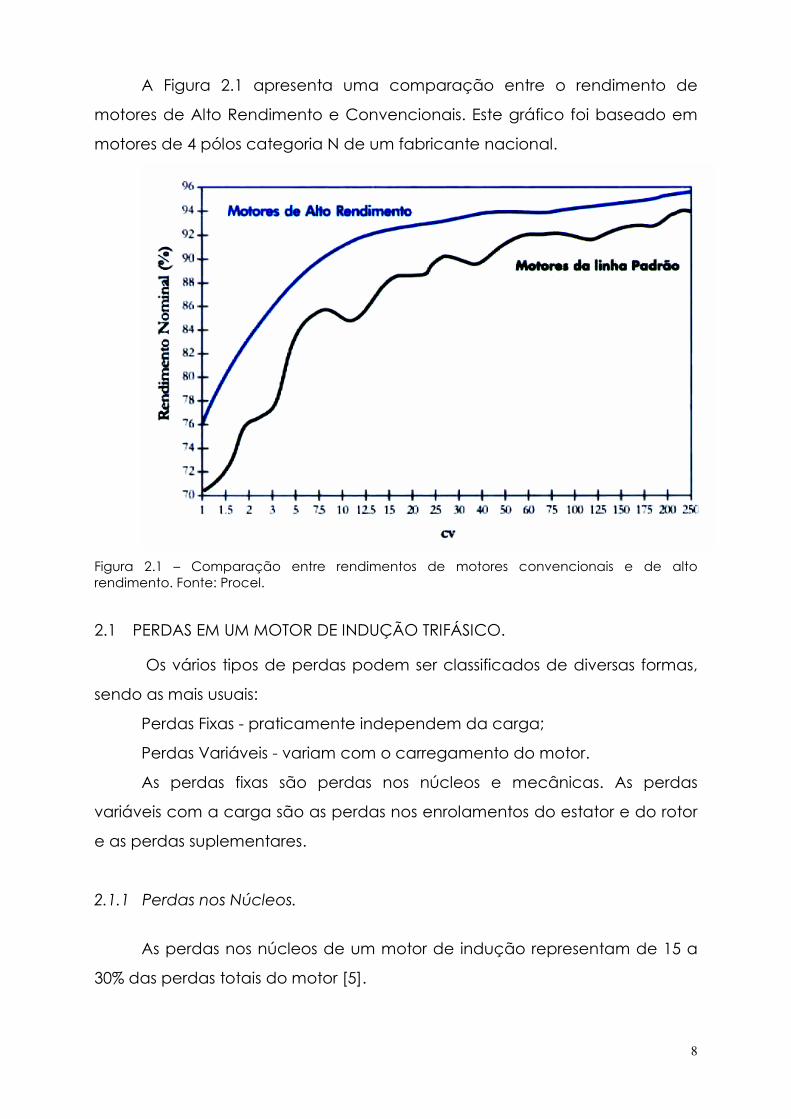
A Figura 2.1 apresenta uma comparação entre o rendimento de
motores de Alto Rendimento e Convencionais. Este gráfico foi baseado em
motores de 4 pólos categoria N de um fabricante nacional.
Figura 2.1 – Comparação entre rendimentos de motores convencionais e de alto rendimento. Fonte: Procel.
2.1 PERDAS EM UM MOTOR DE INDUÇÃO TRIFÁSICO.
Os vários tipos de perdas podem ser classificados de diversas formas,
sendo as mais usuais:
Perdas Fixas - praticamente independem da carga;
Perdas Variáveis - variam com o carregamento do motor.
As perdas fixas são perdas nos núcleos e mecânicas. As perdas
variáveis com a carga são as perdas nos enrolamentos do estator e do rotor
e as perdas suplementares.
2.1.1 Perdas nos Núcleos.
As perdas nos núcleos de um motor de indução representam de 15 a
30% das perdas totais do motor [5].

9
Essas são as perdas que ocorrem nas chapas magnéticas do estator e
do rotor. Estas perdas se devem aos fenômenos de histerese e correntes
parasitas e dependem da frequência e da densidade máxima de fluxo. No
caso particular da perda por correntes parasitas, ela depende também da
espessura das lâminas que formam o núcelo.
As perdas por histerese e correntes parasitas podem ser reduzidas pela
diminuição da densidade de fluxo. Isto pode ser conseguido aumentando-se
o comprimento do pacote magnético1 ou através de um melhor projeto do
circuito magnético [5].
Outro procedimento adotado para redução destas perdas é a
utilização de material magnético que apresente menos perdas.
2.1.2 Perdas Mecânicas
As perdas mecânicas de um motor de indução representam de 2 a
15% das perdas totais do motor [5].
Essas são as perdas devidas ao atrito nos mancais ou nos rolamentos e
a ventilação. Em geral, quando o motor está operando em carga nominal,
elas são as menores parcelas das perdas totais [5].
As perdas por atrito são diminuídas utilizando-se rolamentos de baixas
perdas e com uma melhor lubrificação (como, por exemplo, lubrificantes
sintéticos) [5].
A otimização do projeto do ventilador reduz as perdas por ventilação.
Um motor de alto rendimento produz menores perdas nos enrolamentos e no
núcleo. Assim, torna-se menor a necessidade de ventilação. Uma
consequência positiva da menor ventilação é a redução do nível de ruído
produzido pelo motor.
2.1.3 Perdas por Efeito Joule no Estator
As perdas por Efeito Joule no estator de um motor de indução
representam de 25 a 50% das perdas totais do motor [5].
1 - Nome técnico dado as estrututuras ferromagnéticas do motor.

10
Essas são as perdas por dissipação de calor devido à circulação de
corrente nos condutores do enrolamento do estator. Elas podem ser
calculadas conforme Equação 2.2.
Equação 2.2 – Equação das perdas por Efeito Joule no Estator.
PJ – Perdas por Efeito Joule nos enrolamentos do estator. Re - Resistência do enrolamento. Ie - Corrente no enrolamento.
Nos motores de alto rendimento, utiliza-se condutores de cobre de
maior bitola, ou seja, condutores mais grossos na confecção dos
enrolamentos do estator. Desta forma, a resistência destes enrolamentos é
diminuída. Os fabricantes nacionais têm alcançado estes resultados
mantendo a mesma carcaça do motor padrão.
2.1.4 Perdas por Efeito Joule no Rotor
As perdas por Efeito Joule no rotor de um motor de indução
representam de 15 a 25% das perdas totais do motor [5].
Essas são perdas por dissipação de calor que ocorrem na gaiola do
rotor e dependem da carga, do material do condutor da gaiola, da área da
ranhura e do comprimento das barras. Estas perdas são proporcionais ao
escorregamento de operação.
Assim como no estator, a diminuição destas perdas é feita pelo
aumento da quantidade de material condutor da gaiola. Naturalmente, isto
pode contribuir também para o aumento das dimensões da carcaça [5].
No entanto, o desempenho do motor sofre significativa influência da
resistência do rotor. Sendo assim, a redução destas perdas fica limitada às
imposições aos valores mínimos de conjugado de partida e da máxima
corrente de partida admissível para a máquina.
11
2.1.5 Perdas Suplementares
As perdas suplementares de um motor de indução representam de 15
a 20% das perdas totais do motor [5].
Essas são todas as perdas que não estão incluídas nos outros tipos de
perdas. São definidas como a diferença entre a perda total do motor e os
outros quatro tipos de perdas.
Elas levam em conta vários fenômenos, tais como a distribuição não
uniforme da corrente nos enrolamentos, o efeito de saturação e as
imperfeições na densidade de campo magnético (devido às ranhuras do
estator e do rotor). Estas imperfeições provocam perdas nos dentes das
laminas do estator e do rotor e ocasionam perdas ôhmicas nas barras das
gaiolas, associadas aos harmônicos de corrente [5].
As perdas que ocorrem nas partes metálicas próximas ao campo
magnético de dispersão produzidas pelas cabeças das bobinas são também
computadas nas perdas suplementares.
Os elementos que mais afetam estas perdas são o projeto do
enrolamento do estator, a razão entre a largura do entreferro e a abertura
das ranhuras, a razão entre o número de ranhuras do estator e do rotor e as
superfícies dos pacotes magnéticos do estator e do rotor [5].
As perdas suplementares variam, aproximadamente, com o quadrado
da corrente de carga. As perdas suplementares são as mais difíceis de serem
reduzidas. No entanto, podem apresentar uma grande contribuição para o
aumento da eficiência do motor. Elas podem ser reduzidas pela adoção de
um projeto otimizado e com cuidados de qualidade na fabricação. Estas
perdas são um importante componente das perdas totais do motor [5].
Os vários tipos de perdas dos motores não são independentes. Por
exemplo, aumentar o comprimento do pacote de laminas para redução das
perdas magnéticas provoca aumento no comprimento dos condutores, o
que, por sua vez, aumenta suas perdas por efeito Joule. O projeto final destes
motores deve ser fruto de um balanço dos vários tipos de perdas, de modo a
se alcançar um alto rendimento, mas mantendo-se os níveis de conjugado
12
de partida, capacidade de sobrecarga, corrente de partida e fator de
potência.
2.2 CONSIDERAÇÕES SOBRE MOTORES CONVENCIONAIS E DE ALTO RENDIMENTO.
2.2.1 Benefícios Econômicos do Motor de Alto Rendimento
O custo de um motor envolve não só o seu preço inicial, mas também
o seu custo operacional.
O preço inicial do motor de alto rendimento é superior ao motor da
linha padrão.
A economia no consumo de energia e o tempo de retorno do
investimento, ao se optar por um motor de alto rendimento ao invés de outro
da linha padrão são funções dos seus rendimentos, do tempo de operação,
da potência solicitada pela carga, da tarifa de energia elétrica e dos seus
preços iniciais [5].
2.2.2 Especificação
o desempenho de motores elétricos, de uma forma global, está
associado aos seguintes parâmetros:
· Rendimento;
· Fator de potência;
· Conjugado de partida;
· Conjugado máximo;
· Velocidade de operação;
· Capacidade de aceleração;
· Classe de isolamento;
· Corrente de partida
· Fator de serviço;
· Ruído;
· Temperatura de operação;

13
· Tipo de carcaça.
Numa especificação técnica de um motor, descreve-se as condições
em que o motor deverá operar e define-se o desempenho requerido do
motor.
2.2.3 Dimensionamento do Motor
No Brasil, o superdimensionamento de motores é uma das causas mais
comuns dá operação ineficiente, e as razões mais frequentes para esta
ocorrência são [5]:
· Desconhecimento das características da própria carga [5];
·Desconhecimento de métodos para um dimensionamento adequado
[5];
· Aplicação de sucessivos fatores de segurança nas várias etapas de
um projeto indústria [5];
· Expectativa de aumento futuro de carga [5];
· A não especificação de fator de serviço maior que 1,0 para motores
que esporadicamente apresentam picos de carga [5].
O uso de motores superdimensionados aumenta os custos com [5]:
· A compra do motor de potência maior [5];
· A compra de equipamentos da fonte de alimentação por solicitar
maiores potência aparente (kVA) e reativa (kVAr) [5];
· A energia elétrica consumido, por apresentar rendimento menor [5];
· A penalidade, devido ao baixo fator de potência [5].
Em condição normal de funcionamento, o motor deve ser adequado
à carga, ou seja, deve operar entre 75% e 100% da potência nominal [5]. Por
exemplo, se o dimensionamento mostra que a carga é de 35 cv, um motor
de 40 cv deverá ser usado operando com 88% da potência nominal.

14
Quando um motor é usado para atender a uma carga constante como uma
bomba hidráulica em uma estação elevatória, o motor deve ser
dimensionado o mais próximo possível de 100% da potência nominal.
O motor de alto rendimento bem dimensionado proporcionará uma
máxima economia de energia, permitindo obter elevados rendimento e fator
de potência.
Quando se necessita operar um motor de indução acionado por um
conversor de frequência, deve-se especificar um motor adequado para este
tipo de acionamento. O isolamento do motor deve suportar maiores
temperaturas e maiores picos de tensão e as estruturas ferromagnéticas
devem apresentar menores perdas por histerese e correntes de Foucault,
visto que o motor operará com frequências harmônicas. Os motores de alto
rendimento são mais adequados para acionamento com conversores de
frequência.
2.2.4 Rendimento
Um motor de alto rendimento é especificado da mesma forma que
outro da linha padrão. Ambos, geralmente, possuem a mesma carcaça
padronizada, assim, nenhuma modificação especial é necessária para
trocar um motor padrão por um motor de alto rendimento [5].
Uma vez que os outros parâmetros especificados tenham sido
satisfeitos, o rendimento deve ser um fator determinante na seleção do
motor.
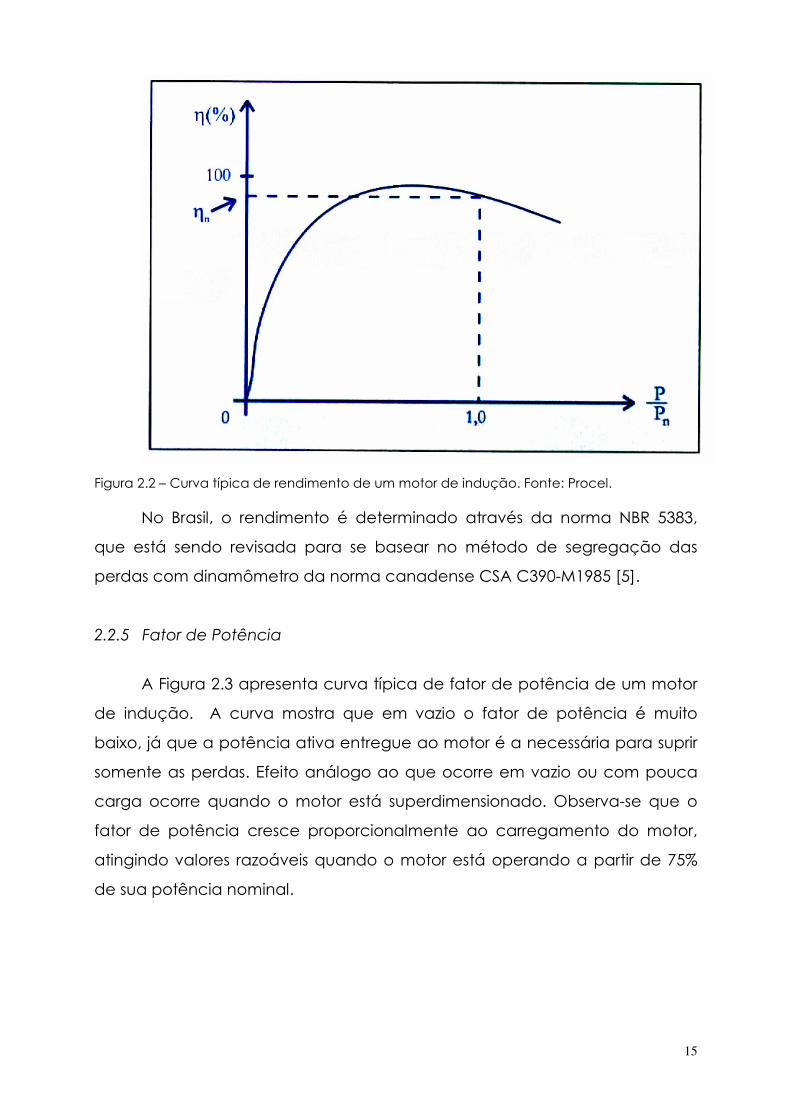
A Figura 2.2 apresenta uma curva típica de rendimento de um motor
de indução. A curva mostra que para cargas pequenas, em relação a sua
potência nominal, o rendimento é baixo, já que as perdas fixas tornam-se
grandes comparadas com a potência fornecida. Quando o carregamento
do motor cresce, o rendimento se eleva e, quando o motor opera com mais
de 50% de sua potência nominal, o rendimento é muito próximo dos valores
de rendimento nominal e máximo, que para alguns motores ocorre a 75% da
potência nominal.
15
Figura 2.2 – Curva típica de rendimento de um motor de indução. Fonte: Procel.
No Brasil, o rendimento é determinado através da norma NBR 5383,
que está sendo revisada para se basear no método de segregação das
perdas com dinamômetro da norma canadense CSA C390-M1985 [5].
2.2.5 Fator de Potência
A Figura 2.3 apresenta curva típica de fator de potência de um motor
de indução. A curva mostra que em vazio o fator de potência é muito
baixo, já que a potência ativa entregue ao motor é a necessária para suprir
somente as perdas. Efeito análogo ao que ocorre em vazio ou com pouca
carga ocorre quando o motor está superdimensionado. Observa-se que o
fator de potência cresce proporcionalmente ao carregamento do motor,
atingindo valores razoáveis quando o motor está operando a partir de 75%
de sua potência nominal.

16
Figura 2.3 – Curva típica de fator de potência de um motor de indução. Fonte: Procel.
A legislação atual exige que as indústrias do grupo tarifário A operem
com fator de potência mínimo de 0,92. Abaixo deste valor, existem
penalizações financeiras aos consumidores [9].
2.2.6 Fator de Serviço
O fator de serviço é um multiplicador que aplicado à potência
nominal, indica a carga permissível que pode ser aplicada continuamente
ao motor, sob tensão e freqüência nominais e com limite de elevação de
temperatura do enrolamento estabelecido. A utilização do fator de serviço
implica vida útil inferior àquela do motor com carga nominal. Entretanto, sua
utilização permite atender a esporádicos picos de carga sem que seja
necessário superdimensionar o motor.
Os valores declarados, por exemplo, rendimento e fator de potência,
não são garantidos pelo fabricante quando o motor estiver operando acima
da potência nominal. A norma NBR 7094 prevê que, para motores de 1,5 a
200 cv, o fator de serviço, quando especificado, deve ser igual a 1,15; caso
não seja especificado, ele é subtendido unitário.

17
2.2.7 Características de Aceleração
Os motores de indução trifásicos com rotor de gaiola são classificados
em categorias, segundo a norma NBR 17094-1, conforme suas características
de conjugado em relação à velocidade e corrente de partida. A Figura 2.4
apresenta as curvas características de cada categoria.
Figura 2.4 - Curvas características de motores de indução segundo norma NBR 17094-1. Fonte: Procel.
Da Figura 2.4, destacamos e definimos alguns pontos importantes:
· Conjugado nominal é o conjugado desenvolvido pelo motor à
potência nominal sob tensão e frequência nominais;
· Conjugado de partida ou com rotor bloqueado é o conjugado
mínimo desenvolvido pelo motor quando o seu eixo está bloqueado;
· Conjugado mínimo é o menor conjugado desenvolvido pelo motor
ao acelerar desde a velocidade zero até a velocidade correspondente ao
conjugado máximo;
· Conjugado máximo é o maior conjugado desenvolvido pelo motor,
sob tensão e frequência nominais. Por exemplo, considera-se o motor
18
operando neste ponto, alimentando uma bomba hidráulica com uma
válvula na descarga parcialmente aberta. Se a válvula sofrer abertura total,
haverá queda brusca de velocidade, devido ao aumento de torque da
carga. Esse efeito pode ser verificado nas curvas de motores de categorias H
e N na Figura 2.4
Se um motor em operação tiver o conjugado da carga elevado
acima do conjugado máximo do motor, haverá desaceleração do eixo,
gerando altas correntes que podem danificar a máquina.
· Escorregamento nominal refere-se à diferença entre a velocidade do
motor a plena carga e a velocidade síncrona.
Cada categoria é adequada a um tipo de carga e se caracteriza
como:
· Categoria N - Possui conjugado de partida normal, corrente de
partida normal e baixo escorregamento. Constitui a maioria dos motores
encontrados no mercado que se prestam ao acionamento de vários tipos de
cargas, como bombas hidráulicas e ventiladores.
· Categoria H - Possui conjugado de partida alto, corrente de partida
normal e baixo escorregamento. Usado para cargas que exigem maior
conjugado de partida, como peneiras, transportadores, carregadores,
cargas de alta inércia, britadores, etc;
· Categoria D - Possui o mais alto conjugado de partida, corrente de
partida normal e alto escorregamento (+ de 5%). Usado em prensas
excêntricas, onde a carga apresenta picos periódicos. Usado também em
elevadores e cargas que necessitam de conjugados de partida muito altos e
corrente de partida limitada [5].
2.2.8 Características da Rede de Alimentação
A operação eficiente dos motores de indução trifásicos depende,
entre outras coisas, da qualidade da rede elétrica de alimentação. As
principais distorções que ocorrem nas redes trifásicas são:
19
· Variação da tensão e/ou freqüência;
· Desequilíbrio da rede trifásica, com as tensões apresentando
diferentes amplitudes e/ou defasagens;
· Conteúdo de harmônicos.
2.2.9 Características Construtivas
Os invólucros dos motores elétricos, conforme as características do
local em que serão instalados e de sua acessibilidade, devem oferecer um
determinado grau de proteção padronizado. Assim, por exemplo, um motor
a ser instalado num local sujeito a jatos d'água deve possuir um invólucro
capaz de suportar tais jatos, sob determinados valores de pressão e ângulo
de incidência, sem que haja penetração de água.
2.2.10 Vida Útil do Motor
O motor de indução trifásico é uma máquina robusta que, quando
utilizado apropriadamente, irá operar por vários anos com o mínimo de
manutenção. Entretanto, uma manutenção preventiva e uma inspeção do
motor e do sistema elétrico de alimentação irão aumentar a sua vida útil.
A vida de um motor praticamente termina quando o isolamento dos
seus enrolamentos se deteriora, tornando-se ressecado e quebradiço.
A melhor maneira de prevenir defeitos é seguir as instruções de
manutenção do fabricante e observar o desempenho normal do motor. A
interpretação adequada destas observações pode ajudar a evitar sérios
defeitos ou falhas do motor. Algumas observações simples podem ser feitas
para verificar se o motor sofreu alguma avaria, conforme indicado a seguir:
· Observar se o motor está mais ruidoso que o normal.
· Observar se a temperatura na carcaça do motor está acima do
normal.
· Observar se o tempo de aceleração do motor para atingir a
velocidade de operação está acima do normal.
20
· Observar se há aumento da vibração.
2.2.11 Os Cuidados na Limpeza do Motor
A limpeza do motor é um ponto primordial da sua manutenção. A
presença de poeira, umidade, partículas em suspensão, óleo, etc. é a
principal causa de falhas dos motores. Falhas do sistema isolante são
frequentemente causadas pela ação da umidade.
A limpeza da superfície externa é extremamente importante, pois é
através dela que o calor gerado pelas perdas do motor é liberado para o
exterior. Uma camada de sujeira dificulta a liberação deste calor, o que
provoca a elevação de temperatura, principalmente nos motores em
regime contínuo. Isto pode reduzir consideravelmente a vida útil da isolação
do enrolamento. Esta limpeza pode ser feita utilizando um pano embebido
em solvente.
A presença de sujeiras e/ou resíduos estranhos no óleo de lubrificação
do mancal ou na graxa do rolamento provoca alterações nas suas
propriedades lubrificantes, aumentando as perdas por atrito e,
conseqüentemente, a temperatura.
A grade de proteção do ventilador nunca deve acumular detritos,
para se obter uma boa renovação do ar de refrigeração.
2.2.12 A Lubrificação do Rolamento e do Mancal
Os mancais devem ser periodicamente inspecionados, de modo a
garantir uma lubrificação correta. Uma consulta ao fabricante ou ao seu
representante local, aliada à própria experiência prática do usuário, pode
definir a periodicidade desta inspeção.
O fabricante do motor sempre apresenta recomendações sobre
procedimentos e uso das graxas ou óleos lubrificantes adequados ao seu
produto. Não se devem misturar diferentes graxas, pois elas podem se
deteriorar mutuamente e, conseqüentemente, privar o rolamento da
lubrificação adequada [5].
21
Uma quantidade reduzida ou um volume excessivo de lubrificante nos
mancais é prejudicial ao motor. O excesso de graxa é uma das causas mais
comuns de falhas do rolamento, pois aumenta o atrito e,
conseqüentemente, a temperatura [5].
2.2.13 Vibração
Um notável aumento na vibração do motor é um indicativo de
defeitos. Algumas das possíveis causas são citadas a seguir:
Os parafusos da montagem folgados;
O eixo inapropriadamente alinhado com a carga;
Rolamentos defeituosos necessitando serem trocados.
2.2.14 Efeitos da variação da amplitude da tensão.
O rendimento e o fator de potência dos motores de indução trifásicos
variam em função da tensão de alimentação. Geralmente, esses motores
são projetados para suportar tensões 10% acima da nominal [5].
As principais causas para alterações da amplitude da tensão são
transformadores e cabos subdimensionados.
Um motor alimentado com tensão reduzida gera redução do torque
de partida e de regime. Em alguns casos pode gerar aumento da corrente
elétrica e da temperatura da máquina.
Geralmente, o motivo da tensão abaixo da nominal é a alta queda de
tensão no alimentador no motor. Neste caso deve ser feito um
redimensionamento dos condutores de alimentação.
Tensões acima da nominal aumentam a corrente de partida e
reduzem o fator de potência. Um provável motivo para tensões elevadas é
uma ligação errada no tap do transformador.
Se possui-se um motor superdimensionado, em alguns casos é possível
aumentar seu rendimento e seu fator de potência alimentando-o com
tensão reduzida.
22
Os motores de alto rendimento possuem a vantagem de serem menos
sensíveis a elevações na amplitude das tensões. Este fato é decorrente de
melhores projetos e materiais de construção.
2.2.15 Efeitos do desequilíbrio da rede elétrica.
Entre as principais causas de desequilíbrio em um sistema trifásico é a
ligação exacerbada de cargas monofásicas no sistema, como iluminação e
motores monofásicos.
O desequilíbrio gera redução do rendimento do motor, redução do
torque e aumento da temperatura de operação.
Para quantificar o desequilíbrio de tensão deve-se considerar as
diferenças de amplitude e de fase, no entanto a norma NBR7094 permite
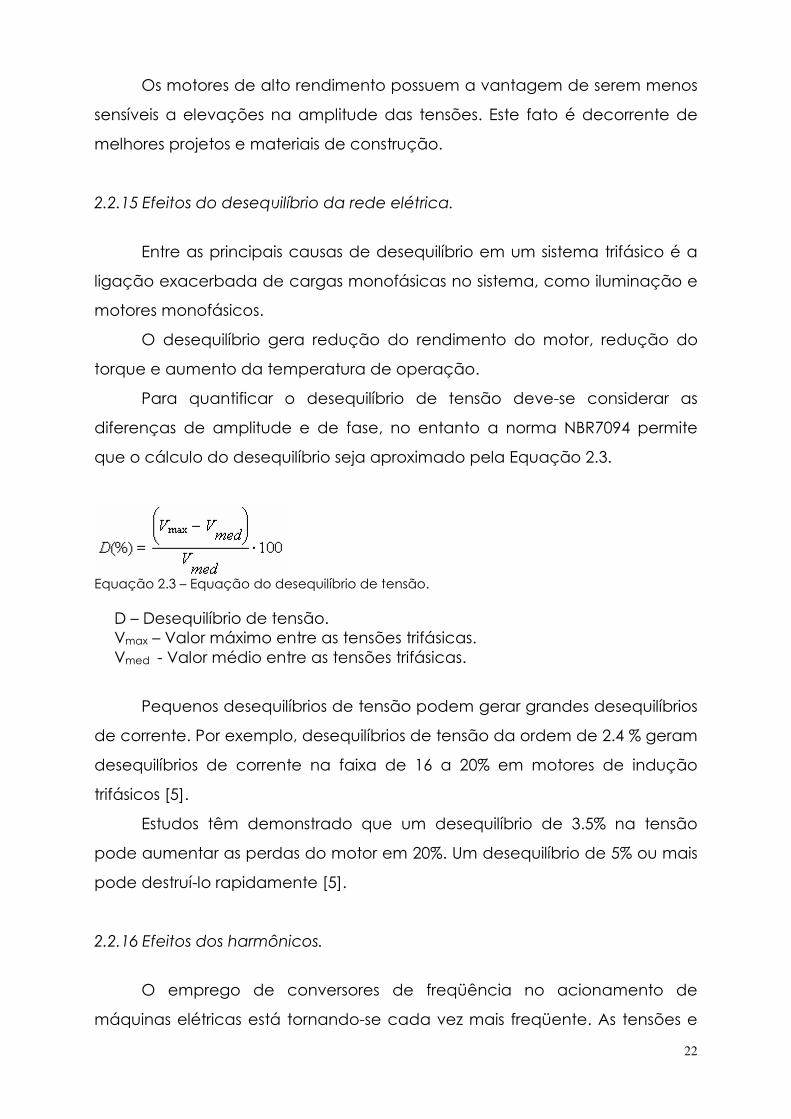
que o cálculo do desequilíbrio seja aproximado pela Equação 2.3.
Equação 2.3 – Equação do desequilíbrio de tensão.
D – Desequilíbrio de tensão. Vmax – Valor máximo entre as tensões trifásicas. Vmed - Valor médio entre as tensões trifásicas.
Pequenos desequilíbrios de tensão podem gerar grandes desequilíbrios
de corrente. Por exemplo, desequilíbrios de tensão da ordem de 2.4 % geram
desequilíbrios de corrente na faixa de 16 a 20% em motores de indução
trifásicos [5].
Estudos têm demonstrado que um desequilíbrio de 3.5% na tensão
pode aumentar as perdas do motor em 20%. Um desequilíbrio de 5% ou mais
pode destruí-lo rapidamente [5].
2.2.16 Efeitos dos harmônicos.
O emprego de conversores de freqüência no acionamento de
máquinas elétricas está tornando-se cada vez mais freqüente. As tensões e
23
correntes na saída dos conversores não são senoidais, estas contêm
componentes harmônicas. O efeito da distorção harmônica tem maior
magnitude em conversores de baixa tensão.
Os harmônicos aumentam as perdas do motor, reduzem o torque
entregue a carga e geram conjugados pulsantes. Consequentemente, o
motor apresenta vibração, aquecimento e redução do rendimento. Os
harmônicos também podem causar redução da vida útil devido a
danificação dos enrolamentos, fadiga no eixo e deterioração do sistema de
isolação.
Os motores de alto rendimento apresentam menores perdas na
presença de harmônicos.
2.2.17 Reparo de motores.
O reparo de motores, geralmente apresenta um menor custo inicial em
relação à aquisição de um motor novo. No entanto, o motor reparado pode
apresentar um rendimento menor. Isso se deve ao fato que no reparo de um
motor, suas características elétricas, magnéticas e mecânicas de projeto são
muitas vezes alteradas, aumentando as perdas da máquina.
Se o reparo for a opção adotada, deve-se procurar uma empresa
especializada que altere minimamente as características originais do motor.
2.3 PRINCÍPIOS DE UM CONVERSOR DE FREQUÊNCIA.
Em muitas aplicações, as máquinas de indução são utilizadas em
acionamento de velocidade variável. Nestas aplicações, geralmente, utiliza-
se um conversor de frequência para acionamento dos motores. Nas
máquinas de indução, os enrolamentos do estator são alimentados por
tensões CA trifásicas equilibradas que produzem tensões induzidas nos
enrolamentos do rotor. No caso de motores com rotor em gaiola, a tensão é
induzida nas barras da gaiola.
O modelo de circuito por fase de uma máquina de indução é
mostrado na Figura 2.5.

24
Figura 2.5 - Modelo de circuito por fase de uma máquina de indução.
Rs – Resistência dos enrolamentos do estator por fase; Xs – Reatância de dispersão dos enrolamentos do estator por fase; Rm – Resistência que representa as perdas por excitação ou no núcleo; Xm – Reatância de magnetização; Rr – Resistência rotórica referida ao circuito do estator por fase; Xr – Reatância de dispersão rotórica referida ao circuito do estator por fase; s- Escorregamento do motor.
A equação do Torque desenvolvido pelo motor em função do
escorregamento é apresentada na Equação 2.4.
Equação 2.4 - Equação do Torque desenvolvido. Fonte: Rashid.
ws – Velocidade síncrona do motor.
Se a máquina for alimentada a partir de uma tensão fixa com
freqüência constante, o torque desenvolvido é uma função do
escorregamento. A Figura 2.6 apresenta a curva característica torque x
escorregamento de um motor de indução trifásico baseada na Equação 2.4
A reversão é a ação de inverter a seqüência de fase das tensões que
alimentam o motor. Este procedimento pode ser usado para frenagem de
máquinas, no entanto gera elevadas correntes durante o processo de
frenagem.

25
A regeneração ocorre quando a velocidade do eixo da máquina é
maior que a síncrona. Quando a máquina opera como gerador, esta opera
na região do gráfico indica por regeneração.
Figura 2.6 – Curva característica de um motor de indução trifásico. Fonte: Pomilio.
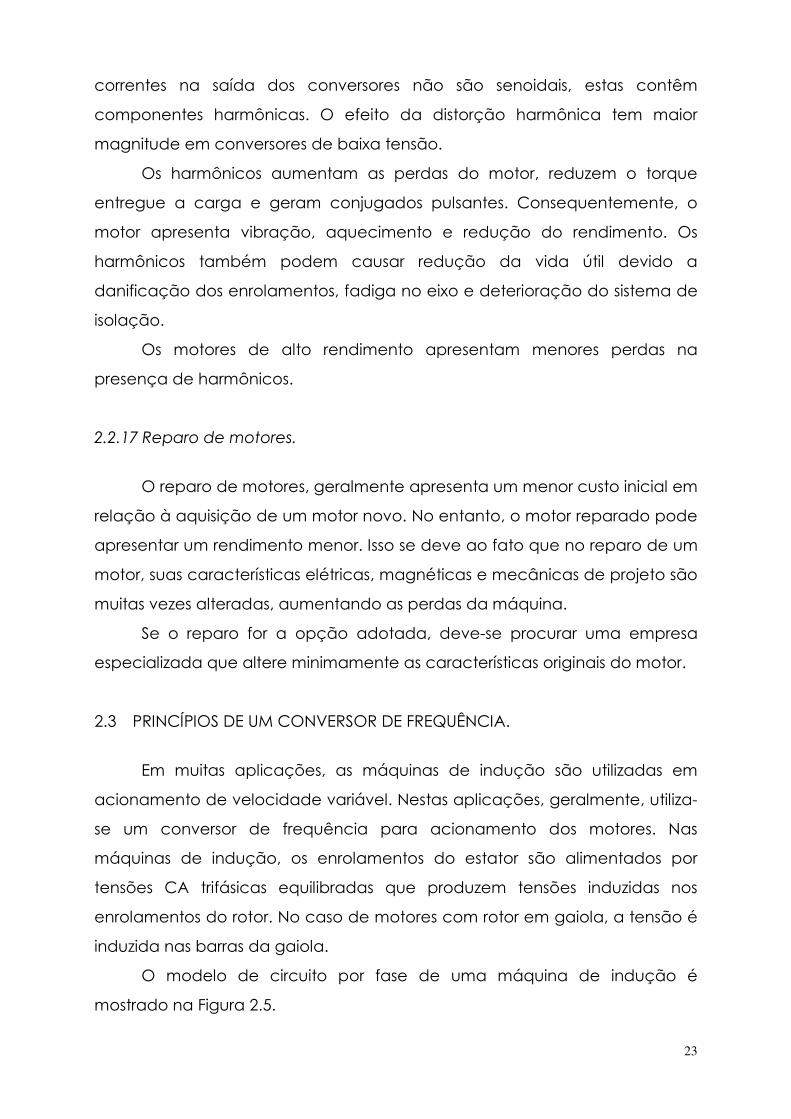
A Equação 2.4 indica que o torque desenvolvido é proporcional ao
quadrado da tensão de alimentação do estator. Caso varie-se a tensão do
estator para ‘bVs’, a curva de torque do motor sofre alterações conforme
apresentado na Figura 2.7. O aspecto da curva torque x velocidade de uma
bomba centrífuga é mostrado na figura, sendo que o ponto de operação do
motor é a intersecção das curvas de torque. Logo, verifica-se a possibilidade
de alterar a velocidade de rotação da bomba dentro de uma faixa pela
variação da tensão.
Em qualquer circuito magnético, a tensão induzida é proporcional ao
fluxo e à freqüência. Aplicando esse fenômeno ao motor de indução
trifásico, tem-se de forma aproximada a Equação 2.5.
Equação 2.5 – Equação do fluxo do entreferro.
Va – Tensão dos terminais do motor de indução; - Fluxo no entreferro;
26
Km – Constante que depende do número de espiras do enrolamento do estator; w – Freqüência da tensão.
Pela Equação 2.5, nota-se que à medida que a tensão é reduzida, o
fluxo no entreferro é reduzido, diminuindo consequentemente o torque do
motor.
Figura 2.7 – Variação da curva de torque do motor de indução com a tensão. Fonte: Pomilio.
wm – Rotação do eixo do motor ws – Rotação síncrona.
O torque e a velocidade de máquinas de indução podem ser
controlados variando-se a freqüência de alimentação. Nota-se na Equação
2.5 que para uma tensão e freqüência nominal, o fluxo terá seu valor
nominal. Se a tensão for mantida fixa e a freqüência reduzida, o fluxo
aumentará. Isso acarretaria na saturação do fluxo no entreferro. Em baixas
freqüências, as reatâncias da máquina diminuem e as correntes da máquina
se elevam. Este tipo de controle não é geralmente utilizado.
Se a freqüência síncrona correspondente à freqüência nominal for
chamada de velocidade base, a velocidade síncrona em qualquer outra
freqüência é dada pela Equação 2.6.
Equação 2.6 – Equação da velocidade síncrona em função da velocidade base.
ws – Velocidade síncrona wb – Velocidade base.

27
Se a relação entre a tensão e a freqüência for mantida constante, o
fluxo permanecerá constante, conforme indicado na Equação 2.5. Esse tipo
de controle é conhecido como controle tensão/ freqüência e é
amplamente utilizado nos conversores de freqüência comerciais.
No entanto, em baixas freqüências o fluxo no entreferro é reduzido
devido a queda de tensão na impedância do estator tornar-se significativa.
Os conversores comerciais aumentam a tensão em baixas freqüências para
manter o nível de torque.
O aspecto das curvas torque x velocidade de motores operando sob
controle tensão/ freqüência é apresentado na Figura 2.8. As curvas de
maiores espessuras indicam as curvas do motor operando sob maiores
tensão e freqüência.
Figura 2.8 – Curvas de torque de motor de indução trifásico para fluxo constante. Fonte: Pomilio.
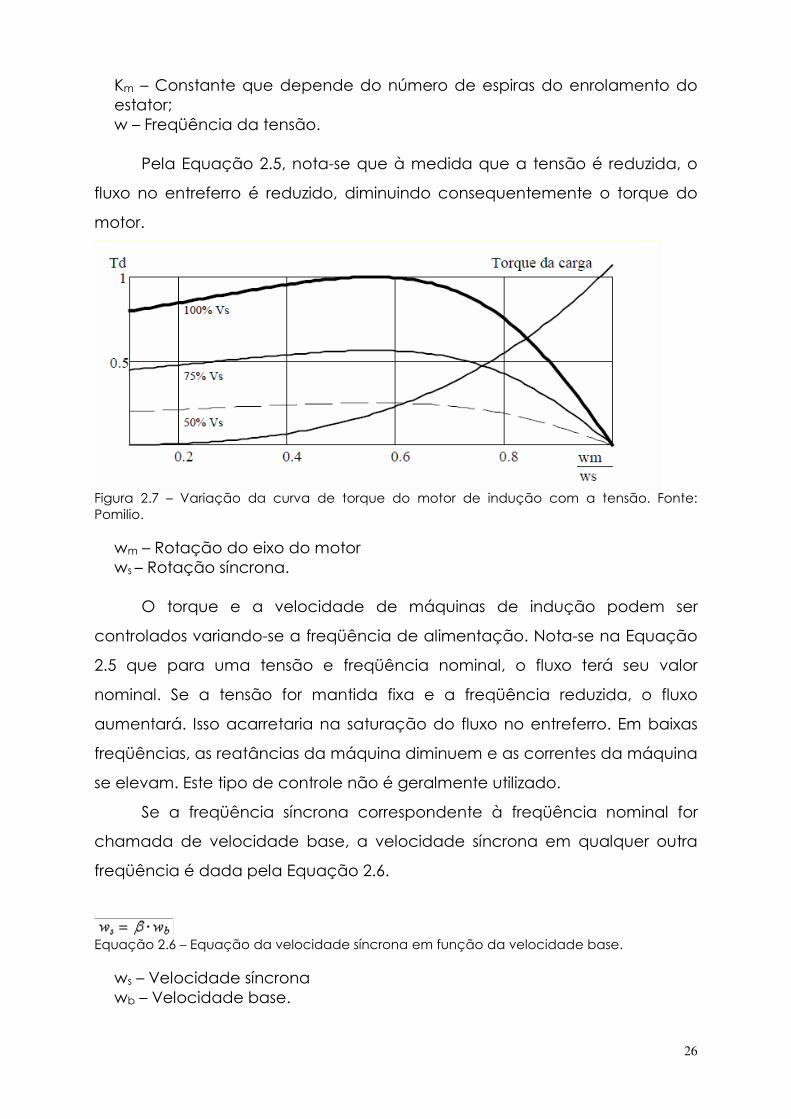
Na Figura 2.9 é mostrado um arranjo típico de circuito para
conversores de freqüência. Neste circuito a tensão CC permanece
constante no inversor onde a técnica PWM é aplicada para variar tanto a
freqüência como a tensão nos terminais do motor de indução trifásico.
28
Figura 2.9 - Arranjo típico de circuito para conversores de frequência.

29
3 PROCESSO DE BOMBEAMENTO D'ÁGUA
3.1 ESTUDO DE PERDA DE CARGA
Ao longo de uma instalação hidráulica, o fluido transportado sofre
perda de energia decorrente do atrito entre a água e as paredes do tubo e
entre as moléculas de água entre si. Essa energia perdida denomina-se
perda de carga.
As perdas de carga podem ser divididas em:
a)Perda de Carga Distribuída (hf): São as perdas que ocorrem ao
longo das tubulações.
b)Perdas de Carga Localizadas ou singulares (hs)- São as perdas
causadas por presença de válvulas, mudanças de direção, variações da
Seção de escoamento e outras singularidades.
A soma das perdas distribuídas e localizadas equivale à perda de
carga total conforme Equação 3.1.
Equação 3.1 – Equação da perda de carga.
Hp -Perda de carga total. hf – Perda de carga distribuída hs – Perda de carga localizada.
3.1.1 Estudo da Perda de Carga Distribuída
O estudo de perda de carga distribuída será realizado considerando-
se o processo em regime permanente e o fluido incompressível. Dado uma
tubulação conforme indicada na Figura 3.1, tem-se que a vazão na seção
(1) é igual à vazão na seção (2). Essa igualdade recebe o nome de Equação
da Continuidade.

30
Figura 3.1 – Tubulação.
Ao longo do circuito percorrido pelo fluido em um conduto forçado é
válida a Equação de Bernoulli. A Equação 3.2 apresenta a Equação de
Bernoulli aplicada em uma linha de fluido.
Equação 3.2 - Equação de Bernoulli.
P1 - Pressão da seção (1) da linha de fluido. P2 - Pressão da seção (2) da linha de fluido. V1 – Velocidade do fluido na seção (1). V2 - Velocidade do fluido na seção (2). Z1 – Altura estática da seção (1) Z2 – Altura estática da seção (2). hf – Perda de carga total ao longo da linha.
- Peso especifico do fluído. 3.1.1.1 Equação de Hagen-Poiseuille (válida para regime Laminar)
A Figura 3.2 mostra um trecho de um conduto por onde escoa um
fluido em regime laminar. No regime laminar o fluido escoa em camadas ou
lâminas de forma ordenada e de forma que as trajetórias das partículas não
se cruzam. O perfil de velocidades que se forma num escoamento em
regime laminar é parabólico e para condutos cilíndricos a expressão da
velocidade é dada pela Equação 3.3.

31
Figura 3.2 – Conduto ecoando fluido em regime laminar.
Equação 3.3 – Equação da velocidade do fluido em regime laminar.
V - Velocidade genérica quando o raio for r. r – Distância do centro do conduto até o ponto onde a velocidade é V. Vmáx - Velocidade máxima do escoamento que ocorre no centro do conduto. R - Raio do conduto.
A perda de carga que ocorre entre duas seções de um conduto
cilíndrico é apresentada na Equação 3.4.
Equação 3.4 – Equação da perda de carga em regime laminar.
hf – Perda de carga . D – diâmetro do conduto. L – Comprimento do conduto. Q - Vazão. ν - Viscosidade cinemática do fluido.
Considera-se que um fluido está em regime laminar se o Número de
Reynolds for menor que 2000. A equação mostra como se calcula o Número
de Reynolds.
Figura 3.3 – Equação do número de Reynolds
Re- Número de Reynolds. V- Velocidade do fluido.
32
D – Diâmetro da tubulação. - Massa específica do fluido. -Viscosidade absoluta do fluido.
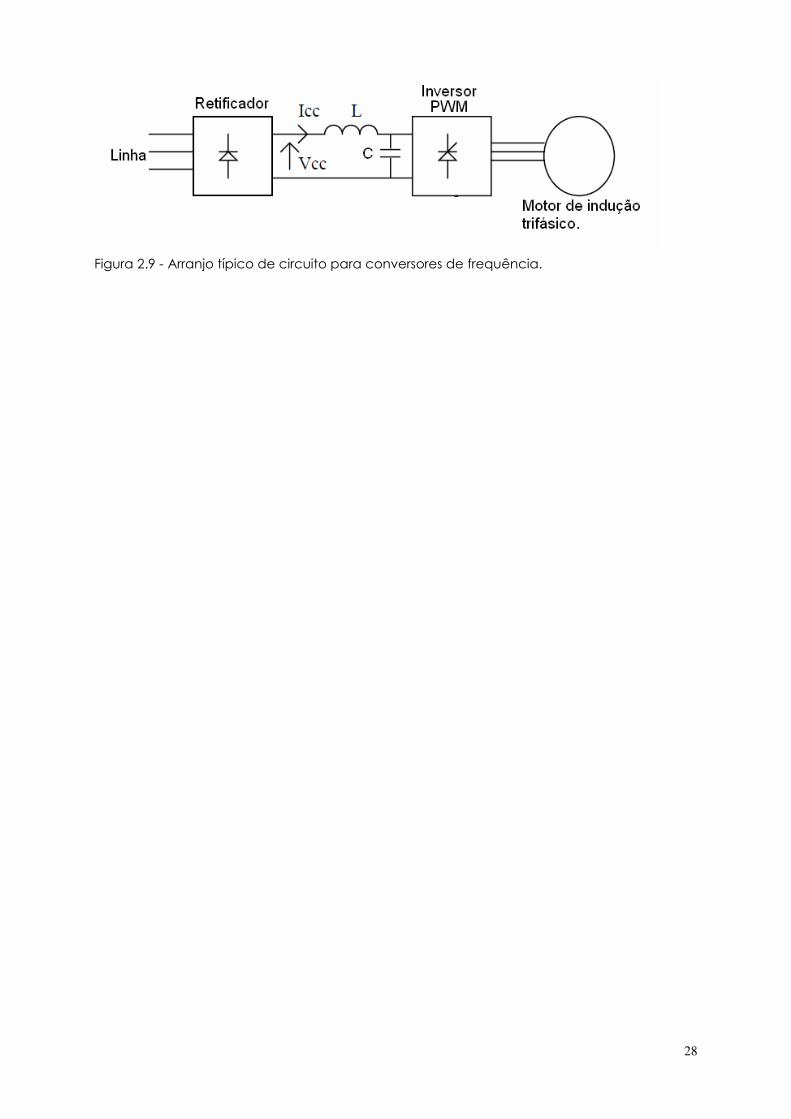
3.1.2 Estudo da Perda de Carga Localizada ou Singular
As perdas de carga localizadas são aquelas causadas por uma
perturbação brusca do escoamento: presença de válvula ,variação de
seção, mudança de direção entre outras singularidades.
A perda de carga localizada é função da velocidade, densidade e
viscosidade do fluido, da rugosidade e das características geométricas da
singularidade.
Um método simples para o cálculo da perda de carga localizada é
apresentado pela Equação 3.5
Equação 3.5 – Equação da perda de carga localizada.
hs – Perda de carga localizada. Ks – Constante específica para cada singularidade. V – Velocidade do fluido g – Aceleração da gravidade.
Os valores típicos de ‘Ks’ podem se encontram na Tabela 3.1.
33
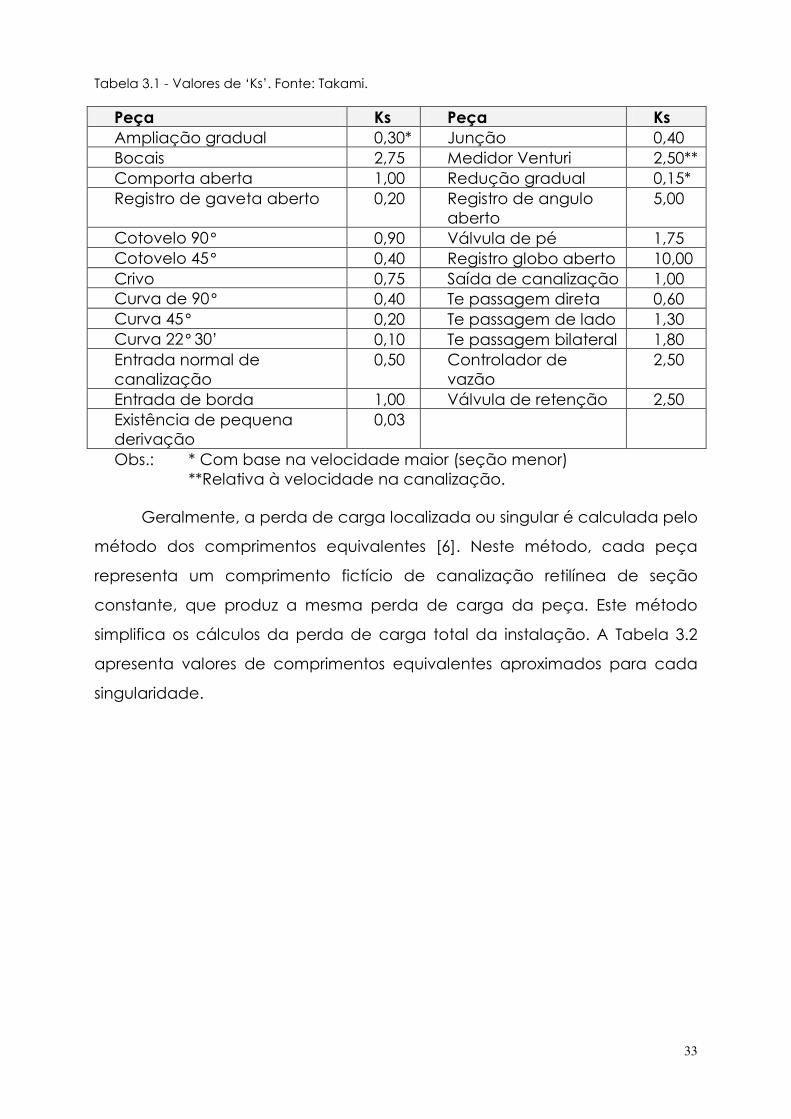
Tabela 3.1 - Valores de ‘Ks’. Fonte: Takami.
Peça Ks Peça Ks Ampliação gradual 0,30* Junção 0,40 Bocais 2,75 Medidor Venturi 2,50** Comporta aberta 1,00 Redução gradual 0,15* Registro de gaveta aberto 0,20 Registro de angulo
aberto 5,00
Cotovelo 90° 0,90 Válvula de pé 1,75 Cotovelo 45° 0,40 Registro globo aberto 10,00 Crivo 0,75 Saída de canalização 1,00 Curva de 90° 0,40 Te passagem direta 0,60 Curva 45° 0,20 Te passagem de lado 1,30 Curva 22° 30’ 0,10 Te passagem bilateral 1,80 Entrada normal de canalização
0,50 Controlador de vazão
2,50
Entrada de borda 1,00 Válvula de retenção 2,50 Existência de pequena derivação
0,03
Obs.: * Com base na velocidade maior (seção menor) **Relativa à velocidade na canalização.
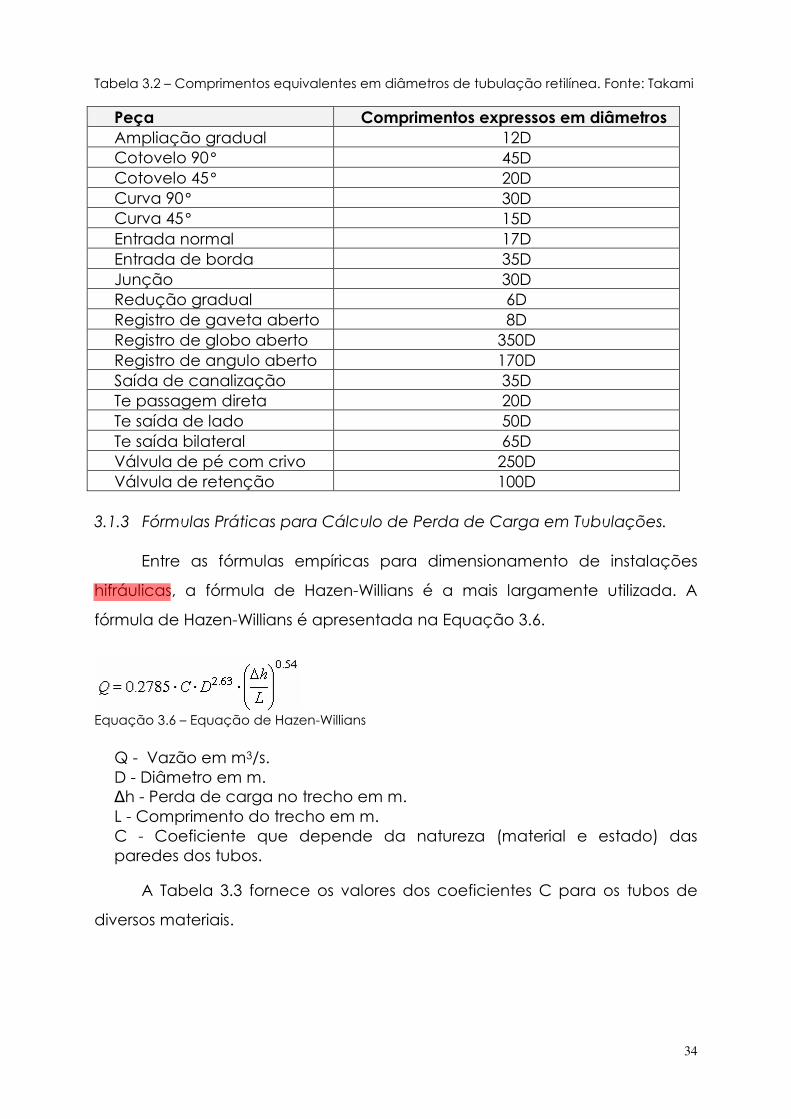
Geralmente, a perda de carga localizada ou singular é calculada pelo
método dos comprimentos equivalentes [6]. Neste método, cada peça
representa um comprimento fictício de canalização retilínea de seção
constante, que produz a mesma perda de carga da peça. Este método
simplifica os cálculos da perda de carga total da instalação. A Tabela 3.2
apresenta valores de comprimentos equivalentes aproximados para cada
singularidade.
34
Tabela 3.2 – Comprimentos equivalentes em diâmetros de tubulação retilínea. Fonte: Takami
Peça Comprimentos expressos em diâmetros Ampliação gradual 12D Cotovelo 90° 45D Cotovelo 45° 20D Curva 90° 30D Curva 45° 15D Entrada normal 17D Entrada de borda 35D Junção 30D Redução gradual 6D Registro de gaveta aberto 8D Registro de globo aberto 350D Registro de angulo aberto 170D Saída de canalização 35D Te passagem direta 20D Te saída de lado 50D Te saída bilateral 65D Válvula de pé com crivo 250D Válvula de retenção 100D
3.1.3 Fórmulas Práticas para Cálculo de Perda de Carga em Tubulações.
Entre as fórmulas empíricas para dimensionamento de instalações
hifráulicas, a fórmula de Hazen-Willians é a mais largamente utilizada. A
fórmula de Hazen-Willians é apresentada na Equação 3.6.
Equação 3.6 – Equação de Hazen-Willians
Q - Vazão em m3/s. D - Diâmetro em m. ∆h - Perda de carga no trecho em m. L - Comprimento do trecho em m. C - Coeficiente que depende da natureza (material e estado) das paredes dos tubos.
A Tabela 3.3 fornece os valores dos coeficientes C para os tubos de
diversos materiais.

35
Tabela 3.3 – Valores do coeficiente C. Fonte: Tamaki.
Materiais Coeficiente C Aço corrugado (chapa ondulada) 60 Aço com junta lock-bar (tubos novos) 130 Aço com junta lock-bar (em serviço) 90 Aço galvanizado 125 Aço rebitado novo 110 Aço rebitado , em uso 85 Aço soldado, novo 130 Aço soldado , em uso 90 Aço soldado com revestimento especial 130 Chumbo 130 Cimento-amianto 140 Cobre 130 Concreto com bom acabamento 130 Concreto com acabamento comum 120 Ferro fundido novo 130 Ferro fundido (sem revestimento), após 15-20 anos 100 Ferro fundido (sem revestimento) usados 90 Ferro fundido com revestimento de cimento 130 Grês cerâmico vidrado(manilhas) 110 Latão 130 Madeira em aduelas 120 Tijolos, condutos bem executados 100 Vidro 140 Plástico 140
A Equação 3.6 pode também ser utilizada para cálculo da perda de
carga de uma tubulação em função da vazão.
O valor do coeficiente ‘C’ principalmente nas canalizações metálicas
não revestidas tende a diminuir com o correr do tempo, aumentando a
rugosidade interna dos tubos e diminuindo a sua capacidade de transporte
de fluidos. [2]. Um valor de ‘C’ comumente utilizado em dimensionamentos
de sistemas com canalizações, por exemplo, de aço galvanizado é 100,
prevendo o envelhecimento da tubulação.
3.2 ALTURA MANOMÉTRICA
Quando se considera um bombeamento, é preciso vencer tanto a
altura geométrica (estática) quanto às perdas de carga que ocorrerão na
tubulação. A energia que a bomba fornece é equivalente à energia que
36
forneceria a um sistema sem perdas com certa altura geométrica. Essa altura
denomina-se “altura manométrica”, ou “altura total” de elevação, ou
“altura manométrica total”. A altura manométrica que uma bomba fornece
também pode ser definida como a energia fornecida por unidade de peso
de fluido transportado.
A Equação 3.7 resume o cálculo da altura manométrica total de um
sistema.
Equação 3.7 – Equação da altura manométrica.
HMT – Altura manométrica Total. HG - Altura geométrica. Hp – Altura manométrica devido às perdas do sistema.
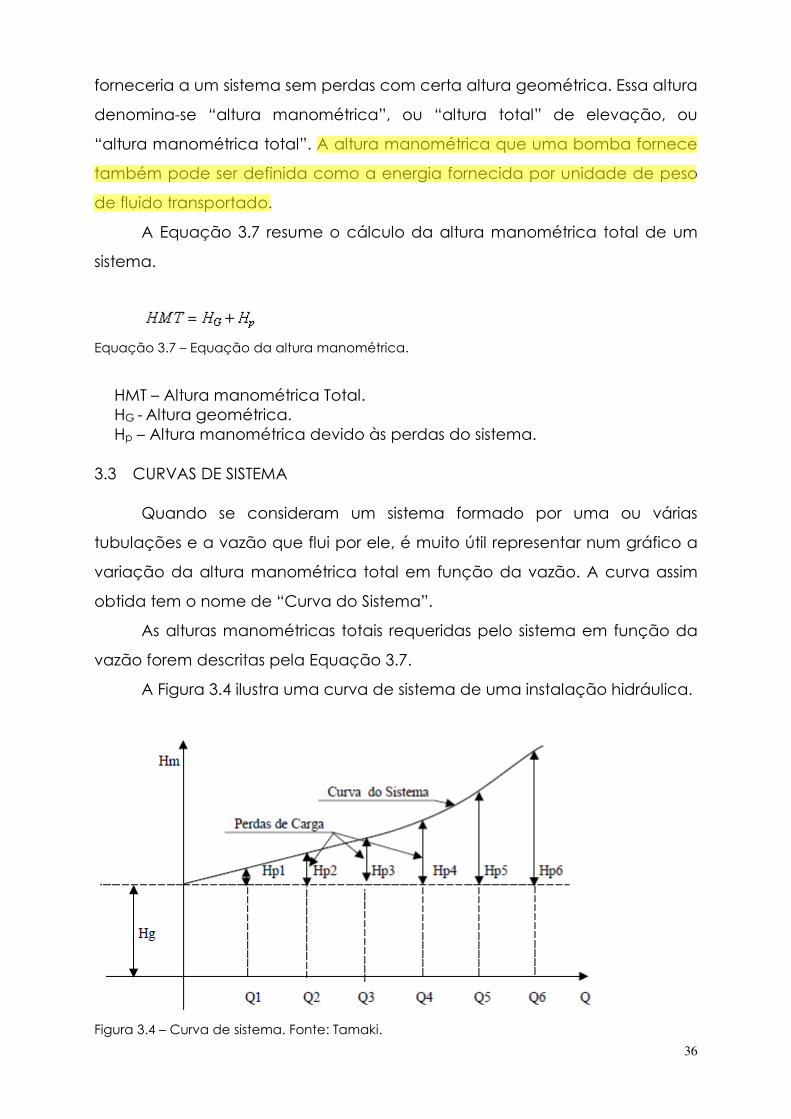
3.3 CURVAS DE SISTEMA
Quando se consideram um sistema formado por uma ou várias
tubulações e a vazão que flui por ele, é muito útil representar num gráfico a
variação da altura manométrica total em função da vazão. A curva assim
obtida tem o nome de “Curva do Sistema”.
As alturas manométricas totais requeridas pelo sistema em função da
vazão forem descritas pela Equação 3.7.
A Figura 3.4 ilustra uma curva de sistema de uma instalação hidráulica.
Figura 3.4 – Curva de sistema. Fonte: Tamaki.

37
Hm – Altura manométrica Total. HG - Altura geométrica. Hp – Altura manométrica devido as perdas do sistema. Q – vazão.
Nas fórmulas para a determinação da perda de carga em tubulação,
a vazão entra elevada ao quadrado (conforme apresentado na Seção 3.1 e
especificadamente na Equação 3.6). O mesmo ocorre na expressão para o
cálculo da perda localizada, conforme Equação 3.5.
Logo, o aspecto da curva de sistema é o de uma função do segundo
grau. Genericamente, ela pode ser escrita conforme Equação 3.8.
Equação 3.8 – Equação da altura manométrica aproximada.
HMT – Altura manométrica Total. HG - Altura geométrica. Q – Vazão no sistema.
- Constante específica do sistema.
3.4 BOMBAS HIDRÁULICAS.
O processo de bombeamento pode ser definido como o efeito de
adicionar energia a um fluido visando movê-lo de um ponto a outro. A
energia cedida permitirá que o fluido seja transportado através de uma
tubulação, atingindo um ponto com cota mais elevada em alguns casos.
Essa energia é cedida por equipamentos denominados bombas que são
máquinas operatrizes hidráulicas.
Basicamente, as bombas podem ser divididas em duas famílias:
• As bombas de deslocamento positivo ou volumógenas;
• As turbobombas, também conhecidas como “rotodinâmicas”,
“hidrodinâmicas” ou, simplesmente, “dinâmicas”.
Das primeiras, o exemplo mais comum são as bombas de concreto,
que equipam os caminhões betoneira das centrais de concreto. No

38
abastecimento de água, são utilizadas as bombas centrífugas, mistas e
axiais, que são os tipos mais comuns das turbobombas.
3.4.1 Componentes principais
Simplificadamente, pode-se considerar que suas principais partes são:
• O rotor (solidário a um eixo - parte móvel);
• A carcaça;
• O difusor (partes fixas).
A finalidade do rotor, também chamado “impelidor”, é transmitir
energia cinética à massa líquida por meio da energia mecânica que recebe
de um motor, possibilitando a conversão dessa energia em energia de
pressão, por meio do difusor. Essas transformações se dão conforme o
teorema de Bernoulli e a Equação da Continuidade, pois, sendo o difusor,
em geral, de seção crescente, proporciona a redução de velocidade da
água que por ele escoa, com o conseqüente aumento da pressão na saída
da carcaça.
Quando se bombeia água limpa, opta-se, normalmente, por uma
bomba de rotor fechado. Há um disco protetor que ajuda no
direcionamento do fluxo. Quando, ao contrário, bombeia-se água com
partículas (areia ou outros sólidos em suspensão), é comum optar-se por
bombas com rotores abertos e semi-abertos, de modo que essas partículas
não obstruam o fluxo. São exemplos comuns as bombas de esgotamento de
valas utilizadas em obras que envolvem a escavação do terreno natural [3].
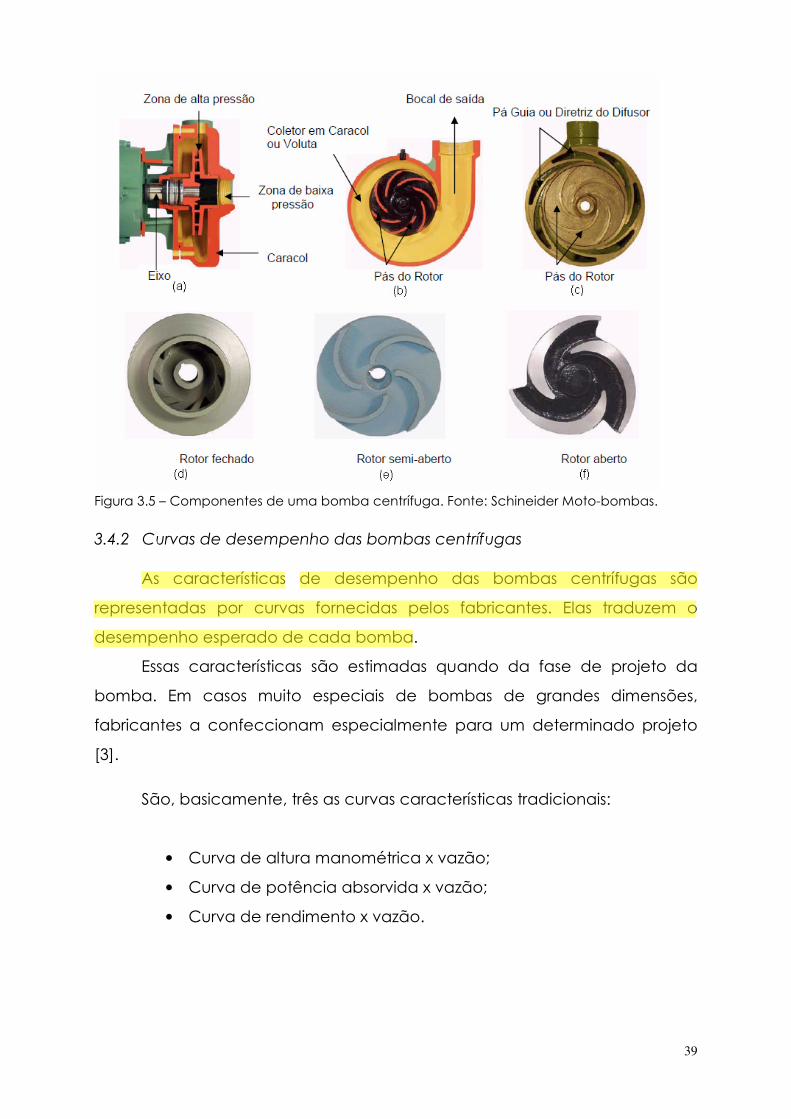
A Figura 3.5 apresenta os componentes principais de uma bomba
centrífuga.
39
Figura 3.5 – Componentes de uma bomba centrífuga. Fonte: Schineider Moto-bombas.
3.4.2 Curvas de desempenho das bombas centrífugas
As características de desempenho das bombas centrífugas são
representadas por curvas fornecidas pelos fabricantes. Elas traduzem o
desempenho esperado de cada bomba.
Essas características são estimadas quando da fase de projeto da
bomba. Em casos muito especiais de bombas de grandes dimensões,
fabricantes a confeccionam especialmente para um determinado projeto
[3].
São, basicamente, três as curvas características tradicionais:
• Curva de altura manométrica x vazão;
• Curva de potência absorvida x vazão;
• Curva de rendimento x vazão.
40
Há ainda outra curva que traduz o NPSH2 requerido pela bomba, o
qual deve ser comparado ao NPSH disponível do sistema.
3.4.2.1 Curva: Altura manométrica x vazão.
É obtida a partir dos ensaios de pressão e vazão da bomba. Embora
seja, teoricamente, uma parábola, devem-se descontar os efeitos do atrito,
que mudam a curva teórica. Nos modelos simuladores, costuma ser
interpolada por uma curva do segundo grau (parábola).
Desde que se considerem apenas os pontos próximos ao ponto de
funcionamento, essa aproximação não traz maiores problemas. Não deve,
contudo, ser utilizada para toda a faixa de funcionamento dada pelo
catálogo.
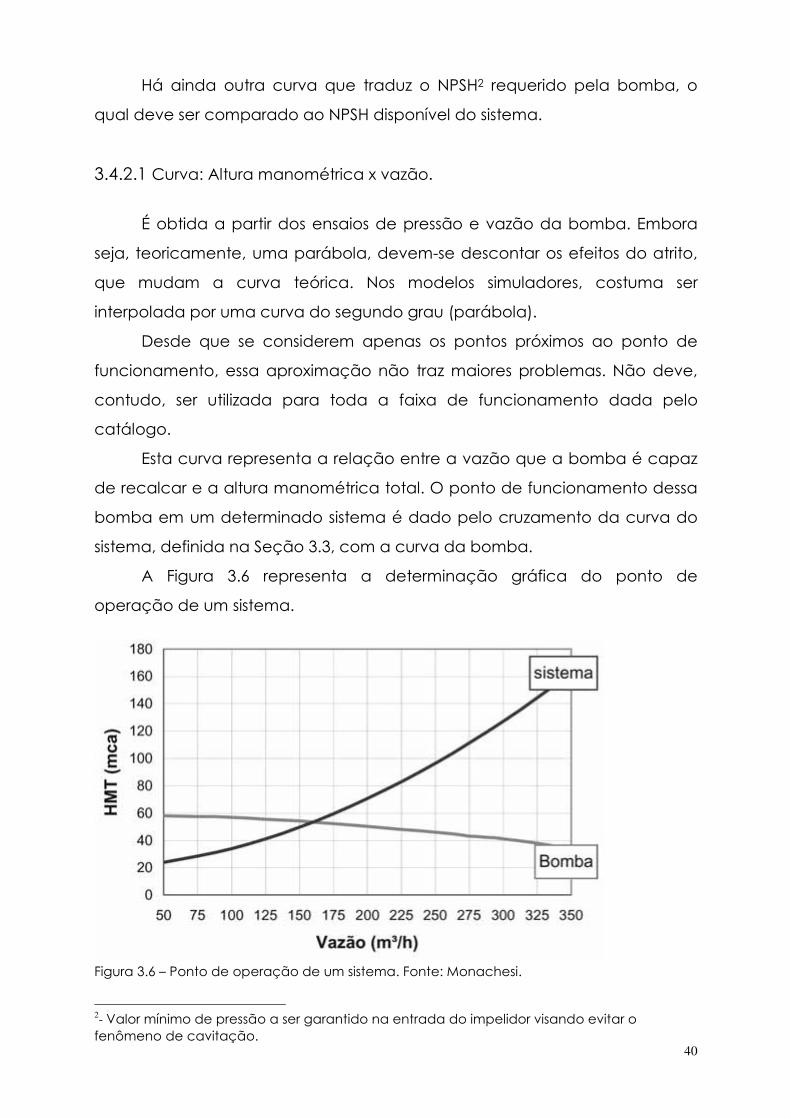
Esta curva representa a relação entre a vazão que a bomba é capaz
de recalcar e a altura manométrica total. O ponto de funcionamento dessa
bomba em um determinado sistema é dado pelo cruzamento da curva do
sistema, definida na Seção 3.3, com a curva da bomba.
A Figura 3.6 representa a determinação gráfica do ponto de
operação de um sistema.
Figura 3.6 – Ponto de operação de um sistema. Fonte: Monachesi. 2- Valor mínimo de pressão a ser garantido na entrada do impelidor visando evitar o
fenômeno de cavitação.
41
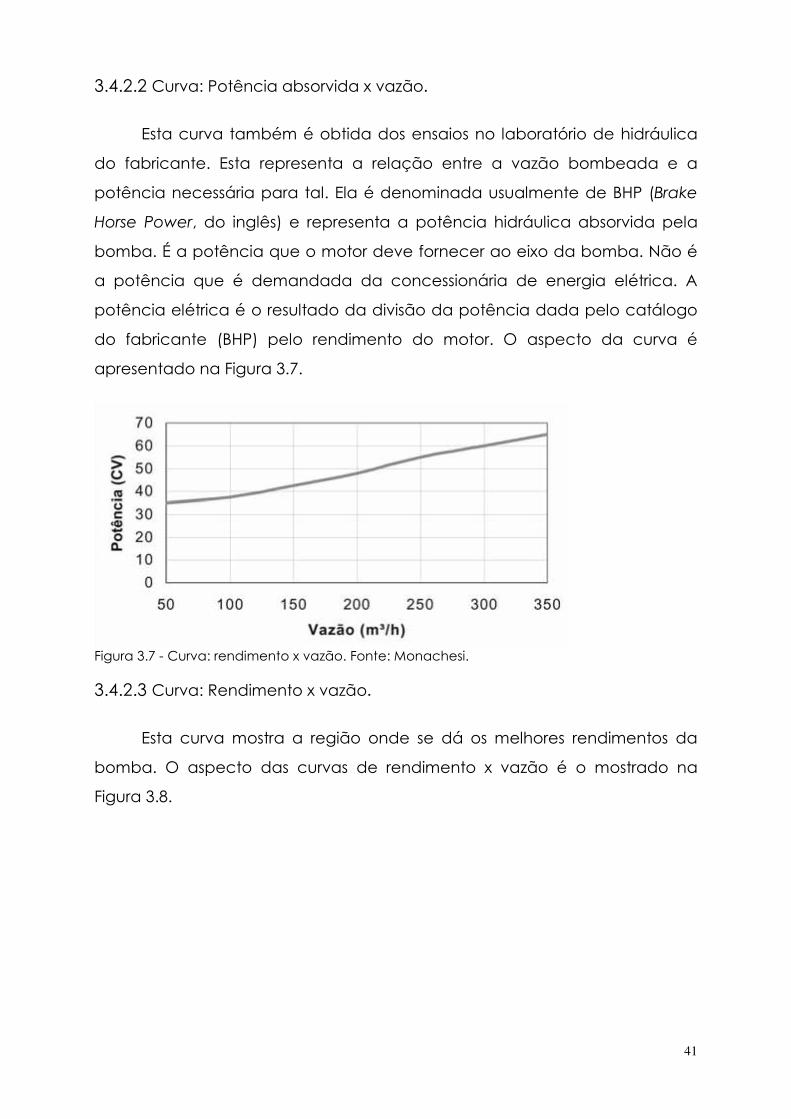
3.4.2.2 Curva: Potência absorvida x vazão.
Esta curva também é obtida dos ensaios no laboratório de hidráulica
do fabricante. Esta representa a relação entre a vazão bombeada e a
potência necessária para tal. Ela é denominada usualmente de BHP (Brake
Horse Power, do inglês) e representa a potência hidráulica absorvida pela
bomba. É a potência que o motor deve fornecer ao eixo da bomba. Não é
a potência que é demandada da concessionária de energia elétrica. A
potência elétrica é o resultado da divisão da potência dada pelo catálogo
do fabricante (BHP) pelo rendimento do motor. O aspecto da curva é
apresentado na Figura 3.7.
Figura 3.7 - Curva: rendimento x vazão. Fonte: Monachesi.
3.4.2.3 Curva: Rendimento x vazão.
Esta curva mostra a região onde se dá os melhores rendimentos da
bomba. O aspecto das curvas de rendimento x vazão é o mostrado na
Figura 3.8.

42
Figura 3.8 – Curva: Rendimento x vazão. Fonte: Monachesi.
A eficiência energética deve ser buscada escolhendo uma bomba
cujo ponto de funcionamento se dê o mais próximo possível do ponto de
melhor rendimento da bomba.
3.4.3 Alteração das curvas características de bombas
As curvas características apresentam mudanças sensíveis de
comportamento em função de alterações na estrutura da bomba ou na
rotação de operação desta. É importante saber quais os fatores que a
influenciam, e quais suas conseqüências.
Para alteração da rotação da bomba tem-se:
• A vazão varia diretamente proporcional a variação da rotação
conforme Equação 3.9.
Equação 3.9 - Variação da vazão para uma variação de rotação.
• A altura manométrica varia proporcional ao quadrado da
variação da rotação conforme Equação 3.10.

43
Equação 3.10 - Variação da altura manométrica para uma variação de rotação.
• A potência varia proporcional ao cubo da variação da rotação
conforme Equação 3.11.
Equação 3.11 - Variação da potência para uma variação de rotação.
Qo - Vazão inicial, em m3/h; Q1 = Vazão final, em m3/h; Ho - Pressão inicial, em mca; H1 = Pressão final, em mca; No - Potência inicial, em cv; N1 = Potência final, em cv; no - Rotação inicial, em rpm; n1 = Rotação final, em rpm.
3.5 UTILIZAÇÃO DE VARIADORES DE VELOCIDADE EM BOMBAS CENTRÍFUGAS.
Os processos que trabalham com bombas centrífugas possuem, em
geral, uma demanda variável. Conforme apresentado na Figura 3.9, o ponto
de operação é determinado pela interseção da curva da bomba, que é
uma função de sua rotação, com a curva do sistema (ponto 1). O controle
da vazão pode ser feito de várias maneiras, sendo uma das mais usuais
aquela onde se utiliza uma válvula de controle para alterar a curva do
sistema (ponto 2).
Desta maneira, a diminuição da vazão é acompanhada por um
aumento da altura manométrica de bombeamento. Uma alternativa a este
método seria utilizar um conversor de frequência que reduzindo a rotação
de trabalho, alteraria a curva da bomba (ponto 3). Desta maneira, a
diminuição da vazão conduz também a um menor valor da altura
manométrica de bombeamento, gerando uma economia de energia,
quando comparada ao método da válvula de controle. A economia de
energia atingida com a utilização do conversor de freqüência é
proporcional à área hachurada na Figura 3.9.
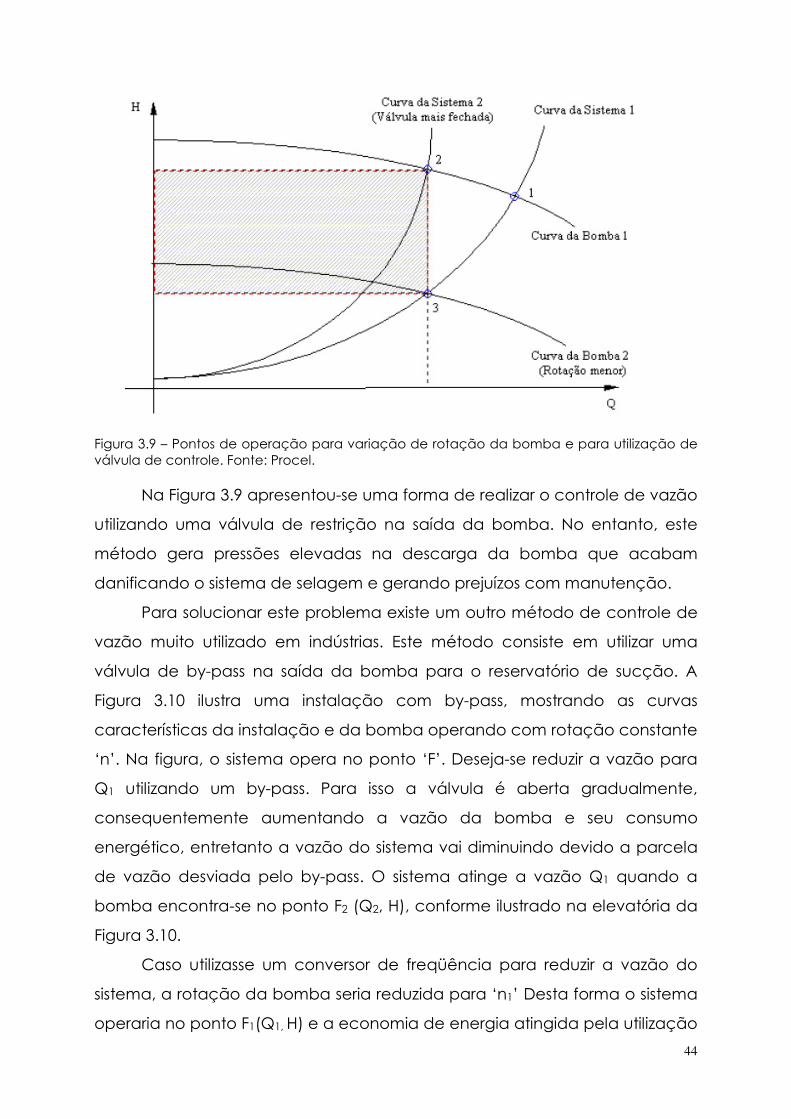
44
Figura 3.9 – Pontos de operação para variação de rotação da bomba e para utilização de válvula de controle. Fonte: Procel.
Na Figura 3.9 apresentou-se uma forma de realizar o controle de vazão
utilizando uma válvula de restrição na saída da bomba. No entanto, este
método gera pressões elevadas na descarga da bomba que acabam
danificando o sistema de selagem e gerando prejuízos com manutenção.
Para solucionar este problema existe um outro método de controle de
vazão muito utilizado em indústrias. Este método consiste em utilizar uma
válvula de by-pass na saída da bomba para o reservatório de sucção. A
Figura 3.10 ilustra uma instalação com by-pass, mostrando as curvas
características da instalação e da bomba operando com rotação constante
‘n’. Na figura, o sistema opera no ponto ‘F’. Deseja-se reduzir a vazão para
Q1 utilizando um by-pass. Para isso a válvula é aberta gradualmente,
consequentemente aumentando a vazão da bomba e seu consumo
energético, entretanto a vazão do sistema vai diminuindo devido a parcela
de vazão desviada pelo by-pass. O sistema atinge a vazão Q1 quando a
bomba encontra-se no ponto F2 (Q2, H), conforme ilustrado na elevatória da
Figura 3.10.
Caso utilizasse um conversor de freqüência para reduzir a vazão do
sistema, a rotação da bomba seria reduzida para ‘n1’ Desta forma o sistema
operaria no ponto F1(Q1, H) e a economia de energia atingida pela utilização
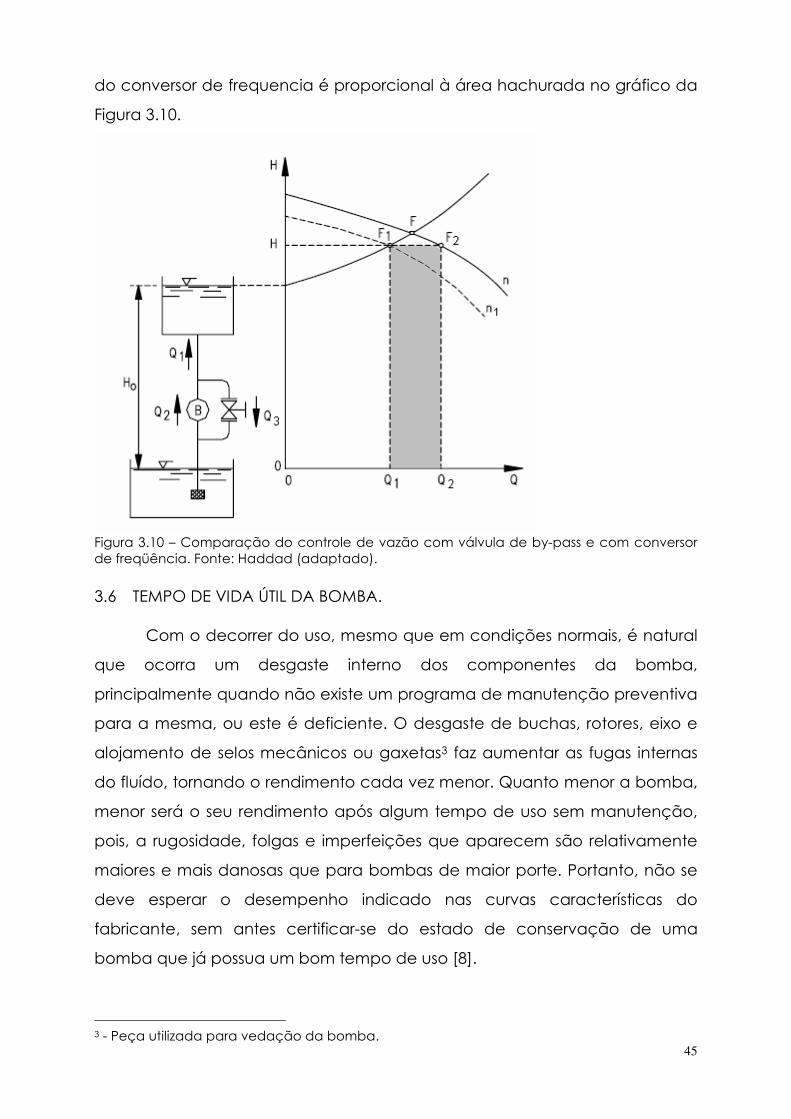
45
do conversor de frequencia é proporcional à área hachurada no gráfico da
Figura 3.10.
Figura 3.10 – Comparação do controle de vazão com válvula de by-pass e com conversor de freqüência. Fonte: Haddad (adaptado).
3.6 TEMPO DE VIDA ÚTIL DA BOMBA.
Com o decorrer do uso, mesmo que em condições normais, é natural
que ocorra um desgaste interno dos componentes da bomba,
principalmente quando não existe um programa de manutenção preventiva
para a mesma, ou este é deficiente. O desgaste de buchas, rotores, eixo e
alojamento de selos mecânicos ou gaxetas3 faz aumentar as fugas internas
do fluído, tornando o rendimento cada vez menor. Quanto menor a bomba,
menor será o seu rendimento após algum tempo de uso sem manutenção,
pois, a rugosidade, folgas e imperfeições que aparecem são relativamente
maiores e mais danosas que para bombas de maior porte. Portanto, não se
deve esperar o desempenho indicado nas curvas características do
fabricante, sem antes certificar-se do estado de conservação de uma
bomba que já possua um bom tempo de uso [8].
3 - Peça utilizada para vedação da bomba.
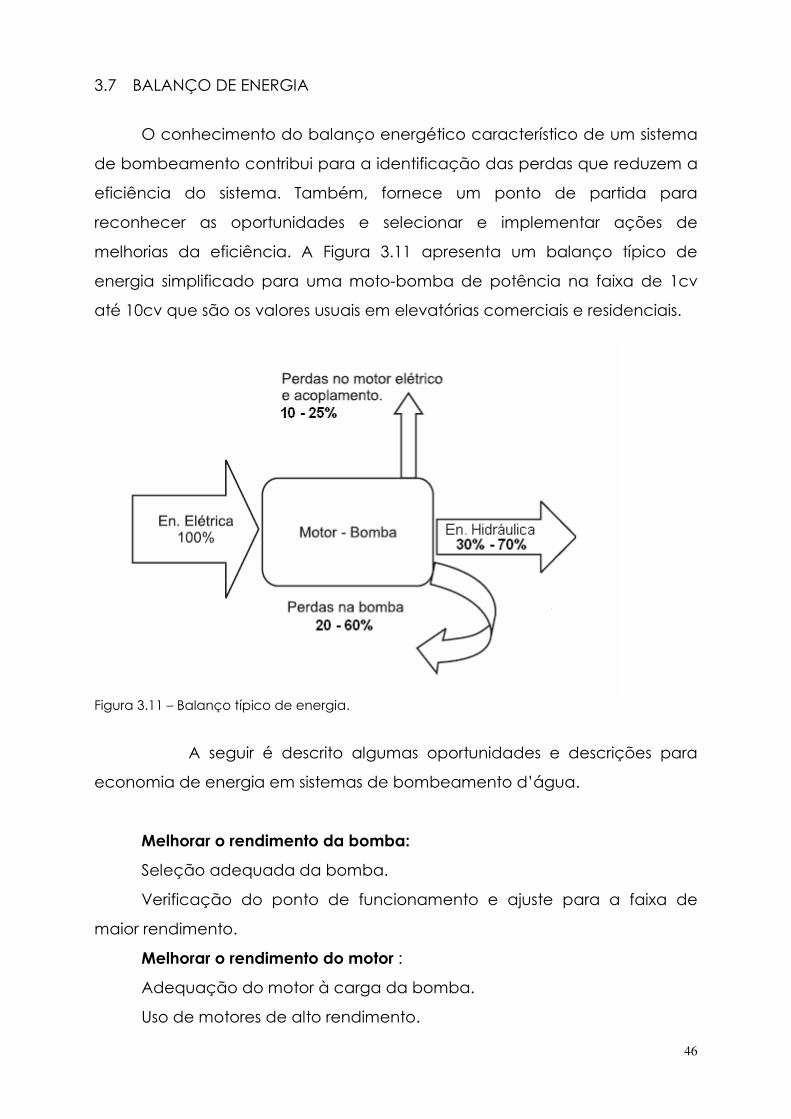
46
3.7 BALANÇO DE ENERGIA
O conhecimento do balanço energético característico de um sistema
de bombeamento contribui para a identificação das perdas que reduzem a
eficiência do sistema. Também, fornece um ponto de partida para
reconhecer as oportunidades e selecionar e implementar ações de
melhorias da eficiência. A Figura 3.11 apresenta um balanço típico de
energia simplificado para uma moto-bomba de potência na faixa de 1cv
até 10cv que são os valores usuais em elevatórias comerciais e residenciais.
Figura 3.11 – Balanço típico de energia.
A seguir é descrito algumas oportunidades e descrições para
economia de energia em sistemas de bombeamento d’água.
Melhorar o rendimento da bomba:
Seleção adequada da bomba.
Verificação do ponto de funcionamento e ajuste para a faixa de
maior rendimento.
Melhorar o rendimento do motor :
Adequação do motor à carga da bomba.
Uso de motores de alto rendimento.
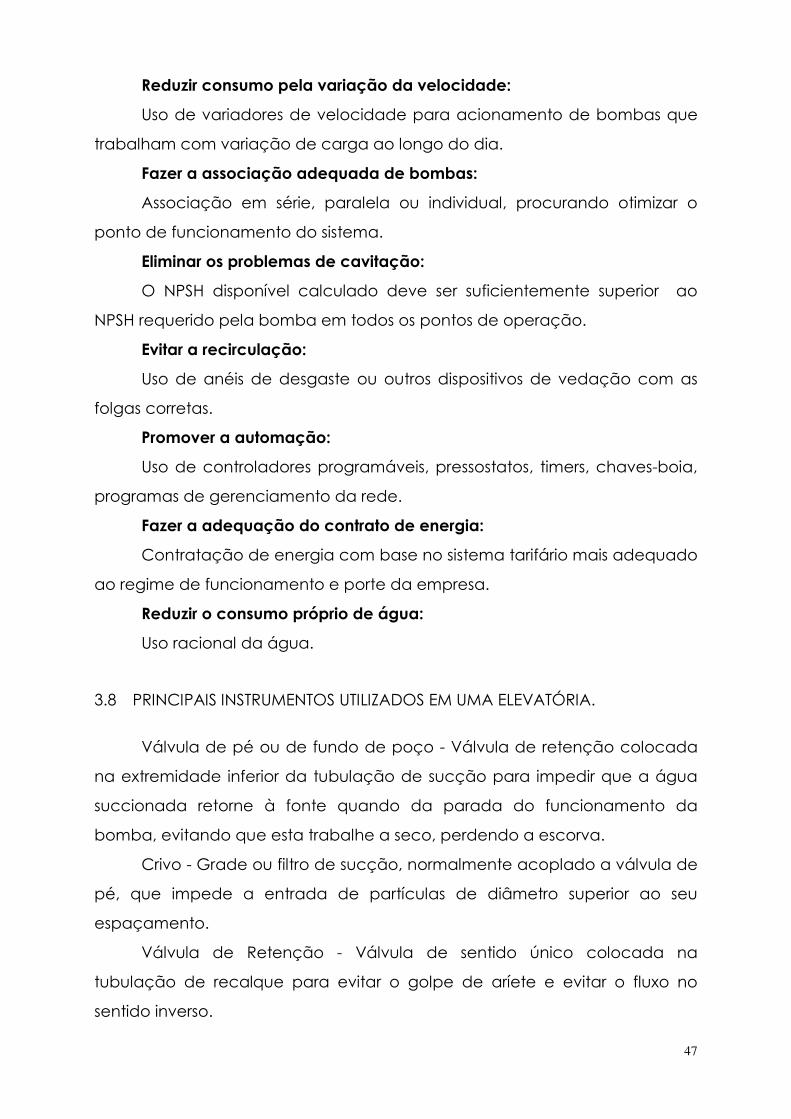
47
Reduzir consumo pela variação da velocidade:
Uso de variadores de velocidade para acionamento de bombas que
trabalham com variação de carga ao longo do dia.
Fazer a associação adequada de bombas:
Associação em série, paralela ou individual, procurando otimizar o
ponto de funcionamento do sistema.
Eliminar os problemas de cavitação:
O NPSH disponível calculado deve ser suficientemente superior ao
NPSH requerido pela bomba em todos os pontos de operação.
Evitar a recirculação:
Uso de anéis de desgaste ou outros dispositivos de vedação com as
folgas corretas.
Promover a automação:
Uso de controladores programáveis, pressostatos, timers, chaves-boia,
programas de gerenciamento da rede.
Fazer a adequação do contrato de energia:
Contratação de energia com base no sistema tarifário mais adequado
ao regime de funcionamento e porte da empresa.
Reduzir o consumo próprio de água:
Uso racional da água.
3.8 PRINCIPAIS INSTRUMENTOS UTILIZADOS EM UMA ELEVATÓRIA.
Válvula de pé ou de fundo de poço - Válvula de retenção colocada
na extremidade inferior da tubulação de sucção para impedir que a água
succionada retorne à fonte quando da parada do funcionamento da
bomba, evitando que esta trabalhe a seco, perdendo a escorva.
Crivo - Grade ou filtro de sucção, normalmente acoplado a válvula de
pé, que impede a entrada de partículas de diâmetro superior ao seu
espaçamento.
Válvula de Retenção - Válvula de sentido único colocada na
tubulação de recalque para evitar o golpe de aríete e evitar o fluxo no
sentido inverso.
48
Registro - Dispositivo para controle da vazão de um sistema hidráulico.
Manômetro - Instrumento que mede a pressão relativa à pressão
atmosférica.
Chave de Nível Bóia Pêra - A Chave de nível tipo bóia pera é utilizada
para medição de nível nos mais diversos tipos de líquidos. Sua principal
aplicação se faz em caixas d’água de grande porte ou poços, no controle
de nível, acionando e desligando comandos de bombas. Existe mudança do
contato elétrico da chave (comutação) no momento em que a bóia inclina-
se de um ângulo igual ou maior que 45º geralmente, comutando novamente
quando o ângulo alcança -45º. A Figura 3.12 apresenta uma chave de nível
bóia pera.
Figura 3.12 - Chave de nível bóia pera. Fonte: Nivetec.
Chave de Nível Bóia Lateral - Este instrumento foi desenvolvido para
aplicações que necessitam detectar e controlar o nível de tanques ou
reservatórios onde são armazenados materiais líquidos como água. Instalada
na lateral do tanque, a chave tem seu funcionamento baseado em uma
bóia cujo movimento é transmitido a uma haste. Esta haste comuta um
contato elétrico toda vez que há variação da posição do nível: Variação de
nível acima da bóia para nível abaixo ou vice-versa.
3.9 SOFTWARES PARA SIMULAÇÃO DE SISTEMAS HIDRÁULICOS.
As análises hidráulicas em software podem ser úteis, dentre outras
finalidades, para a identificação de problemas de abastecimento (pressão
49
insuficiente ou exagerada e/ou qualidade de água distribuída); a otimização
energética de sistemas de bombeamento e reservação (estudo de
paralisação de elevatórias em horários críticos); a detecção de perdas; o
treinamento de operadores (encarregados de operação e de
manutenção); o simples entendimento do funcionamento do sistema que se
opera; e o controle em tempo real.[3]
Também se prestam a tarefas mais simples como a escolha da bomba
ótima para determinada estação elevatória; a verificação do ponto de
funcionamento de uma determinada bomba em uma determinada estação
elevatória; e o estudo para a otimização de adutoras em sistemas
produtores, além de outras situações semelhantes, nas quais os cálculos
podem ser feitos pelo processo tradicional sem grande problema, mas cujos
modelos ajudam a reduzir substancialmente o tempo de cálculo. [3].
Se deseja-se dimensionar uma bomba com vazão e altura
manométrica total praticamente constantes para uma dada aplicação,
vários fabricantes fornecem gratuitamente softwares com essa finalidade. No
entanto, esses softwares geralmente não atendem dimensionamentos mais
complexos.
No site www.epa.gov, da agência de proteção ambiental do governo
norte-americano, pode ser “baixado” um software de código fonte livre
(open-source), chamado “EPANET”, que é o simulador hidráulico no qual se
baseia a maioria dos softwares comerciais para essa finalidade, como, por
exemplo, o WaterCad ( www.haestad.com ) e o MikeNet
(www.boosintl.com).
3.10 SISTEMA ELEVATÓRIO
Para transportar fluidos até cotas mais elevadas, utiliza-se um ou mais
conjuntos elevatórios que são constituídos de bombas hidráulicas e motores
elétricos. Ao conjunto formado pelas bombas, motores elétricos, as
tubulações de sucção e de recalque, e mais os reservatórios denomina-se
sistema de elevatório. A Figura 3.13 mostra um exemplo de sistema elevatório
e os elementos que normalmente os compõe.
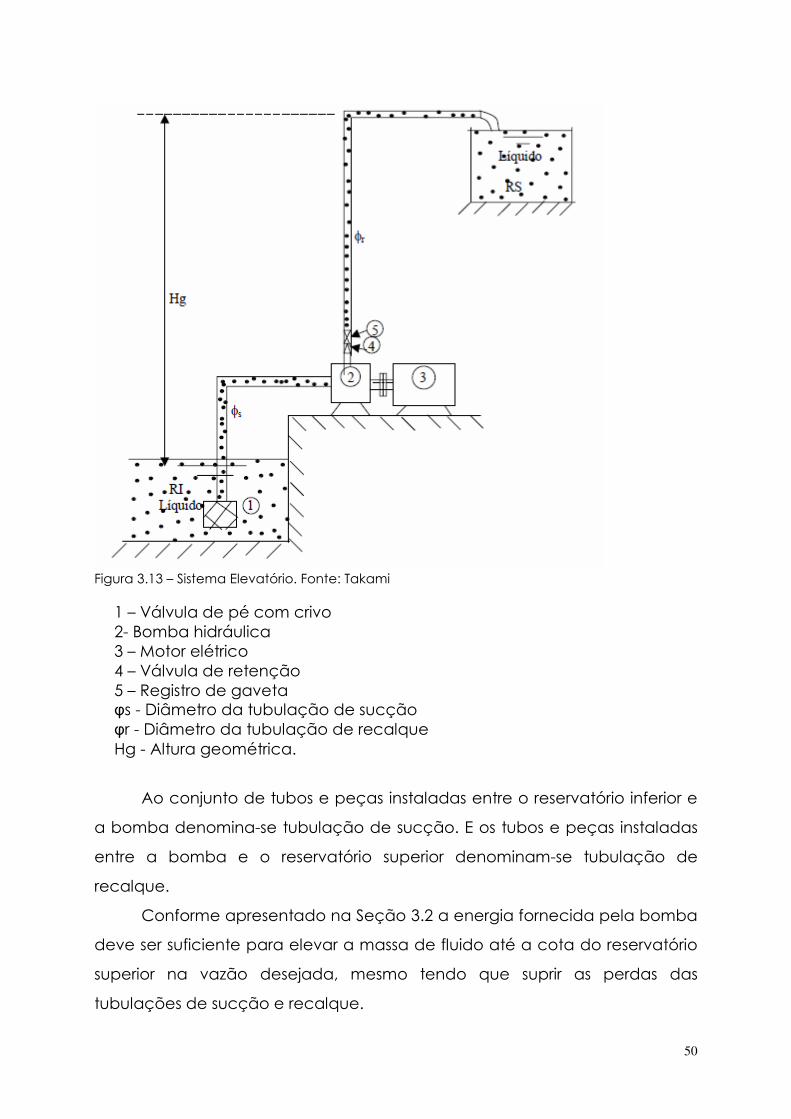
50
Figura 3.13 – Sistema Elevatório. Fonte: Takami
1 – Válvula de pé com crivo 2- Bomba hidráulica 3 – Motor elétrico 4 – Válvula de retenção 5 – Registro de gaveta φs - Diâmetro da tubulação de sucção φr - Diâmetro da tubulação de recalque Hg - Altura geométrica.
Ao conjunto de tubos e peças instaladas entre o reservatório inferior e
a bomba denomina-se tubulação de sucção. E os tubos e peças instaladas
entre a bomba e o reservatório superior denominam-se tubulação de
recalque.
Conforme apresentado na Seção 3.2 a energia fornecida pela bomba
deve ser suficiente para elevar a massa de fluido até a cota do reservatório
superior na vazão desejada, mesmo tendo que suprir as perdas das
tubulações de sucção e recalque.
51
Para um simples dimensionamento de um motor elétrico para
acionamento de uma bomba centrífuga utiliza-se a Equação 3.12.
Equação 3.12 – Equação para dimensionamento de moto-bomba.
Pm - Potência no eixo do motor em CV; γ - Peso específico do fluido em kgf/m3
H - altura manométrica total em m; Q – vazão em m3/s ηB - Rendimento da bomba.
Recomenda-se que a potência instalada seja a potência do motor
comercial imediatamente superior a potência necessária ao acionamento
da bomba. Desta forma, evita-se a operação de motores
superdimensionados, consequentemente com baixos rendimentos. Numa
elevatória não são prováveis riscos de sobrecarga do motor, logo não é
necessário a utilização de grandes margens de segurança. Exceto para o
caso em que o dimensionamento está sujeito a erros significativos.
52
4 PLANTA DE BOMBEAMENTO D’ÁGUA DO LABEFEA.
4.1 DESCRIÇÃO DA PLANTA.
O sistema elevatório compõe-se dos seguintes elementos:
• Dois reservatórios de água com volumes de 1000 l cada, sendo 1
na cota do piso e outro a uma altura de 6 m.
• Tubulações de aspiração ou de sucção.
• Conjunto moto-bomba (4 bombas centrífugas acionadas por 2
motores convencionais e 2 motores de alto rendimento). O
sistema permite combinações de duas bombas em série ou
paralelo.
• Tubulação de recalque ou de elevação.
• Sensor e transmissor de nível no tanque inferior.
• Sensor e transmissor de vazão na descarga do conjunto moto-
bomba.
• Sensor e transmissor de pressão na descarga do conjunto moto-
bomba.
• Duas válvulas de controle pneumáticas. Uma para controle de
vazão de recalque e outra para controle do nível do tanque
inferior.
• Duas válvulas com acionamento manual para alterar a
descarga das bombas em alturas distintas com indicação de
posição via chave fim de curso.
• Um conjunto de válvulas manuais para permitir a seleção da
bomba a ser utilizada e configurar bombas em paralelo ou em
série.
• Um PLC onde está configurado o controle PID de pressão da
descarga das bombas manipulando a rotação dos motores. O
PLC possui também a lógica de controle PID da vazão das moto-
bombas manipulando uma válvula peneumática.
• Dois conversores de freqüência.
• Duas soft-starters.

53
A Figura 4.1 apresenta o layout da Planta-LABEFEA.
Figura 4.1 -Layout da Planta-LABEFEA.
As moto-bombas podem ser acionadas por conversores de
freqüência, por soft-starters ou por partida direta conforme apresentado no
diagrama de comando da Figura 4.2.
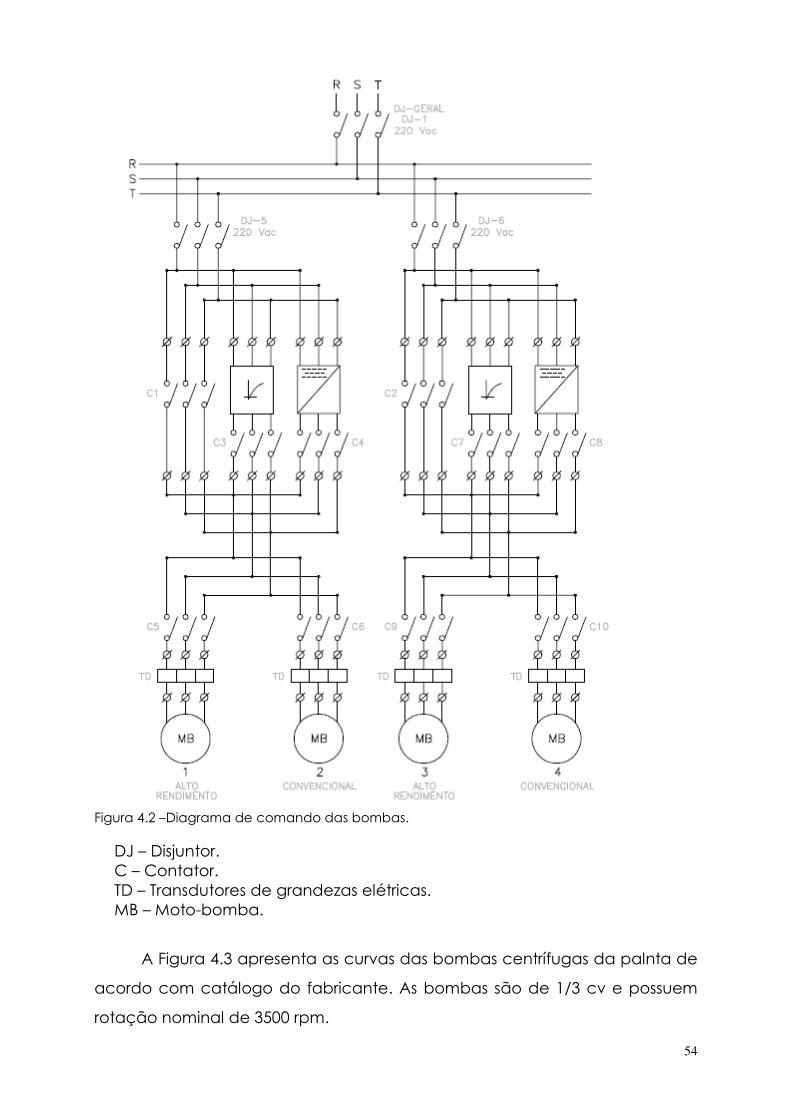
54
Figura 4.2 –Diagrama de comando das bombas.
DJ – Disjuntor. C – Contator. TD – Transdutores de grandezas elétricas. MB – Moto-bomba.
A Figura 4.3 apresenta as curvas das bombas centrífugas da palnta de
acordo com catálogo do fabricante. As bombas são de 1/3 cv e possuem
rotação nominal de 3500 rpm.
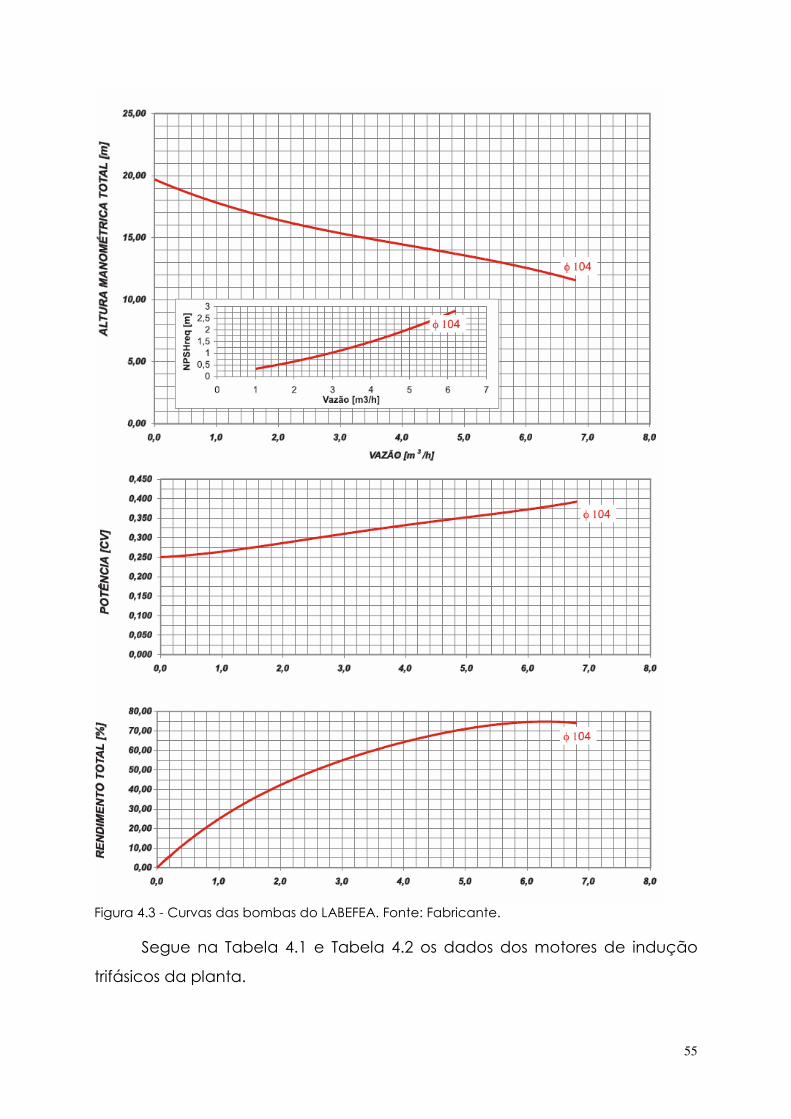
55
Figura 4.3 - Curvas das bombas do LABEFEA. Fonte: Fabricante.
Segue na Tabela 4.1 e Tabela 4.2 os dados dos motores de indução
trifásicos da planta.

56
Tabela 4.1 – Dados dos motores de alto rendimento da Planta-LABEFEA.
Motores de alto rendimento Frequência nominal 60 Hz Potência nominal 1/3 cv Rotação nominal 3390 rpm Fator de Serviço 1.15 Ip/ In 5 Tensão nominal 220/ 380 V Corrente nominal 1.30/ 0.75 Rendimento nominal 68.5 % FP nominal 0.65
Tabela 4.2 - Dados dos motores convencionais da Planta-LABEFEA.
Motores convencionais Freqüência nominal 60 Hz Potência nominal 1/3 cv Rotação nominal 3390 rpm Fator de Serviço 1.15 Ip/ In 5 Tensão nominal 220/ 380 V Corrente nominal 1.34/ 0.77 Rendimento nominal 68.5 % FP nominal 0.65
Verifica-se que as diferenças entre os motores convencionais e de alto
rendimento da planta são ínfimas. De acordo com catálogo de fabricantes,
motores convencionais deste porte apresentam rendimento em torno de 63
%. Portanto, mesmo os motores da planta nomeados como convencionais
possuem característica de motores de alto rendimento. Em geral, motores de
alto rendimento de pequeno porte apresentam características nominais
significativamente melhores que os convencionais. Por outro lado, para
máquinas de grande porte, os motores de alto rendimento possuem
desempenho muito semelhantes que os convencionais. Este fato foi indicado
na Figura 2.1.
Durante a operação dos motores, a potência elétrica máxima atingida
foi 450 W na situação de uma moto-bomba operando na máxima vazão
atingida de 3.5 m3/h.
Para o sistema operando com duas moto-bombas atingiu-se a vazão
máxima de 4.8 m3/h com cada motor consumindo aproximadamente 400W.

57
A Planta-LABEFEA permite a realização de uma série de ensaios como
simulação de controle de pressão na descarga das bombas; controle de
vazão; operação de bombas série e em paralelo.
Uma função da planta é simulação de elevatórias reais em modelo
reduzido, no entanto atualmente existem diversos softwares para simulação
de sistemas hidráulicos, conforme comentado na Seção 3.9, que permitem a
simulação de sistemas reais sem muito trabalho.
4.2 LENVANTAMENTO DE CURVA DO SISTEMA DA PLANTA-LABEFEA: ALTURA MANOMÉTRICA X VAZÃO.
Com a válvula de controle da tubulação de recalque completamente
aberta, levantou-se a curva altura manométrica x vazão da Planta-LABEFEA.
A Tabela 4.3 apresenta os dados obtidos. A vazão e pressão na
descarga das bombas foram obtidos através de medições na planta. A
perda de carga na tubulação de recalque é obtida aplicando a Equação
de Bernoulli entre o início e o final da tubulação de recalque conforme foi
apresentado na Equação 3.2.
Para quantificar a perda de carga na tubulação de sucção é
necessária a medição da pressão da sucção da bomba. No entanto, esta
medição não existe na planta. Logo, as perdas na sucção foram estimadas.
Considerou-se sua variação diretamente proporcional ao quadrado da
vazão, conforme Equação 4.1.
Equação 4.1 – Equação das perdas de carga na tubulação de sucção.
hsu – Perdas de carga na tubulação de sucção. Q – Vazão.
-Constante de proporcionalidade.
A constante de proporcionalidade pode ser obtida possuindo um
ponto da equação. A constante foi obtida calculando-se as perdas teóricas
na vazão de 3.2 m3/ h pela Equação 3.6 – Equação de Hazen-Willians
utilizando o coeficiente C para tubulação de aço galvanizado igual a 125. A
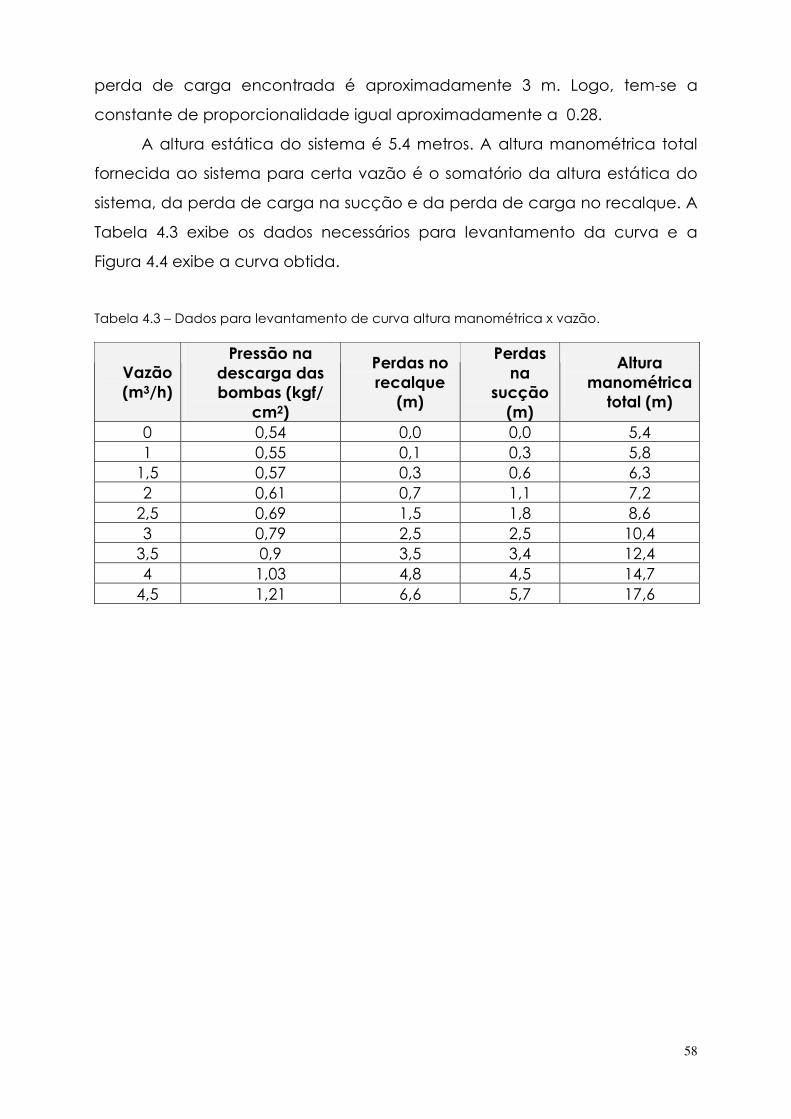
58
perda de carga encontrada é aproximadamente 3 m. Logo, tem-se a
constante de proporcionalidade igual aproximadamente a 0.28.
A altura estática do sistema é 5.4 metros. A altura manométrica total
fornecida ao sistema para certa vazão é o somatório da altura estática do
sistema, da perda de carga na sucção e da perda de carga no recalque. A
Tabela 4.3 exibe os dados necessários para levantamento da curva e a
Figura 4.4 exibe a curva obtida.
Tabela 4.3 – Dados para levantamento de curva altura manométrica x vazão.
Vazão (m3/h)
Pressão na descarga das bombas (kgf/
cm2)
Perdas no recalque
(m)
Perdas na
sucção (m)
Altura manométrica total (m)
0 0,54 0,0 0,0 5,4 1 0,55 0,1 0,3 5,8
1,5 0,57 0,3 0,6 6,3 2 0,61 0,7 1,1 7,2
2,5 0,69 1,5 1,8 8,6 3 0,79 2,5 2,5 10,4
3,5 0,9 3,5 3,4 12,4 4 1,03 4,8 4,5 14,7
4,5 1,21 6,6 5,7 17,6
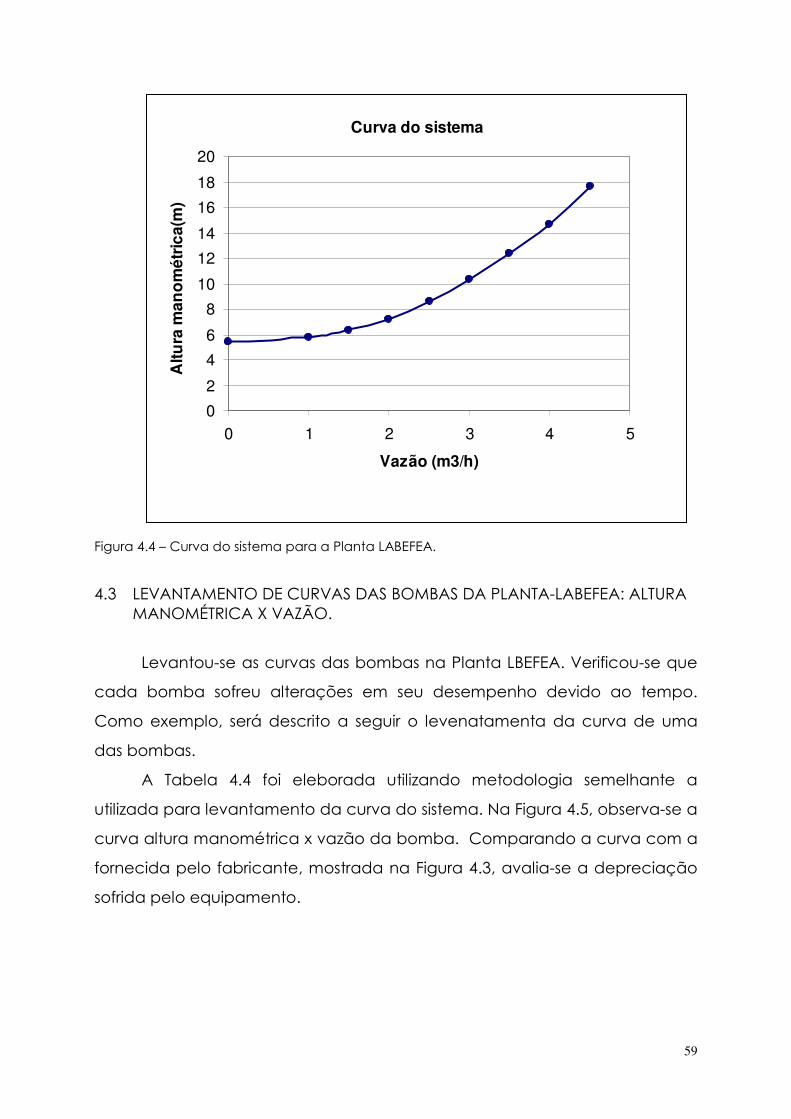
59
Curva do sistema
0
2
4
6
8
10
12
14
16
18
20
0 1 2 3 4 5
Vazão (m3/h)
Alt
ura
ma
no
mé
tric
a(m
)
Figura 4.4 – Curva do sistema para a Planta LABEFEA.
4.3 LEVANTAMENTO DE CURVAS DAS BOMBAS DA PLANTA-LABEFEA: ALTURA MANOMÉTRICA X VAZÃO.
Levantou-se as curvas das bombas na Planta LBEFEA. Verificou-se que
cada bomba sofreu alterações em seu desempenho devido ao tempo.
Como exemplo, será descrito a seguir o levenatamenta da curva de uma
das bombas.
A Tabela 4.4 foi eleborada utilizando metodologia semelhante a
utilizada para levantamento da curva do sistema. Na Figura 4.5, observa-se a
curva altura manométrica x vazão da bomba. Comparando a curva com a
fornecida pelo fabricante, mostrada na Figura 4.3, avalia-se a depreciação
sofrida pelo equipamento.

60
Tabela 4.4 – Dados para levantamento da curva da bomba.
Vazão (m3/h)
Pressão na descarga (kgf/ cm2)
Perdas no recalque
(m)
Perdas na sucção (m)
Altura manométrica total (m)
0 1,87 13,0* 0,0 18,4 1 1,62 10,6 0,3 16,3
1,6 1,46 9,0 0,7 15,1 2,4 1,16 6,1 1,6 13,1 3,2 0,83 2,8 2,9 11,1
Obs.: *Considera-se as perdas para uma vazão infinitesimal.
Curva da bomba
0
2
4
6
8
10
12
14
16
18
20
0 0,5 1 1,5 2 2,5 3 3,5
Vazão (m3/h)
Alt
ura
man
om
étr
ica (
m)
Figura 4.5 – Curva altura manométrica x vazão da bomba.
4.4 COMPARAÇÃO ENTRE DIFERENTES FORMAS DE CONTROLE DE VAZÃO.
Para efeito de análise, comparou-se o consumo energético da planta
para a operação de controle de vazão em diferentes métodos. A Tabela 4.5
mostra a potência elétrica demandada no controle de vazão por válvula de
restrição e por rotação variável com conversor de freqüência. Verifica-se
que quanto menor as vazões, maior é a economia de energia elétrica
apresentado pelo uso do conversor. Na vazão de 3 m3, a solução com
conversor apresenta maior consumo do que a operação com válvula. O
motivo deste fato é que em vazões elevadas, a válvula de restrição faria o
controle com grande abertuta, ou seja, baixa perda de carga. No entanto, o
conversor gera harmônicos de tensão que reduzem o rendimento do motor,
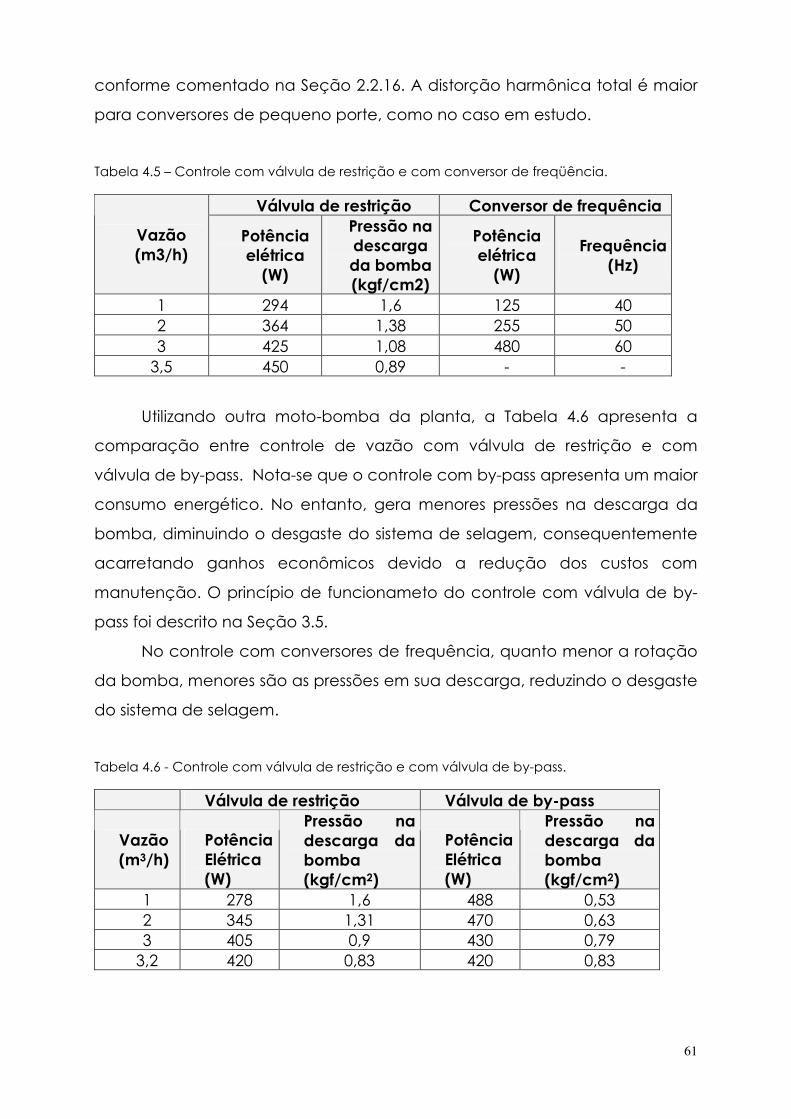
61
conforme comentado na Seção 2.2.16. A distorção harmônica total é maior
para conversores de pequeno porte, como no caso em estudo.
Tabela 4.5 – Controle com válvula de restrição e com conversor de freqüência.
Válvula de restrição Conversor de frequência
Vazão (m3/h)
Potência elétrica (W)
Pressão na descarga da bomba (kgf/cm2)
Potência elétrica (W)
Frequência (Hz)
1 294 1,6 125 40 2 364 1,38 255 50 3 425 1,08 480 60
3,5 450 0,89 - -
Utilizando outra moto-bomba da planta, a Tabela 4.6 apresenta a
comparação entre controle de vazão com válvula de restrição e com
válvula de by-pass. Nota-se que o controle com by-pass apresenta um maior
consumo energético. No entanto, gera menores pressões na descarga da
bomba, diminuindo o desgaste do sistema de selagem, consequentemente
acarretando ganhos econômicos devido a redução dos custos com
manutenção. O princípio de funcionameto do controle com válvula de by-
pass foi descrito na Seção 3.5.
No controle com conversores de frequência, quanto menor a rotação
da bomba, menores são as pressões em sua descarga, reduzindo o desgaste
do sistema de selagem.
Tabela 4.6 - Controle com válvula de restrição e com válvula de by-pass.
Válvula de restrição Válvula de by-pass
Vazão (m3/h)
Potência Elétrica (W)
Pressão na descarga da bomba (kgf/cm2)
Potência Elétrica (W)
Pressão na descarga da bomba (kgf/cm2)
1 278 1,6 488 0,53 2 345 1,31 470 0,63 3 405 0,9 430 0,79
3,2 420 0,83 420 0,83
62
5 PROPOSTA DE ESTAÇÃO ELEVATÓRIA EFICIENTE
Conforme apresentado na Equação 3.6, tem-se que a perda de carga
numa instalação hidráulica é aproximadamente proporcional ao quadrado
da vazão.
A perda de carga consiste na energia por unidade de peso que é
perdida por atrito nas tubulações e singularidades de uma instalação. Logo,
pode-se inferir que a energia perdida por quilograma de água transportada
é proporcional ao quadrado da vazão de transporte da água, conforme
indicado na Equação 5.1.
Equação 5.1 - Equação de energia perdida por atrito na instalação.
E – Energia perdida por quilograma de água transportada na instalação.
K – constante de proporcionalidade.
Q – Vazão de água na instalação hidráulica.
Portanto, verifica-se que a operação de sistemas hidráulicos com
vazões menores corresponde a menores perdas. Se deseja-se transportar
uma quantidade de massa de água, tem-se que quanto menor for a vazão
de transporte, maior será o tempo necessário para transportar toda a massa,
no entanto a energia demanda será menor.
Por exemplo, se deseja-se operar o sistema com uma vazão
corresponde a metade da vazão atual, as perdas por atrito na instalação
irão ser reduzido em 75 % conforme Equação 5.1
Enfim, a solução proposta visa exatamente operar elevatórias com
vazões menores do que as geralmente utilizadas. Para tal será explicitado os
equipamentos necessários para esta solução juntamente com a lógica de
operação.

63
5.1 PRINCÍPIO DE FUNCIONAMENTO DA ESTAÇÃO.
Um sistema padrão de elevatória utilizado em instalações comerciais e
industriais é ilustrado na Figura 5.1
Figura 5.1- Elevatória Padrão
Neste sistema a Bomba B1 opera de forma intermitente. Quando o
nível do tanque superior ficar inferior a posição de “Nível Baixo” a bomba é
acionada e somente será desligada quando o nível do tanque superior for
maior que a posição “Nível Alto”. Após desligada, a bomba permanecerá
neste estado até que o nível do tanque superior desça novamente até
“Nível Baixo”.
Conforme discutido anteriormente, a solução proposta visa modificar
esse sistema de forma que a bomba atenda a demanda de vazão dos
consumidores, ou seja, transporte a mesma quantidade de fluido do sistema
atual, no entanto trabalhando com vazões menores e consequentemente
por intervalos de tempo maiores para atender a demanda de volume de
água.
Considerando que a bomba é acionada por um motor elétrico, o
sistema proposto apresentará um menor consumo de energia elétrica,
devido as menores perdas no sistema.
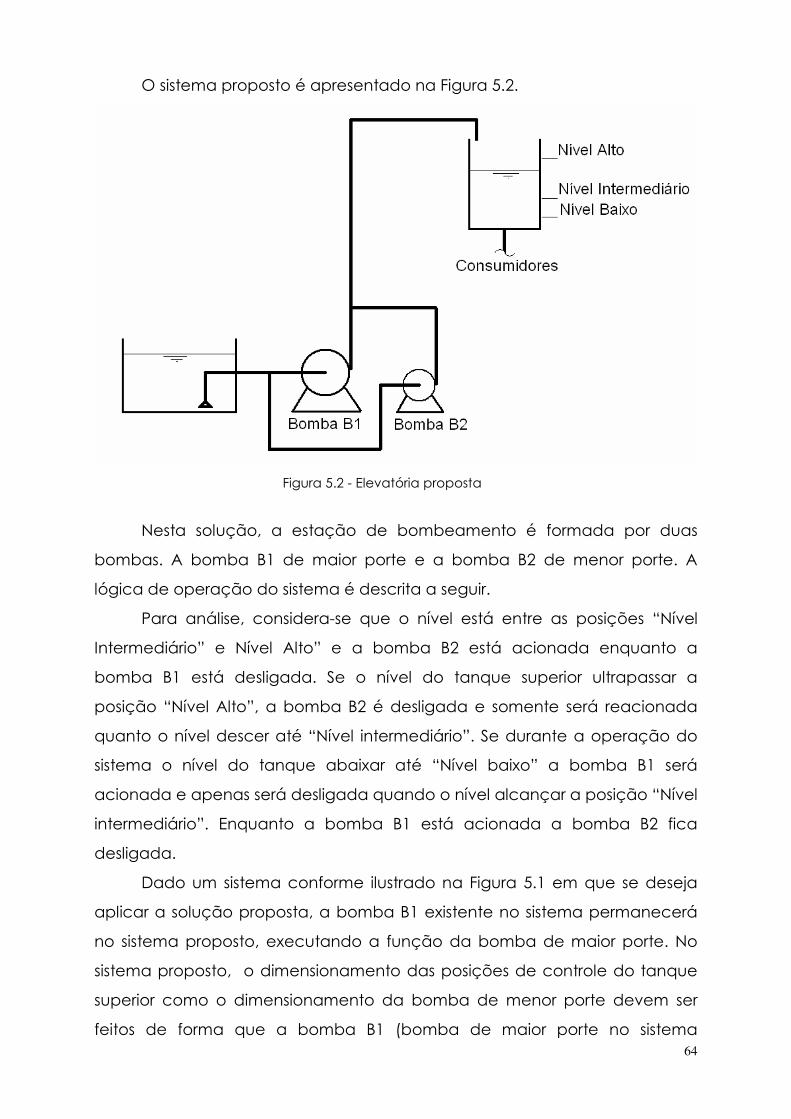
64
O sistema proposto é apresentado na Figura 5.2.
Figura 5.2 - Elevatória proposta
Nesta solução, a estação de bombeamento é formada por duas
bombas. A bomba B1 de maior porte e a bomba B2 de menor porte. A
lógica de operação do sistema é descrita a seguir.
Para análise, considera-se que o nível está entre as posições “Nível
Intermediário” e Nível Alto” e a bomba B2 está acionada enquanto a
bomba B1 está desligada. Se o nível do tanque superior ultrapassar a
posição “Nível Alto”, a bomba B2 é desligada e somente será reacionada
quanto o nível descer até “Nível intermediário”. Se durante a operação do
sistema o nível do tanque abaixar até “Nível baixo” a bomba B1 será
acionada e apenas será desligada quando o nível alcançar a posição “Nível
intermediário”. Enquanto a bomba B1 está acionada a bomba B2 fica
desligada.
Dado um sistema conforme ilustrado na Figura 5.1 em que se deseja
aplicar a solução proposta, a bomba B1 existente no sistema permanecerá
no sistema proposto, executando a função da bomba de maior porte. No
sistema proposto, o dimensionamento das posições de controle do tanque
superior como o dimensionamento da bomba de menor porte devem ser
feitos de forma que a bomba B1 (bomba de maior porte no sistema
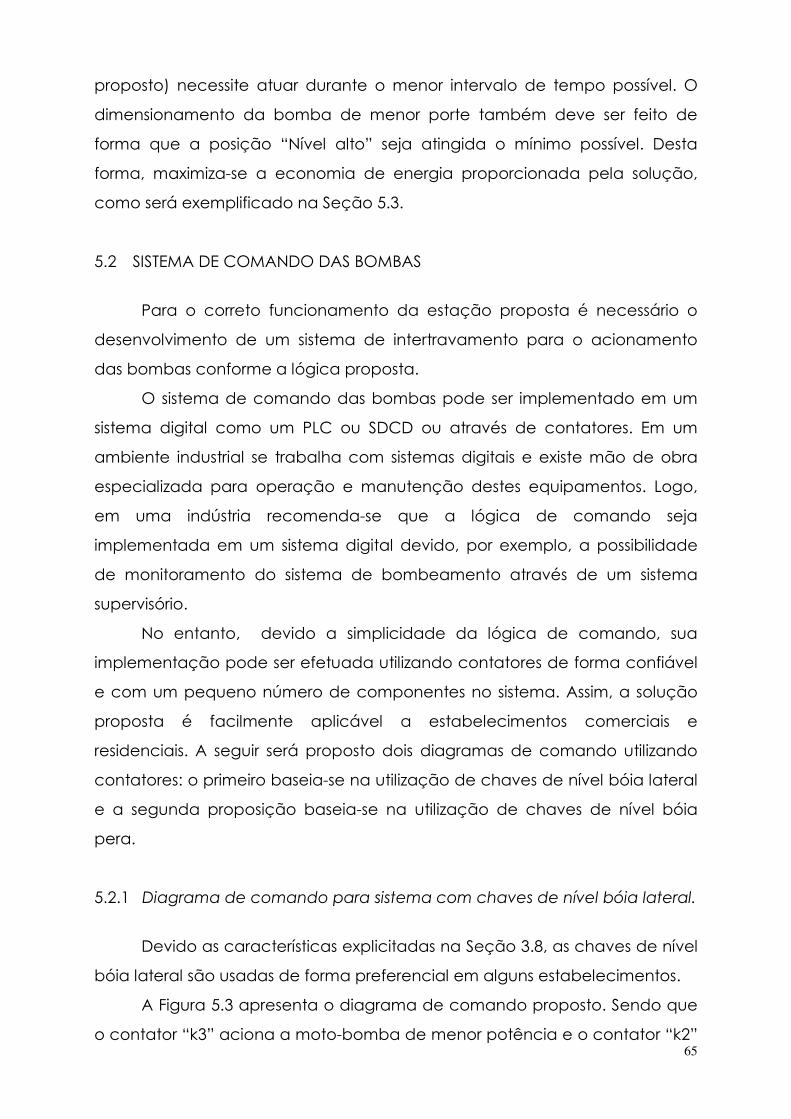
65
proposto) necessite atuar durante o menor intervalo de tempo possível. O
dimensionamento da bomba de menor porte também deve ser feito de
forma que a posição “Nível alto” seja atingida o mínimo possível. Desta
forma, maximiza-se a economia de energia proporcionada pela solução,
como será exemplificado na Seção 5.3.
5.2 SISTEMA DE COMANDO DAS BOMBAS
Para o correto funcionamento da estação proposta é necessário o
desenvolvimento de um sistema de intertravamento para o acionamento
das bombas conforme a lógica proposta.
O sistema de comando das bombas pode ser implementado em um
sistema digital como um PLC ou SDCD ou através de contatores. Em um
ambiente industrial se trabalha com sistemas digitais e existe mão de obra
especializada para operação e manutenção destes equipamentos. Logo,
em uma indústria recomenda-se que a lógica de comando seja
implementada em um sistema digital devido, por exemplo, a possibilidade
de monitoramento do sistema de bombeamento através de um sistema
supervisório.
No entanto, devido a simplicidade da lógica de comando, sua
implementação pode ser efetuada utilizando contatores de forma confiável
e com um pequeno número de componentes no sistema. Assim, a solução
proposta é facilmente aplicável a estabelecimentos comerciais e
residenciais. A seguir será proposto dois diagramas de comando utilizando
contatores: o primeiro baseia-se na utilização de chaves de nível bóia lateral
e a segunda proposição baseia-se na utilização de chaves de nível bóia
pera.
5.2.1 Diagrama de comando para sistema com chaves de nível bóia lateral.
Devido as características explicitadas na Seção 3.8, as chaves de nível
bóia lateral são usadas de forma preferencial em alguns estabelecimentos.
A Figura 5.3 apresenta o diagrama de comando proposto. Sendo que
o contator “k3” aciona a moto-bomba de menor potência e o contator “k2”

66
aciona a moto-bomba de maior potência conforme apresentado na Figura
5.4.
Na Figura 5.3, as chaves de nível bóia lateral são indicadas por “CH1”,
“CH2” e “CH3”. A localização das chaves são mostradas no tanque superior
apresentado. As chaves são indicadas no diagrama de comando em que as
posição mostradas das chaves (aberta ou fechada) são válidas para a
posição do nível de água indicado no tanque superior. Se a posição do nível
de água mudar em relação a uma chave, esta comuta de posição
conforme apresentado na Tabela 5.1.
Tabela 5.1 – Tabela indicativa das posições das chaves de nível bóia lateral.
Posição das chaves ( Aberta ou Fechada) Nível de água
Chave CH1 Chave CH2 Chave CH3
Acima da chave Aberta Fechada Aberta
Abaixo da chave Fechada Aberta Fechada
Figura 5.3 – Diagrama de comando utilizando chaves bóia lateral
67
Figura 5.4 – Acionamento dos motores elétricos
5.2.2 Diagrama de comando para sistema com chaves de nível bóia pera.
Conforme descrito na Seção 3.8, a chave de nível bóia pera é
bastante utilizada devido a sua simplicidade. Logo, o diagrama de
comando proposto com a utilização deste instrumento apresenta uma
simplicidade maior . O diagrama é apresentado na Figura 5.5.
Na Figura, as chaves de nível bóia pera são indicadas por “P1” e “P2”.
A localização das chaves é mostrada no tanque superior apresentado.
Cada uma das bóias é apresentada no desenho em duas localizações
distintas: Bóia alta e bóia baixa.
Em uma chave de nível bóia pera, a localização em que as chaves
mudam de aberto para fechado pode ser em bóia alta ou bóia baixa.
Ambas as chaves representadas na Figura 5.5 mudam da posição
aberto para fechado na localização bóia baixa e somente retornam para
posição aberto na localização bóia alta.
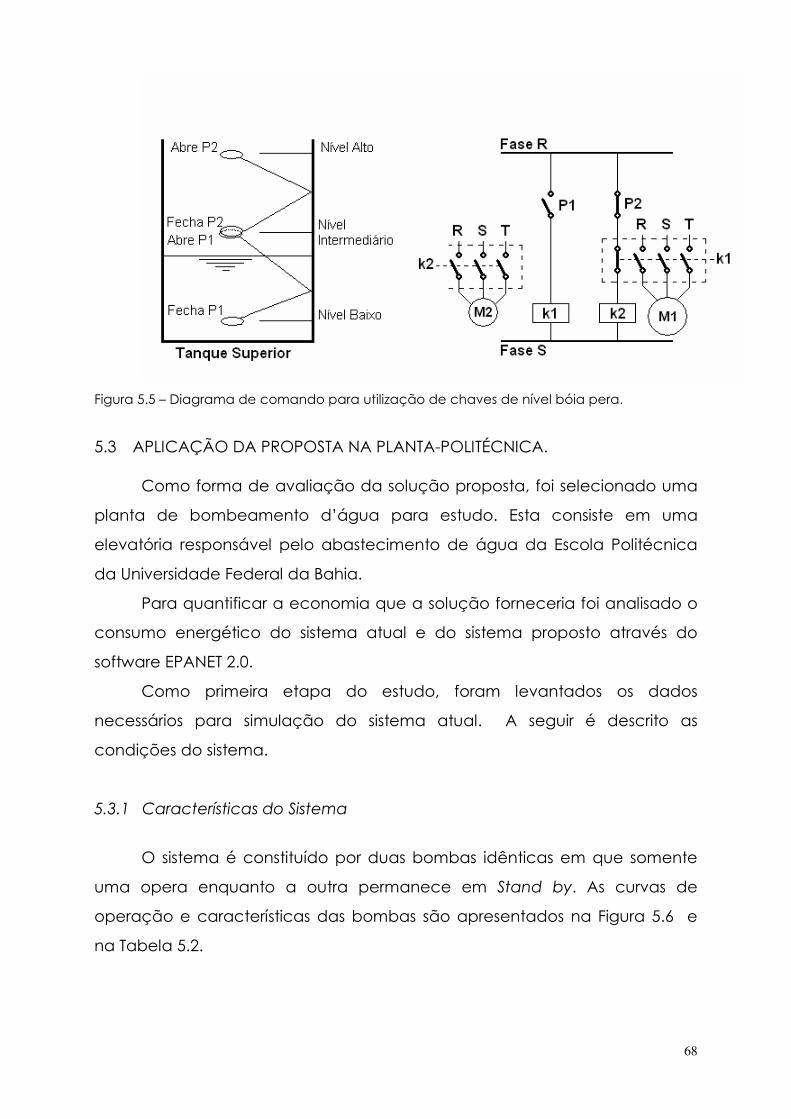
68
Figura 5.5 – Diagrama de comando para utilização de chaves de nível bóia pera.
5.3 APLICAÇÃO DA PROPOSTA NA PLANTA-POLITÉCNICA.
Como forma de avaliação da solução proposta, foi selecionado uma
planta de bombeamento d’água para estudo. Esta consiste em uma
elevatória responsável pelo abastecimento de água da Escola Politécnica
da Universidade Federal da Bahia.
Para quantificar a economia que a solução forneceria foi analisado o
consumo energético do sistema atual e do sistema proposto através do
software EPANET 2.0.
Como primeira etapa do estudo, foram levantados os dados
necessários para simulação do sistema atual. A seguir é descrito as
condições do sistema.
5.3.1 Características do Sistema
O sistema é constituído por duas bombas idênticas em que somente
uma opera enquanto a outra permanece em Stand by. As curvas de
operação e características das bombas são apresentados na Figura 5.6 e
na Tabela 5.2.

69
Figura 5.6 – Curvas das bombas da Planta-Politécnia. Fonte: Catálogo de Fabricante (adaptado)
Tabela 5.2 - Características das bombas da Planta-Politécnia
Grandeza Valor Potência nominal 5 cv Rotação nominal 3450 rpm Diâmetro do rotor 158 mm
Fonte: Catálogo de Fabricante
Para efetuar a análise de consumo de energia elétrica do sistema
atual é necessário o conhecimento da curva HxQ das bombas, rendimento
dos conjuntos moto-bombas, curva do sistema, perfil de vazão demandada
70
do tanque superior e as dimensões do tanque superior. Logo, necessitou-se
realizar algumas medições no sistema a fim de colher tais informações.
A vazão fornecida por uma bomba da planta é igual a 11 m3/h. A
medição foi realizada mensurando-se o volume de água transportado em
um intervalo de tempo e calculando-se a razão entre o volume e o intervalo
de tempo.
As dimensões do tanque superior são aproximadamente 11.3 metros
de largura 7.4 metros de comprimento e 0.55 metros de profundidade.
Conforme descrito na Seção 3.3, Equação 3.8, para levantamento
aproximado da curva do sistema, basta possuir a altura estática da
instalação e um ponto de operação do sistema.
A altura estática da instalação foi mensurada em 22 metros. A partir da
vazão medida e da curva HxQ da bomba tem-se o ponto de operação (11
m3/h x 48 m).
Na casa de máquinas da Planta-Politécnica, foi medido através de um
analisador de energia algumas grandezas elétricas dos motores das moto-
bombas. Os dois motores da planta apresentaram comportamento
semelhante. A Tabela 5.3 apresenta as grandezas elétricas das máquinas em
operação.
Tabela 5.3 - Medições nos motores da Planta-Politécnica
Grandeza Valor Potência Elétrica 4,4 kW Tensão de linha 223 V Corrente de linha 13,4 A Fator de potência 0,85
A potência hidráulica fornecida por uma bomba pode ser calculada a
partir da Equação 5.2.
Equação 5.2 – Equação da Potência Hidráulica
Ph – Potência Hidráulica. Q – Vazão. H – Head (Altura Manométrica).
- Peso específico do fluído.
71
A partir da vazão fornecida pela bomba da Planta-Politécnica
encontra-se o Head através da curva HxQ da bomba. Considerando o peso
específico da água igual a 10.000 N/m3, determina-se a potência hidráulica.
O rendimento dos conjuntos moto-bombas pode ser calculado através
da Equação 5.3
Equação 5.3 – Equação do rendimento das moto-bombas
- Rendimento das moto-bombas.
Pe – Potência Elétrica. Ph – Potência hidráulica.
Para as moto-bombas em estudo, tem-se um rendimento calculado
igual aproximadamente a 33%.
5.3.2 Perfil de demanda de vazão da Escola Politécnica.
Para análise do consumo energético do sistema atual e do sistema
proposto é necessário o conhecimento do perfil de vazão do tanque
superior da Planta-Politécnica. Através de dados do Projeto Água Pura4
estimou-se o perfil de vazão.
O projeto disponibiliza dados de consumo diário da Escola Politécnica
como pode ser visualizado na Figura 5.7.
4 - Projeto realizado pelo Departamento de Engenharia Ambiental da Universidade Federal
da Bahia que visa o consumo racional de água.

72
Figura 5.7 – Consumo de água da Escola Politécnica no período de 07/10/09 até 10/11/09. Fonte: Projeto Água Pura (adaptado).
Na Figura 5.7 as barras em cinza-escuro indicam dias de semana e as
barras em cinza-claro indicam fins de semana.
Analisando os dados dos meses de Setembro, Outubro e Novembro de
2009 observa-se que o consumo médio é aproximadamente 20 m3/dia. A
média de consumo de outros meses do ano de 2009 é próxima a este valor.
A exceção é para os meses de Janeiro e Fevereiro em que a média é
aproximadamente 13 m3/dia.
Para os dados do ano de 2009 tem-se um consumo médio em dias de
semana de 24 m3/dia e em fins de semana de 9 m3/dia.
Assim, para simulação do sistema elaborou-se perfis de vazão de
forma que o consumo total por dia correspondesse aos valores verificados
nos dados do Projeto Água pura.
5.3.3 Seleção das bombas para aplicação da solução.
Conforme foi ilustrado na Figura 5.2, a solução proposta utiliza duas
bombas: Uma de menor porte e uma de maior porte. Na simulação da
solução na Planta-Politécnica, utilizou-se como bomba de maior porte a
73
bomba existente na estação de bombeamento atual. Os dados deste
equipamento foram mostrados na Figura 5.6 e na Tabela 5.2. A bomba de
menor porte deve ser selecionada de forma que a vazão fornecida por esta
seja próxima da vazão média demandada pelos consumidores do sistema.
Considera-se um sistema ideal aquele em que o tanque superior
recebe uma vazão de entrada constante e igual a demanda média de
vazão dos consumidores, sendo que a posição do nível nunca alcança os
limites inferior e superior do tanque. Sendo assim, quanto maior o volume do
tanque superior, mais próximo este sistema é de um sistema ideal, permitindo
maiores oscilações do nível de água. Para o sistema ideal, se seleciona-se
uma bomba de menor porte que fornecesse vazão igual a média da vazão
dos consumidores, ter-se-ia o menor consumo energético possível para esse
sistema, visto que estar-se-ia trabalhando com a menor vazão de
bombeamento possível.
Na seleção da bomba de menor porte para a Planta-Politécnica
buscou-se em catálogos de fabricantes uma bomba que fornecesse uma
vazão próxima a demanda média de vazão dos consumidores. A Figura 5.8
apresenta as curvas de três bombas distintas de um fabricante. A bomba
número “3” foi a bomba seleciona para esta aplicação.
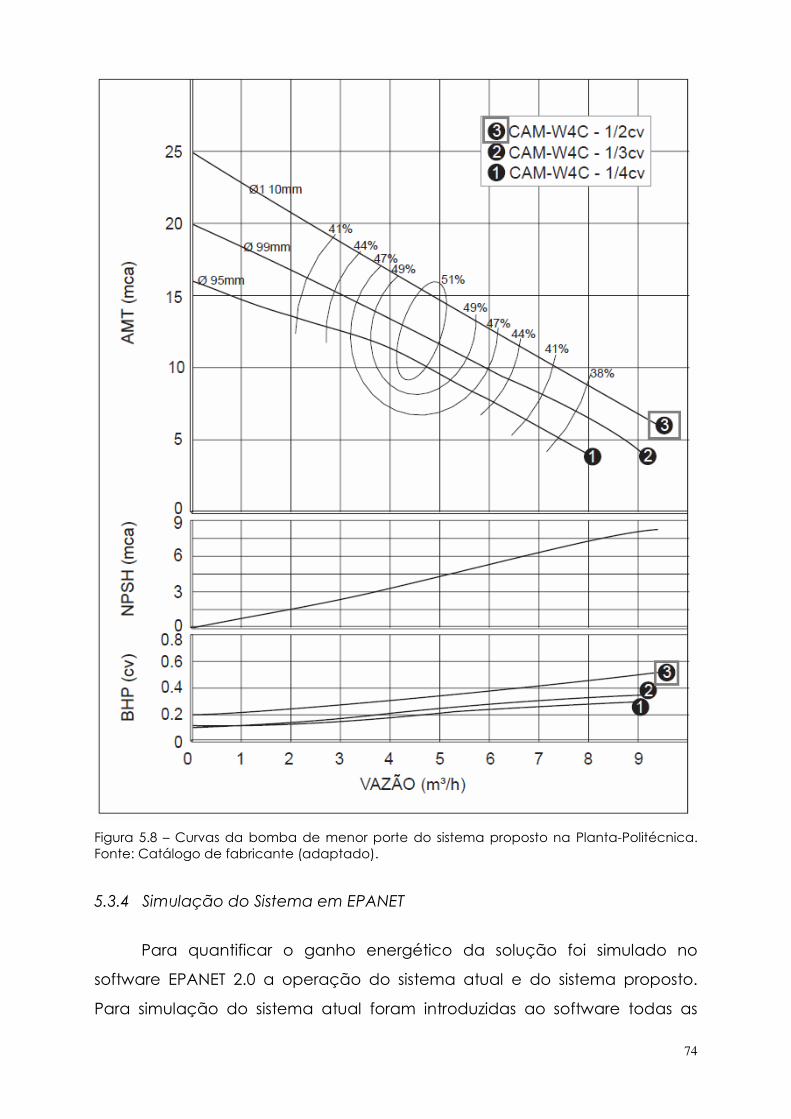
74
Figura 5.8 – Curvas da bomba de menor porte do sistema proposto na Planta-Politécnica. Fonte: Catálogo de fabricante (adaptado).
5.3.4 Simulação do Sistema em EPANET
Para quantificar o ganho energético da solução foi simulado no
software EPANET 2.0 a operação do sistema atual e do sistema proposto.
Para simulação do sistema atual foram introduzidas ao software todas as

75
características do sistema conforme apresentado na Seção 5.3.1. A Figura
5.9 apresenta um esquema da planta simulada.
Conforme dados do Projeto Água Pura apresentados na Seção 5.3.2,
estimou-se os perfis de demanda de vazão da Escola Politécnica nos dias de
semana e nos finais de semana. A Figura 5.10 apresenta os perfis de vazão.
Figura 5.9 – Sistema atual simulado em EPANET
Figura 5.10 – (a) Perfil de vazão nos dias de semana (b) Perfil de vazão nos finais de semana.

76
No reservatório superior do sistema foi utilizada a posição “Nível Baixo”
quando o volume do tanque é 10m3 e posição “Nível Alto” para o volume
de 40m3.
Os principais resultados da simulação são apresentados na Tabela 5.4,
mostrando em seguida o significado dos termos indicados na tabela. Os
resultados mostrados são referentes à moto-bomba da planta.
Tabela 5.4 – Resumo da Simulação do sistema atual.
Percentagem de utilização da bomba
Consumo energético
Potência elétrica
Consumo mensal
7.52 % 0.39 kWh/ m3 4.35 kW 238 kWh
Percentagem de utilização – Indica a percentagem de tempo que a bomba permaneceu ligada em relação ao tempo total do mês. Consumo energético – Indica o consumo de energia elétrica por volume de água bombeado. Potência elétrica – Potência elétrica fornecida a moto-bomba durante sua operação. Consumo mensal – Consumo de energia elétrica no período de um mês.
A energia hidráulica fornecida pela bomba é dividida, basicamente,
em duas parcelas: A primeira é a energia fornecida para água na forma de
energia potencial gravitacional, a segunda parcela é a energia perdida por
atrito ao longo da tubulação. Existe também a energia cinética perdida na
saída da tubulação de recalque, porém de valor desprezível. Os cálculos
destas energias são realizados através da Equação 5.4 e da Equação 5.5. A
Tabela 5.5 apresenta a energia hidráulica fornecida pela bomba no período
de um mês.
Equação 5.4 – Equação da energia potencial gravitacional
Equação 5.5 – Equação da energia perdida por atrito na tubulação
Eg – Energia Potencial gravitacinal. Ep – Energia perdida por atrito na tubulação. He – Head Estático (Altura do sistema). Q – vazão de operação.

77
-Energia perdida na tubulação por unidade de peso de água transportado.
-Tempo total em que o sistema funcinou na vazão de operação. - Peso específico do fluído.
Tabela 5.5 – Energia hidráulica fornecida pela bomba.
Energia Hidráulica Total Energia Potencial Gravitacional
Energia perdida nas tubulações.
79 kWh 36.5 kWh 42.5 kWh
Na Equação 5.4, a vazão multiplicada pelo tempo é igual ao volume
de água transportado. Sendo o Head estático de uma estação elevatória
constante, não se pode reduzir a energia potencial gravitacional fornecida
ao sistema. No entanto, verifica-se que 54% da energia fornecida pela
bomba é perdida ao longo da tubulação. Portanto, observa-se uma grande
oportunidade de redução do consumo energético da Planta-Politécnica
através da implantação da solução proposta.
A Figura 5.11 apresenta o esquema da simulação do sistema proposto
na Planta-Politécnica.
Figura 5.11 - Sistema proposto simulado em EPANET
O sistema proposto foi simulado utilizando os mesmos perfis de
demanda de vazão do sistema atual.

78
No reservatório superior do sistema foi utilizada a posição “Nível Baixo”
quando o volume do tanque é 10m3, posição “Nível Intermediário” quando o
volume do tanque é 20 m3 e posição “Nível Alto” para o volume de 40m3.
Os principais resultados da simulação do sistema proposto podem ser
vistos na Tabela 5.6.
A Tabela 5.7 apresenta a energia hidráulica fornecida pela bomba no
período de um mês.
Tabela 5.6 - Resultados da simulação do sistema proposto.
Bomba Percentagem de utilização
Consumo energético
Potência elétrica
Consumo mensal
Maior Porte 0 % 0 kWh/ m3 0 kW 0 kWh Menor Porte 70,09% 0.17 kWh/ m3 0.21 kW 107 kWh
Tabela 5.7 - Energia hidráulica fornecida pela bomba.
Energia Hidráulica Total Energia Potencial Gravitacional
Energia perdida nas tubulações
37.5 kWh 36.5 kWh 1 kWh
Verifica-se que na simulação do sistema proposto a bomba de maior
porte não necessitou atuar. No entanto, tem-se que a simulação foi
realizada utilizando perfis de demanda de vazão iguais para todos os dias de
semana e outros perfis iguais para todos os finais de semana. Sendo, estes
perfis baseados em médias de consumo. Conduto, verificou-se através de
simulações em EPANET que se em um determinado dia o consumo aumentar
em 45% acima da média, há a necessidade de atuação da bomba de
maior porte. De acordo com dados do Projeto Água Pura este fato ocorre
com frequência tão baixa que o aumento no consumo energético total do
sistema é irrelevante, conforme pôde ser verificado na Figura 5.7.
A Figura 5.13 e a Figura 5.14 apresentam a vazão fornecida pela
bomba e a variação de volume do tanque superior respectivamente. Nota-
se que o volume do tanque superior não cai até 10 m3 em momento algum,
não necessitando a atuação da bomba de maior porte. Observa-se,
também que a vazão de trabalho da bomba de menor porte é 1.2 m3/h
conforme ilustrado na Figura 5.13.

79
Figura 5.12 - Vazão fornecida pelas bombas no sistema proposto.
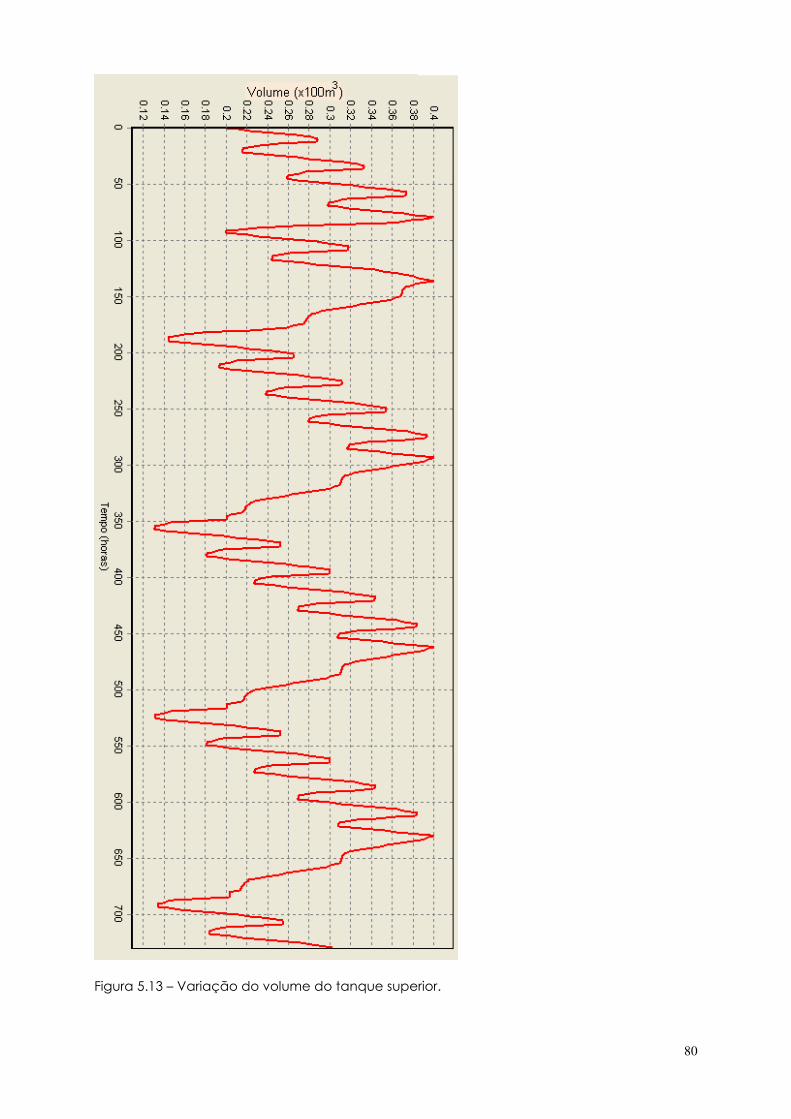
80
Figura 5.13 – Variação do volume do tanque superior.

81
Enfim, o sistema proposto apresentou um consumo energético de 107
kWh, enquanto o sistema atual apresentou um consumo de 238 kWh. Logo se
verifica um ganho energético de 131 kWh, equivalente a 55% do consumo
do sistema atual.
Analisou-se também o ganho energético da solução proposta, caso
esta fosse implementada em um momento em que houvesse um
crescimento vegetativo no consumo da Escola Politécnica de 50%. Os perfis
de demanda de vazão para este caso são mostrados na Figura 5.14.
Figura 5.14 – Perfis de demanda de vazão considerando um crescimento vegetativo. (a) Dia de Semana. (b) Final de Semana.
Os principais resultados da simulação são apresentados na Tabela 5.8
para o sistema atual e na Tabela 5.9 para o sistema proposto.
Tabela 5.8 – Resultados da simulação do sistema atual considerando crescimento vegetativo.
Percentagem de utilização da bomba
Consumo energético
Potência elétrica
Consumo mensal
11.47 % 0.39 kWh/ m3 4.35 kW 364 kWh
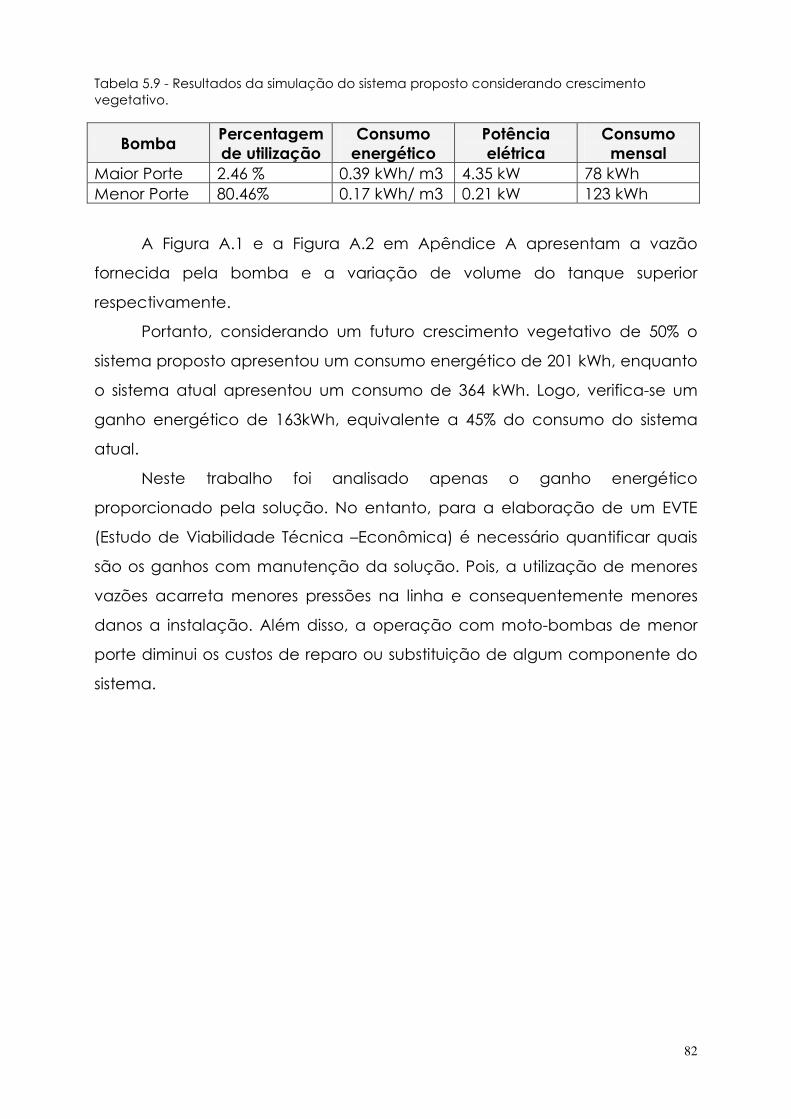
82
Tabela 5.9 - Resultados da simulação do sistema proposto considerando crescimento vegetativo.
Bomba Percentagem de utilização
Consumo energético
Potência elétrica
Consumo mensal
Maior Porte 2.46 % 0.39 kWh/ m3 4.35 kW 78 kWh Menor Porte 80.46% 0.17 kWh/ m3 0.21 kW 123 kWh
A Figura A.1 e a Figura A.2 em Apêndice A apresentam a vazão
fornecida pela bomba e a variação de volume do tanque superior
respectivamente.
Portanto, considerando um futuro crescimento vegetativo de 50% o
sistema proposto apresentou um consumo energético de 201 kWh, enquanto
o sistema atual apresentou um consumo de 364 kWh. Logo, verifica-se um
ganho energético de 163kWh, equivalente a 45% do consumo do sistema
atual.
Neste trabalho foi analisado apenas o ganho energético
proporcionado pela solução. No entanto, para a elaboração de um EVTE
(Estudo de Viabilidade Técnica –Econômica) é necessário quantificar quais
são os ganhos com manutenção da solução. Pois, a utilização de menores
vazões acarreta menores pressões na linha e consequentemente menores
danos a instalação. Além disso, a operação com moto-bombas de menor
porte diminui os custos de reparo ou substituição de algum componente do
sistema.

83
6 CONSIDERAÇÕES FINAIS
A cultura difundida no meio acadêmico e nas indústrias em geral é
que os arranjos com bombas trabalhando em rotação constante penalizam
energeticamente o sistema. Esse pensamento se deve ao fato que sistemas
que controlam vazão com válvulas apresentam maiores consumos
energéticos que sistemas que operam com rotação da bomba variável. No
entanto, a utilização de bombas com velocidade variável nem sempre é
adotada por projetistas devido ao alto custo dos conversores de freqüência.
Trata-se de um custo inicial que é admissível em muitos casos devido à
redução dos custos operacionais e com manutenção dos equipamentos.
Muitas vezes, o principal ganho econômico é devido ao menor desgaste da
bomba.
Contudo, em alguns casos é possível obter ganhos econômicos com
manutenção e operação, mesmo operando elevatórias com bombas de
rotação constante. Como exemplo, tem-se a metodologia proposta neste
trabalho para operação de elevatórias. O arranjo proposto apresentou
ganho energético elevado com a aplicação da solução em uma elevatória
predial.
Entretanto, a viabilidade da solução proposta em elevatórias somente
é verificada caso as perdas de carga em metros do sistema existente sejam
grandes comparadas à altura estática.
A análise global de processos de bombeamento consiste em uma
tarefa multidisciplinar, exigindo conhecimento nas áreas de Elétrica,
Processo, Mecânica e Instrumentação. Portanto, o profissional especialista
em uma área deve buscar conhecimentos em todas as outras ou então
trabalhar junto a uma equipe consolidada.
Em trabalhos futuros pode-se realizar a implantação da metodologia
proposta em estações elevatórias a fim de observar os ganhos energéticos e
econômicos atingidos e as possíveis dificuldades encontradas na montagem,
operação e manutenção do sistema.
84
7 REFERÊNCIAS BIBLIOGRÁFICAS
[1] Tsutiya, Milton Tomoyuki. Redução do custo de Energia Elétrica em
estações Elevatórias de Água e Esgoto, 19o Congresso Brasileiro de
Engenharia Sanitária e Ambiental, Foz do Iguaçu. 1997.
[2] TAKAMI RENATO, Fundamento de modelagem matemática e
técnicas de simulação aplicados a sistemas ambientais, 2005
[3] MONACHESI, MARCELO GAIO, Eficiência Energética em sistemas
de bombeamento d’água. . Ed.: Eletrobrás, Rio de Janeiro 2005.
[4] ELETROBRÁS; http://www.eletrobras.com acessado em 20 de maio
de 2009.
[5] SHINDO REINALDO, Manual Técnico - Procel – Motor de Alto
Rendimento. Ed.: Cepel e Eletrobrás, 2002
[6] LOCATELLI, EGOMAR RODOLFO. Motor Elétrico. Guia Avançado.
Ed.: Gráfica da Eletrobrás. Rio de janeiro, 2004.
[7]AMERICO, MARCIO. Acionamento Eletrônico. Guia Avançado. Ed.:
Gráfica da Eletrobrás. Rio de janeiro, 2004.
[8] SCHINEIDER-MOTO-BOMBAS, Manual Técnico.
[9] Resolução da Agência Nacional de Energia Elétnca - ANEEL nº 456,
de 29/11/2000, publicada em 30/11/2000.
[10] EPE, Revista ‘Resenha Mensal do Mercado de Energia’. Ano II, Nº
16, Janeiro de 2009.
[11] HADDAD, JAMIL; MARTINS, ANDRÉ RAMON. Conservação de
Energia: Eficiência Energética de Instalações e Equipamentos. Ed. EFEI,
Itajubá 2001.
[12] MACINTYRE, A. J. Bombas e Instalações de Bombeamento. Ed.:
Guanabara. Rio de Janeiro, 1987.
[13] DE SOUZA, FRANSCICO CARLOS NETO. Bombas Guia Avançado.
Ed.: Gráfica da Eletrobrás. Rio de janeiro, 2004.
[14] COTRIM, ADEMARO A. M. B., Instalações Elétricas. Ed.: Mc Graw Hill.
São Paulo, 1993.
[15] NIVETECT, Manual de Instruções – Chave de nível bóia pera – série
140.
85
[16] RASHID, M. H.: “Power Electronics: Circuits, Devices and
Applications”, Prentice Hall International, Inc., Englewood Cliffs, 1993.
[17] NBR 7094. “Máquinas elétricas girantes – Motores de Indução -
Especificações”, v.3, 2003.
[18] POMILIO J. A. Conversores para acionamento de máquinas de
indução trifásicas.

86
APÊNDICE A – GRÁFICOS DO SOFTWARE EPANET.
Figura A.1 - Vazão fornecida pelas bombas no sistema proposto, considerando crescimento vegetativo.

87
Figura A.2 – Variação do volume do tanque superior, considerando crescimento vegetativo.

88
APÊNDICE B - FOTOS
(a)
(b) Figura B.1 – (a) Elevatória do LABEFEA. (b) Instrumentos de medição e controle da Planta-LABEFEA.

89
(a)
(b)
(c) Figura B.2 – Planta-LABEFEA. (a) Moto-bombas. (b) – Medição de grandezas elétrica. (c) Painel Elétrico.

90
(a)
(b)
(c) Figura B.3 – Planta-Politécnica. (a) Moto-bomba. (b) Casa de máquinas. (c) Medição de diâmetro.de tubulação de recalque.