Embed Size (px)
Citation preview
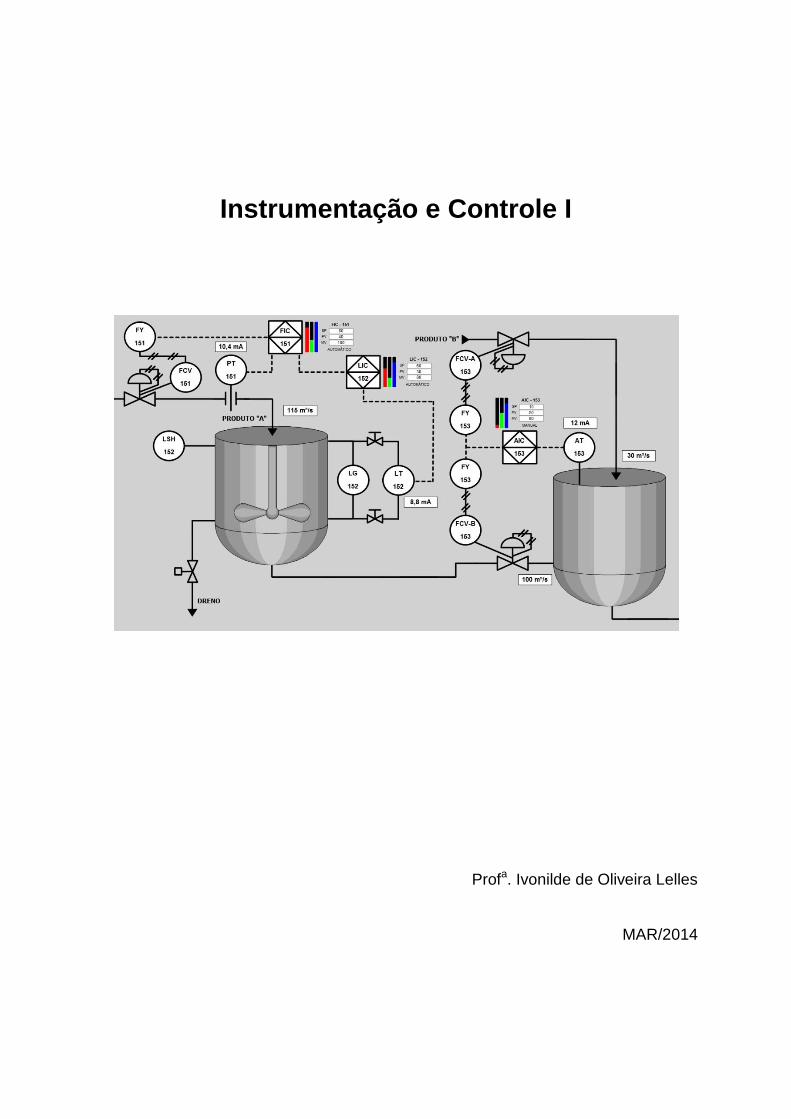
Instrumentação e Controle I
Profa. Ivonilde de Oliveira Lelles
MAR/2014

APRESENTAÇÃO
Este trabalho constitui uma ampliação das notas de aulas dos professores Antônio Nogueira Starling, Ivonilde de Oliveira Lelles e Ronan Drummond de F. Rossi e faz parte do material didático da disciplina de Instrumentação e Controle, na modalidade curso integrado, para uso interno na Coordenação do Curso Técnico de Eletrônica.
SUMÁRIO CAPÍTULO 01 – INTRODUÇÃO AOS SISTEMAS DE CONTROLE ....................................................... 5
1.1. Introdução ..................................................................................................................................... 5 1.2. Caracterização dos Sistemas Automatizados .............................................................................. 6 1.3. Componentes e Funcionamento de um Sistema de controle Automático .................................... 7
EXERCÍCIOS ........................................................................................................................................... 9 CAPITULO 02 – INSTRUMENTAÇÃO INDUSTRIAL ............................................................................10
2.1. Introdução ...................................................................................................................................10 2.2. Classificação dos Instrumentos de Medição...............................................................................10 2.3. Simbologia de Instrumentação ...................................................................................................13 2.4. Características Gerais dos Instrumentos ....................................................................................16
2.4.1. Características estáticas .....................................................................................................16 2.4.2. Características dinâmicas ...................................................................................................20
2.5. O Erro de Medição ......................................................................................................................22 2.6. Calibração de Sistemas de Medição ..........................................................................................26 EXERCÍCIOS .....................................................................................................................................30
CAPÍTULO 03 – CONDICIONADORES DE SINAIS ..............................................................................34 3.1. Introdução ...................................................................................................................................34 3.2. Amplificação Mecânica por Alavancas .......................................................................................35 3.3. Amplificação Angular por Engrenagens ......................................................................................36 3.4. Amplificação Eletrônica ...............................................................................................................37 3.5. Conversores Analógicos .............................................................................................................38
3.5.1. Circuitos conversores de resistência para tensão e para corrente .....................................38 3.5.2. Circuitos conversores de corrente para tensão (Fig. 3.12) .................................................39 3.5.3. Circuitos conversores de tensão para corrente ...................................................................39
3.6. Ponte de Wheatstone .................................................................................................................41 EXERCÍCIOS .....................................................................................................................................42
CAPÍTULO 04 – MEDIÇÃO DE POSIÇÃO ............................................................................................45 4.1. Introdução ...................................................................................................................................45 4.2. Transdutores de Posição ............................................................................................................45
4.2.1. Sensores de proximidade indutivos .....................................................................................45 4.2.2. Sensores de proximidade capacitivos .................................................................................46 4.2.3. Sensores de proximidade magnéticos (efeito Hall) .............................................................46 4.2.4. LVDT (Level Voltage Diferencial Transformer)....................................................................47 4.2.5. Sensor Potenciométrico .......................................................................................................48 4.2.6. Encoders ..............................................................................................................................48 4.2.7. Chaves-limite ou chaves fim-de-curso ................................................................................50
EXERCICIOS .....................................................................................................................................51 CAPÍTULO 05 – MEDIÇÃO DE VELOCIDADE .....................................................................................52
5.1. Introdução ...................................................................................................................................52 5.2. Transdutores de Velocidade .......................................................................................................52
5.2.1. Dínamo Taquimétrico (Tacogerador) ..................................................................................52 5.2.2. Acoplador Ótico ...................................................................................................................53
EXERCÍCIOS .....................................................................................................................................54 CAPÍTULO 06 – MEDIÇÃO FORÇAS ....................................................................................................55
6.1. Introdução ...................................................................................................................................55 6.2. Transdutores de Forças ..............................................................................................................55
6.2.1. Balança de alavanca (Comparação com uma força conhecida) ........................................55 6.2.2. Dinamômetro (comparação com a deformação de um material elástico). .........................56 6.2.3. Célula de carga: (deformação de extensômetros) ..............................................................56
EXERCÍCIOS .....................................................................................................................................60 CAPÍTULO 07 – MEDIÇÃO DE PRESSÃO ...........................................................................................62
7.1. Introdução ...................................................................................................................................62 7.2. Tipos de Pressão ........................................................................................................................63 7.3. Classificação dos Medidores de Pressão ...................................................................................63 7.4. Transdutores de Pressão ............................................................................................................64
7.4.1. Medição por Coluna de Líquido ...........................................................................................64 7.4.2. Tubo de Bourbon .................................................................................................................66 7.4.3. Diafragma ............................................................................................................................66 7.4.4. Fole ......................................................................................................................................67 7.4.5. Campânula...........................................................................................................................67 7.4.6. Resistivo ..............................................................................................................................67 7.4.7. Magnético de Indutância Variável .......................................................................................68
7.4.8. Capacitivo ............................................................................................................................68 EXERCÍCIOS .....................................................................................................................................69
CAPÍTULO 08 – MEDIÇÃO DE NÍVEL ..................................................................................................72 8.1. Introdução ...................................................................................................................................72 8.2. Classificação dos Medidores de Nível ........................................................................................72
8.2.1. Método de Medição Direta ...................................................................................................72 8.2.2. Método da Medição Indireta ................................................................................................72
8.3. Transdutores de Nível .................................................................................................................73 8.3.1. Visores de Nível ...................................................................................................................73 8.3.2. Vareta Molhada ...................................................................................................................74 8.3.3. Flutuadores (bóias) ..............................................................................................................74 8.3.4. Medição de pressão ............................................................................................................75 8.3.5. Borbulhamento ....................................................................................................................75 8.3.6. Manômetro em “U” ...............................................................................................................76 8.3.7. Medidor de Nível Tipo Capacitivo ........................................................................................76 8.3.8. Medidor de Nível Tipo Ultra-Som ........................................................................................79 8.3.9. Medidor de Nível tipo Radioativo .........................................................................................79 8.3.10. Medição por pesagem .......................................................................................................80
EXERCÍCIOS .........................................................................................................................................82 CAPÍTULO 09 – MEDIÇÃO DE VAZÃO ................................................................................................84
9.1. Introdução ...................................................................................................................................84 9.2. Classificação dos Medidores de Vazão ......................................................................................85
9.2.1. Medidores indiretos, utilizando fenômenos intimamente relacionados à quantidade do fluido passante ...............................................................................................................................85 9.2.2. Medidores diretos de volume do fluido passante ................................................................85 9.2.3. Medidores especiais ............................................................................................................85
9.3. Transdutores de Vazão ...............................................................................................................85 9.3.1. Placa de Orifício ..................................................................................................................86 9.3.2. Tubo de Venturi ...................................................................................................................87 9.3.3. Tubo de Pitot........................................................................................................................88 9.3.4. Rotâmetro ............................................................................................................................89 9.3.5. Hélice ...................................................................................................................................90 9.3.6. Turbina .................................................................................................................................90 9.3.7. Medição por efeito magnético..............................................................................................90 9.3.8. Medição por ultra-som .........................................................................................................90
EXERCÍCIOS .....................................................................................................................................90 CAPÍTULO 10 – MEDIÇÃO DE TEMPERATURA .................................................................................93
10.1. Introdução .................................................................................................................................93 10.2. Medição de Temperatura ..........................................................................................................93 10.3. Escalas de Temperatura ...........................................................................................................94 10.4. Conversão de escalas ...............................................................................................................94 10.5. Transdutores de Temperatura ..................................................................................................95
10.5.1. Termômetro a Dilatação de Líquido ..................................................................................95 10.5.2. Termômetros à Pressão de Gás .......................................................................................99 10.5.3. Termômetro à Pressão de Vapor ......................................................................................99 10.5.4. Termômetros a Dilatação de Sólidos (Termômetros Bimetálicos) ..................................100 10.5.5. Termopar .........................................................................................................................100 10.5.6. Termoresistência .............................................................................................................106 10.5.7. Pirômetros........................................................................................................................111
EXERCÍCIOS ...................................................................................................................................112 CAPÍTULO 11 – ELEMENTO FINAL DE CONTROLE ........................................................................116
11.1. Introdução ...............................................................................................................................116 11.2. Válvulas de controle ................................................................................................................116
11.2.1. Partes principais de uma válvula de controle ..................................................................116 11.2.2. Modos de Acionamento das Válvulas .............................................................................119
11.3. Motores Elétricos ....................................................................................................................120 11.4. Resistências ............................................................................................................................121 11.5. Eletroímãs ...............................................................................................................................122 11.6. Lâmpadas e Alarmes Sonoros ................................................................................................122 EXERCÍCIOS ...................................................................................................................................122
5
CAPÍTULO 01 – INTRODUÇÃO AOS SISTEMAS DE CONTROLE
1.1. Introdução
O homem, sabendo das limitações de suas capacidades físicas, tem criado ao longo da história artifícios que lhe permitam utilizar seus poderes naturais. Iniciando com a utilização de fontes energéticas alternativas aos seus próprios músculos, o homem construiu máquinas movidas pela força animal, eólica e da água. Com o advento da tecnologia das máquinas a vapor muitos limites foram ultrapassados, principalmente nas áreas de transporte (barcos a vapor e trens) e na fabricação de bens de consumo. A força das máquinas a vapor foi uma das principais bases para a Revolução Industrial que se iniciou na Inglaterra no século XIX. Até poucas décadas atrás, o comando e controle destas máquinas e equipamentos eram feitos por operadores humanos. Esta associação, onde a máquina fornece força e o homem o pensamento é denominada de Maquinismo ou Mecanização. No Maquinismo o operador, dispondo de informações sensoriais dos dados de aparelhos de medida e de informações diversas, introduz correções na atuação do sistema de máquinas de modo a atingir-se, da melhor forma possível, um objetivo determinado. Um exemplo é o torneiro mecânico que comanda os movimentos do seu torno de acordo com a forma que a peça fabricada vai tomando, em função das medidas que realiza periodicamente. No maquinismo é o operador quem dita o regime de funcionamento da máquina, mas em muitos casos ele fica reduzido à condição de escravo da mesma, sem qualquer possibilidade de alterar o seu “ritmo” de trabalho. Na indústria mecanizada, simbolizada por uma cadeia de produção em massa, todos os movimentos das máquinas são sincronizados e repetitivos. Esse tipo de indústria exige do operário movimentos também monótonos que possam operar a máquina dentro de rigorosos limites de tempo. Submetidos a situações de grande "stress", os operários podem cometer falhas que resultam muitas vezes em sérios prejuízos. Com a evolução da eletrônica que possibilitou o advento das telecomunicações e dos sistemas computacionais, surgiram novas tecnologias que permitiram a criação de equipamentos que não só substituem a força muscular do homem como na mecanização mas que também têm a capacidade de tomada de decisões. A estas tecnologias é dado o nome de AUTOMAÇÃO. Denomina-se Automação Industrial o conjunto de técnicas e/ou equipamentos destinadas a tornar automáticos vários processos produtivos em uma indústria, de modo a eliminar ou reduzir bastante a intervenção humana nos mesmos. Os principais objetivos da Automação Industrial são:
Redução de custos;
Aumento da Produtividade;
Maior segurança na operação da unidade produtiva; Como aspectos positivos e negativos da automação podemos citar:
ASPECTOS POSITIVOS ASPECTOS NEGATIVOS
Valorização do ser humano, liberando-o de tarefas repetitivas, insalubres e/ou arriscadas;
Aumento da qualidade de vida da sociedade, promovendo maior conforto aos indivíduos;
Maior enriquecimento pelo menor custo do produto e/ou pelo aumento da produtividade;
Fator determinante para a sobrevivência da empresa e, portanto, do emprego, dentro de um mercado altamente competitivo;
Criação de empregos diretos e indiretos,
Imprevisibilidade das consequências só passíveis de serem avaliadas no futuro;
Exigência de profissional cada vez mais qualificado, impondo política de emprego de afunilamento;
Risco potencial trazido ao setor de produção pela introdução de novas tecnologias;
Acesso rápido e fácil a essas novas tecnologias só para grandes empresas (exclusão tecnológica);
6
além, de novos empregos, relacionados com a manutenção, desenvolvimento e supervisão de sistemas;
Interesse pela qualidade do produto e satisfação do cliente;
Diminuição, em curto prazo, do emprego disponível;
Desvalorização do trabalho artesanal, aumentando cada vez mais a dependência tecnológica;
A automação baseia-se na utilização de equipamentos capazes de realizar controles e autocorreções através de sensoriamento e ações similares a do ser humano. Para a implementação da Automação Industrial existem várias técnicas e equipamentos que são aplicados conforme o sistema a se automatizar. Os principais equipamentos são:
PLC equipamentos eletrônicos, programados por software, que controlam e coordenam a seqüência de operação de diversas máquinas e equipamentos em uma indústria. Os PLC´s trabalham com variáveis digitais e analógicas.
SDCD Sistemas Digitais de Controle Distribuído: de tecnologia mais recente, são sistemas microprocessados que facilitam o controle e otimização dos processos por computador, diminuindo a interferência do operador durante a operação normal do processo e que passa a intervir somente durante instabilidades operacionais, paradas e partidas.
Controladores (single loop, multi loop) são controladores baseados em microcontroladores de ultima geração, criados para efetuar controle de processos. Por ser microprocessado, seu sistema operacional permite que se adapte à maioria dos processos, bastando para tal a seleção correta dos parâmetros de PID. Os controladores trabalham com variáveis analógicas e, eventualmente, podem possuir saídas digitais de alarme.
CN (Comando Numérico) equipamentos utilizados na fabricação e montagem de peças mecânicas, através do controle de máquinas ferramenta, tais como tornos, fresas, furadeiras, etc. No CNC (comando numérico computadorizado), além das operações normais de um CN, realizada por computador, há às vezes o auxílio de programas CAD para se realizar o projeto gráfico das peças a serem produzidas.
1.2. Caracterização dos Sistemas Automatizados
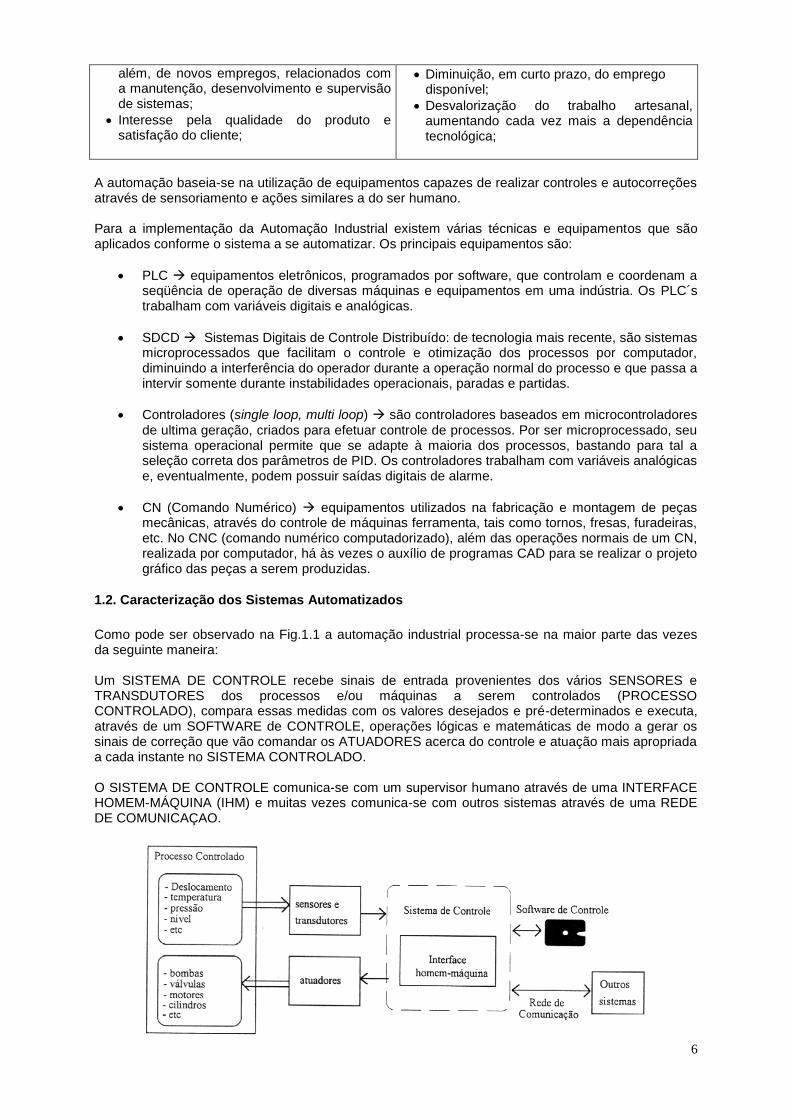
Como pode ser observado na Fig.1.1 a automação industrial processa-se na maior parte das vezes da seguinte maneira: Um SISTEMA DE CONTROLE recebe sinais de entrada provenientes dos vários SENSORES e TRANSDUTORES dos processos e/ou máquinas a serem controlados (PROCESSO CONTROLADO), compara essas medidas com os valores desejados e pré-determinados e executa, através de um SOFTWARE de CONTROLE, operações lógicas e matemáticas de modo a gerar os sinais de correção que vão comandar os ATUADORES acerca do controle e atuação mais apropriada a cada instante no SISTEMA CONTROLADO. O SISTEMA DE CONTROLE comunica-se com um supervisor humano através de uma INTERFACE HOMEM-MÁQUINA (IHM) e muitas vezes comunica-se com outros sistemas através de uma REDE DE COMUNICAÇAO.
7
Fig. 1.1- Diagrama esquemático de um sistema genérico de automação
Através deste esquema percebe-se que o desenvolvimento da Automação somente foi possível devido ao surgimento de sistemas "inteligentes" de controle, que simulam a lógica de pensamento e tomada de decisões realizada por um ser humano, pois é este o elemento responsável pela atuação sobre um sistema. O Controle Contínuo de Processos ou Controle Automático de Processos ou, simplesmente, Controle de Processos, refere-se à Automação de sistemas que possuem grandezas físicas, como temperatura, vazão, pressão, nível, pH, etc., presentes em diversos processos industriais. Pela natureza das grandezas, os sistemas de Controle de Processos estão associados a sinais analógicos. Um Sistema de Controle é formado por um conjunto de dispositivos que mantém uma ou mais grandezas físicas dentro de condições definidas na sua entrada. Os dispositivos que o compõe podem ser elétricos, mecânicos, ópticos e até seres humanos.
EExx..:: Um operador deseja manter a temperatura da água quente em um dado valor. O termômetro instalado na tubulação de saída da água quente mede a temperatura real. Esta temperatura é a saída do sistema. Se o operador observa o termômetro e verifica que a temperatura é maior do que a desejada, ele reduz a quantidade de suprimento de vapor de modo a diminuir esta temperatura. È bem possível que a temperatura se torne demasiado baixa, necessitando repetir a sequência de operações no sentido oposto. Pode-se criar um sistema de Controle de Processos utilizando-se PLC, SDCD ou Controladores. O Controle Automático de Processo é uma evolução do Controle manual. As vantagens de um sistema de controle automatizado em relação a um operador humano podem ser resumidas como:
Maior número de aquisições simultâneas de dados para processamento;
Maior velocidade de processamento e decisão;
Maior confiabilidade;
Maior possibilidade de integração com outros sistemas produtivos; Os processos evoluíram e também a forma de controlá-los. Foram desenvolvidos sistemas de Controle Automático que possibilitaram ao homem controlar os processos com segurança, economia e liberá-lo para atividades não repetitivas e mais nobres. Controlar um processo significa atuar sobre ele, ou sobre as condições a que o processo está sujeito, de modo a atingir algum objetivo. Por exemplo: podemos achar necessário ou desejável manter o processo sempre próximo de um determinado estado estacionário, mesmo que efeitos externos tentem desviá-lo desta condição. Este estado estacionário pode ter sido escolhido por atender melhor aos requisitos de qualidade e segurança do processo. No estudo da automação em sistemas industriais, comerciais, automobilísticos, domésticos, etc., é preciso determinar as condições (ou variáveis) do sistema. È necessário obter os valores das variáveis físicas do ambiente a ser monitorado, e este é o trabalho dos sensores.
1.3. Componentes e Funcionamento de um Sistema de controle Automático
Em um sistema de controle automático, pretende-se controlar uma determinada variável ou condição, chamada de variável do processo (PV). Esta variável ou condição deve ser mantida em um valor desejado pré-determinado, chamado de valor desejado, ponto de controle, valor ou ponto de ajuste, ou “Set Point” (SP).
Num sistema de controle podemos distinguir alguns componentes ou partes:
O processo, ou seja, o sistema controlado, definido como sendo as múltiplas funções desenvolvidas no equipamento, na qual a variável é controlada. Assim, o processo inclui
8
tudo aquilo que afeta a variável controlada, quando não é acionado o elemento final de controle.
O Meio de Medição é o mecanismo destinado a medir o valor real da variável controlada; fornece um sinal proporcional ao valor da variável medida (sensor).
O Meio de Controle é o componente do sistema de controle que recebe o sinal do meio de medição, compara-o com um sinal correspondente ao valor desejado e, se houver diferença, emite um sinal de saída que modificará uma variável ou condição no processo para eliminar esta diferença.
O Elemento Final de Controle é o componente que modifica diretamente uma variável ou condição do processo, que afeta o valor da variável controlada. Esta condição ou variável é chamada de variável manipulada.
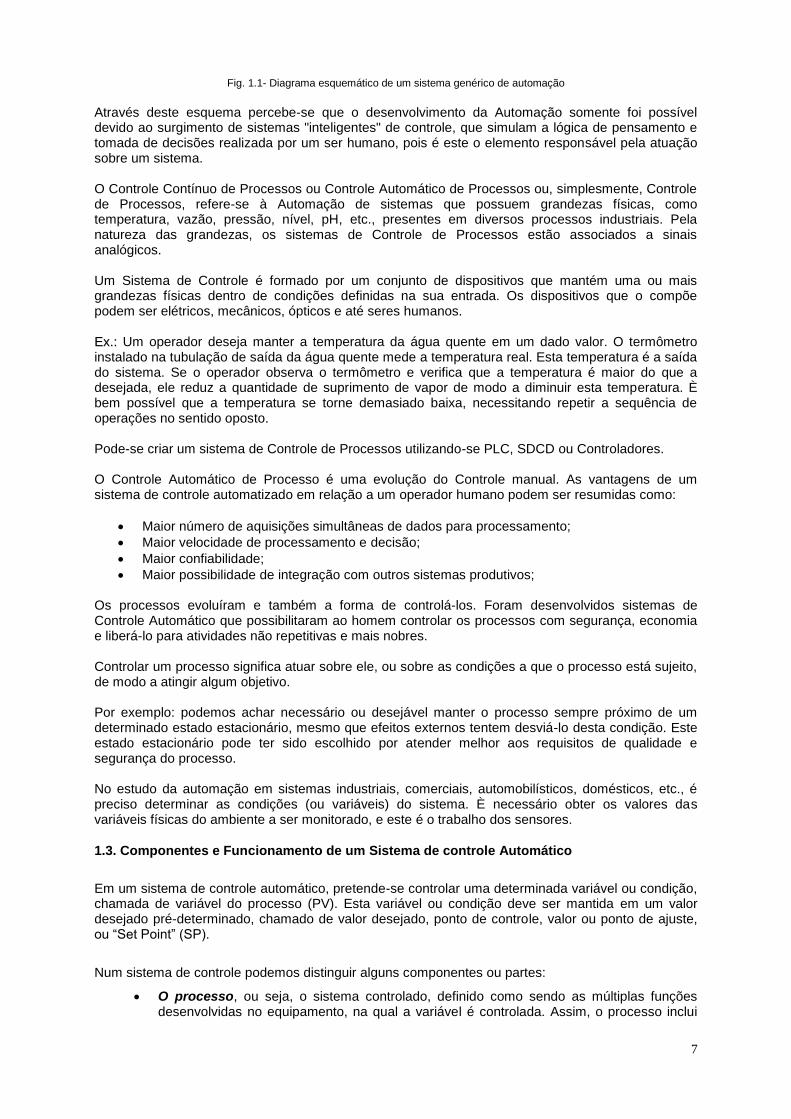
Por exemplo, no controle de velocidade de um automóvel, o atuador poderia ser considerado como o pé do motorista sobre o acelerador, o sensor seria composto pelos seus olhos observando o velocímetro e o controlador seu próprio cérebro. Se o ponto de controle fosse 60 km/h e a velocidade observada no velocímetro fosse 55 km/h, o cérebro processaria a informação vinda dos olhos e mandaria acionar o pé sobre o acelerador, aumentando a velocidade e quando esta estivesse mais próxima do valor programado seria dado o comando de diminuir a pressão sobre o acelerador até que a velocidade se estabilizasse próxima do ponto de controle. Os sistemas de controle podem ser classificados em: malha aberta e malha fechada. Em um sistema de malha aberta, a ação de controle independe da saída. A Fig. 1.2. mostra um exemplo simples: a alimentação de água para um reservatório é comandada por uma válvula manual. Desde que as vazões de suprimento e de processo costumam variar, esse sistema exige a periódica intervenção de um operador para manter o nível de água acima do mínimo necessário e abaixo do máximo (evitar transbordamento).
Fig. 1.2- Exemplo Sistema Malha Aberta
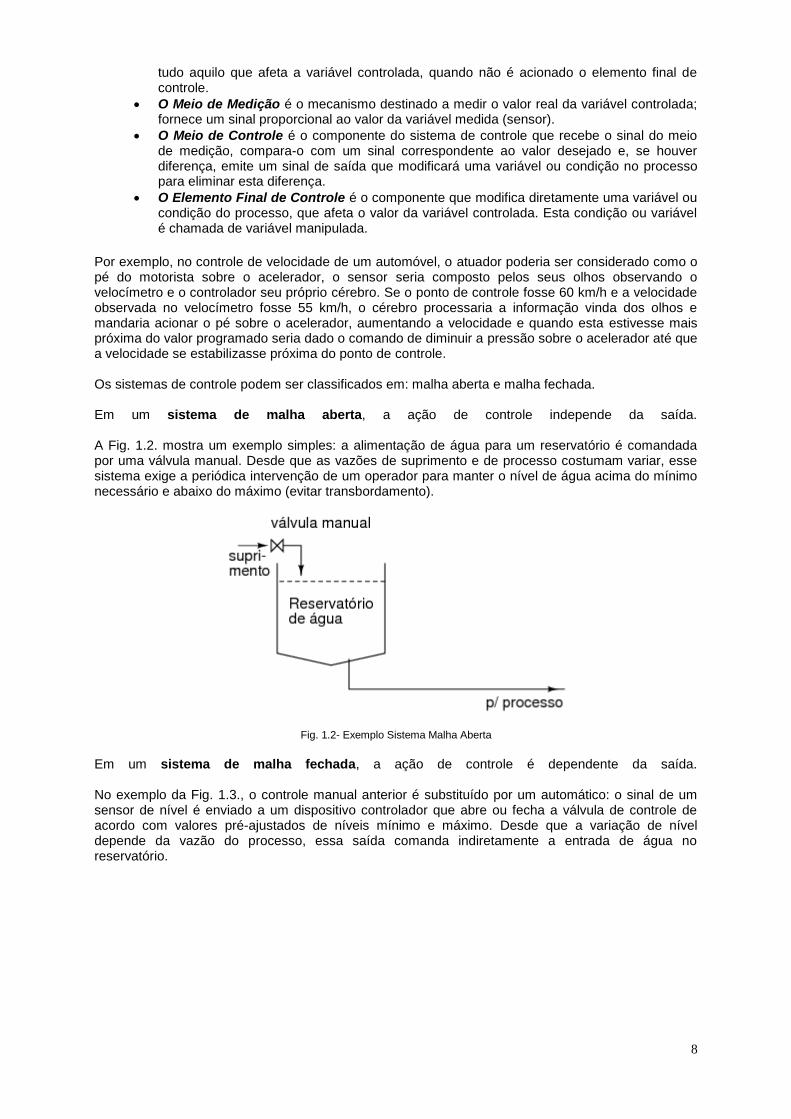
Em um sistema de malha fechada, a ação de controle é dependente da saída. No exemplo da Fig. 1.3., o controle manual anterior é substituído por um automático: o sinal de um sensor de nível é enviado a um dispositivo controlador que abre ou fecha a válvula de controle de acordo com valores pré-ajustados de níveis mínimo e máximo. Desde que a variação de nível depende da vazão do processo, essa saída comanda indiretamente a entrada de água no reservatório.
9
Fig. 1.3- Exemplo Sistema Malha Fechada
O controle em malha fechada também é conhecido como controle realimentado, onde o valor real da saída é subtraído do valor desejado. Essa diferença é o sinal de erro, que o sistema usa para ajustar a saída ao valor desejado. No exemplo anterior, o sensor de nível fornece a realimentação, que, no controlador, é comparada com um valor ajustado. O controlador de nível usa a diferença entre o nível do sensor e o valor ajustado para enviar, quando necessário, o sinal de comando à válvula de controle.
EXERCÍCIOS
1. Defina automação 2. Dê dois exemplos de controle automatizado que você conhece. 3. Comente sobre os aspectos positivos e negativos da automação.
10
CAPITULO 02 – INSTRUMENTAÇÃO INDUSTRIAL
2.1. Introdução
Instrumentação é a ciência que aplica e desenvolve técnicas de medição, indicação, registro e controle de processos de fabricação, visando à otimização na eficiência desses processos. A utilização de instrumentos nos permite:
Incrementar e controlar a qualidade do produto;
Aumentar a produção e o rendimento;
Obter e fornecer dados seguros da matéria prima e da qualidade produzida, além de ter em mãos dados relativos à economia dos processos.
Para cada variável de um processo industrial, podemos utilizar um ou mais instrumentos para executar funções como:
Transmitir;
Registrar;
Indicar;
Controlar;
Analisar; Nas indústrias de processos tais como siderúrgica, petroquímica, alimentícia, papel, etc.; a instrumentação é responsável pelo rendimento máximo de um processo, fazendo com que toda energia cedida, seja transformada em trabalho na elaboração do produto desejado. As principais grandezas que traduzem transferências de energia no processo são: PRESSÃO, NÍVEL, VAZÃO, TEMPERATURA; as quais denominamos de variáveis de um processo. Através dos instrumentos de medição e dispositivos automáticos podemos medir e/ou controlar as diversas variáveis físicas e químicas existentes nos processos industriais.
2.2. Classificação dos Instrumentos de Medição
Existem vários métodos de classificação de instrumentos de medição. Podemos classificá-los por:
Função;
Sinal transmitido ou suprimento;
Tipo de sinal;
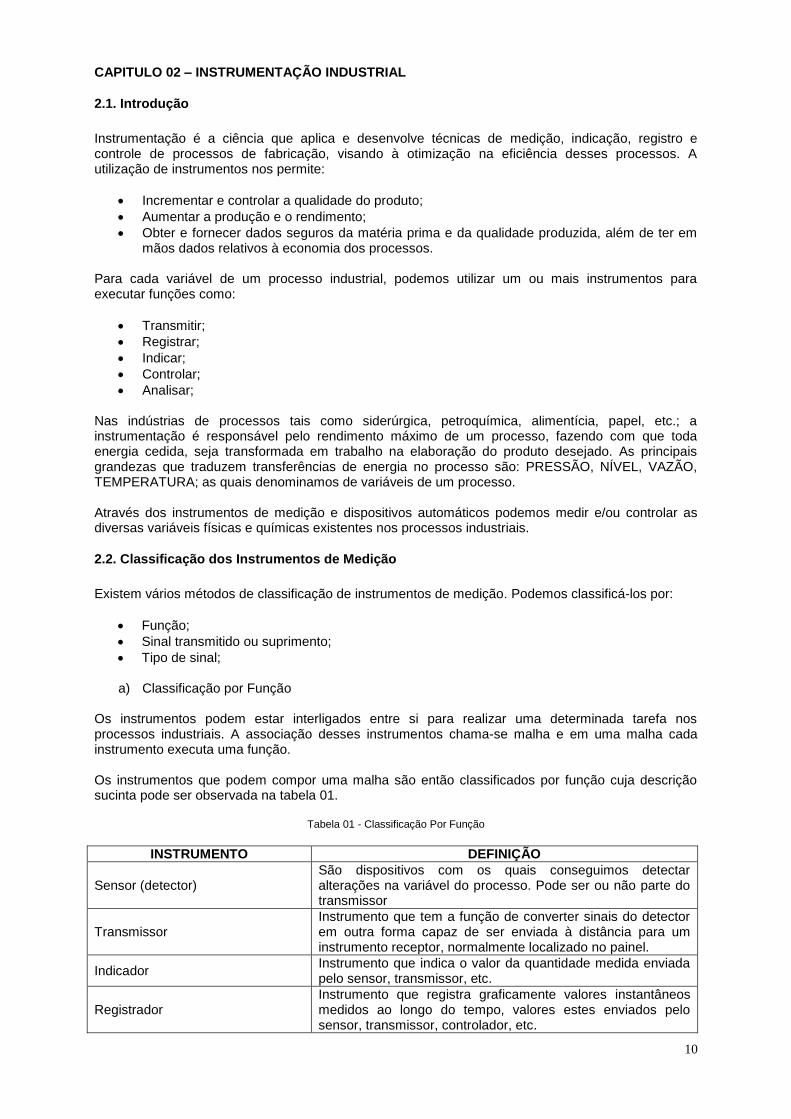
a) Classificação por Função Os instrumentos podem estar interligados entre si para realizar uma determinada tarefa nos processos industriais. A associação desses instrumentos chama-se malha e em uma malha cada instrumento executa uma função. Os instrumentos que podem compor uma malha são então classificados por função cuja descrição sucinta pode ser observada na tabela 01.
Tabela 01 - Classificação Por Função
INSTRUMENTO DEFINIÇÃO
Sensor (detector) São dispositivos com os quais conseguimos detectar alterações na variável do processo. Pode ser ou não parte do transmissor
Transmissor Instrumento que tem a função de converter sinais do detector em outra forma capaz de ser enviada à distância para um instrumento receptor, normalmente localizado no painel.
Indicador Instrumento que indica o valor da quantidade medida enviada pelo sensor, transmissor, etc.
Registrador Instrumento que registra graficamente valores instantâneos medidos ao longo do tempo, valores estes enviados pelo sensor, transmissor, controlador, etc.
11
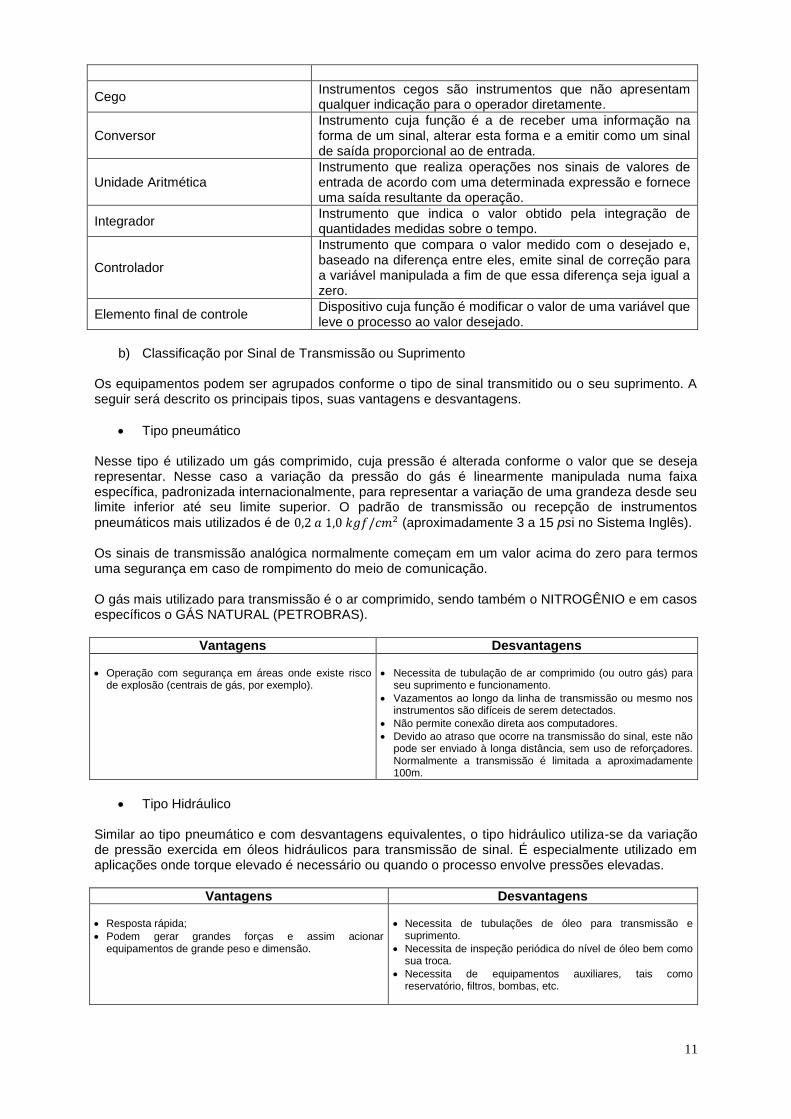
Cego Instrumentos cegos são instrumentos que não apresentam qualquer indicação para o operador diretamente.
Conversor Instrumento cuja função é a de receber uma informação na forma de um sinal, alterar esta forma e a emitir como um sinal de saída proporcional ao de entrada.
Unidade Aritmética Instrumento que realiza operações nos sinais de valores de entrada de acordo com uma determinada expressão e fornece uma saída resultante da operação.
Integrador Instrumento que indica o valor obtido pela integração de quantidades medidas sobre o tempo.
Controlador
Instrumento que compara o valor medido com o desejado e, baseado na diferença entre eles, emite sinal de correção para a variável manipulada a fim de que essa diferença seja igual a zero.
Elemento final de controle Dispositivo cuja função é modificar o valor de uma variável que leve o processo ao valor desejado.
b) Classificação por Sinal de Transmissão ou Suprimento
Os equipamentos podem ser agrupados conforme o tipo de sinal transmitido ou o seu suprimento. A seguir será descrito os principais tipos, suas vantagens e desvantagens.
Tipo pneumático Nesse tipo é utilizado um gás comprimido, cuja pressão é alterada conforme o valor que se deseja representar. Nesse caso a variação da pressão do gás é linearmente manipulada numa faixa específica, padronizada internacionalmente, para representar a variação de uma grandeza desde seu limite inferior até seu limite superior. O padrão de transmissão ou recepção de instrumentos
pneumáticos mais utilizados é de (aproximadamente 3 a 15 psi no Sistema Inglês). Os sinais de transmissão analógica normalmente começam em um valor acima do zero para termos uma segurança em caso de rompimento do meio de comunicação. O gás mais utilizado para transmissão é o ar comprimido, sendo também o NITROGÊNIO e em casos específicos o GÁS NATURAL (PETROBRAS).
Vantagens Desvantagens
Operação com segurança em áreas onde existe risco de explosão (centrais de gás, por exemplo).
Necessita de tubulação de ar comprimido (ou outro gás) para seu suprimento e funcionamento.
Vazamentos ao longo da linha de transmissão ou mesmo nos instrumentos são difíceis de serem detectados.
Não permite conexão direta aos computadores.
Devido ao atraso que ocorre na transmissão do sinal, este não pode ser enviado à longa distância, sem uso de reforçadores. Normalmente a transmissão é limitada a aproximadamente 100m.
Tipo Hidráulico Similar ao tipo pneumático e com desvantagens equivalentes, o tipo hidráulico utiliza-se da variação de pressão exercida em óleos hidráulicos para transmissão de sinal. É especialmente utilizado em aplicações onde torque elevado é necessário ou quando o processo envolve pressões elevadas.
Vantagens Desvantagens
Resposta rápida;
Podem gerar grandes forças e assim acionar equipamentos de grande peso e dimensão.
Necessita de tubulações de óleo para transmissão e suprimento.
Necessita de inspeção periódica do nível de óleo bem como sua troca.
Necessita de equipamentos auxiliares, tais como reservatório, filtros, bombas, etc.
12
Tipo elétrico Esse tipo de transmissão é feito utilizando sinais elétricos de corrente ou tensão. Face à tecnologia disponível no mercado em relação à fabricação de instrumentos eletrônicos microprocessados, hoje, é esse o tipo de transmissão largamente usado em todas as indústrias, onde não ocorre risco de explosão. Assim como na transmissão pneumática, o sinal é linearmente modulado em uma faixa padronizada representando o conjunto de valores entre o limite mínimo e máximo de uma variável de um processo qualquer. Como padrão para transmissão a longas distâncias são utilizados sinais em corrente contínua variando de (4 a 20 mA) e para distâncias até 15 metros aproximadamente, pode-se utilizar também sinais em tensão contínua de 1 a 5V.
Vantagens Desvantagens
Permite transmissão para longas distâncias sem perdas.
A alimentação pode ser feita pelos próprios fios que conduzem o sinal de transmissão.
Permite fácil conexão aos computadores.
Fácil instalação.
Permite de forma mais fácil realização de operações matemáticas.
Permite que o mesmo sinal (4~20mA) seja “lido” por mais de um instrumento, ligando em série os instrumentos. Porém, existe um limite quanto à soma das resistências internas destes instrumentos, que não deve ultrapassar o valor estipulado pelo fabricante do transmissor.
Necessita de técnico especializado para sua instalação e manutenção.
Exige utilização de instrumentos e cuidados especiais em instalações localizadas em áreas de riscos.
Exige cuidados especiais na escolha do encaminhamento de cabos ou fios de sinais.
Os cabos de sinal devem ser protegidos contra ruídos elétricos.
Tipo Digital Nesse tipo, “pacotes de informações” sobre a variável medida são enviados para uma estação receptora, através de sinais digitais modulados e padronizados. Para que a comunicação entre o elemento transmissor receptor seja realizada com êxito é utilizada uma “linguagem” padrão chamado protocolo de comunicação.
Vantagens Desvantagens
Não necessita ligação ponto a ponto por instrumento.
Pode utilizar um par trançado ou fibra óptica para transmissão dos dados.
Imune a ruídos externos.
Permite configuração, diagnósticos de falha e ajuste em qualquer ponto da malha.
Menor custo final.
Existência de vários protocolos no mercado, o que dificulta a comunicação entre equipamentos de marcas diferentes.
Caso ocorra rompimento no cabo de comunicação pode-se perder a informação e/ou controle de várias malhas.
Via Rádio Neste tipo, o sinal ou um pacote de sinais medidos são enviados à sua estação receptora via ondas de rádio em uma faixa de frequência específica.
Vantagens Desvantagens
Não necessita de cabos de sinal.
Pode-se enviar sinais de medição e controle de máquinas em movimento.
Alto custo inicial.
Necessidade de técnicos altamente especializados.
Via Modem A transmissão dos sinais é feita através de utilização de linhas telefônicas pela modulação do sinal em frequência, fase ou amplitude.
Vantagens Desvantagens
Baixo custo de instalação.
Pode-se transmitir dados a longas distâncias.
Necessita de profissionais especializados.
Baixa velocidade na transmissão de dados.
Sujeito a interferências externas, inclusive violação de informações.
13
2.3. Simbologia de Instrumentação
Com objetivo de simplificar e globalizar o entendimento dos documentos utilizados para representar as configurações utilizadas das malhas de instrumentação, normas foram criadas em diversos países. Devido a sua maior abrangência e atualização, uma das normas mais utilizadas em projetos industriais no Brasil é a estabelecida pela ISA (Instrument Society of America).
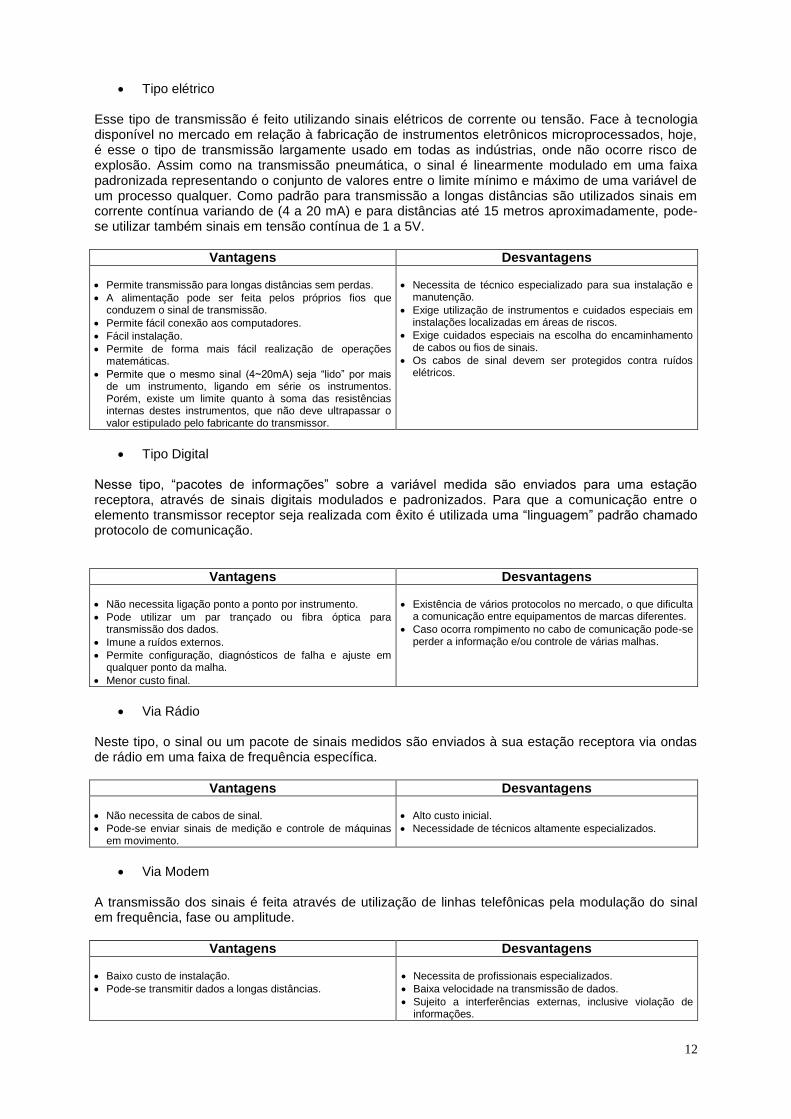
a) Tipos de Conexões
Quadro 1 – Tipos de Conexões
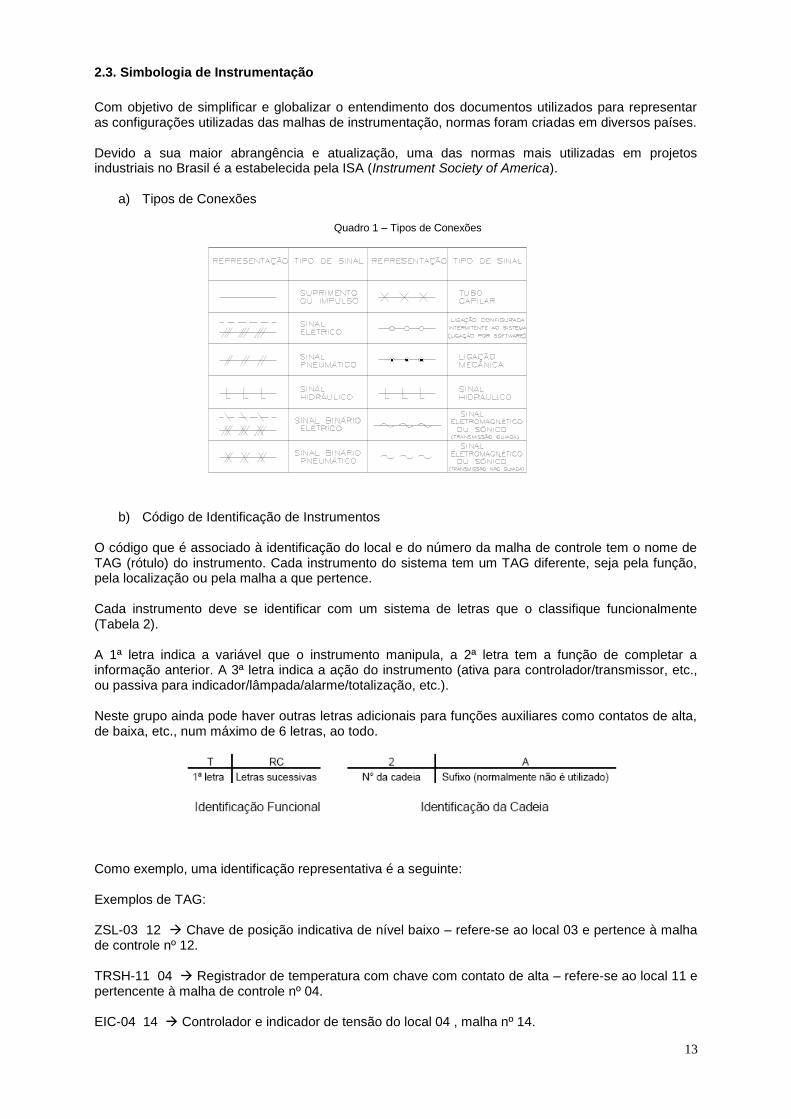
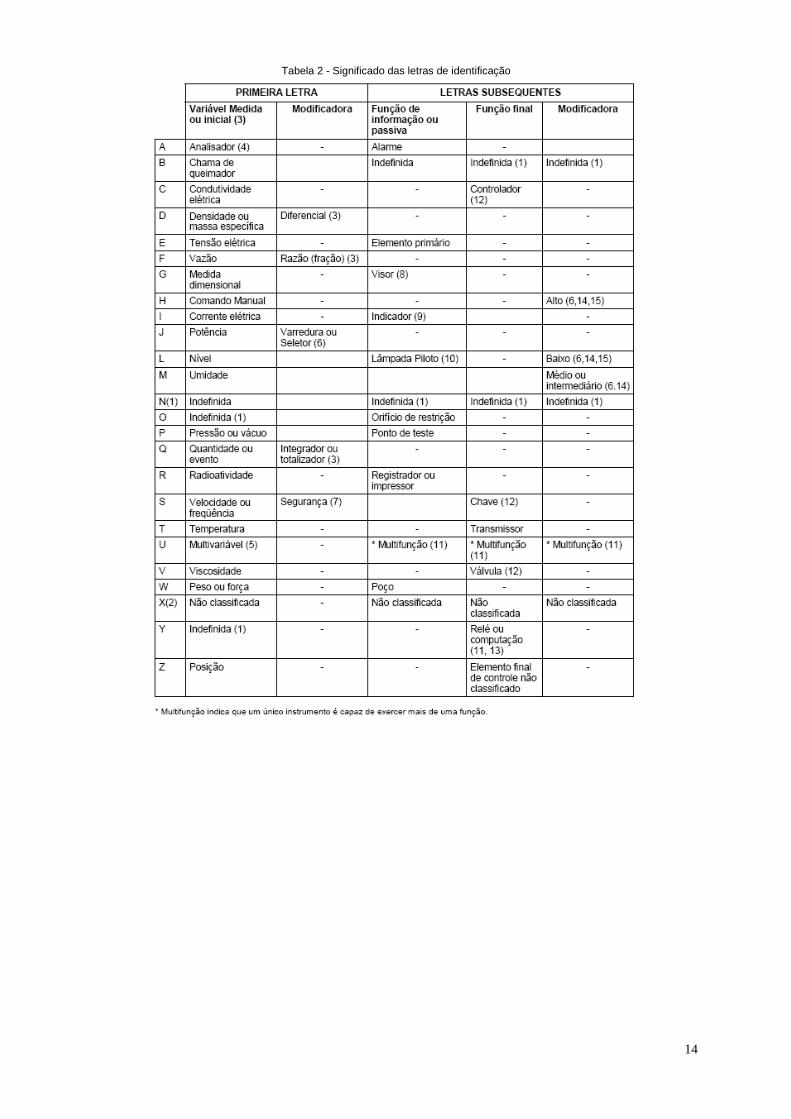
b) Código de Identificação de Instrumentos O código que é associado à identificação do local e do número da malha de controle tem o nome de TAG (rótulo) do instrumento. Cada instrumento do sistema tem um TAG diferente, seja pela função, pela localização ou pela malha a que pertence. Cada instrumento deve se identificar com um sistema de letras que o classifique funcionalmente (Tabela 2). A 1ª letra indica a variável que o instrumento manipula, a 2ª letra tem a função de completar a informação anterior. A 3ª letra indica a ação do instrumento (ativa para controlador/transmissor, etc., ou passiva para indicador/lâmpada/alarme/totalização, etc.). Neste grupo ainda pode haver outras letras adicionais para funções auxiliares como contatos de alta, de baixa, etc., num máximo de 6 letras, ao todo. Como exemplo, uma identificação representativa é a seguinte: Exemplos de TAG: ZSL-03 12 Chave de posição indicativa de nível baixo – refere-se ao local 03 e pertence à malha de controle nº 12. TRSH-11 04 Registrador de temperatura com chave com contato de alta – refere-se ao local 11 e pertencente à malha de controle nº 04. EIC-04 14 Controlador e indicador de tensão do local 04 , malha nº 14.
14
Tabela 2 - Significado das letras de identificação
15
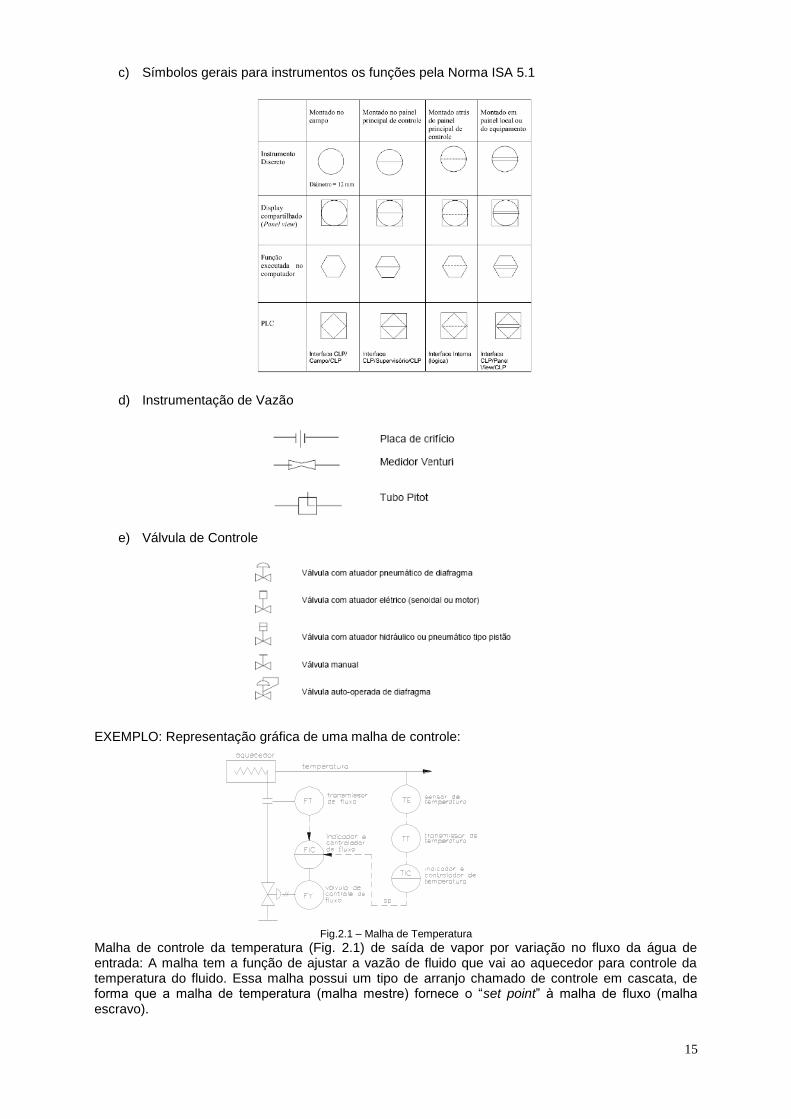
c) Símbolos gerais para instrumentos os funções pela Norma ISA 5.1
d) Instrumentação de Vazão
e) Válvula de Controle EXEMPLO: Representação gráfica de uma malha de controle:
Fig.2.1 – Malha de Temperatura
Malha de controle da temperatura (Fig. 2.1) de saída de vapor por variação no fluxo da água de entrada: A malha tem a função de ajustar a vazão de fluido que vai ao aquecedor para controle da temperatura do fluido. Essa malha possui um tipo de arranjo chamado de controle em cascata, de forma que a malha de temperatura (malha mestre) fornece o “set point” à malha de fluxo (malha escravo).

16
Neste caso, a malha escravo atua em variáveis rápidas (fluxo) e tem ganho alto. A malha mestre atua em variáveis lentas (temperatura) e tem ganho baixo. Normalmente variáveis de fluxo são as mais rápidas, em seguida pressão, depois nível e por fim, temperatura que é a mais lenta.
f) Simbologia para Funções
Quadro 2 – Simbologia para Funções
2.4. Características Gerais dos Instrumentos
A terminologia empregada foi unificada com objetivo de os fabricantes, os usuários e os organismos ou entidades que atuam direta ou indiretamente no campo da Instrumentação Industrial utilizem a mesma linguagem. Os termos empregados definem as características próprias de medida e de controle, bem como as características estáticas e dinâmicas dos diversos instrumentos utilizados. As definições dos termos empregados se relacionam com as normas estabelecidas pela SAMA (Scientific Apparatus Markers Association) em sua norma PMC 20, e que são abordadas a seguir: 2.4.1. Características estáticas
As características estáticas de um instrumento revelam o comportamento instantâneo a uma dada entrada. A maioria dos instrumentos é projetada e construída para que o resultado de sua indicação seja a quantidade da grandeza a qual ele está destinado a medir. Para facilitar a leitura do observador (por exemplo o homem), espera-se que a quantidade da grandeza a ser medida permaneça inalterada por um período de tempo. Quando isto acontece, pode-se dizer que a quantidade da grandeza está estática (ou estável). Mudando a quantidade da grandeza para valores diferentes pode-se obter uma relação entre os valores da quantidade da grandeza a ser medida e a indicação do instrumento.
a) Faixa de medida [RANGE] Conjunto de valores que estão compreendidos dentro dos limites inferior e superior da capacidade de medida, ou de indicação do instrumento. Expressa-se determinando os dois valores extremos.
Por exemplo: Um instrumento que mede temperatura entre 30 a 80C tem um range de: RANGE = 30 a 80
0C
b) Alcance [SPAN]
É a diferença algébrica entre os valores superior e inferior da faixa de medida, ou de indicação, ou de transmissão do instrumento. Por exemplo, um instrumento com faixa de medida de 100ºC a 250ºC, possui um alcance de 150 ºC.

17
c) Zero
È o limite inferior da faixa. Não é, necessariamente, o zero numérico.
d) Sensibilidade [SENSITIVITY] É a razão entre a variação do valor medido ou transmitido para um instrumento e a variação da variável que o acionou, após ter alcançado o estado de repouso. Quanto menor for a sensibilidade de um instrumento maior será, em geral, a necessidade de amplificação do sinal a fim de se reduzir os problemas com ruído na transmissão do mesmo. A sensibilidade pode ser expressa em unidades de medida de saída e de entrada. Por exemplo, um termômetro de vidro com faixa de medida de 0 ºC a 500 ºC possui uma escala de leitura de 50 cm, portanto, a sua sensibilidade é de 0,1 cm/ºC;
e) Resolução É a menor variação na grandeza medida que pode ser detectada pelo instrumento. A resolução está relacionada com o número de "bit" do instrumento: quanto maior o número de "bit" melhor a resolução. Exemplo 1: Um voltímetro analógico com divisões de escala de 0,1V terá sua leitura apresentada com uma resolução de 0,1V; Exemplo 2: Um instrumento com mostrador digital tem resolução correspondente ao dígito menos significativo. Assim, um voltímetro digital que tem um display com duas casas depois da vírgula tem uma resolução de 0,01V.
f) Repetitividade [REPEATIBILITY] Grau de concordância entre os resultados de medições sucessivas de um mesmo mensurando efetuadas sob as mesmas condições de medição. Observações: 1) Estas condições são denominadas condições de repetitividade. 2) Condições de repetitividade incluem:
→ mesmo procedimento de medição; → mesmo observador; → mesmo instrumento de medição, utilizado nas mesmas condições; → mesmo local; → repetição em curto período de tempo.
3) Repetitividade pode ser expressa, quantitativamente, em função das características da dispersão dos resultados.
g) Reprodutibilidade Grau de concordância entre os resultados das medições de um mesmo mensurando efetuadas sob condições variadas de medição. Observações: 1) Para que uma expressão da reprodutibilidade seja válida, é necessário que sejam especificadas as condições alteradas. 2) As condições alteradas podem incluir:
→ princípio de medição; → método de medição;
18
→ observador; → instrumento de medição; → padrão de referência; → local; → condições de utilização; → tempo.
3) Reprodutibilidade pode ser expressa, quantitativamente, em função das características da dispersão dos resultados. 4) Os resultados aqui mencionados referem-se, usualmente, a resultados corrigidos.
h) Erro [ERROR] O erro pode ser apresentado de duas formas:
Erro absoluto: é a diferença algébrica entre o valor medido, ou indicado ou transmitido e o valor real que deveria ser medido, ou indicado, ou transmitido pelo instrumento.
Erro relativo: é apresentado em percentagem tomando como referência um valor da escala do instrumento. Pode ser calculado para o valor indicado do instrumento, mas normalmente o fabricante calcula em relação ao Span (faixa nominal do instrumento ou fundo de escala).
ERRO (em % do Span) = ((V-Vr)/Span) * 100%
onde: V => Valor medido, ou indicado, ou transmitido. Vr => Valor real. Deve-se observar que se o processo está em condições de regime permanente, existe então o chamado ERRO ESTÁTICO. Em condições dinâmicas o erro varia consideravelmente devido aos instrumentos terem características comuns aos sistemas físicos: absorvem energia do processo e esta transferência requer um certo tempo para ser transmitida (TEMPO DE RESPOSTA DO INSTRUMENTO), o qual dá lugar a atrasos na leitura pelo dispositivo. Sempre que as condições forem dinâmicas, existirá um maior ou menor valor do chamado ERRO DINÂMICO (diferença entre o valor instantâneo da variável e o valor indicado ou transmitido pelo instrumento). Seu valor depende do tipo do fluído do processo, de viscosidade, do elemento primário (termopar, termoresistência), dos meios de proteção do instrumento, etc. Estes termos, no entanto, estão em desuso. O termo que está sendo utilizado é o de INCERTEZAS. A palavra “incerteza” significa “dúvida”. De forma ampla “incerteza da medição” significa “dúvida acerca do resultado de uma medição”. Formalmente, define-se incerteza como: “parâmetro, associado com o resultado de uma medição, que caracteriza a dispersão de valores que podem razoavelmente ser atribuídos ao mensurando”.
i) Exatidão Grau de concordância entre o resultado de uma medição e um valor verdadeiro do mensurando. Ou seja, qualidade da medição que assegura que a medida coincida com o valor real da grandeza considerada. O valor representativo deste parâmetro é o valor médio. Isso significa que o valor pode passar de um laboratório para outro, sempre mantendo a medida exata. Este parâmetro é expresso, em geral como porcentagens do fundo de escala. Observações: 1) Exatidão é um conceito qualitativo. 2) O termo precisão não deve ser utilizado como exatidão. Um atirador possui duas armas uma boa e outra com problema na mira. A precisão depende do atirador e não depende da arma. Já a exatidão depende da mira da arma. A Fig. 2.2. exemplifica esta situação.
19
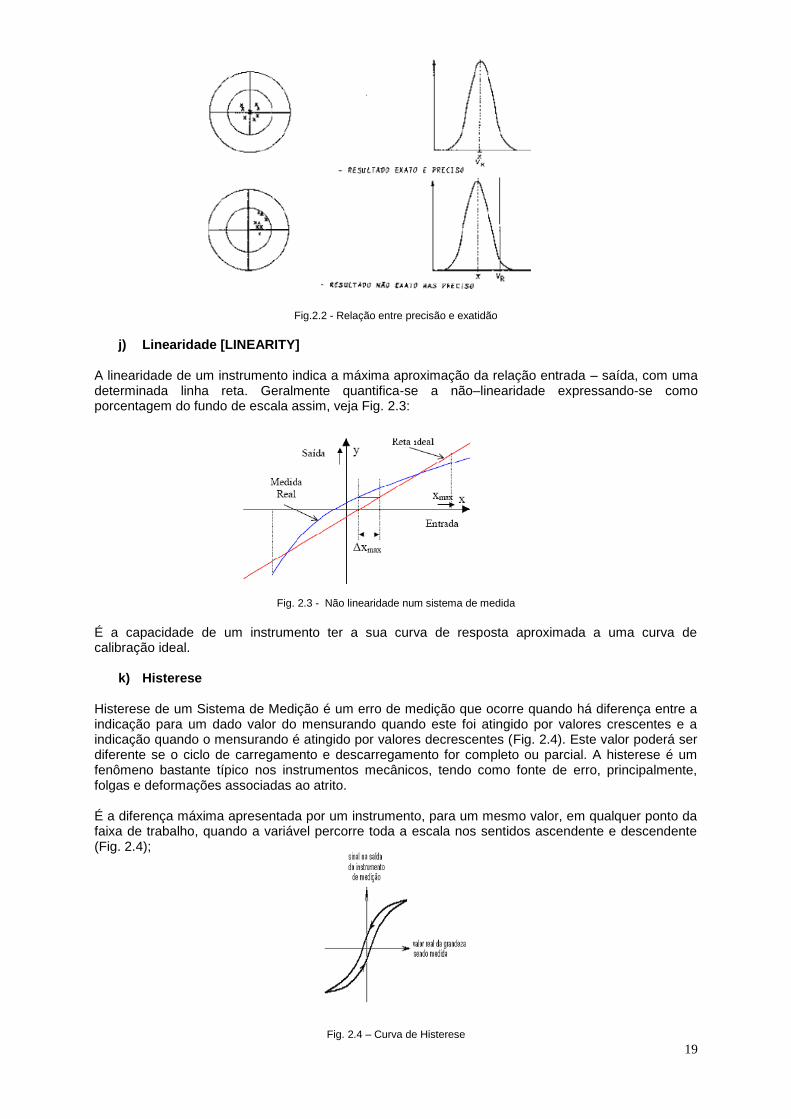
Fig.2.2 - Relação entre precisão e exatidão
j) Linearidade [LINEARITY]
A linearidade de um instrumento indica a máxima aproximação da relação entrada – saída, com uma determinada linha reta. Geralmente quantifica-se a não–linearidade expressando-se como porcentagem do fundo de escala assim, veja Fig. 2.3:
Fig. 2.3 - Não linearidade num sistema de medida
É a capacidade de um instrumento ter a sua curva de resposta aproximada a uma curva de calibração ideal.
k) Histerese Histerese de um Sistema de Medição é um erro de medição que ocorre quando há diferença entre a indicação para um dado valor do mensurando quando este foi atingido por valores crescentes e a indicação quando o mensurando é atingido por valores decrescentes (Fig. 2.4). Este valor poderá ser diferente se o ciclo de carregamento e descarregamento for completo ou parcial. A histerese é um fenômeno bastante típico nos instrumentos mecânicos, tendo como fonte de erro, principalmente, folgas e deformações associadas ao atrito. É a diferença máxima apresentada por um instrumento, para um mesmo valor, em qualquer ponto da faixa de trabalho, quando a variável percorre toda a escala nos sentidos ascendente e descendente (Fig. 2.4);
Fig. 2.4 – Curva de Histerese
20
l) Zona Morta [DEAD ZONE ou DEAD BAND]
É a não alteração na indicação ou no sinal de saída de um instrumento ou em valores absolutos da faixa de medida do mesmo, apesar de ter ocorrido uma sensível variação da variável. É dada em porcentagem do Span de medida (Fig. 2.5).
Fig. 2.5 – Zona Morta
EXEMPLO 1: em alguns dispositivos mecânicos é necessário vencer a força de atrito estático do ponteiro para que seja produzido algum movimento mecânico perceptível, assim a medição de uma grandeza que produza uma força menor que esta força mínima não será percebida. EXEMPLO 2: um instrumento com faixa de medida entre 0ºC a 200ºC possui uma zona morta de
0,1% do span, ou seja 0,2ºC. Portanto, para variações inferiores a este valor, o instrumento não apresentará alteração da medida; EXEMPLO 3: Alguns velocímetros automotivos começam a indicar a velocidade acima de 20Km/h. 2.4.2. Características dinâmicas
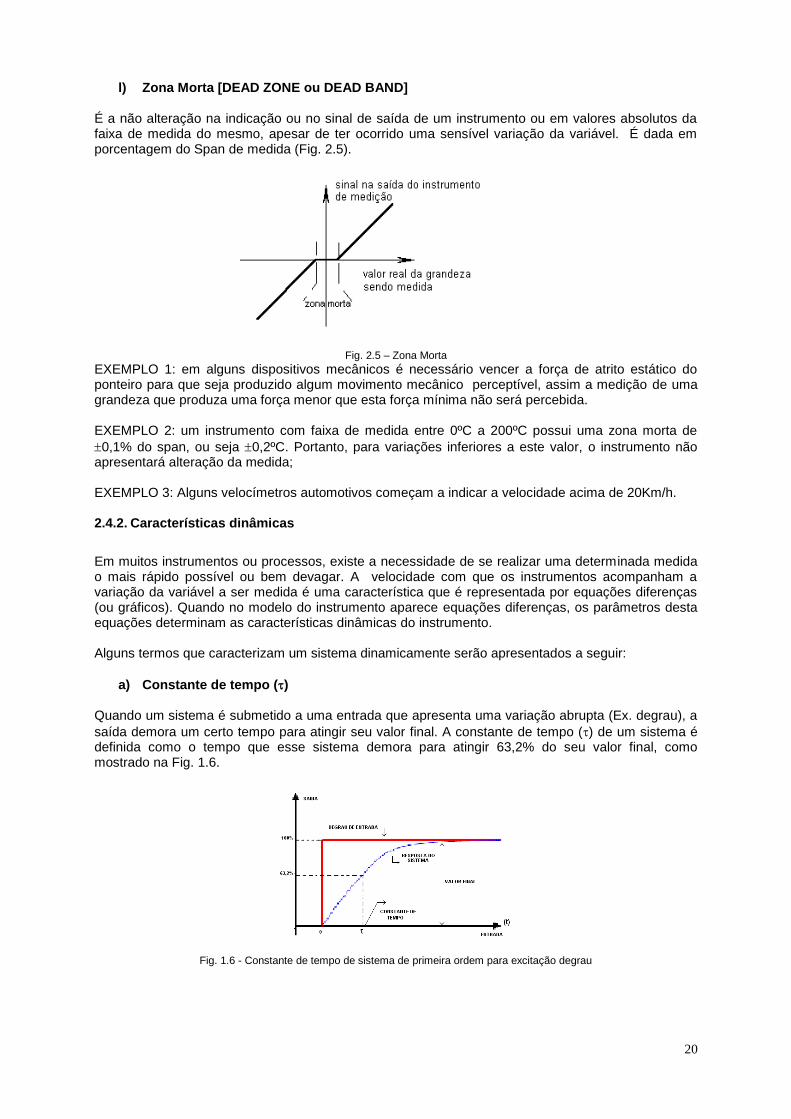
Em muitos instrumentos ou processos, existe a necessidade de se realizar uma determinada medida o mais rápido possível ou bem devagar. A velocidade com que os instrumentos acompanham a variação da variável a ser medida é uma característica que é representada por equações diferenças (ou gráficos). Quando no modelo do instrumento aparece equações diferenças, os parâmetros desta equações determinam as características dinâmicas do instrumento. Alguns termos que caracterizam um sistema dinamicamente serão apresentados a seguir:
a) Constante de tempo () Quando um sistema é submetido a uma entrada que apresenta uma variação abrupta (Ex. degrau), a
saída demora um certo tempo para atingir seu valor final. A constante de tempo () de um sistema é definida como o tempo que esse sistema demora para atingir 63,2% do seu valor final, como mostrado na Fig. 1.6.
Fig. 1.6 - Constante de tempo de sistema de primeira ordem para excitação degrau

21
b) Resposta em frequência (Largura de Banda ou Largura de Faixa)
Quando o sinal aplicado a um instrumento apresenta uma variação com a frequência, chama-se resposta em frequência deste instrumento a mudança da relação saída/entrada do instrumento, usualmente dado em dB (decibéis). A equação abaixo é utilizada para transformar ganho absoluto em dB.
max10
valor
valorlog.20dB
Para -3dB temos:
2
110log.
20
3log.203
max
20
3
maxmax
10
max
10
valor
valor
valor
valor
valor
valor
valor
valordB
Define-se também largura de banda (Bw) como a faixa de frequência cuja relação (saída/entrada) normalizada encontra-se entre 0 e –3 dB, veja Fig. 2.7.
Fig.2.7 - Resposta em frequência de um sistema passa-banda e largura de banda
c) Frequência natural
É a frequência de oscilação livre (ω
n) do sistema em questão. Um instrumento deve ser projetado
para ter sua frequência natural 5 -10 vezes superior à máxima frequência de trabalho do instrumento.
d) Razão de amortecimento É a característica de dissipação de energia (ξ) do sistema que junto com a frequência natural determina o limite da resposta em frequência do instrumento ou sistema.
e) Tempo Morto É o tempo gasto entre o instante de aplicação do estímulo e o início da resposta do instrumento a este estímulo (a saída é atrasada com relação à entrada). Este tempo é fruto, principalmente, do posicionamento do transdutor no processo (Fig. 2.8).
22
Fig. 2.8 – Tempo Morto
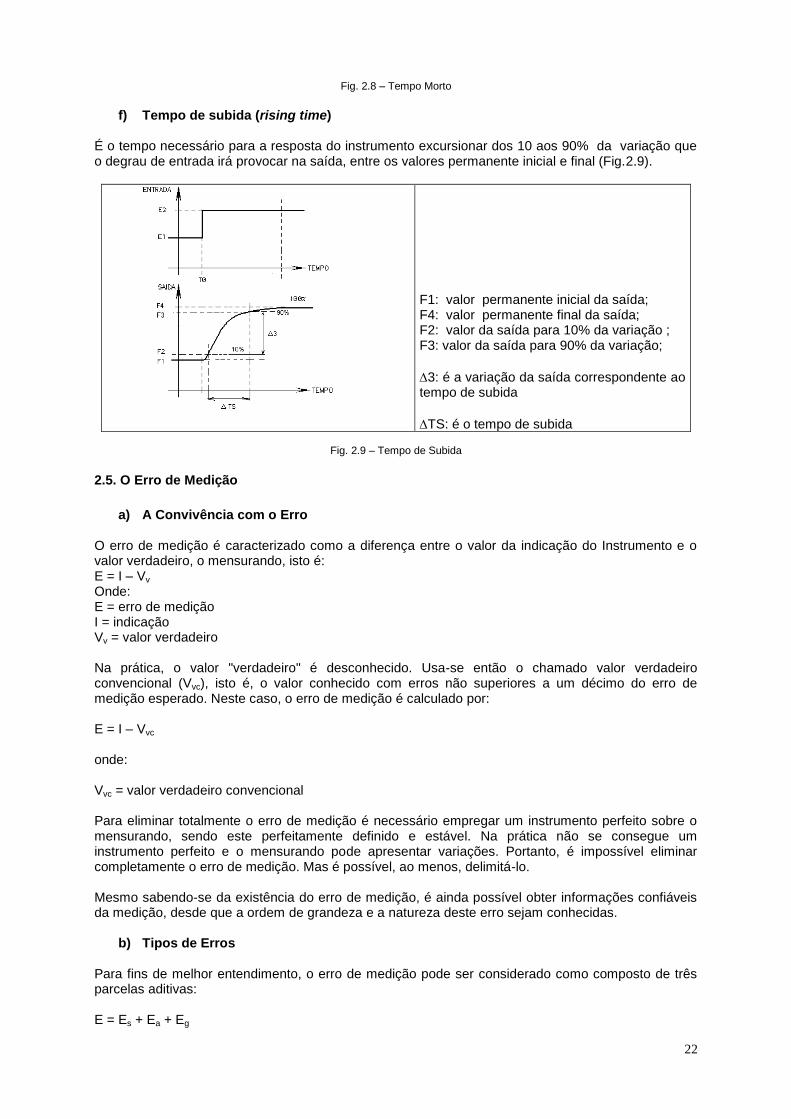
f) Tempo de subida (rising time)
É o tempo necessário para a resposta do instrumento excursionar dos 10 aos 90% da variação que o degrau de entrada irá provocar na saída, entre os valores permanente inicial e final (Fig.2.9).
F1: valor permanente inicial da saída; F4: valor permanente final da saída; F2: valor da saída para 10% da variação ; F3: valor da saída para 90% da variação;
3: é a variação da saída correspondente ao tempo de subida
TS: é o tempo de subida
Fig. 2.9 – Tempo de Subida
2.5. O Erro de Medição
a) A Convivência com o Erro
O erro de medição é caracterizado como a diferença entre o valor da indicação do Instrumento e o valor verdadeiro, o mensurando, isto é: E = I – Vv Onde: E = erro de medição I = indicação Vv = valor verdadeiro Na prática, o valor "verdadeiro" é desconhecido. Usa-se então o chamado valor verdadeiro convencional (Vvc), isto é, o valor conhecido com erros não superiores a um décimo do erro de medição esperado. Neste caso, o erro de medição é calculado por: E = I – Vvc onde: Vvc = valor verdadeiro convencional Para eliminar totalmente o erro de medição é necessário empregar um instrumento perfeito sobre o mensurando, sendo este perfeitamente definido e estável. Na prática não se consegue um instrumento perfeito e o mensurando pode apresentar variações. Portanto, é impossível eliminar completamente o erro de medição. Mas é possível, ao menos, delimitá-lo. Mesmo sabendo-se da existência do erro de medição, é ainda possível obter informações confiáveis da medição, desde que a ordem de grandeza e a natureza deste erro sejam conhecidas.
b) Tipos de Erros Para fins de melhor entendimento, o erro de medição pode ser considerado como composto de três parcelas aditivas: E = Es + Ea + Eg
23
Sendo: E = erro de medição Es= erro sistemático Ea = erro aleatório Eg = erro grosseiro
O erro sistemático O erro sistemático (Es): é a parcela de erro sempre presente nas medições realizadas em idênticas condições de operação. Um dispositivo mostrador com seu ponteiro "torto" é um exemplo clássico de erro sistemático, que sempre se repetirá enquanto o ponteiro estiver torto. Pode tanto ser causado por um problema de ajuste ou desgaste do instrumento, quanto por fatores construtivos. Pode estar associado ao próprio princípio de medição empregado ou ainda ser influenciado por grandezas ou fatores externos, como as condições ambientais. A estimativa do erro sistemático da indicação de um instrumento de medição é também denominado: Tendência (Td).
O erro aleatório Quando uma medição é repetida diversas vezes, nas mesmas condições, observam-se variações nos valores obtidos. Em relação ao valor médio, nota-se que estas variações ocorrem de forma imprevisível, tanto para valores acima do valor médio, quanto para abaixo. Este efeito é provocado pelo erro aleatório (Ea). Diversos fatores contribuem para o surgimento do erro aleatório. A existência de folgas, atrito, vibrações, flutuações de tensão elétrica, instabilidades internas, das condições ambientais ou outras grandezas de influência, contribui para o aparecimento deste tipo de erro. A intensidade do erro aleatório de um mesmo instrumento pode variar ao longo da sua faixa de medição, com o tempo, com as variações das grandezas de influência, dentre outros fatores. A forma como o erro aleatório se manifesta ao longo da faixa de medição depende de cada sistema, sendo de difícil previsão. Embora esse erro não possa ser eliminado, ele pode ser reduzido aumentando-se o número de observações ou ensaios.
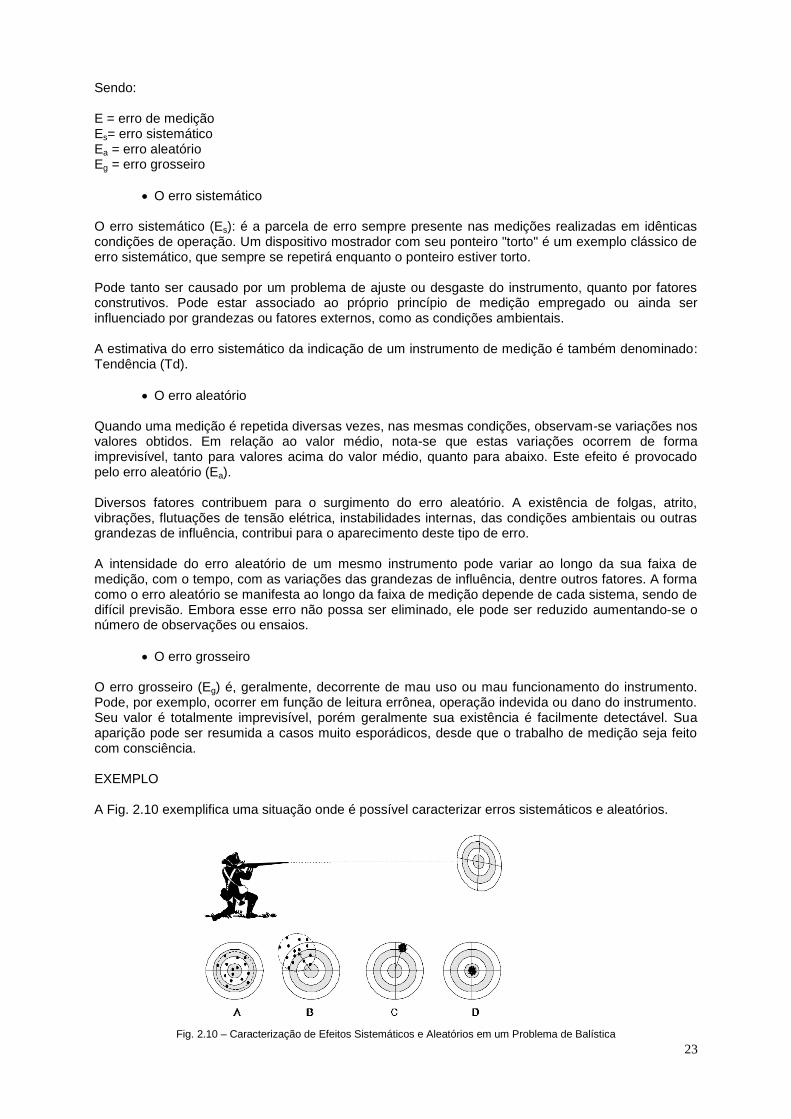
O erro grosseiro O erro grosseiro (Eg) é, geralmente, decorrente de mau uso ou mau funcionamento do instrumento. Pode, por exemplo, ocorrer em função de leitura errônea, operação indevida ou dano do instrumento. Seu valor é totalmente imprevisível, porém geralmente sua existência é facilmente detectável. Sua aparição pode ser resumida a casos muito esporádicos, desde que o trabalho de medição seja feito com consciência. EXEMPLO A Fig. 2.10 exemplifica uma situação onde é possível caracterizar erros sistemáticos e aleatórios.
Fig. 2.10 – Caracterização de Efeitos Sistemáticos e Aleatórios em um Problema de Balística
24
A pontaria de quatro atiradores está sendo colocada à prova. O objetivo é acertar os projéteis no centro do alvo colocado a uma mesma distância. Cada atirador tem direito a 15 tiros. Os resultados da prova de tiro dos atiradores A, B, C, e D estão mostrados nesta mesma figura. As marcas dos tiros do atirador "A" se espalharam por uma área relativamente grande em torno do centro do alvo. Estas marcas podem ser inscritas dentro do círculo tracejado desenhado na figura. Embora este círculo apresente um raio relativamente grande, seu centro coincide aproximadamente com o centro do alvo. O raio do círculo tracejado está associado ao espalhamento dos tiros que decorre diretamente do erro aleatório. A posição média das marcas dos tiros, que coincide aproximadamente com a posição do centro do círculo tracejado, reflete a influência do erro sistemático. Pode-se então afirmar que o atirador "A" apresenta elevado nível de erros aleatórios enquanto o erro sistemático é baixo. No caso do atirador "B", além do raio do círculo tracejado ser grande, seu centro está distante do centro do alvo. Neste caso, tanto os erros aleatórios quanto sistemáticos são grandes. Na condição do atirador "C", a dispersão é muito menor, mas a posição do centro do círculo tracejado está ainda distante do centro do alvo, o que indica reduzidos erros aleatórios e grande erro sistemático. Já a situação do atirador "D" reflete reduzidos níveis de erros aleatórios e também do erro sistemático. Obviamente que, do ponto de vista de balística, o melhor dos atiradores é o atirador "D", por acertar quase sempre muito próximo do centro do alvo com boa repetitividade. Ao se comparar os resultados do atirador "C" com o "A", pode-se afirmar que o atirador "C" é melhor. Embora nenhum dos tiros disparados pelo atirador "C" tenha se aproximado suficientemente do centro do alvo, o seu espalhamento é muito menor. Um pequeno ajuste na mira do atirador "C" o trará para uma condição de operação muito próxima do atirador "D", o que jamais pode ser obtido com o atirador "A". Tanto no exemplo da Fig. 2.10, quanto em problemas de medição, o erro sistemático não é um fator tão crítico quanto o erro aleatório. Através de um procedimento adequado é possível estimá-lo relativamente bem e efetuar a sua compensação, o que equivale ao ajuste da mira do atirador "C" da Fig. 2.10. Já o erro aleatório não pode ser compensado embora sua influência sobre o valor médio
obtido por meio de várias repetições se reduza na proporção de 1/ n , onde "n" é o número de
repetições considerado na média. A seguir são apresentados procedimentos para a estimativa quantitativa dos erros de medição.
c) Fontes de Erros Toda medição está afetada por erros. Estes erros são provocados pela ação isolada ou combinada de vários fatores que influenciam sobre o processo de medição, envolvendo o instrumento, o procedimento de medição, a ação de grandezas de influência e o operador. O comportamento metrológico do instrumento depende fortemente de fatores conceituais e aspectos construtivos. Suas características tendem a se degradar com o uso, especialmente em condições de utilização muito severas. O comportamento do instrumento pode ser fortemente influenciado por perturbações externas e internas, bem como pela influência do operador, ou mesmo do instrumento, modificar indevidamente o mensurando. O procedimento de medição adotado deve ser compatível com as características do mensurando. O número e posição das medições efetuadas, o modelo de cálculo adotado, a interpretação dos resultados obtidos podem também introduzir componentes de incerteza relevantes no resultado da medição. As grandezas de influência externas podem provocar erros alterando diretamente o comportamento do instrumento ou agindo sobre o mensurando. O elemento perturbador mais crítico, de modo geral, é a variação da temperatura ambiente, embora outras grandezas como vibrações mecânicas, variações de pressão atmosférica, umidade ou tensão da rede elétrica, também possam trazer alguma influência. A variação da temperatura provoca dilatação das escalas dos instrumentos de medição de comprimentos, da mesma forma como age sobre o mensurando, por exemplo, modificando o comprimento a medir de uma peça. A variação da temperatura pode também ser uma perturbação interna. Exemplo típico é a instabilidade dos sistemas elétricos de medição, por determinado espaço de tempo, após terem sido ligados. Em função da liberação de calor nos circuitos elétrico/eletrônicos há uma variação das
25
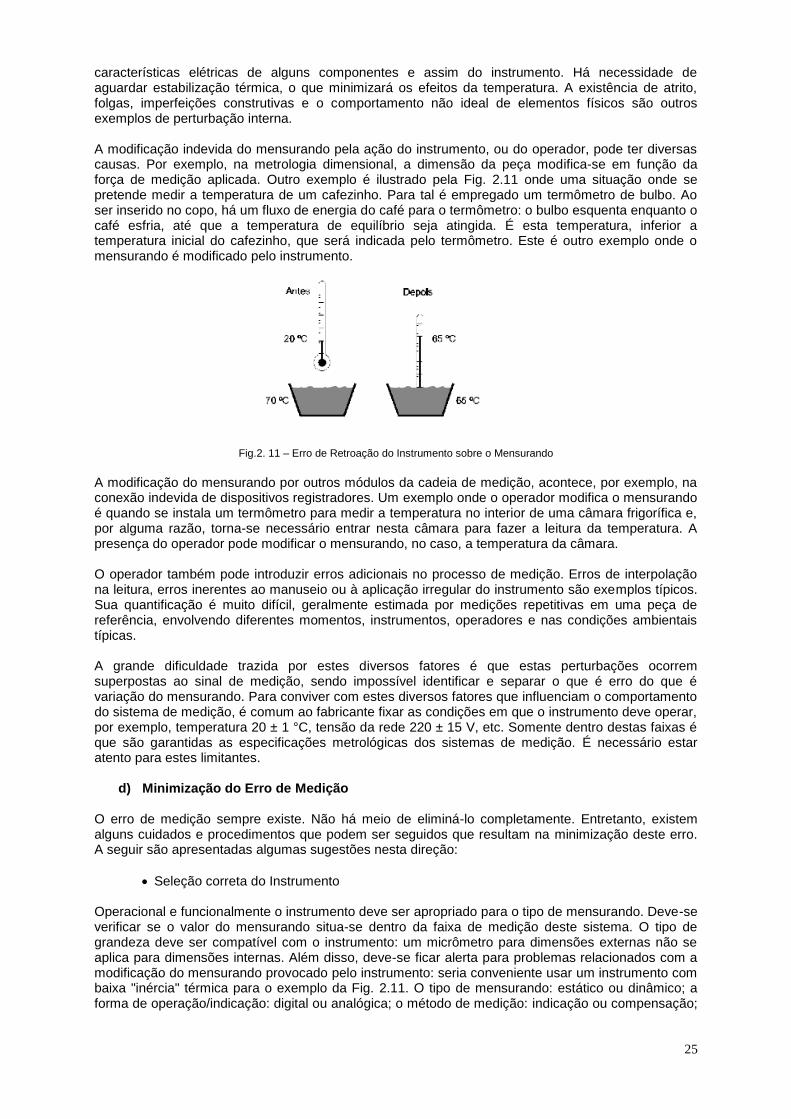
características elétricas de alguns componentes e assim do instrumento. Há necessidade de aguardar estabilização térmica, o que minimizará os efeitos da temperatura. A existência de atrito, folgas, imperfeições construtivas e o comportamento não ideal de elementos físicos são outros exemplos de perturbação interna. A modificação indevida do mensurando pela ação do instrumento, ou do operador, pode ter diversas causas. Por exemplo, na metrologia dimensional, a dimensão da peça modifica-se em função da força de medição aplicada. Outro exemplo é ilustrado pela Fig. 2.11 onde uma situação onde se pretende medir a temperatura de um cafezinho. Para tal é empregado um termômetro de bulbo. Ao ser inserido no copo, há um fluxo de energia do café para o termômetro: o bulbo esquenta enquanto o café esfria, até que a temperatura de equilíbrio seja atingida. É esta temperatura, inferior a temperatura inicial do cafezinho, que será indicada pelo termômetro. Este é outro exemplo onde o mensurando é modificado pelo instrumento.
Fig.2. 11 – Erro de Retroação do Instrumento sobre o Mensurando
A modificação do mensurando por outros módulos da cadeia de medição, acontece, por exemplo, na conexão indevida de dispositivos registradores. Um exemplo onde o operador modifica o mensurando é quando se instala um termômetro para medir a temperatura no interior de uma câmara frigorífica e, por alguma razão, torna-se necessário entrar nesta câmara para fazer a leitura da temperatura. A presença do operador pode modificar o mensurando, no caso, a temperatura da câmara. O operador também pode introduzir erros adicionais no processo de medição. Erros de interpolação na leitura, erros inerentes ao manuseio ou à aplicação irregular do instrumento são exemplos típicos. Sua quantificação é muito difícil, geralmente estimada por medições repetitivas em uma peça de referência, envolvendo diferentes momentos, instrumentos, operadores e nas condições ambientais típicas. A grande dificuldade trazida por estes diversos fatores é que estas perturbações ocorrem superpostas ao sinal de medição, sendo impossível identificar e separar o que é erro do que é variação do mensurando. Para conviver com estes diversos fatores que influenciam o comportamento do sistema de medição, é comum ao fabricante fixar as condições em que o instrumento deve operar, por exemplo, temperatura 20 ± 1 °C, tensão da rede 220 ± 15 V, etc. Somente dentro destas faixas é que são garantidas as especificações metrológicas dos sistemas de medição. É necessário estar atento para estes limitantes.
d) Minimização do Erro de Medição O erro de medição sempre existe. Não há meio de eliminá-lo completamente. Entretanto, existem alguns cuidados e procedimentos que podem ser seguidos que resultam na minimização deste erro. A seguir são apresentadas algumas sugestões nesta direção:
Seleção correta do Instrumento Operacional e funcionalmente o instrumento deve ser apropriado para o tipo de mensurando. Deve-se verificar se o valor do mensurando situa-se dentro da faixa de medição deste sistema. O tipo de grandeza deve ser compatível com o instrumento: um micrômetro para dimensões externas não se aplica para dimensões internas. Além disso, deve-se ficar alerta para problemas relacionados com a modificação do mensurando provocado pelo instrumento: seria conveniente usar um instrumento com baixa "inércia" térmica para o exemplo da Fig. 2.11. O tipo de mensurando: estático ou dinâmico; a forma de operação/indicação: digital ou analógica; o método de medição: indicação ou compensação;
26
o peso, o tamanho e a energia necessária, devem ser levados em conta ao se selecionar o instrumento. A leitura dos catálogos e manuais de operação do instrumento é indispensável.
Modelação correta do processo de medição Um fator de elevada importância é o conhecimento da natureza do processo ou da grandeza que está sendo medida. A correta definição do mensurando, a compreensão de suas características e comportamento devem ser levadas em conta para definir o procedimento de medição a ser adotado. Se, por exemplo, a medição envolve um mensurando variável com o tempo ou posição, a adoção de um procedimento errôneo - apenas adequado para mensurando invariáveis – poderá levar a resultados completamente absurdos.
Adequação do erro máximo do instrumento Embora um instrumento sempre apresente erro de medição, diferentes sistemas de medição podem apresentar diferentes níveis de erros. A qualidade de um instrumento está relacionada com o nível de erro por este apresentado. É quase sempre possível adquirir no mercado instrumentos com diferentes níveis de qualidade por, obviamente, diferentes preços. O equilíbrio entre o custo e benefício deve ser buscado. É difícil estabelecer um procedimento genérico para a correta seleção do instrumento baseado unicamente no seu preço e erro máximo. Porém, espera-se que, nas condições fixadas pelos fabricantes, os erros inerentes do instrumento nunca sejam superiores ao erro máximo do instrumento empregado. Através de uma calibração, e de um procedimento mais cuidadoso de medição, onde seja compensada a tendência do instrumento e a medição seja repetida diversas vezes, é possível reduzir significativamente o nível de erros presente no resultado. INCERTEZA A incerteza está associada ao resultado da medição. Não corresponde ao erro aleatório do sistema de medição, embora este seja uma das suas componentes. Outras componentes são decorrentes da ação de grandezas de influência sobre o processo de medição, as incertezas da tendência (ou da correção), número de medições efetuadas, resolução limitada, etc. Não há, portanto, uma relação matemática explícita entre a incerteza de um processo de medição e a repetitividade de um sistema de medição.
2.6. Calibração de Sistemas de Medição
Um sistema de medição de boa qualidade deve ser capaz de operar com pequenos erros. Seus princípios construtivos e operacionais devem ser projetados para minimizar erros sistemáticos e aleatórios ao longo da sua faixa de medição, nas suas condições de operação nominais. Entretanto, por melhores que sejam as características de um sistema de medição, este sempre apresentará erros, seja por fatores internos, seja por ação das grandezas de influência externas. A perfeita caracterização das incertezas associadas a estes erros é de grande importância para que o resultado da medição possa ser estimado de maneira segura. Embora, em alguns casos, os erros de um sistema de medição possam ser analítica ou numericamente estimados, na prática são utilizados procedimentos experimentais quase que exclusivamente. Através do procedimento experimental denominado calibração é possível correlacionar os valores indicados pelo sistema de medição e sua correspondência com a grandeza sendo medida. Esta operação é extremamente importante e é realizada por um grande número de entidades credenciadas espalhadas pelo país.
Operações Básicas para Qualificação de Sistemas de Medição
a) Calibração Calibração é um procedimento experimental através do qual são estabelecidas, sob condições específicas, as relações entre os valores indicados por um instrumento de medição ou sistema de medição ou valores representados por uma medida materializada ou um material de referência, e os valores correspondentes das grandezas estabelecidos por padrões. Como exemplos, através de uma calibração é possível estabelecer:
27
→ a relação entre temperatura e tensão termoelétrica de um termopar; → uma estimativa dos erros sistemáticos de um manômetro; → o valor efetivo de uma massa padrão; → a dureza efetiva de uma placa "padrão de dureza"; → o valor efetivo de um "resistor padrão".
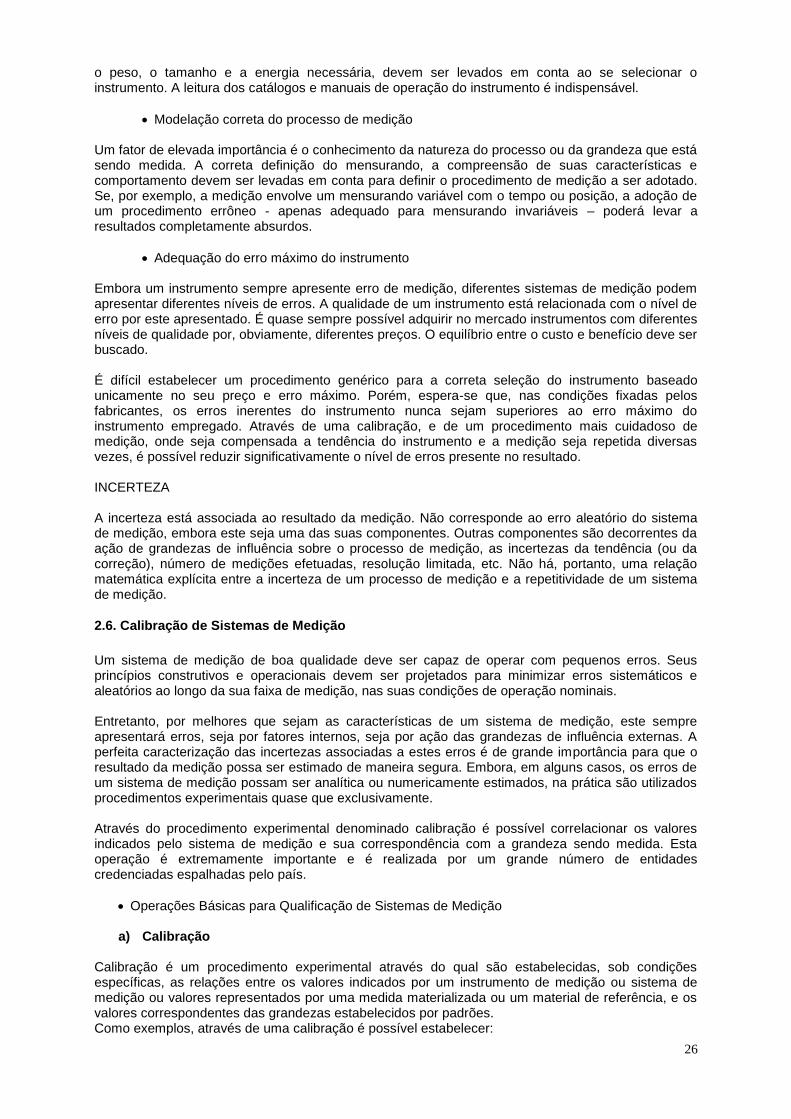
O resultado de uma calibração permite tanto o estabelecimento dos valores do mensurando para as indicações, como a determinação das correções a serem aplicadas. Uma calibração também pode determinar outras propriedades metrológicas como, por exemplo, os efeitos das grandezas de influência sobre a indicação, ou o comportamento metrológico de sistemas de medição em condições adversas de utilização (em temperaturas elevadas ou muito baixas, na ausência de gravidade, sob radiação nuclear, etc.). O resultado da calibração geralmente é registrado em um documento específico denominado certificado de calibração ou, algumas vezes, referido como relatório de calibração. O certificado de calibração apresenta várias informações acerca do desempenho metrológico do sistema de medição analisado e descreve claramente os procedimentos realizados. Frequentemente, como seu principal resultado, apresenta uma tabela, ou gráfico, contendo, para cada ponto medido ao longo da faixa de medição: a) estimativas da correção a ser aplicada e b) estimativa da incerteza associada à correção. Em função dos resultados obtidos, o desempenho do sistema de medição pode ser comparado com aquele constante nas especificações de uma norma técnica, ou outras determinações legais, e um parecer de conformidade podem ser emitido em um laudo técnico ou em um relatório de calibração. A calibração pode ser efetuada por qualquer entidade, desde que esta disponha dos padrões rastreados e pessoal competente para realizar o trabalho. Para que uma calibração tenha validade oficial, é necessário que seja executada por entidade legalmente credenciada. No Brasil, existe a Rede Brasileira de Calibração (RBC), coordenada pelo INMETRO - Instituto Nacional de Metrologia, Normalização e Qualidade Industrial. Esta rede é composta por uma série de laboratórios secundários, espalhados pelo país, ligados a Universidades, Empresas, Fundações e outras entidades, que recebem a creditação do INMETRO e estão aptos a expedir certificados de calibração oficiais (Fig. 2.12). Hoje, com as tendências da globalização da economia, a competitividade internacional das empresas é uma questão crucial. A qualidade dos serviços e dos produtos da empresa têm que ser assegurada a qualquer custo. As normas da série ISO 9000 aparecem para disciplinar à gestão das empresas para melhorar e manter a qualidade de uma organização. A calibração tem o seu papel de grande importância neste processo, uma vez que um dos requisitos necessários para uma empresa que se candidate à certificação pelas normas ISO, é que os sistemas de medição e padrões de referência utilizados nos processo produtivo, tenham certificados de calibração oficiais.
Fig. 2.12 – Hierarquia Metrológica
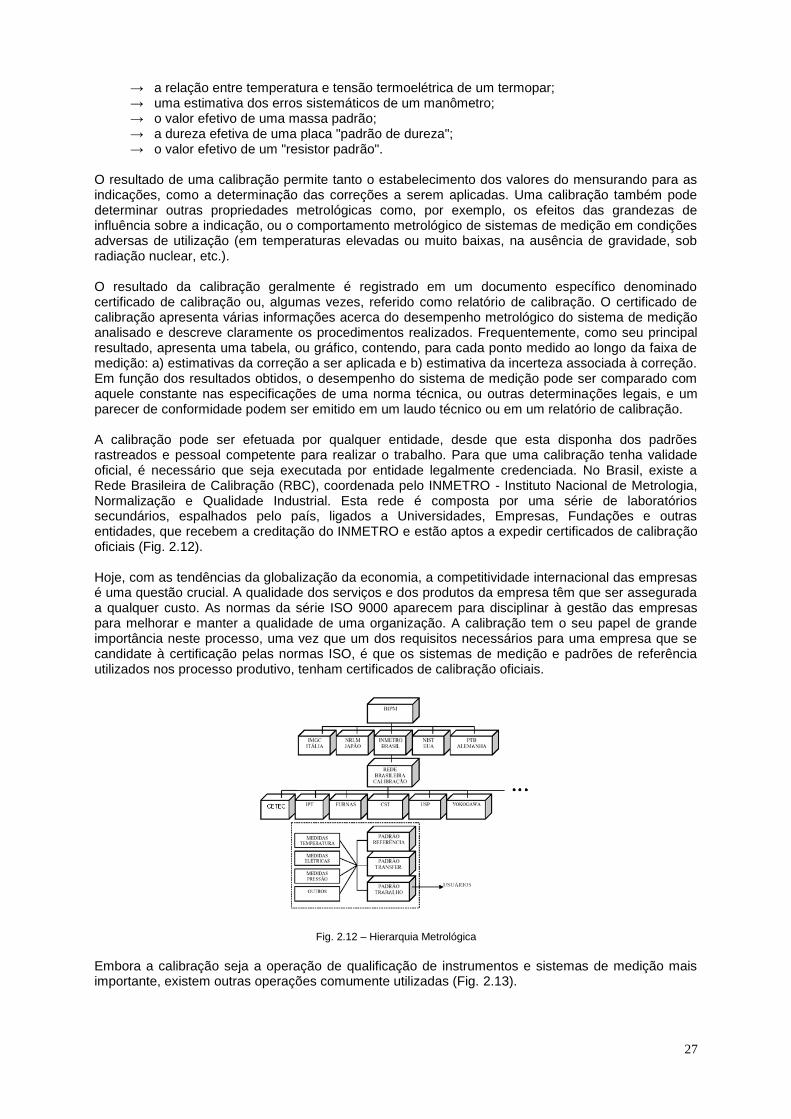
Embora a calibração seja a operação de qualificação de instrumentos e sistemas de medição mais importante, existem outras operações comumente utilizadas (Fig. 2.13).
28
Fig. 2.13 - Fluxograma das etapas de calibração de um instrumento
b) Ajuste
Operação complementar, normalmente efetuada após uma comparação, quando o desempenho metrológico de um sistema de medição não está em conformidade com os padrões de comportamento esperados. Trata-se de uma "regulagem interna" do instrumento, executada por técnico especializado. Visa fazer coincidir, da melhor forma possível, o valor indicado no instrumento, com o valor correspondente do mensurado submetido. São exemplos:
→ alteração do fator de amplificação (sensibilidade) de um instrumento por meio de um potenciômetro interno;
→ regulagem do "zero" de um instrumento por meio de parafuso interno. No caso de medidas materializadas, o ajuste normalmente envolve uma alteração das suas características físicas ou geométricas. Por exemplo: colocação de uma "tara" em uma massa padrão; Após o término da operação de ajuste, é necessário efetuar uma recalibração, visando conhecer o novo comportamento do sistema de medição, após os ajustes terem sido efetuados.
c) Regulagem É também uma operação complementar, normalmente efetuada após uma comparação, quando o desempenho metrológico de um sistema de medição não está em conformidade com os padrões de comportamento esperados. Envolve apenas ajustes efetuados em controles externos, normalmente colocados à disposição do usuário comum. É necessária para fazer o instrumento funcionar adequadamente, fazendo coincidir, da melhor forma possível, o valor indicado com o valor correspondente do mensurado submetido. São exemplos:
→ alteração do fator de amplificação (sensibilidade) de um instrumento por meio de um botão externo;
→ regulagem do "zero" de um instrumento por meio de um controle externo indicado para tal.
d) Verificação
A operação de verificação é utilizada no âmbito da metrologia legal, devendo esta ser efetuada por entidades oficiais denominados de Institutos de Pesos e Medidas Estaduais (IPEM), existentes nos diversos estados da Federação. Trata-se de uma operação mais simples, que tem por finalidade comprovar que:
→ um sistema de medição está operando corretamente dentro das características metrológicas estabelecidas por lei;
→ uma medida materializada apresenta características segundo especificações estabelecidas por normas ou outras determinações legais. São verificados instrumentos como balanças, bombas de gasolina, taxímetros, termômetros clínicos e outros instrumentos, bem como
29
medidas materializadas do tipo massa padrão usados no comércio e área da saúde, com o objetivo de proteger a população em geral.
A verificação é uma operação de cunho legal, da qual resulta a emissão de selo ou plaqueta com a inscrição "VERIFICADO", quando o elemento testado satisfaz às exigências legais. É efetuada pelos órgãos estaduais denominados de Institutos de Pesos e Medidas (IPEM) ou diretamente pelo INMETRO, quando se trata de âmbito federal.
Destino dos Resultados de uma Calibração: Os resultados de uma calibração são geralmente destinados a uma das seguintes aplicações:
→ Levantamento da curva de erros visando determinar se, nas condições em que foi calibrado, o sistema de medição está em conformidade com uma norma, especificação legal ou tolerância definida para o produto a ser medido, e conseqüente emissão de certificado. Efetuado periodicamente, garantirá a confiabilidade dos resultados da medição e assegurará correlação (rastreabilidade) aos padrões nacionais e internacionais;
→ Levantamento da curva de erros visando determinar dados e parâmetros para a operação de ajuste do sistema de medição;
→ Levantamento detalhado da curva de erros e tabelas com valores da correção e sua incerteza, com o objetivo de corrigir os efeitos sistemáticos, visando reduzir a incerteza do resultado da medição. A aplicação da correção poderá ser efetuada manual ou automaticamente;
→ Análise do comportamento metrológico e operacional dos sistemas de medição nas fases de desenvolvimento e aperfeiçoamento, incluindo a análise das grandezas externas que influem no seu comportamento;
→ Análise do comportamento metrológico e operacional dos sistemas de medição em condições especiais de operação (por exemplo: elevadas temperaturas, na ausência de gravidade, em elevadas pressões, etc.);
Adicionalmente, a calibração deve ser efetuada quando, por alguma razão, se deseja o levantamento mais detalhado sobre o comportamento metrológico de um sistema de medição, sobre o qual existe dúvida ou suspeita de funcionamento irregular.
Métodos de Calibração
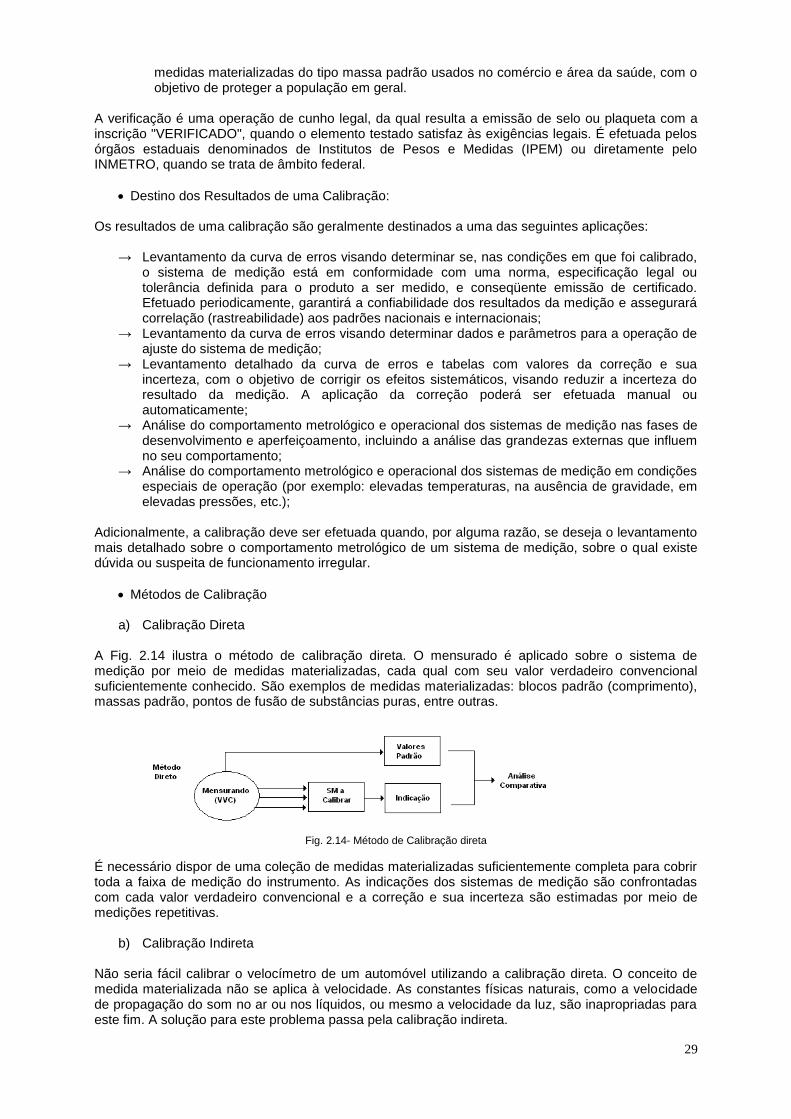
a) Calibração Direta A Fig. 2.14 ilustra o método de calibração direta. O mensurado é aplicado sobre o sistema de medição por meio de medidas materializadas, cada qual com seu valor verdadeiro convencional suficientemente conhecido. São exemplos de medidas materializadas: blocos padrão (comprimento), massas padrão, pontos de fusão de substâncias puras, entre outras.
Fig. 2.14- Método de Calibração direta
É necessário dispor de uma coleção de medidas materializadas suficientemente completa para cobrir toda a faixa de medição do instrumento. As indicações dos sistemas de medição são confrontadas com cada valor verdadeiro convencional e a correção e sua incerteza são estimadas por meio de medições repetitivas.
b) Calibração Indireta Não seria fácil calibrar o velocímetro de um automóvel utilizando a calibração direta. O conceito de medida materializada não se aplica à velocidade. As constantes físicas naturais, como a velocidade de propagação do som no ar ou nos líquidos, ou mesmo a velocidade da luz, são inapropriadas para este fim. A solução para este problema passa pela calibração indireta.
30
Este método é ilustrado na Fig. 2.15. O mensurado é gerado por meio de um dispositivo auxiliar, que atua simultaneamente no sistema de medição a calibrar (SMC) e também no sistema de medição padrão (SMP), isto é, um segundo sistema de medição que não apresente erros superiores à 1/10 dos erros do SMC. As indicações do SMC são comparadas com as do SMP, sendo estas adotadas como Vvc, e os erros são determinados.
Fig. 2.15 - Método de Calibração Indireta
Para calibrar o velocímetro de um automóvel pela calibração indireta, o automóvel é posto em movimento. Sua velocidade em relação ao solo, além de indicada pelo velocímetro, é também medida por meio de um sistema de medição padrão, cujos erros sejam 10 vezes menores que os erros do velocímetro a calibrar. Este SMP pode ser, por exemplo, constituído por uma quinta roda, afixada na parte traseira do automóvel, ou, hoje é comum a utilização de sensores que usam um raio laser dirigido ao solo e, pela análise do tipo de sinal que retorna, determinar a velocidade real do automóvel com baixas incertezas. Neste exemplo o próprio automóvel é o gerador da grandeza padrão, isto é, da velocidade, que é simultaneamente submetida a ambos os sistemas de calibração. Para levantar a curva de erros, o automóvel deve trafegar em diferentes patamares de velocidade repetidas vezes. Algumas vezes não se dispõe de um único sistema de medição padrão que englobe toda a faixa de medição do SMC. Neste caso, é possível utilizar diversos SMPs de forma complementar. Por exemplo:
→ deseja-se calibrar um termômetro entre 20 e 35 °C; → não se dispõe de um padrão que, individualmente, cubra esta faixa completamente; → dispõe-se de um termômetro padrão para a faixa 20 a 30 °C e outro para 30 a 40 °C; → o termômetro a calibrar é parcialmente calibrado para a faixa de 20 a 30 °C contra o
primeiro padrão; → o restante da calibração, entre 30 e 35 °C, é completado contra o segundo padrão.
EXERCÍCIOS
1. Qual a diferença entre instrumentos cegos e instrumentos indicadores? E entre instrumentos
locais e instrumentos remotos? Represente o símbolo relativo a estes últimos. 2. Qual a importância dos transmissores? Dê exemplos de sinais padrões elétrico e pneumático,
para transmissão. 3. Na malha (Fig. 2.E4) indique qual o tipo de cada sinal e qual a função de cada instrumento.
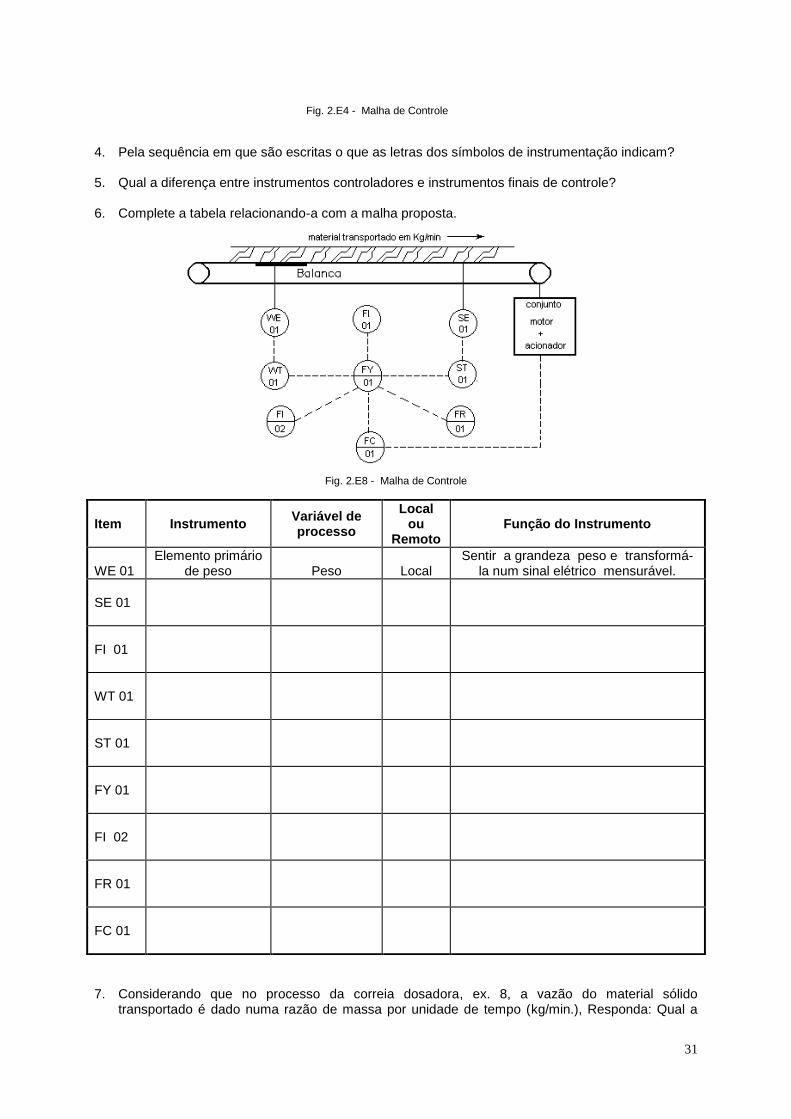
31
Fig. 2.E4 - Malha de Controle
4. Pela sequência em que são escritas o que as letras dos símbolos de instrumentação indicam? 5. Qual a diferença entre instrumentos controladores e instrumentos finais de controle? 6. Complete a tabela relacionando-a com a malha proposta.
Fig. 2.E8 - Malha de Controle
7. Considerando que no processo da correia dosadora, ex. 8, a vazão do material sólido transportado é dado numa razão de massa por unidade de tempo (kg/min.), Responda: Qual a
Item
Instrumento
Variável de processo
Local ou
Remoto Função do Instrumento
WE 01
Elemento primário de peso
Peso
Local
Sentir a grandeza peso e transformá-la num sinal elétrico mensurável.
SE 01
FI 01
WT 01
ST 01
FY 01
FI 02
FR 01
FC 01
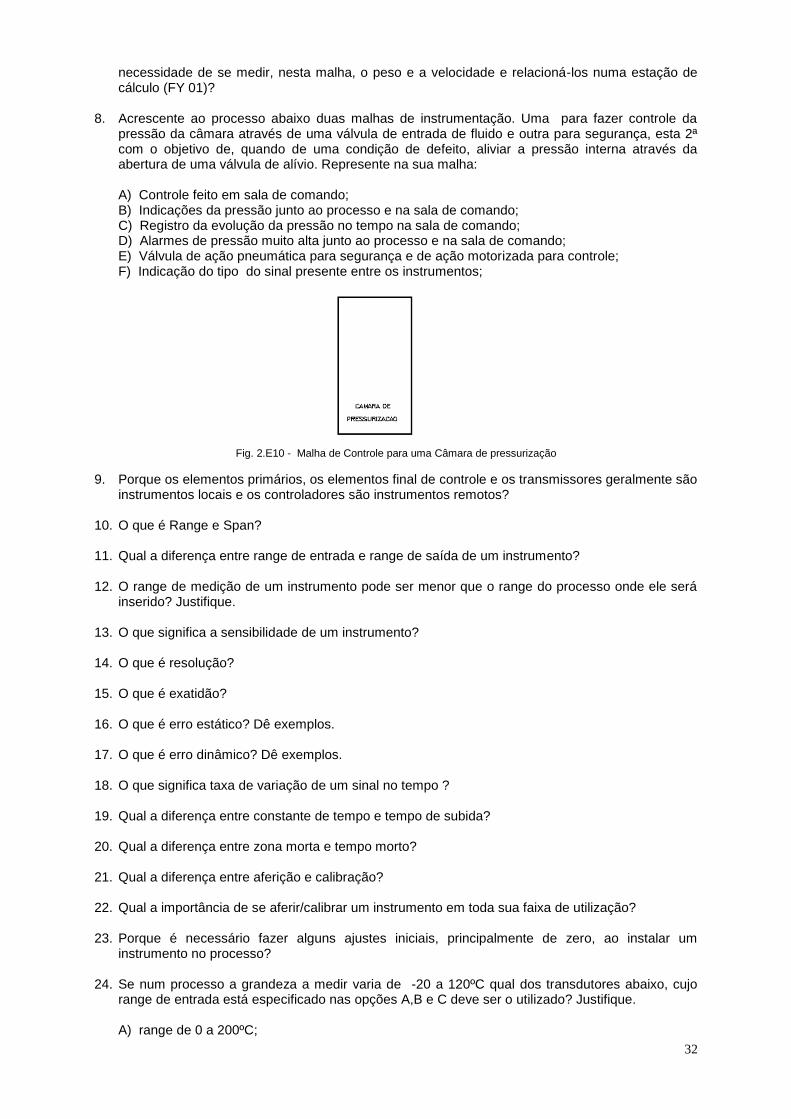
32
necessidade de se medir, nesta malha, o peso e a velocidade e relacioná-los numa estação de cálculo (FY 01)?
8. Acrescente ao processo abaixo duas malhas de instrumentação. Uma para fazer controle da
pressão da câmara através de uma válvula de entrada de fluido e outra para segurança, esta 2ª com o objetivo de, quando de uma condição de defeito, aliviar a pressão interna através da abertura de uma válvula de alívio. Represente na sua malha:
A) Controle feito em sala de comando; B) Indicações da pressão junto ao processo e na sala de comando; C) Registro da evolução da pressão no tempo na sala de comando; D) Alarmes de pressão muito alta junto ao processo e na sala de comando; E) Válvula de ação pneumática para segurança e de ação motorizada para controle; F) Indicação do tipo do sinal presente entre os instrumentos;
Fig. 2.E10 - Malha de Controle para uma Câmara de pressurização
9. Porque os elementos primários, os elementos final de controle e os transmissores geralmente são instrumentos locais e os controladores são instrumentos remotos?
10. O que é Range e Span? 11. Qual a diferença entre range de entrada e range de saída de um instrumento?
12. O range de medição de um instrumento pode ser menor que o range do processo onde ele será
inserido? Justifique.
13. O que significa a sensibilidade de um instrumento?
14. O que é resolução?
15. O que é exatidão?
16. O que é erro estático? Dê exemplos.
17. O que é erro dinâmico? Dê exemplos.
18. O que significa taxa de variação de um sinal no tempo ?
19. Qual a diferença entre constante de tempo e tempo de subida?
20. Qual a diferença entre zona morta e tempo morto?
21. Qual a diferença entre aferição e calibração?
22. Qual a importância de se aferir/calibrar um instrumento em toda sua faixa de utilização?
23. Porque é necessário fazer alguns ajustes iniciais, principalmente de zero, ao instalar um instrumento no processo?
24. Se num processo a grandeza a medir varia de -20 a 120ºC qual dos transdutores abaixo, cujo
range de entrada está especificado nas opções A,B e C deve ser o utilizado? Justifique.
A) range de 0 a 200ºC;
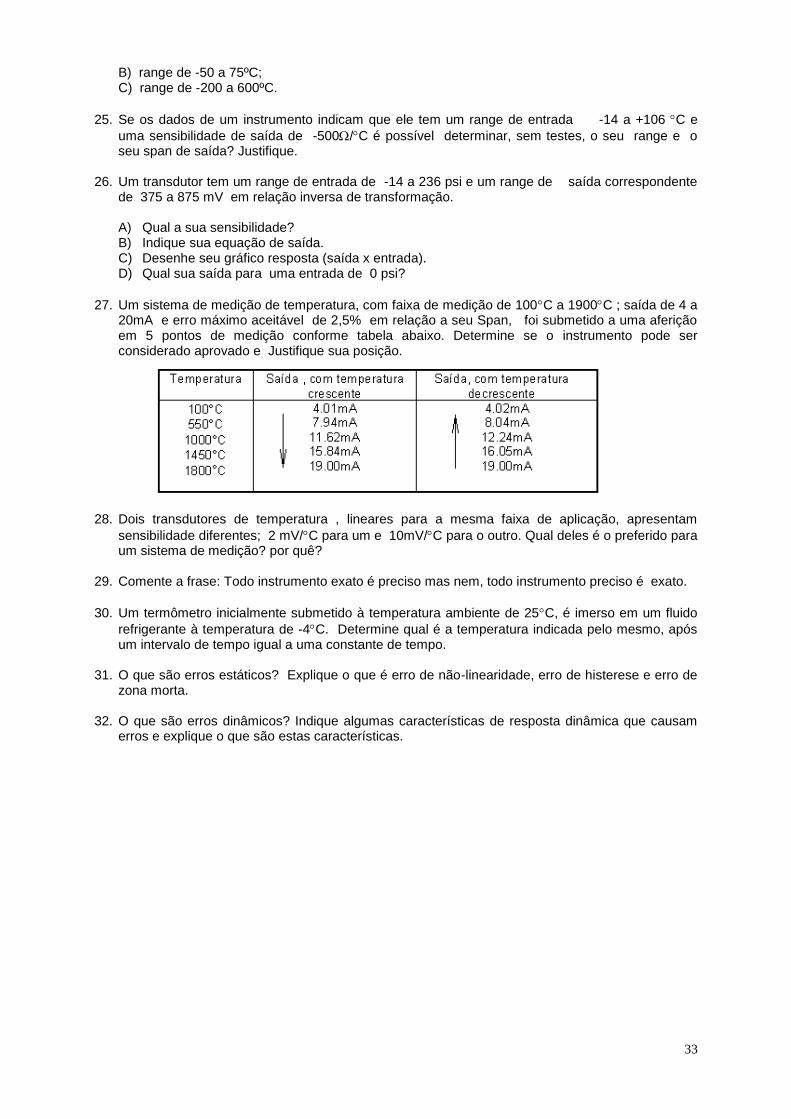
33
B) range de -50 a 75ºC; C) range de -200 a 600ºC.
25. Se os dados de um instrumento indicam que ele tem um range de entrada -14 a +106 C e
uma sensibilidade de saída de -500/C é possível determinar, sem testes, o seu range e o seu span de saída? Justifique.
26. Um transdutor tem um range de entrada de -14 a 236 psi e um range de saída correspondente
de 375 a 875 mV em relação inversa de transformação.
A) Qual a sua sensibilidade? B) Indique sua equação de saída. C) Desenhe seu gráfico resposta (saída x entrada). D) Qual sua saída para uma entrada de 0 psi?
27. Um sistema de medição de temperatura, com faixa de medição de 100C a 1900C ; saída de 4 a 20mA e erro máximo aceitável de 2,5% em relação a seu Span, foi submetido a uma aferição em 5 pontos de medição conforme tabela abaixo. Determine se o instrumento pode ser considerado aprovado e Justifique sua posição.
28. Dois transdutores de temperatura , lineares para a mesma faixa de aplicação, apresentam
sensibilidade diferentes; 2 mV/C para um e 10mV/C para o outro. Qual deles é o preferido para um sistema de medição? por quê?
29. Comente a frase: Todo instrumento exato é preciso mas nem, todo instrumento preciso é exato.
30. Um termômetro inicialmente submetido à temperatura ambiente de 25C, é imerso em um fluido
refrigerante à temperatura de -4C. Determine qual é a temperatura indicada pelo mesmo, após um intervalo de tempo igual a uma constante de tempo.
31. O que são erros estáticos? Explique o que é erro de não-linearidade, erro de histerese e erro de
zona morta. 32. O que são erros dinâmicos? Indique algumas características de resposta dinâmica que causam
erros e explique o que são estas características.
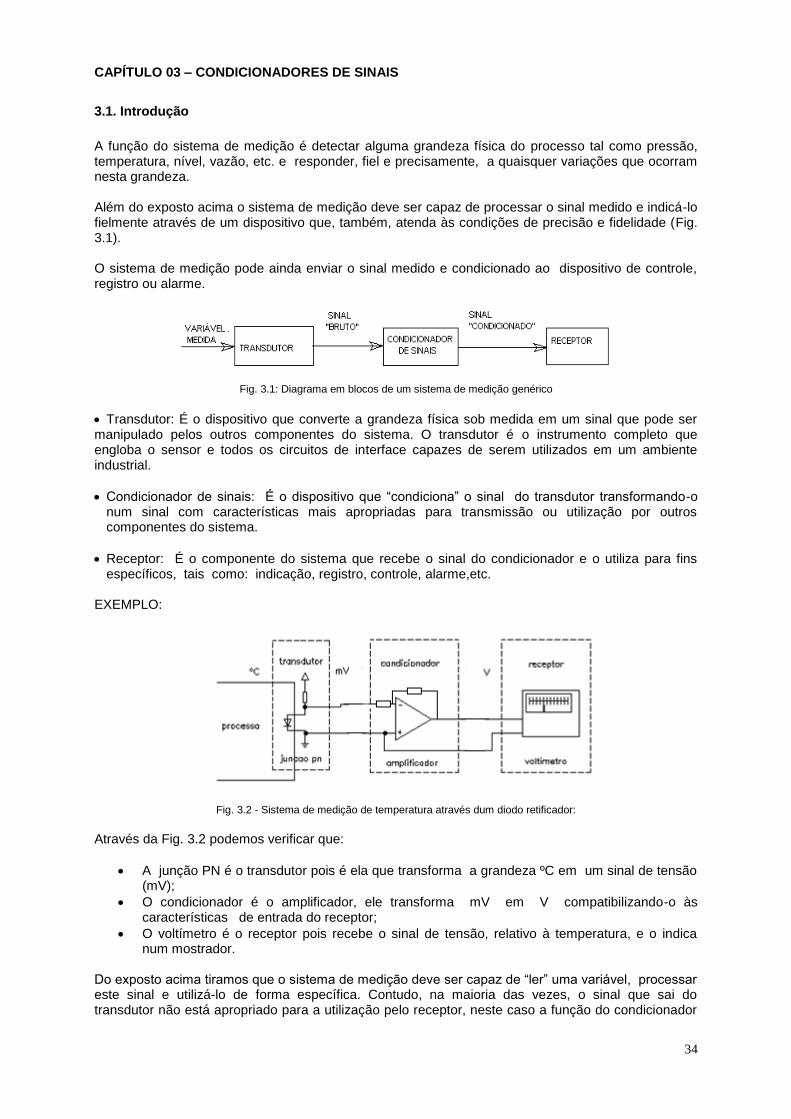
34
CAPÍTULO 03 – CONDICIONADORES DE SINAIS
3.1. Introdução
A função do sistema de medição é detectar alguma grandeza física do processo tal como pressão, temperatura, nível, vazão, etc. e responder, fiel e precisamente, a quaisquer variações que ocorram nesta grandeza. Além do exposto acima o sistema de medição deve ser capaz de processar o sinal medido e indicá-lo fielmente através de um dispositivo que, também, atenda às condições de precisão e fidelidade (Fig. 3.1). O sistema de medição pode ainda enviar o sinal medido e condicionado ao dispositivo de controle, registro ou alarme.
Fig. 3.1: Diagrama em blocos de um sistema de medição genérico
Transdutor: É o dispositivo que converte a grandeza física sob medida em um sinal que pode ser manipulado pelos outros componentes do sistema. O transdutor é o instrumento completo que engloba o sensor e todos os circuitos de interface capazes de serem utilizados em um ambiente industrial.
Condicionador de sinais: É o dispositivo que “condiciona” o sinal do transdutor transformando-o num sinal com características mais apropriadas para transmissão ou utilização por outros componentes do sistema.
Receptor: É o componente do sistema que recebe o sinal do condicionador e o utiliza para fins específicos, tais como: indicação, registro, controle, alarme,etc.
EXEMPLO:
Fig. 3.2 - Sistema de medição de temperatura através dum diodo retificador:
Através da Fig. 3.2 podemos verificar que:
A junção PN é o transdutor pois é ela que transforma a grandeza ºC em um sinal de tensão (mV);
O condicionador é o amplificador, ele transforma mV em V compatibilizando-o às características de entrada do receptor;
O voltímetro é o receptor pois recebe o sinal de tensão, relativo à temperatura, e o indica num mostrador.
Do exposto acima tiramos que o sistema de medição deve ser capaz de “ler” uma variável, processar este sinal e utilizá-lo de forma específica. Contudo, na maioria das vezes, o sinal que sai do transdutor não está apropriado para a utilização pelo receptor, neste caso a função do condicionador
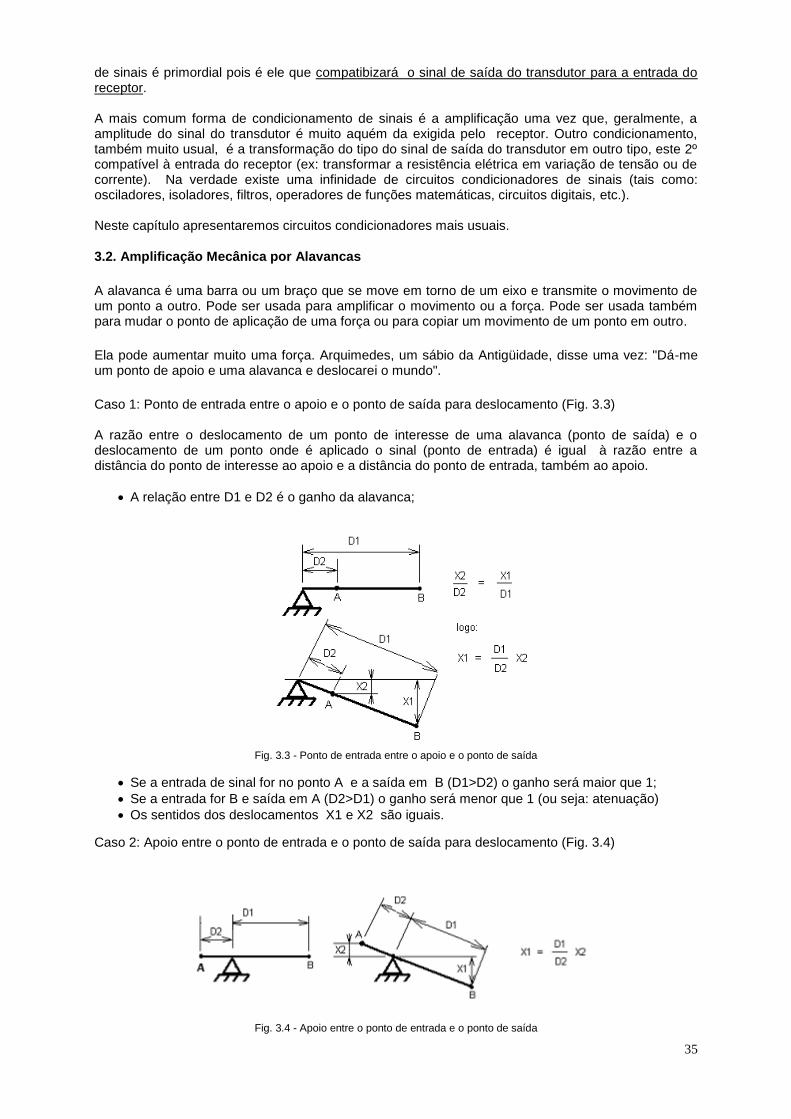
35
de sinais é primordial pois é ele que compatibizará o sinal de saída do transdutor para a entrada do receptor. A mais comum forma de condicionamento de sinais é a amplificação uma vez que, geralmente, a amplitude do sinal do transdutor é muito aquém da exigida pelo receptor. Outro condicionamento, também muito usual, é a transformação do tipo do sinal de saída do transdutor em outro tipo, este 2º compatível à entrada do receptor (ex: transformar a resistência elétrica em variação de tensão ou de corrente). Na verdade existe uma infinidade de circuitos condicionadores de sinais (tais como: osciladores, isoladores, filtros, operadores de funções matemáticas, circuitos digitais, etc.). Neste capítulo apresentaremos circuitos condicionadores mais usuais.
3.2. Amplificação Mecânica por Alavancas
A alavanca é uma barra ou um braço que se move em torno de um eixo e transmite o movimento de um ponto a outro. Pode ser usada para amplificar o movimento ou a força. Pode ser usada também para mudar o ponto de aplicação de uma força ou para copiar um movimento de um ponto em outro.
Ela pode aumentar muito uma força. Arquimedes, um sábio da Antigüidade, disse uma vez: "Dá-me um ponto de apoio e uma alavanca e deslocarei o mundo".
Caso 1: Ponto de entrada entre o apoio e o ponto de saída para deslocamento (Fig. 3.3) A razão entre o deslocamento de um ponto de interesse de uma alavanca (ponto de saída) e o deslocamento de um ponto onde é aplicado o sinal (ponto de entrada) é igual à razão entre a distância do ponto de interesse ao apoio e a distância do ponto de entrada, também ao apoio.
A relação entre D1 e D2 é o ganho da alavanca;
Fig. 3.3 - Ponto de entrada entre o apoio e o ponto de saída
Se a entrada de sinal for no ponto A e a saída em B (D1>D2) o ganho será maior que 1;
Se a entrada for B e saída em A (D2>D1) o ganho será menor que 1 (ou seja: atenuação)
Os sentidos dos deslocamentos X1 e X2 são iguais.
Caso 2: Apoio entre o ponto de entrada e o ponto de saída para deslocamento (Fig. 3.4)
Fig. 3.4 - Apoio entre o ponto de entrada e o ponto de saída
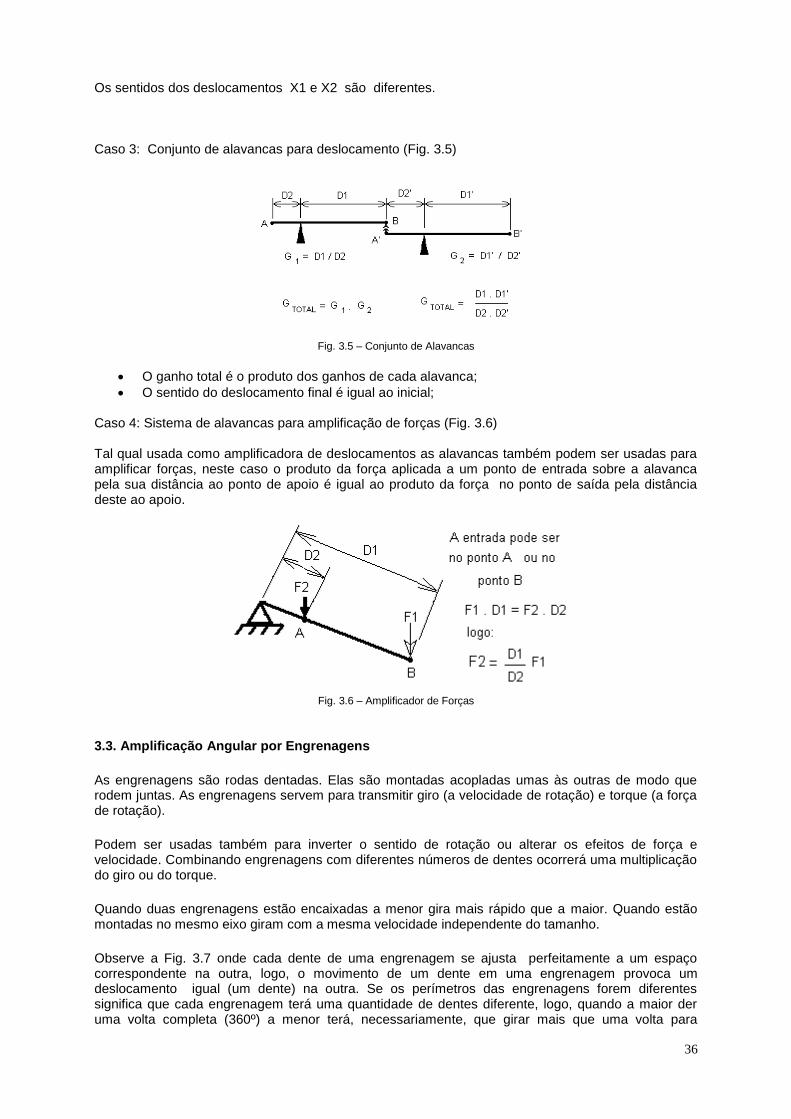
36
Os sentidos dos deslocamentos X1 e X2 são diferentes. Caso 3: Conjunto de alavancas para deslocamento (Fig. 3.5)
Fig. 3.5 – Conjunto de Alavancas
O ganho total é o produto dos ganhos de cada alavanca;
O sentido do deslocamento final é igual ao inicial; Caso 4: Sistema de alavancas para amplificação de forças (Fig. 3.6) Tal qual usada como amplificadora de deslocamentos as alavancas também podem ser usadas para amplificar forças, neste caso o produto da força aplicada a um ponto de entrada sobre a alavanca pela sua distância ao ponto de apoio é igual ao produto da força no ponto de saída pela distância deste ao apoio.
Fig. 3.6 – Amplificador de Forças
3.3. Amplificação Angular por Engrenagens
As engrenagens são rodas dentadas. Elas são montadas acopladas umas às outras de modo que rodem juntas. As engrenagens servem para transmitir giro (a velocidade de rotação) e torque (a força de rotação).
Podem ser usadas também para inverter o sentido de rotação ou alterar os efeitos de força e velocidade. Combinando engrenagens com diferentes números de dentes ocorrerá uma multiplicação do giro ou do torque.
Quando duas engrenagens estão encaixadas a menor gira mais rápido que a maior. Quando estão montadas no mesmo eixo giram com a mesma velocidade independente do tamanho.
Observe a Fig. 3.7 onde cada dente de uma engrenagem se ajusta perfeitamente a um espaço correspondente na outra, logo, o movimento de um dente em uma engrenagem provoca um deslocamento igual (um dente) na outra. Se os perímetros das engrenagens forem diferentes significa que cada engrenagem terá uma quantidade de dentes diferente, logo, quando a maior der uma volta completa (360º) a menor terá, necessariamente, que girar mais que uma volta para
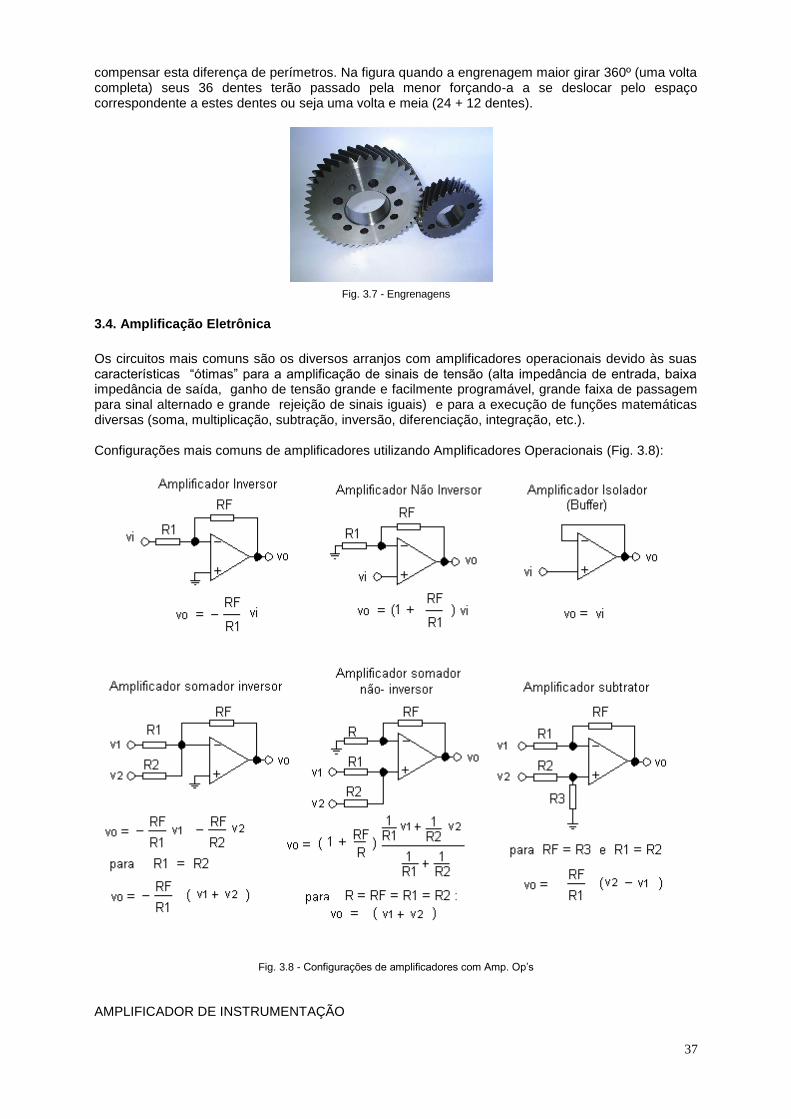
37
compensar esta diferença de perímetros. Na figura quando a engrenagem maior girar 360º (uma volta completa) seus 36 dentes terão passado pela menor forçando-a a se deslocar pelo espaço correspondente a estes dentes ou seja uma volta e meia (24 + 12 dentes).
Fig. 3.7 - Engrenagens
3.4. Amplificação Eletrônica
Os circuitos mais comuns são os diversos arranjos com amplificadores operacionais devido às suas características “ótimas” para a amplificação de sinais de tensão (alta impedância de entrada, baixa impedância de saída, ganho de tensão grande e facilmente programável, grande faixa de passagem para sinal alternado e grande rejeição de sinais iguais) e para a execução de funções matemáticas diversas (soma, multiplicação, subtração, inversão, diferenciação, integração, etc.). Configurações mais comuns de amplificadores utilizando Amplificadores Operacionais (Fig. 3.8):
Fig. 3.8 - Configurações de amplificadores com Amp. Op’s
AMPLIFICADOR DE INSTRUMENTAÇÃO
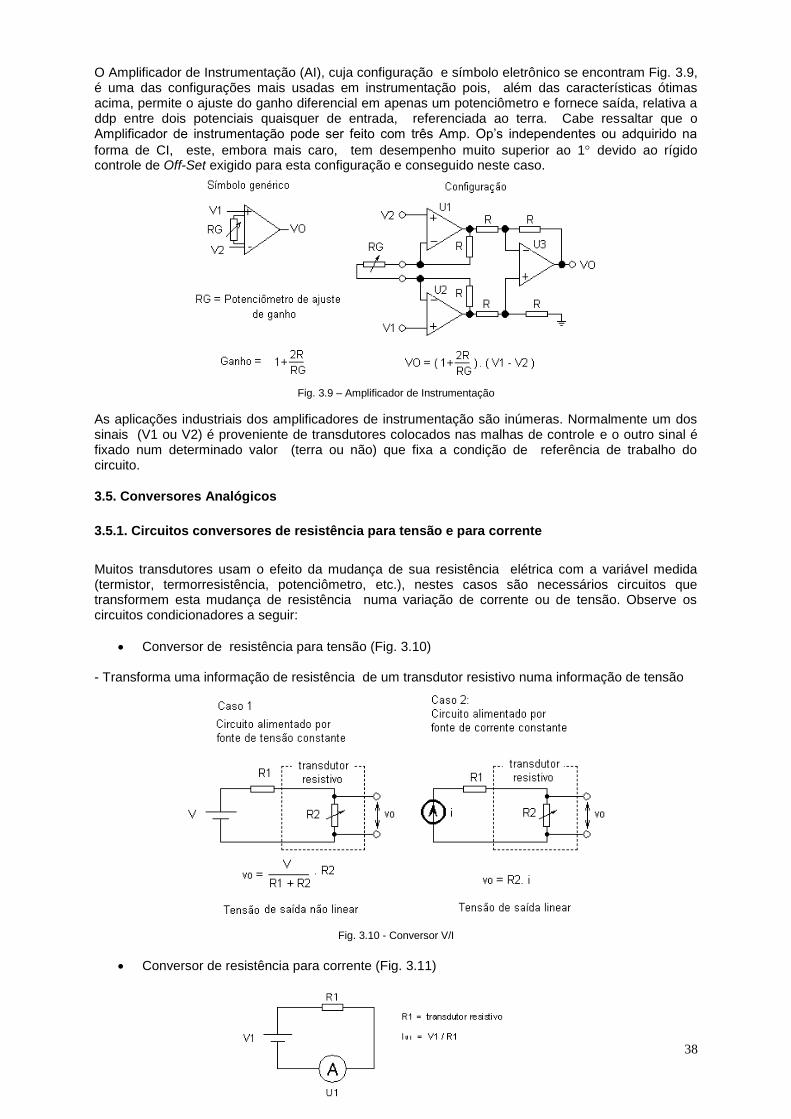
38
O Amplificador de Instrumentação (AI), cuja configuração e símbolo eletrônico se encontram Fig. 3.9, é uma das configurações mais usadas em instrumentação pois, além das características ótimas acima, permite o ajuste do ganho diferencial em apenas um potenciômetro e fornece saída, relativa a ddp entre dois potenciais quaisquer de entrada, referenciada ao terra. Cabe ressaltar que o Amplificador de instrumentação pode ser feito com três Amp. Op’s independentes ou adquirido na
forma de CI, este, embora mais caro, tem desempenho muito superior ao 1 devido ao rígido controle de Off-Set exigido para esta configuração e conseguido neste caso.
Fig. 3.9 – Amplificador de Instrumentação
As aplicações industriais dos amplificadores de instrumentação são inúmeras. Normalmente um dos sinais (V1 ou V2) é proveniente de transdutores colocados nas malhas de controle e o outro sinal é fixado num determinado valor (terra ou não) que fixa a condição de referência de trabalho do circuito.
3.5. Conversores Analógicos
3.5.1. Circuitos conversores de resistência para tensão e para corrente
Muitos transdutores usam o efeito da mudança de sua resistência elétrica com a variável medida (termistor, termorresistência, potenciômetro, etc.), nestes casos são necessários circuitos que transformem esta mudança de resistência numa variação de corrente ou de tensão. Observe os circuitos condicionadores a seguir:
Conversor de resistência para tensão (Fig. 3.10) - Transforma uma informação de resistência de um transdutor resistivo numa informação de tensão
Fig. 3.10 - Conversor V/I
Conversor de resistência para corrente (Fig. 3.11)
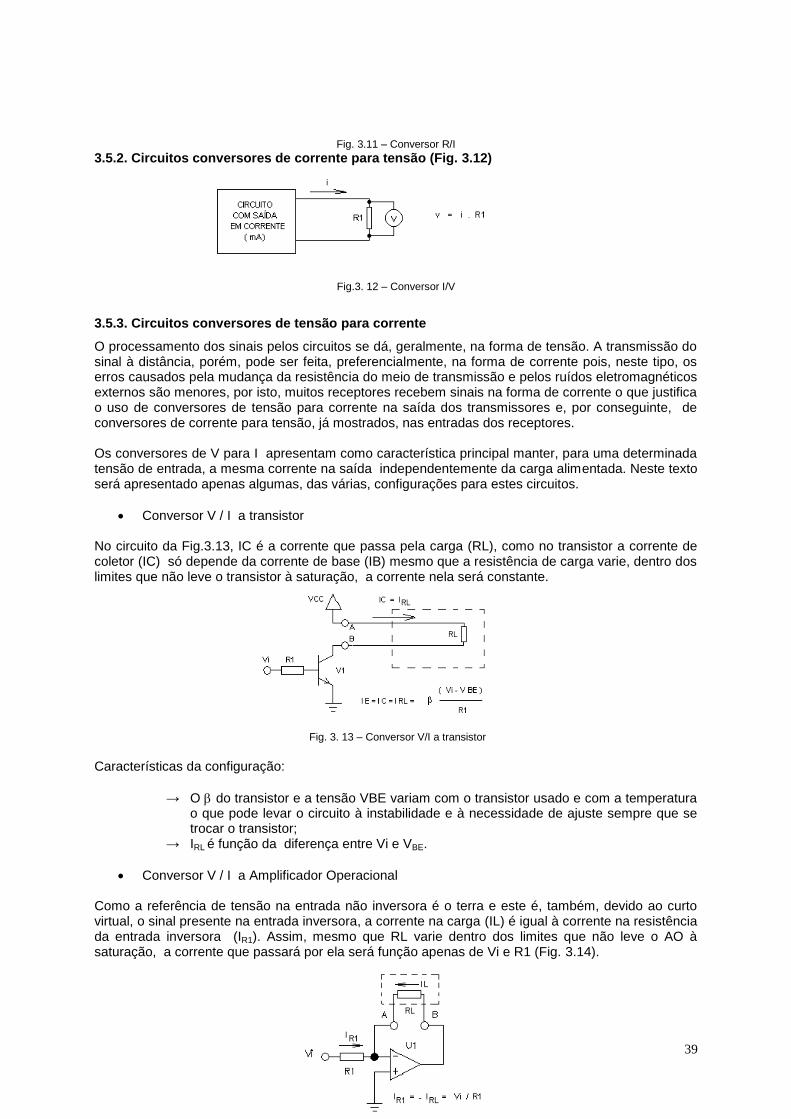
39
Fig. 3.11 – Conversor R/I
3.5.2. Circuitos conversores de corrente para tensão (Fig. 3.12)
Fig.3. 12 – Conversor I/V
3.5.3. Circuitos conversores de tensão para corrente
O processamento dos sinais pelos circuitos se dá, geralmente, na forma de tensão. A transmissão do sinal à distância, porém, pode ser feita, preferencialmente, na forma de corrente pois, neste tipo, os erros causados pela mudança da resistência do meio de transmissão e pelos ruídos eletromagnéticos externos são menores, por isto, muitos receptores recebem sinais na forma de corrente o que justifica o uso de conversores de tensão para corrente na saída dos transmissores e, por conseguinte, de conversores de corrente para tensão, já mostrados, nas entradas dos receptores. Os conversores de V para I apresentam como característica principal manter, para uma determinada tensão de entrada, a mesma corrente na saída independentemente da carga alimentada. Neste texto será apresentado apenas algumas, das várias, configurações para estes circuitos.
Conversor V / I a transistor No circuito da Fig.3.13, IC é a corrente que passa pela carga (RL), como no transistor a corrente de coletor (IC) só depende da corrente de base (IB) mesmo que a resistência de carga varie, dentro dos limites que não leve o transistor à saturação, a corrente nela será constante.
Fig. 3. 13 – Conversor V/I a transistor
Características da configuração:
→ O do transistor e a tensão VBE variam com o transistor usado e com a temperatura o que pode levar o circuito à instabilidade e à necessidade de ajuste sempre que se trocar o transistor;
→ IRL é função da diferença entre Vi e VBE.
Conversor V / I a Amplificador Operacional Como a referência de tensão na entrada não inversora é o terra e este é, também, devido ao curto virtual, o sinal presente na entrada inversora, a corrente na carga (IL) é igual à corrente na resistência da entrada inversora (IR1). Assim, mesmo que RL varie dentro dos limites que não leve o AO à saturação, a corrente que passará por ela será função apenas de Vi e R1 (Fig. 3.14).
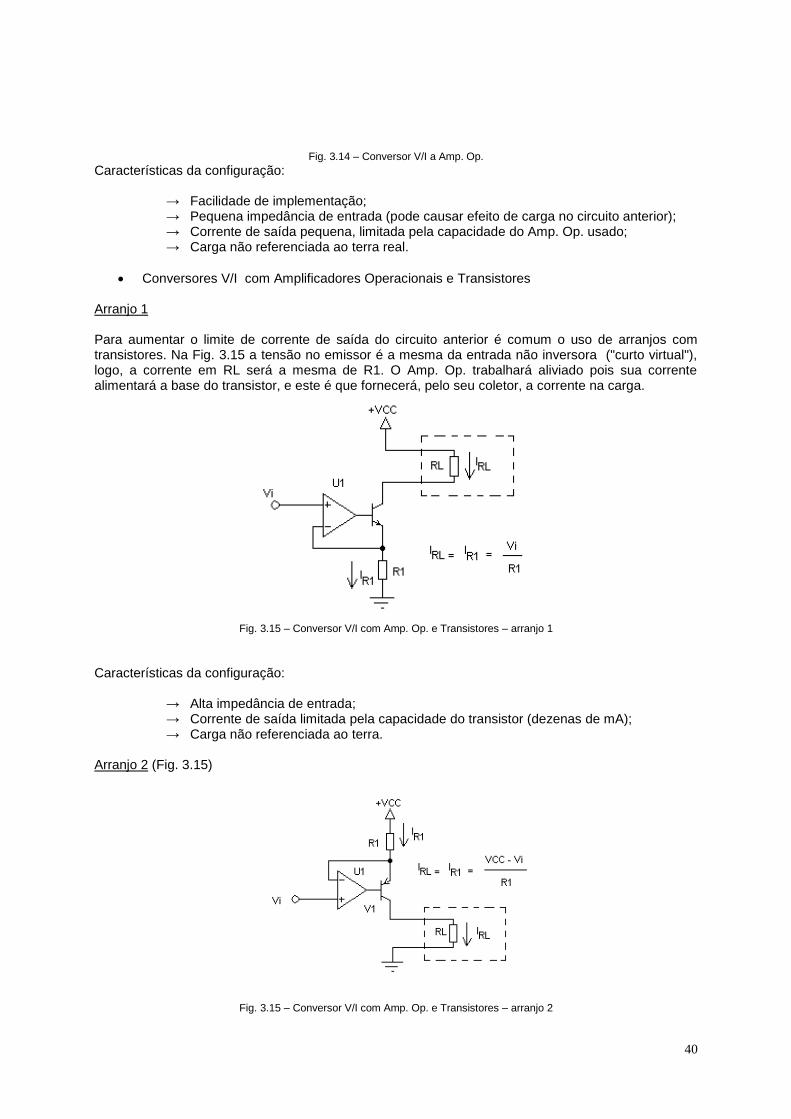
40
Fig. 3.14 – Conversor V/I a Amp. Op.
Características da configuração:
→ Facilidade de implementação; → Pequena impedância de entrada (pode causar efeito de carga no circuito anterior); → Corrente de saída pequena, limitada pela capacidade do Amp. Op. usado; → Carga não referenciada ao terra real.
Conversores V/I com Amplificadores Operacionais e Transistores Arranjo 1 Para aumentar o limite de corrente de saída do circuito anterior é comum o uso de arranjos com transistores. Na Fig. 3.15 a tensão no emissor é a mesma da entrada não inversora ("curto virtual"), logo, a corrente em RL será a mesma de R1. O Amp. Op. trabalhará aliviado pois sua corrente alimentará a base do transistor, e este é que fornecerá, pelo seu coletor, a corrente na carga.
Fig. 3.15 – Conversor V/I com Amp. Op. e Transistores – arranjo 1
Características da configuração:
→ Alta impedância de entrada; → Corrente de saída limitada pela capacidade do transistor (dezenas de mA); → Carga não referenciada ao terra.
Arranjo 2 (Fig. 3.15)
Fig. 3.15 – Conversor V/I com Amp. Op. e Transistores – arranjo 2
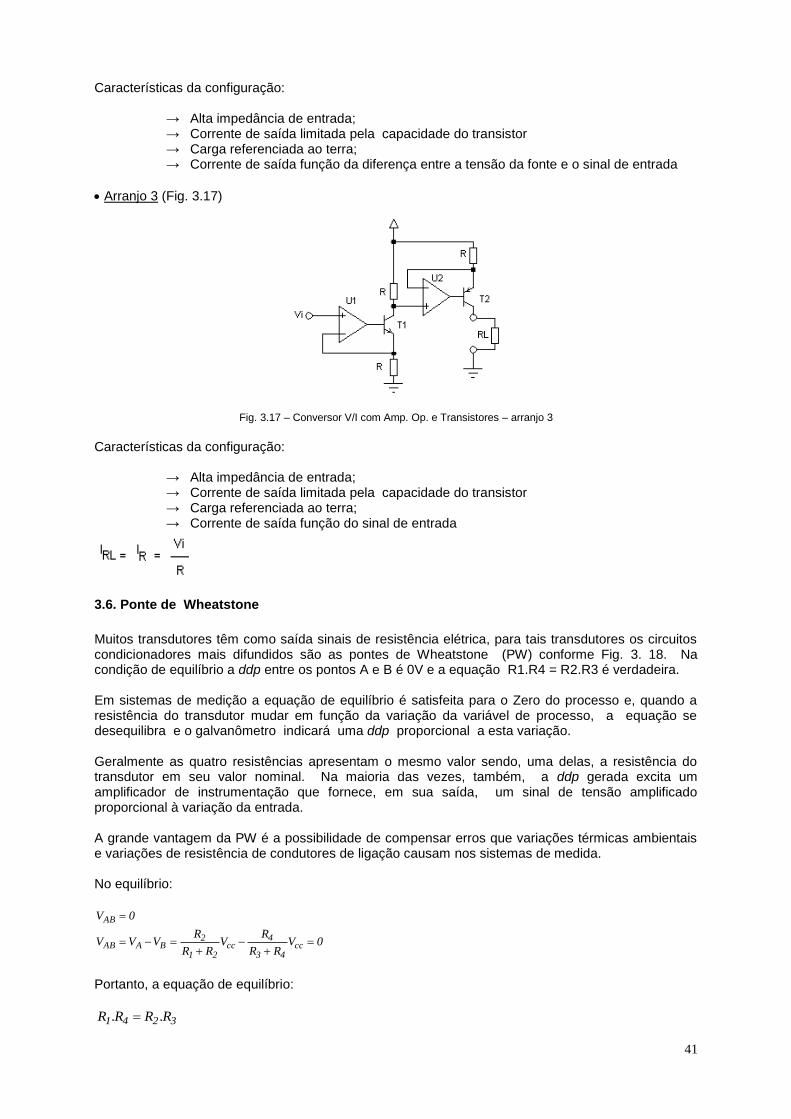
41
Características da configuração:
→ Alta impedância de entrada; → Corrente de saída limitada pela capacidade do transistor → Carga referenciada ao terra; → Corrente de saída função da diferença entre a tensão da fonte e o sinal de entrada
Arranjo 3 (Fig. 3.17)
Fig. 3.17 – Conversor V/I com Amp. Op. e Transistores – arranjo 3
Características da configuração:
→ Alta impedância de entrada; → Corrente de saída limitada pela capacidade do transistor → Carga referenciada ao terra; → Corrente de saída função do sinal de entrada
3.6. Ponte de Wheatstone
Muitos transdutores têm como saída sinais de resistência elétrica, para tais transdutores os circuitos condicionadores mais difundidos são as pontes de Wheatstone (PW) conforme Fig. 3. 18. Na condição de equilíbrio a ddp entre os pontos A e B é 0V e a equação R1.R4 = R2.R3 é verdadeira. Em sistemas de medição a equação de equilíbrio é satisfeita para o Zero do processo e, quando a resistência do transdutor mudar em função da variação da variável de processo, a equação se desequilibra e o galvanômetro indicará uma ddp proporcional a esta variação. Geralmente as quatro resistências apresentam o mesmo valor sendo, uma delas, a resistência do transdutor em seu valor nominal. Na maioria das vezes, também, a ddp gerada excita um amplificador de instrumentação que fornece, em sua saída, um sinal de tensão amplificado proporcional à variação da entrada. A grande vantagem da PW é a possibilidade de compensar erros que variações térmicas ambientais e variações de resistência de condutores de ligação causam nos sistemas de medida. No equilíbrio:
0VRR
RV
RR
RVVV
0V
cc43
4cc
21
2BAAB
AB
Portanto, a equação de equilíbrio:
3241 R.RR.R
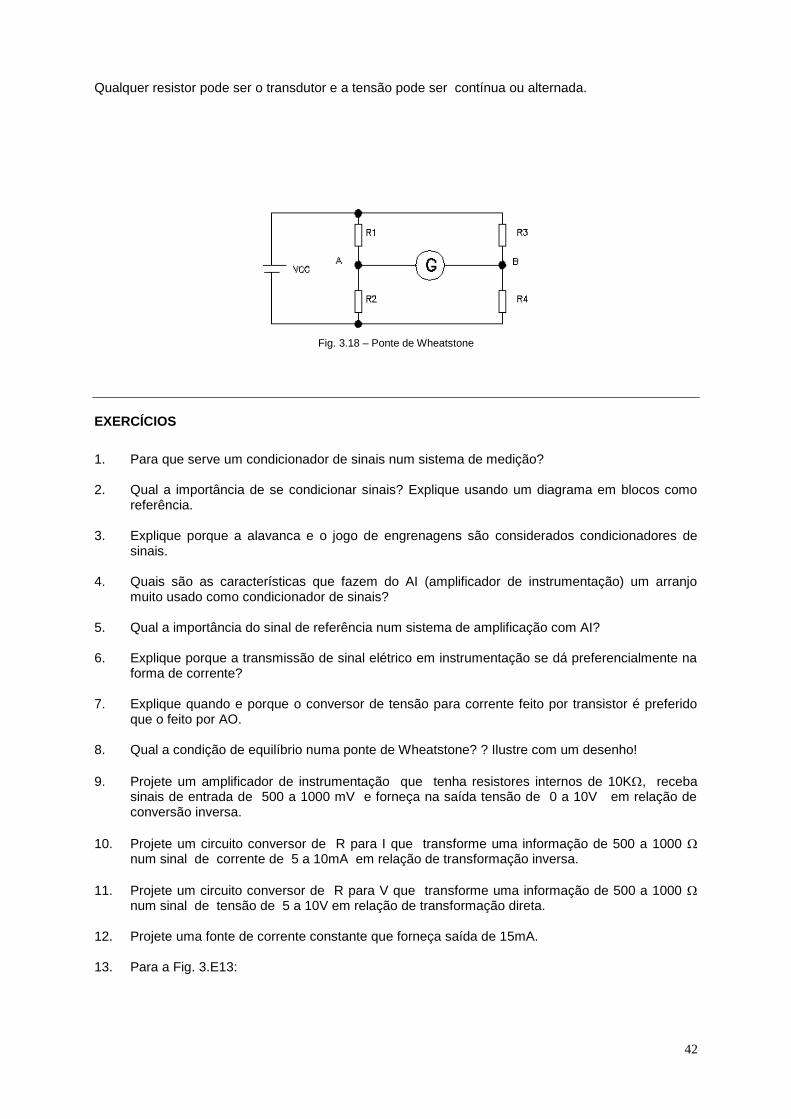
42
Qualquer resistor pode ser o transdutor e a tensão pode ser contínua ou alternada.
Fig. 3.18 – Ponte de Wheatstone
EXERCÍCIOS
1. Para que serve um condicionador de sinais num sistema de medição? 2. Qual a importância de se condicionar sinais? Explique usando um diagrama em blocos como
referência. 3. Explique porque a alavanca e o jogo de engrenagens são considerados condicionadores de
sinais. 4. Quais são as características que fazem do AI (amplificador de instrumentação) um arranjo
muito usado como condicionador de sinais? 5. Qual a importância do sinal de referência num sistema de amplificação com AI? 6. Explique porque a transmissão de sinal elétrico em instrumentação se dá preferencialmente na
forma de corrente? 7. Explique quando e porque o conversor de tensão para corrente feito por transistor é preferido
que o feito por AO. 8. Qual a condição de equilíbrio numa ponte de Wheatstone? ? Ilustre com um desenho!
9. Projete um amplificador de instrumentação que tenha resistores internos de 10K, receba sinais de entrada de 500 a 1000 mV e forneça na saída tensão de 0 a 10V em relação de conversão inversa.
10. Projete um circuito conversor de R para I que transforme uma informação de 500 a 1000 num sinal de corrente de 5 a 10mA em relação de transformação inversa.
11. Projete um circuito conversor de R para V que transforme uma informação de 500 a 1000 num sinal de tensão de 5 a 10V em relação de transformação direta.
12. Projete uma fonte de corrente constante que forneça saída de 15mA. 13. Para a Fig. 3.E13:
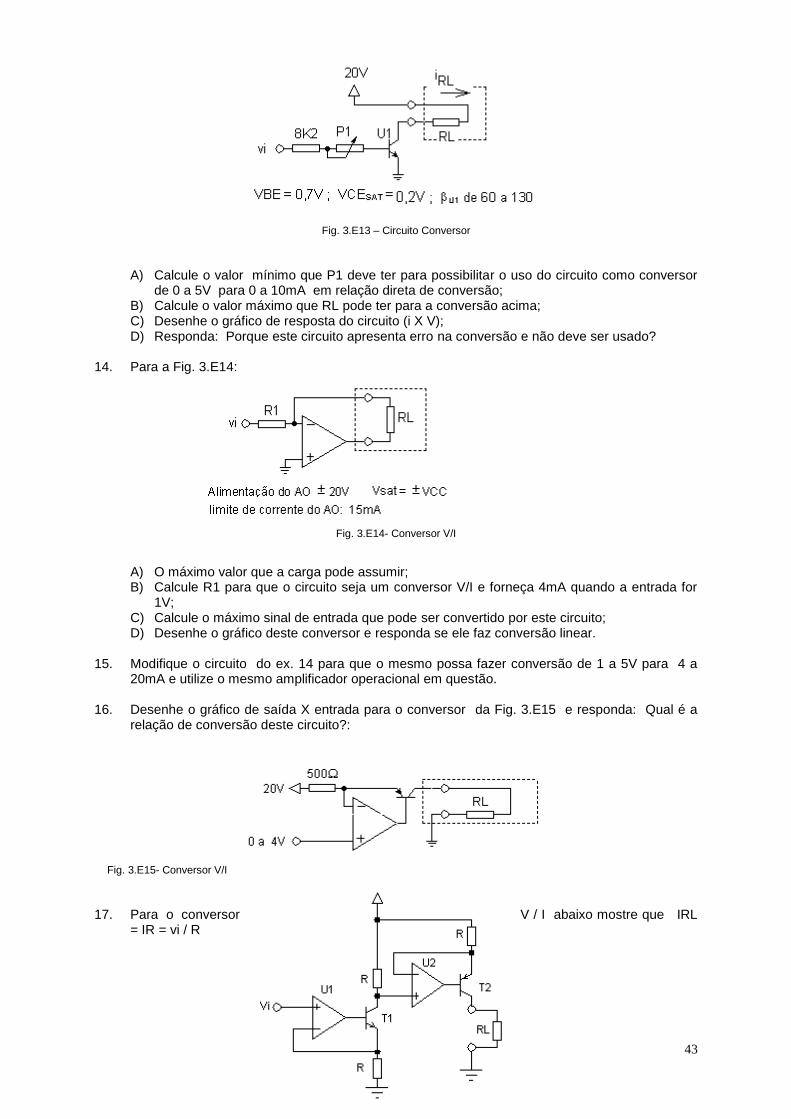
43
Fig. 3.E13 – Circuito Conversor
A) Calcule o valor mínimo que P1 deve ter para possibilitar o uso do circuito como conversor de 0 a 5V para 0 a 10mA em relação direta de conversão;
B) Calcule o valor máximo que RL pode ter para a conversão acima; C) Desenhe o gráfico de resposta do circuito (i X V); D) Responda: Porque este circuito apresenta erro na conversão e não deve ser usado?
14. Para a Fig. 3.E14:
Fig. 3.E14- Conversor V/I
A) O máximo valor que a carga pode assumir; B) Calcule R1 para que o circuito seja um conversor V/I e forneça 4mA quando a entrada for
1V; C) Calcule o máximo sinal de entrada que pode ser convertido por este circuito; D) Desenhe o gráfico deste conversor e responda se ele faz conversão linear.
15. Modifique o circuito do ex. 14 para que o mesmo possa fazer conversão de 1 a 5V para 4 a
20mA e utilize o mesmo amplificador operacional em questão. 16. Desenhe o gráfico de saída X entrada para o conversor da Fig. 3.E15 e responda: Qual é a
relação de conversão deste circuito?:
Fig. 3.E15- Conversor V/I
17. Para o conversor V / I abaixo mostre que IRL
= IR = vi / R
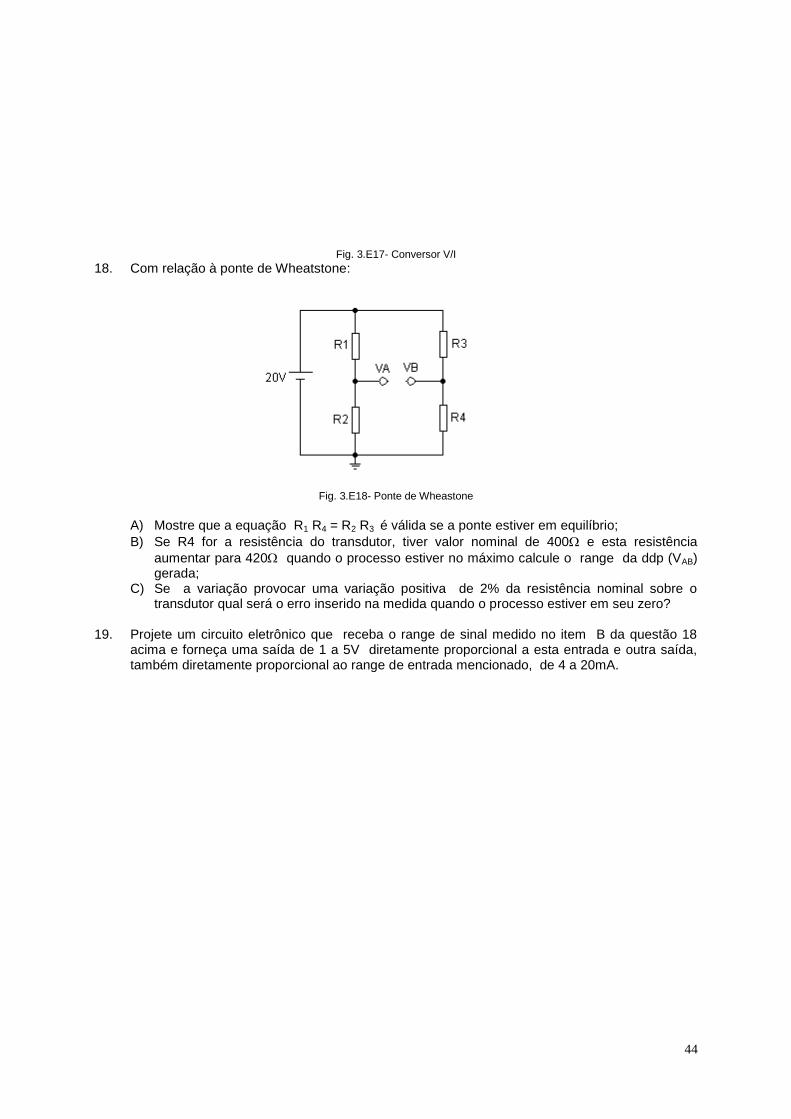
44
Fig. 3.E17- Conversor V/I
18. Com relação à ponte de Wheatstone:
Fig. 3.E18- Ponte de Wheastone
A) Mostre que a equação R1 R4 = R2 R3 é válida se a ponte estiver em equilíbrio;
B) Se R4 for a resistência do transdutor, tiver valor nominal de 400 e esta resistência
aumentar para 420 quando o processo estiver no máximo calcule o range da ddp (VAB) gerada;
C) Se a variação provocar uma variação positiva de 2% da resistência nominal sobre o transdutor qual será o erro inserido na medida quando o processo estiver em seu zero?
19. Projete um circuito eletrônico que receba o range de sinal medido no item B da questão 18
acima e forneça uma saída de 1 a 5V diretamente proporcional a esta entrada e outra saída, também diretamente proporcional ao range de entrada mencionado, de 4 a 20mA.
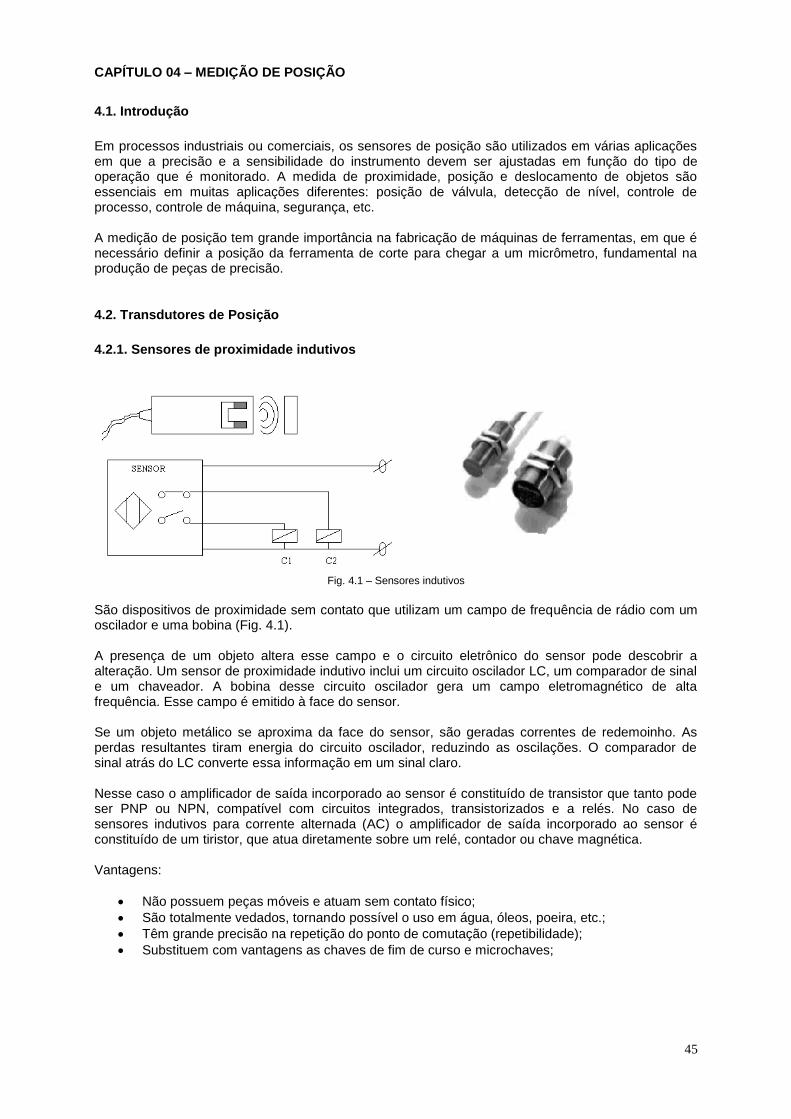
45
CAPÍTULO 04 – MEDIÇÃO DE POSIÇÃO
4.1. Introdução
Em processos industriais ou comerciais, os sensores de posição são utilizados em várias aplicações em que a precisão e a sensibilidade do instrumento devem ser ajustadas em função do tipo de operação que é monitorado. A medida de proximidade, posição e deslocamento de objetos são essenciais em muitas aplicações diferentes: posição de válvula, detecção de nível, controle de processo, controle de máquina, segurança, etc. A medição de posição tem grande importância na fabricação de máquinas de ferramentas, em que é necessário definir a posição da ferramenta de corte para chegar a um micrômetro, fundamental na produção de peças de precisão.
4.2. Transdutores de Posição
4.2.1. Sensores de proximidade indutivos
Fig. 4.1 – Sensores indutivos
São dispositivos de proximidade sem contato que utilizam um campo de frequência de rádio com um oscilador e uma bobina (Fig. 4.1). A presença de um objeto altera esse campo e o circuito eletrônico do sensor pode descobrir a alteração. Um sensor de proximidade indutivo inclui um circuito oscilador LC, um comparador de sinal e um chaveador. A bobina desse circuito oscilador gera um campo eletromagnético de alta frequência. Esse campo é emitido à face do sensor. Se um objeto metálico se aproxima da face do sensor, são geradas correntes de redemoinho. As perdas resultantes tiram energia do circuito oscilador, reduzindo as oscilações. O comparador de sinal atrás do LC converte essa informação em um sinal claro. Nesse caso o amplificador de saída incorporado ao sensor é constituído de transistor que tanto pode ser PNP ou NPN, compatível com circuitos integrados, transistorizados e a relés. No caso de sensores indutivos para corrente alternada (AC) o amplificador de saída incorporado ao sensor é constituído de um tiristor, que atua diretamente sobre um relé, contador ou chave magnética. Vantagens:
Não possuem peças móveis e atuam sem contato físico;
São totalmente vedados, tornando possível o uso em água, óleos, poeira, etc.;
Têm grande precisão na repetição do ponto de comutação (repetibilidade);
Substituem com vantagens as chaves de fim de curso e microchaves;

46
4.2.2. Sensores de proximidade capacitivos
Fig. 4.2 - Sensor capacitivo
Funcionam por campo elétrico que é alterado quando o dielétrico do meio varia. À distância sensora não é fixa mas depende da forma, da massa e do material de que é feita a peça que entra no campo sensor. Os sensores de proximidade capacitivos (Fig. 4.2) são projetados para operar gerando um campo eletrostático e detectando mudanças nesse campo, que acontecem quando um alvo se aproxima da face ativa. As partes internas do sensor consistem em uma ponta capacitiva, um oscilador, um retificador de sinal, um circuito de filtragem e um circuito de saída. A Fig. 4.3 mostra o aspecto construtivo de um sensor capacitivo.
Fig. 4.3 – Aspecto construtivo
Na ausência de um alvo, o oscilador está inativo. Quando o alvo se aproxima, ele aumenta a capacitância do circuito com a ponta de compensação. Quando a capacitância atinge um valor determinado, o oscilador é ativado, o que ativa o circuito de saída e faz com que ele comute seu estado (de “aberto” para “fechado” ou vice-versa). A capacitância do circuito com a ponta de compensação é determinada pelo tamanho do alvo, sua constante dielétrica e a distância até a ponta. Quanto maior o tamanho e a constante dielétrica de um alvo mais ele aumenta a capacitância. Quanto menor a distância entre a ponta e o alvo maior à capacitância. São indicados para detectar materiais metálicos e não-metálicos, tais como: água, óleo, grãos, madeira, papelão, vidro, cerâmica, etc. Este tipo de sensor pode ser utilizado para: controle de nível em silos; contagem de caixas em linha de produção; conferir presença de líquidos em frascos, etc. 4.2.3. Sensores de proximidade magnéticos (efeito Hall)
O efeito Hall foi descoberto em 1879, por Edwin Herbert Hall. Quando um condutor é submetido a um campo magnético perpendicular a direção da corrente elétrica, uma diferença de potencial surge nas laterais deste condutor na presença do campo magnético. Este efeito ocorre devido a cargas elétricas tenderem a desviar-se de sua trajetória por causa da força de Lorentz. Desta forma cria-se um acúmulo de cargas nas superfícies laterais do condutor produzindo uma diferença de potencial. Parte da corrente elétrica se desloca para a lateral e as lacunas de portadores positivos para a outra. O acúmulo de cargas elétricas iguais nas laterais do semicondutor cria uma diferença de potencial chamado tensão Hall. Apesar do efeito Hall existir em qualquer material condutor, seu efeito é mais intenso em materiais semicondutores. Entretanto, os semicondutores apresentam variações de lote para lote, necessitando de um circuito eletrônico auxiliar para ajustar o sinal do efeito Hall para um valor calibrado do campo magnético.
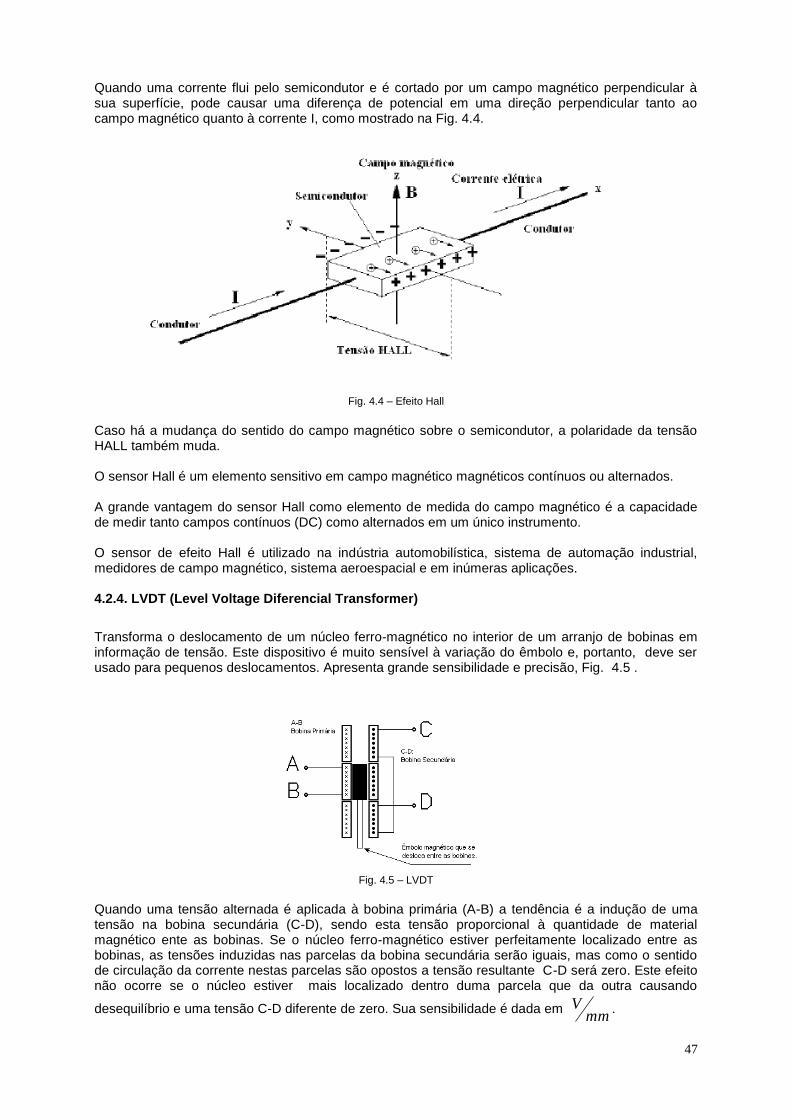
47
Quando uma corrente flui pelo semicondutor e é cortado por um campo magnético perpendicular à sua superfície, pode causar uma diferença de potencial em uma direção perpendicular tanto ao campo magnético quanto à corrente I, como mostrado na Fig. 4.4.
Fig. 4.4 – Efeito Hall
Caso há a mudança do sentido do campo magnético sobre o semicondutor, a polaridade da tensão HALL também muda. O sensor Hall é um elemento sensitivo em campo magnético magnéticos contínuos ou alternados. A grande vantagem do sensor Hall como elemento de medida do campo magnético é a capacidade de medir tanto campos contínuos (DC) como alternados em um único instrumento. O sensor de efeito Hall é utilizado na indústria automobilística, sistema de automação industrial, medidores de campo magnético, sistema aeroespacial e em inúmeras aplicações. 4.2.4. LVDT (Level Voltage Diferencial Transformer)
Transforma o deslocamento de um núcleo ferro-magnético no interior de um arranjo de bobinas em informação de tensão. Este dispositivo é muito sensível à variação do êmbolo e, portanto, deve ser usado para pequenos deslocamentos. Apresenta grande sensibilidade e precisão, Fig. 4.5 .
Fig. 4.5 – LVDT
Quando uma tensão alternada é aplicada à bobina primária (A-B) a tendência é a indução de uma tensão na bobina secundária (C-D), sendo esta tensão proporcional à quantidade de material magnético ente as bobinas. Se o núcleo ferro-magnético estiver perfeitamente localizado entre as bobinas, as tensões induzidas nas parcelas da bobina secundária serão iguais, mas como o sentido de circulação da corrente nestas parcelas são opostos a tensão resultante C-D será zero. Este efeito não ocorre se o núcleo estiver mais localizado dentro duma parcela que da outra causando
desequilíbrio e uma tensão C-D diferente de zero. Sua sensibilidade é dada em mm
V .
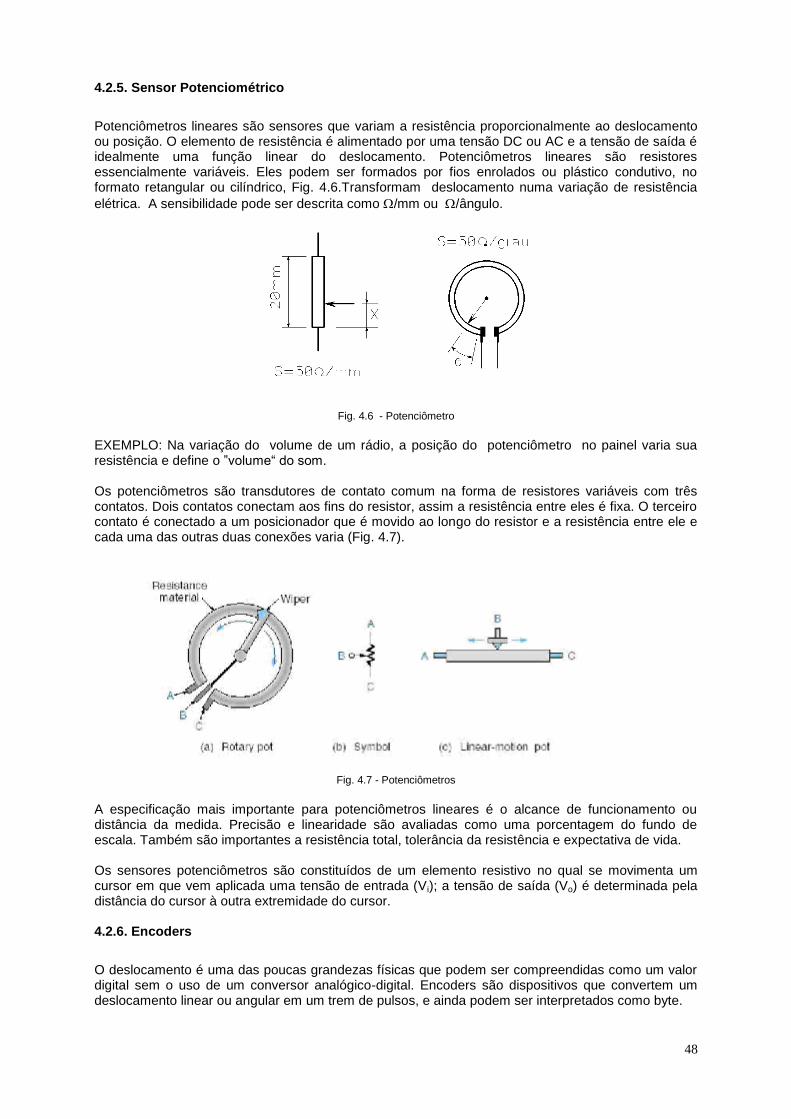
48
4.2.5. Sensor Potenciométrico
Potenciômetros lineares são sensores que variam a resistência proporcionalmente ao deslocamento ou posição. O elemento de resistência é alimentado por uma tensão DC ou AC e a tensão de saída é idealmente uma função linear do deslocamento. Potenciômetros lineares são resistores essencialmente variáveis. Eles podem ser formados por fios enrolados ou plástico condutivo, no formato retangular ou cilíndrico, Fig. 4.6.Transformam deslocamento numa variação de resistência
elétrica. A sensibilidade pode ser descrita como /mm ou /ângulo.
Fig. 4.6 - Potenciômetro
EXEMPLO: Na variação do volume de um rádio, a posição do potenciômetro no painel varia sua resistência e define o ”volume“ do som. Os potenciômetros são transdutores de contato comum na forma de resistores variáveis com três contatos. Dois contatos conectam aos fins do resistor, assim a resistência entre eles é fixa. O terceiro contato é conectado a um posicionador que é movido ao longo do resistor e a resistência entre ele e cada uma das outras duas conexões varia (Fig. 4.7).
Fig. 4.7 - Potenciômetros
A especificação mais importante para potenciômetros lineares é o alcance de funcionamento ou distância da medida. Precisão e linearidade são avaliadas como uma porcentagem do fundo de escala. Também são importantes a resistência total, tolerância da resistência e expectativa de vida. Os sensores potenciômetros são constituídos de um elemento resistivo no qual se movimenta um cursor em que vem aplicada uma tensão de entrada (Vi); a tensão de saída (Vo) é determinada pela distância do cursor à outra extremidade do cursor. 4.2.6. Encoders
O deslocamento é uma das poucas grandezas físicas que podem ser compreendidas como um valor digital sem o uso de um conversor analógico-digital. Encoders são dispositivos que convertem um deslocamento linear ou angular em um trem de pulsos, e ainda podem ser interpretados como byte.
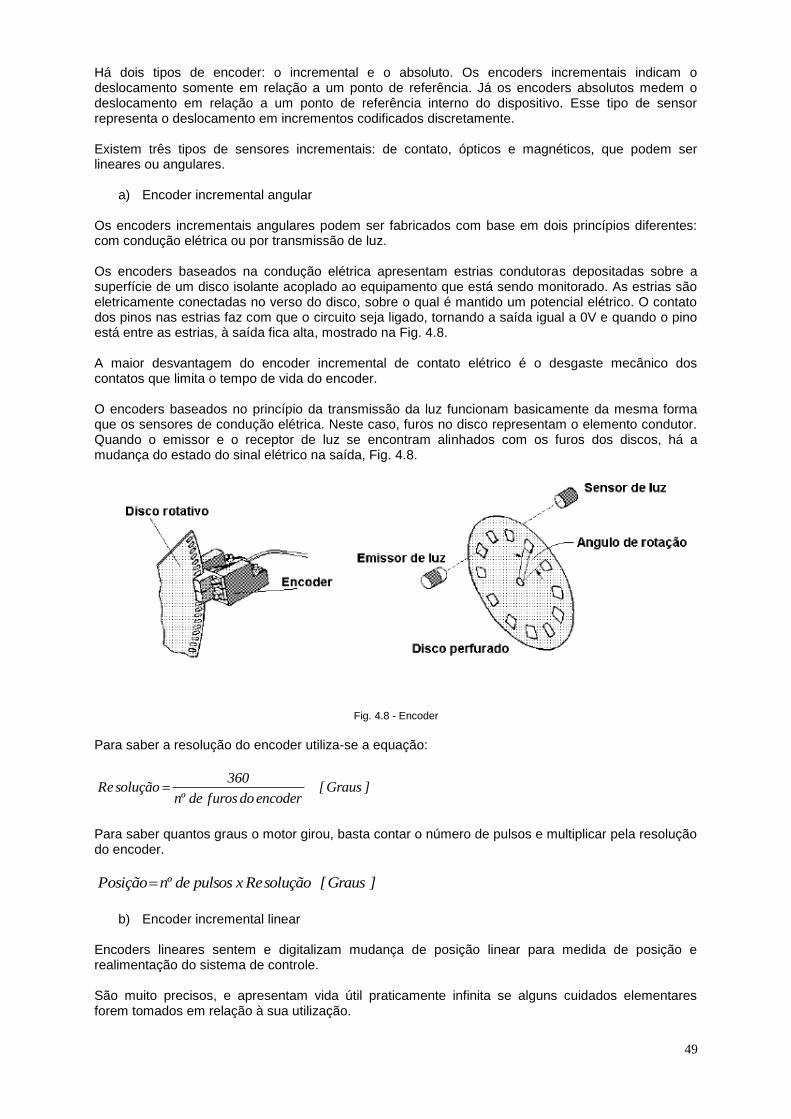
49
Há dois tipos de encoder: o incremental e o absoluto. Os encoders incrementais indicam o deslocamento somente em relação a um ponto de referência. Já os encoders absolutos medem o deslocamento em relação a um ponto de referência interno do dispositivo. Esse tipo de sensor representa o deslocamento em incrementos codificados discretamente. Existem três tipos de sensores incrementais: de contato, ópticos e magnéticos, que podem ser lineares ou angulares.
a) Encoder incremental angular Os encoders incrementais angulares podem ser fabricados com base em dois princípios diferentes: com condução elétrica ou por transmissão de luz. Os encoders baseados na condução elétrica apresentam estrias condutoras depositadas sobre a superfície de um disco isolante acoplado ao equipamento que está sendo monitorado. As estrias são eletricamente conectadas no verso do disco, sobre o qual é mantido um potencial elétrico. O contato dos pinos nas estrias faz com que o circuito seja ligado, tornando a saída igual a 0V e quando o pino está entre as estrias, à saída fica alta, mostrado na Fig. 4.8. A maior desvantagem do encoder incremental de contato elétrico é o desgaste mecânico dos contatos que limita o tempo de vida do encoder. O encoders baseados no princípio da transmissão da luz funcionam basicamente da mesma forma que os sensores de condução elétrica. Neste caso, furos no disco representam o elemento condutor. Quando o emissor e o receptor de luz se encontram alinhados com os furos dos discos, há a mudança do estado do sinal elétrico na saída, Fig. 4.8.
Fig. 4.8 - Encoder
Para saber a resolução do encoder utiliza-se a equação:
]Graus[encoderdofurosdeºn
360soluçãoRe
Para saber quantos graus o motor girou, basta contar o número de pulsos e multiplicar pela resolução do encoder.
]Graus[soluçãoRexpulsosdeºnPosição
b) Encoder incremental linear
Encoders lineares sentem e digitalizam mudança de posição linear para medida de posição e realimentação do sistema de controle. São muito precisos, e apresentam vida útil praticamente infinita se alguns cuidados elementares forem tomados em relação à sua utilização.
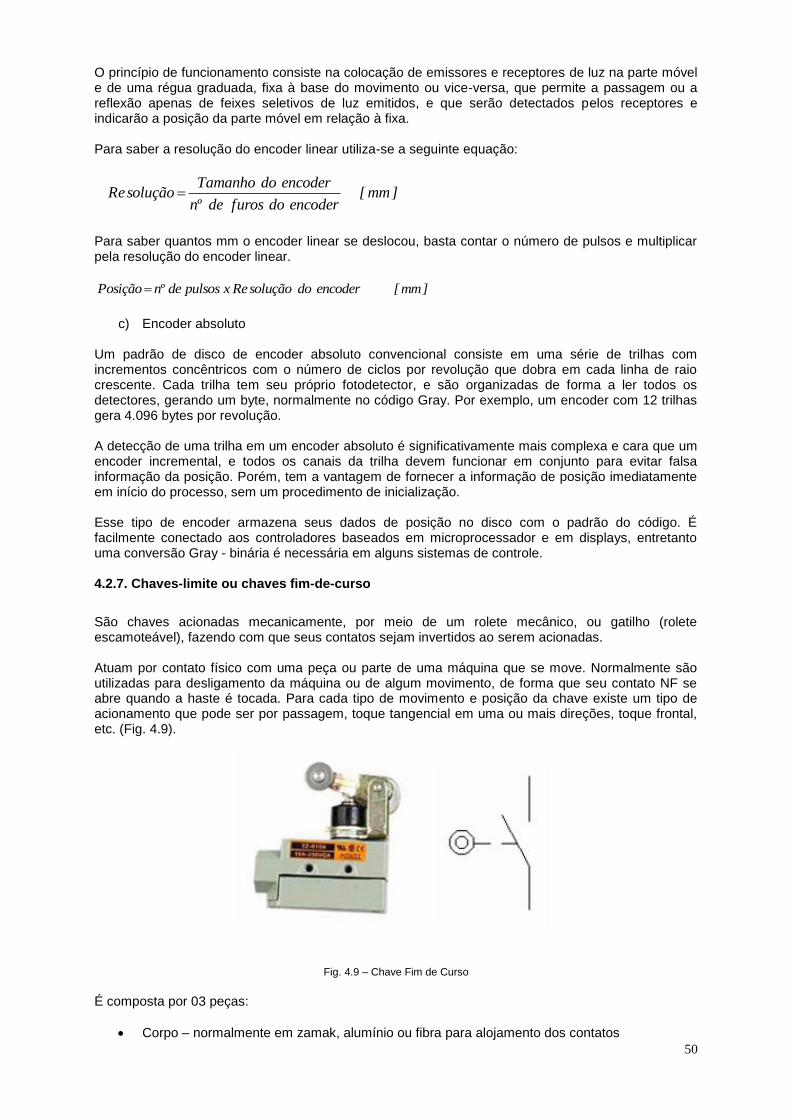
50
O princípio de funcionamento consiste na colocação de emissores e receptores de luz na parte móvel e de uma régua graduada, fixa à base do movimento ou vice-versa, que permite a passagem ou a reflexão apenas de feixes seletivos de luz emitidos, e que serão detectados pelos receptores e indicarão a posição da parte móvel em relação à fixa. Para saber a resolução do encoder linear utiliza-se a seguinte equação:
]mm[encoderdofurosdeºn
encoderdoTamanhosoluçãoRe
Para saber quantos mm o encoder linear se deslocou, basta contar o número de pulsos e multiplicar pela resolução do encoder linear.
]mm[encoderdosoluçãoRexpulsosdeºnPosição
c) Encoder absoluto
Um padrão de disco de encoder absoluto convencional consiste em uma série de trilhas com incrementos concêntricos com o número de ciclos por revolução que dobra em cada linha de raio crescente. Cada trilha tem seu próprio fotodetector, e são organizadas de forma a ler todos os detectores, gerando um byte, normalmente no código Gray. Por exemplo, um encoder com 12 trilhas gera 4.096 bytes por revolução. A detecção de uma trilha em um encoder absoluto é significativamente mais complexa e cara que um encoder incremental, e todos os canais da trilha devem funcionar em conjunto para evitar falsa informação da posição. Porém, tem a vantagem de fornecer a informação de posição imediatamente em início do processo, sem um procedimento de inicialização. Esse tipo de encoder armazena seus dados de posição no disco com o padrão do código. É facilmente conectado aos controladores baseados em microprocessador e em displays, entretanto uma conversão Gray - binária é necessária em alguns sistemas de controle. 4.2.7. Chaves-limite ou chaves fim-de-curso
São chaves acionadas mecanicamente, por meio de um rolete mecânico, ou gatilho (rolete escamoteável), fazendo com que seus contatos sejam invertidos ao serem acionadas. Atuam por contato físico com uma peça ou parte de uma máquina que se move. Normalmente são utilizadas para desligamento da máquina ou de algum movimento, de forma que seu contato NF se abre quando a haste é tocada. Para cada tipo de movimento e posição da chave existe um tipo de acionamento que pode ser por passagem, toque tangencial em uma ou mais direções, toque frontal, etc. (Fig. 4.9).
Fig. 4.9 – Chave Fim de Curso É composta por 03 peças:
Corpo – normalmente em zamak, alumínio ou fibra para alojamento dos contatos
51
Contatos – normalmente 1NA + 1NF para 4A ou 6A – 250 V
Cabeçote – elemento sensor de toque. Principais características que se devem observar para especificação são a velocidade de acionamento (em mm/min.), curso total de acionamento e o ponto em que os contatos se abrem ou fecham.
EXERCICIOS
1. Os sensores de posição indicam que uma determinada posição no movimento foi atingida.
Porém, eles também podem ser usados para indicar presença ou ausência de um objeto. Cite quatro tipos de sensores para detectar presença ou ausência de um objeto. Quais são os sensores? Qual a diferença de funcionamento entre eles? Cite uma possível aplicação para cada um deles.
2. O que é um LDR? Cite 2 aplicações:
3. O que são encoders? Cite duas variáveis que podem ser monitoradas por encoders:
4. Qual a diferença entre um encoder absoluto e um encoder incremental?
5. Implemente um encoder incremental linear que consiga detectar o sentido do movimento.
6. O que é um LVDT? Para quais variáveis físicas podem ser utilizados?
7. Faça um esboço e também a função de transferência para um potenciômetro na função de
transdutor de deslocamento.
8. Qual a principal diferença entre sensores de presença indutivos e capacitivos?
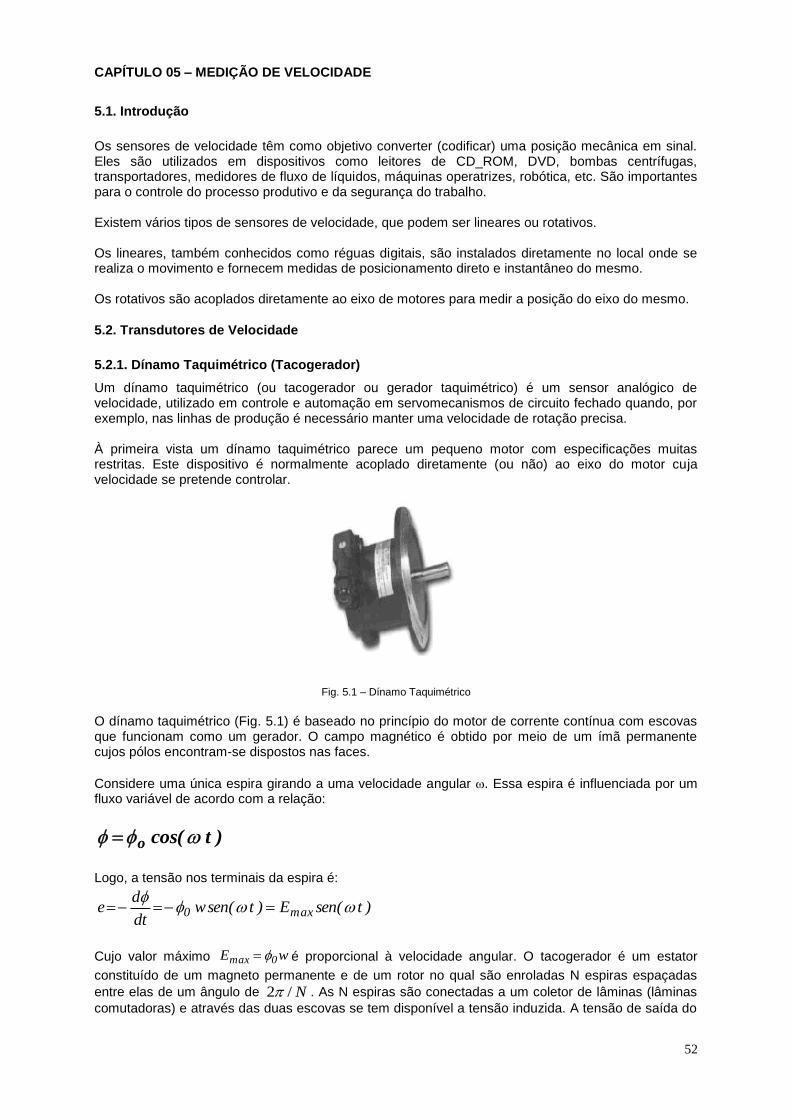
52
CAPÍTULO 05 – MEDIÇÃO DE VELOCIDADE
5.1. Introdução
Os sensores de velocidade têm como objetivo converter (codificar) uma posição mecânica em sinal. Eles são utilizados em dispositivos como leitores de CD_ROM, DVD, bombas centrífugas, transportadores, medidores de fluxo de líquidos, máquinas operatrizes, robótica, etc. São importantes para o controle do processo produtivo e da segurança do trabalho. Existem vários tipos de sensores de velocidade, que podem ser lineares ou rotativos. Os lineares, também conhecidos como réguas digitais, são instalados diretamente no local onde se realiza o movimento e fornecem medidas de posicionamento direto e instantâneo do mesmo. Os rotativos são acoplados diretamente ao eixo de motores para medir a posição do eixo do mesmo.
5.2. Transdutores de Velocidade
5.2.1. Dínamo Taquimétrico (Tacogerador)
Um dínamo taquimétrico (ou tacogerador ou gerador taquimétrico) é um sensor analógico de velocidade, utilizado em controle e automação em servomecanismos de circuito fechado quando, por exemplo, nas linhas de produção é necessário manter uma velocidade de rotação precisa. À primeira vista um dínamo taquimétrico parece um pequeno motor com especificações muitas restritas. Este dispositivo é normalmente acoplado diretamente (ou não) ao eixo do motor cuja velocidade se pretende controlar.
Fig. 5.1 – Dínamo Taquimétrico
O dínamo taquimétrico (Fig. 5.1) é baseado no princípio do motor de corrente contínua com escovas que funcionam como um gerador. O campo magnético é obtido por meio de um ímã permanente cujos pólos encontram-se dispostos nas faces.
Considere uma única espira girando a uma velocidade angular . Essa espira é influenciada por um fluxo variável de acordo com a relação:
)tcos(o
Logo, a tensão nos terminais da espira é:
)t(senE)t(senwdt
de max0
Cujo valor máximo wE 0max é proporcional à velocidade angular. O tacogerador é um estator
constituído de um magneto permanente e de um rotor no qual são enroladas N espiras espaçadas
entre elas de um ângulo de N/2 . As N espiras são conectadas a um coletor de lâminas (lâminas
comutadoras) e através das duas escovas se tem disponível a tensão induzida. A tensão de saída do
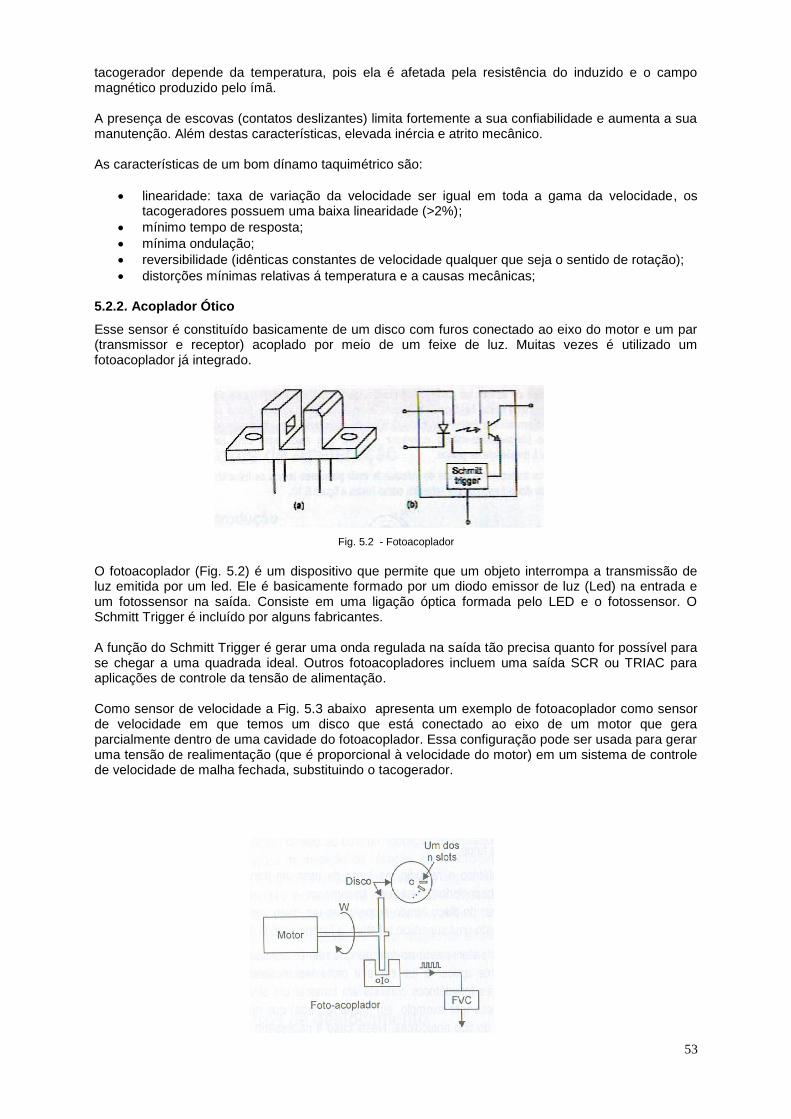
53
tacogerador depende da temperatura, pois ela é afetada pela resistência do induzido e o campo magnético produzido pelo ímã. A presença de escovas (contatos deslizantes) limita fortemente a sua confiabilidade e aumenta a sua manutenção. Além destas características, elevada inércia e atrito mecânico. As características de um bom dínamo taquimétrico são:
linearidade: taxa de variação da velocidade ser igual em toda a gama da velocidade, os tacogeradores possuem uma baixa linearidade (>2%);
mínimo tempo de resposta;
mínima ondulação;
reversibilidade (idênticas constantes de velocidade qualquer que seja o sentido de rotação);
distorções mínimas relativas á temperatura e a causas mecânicas; 5.2.2. Acoplador Ótico
Esse sensor é constituído basicamente de um disco com furos conectado ao eixo do motor e um par (transmissor e receptor) acoplado por meio de um feixe de luz. Muitas vezes é utilizado um fotoacoplador já integrado.
Fig. 5.2 - Fotoacoplador
O fotoacoplador (Fig. 5.2) é um dispositivo que permite que um objeto interrompa a transmissão de luz emitida por um led. Ele é basicamente formado por um diodo emissor de luz (Led) na entrada e um fotossensor na saída. Consiste em uma ligação óptica formada pelo LED e o fotossensor. O Schmitt Trigger é incluído por alguns fabricantes. A função do Schmitt Trigger é gerar uma onda regulada na saída tão precisa quanto for possível para se chegar a uma quadrada ideal. Outros fotoacopladores incluem uma saída SCR ou TRIAC para aplicações de controle da tensão de alimentação. Como sensor de velocidade a Fig. 5.3 abaixo apresenta um exemplo de fotoacoplador como sensor de velocidade em que temos um disco que está conectado ao eixo de um motor que gera parcialmente dentro de uma cavidade do fotoacoplador. Essa configuração pode ser usada para gerar uma tensão de realimentação (que é proporcional à velocidade do motor) em um sistema de controle de velocidade de malha fechada, substituindo o tacogerador.
54
Fig. 5.3 – Aplicação do fotoacoplador para medição de velocidade
A construção do disco inclui n furos distribuídos regularmente em intervalos de forma angular na sua periferia. Quando o disco gira, a luz do LED passa pelos furos do disco e é interrompida pela parte sólida do disco. Por esta razão, o fotoacoplador gera um pulso na saída cujo período do ciclo
depende da velocidade do motor . Desde que o disco tenha n furos, o fotoacoplador deve gerar n
pulsos para cada revolução do disco. Seja a velocidade do motor (RPM) ou /60 (RPS), a freqüência dos pulsos pode ser expressa por:
][60
Hzn
f
Este tipo de sensor faz parte dos denominados transdutores digitais de velocidade que fornecem uma saída em forma de pulsos, variável com a velocidade. Esses pulsos são normalmente enviados a instrumentos contadores ou aplicados a um conversor freqüência-para-tensão, cuja saída será uma tensão DC proporcional à freqüência dos pulsos.
EXERCÍCIOS
1. Descreva em poucas palavras o principio básico de funcionamento do tacogerador. Principais
características e aplicações. 2. Descreva em poucas palavras o principio básico de funcionamento do acoplador óptico. Como ele
pode ser utilizado para medir velocidade? 3. Se você estiver utilizando um encoder simples como controle de velocidade de um motor.
Considerando que o seu controle é analógico, o que você deve fazer antes de utilizar a informação do encoder?

55
CAPÍTULO 06 – MEDIÇÃO FORÇAS
6.1. Introdução
O desenvolvimento dos métodos de medições de força é recente na história da instrumentação. Seu surgimento basicamente se deu em função da necessidade de desenvolver máquinas confiáveis estruturalmente que pudessem atender à produção em massa. A questão então era possibilitar dimensionar os esforços de forma precisa e hábil, sem necessitar recorrer a complexos formalismos matemáticos que muitas vezes possibilitavam respostas aproximadas, além de exigir que os projetistas fossem exímios matemáticos. A grandeza física força é definida como um fenômeno físico que tende a acelerar um corpo. No sistema internacional de medidas a unidade de força é o Newton (N), ou seja, a força necessária para acelerar de 1 m/s
2 um corpo de massa de 1kg.
amF .
onde:
)s/m(quadradoaosegundopormetros:unidadeaceleraçãoa
)kg(ramalogki:unidademassam
)N(Newton:unidadeforçaF
2
A força que tende a anular a força gravitacional que a terra exerce sobre qualquer massa é denominada PESO. Assim, um corpo de 1kg de massa na superfície da terra tem atuando sobre ele uma força de peso igual à força com a qual ele é atraído, ou seja um peso de 1kg . 9,8 m/s
2 (onde
9,8 m/s2 é a aceleração da gravidade).
N8,9s/m8,9.kgf1g.mP 2
onde:
2s/m:unidadegravidadedaaceleraçãog
)kg(ramalogki:unidadepesoP
6.2. Transdutores de Forças
6.2.1. Balança de alavanca (Comparação com uma força conhecida)
Quando o torque ( d.F , onde: distânciad;forçaF ) desconhecido for igual ao torque
produzido pelo corpo conhecido o sistema estará em equilíbrio. Assim a força F é comparada com o peso conhecido. É importante que as massas e os comprimentos dos braços do lado direito e do lado esquerdo do apoio sejam iguais para ocorrer equilíbrio quando nenhuma força e nenhum peso estiverem aplicado na balança (Fig. 6.1). Nos sistemas de alavancas existe uma relação entre o ponto de apoio e o ponto de aplicação da força que tem que ser respeitado de modo que F1.d1 = F2. d2 (torque).
Fig. 6.1 – Balança
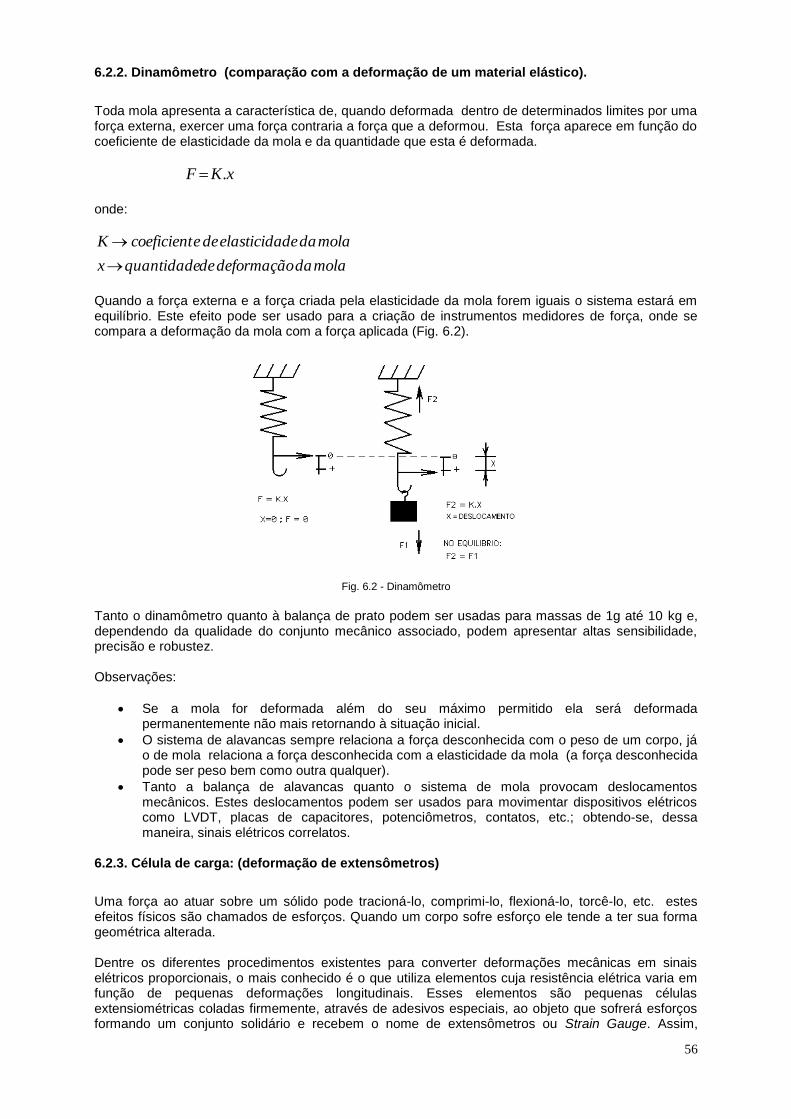
56
6.2.2. Dinamômetro (comparação com a deformação de um material elástico).
Toda mola apresenta a característica de, quando deformada dentro de determinados limites por uma força externa, exercer uma força contraria a força que a deformou. Esta força aparece em função do coeficiente de elasticidade da mola e da quantidade que esta é deformada.
xKF .
onde:
moladadeformaçãodequantidadex
moladadeelasticidadeecoeficientK
Quando a força externa e a força criada pela elasticidade da mola forem iguais o sistema estará em equilíbrio. Este efeito pode ser usado para a criação de instrumentos medidores de força, onde se compara a deformação da mola com a força aplicada (Fig. 6.2).
Fig. 6.2 - Dinamômetro
Tanto o dinamômetro quanto à balança de prato podem ser usadas para massas de 1g até 10 kg e, dependendo da qualidade do conjunto mecânico associado, podem apresentar altas sensibilidade, precisão e robustez. Observações:
Se a mola for deformada além do seu máximo permitido ela será deformada permanentemente não mais retornando à situação inicial.
O sistema de alavancas sempre relaciona a força desconhecida com o peso de um corpo, já o de mola relaciona a força desconhecida com a elasticidade da mola (a força desconhecida pode ser peso bem como outra qualquer).
Tanto a balança de alavancas quanto o sistema de mola provocam deslocamentos mecânicos. Estes deslocamentos podem ser usados para movimentar dispositivos elétricos como LVDT, placas de capacitores, potenciômetros, contatos, etc.; obtendo-se, dessa maneira, sinais elétricos correlatos.
6.2.3. Célula de carga: (deformação de extensômetros)
Uma força ao atuar sobre um sólido pode tracioná-lo, comprimi-lo, flexioná-lo, torcê-lo, etc. estes efeitos físicos são chamados de esforços. Quando um corpo sofre esforço ele tende a ter sua forma geométrica alterada. Dentre os diferentes procedimentos existentes para converter deformações mecânicas em sinais elétricos proporcionais, o mais conhecido é o que utiliza elementos cuja resistência elétrica varia em função de pequenas deformações longitudinais. Esses elementos são pequenas células extensiométricas coladas firmemente, através de adesivos especiais, ao objeto que sofrerá esforços formando um conjunto solidário e recebem o nome de extensômetros ou Strain Gauge. Assim,
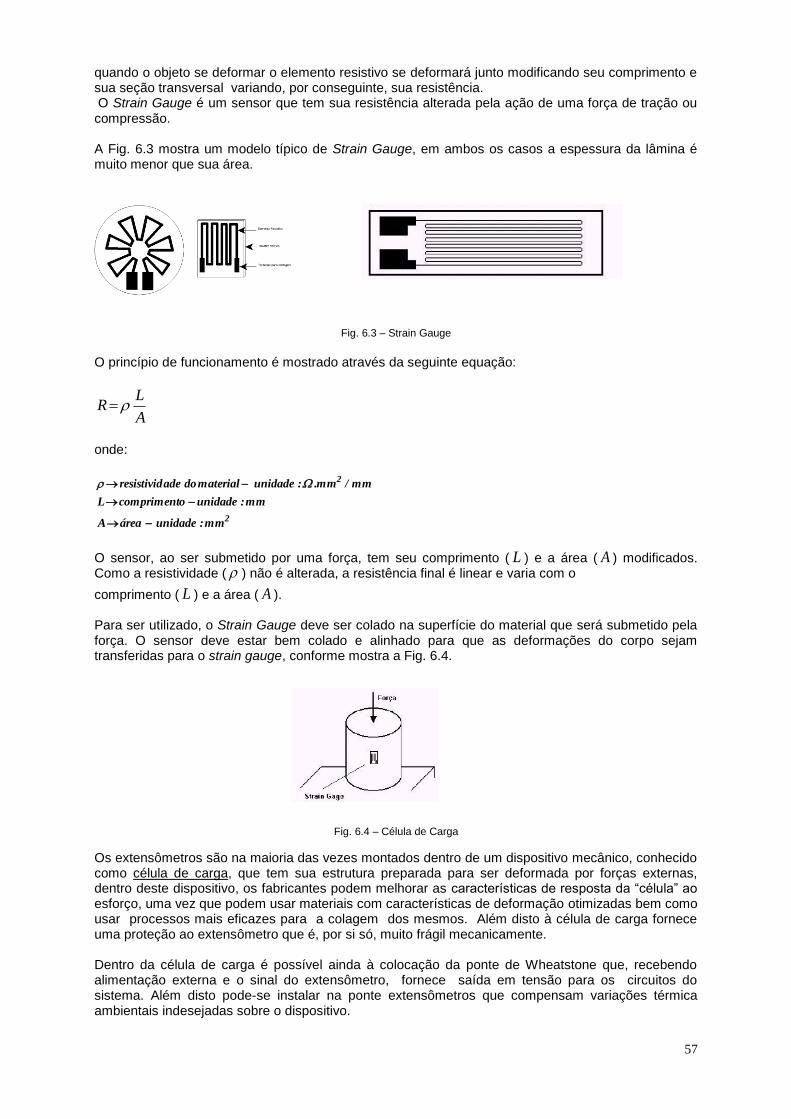
57
quando o objeto se deformar o elemento resistivo se deformará junto modificando seu comprimento e sua seção transversal variando, por conseguinte, sua resistência. O Strain Gauge é um sensor que tem sua resistência alterada pela ação de uma força de tração ou compressão. A Fig. 6.3 mostra um modelo típico de Strain Gauge, em ambos os casos a espessura da lâmina é muito menor que sua área.
Fig. 6.3 – Strain Gauge
O princípio de funcionamento é mostrado através da seguinte equação:
A
LR
onde:
2
2
mm:unidadeáreaA
mm:unidadeocomprimentL
mm/mm.:unidadematerialdoaderesistivid
O sensor, ao ser submetido por uma força, tem seu comprimento ( L ) e a área ( A ) modificados. Como a resistividade ( ) não é alterada, a resistência final é linear e varia com o
comprimento ( L ) e a área ( A ). Para ser utilizado, o Strain Gauge deve ser colado na superfície do material que será submetido pela força. O sensor deve estar bem colado e alinhado para que as deformações do corpo sejam transferidas para o strain gauge, conforme mostra a Fig. 6.4.
Fig. 6.4 – Célula de Carga
Os extensômetros são na maioria das vezes montados dentro de um dispositivo mecânico, conhecido como célula de carga, que tem sua estrutura preparada para ser deformada por forças externas, dentro deste dispositivo, os fabricantes podem melhorar as características de resposta da “célula” ao esforço, uma vez que podem usar materiais com características de deformação otimizadas bem como usar processos mais eficazes para a colagem dos mesmos. Além disto à célula de carga fornece uma proteção ao extensômetro que é, por si só, muito frágil mecanicamente. Dentro da célula de carga é possível ainda à colocação da ponte de Wheatstone que, recebendo alimentação externa e o sinal do extensômetro, fornece saída em tensão para os circuitos do sistema. Além disto pode-se instalar na ponte extensômetros que compensam variações térmica ambientais indesejadas sobre o dispositivo.
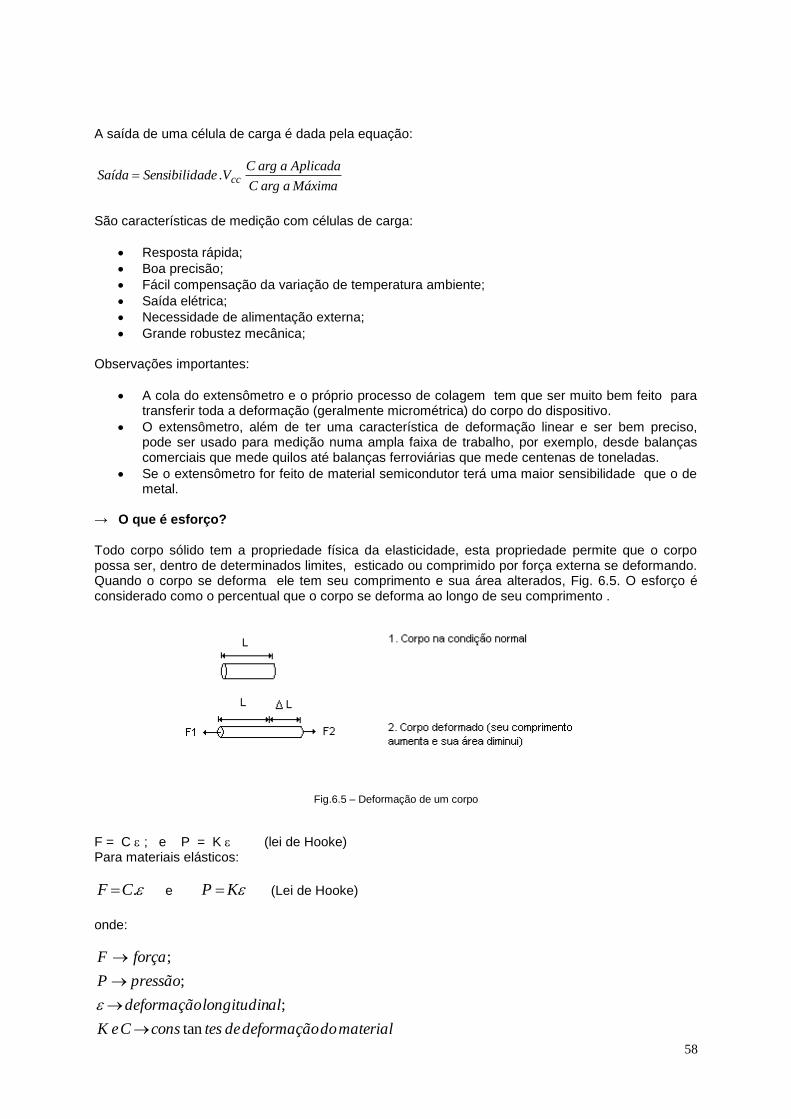
58
A saída de uma célula de carga é dada pela equação:
MáximaaargC
AplicadaaargCV.adeSensibilidSaída cc
São características de medição com células de carga:
Resposta rápida;
Boa precisão;
Fácil compensação da variação de temperatura ambiente;
Saída elétrica;
Necessidade de alimentação externa;
Grande robustez mecânica; Observações importantes:
A cola do extensômetro e o próprio processo de colagem tem que ser muito bem feito para transferir toda a deformação (geralmente micrométrica) do corpo do dispositivo.
O extensômetro, além de ter uma característica de deformação linear e ser bem preciso, pode ser usado para medição numa ampla faixa de trabalho, por exemplo, desde balanças comerciais que mede quilos até balanças ferroviárias que mede centenas de toneladas.
Se o extensômetro for feito de material semicondutor terá uma maior sensibilidade que o de metal.
→ O que é esforço? Todo corpo sólido tem a propriedade física da elasticidade, esta propriedade permite que o corpo possa ser, dentro de determinados limites, esticado ou comprimido por força externa se deformando. Quando o corpo se deforma ele tem seu comprimento e sua área alterados, Fig. 6.5. O esforço é considerado como o percentual que o corpo se deforma ao longo de seu comprimento .
Fig.6.5 – Deformação de um corpo
F = C ; e P = K (lei de Hooke) Para materiais elásticos:
.CF e KP (Lei de Hooke)
onde:
materialdodeformaçãodetesconsCeK
allongitudindeformação
pressãoP
forçaF
tan
;
;
;

59
L
L
(fator de deformação longitudinal)
t (fator de deformação transversal)
A
As
2
(fator de deformação da área transversal A = área)
0,3 para metais (módulo de Poisson) Assim, se a deformação de um material for conhecida pode-se determinar o valor da pressão ou da força que foi aplicada para deformá-lo. → Como o Extensômetro relaciona deformação com sinal elétrico? O extensômetro pode transformar a deformação em sinal elétrico porque, estando colado ao corpo que se deforma sua geometria será alterada de maneira análoga, assim, como a Resistência nominal
do “fio” de resistência do extensômetro é A
L , a deformação provocará uma alteração do
comprimento e da área e, por conseguinte, da resistência do mesmo, que será:
)(
)(
AA
LLRR
Trabalhando algebricamente esta equação e descartando a resistividade (), pois esta é uma constante que não depende da geometria do material, chega-se a seguinte expressão:
A
A
L
L
R
R
Relacionando-se esta equação com as de deformação, teremos:
2
R
R
ou seja o esforço provoca uma deformação que causa uma variação linear da resistência do extensômetro. O fator de sensibilidade de um extensômetro é definido em função da sua deformação longitudinal e vale:
R
R
; R
R logo: 21
onde:
6
26,1
sen
)(
)(
orsemicondut
metalparatípico a
sibilidadedefator
Conclusão: O Extensômetro fornece um sinal de variação de resistência elétrica proporcional à deformação transmitida a ele. Como pela de Hooke pode-se relacionar deformação com força ou pressão o extensômetro é um transdutor de força ou pressão em sinal elétrico. EXEMPLO: Extensômetros medindo peso (Fig.6.6)
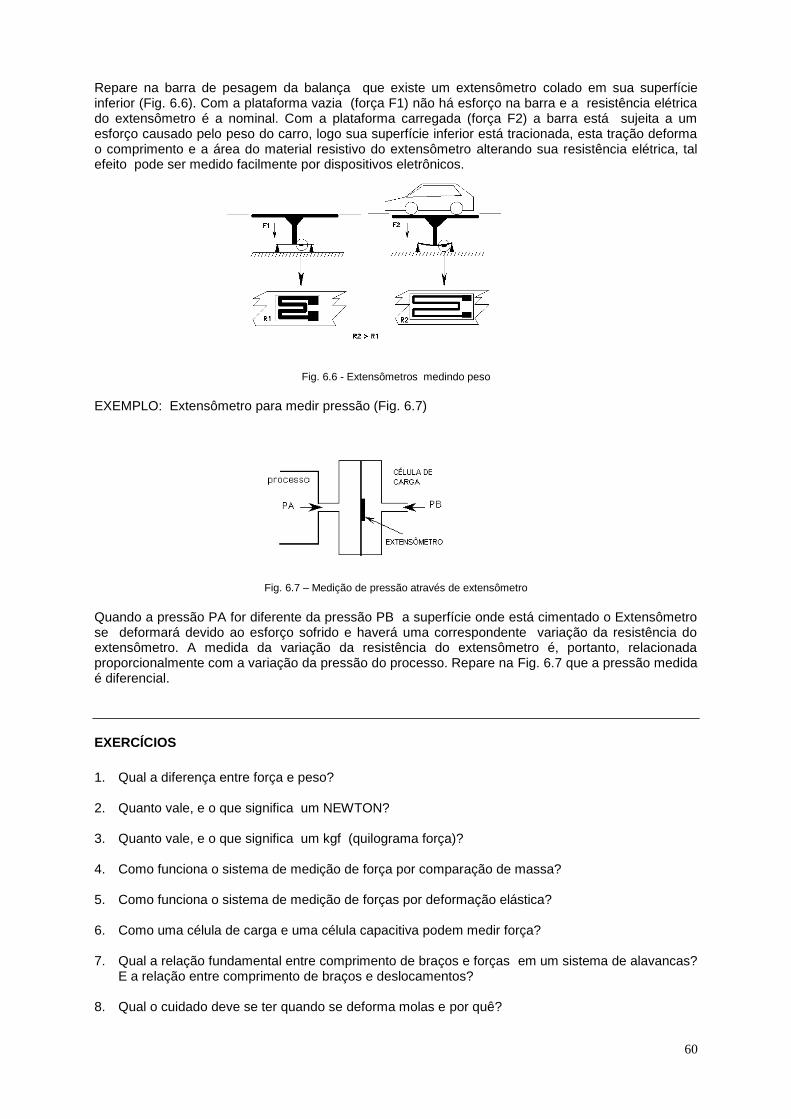
60
Repare na barra de pesagem da balança que existe um extensômetro colado em sua superfície inferior (Fig. 6.6). Com a plataforma vazia (força F1) não há esforço na barra e a resistência elétrica do extensômetro é a nominal. Com a plataforma carregada (força F2) a barra está sujeita a um esforço causado pelo peso do carro, logo sua superfície inferior está tracionada, esta tração deforma o comprimento e a área do material resistivo do extensômetro alterando sua resistência elétrica, tal efeito pode ser medido facilmente por dispositivos eletrônicos.
Fig. 6.6 - Extensômetros medindo peso
EXEMPLO: Extensômetro para medir pressão (Fig. 6.7)
Fig. 6.7 – Medição de pressão através de extensômetro
Quando a pressão PA for diferente da pressão PB a superfície onde está cimentado o Extensômetro se deformará devido ao esforço sofrido e haverá uma correspondente variação da resistência do extensômetro. A medida da variação da resistência do extensômetro é, portanto, relacionada proporcionalmente com a variação da pressão do processo. Repare na Fig. 6.7 que a pressão medida é diferencial.
EXERCÍCIOS
1. Qual a diferença entre força e peso? 2. Quanto vale, e o que significa um NEWTON? 3. Quanto vale, e o que significa um kgf (quilograma força)? 4. Como funciona o sistema de medição de força por comparação de massa? 5. Como funciona o sistema de medição de forças por deformação elástica? 6. Como uma célula de carga e uma célula capacitiva podem medir força? 7. Qual a relação fundamental entre comprimento de braços e forças em um sistema de alavancas?
E a relação entre comprimento de braços e deslocamentos? 8. Qual o cuidado deve se ter quando se deforma molas e por quê?
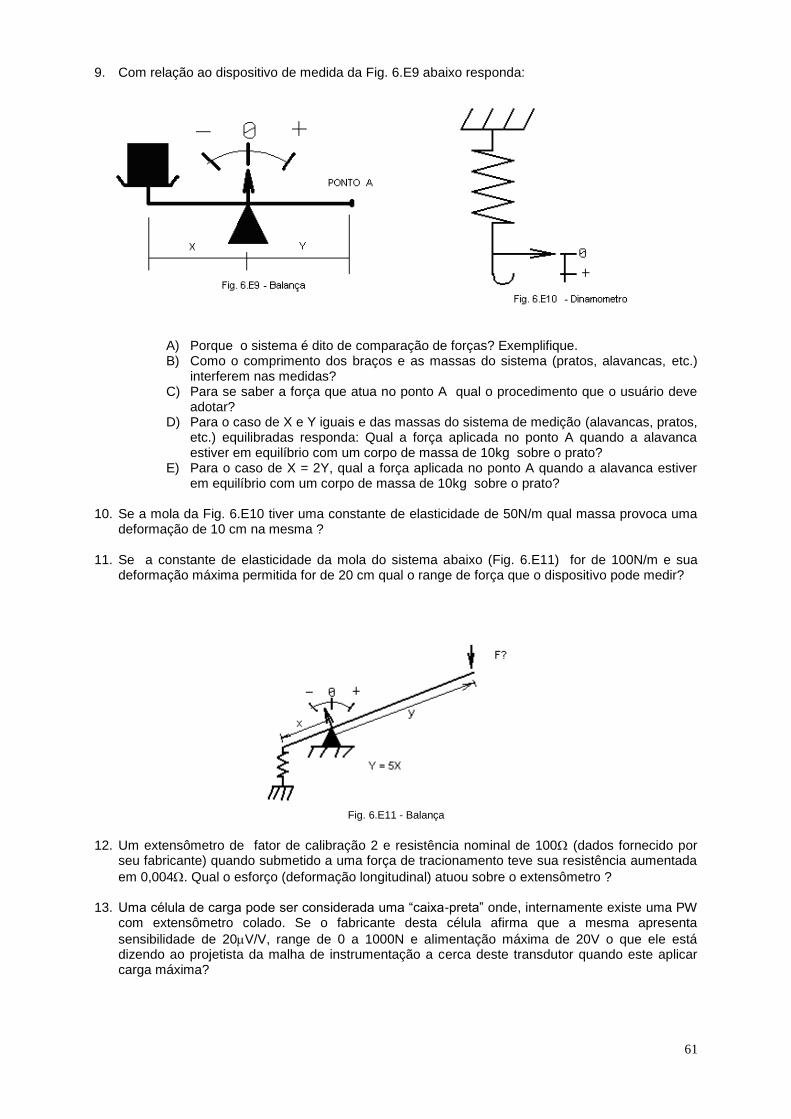
61
9. Com relação ao dispositivo de medida da Fig. 6.E9 abaixo responda:
A) Porque o sistema é dito de comparação de forças? Exemplifique. B) Como o comprimento dos braços e as massas do sistema (pratos, alavancas, etc.)
interferem nas medidas? C) Para se saber a força que atua no ponto A qual o procedimento que o usuário deve
adotar? D) Para o caso de X e Y iguais e das massas do sistema de medição (alavancas, pratos,
etc.) equilibradas responda: Qual a força aplicada no ponto A quando a alavanca estiver em equilíbrio com um corpo de massa de 10kg sobre o prato?
E) Para o caso de X = 2Y, qual a força aplicada no ponto A quando a alavanca estiver em equilíbrio com um corpo de massa de 10kg sobre o prato?
10. Se a mola da Fig. 6.E10 tiver uma constante de elasticidade de 50N/m qual massa provoca uma
deformação de 10 cm na mesma ? 11. Se a constante de elasticidade da mola do sistema abaixo (Fig. 6.E11) for de 100N/m e sua
deformação máxima permitida for de 20 cm qual o range de força que o dispositivo pode medir?
Fig. 6.E11 - Balança
12. Um extensômetro de fator de calibração 2 e resistência nominal de 100 (dados fornecido por seu fabricante) quando submetido a uma força de tracionamento teve sua resistência aumentada
em 0,004. Qual o esforço (deformação longitudinal) atuou sobre o extensômetro ? 13. Uma célula de carga pode ser considerada uma “caixa-preta” onde, internamente existe uma PW
com extensômetro colado. Se o fabricante desta célula afirma que a mesma apresenta
sensibilidade de 20V/V, range de 0 a 1000N e alimentação máxima de 20V o que ele está dizendo ao projetista da malha de instrumentação a cerca deste transdutor quando este aplicar carga máxima?

62
CAPÍTULO 07 – MEDIÇÃO DE PRESSÃO
7.1. Introdução
Conceitua-se pressão geralmente como sendo a força exercida em uma determinada unidade de área (Fig. 7.1).
Fig. 7. 1- Força aplicada em uma superfície
A
FP
onde:
Pa
mNpressãoP
máreaA
NforçaF
2
2
A pressão costuma ser representada por uma série de unidades, como: psi (libras/polegada quadrada), bar, atm, Pa (Pascal), kgf/cm
2, mmH20, mmHg, etc. No sistema internacional de unidades
(S.I.) a pressão passou a ser definida em termos de Newton por metro quadrado, também conhecida como Pascal. Podemos utilizar tabelas (Tabela 1) de conversão para simplificar a transferência entre as diferentes unidades.
Tabela. 1 – Conversão de Unidades de Pressão
É a variável mais medida pois através da pressão podemos medir outras variáveis como vazão, nível e temperatura. A vazão é medida pela pressão diferencial entre dois pontos de uma tubulação onde existe uma restrição. O nível pode ser medido pela pressão estática do fluido no fundo do tanque. Quanto maior a pressão, maior o nível. Deve ser levada em consideração o peso específico do fluido.
63
A temperatura pode ser medida pela pressão interna de um bulbo e capilar inseridos em determinado produto. O aumento da temperatura ocasiona o aumento da pressão interna do bulbo e esta pressão pode ser relacionada com a temperatura do produto naquele instante.
7.2. Tipos de Pressão
Pressão Atmosférica É a pressão exercida pelo peso da camada de ar existente na atmosfera terrestre. (Lembre-se que o ar é composto por Nitrogênio 79%, Oxigênio 20%, e 1% outros gases).
Pressão relativa ou manométrica É a diferença medida entre uma pressão desconhecida e a atmosférica. É a pressão medida tomando-se como referência atmosférica local, isto é, onde se está. Por exemplo: A pressão do pneu de um automóvel que é de aproximadamente 26 psi, ou 1,9 bar.
Pressão absoluta A pressão absoluta é a diferença entre a pressão em um ponto particular num fluido e a pressão absoluta (zero), isto é, vácuo completo. Também se diz que é a medida feita a partir do vácuo absoluto.
Pressão diferencial É a diferença medida entre duas pressões desconhecidas, sendo nenhuma delas a pressão atmosférica.
Pressão negativa ou vácuo É quando um sistema tem pressão relativa menor que a pressão atmosférica.
Pressão estática É a pressão exercida por um líquido em repouso ou que esteja fluindo perpendicularmente à tomada de impulso, por unidade de área exercida.
Pressão dinâmica ou cinética É a pressão exercida por um fluido em movimento. É medida fazendo a tomada de impulso de tal forma que recebe o impacto do fluido. A Fig. 7.2 mostra um comparativo de Pressões.
Fig. 7.2 - Comparativo de Pressões
7.3. Classificação dos Medidores de Pressão
Devido a sua quantidade e diversidade estes podem ser agrupados de varias maneiras, entre elas:
Pelo Princípio de Funcionamento:
→ Equilíbrio de uma pressão desconhecida com uma força conhecida; → Deformação de seu material elástico;
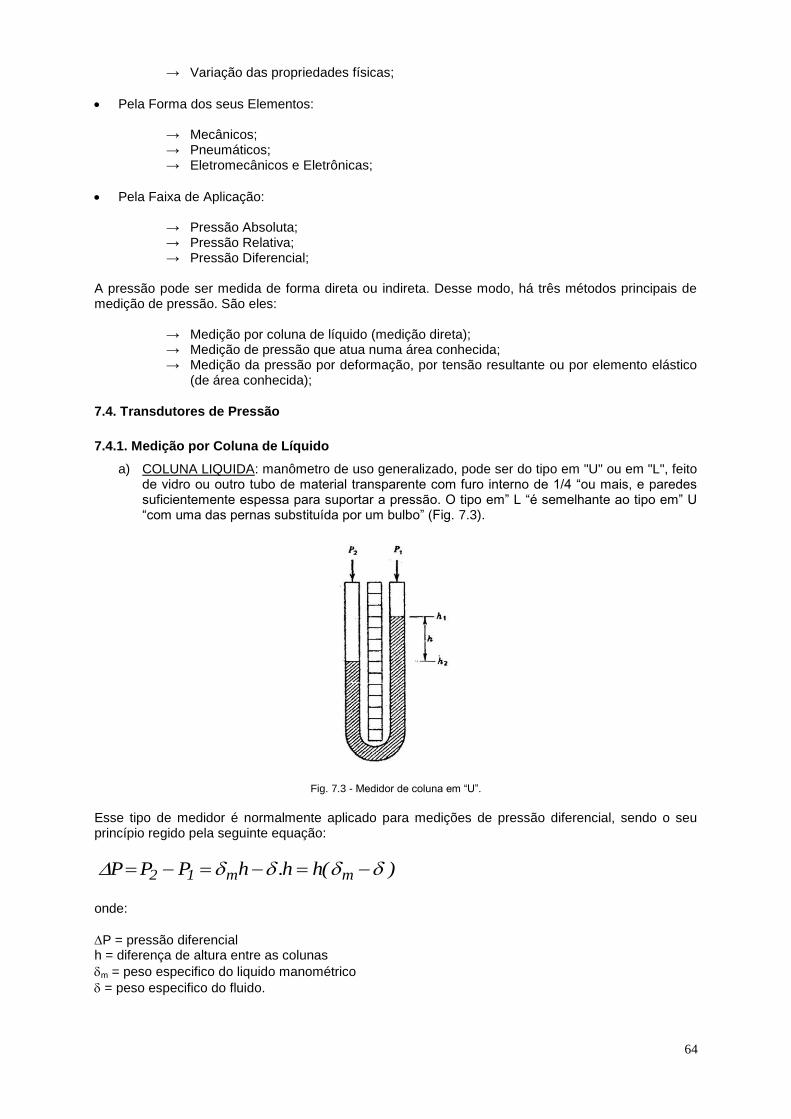
64
→ Variação das propriedades físicas;
Pela Forma dos seus Elementos:
→ Mecânicos; → Pneumáticos; → Eletromecânicos e Eletrônicas;
Pela Faixa de Aplicação:
→ Pressão Absoluta; → Pressão Relativa; → Pressão Diferencial;
A pressão pode ser medida de forma direta ou indireta. Desse modo, há três métodos principais de medição de pressão. São eles:
→ Medição por coluna de líquido (medição direta); → Medição de pressão que atua numa área conhecida; → Medição da pressão por deformação, por tensão resultante ou por elemento elástico
(de área conhecida);
7.4. Transdutores de Pressão
7.4.1. Medição por Coluna de Líquido
a) COLUNA LIQUIDA: manômetro de uso generalizado, pode ser do tipo em "U" ou em "L", feito de vidro ou outro tubo de material transparente com furo interno de 1/4 “ou mais, e paredes suficientemente espessa para suportar a pressão. O tipo em” L “é semelhante ao tipo em” U “com uma das pernas substituída por um bulbo” (Fig. 7.3).
Fig. 7.3 - Medidor de coluna em “U”.
Esse tipo de medidor é normalmente aplicado para medições de pressão diferencial, sendo o seu princípio regido pela seguinte equação:
)(hh.hPPP mm12
onde:
P = pressão diferencial h = diferença de altura entre as colunas
m = peso especifico do liquido manométrico
= peso especifico do fluido.
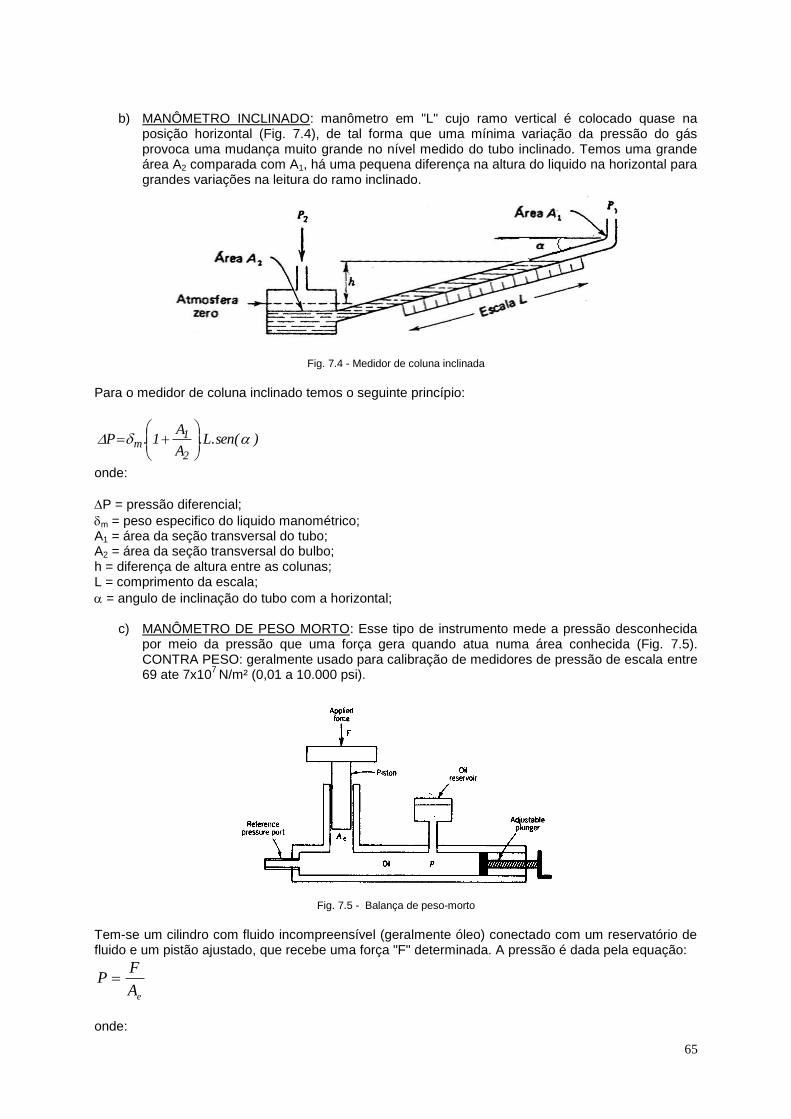
65
b) MANÔMETRO INCLINADO: manômetro em "L" cujo ramo vertical é colocado quase na posição horizontal (Fig. 7.4), de tal forma que uma mínima variação da pressão do gás provoca uma mudança muito grande no nível medido do tubo inclinado. Temos uma grande área A2 comparada com A1, há uma pequena diferença na altura do liquido na horizontal para grandes variações na leitura do ramo inclinado.
Fig. 7.4 - Medidor de coluna inclinada
Para o medidor de coluna inclinado temos o seguinte princípio:
)(sen.L.A
A1.P
2
1m
onde:
P = pressão diferencial;
m = peso especifico do liquido manométrico; A1 = área da seção transversal do tubo; A2 = área da seção transversal do bulbo; h = diferença de altura entre as colunas; L = comprimento da escala;
= angulo de inclinação do tubo com a horizontal;
c) MANÔMETRO DE PESO MORTO: Esse tipo de instrumento mede a pressão desconhecida por meio da pressão que uma força gera quando atua numa área conhecida (Fig. 7.5). CONTRA PESO: geralmente usado para calibração de medidores de pressão de escala entre 69 ate 7x10
7 N/m² (0,01 a 10.000 psi).
Fig. 7.5 - Balança de peso-morto
Tem-se um cilindro com fluido incompreensível (geralmente óleo) conectado com um reservatório de fluido e um pistão ajustado, que recebe uma força "F" determinada. A pressão é dada pela equação:
eA
FP
onde:
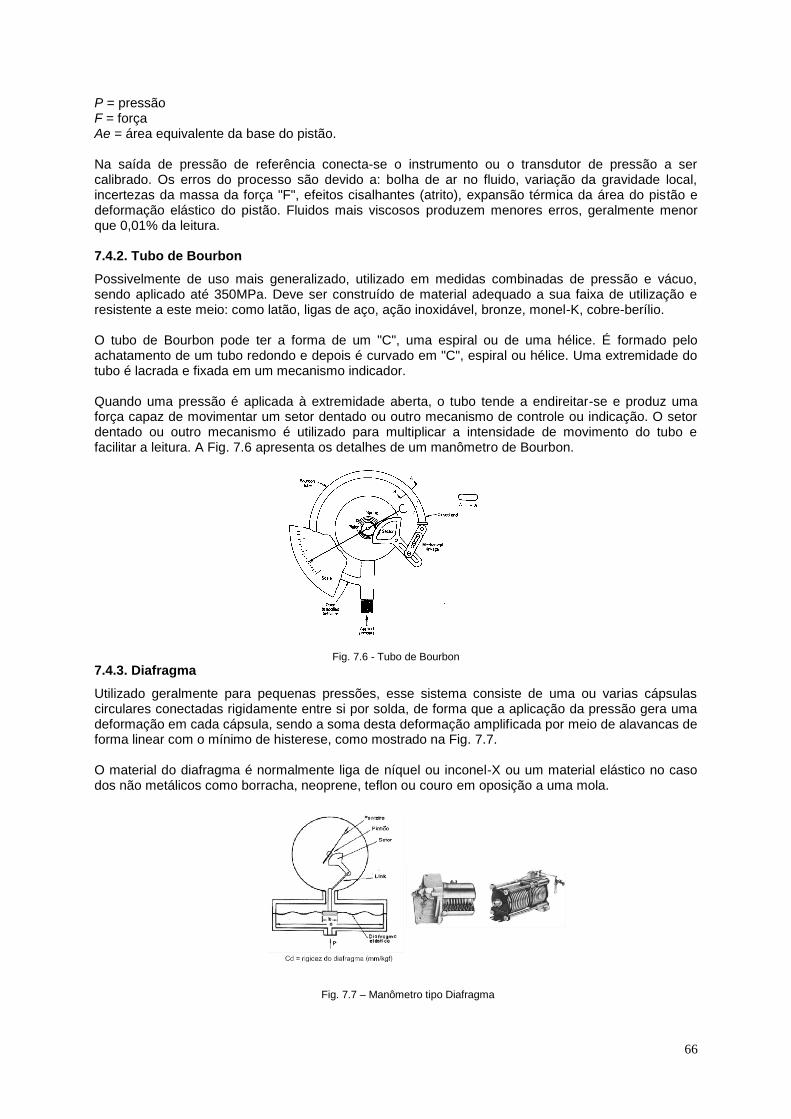
66
P = pressão F = força Ae = área equivalente da base do pistão. Na saída de pressão de referência conecta-se o instrumento ou o transdutor de pressão a ser calibrado. Os erros do processo são devido a: bolha de ar no fluido, variação da gravidade local, incertezas da massa da força "F", efeitos cisalhantes (atrito), expansão térmica da área do pistão e deformação elástico do pistão. Fluidos mais viscosos produzem menores erros, geralmente menor que 0,01% da leitura. 7.4.2. Tubo de Bourbon
Possivelmente de uso mais generalizado, utilizado em medidas combinadas de pressão e vácuo, sendo aplicado até 350MPa. Deve ser construído de material adequado a sua faixa de utilização e resistente a este meio: como latão, ligas de aço, ação inoxidável, bronze, monel-K, cobre-berílio. O tubo de Bourbon pode ter a forma de um "C", uma espiral ou de uma hélice. É formado pelo achatamento de um tubo redondo e depois é curvado em "C", espiral ou hélice. Uma extremidade do tubo é lacrada e fixada em um mecanismo indicador. Quando uma pressão é aplicada à extremidade aberta, o tubo tende a endireitar-se e produz uma força capaz de movimentar um setor dentado ou outro mecanismo de controle ou indicação. O setor dentado ou outro mecanismo é utilizado para multiplicar a intensidade de movimento do tubo e facilitar a leitura. A Fig. 7.6 apresenta os detalhes de um manômetro de Bourbon.
Fig. 7.6 - Tubo de Bourbon
7.4.3. Diafragma
Utilizado geralmente para pequenas pressões, esse sistema consiste de uma ou varias cápsulas circulares conectadas rigidamente entre si por solda, de forma que a aplicação da pressão gera uma deformação em cada cápsula, sendo a soma desta deformação amplificada por meio de alavancas de forma linear com o mínimo de histerese, como mostrado na Fig. 7.7. O material do diafragma é normalmente liga de níquel ou inconel-X ou um material elástico no caso dos não metálicos como borracha, neoprene, teflon ou couro em oposição a uma mola.
Fig. 7.7 – Manômetro tipo Diafragma
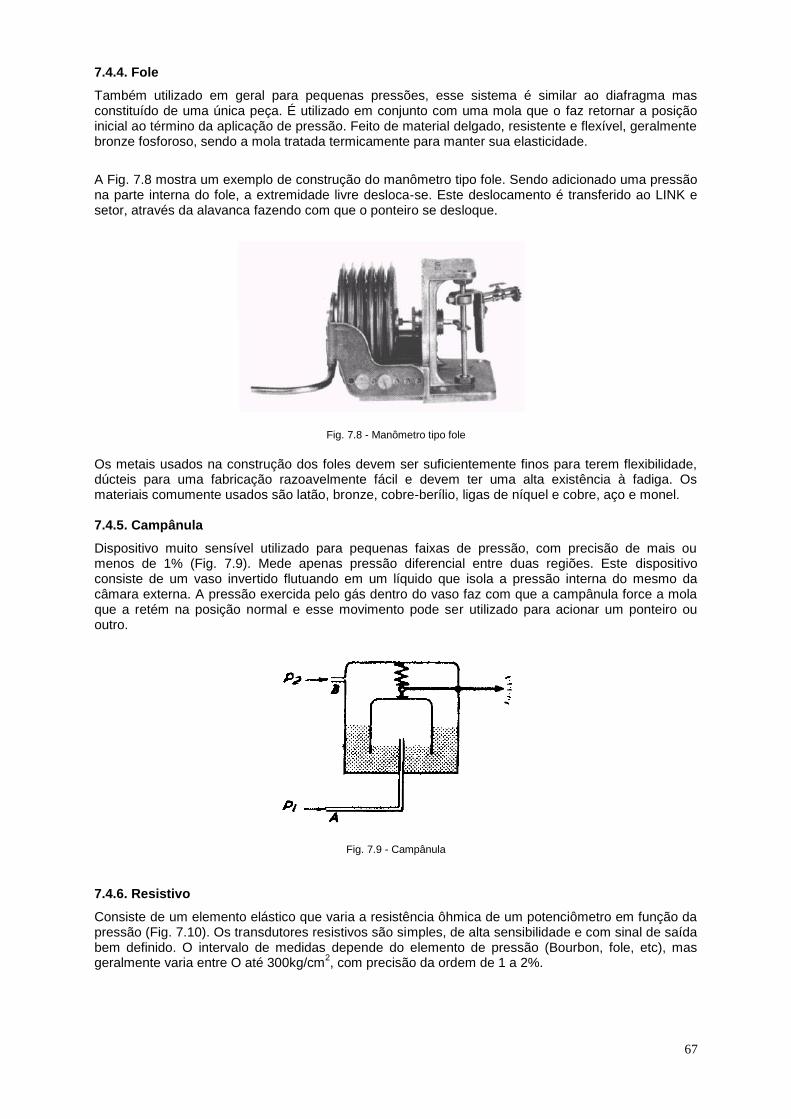
67
7.4.4. Fole
Também utilizado em geral para pequenas pressões, esse sistema é similar ao diafragma mas constituído de uma única peça. É utilizado em conjunto com uma mola que o faz retornar a posição inicial ao término da aplicação de pressão. Feito de material delgado, resistente e flexível, geralmente bronze fosforoso, sendo a mola tratada termicamente para manter sua elasticidade.
A Fig. 7.8 mostra um exemplo de construção do manômetro tipo fole. Sendo adicionado uma pressão na parte interna do fole, a extremidade livre desloca-se. Este deslocamento é transferido ao LINK e setor, através da alavanca fazendo com que o ponteiro se desloque.
Fig. 7.8 - Manômetro tipo fole
Os metais usados na construção dos foles devem ser suficientemente finos para terem flexibilidade, dúcteis para uma fabricação razoavelmente fácil e devem ter uma alta existência à fadiga. Os materiais comumente usados são latão, bronze, cobre-berílio, ligas de níquel e cobre, aço e monel. 7.4.5. Campânula
Dispositivo muito sensível utilizado para pequenas faixas de pressão, com precisão de mais ou menos de 1% (Fig. 7.9). Mede apenas pressão diferencial entre duas regiões. Este dispositivo consiste de um vaso invertido flutuando em um líquido que isola a pressão interna do mesmo da câmara externa. A pressão exercida pelo gás dentro do vaso faz com que a campânula force a mola que a retém na posição normal e esse movimento pode ser utilizado para acionar um ponteiro ou outro.
Fig. 7.9 - Campânula
7.4.6. Resistivo
Consiste de um elemento elástico que varia a resistência ôhmica de um potenciômetro em função da pressão (Fig. 7.10). Os transdutores resistivos são simples, de alta sensibilidade e com sinal de saída bem definido. O intervalo de medidas depende do elemento de pressão (Bourbon, fole, etc), mas geralmente varia entre O até 300kg/cm
2, com precisão da ordem de 1 a 2%.
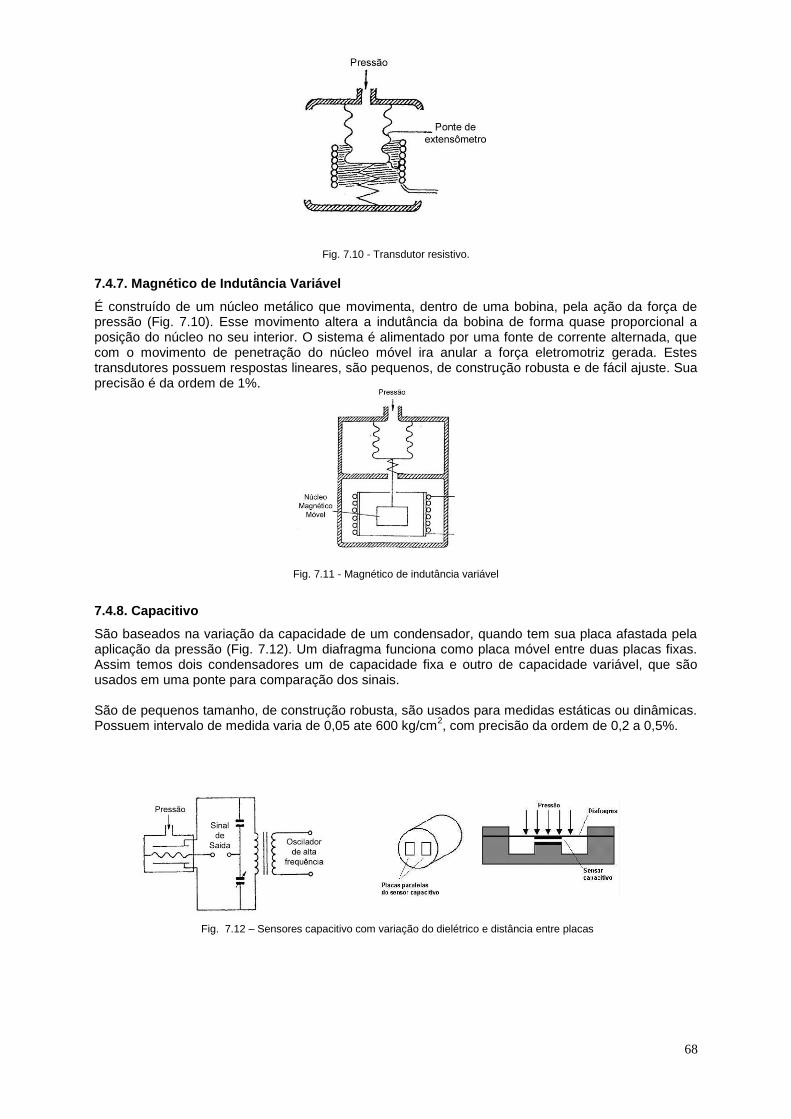
68
Fig. 7.10 - Transdutor resistivo.
7.4.7. Magnético de Indutância Variável
É construído de um núcleo metálico que movimenta, dentro de uma bobina, pela ação da força de pressão (Fig. 7.10). Esse movimento altera a indutância da bobina de forma quase proporcional a posição do núcleo no seu interior. O sistema é alimentado por uma fonte de corrente alternada, que com o movimento de penetração do núcleo móvel ira anular a força eletromotriz gerada. Estes transdutores possuem respostas lineares, são pequenos, de construção robusta e de fácil ajuste. Sua precisão é da ordem de 1%.
Fig. 7.11 - Magnético de indutância variável
7.4.8. Capacitivo
São baseados na variação da capacidade de um condensador, quando tem sua placa afastada pela aplicação da pressão (Fig. 7.12). Um diafragma funciona como placa móvel entre duas placas fixas. Assim temos dois condensadores um de capacidade fixa e outro de capacidade variável, que são usados em uma ponte para comparação dos sinais. São de pequenos tamanho, de construção robusta, são usados para medidas estáticas ou dinâmicas. Possuem intervalo de medida varia de 0,05 ate 600 kg/cm
2, com precisão da ordem de 0,2 a 0,5%.
Fig. 7.12 – Sensores capacitivo com variação do dielétrico e distância entre placas
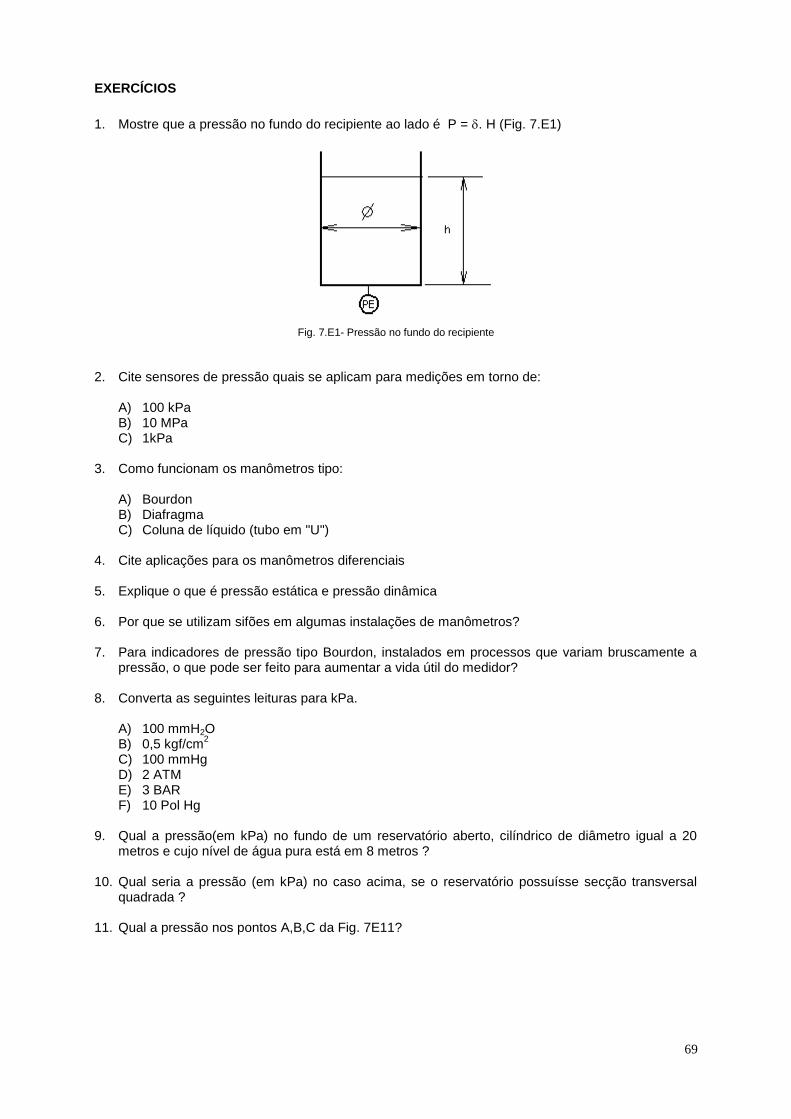
69
EXERCÍCIOS
1. Mostre que a pressão no fundo do recipiente ao lado é P = . H (Fig. 7.E1)
Fig. 7.E1- Pressão no fundo do recipiente
2. Cite sensores de pressão quais se aplicam para medições em torno de:
A) 100 kPa B) 10 MPa C) 1kPa
3. Como funcionam os manômetros tipo:
A) Bourdon B) Diafragma C) Coluna de líquido (tubo em "U")
4. Cite aplicações para os manômetros diferenciais 5. Explique o que é pressão estática e pressão dinâmica 6. Por que se utilizam sifões em algumas instalações de manômetros? 7. Para indicadores de pressão tipo Bourdon, instalados em processos que variam bruscamente a
pressão, o que pode ser feito para aumentar a vida útil do medidor? 8. Converta as seguintes leituras para kPa.
A) 100 mmH2O B) 0,5 kgf/cm
2
C) 100 mmHg D) 2 ATM E) 3 BAR F) 10 Pol Hg
9. Qual a pressão(em kPa) no fundo de um reservatório aberto, cilíndrico de diâmetro igual a 20
metros e cujo nível de água pura está em 8 metros ? 10. Qual seria a pressão (em kPa) no caso acima, se o reservatório possuísse secção transversal
quadrada ? 11. Qual a pressão nos pontos A,B,C da Fig. 7E11?
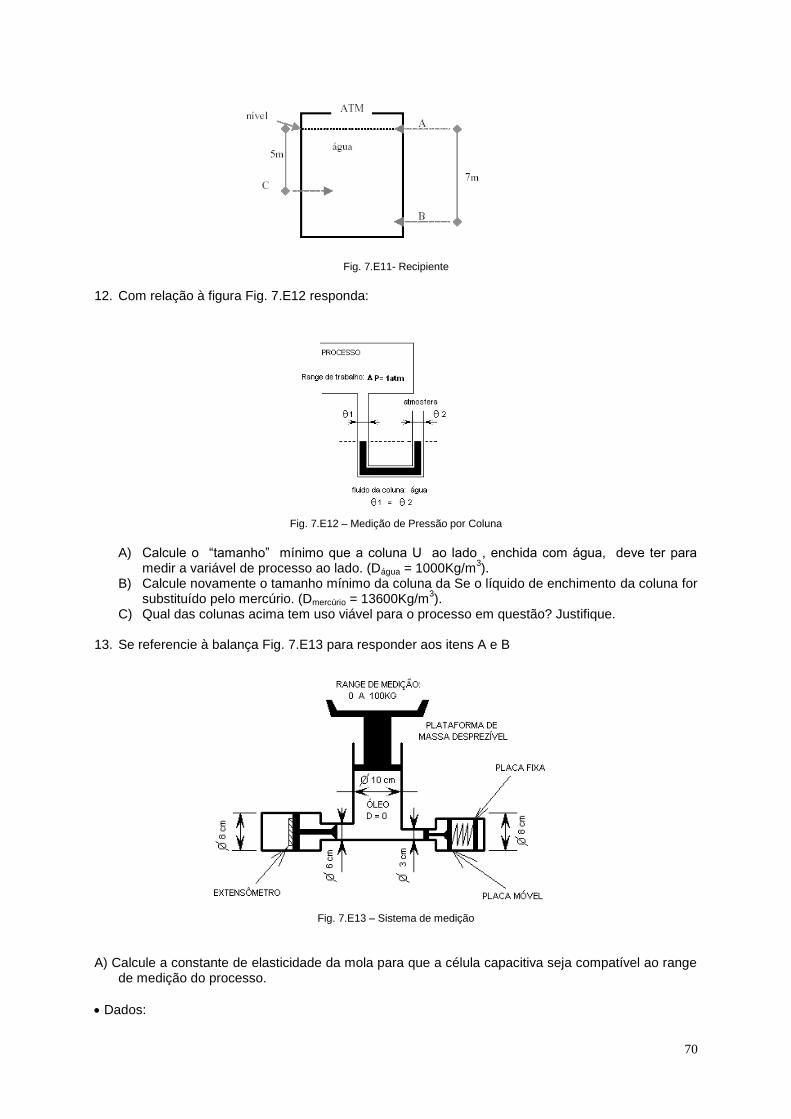
70
Fig. 7.E11- Recipiente
12. Com relação à figura Fig. 7.E12 responda:
Fig. 7.E12 – Medição de Pressão por Coluna
A) Calcule o “tamanho” mínimo que a coluna U ao lado , enchida com água, deve ter para
medir a variável de processo ao lado. (Dágua = 1000Kg/m3).
B) Calcule novamente o tamanho mínimo da coluna da Se o líquido de enchimento da coluna for substituído pelo mercúrio. (Dmercúrio = 13600Kg/m
3).
C) Qual das colunas acima tem uso viável para o processo em questão? Justifique. 13. Se referencie à balança Fig. 7.E13 para responder aos itens A e B
Fig. 7.E13 – Sistema de medição
A) Calcule a constante de elasticidade da mola para que a célula capacitiva seja compatível ao range
de medição do processo.
Dados:
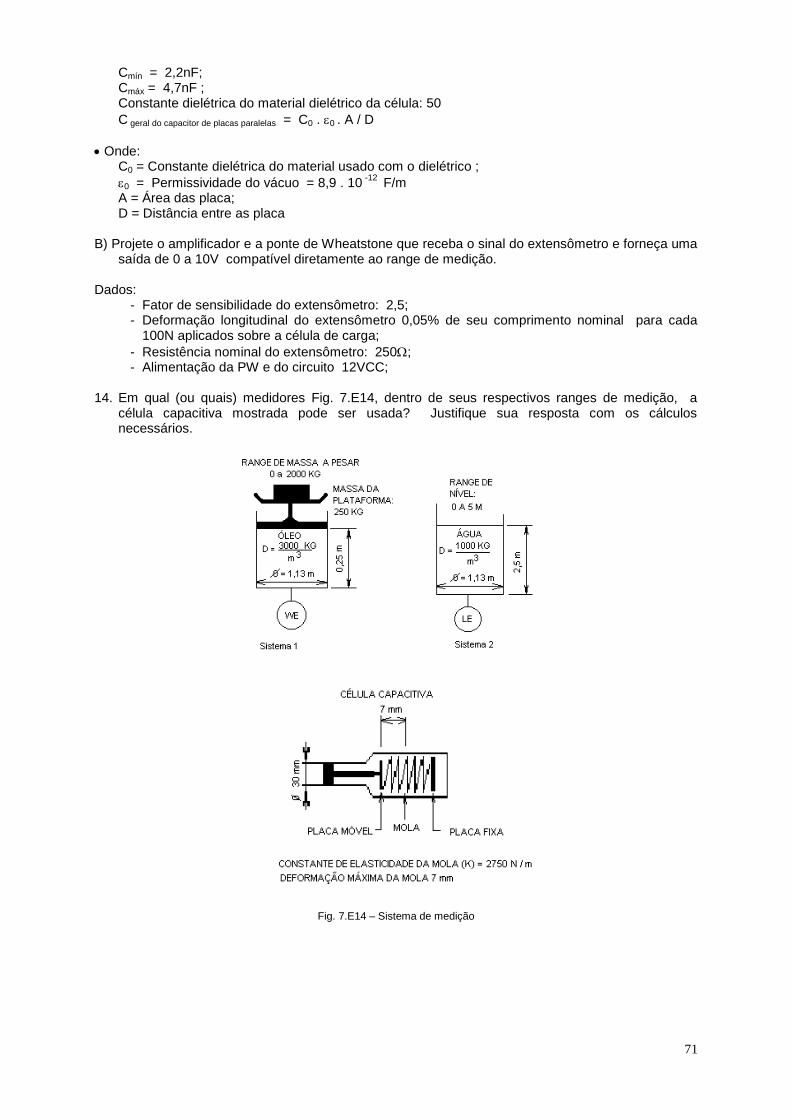
71
Cmín = 2,2nF; Cmáx = 4,7nF ; Constante dielétrica do material dielétrico da célula: 50
C geral do capacitor de placas paralelas = C0 . 0 . A / D
Onde: C0 = Constante dielétrica do material usado com o dielétrico ;
0 = Permissividade do vácuo = 8,9 . 10 -12
F/m A = Área das placa; D = Distância entre as placa
B) Projete o amplificador e a ponte de Wheatstone que receba o sinal do extensômetro e forneça uma
saída de 0 a 10V compatível diretamente ao range de medição. Dados:
- Fator de sensibilidade do extensômetro: 2,5; - Deformação longitudinal do extensômetro 0,05% de seu comprimento nominal para cada
100N aplicados sobre a célula de carga;
- Resistência nominal do extensômetro: 250; - Alimentação da PW e do circuito 12VCC;
14. Em qual (ou quais) medidores Fig. 7.E14, dentro de seus respectivos ranges de medição, a
célula capacitiva mostrada pode ser usada? Justifique sua resposta com os cálculos necessários.
Fig. 7.E14 – Sistema de medição
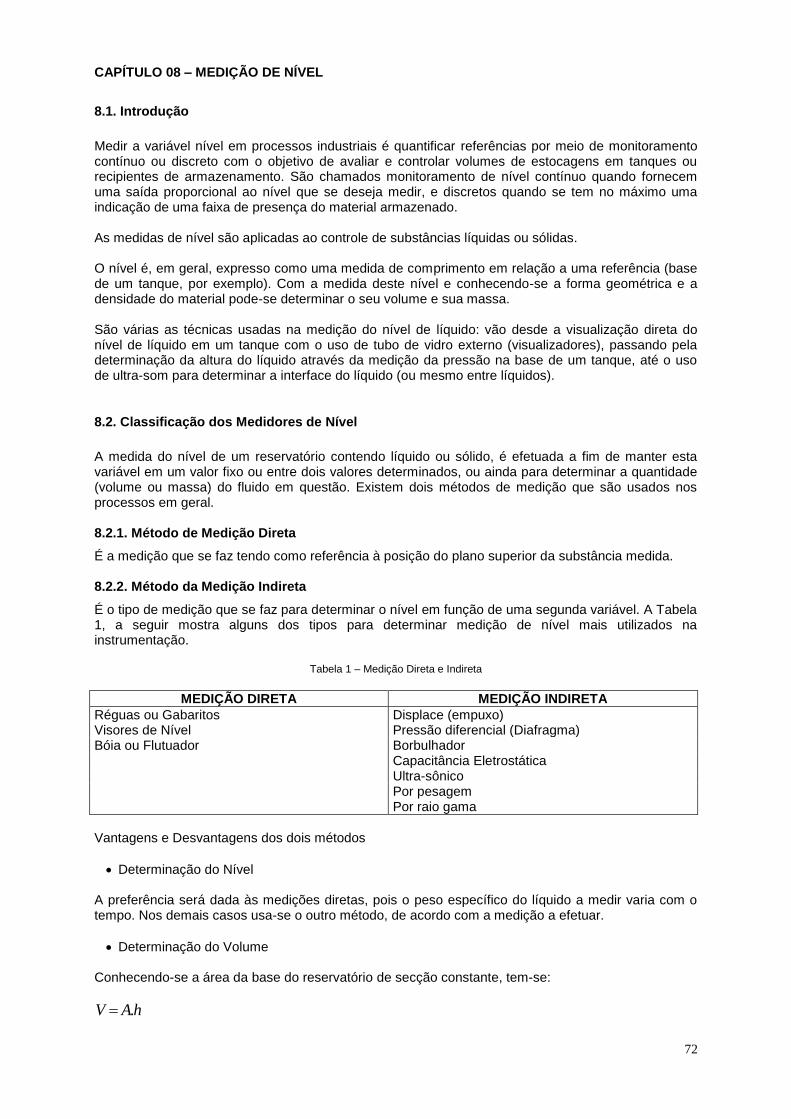
72
CAPÍTULO 08 – MEDIÇÃO DE NÍVEL
8.1. Introdução
Medir a variável nível em processos industriais é quantificar referências por meio de monitoramento contínuo ou discreto com o objetivo de avaliar e controlar volumes de estocagens em tanques ou recipientes de armazenamento. São chamados monitoramento de nível contínuo quando fornecem uma saída proporcional ao nível que se deseja medir, e discretos quando se tem no máximo uma indicação de uma faixa de presença do material armazenado. As medidas de nível são aplicadas ao controle de substâncias líquidas ou sólidas. O nível é, em geral, expresso como uma medida de comprimento em relação a uma referência (base de um tanque, por exemplo). Com a medida deste nível e conhecendo-se a forma geométrica e a densidade do material pode-se determinar o seu volume e sua massa. São várias as técnicas usadas na medição do nível de líquido: vão desde a visualização direta do nível de líquido em um tanque com o uso de tubo de vidro externo (visualizadores), passando pela determinação da altura do líquido através da medição da pressão na base de um tanque, até o uso de ultra-som para determinar a interface do líquido (ou mesmo entre líquidos).
8.2. Classificação dos Medidores de Nível
A medida do nível de um reservatório contendo líquido ou sólido, é efetuada a fim de manter esta variável em um valor fixo ou entre dois valores determinados, ou ainda para determinar a quantidade (volume ou massa) do fluido em questão. Existem dois métodos de medição que são usados nos processos em geral. 8.2.1. Método de Medição Direta
É a medição que se faz tendo como referência à posição do plano superior da substância medida. 8.2.2. Método da Medição Indireta
É o tipo de medição que se faz para determinar o nível em função de uma segunda variável. A Tabela 1, a seguir mostra alguns dos tipos para determinar medição de nível mais utilizados na instrumentação.
Tabela 1 – Medição Direta e Indireta
MEDIÇÃO DIRETA MEDIÇÃO INDIRETA
Réguas ou Gabaritos Displace (empuxo) Visores de Nível Pressão diferencial (Diafragma) Bóia ou Flutuador Borbulhador Capacitância Eletrostática Ultra-sônico Por pesagem Por raio gama
Vantagens e Desvantagens dos dois métodos
Determinação do Nível A preferência será dada às medições diretas, pois o peso específico do líquido a medir varia com o tempo. Nos demais casos usa-se o outro método, de acordo com a medição a efetuar.
Determinação do Volume Conhecendo-se a área da base do reservatório de secção constante, tem-se:
hAV .

73
onde:
;
;
;
ioreservatórdobasedaáreaA
alturah
líquidodovolumeV
Determinação da Massa Sabendo que:
.h.Am
h.Av
v
m
mas g
e
Ph logo:
g
P.Am
g.
PAm
onde:
gravidadedaaceleraçãog
;densidade
;específicopeso
;massam
;pressãoP
A relação acima demonstra que o peso específico não intervém na medida.
Se for usada medição direta, a equação g.h.Am
deverá ser aplicada, o que implica no
conhecimento do peso específico.
8.3. Transdutores de Nível
Medidores de Nível por medição direta 8.3.1. Visores de Nível
A Fig. 8.1 mostra a medida com visualização direta em um tanque.
Fig. 8.1 – Visores de Nível
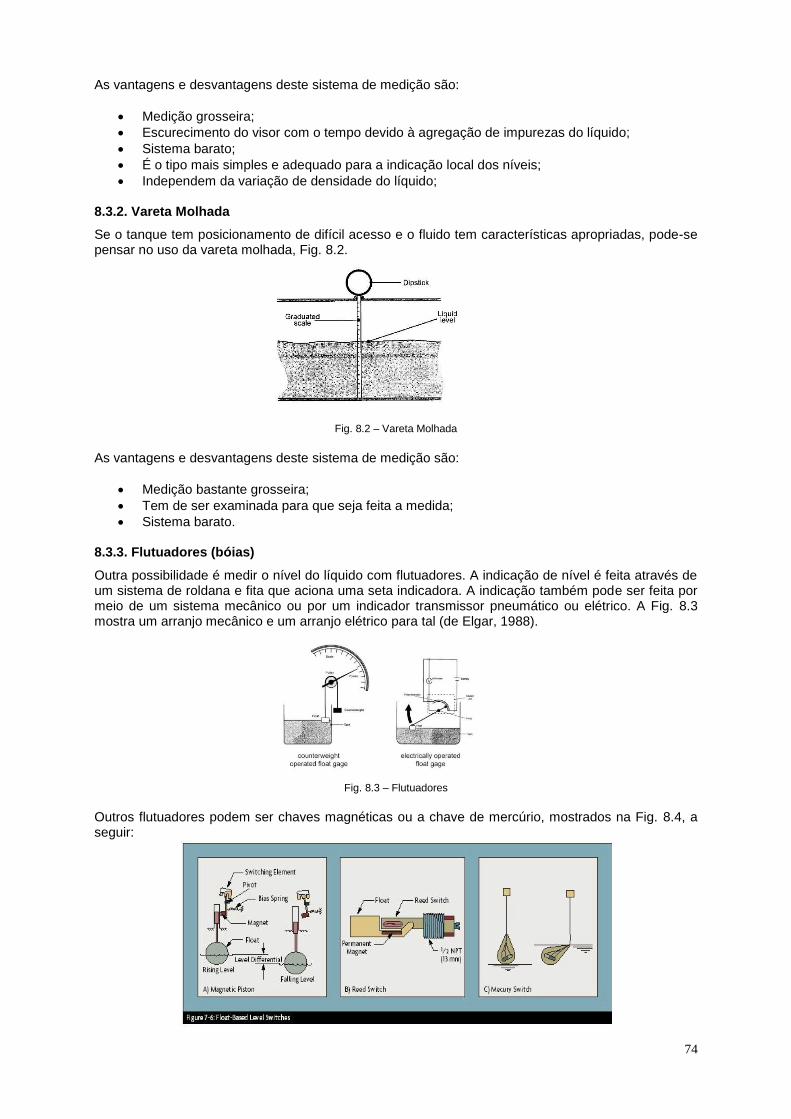
74
As vantagens e desvantagens deste sistema de medição são:
Medição grosseira;
Escurecimento do visor com o tempo devido à agregação de impurezas do líquido;
Sistema barato;
É o tipo mais simples e adequado para a indicação local dos níveis;
Independem da variação de densidade do líquido; 8.3.2. Vareta Molhada
Se o tanque tem posicionamento de difícil acesso e o fluido tem características apropriadas, pode-se pensar no uso da vareta molhada, Fig. 8.2.
Fig. 8.2 – Vareta Molhada
As vantagens e desvantagens deste sistema de medição são:
Medição bastante grosseira;
Tem de ser examinada para que seja feita a medida;
Sistema barato. 8.3.3. Flutuadores (bóias)
Outra possibilidade é medir o nível do líquido com flutuadores. A indicação de nível é feita através de um sistema de roldana e fita que aciona uma seta indicadora. A indicação também pode ser feita por meio de um sistema mecânico ou por um indicador transmissor pneumático ou elétrico. A Fig. 8.3 mostra um arranjo mecânico e um arranjo elétrico para tal (de Elgar, 1988).
Fig. 8.3 – Flutuadores
Outros flutuadores podem ser chaves magnéticas ou a chave de mercúrio, mostrados na Fig. 8.4, a seguir:
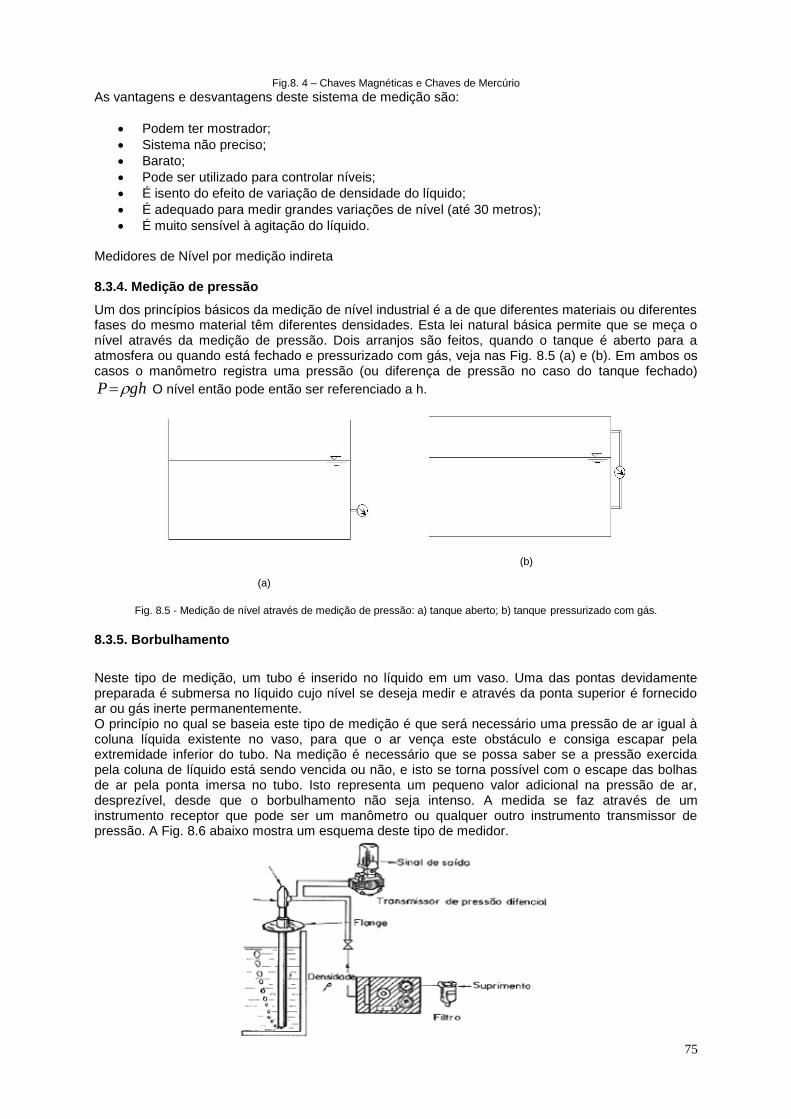
75
Fig.8. 4 – Chaves Magnéticas e Chaves de Mercúrio
As vantagens e desvantagens deste sistema de medição são:
Podem ter mostrador;
Sistema não preciso;
Barato;
Pode ser utilizado para controlar níveis;
É isento do efeito de variação de densidade do líquido;
É adequado para medir grandes variações de nível (até 30 metros);
É muito sensível à agitação do líquido. Medidores de Nível por medição indireta 8.3.4. Medição de pressão
Um dos princípios básicos da medição de nível industrial é a de que diferentes materiais ou diferentes fases do mesmo material têm diferentes densidades. Esta lei natural básica permite que se meça o nível através da medição de pressão. Dois arranjos são feitos, quando o tanque é aberto para a atmosfera ou quando está fechado e pressurizado com gás, veja nas Fig. 8.5 (a) e (b). Em ambos os casos o manômetro registra uma pressão (ou diferença de pressão no caso do tanque fechado)
ghP O nível então pode então ser referenciado a h.
(a)
(b)
Fig. 8.5 - Medição de nível através de medição de pressão: a) tanque aberto; b) tanque pressurizado com gás.
8.3.5. Borbulhamento
Neste tipo de medição, um tubo é inserido no líquido em um vaso. Uma das pontas devidamente preparada é submersa no líquido cujo nível se deseja medir e através da ponta superior é fornecido ar ou gás inerte permanentemente. O princípio no qual se baseia este tipo de medição é que será necessário uma pressão de ar igual à coluna líquida existente no vaso, para que o ar vença este obstáculo e consiga escapar pela extremidade inferior do tubo. Na medição é necessário que se possa saber se a pressão exercida pela coluna de líquido está sendo vencida ou não, e isto se torna possível com o escape das bolhas de ar pela ponta imersa no tubo. Isto representa um pequeno valor adicional na pressão de ar, desprezível, desde que o borbulhamento não seja intenso. A medida se faz através de um instrumento receptor que pode ser um manômetro ou qualquer outro instrumento transmissor de pressão. A Fig. 8.6 abaixo mostra um esquema deste tipo de medidor.
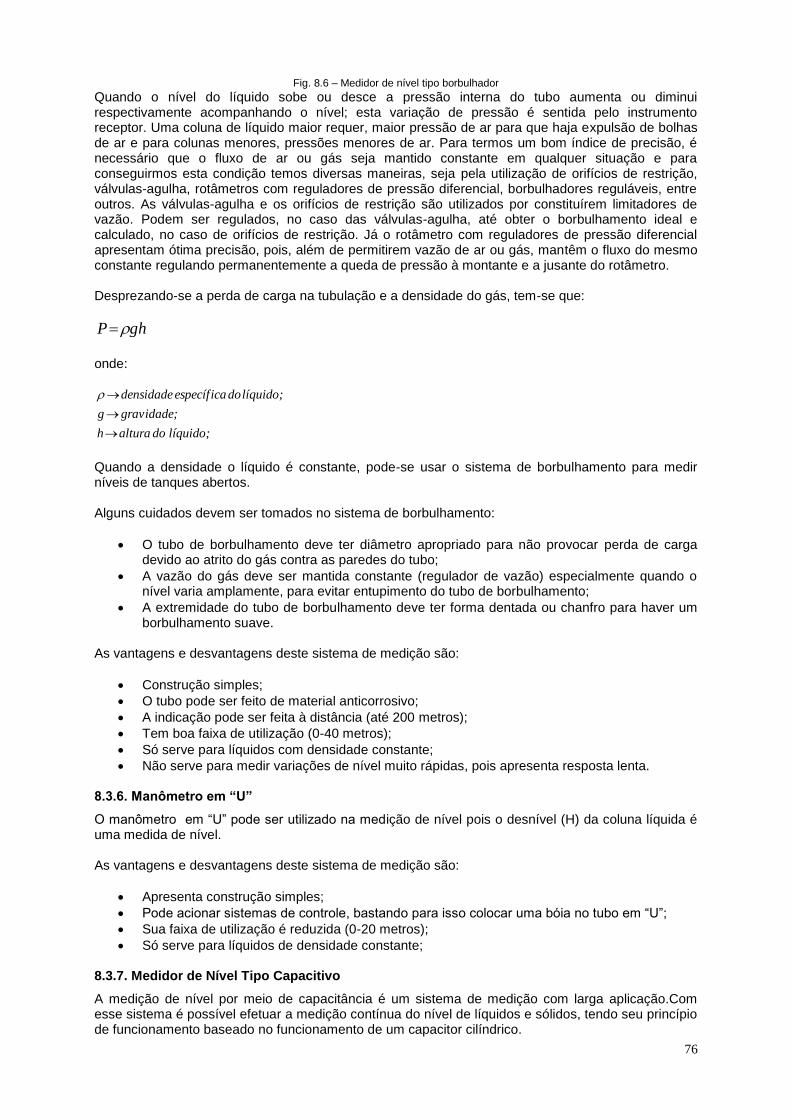
76
Fig. 8.6 – Medidor de nível tipo borbulhador
Quando o nível do líquido sobe ou desce a pressão interna do tubo aumenta ou diminui respectivamente acompanhando o nível; esta variação de pressão é sentida pelo instrumento receptor. Uma coluna de líquido maior requer, maior pressão de ar para que haja expulsão de bolhas de ar e para colunas menores, pressões menores de ar. Para termos um bom índice de precisão, é necessário que o fluxo de ar ou gás seja mantido constante em qualquer situação e para conseguirmos esta condição temos diversas maneiras, seja pela utilização de orifícios de restrição, válvulas-agulha, rotâmetros com reguladores de pressão diferencial, borbulhadores reguláveis, entre outros. As válvulas-agulha e os orifícios de restrição são utilizados por constituírem limitadores de vazão. Podem ser regulados, no caso das válvulas-agulha, até obter o borbulhamento ideal e calculado, no caso de orifícios de restrição. Já o rotâmetro com reguladores de pressão diferencial apresentam ótima precisão, pois, além de permitirem vazão de ar ou gás, mantêm o fluxo do mesmo constante regulando permanentemente a queda de pressão à montante e a jusante do rotâmetro. Desprezando-se a perda de carga na tubulação e a densidade do gás, tem-se que:
ghP
onde:
;líquidodoalturah
;gravidadeg
;líquidodoespecíficadensidade
Quando a densidade o líquido é constante, pode-se usar o sistema de borbulhamento para medir níveis de tanques abertos. Alguns cuidados devem ser tomados no sistema de borbulhamento:
O tubo de borbulhamento deve ter diâmetro apropriado para não provocar perda de carga devido ao atrito do gás contra as paredes do tubo;
A vazão do gás deve ser mantida constante (regulador de vazão) especialmente quando o nível varia amplamente, para evitar entupimento do tubo de borbulhamento;
A extremidade do tubo de borbulhamento deve ter forma dentada ou chanfro para haver um borbulhamento suave.
As vantagens e desvantagens deste sistema de medição são:
Construção simples;
O tubo pode ser feito de material anticorrosivo;
A indicação pode ser feita à distância (até 200 metros);
Tem boa faixa de utilização (0-40 metros);
Só serve para líquidos com densidade constante;
Não serve para medir variações de nível muito rápidas, pois apresenta resposta lenta. 8.3.6. Manômetro em “U”
O manômetro em “U” pode ser utilizado na medição de nível pois o desnível (H) da coluna líquida é uma medida de nível. As vantagens e desvantagens deste sistema de medição são:
Apresenta construção simples;
Pode acionar sistemas de controle, bastando para isso colocar uma bóia no tubo em “U”;
Sua faixa de utilização é reduzida (0-20 metros);
Só serve para líquidos de densidade constante; 8.3.7. Medidor de Nível Tipo Capacitivo
A medição de nível por meio de capacitância é um sistema de medição com larga aplicação.Com esse sistema é possível efetuar a medição contínua do nível de líquidos e sólidos, tendo seu princípio de funcionamento baseado no funcionamento de um capacitor cilíndrico.
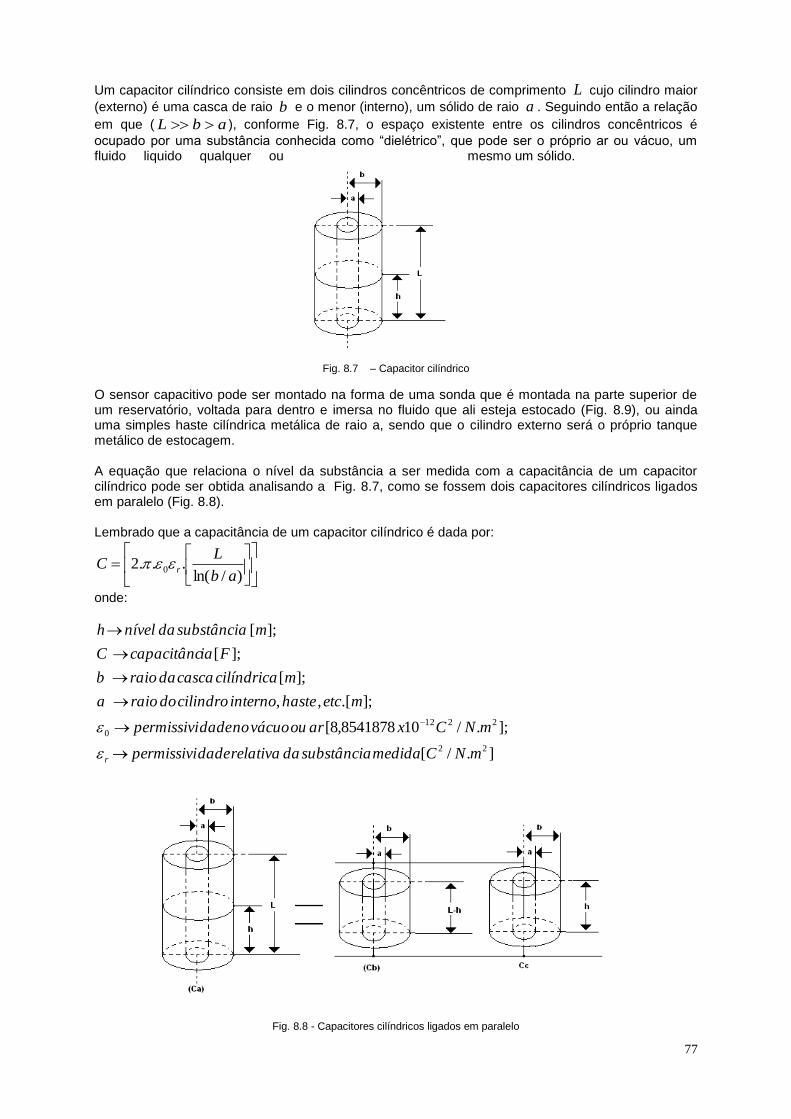
77
Um capacitor cilíndrico consiste em dois cilindros concêntricos de comprimento L cujo cilindro maior
(externo) é uma casca de raio b e o menor (interno), um sólido de raio a . Seguindo então a relação
em que ( abL ), conforme Fig. 8.7, o espaço existente entre os cilindros concêntricos é
ocupado por uma substância conhecida como “dielétrico”, que pode ser o próprio ar ou vácuo, um fluido liquido qualquer ou mesmo um sólido.
Fig. 8.7 – Capacitor cilíndrico
O sensor capacitivo pode ser montado na forma de uma sonda que é montada na parte superior de um reservatório, voltada para dentro e imersa no fluido que ali esteja estocado (Fig. 8.9), ou ainda uma simples haste cilíndrica metálica de raio a, sendo que o cilindro externo será o próprio tanque metálico de estocagem. A equação que relaciona o nível da substância a ser medida com a capacitância de um capacitor cilíndrico pode ser obtida analisando a Fig. 8.7, como se fossem dois capacitores cilíndricos ligados em paralelo (Fig. 8.8). Lembrado que a capacitância de um capacitor cilíndrico é dada por:
)/ln(...2 0
ab
LC r
onde:
]./[
];./108541878,8[
];[.,,
];[
];[
];[
22
2212
0
mNCmedidasubstânciadarelativadadepermissivi
mNCxarouvácuonodadepermissivi
metchasteernointcilindrodoraioa
mcilíndricacascadaraiob
FiacapacitâncC
msubstânciadanívelh
r
Fig. 8.8 - Capacitores cilíndricos ligados em paralelo
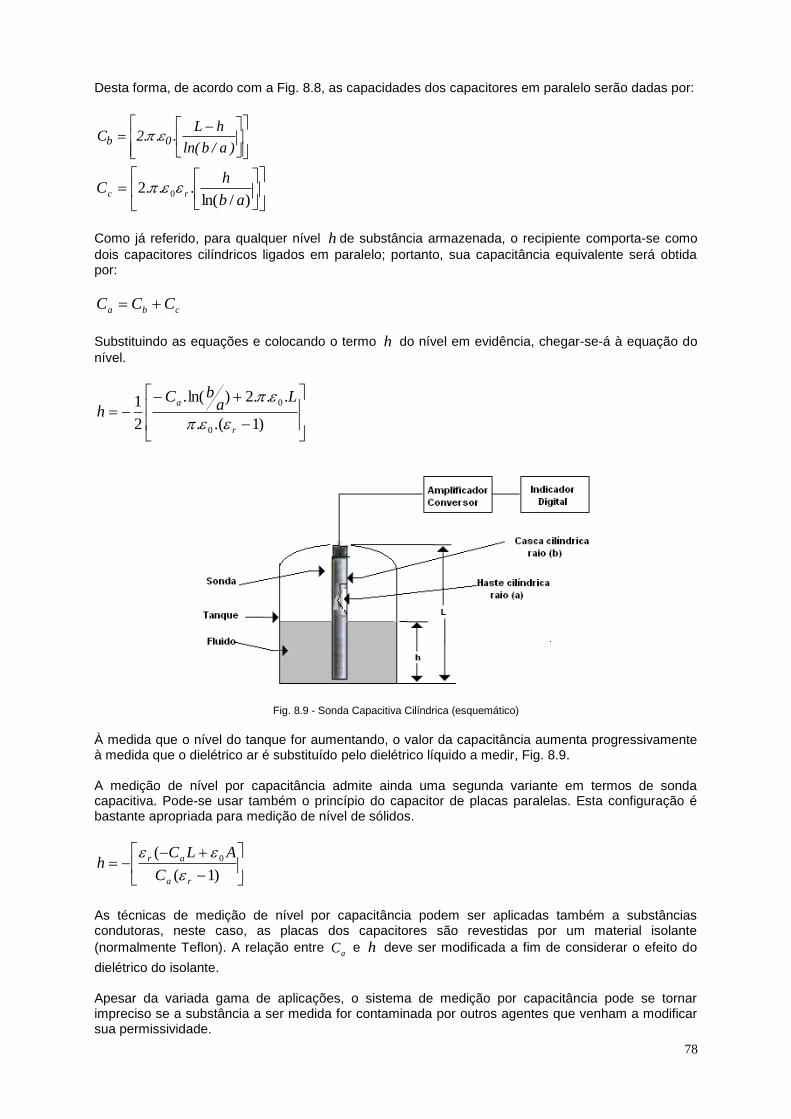
78
Desta forma, de acordo com a Fig. 8.8, as capacidades dos capacitores em paralelo serão dadas por:
)a/bln(
hL...2C 0b
)/ln(...2 0
ab
hC rc
Como já referido, para qualquer nível h de substância armazenada, o recipiente comporta-se como
dois capacitores cilíndricos ligados em paralelo; portanto, sua capacitância equivalente será obtida por:
cba CCC
Substituindo as equações e colocando o termo h do nível em evidência, chegar-se-á à equação do
nível.
)1.(.
...2)ln(.
2
1
0
0
r
a La
bCh
Fig. 8.9 - Sonda Capacitiva Cilíndrica (esquemático)
À medida que o nível do tanque for aumentando, o valor da capacitância aumenta progressivamente à medida que o dielétrico ar é substituído pelo dielétrico líquido a medir, Fig. 8.9. A medição de nível por capacitância admite ainda uma segunda variante em termos de sonda capacitiva. Pode-se usar também o princípio do capacitor de placas paralelas. Esta configuração é bastante apropriada para medição de nível de sólidos.
)1(
( 0
ra
ar
C
ALCh
As técnicas de medição de nível por capacitância podem ser aplicadas também a substâncias condutoras, neste caso, as placas dos capacitores são revestidas por um material isolante
(normalmente Teflon). A relação entre aC e h deve ser modificada a fim de considerar o efeito do
dielétrico do isolante. Apesar da variada gama de aplicações, o sistema de medição por capacitância pode se tornar impreciso se a substância a ser medida for contaminada por outros agentes que venham a modificar sua permissividade.
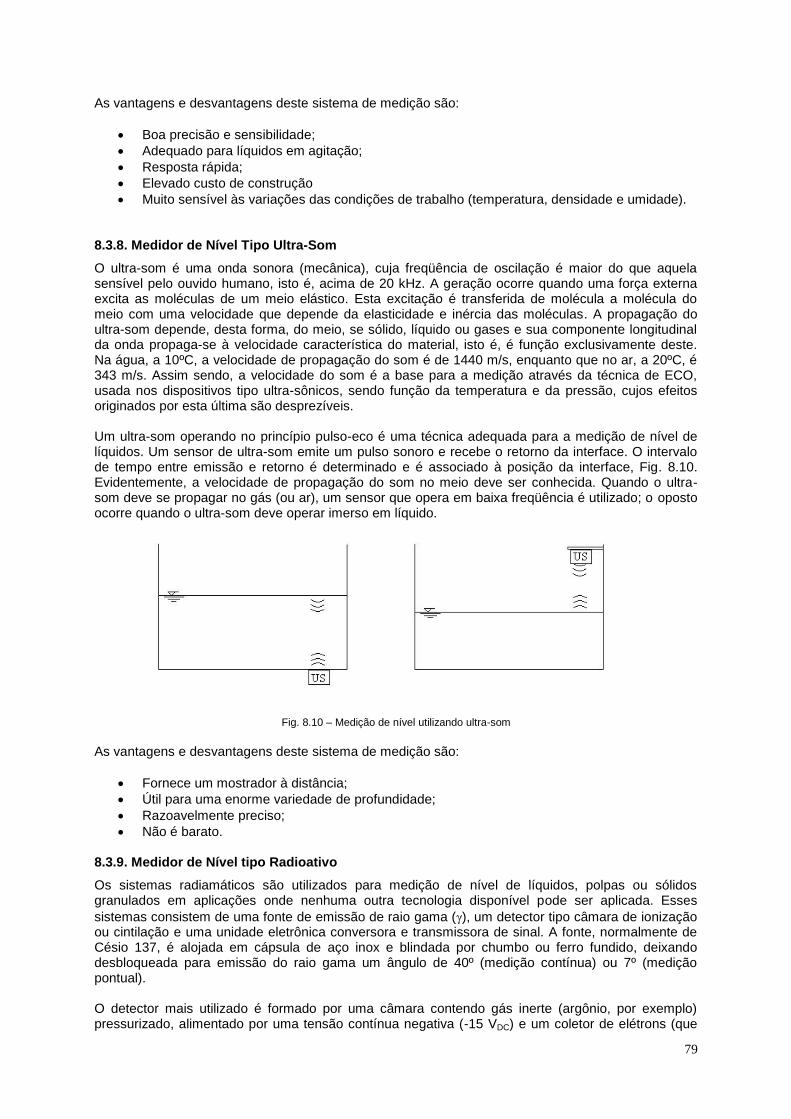
79
As vantagens e desvantagens deste sistema de medição são:
Boa precisão e sensibilidade;
Adequado para líquidos em agitação;
Resposta rápida;
Elevado custo de construção
Muito sensível às variações das condições de trabalho (temperatura, densidade e umidade). 8.3.8. Medidor de Nível Tipo Ultra-Som
O ultra-som é uma onda sonora (mecânica), cuja freqüência de oscilação é maior do que aquela sensível pelo ouvido humano, isto é, acima de 20 kHz. A geração ocorre quando uma força externa excita as moléculas de um meio elástico. Esta excitação é transferida de molécula a molécula do meio com uma velocidade que depende da elasticidade e inércia das moléculas. A propagação do ultra-som depende, desta forma, do meio, se sólido, líquido ou gases e sua componente longitudinal da onda propaga-se à velocidade característica do material, isto é, é função exclusivamente deste. Na água, a 10ºC, a velocidade de propagação do som é de 1440 m/s, enquanto que no ar, a 20ºC, é 343 m/s. Assim sendo, a velocidade do som é a base para a medição através da técnica de ECO, usada nos dispositivos tipo ultra-sônicos, sendo função da temperatura e da pressão, cujos efeitos originados por esta última são desprezíveis. Um ultra-som operando no princípio pulso-eco é uma técnica adequada para a medição de nível de líquidos. Um sensor de ultra-som emite um pulso sonoro e recebe o retorno da interface. O intervalo de tempo entre emissão e retorno é determinado e é associado à posição da interface, Fig. 8.10. Evidentemente, a velocidade de propagação do som no meio deve ser conhecida. Quando o ultra-som deve se propagar no gás (ou ar), um sensor que opera em baixa freqüência é utilizado; o oposto ocorre quando o ultra-som deve operar imerso em líquido.
Fig. 8.10 – Medição de nível utilizando ultra-som
As vantagens e desvantagens deste sistema de medição são:
Fornece um mostrador à distância;
Útil para uma enorme variedade de profundidade;
Razoavelmente preciso;
Não é barato. 8.3.9. Medidor de Nível tipo Radioativo
Os sistemas radiamáticos são utilizados para medição de nível de líquidos, polpas ou sólidos granulados em aplicações onde nenhuma outra tecnologia disponível pode ser aplicada. Esses
sistemas consistem de uma fonte de emissão de raio gama (), um detector tipo câmara de ionização ou cintilação e uma unidade eletrônica conversora e transmissora de sinal. A fonte, normalmente de Césio 137, é alojada em cápsula de aço inox e blindada por chumbo ou ferro fundido, deixando desbloqueada para emissão do raio gama um ângulo de 40º (medição contínua) ou 7º (medição pontual). O detector mais utilizado é formado por uma câmara contendo gás inerte (argônio, por exemplo) pressurizado, alimentado por uma tensão contínua negativa (-15 VDC) e um coletor de elétrons (que
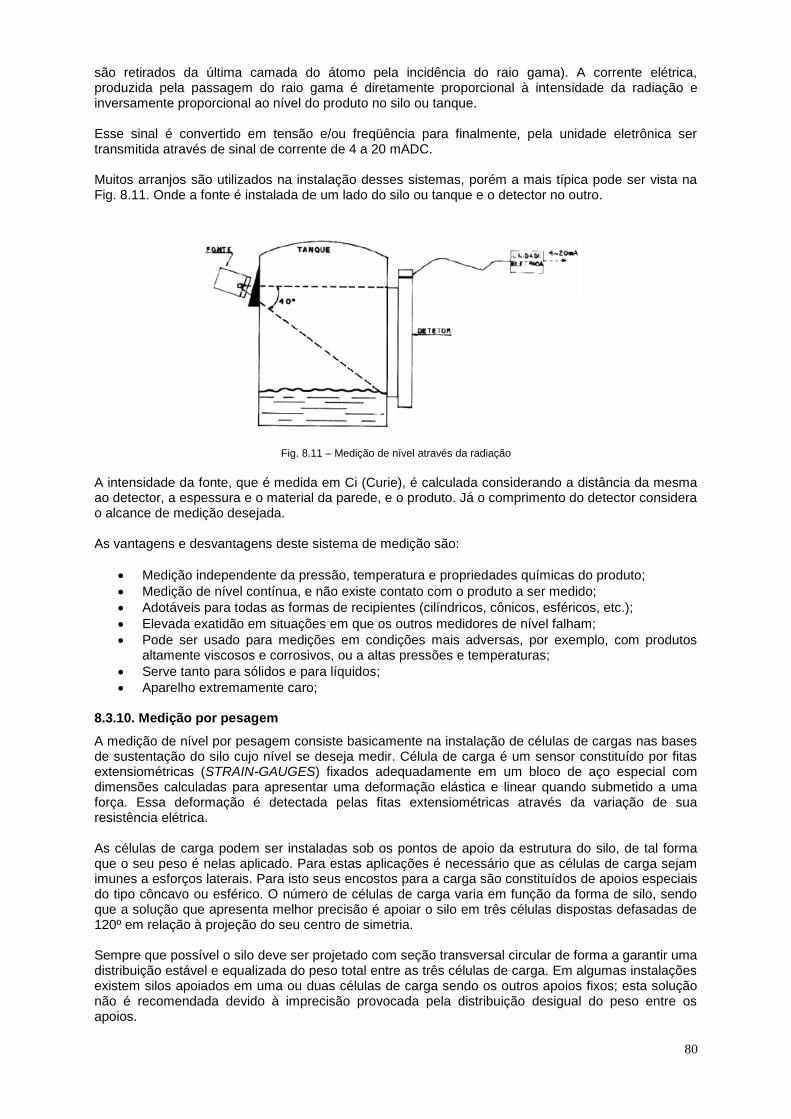
80
são retirados da última camada do átomo pela incidência do raio gama). A corrente elétrica, produzida pela passagem do raio gama é diretamente proporcional à intensidade da radiação e inversamente proporcional ao nível do produto no silo ou tanque. Esse sinal é convertido em tensão e/ou freqüência para finalmente, pela unidade eletrônica ser transmitida através de sinal de corrente de 4 a 20 mADC. Muitos arranjos são utilizados na instalação desses sistemas, porém a mais típica pode ser vista na Fig. 8.11. Onde a fonte é instalada de um lado do silo ou tanque e o detector no outro.
Fig. 8.11 – Medição de nível através da radiação
A intensidade da fonte, que é medida em Ci (Curie), é calculada considerando a distância da mesma ao detector, a espessura e o material da parede, e o produto. Já o comprimento do detector considera o alcance de medição desejada. As vantagens e desvantagens deste sistema de medição são:
Medição independente da pressão, temperatura e propriedades químicas do produto;
Medição de nível contínua, e não existe contato com o produto a ser medido;
Adotáveis para todas as formas de recipientes (cilíndricos, cônicos, esféricos, etc.);
Elevada exatidão em situações em que os outros medidores de nível falham;
Pode ser usado para medições em condições mais adversas, por exemplo, com produtos altamente viscosos e corrosivos, ou a altas pressões e temperaturas;
Serve tanto para sólidos e para líquidos;
Aparelho extremamente caro; 8.3.10. Medição por pesagem
A medição de nível por pesagem consiste basicamente na instalação de células de cargas nas bases de sustentação do silo cujo nível se deseja medir. Célula de carga é um sensor constituído por fitas extensiométricas (STRAIN-GAUGES) fixados adequadamente em um bloco de aço especial com dimensões calculadas para apresentar uma deformação elástica e linear quando submetido a uma força. Essa deformação é detectada pelas fitas extensiométricas através da variação de sua resistência elétrica. As células de carga podem ser instaladas sob os pontos de apoio da estrutura do silo, de tal forma que o seu peso é nelas aplicado. Para estas aplicações é necessário que as células de carga sejam imunes a esforços laterais. Para isto seus encostos para a carga são constituídos de apoios especiais do tipo côncavo ou esférico. O número de células de carga varia em função da forma de silo, sendo que a solução que apresenta melhor precisão é apoiar o silo em três células dispostas defasadas de 120º em relação à projeção do seu centro de simetria. Sempre que possível o silo deve ser projetado com seção transversal circular de forma a garantir uma distribuição estável e equalizada do peso total entre as três células de carga. Em algumas instalações existem silos apoiados em uma ou duas células de carga sendo os outros apoios fixos; esta solução não é recomendada devido à imprecisão provocada pela distribuição desigual do peso entre os apoios.
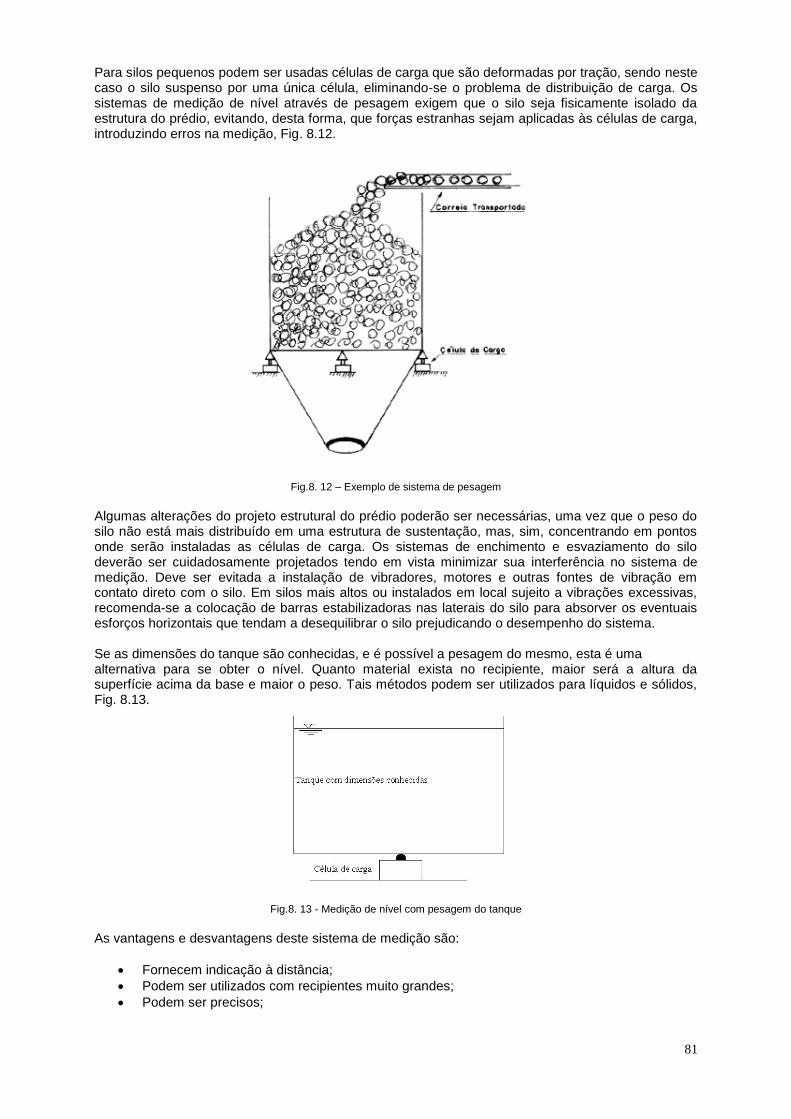
81
Para silos pequenos podem ser usadas células de carga que são deformadas por tração, sendo neste caso o silo suspenso por uma única célula, eliminando-se o problema de distribuição de carga. Os sistemas de medição de nível através de pesagem exigem que o silo seja fisicamente isolado da estrutura do prédio, evitando, desta forma, que forças estranhas sejam aplicadas às células de carga, introduzindo erros na medição, Fig. 8.12.
Fig.8. 12 – Exemplo de sistema de pesagem
Algumas alterações do projeto estrutural do prédio poderão ser necessárias, uma vez que o peso do silo não está mais distribuído em uma estrutura de sustentação, mas, sim, concentrando em pontos onde serão instaladas as células de carga. Os sistemas de enchimento e esvaziamento do silo deverão ser cuidadosamente projetados tendo em vista minimizar sua interferência no sistema de medição. Deve ser evitada a instalação de vibradores, motores e outras fontes de vibração em contato direto com o silo. Em silos mais altos ou instalados em local sujeito a vibrações excessivas, recomenda-se a colocação de barras estabilizadoras nas laterais do silo para absorver os eventuais esforços horizontais que tendam a desequilibrar o silo prejudicando o desempenho do sistema. Se as dimensões do tanque são conhecidas, e é possível a pesagem do mesmo, esta é uma alternativa para se obter o nível. Quanto material exista no recipiente, maior será a altura da superfície acima da base e maior o peso. Tais métodos podem ser utilizados para líquidos e sólidos, Fig. 8.13.
Fig.8. 13 - Medição de nível com pesagem do tanque
As vantagens e desvantagens deste sistema de medição são:
Fornecem indicação à distância;
Podem ser utilizados com recipientes muito grandes;
Podem ser precisos;
82
→ Medição de Nível de Sólidos O aparecimento de modernas plantas com processos que exigem o manuseio de materiais sólidos granulados com melhor monitoração e/ou controle vem pressionando os fabricantes de instrumentos de medição a desenvolver/melhorar as técnicas de medição dessa variável onde as tecnologias convencionais não se aplicam. Hoje, encontramos no mercado vários tipos de dispositivos eletromecânicos, eletrônicos, sônicos ou nucleares para atender às diversas situações, nas quais é necessário o controle do volume ou massa de sólidos armazenados em silos, depósitos de compensação e sistemas de dosagem. Embora alguns deles tenham aplicação quase que universal com ótimos resultados, perdem lugar devido a seu custo elevado, para dispositivos mais simples, menos precisos, desde que estes atendam satisfatoriamente aos requisitos do processo e às condições físicas para a sua instalação. Para a seleção do dispositivo mais adequado para cada caso, torna-se imprescindível o conhecimento do funcionamento e das limitações dos diversos tipos de transdutores existentes, devendo ser considerados ainda aos fatores, tais como: material estocado; geometria e estrutura do silo; precisão requerida; custo; etc.
EXERCÍCIOS
1. Qual (ais) a(s) utilização(ções) dos sensores de nível? 2. Quais os dois tipos de medição? Defina-os. 3. Cite exemplos de sensores de nível do tipo flutuadores. 4. Dados os exemplos da questão anterior, explique seus princípios de funcionamento e
aplicações. 5. Sobre a medição de nível capacitiva, explique seu princípio de funcionamento, suas vantagens
e aplicações. 6. Para o sensor de nível ultra-sônico explique: suas características, aplicações, vantagens e
desvantagens. 7. Quais poderiam ser os tipos de medidores de nível instalados em um reservatório aberto,
armazenando os produtos abaixo?
Água pura
Óleo mineral (de alta viscosidade)
Areia 8. Quais os cuidados que devem ser tomados para instalar medidores de nível (por diferença de
pressão) em tanques fechados? 9. No reservatório abaixo, qual deve ser a faixa de medição (em pressão) do transmissor de nível?
O reservatório é fechado e pressurizado com 300 kPa.
O líquido armazenado é água (25 ºC).
Altura entre as tomadas de pressão: 15 m.
10. Quais as vantagens e desvantagens dos medidores de nível tipo ultra-som e radioativos? 11. Quais tipos de medidores de nível poderiam ser utilizados em reservatórios para sólidos (Cal,
minério, areia, grãos...)? 12. Quais tipos de medidores de nível posso utilizar em um reservatório fechado contendo água,
óleo e gás (já separados pela diferença de densidade; por não se misturarem) se preciso conhecer o nível da interface água/óleo?
83
13. Considere dois tanques que utilizam o princípio de medição por capacitância e contêm a mesma substância armazenada. Por meio das equações obtenha o valor da capacitância Ca, considerando os seguintes valores:
Capacitor Cilíndrico Capacitor de placas
Dimensões da Sonda a = 3mm b = 25 mm L = 4m
A = 7m
2
L = 4m
0 = 8,854187818x10-12
C2/N.m
2 (Ar ou vácuo)
r = 2,652563454x10-11
C2/N.m
2 (Óleo de oliva)
h = 2m
14. Em se tratando de medição de nível por radiação, explique o que significa o termo “meia-vida” e
por que as fontes de radiação nesse sistema utilizam o césio (137
Cs).
15. Um tanque de armazenamento com L=6m tem seu nível controlado por ultra-som. Sabendo que o aparelho é montado no topo do tanque e o nível h detectado de substância contida nele é de 4m, calcule o tempo t que a onda sonora leva de sua saída na fonte até sua recepção que se encontra no mesmo aparelho (velocidade do som = 343m/s)
84
CAPÍTULO 09 – MEDIÇÃO DE VAZÃO
9.1. Introdução
Em alguns processos da indústria química, petrolífera, produção de tintas, leite, refrigerantes, etc., o controle contínuo da variável vazão dos fluidos envolvidos nos processos é de extrema importância. A variável vazão pode ser obtida de forma direta ou indireta. A medida direta consiste na determinação do volume ou peso de fluido que atravessa uma seção num dado intervalo de tempo. Os métodos de medida indireta da vazão exigem a determinação da carga, diferença de pressão, ou velocidade em diversos pontos numa seção transversal. Os métodos mais precisos são as determinações gravimétricas ou volumétricas, nas quais o peso ou volume é medido por balanças ou tanques calibrados num intervalo de tempo que é medido por um cronômetro. Os sensores para medição de vazão são dispositivos desenvolvidos para a determinação da velocidade em que fluem líquidos em tubulações e baseia-se na construção mecânica de dispositivos, onde são estrategicamente colocados sensores de pressão de tal forma que, por diferenças de pressão sejam calculadas a velocidade do líquido fluente e, por conseguinte, a vazão na tubulação. O princípio físico adotado, pela maioria destes sensores, é o mesmo que o utilizado nos sensores de pressão. Vazão é a quantidade - volumétrica ou gravimétrica - do fluxo em relação ao tempo. A vazão volumétrica é expressa em unidades tais como metros cúbicos/hora ou litros/minuto. Multiplicando essas unidades pela densidade do fluido, obtêm-se as unidades da vazão gravimétrica correspondente, por exemplo: toneladas/hora ou quilogramas/minuto.
seg
mTempo
VolumeQvol
3
3m
kg
vol
massa
seg
kgQ.Q volGrav
No caso de líquidos homogêneos é fácil obter seu volume mediante seu peso e sua densidade. Mas, no caso de vapores e gases, onde as densidades variam dependendo das condições de trabalho, tais como temperatura e pressão, é prudente medir as vazões em unidades gravimétricas. Se assim for, é necessário especificar as condições básicas da medida, por exemplo: N m
3/h (Normais metros
cúbicos/hora, isto é, a 0oC e 760mm Hg abs.) e scf/h (Standard cubic feet/hora, a 60
oF e 14,73 psi.
abs., conforme AGA No3).
A medição de vazão é a única que deve ser feita em movimento, ao passo que todas as outras medições, como as de pressão, de temperatura e de nível podem ser feitas em fluídos no estado estático. Para medir a vazão, na maioria dos casos, deve-se colocar algum obstáculo ao fluxo na tubulação, o que irá provocar perturbação no mesmo, causando perdas de carga.
Perda de carga queda de pressão (P) Causas da perda de carga:
→ Atrito; → Turbulência; → Obstáculo;
A maioria dos equipamentos que realizam a medição desta variável se utilizam outras variáveis relacionadas fisicamente com a vazão. Por exemplo, a placa de orifício que gera um diferencial de pressão que é medido por um sensor de pressão diferencial.
85
9.2. Classificação dos Medidores de Vazão
Existem três tipos fundamentais de medidores de vazão, que são: diretos, indiretos e especiais. Em seguida, mostra-se a classificação desses medidores conforme o princípio de funcionamento de cada um: 9.2.1. Medidores indiretos, utilizando fenômenos intimamente relacionados à quantidade do
fluido passante
a) Perda de carga variável (área constante)
→ Orifício → Bocal → Tubo de Venturi → Tubo de Dall → Tubo de Pitot → Cotovelo especial
b) Área variável (perda de carga constante)
→ Rotâmetro c) Medidores em canais abertos
→ Vertedor → Calha de Parshall
9.2.2. Medidores diretos de volume do fluido passante
a) Deslocamento positivo do fluido
→ Disco nutante → Pistão flutuante → Rodas ovais → Roots
b) Velocidade pelo impacto do fluido
→ Tipo hélice → Tipo turbina
9.2.3. Medidores especiais
→ Eletromagnético → Ultra-sônico → Mass Flow → Fio quente
9.3. Transdutores de Vazão
Efeitos físicos usados para se medir vazão de fluidos:
a) Medição de vazão por diferença de pressão Quando o diâmetro de uma tubulação onde “passa” um fluido sofre um estreitamento aparece, em função da alteração da velocidade do fluido, uma diferença de pressão, tomada nas paredes da tubulação, entre as seções de diâmetros diferentes. Esta diferença de pressão se relaciona quadraticamente com a vazão volumétrica do fluido.

86
PAKQvol ..
Qvol = vazão volumétrica do fluido K = constante de estreitamento (depende das unidades usadas e de fatores teóricos e empíricos) A = área de passagem do fluido (obstáculo)
P = perda de carga
h.ppP 21
h.KAQh.KAQ volvol
Para se evitar efeitos de turbulência nas medidas, adota-se colocar o elemento primário de medição de vazão num trecho reto da tubulação onde não haja variação de diâmetro da mesma 10xD antes do elemento primário e 5xD depois (D = diâmetro da tubulação), Fig. 9.1.
Fig. 9.1 – Instalação do medidor
A medição da diferença de pressão 21 pp pode ser feita por transdutores que medem pressão
diferencial como: manômetro U, célula de carga, células capacitivas e uma tabela ou uma fórmula pode ser usada para calcular a vazão. 9.3.1. Placa de Orifício
É um dos meios mais usados para medição de fluxos. Dados de entidades da área de instrumentação mostram que, nos Estados Unidos, cerca de 50% dos medidores de vazão usados pelas indústrias são deste tipo. As placas de orifício são indicadas para medir vazão de líquidos, gases e vapores. As placas podem ser do tipo concêntricas (para fluídos limpos); excêntricas ou segmentais (para fluídos sujos com partículas sólidas em suspensão); Canto arredondado (para fluídos de alta viscosidade). Podem ter diâmetros nominais de 1 “a 40". São fabricadas usualmente em aço inox 304/315; ou em aços-liga como Hastelloy e Monel (outros materiais sob consulta). Vantagens:
simplicidade,
robustas;
custo relativamente baixo,
ausência de partes móveis,
pouca manutenção,
aplicação para muitos tipos de fluido,
instrumentação externa, etc. Desvantagens:
provoca considerável perda de carga no fluxo,
a faixa de medição é restrita,
desgaste da placa,
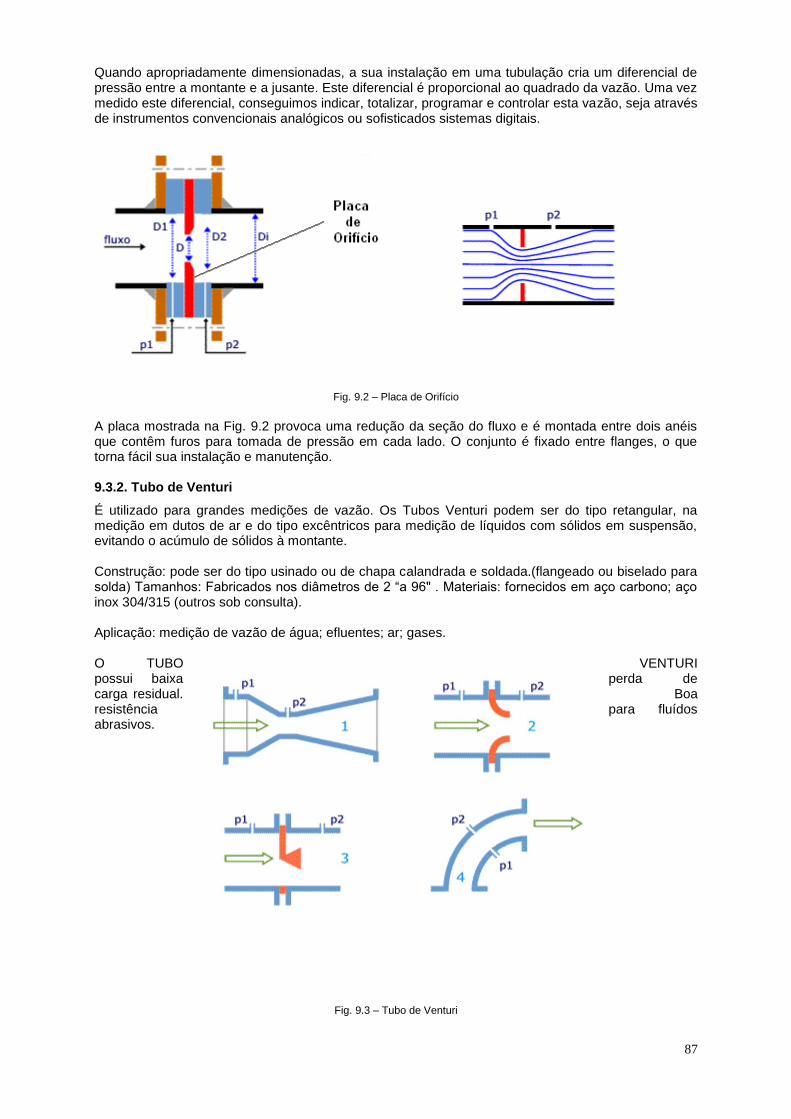
87
Quando apropriadamente dimensionadas, a sua instalação em uma tubulação cria um diferencial de pressão entre a montante e a jusante. Este diferencial é proporcional ao quadrado da vazão. Uma vez medido este diferencial, conseguimos indicar, totalizar, programar e controlar esta vazão, seja através de instrumentos convencionais analógicos ou sofisticados sistemas digitais.
Fig. 9.2 – Placa de Orifício
A placa mostrada na Fig. 9.2 provoca uma redução da seção do fluxo e é montada entre dois anéis que contêm furos para tomada de pressão em cada lado. O conjunto é fixado entre flanges, o que torna fácil sua instalação e manutenção. 9.3.2. Tubo de Venturi
É utilizado para grandes medições de vazão. Os Tubos Venturi podem ser do tipo retangular, na medição em dutos de ar e do tipo excêntricos para medição de líquidos com sólidos em suspensão, evitando o acúmulo de sólidos à montante. Construção: pode ser do tipo usinado ou de chapa calandrada e soldada.(flangeado ou biselado para solda) Tamanhos: Fabricados nos diâmetros de 2 “a 96" . Materiais: fornecidos em aço carbono; aço inox 304/315 (outros sob consulta). Aplicação: medição de vazão de água; efluentes; ar; gases. O TUBO VENTURI possui baixa perda de carga residual. Boa resistência para fluídos abrasivos.
Fig. 9.3 – Tubo de Venturi
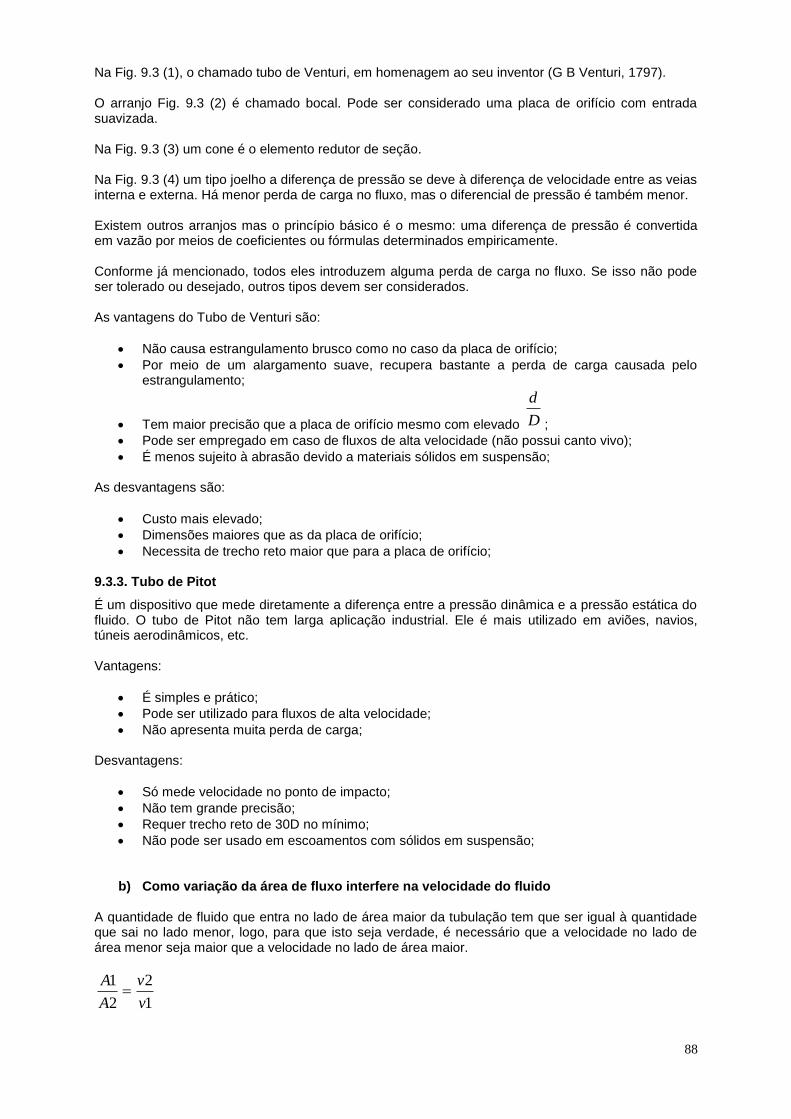
88
Na Fig. 9.3 (1), o chamado tubo de Venturi, em homenagem ao seu inventor (G B Venturi, 1797). O arranjo Fig. 9.3 (2) é chamado bocal. Pode ser considerado uma placa de orifício com entrada suavizada. Na Fig. 9.3 (3) um cone é o elemento redutor de seção. Na Fig. 9.3 (4) um tipo joelho a diferença de pressão se deve à diferença de velocidade entre as veias interna e externa. Há menor perda de carga no fluxo, mas o diferencial de pressão é também menor. Existem outros arranjos mas o princípio básico é o mesmo: uma diferença de pressão é convertida em vazão por meios de coeficientes ou fórmulas determinados empiricamente. Conforme já mencionado, todos eles introduzem alguma perda de carga no fluxo. Se isso não pode ser tolerado ou desejado, outros tipos devem ser considerados. As vantagens do Tubo de Venturi são:
Não causa estrangulamento brusco como no caso da placa de orifício;
Por meio de um alargamento suave, recupera bastante a perda de carga causada pelo estrangulamento;
Tem maior precisão que a placa de orifício mesmo com elevado D
d
;
Pode ser empregado em caso de fluxos de alta velocidade (não possui canto vivo);
É menos sujeito à abrasão devido a materiais sólidos em suspensão; As desvantagens são:
Custo mais elevado;
Dimensões maiores que as da placa de orifício;
Necessita de trecho reto maior que para a placa de orifício; 9.3.3. Tubo de Pitot
É um dispositivo que mede diretamente a diferença entre a pressão dinâmica e a pressão estática do fluido. O tubo de Pitot não tem larga aplicação industrial. Ele é mais utilizado em aviões, navios, túneis aerodinâmicos, etc. Vantagens:
É simples e prático;
Pode ser utilizado para fluxos de alta velocidade;
Não apresenta muita perda de carga; Desvantagens:
Só mede velocidade no ponto de impacto;
Não tem grande precisão;
Requer trecho reto de 30D no mínimo;
Não pode ser usado em escoamentos com sólidos em suspensão;
b) Como variação da área de fluxo interfere na velocidade do fluido
A quantidade de fluido que entra no lado de área maior da tubulação tem que ser igual à quantidade que sai no lado menor, logo, para que isto seja verdade, é necessário que a velocidade no lado de área menor seja maior que a velocidade no lado de área maior.
1
2
2
1
v
v
A
A
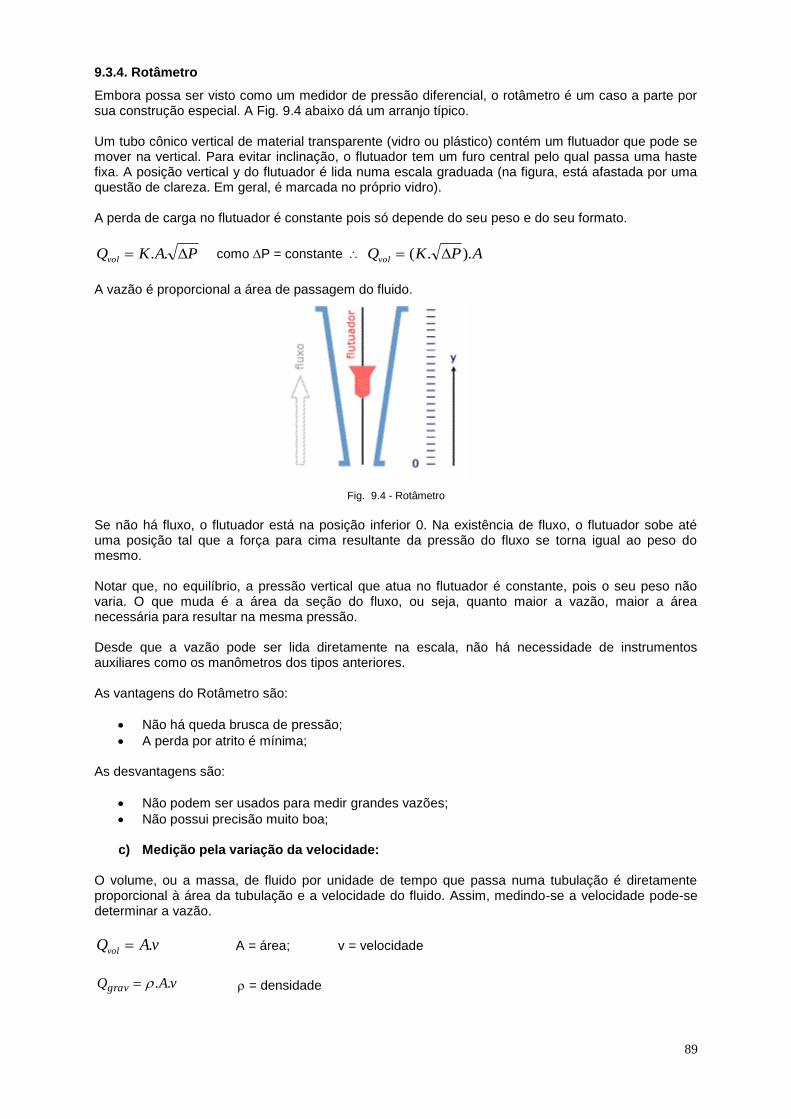
89
9.3.4. Rotâmetro
Embora possa ser visto como um medidor de pressão diferencial, o rotâmetro é um caso a parte por sua construção especial. A Fig. 9.4 abaixo dá um arranjo típico. Um tubo cônico vertical de material transparente (vidro ou plástico) contém um flutuador que pode se mover na vertical. Para evitar inclinação, o flutuador tem um furo central pelo qual passa uma haste fixa. A posição vertical y do flutuador é lida numa escala graduada (na figura, está afastada por uma questão de clareza. Em geral, é marcada no próprio vidro). A perda de carga no flutuador é constante pois só depende do seu peso e do seu formato.
PAKQvol .. como P = constante APKQvol )..(
A vazão é proporcional a área de passagem do fluido.
Fig. 9.4 - Rotâmetro
Se não há fluxo, o flutuador está na posição inferior 0. Na existência de fluxo, o flutuador sobe até uma posição tal que a força para cima resultante da pressão do fluxo se torna igual ao peso do mesmo. Notar que, no equilíbrio, a pressão vertical que atua no flutuador é constante, pois o seu peso não varia. O que muda é a área da seção do fluxo, ou seja, quanto maior a vazão, maior a área necessária para resultar na mesma pressão. Desde que a vazão pode ser lida diretamente na escala, não há necessidade de instrumentos auxiliares como os manômetros dos tipos anteriores. As vantagens do Rotâmetro são:
Não há queda brusca de pressão;
A perda por atrito é mínima; As desvantagens são:
Não podem ser usados para medir grandes vazões;
Não possui precisão muito boa;
c) Medição pela variação da velocidade: O volume, ou a massa, de fluido por unidade de tempo que passa numa tubulação é diretamente proporcional à área da tubulação e a velocidade do fluido. Assim, medindo-se a velocidade pode-se determinar a vazão.
vAQvol . A = área; v = velocidade
v.A.Qgrav = densidade
90
9.3.5. Hélice
A velocidade de rotação é proporcional à velocidade do fluxo e, portanto, à vazão. Vantagem:
É de simples construção e próprio para grandes vazões; Desvantagem:
Apresenta pouca precisão (5%) 9.3.6. Turbina
É semelhante ao tipo hélice, porém com a folga entre o rotor da turbina e o corpo menor. Vantagem:
Possui boa precisão e é próprio para grandes vazões; Desvantagem:
Difícil construção (custo elevado);
Só pode ser utilizado para escoamentos isentos de partículas sólidas em suspensão; MEDIDORES ESPECIAIS DE VAZÃO 9.3.7. Medição por efeito magnético
Seu funcionamento é baseado na lei de Faraday: “Quando um condutor elétrico em movimento corta o fluxo magnético, gera-se uma força eletromotriz através desse condutor”. A força eletromotriz gerada é proporcional à velocidade do condutor, e, portanto, proporcional à vazão do fluido. O condutor é o próprio fluido passante. A força eletromotriz gerada é captada por dois eletrodos embutidos na parede interna do tubo, amplificada e indicada em uma escala convenientemente calibrada par apresentar medida de vazão. Vantagens:
Apresenta boa sensibilidade e precisão;
Não apresenta perda de carga;
O efeito da turbulência é desprezível;
Serve para escoamentos com sólidos em suspensão. Desvantagens:
É de elevado custo;
Serve somente para fluidos que apresentem pelo menos um mínimo de condutibilidade;
O depósito de impurezas no tubo pode causar erro. 9.3.8. Medição por ultra-som
Uma onda de ultra-som é emitida, atravessa o fluido, “bate” na parede oposta da tubulação, se reflete e é, captada pelo receptor (localizado próximo ao emissor), com a onda de ultra-som é mecânica ela será “arrastada” pelo fluido, tanto mais quanto maior for a velocidade do mesmo. O sinal recebido será, portanto, inversamente proporcional à velocidade do fluido. Apresenta as mesmas vantagens do eletromagnético com as adicionais de não depender da condutividade do fluido e nem entrar em contato com o mesmo.
EXERCÍCIOS
1. O que é vazão?
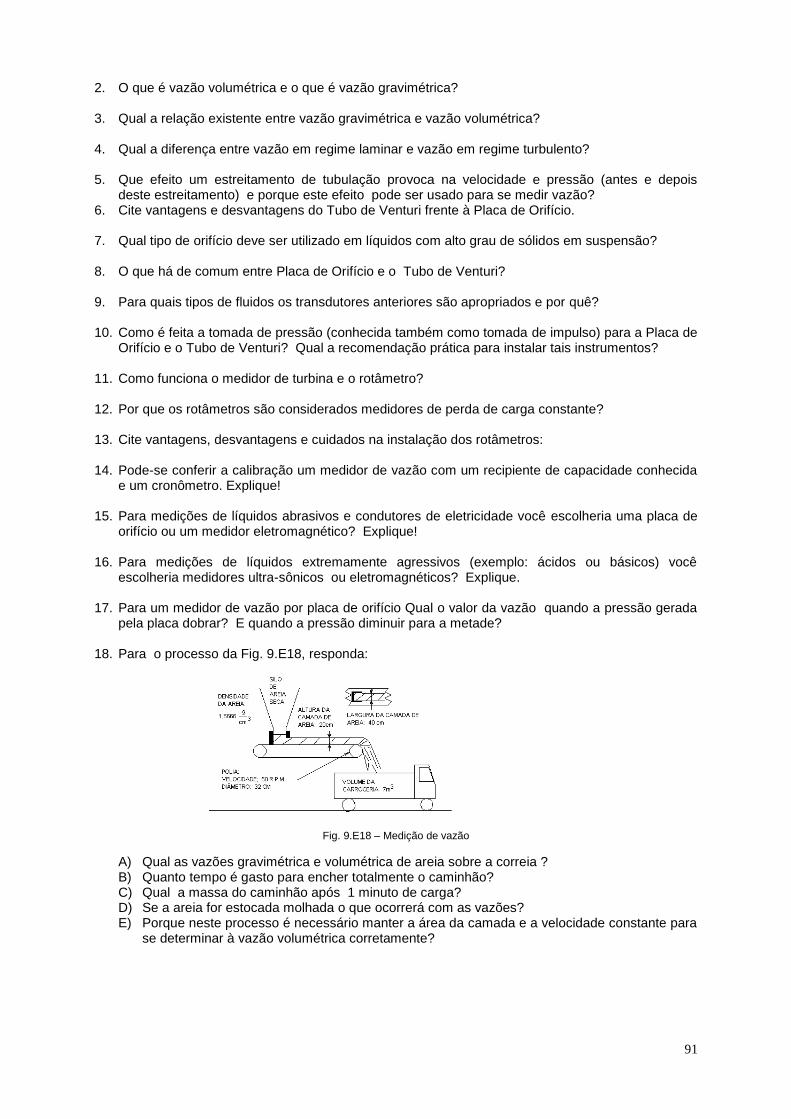
91
2. O que é vazão volumétrica e o que é vazão gravimétrica? 3. Qual a relação existente entre vazão gravimétrica e vazão volumétrica? 4. Qual a diferença entre vazão em regime laminar e vazão em regime turbulento? 5. Que efeito um estreitamento de tubulação provoca na velocidade e pressão (antes e depois
deste estreitamento) e porque este efeito pode ser usado para se medir vazão? 6. Cite vantagens e desvantagens do Tubo de Venturi frente à Placa de Orifício. 7. Qual tipo de orifício deve ser utilizado em líquidos com alto grau de sólidos em suspensão? 8. O que há de comum entre Placa de Orifício e o Tubo de Venturi? 9. Para quais tipos de fluidos os transdutores anteriores são apropriados e por quê? 10. Como é feita a tomada de pressão (conhecida também como tomada de impulso) para a Placa de
Orifício e o Tubo de Venturi? Qual a recomendação prática para instalar tais instrumentos? 11. Como funciona o medidor de turbina e o rotâmetro? 12. Por que os rotâmetros são considerados medidores de perda de carga constante? 13. Cite vantagens, desvantagens e cuidados na instalação dos rotâmetros: 14. Pode-se conferir a calibração um medidor de vazão com um recipiente de capacidade conhecida
e um cronômetro. Explique! 15. Para medições de líquidos abrasivos e condutores de eletricidade você escolheria uma placa de
orifício ou um medidor eletromagnético? Explique! 16. Para medições de líquidos extremamente agressivos (exemplo: ácidos ou básicos) você
escolheria medidores ultra-sônicos ou eletromagnéticos? Explique. 17. Para um medidor de vazão por placa de orifício Qual o valor da vazão quando a pressão gerada
pela placa dobrar? E quando a pressão diminuir para a metade? 18. Para o processo da Fig. 9.E18, responda:
Fig. 9.E18 – Medição de vazão
A) Qual as vazões gravimétrica e volumétrica de areia sobre a correia ? B) Quanto tempo é gasto para encher totalmente o caminhão? C) Qual a massa do caminhão após 1 minuto de carga? D) Se a areia for estocada molhada o que ocorrerá com as vazões? E) Porque neste processo é necessário manter a área da camada e a velocidade constante para
se determinar à vazão volumétrica corretamente?
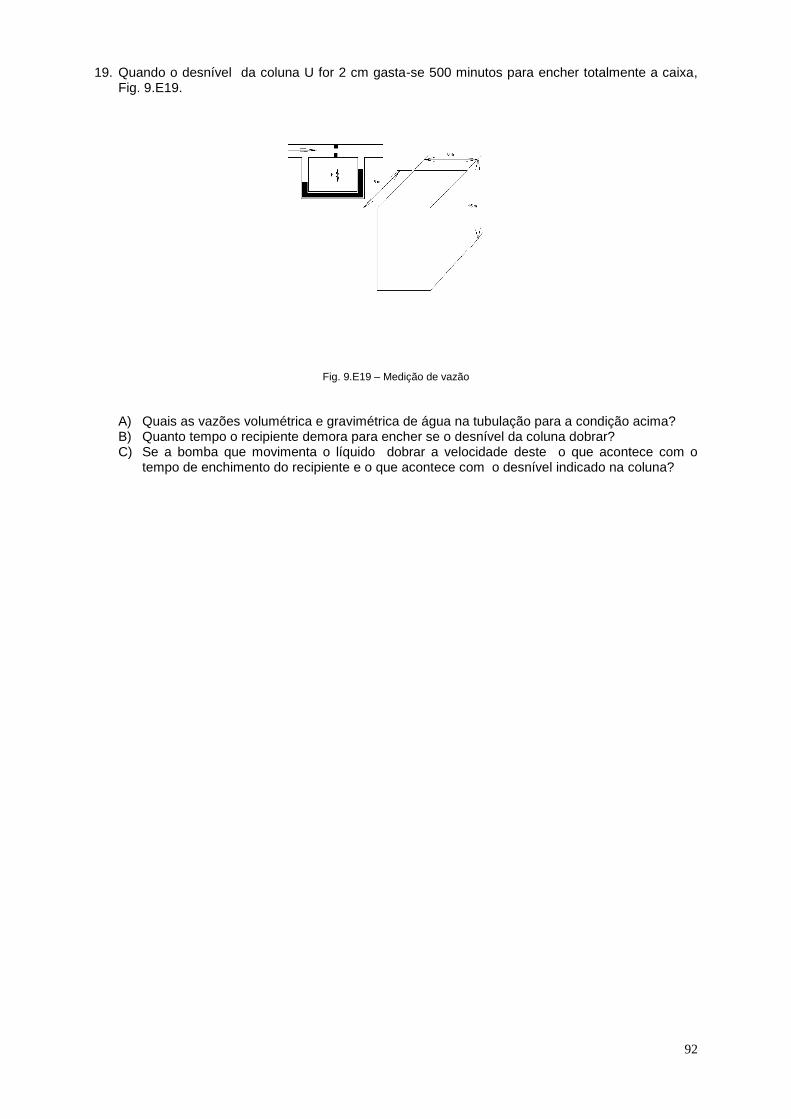
92
19. Quando o desnível da coluna U for 2 cm gasta-se 500 minutos para encher totalmente a caixa, Fig. 9.E19.
Fig. 9.E19 – Medição de vazão
A) Quais as vazões volumétrica e gravimétrica de água na tubulação para a condição acima? B) Quanto tempo o recipiente demora para encher se o desnível da coluna dobrar? C) Se a bomba que movimenta o líquido dobrar a velocidade deste o que acontece com o
tempo de enchimento do recipiente e o que acontece com o desnível indicado na coluna?

93
CAPÍTULO 10 – MEDIÇÃO DE TEMPERATURA
10.1. Introdução
No estudo da automação em sistemas industriais, comerciais, automobilísticos, domésticos, etc., é preciso determinar as condições (variáveis) do sistema. É necessário obter os valores das variáveis físicas do ambiente a ser monitorado, e este é o trabalho dos sensores. A medição de uma grandeza física qualquer consiste, basicamente, na utilização de um conjunto transdutor + condicionador (transmissor), que seja capaz de relacionar, de forma conhecida, a grandeza física em questão com um sinal padronizado. Os transdutores baseiam-se, de forma geral, em leis físicas que associam a variação da grandeza a ser medida com a variação de algum outro tipo de grandeza de fácil medição.
10.2. Medição de Temperatura
A grandeza física temperatura é definida como o grau de agitação das moléculas que constituem as substâncias. Quanto mais rápido o movimento das moléculas mais quente se apresenta o corpo. Assim, a temperatura é representada em uma escala numérica, onde, quanto maior o seu valor, maior é a energia cinética média dos átomos do corpo em questão. Outros conceitos que se confundem às vezes com o de temperatura são:
Energia Térmica.
Calor. A Energia Térmica de um corpo é a somatória das energias cinéticas, dos seus átomos, e além de depender da temperatura, depende também da massa e do tipo de substância. Calor é energia em trânsito ou a forma de energia que é transferida através da fronteira de um sistema em virtude da diferença de temperatura. Até o final do século XVI, quando foi desenvolvido o primeiro dispositivo para avaliar temperatura, os sentidos do nosso corpo foram os únicos elementos de que dispunham os homens para dizer se um certo corpo estava mais quente ou frio do que um outro, apesar da inadequação destes sentidos sob ponto de vista científico. Alguns conceitos preliminares devem ser realizados:
PIROMETRIA - Medição de altas temperaturas, na faixa onde os efeitos de radiação térmica passam a se manifestar.
CRIOMETRIA - Medição de baixas temperaturas, ou seja, aquelas próximas ao zero absoluto de temperatura.
TERMOMETRIA - Termo mais abrangente (medida de temperatura) que incluiria tanto a pirometria, como a criometria que seriam casos particulares de medição.
A literatura geralmente reconhece três meios distintos de transmissão de calor: condução, radiação e convecção.
a) Condução
A condução é um processo pelo qual o calor flui de uma região de alta temperatura para outra de temperatura mais baixa, dentro de um meio sólido, líquido ou gasoso ou entre meios diferentes em contato físico direto.
b) Radiação A radiação é um processo pelo qual o calor flui de um corpo de alta temperatura para um de baixa, quando os mesmos estão separados no espaço, ainda que exista um vácuo entre eles.
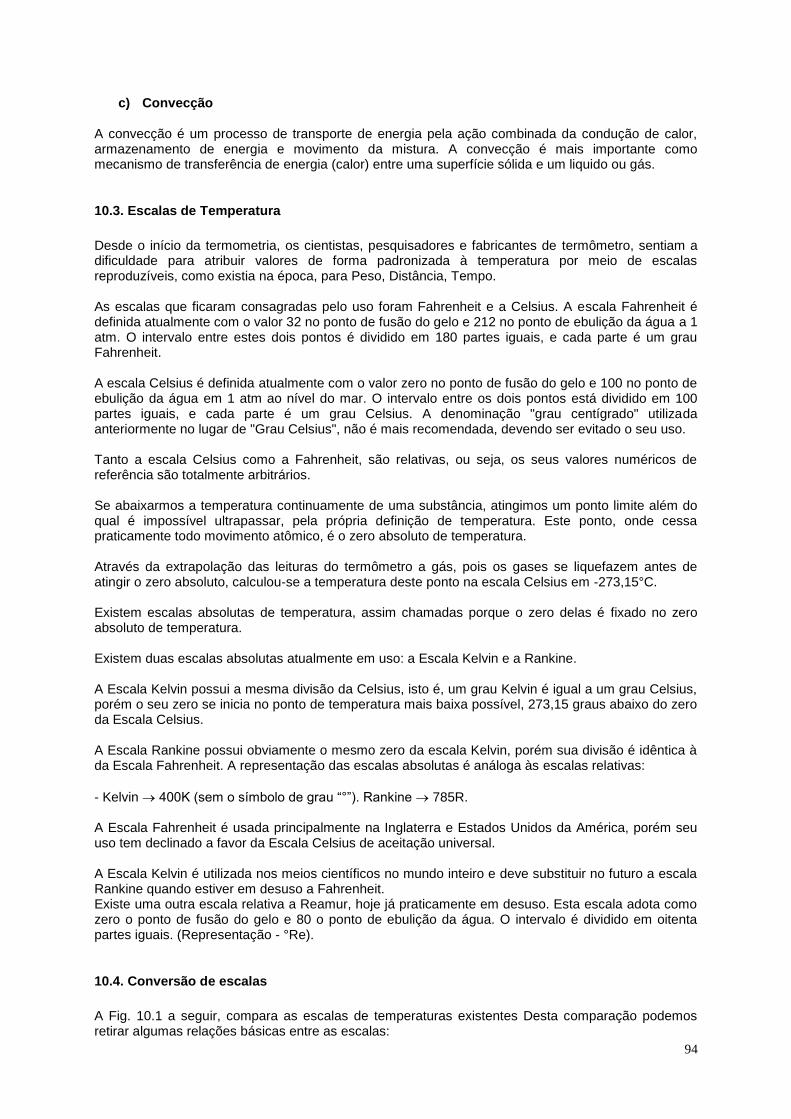
94
c) Convecção A convecção é um processo de transporte de energia pela ação combinada da condução de calor, armazenamento de energia e movimento da mistura. A convecção é mais importante como mecanismo de transferência de energia (calor) entre uma superfície sólida e um liquido ou gás.
10.3. Escalas de Temperatura
Desde o início da termometria, os cientistas, pesquisadores e fabricantes de termômetro, sentiam a dificuldade para atribuir valores de forma padronizada à temperatura por meio de escalas reproduzíveis, como existia na época, para Peso, Distância, Tempo. As escalas que ficaram consagradas pelo uso foram Fahrenheit e a Celsius. A escala Fahrenheit é definida atualmente com o valor 32 no ponto de fusão do gelo e 212 no ponto de ebulição da água a 1 atm. O intervalo entre estes dois pontos é dividido em 180 partes iguais, e cada parte é um grau Fahrenheit. A escala Celsius é definida atualmente com o valor zero no ponto de fusão do gelo e 100 no ponto de ebulição da água em 1 atm ao nível do mar. O intervalo entre os dois pontos está dividido em 100 partes iguais, e cada parte é um grau Celsius. A denominação "grau centígrado" utilizada anteriormente no lugar de "Grau Celsius", não é mais recomendada, devendo ser evitado o seu uso. Tanto a escala Celsius como a Fahrenheit, são relativas, ou seja, os seus valores numéricos de referência são totalmente arbitrários. Se abaixarmos a temperatura continuamente de uma substância, atingimos um ponto limite além do qual é impossível ultrapassar, pela própria definição de temperatura. Este ponto, onde cessa praticamente todo movimento atômico, é o zero absoluto de temperatura. Através da extrapolação das leituras do termômetro a gás, pois os gases se liquefazem antes de atingir o zero absoluto, calculou-se a temperatura deste ponto na escala Celsius em -273,15°C. Existem escalas absolutas de temperatura, assim chamadas porque o zero delas é fixado no zero absoluto de temperatura. Existem duas escalas absolutas atualmente em uso: a Escala Kelvin e a Rankine. A Escala Kelvin possui a mesma divisão da Celsius, isto é, um grau Kelvin é igual a um grau Celsius, porém o seu zero se inicia no ponto de temperatura mais baixa possível, 273,15 graus abaixo do zero da Escala Celsius. A Escala Rankine possui obviamente o mesmo zero da escala Kelvin, porém sua divisão é idêntica à da Escala Fahrenheit. A representação das escalas absolutas é análoga às escalas relativas:
- Kelvin 400K (sem o símbolo de grau “°”). Rankine 785R. A Escala Fahrenheit é usada principalmente na Inglaterra e Estados Unidos da América, porém seu uso tem declinado a favor da Escala Celsius de aceitação universal. A Escala Kelvin é utilizada nos meios científicos no mundo inteiro e deve substituir no futuro a escala Rankine quando estiver em desuso a Fahrenheit. Existe uma outra escala relativa a Reamur, hoje já praticamente em desuso. Esta escala adota como zero o ponto de fusão do gelo e 80 o ponto de ebulição da água. O intervalo é dividido em oitenta partes iguais. (Representação - °Re).
10.4. Conversão de escalas
A Fig. 10.1 a seguir, compara as escalas de temperaturas existentes Desta comparação podemos retirar algumas relações básicas entre as escalas:
95
Fig. 10. 1 – Comparação entre as escalas de temperatura
Desta comparação podemos retirar algumas relações básicas entre as escalas:
9
491
5
15,273
9
32
5
RKFC
A mudança de estado de substâncias puras (fusão, ebulição) é normalmente desenvolvida sem alteração na temperatura. Todo calor recebido ou cedido pela substância é utilizado pelo mecanismo de mudança de estado.
10.5. Transdutores de Temperatura
Os instrumentos de medição de temperatura dividem-se em duas classes:
Instrumentos nos quais o elemento de medição esta em contato com o corpo cuja temperatura se quer medir (transferência de calor por condução).
→ Termômetro à dilatação de liquido. → Termômetro à dilatação de gás. → Termômetro à tensão de vapor saturante. → Termômetro à dilatação de sólido. → Termômetro à resistência elétrica. → Termômetro à par termo elétrico.
Instrumento em que o elemento sensível não está em contato com o corpo cuja temperatura queremos medir (transferência de calor por radiação).
→ Pirômetros à radiação. → Pirômetros ópticos.
O uso dos tipos de medidores citados, dependerá de vários fatores como faixa de medição, tempo de resposta, precisão, etc. Medidores por Dilatação/Expansão 10.5.1. Termômetro a Dilatação de Líquido
Os termômetros de dilatação de líquidos, baseiam-se na lei de expansão volumétrica de um líquido com a temperatura dentro de um recipiente fechado. A equação que rege esta relação é:
3
3
2
210 ).().().(1. TTTVVT
onde:
96
0
10
321
0
0
;exp,,
;
;
TTT
ClíquidodoansãodeeCoeficient
TatemperaturàlíquidodoVolumeV
CemlíquidodoaTemperaturT
Teoricamente esta relação não é linear, porém como os termos de segunda e terceira ordem são desprezíveis, na prática consideramos linear. E daí:
).(1.0 TVVT
Os tipos podem variar conforme sua construção:
→ Recipiente de vidro transparente → Recipiente metálico
Termômetros de dilatação de líquido em recipiente de vidro É constituído de um reservatório, cujo tamanho depende da sensibilidade desejada, soldada a um tubo capilar de seção , mais uniforme possível fechado na parte superior. O reservatório e parte do capilar são preenchidos de um líquido. Na parte superior do capilar existe um alargamento que protege o termômetro no caso da temperatura ultrapassar seu limite máximo. Após a calibração, a parede do tubo capilar é graduada em graus ou frações deste. A medição de temperatura se faz pela leitura da escala no ponto em que se tem o topo da coluna líquida. Os líquidos mais usados são: Mercúrio, Tolueno, Álcool e Acetona (Tab. 1). Nos termômetros industriais, o bulbo de vidro é protegido por um poço metálico e o tubo capilar por um invólucro metálico.
Tabela 1 – Líquidos utilizados em Termômetros de dilatação
LIQUIDO PONTO DE
SOLIDIFICAÇÃO
PONTO DE
EBULIÇÃO(C) FAIXA DE USO (c)
Mercúrio -39 +357 -38 à 356
Álcool Etílico -115 +78 -100 à 70
Tolueno -92 +110 -80 à 100
No termômetro de mercúrio (Fig. 10.2), pode-se elevar o limite máximo até 550C injetando-se gás inerte sob pressão, evitando a vaporização do mercúrio. Por ser frágil e impossível registrar sua indicação ou transmiti-la à distância, o uso deste termômetro é mais comum em laboratórios ou em indústrias, com a utilização de uma proteção metálica, Fig. 10.3.
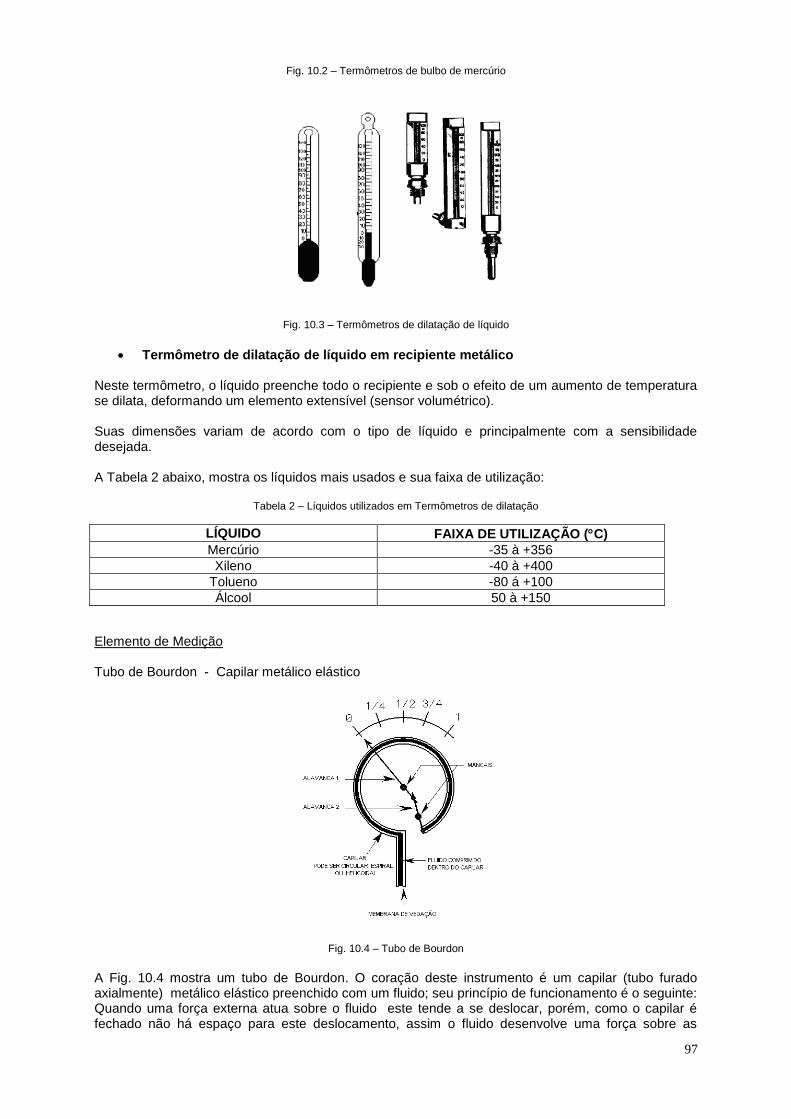
97
Fig. 10.2 – Termômetros de bulbo de mercúrio
Fig. 10.3 – Termômetros de dilatação de líquido
Termômetro de dilatação de líquido em recipiente metálico Neste termômetro, o líquido preenche todo o recipiente e sob o efeito de um aumento de temperatura se dilata, deformando um elemento extensível (sensor volumétrico). Suas dimensões variam de acordo com o tipo de líquido e principalmente com a sensibilidade desejada. A Tabela 2 abaixo, mostra os líquidos mais usados e sua faixa de utilização:
Tabela 2 – Líquidos utilizados em Termômetros de dilatação
LÍQUIDO FAIXA DE UTILIZAÇÃO (C)
Mercúrio -35 à +356
Xileno -40 à +400
Tolueno -80 á +100
Álcool 50 à +150
Elemento de Medição Tubo de Bourdon - Capilar metálico elástico
Fig. 10.4 – Tubo de Bourdon
A Fig. 10.4 mostra um tubo de Bourdon. O coração deste instrumento é um capilar (tubo furado axialmente) metálico elástico preenchido com um fluido; seu princípio de funcionamento é o seguinte: Quando uma força externa atua sobre o fluido este tende a se deslocar, porém, como o capilar é fechado não há espaço para este deslocamento, assim o fluido desenvolve uma força sobre as
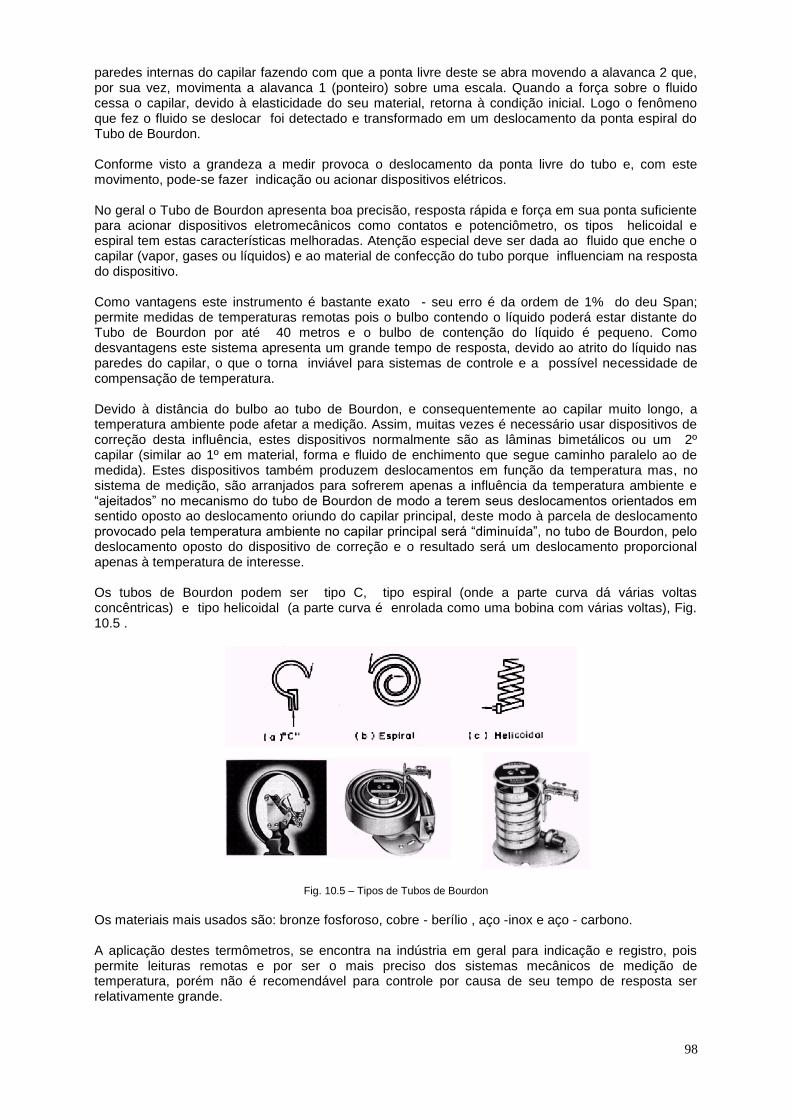
98
paredes internas do capilar fazendo com que a ponta livre deste se abra movendo a alavanca 2 que, por sua vez, movimenta a alavanca 1 (ponteiro) sobre uma escala. Quando a força sobre o fluido cessa o capilar, devido à elasticidade do seu material, retorna à condição inicial. Logo o fenômeno que fez o fluido se deslocar foi detectado e transformado em um deslocamento da ponta espiral do Tubo de Bourdon. Conforme visto a grandeza a medir provoca o deslocamento da ponta livre do tubo e, com este movimento, pode-se fazer indicação ou acionar dispositivos elétricos. No geral o Tubo de Bourdon apresenta boa precisão, resposta rápida e força em sua ponta suficiente para acionar dispositivos eletromecânicos como contatos e potenciômetro, os tipos helicoidal e espiral tem estas características melhoradas. Atenção especial deve ser dada ao fluido que enche o capilar (vapor, gases ou líquidos) e ao material de confecção do tubo porque influenciam na resposta do dispositivo. Como vantagens este instrumento é bastante exato - seu erro é da ordem de 1% do deu Span; permite medidas de temperaturas remotas pois o bulbo contendo o líquido poderá estar distante do Tubo de Bourdon por até 40 metros e o bulbo de contenção do líquido é pequeno. Como desvantagens este sistema apresenta um grande tempo de resposta, devido ao atrito do líquido nas paredes do capilar, o que o torna inviável para sistemas de controle e a possível necessidade de compensação de temperatura. Devido à distância do bulbo ao tubo de Bourdon, e consequentemente ao capilar muito longo, a temperatura ambiente pode afetar a medição. Assim, muitas vezes é necessário usar dispositivos de correção desta influência, estes dispositivos normalmente são as lâminas bimetálicos ou um 2º capilar (similar ao 1º em material, forma e fluido de enchimento que segue caminho paralelo ao de medida). Estes dispositivos também produzem deslocamentos em função da temperatura mas, no sistema de medição, são arranjados para sofrerem apenas a influência da temperatura ambiente e “ajeitados” no mecanismo do tubo de Bourdon de modo a terem seus deslocamentos orientados em sentido oposto ao deslocamento oriundo do capilar principal, deste modo à parcela de deslocamento provocado pela temperatura ambiente no capilar principal será “diminuída”, no tubo de Bourdon, pelo deslocamento oposto do dispositivo de correção e o resultado será um deslocamento proporcional apenas à temperatura de interesse. Os tubos de Bourdon podem ser tipo C, tipo espiral (onde a parte curva dá várias voltas concêntricas) e tipo helicoidal (a parte curva é enrolada como uma bobina com várias voltas), Fig. 10.5 .
Fig. 10.5 – Tipos de Tubos de Bourdon
Os materiais mais usados são: bronze fosforoso, cobre - berílio , aço -inox e aço - carbono. A aplicação destes termômetros, se encontra na indústria em geral para indicação e registro, pois permite leituras remotas e por ser o mais preciso dos sistemas mecânicos de medição de temperatura, porém não é recomendável para controle por causa de seu tempo de resposta ser relativamente grande.

99
10.5.2. Termômetros à Pressão de Gás
Fisicamente idêntico ao termômetro de dilatação de líquido, consta de um bulbo, elemento de medição e capilar de ligação entre estes dois elementos. O volume do conjunto é constante e preenchido com um gás a alta pressão. Com a variação da temperatura, o gás varia sua pressão conforme, aproximadamente a lei dos gases perfeitos, com o elemento de medição operando como medidor de pressão. A Lei de Gay-Lussac, expressa matematicamente este conceito:
n
n
T
P
T
P
T
P
2
2
1
1
Observa-se que as variações de pressão são linearmente dependentes da temperatura, sendo o volume constante. O gás mais utilizado é o N2 e geralmente é pressurizado com uma pressão de 20 a 50 atm., na temperatura mínima a medir. Sua faixa de medição vai de -100 a 600 oC, sendo o limite inferior devido à própria temperatura crítica do gás e o superior proveniente do recipiente apresentar maior permeabilidade ao gás nesta temperatura , o que acarretaria sua perda inutilizando o termômetro (Tabela 3).
Tabela 3 - Gás de enchimento para Termômetros à Pressão de Gás
GÁS TEMPERATURA CRÍTICA (C)
Hélio (He -267,8
Hidrogênio (H2) -239,9
Nitrogênio (N2) -147,1
Dióxido de Carbono (CO2) -31,1
10.5.3. Termômetro à Pressão de Vapor
Sua construção é bastante semelhante ao de dilatação de líquidos, baseando o seu funcionamento na Lei de Dalton: "A pressão de vapor saturado depende somente de sua temperatura e não de seu volume". Portanto para qualquer variação de temperatura haverá uma variação na tensão de vapor do gás liquefeito colocado no bulbo do termômetro e, em conseqüência disto, uma variação na pressão dentro do capilar. A relação existente entre tensão de vapor de um líquido e sua temperatura é do tipo logarítmica e pode ser simplificada para pequenos intervalos de temperatura em:
58,4
11
21
2
1
TT
He
P
P
onde:
;senRe
;
;Pr
21
21
questãoemlíquidodoevaporaçãodelatentecalorotapreHe
absolutasasTemperaturTeT
astemperaturàsrelativasabsolutasessõesPeP
A tabela 4 mostra os líquidos mais utilizados e seus pontos de fusão e ebulição:
Tabela 4 – Líquidos utilizados em Termômetros à Pressão de Vapor
LÍQUIDO PONTO DE FUSÃO (c) PONTO DE EBULIÇÃO (C)
Cloreto de Metila -139 -24
Butano -135 -0,5
Éter Etílico -119 34
Tolueno -95 110
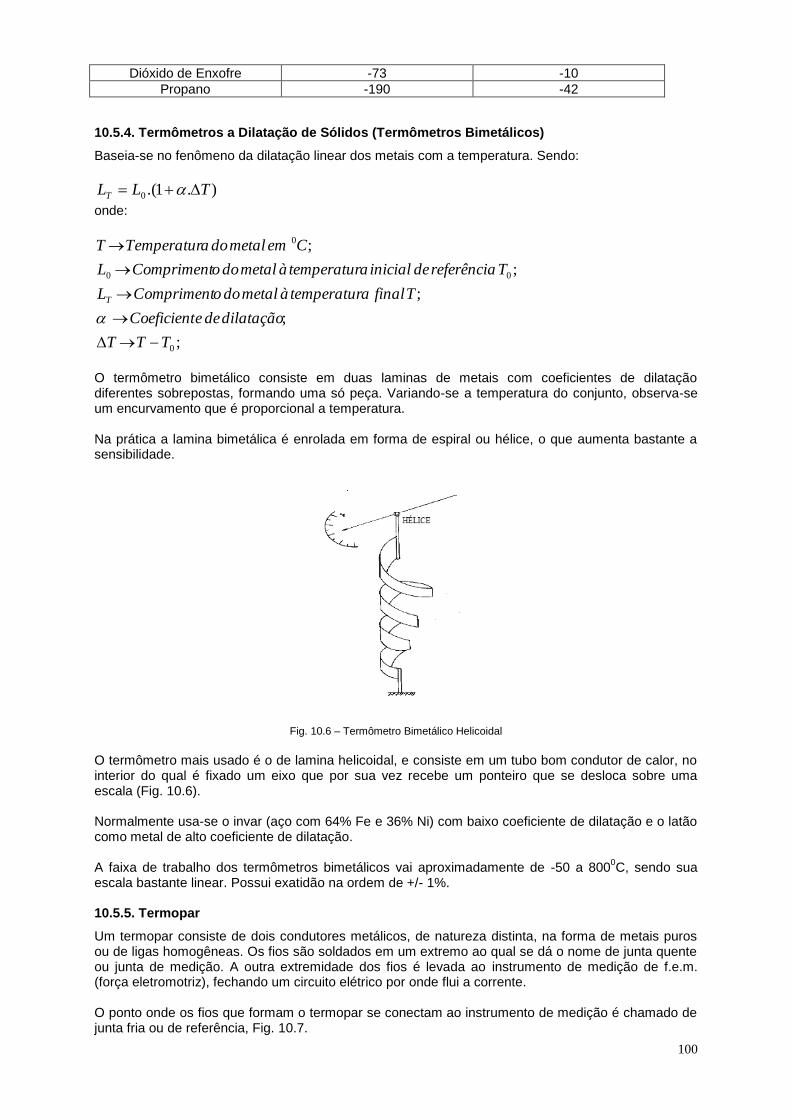
100
Dióxido de Enxofre -73 -10
Propano -190 -42
10.5.4. Termômetros a Dilatação de Sólidos (Termômetros Bimetálicos)
Baseia-se no fenômeno da dilatação linear dos metais com a temperatura. Sendo:
).1.(0 TLLT
onde:
;
;
;
;
;
0
00
0
TTT
dilataçãodeeCoeficient
TfinalatemperaturàmetaldooComprimentL
TreferênciadeinicialatemperaturàmetaldooComprimentL
CemmetaldoaTemperaturT
T
O termômetro bimetálico consiste em duas laminas de metais com coeficientes de dilatação diferentes sobrepostas, formando uma só peça. Variando-se a temperatura do conjunto, observa-se um encurvamento que é proporcional a temperatura. Na prática a lamina bimetálica é enrolada em forma de espiral ou hélice, o que aumenta bastante a sensibilidade.
Fig. 10.6 – Termômetro Bimetálico Helicoidal
O termômetro mais usado é o de lamina helicoidal, e consiste em um tubo bom condutor de calor, no interior do qual é fixado um eixo que por sua vez recebe um ponteiro que se desloca sobre uma escala (Fig. 10.6). Normalmente usa-se o invar (aço com 64% Fe e 36% Ni) com baixo coeficiente de dilatação e o latão como metal de alto coeficiente de dilatação. A faixa de trabalho dos termômetros bimetálicos vai aproximadamente de -50 a 800
0C, sendo sua
escala bastante linear. Possui exatidão na ordem de +/- 1%. 10.5.5. Termopar
Um termopar consiste de dois condutores metálicos, de natureza distinta, na forma de metais puros ou de ligas homogêneas. Os fios são soldados em um extremo ao qual se dá o nome de junta quente ou junta de medição. A outra extremidade dos fios é levada ao instrumento de medição de f.e.m. (força eletromotriz), fechando um circuito elétrico por onde flui a corrente. O ponto onde os fios que formam o termopar se conectam ao instrumento de medição é chamado de junta fria ou de referência, Fig. 10.7.
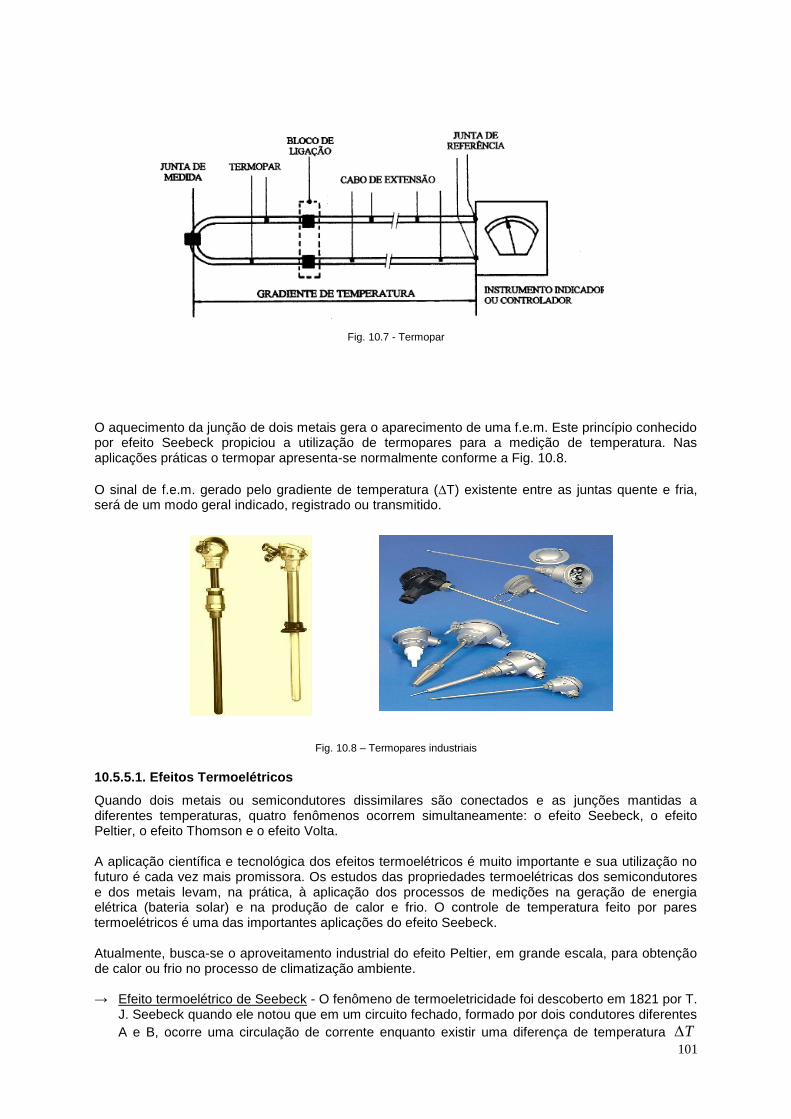
101
Fig. 10.7 - Termopar
O aquecimento da junção de dois metais gera o aparecimento de uma f.e.m. Este princípio conhecido por efeito Seebeck propiciou a utilização de termopares para a medição de temperatura. Nas aplicações práticas o termopar apresenta-se normalmente conforme a Fig. 10.8.
O sinal de f.e.m. gerado pelo gradiente de temperatura (T) existente entre as juntas quente e fria, será de um modo geral indicado, registrado ou transmitido.
Fig. 10.8 – Termopares industriais
10.5.5.1. Efeitos Termoelétricos
Quando dois metais ou semicondutores dissimilares são conectados e as junções mantidas a diferentes temperaturas, quatro fenômenos ocorrem simultaneamente: o efeito Seebeck, o efeito Peltier, o efeito Thomson e o efeito Volta. A aplicação científica e tecnológica dos efeitos termoelétricos é muito importante e sua utilização no futuro é cada vez mais promissora. Os estudos das propriedades termoelétricas dos semicondutores e dos metais levam, na prática, à aplicação dos processos de medições na geração de energia elétrica (bateria solar) e na produção de calor e frio. O controle de temperatura feito por pares termoelétricos é uma das importantes aplicações do efeito Seebeck. Atualmente, busca-se o aproveitamento industrial do efeito Peltier, em grande escala, para obtenção de calor ou frio no processo de climatização ambiente. → Efeito termoelétrico de Seebeck - O fenômeno de termoeletricidade foi descoberto em 1821 por T.
J. Seebeck quando ele notou que em um circuito fechado, formado por dois condutores diferentes
A e B, ocorre uma circulação de corrente enquanto existir uma diferença de temperatura T
102
entre as suas junções. Denominamos a junta de medição de T, e a outra, junta de referência de Tr. A existência de temperatura de uma f.e.m., térmica AB no circuito é conhecida como efeito Seebeck. Quando a temperatura da junta de referência é mantida constante, verifica-se que a f.e.m térmica é uma função da temperatura T da junção de teste.
Este fato permite utilizar um par termelétrico com um termômetro. O efeito Seebeck se produz pelo fato de que os elétrons livres de um metal difere de um condutor para outro e depende da temperatura. Quando dois condutores diferentes são conectados para formar duas junções e estas são mantidas a diferentes temperaturas, a difusão dos elétrons nas junções se produz a ritmos diferentes. → Efeito termelétrico de Peltier - Em 1834, Peltier descobriu que, dada um par termelétrico com
ambas as junções à mesma temperatura, se, mediante uma bateria exterior, produz-se uma corrente no termopar, as temperaturas das junções variam em uma quantidade não inteiramente devida ao efeito Joule. Essa variação adicional de temperatura é o efeito Peltier . O efeito Peltier produz-se tanto pela corrente proporcionada por uma bateria exterior como pelo próprio par termelétrico. O coeficiente Peltier depende da temperatura e dos metais que formam um junção, sendo independente da temperatura da outra junção. O calor Peltier é reversível. Quando se inverte o sentido da corrente. permanecendo constante o seu valor, o calor Peltier é o mesmo, porém em sentido oposto.
→ Efeito Termoelétrico de Thomson - Em 1854, Thomson conclui, através das leis da
termodinâmica, que a condução de calor, ao longo dos fios metálicos de um par termelétrico, que nos transporta corrente, origina uma distribuição uniforme de temperatura em cada fio. Quando existe corrente, modifica-se em cada fio a distribuição de temperatura em um quantidade não inteiramente devida ao efeito Joule. Essa variação adicional na distribuição da temperatura denomina-se efeito Thomson.
O efeito Thomson depende do metal de que é feito o fio e da temperatura média da pequena região considerada. Em certos metais a absorção de calor, quando uma corrente elétrica flui da parte fria para a parte quente do metal é que há geração de calor quando se inverte o sentido da corrente. Em outros metais ocorre o oposto deste efeito, isto é, há liberação de calor quando uma corrente elétrica flui da parte quente para a parte fria do metal. Conclui-se que, com a circulação de corrente ao longo de um fio condutor, a distribuição de temperatura neste condutor se modificará, tanto pelo calor dissipado por efeito Joule, como pelo efeito Thomson. → Efeito termoelétrico de Volta - A experiência de Peltier pode ser explicada através do efeito Volta
enunciado a seguir: “Quando dois metais estão em contato a um equilíbrio térmico e elétrico, existe entre eles uma diferença de potencial que pode ser da ordem de Volts”. Esta diferença de potencial depende da temperatura e não pode ser medida diretamente. 10.5.5.2. Tipos e Características dos Termopares
Existem várias combinações de 2 metais condutores operando como termopares. As combinações de fios devem possuir uma relação razoavelmente linear entre temperatura e f.e.m.: devem desenvolver uma f.e.m. por grau de mudança de temperatura, que seja detectável pelos equipamentos normais de medição. Foram desenvolvidas diversas combinações de pares de ligas metálicas, desde os mais corriqueiros de uso industrial, até os mais sofisticados para uso especial ou restrito a laboratório. Essas combinações foram feitas de modo a se obter uma alta potência termoelétrica, aliando-se ainda as melhores características como homogeneidade dos fios e resistência a corrosão, na faixa de utilização, assim cada tipo de termopar tem uma faixa de temperatura ideal de trabalho, que deve ser respeitada, para que se tenha a maior vida útil do mesmo. Podemos dividir os termopares em três grupos, saber:
103
Termopares Básicos: São assim chamados os termopares de maior uso industrial, em que os fios são de custo relativamente baixo e sua aplicação admite um limite de erro maior.
Termopares Nobres: São aqueles que os pares são constituídos de platina. Embora possuam custo elevado e exijam instrumentos receptores de alta sensibilidade, devido à baixa potência termoelétrica, apresentam uma altíssima precisão, dada a homogeneidade e pureza dos fios dos termopares.
Termopares Especiais: Ao longo dos anos, os tipos de termopares produzidos oferecem, uma característica especial porém, apresentam restrições de aplicação, que devem ser consideradas. Novos tipos de termopares foram desenvolvidos para atender as condições de processo onde os termopares básicos não podem ser utilizados.
Tipo Metais (ou ligas) Range de
Entrada (C) Range de Saída (mV)
Aplicações
Termopares Básicos
T (+ ) Cobre - (99,9%); ( - ) Constantan
- 200 a 370°C
- 5,603 a 19,027 mV
Criometria (baixas temperaturas),indústrias de refrigeração, Pesquisas agronômicas e ambientais, Química e Petroquímica.
J (+ ) Ferro - (99,5 %) ( - ) Constantan
-40 a 760°C
- 1,960 a 42,922 mV
Centrais de energia, Metalúrgica, Petro- química, Química, indústrias em geral.
E (+ ) Chromel ( - ) Constantan
-200 a 870°C - 8,824 a 66,473 mV Química e Petroquímica
K (+ ) Chromel ( - ) Alumel
- 200 a 1260°C
- 5,891 a 50,99 mV
Metalúrgicas, Siderúrgicas, Fundição, Usina de Cimento e Cal, Vidros, Cerâmica, Indústrias em geral.
Termopares Nobres
S (+ ) Platina 90% Rhodio 10% ( - ) Platina 100 %
0 a 1500°C
0 a 15,771 mV
Siderúrgica, Fundição, Metalúrgica, Usina de Cimento, Cerâmica, Vidro e Pesquisa Científica.
R (+ ) Platina 87% Rhodio 13% ( - ) Platina 100 %
0 a 1500°C
0 a 18,842 mV
As mesmas do tipo S
B (+ ) Platina 70 % Rhodio 30 % ( - ) Platina 94% Rhodio 6 %
600 a 1700°C
1,791 a 12,426 mV
Vidro, Siderúrgica, alta temperatura em geral.
* Constantan: Liga Cobre e Níquel – Cu (58%) e Ni (42%) * Alumel: Liga de Níquel, Manganês, Silício e Alumínio – Ni (95,4%), Mn (1,8%), Silício (1,6%) e Al (1,2%) * Cromel: Liga Níquel e Cromo – Ni (90%) e Cr (10%)
Termopares Especiais
Tungstênio – Rhênio: Esses termopares podem ser usados continuamente até 2300 °C e por curto período até 2750 °C.
Irídio 4 0 % - Rhodio / Irídio: Esses termopares podem ser utilizados por períodos limitados até 2000°C.
Platina - 40% Rhodio / Platina - 20 % Rhodio: Esses termopares são utilizados em substituição ao tipo B onde temperaturas um pouco mais elevadas são requeridas. Podem ser usados continuamente até 1500 °C e por curto período até 1800 °C ou 1850 °C.
Ouro- Ferro / Chromel: Esses termopares são desenvolvidos para trabalhar em temperaturas criogênicas.
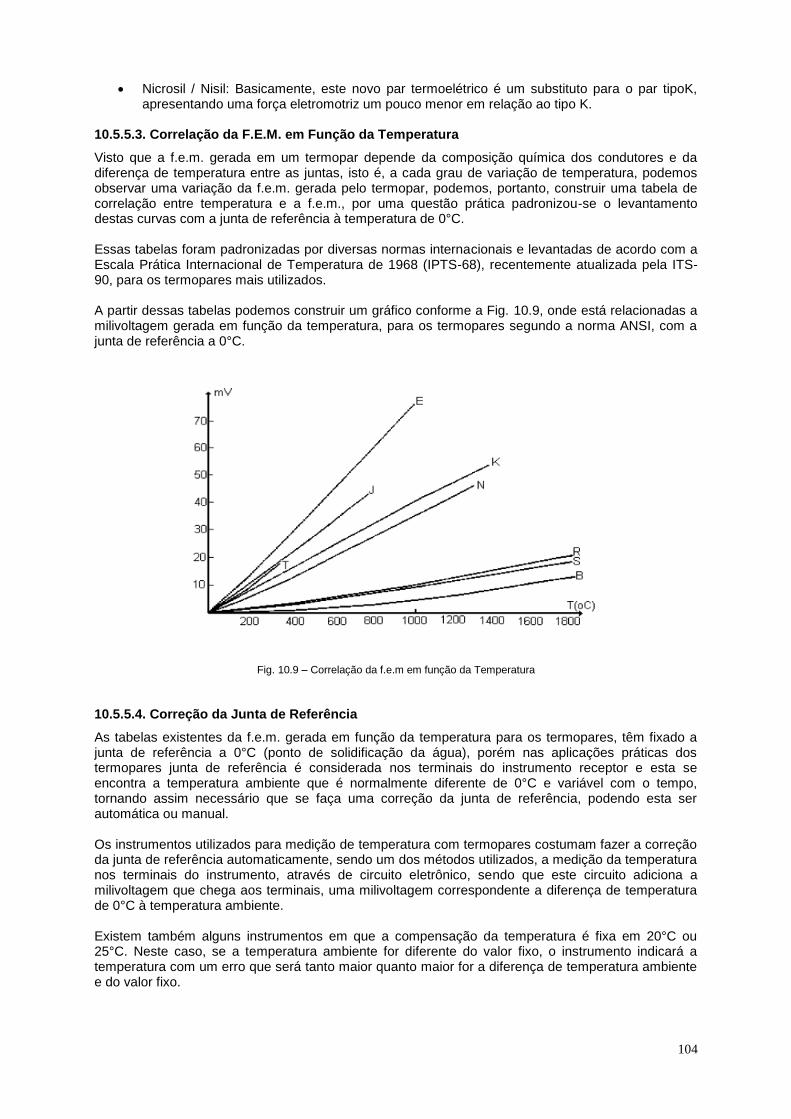
104
Nicrosil / Nisil: Basicamente, este novo par termoelétrico é um substituto para o par tipoK, apresentando uma força eletromotriz um pouco menor em relação ao tipo K.
10.5.5.3. Correlação da F.E.M. em Função da Temperatura
Visto que a f.e.m. gerada em um termopar depende da composição química dos condutores e da diferença de temperatura entre as juntas, isto é, a cada grau de variação de temperatura, podemos observar uma variação da f.e.m. gerada pelo termopar, podemos, portanto, construir uma tabela de correlação entre temperatura e a f.e.m., por uma questão prática padronizou-se o levantamento destas curvas com a junta de referência à temperatura de 0°C. Essas tabelas foram padronizadas por diversas normas internacionais e levantadas de acordo com a Escala Prática Internacional de Temperatura de 1968 (IPTS-68), recentemente atualizada pela ITS-90, para os termopares mais utilizados. A partir dessas tabelas podemos construir um gráfico conforme a Fig. 10.9, onde está relacionadas a milivoltagem gerada em função da temperatura, para os termopares segundo a norma ANSI, com a junta de referência a 0°C.
Fig. 10.9 – Correlação da f.e.m em função da Temperatura
10.5.5.4. Correção da Junta de Referência
As tabelas existentes da f.e.m. gerada em função da temperatura para os termopares, têm fixado a junta de referência a 0°C (ponto de solidificação da água), porém nas aplicações práticas dos termopares junta de referência é considerada nos terminais do instrumento receptor e esta se encontra a temperatura ambiente que é normalmente diferente de 0°C e variável com o tempo, tornando assim necessário que se faça uma correção da junta de referência, podendo esta ser automática ou manual. Os instrumentos utilizados para medição de temperatura com termopares costumam fazer a correção da junta de referência automaticamente, sendo um dos métodos utilizados, a medição da temperatura nos terminais do instrumento, através de circuito eletrônico, sendo que este circuito adiciona a milivoltagem que chega aos terminais, uma milivoltagem correspondente a diferença de temperatura de 0°C à temperatura ambiente. Existem também alguns instrumentos em que a compensação da temperatura é fixa em 20°C ou 25°C. Neste caso, se a temperatura ambiente for diferente do valor fixo, o instrumento indicará a temperatura com um erro que será tanto maior quanto maior for a diferença de temperatura ambiente e do valor fixo.
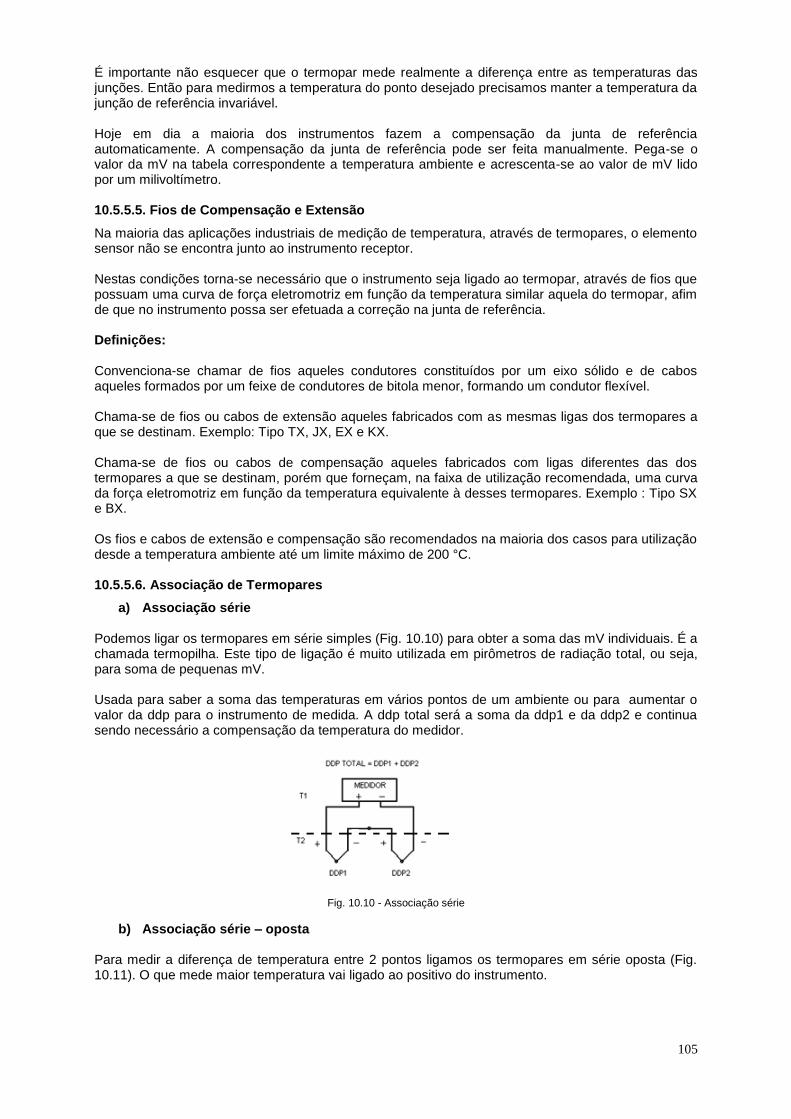
105
É importante não esquecer que o termopar mede realmente a diferença entre as temperaturas das junções. Então para medirmos a temperatura do ponto desejado precisamos manter a temperatura da junção de referência invariável. Hoje em dia a maioria dos instrumentos fazem a compensação da junta de referência automaticamente. A compensação da junta de referência pode ser feita manualmente. Pega-se o valor da mV na tabela correspondente a temperatura ambiente e acrescenta-se ao valor de mV lido por um milivoltímetro. 10.5.5.5. Fios de Compensação e Extensão
Na maioria das aplicações industriais de medição de temperatura, através de termopares, o elemento sensor não se encontra junto ao instrumento receptor. Nestas condições torna-se necessário que o instrumento seja ligado ao termopar, através de fios que possuam uma curva de força eletromotriz em função da temperatura similar aquela do termopar, afim de que no instrumento possa ser efetuada a correção na junta de referência. Definições: Convenciona-se chamar de fios aqueles condutores constituídos por um eixo sólido e de cabos aqueles formados por um feixe de condutores de bitola menor, formando um condutor flexível. Chama-se de fios ou cabos de extensão aqueles fabricados com as mesmas ligas dos termopares a que se destinam. Exemplo: Tipo TX, JX, EX e KX. Chama-se de fios ou cabos de compensação aqueles fabricados com ligas diferentes das dos termopares a que se destinam, porém que forneçam, na faixa de utilização recomendada, uma curva da força eletromotriz em função da temperatura equivalente à desses termopares. Exemplo : Tipo SX e BX. Os fios e cabos de extensão e compensação são recomendados na maioria dos casos para utilização desde a temperatura ambiente até um limite máximo de 200 °C. 10.5.5.6. Associação de Termopares
a) Associação série Podemos ligar os termopares em série simples (Fig. 10.10) para obter a soma das mV individuais. É a chamada termopilha. Este tipo de ligação é muito utilizada em pirômetros de radiação total, ou seja, para soma de pequenas mV. Usada para saber a soma das temperaturas em vários pontos de um ambiente ou para aumentar o valor da ddp para o instrumento de medida. A ddp total será a soma da ddp1 e da ddp2 e continua sendo necessário a compensação da temperatura do medidor.
Fig. 10.10 - Associação série
b) Associação série – oposta Para medir a diferença de temperatura entre 2 pontos ligamos os termopares em série oposta (Fig. 10.11). O que mede maior temperatura vai ligado ao positivo do instrumento.
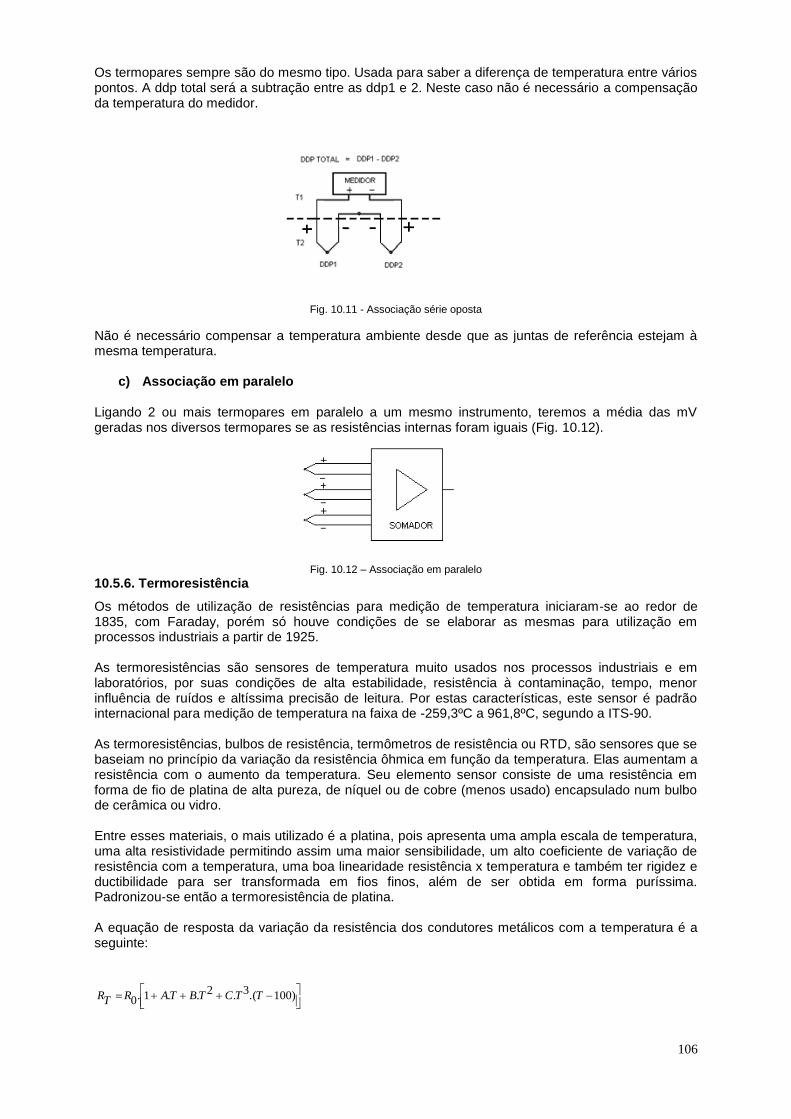
106
Os termopares sempre são do mesmo tipo. Usada para saber a diferença de temperatura entre vários pontos. A ddp total será a subtração entre as ddp1 e 2. Neste caso não é necessário a compensação da temperatura do medidor.
Fig. 10.11 - Associação série oposta
Não é necessário compensar a temperatura ambiente desde que as juntas de referência estejam à mesma temperatura.
c) Associação em paralelo Ligando 2 ou mais termopares em paralelo a um mesmo instrumento, teremos a média das mV geradas nos diversos termopares se as resistências internas foram iguais (Fig. 10.12).
Fig. 10.12 – Associação em paralelo
10.5.6. Termoresistência
Os métodos de utilização de resistências para medição de temperatura iniciaram-se ao redor de 1835, com Faraday, porém só houve condições de se elaborar as mesmas para utilização em processos industriais a partir de 1925. As termoresistências são sensores de temperatura muito usados nos processos industriais e em laboratórios, por suas condições de alta estabilidade, resistência à contaminação, tempo, menor influência de ruídos e altíssima precisão de leitura. Por estas características, este sensor é padrão internacional para medição de temperatura na faixa de -259,3ºC a 961,8ºC, segundo a ITS-90. As termoresistências, bulbos de resistência, termômetros de resistência ou RTD, são sensores que se baseiam no princípio da variação da resistência ôhmica em função da temperatura. Elas aumentam a resistência com o aumento da temperatura. Seu elemento sensor consiste de uma resistência em forma de fio de platina de alta pureza, de níquel ou de cobre (menos usado) encapsulado num bulbo de cerâmica ou vidro. Entre esses materiais, o mais utilizado é a platina, pois apresenta uma ampla escala de temperatura, uma alta resistividade permitindo assim uma maior sensibilidade, um alto coeficiente de variação de resistência com a temperatura, uma boa linearidade resistência x temperatura e também ter rigidez e ductibilidade para ser transformada em fios finos, além de ser obtida em forma puríssima. Padronizou-se então a termoresistência de platina. A equação de resposta da variação da resistência dos condutores metálicos com a temperatura é a seguinte:
)100.(3.2..1.0 TTCTBTARTR
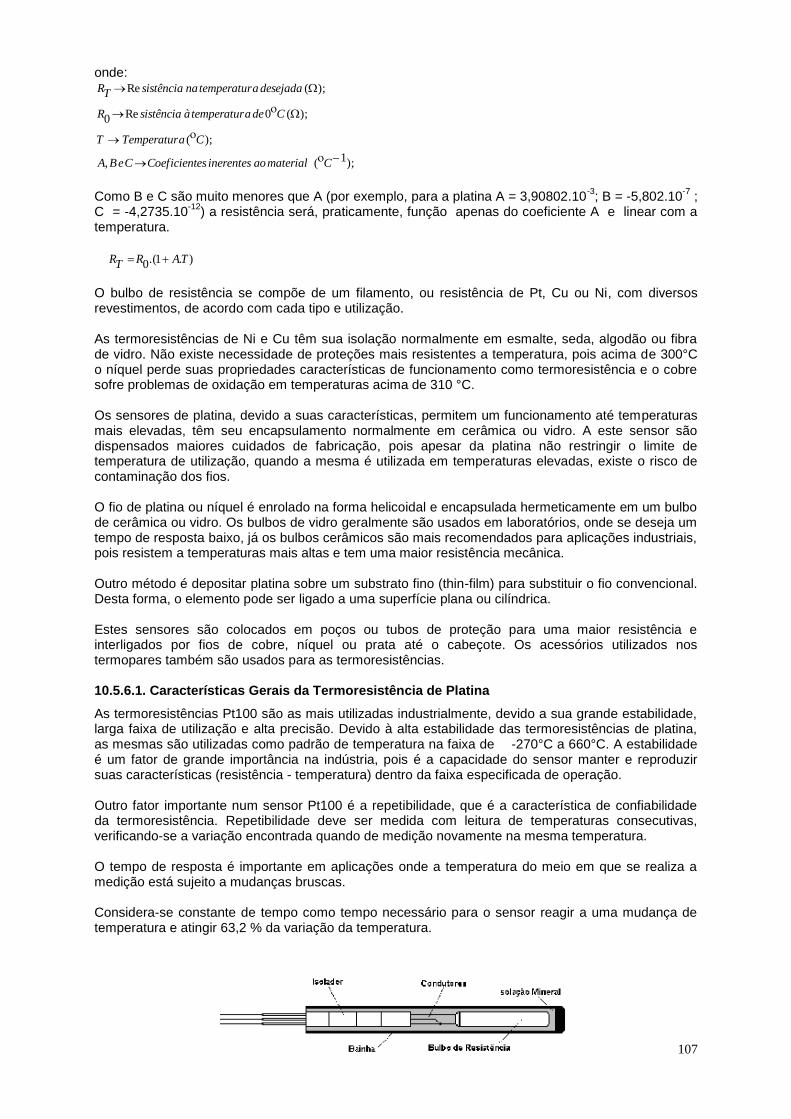
107
onde:
);1(,
);(
);(0Re0
);(Re
CmaterialaoinerentesesCoeficientCeBA
CaTemperaturT
CdeatemperaturàsistênciaR
desejadaatemperaturnasistênciaTR
Como B e C são muito menores que A (por exemplo, para a platina A = 3,90802.10
-3; B = -5,802.10
-7 ;
C = -4,2735.10-12
) a resistência será, praticamente, função apenas do coeficiente A e linear com a temperatura.
).1.(0 TARTR
O bulbo de resistência se compõe de um filamento, ou resistência de Pt, Cu ou Ni, com diversos revestimentos, de acordo com cada tipo e utilização. As termoresistências de Ni e Cu têm sua isolação normalmente em esmalte, seda, algodão ou fibra de vidro. Não existe necessidade de proteções mais resistentes a temperatura, pois acima de 300°C o níquel perde suas propriedades características de funcionamento como termoresistência e o cobre sofre problemas de oxidação em temperaturas acima de 310 °C. Os sensores de platina, devido a suas características, permitem um funcionamento até temperaturas mais elevadas, têm seu encapsulamento normalmente em cerâmica ou vidro. A este sensor são dispensados maiores cuidados de fabricação, pois apesar da platina não restringir o limite de temperatura de utilização, quando a mesma é utilizada em temperaturas elevadas, existe o risco de contaminação dos fios. O fio de platina ou níquel é enrolado na forma helicoidal e encapsulada hermeticamente em um bulbo de cerâmica ou vidro. Os bulbos de vidro geralmente são usados em laboratórios, onde se deseja um tempo de resposta baixo, já os bulbos cerâmicos são mais recomendados para aplicações industriais, pois resistem a temperaturas mais altas e tem uma maior resistência mecânica. Outro método é depositar platina sobre um substrato fino (thin-film) para substituir o fio convencional. Desta forma, o elemento pode ser ligado a uma superfície plana ou cilíndrica. Estes sensores são colocados em poços ou tubos de proteção para uma maior resistência e interligados por fios de cobre, níquel ou prata até o cabeçote. Os acessórios utilizados nos termopares também são usados para as termoresistências. 10.5.6.1. Características Gerais da Termoresistência de Platina
As termoresistências Pt100 são as mais utilizadas industrialmente, devido a sua grande estabilidade, larga faixa de utilização e alta precisão. Devido à alta estabilidade das termoresistências de platina, as mesmas são utilizadas como padrão de temperatura na faixa de -270°C a 660°C. A estabilidade é um fator de grande importância na indústria, pois é a capacidade do sensor manter e reproduzir suas características (resistência - temperatura) dentro da faixa especificada de operação. Outro fator importante num sensor Pt100 é a repetibilidade, que é a característica de confiabilidade da termoresistência. Repetibilidade deve ser medida com leitura de temperaturas consecutivas, verificando-se a variação encontrada quando de medição novamente na mesma temperatura. O tempo de resposta é importante em aplicações onde a temperatura do meio em que se realiza a medição está sujeito a mudanças bruscas. Considera-se constante de tempo como tempo necessário para o sensor reagir a uma mudança de temperatura e atingir 63,2 % da variação da temperatura.
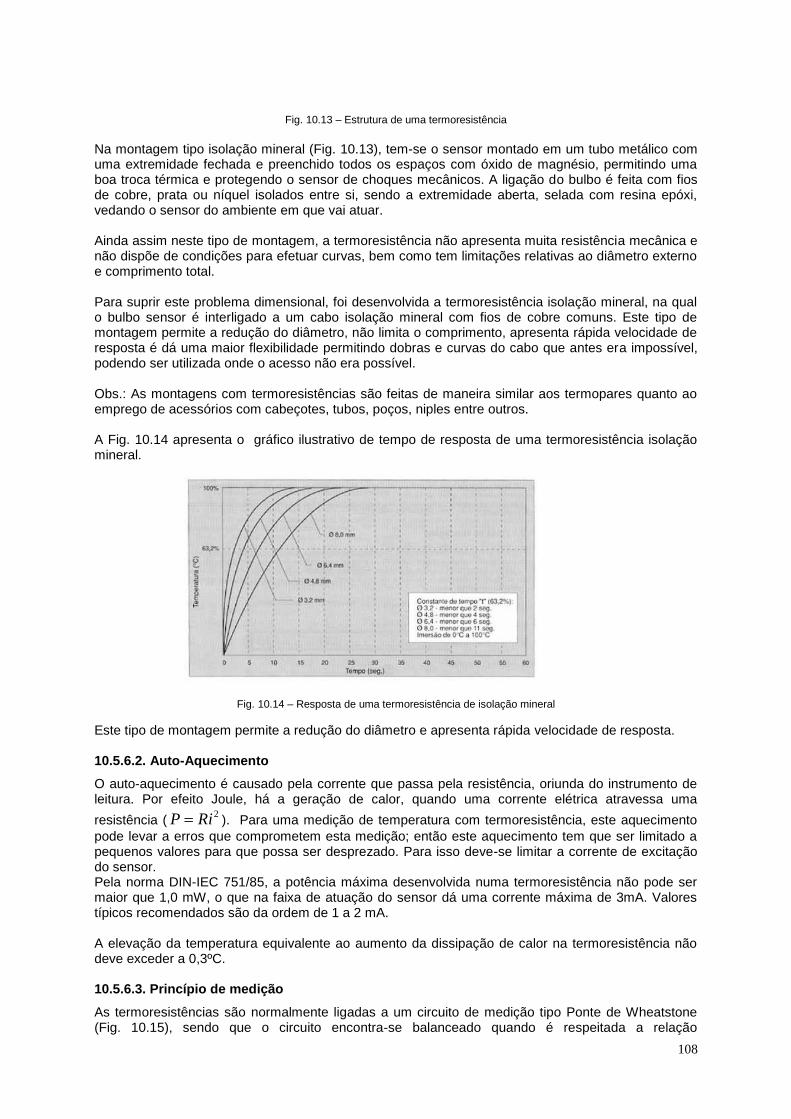
108
Fig. 10.13 – Estrutura de uma termoresistência
Na montagem tipo isolação mineral (Fig. 10.13), tem-se o sensor montado em um tubo metálico com uma extremidade fechada e preenchido todos os espaços com óxido de magnésio, permitindo uma boa troca térmica e protegendo o sensor de choques mecânicos. A ligação do bulbo é feita com fios de cobre, prata ou níquel isolados entre si, sendo a extremidade aberta, selada com resina epóxi, vedando o sensor do ambiente em que vai atuar. Ainda assim neste tipo de montagem, a termoresistência não apresenta muita resistência mecânica e não dispõe de condições para efetuar curvas, bem como tem limitações relativas ao diâmetro externo e comprimento total. Para suprir este problema dimensional, foi desenvolvida a termoresistência isolação mineral, na qual o bulbo sensor é interligado a um cabo isolação mineral com fios de cobre comuns. Este tipo de montagem permite a redução do diâmetro, não limita o comprimento, apresenta rápida velocidade de resposta é dá uma maior flexibilidade permitindo dobras e curvas do cabo que antes era impossível, podendo ser utilizada onde o acesso não era possível. Obs.: As montagens com termoresistências são feitas de maneira similar aos termopares quanto ao emprego de acessórios com cabeçotes, tubos, poços, niples entre outros. A Fig. 10.14 apresenta o gráfico ilustrativo de tempo de resposta de uma termoresistência isolação mineral.
Fig. 10.14 – Resposta de uma termoresistência de isolação mineral
Este tipo de montagem permite a redução do diâmetro e apresenta rápida velocidade de resposta. 10.5.6.2. Auto-Aquecimento
O auto-aquecimento é causado pela corrente que passa pela resistência, oriunda do instrumento de leitura. Por efeito Joule, há a geração de calor, quando uma corrente elétrica atravessa uma
resistência (2RiP ). Para uma medição de temperatura com termoresistência, este aquecimento
pode levar a erros que comprometem esta medição; então este aquecimento tem que ser limitado a pequenos valores para que possa ser desprezado. Para isso deve-se limitar a corrente de excitação do sensor. Pela norma DIN-IEC 751/85, a potência máxima desenvolvida numa termoresistência não pode ser maior que 1,0 mW, o que na faixa de atuação do sensor dá uma corrente máxima de 3mA. Valores típicos recomendados são da ordem de 1 a 2 mA. A elevação da temperatura equivalente ao aumento da dissipação de calor na termoresistência não deve exceder a 0,3ºC. 10.5.6.3. Princípio de medição
As termoresistências são normalmente ligadas a um circuito de medição tipo Ponte de Wheatstone (Fig. 10.15), sendo que o circuito encontra-se balanceado quando é respeitada a relação
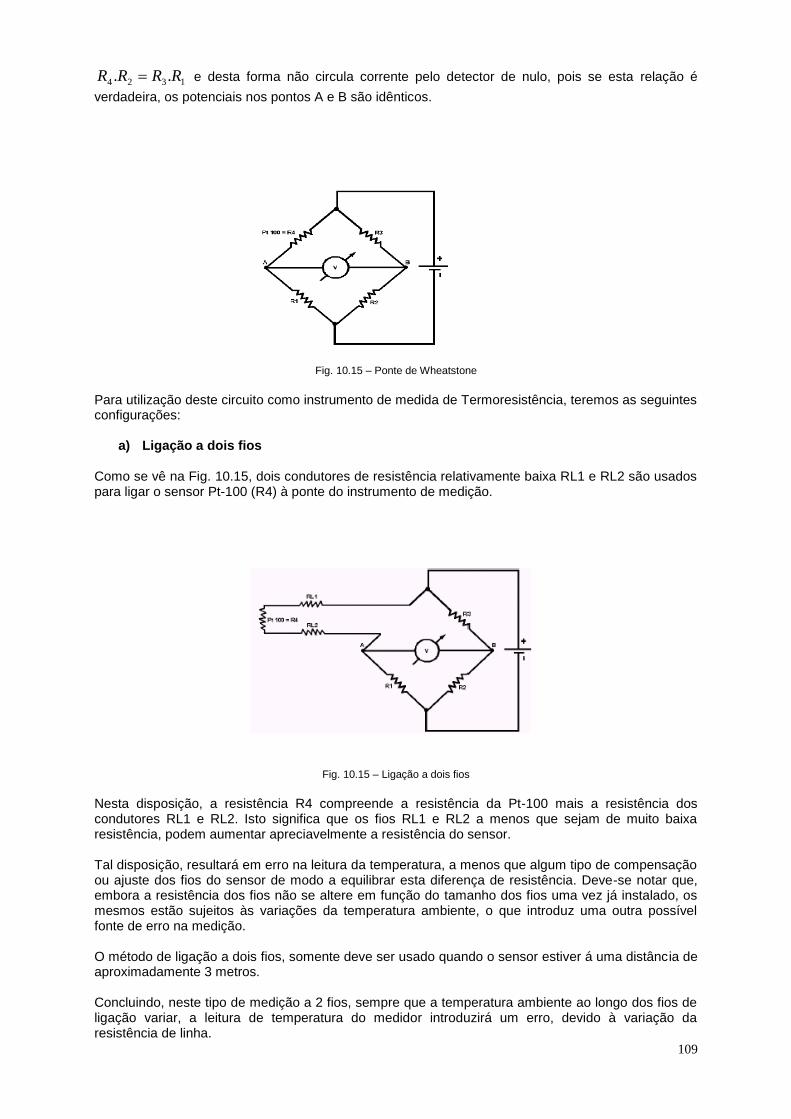
109
1324 .. RRRR e desta forma não circula corrente pelo detector de nulo, pois se esta relação é
verdadeira, os potenciais nos pontos A e B são idênticos.
Fig. 10.15 – Ponte de Wheatstone
Para utilização deste circuito como instrumento de medida de Termoresistência, teremos as seguintes configurações:
a) Ligação a dois fios
Como se vê na Fig. 10.15, dois condutores de resistência relativamente baixa RL1 e RL2 são usados para ligar o sensor Pt-100 (R4) à ponte do instrumento de medição.
Fig. 10.15 – Ligação a dois fios
Nesta disposição, a resistência R4 compreende a resistência da Pt-100 mais a resistência dos condutores RL1 e RL2. Isto significa que os fios RL1 e RL2 a menos que sejam de muito baixa resistência, podem aumentar apreciavelmente a resistência do sensor. Tal disposição, resultará em erro na leitura da temperatura, a menos que algum tipo de compensação ou ajuste dos fios do sensor de modo a equilibrar esta diferença de resistência. Deve-se notar que, embora a resistência dos fios não se altere em função do tamanho dos fios uma vez já instalado, os mesmos estão sujeitos às variações da temperatura ambiente, o que introduz uma outra possível fonte de erro na medição. O método de ligação a dois fios, somente deve ser usado quando o sensor estiver á uma distância de aproximadamente 3 metros. Concluindo, neste tipo de medição a 2 fios, sempre que a temperatura ambiente ao longo dos fios de ligação variar, a leitura de temperatura do medidor introduzirá um erro, devido à variação da resistência de linha.
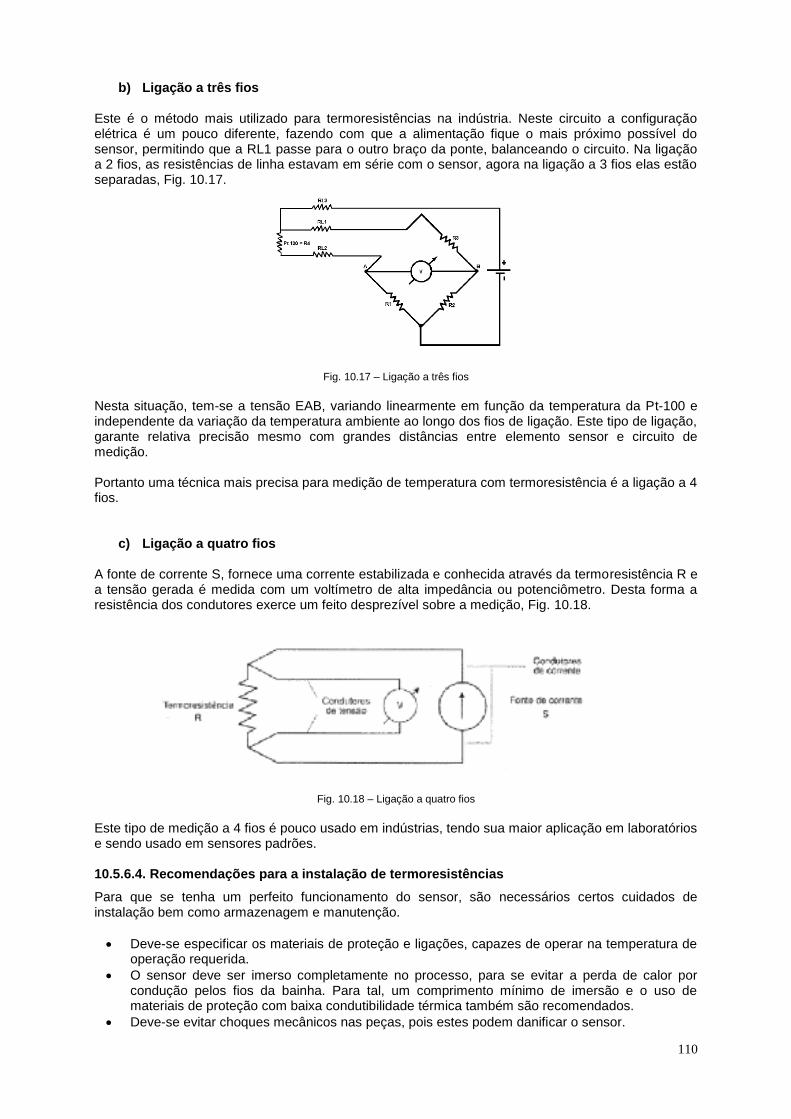
110
b) Ligação a três fios
Este é o método mais utilizado para termoresistências na indústria. Neste circuito a configuração elétrica é um pouco diferente, fazendo com que a alimentação fique o mais próximo possível do sensor, permitindo que a RL1 passe para o outro braço da ponte, balanceando o circuito. Na ligação a 2 fios, as resistências de linha estavam em série com o sensor, agora na ligação a 3 fios elas estão separadas, Fig. 10.17.
Fig. 10.17 – Ligação a três fios
Nesta situação, tem-se a tensão EAB, variando linearmente em função da temperatura da Pt-100 e independente da variação da temperatura ambiente ao longo dos fios de ligação. Este tipo de ligação, garante relativa precisão mesmo com grandes distâncias entre elemento sensor e circuito de medição. Portanto uma técnica mais precisa para medição de temperatura com termoresistência é a ligação a 4 fios.
c) Ligação a quatro fios A fonte de corrente S, fornece uma corrente estabilizada e conhecida através da termoresistência R e a tensão gerada é medida com um voltímetro de alta impedância ou potenciômetro. Desta forma a resistência dos condutores exerce um feito desprezível sobre a medição, Fig. 10.18.
Fig. 10.18 – Ligação a quatro fios
Este tipo de medição a 4 fios é pouco usado em indústrias, tendo sua maior aplicação em laboratórios e sendo usado em sensores padrões. 10.5.6.4. Recomendações para a instalação de termoresistências
Para que se tenha um perfeito funcionamento do sensor, são necessários certos cuidados de instalação bem como armazenagem e manutenção.
Deve-se especificar os materiais de proteção e ligações, capazes de operar na temperatura de operação requerida.
O sensor deve ser imerso completamente no processo, para se evitar a perda de calor por condução pelos fios da bainha. Para tal, um comprimento mínimo de imersão e o uso de materiais de proteção com baixa condutibilidade térmica também são recomendados.
Deve-se evitar choques mecânicos nas peças, pois estes podem danificar o sensor.
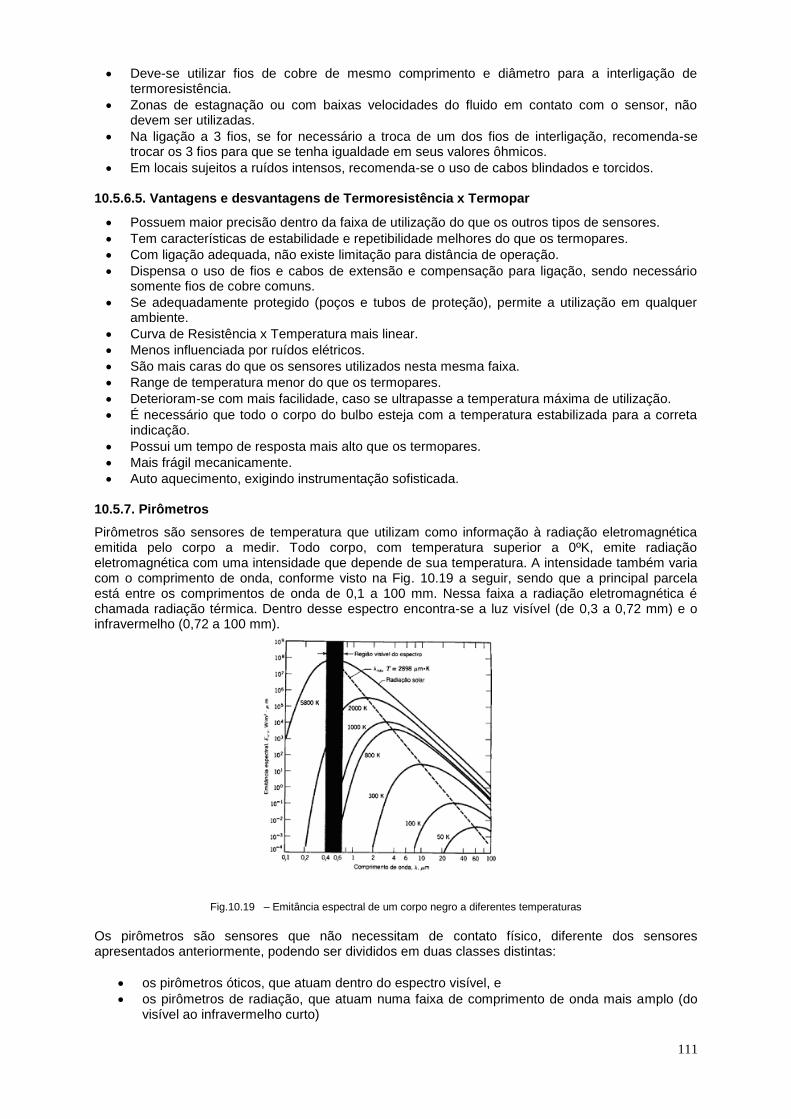
111
Deve-se utilizar fios de cobre de mesmo comprimento e diâmetro para a interligação de termoresistência.
Zonas de estagnação ou com baixas velocidades do fluido em contato com o sensor, não devem ser utilizadas.
Na ligação a 3 fios, se for necessário a troca de um dos fios de interligação, recomenda-se trocar os 3 fios para que se tenha igualdade em seus valores ôhmicos.
Em locais sujeitos a ruídos intensos, recomenda-se o uso de cabos blindados e torcidos. 10.5.6.5. Vantagens e desvantagens de Termoresistência x Termopar
Possuem maior precisão dentro da faixa de utilização do que os outros tipos de sensores.
Tem características de estabilidade e repetibilidade melhores do que os termopares.
Com ligação adequada, não existe limitação para distância de operação.
Dispensa o uso de fios e cabos de extensão e compensação para ligação, sendo necessário somente fios de cobre comuns.
Se adequadamente protegido (poços e tubos de proteção), permite a utilização em qualquer ambiente.
Curva de Resistência x Temperatura mais linear.
Menos influenciada por ruídos elétricos.
São mais caras do que os sensores utilizados nesta mesma faixa.
Range de temperatura menor do que os termopares.
Deterioram-se com mais facilidade, caso se ultrapasse a temperatura máxima de utilização.
É necessário que todo o corpo do bulbo esteja com a temperatura estabilizada para a correta indicação.
Possui um tempo de resposta mais alto que os termopares.
Mais frágil mecanicamente.
Auto aquecimento, exigindo instrumentação sofisticada. 10.5.7. Pirômetros
Pirômetros são sensores de temperatura que utilizam como informação à radiação eletromagnética emitida pelo corpo a medir. Todo corpo, com temperatura superior a 0ºK, emite radiação eletromagnética com uma intensidade que depende de sua temperatura. A intensidade também varia com o comprimento de onda, conforme visto na Fig. 10.19 a seguir, sendo que a principal parcela está entre os comprimentos de onda de 0,1 a 100 mm. Nessa faixa a radiação eletromagnética é chamada radiação térmica. Dentro desse espectro encontra-se a luz visível (de 0,3 a 0,72 mm) e o infravermelho (0,72 a 100 mm).
Fig.10.19 – Emitância espectral de um corpo negro a diferentes temperaturas
Os pirômetros são sensores que não necessitam de contato físico, diferente dos sensores apresentados anteriormente, podendo ser divididos em duas classes distintas:
os pirômetros óticos, que atuam dentro do espectro visível, e
os pirômetros de radiação, que atuam numa faixa de comprimento de onda mais amplo (do visível ao infravermelho curto)

112
10.5.7.3. Termovisão e Termografia
Termografia e Termovisão são técnicas de visualização e registro de imagens térmicas a partir da radiações no infravermelho emitidas pelo ambiente, Fig. 10.23.
Fig. 10.23 – Equipamentos utilizados na Termografia e Termovisão
Campos de Aplicação
Inspeções em linhas de transmissão, painéis elétricos, geradores, etc.
Monitoração de temperaturas superficiais em fornos, linhas de vapor, caldeiras, etc. (inclusive com possibilidades de cálculos de perdas térmicas e inspeção de isolamento térmico);
Inspeção em sistemas de ar condicionado e perdas em edificações;
Monitoração de parâmetros atmosféricos;
Uso na biologia e medicina; As Fig. 10.24 e Fig. 10.25 mostram imagem no visível e no infravermelho de equipamentos.
Fig.10. 24 - Imagem no visível e no infravermelho de um Forno Rotativo
Fig. 10.25 - Imagem de um motor elétrico
EXERCÍCIOS
1. Para um processo com temperatura que varia de 40ºC ~ 150ºC, quais sensores poderiam ser
instalados (para transmissão de sinal)?
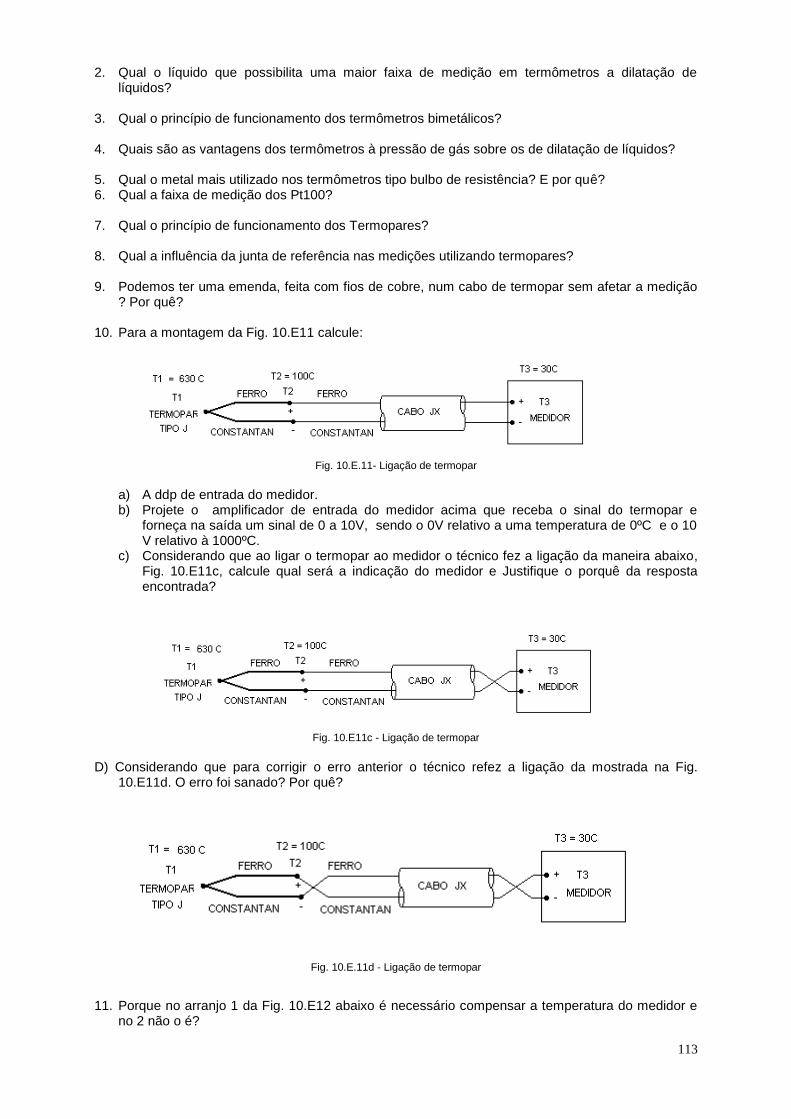
113
2. Qual o líquido que possibilita uma maior faixa de medição em termômetros a dilatação de líquidos?
3. Qual o princípio de funcionamento dos termômetros bimetálicos? 4. Quais são as vantagens dos termômetros à pressão de gás sobre os de dilatação de líquidos? 5. Qual o metal mais utilizado nos termômetros tipo bulbo de resistência? E por quê? 6. Qual a faixa de medição dos Pt100? 7. Qual o princípio de funcionamento dos Termopares? 8. Qual a influência da junta de referência nas medições utilizando termopares? 9. Podemos ter uma emenda, feita com fios de cobre, num cabo de termopar sem afetar a medição
? Por quê? 10. Para a montagem da Fig. 10.E11 calcule:
Fig. 10.E.11- Ligação de termopar
a) A ddp de entrada do medidor. b) Projete o amplificador de entrada do medidor acima que receba o sinal do termopar e
forneça na saída um sinal de 0 a 10V, sendo o 0V relativo a uma temperatura de 0ºC e o 10 V relativo à 1000ºC.
c) Considerando que ao ligar o termopar ao medidor o técnico fez a ligação da maneira abaixo, Fig. 10.E11c, calcule qual será a indicação do medidor e Justifique o porquê da resposta encontrada?
Fig. 10.E11c - Ligação de termopar
D) Considerando que para corrigir o erro anterior o técnico refez a ligação da mostrada na Fig.
10.E11d. O erro foi sanado? Por quê?
Fig. 10.E.11d - Ligação de termopar
11. Porque no arranjo 1 da Fig. 10.E12 abaixo é necessário compensar a temperatura do medidor e no 2 não o é?
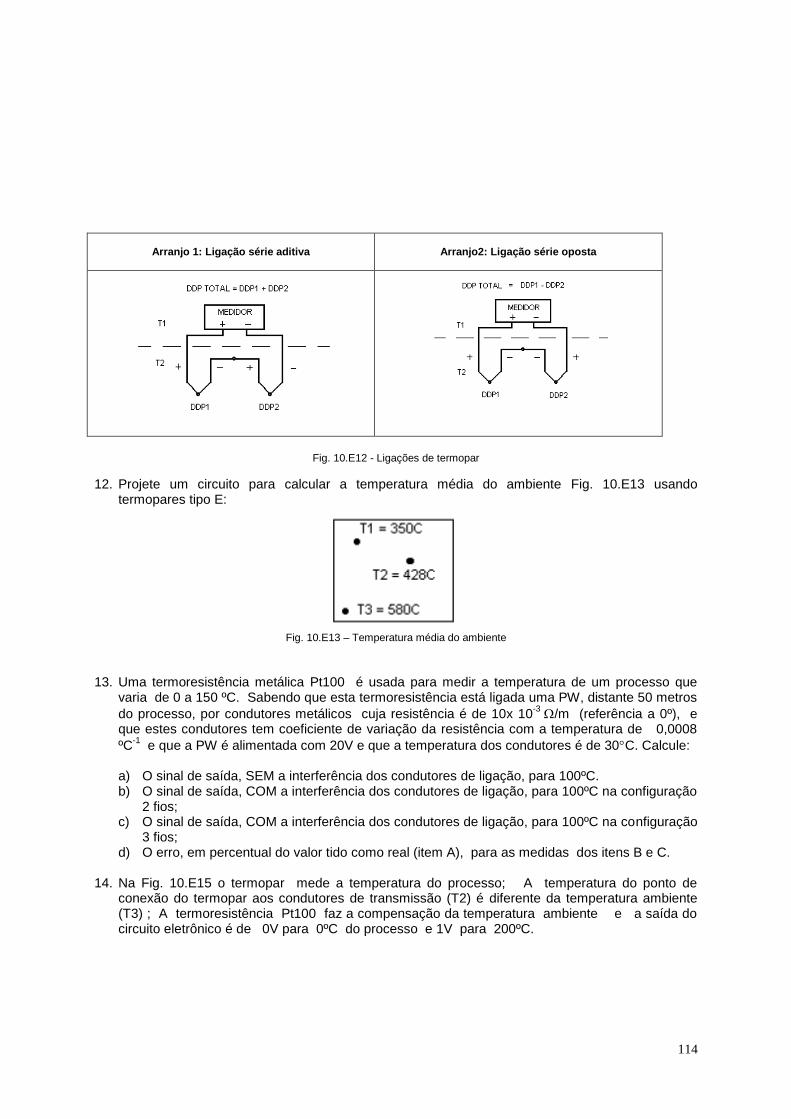
114
Arranjo 1: Ligação série aditiva
Arranjo2: Ligação série oposta
Fig. 10.E12 - Ligações de termopar
12. Projete um circuito para calcular a temperatura média do ambiente Fig. 10.E13 usando termopares tipo E:
Fig. 10.E13 – Temperatura média do ambiente
13. Uma termoresistência metálica Pt100 é usada para medir a temperatura de um processo que
varia de 0 a 150 ºC. Sabendo que esta termoresistência está ligada uma PW, distante 50 metros
do processo, por condutores metálicos cuja resistência é de 10x 10-3 /m (referência a 0º), e
que estes condutores tem coeficiente de variação da resistência com a temperatura de 0,0008
ºC-1
e que a PW é alimentada com 20V e que a temperatura dos condutores é de 30C. Calcule:
a) O sinal de saída, SEM a interferência dos condutores de ligação, para 100ºC. b) O sinal de saída, COM a interferência dos condutores de ligação, para 100ºC na configuração
2 fios; c) O sinal de saída, COM a interferência dos condutores de ligação, para 100ºC na configuração
3 fios; d) O erro, em percentual do valor tido como real (item A), para as medidas dos itens B e C.
14. Na Fig. 10.E15 o termopar mede a temperatura do processo; A temperatura do ponto de
conexão do termopar aos condutores de transmissão (T2) é diferente da temperatura ambiente (T3) ; A termoresistência Pt100 faz a compensação da temperatura ambiente e a saída do circuito eletrônico é de 0V para 0ºC do processo e 1V para 200ºC.
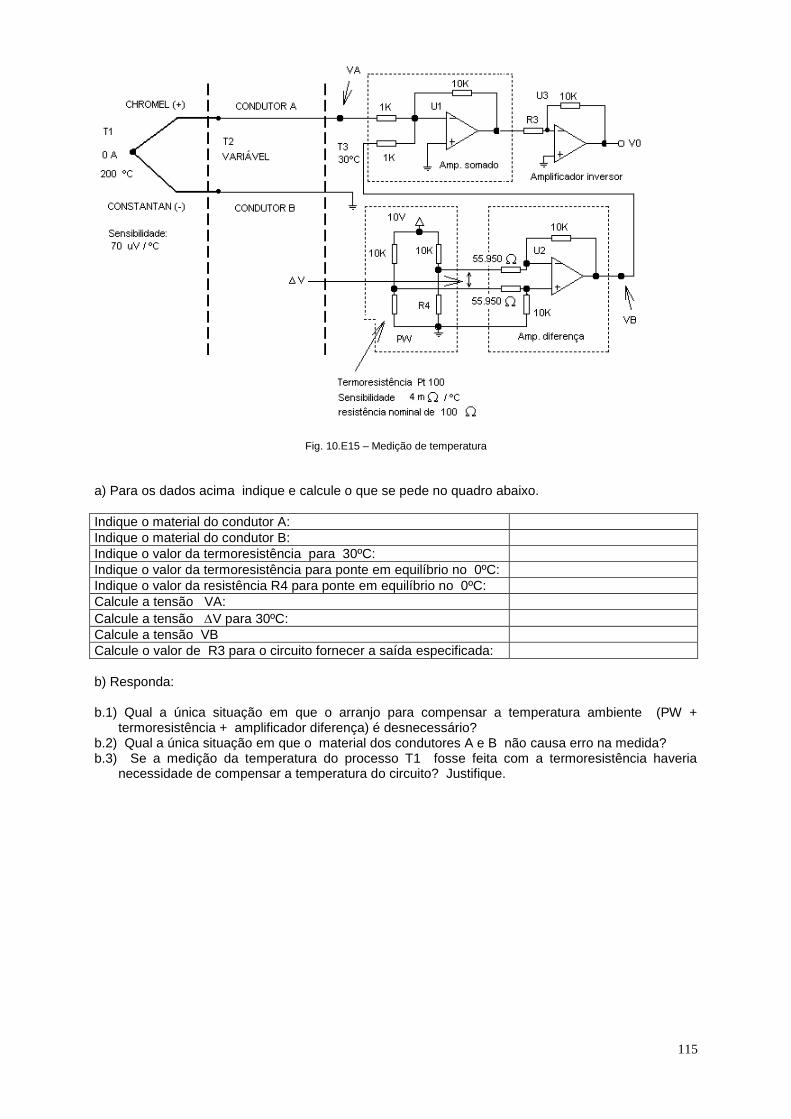
115
Fig. 10.E15 – Medição de temperatura
a) Para os dados acima indique e calcule o que se pede no quadro abaixo.
Indique o material do condutor A:
Indique o material do condutor B:
Indique o valor da termoresistência para 30ºC:
Indique o valor da termoresistência para ponte em equilíbrio no 0ºC:
Indique o valor da resistência R4 para ponte em equilíbrio no 0ºC:
Calcule a tensão VA:
Calcule a tensão V para 30ºC:
Calcule a tensão VB
Calcule o valor de R3 para o circuito fornecer a saída especificada:
b) Responda: b.1) Qual a única situação em que o arranjo para compensar a temperatura ambiente (PW +
termoresistência + amplificador diferença) é desnecessário? b.2) Qual a única situação em que o material dos condutores A e B não causa erro na medida? b.3) Se a medição da temperatura do processo T1 fosse feita com a termoresistência haveria
necessidade de compensar a temperatura do circuito? Justifique.
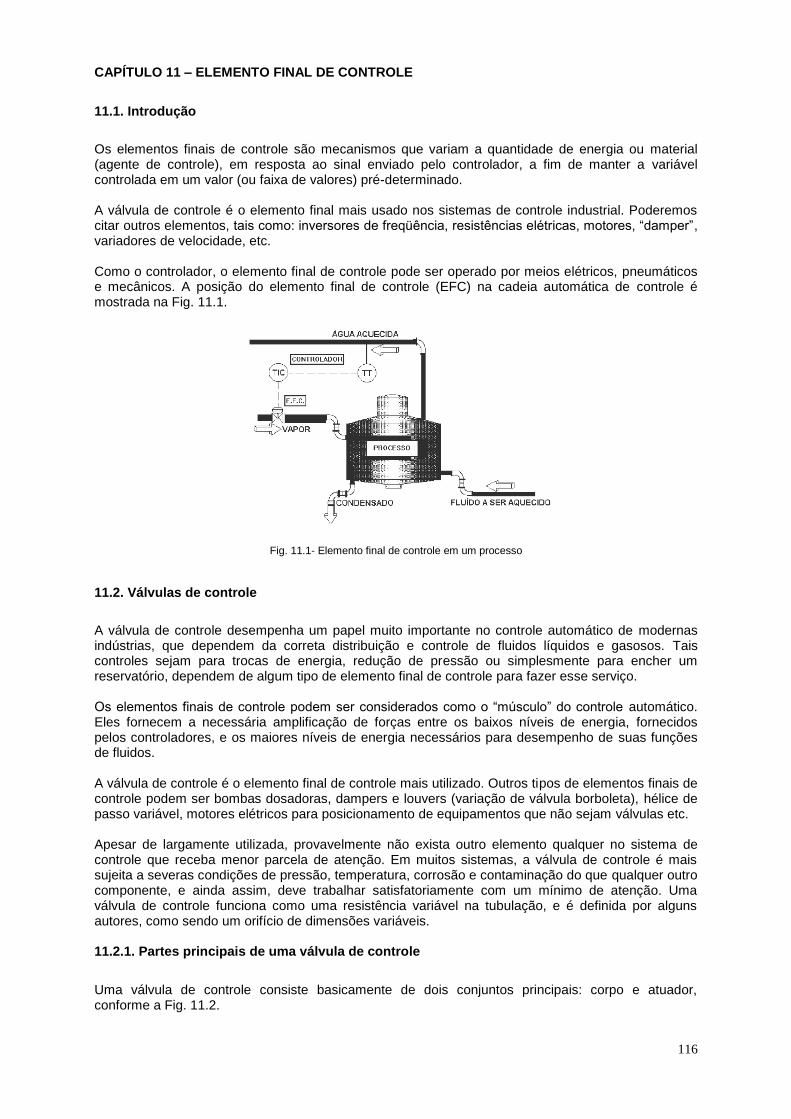
116
CAPÍTULO 11 – ELEMENTO FINAL DE CONTROLE
11.1. Introdução
Os elementos finais de controle são mecanismos que variam a quantidade de energia ou material (agente de controle), em resposta ao sinal enviado pelo controlador, a fim de manter a variável controlada em um valor (ou faixa de valores) pré-determinado. A válvula de controle é o elemento final mais usado nos sistemas de controle industrial. Poderemos citar outros elementos, tais como: inversores de freqüência, resistências elétricas, motores, “damper”, variadores de velocidade, etc. Como o controlador, o elemento final de controle pode ser operado por meios elétricos, pneumáticos e mecânicos. A posição do elemento final de controle (EFC) na cadeia automática de controle é mostrada na Fig. 11.1.
Fig. 11.1- Elemento final de controle em um processo
11.2. Válvulas de controle
A válvula de controle desempenha um papel muito importante no controle automático de modernas indústrias, que dependem da correta distribuição e controle de fluidos líquidos e gasosos. Tais controles sejam para trocas de energia, redução de pressão ou simplesmente para encher um reservatório, dependem de algum tipo de elemento final de controle para fazer esse serviço. Os elementos finais de controle podem ser considerados como o “músculo” do controle automático. Eles fornecem a necessária amplificação de forças entre os baixos níveis de energia, fornecidos pelos controladores, e os maiores níveis de energia necessários para desempenho de suas funções de fluidos. A válvula de controle é o elemento final de controle mais utilizado. Outros tipos de elementos finais de controle podem ser bombas dosadoras, dampers e louvers (variação de válvula borboleta), hélice de passo variável, motores elétricos para posicionamento de equipamentos que não sejam válvulas etc. Apesar de largamente utilizada, provavelmente não exista outro elemento qualquer no sistema de controle que receba menor parcela de atenção. Em muitos sistemas, a válvula de controle é mais sujeita a severas condições de pressão, temperatura, corrosão e contaminação do que qualquer outro componente, e ainda assim, deve trabalhar satisfatoriamente com um mínimo de atenção. Uma válvula de controle funciona como uma resistência variável na tubulação, e é definida por alguns autores, como sendo um orifício de dimensões variáveis. 11.2.1. Partes principais de uma válvula de controle
Uma válvula de controle consiste basicamente de dois conjuntos principais: corpo e atuador, conforme a Fig. 11.2.
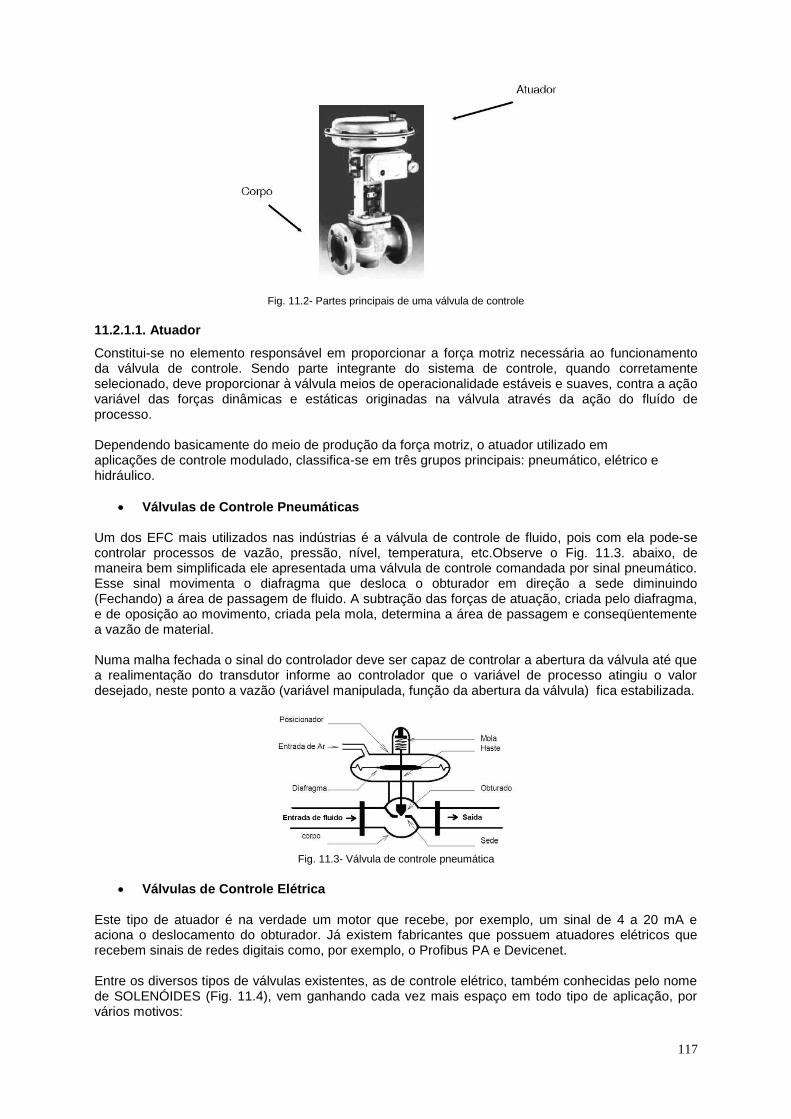
117
Fig. 11.2- Partes principais de uma válvula de controle
11.2.1.1. Atuador
Constitui-se no elemento responsável em proporcionar a força motriz necessária ao funcionamento da válvula de controle. Sendo parte integrante do sistema de controle, quando corretamente selecionado, deve proporcionar à válvula meios de operacionalidade estáveis e suaves, contra a ação variável das forças dinâmicas e estáticas originadas na válvula através da ação do fluído de processo. Dependendo basicamente do meio de produção da força motriz, o atuador utilizado em aplicações de controle modulado, classifica-se em três grupos principais: pneumático, elétrico e hidráulico.
Válvulas de Controle Pneumáticas Um dos EFC mais utilizados nas indústrias é a válvula de controle de fluido, pois com ela pode-se controlar processos de vazão, pressão, nível, temperatura, etc.Observe o Fig. 11.3. abaixo, de maneira bem simplificada ele apresentada uma válvula de controle comandada por sinal pneumático. Esse sinal movimenta o diafragma que desloca o obturador em direção a sede diminuindo (Fechando) a área de passagem de fluido. A subtração das forças de atuação, criada pelo diafragma, e de oposição ao movimento, criada pela mola, determina a área de passagem e conseqüentemente a vazão de material. Numa malha fechada o sinal do controlador deve ser capaz de controlar a abertura da válvula até que a realimentação do transdutor informe ao controlador que o variável de processo atingiu o valor desejado, neste ponto a vazão (variável manipulada, função da abertura da válvula) fica estabilizada.
Fig. 11.3- Válvula de controle pneumática
Válvulas de Controle Elétrica Este tipo de atuador é na verdade um motor que recebe, por exemplo, um sinal de 4 a 20 mA e aciona o deslocamento do obturador. Já existem fabricantes que possuem atuadores elétricos que recebem sinais de redes digitais como, por exemplo, o Profibus PA e Devicenet. Entre os diversos tipos de válvulas existentes, as de controle elétrico, também conhecidas pelo nome de SOLENÓIDES (Fig. 11.4), vem ganhando cada vez mais espaço em todo tipo de aplicação, por vários motivos:
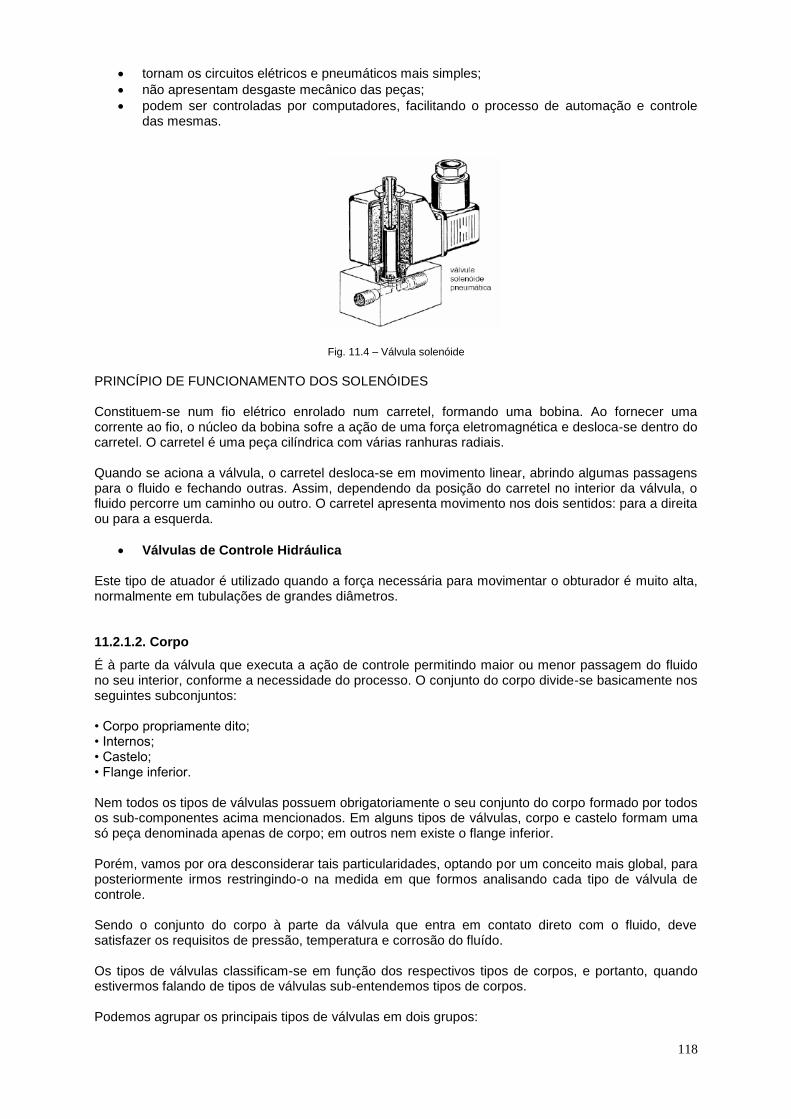
118
tornam os circuitos elétricos e pneumáticos mais simples;
não apresentam desgaste mecânico das peças;
podem ser controladas por computadores, facilitando o processo de automação e controle das mesmas.
Fig. 11.4 – Válvula solenóide
PRINCÍPIO DE FUNCIONAMENTO DOS SOLENÓIDES Constituem-se num fio elétrico enrolado num carretel, formando uma bobina. Ao fornecer uma corrente ao fio, o núcleo da bobina sofre a ação de uma força eletromagnética e desloca-se dentro do carretel. O carretel é uma peça cilíndrica com várias ranhuras radiais. Quando se aciona a válvula, o carretel desloca-se em movimento linear, abrindo algumas passagens para o fluido e fechando outras. Assim, dependendo da posição do carretel no interior da válvula, o fluido percorre um caminho ou outro. O carretel apresenta movimento nos dois sentidos: para a direita ou para a esquerda.
Válvulas de Controle Hidráulica Este tipo de atuador é utilizado quando a força necessária para movimentar o obturador é muito alta, normalmente em tubulações de grandes diâmetros. 11.2.1.2. Corpo
É à parte da válvula que executa a ação de controle permitindo maior ou menor passagem do fluido no seu interior, conforme a necessidade do processo. O conjunto do corpo divide-se basicamente nos seguintes subconjuntos: • Corpo propriamente dito; • Internos; • Castelo; • Flange inferior. Nem todos os tipos de válvulas possuem obrigatoriamente o seu conjunto do corpo formado por todos os sub-componentes acima mencionados. Em alguns tipos de válvulas, corpo e castelo formam uma só peça denominada apenas de corpo; em outros nem existe o flange inferior. Porém, vamos por ora desconsiderar tais particularidades, optando por um conceito mais global, para posteriormente irmos restringindo-o na medida em que formos analisando cada tipo de válvula de controle. Sendo o conjunto do corpo à parte da válvula que entra em contato direto com o fluido, deve satisfazer os requisitos de pressão, temperatura e corrosão do fluído. Os tipos de válvulas classificam-se em função dos respectivos tipos de corpos, e portanto, quando estivermos falando de tipos de válvulas sub-entendemos tipos de corpos. Podemos agrupar os principais tipos de válvulas em dois grupos:
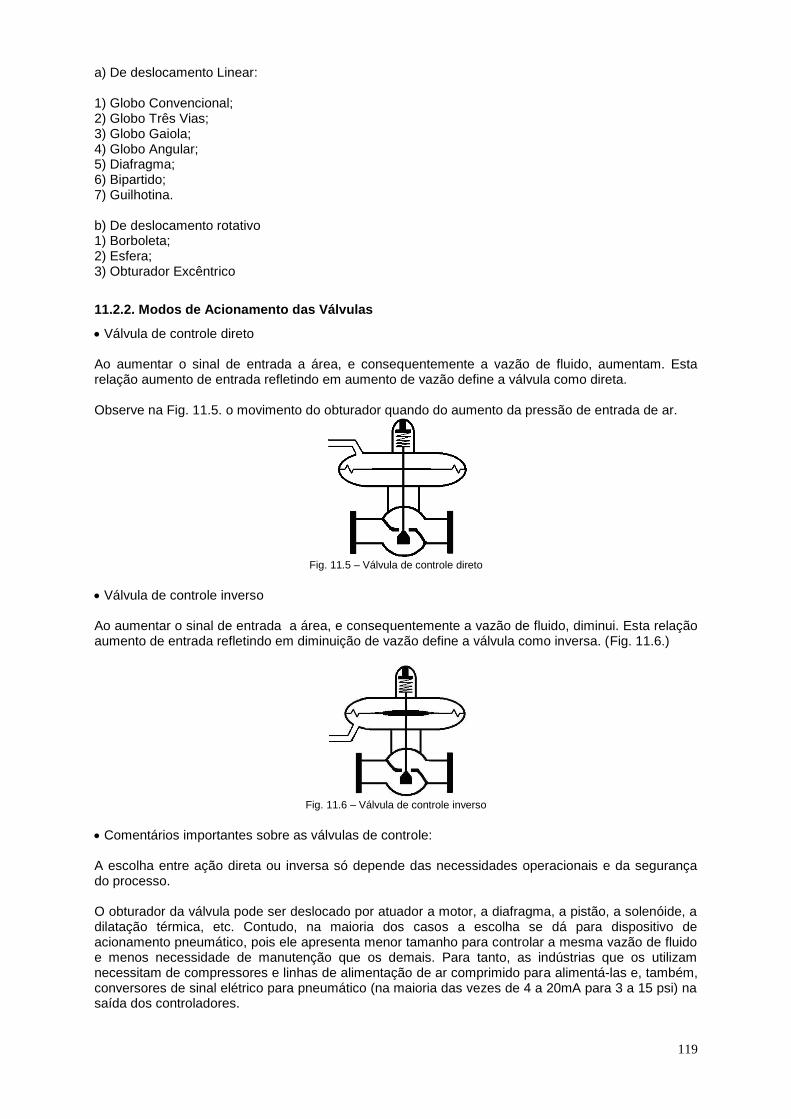
119
a) De deslocamento Linear: 1) Globo Convencional; 2) Globo Três Vias; 3) Globo Gaiola; 4) Globo Angular; 5) Diafragma; 6) Bipartido; 7) Guilhotina. b) De deslocamento rotativo 1) Borboleta; 2) Esfera; 3) Obturador Excêntrico
11.2.2. Modos de Acionamento das Válvulas
Válvula de controle direto Ao aumentar o sinal de entrada a área, e consequentemente a vazão de fluido, aumentam. Esta relação aumento de entrada refletindo em aumento de vazão define a válvula como direta. Observe na Fig. 11.5. o movimento do obturador quando do aumento da pressão de entrada de ar.
Fig. 11.5 – Válvula de controle direto
Válvula de controle inverso Ao aumentar o sinal de entrada a área, e consequentemente a vazão de fluido, diminui. Esta relação aumento de entrada refletindo em diminuição de vazão define a válvula como inversa. (Fig. 11.6.)
Fig. 11.6 – Válvula de controle inverso
Comentários importantes sobre as válvulas de controle: A escolha entre ação direta ou inversa só depende das necessidades operacionais e da segurança do processo. O obturador da válvula pode ser deslocado por atuador a motor, a diafragma, a pistão, a solenóide, a dilatação térmica, etc. Contudo, na maioria dos casos a escolha se dá para dispositivo de acionamento pneumático, pois ele apresenta menor tamanho para controlar a mesma vazão de fluido e menos necessidade de manutenção que os demais. Para tanto, as indústrias que os utilizam necessitam de compressores e linhas de alimentação de ar comprimido para alimentá-las e, também, conversores de sinal elétrico para pneumático (na maioria das vezes de 4 a 20mA para 3 a 15 psi) na saída dos controladores.

120
A forma geométrica do conjunto obturar-sede, a forma de movimentação do obturador, o tipo de atuador e o material de construção da válvula dependem exclusivamente do processo. Fatores como pressão da tubulação, queda de pressão sobre a válvula, range de vazão exigido e características do fluido (densidade, sólidos em suspensão, viscosidade e temperatura) afetam na construção da mesma. A escolha da válvula a usar depende do conhecimento exato das condições do processo e do controle exigido.
11.3. Motores Elétricos
Outro elemento final de controle importante é o motor elétrico. Ele é o acionador de cargas industriais por excelência, sendo usado sem ou variação de velocidade de rotação. Ele pode ser usado para alterar a velocidade de certos equipamentos (correias transportadoras, pontes rolantes, elevadores, trens, etc.) ou para posicionar partes de conjuntos mecânicos (obturadores de válvulas, posição relativa do eixo de antenas, etc.). A saída dos motores é rotação de seu eixo que normalmente é elevada. Como a maioria das cargas mecânicas funciona em baixa rotação é necessário reduzir a velocidade do motor. Isso se faz com o uso redutoras de velocidade (conjunto de engrenagens). Em contrapartida, nessa redução de velocidade, a redutora aumenta a capacidade do motor de acionar cargas de grandes massa, ou seja a redutora trabalha, também, como amplificadora de força, ou torque.
Motor CC. Os dois enrolamentos têm que ser percorridos por corrente contínua e para variar sua velocidade basta alterar a tensão de uma das tensões. (Fig. 11.7 e Fig. 11.8)
Fig. 11.7 - Motor de CC Fig.11.8 - Acionamento do MCC para variação de velocidade
Motor AC Os enrolamentos do motor de indução têm que ser percorridos por correntes alternadas simétricas. Para variar sua velocidade é necessário alterar a freqüência de sua alimentação através de inversores. Ao lado está representado o símbolo elétrico dum motor trifásico de indução rotor fechado em gaiola. (Fig. 11.9 e Fig. 11.10)
Fig. 11.9 - Motor de CA trifásico Fig. 11.10 - Acionamento do MCA para variação de
velocidade
A Fig. 11.11 mostra um exemplo de aplicação de motor elétrico como elemento final de controle.
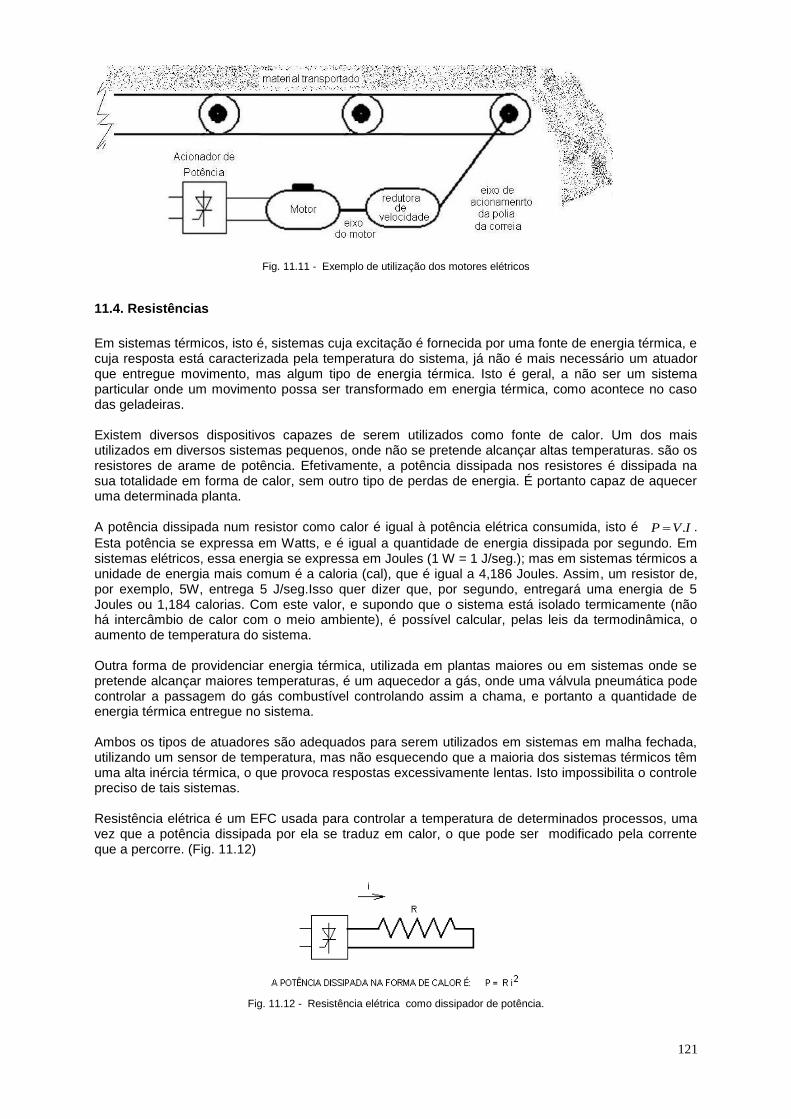
121
Fig. 11.11 - Exemplo de utilização dos motores elétricos
11.4. Resistências
Em sistemas térmicos, isto é, sistemas cuja excitação é fornecida por uma fonte de energia térmica, e cuja resposta está caracterizada pela temperatura do sistema, já não é mais necessário um atuador que entregue movimento, mas algum tipo de energia térmica. Isto é geral, a não ser um sistema particular onde um movimento possa ser transformado em energia térmica, como acontece no caso das geladeiras. Existem diversos dispositivos capazes de serem utilizados como fonte de calor. Um dos mais utilizados em diversos sistemas pequenos, onde não se pretende alcançar altas temperaturas. são os resistores de arame de potência. Efetivamente, a potência dissipada nos resistores é dissipada na sua totalidade em forma de calor, sem outro tipo de perdas de energia. É portanto capaz de aquecer uma determinada planta. A potência dissipada num resistor como calor é igual à potência elétrica consumida, isto é IVP . .
Esta potência se expressa em Watts, e é igual a quantidade de energia dissipada por segundo. Em sistemas elétricos, essa energia se expressa em Joules (1 W = 1 J/seg.); mas em sistemas térmicos a unidade de energia mais comum é a caloria (cal), que é igual a 4,186 Joules. Assim, um resistor de, por exemplo, 5W, entrega 5 J/seg.Isso quer dizer que, por segundo, entregará uma energia de 5 Joules ou 1,184 calorias. Com este valor, e supondo que o sistema está isolado termicamente (não há intercâmbio de calor com o meio ambiente), é possível calcular, pelas leis da termodinâmica, o aumento de temperatura do sistema. Outra forma de providenciar energia térmica, utilizada em plantas maiores ou em sistemas onde se pretende alcançar maiores temperaturas, é um aquecedor a gás, onde uma válvula pneumática pode controlar a passagem do gás combustível controlando assim a chama, e portanto a quantidade de energia térmica entregue no sistema. Ambos os tipos de atuadores são adequados para serem utilizados em sistemas em malha fechada, utilizando um sensor de temperatura, mas não esquecendo que a maioria dos sistemas térmicos têm uma alta inércia térmica, o que provoca respostas excessivamente lentas. Isto impossibilita o controle preciso de tais sistemas. Resistência elétrica é um EFC usada para controlar a temperatura de determinados processos, uma vez que a potência dissipada por ela se traduz em calor, o que pode ser modificado pela corrente que a percorre. (Fig. 11.12)
Fig. 11.12 - Resistência elétrica como dissipador de potência.
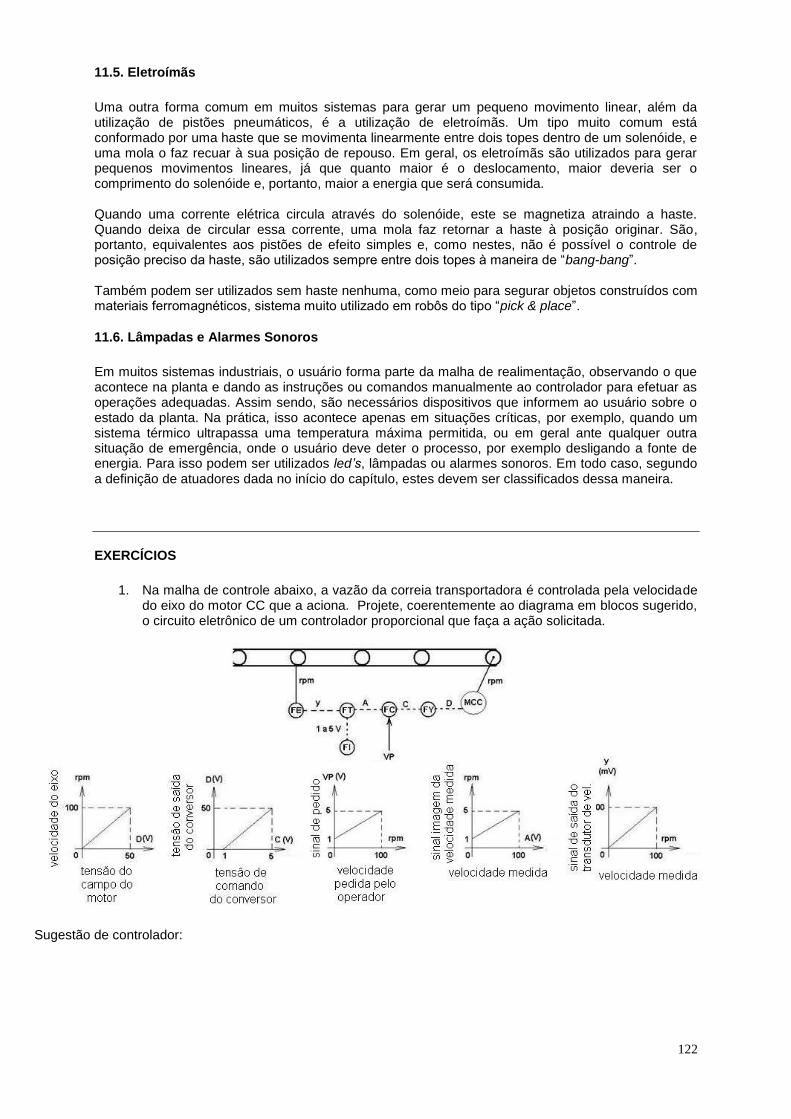
122
11.5. Eletroímãs
Uma outra forma comum em muitos sistemas para gerar um pequeno movimento linear, além da utilização de pistões pneumáticos, é a utilização de eletroímãs. Um tipo muito comum está conformado por uma haste que se movimenta linearmente entre dois topes dentro de um solenóide, e uma mola o faz recuar à sua posição de repouso. Em geral, os eletroímãs são utilizados para gerar pequenos movimentos lineares, já que quanto maior é o deslocamento, maior deveria ser o comprimento do solenóide e, portanto, maior a energia que será consumida. Quando uma corrente elétrica circula através do solenóide, este se magnetiza atraindo a haste. Quando deixa de circular essa corrente, uma mola faz retornar a haste à posição originar. São, portanto, equivalentes aos pistões de efeito simples e, como nestes, não é possível o controle de posição preciso da haste, são utilizados sempre entre dois topes à maneira de “bang-bang”. Também podem ser utilizados sem haste nenhuma, como meio para segurar objetos construídos com materiais ferromagnéticos, sistema muito utilizado em robôs do tipo “pick & place”.
11.6. Lâmpadas e Alarmes Sonoros
Em muitos sistemas industriais, o usuário forma parte da malha de realimentação, observando o que acontece na planta e dando as instruções ou comandos manualmente ao controlador para efetuar as operações adequadas. Assim sendo, são necessários dispositivos que informem ao usuário sobre o estado da planta. Na prática, isso acontece apenas em situações críticas, por exemplo, quando um sistema térmico ultrapassa uma temperatura máxima permitida, ou em geral ante qualquer outra situação de emergência, onde o usuário deve deter o processo, por exemplo desligando a fonte de energia. Para isso podem ser utilizados led’s, lâmpadas ou alarmes sonoros. Em todo caso, segundo a definição de atuadores dada no início do capítulo, estes devem ser classificados dessa maneira.
EXERCÍCIOS
1. Na malha de controle abaixo, a vazão da correia transportadora é controlada pela velocidade do eixo do motor CC que a aciona. Projete, coerentemente ao diagrama em blocos sugerido, o circuito eletrônico de um controlador proporcional que faça a ação solicitada.
Sugestão de controlador:
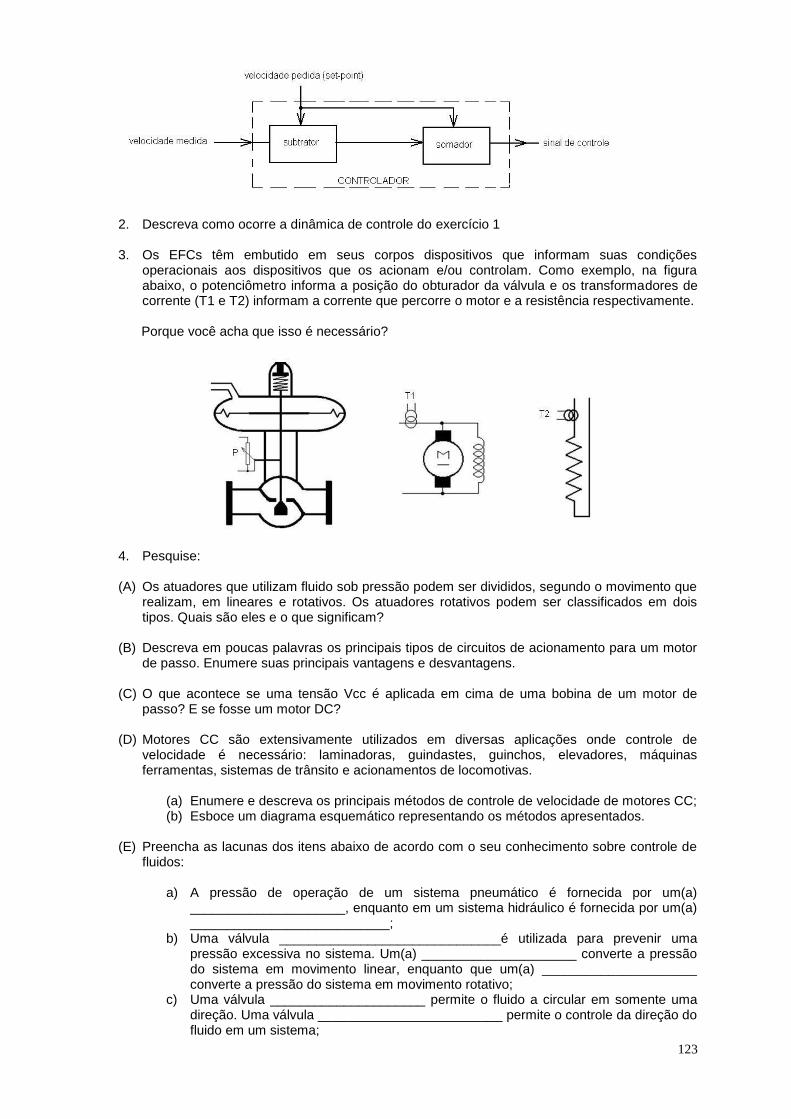
123
2. Descreva como ocorre a dinâmica de controle do exercício 1
3. Os EFCs têm embutido em seus corpos dispositivos que informam suas condições operacionais aos dispositivos que os acionam e/ou controlam. Como exemplo, na figura abaixo, o potenciômetro informa a posição do obturador da válvula e os transformadores de corrente (T1 e T2) informam a corrente que percorre o motor e a resistência respectivamente.
Porque você acha que isso é necessário?
4. Pesquise:
(A) Os atuadores que utilizam fluido sob pressão podem ser divididos, segundo o movimento que realizam, em lineares e rotativos. Os atuadores rotativos podem ser classificados em dois tipos. Quais são eles e o que significam?
(B) Descreva em poucas palavras os principais tipos de circuitos de acionamento para um motor
de passo. Enumere suas principais vantagens e desvantagens.
(C) O que acontece se uma tensão Vcc é aplicada em cima de uma bobina de um motor de passo? E se fosse um motor DC?
(D) Motores CC são extensivamente utilizados em diversas aplicações onde controle de
velocidade é necessário: laminadoras, guindastes, guinchos, elevadores, máquinas ferramentas, sistemas de trânsito e acionamentos de locomotivas.
(a) Enumere e descreva os principais métodos de controle de velocidade de motores CC; (b) Esboce um diagrama esquemático representando os métodos apresentados.
(E) Preencha as lacunas dos itens abaixo de acordo com o seu conhecimento sobre controle de
fluidos:
a) A pressão de operação de um sistema pneumático é fornecida por um(a) _____________________, enquanto em um sistema hidráulico é fornecida por um(a) ___________________________;
b) Uma válvula ______________________________é utilizada para prevenir uma pressão excessiva no sistema. Um(a) _____________________ converte a pressão do sistema em movimento linear, enquanto que um(a) _____________________ converte a pressão do sistema em movimento rotativo;
c) Uma válvula _____________________ permite o fluido a circular em somente uma direção. Uma válvula _________________________ permite o controle da direção do fluido em um sistema;
124
d) Uma válvula _________________________ é controlada através da pressão do fluido, enquanto que uma válvula __________________________ é controlada através de sinais elétricos.
(F) Descreva em poucas palavras o principio básico de funcionamento dos seguintes atuadores:
a) válvula de controle de pressão; b) cilindro de ação dupla; c) motor hidráulico tipo palheta; d) válvula de retenção; e) válvula de controle direcional.
(G) Enumere as principais diferenças entre sistemas pneumáticos e sistemas hidráulicos.
(H) Enumere as principais características de uma válvula atuadora pneumática.
(I) Enumere as principais vantagens e desvantagens de um sistema hidráulico.
(J) Defina em poucas palavras uma válvula de controle? Enumere os principais elementos que
constituem a estrutura básica deste dispositivo.
(K) Quais são as principais funções de uma válvula de controle? Enumere as principais aplicações de válvulas de controle em processos industriais.
(L) Quais os fatores que devem ser considerados na operação e na instalação de uma válvula de
controle? (M) Enumere os principais tipos de válvulas de controle utilizados na indústria.
(N) Explique em poucas palavras como são definidos os seguintes aspectos de uma válvula de
controle: (a) características; (b) dimensionamento;
(O) Como uma válvula pode ser classificada segundo seu princípio de funcionamento?
(P) Quais são os conjuntos e subconjuntos de uma válvula de controle?
(Q) Quais são os tipos de classes que podemos ter em uma válvula?
(R) Quais são os parâmetros que definem o tipo de classe de uma válvula?
(S) Qual deve ser a velocidade de resposta de uma válvula de controle para que a sua dinâmica possa ser praticamente ignorada em uma malha de controle?
(T) De que depende a característica dinâmica de uma válvula?
(U) Explique a diferença entre característica inerente e característica instalada de uma válvula. (V) Que critério pode ser utilizado para se especificar a ação de uma válvula de controle?





























