Embed Size (px)
Citation preview

ITA – INSTITUTO TECNOLÓGICO DE AERONÁUTICA
Ruth Santos Santana
Cairo Lúcio Nascimento Júnior
XX ENCITA – 16 de outubro de 2014
Reprogramação do robô Romeo III

Introdução• A robótica apresenta três questões fundamentais para
serem resolvidas: localização, mapeamento e planejamento da trajetória. O robô Romeo III contempla as três questões, por meio dos sensores, dos sonares e do computador base.

Objetivo• Reativação do robô Romeo III, para cumprir a função de
percorrer um labirinto previamente conhecido em um ambiente estruturado, com linhas pretas em uma superfície branca.

Método• Estudo dos trabalhos realizados anteriormente.• Análise dos componentes de hardware do robô, testando
cada subsistema.• Testes para execução de movimentos básicos.• Composição dos movimentos para percorrer o labirinto.

Estrutura do robô• Duas rodas laterais com motores acoplados• Duas rodas livres, frontal e traseira• 5 pares de LEDs e
fototransistores• Sonares• Detector de colisão

Estrutura do robô• Apresenta 5 subsistemas:- Propulsão- Computação embarcada- Sensoriamento- Comunicação externa- Energia

Estrutura do ambiente• O robô está sempre sobre uma mesa quadriculada
composta de nós, conforme figura. Ele sempre sai de um nó e chega ao outro.

Testes realizados• Relizados programando apenas a placa principal Flashlite
386EX.
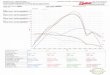
• Leitura dos sensores infravermelhos.

Testes realizados• Acionamento dos motores
• Tipos de movimento
1 e 2: translação3 e 4: rotação com os dois motores5 e 6: rotação apenas com o motor direito7 e 8: rotação apenas com o motor esquerdo

Movimentos executados• Seguidor de linha:
- Utiliza apenas os três sensores centrais.
- É composto por movimentos de duração fixa.
• Rotação sobre um nó:
- Utiliza apenas os sensores L1 e L5.
- Inicialmente os sensores estão sobre a faixa preta, alinhados com o centro do nó.
- Seleciona-se se o sentido de rotação.

Realização da trajetória• Dividiu-se a trajetória em movimentos, e cada movimento
em ações.
Movimentos Ações
Translação lateral 1) saida_translacao
2) translacao
3) chegada_translacao
Rotação 45º 1) rotacao45
Translação diagonal 1) saida_translacao
2) chegada_linha
3) saida_linha
4) chegada_translacao

Realização da trajetória• Translação lateral:
• Translação diagonal:

Realização da trajetória• Trajetória pré-determinada, inserida seguindo a indicação:
RH – Rotação horaria de 45º
RA – Rotacao anti-horária de 45º
TL – Translação lateral
TD – Translaçao diagonal

Realização da trajetória• Exemplo de trajetória
TL RH TD RA TL RA RA TL RH TD

Conclusões e recomendações
• Reestabelecer as demais funcionalidades, como o uso dos sonares.
• Estabelecer o controle da plataforma via internet com o uso da biblioteca eRTOS.

Obrigada!