Embed Size (px)
Citation preview

Filtros Digitais Filtros básicos, parâmetros no domínio do tempo e
frequência, classificação de filtros

Filtros são usados basicamente para dois propósitos:
• Separação de sinais combinados;
• Restauração de sinal que foi distorcido.
A princípio, a separação e/ou restauração de sinais pode ser realizada com ambos os tipos
de filtros, analógicos e digitais. As diferenças básicas são:
Analógicos
• Barato
• Rápidos
• Grande faixa dinâmica (amplitude e frequência)
Digitais
• Muito melhor desempenho. Ex.: Será visto um filtro passa-baixa que possui ganho
1±0,0002 entre frequência zero e 1000Hz e um ganho de menos que 0,0002 para
frequências acima de 1001Hz. Excelente não?

Filtros lineares comumente apresentam as curvas abaixo:
-3dB : amplitude
do
sinal cai à 0,707 e
a potência é
reduzida
à 0,5.
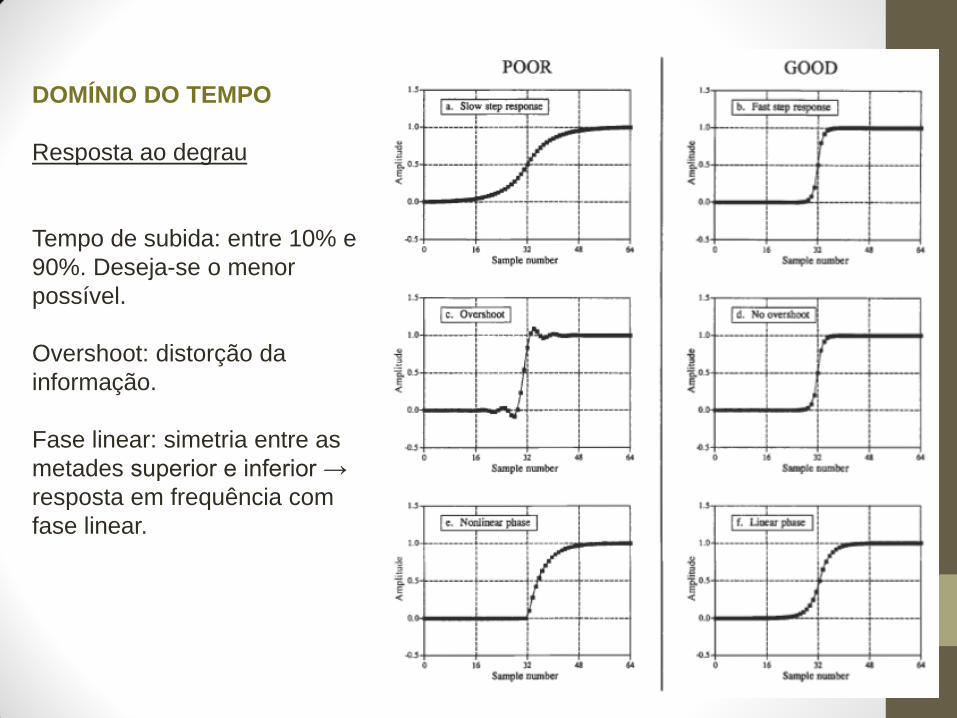
DOMÍNIO DO TEMPO
Resposta ao degrau
Tempo de subida: entre 10% e
90%. Deseja-se o menor
possível.
Overshoot: distorção da
informação.
Fase linear: simetria entre as
metades superior e inferior →
resposta em frequência com
fase linear.

DOMÍNIO DA
FREQUÊNCIA
Resposta em
frequência
Banda passante:
frequências
permitidas (ganho
1 geralmente)
Frequência de
corte: 99%, 90%,
70,7% e 50% da
amplitude para
filtros digitais.
Banda de
transição: deseja-
se a menor
possível.
Banda de
rejeição:
frequências
bloqueadas.

DOMÍNIO DA FREQUÊNCIA
Resposta em frequência

Ex.: Filtros passa-banda e rejeita-banda.
Cascata: 2 estágios Convolução: 1 estágio
Paralelo: 2 estágios Soma: 1 estágio
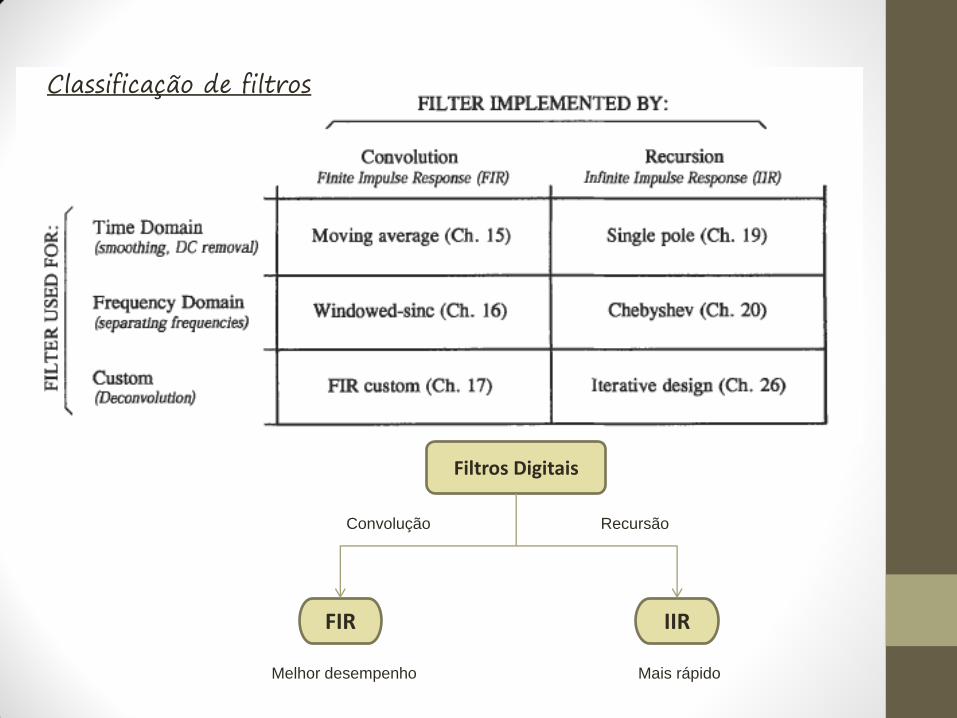
Classificação de filtros
Filtros Digitais
FIR IIR
Convolução Recursão
Melhor desempenho Mais rápido

Filtros Média Móvel Implementação por convolução, redução de ruído, implementação recursiva, passagens múltiplas.

Implementação por Convolução 1
É feito uma média de um número de pontos do sinal da entrada x[], para produzir cada ponto do sinal de saída y[]:
Ex.: O ponto 80 da saída, para um filtro média móvel com M=5 é dado por:
1. O filtro média móvel é uma convolução da entrada com um pulso retangular de área 1.
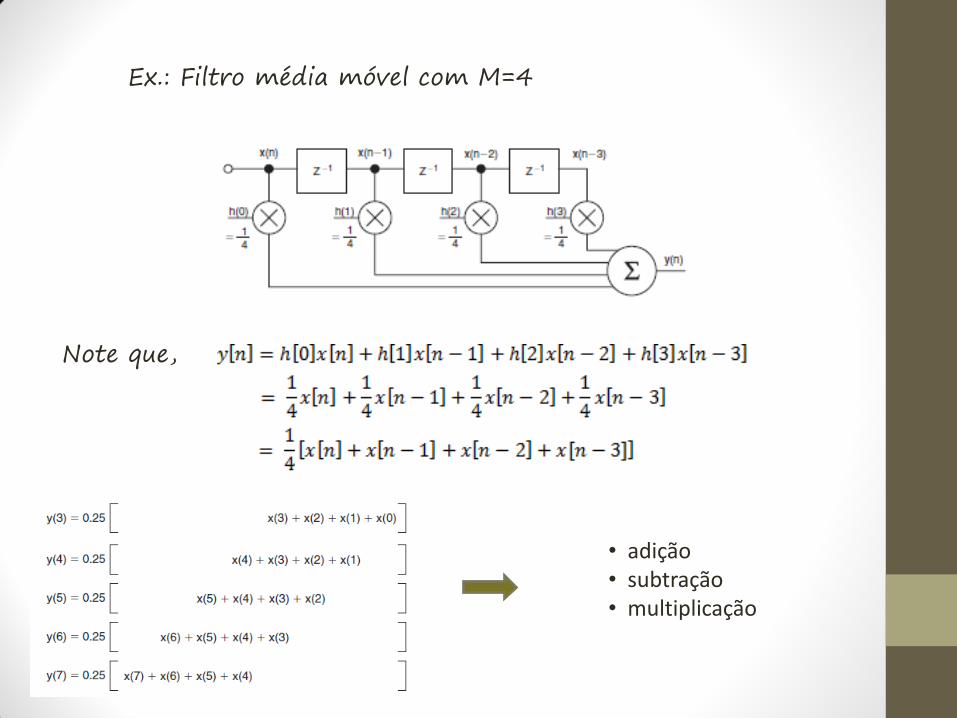
Ex.: Filtro média móvel com M=4
Note que,
• adição • subtração • multiplicação

Redução de ruído versus Resposta ao degrau
O filtro média móvel apresenta bom desempenho em muitas aplicações e ótimo desempenho na redução de ruído branco, ao mesmo tempo que preserva a resposta ao degrau.
A quantidade de ruído reduzida é igual a raiz quadrada do número de pontos no filtro !!

Resposta em frequência
O filtro média móvel possui bom desempenho no domínio do tempo e mal desempenho no domínio da frequência.
1
1. Obtida pela transformada de Fourier do pulso retangular.
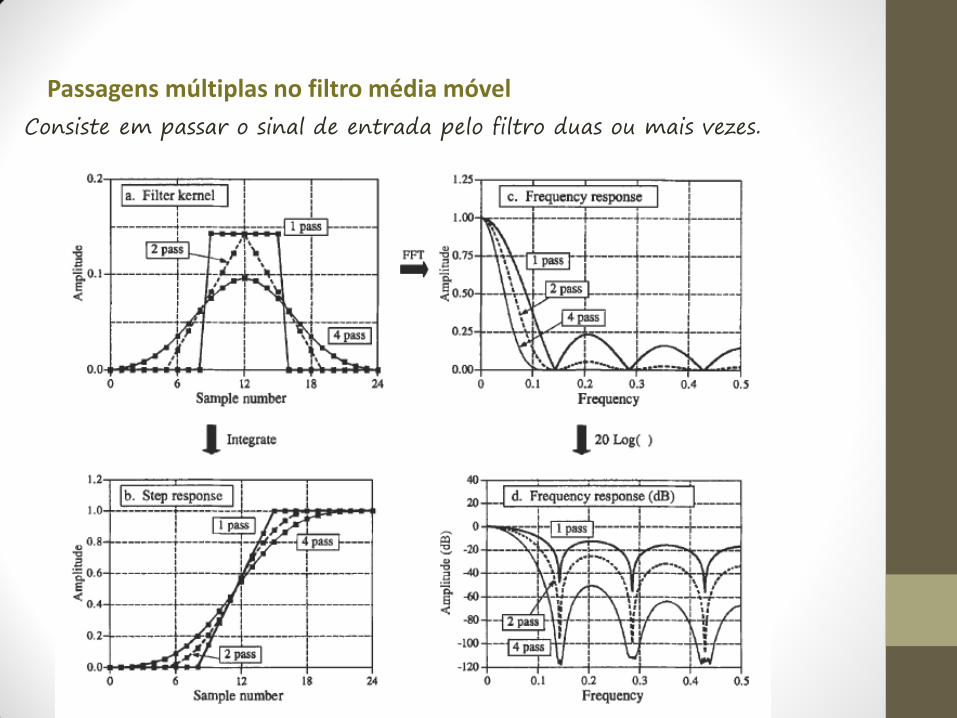
Passagens múltiplas no filtro média móvel
Consiste em passar o sinal de entrada pelo filtro duas ou mais vezes.

Implementação recursiva
É possível implementar um filtro média móvel com um algoritmo rápido. Lembre que a implementação por convolução é lenta !! Ex.: Seja um filtro média móvel com M=7. Dois pontos de saída adjacentes são calculados da seguinte forma:
Uma vez que os pontos x[48]....x[53] aparecem em y[50] e y[51], a melhor maneira para calcular y[51] é
e assim sucessivamente.
7
]54[]53[]52[]51[]50[]49[]48[]51[
7
]53[]52[]51[]50[]49[]48[]47[]50[
xxxxxxxy
xxxxxxxy
]47[]54[7
1y[50]y[51] xx

Depois que o primeiro ponto de y[] é calculado, todos os outros são determinados através de 1 soma e 1 subtração, por ponto:
1
2/)1(
,
][][1
]1[][
pq
Mp
onde
qixpixM
iyiy

Exemplo Implementar um filtro média móvel (recursivo ou não) para filtrar o seguinte sinal:
Gerada através do Matlab/Simulink ...

Resultados Optou-se pelo recursivo. Abaixo algumas formas de onda:
M=7 M=21 Note os picos do ruído filtrado e a tendência de se tornar onda triangular com o aumento de M !

Experiência 2 Parte 1 - Implementar um filtro de média móvel com os seguintes coeficientes:
a) 8
b) 32
c) 128
A frequencia de amostragem é dada por:
fa = [(equipe % 7) + (equipe % 3) ] x 10 kHz
E levantar a curva de resposta em frequencia entre 0 e fa/2 Hz. Entrada como
gerador e saída no conversor D/A do kit. Medir o Tempo de processamento.
Parte 2 – Gerar um sinal modulado em AM, com portadora em 10kHz e sinal
modulante de x Khz. Você deve implementar um detector de envoltória para
recuperar o sinal modulado. Use um filtro mediano ADEQUADO para a
detecção.
x = 300 + [(equipe % 5) x 100] Hz




Demodulador AM-DSB


Filtragem excessiva x Pouca filtragem





























