-
7/31/2019 EM Systems Intro
1/35
-
7/31/2019 EM Systems Intro
2/35
Electromechanical Systems
Bilal Masood
-
7/31/2019 EM Systems Intro
3/35
Contents
Introduction to Machinery Principles
Angular velocity, Acceleration
Torque, Work, Power
Magnetic Field Study
How magnetic field can affect its surroundings!
Faradays Law:
Induced Voltage from a Time-Changing Magnetic
Field Production of Induced Force on a Wire
Induced Voltage on a Conductor moving in a MagneticField
-
7/31/2019 EM Systems Intro
4/35
Transformers
-
7/31/2019 EM Systems Intro
5/35
Transformers
Working principle of Transformers
Construction of Transformers
-
7/31/2019 EM Systems Intro
6/35
Types of Transformers
Core type Transformer
Shell type Transformer
Another means of classifying the transformeris according to the
type of cooling employed
i.e;
a) Oil-filled self-cooledb) Oil-filled water-cooled
c) Air-blast type
-
7/31/2019 EM Systems Intro
7/35
-
7/31/2019 EM Systems Intro
8/35
-
7/31/2019 EM Systems Intro
9/35
-
7/31/2019 EM Systems Intro
10/35
-
7/31/2019 EM Systems Intro
11/35
-
7/31/2019 EM Systems Intro
12/35
Machines
-
7/31/2019 EM Systems Intro
13/35
AC Machinery Fundamentals
-
7/31/2019 EM Systems Intro
14/35
-
7/31/2019 EM Systems Intro
15/35
Electric Motor
What is an Electric Motor?
Electromechanical device that convertselectrical energy to
mechanical energy
Mechanical energy used to e.g. Rotate pump impeller, fan,
blower
Drive compressors
Lift materials
Motors in industry: 70% of electrical load
-
7/31/2019 EM Systems Intro
16/35
Classification of Motors
Electric Motors
Alternating Current(AC) Motors
Direct Current (DC)Motors
Synchronous Induction
Three-PhaseSingle-Phase
Self ExcitedSeparatelyExcited
Series ShuntCompound
-
7/31/2019 EM Systems Intro
17/35
DC-Motors Components
Field pole North pole and south pole
Receive electricity to formmagnetic field
Armature Cylinder between the poles
Electromagnet when current goes through
Linked to drive shaft to drive the load
Commutator Overturns current direction in armature
(Direct Industry, 1995)
-
7/31/2019 EM Systems Intro
18/35
Induction Motor
-
7/31/2019 EM Systems Intro
19/35
Three-phase induction motors are the most commonand frequently
encountered machines in industry
simple design, rugged, low-price, easy maintenance
wide range of power ratings: fractional horsepower to 10
MW
run essentially as constant speed from no-load to full load
Its speed depends on the frequency of the power source
not easy to have variable speed control
requires a variable-frequency power-electronic drive for
optimalspeed control
-
7/31/2019 EM Systems Intro
20/35
Construction
An induction motor has two main parts a stationary stator
consisting of a steel frame that supports a hollow,
cylindrical core
core, constructed from stacked laminations (why?),
having a number of evenly spaced slots, providing the
space for the stator winding
Stator of IM
-
7/31/2019 EM Systems Intro
21/35
Construction
a revolving rotor
composed of punched laminations, stacked to create a series of
rotorslots, providing space for the rotor winding
one of two types of rotor windings
conventional 3-phase windings made of insulated wire
(wound-rotor) similar to the winding on the stator
aluminum bus bars shorted together at the ends by two aluminum
rings,forming a squirrel-cage shaped circuit (squirrel-cage)
Two basic design types depending on the rotor design
squirrel-cage: conducting bars laid into slots and shorted at
bothends by shorting rings.
wound-rotor: complete set of three-phase windings exactly as
thestator. Usually Y-connected, the ends of the three rotor wires
areconnected to 3 slip rings on the rotor shaft. In this way, the
rotorcircuit is accessible.
-
7/31/2019 EM Systems Intro
22/35
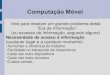
Construction
Squirrel cage rotor
Wound rotor
Notice the
slip rings
-
7/31/2019 EM Systems Intro
23/35
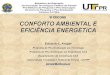
Construction
Cutaway in a
typical wound-
rotor IM.Notice the
brushes and
the slip rings
Brushes
Slip rings
-
7/31/2019 EM Systems Intro
24/35
Losses
-
7/31/2019 EM Systems Intro
25/35
Efficiency of Electric Motors
Factors that influence efficiency
Age
Capacity
Speed
Type
Temperature
Rewinding
Load
-
7/31/2019 EM Systems Intro
26/35
Synchronous Machines
Synchronous generators or alternators are used to convert
mechanical power derived from steam, gas, or
hydraulic-turbine
to ac electric power
Synchronous generators are the primary source of electrical
energy we consume today
Large ac power networks rely almost exclusively on
synchronous
generators
Synchronous motors are built in large units compare to
inductionmotors (Induction motors are cheaper for smaller ratings)
and
used for constant speed industrial drives
-
7/31/2019 EM Systems Intro
27/35
Operation Principle of Generator
-
7/31/2019 EM Systems Intro
28/35
Stator
-
7/31/2019 EM Systems Intro
29/35
Cylindrical-Rotor Synchronous Generator
Stator
Cylindrical rotor
-
7/31/2019 EM Systems Intro
30/35
Poles Stator
Rotor
-
7/31/2019 EM Systems Intro
31/35
Turbine, generator and main transformer of
Kyrene Generation Station. (Courtesy Salt River Project).
-
7/31/2019 EM Systems Intro
32/35
Paralleling of Generators
-
7/31/2019 EM Systems Intro
33/35
Parallel operation of synchronous generators
There are several major advantages to operate generators
inparallel:
Several generators can supply a bigger load than one machineby
itself.
Having many generators increases the reliability of the
powersystem.
It allows one or more generators to be removed for shutdownor
preventive maintenance.
h i i
-
7/31/2019 EM Systems Intro
34/35
Before connecting a generator in parallel with another
generator, it must be synchronized. A generator is said to
be
synchronized when it meets all the following conditions:
The rms line voltages of the two generators must be
equal.
The two generators must have the samephase sequence.
Thephase angles of the two a phases must be equal.
The oncoming generator frequency is equal to the
running system frequency.
Synchronization
Load
Generator 2
Generator 1
Switch
a
b
c
a/
b/
c/
Synchronization
-
7/31/2019 EM Systems Intro
35/35
Synchronization
LoadGenerato
r
Rest of the
power system
Generator
Xs1
Ef1
Xs2
Ef2
Xsn
Efn
Infinite bus
V, fare constant
Xs eq =0
G