Embed Size (px)
Citation preview

Universidade Federal do Rio de Janeiro
INFERÊNCIA DINÂMICA EM COLUNAS DE DESTILAÇÃO PARA UMA
UNIDADE DE PROCESSAMENTO DE GÁS NATURAL
Lilian Rodrigues Canabarro
2011
INFERÊNCIA DINÂMICA EM COLUNAS DE DESTILAÇÃO PARA UMA
UNIDADE DE PROCESSAMENTO DE GÁS NATURAL
Lilian Rodrigues Canabarro
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Química, COPPE, da Universidade Federal do
Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Mestre em
Engenharia Química.
Orientador: Argimiro Resende Secchi
Rio de Janeiro
Junho de 2011

RIO DE JANEIRO, RJ - BRASIL
JUNHO DE 2011

iii
FICHA CATALOGRÁFICA
Canabarro, Lilian Rodrigues
Inferência Dinâmica em Colunas de Destilação para
uma Unidade de Processamento de Gás Natural/ Lilian
Rodrigues Canabarro. – Rio de Janeiro: UFRJ/COPPE,
2011.
XVIII, 138 p.: il.; 29,7 cm.
Orientador: Argimiro Resende Secchi
Dissertação (mestrado) – UFRJ/ COPPE/ Programa
de Engenharia Química, 2011.
Referências Bibliográficas: p. 95-105.
1. Sensores virtuais. 2. Inferência de propriedades. 3.
Simulação dinâmica. I. Secchi, Argimiro Resende. II.
Universidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Química. III. Título.

iv
Ao meu querido Rodrigo,
que sempre me encoraja a seguir em frente e a crescer.
v
AGRADECIMENTOS
A Deus pela minha vida maravilhosa, pelo companheiro ímpar que colocou em meu
caminho e pela minha família linda, que amo tanto.
Ao meu Orientador Argimiro Resende Secchi, pela paciência e dedicação e por ter
acreditado em meu potencial.
Ao Professor Enrique Luis Lima, pela grande amizade, pela oportunidade, pela
confiança e pelas conversas sinceras.
Aos amigos do LADES – Leonardo Dorigo, Cido, Lizandro, Lívia, Michel e, de
maneira especial, à Eliza e ao Evandro, pela valiosa contribuição neste trabalho.
Agradeço a todos pela companhia agradável e pela experiência de aprendermos juntos
todos os dias.
Aos membros da equipe do CENPES\PDEDS\GN – Eng. Marcos Vinícius de Carvalho
Gomes e Eng. Luiz Paulo Silva Vasconcellos, pelo privilégio que me deram de
trabalharmos em conjunto e pela oportunidade de aprendizado.

vi
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
RESUMO
INFERÊNCIA DINÂMICA EM COLUNAS DE DESTILAÇÃO PARA UMA
UNIDADE DE PROCESSAMENTO DE GÁS NATURAL
Lilian Rodrigues Canabarro
Junho/2011
Orientador: Argimiro Resende Secchi
Programa: Engenharia Química
A inferência de propriedades que não podem ser medidas com frequência
adequada para aplicações em tempo real é uma etapa determinante para a
implementação de sistemas de controle avançado bem como para o monitoramento de
processos. Motivado pela possível gama de aplicações dos simuladores dinâmicos, o
sensor virtual desenvolvido neste trabalho foi utilizado para realizar a inferência
dinâmica em tempo real de propriedades de correntes de torres desetanizadora e
desbutanizadora de uma Unidade de Processamento de Gás Natural utilizando modelos
matemáticos fenomenológicos de grande dimensão, incluindo as malhas de controle
existentes no processo real, implementados no Simulador de Processos EMSO.
Resultados satisfatórios foram obtidos para a inferência de propriedades, sendo o sensor
virtual validado para situações em que a planta se encontrava em regime estacionário ou
dinâmico.

vii
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
ABSTRACT
DYNAMIC INFERENCE FOR DISTILLATION COLUMNS OF A NATURAL GAS
PROCESSING UNIT WITH FIRST PRINCIPLES MODEL
Lilian Rodrigues Canabarro
June/2011
Advisor: Argimiro Resende Secchi
Department: Chemical Engineering
The inference of properties that cannot be measured often enough for real-time
applications is a significant step in the advanced control implementation and process
monitoring. Motivated by the wide range of possible applications of dynamic
simulators, this soft sensor was used for dynamic real-time inference of streams
composition of a deethanizer and a debutanizer distillation column of a natural gas
processing unit, using a large-scale first principles model, including its control loops,
implemented in the EMSO process simulator. The phenomenological model was
validated for steady state and dynamic operations. Satisfactory results were obtained for
the prediction of properties using the dynamic simulator.

viii
SUMÁRIO Ficha Catalográfica ...................................................................................................... iii
Agradecimentos ................................................................................................................ v
Resumo ........................................................................................................................ vi
Abstract ....................................................................................................................... vii
Lista de Figuras ................................................................................................................ x
Lista de Tabelas .............................................................................................................. xii
Lista de Símbolos .......................................................................................................... xiii
Lista de Siglas .............................................................................................................. xviii
1. Introdução .............................................................................................................. 1
1.1. Objetivo ............................................................................................................. 1
1.2. A importância do Gás Natural ........................................................................... 2
1.3. Justificativa ........................................................................................................ 6
1.4. Estrutura da Dissertação .................................................................................... 7
2. Revisão Bibliográfica ............................................................................................ 8
2.1. Inferência de Propriedades ................................................................................. 8
2.1.1. Estimadores de Estados e Parâmetros .......................................................... 12
2.1.2. Simulação Dinâmica .................................................................................... 15
2.1.2.1. Simulação Dinâmica no EMSO ................................................................... 18
2.1.3. Validação de Modelos para Inferência de Propriedades .............................. 20
3. Estudo de Caso .................................................................................................... 24
3.1. Descrição da Unidade de Processamento de Gás Natural em Estudo ............. 24
3.1.1. A Torre Desetanizadora ............................................................................... 25
3.1.2. A Torre Desbutanizadora ............................................................................. 27
4. Metodologia ......................................................................................................... 29
4.1. Obtenção e Tratamento Preliminar dos Dados de Processo ............................ 30
4.2. Conversão de Vazões em Base Volumétrica para Base Molar ou Mássica ..... 32
4.3. Detecção de Estados Estacionários .................................................................. 33
4.4. Reconciliação de Dados ................................................................................... 33
4.5. Modelagem Matemática .................................................................................. 36
4.5.1. Equilíbrio Termodinâmico ........................................................................... 37
4.5.2. Comportamento Hidráulico em Cada Estágio .............................................. 39
4.5.3. Dimensão do Problema ................................................................................ 40
ix
4.5.4. Cálculo das Dimensões das Torres para Alimentar o Modelo Dinâmico .... 41
4.5.5. Ajuste dos Parâmetros do Modelo Dinâmico ............................................... 44
4.5.5.1. Sintonia das Malhas de Controle .................................................................. 45
4.6. Análise de Sensibilidade .................................................................................. 46
4.7. Validação do Modelo ....................................................................................... 47
4.7.1. Validação em Estado Estacionário ............................................................... 48
4.7.2. Validação em Regime Dinâmico.................................................................. 48
4.8. Capacidade de Predição do Modelo Dinâmico ................................................ 51
5. Resultados ............................................................................................................ 53
5.1. Detecção de Estados Estacionários .................................................................. 53
5.2. Reconciliação de Dados ................................................................................... 57
5.3. Parâmetros Geométricos para o Modelo Dinâmico ......................................... 59
5.4. Escolha dos Parâmetros do Modelo Dinâmico ................................................ 60
5.5. Análise de Sensibilidade .................................................................................. 62
5.6. Validação do Modelo do Processo ................................................................... 65
5.6.1. Validação em Estado Estacionário ............................................................... 65
5.6.2. Validação em Regime Dinâmico.................................................................. 71
5.7. Capacidade de Predição do Modelo Dinâmico ................................................ 86
6. Conclusões e Sugestões para Trabalhos Futuros ................................................. 92
Referências Bibliográficas .............................................................................................. 95
Anexos .......................................................................................................................... 106
A.1. Modelos em Ambiente EMSO .......................................................................... 106
A.1.1. Código para Conversão de Vazões............................................................. 106
A.1.2. Código para Reconciliação de Dados......................................................... 113
A.1.3. Flowsheet da Torre Desetanizadora ........................................................... 115
A.1.4. Flowsheet da Torre Desbutanizadora ......................................................... 122
A.2. Redes Neuronais Artificiais ............................................................................... 130
A.3. Identificação dos Modelos do Processo Através do Software VIP ................... 133
A.4. Procedimento para Detecção de Estados Estacionários .................................... 136
x
LISTA DE FIGURAS Figura 1.1. Crescimento e estimativa da participação do gás natural na matriz energética brasileira. Fonte: (MME, 2006) ........................................................................................ 4
Figura 2.1. Fluxo de informações da otimização de processos ........................................ 9
Figura 2.2. Comportamento dinâmico da temperatura de uma corrente de uma unidade de processamento de gás natural. ................................................................................... 15
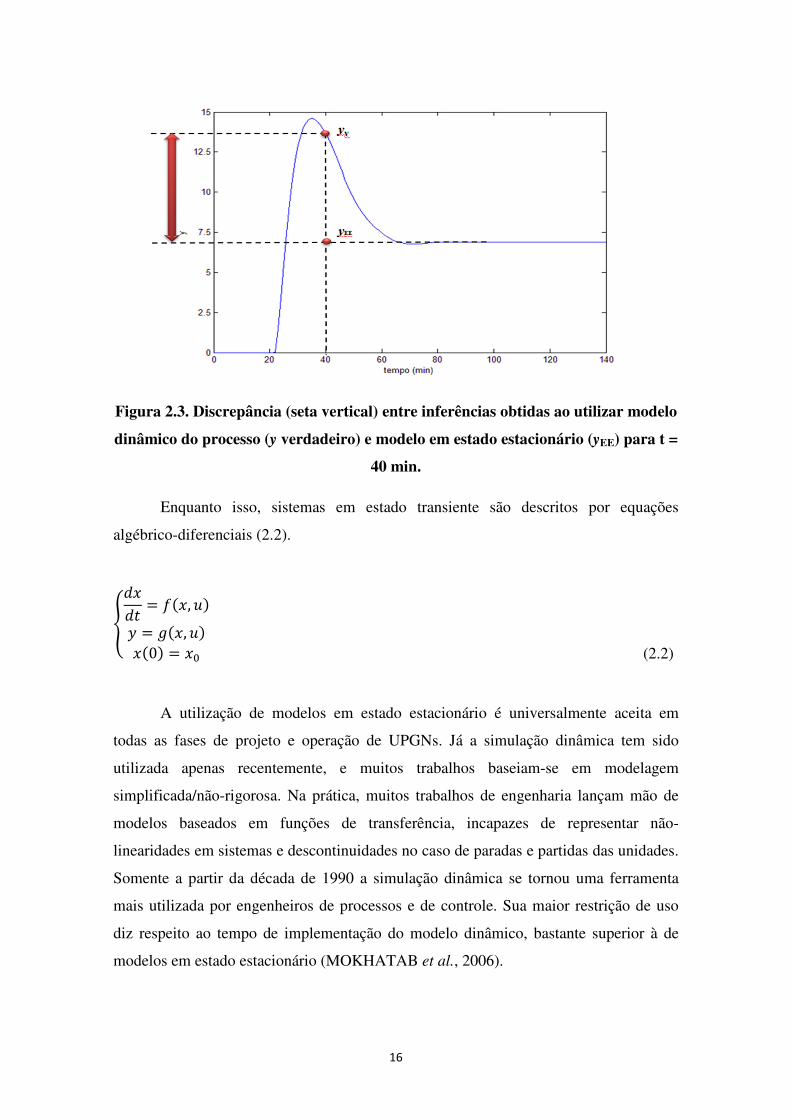
Figura 2.3. Discrepância (seta vertical) entre inferências obtidas ao utilizar modelo dinâmico do processo (y verdadeiro) e modelo em estado estacionário (yEE) para t = 40 min. ................................................................................................................................. 16
Figura 3.1. Fluxograma simplificado da UPGN em estudo. .......................................... 25
Figura 3.2. Ilustração da torre desetanizadora e suas malhas de controle. ..................... 26
Figura 3.3. Ilustração da torre desbutanizadora e suas malhas de controle. ................... 28
Figura 4.1. Atividades relacionadas à alimentação dos dados reais de processo à simulação dinâmica. ....................................................................................................... 30
Figura 4.2. Regiões típicas de um prato (fonte: CALDAS et al., 2007). ....................... 42
Figura 4.3. Configuração dos pratos da coluna de destilação (a) vista superficial dos pratos perfurados; (b) esquema dos comprimentos geométricos do prato. .................... 43
Figura 4.4. Sistema de interfaces utilizadas na validação dos modelos dinâmicos. ....... 49
Figura 5.1. Diagramas para detecção de EE da vazão de carga da torre desetanizadora. ........................................................................................................................................ 53
Figura 5.2. Diagramas para detecção de EE da temperatura de carga da torre desetanizadora. ............................................................................................................... 54
Figura 5.3. Diagramas para detecção de EE da vazão de topo da torre desetanizadora. 54
Figura 5.4.Diagramas para detecção de EE da temperatura de topo da torre desetanizadora. ............................................................................................................... 55
Figura 5.5.Diagramas para detecção de EE da vazão de fundo da torre desetanizadora.55
Figura 5.6.Diagramas para detecção de EE para a temperatura de fundo da torre desetanizadora. ............................................................................................................... 56
Figura 5.7. Diagrama de detecção de Estados Estacionários para a torre desetanizadora. ........................................................................................................................................ 56
Figura 5.8. Erro no balanço de massa. ............................................................................ 59
Figura 5.9. Inferência dinâmica para o dióxido de carbono no GC................................ 73
Figura 5.10. Inferência dinâmica para o metano no GC. ................................................ 73
Figura 5.11. Inferência dinâmica para o etano no GC. ................................................... 73
Figura 5.12. Inferência dinâmica para o propano no GC. .............................................. 74
Figura 5.13. Inferência dinâmica para o propano no GC - comparação com a RNA..... 75
Figura 5.14. Inferência dinâmica para o etano no produto de fundo da T02. ................. 76
Figura 5.15. Inferência dinâmica para o etano no produto de fundo da T02 - comparação com a RNA. .................................................................................................................... 76
Figura 5.16. Inferência dinâmica para o propano no produto de fundo da T02. ............ 77
Figura 5.17. Inferência dinâmica para o i-butano no produto de fundo da T02. ............ 77

xi
Figura 5.18. Inferência dinâmica para o n-butano no produto de fundo da T02. ........... 77
Figura 5.19. Inferência dinâmica para o i-pentano no produto de fundo da T02. .......... 78
Figura 5.20. Inferência dinâmica para o n-pentano no produto de fundo da T02. ......... 78
Figura 5.21. Inferência dinâmica para o n-hexano no produto de fundo da T02. .......... 78
Figura 5.22. Inferência dinâmica para o n-heptano no produto de fundo da T02. ......... 79
Figura 5.23. Inferência dinâmica para o n-octano no produto de fundo da T02. ........... 79
Figura 5.24. Inferência dinâmica para o n-nonano no produto de fundo da T02. .......... 79
Figura 5.25. Soma normalizada do quadrado dos desvios – variáveis da T02. .............. 81
Figura 5.26. Esquema dos testes realizados na etapa de validação dinâmica dos modelos do processo. .................................................................................................................... 82
Figura 5.27. Inferência dinâmica para a temperatura do prato de topo da T03. ............. 82
Figura 5.28. Inferência dinâmica para o etano no GLP. ................................................. 82
Figura 5.29. Inferência dinâmica para o etano no GLP - comparação com a RNA. ...... 83
Figura 5.30. Inferência dinâmica para o propano no GLP. ............................................ 83
Figura 5.31. Inferência dinâmica para o i-butano no GLP. ............................................ 84
Figura 5.32. Inferência dinâmica para o n-butano no GLP. ........................................... 84
Figura 5.33. Inferência dinâmica para o i-pentano no GLP. .......................................... 84
Figura 5.34. Inferência dinâmica para o n-pentano no GLP. ......................................... 85
Figura 5.35. Soma normalizada do quadrado dos desvios – variáveis da T03. .............. 85
Figura 5.36. Teste A – Resposta de F2 para perturbação em T1. .................................... 87
Figura 5.37. Teste B - Resposta de F2 para perturbação em T4. ..................................... 87
Figura 5.38. Teste C - Resposta de X3,3 para perturbação em T4. ................................... 88
Figura 5.39. Teste D - Resposta de X4,3 para perturbação em T4. ................................... 89
Figura 5.40. Teste E - Resposta de X4,7 e do intemperismo do GLP para a perturbação em T4. .............................................................................................................................. 90
Figura 5.41. Teste F - Resposta de X3,3 para perturbação em P2. ................................... 90
Figura 5.42. Teste G - Resposta de X4,7 e do intemperismo do GLP para a perturbação em F7. ............................................................................................................................. 91
Figura A.2.1. Esquema de funcionamento de uma rede neuronal artificial. ................ 131
xii
LISTA DE TABELAS Tabela 1.1. Definição das unidades de gás natural (Fonte: ANP, 2009) .......................... 4 Tabela 1.2. Infraestrutura brasileira de refino/processamento de Gás Natural (Fonte: ANP, 2009) ....................................................................................................................... 5 Tabela 4.1. Dimensão do problema de simulação dinâmica da torre desetanizadora .... 40 Tabela 4.2. Dimensão do problema de simulação dinâmica da torre desbutanizadora .. 41 Tabela 4.3. Parâmetros do modelo de colunas de destilação.......................................... 45 Tabela 4.4. Malhas de controle dos sistemas em estudo ................................................ 46 Tabela 4.5. Parâmetros envolvidos na análise de sensibilidade ..................................... 47 Tabela 4.6. Pontos estacionários utilizados na validação do modelo EMSO ................. 48 Tabela 4.7. Variáveis envolvidas nas simulações em modo dinâmico ........................... 50 Tabela 4.8. Lista de variáveis para a etapa de verificação da capacidade de predição do modelo dinâmico ............................................................................................................ 52 Tabela 5.1. Variâncias (em kmol²/h²) referentes às vazões utilizadas na reconciliação dos dados da torre desetanizadora .................................................................................. 57 Tabela 5.2. Deltas entre as vazões reconciliadas e as vazões "brutas"........................... 57 Tabela 5.3. Deltas entre as composições reconciliadas e as composições "brutas" (carga da torre desetanizadora) .................................................................................................. 58 Tabela 5.4. Média no erro no balanço de massa ............................................................. 58 Tabela 5.5. Parâmetros geométricos da torre desetanizadora ......................................... 59 Tabela 5.6. Parâmetros geométricos da torre desbutanizadora ...................................... 60 Tabela 5.7. Parâmetros ajustados para os modelos dinâmicos ....................................... 61 Tabela 5.8. Análise de sensibilidade aos parâmetros do modelo da T02 ....................... 63 Tabela 5.9. Análise de sensibilidade aos parâmetros do modelo da T03 ....................... 64 Tabela 5.10. Resultados da simulação no EMSO para o SS_1,1 ................................... 66 Tabela 5.11. Resultados da simulação no EMSO para o SS_1,2 ................................... 67 Tabela 5.12. Resultados da simulação no EMSO para o SS_1,3 ................................... 68 Tabela 5.13. Resultados da simulação no EMSO para o SS_2,1 ................................... 70 Tabela 5.14. Resultados da simulação no EMSO para o SS_2,2 ................................... 70 Tabela 5.15. Resultados da simulação no EMSO para o SS_2,3 ................................... 71 Tabela 5.16. Soma do quadrado dos desvios - variáveis da T02 .................................... 80 Tabela 5.17. Soma do quadrado dos desvios - variáveis da T03 .................................... 85 Tabela A.2.1. Variáveis de entrada das redes neuronais utilizadas .............................. 132 Tabela A.3.1. Modelos "caixa-preta" mais utilizados, segundo LJUNG (1999) .......... 135
xiii
LISTA DE SÍMBOLOS
Aa área ativa do prato (m2)
Ad área do downcomer (m2)
Ah área total dos furos no prato (m2)
Ap área útil do prato (m2)
At área total do prato (m2)
D diâmetro interno da torre (m)
E energia interna (kJ) �� resíduo no i-ésimo instante
EMV eficiência de Murphree
f equação algébrica genérica
F1 vazão molar da carga da T02 (kmol/h)
F2 vazão molar do produto de topo da T02 (kmol/h)
F3 vazão molar do produto de fundo/carga da T03 (kmol/h)
F4 vazão molar do produto de topo da T03 (kmol/h)
F5 vazão molar do produto de fundo da T03 (kmol/h)
F6 vazão molar de refluxo da T02 (kmol/h)
F7 vazão molar de refluxo da T03 (kmol/h)
Fin vazão molar de entrada (kmol/h)
Fobj função objetivo
Fout vazão molar de saída (kmol/h)
g equação algébrica genérica
G espaçamento entre pratos (m)
h entalpia (kJ/kmol)
k ganho estático das malhas de controle
K comprimento da corda situada entre o vertedor e o costado da
torre (m)
hw altura do vertedouro (m)
l altura de líquido no prato (m)
L fase líquida
L1 nível no vaso de topo da T02 (m)
L2 nível no fundo da T02 (m)

xiv
L3 nível no vaso de topo da T03 (m)
L4 nível no fundo da T03 (m)
lw comprimento do vertedouro (m)
M massa (kmol)
NE número de medidas
NY número de variáveis
P pressão (atm)
P1 pressão da carga da T02 (atm)
P2 pressão no topo da T02 (atm)
P3 pressão da carga da T03 (atm)
P4 pressão no fundo da T03 (atm)
PDI1 diferencial de pressão na T02 (atm)
PDI2 diferencial de pressão na T03 (atm)
PSTD pressão de condição padrão (1 atm)
Q taxa de energia (kW)
S01 corrente de alimentação da T02
S02 produto de topo da T02
S03 produto de fundo da T02/ carga da T03
S04 produto de topo da T02 (GLP)
S05 produto de fundo da T03
SQR soma do quadrado dos resíduos
t tempo (s)
T temperatura (ºC)
T01 torre desmetanizadora
T02 torre desetanizadora
T03 torre desbutanizadora
T1 temperatura no fundo da T01 (ºC)
T2 temperatura da carga da T02 (ºC)
T3 temperatura do prato de topo da T02 (ºC)
T4 temperatura no fundo da T02 (ºC)
T5 temperatura da carga da T03 (ºC)
T6 temperatura do prato de topo da T03 (ºC)
T7 temperatura no fundo da T03 (ºC)
xv
T8 temperatura do refluxo da T03 (ºC)
TSTD temperatura de condição padrão (20ºC)
u variável algébrica
V fase vapor
vL
volume molar (m³/kmol)
Vt volume total do prato (m³)
x variável genérica de estado
x0 variável genérica no estado inicial
X1,1 dióxido de carbono na carga da T02
X1,2 metano na carga da T02
X1,3 etano na carga da T02
X1,4 propano na carga da T02
X1,5 iso-butano na carga da T02
X1,6 n-butano na carga da T02
X1,7 iso-pentano na carga da T02
X1,8 n-pentano na carga da T02
X1,9 n-hexano na carga da T02
X1,10 n-heptano na carga da T02
X1,11 n-octano na carga da T02
X1,12 n-nonano na carga da T02
X2,1 dióxido de carbono no produto de topo da T02
X2,2 metano no produto de topo da T02
X2,3 etano no produto de topo da T02
X2,4 propano no produto de topo da T02
X2,5 iso-butano no produto de topo da T02
X2,6 n-butano no produto de topo da T02
X2,7 iso-pentano no produto de topo da T02
X2,8 n-pentano no produto de topo da T02
X2,9 n-hexano no produto de topo da T02
X2,10 n-heptano no produto de topo da T02
X2,11 n-octano no produto de topo da T02
X2,12 n-nonano no produto de topo da T02
X3,1 dióxido de carbono no produto de fundo da T02 e carga da T03

xvi
X3,2 metano no produto de fundo da T02 e carga da T03
X3,3 etano no produto de fundo da T02 e carga da T03
X3,4 propano no produto de fundo da T02 e carga da T03
X3,5 iso-butano no produto de fundo da T02 e carga da T03
X3,6 n-butano no produto de fundo da T02 e carga da T03
X3,7 iso-pentano no produto de fundo da T02 e carga da T03
X3,8 n-pentano no produto de fundo da T02 e carga da T03
X3,9 n-hexano no produto de fundo da T02 e carga da T03
X3,10 n-heptano no produto de fundo da T02e carga da T03
X3,11 n-octano no produto de fundo da T02 e carga da T03
X3,12 n-nonano no produto de fundo da T02 e carga da T03
X4,1 dióxido de carbono no produto de topo da T03
X4,2 metano no produto de topo da T03
X4,3 etano no produto de topo da T03
X4,4 propano no produto de topo da T03
X4,5 iso-butano no produto de topo da T03
X4,6 n-butano no produto de topo da T03
X4,7 iso-pentano no produto de topo da T03
X4,8 n-pentano no produto de topo da T03
X4,9 n-hexano no produto de topo da T03
X4,10 n-heptano no produto de topo da T03
X4,11 n-octano no produto de topo da T03
X4,12 n-nonano no produto de topo da T03
X5,1 dióxido de carbono no produto de fundo da T03
X5,2 metano no produto de fundo da T03
X5,3 etano no produto de fundo da T03
X5,4 propano no produto de fundo da T03
X5,5 iso-butano no produto de fundo da T03
X5,6 n-butano no produto de fundo da T03
X5,7 iso-pentano no produto de fundo da T03
X5,8 n-pentano no produto de fundo da T03
X5,9 n-hexano no produto de fundo da T03
X5,10 n-heptano no produto de fundo da T03

xvii
X5,11 n-octano no produto de fundo da T03
X5,12 n-nonano no produto de fundo da T03
xin composição da fase líquida da corrente de entrada
xout composição da fase líquida da corrente de saída
y inferência genérica
yEE inferência obtida por modelo estático
yi variável medida no i-ésimo instante
��� variável estimada no i-ésimo instante
yeij variável reconciliada
yeij variável medida
yeq composição na fase vapor no equilíbrio termodinâmico
yin composição da fase vapor da corrente de entrada
yout composição da fase vapor da corrente de saída
yv inferência obtida por modelo dinâmico
z composição
zin composição da corrente de entrada
α coeficiente de queda de pressão no prato seco
β coeficiente de aeração
ρ massa específica (kg/m³)
σij desvio padrão
τi tempo integral das malhas de controle
τd tempo derivativo das malhas de controle �� coeficiente de atividade
xviii
LISTA DE SIGLAS ANP Agência Nacional do Petróleo
ASTM American Society for Testing and Materials
BP British Petroleum
CPM Controle Preditivo Multivariável
DOU Diário Oficial da União
DPP Depression in the Pour Point (Unidade de Acerto de Ponto de Orvalho)
EAD Equações Algébricas Diferenciais
EE Estado Estacionário
EIA Energy Information Administration
EML EMSO Model Lybrary
EMSO Environment for Modeling, Simulation, and Optimization
GASBOL Gasoduto Brasil – Bolívia
GC Gás Combustível
GLP Gás Liquefeito de Petróleo
GNL Gás Natural Liquefeito
GUI Graphical User Interface
IPOPT_EMSO Método de otimização do ponto interior, implementado em ambiente
EMSO
MME Ministério de Minas e Energia
NIST National Institute of Standards and Technology
OIE Oferta Interna de Energia
PEQ Programa de Engenharia Química
PI Plant Information System
PID Controladores com algoritmo Proporcional-Integral-Derivativo
PLS Partial Least Squares
RD Reconciliação de Dados
RNA Rede Neuronal Artificial
RTO Real Time Optimization
UFL Unidade de Fracionamento de Líquidos de Gás Natural
UPCGN Unidade de Processamento de Condensados de Gás Natural
UPGN Unidade de Processamento de Gás Natural
URGN Unidade de Recuperação de Gás Natural
URL Unidade de Recuperação de Líquidos de Gás Natural
1
1. INTRODUÇÃO
1.1. OBJETIVO
Também chamados de estimadores inferenciais, os sensores virtuais podem ser
considerados como o resultado da interseção entre a tecnologia de Sensores Inteligentes
com técnicas de Modelagem Matemática e Identificação de Sistemas. Sensor virtual é a
associação de um sensor (hardware) ou mais, que permite realizar medições on-line de
algumas variáveis do processo, com um algoritmo de estimação (software), a fim de
prover estimativas on-line de variáveis não medidas, de parâmetros de modelo ou para
superar atrasos de medições, proporcionando a obtenção de dados do processo com
maior frequência.
O objetivo deste trabalho é obter sensores virtuais de composição para correntes
de uma Unidade de Processamento de Gás Natural, cuja localização não poderá ser
informada por questões de sigilo industrial. Esta proposta nasceu do Projeto
“Desenvolvimento de ferramentas e metodologias de simulação para avaliação do
sistema de controle regulatório, avançado e otimização em tempo real buscando o
aumento da rentabilidade e da eficiência energética”. O grupo responsável pelo projeto
é a Célula de Otimização, uma parceria entre o LADES1, instalado a partir de 2007 nas
dependências do Programa de Engenharia Química (PEQ) da COPPE/UFRJ, e o
CENPES/PETROBRAS. As equipes parceiras neste projeto perceberam a necessidade
de avaliar a utilização da simulação dinâmica de processos como ferramenta para
estimativa de propriedades de correntes de processo, originando esta dissertação.
No problema da Unidade de Processamento de Gás Natural (UPGN), detalhado
no Capítulo 3 deste trabalho, o produto de fundo de uma torre desetanizadora alimenta
uma torre desbutanizadora. Há um cromatógrafo na UPGN que informa a composição
das correntes de carga, topo e fundo da torre desetanizadora, bem como da carga da
desbutanizadora e seu topo, uma corrente de GLP que figura como o principal produto
da unidade. Como há apenas um cromatógrafo disponível na UPGN, a informação da
composição de cada uma das correntes é feita em intervalos de 40 a 50 minutos. Dessa
1 LADES – Laboratório de Desenvolvimento de Software para Otimização e Controle de Processos
2
forma, caso não seja possível utilizar inferências nas referidas correntes, torna-se
dificultado o controle automático da qualidade dos produtos envolvidos, bem como a
implementação de sistemas de controle avançado na unidade. A proposta é então inferir
a composição das correntes envolvidas no processo lançando mão de um modelo
matemático fenomenológico dinâmico, para possíveis aplicações em tempo real.
Para alcançar o objetivo proposto, foram utilizados os modelos de duas colunas
de destilação implementados em ambiente EMSO, adaptados de modelo matemático
existente na biblioteca EML do simulador, a fim de reproduzir dados de processo e de
projeto da UPGN supracitada. As inferências obtidas desta forma serão comparadas
àquelas implementadas na unidade real, baseadas em redes neuronais artificiais.
1.2. A IMPORTÂNCIA DO GÁS NATURAL
A Portaria ANP nº 32, de 06/03/2001 (ANP, 2001), estabelece a definição de gás
natural como sendo todo hidrocarboneto que permaneça em estado gasoso nas
condições atmosféricas normais, extraído diretamente a partir de reservatórios
petrolíferos ou gasíferos, incluindo gases úmidos, secos, residuais e gases raros.
Segundo VAZ et al. (2008), o gás natural é uma mistura de hidrocarbonetos leves
encontrada no subsolo, na qual o metano tem uma participação superior a 70% em
volume. A composição do gás natural pode variar bastante, dependendo de fatores
relativos ao campo em que o gás é produzido, processo de produção, condicionamento,
processamento e transporte.
O aumento do consumo de energias alternativas, dentre elas a hídrica, o gás
natural, a eólica e a energia nuclear se deu após a crise do Petróleo na década de 1970,
com o intuito de reduzir a vulnerabilidade da economia mundial frente a flutuações na
oferta e preço do petróleo.
Além disso, a maior conscientização sobre questões ambientais, verificada após
a Conferência Mundial das Nações Unidas (RIO-92) e a elaboração do Protocolo de
Kyoto (Painel de Mudanças Climáticas), levou à opção do consumo de fontes de
energia mais limpas, ou seja, que levassem a menores emissões de gases de efeito
estufa. Desta maneira, várias nações optaram pela inserção ou aumento do consumo de
energias alternativas.

3
Dados do Statistical Review of World Energy (BP, 2007) publicado pela British
Petroleum mostram que em 2006 as regiões que apresentaram as maiores taxas de
crescimento no consumo de gás natural foram: Ásia/Pacífico (6,5%), África (5,5%) e
Oriente Médio (4,5%). O aumento do consumo de gás natural na Ásia (em especial no
Japão e na Coréia do Sul) foi viabilizado técnica e economicamente pelo transporte do
combustível sob a forma liquefeita (GNL), permitindo o comércio além de fronteiras.
Além disso, os gasodutos são um meio de transporte amplamente utilizado, formando
redes de transporte entre os campos produtores, as unidades de processamento e os
mercados consumidores (MATHIAS, 2008).
Apesar de o petróleo ser ainda o principal componente da oferta interna de
energia2 mundial, o gás natural vem adquirindo posição estratégica no mundo, com
participação de 21% em 2008. De acordo com a previsão do Energy Information
Administration (EIA), o gás natural tende a ultrapassar o carvão até o final da próxima
década. A taxa de crescimento da demanda mundial de gás, no período entre 2005 e
2010, foi de 14%, sendo esperado neste último ano (2010) o equivalente a 90,6 bilhões
de metros cúbicos (EIA, 2006).
Desde a criação da Lei n. 9.478/97 (Lei do Petróleo), a participação do gás
natural na matriz energética brasileira aumentou significativamente, assim como a
diversificação da sua demanda. A entrada em operação do Gasoduto Bolívia-Brasil
(GASBOL), no final de 1999, o aumento do volume de reservas provadas de gás natural
de origem nacional (Bacia de Santos – incluindo os novos campos do pré-sal, Campos e
Urucu) e a ampliação da rede de transporte, principalmente sob a forma de gasodutos,
foram os principais responsáveis por esta mudança. Acrescenta-se, ainda, o início de
projetos de integração energética de grandes regiões produtoras de gás da América
Latina, envolvendo países como a Argentina, a Bolívia e a Venezuela (VAZ et al.,
2008; PETROBRAS, 2011a).
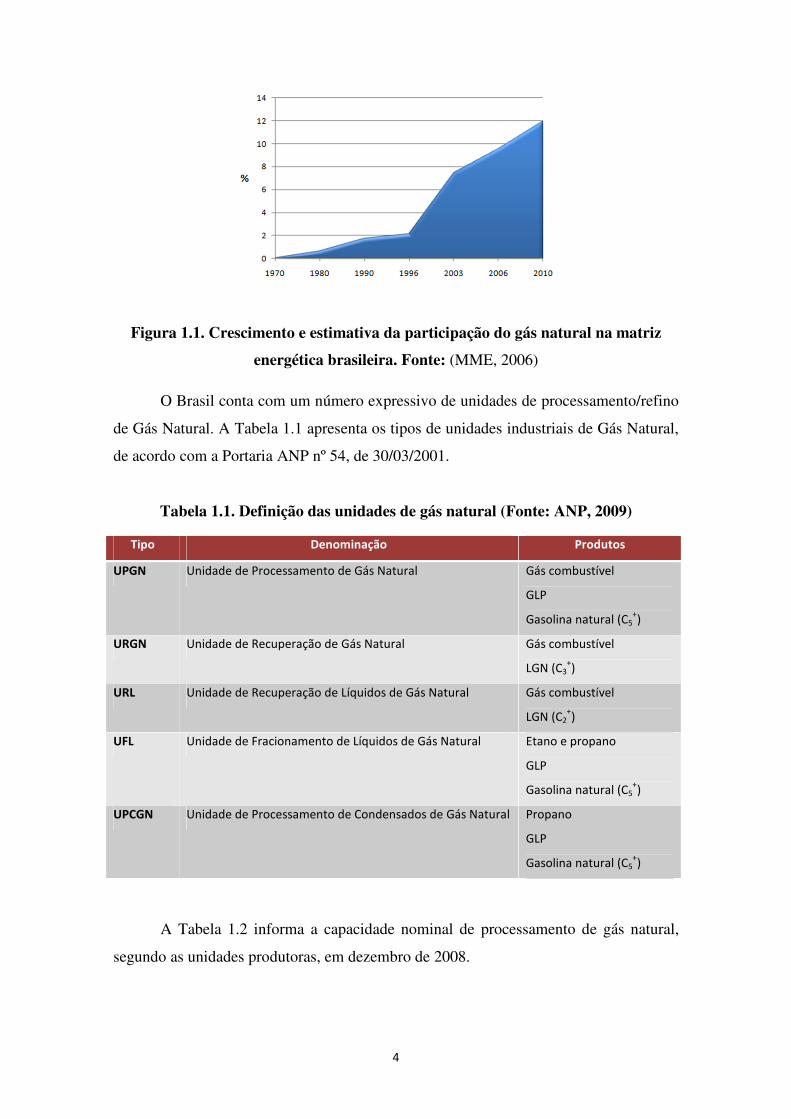
A Figura 1.1 evidencia o aumento na participação do gás natural como fonte de
energia no Brasil, segundo dados do Ministério das Minas e Energia (MME, 2006), com
base no consumo da década de 1970.
2 Oferta Interna de Energia (OIE) – a energia que se disponibiliza para ser transformada, distribuída e
consumida.
4
Figura 1.1. Crescimento e estimativa da participação do gás natural na matriz
energética brasileira. Fonte: (MME, 2006)
O Brasil conta com um número expressivo de unidades de processamento/refino
de Gás Natural. A Tabela 1.1 apresenta os tipos de unidades industriais de Gás Natural,
de acordo com a Portaria ANP nº 54, de 30/03/2001.
Tabela 1.1. Definição das unidades de gás natural (Fonte: ANP, 2009)
Tipo Denominação Produtos
UPGN Unidade de Processamento de Gás Natural Gás combustível
GLP
Gasolina natural (C5+)
URGN Unidade de Recuperação de Gás Natural Gás combustível
LGN (C3+)
URL Unidade de Recuperação de Líquidos de Gás Natural Gás combustível
LGN (C2+)
UFL Unidade de Fracionamento de Líquidos de Gás Natural Etano e propano
GLP
Gasolina natural (C5+)
UPCGN Unidade de Processamento de Condensados de Gás Natural Propano
GLP
Gasolina natural (C5+)
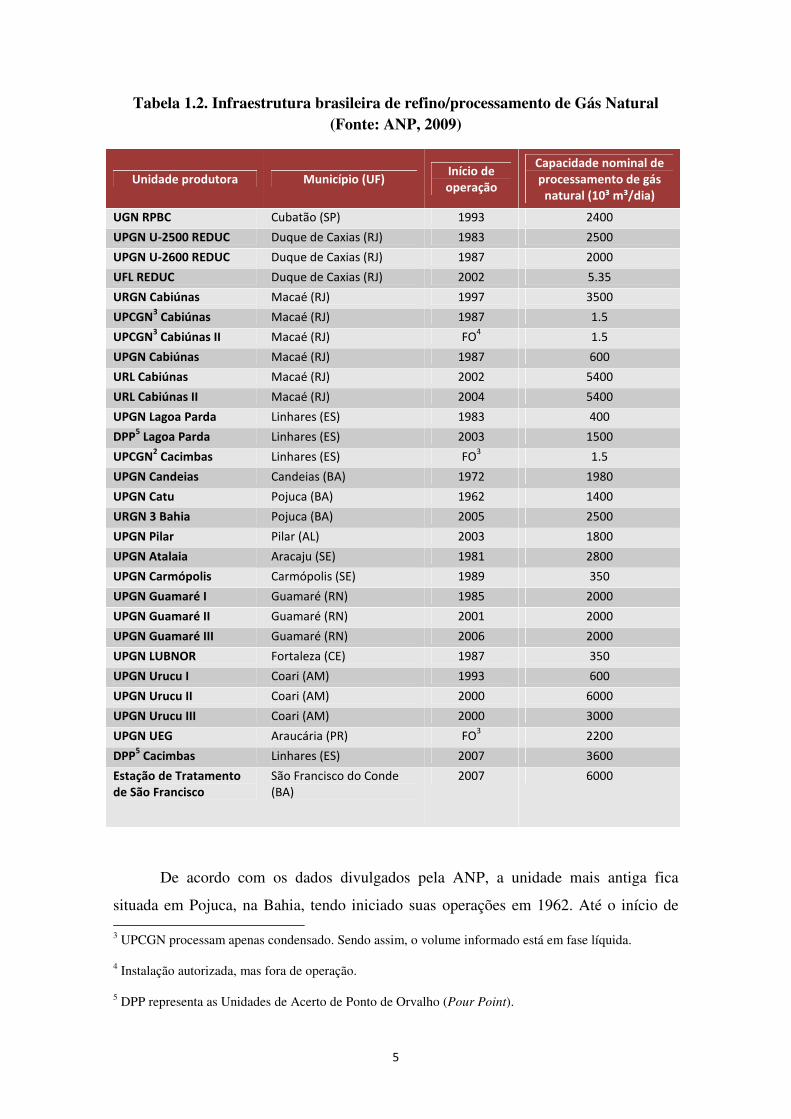
A Tabela 1.2 informa a capacidade nominal de processamento de gás natural,
segundo as unidades produtoras, em dezembro de 2008.
5
Tabela 1.2. Infraestrutura brasileira de refino/processamento de Gás Natural
(Fonte: ANP, 2009)
Unidade produtora Município (UF) Início de operação
Capacidade nominal de processamento de gás
natural (10³ m³/dia)
UGN RPBC Cubatão (SP) 1993 2400
UPGN U-2500 REDUC Duque de Caxias (RJ) 1983 2500
UPGN U-2600 REDUC Duque de Caxias (RJ) 1987 2000
UFL REDUC Duque de Caxias (RJ) 2002 5.35
URGN Cabiúnas Macaé (RJ) 1997 3500
UPCGN3 Cabiúnas Macaé (RJ) 1987 1.5
UPCGN3 Cabiúnas II Macaé (RJ) FO
4 1.5
UPGN Cabiúnas Macaé (RJ) 1987 600
URL Cabiúnas Macaé (RJ) 2002 5400
URL Cabiúnas II Macaé (RJ) 2004 5400
UPGN Lagoa Parda Linhares (ES) 1983 400
DPP5 Lagoa Parda Linhares (ES) 2003 1500
UPCGN2 Cacimbas Linhares (ES) FO
3 1.5
UPGN Candeias Candeias (BA) 1972 1980
UPGN Catu Pojuca (BA) 1962 1400
URGN 3 Bahia Pojuca (BA) 2005 2500
UPGN Pilar Pilar (AL) 2003 1800
UPGN Atalaia Aracaju (SE) 1981 2800
UPGN Carmópolis Carmópolis (SE) 1989 350
UPGN Guamaré I Guamaré (RN) 1985 2000
UPGN Guamaré II Guamaré (RN) 2001 2000
UPGN Guamaré III Guamaré (RN) 2006 2000
UPGN LUBNOR Fortaleza (CE) 1987 350
UPGN Urucu I Coari (AM) 1993 600
UPGN Urucu II Coari (AM) 2000 6000
UPGN Urucu III Coari (AM) 2000 3000
UPGN UEG Araucária (PR) FO3 2200
DPP5 Cacimbas Linhares (ES) 2007 3600
Estação de Tratamento de São Francisco
São Francisco do Conde (BA)
2007 6000
De acordo com os dados divulgados pela ANP, a unidade mais antiga fica
situada em Pojuca, na Bahia, tendo iniciado suas operações em 1962. Até o início de 3 UPCGN processam apenas condensado. Sendo assim, o volume informado está em fase líquida.
4 Instalação autorizada, mas fora de operação.
5 DPP representa as Unidades de Acerto de Ponto de Orvalho (Pour Point).
6
2009, as unidades mais recentes eram a DPP de Cacimbas (ES) e a Estação de
Tratamento de São Francisco (BA). As capacidades somadas das unidades localizadas
em Macaé (RJ) são responsáveis pela maior parcela da capacidade instalada nacional,
com aproximadamente 25% de participação. As UPGNs de Urucu (I, II e III) no Estado
do Amazonas, concentram 15% da capacidade instalada nacional e as UPGNs I, II e III
de Guamaré (RN), respondem por 10% do total.
Segundo VAZ et al. (2008), a principal utilização do gás natural no Brasil era
como combustível veicular. Porém, outros mercados consumidores podem ser melhor
desenvolvidos, tais como: matéria-prima para a indústria química (como, por exemplo,
a reforma a vapor do metano para a geração de gás hidrogênio), petroquímica,
fertilizantes e redutor siderúrgico; participação na produção de GLP (majoritariamente
propano e butanos) e de gás combustível (composto principalmente por etano);
utilização em equipamentos térmicos, tanto para refrigeração quanto para aquecimento;
e co-geração de energia6.
1.3. JUSTIFICATIVA
O Brasil possui atualmente diversas unidades de refino/processamento de gás
natural, conforme pode ser visto na Tabela 1.2. Em muitas dessas unidades tem sido
implantados projetos de Controle Avançado, no sentido de estabilizar a operação das
unidades, aumentar sua confiabilidade e seus rendimentos, a qualidade dos produtos e
sua eficiência energética. Para isto, se faz necessário o monitoramento de algumas
propriedades das correntes envolvidas no processo, como, por exemplo, a composição
dos produtos.
Uma vez que o conhecimento de determinadas variáveis pode não ser possível
na frequência desejada para dadas aplicações de controle avançado, se faz necessária a
utilização de sensores virtuais, com o objetivo de inferir o valor de tais variáveis
possibilitando a oferta mais frequente de dados. Como será visto no capítulo a seguir, é
possível, lançando mão de modelos matemáticos, inferir o valor das variáveis desejadas
a partir do conhecimento de variáveis facilmente medidas no processo, como
temperaturas, pressões e vazões.
6 Produção simultânea de calor e eletricidade a partir do mesmo combustível.

7
1.4. ESTRUTURA DA DISSERTAÇÃO
O conteúdo deste trabalho está centralizado no desenvolvimento de sensores
virtuais através de modelos matemáticos fenomenológicos, que levam em consideração
o comportamento dinâmico do processo.
O Capítulo 2 apresenta uma revisão bibliográfica acerca de sensores virtuais,
com enfoque na simulação dinâmica de processos. Também são abordados tópicos
sobre a estimação de estados e parâmetros e validação de modelos de processos.
A Unidade de Processamento de Gás Natural, para a qual inferências de
propriedades foram desenvolvidas, é descrita no Capítulo 3.
O Capítulo 4 trata da metodologia adotada durante o desenvolvimento deste
trabalho. Nele são descritos os procedimentos de obtenção dos dados de processo, a
detecção de estados estacionários (juntamente com o Anexo A.4) e reconciliação de
dados, a modelagem matemática fenomenológica, o ajuste dos parâmetros do modelo, a
sintonia das malhas de controle. São também objeto deste capítulo, a descrição das
etapas de análise de sensibilidade, validação e verificação da capacidade de predição do
modelo dinâmico.
Os resultados obtidos para esta dissertação e a discussão sobre os mesmos
encontram-se no Capítulo 5. Em seguida, no Capítulo 6, são apresentadas as conclusões
e sugestões para trabalhos futuros a partir do conteúdo do presente texto.
Em seguida, estão listadas as obras da literatura utilizadas nesta pesquisa, na
seção de Referências Bibliográficas.
Finalmente, o leitor tem à sua disposição os Anexos, contendo: os códigos
implementados em ambiente EMSO (Anexo A.1), uma breve revisão sobre redes
neuronais (Anexo A.2) e sobre a identificação de modelos lineares de processo (Anexo
A.3).
8
2. REVISÃO BIBLIOGRÁFICA
2.1. INFERÊNCIA DE PROPRIEDADES
Em muitos casos reais da área industrial o valor de algumas variáveis de
processo não se encontra disponível prontamente, podendo haver motivos diversos para
isso. Alguns autores citam algumas das razões para a dificuldade de obtenção do valor
de determinadas variáveis e FREITAS (2009) as enumera:
• Indisponibilidade de sensores no mercado
• Altos custos de aquisição e de manutenção
• Necessidade periódica de manutenção do equipamento
• Falhas e precisão grosseira
• Elevado tempo de amostragem e/ou de resposta
• Distância considerável do ponto de medição
• Ambiente de medição hostil
Porém, sistemas de controle, monitoramento e otimização de processos
necessitam de dados confiáveis e frequentes acerca das variáveis envolvidas nos
mesmos. Por esse motivo, a utilização de sensores virtuais para estimativa de
propriedades em processos é muito grande, o que envolve uma vasta gama de áreas de
aplicação. Para exemplificar, a Figura 2.1 mostra o fluxo de informações que permeia a
otimização de processos, no qual a inferência de propriedades é peça importante.
Assegurada a disponibilidade de sensores que supere as limitações de custo,
confiabilidade e tempo de amostragem, torna-se possível a implantação de sistemas de
controle mais eficientes, o que eventualmente proporciona reduções em perdas (de
produtos, energia e tempo), maior controle da qualidade dos produtos e da integridade
de equipamentos, diminuição de problemas de segurança, entre outros.
Sendo assim, torna-se justificável o desenvolvimento de alternativas aos
problemas supracitados, lançando mão de sensores virtuais (soft sensors) atuando em
tempo real, capazes de gerar e transmitir informações com a frequência requerida para o
controle de um processo. Os sensores virtuais utilizam informações disponíveis do

9
processo para inferência (predição) de propriedades dificilmente medidas ou obtidas em
intervalos de tempo insatisfatórios.
Figura 2.1. Fluxo de informações da otimização de processos
(adaptado de GOMES (2007)).
Há três principais abordagens utilizadas no desenvolvimento dos sensores
virtuais:
i. Modelos Fenomenológicos: também chamados de modelos mecanicistas ou
modelos “caixa-branca”, são obtidos através de abordagem analítica, derivados
dos princípios básicos ou fundamentais;
ii. Modelos Empíricos: provenientes da interpretação de dados experimentais /
operacionais, através de algoritmos de inteligência artificial e estatística
multivariada, tendo como exemplo as redes neuronais artificiais e a lógica fuzzy.
São também conhecidos como modelos “caixa-preta”;
iii. Métodos Híbridos: combinação de duas ou mais abordagens disponíveis.
Alguns processos apresentam trajetórias complexas, devido à existência de
fenômenos não lineares. Nestes casos, o desenvolvimento de um modelo
fenomenológico confiável pode levar a dificuldades nas etapas de modelagem,
validação e implementação dos sensores virtuais.

10
Na presença de sistemas de automação industrial, um grande número de
variáveis de processo pode ser simultaneamente medido e armazenado, sendo tais
informações facilmente acessadas, o que encoraja a construção de modelos a partir de
dados históricos, baseados em estatística. A obtenção desse tipo de sensor pode, no
entanto, apresentar deficiências, uma vez que é concebido a partir de um determinado
conjunto de dados, podendo assim, negligenciar informações ou efeitos relevantes,
como os relativos à dinâmica do processo em estudo.
Dentre as aplicações industriais para as quais os sensores virtuais têm tido
grande evidência destacam-se os casos nos quais se faz necessária a obtenção de
medidas em um curto intervalo de tempo. SOROUSH (1998) afirma que o sensor
virtual deve fornecer informação confiável com a frequência necessária para aplicações
em tempo real, convergindo para os valores reais assintoticamente. De acordo com
YANG e CHAI (1997), estes sensores constituem uma poderosa ferramenta para
aumento da frequência de amostragem. Os primeiros sensores virtuais relatados na
literatura surgiram de sistemas de controle indireto, nos quais a variável primária a ser
controlada era monitorada através da trajetória de outras variáveis (secundárias),
normalmente temperaturas (ZANATA, 2005).
Uma aplicação dos sensores virtuais foi relatada por CHOI e PARK (2001) em
processos de tratamento de efluentes, apresentando uma alternativa de menor custo,
satisfatória precisão e maior confiabilidade em relação aos sensores convencionais
empregados para medir a composição de fósforo e nitrogênio dissolvidos, assim como
diversos outros trabalhos que vem sendo desenvolvidos na área ambiental (FREITAS,
2009). Outras áreas com grande aplicabilidade para os sensores virtuais são as de
bioprocessos e biotecnologia, assim como na engenharia genética, nas quais os sensores
físicos possuem alto custo de obtenção e manutenção ou não existem. Uma vasta
relação de trabalhos nesta área também pode ser encontrada em FREITAS (2009). A
indústria de polímeros também possui diversas aplicações nas quais se inserem as
inferências, uma vez que a qualidade dos produtos é conhecida baseando-se em
variáveis de processo cujas medições são dificilmente obtidas e geralmente
indisponíveis em tempo real (APPELHAUS e ENGELL, 1996; PRATA, 2005).
Um grande número de trabalhos trata de inferências de propriedades
(composições) em processos que envolvem colunas de destilação. Dentre estes trabalhos
11
pode-se citar a contribuição de MEJDELL e SKOGESTAD (1991), KRESTA et al.
(1994), KANO et al. (2000) e PARK e HAN (2000), que implementaram uma regressão
por mínimos quadrados parciais (PLS – partial least squares) para realizar a inferência
de composição de produtos de colunas de destilação, principalmente em função de
temperaturas de seus pratos. Esta prática corrobora com a afirmação de KISTER (1990)
de que a maneira mais popular de controlar fácil, rápida e economicamente a qualidade
de produtos é através do monitoramento da temperatura. Estas inferências foram
utilizadas para controle da composição dos produtos de topo e fundo das colunas de
destilação em questão. Uma busca pelos termos “inferential” e “distillation” na base
bibliográfica Scopus apresentou como trabalhos mais citados as contribuições de
KRAMER (1992) e de JOSEPH e BROSILOW (1978). Já a busca por “soft sensor” e
“distillation” apresenta como mais citadas as obras de THAM et al. (1991), PARK e
HAN (2000) e FORTUNA et al. (2005), sendo que este último trata mais precisamente
de monitoramento da qualidade de produtos de colunas desbutanizadoras, amplamente
utilizadas em unidades de processamento de petróleo e gás natural.
Na indústria do petróleo, é recorrente a necessidade de se conhecer as
características de complexas misturas de hidrocarbonetos. Este é o caso da obtenção de
ponto de fulgor e fluidez, pressão de vapor Reid (PVR), índice de cetano, viscosidade,
etc., de correntes presentes em processos de refino (destilação atmosférica e a vácuo,
hidrorrefino, coqueamento retardado e craqueamento catalítico são os mais comuns
atualmente), a partir da curva de destilação destas correntes, obtida pelo Método ASTM
D-86. RIAZI e DAUBERT (1987), DUTT (1990), SCHULER et al. (2000),
CHATTERJEE e SARAF (2003) e FARAH (2006) são alguns dos trabalhos
desenvolvidos nesta área com o objetivo de estimar as propriedades supracitadas para
petróleos e seus derivados (querosene, nafta, óleo diesel, óleos básicos lubrificantes,
óleos combustíveis, entre outros), contribuindo para o desenvolvimento de novos
processos e para o subsequente monitoramento dos mesmos.
Devido à sua importância, o cenário de aplicações dos sensores virtuais é cada
vez mais amplo. Dessa forma, é natural que se concentrem esforços nessa área, com o
objetivo de fornecer informação confiável e frequente, que será de grande valia nas
aplicações de controle e monitoramento de processos em tempo real.

12
O termo “sensor virtual” é utilizado para uma ampla variedade de técnicas
inferenciais, utilizadas para a estimativa de estados e parâmetros de um processo. Estes
dois temas são abordados na Seção 2.1.1, a seguir.
2.1.1. ESTIMADORES DE ESTADOS E PARÂMETROS
Variáveis de estados de um processo são aquelas que especificam unicamente o
estado desse processo em um determinado instante de tempo. O controle efetivo de um
processo assim como o seu monitoramento necessitam de informação confiável em
tempo real acerca das suas variáveis. Na prática, porém, somente algumas medidas on-
line das variáveis de estado do processo encontram-se disponíveis. Assim, aquelas que
não são efetivamente medidas em tempo real precisam ser estimadas utilizando-se um
estimador de estados.
Os estimadores de estados, projetados com base em modelos matemáticos,
devem oferecer estimativas confiáveis das variáveis desconhecidas mesmo na presença
de perturbações não medidas e de desvios do modelo. Para isso é desejável que o
estimador tenha a capacidade de se adaptar ao processo, o que é possível através da
adição de parâmetros a serem estimados juntamente com os estados (SOROUSH, 1998).
Estimadores de estados podem ser determinísticos ou não, estáticos ou
dinâmicos, projetados com base em um modelo matemático no qual deve existir uma
relação entre as variáveis cujas medidas encontram-se disponíveis e aquelas que se
deseja estimar. O estimador deve fornecer informação confiável com a frequência
necessária para aplicações em tempo real, convergindo para os valores reais
assintoticamente (SOROUSH, 1998).
Encontram-se aplicações da estimação de estados em controle de processos, com
alguns exemplos estudados nos trabalhos de ALEVISAKIS e SEBORG (1973),
OGUNNAIKE e RAY (1979) e SOROUSH e KRAVARIS (1996), entre muitos outros,
e em monitoramento de processos, como, por exemplo, na detecção antecipada de
situações de risco e de falhas de sensores.
MARQUARDT et al. (1998) analisaram o estado-da-arte das técnicas de
controle preditivo e da otimização dinâmica em tempo real, ambos baseados em
13
modelos, e apontam a estimação de estados como um elemento a ser incluído nessas
tecnologias, no sentido de aumentar o desempenho operacional de unidades de
processo.
No cômputo de trajetórias economicamente ótimas de processos baseado em
modelos rigorosos e não lineares, as variáveis de estado devem ser conhecidas no início
do horizonte de predição. Uma vez que nem todos os estados são medidos na prática, a
estimação de estados é um ingrediente chave para a implementação de controladores
avançados que utilizam otimização direta (ENGELL, 2007). Sendo assim, o projeto
apropriado dos estimadores de estado requer a utilização de modelos rigorosos
usualmente baseados nos princípios fundamentais. Apesar disto, o desenvolvimento de
um modelo de tal porte geralmente é um grande esforço de engenharia, que só será
investido na prática caso seja esperado um grande retorno financeiro com a sua
utilização. Com o objetivo de ultrapassar esta limitação, MARQUARDT (1994) sugeriu
a sistematização da modelagem que suporta o projeto de sistemas de controle, na sua
avaliação e na sua implementação. YIP e MARLIN (2004) discutiram a questão da
fidelidade de modelos em detalhes. Seu trabalho investiga fatores cruciais na decisão da
estrutura de modelo a ser utilizada em sistemas de otimização em tempo real (Real Time
Optimization – RTO), uma vez que sua performance depende da acurácia do modelo do
processo utilizado e, novamente, a utilização de modelos rigorosos baseados em
fundamentos é recomendada. No seu trabalho, SALAU et al. (2009) sugerem que a
escolha do modelo mais apropriado para um determinado processo depende de questões
acerca da observabilidade do sistema e da sintonia do estimador de estados. Uma
modelagem que requeira o menor número de medidas para garantir a observabilidade do
sistema e que tenha um estimador de estados facilmente sintonizável será mais atraente.
Também é possível a aplicação dos estimadores de estados em procedimentos de
reconciliação dinâmica de dados com o objetivo de detectar a ocorrência e magnitude de
erros grosseiros, técnica capaz de reduzir consideravelmente a inacurácia de dados de
processo devido a erros de medida (ABU-EL-ZEET et al., 2002).
Muitos trabalhos encontrados na literatura na área de estimação de estados
baseiam-se em estimadores fundamentados no Filtro de Kalman (KALMAN, 1960).
SALAU (2009) afirma que a escolha por estes estimadores é motivada pelo fato de que

14
a utilização dos mesmos já está consolidada devido à sua extensa pesquisa e aplicação,
baixa demanda computacional e simplicidade.
O Filtro de Kalman é composto por uma série de equações matemáticas que
proporciona uma solução (recursiva) computacional eficiente do método dos mínimos
quadrados. O filtro é muito poderoso em vários aspectos: ele suporta estimativas de
estados do passado, do presente e do futuro, o que pode ser feito mesmo quando a
natureza precisa do sistema modelado não é conhecida (WELCH e BISHOP, 2000).
O Filtro de Kalman foi inicialmente desenvolvido para estimação de estados de
sistemas lineares sem restrições, sujeitos a ruídos de medidas normalmente distribuídos.
Porém, muitos sistemas físicos exibem dinâmica não linear e possuem estados sujeitos a
restrições, como frações mássicas e molares e pressões não negativas. Como resultado,
vários tipos de estimadores de estados não lineares têm sido propostos (SALAU et al.,
2006; SIMON, 2006). SOROUSH (1998) apresentou uma revisão de muitos destes
estimadores.
Além do clássico uso no ajuste de modelos a dados experimentais, a estimação
de parâmetros possui aplicações no monitoramento de processos e no controle
adaptativo, juntamente com a estimação adaptativa para atualização de modelos em
tempo real. Como exemplo pode-se citar parâmetros como o coeficiente global troca
térmica ou a atividade do catalisador de um reator. A informação precisa acerca destes
parâmetros garante a operação mais eficiente e segura desses processos.
Controle adaptativo é utilizado em processos não lineares e com mudança de
ganho, podendo-se citar reatores batelada e semi-batelada multi-produtos, reatores
catalíticos com desativação do catalisador ou reatores com jaquetas com coeficiente
global de transferência de calor sujeito à incrustações (fouling) (SCHENELLE e
RICHARDS, 1986). O controle efetivo desses processos deve ser capaz de lidar e
compensar essas variações no tempo (SOROUSH, 1998).

15
2.1.2. SIMULAÇÃO DINÂMICA
Um ponto importante a ser destacado diz respeito à diferença entre modelos de
inferência estáticos e dinâmicos. A Figura 2.2 mostra o comportamento dinâmico da
temperatura da carga de uma coluna de destilação (unidade de tempo em minutos),
situada em uma unidade de processamento de gás natural, onde a utilização de
estimadores estáticos poderia levar a inferências pobres. Sendo assim, é desejável o
desenvolvimento de ferramentas para inferência de propriedades de processos que
utilizem modelos dinâmicos, de forma a melhor representar os processos em questão.
Figura 2.2. Comportamento dinâmico da temperatura de uma corrente de uma
unidade de processamento de gás natural.
A Figura 2.3 ilustra a diferença entre estimativas utilizando modelos de processo
em estado estacionário e em estado transiente, associado ao exemplo ilustrado pela
Figura 2.2. Nesta figura, a seta vertical indica a discrepância entre a inferência obtida
utilizando modelo dinâmico do processo, aqui representado como yv (“verdadeiro”), e a
inferência obtida ao utilizar modelo estático (yEE), ambas calculadas para t = 40
minutos.
No caso de sistemas em estado estacionário, os modelos matemáticos são
compostos apenas por equações algébricas (2.1).
��, � � 0� � �, � (2.1)
16
Figura 2.3. Discrepância (seta vertical) entre inferências obtidas ao utilizar modelo
dinâmico do processo (y verdadeiro) e modelo em estado estacionário (yEE) para t =
40 min.
Enquanto isso, sistemas em estado transiente são descritos por equações
algébrico-diferenciais (2.2).
���� � �, � � � �, � 0 � �
(2.2)
A utilização de modelos em estado estacionário é universalmente aceita em
todas as fases de projeto e operação de UPGNs. Já a simulação dinâmica tem sido
utilizada apenas recentemente, e muitos trabalhos baseiam-se em modelagem
simplificada/não-rigorosa. Na prática, muitos trabalhos de engenharia lançam mão de
modelos baseados em funções de transferência, incapazes de representar não-
linearidades em sistemas e descontinuidades no caso de paradas e partidas das unidades.
Somente a partir da década de 1990 a simulação dinâmica se tornou uma ferramenta
mais utilizada por engenheiros de processos e de controle. Sua maior restrição de uso
diz respeito ao tempo de implementação do modelo dinâmico, bastante superior à de
modelos em estado estacionário (MOKHATAB et al., 2006).

17
As principais aplicações da simulação dinâmica se devem à possibilidade de
analisar processos, projetar estruturas de controle, reduzir modelos, verificar
controlabilidade e operabilidade, sintonizar controladores, otimizar dinamicamente,
projetar processos, estimar parâmetros, prever o comportamento em partidas, paradas e
transições, atuar como analisadores virtuais em tempo real com a planta,
acompanhamento de processos, etc.
Segundo GOMES (2007), ainda se encontra em fase embrionária a utilização de
simulação dinâmica em sistemas de otimização de processos industriais. Há uma
quantidade limitada de trabalhos reportados na literatura acerca do assunto, apesar de
serem claros os benefícios trazidos por esta tecnologia, uma vez que o modelo dinâmico
elimina fontes de erros e dificuldades gerados nas considerações de que os processos
devem estar em estado estacionário para que seja aplicada a técnica de otimização em
tempo real. Sendo assim, ao lançar mão da ferramenta de simulação dinâmica torna-se
possível a resolução simultânea de problemas de otimização econômica e controle
avançado. Contudo, também são conhecidos os desafios trazidos pela abordagem
dinâmica: o aumento do tempo necessário para construção do modelo do processo e da
complexidade do problema de otimização.
É ainda mais restrito o número de obras na literatura que tratam de simulação
dinâmica de unidades de tratamento e processamento de gás natural. A pesquisa na Base
Scopus realizada em maio de 2011 simultaneamente para os termos “dynamic
simulation” e “natural gas” retornou apenas 198 resultados, sendo o mais citado o de
CRUZ et al. (2003), que modelou o processo de adsorção de contaminantes do gás
natural para fins de projeto, análise e otimização. O trabalho mais antigo, resultante
desta pesquisa, foi publicado por STANLEY e BOHANNAN (1977), sobre a simulação
dinâmica de compressores centrífugos, amplamente utilizados em UPGNs.
Uma pesquisa bibliográfica realizada para publicações na última década acerca
do assunto obteve como resultados os seguintes trabalhos: FINN et al. (2000), OMORI
et al. (2001), OKASINSKI e SCHENK (2007), SINGH e HOVD (2007) e SHIN e LEE
(2009) utilizaram a modelagem dinâmica para representar o processo de liquefação de
gás natural em unidades de processamento offshore, com o objetivo de determinar quais
as melhores maneiras de desengargalar este processo; YOUNG et al. (2001)
investigaram através da simulação dinâmica a substituição do Processo Clauss para

18
recuperação de enxofre a partir do gás natural; PIRES NETO (2002) aplicou a
simulação dinâmica na detecção em tempo real de vazamentos em sistemas contendo
gás natural; HENDERSON et al. (2004) mostraram utilidade da simulação dinâmica
em diversas etapas do ciclo de vida de uma planta de gás natural liquefeito, ou seja,
durante os projetos conceitual e básico, comissionamento, partida, treinamento e
operação; GONZALEZ-BUSTAMANTE et al. (2007) utilizaram a simulação dinâmica
com o objetivo de observar o comportamento transiente do suprimento de gás natural
para uma consumo em uma unidade de produção de energia elétrica; LIN et al. (2009)
aplicaram a simulação dinâmica para representar computacionalmente a produção de
dimetil-éter a partir do gás natural; ARAÚJO JUNIOR (2009) desenvolveu um modelo
dinâmico em ambiente Hysys/Unisim com vistas à aplicação de controle preditivo em
uma Unidade de Recuperação de líquido de gás natural (URL); em seu trabalho,
FERNANDES (2009) implementou, em ambiente EMSO, o modelo dinâmico do ciclo
de refrigeração a propano de uma UPGN e OKASINSKI e LIU (2010) avaliaram
alternativas para o sistema de compressão do ciclo de propano de unidades de
liquefação de gás natural, através da utilização de um modelo dinâmico rigoroso do
processo.
2.1.2.1. SIMULAÇÃO DINÂMICA NO EMSO
Os modelos disponíveis nos principais simuladores comerciais são geralmente
inacessíveis ao usuário, não sendo possível realizar adaptações, aprimoramentos ou até
mesmo simplificações nos modelos, caso julgue necessário. No caso em que não são
fechados, os modelos disponíveis são construídos em linguagens de programação de
difícil compreensão, limitando seu manuseio (STAUDT, 2007).
Atualmente, quase todas as ferramentas computacionais utilizadas para
modelagem e simulação de processos são baseadas na arquitetura sequencial modular.
Embora esta categoria de ferramenta esteja bem difundida na indústria, está se
verificando uma tendência de migração para softwares com arquitetura de modelos
baseados em equações. Isto se deve ao fato de um mesmo modelo poder ser utilizado
para uma gama maior de aplicações (simulação estacionária ou dinâmica, otimização,
estimação de parâmetros, síntese de processos, etc.) e à maior facilidade de
incorporação de informações específicas a um modelo já existente. Um dos motivos
19
para a falta de sucesso comercial de ferramentas baseadas em equações pode ser
atribuído ao fato de que as mesmas não dispõem de um conjunto de modelos para uso
imediato dos usuários, dificultando a sua utilização inicial (STAUDT, 2007).
O projeto ALSOC (Ambiente Livre para Simulação, Otimização e Controle de
Processos) surgiu na década de 2000 em um trabalho conjunto (COPPE/UFRJ, UFRGS
e USP) como um esforço de aproximação universidade–indústria através da
padronização e distribuição sem custo de especificações e ferramentas de software entre
universidades e empresas consorciadas, entre as quais se encontra a PETROBRAS.
Deste projeto nasceu o EMSO (“Environment for Modeling, Simulation, and
Optimization”), uma ferramenta modular orientada por equações (EO) e modelos
escritos em linguagem de modelagem orientada a objetos, reunidos na EML, uma
biblioteca de modelos aberta, ou seja, distribuída livremente e escrita na linguagem do
EMSO (SOARES, 2003).
As principais vantagens das EO e consequentemente do EMSO são devidas aos
modelos de processo serem implementados em uma linguagem de modelagem simples,
em arquitetura modular, podendo ser visualizados e refinados livremente pelo usuário,
além de poderem ser utilizados como fonte de várias tarefas como simulação,
otimização, estimação de parâmetros, reconciliação de dados, etc., proporcionando um
ambiente integrado. Algumas das limitações atuais são a falta de assistência para o
desenvolvimento de modelos e a dificuldade na correção de modelos mal postos
(SOARES e SECCHI, 2003; SECCHI e LEMOS, 2008).
Os simuladores dinâmicos rigorosos, como é o caso do EMSO, tem se mostrado
uma ferramenta promissora, pois fornecem informações muito próximas da realidade
acerca da trajetória das variáveis presentes no processo modelado em regime transiente.
Estes aspectos são interessantes para fins de monitoramento e controle, permitindo que
o processo seja otimizado, planejado, controlado, identificado, etc., reduzindo a
necessidade da realização de experimentos no processo verdadeiro, consequentemente
reduzindo custos e tempo.
Diversos trabalhos desenvolvidos utilizando o EMSO foram publicados
recentemente. STRAATMANN e SECCHI (2008) implementaram no simulador o
modelo do processo de destilação em batelada; VALLERIOTE et al. (2008)
apresentaram a modelagem da produção de dimetil-éter no EMSO; SARTOR (2009)
20
estudou, em sua dissertação de mestrado, a modelagem, simulação e otimização da
extração de óleos essenciais por arraste a vapor; CANABARRO e SECCHI (2010) e
ITO (2010) publicaram resultados obtidos utilizando o EMSO para a inferência
dinâmica de propriedades de correntes da torre desbutanizadora de uma UPGN;
FONSECA et al. (2010) se dedicaram à modelagem, também no simulador, de um
processo de fermentação; MULLER et al. (2010) realizaram a simulação da estação de
tratamento de efluentes de uma refinaria; e RIBEIRO (2011) desenvolveu, também em
sua dissertação de mestrado, uma nova técnica de redução de modelos, aplicando o
EMSO.
2.1.3. VALIDAÇÃO DE MODELOS PARA INFERÊNCIA DE
PROPRIEDADES
Um dos maiores desafios do profissional que analisa um modelo matemático é
determinar se o mesmo representa com acurácia o sistema de interesse, ou seja, se o
modelo é válido.
O trabalho de LAW e KELTON (1991) apresenta uma discussão das práticas
mais comuns de validação de modelos de processos, baseadas não somente em artigos e
livros, mas também na troca de experiências com outros profissionais da área. Trabalhos
importantes acerca de técnicas de validação de modelos encontram-se em BALCI
(1987), BANKS e CARSON (1984) e CARSON (1986). Uma revisão bibliográfica
mais completa sobre o assunto pode ser encontrada em BALCI e SARGENT (1984).
Termos como verificação, validação, credibilidade e manutenção inserem-se
neste contexto e, por isso, necessitam ser definidos:
• Verificação – é a determinação de que o programa computacional no qual está
inserido o modelo matemático do processo está funcionando apropriadamente.
Assim, a verificação consiste em traduzir dados acerca de um dado processo,
encontrados em fluxogramas e planilhas de projeto e dados de processo, em um
programa computacional funcional.
• Validação – consiste em determinar se o modelo matemático (agora não se
referindo mais ao programa computacional) representa fielmente o sistema em

21
estudo. Se um modelo é “válido”, então as decisões tomadas a partir de
informações dadas pelas saídas da simulação devem ser as mesmas que aquelas
que seriam tomadas se fossem realizados experimentos físicos na planta em
questão, caso isso fosse possível.
• Calibração – supondo que ainda haja discrepâncias significativas entre as
saídas do modelo e o comportamento do sistema real, é comum que sejam feitas
alterações no modelo de modo que suas respostas fiquem mais próximas
àquelas esperadas (como é o caso da inclusão de “fatores de ajuste”, por
exemplo), sendo este processo realizado até que sejam obtidos resultados
satisfatórios. Desta forma, o desenvolvimento e a calibração do modelo do
processo caminham em paralelo à validação do mesmo.
• Credibilidade – ocorre quando um modelo e seus resultados são aceitos pelo
cliente como sendo válidos, além de serem utilizados na tomada de decisões
(CARSON, 1986).
• Manutenção – diz respeito à conservação da fidelidade do modelo frente a
eventuais mudanças no sistema ao longo do tempo, sendo também uma etapa
crítica para o desenvolvedor/usuário.
Um objetivo idealista na validação de modelos matemáticos é assegurar que o
modelo utilizado para simular o processo seja bom o suficiente para que decisões
tomadas a partir de resultados da simulação sejam similares àquelas que seriam tomadas
caso os experimentos reais estivessem disponíveis e fossem realizados de maneira
confiável.
A facilidade ou dificuldade de validar um modelo depende da complexidade do
sistema a ser representado e se o mesmo já existe na realidade. Assim sendo, o modelo
de um sistema complexo pode ser apenas uma simplificação do mesmo, desde que gere
resultados compatíveis com os esperados. Porém, perseguir a perfeição pode levar
muito tempo e ter um custo muito alto. Logo, um modelo de processo deve ser
construído para apenas uma gama de finalidades, o que significa que este mesmo
modelo pode não ser satisfatório para a inferência do comportamento de outras variáveis
do processo, fora desta gama (LAW e KELTON, 1991).
Uma das ferramentas mais úteis durante a validação de modelos matemáticos é a
análise de sensibilidade. Ela pode ser utilizada para determinar se as saídas da

22
simulação se alteram significativamente quando o valor de uma das entradas da
simulação é perturbado. As respostas podem ser comparadas às esperadas (de processo)
e então se pode julgar se estão apresentando comportamento adequado frente às
perturbações às quais foram expostas.
Para LAW e KELTON (1991), o teste mais significativo para a validação de um
modelo matemático de processo é a demonstração de que os dados de saída da
simulação se assemelhem aos do sistema verdadeiro, caso estas informações existam e
estejam disponíveis. Se os dois conjuntos de dados são favoravelmente comparáveis,
então o modelo do sistema pode ser considerado como válido. Quanto maior for a
semelhança entre os resultados da simulação e os dados do processo, maior será a
confiança depositada na inferência obtida. Porém, a acurácia requerida aos resultados
dependerá da finalidade para a qual a inferência foi desenvolvida.
Diversos testes estatísticos foram sugeridos na literatura acerca da validação de
modelos de processo, com o objetivo de quantificar a qualidade dos resultados da
comparação entre os resultados da simulação e os dados de processo real
correspondente. Como exemplo, SHANNON (1975) utiliza alguns destes testes em seu
trabalho. Porém, o profissional responsável pela modelagem matemática e simulação de
um sistema deve atentar ao fato de que os sistemas reais são, em sua maioria, não
estacionários, o que restringe a utilização de testes estatísticos clássicos7 na comparação
entre duas séries de dados.
Por este motivo, um grande número de autores prefere avaliar os resíduos entre
os dados simulados e os dados do processo real. Os resíduos de um dado modelo
corresponde às diferenças entre as respostas observadas do processo e os valores
correspondentes preditos por este modelo. Matematicamente, a definição do resíduo ei
para um i-ésimo ponto em um determinado conjunto de dados é dada pela Equação 2.3,
na qual yi corresponde à variável medida e ��� é a variável estimada pelo simulador,
ambas no i-ésimo instante de tempo.
�� � �� − ��� (2.3)
7
Testes estatísticos clássicos baseiam-se em conjuntos de dados independentes e identicamente
distribuídos.
23
Se o modelo do processo estiver “correto”, os resíduos se aproximarão dos erros
aleatórios inerentes às variáveis medidas do processo real, apresentando
consequentemente uma trajetória aleatória ao longo dos conjuntos de dados avaliados.
Esta avaliação pode ser feita visualizando o gráfico dos resíduos contra o tempo.
Uma forma de avaliar a capacidade preditiva de modelos, inclusive permitindo a
comparação entre dois modelos, pode ser feita através da soma do quadrado dos
resíduos (SQR), conforme a Equação 2.4, onde NE é o número de medidas realizadas.
SQR � 1����� − ��� ���� !
(2.4)
Esta métrica será utilizada no Capítulo 5 na determinação do melhor modelo,
dentre os avaliados, para representar a trajetória dinâmica das propriedades das
correntes da Unidade de Processamento de Gás Natural em estudo.

24
3. ESTUDO DE CASO
3.1. DESCRIÇÃO DA UNIDADE DE PROCESSAMENTO DE GÁS
NATURAL EM ESTUDO
A Unidade de Processamento de Gás Natural (UPGN) escolhida para este estudo
de caso pertence à Petrobras e o pólo onde se encontra deve ser omitido pois se trata de
informação sigilosa. Um fluxograma simplificado da unidade encontra-se na Figura 3.1.
A seguir encontra-se uma breve descrição acerca das operações realizadas na UPGN em
questão.
De acordo com CANABARRO et al. (2010), o gás natural recebido na UPGN
passa por um processo de desidratação por peneiras moleculares e, em seguida, é
resfriado e parcialmente condensado em um permutador do tipo caixa-fria, trocando
calor com diversas correntes do processo.
A fase vapor proveniente da carga é dividida em duas partes. Uma delas é
condensada após troca térmica adicional na caixa-fria e, em seguida, enviada ao topo da
coluna desmetanizadora, atuando como pseudo-refluxo da mesma. A segunda corrente
vapor passa por um turbo-expansor, sendo resfriada e gerando a força motriz para o
compressor à jusante. Em seguida, é alimentada à torre desmetanizadora em estágio
intermediário. A fase líquida (fração mais pesada) proveniente da carga é alimentada à
torre em estágio inferior.
Na coluna desmetanizadora a carga é fracionada em gás residual (contendo
aproximadamente 91% de metano e chamado na unidade de gás de venda) e no produto
de fundo que é enviado à coluna desetanizadora.
Na torre desetanizadora o produto de topo é a corrente de gás combustível,
contendo aproximadamente 82% de etano. Esta corrente de gás combustível troca calor
com a carga da unidade, aquecendo-a. Além disso, é consumida como combustível nos
fornos da UPGN e das demais unidades do pólo, sendo esta uma das funções essenciais
desta UPGN.

25
Figura 3.1. Fluxograma simplificado da UPGN em estudo.
Fonte: CANABARRO et al., 2010.
A UPGN em questão faz uso de três utilidades. A energia elétrica é utilizada no
acionamento de motores, dos quais os principais são os compressores de gás residual e
de propano. O propano refrigerante é utilizado como corrente fria no condensador de
topo da coluna desetanizadora e no resfriamento do GLP oriundo da coluna
desbutanizadora e que segue para estocagem em esferas. O gás combustível alimenta o
forno, onde é aquecido o óleo térmico utilizado como fonte de calor no sistema de
desidratação e nos refervedores das colunas desetanizadora e desbutanizadora.
3.1.1. A TORRE DESETANIZADORA
A primeira parte do problema estudado compreende na coluna desetanizadora
pertencente à UPGN acima descrita. Esta coluna possui 32 pratos valvulados e processa
uma mistura contendo 12 componentes (CO2 e série homóloga de metano a n-nonano).
O condensador do tipo chiller da torre é parcial e não há retirada de líquido como
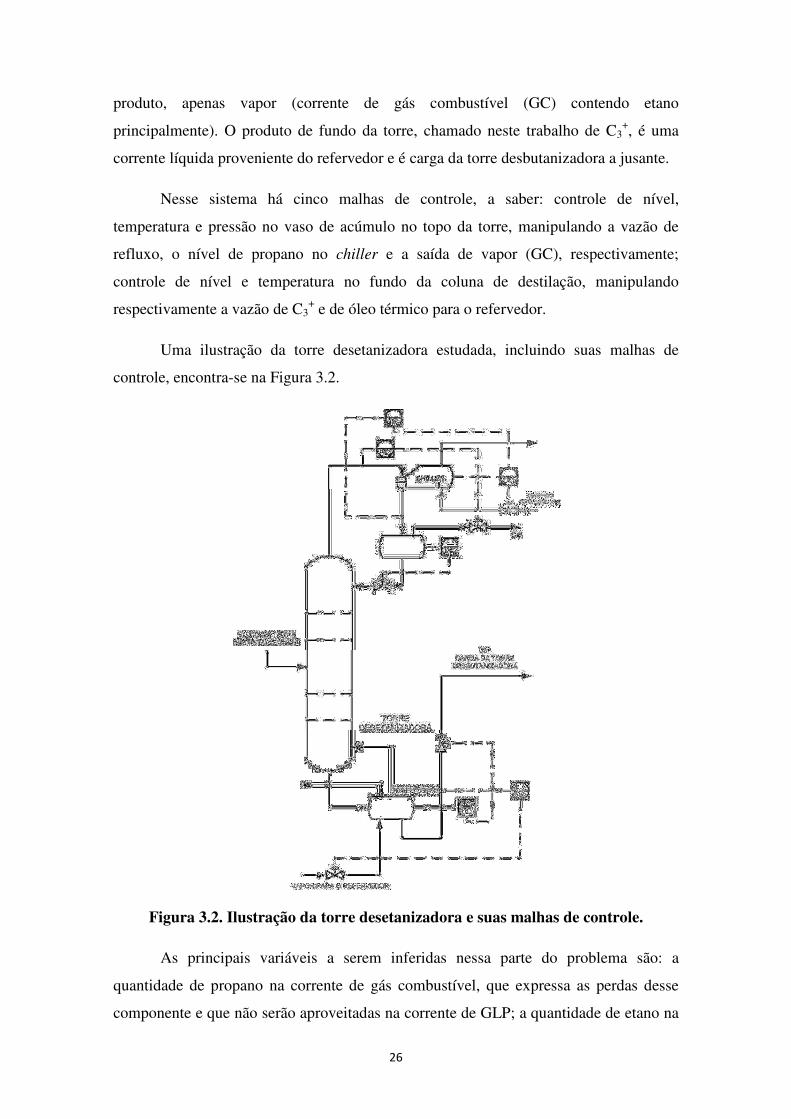
26
produto, apenas vapor (corrente de gás combustível (GC) contendo etano
principalmente). O produto de fundo da torre, chamado neste trabalho de C3+, é uma
corrente líquida proveniente do refervedor e é carga da torre desbutanizadora a jusante.
Nesse sistema há cinco malhas de controle, a saber: controle de nível,
temperatura e pressão no vaso de acúmulo no topo da torre, manipulando a vazão de
refluxo, o nível de propano no chiller e a saída de vapor (GC), respectivamente;
controle de nível e temperatura no fundo da coluna de destilação, manipulando
respectivamente a vazão de C3+ e de óleo térmico para o refervedor.
Uma ilustração da torre desetanizadora estudada, incluindo suas malhas de
controle, encontra-se na Figura 3.2.
Figura 3.2. Ilustração da torre desetanizadora e suas malhas de controle.
As principais variáveis a serem inferidas nessa parte do problema são: a
quantidade de propano na corrente de gás combustível, que expressa as perdas desse
componente e que não serão aproveitadas na corrente de GLP; a quantidade de etano na
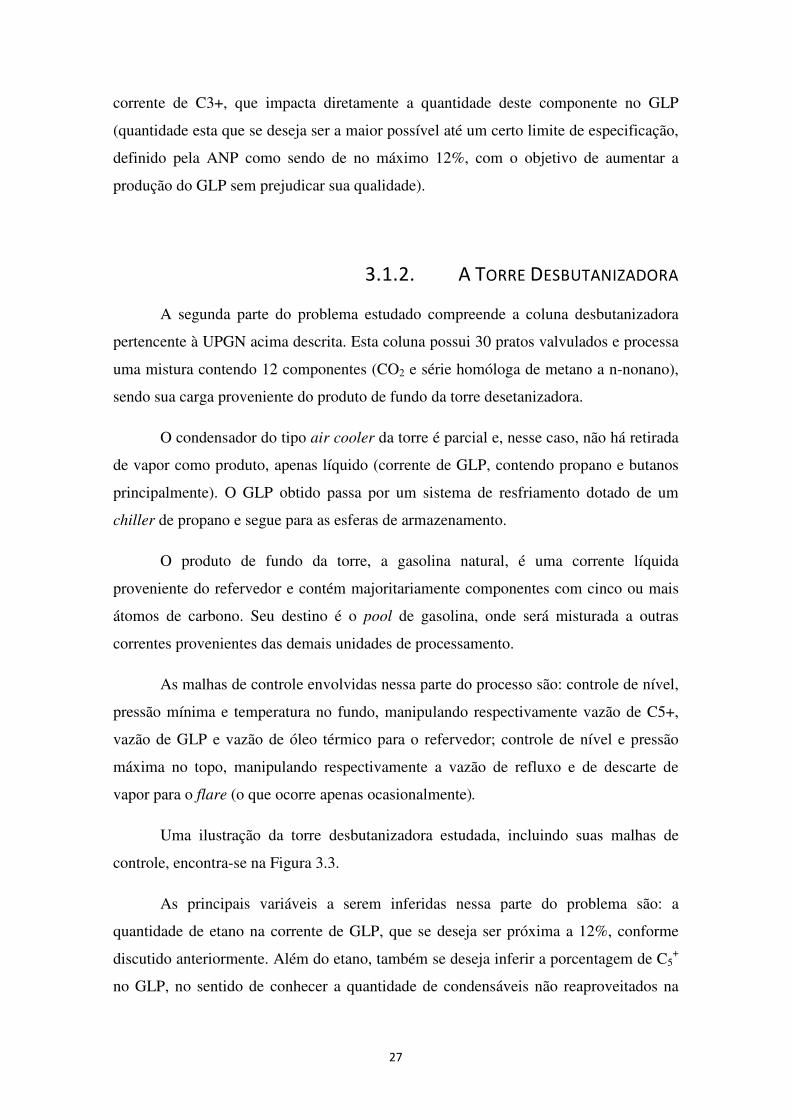
27
corrente de C3+, que impacta diretamente a quantidade deste componente no GLP
(quantidade esta que se deseja ser a maior possível até um certo limite de especificação,
definido pela ANP como sendo de no máximo 12%, com o objetivo de aumentar a
produção do GLP sem prejudicar sua qualidade).
3.1.2. A TORRE DESBUTANIZADORA
A segunda parte do problema estudado compreende a coluna desbutanizadora
pertencente à UPGN acima descrita. Esta coluna possui 30 pratos valvulados e processa
uma mistura contendo 12 componentes (CO2 e série homóloga de metano a n-nonano),
sendo sua carga proveniente do produto de fundo da torre desetanizadora.
O condensador do tipo air cooler da torre é parcial e, nesse caso, não há retirada
de vapor como produto, apenas líquido (corrente de GLP, contendo propano e butanos
principalmente). O GLP obtido passa por um sistema de resfriamento dotado de um
chiller de propano e segue para as esferas de armazenamento.
O produto de fundo da torre, a gasolina natural, é uma corrente líquida
proveniente do refervedor e contém majoritariamente componentes com cinco ou mais
átomos de carbono. Seu destino é o pool de gasolina, onde será misturada a outras
correntes provenientes das demais unidades de processamento.
As malhas de controle envolvidas nessa parte do processo são: controle de nível,
pressão mínima e temperatura no fundo, manipulando respectivamente vazão de C5+,
vazão de GLP e vazão de óleo térmico para o refervedor; controle de nível e pressão
máxima no topo, manipulando respectivamente a vazão de refluxo e de descarte de
vapor para o flare (o que ocorre apenas ocasionalmente).
Uma ilustração da torre desbutanizadora estudada, incluindo suas malhas de
controle, encontra-se na Figura 3.3.
As principais variáveis a serem inferidas nessa parte do problema são: a
quantidade de etano na corrente de GLP, que se deseja ser próxima a 12%, conforme
discutido anteriormente. Além do etano, também se deseja inferir a porcentagem de C5+
no GLP, no sentido de conhecer a quantidade de condensáveis não reaproveitados na
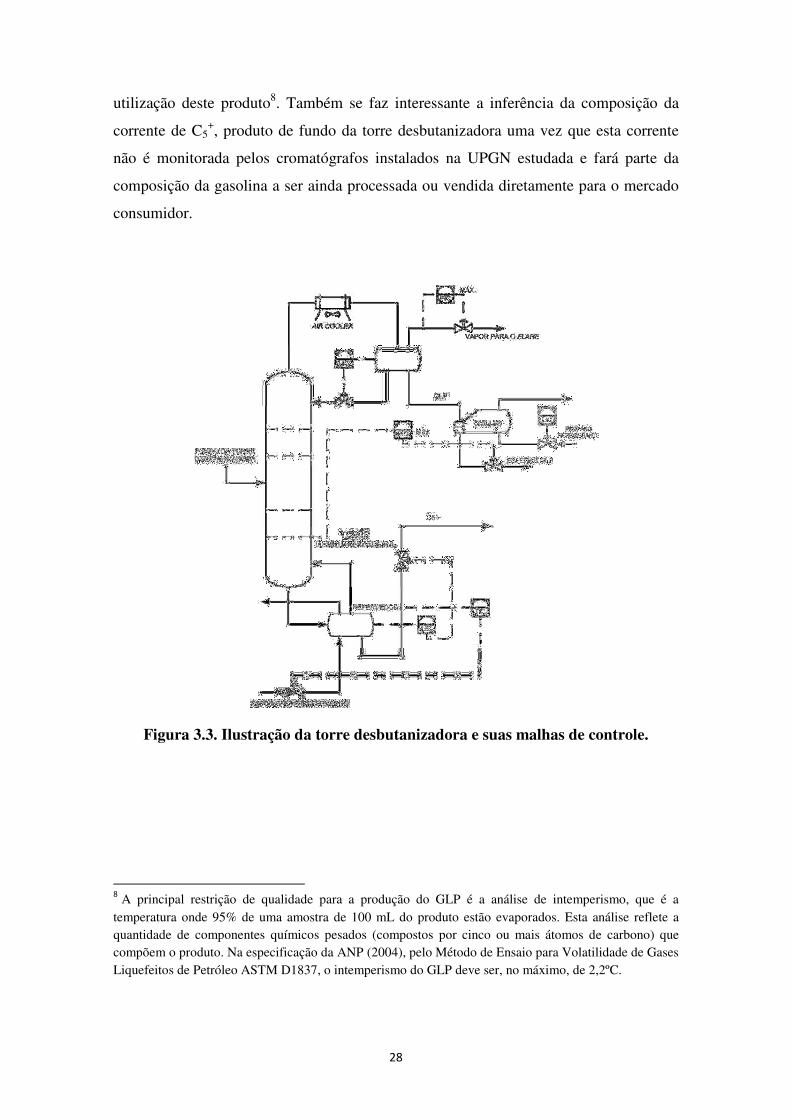
28
utilização deste produto8. Também se faz interessante a inferência da composição da
corrente de C5+, produto de fundo da torre desbutanizadora uma vez que esta corrente
não é monitorada pelos cromatógrafos instalados na UPGN estudada e fará parte da
composição da gasolina a ser ainda processada ou vendida diretamente para o mercado
consumidor.
Figura 3.3. Ilustração da torre desbutanizadora e suas malhas de controle.
8 A principal restrição de qualidade para a produção do GLP é a análise de intemperismo, que é a
temperatura onde 95% de uma amostra de 100 mL do produto estão evaporados. Esta análise reflete a quantidade de componentes químicos pesados (compostos por cinco ou mais átomos de carbono) que compõem o produto. Na especificação da ANP (2004), pelo Método de Ensaio para Volatilidade de Gases Liquefeitos de Petróleo ASTM D1837, o intemperismo do GLP deve ser, no máximo, de 2,2ºC.
29
4. METODOLOGIA
De acordo com as informações apresentadas nos capítulos anteriores, o principal
objetivo deste trabalho é realizar inferências de propriedades de correntes de uma
UPGN via simulação dinâmica, a partir de dados reais de processo. Porém, para que
fosse possível lidar com este tipo de dados, algumas etapas prévias à simulação foram
necessárias.
A Figura 4.1 ilustra as etapas abordadas neste trabalho. O elemento “Controle
Avançado”, apesar de ser citado e participar do fluxo de informações da unidade em
questão, não foi explorado neste texto.
Ainda na Figura 4.1 pode-se notar a inferência de propriedades via redes
neuronais artificiais (RNAs). Este item foi incluído na dissertação pois estes foram os
sensores virtuais utilizados durante a implementação do Projeto de Controle Avançado
na Unidade de Processamento de Gás Natural estudada. Por estarem disponíveis
previamente, serão comparados a algumas das inferências obtidas via simulação
dinâmica em ambiente EMSO. Maiores detalhes acerca da obtenção e treinamento das
RNAs encontram-se no Apêndice A.2.
Este capítulo detalha os procedimentos adotados durante o desenvolvimento e/ou
execução das atividades realizadas neste trabalho. A Seção 4.1 trata da obtenção e
tratamento dos dados reais de processo e a Seção 4.2 introduz a necessidade de
conversão de dados de vazões em base volumétrica, obtidos no item anterior, para base
mássica, o que viabilizará as etapas subsequentes do trabalho; as Seções 4.3 e 4.4
discorrem respectivamente sobre os procedimentos adotados para detecção de estados
estacionários e reconciliação de dados, necessários à garantia de fornecimento de dados
de qualidade ao simulador; a Seção 4.5 apresenta o modelo do processo, bem como o
ajuste de seus parâmetros; finalmente, as Seções 4.7 e 4.8 dizem respeito,
respectivamente, à validação e à verificação da capacidade de predição do modelo
dinâmico rigoroso, comparando-o às RNAs.

30
Figura 4.1. Atividades relacionadas à alimentação dos dados reais de processo à
simulação dinâmica.
4.1. OBTENÇÃO E TRATAMENTO PRELIMINAR DOS DADOS DE
PROCESSO
Os dados utilizados neste trabalho foram obtidos através do Sistema PI
implementado na UPGN estudada. O PI, ou Plant Information System, é uma
ferramenta que permite acompanhamento on-line e armazenamento de dados de
processos industriais.

31
Os dados de vazões, temperaturas, pressões, diferencial de pressão nas torres de
destilação e composições foram coletados, de minuto em minuto, em diversos períodos
(datasets) entre maio de 2008 e outubro de 2009, durante a execução do projeto de
implementação de Sistema de Controle Avançado na Unidade de Processamento de Gás
Natural. Estes mesmos dados foram igualmente úteis em atividades desenvolvidas
paralelamente a este trabalho, como a identificação dos modelos do processo utilizados
no Controlador Preditivo Multivariável (CPM) e a validação das redes neuronais obtidas
para inferir propriedades nesta UPGN.
Os dados obtidos diretamente do PI são chamados neste trabalho de “dados
brutos”. O motivo para isto é a presença de valores espúrios nesta massa de dados, seja
por problemas de calibração dos instrumentos de medição, ou por dificuldades diversas
na transmissão do sinal emitido pelos mesmos, em determinados instantes do período no
qual os dados foram obtidos.
No caso de problemas de calibração se faz necessária a “correção” dos dados de
processo através de métodos de reconciliação de dados. Este assunto será tratado com
maiores detalhes na Seção 4.4.
Quando os dados espúrios foram originados por problemas relacionados à
comunicação entre os instrumentos de medida e o sistema supervisório da unidade, os
mesmos foram substituídos pelos últimos dados válidos. Este fato ocorreu com certa
frequência para sinais oriundos dos cromatógrafos da unidade, o que corrobora com a
necessidade de desenvolver sensores virtuais para a mesma.
Ainda falando a respeito das composições das correntes de processo, foi bastante
recorrente a necessidade de normalização destes dados, uma vez que a soma dos sinais
transmitidos pelos cromatógrafos não necessariamente se igualava a um.
Outro problema encontrado nas informações obtidas no PI diz respeito a sinais
ruidosos, como foi o caso da vazão da carga da torre desetanizadora (T02). Antes de ser
alimentada ao modelo do processo, a vazão da carga foi submetida a um filtro tipo
média móvel de dez pontos (média entre os 5 pontos anteriores e o 5 pontos
posteriores)9 com o objetivo de eliminar o ruído desta medida.
9 Um aperfeiçoamento seria avaliar a quantidade ideal de pontos para cálculo da média móvel, de forma a
atender o compromisso entre reduzir o ruído da variável sem mascarar a trajetória dinâmica do processo.
32
Com o objetivo de ilustrar todo o procedimento de obtenção e tratamento de
dados, detecção de estados estacionários, reconciliação de dados e inferência via
simulação dinâmica e redes neuronais artificiais, foi escolhido o dataset entre a meia
noite do dia 16/07/2009 e a meia noite do dia 20/07/2009, totalizando 345.600 segundos
de dados (amostrados de 60 em 60 segundos). Para facilitar a visualização dos
resultados (principalmente a trajetória dinâmica das variáveis de processo), as
informações apresentadas na Seção 5.6.2 contemplam apenas 15 horas deste conjunto
de dados, escolhidas por conter um considerável número de mudanças ao longo da
trajetória dinâmica do sistema.
4.2. CONVERSÃO DE VAZÕES EM BASE VOLUMÉTRICA PARA BASE
MOLAR OU MÁSSICA
Uma dificuldade inicialmente encontrada nos dados obtidos do PI era o fato de
que todas as vazões eram medidas na forma volumétrica e em condições padrão (1 atm
e 20°C). Com o intuito de viabilizar a verificação do balanço material da unidade, se fez
necessária a obtenção de vazões em base mássica ou molar a partir daquelas fornecidas,
em base volumétrica.
Para isto, um simples modelo de corrente (inserido no modelo Stream existente
no EMSO) foi implementado em ambiente EMSO para converter as vazões
volumétricas em condição padrão para as vazões volumétricas nas condições do
processo, ou ainda, para as vazões molares ou mássicas de processo. As variáveis
envolvidas neste cálculo são dadas pela Equação 4.1, e são válidas para correntes de
alimentação de torres de destilação.
� ��"çã#%, &, ', %()*, &()* (4.1)
A modelagem utilizada para conversão de vazões no ambiente de simulação
encontra-se no Anexo A.1. Para simplificação de cálculos de simulação, muitas das
vezes esse modelo foi utilizado separadamente do modelo da coluna de destilação a fim
de se procurar trabalhar com vazões molares, principalmente para o caso dos modelos
de reconciliação de dados.
33
4.3. DETECÇÃO DE ESTADOS ESTACIONÁRIOS
A identificação do Estado Estacionário (EE) é uma etapa importante para a
otimização e monitoramento satisfatório de um processo. Os modelos em EE são
amplamente utilizados em áreas como otimização, detecção de falhas e reconciliação de
dados. Uma vez que o comportamento de muitos dos processos reais são inerentemente
não estacionários, o ajuste de parâmetros de modelos estacionários que representam
estes processos deve ser avaliado constantemente de modo a garantir sua proximidade
com a trajetória das variáveis reais (CAO e RHINEHART, 1995).
Como será visto na Seção 4.4, a Reconciliação de Dados realizada neste trabalho
utilizou modelos em estado estacionário para garantir o atendimento ao balanço material
global e por componente nas torres de destilação presentes na UPGN em estudo. Desta
forma, para que a Reconciliação de Dados pudesse ser feita de maneira satisfatória, os
dados de processo por ela tratados deveriam estar em EE.
Com o objetivo de identificar em quais períodos os dados encontravam-se em
regime estacionário, o procedimento sugerido por JIANG et al. (2003) e CAUMO
(2006) foi implementado em Matlab® e aplicado aos dados da UPGN. O Apêndice A.4
apresenta a metodologia utilizada. Os resultados obtidos nesta etapa do trabalho podem
ser vistos na Seção 5.1.
4.4. RECONCILIAÇÃO DE DADOS
Segundo PRATA (2005), para que os dados medidos resultem em informações
precisas e que retratem o processo de forma fidedigna, é desejável que os mesmos sejam
reconciliados. A Reconciliação de Dados é um procedimento de ajuste dos valores
medidos de forma que o conjunto reconciliado obedeça às leis de conservação e demais
restrições físicas impostas ao sistema, reduzindo a influência de erros aleatórios nos
dados.
Em seu trabalho, KUEHN e DAVIDSON (1961) reportaram pela primeira vez a
resolução do problema de Reconciliação de Dados (RD) em estado estacionário. Estes
autores formularam a RD como um problema de otimização sujeito a restrições

34
(balanços material e de energia), buscando a minimização de uma função objetivo de
mínimos quadrados ponderados (Equação 4.2).
+,-. =��/��.0 − ��.12�3�.��4
. !
��
� !
(4.2)
Na Equação 4.2, NE é o número de medidas, NY o número de variáveis, ��.0 a
variável estimada pelo modelo (reconciliada), ��.1 a variável medida e 3�. o desvio
padrão da variável medida.
A função de mínimos quadrados ponderados possui um resultado estatístico
preciso, sendo uma métrica natural no caso de erros experimentais distribuídos
normalmente e não correlacionados. Além disso, este tipo de função objetivo permite
lidar com diversos conjuntos de dados, desde que os erros de medidas sejam conhecidos
(ou pelo menos possam ser estimados). Neste caso, a variância do erro experimental
(dada pelo quadrado do desvio padrão de cada medida) é o fator de normalização das
variáveis envolvidas no problema (SCHWAAB e PINTO, 2007).
Neste trabalho, também será considerada a Reconciliação de Dados estacionária
minimizando a função dos mínimos quadrados ponderados. No caso deste estudo, a
função objetivo é dada pela Equação 4.3.
+,-. = 5/+67897 −+67897,10:�:72�
3;,<7897� = + 5/+)?@? −+)?@?,10:�:72�3;,)?@?� =
+ 5/+;AB:? −+;AB:?,10:�:72�3;,;AB:?� = +�5/'� −'�,10:�:72�3C�� =<
�+�5/�� −��,10:�:72�3D�� =
<
�+�5/� −�,10:�:72�3E�� =
<
�
(4.3)
onde zi é a composição da carga, yi a composição da corrente de topo, xi a composição
da corrente de fundo e Fk a vazão molar da corrente k.
O problema de otimização, conforme descrito acima, encontra-se implementado
em ambiente EMSO através da função Reconciliation. O método do ponto interior,
35
através do solver IPOPT, foi utilizado com tolerâncias absoluta e relativa de 10-10 e 10-9,
respectivamente. O Apêndice A.1.2 apresenta o código utilizado para a RD estacionária
no EMSO.
O usuário do simulador deve fornecer um conjunto de medidas estacionárias das
variáveis do processo (chamadas de Experiments), incluindo a variância de cada
variável, além de informar quais variáveis se deseja reconciliar e quais se deseja definir
como livres. Os valores das variâncias utilizadas neste trabalho encontram-se na Seção
5.2. No caso das vazões, utilizou-se como variância o quadrado do desvio padrão das
variáveis medidas. Para as composições, a variância foi estimada como sendo 1% do
valor da medida. Ao executar o módulo de RD, o EMSO busca por um conjunto de
valores que garanta o melhor ajuste das variáveis reconciliadas, atendendo às restrições
do modelo (no caso, balanços de massa global e por componente).
Durante o procedimento de reconciliação de dados da UPGN, foram escolhidas
quatro regiões do dataset que apresentavam comportamento estacionário, de acordo
com os resultados obtidos através do procedimento apresentado na Seção 4.3. Dados
das vazões e composições de carga, topo e fundo da torre desetanizadora, referentes a
estas regiões, foram informados na seção Experiments do módulo de Reconciliação do
EMSO.
Após realizada a Reconciliação de Dados no EMSO, as variáveis reconciliadas
foram comparadas aos dados “brutos” de processo nas regiões definidas como em
regime estacionário, com o intuito de verificar a existência de erros sistemáticos nas
medidas feitas na unidade industrial. Caso se confirme a presença desta classe de erros,
os deltas (bias) obtidos da diferença entre os valores reconciliados e “brutos” seriam
somados aos valores “brutos” de todo o dataset (inclusive nos momentos em que a
planta encontrava-se em regime dinâmico) tornando-os “corrigidos”. Os resultados
desta análise se encontram na Seção 5.2.
O modelo dinâmico da torre desetanizadora, apresentado na Seção 4.5, foi então
alimentado de duas formas: primeiro com dados “brutos” e em seguida, com dados
“corrigidos”, conforme será descrito na Seção 4.7.2. Os resultados foram comparados a
fim de avaliar os benefícios obtidos com a reconciliação dos dados de processo e
apresentados na Seção 5.6.
36
4.5. MODELAGEM MATEMÁTICA
A modelagem mais comum de colunas de destilação é aquela que aborda o
comportamento do equilíbrio termodinâmico prato a prato (ou por estágio teórico, no
caso de torres recheadas). São chamados modelos rigorosos de colunas de destilação
aqueles modelos matemáticos que realizam o cálculo de composições, temperaturas e
pressões a cada estágio, baseados nas leis de conservação, relações de equilíbrio ou
transferência de massa e propriedades físicas dos componentes.
Os modelos dinâmicos descrevem os fenômenos observados através de um
conjunto acoplado de equações algébrico-diferenciais (EADs). Como exemplo de
equações algébricas temos as relações de equilíbrio líquido-vapor, restrições como o
somatório de composições igual à unidade (Equação 4.4, para a fase líquida, também
válida para a fase vapor), cálculo de propriedades físicas, etc. Já as equações que
representam os balanços de massa (Equação 4.5) e energia (Equação 4.6), que levam em
consideração os termos de acúmulo no tempo, são classificadas como equações
diferenciais.
���
= 1
(4.4)
�F��� = +�B. '�B,� + + �BH . �B,� + + �BI . ��B,� − +?AJH . ?AJ,� − +?AJI . �?AJ,�
(4.5)
���� = +�B. ℎ�B + + �BH . ℎH�B + + �BI . ℎI�B − +?AJH . ℎH?AJ − +?AJI . ℎI?AJ + L (4.6)
Nas Equações acima, +Me+O são as vazões molares de líquido e vapor,
respectivamente. Os subscritos in e out indicam as correntes de entrada e saída,
respectivamente. z representa a composição da carga, x e y, as composições das fases
líquida e vapor das correntes que entram e saem de cada estágio para o i-ésimo
componente, h a entalpia das correntes e L é a taxa de calor fornecido ao estágio por
fonte externa.
A massa, M, acumulada em cada estágio para o componente i é definida na
Equação 4.7:
F� = FH . ?AJ,� +FI . �?AJ,�
(4.7)

37
Na Equação 4.6, E representa a energia acumulada em cada estágio, podendo ser
calculada através da Equação 4.8, na qual ℎHeℎI representam as entalpias específicas
das fases líquida e vapor, respectivamente, Pout a pressão no estágio e Vt o volume total
do prato.
� = FH . ℎH?AJ +FI . ℎI?AJ − &?AJH . PJ
(4.8)
Na modelagem implementada em ambiente EMSO, STAUDT (2007) também
inclui, além das restrições citadas anteriormente, a restrição geométrica (Equação 4.9) e
o cálculo do nível de líquido no prato (Equação 4.10). Nestas equações, Ap é a área útil
do prato, l é o nível de líquido no prato, QH é o volume molar da fase líquida eQI é o
volume molar da fase vapor. O significado destas variáveis ficará mais claro na Seção
4.5.4, que apresenta os parâmetros geométricos das torres de destilação e a forma como
os mesmos são obtidos a partir de dados de projeto destes equipamentos.
PJ = FH . QH +FI . QI
(4.9)
R = FH . QHS@
(4.10)
As seções a seguir apresentam maiores detalhes acerca da modelagem em
ambiente EMSO do problema de simulação dinâmica das colunas de destilação da
Unidade de Processamento de Gás Natural.
4.5.1. EQUILÍBRIO TERMODINÂMICO
Neste trabalho foi considerada a presença de alguns componentes presentes no
Gás Natural, coincidindo com aqueles monitorados durante a operação da UPGN
através de cromatógrafos. A mistura que configura como carga contém as seguintes
substâncias: dióxido de carbono, metano, etano, propano, i-butano, n-butano, i-pentano,
n-pentano, n-hexano, n-heptano, n-octano e n-nonano.
38
A modelagem dinâmica e rigorosa do problema apresentado no Capítulo 3 foi
implementada no Simulador EMSO usando o modelo termodinâmico SRK10 (Soave –
Redlich – Kwong), para as fases líquida e vapor, por se tratar de hidrocarbonetos leves a
pressões elevadas. Este tipo de modelo termodinâmico, baseado em equações de estado
cúbicas, se mostrou adequado para o cálculo termodinâmico de diversos sistemas
envolvendo misturas de Gás Natural (CHVIDCHENKO, 2008).
As condições a serem satisfeitas para atendimento do equilíbrio termodinâmico
encontram-se nas Equações 4.11 a 4.13 (referentes ao equilíbrio químico, térmico e
mecânico, respectivamente), nas quais ɸT�é o coeficiente de fugacidade do componente i
em solução; � é a composição do componente i na fase líquida; o sobrescrito L é
utilizado para representar o líquido e V para o vapor; T e P são temperatura e pressão,
respectivamente e yeq,i é a composição de equilíbrio do componente i na fase vapor.
ɸ��H . � � ɸ��I . �0V,�(W = 1,2, … , Z#[\#"�"��
(4.11)
%H � %I (4.12) &H � &I (4.13)
Segundo ELGUE et al. (2004), costuma-se, na modelagem de colunas de
destilação, introduzir nos cálculos termodinâmicos a ponderação pela Eficiência de
Murphree (EMV), definida na Equação 4.14. Trata-se da relação entre o comportamento
de um prato real com o equilíbrio termodinâmico, que é hipotético. Dessa forma, quanto
pior for o contato entre as fases do sistema, pior será a transferência de massa entre as
mesmas e mais expressivas serão as não-idealidades inerentes ao processo, levando a
menores valores de EMV.
�]I,� = �?AJ,� −��B,��0V,� −��B,� (4.14)
10 Os cálculos termodinâmicos de substâncias puras e misturas, necessários às simulações em ambiente EMSO, são executados pelo software VRTherm.
39
A Equação 4.14 para a Eficiência de Murphree é baseada na comparação da
composição da fase vapor que efetivamente deixa o prato i (�?AJ,� com a composição
que o vapor teria se estivesse em equilíbrio com o líquido que deixa o prato i (�0V,� . A seção seguinte explicita alguns aspectos da modelagem do comportamento
dos fluidos no modelo dinâmico no EMSO.
4.5.2. COMPORTAMENTO HIDRÁULICO EM CADA ESTÁGIO
O modelo básico de colunas de destilação foi construído originalmente no
trabalho de STAUDT (2007), contendo as equações correspondentes aos balanços de
massa e energia e às relações de equilíbrio. O modelo complementar contém as
equações da hidrodinâmica que calculam as vazões de líquido e de vapor que deixam
cada prato da coluna.
O cálculo da vazão de vapor que deixa os pratos (FV) é dado pela Equação 4.15,
na qual Ah é a área total dos furos do prato, α é o coeficiente de queda de pressão no
prato seco, υO é o volume molar da fase vapor, ρV a massa específica da fase vapor, PinV
e PoutV as pressões das correntes de entrada e saída do prato, respectivamente.
+I � S_`I a&�BI − &?AJI bI . c (4.15)
A vazão de líquido que deixa cada prato (FL) é dada pela Equação de Francis
(Equação 4.16), na qual υM é o volume molar da fase líquida, lw é o comprimento do
vertedouro, l é o nível de líquido no prato, hw é a altura do vertedouro β é o coeficiente
de aeração (correlacionada à fração de vapor na fase líquida) e γ = 1,84 s-1.
+H = γRd`H eR − f. ℎd
f g�
(4.16)
A eficiência do prato, o coeficiente de queda de pressão do prato seco e o
coeficiente de aeração foram considerados parâmetros de ajuste para cada seção da
coluna (retificação e esgotamento). Além destas, outras considerações foram feitas
acerca do comportamento dos fluidos através dos pratos, a saber:

40
• Fases líquida e vapor idealmente misturadas;
• Pressão, temperatura e composições das fases uniformes em cada prato11;
• Arraste e gotejamento de líquido desprezíveis.
As considerações acima evitam o aumento aparentemente desnecessário da
complexidade do problema. Aspectos como custo computacional, quantidade de
parâmetros (e incertezas dos modelos), assim como a da quantidade de informações
necessárias para a resolução do sistema de equações algébrico-diferenciais devem ser
levados em consideração. Segundo KLINGBERG (2000), um item muito importante no
exercício da modelagem de processos é manter o compromisso entre a simplicidade e a
precisão, evitando problemas numéricos e garantindo uma solução computacionalmente
viável, o que é ainda mais crucial quando se trata de aplicações para inferências em
tempo real.
4.5.3. DIMENSÃO DO PROBLEMA
O modelo final utilizado no simulador dinâmico possui um número grande de
variáveis e equações, o que significa um desafio para o problema de estimação de
estados, principalmente para aplicação em tempo real. As Tabelas 4.1 e 4.2 explicitam
alguns detalhes sobre a dimensão do problema em estudo.
Tabela 4.1. Dimensão do problema de simulação dinâmica da torre desetanizadora
Classe Quantidade
Equações 2591
Variáveis 2634
Especificações 43
Estados a estimar 462
11 Modelos de mistura considerariam gradientes de concentração nas fases, o que aumentaria a complexidade do problema devido à utilização de equações diferenciais parciais.
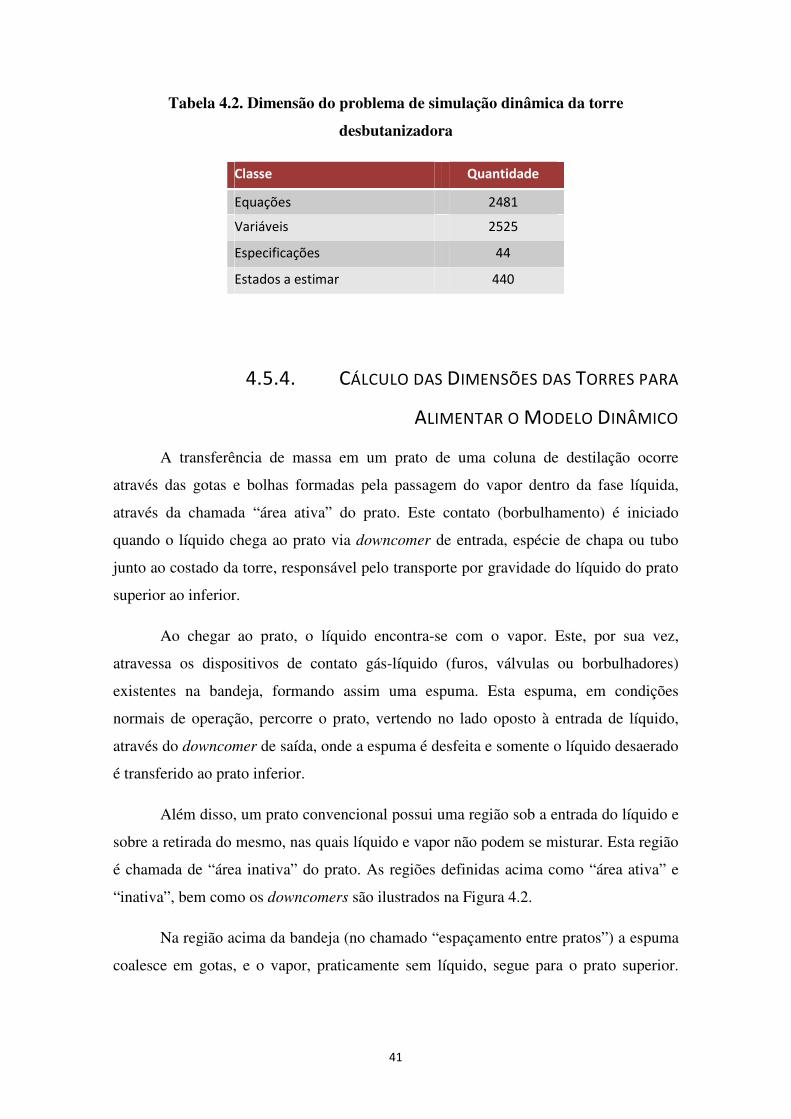
41
Tabela 4.2. Dimensão do problema de simulação dinâmica da torre
desbutanizadora
Classe Quantidade
Equações 2481
Variáveis 2525
Especificações 44
Estados a estimar 440
4.5.4. CÁLCULO DAS DIMENSÕES DAS TORRES PARA
ALIMENTAR O MODELO DINÂMICO
A transferência de massa em um prato de uma coluna de destilação ocorre
através das gotas e bolhas formadas pela passagem do vapor dentro da fase líquida,
através da chamada “área ativa” do prato. Este contato (borbulhamento) é iniciado
quando o líquido chega ao prato via downcomer de entrada, espécie de chapa ou tubo
junto ao costado da torre, responsável pelo transporte por gravidade do líquido do prato
superior ao inferior.
Ao chegar ao prato, o líquido encontra-se com o vapor. Este, por sua vez,
atravessa os dispositivos de contato gás-líquido (furos, válvulas ou borbulhadores)
existentes na bandeja, formando assim uma espuma. Esta espuma, em condições
normais de operação, percorre o prato, vertendo no lado oposto à entrada de líquido,
através do downcomer de saída, onde a espuma é desfeita e somente o líquido desaerado
é transferido ao prato inferior.
Além disso, um prato convencional possui uma região sob a entrada do líquido e
sobre a retirada do mesmo, nas quais líquido e vapor não podem se misturar. Esta região
é chamada de “área inativa” do prato. As regiões definidas acima como “área ativa” e
“inativa”, bem como os downcomers são ilustrados na Figura 4.2.
Na região acima da bandeja (no chamado “espaçamento entre pratos”) a espuma
coalesce em gotas, e o vapor, praticamente sem líquido, segue para o prato superior.

42
Neste sistema, o nível de líquido nos pratos é geralmente mantido por dispositivos
chamados vertedores.
Figura 4.2. Regiões típicas de um prato (fonte: CALDAS et al., 2007).
O projeto dos internos da torre, principalmente dos pratos ou recheios, é um dos
grandes responsáveis pela habilidade adequada de misturar e, subsequentemente,
separar as fases líquida e vapor (CALDAS et al., 2007).
Os cálculos necessários para a obtenção dos parâmetros geométricos
(downcomers, vertedores, área ativa, etc.) dos internos e equipamentos correlatos às
torres desetanizadora e desbutanizadora são detalhados a seguir12.
a) Seções de topo e fundo das colunas
A Figura 4.3 apresenta a configuração das áreas de downcomer, ativa e inativa
dos pratos de uma coluna de destilação, além da disposição dos dispositivos de contato
entre líquido e vapor.
12 Por se tratar de informações classificadas como confidencias pela Petrobras, os dados geométricos das
torres serão omitidos e somente os valores dos parâmetros necessários ao modelo dinâmico serão
informados.
Espaçamento entre pratos

43
Figura 4.3. Configuração dos pratos da coluna de destilação (a) vista superficial
dos pratos perfurados; (b) esquema dos comprimentos geométricos do prato.
A seção de topo da torre desetanizadora (T02) compreende os pratos de números
1 a 16 e para a desbutanizadora (T03), de 1 a 15, sendo, para ambas, o prato de número
1 correspondente ao prato de topo. Enquanto a T02 possui um total de 32 pratos, a T03
possui 30. Consideraram-se, para cada uma das colunas, dimensões iguais para os pratos
da seção de topo, diferenciando-os da seção de fundo.
Os dados disponíveis de projeto da UPGN são: diâmetro da seção da torre (D),
comprimento do vertedouro (lw), altura do vertedouro (hw), comprimento da corda
obtida entre o vertedor e o costado (K – vide Figura 4.3) e espaçamento entre pratos (G).
A partir destes dados disponibilizados, foram obtidos os parâmetros geométricos dos
modelos das colunas T02 e T03 implementados em ambiente EMSO (volume total do
prato (Vt), área útil de líquido no prato (Ap), e área total dos furos no prato (Ah)). Para
tal, foram utilizadas as Equações 4.17 a 4.24, a seguir.
SJ � h. i�4 (4.17)
PJ � SJ k l (4.18)
SJ8�âB9An?7-< � Rd k o2 � Rd k pi2 � qr2 (4.19)

44
Ás�t(0çã?<�8<An787-< �u2 × v�"#w! eRd/2i/2gy × i�8 (4.20)
S: �SJ8�âB9An?7-< − Ás�t(0çã?<�8<An787-< (4.21)
S@ �SJ − S: (4.22)
Para o cálculo das áreas dos furos dos pratos com dispositivos do tipo válvulas,
que é o caso da UPGN estudada, considera-se uma aproximação de 8 a 15% da área
ativa (Aa) do prato (CALDAS et al., 2007). Foi utilizado o valor de 15% da área ativa
para o cálculo das áreas perfuradas (Ah), levando à obtenção de uma área perfurada
maior (gerando pequena perda de carga, como é verificado na prática para as torres T02
e T03).
S7 �SJ − 2 × S: (4.23)
S_ �0,15 k S7 (4.24)
b) Condensador e refervedor
O condensador foi modelado como sendo vaso de acúmulo de topo e trocador de
calor fisicamente no mesmo local. No caso do refervedor, o vaso de acúmulo é, na
realidade um volume considerável existente no fundo da torre. A modelagem do
refervedor também considerou a troca térmica ocorrendo no mesmo local do vaso de
acúmulo. Os dados disponíveis de projeto para este equipamento são o diâmetro e o
comprimento dos vasos (no caso do refervedor, a altura da região de acúmulo no fundo
da torre), possibilitando o cálculo da área transversal e do volume dos mesmos.
4.5.5. AJUSTE DOS PARÂMETROS DO MODELO DINÂMICO
O modelo matemático de colunas de destilação implementado em ambiente
EMSO é composto por alguns parâmetros cujos valores devem ser determinados de
forma a assegurar a boa performance das inferências frente ao comportamento real do
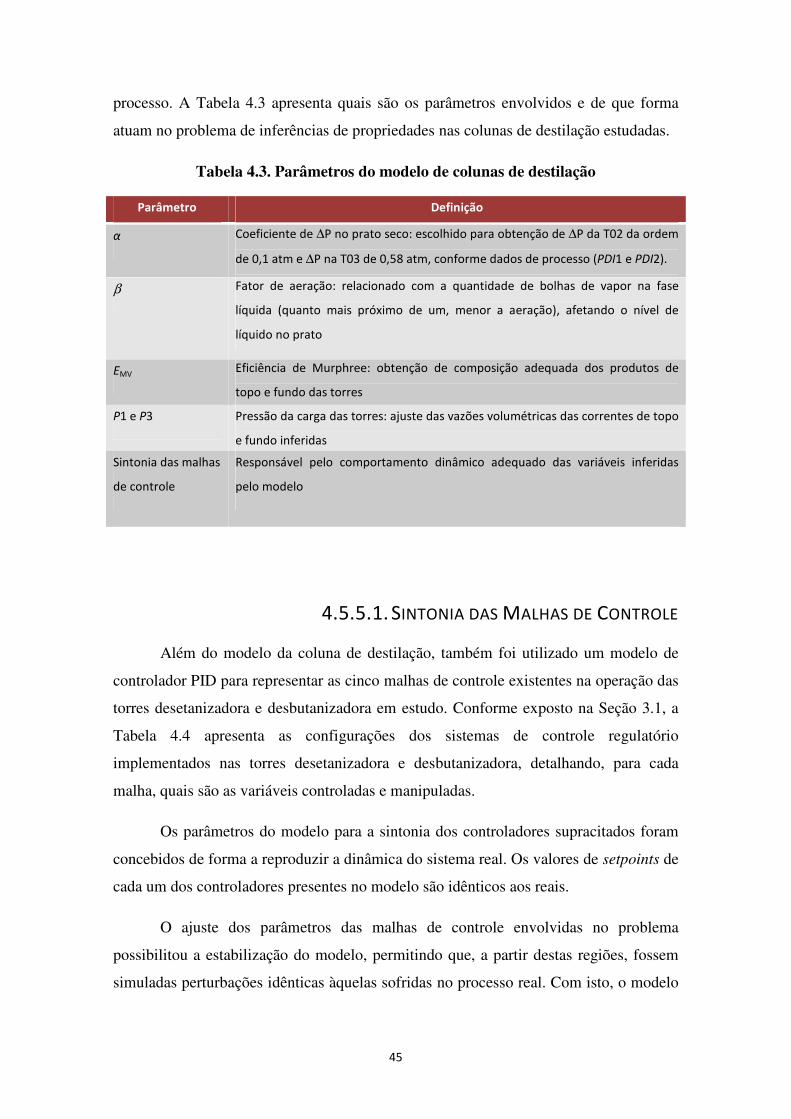
45
processo. A Tabela 4.3 apresenta quais são os parâmetros envolvidos e de que forma
atuam no problema de inferências de propriedades nas colunas de destilação estudadas.
Tabela 4.3. Parâmetros do modelo de colunas de destilação
Parâmetro Definição
α Coeficiente de ∆P no prato seco: escolhido para obtenção de ∆P da T02 da ordem
de 0,1 atm e ∆P na T03 de 0,58 atm, conforme dados de processo (PDI1 e PDI2).
β Fator de aeração: relacionado com a quantidade de bolhas de vapor na fase
líquida (quanto mais próximo de um, menor a aeração), afetando o nível de
líquido no prato
EMV Eficiência de Murphree: obtenção de composição adequada dos produtos de
topo e fundo das torres
P1 e P3 Pressão da carga das torres: ajuste das vazões volumétricas das correntes de topo
e fundo inferidas
Sintonia das malhas
de controle
Responsável pelo comportamento dinâmico adequado das variáveis inferidas
pelo modelo
4.5.5.1. SINTONIA DAS MALHAS DE CONTROLE
Além do modelo da coluna de destilação, também foi utilizado um modelo de
controlador PID para representar as cinco malhas de controle existentes na operação das
torres desetanizadora e desbutanizadora em estudo. Conforme exposto na Seção 3.1, a
Tabela 4.4 apresenta as configurações dos sistemas de controle regulatório
implementados nas torres desetanizadora e desbutanizadora, detalhando, para cada
malha, quais são as variáveis controladas e manipuladas.
Os parâmetros do modelo para a sintonia dos controladores supracitados foram
concebidos de forma a reproduzir a dinâmica do sistema real. Os valores de setpoints de
cada um dos controladores presentes no modelo são idênticos aos reais.
O ajuste dos parâmetros das malhas de controle envolvidas no problema
possibilitou a estabilização do modelo, permitindo que, a partir destas regiões, fossem
simuladas perturbações idênticas àquelas sofridas no processo real. Com isto, o modelo
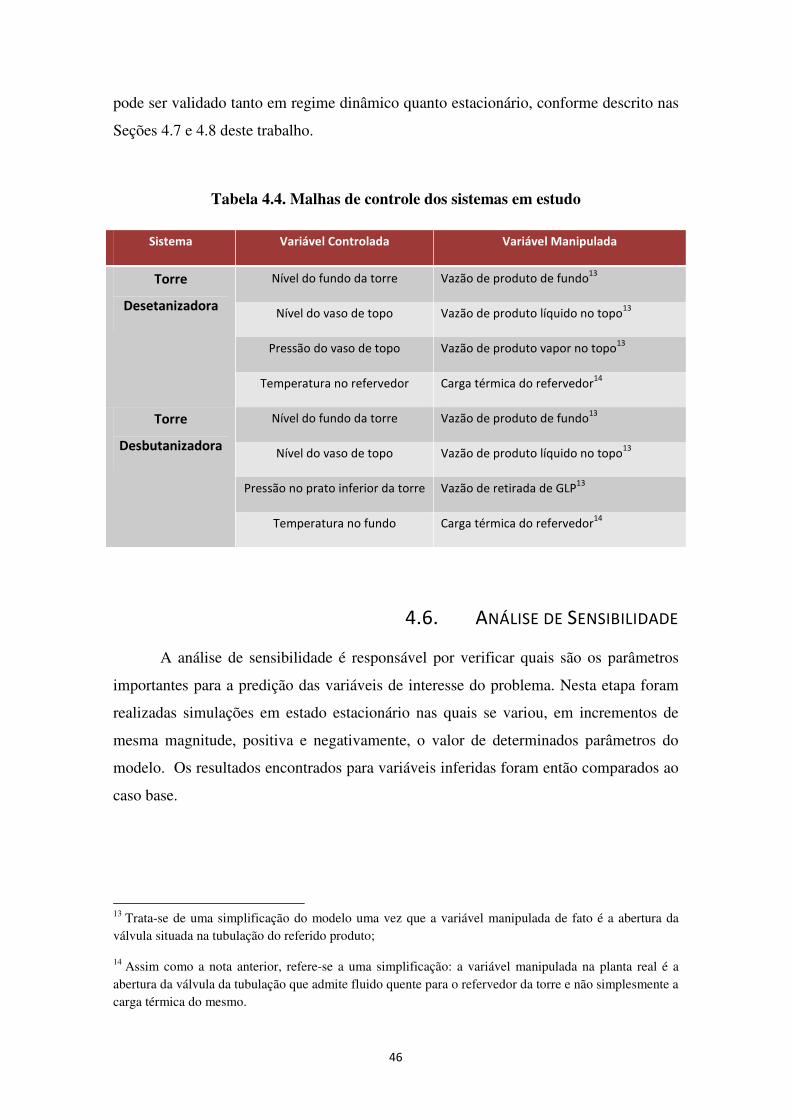
46
pode ser validado tanto em regime dinâmico quanto estacionário, conforme descrito nas
Seções 4.7 e 4.8 deste trabalho.
Tabela 4.4. Malhas de controle dos sistemas em estudo
Sistema Variável Controlada Variável Manipulada
Torre
Desetanizadora
Nível do fundo da torre Vazão de produto de fundo13
Nível do vaso de topo Vazão de produto líquido no topo13
Pressão do vaso de topo Vazão de produto vapor no topo13
Temperatura no refervedor Carga térmica do refervedor14
Torre
Desbutanizadora
Nível do fundo da torre Vazão de produto de fundo13
Nível do vaso de topo Vazão de produto líquido no topo13
Pressão no prato inferior da torre Vazão de retirada de GLP13
Temperatura no fundo Carga térmica do refervedor14
4.6. ANÁLISE DE SENSIBILIDADE
A análise de sensibilidade é responsável por verificar quais são os parâmetros
importantes para a predição das variáveis de interesse do problema. Nesta etapa foram
realizadas simulações em estado estacionário nas quais se variou, em incrementos de
mesma magnitude, positiva e negativamente, o valor de determinados parâmetros do
modelo. Os resultados encontrados para variáveis inferidas foram então comparados ao
caso base.
13 Trata-se de uma simplificação do modelo uma vez que a variável manipulada de fato é a abertura da válvula situada na tubulação do referido produto;
14 Assim como a nota anterior, refere-se a uma simplificação: a variável manipulada na planta real é a abertura da válvula da tubulação que admite fluido quente para o refervedor da torre e não simplesmente a carga térmica do mesmo.
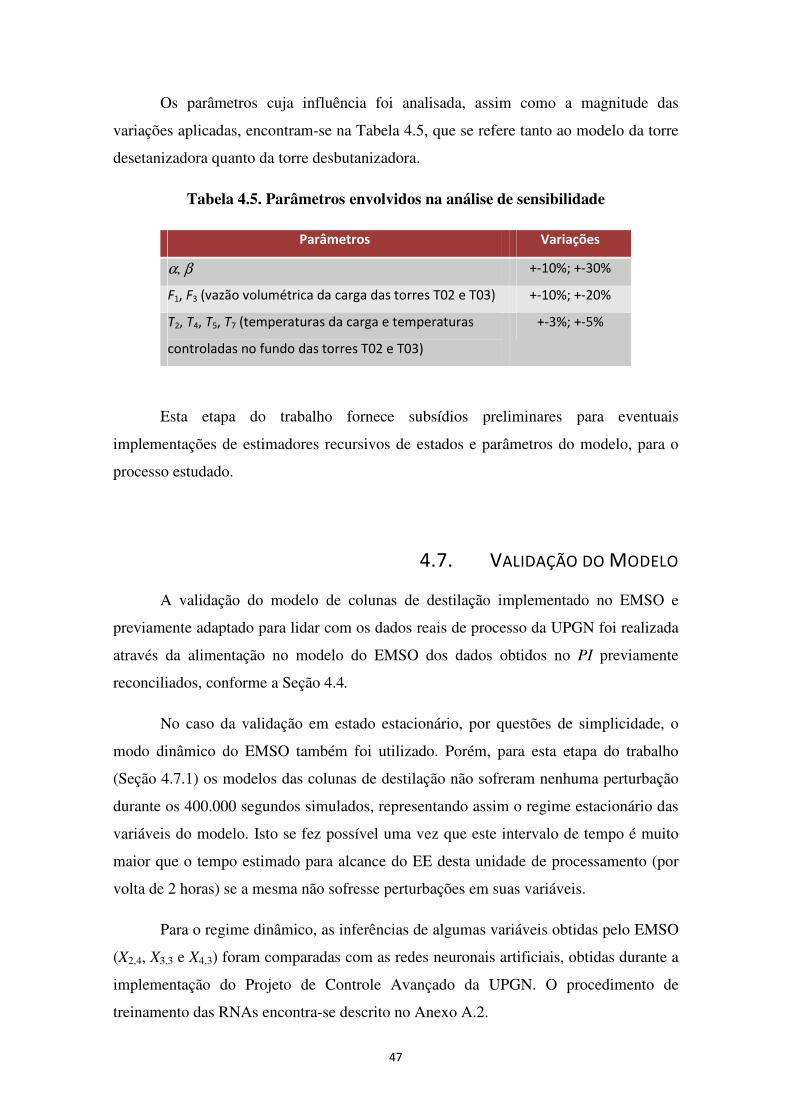
47
Os parâmetros cuja influência foi analisada, assim como a magnitude das
variações aplicadas, encontram-se na Tabela 4.5, que se refere tanto ao modelo da torre
desetanizadora quanto da torre desbutanizadora.
Tabela 4.5. Parâmetros envolvidos na análise de sensibilidade
Parâmetros Variações
α, β +-10%; +-30%
F1, F3 (vazão volumétrica da carga das torres T02 e T03) +-10%; +-20%
T2, T4, T5, T7 (temperaturas da carga e temperaturas
controladas no fundo das torres T02 e T03)
+-3%; +-5%
Esta etapa do trabalho fornece subsídios preliminares para eventuais
implementações de estimadores recursivos de estados e parâmetros do modelo, para o
processo estudado.
4.7. VALIDAÇÃO DO MODELO
A validação do modelo de colunas de destilação implementado no EMSO e
previamente adaptado para lidar com os dados reais de processo da UPGN foi realizada
através da alimentação no modelo do EMSO dos dados obtidos no PI previamente
reconciliados, conforme a Seção 4.4.
No caso da validação em estado estacionário, por questões de simplicidade, o
modo dinâmico do EMSO também foi utilizado. Porém, para esta etapa do trabalho
(Seção 4.7.1) os modelos das colunas de destilação não sofreram nenhuma perturbação
durante os 400.000 segundos simulados, representando assim o regime estacionário das
variáveis do modelo. Isto se fez possível uma vez que este intervalo de tempo é muito
maior que o tempo estimado para alcance do EE desta unidade de processamento (por
volta de 2 horas) se a mesma não sofresse perturbações em suas variáveis.
Para o regime dinâmico, as inferências de algumas variáveis obtidas pelo EMSO
(X2,4, X3,3 e X4,3) foram comparadas com as redes neuronais artificiais, obtidas durante a
implementação do Projeto de Controle Avançado da UPGN. O procedimento de
treinamento das RNAs encontra-se descrito no Anexo A.2.
48
4.7.1. VALIDAÇÃO EM ESTADO ESTACIONÁRIO
Tendo realizado, para os dados reais da Unidade de Processamento de Gás
Natural, a etapa de detecção de estados estacionários (conforme Seção 4.3), foram
selecionados pontos nos quais a planta encontrava-se em regime estacionário. Aos
dados de processo correspondentes a estes pontos foram comparadas algumas das
variáveis inferidas pelo EMSO através dos modelos das torres desetanizadora (T02) e
desbutanizadora (T03).
A Tabela 4.6 apresenta os pontos estacionários avaliados para a T02 e a T03.
Tabela 4.6. Pontos estacionários utilizados na validação do modelo EMSO
Torre Ponto Data
T02
SS_1,1 16/07/2009 16:37
SS_1,2 17/07/2009 22:34
SS_1,3 19/09/2009 19:37
T03
SS_2,1 17/07/2009 22:34
SS_2,2 19/09/2009 03:43
SS_2,3 19/09/2009 19:37
4.7.2. VALIDAÇÃO EM REGIME DINÂMICO
Tendo sido realizada a etapa de ajuste dos parâmetros do modelo dinâmico
implementado no Simulador EMSO, incluindo a sintonia das malhas de controle
presentes, e de validação em estado estacionário (Seções 4.5.5 e 4.7.1), obteve-se um
modelo dinâmico robusto, preparado para receber dados de processo da UPGN. A partir
destes dados foi possível inferir diversas variáveis desejadas, permitindo visualizar a
trajetória das mesmas no tempo.
Esta etapa do trabalho foi realizada lançando mão de interfaces entre os
softwares Microsoft Excel® 2007, Matlab® R2008a/Simulink® 7.1 e EMSO 0.9.60 em
modo dinâmico, preparadas originalmente para atender a aplicações on-line. O sistema
utilizado encontra-se ilustrado na Figura 4.4.
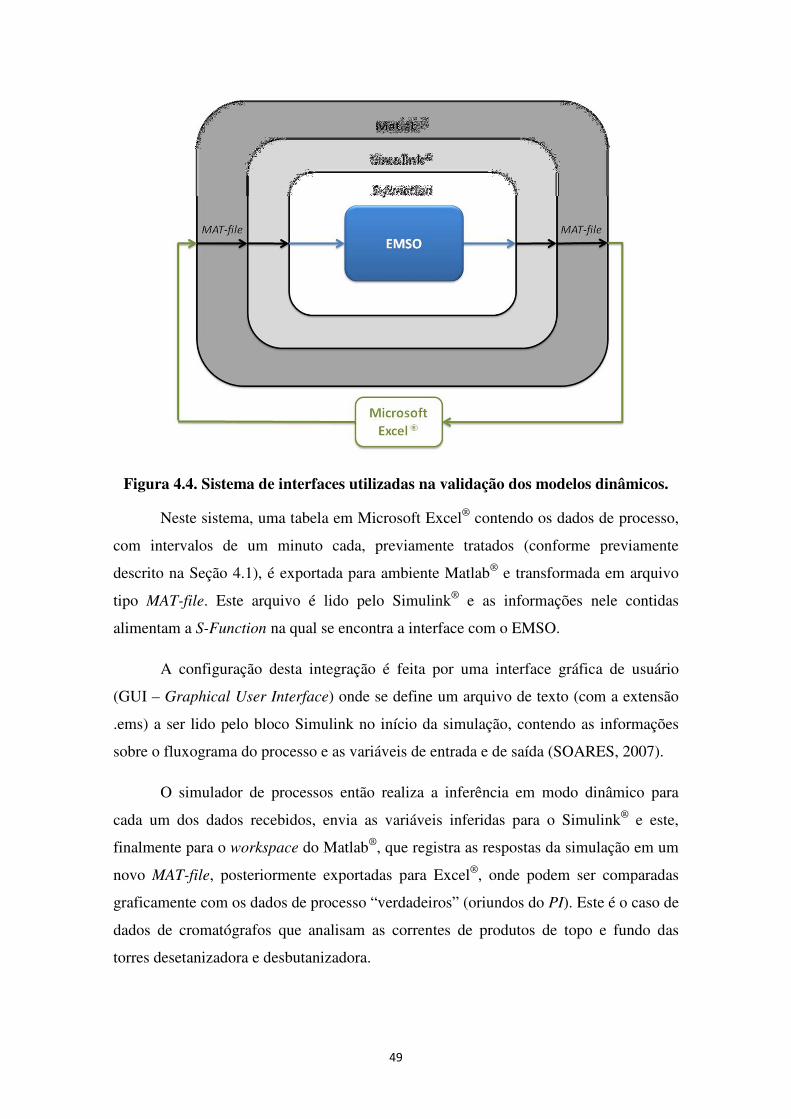
49
Figura 4.4. Sistema de interfaces utilizadas na validação dos modelos dinâmicos.
Neste sistema, uma tabela em Microsoft Excel® contendo os dados de processo,
com intervalos de um minuto cada, previamente tratados (conforme previamente
descrito na Seção 4.1), é exportada para ambiente Matlab® e transformada em arquivo
tipo MAT-file. Este arquivo é lido pelo Simulink® e as informações nele contidas
alimentam a S-Function na qual se encontra a interface com o EMSO.
A configuração desta integração é feita por uma interface gráfica de usuário
(GUI – Graphical User Interface) onde se define um arquivo de texto (com a extensão
.ems) a ser lido pelo bloco Simulink no início da simulação, contendo as informações
sobre o fluxograma do processo e as variáveis de entrada e de saída (SOARES, 2007).
O simulador de processos então realiza a inferência em modo dinâmico para
cada um dos dados recebidos, envia as variáveis inferidas para o Simulink® e este,
finalmente para o workspace do Matlab®, que registra as respostas da simulação em um
novo MAT-file, posteriormente exportadas para Excel®, onde podem ser comparadas
graficamente com os dados de processo “verdadeiros” (oriundos do PI). Este é o caso de
dados de cromatógrafos que analisam as correntes de produtos de topo e fundo das
torres desetanizadora e desbutanizadora.

50
A Tabela 4.7 apresenta quais foram as variáveis de entrada dos modelos das
torres desetanizadora e desbutanizadora, bem como as variáveis inferidas pelo EMSO.
Tabela 4.7. Variáveis envolvidas nas simulações em modo dinâmico
Torre Variáveis de entrada Variáveis inferidas
T02
Temperatura da carga
Vazão volumétrica da carga
Composição da carga (cromatógrafos)
Setpoint do controlador de pressão de topo
Setpoint do controlador de temperatura de fundo
Temperatura do prato de topo15
Composição do produto de topo
Composição do produto de fundo
T03
Temperatura da carga
Vazão volumétrica da carga
Composição da carga (cromatógrafos ou composição
inferida do produto de fundo da T02)
Setpoint do controlador de pressão de fundo
Setpoint do controlador de temperatura de fundo
Temperatura do prato de topo15
Composição do produto de topo16
A seguir encontra-se a descrição de dois testes realizados nesta etapa do
trabalho. O primeiro teste refere-se à qualidade dos dados de entrada dos modelos em
ambiente EMSO das torres desetanizadora e desbutanizadora. O segundo diz respeito à
origem dos dados de entrada do modelo da torre desbutanizadora.
a) Qualidade dos dados de entrada dos modelos
Foi avaliado o impacto nas inferências realizadas pelo EMSO utilizando como
dados de entrada dos modelos das torres T02 e T03: (i) dados não reconciliados; (ii)
dados reconciliados de vazão e composição das cargas de cada uma das torres, de
acordo com a metodologia apresentada na Seção 4.4. A Seção 5.6.2 traz os resultados
obtidos neste teste para as inferências dos produtos de topo e fundo da torre
desetanizadora.
15
Variável inferida e lida do PI a cada minuto, com o objetivo de checar o desempenho da trajetória
prevista pelo modelo dinâmico.
16 Para a torre desbutanizadora (T03) a composição do produto de fundo não aparece na lista das variáveis inferidas uma vez que este dado de processo não se encontra disponível no conjunto de variáveis do PI.
51
b) Origem e frequência dos dados de entrada do modelo da torre
desbutanizadora
Como ainda se pode verificar nas informações contidas na Tabela 4.7, foram
também utilizadas como entradas da T03 inferências da composição do produto de
fundo da T02 com o intuito de realizar com maior frequência o fornecimento de dados
para este modelo, possivelmente favorecendo a qualidade da inferência do produto de
topo da torre desbutanizadora. Com isto, na Seção 5.6.2 são comparados os resultados
obtidos para as inferências do produto de topo da T03, partindo da composição da carga
desta mesma torre, tanto informada pelo PI quanto pela inferência do produto de fundo
da T02.
Os resultados obtidos em ambiente EMSO foram comparados às variáveis
também inferidas por redes neuronais artificiais (cuja metodologia de obtenção
encontra-se no Anexo A.2). São elas:
• Propano no produto de topo da T02;
• Etano no produto de fundo da T02;
• Etano no produto de topo da T03.
4.8. CAPACIDADE DE PREDIÇÃO DO MODELO DINÂMICO
Durante a execução do projeto de implementação do Controle Avançado (CAv)
na UPGN estudada foram realizados testes que permitiram a identificação em malha
fechada de modelos lineares do processo (maiores detalhes acerca do assunto
encontram-se no Anexo A.3). Nestes testes de identificação foram utilizadas
perturbações do tipo degrau nas variáveis que figurariam como manipuladas no CAv.
O objetivo desta etapa do trabalho é justamente comparar a resposta das
variáveis inferidas no EMSO aos testes degrau realizados na prática àquelas obtidas
através dos modelos identificados em malha fechada, de forma a verificar a capacidade
de predição do modelo dinâmico. A ideia é perturbar as entradas da simulação dinâmica
da mesma forma que a planta foi perturbada (com mesma magnitude e duração) e em
seguida, comparar as saídas sob a forma de variáveis-desvio.

52
A Tabela 4.8 apresenta os testes realizados e a lista de variáveis perturbadas e as
respectivas respostas observadas. Os resultados desta etapa poderão ser visualizados na
Seção 5.7.
Tabela 4.8. Lista de variáveis para a etapa de verificação da capacidade de
predição do modelo dinâmico
Teste Variável perturbada
Magnitude da perturbação degrau
Variável inferida
A setpoint da T1 4ºC F2
B setpoint da T4 4ºC F2
C setpoint da T4 4ºC X3,3
D setpoint da T4 4ºC X4,3
E setpoint da T4 4ºC X4,3 e Intemperismo do GLP
F setpoint da P2 30 kPa X3,3
G F7 3 m³/h X4,3 e Intemperismo do GLP

53
5. RESULTADOS
5.1. DETECÇÃO DE ESTADOS ESTACIONÁRIOS
Um exemplo dos resultados obtidos a partir do procedimento de Detecção de
Estados Estacionários, descrito na Seção 4.3 e no Apêndice A.4, para algumas das
variáveis da T02 podem ser visualizados nas Figuras 5.1 a 5.6, nas quais: o diagrama
superior mostra a variável antes de passar por filtro; o diagrama intermediário mostra a
variável filtrada e, finalmente, o diagrama inferior representa os valores do Índice de
Estado Estacionário, Bi(t), na batelada de dados avaliada.
Figura 5.1. Diagramas para detecção de EE da vazão de carga da torre
desetanizadora.
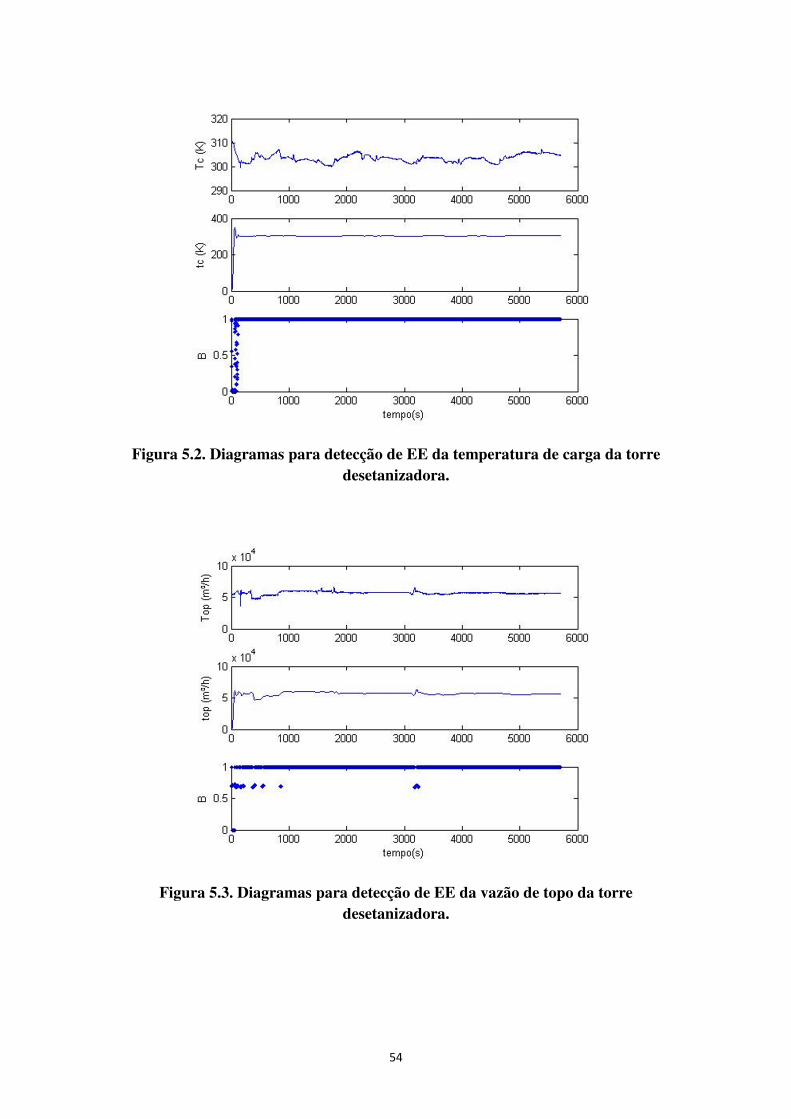
54
Figura 5.2. Diagramas para detecção de EE da temperatura de carga da torre
desetanizadora.
Figura 5.3. Diagramas para detecção de EE da vazão de topo da torre
desetanizadora.
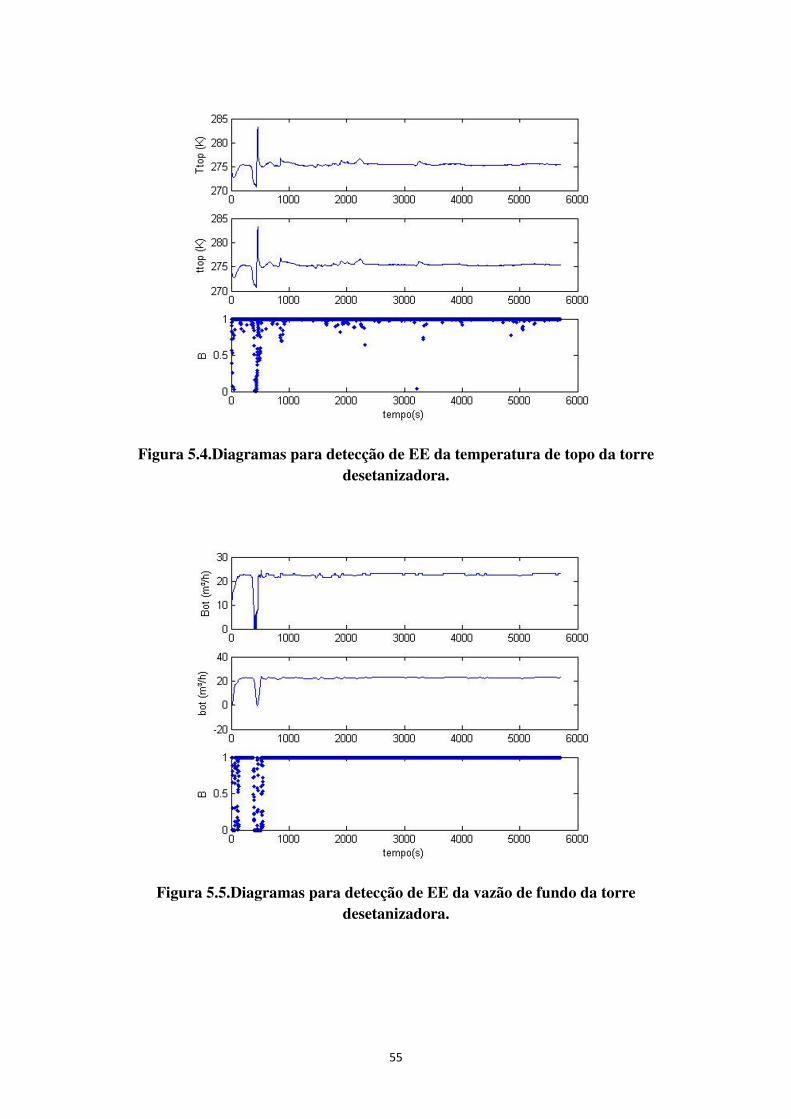
55
Figura 5.4.Diagramas para detecção de EE da temperatura de topo da torre
desetanizadora.
Figura 5.5.Diagramas para detecção de EE da vazão de fundo da torre
desetanizadora.

56
Figura 5.6.Diagramas para detecção de EE para a temperatura de fundo da torre
desetanizadora.
A Figura 5.7 apresenta os valores obtidos para o Índice de Estado Estacionário
da torre desetanizadora, Bm(t), para o intervalo de dados avaliado. A partir desta Figura
pode-se considerar que a torre se encontra em EE em grande parte do tempo (Bm(t) = 1).
Figura 5.7. Diagrama de detecção de Estados Estacionários para a torre
desetanizadora.
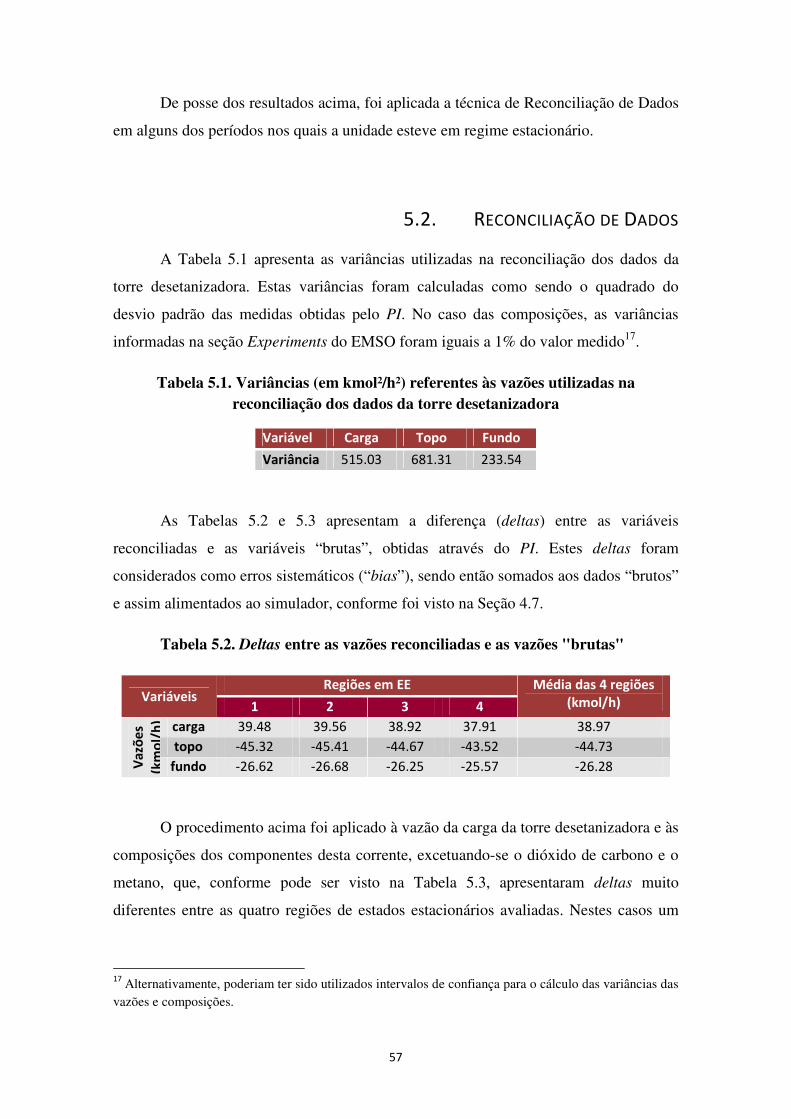
57
De posse dos resultados acima, foi aplicada a técnica de Reconciliação de Dados
em alguns dos períodos nos quais a unidade esteve em regime estacionário.
5.2. RECONCILIAÇÃO DE DADOS
A Tabela 5.1 apresenta as variâncias utilizadas na reconciliação dos dados da
torre desetanizadora. Estas variâncias foram calculadas como sendo o quadrado do
desvio padrão das medidas obtidas pelo PI. No caso das composições, as variâncias
informadas na seção Experiments do EMSO foram iguais a 1% do valor medido17.
Tabela 5.1. Variâncias (em kmol²/h²) referentes às vazões utilizadas na
reconciliação dos dados da torre desetanizadora
Variável Carga Topo Fundo
Variância 515.03 681.31 233.54
As Tabelas 5.2 e 5.3 apresentam a diferença (deltas) entre as variáveis
reconciliadas e as variáveis “brutas”, obtidas através do PI. Estes deltas foram
considerados como erros sistemáticos (“bias”), sendo então somados aos dados “brutos”
e assim alimentados ao simulador, conforme foi visto na Seção 4.7.
Tabela 5.2. Deltas entre as vazões reconciliadas e as vazões "brutas"
Variáveis Regiões em EE Média das 4 regiões
(kmol/h) 1 2 3 4
Vaz
ões
(k
mo
l/h
) carga 39.48 39.56 38.92 37.91 38.97
topo -45.32 -45.41 -44.67 -43.52 -44.73
fundo -26.62 -26.68 -26.25 -25.57 -26.28
O procedimento acima foi aplicado à vazão da carga da torre desetanizadora e às
composições dos componentes desta corrente, excetuando-se o dióxido de carbono e o
metano, que, conforme pode ser visto na Tabela 5.3, apresentaram deltas muito
diferentes entre as quatro regiões de estados estacionários avaliadas. Nestes casos um
17
Alternativamente, poderiam ter sido utilizados intervalos de confiança para o cálculo das variâncias das vazões e composições.

58
bias nulo foi adicionado ao valor “bruto” destas variáveis uma vez que não foi possível
identificar um erro sistemático na medição das mesmas.
Tabela 5.3. Deltas entre as composições reconciliadas e as composições "brutas"
(carga da torre desetanizadora)
Variáveis Regiões em EE Média das 4 regiões
(kmol/h) 1 2 3 4
Co
mp
osi
ção
da
carg
a (%
)
CO2 -0.0124 -0.2669 0.0024 0.0109 18
C1 -0.0300 -0.5146 -0.2295 0.0735 18
C2 6.8587 7.8942 6.5388 7.4362 7.1820
C3 17.7195 17.7280 16.9026 16.2814 17.1579
iC4 3.8237 3.6733 3.5738 3.3954 3.6166
nC4 5.9569 5.6464 5.9351 5.3692 5.7269
iC5 1.7434 1.7419 2.1448 1.7485 1.8447
nC5 1.3181 1.4184 1.6954 1.3809 1.4532
nC6 1.2884 1.5030 1.5912 1.4076 1.4476
nC7 0.5595 0.5262 0.5118 0.5150 0.5281
nC8 0.2973 0.2350 0.2529 0.2945 0.2699
nC9 -0.0155 0.0128 0.0326 0.0305 0.0151
Os resultados presentes na Figura 5.8 e na Tabela 5.4 mostram o principal
benefício atingido através da Reconciliação de Dados: a proximidade ao atendimento do
balanço de massa pelos dados de processo. Em ambos estão explícitos o erro, em mol/s,
entre a vazão de entrada da torre e a soma das vazões de saída. Antes da aplicação da
reconciliação aos dados, a média do erro no balanço de massa chegava a
aproximadamente 30 mol/s (108 kmol/h), enquanto que, após a aplicação da técnica no
EMSO, o erro caiu consideravelmente, aproximando-se de zero.
Tabela 5.4. Média no erro no balanço de massa
Situação em relação à RD Média no erro do BM (kmol/h)
Antes -107.57
Após 2.42
18 Deltas diferiram consideravelmente entre as 4 regiões em estado estacionário avaliadas, não fazendo sentido o cálculo da média nestes casos.
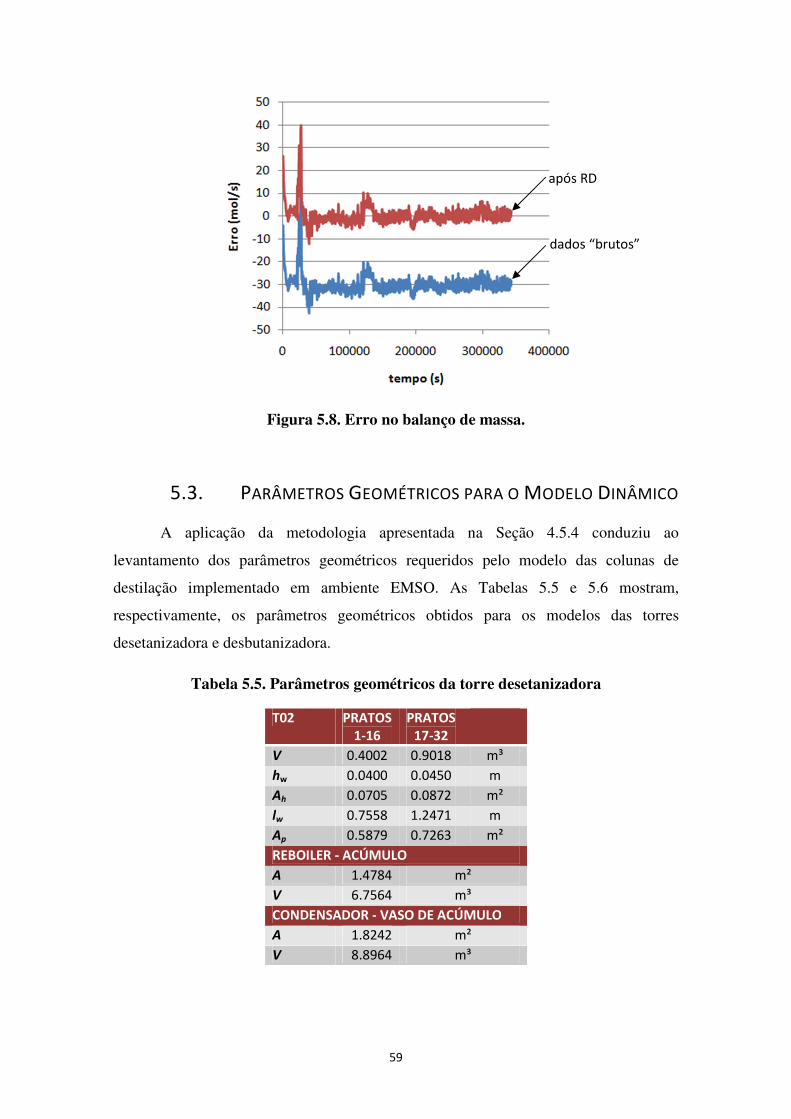
59
Figura 5.8. Erro no balanço de massa.
5.3. PARÂMETROS GEOMÉTRICOS PARA O MODELO DINÂMICO
A aplicação da metodologia apresentada na Seção 4.5.4 conduziu ao
levantamento dos parâmetros geométricos requeridos pelo modelo das colunas de
destilação implementado em ambiente EMSO. As Tabelas 5.5 e 5.6 mostram,
respectivamente, os parâmetros geométricos obtidos para os modelos das torres
desetanizadora e desbutanizadora.
Tabela 5.5. Parâmetros geométricos da torre desetanizadora
T02 PRATOS 1-16
PRATOS 17-32
V 0.4002 0.9018 m³
hw 0.0400 0.0450 m
Ah 0.0705 0.0872 m²
lw 0.7558 1.2471 m
Ap 0.5879 0.7263 m²
REBOILER - ACÚMULO
A 1.4784 m²
V 6.7564 m³
CONDENSADOR - VASO DE ACÚMULO
A 1.8242 m²
V 8.8964 m³
após RD
dados “brutos”

60
Tabela 5.6. Parâmetros geométricos da torre desbutanizadora
T03 PRATOS 1-15
PRATOS 16-30
V 0.7119 1.1127 m³
hw 0.0400 0.0450 m
Ah 0.1144 0.1339 m²
lw 0.9029 1.8242 m
Ap 0.9533 1.1161 m²
REBOILER – ACÚMULO
A 1.8242 m²
V 3.0480 m³
CONDENSADOR - VASO DE ACÚMULO
A 2.6274 m²
V 16.0137 m³
5.4. ESCOLHA DOS PARÂMETROS DO MODELO DINÂMICO
A Tabela 5.7 apresenta os valores escolhidos para os parâmetros das colunas
desetanizadora (T02) e desbutanizadora (T03).
Conforme descrito na Seção 4.5.5 (Tabela 4.3), os valores de α foram escolhidos
de forma a garantir ∆P nas torres T02 e T03 aproximadamente iguais a 0,1 atm e 0,58
atm, respectivamente. Estes são valores médios observados nos dados de processo
coletados no PI.
No caso do fator de aeração β, o valor igual à unidade foi escolhido por
simplificação. Como será visto no tópico de Análise de Sensibilidade, este parâmetro
não é capaz de afetar o valor inferido das variáveis em estado estacionário (apenas o faz
em regime dinâmico pois só neste regime interfere no nível de líquido no prato e
consequentemente nas vazões de líquido no interior da torre (refluxo interno), no tempo
de residência dentro da mesma e, portanto, no equilíbrio líquido-vapor).
Para a eficiência de Murphree, EMV, que traduz o afastamento ao equilíbrio
termodinâmico, foram escolhidos 0,9 para a T02 e 1 para a T03, uma vez que estes
valores mostraram bons resultados ao comparar a inferência da composição dos
produtos da torre com os dados de processo.
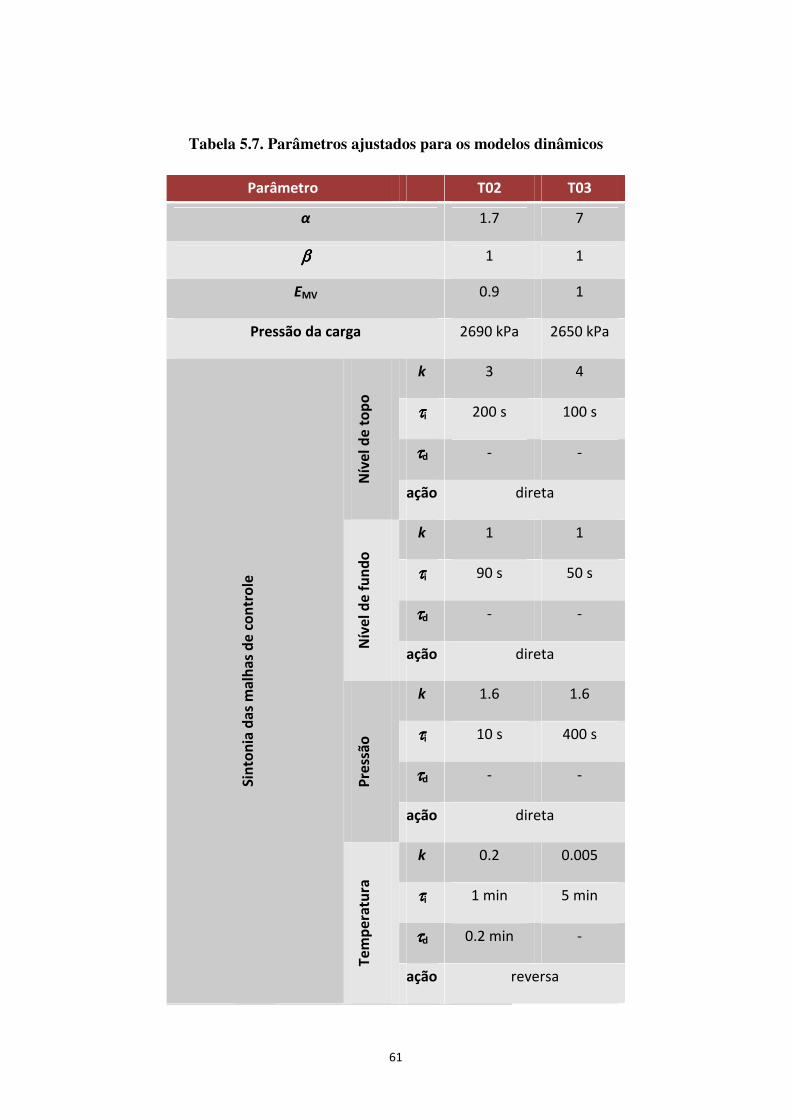
61
Tabela 5.7. Parâmetros ajustados para os modelos dinâmicos
Parâmetro T02 T03
α 1.7 7
ββββ 1 1
EMV 0.9 1
Pressão da carga 2690 kPa 2650 kPa
Sin
ton
ia d
as m
alh
as d
e co
ntr
ole
Nív
el d
e to
po
k 3 4
ττττi 200 s 100 s
ττττd - -
ação direta
Nív
el d
e fu
nd
o
k 1 1
ττττi 90 s 50 s
ττττd - -
ação direta
Pre
ssão
k 1.6 1.6
ττττi 10 s 400 s
ττττd - -
ação direta
Tem
per
atu
ra
k 0.2 0.005
ττττi 1 min 5 min
ττττd 0.2 min -
ação reversa

62
Os valores escolhidos para as pressões P1 e P3 foram responsáveis por obter
valores inferidos de vazões de topo e fundo coerentes àqueles lidos no PI, de acordo
com o que pode ser verificado nos dados das Tabelas 5.10 a 5.15.
Finalmente, acerca dos parâmetros de sintonia das malhas de controle: apesar de
terem sido definidos pelo método de “tentativa e erro” (um aperfeiçoamento poderia ser
a implementação do algoritmo PID efetivamente utilizado na planta real), resultaram em
um desempenho bastante desejável durante os testes de validação dinâmica dos modelos
das colunas de destilação estudadas, cujos resultados poderão ser visualizados na Seção
5.6.2.
5.5. ANÁLISE DE SENSIBILIDADE
Os resultados obtidos na etapa de análise de sensibilidade encontram-se nas
Tabelas 5.8 e 5.9, nas quais somente estão incluídas as respostas (sob a forma de
variáveis desvio) aos parâmetros que provocaram mudanças no valor das variáveis de
saída da simulação estacionária. Não foram registradas alterações nas variáveis
observadas para perturbações em β.
A Tabela 5.8 mostra que o diferencial de pressão da torre desetanizadora é
fortemente influenciado pelo parâmetro α e pelas temperaturas da carga e de fundo da
torre. Já a temperatura do prato de topo da T02 somente é sensível a variações no
setpoint do controlador da temperatura de fundo da torre. Da mesma forma, esta
temperatura influencia a quantidade de metano e etano no produto de topo, bem como o
propano no produto de fundo da T02 e, em destaque, o etano nesta mesma corrente.
A Tabela 5.9 mostra que o coeficiente de ∆P no prato seco, α, influencia de
maneira linear (respostas de mesma magnitude para perturbações positivas e negativas)
o diferencial de pressão na torre desbutanizadora, assim como a temperatura no prato de
topo. Também influenciam estas duas variáveis a vazão e a temperatura da carga (esta
também de maneira linear) e o setpoint da temperatura de fundo da T03. No caso da
vazão da carga da torre, também ocorre pequena influência na quantidade de pentanos
no produto de fundo da desbutanizadora. Nota-se ainda influência da temperatura do
fundo da torre em diversas composições (etano, propano, butanos e pentano no GLP e
butanos e pentanos na “gasolina natural”).

63
Os resultados mostram ainda que tanto os butanos no GLP quanto os pentanos no produto de fundo da torre (ambos componentes chaves
neste serviço) são fortemente influenciados pela temperatura de fundo da torre.
Os resultados obtidos na etapa de Análise de Sensibilidade podem ser utilizados futuramente, caso se deseje implementar a estimação de
parâmetros e estados recursiva para o processo estudado.
Tabela 5.8. Análise de sensibilidade aos parâmetros do modelo da T02
Parâmetro Valor desvio%
PDI1 desvio%
T3 desvio%
X2,2 desvio%
X2,3 desvio%
X3,3 desvio%
X3,4
α
-30% -30.0330 - - - - -
-10% -9.9792 - - - - -
10% 10.0201 - - - - -
30% 30.0178 - - - - -
T2
-5% 9.9286 - - - - -
-3% 6.4617 - - - - -
3% -9.6597 - - - - -
5% -15.7149 - - - - -
T4 (setpoint)
-5% -10.9555 -0.2990 33.4725 -5.7461 134.1743 -15.4437
-3% -6.3485 -0.1428 15.8767 -2.7449 78.9403 -9.0756
3% 9.9455 0.0904 -9.9257 1.7320 -75.9229 8.7155
5% 45.9838 7.0796 -20.6813 -7.5202 -99.7891 1.7292
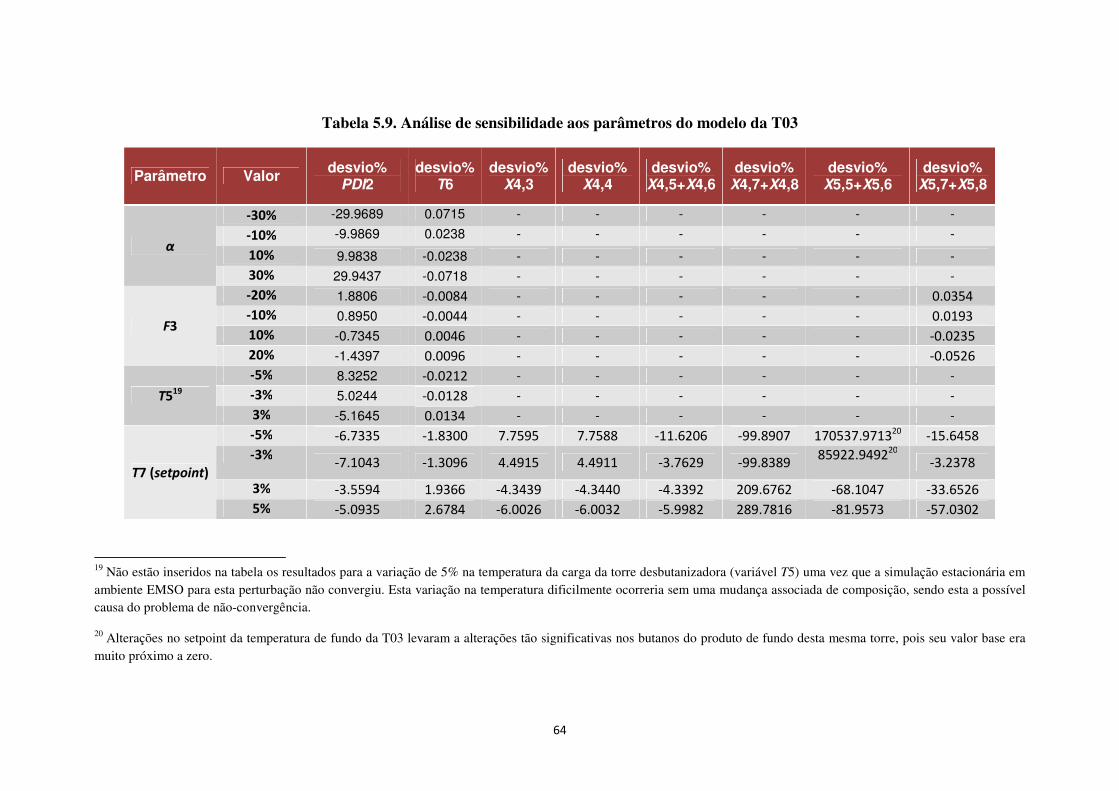
64
Tabela 5.9. Análise de sensibilidade aos parâmetros do modelo da T03
Parâmetro Valor desvio%
PDI2 desvio%
T6 desvio%
X4,3 desvio%
X4,4 desvio%
X4,5+X4,6 desvio%
X4,7+X4,8 desvio%
X5,5+X5,6 desvio%
X5,7+X5,8
α
-30% -29.9689 0.0715 - - - - - -
-10% -9.9869 0.0238 - - - - - -
10% 9.9838 -0.0238 - - - - - -
30% 29.9437 -0.0718 - - - - - -
F3
-20% 1.8806 -0.0084 - - - - - 0.0354
-10% 0.8950 -0.0044 - - - - - 0.0193
10% -0.7345 0.0046 - - - - - -0.0235
20% -1.4397 0.0096 - - - - - -0.0526
T519
-5% 8.3252 -0.0212 - - - - - -
-3% 5.0244 -0.0128 - - - - - -
3% -5.1645 0.0134 - - - - - -
T7 (setpoint)
-5% -6.7335 -1.8300 7.7595 7.7588 -11.6206 -99.8907 170537.971320 -15.6458
-3% -7.1043 -1.3096 4.4915 4.4911 -3.7629 -99.8389
85922.949220
-3.2378
3% -3.5594 1.9366 -4.3439 -4.3440 -4.3392 209.6762 -68.1047 -33.6526
5% -5.0935 2.6784 -6.0026 -6.0032 -5.9982 289.7816 -81.9573 -57.0302
19 Não estão inseridos na tabela os resultados para a variação de 5% na temperatura da carga da torre desbutanizadora (variável T5) uma vez que a simulação estacionária em ambiente EMSO para esta perturbação não convergiu. Esta variação na temperatura dificilmente ocorreria sem uma mudança associada de composição, sendo esta a possível causa do problema de não-convergência.
20 Alterações no setpoint da temperatura de fundo da T03 levaram a alterações tão significativas nos butanos do produto de fundo desta mesma torre, pois seu valor base era muito próximo a zero.
65
5.6. VALIDAÇÃO DO MODELO DO PROCESSO
A etapa de validação do modelo matemático do processo foi determinante para o
trabalho, com vistas à obtenção de inferências de qualidade, que representassem de
maneira adequada o comportamento das variáveis envolvidas. Por este motivo, a
validação e o desenvolvimento do modelo como um todo estiveram desde o início
alinhados.
A validação do modelo da torre desetanizadora, assim como para a torre
desbutanizadora, implementados no simulador EMSO, foi realizada para operação em
estado estacionário e em regime transiente. Os resultados obtidos na avaliação da
qualidade das inferências encontram-se a seguir.
5.6.1. VALIDAÇÃO EM ESTADO ESTACIONÁRIO
As Tabelas 5.10 a 5.12 apresentam os dados de entrada, obtidos no PI nos três
momentos em que a planta se encontrava em estado estacionário (conforme Tabela 4.6),
e os dados de saída do modelo em modo estacionário da torre desetanizadora (T02). Aos
dados de saída foram comparados os dados de processo extraídos do PI, nestes mesmos
momentos (SS_1,1, SS_1,2 e SS_1,3)21.
Puderam então ser calculados os desvios absolutos e relativos das variáveis
inferidas em relação às variáveis reais (reconciliadas). O desvio absoluto foi obtido
subtraindo-se o valor de referência da variável extraído do PI daquele inferido pelo
EMSO. Já o desvio relativo foi calculado conforme a Equação 5.1:
Desviorelativo � �Valorreferência − Valorinferido × 100Valorreferência � (5.1)
21 O leitor, ao visualizar as tabelas deste capítulo, pode sentir falta de algumas variáveis que poderiam ser inferidas pelo EMSO nesta etapa do trabalho, como é o caso da fração molar de dióxido de carbono e de metano no produto de fundo da torre desetanizadora. As mesmas foram omitidas uma vez que seus valores eram muito pequenos e qualquer diferença entre a inferência e os dados do PI levaria a desvios enormes, prejudicando injustamente a avaliação do modelo matemático.

66
No caso das vazões e composições, os valores inferidos pelo simulador foram
comparados aos valores reconciliados das variáveis obtidas no PI.
Tabela 5.10. Resultados da simulação no EMSO para o SS_1,1
Variável
Valor
referência
(PI)
Unidade Valor EMSO Desvio
relativo (%)
Desvio
absoluto
En
tra
da
s
F1 1389.17 m³/h 1389.17 - -
T2 30.40 ºC 30.40 - -
X1,1 1.7650 % 1.7650 - -
X1,2 4.7970 % 4.7970 - -
X1,3 47.8445 % 47.8445 - -
X1,4 25.7650 % 25.7650 - -
X1,5 4.7910 % 4.7910 - -
X1,6 7.6860 % 7.6860 - -
X1,7 2.2055 % 2.2055 - -
X1,8 2.2445 % 2.2445 - -
X1,9 1.7235 % 1.7235 - -
X1,10 0.6970 % 0.6970 - -
X1,11 0.3674 % 0.3674 - -
X1,12 0.1024 % 0.1024 - -
P2 2735.00 kPa abs. 2735 - -
T4 88.00 ºC 88.00 - -
Sa
ída
s
F2 128.74 Mm³/h 143.71 11.62 -14.97
T3 2.82 ºC 4.16 47.46 -1.34
X2,1 3.3013 % 3.5900 8.75 -0.29
X2,2 9.5731 % 9.8300 2.68 -0.26
X2,3 86.8101 % 85.9800 0.96 0.83
X2,4 0.3965 % 0.5944 49.93 -0.20
F3 26.11 m³/h 27.59 5.67 -1.48
X3,3 9.6491 % 11.4600 18.77 -1.81
X3,4 50.0331 % 49.7800 0.51 0.25
X3,5 9.5391 % 9.3600 1.88 0.18
X3,6 15.5324 % 15.0300 3.23 0.50
X3,7 4.8045 % 4.3200 10.08 0.48
X3,8 4.7383 % 4.3400 8.41 0.40
X3,9 3.6264 % 3.3600 7.35 0.27
X3,10 1.1859 % 1.3400 12.99 -0.15
X3,11 0.6147 % 0.7230 17.61 -0.11
X3,12 0.1650 % 0.2555 54.89 -0.09
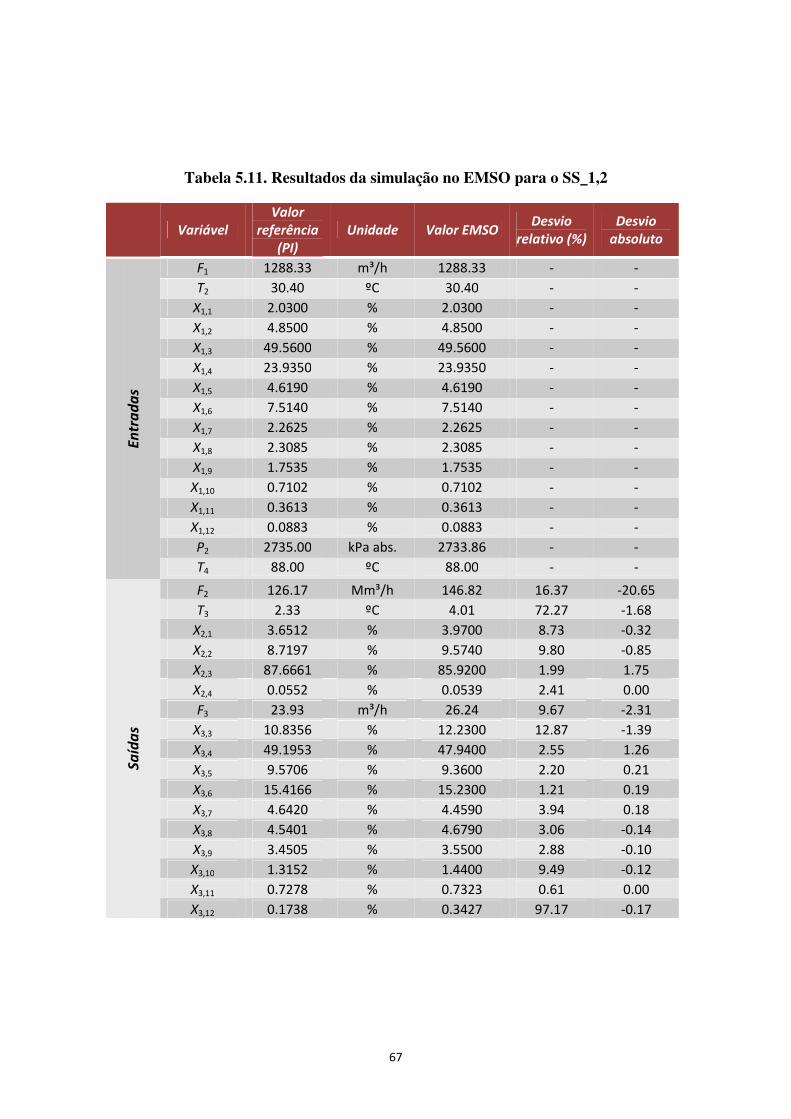
67
Tabela 5.11. Resultados da simulação no EMSO para o SS_1,2
Variável
Valor
referência
(PI)
Unidade Valor EMSO Desvio
relativo (%)
Desvio
absoluto
En
tra
da
s
F1 1288.33 m³/h 1288.33 - -
T2 30.40 ºC 30.40 - -
X1,1 2.0300 % 2.0300 - -
X1,2 4.8500 % 4.8500 - -
X1,3 49.5600 % 49.5600 - -
X1,4 23.9350 % 23.9350 - -
X1,5 4.6190 % 4.6190 - -
X1,6 7.5140 % 7.5140 - -
X1,7 2.2625 % 2.2625 - -
X1,8 2.3085 % 2.3085 - -
X1,9 1.7535 % 1.7535 - -
X1,10 0.7102 % 0.7102 - -
X1,11 0.3613 % 0.3613 - -
X1,12 0.0883 % 0.0883 - -
P2 2735.00 kPa abs. 2733.86 - -
T4 88.00 ºC 88.00 - -
Sa
ída
s
F2 126.17 Mm³/h 146.82 16.37 -20.65
T3 2.33 ºC 4.01 72.27 -1.68
X2,1 3.6512 % 3.9700 8.73 -0.32
X2,2 8.7197 % 9.5740 9.80 -0.85
X2,3 87.6661 % 85.9200 1.99 1.75
X2,4 0.0552 % 0.0539 2.41 0.00
F3 23.93 m³/h 26.24 9.67 -2.31
X3,3 10.8356 % 12.2300 12.87 -1.39
X3,4 49.1953 % 47.9400 2.55 1.26
X3,5 9.5706 % 9.3600 2.20 0.21
X3,6 15.4166 % 15.2300 1.21 0.19
X3,7 4.6420 % 4.4590 3.94 0.18
X3,8 4.5401 % 4.6790 3.06 -0.14
X3,9 3.4505 % 3.5500 2.88 -0.10
X3,10 1.3152 % 1.4400 9.49 -0.12
X3,11 0.7278 % 0.7323 0.61 0.00
X3,12 0.1738 % 0.3427 97.17 -0.17

68
Tabela 5.12. Resultados da simulação no EMSO para o SS_1,3
Variável
Valor
referência
(PI)
Unidade Valor EMSO Desvio
relativo (%)
Desvio
absoluto
En
tra
da
s
F1 1263.75 m³/h 1263.75 - -
T2 32.75 ºC 32.75 - - X1,1 2.2465 % 2.2465 - - X1,2 4.3660 % 4.3660 - - X1,3 49.2635 % 49.2635 - - X1,4 24.2300 % 24.2300 - - X1,5 4.6060 % 4.6060 - - X1,6 7.5420 % 7.5420 - - X1,7 2.2710 % 2.2710 - - X1,8 2.3635 % 2.3635 - - X1,9 1.8095 % 1.8095 - - X1,10 0.7580 % 0.7580 - - X1,11 0.4153 % 0.4153 - - X1,12 0.1170 % 0.1170 - - P2 2735.00 kPa abs. 2735.00 - - T4 88.00 ºC 88.00 - -
Sa
ída
s
F2 129.52 Mm³/h 122.12 5.71 7.40
T3 2.33 ºC 3.66 57.22 -1.33
X2,1 3.7687 % 4.4650 18.48 -0.70 X2,2 8.5862 % 8.7500 1.91 -0.16 X2,3 87.6425 % 86.5000 1.30 1.14 X2,4 0.0937 % 0.2804 199.25 -0.19 F3 23.45 m³/h 22.51 4.02 0.94
X3,3 11.4891 % 12.1200 5.49 -0.63 X3,4 48.5414 % 48.1100 0.89 0.43 X3,5 9.3342 % 9.2000 1.44 0.13 X3,6 15.1762 % 15.0600 0.77 0.12 X3,7 4.6393 % 4.5300 2.36 0.11 X3,8 4.5619 % 4.7100 3.25 -0.15 X3,9 3.6040 % 3.6150 0.31 -0.01 X3,10 1.4443 % 1.5100 4.55 -0.07 X3,11 0.8550 % 0.8390 1.87 0.02 X3,12 0.2084 % 0.2650 27.18 -0.06
A análise do conteúdo das tabelas acima mostra que foram obtidos bons
resultados para a inferência do percentual de metano e etano no produto de topo da torre
desetanizadora, o que é positivo uma vez que o etano é o componente-chave da
separação que ocorre nesta torre. Com relação ao percentual de propano no produto de
topo, apesar do valor inferido ter apresentado desvio relativo elevado em relação à
informação fornecida pelo PI, nos três estados estacionários avaliados a inferência é da
mesma ordem de grandeza do valor de referência, com desvio absoluto sempre menor
69
que 0,20%. Este valor parece ser razoável frente à sensibilidade/precisão dos
cromatógrafos industriais.
A composição da corrente proveniente do fundo da T02 foi inferida
satisfatoriamente nos três pontos estacionários avaliados. Um destaque deve ser dado à
porcentagem de etano nesta corrente que deve ser quantificada com a maior precisão
possível pois a confiabilidade nesta variável é de grande importância para o sistema de
Controle Avançado (CAv) implementado na UPGN. Quanto mais correta for a fração
molar de etano informada ao Controlador Preditivo Multivariável (CPM) para a carga
da torre desbutanizadora, melhor será a inferência deste componente no GLP. Desta
forma, melhor poderá ser explorada a composição deste produto pelo próprio CPM, que
foi configurado de modo a maximizar a produção de GLP na UPGN estudada, ou seja,
de modo a maximizar a quantidade de etano no GLP sem que ultrapasse o valor
especificado, que é igual a 12%.
Os valores obtidos como resposta da simulação no que diz respeito às vazões dos
produtos da torre desetanizadora também são satisfatórios (principalmente por se tratar
de vazões volumétricas, nas quais estão embutidas incertezas elevadas devido à maneira
como são medidas na prática22), assim como a temperatura do topo da torre (T3).
As Tabelas 5.13 a 5.15 apresentam os dados de entrada, obtidos no PI nos três
momentos em que a planta se encontrava em estado estacionário (conforme Tabela 4.6),
e os dados de saída do modelo em modo estacionário da torre desbutanizadora (T03).
Aos dados de saída foram comparados os dados de processo extraídos do PI, nestes
mesmos momentos (SS_2,1, SS_2,2 e SS_2,3). Da mesma forma que foi feita para a
T02, foram calculados os desvios absolutos e relativos entre as variáveis inferidas e
aquelas informadas pelo PI. Conforme pode ser constatado pela observação das Tabelas
5.13 a 5.15, a etapa de validação em regime estacionário para a torre desbutanizadora da
UPGN estudada foi bastante satisfatória, tanto no que diz respeito às vazões dos
produtos da T03 (F4 e F5), quanto para a composição do GLP produzido, para a
temperatura de topo da torre (T6) e para o diferencial de pressão ao longo dos pratos.
Como já dito anteriormente, não se encontra disponível no PI a composição do produto
de fundo da torre desbutanizadora. Por este motivo não foram feitas comparações para
as frações molares inferidas pelo EMSO nesta corrente. 22 Para maiores detalhes, consultar MARTINS (1998).
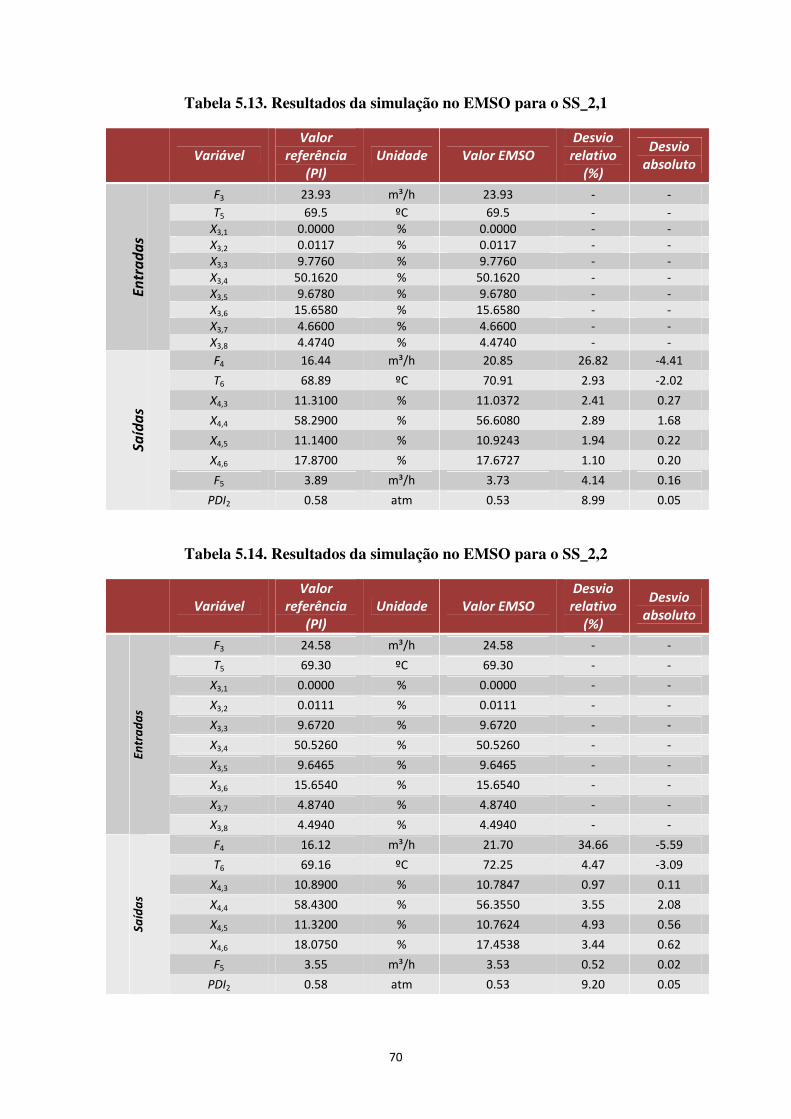
70
Tabela 5.13. Resultados da simulação no EMSO para o SS_2,1
Variável
Valor
referência
(PI)
Unidade Valor EMSO
Desvio
relativo
(%)
Desvio
absoluto
En
tra
da
s
F3 23.93 m³/h 23.93 - -
T5 69.5 ºC 69.5 - - X3,1 0.0000 % 0.0000 - - X3,2 0.0117 % 0.0117 - - X3,3 9.7760 % 9.7760 - - X3,4 50.1620 % 50.1620 - - X3,5 9.6780 % 9.6780 - - X3,6 15.6580 % 15.6580 - - X3,7 4.6600 % 4.6600 - - X3,8 4.4740 % 4.4740 - -
Sa
ída
s
F4 16.44 m³/h 20.85 26.82 -4.41
T6 68.89 ºC 70.91 2.93 -2.02
X4,3 11.3100 % 11.0372 2.41 0.27
X4,4 58.2900 % 56.6080 2.89 1.68
X4,5 11.1400 % 10.9243 1.94 0.22
X4,6 17.8700 % 17.6727 1.10 0.20
F5 3.89 m³/h 3.73 4.14 0.16
PDI2 0.58 atm 0.53 8.99 0.05
Tabela 5.14. Resultados da simulação no EMSO para o SS_2,2
Variável
Valor
referência
(PI)
Unidade Valor EMSO
Desvio
relativo
(%)
Desvio
absoluto
En
tra
da
s
F3 24.58 m³/h 24.58 - -
T5 69.30 ºC 69.30 - -
X3,1 0.0000 % 0.0000 - -
X3,2 0.0111 % 0.0111 - -
X3,3 9.6720 % 9.6720 - -
X3,4 50.5260 % 50.5260 - -
X3,5 9.6465 % 9.6465 - -
X3,6 15.6540 % 15.6540 - -
X3,7 4.8740 % 4.8740 - -
X3,8 4.4940 % 4.4940 - -
Sa
ída
s
F4 16.12 m³/h 21.70 34.66 -5.59
T6 69.16 ºC 72.25 4.47 -3.09
X4,3 10.8900 % 10.7847 0.97 0.11
X4,4 58.4300 % 56.3550 3.55 2.08
X4,5 11.3200 % 10.7624 4.93 0.56
X4,6 18.0750 % 17.4538 3.44 0.62
F5 3.55 m³/h 3.53 0.52 0.02
PDI2 0.58 atm 0.53 9.20 0.05
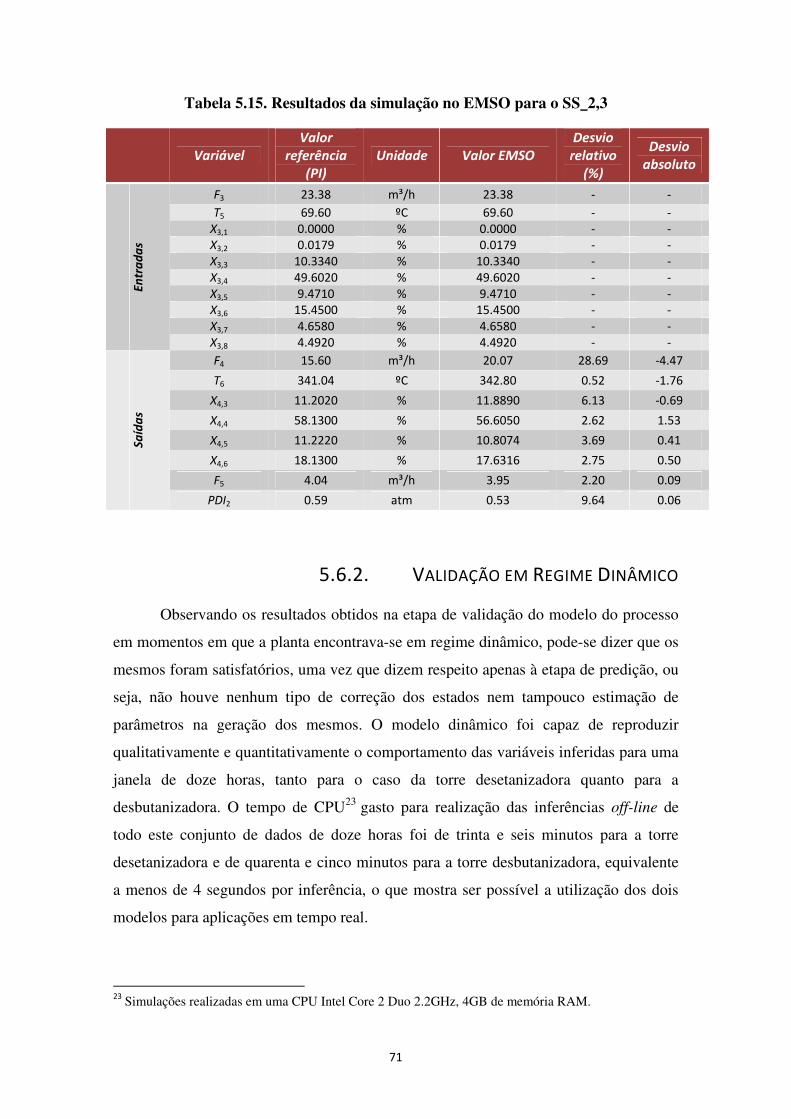
71
Tabela 5.15. Resultados da simulação no EMSO para o SS_2,3
Variável
Valor
referência
(PI)
Unidade Valor EMSO
Desvio
relativo
(%)
Desvio
absoluto
En
tra
da
s
F3 23.38 m³/h 23.38 - -
T5 69.60 ºC 69.60 - - X3,1 0.0000 % 0.0000 - - X3,2 0.0179 % 0.0179 - - X3,3 10.3340 % 10.3340 - - X3,4 49.6020 % 49.6020 - - X3,5 9.4710 % 9.4710 - - X3,6 15.4500 % 15.4500 - - X3,7 4.6580 % 4.6580 - - X3,8 4.4920 % 4.4920 - -
Sa
ída
s
F4 15.60 m³/h 20.07 28.69 -4.47
T6 341.04 ºC 342.80 0.52 -1.76
X4,3 11.2020 % 11.8890 6.13 -0.69
X4,4 58.1300 % 56.6050 2.62 1.53
X4,5 11.2220 % 10.8074 3.69 0.41
X4,6 18.1300 % 17.6316 2.75 0.50
F5 4.04 m³/h 3.95 2.20 0.09
PDI2 0.59 atm 0.53 9.64 0.06
5.6.2. VALIDAÇÃO EM REGIME DINÂMICO
Observando os resultados obtidos na etapa de validação do modelo do processo
em momentos em que a planta encontrava-se em regime dinâmico, pode-se dizer que os
mesmos foram satisfatórios, uma vez que dizem respeito apenas à etapa de predição, ou
seja, não houve nenhum tipo de correção dos estados nem tampouco estimação de
parâmetros na geração dos mesmos. O modelo dinâmico foi capaz de reproduzir
qualitativamente e quantitativamente o comportamento das variáveis inferidas para uma
janela de doze horas, tanto para o caso da torre desetanizadora quanto para a
desbutanizadora. O tempo de CPU23 gasto para realização das inferências off-line de
todo este conjunto de dados de doze horas foi de trinta e seis minutos para a torre
desetanizadora e de quarenta e cinco minutos para a torre desbutanizadora, equivalente
a menos de 4 segundos por inferência, o que mostra ser possível a utilização dos dois
modelos para aplicações em tempo real.
23
Simulações realizadas em uma CPU Intel Core 2 Duo 2.2GHz, 4GB de memória RAM.

72
As figuras a seguir trazem os resultados obtidos nesta etapa do trabalho. Assim
como foi feito para a validação em estado estacionário, a validação em regime dinâmico
caminhou juntamente com a determinação dos parâmetros e o desenvolvimento do
modelo matemático do processo.
Conforme mencionado na Seção 4.7.2, foram comparadas aos resultados da
simulação dinâmica em ambiente EMSO as variáveis inferidas pelas Redes Neuronais
Artificiais (RNAs), quando as mesmas se encontravam disponíveis. As Figuras 5.13,
5.15 e 5.29 apresentam esta comparação.
Abaixo se encontram os resultados dos dois testes realizados. O primeiro deles
(a) refere-se à qualidade dos dados de entrada dos modelos em ambiente EMSO das
torres desetanizadora e desbutanizadora, ou seja, se eram provenientes de conjuntos de
dados reconciliados ou não. O segundo (b) diz respeito à origem dos dados de entrada
do modelo da torre desbutanizadora: ao modelo implementado no EMSO para a T03
foram alimentados dados retirados diretamente do PI e também dados provenientes das
saídas da simulação para a T02.
a) Qualidade dos dados de entrada dos modelos
As Figuras 5.10 a 5.24 apresentam os resultados obtidos para as inferências dos
produtos da torre desetanizadora, nas quais os pontos correspondem aos dados do PI, e
as barras verticais representam o desvio padrão dos mesmos (calculado para o todo
dataset citado na Seção 4.1). Os dados representados pela linha tracejada dizem respeito
às variáveis inferidas pelo EMSO antes de realizar a reconciliação dos dados do
processo e, em linha contínua, as saídas da simulação dinâmica para entradas
reconciliadas 24 . Destas figuras, as de número 5.10 e 5.13, apresentam variáveis
relacionadas ao produto de topo da desetanizadora (corrente de gás combustível – GC).
As demais correspondem ao produto de fundo/carga da T03.
24 O leitor pode observar que nestes gráficos a linha contínua permanece constante nas primeiras horas de inferência o que ocorreu devido a problemas de convergência do modelo com os valores reconciliados.

73
Figura 5.9. Inferência dinâmica para o dióxido de carbono no GC.
Figura 5.10. Inferência dinâmica para o metano no GC.
Figura 5.11. Inferência dinâmica para o etano no GC.
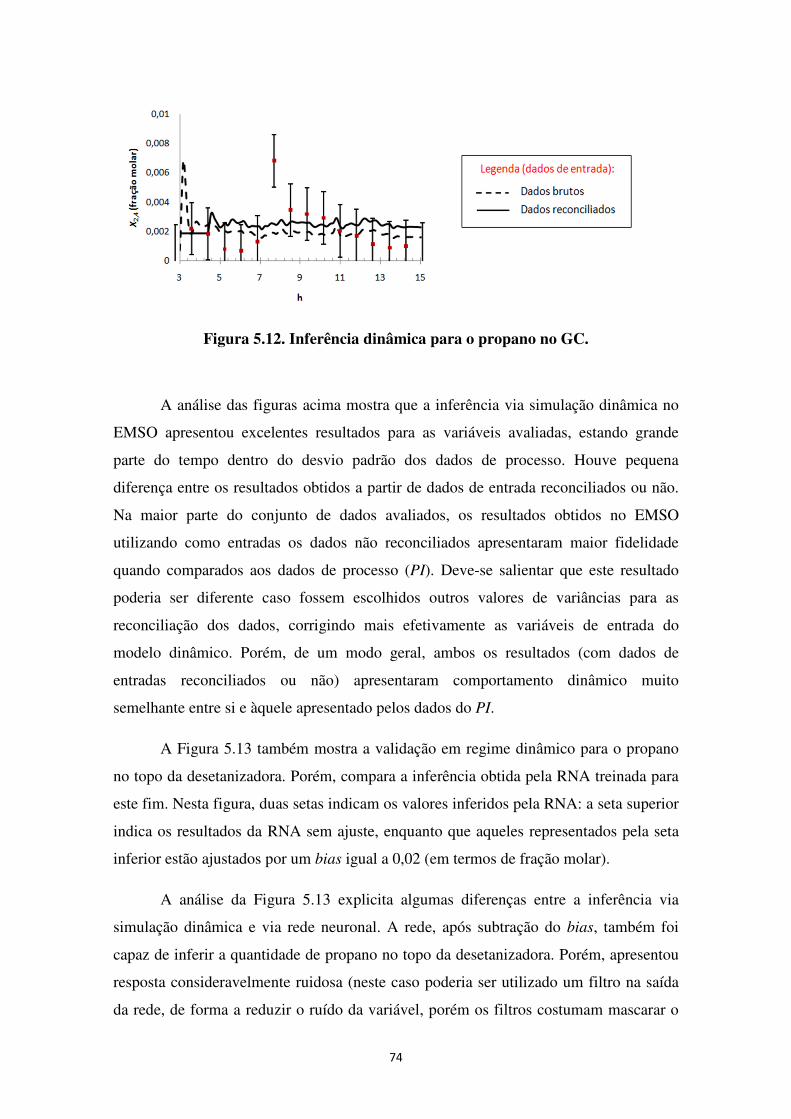
74
Figura 5.12. Inferência dinâmica para o propano no GC.
A análise das figuras acima mostra que a inferência via simulação dinâmica no
EMSO apresentou excelentes resultados para as variáveis avaliadas, estando grande
parte do tempo dentro do desvio padrão dos dados de processo. Houve pequena
diferença entre os resultados obtidos a partir de dados de entrada reconciliados ou não.
Na maior parte do conjunto de dados avaliados, os resultados obtidos no EMSO
utilizando como entradas os dados não reconciliados apresentaram maior fidelidade
quando comparados aos dados de processo (PI). Deve-se salientar que este resultado
poderia ser diferente caso fossem escolhidos outros valores de variâncias para as
reconciliação dos dados, corrigindo mais efetivamente as variáveis de entrada do
modelo dinâmico. Porém, de um modo geral, ambos os resultados (com dados de
entradas reconciliados ou não) apresentaram comportamento dinâmico muito
semelhante entre si e àquele apresentado pelos dados do PI.
A Figura 5.13 também mostra a validação em regime dinâmico para o propano
no topo da desetanizadora. Porém, compara a inferência obtida pela RNA treinada para
este fim. Nesta figura, duas setas indicam os valores inferidos pela RNA: a seta superior
indica os resultados da RNA sem ajuste, enquanto que aqueles representados pela seta
inferior estão ajustados por um bias igual a 0,02 (em termos de fração molar).
A análise da Figura 5.13 explicita algumas diferenças entre a inferência via
simulação dinâmica e via rede neuronal. A rede, após subtração do bias, também foi
capaz de inferir a quantidade de propano no topo da desetanizadora. Porém, apresentou
resposta consideravelmente ruidosa (neste caso poderia ser utilizado um filtro na saída
da rede, de forma a reduzir o ruído da variável, porém os filtros costumam mascarar o
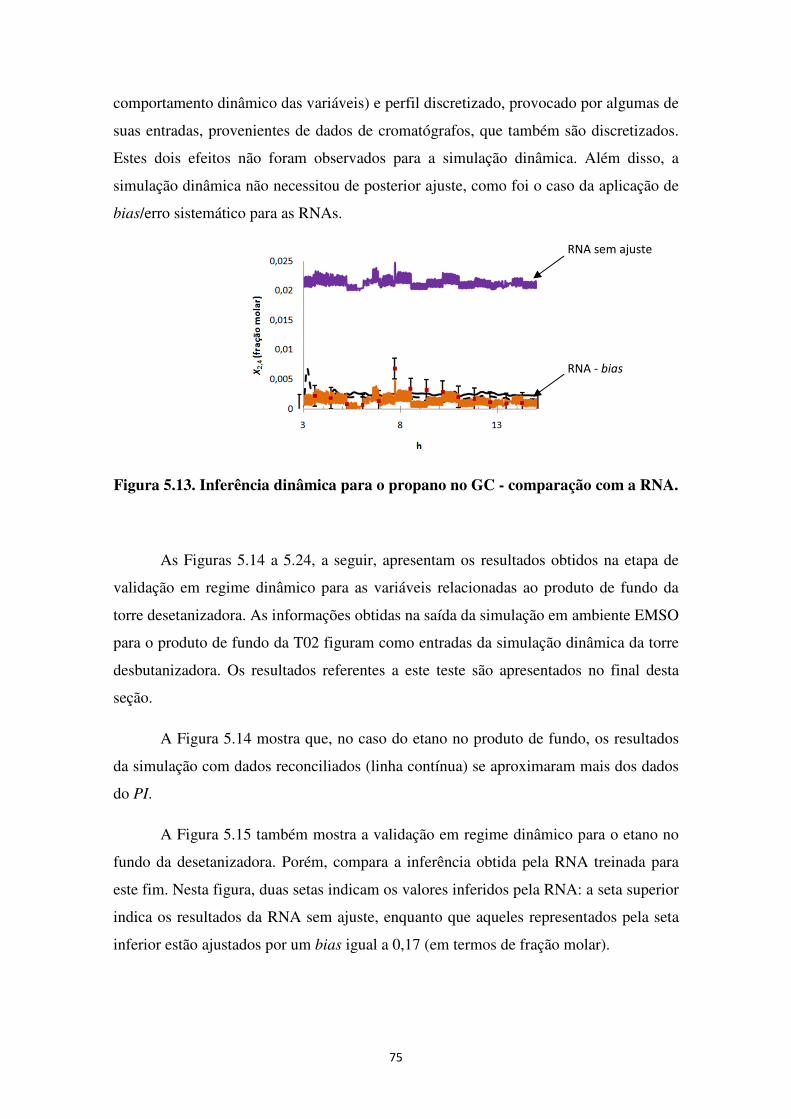
75
comportamento dinâmico das variáveis) e perfil discretizado, provocado por algumas de
suas entradas, provenientes de dados de cromatógrafos, que também são discretizados.
Estes dois efeitos não foram observados para a simulação dinâmica. Além disso, a
simulação dinâmica não necessitou de posterior ajuste, como foi o caso da aplicação de
bias/erro sistemático para as RNAs.
Figura 5.13. Inferência dinâmica para o propano no GC - comparação com a RNA.
As Figuras 5.14 a 5.24, a seguir, apresentam os resultados obtidos na etapa de
validação em regime dinâmico para as variáveis relacionadas ao produto de fundo da
torre desetanizadora. As informações obtidas na saída da simulação em ambiente EMSO
para o produto de fundo da T02 figuram como entradas da simulação dinâmica da torre
desbutanizadora. Os resultados referentes a este teste são apresentados no final desta
seção.
A Figura 5.14 mostra que, no caso do etano no produto de fundo, os resultados
da simulação com dados reconciliados (linha contínua) se aproximaram mais dos dados
do PI.
A Figura 5.15 também mostra a validação em regime dinâmico para o etano no
fundo da desetanizadora. Porém, compara a inferência obtida pela RNA treinada para
este fim. Nesta figura, duas setas indicam os valores inferidos pela RNA: a seta superior
indica os resultados da RNA sem ajuste, enquanto que aqueles representados pela seta
inferior estão ajustados por um bias igual a 0,17 (em termos de fração molar).
RNA sem ajuste
RNA - bias
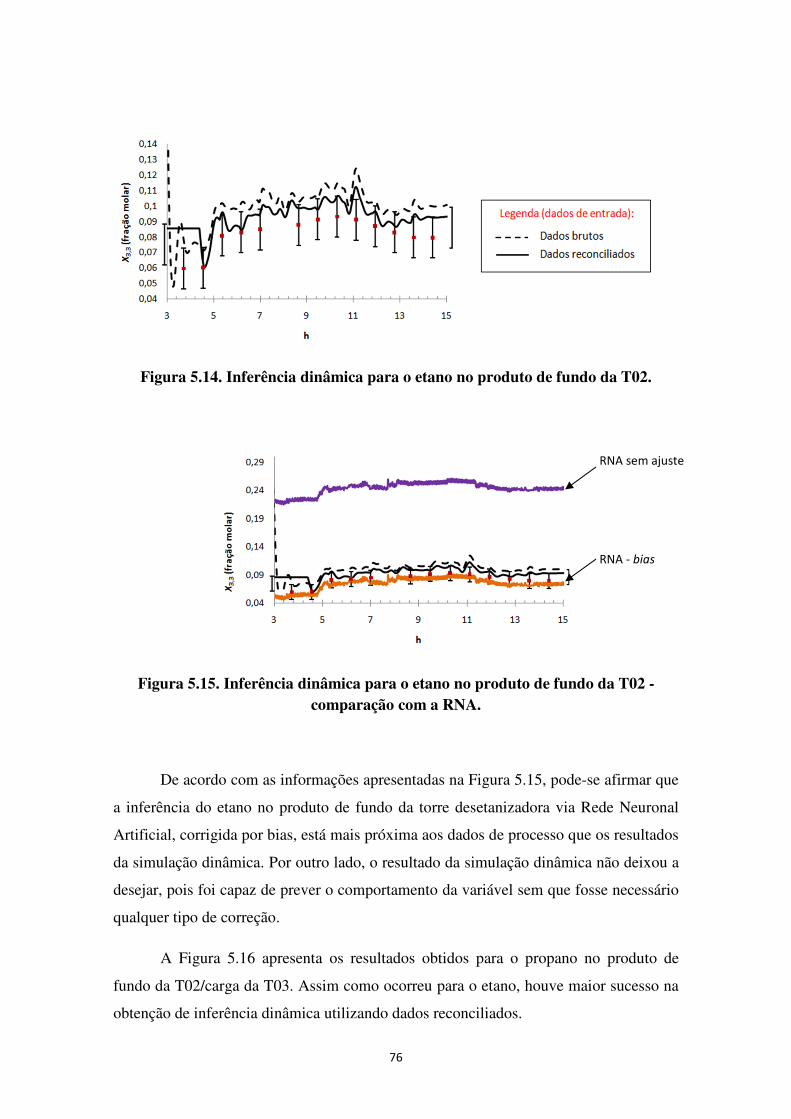
76
Figura 5.14. Inferência dinâmica para o etano no produto de fundo da T02.
Figura 5.15. Inferência dinâmica para o etano no produto de fundo da T02 -
comparação com a RNA.
De acordo com as informações apresentadas na Figura 5.15, pode-se afirmar que
a inferência do etano no produto de fundo da torre desetanizadora via Rede Neuronal
Artificial, corrigida por bias, está mais próxima aos dados de processo que os resultados
da simulação dinâmica. Por outro lado, o resultado da simulação dinâmica não deixou a
desejar, pois foi capaz de prever o comportamento da variável sem que fosse necessário
qualquer tipo de correção.
A Figura 5.16 apresenta os resultados obtidos para o propano no produto de
fundo da T02/carga da T03. Assim como ocorreu para o etano, houve maior sucesso na
obtenção de inferência dinâmica utilizando dados reconciliados.
RNA - bias
RNA sem ajuste

77
Figura 5.16. Inferência dinâmica para o propano no produto de fundo da T02.
As Figuras 5.17 e 5.18 apresentam os resultados obtidos para o i-butano e para o
n-butano na etapa de validação em regime dinâmico utilizando o EMSO. Já as Figuras
5.19 e 5.20 mostram os resultados da inferência dinâmica para o i-pentano e o n-
pentano, ambos no produto de fundo da T02.
Figura 5.17. Inferência dinâmica para o i-butano no produto de fundo da T02.
Figura 5.18. Inferência dinâmica para o n-butano no produto de fundo da T02.

78
Figura 5.19. Inferência dinâmica para o i-pentano no produto de fundo da T02.
Figura 5.20. Inferência dinâmica para o n-pentano no produto de fundo da T02.
Finalmente, as Figuras 5.21 a 5.24 trazem os resultados obtidos para a inferência
da série homóloga entre n-hexano e n-nonano, presentes no produto de fundo da torre
desetanizadora estudada.
Figura 5.21. Inferência dinâmica para o n-hexano no produto de fundo da T02.

79
Figura 5.22. Inferência dinâmica para o n-heptano no produto de fundo da T02.
Figura 5.23. Inferência dinâmica para o n-octano no produto de fundo da T02.
Figura 5.24. Inferência dinâmica para o n-nonano no produto de fundo da T02.

80
Analisando os resultados apresentados acima pode-se dizer que a inferência via
simulação dinâmica obteve sucesso para todos os componentes do produto de fundo da
torre desetanizadora, com exceção do n-nonano (Figura 5.24), o que condiz com os
resultados verificados na etapa de validação em estado estacionário (Seção 5.6.1). Para
o produto de fundo, excetuando-se o etano e o propano nesta corrente, não há diferença
significativa entre os resultados obtidos a partir de dados reconciliados ou não
reconciliados.
A Tabela 5.16 apresenta a soma do quadrado dos desvios entre a variável lida do
PI e a variável inferida pelo EMSO (ou RNA, quando disponível) ao longo do período
de doze horas avaliado, para a composição dos produtos de topo e fundo da T02.
Tabela 5.16. Soma do quadrado dos desvios - variáveis da T02
# Variável EMSO sem Reconciliação
de Dados
EMSO com Reconciliação
de Dados RNA-bias
1 X2,1 0.00333 0.00843 -
2 X2,2 0.00733 0.04188 -
3 X2,3 0.01963 0.51464 -
4 X2,4 0.00020 0.00005 0.00828
5 X3,3 0.17310 0.00276 0.49897
6 X3,4 0.07315 0.00207 -
7 X3,5 0.00188 0.00062 -
8 X3,6 0.00481 0.00149 -
9 X3,7 0.00040 0.00016 -
10 X3,8 0.00031 0.00003 -
11 X3,9 0.00031 0.00015 -
12 X3,10 0.00005 0.00004 -
13 X3,11 0.00002 0.00002 -
14 X3,12 0.00002 0.00002 -
A Figura 5.25 apresenta um resumo dos resultados obtidos para a inferência
dinâmica no EMSO para a torre desetanizadora, explicitados na Tabela 5.16. Para
facilitar a comparação, os valores foram normalizados em relação ao maior valor de
soma do quadrado dos desvios, para cada uma das variáveis. Nesta figura, o eixo das
abscissas representa cada uma das variáveis inferidas, conforme a numeração que
aparece na Tabela 5.16. Já o eixo das ordenadas corresponde à soma do quadrado dos
desvios normalizada.
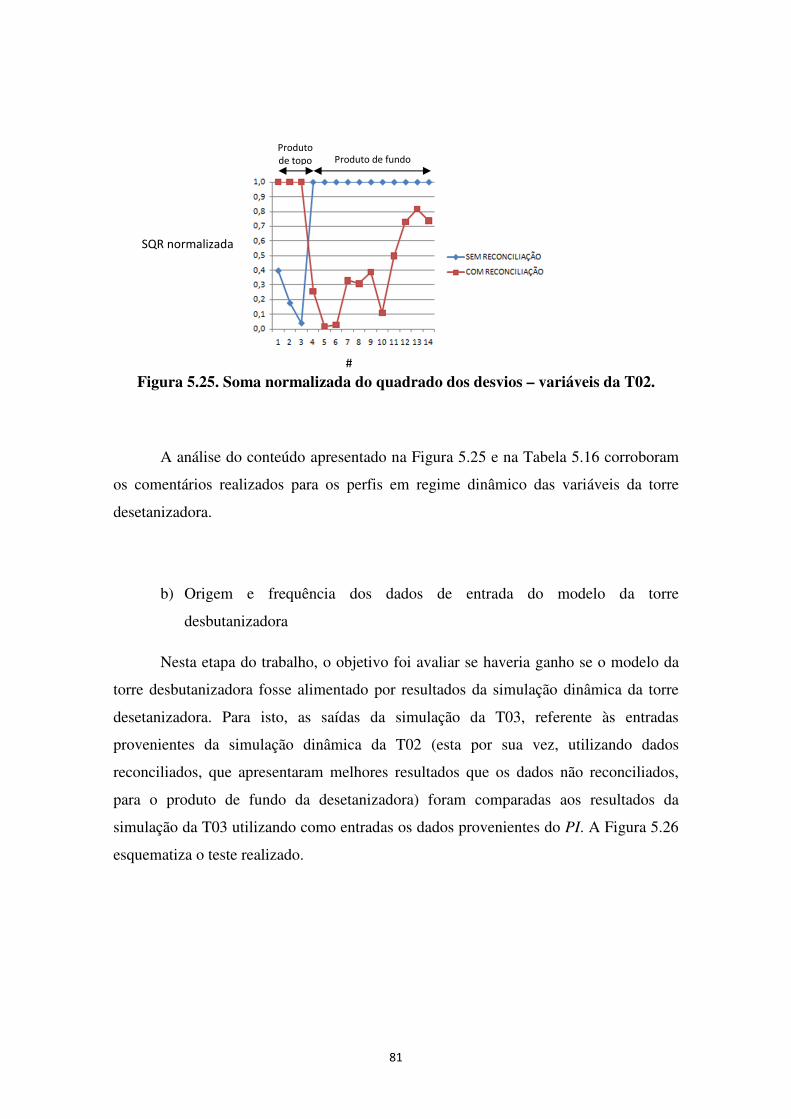
81
Figura 5.25. Soma normalizada do quadrado dos desvios – variáveis da T02.
A análise do conteúdo apresentado na Figura 5.25 e na Tabela 5.16 corroboram
os comentários realizados para os perfis em regime dinâmico das variáveis da torre
desetanizadora.
b) Origem e frequência dos dados de entrada do modelo da torre
desbutanizadora
Nesta etapa do trabalho, o objetivo foi avaliar se haveria ganho se o modelo da
torre desbutanizadora fosse alimentado por resultados da simulação dinâmica da torre
desetanizadora. Para isto, as saídas da simulação da T03, referente às entradas
provenientes da simulação dinâmica da T02 (esta por sua vez, utilizando dados
reconciliados, que apresentaram melhores resultados que os dados não reconciliados,
para o produto de fundo da desetanizadora) foram comparadas aos resultados da
simulação da T03 utilizando como entradas os dados provenientes do PI. A Figura 5.26
esquematiza o teste realizado.
Produto de fundo Produto de topo
SQR normalizada
#
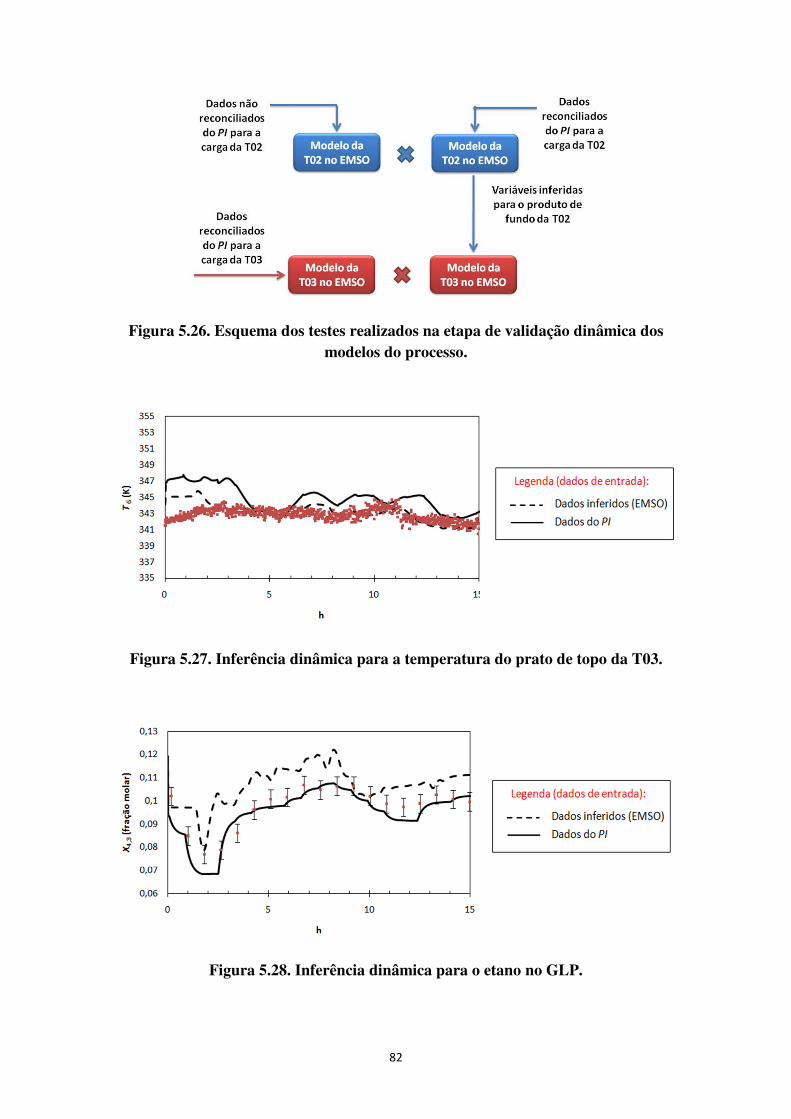
82
Figura 5.26. Esquema dos testes realizados na etapa de validação dinâmica dos
modelos do processo.
Figura 5.27. Inferência dinâmica para a temperatura do prato de topo da T03.
Figura 5.28. Inferência dinâmica para o etano no GLP.
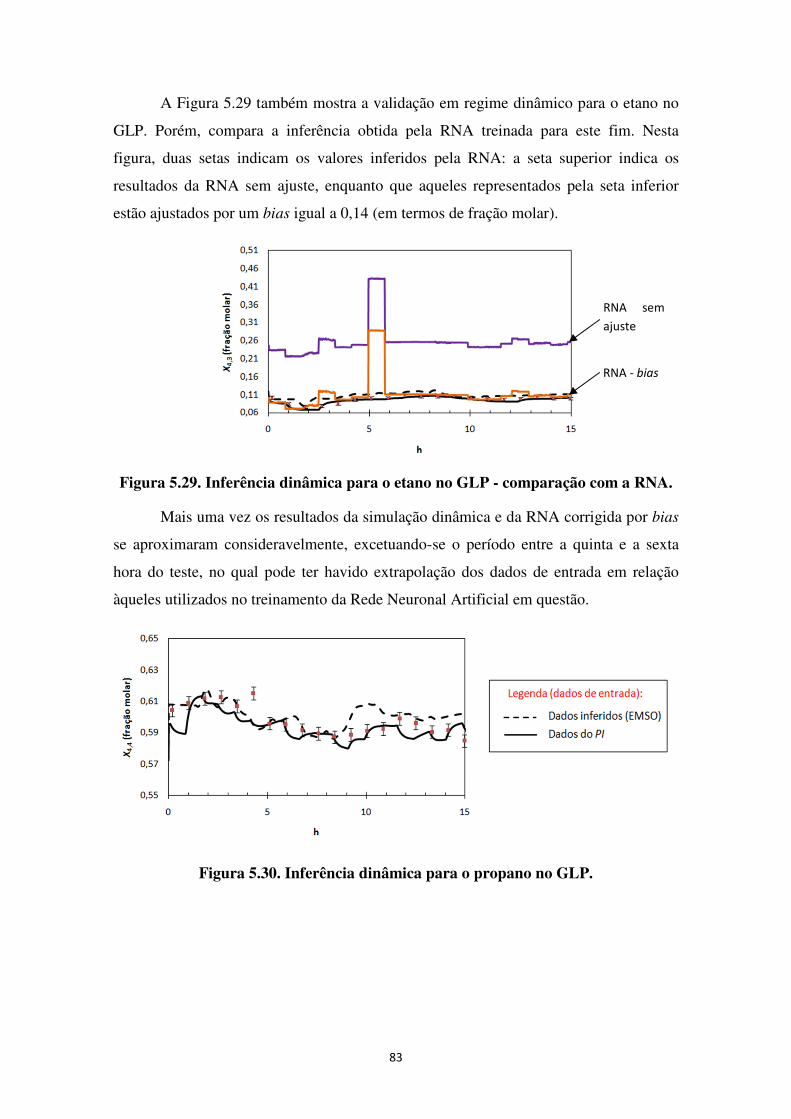
83
A Figura 5.29 também mostra a validação em regime dinâmico para o etano no
GLP. Porém, compara a inferência obtida pela RNA treinada para este fim. Nesta
figura, duas setas indicam os valores inferidos pela RNA: a seta superior indica os
resultados da RNA sem ajuste, enquanto que aqueles representados pela seta inferior
estão ajustados por um bias igual a 0,14 (em termos de fração molar).
Figura 5.29. Inferência dinâmica para o etano no GLP - comparação com a RNA.
Mais uma vez os resultados da simulação dinâmica e da RNA corrigida por bias
se aproximaram consideravelmente, excetuando-se o período entre a quinta e a sexta
hora do teste, no qual pode ter havido extrapolação dos dados de entrada em relação
àqueles utilizados no treinamento da Rede Neuronal Artificial em questão.
Figura 5.30. Inferência dinâmica para o propano no GLP.
RNA - bias
RNA sem
ajuste

84
Figura 5.31. Inferência dinâmica para o i-butano no GLP.
Figura 5.32. Inferência dinâmica para o n-butano no GLP.
Figura 5.33. Inferência dinâmica para o i-pentano no GLP.
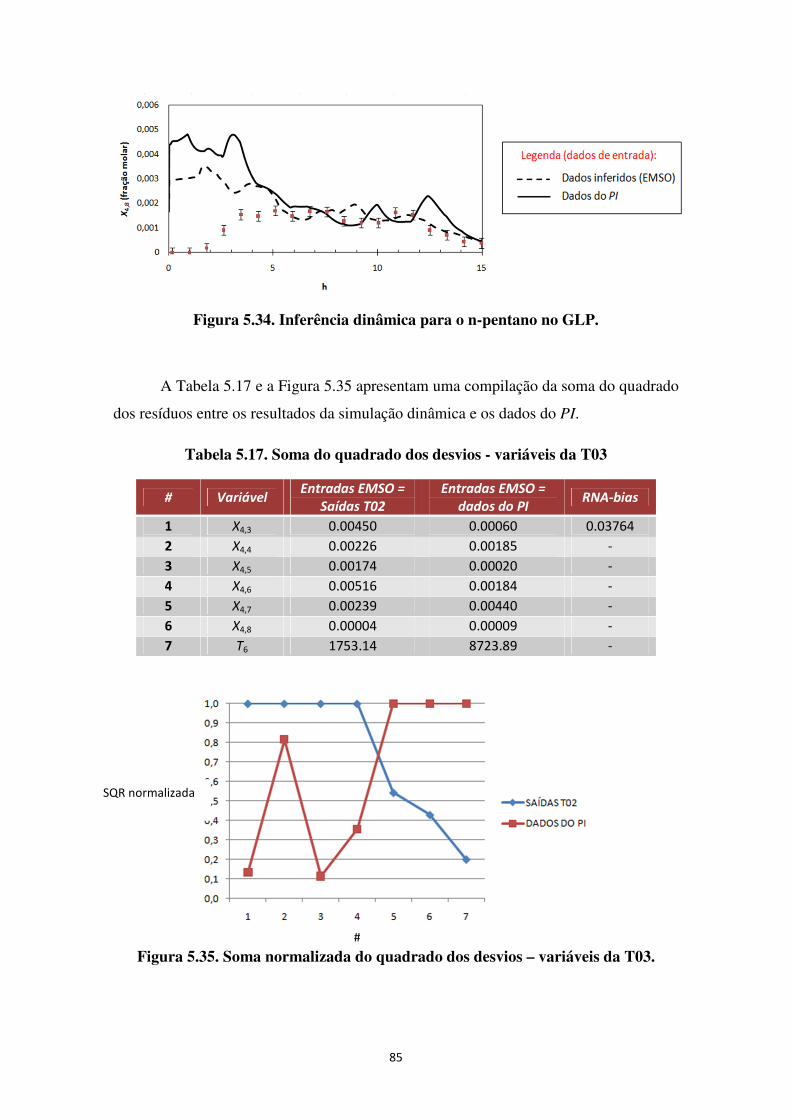
85
Figura 5.34. Inferência dinâmica para o n-pentano no GLP.
A Tabela 5.17 e a Figura 5.35 apresentam uma compilação da soma do quadrado
dos resíduos entre os resultados da simulação dinâmica e os dados do PI.
Tabela 5.17. Soma do quadrado dos desvios - variáveis da T03
# Variável Entradas EMSO =
Saídas T02
Entradas EMSO =
dados do PI RNA-bias
1 X4,3 0.00450 0.00060 0.03764
2 X4,4 0.00226 0.00185 -
3 X4,5 0.00174 0.00020 -
4 X4,6 0.00516 0.00184 -
5 X4,7 0.00239 0.00440 -
6 X4,8 0.00004 0.00009 -
7 T6 1753.14 8723.89 -
Figura 5.35. Soma normalizada do quadrado dos desvios – variáveis da T03.
SQR normalizada
#
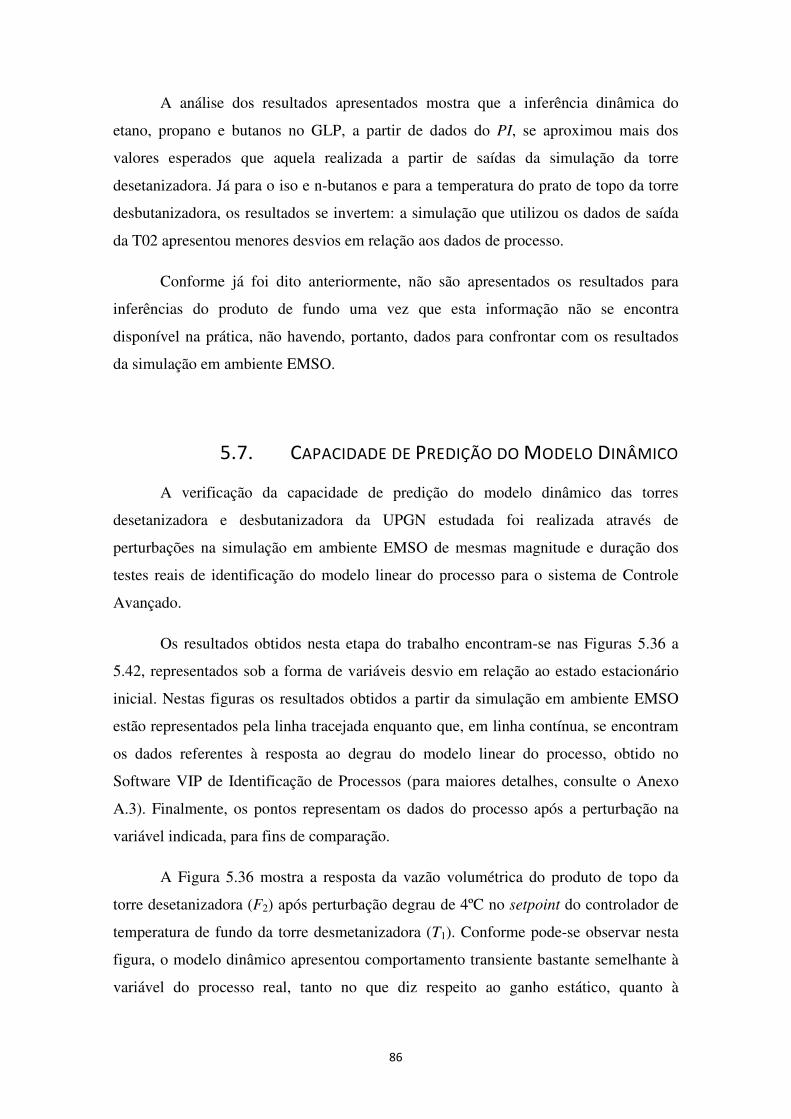
86
A análise dos resultados apresentados mostra que a inferência dinâmica do
etano, propano e butanos no GLP, a partir de dados do PI, se aproximou mais dos
valores esperados que aquela realizada a partir de saídas da simulação da torre
desetanizadora. Já para o iso e n-butanos e para a temperatura do prato de topo da torre
desbutanizadora, os resultados se invertem: a simulação que utilizou os dados de saída
da T02 apresentou menores desvios em relação aos dados de processo.
Conforme já foi dito anteriormente, não são apresentados os resultados para
inferências do produto de fundo uma vez que esta informação não se encontra
disponível na prática, não havendo, portanto, dados para confrontar com os resultados
da simulação em ambiente EMSO.
5.7. CAPACIDADE DE PREDIÇÃO DO MODELO DINÂMICO
A verificação da capacidade de predição do modelo dinâmico das torres
desetanizadora e desbutanizadora da UPGN estudada foi realizada através de
perturbações na simulação em ambiente EMSO de mesmas magnitude e duração dos
testes reais de identificação do modelo linear do processo para o sistema de Controle
Avançado.
Os resultados obtidos nesta etapa do trabalho encontram-se nas Figuras 5.36 a
5.42, representados sob a forma de variáveis desvio em relação ao estado estacionário
inicial. Nestas figuras os resultados obtidos a partir da simulação em ambiente EMSO
estão representados pela linha tracejada enquanto que, em linha contínua, se encontram
os dados referentes à resposta ao degrau do modelo linear do processo, obtido no
Software VIP de Identificação de Processos (para maiores detalhes, consulte o Anexo
A.3). Finalmente, os pontos representam os dados do processo após a perturbação na
variável indicada, para fins de comparação.
A Figura 5.36 mostra a resposta da vazão volumétrica do produto de topo da
torre desetanizadora (F2) após perturbação degrau de 4ºC no setpoint do controlador de
temperatura de fundo da torre desmetanizadora (T1). Conforme pode-se observar nesta
figura, o modelo dinâmico apresentou comportamento transiente bastante semelhante à
variável do processo real, tanto no que diz respeito ao ganho estático, quanto à

87
dinâmica. Por outro lado, o modelo linear identificado pelo VIP apresentou uma
resposta bastante pobre em relação à perturbação aplicada ao processo.
Figura 5.36. Teste A – Resposta de F2 para perturbação em T1.
A Figura 5.37 mostra a resposta da vazão volumétrica do produto de topo da
torre desetanizadora (F2) após perturbação degrau de 4ºC no setpoint do controlador de
temperatura de fundo da torre desetanizadora (T4). Novamente o modelo implementado
em ambiente EMSO foi capaz de predizer o comportamento da variável real, com
exceção da oscilação que ocorre no período entre 1000 e 2000 s de simulação. Neste
caso, o modelo do VIP também representou de maneira equivocada o comportamento
da variável F2 após a perturbação degrau em T4. Neste momento, o processo está,
provavelmente, sofrendo a influência de uma variável secundária, diferente da
temperatura de fundo da torre desetanizadora, provocando a oscilação não prevista pelos
modelos dinâmico (EMSO) e linear (VIP).
Figura 5.37. Teste B - Resposta de F2 para perturbação em T4.

88
A Figura 5.38 mostra a resposta da fração molar de etano no produto de fundo
da torre desetanizadora (X3,3) após perturbação degrau de 4ºC no setpoint do controlador
de temperatura de fundo da torre desetanizadora (T4). Mais uma vez o modelo dinâmico
se sobressaiu quando comparado à resposta do modelo linear do processo, sendo capaz
de prever o comportamento transiente do etano no produto de fundo da T02 após
perturbação na temperatura de fundo desta mesma torre25. Porém, é esperado que o
ganho estático final do processo seja negativo conforme mostrou o modelo linear (e a
Figura 5.39), uma vez que, aumentando a temperatura de fundo há maior volatilização
dos componentes encontrados nesta no fundo da torre desetanizadora, reduzindo a
participação dos mesmos nesta região.
Figura 5.38. Teste C - Resposta de X3,3 para perturbação em T4.
A Figura 5.39 mostra a resposta da fração molar de etano no produto de topo da
torre desbutanizadora (X4,3) após perturbação degrau de 4ºC no setpoint do controlador
de temperatura de fundo da torre desetanizadora (T4). O Caso D trata de uma inferência
composta, ou seja, permitiu inferir via simulação dinâmica no EMSO o produto de topo
da torre desbutanizadora (T03) a partir de uma perturbação em uma variável do modelo
dinâmico da torre desetanizadora (T02), cuja corrente de fundo atua como carga da torre
a jusante. Excetuando-se o dado de processo situado após os 6000s de simulação, pode-
se dizer que tanto o modelo dinâmico do EMSO quanto o modelo linear obtido pelo VIP
proporcionaram inferências satisfatórias para o etano no produto de topo da T03
(corrente de GLP), frente à perturbação supracitada25.
25
Deve-se mencionar que esta é uma análise superficial, uma vez que apenas quatro pontos do PI (referência) encontravam-se disponíveis para comparação com a trajetória dos modelos dinâmico e linear.

89
Figura 5.39. Teste D - Resposta de X4,3 para perturbação em T4.
A Figura 5.40 mostra a resposta do intemperismo do GLP após perturbação
degrau de 4ºC no setpoint do controlador da temperatura de fundo da torre
desetanizadora (T4). Como o intemperismo não compõe o modelo do processo no
EMSO, a sua resposta, gerada pelo modelo linear do VIP (curva contínua) foi
comparado nesta figura à fração molar do i-pentano no GLP26 (X4,7 – curva tracejada),
que teoricamente está intimamente ligada ao intemperismo no GLP. Os dados de
cromatógrafo do i-pentano são representados pelos pontos, na Figura 5.40.
A análise das respostas apresentadas na Figura 5.40 mostra que as respostas da
simulação dinâmica (linha tracejada) e do modelo linear (linha contínua) têm tendências
antagônicas. Ao provocar um degrau no setpoint do controlador de temperatura de
fundo da torre desetanizadora (T4) espera-se que haja maior volatilização dos
componentes da mistura no fundo da torre. Este fenômeno faria com que a carga da
torre desbutanizadora ficasse mais “pesada”, refletindo em um aumento na fração molar
de pentanos e mais pesados no GLP (conforme aponta a resposta do EMSO e os dados
de cromatógrafo). Desta forma, aumentaria também o intemperismo do próprio GLP,
diferentemente do que foi apontado pelo modelo linear do processo. Infelizmente não há
dados de processo para o intemperismo (apenas inferências realizadas via redes
neuronais) que pudessem ser comparados à trajetória sugerida pelo modelo linear.
26 O n-pentano apareceu em quantidades desprezíveis durante o dataset em que ocorreram os testes de
identificação para a variável F7.
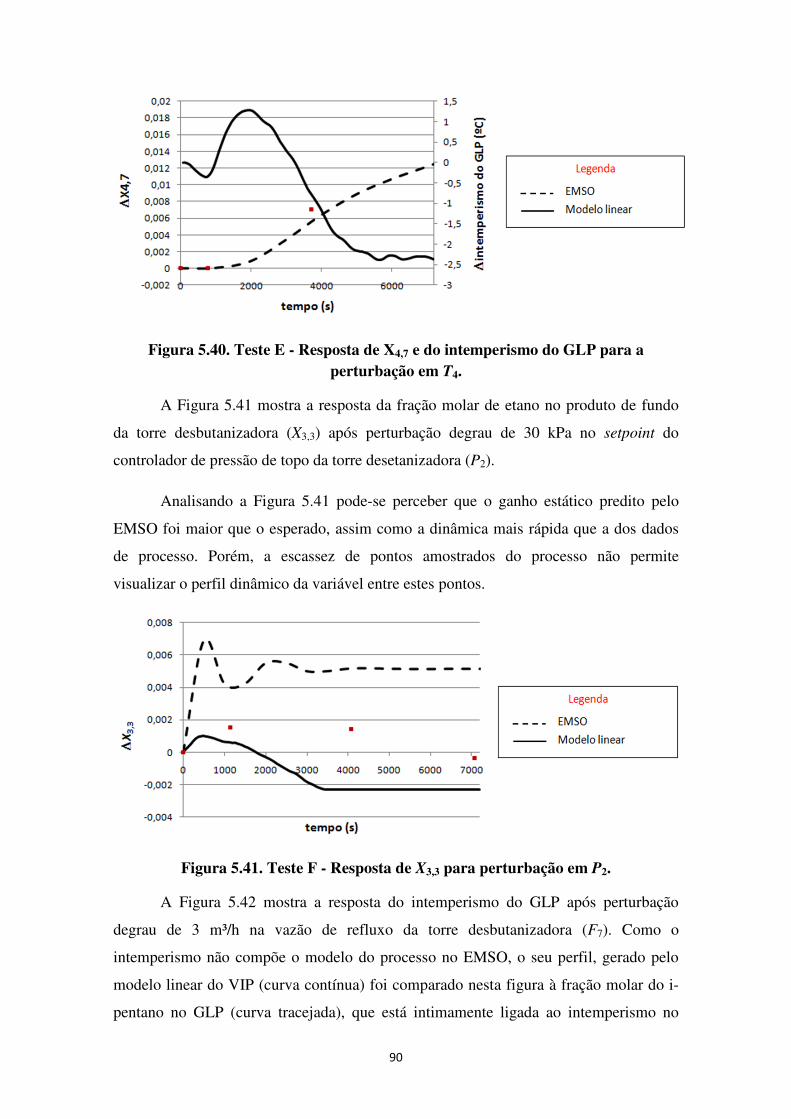
90
Figura 5.40. Teste E - Resposta de X4,7 e do intemperismo do GLP para a
perturbação em T4.
A Figura 5.41 mostra a resposta da fração molar de etano no produto de fundo
da torre desbutanizadora (X3,3) após perturbação degrau de 30 kPa no setpoint do
controlador de pressão de topo da torre desetanizadora (P2).
Analisando a Figura 5.41 pode-se perceber que o ganho estático predito pelo
EMSO foi maior que o esperado, assim como a dinâmica mais rápida que a dos dados
de processo. Porém, a escassez de pontos amostrados do processo não permite
visualizar o perfil dinâmico da variável entre estes pontos.
Figura 5.41. Teste F - Resposta de X3,3 para perturbação em P2.
A Figura 5.42 mostra a resposta do intemperismo do GLP após perturbação
degrau de 3 m³/h na vazão de refluxo da torre desbutanizadora (F7). Como o
intemperismo não compõe o modelo do processo no EMSO, o seu perfil, gerado pelo
modelo linear do VIP (curva contínua) foi comparado nesta figura à fração molar do i-
pentano no GLP (curva tracejada), que está intimamente ligada ao intemperismo no
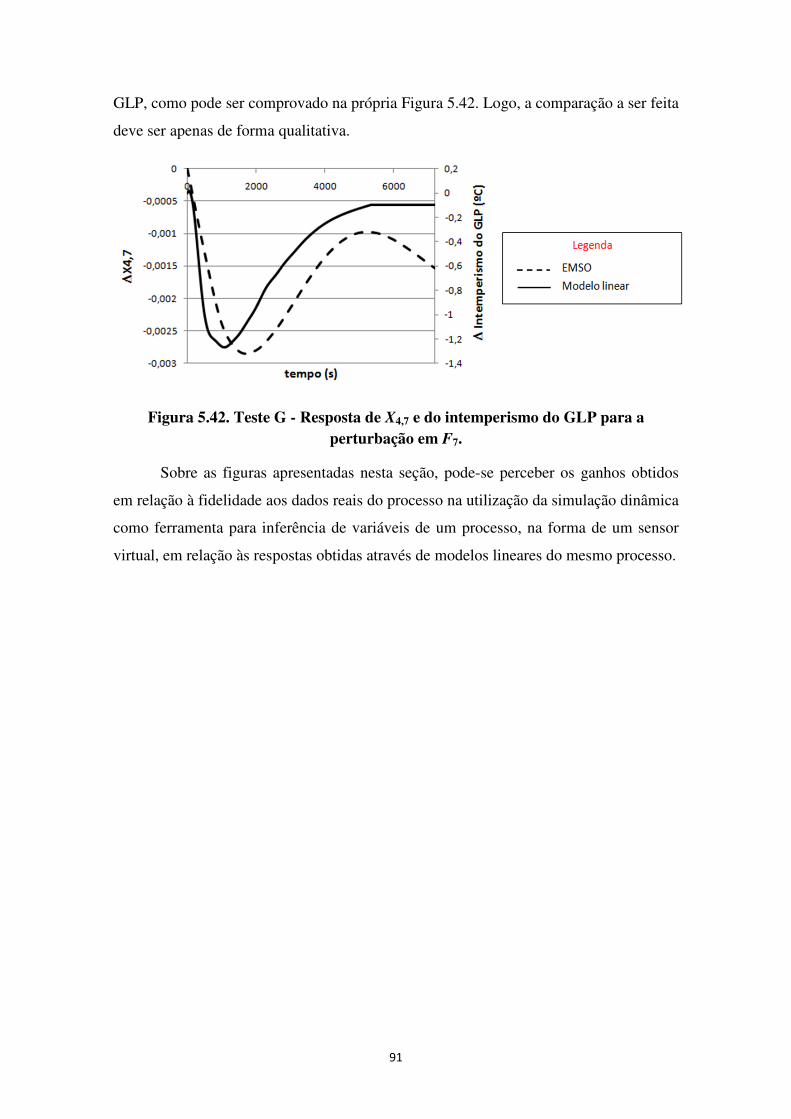
91
GLP, como pode ser comprovado na própria Figura 5.42. Logo, a comparação a ser feita
deve ser apenas de forma qualitativa.
Figura 5.42. Teste G - Resposta de X4,7 e do intemperismo do GLP para a
perturbação em F7.
Sobre as figuras apresentadas nesta seção, pode-se perceber os ganhos obtidos
em relação à fidelidade aos dados reais do processo na utilização da simulação dinâmica
como ferramenta para inferência de variáveis de um processo, na forma de um sensor
virtual, em relação às respostas obtidas através de modelos lineares do mesmo processo.

92
6. CONCLUSÕES E SUGESTÕES PARA
TRABALHOS FUTUROS
Foram desenvolvidos modelos fenomenológicos, rigorosos e dinâmicos para a
inferência de propriedades de correntes de uma unidade real de processamento de gás
natural (UPGN), com o objetivo de proporcionar o conhecimento do valor das variáveis
de processo com tempos de amostragem consideravelmente menores que os
disponibilizados pelos instrumentos físicos de medida de propriedades instalados na
UPGN, o que se faz necessário em aplicações de Controle Avançado e no
monitoramento efetivo do processo. Para tal, foram implementados no simulador
EMSO modelos de uma torre desetanizadora e desbutanizadora, pertencentes à planta
supracitada.
A obtenção dos modelos do processo passou pela análise de sensibilidade e
escolha de parâmetros de forma que o mesmo representasse o processo real de forma
adequada, reproduzindo da maneira mais fiel possível o perfil, principalmente em
regime dinâmico, das variáveis da UPGN em questão.
Concomitantemente ao desenvolvimento do modelo matemático do processo,
foram realizadas as etapas de validação do modelo em estado estacionário e dinâmico,
calcadas na comparação das variáveis inferidas pelo sensor virtual em ambiente EMSO
com dados do processo real. Dados da UPGN real também foram utilizados como
entradas do modelo matemático.
Para que estes dados de processo pudessem ser utilizados de maneira consistente
foram então utilizadas técnicas de reconciliação de dados e detecção de estados
estacionários.
Para a torre desetanizadora foram comparados os resultados obtidos para a
simulação dinâmica de minuto a minuto, a partir de dados de entrada do modelo
reconciliados e não reconciliados. Para as variáveis relacionadas ao produto de topo
desta torre, os resultados para os dados não reconciliados se aproximaram mais dos
dados de processo, o que provavelmente pode ter ocorrido devido a escolhas
93
inadequadas das variâncias para as variáveis (vazões e composições) na etapa de
Reconciliação Estacionária dos Dados. Enquanto isso, para o produto de fundo (que
figura como corrente de alimentação da torre desbutanizadora), os dados reconciliados
proporcionaram inferências de melhor qualidade.
No caso da torre desbutanizadora, foram também testadas duas situações
distintas: dados da corrente de alimentação provenientes do resultado da simulação
dinâmica da torre desetanizadora versus dados de entrada do modelo provenientes do
processo (com maiores tempos de amostragem). No caso dos componentes leves do gás
liquefeito de petróleo (GLP – produto de topo da torre), os dados de entrada obtidos
diretamente do processo levaram a inferências dinâmicas mais próximas dos valores
reais das variáveis. Por outro lado, tanto para a temperatura de topo da torre, quanto
para os componentes mais pesados que poderiam ser encontrados no GLP (pentanos), a
inferência obtida a partir da simulação no EMSO para a torre desetanizadora levou a
resultados mais confiáveis.
Outro ponto explorado no trabalho foi a comparação do modelo dinâmico do
EMSO com modelos matemáticos baseados em Redes Neuronais Artificiais (RNAs).
Esta etapa do trabalho mostrou, para o conjunto de dados avaliados, que as RNAs, se
corrigidas com bias (erros sistemáticos entre a inferência e o valor esperado),
apresentam resultados semelhantes aos obtidos pela simulação dinâmica, exceto no que
se refere a saídas discretizadas, provocadas por dados de entrada discretizados
(provenientes de cromatógrafos com tempos de amostragem na faixa dos quarenta a
cinquenta minutos).
Para finalizar, os resultados obtidos através do modelo dinâmico no EMSO
foram comparados aos modelos lineares identificados para o mesmo processo, após
ambos serem perturbados com a mesma intensidade e duração. Algumas variáveis do
processo apresentaram resultados equivalentes para as duas abordagens, enquanto que
outras não. Estas diferenças foram discutidas ao longo da Seção 5.7, que trata do
assunto.
Abaixo seguem algumas sugestões para trabalhos futuros utilizando as lições
aprendidas durante o desenvolvimento desta dissertação:
94
• Implementação no EMSO de modelos de inferências de intemperismo do GLP, e
de Pressão de Vapor Reid (PVR), para a corrente de C5+;
• Implementação em tempo real do sistema de aquisição e tratamento preliminar
de dados, detecção de estados estacionários, reconciliação de dados e simulação
dinâmica. Para tal poderiam ser utilizadas ferramentas como o EMSO OPC que
fazem o link entre o servidor OPC da unidade e o simulador de processos. As
saídas do simulador poderiam ser direcionadas a entradas do controlador
preditivo multivariável instalado na UPGN, assim como é feito atualmente com
as saídas das redes neuronais artificiais;
• Utilizar o modelo dinâmico desenvolvido para o processo em ambiente EMSO
como parte integrante de um estimador de estados tipo CEKF (Constrained
Extended Kalman Filter). Com isto seria possível realizar inferência adaptativa e
recursiva do processo.
• Utilizar o modelo dinâmico desenvolvido para o processo em treinamentos de
operadores;
• Utilizar o modelo dinâmico desenvolvido para o processo na identificação de
modelos não-lineares entre variáveis deste mesmo processo e para processos
similares;

95
REFERÊNCIAS BIBLIOGRÁFICAS
ABU-EL-ZEET, Z. H., ROBERTS, P. D., BECERRA, V. M., 2002, “Enhancing model
predictive control using dynamic data reconciliation”, AIChE Journal., v.48, n.2, p.324-
333.
AGUIRRE, L. A., 2004, Introdução à identificação de sistemas: técnicas lineares e
não-lineares aplicadas a sistemas reais. Belo Horizonte: Ed. UFMG.
ALEVISAKIS, G., SEBORG, D., 1973, “An extension of the Smith predictor to
multivariable linear systems containing time delays”, Int. J. Control, v. 17, pp. 541.
ANP, 2001, Portaria ANP nº 32 – Publicada no DOU 07/03/2001.
ANP, 2004, Resolução ANP Nº 18 – Publicada no DOU 06/09/2004.
ANP, 2009, Dados Históricos do Boletim do Gás Natural. Agência Nacional do
Petróleo, Gás Natural e Biocombustíveis, Rio de Janeiro, RJ, Brasil.
APPELHAUS, P., ENGELL, S., 1996, “Extended observers for the polymerization of
poly ethylene terephthalate”, In: Proceedings of IFAC World Congress, pp. 175.
ARAÚJO JUNIOR, G. F., 2009, Simulação Dinâmica e Controle Preditivo de uma
Unidade de Processamento de Gás Natural. Projeto Final de Curso. Escola de Química,
UFRJ, Rio de Janeiro, RJ, Brasil.
BALCI, O., 1987, “Credibility Assessment of Simulation Results: The State of the Art”,
Proceedings of Conference on Methodology and Validation, pp. 19-25. Orlando,
Florida, USA.
BALCI, O., SARGENT, R. G., 1984, “A bibliography on the credibility assessment and
validation of simulation and mathematical models”, Simuletter, v. 15, pp. 15-27.
BANKS, J., CARSON, J. S., 1984, Discrete-Event System Simulation, New Jersey:
Prentice Hall.
BP, 2007, BP Statistical Review of World Energy.
96
CALDAS, J. N., LACERDA, A. I., VELOSO, E., PASCHOAL, L. C. M., 2007,
Internos de torres: pratos e recheios. Rio de Janeiro: Interciência: Petrobras.
CANABARRO, L. R., MENEZES, M. P., RIBEIRO, L. D., 2009, Estudo de um
problema de controle de processos no sistema de refrigeração a propano em uma
Unidade de Processamento de Gás Natural. Trabalho de Conclusão de Curso
(Especialização em Engenharia de Processos Downstream/PROMINP) – Pontifícia
Universidade Católica do Rio de Janeiro, Rio de Janeiro, RJ, Brasil.
CANABARRO, L.R., SECCHI, A.R., 2010, “Inferência dinâmica em colunas de
destilação para uma unidade de processamento de gás natural com modelo
fenomenológico”, In: Anais do XVIII Congresso de Brasileiro de Engenharia Química
(COBEQ 2010), Foz do Iguaçu, PR.
CAO, S., RHINEHART, R., 1995, “An efficient method for on-line identification of
steady state”, Journal of Process Control, v. 6, pp. 363-374.
CARSON, J. S., 1986, “Convincing users of model´s validity is challenging aspect of
modeler´s job”, Ind. Eng., v. 18, pp. 74-85.
CAUMO, L., 2006, Aplicação e Cálculo da derivada de Sinais de Processos
Industriais. Dissertação de Mestrado. Programa de Pós-Graduação em Engenharia
Química, Universidade Federal do Rio Grande do Sul, Porto Alegre, RS, Brasil.
CHATTERJEE, T., SARAF, D., 2004, “On-line estimation of product properties for
crude distillation units”, Journal of Process Control, v.14, pp.61-77.
CHOI, D., PARK, H., 2001, “A hybrid artificial neural network as a software sensor for
optimal control of a wastewater treatment process”, Water Research, v. 35 , pp. 3959–
3967.
CHVIDCHENKO, V., 2008, Estudo comparativo do desempenho das equações de
estado CPA, SRK e PR na modelagem de sistemas de interesse para a indústria do gás
natural. Dissertação de Mestrado. Escola de Química, UFRJ, Rio de Janeiro, RJ, Brasil.
CRUZ, P. SANTOS, J.C., MAGALHÃES, F.D., MENDES, S.A., 2003, “Cyclic
adsorption separation processes: Analysis strategy and optimization procedure”,
Chemical Engineering Science, v.58, n.14, pp. 3143-3158.
97
DARWISH, N. A., HILAL, N., 2008, “Sensitivity analysis and faults diagnosis using
artificial neural networks in natural gas TEG-dehydration plants”, Chemical
Engineering Journal, v. 137, n. 2, pp. 189-197.
DUTT, N.V.K., 1990, “A Simple Method of Estimating the Viscosity of Petroleum
Crude Oil and Fractions”. The Chemical Engineering Journal, v. 45, p. 83-88.
EIA, 2006, Annual Energy Outlook 2006. Disponível em
http://www.eia.doe.gov/emeu/iea/wecbtu.html. Acesso em 9 de outubro de 2009.
ELGUE, S., PRAT, L., CABASSUD, M., LANN, J. L., CÉZERAC, J., 2004, “Dynamic
models for start-up operations of batch distillation columns with experimental
validation”, Computers and Chemical Engineering, v. 28, pp. 2735-2747.
ENDER, L., 2002, Redes Neurais aplicadas em estratégias de controle não-linear. Tese
de Doutorado. Faculdade de Engenharia Química. Universidade Estadual de Campinas.
Campinas, São Paulo, SP, Brasil.
ENGELL, S., 2007, “Feedback control for optimal process operation”, Journal of
Process Control, v. 17, pp. 203–219
FARAH, M.A., 2006, Caracterização de frações de petróleo pela viscosidade, Tese de
Doutorado, Escola de Química, Universidade Federal do Rio de Janeiro, Rio de Janeiro,
RJ, Brasil.
FARASAT, I., GIRI, M. S., NIASAR, M. S., 2006, “Optimization of amines mixture's
formulation by neural networks in gas sweeting”. In: Proceedings of 2006 AIChE
Spring Annual Meeting, San Francisco, California, USA.
FERNANDES, P. A., 2009, Modelagem e Simulação Dinâmica do Ciclo de
Refrigeração a Propano de uma Unidade de Processamento de Gás Natural.
Monografia, Universidade Federal do Rio de Janeiro, Escola de Química, Rio de
Janeiro, RJ, Brasil.
FERREIRA, H. S., 2003, Métodos matemáticos em modelagem e simulação do
craqueamento térmico do 1,2 dicloroetano. Tese de Doutorado, Universidade Estadual
de Campinas, Campinas, SP, Brasil.

98
FINN, A. J., JOHNSON, G. L., TOMLINSON, T. R., 2000, “LNG technology for
offshore and mid-scale plants”, In: GPA Annual Convention Proceedings.
FONSECA, G.C., SECCHI, A.R., GIORDANO, R.C., CRUZ, A.J.G., 2010,
“Modelagem e Simulação da Etapa de Fermentação no Simulador de Processos
EMSO”, In: Anais do XVIII Congresso de Brasileiro de Engenharia Química (COBEQ
2010), Foz do Iguaçu, PR.
FORTUNA, L. GRAZIANI, S. XIBLIA, M.G., 2005, “Soft sensors for product quality
monitoring in debutanizer distillation columns”, Control Engineering Practice, v13,
n.4, pp. 499-508.
FREITAS, K. P., 2009, Ferramentas estatísticas para monitoramento de modelos
inferenciais. Dissertação de Mestrado, Programa de Engenharia Química,
COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
GOMES, M. V. C., 2007, Otimização sequencial por aproximações – uma aplicação
em tempo real para o refino de petróleo. Tese de Doutorado, Programa de Engenharia
Química, COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
GONZALEZ-BUSTAMANTE, J.A., SALA, J M., MIGUEZ, J.L., FLORES, I., 2007,
“Modelling and dynamic simulation of processes with MATLAB. An application of a
natural gas installation in a power plant”, Energy, v. 32, n. 7, pp. 1271-1282.
HENDERSON, P., PEKEDIZ, A., SCHINDLER, H., 2004, “Dynamic simulation
studies help ensure safety by confirming operational readiness of LNG plant assets”, In:
2004 AIChE Spring Meeting, Conference Proceedings
ITO, E.H.C., 2010, Desenvolvimento de Inferências para Colunas de Destilação de uma
UPGN, Projeto Final de Curso, Escola de Química, Universidade Federal do Rio de
Janeiro, Rio de Janeiro, RJ, Brasil.
JIANG, T., CHEN, B., HE, X., STUART, P., 2003, “Application of steady-state
detection method based on wavelet transform”, Computers and Chemical Engineering,
v. 27, pp. 569-578.
JOSEPH, B., BROSILOW, C.B., 1978, “Inferential control of processes – I. Steady
State Analysis and design”, AIChE Journal, v.24, n.3, pp.485-492.
99
KAHRS, O., MARQUARDT, W., 2007, “Incremental identification of hybrid process
models”, Computers and Chemical Engineering, v. 32, n. 4/5, pp. 694-705.
KALMAN, R., 1960, “A new approach to linear filtering and prediction problems”.
ASME Journal of Basic Engineering, v. 82, n. 1, pp. 35-45.
KANO, M., MIYAZAKI, K., HASEBE, S., HASHIMOTO, I., 2000, “Inferential
control system of distillation compositions using dynamic Partial Least Squares
regression”, Journal of Process Control, v.10, n.2, pp. 157-166.
KISTER, H., 1990, Distillation Operation, New York: McGraw-Hill.
KLINGBERG, A., 2000, Modeling and Optimization of Batch Distillation. Dissertação
de Mestrado. Department of Automatic Control, Lund Institute of Technology, Lund,
Sweden.
KRAMER, M.A., 1992, “Auto-associative neural networks”, Computers and Chemical
Engineering, v.16, n.4, pp. 313-328.
KRESTA, J.V., MARLIN, T.E., MACGREGOR, J.F., 1994, “Development of
inferential process models using PLS”, Computers and Chemical Engineering, v.18,
n.7, pp. 597-611.
KUHEN, D. R., DAVIDSON, H., 1961, “Computer control. II. Mathematics of
control”, Chemical Engineering Progress, v. 57, pp. 44-47.
LAW, A. M., KELTON, W. D., 1991, Simulation Modeling and Analysis, 3rd ed. New
York: McGraw-Hill.
LIN, J., LEE, J., WANG, G., 2009, “Dynamic simulation for the production of dimethyl
ether from natural gas”, In: Proceedings of 2009 AIChE Annual Meeting, 09AIChE.
LJUNG, L., 1999, System Identification: Theory for the user. Prentice-Hall PTR, NJ, 2nd
edition.
MARQUARDT, W., 1994, “Towards a Process Modeling Methodology”, In: R. Berber
(Eds.): R. Berber: Methods of Model-Based Control, NATO-ASI Ser. E, Applied
Sciences, Kluwer Academic Pub., Dordrecht, Kluwer Academic Pub, 3-41.
100
MARQUARDT, W., BOSGRA O. H., BACKX, T., 1998, “Towards intentional
dynamics in supply chain conscious process operations”, In: Proceedings of the 3rd
International Conference on Foundations of Computer Aided Process Operations,
Snowbird, Utah, USA.
MARTINS, N., 1998, Manual de medição de vazão: através de placas de orifício,
bocais e venturis. Rio de Janeiro: Interciência, Petrobras.
MATHIAS, M. C., 2008, A Formação da Indústria Global de Gás Natural: Definição,
Condicionantes e Desafios. Dissertação de Mestrado, Programa de Planejamento
Energético, COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
McCULLOCH, W. S., PITTS, W., 1943,”A logical calculus of the ideas immanent in
neurons activity”, Bull. Math. Biophys., v. 5, pp. 115.
MEJDELL, T., SKOGESTAD, S., 1991, “Composition Estimator in a Pilot-Plant
Distillation Column Using Multiple Temperatures”,
Industrial & Engineering Chemistry Research, v.30, pp. 2555-2564.
MME, 2006, BEM – Balanço Energético Nacional 2005. Retrieved outubro 9, 2009,
from Site do Ministério de Minas e Energia: http://www.mme.gov.br
MOKHATAB, S., POE, W. A., SPEIGHT, J. G., 2006, “Dynamic simulation of gas
processing plants”, In Handbook of Natural Gas Transmission and Processing (pp. 461-
483). Burlington: Gulf Professional Publishing.
MULLER, M.A., LONGHI, L.G.S., ASSIS, W.R., SECCHI, A.R., 2008, “Modelagem
Dinâmica da Estação de Tratamentos de Despejos Industriais da REFAP usando o
simulador EMSO”, In: Anais do I Congresso de Instrumentação, Controle e Automação
da Petrobras (I CICAP), Rio de Janeiro, RJ.
NABAVI, R., NIAEI, A., SALARI, D., TOWFIGHI, J., 2007, “Modeling of thermal
cracking of LPG: Application of artificial neural network in prediction of the main
product yields”, Journal of Analytical and Applied Pyrolysis, v. 80, n. 1, pp. 175-181.
NIEDERBERGER, J., WAINTRAUB, S., AYRES, J. S. S., 2000, “PETROX –
Simulador de Processos de Refino e Petroquímica”, In: Anais do XIII Congresso
Brasileiro de Engenharia Química (COBEQ).

101
OGUNNAIKE, B. A., RAY, W. H., 1979, “Multivariable controller design for linear
systems having multiple time delays”, AIChE Journal 25, 1043.
OKASINSKI, M. J., LIU, Y. N., 2010, “Dynamic simulation of C3-MR LNG plants
with parallel compression strings”, In: Proceedings of the 16th International
Conference and Exhibition on Liquefied Natural Gas, LNG 16.
OKASINSKI, M. J., SCHENK, M. A., 2007, “Dynamics of baseload liquefied natural
gas plants-advanced modelling and control strategies”, In: 15th International
Conference and Exhibition on Liquified.
OMORI, H., KONISHI, H., RAY, S. A., DE LA VEGA, F. F., DURR, C. A., 2001, “A
new tool - Efficient and accurate for LNG plant design and debottlenecking”, In: IGT
International Liquefied Natural Gas Conference Proceedings.
PARK, S., HAN, C., 2000, “A nonlinear soft sensor based on multivariate smoothing
procedure for quality estimation in distillation columns”, Computers and Chemical
Engineering, v.24, pp. 871-877.
PETROBRAS, 2011a, Disponível em www.petrobras.com.br/minisite/presal/pt/uma-
nova-fronteira. Acesso em 4 de maio de 2011.
PETROBRAS, 2011b, Sistema de Visualização de Dados e Geração de Modelos de
Processo – VIP – Manual do Usuário. Acesso em abril de 2011.
PIRES NETO, J. P., 2002, “Dynamic modeling in compressible flow systems for
application in real time leak detection”. Boletim Técnico da PETROBRAS, v. 45, n. 2,
pp. 128-159.
PRATA, D. M., 2005, Reconciliação de Dados em um Reator de Polimerização.
Dissertação de Mestrado, Programa de Engenharia Química, COPPE/UFRJ, Rio de
Janeiro, RJ, Brasil.
RIAZI, M.R., DAUBERT, T.E., 1987, “Predicting flash and pour points”, Hydrocarbon
Process, September, pp. 81-83.
RIBEIRO, L.D., 2011, Nova Técnica de Redução de Ordem de Modelo Baseada em
Resíduos Ponderados no Domínio Discreto, Dissertação de Mestrado, Programa de
Engenharia Química, COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
102
SALAU, N. P. G., 2009, Abordagem Sistemática para Construção e Sintonia de
Estimadores de Estados Não-Lineares. Tese de Doutorado. Programa de Pós-Graduação
em Engenharia Química. Universidade Federal do Rio Grande do Sul, Porto Alegre, RS,
Brasil.
SALAU, N. P. G., SECCHI, A. R., TRIERWEILER, J. O., 2006, “Comparison of
different implementation structures for Extended Kalman Filter”, In: XVI Congresso
Brasileiro de Engenharia Química, Santos, Brasil, v. 1., p. 1-8.
SALAU, N. P., TRIERWEILER, J. O., SECCHI, A. R., MARQUARDT, W., 2009, “A
new process-noise covariance matrix tuning algorithm for Kalman-based state
estimators”, In: IFAC International Symposium on Advanced Control of Chemical
Processes 2009, Istanbul. Proceedings of ADCHEM 2009.
SARTOR, R.B., 2009, Modelagem, Simulação e Otimização de uma Unidade Industrial
de Extração de Óleos Essenciais por Arraste à Vapor, Dissertação de Mestrado,
Programa de Pós-Graduação em Engenharia Química, Universidade Federal do Rio
Grande do Sul, Porto Alegre, RS, Brasil.
SCHENELLE Jr., P. D., RICHARDS, J. R., 1986, “A review of industrial reactor
control: difficult problems and workable solutions”, Chem. Process Control, v.III, pp.
749.
SCHULER, M., FRIEDMAN, Y.Z., KESLER, M.G., BELANGER, P., 2000, “Use
column data to infer and control crude fractionation product properties”. In: NPRA
Conference. Disponível em http://petrocontrol.com/papers/2000_URC_CDU_Experience.pdf.
Acesso em 21 de maio de 2011.
SCHWAAB, M., PINTO, J. C., 2007, Análise de Dados Experimentais I –
Fundamentos de Estatística e Estimação de Parâmetros. Série Escola Piloto em
Engenharia Química, v.1, COPPE/UFRJ, Rio de Janeiro: E-Papers.
SECCHI, A. R., LEMOS, E. M., 2008, “Simulação Dinâmica e Otimização de
Processos usando o EMSO”, In: Colóquio Anual de Engenharia Química. Programa de
Engenharia Química, COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
SHANNON, R. E., 1975, Systems Simulation: The Art and Science. Englewood Cliffs,
New Jersey: Prentice Hall.
103
SHIN, Y., LEE, Y. P., 2009, “Design of a boil-off natural gas reliquefaction control
system for LNG carriers”, Applied Energy, v. 86, n. 1, pp. 37-44.
SIMON, D., 2006, Optimal State estimation: Kalman, H Infinity, and Nonlinear
Approaches, New Jersey: Wiley-Interscience.
SIMPSON, P. K., 1990, Artificial Neural Systems: Foundations, Paradigms,
Applications and Implementations. New York: Pergamom Press.
SINGH, A., HOVD, M., 2007, “Dynamic Modeling and Control structure design for a
Liquefied Natural Gas Process”, In: Proceedings of American Control Conference,
2007. ACC '07, New York, NY, USA
SJÖBERT, J., ZHANG, Q., LJUNG, L., BENVENISTE, A. L., DELYON, B.,
GLORENNEC, P.-Y., HJALMARSSON, H., JUDITSKY, A., 1995, “Nonlinear Black-
box Modeling in System Identification: a Unified Overview”, Automatica, v. 31, n. 12,
pp. 1691-1724.
SOARES, R. P., 2003, Desenvolvimento de um Simulador Genérico de Processos
Dinâmicos. Dissertação de Mestrado, Programa de Pós Graduação em Engenharia
Química, Universidade Federal do Rio Grande do Sul, Porto Alegre, RS , Brasil.
SOARES, R. P., 2007, EMSO Manual, Disponível em
www.enq.ufrgs.br/alsoc/download/emso/docs/Manual.pdf. Acesso em 05 de abril de
2010.
SOARES, R. P., SECCHI, A. R., 2003, “EMSO: A New Environment for Modelling,
Simulation and Optimisation”. In: Proceedings of the 13th European Symposium on
Computer Aided Process Engineering (ESCAPE 13), pp. 947-852, Lappeenranta,
Finland.
SOROUSH, M., 1998, “State and parameter estimations and their applications in
process control”, Computers and Chemical Engineering, v. 23 , pp. 229-245.
SOROUSH, M., KRAVARIS, C., 1996, “A continuous-time formulation of nonlinear
model predictive control”, Int. J. Control, v. 63, pp. 121.

104
SOTELO, F. F., 2006, Aplicação da espectroscopia de infravermelho próximo na
caracterização de petróleo. Simulação de uma unidade de destilação atmosférica. Tese
de Doutorado. Universidade de São Paulo/ EPUSP, São Paulo, SP, Brasil.
STANLEY, R.A., BOHANNAN, W.R., 1977, “Dynamic simulation of centrifugal
compressor systems”, In: Proceedings of the Sixth Turbomachinery Symposium, pp.
123-131.
STAUDT, P. B., 2007, Modelagem e Simulação Dinâmica de Colunas de Destilação.
Dissertação de Mestrado, Programa de Pós Graduação em Engenharia Química,
Universidade Federal do Rio Grande do Sul Porto Alegre, RS, Brasil.
STRAATMANN, G.S., MACIEL, M.C., SECCHI, A.R., 2008, “Modelagem de uma
Coluna de Destilação Batelada para Implementação no Simulador EMSO”, In: Anais do
XVII Congresso de Brasileiro de Engenharia Química (COBEQ 2008), Recife, PE.
THAM, M.T., MONTAGUE, G.A., JULIAN MORRIS, A., LANT, P.A., 1991, “Soft-
sensors for process estimation and inferential control”, Journal of Process Control, v.1,
n.1, pp. 3-14.
VALLERIOTE, A.J.N., LEMOS, E.M., BISCAIA JR., E.C., TAVARES, F.W.,
SECCHI, A.R., 2008, “Simulaçao do Processo de Produção do DME no Ambiente
EMSO”, In: Anais do XVII Congresso de Brasileiro de Engenharia Química (COBEQ
2008), Recife, PE.
VAZ, C. E., MAIA, J. L., SANTOS, W. G., 2008, Tecnologia da Indústria do Gás
Natural. São Paulo: Blucher.
WELCH, G., BISHOP G., 2000, An Introduction to the Kalman Filter, UNC Chapel
Hill TR 95-041.
YANG, Y., CHAI, T., 1997, “Application of statistical theory of adjustment to material
balances”, In: Proceedings of the American Control Conference. Albuquerque, New
Mexico, USA.
YIP, W. S., MARLIN, T. E., 2004, “The effect of model fidelity on real-time
optimization performance”, Comp. Chem. Eng., v. 28, pp. 267-280.

105
YOUNG, B., MONNERY, W., SVRCEK, W., BAKER, J., 2001, “Dynamic simulation
improves gas plant: SRU control-scheme selection”, Oil and Gas Journal, v. 99, n. 22,
pp. 54-57.
ZANATA, D. F., 2005, Desenvolvimento de Sensor Virtual empregando Redes Neurais
para Medição da Composição em uma Coluna de Destilação. Dissertação de Mestrado,
Universidade de São Paulo, São Paulo, SP, Brasil.
106
ANEXOS
A.1. MODELOS EM AMBIENTE EMSO
A.1.1. CÓDIGO PARA CONVERSÃO DE VAZÕES
O código abaixo foi utilizado para conversão de vazões volumétricas, medidas
na unidade de processo em condição padrão (20ºC e 1 atm), para vazões molares, a
partir das quais foi possível realizar a Reconciliação de Dados mencionada na Seção
4.4.
Os demais elementos que aparecem no arquivo “streams.mso” da Biblioteca
EML do EMSO e não se encontram neste texto permaneceram inalterados durante a
execução das simulações neste software.
using "types";
Model stream
ATTRIBUTES
Pallete = false;
Brief = "General Material Stream";
PARAMETERS
outer NComp as Integer
VARIABLES
F as flow_mol (Brief = "Stream Molar Flow Rate");
T as temperature (Brief = "Stream Temperature");
P as pressure (Brief = "Stream Pressure");
h as enth_mol (Brief = "Stream Enthalpy");
v as fraction (Brief = "Vapourization fraction");
z(NComp) as fraction (Brief = "Stream Molar Fraction");
end
107
Model liquid_stream as stream
ATTRIBUTES
Pallete = false;
Brief = "Liquid Material Stream";
PARAMETERS
outer PP Plugin
T_std as temperature (Brief = "Standard temperature", Hidden=true, Default = 293.15);
P_std as pressure (Brief = "Standard pressure", Hidden=true, Default = 1);
VARIABLES
Fvol as flow_vol (Brief = "Volumetric Flow");
Fvol_std as flow_vol (Brief = "Standard Volumetric Flow (1 atm, 20 C)");
vm as volume_mol (Brief = "Molar Volume", Protected=true);
vm_std as volume_mol (Brief = "Standard Molar Volume",Protected=true);
EQUATIONS
"Liquid Enthalpy"
h = PP.LiquidEnthalpy(T, P, z);
"Liquid stream"
v = 0;
"Molar Volume"
vm = PP.LiquidVolume(T, P, z);
"Standard Molar Volume"
vm_std = PP.LiquidVolume(T_std, P_std, z);
"Volumetric Flow"
Fvol = F*vm ;
"Standard Volumetric Flow"
Fvol_std = F*vm_std ;
End
108
Model vapour_stream as stream
ATTRIBUTES
Pallete = false;
Brief = "Vapour Material Stream";
PARAMETERS
outer PP as Plugin
T_std as temperature (Brief = "Standard temperature", Hidden=true, Default = 293.15);
P_std as pressure (Brief = "Standard pressure", Hidden=true, Default = 1);
VARIABLES
Fvol as flow_vol (Brief = "Volumetric Flow");
Fvol_std as flow_vol
(Brief = "Standard Volumetric Flow (1 atm, 20 C)");
vm as volume_mol
(Brief = "Molar Volume",Protected=true);
vm_std as volume_mol
(Brief = "Standard Molar Volume",Protected=true);
EQUATIONS
"Vapour Enthalpy"
h = PP.VapourEnthalpy(T, P, z);
"Vapour stream"
v = 1;
"Molar Volume"
vm = PP.VapourVolume(T, P, z);
"Standard Molar Volume"
vm_std = PP.VapourVolume(T_std, P_std, z);
"Volumetric Flow"
Fvol = F*vm ;
"Standard Volumetric Flow"
Fvol_std = F*vm_std ;
End
109
Model source
ATTRIBUTES
Pallete = true;
Icon = "icon/Source";
Brief = "Material stream source";
“The user should specify:
* Total molar (mass or volumetric) flow
* Temperature
* Pressure
* Molar or mass composition
No matter the specification set, the model will calculate some
additional properties:
* Mass density
* Mass flow
* Mass compostions
* Specific volume
* Vapour fraction
* Volumetric flow
* Liquid and Vapour compositions";
PARAMETERS
outer PP as Plugin
outer NComp as Integer
(Brief = "Number of chemical components", Lower = 1);
M(NComp) as molweight (Brief = "Component Mol Weight");
CompositionBasis as Switcher
(Brief = "Molar or Mass Composition", Valid = ["Molar", "Mass"], Default="Molar");
ValidPhases as Switcher
(Brief = "Valid Phases for Flash Calculation", Valid = ["Vapour-Only", "Liquid-Only","Vapour-Liquid"], Default="Vapour-Liquid");
T_std as temperature
(Brief = "Standard temperature", Hidden=true, Default = 293.15);
P_std as pressure
(Brief = "Standard pressure", Hidden=true, Default = 1);

110
SET
M = PP.MolecularWeight();
VARIABLES
out Outlet as stream
(Brief = "Outlet stream", Protected=true);
Composition(NComp) as fraction
(Brief = "Stream Composition");
F as flow_mol
(Brief = "Stream Molar Flow Rate");
Fw as flow_mass
(Brief = "Stream Mass Flow");
Fvol as flow_vol
(Brief = "Volumetric Flow");
Fvol_std as flow_vol
(Brief = "Standard Volumetric Flow (1 atm, 20 C)");
T as temperature
(Brief = "Stream Temperature");
T_Cdeg as temperature
(Brief = "Temperature in °C", Lower=-200);
P as pressure
(Brief = "Stream Pressure");
x(NComp) as fraction
(Brief = "Liquid Molar Fraction",Hidden=true);
y(NComp) as fraction
(Brief = "Vapour Molar Fraction",Hidden=true);
Mw as molweight
(Brief = "Average Mol Weight",Protected=true);
vm as volume_mol
(Brief = "Molar Volume",Protected=true);
vm_std as volume_mol
(Brief = "Standard Molar Volume",Protected=true);
rho as dens_mass
(Brief = "Stream Mass Density",Protected=true);
rhom as dens_mol
(Brief = "Stream Molar Density",Protected=true);
111
zmass(NComp) as fraction
(Brief = "Mass Fraction",Protected=true);
EQUATIONS
switch CompositionBasis
case "Molar":
"Stream Molar Composition"
Outlet.z = Composition/sum(Composition);
"Stream Mass Composition"
zmass = M*Outlet.z / Mw;
case "Mass":
"Stream Mass Composition"
zmass = Composition/sum(Composition);
"Stream Molar Composition"
Outlet.z*sum(zmass/M) = zmass/M;
end
switch ValidPhases
case "Liquid-Only":
"Vapour Fraction"
Outlet.v = 0;
"Liquid Composition"
x = Outlet.z;
"Vapour Composition"
y = Outlet.z;
"Overall Enthalpy"
Outlet.h = PP.LiquidEnthalpy(Outlet.T, Outlet.P, x);
"Molar Volume"
vm = PP.LiquidVolume(Outlet.T, Outlet.P, x);
"Standard Molar Volume"
vm_std = PP.LiquidVolume(T_std, P_std, x);
case "Vapour-Only":
"Vapor Fraction"
Outlet.v = 1;
"Liquid Composition"
x = Outlet.z;
"Vapour Composition"

112
y = Outlet.z;
"Overall Enthalpy"
Outlet.h = PP.VapourEnthalpy(Outlet.T, Outlet.P, y);
"Molar Volume"
vm = PP.VapourVolume(Outlet.T, Outlet.P, y);
"Standard Molar Volume"
vm_std = PP.VapourVolume(T_std, P_std, y);
case "Vapour-Liquid":
"Flash Calculation"
[Outlet.v, x, y] = PP.Flash(Outlet.T, Outlet.P, Outlet.z);
"Overall Enthalpy"
Outlet.h = (1-Outlet.v)*PP.LiquidEnthalpy(Outlet.T, Outlet.P, x) + Outlet.v*PP.VapourEnthalpy(Outlet.T, Outlet.P, y);
"Molar Volume"
vm = (1-Outlet.v)*PP.LiquidVolume(Outlet.T, Outlet.P, x) + Outlet.v*PP.VapourVolume(Outlet.T, Outlet.P, y);
"Standard Molar Volume"
vm_std = (1-Outlet.v)*PP.LiquidVolume(T_std, P_std, x) + Outlet.v*PP.VapourVolume(T_std, P_std, y);
end
"Molar Density"
rhom * vm = 1;
"Average Molecular Weight"
Mw = sum(M*Outlet.z);
"Mass or Molar Density"
rhom * Mw = rho;
"Flow Mass"
Fw = Mw*Outlet.F;
"Volumetric Flow"
Fvol = Outlet.F*vm ;
"Standard Volumetric Flow"
Fvol_std = Outlet.F*vm_std ;
"Temperature in °C"
T_Cdeg = Outlet.T - 273.15 * 'K';
"Equate Flow"
Outlet.F = F;
"Equate Pressures"

113
Outlet.P = P;
"Equate Temperatures"
Outlet.T = T;
End
A.1.2. CÓDIGO PARA RECONCILIAÇÃO DE DADOS
Os códigos listados a seguir foram utilizados na etapa de Reconciliação de
Dados. Os mesmos foram desenvolvidos pela Engª. Eliza Ito, em 2010, tendo sido
gentilmente fornecidos para utilização neste trabalho.
using "types";
FlowSheet teste
VARIABLES
F_in as flow_mol; F_bot as flow_mol; F_top as flow_mol;
z(12) as fraction; y(12) as fraction; x(12) as fraction;
z1 as fraction; z2 as fraction; z3 as fraction;
z4 as fraction; z5 as fraction; z6 as fraction;
z7 as fraction; z8 as fraction; z9 as fraction;
z10 as fraction; z11 as fraction; z12 as fraction;
y1 as fraction; y2 as fraction; y3 as fraction;
y4 as fraction; y5 as fraction; y6 as fraction;
y7 as fraction; y8 as fraction; y9 as fraction;
y10 as fraction; y11 as fraction; y12 as fraction;
x1 as fraction; x2 as fraction; x3 as fraction;
x4 as fraction; x5 as fraction; x6 as fraction;
x7 as fraction; x8 as fraction; x9 as fraction;
x10 as fraction; x11 as fraction; x12 as fraction;
EQUATIONS
"Global Molar Balance"
F_in = F_bot+F_top;
"Component Molar Balance"
F_in*z = F_bot*x + F_top*y;
sum(z) = 1; sum(y) = 1;
z1 = z(1); z2 = z(2); z3 = z(3); z4 = z(4); z5 = z(5);
z6 = z(6); z7 = z(7); z8 = z(8); z9 = z(9); z10 = z(10);

114
z11 = z(11); z12 = z(12);
y1 = y(1); y2 = y(2); y3 = y(3); y4 = y(4); y5 = y(5);
y6 = y(6); y7 = y(7); y8 = y(8); y9 = y(9); y10 = y(10);
y11 = y(11); y12 = y(12);
x1 = x(1); x2 = x(2); x3 = x(3); x4 = x(4); x5 = x(5);
x6 = x(6); x7 = x(7); x8 = x(8); x9 = x(9); x10 = x(10);
x11 = x(11); x12 = x(12);
SPECIFY
F_in = 130.8288228 * 'kmol/h';
F_top = 65.7138693 * 'kmol/h';
z1 = 1.6277/100; z2 = 6.6997/100;
#z3 será obtido por normalização!
z4 = 27.0597/100; z5 = 5.3336/100; z6 = 8.5109/100;
z7 = 2.5568/100; z8 = 2.6182/100; z9 = 2.1569/100;
z10 = 0.8864/100; z11= 0.4726/100; z12= 0.0958/100;
x1 = 0; x2 = 0.0134/100;
#x3 será obtido por normalização!
x4 = 49.08/100; x5 = 9.8825/100; x6 = 15.7543/100;
x7 = 4.7518/100; x8 = 4.6872/100; x9 = 4.0676/100;
x10 = 1.5731/100; x11= 0.7935/100; x12= 0.1356/100;
OPTIONS
Dynamic = false;
end
Reconciliation teste_rec as teste
RECONCILE
F_in;F_top;F_bot;
z1;z2;z3;z4;z5;z6;y7;z8;z9;z10;z11;z12;
y1;y2;y3;y4;y5;y6;z7;y8;y9;y10;y11;y12;
x1;x2;x3;x4;x5;x6;x7;x8;x9;x10;x11;x12;
FREE
F_in;F_top;
z1;z2;z4;z5;z6;z7;z8;x9;z10;z11;z12;
x1;x2;x4;x5;x6;x7;x8;z9;x10;x11;x12;
EXPERIMENTS
"T02_vaz_mol_regiao_1.dat" 1;
115
OPTIONS
Filter = "mean";
Significance = 0.90;
ObjectiveFunction = "Normal";
InfeasiblePath = true;
NLPSolveNLA = true;
NumJac = false;
GrossErrorTests(
Global = true,
Nodal = true,
Measurements = true);
NLPSolver(
RelativeAccuracy = 1e-9,
AbsoluteAccuracy = 1e-10,
MaxIterations = 2000,
File = "ipopt_emso");
NLASolver(File = "nlasolver",
RelativeAccuracy = 1e-5);
Dynamic = false; end
A.1.3. FLOWSHEET DA TORRE DESETANIZADORA
Os códigos listados abaixo correspondem ao Flowsheet da torre desetanizadora
(T02), responsável pela inferência dinâmica das propriedades das correntes desta torre,
em ambiente EMSO.
using "stage_separators/column2";
using "controllers/PIDIncr";
using "controllers/PIDs";
FlowSheet T02
PARAMETERS
PP as Plugin(Brief="Physical Properties",
Type="PP",
116
Components = ["carbon dioxide","methane", "ethane", "propane", "isobutane","n-butane","isopentane","n-pentane","n-hexane", "n-heptane","n-octane","n-nonane"],
LiquidModel = "SRK",
VapourModel = "SRK");
NComp as Integer;
Lmin as length (Brief="Minimum bottom level");
Lmax as length (Brief="Maximum bottom level");
Frmin as flow_mol (Brief="Minimum bottom flow rate");
Frmax as flow_mol (Brief="Maximum bottom flow rate");
Fcmin as flow_mol (Brief="Minimum top flow rate");
Fcmax as flow_mol (Brief="Maximum top flow rate");
Fcmin2 as flow_mol (Brief="Minimum top flow rate");
Fcmax2 as flow_mol (Brief="Maximum top flow rate");
Pmin as pressure (Brief="Minimum top flow rate");
Pmax as pressure (Brief="Maximum top flow rate");
FVMin as flow_mol;
FVMax as flow_mol;
FLMax as flow_mol;
FLMin as flow_mol;
PMin as pressure;
PMax as pressure;
LMax as length;
LMin as length;
TMax as temperature;
TMin as temperature;
QrMax as heat_rate;
QrMin as heat_rate;
TcMax as temperature;
TcMin as temperature;
QcMax as heat_rate;
QcMin as heat_rate;
VARIABLES
Qc as energy_source
(Brief="Heat rate removed from condenser");
Qr as energy_source

117
(Brief="Heat rate supplied to reboiler");
SP_Ptopo as pressure;
SP_Tfundo as temperature;
RR as positive;
deltaP as press_delta;
SET
NComp = PP.NumberOfComponents;
DEVICES
feed as source;
T02 as Distillation_kettle_cond;
zero as stream;
LC1 as PIDIncr;
LC_topo as PIDIncr;
PC_topo as PIDIncr;
TC_fundo as PID;
CONNECTIONS
feed.Outlet to T02.trays(17).Inlet;
zero to T02.reb.Inlet;
zero to T02.trays([1:16]).Inlet;
zero to T02.trays([18:T02.NTrays]).Inlet;
Qc.OutletQ to T02.cond.InletQ;
Qr.OutletQ to T02.reb.InletQ;
EQUATIONS
"Controlador de Nível (fundo T02) - LIC.290.005"
LC1.Parameters.tau = 1*'s';
LC1.Parameters.tauSet = 1*'s';
LC1.Parameters.alpha = 0.3;
LC1.Parameters.bias = 0.2;
LC1.Parameters.gamma = 1;
LC1.Parameters.beta = 1;
LC1.Options.action = -1;
LC1.Options.clip = 1;
LC1.Options.autoMan = 0;
LC1.Parameters.intTime = 90*'s';
LC1.Parameters.gain = 1;
118
LC1.Parameters.derivTime = 0*'s';
LC1.Ports.setPoint = (1 * 'm' - Lmin)/(Lmax-Lmin);
LC1.Ports.input = (T02.reb.Level - Lmin)/(Lmax-Lmin);
T02.reb.OutletL.F = Frmin + (Frmax-Frmin) * LC1.Ports.output;
"Controlador de Nível (topo T02) - LIC.290.018"
LC_topo.Parameters.tau = 1*'s';
LC_topo.Parameters.tauSet = 1*'s';
LC_topo.Parameters.alpha = 0.3;
LC_topo.Parameters.bias = 0.6;
LC_topo.Parameters.gamma = 1;
LC_topo.Parameters.beta = 1;
LC_topo.Options.action = -1;
LC_topo.Options.clip = 1;
LC_topo.Options.autoMan = 0;
LC_topo.Parameters.intTime = 200*'s';
LC_topo.Parameters.gain = 3;
LC_topo.Parameters.derivTime = 0*'s';
LC_topo.Ports.setPoint = (1* 'm' - Lmin)/(Lmax-Lmin);
LC_topo.Ports.input = (T02.cond.Level - Lmin)/(Lmax-Lmin);
T02.sptop.Outlet1.F = 0 * 'kmol/h';
T02.sptop.Outlet2.F=Fcmin2+(Fcmax2-Fcmin2)*LC_topo.Ports.output;
"Controlador de Pressão - PIC.290.027"
PC_topo.Parameters.tau = 1*'s';
PC_topo.Parameters.tauSet = 1*'s';
PC_topo.Parameters.alpha = 0.3;
PC_topo.Parameters.bias = 0.1;
PC_topo.Parameters.gamma = 1;
PC_topo.Parameters.beta = 1;
PC_topo.Options.action = -1;
PC_topo.Options.clip = 1;
PC_topo.Options.autoMan = 0;
PC_topo.Parameters.intTime = 10*'s';
PC_topo.Parameters.gain = 1.6;
PC_topo.Parameters.derivTime = 0*'s';
PC_topo.Ports.setPoint = (SP_Ptopo - Pmin)/(Pmax-Pmin);
119
PC_topo.Ports.input = (T02.cond.OutletV.P - Pmin)/(Pmax-Pmin);
T02.cond.OutletV.F=Fcmin+(Fcmax-Fcmin)*PC_topo.Ports.output;
"Controlador de temperatura (fundo T02) - TIC.290.051"
TC_fundo.Parameters.tau = 1*'s';
TC_fundo.Parameters.tauSet = 1*'s';
TC_fundo.Parameters.alpha = 0.3;
TC_fundo.Parameters.bias = 0.4;
TC_fundo.Parameters.gamma = 1;
TC_fundo.Parameters.beta = 1;
TC_fundo.Options.action = 1;
TC_fundo.Options.clip = 1;
TC_fundo.Options.autoMan = 0;
TC_fundo.Parameters.intTime = 1*'min';
TC_fundo.Parameters.gain = 0.2;
TC_fundo.Parameters.derivTime = 0.2*'min';
TC_fundo.Ports.setPoint = (SP_Tfundo - TMin)/(TMax-TMin);#OK
TC_fundo.Ports.input = (T02.reb.OutletL.T - TMin)/(TMax-TMin);
Qr.OutletQ.Q = QrMin + (QrMax-QrMin) * TC_fundo.Ports.output;
Qc.OutletQ.Q = -900 * 'kW';
T02.trays(2:16).Emv = T02.trays(1).Emv;
T02.trays(18:32).Emv = T02.trays(17).Emv;
T02.trays(2:16).beta = T02.trays(1).beta;
T02.trays(18:32).beta = T02.trays(17).beta;
T02.trays(2:16).alfa = T02.trays(1).alfa;
T02.trays(18:32).alfa = T02.trays(17).alfa;
RR*(T02.cond.OutletV.F+T02.sptop.Outlet1.F)= 02.sptop.Outlet2.F;
deltaP = T02.trays(32).OutletL.P - T02.trays(1).OutletL.P;
SPECIFY
feed.Outlet.F = 70 * 'mol/s';
feed.Outlet.T = (305.9) * 'K';
feed.Outlet.P = 2593 * 'kPa';
feed.Composition =
[0.02511,0.03811,0.4176,0.2863,0.0546,0.0890,0.0270,0.0261,0.0216,
0.0084,0.0046,0.0009];
120
zero.F = 0 * 'kmol/h';
zero.T = 300 * 'K';
zero.P = 1 * 'atm';
zero.z = 1/NComp;
zero.v = 0;
zero.h = 0 * 'J/mol';
T02.pump1.dP = 2 * 'kPa';
T02.trays(1).Emv = 0.9;
T02.trays(17).Emv = 0.9;
T02.alfaTopo = 2;
T02.trays(1).beta = 1;
T02.trays(17).beta = 1;
T02.trays(1).alfa = 1.7;
T02.trays(17).alfa = 1.7;
SP_Ptopo = 2735 * 'kPa';
SP_Tfundo = (89.5+273.15) * 'K';
SP_Ttopo = (-1.1391+273.15) * 'K';
SET
T02.NTrays = 32;
T02.cond.V = 8.8964 * 'm^3';
T02.cond.Across = 1.8242 * 'm^2';
T02.trays(1:16).V = 0.4002 * 'm^3';
T02.trays(17:T02.NTrays).V = 0.9018 * 'm^3';
T02.trays(1:16).Ah = 0.0705 * 'm^2';
T02.trays(17:T02.NTrays).Ah = 0.0872 * 'm^2';
T02.trays(1:16).lw = 0.7558 * 'm';
T02.trays(17:T02.NTrays).lw = 1.2471 * 'm';
T02.trays(1:16).hw = 0.0400 * 'm';
T02.trays(17:T02.NTrays).hw = 0.0450 * 'm';
T02.trays(1:16).Ap = 0.5879 * 'm^2';
T02.trays(17:T02.NTrays).Ap = 0.7263 * 'm^2';
T02.trays.Q = 0 * 'kW';
T02.reb.V = 6.7564 * 'm^3';
T02.reb.Across = 1.8242 * 'm^2';
LC1.PID_Select = "Ideal_AW";
121
LC_topo.PID_Select = "Ideal_AW";
PC_topo.PID_Select = "Ideal_AW";
TC_fundo.PID_Select = "Ideal_AW";
Frmin = 0 * 'kmol/h';
Frmax = 1000 * 'kmol/h';
Fcmin = 0 * 'kmol/h';
Fcmax = 1000 * 'kmol/h';
Fcmin2 = 0.5 * 'kmol/h';
Fcmax2 = 1200 * 'kmol/h';
Lmin = 0 * 'm';
Lmax = 6.75 * 'm';
Pmin = 20 * 'atm';
Pmax = 30 * 'atm';
PMax = 35 *'atm';
PMin = 10 *'atm';
LMax = 5 *'m';
LMin = 0 *'m';
FVMax = 4000 *'kmol/h';
FVMin = 0 *'kmol/h';
FLMax = 4000 *'kmol/h';
FLMin = 0 *'kmol/h';
QrMax = 3000 * 'kW';
QrMin = 0 * 'kW';
TMax = (200+273.15) *'K';
TMin = (0+273.15) *'K';
QcMax = -2700 * 'kW';
QcMin = 0 * 'kW';
TcMax = (20+273.15) *'K';
TcMin = (-20+273.15) *'K';
INITIAL
T02.cond.OutletL.T = 273 *'K';
T02.cond.ML = 10 * 'kmol';
T02.cond.OutletL.z([1:(NComp-1)]) = 1/NComp;
T02.reb.OutletL.T = (120+273.15) *'K';
T02.reb.ML = 5 * 'kmol';

122
T02.reb.OutletL.z([1:(NComp-1)]) = 1/NComp;
T02.trays.OutletL.T =[255:(330-255)/(T02.NTrays-1):330]* 'K';
T02.trays.Level = 1.05 * T02.trays.hw;
T02.trays(1:16).OutletL.z([1:(NComp-1)]) = 1/NComp;
T02.trays(17:T02.NTrays).OutletL.z([1:(NComp-1)]) = 1/NComp;
OPTIONS
TimeStep = 500;
TimeEnd = 450000;
InitialFile = "T02_20101225.rlt";
DAESolver(
File = "dasslc",
RelativeAccuracy = 1e-4,
AbsoluteAccuracy = 1e-6 );
NLASolver(
File = "sundials",
RelativeAccuracy = 1e-4,
AbsoluteAccuracy = 1e-6 );
End
A.1.4. FLOWSHEET DA TORRE DESBUTANIZADORA
Os códigos listados abaixo correspondem ao Flowsheet da torre desbutanizadora
(T03), responsável pela inferência dinâmica das propriedades das correntes desta torre,
em ambiente EMSO.
using "stage_separators/column2";
using "controllers/PIDIncr";
using "controllers/PIDs";
FlowSheet T03
PARAMETERS
PP as Plugin(Brief="Physical Properties",
Type="PP",
Components = ["carbon dioxide","methane", "ethane", "propane", "isobutane","n-butane","isopentane","n-pentane","n-hexane", "n-heptane","n-octane","n-nonane"],
LiquidModel = "SRK", VapourModel = "SRK");
123
NComp as Integer;
Lmin as length (Brief="Minimum bottom level");
Lmax as length (Brief="Maximum bottom level");
Frmin as flow_mol (Brief="Minimum bottom flow rate");
Frmax as flow_mol (Brief="Maximum bottom flow rate");
Fcmin as flow_mol (Brief="Minimum top flow rate");
Fcmax as flow_mol (Brief="Maximum top flow rate");
Fcmin2 as flow_mol (Brief="Minimum top flow rate");
Fcmax2 as flow_mol (Brief="Maximum top flow rate");
Pmin as pressure (Brief="Minimum top flow rate");
Pmax as pressure (Brief="Maximum top flow rate");
FVMin as flow_mol;
FVMax as flow_mol;
FLMax as flow_mol;
FLMin as flow_mol;
PMin as pressure;
PMax as pressure;
LMax as length;
LMin as length;
TMax as temperature;
TMin as temperature;
QrMax as heat_rate;
QrMin as heat_rate;
TcMax as temperature;
TcMin as temperature;
QcMax as heat_rate;
QcMin as heat_rate;
VARIABLES
Qc as energy_source
(Brief="Heat rate removed from condenser");
Qr as energy_source
(Brief="Heat rate supplied to reboiler");
SP_Ptopo as pressure;
SP_Tfundo as temperature;
124
RR as positive;
deltaP as press_delta;
SET
NComp = PP.NumberOfComponents;
DEVICES
F as source;
T03 as Distillation_kettle_cond;
zero as stream;
LC1 as PIDIncr;
LC_topo as PIDIncr;
PC_topo as PIDIncr;
PC_fundo as PIDIncr;
TC_fundo as PID;
CONNECTIONS
F.Outlet to T03.trays(13).Inlet;
zero to T03.reb.Inlet;
zero to T03.trays([1:12]).Inlet;
zero to T03.trays([14:T03.NTrays]).Inlet;
Qc.OutletQ to T03.cond.InletQ;
Qr.OutletQ to T03.reb.InletQ;
EQUATIONS
"Controlador de Nível (fundo T03) - LIC.290.025"
LC1.Parameters.tau = 1*'s';
LC1.Parameters.tauSet = 1*'s';
LC1.Parameters.alpha = 0.3;
LC1.Parameters.bias = 0.5;
LC1.Parameters.gamma = 1;
LC1.Parameters.beta = 1;
LC1.Options.action = -1;
LC1.Options.clip = 1;
LC1.Options.autoMan = 0;
LC1.Parameters.intTime = 50*'s';
LC1.Parameters.gain = 1;
LC1.Parameters.derivTime = 0*'s';
LC1.Ports.setPoint = (1.5* 'm' - Lmin)/(Lmax-Lmin);
125
LC1.Ports.input = (T03.reb.Level - Lmin)/(Lmax-Lmin);
T03.reb.OutletL.F = Frmin + (Frmax-Frmin) * LC1.Ports.output;
"Controlador de Nível (topo T03) - LIC.290.022"
LC_topo.Parameters.tau = 1*'s';
LC_topo.Parameters.tauSet = 1*'s';
LC_topo.Parameters.alpha = 0.3;
LC_topo.Parameters.bias = 0.2;
LC_topo.Parameters.gamma = 1;
LC_topo.Parameters.beta = 1;
LC_topo.Options.action = -1;
LC_topo.Options.clip = 1;
LC_topo.Options.autoMan = 0;
LC_topo.Parameters.intTime = 100*'s';
LC_topo.Parameters.gain = 4;
LC_topo.Parameters.derivTime = 0*'s';
LC_topo.Ports.setPoint = (1 * 'm' - Lmin)/(Lmax-Lmin);
LC_topo.Ports.input = (T03.cond.Level - Lmin)/(Lmax-Lmin);
T03.sptop.Outlet2.F=Fcmin2+(Fcmax2-Fcmin2)*C_topo.Ports.output;
"Controlador de Pressão - PIC.290.029B
PC_fundo.Parameters.tau = 1*'s';
PC_fundo.Parameters.tauSet = 1*'s';
PC_fundo.Parameters.alpha = 0.3;
PC_fundo.Parameters.bias = 0.1;
PC_fundo.Parameters.gamma = 1;
PC_fundo.Parameters.beta = 1;
PC_fundo.Options.action = -1;
PC_fundo.Options.clip = 1;
PC_fundo.Options.autoMan = 0;
PC_fundo.Parameters.intTime = 5*'min';
PC_fundo.Parameters.gain = 0.005;
PC_fundo.Parameters.derivTime = 0*'min';
PC_fundo.Ports.setPoint = (SP_Pfundo - Pmin)/(Pmax-Pmin);
PC_fundo.Ports.input=(T03.trays(30).OutletV.P-Pmin)/(Pmax-Pmin);
T03.sptop.Outlet1.F=Fcmin+(Fcmax-Fcmin)*PC_fundo.Ports.output;
"Controlador de temperatura (fundo T03) - TIC.290.061"
126
TC_fundo.Parameters.tau = 1*'s';
TC_fundo.Parameters.tauSet = 1*'s';
TC_fundo.Parameters.alpha = 0.3;
TC_fundo.Parameters.bias = 0.4;
TC_fundo.Parameters.gamma = 1;
TC_fundo.Parameters.beta = 1;
TC_fundo.Options.action = 1;
TC_fundo.Options.clip = 1;
TC_fundo.Options.autoMan = 0;
TC_fundo.Parameters.intTime = 1*'min';
TC_fundo.Parameters.gain = 0.025;
TC_fundo.Parameters.derivTime = 0.25*'min';
TC_fundo.Ports.setPoint = (SP_Tfundo - TMin)/(TMax-TMin);
TC_fundo.Ports.input = (T03.reb.OutletL.T - TMin)/(TMax-TMin);
Qr.OutletQ.Q = QrMin + (QrMax-QrMin) * TC_fundo.Ports.output;
Qc.OutletQ.Q = -2400*'kW';
T03.trays(2:15).Emv = T03.trays(1).Emv;
T03.trays(17:30).Emv = T03.trays(16).Emv;
T03.trays(2:15).beta = T03.trays(1).beta;
T03.trays(17:30).beta = T03.trays(16).beta;
T03.trays(2:15).alfa = T03.trays(1).alfa;
T03.trays(17:30).alfa = T03.trays(16).alfa;
RR*(T03.cond.OutletV.F+T03.sptop.Outlet1.F)=03.sptop.Outlet2.F;
deltaP = T03.trays(30).OutletL.P - T03.trays(1).OutletL.P;
SPECIFY
F.Fvol_std = 23.3784 * 'm^3/h';
F.Outlet.T = (342.7471) * 'K';
F.Outlet.P = 2550*1e3 * 'Pa';
F.Composition = [0,0.0002,0.1033,0.4960,0.0947,0.1545,0.0466,
0.0449,0.0360,0.0139,0.008,0.0017];
zero.F = 0 * 'kmol/h';
zero.T = 300 * 'K';
zero.P = 1 * 'atm';
zero.z = 1/NComp;
zero.v = 0;

127
zero.h = 0 * 'J/mol';
T03.pump1.dP = 2 * 'kPa';
T03.trays(1).Emv = 1;
T03.trays(16).Emv = 1;
T03.alfaTopo = 2;
T03.trays(1).beta = 1;
T03.trays(16).beta = 1;
T03.trays(1).alfa = 7;
T03.trays(16).alfa = 7;
SP_Pfundo = (1630 + 101.325) * 'kPa';
SP_Ttopo = (325) * 'K';
SP_Tfundo = (450.9021) * 'K';
SET
T03.NTrays = 30;
T03.cond.V = 16.0137 * 'm^3';
T03.cond.Across = 2.6274 * 'm^2';
T03.trays(1:15).V = 0.7119 * 'm^3';
T03.trays(16:T03.NTrays).V = 1.1127 * 'm^3';
T03.trays(1:15).Ah = 0.1144 * 'm^2';
T03.trays(16:T03.NTrays).Ah = 0.1339 * 'm^2';
T03.trays(1:15).lw = 0.9029 * 'm';
T03.trays(16:T03.NTrays).lw = 1.8242 * 'm';
T03.trays(1:15).hw = 0.0400 * 'm';
T03.trays(16:T03.NTrays).hw = 0.0450 * 'm';
T03.trays(1:15).Ap = 0.9533 * 'm^2';
T03.trays(16:T03.NTrays).Ap = 1.1161 * 'm^2';
T03.trays.Q = 0 * 'kW';
T03.reb.V = 3.0480 * 'm^3';
T03.reb.Across = 1.8241 * 'm^2';
LC1.PID_Select = "Ideal_AW";
LC_topo.PID_Select = "Ideal_AW";
PC_topo.PID_Select = "Ideal_AW";
PC_fundo.PID_Select = "Ideal_AW";
TC_fundo.PID_Select = "Ideal_AW";
Frmin = 0 * 'kmol/h';

128
Frmax = 1000 * 'kmol/h';
Fcmin = 1 * 'kmol/h';
Fcmax = 1000 * 'kmol/h';
Fcmin2 = 40 * 'kmol/h';
Fcmax2 = 5000 * 'kmol/h';
Lmin = 0 * 'm';
Lmax = 3 * 'm';
Pmin = 2 * 'atm';
Pmax = 30 * 'atm';
PMax = 35 *'atm';
PMin = 10 *'atm';
LMax = 5 *'m';
LMin = 0 *'m';
FVMax = 4000 *'kmol/h';
FVMin = 0 *'kmol/h';
FLMax = 4000 *'kmol/h';
FLMin = 0 *'kmol/h';
QrMax = 3700 * 'kW';
QrMin = 0 * 'kW';
TMax = (300+273.15) *'K';
TMin = (50+273.15) *'K';
QcMax = -2400 * 'kW';
QcMin = 0 * 'kW';
TcMax = (100+273.15) *'K';
TcMin = (0+273.15) *'K';
INITIAL
T03.cond.OutletL.T = 273 *'K';
T03.cond.ML = 10 * 'kmol';
T03.cond.OutletL.z([1:(NComp-1)]) = 1/NComp;
T03.reb.OutletL.T = (120+273.15) *'K';
T03.reb.ML = 15 * 'kmol';
T03.reb.OutletL.z([1:(NComp-1)]) = 1/NComp;
T03.trays.OutletL.T = [255:(330-255)/(T03.NTrays-1):330] * 'K';
T03.trays.Level = 1.05*T03.trays.hw;
T03.trays(1:15).OutletL.z([1:(NComp-1)]) = 1/NComp;
129
T03.trays(16:T03.NTrays).OutletL.z([1:(NComp-1)]) = 1/NComp;
OPTIONS
TimeStep = 500;
TimeEnd = 450000;
InitialFile = "Validação_T03_dyn_20100827.rlt";
DAESolver(
File = "dasslc",
RelativeAccuracy = 1e-4,
AbsoluteAccuracy = 1e-6 );
NLASolver(
File = "sundials",
RelativeAccuracy = 1e-4,
AbsoluteAccuracy = 1e-6 );
end

130
A.2. REDES NEURONAIS ARTIFICIAIS
O conceito das Redes Neuronais Artificiais (RNAs) está baseado na estrutura
dos neurônios no cérebro humano e sua capacidade de aprendizagem e processamento.
Este conceito foi introduzido por McCULLOCH e PITTS (1943).
As RNAs pertencem à classe dos modelos reduzidos, obtidos através da
simplificação de processos e/ou fenômenos físicos (GOMES, 2007). Estes modelos
matemáticos, do tipo “caixa-preta”, fornecem uma descrição do processo através de um
mapeamento da relação entre os dados de entrada e saída. Através de sua utilização é
possível obter bons resultados com pouco conhecimento prévio do sistema (AGUIRRE,
2004).
A utilização de uma abordagem mais enxuta na modelagem de processos
possibilita, em muitos casos, maior agilidade na resolução do problema matemático.
Esta característica é de grande valia em aplicações de sensores virtuais para
monitoramento de processos e controle regulatório e avançado, contribuindo para a
confiabilidade e eficiência computacional dos sistemas.
Os neurônios artificiais atuam como os seus inspiradores biológicos, recebendo
informações oriundas de sensores ou de outros neurônios artificiais, realizando
operações e passando o resultado das mesmas adiante. Segundo ENDER (2002), as
redes neuronais processam dados utilizando paralelismo lógico para todos os neurônios
da mesma camada, combinando-o com operações seriais ponderadas, ou seja, a
passagem da informação para neurônios de outra camada multiplicadas por “pesos”. A
Figura A.2.1 ilustra o funcionamento das Redes Neuronais Artificiais.
O processo de treinamento das RNAs é iterativo, de forma a obter os pesos entre
as camadas de neurônios e o exterior que reproduzam o comportamento entre as
entradas do processo e as saídas para o mesmo (SIMPSON, 1990). Os métodos de
treinamento mais empregados baseiam-se em experiência, ou seja, à rede são
apresentadas as entradas e as saídas esperadas para as mesmas, permitindo o ajuste dos
pesos27.
27 Consultar ENDER (2002) para maiores detalhes acerca do assunto.

131
Figura A.2.1. Esquema de funcionamento de uma rede neuronal artificial.
O treinamento das RNAs utilizadas neste trabalho como comparação aos
resultados obtidos via simulação dinâmica foi realizado utilizando os modelos rigorosos
das colunas de destilação da UPGN estudada, implementados em ambiente PETROX28,
simulador estático de processos de arquitetura sequencial modular desenvolvido pelo
CENPES/PETROBRAS (NIEDERBERGER et al., 2000).
A Tabela Tabela A.2.1 apresenta as variáveis selecionadas para atuar como
entradas das redes neuronais artificiais encontradas neste trabalho. As mesmas foram
construídas com apenas uma camada escondida, conforme mostra a Figura Figura
A.2.1.
De acordo com GOMES (2007), observa-se um expressivo número de
aplicações das RNAs, embora estejam disponíveis na atualidade simuladores baseados
em modelos matemáticos rigorosos. O autor cita algumas destas aplicações, encontradas
na literatura acerca do assunto: KAHRS e MARQUARDT (2007), SOTELO (2006) e
FERREIRA (2003), além de diversas utilizadas na área de otimização de processos.
Apenas um restrito conjunto de obras está relacionado ao processamento de gás
natural ou GLP. Alguns exemplos são FARASAT et al. (2006) que trata do processo de
dessulfurização, NABAVI et al. (2007), sobre craqueamento térmico de GLP, e
DARWISH e HILAL (2008), acerca da etapa de desidratação do gás com glicol.
28
O trabalho de GOMES (2007) detalha como RNAs como as presentes neste trabalho podem ser treinadas utilizando o PETROX.
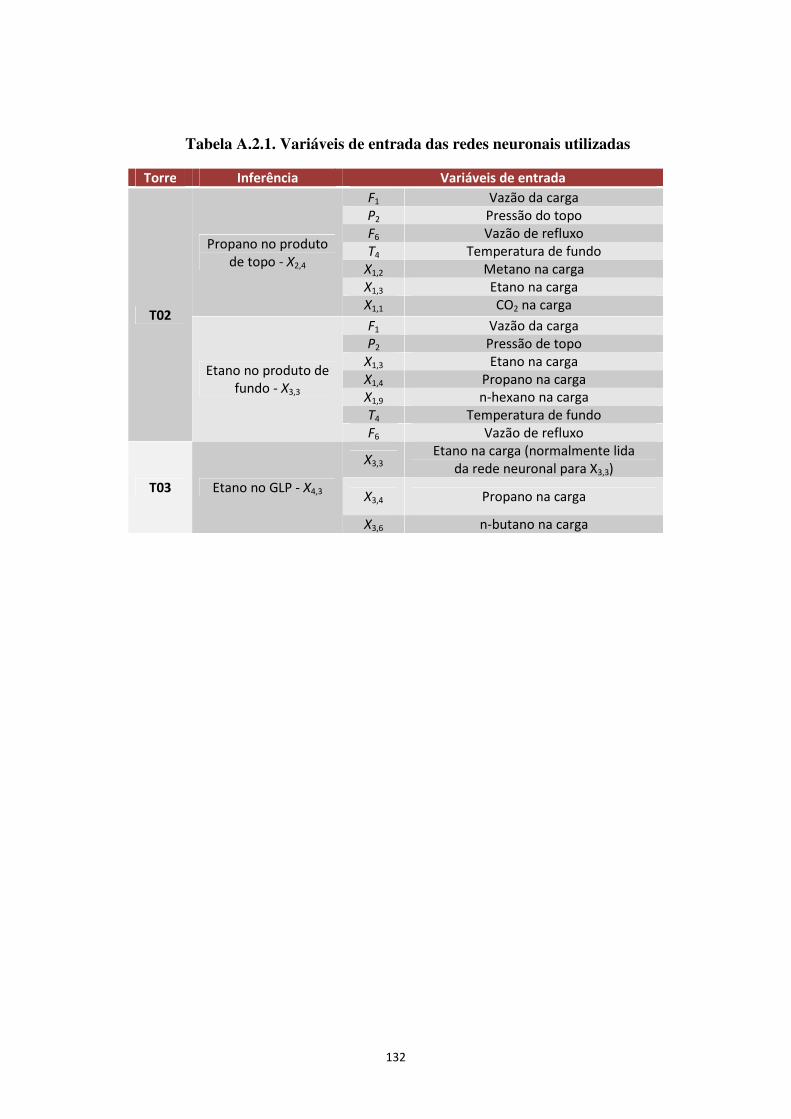
132
Tabela A.2.1. Variáveis de entrada das redes neuronais utilizadas
Torre Inferência Variáveis de entrada
T02
Propano no produto de topo - X2,4
F1 Vazão da carga P2 Pressão do topo F6 Vazão de refluxo T4 Temperatura de fundo
X1,2 Metano na carga X1,3 Etano na carga X1,1 CO2 na carga
Etano no produto de fundo - X3,3
F1 Vazão da carga P2 Pressão de topo
X1,3 Etano na carga X1,4 Propano na carga X1,9 n-hexano na carga T4 Temperatura de fundo F6 Vazão de refluxo
T03 Etano no GLP - X4,3
X3,3 Etano na carga (normalmente lida
da rede neuronal para X3,3)
X3,4 Propano na carga
X3,6 n-butano na carga

133
A.3. IDENTIFICAÇÃO DOS MODELOS DO
PROCESSO ATRAVÉS DO SOFTWARE VIP
Durante a implementação do Sistema de Controle Avançado da UPGN foi
realizada a etapa de Identificação Multivariável. Para isto foi utilizado o Software VIP
(Sistema de Visualização de Dados e Geração de Modelos de Processo), versão 2.1.1,
que calcula os coeficientes do modelo de convolução de sistema invariante no tempo, de
uma planta industrial, a partir de dados de séries temporais de entrada (variáveis
independentes) e saída (variáveis dependentes) desta planta, obtidos num teste
especifico para este fim29.
Para a obtenção dos dados de entrada e saída é feito um teste na planta
industrial, no qual os valores de algumas variáveis independentes (variáveis
manipuladas segundo a vontade do programador do teste ou variáveis de tipo
perturbação, determinadas por fatores independentes da vontade do programador, tais
como variações climáticas, disponibilidade de utilidades, etc.) têm seus valores
alterados e registrados (entradas) e as variáveis dependentes (em geral as grandezas
controladas no Sistema de Controle Avançado) têm seus respectivos movimentos de
reação também registrados (saídas). Durante o teste é utilizado um sistema de aquisição
de dados de engenharia que se comunica com os SDCD's.
Os resultados do programa de identificação VIP são os coeficientes de modelo
de convolução. Cada par (variável independente, variável dependente) possui um
conjunto de coeficientes de convolução que modela a relação entre essas duas variáveis.
O volume de dados utilizados nos testes é função do número de variáveis
independentes, do tempo necessário para a planta atingir o estado estacionário, das
condições operacionais, do nível de perturbações não medidas e da eficiência do sistema
de coleta de dados. O método de cálculo dos coeficientes exige que haja uma magnitude
mínima na variação dos valores das variáveis independentes que possibilite gerar
29 Neste projeto foram utilizadas Redes Neuronais Artificiais (corrigidas por bias), conforme descritas no
Anexo A.2, no lugar de composições informadas por cromatógrafos com o intuito de aumentar a
frequência de amostragem destas variáveis.

134
coeficientes viáveis. Assim, enquanto os valores válidos de uma variável independente
estiverem constantes, esta variável independente não poderá ser incluída no modelo de
identificação (PETROBRAS, 2011b).
A identificação multivariável extrai os efeitos individualizados de cada variável
independente sobre cada uma das dependentes (PETROBRAS, 2011b). A identificação
multivariável em malha fechada foi utilizada no caso da UPGN pois desejava-se manter
a unidade sob controle, além de conservar as características do sistema controlado a fim
de obter modelos mais próximos do comportamento real/normal da planta.
O problema da identificação de sistemas diz respeito à obtenção de modelos
“caixa-preta”, muitas vezes de natureza não-linear. Conforme exposto no Item 2.1 deste
trabalho, modelos “caixa-preta” são aqueles em que nenhum conhecimento (insight)
físico é utilizado, porém sua estrutura é reconhecidamente flexível e tem sido utilizada
com sucesso na literatura (SJÖBERT et al., 1995). O problema consiste em observar
entradas (u(t)) e saídas (y(t)) de um sistema dinâmico de acordo com o conteúdo das
Equações (A.3.1 e (A.3.2.
�� � ��1 �2 …�� � (A.3.1)
�� � ��1 �2 …�� � (A.3.2)
O objetivo é determinar relações (canais) entre as variáveis observadas no
passado ��Jw!, �Jw!� e as saídas em tempos futuros (y(t)), conforme a Equação A.3.3,
que modela sistemas dinâmicos em tempos discretos de amostragem e na qual o termo
Q(�) representa que o valor da variável de saída não necessita ser uma função exata dos
dados do passado (SJÖBERT et al., 1995).
�(�) � �(�Jw!, �Jw!) + Q(�) (A.3.3)
A função g(t) é então determinada em grande parte dos casos dentro de uma
família de funções previamente conhecidas (como a função beta, a função gama, a
função exponencial, etc.). Para uma melhor discussão sobre como obter uma boa
parametrização da função g, consultar LJUNG (1999) e o trabalho de SJÖBERT et al.
(1995).
Os modelos identificados para a UPGN pertencem à classe de modelos
dinâmicos mais simples daquelas utilizadas na atualidade, chamada de FIR (acrônimo
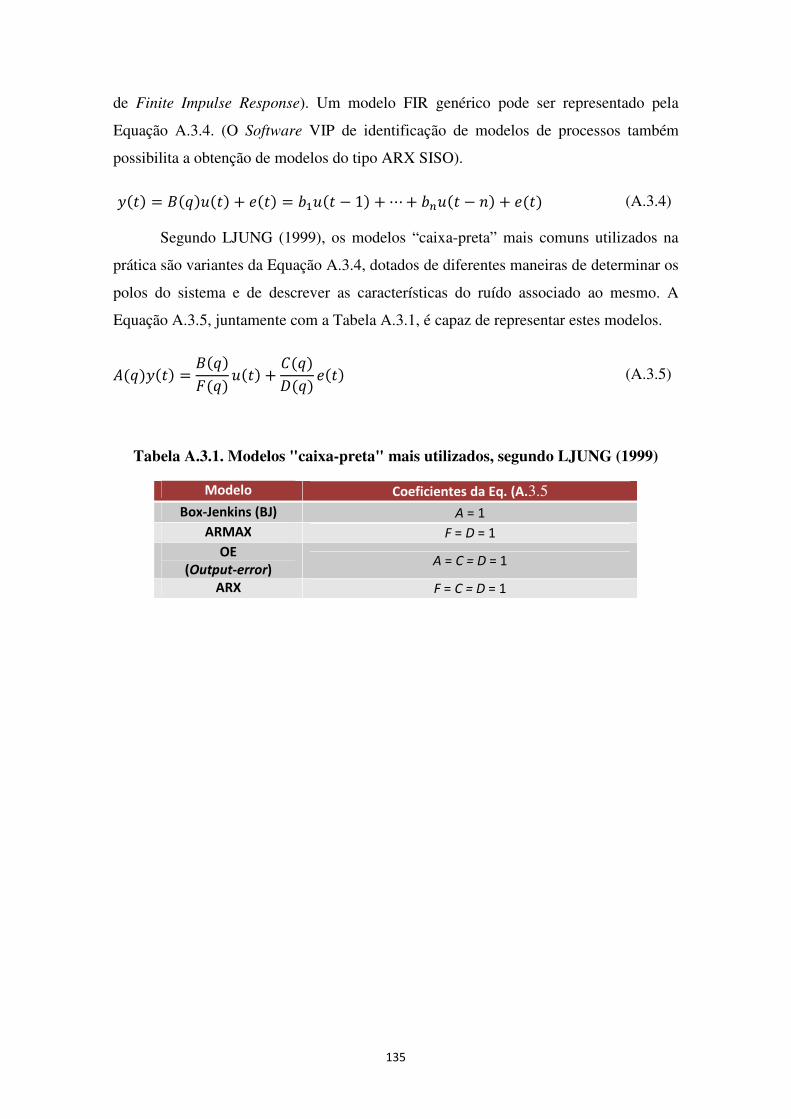
135
de Finite Impulse Response). Um modelo FIR genérico pode ser representado pela
Equação A.3.4. (O Software VIP de identificação de modelos de processos também
possibilita a obtenção de modelos do tipo ARX SISO).
�(�) � �(�)�(�) + �(�) � �!�(� � 1) +⋯+ �B�(� � ") + �(�) (A.3.4)
Segundo LJUNG (1999), os modelos “caixa-preta” mais comuns utilizados na
prática são variantes da Equação A.3.4, dotados de diferentes maneiras de determinar os
polos do sistema e de descrever as características do ruído associado ao mesmo. A
Equação A.3.5, juntamente com a Tabela A.3.1, é capaz de representar estes modelos.
S(�)�(�) � �(�)+(�) �(�) +�(�)i(�) �(�) (A.3.5)
Tabela A.3.1. Modelos "caixa-preta" mais utilizados, segundo LJUNG (1999)
Modelo Coeficientes da Eq. (A.3.5
Box-Jenkins (BJ) A = 1
ARMAX F = D = 1
OE (Output-error)
A = C = D = 1
ARX F = C = D = 1

136
A.4. PROCEDIMENTO PARA DETECÇÃO DE
ESTADOS ESTACIONÁRIOS
Conforme registrado na Seção 4.3, a metodologia utilizada neste trabalho para
detecção de estados estacionários foi apresentada por JIANG et al. (2003) e CAUMO
(2006) e implementada em ambiente Matlab® R2008a (segue código ao final deste
Anexo). O procedimento adotado encontra-se listado a seguir.
i. Leitura dos dados referentes às variáveis que se deseja filtrar;
ii. Filtro da variável utilizando a função idfilt do Matlab®;
iii. Cálculo das derivadas primeira e segunda, d1 e d2, da série de dados;
iv. Determinação do valor de corte da derivada primeira, Ts, igual ao desvio padrão
da derivada primeira (Equação A.4.1);
%v � 3:� (A.4.1)
v. Determinação do valor de corte da derivada segunda, Tw, sendo este igual ao
valor mediano da série de derivadas segunda obtida (Equação A.4.2);
%� � ����� (A.4.2)
vi. Escolha do valor de corte Tu. Este valor pode ser estimado a partir do
conhecimento do processo e através da Equação A.4.3, na qual λs é um
parâmetro de ajuste de qualidade, a ser escolhido pelo usuário;
%� � 3. %v. �v (A.4.3)
vii. Cálculo de γ, θ(t) e ξ(θ(t)) (Equações A.4.4 a A.4.6);
� � � 0v�|��| ≤ %�|��| � %�2. %� v�%� < |��| < 3. %�1v�|��| ≥ 3. %� (A.4.4)
�� � |�!| + �. |��| (A.4.5)

137
��� � 12 Z#v u�� − %v%� − %v . hy + 1¡ (A.4.6)
viii. Cálculo do Índice de Estado Estacionário de cada variável, Bi(t) (Equação
A.4.7);
��� � ¢ 0v��(�) ≥ %��/�(�)2v�%v < �(�) < %�
1v��(�) ≤ %v (A.4.7)
ix. Cálculo do Índice de Estado Estacionário multivariável, Bm(t) (Equação A.4.8,
proposta por CAUMO (2006)).
�1(�) �£���(�)�! �¤�
� ! (A.4.8)
Segundo a metodologia apresentada por CAUMO (2006), considera-se que todas
as variáveis possuem a mesma importância na determinação do EE.
Um sistema será então considerado em EE se todas as variáveis estiverem
estacionárias no instante de tempo no qual está sendo feita a avaliação, ou seja, Bm(t) =
1.
A técnica apresentada é pontual, tendo a vantagem de não ser necessário
determinar a situação do processo sobre períodos de tempo, o que se torna bastante
relevante em aplicações em tempo real.
O código apresentado a seguir foi programado em ambiente Matlab® para
detecção de estados estacionários do dataset mencionado na Seção 4.1.
%% ROTINA PARA DETECÇÃO DE ESTADOS ESTACIONÁRIOS - MATLAB $$ %% AUTOR: LILIAN R. CANABARRO - JANEIRO/2011 %% BASEADA NA METODOLOGIA DE JUANG et al. (2003) e CAUMO (2006) %% 1) Leitura dos dados de processo dados = xlsread('Dados_deteccao_EE.xls','Plan1','b6:h5716'); %% Loop para cada coluna: %% Especificar lambda para cada coluna lambda = [1.2 1.2 50 1.2 1.2 1.2];
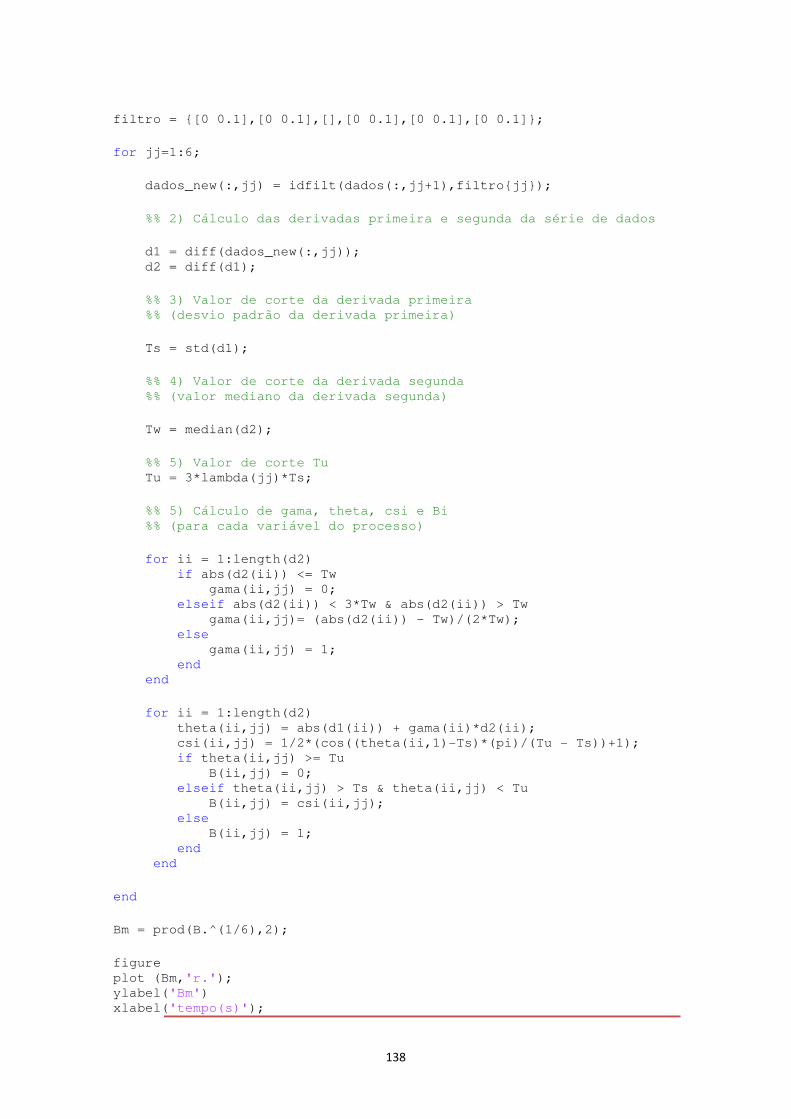
138
filtro = {[0 0.1],[0 0.1],[],[0 0.1],[0 0.1],[0 0.1]}; for jj=1:6; dados_new(:,jj) = idfilt(dados(:,jj+1),filtro{jj}); %% 2) Cálculo das derivadas primeira e segunda da série de dados d1 = diff(dados_new(:,jj)); d2 = diff(d1); %% 3) Valor de corte da derivada primeira %% (desvio padrão da derivada primeira) Ts = std(d1); %% 4) Valor de corte da derivada segunda %% (valor mediano da derivada segunda) Tw = median(d2); %% 5) Valor de corte Tu Tu = 3*lambda(jj)*Ts; %% 5) Cálculo de gama, theta, csi e Bi %% (para cada variável do processo) for ii = 1:length(d2) if abs(d2(ii)) <= Tw gama(ii,jj) = 0; elseif abs(d2(ii)) < 3*Tw & abs(d2(ii)) > Tw gama(ii,jj)= (abs(d2(ii)) - Tw)/(2*Tw); else gama(ii,jj) = 1; end end for ii = 1:length(d2) theta(ii,jj) = abs(d1(ii)) + gama(ii)*d2(ii); csi(ii,jj) = 1/2*(cos((theta(ii,1)-Ts)*(pi)/(Tu - Ts))+1); if theta(ii,jj) >= Tu B(ii,jj) = 0; elseif theta(ii,jj) > Ts & theta(ii,jj) < Tu B(ii,jj) = csi(ii,jj); else B(ii,jj) = 1; end end end Bm = prod(B.^(1/6),2); figure plot (Bm,'r.'); ylabel('Bm') xlabel('tempo(s)');