Embed Size (px)
Citation preview

Nota de Aplicação
Exemplo de comunicação em rede ProfibusLexium 32M com S7-1200
Suporte Técnico Brasil
Versão: ●1.0

Arquitetura utilizada como exemplo
●Utilização de um Lexium 32 Modular, com placa PROFIBUS e um CLP S7-1200.
S7-1200
Profibus
LXM32M

LXM32M – S7-1200Configuração / Hardware
●Arquivo GSD para LXM32M: "SE120B9D.GSD"
LXM32M usa 26 bytes de dados na entrada e 26 bytes de dados na saída. Drive Profile Lexium 1

LXM32M – S7-1200

LXM32M – S7-1200 Bloco de funções - LXM32_Control
Schneider Electric 5TSC Brazil– Bruno Oliveira de Souza – 19/02/2014
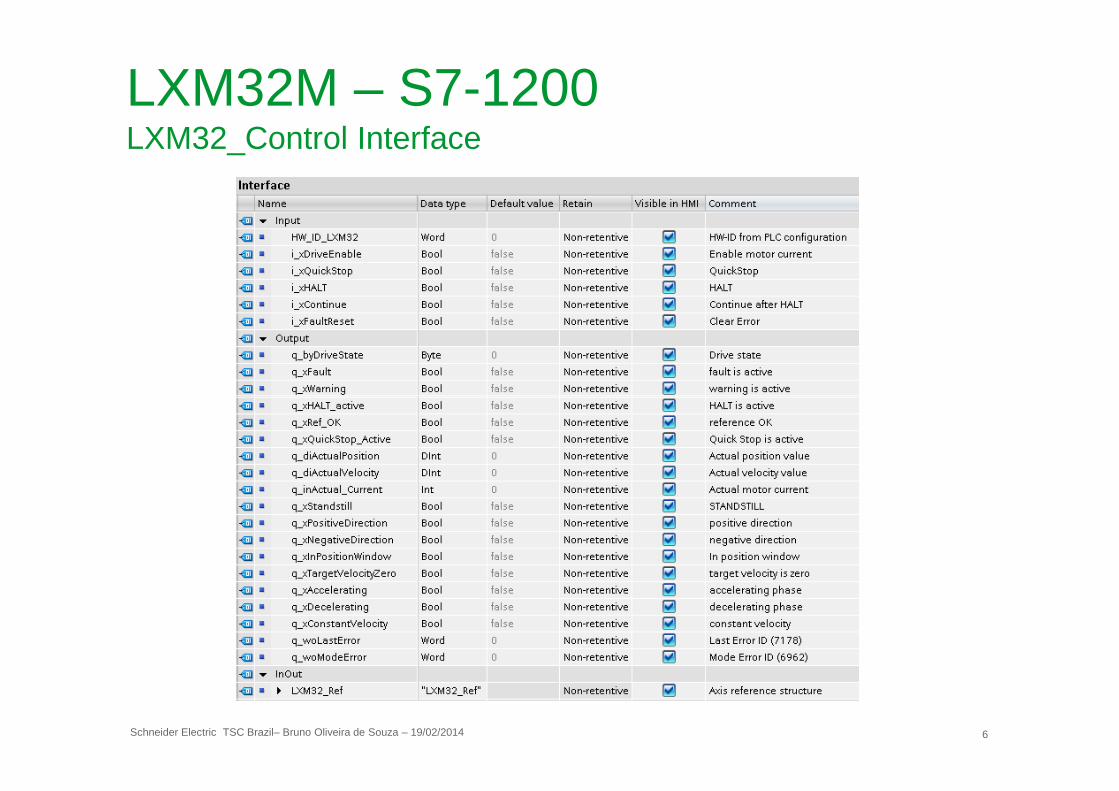
LXM32M – S7-1200 LXM32_Control Interface
Schneider Electric 6TSC Brazil– Bruno Oliveira de Souza – 19/02/2014

LXM32M – S7-1200 Bloco de funções - LXM32_Control
ENTRADAS
i_DriveEnable: Habilitar estágio de potência i_xQuickStop: Parada de movimento rápidoi_xHALT: Parada ativadai_xContinue: Movimento contínuo após paradai_xFaultReset: Erro reset
Schneider Electric 7TSC Brazil– Bruno Oliveira de Souza – 19/02/2014

LXM32M – S7-1200 Bloco de funções - LXM32_Control
SAÍDAS
q_byDriveState: Estado de funcionamento do Driveq_xFault: Falha ativada do Driveq_xWarning: Alarme ativadoq_xRef_OK: Drive referênciado
Schneider Electric 8TSC Brazil– Bruno Oliveira de Souza – 19/02/2014
q_xRef_OK: Drive referênciadoq_xQuickStop_Active: Parada rápida ativadaq_diActualPosition: Posição atual do motor q_diActualVelocity: Velocidade atual do motorq_inActual_Current: Corrente atual do motorq_xStandstill: Bit de status STANDSTILLq_xPositiveDirection: Bit de status motor em movimento positivoq_xNegativeDirection: Bit de status motor em movimento negativoq_xInPositionWindow: Bit de status “In Position Window”q_xTargetVelocityZero: Target de velocidade zeroq_xAccelerating: Aceleração do Driveq_xDecelerating: Desaceleração do Driveq_xConstantVelocity: Movimento de velocidade constanteq_woLastError: Erro de Drive ID - Consulte o manual do produto (Object 7178) q_woModeError: Erro de Drive ID - Consulte o manual do produto (Object 6962)

LXM32M – S7-1200 Blocos de funções - LXM32_Homing
Schneider Electric 9TSC Brazil– Bruno Oliveira de Souza – 19/02/2014

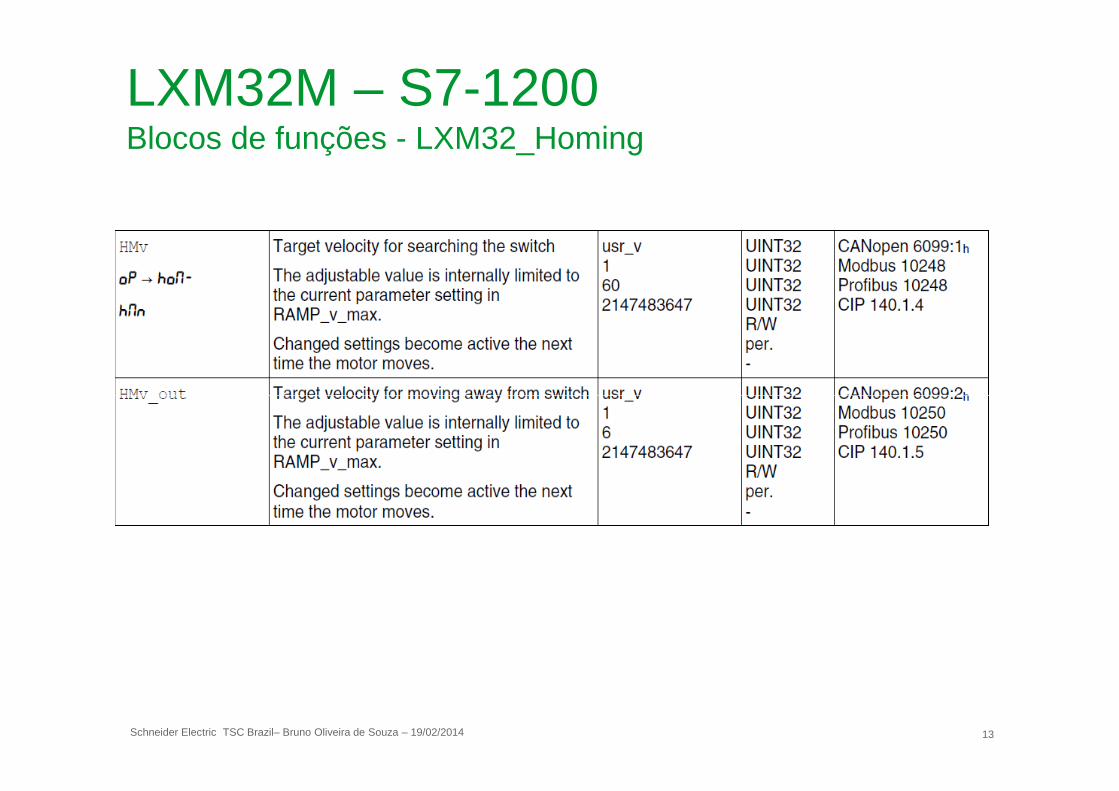
LXM32M – S7-1200Blocos de funções - LXM32_Homing
Em oci_execute, inicia referência de movimento da borda.O homing é terminado sem erro quando a saída "q_xDone" é verdadeira. Homing poderia ser abortado por uma parada rápida (Controle LXM32), neste caso, a saída "q_xError" será definida como TRUE.
Tipos de Homing: (Parâmetro no Manual (6936))
Schneider Electric 10TSC Brazil– Bruno Oliveira de Souza – 19/02/2014
Uma descrição detalhada dos parâmetros homing, está disponível no manual do LXM32.

LXM32M – S7-1200Blocos de funções - LXM32_Homing
Schneider Electric 11TSC Brazil– Bruno Oliveira de Souza – 19/02/2014

LXM32M – S7-1200Blocos de funções - LXM32_Homing
Schneider Electric 12TSC Brazil– Bruno Oliveira de Souza – 19/02/2014
LXM32M – S7-1200Blocos de funções - LXM32_Homing
Schneider Electric 13TSC Brazil– Bruno Oliveira de Souza – 19/02/2014

LXM32M – S7-1200 Perfil de Posição - LXM32_ProfilePosition
Schneider Electric 14TSC Brazil– Bruno Oliveira de Souza – 19/02/2014

LXM32M – S7-1200 Perfil de Posição - LXM32_ProfilePosition
Borda de subida em oci_execute movimento de partida.
Borda de subida "i_xAbort" movimento de parada.
“i_inPTP_Tipo”:1 = Absolute movement2 = Additive movement3 = Relative movement
Schneider Electric 15TSC Brazil– Bruno Oliveira de Souza – 19/02/2014
Novo target de posição do alvo pode ser iniciado com uma nova borda de subida em "i_xExecute" durante movimento ativado.
Movimento absoluto: Alterar valor velocidade do target durante o movimento ativo, efeito imediato

LXM32M – S7-1200 Perfil de Velocidade - LXM32_ProfileVelocity
Schneider Electric 16TSC Brazil– Bruno Oliveira de Souza – 19/02/2014
i_xAnalogueInputMode: TRUE = target velocidade é definida pela entrada analógica do módulo IO.Ao alterar o valor da velocidade durante a ativação, o efeito será imediato.
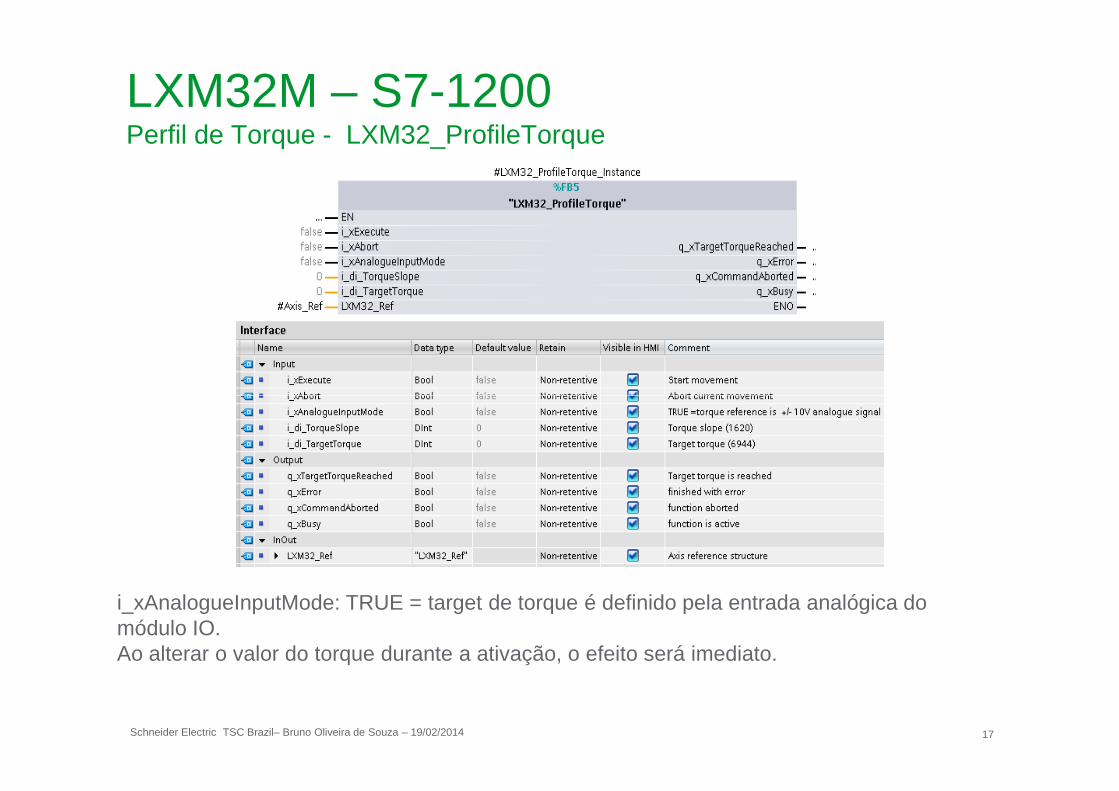
LXM32M – S7-1200 Perfil de Torque - LXM32_ProfileTorque
Schneider Electric 17TSC Brazil– Bruno Oliveira de Souza – 19/02/2014
i_xAnalogueInputMode: TRUE = target de torque é definido pela entrada analógica do módulo IO.Ao alterar o valor do torque durante a ativação, o efeito será imediato.

LXM32M – S7-1200 LXM32_Jog
Schneider Electric 18TSC Brazil– Bruno Oliveira de Souza – 19/02/2014
Nota: Os valores dos parâmetros em modo manual, devem ser configurados pelo comissionamento de ferramentas ou usando bloco de função LXM32 Parâmetro READ_WRITE.

LXM32M – S7-1200 Parâmetro Read_Write - LXM32_Parameter_Read_Write
Schneider Electric 19TSC Brazil– Bruno Oliveira de Souza – 19/02/2014

LXM32M – S7-1200 LXM32_ElectronicGear
Schneider Electric 20TSC Brazil– Bruno Oliveira de Souza – 19/02/2014
Nota: Os valores dos parâmetros adicionais em modo ElectronicGear, devem ser configurados pelo comissionamento de ferramentas ou usando bloco de função LXM32 Parâmetro READ_WRITE.

Avisos Importantes
• Equipamentos elétricos devem ser instalados, operados e manuseados apenas por pessoas qualificadas.
• Uma pessoa qualificada é aquela que tem habilidades e conhecimentos relacionados com a construção, instalação e operação de equipamentos elétricos e recebeu treinamento adequado para reconhecer e evitar os perigos envolvidos.
• Nenhuma responsabilidade é assumida pela Schneider Electric por qualquer conseqüências decorrentes da utilização deste material.
Schneider Electric 21TSC Brazil– Bruno Oliveira de Souza – 19/02/2014
conseqüências decorrentes da utilização deste material.
•Todas as informações contidas neste documento estão corretas de acordo com o conhecimento do autor. Esta abordagem foi projetada e testada em condições de laboratório. O ambiente pode influenciar o comportamento de dispositivos eletrônicos e, portanto, o usuário assume toda a responsabilidade para aplicar as soluções apresentadas.
• Este documento está disponível no site http://www.schneider-electric.com





























