Embed Size (px)
Citation preview
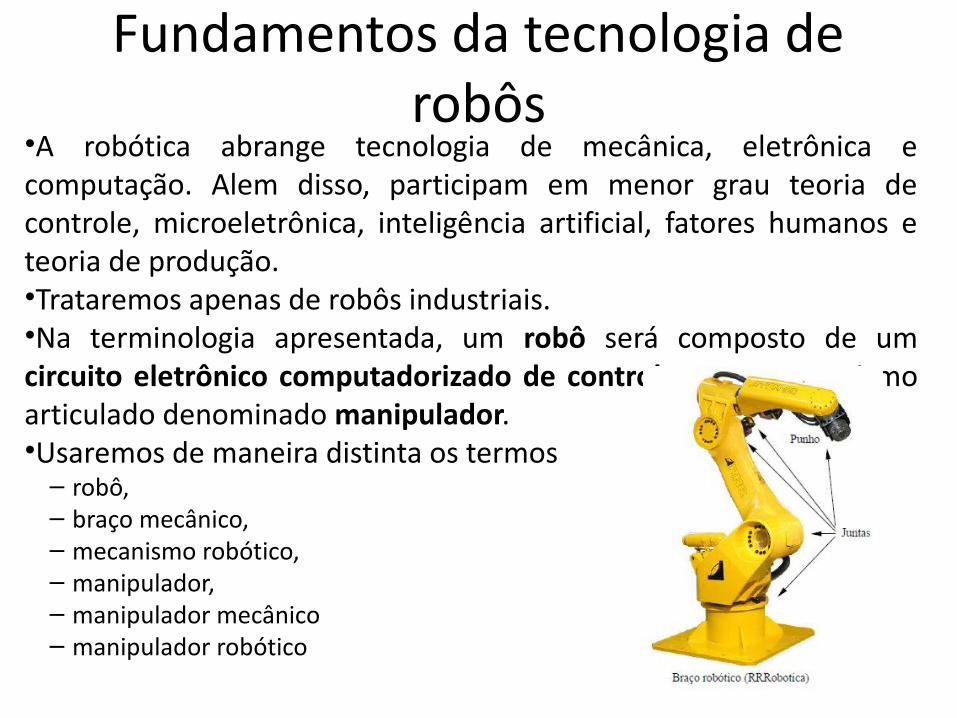
Fundamentos da tecnologia de robôs
•A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial, fatores humanos e teoria de produção.•Trataremos apenas de robôs industriais.•Na terminologia apresentada, um robô será composto de um circuito eletrônico computadorizado de controle e um mecanismo articulado denominado manipulador.•Usaremos de maneira distinta os termos– robô, – braço mecânico, – mecanismo robótico, – manipulador, – manipulador mecânico– manipulador robótico
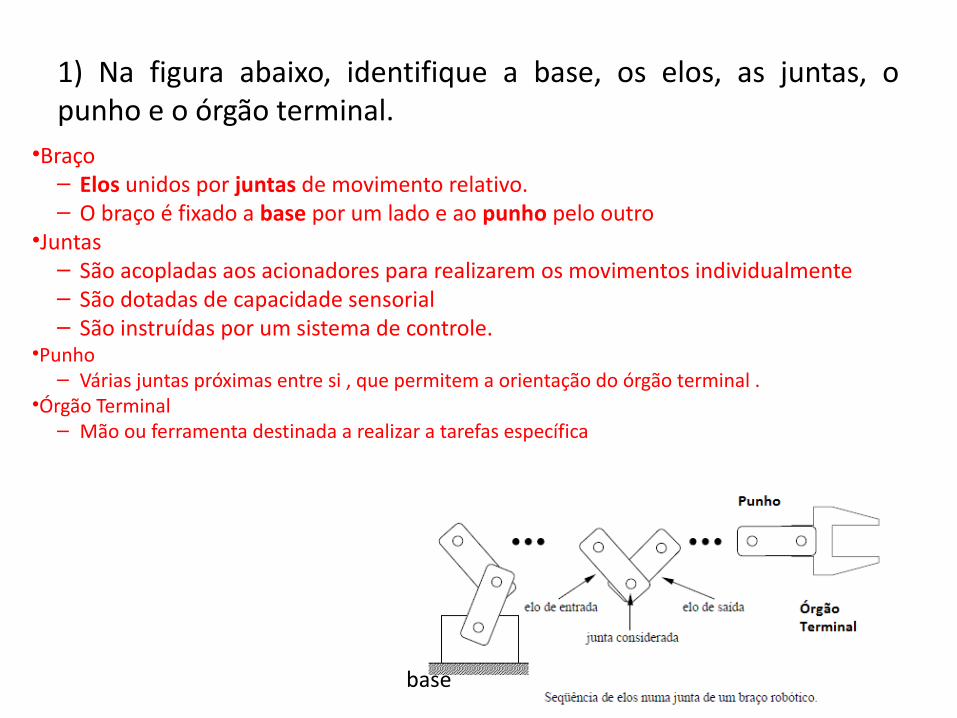
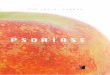
1) Na figura abaixo, identifique a base, os elos, as juntas, o punho e o órgão terminal.
•Braço – Elos unidos por juntas de movimento relativo.– O braço é fixado a base por um lado e ao punho pelo outro
•Juntas– São acopladas aos acionadores para realizarem os movimentos individualmente– São dotadas de capacidade sensorial– São instruídas por um sistema de controle.
•Punho– Várias juntas próximas entre si , que permitem a orientação do órgão terminal .
•Órgão Terminal– Mão ou ferramenta destinada a realizar a tarefas específica
base
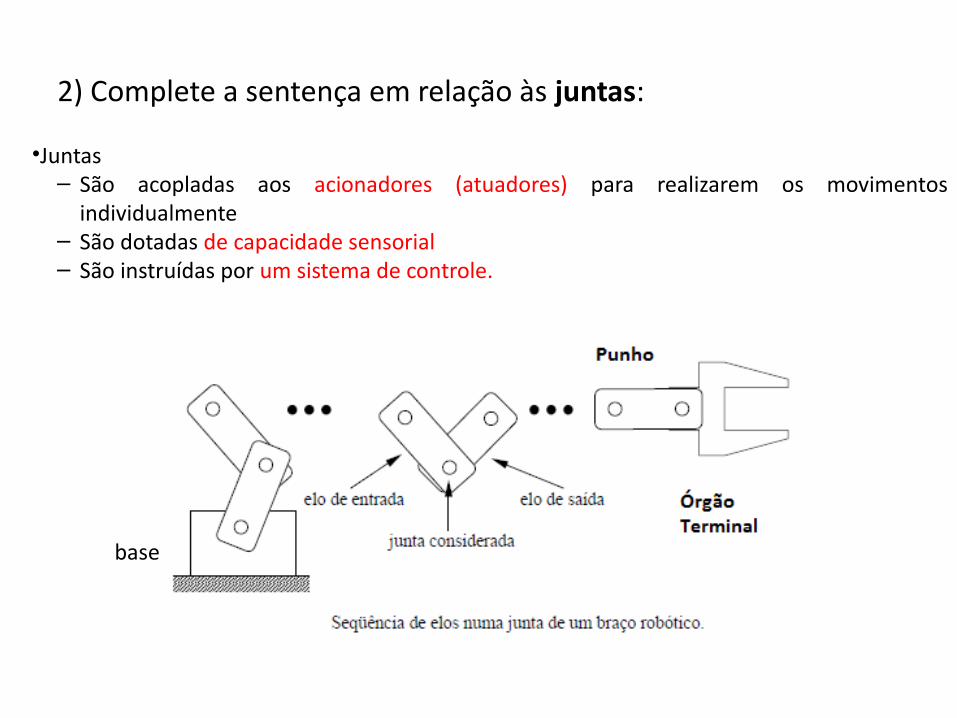
2) Complete a sentença em relação às juntas:
•Juntas– São acopladas aos acionadores (atuadores) para realizarem os movimentos
individualmente– São dotadas de capacidade sensorial– São instruídas por um sistema de controle.
base

3) Qual a diferença entre cinemática direta e inversa ?•Na cinemática direta conhecendo a posição de cada junta obtém-se a posição do órgão terminal (coordenadas cartesianas (x,y,z))•Na cinemática inversa, conhecendo a posição da extremidade do robô obtêm-se a configuração das juntas para atingir tal posição•Em sistemas de controle dos braços mecânicos somente as posições das juntas são relevantes (de conhecer a cinemática inversa).
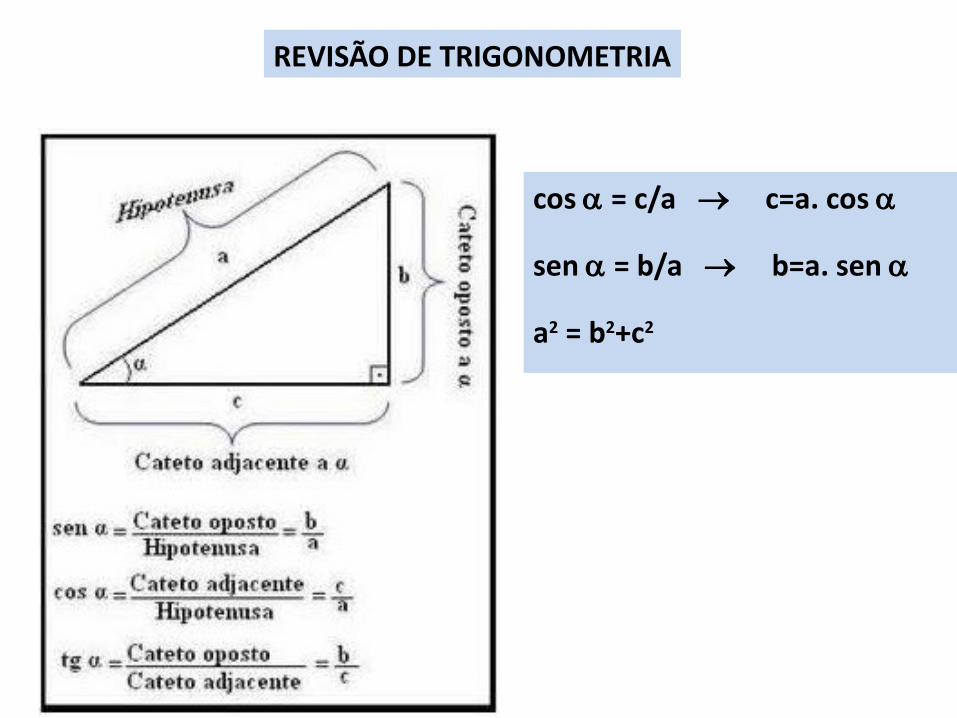
cos = c/a c=a. cos
sen = b/a b=a. sen
a2 = b2+c2
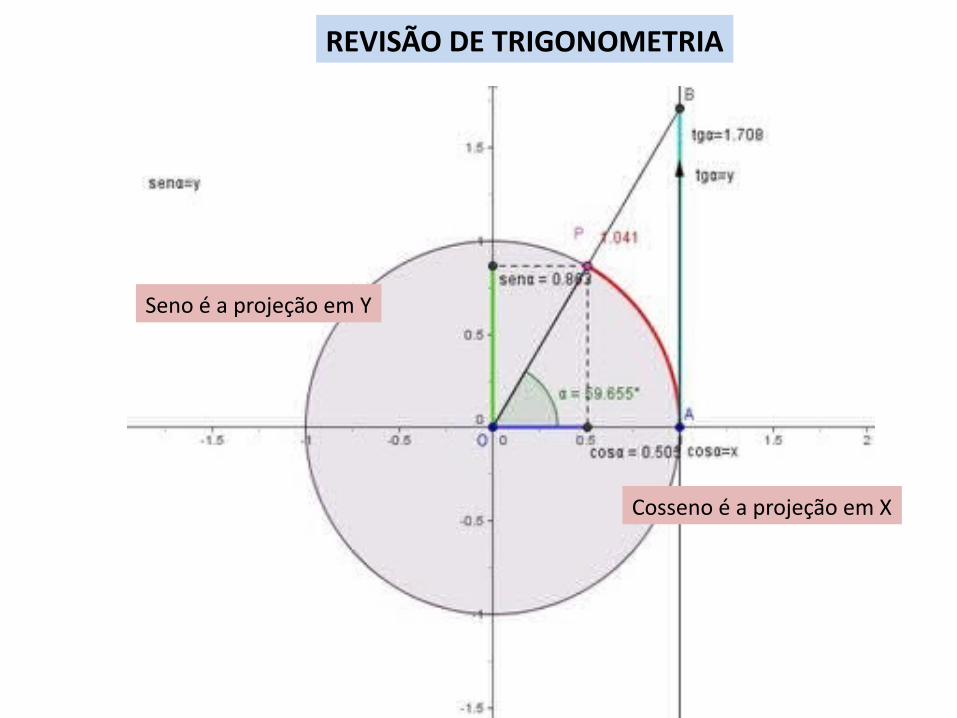
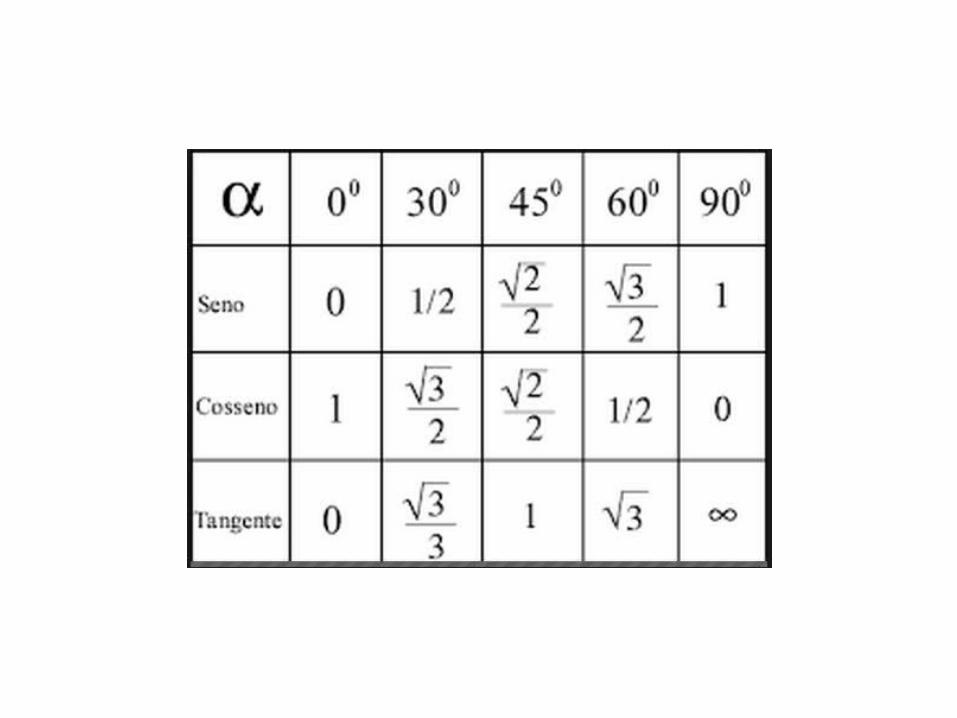
REVISÃO DE TRIGONOMETRIA
REVISÃO DE TRIGONOMETRIA
Cosseno é a projeção em X
Seno é a projeção em Y
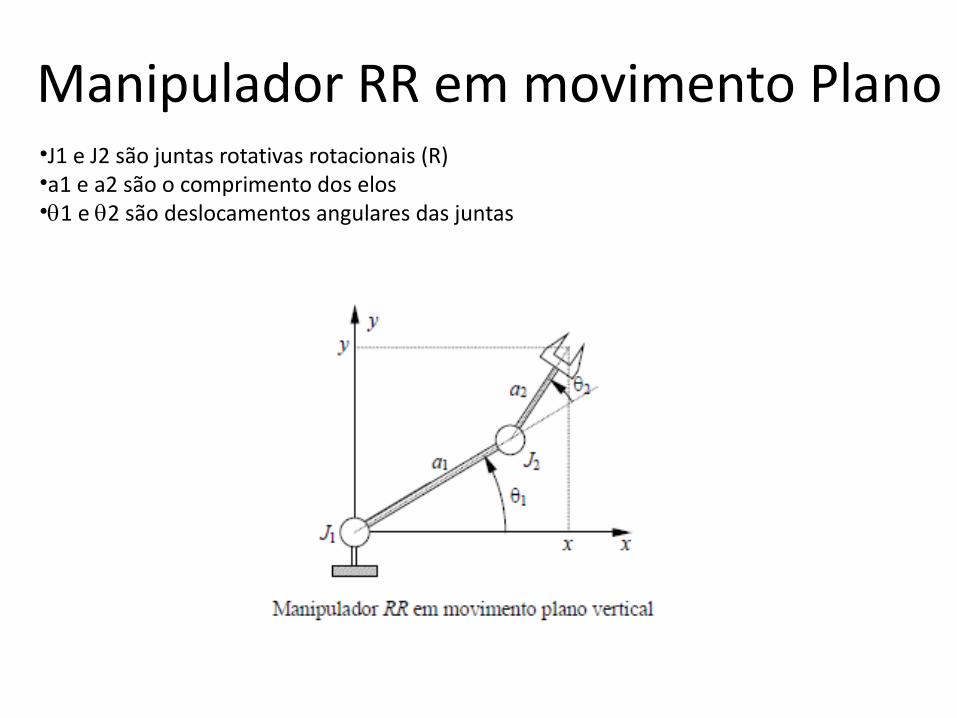
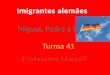
Manipulador RR em movimento Plano•J1 e J2 são juntas rotativas rotacionais (R)•a1 e a2 são o comprimento dos elos•1 e 2 são deslocamentos angulares das juntas
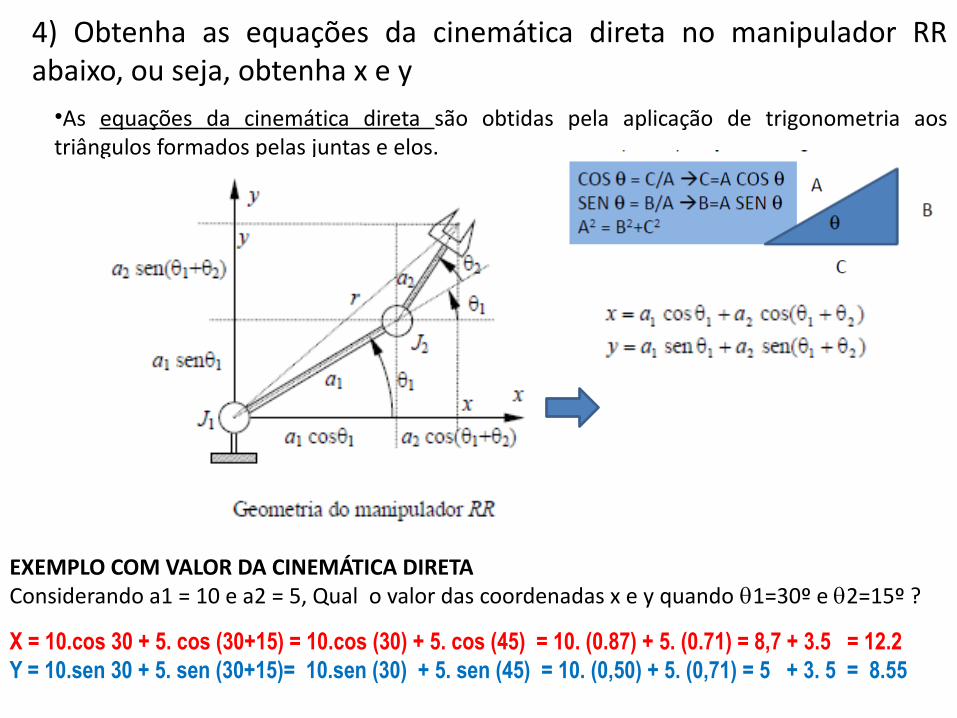
4) Obtenha as equações da cinemática direta no manipulador RR abaixo, ou seja, obtenha x e y•As equações da cinemática direta são obtidas pela aplicação de trigonometria aos triângulos formados pelas juntas e elos.
EXEMPLO COM VALOR DA CINEMÁTICA DIRETAConsiderando a1 = 10 e a2 = 5, Qual o valor das coordenadas x e y quando 1=30º e 2=15º ?
X = 10.cos 30 + 5. cos (30+15) = 10.cos (30) + 5. cos (45) = 10. (0.87) + 5. (0.71) = 8,7 + 3.5 = 12.2Y = 10.sen 30 + 5. sen (30+15)= 10.sen (30) + 5. sen (45) = 10. (0,50) + 5. (0,71) = 5 + 3. 5 = 8.55

Manipulador RR em movimento Plano•As equações da cinemática inversa podem ser obtidas de:
•Sabendo que
•Conclui-se que
•Portanto
CINEMÁTICA INVERSAConsiderando a1 = 10 e a2 = 5, Qual o valor de 2 quando x=12.2 e y=8.5 ?
2 = arcos ((12.2)2 + (8.5) 2 – 100 – 25/ 2.10.5) = arcos (148.84 + 72.25 – 100 – 25/ 100)=arcos (0,96) ~ 15o
=1= 1+ 2

Manipulador RR em movimento Plano•O ângulo 1 será obtido pela aplicação da tangente da diferença entre ângulos. No triângulo OPQ da figura tem-se que :

Manipulador RR em movimento Plano
CINEMÁTICA INVERSAConsiderando a1 = 10 e a2 = 5, Qual o valor de 1 quando x=12.2 e y=8.5 e 2=15º ?
tg 1 = [8.5 (10+5.cos (15)) – (12,2).5.sen (15)] / [(12.2). (10+5.cos(15)) +(8.5).5.sen (15)] Tg 1 = [126– 15.78] / [180.92 + 11] = [110.22] / [191.92] = 0.574 1 = 30
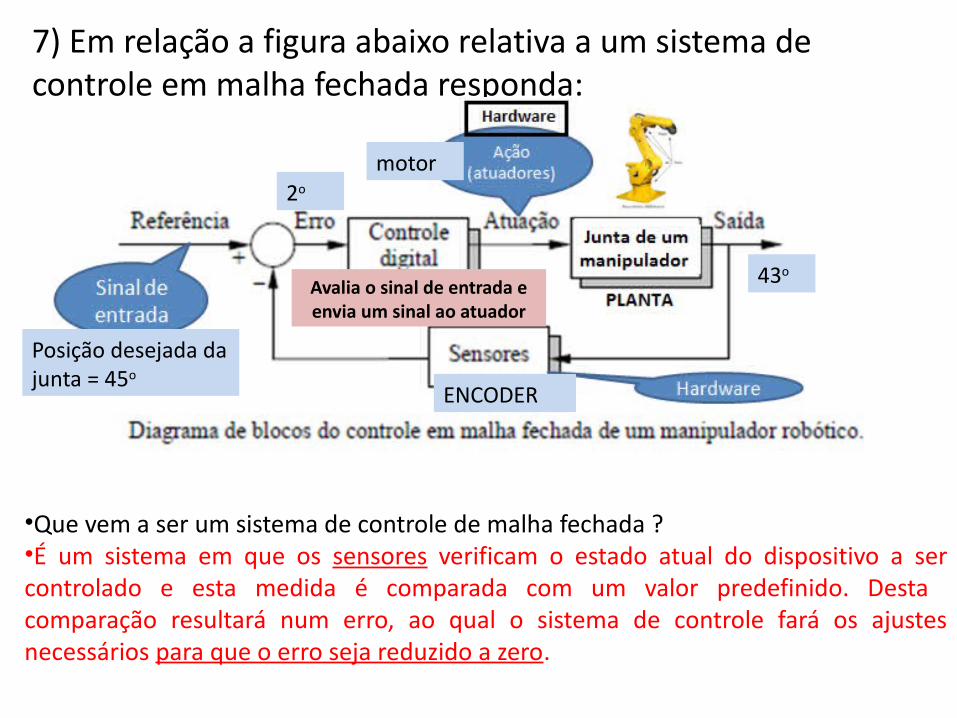
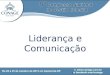
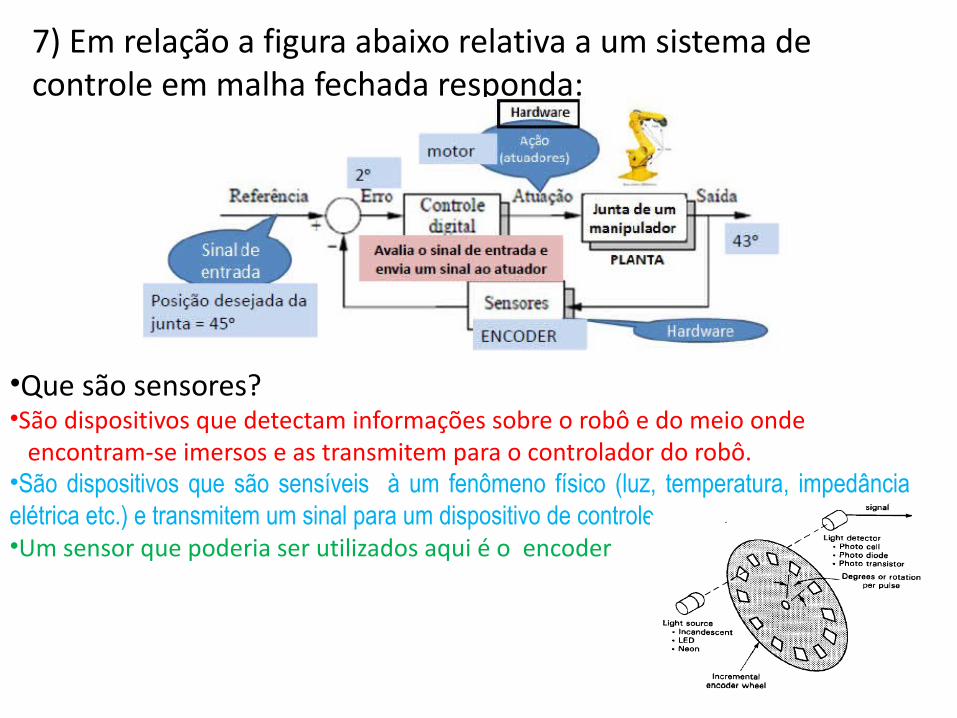
7) Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda:
•Que vem a ser um sistema de controle de malha fechada ?•É um sistema em que os sensores verificam o estado atual do dispositivo a ser controlado e esta medida é comparada com um valor predefinido. Desta comparação resultará num erro, ao qual o sistema de controle fará os ajustes necessários para que o erro seja reduzido a zero.
Posição desejada da junta = 45o
motor
43o
ENCODER
2o
Avalia o sinal de entrada e envia um sinal ao atuador
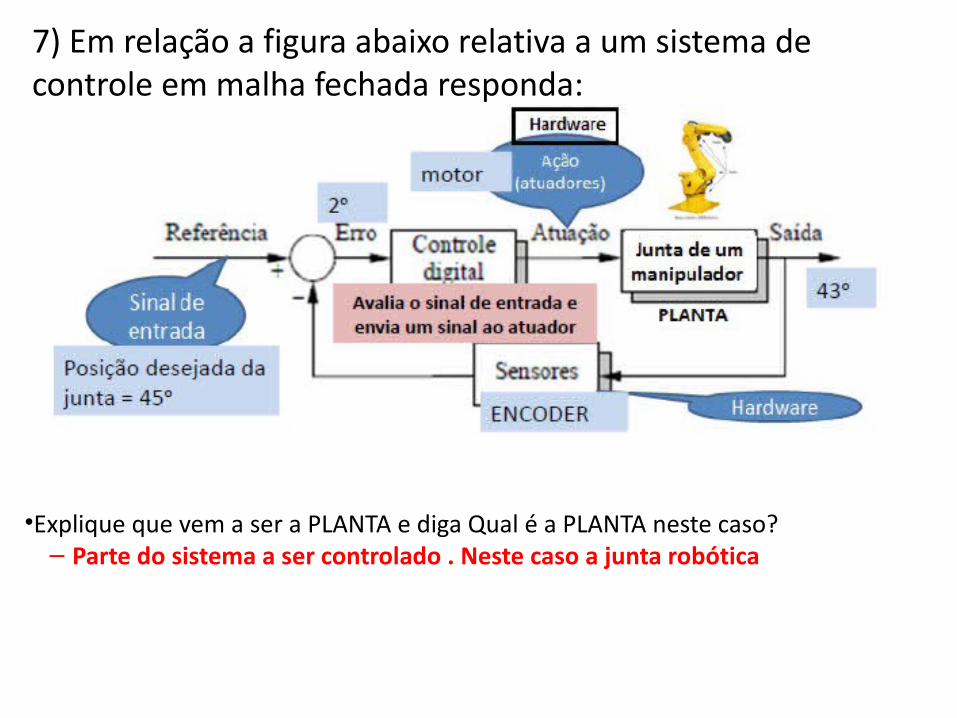
7) Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda:
•Explique que vem a ser a PLANTA e diga Qual é a PLANTA neste caso?– Parte do sistema a ser controlado . Neste caso a junta robótica
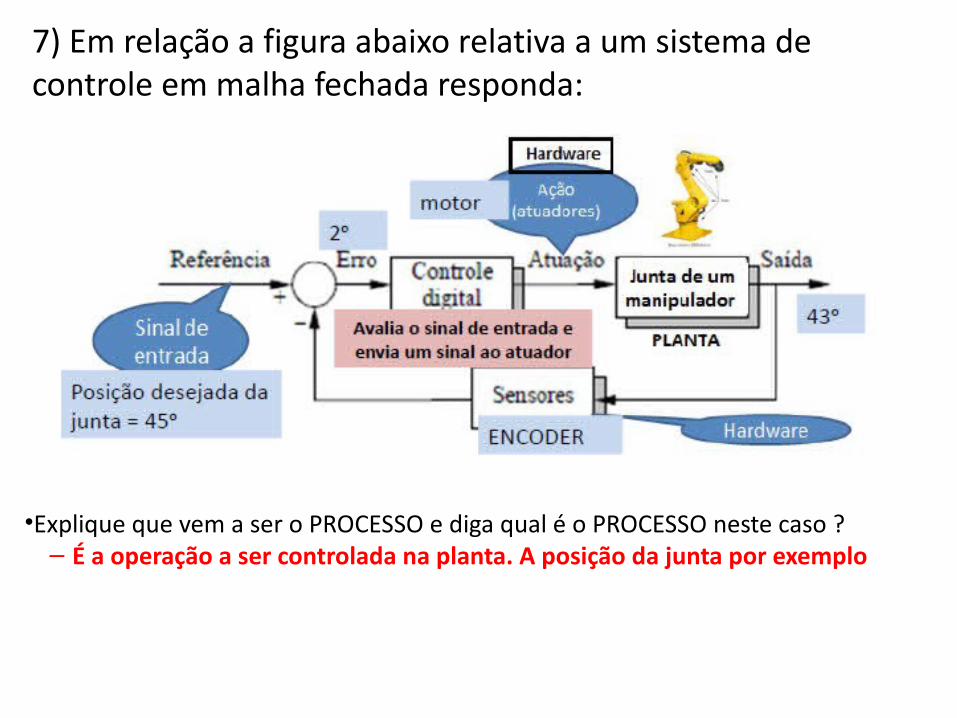
7) Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda:
•Explique que vem a ser o PROCESSO e diga qual é o PROCESSO neste caso ?– É a operação a ser controlada na planta. A posição da junta por exemplo

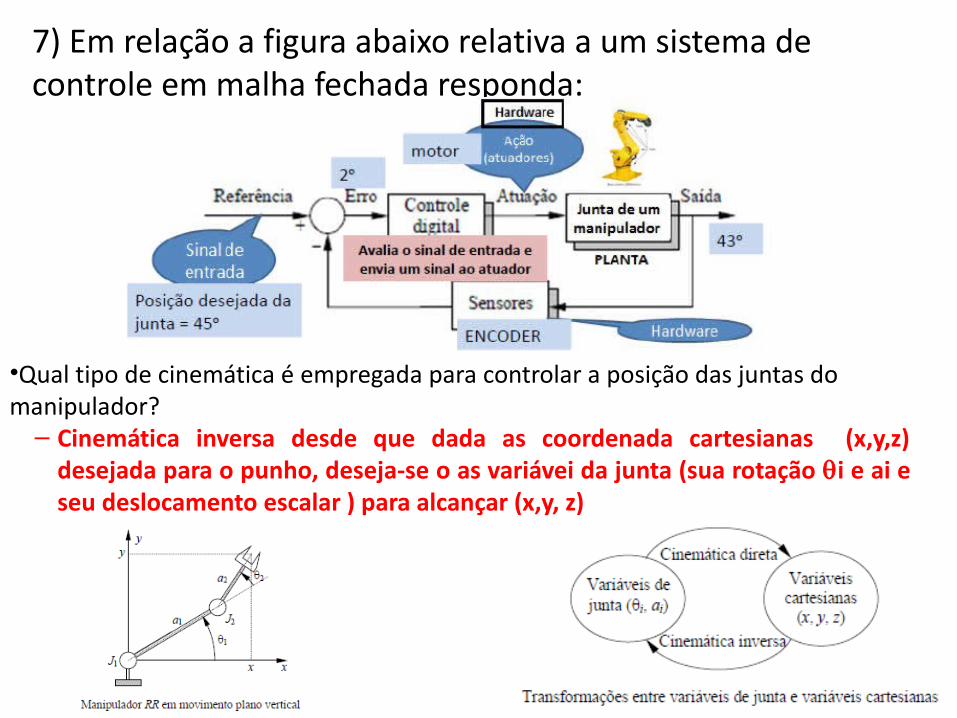
7) Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda:
•Cite um exemplo de atuador que poderia ser utilizado ?– Um motor para colocar a junta na posição desejada
7) Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda:
•Qual tipo de cinemática é empregada para controlar a posição das juntas do manipulador?– Cinemática inversa desde que dada as coordenada cartesianas (x,y,z)
desejada para o punho, deseja-se o as variávei da junta (sua rotação i e ai e seu deslocamento escalar ) para alcançar (x,y, z)
7) Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda:
•Que são sensores?•São dispositivos que detectam informações sobre o robô e do meio onde encontram-se imersos e as transmitem para o controlador do robô.•São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e transmitem um sinal para um dispositivo de controle.•Um sensor que poderia ser utilizados aqui é o encoder
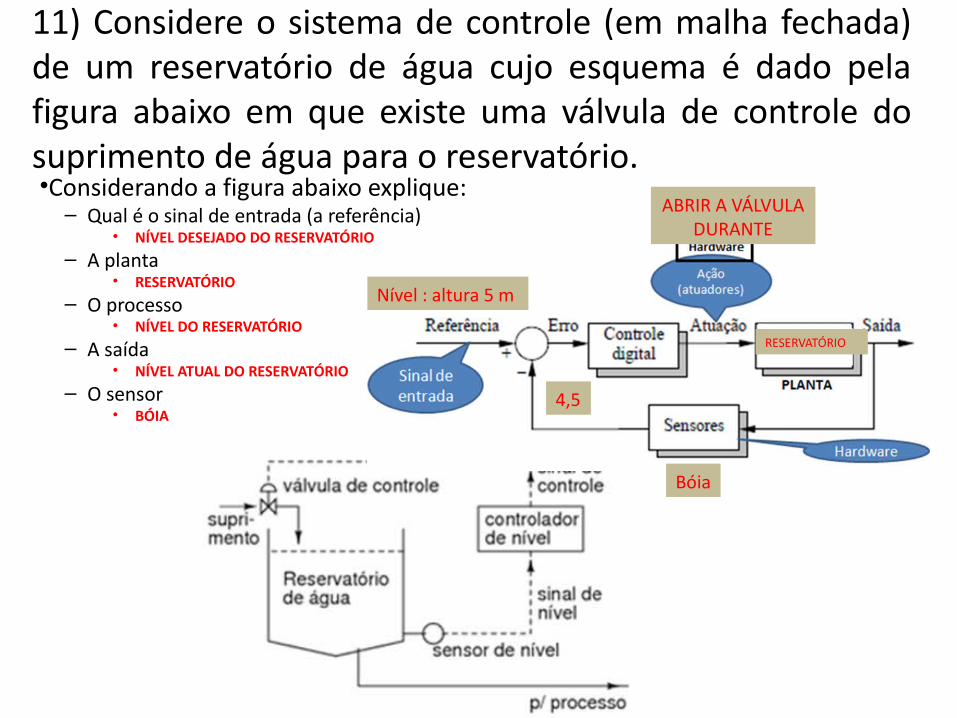
11) Considere o sistema de controle (em malha fechada) de um reservatório de água cujo esquema é dado pela figura abaixo em que existe uma válvula de controle do suprimento de água para o reservatório.•Considerando a figura abaixo explique:– Qual é o sinal de entrada (a referência)
• NÍVEL DESEJADO DO RESERVATÓRIO– A planta
• RESERVATÓRIO– O processo
• NÍVEL DO RESERVATÓRIO– A saída
• NÍVEL ATUAL DO RESERVATÓRIO– O sensor
• BÓIA
Nível : altura 5 m
Bóia
RESERVATÓRIO
4,5
ABRIR A VÁLVULA DURANTE

Sistema de Controle•Vantagens do Sistema de controle em malha fechada
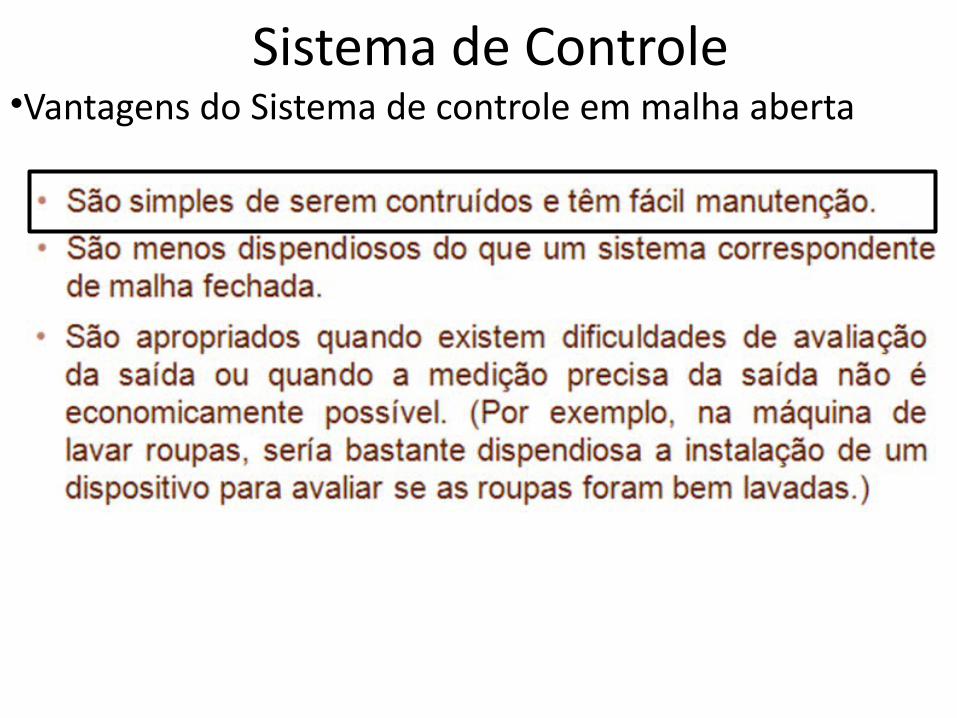
Sistema de Controle•Vantagens do Sistema de controle em malha aberta

Sistema de Controle•12) Considerando que os comandos para uma máquina de lavar roupa são colocar de molho, lavar e enxaguar, tudo durante certo tempo, explique porque ela é considerada um sistema de controle de malha aberta.– É um sistema de controle de malha aberta pois a saída não é comparada com a entrada
de referência (sinal de entrada)– Assim, a cada entrada de referência corresponde uma condição fixa de operação. – As operações de colocar de molho, lavar e enxaguar são executadas em uma sequência
em função do tempo. A lavadora não mede o sinal de saída, isto é, não verifica se as roupas estão bem lavadas.
molho não acionar o motorlavar acionar o motor durante 10 minEnxaguar acionar o motor durante 15 min
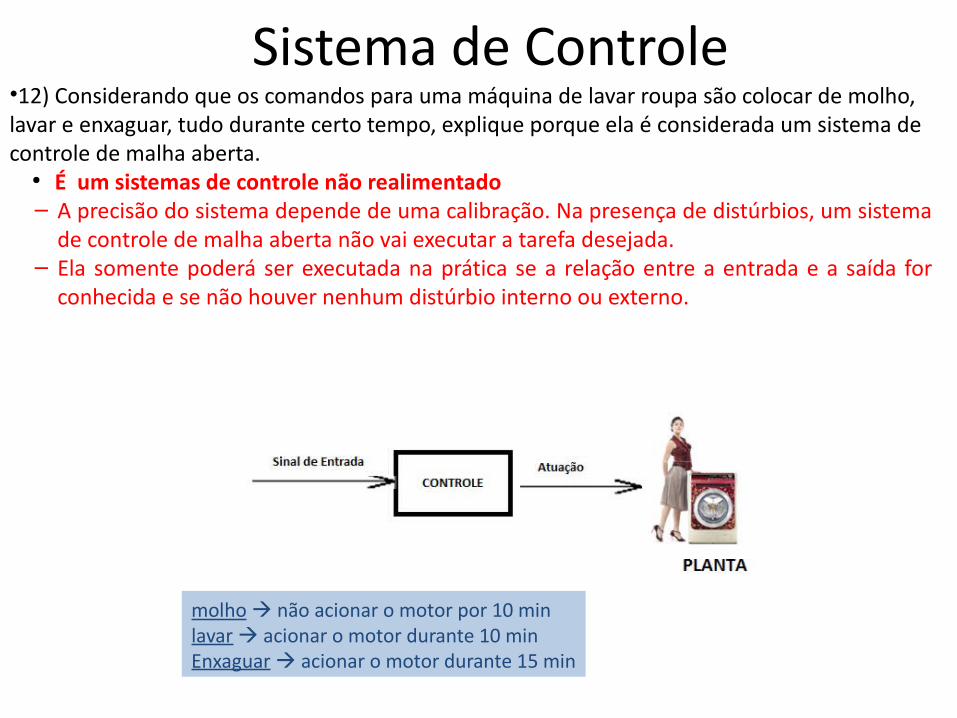
Sistema de Controle•12) Considerando que os comandos para uma máquina de lavar roupa são colocar de molho, lavar e enxaguar, tudo durante certo tempo, explique porque ela é considerada um sistema de controle de malha aberta.
● É um sistemas de controle não realimentado – A precisão do sistema depende de uma calibração. Na presença de distúrbios, um sistema
de controle de malha aberta não vai executar a tarefa desejada.– Ela somente poderá ser executada na prática se a relação entre a entrada e a saída for
conhecida e se não houver nenhum distúrbio interno ou externo.
molho não acionar o motor por 10 minlavar acionar o motor durante 10 minEnxaguar acionar o motor durante 15 min
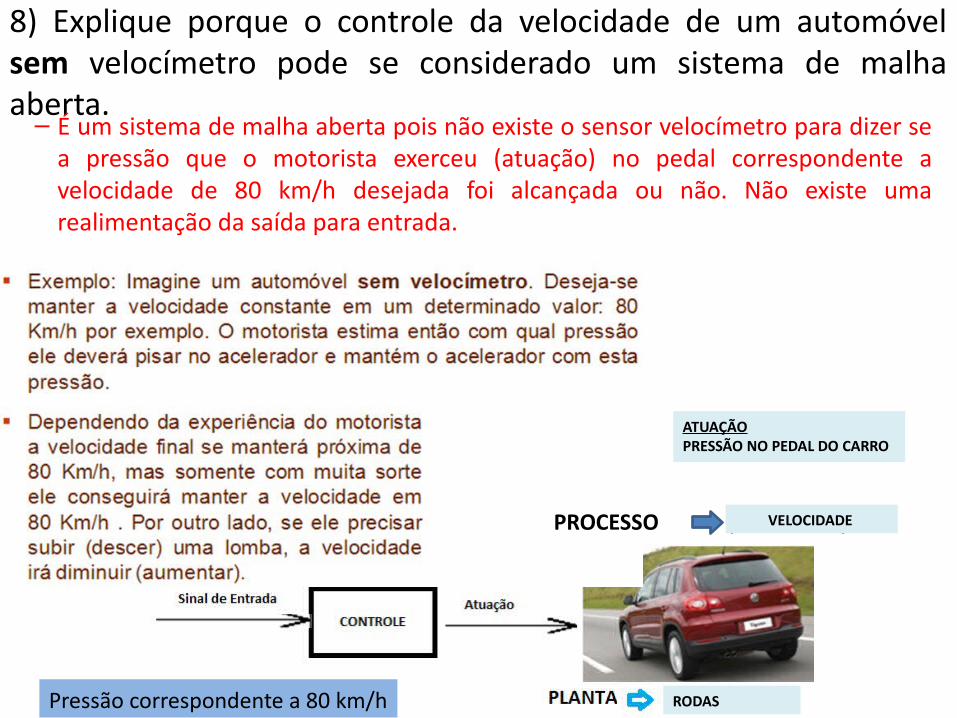
8) Explique porque o controle da velocidade de um automóvel sem velocímetro pode se considerado um sistema de malha aberta.– É um sistema de malha aberta pois não existe o sensor velocímetro para dizer se
a pressão que o motorista exerceu (atuação) no pedal correspondente a velocidade de 80 km/h desejada foi alcançada ou não. Não existe uma realimentação da saída para entrada.
PROCESSO pressão no pedal
ATUAÇÃOPRESSÃO NO PEDAL DO CARRO
RODAS
VELOCIDADE
Pressão correspondente a 80 km/h

8) Explique porque o controle da velocidade de um automóvel com velocímetro pode se considerado um sistema de malha fechada.– É um sistema de malha fechada pois o sensor velocímetro informa ao motorista
o erro na velocidade que foi colocada no carro (2km/h por exemplo se a velocidade detectada for 78 hm/h) e este irá exercer uma pressão maior no pedal do carro. O motorista faz o papel de controlador e atuador.
PROCESSO pressão no pedal
ATUAÇÃOPRESSÃO NO PEDAL DO CARRO
RODAS
VELOCIDADE
Pressão correspondente
a 80 km/h
SENSOR
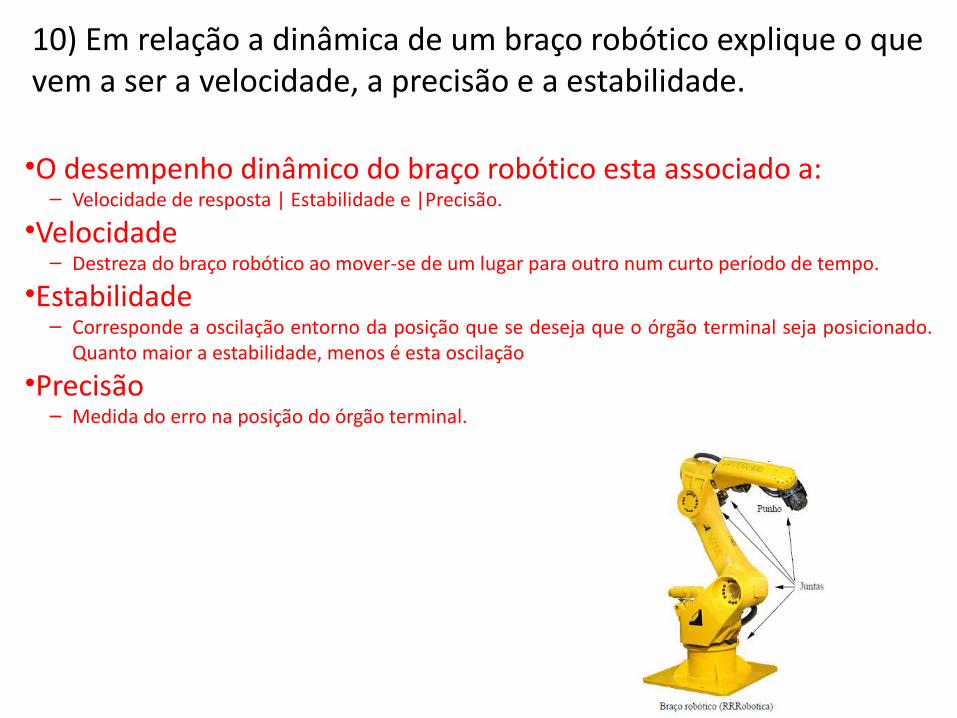
10) Em relação a dinâmica de um braço robótico explique o que vem a ser a velocidade, a precisão e a estabilidade.
•O desempenho dinâmico do braço robótico esta associado a:– Velocidade de resposta | Estabilidade e |Precisão.
•Velocidade– Destreza do braço robótico ao mover-se de um lugar para outro num curto período de tempo.
•Estabilidade– Corresponde a oscilação entorno da posição que se deseja que o órgão terminal seja posicionado.
Quanto maior a estabilidade, menos é esta oscilação
•Precisão– Medida do erro na posição do órgão terminal.
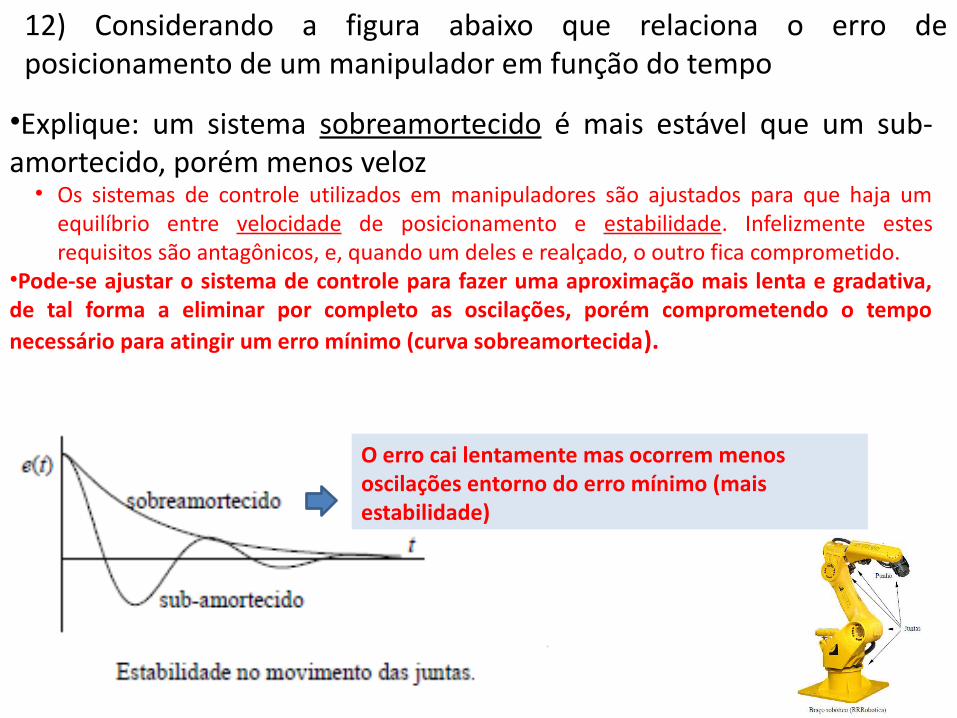
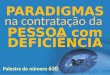
12) Considerando a figura abaixo que relaciona o erro de posicionamento de um manipulador em função do tempo
•Explique: um sistema sobreamortecido é mais estável que um sub-amortecido, porém menos veloz• Os sistemas de controle utilizados em manipuladores são ajustados para que haja um
equilíbrio entre velocidade de posicionamento e estabilidade. Infelizmente estes requisitos são antagônicos, e, quando um deles e realçado, o outro fica comprometido.
•Pode-se ajustar o sistema de controle para fazer uma aproximação mais lenta e gradativa, de tal forma a eliminar por completo as oscilações, porém comprometendo o tempo necessário para atingir um erro mínimo (curva sobreamortecida).
O erro cai lentamente mas ocorrem menos oscilações entorno do erro mínimo (mais estabilidade)
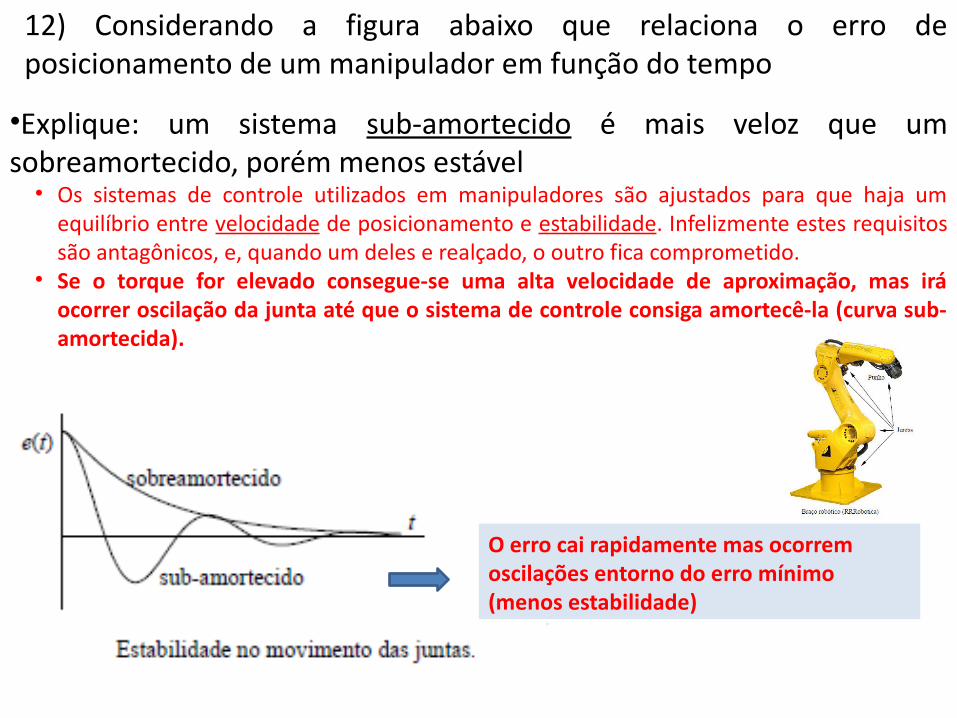
12) Considerando a figura abaixo que relaciona o erro de posicionamento de um manipulador em função do tempo
•Explique: um sistema sub-amortecido é mais veloz que um sobreamortecido, porém menos estável• Os sistemas de controle utilizados em manipuladores são ajustados para que haja um
equilíbrio entre velocidade de posicionamento e estabilidade. Infelizmente estes requisitos são antagônicos, e, quando um deles e realçado, o outro fica comprometido.
• Se o torque for elevado consegue-se uma alta velocidade de aproximação, mas irá ocorrer oscilação da junta até que o sistema de controle consiga amortecê-la (curva sub-amortecida).
O erro cai rapidamente mas ocorrem oscilações entorno do erro mínimo (menos estabilidade)