Embed Size (px)
Citation preview
IDENTIFICAÇÃO E CONTROLE DE PROCESSOS VIADESENVOLVIMENTOS EM SÉRIES ORTONORMAIS. PARTE A:
IDENTIFICAÇÃO
Ricardo J. G. B. Campello∗
[email protected] H. C. Oliveira†
Wagner C. Amaral‡[email protected]
∗SCC/ICMC/USPCP 668 CEP 13560-970São Carlos - SP, Brasil
†PPGEPS/CCET/PUCPRRua Imaculada Conceição 1155 CEP 80215-901
Curitiba - PR, Brasil
‡DCA/FEEC/UNICAMPCP 6101 CEP 13083-970
Campinas - SP, Brasil
ABSTRACT
In this paper, an overview about the identification of dynamicsystems using orthonormal basis function models, such asthose based on Laguerre and Kautz functions, is presented.The mathematical foundations of these models as well astheir advantages and limitations are discussed within the con-texts of linear, robust, and nonlinear identification. Thediscussions comprise a broad bibliographical survey on thesubject and a comparative analysis involving some specificmodel realizations, namely, linear, Volterra, fuzzy, and neu-ral models within the orthonormal basis function framework.Theoretical and practical issues regarding the identificationof these models are also presented and illustrated by meansof two case studies related to a polymerization process.
KEYWORDS: Modeling, Orthonormal Basis Functions, La-
Artigo submetido em 14/08/20061a. Revisão em 19/03/2007Aceito sob recomendação do Editor Associado
Prof. Liu Hsu
guerre, Kautz, GOBFs, Linear Identification, Robust Iden-tification, Nonlinear Identification, Volterra Models, FuzzyModels, Neural Networks.
RESUMO
O presente artigo apresenta uma visão geral do estado da artena área de identificação de sistemas utilizando modelos di-nâmicos com estrutura desenvolvida através de bases de fun-ções ortonormais, como as funções de Laguerre, Kautz oufunções ortonormais generalizadas. Discute-se as vantagense possíveis limitações desse tipo de estrutura bem como osfundamentos matemáticos dos modelos correspondentes noscontextos de identificação linear, linear com incertezas para-métricas (identificação robusta) e não linear, incluindo umarevisão bibliográfica abrangente sobre o tema. Diferentes re-alizações de modelos com funções de base ortonormal, a sa-ber, modelos lineares, de Volterra,fuzzye neurais, são deta-lhadas e discutidas comparativamente em termos de capaci-dade de representação, parcimônia, complexidade de projeto
Revista Controle & Automação/Vol.18 no.3/Julho, Agosto e S etembro 2007 301

e interpretabilidade. Aspectos práticos da identificação des-ses modelos são também apresentados e ilustrados através dedois casos de estudo envolvendo um processo simulado depolimerização isotérmica.
PALAVRAS-CHAVE : Modelagem, Bases de Funções Orto-normais, Laguerre, Kautz, GOBFs, Identificação Linear,Identificação Robusta, Identificação Não Linear, Modelos deVolterra, ModelosFuzzy, Modelos Neurais.
1 INTRODUÇÃO
A crescente complexidade dos processos de produção e a de-manda por alta eficiência em plantas industriais impõem res-trições cada vez maiores aos sistemas de controle associa-dos. Com o objetivo de aprimorar o desempenho desses sis-temas, várias estratégias de controle avançado têm sido pro-postas. Dentre as mais bem sucedidas, destacam-se aquelasque utilizam modelos matemáticos dinâmicos dos processosa serem controlados, como as estratégias de controle predi-tivo (Model Based Predictive Controllers− MBPC ou MPC)(Garcia et al., 1989; Soeterboek, 1992; Clarke, 1994; Ca-macho and Bordons, 1999; Henson, 1998; Allgower andZheng, 2000; Oliveira et al., 2007). Nessas estratégias, omodelo faz um papel crucial ao prever o comportamento di-nâmico do processo e assim permitir a tomada de decisãopor parte do controlador de forma antecipativa e com baseem critérios de otimalidade.
Modelos de sistemas dinâmicos são usualmente construídossegundo a bem conhecida estrutura (N)ARX− (Nonlinear)Auto-Regressive with eXogenous inputs− em que a saída dosistema em um dado instante de tempo discreto é represen-tada utilizando amostras passadas dos seus sinais de entrada esaída (E/S) (Sjöberg et al., 1995; Nelles, 2001; Campello andOliveira, 2007), como nos modelos polinomiais (Leontaritisand Billings, 1985). Embora essa abordagem possua uma sé-rie de propriedades interessantes, tal como permitir represen-tações parcimoniosas mesmo de sistemas instáveis (memóriainfinita), além de outras vantagens discutidas, por exemplo,em (Aguirre et al., 2002; Corrêa and Aguirre, 2004), umdos seus principais problemas é que a característica auto-regressiva em geral leva a uma elevada sensibilidade à es-colha da ordem dos modelos e causa a recursão de erros quepodem comprometer a qualidade de previsão dos mesmos,especialmente em horizontes de previsão longos. Essa ca-racterística é indesejada em determinadas situações práticas,particularmente em aplicações de controle preditivo. Por estarazão, estruturas alternativas para a modelagem de sistemasdinâmicos têm sido investigadas.
Uma abordagem de particular interesse para contornar o pro-blema mencionado acima é a utilização de modelos sem re-alimentação de saída (Nelles, 2001). A subcategoria mais
conhecida dentro desta classe é constituída pelos modeloscom estrutura (N)FIR− (Nonlinear) Finite Impulse Res-ponse− em que a saída do sistema em um dado instante detempo discreto é representada utilizando amostras passadasapenas dos seus sinais de entrada (Sjöberg et al., 1995; Nel-les, 2001; Campello and Oliveira, 2007). A ausência de re-cursão de saída nesses modelos, no entanto, possui um preço.Trata-se da quantidade elevada de termos no vetor de regres-são, especialmente na representação de sistemas com dinâ-micas (de tempo discreto) lentas. A quantidade de termos deregressão é proporcional à quantidade de parâmetros desco-nhecidos do modelo, sendo que esta relação é exponencialpara a grande maioria dos modelos não lineares de propósitogeral, como será visto em seções subseqüentes. Uma estraté-gia para contornar esse problema é utilizar uma outra subca-tegoria de modelos sem realimentação de saída, a dizer, aque-les dotados de estrutura (N)OBF− (Nonlinear) OrthonormalBasis Functions(Sjöberg et al., 1995; Nelles, 2001; Cam-pello and Oliveira, 2007).
Modelos (N)OBF possuem estrutura desenvolvida atravésde bases de funções ortonormais (Ninness and Gustafs-son, 1995; Ninness and Gustafsson, 1997), como as funçõesde Laguerre e Kautz (Broome, 1965; Wahlberg, 1991; Wahl-berg, 1994; Wahlberg and Mäkilä, 1996) ou as funções or-tonormais generalizadas (Generalized Orthonormal Bases ofFunctions− GOBFs) (Heuberger et al., 1995; Van den Hofet al., 1995; Ninness and Gustafsson, 1997). Essas fun-ções têm sido amplamente utilizadas no contexto de mode-lagem e controle de sistemas lineares e não lineares (e.g.ver (Heuberger et al., 2005; Oliveira et al., 2007) e refe-rências inclusas), especialmente porque os modelos dinâmi-cos correspondentes exibem várias características desejáveis,tais como (Dumont and Fu, 1993; Nelles, 2001; Heubergeret al., 2005):i) Ausência de realimentação de saída e, con-seqüentemente, de erros de previsão, o que leva a modelosmais precisos, ao desacoplamento natural das múltiplas saí-das em modelos multivariáveis e a um conjunto de proprie-dades estatísticas favoráveis à estimação numérica daquelesmodeloslineares nos parâmetrosvia algoritmo de mínimosquadrados;ii) Não é necessário conhecer os termos passadosrelevantes dos sinais de E/S do sistema, cujo procedimentode determinação não é trivial, particularmente no caso nãolinear; iii) É possível aumentar acapacidade de represen-taçãodos modelos meramente incrementando o número defunções ortonormais na base;iv) É garantido que a represen-tação de um sistema estável é também estável;v) Robusteza estimativas pouco precisas do atraso de transporte do sis-tema, tolerância a dinâmicas não modeladas e sensibilidadereduzida aos parâmetros estimados.
O presente trabalho apresenta uma visão geral do estado daarte na área de identificação e controle de sistemas dinâmicosatravés de modelos do tipo (N)OBF. Por simplicidade e sem
302 Revista Controle & Automação/Vol.18 no.3/Julho, Agost o e Setembro 2007

perda de generalidade, apenas o caso SISO (Single Input−Single Output) será considerado. O trabalho está separadoem duas partes principais:a) identificação; eb) controle. Aparte de identificação é descrita no presente artigo, estandoorganizada conforme será apresentado a seguir. A parte decontrole, por sua vez, é abordada como continuação, em umsegundo artigo (Oliveira et al., 2007).
A seção 2 deste artigo discute o problema de identificaçãode sistemas dinâmicos lineares através de modelos com es-trutura OBF, incluindo a identificação robusta de modeloscom incertezas paramétricas estruturadas. A seção 3 abordaaidentificação de sistemas não lineares, apresentando diferen-tes possíveis realizações de modelos com estrutura NOBF.A seção 4 discute comparativamente as diferentes aborda-gens reportadas nas seções anteriores, enquanto a seção 5apresenta uma série de alternativas para o projeto das basesde funções ortonormais que equipam os modelos correspon-dentes. Na seção 6, descreve-se dois casos de estudo en-volvendo um processo de polimerização isotérmica e, final-mente, apresentam-se as conclusões na seção 7.
2 IDENTIFICAÇÃO DE SISTEMAS LINEA-RES
A idéia por trás dos modelos dinâmicos lineares com estru-tura OBF é fundamentada na propriedade de completude dasbases ortonormais de Laguerre, Kautz e GOBFs. Essa propri-edade garante que qualquer função do espaçol2[0,∞) podeser aproximada com precisão arbitrária por uma combinaçãolinear de funções de uma dessas bases. Em outras palavras,para qualquer funçãoh(κ) : N → ℜ quadraticamente somá-vel em[0,∞), isto é,
∑∞κ=0 h(κ)2 < ∞, existe um inteiro
n > 0 tal que para qualquerǫ > 0 tem-se
∞∑
κ=0
(
h(κ) −
n∑
i=1
ciφi(κ)
)2
< ǫ (1)
onde{φ1(κ), · · · , φn(κ) } é o conjunto com asn primeirasfunções ortonormais da base ec1, · · · , cn são escalares. Por-tanto, a representaçãoh(κ) =
∑n
i=1 ciφi(κ) converge parah(κ), sendo exata paran infinito, ou seja
h(κ) =
∞∑
i=1
ciφi(κ) (2)
Para qualquer inteiroj > 0 tem-se de (2) que
∞∑
κ=0
h(κ)φj(κ) =
∞∑
κ=0
φj(κ)
∞∑
i=1
ciφi(κ) =
=∞∑
i=1
ci
∞∑
κ=0
φj(κ)φi(κ)
(3)
e utilizando a propriedade de ortonormalidade das funções,isto é
∞∑
κ=0
φi(κ)φj(κ) =
{
1 se i = j
0 se i 6= j(4)
tem-se de (3) que os coeficientes da série são dados por
cj =
∞∑
κ=0
h(κ)φj(κ) (5)
A idéia da representação OBF em modelos dinâmicos é de-senvolver a resposta ao impulso do sistema através de umabase de funções ortonormais. Esse desenvolvimento é pos-sível para sistemas dinâmicos (BIBO) estáveis, cuja respostaao impulso é absolutamente (e portanto quadraticamente) so-mável. É importante lembrar que sistemas com integradorespossuem resposta ao impulso com energia infinita, e portantonão se enquadram no requerimento acima. Como em geral apresença de integradores em um sistema real é conhecida,pode-se modelar a variação da saída do sistema ao invés doseu valor absoluto, o que é equivalente a retirar o(s) integra-dor(es) da malha de identificação.
A equação de convolução que descreve um sistema di-nâmico linear, causal, invariante no tempo e consideradoem repouso para instantes de tempo negativo, é dada pory(k) =
∑k
m=0 h(m)u(k − m), ondeu(k) é a entrada no ins-tante discretok, y(k) é a saída naquele instante eh(m) é aresposta ao impulso do sistema. O desenvolvimento apro-ximado da função de resposta ao impulsoh em n funçõesortonormais é realizado de forma tal que o modelo de convo-lução é representado como:
Revista Controle & Automação/Vol.18 no.3/Julho, Agosto e S etembro 2007 303

y(k) =
k∑
m=0
h(m)u(k − m)
=k∑
m=0
n∑
i=1
ciφi(m)u(k − m)
=n∑
i=1
ci
k∑
m=0
φi(m)u(k − m)
=
n∑
i=1
cili(k)
(6)
onde o termoli(k) é a convolução da entradau com ai-ésima função ortonormalφi no instantek. Como cada fun-ção da base ortonormal pode ser associada, a partir da trans-formada Z, a uma função de transferência que define um fil-tro linear, o termoli é simplesmente o resultado de umafiltragem do sinal de entradau, isto é,li(k) = Φi(q)u(k),ondeΦi(q) é a função de transferência discreta dai-ésimafunção ortonormal representada no operador deslocamento
q, sendoq u(k)△= u(k + q). O conjunto de funções de trans-
ferência dos filtros associados à bem conhecida base de La-guerre (Wahlberg, 1991), por exemplo, é dado por:
Φi(z) = Z{φi(k)} =
√
1 − p2
z − p
(
1 − pz
z − p
)i−1
; i = 1, 2, · · ·
(7)
ondep ∈ {ℜ : | p | < 1} é o pólo estável que parametriza asfunções ortonormais. Note que parap = 0 obtém-se a baseΦi(z) = z−i ou, equivalentemente,Φi(q) = q−i, o que im-plica li(k) = q−i u(k) = u(k − i). Logo, parap = 0 o mo-delo em (6) pode ser rescrito comoy(k) =
∑n
i=1 ciu(k− i),isto é, o modelo clássico FIR (Ljung, 1999). Tem-se, por-tanto, que a base ortonormal FIR é um caso particular dabase de Laguerre. A base FIR, porém, geralmente requerquantidades elevadas de termosn para proporcionar aproxi-mações precisas, especialmente na representação de sistemascom dinâmicas (de tempo discreto) predominantemente len-tas. A inserção de dinâmica nos filtros de Laguerre em (7),através de um pólop não nulo, ameniza significativamenteesse problema ao incorporar na base conhecimentoa prioria respeito do comportamento dinâmico do sistema (Ninnessand Gustafsson, 1995; Ninness and Gustafsson, 1997). Defato, quanto mais próximo o pólo estiver da dinâmica domi-nante do sistema, menor será a quantidade de funções na basenecessárias para aproximar o sistema com dada precisão.
A base de Kautz (Wahlberg, 1994) é uma generalização dabase de Laguerre onde as funções são parametrizadas por umpar de pólos complexos conjugados. Por esta razão, a base de
Kautz requer um número menor de funções para representarsistemas com dinâmicas dominantes mal amortecidas (osci-latórias). As bases de Laguerre e Kautz são realizações par-ticulares das bases ortonormais generalizadas (Van den Hofet al., 1995; Ninness and Gustafsson, 1997), onde as fun-ções não são necessariamente parametrizadas apenas por umúnico pólo ou par de pólos. Em função da flexibilidade adici-onal resultante da incorporação de múltiplos modos, as basesgeneralizadas podem requerer um número menor de funçõespara a representação de um dado sistema. Por outro lado,requerem uma maior quantidade de informaçãoa priori so-bre as suas dinâmicas dominantes. Por esta razão, as basesde Laguerre e Kautz ainda são mais amplamente difundidase adotadas na literatura (e.g. ver (da Rosa et al., 2007) ereferências inclusas); em especial a primeira, que será consi-derada nos desenvolvimentos subseqüentes do presente tra-balho.
As funções ortonormais são recursivas, isto é, ai-ésima fun-ção pode ser escrita em função da(i−1)-ésima. Logo, é pos-sível escrever a dinâmica do conjunto de filtros ortonormaisatravés de uma equação de estados (Oliveira, 1997). Nessecaso, o modelo em (6) pode ser representado em espaço deestados, como:
l(k + 1) = A l(k) + bu(k) (8)
y(k) = H(l(k)) (9)
onde o vetor de estadosl(k) = [ l1(k) · · · ln(k) ]T é cons-tituído pelas saídas dos filtros ortonormais eH é o mapea-mento estático (equação de observação) dado pela combina-ção linear desses estados, isto é
H(l(k)) =
n∑
i=1
cili(k) (10)
A matriz A e o vetorb na equação (8) dependem apenas dabase de funções ortonormais. No caso da base de Laguerretem-se (Dumont and Fu, 1993; Oliveira, 1997):
A =
p 0 0 · · · 01 − p2 p 0 · · · 0
(−p)(1 − p2) 1 − p2 p · · · 0...
......
. . ....
(−p)n−2(1 − p2) (−p)n−3(1 − p2) · · · p
(11)
304 Revista Controle & Automação/Vol.18 no.3/Julho, Agost o e Setembro 2007

b =√
1 − p2[
1 −p (−p)2 · · · (−p)n−1]T
(12)
ondep é o pólo de Laguerre. O modelo com dinâmica deLaguerre é ilustrado na Figura 1, onde se observa a recur-são dos estados através da disposição em cascata dos filtros,representados no planoz. Nota-se que, uma vez escolhidoo pólo de Laguerre (ver seção 5), o modelo é completa-mente determinado pelos coeficientesc(·) da série em (10).Se a resposta ao impulso do sistema estiver disponível, essescoeficientes podem ser calculados analiticamente através daequação (5)1. Essa abordagem não paramétrica, no entanto,embora seja simples e matematicamente fundamentada, podenão ser eficaz em problemas práticos. A razão é que a res-posta ao impulso do sistema, quando disponível, pode conterruído e/ou dinâmicas não modeladas. Uma abordagem maiseficiente é considerar os coeficientesc(·) como parâmetrosa serem estimados numericamente utilizando dados de E/Sdo sistema, o que pode ser realizado de forma simples utili-zando algoritmos de estimação linear (e.g. mínimos quadra-dos) (Ljung, 1999; Aguirre, 2004).
Finalmente, é importante salientar que, embora nenhumatraso de transporte esteja explicitamente representado nadescrição acima do modelo, as funções ortonormais sãocapazes de representar dinâmicas com essa característica(Mäkilä, 1990; Fu and Dumont, 1993). Não obstante, pode-se incorporar explicitamente ao modelo qualquer informaçãoaproximada disponível sobre o atraso real do sistema, o quepermite uma redução no número de funções e respectivos fil-
q
1 − p2
z − p
1 − pz
z − p
1 − pz
z − p
1 − pz
z − p
l1(k) l2(k) l3(k)
ln(k)u(k)
y(k)H
Figura 1: Modelo OBF com dinâmica de Laguerre.
tros necessários para modelá-lo com uma dada precisão. Paratanto, basta substituiru(k) por u(k − τd) na equação (8),ondeτd é o atraso estimado.
2.1 Identificação Robusta
Muitas vezes um único modelo linear não é capaz de repre-sentar adequadamente um sistema complexo. Uma das possí-veis razões é a presença de perturbações externas, que podeminviabilizar a obtenção de um conjunto único de parâmetros
1Note que a resposta ao impulso de um sistema BIBO estável neces-sariamente se anula ou tende assintoticamente a zero com o tempo, o queviabiliza o truncamento da equação (5).
que garantam a um determinado modelo uma representaçãofiel do sistema de interesse. Nestes casos, um procedimentoé a incorporação de incertezas associadas aos parâmetros domodelo. Modelos com incertezas paramétricas são a base dediversos algoritmos de controle denominados de Robustos.Em modelos com funções ortonormais, como os representa-dos pelas equações (8) a (10), tem-se:
y(k) =
n∑
i=1
cili(k) = cTl(k) (13)
Definindo ci(εi) como os parâmetros incertos do modelo,chega-se a:
y(k, ε) =
n∑
i=1
ci(εi)li(k) = c(ε)Tl(k) (14)
ondeε é um vetor cujoi-ésimo elemento éεi, que por suavez, representa a incerteza relativa ao parâmetroci.
Na seqüencia, duas abordagens para estimação robusta dosparâmetros do modelo com bases ortonormais e suas incer-tezas são apresentadas (Oliveira, 1997; Oliveira et al., 1998).A primeira assume a medida de um conjunto de dados de en-trada e saída do processo e a utilização de métodos de iden-tificação robusta baseados na abordagem UBBE (UnknownBut Bounded Error) (Milanese and Belforte, 1982). Já a se-gunda assume o conhecimentoa priori da incerteza do mo-delo associada com a resposta ao impulso do processo. Em(Moreira, 2006), um algoritmo baseado nesta segunda abor-dagem, para cálculo dos limites de incerteza no modelo, éapresentado.
No contexto de controle robusto, usualmente a representa-ção das incertezas no modelo é aproximada por formas ge-ométricas no espaço formado pelos parâmetros, e.g., umpolitopo, um ortotopo ou um elipsóide (Walter and Piet-Lahanier, 1990; Favier and Arruda, 1996). As abordagensaqui mencionadas representam o espaço de incertezas pa-ramétricas como um ortotopo, isto é, a incerteza relativaao modelo está associada a um valor mínimo e máximopara cada parâmetro, ou:ci(εi) ∈ [ci,min, ci,max]. O pro-blema de identificação robusta com modelos de Laguerreusando aproximações elipsoidais é relatado em (Wahlbergand Ljung, 1992).
A formulação do problema de identificação robusta UBBE émostrada a seguir. Seja o modelo (13) de um dado processo.O erro da saída deste modelo em relação à saída do processo,em dado instante de tempok e para um dado conjunto deparâmetrosci, é definido por:
Revista Controle & Automação/Vol.18 no.3/Julho, Agosto e S etembro 2007 305

e(k) = y(k) − y(k) (15)
ondey(k) é a saída medida do processo ey(k) é a saída domodelo para o conjunto de parâmetrosci. Assuma quee(k)satisfaça a:
e(k) ∈ [ emin(k), emax(k) ] (16)
ondeemin(k) eemax(k) são limites (inferior e superior) parao erro do modelo no instantek. Em princípio, esses limitessão assumidos conhecidos, ou seja, passíveis de determina-ção. No entanto, pode-se arbitrá-los, com os seguintes riscos:i) o problema de identificação robusta dos parâmetros não tersolução caso os limites sejam subestimados; ouii) a soluçãoser excessivamente conservativa para limites superestimados(conservativos).
Dadas as considerações acima e um conjunto inicialS∗, de-finido de forma a conter todos os possíveis valores para osparâmetrosci, o problema de identificação robusta consisteem encontrar um sub-conjunto deS∗, dado porS, contendovalores paraci que sejam consistentes com as equações (13),(15) e (16). O resultado deste problema é a identificação deum conjuntoS de valores admissíveis para os parâmetrosci
do modelo (13).
SejaN o número de medidas de entradau(k) e saíday(k)disponíveis do processo. A partir da representação em esta-dos da base ortonormal2, pode-se calcular o vetorl(k) parak = 1, . . . , N . Portanto, utilizando o conjunto de medidasdisponíveis e supondo uma representação exata do politopoformado pelo conjuntoS, tem-se que:
S = { c : y(k) − emin(k) ≤ cTl(k) ≤
y(k) + emax(k), k = 1, . . . , N }(17)
e c(ε) em (14) representa então todos os vetoresc tal quec ∈ S.
Baseado na definição do conjuntoS em (17), tem-se que aobtenção dos limites de incerteza dos parâmetros dec(ε)pode ser feita utilizando diversos algoritmos de identificaçãorobusta descritos na literatura como, por exemplo, (Milaneseand Belforte, 1982; Norton, 1990; da Silva, 1995). Um pro-blema com essa abordagem é que o conjuntoS definidoem (17) forma um politopo cuja determinação pode se tor-nar muito complexa à medida que o número de medidas au-menta. Para contornar esse problema, um algoritmo para de-
2Equações (8), (11) e (12) para a base de Laguerre.
terminar uma aproximação na forma de um ortotopoO limi-tante exterior aS, S ⊂ O, é proposta em (Milanese andBelforte, 1982). Neste algoritmo, assume-se|e(k)| ≤ emax
(constante) e tem-se que cada limiteci,min e ci,max do inter-valo de incerteza do parâmetroci(εi) é associado a um pro-blema de programação linear, onde as restrições são o do-mínio de pertinência dec(ε), i.e. S. Assim, o cálculo doortotopoO exterior aS requer a resolução de 2n problemasde programação linear, cada um com 2N restrições.
A segunda abordagem de identificação robusta consideradaneste trabalho é apresentada a seguir (Oliveira, 1997). Sejaum conjunto deM realizações da resposta ao impulso querepresenta a incerteza sobre o processo, isto é,hm(k), m =1, . . . , M . Assuma que o espaço formado pelos parâmetrosincertos do modelo é um ortotopo; portanto, cada parâmetroé dado por:
ci(εi) = ci + εi∆ci (18)
com |εi| ≤ 1, ou seja,ci(εi) ∈ [ci,min, ci,max]. Atravésda equação (5), tem-se que cada resposta ao impulso estáassociada a um modelo, isto é:
ci,m =
∞∑
k=0
hm(k)φi(k) (19)
Portanto, de todos os elementosci,m, m = 1, . . . , M , chega-se aos limites[ci,min, ci,max] para cada parâmetroi como:
ci,min = minm=1,...,M
ci,m
ci,max = maxm=1,...,M
ci,m
(20)
É importante destacar que as características positivas daidentificação de modelos com estrutura OBF citadas ante-riormente permanecem válidas no contexto de identificaçãorobusta apresentado nesta seção. Uma delas é a não necessi-dade da definiçãoa priori da ordem e atraso do processo, oque representa uma vantagem em relação aos modelos comestrutura ARX ou ARMAX. Além disto, em relação aos mo-delos com estrutura FIR, a diminuição do número de parâ-metros a identificar reduz a complexidade do algoritmo deidentificação robusta.
3 IDENTIFICAÇÃO DE SISTEMAS NÃO LI-NEARES
A justificativa do modelo OBF linear apresentado na seção 2,onde o mapeamento estáticoH em (9) é dado por uma com-
306 Revista Controle & Automação/Vol.18 no.3/Julho, Agost o e Setembro 2007

binação linear dos seus argumentos, advém do desenvolvi-mento da resposta ao impulso do sistema através de uma baseortonormal. Uma questão importante é se é possível simples-mente substituir o mapeamento linearH por um mapeamentonão linear de forma a obter um modelo capaz de representartambém dinâmicas não lineares. Nesse caso o modelo se-ria descrito por uma dinâmica linear que relaciona a entradau(k) aos estados ortonormaisli(k) seguida de um mapea-mento estático entre esses estados e a saíday(k), ou seja, ummodelo do tipoWiener(Campello and Oliveira, 2007). Nessaseção são discutidas implementações não lineares para o ope-radorH que são de particular interesse no presente contextoporque, entre outras razões, podem ser justificadas (interpre-tadas) sob o ponto de vista matemático.
A forma do mapeamento estáticoH determina uma realiza-ção específica de modelo com estrutura (N)OBF. As realiza-ções não lineares consideradas nesse trabalho podem ser to-das descritas utilizando uma formulação unificada onde essemapeamento é representado de formalinear nos parâmetros,como:
H(l(k)) = λ(k)T ζ (21)
sendoζ ∈ ℜµ×1 um vetor de parâmetros a serem estimados eλ(k) ∈ ℜµ×1 um vetor de regressão que depende apenas dosestados ortonormaisl(k). O modelo linear discutido na seçãoanterior, por exemplo, pode ser colocado nessa forma sim-plesmente fazendoµ = n, ζ = [c1 · · · cn]T e λ(k) = l(k).Alternativamente, pode-se inserir um termo aditivoc0 ca-paz de representar nível constante não nulo na saída dosistema, bastando para isso fazerζ = [c0 c1 · · · cn]T eλ(k) = [ 1 l(k)T ]T . Nesse caso o modelo é denominadoafime o número de elementos no vetor de parâmetros a se-rem estimados éµ = n + 1.
3.1 Modelos de Volterra
Modelos de Volterra de tempo discreto assumem que o sis-tema admite a seguinte descrição polinomial de ordemM(Schetzen, 1980; Rugh, 1981; Doyle III et al., 2002):
y(k) =M∑
m=1
ǫm∑
k1=0
· · ·
ǫm∑
km=0
hm(k1, k2, · · · , km)m∏
j=1
u(k−kj)
(22)
ondeu, y e hm são a entrada, a saída e umkernel (nú-cleo) dem-ésimo grau, respectivamente, sendoǫm a quan-tidade de elementos a partir da qual okernel hm é assu-mido nulo em qualquer dimensão. Essa representação é cla-ramente uma generalização deM -ésima ordem do modelo
linear tipo FIR discutido na seção 2, sendo okernelhm umageneralização dem-ésima dimensão da função de respostaao impulso daquele modelo. É também uma realização es-pecífica de entrada-saída do tipoy(k) = G
(
{u(τ)}kτ=−∞
)
,ondeG é um operador não linear. Boyd e Chua (Boyd andChua, 1985) mostraram que o modelo em (22) pode aproxi-mar com precisão arbitrária qualquer sistema que admita des-crição de entrada-saída através de um operadorG contínuo ecomfading memory3, desde que a entradau seja limitada in-ferior e superiormente. Esses requerimentos abrangem umaampla classe de sistemas reais.
O problema de identificação de sistemas não lineares uti-lizando modelos de Volterra remete imediatamente ao pro-blema de estimação doskernelsdo modelo, que tem sido in-vestigado por décadas (Eykhoff, 1974; Billings, 1980; Schet-zen, 1980; Rugh, 1981; Doyle III et al., 2002). A principaldificuldade é que oskernelssão, em princípio, funções nãoparametrizadas que só podem ser mensuradas se suas contri-buições individuais puderem ser separadas da resposta totaldo sistema (Schetzen, 1980). Uma abordagem simples e di-reta pode ser obtida se cada elemento de cada um dosker-nelsfor tratado como um parâmetro independente a ser esti-mado (Doyle III et al., 2002). Nesse caso, o modelo de Vol-terra (22) torna-se linear nesses parâmetros e algoritmos deestimação clássicos podem ser aplicados. Essa abordagem,no entanto, usualmente torna o modelo sobre-parametrizado.Logo, é importante reduzir sua complexidade antes do proce-dimento de estimação de forma a melhorar o seu condiciona-mento numérico e reduzir a variância do estimador. Uma es-tratégia de particular interesse para lidar com esse problema,originalmente sugerida por Wiener (Wiener, 1958), é o de-senvolvimento doskernelsde Volterra através de funções debase ortonormal, conforme discutido a seguir.
3.1.1 Modelo OBF-Volterra
Por hipótese, oskernels hm em (22) são tais quehm(k1, · · · , km) = 0 paraki > ǫm (∀i ∈ {1, · · · , m}). Oskernelssão, portanto, absolutamente somáveis em[0,∞), oque significa que o modelo é estável. Logo, esseskernelspodem ser desenvolvidos em funções de base ortonormal.A seguir assume-se, por simplicidade e sem perda de ge-neralidade, que todos oskernelssão desenvolvidos atravésde uma mesma base de funções. Nesse caso, o desenvolvi-mentom-dimensional dokernelde graum qualquer é dadopor (Schetzen, 1980):
3Sistemas comfading memorysão aqueles para os quais a resposta a umadada excitação de entrada se anula ou decresce de forma rápida o suficientepara que não seja significativa após um dado período finito de tempo, o quebasicamente remete a sistemas estáveis com estado estacionário único.
Revista Controle & Automação/Vol.18 no.3/Julho, Agosto e S etembro 2007 307
hm(k1, · · · , km) =
∞∑
i1=1
· · ·
∞∑
im=1
ci1,...,im
m∏
j=1
φij(kj) (23)
ondeφi é ai-ésima função ortonormal da base ec(·) são oscoeficientes do desenvolvimento, dados por:
ci1,...,im=
∞∑
k1=0
· · ·
∞∑
km=0
hm(k1, · · · , km)
m∏
j=1
φij(kj)
(24)
Note que para okernelde 1o grau (m = 1) o desenvolvi-mento acima é equivalente ao desenvolvimento da respostaao impulso do modelo linear de convolução visto na seção 2.
Das equações (22) e (23), lembrando quehm(k1, · · · , km) = 0 para ki > ǫm, pode-se rescrevero modelo de Volterra como:
y(k) =
M∑
m=1
∞∑
i1=1
· · ·
∞∑
im=1
ci1,...,im
m∏
j=1
lij(k) (25)
ondeli é a saída doi-ésimo filtro ortonormal (i.e. oi-ésimoestado), dado porli(k) =
∑∞τ=0 φi(τ)u(k − τ). Por razões
práticas, os modelos de 2a ordem (M = 2) são aqueles usu-almente adotados tanto em problemas de natureza acadê-mica como em problemas reais (Billings, 1980; Dumont andFu, 1993). Ainda por razões práticas, os desenvolvimentosdoskernelsde 1o e 2o grau são truncados em quantidadesn1
en2 de funções ortonormais, respectivamente. Nesse caso, omodelo é reescrito como:
y(k) = c0 +
n1∑
i1=1
ci1 li1(k) +
n2∑
i1=1
i1∑
i2=1
ci1,i2 li1(k) li2(k)
(26)
ondec0 é um coeficiente de ordem zero adicional inseridoapenas para a representação de eventual nível constante nãonulo na saída do sistema. Note que, para fins computacionais,os coeficientesc(·) podem ser considerados como parâmetrosa serem estimados numericamente. Logo, uma vez que qual-quer par de coeficientesci,j ecj,i multiplicam o mesmo fatorli(k)lj(k) no termo de 2a ordem, ambos os coeficientes po-dem ser representados através de um único parâmetro a serestimado, conforme previsto na equação (26).
Considerando portanto os coeficientesc(·) como parâmetrosa serem estimados, o modelo (26) pode ser rescrito na formaem (9) e (21) definindo os vetoresλ(k) eζ em (21) como:
ζ = [ c0 c1 · · · cn1c1,1 c2,1 c2,2 · · ·
cn2,1 cn2,2 · · · cn2,n2]T
(27)
λ(k) = [ 1 l1(k) · · · ln1(k) l1(k)2 l2(k)l1(k) l2(k)2
· · · ln2(k)l1(k) ln2
(k)l2(k) · · · ln2(k)2 ]T
(28)
sendo a ordem da dinâmica de estados em (8) dada porn = max{n1, n2}. Nesse caso, o número de parâmetros domodelo é dado porµ = (n2
2 + n2 + 2n1 + 2)/2.
3.2 Modelos FuzzyTS
Os modelosfuzzydo tipo Takagi-Sugeno (TS) são consti-tuídos por um conjunto deM regras (implicações) do se-guinte formato (Takagi and Sugeno, 1985; Yager and Fi-lev, 1994; Babuška, 1998):
Ri: SE x1 é X i1 E · · · E xn é X i
n
ENTÃO y = fi(x1, . . . , xn)(29)
onde Ri denota ai-ésima regra,xj ∈ Xj ⊂ℜ (j = 1, · · · , n)são as variáveis de entrada (variáveis da premissa),y ∈ Y⊂ℜ é a variável de saída,fi (i = 1, · · · , M ) sãofunções que relacionam as entradas do modelo com suasaída eX i
j são conjuntosfuzzy definidos sobre os uni-versos de discursoXj das respectivas variáveis, ou seja,X i
j : Xj → [0, 1].
A inferência de um valor de saíday a partir de um conjuntoespecífico de valores de entrada é simplesmente calculadacomo a média ponderada das saídas individuais de cada re-gra, como segue:
y =
M∑
i=1
wi fi(x1, . . . , xn)
M∑
i=1
wi
(30)
ondewi é o nível de ativação (firing weight) dai-ésima regra,dado por:
wi = X i1(x1)X i
2(x2) · · · X in(xn) (31)
Sugeno e seus colaboradores (Takagi and Sugeno, 1985; Su-geno and Kang, 1986; Sugeno and Kang, 1988; Sugeno and
308 Revista Controle & Automação/Vol.18 no.3/Julho, Agost o e Setembro 2007

Tanaka, 1991) propuseram originalmente a utilização de fun-ções afins nos conseqüentes das regras, ou seja:
fi(x1, . . . , xn) = θi0 +
n∑
j=1
θij xj (32)
Essa escolha permite uma interpretação matemática simplesdo modelo como uma interpolação de diferentes modelos lo-cais afins e implica que a saída em (30) élinear nos parâ-metrosθi
0, · · · , θin (i = 1, · · · , M ). Logo, esses parâmetros
podem ser estimados utilizando algoritmos de estimação li-near.
Um exemplo de um modelo TS estático com uma única va-riável de entrada e três regras é ilustrado na Figura 2. Asregras do modelo são dadas abaixo:
R1: SE x éPequena ENTÃO y = a1 + b1xR2: SE x éMédia ENTÃO y = a2 + b2xR3: SE x éGrande ENTÃO y = a3 + b3x
(33)
ondePequena, Média e Grandesão rótulos lingüísticos as-sociados a conjuntosfuzzydefinidos sobre o universo de dis-curso da variável de entrada, conforme ilustrado na Figura 2.Esses conjuntos determinam, através da equação (31), o ní-vel (e conseqüentemente a região) de ativação de cada regra,
Figura 2: Modelo TS estático com 3 regras (modelos locaisafins).
isto é, o peso de cada modelo local no cálculo ponderado dasaída dado pela equação (30).
Modelos TS dinâmicos possuem exatamente a mesma for-mulação descrita acima, exceto que os modelos locais sãodinâmicos ao invés de estáticos. Em princípio, os modelos
locais podem possuir qualquer estrutura no que se refere àsua topologia dinâmica. Para modelos locais lineares com es-trutura FIR, por exemplo, basta redefinir as variáveis da pre-missa comox1 = u(k − 1), · · · , xn = u(k − n), ondeu(k)é a entrada do sistema dinâmico no instantek.
3.2.1 Modelos OBF-TS
Um caso particular no contexto de modelos TS dinâmi-cos é obtido utilizando modelos locais com estrutura OBF(Nelles, 2001; Campello, 2002). Nesse caso, as entradas domodelo TS são dadas pelas saídas do conjunto de filtros orto-normais, isto é,x1 = l1(k), · · · , xn = ln(k), o que equivalea implementar o operadorH em (9) e (21) através de um mo-delo TS. As regras do modelo assumem portanto a forma4:
Ri: SE l1(k) é X i1 E · · · E ln(k) é X i
n
ENTÃO y(k) = θi0 + θi
1l1(k) + · · · + θinln(k)
(34)
e a saída é rescrita a partir de (30) como:
y(k) =
M∑
i=1
wi
(
θi0 + θi
1l1(k) + · · · + θinln(k)
)
M∑
i=1
wi
(35)
ondewi é rescrito de (31) como
wi =
n∏
j=1
X ij(lj(k)) (36)
O modelo OBF-TS acima pode ser facilmente rescrito naforma geral dada pelas equações (9) e (21). Para tanto, bastadefinir os vetoresζ eλ(k) em (21) como:
ζ = [ θ10 θ1
1 · · · θ1n · · · θM
0 θM1 · · · θM
n ]T
(37)
λ(k)= γ(k) [ w1 w1l1(k) · · · w1ln(k) · · ·
wM wM l1(k) · · · wM ln(k) ]T
(38)
4Por simplicidade assume-se em (34) que os modelos locais sãolineares(afins) e que possuem todos a mesma ordemn, mas ambas as hipótesespodem ser relaxadas no caso mais geral.
Revista Controle & Automação/Vol.18 no.3/Julho, Agosto e S etembro 2007 309

onde γ(k) = 1/∑M
i=1 wi é o termo de normalização daequação (35). Nesse caso, assumindo que os conjuntosfuzzydas regras são determinadosa priori (e.g. através de técnicasde fuzzy clustering(Babuška, 1998)), o número de parâme-tros do modelo é dado porµ = M(n + 1).
Duas questões fundamentais surgem quando implementamoso mapeamentoH na Figura 1 de forma alternativa àquelasdiscutidas em seções anteriores para os casos linear e Vol-terra: A interpretação matemática do modelo resultante e asua capacidade de representação. No caso do modelo TSdescrito acima, a interpretação matemática é evidente. Trata-se de uma interpolação deM diferentes modelos OBF li-neares (afins) que compartilham a mesma dinâmica de esta-dos (e.g. de Laguerre). Em (Campello, 2002; Campello andAmaral, 2002) propôs-se um modelo ainda mais geral, de-nominado Modelo OBF-TS Generalizado, onde os modelosOBF locais possuem representações de estado independen-tes, isto é, cada modelo pode possuir um conjunto de filtrosortonormais parametrizado em uma base diferente de fun-ções. Essa arquitetura é mais flexível no sentido de permitira representação de dinâmicas não lineares complexas atra-vés de um conjunto menor de parâmetros, mas está além doescopo do presente trabalho.
No que diz respeito à capacidade de representação dos mode-los OBF-TS, também se dispõe de um resultado (Campello,2002; Campello, Meleiro and Amaral, 2004) que toma comoponto de partida a capacidade de aproximação universaldos sistemasfuzzy (Wang and Mendel, 1992; Zeng andSingh, 1994; Zeng and Singh, 1995; Kosko, 1997) e a capaci-dade de representação dos modelos de Volterra, formalizadano trabalho de (Boyd and Chua, 1985) (conforme discutidona seção 3.1). Esse resultado mostra que os modelos OBF-TS podem aproximar com precisão arbitrária qualquer sis-tema dinâmico não linear de tempo discreto que seja causal eadmita representação de entrada-saída através de um opera-dor contínuo e comfading memory, desde que a entrada sejalimitada em um intervalo fechado. É importante mencionarque a hipótese de entrada limitada é essencial para a utiliza-ção de qualquer modelofuzzyou neural, independente da suaconfiguração dinâmica, uma vez que essa hipótese é neces-sária para garantir domínios de entrada compactos para essesmodelos. Essa hipótese também não é restritiva no contextode engenharia.
3.2.2 Caso Particular: OBF-RBF
Assumindo que o conseqüente de cada regra (modelo local)em (34) é dado apenas pelo termo constante da relação, istoé, y(k) = θi
0, pode-se reescrever os vetores em (37) e (38)como:
ζ =[ θ10 · · · θM
0 ]T (39)
λ(k)=γ(k) [ w1 · · · wM ]T (40)
Assumindo ainda que os conjuntosfuzzydas regras são Gaus-sianos, recai-se em um caso especial do modelo TS que coin-cide, exceto pelo fator de normalizaçãoγ(k) (que não alteraa análise porque pode ser incorporado ao vetor de parâme-tros), com a formulação de um tipo particular de rede neural,a rede neuralRadial Basis Function− RBF (Broomhead andLowe, 1988; Haykin, 1999). Essa mesma equivalência é ve-rificada também para modelosfuzzycom estrutura relacionalsimplificada (Campello and Amaral, 1999; Campello, 2002).Maiores detalhes sobre a equivalência entre diferentes clas-ses de modelosfuzzye redes neurais podem ser encontradosem (Hunt et al., 1996; Cho and Wang, 1996).
Modelos dinâmicos NOBF com mapeamento estáticoH(Figura 1) do tipo RBF foram introduzidos em (Oliveiraet al., 1999; Campello et al., 1999). Dado que as redes RBFtambém são aproximadores universais (Haykin, 1999; Bragaet al., 2000), a capacidade de aproximação dos modelosOBF-RBF é a mesma dos modelos OBF-TS, embora essesúltimos usualmente requeiram uma quantidade de parâme-tros inferior para proporcionar uma mesma precisão. Os mo-delos OBF-RBF também apresentam alguma interpretaçãomatemática como um caso particular dos modelos OBF-TS.Por outro lado, modelos OBF-Neurais propostos em outrostrabalhos (Back and Tsoi, 1996; Sentoni et al., 1996; Sentoniet al., 1998; Balestrino et al., 1999; Alataris et al., 2000;Váz-quez and Agamennoni, 2001; Arto et al., 2001; Campello,Von Zuben, Amaral, Meleiro and Maciel Filho, 2003), base-ados na utilização de outras arquiteturas de redes (e.g. MLP),não apresentam qualquer interpretação além da implementa-ção arbitrária do mapeamento estáticoH através de uma redeneural ou neuro-fuzzy.
4 COMPARAÇÕES DAS ABORDAGENS(N)OBF
Em resumo, até o presente ponto foram mencionadas quatroalternativas para a implementação do mapeamento estáticoHque precede a dinâmica de estados constituída pelo conjuntode filtros ortonormais nos modelos (N)OBF: (a) Combinaçãolinear (ou afim); (b) Polinômio multidimensional (Volterra);(c) ModelofuzzyTS; (d) Rede neural. A primeira abordagemem princípio se restringe à representação de sistemas dinâmi-cos lineares, sem ou com incertezas paramétricas, sendo quenesse último caso algoritmos de identificação robusta (seção2.1) são requeridos.
No tocante às abordagens não lineares, é importante destacar
310 Revista Controle & Automação/Vol.18 no.3/Julho, Agost o e Setembro 2007
algumas diferenças estruturais significativas que existemen-tre elas. No caso de Volterra, por exemplo, a não linearidadedo mapeamento estático é polinomial, de forma que a únicaalternativa para melhorar a capacidade de representação domodelo é aumentar a ordem do polinômio. A complexidadedos modelos de Volterra, no entanto, depende exponencial-mente da ordem polinomial, o que usualmente restringe aaplicação dos mesmos à representação de 2a ordem de sis-temas com não linearidades suaves (Billings, 1980; Dumontand Fu, 1993). Esse problema não ocorre com as realiza-ções através de aproximadores universais, como os mode-los fuzzye as redes neurais, cujos mapeamentos podem assu-mir teoricamente formas contínuas arbitrárias sobre um do-mínio compacto. Nesses casos, embora a quantidade de re-grasfuzzyou neurônios necessários a uma dada capacidadede representação tipicamente cresça de forma exponencialcom a dimensão do domínio (maldição da dimensionalidade(Kosko, 1992)), é possível aumentar a precisão do modelotambém através do ajuste paramétrico dos seus conjuntosfuzzyou funções de ativação neurais. Essa flexibilidade, poroutro lado, demanda a utilização de procedimentos de esti-mação mais sofisticados. Embora ambas as abordagensfuzzye neural apresentem a mesma capacidade de representaçãoe flexibilidade, os modelos OBF-TS apresentam a vantagemda interpretabilidade matemática que, de forma geral, os mo-delos OBF-Neurais não possuem.
5 PROJETO DA BASE DE FUNÇÕES OR-TONORMAIS
Conforme discutido na seção 2, as bases de funções ortonor-mais são completas no espaçol2[0,∞), o que leva a duas im-plicações fundamentais. A primeira é que o número de fun-ções em uma base truncada,n, representa apenas um com-promisso entre a capacidade de aproximação e a quantidadede parâmetros do modelo, grandezas monotonicamente cres-centes emn. Deve-se enfatizar, porém, que o número defunções necessárias para proporcionar uma dada precisão de-pende da complexidade do problema. Sistemas dinâmicoscom múltiplos modos dominantes, por exemplo, requeremuma quantidade maior de funções. Nesse sentido, conformejá foi discutido, a demanda de funções também depende dabase utilizada (e.g. Laguerre, Kautz ou GOBFs).
A segunda implicação da completude das bases ortonormaisé que a parametrização do conjunto de funções não é crí-tica. Para a base de Laguerre, por exemplo, essa condiçãosignifica que para qualquer pólo de Laguerrep estável existeuma quantidade correspondenten de funções que proporci-ona uma determinada capacidade de aproximação. Dada umaquantidade fixa de funções, o problema que se coloca é comoselecionar o pólo de Laguerre para maximizar a precisão domodelo. A solução para esse problema está bem estabelecida
na literatura no contexto de modelos lineares. Em (Masnadi-Shirazi and Ahmed, 1991), por exemplo, obtém-se o póloque minimiza o erro de aproximação do desenvolvimento daresposta ao impulso de uma classe de sistemas lineares emuma quantidade fixa de funções ortonormais. Em (Oliveirae Silva, 1994; Oliveira e Silva, 1995a) obtém-se um con-junto de condições de otimalidade para o pólo de Laguerreenvolvendo o erro de aproximação de sistemas lineares emum contexto mais amplo. Em (Fu and Dumont, 1993) umasolução para o cálculo do pólo é obtida analiticamente ma-ximizando a taxa de convergência do desenvolvimento or-tonormal da resposta ao impulso do sistema, o que mini-miza um limitante superior da norma quadrática do erro deaproximação associado a um truncamento desse desenvolvi-mento em um número finito de funções. Resultado análogofoi apresentado em (Tanguy et al., 1995; Tanguy et al., 2000)e posteriormente estendido para o caso de modelos de Vol-terra de segunda ordem em (Campello et al., 2001; Cam-pello et al., 2002) e modelos de Volterra de qualquer or-dem em (Campello, Favier and Amaral, 2003; Campello,Favier and Amaral, 2004; Kibangou et al., 2005b; Cam-pello et al., 2006). Soluções para problemas similares en-volvendo outras bases de funções ortonormais têm sido tam-bém investigadas (Oliveira e Silva, 1995b; Tanguy et al.,2002; Favier et al., 2003; Kibangou et al., 2003; Kibangouet al., 2005a; Kibangou et al., 2005c; da Rosa, 2005; da Rosaet al., 2006; da Rosa et al., 2007).
No caso da base de Laguerre em particular, cujas funções sãoparametrizadas em um único pólo real, a determinação dopólo pode ser vista simplesmente como um problema de oti-mização escalar. Logo, apesar dos resultados teóricos men-cionados anteriormente, tem-se que o procedimento de oti-mização pode ser executado utilizando busca exaustiva, viadiscretização do intervalo de factibilidade(−1, 1) (Oliveiraand Amaral, 2000). O principal inconveniente desse tipo deabordagem é que para cada avaliação do valor do critério, as-sociado a um determinado valor atribuído ao pólo, deve-seestimar todos os demais parâmetros do modelo, i.e., o mape-amento estáticoH em (9), o que pode representar um custocomputacional elevado dependendo do problema e do tipo demodelo (N)OBF adotado.
Independente do tipo de modelo em questão, isto é, daforma do mapeamentoH em (9), uma heurística simplesporém eficaz para selecionar a parametrização das funçõesortonormais é utilizando conhecimentoa priori a respeitodas dinâmicas dominantes do sistema (Ninness and Gustafs-son, 1995; Ninness and Gustafsson, 1997), o que usualmentepode ser obtido através da observação da sua resposta notempo ou em freqüência (Zervos and Dumont, 1988; Wahl-berg and Ljung, 1992). Para a base de Laguerre, por exem-plo, isso equivale essencialmente a selecionar o pólo real es-tável que melhor represente a constante de tempo dominante
Revista Controle & Automação/Vol.18 no.3/Julho, Agosto e S etembro 2007 311

do sistema (Sentoni et al., 1996; Sentoni et al., 1998).
6 EXEMPLOS
Nesta seção, a identificação de sistemas utilizando as técni-cas descritas na seção 2.1 e na seção 3 é ilustrada através dedois casos de estudo envolvendo a simulação de um mesmoprocesso dinâmico. Trata-se de um reator do tipo CSTR(Continuous Stirred Tank Reactor), particularmente, um pro-cesso de polimerização isotérmica que utiliza tolueno comosolvente (Doyle III et al., 1995). O peso molecular médio(Number Average Molecular Weight− NAMW) do polímeroresultante da reação,y(t) [kg/kmol], é controlado através damanipulação da taxa de fluxo da substância iniciadora,u(t)[m3/h ]. Um modelo físico de estados desse processo é dadopor:
x1(t) = 10(6 − x1(t)) − 2, 4568x1(t)√
x2(t)x2(t) = 80u(t)− 10, 1022x2(t)
x3(t) = 0, 002412x1(t)√
x2(t) + 0, 112191x2(t) − 10x3(t)
x4(t) = 245, 978x1(t)√
x2(t) − 10x4(t)
y(t) =x4(t)
x3(t)(41)
ondet é a variável de tempo contínuo. As condições nomi-nais de operação sãox1(0) = 5, 506774,x2(0) = 0, 132906,x3(0) = 0, 0019752, x4(0) = 49, 3818, u(0) = 0, 016783 ey(0) = 25000, 5 (Doyle III et al., 1995; Maner et al., 1996).Os sinais utilizados para fins de identificação são amostra-dos com períodoT = 0, 03h e normalizados para evitar aocorrência de problemas numéricos durante a fase de esti-mação dos parâmetros dos modelos, de forma queun(k) =(u(kT ) − u(0))/u(0) eyn(k) = (y(kT ) − y(0))/y(0).
De uma forma geral, a estimação de modelos requer a ob-tenção de um conjunto de dados de E/S representativo dasdinâmicas do processo. Para tanto, simula-se o conjunto deequações diferenciais (41) a partir de condições iniciais da-das pelas condições nominais de operação. A simulação éexecutada det = 0 até t = 32h, com a entrada dada poruma seqüência de degraus de mesma duração e amplitudealeatória no intervalo operacional normalizado[−0,6 , 0,8].O conjunto de dados de E/S resultante é dividido em duaspartes. A primeira metade (primeiras 16 horas) é destinada àestimação de modelos (N)OBF do processo e a outra metadeé destinada à validação desses modelos. A primeira1/2 horade cada conjunto é reservada apenas para a convergência dosestados de Laguerre cujos valores iniciais são consideradosdesconhecidos (e configurados nulos) no início das simula-ções porque, na prática, o histórico do sinal de entrada an-terior aos dados disponíveis para identificação é usualmentedesconhecido. Esse procedimento também faz com que otransitório associado às condições iniciais do processo nãoexerça influência sobre a estimação dos parâmetros do mo-
delo.
6.1 Exemplo 1: Caso Linear - Robusto
A seguir, ilustra-se o problema de identificação do processode polimerização CSTR utilizando um modelo linear com es-trutura OBF e incertezas paramétricas, conforme seção 2.1.Adota-se, neste exemplo, as duas metodologias lá então apre-sentadas. É importante destacar que, embora a abordagem deobtenção de um conjunto de modelos lineares via identifica-ção robusta seja direcionada primordialmente à representa-ção de sistemas lineares com incertezas, no presente contextode modelagem de um processo não linear essa abordagempode ser também vista como a obtenção de um conjunto decandidatos a aproximações lineares do processo em diferen-tes regiões de operação.
No caso da segunda metodologia de identificação robustaapresentada na seção 2.1, viu-se que é necessário um con-junto de respostas ao impulso do sistema. Para o processo depolimerização CSTR (41), este conjunto de respostas ao im-pulso pode ser obtido aplicando impulsos de diferentes am-plitudes e dividindo os respectivos sinais de saída pela am-plitude do impulso correspondente. O objetivo é capturar aresposta dinâmica do sistema a sinais com energia diferentesem que, para tanto, a amplitude da entrada tenha influênciano resultado. Com essa metodologia, se o processo além dedeterminístico fosse também linear, o conjunto de respostasao impulso seria perfeitamente idêntico. No entanto, devidoà não linearidade do sistema, isso não ocorre, conforme podeser observado na Figura 3. Essa figura apresenta o conjuntode respostas do processo CSTR para impulsos de amplitudesno intervalo operacional normalizado[−0,6 , 0,8] − discre-tização de0,1.
Conforme mencionado na seção 5, o método apresentado em(Fu and Dumont, 1993) para sistemas lineares permite cal-cular um valor ótimo para o pólo das funções de Laguerre apartir da resposta ao impulso do sistema. O processo (41) énão linear e a aplicação deste método, assumindo por exem-plo 6 funções de Laguerre, gera um conjunto de pólos ótimos(um para cada resposta ao impulso) cujo valor médio é0,56.Assumindo, portanto, 6 funções de Laguerre parametrizadascom pólop = 0,56, a utilização das equações (19) e (20)leva a um modelo linear com parâmetros incertosci(εi) quepertencem ao intervalo[ci,min, ci,max] dado por:
cmax = [−0, 0499 −0, 0783 −0, 0459 −0, 0218
−0, 0092 −0, 0036](42)
312 Revista Controle & Automação/Vol.18 no.3/Julho, Agost o e Setembro 2007

0 0.2 0.4 0.6 0.8 1 1.2 1.4−0.045
−0.04
−0.035
−0.03
−0.025
−0.02
−0.015
−0.01
−0.005
0conjunto de respostas ao impulso
tempo [horas]
NA
MW
Figura 3: Conjunto de respostas ao impulso normalizadas.
e
cmin = [−0, 0517 −0, 0839 −0, 0487 −0, 0223
−0, 0093 −0, 0036](43)
Um exemplo de aplicação da primeira metodologia de identi-ficação robusta apresentada na seção 2.1 (UBBE) é apresen-tado a seguir. Neste caso, é utilizado um conjunto de dadosde E/S (aqueles destinados para estimação) e assumido umerro máximo de previsãoemax = 0,15. Para efeito de com-paração, o pólop = 0,56 e a quantidaden = 6 de funções deLaguerre adotados na abordagem anterior são a seguir man-tidos.
Com todas as informações apresentadas, a representação emestados da base de funções em (8), (11) e (12), além das hipó-teses (16) e (17), tem-se que a utilização do método de esti-mação robusta apresentado em (Milanese and Belforte, 1982)leva a um modelo linear com parâmetros incertosci(εi) quepertencem ao intervalo[ci,min, ci,max] dado por:
cmax = [0, 0994 0, 0652 0, 1018 0, 1511
0, 1806 0, 1977](44)
e
cmin = [−0, 1514 −0, 2939 −0, 1972 −0, 2193
−0, 2478 −0, 1577](45)
A partir dos resultados acima, nota-se que as duas estraté-gias de identificação robusta aqui apresentadas são capazesde gerar limites de incerteza para os parâmetros do modelo
ortonormal. No entanto, comparando os dois resultados apre-sentados, nota-se que o método baseado em UBBE tende agerar um ortotopo maior (incertezas mais conservativas queo método baseado na resposta ao impulso). A aplicação desteresultado em um algoritmo de controle robusto, e.g. (Oliveiraet al., 2000), irá gerar uma lei de controle também mais con-servativa. Outra questão relacionada com este método é aseleção do erro máximo de previsão, de cálculo ou seleçãomuitas vezes difícil. Porém, uma vantagem consiste no fatoque o tipo de informação requerida pelo método, isto é, umpar de sinais de entrada / saída, é semelhante à utilizada emalgoritmos de estimação para sistemas lineares baseados emmínimos quadrados. Neste aspecto, é importante lembrarque sistemas dinâmicos reais nem sempre reagem adequa-damente ou mesmo admitem operacionalmente a realizaçãode ensaios envolvendo a aplicação de impulsos, dificultandoa obtenção das informações que alimentam os cálculos dométodo baseado nesse tipo de excitação do sistema.
6.2 Exemplo 2: Caso Não Linear
Nesta seção, aborda-se o problema de identificação do pro-cesso de polimerização CSTR utilizando as diferentes rea-lizações de modelos com estrutura NOBF apresentadas naseção 3. Os modelos obtidos são comparados entre si em ter-mos de precisão e complexidade paramétrica. Esses modelossão também comparados com modelos OBF lineares, semincertezas paramétricas, com o objetivo de se enfatizar a di-ferença de desempenho quando da utilização de modelos nãolineares na identificação de processos com essa mesma carac-terística. Não são realizadas comparações com os modelosOBF com incertezas paramétricas obtidos na seção 6.1, dadoque os algoritmos de identificação robusta produzem um con-junto infinito de modelos, ao invés de um único modelo cujodesempenho possa ser avaliado e comparado de forma direta.Não obstante, diferenças entre as abordagens linear robusta enão linear podem ser avaliadas indiretamente no contexto decontrole (Oliveira et al., 2007).
O pólo p de Laguerre foi selecionado experimentalmentecom base em ensaios preliminares utilizando um modeloOBF-Volterra comn1 = n2 = 3 funções ortonormais nostermos de 1a e 2a ordem. Adotou-se por simplicidade oprocedimento de busca exaustiva descrito em (Oliveira andAmaral, 2000), onde o intervalo de factibilidade(−1, 1) édiscretizado (aqui com uma quantização de 0,05) e um mo-delo diferente é estimado para cada valor do conjunto resul-tante. O pólop = 0, 75 foi escolhido como aquele que re-sulta no modelo com o menor erro de previsão para os dadosde validação. Uma vez selecionado o pólo, diferentes mode-los OBF lineares e OBF-Volterra contendo diferentes quan-tidades de funções de Laguerre são estimados via mínimosquadrados e validados utilizando os dados de E/S disponíveis
Revista Controle & Automação/Vol.18 no.3/Julho, Agosto e S etembro 2007 313

(cuja geração foi discutida no início da seção 6). Os resul-tados em termos do Erro Quadrático Médio (EQM) entre asaída medida do sistema e a saída prevista de cada modelosão apresentados nas tabelas 1 e 2.
Tabela 1: Desempenho de simulação de modelos OBF linea-res para dados de validação (normalizados).
No. Fun. Laguerren No. Parâm.µ EQM1 2 0,003254292 3 0,001458553 4 0,00145919
Tabela 2: Desempenho de simulação de modelos OBF-Volterra de 2a ordem para dados de validação (normaliza-dos).
No. Fun. Laguerre No. Parâm.µ EQMn1 n2
1 1 3 0,002173622 1 4 0,000415453 1 5 0,000410522 2 6 0,000148293 2 7 0,000143833 3 10 0,00014230
Observa-se na tabela 1 que o desempenho do modelo linearnão melhora a partir de duas funções ortonormais, o queocorre parcialmente como conseqüência da seleção rigorosado pólo de Laguerre, mas principalmente devido à incapa-cidade do modelo representar as dinâmicas não lineares doprocesso. Essa hipótese é verificada graficamente através daFigura 4, que apresenta a saída medida do sistema para os da-dos de validação e a saída prevista do melhor modelo obtido(n = 2). Observa-se na figura que o modelo não representafielmente os ganhos do processo.
Comparando as tabelas 1 e 2 fica claro que a inclusão dotermo não linear de 2a ordem melhora significativamente odesempenho do modelo. De fato, comparando modelos comquantidades similares de parâmetros, particularmente o mo-delo linear comn = 2 ou 3 e o modelo de Volterra comn1 = 2 e n2 = 1, nota-se que o primeiro apresenta erro su-perior a 3 vezes o segundo. Mais além, nota-se que para umamesma quantidade de filtros de Laguerre, especificamente 2ou 3, o erro associado ao modelo de Volterra é aproxima-damente 10 vezes inferior. A superioridade do modelo nãolinear pode ser também observada graficamente comparandoas Figuras 4 e 5. Essa última apresenta a saída medida do sis-tema para os dados de validação e a saída prevista do melhor
0 2 4 6 8 10 12 14 16−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
tempo [horas]
NA
MW
[kg/
kmol
]
Figura 4: Saída medida do processo CSTR (linha cheia) esaída prevista do modelo de Laguerre linear comn = 2 (li-nha tracejada): dados de validação normalizados.
modelo de Volterra obtido (n1 = n2 = 3).
No caso dos modelos OBF-TS e OBF-RBF os parâmetrosde projeto (além do pólop = 0, 75 já selecionado) são: onúmero de funções/filtros de Laguerren, o número de re-grasfuzzyM , os conjuntosfuzzydas variáveis da premissa eo vetor de parâmetros contendo os coeficientes dos modeloslocais (afins ou constantes). Por simplicidade, adota-se aqui
0 2 4 6 8 10 12 14 16−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
tempo [horas]
NA
MW
[kg/
kmol
]
Figura 5: Saída medida do processo CSTR (linhacheia) e saída prevista do modelo Laguerre-Volterra comn1 = n2 = 3 (linha tracejada): dados de validação norma-lizados.
uma base de regrasfuzzycompleta associada a uma partiçãoem grade (grid) do domínio de entrada (Passino and Yurko-vich, 1997). Nessa abordagem, um dado número de conjun-
314 Revista Controle & Automação/Vol.18 no.3/Julho, Agost o e Setembro 2007
tosfuzzyreferenciais é associado a cada variável da premissa(estado de Laguerre). A base de regras correspondente é inti-tuladacompletaporque consiste de todas as possíveis regrasno que se refere a combinações desses conjuntos referenciais.Nesse caso, sendoα o número de conjuntosfuzzyreferenciaisatribuídos a cada variável da premissa, tem-se que o númerode regras do modelo éM = αn. Adota-se, também por sim-plicidade, uma distribuição homogênea de conjuntosfuzzyGaussianos sobre o universo de discurso da variável corres-pondente, ou seja, centros eqüidistantes e aberturas iguais àdistância entre dois centros consecutivos. Por fim, seleciona-seα = 2 para evitar quantidades elevadas de parâmetros−µ = αn(n + 1) em (37) eµ = αn em (39)− a serem esti-mados via mínimos quadrados. Esse valor é suficiente paraproporcionar resultados satisfatórios na presente aplicação,conforme será visto na seqüência. Antes, é importante men-cionar que o número de conjuntosfuzzypor variável da pre-missa, a forma desses conjuntos e ainda o número de regrasfuzzyem uma base de regras possivelmente incompleta, po-deriam todos ser otimizados a partir de diferentes estratégias,levando a modelos mais parcimoniosos e ao mesmo tempomais precisos (Babuška, 1998; Espinosa et al., 2004). Nessecaso, porém, o esforço adicional empreendido nesta etapaprecisaria ser considerado nas análises comparativas com osdemais modelos, o que está além do escopo do presente tra-balho.
A partir da parametrização descrita acima, basta definir aquantidaden de funções de Laguerre e estimar via mínimosquadrados os coeficientes dos modelos locais (afins para omodelo TS e constantes para o modelo RBF). Modelos comdiferentes quantidades de funções de Laguerre são estimadose validados utilizando os dados de E/S disponíveis. Os resul-tados em termos do EQM entre a saída medida do sistema ea saída prevista de cada modelo são apresentados nas tabelas3 e 4.
Tabela 3: Desempenho de simulação de modelos OBF-RBFpara dados de validação (normalizados).
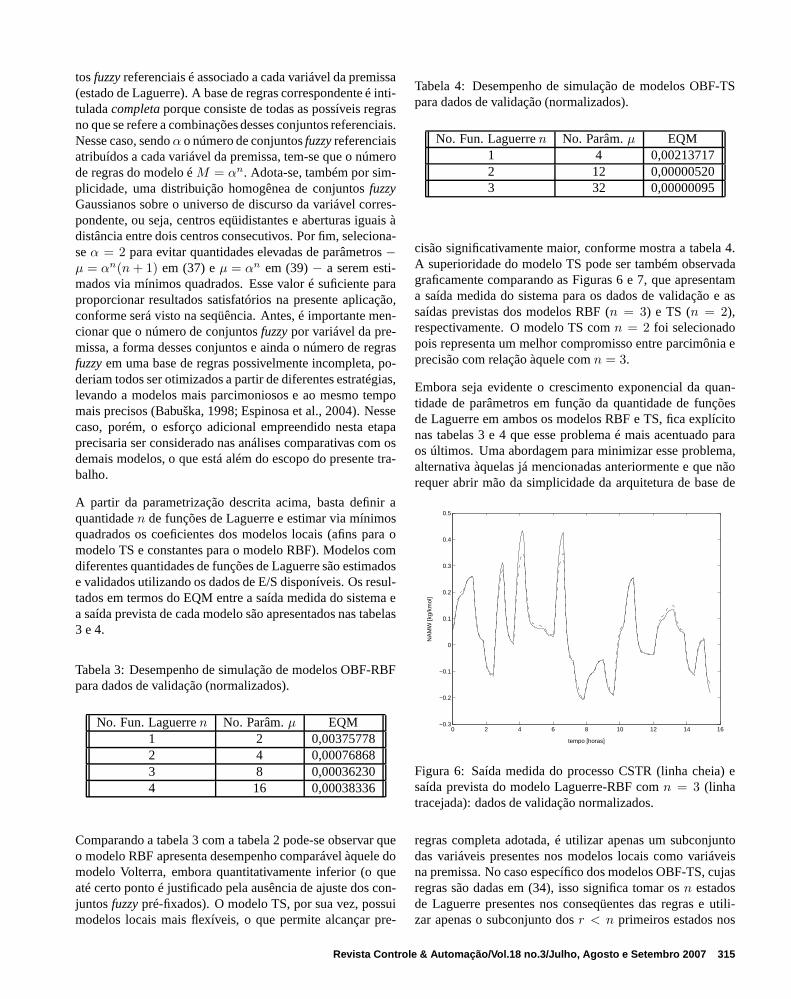
No. Fun. Laguerren No. Parâm.µ EQM1 2 0,003757782 4 0,000768683 8 0,000362304 16 0,00038336
Comparando a tabela 3 com a tabela 2 pode-se observar queo modelo RBF apresenta desempenho comparável àquele domodelo Volterra, embora quantitativamente inferior (o queaté certo ponto é justificado pela ausência de ajuste dos con-juntosfuzzypré-fixados). O modelo TS, por sua vez, possuimodelos locais mais flexíveis, o que permite alcançar pre-
Tabela 4: Desempenho de simulação de modelos OBF-TSpara dados de validação (normalizados).
No. Fun. Laguerren No. Parâm.µ EQM1 4 0,002137172 12 0,000005203 32 0,00000095
cisão significativamente maior, conforme mostra a tabela 4.A superioridade do modelo TS pode ser também observadagraficamente comparando as Figuras 6 e 7, que apresentama saída medida do sistema para os dados de validação e assaídas previstas dos modelos RBF (n = 3) e TS (n = 2),respectivamente. O modelo TS comn = 2 foi selecionadopois representa um melhor compromisso entre parcimônia eprecisão com relação àquele comn = 3.
Embora seja evidente o crescimento exponencial da quan-tidade de parâmetros em função da quantidade de funçõesde Laguerre em ambos os modelos RBF e TS, fica explícitonas tabelas 3 e 4 que esse problema é mais acentuado paraos últimos. Uma abordagem para minimizar esse problema,alternativa àquelas já mencionadas anteriormente e que nãorequer abrir mão da simplicidade da arquitetura de base de
0 2 4 6 8 10 12 14 16−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
tempo [horas]
NA
MW
[kg/
kmol
]
Figura 6: Saída medida do processo CSTR (linha cheia) esaída prevista do modelo Laguerre-RBF comn = 3 (linhatracejada): dados de validação normalizados.
regras completa adotada, é utilizar apenas um subconjuntodas variáveis presentes nos modelos locais como variáveisna premissa. No caso específico dos modelos OBF-TS, cujasregras são dadas em (34), isso significa tomar osn estadosde Laguerre presentes nos conseqüentes das regras e utili-zar apenas o subconjunto dosr < n primeiros estados nos
Revista Controle & Automação/Vol.18 no.3/Julho, Agosto e S etembro 2007 315
0 2 4 6 8 10 12 14 16−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
tempo [horas]
NA
MW
[kg/
kmol
]
Figura 7: Saída medida do processo CSTR (linha cheia) esaída prevista do modelo Laguerre-TS comn = 2 (linha tra-cejada): dados de validação normalizados.
antecedentes (premissa). Em outras palavras, significa uti-lizar apenas um subconjunto dos estados de Laguerre comovariáveis de decisão sobre a região operacional do sistema,o que pode implicar em pouca ou mesmo nenhuma perdade desempenho dependendo da complexidade das dinâmicasenvolvidas. Parar = 1, por exemplo, tem-se que as regrasassumem a seguinte forma:
Ri: SE l1(k) é X i1
ENTÃO y(k) = θi0 + θi
1l1(k) + · · · + θinln(k)
(46)
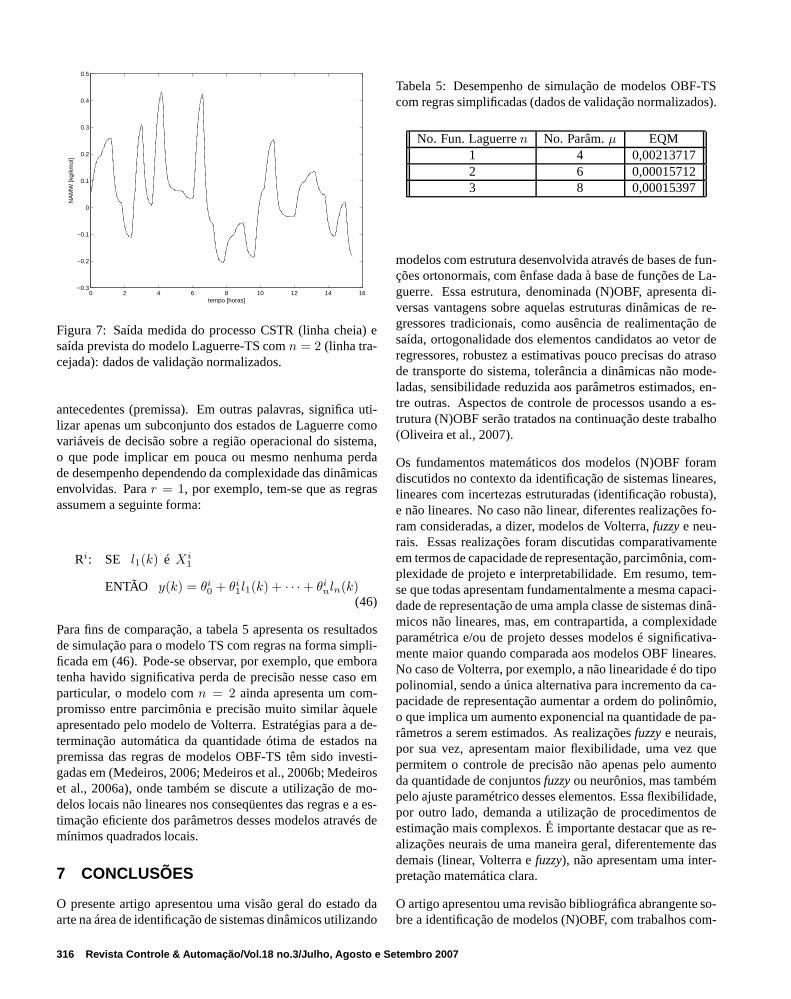
Para fins de comparação, a tabela 5 apresenta os resultadosde simulação para o modelo TS com regras na forma simpli-ficada em (46). Pode-se observar, por exemplo, que emboratenha havido significativa perda de precisão nesse caso emparticular, o modelo comn = 2 ainda apresenta um com-promisso entre parcimônia e precisão muito similar àqueleapresentado pelo modelo de Volterra. Estratégias para a de-terminação automática da quantidade ótima de estados napremissa das regras de modelos OBF-TS têm sido investi-gadas em (Medeiros, 2006; Medeiros et al., 2006b; Medeiroset al., 2006a), onde também se discute a utilização de mo-delos locais não lineares nos conseqüentes das regras e a es-timação eficiente dos parâmetros desses modelos através demínimos quadrados locais.
7 CONCLUSÕES
O presente artigo apresentou uma visão geral do estado daarte na área de identificação de sistemas dinâmicos utilizando
Tabela 5: Desempenho de simulação de modelos OBF-TScom regras simplificadas (dados de validação normalizados).
No. Fun. Laguerren No. Parâm.µ EQM1 4 0,002137172 6 0,000157123 8 0,00015397
modelos com estrutura desenvolvida através de bases de fun-ções ortonormais, com ênfase dada à base de funções de La-guerre. Essa estrutura, denominada (N)OBF, apresenta di-versas vantagens sobre aquelas estruturas dinâmicas de re-gressores tradicionais, como ausência de realimentação desaída, ortogonalidade dos elementos candidatos ao vetor deregressores, robustez a estimativas pouco precisas do atrasode transporte do sistema, tolerância a dinâmicas não mode-ladas, sensibilidade reduzida aos parâmetros estimados, en-tre outras. Aspectos de controle de processos usando a es-trutura (N)OBF serão tratados na continuação deste trabalho(Oliveira et al., 2007).
Os fundamentos matemáticos dos modelos (N)OBF foramdiscutidos no contexto da identificação de sistemas lineares,lineares com incertezas estruturadas (identificação robusta),e não lineares. No caso não linear, diferentes realizações fo-ram consideradas, a dizer, modelos de Volterra,fuzzye neu-rais. Essas realizações foram discutidas comparativamenteem termos de capacidade de representação, parcimônia, com-plexidade de projeto e interpretabilidade. Em resumo, tem-se que todas apresentam fundamentalmente a mesma capaci-dade de representação de uma ampla classe de sistemas dinâ-micos não lineares, mas, em contrapartida, a complexidadeparamétrica e/ou de projeto desses modelos é significativa-mente maior quando comparada aos modelos OBF lineares.No caso de Volterra, por exemplo, a não linearidade é do tipopolinomial, sendo a única alternativa para incremento da ca-pacidade de representação aumentar a ordem do polinômio,o que implica um aumento exponencial na quantidade de pa-râmetros a serem estimados. As realizaçõesfuzzye neurais,por sua vez, apresentam maior flexibilidade, uma vez quepermitem o controle de precisão não apenas pelo aumentoda quantidade de conjuntosfuzzyou neurônios, mas tambémpelo ajuste paramétrico desses elementos. Essa flexibilidade,por outro lado, demanda a utilização de procedimentos deestimação mais complexos. É importante destacar que as re-alizações neurais de uma maneira geral, diferentemente dasdemais (linear, Volterra efuzzy), não apresentam uma inter-pretação matemática clara.
O artigo apresentou uma revisão bibliográfica abrangente so-bre a identificação de modelos (N)OBF, com trabalhos com-
316 Revista Controle & Automação/Vol.18 no.3/Julho, Agost o e Setembro 2007

preendendo todas as realizações mencionadas acima. Aspec-tos práticos da modelagem foram também discutidos e ilus-trados através de dois casos de estudo envolvendo um reatorde polimerização isotérmica do tipo CSTR.
AGRADECIMENTOS
O primeiro e terceiro autores agradecem ao Conselho Naci-onal de Desenvolvimento Científico e Tecnológico− CNPq(processos 307554/2003-1 e 301345184, respectivamente).
REFERÊNCIAS
Aguirre, L. A. (2004). Introdução à Identificação de Sis-temas: Técnicas Lineares e Não Lineares Aplicadas aSistemas Reais, 2 edn, Editora UFMG.
Aguirre, L. A., Correa, M. V. and Cassini, C. (2002). Nonli-nearities in NARX polynomial models: Representationand estimation,IEE Proc. Control Theory and Applica-tions149: 343–348.
Alataris, K., Berger, T. W. and Marmarelis, V. Z. (2000). Anovel network for nonlinear modeling of neural systemswith arbitrary point-process inputs,Neural Networks13: 255–266.
Allgower, F. and Zheng, A. (eds) (2000).Nonlinear ModelPredictive Control, Birkhauser Verlag.
Arto, V., Hannu, P. and Halme, A. (2001). Modeling of chro-matographic separation process with Wiener-MLP re-presentation,Journal of Process Control11: 443–458.
Babuška, R. (1998).Fuzzy Modeling for Control, KluwerAcademic Publishers.
Back, A. D. and Tsoi, A. C. (1996). Nonlinear system iden-tification using discrete Laguerre functions,Journal ofSystems Engineering6: 194–207.
Balestrino, A., Caiti, A. and Zanobini, G. (1999). Identi-fication of Wiener-type nonlinear systems by Laguerrefilters and neural networks,Proc. 14th International Fe-deration of Automatic Control (IFAC) World Congress,Beijing/China, pp. 433–438.
Billings, S. A. (1980). Identification of nonlinear systems- asurvey,IEE Proc. Pt D127(6): 272–285.
Boyd, S. and Chua, L. O. (1985). Fading memory andthe problem of approximating nonlinear operators withVolterra series,IEEE Trans. on Circuits and Systems32(11): 1150–1161.
Braga, A. P., Carvalho, A. C. P. L. F. and Ludemir, T. B.(2000).Redes Neurais Artificiais: Teoria e Aplicações,LTC.
Broome, P. W. (1965). Discrete orthonormal sequences,Journal of the Association for Computing Machinery12(2): 151–168.
Broomhead, D. S. and Lowe, D. (1988). Multivariate functi-onal interpolation and adaptive networks,Complex Sys-tems2: 321–355.
Camacho, E. F. and Bordons, C. (1999).Model PredictiveControl, Springer-Verlag.
Campello, R. J. G. B. (2002).Arquiteturas e Metodolo-gias para Modelagem e Controle de Sistemas Comple-xos utilizando Ferramentas Clássicas e Modernas, PhDthesis, DCA/FEEC/UNICAMP, Campinas/SP, Brasil.
Campello, R. J. G. B. and Amaral, W. C. (1999). Equiva-lência entre modelos nebulosos e redes neurais,AnaisIV Simpósio Brasileiro de Automação Inteligente, SãoPaulo/Brasil, pp. 208–212.
Campello, R. J. G. B. and Amaral, W. C. (2002). Takagi-Sugeno fuzzy models within orthonormal basis func-tion framework and their application to process con-trol, Proc. 11th IEEE Internat. Conference on FuzzySystems, Honolulu/USA, pp. 1399–1404.
Campello, R. J. G. B., Amaral, W. C. and Favier, G.(2001). Optimal Laguerre series expansion of discreteVolterra models,Proc. European Control Conference,Porto/Portugal, pp. 372–377.
Campello, R. J. G. B., Amaral, W. C. and Favier, G. (2002).Desenvolvimento ótimo de modelos de Volterra emfunções ortonormais de Laguerre,Anais XIV CongressoBrasileiro de Automática, Natal/Brasil, pp. 128–133.
Campello, R. J. G. B., Amaral, W. C. and Favier, G. (2006).A note on the optimal expansion of Volterra modelsusing Laguerre functions,Automatica42: 689–693.
Campello, R. J. G. B., Favier, G. and Amaral, W. C. (2003).Optimal expansions of discrete-time Volterra modelsusing Laguerre functions,Proc. of the 13th IFACSymposium on System Identification, Rotterdam/TheNetherlands, pp. 1844–1849.
Campello, R. J. G. B., Favier, G. and Amaral, W. C. (2004).Optimal expansions of discrete-time Volterra modelsusing Laguerre functions,Automatica40: 815–822.
Campello, R. J. G. B., Meleiro, L. A. C. and Amaral, W. C.(2004). Control of a bioprocess using orthonormal basisfunction fuzzy models,Proc. 13th IEEE Internat. Con-ference on Fuzzy Systems, Budapest/Hungary, pp. 801–806.
Revista Controle & Automação/Vol.18 no.3/Julho, Agosto e S etembro 2007 317

Campello, R. J. G. B. and Oliveira, G. H. C. (2007). Modelosnão lineares,in L. A. Aguirre, A. P. Alves da Silva,M. F. M. Campos and W. C. Amaral (eds),Enciclopédiade Automática, Vol. 3 (Cap. 4), Edgard Blücher.
Campello, R. J. G. B., Oliveira, G. H. C., Von Zuben, F. J.and Amaral, W. C. (1999). Redes neurais com base defunções ortonormais,Anais IV Simpósio Brasileiro deAutomação Inteligente, São Paulo/Brasil, pp. 213–218.
Campello, R. J. G. B., Von Zuben, F. J., Amaral, W. C., Me-leiro, L. A. C. and Maciel Filho, R. (2003). Hierarchicalfuzzy models within the framework of orthonormal ba-sis functions and their application to bioprocess control,Chemical Engineering Science58: 4259–4270.
Cho, K. B. and Wang, B. H. (1996). Radial basis func-tion based adaptive fuzzy systems and their applicati-ons to system identification and prediction,Fuzzy Setsand Systems83: 325–339.
Clarke, D. W. (ed.) (1994).Advances in Model Based Pre-dictive Control, Oxford University Press.
Corrêa, M. V. and Aguirre, L. A. (2004). Identificação não-linear caixa-cinza− Uma revisão e novos resultados,Controle & Automação15: 109–126.
da Rosa, A. (2005).Desenvolvimento de modelos discretosde Volterra usando funções de Kautz, Master’s thesis,DCA/FEEC/UNICAMP, Campinas/SP, Brasil.
da Rosa, A., Amaral, W. C. and Campello, R. J. G. B. (2006).Desenvolvimento de modelos de Volterra usando fun-ções de Kautz e sua aplicação à modelagem de um sis-tema de levitação magnética,Anais do Congresso Bra-sileiro de Automática, Salvador/Brasil, pp. 274–279.
da Rosa, A., Campello, R. J. G. B. and Amaral, W. C. (2007).Choice of free parameters in expansions of discrete-time Volterra models using Kautz functions,Automa-tica 43(6).
da Silva, I. N. (1995). Estimação paramétrica robustaatravés de redes neurais artificiais, Master’s thesis,DCA/FEEC/UNICAMP - Brasil.
Doyle III, F. J., Ogunnaike, B. A. and Pearson, R. K. (1995).Nonlinear model-based control using second-order Vol-terra models,Automatica31: 697–714.
Doyle III, F. J., Pearson, R. K. and Ogunnaike, B. A.(2002). Identification and Control using Volterra Mo-dels, Springer-Verlag.
Dumont, G. A. and Fu, Y. (1993). Non-linear adaptive con-trol via Laguerre expansion of Volterra kernels,Int. J.Adaptive Control and Signal Processing7: 367–382.
Espinosa, J., Vandewalle, J. and Wertz, V. (2004).FuzzyLogic, Identification and Predictive Control, Springer-Verlag.
Eykhoff, P. (1974). System Identification: Parameter andState Estimation, John Wiley & Sons.
Favier, G. and Arruda, L. V. R. (1996). Review and com-parison of ellipsoidal bounding algorithms,in M. Mila-nese (ed.),Bounding Approaches to System Identifica-tion, Plenum Press, New York, pp. 43–68.
Favier, G., Kibangou, A. Y. and Campello, R. J. G. B. (2003).Nonlinear system modelling by means of orthonormalbasis functions,Proc. 2nd IEEE Int. Conference onSignal, Systems, Decision and Information Technology,Sousse/Tunisia.
Fu, Y. and Dumont, G. A. (1993). An optimum time scale fordiscrete Laguerre network,IEEE Trans. on AutomaticControl 38(6): 934–938.
Garcia, C. E., Prett, D. M. and Morari, M. (1989). Modelpredictive control: Theory and practice - a survey,Au-tomatica25(3): 335–348.
Haykin, S. (1999). Neural Networks: A ComprehensiveFoundation, 2nd edn, Prentice Hall.
Henson, M. A. (1998). Nonlinear model predictive con-trol: Current status and future directions,Computersand Chemical Engineering23: 187–202.
Heuberger, P. S. C., Van den Hof, P. M. J. and Bosgra, O. H.(1995). A generalized orthonormal basis for linear dy-namical systems,IEEE Trans. on Automatic Control40: 451–465.
Heuberger, P. S. C., Van den Hof, P. M. J. and Wahlberg,B. (2005). Modelling and Identification with RationalOrthogonal Basis Functions, Springer.
Hunt, K. J., Haas, R. and Murray-Smith, R. (1996). Exten-ding the functional equivalence of radial basis functionnetworks and fuzzy inference systems,IEEE Trans.Neural Networks7: 776–781.
Kibangou, A., Favier, G. and Hassani, M. (2003). Generali-zed orthonormal basis selection for expanding quadra-tic Volterra filters,Proc. IFAC Symposium on SystemIdentification, Rotterdam/The Netherlands, pp. 1119–1124.
Kibangou, A. Y., Favier, G. and Hassani, M. M. (2005a).Iterative optimization method of GOB-Volterra filters,Proc. 16th International Federation of Automatic Con-trol (IFAC) World Congress, Prague/Czech Republic.
318 Revista Controle & Automação/Vol.18 no.3/Julho, Agost o e Setembro 2007

Kibangou, A. Y., Favier, G. and Hassani, M. M. (2005b).Laguerre-Volterra filters optimization based on La-guerre spectra,EURASIP Journal on Applied SignalProcessing17: 2874–2887.
Kibangou, A. Y., Favier, G. and Hassani, M. M. (2005c).Selection of generalized orthonormal bases for second-order Volterra filters,Signal Processing85: 2371–2385.
Kosko, B. (1992).Neural Networks and Fuzzy Systems: ADynamical Systems Approach to Machine Intelligence,Prentice Hall.
Kosko, B. (1997).Fuzzy Engineering, Prentice Hall.
Leontaritis, I. and Billings, S. A. (1985). Input-output para-metric models for nonlinear systems− Parts I and II,Int. Journal of Control41(6): 303–344.
Ljung, L. (1999).System Identification: Theory for the user,2nd edn, Prentice Hall.
Mäkilä, P. M. (1990). Approximation of stable systems byLaguerre filters,Automatica26(2): 333–345.
Maner, B. R., Doyle III, F. J., Ogunnaike, B. A. and Pear-son, R. K. (1996). Nonlinear model predictive con-trol of a simulated multivariable polymerization re-actor using second-order Volterra models,Automatica32(9): 1285–1301.
Masnadi-Shirazi, M. A. and Ahmed, N. (1991). OptimumLaguerre networks for a class of discrete-time systems,IEEE Transactions on Signal Processing39(9): 2104–2108.
Medeiros, A. V. (2006).Modelagem de sistemas dinâmicosnão lineares utilizando sistemas fuzzy, algoritmos ge-néticos e funções de base ortonormal, Master’s thesis,DCA/FEEC/UNICAMP, Campinas/SP, Brasil.
Medeiros, A. V., Amaral, W. C. and Campello, R. J. G. B.(2006a). GA optimization of generalized OBF TS fuzzymodels with global and local estimation approaches,Proc. 15th IEEE Internat. Conference on Fuzzy Sys-tems, Vancouver/Canada, pp. 8494–8501.
Medeiros, A. V., Amaral, W. C. and Campello, R. J. G. B.(2006b). GA optimization of OBF TS fuzzy modelswith linear and non linear local models,Anais Sim-pósio Brasileiro de Redes Neurais (SBRN), RibeirãoPreto/Brasil.
Milanese, M. and Belforte, G. (1982). Estimation theory anduncertainty intervals evaluation in presence of unknownbut bounded errors : Linear families of models and esti-mators,IEEE Trans. on Automatic Control27(2): 408–414.
Moreira, V. D. (2006).Controle Preditivo Robusto de Siste-mas Hibridos Incertos Integrando Restrições, Lógica eDinâmica Baseada em Séries de Funções Ortonormais,PhD thesis, DCA/FEEC/UNICAMP.
Nelles, O. (2001).Nonlinear System Identification, Springer-Verlag.
Ninness, B. and Gustafsson, F. (1995). Orthonormal basesfor system identification,Proc. 3rd European ControlConference, Vol. 1, Rome/Italy, pp. 13–18.
Ninness, B. and Gustafsson, F. (1997). A unifying cons-truction of orthonormal bases for system identification,IEEE Trans. on Automatic Control42: 515–521.
Norton, J. P. (1990). Fast and robust algorithm to com-pute exact polytope parameter bounds,Mathematicsand Computers in Simulation32: 481–493.
Oliveira e Silva, T. A. M. (1994). Optimality conditions fortruncated Laguerre networks,IEEE Trans. Signal Pro-cessing42: 2528–2530.
Oliveira e Silva, T. A. M. (1995a). On the determinationof the optimal pole position of Laguerre filters,IEEETrans. Signal Processing43: 2079–2087.
Oliveira e Silva, T. A. M. (1995b). Optimality conditions fortruncated Kautz networks with two periodically repea-ting complex conjugate poles,IEEE Trans. AutomaticControl 40: 342–346.
Oliveira, G. H. C. (1997). Controle Preditivo paraProcessos com Incertezas Estruturadas baseadoem Séries de Funções Ortonormais, PhD thesis,DCA/FEEC/UNICAMP - Campinas/SP/Brasil.
Oliveira, G. H. C. and Amaral, W. C. (2000). Identificação econtrole preditivo de processos não lineares utilizandoséries de Volterra e bases de funções ortonormais,AnaisXIII Congresso Brasileiro de Automática, Florianópo-lis/Brasil, pp. 2174–2179.
Oliveira, G. H. C., Amaral, W. C., Favier, G. and Dumont, G.(2000). Constrained robust predictive controller for un-certain processes modeled by orthonormal series func-tions,Automatica36(4): 563–572.
Oliveira, G. H. C., Campello, R. J. G. B. and Amaral, W. C.(1999). Fuzzy models within orthonormal basis func-tion framework,Proc. 8th IEEE Internat. Conferenceon Fuzzy Systems, Seoul/Korea, pp. 957–962.
Oliveira, G. H. C., Campello, R. J. G. B. and Amaral, W. C.(2007). Identificação e controle de processos via desen-volvimentos em séries ortonormais. Parte B: Controlepreditivo,Controle & Automação18(3): 322–336.
Revista Controle & Automação/Vol.18 no.3/Julho, Agosto e S etembro 2007 319
Oliveira, G. H. C., Favier, G., Dumont, G. and Amaral,W. C. (1998). Uncertainties identification using la-guerre models with application to paper machine head-box,Proc. of IEEE/IMACS Multiconference on Compu-tational Engineering in Systems Applications - CESA,Symposium on Control Optimization and Supervision,Vol. 1, Tunisia, pp. 329–334.
Passino, K. M. and Yurkovich, S. (1997).Fuzzy Control,Addison Wesley.
Rugh, W. J. (1981).Nonlinear System Theory: The Volterra /Wiener Approach, The Johns Hopkins University Press.
Schetzen, M. (1980).The Volterra and Wiener Theories ofNonlinear Systems, John Wiley & Sons.
Sentoni, G., Agamennoni, O., Desages, A. and Romagnoli,J. (1996). Approximate models for nonlinear processcontrol,AIChE Journal42: 2240–2250.
Sentoni, G. B., Biegler, L. T., Guiver, J. B. and Zhao, H.(1998). State-Space nonlinear process modeling: Iden-tification and universality,AIChE Journal44: 2229–2239.
Sjöberg, J., Zhang, Q., Ljung, L., Benveniste, A., Delyon,B., Glorennec, P.-Y., Hjalmarsson, H. and Juditsky, A.(1995). Nonlinear black-box modeling in system iden-tification: A unified overview,Automatica31: 1691–1724.
Soeterboek, R. (1992).Predictive Control: A Unified Appro-ach, Prentice Hall.
Sugeno, M. and Kang, G. T. (1986). Fuzzy modelling andcontrol of multilayer incinerator,Fuzzy Sets and Sys-tems18: 329–346.
Sugeno, M. and Kang, G. T. (1988). Structure identificationof fuzzy model,Fuzzy Sets and Systems28: 15–33.
Sugeno, M. and Tanaka, K. (1991). Successive identificationof a fuzzy model and its applications to prediction of acomplex system,Fuzzy Sets and Systems42: 315–334.
Takagi, T. and Sugeno, M. (1985). Fuzzy identificationof systems and its applications to modeling and con-trol, IEEE Trans. Systems, Man and CyberneticsSMC-15: 116–132.
Tanguy, N., Morvan, R., Vilbé, P. and Calvez, L. C.(2000). Online optimization of the time scale in adap-tive Laguerre-based filters,IEEE Trans. on Signal Pro-cessing48: 1184–1187.
Tanguy, N., Morvan, R., Vilbé, P. and Calvez, L. C.(2002). Pertinent choice of parameters for discreteKautz approximation,IEEE Trans. on Automatic Con-trol 47: 783–787.
Tanguy, N., Vilbé, P. and Calvez, L. C. (1995). Optimumchoice of free parameter in orthonormal approximati-ons,IEEE Trans. on Automatic Control40: 1811–1813.
Van den Hof, P. M. J., Heuberger, P. S. C. and Bo-kor, J. (1995). System identification with generalizedorthonormal basis functions,Automatica31(12): 1821–1834.
Vázquez, M. Á. A. and Agamennoni, O. E. (2001). Approxi-mate models for nonlinear dynamical systems and theirgeneralization properties,Mathematical and ComputerModelling33: 965–986.
Wahlberg, B. (1991). System identification using Laguerremodels,IEEE Trans. on Automatic Control36(5): 551–562.
Wahlberg, B. (1994). System identification using Kautz mo-dels, IEEE Trans. on Automatic Control39(6): 1276–1282.
Wahlberg, B. and Ljung, L. (1992). Hard frequency-domainmodel error bounds from least-squares like identifi-cation techniques,IEEE Trans. on Automatic Control37(7): 900–912.
Wahlberg, B. and Mäkilä, P. M. (1996). Approximationof stable linear dynamical systems using Laguerre andKautz functions,Automatica32(5): 693–708.
Walter, E. and Piet-Lahanier (1990). Estimation of parameterbounds from bounded-error data: A survey,Mathema-tics and Computers in simulation32: 449–468.
Wang, L.-X. and Mendel, J. M. (1992). Fuzzy basis func-tions, universal approximation and orthogonal leastsquares learning,IEEE Trans. Neural Networks3: 807–814.
Wiener, N. (1958).Nonlinear Problems in Random Theory,Wiley.
Yager, R. R. and Filev, D. P. (1994).Essentials of FuzzyModeling and Control, John Wiley & Sons.
Zeng, X.-J. and Singh, M. G. (1994). Approximation the-ory of fuzzy systems - SISO case,IEEE Trans. FuzzySystems2: 162–176.
Zeng, X.-J. and Singh, M. G. (1995). Approximation the-ory of fuzzy systems - MIMO case,IEEE Trans. FuzzySystems3: 219–235.
320 Revista Controle & Automação/Vol.18 no.3/Julho, Agost o e Setembro 2007

Zervos, C. C. and Dumont, G. A. (1988). Deterministicadaptive control based on Laguerre series representa-tion, Int. J. Control48(6): 2333–2359.
Revista Controle & Automação/Vol.18 no.3/Julho, Agosto e S etembro 2007 321





























