Embed Size (px)
Citation preview

معمل اآلالت الكھربائیةELECTRICAL MACHINES LAB.
یةكھربائھندسة - 411مقرر : ھكھ ال
EngE411-Electrical Engineering
-AC MACHENERY FUNDAMENTAL (Lucas Nulle Equipments); - SYNCHRONOUS GENERATOR; - SYNCHRONOUS MOTOR; - SYNCHRONISATION Connect a synchronous
generator to an existing mains system; - INDUCTION MOTORS (Squirrel-Cage Rotor); -INDUCTION MOTORS (Wound Rotor).
Synchronous Machine
جازان جامعة كلــیة الھندسة
قســم الھندسة الكھربائیة
Jazan University
Engineering College Electrical Engineering Department

1 Purpose of the experiment This experiment explains the basic construction of a synchronous machine and the behaviour in both motor and generator modes.
The machine at first operates as a motor. The correlation between current, excitation and torque is investigated. Furthermore the performance of the machine as a genera- tor connected to the mains is examined. Also the solitary operation is considered. The regulation characteristic will be measured and synchronization with mains is realized.
2 Preparation of the experiment 2.1 Construction of the synchronous machine A synchronous machine is an induction machine where the rotational speed of the rotor and the rotational speed of the stator field are equal. The machine consists of three main parts:
• Stator, which carries the three phase winding,
• Rotor, with one DC winding or permanent magnets, and
• Slip rings or excitation machine (exciter) (in case of electrical excitation). Normally
synchronous machines are built as internal - field machines. Machines with poles 2p = 2 have a round rotor (cylindrical/turbo-rotor) because of high centrifugal forces, while those with 2p = 4, 6, 8 and more poles mostly have a salient-pole rotor (Fig. 1). The stator carries the three phase winding and must be made of laminated iron sheets in order to reduce eddy currents. Since the flux in the rotor is constant with time at a particular place on the rotor, the rotor can be built from massive steel. The excitation winding is generally supplied with DC through the slip rings. In order to reduce oscillations in case of a network fault, the machine has a damper winding. Besides that, this winding has a weakening effect on reverse rotating fields during the operation in an unsymmetrical network.
When a synchronous machine runs asynchronously, the damper winding acts similar to the cage rotor in an induction machine. This is the reason for using damper winding as a starting winding for an asynchronous start-up in the motor mode (see chapter 3.2.1). The machine is accelerated nearly to the synchronous rotational speed and run in synchronism by reluctance (salient pole machine) or by switching on supply to the excitation winding in synchronism.
The damper winding consists of bars located in the pole shoes through which are

f
short-circuited to a cage by rings. In many cases the massive poles of the salient
Excitation winding
N .
.
Stator yoke
Stator=Armature
Pole core
Rotor=Mag.wheel
S S
. Pole shoe .
N
Stator slots, Teeth Damper winding (Damper bars)
Figure 1: Synchronous machine, inner-pole type with salient-pole rotor pole machine are also used as a damper winding. In that case the pole shoes are conductively connected to each other by rings.
2.2 Mode of operation
In the further descriptions an internal-field machine is assumed. Like in an induction machine, the stator slots carry a three-phase winding. The number of pole pairs is p and the supply frequency of the stator currents is f . The stator currents produce a rotating magnetic field of p pole pairs with the rotational speed n = f /p ([n] = 1/s), i.e. a field, which in principle corresponds to the field of the same pole number and rotational speed produced by the DC excited rotor (e.g. according to Fig.1)
A constant torque can be produced only if the stator field and the DC excited rotor field rotate synchronously. If the rotational speed of the rotor and the rotational speed n0 = p (synchronous rotational speed) of the power system differ, then the machine falls out of step and a periodic torque alternating between a positive and negative maximum value appears, with an average value equal to zero. Furthermore the currents are inadmissibly high.

If the synchronous machine operates at mains, the machine first has to be synchro- nized. The terminal voltage of the generator at no-load at the instant of connection must be equal to the voltage of the power system in magnitude, frequency, phase sequence and phase lag (synchronization conditions) (see chapter 3.2.2).
For the examination of the synchronization conditions in addition to the synchroscope and null voltage detector, the dark connection and mixed connection can be used.
The frequency of the machine is influenced by the rotational speed of the prime mover, while the voltage magnitude is influenced by the excitation current.
L1 L1
L2 L2
L3 L3 UN UN
V V
U U V V
UM UM
V V
U1 V1 W1 U1 V1 W1
Figure 2: Dark connection (left) and mixed connection (right) If the dark connection is applied, the generator will have the correct phase sequence if all the three lamps light up and go out at the same time. If the lamps light up one after the other, the phase sequence will be wrong and two terminals must be exchanged. Lamps light up and go out with the beat frequency as soon as the synchronization conditions are approximately fulfilled. At the switching instant the lamps must be dark. If mixed circuit is used, then the generator has the correct phase sequence if the lamps light up one after the other. By the direction of rotation of the glowing lights it can be concluded whether the machine runs too slow or too fast. Regarding the connection on the right side of Fig. 2, the lamp in branch L1-U1 must be off at the switching instant.
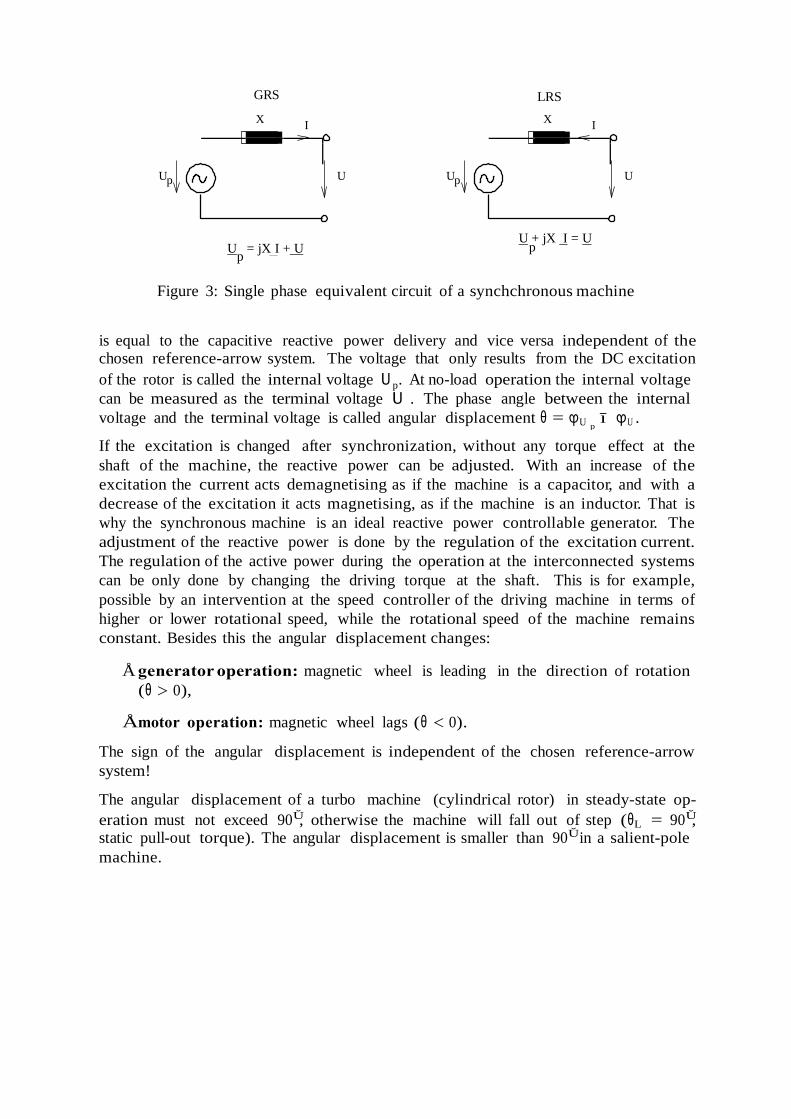
The single phase equivalent circuit diagram is presented in Fig. 3. In the genera- tor reference-arrow system (GRS), the delivered current is positive. Delivered active power is positive in GRS and negative in LRS. Inductive reactive power absorption
p
GRS LRS
X I X I
Up U Up U
Up = jX I + U U + jX I = U
p
Figure 3: Single phase equivalent circuit of a synchchronous machine
is equal to the capacitive reactive power delivery and vice versa independent of the chosen reference-arrow system. The voltage that only results from the DC excitation of the rotor is called the internal voltage U p. At no-load operation the internal voltage can be measured as the terminal voltage U . The phase angle between the internal voltage and the terminal voltage is called angular displacement θ = ϕU − ϕU .
If the excitation is changed after synchronization, without any torque effect at the shaft of the machine, the reactive power can be adjusted. With an increase of the excitation the current acts demagnetising as if the machine is a capacitor, and with a decrease of the excitation it acts magnetising, as if the machine is an inductor. That is why the synchronous machine is an ideal reactive power controllable generator. The adjustment of the reactive power is done by the regulation of the excitation current. The regulation of the active power during the operation at the interconnected systems can be only done by changing the driving torque at the shaft. This is for example, possible by an intervention at the speed controller of the driving machine in terms of higher or lower rotational speed, while the rotational speed of the machine remains constant. Besides this the angular displacement changes:
• generator operation: magnetic wheel is leading in the direction of rotation
(θ > 0),
• motor operation: magnetic wheel lags (θ < 0). The sign of the angular displacement is independent of the chosen reference-arrow system!
The angular displacement of a turbo machine (cylindrical rotor) in steady-state op- eration must not exceed 90, otherwise the machine will fall out of step (θL = 90, static pull-out torque). The angular displacement is smaller than 90 in a salient-pole machine.

φ
I cos φ > 0 ( θ > 0 )
I cos φ < 0 ( θ < 0 )
Generator operation (Active power delivery) Motor operation (Active power consumption)
I sin φ > 0 (UP cos θ >U) O" verexcitation (Delivery of inductive reactive power)
Machine acts as capacitor
I sin φ < 0 (UP cos θ <U)
EZS
Underexcitation (Consumption of inductive reactive power) Machine acts as inductive coil
jXI
U
jXI
.
UP U
. I φ I
UP θ φ θ
jXI
jXI UP U . U
.
φ θ θ UP
I I
Figure 4: Operating ranges of a synchronous machine Regarding the correlation between the torque and the angular displacement there is a certain analogy with a torsion spring. An oscillating system is created as a result of the interconnection of this torsion spring and the moment of inertia of the rotor. This system must not be excited with its natural frequency (a reciprocating engine as

driving machine must therefore be examined). Also, with every load impulse, swinging oscillations occur, which fade away due to the damper winding. Under inconvenient circumstances, e.g. with a large ohmic resistance between the power system and the machine due to under-dimensioned lines, the oscillations can remain.
2.3 Applications
Synchronous motors are used where a fixed speed is required at network supply and if there is a need for reactive power supply. In dynamic speed control drives, for e.g. in robots or servo drives, previously synchronous machines with permanent magnets have been used.
The synchronous machine as a reactive power generator, is used to prevent transmis- sion of reactive power over a long line path. The armature current is increased by changing the excitation current at constant rotational speed and constant mechanical load. If the machine is for e.g. overexcited, the current phasor Iarmature is in the first quadrant (see Fig. 4) and its absolute value is larger than at straight active load, since now only reactive power is delivered to the network.
The minimum value of the stator current occurs according to the pure active power of the motor. If the stator current is drawn with respect to the excitation current, the well known V-curve is obtained. (see chapter 3.2.2).
More often the synchronous machine is used as a three-phase generator in power stations. Now a specific output up to 1500 MVA are made. Generators in thermal power stations are cylindrical-rotor machines, while for hydro power plants salient- pole machines are used. As a single-phase alternator, a synchronous machine serves to supply the 16 2/3 Hz railway network. For the local power supply a synchronous generator is placed in a small run-of-river power station, unit-type power stations combined with heat and power or in wind power plants. If due to the location there is no power supply possible then the generator runs in solitary operation. With that the voltage and frequency must be kept stable independent of the load by the regulation of the exciting current and the driving power: If the stator current increases due to an increased power demand, the voltage drop over the reactance increases. This would lead to a decrease of the terminal voltage. Therefore the excitation current must be increased until the terminal voltage reaches the rated value. (see chapter 3.3.2).

3 Experiment realization 3.1 Safety requirements
Voltage applied amounts up to 400 V; that is why the laboratory orders must be strictly respected, particulary these ones:
1. Setting up and changing of circuit connections is allowed only at no voltage
conditions.
2. Before the beginning of operation the superintendent must be consulted and every connection must be inspected.
3. Adjustment of variable capacitors must be performed under no voltage condi- tions.
4. Before the experiment, every participant must inform himself about the location and function of the emergency devices.
5. Nominal values of the test machine can be exceeded only for a short period of time. Read the rated values of the machine from the rating plate on the machine.
UN IN nN PN
cosϕN
generator motor

3.2 Synchronous motor 3.2.1 Connection and starting
Experimental setup
1. Set the connection according to Fig. 5.
2. Is the machine connected in star or delta connection?
3. Whch function has the starting resistance? Sketch the resulting connection of elements of the excitation circuit for both pushbutton positions.
Experiment realization
1. Set the switch of the control unit to M = const.
2. Set the starting resistance on R = 30Ω .
3. Set the excitation current on 0.6 A.
4. Switch the synchronous motor at the mains with free running pendulum machine and with pressed push button.
5. When the speed stops to increase, release the button. Describe the rotation speed behaviour immediately after the button is released.
6. Load the motor using the pendulum machine according to 1 and write down the
rotation speed. Which effect occurs with increase of the load?
M/Nm 0 1 2 3 4 5 7
n/min−1
Table 1: Speed/Torque characteristics of the synchronous motor

L1
L2
400 V L3 N
PE
F1 ... F3
A V
W2 U2 V2
U1 V1 W1
M
F1 F2
starter K L
A V
L− L+
D.C.voltage source 0 − 40V (Current Indicating Unit)
Figure 5: Connection for motor op9eration of the synchronous motor

3.2.2 V–characteristic
Experimental setup
Complete the connection according to Fig. 5 with the phase measuring instrument that enables the measuring of the phase shift between the phase voltage and the phase current of the synchronous motor.
Experiment realization
1. Switch the synchronous machine at the mains according to the connection pro- cedure 1 – 3 in 3.2.1.
2. Load the machine using the pendulum machine according to Tab. 2. Write down the values of the power factor and the phase current in Tab. 2.
M/Nm 0 Const.
I /A E 1 2 3 4 5 6 7 8 9 10
I/A
cos ϕ
M/Nm 2 Const.
I /A E 3 4 5 6 7 8 9 10
I/A
cos ϕ
M/Nm 4 Const.
I /A E
5 6 7 8 9 10
I/A
cos ϕ
Table 2: V-characteristic: Measurement values

Analysis
1. Draw the characteristics of the phase current in dependency of the excitation current at a constant load in the diagram on Fig. 6.
2. Mark the points at which the motor has consumed pure active power. Connect the points.
3. Is the inductive power consumed or delivered in overexcited operation?
Generator reference-arrow system (GRS)?
Load reference-arrow system (LRS)?
4. Mark the areas of over excitation and under excitation in the diagram.
5. Now the motor is more loaded at the constant excitation current. How does this influence the machine’s reactive power delivery/absorption in GRS/LRS?
At over excitation?
At under excitation?
3.3 Synchronous generator 3.3.1 Operation at constant-voltage constant frequency system,
synchronization Experimental setup
Set up the connection according to Fig. 7. Experiment realization
1. Which synchronization conditions must be fulfilled and how are you going to accomplish that?

Dou
ble
V−m
eter
L1
L2
400 V L3 N
PE
V
F1 ... F3
A V
W2 U2 V2
U1 V1 W1
G M
F1 F2
A V
L L+
dc voltage source 0 − 40V Current Indicating Unit
Figure 7: Connection for stiff system operation

2. Switch the control unit of the pendulum machine on n = const; drive the syn- chronous machine using the pendulum machine and adjust the rotation speed as closely as possible on 1500 min−1.
3. Secure that the synchronization conditions are fulfilled and switch on the ma-
chine in proper moment parallel to mains.
4. Write down the values of the torque and the excitation current.
M IE
5. How can the reactive power delivery be changed at the constant mechanical load on the shaft?
6. How can the active power delivery be changed at the constant excitation current?
7. Vary the excitation current. Do not exceed the rated values! What is the response of the terminal current on excitation current changes?
8. Vary the driving torque of the pendulum machine. Do not exceed the rated
values! What is the terminal current response?
9. Recover the values of the torque and the excitation current immediately after synchronization. Disconnect the synchronous generator from the mains.
3.3.2 Solitary operation, no-load characteristic
In this and the following experiments, the synchronous machine operates as a genera- tor in solitary operation. The speed and the terminal voltage are not rigidly connected on the network, but freely adjusted after loading.
The no-load characteristic provides information about magnetic utilization of the ma- chine. The terminal voltage as a function of the excitation current will be taken at the operation with constant rotation speed and no load

Experimental setup
Set up the connection according to Fig. 8.
L1 L2 N L3 PE
V
W2 U2 V2
U1 V1 W1
G M
F1 F2
V A
L− L+ DC voltage source 0 − 40V (Current Indicating Unit)
Figure 8: Connection for the detection of the no-load characteristic
Experiment realization
1. Drive the synchronous machine at nominal speed using the pendulum machine and open terminals.
2. Change the excitation current according to Tab. 3 and write down the no-load
voltage V0 of the terminal.
IF /mA 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 EA /V
Table 3: No-load experiment

V
A
Analysis
1. Draw the no-load characteristic in the diagram Fig. 9.
2. Explain the behaviour of the no-load characteristic. 3.3.3 Load characteristic at constant excitation
Experimental setup
Set up the connection according to Fig. 10.
A
V
W2 U2 V2
U1 V1 W1
G M
F1 F2
PE
L− L+
DC voltage source 0 − 40V (Current indicating unit)
Figure 10: Connection for the detection of the load characteristic

Experiment realization
1. Drive the synchronous machine at constant nominal speed using the pendulum machine.
2. Adjust the excitation current so there is the nominal voltage on the terminal in no-load operation.
3. Load the machine at constant excitation current according to Tab. 4.
Ohmic load step ∞ 100 95 90 85 80 75 70 65 60 55 VT/V IL/A
Table 4: Load characteristic
Analysis
1. Enter the measured values in the diagram Table 4.
2. Which intolerable effect appears for connected consumer with increasing load of the machine? How can it be reduced?
3.3.4 Load characteristic at constant terminal voltage (excitation
characteristic) Experimental setup
Connect the machine according to 3.3.3. Experiment realization
1. Drive the synchronous machine at constant nominal speed using the pendulum machine.
2. Adjust the excitation current so there is the nominal voltage on the terminal in no-load operation.
3. Load the machine according to Tab. 5. Keep the terminal voltage constant while changing the excitation appropriately. Write down values of the phase current and the excitation current in Tab. 5.
Ohmic load step ∞ 100 95 90 85 80 75 70 65 60 I /A IE /A
Table 5: Excitation regulation curve (ohmic load)

4. Repeat the experiment with pure inductive i.e. capacitive load. Caution: Connect the capacitor steps only at IE =0 to avoid possible damage of the installation by peak values that occur with capacitive load connection!
Ind. load step 0 1 2 3 4 5 6 I /A IE /A
Table 6: Excitation regulation curve (inductive load)
Cap. load step 0 1 2 3 4 5 6 I /A IE /A
Table 7: Excitation regulation curve (capacitive load)
Analysis
1. Write down measured values in the diagram Table 7.
2. Explain the obtained characteristics.
3. Explain by means of the equivalent circuit diagram of a synchronous generator, how the reactance of a (turbo) generator can be determined.
4. Draw the phasor diagram of the measuring point at inductive load (step 4) for a
reactance of X=185Ω.

Manual mains Synchronization
Introduction/instructions
To be able to connect a synchronous generator to an existing mains system, certain
prerequisites need to be observed. First you must ensure that the momentary
voltage values upstream and downstream from the power circuit breaker that you
are using to switch in the load are identical. This requires the same phase angle and
sequence, the same frequency and the same rms voltage.
The voltages of both systems are displayed using a dual-range voltmeter. The
amplitude of the generated voltage is preset on the generator by adjusting the
exciter voltage.
The frequencies of both power systems are displayed using a dual-range frequency
meter. The frequency of the generator is controlled by adjusting the generator speed
Synchronisation with the aid of a dark-lamp synchronisation circuit:
z In the case of a dark-lamp synchronisation circuit, one lamp is connected to
the corresponding phase conductor for each phase. This means that the first
lamp is connected between L1 on the mains and L1 on the generator, the
second lamp is connected between L2 on the mains and L2 and the third lamp
between L3 on the mains and L3 on the generator
Synchronisation with the aid of the bright-lamp synchronisation circuit:
z In the case of bright-lamp synchronisation method the lamps are crossed over
between the phase conductors. This means that the first lamp is connected
between L1 on the mains and L2 on the generator, the second lamp is
connected between L2 and L3 and the third lamp is between L3 and L1
Synchronisation using the three-lamp circuit:
z In the case of synchronisation using the three-lamp method, the first lamp is
connected between L1 on the mains and L3 on the generator, the second
lamp is between L2 and L2 and the third lamp is connected between L3 and
L1.

z During adjustment the impression of a rotating luminous spot arises as long as
the phases do not coincide. Varying the speed also causes the speed of this
rotating light to vary.
Should the lamps light up in alternation then you need to change one of the phases
on the generator.

Circuit diagram - Dark-lamp synchronisation circuit

Experiment procedure (dark-lamp synchronisation circuit)
z Use the servo-brake as the drive motor for the synchronous generator
z Select "synchronisation" mode on the brake's control unit and start the
drive motor
z As the rotation speed, simply set the synchronous speed of the generator on
the control unit
z Switch the DC power supply on
z Adjust the exciter current with the aid of the exciter control unit so that
the generator voltage corresponds to the mains voltage
z Carefully adjust the speed on the control unit of the servo-brake until all of
the incandescent lamps go out, i.e. are dark
z At the right moment - when all of the incandescent lamps are off at the
same time - actuate the power circuit breaker Q2, thereby switching the
generator through to the mains
z The synchronising process is thus completed
z Increase the drive power of the generator by setting the (negative) drive
torque of the drive motor to approximately 1 Nm
z Now observe the generator
z Afterwards decouple the generator from the mains again and stop the
drive motor
z Switch off the excitation as well
z This part of the experiment, "Mains synchronisation using the dark-
lamp synchronisation method" is now concluded

Three-Phase Induction Motors
OBJECTIVE
This experiment demonstrates the performance of squirrel-cage induction motors and the
method for deriving electrical equivalent circuits from test data. REFERENCES
1. “Electric Machinery”, Fitzgerald, Kingsley, and Umans, McGraw-Hill Book Company, 1983, Chapter 9.
2. “Electric Machinery and Transformers”, Kosow, Irving L., Prentice-Hall, Inc., 1972.
3. “Electromechanical Energy Conversion”, Brown, David, and Hamilton, E. P.,
MacMillan Publishing Company, 1984.
4. “Electromechanics and Electric Machines”, Nasar, S. A., and Unnewehr, L. E., John Wiley and Sons, 1979.
BACKGROUND INFORMATION
The three-phase squirrel-cage induction motor can, and many times does, have the same
armature (stator) winding as the three-phase synchronous motor. As in the synchronous motor,
applying three-phase currents to the armature creates a synchronously-rotating magnetic field.
The induction motor rotor is a completely short-circuited conductive cage. Figures 1 and
2 illustrate the rotor construction.

Figure 1: Induction machine construction.
Figure 2: Squirrel-case rotor.

The rotor receives its excitation by induction from the armature field. Hence, the
induction machine is a doubly-excited machine in the same sense as the synchronous and DC
machines.
The basic principle of operation is described by Faraday’s Law. If we assume that the
machine rotor is at a standstill and the armature is excited, then the armature-produced rotating
field is moving with respect to the rotor. In fact, the relative speed between the rotating field and
the rotor is synchronous speed. For this condition, the rotating field induces a large voltage in
the rotor bars. The large voltage causes a large current in the squirrel-case which, in turn, creates
a magnetic field in the rotor. The rotor magnetic field interacts with the armature magnetic field,
and a torque is produced. If the produced torque is larger than any load torque, the rotor begins
to turn. As the rotor accelerates, the speed difference between the rotor and the armature field is
reduced. This reduced speed difference (or slip) causes the induced rotor voltage to be reduced,
the rotor current to be reduced, the rotor flux to be reduced, and the torque produced by the
machine to be reduced. Eventually, the torque produced by the motor equals the torque
demanded by the load, and the motor settles to an equilibrium rotor speed. This equilibrium
rotor speed must be less than synchronous speed since there must be a slip to produce torque.
The frequency-dependent nature of the rotor impedances causes the torque versus speed
characteristic of the induction motor to be quite non-linear. Figure 3 shows a typical
characteristic.
Figure 3: Typical induction motor torque-speed curve.

Designers have learned to design rotors for specific torque characteristics. The National
Electrical Manufacturers Association NEMA has classified and standard designs which satisfy a
range of torque-speed characteristics. Figure 4 shows the NEMA designs and the rotor bar
geometries that produce the responses.
Figure 4: Effects of rotor bar geometry on torque characteristics in squirrel-case machines.

SC
The induction motor is normally modeled as an equivalent electrical circuit. Figure 5
shows typical equivalent circuits.
Figure 5: Two forms of equivalent circuits of an induction motor.
Remember SLIP =( SPEEDsyn – SPEEDm) / SPEEDsyn
P = T ω
Q = S 2 − P 2
Pdev = I 2 r '2 (1 − slip) for one phase
T = P/ω
2 slip
Rsc = Psc / I2SC
Xsc = QSC / I2
R1= 2.3Ώ
R2=Rsc – R1
X1 = X2 = Xsc / 2
pf = P/S
Z1 = R1 + J X1

Vcore = Voc –( Ioc)(Z1)
Pcore =Poc – R1(Ioc2)
Qcore= Qoc – X1(Ioc2) Rc
= (Vcore)2 / Pcore Xm =
(Vcore)2 / Qcore
The impedances of the circuits shown in Figure 5 are found from no-load and blocked-
rotor tests. Full descriptions of the circuits and the tests are found in Reference 1.
The torque-speed characteristic of an induction motor can be significantly changed by
designing different resistance values within the rotor bars. Figure 6 shows the impact of
different rotor resistance values.
Figure 6: Effect of changing rotor resistance on the torque-speed characteristic of an induction motor.
INTRODUCTION
The squirrel-cage induction motor is already mounted to the dynamometer. Note that the
pulley system ratio is 1:1. Therefore, the motor being tested operates at same the speed of
dynamometer. The motor is rated for ¼ horsepower, 115VL-L, and 1725 RPM. Its rated full-load

VL-L VL-N Calculated ILine Pin phase
2.5A
current is 2.5 amperes. The stator resistance was measured by an ohmmeter and is 2.3Ω/phase.
This is the R1 value to be used for the equivalent circuit. Note that R1 cannot be neglected for the
no-load tests.
The neutral of the motor is not accessible; however, since the motor is balanced, its
effective neutral will be very close to the power supply neutral.
We cannot run a test to measure the actual starting torque at rated voltage. The current is
very high and quickly burns the motor.
SUGGESTED PROCEDURE
1. Connect the system shown in Figure 7. Note that the measured voltages are line-to-line
values, measured currents are phase currents, and measured power is for one phase only.
Run the no-load test at rated voltage (115VL-L). Record I, VL-L, P1 - φ.
VL-L Rated VL-N Calculated ILine Pin phase
115VL-L
Secure the motor with the clamp. Run the blocked-rotor test at rated line current (2.5A).
Record I, VL-L, P1 - φ.
2. Remove the rotor lock from the dynamometer and apply rated voltage to the induction
motor. Place all five switches on the load bank in the “up” position. Adjust the
dynamometer field to load the induction motor to rated current (2.5A). Measure the
torque and speed.
VL-L Rated ILine Rated Pin phase RPM Torque VDyn IDyn
115V 2.5A
3. For the following test, do not let the machine run above rated current for sustained

periods of time.
a) Using 100% of rated voltage (115VL-L), maintain constant, take the measurements
shown to complete the table below, as motor armature current is varied from rated
current (2.5A) to 3.0 Amps. Control the induction motor line current by adjusting
the dynamometer field.
Vmot L-L Imot RPM Torque Vd Id 115 V 2.5 A 115 V 2.6 A 115 V 2.7 A 115 V 2.8 A 115 V 2.9 A 115 V 3.0 A
100 % Voltage Line-to-Line
b) Repeat part “a” using 90% of rated voltage. Complete the table below..
Vmot L-L Imot RPM Torque Vd Id 103 V 2.5 A 103 V 2.6 A 103 V 2.7 A 103 V 2.8 A 103 V 2.9 A 103 V 3.0 A
90 % Voltage Line-to-Line Line

c) Repeat part “a” using 80% of rated voltage. Complete the table below.
Install the dynamometer lock for the next class.
REPORT
1. Derive an equivalent circuit like Figure 5 for the tested machine. Assume a NEMA “D”
motor. X1 = X2’ in the equivalent circuit.
2. Plot the torque vs. speed and current vs. speed from the experiment data. Note:
Plot the three different voltage cases for torque on the same plot. Plot the three
different voltage cases for current on the same plot.
3. Using the equivalent circuit, plot torque vs. speed curves and current vs. speed for
80%, 90% and 100% of rated voltage as speed varies from 1 to 1800 RPM. Note: Plot
the three different voltage cases for torque on the same plot. Plot the three different
voltage cases for current on the same plot. Compare the calculated data with the
measured data include MATLAB program listing and plot output.
4. Increase the resistor in the rotor by 1Ω, of the equivalent circuit and
recalculate the curves as above. This new set of curves is equivalent to adding
resistance to the rotor of the machine. Note: Plot the three different voltage cases for
torque on the same plot. Plot the three different voltage cases for current on the same
plot.
5. Comment on the differences noted between using stator voltage control and
adding rotor resistance, to control the speed of the motor.
6. Explain why the induction motor slows down as the load is increased.
7. Explain how the three-phase induction motor develops starting torque.
Vmot L-L Imot RPM Torque Vd Id 92 V 2.5 A 92 V 2.6 A 92 V 2.7 A 92 V 2.8 A 92 V 2.9 A 92 V 3.0 A
80 % Voltage Line-to-Line

EXPERIMENT-5:
LOAD TEST ON 3 PHASE SQUIRREL CAGE INDUCTION MOTOR
APPARATUS REQUIRED :
THREE PHASE 5 HP INDUCTION MOTOR SETUP - 1 Nos THREE PHASE AC MCB (8A) - 1 Nos STAR - DELTA STARTER - 1 Nos THREE PHASE WATT METER 500V, 10A, LPF - 1 Nos AC VOLTMETER ( 0 - 500)V - 1 Nos AC AMMETER ( 0 - 10)A - 1 Nos FUSE - 3 Nos

EXPERIMENT-6:
SPEED CONTROL AND LOAD TEST ON 3 PHASE INDUCTION MOTOR WOUND ROTOR
APPARATUS REQUIRED :
5 HP THREE PHASE SLIP RING INDUCTION MOTOR SETUP - 1 Nos THREE PHASE AC MCB (8A) - 1 Nos STAR DELTA STARTER - 1 Nos THREE PHASE WATTMETER 500V , 10A, LPF - 1 Nos AC VOLTMETER ( 0 - 500 )V, - 1 Nos
(0 - 300)V - 1 Nos AC AMMETER ( 0 - 12)A - 1 Nos
( 0 - 10)A - 1 Nos THREE PHASE ROTOR RESISTANCE - 1 Nos FUSE - 3 Nos






























