Embed Size (px)
Citation preview

Universidade Federal de São CarlosCentro de Ciências Exatas e de TecnologiaDepartamento de Matemática
Grupos de Simetria I
Autor: Lucas Fabiano Lima
Orientadora: Prof. Dra. Natalia Andrea Viana Bedoya
Disciplina: Trabalho de Conclusão do Curso A
Curso: Licenciatura em Matemática
Professores Responsáveis: Karina Schiabel Silva
Tomas Edson Barros
Vera Lúcia Carbone
São Carlos, 15 de julho de 2011.

Grupos de Simetria I
Autor: Lucas Fabiano Lima
Orientador: Prof. Dra. Natalia Andrea Viana Bedoya
Disciplina: Trabalho de Conclusão do Curso A
Curso: Licenciatura em Matemática
Professores Responsáveis: Karina Schiabel Silva
Tomas Edson Barros
Vera Lúcia Carbone
Instituição: Universidade Federal de São Carlos
Centro de Ciências Exatas e de Tecnologia
Departamento de Matemática
São Carlos, 15 de julho de 2011.
Lucas Fabiano Lima Natalia Andrea Viana Bedoya

Agradecimentos
Agradeço a todos que me ajudaram neste trabalho. Principalmente aos mais próximos.

Resumo
Neste trabalho estudamos o conceito de grupo de simetria apoiados na geometria de
uma placa hexagonal, de uma pirâmide e dos sólidos de Platão. Podemos resumir o con-
teúdo estudado em dois resultados principais:
1. Os grupos de simetria rotacional do tetraedro, da pirâmide de base dodecagonal e da
placa hexagonal não são isomorfos.
2. O grupo de simetria rotacional do tetraedro é isomorfo a A4, o do cubo e do octaedro
são isomorfos a S4, enquanto que os do dodecaedro e icosaedro são isomorfos a A5.

iv
Sumário
Introdução vii
1 Simetrias do tetraedro 1
1.1 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Axiomas 8
2.1 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 Números 18
3.1 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4 Grupos Diedrais 25
4.1 O grupo Dn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5 Subgrupos e Geradores 36
5.1 Geradores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.2 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6 Permutações 48
6.1 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
7 Isomor�smos 57
7.1 Comparando grupos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
7.2 Buscando isomor�smos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
7.3 Resultados Sobre os três primeiros sólidos . . . . . . . . . . . . . . . . . . 61
8 Sólidos de Platão e o Teorema de Cayley 68
8.1 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72

v
Lista de Figuras
1.1 Tetraedro com os eixos de rotação.[1] . . . . . . . . . . . . . . . . . . . . . 1
1.2 Placa hexagonal com eixos de rotação.[1] . . . . . . . . . . . . . . . . . . 2
1.3 Pirâmide com seu único eixo de rotação.[1] . . . . . . . . . . . . . . . . . . 2
1.4 Aplicação das rotações r e s.[1] . . . . . . . . . . . . . . . . . . . . . . . . 3
1.5 Sólido obtido após colarmos dois tetraedros. . . . . . . . . . . . . . . . . . 5
1.6 Cubo com seus três tipos de eixos de simetria rotacional.[1] . . . . . . . . . 6
1.7 srs comparada a rotação com eixo passando pelo 4. . . . . . . . . . . . . . 6
1.8 rsrr comparada a rotação com eixo passando pelos pontos médios de 12 e
34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.9 Igualdade de rotações. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 Cristal de Neve.[1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Sobrejeção de uma isometria . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.1 Placa triagonal.[1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2 r e s aplicadas na placa triangular.[1] . . . . . . . . . . . . . . . . . . . . . 26
5.1 Placa hexagonal com triangular inscrita [1] . . . . . . . . . . . . . . . . . . 36
5.2 Hexágono regular e suas simetrias. . . . . . . . . . . . . . . . . . . . . . . 44
7.1 Tabuleiro de xadrez e suas simetrias planas.[1] . . . . . . . . . . . . . . . 57
7.2 Tetraedro com vertices enumerados.[1] . . . . . . . . . . . . . . . . . . . . 59
8.1 Sólidos de Platão.[1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
8.2 Cubo com os eixos de rotação.[1] . . . . . . . . . . . . . . . . . . . . . . . 69
8.3 Octaedro inscrito no cubo.[1] . . . . . . . . . . . . . . . . . . . . . . . . . 70
8.4 Um dos 5 cubos inscritos no dodecaedro.[1] . . . . . . . . . . . . . . . . . 71
8.5 Tetraedro inscrito. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
8.6 Cubo com faixas.[1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Observação: O símbolo [1] indica que a �gura foi retirada da referência [1] da bibli-
ogra�a.

vi
Lista de Tabelas
4.1 Tábua de multiplicação de D3. . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 Tábua de multiplicação de D4 . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.3 Ordem dos elementos em Z5. . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.4 Ordem dos elementos em Z9 . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.5 Inversos de cada elemento . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.6 Ordem de cada elemento . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6.1 Tábua de multiplicação de S3. . . . . . . . . . . . . . . . . . . . . . . . . . 53
7.1 Tábua de multiplicação simetrias planas do tabuleiro. . . . . . . . . . . . . 58
7.2 Tábua de multiplicação do conjunto de�nido acima. . . . . . . . . . . . . . 58
7.3 Tábua de multiplicação do conjunto A. . . . . . . . . . . . . . . . . . . . . 62
7.4 Tábua de multiplicação do conjunto. . . . . . . . . . . . . . . . . . . . . . 62

vii
Introdução
A teoria de grupos é um ramo da Matemática que estuda estruturas algébricas chamadas
de grupos. Podemos estudar estas estruturas desconexas de qualquer tipo de aplicação,
apenas visando o desenvolvimento da própria teoria. Por outro lado esta teoria aparece
também em outras ciências, como na Física e na Química, onde é utilizada principalmente
para capturar simetrias internas de uma estrutra, através de isomor�smos de grupo.
O presente trabalho está dividido em oito capítulos cujos títulos são : Simetrias
no Tetraedro, Axiomas, Números, Grupos Diedrais, Subgrupos e Geradores,
Permutações, Isomor�smos, Sólidos de Platão e o Teorema de Cayley, seguindo
a referência [1]( Armstrong Mark Anthony.Groups and symmetry . Undergraduate Texts
in Mathematics, Springer-Verlag, New York, 1988.). Visando um melhor aproveitamento
desta oportunidade de estudar um novo assunto, nosso alvo neste trabalho são os exercí-
cios propostos, e nosso objetivo principal é tentar resolvê-los.
A motivação deste projeto está no desejo do aluno em conhecer aplicações da estrutura
algébrica de grupo em um contexto diferente do matemático.

1
Capítulo 1
Simetrias do tetraedro
Começaremos nosso trabalho tentando responder a uma pergunta: Quantas simetrias o
tetraedro possui?
Para respondermos esta pergunta devemos primeiro entender qual o conceito de simetria.
Simetria, em nosso trabalho signi�cará a preservação da estrutura geométrica de um
determinado elemento de um espaço arbitrário. Abordaremos simetrias em sólidos e
também em �guras planas. Por exemplo, uma simetria do tetraedro seria uma cópia do
tetraedro com a mesma estrutura original mas com os vértices, lados ou arestas trocados
de lugar. Note que estas novas posições do tetraedro são obtidas através de rotações,
re�exões, etc, operações que atuam em eixos diferentes. Associaremos assim, a cada
simetria a operação que induziu tal disposição das arestas, vértices e faces. Devido a
esta relação, nos referiremos a rotações, re�exões, etc, como simetrias. Observando o
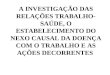
tetraedro na �gura abaixo notamos quatro eixos do tipo L de simetria rotacional. Cada
um destes eixos nos gera duas rotações no sentido anti-horário, proporcionando um total
de 8 simetrias. Existem ainda três eixos do tipo M , onde existe apenas uma rotação de
π em cada um, portanto resultando em mais três simetrias. Por �m, existe a simetria
identidade, que pode ser obtida a partir de uma rotação de 2π em qualquer um dos eixos.
Somando-se todas estas simetrias, temos um total de 12 simetrias rotacionais no tetraedro.
Figura 1.1: Tetraedro com os eixos de rotação.[1]

1. Simetrias do tetraedro 2
Podemos ainda contar da mesma forma quanta simetria existe em uma placa hexagonal
como a da �gura abaixo. Observe que existem 3 eixos do tipo M , cada um destes eixos
nos fornecem apenas uma simetria (π no sentido anti-horario). Existem ainda três eixos
do tipo L, cada um descrevendo também apenas uma simetria cada (π no sentido anti-
horario). Temos também um eixo P no centro da placa hexagonal, que nos fornece 5
simetrias, (as rotações de π/3,2π/3,π, 4π/3 ,5π/3 no sentido anti-horário). Não nos
esquecendo da identidade, temos um total de 12 simetrias.
Figura 1.2: Placa hexagonal com eixos de rotação.[1]
Observemos agora um terceiro sólido, a pirâmide de base dodecaédrica evidenciada
pela �gura abaixo. Note que nesta pirâmide existe apenas um eixo de rotação, que passa
pelo vértice de encontro das arestas e pelo centro da base. Temos então 12 simetrias
obtidas a partir das 12 rotações no sentido anti-horário (kπ/6 para 1 ≤ k ≤ 12).
Figura 1.3: Pirâmide com seu único eixo de rotação.[1]

1. Simetrias do tetraedro 3
Podemos notar o mesmo número de simetrias rotacionais nestes três sólidos, mas clara-
mente estas simetrias não são as mesmas. A diferença mais gritante é o fato de que a
pirâmide possui apenas um eixo de simetria, onde apenas uma rotação de π/6 no sentido
anti-horário repetida 12 vezes faz com que a pirâmide volte a sua posição inicial. Olhando
para a placa ou o tetraedro, não existe uma rotação que, quando repetida nos fornece as
outras rotações, diferentemente da pirâmide, onde isto ocorre.
Podemos notar ainda outras diferenças, basta nos atentarmos a forma como combi-
namos as simetrias em cada um dos casos. Note que na pirâmide as rotações comutam,
isto é, se tomarmos quaisquer duas rotações e executarmos uma depois a outra o resul-
tado será o mesmo se invertermos a ordem de execução, isto se deve ao fato de todas as
rotações serem em torno do mesmo eixo. Propriedade que já não acontece no tetraedro
nem na placa hexagonal. Façamos um experimento com o tetraedro.
Marcando seus vértices com os números 1, 2, 3, 4 e aplicando a rotação r (2π/3 em L) e
depois s (π em M). E depois invertendo a ordem, aplicando primeiro s depois r, obtemos
o esquema da Figura 1.4.
Figura 1.4: Aplicação das rotações r e s.[1]
Ambas rotações r e s são pensadas como movimentos rígidos no espaço, cada uma
delas possui um eixo �xo no espaço e rotacionam o tetraedro T sobre si mesmo.
Uma observação valiosa é que a placa hexagonal possui 7 simetrias que, quando combi-
nadas consigo mesmas, fornecem a identidade, são elas: as três rotações de π no sentido
anti-horario dos três eixos L e dos três eixos M , resultando em 6, existe ainda a rotação
de π em torno do eixo central. Já no tetraedro existem apenas 3, que são as três rotações

1. Simetrias do tetraedro 4
de π em torno de cada um dos três eixos M .
Geometricamente vemos que estas três rotações do tetraedro comutam entre si, enquanto
que apenas uma da placa comuta com as outras 6, esta rotação é a de π em torno do eixo
central.
Observe que queremos uma medida que nos forneça mais informações sobre as simetrias
em cada um dos sólidos, para isto não basta apenas contá-las, mas também saber qual
o comportamento quando combinadas entre si. Para isto introduziremos o conceito de
Grupo de Simetria. O conjunto das simetrias rotacionais de T possui uma certa estrutura
algébrica.
Dadas duas rotações u e v , podemos "combiná-las"operando primeiro v e depois u para
produzirmos uma nova rotação que também atua em T , fazendo-o rotacionar em torno de
si mesmo, escrevemos esta rotação como uv (convencionalmente a notação utilizada para
composição de funções).
A rotação identidade, que denotamos por e se comporta de maneira especial, sempre
quando combinada com outra rotação u, independentemente da ordem em que se faça
isto, o resultado sempre será a rotação u. Ou seja temos sempre ue = u e eu = u para
toda simetria u de T .
Cada rotação u possui a rotação chamada inversa, u−1 que também gera uma simetria de
T e satisfaz
uu−1 = e = u−1u.
Para obter tal rotação u−1, basta rotacionar no mesmo eixo de que u, pelo mesmo argu-
mento mas no sentido oposto de u. Por exemplo, a rotação inversa de r é rr, ou seja a
rotação de r no sentido horário.
Por �m, se tomarmos três rotações u, v e w de T , não importa se operarmos primeiro
as duas rotações u e v e o resultado é operado com w, ou se operamos u com o resultado
de vw, o resultado é sempre a mesma rotação, ou seja
(uv)w = u(vw).
para quaisquer u, v e w rotações de T .
Resumindo o que �zemos até agora: Oservamos que as 12 rotações do tetraedro repre-
sentam 12 simetrias rotacionais diferentes do tetraedro T . Sendo assim, podemos colocar
todas estas rotações em um conjunto e munir este conjunto pela operação de composição
de funções, neste caso rotações. Conseguimos algumas propriedades dentro deste con-
junto, que nos garantem que este conjunto munido desta operação consiste em ser o
Grupo de simetria rotacional do tetraedro. Vamos formalizar a estrutura de grupo no
capítulo seguinte.

1. Simetrias do tetraedro 5
1.1 Exercícios
1.1) Cole duas cópias de um tetraedro regular de forma que eles possuam uma face trian-
gular em comum, trabalhe então em todas as simetrias rotacionais que este novo sólido
possui.
Solução:
Figura 1.5: Sólido obtido após colarmos dois tetraedros.
Observando a �gura acima, notamos que nosso novo sólido possui um eixo central P que
nos gera 2 simetrias a partir das rotações de 2π/3 4π/3 existem ainda mais dois eixos do
tipo L cada um gera apenas uma simetria após um giro de π, totalizando 3 simetrias.
Sendo assim temos um total de cinco simetrias diferentes da identidade. Ou seja, con-
tando todas, temos apenas seis simetrias rotacionais.
1.2) Encontre todas as simetrias rotacionais de um cubo.
Solução:
A �gura abaixo evidencia os eixos de simetria do cubo, no capítulo 8 veremos que o total
de simetrias rotacionais no cubo são 24.

1. Simetrias do tetraedro 6
Figura 1.6: Cubo com seus três tipos de eixos de simetria rotacional.[1]
1.3) Adotando a notação da Figura 1.4, mostre que os eixos da rotação composta srs
passa pelo vértice 4 e o eixo de rsrr é determinado pelos pontos médios das arestas 12 e
34.
Solução:
As imagens abaixo ilustram o pedido :
Figura 1.7: srs comparada a rotação com eixo passando pelo 4.

1. Simetrias do tetraedro 7
Figura 1.8: rsrr comparada a rotação com eixo passando pelos pontos médios de 12 e 34.
1.5) Novamente, com a notação utilizada na Figura 1.4, cheque que r−1 = rr, s−1 =
s, (rs)−1 = srr, e(sr)−1 = rrs.
Solução: Assumindo que (rs)−1 = s−1r−1 temos o seguinte esquema:
Figura 1.9: Igualdade de rotações.

8
Capítulo 2
Axiomas
No capítulo anterior de�nimos a noção de grupo usando as simetrias do tetraedro como
guia. O primeiro ingrediente para obtermos um grupo é um conjunto , o segundo, é uma
regra que nos permite combinar qualquer par ordenado x, y de elementos de um conjunto e
obter um único "produto"xy que é também pertence ao conjunto. Esta regra é geralmente
chamada de multiplicação em um determinado conjunto.
De�nição 2.1. Um grupo G é um conjunto munido de uma multiplicação em G que
satisfaz três axiomas
i) A multiplicação é associativa, ou seja , para quaisquer x, y, z ∈ G temos
(xy)z = x(yz).
ii) Existe um elemento e ∈ G chamado elemento neutro, ele é tal que , para qualquer
x ∈ G temos
xe = x = ex.
iii) Para cada x ∈ G existe o chamado elemento inverso de x que satisfaz
x−1x = e = xx−1.
Observação 2.2. Note que por simplicidade não exibiremos nenhum caractere para a ope-
ração de multiplicação em um grupo.
Esta estrutura de grupo aparece em muitas outras situações além do grupo de simetria
rotacional do tetraedro. Por exemplo se munirmos a reta real com a operação usual de
adição. Teremos a associativa, a reta contém o 0 que atuará como elemento neutro e
também para todo número real x existe −x que também é real. Assim obtemos o grupo
R. Note que neste caso as palavras "produto" e "multiplicação" se levadas ao pé da
letra, não fazem sentido, mas em termos de grupos, a "multiplicação" será utilizada para
nomear a operação do grupo, assim como a palavra "produto" que será utilizada para

2. Axiomas 9
Figura 2.1: Cristal de Neve.[1]
quando dois elementos são operados.
Onde as simetrias podem ser úteis? Um químico pode estar interessado em quantas
simetrias uma molécula em particular CH4 por exemplo (metano) pode ser pensada como
tendo um núcleo de carbono no centro do tetraedro regular, com quatro hidrogênios nos
vértices do tetraedro. A molécula de Benzeno C6H6 por outro lado é modelada por
uma estrutura hexagonal, com um carbono e um hidrogênio em cada vértice.(A simetria
hexagonal é comum na natureza, acima o cristal de neve). De nossa experiência com
o tetraedro, e o hexágono, sabemos que a ordem em que se combinam duas simetrias
importa. Desta forma existe uma diferença quando tomamos um par de elementos de um
grupo na ordem x,y ou na ordem oposta y,x. No primeiro caso, obtemos o elemento xy,
e no segundo o elemento yx, que não precisam necessariamente serem iguais.
Outro exemplo pode ser um físico aprendendo relatividade, ele conhecerá o grupo de
Lorentz, cujo os elementos são matrizes da forma
A =
[cosh(u) senh(u)
senh(u) cosh(u)
](∗)
Estes elementos são combinados através da operação de multiplicação usual de matrizes.

2. Axiomas 10
Note que cosh(u), e senh(u) são funções hiperbólicas, assim chamadas pois as equações
paramétricas x = cosh(u) e y = senh(u) determinam a hipérbole x2 − y2 = 1. Estas
funções satisfazem também as relações
cosh(u± v) = cosh(u)cosh(v)± senh(u)senh(v),
senh(u± v) = senh(u)cosh(v)± cosh(u)senh(v).
Se operarmos então duas destas matrizes com a multiplicação usual de matrizes , através
destas relações acima, obteremos também uma matriz com a mesma estrutura. Note
ainda que a matriz identidade pertence ao conjunto pois tem a forma dos elementos do
conjunto de Lorentz, basta observarmos que senh(t) = e t−e−t
2e cosh(t) = e t+e−t
2então
temos
Id =
[cosh(0) senh(0)
senh(0) cosh(0)
].
Para cada matriz da forma de Lorentz, existe uma inversa, pois o determinante é sempre
diferente de zero, e mais, esta inversa possui também a estrutura de uma de Lorentz. O
inverso da matriz (∗) é
A−1 =
[cosh(−u) senh(−u)senh(−u) cosh(−u)
].
Sabendo que a multiplicação de matrizes é associativa, o conjunto destas matrizes de
Lorentz formam de fato um grupo.
Podemos pensar nas propriedades geométricas do plano, em particular aquelas que são
deixadas inalteradas por funções, estas funções são elementos de um grupo particular, o
grupo de similaridades do plano.
De�nição 2.3. Uma similaridade no plano é uma transformação que aumenta ou encolhe
�guras, enquanto conserva o formato, a estrutura desta �gura .
Note que em nossa de�nição a noção de similaridade está bem vaga, não especi�camos
os espaços onde ela está de�nida, englobando assim uma grande quantidade de funções,
isto porque estamos interessados apenas na propriedade relacionada a simetria. Outra
característica decorrente da de�nição é que uma similiaridade preserva segmentos retos,
apenas os multiplicando por um escalar. Triângulos são enviados em triângulos, onde
temos que os ângulos são preservados em magnitude, mas não necessariamente em sentido.
O exercício 2.4 nos fornecerá a informação de que o conjunto de todas as similaridades
constitui um grupo pela operação de composição de funções.
Podemos agora, a partir dos axiomas de grupo, determinar uma quantidade considerável
de propriedades comuns a todos eles, que podem ser utilizadas todas as vezes que os
axiomas forem satisfeitos. Isto nos dá uma grande vantagem, pois não temos que �car
veri�cando para grupos diferentes.
Seguem duas propriedades comuns a todos os grupos:

2. Axiomas 11
1)O elemento neutro em um grupo é único.
Demonstração. Suponhamos que e e e′ sejam dois elementos neutros em um grupo (nunca
se viram 3 letras e alinhadas fazendo tanto sentido) . Por um lado temos que ee′ = e′ pois
e é elemento neutro, e por outro temos que ee′ = e pois e′ é elemento neutro, portanto
temos que e = e′.
2)O elemento inverso de cada grupo é único.
Demonstração. Sejam y, z elementos inversos de x em um grupo. Então
y = ey = (pois e é o elemento neutro)
= (zx)y = (pois e é o inverso de x e vice versa)
= z(xy) = (associativa do grupo)
= ze = (como y é o também inverso de x)
= z. (pois e é o elemento neutro).
2.1 Exercícios
2.1) Compare a simetria de um cristal de neve com a simetria da placa hexagonal na
Figura 2.1.
Solução:
Podemos observar que assim como a placa, o cristal possui seis vértices e também, em seu
interior a forma de um hexágono. Desta forma, podemos a�rmar que a simetria obtida
na placa é a mesma observada no cristal de neve.
2.2) Mostre que o conjunto R∗+ munido da operação usual de multiplicação é grupo.
Solução:
Devemos mostrar três propriedades de grupo:
i) Associativa: Sejam x,y e z elementos de R∗+. Como a operação usual de multiplicação
em R é associativa temos que (x.y).z = x.(y.z)
ii) Existência de um elemento neutro: Basta observarmos que 1 ∈ R∗+ e que 1x = x = x1
para todo x ∈ R∗+.
iii) Existência de um elemento inverso para cada x ∈ R∗+: Como todo x ∈ R∗+ é tal
que x > 0 temos então que para cada x o elemento inverso com relação a operação de

2. Axiomas 12
multiplicação é 1x. Basta observarmos que:
x1
x= 1 =
1
xx
Portanto R∗+ é grupo, como queríamos.
2.3) Qual das coleções de matrizes 2 × 2 com entradas reais formam um grupo com a
multiplicação usual de matrizes?
Solução:
(i) Matrizes da forma
[a b
b c
]onde ac 6= b2.
Não constitui um grupo, basta observarmos que o produto das seguintes matrizes
A =
[1 2
2 3
]e B =
[4 5
5 6
]é a matriz D =
[14 17
23 28
]que não pertence ao conjunto
das matrizes da forma (i), ou seja, a operação de multiplicação usual de matrizes neste
conjunto não é fechada.
(ii) Matrizes da forma
[a b
c a
]onde a2 6= bc.
Este conjunto munido da operação de multiplicação usual de matrizes não constitui
um grupo. Basta observarmos que tal operação não é fechada, ou seja, quando oper-
armos dois elementos deste conjunto, podemos obter uma matriz que não seja da forma
acima. Para tanto exibimos o seguinte caso:
Seja A =
[a b
c a
]e B =
[d e
f d
]com a 6= b 6= c 6= d 6= e 6= f 6= 0. Operando A.B
obtemos C =
[ad+ bf ae+ bd
cd+ af ce+ ad
]que não pertence ao conjunto das matrizes da forma
(ii).
(iii) Matrizes da forma
[a b
c d
]onde ad− bc 6= 0.
De fato este conjunto munido da operação de multiplicação usual de matrizes con-
stitui um grupo. Observemos primeiramente que a operação é fechada. Sejam A e B
matrizes satisfazendo det(A) 6= 0 e det(B) 6= 0. Operando A.B obtemos a matriz C.
Como det(C) = det(A.B) = det(A).det(B) 6= 0. Portanto a operação é fechada.
Para associativa sejam A =
[a b
c d
], B =
[e f
g h
],
C =
[j k
l m
]elementos do conjunto descrito em (iii). Operando (A.B).C obtemos a
matriz

2. Axiomas 13
D =
[aej + bgj + afl + bhl aek + bgk + afm+ bhm
cej + dgj + cfl + dhl cek + dgk + cfm+ dhm
].
por outro lado, operando A.(B.C) obtemos a matriz
F =
[aej + afl + bgj + bhl aek + afm+ bgk + bhm
cej + cfl + dgj + dhl cek + cfm+ dgk + dhm
]como as entradas são reais, temos que os números a, b, c, d, e, f, g, h, j, k, l,m comutam
pela operação de multiplicação e também adição dos números reais. Assim temos que
(A.B).C = D = F = A.(B.C) ou seja, a associativa como queríamos.
Para o elemento neutro, basta observarmos que a matriz identidade
I =
[1 0
0 1
]é da forma de (iii) , com a = 1, b = 0 = c e d = 1.
Para o elemento inverso, a condição de que ad − bc 6= 0 nos garante que para cada
matriz A =
[a b
c d
]existirá uma matriz inversa A−1 = 1
det(A)·
[d −b−c a
]tal que
A.A−1 = I = A−1.A onde I é a matriz identidade.
2.4)Seja f uma similaridade do plano. Mostre que f é uma bijeção e que a função
inversa f−1 é também uma similaridade. Veri�que que a coleção de todas as similari-
dades do plano formam um grupo com a operação de composição de funções.
Solução:
De fato, de�nimos a similaridade f : R2 → R2 como f(v) = λv, ∀v ∈ R2 e com λ ∈ R∗+�xo. Aqui o vetor v é interpretado como o vetor que representa um segmento reto, ou
seja, representa o vetor diferença w − u para alguns w, v ∈ R2. Para provarmos que f é
injetora sejam v1, v2 ∈ R2, suponhamos f(v1) = f(v2). Então temos
λv1 = λv2 ⇒ v1 = v2, pois λ > 0
Para provarmos a sobrejeção, seja x ∈ R2, devemos encontrar v ∈ R2 tal que f(v) = x.
Ora, então
λv = x,
como λ > 0 temos que
v =1
λx.
Assim, como f é sobrejetora e injetora temos que f é bijetora.
Para mostrarmos que f−1 : R2 → R2 é também uma similaridade, basta observarmos que
f−1(v) =1
λv,

2. Axiomas 14
como λ > 0 então 1λ> 0 e assim f−1 é também uma similaridade.
Para a segunda parte do exercício, considere agora o conjunto (G, ◦), onde G é o
conjunto de todas as similaridades no plano e ◦ é a operação de composição de funções.
Provemos que (G, ◦) é grupo.Note primeiramente que a operação está bem de�nida, ou seja, é fechada. Sejam f, g ∈ G,com f(v) = av e g(v) = bv ∀v ∈ R2 e a, b ∈ R. Então f ◦ g(v) = a(bv) = (ab)v que é
também uma similaridade.
i) Associativa: Sejam f, g, h ∈ G, tais que f(v) = av, g(v) = bv, h(v) = cv com
a, b, c ∈ R.
f ◦ (g ◦ h)(v) = f(g(h(v))) = f(g(cv)) = f(bcy) =
= abcv = (ab)cv = (ab)h(v) =
= (f ◦ g) ◦ h(v).
ii) Existência do elemento neutro: Basta mostrarmos que a função identidade Id :
R2 → R2 é também uma similaridade. Mas isto é trivial, basta atentarmos que Id(x) = 1x
∀x ∈ G.iii) Elemento inverso: Como provamos que toda similaridade f ∈ G é bijeção, então
existe f−1 também similaridade como provado acima. Basta veri�carmos se f ◦ f−1 =
Id = f−1 ◦ f para todo v ∈ R2.
f ◦ f−1(v) = f(1
λv) = λ
1
λv = v = Id(v).
Por outro lado ,
f−1 ◦ f(v) = f−1(λv) =1
λλv = v = Id(v).
Assim concluímos que (G, ◦) é de fato um grupo.
2.5)Uma função do plano em si mesmo, que preserva a distância entre quaisquer dois
pontos é chamada isometria. Prove que uma isometria deve ser, necessariamente uma
bijeção,e cheque que a coleção de todas as isometrias do plano formam um grupo com a
operação de composição.
Solução:
Consideraremos neste exercício R2 como um espaço vetorial normado. Assim uma isome-
tria no plano, é uma função f : R2 → R2 tal que
||x− y|| = ||f(x)− f(y)|| para quaisquer x, y ∈ R2.
Provemos primeiro que f é injetora: Sejam x, y ∈ R2, suponhamos f(x) = f(y), pela
propriedade de isometria, temos que ||f(x)− f(y)|| = ||x− y|| observe que||f(x)− f(y)|| = 0 assim ||x− y|| = 0 e isto ocorre ⇔ x = y .

2. Axiomas 15
Figura 2.2: Sobrejeção de uma isometria
Para provarmos que f é sobrejetora, sejam A,B ∈ R2, A 6= B, então da injeção temos
que f(A) 6= f(B) e
||A−B|| = ||f(A)− f(B)||.
Seja D ∈ R2(contra-domínio). Considere C ∈ R2, tal que
||A− C|| = ||f(A)−D|| e ||B − C|| = ||f(B)−D||.
Então f(C) = D ou f(C) é simétrico a D em relação ao segmento f(A)f(B). De fato se
nenhuma das duas ocorre, então f não é isometria. Se f(C) = D acabou, caso contrário
seja C simétrico a C em relação a AB. Então f(C) é simétrico aD em relação a f(A)f(B).
Como a segunda não pode ocorrer, f(C) = D. E então temos o resultado. A �gura acima
ilustra tal situação.
Conclusão: Toda isometria no plano é uma bijeção.
Para a segunda parte do exercício, considere (H, ◦) o conjunto de todas as isometrias
no plano munido da operação de composição de funções. Provemos que (H, ◦) é grupo.i) Associativa: Sejam f, g, h ∈ H. Segue do fato de que ◦ é associativa para todas as
funções, em particular as isometrias.
ii) Existência do elemento neutro: Basta mostrarmos que Id : R2 → R2 é também uma
isometria. Mas de fato, basta observarmos que pela própria de�nição de Id temos que:
||Id(x)− Id(y)|| = ||x− y|| para quaisquer x, y ∈ R2.
iii) Existência do elemento inverso em (H, ◦): Provamos primeiramente que toda isometria
é uma bijeção, portanto para cada f ∈ (H, ◦) existe f−1 tal que f ◦ f−1 = Id = f−1 ◦ f .Basta então, mostrarmos que f−1 e também uma isometria. Sejam x, y ∈ R2 tais que
f−1(x) = u e f−1(y) = ventão temos que
||f−1(x)− f−1(y)|| = ||u− v||
como f é isometria temos ainda
||u− v|| = ||f(u)− f(v)|| = ||x− y||

2. Axiomas 16
Observando os extremos das igualdades temos ||f−1(x)− f−1(y)| = ||x− y|| portanto f−1
é uma isometria como queríamos mostrar.
2.6)Mostre que a coleção de todas as rotações do plano em torno da origem formam
um grupo com a operação de composição de funções.
Solução:
Podemos entender uma rotação θ : R2 → R2 como sendo uma mudança de base, cuja
matriz de mudança é
θ =
[cos(θ) −sen(θ)sen(θ) cos(θ)
].
Para 0 ≤ θ ≤ 2π .Observe que a operação de composição ◦ é fechada. Basta observarmos
que
θ ◦ λ =
[cos(θ) −sen(θ)sen(θ) cos(θ)
].
[cos(λ) −sen(λ)sen(λ) cos(λ)
]=
=
[cos(θ + λ) −sen(θ + λ)
sen(θ + λ) cos(θ + λ)
],
que é também uma rotação em torno da origem.
A associativa segue da associatividade da multiplicação de matrizes. Temos que a matriz
identidade é também uma matriz de rotação, basta observar que
Id =
[cos(2π) −sen(2π)sen(2π) cos(2π)
].
Por �m, como cada uma destas matrizes possui determinante diferente de zero, são inver-
síveis, e como no grupo de Lorentz, o inverso de uma matriz de rotação θ, será a rotação
no sentido horário por um argumento de θ com o eixo x. Assim temos
θ−1 =
[cos(−θ) −sen(−θ)sen(−θ) cos(−θ)
].
Com isto, concluímos que o conjunto de rotações do plano com relação a origem constitui
um grupo.
2.7)Sejam x e y elementos de um grupo G. Prove que G contém elementos w, z que
satisfazem wx = y e xz = y. Mostre ainda que estes elementos são únicos
Solução:
Sejam x, y ∈ G. Para mostrarmos a existência de w basta observar que podemos escrever
y da seguinte forma:
y = ye = y(xx−1) = y(x−1x) = (yx−1)x.

2. Axiomas 17
Temos então que w = yx−1.
Para veri�carmos a unicidade de w suponhamos que exista w′ ∈ G tal que
w′x = y, mostremos que w′ = w. Temos então
wx = y = w′x
wx = w′x
(wx)x−1 = (w′x)x−1
w(xx−1) = w′(xx−1)
we = w′e⇔ w = w′.
Mostremos agora a existência de z ∈ G. De modo análogo, podemos escrever y da
seguinte forma
y = ey = (xx−1)y = x(x−1y).
Temos então que z = (x−1y).
Veri�quemos agora a unicidade de z. Suponhamos que existe z′ ∈ G tal que xz′ = y,
mostremos que z′ = z. Para tanto basta observarmos que , se ambos satisfazem a mesma
propriedade então
xz = y = xz′
x−1(xz) = x−1(xz′)
(x−1x)z = (x−1x)z′
ez = ez′ ⇔ z = z′.
como queríamos.
2.8)Se x e y são elementos de um grupo, prove que (xy)−1 = y−1x−1.
Solução:
Para tanto observemos as seguintes igualdades
y−1x−1(xy) = y−1y = e.
Temos então que
y−1x−1(xy) = e.
Operando com (xy)−1 pela direita em ambos os lados da equação acima obtemos
(y−1x−1(xy))(xy)−1 = e(xy)−1
(y−1x−1)((xy)(xy)−1) = (xy)−1
y−1x−1e = (xy)−1
y−1x−1 = (xy)−1.
A última equação nos dá a igualdade procurada.

18
Capítulo 3
Números
Podemos observar que se munirmos cada um dos seguintes conjuntos com a operação de
adição obteremos grupos:
Z, Q, R, C, (∗)
Note que o elemento neutro de todos estes grupos é o zero. A associativa segue da adição,
e os inversos da própria estrutura de cada conjunto. Se munirmos agora os conjuntos
Q− {0}, R− {0}, Q∗+, R∗+, {1,−1}, C− {0}, {±1,±i},
com a operação de multiplicação usual, transformaremos todos eles em grupos onde 1 é o
elemento neutro e 1xé o inverso do elemento x.
Mas note que o processo de se obter um grupo não é tão trivial quanto acima, um
exemplo, é quando tomamos o conjunto dos números inteiros ímpares munido da operação
de soma, este conjunto não é grupo, pois não existe o elemento neutro 0. Outro exem-
plo que merece atenção é quando tomamos o conjunto dos números reais munido com a
multiplicação usual. Note que devemos tirar o 0 pois não existe x ∈ R tal que x.0 = 1,
sendo assim 0 não possui inverso. Note que os reais, racionais , e complexos não nulos,
todos formam grupos se munidos com a operação de multiplicação. Um exemplo que nos
mostra que nem todo conjunto sem o zero munido da operação de multiplicação constitui
um grupo é Z− {0} com a multiplicação. Seja x ∈ Z tal que x.2 = 1⇒ x = 12/∈ Z assim
2 não possui inverso.
Denotamos por C o círculo unitário no plano complexo, ou seja , C consiste dos
números complexos que possuem módulo 1. Munindo C com a multiplicação, temos que
se z, w ∈ C, então |zw| = |z|.|w| = 1 o que mostra que zw ∈ C. O número 1 ∈ C , ele
fará o papel de elemento neutro. Por �m , se z ∈ C então |1z| = 1
|z| = 1 então 1z∈ C assim
cada elemento z possui seu inverso também em C. Assim concluímos que os três axiomas

3. Números 19
de grupo são satisfeitos por C munido da multiplicação, portanto C é um grupo. Note
que não mencionamos a propriedade associativa acima, se aceitarmos que ela vale para
quaisquer três números complexos, em particular valerá para quaisquer três elementos de
C.
Observação 3.1. Note que geralmente a notação mais formal quando nos referimos a
um grupo G por exemplo é (G, .) onde o ponto pode ser substituído pelo caractere que
representa a operação com a qual o conjunto G está munido e o confere o status de grupo.
Por praticidade a utilizaremos somente quando for imprescindível saber qual a operação
de�nida no grupo.
Existe uma propriedade que um grupo pode possuir, está na seguinte de�nição.
De�nição 3.2. Um grupo G é dito comutativo ou abeliano se para quaisquer x, y ∈ Gtemos xy = yx.
Na lista (∗), todos são abelianos, pois x + y = y + x e x.y = y.x para quaisquer x, y
reais ou complexos.
Seja agora n um inteiro positivo. O conjunto 0, 1, 2, . . . , n − 1 pode se tornar um grupo
se o munirmos com a adição módulo n. Se x e y pertencem a este conjunto temos que
x+n y =
{x+ y, 0 ≤ x+ y ≤ n
x+ y − n, x+ y ≥ n
Tal operação atua da seguinte maneira, por exemplo, 5 +6 3 = 8 − 6 = 2. Note que +n
é fechada, ou seja, se operarmos dois números x e y do conjunto, o resultado será ainda
um elemento deste conjunto, pois 0 ≤ x +n y ≤ n + 1. Se tomarmos (x +n y) +n z e
x+n (y +n z) veremos que ambos são iguais a
x+ y + z, se 0 ≤ x+ y + z ≤ n
x+ y + z − n, se n ≤ x+ y + z ≤ 2n
x+ y + z − 2n, se x+ y + z ≥ 2n
Isto nos dá a associativa, note que 0 é o elemento neutro , o inverso de um elemento x 6= 0
é o elemento n− x. Note que este grupo é abeliano pois x+n y = y +n x, assim temos o
grupo abeliano �nito Zn.
Dois números inteiros são ditos congruentes modulo n se eles diferem por um múltiplo
de n. Claramente cada inteiro x é congruente módulo n a exatamente um dos inteiros
0, 1, 2 . . . , n − 1, ou seja, o resto da divisão de x por n. Geralmente utilizamos denotar
por x(mod n) o elemento correspondente a x no conjunto acima. Assim x+n y é apenas
x+ y (mod n).
O conjunto dos inteiros {0, 1, 2, . . . , n − 1} pode também ser munido pela multiplicação

3. Números 20
módulo n
x.ny = xy(mod n).
Por exemplo 5.63 = 3.
Para que o conjunto {0, 1, 2, . . . , n − 1} se torne um grupo com a operação de multipli-
cação módulo n devemos remover o número 0, pois o produto de 0 com qualquer um dos
elementos é 0, se ele estivesse no conjunto teríamos problemas em encontrar seu inverso,
ou seja, um número que multiplicado por zero resulta em 1 que é o elemento neutro desta
operação. Observe que a remoção do número zero não é o bastante. Por exemplo, seja
n = 10 então 2.105 = 0 ou seja, esta operação quando aplicada nos elementos 1, 2, . . . , 9
pode produzir um número inteiro que não está entre 1 e 9. A operação não é fechada,
portanto não temos um grupo.
O conjunto {1, 2, . . . , n − 1} quando munido da multiplicação modulo n constituirá
um grupo apenas quando n for primo. Este resultado está expresso no Exercício 3.10.
A operação de adição módulo n é uma saída rápida e prática para transformarmos tal
conjunto em um grupo. Na verdade ela é um outro caminho para que não seja preciso
de�nirmos relação de equivalência, classes de equivalência e conjunto quociente, que seria
a maneira mais algébrica de construirmos o grupo Zn.
3.1 Exercícios
3.1)Mostre que cada uma das seguintes coleções de números formam um grupo com a
operação de adição.
Solução:
a) Os números inteiros pares.
Primeiro observemos que a operação é fechada, pois a soma de dois números pares é ainda
um número par. Sejam agora x = 2k, y = 2p e z = 2l, com k, l, p ∈ Z.i)Associativa:
(x+ y) + z = (2k + 2p) + 2l = 2k + (2p+ 2l) = x+ (y + z)
a segunda igualdade segue da associativa em Z.ii) Existência do elemento neutro: De fato, 0 é par, pois pode ser escrito como 2(0).
iii) Existência de um elemento inverso para cada inteiro par: Basta observarmos que o
inverso de x = 2p com p ∈ Z é x−1 = 2(−p) pois:
x+ x−1 = 2p+ 2(−p) = 2p− 2p = 0 = −2p+ 2p = 2(−p) + 2(p) = x−1 + x.
b) Todos os números reais da forma a+ b√2 onde a, b ∈ Z.
A associativa segue pois os números desta forma, são, antes de mais nada números reais,
sendo assim a associatividade segue de brinde. Note que o elemento neutro 0 é da forma

3. Números 21
acima, basta tomarmos a = b = 0. Por �m, cada um destes elementos possui inverso,
o inverso de a + b√2 é o número −a + (−b
√2), isto completa nossos argumentos para
provar que tal conjunto é um grupo com a operação de adição.
3.2)Chamaremos Q(√2) o conjunto que possui a mesma característica do descrito no
item b) do Exercício 3.1, mas com a, b ∈ Q. Dado um elemento não-nulo a + b√2 de
Q(√2), exprima 1/(a+ b
√2) na forma c+d
√2, onde c, d ∈ Q. Prove que a multiplicação
torna Q(√2)− {0} em um grupo.
Solução:
Dado a + b√2 6= 0 com a, b ∈ Q, para escrevermos 1/(a + b
√2) na forma c + d
√2 com
a, b ∈ Q, basta observarmos as igualdades
1
a+ b√2· a− b
√2
a−√2
=a− b
√2
a2 + 2b=
a
a2 + 2b+−b
a2 + 2b
√2
basta então escrever c = aa2+2b
e d = −ba2+2b
que obtemos o desejado.
Mostremos agora queQ(√2)−{0}munido da operação de multiplicação usual dos números
reais, forma um grupo:
A associatividade segue dos números reais. O elemento neutro 1 é da forma acima, basta
tomarmos a = 1 e b = 0. O inverso de um elemento a+ b√2, será o elemento que satisfaz
(a+ b√2)(e+ f
√2) = 1. (3.1)
A Equação(3.1) nos diz então que o elemento inverso de a + b√2 é o elemento 1
e+f√2.
Pergunta: Este elemento pertence ao conjunto Q(√2) − {0}? Sim, pela primeira parte
do exercício, temos que ele pode ser escrito na forma c + d√2. Assim concluímos que
Q(√2)− {0} é um grupo pela operação de multiplicação.
3.3)Seja n um inteiro positivo, e seja G o conjunto que consiste de todos os números
complexos z que satisfazem zn = 1. Mostre que G forma um grupo pela operação de
multiplicação dos números complexos.
Solução:
Podemos interpretar os números complexos que satisfazem a igualdade zn = 1 como os
vétices do polígono de n lados inscrito na circunferência de centro na origem e raio 1.
Assim |z| = 1 para todo z que satisfaz a igualdade zn = 1.
Veri�quemos primeiramente que a operação é fechada. Seja x, y ∈ G para veri�carmos que
x.y pertence também a G basta observarmos se (xy)n = 1 para tanto segue a igualdade
(xy)n = xnyn = 1.1 = 1.

3. Números 22
portanto xy ∈ G.i)Associativa: Segue da associatividade da multiplicação dos números complexos.
ii)Exitência de um elemento neutro: Basta observarmos que 1 ∈ G pois 1n = 1 e que
1.z = z = z.1 para todo z ∈ G.iii)Existência de um elemento inverso para cada z ∈ G: Como todo z ∈ G é tal que
|z| = 1 então z 6= 0 para todo z ∈ G. Então o inverso de z, ou seja, z−1 é 1z. Note que
z−1 pertence a G pois
(z−1)n =
(1
z
)n=
1n
zn=
1
1= 1.
Fazendo a seguinte multiplicação
z−1 =1
z· zz=
z
|z|2=z
1= z.
vemos que z−1 = z para todo z ∈ G.Isto mostra que o elemento inverso de z em G é z.
Assim podemos concluir que (G, ·) é de fato um grupo.
3.4)Varie n no exercício anterior e cheque que a união(U) de todos estes grupos
U =∞⋃n=1
{z ∈ C|zn = 1}
munido da operação de multiplicação complexa é também um grupo.
Solução:
Primeiro veri�quemos que a operação de multiplicação de números complexos pertencentes
a U é fechada. Sejam z1, z2 ∈ U , então z1 deve pertencer a algum conjunto tal que zk1 = 1
para algum k ∈ Z. Da mesma forma existe um p ∈ Z tal que zp2 = 1. Para provarmos que
z1z2 ∈ U devemos encontrar j inteiro tal que (z1z2)j = 1. Basta tomarmos j = m.m.c(k, p)
assim j = k.n1 e j = p.n2 como U é abeliano temos
(z1.z2)j = zk.n1
1 .zp.n2
2 = 1n1 .1n2 = 1.1 = 1.
A associatividade segue do fato de que em cada um dos conjuntos ela é válida, e como
a operação em U é fechada, sempre irá valer.
O elemento neutro 1 está presente em todos os conjuntos, assim também em U . O ele-
mento inverso existe em todos os grupos, segue também do fato da operação ser fechada
que qualquer elemento possui seu inverso em U .
Concluímos então que (U, ·) é grupo.
3.5)Seja n um inteiro positivo. Prove que
(x ·n y) ·n z = x ·n (y ·n z),

3. Números 23
para todos x, y, z ∈ Z.Solução:
Basta observarmos que
(x ·n y) ·n z = [xy(mod n)] ·n z(mod n).
Pelas propriedades de congruências módulo n temos que
[xy(mod n)] ·n z(mod n) = (xy)z(mod n) = x(yz)(mod n) = x(mod n) ·n [yz(mod n)] =
= x ·n (y ·n z),
como queríamos.
3.8)Mostre que se um subconjunto A {1, 2, . . . , 21}(*) contém um número par, ou
contém o número 11, então este conjunto não pode formar um grupo com a operação de
multiplicação módulo 22.
Solução:
Observemos o primeiro caso, se um subconjunto possui um número par. Neste caso este
o número par será da forma 2k com k inteiro e 1 ≤ k ≤ 10. Para que este subconjunto
seja um grupo , este elemento deve possuir inverso, ou seja, deve existir um inteiro z com
1 ≤ z ≤ 21 tal que 2k .22 z = 2kz(mod 22) = 1, esta igualdade é equivalente a dizermos
que 22 divide 2kz − 1, ou seja , que 22 divida um número ímpar. Isto não acontece,
portanto tal z não existe, o que impede que o subconjunto com o número par 2k seja um
grupo.
Podemos utilizar o mesmo argumento para mostrar que 11 não possuirá inverso se mu-
nirmos um subconjunto com a operação ·22. Suponhamos que o inverso de 11 seja z com
1 ≤ z ≤ 21 tal que 11 ·22 z = 11z(mod 22) = 1. Equivalentemente devemos ter que
22 divide 11z − 1. Como z é inteiro, temos duas possibilidades, quando z é par, e quando
z é ímpar.
Se z é par, ele é da forma 2k para algum k ∈ Z, assim 11z = 22k pela observação sublin-
hada acima temos que 22 divide 22k − 1, um absurdo.
A segunda possibilidade é quando z é ímpar, portanto tem a forma z = 2k+1 para algum
k ∈ Z. Assim temos que 11z = 22k+11, ainda pela observação sublinhada, temos que 22
divide 22k + 10 um absurdo.
Chegamos então em dois absurdos, o que mostra que um subconjunto do conjunto (*) que
contenha o número 11 munido da operação de multiplicação módulo 22 não pode ser um
grupo.
3.9)Seja p um número primo e seja x um inteiro que satisfaz 1 ≤ x ≤ p− 1. Mostre que
nenhum dos números x, 2x, . . . , (p− 1)x é um múltiplo de p. Deduza a existência de um
inteiro z tal que 1 ≤ z ≤ p− 1 e xz(mod p)= 1.

3. Números 24
Solução:
Para a primeira parte suponhamos que exista k1 ∈ Z com 1 ≤ k1 ≤ p− 1 tal que k1x = lp
para algum l ∈ Z. Sabemos então que p|k1 ou p|x, pois p é primo, mas isto é um absurdo,
pois ambos são inteiros menores do que p.
A segunda parte pode ser interpretada como a propriedade do elemento inverso no grupo
Zp. Queremos mostrar então a existência de um inteiro z com 1 ≤ z ≤ p − 1 com
xz(mod p) = 1. Como 1 ≤ x ≤ p − 1, temos que mdc(x, p) = 1 logo existem n1, n2, tais
que
n1x+ n2p = 1
n1x− 1 = −n2p
n1x(mod p) = 1.
Note que n1 6= p. Se n1 > p temos que
n1 = kp+ r
onde r < p, assim basta tomarmos r = z. Se n1 < 0 e n1 < p, basta utilzarmos a mesma
idéia e tomarmos r = z novamente. Isto conclui nossa prova.
3.10)Usando os resultados dos exercícios 3.5 e 3.9 veri�que que a multiplicação módulo
n faz o conjunto {1, 2, . . . , n − 1} se tornar um grupo se n é primo. O que acontece de
errado quando n não é um número primo?
Solução:
A propriedade associativa segue do Exercício 3.5, o elemento neutro claramente é 1, e o
elemento inverso de cada um dos elementos do conjunto foi encontrado no Exercício 3.9.
Quanto a pergunta sobre o que acontece no caso em que n não é primo, o problema é
que existem divisores de n que estão no conjunto {1, 2, . . . , n− 1}. Suponhamos ser l tal
divisor. Então n = lm, como m também divide n, temos m, l ∈ {1, 2, . . . , p−1} operando
l ·n m = 0
acabamos caindo no fato da operação não ser fechada, impedindo então o conjunto de ser
um grupo com a operação de multiplicação módulo n.

25
Capítulo 4
Grupos Diedrais
Introduzimos anteriormente uma �gura geométrica que chamamos de placa hexagonal.
Encontramos ao total 12 simetrias rotacionais. A indagação que pode aparecer é se existe
algum resultado mais geral, ou seja, que esta simetrias possam ser observadas em �guras
com a mesma estrutura que a placa, mas que contenham mais lados.A resposta para esta
pergunta é que para cada inteiro n positivo, igual ou maior a 3 podemos produzir uma
placa que possui n lados iguais.
Figura 4.1: Placa triagonal.[1]
Desta forma , produzimos uma família de grupos de simetria que não são abelianos.
Os grupos de simetria associados a cada placa de n lados iguais são os chamados Grupos
Diedrais.
Quando temos n = 3 temos uma placa triangular que possui 6 simetrias rotacionais,
geradas pelos eixos do tipo M , N e pelo central. Podemos fazer uma lista com tais
simetrias
e, r, r2, s, rs, r2s (∗)

4. Grupos Diedrais 26
Note que todos os elementos desta lista são combinações de r e s. O elemento r2 por
exemplo, representa a composição rr, já o elemento rs representa a composição de r e
s , onde s é aplicado primeiramente e em seguida r. Note que a simetria identidade é
representada pela letra e, que pode ser obtida de r3 e s2. estes são na verdade os elementos
do grupo D3, ou seja, o grupo diedral da placa de 3 lados iguais.
Estes seis elementos se combinados nos fornecerão ainda um elemento da lista (∗), uma
observação que pode surgir é que em nossa lista (∗) não existem elementos da forma sri,
isto se deve ao fato de conseguirmos sempre, em um grupo diedral obter a relação sri =
rn−is para todo 0 ≤ i ≤ n. Tal a�rmação será provada no Exercício 4.1. Geometricamente
podemos conferir em nossa placa triangular que sr = r2s através da seguinte �gura que
mostra a visão de cima da placa: A partir disto, podemos realizar algumas manipulações
Figura 4.2: r e s aplicadas na placa triangular.[1]
algébricas , por exemplo mostrar que sr2 = rs:
sr2 = s(rr) = (sr)r = (r2s)r = r2(sr) =
= r2(r2s) = r4s = r3(rs) = e(rs) = rs.
Realizando observações geométricas concluímos que r3 = e,s2 = e e sr = r2s, a partir
disto, mostraremos no seguinte exemplo que qualquer produto realizado entre elementos
da lista (∗) nos fornece ainda um elemento da lista .
r(r2s) = r3s = es = s.
(r2s)(rs) = r2(s(rs)) = r2((sr)s) = r2((r2s)s) =
= r2(r2s2) = r4s2 = re = r.
Ao manipularmos algebricamente os produtos entre estes elementos, usamos a lei as-
sociativa indiscriminadamente. Ou seja, estamos dizendo que os parênteses, quando ope-
ramos elementos de um grupo diedral, não fazem sentido.

4. Grupos Diedrais 27
Teorema 4.1. Sejam x1, x2, . . . , xn elementos de um grupo , a propriedade associativa é
válida para quaisquer produtos de k destes elementos com 1 ≤ k ≤ n− 1.
Proposição 4.2. Se x e y são elementos de um grupo, então (xy)−1 = y−1x−1.
Demonstração.
xyy−1x−1 = xex−1 = xx−1 = e,
assim como y−1x−1xy = e.
Proposição 4.3. Se x1, . . . , xn são elementos de um grupo então
(x1, x2 . . . xn)−1 = x−1n x−12 . . . x−12 x−11 .
Demonstração. Basta observarmos que
x1, x2 . . . xnx−1n x−1n−1 . . . x
−12 x−11 = e.
E também
x−1n x−1n−1 . . . x−12 x−11 x1, x2 . . . xn = e.
E nossa prova está completa.
Escreveremos xm para um elemento que é um produto de m cópias de x,e x−n para
o elemento que é o produto de n cópias de x−1. Assim temos que xmxn = xm+n e
(xm)n = xmn, para quaisquer inteiros m e n. Denotaremos x0 = e. Abaixo exibimos o
que é chamada tábua de multiplicação de D3, que exibe as 36 possibilidades de produtos
xy com x, y ∈ D3
e r r2 s rs r2s
e e r r2 s rs r2s
r r r2 e sr s rs
r2 r2 e r rs r2s s
s s rs r2s e r r2
rs rs s r2 s e r
r2s r2s s rs r r2 e
Tabela 4.1: Tábua de multiplicação de D3.
Nesta tábua, o produto xy, é o elemento presente na intersecção da coluna x com a linha
y. Esta estrutura de tábua pode ser construída para qualquer grupo diedral (ou �nito),
observe que cada elemento do grupo aparece uma vez em cada linha e também exatamente
uma vez em cada coluna, esta característa estará presente também em qualquer tábua de

4. Grupos Diedrais 28
um grupo. Em particular, podemos observar que o elemento neutro aparece apenas uma
vez em cada linha, o que nos evindencia que o inverso de cada elemento é único.
4.1 O grupo Dn
Formalizando a estrutura que foi explorada acima, podemos então de�nir O grupo
diedral Dn, ele é o grupo de simetria rotacional da placa com n lados iguais. Seus
elementos possuem as mesmas caracteríscas que os elementos de D3. Seja r a rotação de
2π/n em torno do eixo perpendicular a placa passando pelo centro, e s a rotação de π
em torno dos eixos de simetria que atravessam o plano da placa , como N e M . Assim os
elementos de de Dn são
e, r, r2, . . . , rn−1, s, rs, r2s, . . . , rn−1s.
Claramente rn = e , s2 = e e a propriedade sri = rn−is para 0 ≤ i ≤ n também se faz
válida. Todos os produtos de elementos de Dn podem ser manipulados utilizando estes
fatos. Então um elemento deste grupo terá uma destas duas formas: ra ou ras onde
0 ≤ a ≤ n− 1, temos então
rarb = rk
ra(rbs) = rks
}onde k = a+n b,
(ras)rb = rls
(ras)(rbs) = rls
}onde l = a+n (n− b),
Assim temos que todos os elementos são produtos da forma rjsi com 1 ≤ j ≤ n − 1,
0 ≤ i ≤ 1 quando isto acontece, dizemos que r e s geram Dn.
De�nição 4.4. A ordem de um grupo �nito, é o número de elementos que o grupo
possui, ou seja, sua cardinalidade. Um grupo que possu in�nitos elementos é dito de
ordem in�nita. Geralmente utilizamos a notação |G| para a ordem de G.
De�nição 4.5. Se x ∈ G e se xn = e para algum n inteiro positivo, dizemos que x possui
ordem �nita, e o menor m tal que xm = e é dita a ordem de x. Se tal m não existe,
dizemos que x possui ordem in�nita.
Abaixo temos alguns exemplos:
1. A ordem de D3 é seis. Existem dois elementos de ordem três r, r2 e três elementos
de ordem dois s, rs, r2s
2. A ordem de Z6 é também seis. Os elementos 1 e 5 possuem ambos ordem seis,2 e 4
possuem ordem três, e 3 possui ordem dois.

4. Grupos Diedrais 29
3. R possui ordem in�nita, e todo elemento (exceto o 0) possui também ordem in�nita,
pois se adicionando repetidamente um número real a ele mesmo, nunca obteremos
0, a menos é claro que o número seja zero.
4. C o círculo unitário no plano complexo, transformado em um grupo após ser munido
pela multiplicação de números complexos é um grupo de ordem in�nita. Este grupo
possui elementos de ordem �nita e também de ordem in�nita. Um elemento típico
de C, é da forma eiθ possui ordem �nita precisamente quando θ é um múltiplo
racional de 2π, isto é, θ = 2mπn
para alguns inteiros m e n.
4.2 Exercícios
4.1)Trabalhe com a tábua de multiplicação do grupo diedral D4. Quantos elementos de
ordem 2 existem em Dn?
Solução:
A tábua de multiplicação em D4 é a seguinte:
· e r r2 r3 s rs r2s r3s
e e r r2 r3 s rs r2s r3s
r r r2 r3 e r3s s rs r2s
r2 r2 r3 e r r2s r3s s rs
r3 r3 e r r2 rs r2s rs s
s s r3s r2s r3s e r r2 r3
rs rs s r3s s r3 e r r2
r2s r2s rs s rs r2 r3s e r
r3s r3s r2s s r2s r r2s r3 e
Tabela 4.2: Tábua de multiplicação de D4
Primeiro temos que observar que a propriedade sri = rn−is é válida para quaisquer
inteiros n ≥ 3 e 0 ≤ i ≤ n para os elementos de Dn.
Faremos a prova por indução. Para n = 3 sabemos geometricamente que sri = r3−is
é válida para 0 ≤ i ≤ 3. Assumiremos como hipótese de indução válido para n − 1 e
provaremos para n. Temos então sri = rn−is operando com r em ambos os lados obtemos
srir = rn−isr = rn−irn−1s = rn−irn−1s =
= rnrn−1−is = ern−1−is =
= rn−(i+1)s.
Olhando para o primeiro e o último termo obtemos a igualdade procurada
sri+1 = rn−(i+1)s, ou seja a propriedade é válida para n arbitrário e para 1 ≤ i + 1 ≤ n,

4. Grupos Diedrais 30
para i = 0 é trivial. �ca assim demonstrada a propriedade.
Para a segunda parte, sobre a quantidade de elementos de ordem dois em Dn teremos que
dividir o problema em dois casos, quando n é par e quando n é ímpar.
Quando n é par existe um número p ∈ Z tal que p = n2, assim a potência rp possui ordem
dois, pois
(rp)(rp) = (rn2 )(r
n2 ) = r
n+n2 = rn = e.
Se n é ímpar não existe tal p, então nenhuma potência de r possui ordem dois. Mas, por
outro lado, independente de n ímpar ou par, todo elemento da forma ris, 1 ≤ i ≤ n − 1
possui ordem dois, pois
(ris)(ris) = rirn−iss = rne = ee = e.
Assim podemos concluir que : Quando n é par, teremos n + 1 elementos de ordem dois,
se n ímpar teremos apenas n elementos de ordem dois em Dn.
4.2)Encontre a ordem de cada elemento de Z5 e Z9.
Solução:
Exibamos os elementos de Z5 = {0, 1, 2, 3, 4} e de Z9 = {0, 1, 2, 3, 4, 5, 6, 7, 8}. Estamos
considerando a operação +5 em Z5 e +9 em Z9. Assim temos as seguintes tabelas
Elemento de Z5 ordem0 11 52 53 54 5
Tabela 4.3: Ordem dos elementos em Z5.
Elemento de Z9 ordem
0 1
1 9
2 9
3 3
4 6
5 9
6 3
7 9
8 9

4. Grupos Diedrais 31
Tabela 4.4: Ordem dos elementos em Z9
4.3)Cheque que os inteiros 1, 2, 4, 7, 8, 11, 13, 14 formam um grupo com a multiplicação
módulo 15. Trabalhe com a tábua de multiplicação gerada neste conjunto e encontre a
ordem de cada elemento.
Solução:
A propriedade associativa segue do Exercício 3.5, o elemento neutro claramente é 1, basta
exibirmos os inversos de cada elemento. Basta observarmos que o inverso de um elemento
x deste conjunto é o fator que quando multiplicado por x resulta em um número que é
congruente módulo 15 a 1. Assim temos a seguinte tabela
x 1 2 4 7 8 11 13 14
x−1 1 8 4 13 2 11 7 14
Tabela 4.5: Inversos de cada elemento
A ordem de cada elemento é descrita pela tabela
x 1 2 4 7 8 11 13 14
Ordem 1 4 2 4 4 2 4 2
Tabela 4.6: Ordem de cada elemento
4.4) Seja g um elemento de um grupo G. Mantenha g �xo e deixe x variar por G. Prove
que os produtos gx são distintos e preenchem G.
Solução:
Suponhamos por absurdo que existam dois produtos gx e gx′ iguais com x e x′ distintos.
Temos então
gx = gx′ =
(g−1g)x = (g−1g)x′ = ( operando com o inverso de g)
x = x′.
Os produtos preenchem G pois a operação em G é fechada, assim , gx ∈ G para todo
x ∈ G , como já provamos que estes produtos são distintos para x distintos , temos então

4. Grupos Diedrais 32
que os produtos de fato preenchem G.
4.5) Um elemento x de um grupo satisfaz x2 = e precisamente quando x = x−1. Use
esta observação para mostrar que um grupo de ordem par deve conter um número ímpar
de elementos de ordem 2.
Solução:
Suponhamos por absurdo que um grupo G de ordem par contém um número par de ele-
mentos com ordem 2.
Seja n a ordem de um grupo G, e
e, x1, x2, . . . , xn−1,
os elementos de G, onde e representa o elemento neutro.
Temos que analisar especi�camente a ordem dos elementos x1, . . . , xn−1. Note que como
n é par , esta quantidade de elementos é uma quantidade ímpar.
e, x1, x2, . . . , xn−1︸ ︷︷ ︸quantidade ímpar
Como supomos que existe uma quantidade par de elementos de ordem 2, uma quantidade
par destes elementos marcados possui ordem 2. Retirando os elementos que possuem or-
dem 2 desta quantidade ímpar, nos resta ainda uma quantidade ímpar de elementos que
não possuem ordem 2, ou seja são os elementos que veri�cam x 6= x−1. Como cada um
destes elementos de ordem diferente de 2 deve possuir seu inverso, deveríamos ter uma
quantidade par, mas isto não acontece. Assim, chegamos em um absurdo e o exercício
está completo.
4.6)Se x, y são elementos de um grupo G, e se todos os seguintes elmentos x, y e xy
possuem ordem 2, prove que xy = yx.
Solução:
Como os três elementos possuem ordem 2 temos as seguintes equações
x = x−1 (4.1)
y = y−1 (4.2)
xy = (xy)−1 = y−1x−1. (4.3)
Temos então pela Equação( 4.3) que
(xy)(xy) = e
xy = y−1x−1e.
Pelas duas primeiras equações aplicadas na anterior temos �nalmente que xy = yx como

4. Grupos Diedrais 33
queríamos.
4.8)Sejam x e g elementos de um grupo G. Mostre que x e gxg−1 possuem a mesma
ordem. Prove também que xy e yx possuem a mesma ordem para quaisquer x, y ∈ G.Solução:
Suponhamos que x e gxg−1 possuem respectivamente ordens �nitas n e n′, nosso intento
é mostrar que n = n′. Para tanto observemos que
(gxg−1)n′
= (gxg−1)(gxg−1) . . . (gxg−1)(gxg−1)︸ ︷︷ ︸n′ vezes
=
= gx2g−1gx2g−1 . . . gx2g−1gx2g−1 =
= gx4g−1 . . . gx4g−1 =
= gxn′g−1.
Como a ordem de gxg−1 é n′ temos que
gxn′g−1 = e. (4.4)
Note também que xn = e, substituindo esta equação em 4.4 temos
gxn′g−1 = xn,
operando com g e g−1 pela esquerda e depois pela direita temos
xn′= xn ⇔ n′ = n
o que conclui a primeira parte. Para mostrarmos que xy e yx possuem a mesma ordem,
suponhamos que xy tenha ordem k, mostraremos que yx também possui ordem k, ou seja
queremos mostrar que (yx)k = e. Para tanto basta observarmos as seguintes igualdades
(xy)k = xyxy . . . xyxy
= x(yxyxyx . . . yxyx)y =
= x(yx)k−1y.
Como a ordem de xy é k temos que
x(yx)k−1y = e. (4.5)

4. Grupos Diedrais 34
Trabalhando na Equação (4.5) obtemos
x(yx)k−1y = e
x(yx)k(yx)−1y = e
x(yx)kx−1y−1y = e (pois (yx)−1 = x−1y−1)
x(yx)kx−1 = e
x(yx)k = ex (operando com x pela direita)
(yx)k = x−1x = e. (operando com x−1 pela esquerda)
A última igualdade é a procurada.
4.9)Cheque que as matrizes 2× 2[a b
c d
]onde a, b, c, d ∈ Z e ad− bc = 1
formam um grupo pela operação de multiplicação usual de matrizes. Sejam ainda
A =
[0 −11 0
], B =
[0 1
−1 −1
]encontre as ordens de A, B e AB.
Solução:
Para mostrarmos que o conjunto de tais matrizes formam um grupo basta atentarmos que
a propriedade associativa segue da multiplicação usual de matrizes, a matriz identidade
satisfaz ad − bc = 1 pois a = 1, b = 0, c = 0 e d = 1, assim temos o elemento neutro. A
igualdade ad − bc = 1 nos diz que o determinante destas matrizes é sempre diferente de
zero, assim o inverso de uma matriz A será a matriz A−1 = 1det(A)
.
[d −b−c a
]. Para a
segunda parte segue que :
A2 =
[−1 0
0 −1
], A3 =
[0 1
−1 0
], A4 =
[1 0
0 1
]
Assim veri�camos que a ordem de A é 4.
B2 =
[−1 −11 0
], B3 =
[1 0
0 1
]Assim concluímos que a ordem de B é 3.
A matriz AB possui ordem in�nita, ou seja, não existe um inteiro m tal que (AB)m =
e = Id.

4. Grupos Diedrais 35
4.10)Lei associativa geral. Seja G um grupo por meio de indução mostrar que
os produtos x1, x2, . . . , xk de elementos de G sempre fazem sentido sem nenhum parên-
teses quando 1 ≤ k ≤ n − 1. Devemos veri�car que um produto arbitrário x1, . . . , xn
de comprimento n está tão bem de�nido independente da forma em que quebramos este
produto através dos parênteses. Suponhamos combinar estes elementos em duas maneiras
diferentes, de forma que as multiplicações �nais nos dois procedimentos são
(x1x2 · · · xr)(xr+1 · · ·xn), (1)
(x1x2 · · · xs)(xs+1 · · ·xn), (2)
onde 1 ≤ r < s ≤ n−1. Estes termos dentro dos parênteses fazem sentido devido a nossa
hipótese de indução. Escrevendo (1) como
(x1x2 · · ·xr)[(xr+1 · · ·xs)(xs+1 · · ·xn)]
expresse (2) de maneira similar , e use a lei associativa para três elementos para terminar
o argumento.
Solução:
Temos então, mais claramente
(x1x2 · · ·xn) = (x1x2 · · · xr) (xr+1 · · ·xn)︸ ︷︷ ︸aplicando a H.I.
= (x1x2 · · ·xr) [(xr+1 · · ·xs)(xs+1 · · ·xn)].
Por outro lado temos que
(x1x2 · · ·xn) = (x1x2 · · ·xs)︸ ︷︷ ︸aplicando a H.I.
(xs+1 · · ·xn)
= [(x1x2 · · ·xr)(xr+1 · · ·xs)] (xs+1 · · ·xn).
Por �m utilizamos a lei associativa para três elementos e mostramos que
[(x1x2 · · ·xr)(xr+1 · · · xs)] (xs+1 · · · xn) = (x1x2 · · ·xr) [(xr+1 · · ·xs)(xs+1 · · ·xn)].

36
Capítulo 5
Subgrupos e Geradores
Retomando a noção de grupo diedral, tomemos os seguintes elementos de D6
e, r2, r4s, r2s, r4s
o subconjunto de D6 que contém estes elementos, se munido da operação de composição,
ou seja, a mesma de D6 constitui um grupo. Isto é fácil de ser veri�cado. O produto de
dois elementos desta lista é ainda um deles, o elemento neutro e também está presente, e
como
e−1 = e, (r2)−1 = r4, (r4)−1 = r2, s−1 = s, (r2s)−1 = r2s, (r4s)−1 = r4s,
temos que todos os inversos de cada elemento deste conjunto também pertencem a este
conjunto. Se olharmos para a �gura abaixo veremos que estes elementos formam o grupo
de simetria rotacional do triângulo inscrito no hexágono. Então, acabamos de obter uma
cópia de D3 dentro de D6, neste caso, ele será visto como um subgrupo de D6.
Figura 5.1: Placa hexagonal com triangular inscrita [1]
De�nição 5.1. Um subgrupo de um grupo G, é um subconjunto de G que por si só
constitui um grupo com a mesma operação de G.

5. Subgrupos e Geradores 37
Suponhamos que H ⊂ G, queremos saber quando H é um subgrupo ou não de G.
Precisamos então responder apenas a três questões.
1. Dados x, y ∈ H, o produto xy pertence também a H?
2. O elemento neutro de G pertence também a H?
3. Cada elemento de H certamente possui inverso, mas será que este inverso pertence
a H?
Se as respostas a estas três perguntas forem um sonoro "sim", então de fato H é um
subgrupo de G. Note que não é necessário que chequemos a associativa, pois os elementos
de H são antes de tudo, elementos de G, como G é grupo, a associativa é válida. Quando
H é subgrupo de G utilizamos a notação H < G.
Exemplo 5.2. Os elementos e, r, r2, r3, r4, r5 formam um subgrupo de D6. Este
subgrupo consiste das rotações que deixam a placa com a mesma face virada para cima.
O exemplo acima pode ser generalizado como segue :
Teorema 5.3. Dado um grupo G e um elemento x de G, o conjunto de todas as potências
de x é um subgrupo de G.
Demonstração. Para a prova, basta respondermos as três perguntas. Note que dados xm
e xn potências de x , temos que xmxn = xm+n que é também uma potência de x. O
elemento neutro é também uma potência de x, no caso, x0. E por �m, o inverso de uma
potência xk é a potência x−k o que conclui nossa demosntração.
O subgrupo gerado pelo elemento x é geralmente denotado por 〈x〉. Se x possui ordem
in�nita, então 〈x〉 consiste dos elementos . . . x−2, x−1, e, x, x2, x3, . . . Se x possui ordem
�nita, digamos m, os elementos de 〈x〉 são e, x, x2, . . . , xm−1. Então concluímos que a
ordem de x é exatamente a ordem do subgrupo gerado por x. Temos um caso
especial, que será apresentado pela seguinte de�nição.
De�nição 5.4. Seja G um grupo, se existe um elemento x ∈ G tal que 〈x〉 = G, dizemos
que G é um grupo cíclico.
Exemplo 5.5. O grupo Z é cíclico (relembrando que neste caso Z está munido da operação
de adição), gerado por 1, ou −1. Isto segue do fato de que qualquer elemento em Z pode
ser escrito como uma potência de 1, lembrando que o termo potência pode ser utilizado
neste contexto, pois para nós a operação em um grupo é de�nida como multiplicação, por
exemplo 4 = 1 + 1 + 1 + 1 = 14.
Exemplo 5.6. O número 1 gera Zn, assim Zn é cíclico de ordem n. Pois a ordem de 1
em Zn é n.

5. Subgrupos e Geradores 38
Exemplo 5.7. Em Z6 temos
〈0〉 = {0}
〈1〉 = 〈5〉 = Z6
〈2〉 = 〈4〉 = {0, 2, 4}
〈3〉 = {0, 3}
Por exemplo, os elmentos de 〈4〉 são 4, 4 +6 4 = 2,e 4 +6 4 +6 4 = 0.
Exemplo 5.8. Em D3 temos
〈e〉 = {0}
〈r〉 = 〈r2〉 = {e, r, r2}
〈s〉 = {e, s}
〈rs〉 = {e, rs}
〈r2s〉 = {e, r2, s}
5.1 Geradores
O grupo diedral Dn não é cíclico, mas cada um de seus elementos pode ser escrito em
termos de r e s, dizemos assim que r e s geram Dn
De�nição 5.9. Seja X um subconjunto não vazio de um grupo G. Uma expressão da
forma
xm11 xm2
2 xm33 . . . xmk
k (∗)
onde xi ∈ X para 1 ≤ i ≤ k, não necessariamente distintos, com inteirosmi com 1 ≤ i ≤ k
é chamada uma palavra nos elementos de X.
Proposição 5.10. A coleção de todas estas palavras é um subgrupo de G.
Demonstração. Note que o produto de duas palavras é ainda uma palavra, o elemento
neutro e é a palavra x0. O inverso da palavra
xm11 xm2
2 xm33 . . . xmk
k é x−mkk x
−mk−1
k−1 . . . x−m22 x−m1
1
que é também uma palavra.
Este subgrupo é chamado de subgrupo gerado por X. Se esta coleção preenche todo
o G, dizemos que X é um conjunto de geradores para G, ou que os elementos de X
juntos geram G.

5. Subgrupos e Geradores 39
Observação 5.11. Suponha que X é um conjunto de geradores para G e Y um outro
subconjunto de G. Então se Y contém X, temos que todo elemento de X pode ser escrito
como uma palavra composta por elementos de Y , então Y é um conjunto de geradores
para G.
Exemplo 5.12. r e s geram Dn. Note que r e s não são os únicos geradores de Dn,
por exemplo, rs e s juntos geram Dn pois r = (rs)s e então toda palavra em r pode ser
convertida em uma palavra em termos de rs e s.
Exemplo 5.13. Seja G o conjunto de funções reais que preservam distância e levam
inteiros em inteiros. Então G é um grupo com a operação de composição de funções.
Pelo Exercício 5.9 , este grupo é composto por, translações para a direita ou esquerda
por uma distância inteira, re�exões em um número inteiro ou uma re�exão em um ponto
que está entre dois inteiros. Seja t uma translação para a direita de uma unidade, então
t(x) = x + 1, e seja s a re�exão na origem, então s(x) = −x. Então os elementos de G
são
. . . , t−2, t−1, e, t, t2, . . .
. . . t−2s, t−1s, s, ts, t2s, . . . (∗∗)onde e é a função identidade. Por exemplo, t−2(x) = x − 2, mostrando que t−2 é uma
translação para a esquerda por duas unidades, e ts(x) = t(−x) = −x+ 1, mostrando que
ts é a re�exão no ponto 12. A translação t e a re�exão s juntas geram G. Assim como as
duas re�exões ts e s também geram G. Note que
st(x) = s(x+ 1) = −x− 1
e
t−1s(x) = t−1(−x) = −x− 1,
o que implica que st = t−1s, sabendo que s2 = e e st = t−1s , conseguimos multiplicar
quaisquer dois elementos da lista (∗∗) e manipular o produto para tenha a mesma forma.
Este último exemplo nos lembra muito o grupo Dn. A diferença é que a rotação r de
ordem n foi trocada pela translação t de ordem in�nita. Por esta razão, chamamos G o
grupo diedral in�nito e o denotamos por D∞. Apresentamos por �m, dois teoremas
muito úteis sobre subgrupos.
Teorema 5.14. Um subconjunto H de um grupo G é um subgrupo de G se, e somente
se, xy−1 pertence H sempre que x e y pertencem a H.
Demonstração. (⇒) Se H é um subgrupo de G, e x, y ∈ H, sabemos que y−1 deve estar
em H, assim como o produto xy−1 também deve pertencer a H, pois a operação é fechada

5. Subgrupos e Geradores 40
em H.
(⇐) Suponhamos que H seja um subconjunto não-vazio de G, e que xy−1 ∈ H sempre que
x, y ∈ H. Se x ∈ H, então e = xx−1 ∈ H, e x−1 = ex−1 ∈ H. Por �m, se y ∈ H, então
y−1 ∈ H pelo mesmo argumento utilizado acima para x−1, assim xy = x(y−1)−1 ∈ H.
Portanto, H é um subgrupo de G.
Teorema 5.15. A intersecção de dois subgrupos de um grupo é por si própria um sub-
grupo.
Demonstração. Sejam H e K subgrupos do grupo G. O elemento neutro pertence a
ambos, portanto a intersecção H ∩K é não vazia. Se x e y são elementos da intersecção
H ∩ K, são ambos elementos de H e K. Como H,K são subgrupos, o produto xy−1
pertence a H e K. Portanto xy−1 ∈ H ∩K pelo Teorema 5.14 temos que a intersecção
H ∩K é de fato um subgrupo.
Teorema 5.16. (a) Todo subgrupo de Z é cíclico.
(b)Mais geralmente, todo subgrupo de um grupo cíclico é também cíclico.
Demonstração. Parte (a) Seja H um subgrupo de Z. Se H = {0} então H é cíclico.
Se H 6= {0}, então H contém um inteiro não nulo x, como H é subgrupo, deve conter o
elemento x−1 = −x. Então H contém um inteiro positivo. Seja d o menor inteiro positivo
em H. A�rmamos que d gera H. Se n ∈ H, divida n por d, para obter n = qd+m onde
q e m são inteiros e 0 ≤ m ≤ d. Em outras palavras, m = n(mod d). Sabemos que n ∈ He d ∈ H. Como H é um subgrupo qd ∈ H, portanto −qd ∈ H, assim
m = n− qd = n+ (−qd)
pertence a H. Isto contradiz nossa escolha de d a menos que m seja zero. Consequente-
mente n = qd, o que mostra que cada elemento de H é um inteiro múltiplo de d, ou seja
d gera H como queríamos.
Demonstração. Parte (b) Seja G um grupo cíclico e K um subgrupo de G diferente do
subgrupo trivial {e}. Se x é um gerador para G, então todo elemento de G, e conse-
quentemente, todo elemento de K é uma potência de x. Seja H = {n ∈ Z | xn ∈ K}. Étrivial o fato de que H é um subgrupo de Z. A soma de dois elementos de H é também
um número inteiro, zero pertence a H pois x0 = e que pertence a K, e se n pertence a H,
−n também pertence a H, pois o inverso de xn é x−n. Assim por (a), H é cíclico e , se d
gera H, então xd gera K. O que completa nossa prova.
5.2 Exercícios
5.1)Encontre todos os subgrupos de Z4, Z7 e Z12
Solução:

5. Subgrupos e Geradores 41
Omitiremos de cada coleção de subgrupos os subgrupos triviais {0} e também omitiremos
o próprio grupo. Assim em Z4 temos apenas um subgrupo,
{0, 2}.
Para Z7 não temos nenhum subgrupo não trivial e diferente dele próprio. Para Z12 temos
{0, 6}, {0, 2, 4, 6, 8, 10}, {0, 4, 8}, {0, 3, 9, 6}.
5.2)Se m e n são inteiros positivos, e se m é um divisor de n, mostre que Zn contém
um subgrupo de ordem m. O grupo Zn contém mais de um subgrupo de ordem m?
Solução:
Se m divide n então existe k ∈ Z com 1 ≤ k ≤ n−1 tal que n = mk. Tomemos o conjunto
gerado por k. A�rmamos que H = 〈k〉 é um subgrupo de Zn de ordem m.
A operação de�nida em H é a mesma que em Zn, ou seja, a operação +n. É trivial que a
operação é fechada em H pois quaisquer dois elementos de H quando operados, resultam
ainda em um mútiplo de k.
O elemento neutro de H é também o mesmo de Zn, 0 ∈ H pois
0 = k + . . .+ k︸ ︷︷ ︸m vezes
Quanto a existência de um elemento inverso para cada elemento de H basta observarmos
que o oposto de
x = (k + . . .+ k)︸ ︷︷ ︸p vezes
é
x−1 = (k + . . .+ k)︸ ︷︷ ︸m−p vezes
pois ao operarmos tanto pela direita quanto pela esquerda com o elemento x−1 em x,
teremos o elemento neutro e.
Note que H é cíclico, portanto sua ordem é a ordem do elemento que o gerou, neste
caso, k, desta forma a ordem de H é m como queríamos. Quanto a pergunta se este é o
único subgrupo de Zn de ordem m a resposta é a�rmativa, pois, pelo algoritmo da divisão
euclidiana, o quociente k = nm
é único, ou seja, só existe tal k que faz com que o único
subgrupo de Zn com ordem m seja 〈k〉.
5.3)Com a notação do Capítulo 4, cheque que rs e r2s juntos geram Dn.
Solução:
Como qualquer elemento de Dn é obtido a partir de produtos entre r e s, basta mostrar-
mos que a partir de rs e r2s podemos obter r e s. Para tanto observe que podemos obter

5. Subgrupos e Geradores 42
s através dos seguintes produtos respectivamente
rs(r2s)rs = rrn−2ssrs = rn−1ers = rnr−1rs = er−1+1s = es = s
Obtemos então a seguinte equação
rs(r2s)rs = s. (5.1)
Da mesma forma obtemos r por
r2s(rs) = r2rn−1ss = rnree = er = r,
isto é
r2s(rs) = r. (5.2)
5.4)Encontre um subgrupo de Dn gerado por r2 e r2s, distinguindo cuidadosamente os
casos em que n é par e em que n é ímpar.
Solução:
Denotemos por G tal subgrupo de Dn. Abordemos o primeiro caso em que n é par. Como
vimos no Exercício 4.1 quando n é par existe um p ∈ Z tal que p = n2temos então que r2
possui ordem p, com isto garantimos em nosso subgrupo as potências
r2 , r4 , r6 . . . , r2p−4 , r2p−2.
Garantimos também s pois o inverso de r2, rn−2 também pertence a G, assim operando
rn−2r2s obtemos s. Daqui podemos garantir todas as seguintes potências
r2s, r4s, r6s, . . . , r2p−2s.
Mas não existe mais elementos além destes, pois, como n é par, qualquer produto entre
elementos da forma ras com elementos da mesma forma, ou nos fornecem potências pares
de r ou o elemento s. O elemento neutro claramente pertence a este grupo porque s2 = e.
Estes são os elementos do subgrupo gerado por r2 e r2s quando n é par.
Para o caso em que n é ímpar, suponhamos n da forma n = 2k + 1 para algum k ∈ Z+.
Podemos garangir a priori os seguintes elementos
r2 , r4 , . . . , r2k, r2s, r4s, . . . , r2ks.
Note que r ∈ G pois r2kr2 = r2k+2 = r. Como r está presente, basta operarmos r com
r2ks para obtermos s pois, rr2ks = r2k+1s = rns = s, como r e s geram Dn e veri�-

5. Subgrupos e Geradores 43
camos que r e s pertencem a G, concluímos que quando n é ímpar, o subgrupo gerado por
rs e r2 é na verdade o próprio Dn. Ou seja r2 e r2s são geradores de Dn quando n é ímpar.
5.5)Suponha que H é um subconjunto �nito não-vazio de um grupo G. Prove que H
é um subgrupo de G se, e somente se xy pertence a H sempre quando x e y pertencem a
H.
Solução:
(⇒) Segue dos axiomas de grupo, que exigem que a operação seja fechada.
(⇐) Como H é �nito, tome x ∈ H, por hipótese temos que todas as potências de x
também pertencem a H. A�rmamos que existem i, j, k ∈ N, com i < j e j = i + k tais
que
xi = xj (5.3)
Note que a Equação (5.3) é verdadeira, senão teríamos H in�nito. Como j = i + k,
desenvolvendo o lado direito da Equação (5.3) obtemos
xi = xixk ⇒ xk = e. (5.4)
A Equação (5.4) nos diz que o produto de x e seu inverso xk−1 estão em H. Pelo Teorema
5.14 temos que H é de fato um subgrupo de G.
5.6)Desenhe uma diagonal em hexágono regular. Liste as simetrias planas do hexágono
que deixam a diagonal �xa, e aquelas que enviam a diagonal em si mesmo. Mostre que
ambas coleções destas simetrias são subgrupos do grupo de todas as simetrias planas do
hexágono.
Solução:
Utilizando a notação na �gura abaixo, r é a rotação de 2π/3 no sentido anti-horário,
enquanto que s é a re�exão na diagonal assinalada. Temos que as únicas simetrias que
deixam a diagonal �xa são as rotações r3 e r6 e a re�exão que denotaremos por s. Temos
então os seguintes subgrupos
{s, e}, {e, r3}, {e, s, r3, sr3, r3s}, {e, sr3, r3s}.
Para veri�car se estes conjuntos são de fato subgrupos do grupo de todas as simetrias
planas do hexágono, basta observarmos que a operação é fechada em cada um deles, o
elemento neutro, a simetria e aparece em todos, e seus inversos estão presentes também,
basta observar que o inverso de s é o próprio s, o de r3 é o próprio, de r3s é sr3, o que
termina nossos argumentos.
5.7)Seja G um grupo abeliano e seja H o conjunto que consiste nos elementos de G que
possuem ordem �nita. Prove que H é um subgrupo de G.
Solução:

5. Subgrupos e Geradores 44
Figura 5.2: Hexágono regular e suas simetrias.
Para provarmos que H é subgrupo basta observarmos os seguintes axiomas
i) A operação é fechada em H: Sejam x, y ∈ H , suponhamos que xn = e e yp = e.
Tomemos k = m.m.c(n, p), podemos escrever k das seguintes formas k = nλ1 e k = pλ2
como G é abeliano temos
(xy)k = xkyk = xnλ1ypλ2 = e (5.5)
ii) O elemento neutro e pertence a H: De fato, pois e possui ordem 1.
iii) Para cada x ∈ H o elemento inverso x−1 também pertence a H: Basta observarmos
que cada x ∈ H possui ordem �nita, seja então α a ordem de x, assim xα = e, como G é
abeliano temos
xxα−1 = e = xα−1x (5.6)
desta forma observamos que o elemento x−1 = xα−1 que é também de ordem �nita, por-
tanto pertence a H.
Por i), ii) e iii) concluímos que H de fato constitui um subgrupo de G.
5.8)Quais elementos do grupo diedral in�nito possuem ordem �nita? O conjunto destes
elementos é um subgrupo de D∞?
Solução:
Para relembrar quais são os elementos de D∞, segue a lista abaixo
. . . , t−2, t−1, s, e, , t, t2, . . .
os únicos elementos desta lista que possuem ordem �nita são s e e. O conjunto {s, e} éde fato um subgrupo, pois o inverso de s é ele mesmo.
5.9)Seja f uma função real que preserva a distância entre todo par de pontos, e que manda
números inteiros neles mesmos.
a) Assumindo que f não possui pontos �xos, mostre que f é uma translação por
uma distância inteira.
b) Se f deixa exatamente um ponto �xo, mostre que este ponto é um inteiro ou está

5. Subgrupos e Geradores 45
entre dois inteiros, mostre ainda que f é uma re�exão neste ponto.
c) Finalmente, cheque que f deve ser a identidade se deixa mais de um ponto �xo.
Solução:
a) f é de fato uma translação. Como f preserva distância, seja x ∈ R temos que
(∗) |x− 0| = |f(x)− f(0)| ⇒
{x = f(x)− f(0) ou
−x = f(x)− f(0)
Como f envia números inteiros em números inteiros, temos que f(0) é um número
inteiro, assim para o primeiro caso temos f(x) = x+ f(0) e no segundo f(x) = −x+ f(0)em ambos os casos temos uma translação por um número inteiro como queríamos.
b) Seja x tal ponto �xo, seja y ∈ R arbitrário. Como f preserva distâncias temos que
(∗∗) |x− y| = |x− f(y)| ⇒
{x− y = x− f(y) (1) ou
−x+ y = x− f(y) (2)
Se tivermos x− y = x− f(y) teríamos que f(y) = y contradizendo o fato de que o ponto
�xo é único. Teremos então que
−x+ y = x− f(y)
2x = f(y) + y (5.7)
Se substituirmos x por y em (∗) teremos duas possibilidades para y : (i) y = f(y)− f(0)ou (ii) −y = f(y)− f(0). Substituindo a (i) na Equação (5.7) temos que
x = f(y)− f(0)
2.
Este caso nos fornece dois outros subcasos:
(i1) y inteiro e f(0) par.
(i2) y inteiro e f(0) ímpar.
Para o caso (i1), temos que x é inteiro.
Para o caso (i2), notamos que x está entre os inteiros f(y) e f(y)− f(0).
Por outro lado, se substituirmos (ii) na Equação 5.7 temos que
x =f(0)
2.
O que mostra que x está entre dois inteiros, 0 e f(0), e, quando f(0) é par, x é um inteiro.
Por �m, f é de fato uma re�exão em x pois f(x) = x.

5. Subgrupos e Geradores 46
c) Se f deixa mais de um ponto �xo, sejam x, z com x 6= z, tais que f(x) = x e
f(z) = z. Seja também f(y) 6= y. Temos então que
|x− y| = |x− f(y)| e |z − y| = |z − f(y)|
Segue que
x− y = f(y)− x e z − y = f(y)− z
f(y) = 2x− y e f(y) = 2z − y
Desta duas equações concluímos que x = y mas isto contradiz nossa hipótese, portanto
absurdo. Concluímos então que f deve necessariamente ser a identidade.
5.10)Faça uma lista dos elementos de Z12, que geram Z12. Responda a mesma questão
para Z5 e Z9. As respostas sugerem um resultado geral?
Solução:
Os elementos que geram Z12 são {1, 5, 7, 11} para Z5 temos {1, 2, 3, 4}, para Z9 temos
{1, 2, 4, 5, 7, 8}. Observando estas respostas podemos sugerir um resultado geral: O con-
junto dos geradores do grupo Zn é o conjunto {x ∈ Zn|m.d.c(x, n) = 1}.
5.11)Mostre que Q não é cíclico. Além disto, mostre que Q não pode ser gerado por
um número �nito de elementos.
Solução:
Suponhamos por absurdo que Q é cíclico, seja p ∈ Q tal que 〈p〉 = Q. Seja ab∈ Q, note
que seu inverso −ab
nunca poderá ser obtido por potência de p(Estamos vendo Q com a
operação de soma). Portanto Q não é cíclico. Suponhamos agora por absurdo novamente,
que ele é gerado por uma coleção �nita de racionais{a1b1,a2b2, . . . ,
anbn
}.
Note quem.d.c(ai, bi) = 1 para i = 1, 2, . . . , n−1, n. Seja q = ab∈ Q tal quemdc(a, bi) = 1
e m.d.c(b, ai) = 1 , note que podemos ter então abcomo sendo o número racional
a
b= a1a2a3...an−1an
b1b2b3...bn−1bn
a(b1b2b3 . . . bn−1bn) = b(a1a2a3 . . . an−1an)
Sabendo que mdc(a, bi) e mdc(b, ai) são iguais a 1, temos que b|a um absurdo pois
mdc(a, b) = 1.
Portanto concluímos que Q não é �nitamente gerado.
5.12)Se a, b ∈ Z são ambos diferentes de zero e se H = {λa+ φb | λ, φ ∈ Z}, mostre
que H é um subgrupo de Z. Seja d o menor inteiro positivo em H. Cheque que d é o

5. Subgrupos e Geradores 47
maior divisor comum de a e b.
Solução:
Para mostrarmos que H é subgrupo, basta veri�carmos se 0 ∈ H e se a operação é fechada
em H e se os inversos estão também em H. Note que 0 pertence a H, basta tomarmos
λ = φ = 0.
Sejam agora u, v ∈ H tais que u = λ1a+ φb1 e v = λ2a+ φ2b note que
u+ v = (λ1 + λ2)a+ (φ1 + φ2)b ∈ H
Seja v = λia + φib ∈ H , note que −v ∈ H pois −v = (−λi)a + (−φi)b. Portanto H é
subgrupo de Z. Para a segunda parte, seja d ≤ λa + φb para quaisquer λ, φ ∈ Z. Como
d ∈ H suponhamos
d = λpa+ φpb para algum p (5.8)
Note que a equação 5.8 é Diofantina, temos então que mdc(a, b)|d. Observe ainda que
mdc(a, b) divide todos os elementos de H, mas como d é o menor inteiro que ele divide,
temos que d = mdc(a, b) como queríamos.

48
Capítulo 6
Permutações
Para os devidos �ns de encontrarmos relações entre os grupos de simetria, introduziremos
um novo grupo, o grupo das permutações. Antes disto, devemos entender o que é uma
permutação.
De�nição 6.1. Uma permutação de um conjunto arbitrário X será entendida como uma
bijeção de X nele próprio. A coleção de todas as permutações de X constituirá o grupo
SX com a operação de composição de funções.
É fácil checarmos que SX é de fato um grupo. Se tivermos α e β permutações de X,
a função composta αβ : X → X de�nida por αβ(x) = α(β(x)) é ainda uma permutação.
Note que a composição de funções é associativa, e a função identidade ε é também uma
permutação, sendo assim atuará como elemento neutro em nosso grupo. Como cada
α ∈ SX é antes de mais nada unma bijeção, para cada α existe α−1 tal que
αα−1 = ε = α−1α.
Isto completa nossos argumentos para mostrar que SX é de fato um grupo.
De�nição 6.2. Se X é um conjunto in�nito, então SX é támbém um grupo in�nito.
Quando X consiste em ser os n primeiros inteiros positivos, SX é escrito como Sn, e é
chamado de Grupo simétrico de grau n. A ordem de Sn é claramente n!.
Exemplo 6.3. Os seis elementos de S3 são:
ε =
[1 2 3
1 2 3
],
[1 2 3
2 1 3
],
[1 2 3
3 2 1
],
[1 2 3
1 3 2
],
[1 2 3
2 3 1
],
[1 2 3
3 1 2
]
Cada uma destas matriz representa uma permutação, por exemplo a matriz[1 2 3
3 1 2
]

6. Permutações 49
é interpretado como a permutação que envia o número 1 no número 3, o número 2 no
número 1 e o número 3 no núnmero 2. E quanto a composição de duas permutações,
devemos nos lembrar que o elemento αβ signi�ca a permutação β atuando primeiro e
depois α. Por exemplo [1 2 3
2 1 3
][1 2 3
1 3 2
]=
[1 2 3
2 3 1
],
enquanto que [1 2 3
1 3 2
][1 2 3
2 1 3
]=
[1 2 3
3 1 2
](∗)
Com isto podemos concluir que S3 não é abeliano. Podemos assim dizer que Sn não é
abeliano para n ≥ 3, basta provarmos por indução sobre n.
Quando aumentamos o valor de n esta notação matricial se torna inviável, por exemplo
um elemento α em S6 de�nido por[1 2 3 4 5 6
5 4 3 6 1 2
].
Podemos obter as mesmas informações contidas nesta matriz escrevendo α como
α = (15)(246). Em cada um dos parênteses o inteiro que vem logo após o outro é a
imagem do anterior.
Neste exemplo, 1 é enviado em 5, e 5 em 1. O 2 é enviado em 4, 4 em 6 e 6 em 2. Os
elementos que permanecem �xos durante a permutação, isto é, aqueles que são enviados
em si próprios não são mencionados com esta notação, neste caso , por exemplo o número 3.
Podemos descrever qualquer permutação desta forma, o procedimento é o seguinte: Abra
um par de parênteses, escreva então a imagem do menor inteiro movido pela permutação.
Liste então a imagem deste inteiro pela permutação, repita o processo com este inteiro
até que o ciclo esteja completo. Se sobraram inteiros que não foram evidenciados neste
primeiro ciclo, repita o processo abrindo um novo parênteses e iniciando com o menor
inteiro que não foi mencionado anteriormente. Temos abaixo alguns exemplos que nos
ajudam a entender o processo[1 2 3 4 5 6 7 8 9
1 8 9 3 6 2 7 5 4
]= (2856)(394)
[1 2 3 4 5 6 7 8
8 1 6 7 3 5 4 2
]= (182)(365)(47)
Aplicando este processo a S3 obtemos que os elementos são representados por
ε, (12), (13), (23), (123), e (132)

6. Permutações 50
Desta forma o cálculo (∗) se torna
(12)(23) = (123), enquanto que (23)(12) = (132).
Com esta nova notação, uma permutação (a1a2 . . . ak) dentro de um único par de
parênteses é chamada permutação cíclica. Esta permutação envia a1 em a2, a2 em
a3, . . . , ak−1 em ak e ak em a1. Deixando todos os outros inteiros �xos. O número k é o
comprimento, e uma permutação de comprimento k é chamada k-ciclo. Uma 2− ciclo égeralmente chamada transposição. O procedimento descrito acima, nos mostra que todo
elemento de Sn pode ser escrito como produto de permutações cíclicas disjuntas, disjuntas
no sentido de que nenhum inteiro é movido por mais de uma permutação cíclica.
Observemos no exemplo onde obtemos (2856) e (394), o primeiro ciclo afeta apenas os
inteiros 2,5,6 e 8, e a segundo move apenas 3,4 e 9. Como estas permutações são disjuntas,
elas comutam entre si. Existe então um resultado geral aqui: Se α e β são elementos de
Sn e se nenhum inteiro é movido por α e β simultaneamente, então αβ = βα.
Observação 6.4. A decomposição de um elemento de Sn como produto de permutações
cíclicas disjuntas é único.
Teorema 6.5. O conjunto das transposições em Sn, é um connjunto de geradores para
Sn.
Demonstração. Cada elemento de Sn pode ser escrito com produto de permutações cícli-
cas, e cada permutação cíclica pode ser escrita como produto de transposições pois
(a1a2 . . . ak) = (a1ak) . . . (a1a3)(a1a2).
Portanto, cada elemento de Sn pode ser escrito como produto de transposições. Note que
as transposições não precisam ser necessariamente disjuntas, e esta decomposição não é
única.
Exemplo 6.6. Observe que[1 2 3 4 5 6
5 4 3 6 1 2
]= (15)(246) = (15)(26)(24).
Como (246) = (624) = (462) podemos ter , equivalentemente[1 2 3 4 5 6
5 4 3 6 1 2
]= (15)(624) = (15)(64)(62) =
= (15)(46)(26)
Teorema 6.7. (a) As transposições (12), (13), (14), . . . (1n) juntas, geram Sn
(b) As transposições (12), (23), . . . , (n− 1 n) geram Sn

6. Permutações 51
Demonstração. (a) Note que (ab) = (1a)(1b)(1a) e pelo Teorema 6.5 temos que qualquer
permutação é escrita como produto de transposições. Assim, pela fórmula acima, as trans-
posições são escritas como produto de (1a) e (1b), como a, b são inteiros perntencentes a
{1, 2 . . . , n} representam transposições da forma (12), (13), . . . (1n) o que completa nosso
argumento.
(b) Pela parte (a), sabemos que toda permutação de Sn é escrita em função de (12), (13), . . . (1n),
sendo assim, nosso problema se resume a escrever cada uma das transposições (1k),
com 1 ≤ k ≤ n em função de (12), (23), . . . , (n − 1 n). Mas note que (1k) = (k − 1
k) . . . (34)(23)(12)(23)(34) . . . (k − 1 k), o que resolve nosso problema, com isto concluí-
mos nosso argumento.
Teorema 6.8. A transposição (12) e o n-ciclo (123 . . . n) geram Sn.
Demonstração. Pelo Teorema 6.5 parte (b), Nosso problema se resume a escrever cada
transposição da forma (k k + 1) como uma palavra constituida por (12) e (12 . . . n).
Observe então que podemos escrever
(k k + 1) = (12 . . . n)k−1(12)(12 . . . n)1−k, para 2 ≤ k ≤ n.
O que completa nossa demonstração.
Um elemento de Sn pode ser escrito como produto de transposições de várias maneiras.
No entanto, o número de transposições que ocorre em cada uma destas maneiras é sempre
par ou ímpar. Para checarmos se uma dada permutação é par ou ímpar introduziremos o
polinômio
P = P (x1, x2, . . . , xn) = (x1 − x2)(x1 − x3) . . . (x1 − xn)(x2 − x3 . . . (xn−1 − xn).
Em outras palavras, o polinômio P consiste do produto de todos os fatores (xi− xj) com1 ≤ i ≤ n, 1 ≤ j ≤ n e i ≤ j.
Se α ∈ Sn, de�nimos αP como todos os produtos (xα(i)−xα(j)) novamente com 1 ≤ i ≤ n,
1 ≤ j ≤ n e i ≤ j. O efeito de α é permutar os termos de P , ao mesmo tempo que também
troca o sinal de alguns destes termos. Portanto αP é positivo ou negativo, isto determina
o que chamamos de sinal de α. α será positivo, +1, se αP = P , se αP = −P então o
sinal de α é negativo, -1.
Exemplo 6.9. Para n = 3 e α = (132)
P = (x1 − x2)(x1 − x3)(x2 − x3)αP = (x3 − x1)(x3 − x2)(x1 − x2) = +P
Assim o sinal de α é igual a +1.

6. Permutações 52
Em geral , se α, β ∈ Sn o sinal de αβ é o produto dos sinais de α e β. Note que o sinal
da transposição (12) é -1. Como
(1a) = (2a)(12)(2a) para n ≥ 2,
Pouco nos importa o sinal de (2a), sabendo que o sinal de (12) é negativo, podemos
concluir que o sinal de uma transposição (1a) é sempre -1. Observe ainda que uma
transposição (ab) pode ser escrita como
(ab) = (1a)(1b)(1a).
Como o sinal de cada uma destas transposições é -1, concluímos que o sinal de qualquer
transposição é negativo. Consequentemente, se um elemento de Sn pode ser escrito como
produto de um número par de transposições, então seu sinal será positivo. Se o número
de transposições em sua decomposição for ímpar, então seu sinal será negativo.
De�nição 6.10. Um elemento α ∈ Sn que pode ser escrito como produto de um número
par de transposições, será chamado permutação par, e o sinal associado a ele será positivo
+1. Se o número de transposições for ímpar, então o elemento será chamado permutação
ímpar, e o sinal associado a ele será -1.
Como
(a1a2 . . . ak) = (a1ak) . . . (a1a3)(a1a2)
Temos que uma permutação cíclica será par quando seu comprimento for ímpar, analoga-
mente, será ímpar se seu comprimento for par.
Teorema 6.11. As permutações pares em Sn formam um subgrupo de ordem n!/2 chamado
de grupo alternado An de grau n.
Demonstração. Se α e β são permutações pares, podemos escrevê-las como produto de
um número par de transposições. Quando compomos as duas permutações, α e β sua rep-
resentação conterá um total par de transposições, isto mostra que αβ é par. Escrevendo o
produto das transposições que compõem α na ordem inversa, mostramos que α−1 é uma
permutação par.
A identidade (ε) é claramente par, pois ε = (12)(12). Assim concluímos que as per-
mutações formam de fato um subgrupo de Sn. Note que se α é par, (12)α é ímpar,
analogamente se α é ímpar, então (12)α é par.Note que nenhum elemento da forma (12)α
que seja par e ímpar. Ou seja, assim dividimos nosso grupo Sn em exatamente dois con-
juntos disjuntos, as permutações pares, e as ímpares, como a ordem de Sn é n!, temos que
a ordem do subgrupo constituído pelas permutações pares possui ordem n!/2.
Teorema 6.12. Para n ≥ 3 os 3-ciclos geram An.

6. Permutações 53
Demonstração. Cada 3-ciclo é certamente uma permutação par. Dado um elemento de
An, usando o Teorema 6.7 (a), para escrevê-lo como o produto de um número par de
transposições da forma (1a). Colocando estas transposições em pares adjacentes e com-
binando cada par usando (1a)(1b) = (1ab).
Fizemos com que nosso elemento expresso como produto de 3-ciclos como queríamos.
Exemplo 6.13. Os doze elementos de A4 são
ε, (12)(34), (13)(24), (14)(23)
(123), (124), (134), (234),
(132), (142), (143), (243).
Os outros elementos de S4 são as permutações ímpares
(12), (13), (14), (23), (24), (34),(1234), (1243), (1324),
(1432), (1342), (1423).
6.1 Exercícios
6.1)Escreva a tábua de multiplicação para S3.
Solução:
Sejam os elementos de S3 nomeados da seguinte forma
α1 = (12) α2 = (13) α3 = (23) α4 = (123) α5 = (132) ε = identidade
◦ ε α1 α2 α3 α4 α5
ε ε α1 α2 α3 α4 α5
α1 α1 ε α4 α5 α2 α3
α2 α2 α5 ε α4 α3 α1
α3 α3 α4 α5 ε α1 α2
α4 α4 α3 α1 α2 α5 ε
α5 α5 α2 α3 α1 ε α4
Tabela 6.1: Tábua de multiplicação de S3.
6.2)Expresse cada um dos seguintes elementos de S8 como produto de permutações cíclicas
disjuntas, e também como produto de transposições
Solução:
a)
[12345678
76418235
]= (1734)(26)(58) = (14)(13)(17)(26)(58)
b) (4568)(1245) = (125)(468) = (15)(12)(48)(46)

6. Permutações 54
c) (624)(253)(876)(45) = (25346)(876)(45) = (2534687)(34) = (253687) = (27)(28)(26)(23)(25)
Alguma destas permutações pertence a A8?
Sim, apenas (b) pois é par.
6.3)Mostre que os elementos de S9 que enviam os números 2, 5, 7 neles mesmos, for-
mam um subgrupo de S9. Qual a ordem deste grupo?
Solução:
Denotemos por G tal conjunto. Note que a composição de dois elementos de G ainda
preservam a imagem dos números 2, 5, 7, portanto a operação é fechada. Observe ainda
que a permutação identidade ε pertence a G pois ela deixa 2, 5, 7 �xos. E por �m, o ele-
mento inverso de cada uma das permutações de G também pertence a G, basta observar
que o inverso de uma permutação pode ser escrito com os mesmos números colocados na
ordem inversa em cada ciclo, assim no elemento inverso teremos um ciclo apenas com os
números2, 5, 7 escritos na ordem inversa, sendo assim o elemento inverso também restringe
a imagem de tais números ao conjunto que os contém.
Por contagem temos que a ordem deste grupo é 6!3! = 4320.
6.4)Encontre um subgrupo de S4 que possua seis elementos. Quantos subgrupos de ordem
seis existem em S4? Solução:
Para encontrarmos um subgrupo de ordem 6 basta construirmos o conjunto das permu-
tações que possuem a imagem de um dos 4 primeiros inteiros �xa. 1, 2, 3, 4. Fixando 1
por exemplo. A prova de que este conjunto é um subgrupo de S4 é análoga ao exercício
anterior.
A priori, encontramos quatro destes subgrupos, variando o inteiro que pode permanecer
�xo em cada permutação.
6.5)Calcule αP (x1x2x3x4) quando α = (143) e quando α = (23)(412).
Solução:
Quando α = (143)
P (x1, x2, x3, x4) = (x1 − x2)(x1 − x3)(x1 − x4)(x2 − x3)(x2 − x4)(x3 − x4)
αP = (x4 − x2)(x4 − x1)(x4 − x3)(x2 − x1)(x2 − x3)(x1 − x3)
Quando α = (23)(412) = (1234) assim
αP = (x3 − x4)(x3 − x2)(x3 − x1)(x4 − x2)(x4 − x1)(x2 − x1)
Concluímos que (143) é par e (1234) é ímpar.

6. Permutações 55
6.8)Se α, β ∈ Sn mostre que αβα−1β−1 sempre pertence a An e que αβα−1 petence a
An sempre que β é uma permutação par.
Solução:
Para pertencer a An basta que a permutação seja par, ou equivalentemente, seu sinal seja
positivo. Dividiremos em 4 casos
i) α e β pares( positivos)
ii) α par e β ímpar (positivo e negativo)
iii) α ímpar e β par (negativo e positivo)
iv) α ímpar e β ímpar (negativo e negativo)
Sabendo que o sinal de um produto de permutações é igual ao produto dos sinais temos
que em todos os casos acima αβα−1β−1 é positivo, ou seja, par. Portanto αβα−1β−1 ∈ An.E de fato quando β é par, o sinal associado a ela é positivo, então αβα−1 pertence a An.
6.11)Encontre a ordem da permutação a) do exercício 6.2
Solução:
(1734)(26)(58)(1734)(26)(58) = (1734)(1734) = (13)(47) = α2
(13)(47)(1734)(26)(58) = (1437)(26)(58) = α3
(1437)(26)(58)(1734)(26)(58) = ε. Portanto concluímos que a ordem de α = (1734)(26)(58)
é quatro.
6.12)Prove que a ordem de um elemento α ∈ Sn é o mmc do comprimento de cada
um dos ciclos quando α é escrito como produto de permutações cíclicas disjuntas.
Solução:
Primeiro, observemos que a ordem de um ciclo (a1a2 . . . al) é exatamente seu compri-
mento. Isto segue pois ao compormos sussecivamente este ciclo, cada composição faz com
que ele mude sua imagem para o elemento que o sucede, ou seja, a imagem de ai, após
uma composição será ai+1 fazendo assim ai percorrer os elementos a partir das potências.
Para que tenhamos a ordem deste ciclo, devemos observar quando os elementos ai que
aparecem no ciclo, voltarão a sua posição original, neste caso isto ocorrerá apenas após
percorrerem todos os elementos do ciclo, ou seja após compormos o ciclo l vezes.
Suponhamos agora, α ∈ Sn, note que α pode ser escrito como produto de permutações
cíclicas disjuntas, sendo assim ele tem a forma
α = (a1 . . . am)(b1 . . . bj) . . . (c1 . . . cf )
Para encontrarmos a ordem de α devemos descobrir qual potência p de α satisfaz αp = ε.
Ao elevarmos α a p-ésima potência, elevamos também cada um dos ciclos, sendo assim,

6. Permutações 56
temos que encontrar uma potência que anule todos os ciclos, sabendo que o comprimento
de cada um dos ciclos é a sua ordem, basta tomarmos p = mmc(m, j . . . , f para que
tenhamos a igualdade αp = ε satisfeita. Sendo assim concluímos o que a ordem de α
é de fato o mmc dos comprimentos das permutações cíclicas disjuntas presentes em sua
decomposição.

57
Capítulo 7
Isomor�smos
7.1 Comparando grupos
Observe o tabuleiro de xadrez, ele possui 4 simetrias planas, a identidade e, a rotação de
π em torno do centro e as re�exões q1 e q2 nas diagonais. Estas quatro simetrias formam
Figura 7.1: Tabuleiro de xadrez e suas simetrias planas.[1]
um grupo com a operação de composição, cuja tábua de multiplicação é evidenciada na
Tabela 7.1. Observe também que o conjunto dos números 1, 3, 5, 7, se munido da operação
de multiplicação módulo 8, constitui um grupo, cuja tábua de multiplicação está abaixo
da tábua de multiplicação é a Tabela 7.2 .
Observando estas tabelas podemos notar algumas semelhanças. Em cada caso, o grupo
possui quatro elementos, e estes elementos aparecem combinados da mesma maneira nas
duas tábuas, basta igualarmos os nomes para veri�car que de fato o comportamento de
cada um dos elementos é o mesmo independente do grupo ao qual pertence. Chamemos

7. Isomor�smos 58
e r q1 q2e e r q1 q2r r e q2 q1q1 q1 q2 e r
q2 q2 q1 r e
Tabela 7.1: Tábua de multiplicação simetrias planas do tabuleiro.
1 3 5 7
1 1 3 5 7
3 3 1 7 5
5 5 7 1 3
7 7 5 3 1
Tabela 7.2: Tábua de multiplicação do conjunto de�nido acima.
o primeiro grupo de G e o segundo de G′, e consideremos a correspondência
e→ 1, r → 3, q1 → 5, q2 → 7,
x → x′. Quando dizemos que os elementos se combinam da mesma maneira, estamos
dizendo que se x→ x′ e y → y′ então xy → x′y′.
De�nição 7.1. Dois grupos G e G′ são isomorfos se existe uma bijeção φ de G em G′
que satisfaz
φ(xy) = φ(x)φ(y) para quaisquer x, y ∈ G.
A função φ é chamada um isomor�smo entre G e G′.
Em outras palavras um isomor�smo é uma bijeção que carrega a multiplicação de G
para a de G′. Concluímos então que os grupos associados às tabelas 7.1 e 7.2 são isomorfos.
Para as características em que estamos interessados, ou seja, algébricas, consideraremos
G e G′ �iguais�.
7.2 Buscando isomor�smos
Procurar por uma bijeção entre G e G′ implica que G e G′ devem possuir o �mesmo
tamanho�. Se, além disso tivermos que φ(xy) = φ(x)φ(y) para quaisquer x, y, signi�ca
que não importa se primeiro combinamos dois elementos em G e depois enviamos para
G′ por φ, ou se primeiro enviamos separadamente por φ os elementos x e y para G′,
para depois combinar suas imagens, o resultado é o mesmo. Se existir tal φ, concluímos
que G′ é de fato G disfarçado. Note que a função inversa φ−1 : G′ → G é também um
isomor�smo, assim nossa de�nição é simétrica, isto é, dizer que G e G′ são isomorfos, é

7. Isomor�smos 59
equivalente a dizer que G′ e G são isomorfos. Para indicar que G e G′ são isomorfos,
escrevemos G ∼= G′.
Exemplo 7.2. φ : R → R∗+ de�nido por φ(x) = ex é um isomor�smo. Note que φ é
claramente uma bijeção. Note também que
φ(x+ y) = ex+y = exey = φ(x)φ(y)
para quaisquer x, y ∈ R. Assim concluímos que R e R∗+ são isomorfos. Observe que em
R a operação é a adição usual e em R∗+ é a multiplicação usual.
Exemplo 7.3. Já sabemos um pouco sobre as simetrias no tetraedro. São 12 simetrias
rotacionais que compõem o grupo não abeliano G. Podemos aprender mais com o que
segue. Enumerando os vértices com os números 1, 2, 3 e 4, como na Figura 7.2. Cada sime-
tria rotacional induz uma permutação destes 4 primeiros inteiros. Por exemplo, a rotação
r, induz a permutação cíclica (234) e s induz (14)(23). Trabalhando sistematicamente por
todas as outras possibilidade de rotações e combinações desta rotações, conseguimos uma
identi�cação com os doze elementos de A4. Se duas rotações, u, v induzem as permutações
α,β, respectivamente, então uv claramente induz αβ. Portanto a correspondência
simetria rotacional −→ permutação induzida,
mostra que G ∼= A4.
Figura 7.2: Tetraedro com vertices enumerados.[1]

7. Isomor�smos 60
Exemplo 7.4. Qualquer grupo cíclico in�nito é isomorfo a Z. Seja G um grupo cíclico
in�nito, gerado por x. De�nimos φ : G→ Z por φ(xm) = m. Então φ é um isomor�smo.
Note que φ é uma bijeção e preserva a operação pois:
φ(xmxn) = φ(xm+n) = m+ n = φ(xm) + φ(xn) para quaisquer elementos de G.
Exemplo 7.5. Qualquer grupo cíclico �nito de ordem n é isomorfo a Zn. Se G é um
grupo cíclico de ordem n, e se x gera G, de�nimos φ : G → Zn por φ(xm) = m(mod n).
Esta aplicação é de fato uma bijeção, a prova de que conserva a operação é análoga a
prova acima, mas com a operação +n.
Exemplo 7.6. D3 e S3 são isomorfos. Para obtermos tal isomor�smo basta reproduzirmos
o procedimento feito para o tetraedro no Exemplo 7.3, numerando cada um dos vértices
de um triângulo equilátero da placa triangular com os números de 1 a 6.
Proposição 7.7. Se uma função φ : G → G′ é um isomor�smo, então G e G′ têm a
mesma ordem. Mais ainda, φ leva o elemento neutro de G no elemento neutro de G′.
Demonstração. Suponhamos x′ ∈ G′ e φ(x) = x′ então
x′φ(e) = φ(x)φ(e) = φ(xe) = φ(x) = x′.
Analogamente mostramos que φ(e)x′ = x′, mostrando que φ(e) é o elemento neutro de
G′. Outro argumento que pode ser usado é que
φ(e)φ(e) = φ(ee) = φ(e) .
Se multiplicarmos a equação acima, em ambos os lados pelo inverso de φ(e) em G′,
obtermos que φ(e) é o elemento neutro de G′. Note que este último argumento não utiliza
o fato de φ ser uma bijeção, apenas de que φ conserva a operação.
Proposição 7.8. O isomor�smo φ manda elementos inversos de G em elementos inversos
de G′, no sentido que
φ(x)−1 = φ(x−1), ∀x ∈ G.
Demonstração. Basta observarmos que
φ(x−1)φ(x) = φ(x−1x) = φ(e) = e.
Analogamente, mostramos que φ(x)φ(x−1) = e. Portanto φ(x−1) é de fato o inverso de
φ(x) em G′.
Proposição 7.9. Se G é abeliano, então G′ também o é. Ou seja, o isomor�smo conserva
a propriedade comutativa da operação.
Demonstração. Sejam x′, y′ ∈ G′, se φ(x) = x′,e φ(y) = y′ então

7. Isomor�smos 61
x′y′ = φ(x)φ(y) = φ(xy) =
= φ(yx) = (pois G é abeliano)
= φ(y)φ(x) = y′x′.
Proposição 7.10. Se φ : G→ G′ é um isomor�smo, e se H é um subgrupo de G, então
φ(H) é um subgrupo de G′.
Demonstração. Usaremos o Teorema 5.14. Suponhamos x′, y′ ∈ φ(H), então podemos
encontrar x, y ∈ H tais que φ(x) = x′ e φ(y) = y′. Como H é subgrupo de G, temos que
xy−1 ∈ H, mais ainda
φ(xy−1) = φ(x)φ(y−1) = φ(x)φ(y)−1 = x′(y′)−1.
Assim vemos que x′(y′)−1 ∈ φ(H) como queríamos.
Se na proposição acima, tivermos ainda que H é cíclico, gerado por um elemento
g ∈ G e x′ ∈ φ(H) então x′ = φ(gm) = φ(g)m. Portanto φ(H) é gerado pelo elemento
φ(g). Além disso Um isomor�smo preserva a ordem de cada elemento. e se φ : G→ G′
e ξ : G′ → G′′ são ambos isomor�smos, então a composição ξ ◦ φ : G→ G′′ é também um
isomor�smo.
7.3 Resultados Sobre os três primeiros sólidos
No capítulo 1 introduzimos três sólidos: O tetraedro regular, a placa hexagonal com lados
iguais e uma pirâmide regular com base dodecagonal.
A observação geométrica de que estes três sólidos possuem tipos de simetrias diferentes
é trazida para o contexto algébrico com o fato de que os grupos de simetrias destes três
sólidos não são isomorfos.
Para mostrarmos este resultado, precisamos mostrar que o grupo de simetria rotacional
do tetraedro é isomorfo a A4, o que já foi feito no Exemplo 7.3. Note que o grupo da placa,
é por de�nição D6, e o da pirâmide é cíclico, portanto isomorfo a Z12. Destes três grupos,
o único abeliano é Z12 portanto não é isomorfo a D6 nem a A4, o que já mostra que o
grupo de simetria rotacional da pirâmide não é isomorfo a nenhum dos outros dois grupos
de simetria rotacional. Por �m, note que D6, ao contrário de A4 contém um elemento de
ordem 6, o que impede que ambos sejam isomorfos.
Exercícios
7.1)Cheque que o conjunto A = {1, 2, 4, 5, 7, 8} constitui um grupo pela multiplicação
módulo 9, mostre também que este grupo é isomorfo a Z6.

7. Isomor�smos 62
Solução:
A propriedade associativa segue do Exercício 3.5. O elemento neutro claramente é 1. Para
os inversos, observando a tábua de multiplicação temos que: 1−1 = 1, 2−1 = 5, 4−1 = 7,
5−1 = 2, 7−1 = 4 e 8−1 = 8. Por outro lado,
0→ 1, 1→ 2, 2→ 4, 5→ 5, 3→ 8, 4→ 7,
é um isomor�smo de Z6 em {1, 2, 4, 5, 7, 8}. De fato é, pois é uma bijeção e conserva a
operação. Este isomor�smo foi construído pensando em levar o elemento neutro de um
grupo no elemento neutro do outro e também na preservação da ordem de cada elemento.
·9 1 2 4 5 7 8
1 1 2 4 5 7 8
2 2 4 8 1 5 7
4 4 8 7 2 1 5
5 5 1 2 7 8 4
7 7 5 1 8 4 2
8 8 7 5 4 2 13
Tabela 7.3: Tábua de multiplicação do conjunto A.
7.2)Veri�que que o conjunto B = {1, 3, 7, 9, 11, 13, 17, 19} formam um grupo pela mul-
tiplicação módulo 20. Explique por que este grupo não é isomorfo a Z8.
Solução:
·20 1 3 7 9 11 13 17 19
1 1 3 7 9 11 13 17 19
3 3 9 1 7 13 19 11 17
7 7 1 9 3 17 11 19 13
9 9 7 3 1 19 17 13 11
11 11 13 17 19 1 3 7 9
13 13 19 11 17 3 9 1 7
17 17 11 19 13 7 1 9 3
19 19 17 13 11 9 7 3 1
Tabela 7.4: Tábua de multiplicação do conjunto.
Novamente temos a associativa através do exercício 3.5 . O elemento neutro é clara-
mente 1. Para os inversos basta observarmos a tábua de multiplicação:
1−1 = 1, 3−1 = 7, 7−1 = 3, 9−1 = 9, 11−1 = 11, 13−1 = 17, 17−1 = 13, 19−1 = 19.

7. Isomor�smos 63
O isomor�smo entre o conjunto e Z8 não ocorre pelo seguinte fato. Um isomor�smo deve
preservar a ordem de cada elemento, note que no primeiro conjunto temos 3 elementos,
além do elemento neutro que possuem ordem dois, enquanto que em Z8 apenas 4 além da
identidade possui ordem 2. Sendo assim, tal isomor�smo não existe.
7.3)Mostre que o subgrupo {ε, (12)(34), (13)(24), (14)(23)} de A4 é isomorfo ao grupo
de simetrias planas do tabuleiro de xadrez.
Solução:
O grupo das simetrias planas do tabuleiro de xadrez é o seguinte conjunto {e, r, q1, q2}munido da operação de composição de funções. Observando a ordem de cada elemento,
podemos ter a seguinte correspondência
ε↔ e (14)(23)↔ r (12)(34)↔ q1 (13)(24)↔ q2.
Note que esta correspondência é uma bijeção, e é trivial o fato de que ela conserva a
operação. Portanto é isomor�smo, garantido que os dois grupos são isomorfos.
7.4)Produza um ismor�smo especí�co entre S3 e D3. Quantos isomor�smos diferentes
existem de S3 em D3?
Solução:
Relembrando que S3 = {(12), (13), (123), (132), (23), ε} e D3 = {r, r2, s, rs, r2s, e}, a re-
lação
r ↔ (123) r2 ↔ (132) s↔ (12) rs↔ (13) r2s↔ (23) e↔ ε,
é claramente uma bijeção que conserva a operação, e portanto um isomor�smo.
A pergunta sobre quantos isomor�smos diferentes existem entre S3 e D3 se resume a re-
sponder a pergunta de quantas opções de imagens temos para os elementos r e s de D3.
Para o elemento r temos a opção de duas imagens, em que gira a placa uma ou duas
vezes, produzindo duas permutação distintas dos vértices. Para o elemento s temos três
opções, como existe um eixo para cada vértice, o que acaba resultando em 3 permutações
diferentes dos vértices. Assim combinando as opções para r e s temos 3.2 = 6 isomor�s-
mos diferentes.
7.5)Seja G um grupo. Mostre que a correspondência x ↔ x−1 é um isomor�smo de
G em G se, e somente se, G é abeliano.
(⇒) Se x↔ x−1 é um isomor�smo sabemos que para quaisquer x, y ∈ G temos que
x−1y−1 = (xy)−1. (7.1)

7. Isomor�smos 64
pela equação 7.1 temos que
(xy)x−1y−1 = e
(xy)x−1 = ey
xy = yx.
O que nos mostra que G é abeliano.
(⇐)Para veri�carmos que x↔ x−1 é um isomor�smo , devemos mostrar que é uma bijeção
e que conserva a operação. Provemos a injeção. Suponhamos φ(x1) = φ(x2) temos então
x−11 = x−12
x−11 x2 = x−12 x2
x−11 x2 = e = x2x−11 ⇔
⇔ (x−11 )−1 = x2 ⇔
⇔ x1 = x2.
Agora a sobrejeção. Seja y ∈ G, existe x ∈ G tal que φ(x) = y? De fato, como G é grupo,
tome x = y−1 temos então
φ(x) = (y−1)−1 = y.
Provemos agora que φ conserva a operação. Como por hipótese G é abeliano temos que
φ(xy) = (xy)−1 = y−1x−1 = como G é abeliano
= x−1y−1 = φ(x)φ(y).
Assim terminamos nosso exercício.
7.6)Mostre que Q∗+ não é isomorfo a Z.Solução:
Basta observarmos que Z é cíclico, portanto se existisse um isomor�smo, o elemento por
exemplo φ(1) em Q∗+ deveria gerar Q∗+ , mas isto é um absurdo, pois ja provamos que Q∗+não é �nitamente gerado, muito menos cíclico.
7.7)Se G é um grupo, e se g é um elemento de G, mostre que a função φ : G → G
de�nida por φ(x) = gxg−1 é um isomor�smo.
Solução:
Novamente, devemos mostrar que φ é bijeção e conserva a operação.

7. Isomor�smos 65
φ é injetora: Sejam φ(x) = φ(y) elementos de G. Temos então que
φ(x) = φ(y)
gxg−1 = gyg−1 operando com g em ambos os lados pela direita
gx = gy (operando agora com g−1 pela esquerda)
x = y.
Para a sobrejeção, devemos mostrar que para cada y ∈ G existe um x ∈ G tal que
φ(x) = y. Basta tomarmos x = g−1yg, que tal igualdade é satisfeita. Temos então
a bijeção. Mostremos agora que φ conserva a operação. Sejam x, y elementos de G,
tomemos
φ(xy) = gxyg−1 = (como g possui elemento inverso temos que)
= gxg−1gyg−1 =
= φ(x)φ(y).
Com isto concluímos que φ é de fato um isomor�smo.
7.8) Diremos que H é um subgrupo próprio do grupo G se H não é apenas {e} e
também não é todo G. Encontre um exemplo de um grupo que é isomorfo a um dos seus
subgrupos próprios.
Solução:
Um exemplo é o grupo (Z,+) que é isomorfo ao subgrupo 2Z que consiste de todos os
elementos pares de Z munido da operação de soma. Para tanto basta estabelecermos a
seguinte função : f : Z → 2Z de�nida por f(x) = 2x. Claramente f é uma bijeção e
conserva a operação de soma.
7.9)Suponha que G é um grupo cíclico. Se x gera G, e se φ : G → G é um isomor-
�smo, prove que φ é completamente determinada por φ(x) e que φ(x) també gera G. Use
estes fatos para encontrar todos os isomor�smos de Z em Z, e todos os isomor�smos de
Z12 em Z12.
Solução:
Note que como φ conserva a operação temos que para um φ(a) ∈ G arbitrário
φ(a) = φ(xm) = φ(xxxx . . . xxx︸ ︷︷ ︸m vezes
) =
= φ(x) . . . φ(x) =
= φ(x)m.
Estas igualdades nos a�rmam que qualquer elemento presente na imagem de φ é gerado

7. Isomor�smos 66
por φ(x). Como φ é um isomor�smo, temos que φ é uma bijeção, o que implica que
Im(φ) = G, se φ(x) gera Im(φ) φ(x) gera G.
Sabendo que Z é cíclico, sabemos que o elemento φ(1) gera toda a imagem, portanto
para achar todos os isomor�smos de Z em Z basta contar quantas opções de imagem
temos para 1. São 1 ou −1, portanto temos um total de dois isomor�smos.
Para o caso de Z12 devemos observar que um elemento a ∈ Z12 só pode gerar este
conjunto se possuir ordem exatamente 12, pois Zn é cíclico. Se mdc(a, 12) 6= 1 a não
pode ser um gerador, pois como existe um c ∈ Z12 diferente de 12, que é a ordem de a.
Portanto os elementos que podem gerar Z12 são :{1, 5, 7, 11}. Sendo assim temos um total
de quatro opções para φ(1), gerando um total de quatro isomor�smos distintos entre Z12
e Z12.
7.10)Mostre que R não é isomorfo a Q e que R − {0} não é isomorfo a Q − {0}. Ré isomorfo a R− {0}?Solução:
Suponhamos primeiramente que exista um isomor�smo entre R e Q, teríamos então uma
bijeção entre tais conjuntos, o que é um absurdo, pois por um resultado de análise, temos
que R é não-enumerável enquanto que Q é enumerável. Pelo mesmo argumento mostramos
que R− {0} e Q− {0} não são isomorfos. Suponhamos agora que exista um isomor�smo
φ entre R e R − {0}. Note que o primeiro grupo deve estar necessariamente munido da
operação de soma usual, enquanto que o segundo deve estar munido da operação de mul-
tiplicação. Seja um elemento a ∈ R e suponhamos que sua imagem por φ seja φ(a) = −1.Como φ é isomor�smo temos
φ(2a) = φ(a+ a) = φ(a)φ(a) =
= (−1)(−1) = 1.
Mas note que como φ é um isomor�smo, ele deve levar elemento neutro em elemento
neutro, sendo assim temos que φ(0) = 1 . Substituindo na equação acima temos então
que φ(2a) = φ(0), como φ é bijeção, isto implica que a = 0, assim φ(a) = 1 (→←) um
absurdo, pos havíamos suposto que φ(a) = −1. Sendo assim, concluímos que R não é
isomorfo a R− 0.
7.11)Prove que o subgrupo de S6 gerado por (1234) e (56) é isomorfo ao grupo descrito
no exercício 7.2.
Solução:
Para tanto, basta exibirmos o isomor�smo nos elementos (1234) e (56). Observando a
tábua de multiplicação obtida no exercício 7.2 podemos identi�car a ordem de cada um

7. Isomor�smos 67
daqueles elementos. Sendo assim um ismor�smo seria uma aplicação bijetora φ tal que
φ((1234)) = 3 e φ((56)) = 11. Este isomor�smo é uma bijeção entre o subgrupo de S6
e o conjunto evidenciado no exercício 7.2 pois conserva a ordem de cada elemento, leva
geradores em geradores. Os elementos 11 e 3 são geradores do grupo descrito no Exercício
7.2, pois : 112 = 1, 32 = 9, 33 = 7, 11 ·20 3 = 13, 7 ·20 11 = 17, e 3 ·20 13 = 19. Esta função
ainda leva elemento neutro em elemento neutro e também é bijeção.
7.12)Mostre que o subgrupo de S4 gerado por (1234) e (24) é isomorfo a D4.
Solução:
Pelo mesmo processo do exercício anterior, basta levarmos por uma aplicação φ o ele-
mento (1234) em r e o elemento (24) em s, sendo assim, levamos geradores em geradores,
portanto um isomor�smo é de�nido.

68
Capítulo 8
Sólidos de Platão e o Teorema de
Cayley
Existem apenas cinco sólidos regulares convexos, o tetraedro (com faces triangulares),
cubo (com faces quadradas),octaedro (com oito faces triangulares),dodecaedro (com
doze faces pentagonais) e o icosaedro (com vinte faces triangulares). Eles são os chama-
dos Sólidos de Platão. Mostramos até agora que o grupo de simetrias rotacionais do
tetraedro é isomorfo ao grupo alternado A4. Mostraremos resultados análogos para os
outros quatro sólidos restantes.
Figura 8.1: Sólidos de Platão.[1]
Um cubo possui exatamente vinte e quatro simetrias rotacionais, elas podem ser con-
tadas da mesma maneira como contamos no tetraedro. Encontramos os tipos de eixo de

8. Sólidos de Platão e o Teorema de Cayley 69
simetria L, M e N . Existem três eixos do tipo L, cada um nos fornece três simetrias, ou
seja, um total de 9. Existem ainda seis eixos do tipoM , cada um nos fornece apenas uma
simetria. Por �m existem quatro eixos do tipo N , cada um nos fornecem duas rotações, a
de 2π/3 ou 4π/3, ou seja um total de 8. Ao somarmos todas estas simetrias, obtemos um
total de vinte e três simetrias rotacionais diferentes da identidade, obtida a partir de uma
rotação de 2π em qualquer um dos eixos. Sendo assim totalizamos 24 simetrias rotacionais.
Figura 8.2: Cubo com os eixos de rotação.[1]
Enumerando os vértices do cubo, podemos produzir um isomor�smo entre o grupo
de simetrias rotacionais do cubo e um subgrupo de S8. Para tanto, temos que observar
que cada simetria rotacional no cubo permuta as quatro diagonais principais do cubo.
Podemos utilizar este fato para mostrar que este grupo de simetria rotacional é isomorfo a
S4. Se eunumerarmos os vértices do cubo da forma como a �gura acima mostra, de�nimos
a diagonal Nk como sendo a diagonal que une k a k′, para 1 ≤ k ≤ 4. Cada simetria
rotacional permuta as diagonais N1,N2,N3 e N4, consequentemente, nos dá a permutação
dos números 1, 2, 3, 4. Por exemplo, rerindo-nos a Figura 8.2, r envia N1 em N2, N2 em
N3, N3 em N4 e N4 em N1, o que induz a permutação (1234) enquanto que a rotação s
induz a permutação (143).
Por t, as diagonais N1 e N2 são trocadas enquanto N3 em N4 são matidas �xas. Sendo
assim a rotação t induz a permutação (12).
Seja G o grupo de simetria rotacional do cubo, e φ : G→ S4 onde φ é a função construída
acima. Como o produto de duas rotações claramente induz o produto de permutações,
basta checarmos que φ é uma bijeção.
Para tanto, basta lembrarmos que uma sobrejeção entre dois conjuntos �nitos que possuem

8. Sólidos de Platão e o Teorema de Cayley 70
o mesmo número de elementos é uma bijeção. Mostremos que φ é sobrejetora. Note que
(1234) e (12) pertencem a φ(G), e φ(G) é um subgrupo de S4 pois φ manda a operação de
G em S4. Portanto, uma palavra que pode ser formada por (1234) e (12) deve pertencer
a φ(G). Como (1234) e (12) geram todo S4, φ(G) = S4 o que completa nosso argumento.
Unindo os centros de cada par de lados adjacentes de um cubo, podemos produzir um
octaedro regular inscrito no cubo. O mesmo procedimento repetido dentro do octaedro nos
fornece um cubo inscrito no octaedro. Dizemos então que o cubo e o octaedro são sólidos
duais. Eles claramente possuem a mesma quantidade de simetrias. Basta observar que
qualquer simetria do cubo é uma simetria do octaedro, e vice-versa, pois os eixos de
simetria de cada um deles é também um eixo de simetria do segundo. Podemos dizer
então, que os grupos de simetria rotacional do cubo e do octaedro são isomorfos.
Figura 8.3: Octaedro inscrito no cubo.[1]
Existem ainda outros dois sólidos regulares, o dodecaedro e o icosaedro. Ambos são
duais um do outro, estamos interessados apenas nos grupos de simetria rotacional , por-
tanto, basta estudarmos um deles. Escolhemos o dodecaedro.
Observe na Figura 8.4 que cada vértice do cubo é um vérice do dodecaedro, e cada
aresta do cubo é uma diagonal de uma face pentagonal. Se olharmos para uma face pen-
tagonal especí�ca, exatamente uma das cinco diagonais é uma aresta do cubo inscrito.
Sendo assim sabemos que existem mais quatro cubos diferentes inscritos no dodecae-
dro. Existem cinco cubos, que são permutados a cada simetria rotacional do dodecaedro.
Usando-os, como usamos as diagonais do cubo, conseguimos concluir que o grupo de sime-
tria rotacional do dodecaedro é isomorfo a A5.
Resumimos nossos resultados da seguinte forma.O grupo de simetria rotacional do
tetraedro é isomorfo a A4, o cubo e o octaedro possuem os grupos de simetria rotacional
isomorfos a S4. O dodecaedro e o icosaedro possuem grupos de simetria rotacional iso-
morfos a A5.

8. Sólidos de Platão e o Teorema de Cayley 71
Figura 8.4: Um dos 5 cubos inscritos no dodecaedro.[1]
Temos conseguido resultados de isomor�smos entre os grupos de simetria rotacional
e grupos de permutações. Mostraremos agora um resultado geral que garante que todo
grupo é isomorfo a um subgrupo de um grupo de permutações.
Teorema 8.1. Teorema de Cayley. Seja G um grupo, então G é isomorfo a um
subgrupo de SG.
Demonstração. Cada elemento g ∈ G nos fornece uma permutação Lg : G → G de�nida
por Lg(x) = gx. Lg é injetora pois, se tivermos Lg(x) = Lg(y) ⇒ gx = gy ⇒ x = y.
Lg é também sobrejetora, seja z ∈ G, então Lg(g−1z) = gg−1z = z. Chamamos Lg de
uma translação a esquerda por g. Note que se se G = R temos de fato uma translação
física. Seja G′ = {Lg | g ∈ G} subconjunto de SG. A operação em SG é a composição de
funções, e
Lg(Lh(x)) = Lg(hx) = ghx = Lgh(x) ∀x ∈ G.
Isto nos mostra que o produto de dois elementos de G′ está em G′. O elemento neutro de
SG pertence a G′ pos é igual a Le, o inverso de Lg em SG é Lg−1 que também pertence a
G′. Assim concluímos que G′ é um subgrupo de SG, a correspondência estabelecida entre
G e G′ de�nida por
g −→ Lg
Certamente é sobrejetora, pois G′ é o conjunto imagem desta aplicação, note ainda que
ela preserva a operação pois
gh→ Lgh = LgLh
Por �m, mostramos que tal aplicação é injetora, pois Lg = Lh ⇒ g = Lg(e) = Lh(e) = h.
Portanto , temos um isomor�smo entre G e um subgrupo G′ de SG como queríamos.
Teorema 8.2. Se G é um grupo �nito de ordem n, então G é isomorfo a algum subgrupo
de Sn.

8. Sólidos de Platão e o Teorema de Cayley 72
Demonstração. Se os elementos de G forem enumerados com 1, 2, . . . , n, então cada per-
mutação de G induz uma permutação dos inteiros 1, 2, . . . , n. Este argumento nos fornece
um isomor�smo de SG em Sn e consequentemente, o subgrupo G′ de SG é isomorfo a
algum subgrupo G′′ de Sn pela Proposição 7.10. Como G é isomorfo a G′, e a composição
de isomor�smos é também um isomor�smo, temos que G ∼= G′. Assim temos que
G ∼= G′ ∼= G′′
Ou seja temos um isomor�smo de G em um subgrupo G′′ de Sn como queríamos.
8.1 Exercícios
8.1)Enumere as arestas de um tetraedro regular de 1 a 6, de forma que cada simetria
rotacional do tetraedro produza um elemento de S6. Trabalhe com os doze elementos de
S6 identi�cados desta forma, e mostre que eles formam um subgrupo de S6.
Solução:
Podemos identi�car cada uma das rotações
e , r , r2 , s , rs , r2s
com uma permutação em S6. Numerando cada uma das arestas, cada rotação induz uma
permutação, desta forma temos a relação
r ↔ (312)(645) r2 ↔ (321)(654) s↔ (51)(62) rs↔ (163)(245) r2s↔ (614)(253)
e↔ ε
Mostremos agora que o conjunto {(312)(645), (321)(654), (51)(62), (163)(245), (614)(253), ε}é um subgrupo de S6. Para tanto basta veri�carmos que o elemento neutro pertence a
este conjunto, o que já é visto. Precisamos veri�car a presença do elemento inverso para
cada um dos elementos deste conjunto. Para tanto observe que a relação de�nida acima
é um isomor�smo, sendo assim, os inversos de cada um dos elementos do conjunto de
simetrias rotações também está presente no subconjunto de S6. Com isto, concluímos que
tal conjunto é um subgrupo de S6.

8. Sólidos de Platão e o Teorema de Cayley 73
8.2)Unindo os centros de cada par de faces adjacentes do tetraedro regular, observe
que o resultado é um segundo tetraedro regular inscrito de ponta cabeça no primeiro.
Solução:
O resultado é a seguinte Figura:
Figura 8.5: Tetraedro inscrito.
8.3)Enumere as faces do cubo de 1 a 6. Encontre os elementos de S6 que correspondem
as rotações r, s e t na Figura 8.2
Solução:
Observando a Figura 8.2 com os vértices numerados, e examinando o efeito das rotações
nas faces temos a seguinte relação
r ↔ (1234) s↔ (643)(215) t↔ (15)(24)(63).
8.4)Observe o cubo com um traço marcada em cada uma de suas faces. Quais sime-
trias rotacionais do cubo, enviam traços em traços? A qual subgrupo de S4 estas rotações
correspondem?
Solução:
Operando com as rotações neste cubo com os traços obtemos que apenas as rotações s

8. Sólidos de Platão e o Teorema de Cayley 74
Figura 8.6: Cubo com faixas.[1]
e s2 levam traços em traços. Se enumerarmos os vértices do cubo, produzindo as quatro
diagonais N1, N2, N3, N4. As rotações s e s2 induzem, respectivamente as permutações
(143) e (134) das diagonais N1, N3 e N4. Assim estas permutações correspondem ao sub-
grupo gerado por estes dois elementos, ou 〈(143)〉.
8.6)Utilize o procedimento do Teorema de Cayley para obter um subgrupo de S6 que seja
isomorfo a D3.
Solução:
Note que D3 = {e, r, r2, s, rs, r2s}. De�nimos a mesma função utilizada na demonstração
do Teorema de Cayley, onde φ associa cada rotação, por exemplo r, a permutação Lr sendo
assim, de�nimos o conjunto G′ = {Lg | g ∈ D3}. Pelo teorema temos que D3∼= G′ ⊂ SG.
Mas note que SD3 é isomorfo a S6, assim G′ é isomorfo a algum subgrupo de S6, portanto
D3 é também isomorfo a este subgrupo.
8.7)Mostre que o Teorema de Cayley, quando aplicado a R, produz o subgrupo de SR
que contém todas as translações da reta real.
Pelo Teorema de Cayley temos que R ∼= B ⊂ SR com B subgrupo de SR.
AFIRMAÇÃO: Tal B possui todas as translações de R.
Note que toda translação é uma permutação dos elementos de R. Portanto nossa tarefa
se resume a de�nir uma função φ : R→ B que seja bijetora em um subconjunto A ⊂ B.
De�namosφ : R→ B
x 7→ φx
Onde φx é a translação φx(y) = y + x. Note que desta forma estamos tentando
englobar todas as translações em R. De�nimos agora o conjunto A = {φx | x ∈ R}. Paramostrarmos que A possui todas as translações de R, basta mostrarmos que φ é injetora

8. Sólidos de Platão e o Teorema de Cayley 75
em A. Sejam
φx = φy
t+ x = t+ y para todo t ∈ R
x = y
Desta forma conseguimos mostrar que o conjunto A ⊂ B contém todas as translações da
reta real, e está contido em um subgrupo de SR.
8.8)Converta cada elemento α ∈ Sn em um elemento α∗ de Sn+2 como segue. A nova
permutação α∗ se comporta como α nos inteiros 1, 2, . . . , n. Se α é uma permutação par,
então α∗ �xa n + 1 e n + 2, por outro lado, se α é ímpar, α∗ troca n + 1 e n + 2. Veri-
�que que α∗ sempre é uma permutação par, e que a correspondencia α → α∗ de�ne um
isomor�smo de Sn a um subgrupo de An+2.
Solução:
Primeiramente devemos mostrar que α∗ é sempre par. Para isto, basta observarmos os
seguintes casos. Quando α é par, na decomposição de α∗ como produto de transposições
aparecerão apenas as transposições de α, pois n+1 e n+2 estão �xos, como este número
é par, temos que α∗ é par.
Quando α é ímpar, na decomposição de α∗ em produto de transposições aparecerão todas
as transposições de α, um número ímpar, mas além destas existe ainda a transposição
(n+ 1 n+ 2), resultando em um número par, portanto α∗ é também par.
Devemos mostrar que a função
φ : Sn → A ⊂ Sn+2
α 7→ α∗
é um isomor�smo, onde A = {φ(α) | α ∈ Sn}. Note que φ conserva a operação pela sua
própria de�nição.
Provemos a injeção de φ. Sejam α∗ = β∗ , note que esta igualdade é valida se, e somente
se, ambas permutações mantém n + 1 e n + 2 �xos ou não. Se estão �xos, então α = α∗
e β = β∗ então α = β.
Se não estão �xos temos a transposição (n + 1 n + 2) aparece em ambos os elementos,
mas fora ela, as transposições presentes em cada decomposição é exatamente igual, o que
implica que α = β.
A sobrejeção segue pois A é o conjunto imagem. Portanto φ é de fato um isomor�smo.
Note que A é claramente um subgrupo de Sn+2, e A ⊂ An+2 pois como foi provado, todas
as permutações em A são pares. Como φ leva o elemento neutro em elemento neutro, e
também os inversos, assim temos os inversos de cada um dos elementos presentes em A

8. Sólidos de Platão e o Teorema de Cayley 76
também contidos em A, com isto concluímos que Sn é isomorfo a um subgrupo de An+2.
8.9)Se G é um grupo �nito de ordem n, prove que G é isomorfo a um subgrupo do grupo
alternado An+2.
Solução:
Basta observarmos que pelo exercício anterior temos que Sn ∼= B ⊂ An+2 , pelo Teo-
rema 8.2, como G tem ordem n, existe um isomor�smo entre SG e Sn então, como com-
posição de isomor�smo, é ainda isomor�smo temos que
G ∼= B ⊂ Sn ∼= C ⊂ An+2
Portanto G ∼= C ⊂ An+2 onde C em um subgrupo de An+2.
8.10)Se α é um elemento de Sn, seja α] a permutação em S2n de�nida por
α](k) =
{α(k), 1 ≤ k ≤ n
α(k − n) + n, n+ 1 ≤ k ≤ 2n.
Mostre que α] é sempre par e que α→ α] é um isomor�smo de Sn em A2n.
Solução:
Para mostrarmos que α] é sempre par, devemos observar os casos em que α é par e também
em que é ímpar.
Se α é par sua imagem está descrita por uma quantidade par de transposições. Precisamos
observar as imagens dos inteiros n + 1, . . . , 2n. Note que a imagem dos elementos desta
última lista , será a imagem dos elementos 1, 2, . . . , n acrescida de n, isto é uma bijeção,
assim o número de transposições que descreverá a imagem destes elementos será também
par. Na decomposição de α] teremos então uma quantidade par de transposições, o que
implica que α]é par.
Se α é ímpar, pelo mesmo argumento utilizado anteriormente, teremos na decomposição
de α] duas quantidades ímpares de transposições, o que resultará em um total par de
transposições, implicando que α] é par.
Mostremos agora queφ : Sn → B ⊂ A2n
α 7→ α]
Onde B = {φ(α) | α ∈ Sn}, é de fato um isomor�smo. Provemos primeiramente que φ
preserva a operação. Sejam α e β ∈ Sn temos então
φ(αβ) = (αβ)] =
=
{(αβ)(k), 1 ≤ k ≤ n
(αβ)(k − n) + n, n+ 1 ≤ k ≤ 2n=
{α(β(k)), 1 ≤ k ≤ n
α(β(k − n)) + n, n+ 1 ≤ k ≤ 2n.
Por outro lado temos que :

8. Sólidos de Platão e o Teorema de Cayley 77
α]β] = α]
{β(k), 1 ≤ k ≤ n
β(k − n) + n, n+ 1 ≤ k ≤ 2n=
=
{α(β(k)), 1 ≤ k ≤ n
α(β)(k − n) + n− n) + n, n+ 1 ≤ k ≤ 2n=
=
{α(β(k)), 1 ≤ k ≤ n
α(β)(k − n)) + n, n+ 1 ≤ k ≤ 2n.
Ou seja,
φ(αβ) = (αβ)]
= α]β]
= φ(α)φ(β).
Mostremos agora a injeção. Sejam φ(α) e φ(β) elementos de B tais que φ(α) = φ(β).
Temos então
{α(k), 1 ≤ k ≤ n
α(k − n) + n, n+ 1 ≤ k ≤ 2n=
{β(k), 1 ≤ k ≤ n
β(k − n) + n, n+ 1 ≤ k ≤ 2n
⇐⇒
α = β.
Como B é o conjunto imagem temos a sobrejeção.B é claramente um subgrupo de A2n,
assim concluímos que φ é de fato um isomor�smo entre Sn e um subgrupo de A2n.
8.12)Trabalhando com o grupo de todas as simetrias do cubo, mostre que cada permu-
tação das diagonais principais podem ser realizadas por precisamente duas simetrias.
Solução:
Sabemos que o grupo de todas as simetrias do cubo é isomorfo a S4, seja f o isomor�smo
entre estes dois grupos. Pelo Teorema 6.8 sabemos que (1234) e (12) geram S4, como existe
o isomor�smo f , basta considerarmos a imagem inversa de cada uma destas permutações.
Neste caso são respectivamente as rotações r e t. Portanto as duas simetrias que induzem
as duas permutações que geram o grupo de todas as permutações das diagonais são r e t.

78
Referências Bibliográ�cas
[1] Mark Anthony.Groups and symmetry . Undergraduate Texts in Mathematics,
Springer-Verlag, New York, 1988.
[2] César Polcino; COELHO, Sônia Pitta. Números: Uma introdução à Matemática.3 ed.,
São Paulo, Edusp, 2006.
São Carlos, 15 de julho de 2011.