Embed Size (px)
Citation preview

Equacoes Diferenciais
Notas Sobre as Aulas Teoricas
Joao Teixeira, Maria Joao Borges
1o Semestre de 2019/20


Indice
1 Equacoes Diferenciais Ordinarias 5
1.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1 Notacao e Definicoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.2 Ordem e Solucoes de uma Equacao Diferencial Ordinaria . . . . . . . . . 6
1.1.3 Equacoes Diferenciais Ordinarias de Primeira Ordem . . . . . . . . . . . 7
1.2 Equacoes Escalares de Primeira Ordem . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.1 Determinacao da Solucao Geral . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.2 Equacoes Lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.3 Equacoes Separaveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2.4 Equacoes Exactas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2.5 Equacoes Redutıveis a Exactas . . . . . . . . . . . . . . . . . . . . . . . 16
1.3 Existencia, Unicidade e Prolongamento de Solucoes . . . . . . . . . . . . . . . . 20
1.3.1 Teorema de Peano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.3.2 Exemplo de Nao Unicidade de Solucao . . . . . . . . . . . . . . . . . . . 21
1.3.3 Condicao de Lipschitz . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.3.4 Teorema de Picard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.3.5 O teorema de Picard (revisitado) e alguns exemplos . . . . . . . . . . . . 31
1.3.6 Prolongamento de Solucao . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.3.7 Comparacao de Solucoes . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.4 Equacoes Vectoriais ou Sistemas de 1a Ordem . . . . . . . . . . . . . . . . . . . 39
1.4.1 Condicao de Lipschitz e Teorema de Picard no Caso Vectorial . . . . . . 39
1.4.2 Equacoes Vectoriais Lineares . . . . . . . . . . . . . . . . . . . . . . . . 40
1.4.3 Equacoes vectoriais Lineares — Caso Nao Homogeneo . . . . . . . . . . 45
1.4.4 Equacoes Vectoriais Lineares de Coeficientes Constantes . . . . . . . . . 46
1.4.5 Serie da Exponencial de uma Matriz . . . . . . . . . . . . . . . . . . . . 52
1.4.6 Calculo da Exponencial de uma Matriz . . . . . . . . . . . . . . . . . . . 55
1.5 Equacoes Lineares de Ordem n . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
1.5.1 Equacao linear de 2a ordem . . . . . . . . . . . . . . . . . . . . . . . . . 64
1.5.2 Equacao linear de 2a ordem de coeficientes constantes . . . . . . . . . . 65
1.5.3 Equacao linear de ordem n e equacao vectorial equivalente . . . . . . . . 69
1.5.4 Solucao geral da equacao homogenea . . . . . . . . . . . . . . . . . . . 70
1.5.5 Equacao homogenea de ordem n de coeficientes constantes . . . . . . . . 71
1.5.6 Solucoes Particulares Atraves da Formula de Variacao das Constantes . . 76
1.5.7 Metodo dos Coeficientes Indeterminados . . . . . . . . . . . . . . . . . . 78
1.5.8 Aplicacoes a resolucao de equacoes vectoriais de 1a ordem . . . . . . . . 80
1.6 Transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3

1.6.1 Definicao e Propriedades . . . . . . . . . . . . . . . . . . . . . . . . . . 831.6.2 Aplicacoes da Transformada de Laplace as equacoes diferenciais . . . . . 861.6.3 Distribuicao Delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . 891.6.4 Inversao da Transformada de Laplace . . . . . . . . . . . . . . . . . . . 90
2 Introducao as Equacoes Diferenciais Parciais 952.1 Metodo de Separacao de Variaveis . . . . . . . . . . . . . . . . . . . . . . . . . 962.2 Series de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
2.2.1 Definicao e convergencia pontual . . . . . . . . . . . . . . . . . . . . . . 992.2.2 O Nucleo de Dirichlet e as Somas Parciais das Series de Fourier . . . . . 1032.2.3 Serie de Fourier de Senos . . . . . . . . . . . . . . . . . . . . . . . . . . 1062.2.4 Serie de Fourier de Cosenos . . . . . . . . . . . . . . . . . . . . . . . . . 108
2.3 Problema de Dirichlet Homogeneo para a Equacao do Calor Unidimensional . . . 1092.3.1 Exemplo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1092.3.2 Exemplo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
2.4 Problema de Dirichlet nao Homogeneo para a Equacao do Calor Unidimensional . 1112.5 Problema de Neumann Homogeneo para a Equacao do Calor Unidimensional . . 1122.6 Unicidade de Solucao do Problema de Dirichlet para a Equacao do Calor . . . . 1142.7 A Equacao das Ondas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
2.7.1 Problema da Corda Vibrante . . . . . . . . . . . . . . . . . . . . . . . . 1152.8 Equacao de Laplace Bidimensional . . . . . . . . . . . . . . . . . . . . . . . . . 119
2.8.1 Problema de Dirichlet Semi-Homogeneo para a Equacao de Laplace . . . 1202.8.2 Problema de Dirichlet nao Homogeneo para a Equacao de Laplace . . . . 123
4

Capıtulo 1
Equacoes Diferenciais Ordinarias
1.1 Introducao
1.1.1 Notacao e Definicoes
Designa-se por equacao diferencial uma relacao de igualdade entre termos envolvendo uma funcaoy(x), as suas derivadas e a variavel independente x. A equacao podera tambem depender deparametros nao directamente relacionados com a variavel independente x. E talvez mais simplespensar numa equacao diferencial como uma equacao cuja incognita pertence a um espaco defuncoes
Rn ⊃ D ∋ x = (x1, x2, . . . xn) 7−→ y(x) =
(
y1(x), . . . , ym(x))
∈ Rm
(pode-se ter C em vez de R). Desta forma, x1, . . . xn sao as variaveis independentes (e a dimensaodo domınio de y, n ∈ N, o seu numero) e y1, . . . , ym as variaveis dependentes (e a dimensao docontradomınio de y, m ∈ N, o seu numero). Note que os (eventuais) parametros nao sao contadoscomo variaveis independentes ou dependentes da equacao.
As equacoes diferenciais dizem-se ordinarias se o domınio da funcao y(x) esta contido em R,caso em que as derivadas que nela surgem sao totais (em ordem a x ∈ R). Dizem-se parciais setem mais do que uma variavel independente (o domınio de y(x) esta contido em R
n) e envolvemderivadas parciais de y (em ordem a x1, x2, . . .).
As equacoes diferenciais classificam-se como escalares ou vectoriais consoante tenham umaou mais do que uma variavel dependente (ou seja, o contradomınio de y(x) esta contido em R
no caso escalar e Rm no caso vectorial). Neste ultimo caso e costume considerar que a variavel
dependente e o vector y(x) =(y1(x), . . . ym(x)
)∈ R
m.
Por exemplo, a equacaody
dx+ 2ayx = 0
e ordinaria, x e a variavel independente e y = y(x) a variavel dependente, enquanto a e umparametro. Ja a 2a Lei de Newton para o movimento de uma partıcula em R
3
F (t, r) = mr, (1.1)
e uma equacao ordinaria vectorial, pois r = r(t) = (x(t), y(t), z(t)). Aqui utilizou-se a notacaode Newton
r =dr
dtr =
d2r
dt2
5

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
para representar as 1a e 2a derivadas em ordem a t. A massa da partıcula, m, e apenas umparametro.
Como exemplos de equacoes diferencias parciais escalares, podemos indicar a equacao deLaplace num domınio bidimensional,
∂2u
∂x2+
∂2u
∂y2= 0,
(ja introduzida na Analise Complexa), onde u : D ⊂ R2 → R; a equacao do calor unidimensional,
∂u
∂t= k
∂2u
∂x2
onde u : R× [0, L] → R; a equacao das ondas unidimensional
∂2u
∂t2= c2
∂2u
∂x2
onde u : R× [0, L] → R. Tambem poderemos ter versoes tridimensionais destas equacoes como,por exemplo, a equacao do calor no espaco:
∂u
∂t= k
(∂2u
∂x2+
∂2u
∂y2+
∂2u
∂z2
)
def= k∇2u
onde u = u(t, x, y, z), com t ∈ R e (x, y, z) ∈ D ⊂ R3 e ∇2 e o operador laplaciano.
Alguns problemas de equacoes diferencias parciais sao de estudo muito difıcil. Um dos maisconhecidos exemplos consiste nas equacoes de Navier-Stokes
∂u
∂t− (u · ∇)u = ν∇2u+ f(t, x)
div u = 0
onde u = u(t, x, y, z) ∈ D ⊂ R3, com t ∈ R, (x, y, z) ∈ D ⊂ R
3. As suas solucoes descrevem ocampo de velocidade, u, de um fluıdo incompressıvel de viscosidade ν que ocupa o domınio D eesta sujeito a uma forca exterior f . Trata-se, pois, de uma equacao diferencial parcial vectorial,que e bem conhecida pelas suas aplicacoes a hidrodinamica e aerodinamica. Para uma descricaode um problema em aberto relacionado com estas equacoes ver
http://www.claymath.org/millennium/Navier-Stokes_Equations
Dedicaremos o que resta deste capıtulo ao estudo das equacoes diferenciais ordinarias.
1.1.2 Ordem e Solucoes de uma Equacao Diferencial Ordinaria
Uma equacao diferencial (ordinaria ou parcial) diz-se de ordem n se a maior ordem das derivadasdas suas variaveis dependentes y1, · · · ym e n. Representamos o espaco vectorial das funcoescontınuas y : I → R
m (com I um intervalo aberto) por C(I,Rm), que abreviaremos para C(I). Oespaco vectorial das funcoes contınuas e com derivadas contınuas ate a ordem n sera representadopor Cn(I,Rm) ou, abreviadamente, Cn(I). Assim:
Cn(I) ={
y ∈ C(I) : y′, y′′, · · · y(n) ∈ C(I)}
6

1.1. INTRODUCAO
Uma funcao f e de classe Cn em I se e so se f ∈ Cn(I).
Diz-se que uma funcao y ∈ Cn(I), onde I e um intervalo aberto, e uma solucao da equacaodiferencial (em I) se satisfaz a equacao para qualquer t ∈ I, ou seja, se substituindo y1(t) · · · yn(t)na equacao diferencial se obtem uma identidade, qualquer que seja t ∈ I.
Consideraremos equacoes diferenciais ordinarias de 1a ordem (escalares ou vectoriais) quepodem ser explicitadas na forma:
dy
dt= f(t, y),
onde f : I ×D, e onde D e um subconjunto aberto de Rm. Uma solucao da equacao (1) e uma
funcao y ∈ C1(I,Rm) tal que y(t) ∈ D e y′(t) = f(t, y(t)) para qualquer t ∈ I.
Como veremos posteriormente, o estudo de alguns tipos de equacoes ordinarias de ordem n(escalares ou vectoriais) pode ser reduzido ao das equacoes vectoriais de 1a ordem. Por exemplo,na 2a Lei de Newton (1.1), introduzindo como variavel dependente a quantidade de movimento,p = mr, obtem-se a equacao vectorial de 1a ordem:
r =1
mp
p = F (t, r)
1.1.3 Equacoes Diferenciais Ordinarias de Primeira Ordem
Como exemplo, escrevemos a mais simples equacao diferencial de 1a ordem, no caso escalar:
y′ = g(t).
A solucao geral desta equacao, que se obtem por primitivacao, e
y(t) =
∫
g(t)dt +C, C ∈ R,
estando bem definida em qualquer intervalo onde g e contınua. Note-se que existe uma infinidadede solucoes para a equacao diferencial; o mesmo se passa com qualquer equacao diferencialordinaria de 1a ordem, y′ = f(t, y), desde que f seja uma funcao contınua num conjunto aberto.
Acrescentando a equacao de 1a ordem uma condicao inicial, obtem-se um problema de valorinicial (ou problema de Cauchy):
y′ = f(t, y)
y(t0) = y0
(1.2)
Em certas condicoes (veremos isso mais tarde) um problema de valor inicial tem solucao unica.
O intervalo maximo de solucao, Imax, do problema de valor inicial e o “maior intervalo” ondeo problema (1.2) tem solucao. Mais exactamente, Imax e o intervalo maximal de existencia desolucao 1.
1O intervalo Imax diz-se maximal no sentido em que existe uma solucao de (1.2) em Imax e qualquer outrointervalo onde uma solucao de (1.2) esta definida esta contido em Imax
7

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
1.2 Equacoes Escalares de Primeira Ordem
1.2.1 Determinacao da Solucao Geral
Muitos metodos de determinacao da solucao geral de equacoes diferenciais escalares de 1a ordembaseiam-se na reducao da equacao a uma igualdade do tipo
d
dt
(
G(t, y(t)
))
= g(t), (1.3)
onde G = G(t, y), g = g(t) e a derivada no 1o membro da equacao e uma derivada total emordem a t. Por primitivacao, a solucao geral de (1.3), escrita na forma implıcita, e:
G(t, y(t)) =
∫
g(t)dt +C
1.2.2 Equacoes Lineares
Uma equacao escalar de primeira ordem diz-se linear, se pode ser escrita na forma
y + a(t)y = b(t) (1.4)
A equacao diz-se homogenea se b(t) ≡ 0. Nesse caso (e se y 6= 0) ela e equivalente a
y′
y= −a(t) ⇔ d
dt
(
log |y|)
= −a(t)
Primitivando, obtem-se:
log |y| = −∫
a(t)dt+ C ⇔ |y| = eC exp
(
−∫
a(t)dt
)
⇔ y(t) = ±D exp
(
−∫
a(t)dt
)
6= 0
onde D = eC > 0. Fazendo K = ±D e notando que y(t) ≡ 0 tambem e solucao de y′ = −a(t)y,obtemos a solucao geral da equacao linear homogenea
y(t) = K exp
(
−∫
a(t)dt
)
, t ∈ I
onde I e qualquer intervalo aberto onde a(t) e contınua e K ∈ R.
Resolvamos agora a equacao nao homogenea. Multiplicando a equacao (1.4) por uma funcaoµ(t) tal que µ = a(t)µ, por exemplo, tomando
µ(t) = exp
(∫
a(t)dt
)
obtem-se a equacao equivalente 2:
µ(t)y + µ(t)a(t)y = µ(t)b(t) ⇔ µy + µy = µ(t)b(t) ⇔ d
dt
(
µy)
= µ(t)b(t)
2As equacoes sao equivalentes pois µ(t) = e∫a(t)dt 6= 0, para qualquer t
8

1.2. EQUACOES ESCALARES DE PRIMEIRA ORDEM
Assim, a solucao geral de (1.4) e dada pela expressao:
y(t) =1
µ(t)
[ ∫
µ(t)b(t)dt+ C]
, C ∈ R.
Teorema: (Existencia de solucao de um PVI com equacao linear)Seja I ⊂ R, a e b funcoes contınuas em I e t0 ∈ I. Entao, para qualquer y0 ∈ R, o PVI
y + a(t)y = b(t)
y(t0) = y0
admite a solucao unica
y(t) =1
µ(t)
[ ∫ t
t0
µ(s)b(s)ds + µ(t0)y0
]
,
definida para todo t ∈ I.
Exemplo
(1) Determinar a solucao do seguinte problema de valor inicial, indicando o intervalo maximode existencia de solucao:
{w + w = e−2t
w(0) = 3
A equacao w+w = e−2t e linear, com a(t) = 1 e b(t) = e−2t obviamente contınuas em R.Um factor integrante (em I = R) para a equacao e:
µ(t) = e∫dt = et
Sendo assim
w +w = e−2t ⇔ d
dt
(
etw)
= e−t ⇔ w(t) = e−t(−e−t + C) , C ∈ R
Dado que w(0) = 3 conclui-se que C = 4 e a solucao do PVI e
w(t) = e−t(4− e−t
)
O intervalo maximo de solucao corresponde ao maior intervalo onde w(t) esta bem definidae e continuamente diferenciavel. Neste caso, Imax = R. Note que solucao esta definida (ee continuamente diferenciavel) em I = R, pois a(t) e b(t) sao contınuas em R.
(2) Determinar a solucao do (PVI)
2xyy′ + (1 + x)y2 = 2ex , x > 0 e y(1) = 2
efectuando a mudanca de variavel v = y2.
Tomando v = y2 tem-se que v′ = (y2)′ = 2yy′. Substituindo na equacao
xv′ + (1 + x)v = 2ex ⇔ v′ +(1
x+ 1)
v =2ex
x
9

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Trata-se de uma equacao linear, com a(x) = 1x +1 e b(x) = 2ex
x obviamente contınuas parax > 0. Um factor integrante para a equacao e:
µ(x) = e∫( 1x+1) dx = xex
Sendo assim
v′ +( 1
x+ 1)
v =2ex
x⇔ xexv′ + (1 + x)exv = 2e2x ⇔ d
dx
(
xexv)
= 2e2x
pelo que
v(x) =e2x + c
xex, c ∈ R.
Dado que v = y2, tem-se que
y(x) =
√
e2x + c
xexou y(x) = −
√
e2x + c
xex
tendo-se o primeiro caso se a condicao inicial for positiva e o segundo se a condicao inicialfor negativa. Assim e dado que y(1) = 2 > 0, tem-se que a solucao do (PVI) e
y(x) =
√
e2x + 4e− e2
xex
Como e2x + 4e− e2 e sempre positivo e xex > 0 se e so se x > 0, entao
e2x + 4e− e2
xex> 0 ⇔ x > 0
Alem disso, o valor inicial x0 = 1 e positivo. Assim, Imax =]0,+∞[.
1.2.3 Equacoes Separaveis
Uma equacao escalar de primeira ordem, diz-se separavel se pode ser escrita na forma
f(y)dy
dt= g(t) (1.5)
Para se poder encontrar a sua solucao geral, e necessario que f e g estejam definidas e sejamcontınuas em subconjuntos abertos de R.
Se F (y) =∫f(y)dy entao:
d
dtF (y) = F ′(y)
dy
dt= f(y)
dy
dt= g(t).
Em consequencia, a solucao geral da equacao (1.5) e dada implicitamente por
∫
f(y)dy =
∫
g(t)dt+ C
Note que a equacao anterior e da forma
Φ(t, y) = C onde Φ(t, y) = F (y)−∫
g(t)dt
10

1.2. EQUACOES ESCALARES DE PRIMEIRA ORDEM
Considere-se uma condicao inicial generica, y(t0) = y0. Se C for escolhido por forma a que (t0, y0)verifique a equacao implıcita, isto e, C = Φ(t0, y0), entao o grafico da solucao do PVI e umacurva de nıvel da funcao Φ(t, y). Para ser possıvel definir uma funcao S(t) tal que y = S(t) sejaa unica solucao da equacao implıcita numa vizinhanca de t0, isto e, para que, para (t, y) numavizinhanca de (t0, y0),
Φ(t, y) = C ⇔ y = S(t)
entao e obviamente necessario que a equacao Φ(t, y) = C tenha uma e uma so solucao pois, casocontrario, nao se pode definir a funcao S(t). Neste caso, S(t) diz-se uma solucao explıcita (local)de Φ(t, y) = C. Para poder concluir da existencia de solucao explıcita local da equacao, e util oseguinte teorema:
Teorema da funcao implıcita (em R2):
Seja G : D → R uma funcao de classe C1 num conjunto aberto D ⊂ R2 tal que (t0, y0) ∈ D,
G(t0, y0) = 0 e∂G
∂y(t0, y0) 6= 0.
Entao a equacaoG(t, y) = 0
define uma unica funcao y de classe C1 numa vizinhanca de t0 tal que y(t0) = y0 e:
G(t, y(t)) = 0
para t nessa vizinhanca.
No caso presente, temos G(t, y) = Φ(t, y)− C, pelo que:
∂
∂y
(Φ− C
)(t0, y0) = F ′(y0) = f(y0).
Consequentemente, basta verificar que f(y0) 6= 0 para garantir a existencia de solucao explıcitado PVI numa vizinhanca de t0.
Teorema: (Existencia de solucao (local) do PVI para a equacao separavel)Sejam f e g funcoes reais de variavel real contınuas em vizinhancas de y0 e t0 respectivamente.
Se f(y0) 6= 0, entao o PVI
f(y)dy
dt= g(t)
y(t0) = y0
admite solucao unica definida numa vizinhanca de t0. A solucao e definida implicitamente pelaequacao
∫ y
y0
f(u)du =
∫ t
t0
g(s)ds
ou, equivalentemente, ∫
f(y)dy −∫
g(t)dt = C,
com C determinado pela condicao inicial y(t0) = y0.
11

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Exemplo
(1) Determinar a solucao do PVI
dy
dx= y(x− 3)
y(0) = 5
Para determinar solucoes tais que y(t) 6= 0, para qualquer t:
dy
dx= y(x− 3) ⇔ 1
y
dy
dx= x− 3 ⇔ d
dx
∫1
ydy = x− 3 ⇔ log|y| = x2
2− 3x+ C
pelo que a solucao geral da equacao e dada por
y(x) = Kex2
2−3x, com K ∈ R
(Note que y(t) ≡ 0 tambem e solucao da equacao diferencial). Atendendo a que y(0) = 5tem-se que K = 5 e como tal a solucao do PVI e
y(x) = 5ex2
2−3x
O domınio de diferenciabilidade da funcao y e R, pelo que o intervalo maximo de existenciade solucao e Imax = R. (Observe-se tambem que y(t) 6= 0, para todo o t ∈ R, pelo que asequivalencias acima sao sempre validas).
(2) Determinar a solucao do PVI
dy
dx= −3y
y(0) = y0
Note-se em primeiro lugar que a equacao dydx = −3y admite a solucao de equilıbrio (ou
constante) y(x) ≡ 0, mas esta solucao so verifica a condicao inicial no caso em que y0 = 0.Para determinar solucoes nao constantes,
dy
dx= −3y ⇔ 1
y
dy
dx= −3 ⇔ d
dx
∫1
ydy = −3 ⇔ log|y| = −3x+ C
pelo que a solucao geral da equacao e dada por
y(x) = Ke−3x
Atendendo a que y(0) = y0 tem-se que K = y0 e como tal a solucao do PVI e
y(x) = y0e−3x
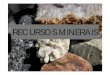
Na Figura 1.1 encontra-se o tracado de algumas destas solucoes. Note-se, em particular,que a solucao constante, y(x) ≡ 0, tem a seguinte propriedade:
1. Todas as outras solucoes se aproximam de y(x) ≡ 0 quando x → +∞.
2. Todas as outras solucoes se afastam de y(x) ≡ 0 quando x → −∞.
Devido a propriedade 1, dizemos que a solucao y(x) ≡ 0 e assimptoticamente estavel quandox → +∞.
12

1.2. EQUACOES ESCALARES DE PRIMEIRA ORDEM
-0.45 -0.33 -0.21 -0.09 0.03 0.15 0.27 0.39−6
−4
−2
0
2
4
6
K=0
K=-1/2
K=-1/2
K=1/2
K=1
Figura 1.1: A solucao de equilıbrio y(t) ≡ 0 e as solucoes correspondentes a y0 = ±1/2, y0 = ±1..
1.2.4 Equacoes Exactas
Seja A ⊂ R2 aberto e M,N : A → R. Uma equacao diferencial do tipo
M(t, y) +N(t, y)dy
dt= 0 (1.6)
diz-se exacta se e so se e equivalente a
d
dt
(
φ(t, y))
= 0, (1.7)
onde φ : A → R e de classe C1.
A solucao geral, na forma implıcita, da equacao exacta e, entao:
φ(t, y) = C, com C ∈ R.
Em que condicoes existe uma tal funcao φ, de forma a que a equacao (1.6) seja equivalentea (1.7)? Comecamos por notar que a equacao (1.7) se pode escrever:
∂φ
∂t+
∂φ
∂y
dy
dt= 0 (1.8)
Comparando a equacao (1.6) com (1.8), concluımos que para (1.6) ser exacta e necessario esuficiente que:
M =∂φ
∂te N =
∂φ
∂y,
13

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
ou seja, (M,N) = ∇φ, para certa funcao φ ∈ C1(A,R). Isto e equivalente a dizer que o campo(M,N) e um campo gradiente 3.
Exemplo: as equacoes separaveis que, como vimos, se podem escrever na forma
−g(t) + f(y)dy
dt= 0,
onde g : A → R e f : B → R sao funcoes contınuas 4, sao tambem exactas. De facto, bastatomar um potencial φ : A×B → R dado por:
φ(t, y) =
∫
f(y)dy −∫
g(t)dt.
Este exemplo nao parece muito interessante, pois obtivemos o potencial a partir do conhecimentoprevio da solucao geral da equacao separavel.
Problemas mais interessantes – no sentido em que nao podem ser facilmente resolvidos poroutros metodos – podem-se abordar tomando como ponto de partida a seguinte (e ja vossaconhecida) condicao necessaria para que um campo seja gradiente.
Proposicao: se A ⊂ R2 e aberto e simplesmente conexo, M,N : A → R sao de classe C1 e
∂M
∂y=
∂N
∂tem A
entao existe φ : A → R de classe C2 tal que (M,N) = ∇φ. Em particular, isto implica que aequacao M(t, y) +N(t, y)y′ = 0 e exacta.
Considerando agora um problema de valor inicial de uma equacao exacta (1.7) com condicaoinicial y(t0) = y0, a sua solucao geral e:
φ(t, y) = C, com C = φ(t0, y0)
O teorema da funcao implıcita garante a existencia de solucao local desde que:
∂
∂y(Φ − C)(t0, y0) =
∂Φ
∂y(t0, y0) = N(t0, y0) 6= 0.
Teorema:(Existencia de solucao (local) do PVI para a equacao exacta). Sejam A ⊂ R2 aberto
e simplesmente conexo e M,N : A → R de classe C1. Se
a)∂M
∂y=
∂N
∂tem A,
b) N(t0, y0) 6= 0,
3(M,N) : A → R e um campo gradiente com um potencial φ ∈ C1(A,R).4A,B ⊂ R sao conjuntos abertos
14

1.2. EQUACOES ESCALARES DE PRIMEIRA ORDEM
entao existe φ : A → R de classe C1 tal que 5.
φ(t, y) = C, com C = φ(t0, y0)
define implicitamente a solucao do problema de valor inicial:
M(t, y) +N(t, y)dy
dt= 0
y(t0) = y0
para t numa vizinhanca de t0.
Exemplo
(1) Determinar a solucao geral da equacao
e4x + 2xy2 + (cos y + 2x2y)dy
dx= 0
SendoM(x, y) = e4x + 2xy2 e N(x, y) = cos y + 2x2y
e facil de verificar que
(i) M e N sao continuamente diferenciaveis em U = R2;
(ii)∂M
∂y= 4xy =
∂N
∂xpara todo (x, y) ∈ R
2.
Conclui-se que (M,N) e um campo gradiente em R2, isto e, existe Φ : R2 → R tal que
∇Φ = (M,N).
Calculo de Φ
∂Φ
∂x= M ⇒ Φ(x, y) =
∫
(e4x + 2xy2) dx+ C(y) ⇒ Φ(x, y) =e4x
4+ x2y2 + C(y)
e, por outro lado
∂Φ
∂y= N ⇒ 2x2y + C ′(y) = cos y + 2x2y ⇒ C(y) = sen y +D
pelo que
Φ(x, y) =e4x
4+ x2y2 + sen y +D , D ∈ R
Resolucao da equacao
Nestas circunstancias 6
e4x + 2xy2 + (cos y + 2x2y)dy
dx= 0 ⇔ d
dx
(e4x
4+ x2y2 + sen y
)
= 0
pelo que a solucao geral da equacao e definida implicitamente por
e4x
4+ x2y2 + sen y = K , K ∈ R
5De facto, as hipoteses garantem que φ e de classe C2; mas esta conclusao mais forte nao e necessaria para oque iremos fazer.
6Note que precisamos apenas de um Φ : R2 → R tal que ∇Φ = (M,N). Qualquer um destes potenciais, emparticular o que se obtem com C = 0, pode ser usado para resolver a equacao exacta.
15

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
1.2.5 Equacoes Redutıveis a Exactas
Qualquer equacao escalar de primeira ordem e redutıvel a exacta, ou seja, pode ser transformadanuma equacao exacta, multiplicando-a por uma funcao µ(t, y) apropriada. A funcao µ denomina-se por um factor integrante da equacao, e pode ser calculado resolvendo a equacao diferencialparcial
∂(µM)
∂y=
∂(µN)
∂t
No geral pode ser impraticavel obter uma solucao explıcita para esta equacao. Contudo, ela podeser facilmente resolvida nos casos em que existe um factor integrante, µ, que depende apenas deuma variavel.
- A equacao diferencial
M(t, y) +N(t, y)dy
dt= 0
e redutıvel a exacta, com factor integrante so dependendo de t, µ = µ(t), se a funcao
∂M∂y − ∂N
∂t
N
depender apenas de t. Se esta condicao se verificar, o factor integrante e uma das solucoesda equacao diferencial
µ =
∂M∂y − ∂N
∂t
Nµ
- A equacao diferencial
M(t, y) +N(t, y)dy
dt= 0
e redutıvel a exacta, com factor integrante so dependendo de y, µ = µ(y), se a funcao
∂N∂t − ∂M
∂y
M
depender apenas de y. Se esta condicao se verificar, o factor integrante e uma das solucoesda equacao diferencial
µ =
∂N∂t − ∂M
∂y
Mµ
Em qualquer dos casos, a solucao da equacao inicial sera dada por
Φ(t, y) = C
em que Φ satisfaz∂Φ
∂t= µM ,
∂Φ
∂y= µN
Exemplos:
16

1.2. EQUACOES ESCALARES DE PRIMEIRA ORDEM
1. Considere a equacao diferencial
3x2y + 2xy + y3 + (x2 + y2)dy
dx= 0
SendoM(x, y) = 3x2y + 2xy + y3 , N(x.y) = x2 + y2
e facil de concluir que M e N tem derivada contınua em R2 (sao funcoes polinomiais) e
∂M
∂y= 3x2 + 2x+ 3y2 ,
∂N
∂x= 2x
pelo que a equacao nao e exacta. Admitindo que e redutıvel a exacta, existe um factorintegrante µ tal que a equacao
(3x2y + 2xy + y3)µ + (x2 + y2)µdy
dx= 0
e exacta. A equacao que o factor integrante satisfaz e:
(3x2y + 2xy + y3)∂µ
∂y+ (3x2 + 2x+ 3y2)µ = (x2 + y2)
∂µ
∂x+ 2xµ
Supondo que µ = µ(x) (o que implica ∂µ/∂y = 0 e ∂µ/∂x = µ′(x)) tem-se que
(3x2 + 2x+ 3y2)µ = (x2 + y2)µ′(x) + 2xµ ⇔ µ′(x)µ(x)
=3x2 + 2x+ 3y2 − 2x
x2 + y2= 3
Note que a equacao µ′(x)/µ(x) = 3 e equivalente a equacao do factor integrante com ahipotese adicional µ = µ(x). Ela pode obviamente ser resolvida, pois o segundo membronao depende de y, dando como solucao o factor integrante µ(x) = e3x.
Considere-se entao a equacao (equivalente a original)
e3x(3x2y + 2xy + y3) + e3x(x2 + y2)dy
dx= 0,
que, por construcao, e exacta. Podemos novamente verificar esse facto observando que asfuncoes e3x(3x2y + 2xy + y3) e e3x(x2 + y2) sao diferenciaveis em R
2 e:
∂
∂y
[
e3x(3x2y + 2xy + y3)]
=∂
∂x
[
e3x(x2 + y2)]
Sendo assim (µM,µN) e um campo gradiente em R2, isto e, existe Φ : R2 → R tal que
∇Φ = (µM,µN).
Calculo de Φ
∂Φ
∂y= µN ⇒ Φ(x, y) =
∫
e3x(x2 + y2) dy + C(x)
⇒ Φ(x, y) = e3x(
x2y +y3
3
)
+ C(x)
17

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
e, por outro lado
∂Φ
∂x= µM ⇒ 3e3x
(x2y+ y3
3
)+2xye3x+C ′(x) = e3x(3x2y+2xy+y3) ⇒ C(x) = K
pelo que
Φ(x, y) = e3x(
x2y +y3
3
)
+K , K ∈ R
Resolucao da equacao
Nestas circunstancias
3x2y + 2xy + y3 + (x2 + y2)dy
dx= 0 ⇔ e3x(3x2y + 2xy + y3) + e3x(x2 + y2)
dy
dx= 0
⇔ d
dx
[
e3x(
x2y +y3
3
)]
= 0
pelo que a solucao geral da equacao e definida implicitamente por
e3x(
x2y +y3
3
)
= k , k ∈ R.
2. Considere a equacao diferencial
y + (2xy − e−2y)dy
dx= 0
SendoM(x, y) = y , N(x.y) = 2xy − e−2y
e facil de concluir que M e N tem derivada contınua em R2 e
∂M
∂y= 1 ,
∂N
∂x= 2y
pelo que a equacao nao e exacta. Admitindo que e redutıvel a exacta, existe um factorintegrante µ tal que a equacao
yµ+ (2xy − e−2y)µdy
dx= 0
e exacta. Pelo que
y∂µ
∂y+ µ = (2xy − e−2y)
∂µ
∂x+ 2yµ
Supondo que µ = µ(x) (o que implica ∂µ/∂y = 0 e ∂µ/∂x = µ′(x)) tem-se que
µ = (2xy − e−2y)µ′(x) + 2yµ ⇔ µ′(x)µ(x)
=1− 2y
2xy − e−2y
Como se ve, a funcao1− 2y
2xy − e−2ynao depende apenas da variavel x, pelo que nao existe
factor de integracao dependendo apenas de x.
18

1.2. EQUACOES ESCALARES DE PRIMEIRA ORDEM
Supondo agora que µ = µ(y) (o que implica ∂µ/∂x = 0 e ∂µ/∂y = µ′(y)) tem-se que
yµ′ + µ = 2yµ ⇔ µ′(y)µ(y)
=2y − 1
y⇔ µ′(y)
µ(y)= 2− 1
y
Neste caso a equacao anterior pode ser resolvida pois o segundo membro depende apenasde y. Como tal, o factor integrante e uma das suas solucoes nao nulas, por exemplo,
µ(y) =e2y
y. Considere-se entao a equacao
e2y +
(
2xe2y − 1
y
)dy
dx= 0
que, tendo sido obtida por multiplicacao de ambos os membros da equacao original pelofactor integrante, e necessariamente exacta. Para confirmar este facto, observe-se que asfuncoes e2y e 2xe2y − 1
y sao diferenciaveis em R2 \ {(x, 0) : x ∈ R}, e
∂
∂y
[
e2y]
= 2e2y =∂
∂x
[
2xe2y − 1
y
]
Sendo assim (µM,µN) e um campo gradiente em {(x, y) ∈ R2 : y > 0} (ou em {(x, y) ∈
R2 : y < 0}), isto e, existe Φ : {(x, y) ∈ R
2 : y > 0} → R (ou Φ : {(x, y) ∈ R2 : y <
0} → R) tal que ∇Φ = (µM,µN).
Calculo de Φ
∂Φ
∂x= Mµ ⇒ Φ(x, y) =
∫
e2y dx+ C(y) ⇒ Φ(x, y) = xe2y + C(y)
e, por outro lado
∂Φ
∂y= µN ⇒ 2xe2y + C ′(y) = 2xe2y − 1
y⇒ C(y) = −log|y|+ const.
pelo que
Φ(x, y) = xe2y − log|y|+ const. , const. ∈ R
Resolucao da equacao
Nestas circunstancias, para y > 0 ou y < 0:
y + (2xy − e−2y)dy
dx= 0 ⇔ e2y + (2xe2y − 1
y)dy
dx= 0
⇔ d
dx
(
xe2y − log |y|+ const.)
= 0
pelo que a solucao geral da equacao e definida implicitamente por
xe2y − log |y| = k , k ∈ R
19

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
1.3 Existencia, Unicidade e Prolongamento de Solucoes
Consideramos o problema de valor inicial (PVI)
dy
dt= f(t, y)
y(t0) = y0
(1.9)
onde a funcao f : D → R tem domınio aberto D ⊂ R2. E costume designar f(t, y) por campo de
direccoes da equacao diferencial em (1.9); isto deriva do facto de a recta tangente ao graficodas solucoes da equacao diferencial ter, em cada ponto (t, y) desse grafico, declive igual af(t, y). Note que se y(t) e solucao da equacao diferencial entao f(t, y(t)) = dy
dt (t).
Nesta seccao estudamos as condicoes que a funcao f(t, y) deve verificar para que a solucaodo PVI:
• exista;
• seja unica;
• esteja definida num intervalo maximal I =]a, b[.
Estas questoes matematicas sao muito importantes do ponto de vista das aplicacoes. Osmetodos numericos que na pratica sao aplicados no calculo aproximado de solucoes de umaequacao diferencial ordinaria exigem, como hipotese, que a solucao do PVI exista, seja unica eque dependa continuamente das condicoes iniciais — isto e, que seja um problema bem posto. Esabido que quando um PVI falha uma daquelas propriedades as solucoes dos esquemas numericoscorrespondentes podem exibir comportamentos que as tornam inuteis, na optica das aplicacoes.
1.3.1 Teorema de Peano
Se exigirmos apenas continuidade de f(t, y), podemos provar o:
Teorema de Peano (Existencia de solucao local)
Considere-se D ⊆ R2 aberto, e f : D → R, contınua em (t, y) ∈ D. Se (t0, y0) ∈ D, o
problema de valor inicial{
y = f(t, y)y(t0) = y0
admite pelo menos uma solucao, y(t), num intervalo ]t0 − α, t0 + α[ para certo α > 0.
Pode-se entao colocar a questao de saber se a continuidade de f(t, y) e suficiente para provarunicidade de solucao. A subseccao seguinte mostra que a resposta a esta questao e negativa.
20

1.3. EXISTENCIA, UNICIDADE E PROLONGAMENTO DE SOLUCOES
1.3.2 Exemplo de Nao Unicidade de Solucao
Considere-se o problema de valor inicial:
dy
dt= |y|1/2
y(0) = 0 ,
Vamos construir um conjunto infinito de solucoes para este PVI.Comecamos por notar que a solucao constante y(t) ≡ 0 e solucao do PVI. Por outro lado,
admitindo que y(t) > 0, a equacao pode ser escrita na forma
y−1/2 dy
dt= 1 ⇔ d
dt
(∫
y−1/2dy)
= 1 ⇔ 2y1/2 = t+ c
Desta forma, para t+ c > 0 ⇔ t > −c, a funcao
y(t) =1
4(t+ c)2
e continuamente diferenciavel e satisfaz a equacao diferencial para t > −c.
Figura 1.2: A solucao de equilıbrio y(t) ≡ 0 e a solucao y(t) = t2/4.
Podemos agora utilizar o metodo de “cortar” e “colar” a partir das solucoes y(t) ≡ 0 ey(t) = 1
4(t + c)2, para t > −c, para criar novas solucoes do PVI. Sera necessario, obviamente,que que no “ponto de colagem” a nova solucao seja uma funcao contınua, diferenciavel e queverifique a equacao diferencial.
Para t1 > 0, defina-se
yt1(t) =
0 se t ≤ t1
1
4
(t− t1
)2se t > t1
Verifica-se que yt1 e diferenciavel e verifica a equacao diferencial em R\{t1}, pois foi construıdaa custa das solucoes y(t) ≡ 0 e y(t) = 1
4 (t + c)2, com c = −t1. Note que esta escolha de c fazprecisamente com que
limt→t−1
yt0(t) = limt→t+1
yt1(t) ⇔ 0 =( t12− k)2
,
21

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Figura 1.3: As solucoes do PVI quando c = 0.
ou seja, que yt1 seja contınua em t1 e yt1(t1) = 0. Tambem as derivadas laterais de yt1 em t1existem e sao nulas, pelo que yt1 satisfaz a equacao diferencial em t1.
Figura 1.4: As solucoes yt1 com t1 = 1/5, t1 = 1/2 e t1 = 6/5.
O facto de existir uma infinidade de solucoes mostra que a continuidade da funcao f(t, y) =√y
no seu domınio nao e suficiente para garantir unicidade de solucao para o PVI.
De facto, temos que
|f(t, x)− f(t, y)| =∣∣∣∣∣
√
|x| −√
|y|x− y
∣∣∣∣∣|x− y|,
onde o termo ∣∣∣∣∣
√
|x| −√
|y|x− y
∣∣∣∣∣,
22

1.3. EXISTENCIA, UNICIDADE E PROLONGAMENTO DE SOLUCOES
nao e limitado para x e y num vizinhanca qualquer da origem. Isto implica, em particular, quefixando y = 0 as taxas medias de crescimento da funcao f nao sao limitadas. Ora, foi precisamentenos pontos onde a solucao da equacao e nula que se observou a bifurcacao de solucoes!
1.3.3 Condicao de Lipschitz
Nesta seccao definiremos uma classe de funcoes contınuas que nao sao necessariamente dife-renciaveis relativamente a y, mas para as quais o Teorema de Picard e valido. O exemplo anteriorsugere que se introduza a seguinte condicao adicional sobre f , que e devida a Lipschitz.
Considere-se f : D → R, onde D ⊂ R2. Diz-se que
• f e lipschitziana relativamente a y em D sse
|f(t, y)− f(t, w)| ≤ K|y − w| . ∀(t, y), (t, w) ∈ D
A constante K ∈ R+ e denominada a constante de Lipschitz. Observe-se que se a funcao
f e lipschitziana relativamente a y em D, verificara∣∣∣f(t, y)− f(t, w)
y − w
∣∣∣ ≤ K . ∀(t, y), (t, w) ∈ D
o que significa que as taxas de crescimento medio de f relativamente a segunda coordenada,sao limitadas em D. Em particular isto significa que:
⋄ Se ∂f/∂y existe (em D), entao ∂f/∂y e uma funcao limitada em D;
⋄ Se ∂f/∂y nao existe em todos os pontos de D (porque nao existe limh→0
f(t,y+h)−f(t,y)h ,
para algum (t, y) ∈ D), ainda assim a razao incremental f(t,y)−f(t,y+h)h sera sempre
limitada, para todo h numa vizinhanca de 0.
• f e localmente lipschitziana relativamente a y em D sse for lipschitziana relativamentea y em todo o subconjunto compacto de D.
• Criterio
Se f e contınua num aberto D ⊂ R2 e
∂f
∂yexiste e e contınua em D ⊂ R
2 entao f e
localmente lipschitziana relativamente a y em D.
1.3.4 Teorema de Picard
Enunciaremos, de seguida, o resultado que estabelece existencia e unicidade de solucao de umproblema de valor inicial relativo a uma equacao diferencial ordinaria e escalar de primeira ordem.Veremos mais tarde que este teorema pode ser generalizado as equacoes vectoriais de primeiraordem, garantindo nessa versao a existencia e unicidade de problemas de valor inicial envolvendoessas equacoes e (como sua consequencia) tambem envolvendo equacoes lineares de ordem n.
Teorema de Picard
Considere-se D ⊆ R2 aberto e f : D → R contınua e localmente lipschitziana relativamente a y
em D. Se (t0, y0) ∈ D, o problema de valor inicial{
y = f(t, y)y(t0) = y0
23

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
admite uma unica solucao, y(t), definida numa vizinhanca de t0, isto e, num intervalo ]t0−α, t0+α[para algum α > 0.
A demonstracao deste teorema e feita de forma construtiva, sendo obtida a solucao a custa deuma sucessao de aproximacoes da solucao. Apresentaremos em seguida essa construcao e depoisos varios passos da demonstracao do teorema.
Equivalencia entre o Problema de Valor Inicial e um Problema Integral
E facil verificar que o problema de valor inicial
dy
dt= f(t, y)
y(t0) = y0
(1.10)
e equivalente a equacao integral
y(t) = y0 +
∫ t
t0
f(s, y(s)
)ds (1.11)
para y ∈ C1(I), sendo I qualquer intervalo aberto contendo t0.
De facto, se y ∈ C1(I) satisfaz o PVI (1.10) entao, integrando ambos os membros da equacaodiferencial entre t0 e t e usando o teorema fundamental do calculo:
∫ t
t0
y′(s) ds =∫ t
t0
f(s, y(s)
)ds ⇔ y(t)− y(t0) =
∫ t
t0
f(s, y(s)
)ds
Usando agora a condicao inicial do PVI (1.10), obtem-se a equacao integral (1.11).
Reciprocamente, admitindo que y ∈ C1(I) e solucao da equacao integral (1.11) entao, apli-cando o teorema fundamental do calculo ao integral do membro direito da equacao conclui-se quey(t) e diferenciavel e que:
dy
dt= f(t, y(t)) ∀t ∈ I.
Assim sendo, y(t) e solucao da equacao diferencial. Por outro lado, substituindo t por t0 naequacao integral (1.11), obtem-se y(t0) = y0.
A equacao integral e, do ponto de vista da analise matematica, muito util pois e muito maisfacil obter estimativas de integrais do que de derivadas.
24

1.3. EXISTENCIA, UNICIDADE E PROLONGAMENTO DE SOLUCOES
Iteradas de Picard
Derivamos agora a partir da equacao integral uma sucessao de aproximacoes — as iteradas dePicard. Trata-se de uma sucessao de funcoes contınuas yn : I → R definida recursivamente por:
y0(t) = y0
y1(t) = y0 +
∫ t
t0
f(s, y0(s)
)ds
y2(t) = y0 +
∫ t
t0
f(t, y1(s)
)ds
...
yn+1(t) = y0 +
∫ t
t0
f(s, yn(s)
)ds
...
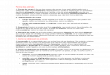
Exemplo 1: Considere-se o problema de valor inicial (PVI)
y′ = 2xy
y(0) = 1(1.12)
A solucao do problema (1.12) e
y(x) = ex2
, IMax = R
Por outro lado a sucessao (yn)n∈N0 das iteradas de Picard associadas ao PVI e
y0(x) = y0 = 1
y1(x) = 1 +
∫ t
02sy0(s) ds = 1 +
∫ x
0(2s) ds = 1 + x2
y2(x) = 1 +
∫ x
0(2sy1(s)) ds = 1 +
∫ x
02s(1 + s2) ds = 1 + x2 +
x4
2
y3(x) = 1 +
∫ x
0(2sy2(s)) ds = 1 +
∫ x
02s(1 + s2 +
s4
2) ds = 1 + x2 +
x4
2+
x6
6
...
Na Figura 1.5 estao representadas as primeiras iteradas de Picard assim como a solucao do PVI.Pode-se verificar, por inducao matematica, que:
yn(x) = 1 +x2
1!+
x4
2!· · · + x2n
n!=
n∑
k=0
x2k
k!.
25

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
-0.05 0.07 0.19 0.31 0.43 0.55 0.67 0.79 0.910.5
1
1.5
2
2.5
3
y_1y_2y_3y(t)
Figura 1.5: Algumas iteradas de Picard e a solucao do PVI (1.12).
Neste caso, a sucessao das iteradas de Picard, yn, e precisamente igual a sucessao das somasparciais da serie de Maclaurin da solucao do (PVI), y(x) = ex
2. No entanto, e conforme se ilustra
no exemplo seguinte, tal tipo de identidade pode nao se verificar mesmo em casos simples.
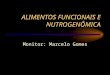
Exemplo 2: Considere-se o (PVI){
y′ = y2
y(0) = 1(1.13)
Vamos construir a sucessao (yn)n∈N0 das iteradas de Picard associadas ao (PVI). Assim:
y0(x) = y0 = 1
y1(x) = 1 +∫ x0 (y0(s))
2ds = 1 +∫ x0 1 ds = 1 + x
y2(x) = 1 +∫ x0 (y1(s))
2ds = 1 +∫ x0 (1 + s)2 ds = 1 + x+ x2 + x3
3
y3(x) = 1 +∫ x0 (y2(s))
2ds = 1 +∫ x0 (1 + s+ s2 + s3
3 )2 ds =
= 1 + x+ x2 + x3 + 2x4
3 + x5
3 + x6
9 + x7
63
...
Por outro lado, resolvendo a equacao diferencial, obtem-se
y′ = y2 ⇔ d
dx
∫
y−2dy = 1 ⇔ y(x) =1
c− x.
26

1.3. EXISTENCIA, UNICIDADE E PROLONGAMENTO DE SOLUCOES
A solucao do (PVI) sera entao
y(x) =1
1− x, IMax =]−∞, 1[
Na Figura 1.6 estao representadas as primeiras iteradas de Picard, bem como a solucao do (PVI).E de observar que quando nos aproximamos do ponto x = 1 (onde a solucao do (PVI) explode)a convergencia das iteradas de Picard torna-se cada vez mais lenta.
-0.95 -0.75 -0.55 -0.35 -0.15 0.05 0.25 0.45 0.65 0.85−5
0
5
10
15
y_0y_1y_2y_3y(t)
Figura 1.6: Algumas iteradas de Picard e a solucao do PVI (1.13).
Pode-se provar (a demonstracao nao e inteiramente trivial) que as iteradas de Picard desteproblema verificam
yn(x) = 1 + x+ x2 + · · ·+ xn +Rn+1(x) = Sn(x) +Rn+1(x) (1.14)
onde Rn+1(x) e uma funcao polinomial com um zero de ordem n + 1 em x = 0. Note queSn(x) = 1 + x+ x2 + · · ·+ xn e a sucessao das somas parciais da serie geometrica, cuja soma eprecisamente a solucao do (PVI), y(x) = 1
1−x , mas somente em ]− 1, 1[.
Em casos menos simples que estes dois exemplos — quando f(t, y) nao e uma funcao polino-mial — as iteradas de Picard nao sao polinomiais; no entanto, e mesmo sem se conhecer a formaexplıcita dessas iteradas, pode-se usar a analise matematica para provar a sua convergencia local.
Para concluir a demonstracao do Teorema de Picard, iremos mostrar que a sucessao dasiteradas de Picard, dada por
yn+1(t) = y0 +
∫ t
t0
f(s, yn(s)
)ds , (1.15)
converge uniformemente num certo intervalo, I = [t0−α, t0+α] para uma funcao contınua, y(t).A partir deste facto, e tomando o limite quando n → ∞ em ambos os membros da igualdade(1.15), poderemos entao concluir que y(t) satisfaz a equacao integral (1.11) em I, pelo que deveraser solucao do PVI no intervalo aberto ]t0 − α, t0 + α[.
27

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Convergencia Uniforme das Iteradas de Picard
Vamos entao demonstrar que a sucessao das iteradas de Picard, yn(t), converge uniformementenum intervalo [t0−α, t0 +α], para certos α > 0 suficientemente pequenos (o intervalo de valorespossıveis ira depender de t0, y0 e f).
Comecamos por estimar a diferenca entre duas iteradas de Picard consecutivas 7:
|yn+1(t)− yn(t)| =
∣∣∣∣y0 +
∫ t
t0
f(s, yn(s)
)ds− y0 −
∫ t
t0
f(s, yn−1(s)
)ds
∣∣∣∣
≤∫ t
t0
∣∣∣f(s, yn(s)
)− f
(s, yn−1(s)
)∣∣∣ |ds|
Vamos estimar a funcao integranda atraves da condicao de Lipschitz. Considere-se um rectanguloR = {(t, y) ∈ R
2 : t0 − a ≤ t ≤ t0 + a e y0 − b ≤ y ≤ y0 + b} contido no domınio, D, de f .
R
y
tt0
y0
t0 − a t0 + a
y0 − b
y0 + b
(t0, y0)
Figura 1.7: O rectangulo R.
Seja K a constante de Lipschitz de f (relativamente a y) no conjunto compacto R, ou seja, Kverifica:
|f(t, y)− f(t, x)| ≤ K|y − x| ∀(t, y), (t, x) ∈ R (1.16)
Para que o grafico das iteradas de Picard permaneca no interior de R (por forma a que a estimativade Lipschitz (1.16) seja valida quando aplicada a pontos (t, yn(t)), e necessario que:
1o) t ∈]t0 − a, t0 + a[, pelo que devemos ter α < a.
2o) SejaM = max {|f(t, y)| : (t, y) ∈ R}
Para que(t, yn(t)
)esteja no interior de R para t ∈ [t0 − α, t0 + α], e necessario que
|yn(t)− y0| < b. Como
|yn(t)− y0| ≤∫ t
t0
∣∣f(s, yn(s)
)∣∣ |ds| ≤ M
∫ t
t0
|ds| = M |t− t0| ≤ Mα,
7Se f : I → R e contınua no intervalo I e a, b ∈ I (sem que se tenha, necessariamente, b ≥ a) entao obtem-se,como caso particular da propriedade de majoracao do integral complexo:
∣
∣
∣
∣
∫ b
a
f(t)dt
∣
∣
∣
∣
≤
∫ b
a
|f(t)| |dt|.
Note que∫ b
a|f(t)| |dt| e igual a
∫ b
a|f(t)| dt se b ≥ a e a
∫ a
b|f(t)|dt se b < a. Em particular,
∫ b
a|dt| = |b− a|.
28

1.3. EXISTENCIA, UNICIDADE E PROLONGAMENTO DE SOLUCOES
isso implica que devemos ter Mα < b. Para tal, e preciso exigir α < b/M .
Assim, para qualquer t ∈ [t0 − α, t0 + α]def= Iα:
|yn+1(t)− yn(t)| ≤∫ t
t0
∣∣∣f(s, yn(s)
)− f
(s, yn−1(s)
)∣∣∣ |ds|
≤∫ t
t0
K |yn(s)− yn−1(s)| |ds|
≤ K maxs∈Iα
∣∣∣yn(s)− yn−1(s)
∣∣∣
∫ t
t0
|ds|
≤ Kα maxs∈Iα
∣∣∣yn(s)− yn−1(s)
∣∣∣
Isto implica que:
maxt∈Iα
∣∣∣yn+1(t)− yn(t)
∣∣∣ ≤ Kα max
t∈Iα
∣∣∣yn(t)− yn−1(t)
∣∣∣
≤ (Kα)2 maxt∈Iα
∣∣∣yn−1(t)− yn−2(t)
∣∣∣
...
≤ (Kα)n maxt∈Iα
∣∣∣y1(t)− y0
∣∣∣
Como y1(t)− y0 =∫ tt0f(s, y0) ds, resulta entao da desigualdade anterior que:
maxt∈Iα
∣∣∣yn+1(t)− yn(t)
∣∣∣ ≤ (Kα)n max
t∈Iα
∣∣∣∣
∫ t
t0
f(s, y0) ds
∣∣∣∣
≤ (Kα)n maxt∈Iα
∫ t
t0
|f(s, y0)| |ds|
≤ (Kα)n maxt∈Iα
∫ t
t0
M |ds|
= (Kα)nMα < (Kα)nb
Definindo r = Kα, entao
maxt∈Iα
∣∣∣yn+1(t)− yn(t)
∣∣∣ < brn. (1.17)
Utilizando somas telescopicas:
yn(t) =(yn(t)− yn−1(t)
)+(yn−1(t)− yn−2(t)
)+ . . .
. . .+(y2(t)− y1(t)
)+(y1(t)− y0
)+ y0
= y0 +n∑
k=1
(
yk(t)− yk−1(t))
Isto significa que yn(t) e a sucessao das somas parciais da serie
y0 +n−1∑
k=0
(
yk(t)− yk−1(t))
(1.18)
29

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
A terceira restricao que introduzimos ao valor de α e r = Kα < 1, ou seja α < 1/K . Assim,
como |r| < 1,∑∞
k=m brk e uma serie geometrica convergente. Por outro lado, o termo geral daserie (1.18) verifica
∣∣∣yk(t)− yk−1(t)
∣∣∣ ≤ brk,
para k ≥ 1. Pelo criterio de Weierstrass, yn(t) converge uniformemente em Iα, e o limite e asoma da serie de funcoes contınuas (1.18). Resulta assim que y : Iα → R existe e e contınuadesde que tomemos:
α < min
{
a,b
M,1
K
}
(1.19)
Existencia e Regularidade da Solucao
Considerando agora as iteradas de Picard,
yn+1(t) = y0 +
∫ t
t0
f(t, yn(t)
)dt (1.20)
e usando a convergencia uniforme de yn(t) para y(t) em Iα, entao tomando o limite em ambosos membros de (1.20) conclui-se que que y(t) satisfaz a equacao integral:
y(t) = y0 +
∫ t
t0
f(t, y(t)
)dt
Como y(t) e contınua em Iα, entao f(t, y(t)
)e contınua em Iα. Por aplicacao do teorema
fundamental do calculo ao 2o membro da equacao integral, podemos concluir que y ∈ C1(Iα).
Unicidade de Solucao
Supondo que y(t) e z(t) sao duas solucoes do PVI, entao verificam
y(t) = y0 +
∫ t
t0
f(t, y(t)
)dt
z(t) = y0 +
∫ t
t0
f(t, z(t)
)dt
em Iα = [t0 − α, t0 + α], onde α satisfaz (1.19). Assim:
|y(t)− z(t)| ≤∫ t
t0
∣∣∣f(s, y(s)
)− f
(s, z(s)
)∣∣∣ |ds|
≤∫ t
t0
K |y(s)− z(s)| |ds|
≤ K maxs∈Iα
∣∣y(s)− z(s)
∣∣
∫ t
t0
|ds|
≤ Kα maxs∈Iα
∣∣y(s)− z(s)
∣∣
Como α < 1/K, ou seja, Kα < 1,
|y(t)− z(t)| ≤ maxs∈Iα
∣∣∣y(s)− z(s)
∣∣∣,
30

1.3. EXISTENCIA, UNICIDADE E PROLONGAMENTO DE SOLUCOES
sendo a igualdade apenas verificada quando maxs∈Iα
∣∣y(s) − z(s)
∣∣ = 0. Como e impossıvel que se
verifique a desigualdade estrita para todo o t ∈ Iα (pois o maximo de |y(t)− z(t)| e atingido numponto t1 ∈ Iα) concluımos que max
s∈Iα
∣∣y(s)− z(s)
∣∣ = 0, ou seja:
y(t) = z(t) ∀t ∈ [t0 − α, t0 + α]
�
1.3.5 O teorema de Picard (revisitado) e alguns exemplos
Vejamos agora o enunciado do teorema que efectivamente provamos, onde se acrescenta a in-formacao que obtivemos sobre o tamanho dos intervalos onde se garante existencia e e unicidadede solucao.
Teorema de PicardConsidere-se D ⊆ R
2 aberto e f : D → R contınua e localmente lipschitziana relativamente a yem D. Se (t0, y0) ∈ D, o problema de valor inicial
{y = f(t, y)y(t0) = y0
admite uma unica solucao, y(t), definida numa vizinhanca de t0, isto e, num intervalo do tipo]t0 − α, t0 + α[.Alem disso, a conclusao acima e valida para qualquer α < min
{a, b
M , 1K
}, onde a e b sao as
dimensoes de um rectangulo R = {(t, y) ∈ R2 : |t − t0| ≤ a e |y − y0| ≤ b} contido em D 8,
M = max(t,y)∈R
|f(t, y)| e K e uma constante de Lipschitz de f em R 9.
Supondo que f satisfaz as condicoes do teorema de Picard, podemos desde ja concluir oseguinte: os graficos de quaisquer duas solucoes distintas, y1(t) e y2(t) da mesma equacao dife-rencial,
y′ = f(t, y),
definidas no mesmo intervalo aberto, I ⊂ R, nao se podem intersectar; isto e, nao existe t ∈ Ital que
y1(t) = y2(t)
Isto porque, admitindo que o oposto seria valido entao, e tomando y = y1(t) = y2(t), o problemade valor inicial {
y = f(t, y)y(t) = y
teria duas solucoes distintas, y1(t) e y2(t), definidas numa vizinhanca de t. Ora isto contradiz aconclusao do teorema de Picard.
Exemplos:
8Ver fig. 1.79Ou seja, K > 0 e tal que |f(t, y)− f(t, x)| ≤ K|y − x| para quaisquer (t, y), (t, x) ∈ R.
31

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
(1) Considere-se o problema de valor inicial
d y
dx= 3√
1− xy , y(0) = 0 (1.21)
Comecemos por observar que f(x, y) = 3√1− xy
• esta definida e e contınua em R2;
• ∂f/∂y esta definida e e contınua em R2 \ {(x, y) : xy = 1}, consequentemente, f e
localmente lipschitziana neste conjunto.
Conclui-se que f(x, y) verifica as condicoes do Teorema de Picard em D = R2\{(x, y) : xy = 1}.
Dado que (x0, y0) = (0, 0) ∈ D o problema de valor inicial (1.21) admite uma unica solucao, y(x)definida numa vizinhanca de x0 = 0.
(2) Considere-se o problema de valor inicial
d y
dx= 3√
1− xy , y(1) = 1 (1.22)
Como vimos no exemplo anterior f(x, y) = 3√1− xy verifica as condicoes do Teorema de Picard
em D = R2 \ {(x, y) : xy = 1}. Em primeiro lugar, e dado que f(x, y) e contınua em R
2,o Teorema de Peano garante que o PVI (1.22) admite pelo menos uma solucao definida numavizinhanca de x0 = 1. No entanto neste exemplo tem-se que (x0, y0) = (1, 1) 6∈ D. Apesardisso nao se pode, de imediato, concluir que f(x, y) nao verifica as condicoes do Teorema dePicard num conjunto que contenha (1, 1). O facto de ∂f
∂y (1, 1) nao existir nao e suficiente paragarantir que f(x, y) nao e lipschtziana em conjuntos contendo (1, 1); teremos, por isso, que overificar directamente. Assim, seja B qualquer subconjunto fechado e limitado de R
2, e (x, y1),(x, y2) ∈ B:
|f(x, y1)− f(x, y2)| =∣∣∣
3√
1− xy1 − 3√
1− xy2
∣∣∣ =
∣∣∣∣
3√1− xy1 − 3
√1− xy2
y1 − y2
∣∣∣∣|y1 − y2|
Para que f seja lipschitziana em B, a quantidade
L(x, y1, y2) =
∣∣∣∣
3√1− xy1 − 3
√1− xy2
y1 − y2
∣∣∣∣
tem que ser limitada para todos (x, y1), (x, y2) ∈ B. Considere-se (x, y2) = (1, 1) e (x, y1) =(1, 1 + h) para h ∈ R. Temos entao que
L(1, 1, 1 + h) =
∣∣∣∣
3√−h
h
∣∣∣∣= |h|−2/3
E entao facil de observar que para valores de h proximos de 0 (o que corresponde a estarmos empontos (x, y) proximos de (1, 1)), |h−2/3| aproxima-se de ∞ pelo que L(1, 1, 1+h) nao e limitada.Concluimos que f nao e lipschtziana em qualquer conjunto contendo o ponto (1, 1), pelo que naose verificam as condicoes do Teorema de Picard numa vizinhanca de (1, 1). Concluimos entao quenao se pode garantir unicidade de solucao para (1.22).
32

1.3. EXISTENCIA, UNICIDADE E PROLONGAMENTO DE SOLUCOES
(3) Considere-se o problema de valor inicial
d y
dx= |x+ y| , y(1) = −1 (1.23)
Comecemos por observar que f(x, y) = |x + y| esta definida e e contınua em R2 o Teorema de
Peano garante que o PVI (1.23) admite pelo menos uma solucao definida numa vizinhanca dex0 = 1. Por outro lado, ∂f/∂y esta definida e e contınua em D = R
2 \ {(x, y) : x + y = 0}.Visto (x0, y0) 6∈ D, teremos que averiguar directamente se f(x, y) e lipschitziana numa vizinhancado ponto (x0, y0) = (1,−1). conjunto limitado e fechado que contenha (1,−1). Assim, seja Bqualquer subconjunto fechado e limitado de R
2, e (x, y1), (x, y2) ∈ B.
|f(x, y1)− f(x− y2)| = | |x+ y1| − |x+ y2| | ≤∣∣∣(x+ y1)− (x+ y2)
∣∣∣ = |y1 − y2|
Tem-se entao que f(x, y) e lipschitziana em B (com constante de Lipschitz L = 1, pelo que f elocalmente lipschitziana em R
2. O Teorema de Picard garante entao unicidade de solucao para(1.23).
(4) Sendo a ∈ R, considere-se o problema de valor inicial
{
y′ + ay = y2 cos(y + t)
y(0) = 1(1.24)
Definindo f(t, y) = −ay+ y2 cos(y+ t), a equacao pode-se escrever na forma y′ = f(t, y). Note-se que f(t, y) e continuamente diferenciavel em R
2, logo e contınua e localmente lipshitzianarelativamente a y em R
2. Pelo teorema de Picard, existe solucao unica do problema de valorinicial numa vizinhanca de t0 = 0, ou seja, num intervalo ]− α,α[, para algum α > 0.
Determinemos agora um intervalo de valores de a para os quais a solucao do problema (1.24)esta definida em R. Notando que a equacao y′ = f(t, y) = y(y − a) cos(y + t) tem as solucoesestacionarias u(t) ≡ 0 e v(t) ≡ a, basta tomarmos a > 1 para que se verifique
0 < y(0) = 1 < a
Como, pelo teorema de Picard, os graficos de solucoes distintas do problema y′ = f(t, y) nao sepodem intersectar, entao uma solucao que comeca num ponto y(0) ∈]0, a[ deve permanecer nesseintervalo (pois nao se pode ter y(t) = u(t) = 0 ou y(t) = v(t) = a para qualquer t ∈ Imax).Assim sendo:
0 ≤ y(t) ≤ a ∀t ∈ Imax
Para concluirmos que Imax = R podemos aplicar o teorema de Picard (em versao melhorada)sucessivamente. Por exemplo, tomando t1 = α e y1 = y(α), o problema
{
y′ + ay = y2 cos(y + t)
y(t1) = y1(1.25)
tem solucao unica definida num intervalo ]t1 − α1, t1 + α1[, o que permite prolongar a solucao(unica) do PVI (1.25) ao intervalo ] − α,α + α1[. Repetindo este procedimento, pode-se provarque Imax ⊃ [0,∞[. Fazendo o mesmo do lado esquerdo do intervalo ]−α,α[, podemos igualmenteprovar que Imax ⊃]−∞, 0].
Em vez de discutirmos a prova neste exemplo particular, veremos na proxima seccao umaforma sistematica de o fazer utilizando o teorema do prolongamento da solucao.
33

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
1.3.6 Prolongamento de Solucao
Considere agora um problema de valor inicial
dy
dt= f(t, y) , y(t0) = y0
que verifique as condicoes do teorema de Picard.Sejam y1 : I1 → R e y2 : I2 → R tais que I1 ⊂ I2. Pode-se desde ja concluir que a restricao de
y2 a I1 e precisamente y1. Caso contrario, terıamos duas solucoes distintas da equacao diferencialdefinidas em I1, cujos graficos se intersectam em pelo menos (t0, y0). Como ja vimos na subseccao1.3.5, isto entraria em contradicao com a unicidade de solucao. Diz-se por isso que a solucao y2e um prolongamento da solucao y1 : I1 → R ao intervalo I2 ⊃ I1.
Sem acrescentar mais condicoes a f , a conclusao do teorema de Picard pode ser substanci-almente melhorada de forma a incluir alguma informacao sobre a possibilidade de prolongamentoda solucao local.
Teorema (Prolongamento de Solucao):Seja D ⊂ R
2 aberto, (t0, y0) ∈ D, f : D → R contınua e localmente lipshitziana relativamente ay em D. Entao a solucao unica do problema de valor inicial
dy
dt= f(t, y) , y(t0) = y0
esta definida num intervalo maximo de definicao, Imax =]a, b[, cujos extremos, a, b ∈ R, verificam
(i) b = +∞ ou
(ii) b < +∞ e(t, y(t)
)→ ∂D quando t → b− ou
(iii) b < +∞ e limt→b−
|y(t)| = +∞e
(i) a = −∞ ou
(ii) a > −∞ e(t, y(t)
)→ ∂D quando t → a+ ou
(iii) a > −∞ e limt→a+
|y(t)| = +∞
Note que os casos do tipo (iii) significam que a solucao explode (respectivamente, quandot → b ou t → a). Quanto aos casos do tipo (ii), por exemplo
(t, y(t)
)→ ∂D quando t → b−
significa que qualquer ponto limite do grafico de y(t) para t ∈ [t0, b[ (este grafico e o conjunto{(t, y(t)) : t ∈ [t0, b[} ⊂ R
2) pertence a fronteira de D, ∂D. Isto e equivalente a dizer quequalquer sucessao tn ∈ ]a, b[ tal que tn → b e y(tn) e convergente verifica:
limn→+∞
(tn, y(tn)
)∈ ∂D
(e, analogamente, quando t → a+).
34

1.3. EXISTENCIA, UNICIDADE E PROLONGAMENTO DE SOLUCOES
Dem.:Vamos provar a conclusao do teorema para o prolongamento para a direita, isto e, ate b.Seja J o conjunto dos τ ∈ R tais que existe solucao y : [t0, τ ] → R do problema de valor
inicial 10. Pelo teorema de Picard, J 6= ∅. Se J nao for majorado, entao a conclusao do teoremae satisfeita pois verifica-se o caso (i). Por outro lado, se J e majorado, como J 6= ∅ entao existeb = supJ < +∞.
Admitamos que tanto (ii) como (iii) nao se verificam. Como limt→a+
|y(t)| = +∞ nao e verdade,
entao existe uma sucessao sn → b− tal que y(sn) e limitada; sendo limitada, tal sucessao temuma subsucessao convergente. Isto mostra que existem sucessoes tn ∈ ]a, b[ tais que tn → b ey(tn) e convergente. Mas como (ii) nao se verifica, entao para pelo menos uma dessas sucessoes,(tn, y(tn)
)converge para um certo (b, ω) ∈ intD.
Seja δ < 13dist
((b, ω), ∂D
); assim sendo, B3δ(b, ω) e um subconjunto compacto de D. Seja
K a constante de Lipschitz de f em B3δ(b, ω) e
α = min
{
δ,δ
M,1
K
}
. (1.26)
∂D
2δ
2δ(t, y)
(b, w)
Figura 1.8
Seja (t, y) um termo da sucessao(tn, y(tn)
)tal que
∥∥(t, y)− (b, ω)
∥∥ < α (1.27)
Entao o quadrado
R ={
(t, y) : t ∈ [t− δ, t + δ] e y ∈ [y − δ, y + δ]}
verificaR ⊂ Bδ
√2(t, y) ⊂ Bδ
√2+α(b, ω) ⊂ B3δ(b, ω),
pois, tendo em conta (1.26), δ√2 + α ≤ δ
√2 + δ < 3δ.
Pelo teorema de Picard (em versao melhorada) e (1.26), concluimos que a solucao y(t) admiteextensao ao intervalo [t0, t+ α] e que, tendo em conta (1.27), b− t < α, o que implica que:
10Note que se y : I → R e y : I → R (onde I ⊂ I sao intervalos), entao a solucao y restrita a I e uma solucaodo PVI em I . Resulta da unicidade de solucao do PVI que y(t) = y(t) para qualquer t ∈ I ; ou seja, a restricao dey ao domınio de y, I , coincide necessariamente com y.
35

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
t+ α > b
Mas isto e absurdo, pois contradiz o facto de que b = supJ .A demonstracao do prolongamento para a esquerda (ate a) e analoga a anterior. �
Em qualquer um dos casos, verificar que a solucao nao pode ser prolongada ate t = ∞(ou t = −∞) porque a fronteira do conjunto D e atingida pode ser facil de constatar pois afuncao f(t, y) e dada e, consequentemente, conhecemos os subconjuntos de R
2 onde o graficoda solucao nao pode entrar. Para mostrar que a solucao explode (ou que nao explode) ou, maisgenericamente, que o seu grafico esta confinado a uma certa regiao de R2, e muito util o seguintecriterio.
1.3.7 Comparacao de Solucoes
Comparacao de Solucoes:
Considere-se D ⊆ R2, f , g : D → R verificando as condicoes do Teorema de Picard e
(t0, y0) ∈ D.Sejam ainda, y(t) a solucao do PVI
dy
dt= f(t, y) , y(t0) = y0
e u(t) a solucao do PVIdu
dt= g(t, u) , u(t0) = y0
Sef(t, y) ≤ g(t, y) , ∀(t, y) ∈ D
entao
y(t) ≤ u(t) para todo t ≥ t0
y(t) ≥ u(t) para todo t ≤ t0
Consequencias:
• Mostrar que a solucao explode
Seja u(t) a solucao do PVI
du
dt= g(t, u) , u(t0) = α
definida em Iumax =]t0 − ǫ, T [, tendo-se que limt→T−
u(t) = +∞. Se y(t) e solucao do PVI
dy
dt= f(t, y) , y(t0) = α
36

1.3. EXISTENCIA, UNICIDADE E PROLONGAMENTO DE SOLUCOES
e f(t, y) ≥ g(t, y) para todo (t, y). Observe-se que, pelo teorema anterior, esta condicaoimplica que y(t) ≥ u(t) para todo t ≥ α; assim sendo, y(t) explode no intervalo ]t0, T ], isto
e, existe Θ ∈]t0, T ] tal que limt→Θ−
y.(t) = +∞ e consequentemente sup Iymax = Θ
• Mostrar que a solucao nao explode
Seja u(t) a solucao do PVI
du
dt= g(t, u) , u(t0) = α
definida em Iumax =]a,+∞[ para certo a < t0. Se y(t) e solucao do PVI
dy
dt= f(t, y) , y(t0) = α
e f(t, y) ≤ g(t, y) para todo (t, y) (observe-se que pelo teorema anterior esta condicaoimplica que y(t) ≤ u(t) para todo t ≥ α), entao y(t) nao explode para +∞ em ]t0,+∞[.Analogamente, seja v(t) a solucao do PVI
dv
dt= h(t, v) , v(t0) = α
definida em Ivmax =]a1,+∞[ para certo a1 < t9. Se y(t) e solucao do PVI
dy
dt= f(t, y) , y(t0) = α
e f(t, y) ≥ h(t, y) para todo (t, y) (observe-se que pelo teorema anterior esta condicaoimplica que y(t) ≥ v(t) para todo t ≥ α), entao y(t) nao explode para −∞ em ]t0,+∞[.Conclui-se que y(t) nao explode no intervalo ]t0,+∞[.
Exemplo 1Considere-se o PVI
y′ = (1 + y2)f(ty) , y(0) = 0 (1.28)
em que f e uma funcao de classe C1(R), verificando f(x) ≥ 1 para qualquer x ∈ R.Como a funcao (1 + y2)f(ty) e contınua em R
2, e a funcao
∂
∂y
((1 + y2)f(ty)
)= 2yf(ty) + (1 + y2)f ′(ty)t
e tambem contınua em R2 — logo f e localmente lipschitziana relativamente a y em R
2 — oteorema de Picard garante a existencia de uma solucao unica, y(t), definida num vizinhanca abertada origem e que verifica y(0) = 0.
Pretendemos agora mostrar que o intervalo maximo de definicao da solucao do problema devalor inicial e majorado. Note que, para qualquer numero real ty, f(ty) ≥ 1, o que implica que:
(1 + y2)f(ty) ≥ 1 + y2 para qualquer (t, y) ∈ R2 (1.29)
Consideremos agora o problema de valor inicial
u′ = 1 + u2 , u(0) = 0 ;
37

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
resolvendo a equacao separavel e fazendo uso da condicao inicial, obtem-se a sua unica solucao:
u(t) = tg t,
definida em ]π/2, π/2[. Note que u(t) explode quando t → ±π/2.Tendo em conta a estimativa (1.29), utilizando o teorema de comparacao de solucoes, a
solucao y(t) do (PVI) (1.28) verifica:
y(t) ≥ u(t) = tg t para t ≥ 0
Como limt→π
2
tg t = +∞ a solucao explode e, como tal, o intervalo maximo de definicao da solucao
do problema de valor inicial e majorado.
Exemplo 2
Considere-se o problema de valor inicial
y′ = −2(sen(ety) + 2)y , y(0) = 1 (1.30)
Sendo
f(t, y) = −2(sen(ety) + 2)y
e facil de verificar que tanto f como ∂f/∂y sao contınuas em R2. Isto implica que f verifica
as condicoes do Teorema de Picard em D = R2 e assim (1.30) tem uma solucao unica numa
vizinhanca de t0 = 0. Temos agora que mostrar que a solucao pode ser prolongada a R. Obser-vemos que para y(t) > 0 (isso acontecera, pelo menos, numa vizinhanca de t0 = 0), a equacao eequivalente a:
y′
y= −2(sen(ety) + 2)
Integrando esta igualdade de 0 a t, obtem-se:
log y(t)− log y(0) =
∫ t
0(−2(sen(esy(s)) + 2))ds
Como, para quaisquer (s, y) ∈ R2,
−6 ≤ −2(sen(esy(s)) + 2) ≤ −2
pode-se concluir que:
−6t ≤∫ t
0(−2(sen(esy(s)) + 2))ds ≤ −2t para t ≥ 0,
−2t ≤∫ t
0(−2(sen(esy(s)) + 2))ds ≤ −6t para t ≤ 0.
Desta forma (e como log y(0) = log 1 = 0):
−6t ≤ log y(t) ≤ −2t para t ≥ 0
−2t ≤ log y(t) ≤ −6t para t ≤ 0
38

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
Em primeiro lugar, isto mostra que log y(t) nao explode. Em particular, isto implica que y(t) 6= 0,para qualquer t ∈ Imax; pois se existisse β tal que y(β) = 0 entao limt→β log y(t) = −∞. Destaforma, as desigualdades acima estimam o valor de y(t) para qualquer t ∈ R onde a solucao estadefinida. O grafico da solucao esta confinado a regiao do plano situada entre as curvas y = e−2t
e y = e−6t, pelo que y(t) nao explode em tempo finito. Como o domınio de f e R2, o teorema
do prolongamento de solucao garante a existencia de uma (unica) solucao global.
1.4 Equacoes Vectoriais ou Sistemas de 1a Ordem
Sendo I ⊂ R, A ⊂ Rn e, para i = 1, ..., n, fi : I × A → R, denomina-se por equacao diferencial
vectorial de primeira ordem um sistema de equacoes do tipo
y′1(t) = f1(t, y1(t), . . . , yn(t)
)
...y′n(t) = fn
(t, y1(t), . . . , yn(t)
)
onde as solucoes sao funcoes y1(t), ..., yn(t) : I → R de classe C1 em I. Utilizando notacaovectorial, este sistema pode entao ser escrito de forma abreviada como a equacao vectorial
y′(t) = F (t,y(t)) ,
sendo
y(t) =
y1(t)...
yn(t)
e F (t,y(t)) =
f1(t, y1(t), . . . , yn(t)
)
.
.
.fn(t, y1(t), . . . , yn(t)
)
Tal como no caso escalar (n = 1), sendo t0 ∈ I, denomina-se problema de valor inicial a
y′(t) = F(t,y(t)
), t ∈ I
y(t0) = y0
onde se supoe que t0 ∈ I e y0 =(y1(t0), . . . , yn(t0)
)∈ A.
1.4.1 Condicao de Lipschitz e Teorema de Picard no Caso Vectorial
Uma funcao vectorial, f(t,y) : D ⊂ Rn+1 → R
n, contınua em D, denomina-se localmentelipschitziana relativamente a y se cada uma das funcoes escalares fi(t, y1, ..., yn), i = 1, ..., n, forlocalmente lipschitziana relativamente a y1,..., yn em D, isto e
|fi(t, y1, . . . , yn)− f1(t, x1, . . . , xn)| ≤ K||(y1, . . . , yn)− (x1, . . . , xn)|| onde
||(y1, . . . , yn)− (x1, . . . , xn)|| def=√
(y1 − x1)2 + . . .+ (yn − xn)2
39

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
para todos (t, y1, . . . , yn), (t, u1, . . . , un) em subconjuntos compactos de D. Isto e equivalente adizer que existe L ∈ R
+ tal que:
||f(t,y) − f(t,x)|| ≤ L||y − x||
para quaisquer (t,y), (t,x) ∈ D. 11
O seguinte teorema tem demonstracao analoga ao teorema homonimo que enunciamos ante-riormente para o caso escalar.
Teorema de Picard (Existencia e unicidade de solucao no caso vectorial): Considere-se odomınio D = I×R
n ⊆ Rn+1, onde f : D → R e contınua e localmente lipschitziana relativamente
a y. Se (t0,y0) ∈ D, o problema de valor inicial
{y = f(t,y)y(t0) = y0
admite solucao unica num intervalo ]t0 − α, t0 + α[, para certo α > 0.
1.4.2 Equacoes Vectoriais Lineares
A equacao vectorial denomina-se linear se a funcao F (t,y) for linear em y, isto e, se for da forma
y′1(t) = a11(t)y1(t) + · · ·+ a1n(t)yn(t) + b1(t)...
......
y′n(t) = an1(t)y1(t) + · · ·+ ann(t)yn(t) + bn(t)
ou, na forma vectorial:y′(t) = A(t)y(t) + b(t) (1.31)
sendo
y(t) =
y1(t)...yn(t)
, A(t)
a11(t) . . . a1n(t)...
...an1(t) . . . ann(t)
e b(t) =
b1(t)...bn(t)
.
Funcoes matriciais
No seguimento, sera necessario estudar funcoes X cujo domınio e um intervalo real e cujo conjuntode chegada e um espaco vectorial de matrizes reais (ou complexas) de dimensao n×m, que aquidenotaremos por Mn×m(R) (ou C).
Genericamente, um funcao X : I ⊂ R → Mn×m(R), com
X(t) =[
xij(t)]
i=1...nj=1...m
11Recordamos que, dados dois conjuntos A e B, o produto cartesiano de A por B, denotado A×B, e o conjuntodos pares ordenados (a, b) tais que a ∈ A e b ∈ B. No nosso caso, se t ∈ R e y = (y1, . . . , yn) ∈ R
n, entao(t,y) ∈ R× R
n. E usual identificar (t,y) ∈ R× Rn com (t, y1, . . . , yn) ∈ R
n+1; neste sentido, podemos dizer queR× R
n = Rn+1.
40

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
pode, de facto, ser interpretada como uma funcao vectorial com as n×m componentes:
x11(t), . . . , x1m(t), x21(t), . . . , x2m(t), . . . . . . , xn1(t), . . . , xnn(t).
Sendo assim, pode-se neste contexto utilizar os conceitos e resultados ja discutidos quando seestudou as funcoes vectoriais. A derivada de X(t) e, entao, dada por
dX
dt=
[dxijdt
]
i=1,...nj=1...m
,
e esta bem definida se as funcoes componentes forem diferenciaveis em I. Analogamente, ointegral de X entre t0, t ∈ I e dado por:
∫ t
t0
X(s) ds =[∫ t
t0xij(s) ds
]
i=1,...nj=1...m
,
sempre que as funcoes componentes sejam seccionalmente contınuas em I. Desta forma, alinearidade da derivada e do integral ficam asseguradas.
Relativamente a derivada do produto de duas matrizes,
X(t) =[
xik(t)]
i=1...nk=1...m
por Y (t) =[
ykj(t)]
k=1...mj=1...k
,
o resultado tem que ser deduzido (porque?). No entanto isso, e tarefa relativamente facil: calcu-lando a derivada da componente (i, j) de X(t)Y (t), obtem-se:
d
dt
m∑
k=1
xik(t)ykj(t) =m∑
k=1
x′ik(t)ykj(t) +m∑
k=1
xik(t)y′kj(t) ,
Resulta assim que(X(t)Y (t)
)′= X ′(t)Y (t) +X(t)Y ′(t).
Exemplo: Dada uma funcao escalar ϕ : R → R e uma matriz n × n, A =[aij]n
i,j=1, de
componentes aij ∈ R (independentes de t), vejamos como se calculam a derivada e o integral dafuncao matricial ϕ(t)A 12.
(a) Se ϕ e de classe C1 entao:
d
dt
(
ϕ(t)A)
=
[d
dt
(
aijϕ(t))]n
i,j=1
=[
aijϕ′(t)]n
i,j=1= ϕ′(t)
[
aij
]n
i,j=1= ϕ′(t)A
Identicamente (verifique):
(b) Se ϕ e seccionalmente contınua em qualquer intervalo fechado e limitado, entao:∫ t
t0
ϕ(s)A ds =(∫ t
t0ϕ(s) ds
)
A,
(c) Se ϕ e contınua entao, usando o teorema fundamental do calculo:
d
dt
∫ t
t0
ϕ(s)A ds = ϕ(t)A
12Note que ϕ(t)A e o produto do escalar ϕ(t) pela matriz constante A.
41

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Caso Homogeneo e Matriz Solucao Fundamental
Fazendo b(t) ≡ 0 na equacao (1.31), obtem-se a equacao linear homogenea associada
y′(t) = A(t)y(t) (1.32)
com y ∈ Rn e A(t) =
[
aij(t)]n
i,j=1, onde as funcoes aij(t) : I ⊆ R → R sao contınuas.
Definicao (Matriz Solucao Fundamental): Uma matriz S(t) denomina-se matriz solucao fun-damental de (1.32) se e so se
(i) detS(t) 6= 0 para todo t ∈ I, o que significa que as colunas de S(t) sao linearmenteindependentes (S(t) e nao singular) para qualquer t ∈ I;
(ii) as colunas de S(t) sao solucoes da equacao y′(t) = A(t)y(t).
Exemplo 1:
Considere-se a equacao vectorial
y′(t) = Ay(t) sendo A =
[1 −10 −1
]
(1.33)
Fazendo y = (x,y), a equacao pode ser escrita na forma
{x′ = x− yy′ = −y
Atendendo a que a segunda equacao so depende da funcao y, podemos resolve-la. Assim:
y′ = −y ⇔ y(t) = c1e−t
Substituindo na primeira equacao obtem-se
x′ − x = −c1e−t ⇔ d
dt
(
e−tx)
= −c1e−2t ⇔ x(t) =
c12e−t + c2e
t
Tem-se entao que a solucao geral da equacao vectorial e
y(t) =
[c12 e
−t + c2et
c1e−t
]
=
[12e
−t et
e−t 0
] [c1c2
]
def= S(t)C,
E agora facil de verificar que a matriz S(t) acima definida e uma matriz solucao fundamentalassociada a equacao (1.33). De facto
(i) A matriz S(t) e nao singular em R, pois
detS(t) = −1 6= 0 ∀t ∈ R
42

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
(ii) Verifica-se que y′i(t) = Ayi(t), i = 1, 2 em que yi(t) representa a coluna i de S(t). De
facto, para i = 1
y′1(t) =
d
dt
[12e
−t
e−t
]
=
[−1
2e−t
−e−t
]
e Ay1(t) =
[1 −10 −1
] [12e
−t
e−t
]
=
[−1
2e−t
−e−t
]
e para i = 2
y′2(t) =
d
dt
[et
0
]
=
[et
0
]
e Ay2(t) =
[1 −10 −1
] [et
0
]
=
[et
0
]
Observe-se que nao ha uma unica matriz solucao fundamental da equacao — por exemplo,se S(t) e uma matriz solucao fundamental qualquer matriz obtida por troca de colunas de S(t) etambem uma matriz solucao fundamental.
Proposicao (Caracterizacao da Matriz Solucao Fundamental): S(t) e uma matriz solucaofundamental da equacao (1.32) se e so se:
(i) Existe um t0 ∈ I tal que S(t0) e nao singular.
(ii) S′(t) = A(t)S(t)
Demonstracao: (ii) e apenas outra forma de escrever a alınea (ii) da definicao de S(t).Quanto a (i), suponhamos que existe um t ∈ I tal que S(t) e singular; isto e, para certo b ∈Rn \ {0}, S(t)b = 0, e derivemos uma contradicao. Como
S′(t)b = A(t)S(t)b ,
Considerando y(t) = S(t)b entao das equacoes anteriores:{
y′ = A(t)y
y(t) = S(t)b = 0
Por unicidade de solucao deste PVI, y(t) ≡ 0. Conclui-se entao que S(t)b = 0 para todo o t ∈ I,pelo que S(t) e singular para todo o t ∈ I; logo, em particular, tambem S(t0) e singular, o quecontradiz a hipotese. �
Como corolario da proposicao anterior, obtemos:
Teorema (Matriz Solucao Fundamental): S(t) e uma matriz solucao fundamental daequacao (1.32) se e so se e a solucao do problema de valor inicial
{S′ = A(t)SS(0) = S0
para alguma matriz nao singular, S0 ∈ Mn×n(R).
Exemplo 2: Para obter uma matriz solucao fundamental, S(t), da equacao y′ = A(t)y,podemos resolver os n problemas
{y′ = A(t)yy(t0) = ei
com i = 1, 2, . . . n.
43

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
onde e1, e2 . . . en sao os vectores da base canonica de Rn. As colunas de S(t) serao as solucoes
desses n problemas.
Resulta da definicao que a matriz S(t) e invertıvel para todo o t. Sendo assim
0 =d
dt
(
S(t)S−1(t))
= S′(t)S−1(t) + S(t)d
dt
(
S−1(t))
,
pelo que S(t) ddt
(S−1(t)
)= −S′(t)S−1(t). Desta forma:
d
dt
(
S−1(t))
= −S−1(t)S′(t)S−1(t)
Atendendo a que S′(t) = A(t)S(t) implica A(t) = S′(t)S−1(t), entao a inversa da matriz solucaofundamental verifica:
d
dt
(
S−1(t))
= −S−1(t)A(t) (1.34)
Caracterizacao das Solucoes da Equacao Homogenea
Teorema: Considere-se I ⊂ R e A(t) =[
aij(t)]n
i,j=1, com aij(t) : I → R contınuas, e o problema
de valor inicial: {y′(t) = A(t)y(t)y(t0) = y0
(1.35)
onde t0 ∈ I e y0 ∈ Rn. Seja S(t) uma matriz solucao fundamental da equacao diferencial.
Entao o problema (1.35) tem uma unica solucao dada por y(t) = S(t)S−1(t0)y0. Alem disso, assolucoes da equacao diferencial formam um espaco vectorial de dimensao n, sendo uma sua baseconstituıda pelas colunas de S(t); ou seja, a sua solucao geral e:
y(t) = S(t)C com C = (c1, ..., cn) ∈ Rn
Demonstracao: Seja y(t) uma solucao arbitraria da equacao y′ = A(t)y e considere-sez(t) = S−1(t)y(t). Queremos mostrar que z(t) e constante. Entao, usando a equacao (1.34):
z′(t) =(S−1(t)
)′y(t) + S−1(t)y′(t)
= −S−1(t)A(t)y(t) + S−1(t)y′(t)
= S−1(t)(
y′(t)−A(t)y(t))
= 0
Temos entao que S−1(t)y(t) = z(t) = C, com C ∈ Rn, o que nos permite concluir que:
(1) a solucao geral da equacao diferencial e y(t) = S(t)C;
(2) se y(t0) = y0 entao C = S−1(t0)y(t0) = S−1(t0)y0, pelo que a solucao do PVI (1.35) ey(t) = S(t)S−1(t0)y0.
�
44

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
1.4.3 Equacoes vectoriais Lineares — Caso Nao Homogeneo
Dada uma matriz solucao fundamental de y′ = A(t)y, pretendemos obter as solucoes da equacaonao homogenea y′ = A(t)y + b(t)
Teorema (Formula de Variacao das Constantes): Sendo A =[
aij(t)]n
i,j=1, com componentes
aij : I ⊂ R → R contınuas, b : I ⊆ R → Rn tambem contınua, y0 ∈ R
n e S(t) uma matrizsolucao fundamental de y′ = A(t)y, entao a solucao do problema de valor inicial
{y′ = A(t)y + b(t)y(t0) = y0
(1.36)
e dada pela formula de variacao das constantes:
y(t) = S(t)S−1(t0)y0 + S(t)
∫ t
t0
S−1(s)b(s)ds (1.37)
Demonstracao: Escrevendo a equacao diferencial (1.36) na forma y′ − A(t)y = b(t), e multi-plicando ambos os membros por S−1(t), obtem-se:
S−1(t)y′ − S−1(t)A(t)y = S−1(t)b(t)
Atendendo a que(
S−1(t))′
= −S−1(t)A(t) (equacao (1.34)), resulta pois que
S−1(t)y′ +(
S−1(t))′
y = S−1(t)b(t),
ou sejad
dt
(
S−1(t)y(t))
= S−1(t)b(t) (1.38)
Integrando entre t0 e t, e considerando que y(t0) = y0, temos que:
S−1(t)y(t) − S−1(t0)y0 =
∫ t
t0
S−1(s)b(s) ds
Multiplicando agora a esquerda por S(t) obtem-se:
y(t) − S(t)S−1(t0)y0 = S(t)
∫ t
t0
S−1(s)b(s) ds.
�
Corolario (Formula de Variacao das Constantes para a Solucao Geral): Nas mesmascondicoes do teorema anterior, a solucao geral da equacao
y′ = A(t)y + b(t)
e dada por:
y(t) = S(t)C + S(t)
∫ t
S−1(s)b(s) ds , C ∈ Rn; (1.39)
45

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
(onde∫ t
x(s)ds representa uma primitiva da funcao vectorial x(t)).
Demonstracao: Repita a prova do teorema anterior, primitivando ambos os membros da igual-dade (1.38) em vez de os integrar entre t0 e t (exercıcio). Note que a constante de primitivacao,C, pertence a R
n. �
1.4.4 Equacoes Vectoriais Lineares de Coeficientes Constantes
A equacao vectorial linear denomina-se de coeficientes constantes se a matriz A(t) tiver entradasconstantes, isto e, se for da forma
y′1(t) = a11 y1(t) + ...+ a1n yn(t) + b1(t)...
......
y′n(t) = an1 y1(t) + ...+ ann yn(t) + bn(t)
ou, na forma vectorial,y′(t) = Ay(t) + b(t), (1.40)
sendo
y(t) =
y1(t)...yn(t)
, A(t) =
a11 . . . a1n...
...an1 . . . ann
e b(t) =
b1(t)...bn(t)
Caso Homogeneo
Tal como anteriormente, o caso homogeneo corresponde a tomar b(t) ≡ 0 na equacao (1.40).Vamos assim estudar a equacao
y′(t) = Ay(t) (1.41)
onde t ∈ R, y(t) ∈ Rn e A =
[
aij
]n
i,j=1com aij ∈ R.
Exponencial de uma Matriz
Dados uma matriz A ∈ Mn×n(R), convenciona-se que:
A0 def= I,
onde I representa a matriz identidade de Mn×n(R).Recordamos o problema de valor inicial escalar,
{y′ = ayy(0) = 1
,
tem por unica solucao y(t) = eat. Procedendo por analogia, definimos a exponencial de tA, quedenotamos por etA, da forma que se segue.
46

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
Definicao (Exponencial de uma Matriz): Seja t ∈ R e A ∈ Mn×n(R). Entao eAt e a(unica) matriz solucao fundamental de (1.41) que e igual a matriz identidade em t = 0. Istoequivale a dizer que X(t) = eAt e a solucao do problema de valor inicial:
{X ′ = AXX(0) = I
(1.42)
Resulta imediatamente da definicao anterior que:
Proposicao: Se A ∈ Mn×n(R) e S e uma matriz solucao fundamental de y′ = Ay entao:
etA = S(t)S−1(0)
Exemplo 3: No exemplo 1 desta seccao (resolucao da equacao diferencial (1.33)), a solucaotambem pode ser escrita na forma:
y(t) =
[c12 e
−t + c2et
c1e−t
]
=
[et 1
2e−t
0 e−t
] [c2c1
]
def= S1(t)C
pelo que S1(t) e tambem uma matriz solucao fundamental. (A verificacao e obvia). Uma outramatriz solucao fundamental e:
X(t) = S(t)S−1(0) =
[
et e−t−et
20 e−t
]
Note que a exponencial da matriz tA, X(t), tem uma propriedade importante — e a unica matrizsolucao fundamental que verifica X(0) = I.
Solucao do Problema de Valor Inicial da Equacao y′ = Ay
Teorema (Solucao de uma equacao vectorial linear homogenea de coeficientes constantes)
Se A = [ai,j] e uma matriz n× n, com ai,j ∈ R, o problema de valor inicial
{y = Ayy(t0) = y0
tem solucao unica, dada por:
y(t) = eA(t−t0)y0 , t ∈ R
Alem disso, as solucoes da equacao y′ = Ay formam um espaco vectorial de dimensao n, sendodadas por y(t) = eAtC, onde C ∈ R
n.
47

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Diagonalizacao de A e o calculo eAt
Uma matriz n×n A, com n ∈ N, diz-se diagonalizavel se admite n vectores proprios linearmenteindependentes. Sendo λ um valor proprio de A, recordamos que:
a) A multiplicidade algebrica de λ, ma(λ) e o numero de vezes que o factor (r− λ) ocorre nafactorizacao do polinomio caracterıstico p(r) = det(A− rI).
b) A multiplicidade geometrica de λ, mg(λ) e o numero de vectores proprios de A linearmenteindependentes associados a λ; Note que 1 ≤ mg(λ) ≤ ma(λ).
Entao a matriz A e diagonalizavel se e so se mg(λ) = ma(λ) para qualquer valor proprio, λ,de A. No caso particular de A admitir n valores proprios distintos, entao A e necessariamentediagonalizavel. Se A tem pelo menos um valor proprio, λ, com multiplicidade algebrica ma(λ) > 1e mg(λ) < ma(λ), entao a matriz A nao e diagonalizavel.
Para obter solucoes linearmente de y′ = Ay, podemos usar o seguinte resultado.
Proposicao: Seja A ∈ Mn×n(R). Se λ ∈ C e um valor proprio de A e v ∈ Cn um vector proprio
associado a λ entao y(t) = etλv e uma solucao da equacao y′ = Ay. Alem disso, u = Rey eu = Imy sao solucoes reais de y′ = Ay.
Demonstracao: Para provar a primeira parte, basta ver que:
dy
dt=
d
dt
(eλtv
)= eλt λv = eλtAv = A
(etλv
)= Ay(t).
Tendo em conta que
u′ + iu′ = (u+ iu)′ = y′ = Ay = A(u+ iu) = Au+ iAu,
tomando a parte real e a parte imaginaria de ambos os membros desta igualdade obtem-se u′ = Aue u′ = Au. �
Se A for uma matriz n × n real diagonalizavel, entao existe um conjunto de n vectoresproprios de A linearmente independentes v1,v2, . . . ,vn. Se λ1, λ2, . . . , λn forem os respectivosvalores proprios associados, podemos construir uma matriz solucao fundamental — e daı obtereAt — colocando nas colunas de S as solucoes de y′ = Ay dadas pela proposicao anterior; isto e:
eλ1tv1, eλ2tv2, . . . , e
λntvn.
Note que S(0) e nao singular.
Se λ for um valor proprio complexo de uma matriz real A, com vector proprio associadov ∈ C
n, entao o procedimento anterior da-nos uma matriz solucao fundamental complexa; noentanto, podemos utilizar as funcoes reais Re eλtv e Im eλtv, no lugar de eλ1tv e eλ1tv 13
13Se A e uma matriz real, entao A = A. Se (λ,v) e um par valor proprio, vector proprio (complexo) de A,entao (λ, v) e tambem um par valor proprio, vector proprio de A, pois Av = Av = Av = λv = λv. Neste caso,
Re eλtv = Re eλtv e Im eλtv = − Im eλtv. Por cada par de vectores proprios conjugados, v e v, produzem-sedesta forma duas (nao quatro!) funcoes reais linearmente independentes, Re eλtv e Im eλtv.
48

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
Exemplo (retrato de fase de uma equacao diferencial): Seja
A =
[3 51 −1
]
.
Vamos calcular uma matriz solucao fundamental associada a y′ = Ay comecando por calcular osvalores proprios de A:
det(A− λI) = 0 ⇔ (3− λ)(−1− λ)− 5 = 0 ⇔ λ2 − 2λ− 8 = 0 ⇔ λ = 4 ∨ λ = −2
Conclui-se de imediato que a matriz A e diagonalizavel. Como tal, vamos calcular os seus doisvectores proprios.
• Para λ = 4 o vector proprio associado e uma solucao nao nula de
(A− 4I)v = 0 ⇔[−1 51 −5
] [v1v2
]
=
[00
]
⇔ v1 − 5v2 = 0
Entao podemos escolher (por exemplo) v2 = 1; o vector proprio associado a 4 sera v =(5, 1).
• Para λ = −2 o vector proprio associado e uma solucao nao nula de
(A+ 2I)v = 0 ⇔[5 51 1
] [v1v2
]
=
[00
]
⇔ v1 + v2 = 0
Entao podemos escolher (por exemplo) v2 = 1; o vector proprio associado a −2 seraw = (−1, 1).
Como tal, a matriz
S(t) =
[
e−2t
[−11
]
e4t[51
] ]
e uma matriz solucao fundamental associada a equacao y′ = Ay. Dado que
S(0) =
[−1 51 1
]
nao e a matriz identidade, tem-se que
eAt = S(t)S−1(0) = −1
6
[−e−2t 5e4t
e−2t e4t
] [1 −5−1 −1
]
= −1
6
[−e−2t − 5e4t 5e−2t − 5e4t
e−2t − e4t −5e−2t − e4t
]
isto e
eAt =1
6
[e−2t + 5e4t −5e−2t + 5e4t
−e−2t + e4t 5e−2t + e4t
]
Para o estudo qualitativo de y′ = Ay e importante calcular as solucoes do problema de valorinicial
y′ = Ay , y(0) = y0 (1.43)
49

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
para alguns valores especiais de y0 ∈ R2. Comecemos por analisar a solucao de (1.43) quando
y0 = (0, 0). Neste caso, a solucao do sistema e constante e igual a (0, 0), pelo que a origem e,precisamente, o unico ponto de equilıbrio do sistema.
Escolhendo um ponto inicial y0 = (−5,−1) (que pertence ao espaco proprio associado aovalor proprio 4) entao
y(t) = eAty0 =1
6
[e−2t + 5e4t −5e−2t + 5e4t
−e−2t + e4t 5e−2t + e4t
] [−5−1
]
=
[−5e4t
−e4t
]
= −e4t[51
]
Escrevendo y(t) =(x(t), y(t)
)obtemos as equacoes parametricas da solucao de (1.43)
{x(t) = −5e4t
y(t) = −e4t
Por eliminacao do parametro t obtem-se a equacao cartesiana da solucao, que e o conjunto dos(x, y) ∈ R2 tais que x = 5y. Isto diz-nos que quando a condicao inicial pertence ao espaco propriode λ = 4, a solucao do (1.43) nele permanecera para todo o t. Mais se observa que, e como nestecaso
limt→+∞
e4t = +∞ , (1.44)
a solucao do PVI afasta-se do ponto de equilıbrio quando t → +∞.Escolhendo um ponto inicial y0 = (−1, 1) (que pertence ao espaco proprio associado ao valor
proprio −2) entao
y(t) = eAty0 =1
6
[e−2t + 5e4t −5e−2t + 5e4t
−e−2t + e4t 5e−2t + e4t
] [−11
]
=
[−e−t
e−t
]
= e−t
[−11
]
Fazendo y(t) = (x(t), y(t)), obtemos assim as equacoes parametricas da solucao do (1.43)
{x(t) = −e−t
y(t) = e−t
Por eliminacao do parametro t obtem-se a equacao cartesiana da solucao, que e o conjunto dos(x, y) ∈ R
2 tais que x = −y. Isto diz-nos que quando a condicao inicial pertence ao espacoproprio de λ = −2, a solucao do (1.43) nele permanecera para todo t. Mais se observa que, ecomo nesse caso
limt→+∞
e−2t = 0 , (1.45)
a solucao do PVI aproxima-se do ponto de equilıbrio quando t → +∞. Devido a (1.44) e (1.45),dizemos que a origem e um ponto de sela.
Em qualquer outra situacao, a solucao nao e constante nem esta confinada a uma recta. Porexemplo, se y0 = (1, 1), a solucao de (1.43) e dada por
y(t) = eAty0 =1
6
[e−2t + 5e4t −5e−2t + 5e4t
−e−2t + e4t 5e−2t + e4t
] [11
]
=1
3
[−2e−t + 54t
2e−t + e4t
]
Fazendo y(t) =(x(t), y(t)
), obtemos as equacoes parametricas da solucao do (1.43)
{3x(t) = −2e−t + 5e4t
3y(t) = 2e−t + e4t
50

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
Eliminando o parametro t, a equacao cartesiana da solucao no espaco (x, y) fica
x+ y = 2( 4
5x− y
)2.
De um modo geral, se y0 = (α, β) ∈ R2 \{(0, 0)
}, a solucao de (1.43) e dada por
y(t) = eAty0 =1
6
[e−2t + 5e4t −5e−2t + 5e4t
−e−2t + e4t 5e−2t + e4t
] [αβ
]
=1
6
[δe−t − 5γe4t
δe−t + γe4t
]
em que, para facilitar a escrita, fizemos γ = α+ β e δ = −α+ 5δ. Fazendo y(t) =(x(t), y(t)
),
obtemos as equacoes parametricas da solucao de (1.43)
{6x(t) = δe−t − 5γe4t
6y(t) = δe−t + γe4t
Eliminando o parametro t, a equacao cartesiana da solucao fica
x+ y =γδ2
((6 + 5γ)x+ 5γy
)2 .
−4 −2 0 2 4x
−4
−2
0
2
4
y
Figura 1.9: O Retrato de fase da equacao y′ = Ay e o grafico das equacoes cartesianas de varias solucoesde y′ = Ay, no espaco dos (x, y) ∈ R
2. As setas indicam o sentido em que as curvas sao percorridas (tcrescente).
51

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
A figura 1.9 representa o grafico das curvas, no espaco dos pontos (x, y) ∈ R2, que resultam
das solucoes da equacao linear homogenea y′ = Ay apos eliminacao da variavel t. Este tipode representacao grafica das solucoes e comunmente designado por retrato de fase da equacaodiferencial, sendo uma forma muito pratica de visualizar o comportamento qualitativo das suassolucoes.
1.4.5 Serie da Exponencial de uma Matriz
Para encontrar um desenvolvimento em serie para a exponencial de At, procuremos uma solucaoda equacao (1.42) atraves das iteradas de Picard:
X0(t) = I
Xn+1(t) = I +
∫ t
t0
AXn(s) ds para n ∈ N
Calculando as primeiras 3 iteracoes, obtem-se:
X0(t) = I
X1(t) = I +
∫ t
t0
Ads = I + tA
X2(t) = I +
∫ t
t0
(A+ sA2
)ds = I +
∫ t
t0
Ads+
∫ t
t0
sA2 ds = I + tA+t2
2A2
X3(t) = I +
∫ t
t0
(
A+ sA2 +s2
2A3
)
ds = I + tA+t2
2!A2 +
t3
3!A3
Resulta entao que14:
Xn(t) = I + tA+t2
2!A2 + · · ·+ tk
k!Ak
Isto sugere que a forma da solucao de (1.42) e o “limite” da expressao anterior, ou seja:
X(t) = I + tA+t2
2!A2 + · · · + tk
k!Ak + · · · =
∞∑
k=0
tk
k!Ak =
∞∑
k=0
1
k!(tA)k .
Esta formula e analoga a que define a serie de Maclaurin da funcao exponencial, eat =∑∞
k=0(at)k
k! , para a, t ∈ R. No nosso caso trata-se de uma serie de potencias de matrizes onde,em cada termo, aparece tA no lugar de ta. Isto leva-nos a conjecturar o seguinte:
Teorema (Serie da Exponencial de uma Matriz): Sendo A uma matriz n× n de compo-nentes reais e t ∈ R, a exponencial de tA, etA, e dada por:
etA =
∞∑
k=0
(tA)k
k!= I + tA+
t2
2A2 +
t3
3!A3 + · · · + tk
k!Ak + · · · (1.46)
14Pode-se facilmente provar este resultado por inducao. No entanto, neste contexto isso sera desnecessario, poisestamos apenas a usar as iteradas de Picard para formular uma conjectura cuja veracidade sera depois comprovadapor outro metodo.
52

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
Alem disso, a serie (1.46) converge uniformemente para t em intervalos do tipo [−R,R] (paraqualquer R > 0) e verifica AeAt = eAtA, para todo o t ∈ R.
Demonstracao: Para provar este teorema, precisaremos em primeiro lugar de saber produzirestimativas de matrizes. Sendo A = [aij]
ni,j=1, consideramos:
‖A‖ = n maxi,j=1,...,n
|aij | .
Note que qualquer componente aij de A verifica:
|aij | ≤1
n‖A‖. (1.47)
De facto, esta funcao tem as propriedades de uma norma 15; mas vamos aqui provar apenas apropriedade de ‖A‖ de que efectivamente precisamos.
Se B = [bij ]ni,j=1 e outra matriz real, entao as componentes do produto AB verificam:
∣∣∣∣∣
n∑
k=1
aikbkj
∣∣∣∣∣≤
n∑
k=1
|aik| |bik| ≤n∑
k=1
1
n2‖A‖‖B‖ =
1
n‖A‖‖B‖
Ou seja, o modulo de cada componente de AB e majorado pelo mesmo valor: 1n ‖A‖‖B‖. Desta
forma:
‖AB‖ ≤ n
(1
n‖A‖‖B‖
)
= ‖A‖‖B‖
Pela desigualdade anterior, ‖Ak‖ ≤ ‖A‖‖Ak−1‖ ≤ ‖A‖2‖Ak−2‖ ≤ · · · ≤ ‖A‖k, para k =1, 2, 3, . . . . Como tambem ‖A0‖ = ‖I‖ = 1 = ‖A‖0, resulta pois que:
‖Ak‖ ≤ ‖A‖k para k = 0, 1, 2, . . . (1.48)
Passamos agora a demonstracao da convergencia da serie. Para tal, basta provar que todasas componentes da soma da serie (1.46) existem (em R).
Sendo δii = 1 e δij = 0 se i 6= j , e denotando cada componente (i, j) de Ak por a(k)ij , entao
as componentes de eAt sao as somas das series reais 16:
δij + tai,j +t2
2!a(2)ij + · · · + tk
k!a(k)ij + · · · =
∞∑
k=0
tk
k!a(k)ij com i, j = 1, 2, . . . n. (1.49)
Vamos agora provar a convergencia uniforme destas series, para t num intervalo do tipo[−R,R], com R > 0. Para |t| ≤ R, e usando (1.47) e (1.48), podemos majorar cada um dostermos das series anteriores como se segue:
∣∣∣∣
tk
k!a(k)ij
∣∣∣∣=
|t|kk!
∣∣∣a
(k)ij
∣∣∣ ≤ Rk
k!
∣∣∣a
(k)ij
∣∣∣ ≤ Rk
k!
‖Ak‖n
≤ Rk
k!
‖A‖kn
=
(‖A‖R
)k
n k!
15E facil provar que para quaisquer duas matrizes reais, A,B, de dimensao n×n, se tem: (a) ‖A‖ = 0 ⇔ A = 0;(b) ‖cA‖ = |c| ‖A‖, para c ∈ R; (c) ‖A+B‖ ≤ ‖A‖+ ‖B‖; (d) ‖AB‖ ≤ ‖A‖ ‖B‖.
16O sımbolo δij , designado na literatura por delta de Kronecker, representa as componentes da matriz identidade.
Note que a(0)ij = δij .
53

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Como a serie real1
n
n∑
k=0
(‖A‖R
)k
k!
e convergente — a sua soma e 1ne
‖A‖R — entao, pelo criterio de Weierstrass, as series (1.49)convergem uniformemente para t em intervalos do tipo [−R,R]; isto vale para qualquer R > 0.Em particular, as series (1.49) convergem pontualmente para qualquer t ∈ R. Isto prova que etA
esta bem definida por (1.46), e diferenciavel em R e pode ser derivada termo a termo.Usando o resultado anterior, podemos agora calcular a derivada de etA:
d
dtetA =
d
dt
(
I + tA+t2
2!A2 +
t3
3!A3 + · · ·+ tn
n!An + · · ·
)
= 0 +A+2t
2!A2 +
3t2
3!A3 + · · · + ntn−1
n!An + · · ·
= A
(
I + tA+t2
2!A2 +
t3
3!A3 + · · ·+ tn
n!An + · · ·
)
= AetA
=
(
I + tA+t2
2!A2 +
t3
3!A3 + · · · + tn
n!An + · · ·
)
A = etA A
Assim sendo:d
dtetA = AetA = etA A
Note tambem que e0A = I. Isto conclui a demonstracao do teorema. �
Algumas propriedades de eAt
Dado t ∈ R e A ∈ Mni,j=1(R), listamos aqui algumas das propriedades de eAt = etA:
(a) e0 e a matriz identidade em Rn;
(b) S(t) = eAt e a unica matriz solucao fundamental de y′ = Ay que verifica S(0) = I.
(c) eAt e uma funcao diferenciavel em qualquer t ∈ R e:
d
dt
(
eAt)
= AeAt = eAtA
(d) A matriz eAt e invertıvel para qualquer t ∈ R e
(
eAt)−1
= e−At
(e) Se A, B sao quaisquer matrizes n× n verificando AB = BA, entao:
eAtB = BeAt
(f) Se A, B sao quaisquer matrizes n× n verificando AB = BA, entao:
e(A+B)t = eAteBt
54

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
Demonstracao:
(d) Atendendo a que:
d
dt
(
eAt e−At)
= eAtAe−At + eAt(−A)e−At = eAtAe−At − eAtAe−At = 0,
entao eAt e−At e constante. Em particular:
eAt e−At = eA 0 e−A 0 = I2 = I.
(e) (Exercıcio)
(f) Considere X(t) = eAteBt. Entao X(0) = I e (usando (e)):
X ′(t) = AeAteBt + eAtBeBt = AeAteBt +BeAteBt = (A+B)eAteBt = (A+B)X(t).
Isto prova que X(t) = e(A+B)t. �
1.4.6 Calculo da Exponencial de uma Matriz
• A e uma matriz diagonal:
Se A =
λ1 0 ... 00 λ2 ... 0
..
0 0 ... λn
⇒ eAt =
eλ1t 0 ... 00 eλ2t ... 0
..
0 0 ... eλnt
• A e uma matriz diagonalizavel:
Uma matriz A, n×n, diz-se diagonalizavel se admite n vectores linearmente independentes.Demonstra-se que,
se A e diagonalizavel entao A = SΛS−1
em que
Λ =
λ1 0 ... 00 λ2 ... 0
..
0 0 ... λn
e S =
| ... |v1 ... vn
| ... |
sendo λ1, ..., λn os valores proprios de A e v1, ...,vn os correspondentes vectores proprios.
Proposicao: Se A e B sao matrizes n×n semelhantes, isto e, se existe uma matriz S naosingular tal que A = SBS−1 entao:
eAt = SeBtS−1
55

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Dem.: Para qualquer k ∈ N:
(
SBS−1)k
= (SB
I︷ ︸︸ ︷
S−1)(S B
I︷ ︸︸ ︷
S−1)(S B · · · · · ·BI
︷ ︸︸ ︷
S−1)(S BS−1)︸ ︷︷ ︸
k vezes
= SBkS−1.
Assim
eAt =∞∑
k=0
tk
k!
(
SBS−1)k
=∞∑
k=0
tk
k!
(
SBkS−1)
= S
( ∞∑
k=0
tk
k!Bk
)
S−1 = SeBtS−1.
�
Podemos entao concluir que, se A e diagonalizavel, isto e, se
A = S
λ1 0 ... 00 λ2 ... 0
..
0 0 ... λn
S−1
entao
eAt = SeΛtS−1 = S
eλ1t 0 ... 00 eλ2t ... 0
..
0 0 ... eλnt
S−1
Observacoes:
⋄ Como consequencia dos teoremas anteriores, dado que a matriz eAt e uma matrizsolucao fundamental da equacao y = Ay, a sua solucao e da forma y(t) = eAtC, comC ∈ R
n. Atendendo a que eAt = SeΛtS−1, entao
y(t) = SeΛtS−1C ≡ SeΛtC1
pelo que a matriz S(t) = SeΛt e tambem uma matriz solucao fundamental associadaa equacao. No entanto, a nao ser que a matriz S seja a matriz identidade, S(t) nao ea matriz eAt, visto que S(0) nao e a matriz identidade.
⋄ Dada qualquer matrizA, como vimos a matriz eAt e a unica matriz solucao fundamentalassociada a equacao y = Ay, S(t), que verifica S(0) = I.
⋄ Conhecida qualquer matriz solucao fundamental, S(t), associada a equacao y = Ay,tem-se que
eAt = S(t)S−1(0)
56

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
Exemplo 1
Determinar a solucao do seguinte PVI:{
x′ = x+ yy′ = 3x− y
,
[x(0)y(0)
]
=
[01
]
Podemos escrever a equacao na forma matricial
y′ = Ay ⇔[x(t)y(t)
]′=
[1 13 −1
] [x(t)y(t)
]
e ja sabemos que a solucao do PVI e dada por
y(t) = eAty(0) ⇔[x(t)y(t)
]
= eAt
[01
]
Calculo de eAt
Os valores proprios da matriz A sao ±2 (pelo que podemos concluir desde ja que a matrizA e diagonalizavel).
O vector proprio associado ao valor proprio λ1 = 2 e uma solucao nao nula da equacao
(A− 2I)v = 0 ⇔[−1 13 −3
] [ab
]
= 0 ⇔ a = b
pelo que podemos escolher, por exemplo v1 = (1, 1).
O vector proprio associado ao valor proprio λ2 = −2 e uma solucao nao nula da equacao
(A+ 2I)v = 0 ⇔[3 13 1
] [ab
]
= 0 ⇔ b = −3a
pelo que podemos escolher, por exemplo v2 = (1,−3). Assim teremos
A = SΛS−1 =
[1 11 −3
] [2 00 −2
]
S−1
pelo que
eAt = SeΛtS−1 =1
4
[1 11 −3
] [e2t 00 e−2t
] [3 11 −1
]
=1
4
[3e2t + e−2t e2t − e−2t
3e2t − 3e−2t e2t + 3e−2t
]
Calculada a matriz eAt, a solucao do PVI e y(t) = eAty(0), ou seja:
[x(t)y(t)
]
=1
4
[3e2t + e−2t e2t − e−2t
3e2t − 3e−2t e2t + 3e−2t
] [01
]
=1
4
[e2t − e−2t
e2t + 3e−2t
]
Tal como foi observado, a matriz
SeΛt =
[1 11 −3
] [e2t 00 e−2t
]
=
[e2t e−2t
e2t −3e−2t
]
57

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
e tambem uma matriz solucao fundamental, pelo que poderıamos escrever a solucao geralda equacao
[x(t)y(t)
]
=
[e2t e−2t
e2t −3e−2t
] [c1c2
]
e, posteriormente, calcular as constantes c1, c2 de modo a que seja verificada a condicaoinicial. Na pratica, isso corresponde a resolver o sistema de equacoes lineares, o que eequivalente a inverter S(0) e multiplicar o resultado pelo valor inicial.
• A e uma matriz nao diagonalizavel:
A matriz A (n×n) diz-se nao diagonalizavel, se A nao admite n vectores proprios linearmenteindependentes. Neste caso, A nao e semelhante a uma matriz diagonal, isto e, nao existemuma matriz diagonal Λ e uma matriz nao singular S tais que A = SΛS−1.
Para determinar a matriz eAt, vamos precisar de algumas definicoes e resultados parciais.
Matriz Diagonal por Blocos
Uma matriz n× n, e diagonal por blocos, se for da forma
A =
A1 0 0
0 A2 0
..
0 0 Ak
(1.50)
em que A1,...,Ak sao matrizes quadradas de dimensoes m1 × m1,..., mk × mk, res-pectivamente, tendo-se m1 + ...+mk = n.
Exemplo:
A matriz
A =
−1 0 0 0 0 00 1 2 0 0 00 2 3 0 0 00 0 0 −1 3 00 0 0 3 2 10 0 0 −1 −1 1
e uma matriz diagonal por blocos A1, A2, A3, em que
A1 =[−1
], A2 =
[1 22 3
]
, A3 =
−1 3 03 2 1−1 −1 1
Exponencial de uma matriz diagonal por blocos
58

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
Se A e diagonal por blocos, como em (1.50), entao
eAt =
eA1t 0 0
0 eA2t 0
..
0 0 eAkt
Bloco de Jordan
Uma matriz k × k diz-se um bloco de Jordan se for da forma
Jkλ =
λ 1 0 00 λ 1 0
. .. .
0 λ 10 0 λ
Exemplo:
J2−1 =
[−1 10 −1
]
; J32 =
2 1 00 2 10 0 2
; J40 =
0 1 0 00 0 1 00 0 0 10 0 0 0
Exponencial de um Bloco de Jordan
Se Jλ e um bloco de Jordan de dimensao k × k, entao
eJλ t =
eλt teλt t2
2!eλt . . . . tk−1
(k−1)!eλt
0 eλt teλt t2
2!eλt . . . tk−2
(k−2)!eλt
. . . . . .. . . . .
0 eλt teλt t2
2!eλt
0 eλt teλt
0 0 0 eλt
59

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
isto e, os elementos aij, i, j = 1, ..., k da matriz eJλt sao da forma:
aij =
eλt se i = j (diagonal principal)teλt se i+ 1 = j (diagonal acima da principal)t2
2!eλt se i = j + 2 (2a¯ diagonal acima da principal)
.
.
.tk−1
(k−1)!eλt se i+ k − 1 = j ((k − 1) esima diagonal acima da principal)
0 se i < j (abaixo da diagonal principal)
Exemplo:
Para os blocos de Jordan do exemplo anterior tem-se que
exp(
J2−1t)
= e−t
[1 t0 1
]
; exp(
J32 t)
= e2t
1 t t2
20 1 t0 0 1
;
exp(
J40 t)
=
1 t t2
2t3
3!
0 1 t t2
20 0 1 t0 0 0 1
Exponencial de uma matriz nao diagonalizavel
Seja A uma matriz, n× n, nao diagonalizavel. Demonstra-se que,
se A e nao diagonalizavel entao A = SJS−1
em que J e uma matriz diagonal por blocos de Jordan, isto e
J =
Jm1λ1
0 0
0 Jm2λ2
0
..
0 0 Jmkλk
em que λ1, . . . , λk sao valores proprios de A com multiplicidades algebricas m1, . . . ,mk, respecti-vamente, (multiplicidade enquanto raızes do polinomio caracterıstico) e multiplicidade geometrica1 (cada valor proprio λ1, . . . λk tem um unico vector proprio associado v1, . . . , vk, respectivamente)17.
17A lista de valores proprios, λ1, . . . λk, pode conter repeticoes. Nesse caso se, por exemplo, λ2 = λ1 (e λj 6= λ1,para j ≥ 3) entao λ1 tem dois vectores proprios associados linearmente independentes, v1 e v2 (multiplicidadegeometrica igual a 2) e m1 +m2 e a multiplicidade algebrica de λ1.
60

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
A matriz S e tambem formada por k “blocos” de colunas
S =
| . . . |S1 . . . Sk
| . . . |
em que, para i = 1, ..., k
Si =
| | . . |vi vG1
i . . vGmi−1
i
| | . . |
sendo vi o vector proprio associado ao valor proprio λi, e vGj
i , j = 1, ...,mi − 1, vectores propriosgeneralizados, i.e., verificando as equacoes
(A− λiI)vG1i = vi
(A− λiI)vG2i = vG1
i
(A− λiI)vG3i = vG2
i . . .
ate se calcularem mi − 1 vectores proprios generalizados.
Exemplo:
Determinar eAt sendo
A =
−2 0 10 −3 −10 1 −1
Dado que a matriz nao e nem diagonal, nem um bloco de Jordan (ou afim) nem diagonal porblocos, teremos que determinar eAt pelo processo usual de calculo de valores e vectores proprios.Os valores proprios de A sao as solucoes de
det(A− λ I) = 0 ⇔ (λ+ 2)3 = 0
Tem-se entao que −2 e o valor proprio de A com multiplicidade algebrica 3. Note-se que so depoisde calcular a sua multiplicidade geometrica (numero de vectores proprios linearmente independen-tes associado a −2) poderemos concluir se A e diagonalizavel (se a multiplicidade geometricafor 3) ou nao diagonalizavel (se a multiplicidade geometrica for 2 ou 1). Os vectores propriosassociados a −2 sao as solucoes nao nulas de
(A+ 2I)v = 0 ⇔
0 0 10 −1 −10 1 1
abc
=
000
⇔{
b = c = 0a ∈ R
Entao
v = (a, b, c) = (a, 0, 0) = a(1, 0, 0)
Conclui-se que a multiplicidade geometrica do valor proprio e 1, ou seja admite apenas um vectorproprio independente, que por exemplo pode ser v = (1, 0, 0). Sendo assim a matriz A e nao
61

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
diagonalizavel, pelo que e semelhante a uma matriz formada por um unico bloco de Jordan, ouseja:
A = SJS−1
em que
J =
−2 1 00 −2 10 0 −2
e S =
1 | |0 v1 v20 | |
sendo v1 e v2 vectores proprios generalizados de v. O primeiro vector proprio generalizado esolucao nao nula de
(A+ 2I)v1 = v ⇔
0 0 10 −1 −10 1 1
abc
=
100
⇔
c = 1b = −1a ∈ R
Entaov1 = (a, b, c) = (a,−1, 1) = a(1, 0, 0) + (0.− 1, 1)
Podemos entao escolher, por exemplo, v1 = (0. − 1, 1). O segundo vector proprio generalizado esolucao nao nula de
(A+ 2I)v2 = v1 ⇔
0 0 10 −1 −10 1 1
abc
=
0−11
⇔
c = 0b = 1a ∈ R
Entaov1 = (a, b, c) = (a, 1, 0) = a(1, 0, 0) + (0.1, 0)
Podemos entao escolher, por exemplo, v2 = (0.1, 0). Em consequencia
S =
1 0 00 −1 10 1 0
Por ser um bloco de Jordan tem-se que
eJt = e−2t
1 t t2
20 1 t0 0 1
e finalmente
eAt = SeJtS−1 = e−2t
1 t2
2 t+ t2
20 −t+ 1 −t0 t t+ 1
Caso Nao Homogeneo
Vamos agora resolver a equacaoy′(t) = Ay(t) + b(t) (1.51)
com y ∈ Rn, A =
[
aij
]n
i,j=1, aij ∈ R e b : I ⊆ R → R
n.
62

1.4. EQUACOES VECTORIAIS OU SISTEMAS DE 1a ORDEM
Formula da Variacao das Constantes:
(Existencia e unicidade de solucao de uma equacao vectorial linear de coeficientes constantes)
Aplicando a formula (1.39), concluımos que a solucao geral da equacao (1.51) e dada por
y(t) = eAtC + eAt
∫ t
e−As b(s) ds , C ∈ Rn
Se adicionalmente for dada a condicao inicial y(t0) = y0, a solucao do PVI sera neste caso dadapor
y(t) = eA(t−t0)y0 + eAt
∫ t
t0
e−As b(s) ds
para todo t ∈ I.
Exemplo:
Determinar a solucao do PVI
y′ = Ay + b(t) , y(0) = (1,−1, 0)
em que
A =
−2 0 10 −3 −10 1 −1
, b(t) =
10
2e−2t
Recorrendo ao resultado do exemplo anterior
eAt = e−2t
1 t2
2 t+ t2
20 −t+ 1 −t0 t t+ 1
e aplicando a formula da variacao das constantes, a solucao do PVI e dada por
y(t) = eAt
1−10
+ eAt
∫ t
0e−As
10
2e−2s
ds
= eAt
(
1−10
+
∫ t
0e2s
1 s2
2 −s+ s2
20 s+ 1 s0 −s −s+ 1
10
2e−2s
ds
)
= e−2t
1 t2
2 t+ t2
20 −t+ 1 −t0 t t+ 1
(
1−10
+
e2t−12 − t2 + t3
3t2
−t2 + 2t
)
= e−2t
e2t+32 + t2
2 + t3
3−t2 + t− 1
t2 + t
63

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
1.5 Equacoes Lineares de Ordem n
Uma equacao diferencial ordinaria de ordem n tem a forma:
y(n)(t) = f(
t, y(t), y′(t), · · · , y(n−1)(t))
Uma solucao desta equacao e uma funcao y : I → R de classe Cn que a satisfaz. Aqui, I ⊂ R
denota um intervalo aberto.Uma equacao de ordem n ∈ N diz-se linear se e da forma
y(n) + an−1(t) y(n−1) + ...+ a1(t) y
′ + a0(t) y = b(t) (1.52)
onde a0(t), a1(t),..., an−1(t) e b(t) sao funcoes reais definidas e contınuas em I.
1.5.1 Equacao linear de 2a ordem
Como exemplo introdutorio deste topico, estudamos agora o caso especial das equacoes linearesde 2a ordem:
y + a1(t) y + a0(t) y = b(t) (1.53)
Fazendo y = v (o que implica que v = y), verificamos que a equacao (1.53) e equivalente aosistema de duas equacoes de 1a ordem:
{
y = v
v = −a0(t) y − a1(t) v + b(t)
Este sistema pode-se escrever da seguinte forma:[yv
]′
︸ ︷︷ ︸
y
=
[0 1
−a0(t) −a1(t)
]
︸ ︷︷ ︸
A(t)
[yv
]
︸ ︷︷ ︸
y
+
[0
b(t)
]
︸ ︷︷ ︸
h(t)
ou seja,y = A(t)y + h(t),
em que A(t) se designa por matriz companheira da equacao (1.53).A equacao linear homogenea de 2a ordem e a equacao (1.53) no caso especial b(t) = 0, isto
e:y + a1(t) y + a0(t) y = 0 (1.54)
Como vimos, esta equacao e equivalente a:[yv
]′
︸ ︷︷ ︸
y
=
[0 1
−a0(t) −a1(t)
]
︸ ︷︷ ︸
A(t)
[yv
]
︸ ︷︷ ︸
y
Aplicando agora a teoria, apresentada na seccao anterior, das equacoes vectoriais lineares, asolucao geral de y = A(t)y e dada por:
[yv
]
︸ ︷︷ ︸
y
=
[u1 u2u1 u2
]
︸ ︷︷ ︸
W (t)
[c1c2
]
︸ ︷︷ ︸
C
64

1.5. EQUACOES LINEARES DE ORDEM N
com C = (c1, c2) ∈ R2. A funcao matricial
W (t) =
[u1 u2u1 u2
]
designa-se pormatriz wronskiana de (1.54). W (t) e uma matriz solucao fundamental da equacaovectorial de 1a ordem equivalente, logo as suas colunas, que sao sempre da forma (y, y) 18, saosolucoes linearmente independentes do sistema.
Desta forma, as solucoes da eq. (1.54) sao dadas por
y(t) = c1u1(t) + c2u2(t), com c1, c2 ∈ R,
onde u1(t) e u2(t) sao duas solucoes linearmente independentes de (1.54) 19. Isto significa que assolucoes de (1.54) formam um espaco vectorial de dimensao 2. Desta forma, e valido o seguinteresultado:
Princıpio da Sobreposicao de SolucoesSe u(t) e v(t) sao solucoes (reais ou complexas) da equacao homogenea
y + a1(t) y + a0(t) y = 0,
entao c1u(t)+c2v(t) e tambem solucao de (1.54), para quaisquer constantes (reais ou complexas)c1, c2.
1.5.2 Equacao linear de 2a ordem de coeficientes constantes
Estudemos agora a equacao (1.54) no caso em que os coeficientes sao constantes, ou seja:
y + a1 y + a0 y = 0 com a0, a1 ∈ R (1.55)
O polinomio caracterıstico desta equacao diferencial e definido por:
P (r) = r2 + a1r1 + a0r
0 = r2 + a1r + a0
As raızes de P (r) sao os valores (reais ou complexos):
λ =1
2
(
−a1 ±√
a21 − 4a0
)
Consoante o tipo de raızes, ha tres casos possıveis:
Caso 1: duas raızes reais distintas se a21 − 4a0 > 0.
Caso 2: uma raiz real dupla se a21 − 4a0 = 0.
Caso 3: duas raızes complexas conjugadas se a21 − 4a0 < 0.
18Note que v = y implica que as componentes da segunda linha de W (t) sao as derivadas das componentes daprimeira linha.
19Caso contrario, e como u1 e u2 nao podem ser funcoes nulas, terıamos u2 = cu1 (com c 6= 0), pelo queu2 = cu1. Resultaria entao que (u1, u1) = c(u2, u2), ou seja, as colunas de W (t) seriam linearmente dependentes.
65

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Denotando as raızes de P (r) por λ1 e λ2, podemos factorizar o polinomio caracterıstico daseguinte forma:
P (r) = (r − λ1)(r − λ2) ou P (r) = (r − λ1)2 se λ1 = λ2
Vamos agora definir o operador derivada, D, por Dy =dy
dt= y 20. Entao a equacao (1.55)
pode-se escrever na formaD2y + a1Dy + a0y = 0,
que e equivalente a:(D2 + a1D + a0
)y = 0
Eis algumas definicoes e propriedades relevantes dos operadores que iremos utilizar:
• D e um operador linear i.e. D(cy1 + dy2) = cDy1 + dDy2, onde c, d sao escalares,y1, y2 : I → R (ou C)
• Soma dos operadores A e B: (A+B)y = Ay +By
• Produto de um operador A por um escalar c: (cA)y = c(Ay)
• Produto dos operadores A e B: (AB)y = A(By); trata-se, de facto, da composicao dosoperadores A,B.
Notamos que o produto de operadores e, em geral, nao comutativo. Por exemplo, os opera-dores D e Ay = f(t)y(t)
DAy = D(f(t)y(t) = f ′(t)y(t) + f(t)y′(t)
ADy = A(Dy) = Ay′ = f(t)y′(t)
Logo o operador Ay = f(t)y(t) apenas comuta com D se f ′(t) = 0, isto e, Ay = cy, onde c euma constante.
Vejamos agora como proceder a factorizacao do polinomio diferencial
P (D) = D2 + a1D + a0.
Tendo em conta queP (r) = r2 + a1r + a0 = (r − λ1)(r − λ2) (1.56)
entao P (D) factoriza-se de forma analoga a P (r):
P (D) = D2 + a1D + a0 = (D − λ1)(D − λ2)
Vejamos porque. Usando a linearidade dos operadores e o facto de D comutar com o operadorproduto por uma constante, cI (c ∈ R ou c ∈ C):
(D − λ1)(D − λ2) = D(D − λ2)− λ1(D − λ2) = D2 −Dλ2 − λ1D + λ1λ2
= D2 − λ2Dλ1D + λ1λ2 = D2 − (λ1 + λ2)D + λ1λ2
20O operador derivada e, de facto, a aplicacao D : C1(I) → C(I) definida por Dy = y, onde I e um intervaloaberto. Estas aplicacoes cujo domınio e um conjunto de funcoes reais (ou complexas) designam-se comunmente,na literatura matematica, por operadores.
66

1.5. EQUACOES LINEARES DE ORDEM N
Ora, os coeficientes do polinomio do 2o grau (1.56) verificam a1 = −(λ1 +λ2) e a0 = λ1λ2, peloque
(D − λ1)(D − λ2) = D2 + a1D + a0.
A equacao diferencial e pois equivalente a:
(D − λ1)(D − λ2)y = 0 se λ1 6= λ2
e a
(D − λ1)2y = 0 se λ1 = λ2
Vejamos agora como usar a factorizacao do polinomio diferencial para determinar a solucaogeral da equacao homogenea. Tendo em conta que D − λ1 e D − λ2 comutam 21:
(D − λ1) (D − λ2)y︸ ︷︷ ︸
=0
= 0 ⇔ (D − λ2) (D − λ1)y︸ ︷︷ ︸
=0
= 0
Isto e, as solucoes de (D − λ1)y = 0 e de (D − λ2)y = 0 sao certamente solucoes de (1.55).
Resolvendo entao (D − λ)y = 0 (com λ = λ1 ou λ = λ2):
y + λy = 0 uma solucao e y(t) = eλt
No caso λ1 6= λ2, obtem-se duas solucoes linearmente independentes:
y1(t) = eλ1t e y2(t) = eλ2t
No caso λ1 = λ2, o procedimento anterior permite apenas encontrar uma solucao linearmenteindependente de (D − λ1)
2y = 0: y1(t) = eλ1t.
Para obter uma segunda, escrevemos um sistema de equacoes equivalente a equacao tomandov = (D − λ1)y:
(D − λ1) (D − λ1)y︸ ︷︷ ︸
v
= 0
{(D − λ1)v = 0(D − λ1)y = v
⇐{
v = eλ1t
y − λ1y = eλ1t ⇐{
v = eλ1t
y = teλ1t
Assim, se λ1 = λ2, obtivemos estas duas solucoes (que tambem sao linearmente independentes):
y1(t) = eλ1t e y2(t) = teλ1t
Como vimos anteriormente, o espaco de solucoes da equacao (1.55) tem dimensao 2, o quesignifica que a solucao geral da mesma pode ser dada por:
Caso 1: y(t) = c1eλ1t + c2e
λ2t, com c1, c2 ∈ R.
Caso 2: y(t) = c1eλ1t + c2te
λ1t, com c1, c2 ∈ R.
Caso 3: y(t) = d1eλ1t + d2e
λ2t, com d1, d2 ∈ C. Note que, neste caso, esta formularepresenta o espaco vectorial das solucoes complexas da equacao (1.55).
21Isto e, (D − λ1)(D − λ2) = (D − λ2)(D − λ1) (verifique).
67

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
No caso 3, e para obter uma formula para a solucao geral real, notamos em primeiro lugar queP (r) e um polinomio de coeficientes reais pelo que se λ1 = α + iβ (onde α, β ∈ R sao a partereal e a parte imaginaria de λ1) entao λ2 = λ1 = α− iβ. Entao:
eλ1t = eαteiβt = eαt cos(βt) + ieαt sen(βt)
eλ2t = eαte−iβt = eαt cos(βt)− ieαt sen(βt)
Como Re eλ1t e Im eλ1t tambem sao solucoes de (1.55), entao duas solucoes reais linearmenteindependentes sao,
u1(t) = eαt cos(βt) e u2(t) = eαt sen(βt).
Assim sendo:
Caso 3 (solucoes reais): y(t) = c1eαt cos(βt) + c2e
αt sen(βt), com c1, c2 ∈ R.
Exemplo 1: resolver a equacao y′′ − 4y = 0.
Usando a notacao y′ = Dy, a equacao pode ser escrita na forma (D2− 4)y = 0. O polinomiocaracterıstico associado a equacao e P (r) = r2 − 4 = (r − 2)(r + 2). Entao
(D2 − 4)y = 0 ⇔ (D − 2)(D + 2)y = 0
⇐ (D − 2)y = 0 ou (D − 2)y = 0
Assim, duas solucoes linearmente independentes sao e2t e e−2t, pelo que uma base do espaco desolucoes de (D − 2)(D + 2)y = 0 e < e2t, e−2t >. Concluimos que a solucao geral da equacaoy′′ − 4y = 0 e y(t) = c1e
2t + c2e−2t, com c1, c2 ∈ R.
Exemplo 2: resolver a equacao y′′ − 6y′ + 9y = 0.
Usando a notacao y′ = Dy, a equacao pode ser escrita na forma (D2 − 6D + 9)y = 0. Opolinomio caracterıstico associado a equacao e P (r) = r2 − 6r + 9 = (r − 3)2. Entao uma basedo espaco de solucoes de
(D2 − 6D + 9)y = 0 ⇔ (D − 3)2y = 0
e < e3t, te3t >, e a solucao geral da equacao y′′ − 6y′ + 9y = 0 e y(t) = c1e3t + c2te
3t, comc1, c2 ∈ R.
Exemplo 3: resolver a equacao y′′ + 2y′ + 2y = 0.
Usando a notacao y′ = Dy, a equacao pode ser escrita na forma (D2 + 2D + 2)y = 0. Opolinomio caracterıstico associado a equacao e P (r) = r2+2r+2 = (r+1− i)(r+1+ i). Entaouma base do espaco de solucoes reais de
(D2 − 2D + 2)y = 0 ⇔ (D + 1− i)(D + 1 + i)y = 0
e < et cos t, et sen t >. Desta forma, a solucao geral da equacao y′′ + 2y′ + 2 = 0 e dada pory(t) = c1e
t cos t+ c2et sen t, com c1, c2 ∈ R.
68

1.5. EQUACOES LINEARES DE ORDEM N
1.5.3 Equacao linear de ordem n e equacao vectorial equivalente
Regressamos ao estudo da equacao linear de ordem n:
y(n) + an−1(t) y(n−1) + ...+ a1(t) y
′ + a0(t) y = b(t) (1.57)
onde a0(t), a1(t),..., an−1(t) e b(t) sao funcoes reais definidas e contınuas em I. Considera-se:
y = (y0, y1, y2, . . . , yn−2, yn−1)def= (y, y′, y′′, . . . , y(n−2), y(n−1))
Tendo em conta a definicao destas variaveis, entao a equacao (1.57) e equivalente a:
y′0y′1...
y′n−2
y′n−1
=
y′
y′′
...
y(n−1)
y(n)
=
y1y2...
yn−1
−a0(t) y0 − · · · − an−1(t) yn−1 + b(t)
Este sistema de equacoes de 1a ordem pode-se escrever na forma
y0y1...
yn−2
yn−1
′
︸ ︷︷ ︸
y′
=
0 1 0 · · · 00 0 1 · · · 0...
......
...0 0 0 · · · 1
−a0 −a1 −a2 · · · −an−1
︸ ︷︷ ︸
A(t)
y0y1...
yn−2
yn−1
︸ ︷︷ ︸
y
+
00...0
b(t)
︸ ︷︷ ︸
h(t)
onde A(t) e amatriz companheira da equacao (1.57). Assim, a equacao de ordem n e equivalentea equacao vectorial de 1a ordem:
y′ = A(t)y + h(t)
A solucao geral de y′ = A(t)y e pois dada por:
y = X(t)C
onde X(t) e uma matriz solucao fundamental de y′ = A(t)y e C ∈ Rn.
Se u1, u2, . . . , un : I → R de classe Cn−1 em I sao linearmente independentes, define-se amatriz wronskiana de u1, u2, . . . , un por:
W =
u1 u2 · · · unu′1 u′2 · · · u′n...
......
u(n−1)1 u
(n−1)2 · · · u
(n−1)n
Como as colunas de X(t) sao solucoes linearmente independentes de y′ = A(t)y, entao X(t) euma matriz solucao fundamental de y′ = A(t)y se e so se X(t) e uma matriz wronskiana de nsolucoes linearmente independentes de
y(n) + an−1(t) y(n−1) + . . .+ a1(t) y
′ + a0(t) y = 0
69

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Esta ultima equacao designa-se por equacao homogenea associada a (1.57).Determinemos agora uma formula para a solucao geral da equacao linear nao homogenea
(1.57). Se y(t) e uma solucao arbitraria de (1.57) e yP (t) uma solucao particular da mesmaequacao entao, pela linearidade dos operadores derivada:
Dn(y − yP ) + an−1Dn−1(y − yP ) + a1D(y − yP ) + a0(y − yP )
= Dny + an−1Dn−1y + a1Dy + a0y
︸ ︷︷ ︸
=b(t)
−(DnyP + an−1D
n−1yP + a1DyP + a0yP︸ ︷︷ ︸
=b(t)
)
= b(t)− b(t) = 0
Isto significa que a diferenca y(t)− yP (t) e uma solucao da equacao homogenea; o que sugere asolucao geral da equacao nao homogenea (1.57) e da forma
y(t) = yG(t) + yP (t)
em que yG(t) e a solucao geral da equacao homogenea associada e yP (t) e uma solucao particularda equacao nao homogenea. Ora
Dn(yG + yP ) + an−1Dn−1(yG + yP ) + a1D(yG − yP ) + a0(yG − yP )
= DnyG + an−1Dn−1yG + a1DyG + a0yG
︸ ︷︷ ︸
=0
+DnyP + an−1Dn−1yP + a1DyP + a0yP
︸ ︷︷ ︸
=b(t)
= 0 + b(t) = b(t)
o que mostra que y(t) = yG(t) + yP (t) e, de facto, a solucao geral da equacao nao homogenea.
1.5.4 Solucao geral da equacao homogenea
Pode-se facilmente verificar (como acima, fica como exercıcio) a seguinte propriedade genericadas equacoes lineares homogeneas de ordem n (de coeficientes constantes) da forma
y(n) + an−1(t) y(n−1) + . . .+ a1(t) y
′ + a0(t) y = 0 (1.58)
Princıpio da sobreposicao de solucoes: se u(t) e v(t) sao duas solucoes da equacao P (D)y = 0,entao c1u(t) + c2v(t) e tambem solucao de P (D)y = 0, para quaisquer constantes reais c1 e c2(ou complexas) 22.
Isto sugere que a solucao geral destas equacoes possa ser obtida a partir de uma combinacaolinear de solucoes apropriadamente escolhidas. Como vimos, a equacao (1.58) e uma equacao deordem n com b(t) ≡ 0 (isto e, homogenea), pelo que e equivalente a
y′ = A(t)y
onde
A(t) =
0 1 0 · · · 00 0 1 · · · 0...
......
...0 0 0 · · · 1
−a0(t) −a1(t) −a2(t) · · · −an−1(t)
22E de notar que esta propriedade e verificada por todas as equacoes lineares homogeneas (diferenciais ou deoutro tipo).
70

1.5. EQUACOES LINEARES DE ORDEM N
e a matriz companheira de (1.58). Pela teoria das equacoes vectoriais lineares, o espaco de solucoesda equacaoX ′ = A(t)X, tem dimensao n, pelo que existem n solucoes linearmente independentes,X1, ..., Xn. As funcoes X1, ..., Xn sao as colunas de uma matriz solucao fundamental de y′ =A(t)y ou, equivalentemente, de uma matriz wronskiana de n solucoes linearmente independentesda equacao homogenea (1.58). Como tal, a solucao geral de X ′ = A(t)X e da forma
X(t) = c1X1(t) + · · ·+ cnXn(t) , c1, ...cn ∈ R
ou seja
yy′...
y(n−1)
︸ ︷︷ ︸
X(t)
= c1
y1y′1...
y(n−1)1
︸ ︷︷ ︸
X1(t)
+c2
y2y′2...
y(n−1)2
︸ ︷︷ ︸
X2(t)
+ · · · + cn
yny′n...
y(n−1)n
︸ ︷︷ ︸
Xn(t)
Dado que a solucao da equacao P (D)y = 0 e apenas a primeira componente de X(t), ou seja, y,entao a solucao geral da equacao homogenea P (D)y = 0 e uma combinacao linear das primeirascomponentes das funcoes vectoriais X1, ..., Xn, ou seja, de y1, y2, · · · , yn.
Podemos entao concluir que o espaco das solucoes da equacao
y(n) + an−1(t) y(n−1) + . . .+ a1(t) y
′ + a0(t) y = 0
tem dimensao n e que a sua solucao geral e da forma
y(t) = α1y1(t) + ...+ αnyn(t),
em que α1, ... , αn sao constantes (reais ou complexas) e y1,..., yn sao n solucoes linearmenteindependentes da equacao homogenea.
1.5.5 Equacao homogenea de ordem n de coeficientes constantes
Consideremos agora a equacao de ordem n de coeficientes constantes:
y(n) + an−1 y(n−1) + . . . + a1 y
′ + a0 y = b(t)
onde a0, a1, . . . an−1 ∈ R e b(t) e uma funcao real definida e contınua em I.Tomando b(t) ≡ 0, obtem-se a equacao homogenea associada:
y(n) + an−1 y(n−1) + . . .+ a1 y
′ + a0 y = 0 (1.59)
Considerando, como anteriormente, o operador diferencial D = ddt , podemos escrever (1.59)
na forma(Dn + an−1D
n−1 + · · ·+ a1D + a0)
︸ ︷︷ ︸
P (D)
y = 0
Define-se entao o polinomio caracterıstico da equacao (nao homogenea ou homogenea) por:
P (R) = Rn + an−1Rn−1 + · · ·+ a1R+ a0
O seguinte resultado estabelece uma relacao entre os valores proprios da matriz companheira, A,e as raızes do polinomio caracterıstico de (1.59):
71

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Proposicao: Os valores proprios da matriz companheira, A, da equacao diferencial y(n) +an−1 y
(n−1) + . . . + a1 y′ + a0 y = b(t) sao as raızes do seu polinomio caracterıstico P (R) =
Rn + an−1Rn−1 + · · ·+ a1R+ a0.
Demonstracao: det(A− λI) = ±P (λ).
Este resultado sugere uma relacao entre as raızes de P (R) e as solucoes da equacao ho-mogenea. Para obter essas solucoes vamos recorrer a factorizacao de P (R).
Admitindo que as raızes de P (λ) sao:
λ1 com multiplicidade m1
λ2 com multiplicidade m2...
...λk com multiplicidade mk
entaoP (R) = (R− λ1)
m1(R− λ2)m2 · · · (R− λk)
mk ,
onde, tendo em conta que o grau de P (R) e n,
m1 +m2 + . . .+mk = n.
Tal como no caso das equacoes de ordem 2, o polinomio diferencial factoriza-se da mesma formaque P (R):
P (D) = (D − λ1)m1(D − λ2)
m2 · · · (D − λk)mk
Como D − λi comuta com D − λj , pode-se trocar a ordem dos factores. Entao as solucoes de
(D − λj)mjy = 0 com j = 1, 2, . . . , k
sao solucoes de P (D)y = 0.Para mj = 1, obtivemos a solucao eλjt.No caso mj = 2, obtivemos duas solucoes linearmente independentes:
eλjt , teλjt
Para o caso geral, e util o seguinte resultado.
Proposicao: Sejam k,m ∈ N e λ ∈ C. Entao, para k < m:
(D − λ)mtkeλt = 0
Demonstracao:
(D − λ)tkeλt = ktk−1eλt + tkλeλt − λtkeλt = ktk−1eλt
Iterando a formula anterior:
(D − λ)mtkeλt = (D − λ)m−1ktk−1eλt
= (D − λ)m−2k(k − 1)tk−2eλt
...
= (D − λ)m−k+1k(k − 1) · · · 2 teλt
= (D − λ)m−kk!eλt = 0
Aplicando a proposicao anterior, obtemos solucoes da forma tleλt para l < mj; ou seja:
72

1.5. EQUACOES LINEARES DE ORDEM N
• Caso 1: λj ∈ R. Entao
eλjt , teλjt , t2eλjt . . . , tmj−1eλjt
sao mj solucoes (reais) linearmente independentes.
• Caso 2: λj = αj + iβj ∈ C. Isto implica que λj = αj − iβj tambem e raiz de P (R). Nestecaso, obtem-se 2mj solucoes linearmente independentes,
eλjt , teλjt , t2eλjt . . . , tmj−1eλjt
eλjt , teλjt , t2eλjt . . . , tmj−1eλjt.
Porem, estas solucoes sao complexas.
No entanto, tendo em conta que:
eλjt = eαjteiβjt = eαjt cos(βjt) + ieαjt sen(βjt)
eλjt = eαjte−iβjt = eαjt cos(βjt)− ieαjt sen(βjt)
entao pelo princıpio da sobreposicao,
1
2
(
tmeλjt + tmeλjt)
= tmeαjt cos(βjt)
1
2i
(
tmeλjt − tmeλjt)
= tmeαjt sen(βjt)
sao tambem solucoes (e sao funcoes reais). Assim, a partir do par de raızes α ± iβ demultiplicidades mj obtem-se 2mj solucoes linearmente independentes (reais):
eαjt cos(βjt) , teαjt cos(βjt) , . . . , tmj−1eαjt cos(βjt)
eαjt sen(βjt) , teαjt sen(βjt) , . . . , tmj−1eαjt sen(βjt)
O numero total de solucoes reais linearmente independentes obtidas pelo procedimento anteriore igual ao numero de raızes, contando as multiplicidades, do polinomio caracterıstico; ou seja,igual a:
m1 +m2 + · · ·+mk = n
Este procedimento permite assim obter uma base para o espaco de solucoes da equacao homogenea(1.59) constituida apenas por funcoes reais.
Exemplo 1:Consideremos a equacao
y(6) + y(5) + y(4) + y(3) = 0 ⇔ (D6 +D5 +D4 +D3)y = 0
O seu polinomio caracterıstico (e factorizacao) e:
P (R) = R6 +R5 +R4 +R3 = R3(R3 +R2 +R+ 1)
= R3(R+ 1)(R2 + 1) = R3(R+ 1)(R − i)(R + i)
As raızes do polinomio caracterıstico (e correspondentes solucoes da equacao diferencial) sao :
73

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
• λ = 0, com multiplicidade 3:
e0t︸︷︷︸
1
, te0t︸︷︷︸
t
, t2e0t︸︷︷︸
t2
• λ = −1, com multiplicidade 1e−t
• λ = ±i, com multiplicidade 1
e0t cos(1t)︸ ︷︷ ︸
cos t
, e0t sen(1t)︸ ︷︷ ︸
sen t
A solucao geral da equacao e:
y(t) = c1 + c2t+ c3t2 + c4e
−t + c5 cos t+ c6 sen t
com c1, c2, . . . , c6 ∈ R.
Problema de valor inicialNa equacao vectorial de ordem 1 equivalente, y′ = Ay, a condicao inicial e da forma:
y(t0) =(y(t0), y
′(t0), . . . , yn−1(t0)
)= y0 = (y00 , y
01, y
0n−1) ∈ R
n
Para obter um problema bem posto (onde a solucao existe e e unica), sera necessario prescrevero valor da solucao e das suas derivadas ate a ordem n− 1, num ponto t0 ∈ R:
O problema de valor inicial para uma equacao de ordem n tem, entao, a forma:
{y(n) + an−1 y
(n−1) + . . . + a1 y′ + a0 y = b(t)
y(t0) = y0,0, y′(t0) = y0,1, . . . , y(n−1)(t0) = y0,n−1
onde t0 ∈ R e y0,0 , y0,1 , . . . , y0,n−1 ∈ R.
Exemplo 1 (continuacao): No exemplo acima discutido, vamos acrescentar as condicoesiniciais:
y(0) = y′(0) = 1 , y′′(0) = y(3)(0) = y(4)(0) = y(5)(0) = 0
Calculando as derivadas (ate a ordem 5) da solucao geral e substituindo os valores dados pelascondicoes iniciais, obtem-se:
y(0) = 1y′(0) = 1y′′(0) = 0
y(3)(0) = 0
y(4)(0) = 0
y(5)(0) = 0
⇔
c1 + c4 + c5 = 1c2 − c4 + c6 = 12c3 + c4 − c5 = 0−c4 − c6 = 0c4 + c5 = 0−c4 + c6 = 0
⇔
c1 = 1c2 = 1c3 = 0c4 = 0c5 = 0c4 = c6 = 0
Desta forma, a solucao do problema de valor inicial e
y(t) = 1 + t.
74

1.5. EQUACOES LINEARES DE ORDEM N
Vejamos mais alguns exemplos.
Exemplo 2:
Determinar a solucao geral da equacao
y′′′ + 4y′′ + 4y′ = 0 (1.60)
Fazendo y′ = Dy, a equacao pode ser escrita na forma
(D3 + 4D2 + 4D)y = 0 ⇔ D(D + 2)2y = 0 ⇐ Dy = 0 ou (D + 2)2y = 0
Podemos entao obter solucoes linearmente independentes da equacao (1.60) resolvendo Dy = 0 e(D+2)2y = 0. Uma solucao da equacao Dy = 0 e e0t. Por outro lado a equacao (D+2)2y = 0tem como solucoes, por exemplo, e−2t e te−2t. Como tal a solucao geral de (1.60) e
y(t) = c1 + c2e−2t + c3te
−2t , c1, c2 c3 ∈ R
Exemplo 3:
Determinar a solucao do PVI
y′′ + 8y′ + 12y = 0 , y(0) = 3 , y′(0) = −14 (1.61)
Comecemos por determinar a solucao geral da equacao. Fazendo y′ = Dy, a equacao pode serescrita na forma
(D2 + 8D + 12)y = 0 ⇔ (D + 2)(D + 6)y = 0 ⇔ (D + 6)y = 0 ou (D + 2)y = 0
Uma solucao da equacao (D+6)y = 0 e e−6t. Por outro lado a equacao (D+2)y = 0 tem comosolucao e−2t. Como tal a solucao geral da equacao e dada por
y(t) = c1e−6t + c2e
−2t , c1, c2 ∈ R
Para que as condicoes iniciais se verifiquem
{y(0) = 3y′(0) = −14
⇒{
c1 + c2 = 3−6c1 − 2c2 = −14
⇒{
c1 = 2c2 = 1
Finalmente a solucao de (1.61) e
y(t) = 2e−6t + e−2t
75

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
1.5.6 Solucoes Particulares Atraves da Formula de Variacao das Constantes
Para calcular uma solucao particular, yP (t), da equacao
P (D)y = h(t) (1.62)
comecamos por discutir o metodo mais geral, e que consiste na aplicacao da formula da variacaodas constantes (1.39). Em teoria, este metodo e aplicavel a todos os problemas em que h(t)e somente uma funcao contınua. Na pratica, contudo, pode nao ser facil obter uma formulaexplıcita por primitivacao (e invocando apenas funcoes elementares).
Como vimos, a equacao nao homogenea de ordem n pode ser escrita como a equacao vectorialde ordem 1:
d
dt
yy′
y′′
.
.
.
y(n−1)
= A
yy′
y′′
.
.
.
y(n−1)
+
000...
h(t)
(1.63)
em que
A =
0 1 0 ... 00 0 1 .... 0
...0 0 0 ... 1−a0 −a1 −a2 ... −an−1
e a ja referida matriz companheira da equacao (1.62). Sendo y1,...,yn solucoes linearmenteindependentes da equacao homogenea associada (conforme foram determinadas na subseccaoanterior), a sua matriz Wronskiana e
W (t) =
y1 ... yny′1 ... y′n. ... .. ... .
y(n−1)1 ... y
(n−1)n
Como as colunas da matriz W (t) sao solucoes linearmente independentes da equacao homogeneaassociada a (1.63), a matriz W (t) e uma matriz solucao fundamental da equacao vectorial (1.63)pelo que, por aplicacao da formula da variacao das constantes para equacoes vectoriais, tem-seque uma solucao particular de (1.63) sera dada por
yy′
y′′
.
.
.
y(n−1)
= W (t)
∫ t
W−1(s)
000...
h(s)
ds ,
76

1.5. EQUACOES LINEARES DE ORDEM N
tendo-se entao que:
yP (t) =[y1(t) ... yn(t)
]∫ t
W−1(s)
0..0
h(s)
ds
Exemplo:
Determinar a solucao geral da equacao
y′′ + 2y′ + 2y = 2e−t (1.64)
A solucao geral da equacao e da forma
y(t) = yG(t) + yP (t)
em que yG e a solucao geral da equacao homogenea associada, e yP e uma solucao particular de(1.64).
• Calculo de yG
Como foi referido, yG e a solucao de
y′′ + 2y′ + 2y = 0
e como tal a sua solucao geral e (determinada no exemplo 3 da subseccao 2.5.2)
yG(t) = c1e−t cos t+ c2e
−t sen t , c1, c2 ∈ R
• Calculo de yP
Para determinar yP vamos utilizar a formula da variacao das constantes. Comecamos porobservar que e−t cos t e e−t sen t sao solucoes da equacao homogenea, e como tal umamatriz Wronskiana e dada por:
W (t) =
[e−t cos t e−t sen t
(e−t cos t)′ (e−t sen t)′
]
=
[e−t cos t e−t sen t
−e−t(cos t+ sen t) e−t(− sen t+ cos t)
]
Assim
yP (t) =[e−t cos t e−t sen t
]∫
W−1(t)
[0
2e−t
]
dt = 2e−t
Finalmente a solucao geral de (1.64) e
y(t) = c1e−t cos t+ c2e
−t sen t+ 2e−t , c1, c2 ∈ R
77

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
1.5.7 Metodo dos Coeficientes Indeterminados
Descrevemos agora um outro metodo para o calculo de uma solucao particular da equacao
P (D)y = b(t) (1.65)
que e bastante mais eficiente que o anterior. Contudo, este metodo e apenas aplicavel nos casosem que o termo nao homogeneo, b(t), e uma funcao da forma
tpeλt ou tpeαt cos(βt) ou tpeαt sen(βt) , p ≥ 0 (1.66)
ou suas combinacoes lineares.Dada uma funcao b(t), define-se polinomio aniquilador de b(t) como sendo o polinomio dife-
rencial PA(D) que verificaPA(D)b(t) = 0
Se b(t) for uma combinacao linear de funcoes do tipo (1.66), entao existe um polinomio aniquilador,e, pela subseccao 2.5.5, concluımos que
se b(t) = tpeλt, entao o seu polinomio aniquilador e
PA(D) = (D − λ)p+1
se b(t) = tpeαt cos(βt) ou b(t) = tpeαt sen(βt), entao o seu polinomio aniquilador e daforma
PA(D) =(
D − (α+ iβ))p+1(
D − (α− iβ))p+1
=(
(D − α)2 + β2)p+1
O metodo dos coeficientes indeterminados para resolver a equacao P (D)y = b(t) consiste em:
1. Determinar o polinomio aniquilador, PA(D), de b(t). Seja k o seu grau.
2. Aplicar PA(D) a ambos os membros da equacao inicial, donde resulta:
P (D)y = b(t) ⇒ PA(D)P (D)y = PA(D)b(t) ⇔ PA(D)P (D)y = 0
Note que a aplicacao de PA(D) nao produz uma equacao equivalente a inicial. Emboraqualquer solucao de P (D)y = b(t) seja solucao de PA(D)P (D)y = 0, nem todas as solucoesda segunda equacao resolvem a primeira.
Assim obtivemos uma equacao diferencial linear homogenea de coeficientes constantes deordem n+ k.
3. A solucao geral da equacao PA(D)P (D)y = 0 e dada por
y(t) = α1y1 + ...+ αnyn + β1w1 + ...+ βpwp
em que y1, ..., yn sao as solucoes linearmente independentes da equacao P (D)y = 0determinadas previamente, ou seja:
yG(t) = α1y1 + ...+ αnyn
Tem-se entao que existem β1, ..., βk ∈ R tais que
yP = β1w1 + ...+ βpwp
e uma solucao particular de P (D)y = b(t).
78

1.5. EQUACOES LINEARES DE ORDEM N
4. Determinam-se os coeficientes β1, ..., βp de modo a que w = β1w1 + ... + βpwp verifiqueP (D)w = b(t).
Exemplo:Determinar a solucao do PVI
y′′ + 3y′ + 2y = e−x , y(0) = 0 , y′(0) = 1 (1.67)
A solucao da equacao diferencial e da forma
y(x) = yG(x) + yP (x)
em que yG e a solucao geral da equacao homogenea associada, e yP e uma solucao particular daequacao completa.
• Calculo de yg
A equacao homogenea associada e
y′′ + 3y′ + 2y = 0
Fazendo y′ = Dy, obtem-se
(D2 +3D+2)y = 0 ⇔ (D+1)(D+2)y = 0 ⇔ (D+1)y = 0 ou (D+2)y = 0
Uma solucao da equacao (D+1)y = 0 e e−x. Por outro lado a equacao (D+2)y = 0 temcomo solucao e−2x. Como tal
yG(x) = c1e−x + c2e
−2x , c1, c2 ∈ R
• Calculo de yP
Dado que b(x) = e−x, podemos utilizar o metodo dos coeficientes indeterminados paradeterminar a solucao particular yP . O polinomio aniquilador de b(x) e
PA(D) = D + 1
Assim, e utilizando a factorizacao do polinomio caracterıstico feito anteriormente
(D + 1)(D + 2)y = e−x ⇒ (D + 1)(D + 1)(D + 2)y = (D + 1)e−x,
ou seja,(D + 1)2(D + 2)y = 0
A solucao geral desta ultima equacao (que e homogenea) e:
y(x) = c1e−x + c2xe
−x + c3e−2x
Dado que c1e−x + c3e
−2x representa a solucao geral da equacao homogenea associada a(1.67), conclui-se que a forma da solucao particular e yP (x) = αxe−x. Seguidamenteteremos que determinar o valor da constante α de modo a que yP seja de facto solucaoda equacao y′′ + 3y′ + 2y = e−x. Substituindo yP (x) na equacao nao homogenea (1.67),obtem-se:
(αxe−x)′′ + 3(αxe−x)′ + 2(αxe−x) = e−x ⇔ α = 1
Conclui-se queyP (x) = xe−x
79

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
• Calculo da solucao geral de (1.67)
Como ja foi referido
y(x) = yG(x) + yP (x) = c1e−x + c2e
−2x + xe−x , c1, c2 ∈ R
• Calculo da solucao de (1.67)
Para que as condicoes iniciais se verifiquem{
y(0) = 0y′(0) = 1
⇒{
c1 + c2 = 0−c1 − 2c2 + 1 = 1
⇒{
c1 = 0c2 = 0
Finalmente a solucao de (1.61) ey(x) = xe−x
1.5.8 Aplicacoes a resolucao de equacoes vectoriais de 1a ordem
Como exemplo de aplicacao do metodos desta seccao as equacoes vectoriais lineares — queestudamos na seccao 1.4 — vamos agora resolver a equacao vectorial linear de primeira ordem,de coeficientes constantes, no caso linear. O metodo consiste em resolver a equacao
Y′(t) = AY(t), (1.68)
com Y ∈ Rn, A =
[
aij(t)]n
i,j=1, aij ∈ R, procurando reduzi-la a uma equacao linear homogenea
de ordem n equivalente.A equacao vectorial linear de coeficientes constantes, homogenea, pode ser escrita na forma
y′1(t) = a11 y1(t) + ...+ a1n yn(t)...
......
y′n(t) = an1 y1(t) + ...+ ann yn(t)
Usando o metodo de substituicao, esta equacao pode ser reduzida a uma equacao de ordem n,linear, de coeficientes constantes, homogenea, onde a sua variavel dependente e precisamente umadas componentes yi de Y (para algum i ∈ {1, . . . , n}).
Exemplo 1:Dada a matriz
A =
2 4 0−1 −2 01 2 0
vamos — atraves da resolucao de equacoes homogeneas escalares de ordem n de coeficientesconstantes — determinar a matriz eAt e a solucao do (PVI):
x′ = 2x+ 4yy′ = −x− 2yz′ = x+ 2y
,(
x(0), y(0), z(0))
= (1, 1, 1)
Comecemos por determinar uma matriz solucao fundamental associada ao sistema (que e ho-mogeneo). A partir da 1a equacao,
x′ = 2x+ 4y ⇒ y =x′ − 2x
4.
80

1.5. EQUACOES LINEARES DE ORDEM N
Substituindo y por x′−2x4 na segunda equacao, obtemos:
y′ = −x− 2y ⇒(x′ − 2x
4
)′= −x− 2
(x′ − 2x
4
)
⇔ x′′ = 0 ⇔ x(t) = c1 + c2t
Assim
y(t) =x′ − 2x
4=
c2 − 2c1 − 2c1t
4e z =
∫
(x+ 2y)dt =c2t
2+ c3
Entao
x(t)y(t)z(t)
=
c1 + c2tc2−2c1−2c1t
4c2t2 + c3
=
1 t 0−1
214 − t
2 00 t
2 1
c1c2c3
A matriz
S(t) =
1 t 0−1
214 − t
2 00 t
2 1
e uma matriz solucao fundamental associada ao sistema mas nao e eAt (dado que para t = 0 naoiguala a matriz identidade. Tem-se que
eAt = S(t)S−1(0) =
1 t 0−1
214 − t
2 00 t
2 1
1 0 0−1
214 0
0 0 1
−1
=
1 + 2t 4t 0−t 1− 2t 0t 2t 1
Finalmente, a solucao do (PVI) e dada por
x(t)y(t)z(t)
=
1 + 2t 4t 0−t 1− 2t 0t 2t 1
111
=
1 + 6t1− 3t1 + 3t
.
Exemplo 2:Determinar a solucao geral da equacao
Y ′ =
[1 −33 1
]
Y
Fazendo Y = (x, y), a equacao pode ser escrita na forma
[x′
y′
]
=
[1 −33 1
] [xy
]
⇔{
x′ = x− 3yy′ = 3x+ y
Resolvendo (por exemplo) a primeira equacao em ordem a y, obtem-se
y = −1
3
(x′ − x
)
pele que, substituindo na segunda equacao
(
− 1
3
(x′ − x
))′= 3x+
(
− 1
3
(x′ − x
))
81

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
que e uma equacao de segunda ordem (linear, de coeficientes constantes, homogenea) em x.Simplificando e resolvendo
x′′ − 2x′ + 10x = 0 ⇔ (D2 − 2D + 10)x = 0
O polinomio caracterıstico associado, P (R) = R2 − 2R + 10, tem raızes complexas conjugadas1 ± 3i pelo que uma base do espaco de solucoes sera (por exemplo) Re e(1+3i)t e Im e(1+3i)t.Tem-se entao que
x(t) = aet cos(3t) + bet sen(3t)
e tornando a substituir
y = −1
3
(x′ − x
)= −bet cos(3t) + aet sen(3t)
Finalmente, a solucao da equacao vectorial e dada por
Y (t) = et[
a cos(3t) + b sen(3t)−b cos(3t) + a sen(3t)
]
, a, b ∈ R.
Exemplo 3:Vamos agora determinar a solucao geral da equacao
Y ′ =
2 0 00 2 10 0 2
Y ⇔
x′ = 2xy′ = 2y + zz′ = 2z
Neste caso nao vamos conseguir reduzir o sistema a uma equacao de ordem 3 em qualquer umadas variaveis, consequencia de nas duas ultimas equacoes nao ha dependencia em x e na primeiranao haver dependencia nas variaveis y e z. No entanto conseguiremos aplicar o metodo aos“sub-sistemas”
x′ = 2x e
{y′ = 2y + zz′ = 2z
Para o primeirox′ = 2x ⇔ x(t) = c1e
2t
Para o outro sistema, podemos utilizar dois metodos: ou reduzir a uma equacao de ordem 2(forcosamente em y) e resolve-lo como no exemplo anterior, ou como metodo alternativo queresulta sempre que a matriz associada ao sistema e triangular, e que consiste em resolver aequacao em z′ (dado que so depende de z) substituir na equacao em y′ (dado que, conhecida zso depende de y). Assim
z′ = 2z ⇔ z(t) = c2e2t
Substituindo na equacao em y′
y′ = 2y + c2e2t ⇔ y′ − 2y = c2e
2t ⇔ d
dt
(
e−2ty)
= c2 ⇔ y(t) = e2t(c2t+ c3)
e substituindo na equacao em x′ Finalmente, a solucao da equacao vectorial e dada por
Y (t) = e2t
c1c2t+ c3
c2
82

1.6. TRANSFORMADA DE LAPLACE
1.6 Transformada de Laplace
1.6.1 Definicao e Propriedades
Definicao da Transformada de Laplace
Seja f : [0,∞[→ R. Define-se a Transformada de Laplace de f como sendo a funcao de variavelcomplexa
L{f}(s) = F (s) =
∫ ∞
0e−stf(t) dt (1.69)
Por vezes usa-se a notacao L{f(t)}(s) para representar L{f}(s), em situacoes em que se designaa funcao f pela formula que a define.
Domınio da Transformada de Laplace
Se a funcao f for seccionalmente contınua em qualquer [0, T ], com T ∈ R+ e verificar
|f(t)| ≤ Meαt , ∀t ≥ 0 (1.70)
para certas constantes M > 0 e α ∈ R, entao a transformada de Laplace de f esta bem definidano semi-plano complexo Re s > α.
Demonstracao: Para qualquer t > 0 e s ∈ C tal que Re s > α ⇔ α−Re s < 0:
∣∣e−stf(t)
∣∣ =
∣∣∣e(−Re s)t
∣∣∣
∣∣∣e−i(Im s)t
∣∣∣ |f(t)| ≤ e(−Re s)tMeαt = Me(α−Re s)t
Entao, para Re s > α:
∣∣∣∣
∫ ∞
0e−stf(t) dt
∣∣∣∣≤∫ ∞
0Me(α−Re s)t dt = M lim
R→∞e(α−Re s)t
α− Re s
∣∣∣∣∣
R
0
=M
Re s− α
�
Nota: Se f : [0,∞[→ C, entao podemos definir a transformada de Laplace de f pela equacao(1.69), e a mesma estara bem definida para Re s > α, onde α ∈ R
+ e obtido a partir da condicaode convergencia (1.70).
Exemplo:
Sendo f(t) = eat, a ∈ R, (ou a ∈ C) tem-se que
L{eat}(s) =∫ ∞
0e−steatdt = lim
R→∞e(a−s)t
a− s
∣∣∣∣∣
R
t=0
=1
s− a, Re s > a
Como caso particular
L{1}(s) = L{e0t}(s) = 1
s, Re s > 0
Funcao de Heaviside
83

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Sendo c ∈ R, define-se a funcao de Heaviside (centrada em c) por
Hc(t) =
{0 se t < c1 se t ≥ c
Se c = 0, escreve-se simplesmente H(t)def= H0(t). Para qualquer c ∈ R, Hc(t) = H(t− c).
Exemplo: (Transformada de Laplace da funcao de Heaviside)
Se c ≥ 0
L{Hc(t)}(s) =∫ ∞
0H(t− c)e−tsdt =
∫ ∞
ce−tsdt = lim
N→∞−e−ts
s
∣∣∣∣
N
c
=e−cs
s, Re s > 0
Propriedades Elementares da Transformada de Laplace:
Assumindo que as funcoes f e g admitem transformadas de Laplace bem definidas numa regiaoRe s > a (para algum a ∈ R):
(1) LinearidadeL{f + g}(s) = L{f}(s) + L{g}(s)
e para α ∈ R
L{αf}(s) = αL{f}(s)Em consequencia, para quaisquer α, β ∈ R
L{αf + βg} (s) = αL{f}(s) + βL{g}(s)
(2) Translacao da Transformada de Laplace Para a ∈ R,
L{e−atf(t)}(s) = L{f(t)}(s + a)
(3) Derivada da Transformada de Laplace Para n ∈ N
dn
dsn
(
L{f(t)}(s))
= (−1)nL{tnf(t)}(s)
(4) Transformada de Laplace da Translacao Para c ∈ R+,
L{H(t− c)f(t− c)}(s) = e−csL{f(t)}(s)
(5) Transformada de Laplace da Derivada
Se f admite derivada seccionalmente contınua em [0,∞[ e Re s > 0 entao:
L{f ′(t)}(s) = −f(0) + sL{f(t)}(s)Entao, aplicando n ∈ N vezes a propriedade anterior, se f admite derivadas seccionalmentecontınuas ate a ordem n em [0,∞[:
L{f (n)(t)}(s) = −f (n−1)(0)− sf (n−2)(0) − · · · − sn−2f ′(0)− sn−1f(0) + snL{f(t)}(s)
84

1.6. TRANSFORMADA DE LAPLACE
Demonstracao:
(1) A propriedade e verdadeira devido a linearidade dos integrais improprios.
(2) L{e−atf(t)}(s) =∫ ∞
0e−ste−atf(t) dt =
∫ ∞
0e−(s+a)tf(t) dt = L{f(t)}(s + a)
(3) Vamos provar o resultado por inducao. No caso n = 1:
d
dsL{f(t)}(s) =
d
ds
∫ ∞
0e−stf(t) dt =
∫ ∞
0
d
ds
(e−stf(t)
)dt =
∫ ∞
0e−st(−t)f(t) dt
= −L{tf(t)}(s)
Admitindo que a propriedade e valida para n− 1, entao (e usando o caso n = 1):
dn
dsnL{f(t)}(s) =
d
ds
(dn−1
dsn−1L{f(t)}(s)
)
=d
ds
(
(−1)n−1L{tn−1f(t)}(s))
= (−1)n−1 d
dsL{tn−1f(t)}(s) = (−1)n−1(−1)L
{
t(tn−1f(t))}
(s)
= (−1)nL{tnf(t)}(s)
(4) Como H(t− c) = 0 para t ∈ [0, c]:
L{H(t− c)f(t− c)}(s) =∫ ∞
0e−stH(t− c)f(t− c) dt =
∫ ∞
ce−stf(t− c) dt
Fazendo θ = t− c no ultimo integral, obtem-se:
L{H(t− c)f(t− c)}(s) =∫ ∞
0e−s(θ+c)f(θ) dθ = e−cs
∫ ∞
0e−sθf(θ) dθ = e−csL{f(t)}(s)
(5) Integrando por partes (e atendendo a que, por hipotese, Re s > 0):
L{f ′(t)}(s) =∫ ∞
0e−stf ′(t) dt = e−stf(t)
∣∣∞0
+ s
∫ ∞
0e−stf(t) dt = −f(0) + sL{f(t)}(s)
Exemplos
a) Para b ∈ R, e usando a linearidade da transformada de Laplace:
L{cos(bt)}(s) = L{eibt + e−ibt
2}(s) = 1
2
( 1
s− ib+
1
s+ ib
)
=s
s2 + b2, Re s > 0
L{sen(bt)}(s) = L{eibt − e−ibt
2i}(s) = 1
2i
( 1
s− ib− 1
s+ ib
)
=b
s2 + b2, Re s > 0
85

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
b) Para a e b ∈ R, e usando a propriedade da translacao da transformada de Laplace:
L{e−at cos(bt)}(s) = L{cos(bt)}(s + a) =s+ a
(s+ a)2 + b2, Re s > −a
L{e−at sen(bt)}(s) = L{sen(bt)}(s + a) =b
(s+ a)2 + b2, Re s > −a
c) Se n ∈ N e a ∈ R, e usando a propriedade da derivada da transformada de Laplace:
L{tneat}(s) = (−1)ndn
dsn
(
L{eat}(s))
=n!
(s − a)n+1, Re s > a
Particularizando o resultado anterior para a = 0, obtem-se:
L{tn}(s) = n!
sn+1, Re s > 0
d) Por aplicacao da propriedade da transformada de Laplace da translacao, determinar f(t) tal
que L{f(t)}(s) = e−2s
s2.
L{f(t)}(s) = e−2s 1
s2= e−2sL{t}(s) = L
{H(t− 2)(t − 2)
}(s)
1.6.2 Aplicacoes da Transformada de Laplace as equacoes diferenciais
Vamos introduzir um metodo que permite resolver um problema de valor inicial para uma equacaolinear de ordem n, de coeficientes constantes. Para tal, vamos usar a Transformada de Laplacepara obter a solucao de problemas de valor inicial do tipo:
yn + an−1y(n−1) + ...+ a1y
′ + a0y = b(t)
y(0) = b0 , y′(0) = b1 , ..., y
(n−1)(0) = bn−1
(1.71)
1. Aplicar a Transformada de Laplace a ambos os membros da equacao diferencial do problema(1.71):
L{yn + an−1y(n−1) + ...+ a1y
′ + a0y}(s) = L{b(t)}(s)
2. Aplicando as propriedades da transformada de Laplace, e com
Y (s) = L{y(t)}(s)
obtem-se
Y (s) =1
P (s)
(B(s) +Q(s)
)
onde P (s) e o polinomio caracterıstico associado a (1.71), B(s) a transformada de Laplacede b(t) e Q(s) um polinomio de grau menor ou igual que n−1. Quando as condicoes iniciaissao nulas, Q(s) = 0.
86

1.6. TRANSFORMADA DE LAPLACE
3. Finalmente, determinar a funcao y(t) tal que
L{y(t)}(s) = Y (s).
Em consequencia:
y(t) = L−1{Y (s)}(t)Diz-se que y(t) e a transformada de Laplace inversa de Y (s). Utilizando este metodo,obtem-se a solucao, y(t), do PVI (1.71).
Exemplo:
Determinar a solucao (para t ≥ 0) do problema de valor inicial:
y + y = b(t) , y(0) = y(0) = 0.
onde b(t) e definida pela expressao
b(t) =
{t2 se 0 ≤ t < 10 se t ≥ 1
=(1−H(t− 1)
)t2 = t2 −H(t− 1) t2
Aplicando a transformada de Laplace a ambos os membros da equacao diferencial, obtem-se
L{y + y} (s) = L{b(t)} (s).
Pela propriedade da transformada de Laplace da translacao:
L{b(t)} (s) = L{t2}(s)− L
{H(t− 1)t2
}(s) =
2
s3− L
{
H(t− 1)((t− 1) + 1)
)2}
(s)
=2
s3− e−sL
{(t+ 1)2
}(s) =
2
s3− e−sL
{t2 + 2t+ 1
}(s)
=2
s3− e−s
(2
s3+
2
s2+
1
s
)
Por outro, usando a linearidade:
L{y + y} (s) = L{y} (s) + L{y} (s) = 2
s3− e−s
( 2
s3+
2
s2+
1
s
)
Pela propriedade da transformada de Laplace da derivada,
−y(0) − sy(0) + s2L{y} (s) + L{y} (s) = 2
s3− e−s
( 2
s3+
2
s2+
1
s
)
Usando a notacao Y (s) = L{y(t)} (s), e atendendo a que y(0) = y(0) = 0, tem-se entao
(s2 + 1)Y (s) =2
s3− e−s
( 2
s3+
2
s2+
1
s
)
,
ou seja,
Y (s) =1
s2 + 1
(2
s3− e−s
( 2
s3+
2
s2+
1
s
))
.
87

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
Sejam F1(s) e F2(s) tais que:
Y (s) =2
s3(s2 + 1)︸ ︷︷ ︸
− e−s
(1
s2 + 1
( 2
s3+
2
s2+
1
s
))
︸ ︷︷ ︸
F1(s) F2(s)
Em F1(s), fazendo separacao em fraccoes simples e aplicando as propriedades da Transformadade Laplace:
F1(s) =−2
s+
0
s2+
2
s3+
2s+ 0
s2 + 1
=−2
s+
d2
ds21
s+ 2
s
s2 + 1
= −2L{1}(s) + L{t2}(s) + 2L{cos t}(s)
= L{−2 + t2 + 2cos t}(s)
Tratando F2(s) de forma similar:
F2(s) = e−s(−1
s+
2
s2+
2
s3+
s− 2
s2 + 1
)
= e−s(−1
s− 2
d
ds
1
s+
d2
ds21
s+
s
s2 + 1− 2
1
s2 + 1
)
= e−s(
− L{1} (s) + 2L{t} (s) + L{t2}(s) + L{cos t} (s)− 2L{sen t} (s)
)
= e−sL{−1 + 2t+ t2 + cos t− 2 sen t
}(s)
= L{
H(t− 1)(
− 1 + 2(t− 1) + (t− 1)2 + cos(t− 1)− 2 sen(t− 1))}
(s)
Conclui-se que
Y (s) = L{
− 2 + t2 + 2cos t
−H(t− 1)(
− 1 + 2(t− 1) + (t− 1)2 + cos(t− 1)− 2 sen(t− 1))}
(s)
e assim a solucao do PVI e
y(t) = −2 + t2 + 2cos t−H(t− 1)(
− 1 + 2(t− 1) + (t− 1)2 + cos(t− 1)− 2 sen(t− 1))
=
−2 + t2 + 2cos t se 0 ≤ t < 1
−3 + t2 + 2cos t− 2(t− 1)− (t− 1)2 − cos(t− 1) + 2 sen(t− 1) se t ≥ 1
88

1.6. TRANSFORMADA DE LAPLACE
1.6.3 Distribuicao Delta de Dirac
A delta de Dirac e a distribuicao que verifica
δ(t) = 0 ∀t ∈ R \ {0}∫ ∞
−∞δ(x) dx = 1
Se f e contınua em t = 0 entao:∫ ∞
−∞δ(t)f(t) dt = f(0)
Mais genericamente, podemos definir a distribuicao delta de Dirac centrada em um dado c ∈ R
por:δc(t) = δ(t− c)
A distribuicao δc(t) verifica, entao:
a) δc(t) = 0 para qualquer t ∈ R \ {c}.
b)
∫ ∞
−∞δc(t) dt = 1
c) Se f e contınua em c entao
∫ ∞
−∞δc(t)f(t) dt = f(c)
Desta forma:
L{δc(t)} =
∫ ∞
−∞δc(t)e
−st dt = e−cs.
Exemplo:
Determinar a solucao (para t ≥ 0) do problema de valor inicial:
y + 2y + y = 2δ(t − 2) , y(0) = y(0) = 0.
Aplicando a Transformada de Laplace a ambos os membros da equacao diferencial, obtem-se
L{y + 2y + y} (s) = L{2δ(t)} (s) = 2e−2s
Usando a linearidade, a propriedade da transformada de Laplace da derivada e a notacao Y (s) =L{y(t)} (s)
−y(0) − sy(0) + s2Y (s) + 2 (−y(0) + sY (s)) + Y (s) = 2e−2s,
o que e equivalente a(s2 + 2s+ 1)Y (s) = 2e−2s,
ou seja
Y (s) = e−2s 2
(s+ 1)2= e−2sL
{2tet
}(s) = L
{
2H(t− 2)(t− 2)e−(t−2)}
(s)
Consequentemente, a solucao do problema de valor inicial e:
y(t) = 2H(t− 2)(t− 2)e−(t−2).
89

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
1.6.4 Inversao da Transformada de Laplace
Teorema de Inversao da Transformada de Laplace
Seja F (s) uma funcao analıtica em C excepto num conjunto finito de singularidades (isoladas),{s1, s2, . . . , sn} ⊂ C. Seja α ∈ R tal que F (s) e analıtica no semi-plano Re s ≥ α (isto e, αe maior que qualquer um dos valores Re s1,Re s2, . . . ,Re sn). Suponhamos tambem que F (s)verifica, para certos M,β, R ∈ R
+:
|F (s)| ≤ M
|s|β , se |s| ≥ R (1.72)
Entao
f(t) =
n∑
j=1
Res(estF (s), sj
)(1.73)
satisfaz L{f(t)} (s) = F (s) para Re s > α.Demonstracao: Seja R > |α| tal que todas as singularidades de F (s) estao no interior da
circunferencia |s| = R (isto e, |sj| < R, para j = 1, 2, . . . , n).
s1
s2
s3
sn−1
sns
IR −IR
Re s
Im s
α
γ−R
γ+R
α+ i√R2 − α2
α− i√R2 − α2
Figura 1.10: Demonstracao do teorema de inversao da transformada de Laplace.
Sejam
γ+R = {s ∈ C : |s| = R e Re s ≥ α}γ−R = {s ∈ C : |s| = R e Re s ≤ α}
(em que a circunferencia e sempre percorrida no sentido directo) e IR o segmento que une osextremos de ambas as curvas, com inıcio em α−i
√R2 − α2 e fim em α+i
√R2 − α2. Considere-se
as curvas de Jordan:Γ+R = γ+R + (−IR) , Γ−
R = γ−R + IR
90

1.6. TRANSFORMADA DE LAPLACE
Note que ambas as curvas sao percorridas no sentido directo.
Aplicando o teorema dos resıduos a funcao estF (s), que e analıtica em C \ {s1, s2, . . . , sn}(considera-se t ∈ R como parametro):
∫
Γ−
R
estF (s) ds = 2πin∑
j=1
Res(estF (s), sj
)= 2πif(t) (1.74)
A transformada de Laplace de f (nos pontos s ∈ C onde o limite que define o integral improprioconverge) sera entao dada por:
2πiL{f(t)} (s) = limN→∞
∫ N
0e−st
(∫
Γ−
R
eztF (z) dz
)
dt.
Pelo teorema de Fubini:
2πiL{f(t)} (s) = limN→∞
∫
Γ−
R
(∫ N
0e(z−s)t dt
)
F (z) dz = limN→∞
∫
Γ−
R
e(z−s)N − 1
z − sF (z) dz.
Para Re s > α e notando que, para z ∈ Γ−R, Re z ≤ α:
limN→∞
∣∣∣e(z−s)N
∣∣∣ ≤ lim
N→∞e(α−Re s)N = 0,
pelo que, para esses valores de s, o limite que define L{f(t)} (s) existe e:
2πiL{f(t)} (s) = −∫
Γ−
R
F (z)
z − sdz.
Considera-se agora R suficientemente grande, de tal forma que — para alem das sigularidadess1, s2, . . . , sn — tambem s esta no interior da circunferencia |z| = R, e a estimativa (1.72) evalida para |z| = R (ou seja, R ≥ R). Aplicando a formula integral de Cauchy a curva Γ+
R e afuncao F (que e analıtica nessa curva e no seu interior):
2πiL{f(t)} (s) = −∫
Γ−
R
F (z)
z − sdz −
∫
Γ+R
F (z)
z − sdz + 2πiF (s)
︸ ︷︷ ︸
= 0
= −∫
|z|=R
F (z)
z − sdz + 2πiF (s).
Como:∣∣∣∣∣
∫
|z|=R
F (z)
z − sdz
∣∣∣∣∣≤∫
|z|=R
|F (z)||z − s| |dz| ≤
M/Rβ
R− |s|
∫
|z|=R|dz| = 2πRM
Rβ(R− |s|) → 0
quando R → ∞, concluımos que,
2πiL{f(t)} (s) = limR→∞
(
−∫
|z|=R
F (z)
z − sdz + 2πiF (s)
)
= 2πiF (s),
91

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
ou seja,L{f(t)} (s) = F (s).
�.
Este teorema de inversao pode ser util quando F (s) e uma funcao racional, isto e, F (s) = P (s)Q(s) ,
onde P (s) e Q(s) sao polinomios. Neste caso, e como vimos no estudo do lema de Jordan, bastaque o grau de Q(s) seja maior que o de P (s) para a condicao (1.72) seja satisfeita.
Exemplo 1:
Determinar a transformada de Laplace inversa de F (s) =s+ 1
s2 + s− 6.
Como s2 + s − 6 = (s + 3)(s − 2), estF (s) = est s+1(s+3)(s−2) tem por singularidades s = 2 e
s = −3, sendo ambas polos simples. Note que o grau de s2 + s− 6 e maior que o de s− 1. Peloteorema de inversao da transformada de Laplace:
L−1{F (s)} = L−1
{s+ 1
(s+ 3)(s − 2)
}
= Res(estF (s), 2
)+Res
(estF (s),−3
)
Os resıduos dos polos simples sao:
Res(G(s), 2
)= lim
s→2
s+ 1
s+ 3est =
3
5e2t
Res(G(s),−3
)= lim
s→−3
s+ 1
s− 2est =
2
5e−3t.
Assim sendo,
L−1{F (s)} =3
5e2t +
2
5e−3t.
Exemplo 2:
Sendo F (s) uma funcao que verifica as condicoes do teorema de inversao da transformada deLaplace, provar que
f(t) = L−1{F (s)}(t) = 1
2πi
∫ α+i∞
α−i∞estF (s) ds para t > 0. (1.75)
Notamos em primeiro lugar que a equacao (1.74) e valida para qualquer R muito grande;tomando o limite em ambos os membros de (1.74) quando R → ∞, entao:
2πif(t) = limR→∞
(∫
IR
estF (s) ds +
∫
γ−
R
estF (s) ds
)
=
∫ α+i∞
α−i∞estF (s) ds + lim
R→∞
∫
γ−
R
estF (s) ds
Resta provar que limR→∞∫
γ−
RestF (s) ds = 0.
92

1.6. TRANSFORMADA DE LAPLACE
A curva γ−R e o arco de circunferencia parametrizado por s(θ) = Reiθ, com π2 −κ ≤ θ ≤ 3π
2 +κe κ = arctg α√
R2−α2. Podemos escrever γ−R = C1
R + SR + C2R
23 onde o parametro θ satisfaz:
π2 − κ < θ < π
2 para z(θ) ∈ C1R ;
π2 < θ < 3π
2 para z(θ) ∈ SR ;
3π2 < θ < 3π
2 + κ para z(θ) ∈ C2R .
Para estimar os integrais ao longo de C1R +C2
R, tendo em conta que∣∣ets∣∣ = etRe s ≤ etα para
s ∈ γ−R : ∣∣∣∣∣
∫
C−
R+C+R
estF (s) ds
∣∣∣∣∣≤ Metα
Rβ
∫
C−
R+C+R
|ds| = Metα
Rβ2R|κ|
Como | arctg x| ≤ |x|, entao R|κ| = R∣∣∣arctg α√
R2−α2
∣∣∣ ≤ R |α|√
R2−α2= |α|√
1−α2/R2, pelo que:
∣∣∣∣∣
∫
C−
R+C+R
estF (s) ds
∣∣∣∣∣≤ 2Metα|α|
Rβ√
1− α2/R2−→ 0 quando R → ∞
O integral ao longo de SR pode ser estimado usando o metodo da prova do lema de Jordan.Em primeiro lugar,
∫
SR
∣∣ets∣∣|ds| =
∫ 3π2
π2
∣∣etR cos θ
∣∣∣∣eitR sen θ
∣∣Rdθ
=
∫ 3π2
π2
etR cos θ Rdθ =
∫ π
0etR cos(ω+π
2 )Rdω =
∫ π
0e−tR senω Rdω.
O ultimo integral foi estimado na demonstracao do lema de Jordan 24, obtendo-se entao:
∫
SR
∣∣ets∣∣|ds| ≤ π
tpara t > 0.
Entao, para t > 0,
∣∣∣∣
∫
SR
f(z)ets ds
∣∣∣∣≤ M
Rβ
∫
SR
|ets||ds| ≤ Mπ
Rβt−→ 0 quando R → ∞
23A ideia desta decomposicao baseia-se no facto de os comprimentos das curvas C1R e C2
R nao tenderem para∞ quando R → ∞, o que permite uma majoracao mais simples dos integrais correspondentes. Por outro lado, ointegral ao longo de SR pode ser estimado pelo metodo que foi usado na prova do lema de Jordan.
24Reproduzimos aqui a parte relevante dessa prova. Como sen(π−ω) = sen(ω), para ω ∈ [0, π], entao ω = π2e
um eixo de simetria do grafico da funcao g(ω) = e−tR senω. Desta forma, e atendendo tambem a que senω ≥ 2πω
para qualquer ω ∈ [0, π/2]:
∫ π
0
e−tR senωRdω = 2
∫ π/2
0
e−tR senωRdω ≤
∫ π/2
0
e−2tR
πω2Rdω =
π
t
(
1− e−tR) <π
t(1.76)
93

CAPITULO 1. EQUACOES DIFERENCIAIS ORDINARIAS
94

Capıtulo 2
Introducao as Equacoes Diferenciais Parciais
O objectivo de resolver uma equacao diferencial parcial e determinar uma funcao u(x1, ..., xn) queverifica uma relacao de igualdade envolvendo as suas derivadas (que serao derivadas parciais).
Centraremos o nosso estudo nas equacoes diferenciais parciais lineares de segunda ordem emdomınios (espaciais) rectangulares, em que as equacoes sao afins aos tres tipos seguintes:
• Equacao do Calor∂u
∂t= K
(∂2u
∂x21+ ...+
∂2u
∂x2n
)
em que t > 0, x1 ∈ [0, L1],..., xn ∈ [0, Ln], e K > 0 e a condutividade termica do material.Este tipo de equacoes esta associado a processos envolvendo conducao termica e difusao1.
• Equacao de Laplace∂2u
∂x21+ ...+
∂2u
∂x2n= 0
em que x1 ∈ [0, L1],..., xn ∈ [0, Ln]. Este tipo de equacoes esta associado a processosestacionarios de conducao termica e difusao, a electrostatica e ao movimento dos fluıdos.
• Equacao das Ondas∂u2
∂t2= c2
(∂2u
∂x21+ · · ·+ ∂2u
∂x2n
)
em que t > 0, x1 ∈ [0, L1],..., xn ∈ [0, Ln], e c uma constante. Este tipo de equacoes estaassociado a processos envolvendo propagacao de ondas.
Para resolver estas equacoes, necessitaremos de estabelecer
• Condicoes de Fronteira
Que predefinem o comportamento da funcao u na fronteira de R = [0, L1]× ...× [0, L1], eque poderao ser de varios tipos:
⋄ Condicoes de Dirichlet
se definem o valor de u na fronteira de R;
1No caso de de tratar da equacao de difusao, ∂u∂t
= D(
∂2u∂x2
1
+ ... + ∂2u∂x2
n
)
, D > 0 e o coeficiente de difusao da
susbtancia.
95

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
⋄ Condicoes de Neumann
se definem o valor de ∂u∂x na fronteira de R (ou seja, definem o fluxo de u na fronteira
de R);
Poderao ainda ser mistas se existirem condicoes dos dois tipos.
As condicoes de fronteira dizem-se homogeneas se forem nulas.
• Condicoes Iniciais
que definem o estado inicial, isto e, para a equacao do calor
u(0, x1, ..., xn) = f(x1, ..., xn) , ∀(x1, ..., xn) ∈ R
e para a equacao das ondas
{u(0, x1, ..., xn) = f(x1, ..., xn)∂u∂t (0, x1, ..., xn) = g(x1, ..., xn)
, ∀(x1, ..., xn) ∈ R
2.1 Metodo de Separacao de Variaveis
Para descrever o metodo de separacao de variaveis, vamos aplica-lo ao problema de Dirichlethomogeneo para a equacao do calor.
A equacao do calor unidimensional modela a propagacao de calor (ou a difusao de umasubstancia) atraves de um corpo unidimensional (por exemplo uma barra) de comprimento L. Afuncao u(t, x) mede a temperatura da barra no ponto x no instante t e verifica a equacao do calor
∂u
∂t= K
∂2u
∂x2, ∀t > 0 , x ∈]0, L[
sendo K > 0 a condutividade termica (ou o coeficiente de difusao). Assumiremos condicoes defronteira de Dirichlet homogeneas, isto e
u(t, 0) = u(t, L) = 0 , ∀t > 0
e a condicao inicial
u(0, x) = f(x) , ∀x ∈]0, L[em que f e uma funcao seccionalmente contınua e com derivada seccionalmente contınua definidano intervalo [0, L].
Resolveremos entao o problema de valores na fronteira e inicial
∂u
∂t= K
∂2u
∂x2t > 0 , x ∈]0, L[
u(t, 0) = u(t, L) = 0 t > 0
u(0, x) = f(x) x ∈]0, L[
(2.1)
Comecamos por notar que se f(x) ≡ 0 entao a solucao de (2.1) e u(t, x) ≡ 0. Se f nao eidenticamente nula entao u tambem nao o sera.
96

2.1. METODO DE SEPARACAO DE VARIAVEIS
Vamos utilizar o metodo de separacao de variaveis para determinar solucoes do problema (2.1)da forma
u(t, x) = T (t)X(x)
Pela observacao acima feita, nem T (t) nem X(x) poderao ser identicamente nulas. Substituindona equacao diferencial obtem-se
∂
∂t
(
T (t)X(x))
= K∂2
∂x2
(
T (t)X(x))
⇔ T ′(t)X(x) = KT (t)X ′′(x) ⇔ T ′(t)KT (t)
=X ′′(x)X(x)
Observe-se que, separadas as variaveis, pretende-se que para todos t > 0 e x ∈]0, L[ uma funcao
de t ( T ′(t)KT (t)) iguale uma funcao de x (X
′′(x)X(x) ). Para que tal se verifique e necessario que ambos
igualem uma constante, isto e, para λ ∈ R
T ′(t)KT (t)
= λ eX ′′(x)X(x)
= λ
Por outro lado, atendendo as condicoes de fronteira
• u(t, 0) = 0 implica T (t)X(0) = 0 e como tal ou T (t) e a funcao identicamente nula ouX(0) = 0. Dado que a primeira hipotese nao pode ocorrer (implicaria u ≡ 0) tem-se queX(0) = 0.
• u(t, L) = 0 implica T (t)X(L) = 0 e como tal ou T (t) e a funcao identicamente nula ouX(L) = 0. Dado que a primeira hipotese nao pode ocorrer, tem-se que X(L) = 0.
E conveniente notar que, se nao exigıssemos condicoes de fronteira nulas, o metodo de se-paracao de variaveis falharia neste ponto. A razao e muito simples — a lei do anulamento doproduto nao seria aplicavel.
Temos entao dois problemas para resolver - correspondentes a duas equacoes diferenciaisordinarias
(P1)
{X ′′ − λX = 0X(0) = X(L) = 0
, (P2) T ′ = λKT
Comecamos por resolver o problema (P1). Trata-se duma equacao diferencial linear homogenea,cuja solucao tem que verificar condicoes de fronteira nulas. Nesta situacao, a funcao nula e sempresolucao de (P1). Existem no entanto alguns valores de λ para os quais essa nao e a unica solucaode (P1).
Definicao: λ diz-se um valor proprio de (P1), associado a funcao propria ϕ(x), sse ϕ(x) foruma solucao nao nula de (P1).
Para continuar a nossa resolucao, teremos que encontrar os valores propios de (P1) a fim dedeterminar as suas solucoes nao nulas. Assim
X ′′ − λX = 0 ⇔ (D2 − λ)X = 0
Teremos entao tres casos possıveis:
λ = 0 — A equacao e D2X = 0 o que implica X(x) = Ax+B, A, B ∈ R;
λ > 0 (λ = µ2) — A equacao e (D−µ)(D+µ)X = 0 o que implica X(x) = Aeµx+Be−µx;
97

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
λ < 0 (λ = −ω2) — A equacao e (D + iω)(D − iω)X = 0 o que implica X(x) =A sen(ωx) +B cos(ωx);
Os casos λ = 0 e λ > 0, combinados com as condicoes de fronteira, produzem apenas a solucaonula. Conclui-se que qualquer λ ≥ 0 nao e valor proprio de (P1). Para o caso λ < 0, tem-se que
X(0) = 0 ⇒ B = 0
X(L) = 0 ⇒ A sen(ωx) = 0
pelo que,A = 0 ⇒ X(x) ≡ 0
ousen(ωL) = 0 ⇒ ω =
nπ
L⇒ X(x) = sen
nπx
L, com n ∈ Z
Temos assim que λ = −ω2 = −n2π2
L2 e X(x) = sen nπxL , para n ∈ Z, sao os valores proprios
e as correspondentes funcoes proprias associadas. Note que para os ındices n inteiros negativosrepetem-se os valores proprios e as funcoes proprias (a menos de combinacao linear). Conclui-se
que qualquer λ que nao seja da forma −n2π2
L2 (para algum n ∈ N) nao e valor proprio de (P1), e
para cada n ∈ N, λ = −n2π2
L2 e valor proprio de (P1) associado a funcao propria Xn(x) = sen nπxL .
Para resolver o problema (P2), utilizaremos apenas os valores proprios de (P1), dado quepara outros valores de λ a unica solucao de (P1) e a nula. Assim, para cada n ∈ N
T ′ = −n2π2
L2KT ⇒ Tn(t) = e−
n2π2KL2 t
Resolvidos (P1) e (P2), podemos concluir que as solucao da equacao do calor unidimensional, daforma u(t, x) = T (t)X(x), que verificam condicoes de fronteira de Dirichlet nulas sao as funcoesda forma
un(t, x) = Tn(t)Xn(x) = e−n2π2K
L2 t sennπx
L, , n ∈ N (2.2)
Princıpio da Sobreposicao
Qualquer combinacao linear de solucoes de equacoes diferenciais lineares homogeneas (in-cluindo de um numero infinito, se houver convergencia), verificando condicoes de fronteira ho-mogeneas, e tambem solucao da equacao e verifica as mesmas condicoes de fronteira.
Observa-se que, relativamente a sobreposicoes com um numero infinito de termos, sera ne-cessario verificar adicionalmente que a serie obtida e uniformemente convergente em subconjuntoscompactos do domınio onde a equacao diferencial e satisfeita.
Entao, atendendo a (2.2)
u(t, x) =∞∑
n=1
cnun(t, x) =∞∑
n=1
cne−n2π2K
L2 t sennπx
L, , cn ∈ R
e solucao da equacao do calor unidimensional que verifica condicoes de fronteira de Dirichlet nulas.Para determinar as constantes cn teremos que utilizar a condicao de fronteira u(0, x) = f(x).Resulta entao que:
∞∑
n=1
cn sennπx
L= f(x) (2.3)
98

2.2. SERIES DE FOURIER
2.2 Series de Fourier
2.2.1 Definicao e convergencia pontual
Para qualquer L ∈ R+ , considere-se uma funcao f : [−L,L] → R. Pode-se associar a f a sua
Serie de Fourier, ou serie trigonometrica
SFf (x) =a02
+
∞∑
n=1
(
an cos(nπx
L) + bn sen(
nπx
L))
em que
a0 =1
L
∫ L
−Lf(x) dx , an =
1
L
∫ L
−Lf(x) cos(
nπx
L)dx
e
bn =1
L
∫ L
−Lf(x) sen(
nπx
L)dx
Teorema: (convergencia pontual da serie de Fourier)
Se f : [−L,L] → R e uma funcao seccionalmente contınua e de derivada seccionalmentecontınua em ] − L,L[, entao para cada x ∈ [−L,L], a serie de Fourier associada e uma serieconvergente, tendo-se que
SFf (x) =
f(x) sendo x um ponto de continuidade de f
f(x+) + f(x−)2
sendo x um ponto de descontinuidade de f
f(L−) + f(−L+)
2sendo x = −L ou x = L
(2.4)
Se f e contınua em x = −L e em x = L tem-se, simplesmente 2:
SFf (±L) =f(L) + f(−L)
2
Note-se que a serie de Fourier SFf esta bem definida em R, e periodica de perıodo 2L e estarelacionada, no sentido descrito em (2.4)) com a extensao periodica, f , de f a R, isto e:
SFf (x) =
f(x) sendo x um ponto de continuidade de f
f(x+) + f(x−)2
sendo x um ponto de descontinuidade de f
Exemplo:Determinar a serie de Fourier da funcao f : [−1, 1] → R definida por
f(x) =
{−π se x ∈ [−1, 0[π se x ∈ [0, 1]
2Na maior parte das aplicacoes, f e contınua em x = ±L; nos casos em que a continuidade em x = ±Lnao se verifica, pode-se de qualquer modo alterar a definicao da funcao f de forma a que f(L) = f(L−) ef(−L) = f(−L+).
99

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
A serie de Fourier associada a f sera
SFf (x) =a02
+
∞∑
n=1
(
an cos(nπx) + bn sen(nπx))
Atendendo a que a funcao f e uma funcao ımpar, ter-se-a
a0 =
∫ 1
−1f(x)dx = 0 e an =
∫ 1
−1f(x) cos(nπx)dx = 0 ∀n ∈ N
Por outro lado
bn =
∫ 1
−1f(x) sen(nπx)dx = 2
∫ 1
0π sen(nπx)dx =
2
n
(
1− (−1)n)
Concluimos que
SFf (x) =
∞∑
n=1
2
n
(
1− (−1)n)
sen(nπx)
Atendendo a que, para n par, 1− (−1)n = 0, os termos de ordem par da serie anterior sao nulos:
SFf (x) =
∞∑
k=1
4
2k − 1sen((2k − 1)πx
)
Dado que tanto f como f ′ sao funcoes seccionalmente contınuas em [−1, 1] o teorema anteriorpermite-nos concluir que SFf (x) esta bem definida para x ∈ [−1, 1]. Pela periodicidade dasfuncoes sen(nπx), e facil de compreender que SFf esta bem definida para todo x ∈ R e que eperiodica de perıodo 2. De seguida mostra-se alguna graficos das aproximacoes da serie de Fourierda funcao f , isto e, o grafico de alguns termos da sucessao das somas parciais
SNf(x) =
N∑
k=1
4
2k − 1sen((2k − 1)πx
)
(para alguns valores de N ∈ N).
Grafico da funcao (S1f)(x) = 4 sen(πx)
100

2.2. SERIES DE FOURIER
-0.9 -0.57 -0.24 0.09 0.42 0.75
−5
−4
−3
−2
−1
0
1
2
3
4
5
Figura 2.1: Aproximacao N = 1
Grafico da funcao (S2f)(x) = 4 sen(πx) + 43 sen(3πx)
-0.9 -0.57 -0.24 0.09 0.42 0.75
−4
−3
−2
−1
0
1
2
3
4
Figura 2.2: Aproximacao N = 2
Grafico da funcao (S3f)(x) = 4 sen(πx) + 43 sen(3πx) +
45 sen(5πx)
101

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
-0.9 -0.57 -0.24 0.09 0.42 0.75
−4
−3
−2
−1
0
1
2
3
4
Figura 2.3: Aproximacao N = 3
Grafico da funcao (S5f)(x) = 4 sen(πx) + 43 sen(3πx) +
45 sen(5πx) +
47 sen(7πx) +
49 sen(9πx)
-0.9 -0.68 -0.46 -0.24 -0.02 0.2 0.42 0.64 0.86
−4
−3
−2
−1
0
1
2
3
4
Figura 2.4: Aproximacao N = 5
Grafico da funcao (S12f)(x) =∑12
n=14
2n−1 sen((2n − 1)πx)
Em [−1, 1] a soma da serie de Fourier da funcao f sera dada por:
SFf (x) =
−π se x ∈]− 1, 0[π se x ∈]0, 1[0 se x = ±1 ou x = 0
(2.5)
Por ser uma funcao periodica de perıodo 2, em R a soma da serie de Fourier da funcao f seradada pela extensao periodica de perıodo 2 da funcao definida em (2.5).
102

2.2. SERIES DE FOURIER
-0.9 -0.68 -0.46 -0.24 -0.02 0.2 0.42 0.64 0.86
−4
−3
−2
−1
0
1
2
3
4
Figura 2.5: Aproximacao N = 12
2.2.2 O Nucleo de Dirichlet e as Somas Parciais das Series de Fourier
Vamos nesta seccao tentar explicar a razao do comportamento oscilatorio das somas parciais dasseries de Fourier.
Para cada N ∈ N, definimos o nucleo de Dirichlet, DN (x), como sendo a funcao trigo-nometrica:
DN (x) =1
2+
N∑
k=1
cos kx =1
2+ cos x+ cos(2x) + · · ·+ cos(Nx) (2.6)
Verifica-se facilmente que DN (x) e uma funcao par e que:
1
π
∫ π
−πDN (x) dx = 1
Note tambem que:
DN (x) =1
2+
N∑
k=1
cos kx
=1
2+
1
2
N∑
k=1
(
eikx + e−ikx)
=1
2
(
e−iNx + e−i(N−1)x + · · · + e−ix + 1 + eix + · · ·+ eiNx)
=1
2e−iNx
(
1 + eix + ei2x + · · ·+ ei2Nx)
=1
2e−iNx
2N∑
k=0
(eix)k
103

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
Como o somatorio acima obtido nao e mais do que a soma dos primeiros 2N + 1 termos da seriegeometrica de razao eix, entao:
DN (x) =1
2e−iNx 1− (eix)2N+1
1− eix
=e−i(N+ 1
2)x
2e−ix2
1− ei(2N+1)x
1− eix
=e−i(N+ 1
2)x − ei(N+ 1
2)x
2i
1
2
2i
e−ix2 − ei
x2
= − sen((
N + 12
)x) 1
2
1
− sen x2
=sen((
N + 12
)x)
2 sen x2
-2.85 -2.5 -2.15 -1.8 -1.45 -1.1 -0.75 -0.4 -0.05 0.3 0.65 1 1.35 1.7 2.05 2.4 2.75 3.1−4
−2
0
2
4
6
8
10
12
Figura 2.6: Grafico de D10(x)
Seja agora f uma funcao real, seccionalmente contınua em [−π, π], e admitamos que f foiperiodicamente extendida a R. 3.
3Ou seja, dada f : [−π, π] → R pode-se definir f(y) para qualquer y ∈ R tendo em conta que existem k ∈ Z e
x ∈ [−π, π] tais que y = x+ 2kπ; assim sendo, considera-se que f(y) = f(x+ 2kπ)def= f(x). O que desta forma
se obtem e, como se sabe, a extensao periodica de f a R.
104

2.2. SERIES DE FOURIER
-1.6 1.6−5
0
5
10
15
20
25
Figura 2.7: Grafico de D20(x)
A sucessao das somas parciais, SN (x), da serie de Fourier de f e dada por:
SN (x) =a02
+
N∑
k=1
(ak cos kx+ bk sen kx
)
=1
π
[
∫ π−π
12f(y) dy +
N∑
k=1
(∫ π−π f(y) cos ky dy
)
cos kx+(∫ π
−π f(y) sen ky dy)
sen kx
]
=1
π
∫ π
−πf(y)
(
1
2+
N∑
k=1
(cos ky cos kx+ sen ky sen kx
)
)
dy
=1
π
∫ π
−πf(y)
(
1
2+
N∑
k=1
cos(
k(y − x)))
dy
=1
π
∫ π
−πf(y)DN (y − x) dy
Desta forma se deduziu uma formula integral para a sucessao das somas parciais da serie deFourier de f :
SN (x) =1
π
∫ π
−πf(y)DN (y − x) dy =
1
π
∫ π
−πf(x+ θ)DN (θ) dθ, (2.7)
O ultimo integral foi obtido atraves da substituicao de variavel y − x = θ 4.
4Como a funcao f(x+ θ)DN (θ) e periodica de perıodo 2π, o integral entre −π − x e π− x e igual ao integralentre −π e π.
105

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
-1.6 1.6
−20
0
20
40
60
80
100
120
Figura 2.8: Grafico de D100(x)
A formula (2.7) diz-nos, grosso modo, que SN (x) e uma “media ponderada” de f numavizinhanca de x, em que os “pesos” sao dados pelo nucleo de Dirichlet, DN (x). Note que a“soma dos pesos” e 1
π
∫ π−π DN (θ) dθ = 1 5. Nas figuras (3.6), (3.7) e (3.8) representa-se os
graficos de DN (x) para alguns valores de N . Pode-se observar o comportamento oscilatorio donucleo de Dirichlet: a medida que N cresce, as oscilacoes de DN (x) aumentam em amplitudemas concentram-se junto de x = 0. Se f for seccionalmente C1 entao e possıvel provar, a partirda formula (2.7), que SN (x) converge da forma descrita pelo teorema da convergencia pontual(equacao (2.4)).
2.2.3 Serie de Fourier de Senos
Sendo L > 0 e f : [0, L] → R uma funcao seccionalmente contınua e de derivada seccionalmentecontınua em ]0, L[, pode-se associar a f a serie de senos
Ssenf(x) =∞∑
n=1
bn sen(nπx
L)
em que
bn =2
L
∫ L
0f(x) sen(
nπx
L)dx
Esta serie e obtida, efectuando a extensao ımpar de f ao intervalo [−L,L], e calculando a suaserie de Fourier. Observe-se que se uma dada funcao g e ımpar, os coeficientes da serie de Fourier
5Em rigor, o primeiro integral da equacao (2.7) designa-se por convolucao de f com DN .
106

2.2. SERIES DE FOURIER
verificam:
an =1
L
∫ L
−Lg(x) cos(
nπx
L)dx = 0 , ∀n ≥ 0
bn =1
L
∫ L
−Lg(x) sen(
nπx
L)dx =
2
L
∫ L
0g(x) sen(
nπx
L)dx
Pelo Teorema da convergencia pontual das series de Fourier e atendendo que se esta a utilizar aextensao ımpar de f a [−L,L], conclui-se que para x ∈ [0, L]
Ssenf(x) =
f(x) sendo x um ponto de continuidade de f
f(x+) + f(x−)2
sendo x um ponto de descontinuidade de f
0 se x = L
0 se x = 0
Exemplo:
Determinar a serie de Fourier de senos da funcao f : [0, 2] → R definida por
f(x) =
{1− x se x ∈ [0, 1[0 se x ∈ [1, 2][
A serie de senos da funcao f em [0, 2] sera da forma
Ssenf(x) =
∞∑
n=1
bn sennπx
2
em que
bn =
∫ 2
0f(x) sen
nπx
2dx =
∫ 1
0(1− x) sen
nπx
2dx =
2
nπ− 4
n2π2sen
nπ
2
Conclui-se que
Ssenf(x) =∞∑
n=1
( 2
nπ− 4
n2π2sen
nπ
2
)
sennπx
2
Pelo Teorema da convergencia pontual das series de Fourier, tem-se que em [−2, 2]
Ssenf(x) =
f(x) se x ∈]0, 2]0 se x = 0−f(−x) se x ∈ [−2, 0[
(2.8)
e em R a soma da serie de senos da funcao f sera a extensao periodica de perıodo 4, de (2.8) aR.
107

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
2.2.4 Serie de Fourier de Cosenos
Sendo L > 0 e f : [0, L] → R uma funcao seccionalmente contınua e de derivada seccionalmentecontınua em ]0, L[, pode-se associar a f a serie de Cosenos
Scosf(x) =a02
+∞∑
n=1
an cos(nπx
L)
em que
a0 =2
L
∫ L
0f(x)dx , an =
2
L
∫ L
0f(x) cos(
nπx
L)dx
Esta serie e obtida, efectuando a extensao par de f ao intervalo [−L,L], e calculando a suaserie de Fourier. Observe-se que se uma dada funcao g e par os coeficientes da serie de Fourierverificam:
a0 =1
L
∫ L
−Lg(x)dx =
2
L
∫ L
0g(x)dx
an =1
L
∫ L
−Lg(x) cos(
nπx
L)dx =
2
L
∫ L
0g(x) cos(
nπx
L)dx
bn =1
L
∫ L
−Lg(x) sen(
nπx
L)dx = 0 ∀n ≥ 0
Pelo Teorema da convergencia pontual das series de Fourier e atendendo que se esta a utilizar aextensao par de f a [−L,L], conclui-se que para x ∈ [0, L]
Scosf(x) =
f(x) sendo x um ponto de continuidade de f
f(x+) + f(x−)2
sendo x um ponto de descontinuidade de f
f(L) se x = L
f(0) se x = 0
Exemplo: Determinar a serie de Fourier senos da funcao g : [0, π] → R definida por
g(x) =
{0 se x ∈ [0, π4 [1 se x ∈ [π4 , π]
A serie de cosenos da funcao g em [0, π] sera da forma
Scosg(x) =a02
+∞∑
n=1
an cos(nx)
em que
a0 =2
π
∫ π
0g(x)dx =
2
π
∫ π
π4
dx =3
2
108

2.3. PROBLEMA DE DIRICHLET HOMOGENEO PARA A EQUACAO DO CALORUNIDIMENSIONAL
e para n ∈ N
an =2
π
∫ π
0g(x) cos(nx)dx =
2
π
∫ π
π4
cos(nx)dx = − 2
nπsen
nπ
4
Conclui-se que
Scosg(x) =3
4−
∞∑
n=1
2
nπsen
nπ
4cos(nx)
Pelo Teorema da convergencia das series de Fourier, tem-se que em [−π, π]
Scosg(x) =
0 se x ∈]− π4 ,
π4 [
1 se x ∈ [−π,−π4 [∪]π4 , π]
1/2 se x = ±π4
(2.9)
e em R a soma da serie de cosenos da funcao g sera a extensao periodica de perıodo 2π, de (2.9)a R.
2.3 Problema de Dirichlet Homogeneo para a Equacao do Calor
Unidimensional
Vamos resolver o problema de valores na fronteira e inicial
∂u
∂t= K
∂2u
∂x2t > 0 , x ∈]0, π[
u(t, 0) = u(t, π) = 0 t > 0
u(0, x) = f(x) x ∈]0, π[
(2.10)
em que f e uma funcao seccionalmente contınua em ]0, π[. Tal como deduzimos na Seccao 2.1,a solucao do problema (2.10) e dada por
u(t, x) =∞∑
n=1
cne−n2Kt sen(nx) , cn ∈ R
e para determinar as constantes (cn)n∈N usaremos a condicao inicial, pelo que
∞∑
n=1
cn sen(nx) = f(x) (2.11)
2.3.1 Exemplo 1
Se a condicao inicial forf(x) = sen(2x)− 3 sen(5x)
por (2.11),∞∑
n=1
cn sen(nx) = sen(2x)− 3 sen(5x)
109

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
e e entao facil de deduzir que
c2 = 1 , c5 = −3 e cn = 0 ∀n ∈ N \ {2, 5}
Concluimos que a solucao de (2.10) quando f(x) = sen(2x) − 3 sen(5x) e dada por
u(t, x) = e−4Kt sen(2x)− 3e−25Kt sen(5x)
2.3.2 Exemplo 2
Se a condicao inicial for
f(x) =π
2−∣∣∣x− π
2
∣∣∣ =
{x se 0 ≤ x ≤ π
2π − x se π
2 < x ≤ π
por (2.11),∞∑
n=1
cn sen(nx) =π
2−∣∣∣π
2− x∣∣∣
pelo que para determinar as constantes (cn) precisamos de determinar a serie de senos da funcaof(x) em [0, π]. Assim
Ssenf(x) =
∞∑
n=1
bn sen(nx)
em que
bn =2
π
∫ π
0f(x) sen(nx) dx =
2
π
[ ∫ π/2
0x sen(nx) dx+
∫ π
π/2(π − x) sen(nx) dx
]
=4
πn2sen
nπ
2
Dado que a extensao periodica (de perıodo 2π) a R da extensao ımpar de f ao intervalo [−π, π]e contınua, tem-se que para todo x ∈ [0, π]
π
2−∣∣∣x− π
2
∣∣∣ =
∞∑
n=1
4
πn2sen
nπ
2sen(nx)
pelo que se conclui que para todo n ∈ N se tem
cn =4
πn2sen
nπ
2
e a solucao de (2.10) quando f(x) = π2 −
∣∣∣x− π
2
∣∣∣ e dada por
u(t, x) =
∞∑
n=1
4
πn2sen
nπ
2e−n2Kt sen(nx)
110

2.4. PROBLEMA DE DIRICHLET NAO HOMOGENEO PARA A EQUACAO DO CALORUNIDIMENSIONAL
2.4 Problema de Dirichlet nao Homogeneo para a Equacao doCalor Unidimensional
Vamos resolver o problema
∂u
∂t= K
∂2u
∂x2t > 0 , x ∈]0, L[
u(t, 0) = T1 , u(t, L) = T2 t > 0
u(0, x) = f(x) x ∈]0, L[
(2.12)
em que T1. T2 sao constantes. No contexto da equacao do calor unidimensional, estas condicoesde fronteira significam que as extremidades da barra, 0 e L, sao mantidas a temperatura constante,T1 e T2 respectivamente, durante todo o processo. Sendo estas constantes diferentes de zero, naopodemos aplicar directamente o metodo de separacao de variaveis. Temos entao que considerar
u(t, x) = ue(x) + v(t, x) (2.13)
em que ue(x) e solucao do problema de valores na fronteira
u′′e = 0 , ue(0) = T1 e ue(L) = T2
e v(t, x) e solucao do problema de valores iniciais e de fronteira
∂v
∂t= K
∂2v
∂x2t > 0 , x ∈]0, L[
v(t, 0) = 0 , v(t, L) = 0 t > 0
v(0, x) = f(x)− ue(x) x ∈]0, L[
(2.14)
Vamos verificar em primeiro lugar que se u(t, x) e da forma dada em (2.13) entao e solucao de(2.12). De facto, utilizando a linearidade da derivada
K∂2u
∂x2= K
∂2ue∂x2
+K∂2v
∂x2= Ku′′e +K
∂2v
∂x2= 0 +
∂v
∂t=
∂ue∂t
+∂v
∂t=
∂u
∂t
pelo que verifica a equacao diferencial de (2.12). Por outro lado
u(t, 0) = ue(0) + v(t, 0) = T1 + 0 = T1 e u(t, L) = ue(L) + v(t, L) = T2 + 0 = T2
pelo que verifica as condicoes de fronteira de (2.12). Finalmente
u(0, x) = ue(x) + v(0, x) = ue(x) + f(x)− ue(x) = f(x)
pelo que verifica a condicao inicial de (2.12). Conclui-se que u(t, x) dada em (2.13) e solucao de(2.12). A funcao ue(x) e denominada uma solucao estacionaria de (2.12), pois nao depende de t.
A equacao u′′e = 0 tem como solucao ue(x) = Ax+ B. Dado que ue(0) = T1 e ue(L) = T2
conclui-se que
ue(x) =T2 − T1
Lx+ T1
111

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
Por outro pela Seccao 1, dado que (2.14) e o problema da equacao do calor com condicoes defronteira de Dirichlet homogeneas
v(t, x) =
∞∑
n=1
cne−n2π2K
L2 t sennπx
L
em que para todo n ∈ N, (cn) sao os coeficientes da serie de senos da funcao f(x)− T2−T1L x−T1
em [0, L], isto e
cn =2
L
∫ L
0
(
f(x)− T2 − T1
Lx− T1
)
sennπx
Ldx (2.15)
Concluimos que a solucao de (2.12) e dada por
u(t, x) =T2 − T1
Lx+ T1 +
∞∑
n=1
cne−n2π2K
L2 t sennπx
L
com (cn) dados por (2.15).
2.5 Problema de Neumann Homogeneo para a Equacao do Calor
Unidimensional
Resolveremos o problema de valores na fronteira e inicial
∂u
∂t= K
∂2u
∂x2t > 0 , x ∈]0, L[
∂u∂x(t, 0) =
∂u∂x(t, L) = 0 t > 0
u(0, x) = f(x) x ∈]0, L[
(2.16)
isto e, vamos estudar a propagcao de calor numa barra de comprimento L em que nao ha troca decalor com o exterior pelas suas extremidades (o significado das condicoes de Neumenn ∂u
∂x(t, 0) =∂u∂x(t, L) = 0 e que o fluxo de calor atraves da fronteira do corpo, que neste caso sao os pontosx = 0 e x = L, e nulo).
Observa-se que se f(x) ≡ 0 entao a solucao de (2.16) e u(t, x) ≡ 0. Se f nao e identicamentenula entao u tambem nao o sera.
Vamos utilizar o metodo de separacao de variaveis para determinar solucoes do problema(2.16) da forma
u(t, x) = T (t)X(x)
Pela observacao acima feita, nem T (t) nem X(x) poderao ser identicamente nulas. Substituindona equacao diferencial, tal como nos casos anteriores
∂
∂t
(
T (t)X(x))
= K∂2
∂x2
(
T (t)X(x))
⇔ T ′(t)KT (t)
=X ′′(x)X(x)
Observe-se que, separadas as variaveis, pretende-se que para todos t > 0 e x ∈]0, L[ uma funcao
de t ( T ′(t)KT (t)) iguale uma funcao de x (X
′′(x)X(x) ). Para que tal se verifique e necessario que ambos
igualem uma constante, isto e, para λ ∈ R
T ′(t)KT (t)
= λ eX ′′(x)X(x)
= λ
112

2.5. PROBLEMA DE NEUMANN HOMOGENEO PARA A EQUACAO DO CALORUNIDIMENSIONAL
Por outro lado, atendendo as condicoes de fronteira
• ∂u∂x(t, 0) = 0 implica T (t)X ′(0) = 0 e como tal ou T (t) e a funcao identicamente nula ouX ′(0) = 0. Dado que a primeira hipotese nao pode ocorrer (implicaria u ≡ 0) tem-se queX ′(0) = 0.
• ∂u∂x(t, L) = 0 implica T (t)X ′(L) = 0 e como tal ou T (t) e a funcao identicamente nula ouX ′(L) = 0. Dado que a primeira hipotese nao pode ocorrer, tem-se que X ′(L) = 0.
Temos entao dois problemas para resolver — correspondentes a duas equacoes diferenciais or-dinarias
(P1)
{X ′′ − λX = 0X ′(0) = X ′(L) = 0
, (P2) T ′ = λKT
Comecamos por resolver o problema (P1). Trata-se de um problema de valores proprios e paraos determinar teremos que encontra as solucoes nao nulas de (P1). Assim
X ′′ − λX = 0 ⇔ (D2 − λ)X = 0
Teremos entao tres casos possıveis:
λ = 0 — A equacao e D2X = 0 o que implica X(x) = Ax+B, A, B ∈ R;
λ > 0 (λ = µ2) — A equacao e (D−µ)(D+µ)X = 0 o que implica X(x) = Aeµx+Be−µx;
λ < 0 (λ = −ω2) — A equacao e (D + iω)(D − iω)X = 0 o que implica X(x) =A sen(ωx) +B cos(ωx);
O caso λ > 0 combinado com as condicoes de fronteira, produz apenas a solucao nula.Conclui-se que qualquer λ > 0 nao e valor proprio de (P1).Para o caso λ = 0 obtem-se X(x) = Ax + B que combinado com as condicoes de fronteira,produz X(x) = B. Pelo que λ = 0 e valor proprio de (P1) associado a funca propria X0(x) = 1Para o caso λ < 0, tem-se que
X ′(0) = 0 ⇒ A = 0
X ′(L) = 0 ⇒ Bω sen(ωx) = 0
pelo que,B = 0 ⇒ X(x) ≡ 0
ousen(ωL) = 0 ⇒ ω =
nπ
L⇒ X(x) = cos
nπx
L, com n ∈ N
Temos assim que λ = 0, com X(x) = 1 e λ = −ω2 = −n2π2
L2 e X(x) = cos nπxL , para n ∈ N, sao
os valores proprios e as correspondentes funcoes proprias associadas.Para resolver o problema (P2), utilizaremos apenas os valores proprios de (P1), dado que
para outros valores de λ a unica solucao de (P1) e a nula. Assim, para λ = 0
T ′ = 0 ⇒ T0(t) = 1
e para cada n ∈ N
T ′ = −n2π2
L2KT ⇒ Tn(t) = e−
n2π2KL2 t
113

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
Resolvidos (P1) e (P2), podemos concluir que as solucao da equacao do calor unidimensional, daforma u(t, x) = T (t)X(x), que verificam condicoes de fronteira de Dirichlet nulas sao as funcoesda forma
u0(t, x) = T0(t)X0(x) = c0 e un(t, x) = Tn(t)Xn(x) = e−n2π2K
L2 t sennπx
L, , n ∈ N
Entao
u(t, x) =
∞∑
n=0
cnun(t, x) = c0 +
∞∑
n=1
cne−n2π2K
L2 t cosnπx
L, , cn ∈ R
e solucao da equacao do calor unidimensional que verifica condicoes de fronteira de Neumann nulas.Para determinar as constantes cn teremos que utilizar a condicao de fronteira u(0, x) = f(x).Resulta entao que:
c0 +
∞∑
n=1
cn cosnπx
L= f(x) (2.17)
Concluindo-se que as constantes cn sao os coeficientes da serie de cosenos de f em [0, L], ou seja
c0 =a02
=1
L
∫ L
0f(x)dx
e para cada n ∈ N
cn = an =2
L
∫ L
0f(x) cos
nπx
Ldx
2.6 Unicidade de Solucao do Problema de Dirichlet para a Equacaodo Calor
Admitamos agora que u(t, x) e u(t, x) sao duas funcoes de classe C1 na variavel t e de classe C2
na variavel x 6 que satisfazem o problema:
∂u
∂t= K
∂2u
∂x2t > 0 , x ∈ ]0, L[
u(t, 0) = T1 , u(t, L) = T2 t > 0
u(0, x) = f(x) x ∈ ]0, L[
Entao v(t, x) = u(t, x)− u(t, x) satisfaz o problema homogeneo:
∂v
∂t= K
∂2v
∂x2t > 0 , x ∈ ]0, L[
v(t, 0) = v(t, L) = 0 t > 0
v(0, x) = 0 x ∈ ]0, L[
(2.18)
6Dizemos, por exemplo, que u(t, x) e de classe C1 na variavel t se para qualquer x0 ∈ [0, L], a funcaoϕ(t) = u(t, x0) e de classe C1.
114

2.7. A EQUACAO DAS ONDAS
Multiplicando a equacao do calor (2.18) por v e integrando em x no intervalo [0, L], obtem-se:
∫ L
0v∂v
∂tdx = K
∫ L
0v∂2v
∂x2dx
Integrando o segundo membro por partes, e usando as condicoes iniciais 7 em (2.18), obtem-se:
∫ L
0v∂2v
∂x2dx = K
(
v(t, 0) ∂v∂x(t, 0) − v(t, L) ∂v
∂x(t, L)−∫ L
0
(∂v
∂x
)2
dx
)
= −K
∫ L
0
(∂v
∂x
)2
dx ≤ 0
Quanto ao primeiro membro:
∫ L
0v∂v
∂tdx =
1
2
∫ L
02v
∂v
∂tdx =
1
2
∫ L
0
∂
∂t
(
v(t, x))2
dx =d
dt
1
2
∫ L
0
(
v(t, x))2
dx
Definido E(t) = 12
∫ L0
(v(t, x)
)2dx, entao conclui-se dos resultados anteriores que
dE
dt≤ 0. Por
outro lado, pela condicao inicial E(0) = 0; alem disso, E(t) ≥ 0, para qualquer t ≥ 0. Assimsendo, teremos necessariamente que E(t) ≡ 0, donde se conclui que:
v(t, x) ≡ 0 ⇔ u(t, x) ≡ u(t, x).
2.7 A Equacao das Ondas
Um outro exemplo de equacao diferencial parcial de extrema relevancia fısica e a equacao das ondas(linear). No mundo da fısica, os fenomenos ondulatorios sao comuns: os exemplos obvios sao asperturbacoes na superfıcie de um fluıdo, as vibracoes de cordas em instrumentos musicais, a asperturbacoes de pressao no ar que consistem na propagacao de som, e a radiacao electromagnetica.Se a amplitude das perturbacoes for suficientemente pequena e regular, a variavel de perturbacaou(x, t) associada as ondas verifica a equacao das ondas (linear)
∂2v
∂t2= c2∆u
onde u(t, x) e uma funcao da posicao e do tempo que descreve o comportamento da onda e c ea velocidade de propagacao da onda no meio em questao.
2.7.1 Problema da Corda Vibrante
A equacao das ondas unidimensional pode ser usada como modelo matematico de uma cordavibrante.
Considere-se o problema de ondas (nao forcadas) numa corda de comprimento finito L, composicao e velocidade inicial dadas e extremidades fixas.
7Este mesmo argumento pode ser usado para provar unicidade de solucao para o problema de Neumann; nocaso de condicoes de fronteira de Neumann, teremos ∂v
∂x(t, 0) = ∂v
∂x(t, L) = 0 em vez de v(t, 0) = v(t, L) = 0.
115

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
xx0 L
u
u(t, x)
Figura 2.9: Problema da corda vibrante
Pretende-se entao encontrar o deslocamento u(t, x) verificando o problema de valores nafronteira e inicial
∂2u
∂t2= c2
∂2u
∂x2t > 0 , x ∈]0, L[
u(t, 0) = u(t, L) = 0 t > 0
u(0, x) = f(x) x ∈]0, L[
∂u∂t (0, x) = g(x) x ∈]0, L[
(2.19)
Comecamos por notar que se f(x) ≡ 0 e g(x) ≡ 0 entao a solucao de (2.19) e u(t, x) ≡ 0. Se fou g nao sao identicamente nulas entao u tambem nao o sera.
Tal como para a resolucao da equacao do calor unidimensional, e dado que estamos a consi-derar condicoes de fronteira homogeneas, vamos utilizar o metodo de separacao de variaveis paradeterminar solucoes do problema (2.19) da forma
u(t, x) = T (t)X(x)
Pela observacao acima feita, nem T (t) nem X(x) poderao ser identicamente nulas. Substituindona equacao diferencial obtem-se
∂2
∂t2
(
T (t)X(x))
= c2∂2
∂x2
(
T (t)X(x))
⇔ T ′′(t)X(x) = c2T (t)X ′′(x) ⇔ T ′′(t)c2T (t)
=X ′′(x)X(x)
Observe-se que, separadas as variaveis, pretende-se que para todos t > 0 e x ∈]0, L[ uma funcao
de t ( T ′′(t)c2T (t)
) iguale uma funcao de x (X′′(x)
X(x) ). Para que tal se verifique e necessario que ambos
116

2.7. A EQUACAO DAS ONDAS
igualem uma constante, isto e, para λ ∈ R
T ′′(t)c2T (t)
= λ eX ′′(x)X(x)
= λ
Por outro lado, atendendo as condicoes de fronteira e possıveis condicoes iniciais nulas (note quepelo que ja foi referido apenas uma delas o podera ser)
• u(t, 0) = 0 implica T (t)X(0) = 0 e como tal ou T (t) e a funcao identicamente nula ouX(0) = 0. Dado que a primeira hipotese nao pode ocorrer (implicaria u ≡ 0) tem-se queX(0) = 0.
• u(t, L) = 0 implica T (t)X(L) = 0 e como tal ou T (t) e a funcao identicamente nula ouX(L) = 0. Dado que a primeira hipotese nao pode ocorrer, tem-se que X(L) = 0.
Temos entao dois problemas para resolver - correspondentes a duas equacoes diferenciaisordinarias
(P1)
{X ′′ − λX = 0X(0) = X(L) = 0
, (P2) T ′′ = λc2T
Comecamos por resolver o problema (P1), que e um problema de valores proprios. Assim:
X ′′ − λX = 0 ⇔ (D2 − λ)X = 0
Teremos entao tres casos possıveis:
λ = 0 — A equacao e D2X = 0 o que implica X(x) = Ax+B, A, B ∈ R;
λ > 0 (λ = µ2) — A equacao e (D−µ)(D+µ)X = 0 o que implica X(x) = Aeµx+Be−µx;
λ < 0 (λ = −ω2) — A equacao e (D − iω)(D + iω)X = 0 o que implica X(x) =A sen(ωx) +B cos(ωx);
Os casos λ = 0 e λ > 0, combinados com as condicoes de fronteira, produzem apenas a solucaonula. Conclui-se que qualquer λ ≥ 0 nao e valor proprio de (P1). Para o caso λ < 0, tem-se que
X(0) = 0 ⇒ B = 0
X(L) = 0 ⇒ A sen(ωx) = 0
pelo que,
A = 0 ⇒ X(x) ≡ 0
ou
sen(ωL) = 0 ⇒ ω =nπ
L⇒ X(x) = sen
nπx
L, com n ∈ Z
Temos assim que λ = −ω2 = −n2π2
L2 e X(x) = sen nπxL , para n ∈ Z, sao os valores proprios
e as correspondentes funcoes proprias associadas. Note que para os ındices n inteiros negativosrepetem-se os valores proprios e as funcoes proprias (a menos de combinacao linear). Conclui-se
que qualquer λ que nao seja da forma −n2π2
L2 (para algum n ∈ N) nao e valor proprio de (P1), e
para cada n ∈ N, λ = −n2π2
L2 e valor proprio de (P1) associado a funcao propria Xn(x) = sen nπxL .
117

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
Para resolver o problema (P2), utilizaremos apenas os valores proprios de (P1), dado quepara outros valores de λ a unica solucao de (P1) e a nula. Assim, para cada n ∈ N
T ′′ +n2π2
L2c2T = 0 ⇒ (D2 +
n2π2
L2c2)T = 0 ⇒ Tn(t) = αn sen
nπct
L+ βn cos
nπct
L
Resolvidos (P1) e (P2), podemos concluir que as solucoes da equacao das ondas unidimensional,da forma u(t, x) = T (t)X(x), que verificam condicoes de fronteira de Dirichlet nulas sao asfuncoes da forma
un(t, x) = Tn(t)Xn(x) = sennπx
L
(
αn sennπct
L+ βn cos
nπct
L
)
, n ∈ N (2.20)
Por sobreposicao, a solucao da equacao diferencial que satisfaz as condicoes de fronteira sera:
u(t, x) =
∞∑
n=1
sennπx
L
(
αn sennπct
L+ βn cos
nπct
L
)
.
Utilizando a condicao inicial u(0, x) = f(x), resulta que:
βn =2
L
∫ L
0f(x) sen
nπx
Ldx.
Utilizando a condicao inicial ∂u∂t (0, x) = g(x), resulta que
nπc
Lαn =
2
L
∫ L
0g(x) sen
nπx
Ldx,
ou seja:
αn =2
nπc
∫ L
0g(x) sen
nπx
Ldx.
Procuremos agora as denominadas solucoes de d’Alembert para a equacao das ondas. Aten-dendo as igualdades trigonometricas
sen(a) sen(b) =1
2
(
cos(a− b)− cos(a+ b))
, sen(a) cos(b) =1
2
(
sen(a− b) + sen(a+ b))
podemos escrever
∞∑
n=1
βn sennπx
Lcos
nπct
L=
∞∑
n=1
βn2
(
sennπ
L(x− ct) + sen
nπ
L(x+ ct)
)
e ∞∑
n=1
αn sennπx
Lsen
nπct
L=
∞∑
n=1
αn
2
(
cosnπ
L(x− ct)− cos
nπ
L(x+ ct)
)
Pela definicao dos coeficientes das series de Fourier de senos (αn) e (βn) se, em [0, L], f e gforem funcoes contınuas com derivadas seccionalmente contınuas, teremos
f(x) =
∞∑
n=1
βn sennπx
Le g(x) =
∞∑
n=1
nπc
Lαn sen
nπx
L
118

2.8. EQUACAO DE LAPLACE BIDIMENSIONAL
onde f : R → R e g : R → R sao as extensoes periodicas das extensoes ımpares de f e g a[−L,L]. Resulta entao que:
∞∑
n=1
βn sennπx
Lcos
nπct
L=
1
2
(
f(x− ct) + f(x+ ct))
.
Da mesma forma:
∞∑
n=1
αn sennπx
Lsen
nπct
L=
∞∑
n=1
αn
2
∫ x+ct
x−ct
nπ
Lsen
nπs
Lds
=1
2
∫ x+ct
x−ct
( ∞∑
n=1
nπαn
Lsen
nπs
L
)
ds
=1
2c
∫ x+ct
x−ctg(s)ds.
Finalmente, a solucao do problema pode ser escrita na forma
u(t, x) =1
2
(
f(x− ct) + f(x+ ct))
+1
2c
∫ x+ct
x−ctg(s)ds
Para ilustrar, vamos considerar o exemplo em que L = 1, c = 1, a posicao inicial, f(x) =sen(πx) e a velocidade inicial g(x) = 0. Temos assim que a solucao do problema de vaores nafronteira e inicial
∂2u
∂t2=
∂2u
∂x2t > 0 , x ∈]0, 1[
u(t, 0) = u(t, 1) = 0 t > 0
u(0, x) = sen(πx) x ∈]0, 1[
∂u∂t (0, x) = 0 x ∈]0, 1[
(2.21)
e
u(t, x) =1
2
(
senπ(x− t) + senπ(x+ t))
2.8 Equacao de Laplace Bidimensional
A equacao de Laplace bidimensional e a equacao diferencial parcial de segunda ordem, linear
∂2u
∂x2+
∂2u
∂y2= 0
assim chamada em homenagem ao influente matematico frances do seculo XVIII, Pierre-SimonLaplace. Esta equacao, assim como as suas versoes em dimensoes superiores, e sem duvida umadas mais importantes equacoes diferenciais da fısica e da matematica. Como vimos, as solucoesreais desta equacao sao denominadas funcoes harmonicas.
119

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
A versao nao homogenea da equacao de Laplace
∂2u
∂x2+
∂2u
∂y2= f(x, y)
e conhecida como a equacao de Poisson, em homenagem Simeon-Denis Poisson, que foi aluno deLaplace.
Para alem da sua importancia teorica, as equacoes de Laplace e Poisson surgem como assolucoes estacionarias numa grande variedade de modelos fısicos. Por exemplo, u(x, y) pode serinterpretada como o deslocamento de uma membrana e f(x, y) representa uma forca externa queactua sobre a superfıcie da membrana. Outro exemplo e o equilıbrio termico de placas: neste caso,u(x, y) representa a temperatura e f(x, y) uma fonte de calor externa. Na mecanica de fluidos,u(x, y) representa a funcao potencial cujo gradiente v = ∇u e o vector velocidade do um de umfluido cujo fluxo e invariante por translacoes segundo uma certa direccao. Esta mesma teoria dopotencial e aplicavel a electrostatica bidimensional e aos potenciais gravitacionais.
Uma vez que a equacao de Laplace — e, tambem, a de Poisson — descrevem situacoesestacionarias, elas surgem associadas a problemas de valor na fronteira. Note-se que as equacoesdo calor e das ondas — que descrevem sistemas fısicos que evoluem com o tempo — estaoassociadas a problemas de valor na fronteira e de valor inicial.
Procuramos uma solucao, u(x, y), para a equacao de Laplace — definida para (x, y) numaregiao aberta e limitada, D ⊂ R
2 — que satisfaz certas condicoes quando (x, y) pertence afronteira do conjunto D. Observamos que no caso bidimensional a fronteira de D e constituıdapor uma ou mais curvas simples e fechadas. Como ja referido, os tipos mais importantes decondicoes de fronteira sao
• Condicoes de Dirichlet: que especificam o valor de u(x, y) na fronteira do domınio
u(x.y) = h(x, y) , para (x, y) ∈ ∂D
para certa funcao h conhecida.
• Condicoes de Neumann: na qual e especificada a derivada de u segundo a normal nafronteira do domınio
∂u
∂n= ∇u · n = k(x, y) , para (x, y) ∈ ∂D
para certa funcao j conhecida, e n representa a normal unitaria exterior a fronteira de D.
2.8.1 Problema de Dirichlet Semi-Homogeneo para a Equacao de Laplace
Vamos resolver o problema
∂2u
∂x2+
∂2u
∂y2= 0 x ∈]0, a , y ∈]0, b[
u(x, 0) = f(x) , u(x, b) = 0 x ∈]0, a[
u(0, y) = u(a, y) = 0 y ∈]0, b[
(2.22)
Observa-se que se f(x) ≡ 0 a solucao de (2.22) e u(x, y) ≡ 0. Por outro lado, pode-se provar quese f nao for identicamente nula entao u tambem nao o sera. Tal como nos exemplos anteriores,
120

2.8. EQUACAO DE LAPLACE BIDIMENSIONAL
e tendo em conta que este problema tem 3 condicoes de fronteira homogeneas e um domıniorectangular, o metodo de separacao de variaveis consiste na determinacao de solucoes nao nulasdo problema (2.22) da forma:
u(x, y) = X(x)Y (y) (2.23)
Note que nemX(x) nem Y (y) poderao ser identicamente nulas, pois caso contrario u(x,y) tambemo sera. Substituindo (2.23) na equacao diferencial obtem-se
∂2
∂x2
(
X(x)Y (y))
+∂2
∂y2
(
X(x)Y (y))
= 0 ⇔ X ′′(x)Y (y) +X(x)Y ′′(y) = 0
⇔ X ′′(x)X(x)
= −Y ′′(y)Y (y)
Observe-se que as variaveis aparecem separadas: pretende-se que para todos os x ∈]0, a[ e
y ∈]0, b[, X′′(x)X(x) , que e funcao apenas de x, iguale −Y ′′(y)
Y (y) , que e funcao apenas de y. Para quetal se verifique e necessario que ambos os membros sejam iguais a uma constante; isto e, paraλ ∈ R:
X ′′(x)X(x)
= λ e − Y ′′(y)Y (y)
= λ
Por outro lado, atendendo as condicoes de fronteira nulas
• u(0, y) = 0 implica X(0)Y (y) = 0 e como tal ou Y (y) e a funcao identicamente nula ouX(0) = 0. Dado que a primeira hipotese nao pode ocorrer (implicaria u ≡ 0) tem-se queX(0) = 0.
• u(a, y) = 0 implica X(a)Y (y) = 0 e como tal ou Y (y) e a funcao identicamente nula ouX(a) = 0. Dado que a primeira hipotese nao pode ocorrer, tem-se que X(a) = 0.
• u(x, b) = 0 implica X(x)Y (b) = 0 e como tal ou X(x) e a funcao identicamente nula ouY (b) = 0. Dado que a primeira hipotese nao pode ocorrer (implicaria u ≡ 0) tem-se queY (b) = 0.
Temos entao dois problemas para resolver, envolvendo cada um deles uma equacao diferencialordinaria de 2a ordem:
(P1)
{X ′′ − λX = 0X(0) = X(a) = 0
, (P2)
{Y ′′ + λY = 0Y (b) = 0
Comecamos por resolver o problema (P1), que e um problema de valores proprios. Assim:
X ′′ − λX = 0 ⇔ (D2 − λ)X = 0
Teremos entao tres casos possıveis:
λ = 0 — A equacao e D2X = 0 o que implica X(x) = Ax+B, A, B ∈ R;
λ > 0 (λ = µ2) — A equacao e (D−µ)(D+µ)X = 0 o que implica X(x) = Aeµx+Be−µx;
λ < 0 (λ = −ω2) — A equacao e (D − iω)(D + iω)X = 0 o que implica X(x) =A sen(ωx) +B cos(ωx);
121

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
Como vimos no estudo da equacao do calor, os casos λ = 0 e λ > 0, combinados com as duascondicoes de fronteira nulas, produzem apenas a solucao nula. Conclui-se que qualquer λ ≥ 0nao e valor proprio de (P1). Para o caso λ < 0, tem-se que
X(0) = 0 ⇒ B = 0
X(a) = 0 ⇒ A sen(ωx) = 0
pelo que,A = 0 ⇒ X(x) ≡ 0
ousen(ωa) = 0 ⇒ ω =
nπ
a⇒ X(x) = sen
nπx
a, com n ∈ Z
Temos assim que λ = −ω2 = −n2π2
a2e X(x) = sen nπx
a , para n ∈ Z, sao os valores propriose as correspondentes funcoes proprias associadas. Note que para os ındices n inteiros negativosrepetem-se os valores proprios e as funcoes proprias (a menos de combinacao linear). Conclui-se
que qualquer λ que nao seja da forma −n2π2
a2(para algum n ∈ N) nao e valor proprio de (P1), e
para cada n ∈ N, λ = −n2π2
a2 e valor proprio de (P1) associado a funcao propria Xn(x) = sen nπxa .
Para resolver o problema (P2), utilizaremos apenas os valores proprios de (P1), dado quepara outros valores de λ a unica solucao de (P1) e a nula. Assim, para cada n ∈ N
Y ′′ − n2π2
a2Y = 0 ⇒
(
D2 − n2π2
a2
)
Y = 0 ⇒ Yn(y) = anenπya + bne
−nπya ,
onde an, bn ∈ R. As solucoes que satisfazem a condicao Y (b) = 0 sao as solucoes de
anenπba + bne
−nπba = 0 ,
ou seja,
bn = −ane2nπb
a
Entao, para cada n ∈ N, as solucoes de (P2) sao:
Yn(y) = an
(
enπya − e
2nπba e−
nπya
)
= anenπba
(
e−nπb
a enπya − e
nπba e−
nπya
)
= 2anenπba
(12e
nπ(y−b)a − 1
2e−nπ(y−b)
a
)
= αn shnπ(y − b)
a, onde αn = 2ane
nπba ∈ R.
Resolvidos (P1) e (P2), podemos concluir que um conjunto de solucoes linearmente independentesda equacao de Laplace bidimensional, da forma u(x, y) = X(x)Y (y), que verificam as condicoesde fronteira homogeneas, e constituıdo pelas funcoes:
un(x, y) = Xn(x)Yn(y) = sennπx
ash
nπ(y − b)
a, n ∈ N (2.24)
Podemos agora procurar uma solucao da equacao diferencial que satisfaca todas as condicoesde fronteira recorrendo ao princıpio da sobreposicao:
u(x, y) =
∞∑
n=1
αn sennπx
ash
nπ(y − b)
a
122

2.8. EQUACAO DE LAPLACE BIDIMENSIONAL
Da condicao de fronteira nao nula, u(x, 0) = f(x), resulta que:
f(x) =
∞∑
n=1
αn sh
(
−nπb
a
)
sennπx
a= −
∞∑
n=1
αn shnπb
asen
nπx
a.
Entao, para cada n ∈ N, os coeficientes αn sao obtidos a custa dos coeficientes da serie de senosde f em [0, a] por
−αn shnπb
a=
2
a
∫ a
0f(x) sen
nπx
adx.
ou
αn = − 2
a sh(nπb/a)
∫ a
0f(x) sen
nπx
adx.
2.8.2 Problema de Dirichlet nao Homogeneo para a Equacao de Laplace
Consideremos agora o problema de valores na fronteira relativo a equacao de Laplace comcondicoes de Dirichlet nao homogeneas. Pretende-se determinar uma solucao de
∂2u
∂x2+
∂2u
∂y2= 0 x ∈]0, a , y ∈]0, b[
u(x, 0) = f1(x) , u(x, b) = f2(x) x ∈]0, a[
u(0, y) = f3(y) , u(a, y) = f4(y) y ∈]0, b[
(2.25)
Pelo princıpio da sobreposicao, a solucao de (2.25) pode ser escrita na forma
u(x, y) =
4∑
i=1
u1(x, y)
em que u1 e solucao de
∂2u
∂x2+
∂2u
∂y2= 0 x ∈]0, a , y ∈]0, b[
u(x, 0) = f1(x) , u(x, b) = 0 x ∈]0, a[
u(0, y) = 0 , u(a, y) = 0 y ∈]0, b[
u2 e solucao de
∂2u
∂x2+
∂2u
∂y2= 0 x ∈]0, a , y ∈]0, b[
u(x, 0) = 0 , u(x, b) = f2(x) x ∈]0, a[
u(0, y) = 0 , u(a, y) = 0 y ∈]0, b[
123

CAPITULO 2. INTRODUCAO AS EQUACOES DIFERENCIAIS PARCIAIS
u3 e solucao de
∂2u
∂x2+
∂2u
∂y2= 0 x ∈]0, a , y ∈]0, b[
u(x, 0) = 0 , u(x, b) = 0 x ∈]0, a[
u(0, y) = f3(y) , u(a, y) = 0 y ∈]0, b[e u4 e solucao de
∂2u
∂x2+
∂2u
∂y2= 0 x ∈]0, a , y ∈]0, b[
u(x, 0) = 0 , u(x, b) = 0 x ∈]0, a[
u(0, y) = 0 , u(a, y) = f4(y) y ∈]0, b[
A solucao de cada um destes problemas e obtida pelo metodo utilizado na resolucao de (2.22).
124