Embed Size (px)
Citation preview

ESTIMATIVAS DA PORCENTAGEM DE TEMPO VIAJANDO EM PELOTÕES
BASEADOS EM DADOS COLETADOS EM CAMPO
José Elievam Bessa Júnior
Mariana Corrêa Posterlli
José Reynaldo Setti Universidade de São Paulo
Escola de Engenharia de São Carlos
Departamento de Engenharia de Transportes
RESUMO
O Highway Capacity Manual 2010 (HCM2010) utiliza a velocidade média de viagem (ATS) e a porcentagem de
tempo viajando em pelotões (PTSF) como medidas de desempenho para determinar o nível de serviço (NS) em
rodovias de pista simples. A PTSF, no entanto, é praticamente impossível de ser obtida em campo. Por esse mo-
tivo, o HCM propõe que ela seja estimada a partir da medida proxy porcentagem de veículos em pelotões (PF).
Com base nisso, a meta deste trabalho foi analisar algumas formas de estimar a PTSF a partir de dados de tráfego
normalmente observáveis em campo e compará-los com valores obtidos com simulação microscópica. Além de
avaliar a PF como medida proxy da PTSF, quatro outros modelos foram avaliados, sendo alguns baseados na
Teoria das Filas e na Teoria dos Gargalos Móveis. Dados de tráfego coletados com filmadoras no estado de São
Paulo foram usados para calibrar o simulador de tráfego escolhido, o CORSIM. Os resultados dos modelos tes-
tados divergiram significativamente dos valores produzidos pelo CORSIM, o que pode significar que a PTSF
pode não ser uma boa medida de desempenho da qualidade de serviço em rodovias de pista simples.
ABSTRACT
The Highway Capacity Manual 2010 (HCM2010) uses Average Travel Speed (ATS) and Percent Time-Spent-
Following (PTSF) as measures of effectiveness to obtain Level of Service (LOS) on two-lane rural highways.
However, the PTSF is almost impossible to be obtained directly from the road. For this reason, HCM recom-
mends using the proxy measure Percent Following (PF). Thus, the goal of the research reported in this paper was
to analyze models that estimate PTSF from traffic data and to compare their results to values obtained by micro-
scopic simulation. Besides analyzing PF as a proxy measure of PTSF, other four models were evaluated, some of
them based on queuing theory and moving bottlenecks theory. Traffic data obtained using camcorders on two-
lane rural highways in the state of São Paulo were used to calibrate and validate CORSIM. The results of the
models diverged significantly from the CORSIM results. These results might mean that PTSF may not be a good
measure of effectiveness of quality of service on two-lane rural highways.
1. INTRODUÇÃO
O conceito de nível de serviço tem sido amplamente usado por analistas de tráfego como um
meio para avaliar a qualidade de serviço em vias no âmbito urbano e rural. Assim como ocor-
re no Brasil, esse conceito tem auxiliado na tomada de decisão para, por exemplo, fazer análi-
ses de segurança viária, duplicar ou construir faixas adicionais em rodovias de pista simples
(Cohen e Polus, 2011). Especificamente sobre esse tipo de rodovia, o Highway Capacity Ma-
nual - HCM (TRB, 2010) usa a Velocidade Média de Viagem (ATS) e a Porcentagem de
Tempo Viajando em Pelotões (PTSF) como as medidas de desempenho para determinar o ní-
vel de serviço.
A PTSF é, por definição, a porcentagem de tempo em que os veículos mais rápidos permane-
cem atrás de veículos lentos (como os caminhões) devido à impossibilidade de realizar ultra-
passagens. Na prática, determinar a PTSF é extremamente complicado, uma vez que seriam
necessários muitos pesquisadores embarcados em veículos velozes para obter um valor ade-
quado. Ciente desse problema, o HCM sugere que seja usada a porcentagem de veículos em
pelotões (PF) – que é a porcentagem de headways menores ou iguais ao valor crítico de 3 s –
como medida proxy para estimar a PTSF. No entanto, pelo menos um estudo na literatura
(Dixon et al., 2002) mostrou que essa estimativa não é boa, com diferenças muito grandes em
relação aos valores obtidos por microssimulação (TWOPAS).

Outros trabalhos têm apresentado modelos teóricos para calcular a PTSF a partir de dados ob-
tidos facilmente da observação das correntes tráfego. Sendo assim, os seguintes questiona-
mentos podem ser feitos:
É possível usar a PF como medida proxy da PTSF levando em conta a situação brasi-
leira?
É possível desenvolver um modelo de tráfego para obter a PTSF em função da PF e de
outras informações da rodovia?
Os modelos teóricos existentes na literatura para estimar a PTSF funcionam bem para
as rodovias brasileiras?
A partir desses questionamentos, a meta deste trabalho foi traçada e consiste em avaliar qual
seria a melhor maneira de estimar a PTSF com base em dados obtidos diretamente da obser-
vação do tráfego. A PTSF obtida de um simulador calibrado (CORSIM) para cada trecho de
rodovia estudada foi usada para analisar a qualidade das estimativas propostas.
2. REVISÃO DA LITERATURA
O HCM2010 admite que tanto os critérios como a seleção de medidas de desempenho para
determinar o nível de serviço foram feitas através da opinião e do julgamento dos membros da
Highway Capacity and Quality of Service Committee (HCQS), do Transportation Research
Board (TRB). Assim foi necessário ser feito uma vez que, por muito tempo, havia pouca in-
formação sobre como os usuários de transportes percebiam as condições operacionais. Embo-
ra haja esforços no sentido de alterar essa realidade, as pesquisas com usuários ainda são inci-
pientes, fazendo com que muito dos diversos métodos apresentados no HCM2010 ainda não
sigam a recomendação sobre a opinião do usuário como desejado (TRB, 2010, v.1, p. 7–8).
O uso da PTSF como medida de desempenho vai contra as recomendações do próprio manu-
al, o que fez surgir uma linha de pesquisa que busca obter uma medida de desempenho possí-
vel de ser obtida diretamente em campo para esse tipo de estrada. Ainda por essa razão, al-
guns países, como a África do Sul (Van As, 2003) e a Alemanha (FGSV, 2005), desenvolve-
ram métodos próprios para estimar o nível de serviço em rodovias de pista simples, que não
dependem do uso da PTSF). Por outro lado, há autores que insistem que a PTSF é uma medi-
da de desempenho conceitualmente interessante e, dessa maneira, sugerem sua determinação a
partir de dados coletados da observação de outras variáveis do tráfego. Esta seção aborda al-
gumas das principais estimativas encontradas na literatura para encontrar a PTSF e que foram
analisadas em seções subsequentes.
2.1. Pursula (1995)
Pursula (1995) procurou obter uma relação entre a PTSF e a PF que não fosse uma relação di-
reta, como sugere o HCM para avaliação de rodovias de pista simples. Pursula (1995) emba-
sa-se na hipótese de que uma corrente de tráfego em regime não congestionado possui dois
estados distintos: dentro e fora de pelotões. Em cada um desses estados, é possível afirmar
que existe uma outra corrente de tráfego com velocidade u, densidade k e fluxo q, valores que
permanecem constante ao longo de um percurso. Além disso, o número de veículos dentro e
fora dos pelotões também se mantém constante para um trajeto. Baseado nessas hipóteses, e
usando o índice “1” para representar o estado “dentro dos pelotões”, “2” para o estado “fora
dos pelotões” e nenhum índice quando menciona-se a corrente de tráfego total por sentido
(nomenclatura usada em todas as variáveis apresentadas neste artigo), a PTSF poderia ser es-
timada, para uma trajetória veicular, como:
1 1
1 1 2 2
k lPTSF
k l k l
, (1)

em que: k1, k2: densidade dentro e fora dos pelotões, respectivamente; e
l1, l2: comprimento do trecho dentro e fora dos pelotões, respectivamente.
A partir de dados obtidos da observação do tráfego em um ponto da rodovia, é possível obter
N1 (número de veículos fora dos pelotões) e N2 (número de veículos em pelotões), que não re-
presentam a mesma coisa do número de veículos dentro (k1l1) e fora dos pelotões (k2l2) ao
longo de uma trajetória veicular. Isso ocorre porque enquanto um pelotão passa por um ponto
de coleta, novos veículos são adicionados aos dois estados do tráfego. Considerando t1 e t2
como o tempo que os veículos passam dentro e fora de pelotões, é possível relacionar a velo-
cidade w da onda choque com l1 e l2, de modo que 1 1t l w e 2 2t l w . Da equação funda-
mental do tráfego, sabe-se que 1 1 1q u k e 2 2 2q u k , o que implica em:
1 1 1 1 1q l u k lPF
ql ukl . (2)
Reescrevendo a Equação 1 a partir da Equação 2, PTSF toma a forma:
1 1 1 1
1 1 2 2
k l k lPTSF
k l k l kl
. (3)
Das Equações 2 e 3, encontra-se um modelo para estimar PTSF em função de PF:
1
uPTSF PF
u . (4)
2.2. Laval (2006)
A partir da teoria dos gargalos móveis proposta por Newell (1998), Laval (2006) determinou
o efeito que um veículo lento poderia ocasionar em uma corrente de tráfego e, dessa maneira,
obteve uma formulação capaz de estimar medidas de desempenho importantes para rodovias
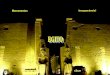
de pista simples, dentre elas a PTSF. A primeira hipótese para formulação do problema e do
modelo consiste na forma do diagrama fundamental do tráfego (considerado triangular) e de
um diagrama espaço-tempo, como mostra a Figura 1.
(a) (b) Figura 1: Diagrama fundamental do tráfego (a) e diagrama espaço-tempo (b) [adaptado de Laval (2006)]
Na Figura 1, algumas variáveis são notáveis, como a velocidade média da corrente de tráfego
(u), a velocidade de fluxo-livre (uf), a velocidade de fluxo-livre para veículos pesados (v) –
cuja proporção desses veículos é dada por r – e a velocidade da onda de choque w. O tráfego
total é dado pelo estado “A”, enquanto os estados dentro e fora do pelotão seguem os índice
“1” e “2”, conforme a seção anterior. Para um determinada corrente de tráfego “A”, o fluxo é
dado por QA e a densidade por KA. A capacidade é denotada por Q, com as razões adimensio-

nais tendo a forma A Aq Q Q e A Ak K Q . Considera-se s uma variável que representa a
colisão entre ondas de choque na transição do estado “A” para a situação em fila (estado “1”).
Sendo assim, o modelo foi desenvolvido para situações não-triviais em que 0 s v , ou, de
maneira equivalente, 2 1Aq q q . Na notação usada, qA = q. Sendo a relação q k u , o ter-
mo
f
f
u w vc
v w u
e 1c c , é possível definir com o auxílio da Figura 1 que:
1
f
f A
v u ul
u u rq
,
2
f
f A
u v ul
u u rq
. (5)
Quando qA < q2, a solução trivial é que l1 = 0, ou seja, todos os veículos viajam livremente e,
por consequência, PTSF seria igual a zero. No caso de qA > q1, a fila se propaga até a entrada
do trecho e todos os veículos estariam em pelotão (PTSF = 100).
Para representar as variáveis de tráfego no fluxo oposto, é utilizado um apóstrofo (’), como
por exemplo qA’, r’, etc. Ao invés de tentar estimar q2 em campo, Laval (2006) propõe deter-
minar essa variável em função de um modelo desenvolvido com base na hipótese de que uma
ultrapassagem é possível somente quando o tráfego no sentido oposto está em fluxo-livre. Es-
se modelo é apresentado nas equações:
22
0 1 2 3
22
A A A A A Ac q q c c c q c q c q qq
c c c
, (6)
sendo que
AA
A
c cqcq
c cq
e A
A
A
c cqcq
c cq
, (7)
em que: 2 2
0c c c , 4 2 2 2 2 4
1 1 2 2 1c c c c cc c
,
2
2 2 2c c c c e 2
3 2 2c c c c .
Sabe-se que a PTSF é dada pela razão 1 1 2t t t , em que, para um dado trajeto veicular,
1 1 1t l v v e 2 2 ft l u v . Após manipulação, a PTSF pode ser estimada por:
2 2
2
A
A
w q vc c q qPTSF
wq v w cq
. (8)
2.3. Cohen e Polus (2011)
O trabalho desenvolvido por Cohen e Polus (2011) representa uma extensão de um estudo an-
terior (Polus e Cohen, 2009), que contém outros detalhes importantes para explicação do mé-
todo para estimativa da PTSF baseado na Teoria das Filas. Duas são as variáveis que devem
ser obtidas da observação direta do tráfego – Q0 e N0 – definidas como o número médio de
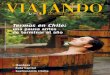
headways observados dentro dos pelotões e fora os pelotões, respectivamente. A Figura 2
mostra um exemplo das medidas Q0 e N0 calculadas para uma corrente de tráfego hipotética,
em que 0 1 2 2 3 1,67Q , ao passo que 0 3 1 2 2,00N .
A intensidade do tráfego (ρ) é uma medida de desempenho comum em teoria das filas. A pro-
posta de adotar ρ para avaliar rodovias de pista simples parte da premissa que os pelotões se-
guem o mesmo processo de formação de filas do tipo M/M/1. Com isso, Q0 possui o mesmo

tamanho da fila média obtida levando em consideração filas não-vazias e relaciona-se com ρ
como 0 1 1Q ou mesmo 1
01 Q
(Gross e Harris, 1985, p. 73).
Figura 2: Exemplo de obtenção das variáveis Q0 e N0 para um trecho hipotético
Ao analisar dados de 30 trechos de rodovias, Cohen e Polus (2011) constataram que uma dis-
tribuição geométrica representava bem a probabilidade de obter um determinado Q0. Sendo
assim, foi possível denominar uma probabilidade π de encontrar veículos lentos sem ter veícu-
los rápidos impedidos por ele (que é um sistema sem clientes, ou “vazio”), mas que eventu-
almente irão criar pelotões em um momento posterior da viagem. Essa distribuição geométri-
ca também possibilita denominar a probabilidade de encontrar um sistema não vazio, como
mostra a equação:
1
, se 0Prob
1 1 , se 0i
iQ i
i
, (9)
em que i é o número de headways dentro de pelotões. Para π = 0, o número médio de veículos
em pelotão L é igual a Q0. Para π > 0, π = 1 – ρ e L = Q0 – 1.
Supondo-se que δ representa o tempo médio gasto pelos veículos viajando em pelotões (desde
a entrada no pelotão até o início da manobra de ultrapassagem) e que θ é o tempo médio de
viagem fora dos pelotões, PTSF pode ser definida como:
100PTSF
. (10)
A variável δ pode ser expressa como L , em que é a taxa de chegada de veículos rá-
pidos no final do pelotão e pode ser expressa como o inverso do headway médio de chegadas
no final do pelotão hb. Dessa forma, para diferentes valores de π, sabe-se que:
0
0
, se 0
1 , se 1
b
b
Q h
Q h
. (11)
O tempo médio de viagem fora dos pelotões, θ, por sua vez, pode ser considerado como o
produto entre o número médio de headways fora dos pelotões N0 e o headway médio hb:
0 bN h . (12)
Das equações 10 a 12, estima-se a PTSF com base em dados de campo da seguinte forma:
0
0 0
0
0 0
100 , se 0
1100 , se 1
1
Q
N QPTSF
Q
N Q
. (13)

Cohen e Polus (2011) recomendam usar a PTSF da Equação 13 quando π = 0, com a justifica-
tiva de ter fornecido valores mais próximos daqueles encontrados no HCM. Adicionado a is-
so, essa formulação não provoca uma PTSF igual a zero quando Q0 = 1, o que ocorre quando
π = 1 – ρ. Em razão disso, a primeira linha da Equação 13 foi usada para os testes apresenta-
dos em seções seguintes deste trabalho.
3. COLETA DE DADOS
Um conjunto de dados de tráfego em rodovias de pista simples paulistas vem sendo alimenta-
do por diversas pesquisas (Egami, 2006; Mon-Ma, 2008; Bessa Jr. e Setti, 2011; Bessa Jr. e
Setti, 2012) com o intuito principal de calibrar e validar simuladores de tráfego. Nesta pesqui-
sa, foram realizadas simulações em rodovias de pista simples com o CORSIM (McTrans,
2010), sendo necessário sua calibração e validação. No entanto, além desse propósito, os da-
dos também foram necessários para realizar as estimativas da PTSF, que é a meta deste traba-
lho. O conjunto de dados foi coletado por meio de um método baseado na filmagem do tráfe-
go (Romana, 1994). Sua utilização foi melhor abordada em outro trabalho (Bessa Jr. e Setti,
2012), embora alguns detalhes sejam mostrados a seguir.
O método de obtenção dos dados consiste em posicionar câmeras de vídeo nas extremidades e
em pontos intermediários de trechos selecionados. Informações sobre as velocidades médias
de viagem, a composição veicular e os headways dos veículos são obtidos da observação pos-
terior das filmagens. As filmagens foram realizadas em 15 trechos de rodovias de pista sim-
ples paulistas, levando sempre em consideração a obtenção de correntes de tráfego de modo
que se tenha um conjunto heterogêneo, seja do ponto de vista da magnitude do fluxo, seja
considerando-se a geometria dos trechos. A Tabela 1 apresenta um resumo acerca dos trechos
de rodovias selecionados para estudo.
Tabela 1: Rodovias de pista simples selecionadas para filmagem do tráfego
Rodovia Trecho km inicial km final Extensão
(km) Terreno
Segmentos com faixas adicionais?
SP-215 SP-310 - Descalvado 133 138,5 5,5 ondulado não
SP-225 Itirapina - Brotas 113 121 8,0 ondulado não
SP-225 Brotas - Jaú 133 141 8,0 ondulado não
SP-253 SP-255 - Luis Antônio 151 155 4,0 plano não
SP-322 Bebedouro - Pitangueiras 382,5 388,3 5,8 ondulado não
SP-253 SP-255 - Luis Antônio 161 168 7,0 ondulado sim
SP-255 Ribeirão Preto - Araraquara 54 60 6,0 ondulado sim
SP-255 Jaú - Barra Bonita 162,2 168,5 6,3 montanhoso sim
SP-318 São Carlos - Ribeirão Preto 262 266 4,0 ondulado sim
SP-255 Jaú - Bocaina 139 145 6,0 montanhoso sim*
SP-98 Bertioga - Mogi das Cruzes 93,8 97,4 3,6 plano não
SP-123 Taubaté - Campos do Jordão 7,9 13,3 5,4 plano não
SP-308 Salto-Capivari 102,5 108,0 5,5 ondulado não
SP-300 Tietê-Laranjal Paulista 168,5 172,5 4,0 ondulado sim
SP-270 Alumínio-Sorocaba 82,0 89,0 6,0 ondulado sim
* Não havia segmentos com faixas adicionais na primeira das duas coletas de dados realizadas no trecho
4. CALIBRAÇÃO E VALIDAÇÃO DO CORSIM
O método de calibração e validação do CORSIM é fortemente baseado na proposta de um es-
tudo anterior (Bessa Jr. e Setti, 2012) e foi realizado a partir de um Algoritmo Genético (AG).
A principal diferença do AG aplicado nesta pesquisa e a apresentada em Bessa Jr. e Setti
(2012) consiste na função objetivo, ou fitness, determinada de modo que fosse possível com-
parar, mais adequadamente, as medidas de desempenho obtidas em campo e pelo simulador
calibrado. A partir dos dados coletados, foi possível obter os histogramas das velocidades

médias de viagem e dos headways por sentido. Feito isso, a função fitness foi definida e con-
siste no coeficiente de correlação entre os histogramas dos dados de campo e simulados com
o CORSIM:
1
2 21 1
1 1
1( )
P
SIM OBSSIM OBSM Nk
P Pi j
SIM OBSSIM OBS
k k
H H H H
F IM N
H H H H
, (14)
em que F(I) é o fitness do cromossomo I; M é o total de trechos selecionados; N é o total de
histogramas calculados para cada corrente de tráfego; e P é o total de classes de cada histo-
grama. SIMH e OBSH representam a frequência de uma classe k do histograma de uma medida
de desempenho j de uma corrente de tráfego i simulada e observada, respectivamente. SIMH e
OBSH significam a média das frequências das classes de um histograma para uma medida de
desempenho j de uma corrente de tráfego i simulada e observada, respectivamente. Na aplica-
ção realizada neste trabalho, a função fitness varia entre 0 (nenhuma correlação) e 1 (correla-
ção perfeita) na comparação entre os dados simulados e observados.
Diferentemente do que foi feito em Bessa Jr. e Setti (2012), quando a calibração foi desenvol-
vida para obter parâmetros do simulador que fossem adequados para todos os trechos, neste
trabalho o AG foi aplicado individualmente para cada um dos 15 trechos de rodovias apresen-
tados na Tabela 1. O intuito com isso é obter valores da PTSF mais acuradas para cada trecho,
a fim de aproximar esses valores do que realmente acontece em campo e de modo que as es-
timativas realizadas com dados observados em campo possam ser corretamente avaliadas pos-
teriormente. Outras características do AG (tamanho da população, taxas dos operadores gené-
ticos, período de warm-up, número de gerações, etc.) foram mantidas em relação à aplicação
desenvolvida no trabalho anterior.
As informações foram agregadas em intervalos de 15 minutos para formarem as correntes de
tráfego a serem modeladas no CORSIM. Em cada uma das 15 aplicações do AG, metade das
correntes de tráfego de cada trecho foram utilizadas para calibração e outra metade para vali-
dação do simulador. Os resultados da calibração apresentaram fitness variando de 0,70 a 0,91,
com média igual a 0,84. Na validação, os valores da função objetivo apresentaram-se entre
0,71 e 0,88, sendo a média por volta de 0,83. Esses resultados foram bons, com coeficientes
de correlação considerados fortes.
5. ANÁLISE DAS ESTIMATIVAS DA PTSF
Esta seção apresenta o resultados de estimativas da PTSF com base em outros dados facil-
mente observáveis em campo, em função dos métodos: i) do HCM2010, a medida proxy PF
(headway crítico de 3 s); ii) de Pursula (1995); iii) de Laval (2006); e iv) de Cohen e Polus
(2011). Essas estimativas devem ser comparadas com valores da PTSF obtidos do CORSIM
calibrado individualmente para cada trecho observado nesta pesquisa.
Além dessas quatro estimativas, uma quinta proposta foi avaliada: um modelo que não so-
mente relacione a PTSF com a PF diretamente, como recomenda o HCM, mas que seja corre-
lacionada também com outras variáveis do tráfego ou da geometria da via. Especificamente
sobre os alinhamentos horizontal e vertical dos trechos, foram determinadas suas magnitudes
com base em duas variáveis propostas pelo Manual de Capacidade Viária Alemão
(HBS2001): a “classe da rampa” (COG) e a sinuosidade KU.

No HBS2001, para estimação do nível de serviço, o efeito da declividade e do comprimento
de rampas é representado por uma variável chamada “classe da rampa” (COG), definida por
meio do impacto na velocidade de um “veículo pesado de projeto” nessas rampas. Para esse
veículo, determina-se a velocidade de equilíbrio alcançada (BSFZ) em um trecho de rodovia.
Em função dessa velocidade, um determinado trecho COG pode ter valores entre 1 (menor
impacto na velocidade, menos íngreme) e 5 (maior impacto, mais íngreme). A Tabela 2 foi
encontrada por Bessa Jr. e Setti (2012) e mostra quais os valores de COG foram atribuídos pa-
ra rampas de acordo com a declividade e o comprimento do trecho considerando-se dados co-
letados em estradas brasileiras.
Tabela 2: Valores para COG atribuídos para rampas de acordo com a declividade e o comprimento do trecho
Comprimento L (m)
Declividade i (%)*
i ≤ 2% i = 3% i = 4% i = 5% i = 6% i = 7% i > 7%
L < 200 1 (1) 1 (1) 1 (1) 1 (1) 1 (1) 1 (1) 1 (1)
200 < L ≤ 400 1 (1) 1 (1) 1 (1) 1 (1) 2 (2) 2 (2) 2 (2)
400 < L ≤ 600 1 (1) 1 (1) 2 (2) 2 (2) 2 (2) 2 (2) 3 (3)
600 < L ≤ 800 1 (1) 2 (2) 2 (2) 2 (2) 3 (3) 3 (3) 4 (5)
800 < L ≤ 1000 1 (1) 2 (2) 2 (2) 3 (3) 4 (5) 4 (5) 5 (5)
1000 < L ≤ 1200 1 (1) 2 (2) 3 (4) 4 (5) 4 (5) 5 (5) 5 (5)
1200 < L ≤ 1400 1 (1) 3 (3) 4 (4) 5 (5) 5 (5) 5 (5) 5 (5)
1400 < L ≤ 2400 1 (2) 3 (4) 5 (5) 5 (5) 5 (5) 5 (5) 5 (5)
L > 2400 2 (3) 3 (4) 5 (5) 5 (5) 5 (5) 5 (5) 5 (5)
* Valores em parênteses representam os declives com mesmo valor absoluto para a declividade i
O alinhamento horizontal é determinado para um trecho homogêneo de rodovia de extensão
L, dado em km, com n elementos (tangente, curva circular, curva de transição). A Equação 15
mostra como a sinuosidade KU, dada em graus/km, deve ser calculada, sendo γi a mudança
angular do elemento horizontal i (dada em graus):
1
n
i
iKUL
. (15)
Foram atribuídas 4 categorias da sinuosidade em função dos valores de KU (entre 0 e 67º/km;
entre 67 e 135º/km; entre 135 e 202º/km; e mais do que 202º/km), seguindo o HBS2001.
Com isso, foram buscadas correlações mais significativas entre a PTSF (CORSIM) e outros
dados de tráfego coletados em metade dos trechos observados (a outra metade foi usada para
validar a qualidade das estimativas). Foram encontradas fortes correlações entre a PTSF e os
valores do fluxo direcional q (em veic/h), da classe da rampa COG, da classe da sinuosidade
KUcl, da porcentagem de zonas com ultrapassagens proibidas NPZ e da porcentagem de veí-
culos em pelotões PF (headway críticos de 3 s). O modelo linear obtido foi:
0,2409 0.0373 4,7558 16,078 0,2388clPTSF PF q COG KU NPZ . (16)
Feito isso, há 5 tipos de estimativas da PTSF. Para validar a qualidade dos valores encontra-
dos com os modelos propostos, foi realizado um teste de hipóteses t-Student (Triola, 2005, p.
347). Além disso, foi realizado um teste de aderência de Kolmogorov-Smirnov das distribui-
ções de frequência acumulada da PTSF “observada” (CORSIM) e “estimada” em metade dos
dados coletados. Os resultados do teste de hipótese mostraram que, das 5 propostas para es-
timar a PTSF, a hipótese nula de igualdade entre as médias teve que ser rejeitada em 4 delas,
com exceção do novo modelo obtido neste trabalho. No teste de Kolmogorov-Smirnov, todos
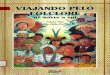
os modelos tiveram a hipótese nula de igualdade entre as distribuições rejeitada. A Figura 3

apresenta a comparação entre as estimativas e os valores do CORSIM, com a apresentação
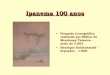
dos coeficientes de correlação obtidos. A Figura 4 mostra as distribuições de frequência rela-
tiva acumuladas, cujo valor máximo em determinada classe é a estatística usada no teste de
Kolmogorov-Smirnov. Das duas figuras, percebe-se que os modelos para PF e os propostos
por Pursula (1995) e Cohen e Polus (2011) tiveram resultados semelhantes. O modelo de La-
val (2006) foi o que menos se adequou a PTSF encontrada com o CORSIM, enquanto que o
novo modelo proposto apresentou as melhores estimativas.
Os testes estatísticos sugerem que as alternativas para estimar a PTSF não fornecem resulta-
dos confiáveis, o que pode acarretar em diferenças na determinação do nível de serviço. Uma
das causas para isso pode ser o headway crítico usado no simulador e sugerido pelo HCM, de
3 segundos, que pode não ser o mais adequado. Maiores discussões sobre os resultados e re-
comendações para trabalhos futuros podem ser vistos no item a seguir.
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80 100
PF
PTSF (CORSIM)
(a)
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80 100
PT
SF
(Pu
rsu
la,
1995
)
PTSF (CORSIM)
(b)
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80 100
PT
SF
(Co
hen
e P
olu
s, 2
011)
PTSF (CORSIM)
(c)
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80 100
PT
SF
(Lav
al,
2006
)
PTSF (CORSIM)
(d) Figura 3: Valores para a PTSF obtidos com o CORSIM e de acordo com o HCM (a); com Pursula (1995) (b); com
Cohen e Polus (2011) (c); com Laval (2006) (d); e com o novo modelo proposto (e)
r2 = 56% r2 = 58%
r2 = 56% r2 = 48%

0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80 100
PT
SF
(No
vo m
od
elo
)
PTSF (CORSIM)
(e) Figura 3 (Cont.): Valores para a PTSF obtidos com o CORSIM e de acordo com o HCM (a); com Pursula (1995) (b);
com Cohen e Polus (2011) (c); com Laval (2006) (d); e com o novo modelo proposto (e)
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0 20 40 60 80 100
Fre
qu
ênci
a
Classe (%)
CORSIM
PF
Δ=19% (máx=6%)
(a)
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0 20 40 60 80 100
Fre
qu
ênci
a
Classe (%)
CORSIM
Pursula (1995)
Δ=20% (máx=6%)
(b)
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0 20 40 60 80 100
Fre
qu
ênci
a
Classe (%)
CORSIM
Cohen e Polus (2011)
Δ=12% (máx=6%)
(c)
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0 20 40 60 80 100
Fre
qu
ênci
a
Classe (%)
CORSIM
Laval (2006)
Δ=25% (máx=6%)
(d)
Figura 4: Distribuições de frequência acumuladas da PTSF obtidas com o CORSIM e de acordo com o HCM (a); com Pursula (1995) (b); com Cohen e Polus (2011) (c); com Laval (2006) (d); e com o novo modelo (e)
r2 = 69%

0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0 20 40 60 80 100
Fre
qu
ênci
a
Classe (%)
CORSIM
Novo modelo
Δ=10% (máx=6%)
(e)
Figura 4 (Cont.): Distribuições de frequência acumuladas da PTSF obtidas com o CORSIM e de acordo com o HCM (a); com Pursula (1995) (b); com Cohen e Polus (2011) (c); com Laval (2006) (d); e com o novo modelo (e)
6. CONSIDERAÇÕES FINAIS
Este trabalho teve como meta estimar valores da PTSF para rodovias de pista simples por
meio de métodos propostos na literatura e compará-los com os valores provenientes do simu-
lador de tráfego CORSIM calibrado e validado. Cinco métodos foram estudados: i) a PF co-
mo medida proxy da PTSF, como recomenda o HCM; ii) a PTSF como função da PF e de ou-
tras variáveis do tráfego; iii) a estimativa proposta por Pursula (1995); iv) o modelo de Laval
(2006), que se baseia na teoria dos gargalos móveis; e v) o método de Cohen e Polus (2011),
que considera fortemente os conceitos de teoria das filas.
Os resultados apresentados, que foram avaliados por meio de teste t-Student e de um teste de
aderência de Kolmogorov-Smirnov, mostraram que as estimativas não fornecem valores sufi-
cientemente próximos daqueles obtidos com o CORSIM calibrado. Consideram-se dois os
motivos que levaram à essas conclusões:
A calibração realizada tanto para a análise das estimativas da PTSF como para a calibra-
ção desenvolvida no trabalho de Bessa Jr. e Setti (2012) previa o ajuste do headway críti-
co que determinada se o veículo está ou não em um pelotão (e se, consequentemente, um
dado veículo deseja realizar uma ultrapassagem). Como o valor fornecido pelo AG, na
maior parte das soluções, esteve bem próximo de 3 segundos, resolveu-se manter este va-
lor fixo. No entanto, recomenda-se desenvolver, futuramente, um estudo mais detalhado
para encontrar um novo headway crítico e, com isso, determinar novas estimativas da
PTSF. Um método que poderia ser usado é apresentado em Lobo et al. (2011).
De fato, outra razão para as estimativas não terem sido satisfatórias pode estar relaciona-
da com a própria PTSF, que pode não ser uma medida de desempenho adequada para
avaliar a qualidade de serviço em rodovias de pista simples. Outros autores têm enfatiza-
do isso, levando à conclusão de que o melhor caminho seria usar outra medida de desem-
penho para substituir a PTSF. Exemplos de trabalhos nessa linha de pesquisa são Yu e
Washburn (2009) – que recomenda a Porcentagem de Atraso – e o trabalho de Van As
(2003) – que propõe o uso da Densidade de Veículos em Pelotões.
Sob o ponto de vista da aplicabilidade dos modelos propostos, Laval (2006) parece ser o mais
complicado para que o método seja utilizado por tomadores de decisão e técnicos na área de

Engenharia de Transportes. Vale lembrar que uma das premissas básicas para propor uma
medida de desempenho é que ela, além de refletir a opinião do usuário, também seja de fácil
aplicação e entendimento. Futuramente, outros estudos nessa área devem levar esses aspectos
em consideração.
AGRADECIMENTOS
Os autores agradecem o apoio da FAPESP e do CNPq pelo suporte financeiro sob a forma de bolsas de doutora-
do, de iniciação científica e de produtividade em pesquisa. Os autores também agradecem à ARTESP, ao DER-
SP e às concessionárias ViaOeste e Rodovias do Tietê pelo apoio nas coletas de dados em campo e pela disponi-
bilização de dados provenientes de sensores de tráfego.
REFERÊNCIAS
Bessa Jr., J. E. e J. R. Setti (2012) Relações fluxo-velocidade para rodovias de pista simples no Brasil. Anais do
XXVI Congresso de Pesquisa e Ensino em Transportes, ANPET, Joinville-SC, CD-ROM.
Bessa Jr., J. E. e J. R. Setti (2011) Derivation of ATS and PTSF functions for two-lane, rural highways in Brazil.
6th International Symposium on Highway Capacity and Quality of Service, Stockholm. Procedia - Social
and Behavioral Sciences. Amsterdam : Elsevier, v. 16. p. 282–292.
Cohen, M. e A. Polus (2011) Estimating percent-time-spent-following on two-lane rural highways. Transporta-
tion Research Part C, v. 19, p. 1319–1325.
Dixon, M. P.; S. Sarepali e K. K. A. Young (2002) Field evaluation of Highway Capacity Manual 2000 analysis
procedures for two-lane highways. Transportation Research Record 1802, TRB, National Research
Council, Washington, D.C, p. 125–132.
Egami, C. Y. (2006) Adaptação do HCM-2000 para determinação do nível de serviço em rodovias de pista sim-
ples sem faixas adicionais no Brasil. Tese (Doutorado) – Escola de Engenharia de São Carlos, Universi-
dade de São Paulo, São Carlos.
FGSV (2005) Handbuch zur Bemessung von Strassenverkehrsanlagen 2001 (HBS, German Highway Capacity
Manual 2001). Forschungsgesellschaft fur Straßen- und Verkehrswesen (FGSV), Cologne.
Gross, D. e C. M. Harris (1985) Fundamentals of queueing theory. Second edition. John Wiley & Sons, Inc.,
USA, 1985, 585p.
Laval, J. A. (2006) A macroscopic theory of two-lane rural roads. Transportation Research Part B, v. 40, p.
937–944.
Lobo, A.; M. A. P. Jacques; C. M. Rodrigues e A. Couto (2011) Free-gap evaluation for two-lane rural high-
ways. Transportation Research Record 2223, TRB, National Research Council, Washington, D.C, p. 9–
17.
McTrans (2010) CORSIM – Reference Manual. TSIS Version 6.2, McTrans, University of Florida.
Mon-Ma, M. L. (2008) Adaptação do HCM-2000 para rodovias de pista simples com faixas adicionais típicas
do Estado de São Paulo. Tese (Doutorado) - Escola de Engenharia de São Carlos, USP, São Carlos.
Newell, G. F. (1998). A moving bottleneck. Transportation Research Part B, v. 32, n. 8, p. 531–537.
Polus, A.; Cohen, M. (2009) Theoretical and empirical relationships for the quality of flow and for a new level of
service on two-lane highways. Journal of Transportation Engineering, ASCE, v. 135, n. 6, p. 380–385.
Pursula, M. (1995) Approximation of percentage time delay with local measurements. Transportation Research
Record 1484, TRB, National Research Council, Washington, D.C, p. 58–65.
Romana, M. G. (1994). Evalución práctica de niveles de servicio em carreteras convencionales de dos carriles
em España. Tese (doutorado). Departamento de Ingeniería Civil, Universidad Politécnica de Madrid.
TRB (2010) Highway Capacity Manual 2010. Transportation Research Board. Washington D.C.
Triola, M. F. (2005) Introdução à Estatística, 9ª edição, LTC Editora, Rio de Janeiro, RJ, 656 p.
Van As, C. (2003) The development of an analysis method for the determination of level of service of two-lane
undivided highways in South Africa. Project Summary. South African National Roads Agency Limited.
Willmott, C. J (1981). On the validation of models. Physical Geography, n. 2, p. 184–194.
Yu, Q.; Washburn, S. (2009) Operational performance assessment for two-lane highway facilities. Journal of
Transportation Engineering, ASCE, v. 135, n. 4, p. 197–205.
Endereço para contato:
MSc. José Elievam Bessa Júnior ([email protected] ou [email protected])
Mariana Corrêa Posterlli ([email protected])
Prof. Dr. José Reynaldo Setti ([email protected])
Universidade de São Paulo, Escola de Engenharia de São Carlos, Departamento de Engenharia de Transportes
Av. Trabalhador São-carlense, 400 – São Carlos, SP, 13566-590