Embed Size (px)
Citation preview

IDENTIFICACAO E RASTREAMENTO EM TEMPO REALDE MULTIPLOS AGENTES AUTONOMOS
Oliver Matias van Kaic kWilliam Robson Schwar tz
Murilo Vicente Gonc alves da Silv aHelio Pedrini
Universidade Federal do Parana
Departamento de Informatica
Curitiba-PR, Brasil, 81531-990�omvk99,wrs99,mvgs99,helio � @inf.ufpr.br
RESUMO
Futebol de Robos tem sido adotado internacionalmente como uma atividade cientıfica voltada a
educacao e pesquisa, visando estimular o desenvolvimento de novas tecnicas na area de Inteligencia
Artificial. O domınio de Futebol de Robos e bastante dinamico e complexo, consistindo de multiplos
agentes capazes de realizar acoes individuais e colaborativas para a execucao de uma tarefa. Este ar-
tigo descreve o sistema de visao computacional implementado em nosso de time de Futebol de Robos.
A arquitetura basica do time e os algoritmos adotados para a identificacao e rastreamento dos objetos
sao apresentados e discutidos. Um algoritmo simples e eficiente e proposto para a identificacao e ras-
treamento em tempo real de objetos durante o jogo. Diversos experimentos reais sao realizados para
demonstrar o desempenho de nossos algoritmos.
PALAVRAS-CHAVE: Visao Computacional, Futebol de Robos, Reconhecimento de Objetos.
1 Intr oduc ao
OFuteboldeRobosfoi propostopordiversospesquisadores[3, 5] comoumaatividadecientıfica
que integra uma grandevariedadede topicos relacionadosa educac¸ao e pesquisana area
de InteligenciaArtificial, tais como visao computacional,princıpios de agentesautonomos,
colaborac¸ao de multi-agentes,raciocınio em temporeal e robotica. O domınio de Futebolde
Robos e bastantedinamicoe complexo, consistindode multiplos agentescapazesde realizar
acoesindividuaise colaborativasatravesde operac¸oese movimentosaltamentecoordenados
paraatingir objetivosespecıficos.
Coma internacionalizac¸aodaideiado FuteboldeRobos,surgiu a necessidadededefinicao
deregrasdemodoa garantircompatibilidadeentreasequipes.Comoresultado,surgiu a Fed-
eration of International Robot-soccerAssociation(FIRA), a qual organizatorneiosanuaise

promove o desenvolvimentode sistemasinteligentese robos autonomos,contribuindo parao
estadodaarteemareasespecializadas.Atualmente,a FIRA contacomdezcategoriasou ligas,
asquaisdiferenciamentresi com relacao ao numero,tamanhoe forma dosrobos utilizados
pelasequipes[2]. ParalelamenteaosdesenvolvimentosdaFIRA, surgiu umaoutraorganizac¸ao
internacionaldenominadaRobotWorld CupInitiative (RoboCup).A RoboCuptambempossui
diversascategoriasou ligas, dentreelasa liga de simuladores(softwares),a liga de robos de
pequenoemedioporte,roboscompernasea liga humanoide[4].
O projeto de Futebolde Robos em desenvolvimento na UniversidadeFederaldo Parana
(UFPR)iniciou-seem1997,contandocoma participacaodoscursosde Informaticae Engen-
hariaEletrica. Desdeentao,variosexperimentostemsido realizadosvisandoa construc¸aode
umtimecompletoderoboscomadequadograudeintegracaoe robustezaumbaixocusto.
Seguindoesseproposito,decidiu-seadotarasregrasdaRoboCupnacategoriadepequenos
robos (small), ondecadaequipee compostade cinco robos cujo formatodeve estarcontido
em um cilindro com 18cmde diametroe 22.5cmde altura. Marcascoloridassao utilizadas
paraidentificaros robos de cadaequipe. Em adicao a essasmarcas,cadarobo deve carregar
umaboladeping-pongcoloridaquee usadacomoo uniformeou camisetado time. O campo
e formadopor umasuperfıcie planade cor verdecom dimensoesde 152.5cm� 274cm. Uma
camerainstaladaa umaalturamınima de 3 metrosacimado campoe utilizadaparacapturar
imagensdo jogo, quesaotransmitidasa um computadorresponsavel pelainterpretac¸aodessas
imagensedecisaodasestrategiasetaticasdejogos.As acoesnodomınio saorealizadasatraves
decomandosdemovimentosenviadosaosrobosvia comunicac¸aosemfio. Parao jogo,utiliza-
seumabola de golfe com aproximadamente3cm de diametroe de cor laranja. Um esquema
basicodo sistemaeapresentadonafigura1.
Figura 1: Esquema basico de um sistema de Futebol de Robos (adaptado de [2]).
O sistemautilizadoemnossoprojetoestadividido emtresmodulosprincipais(figura2):
� Visao Computacional: a partir da imagemcapturadapelacameradigital, e responsavel
peloreconhecimentodosrobosedabolanocampodejogo. A determinac¸aodaposicaoe
orientacaodosrobose realizadaatravesdemarcascoloridascolocadassobrecadarobo;

Estratégia
Aquisição
Imagemda
Comandosde
Visão Computacional Comunicação
Reconhecimentoda
Imagem
Conversão
Transmissão
Figura 2: Modulos principais do projeto Futebol de Robos da UFPR.
� Estrategia: atravesdasinformacoesfornecidaspelo modulo de visao computacional,e
responsavel pelasdecisoesdejogadascomrelacaoaosmovimentosdosrobos,incluindo
taticasde jogo, definicoesdastrajetoriasdos jogadorese tendenciasde movimentacao
dabola. Cadarobo deve sercapazdeplanificare refinarseusobjetivosdeumamaneira
eficaz,levandoemcontao contexto atualemqueeleseencontra;
� Comunicac¸ao: converteasinstrucoesresultantesdaestrategiaemcomandosdemovimentacao
paraosrobos. Tendoemvistaa propostadeseter robosautonomos,e proibidoqualquer
tipo deligacaoaosroboscomfios.
Esteartigo descreve o modulo de visao computacionalimplementadono time de Futebol
deRobosdaUFPR.A secao2 apresentaosalgoritmospropostosparapermitir a identificacao
e localizacaodosobjetosdeinteresse(robose bola)duranteo jogo. Algumasotimizacoessao
descritasde modoa melhoraro desempenhodo modulo de visao computacional.A secao 3
analisao desempenhodo sistemadesenvolvido e apresentaalgunsresultadosexperimentais.
Conclusoesesugestoesparatrabalhosfuturossaoapresentadasnasecao4.
2 Sistema de Visao Computacional
O principal objetivo do modulo de visao computacionale criar um modelo a partir das
informacoessobrecadaobjeto encontradona imagem,mais especificamenteidentificandoa
posicaodabolaea posicaoeorientacaodosagentesautonomos
O sistemadevisaocomputacional,utilizandoa basedeconhecimento,processaa imagem
capturadanomomentoeidentificaosobjetoseabola(figura3). A representac¸aoparaasituacao
atuale criada,contendoasposicoesdosobjetoseasorientacoesdosrobos.
As principaisetapasdo modulodevisaocomputacionalimplementadosno timedeFutebol
deRobosdaUFPRconsistemnaaquisicaodaimagem,construc¸aodeumabasedeconhecimen-

Imagem
Base
Conhecimentode
RepresentaçãoIS
V
OÃ
Figura 3: Reconhecimento de objetos.
to, reconhecimentodascoresdosobjetos(robosebola)edeterminac¸aodaposicaoeorientacao
dosrobos de nossaequipeno campode jogo. Essasetapassao descritasnassecoesa seguir.
images
2.1 Construc¸ao da Base de Conhecimento
Antes dos jogos, uma basede conhecimentoe construıda paraque o algoritmo possasaber
quantosobjetosirao haver na cenae quaissao ascorese caracterısticasdessesobjetos. Essa
basedeconhecimentoeconstruıdaatualmentepormeiodeumainterfacegraficacontroladapor
umoperadorhumanoduranteo perıododecalibracaodosistema.
Nossabasedeconhecimentocontemasseguintesinformacoes:
��� : numeroderobosdenossaequipe;
� cor b : cor dospixels ����� ��� dabola;
� cor c : cordacamisetadosrobos(cor unicaparatodososrobosdanossaequipe);
� diam c : diametrodacamisetadosrobos;
� cor ��� : cordamarcadecadarobo ��� ; (umacorparacadarobo)
� dist c m : distanciaempixelsentreamarcae acamisetadosrobos.
2.2 Classificac¸ ao das cores
O sistemautilizado paraatribuir um valor a um pixel e o espac¸o cromatico RGB, o qual e
diretamentefornecidopelanossacamera. Parautilizar o HSI, por exemplo,serianecessario
fazerumaconversaodealgumoutro formatodisponıvel nacameraparaeste,o querequereria
maior tempode processamento.Outrosformatoscomoo YUV carregamumaquantidadede
informacaobemmenor(8 bits saofornecidosemnossacamera)comparadoscomos24 bits do
RGB.
No sistemaRGB, a cor de cadapixel e definidapor tres componentes(R, G, B). Cada
componentedefineaquantidadedeumacorprimariapresentenacordopixel. Logo,Rdefinea

quantidadedevermelho,B aquantidadedeazuleG a quantidadedeverde.No RGB fornecido
pela camera,cadacomponentee definidapor 8 bits, o que totaliza uma boa quantidadede
informacaosobreumacor (24 bits).
As imagensutilizadassao compostaspor variosobjetosdispostossobreum fundo de cor
unica.Cadaobjetoaserreconhecidotambempossuiapenasumacorcomoatributo. Quandoas
imagenssao convertidasparaa formadigital, ospixelsquedefinemos objetosacabamsendo
devariostonsde umamesmacor. De forma a verificarseum pixel pertencea umaclassede
corparticular, o reconhecimentodeveutilizar um espac¸o detoleranciadeumadeterminadacor
aoinvesdeumvalorabsolutoparacomparac¸ao.
Paraclassificarumpixel comoequivalenteaumadeterminadacor, cadacomponentedacor
devepertenceraum intervalodetolerancia.Ostresintervalosaosquaisascomponentesdacor
devempertencersimultaneamentecaracterizamum volumeno espac¸o parametricodo sistema
RGB,queeo espac¸o (intervalo)detoleranciadeumacor.
Paradeterminac¸aodesteespac¸o detolerancia,o usuariodeve inicialmenteinformarumval-
or paracadacomponentedo sistemaRGB, o qual e feito por meio de uma interfacegrafica
apresentadadurantea etapade calibracao. Estevalor e consideradoo centrodo intervalo de
toleranciade umadeterminadacomponente.Os extremossuperiore inferior do intervalo sao
obtidosadicionando-see subtraindo-se,respectivamente,umacertatolerancia � ao valor ini-
cial. Estevalor detoleranciae determinadoempiricamente,poisdeve serajustadosegundoas
condicoesdeiluminacaoe contrastedasimagenscapturadas.
Paraverificar seumadeterminadacomponenteda cor de um pixel pertenceao intervalo,
cujo centroe representadopelovalor cor, utiliza-sea expressao ������������� �!#"%$&�'�(�)�+*,� ,
queotimizadaparaa computac¸ao torna-se-.�(���/�0�1�2#"%$ -3�4� . O testeacimae realizadopara
cadacomponente(R,G,B)dacor e,seresultaremverdadeiroparaastrescomponentes,pixel e
consideradocomosendoequivalenteacor, segundoa tolerancia� .
De modoa tornaro processamentomaiseficiente,e utilizadaumaotimizacao baseadano
usodemascaras[1] paradeterminarseum valorpertenceaum intervalo. Divide-seo intervalo
inteirodeumacomponenteem � partesdiscretas.Cria-seentaoumvetorcom � posicoes,cada
posicao representandoum intervalo de 5 unidades.Determina-seo intervalo de equivalencia
paraumadeterminadacomponentedacorecoloca-seo valor1 nasposicoesdovetorqueestao
dentrodointervaloeovalor0 nasqueestaofora. Paraverificarseumacorpertenceaoespac¸ode
tolerancia,cadavetore indexadocoma respectivacomponentee depoise realizadaa operac¸ao
logicaAND entreessestreselementosdosvetores.Seaoperac¸aoresultaremverdadeiro,o pixel
e equivalentea cor. Essaotimizacao podeserrealizadacom variossistemasde cores,aqui e
ilustradoapenascomo sistemaRGB.

Considereaamplitudedascomponentes
6+798;:.<�7 �>= 7@?6+AB8;:.<�A �>= AC?6EDF84:G<�D �>= DH?
onde<
e = sao respectivamenteos limites inferior e superiordo intervalo de amplitudeda
componente.
Osintervalosdeamplitudesaodivididosem � partesdetamanho5 cadaum,ou seja
5 798 �H= 7 � <�7 �@I(�5 AJ8 �H= A � <�A �@I>�5 DK8 �H= D � <LD �MI(�
Devemoscriar osvetoresde componentesN 7 , N A e N D paraumadeterminadacor, definida
pelosintervalos O 7 , O A e O D . Osvetoresresultantessao
N 7P8RQ �TS>�VULUVUW� �VX)�VUVUVUW�@� Y[ZN AJ8RQ%\ SC�VUVUVUW� \ X)�VUVUVU]� \ Y[ZN DK8RQ)^ S(�VUVUVU]� ^ XT�VUVUVUW� ^ YTZ
onde�VX equivalea:G<(7 *�5 7>_ � <�7 *`5 7 � _ *ba��c�da ? , \ X equivalea
:.<�A *�5 A�_ � <(A *`5 A � _ *ea%�c��a ? e^ X equivalea:G<�D *`5 Df_ � <�D *`5 D � _ *ba��g�da ? .
O valor �VX sera1 seo intervalorepresentadoporeleestivercontidonointervalodarespectiva
componente,casocontrariosera0 (se:G<(7 *h5 7>_ � <�7 *i5 7 � _ *�a%�j�ka ?�l O 7 entao �VX e 1, senao0).
As outrascomponentessaodeterminadasdemaneiraanaloga.
As componentesdeumpixel qualquer, sendo� �!#"%$ 8 �!��� \ � ^ � , pertencemaosintervalos O 7 ,O A e O D se N 7%: �[I(� ?m8 a , N AT:.\ I(� ?n8 a e N D>:G^ I(� ?m8 a .
Seo valor � for umapotenciade2, asdivisoes �oI>� ,\ I(� , e
^ I(� podemsersubstituıdaspor
divisoesnabase2, quesaocomputacionalmentemaisrapidas.
2.3 Reconhecimento e Rastreamento dos Objetos
Os objetosa seremidentificadosna imagemsao os robos e a bola. De modo a permitir a
identificacao,a localizacaoe a orientacaodosrobosdenossotime, algumasmarcassaocolo-
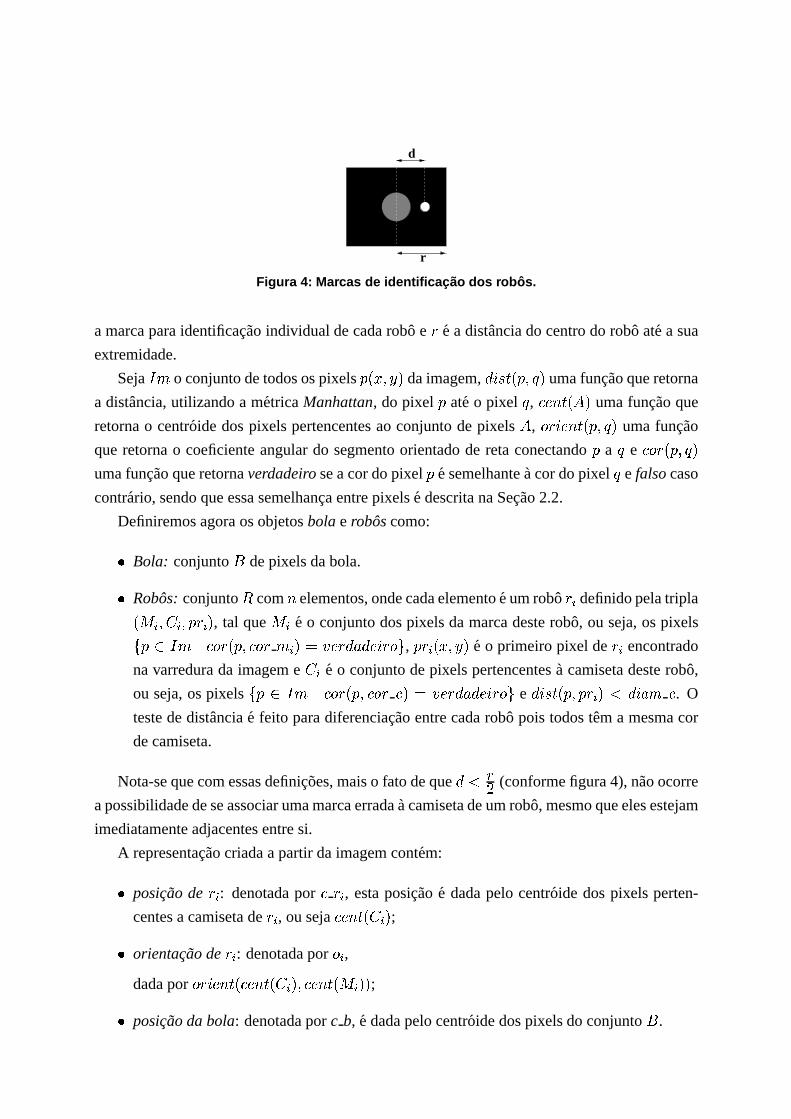
cadassobrecadarobo. A figura4 mostraumexemplodemarcasutilizadasnaidentificacaodos
robosdenossaequipe.
No centrodasuperfıcie do robo localiza-sesuacamiseta.A umadistancia p do centroesta
d
r
Figura 4: Marcas de identificac¸ ao dos robos.
a marcaparaidentificacaoindividualdecadarobo e � e a distanciado centrodo robo ate a sua
extremidade.
Seja< � o conjuntodetodosospixels �3�q�� �1� daimagem,pr�tsV5��u�W� v[� umafuncaoqueretorna
a distancia,utilizandoa metricaManhattan, do pixel � ate o pixel v , �(" � 5�� 6 � umafuncaoque
retornao centroide dospixelspertencentesao conjuntode pixels6
, ���)�t" � 5��u�W� v[� umafuncao
queretornao coeficienteangulardo segmentoorientadode retaconectando� a v e �(�)���w�]� vo�umafuncaoqueretornaverdadeiro seacordopixel � esemelhanteacordopixel v e falsocaso
contrario,sendoqueessasemelhanc¸aentrepixelsedescritanaSecao2.2.
Definiremosagoraosobjetosbolae roboscomo:
� Bola: conjuntox depixelsdabola.
� Robos: conjuntoy com � elementos,ondecadaelementoeumrobo �L� definidopelatripla
�2z{�|�CO}�H�H� �L�~� , tal que z{� e o conjuntodospixelsdamarcadesterobo, ou seja,ospixelsQ �0� < � -��(���1�u�W�C�(�)� ���!� 8'� "V�Tp���p�"V�2�[�rZ , � �L���q�� �1� e o primeiropixel de ��� encontrado
navarredurada imageme O}� e o conjuntodepixelspertencentesa camisetadesterobo,
ou seja,ospixelsQ ��� < � -n�(�)���w�W�)�C�)� �V� 8�� "V�Tp���p�"V�H�T�rZ e pr�|sL5��u�W�H� �L�q�����[�!�[� � . O
testededistanciae feito paradiferenciac¸aoentrecadarobo pois todostema mesmacor
decamiseta.
Nota-sequecomessasdefinicoes,maiso fatodeque p�� �� (conformefigura4), naoocorre
apossibilidadedeseassociarumamarcaerradaacamisetadeumrobo, mesmoqueelesestejam
imediatamenteadjacentesentresi.
A representac¸aocriadaapartir daimagemcontem:
� posicao de �L� : denotadapor � ��� , estaposicao e dadapelo centroide dospixels perten-
centesacamisetade �L� , ouseja ��" � 5��2O}�!� ;� orientacao de �L� : denotadapor �%� ,
dadapor ���T�H" � 5��2�(" � 5��!O}�!�(� ��" � 5��Hz{�!�M� ;� posicaoda bola: denotadapor c b, e dadapelocentroidedospixelsdo conjunto x .
A ideiabasicado algoritmoe percorrera imageme classificarcadapixel segundosuacor
como, pixel da bola, da camiseta,da marcade algum dos robos ou do fundo, sendoentao
inseridono respectivo conjuntodepixels( x , O}� , z{� ). Ospixelsdo fundosaodescartados.Em
seguidacadaconjuntode pixels O}� (camisetas),e associadoa um conjunto z{� (marcas)e e
calculadaaposicaodabolae aposicaoeorientacaodosrobos.
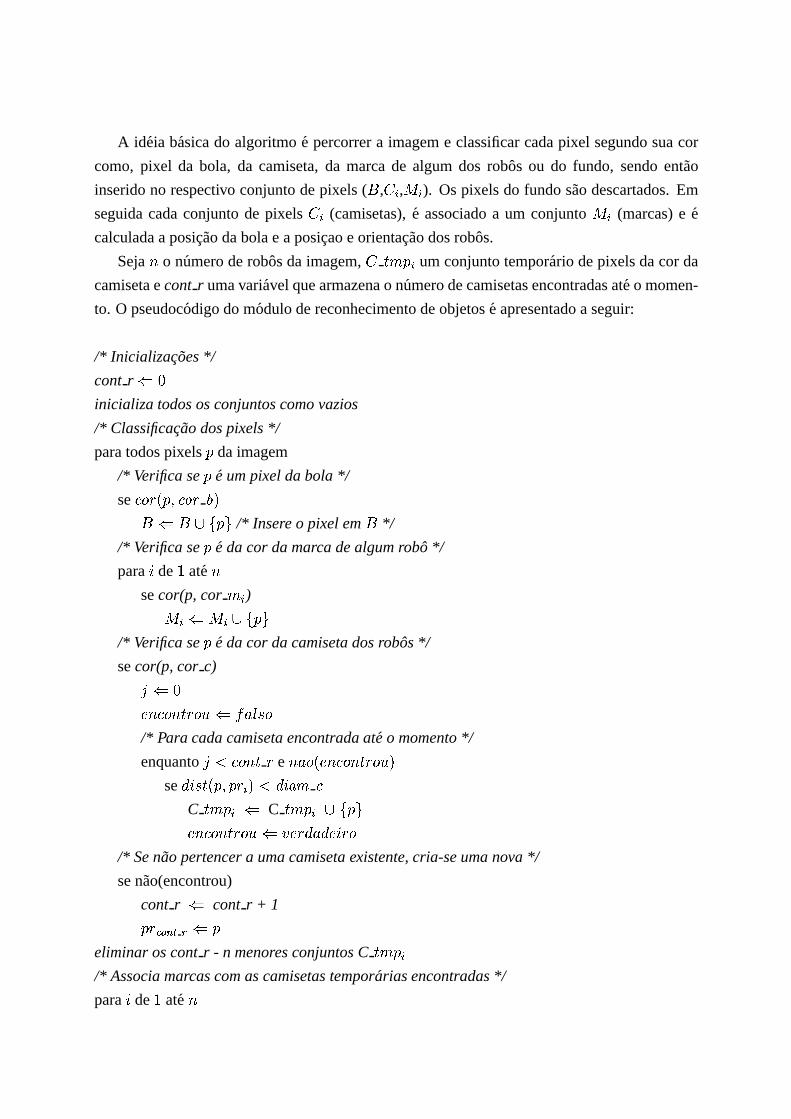
Seja � o numeroderobosdaimagem,O 5f���1� um conjuntotemporario depixelsdacor da
camisetaecont r umavariavel quearmazenao numerodecamisetasencontradasateo momen-
to. O pseudocodigodo modulodereconhecimentodeobjetoseapresentadoaseguir:
/* Inicializacoes*/
cont r � �inicializa todososconjuntoscomovazios
/* Classificac¸ao dospixels*/
paratodospixels � daimagem
/* Verifica se� e umpixel dabola */
se �(�)���w�W�)�C�)� ���x4� x�� Q �]Z /* Insereo pixel em x */
/* Verifica se� e da cor damarcadealgumrobo */
para� de a ate �secor(p,cor ��� )
z{�j� z{��� Q �]Z/* Verifica se� e da cor dacamisetadosrobos*/
secor(p,cor c)� � �" � ��� � 5f�T����� �m��$!s%�/* Para cadacamisetaencontradaate o momento*/
enquanto� �d��� � 5 � e � �����2" � ��� � 5f�T���j�
se p��tsL5��w�W�H�1�L��P�R�[�!�[� �C 5f������� C 5f������� Q �]Z" � �(� � 5f�[����� � "V�[p���p�"V�H�T�
/* Senao pertencera umacamisetaexistente, cria-seumanova*/
senao(encontrou)
cont r � cont r + 1
�1�[�~�|�C� �9� �eliminaroscont r - n menoresconjuntosC 5f���1�/* Associamarcascomascamisetastemporariasencontradas*/
para� de a ate �

para�
de a ate �se pr�|sL5��2�(" � 5��2z{�!�(� ��" � 5�� C 5f���r¡ )) ¢£�[�¥¤(¦ � �
O}�m� C 5f����¡ ,/* Encontra centro da bola */
c b � �(" � 5��!x§�/* Encontra centro dosrobos*/
para� de a ate �� �L�j� ��" � 5��2O}��
/* Encontra orientacao dosrobos*/
para� de a ate ������ �)�)�t" � 5��2O}�|�>zh��
2.4 Otimizac oes
Comintuito demelhorara qualidadedosresultadose aumentara velocidadedeprocessamen-
to pretendemosimplementaralgumasotimizacoesque foram estudadase serao descritasnas
secoesseguintes.
Paraaumentona qualidadeda classificac¸aode corese propostoo usoderedesneuraisar-
tificiais. Paraobtencaodeumamaiorvelocidade,e propostoum metodoqueutiliza a basede
conhecimentoparaevitar quetodosospixelsdaimagemsejampercorridos.
Paraaumentonaqualidadedaclassificac¸aodecorese propostoo usoderedesneuraisarti-
ficiais. Paraobtencaodeumamaiorvelocidade,saopropostosdoismetodos,o primeirousaa
basedeconhecimentoparanaopercorrertodosospixelsda imageme o segundoutilizandoa
representac¸aodaimagemanteriorparadelimitaramaximaregiaoondeo objetoseraencontrado
naimagema serprocessada.
2.4.1 Classificac¸ ao das cores Utilizando Redes Neurais Ar tificiais
Umapossıvel solucaoparaeliminaradeterminac¸aoempıricadatoleranciautililizadaparatestar
quecor tem um determinadopixel, e a utilizacao de redesneuraisartificiais. Devido a carac-
terısticadeextrapolacao,asredesneuraisconseguemdetectarpadroesquenaoforamutilizados
nafasedeaprendizado.
A redeneuralsera um perceptron em multicamadas,pelasuacapacidadede detecc¸ao de
padroes. A topologiada redesera compostapor tres neuronios na camadade entrada,que
receberao os tonsR, G e B do pixel, umacamadaocultae na camadade saıda o numerode
neuroniossera igualaonumerodecoresdiferentesaseremclassificadas(Figura5).
O treinamentoda redesera realizadodurantea construc¸ao da basede conhecimento,uti-
lizando o algoritmo backpropagation paracorrecao de errosna determinac¸ao dos pesosdas
sinapses.Na saıda, o neuronio querepresentaessepadrao de entradatera um valor alto e os

demaisneuroniosteraovaloresbaixos.
.
.
.
C1
C3
C2
Cn
R
G
B
Figura 5: A topologia proposta para rede neural artificial. A entrada recebe os componentes dopix el e a saıda mostra qual padr ao de cor ¨W©CªH¨j«(ªM¬�¬M¬rªH¨j a entrada representa.
2.4.2 Varredura Parcial da Imagem
Em buscade umavelocidademaior no algoritmo,umapossıvel solucao seriaa alteracao do
metodode varredurade imagem. O metodoconsistiriaem percorrerparcialmentea areada
imagem,o que e possıvel ja que os objetoscobremuma areaque contem um determinado
numerode pixels. Para detectaro local ondeseencontraum objeto e necessario identificar
somenteacoordenadadeumpixel.
Para percorrerparcialmentea imageme criadauma gradecom espac¸amentoentrecada
pontode tal forma que os objetossempreestejamno mınimo sobreum ponto da grade. A
distanciaentredoispontos�mS e � ® dagradedevesermenorqueo diametrop domenorobjetoa
serdetectado.Define-seaseguinteformulaparacalcularadistanciaentrecadapontodagrade,
pr�|sL5��w�jSC�H� ®>�P��p , ondep��tsL5��w�jS(�H�1®>� retornaadistanciaentreospontos�jS e � ® .A partir da formulaacima,e possıvel calcularo numerode pontosqueserao percorridos.
Supondoumaimagemcom alturade ¯ pixelse largurade ° pixels,utilizandoo metodoque
percorretoda a imagem,o numerode pixels percorridose °²±³¯ . Utilizando o metodode
varreduraparcial,seriampercorridos�!°´I1�2pµ�`pr�|sL5��u�jS(�H� ®>�M�@�3±¶�H¯nI1�!p·��pr�|sL5��u�jS>�H� ®C�@�@� pixels.
3 Resultados Experimentais
Alguns resultadosobtidosatravesda utilizacao de nossoalgoritmosao apresentadosnasfig-
uras6(a)-(f). Paraavaliar a robustezdo algoritmo,foi utilizadoum numerovariavel derobos,
comorientacoeseposicoesdiferentesnasimagens.
As imagensna colunaa esquerdamostramas imagensoriginaiscapturadaspelacamera,
enquantoasimagensa direitamostramosresultadosgeradospeloalgoritmo.As imagens6(a)
e (c) contem, respectivamente,dois e tres robos voltadosparaa bola; as imagens6(b) e (d)
mostramosresultadosdoprocessamentodasimagenscapturadas.O sistemadetectousatisfato-
riamentetodososobjetos,mostrandocırculosbrancosemtornodo centrodosrobose dabola
eum segmentoderetaparaindicara orientacaodecadarobo. Na imagem6(e),emboraostres
robosestejambastanteproximosentresi, o algoritmoidentificoucorretamentetodososobjetos
dacena.
OsalgoritmosforamimplementadosemmicrocomputadoresPCPentiumIII 450MHZ com
128MbytesdeRAM utilizandolinguagemdeprogramac¸aoC como sistemaoperacionalLinux.
As imagenssaocapturadaspor umacameradevıdeocoloridaJVC comsaıdaemVHS e digi-
talizadaspor umaplacaPCI daPixelView PV-Bt-878. A imagemdigitalizadautiliza resolucao
de320� 240pixelse24 bits dequantizac¸aoemRGB.
O processamentodaimagemutiliza comointerfaceo video4linux, possibilitandoaaquisicao
deimagensdigitaiscomgrandesimplicidadeeversatilidade,operandocomtaxasde30quadros
porsegundo.
4 Conc lus oes e Trabalhos Futur os
Nossosistemadevisaocomputacionalmostrou-serobustoascondicoesdeluminosidade,sendo
capazde identificarascoresdosobjetoscomaltaprecisao. Ele permitea execucaoemtempo
real,tal queobjetospodemserlocalizadose rastreadosaumataxade30 quadrospor segundo.
Trabalhosfuturos incluem a implementac¸ao de todasas otimizacoespropostasanterior-
mentede modoa melhorara qualidadedosresultadose aumentara velocidadede processa-
mento.O usoderedesneuraisparaa classificac¸aodecorese localizacaodeobjetos,associado
a um metodode varreduraparcialda imagem,devem melhorara robusteze desempenhodo
atualsistemadevisaocomputacional.
Referencias
[1] BRUCE, J., BALCH, T., AND VELOSO, M. Fastandcheapcolor imagesegmentationfor
interactive robots.In Workshopon InteractiveRoboticsandEntertainment(Apr. 2000).
[2] FIRA. Federationof InternationalRobot-soccerAssociation. http://www.fira.net.
[3] K ITANO, H., KUNIYOSHI , Y., NODA , I ., ASADA , M., MATSUBARA , H., AND OSAWA ,
H. Robocup:A challengeproblemfor AI. AI Magazine18, 1 (1997),73–85.
[4] ROBOCUP. RobotWorld CupInitiative. http://www.robocup.org.
[5] SANDERSON, A. Micro-RobotWorld CupSoccerTournament(MiroSot). IEEE Robotics
andAutomationMagazine(Dec.1997).

(a) (b)
(c) (d)
(e) (f)
Figura 6: Exemplos do reconhecimento de objetos. As imagens capturadas pela camera saomostradas a esquer da, enquanto as imagens a direita mostram o resultado apos a detecc ao dosobjetos.





























