Embed Size (px)
Citation preview

LEONARDO ALEXANDRE PEYREacute TARTARUGA
ENERGEacuteTICA E MECAcircNICA DA CAMINHADA E CORRIDA HUMANA
Com especial referecircncia agrave locomoccedilatildeo em plano inclinado e efeitos da idade
Tese de Doutorado
Orientador Prof Dr Jefferson Fagundes Loss
UFRGS
Porto Alegre RS BRASIL
2008
2
LEONARDO ALEXANDRE PEYREacute TARTARUGA
ENERGEacuteTICA E MECAcircNICA DA CAMINHADA E CORRIDA HUMANA
Com especial referecircncia agrave locomoccedilatildeo em plano inclinado e efeitos da idade
Documento apresentado como requisito parcial para obtenccedilatildeo do grau de Doutor em Ciecircncias do Movimento Humano Universidade Federal do Rio Grande do Sul Programa de Poacutes-Graduaccedilatildeo em Ciecircncias do Movimento Humano
Orientador Prof Dr Jefferson Fagundes Loss
Porto Alegre 2008
3
---------------------------------------------------------
--------------------------------------------------------
---------------------------------------------------------
4
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL
PROGRAMA DE POacuteS-GRADUACcedilAtildeO EM CIEcircNCIAS DO MOVIMENTO HUMANO
A COMISSAtildeO EXAMINADORA ABAIXO ASSINADA APROVA A TESE
ENERGEacuteTICA E MECAcircNICA DA CAMINHADA E CORRIDA HUMANA
Com especial referecircncia agrave locomoccedilatildeo em plano inclinado e efeitos da idade
ELABORADA POR
LEONARDO ALEXANDRE PEYREacute TARTARUGA
ORIENTADO POR
JEFFERSON FAGUNDES LOSS
COMO REQUISITO PARCIAL PARA A OBTENCcedilAtildeO DO GRAU DE
DOUTOR EM CIEcircNCIAS DO MOVIMENTO HUMANO
COMISSAtildeO EXAMINADORA
Alberto Enrico Minetti MD
Istituto di Fisiologia Umana I Universitagrave degli Studi di Milano Itaacutelia
Carlos Bolli Mota PhD
Laboratoacuterio de Biomecacircnica Universidade Federal de Santa Maria Brasil
Rogeacuterio Jose Marczak Dr Eng
Grupo de Mecacircnica Aplicada Universidade Federal do Rio Grande do Sul Brasil
Porto Alegre 13 de fevereiro de 2008
5
DEDICATOacuteRIA
Aos meus irmatildeos Ivaacuten e Virginia
Pela convivecircncia pela paciecircncia pelo exemplo
de caraacuteter entrega e brilhantismo nas coisas
que fazem
6
AGRADECIMENTOS
Agradeccedilo a todos que ajudaram de forma direta ou indireta na concretizaccedilatildeo do meu doutorado Tenho a plena convicccedilatildeo de que esta obra eacute fruto de um trabalho coletivo e estas linhas representam muito timidamente meu sentimento de gratidatildeo com todas as pessoas que estiveram comigo nesta caminhada
Ao meu orientador Prof Jefferson Loss por tantas coisas que surgiram advindas daquele convite no Centro Oliacutempico Especialmente agrave liberdade dada para seguir o caminho que trilhei nestes trecircs anos e ao exemplo de busca incessante de aprofundamento no que estamos estudando
Agrave minha Matildee pela palavra certa na hora certa Agrave memoacuteria do meu pai Eduardo Juan Peyreacute Priguetti Agrave minha famiacutelia Matildee Ivaacuten Virgiacutenia La Abuela Felipe Fernanda La Tia Gianella Marcus Joseacute Luiz Juliana
Agrave minha amada namorada e companheira Ileana pelo apoio e amor Obrigado por trilhar este caminho ao meu lado obrigado pelo esforccedilo e pela forccedila de vontade para encarar a fase ldquomilaneserdquo de nossas vidas Agradeccedilo tambeacutem agrave famiacutelia de Cordoba Abel Raquel Gabriela Adriaacuten Gerardo e Camila
Ao Grupo de Investigaccedilatildeo da Mecacircnica do Movimento ndash BIOMEC Faacutebia Artur Faacutebio Paulo Coxa Francisco Carolzita Joely Gustavo Dani Aldabe Letiacutecia Deacutebi Maicon Lipe e Marcelo pelo companheirismo e aprendizagem Em especial aos meus professores de Matlab Daniel Everton e La Torre
Aos meus bolsistas e alunos Roberto Ribas Thiago Duarte Queiroz Mariana Boos e Carlos Coutinho especialmente ao Roberto e ao Thiago pela ajuda nestes uacuteltimos meses
Aos colegas do Grupo de Histofisiologia Comparada da Ufrgs em especial agrave Profa Matilde Jocemar Thais e a Rafaela pela convivecircncia e ensinamentos durante meu primeiro ano de doutorado
Aos Professores e funcionaacuterios do Istituto di Fisiologia Umana I de Milatildeo pela recepccedilatildeo calorosa e apoio incondicional
Aos meus co-orientadores Prof Alberto Minetti e Prof Giovanni Cavagna pela orientaccedilatildeo disponibilidade e atenccedilatildeo dispensada al braziliano grazie mille Aos meus companheiros Davide Susta e Mario Legramandi pelo companheirismo e ensinamentos durante o ano em Milatildeo
Aos sujeitos dos experimentos apresentados nesta tese Aos meus caros companheiros da Expediccedilatildeo no Nepal Ardigograve Formenti Susta e
Canova pela descontraccedilatildeo e parceria Ao Comitecirc de Pesquisa em Altitude da Repuacuteblica da Itaacutelia Everest-K2-CNR por ter dado o apoio financeiro para minha participaccedilatildeo na Expediccedilatildeo Aos caros Kagi Bista e Botko e aos carregadores Nepaleses Namaskar
Ao CNPq pelo apoio financeiro que permitiu meus estudos durante estes trecircs anos inclusive meus estudos no exterior
Aos companheiros funcionaacuterios da Esef que me ldquosuportamrdquo desde 1995 em especial aos colegas do Poacutes-Graduaccedilatildeo Rosane Ana e Andrezito e aos colegas do Lapex Dani Luciano Alex Carla Maacutercia Sarinha Vanessa e Luiz
7
SUMAacuteRIO
LISTA DE FIGURAS 10
RESUMO 14
ABSTRACT 16
DEFINICcedilAtildeO DE TERMOS 18
LISTA DE SIacuteMBOLOS E ABREVIATURAS 20
INTRODUCcedilAtildeO GERAL 27
11 Locomoccedilatildeo humana 27
13 Formato da tese 30
131 Objetivo geral 32
132 Objetivos especiacuteficos 32
2 O CUSTO EMG DA CAMINHADA HUMANA 33
21 Introduccedilatildeo 33
22 Metodologia 36
221 Construccedilatildeo do modelo 36
222 Testando o modelo 41
23 Resultados 42
231 Variaacuteveis espaccedilos-temporais 42
232 Atividade EMG 43
8
233 Custo EMG 47
24 Discussatildeo 49
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular 49
242 Sobre o meacutetodo 51
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia 52
251 Materiais e meacutetodos 53
252 Resultados 56
253 Discussatildeo 57
3 MECAcircNICA DA CORRIDA DE IDOSOS 60
31 Introduccedilatildeo 60
32 Materiais e Meacutetodos 61
321 Amostra e procedimento experimental 61
322 Dos registros da plataforma ao trabalho externo 63
323 Estimativa do trabalho interno 66
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato 66
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio 67
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente 68
327 Transduccedilatildeo EpEk durante o passo 68
328 Rigidez vertical (k) 70
329 Estatiacutestica 71
33 Resultados 71
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM 72
332 Trabalho 74
333 Assimetria contato-despregue 75
34 Discussatildeo 76
341 Sobre o meacutetodo 76
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical 80
343 A assimetria contato-despregue 90
9
4 PREDIZENDO VF CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO
TERRESTRE 101
41 Introduccedilatildeo 101
42 Equaccedilatildeo do tempo de atraso 102
43 Estimativa da velocidade horizontal 104
44 Equaccedilatildeo de custo energeacutetico 106
45 Discussatildeo 107
5 CONCLUSAtildeO GERAL 111
51 O custo EMG da caminhada humana 111
52 A mecacircnica da corrida de idosos 111
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre 112
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico 112
541 Respondendo algumas criacuteticas atuais 116
55 Propostas para futuros estudos 118
551 Custo EMG da caminhada humana 118
552 Mecacircnica da corrida dos idosos 118
553 Modelo matemaacutetico da locomoccedilatildeo terrestre 119
6 REFEREcircNCIAS 120
APEcircNDICES 130
A- Programa de anaacutelise EMG da caminhada LocoEmg 130
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada) 132
C- Textos completos referentes agrave tese 134
D- Paracircmetros musculares 135
10
Lista de Figuras
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-invertido para a
caminhada e massa-mola para a corrida (Fonte SAIBENE e MINETTI 2003
modificado no presente estudo) 29
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset 38
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda
metade da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo
isomeacutetrica Setas verticais apontando para baixo indicam momento de contato
e de despregue 39
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de
passada com o tempo de passada normalizado em percentual do ciclo O 0shy
100 representa o momento de contato com o solo As cores indicam a
velocidade de caminhada (de 2 agrave 7 kmh-1) Cada muacutesculo eacute representado
nas linhas e em cada coluna eacute apresentada a atividade EMG por inclinaccedilatildeo 46
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal + carga)
11
dos carregadores Nepaleses (NEP) e montanhistas Caucasianos (CAU) em
subida (up) e descida (down) 57
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da PMV (positiva ou
negativa) pela potecircncia metaboacutelica respectiva (MINETTI et al 2006) As
linhas satildeo as razotildees entre eficiecircncia muscular positiva e negativa
(WOLEDGE et al 1985) 58
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado 69
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da caminhada
(pecircndulo-invertido) e de segmento complacente da corrida (massa-mola) e
seus principais constituintes Note que o tracejado indica a trajetoacuteria do corpo
de massa m durante o contato g eacute a aceleraccedilatildeo gravitacional k eacute a rigidez da
mola ll0 eacute o comprimento do membro inferior e a0 eacute o acircngulo da perna de
apoio no momento do contato com o solo 77
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um passo
em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis a
direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup
+ Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo
(tae) da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na
direccedilatildeo vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os
ciacuterculos em vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2)
e a frente (Lce) A linha em vermelho pontilhada em cada painel indica o
tempo de contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente
(Lc) durante o passo As linhas azuis pontilhadas em cada painel indicam o
tempo aeacutereo total (ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La)
durante o passo As barras verticais indicam o desvio-padratildeo da meacutedia os
12
nuacutemeros proacuteximos aos siacutembolos nos paineacuteis superiores indicam o nuacutemero de
itens nas meacutedias 85
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e
velocidade vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown
(paineacuteis inferiores) atingidos pelo CM durante o passo em funccedilatildeo da
velocidade de corrida Estatiacutestica e outras indicaccedilotildees conforme a figura 33 89
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e
frequumlecircncia do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute
maior nos idosos nas altas velocidades (paineacuteis superiores) a rigidez vertical
normalizada pela massa eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras
indicaccedilotildees conforme figura 33 91
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com
seus 94
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As
fraccedilotildees do deslocamento vertical do CM durante contato ScSv (ciacuterculos
preenchidos deslocamento descendente ciacuterculos abertos deslocamento
ascendente) e quando a Fv eacute maior do que o PC SceSv (quadrados
preenchidos deslocamento 95
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito
idoso paineacuteis a direita sujeito jovem em cada painel o comportamento da
transduccedilatildeo Ep-Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas
na energia potencial gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf
normalizada para oscilar entre zero e um Mesmos passos da figura 1 cada
painel comeccedila e termina no valor menor da curva Ep As cores diferentes na
curva Ep distinguem as fraccedilotildees do passo onde a Fv exercida no solo eacute maior
do que o PC (vermelho) e menor do que o PC (azul) As linhas contiacutenuas de
Ep indicam a fase de contato enquanto que as linhas pontilhadas Ep (azul
fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As quatro fases
correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
13
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown
(azul) e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas
pontilhadas verticais satildeo apresentadas nos dois picos de Ek e ocupam a
fraccedilatildeo onde a transduccedilatildeo Ep-Ek ocorre conforme indicado pelos incrementos
da curva Rint(t) 98
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos painel
inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura
31) e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e
barras azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de
corrida Estatiacutestica conforme figura 33 99
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de
reaccedilatildeo do solo durante a corrida 103
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de
progressatildeo 108
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de
progressatildeo Fonte Minetti 1998b 109
Figura 51 Modelo conceitual da locomoccedilatildeo humana 113
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido
de elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006117
Figura A1 Janela principal do programa LocoEmgVI 130
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI 131
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados 132
14
Resumo
Dois modelos mecacircnicos o pecircndulo-invertido e o massa-mola explicam como
os mecanismos pendular e elaacutestico minimizam o dispecircndio energeacutetico advindo dos
muacutesculos durante caminhada e corrida humana A presente tese testa dois efeitos
que para nosso conhecimento todavia natildeo possuem respostas conclusivas da
literatura nomeadamente o processo de envelhecimento na mecacircnica da corrida
humana e o efeito da inclinaccedilatildeo do terreno na velocidade oacutetima da caminhada Para
estudar o primeiro efeito as forccedilas de reaccedilatildeo do solo provenientes de uma
plataforma de forccedila (4m x 050m) foram usadas para a posterior comparaccedilatildeo de i)
trabalho mecacircnico ii) paracircmetros do sistema massa-mola e iii) assimetrias contato-
despregue entre jovens e idosos Os idosos produzem menos forccedila durante a fase
de trabalho mecacircnico positivo com uma menor oscilaccedilatildeo vertical total e oscilaccedilatildeo
durante a fase aeacuterea Consequumlentemente a capacidade de armazenar e re-utilizar
energia elaacutestica dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio
energeacutetico neste grupo quando comparado com jovens Para o modelo do custo
eletromiograacutefico (EMG) da caminhada humana criou-se duas abordagens
experimental e teoacuterica Em ambas as abordagens informaccedilotildees da atividade EMG de
dezesseis muacutesculos sendo 8 posturais e 8 propulsores foram coletadas e
analisadas a partir da integral EMG A abordagem teoacuterica parece ter uma melhor
relaccedilatildeo com as evidecircncias experimentais sobre a energeacutetica da caminhada humana
em inclinaccedilotildees Os principais mecanismos envolvidos na nova hipoacutetese satildeo i)
muacutesculos posturais que natildeo realizam trabalho muscular exercem uma funccedilatildeo
importante na determinaccedilatildeo do dispecircndio energeacutetico total e ii) a presente hipoacutetese
leva em consideraccedilatildeo a co-contraccedilatildeo de muacutesculos antagonistas no dispecircndio
15
energeacutetico total Mais experimentos satildeo necessaacuterios para confirmar o modelo
apresentado neste estudo Aleacutem disso atraveacutes de estrateacutegias de otimizaccedilatildeo e
prediccedilatildeo linear um modelo teoacuterico foi delineado a fim de determinar paracircmetros
mecacircnicos (comprimento de passada e velocidade de progressatildeo) e energeacuteticos da
locomoccedilatildeo terrestre em situaccedilotildees onde as informaccedilotildees disponiacuteveis satildeo apenas a
massa e uma curva forccedila de reaccedilatildeo vertical versus tempo Os resultados advindos
do modelamento correspondem aos paracircmetros determinados experimentalmente
Laboratoacuterios que detenham apenas uma plataforma de forccedila ou nas aacutereas onde as
informaccedilotildees de entrada do atual modelo sejam as uacutenicas informaccedilotildees (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis primaacuterias da
locomoccedilatildeo podem ser preditas com razoaacutevel acuraacutecia
Palavras-chave custo eletromiograacutefico da caminhada mecacircnica da corrida de
idosos modelo teoacuterico da locomoccedilatildeo terrestre mecanismos minimizadores de
energia locomoccedilatildeo humana
16
Abstract
Two mechanical models the inverted pendulum and spring-mass explain how
do the pendular and elastic mechanisms minimizing energy expenditure from
muscles during human walking and running Here we test two effects that to our
knowledge do not have yet conclusive responses from literature specifically the
ageing effects on mechanics of human running and the effect of gradient on walking
optimal speed In order to check the former effect the ground reaction forces came
from a force platform (4m x 05m) were used for a later comparison i) mechanical
work ii) spring-mass parameters and iii) landing-takeoff asymmetries The old
subjects produce less force during positive work resulting in a smaller overall and
aerial vertical oscillation of the centre of mass Consequently the potential for restore
elastic energy from tendons is reduced contributing to greater energy expenditure
than in young subjects In relation to Electromyographical (EMG) Cost of human
walking we created two approaches experimental and theoretical In both
approaches information from EMG activity of sixteen muscles eight postural and
eight propulsor were collected and analysed The theoretical approach seems to fit
better with the energy expenditure during gradient walking The main mechanisms
involved in this new hypothesis are i) postural muscles that do not perform muscular
work play an important role in the total energy expenditure and ii) the present
hypothesis take the co-contraction into account of the antagonist muscles in the total
energy expenditure Further experiments are necessary to confirm this hypothesis
Besides using optimization and linear prediction procedures a theoretical model was
designed to estimate mechanical parameters (stride length and velocity of
progression) and energetic variables of terrestrial locomotion when available
information consists only of mass and one vertical ground reaction force versus time
17
The results from this modelling are similar to experimentally obtained data
Laboratories with just one force platform or in areas where the present modelrsquos input
information be the unique accessible data (eg palaeontology forensic
biomechanics etc) the prime variables of locomotion may be estimated with
reasonable accuracy
Keywords electromyographical cost of walking running mechanics in the
elderly theoretical model of terrestrial locomotion mechanisms for minimizing
expenditure energy human locomotion
18
Definiccedilatildeo de Termos
Contraccedilatildeo concecircntrica contraccedilatildeo muscular realizada durante encurtamento
do muacutesculo
Contraccedilatildeo excecircntrica contraccedilatildeo muscular realizada durante alongamento
do muacutesculo
Custo energeacutetico o dispecircndio advindo dos muacutesculos em funccedilatildeo da distacircncia
percorrida normalizado pela massa corporal A unidade eacute em Jkg-1m -1
Eficiecircncia mecacircnica a potecircncia mecacircnica gerada dividida pela potecircncia
metaboacutelica despendida durante uma passada
Passada um periacuteodo que compreende desde o momento do contato de um
peacute com o solo e finaliza no subsequumlente momento de contato do mesmo peacute
Passo um periacuteodo que compreende desde o momento do contato de um peacute
com o solo e finaliza no subsequumlente momento de contato do peacute contra-
lateral
Potecircncia mecacircnica externa o somatoacuterio dos incrementos positivos de
energia mecacircnica externa durante uma passada dividido pelo tempo da
passada
Recovery ndash R percentual de transferecircncia entre energia cineacutetica e potencial
gravitacional durante um ciclo de passada
Tempo aeacutereo efetivo duraccedilatildeo no qual a forca vertical eacute menor do que a
forccedila peso durante um passo
Tempo de contato efetivo duraccedilatildeo no qual a forccedila vertical eacute maior do que a
forccedila peso durante um passo
Trabalho mecacircnico externo O trabalho realizado para elevar e acelerar o
CM em relaccedilatildeo ao ambiente externo No presente estudo foi desconsiderado
19
o trabalho mecacircnico externo advindo de aceleraccedilotildees horizontais meacutedio-
laterais
Trabalho mecacircnico interno O trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM
Trabalho mecacircnico total O somatoacuterio dos moacutedulos do trabalho mecacircnico
externo e interno No presente estudo o trabalho interno foi considerado
aceitando transferecircncia de energia mecacircnica entre segmentos de mesmos
membros
20
Lista de Siacutembolos e Abreviaturas
l0 comprimento do membro inferior
μV microvolts
0 acircngulo da perna de apoio com o solo no momento
do contato
Fvc Fv meacutedia durante a fase de contato do peacute com o
solo
Ah variaccedilatildeo de altura
AhorPosition idem ao CPexp
At tempo de locomoccedilatildeo
Atime tempo de passada
Ltphoto tempo entre as passagens pelas fotoceacutelulas
2D duas dimensotildees
av aceleraccedilatildeo vertical do CM
avae aceleraccedilatildeo vertical do CM durante fase aeacuterea
efetiva
avce aceleraccedilatildeo vertical do CM durante contato efetivo
avmx aceleraccedilatildeo vertical maacutexima do CM
c constante de custo
CAU Caucasianos
CM centro de massa
cos cosseno
CP comprimento de passada
21
CPexp comprimento de passada determinada
experimentalmente
Ctot Custo energeacutetico da locomoccedilatildeo
dB decibeacuteis
DF duty factor (fraccedilatildeo da passada na qual um peacute toca
o solo)
DFregression valores de Vf preditos por regressatildeo linear
advindos de DF
dp desvio-padratildeo
dt periacuteodo de um quadro
Ecm energia mecacircnica do CM
Ek energia cineacutetica
Ekf energia cineacutetica horizontal
Ekfmn energia cineacutetica horizontal miacutenima
Ekmxdown energia cineacutetica vertical maacutexima durante
deslocamento descendente do CM
Ekmxup energia cineacutetica vertical maacutexima durante
deslocamento ascendente do CM
Ekv energia cineacutetica vertical
Emetabolic potecircncia metaboacutelica
EMG eletromiografia ou eletromiograacutefico
EmgCosttheor custo EMG teoacuterico
EmgCostexp custo EMG teoacuterico
EMGiso atividade EMG durante contraccedilatildeo isomeacutetrica
EMGneg atividade EMG durante trabalho negativo
EMGpos atividade EMG durante trabalho positivo
cmuscular energia metaboacutelica advinda do muacutesculo-esqueleacutetico
cmetaboacutelica energia metaboacutelica total durante locomoccedilatildeo
crepouso energia metaboacutelica durante posiccedilatildeo em peacute
celaacutestica energia recuperada por via elaacutestica
cpendular energia recuperada por via pendular
creconvertida energia total recuperada
Ep energia potencial gravitacional do CM
22
Epmn energia potencial gravitacional miacutenima do CM
total energia total necessaacuteria para realizar a locomoccedilatildeo
f frequumlecircncia de passo
Ff componente antero-posterior da forccedila de reaccedilatildeo do
solo
FinalhorPosition posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo de passada
FP frequumlecircncia de passada
FPexp frequumlecircncia de passada determinada
experimentalmente
FPregression valores de Vf preditos por regressatildeo linear a partir
de dados de FP
FPtheor frequumlecircncia de passada obtida indiretamente
Fr nuacutemero de froude
fs frequumlecircncia do sistema massa-mola
fsample frequumlecircncia de amostragem
Fv componente vertical da forccedila de reaccedilatildeo do solo
Fvmx Fv maacutexima
Fvmxyoung Fv maacutexima nos jovens
Fvmxold Fv maacutexima nos idosos
Fvscale PC mensurado com uma balanccedila
Fvpeak pico de impacto vertical
Fvplate forccedila vertical media durante um ciclo de passada
g aceleraccedilatildeo gravitacional
GPS sistema de posicionamento global
h hora
Hz Hertz
Iv impulso vertical
InitialhorPosition posiccedilatildeo horizontal do quadril no quadro que inicia o
ciclo de passada
Iemg integral EMG
Iemgcon integral EMG durante contraccedilatildeo concecircntrica
Iemgexc integral EMG durante contraccedilatildeo excecircntrica
J Joules
23
k rigidez vertical
kg quilograma
km quilometro
L comprimento do passo
Lae deslocamento horizontal do CM durante fase aeacuterea
efetiva
Lce deslocamento horizontal do CM durante contato
efetivo
M massa corporal
m metros
Mass massa dos muacutesculos analisados
ms milisegundos
mtot massa total (massa total somada agrave carga externa)
mV milivolts
N Newtons
NEP Nepaleses
nframes nuacutemero de quadros que totalizam um ciclo de
passada
nf nuacutemero de quadros
norm normalizado
O2 oxigecircnio
p iacutendice de significacircncia estatiacutestico
PC peso corporal
PMV potecircncia mecacircnica vertical
q fator de forma da curva de Fv em funccedilatildeo do tempo
qmean meacutedia dos valores qrsquos durante o tc
qregression valores de Vf predito por regressatildeo linear a partir
de dados de q
R Recovery percentual de reconversatildeo entre energia
cineacutetica e potencial gravitacional
R coeficiente de correlaccedilatildeo
r transduccedilatildeo entre energia cineacutetica e potencial
gravitacional
24
Rint transduccedilatildeo acumulada entre energia cineacutetica e
potencial gravitacional durante um passo
Rintdown transduccedilatildeo acumulada durante deslocamento
descendente do CM
Rintup transduccedilatildeo acumulada durante deslocamento
ascendente do CM
rms raiz quadrada da meacutedia dos quadrados
s segundos
Sae deslocamento vertical do CM durante fase aeacuterea
efetiva
Saedown deslocamento descendente do CM durante Sae
Saeup deslocamento ascendente do CM durante Sae
Sc deslocamento do CM durante a fase de contato
Sce deslocamento vertical do CM durante contato
efetivo
Scdown deslocamento descendente do CM durante Sc
Scup deslocamento ascendente do CM durante Sc
Scedown deslocamento descendente do CM durante Sce
Sceup deslocamento ascendente do CM durante Sce
SEE erro meacutedio da estimativa
sin seno
Skinf dobra cutacircnea
Sv deslocamento do CM durante um passo
Svdown deslocamento descendente do CM durante Sv
Svup deslocamento ascendente do CM durante Sv
T tempo de um passo
t tempo
ta tempo em que a acontece durante W+
t tempo em que acontece durante W-
ta periacuteodo do passo no qual o peacute natildeo estaacute em contato
com o solo
tae periacuteodo do passo no qual a Fv eacute maior do que o PC
peso corporal
25
taedown periacuteodo do deslocamento descendente do CM
durante tae
taeup periacuteodo do deslocamento ascendente do CM
durante tae
tbrake tempo de Wshy
tc periacuteodo do passo no qual um peacute estaacute em contato
com o solo
tce periacuteodo do passo no qual a Fv eacute menor do que o
PC
tcedown periacuteodo do deslocamento descendente do CM
durante tce
tceup periacuteodo do deslocamento ascendente do CM
durante tce
tpush tempo de W+
tstep tempo do passo
Vf velocidade de progressatildeo
V f velocidade meacutedia de progressatildeo
Vfexp velocidade de progressatildeo determinada
experimentalmente
VO2iso consumo de O2 durante contraccedilatildeo isomeacutetrica
VO2neg consumo de O2 durante trabalho mecacircnico
negativo
VO2pos consumo de O2 durante trabalho mecacircnico positivo
Vv velocidade vertical do CM
Vvmx velocidade vertical maacutexima do CM
Vvmxdown velocidade vertical maacutexima durante deslocamento
descendente do CM
Vvmxup velocidade vertical maacutexima durante deslocamento
ascendente do CM
Wshy trabalho mecacircnico negativo
W Watts
W+ trabalho mecacircnico positivo
Wext trabalho mecacircnico externo
Wextf trabalho mecacircnico externo horizontal
26
Wextf+ trabalho mecacircnico externo horizontal positivo
Wextv trabalho mecacircnico externo vertical
Wint trabalho mecacircnico interno
Wtot trabalho mecacircnico total
a fase durante W+ em que Ek e Ep do CM aumentam
concomitantemente
fase durante W- em que Ek e Ep do CM diminuem
concomitantemente
27
INTRODUCcedilAtildeO GERAL
11 Locomoccedilatildeo humana
A teoria da evoluccedilatildeo Darwinista conhecida como Teoria da Seleccedilatildeo Natural
nos indica entre outros pressupostos que a multiplicidade de espeacutecies que habitam
a face da terra eacute produto de um sistema altamente complexo e competitivo de
sobrevivecircncia sistema este que reflete fatores preditores da aptidatildeo definidos como
geneacuteticos e do meio ambiente As capacidades de reproduccedilatildeo de alimentaccedilatildeo e de
locomoccedilatildeo satildeo moduladas por aspectos do genoacutetipo influenciados pelos fatores
ambientais O conceito de aptidatildeo relacionada agrave locomoccedilatildeo desde um ponto de
vista bioloacutegico pode ser abordado analiticamente atraveacutes de seus componentes
principais Estes satildeo velocidade aceleraccedilatildeo maneabilidade resistecircncia economia
e estabilidade (ALEXANDER 2003)
A locomoccedilatildeo tem importacircncia fundamental para a sobrevivecircncia pois
possibilita entre outros fatores a procura por alimentos a busca por um local com
melhor clima caccedilar uma presa ou fugir de um perigo eminente (SAIBENE e
MINETTI 2003) Nos mamiacuteferos terrestres a locomoccedilatildeo acontece atraveacutes do uso
das pernas Este tipo de locomoccedilatildeo tem nos humanos por exemplo alguns
aspectos de ineficiecircncia quando comparada com outros animais (peixes e paacutessaros)
A ineficiecircncia da locomoccedilatildeo de biacutepedes eacute baseada no fato de que os segmentos
inferiores encostam repetidamente no solo para absorver e transferir energia
(trabalho negativo e positivo respectivamente) com o meio ambiente de modo que
os segmentos sofrem uma colisatildeo no momento de contato com o solo
caracterizando situaccedilotildees de grandes aceleraccedilotildees Para manter a velocidade meacutedia
de locomoccedilatildeo torna-se necessaacuterio uma re aceleraccedilatildeo do centro de massa (CM)
28
Energia quiacutemica eacute despendida para manter os muacutesculos ativos durante estas
diferentes fases A fim de atenuar este dispecircndio dois mecanismos baacutesicos satildeo
usados pelo sistema locomotor na corrida e na caminhada o mecanismo do pecircndulo
na caminhada e o mecanismo da massa-mola para a corrida (CAVAGNA e
KANEKO 1977 ver figura 11) Na caminhada a energia potencial eacute alta quando o
CM estaacute sobre o ponto de contato do corpo com o solo mas a partir deste momento
a energia potencial gravitacional comeccedila a diminuir e a energia cineacutetica horizontal
obteacutem um acreacutescimo gradativo Quando o ponto de contato volta a estar na frente do
CM a energia cineacutetica diminui e potencial aumenta
Estes comportamentos entre energia cineacutetica horizontal e potencial
gravitacional acontecem em oposiccedilatildeo de fase (CAVAGNA et al 1963) e portanto
com um processo de reconversatildeo entre energia cineacutetica e potencial gravitacional
(recovery ndash R) Por outro lado na corrida os acreacutescimos de energia potencial e
cineacutetica acontecem concomitantemente portanto o mecanismo de conservaccedilatildeo de
energia citado anteriormente natildeo se aplica neste tipo de locomoccedilatildeo Eacute postulado
que durante a primeira metade da fase de apoio da corrida principalmente
muacutesculos e tendotildees alongam armazenando energia elaacutestica enquanto que os
moacutedulos de energia cineacutetica horizontal e potencial gravitacional diminuem Esta
energia elaacutestica armazenada como uma mola comprimida por uma massa eacute
transformada em energia cineacutetica horizontal e potencial gravitacional de modo
gradativo durante a segunda metade da fase de apoio (CAVAGNA et al 1964
KOMI 2000 figura 11) Evidecircncias de energia elaacutestica armazenada e reconvertida
tambeacutem foram encontradas em cangurus (ALEXANDER e VERNON 1975) e em
cavalos (BIEWENER 1998) Os ligamentos do arco do peacute tambeacutem respondem pelo
comportamento elaacutestico do sistema locomotor na corrida (KER et al 1987)
Enquanto que a medida de trabalho externo possui uma correspondecircncia com
o trabalho mecacircnico realizado pelos muacutesculos na caminhada os valores obtidos
para a corrida superestimam o trabalho muscular realizado devido agrave dificuldade de
quantificar a energia elaacutestica durante o movimento (SAIBENE e MINETTI 2003) De
fato parte consideraacutevel do aumento e diminuiccedilatildeo da energia mecacircnica total na
corrida natildeo eacute causada pelas contraccedilotildees (excecircntricas e concecircntricas) musculares
mas pelo alongamento e encurtamento das estruturas elaacutesticas da unidade muacutesculo-
tendatildeo mais especificamente os tendotildees e estruturas elaacutesticas do muacutesculo
Portanto na corrida a adiccedilatildeo do trabalho interno e a transferecircncia entre segmentos
29
dos mesmos membros (inferiores e superiores) permitem uma estimativa mais
proacutexima do trabalho mecacircnico total (WILLEMS et al 1995)
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-
invertido para a caminhada e massa-mola para a corrida (Fonte
SAIBENE e MINETTI 2003 modificado no presente estudo)
As determinantes mecacircnicas da locomoccedilatildeo humana e animal tem sido
extensivamente estudadas em diferentes situaccedilotildees velocidade (CAVAGNA et al
1963 1964) gravidade (KRAM et al 1997 CAVAGNA et al 2000 1998
CAVAGNA et al 2005) planos inclinados (MINETTI et al 1993 1994)
O trabalho mecacircnico durante a locomoccedilatildeo em inclinaccedilotildees tem sido estudado
na caminhada (MINETTI et al 1993) e na corrida (MINETTI et al 1994)
encontrando valores de maior eficiecircncia mecacircnica entre 10 e 15 de inclinaccedilatildeo
negativa (declive) Todavia o modelo do pecircndulo invertido natildeo se sustenta para
situaccedilotildees de inclinaccedilotildees extremas Deste modo a reconversatildeo de energia parece
natildeo atuar na determinaccedilatildeo da velocidade oacutetima de caminhada nestas situaccedilotildees
Uma nova hipoacutetese eacute que os muacutesculos posturais do quadril possam contribuir para
gerar o alto custo de transporte em velocidades baixas de caminhada em inclinaccedilotildees
diferentes da inclinaccedilatildeo oacutetima (-10 onde haacute o menor custo metaboacutelico e
mecacircnico)
Esta hipoacutetese pretende ser testada atraveacutes da anaacutelise do custo
eletromiograacutefico (EMG) durante caminhada em diferentes velocidades e inclinaccedilotildees
de terreno O custo EMG seraacute compreendido como o somatoacuterio de ativaccedilatildeo EMG em
funccedilatildeo da distacircncia percorrida Se satisfatoacuterio o custo EMG poderaacute explicar as curva
30
em forma de U de custo metaboacutelico em funccedilatildeo da velocidade determinadas no
trabalho pioneiro de MARGARIA (1938)
Diferentemente da caminhada a corrida pode ser explicada do ponto de vista
mecacircnico pelo modelo massa-mola Este modelo possibilita dividir a oscilaccedilatildeo
vertical do CM em duas partes durante a passada da corrida a fase inferior da
oscilaccedilatildeo (quando a forccedila vertical exercida no solo eacute maior do que o peso corporal) e
a fase superior da oscilaccedilatildeo (quando a forccedila vertical eacute menor do que o peso
corporal) De acordo com o modelo massa-mola a duraccedilatildeo da fase inferior da
oscilaccedilatildeo representa meio periacuteodo do sistema e o deslocamento do CM durante este
periacuteodo representa a amplitude da oscilaccedilatildeo (BLICKHAN 1989 CAVAGNA et al
2005) Observaccedilotildees preliminares suportam a hipoacutetese de que sujeitos idosos
utilizem de uma maior geraccedilatildeo de trabalho interno devido a diminuiccedilatildeo da fase
superior da oscilaccedilatildeo do CM
Portanto a anaacutelise dos determinantes mecacircnicos da caminhada e corrida
deveratildeo contribuir no entendimento da locomoccedilatildeo desde um ponto de vista
energeacutetico Aleacutem disso procuramos realizar um estudo teoacuterico com o objetivo de
predizer variaacuteveis fundamentais e trabalho mecacircnico da locomoccedilatildeo terrestre
Informaccedilotildees biomecacircnicas sobre a energia da locomoccedilatildeo poderatildeo servir
como base para aplicaccedilotildees futuras na aacuterea da Fisioterapia na anaacutelise da locomoccedilatildeo
patoloacutegica bem como na Educaccedilatildeo Fiacutesica e Esportes atraveacutes do uso deste
conhecimento nas aacutereas do esporte de rendimento e sauacutede agraves quais utilizam-se das
atividades fiacutesicas locomotoras
13 Formato da tese
O estado-da-arte apresentado no capiacutetulo introdutoacuterio mostra um
desenvolvimento notaacutevel do corpo de conhecimento relacionado agrave mecacircnica e
energeacutetica da locomoccedilatildeo humana As bases cientiacuteficas atuais que procuram
encontrar as determinantes mecacircnicas de caracteriacutesticas fundamentais da
caminhada e corrida humana tais como velocidade e inclinaccedilatildeo oacutetima da
locomoccedilatildeo eficiecircncia e economia em situaccedilatildeo com carga e inclinaccedilatildeo e mudanccedila
de formas de locomoccedilatildeo conforme o aumento da velocidade demonstram ser
satisfatoacuterias em inuacutemeras situaccedilotildees
31
Contudo modelos biomecacircnicos que analisem natildeo apenas situaccedilotildees
particulares mas que expliquem as questotildees fundamentais da locomoccedilatildeo humana
tendo em consideraccedilatildeo a complexidade deste tipo de movimento ainda satildeo
escassos Atualmente temos hipoacuteteses que necessitam de experimentaccedilatildeo para
tornaacute-las robustas o suficiente para responder as questotildees fundamentais da
locomoccedilatildeo e ao mesmo tempo se manterem simples o bastante que as caracterize
como fundamentais Portanto a presente tese ENERGEacuteTICA E MECAcircNICA DA
CAMINHADA E CORRIDA HUMANA Com especial referecircncia agrave locomoccedilatildeo em
plano inclinado e efeitos da idade natildeo oferece uma resposta final e acabada para as
relaccedilotildees entre a energeacutetica e mecacircnica da locomoccedilatildeo humana mas tem como eixo
principal por meio de abordagens experimentais e teoacutericas avanccedilar no
entendimento dos paradigmas mecacircnicos das formas fundamentais de locomoccedilatildeo
usadas pelo ser humano caminhada e corrida
Em base disso o capiacutetulo 2 Custo EMG da Caminhada Humana procura
avanccedilar e aperfeiccediloar a hipoacutetese do Custo de Geraccedilatildeo de Forccedila (KRAM e TAYLOR
1990) com o desenvolvimento do modelo do Custo de Ativaccedilatildeo Muscular que daacute
base para o estudo Atraveacutes de experimentos em diferentes velocidades e
inclinaccedilotildees de caminhada eacute dada uma explicaccedilatildeo das curvas em forma de U do
custo metaboacutelico em funccedilatildeo da velocidade determinadas no estudo pioneiro de
MARGARIA em 1938
Motivado pela falta de explicaccedilatildeo das mudanccedilas estruturais e funcionais
devido agrave idade aplicadas agrave mecacircnica e energeacutetica da locomoccedilatildeo humana o capiacutetulo
3 Mecacircnica da Corrida em Idosos compara o trabalho mecacircnico e o sistema massa-
mola entre jovens e idosos em diferentes velocidades de corrida analisando o
sistema massa-mola natildeo apenas pelas suas caracteriacutesticas originais (BLICKHAN
1989 MCMAHON e CHENG 1990) mas tambeacutem pelas assimetrias deste sistema
na corrida humana determinadas recentemente na literatura (CAVAGNA 2006)
Nestes dois estudos eacute usada a abordagem experimental o primeiro se
utilizando da teacutecnica de EMG e o segundo estudo abordando a teacutecnica da
dinamometria especificamente o uso de plataformas de forccedila A percepccedilatildeo da
limitaccedilatildeo metodoloacutegica do uso deste equipamento aliada agrave necessidade de
abordagens teoacutericas da mecacircnica e energeacutetica da caminhada e corrida humana e
animal em situaccedilotildees onde apenas uma curva forccedila de reaccedilatildeo do solo versus tempo
eacute disponiacutevel ofereceram a justificativa para o capiacutetulo 4 Prediccedilatildeo da Vf CP e Custo
32
Energeacutetico da Locomoccedilatildeo Terrestre A construccedilatildeo de um modelo biomecacircnico
destes paracircmetros eacute endereccedilada neste estudo atraveacutes de meacutetodo de miacutenimos
quadrados e princiacutepios da dinacircmica e otimizaccedilatildeo de paracircmetros caracterizadores da
locomoccedilatildeo nomeadamente massa corporal frequumlecircncia de passo (FP) fator de forma
ldquoqrdquo e duty factor (DF)
Finalmente no capiacutetulo 5 os resultados de cada estudo satildeo sumarizados e
no capiacutetulo 6 satildeo apresentadas algumas consideraccedilotildees sobre a mecacircnica e
energeacutetica da locomoccedilatildeo humana e os possiacuteveis desdobramentos advindos dos
presentes achados Ainda no capiacutetulo 8 estatildeo inseridos os apecircndices da tese
131 Objetivo geral
O objetivo da presente tese eacute analisar o custo EMG da caminhada humana e
a mecacircnica da corrida de idosos Esta seacuterie de estudos tem tambeacutem como objetivo
construir um modelo biomecacircnico do custo energeacutetico da locomoccedilatildeo terrestre
132 Objetivos especiacuteficos
- Estudar as determinantes da velocidade oacutetima de caminhada em inclinaccedilotildees com
ecircnfase na construccedilatildeo do modelo do custo EMG da caminhada humana
- Comparar a mecacircnica da corrida com particular referecircncia ao trabalho mecacircnico e
sistema massa-mola entre jovens e idosos em vaacuterias velocidades de corrida
- Construir um modelo biomecacircnico capaz de predizer paracircmetros fundamentais e
custo energeacutetico da locomoccedilatildeo terrestre
33
2 O CUSTO EMG DA CAMINHADA HUMANA
21 Introduccedilatildeo
Durante um ciclo de passada de caminhada a energia cineacutetica do CM
corporal varia inversamente com a energia potencial gravitacional do CM Apesar da
presenccedila importante deste comportamento a transformaccedilatildeo de energia entre uma
forma e outra natildeo eacute total e o restante de energia necessaacuterio para manter a
locomoccedilatildeo eacute providenciado pelos muacutesculos e eacute quando normalizado pela massa
corporal e por unidade de distacircncia igual agrave 03 Jkg-1m-1 durante a velocidade oacutetima
de caminhada (aproximadamente 45 kmh-1 em adultos) Este mecanismo pendular
de minimizaccedilatildeo de energia foi primeiramente observado por CAVAGNA et al (1963)
e denominado como modelo do ldquopecircndulo invertidordquo
Interessantemente natildeo obstante a sua simplicidade o modelo auxiliou no
entendimento e aprofundamento das determinantes mecacircnicas da locomoccedilatildeo
Atraveacutes deste meacutetodo foi possiacutevel oferecer o primeiro insight desde o ponto-de-vista
mecacircnico sobre a velocidade oacutetima de locomoccedilatildeo e a forma em U do custo de
transporte da caminhada [ml de oxigecircnio - O2 - por kg de massa corporal por
distacircncia percorrida observada por MARGARIA (1938)] Na seacuterie de experimentos
desenvolvida por Cavagna e colegas (CAVAGNA et al 1976 HEGLUND et al
34
1982b) foi apresentada a formulaccedilatildeo matemaacutetica denominada como Recovery (R)
definida como
W f + W -Wv extR() = 100 Eq 21 W f + Wv
onde W f eacute trabalho mecacircnico externo horizontal Wv eacute trabalho mecacircnico externo
vertical e Wext eacute trabalho mecacircnico externo Esta equaccedilatildeo determina o percentual de
reconversatildeo via pendular entre energia cineacutetica e potencial gravitacional durante a
passada E de fato na velocidade oacutetima de caminhada o R alcanccedila
aproximadamente seu valor maacuteximo
Poreacutem o custo de geraccedilatildeo de trabalho como mecanismo principal do custo
energeacutetico da locomoccedilatildeo tem recebido vaacuterias criacuteticas da literatura As criacuteticas se
baseiam principalmente (1) na questatildeo do paradoxo do trabalho zero que afirma
que fisicamente durante um ciclo de passada completo em velocidade constante e
no plano as variaccedilotildees de energias cineacuteticas e potencial satildeo iguais agrave zero
(desprezando a resistecircncia do ar e fricccedilotildees teciduais) portanto analisando de um
ponto-de-vista somente da fiacutesica o sujeito natildeo realizaria trabalho nesta situaccedilatildeo
(ALESHINSKY 1986) (2) o problema da co-contraccedilatildeo afirma que existe um custo
metaboacutelico importante devido agrave contraccedilatildeo de muacutesculos antagonistas que natildeo geram
movimento portanto sem geraccedilatildeo de trabalho mecacircnico Este uacuteltimo
questionamento levou um grupo de pesquisadores a formular a denominada
hipoacutetese da forccedila ou Teoria do custo energeacutetico da geraccedilatildeo de forccedila (HEGLUND et
al 1982b KRAM e TAYLOR 1990 ROBERTS et al 1998) para explicar de modo
simplificado o custo energeacutetico da locomoccedilatildeo
Essencialmente a hipoacutetese da forccedila afirma que o custo energeacutetico da corrida
ou caminhada eacute determinado pelo produto da integral da curva forccedila de reaccedilatildeo do
solo-tempo por um fator proporcional agrave taxa de ciclos de pontes-cruzadas de miosina
no muacutesculo independente da geraccedilatildeo de trabalho mecacircnico Apesar da hipoacutetese
concordar com achados experimentais estes satildeo encontrados em situaccedilotildees
limitadas e aleacutem disso a hipoacutetese da forccedila considera como negligenciaacutevel o custo
de balanccedilar os segmentos para traacutes e para frente Esta pressuposiccedilatildeo eacute considerada
como incorreta (MARSH et al 2004) O problema principal desta hipoacutetese se refere
35
agrave desconsideraccedilatildeo do trabalho elemento fundamental segundo a primeira lei da
termodinacircmica Conforme apontado por HEGLUND 2004) ldquoforccedila natildeo eacute trabalho
nem mesmo eacute energia Se a energia metaboacutelica eacute consumida aquela energia deve
ir para algum lugar Se a energia de um segmento corporal aumenta aquela energia
vem de algum lugar Se a energia daquele segmento diminui a energia vai para
algum lugarrdquo
Durante a locomoccedilatildeo em inclinaccedilotildees foi observado que na inclinaccedilatildeo oacutetima
(aproximadamente -10) a constante de custo metaboacutelico inverso ao tempo de
apoio obteve uma variaccedilatildeo significativa (MINETTI et al 1994) indicando que o
custo de geraccedilatildeo de trabalho mecacircnico era mais satisfatoacuterio do que o custo de
geraccedilatildeo de forccedila Mas um achado intrigante nos estudos de Minetti e
colaboradores sobre as determinantes mecacircnicas da energeacutetica da caminhada e
corrida em inclinaccedilotildees (1993 e 1994 respectivamente) foi sobre a ausecircncia de
trabalho mecacircnico negativo em inclinaccedilotildees positivas e de trabalho positivo em
inclinaccedilotildees negativas (apoacutes 30 de inclinaccedilatildeo na corrida e 15 na caminhada)
independente da velocidade Portanto o modelo do custo de geraccedilatildeo de trabalho
como determinante do custo energeacutetico da locomoccedilatildeo natildeo se aplica nestas
situaccedilotildees perdendo sua amplitude como Teoria geral para a energeacutetica e mecacircnica
da caminhada
Tendo em consideraccedilatildeo que durante situaccedilotildees de locomoccedilatildeo de pouca
eficiecircncia mecacircnica como na situaccedilatildeo de velocidades mais baixas que a velocidade
oacutetima e durante inclinaccedilotildees extremas satildeo geradas situaccedilotildees de instabilidade de
locomoccedilatildeo e provavelmente maiores co-contraccedilotildees musculares propomos neste
experimento testar a hipoacutetese denominada de ldquocusto EMG da caminhada humanardquo
Uma base importante desta hipoacutetese reside no raciociacutenio de que nas situaccedilotildees
citadas anteriormente a contribuiccedilatildeo de muacutesculos que contraem isometricamente
principalmente os posturais teratildeo uma contribuiccedilatildeo importante para o alto custo
relativo da locomoccedilatildeo
Portanto o objetivo deste estudo eacute desenvolver o modelo do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees Teoricamente a hipoacutetese do
presente estudo diferente da hipoacutetese da forccedila natildeo iraacute desconsiderar o trabalho
mecacircnico gerado mas este seraacute considerado como um dos produtos da variaccedilatildeo da
energia (devido ao consumo de energia metaboacutelico) e a quantidade de ativaccedilatildeo
muscular e as eficiecircncias de ativaccedilatildeo satildeo as determinantes do custo energeacutetico
36
usando os equivalentes metaboacutelicos da ativaccedilatildeo EMG da literatura W+ Wshy
(BIGLAND-RITCHIE e WOODS 1976) e durante contraccedilatildeo isomeacutetrica
(CERRETELLI et al 1976) O modelo eacute apresentado em detalhes na metodologia
22 Metodologia
221 Construccedilatildeo do modelo
O presente modelo eacute configurado como biomecacircnico e se utiliza de
pressupostos originados da fiacutesica e da biologia
O modelo assume que i) toda a energia despendida pelos muacutesculos possui
uma correspondente quantidade de ativaccedilatildeo EMG ii) a atividade EMG realizada
pelos muacutesculos posturais durante todo o ciclo de passada e pelos muacutesculos
propulsores durante a fase aeacuterea seraacute considerada como uma atividade EMG
realizada durante contraccedilotildees isomeacutetricas Seraacute considerada como contraccedilatildeo
excecircntrica e concecircntrica a atividade EMG realizada pelos muacutesculos propulsores
durante a primeira e segunda metades da fase de apoio respectivamente iii) O
custo energeacutetico da locomoccedilatildeo eacute devido agrave ativaccedilatildeo de muacutesculos propulsores e
posturais estes uacuteltimos natildeo diretamente ligados agrave geraccedilatildeo de trabalho mecacircnico iv)
Mais do que uma relaccedilatildeo com a produccedilatildeo de forccedila muscular a quantidade de
ativaccedilatildeo EMG e consequumlentemente o custo EMG possui uma correspondecircncia com
o trabalho mecacircnico realizado durante a ativaccedilatildeo muscular
Um conjunto de algoritmos foi desenvolvido em Labview a fim de analisar o
sinal EMG e as variaacuteveis espaccedilos-temporais (figuras 21 22 e 23 apecircndice 81) O
programa retifica suaviza (atraveacutes de uma integraccedilatildeo com janelamento moacutevel
50Hz do tipo Hamming) e divide todas as curvas de EMG por ciclo de passada
retirando os ciclos de passadas com um tempo 20 menor ou maior do tempo
meacutedio do ciclo de passada e do tempo de apoio Apoacutes normaliza o tempo do ciclo
para 100 quadros (interpolaccedilatildeo via spline) e calcula a meacutedia desvio-padratildeo e
coeficiente de variaccedilatildeo em cada quadro por muacutesculo analisado Este procedimento
tem o objetivo de criar graacuteficos de atividade eletromiograacutefica em funccedilatildeo do
37
percentual do ciclo de passada A fim de analisar o efeito das ponderaccedilotildees pelo
volume muscular e dobra cutacircnea foram desenvolvidas duas estrateacutegias de
modelamento nomeadamente ldquoabordagem experimentalrdquo e ldquoabordagem teoacutericardquo
Abordagem experimental
Usando o sinal suavizado sem a normalizaccedilatildeo foi realizada uma integral em
funccedilatildeo do tempo do seguinte modo
t
Iemg(t) = f EMG dt Eq 22 0
Este valor integrado eacute dividido pelo CP determinando a quantidade de
atividade EMG em funccedilatildeo da distacircncia e seraacute considerado como um custo miacutenimo
EMG Os valores de custo EMG satildeo ponderados em funccedilatildeo do volume muscular
(WINTERS e WOO 1990) e da dobra cutacircnea (NORDANDER et al 2003) do
seguinte modo
Iemg1 Iemg2 Iemg16EmgCost (mV m) = ( + + l middot CP-1 Eq 23 exp ( Mass1 Sk inf1 Mass2 Sk inf2 Mass16 Sk inf16 lmiddot middot middot Masstotal Sk inftotal Masstotal Sk inftotal Masstotal Sk inftotal
onde EmgCostexp eacute o custo miacutenimo EMG experimental Mass eacute a massa dos
muacutesculos analisados e eacute o somatoacuterio de todas as massas musculares Masstotal
analisadas Sk inf eacute a dobra cutacircnea de cada regiatildeo de colocaccedilatildeo dos eletrodos e
eacute o somatoacuterio de todas as dobras cutacircneas analisadas A fim de Sk inftotal
compreender melhor as determinantes da velocidade oacutetima nas inclinaccedilotildees dividiu-
se a Iemg em trecircs aacutereas (a) fase de contato (b) fase aeacuterea e (c) offset (figura 21)
Abordagem teoacuterica
A presente abordagem calcula o sinal EMG atraveacutes dos seus equivalentes
metaboacutelicos Estes equivalentes satildeo advindos da literatura (BIGLAND-RITCHIE e
WOODS 1976) e o objetivo deste procedimento foi verificar se levando em
38
consideraccedilatildeo os equivalentes metaboacutelicos da atividade EMG (para contraccedilotildees
concecircntrica excecircntrica e isomeacutetrica) seria possiacutevel explicar mais satisfatoriamente
as velocidades oacutetimas na caminhada em inclinaccedilotildees Este procedimento assume
que uma determinada quantidade de ativaccedilatildeo eleacutetrica muscular gera distintos custos
energeacuteticos sendo estes dependentes do tipo de contraccedilatildeo muscular Para este
propoacutesito primeiro dividimos a anaacutelise em dois grupos de muacutesculos propulsores
(gluteus maximus gluteus medius deltoideus anterior rectus femuralis vastus
lateralis biceps femuralis caput longus tibialis anterior e gastrocnemius lateralis) e
posturais (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis trapezius ascendens)
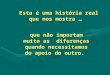
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset
Os muacutesculos posturais foram considerados como muacutesculos contraindo
isometricamente durante todo o ciclo de passada enquanto que os muacutesculos
39
propulsores foram analisados como realizando (a) contraccedilatildeo excecircntrica na primeira
fase de contato (b) concecircntrica na segunda fase de contato e (c) contraccedilatildeo
isomeacutetrica durante a fase aeacuterea (figura 22)
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda metade
da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo isomeacutetrica
Setas verticais apontando para baixo indicam momento de contato e de
despregue
Assim foram calculadas as correspondentes integrais
t 2c
Iemgexc (t) = f EMG dt Eq 24 0
40
onde Iemgexc eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a primeira
metade da fase de contato (contraccedilatildeo excecircntrica)
tc
Iemgcon (t) = f EMG dt Eq 25 t 2c
onde Iemgcon eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a segunda
metade da fase de contato (contraccedilatildeo concecircntrica)
ta
Iemgiso (t) = f EMG dt Eq 26 0
onde Iemgiso eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a fase aeacuterea
(contraccedilatildeo isomeacutetrica)
As integrais foram convertidas para uma unidade de counts usada por
BIGLAND-RITCHIE e WOODS 1976) usando um fator de transformaccedilatildeo igual agrave 200
counts (mVs)-1 deste modo temos a atividade EMG durante contraccedilatildeo excecircntrica
(EMGneg) concecircntrica (EMGpos) e isomeacutetrica (EMGiso) em counts Os equivalentes
metaboacutelicos satildeo obtidos atraveacutes de equaccedilotildees de regressatildeo linear criadas no
presente estudo usando dados experimentais de Bigland e Ritchie (1976) como
segue
VO2neg (ml) = 00015 EMGneg + 03353 Eq 27
VO2 pos(ml) = 00042 EMGpos + 01493 Eq 28
(ml) = 00042 EMGiso + 01493 Eq 29 VO2iso
EmgCosttheor (J m) = 201[(VO2 iso1 + VO2 iso 2 + VO2 iso16) + (VO2 neg 1 + VO2 neg 2 + VO2 neg 16) +
(VO2 pos1 + VO2 pos 2 + VO2 pos16)] CP-1 Eq 210
onde EmgCosttheor eacute o custo EMG teoacuterico O somatoacuterio dos dispecircndios energeacuteticos
dados em ml de O2 foram convertidos para Joules (J) usando um equivalente
41
energeacutetico de 201 Jml-1 (BLAXTER 1989) e apoacutes foram divididos por CP (conforme
equaccedilatildeo 210) Nesta abordagem teoacuterica entende-se o EmgCosttheor como um custo
miacutenimo energeacutetico devido agrave notoacuteria impossibilidade de obter a totalidade da ativaccedilatildeo
EMG e consequentemente do custo energeacutetico da locomoccedilatildeo Mais do que isso o
modelo procura compreender as determinantes da velocidade oacutetima de caminhada
nas inclinaccedilotildees
222 Testando o modelo
Um homem adulto sem histoacuteria de lesotildees no sistema muacutesculo-esqueleacutetico
realizou caminhadas de 2 minutos sobre uma esteira (WOODWAY Usa) nas
velocidades de 2 3 4 5 6 e 7 kmh-1 e nas inclinaccedilotildees de 0 5 10 e 15 O uso
das velocidades 6 ou 7 kmh-1 foram escolhidas em funccedilatildeo do Nuacutemero de Froude
(Fr) O valor maacuteximo de Fr foi o equivalente agrave velocidade espontacircnea de transiccedilatildeo
(aproximadamente 05 no plano MINETTI et al 1994) O uso do Fr eacute baseado da
teoria das similaridades dinacircmicas Esta teoria afirma que dois animais
geometricamente similares (como no caso do presente estudo) deslocam-se
tambeacutem de modo similar quando o movimento eacute multiplicado por fatores
relacionados ao tempo dimensotildees lineares e forccedilas (ver ALEXANDER 2005)
Fr = Vf 2 gL Eq 211
onde Vf eacute velocidade de progressatildeo em ms-1 g eacute aceleraccedilatildeo gravitacional (g) (981
ms-2) e L eacute um comprimento corporal conhecido (no presente estudo foi utilizado o
comprimento de membros inferiores em m)
Coleta de dados
O voluntaacuterio foi informado do objetivo do estudo dos riscos e eventuais
desconfortos e assinou um termo de consentimento
O indiviacuteduo estava vestido com roupas apropriadas para caminhada A coleta
de dados foi realizada em inclinaccedilotildees de 0 5 10 e 15 nas velocidades de 2 3 4
5 6 7 kmh-1 para cada inclinaccedilatildeo A atividade EMG de dezesseis muacutesculos foi
42
analisada (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis deltoideus anterior trapezius ascendens gluteus
maximus gluteus medius rectus femuralis vastus lateralis biceps femuralis caput
longus tibialis anterior e gastrocnemius lateralis) usando um eletromioacutegrafo portaacutetil
(EMGpocket Elite System Itaacutelia)
Para a preparaccedilatildeo do local e colocaccedilatildeo dos eletrodos de superfiacutecie bipolares
foram observadas as orientaccedilotildees da Seniam (FRERIKS et al 1991)
Simultaneamente ao registro EMG sinais advindos de seis sensores de pressatildeo
(footswitches) trecircs em cada peacute (regiatildeo do calcanhar quinto e primeiro metatarsos
inferiores) foram registrados no eletromiograacutefo portaacutetil Os sinais EMGrsquos foram preacuteshy
amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um niacutevel de ruiacutedo menor do
que 1 mV rms e filtrados por um filtro do tipo Butterworth (50-450 Hz terceira
ordem) A frequumlecircncia de amostragem da EMG e dos sensores de pressatildeo foi de
1000 Hz
Foram coletadas a massa e estatura corporal e comprimento de membro
inferior As dobras cutacircneas tambeacutem foram coletadas antes dos testes usando um
plicocircmetro (The body calliper CA Usa)
Um possiacutevel efeito de fadiga no sinal EMG foi controlado repetindo o primeiro
teste Com diferenccedilas maiores de 10 entre a integral EMG dos muacutesculos
analisados do primeiro e uacuteltimo teste a coleta seria descartada poreacutem a diferenccedila
foi menor do que este limite
23 Resultados
231 Variaacuteveis espaccedilos-temporais
As variaacuteveis espaccedilos-temporais da caminhada em diferentes velocidades e
diferentes inclinaccedilotildees satildeo apresentadas na tabela 21 O CP e a FP aumentam com
o aumento da velocidade poreacutem natildeo com o aumento da inclinaccedilatildeo O DF eacute maior na
velocidade oacutetima de locomoccedilatildeo nas inclinaccedilotildees (10 e 15) enquanto que apresenta
uma relaccedilatildeo inversa com Vf nas inclinaccedilotildees mais baixas (0 e 5)
43
232 Atividade EMG
A atividade EMG dos muacutesculos posturais (erector spinae longissimus erector
spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis trapezius ascendens) e
dos muacutesculos propulsores (gluteus maximus gluteus medius rectus femoralis
vastus lateralis deltoideus anterior biceps femoralis caput longus tibialis anterior e
gastrocnemius lateralis) eacute apresentada nas figuras 23 e 24 Os resultados do
presente estudo referente ao comportamento da atividade EMG durante caminhada
no plano satildeo semelhantes agrave literatura tanto em relaccedilatildeo aos muacutesculos propulsores
(LAY et al 2007 NYMARK et al 2005) quanto para os muacutesculos posturais (WHITE
e MCNAIR 2002 DEN OTTER et al 2004 LAMOTH et al 2006)
De um modo geral o sinal EMG em funccedilatildeo do percentual do ciclo (portanto
independente da distacircncia percorrida) aumentou conforme o aumento da velocidade
e inclinaccedilatildeo Observa-se tambeacutem um aumento no offset nas maiores inclinaccedilotildees
(veja figuras 23 e 24)
Tabela 21 Valores meacutedios e desvios-padratildeo (dp) de frequumlecircncia de passada (FP)
comprimento de passada (CP) tempo de fase aeacuterea (ta) tempo de contato (tc)e
duty factor (DF) nas diferentes velocidades (Vf) em diferentes inclinaccedilotildees do
terreno
0
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0518 0022 1074 0044 0706 0039 1227 0087 064
3 0660 0017 1263 0032 0604 0030 0912 0042 060
4 0779 0013 1426 0025 0541 0023 0743 0028 058
5 0879 0010 1580 0018 0492 0022 0646 0024 057
6 0970 0009 1719 0015 0446 0012 0586 0014 057
7 1061 0022 1834 0042 0415 0010 0528 0024 056
5
44
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0504 0026 2210 0056 0656 0054 1334 0089 067
3 0640 0015 2606 0030 0635 0033 0930 0048 059
4 0797 0013 2790 0023 0526 0017 0729 0028 058
5 0895 0008 3104 0014 0478 0017 0639 0020 057
6 1002 0009 3326 0016 0426 0009 0572 0014 057
7 1081 0015 3600 0025 0400 0007 0525 0014 057
10
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0302 0000 3674 0000 1309 0090 1998 0090 060
3 0262 0013 3182 0151 1216 0094 2602 0174 068
4 0300 0007 3699 0085 1229 0086 2101 0114 063
5
6 0495 0006 3300 0036 0854 0021 1166 0028 058
7 0556 0008 3429 0015 0775 0022 1023 0026 057
15
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0275 0022 3041 0216 1282 0079 2368 0255 065
3 0319 0011 3492 0122 1208 0074 1936 0121 062
4 0399 0007 3482 0059 1497 0046 1011 0040 040
5 0450 0008 3703 0068 0919 0041 1302 0060 059
6 0524 0009 3711 0064 0808 0026 1101 0035 058
7 0597 0012 3257 0069 0721 0024 0954 0037 057
O maior pico de ativaccedilatildeo EMG entre os muacutesculos propulsores foi do tibialis
anterior com valor de 73 mV agrave 7 kmh-1 agrave 15 enquanto que para os muacutesculos
posturais foi do trapezius ascendens com 34 mV tambeacutem agrave 7 kmh-1 agrave 15
erector
spinae
longissimus
erector
spinae
iliocostalis
trapezius
descendens
latissimus
dorsis
obliquus
externus
abdominis
obliquus
internus
abdominis
rectus
abdominis
deltoideus
anterior
45
0 5 10 15
Figura 2 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
trapezius
ascenden
gluteus
maximus
gluteus
medius
rectus
femoralis
vastus
lateralis
biceps
femoralis
caput
tibialis
anterior
gastrocnemius
lateralis
46
0 5 10 15
Figura 24
47
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
com o tempo de passada normalizado em percentual do ciclo O 0-100 representa
o momento de contato com o solo As cores indicam a velocidade de caminhada (de
2 agrave 7 kmh-1) Cada muacutesculo eacute representado nas linhas e em cada coluna eacute
apresentada a atividade EMG por inclinaccedilatildeo
A ativaccedilatildeo EMG parece seguir um padratildeo bem definido com exceccedilatildeo do
trapezius descendens obliquus internus abdominis onde picos de ativaccedilotildees
aparecem apoacutes os 3 kmh-1 seguindo um comportamento de aumento com o
acreacutescimo da inclinaccedilatildeo e no muacutesculo deltoideus anterior no qual ateacute a velocidade
de 5 kmh-1 o pico maior se apresenta no final da fase de apoio enquanto que nas
velocidades de 6 e 7 kmh-1 o pico passa a se situar na fase aeacuterea O uacutenico muacutesculo
analisado neste estudo que apresenta um comportamento diferente entre as
inclinaccedilotildees eacute o rectus femoralis onde nas inclinaccedilotildees 0 5 e 10 os picos aparecem
apenas nas velocidades raacutepidas enquanto que na inclinaccedilatildeo de 15 o pico eacute visiacutevel
logo na velocidade de 2 kmh-1
Poreacutem quando analisamos a quantidade de ativaccedilatildeo por distacircncia percorrida
ou seja o custo EMG os resultados mudam
233 Custo EMG
A quantidade de atividade EMG calculada atraveacutes da abordagem
experimental eacute apresentada na figura 25 Durante a caminhada no plano (primeira
linha da figura 25) eacute possiacutevel observar um miacutenimo de ativaccedilatildeo no somatoacuterio total
devido principalmente agrave ativaccedilatildeo durante a fase aeacuterea e ao offset Este miacutenimo
acontece tambeacutem na inclinaccedilatildeo a 10 de inclinaccedilatildeo mas a 5 e a 15 a
quantidade de ativaccedilatildeo parece diminuir conforme o aumento da Vf
A figura 26 apresenta os valores de custo EMG calculado atraveacutes da
abordagem teoacuterica Observa-se um miacutenimo a 0 e 15 de inclinaccedilatildeo
Para nosso conhecimento natildeo existem dados de atividade EMG de muacutesculo
posturais durante caminhada nas inclinaccedilotildees A quantidade de ativaccedilatildeo EMG por
passada dos muacutesculos posturais e propulsores parecem aumentar com o acreacutescimo
da velocidade e inclinaccedilatildeo
48
49
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
24 Discussatildeo
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular
Inicialmente proposto para a corrida de quadruacutepedes (KRAM e TAYLOR
1990) e apoacutes para a corrida de biacutepedes (ROBERTS et al 1998 ROBERTS et al
1997) corrida para traacutes (WRIGHT e WEYAND 2001) e caminhada humana
(GRIFFIN et al 2003) a teoria do custo energeacutetico da geraccedilatildeo de forccedila foi formulada
a partir dos resultados que para animais com grande variaccedilatildeo de massa correndo
em diversas velocidades o custo mecacircnico natildeo se correlacionava bem com o custo
metaboacutelico da locomoccedilatildeo terrestre (HEGLUND et al 1982b TAYLOR 1985)
0 5
10
15
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
50
Uma justificativa para explicar esse resultado se referia ao fato de que o
muacutesculo durante a fase de apoio na corrida contraia isometricamente deste modo
natildeo realizando trabalho
Recentemente foi observado que esse comportamento acontece tambeacutem no
muacutesculo gastrocnemius medialis durante a caminhada (FUKUNAGA et al 2001)
Poreacutem na corrida este comportamento sucede apenas em velocidades maiores de
13 kmh-1 em adultos (CAVAGNA 2006) e natildeo eacute visiacutevel em idosos mesmo em
velocidades maacuteximas (estudo sobre a mecacircnica da corrida em idosos Capiacutetulo 3)
Ainda assim a teoria afirma que o custo metaboacutelico despendido pelos muacutesculos eacute
proporcional agrave integral forccedila de reaccedilatildeo do solo-tempo multiplicada por um fator
proporcional agrave taxa de ciclos de pontes cruzadas no muacutesculo-esqueleacutetico
A proposiccedilatildeo do Custo Energeacutetico da Geraccedilatildeo de Forccedila assume que i) a
maior parte da forccedila exercida pelos muacutesculos acontece em oposiccedilatildeo agrave gravidade ii)
uma unidade de volume muscular ativado exerce uma respectiva forccedila no solo
independente da velocidade ou tamanho do animal iii) originalmente foi presumido
que os muacutesculos agiam em similares amplitudes da relaccedilatildeo forccedila-velocidade [esta
pressuposiccedilatildeo foi recentemente interpretada em um interessante modelo
biomecacircnico proposto por BLANCO e GAMBINI 2006) como independente para a
determinaccedilatildeo das relaccedilotildees encontradas por KRAM e TAYLOR 1990)] portanto eacute
esperado que animais pequenos que realizam o tempo de contato menor usem
fibras glicoliacuteticas em maior quantidade e consequentemente tenham um maior
dispecircndio energeacutetico e assim explica-se o fato de que animais pequenos despendem
mais energia para transportar 1 N de forccedila por km percorrido do que animais
maiores (HOYT e TAYLOR 1981) Portanto o custo energeacutetico da locomoccedilatildeo
segundo a presente teoria eacute determinado pelo custo de suportar o peso corporal e o
tempo disponiacutevel para exercer forccedila contra o solo
Ainda assim a teoria apresenta seacuterias restriccedilotildees e parece funcionar em
situaccedilotildees particulares A formulaccedilatildeo apresentada por Kram e Taylor indica como
insignificante o dispecircndio energeacutetico devido aos movimentos de balanccedilo dos
membros quando natildeo estatildeo em apoio Vaacuterias evidecircncias em aves (MARSH et al
2004) e em humanos (DOKE et al 2005 GOTTSCHALL e KRAM 2005 DOKE e
KUO 2007) demonstram que este dispecircndio natildeo eacute despreziacutevel Outra criacutetica
levantada pela literatura (ALEXANDER 1991 HEGLUND 2004) se refere agrave
desconsideraccedilatildeo do trabalho variaacutevel fundamental na Termodinacircmica para explicar
51
a energeacutetica da locomoccedilatildeo Forccedila natildeo eacute trabalho nem mesmo eacute energia portanto
ela isoladamente natildeo possibilita uma resposta final sobre a energia A hipoacutetese do
custo de ativaccedilatildeo muscular apresentado aqui natildeo despreza o dispecircndio energeacutetico
dos membros superiores e aleacutem disso considera as eficiecircncias dos diferentes tipos
de trabalho mecacircnico quando insere os equivalentes metaboacutelicos da ativaccedilatildeo
muscular (abordagem teoacuterica Metodologia)
242 Sobre o meacutetodo
Algumas consideraccedilotildees importantes podem ser feitas sobre a teacutecnica da
EMG Comumente esta teacutecnica eacute usada nos campos da biomecacircnica e biologia
experimental a fim de determinar a quantidade de ativaccedilatildeo muscular e os periacuteodos
em que elas acontecem poreacutem neste estudo pretendeu-se usar a determinada
teacutecnica a fim de oferecer uma informaccedilatildeo global da ativaccedilatildeo de tal modo que
pudesse ter uma correspondecircncia com a ativaccedilatildeo EMG de todo o corpo incluindo os
muacutesculos posturais que natildeo geram trabalho muscular importante mas segundo a
hipoacutetese central do presente estudo participam de forma decisiva como uma
determinante da caminhada humana
Assim esta abordagem permite inferir sobre os mecanismos principais da
locomoccedilatildeo e permite explicar a biomecacircnica da locomoccedilatildeo especialmente referente
agrave energeacutetica da caminhada humana Aleacutem de auxiliar na explicaccedilatildeo da velocidade
oacutetima no plano o custo EMG parece dar um indicativo sobre a energeacutetica em
situaccedilotildees criacuteticas com restriccedilotildees do ambiente (inclinaccedilatildeo) e situaccedilotildees natildeo usuais
(velocidades de progressatildeo baixas)
Nestas situaccedilotildees eacute provaacutevel que dois mecanismos estejam relacionados a fim
de justificar a hipoacutetese do custo EMG i) a estabilidade dinacircmica prejudicada e ii) o
custo da co-contraccedilatildeo Os dois mecanismos parecem estar diretamente ligados ao
maior custo EMG e consequumlentemente ao custo energeacutetico da caminhada
Evidecircncias experimentais datildeo suporte para esta inferecircncia Durante caminhada
realizada para fins de lazer em velocidades muito baixas ou mesmo em marchas
patoloacutegicas foi encontrado um aumento na atividade EMG em comparaccedilatildeo com a
velocidade auto-selecionada correspondente agrave velocidade oacutetima Os achados
mostram um aumento de ativaccedilatildeo EMG com o aumento da Vf mesmo em muacutesculos
do tronco durante locomoccedilatildeo no plano (ANDERS et al 2007) Novamente o foco do
52
presente estudo foi referente agrave quantidade de ativaccedilatildeo em funccedilatildeo da distacircncia
percorrida enquanto que nestes estudos a variaacutevel em questatildeo foi avaliada em
funccedilatildeo da passada Aleacutem disso aumentos foram encontrados nos valores de coshy
contraccedilatildeo durante velocidades muito baixas (020 e 030 ms-1) em comparaccedilatildeo com
a velocidade auto-selecionada (NYMARK et al 2005)
As relaccedilotildees entre estabilidade articular e quantidade de ativaccedilatildeo geral
(ANDERSON e BEHM 2004) e estabilidade corporal e ativaccedilatildeo de muacutesculos
localizados especificamente no tronco (GARDNER-MORSE e STOKES 1998
GRANATA e MARRAS 2000 GRANATA e ORISHIMO 2001) satildeo bem
estabelecidas na literatura inclusive indicando um prejuiacutezo maior na ativaccedilatildeo EMG
durante perturbaccedilotildees agrave estabilidade com contraccedilotildees concecircntricas do que
excecircntricas e isomeacutetricas Um possiacutevel modo de testar estes mecanismos poderia
ser atraveacutes da perturbaccedilatildeo da estabilidade e os efeitos na ativaccedilatildeo EMG durante
caminhada (por exemplo em terrenos irregulares)
Outro achado importante que daacute sustentaccedilatildeo agrave hipoacutetese do custo EMG da
caminhada humana eacute observado por PRILUTSKY e GREGOR 2001) onde a
atividade EMG de muacutesculos propulsores (rectus femoralis gastrocnemius medialis
vastus medialis biceps femoralis gluteus maximus e soleus) foi maior na corrida do
que na caminhada em velocidades abaixo da velocidade de transiccedilatildeo entre
caminhada e corrida enquanto que durante velocidades acima da de transiccedilatildeo os
muacutesculos propulsores apresentam uma maior atividade EMG na caminhada do que
na corrida o que coincide com o dispecircndio metaboacutelico nestas situaccedilotildees
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia
A alta especializaccedilatildeo da locomoccedilatildeo suportando cargas em regiotildees inoacutespitas da
terra indica um desafio para o entendimento dos fundamentos da mecacircnica e
energeacutetica da locomoccedilatildeo humana Mundialmente famosos satildeo os achados sobre a
economia de locomoccedilatildeo de mulheres africanas que transportam cargas sobre a
cabeccedila de ateacute 70 da massa corporal sem um maior custo mecacircnico devido a um
ajuste aperfeiccediloado das curvas de energia potencial e cineacutetica do centro de massa
colaborando para um mais alto R (percentual de reconversatildeo entre energia cineacutetica
53
e potencial durante um ciclo de passada) (MALOIY et al 1986) Evidecircncias de um
custo metaboacutelico relativamente baixo da locomoccedilatildeo no plano foram tambeacutem
encontradas em carregadores Nepaleses (BASTIEN et al 2005) Poreacutem
diferentemente das condiccedilotildees geograacuteficas nas quais as mulheres africanas realizam
suas atividades locomotoras o espaccedilo geograacutefico dos carregadores Nepaleses eacute
caracterizado por terrenos inclinados Em um estudo recente Minetti e
colaboradores (MINETTI et al 2006) apresentaram as primeiras informaccedilotildees sobre
eficiecircncia mecacircnica (potecircncia mecacircnica desenvolvida dividida pela potecircncia
metaboacutelica despendida) de carregadores Nepaleses em inclinaccedilotildees extremas
especialmente da regiatildeo do Himalaia indicando uma eficiecircncia aproximadamente
33 maior do que a de montanhistas Caucasianos De fato os carregadores
Nepaleses apresentam caracteriacutesticas notaacuteveis do ponto de vista energeacutetico
Transportam desde a infacircncia cargas geralmente entre 80 e 90 da massa corporal
(utilizando-se de uma faixa posta agrave testa no qual eacute ligada a uma cesta de vime nas
costas) em terrenos acidentados com inclinaccedilotildees de ateacute 50 em situaccedilatildeo de
hipoacutexia de altitude (MALVILLE et al 2001)
A hipoacutetese da transferecircncia eficiente entre energia cineacutetica e potencial do
centro de massa corporal natildeo se sustenta pois em inclinaccedilotildees maiores de 15 e ndash
15 as mudanccedilas de energia potencial ocorrem apenas positivamente e
negativamente respectivamente (MINETTI et al 1993) Portanto sem a
possibilidade de transferecircncia de energia por via pendular e tendo em consideraccedilatildeo
a menor variabilidade de oscilaccedilatildeo do tronco dos Nepaleses encontrada por
MINETTI et al 2006) apresentamos uma hipoacutetese de que o custo de ativaccedilatildeo
muscular (ou custo EMG) da locomoccedilatildeo eacute menor no grupo de carregadores do
Himalaia do que nos montanhistas Caucasianos Devido agrave falta de informaccedilotildees
espaccedilos-temporais da locomoccedilatildeo com carga em grandes inclinaccedilotildees foram
analisados estes paracircmetros da passada a fim de auxiliar no entendimento da
energeacutetica e mecacircnica da locomoccedilatildeo em planos inclinados
251 Materiais e meacutetodos
Cinco carregadores Nepaleses (idade 23 plusmn 9 anos estatura 163 plusmn 003 m
massa corporal 546 plusmn 62 kg) e cinco montanhistas Caucasianos (idade 32 plusmn 3
anos estatura 176 plusmn 007 m massa corporal 742 plusmn 67 kg) selecionados por
54
voluntariedade realizaram o experimento em Namche-Bazar regiatildeo do vale
Khumbu no Parque Nacional de Sagarmatildethatilde (Everest em nepalecircs) O experimento
consistia de caminhada sem e com carga (40 kg) em situaccedilatildeo de subida e descida
com uma inclinaccedilatildeo meacutedia de 22 em um ritmo que poderiam suportar por muitas
horas Os Nepaleses utilizavam a usual faixa na testa onde era ligada com a cesta
nas costas onde suportavam o peso enquanto que os Caucasianos usavam uma
mochila de alpinismo O trecho foi escolhido de modo a assegurar que as trocas de
energia fossem principalmente devidas as mudanccedilas de energia potencial sem a
possibilidade de transferecircncia entre energia potencial e cineacutetica dentro de uma
passada (MINETTI et al 2006) Antes de iniciar os experimentos eram realizadas
medidas de dobras cutacircneas nas regiotildees de colocaccedilatildeo de eletrodos
O set-up experimental incluiu um eletromioacutegrafo portaacutetil (PocketEmg BTS
Milatildeo Itaacutelia) um analisador de gases portaacutetil (K4b2 Cosmed Roma Itaacutelia) um GPS
(GPSmAP76CS) e lactiacutemetro (Accutrend Roche Diagnostic Basel Suiacuteccedila) Foram
analisados a atividade EMG de quatorze muacutesculos (erector spinae longissimus
erector spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis deltoideus anterior
trapezius ascendens gluteus maximus gluteus medius biceps femuralis caput
longus vastus lateralis e gastrocnemius lateralis) Para a preparaccedilatildeo do local e
colocaccedilatildeo dos eletrodos de superfiacutecie bipolares foram seguidas as orientaccedilotildees da
Seniam (FRERIKS et al 1991) Simultaneamente ao registro EMG sinais advindos
de seis sensores de pressatildeo (footswitches) trecircs em cada peacute (regiatildeo do calcanhar
primeiro e quinto metatarso inferior) eram registrados no eletromiograacutefo portaacutetil Os
sinais EMGrsquos foram preacute-amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um
niacutevel de ruiacutedo menor do que 1 μV rms e filtrados por um filtro do tipo Butterworth (50shy
450 Hz terceira ordem) A frequumlecircncia de amostragem da EMG e dos sensores de
pressatildeo foi de 1000 Hz
O custo metaboacutelico foi calculado segundo procedimentos do estudo anterior
(MINETTI et al 2006) O sinal EMG foi retificado e integrado e os valores meacutedios da
atividade EMG de todo o trecho foram subtraiacutedos pelos respectivos valores da
situaccedilatildeo em repouso (idem ao consumo de O2) e divididos pela velocidade meacutedia
(Vf ) A potecircncia EMG geral foi obtida a partir do somatoacuterio dos quatorze muacutesculos
ponderado pelos respectivos volumes musculares (YAMAGUCHI et al 1991) e
55
dobra cutacircnea respectiva Determinou-se o Custo EMG atraveacutes do procedimento
experimental
Para fins de comparaccedilatildeo das Vf rsquos de locomoccedilatildeo usamos o Nf baseado na
teoria das similaridades dinacircmicas (sub-seccedilatildeo 222) para normalizar a Vf No caso
presente ao inveacutes de utilizar o comprimento de membro inferior utilizamos a
estatura da seguinte forma
Vf 2
Fr = Eq 212 g estatura
Tendo em consideraccedilatildeo que a estatura meacutedia dos Caucasianos eacute maior (013
m) e que as Vf rsquos de subida e descida dos Caucasianos com carga foram 35 e 17
menores do que as dos Nepaleses deste modo os Frrsquos dos Caucasianos para os
mesmos trechos foram 40 e 24 menores do que dos Nepaleses
Os procedimentos para anaacutelise dos dados de posiccedilatildeo e Vf oriundos do GPS
satildeo os mesmos de MINETTI et al 2006) A potecircncia mecacircnica vertical (PMV) foi
calculada como segue
g h mtotPMV = Eq 213 t
onde Ah eacute variaccedilatildeo de altura mtot eacute a massa total (massa corporal + carga) g eacute
aceleraccedilatildeo gravitacional e At eacute o tempo de locomoccedilatildeo
Uma seacuterie de programas computacionais (Labview versatildeo 71 National
Instruments Austin USA) foram construiacutedos para o processamento dos dados EMG
GPS e paracircmetros espaccedilos-temporais
Foi utilizado Testes-t de student para amostras independentes para comparar
os paracircmetros espaccedilos-temporais entre Nepaleses e Caucasianos (SPSS para
Windows versatildeo 14 USA)
56
252 Resultados
Variaacuteveis espaccedilos-temporais
O Fr dos Nepaleses foi maior do que as dos Caucasianos em situaccedilatildeo com
carga (plt001) mas sem carga as diferenccedilas diminuem acentuadamente (4 e 23
maiores sem e com carga respectivamente pgt005) O CP e FP dos Nepaleses
foram maiores na subida com carga mas durante a descida com carga apesar da
Vf maior apenas o CP foi maior nos Nepaleses e a FP foi similar (pgt005)
Paracircmetros energeacuteticos
A atividade EMG por unidade de tempo foi similar entre Nepaleses e
Caucasianos Contudo a ativaccedilatildeo EMG total ou seja por unidade de distacircncia
(ldquocustordquo EMG da locomoccedilatildeo) foi notavelmente maior nos Caucasianos na situaccedilatildeo
com carga especialmente na fase de subida (observe a inclinaccedilatildeo das retas na
figura 27)
A atividade EMG tambeacutem foi analisada no domiacutenio da frequumlecircncia para testar
uma possiacutevel diminuiccedilatildeo nos paracircmetros de mediana meacutedia e pico da frequumlecircncia
que pudessem explicar via fadiga neuromuscular (KNAFLITZ e BONATO 1999) o
efeito da carga no aumento da ativaccedilatildeo EMG por distacircncia percorrida nos
Caucasianos (inclinaccedilotildees das retas na figura 27)
Utilizou-se a transformada raacutepida de Fourier com janelamento de 10 segundos
analisando o centro dos bursts de 512 pontos determinados por uma integraccedilatildeo com
janelamento moacutevel Hanning de 50 ms Todavia nenhuma diferenccedila significativa foi
encontrada nos paracircmetros de frequumlecircncia entre os primeiros e uacuteltimos vinte
segundos de experimento (diminuiccedilotildees lt 5)
O notaacutevel desempenho dos Nepaleses na subida com carga eacute confirmado pela
PMV 33 maior do que a dos Caucasianos Embora a Vf e a PMV sejam maiores
nos Nepaleses estes apresentam um custo metaboacutelico 39 menor que os
Caucasianos Esta economia energeacutetica especiacutefica agrave situaccedilatildeo de carga e inclinaccedilatildeo
extrema eacute observada tambeacutem na figura 28 na qual os Caucasianos sem carga
apresentam uma eficiecircncia similar agraves eficiecircncias dos Nepaleses mas com uma baixa
eficiecircncia na situaccedilatildeo com carga
57
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal +
carga) dos carregadores Nepaleses (NEP) e montanhistas Caucasianos
(CAU) em subida (up) e descida (down)
A eficiecircncia menor dos Caucasianos na situaccedilatildeo com carga parece ser
explicada pela quantidade de ativaccedilatildeo muscular A interessante semelhanccedila entre o
custo EMG e o custo energeacutetico (figura 27) demonstram a eficaacutecia do meacutetodo EMG
utilizado no presente estudo a fim de representar uma ativaccedilatildeo muscular geral
durante a locomoccedilatildeo
253 Discussatildeo
A menor ativaccedilatildeo muscular eacute extremamente interessante pois explica de modo
importante o mecanismo da alta eficiecircncia e economia energeacutetica nos Nepaleses
58
Os resultados de potecircncia metaboacutelica e PMV confirmam os achados de
MINETTI et al 2006) Aleacutem disso o custo energeacutetico na situaccedilatildeo sem carga eacute
similar entre Caucasianos e Nepaleses Em outras palavras o desempenho notaacutevel
dos Nepaleses eacute especiacutefico somente na situaccedilatildeo de subida com carga
000
004
008
012
016
020
024
028
-12 -10 -08 -06 -04 -02 00
efi
ciecirc
nc
ia m
iacutenim
a d
e t
rab
alh
o p
os
itiv
o NEP 0kg
CAU 0kg
NEP 40kg
CAU 40kg
14
15
eficiecircncia miacutenima de trabalho negativo
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da
PMV (positiva ou negativa) pela potecircncia metaboacutelica respectiva
(MINETTI et al 2006) As linhas satildeo as razotildees entre eficiecircncia
muscular positiva e negativa (WOLEDGE et al 1985)
A melhor economia nos Nepaleses durante a subida com carga pode ser
relacionada agraves propriedades mecacircnicas de contraccedilatildeo muscular especificamente agrave
relaccedilatildeo potecircncia-velocidade Tendo em consideraccedilatildeo que os Caucasianos
realizaram o trecho de subida com carga em uma velocidade de progressatildeo 33
menor que os Nepaleses pode-se inferir que os Caucasianos realizaram a atividade
em uma regiatildeo menor de produccedilatildeo de potecircncia devido agrave relativa baixa velocidade
que por sua vez corresponde agrave uma zona de baixa eficiecircncia Outro fator secundaacuterio
pode ser a aclimataccedilatildeo de longo prazo destes indiviacuteduos agrave hipoacutexia de altitude
favorecendo o transporte e utilizaccedilatildeo de O2 no muacutesculo esqueleacutetico
59
Surpreendentemente a ativaccedilatildeo EMG por unidade de tempo eacute semelhante
entre Nepaleses e Caucasianos e por consequumlecircncia a ativaccedilatildeo total eacute menor nos
Nepaleses
Pode-se afirmar tambeacutem que a razatildeo entre ativaccedilatildeo EMG na subida e descida
independente da massa total eacute em torno de 15 e 2 corroborando com os dados de
BIGLAND-RITCHIE e WOODS 1976)
Em conclusatildeo a hipoacutetese da ativaccedilatildeo muscular econocircmica nos carregadores
Nepaleses eacute confirmada Os paracircmetros espaccedilos-temporais da passada parecem
natildeo justificar o menor custo energeacutetico nos Nepaleses O custo EMG foi maior nos
Caucasianos especialmente durante a ascensatildeo com carga indicando uma
justificativa a um achado anterior de maior estabilidade no tronco em Nepaleses
(MINETTI et al 2006)
60
3 MECAcircNICA DA CORRIDA DE IDOSOS
31 Introduccedilatildeo
Nos idosos a forccedila muscular eacute reduzida Isso tem sido atribuiacutedo
principalmente a atrofia da massa muscular com a reduccedilatildeo da aacuterea de sua secccedilatildeo
transversal (DOHERTY 2003 FRONTERA et al 2000 TRAPPE et al 2003) e
tambeacutem agrave deficiecircncia na produccedilatildeo intriacutenseca de forccedila no niacutevel da interaccedilatildeo entre
actina e miosina (PHILLIPS et al 1991 FRONTERA et al 2000 LOWE et al 2001
MORSE et al 2005) Experimentos realizados tanto em espeacutecimes isoladas de
muacutesculo (OCHALA et al 2006 PHILLIPS et al 1991) quanto in vivo em humanos
(KLASS et al 2005 PORTER et al 1997 POUSSON et al 2001 VANDERVOORT
et al 1990) mostram que a forccedila que um muacutesculo exerce ao alongar-se
(frequumlentemente chamada de contraccedilatildeo excecircntrica) tem reduccedilatildeo menor devido ao
processo de envelhecimento que a forccedila desenvolvida durante contraccedilatildeo isomeacutetrica
e durante encurtamento (frequumlentemente chamada de contraccedilatildeo concecircntrica)
O efeito das mudanccedilas das propriedades de contraccedilatildeo do muacutesculo no
trabalho mecacircnico realizado durante locomoccedilatildeo natildeo eacute conhecido O trabalho
mecacircnico realizado ao caminhar natildeo tem sido considerado significativamente maior
em indiviacuteduos idosos apesar de um maior dispecircndio energeacutetico resultando em uma
61
menor eficiecircncia mecacircnica atribuiacuteda agrave co-contraccedilatildeo de muacutesculos antagonistas
(MIAN et al 2006)
O mecanismo elaacutestico da corrida contraacuterio ao mecanismo pendular da
caminhada necessita de uma intervenccedilatildeo muscular muito maior para manter o
movimento do CM Um ciclo alongamento-encurtamento das unidades muacutesculoshy
tendiacuteneas ocorre em cada passo da corrida com grande entrada e saiacuteda de energia
mecacircnica para dentro e para fora das unidades muacutesculo-tendiacuteneas A mecacircnica da
corrida assim mais que a caminhada pode revelar mudanccedilas no trabalho mecacircnico
realizado em cada passo devido ao desempenho muscular reduzido nos idosos
Aleacutem disso uma assimetria contato-despregue ocorre durante a corrida
surgindo do fato que as unidades muacutesculo-tendiacuteneas contraacuterio a uma mola sem
atrito tecircm comportamento diferente durante alongamento e encurtamento
Recentemente foi observado que a assimetria contato-despregue eacute uma
consequumlecircncia da relaccedilatildeo forccedila-velocidade do muacutesculo e eacute maior quanto maior for a
mudanccedila no comprimento do muacutesculo em relaccedilatildeo agravequela do tendatildeo dentro das
unidades muacutesculo-tendiacuteneas (CAVAGNA 2006)
O trabalho mecacircnico realizado durante a corrida em idosos e sua assimetria
contato-despregue para nosso conhecimento ainda natildeo satildeo determinados
Neste estudo foi calculado o trabalho mecacircnico externo realizado para manter
o movimento do CM e o tempo das trocas de energia mecacircnica durante as fases de
trabalho negativo e positivo do bouncing do corpo em indiviacuteduos idosos correndo
em diferentes velocidades Os resultados obtidos em indiviacuteduos idosos satildeo
comparados agravequeles obtidos em indiviacuteduos jovens A hipoacutetese apresentada eacute que o
aumento da discrepacircncia em idosos entre o desenvolvimento da forccedila durante
alongamento e durante encurtamento se operacional durante a corrida iraacute aumentar
a assimetria contato-despregue do aparente bouncing do corpo em relaccedilatildeo agravequele
de indiviacuteduos jovens
32 Materiais e Meacutetodos
321 Amostra e procedimento experimental
Os experimentos foram realizados em oito indiviacuteduos idosos (homens idade
62
736plusmn55 anos altura 172plusmn006 m massa 711plusmn92 kg media plusmn dp) e oito indiviacuteduos
jovens (6 homens e duas mulheres idade 208plusmn16 anos altura 176plusmn008 m massa
634plusmn100 kg) Trecircs indiviacuteduos em cada grupo satildeo treinados (volume miacutenimo
semanal de corrida de 40 km) enquanto cinco satildeo sedentaacuterios saudaacuteveis Os
resultados relatados neste estudo satildeo uma meacutedia dos dados obtidos de todos os
sujeitos em cada grupo independente de seu treinamento Resultados similares
poreacutem foram obtidos comparando os trecircs indiviacuteduos idosos treinados com os trecircs
indiviacuteduos jovens do sexo masculino natildeo treinados de acordo com os achados que
o efeito da idade nas unidades muacutesculo-tendiacuteneas satildeo similares em corredores e
indiviacuteduos natildeo-ativos (KARAMANIDIS e ARAMPATZIS 2005) Consentimento
informado escrito foi obtido de cada indiviacuteduo Os estudos foram realizados de
acordo com a Declaraccedilatildeo de Helsinque
Os indiviacuteduos correram de um lado para o outro ao longo de uma pista de
corrida de 50 metros a qual foi incorporada no niacutevel do solo 8 plataformas de forccedila
de 05 m 05 m em sequumlecircncia totalizando um espaccedilo contiacutenuo de 4 m 05 m
sensiacutevel agrave forccedila aplicada na plataforma nas direccedilotildees anterior e vertical A uacutenica
instruccedilatildeo dada a cada indiviacuteduo foi para correr normalmente em uma velocidade
constante mensurada por duas fotoceacutelulas posicionadas distantes de 1 agrave 3 m
(dependendo da velocidade) ao longo do lado da plataforma Mais caracteriacutesticas da
plataforma de forccedila satildeo descritas por CAVAGNA (1975)
O procedimento do experimento consistiu em medir a forccedila aplicada no solo
no plano sagital durante corrida em diferentes velocidades Os dados foram
adquiridos em um microcomputador a uma taxa de 500 Hz por canal de i) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo anterior (Ff) ii) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo vertical (Fv) e iii) sinal das
fotoceacutelulas A aquisiccedilatildeo e anaacutelise dos dados foram realizadas atraveacutes de um
conversor analoacutegico-digital (National Instruments Austin TX USA) e um software
feito em LabView para Macintosh (versatildeo 71)
Foram feitas anaacutelises em um total de 124 corridas com velocidades meacutedias
entre 3 e 17 kmh-1 para os idosos e 229 corridas entre 3 e 21 kmh-1 para os jovens
O nuacutemero menor de execuccedilotildees realizado pelos idosos foi para diminuir riscos de
fadiga neste grupo
63
322 Dos registros da plataforma ao trabalho externo
O processo usado para calcular as mudanccedilas da energia mecacircnica do CM do
corpo derivadas das forccedilas de reaccedilatildeo do solo eacute descrito em detalhes por CAVAGNA
1975) Em resumo somente o movimento no plano sagital foi considerado para
calcular a energia mecacircnica do CM A energia cineacutetica de translaccedilatildeo lateral do CM
foi ignorada O sinal da plataforma de forccedila sem carga foi mensurado imediatamente
antes de cada corrida e subtraiacutedo dos registros da Fv e da Ff de modo a computar
uma possiacutevel mudanccedila da linha de base da plataforma Somente o grupo de
registros da Fv e da Ff compreendida entre os cruzamentos das fotoceacutelulas foi
utilizado para anaacutelises subsequumlentes As velocidades vertical e anterior do CM foram
obtidas como segue
Antes do todas as aquisiccedilotildees a plataforma era calibrada com cargas
conhecidas no sentido vertical e horizontal acircntero-posterior
A forccedila vertical meacutedia mensurada pela plataforma de forccedila Fvplate em um
intervalo de tempo correspondente a um nuacutemero de quadros nf em um determinado
nuacutemero de passos T selecionados entre picos (ou vales) nos registros de forccedila
devem igualar ao PC mensurado com uma balanccedila Fvscale
IfirstPeakorValley
SecondPeakorValleyF = Fvi
= F Eq 31 vplate vscalenf
Fvplate foi entatildeo subtraiacuteda da coluna de dados Fv e o resultado (Fv-Fvplate)M (M
eacute a massa corporal) foi integrado no tempo para obter as mudanccedilas nos registros da
velocidade vertical para o intervalo de tempo entre os cruzamentos das fotoceacutelulas
FinalTime AVel = f [(Fv - Fv plate) M]dt Eq 32
InitialTime
Um ou mais passos regulares foram subsequumlentemente escolhidos para
anaacutelise entre dois picos ou vales da curva de velocidade vertical A regularidade dos
passos (drift) foi determinada pela diferenccedila entre incrementos positivos e negativos
agraves mudanccedilas nas velocidades vertical e horizontal divididas pela soma dos
incrementos
64
| V | V | V |I + increments I VincrementsDrift = 100 Eq 33
| V | + | V |I + increments I Vincrements
Durante a corrida no plano os deslocamentos verticais ascendente e
descendente do CM do corpo satildeo em meacutedia iguais durante um nuacutemero inteiro de
passos ie a velocidade vertical meacutedia deve ser nula Baseado nessa consideraccedilatildeo
a aacuterea abaixo das mudanccedilas da velocidade vertical registrada correspondendo ao
intervalo selecionado acima seraacute dividido por nf e o resultado seraacute subtraiacutedo do total
da variaccedilatildeo da velocidade vertical registrada entre os cruzamentos das fotoceacutelulas
para obter os valores instantacircneos positivo (ascendente) e negativo (descendente)
da Vv
nf
f AVv dt
V (t) = i= 0 -AV Eq 34 v nf v
As mudanccedilas na velocidade horizontal foram determinadas pela integraccedilatildeo da
curva FfM durante o tempo entre os cruzamentos das fotoceacutelulas Ltphoto A aacuterea
abaixo dessa variaccedilatildeo de velocidade horizontal foi entatildeo dividida por Ltphoto e o
resultado foi subtraiacutedo do mesmo registro para localizar a velocidade meacutedia de
corrida no traccedilado
Atphoto
AVf (t) = f Ff M dt Eq 35 i= 0
A velocidade meacutedia de corrida mensurada atraveacutes da distacircncia das
fotoceacutelulaLtphoto foi entatildeo somada a seacuterie resultante para obter os valores
instantacircneos de Vf
f AVf dt Vf (t) = + AVf Eq 36
A tphoto
65
A velocidade vertical instantacircnea Vv(t) foi utilizada para calcular a energia
cineacutetica instantacircnea do movimento vertical
Ekv (t) = 05M Vv (t)2 Eq 37
e por integraccedilatildeo o deslocamento vertical do CM Sv(t)
Sv (t) = f Vv (t) dt Eq 38
com a correspondente energia potencial gravitacional
E p (t) = M g Sv (t) Eq 39
A energia cineacutetica horizontal foi calculada como
Ekf (t) = 05M Vf (t)2 Eq 310
a energia cineacutetica translacional total do CM no plano sagital como
(t) Eq 311 Ek (t) = Ekv (t) + Ekf
e a energia mecacircnica translacional do CM no plano sagital como
Ecm(t) = Ekv (t) + Ekf (t) + E p (t) Eq 312
Apoacutes como mencionado acima a seleccedilatildeo foi feita inicialmente entre picos (ou
vales) das mudanccedilas da velocidade vertical os registros foram expandidos para
incluir o vale anterior (ou pico) de Ep(t) ateacute uma imagem clara dos passos a ser
obtidos (figura 31)
Algoritmos foram feitos para calcular o trabalho realizado durante os passos
selecionados entre vales (ou picos) da Ep Wv Wkf e Wext foram calculados com as
amplitudes dos vales ou picos e os valores inicial e final nos registros da Ep(t) Ekf(t)
e Ecm(t) Valores positivos das variaccedilotildees de energia foram considerados como
66
trabalho positivo valores negativos foram considerados como trabalho negativo Em
uma perfeita corrida em velocidade constante no plano a razatildeo entre os valores
absolutos de trabalho positivo e negativo realizados em um nuacutemero inteiro de
passos deve ser igual a um
323 Estimativa do trabalho interno
O trabalho positivo normalizado pela massa e unidade de distacircncia para
acelerar os membros em relaccedilatildeo ao CM do corpo foi estimado para cada corrida
com a equaccedilatildeo
W int ML(J kg-1 m -1) = 014010-200L Vf f Eq 313
onde L eacute o comprimento do passo em metros Vf a velocidade meacutedia de corrida em
metros por segundo e f eacute a frequumlecircncia de passos em Hz (CAVAGNA et al 1997) Os
valores estimados de WintML como uma funccedilatildeo da velocidade em kmh-1 foram
interpolados por um ajuste polinomial de segunda ordem Deve ser salientado que
usando a mesma equaccedilatildeo para calcular Wint nos indiviacuteduos jovens e idosos assume-
se o mesmo movimento dos membros nos dois grupos
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato
Como a energia mecacircnica do CM eacute constante quando o corpo eacute deslocado no
ar (a resistecircncia do ar eacute negligenciada) o tempo aeacutereo foi calculado como o intervalo
de tempo durante o qual
dEcm(t) dt = 0 Eq 314
Como descrito em detalhes em um estudo preacutevio (CAVAGNA 2006) esse
processo pode resultar em uma superestimativa (7) do tempo aeacutereo devido ao
ruiacutedo do registro do dEcm(t)dt A duraccedilatildeo da frenagem tbrake e a duraccedilatildeo da
propulsatildeo tpush foram calculadas como o intervalo de tempo durante o qual o
dEcm(t)dt foi positivo e negativo respectivamente Novamente devido ao ruiacutedo do
67
registro do dEcm(t)dt tbrake eou tpush foi provavelmente em alguns casos
subestimado (5-7 CAVAGNA 2006) O mesmo eacute verdade para os deslocamentos
descendente e ascendente do CM durante contato Scdown e Scup que foram
mensurados nas porccedilotildees descendente e ascendente da curva Ep(t)
respectivamente durante o intervalo de tempo onde dEcm(t)dt eacute negativo e positivo
respectivamente O deslocamento vertical descendente total Svdown e deslocamento
vertical ascendente Svup foram calculados do decreacutescimo e acreacutescimo totais da
curva Ep(t) respectivamente ocorrendo entre dois ou mais picos (ou vales) de Ep
divididos pelo nuacutemero de passos
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio
A forccedila vertical Fv aplicada pelo peacute no solo eacute
= PC + M a Eq 315 Fv v
onde Mb eacute a massa do corpo e av eacute a aceleraccedilatildeo vertical do CM ie o tempo
derivado de sua velocidade vertical Vv Quando a velocidade vertical e Ekv estatildeo no
maacuteximo a derivada eacute nula av=0 e como consequumlecircncia
Fv = PC Eq 316
A localizaccedilatildeo dos picos Ekv alcanccedilados durante os passos (figura 31) foi
entatildeo utilizada para determinar os instantes onde a Fv eacute igual ao PC A localizaccedilatildeo e
as amplitudes de Ep simultacircneo com os picos de Ekv foram utilizados para determinar
a parte do deslocamento vertical ocorrendo abaixo do ponto de equiliacutebrio durante a
desaceleraccedilatildeo descendente do CM Scedown e durante a aceleraccedilatildeo ascendente do
CM Sceup As diferenccedilas
S - S = S Eq 317 vdown cedown aedown
e
68
S - S = S Eq 318 vup ceup aeup
informa sobre o deslocamento vertical quando o CM do corpo acelera descendente e
desacelera ascendente respectivamente (CAVAGNA et al 1988)
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente
A velocidade vertical maacutexima e a energia cineacutetica maacutexima Ek=Ekv+Ekf
alcanccediladas pelo CM durante deslocamento descendente Vvmxdown e Ekmxdown e
durante a elevaccedilatildeo Vvmxup e Ekmxup satildeo determinados por comparaccedilatildeo dos picos
em Ekv e Ek com a curva Ep simultacircnea Como a velocidade vertical maacutexima pode
aumentar com a amplitude do deslocamento vertical que pode ser diferente durante
a elevaccedilatildeo e o deslocamento descendente (ver eg as curvas Ep na figura 31) a
razatildeo entre as velocidades descendente e ascendente maacuteximas foram normalizadas
(V V )(S S ) = (V V )norm Eq 319 vmxdown vmxup vup vdown vmxdown vmxup
327 Transduccedilatildeo Ep Ek durante o passo
O tempo de curso da transduccedilatildeo ocorrendo no passo entre energia potencial
gravitacional Ep e energia cineacutetica do CM Ek pode ser determinado pelo valor
absoluto das mudanccedilas ambos incrementos positivos e negativos de Ep Ek e Ecm
em intervalos curtos de tempo dentro do ciclo do passo (CAVAGNA et al 2002)
1 | Ecm(t) |r(t) = Eq 320
(| E p (t) | + | Ek (t) |)
A transduccedilatildeo Ep-Ek eacute completa (r(t)=1) durante a fase aeacuterea quando nenhum
trabalho externo eacute realizado pela forccedila muscular Entretanto a transduccedilatildeo Ep-Ek
tambeacutem ocorre durante contato quando o corpo eacute parcialmente sustentado pelo peacute
no chatildeo na parte superior da trajetoacuteria do CM (0lt r(t)lt1)
69
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado
70
(incrementos de Ecm) eacute indicado em vermelho enquanto que o tempo de
trabalho mecacircnico negativo (decrementos de Ecm) eacute indicado em azul
A transduccedilatildeo Ep-Ek eacute nula (r(t)=0) em duas fases do passo a e onde Ek
aumenta e diminui respectivamente simultaneamente com a energia potencial
gravitacional Ep (CAVAGNA et al 2002) Note que trabalho externo positivo e
negativo satildeo ambos realizados nas fases a e do passo (r(t)=0) e nas fases do
passo onde uma transduccedilatildeo ocorre entre Ek e Ep (0lt r(t)lt 1)
Nesse estudo r(t) foi calculado a partir do valor absoluto do tempo derivado
de Ep Ek e Ecm no intervalo de tempo contido entre dois ou mais picos (ou vales) de
Ep O valor cumulativo de energia recuperada Rint(t) resultando da transduccedilatildeo
instantacircnea de Ek-Ep foi determinado na aacuterea abaixo do r(t) registrado dividida pelo
periacuteodo do passo
T Rint (t) = ( f r(u)du) T Eq 321
0
No final do passo Rint(t)=Rint (CAVAGNA et al 2002) Para determinar a
assimetria do ciclo do passo eacute uacutetil saber quanto da transduccedilatildeo Ek-Ep ocorre durante
o deslocamento descendente e durante a elevaccedilatildeo do CM A derivada
dE p dt Eq 322
eacute utilizada para determinar a quantidade de transduccedilatildeo ocorrendo durante o
deslocamento descendente Rintdown e durante a elevaccedilatildeo do CM Rintup A
assimetria do passo foi quantificada pela razatildeo
Rintdown Rintup Eq 323
328 Rigidez vertical (k)
A k normalizada pela massa
k M Eq 324
71
caracterizando a frequumlecircncia natural do sistema eacute em todas as condiccedilotildees (com ou
sem uma fase aeacuterea) a inclinaccedilatildeo da relaccedilatildeo av-Sv quando avgt1g A inclinaccedilatildeo
meacutedia nessa amplitude pode ser avaliada pela razatildeo entre a aceleraccedilatildeo ascendente
maacutexima avmx e a amplitude da oscilaccedilatildeo
(S + S )ceup cedownS = Eq 325 ce 2
No presente estudo a k normalizada pela massa foi mensurada como
k M = a S Eq 326 vmx ce
E a frequumlecircncia natural do sistema massa-mola como
)05 (a Svmx cefs = Eq 327 2
329 Estatiacutestica
Os dados coletados como uma funccedilatildeo da velocidade decorrida foram
agrupados em classes de intervalos de um kmh-1 como segue 3 agrave lt4 kmh-1 4 agrave lt5
kmh-1 20 agrave lt21 kmh-1 Quando comparadas agraves meacutedias de diferentes variaacuteveis
com o mesmo nuacutemero de itens em uma certa velocidade de corrida dentro de um
grupo de indiviacuteduos um teste t para amostra pareadas foi utilizado para determinar
quando as meacutedias eram significativamente diferentes Quando comparadas as
meacutedias de diferentes variaacuteveis entre os dois grupos de indiviacuteduos com diferentes
nuacutemero de itens um teste t para amostras independentes foi utilizado (SPSS versatildeo
14) Em todos os testes o p usado foi menor do que 5
33 Resultados
Na primeira seccedilatildeo dos Resultados o bouncing do corpo a cada passo eacute
descrito desconsiderando as diferenccedilas no movimento ascendente e descendente
72
do CM (Por exemplo O deslocamento vertical Sv eacute medido como (Svup+Svdown)2 o
tempo de contato com o solo como tc =(tcup+tcdown)2 etc) Este procedimento
pressupotildee uma igualdade dinacircmica durante a subida e a descida do CM como em
um oscilador harmocircnico (CAVAGNA et al 1988 BLICKHAN 1989 SCHEPENS et
al 1998)
A potecircncia meacutedia do passo despendida para acelerar e elevar o CM do corpo
e do correspondente trabalho mecacircnico realizado por unidade distacircncia satildeo
apresentados na segunda parte Na terceira seccedilatildeo a assimetria contato-despregue
eacute considerada analisando separadamente os eventos que ocorrem durante a subida
e durante a descida do CM (CAVAGNA 2006) Em todas as seccedilotildees os resultados
obtidos sobre os indiviacuteduos idosos satildeo comparados com aqueles obtidos nos
indiviacuteduos jovens
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM
Parte superior e inferior do bouncing
O periacuteodo do passo (T parte superior da figura 33) o deslocamento vertical
do CM durante cada etapa (Sv meio da figura) e o comprimento do passo (L na
parte inferior da figura) satildeo apresentados em funccedilatildeo da velocidade de corrida (Vf) na
figura 33 (quadrados pretos) Segundo o modelo massa-mola o periacuteodo do passo
a oscilaccedilatildeo vertical do CM e o correspondente deslocamento para frente foram
divididos em duas partes uma parte mais baixa que acontece quando a Fv eacute maior
do que o PC (tce Sce e Lce ciacuterculos vermelhos) e uma parte superior quando a Fv eacute
menor que o PC (tae Sae e Lae ciacuterculos azuis abertos) Para comparaccedilatildeo o periacuteodo
do passo o deslocamento vertical e o comprimento do passo tambeacutem foram
divididos de acordo com a tradiccedilatildeo nas suas fraccedilotildees que ocorrem durante a fase
de contato com o terreno (tc Sc e Lc pontilhada linhas vermelhas) e durante a fase
aeacuterea (ta Sa e La linhas pontilhadas em azul) O significado biomecacircnico dos
resultados na figura 33 tem sido explicado em estudos anteriores realizados em
indiviacuteduos adultos de diferentes idades (CAVAGNA et al 1988) e em crianccedilas com
idades entre os 2 e 16 anos (SCHEPENS et al 1998) durante a corrida em
diferentes velocidades Em ambos os estudos as partes inferior e superior do
bouncing do corpo foram simeacutetricos ateacute ~ 11 kmh-1 (isto eacute tce=tae e Sce=Sae) e
- -
73
assimeacutetricos em velocidades mais elevadas (isto eacute taegttce e SaegtSce) O momento
vertical ganho e perdido durante tce deve ser igual ao momento vertical ganho e
perdido durante tae ie
avce tce = avae tae Eq 328
O bouncing simeacutetrico implica a mesma aceleraccedilatildeo vertical meacutedia durante a
parte inferior e superior do bouncing A aceleraccedilatildeo vertical meacutedia durante a parte
inferior do bouncing avce aumentou com a velocidade enquanto que a aceleraccedilatildeo
vertical meacutedia durante a parte superior do bouncing avae natildeo pode exceder 1 g (eacute 1 g
quando tae= ta) Deste modo o bouncing torna-se assimeacutetrico quando a aceleraccedilatildeo
vertical meacutedia durante tce exceder 1g Os resultados obtidos em relaccedilatildeo aos
indiviacuteduos jovens demonstram que o bouncing tende a ser simeacutetrico em baixas
velocidades e assimeacutetrico em altas velocidades (ver tce versus tae e Sce versus Sae na
tabela 1) Por outro lado os resultados obtidos no grupo dos idosos mostram duas
diferenccedilas importantes i) o bouncing eacute simeacutetrico nas velocidades mais altas (tce=tae e
Sce=Sae) e ii) a assimetria quando presente eacute invertida (ou seja tcegttae e ScegtSae)
Amplitude do deslocamento vertical
O deslocamento vertical do CM corporal em cada etapa da corrida Sv atinge
um maacuteximo em velocidades intermediaacuterias sendo inferior nos indiviacuteduos idosos do
que nos jovens ~ 75 cm a ~ 75 kmh-1 nos idosos e ~ 10 cm a ~ 10 kmh-1 nos
jovens Valores similares de Sv foram medidos com procedimento experimental
diferente em adultos idosos e jovens correndo a ~ 10 kmh-1 (KARAMANIDIS e
ARAMPATZIS 2005) A reduccedilatildeo de Sv nos indiviacuteduos idosos eacute devida a uma
reduccedilatildeo de todas as suas componentes (Sce Sae Sc e Sa) mas eacute particularmente
relevante considerar aqui a reduccedilatildeo da Sce (tabela 32) que representa a amplitude
da oscilaccedilatildeo do sistema massa-mola a partir de sua posiccedilatildeo de equiliacutebrio (Fv igual
ao PC) ateacute sua compressatildeo maacutexima (Fv maacutexima) A amplitude da oscilaccedilatildeo eacute menor
nos idosos do que nos jovens Como esperado esta eacute acompanhada por uma
aceleraccedilatildeo menor para cima atingida no final da compressatildeo avmx e por uma menor
velocidade maacutexima ascendente Vvmx atingida quando av=0 (figura 34 e tabela 32)
74
A velocidade vertical menor resulta por sua vez em um curto tempo aeacutereo efetivo
tae (figura 33 e tabela 32)
Frequumlecircncia de passo e do sistema massa-mola
Os dois paineacuteis superiores da figura 33 mostram que o periacuteodo do passo (T=
tae+ tce) eacute menor nos idosos do que nos jovens Isto eacute devido ao tempo aeacutereo efetivo
tae mais curto enquanto que o tempo de contato efetivo tce eacute igual entre os jovens e
os idosos (tabela 32) Segundo o modelo massa-mola da corrida o tce representa
metade do periacuteodo de oscilaccedilatildeo do sistema elaacutestico Este meio-periacuteodo similar
sugere uma frequumlecircncia de ressonacircncia semelhante fs=(kM)-05(2n) do sistema
elaacutestico aparente atraveacutes do qual o corpo se desloca ou seja uma k normalizada
pela massa corporal (kM) A figura 35 mostra que em altas velocidades k eacute maior
nos indiviacuteduos idosos (paineacuteis superior) mas devido agrave sua maior massa corporal agrave
rigidez de massa especiacutefica vertical (kM= avmxSce veja na Metodologia) eacute de fato
similar ao dos jovens (paineacuteis centrais da figura 35 e tabela 32) Em ambos os
grupos kM tende a ser aproximadamente constante ateacute ~ 10 kmh-1 e em seguida
aumenta com a velocidade Os dois paineacuteis inferiores da figura 35 mostram a
frequumlecircncia do passo f apresentada em conjunto com a frequumlecircncia de ressonacircncia do
sistema fs Pode ser observado que i) f eacute maior nos idosos do que nos jovens ii) nos
idosos a f permanece semelhante agrave fs (tabela 1) enquanto que iii) nos jovens a f eacute
inferior agrave fs (tabela 31)
332 Trabalho
O trabalho externo normalizado pela M Wext realizado para sustentar o
movimento do CM corporal no plano sagital eacute descrito na figura 36 em funccedilatildeo da
velocidade de corrida Pode ser observado que trabalho feito para sustentar as
mudanccedilas de velocidade horizontal Wextf aumenta conforme o acreacutescimo de
velocidade de modo semelhante em indiviacuteduos jovens e idosos O trabalho
realizado contra a gravidade Wextv eacute menor nos indiviacuteduos idosos (tabela 32) O
trabalho externo Wext Wextf + Wextv tambeacutem eacute menor nos idosos particularmente
nas maiores velocidades de progressatildeo
75
A menor potecircncia mecacircnica despendida contra a gravidade pelos idosos
mostra que o menor deslocamento vertical em cada passo natildeo eacute compensado pelo
aumento na frequumlecircncia de passo induzido pelo menor tempo aeacutereo efetivo tae (figura
33) A constataccedilatildeo de que o envelhecimento diminui o trabalho feito contra a
gravidade Wextv deixando inalterado o trabalho para sustentar as mudanccedilas na
velocidade horizontal Wextf resulta em uma velocidade menor de corrida onde o
Wextv se iguala ao Wextf esta velocidade eacute ~ 12 kmh-1 nos idosos e ~ 15 kmh-1 nos
jovens Os dois paineacuteis inferiores na figura 36 (analisados mais profundamente na
Discussatildeo) apresentam o trabalho mecacircnico total realizado por unidade de distacircncia
percorrida Wtot =Wext+Wint onde Wext eacute o trabalho positivo feito para manter o
movimento em relaccedilatildeo ao ambiente e o Wint eacute o trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM (calculado conforme descrito na Metodologia)
333 Assimetria contato-despregue
Os deslocamentos verticais do CM para baixo e para cima durante a fase de
contato estatildeo traccedilados na figura 37 e estatildeo expressos como uma fraccedilatildeo dos
deslocamentos verticais descendente e ascendente (ScdownSvdown ciacuterculos cheios e
ScupSvup ciacuterculos abertos) Na mesma figura eacute apresentada a fraccedilatildeo do
deslocamento vertical realizado pela amplitude da oscilaccedilatildeo do sistema massa-mola
para baixo de av=0 ateacute avmx (ScedownSvdown quadrados cheios) e para cima de avmx
ateacute av=0 (SceupSvup quadrados abertos) Quando a fase aeacuterea eacute nula nas
velocidades mais baixas de corrida todo o deslocamento vertical acontece em
contato com o solo e ScSv=1 Com o aumento da velocidade acontece uma fase
aeacuterea de duraccedilatildeo progressivamente maior durante a corrida e a fraccedilatildeo do
deslocamento vertical em contato com o solo diminui mais acentuadamente durante
o deslocamento para baixo (ciacuterculos cheios) do que durante o deslocamento para
cima (ciacuterculos abertos) ou seja (ScupSvup)gt(ScdownSvdown) Em outras palavras a
altura do CM no instante do contato eacute superior agrave sua altura no instante do toque no
solo o que indica que a elevaccedilatildeo do CM eacute inferior agrave descida durante a fase de
contato do peacute com o solo (CAVAGNA 2006) Esta assimetria contato-despregue
estaacute presente em ambos os grupos mas eacute maior nos idosos do que nos jovens
principalmente devido a uma menor reduccedilatildeo na ScupSvup com o aumento da
velocidade uma maior elevaccedilatildeo do CM se daacute em contato com o solo nos indiviacuteduos
76
idosos Em ambas as faixas etaacuterias a fraccedilatildeo de deslocamento vertical ocupada pela
amplitude de oscilaccedilatildeo SceSv se aproxima de metade de Sv quase independente da
velocidade apoiando a ideacuteia de que a oscilaccedilatildeo vertical do sistema massa-mola eacute
equilibrado em torno do ponto onde a Fv se iguala ao PC Em contraste ScSv muda
acentuadamente com a velocidade ateacute o ponto em que toda a oscilaccedilatildeo tem lugar
no contato com o solo (ScSv=1)
34 Discussatildeo
341 Sobre o meacutetodo
Este sub-capiacutetulo procura discutir o meacutetodo usado no estudo especialmente
em relaccedilatildeo ao raciociacutenio envolvido e a discussatildeo de algumas abordagens similares
ao modelo usado no presente estudo
O meacutetodo dinamomeacutetrico usado no presente estudo tem como base a teoria
do custo de geraccedilatildeo de trabalho mecacircnico Esta teoria pode ser considerada como a
primeira tentativa satisfatoacuteria nas aacutereas limiacutetrofes entre biomecacircnica biologia
experimental e fisiologia comparativa de explicar sob o ponto-de-vista mecacircnico as
formas principais de locomoccedilatildeo humana a caminhada e a corrida
Baseados no meacutetodo de FENN (1930) para a determinaccedilatildeo do trabalho
mecacircnico contra a gravidade e o trabalho mecacircnico devido agraves mudanccedilas de
velocidade Cavagna e colaboradores perceberam que o ser humano quando
caminhava e corria apresentava caracteriacutesticas nas curvas de energia mecacircnica e
no somatoacuterio dos incrementos positivos nestas energias que permitiam diferenciar
estes tipos de locomoccedilatildeo ao mesmo tempo que auxiliavam no entendimento do
comportamento da unidade muacutesculo-tendatildeo e dos mecanismos minimizadores de
dispecircndio energeacutetico mecanismo pendular e elaacutestico (ver figura 32) Os
incrementos positivos de energia mecacircnica (trabalho positivo) satildeo originados
principalmente por muacutesculos e tendotildees enquanto que os incrementos negativos de
energia mecacircnica (trabalho negativo) satildeo em parte armazenados nas estruturas natildeo
contraacuteteis dos muacutesculos e tendotildees e outra parte eacute degradada em forma de calor
Tendo em consideraccedilatildeo os princiacutepios da termodinacircmica foi possiacutevel aplicar
estes mecanismos a fim de entender o porquecirc que durante a fase de apoio na
corrida a energia cineacutetica se apresenta em fase com a energia potencial do CM em
77
relaccedilatildeo ao meio ambiente enquanto que na caminhada estas energias apresentam
comportamentos contraacuterios
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da
caminhada (pecircndulo-invertido) e de segmento complacente da corrida
(massa-mola) e seus principais constituintes Note que o tracejado
indica a trajetoacuteria do corpo de massa m durante o contato g eacute a
aceleraccedilatildeo gravitacional k eacute a rigidez da mola l0 eacute o comprimento do
membro inferior e a0 eacute o acircngulo da perna de apoio no momento do
contato com o solo
O somatoacuterio dos incrementos positivos de energia mecacircnica tambeacutem
conhecido como trabalho mecacircnico externo eacute menor do que a energia metaboacutelica
despendida pelos muacutesculos durante a caminhada enquanto que o trabalho
mecacircnico externo na corrida apresenta valor maior ao da energia metaboacutelica
despendida pelos muacutesculos Este aparente paradoxo demonstrava que a razatildeo
entre potecircncia mecacircnica gerada e a potecircncia metaboacutelica despendida ultrapassava a
eficiecircncia maacutexima de transformaccedilatildeo de energia quiacutemica em trabalho mecacircnico e foi
considerado como a primeira evidecircncia de que as unidades muacutesculo-tendatildeo
responsaacuteveis pela frenagem e propulsatildeo durante a fase de apoio da corrida eram
tambeacutem responsaacuteveis por absorccedilatildeo e re-utilizaccedilatildeo de energia elaacutestica (CAVAGNA et
al 1964) permitindo mais tarde a formulaccedilatildeo do modelo massa-mola ou ldquobouncingrdquo
da corrida (BLICKHAN 1989 MCMAHON e CHENG 1990 figura 32) e o posterior
estudo do ciclo alongamento-encurtamento do muacutesculo-esqueleacutetico
78
Portanto durante atividades ciacuteclicas como a locomoccedilatildeo os muacutesculos
responsaacuteveis pelo movimento possuem uma capacidade de geraccedilatildeo de forccedila
durante seu encurtamento (contraccedilatildeo concecircntrica) maior do que em contraccedilotildees
similares mas precedidas de contraccedilatildeo isomeacutetrica No caso da locomoccedilatildeo mais
especificamente da corrida durante contraccedilotildees concecircntricas os muacutesculos
propulsores utilizam uma energia armazenada durante a precedente contraccedilatildeo
excecircntrica (CAVAGNA et al 1964 CAVAGNA et al 1968) O modelo massa-mola
assume que a unidade muacutesculo-tendatildeo exerce um comportamento similar agrave de uma
mola ou seja quando a mola diminui de comprimento apoacutes o impacto (alongamento
do muacutesculo) armazena energia potencial elaacutestica e quando a mola aumenta seu
comprimento (encurtamento do muacutesculo) durante a segunda fase de contato
transforma energia potencial elaacutestica em energia cineacutetica O modelo tambeacutem
assume mesma altura e velocidade do CM no momento do contato e despregue
A primeira pressuposiccedilatildeo do modelo (sobre a semelhanccedila entre mola e
unidade muacutesculo-tendatildeo) apesar de correta natildeo indica informaccedilotildees sobre seus
constituintes o muacutesculo e o tendatildeo Vaacuterias evidecircncias mostram diferenccedilas no
comportamento mecacircnico do muacutesculo e do tendatildeo e estas diferenccedilas satildeo
moduladas pela forccedila imposta agrave unidade consequumlentemente dependentes da
velocidade de corrida Por exemplo KRAM e TAYLOR (1990) sugeriram que o
dispecircndio de energia durante a corrida era devido ao custo de geraccedilatildeo de forccedila das
fibras musculares agindo de forma isomeacutetrica sem realizaccedilatildeo de trabalho muscular
Evidecircncias em modelo animal confirmam este raciociacutenio (ROBERTS et al 1997
BIEWENER 1998)
Ainda assim para ser inteiramente vaacutelido este modelo o tempo de trabalho
externo positivo e negativo devem ser iguais em todas as velocidades de corrida
contudo uma assimetria nos tempos de trabalho positivo e negativo satildeo encontradas
na corrida humana em velocidades baixas (ateacute 14 kmh-1) com um menor tempo
para o trabalho mecacircnico externo negativo (CAVAGNA 2006)
Portanto o mecanismo de minimizaccedilatildeo de energia apresentada por KRAM e
TAYLOR 1990) parece se sustentar apenas em altas velocidades Em velocidades
menores os muacutesculos propulsores ativam em intensidade menor portanto gerando
uma tensatildeo menor no tendatildeo provavelmente insuficiente para gerar uma mudanccedila
importante no comprimento do tendatildeo Portanto o trabalho muscular eacute significativo
com contraccedilotildees excecircntricas em maior velocidade do que as contraccedilotildees
79
concecircntricas o que corresponde com a relaccedilatildeo forccedila versus velocidade e tambeacutem
com os resultados de eficiecircncia muscular para seacuteries de alongamento encurtamento
em diferentes velocidades (maior eficiecircncia em alta velocidade de encurtamento e
menor velocidade de alongamento ndash HEGLUND e CAVAGNA 1987) Ou seja em
velocidades menores parece existir um importante trabalho muscular executado de
modo assimeacutetrico com o tendatildeo agindo apenas como transmissor de forccedilas
enquanto que em altas velocidades com o aumento do pico de estresse no muacutesculo
e consequumlentemente aumento da rigidez da unidade muacutesculo-tendatildeo o muacutesculo
contrai isometricamente e o tendatildeo muda de comprimento agindo como um elaacutestico
(o muacutesculo tambeacutem gera tensatildeo devido agrave histerese do tendatildeo poreacutem eacute
negligenciaacutevel ndash ALEXANDER 2002)
Sobre o segundo criteacuterio (da semelhanccedila de altura e velocidade no contato e
despregue) os proacuteprios autores do modelo massa-mola indicam que em geral os
animais apresentam uma velocidade no contato maior do que no despregue bem
como realizam o contato com as articulaccedilotildees das pernas mais flexionadas do que
no despregue (BLICKHAN 1989) Poreacutem se as anaacutelises da velocidade e altura satildeo
modificadas do momento de contato e despregue para o iniacutecio da fase aeacuterea e de
contato efetivos (quando a forccedila vertical eacute igual aacute forccedila peso) levando em
consideraccedilatildeo o periacuteodo natural do sistema elaacutestico a velocidade continua maior no
iniacutecio do contato efetivo em todas as velocidades de corrida mas a altura do CM eacute
maior no contato efetivo inicial do que no momento de fase aeacuterea inicial em
velocidades baixas de corrida (aproximadamente de 8 agrave 14 kmh-1) Acima destas
velocidades a altura do CM eacute maior no iniacutecio da fase aeacuterea efetiva do que no iniacutecio
da fase de contato efetivo (CAVAGNA 2006) Estas assimetrias podem chegar ateacute
30
Um ponto chave na formulaccedilatildeo deste modelo eacute a determinaccedilatildeo da rigidez do
sistema massa-mola aqui tambeacutem uma simplificaccedilatildeo do fenocircmeno pois considera
apenas os valores maacuteximos de forccedila e deslocamento verticais como se durante toda
a fase de apoio a rigidez fosse constante
Caacutelculo da rigidez de mola
Os caacutelculos da rigidez de mola do sistema bouncing representam as
propriedades de mola do movimento vertical do corpo e da perna A rigidez vertical eacute
80
estimada como a razatildeo do pico de forccedila vertical (algumas vezes denominado como
forccedila maacutexima durante a fase ativa do tempo de contato) e o deslocamento maacuteximo
vertical do CM durante o apoio (CAVAGNA et al 1988 MCMAHON e CHENG
1990) Outro meacutetodo alternativo para o caacutelculo da rigidez vertical utiliza o tempo de
contato efetivo assumindo que este tempo representa o meio periacuteodo de oscilaccedilatildeo
do sistema elaacutestico (ver CAVAGNA et al 2005) k = Mb( tce)2 onde Mb eacute massa
corporal Este uacuteltimo meacutetodo apresenta a vantagem de evitar a influecircncia das
oscilaccedilotildees de aceleraccedilatildeo vertical do CM apoacutes o contato inicial A rigidez de perna eacute
a razatildeo do pico de forccedila vertical e a mudanccedila no comprimento de perna durante o
apoio A variaccedilatildeo do comprimento de perna eacute determinada com a equaccedilatildeo 330
(MCMAHON e CHENG 1990)
delta l = ycm + l0 (1V cosa0) Eq 329
Onde l0 eacute o comprimento de perna em repouso e a0 eacute o acircngulo da perna no
contato inicial em relaccedilatildeo agrave vertical (a0 = sin-1(Vf tc2 l0) onde Vf eacute a velocidade
horizontal e tc eacute o tempo de apoio Apesar do uso frequumlente desta medida no campo
das Ciecircncias do Esporte e Biologia Experimental a rigidez de pernas possui uma
forte limitaccedilatildeo devido ao uso da medida de membro inferior incorrer em um alto grau
de erro (e 1 cm dados natildeo publicados) Aleacutem disso se utiliza da medida de tempo
de contato enquanto que a relaccedilatildeo inversa com o sistema massa-mola eacute dada pelo
tempo de contato efetivo (quando a forccedila vertical eacute maior do que o peso corporal)
portanto natildeo representa as mudanccedilas do sistema massa-mola frente agrave restriccedilotildees do
ambiente (eg gravidade CAVAGNA et al 2005)
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical
A menor amplitude de oscilaccedilatildeo do sistema elaacutestico nos idosos (Sce na figura
33) implica i) uma menor forccedila vertical maacutexima Fvmx e energia elaacutestica armazenada
em cada passo ii) uma maior frequumlecircncia de passo iii) uma menor variaccedilatildeo de
energia externa para manter o movimento do CM do corpo em relaccedilatildeo ao meio
ambiente externo e iv) um maior trabalho interno para acelerar os segmentos
relativo ao CM
81
Destaca-se que as divisotildees do passo baseadas no tempo de contato efetivo
(vermelho) aeacutereo efetivo (azul) correspondem agrave aproximadamente metade da
duraccedilatildeo e deslocamento durante o passo Em contraste a fraccedilatildeo do passo realizado
durante o tempo aeacutereo e de contato variam bastante com a velocidade Aleacutem disso
o tcetae e SceSce nos idosos enquanto que o contraacuterio acontece com os jovens
Linhas representam a meacutedia ponderada de todos os dados (Kaleidagraph 364) e a
uacutenica proposta destas linhas eacute ser um guia para os olhos elas natildeo descrevem o
mecanismo fiacutesico envolvido (figura 33)
Tabela 31 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nos quais os pares de variaacuteveis listadas satildeo significativamente diferentes dentro de
cada grupo experimental
Vf Idoso Jovem
(km h-1) tce vs tae Sce vs Sae fs vs f tce vs tae Sce vs Sae fs vs f
3 006 312 10-4 079 001 004 117 10-3
4 031 013 028 008 058 005
5 003 003 004 091 014 020
6 001 473 10-3 003 005 026 001
7 002 001 020 011 045 001
8 102 10-7 361 10-8 190 10-4 003 048 256 10-3
9 445 10-4 753 10-6 002 001 057 151 10-3
10 250 10-4 212 10-5 510 10-4 243 10-3 091 284 10-3
11 014 003 028 158 10-4 019 234 10-4
12 044 013 061 249 10-5 002 328 10-5
13 018 003 020 310 10-6 261 10-3 100 10-5
14 001 042 005 388 10-6 183 10-3 166 10-5
15 029 022 012 107 10-6 256 10-4 166 10-6
16 057 048 090 947 10-5 361 10-3 292 10-4
Forccedila e energia elaacutestica
A forccedila maacutexima vertical eacute dada pela massa corporal multiplicada pela
aceleraccedilatildeo vertical maacutexima e o resultado eacute somado ao peso corporal Avmx (equaccedilatildeo
82
34) A massa corporal meacutedia eacute 711 kg nos idosos e 634 kg nos jovens A variaccedilatildeo
da aceleraccedilatildeo maacutexima atingida pelos indiviacuteduos idosos nas suas altas velocidades
(15-17 kmh-1) eacute de 1077 plusmn 197 ms-2 (n=7) Considerando que nas mesmas
velocidades alcanccediladas pelos jovens a variaccedilatildeo foi de 1886 plusmn 274 ms-2 (n=24)
(figura 34) Note que a aceleraccedilatildeo ascendente e velocidade vertical maiores
atingidas pelos jovens Contraacuterio ao bouncing elaacutestico a velocidade vertical maacutexima
alcanccedilada durante o deslocamento descendente eacute maior do que o alcanccedilado
durante a elevaccedilatildeo sendo esta diferenccedila maior nos idosos
Tabela 32 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Wf Wv tce tae Sce
3 008 003 095 482 10-3 005
4 008 015 004 074 062
5 062 002 083 006 006
6 259 10-3 138 10-4 034 427 10-4 001
7 049 133 10-6 073 287 10-5 140 10-3
8 004 162 10-6 039 231 10-6 198 10-3
9 007 581 10-6 028 107 10-5 407 10-4
10 005 120 10-10 094 605 10-9 176 10-6
11 014 170 10-6 025 383 10-7 435 10-6
12 014 471 10-7 019 321 10-6 380 10-5
13 007 114 10-6 068 228 10-6 196 10-6
14 099 400 10-6 005 170 10-5 231 10-5
15 014 222 10-7 010 142 10-6 685 10-8
16 066 208 10-4 061 184 10-4 718 10-4
De acordo com a equaccedilatildeo 34 estes nuacutemeros resultam em uma forccedila vertical
maacutexima Fvmxold=1463 kN e Fvmxyoung=1818 kN note que 75 de diferenccedila na Avmx
resulta em 24 de diferenccedila em Fvmx devido agrave maior massa corporal dos indiviacuteduos
idosos A forccedila mais baixa alcanccedilada durante o contato pelos indiviacuteduos idosos pode
83
ser explicada em parte pela bem documentada perda de forccedila muscular (eg
DOHERTY 2003) e em parte por uma estrateacutegia de aumentar a seguranccedila do
sistema muacutesculo-esqueleacutetico (KARAMANIDIS e ARAMPATZIS 2005)
A aparente k a 15-17 kmh-1 eacute 3732plusmn885 kNm-1 (n=7) nos indiviacuteduos idosos
e 2869plusmn650 kNm-1 (n=24) nos indiviacuteduos jovens (figura 35) Assumindo uma
relaccedilatildeo forccedila-comprimento linear dos elementos elaacutesticos seu alongamento maacuteximo
(de zero a Fvmx) seria (14633732)=0039 m nos idosos e (18182869)=0063 m
nos indiviacuteduos jovens Os paineacuteis inferiores da figura 35 mostram que a frequumlecircncia
de passo (linhas contiacutenuas) eacute similar agrave frequumlecircncia natural do sistema (linhas
pontilhadas) em todas as velocidades nos idosos enquanto que com os jovens a
frequumlecircncia do passo torna-se menor do que a frequumlecircncia do sistema com o aumento
da velocidade
Tabela 33 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Avmx Vvmx AvmxSce (AvmxSce)Mb Sv
3 004 003 099 039 002
4 001 011 003 022 034
5 152 10-3 001 024 040 003
6 601 10-4 232 10-4 049 067 772 10-4
7 132 10-3 422 10-6 066 007 367 10-5
8 918 10-7 154 10-6 025 018 271 10-5
9 526 10-5 131 10-6 007 067 137 10-5
10 134 10-7 196 10-11 072 001 146 10-8
11 439 10-4 744 10-7 046 004 798 10-7
12 533 10-6 666 10-7 040 002 552 10-6
13 264 10-4 401 10-6 061 022 158 10-6
14 115 10-3 366 10-6 005 652 10-5 126 10-5
15 891 10-6 725 10-8 031 009 316 10-7
16 353 10-3 258 10-4 048 005 267 10-4
84
Visto que a energia potencial gravitacional e a energia cineacutetica do CM estatildeo
em fase durante a corrida o sistema elaacutestico sofre sua maacutexima tensatildeo quando o
componente vertical da forccedila de reaccedilatildeo do solo encontra-se no maacuteximo ((Fvmx)) e o
componente horizontal eacute nulo (Ff=0)
Na verdade Fvmx ocorre no ponto mais baixo da trajetoacuteria (Epmn) quando o
CM termina sua desaceleraccedilatildeo e comeccedila a sua aceleraccedilatildeo (ou seja Ff=0 e Ekfmn) A
energia elaacutestica armazenada em cada passo pode assim ser computada usando-se
apenas a forccedila vertical como (14630039)2=2853 J e (18180063)2=5727 J para
os indiviacuteduos idosos e para os indiviacuteduos jovens respectivamente Esta energia
elaacutestica eacute posteriormente utilizada em parte durante o impulso para elevar e acelerar
a frente o CM
Tabela 34 Comparaccedilatildeo das assimetrias contato-despregue entre jovens idosos e
sistema elaacutestico
IDOSO JOVEM ELAacuteSTICO
Vvmxdown Vvmxup 118plusmn011 107plusmn008 1
f 124plusmn018 106plusmn010 1
Rintdown Rintup 213plusmn130 126plusmn032 1
tpush tbrake 125plusmn016 115plusmn013 1
Ekmxdown - Ekmxup (J) 1003plusmn625 752plusmn542 0
Valores satildeo meacutediaplusmndp (plt0001 N=124 ( N=122) para idosos e N=195 para jovens)
Amplitude de velocidades 3-17 kmh-1
A maacutexima compressatildeo elaacutestica do sistema tambeacutem pode ser analisada como
o deslocamento vertical do CM durante o contato o que em 15-17 kmh-1 eacute em
meacutedia Sc=0032plusmn0006 m (n=7) nos idosos e Sc=0060plusmn0007 m (n=24) nos jovens
(em vez de 0039 m e 0063 m como calculado acima)
85
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um
passo em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis
a direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup +
86
Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo (tae)
da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na direccedilatildeo
vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os ciacuterculos em
vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2) e
a frente (Lce) A linha em vermelho pontilhada em cada painel indica o tempo de
contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente (Lc) durante o
passo As linhas azuis pontilhadas em cada painel indicam o tempo aeacutereo total
(ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La) durante o passo As
barras verticais indicam o desvio-padratildeo da meacutedia os nuacutemeros proacuteximos aos
siacutembolos nos paineacuteis superiores indicam o nuacutemero de itens nas meacutedias
A discrepacircncia pode ser devida em parte agrave uma subestimaccedilatildeo do Sc como
medido (ver Metodologia) A energia elaacutestica armazenada computada como (Fvmx
Sc)2 eacute (1463 0032)2=2341 J (em vez de 2853 J conforme calculado acima) e
(1818 0060)2=5454 J (em vez de 5727 J) para indiviacuteduos idosos e indiviacuteduos
jovens respectivamente
A partir dos dados meacutedios de frequumlecircncia de passo e potecircncia em um mesmo
conjunto de velocidades (figuras 36 e 37) o trabalho externo em cada passo
resultou (405 711)368=7825 J nos indiviacuteduos idosos e (538
634)279=12226 J nos indiviacuteduos jovens Daqui resulta que a contribuiccedilatildeo
elaacutestica para o trabalho externo em cada passo poderia ser 28537825=036 e
572712226=047 respectivamente (ou 23417825=030 e 545412226=045
usando Sc)
Estes caacutelculos aproximados em conjunto com uma maior assimetria contato-
despregue que seraacute discutida a seguir (tabela 34) indicam uma menor restituiccedilatildeo
elaacutestica do corpo nos idosos A maior rigidez k medida nos indiviacuteduos idosos em
sua mais alta velocidade de corrida (figura 35) em aparente desacordo com a
menor rigidez dos tendotildees do gastrocnemius (ONAMBELE et al 2006) do
quadriacuteceps (KARAMANIDIS e ARAMPATZIS 2005) medidos nos idosos Por outro
lado um aumento pela idade da rigidez dos elementos elaacutesticos nos tendotildees e
muacutesculos foi relatado em favor dos muacutesculos flexores do cotovelo (VALOUR e
POUSSON 2003)
87
Importante ressaltar que na complexa deformaccedilatildeo de todo corpo no solo a
aparente k eacute o resultado de um conjunto de unidades muacutesculo-tendatildeo em seacuterie cujas
propriedades elaacutesticas dependem do niacutevel de ativaccedilatildeo muscular O nuacutemero de
unidades muacutesculo-tendatildeo em seacuterie depende por sua vez da orientaccedilatildeo dos
segmentos e do tronco durante o impacto sobre o solo que pode ser diferente nos
indiviacuteduos idosos e nos indiviacuteduos jovens (por exemplo apoio na parte da frente do
peacute mais do que no calcanhar)
O maior valor de k encontrado em idosos em suas mais altas velocidades de
corrida portanto natildeo eacute necessariamente uma indicaccedilatildeo de uma maior rigidez dos
seus tendotildees ou unidades de muacutesculo-tendatildeo medidos durante contraccedilotildees
voluntaacuterias maacuteximas
Frequumlecircncia
O menor tempo aeacutereo efetivo tae nos idosos causa um aumento na
frequumlecircncia da passo f =1(tce+tae) para valores que satildeo iguais e por vezes
superiores agrave frequumlecircncia do sistema fs=1(2tce) Diferentemente dos jovens que
optam em uma grande extensatildeo de velocidades por uma FP mais baixa agrave do
sistema aumentando o tae em relaccedilatildeo ao tce (figuras 33 35 e tabela 32)
Os fatores que determinam a escolha da f a uma determinada velocidade de
corrida satildeo i) sintonizando a frequumlecircncia de passo f para a frequumlecircncia natural do
sistema fs (CAVAGNA et al 1997) e ii) escolhendo uma f que minimize a potecircncia
meacutedia de passada limitada aerobicamente (Wextf figura 36) dentro dos limites
estabelecidos pela potecircncia anaeroacutebica meacutedia durante o empurre (trabalho positivo)
(W+tpush liberada imediatamente pelo muacutesculo durante a contraccedilatildeo) (CAVAGNA et
al 1991) A primeira estrateacutegia eacute normalmente adotada em baixas velocidades de
corrida e modificada para a segunda estrateacutegia de corrida em altas velocidades Isto
eacute feito atraveacutes de um aumento da aceleraccedilatildeo ascendente meacutedia avce acima de 1 g
com o consequumlente aumento de tae em relaccedilatildeo ao tce (equaccedilatildeo 36) Assim a
frequumlecircncia de passo f=1(tce+tae) torna-se menor do que a frequumlecircncia do sistema
fs=1(2tce) bem como o incremento da potecircncia meacutedia do passo Wextf eacute controlada
Nos indiviacuteduos idosos a segunda estrateacutegia nunca eacute adotada A aceleraccedilatildeo meacutedia
para cima nunca excede 1 g mesmo nas velocidades altas 15-17 kmh-1 onde avce
=742plusmn123 ms-2 (n=7) segue-se que f fs em todas as velocidades (figura 35) Isto
88
permite uma menor forccedila durante o empurre da corrida em alta velocidade
resultando em uma potecircncia meacutedia durante o empurre ~ 60 daquela dos jovens
mas o aumento da frequumlecircncia da passada resulta em um maior Wint e um grande
incremento na potecircncia meacutedia de passo Wextf em corridas de alta velocidade (ver
abaixo) Aleacutem disso como se verificou neste estudo a mais baixa deformaccedilatildeo
elaacutestica do sistema diminui a fraccedilatildeo de Wext possivelmente sustentado pelo
mecanismo elaacutestico (ver tabela 34) Em contrapartida a segunda estrateacutegia eacute
seguida pelos jovens onde avce =1248plusmn18 ms-2 (n=24) no mesmo intervalo de
velocidades (15-17 kmh-1) resultando em uma menor frequumlecircncia de passo (f lt fs)
que limita o aumento do Wint da corrida em altas velocidades e um consequumlente
incremento da Wextf+ (ver abaixo)
Aleacutem disso a maior deformaccedilatildeo elaacutestica do sistema permite uma maior
utilizaccedilatildeo da energia elaacutestica (tabela 34) Sabe-se que uma mudanccedila na frequumlecircncia
de passo a uma determinada velocidade tem efeitos opostos sobre a potecircncia
externa o que diminui com o aumento da frequumlecircncia da passada e a potecircncia
interna para reposicionar os segmentos em cada passo que aumenta com a
frequumlecircncia (CAVAGNA et al 1991)
Em que medida a menor potecircncia externa meacutedia do passo devido agrave menor
amplitude da oscilaccedilatildeo dos segmentos nos idosos eacute compensada por uma maior
potecircncia interna meacutedia do passo devido ao aumento da frequumlecircncia de passo
89
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e velocidade
vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown (paineacuteis inferiores)
atingidos pelo CM durante o passo em funccedilatildeo da velocidade de corrida Estatiacutestica
e outras indicaccedilotildees conforme a figura 33
O total do trabalho realizado por unidade distacircncia Wtot =Wint+Wext foi somado
pelo Wint estimado pelas equaccedilotildees 32 e 33 para os indiviacuteduos jovens e idosos
como descrito nos Meacutetodos e pelo Wext calculado a partir das seguintes equaccedilotildees
obtidas pela interpolaccedilatildeo de todos os dados experimentais
W ML(J kg-1 m -1) = 29738 Vf - 03217 Eq 330 extyoung
90
(R=0831) para o grupo de indiviacuteduos jovens e
W ML(J kg-1 m -1) = 28445 Vf - 040856 Eq 331 extold
(R=0762) para o grupo de indiviacuteduos idosos O Wtot resultante (linhas
pontilhadas nos paineacuteis inferiores da figura 36) mostra que o trabalho externo menor
no idoso por unidade de distacircncia eacute progressivamente compensado com o aumento
da velocidade por um maior trabalho interno devido agrave sua frequumlecircncia de passada
(FP) aumentada O Wtot alcanccedila um minimum a ~75 kmh-1 nos indiviacuteduos idosos e
um miacutenimo a ~8-12 kmh-1 nos indiviacuteduos jovens
A diferenccedila em Wtot eacute invertida acima de ~14 kmh-1 Eacute possiacutevel que a menor
utilizaccedilatildeo da energia elaacutestica em idosos aumente o gasto de sua energia metaboacutelica
para o mesmo Wtot O consumo de O2 durante a corrida a 10 kmh-1 aumentou com a
idade em corredores treinados do sexo feminino (EVANS et al 1995)
343 A assimetria contato-despregue
As quatro fases do bouncing as diferenccedilas com um sistema elaacutestico
Antes de descrever a assimetria contato-despregue no aparente bouncing do
CM em cada passo da corrida vale a pena referir que os momentos de contato e
despregue podem natildeo ocorrer durante corridas de baixa velocidade quando a
oscilaccedilatildeo vertical do CM do corpo se daacute totalmente em contato com o solo (figura
38) Eacute oacutebvio que neste caso o contato com o solo natildeo pode ser tomado como um
indicador de contato e despregue quando se descreve o bouncing do sistema
elaacutestico Neste caso a oscilaccedilatildeo vertical ocorre abaixo e acima da posiccedilatildeo de
equiliacutebrio (onde a Fv iguala o PC e a velocidade vertical eacute maacutexima) Mesmo quando
uma fase aeacuterea ocorre durante o passo a fraccedilatildeo do deslocamento vertical do CM
total em que o corpo estaacute em contato com o solo ScSv muda amplamente com a
velocidade enquanto que a fraccedilatildeo do deslocamento vertical abaixo e acima do ponto
de equiliacutebrio SceSv se aproxima da metade do Sv quase independente da
velocidade (figura 37)
91
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e frequumlecircncia
do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute maior nos idosos
nas altas velocidades (paineacuteis superiores) a rigidez vertical normalizada pela massa
eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras indicaccedilotildees conforme figura 33
92
Estas observaccedilotildees indicam que eacute mais adequado considerar-se contato
efetivo o instante no qual a Fv aumenta acima do PC (ao inveacutes do instante em que o
peacute estaacute em contato com o solo) e despregue efetivo o instante em que a Fv diminui
para valores menores do que o PC (ao inveacutes do instante no qual o peacute deixa o solo)
A assimetria contato-despregue desaparece quando o bouncing do corpo eacute mais
corretamente dividido desta forma (ou seja tce versus tae em vez de tc versus ta)
(CAVAGNA et al 1988 MCMAHON e CHENG 1990) Ainda na figura 37 pode ser
observado que ScSv mudam mais com a velocidade do que a amplitude da
oscilaccedilatildeo SceSv ao qual atinge a metade do deslocamento vertical Sv Exceto as
velocidades muito baixas quando a fase aeacuterea eacute nula (ScSv=1 eg paineacuteis
superiores nas figuras 31 e 38) o deslocamento descendente enquanto o peacute toca o
solo eacute menor do que o deslocamento ascendente particularmente nos idosos a
descida baliacutestica do CM eacute maior do que a elevaccedilatildeo baliacutestica (veja a linha azul
pontilhada na figura 38)
Segundo a equaccedilatildeo 34 a velocidade vertical descendente eacute maacutexima no
instante do contato efetivo e a velocidade vertical ascendente eacute maacutexima no instante
do despregue efetivo No movimento harmocircnico de um sistema elaacutestico as
velocidades ascendentes e descendentes maacuteximas satildeo iguais Isso natildeo eacute verdade
na corrida humana a velocidade maacutexima descendente eacute superior agrave velocidade
maacutexima ascendente (CAVAGNA 2006) Estes resultados mostram que a assimetria
eacute maior em indiviacuteduos idosos do que nos jovens na variaccedilatildeo normal de velocidades
(3-17 kmh-1) a proporccedilatildeo normalizada ((VvmxdownVvmxup)norm=116plusmn009 (n=124)
nos idosos e 107plusmn007 (n=195) nos jovens (p=126 10-19) (tabela 34) Outras
assimetrias satildeo apresentadas a seguir atraveacutes da anaacutelise das mudanccedilas na energia
potencial gravitacional Ep e energia cineacutetica translacional Ek=Ekv+Ekf do CM
corporal durante as quatro fases de oscilaccedilatildeo do sistema em relaccedilatildeo a posiccedilatildeo de
equiliacutebrio (Fv=Mg) (CAVAGNA 2006) Estas fases satildeo apresentadas na figura 38 a
partir do topo da trajetoacuteria do CM corporal Durante a aceleraccedilatildeo descendente
(Saedown azul) a Ep diminui e a Ek aumenta indicando uma transduccedilatildeo de Ep em Ek
o que ocorre tanto na presenccedila quanto na ausecircncia de uma fase aeacuterea (por
exemplo na parte superior do painel esquerdo da figura 38) O montante desta
transduccedilatildeo eacute dado pelo incremento Rintdown da curva do Rint(t) apoacutes o maacuteximo de Ep
Durante a desaceleraccedilatildeo descendente (Scedown vermelho) o trabalho externo
negativo eacute feito para diminuir simultaneamente Ep e Ek O trecho superior da curva
93
Rint(t) correspondente agrave fraccedilatildeo do passo mostra que natildeo ocorre transduccedilatildeo entre
Ep e Ek Note-se que o pico de Ek durante o passo eacute atingido proacuteximo ao iniacutecio da
fase de trabalho negativo consistente com a velocidade maacutexima de alongamento
das unidades muacutesculo-tendotildees (HEGLUND e CAVAGNA 1987)
Durante a aceleraccedilatildeo ascendente (Sceup vermelho) trabalho positivo externo
eacute feito para aumentar simultaneamente Ep e Ek O trecho inferior da curva Rint(t)
correspondente agrave fraccedilatildeo a do passo mostra que natildeo ocorre transduccedilatildeo entre Ep e
Ek Note que enquanto eacute quase totalmente contida dentro do Scedown a continua
apoacutes o final do Sceup ou seja dentro da desaceleraccedilatildeo ascendente do CM (Saeup
azul) Em outras palavras a perna ainda estaacute a exercer uma forccedila propulsiva a fim
de acelerar o corpo a frente embora a forccedila vertical tenha diminuiacutedo para valores
abaixo do peso corporal Essa assimetria eacute maior no idoso A proporccedilatildeo a eacute
124plusmn018 nos indiviacuteduos idosos e 106plusmn010 nos indiviacuteduos jovens (p=41510-19
tabela 34)
Importante notar a origem diferente dos dois picos Ekmxup (inferior) e
Ekmxdown (superior) alcanccedilados durante o passo de corrida durante a elevaccedilatildeo e
descenso do CM Ekmxup se deve ao empurre para frente enquanto Ekmxdown eacute
devido agrave gravidade A diferenccedila meacutedia Ekmxdown- Ekmxup=752plusmn542 nos indiviacuteduos
jovens e 987plusmn592 nos idosos (p=00004) indica uma maior perda da energia
cineacutetica Ekv no idoso adquirida durante a descida (tabela 34)
Durante a desaceleraccedilatildeo ascendente do CM (Saeup azul) a transduccedilatildeo de Ek
em Ep acontece apenas na uacuteltima parte da elevaccedilatildeo porque como descrito acima
Ep e Ek aumentam simultaneamente durante a maior parte do Saeup Na verdade a
transduccedilatildeo de Ek em Ep eacute quase nula nos idosos (figura 38) O incremento da curva
Rint(t) que ocorre durante a elevaccedilatildeo Rintup eacute inferior ao que ocorre durante a
queda Rintdown Tambeacutem esta assimetria eacute maior no idoso A proporccedilatildeo
RintdownRintup nos indiviacuteduos idosos eacute 213plusmn13 e 126 plusmn 032 nos indiviacuteduos jovens
(p=33310-11 tabela 34) Este fenocircmeno eacute acompanhado por uma maior fraccedilatildeo da
elevaccedilatildeo em contato com o solo como indicado pela maior proporccedilatildeo ScupSvup nos
idosos (figura 37) Um tempo aeacutereo inferior nos idosos durante a corrida em ~ 10
kmh-1 foi encontrado por KARAMANIDIS e ARAMPATZIS 2005)
94
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com seus
95
dois componentes o trabalho realizado contra a gravidade (Wv ciacuterculos abertos) e
para sustentar as mudanccedilas de velocidade a frente (Wf quadrados abertos)
Estatiacutestica e outras indicaccedilotildees conforme figura 33
Note que particularmente nos idosos a transduccedilatildeo da Ek em Ep durante a
elevaccedilatildeo (incremento Rintup da curva Rint(t) abaixo da linha horizontal pontilhada) eacute
menor do que a transduccedilatildeo da Ep em Ek durante o deslocamento descendente
(incrementos Rintdown da curva Rint(t) acima da linha horizontal pontilhada) esta
assimetria eacute acompanhada pela elevaccedilatildeo baliacutestica (nulo nos idosos) menor do que a
descida baliacutestica Nos trechos horizontais da curva Rint(t) nenhuma transduccedilatildeo
ocorre Ep e Ek e unidades muacutesculo-tendatildeo absorvem simultaneamente Ep e Ek (fase
) e aumentam Ep e Ek simultaneamente (fase a) Note que enquanto que a fase eacute
realizada durante Scedown a estende-se aleacutem do Sceup dentro de uma grande parte
do Saeup devido ao continuo aumento da Ek Esta assimetria tambeacutem eacute maior nos
idosos
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As fraccedilotildees do
deslocamento vertical do CM durante contato ScSv (ciacuterculos preenchidos
deslocamento descendente ciacuterculos abertos deslocamento ascendente) e quando
a Fv eacute maior do que o PC SceSv (quadrados preenchidos deslocamento
96
descendente quadrados abertos deslocamento ascendente) satildeo apresentados em
funccedilatildeo da velocidade de corrida Estatiacutestica conforme figura 33
Um trabalho externo positivo eacute realizado (segmentos vermelhos na figura 31)
natildeo soacute para aumentar simultaneamente Ep e Ek (fraccedilatildeo a do passo) mas tambeacutem
quando ocorre transduccedilatildeo da Ek em Ep no final do empurre durante o alcance do
platocirc de Ecm (figura 31) Daqui resulta que a duraccedilatildeo de trabalho positivo tpush eacute
superior agrave duraccedilatildeo a a proporccedilatildeo tpushta diminui com a velocidade de ~19 agrave 3-5
kmh-1 para ~11 agrave 15-17 kmh-1 Da mesma forma o trabalho externo negativo eacute
feito (segmentos azuis na figura 31) natildeo apenas para diminuir simultaneamente Ep e
Ek (fraccedilatildeo do passo) mas tambeacutem quando ocorre uma transduccedilatildeo de Ep em Ek no
iniacutecio da frenagem durante a acentuada diminuiccedilatildeo de Ecm no final de seu platocirc
(figura 31) Consequentemente a duraccedilatildeo do trabalho negativo tbrake eacute maior do que
a duraccedilatildeo a proporccedilatildeo tbraket diminui com a velocidade de ~17 agrave 3-5 kmh-1 para
~12 agrave 15-17 kmh-1
A duraccedilatildeo do empurre e da frenagem estatildeo apresentados na figura 39 em
funccedilatildeo da Vf Observa-se que tanto nos indiviacuteduos idosos quanto nos jovens tpushgt
tbrake ateacute 13-14 kmh-1 (tabela 31) A proporccedilatildeo eacute tpushtbrake=125plusmn016 nos indiviacuteduos
idosos e 115plusmn013 nos indiviacuteduos jovens (p=11610-9 tabela 34) Novamente a
assimetria eacute maior nos indiviacuteduos idosos
Durante a corrida no plano a uma velocidade constante o momentum perdido
Fbrake tbrake equivale ao momentum adquirido Fpush tpush (realmente na direccedilatildeo vertical
o momentum perdido eacute ligeiramente maior que o momentum adquirido porque a
velocidade descendente maacutexima eacute 7-16 maior do que a velocidade ascendente
maacutexima tabela 34) Deste modo se tpushgt tbrake entatildeo Fpush lt Fbrake ou seja a forccedila
meacutedia durante o trabalho positivo eacute inferior agrave forccedila meacutedia durante o trabalho
negativo
As assimetrias do bouncing acima descritas estatildeo resumidas na tabela 34
onde eacute feita uma comparaccedilatildeo entre indiviacuteduos idosos indiviacuteduos jovens e um
sistema elaacutestico Observa-se que o desvio de um sistema elaacutestico eacute maior para os
indiviacuteduos idosos do que para os indiviacuteduos jovens isto eacute o salto dos indiviacuteduos
idosos eacute menos elaacutestico do que o dos indiviacuteduos jovens Note a mesma conclusatildeo
foi encontrada acerca da estimativa da energia elaacutestica armazenada em cada passo
97
98
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito idoso
paineacuteis a direita sujeito jovem em cada painel o comportamento da transduccedilatildeo Ep-
Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas na energia potencial
gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf normalizada para oscilar entre
zero e um Mesmos passos da figura 1 cada painel comeccedila e termina no valor
menor da curva Ep As cores diferentes na curva Ep distinguem as fraccedilotildees do passo
onde a Fv exercida no solo eacute maior do que o PC (vermelho) e menor do que o PC
(azul) As linhas contiacutenuas de Ep indicam a fase de contato enquanto que as linhas
pontilhadas Ep (azul fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As
quatro fases correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown (azul)
e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas pontilhadas verticais
satildeo apresentadas nos dois picos de Ek e ocupam a fraccedilatildeo onde a transduccedilatildeo Ep-Ek
ocorre conforme indicado pelos incrementos da curva Rint(t)
Por que o bouncing do corpo eacute diferente daquele de um sistema elaacutestico
A cada passo executado as unidades muacutesculo-tendatildeo satildeo submetidas a um
ciclo alongamento-encurtamento durante o contato com o solo As unidades
muacutesculo-tendatildeo satildeo constituiacutedas por duas estruturas em seacuterie que apresentam
respostas diferentes durante o alongamento e encurtamento Enquanto os tendotildees
tecircm um comportamento semelhante entre o alongamento e encurtamento devido agrave
sua pequena histerese (ALEXANDER 2002) o muacutesculo exerce uma maior forccedila
durante o alongamento do que durante o encurtamento dependente da relaccedilatildeo
forccedila-velocidade (FENN e MARSH 1935 HILL 1938) Este fato resulta em uma
resposta diferente das unidades muacutesculo-tendatildeo a um ciclo alongamento-
encurtamento dependente da mudanccedila do comprimento relativo de muacutesculo e
tendatildeo durante o ciclo (CAVAGNA 2006)
O alongamento dos muacutesculos em relaccedilatildeo ao alongamento do tendatildeo depende
da rigidez do muacutesculo em relaccedilatildeo agrave do tendatildeo a rigidez do muacutesculo por sua vez
depende da sua ativaccedilatildeo Se a ativaccedilatildeo eacute elevada como em altas velocidades
(BIEWENER 1998) e o muacutesculo eacute mantido isomeacutetrico como alguns estudos
sugerem para a corrida (KRAM e TAYLOR 1990 BIEWENER et al 1998
99
ROBERTS et al 1998) a maioria da mudanccedila no comprimento seraacute realizada pelos
tendotildees e as caracteriacutesticas do bouncing se aproximaratildeo agraves de um corpo elaacutestico
Se por outro lado a ativaccedilatildeo muscular for baixa uma importante fraccedilatildeo da mudanccedila
do comprimento seraacute realizada pelo muacutesculo Neste caso a forccedila desenvolvida
durante o alongamento eacute esperada que exceda a que foi desenvolvida durante o
encurtamento e as caracteriacutesticas do bouncing foram distintas agrave de um corpo
elaacutestico
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos
painel inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura 31)
e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e barras
azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de corrida
Estatiacutestica conforme figura 33
Esta eacute possivelmente a razatildeo pela qual a proporccedilatildeo tpushtbrake (figura 39) eacute
maior em velocidades baixas de corrida quando a ativaccedilatildeo muscular eacute menor e o
comprimento muscular eacute alterado e consequumlentemente o trabalho sustentado por
filamentos de muacutesculos que deslizam dentro das unidades muacutesculo-tendatildeo eacute
relativamente maior (CAVAGNA 2006) Pode ser observado que a duraccedilatildeo de
trabalho externo positivo eacute maior do que a duraccedilatildeo do trabalho externo negativo ateacute
a velocidade de 12-14 kmh-1 (tabela 31) como esperado a partir da relaccedilatildeo forccedilashy
100
velocidade muscular Isto sugere que com o aumento da velocidade a contribuiccedilatildeo
do trabalho pelas estruturas contraacuteteis eacute progressivamente substituiacutedo pela
armazenagem e re-utilizaccedilatildeo de energia elaacutestica pelos tendotildees A razatildeo tpushtbrake eacute
maior nos idosos (tabela 34)
Um corolaacuterio deste ponto de vista eacute que as fibras musculares curtas
aparentemente de pouca importacircncia ligadas em seacuterie com tendotildees muito longos
(ALEXANDER 2001) tecircm papel fundamental de modular a energia elaacutestica
armazenada nos tendotildees e para ajustar toda a extensatildeo da mudanccedila imposta agrave
unidade muacutesculo-tendatildeo Uma forccedila muscular maior durante o alongamento do que
durante o encurtamento juntamente com a perda de energia durante o ciclo
alongamento-encurtamento satildeo tanto consequumlecircncias da relaccedilatildeo forccedila-velocidade do
muacutesculo e podem explicar pelo menos qualitativamente o conjunto dos desvios do
sistema elaacutestico (tabela 33)
O maior desvio de um sistema elaacutestico encontrado nos indiviacuteduos mais idosos
eacute coerente com a menor forccedila desenvolvida pelos seus muacutesculos o que implicaria
uma mudanccedila relativamente maior do comprimento do muacutesculo nas unidades
muacutesculo-tendatildeo A segunda razatildeo pode ser a maior diferenccedila na forccedila desenvolvida
pelos muacutesculos durante o alongamento relativo ao encurtamento relatado na
literatura em idosos (PHILLIPS et al 1991 OCHALA et al 2006 VANDERVOORT
et al 1990 PORTER et al 1997 POUSSON et al 2001 KLASS et al 2005)
Em conclusatildeo modificaccedilotildees na estrutura muscular menor forccedila e uma
relaccedilatildeo forccedila-velocidade mais assimeacutetrica resultam em uma modificaccedilatildeo da energia
mecacircnica do CM do corpo durante a corrida A menor forccedila especialmente durante
trabalho positivo explica a menor amplitude da oscilaccedilatildeo vertical que por sua vez eacute
a causa do menor trabalho externo da maior frequumlecircncia da passada e maior
trabalho interno A relaccedilatildeo forccedila-velocidade mais assimeacutetrica explica a maior
assimetria contato-despregue Ambas as modificaccedilotildees resultam em uma menor
utilizaccedilatildeo da energia elaacutestica durante o bouncing do idoso
101
4 PREDIZENDO Vf CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO TERRESTRE
41 Introduccedilatildeo
A dinacircmica da locomoccedilatildeo eacute determinada principalmente pelas forccedilas de
reaccedilatildeo do solo geradas de modo agrave re-acelerar e deslocar o corpo contra a forccedila
gravitacional em um ciclo de passada O meacutetodo para analisar o trabalho e o custo
mecacircnico externos usando plataformas dinamomeacutetricas foi introduzido por Cavagna
e colaboradores (caminhada CAVAGNA et al 1963 corrida CAVAGNA et al
1964) Desde entatildeo o Wext tem sido investigado em diferentes condiccedilotildees e
populaccedilotildees [terreno (FORMENTI et al 2005 FORMENTI e MINETTI 2007)
crianccedilas (CAVAGNA et al 1983 SCHEPENS et al 1998 SCHEPENS et al 2001)
meacutetodo de locomoccedilatildeo (MINETTI 1998a ARDIGO et al 2003) deficiecircncia de
hormocircnio do crescimento (MINETTI et al 2000) gradiente de locomoccedilatildeo (MINETTI
et al 1993 1994) idosos (MIAN et al 2006 estudo atual capiacutetulo 3)]
Apesar de sua relevacircncia cientiacutefica o nuacutemero de laboratoacuterios onde trabalho e
custo mecacircnico satildeo avaliados eacute limitado devido a questotildees metodoloacutegicas Em
especial a aquisiccedilatildeo da energia mecacircnica externa eacute atualmente limitada pela
necessidade de espaccedilo suficiente para posicionar plataformas de forccedila para coletar
dois passos sucessivos de modo a obter o miacutenimo de duas curvas de forccedilas de
reaccedilatildeo do solo consecutivas essenciais para esse meacutetodo Durante a corrida haacute um
periacuteodo entre as duas curvas durante o qual ambos os peacutes estatildeo fora do solo (em
velocidades normais) enquanto que durante a caminhada esse periacuteodo eacute
substituiacutedo por uma fase de apoio duplo
Independente se as duas curvas estatildeo sobrepostas ou natildeo (caminhando ou
correndo respectivamente) haacute ainda alguma dificuldade em obter
102
experimentalmente no miacutenimo duas curvas similares de modo que a Fv meacutedia seja
igual ao PC Normalmente mais de um terccedilo das aquisiccedilotildees com indiviacuteduos normais
satildeo rejeitadas (dados natildeo-publicados) devido agrave dificuldade de caminhar ou correr
em plataformas em uma velocidade constante E aleacutem disso a maior parte dos setshy
uprsquos biomecacircnicos satildeo dispostos de modo que as curvas sucessivas sejam obtidas
da mesma plataforma Dados de Bastien e colaboradores mostram que duas
medidas sucessivas em diferentes plataformas de forccedila eram possiacuteveis apenas em
10 das tentativas Assim medir o Wint realizado durante o duplo apoio eacute uma tarefa
difiacutecil e essa variaacutevel em seu maacuteximo representa mais de 40 do Wext (BASTIEN
et al 2003)
Deste modo o presente texto procura analisar as possibilidades de anaacutelise da
biomecacircnica da locomoccedilatildeo em situaccedilotildees onde apenas uma plataforma de forccedila com
dimensotildees capazes de analisar apenas um apoio simples satildeo disponiacuteveis
O objetivo desse trabalho eacute estabelecer uma equaccedilatildeo capaz de predizer o
trabalho mecacircnico usando procedimentos de prediccedilatildeo linear e otimizaccedilatildeo e checar
sua validade analisando experimentos de locomoccedilatildeo em diferentes velocidades
42 Equaccedilatildeo do tempo de atraso
Usando a primeira lei de Newton (um corpo se move a uma velocidade
constante quando a soma total das forccedilas externas eacute igual a zero) temos que a Fv
meacutedia exercida contra o solo durante um ciclo de passada a uma velocidade
constante eacute igual ao PC (CAVAGNA e MARGARIA 1966) Se somente as forccedilas de
reaccedilatildeo do solo de um uacutenico passo satildeo coletadas e a simetria eacute assumida
(KARAMANIDIS et al 2003) o atraso de tempo entre passos (s) pode ser obtido
por
F t Ivc c vt = = Eq 41 step M g M g
onde tc e Fvc satildeo a duraccedilatildeo e a Fv meacutedia durante o fase de contato (figura 41)
respectivamente e Iv eacute o impulso vertical Essa informaccedilatildeo eacute crucial se a passada
completa deve ser reconstruiacuteda (no novo passo elaborado somente a forccedila
103
horizontal precisa ser invertida enquanto que a Fv precisa ser somente duplicada a
partir do atraso do tempo tstep)
M g M gFP = = Eq 42
2F t 2 Ivc c v
de onde o CP (CP m) pode ser inferido
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de reaccedilatildeo do solo durante a
corrida
O DF (ALEXANDER e JAYES 1980) ie a fraccedilatildeo do tempo de passada no
qual um uacutenico peacute estaacute no solo eacute
104
M g 1DF = = Eq 43
2F F vc vc2
M g
e deste modo eacute possiacutevel indicar se o modo de locomoccedilatildeo eacute caminhada (DF05) ou
corrida (DFlt05) Ateacute esse ponto a uacutenica variaacutevel a ser conhecida antecipadamente
eacute a massa corporal (kg)
43 Estimativa da velocidade horizontal
Enquanto pares de fotoceacutelulas satildeo comumente encontrados em laboratoacuterios
por vezes a Vf natildeo eacute conhecida (paleontologia biomecacircnica forecircnsica etc) Assim
FP DF e massa podem entrar no modelo de prediccedilatildeo de velocidade (ms-1) com
base em dados coletados previamente (NILSSON e THORSTENSSON 1989)
Vf = (1953F M g) - (14843Iv M g) + 5415 Eq 44 v peak
onde Fvpeak eacute a forccedila de impacto vertical e Iv eacute impulso vertical O erro meacutedio da
estimativa (SEE = 05 dp(1 ndash R2)) eacute 005 ms-1 Entatildeo o CP pode ser obtido como
VfFP ou
1953Fv peak -14843Iv + 5415M gCP = Eq 45
2Fvc
Apesar do alto coeficiente de regressatildeo e baixo erro padratildeo da meacutedia esse
meacutetodo necessita do primeiro pico vertical e assim se torna limitado por exemplo
em humanos para corredores que apoacuteiam o peacute com o calcanhar no momento do
contato Para evitar essa limitaccedilatildeo foi construiacutedo um modelo de regressatildeo linear
muacuteltipla incluindo variaacuteveis descritivas (MINETTI e ALEXANDER 1997) da
energeacutetica da locomoccedilatildeo
qregression + + DFregression + FPregressionVf = Eq 46 3
105
Para cada regressatildeo o meacutetodo dos miacutenimos quadrados eacute usado Enquanto
que o DF e o FP satildeo calculados (equaccedilotildees 42 e 43) o fator q precisa ser
determinado O fator q (tambeacutem conhecido como fator de forma) oferece
informaccedilotildees relacionadas ao formato da curva forccedila-tempo durante a fase de apoio
Usualmente a forccedila vertical pode ser determinada somente com dois primeiros
cossenos de uma seacuterie de Fourier (ALEXANDER 1978)
tc ) Eq 47 Fv = x cos( tc ) V qcos(3
onde x eacute PC e tc eacute tempo de contato A ausecircncia de coeficientes seno indica uma
simetria nas curvas forccedila-tempo e nestes casos o fator q eacute constante Em outras
palavras conhecendo somente o valor da Fv e sua respectiva fase eacute possiacutevel
encontrar o fator q Todavia na caminhada satildeo frequumlentemente observadas curvas
assimeacutetricas (NILSSON e THORSTENSSON 1989) assim incluiacuteu-se dois
coeficientes senos na equaccedilatildeo
tc ) Eq 48 Fv = x cos( tc ) V qcos(3 tc ) + a1 sin(2 tc ) V a2 sin(4
onde a1 e a2 satildeo constantes Assim usando um simples caacutelculo de meacutedia aritmeacutetica
para o q durante o tc noacutes temos
q1 + q2 + q3 + qnqmean = Eq 49 n
Usando os valores de fator q advindos da literatura (MINETTI e ALEXANDER
1997) construiacutemos a seguinte equaccedilatildeo de regressatildeo em situaccedilotildees de caminhada
DF 05 qregression = 23061q + 05873 R=079 Eq 410
onde qregression eacute a Vf estimada e utilizada na equaccedilatildeo 46 Para situaccedilotildees de corrida
o fator q natildeo varia em funccedilatildeo da velocidade (figura 42) obtendo um coeficiente
106
angular da equaccedilatildeo de regressatildeo muito baixo (00916) portanto em situaccedilotildees de
corrida o qregression eacute cancelado
As seguintes equaccedilotildees (411 412 413 e 414) foram originadas dos dados
apresentados na figura 43 de MINETTI (1998b) Nesta figura as informaccedilotildees satildeo
valores meacutedios (meacutedias advindas de 22 agrave 42 medidas para cada velocidade e tipo
de locomoccedilatildeo) de medidas de FP e DF portanto as equaccedilotildees a seguir apresentam
valores de R subestimados enquanto que as equaccedilotildees de regressatildeo representam
de modo satisfatoacuterio os dados de origem A Vf predita pela frequumlecircncia de passada
FPregression foi determinada para a caminhada como
DF 05 FPregression = 27781FP V12077 R=098 Eq 411
e para a corrida
DF lt 05 FPregression = 75469FP - 79561 R=090 Eq 412
A Vf predita pelo duty factor DFregression foi determinado para a caminhada
como
DF 05 DFregression = V12342DF + 84628 R=099 Eq 413
e para a corrida
DF lt 05 DFregression = -16912DF + 87422 R=098 Eq 414
44 Equaccedilatildeo de custo energeacutetico
O atraso entre passos tstep e a Vf satildeo cruciais para ldquosintetizarrdquo toda a
passada e calcular o trabalho mecacircnico externo e a recuperaccedilatildeo de energia (ambos
valores total (CAVAGNA e KANEKO 1977) e instantacircneo (CAVAGNA et al 2002))
Assim as forccedilas de reaccedilatildeo do solo satildeo integradas duas vezes para posiccedilatildeo
do CM e dados da velocidade A primeira integraccedilatildeo das forccedilas horizontais e
107
verticais menos o PC ambas divididas pela massa corporal resultam na aceleraccedilatildeo
do CM A constante de integraccedilatildeo usada para as forccedilas acircntero-posteriores foi a
velocidade meacutedia de progressatildeo Para as forccedilas vertical e meacutedio-lateral noacutes
assumimos que as velocidades inicial e final em todo o ciclo eram iguais A variaccedilatildeo
positiva ponto-a-ponto da Ep somada a variaccedilatildeo positiva ponto-a-ponto da Ek
durante uma passada completa resulta na energia mecacircnica externa total Ecm
(CAVAGNA e KANEKO 1977 WILLEMS et al 1995) Para evitar o ldquoparadoxo do
trabalho zerordquo o trabalho externo eacute determinado somando somente os incrementos
positivos da Ecm Sabendo o Wext e estimando o Wint (MINETTI 1998b) foi
calculado o Wtot e o custo energeacutetico (Ctot) da locomoccedilatildeo
A velocidade horizontal foi determinada atraveacutes do meacutetodo de regressatildeo
linear muacuteltipla usando como variaacuteveis independentes os coeficientes da curva Fv (de
NILSSON e THORSTENSSON 1989) A validade cruzada das equaccedilotildees
desenvolvidas no presente estudo foi calculada por coeficientes de regressatildeo (R)
45 Discussatildeo
O presente modelo prediz a velocidade horizontal e o custo energeacutetico da
locomoccedilatildeo terrestre Aleacutem disso o modelo matemaacutetico permite estimar outros
importantes paracircmetros da locomoccedilatildeo como a FP e o DF
Outros modelos
Tem sido proposto que o custo energeacutetico da locomoccedilatildeo terrestre pode ser
determinado pelo custo da produccedilatildeo de forccedila para suportar o PC (KRAM e TAYLOR
1990) Fundamentalmente o custo de geraccedilatildeo de forccedila indica que a potecircncia
metaboacutelica da locomoccedilatildeo eacute relacionada diretamente ao PC e o tempo disponiacutevel
para produzir forccedila
c Mg E
metabolic = Eq 415 tc
108
onde c eacute uma constante de custo (que expressa a proporcionalidade entre taxa de
dispecircndio de energia normalizado pela massa e taxa de geraccedilatildeo de forccedila)
entretanto esse modelo tecircm sido alvo de criacuteticas Resumidamente a principal criacutetica
eacute baseada em i) a suposiccedilatildeo que o dispecircndio metaboacutelico devido ao movimento dos
membros superiores eacute negligenciaacutevel e ii) a desconsideraccedilatildeo do conceito de
trabalho O presente trabalho tambeacutem mostra que levar em consideraccedilatildeo apenas o
tempo da geraccedilatildeo de forccedila e a forccedila natildeo eacute o bastante para determinar o custo
energeacutetico da locomoccedilatildeo As informaccedilotildees contidas no proacuteprio comportamento da
curva forccedila vertical-tempo parecem influenciar de modo importante a determinaccedilatildeo
de paracircmetros fundamentais da locomoccedilatildeo Especialmente o Iv e o fator de forma q
indicam um ajuste da curva de regressatildeo linear importante para a determinaccedilatildeo da
Vf
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de progressatildeo
A prediccedilatildeo da FP e DF foram comparados com os valores
determinados experimentalmente em dois sujeitos (sujeitos RR e TD 175 e
170m de estatura 78 e 84kg de massa corporal) correndo em vaacuterias velocidades de
progressatildeo As forccedilas de reaccedilatildeo do solo foram registradas em uma plataforma de
forccedila AMTI agrave uma frequumlecircncia de amostragem de 1000Hz e a Vf foi determinada
quadro a quadro atraveacutes de uma cacircmera colocada agrave 5m de distacircncia da aacuterea de
interesse e 1m de altura do piso A mesma foi posta de forma a registrar o
movimento no plano sagital dos sujeitos com uma frequumlecircncia de amostragem de
109
50Hz Um procedimento de calibraccedilatildeo 2D foi realizado a fim de converter as
informaccedilotildees de pixels para metros As informaccedilotildees de posiccedilatildeo linear foram filtradas
atraveacutes de um filtro passa-baixa do tipo Butterworth com frequumlecircncia de corte
variando entre 3 e 9Hz determinados para cada corrida atraveacutes do procedimento de
anaacutelise residual (WINTER 2005) A coordenada horizontal do ponto anatocircmico do
quadril foi utilizada para determinar a FPexp CPexp e a velocidade meacutedia
experimentais A FPexp foi determinada pela frequumlecircncia de amostragem fsample
dividida pelo nuacutemero de quadros que totalizam um ciclo de passada nframes
f sampleFPexp = Eq 416 n frames
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de progressatildeo Fonte
Minetti 1998b
O CPexp foi determinado pela posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo FinalhorPosition diminuiacutedo pela posiccedilatildeo horizontal do quadril no
primeiro quadro InitialhorPosition
CPexp = horPosition = FinalhorPosition V InitialhorPosition Eq 417
110
A velocidade meacutedia experimental Vfexp foi determinada pela variaccedilatildeo da
posiccedilatildeo horizontal durante um ciclo de passada dividida pela variaccedilatildeo de tempo de
um ciclo de passada a partir da Eq 411
n frames 1time = = Eq 418
f sample FPexp
temos
horPositionVfexp = Eq 419 time
A razatildeo entre a frequumlecircncia FP experimental e teoacuterica foi de 1001 A razatildeo
para o DF foi de 0977
O presente modelo pode auxiliar a determinar paracircmetros espaccedilos-temporais
e energeacuteticos de animais extintos prevendo a forccedila de reaccedilatildeo do solo de um uacutenico
passo
Atraveacutes da anaacutelise das informaccedilotildees contidas em uma curva de forccedila de
reaccedilatildeo do solo vertical pelo tempo informaccedilotildees fundamentais da mecacircnica e
energeacutetica da locomoccedilatildeo podem ser estimadas em situaccedilotildees que a informaccedilatildeo
experimental direta natildeo for disponiacutevel
111
5 CONCLUSAtildeO GERAL
51 O custo EMG da caminhada humana
O objetivo deste estudo foi construir um modelo do custo EMG da caminhada
humana Para tanto criou-se duas abordagens experimental e teoacuterica sendo que a
teoacuterica parece ter uma melhor relaccedilatildeo com as evidecircncias experimentais sobre a
energeacutetica da locomoccedilatildeo humana A estabilidade em conjunto com a atividade EMG
de muacutesculos posturais parece ser um mecanismo primaacuterio da energeacutetica da
locomoccedilatildeo
52 A mecacircnica da corrida de idosos
A mecacircnica da corrida de idosos foi comparada com a de jovens atraveacutes da
determinaccedilatildeo e comparaccedilatildeo do trabalho mecacircnico e de paracircmetros do sistema
massa-mola especialmente usando aspectos de assimetria do mecanismo elaacutestico
de minimizaccedilatildeo de energia entre os grupos experimentais
Os idosos produzem menos forccedila durante a fase de trabalho mecacircnico
positivo com uma menor oscilaccedilatildeo vertical durante a fase aeacuterea e menor oscilaccedilatildeo
total Consequentemente a capacidade de armazenar e re-utilizar energia elaacutestica
112
dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio energeacutetico neste
grupo quando comparado com jovens
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre
Tendo apenas as informaccedilotildees de uma curva forccedila vertical versus tempo e a
massa corporal construiu-se um modelo biomecacircnico de prediccedilatildeo do CP Vf e custo
energeacutetico da locomoccedilatildeo terrestre Os resultados advindos do modelamento
correspondem aos paracircmetros determinados experimentalmente Laboratoacuterios que
detenham apenas uma plataforma de forccedila ou nas aacutereas onde as informaccedilotildees de
entrada do atual modelo constituam a uacutenica fonte de dados disponiacutevel (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis-chaves da
locomoccedilatildeo podem ser realizadas com razoaacutevel acuraacutecia
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico
O seguinte texto representa um esforccedilo de raciociacutenio a partir dos achados da
presente tese aliados ao referencial teoacuterico abordado durante os capiacutetulos
anteriores a fim de compreender as determinantes da locomoccedilatildeo humana Mais do
que oferecer uma resposta final sobre a mecacircnica e a energeacutetica da locomoccedilatildeo
humana este texto lanccedila uma provaacutevel resposta ainda inicial acerca das
determinantes envolvidas da locomoccedilatildeo humana
As situaccedilotildees de locomoccedilatildeo que desafiam as noccedilotildees atuais da mecacircnica e
energeacutetica da locomoccedilatildeo tratadas nesta tese nomeadamente o processo de
envelhecimento e as inclinaccedilotildees satildeo algumas das questotildees que natildeo satildeo todavia
compreendidas pelas teorias atuais da locomoccedilatildeo humana mas que a presente
hipoacutetese pretende responder A locomoccedilatildeo humana eacute determinada desde o ponto
de vista mecacircnico como uma seacuterie de accedilotildees complexas de segmentos interligados
ao qual geram torques atraveacutes da ativaccedilatildeo muscular e transmissatildeo de forccedilas pelos
tendotildees anexados em seacuterie aos muacutesculos e agraves articulaccedilotildees que conectam os
Restriccedilotildees da tarefa
velocidade
Restriccedilotildees do organismo
- massa
- comprimento do membro
i f i
Tendatildeo
- energia
Energia
mecacircnica do
CM
Mecanismo
minimizador
Dispecircndio
energeacutetico
Restriccedilotildees do
ambiente Muacutesculos
- eficiecircncia
113
segmentos Todo este sistema eacute controlado pelo sistema nervoso central e
perifeacuterico Ainda assim apesar da extrema complexidade deste tipo de movimento
conforme discutido extensivamente nas seccedilotildees 21 31 e 41 a corrida e a
caminhada humana se caracterizam como sistemas capazes de minimizar o
dispecircndio energeacutetico advindo dos muacutesculos sistemas estes denominados de
massa-mola e pecircndulo invertido respectivamente Desde a sua introduccedilatildeo ateacute os
dias atuais estes sistemas tecircm recebido intensas criacuteticas da literatura abordadas em
capiacutetulos precedentes poreacutem mais do que por agrave prova os achados principais que
deram base para estes sistemas as criacuteticas satildeo direcionadas agraves limitaccedilotildees dos
sistemas especialmente da forma em que foram propostos A seacuterie de experimentos
realizados primeiramente com humanos (CAVAGNA et al 1963 1964) e apoacutes com
animais (FEDAK et al 1982 HEGLUND et al 1982a HEGLUND et al 1982b
TAYLOR et al 1982) demonstraram de modo inequiacutevoco que as curvas de energia
potencial gravitacional e cineacutetica do CM se apresentavam em fase durante a
corridagalope e em contra-fase (atraso de 180 graus) na caminhada Deste ponto
em diante eacute estabelecido que durante a transiccedilatildeo da caminhada para a corrida os
sistemas satildeo modificados de um modo discreto ou seja o pecircndulo invertido seria
ldquodesligadordquo e o sistema massa-mola acionado automaticamente
Figura 51 Modelo conceitual da locomoccedilatildeo humana
114
Este raciociacutenio adveacutem dos achados de Cavagna e colegas e aleacutem disso da
observaccedilatildeo de paracircmetros cinemaacuteticos e cineacuteticos aos quais respondem de forma
discreta na mudanccedila do tipo de locomoccedilatildeo por exemplo o DF durante caminhada
varia de 065 em baixas velocidades ateacute 055 em altas velocidades de forma
contiacutenua poreacutem quando o sujeito faz a transiccedilatildeo para a corrida o DF passa para
04 O fator de forma ldquoqrdquo da curva de forccedila vertical em funccedilatildeo do tempo tambeacutem se
modifica abruptamente variando de 07 na caminhada para -01 durante corrida
(ALEXANDER e JAYES 1980) Uma justificativa para este comportamento discreto
eacute relacionado agrave um tipo de locomoccedilatildeo pouco usada por seres-humanos o skipping
Por outro lado evidecircncias experimentais tecircm demonstrado que em algumas
velocidades de caminhada parece existir um mecanismo elaacutestico de minimizaccedilatildeo de
energia (FUKUNAGA et al 2001) denominado de sistema de ldquocatapultardquo devido agrave
caracteriacutestica de baixa velocidade durante a frenagem e alta velocidade na fase de
propulsatildeo (ISHIKAWA et al 2005 ISHIKAWA et al 2007) Por outro lado durante a
corrida no estudo da mecacircnica da corrida dos idosos foi observada uma transduccedilatildeo
de energia cineacutetica e potencial gravitacional em baixas velocidades diminuindo com
o aumento da velocidade (relativo ao deslocamento vertical total capiacutetulo 3)
enquanto que a contribuiccedilatildeo do tendatildeo e consequentemente do componente
elaacutestico da unidade muacutesculo-tendatildeo aumentam (CAVAGNA 2006) Portanto os dois
sistemas parecem natildeo mudar atraveacutes de transformaccedilotildees abruptas como os
paracircmetros anteriormente apresentados poderiam induzir mas eacute notoacuterio um
continuum de mudanccedilas nas caracteriacutesticas mecacircnicas destes dois tipos de
locomoccedilatildeo e a mudanccedila na predominacircncia do mecanismo minimizador parece ser o
responsaacutevel pela transiccedilatildeo de um tipo de locomoccedilatildeo para outro
Para construir este modelo eacute necessaacuterio sabermos quanto de energia eacute
recuperado pelos mecanismos minimizadores A energia recuperada por via
pendular eacute calculada como (ver capiacutetulo 327)
cpendular = Rint Eq 51
e a energia elaacutestica armazenada como
115
Fvmx k = Eq 52 celaacutestica 2
Este raciociacutenio leva agrave um modelo de minimizaccedilatildeo de energia assumido
simplesmente como o somatoacuterio dos mecanismos elaacutestico e pendular
= Eq 53 creconvertida cpendular + celaacutestica
Assumindo como constante o dispecircndio energeacutetico sob outras formas de
energia (teacutermica) a energia despendida para a contraccedilatildeo dos muacutesculos esqueleacuteticos
a fim de gerar a locomoccedilatildeo pode ser determinada por
= -E Eq 54 Emuscular Emetaboacutelica repouso
e deste modo podemos afirmar que a energia total para percorrer determinada
distacircncia eacute dada por
= Eq 55 total Ereconvertida + Emuscular
e este valor em um amplo espectro de velocidades e tipos de locomoccedilatildeo apresente
uma relaccedilatildeo linear direta com a velocidade da locomoccedilatildeo (restriccedilatildeo da tarefa)
Mas quais os fatores que determinam este continuum de mecanismos
minimizadores O compromisso entre estes mecanismos (pendular e elaacutestico) eacute
diretamente ligado ao comportamento da energia mecacircnica vertical (potencial
gravitacional + cineacutetica) e da unidade muacutesculo-tendatildeo E em uacuteltima anaacutelise estas
caracteriacutesticas mecacircnicas parecem ser moduladas por restriccedilotildees do ambiente (g
inclinaccedilatildeo) restriccedilotildees da tarefa (velocidade) e restriccedilotildees do organismo (massa e
comprimento de membros inferiores) conforme figura 51
Hipoacuteteses levantadas com o atual modelo
i) A velocidade de transiccedilatildeo deve coincidir com a mudanccedila na
predominacircncia do mecanismo minimizador de energia
ii) Analisar o mecanismo pendular em diferentes velocidades de corrida
116
iii) Quando as demais restriccedilotildees estatildeo controladas as restriccedilotildees do
organismo e o compromisso entre massa e comprimento de membro
inferior poderiam explicar as mudanccedilas no uso dos mecanismos pendular
e elaacutestico
iv) Existe uma velocidade oacutetima para a corrida humana
v) O somatoacuterio da quantidade de energia reconvertida por meio pendular e
elaacutestico somado ao dispecircndio energeacutetico dos muacutesculos deve ser altamente
relacionado com a velocidade de locomoccedilatildeo
541 Respondendo algumas criacuteticas atuais
Este modelo pode explicar os resultados de GEYER et al 2006) sobre a
possibilidade de um modelo de ldquopecircndulo-invertido carregado por uma molardquo
(BLICKHAN et al 2007) ser aplicado na caminhada devido a melhor representaccedilatildeo
da curva forccedila tempo pelo meacutetodo proposto do que pelo modelo do pecircndulo-
invertido Apesar da boa representaccedilatildeo de uma variaacutevel mecacircnica da locomoccedilatildeo o
modelo despreza uma questatildeo central da anaacutelise da locomoccedilatildeo a determinaccedilatildeo do
mecanismo minimizador de energia Portanto apesar da coincidecircncia da resposta de
forccedila de reaccedilatildeo do solo vertical originada pelo modelo e a medida experimental o
modelo apenas apresenta uma possibilidade do ponto de vista matemaacutetico de
representaccedilatildeo do modelo teoacuterico de continuum apresentado aqui
Recentemente uma extensa revisatildeo de BIEWENER 2006) analisou como as
flutuaccedilotildees na energia mecacircnica do CM de animais podem ser usadas a fim de
identificar os mecanismos fundamentais envolvidos na locomoccedilatildeo terrestre e indicou
que quando satildeo comparados os padrotildees mecacircnicos e cinemaacuteticos de uma ampla
diversidade de quadruacutepedes e biacutepedes padrotildees mais complexos emergem
observando que alguns animais menos aptos para a locomoccedilatildeo (less cursorial)
podem combinar padrotildees mecacircnicos da caminhada e corrida em velocidades
intermediaacuterias ou em animais de grande tamanho (eg elefantes apresentam
aspectos de corrida mas com um comportamento pendular entre a energia cineacutetica e
potencial gravitacional do CM) Novamente a hipoacutetese do continuum se apresenta
como um forte candidato para explicar atraveacutes de uma teoria simples e unificante a
locomoccedilatildeo de vertebrados
117
O que acontece nas inclinaccedilotildees
Quando nos deslocamos no plano eacute bem determinado que o trabalho
mecacircnico liacutequido apresente um valor muito baixo e natildeo eacute igual a zero devido agrave
resistecircncia do ar e agrave fricccedilatildeo dos tecidos mas ainda assim eacute comumente assumido
como negligenciaacutevel (ALEXANDER 1989) poreacutem a energia mecacircnica total para
movimentar o CM em relaccedilatildeo ao ambiente externo varia durante um ciclo de
passada de modo que o somatoacuterio dos incrementos (trabalho positivo) seja igual ao
somatoacuterio dos decrementos (trabalho negativo) Como observado no estudo ldquocusto
EMG da caminhada humanardquo (Capiacutetulo 2) existe uma predominacircncia de trabalho
positivo em inclinaccedilotildees positivas e predominacircncia de trabalho negativo em
inclinaccedilotildees negativas (figura 52)
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido de
elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006
118
Portanto o pecircndulo invertido natildeo atua como mecanismo minimizador de
dispecircndio energeacutetico e natildeo obstante a falta de evidecircncias eacute razoaacutevel supor que a
energia elaacutestica natildeo atue de forma importante nas inclinaccedilotildees Importante notar que
a inexistecircncia de um mecanismo minimizador natildeo significa que o modelo natildeo
contempla esta situaccedilatildeo apenas demonstra que devido agrave uma restriccedilatildeo severa do
ambiente (inclinaccedilatildeo extrema) o organismo natildeo dispotildee de nenhum auxiacutelio
importante para economizar energia sobrecarregando os muacutesculos a fim de produzir
a energia necessaacuteria para manter o movimento de locomoccedilatildeo Nesta situaccedilatildeo o
dispecircndio energeacutetico eacute dependente apenas da quantidade de ativaccedilatildeo muscular e
seus respectivos equivalentes energeacuteticos de atividade EMG como demonstrado no
estudo do custo EMG da caminhada humana
55 Propostas para futuros estudos
551 Custo EMG da caminhada humana
Testar o modelo do Custo EMG
- em diferentes terrenos
- em populaccedilotildees com patologias do sistema nervoso
- em inclinaccedilotildees negativas
552 Mecacircnica da corrida dos idosos
- desenvolver um modelo matemaacutetico que tenha em consideraccedilatildeo os
comportamentos diferentes entre a fase de encurtamento e alongamento das
unidades muacutesculo-tendatildeo atraveacutes de um modelo viscoelaacutesticohiperelaacutestico
- estudar o bouncing elaacutestico da corrida em inclinaccedilotildees
- estudar o efeito da fadiga no bouncing elaacutestico da corrida humana
- estudar o modelo massa-mola ponto-a-ponto
- estudar o bouncing elaacutestico entre sujeitos com diferentes estruturas
muacutesculo-esqueleacuteticas (velocistas vs fundistas obesos vs natildeo-obesos homens vs
mulheres)
119
- usar os paracircmetros do modelo massa-mola e as assimetrias contato-
despregue de sujeitos normais para comparaccedilatildeo com amputados e portadores de
necessidades especiais com restriccedilotildees na locomoccedilatildeo
- estudar o bouncing elaacutestico na corrida de velocidade de atletas de alto
rendimento
553 Modelo matemaacutetico da locomoccedilatildeo terrestre
Testar o modelo
- para situaccedilatildeo de aceleraccedilotildees
- em animais extintos
120
6 Referecircncias
ALESHINSKY SY An energy sources and fractions approach to the mechanical
energy expenditure problem--IV Criticism of the concept of energy transfers within
and between links J Biomech 19 4 307-309 1986
ALEXANDER RM Damper for bad vibrations Nature 414 6866 855-857 2001
ALEXANDER RM Energy-saving mechanisms in walking and running J Exp Biol 160
55-69 1991
ALEXANDER RM Models and the scaling of energy costs for locomotion J Exp Biol
208 Pt 9 1645-1652 2005
ALEXANDER RM Optimization and gaits in the locomotion of vertebrates Physiol Rev
69 4 1199-1227 1989
ALEXANDER RM Principles of animal locomotion Princeton NJ Princeton
University Press 2003
ALEXANDER RM Tendon elasticity and muscle function Comp Biochem Physiol A
Mol Integr Physiol 133 4 1001-1011 2002
ALEXANDER RM Vertical movements in walking and running Journal of Zoology
185 27-40 1978
ALEXANDER RM JAYES AS Fourier analysis of forces exerted in walking and
running J Biomech 13 4 383-390 1980
ALEXANDER RM VERNON A Mechanics of hopping by kangaroos (Macropodidae)
Journal of Zoology 177 265-303 1975
121
ANDERS C WAGNER H PUTA C GRASSME R PETROVITCH A SCHOLLE
HC Trunk muscle activation patterns during walking at different speeds J
Electromyogr Kinesiol 17 2 245-252 2007
ANDERSON KG BEHM DG Maintenance of EMG activity and loss of force output
with instability J Strength Cond Res 18 3 637-640 2004
ARDIGO LP SAIBENE F MINETTI AE The optimal locomotion on gradients
walking running or cycling Eur J Appl Physiol 90 3-4 365-371 2003
BASTIEN GJ HEGLUND NC SCHEPENS B The double contact phase in walking
children J Exp Biol 206 Pt 17 2967-2978 2003
BASTIEN GJ SCHEPENS B WILLEMS PA HEGLUND NC Energetics of load
carrying in Nepalese porters Science 308 5729 1755 2005
BIEWENER AA Muscle-tendon stresses and elastic energy storage during locomotion
in the horse Comp Biochem Physiol B Biochem Mol Biol 120 1 73-87 1998
BIEWENER AA Patterns of mechanical energy change in tetrapod gait pendula
springs and work J Exp Zoolog A Comp Exp Biol 305 11 899-911 2006
BIEWENER AA KONIECZYNSKI DD BAUDINETTE RV In vivo muscle forceshy
length behavior during steady-speed hopping in tammar wallabies J Exp Biol 201
Pt 11 1681-1694 1998
BIGLAND-RITCHIE B WOODS JJ Integrated electromyogram and oxygen uptake
during positive and negative work J Physiol 260 2 267-277 1976
BLANCO RE GAMBINI R A biomechanical model for size speed and anatomical
variations of the energetic costs of running mammals J Theor Biol 241 1 49-61
2006
BLAXTER K Energy metabolism in animals and man Cambridge UK Cambridge
University Press 1989
BLICKHAN R The spring-mass model for running and hopping J Biomech 22 11-12
1217-1227 1989
BLICKHAN R SEYFARTH A GEYER H GRIMMER S WAGNER H GUNTHER
M Intelligence by mechanics Philos Transact A Math Phys Eng Sci 365 1850
199-220 2007
122
CAVAGNA GA Force platforms as ergometers J Appl Physiol 39 1 174-179 1975
CAVAGNA GA The landing-take-off asymmetry in human running J Exp Biol 209 Pt
20 4051-4060 2006
CAVAGNA GA DUSMAN B MARGARIA R Positive work done by a previously
stretched muscle J Appl Physiol 24 1 21-32 1968
CAVAGNA GA FRANZETTI P FUCHIMOTO T The mechanics of walking in
children J Physiol 343 323-339 1983
CAVAGNA GA FRANZETTI P HEGLUND NC WILLEMS P The determinants of
the step frequency in running trotting and hopping in man and other vertebrates J
Physiol 399 81-92 1988
CAVAGNA GA HEGLUND NC WILLEMS PA Effect of an increase in gravity on the
power output and the rebound of the body in human running J Exp Biol 208 Pt 12
2333-2346 2005
CAVAGNA GA KANEKO M Mechanical work and efficiency in level walking and
running J Physiol 268 2 467--481 1977
CAVAGNA GA MANTOVANI M WILLEMS PA MUSCH G The resonant step
frequency in human running Pflugers Arch 434 6 678-684 1997
CAVAGNA GA MARGARIA R Mechanics of walking J Appl Physiol 21 1 271-278
1966
CAVAGNA GA SAIBENE FP MARGARIA R External work in walking J Appl
Physiol 18 1-9 1963
CAVAGNA GA SAIBENE FP MARGARIA R Mechanical Work in Running J Appl
Physiol 19 249-256 1964
CAVAGNA GA THYS H ZAMBONI A The sources of external work in level walking
and running J Physiol 262 3 639-657 1976
CAVAGNA GA WILLEMS PA FRANZETTI P DETREMBLEUR C The two power
limits conditioning step frequency in human running J Physiol 437 95-108 1991
CAVAGNA GA WILLEMS PA HEGLUND NC The role of gravity in human walking
pendular energy exchange external work and optimal speed J Physiol 528 Pt 3
657-668 2000
123
CAVAGNA GA WILLEMS PA HEGLUND NC Walking on Mars Nature 393 6686
636 1998
CAVAGNA GA WILLEMS PA LEGRAMANDI MA HEGLUND NC Pendular
energy transduction within the step in human walking J Exp Biol 205 Pt 21 3413shy
3422 2002
CERRETELLI P VEICSTEINAS A FUMAGALLI M DELLORTO L Energetics of
isometric exercise in man J Appl Physiol 41 2 136-141 1976
DEN OTTER AR GEURTS AC MULDER T DUYSENS J Speed related changes
in muscle activity from normal to very slow walking speeds Gait Posture 19 3 270shy
278 2004
DOHERTY TJ Invited review Aging and sarcopenia J Appl Physiol 95 4 1717-1727
2003
DOKE J DONELAN JM KUO AD Mechanics and energetics of swinging the human
leg J Exp Biol 208 Pt 3 439-445 2005
DOKE J KUO AD Energetic cost of producing cyclic muscle force rather than work to
swing the human leg J Exp Biol 210 Pt 13 2390-2398 2007
EVANS SL DAVY KP STEVENSON ET SEALS DR Physiological determinants
of 10-km performance in highly trained female runners of different ages J Appl
Physiol 78 5 1931-1941 1995
FEDAK MA HEGLUND NC TAYLOR CR Energetics and mechanics of terrestrial
locomotion II Kinetic energy changes of the limbs and body as a function of speed
and body size in birds and mammals J Exp Biol 97 23-40 1982
FENN WO Work against gravity and work due to velocity changes in running Am J
Physiol 93 433-462 1930
FENN WO MARSH BS Muscular force at different speeds of shortening J Physiol
85 3 277-297 1935
FORMENTI F ARDIGO LP MINETTI AE Human locomotion on snow determinants
of economy and speed of skiing across the ages Proc Biol Sci 272 1572 1561shy
1569 2005
124
FORMENTI F MINETTI AE Human locomotion on ice the evolution of ice-skating
energetics through history J Exp Biol 210 Pt 10 1825-1833 2007
FRERIKS B HERMENS H DISSELHORST-KLUG C RAU G The
recommendations for sensor and sensor placement procedures for surface
electromyography In HERMENS H (editor) European recommendations for
surface electromyography Enschede Roessingh Research and Development
1991
FRONTERA WR SUH D KRIVICKAS LS HUGHES VA GOLDSTEIN R
ROUBENOFF R Skeletal muscle fiber quality in older men and women Am J
Physiol Cell Physiol 279 3 C611-618 2000
FUKUNAGA T KUBO K KAWAKAMI Y FUKASHIRO S KANEHISA H
MAGANARIS CN In vivo behaviour of human muscle tendon during walking Proc
Biol Sci 268 1464 229-233 2001
GARDNER-MORSE MG STOKES IA The effects of abdominal muscle coactivation
on lumbar spine stability Spine 23 1 86-91 discussion 91-82 1998
GEYER H SEYFARTH A BLICKHAN R Compliant leg behaviour explains basic
dynamics of walking and running Proc Biol Sci 273 1603 2861-2867 2006
GOTTSCHALL JS KRAM R Energy cost and muscular activity required for leg swing
during walking J Appl Physiol 99 1 23-30 2005
GOTTSCHALL JS KRAM R Mechanical energy fluctuations during hill walking the
effects of slope on inverted pendulum exchange J Exp Biol 209 Pt 24 4895-4900
2006
GRANATA KP MARRAS WS Cost-benefit of muscle cocontraction in protecting
against spinal instability Spine 25 11 1398-1404 2000
GRANATA KP ORISHIMO KF Response of trunk muscle coactivation to changes in
spinal stability J Biomech 34 9 1117-1123 2001
GRIFFIN TM ROBERTS TJ KRAM R Metabolic cost of generating muscular force
in human walking insights from load-carrying and speed experiments J Appl
Physiol 95 1 172-183 2003
HEGLUND NC Running a-fowl of the law Science 303 47-48 2004
125
HEGLUND NC CAVAGNA GA Mechanical work oxygen consumption and efficiency
in isolated frog and rat muscle Am J Physiol 253 1 Pt 1 C22-29 1987
HEGLUND NC CAVAGNA GA TAYLOR CR Energetics and mechanics of
terrestrial locomotion III Energy changes of the centre of mass as a function of
speed and body size in birds and mammals J Exp Biol 97 41-56 1982a
HEGLUND NC FEDAK MA TAYLOR CR CAVAGNA GA Energetics and
mechanics of terrestrial locomotion IV Total mechanical energy changes as a
function of speed and body size in birds and mammals J Exp Biol 97 57-66
1982b
HILL AV The heat of shortening and the dynamic constants of muscle Proceedings of
the Royal Society B 126 136-195 1938
HOYT DF TAYLOR CR Gait and the energetics of locomotion in horses Nature
292 239-240 1981
ISHIKAWA M KOMI PV GREY MJ LEPOLA V BRUGGEMANN GP Muscleshy
tendon interaction and elastic energy usage in human walking J Appl Physiol 99
2 603-608 2005
ISHIKAWA M PAKASLAHTI J KOMI PV Medial gastrocnemius muscle behavior
during human running and walking Gait Posture 25 3 380-384 2007
KARAMANIDIS K ARAMPATZIS A Mechanical and morphological properties of
different muscle-tendon units in the lower extremity and running mechanics effect of
aging and physical activity J Exp Biol 208 Pt 20 3907-3923 2005
KARAMANIDIS K ARAMPATZIS A BRUGGEMANN GP Symmetry and
reproducibility of kinematic parameters during various running techniques Med Sci
Sports Exerc 35 6 1009-1016 2003
KER RF BENNETT MB BIBBY SR KESTER RC ALEXANDER RM The
spring in the arch of the human foot Nature 325 7000 147-149 1987
KLASS M BAUDRY S DUCHATEAU J Aging does not affect voluntary activation of
the ankle dorsiflexors during isometric concentric and eccentric contractions J Appl
Physiol 99 1 31-38 2005
126
KNAFLITZ M BONATO P Time-frequency methods applied to muscle fatigue
assessment during dynamica contractions J Electromyogr Kinesiol 9 337-350
1999
KOMI PV Stretch-shortening cycle a powerful model to study normal and fatigued
muscle J Biomech 33 10 1197-1206 2000
KRAM R DOMINGO A FERRIS DP Effect of reduced gravity on the preferred walkshy
run transition speed J Exp Biol 200 Pt 4 821-826 1997
KRAM R TAYLOR CR Energetics of running a new perspective Nature 346 6281
265-267 1990
LAMOTH CJ MEIJER OG DAFFERTSHOFER A WUISMAN PI BEEK PJ
Effects of chronic low back pain on trunk coordination and back muscle activity during
walking changes in motor control Eur Spine J 15 1 23-40 2006
LAY AN HASS CJ RICHARD NICHOLS T GREGOR RJ The effects of sloped
surfaces on locomotion an electromyographic analysis J Biomech 40 6 1276shy
1285 2007
LOWE DA SUREK JT THOMAS DD THOMPSON LV Electron paramagnetic
resonance reveals age-related myosin structural changes in rat skeletal muscle
fibers Am J Physiol Cell Physiol 280 3 C540-547 2001
MALOIY GM HEGLUND NC PRAGER L CAVAGNA GA TAYLOR CR
Energetic cost of carrying loads have African women discovered an economic way
Nature 319 668-669 1986
MALVILLE NJ BYRNES WC ALLEN LIM B BASNYAT R Commercial porters of
eastern nepal health status physical work capacity and energy Expenditure Am J
Hum Biol 13 44-56 2001
MARGARIA R Sulla fisiologia e specialmente sul consumo energetico della marcia
e della corsa a varia velocitagrave ed inclinazione del terreno 1938
MARSH RL ELLERBY DJ CARR JA HENRY HT BUCHANAN CI Partitioning
the energetics of walking and running swinging the limbs is expensive Science
303 5654 80-83 2004
127
MCMAHON TA CHENG GC The mechanics of running how does stiffness couple
with speed J Biomech 23 Suppl 1 65-78 1990
MIAN OS THOM JM ARDIGO LP NARICI MV MINETTI AE Metabolic cost
mechanical work and efficiency during walking in young and older men Acta
Physiol (Oxf) 186 2 127-139 2006
MINETTI AE The biomechanics of skipping gaits a third locomotion paradigm Proc
Biol Sci 265 1402 1227-1235 1998a
MINETTI AE A model equation for the prediction of mechanical internal work of
terrestrial locomotion J Biomech 31 5 463-468 1998b
MINETTI AE ALEXANDER RM A theory of metabolic costs for bipedal gaits J Theor
Biol 186 4 467-476 1997
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of gradient walking
energetics in man J Physiol 472 725-735 1993
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of the minimum
energy cost of gradient running in humans J Exp Biol 195 211-225 1994
MINETTI AE ARDIGO LP SAIBENE F FERRERO S SARTORIO A Mechanical
and metabolic profile of locomotion in adults with childhood-onset GH deficiency Eur
J Endocrinol 142 1 35-41 2000
MINETTI AE FORMENTI F ARDIGO LP Himalayan porters specialization
metabolic power economy efficiency and skill Proc Biol Sci 273 1602 2791shy
2797 2006
MORSE CI THOM JM REEVES ND BIRCH KM NARICI MV In vivo
physiological cross-sectional area and specific force are reduced in the
gastrocnemius of elderly men J Appl Physiol 99 3 1050-1055 2005
NILSSON J THORSTENSSON A Ground reaction forces at different speeds of human
walking and running Acta Physiol Scand 136 2 217-227 1989
NYMARK JR BALMER SJ MELIS EH LEMAIRE ED MILLAR S
Electromyographic and kinematic nondisabled gait differences at extremely slow
overground and treadmill walking speeds J Rehabil Res Dev 42 4 523-534 2005
128
OCHALA J DORER DJ FRONTERA WR KRIVICKAS LS Single skeletal muscle
fiber behavior after a quick stretch in young and older men a possible explanation of
the relative preservation of eccentric force in old age Pflugers Arch 452 4 464shy
470 2006
ONAMBELE GL NARICI MV MAGANARIS CN Calf muscle-tendon properties and
postural balance in old age J Appl Physiol 100 6 2048-2056 2006
PHILLIPS SK BRUCE SA WOLEDGE RC In mice the muscle weakness due to
age is absent during stretching J Physiol 437 63-70 1991
PORTER MM VANDERVOORT AA KRAMER JF Eccentric peak torque of the
plantar and dorsiflexors is maintained in older women J Gerontol A Biol Sci Med
Sci 52 2 B125-131 1997
POUSSON M LEPERS R VAN HOECKE J Changes in isokinetic torque and
muscular activity of elbow flexors muscles with age Exp Gerontol 36 10 1687shy
1698 2001
PRILUTSKY BI GREGOR RJ Swing- and support-related muscle actions
differentially trigger human walk-run and run-walk transitions J Exp Biol 204 Pt 13
2277-2287 2001
ROBERTS TJ KRAM R WEYAND PG TAYLOR CR Energetics of bipedal
running I Metabolic cost of generating force J Exp Biol 201 Pt 19 2745-2751
1998
ROBERTS TJ MARSH RL WEYAND PG TAYLOR CR Muscular force in
running turkeys the economy of minimizing work Science 275 5303 1113-1115
1997
SAIBENE F MINETTI AE Biomechanical and physiological aspects of legged
locomotion in humans Eur J Appl Physiol 88 4-5 297-316 2003
SCHEPENS B WILLEMS PA CAVAGNA GA The mechanics of running in children
J Physiol 509 ( Pt 3) 927-940 1998
SCHEPENS B WILLEMS PA CAVAGNA GA HEGLUND NC Mechanical power
and efficiency in running children Pflugers Arch 442 1 107-116 2001
129
TAYLOR CR Force development during sustained locomotion a determinant of gait
speed and metabolic power J Exp Biol 115 253-262 1985
TAYLOR CR HEGLUND NC MALOIY GM Energetics and mechanics of terrestrial
locomotion I Metabolic energy consumption as a function of speed and body size in
birds and mammals J Exp Biol 97 1-21 1982
TRAPPE S GALLAGHER P HARBER M CARRITHERS J FLUCKEY J
TRAPPE T Single muscle fibre contractile properties in young and old men and
women J Physiol 552 Pt 1 47-58 2003
VALOUR D POUSSON M Compliance changes of the series elastic component of
elbow flexor muscles with age in humans Pflugers Arch 445 6 721-727 2003
VANDERVOORT AA KRAMER JF WHARRAM ER Eccentric knee strength of
elderly females J Gerontol 45 4 B125-128 1990
WHITE SG MCNAIR PJ Abdominal and erector spinae muscle activity during gait
the use of cluster analysis to identify patterns of activity Clin Biomech (Bristol
Avon) 17 3 177-184 2002
WILLEMS PA CAVAGNA GA HEGLUND NC External internal and total work in
human locomotion J Exp Biol 198 Pt 2 379-393 1995
WINTER D Biomechanics and motor control of human movement 3rd Waterloo
John Wiley amp Sons 2005
WINTERS JM WOO S Multiple muscle systems Springer-Verlag 1990
WOLEDGE RC CURTIN N HOMSHER E Energetic aspects of muscle
contraction Londres Academic Press 1985
WRIGHT S WEYAND PG The application of ground force explains the energetic cost
of running backward and forward J Exp Biol 204 Pt 10 1805-1815 2001
YAMAGUCHI G SAWA A MORAN D RESSLER M WINTERS JM A survey of
human musculotendon actuator parameters J M Winters 1991
130
Apecircndices
A- Programa de anaacutelise EMG da caminhada LocoEmg
Uma seacuterie de algoritmos (figuras A1 A2 e A3) foram desenvolvidos em
ambiente Labview versatildeo 71 a fim de analisar o sinal bruto de EMG Para tanto
informaccedilotildees advindas de sensores de pressatildeo foram calculadas de forma a
possibilitar as seguintes anaacutelises
Figura A1 Janela principal do programa LocoEmgVI
131
Este programa foi utilizado no capiacutetulo 2 no experimento do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees e no experimento do custo EMG
da locomoccedilatildeo de montanhistas Caucasianos e carregadores Nepaleses no Himalaia
Nepal Atraveacutes do uso dos sensores de pressatildeo foi possiacutevel calcular o tempo de
passada o tempo de vocirco o tempo de apoio e o tempo de apoio duplo para utilizar
no desenvolvimento das abordagens experimental e teoacuterica do custo EMG da
locomoccedilatildeo humana
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI
Os dados de input do programa foram inseridos na janela principal (figura
A1) onde no final da anaacutelise satildeo apresentados os resultados de atividade EMG
meacutedia e desvio padratildeo em funccedilatildeo do percentual do ciclo de passadaO bloco de
diagrama apresentado na figura A2 mostra a estrutura geral do programa com seus
algoritmos localizados nas subrotinas (quadrados verdes)
As principais subrotinas ou algoritmos de primeiro niacutevel satildeo i) Abre e organiza
arquivo ii) Filtra sinal EMG iii) Calcula Variaacuteveis Espaccedilo-Temporais iv) Divide
Ciclos e Interpola Sinal EMG v) Integra Sinal EMG vi) Salva Resultados vi) Imprime
Resultados Gerais
132
Na subrotina Salva resultados arrays eram transformados em arquivos no
formato txt para posterior anaacutelise estatiacutestica Os arquivos eram variaacuteveis espaccedilo-
temporais valores meacutedios interpolados para fase de apoio e balanccedilo valores Emg
meacutedios e desvio-padratildeo interpolados por ciclo de passada e somatoacuterio das integrais
Emg brutos e convertidos por Equivalentes Metaboacutelicos de Ativaccedilatildeo Emg
A janela de impressatildeo eacute apresentada na figura A3
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados
Nesta janela os dados EMGrsquos por muacutesculo satildeo apresentados atraveacutes de seus
valores valores meacutedios e dprsquos em funccedilatildeo do percentual do ciclo de passada
Informaccedilotildees da Vf nome do arquivo inclinaccedilatildeo do terreno e nuacutemero de ciclos
analisados tambeacutem satildeo apresentados Arquivos de imagem destas janelas foram
elaborados e armazenados para posterior verificaccedilatildeo dos dados
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada)
133
PEYREacute-TARTARUGA LA TARTARUGA MP COERTJENS M KRUEL LFM
Influence of Allometry scale on relationship between running economy and
kinematical parameters Biology of Sport (aceito) 2008
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
OLIVEIRA AR KRUEL LFM Physiologic and biomechanical effects ofwater run
training on running performance European Journal of Applied Physiology
(submetido) 2008
CORREA TC PEYREacute-TARTARUGA LA FURLAN E RIBAS R LOSS JF
Mathematical model of energy cost in sprint running Proceedings of XXV
International Symposium on Biomechanics in Sports ISBS (CD) 2007
PEYREacute-TARTARUGA LA COERTJENS M TARTARUGA MP DE MEDEIROS
MH KRUEL LFM Influence of the allometric scale on the relationship between
running economy and biomechanical variables in runners Medicine and Science in
Sports and Exercise 39 (Supplement) S208-S209 2007
PEYREacute-TARTARUGA LA DE MEDEIROS MH COERTJENS M TARTARUGA
MP KRUEL LFM The relation between running economy and kinematical
variables influence of body mass in competitive runners Journal of Biomechanics
39 (Supplement 1) S631 2006
ILHA J ARAUJO RT MALYSZ T PEYREacute-TARTARUGA LA ACHAVAL M
Effects of endurance and resistance exercise training on locomotion of rats after
sciatic nerve crush Physiological Mini Reviews 2 (4) 109 2006
ILHA J PEYREacute-TARTARUGA LA ARAUJO RT METZEN F MALYSZ T
CANTO F ACHAVAL ELENA M LOSS JF Locomotor behaviour assessment in
the rat by kinematic analysis Journal of Biomechanics 39 (Supplement 1) S507
2006
SCHIEHLL PE PEYREacute-TARTARUGA LA ZINGANO GM LOSS JF
Estimation of the quantification of the elastics loads on the jump fit circuit Journal of
134
Biomechanics 39 (Supplement 1) S555 2006
MARTINEZ FG PEYREacute-TARTARUGA LA HERMEL EES XAVIER LL
RASIA-FILHO AA ACHAVAL M Intermediate filament expression in the medial
5thamygdala subnuclei during postnatal development of male and female rats
Forum of the Federation of European Neuroscience Societes Viena FENS 3
A1556 2006
FRAGA CHW BLOEDOW LS CARPES F PEYREacute-TARTARUGA LA
TARTARUGA MP FOLLMER B GUIMARAtildeES ACS Methodologic proposal to
verify the influence of cycling on running kinematic aspects in Triathlon Revista
Motriz 12 (2) 159-164 2006
PEYREacute-TARTARUGA LA KRUEL LFM Deep water running limits and
possibilities to elite runners Brazilian Journal of Sports Medicine 12 (5)286-290
2006
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
RIBAS LR KRUEL LFM Comparison of the subtalar joint angle during
submaximal running speeds Acta Ortopeacutedica Brasileira 13 (2) 57-60 2005
C- Textos completos referentes agrave tese
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA Old men
running mechanical work and elastic bounce Proceedings of the Royal Society B
275 (1633) 411-418 2008 101098rspb20071288
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA The landingshy
takeoff asymmetry is enhanced in old age Journal of Experimental Biology
(aceito com modificaccedilotildees) 2008
MINETTI AE PEYREacute-TARTARUGA LA ARDIGOgrave LP FORMENTI F SUSTA
135
D Energetical and electromyographical cost of locomotion in Nepalese Porters on
Himalaya Anais do XII Congresso Brasileiro de Biomecacircnica 88-94 2007
D- Paracircmetros musculares
Os paracircmetros musculares utilizados no estudo Custo EMG da caminhada
humana foram adquiridos de YAMAGUCHI et al (1991) e satildeo apresentados em
detalhes nas duas figura seguintes (figuras D1 e D2)
Figura D1 Paracircmetros musculares utilizados Fonte YAMAGUCHI et al 1991
136

2
LEONARDO ALEXANDRE PEYREacute TARTARUGA
ENERGEacuteTICA E MECAcircNICA DA CAMINHADA E CORRIDA HUMANA
Com especial referecircncia agrave locomoccedilatildeo em plano inclinado e efeitos da idade
Documento apresentado como requisito parcial para obtenccedilatildeo do grau de Doutor em Ciecircncias do Movimento Humano Universidade Federal do Rio Grande do Sul Programa de Poacutes-Graduaccedilatildeo em Ciecircncias do Movimento Humano
Orientador Prof Dr Jefferson Fagundes Loss
Porto Alegre 2008
3
---------------------------------------------------------
--------------------------------------------------------
---------------------------------------------------------
4
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL
PROGRAMA DE POacuteS-GRADUACcedilAtildeO EM CIEcircNCIAS DO MOVIMENTO HUMANO
A COMISSAtildeO EXAMINADORA ABAIXO ASSINADA APROVA A TESE
ENERGEacuteTICA E MECAcircNICA DA CAMINHADA E CORRIDA HUMANA
Com especial referecircncia agrave locomoccedilatildeo em plano inclinado e efeitos da idade
ELABORADA POR
LEONARDO ALEXANDRE PEYREacute TARTARUGA
ORIENTADO POR
JEFFERSON FAGUNDES LOSS
COMO REQUISITO PARCIAL PARA A OBTENCcedilAtildeO DO GRAU DE
DOUTOR EM CIEcircNCIAS DO MOVIMENTO HUMANO
COMISSAtildeO EXAMINADORA
Alberto Enrico Minetti MD
Istituto di Fisiologia Umana I Universitagrave degli Studi di Milano Itaacutelia
Carlos Bolli Mota PhD
Laboratoacuterio de Biomecacircnica Universidade Federal de Santa Maria Brasil
Rogeacuterio Jose Marczak Dr Eng
Grupo de Mecacircnica Aplicada Universidade Federal do Rio Grande do Sul Brasil
Porto Alegre 13 de fevereiro de 2008
5
DEDICATOacuteRIA
Aos meus irmatildeos Ivaacuten e Virginia
Pela convivecircncia pela paciecircncia pelo exemplo
de caraacuteter entrega e brilhantismo nas coisas
que fazem
6
AGRADECIMENTOS
Agradeccedilo a todos que ajudaram de forma direta ou indireta na concretizaccedilatildeo do meu doutorado Tenho a plena convicccedilatildeo de que esta obra eacute fruto de um trabalho coletivo e estas linhas representam muito timidamente meu sentimento de gratidatildeo com todas as pessoas que estiveram comigo nesta caminhada
Ao meu orientador Prof Jefferson Loss por tantas coisas que surgiram advindas daquele convite no Centro Oliacutempico Especialmente agrave liberdade dada para seguir o caminho que trilhei nestes trecircs anos e ao exemplo de busca incessante de aprofundamento no que estamos estudando
Agrave minha Matildee pela palavra certa na hora certa Agrave memoacuteria do meu pai Eduardo Juan Peyreacute Priguetti Agrave minha famiacutelia Matildee Ivaacuten Virgiacutenia La Abuela Felipe Fernanda La Tia Gianella Marcus Joseacute Luiz Juliana
Agrave minha amada namorada e companheira Ileana pelo apoio e amor Obrigado por trilhar este caminho ao meu lado obrigado pelo esforccedilo e pela forccedila de vontade para encarar a fase ldquomilaneserdquo de nossas vidas Agradeccedilo tambeacutem agrave famiacutelia de Cordoba Abel Raquel Gabriela Adriaacuten Gerardo e Camila
Ao Grupo de Investigaccedilatildeo da Mecacircnica do Movimento ndash BIOMEC Faacutebia Artur Faacutebio Paulo Coxa Francisco Carolzita Joely Gustavo Dani Aldabe Letiacutecia Deacutebi Maicon Lipe e Marcelo pelo companheirismo e aprendizagem Em especial aos meus professores de Matlab Daniel Everton e La Torre
Aos meus bolsistas e alunos Roberto Ribas Thiago Duarte Queiroz Mariana Boos e Carlos Coutinho especialmente ao Roberto e ao Thiago pela ajuda nestes uacuteltimos meses
Aos colegas do Grupo de Histofisiologia Comparada da Ufrgs em especial agrave Profa Matilde Jocemar Thais e a Rafaela pela convivecircncia e ensinamentos durante meu primeiro ano de doutorado
Aos Professores e funcionaacuterios do Istituto di Fisiologia Umana I de Milatildeo pela recepccedilatildeo calorosa e apoio incondicional
Aos meus co-orientadores Prof Alberto Minetti e Prof Giovanni Cavagna pela orientaccedilatildeo disponibilidade e atenccedilatildeo dispensada al braziliano grazie mille Aos meus companheiros Davide Susta e Mario Legramandi pelo companheirismo e ensinamentos durante o ano em Milatildeo
Aos sujeitos dos experimentos apresentados nesta tese Aos meus caros companheiros da Expediccedilatildeo no Nepal Ardigograve Formenti Susta e
Canova pela descontraccedilatildeo e parceria Ao Comitecirc de Pesquisa em Altitude da Repuacuteblica da Itaacutelia Everest-K2-CNR por ter dado o apoio financeiro para minha participaccedilatildeo na Expediccedilatildeo Aos caros Kagi Bista e Botko e aos carregadores Nepaleses Namaskar
Ao CNPq pelo apoio financeiro que permitiu meus estudos durante estes trecircs anos inclusive meus estudos no exterior
Aos companheiros funcionaacuterios da Esef que me ldquosuportamrdquo desde 1995 em especial aos colegas do Poacutes-Graduaccedilatildeo Rosane Ana e Andrezito e aos colegas do Lapex Dani Luciano Alex Carla Maacutercia Sarinha Vanessa e Luiz
7
SUMAacuteRIO
LISTA DE FIGURAS 10
RESUMO 14
ABSTRACT 16
DEFINICcedilAtildeO DE TERMOS 18
LISTA DE SIacuteMBOLOS E ABREVIATURAS 20
INTRODUCcedilAtildeO GERAL 27
11 Locomoccedilatildeo humana 27
13 Formato da tese 30
131 Objetivo geral 32
132 Objetivos especiacuteficos 32
2 O CUSTO EMG DA CAMINHADA HUMANA 33
21 Introduccedilatildeo 33
22 Metodologia 36
221 Construccedilatildeo do modelo 36
222 Testando o modelo 41
23 Resultados 42
231 Variaacuteveis espaccedilos-temporais 42
232 Atividade EMG 43
8
233 Custo EMG 47
24 Discussatildeo 49
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular 49
242 Sobre o meacutetodo 51
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia 52
251 Materiais e meacutetodos 53
252 Resultados 56
253 Discussatildeo 57
3 MECAcircNICA DA CORRIDA DE IDOSOS 60
31 Introduccedilatildeo 60
32 Materiais e Meacutetodos 61
321 Amostra e procedimento experimental 61
322 Dos registros da plataforma ao trabalho externo 63
323 Estimativa do trabalho interno 66
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato 66
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio 67
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente 68
327 Transduccedilatildeo EpEk durante o passo 68
328 Rigidez vertical (k) 70
329 Estatiacutestica 71
33 Resultados 71
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM 72
332 Trabalho 74
333 Assimetria contato-despregue 75
34 Discussatildeo 76
341 Sobre o meacutetodo 76
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical 80
343 A assimetria contato-despregue 90
9
4 PREDIZENDO VF CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO
TERRESTRE 101
41 Introduccedilatildeo 101
42 Equaccedilatildeo do tempo de atraso 102
43 Estimativa da velocidade horizontal 104
44 Equaccedilatildeo de custo energeacutetico 106
45 Discussatildeo 107
5 CONCLUSAtildeO GERAL 111
51 O custo EMG da caminhada humana 111
52 A mecacircnica da corrida de idosos 111
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre 112
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico 112
541 Respondendo algumas criacuteticas atuais 116
55 Propostas para futuros estudos 118
551 Custo EMG da caminhada humana 118
552 Mecacircnica da corrida dos idosos 118
553 Modelo matemaacutetico da locomoccedilatildeo terrestre 119
6 REFEREcircNCIAS 120
APEcircNDICES 130
A- Programa de anaacutelise EMG da caminhada LocoEmg 130
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada) 132
C- Textos completos referentes agrave tese 134
D- Paracircmetros musculares 135
10
Lista de Figuras
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-invertido para a
caminhada e massa-mola para a corrida (Fonte SAIBENE e MINETTI 2003
modificado no presente estudo) 29
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset 38
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda
metade da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo
isomeacutetrica Setas verticais apontando para baixo indicam momento de contato
e de despregue 39
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de
passada com o tempo de passada normalizado em percentual do ciclo O 0shy
100 representa o momento de contato com o solo As cores indicam a
velocidade de caminhada (de 2 agrave 7 kmh-1) Cada muacutesculo eacute representado
nas linhas e em cada coluna eacute apresentada a atividade EMG por inclinaccedilatildeo 46
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal + carga)
11
dos carregadores Nepaleses (NEP) e montanhistas Caucasianos (CAU) em
subida (up) e descida (down) 57
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da PMV (positiva ou
negativa) pela potecircncia metaboacutelica respectiva (MINETTI et al 2006) As
linhas satildeo as razotildees entre eficiecircncia muscular positiva e negativa
(WOLEDGE et al 1985) 58
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado 69
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da caminhada
(pecircndulo-invertido) e de segmento complacente da corrida (massa-mola) e
seus principais constituintes Note que o tracejado indica a trajetoacuteria do corpo
de massa m durante o contato g eacute a aceleraccedilatildeo gravitacional k eacute a rigidez da
mola ll0 eacute o comprimento do membro inferior e a0 eacute o acircngulo da perna de
apoio no momento do contato com o solo 77
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um passo
em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis a
direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup
+ Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo
(tae) da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na
direccedilatildeo vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os
ciacuterculos em vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2)
e a frente (Lce) A linha em vermelho pontilhada em cada painel indica o
tempo de contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente
(Lc) durante o passo As linhas azuis pontilhadas em cada painel indicam o
tempo aeacutereo total (ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La)
durante o passo As barras verticais indicam o desvio-padratildeo da meacutedia os
12
nuacutemeros proacuteximos aos siacutembolos nos paineacuteis superiores indicam o nuacutemero de
itens nas meacutedias 85
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e
velocidade vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown
(paineacuteis inferiores) atingidos pelo CM durante o passo em funccedilatildeo da
velocidade de corrida Estatiacutestica e outras indicaccedilotildees conforme a figura 33 89
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e
frequumlecircncia do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute
maior nos idosos nas altas velocidades (paineacuteis superiores) a rigidez vertical
normalizada pela massa eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras
indicaccedilotildees conforme figura 33 91
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com
seus 94
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As
fraccedilotildees do deslocamento vertical do CM durante contato ScSv (ciacuterculos
preenchidos deslocamento descendente ciacuterculos abertos deslocamento
ascendente) e quando a Fv eacute maior do que o PC SceSv (quadrados
preenchidos deslocamento 95
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito
idoso paineacuteis a direita sujeito jovem em cada painel o comportamento da
transduccedilatildeo Ep-Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas
na energia potencial gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf
normalizada para oscilar entre zero e um Mesmos passos da figura 1 cada
painel comeccedila e termina no valor menor da curva Ep As cores diferentes na
curva Ep distinguem as fraccedilotildees do passo onde a Fv exercida no solo eacute maior
do que o PC (vermelho) e menor do que o PC (azul) As linhas contiacutenuas de
Ep indicam a fase de contato enquanto que as linhas pontilhadas Ep (azul
fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As quatro fases
correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
13
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown
(azul) e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas
pontilhadas verticais satildeo apresentadas nos dois picos de Ek e ocupam a
fraccedilatildeo onde a transduccedilatildeo Ep-Ek ocorre conforme indicado pelos incrementos
da curva Rint(t) 98
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos painel
inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura
31) e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e
barras azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de
corrida Estatiacutestica conforme figura 33 99
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de
reaccedilatildeo do solo durante a corrida 103
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de
progressatildeo 108
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de
progressatildeo Fonte Minetti 1998b 109
Figura 51 Modelo conceitual da locomoccedilatildeo humana 113
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido
de elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006117
Figura A1 Janela principal do programa LocoEmgVI 130
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI 131
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados 132
14
Resumo
Dois modelos mecacircnicos o pecircndulo-invertido e o massa-mola explicam como
os mecanismos pendular e elaacutestico minimizam o dispecircndio energeacutetico advindo dos
muacutesculos durante caminhada e corrida humana A presente tese testa dois efeitos
que para nosso conhecimento todavia natildeo possuem respostas conclusivas da
literatura nomeadamente o processo de envelhecimento na mecacircnica da corrida
humana e o efeito da inclinaccedilatildeo do terreno na velocidade oacutetima da caminhada Para
estudar o primeiro efeito as forccedilas de reaccedilatildeo do solo provenientes de uma
plataforma de forccedila (4m x 050m) foram usadas para a posterior comparaccedilatildeo de i)
trabalho mecacircnico ii) paracircmetros do sistema massa-mola e iii) assimetrias contato-
despregue entre jovens e idosos Os idosos produzem menos forccedila durante a fase
de trabalho mecacircnico positivo com uma menor oscilaccedilatildeo vertical total e oscilaccedilatildeo
durante a fase aeacuterea Consequumlentemente a capacidade de armazenar e re-utilizar
energia elaacutestica dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio
energeacutetico neste grupo quando comparado com jovens Para o modelo do custo
eletromiograacutefico (EMG) da caminhada humana criou-se duas abordagens
experimental e teoacuterica Em ambas as abordagens informaccedilotildees da atividade EMG de
dezesseis muacutesculos sendo 8 posturais e 8 propulsores foram coletadas e
analisadas a partir da integral EMG A abordagem teoacuterica parece ter uma melhor
relaccedilatildeo com as evidecircncias experimentais sobre a energeacutetica da caminhada humana
em inclinaccedilotildees Os principais mecanismos envolvidos na nova hipoacutetese satildeo i)
muacutesculos posturais que natildeo realizam trabalho muscular exercem uma funccedilatildeo
importante na determinaccedilatildeo do dispecircndio energeacutetico total e ii) a presente hipoacutetese
leva em consideraccedilatildeo a co-contraccedilatildeo de muacutesculos antagonistas no dispecircndio
15
energeacutetico total Mais experimentos satildeo necessaacuterios para confirmar o modelo
apresentado neste estudo Aleacutem disso atraveacutes de estrateacutegias de otimizaccedilatildeo e
prediccedilatildeo linear um modelo teoacuterico foi delineado a fim de determinar paracircmetros
mecacircnicos (comprimento de passada e velocidade de progressatildeo) e energeacuteticos da
locomoccedilatildeo terrestre em situaccedilotildees onde as informaccedilotildees disponiacuteveis satildeo apenas a
massa e uma curva forccedila de reaccedilatildeo vertical versus tempo Os resultados advindos
do modelamento correspondem aos paracircmetros determinados experimentalmente
Laboratoacuterios que detenham apenas uma plataforma de forccedila ou nas aacutereas onde as
informaccedilotildees de entrada do atual modelo sejam as uacutenicas informaccedilotildees (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis primaacuterias da
locomoccedilatildeo podem ser preditas com razoaacutevel acuraacutecia
Palavras-chave custo eletromiograacutefico da caminhada mecacircnica da corrida de
idosos modelo teoacuterico da locomoccedilatildeo terrestre mecanismos minimizadores de
energia locomoccedilatildeo humana
16
Abstract
Two mechanical models the inverted pendulum and spring-mass explain how
do the pendular and elastic mechanisms minimizing energy expenditure from
muscles during human walking and running Here we test two effects that to our
knowledge do not have yet conclusive responses from literature specifically the
ageing effects on mechanics of human running and the effect of gradient on walking
optimal speed In order to check the former effect the ground reaction forces came
from a force platform (4m x 05m) were used for a later comparison i) mechanical
work ii) spring-mass parameters and iii) landing-takeoff asymmetries The old
subjects produce less force during positive work resulting in a smaller overall and
aerial vertical oscillation of the centre of mass Consequently the potential for restore
elastic energy from tendons is reduced contributing to greater energy expenditure
than in young subjects In relation to Electromyographical (EMG) Cost of human
walking we created two approaches experimental and theoretical In both
approaches information from EMG activity of sixteen muscles eight postural and
eight propulsor were collected and analysed The theoretical approach seems to fit
better with the energy expenditure during gradient walking The main mechanisms
involved in this new hypothesis are i) postural muscles that do not perform muscular
work play an important role in the total energy expenditure and ii) the present
hypothesis take the co-contraction into account of the antagonist muscles in the total
energy expenditure Further experiments are necessary to confirm this hypothesis
Besides using optimization and linear prediction procedures a theoretical model was
designed to estimate mechanical parameters (stride length and velocity of
progression) and energetic variables of terrestrial locomotion when available
information consists only of mass and one vertical ground reaction force versus time
17
The results from this modelling are similar to experimentally obtained data
Laboratories with just one force platform or in areas where the present modelrsquos input
information be the unique accessible data (eg palaeontology forensic
biomechanics etc) the prime variables of locomotion may be estimated with
reasonable accuracy
Keywords electromyographical cost of walking running mechanics in the
elderly theoretical model of terrestrial locomotion mechanisms for minimizing
expenditure energy human locomotion
18
Definiccedilatildeo de Termos
Contraccedilatildeo concecircntrica contraccedilatildeo muscular realizada durante encurtamento
do muacutesculo
Contraccedilatildeo excecircntrica contraccedilatildeo muscular realizada durante alongamento
do muacutesculo
Custo energeacutetico o dispecircndio advindo dos muacutesculos em funccedilatildeo da distacircncia
percorrida normalizado pela massa corporal A unidade eacute em Jkg-1m -1
Eficiecircncia mecacircnica a potecircncia mecacircnica gerada dividida pela potecircncia
metaboacutelica despendida durante uma passada
Passada um periacuteodo que compreende desde o momento do contato de um
peacute com o solo e finaliza no subsequumlente momento de contato do mesmo peacute
Passo um periacuteodo que compreende desde o momento do contato de um peacute
com o solo e finaliza no subsequumlente momento de contato do peacute contra-
lateral
Potecircncia mecacircnica externa o somatoacuterio dos incrementos positivos de
energia mecacircnica externa durante uma passada dividido pelo tempo da
passada
Recovery ndash R percentual de transferecircncia entre energia cineacutetica e potencial
gravitacional durante um ciclo de passada
Tempo aeacutereo efetivo duraccedilatildeo no qual a forca vertical eacute menor do que a
forccedila peso durante um passo
Tempo de contato efetivo duraccedilatildeo no qual a forccedila vertical eacute maior do que a
forccedila peso durante um passo
Trabalho mecacircnico externo O trabalho realizado para elevar e acelerar o
CM em relaccedilatildeo ao ambiente externo No presente estudo foi desconsiderado
19
o trabalho mecacircnico externo advindo de aceleraccedilotildees horizontais meacutedio-
laterais
Trabalho mecacircnico interno O trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM
Trabalho mecacircnico total O somatoacuterio dos moacutedulos do trabalho mecacircnico
externo e interno No presente estudo o trabalho interno foi considerado
aceitando transferecircncia de energia mecacircnica entre segmentos de mesmos
membros
20
Lista de Siacutembolos e Abreviaturas
l0 comprimento do membro inferior
μV microvolts
0 acircngulo da perna de apoio com o solo no momento
do contato
Fvc Fv meacutedia durante a fase de contato do peacute com o
solo
Ah variaccedilatildeo de altura
AhorPosition idem ao CPexp
At tempo de locomoccedilatildeo
Atime tempo de passada
Ltphoto tempo entre as passagens pelas fotoceacutelulas
2D duas dimensotildees
av aceleraccedilatildeo vertical do CM
avae aceleraccedilatildeo vertical do CM durante fase aeacuterea
efetiva
avce aceleraccedilatildeo vertical do CM durante contato efetivo
avmx aceleraccedilatildeo vertical maacutexima do CM
c constante de custo
CAU Caucasianos
CM centro de massa
cos cosseno
CP comprimento de passada
21
CPexp comprimento de passada determinada
experimentalmente
Ctot Custo energeacutetico da locomoccedilatildeo
dB decibeacuteis
DF duty factor (fraccedilatildeo da passada na qual um peacute toca
o solo)
DFregression valores de Vf preditos por regressatildeo linear
advindos de DF
dp desvio-padratildeo
dt periacuteodo de um quadro
Ecm energia mecacircnica do CM
Ek energia cineacutetica
Ekf energia cineacutetica horizontal
Ekfmn energia cineacutetica horizontal miacutenima
Ekmxdown energia cineacutetica vertical maacutexima durante
deslocamento descendente do CM
Ekmxup energia cineacutetica vertical maacutexima durante
deslocamento ascendente do CM
Ekv energia cineacutetica vertical
Emetabolic potecircncia metaboacutelica
EMG eletromiografia ou eletromiograacutefico
EmgCosttheor custo EMG teoacuterico
EmgCostexp custo EMG teoacuterico
EMGiso atividade EMG durante contraccedilatildeo isomeacutetrica
EMGneg atividade EMG durante trabalho negativo
EMGpos atividade EMG durante trabalho positivo
cmuscular energia metaboacutelica advinda do muacutesculo-esqueleacutetico
cmetaboacutelica energia metaboacutelica total durante locomoccedilatildeo
crepouso energia metaboacutelica durante posiccedilatildeo em peacute
celaacutestica energia recuperada por via elaacutestica
cpendular energia recuperada por via pendular
creconvertida energia total recuperada
Ep energia potencial gravitacional do CM
22
Epmn energia potencial gravitacional miacutenima do CM
total energia total necessaacuteria para realizar a locomoccedilatildeo
f frequumlecircncia de passo
Ff componente antero-posterior da forccedila de reaccedilatildeo do
solo
FinalhorPosition posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo de passada
FP frequumlecircncia de passada
FPexp frequumlecircncia de passada determinada
experimentalmente
FPregression valores de Vf preditos por regressatildeo linear a partir
de dados de FP
FPtheor frequumlecircncia de passada obtida indiretamente
Fr nuacutemero de froude
fs frequumlecircncia do sistema massa-mola
fsample frequumlecircncia de amostragem
Fv componente vertical da forccedila de reaccedilatildeo do solo
Fvmx Fv maacutexima
Fvmxyoung Fv maacutexima nos jovens
Fvmxold Fv maacutexima nos idosos
Fvscale PC mensurado com uma balanccedila
Fvpeak pico de impacto vertical
Fvplate forccedila vertical media durante um ciclo de passada
g aceleraccedilatildeo gravitacional
GPS sistema de posicionamento global
h hora
Hz Hertz
Iv impulso vertical
InitialhorPosition posiccedilatildeo horizontal do quadril no quadro que inicia o
ciclo de passada
Iemg integral EMG
Iemgcon integral EMG durante contraccedilatildeo concecircntrica
Iemgexc integral EMG durante contraccedilatildeo excecircntrica
J Joules
23
k rigidez vertical
kg quilograma
km quilometro
L comprimento do passo
Lae deslocamento horizontal do CM durante fase aeacuterea
efetiva
Lce deslocamento horizontal do CM durante contato
efetivo
M massa corporal
m metros
Mass massa dos muacutesculos analisados
ms milisegundos
mtot massa total (massa total somada agrave carga externa)
mV milivolts
N Newtons
NEP Nepaleses
nframes nuacutemero de quadros que totalizam um ciclo de
passada
nf nuacutemero de quadros
norm normalizado
O2 oxigecircnio
p iacutendice de significacircncia estatiacutestico
PC peso corporal
PMV potecircncia mecacircnica vertical
q fator de forma da curva de Fv em funccedilatildeo do tempo
qmean meacutedia dos valores qrsquos durante o tc
qregression valores de Vf predito por regressatildeo linear a partir
de dados de q
R Recovery percentual de reconversatildeo entre energia
cineacutetica e potencial gravitacional
R coeficiente de correlaccedilatildeo
r transduccedilatildeo entre energia cineacutetica e potencial
gravitacional
24
Rint transduccedilatildeo acumulada entre energia cineacutetica e
potencial gravitacional durante um passo
Rintdown transduccedilatildeo acumulada durante deslocamento
descendente do CM
Rintup transduccedilatildeo acumulada durante deslocamento
ascendente do CM
rms raiz quadrada da meacutedia dos quadrados
s segundos
Sae deslocamento vertical do CM durante fase aeacuterea
efetiva
Saedown deslocamento descendente do CM durante Sae
Saeup deslocamento ascendente do CM durante Sae
Sc deslocamento do CM durante a fase de contato
Sce deslocamento vertical do CM durante contato
efetivo
Scdown deslocamento descendente do CM durante Sc
Scup deslocamento ascendente do CM durante Sc
Scedown deslocamento descendente do CM durante Sce
Sceup deslocamento ascendente do CM durante Sce
SEE erro meacutedio da estimativa
sin seno
Skinf dobra cutacircnea
Sv deslocamento do CM durante um passo
Svdown deslocamento descendente do CM durante Sv
Svup deslocamento ascendente do CM durante Sv
T tempo de um passo
t tempo
ta tempo em que a acontece durante W+
t tempo em que acontece durante W-
ta periacuteodo do passo no qual o peacute natildeo estaacute em contato
com o solo
tae periacuteodo do passo no qual a Fv eacute maior do que o PC
peso corporal
25
taedown periacuteodo do deslocamento descendente do CM
durante tae
taeup periacuteodo do deslocamento ascendente do CM
durante tae
tbrake tempo de Wshy
tc periacuteodo do passo no qual um peacute estaacute em contato
com o solo
tce periacuteodo do passo no qual a Fv eacute menor do que o
PC
tcedown periacuteodo do deslocamento descendente do CM
durante tce
tceup periacuteodo do deslocamento ascendente do CM
durante tce
tpush tempo de W+
tstep tempo do passo
Vf velocidade de progressatildeo
V f velocidade meacutedia de progressatildeo
Vfexp velocidade de progressatildeo determinada
experimentalmente
VO2iso consumo de O2 durante contraccedilatildeo isomeacutetrica
VO2neg consumo de O2 durante trabalho mecacircnico
negativo
VO2pos consumo de O2 durante trabalho mecacircnico positivo
Vv velocidade vertical do CM
Vvmx velocidade vertical maacutexima do CM
Vvmxdown velocidade vertical maacutexima durante deslocamento
descendente do CM
Vvmxup velocidade vertical maacutexima durante deslocamento
ascendente do CM
Wshy trabalho mecacircnico negativo
W Watts
W+ trabalho mecacircnico positivo
Wext trabalho mecacircnico externo
Wextf trabalho mecacircnico externo horizontal
26
Wextf+ trabalho mecacircnico externo horizontal positivo
Wextv trabalho mecacircnico externo vertical
Wint trabalho mecacircnico interno
Wtot trabalho mecacircnico total
a fase durante W+ em que Ek e Ep do CM aumentam
concomitantemente
fase durante W- em que Ek e Ep do CM diminuem
concomitantemente
27
INTRODUCcedilAtildeO GERAL
11 Locomoccedilatildeo humana
A teoria da evoluccedilatildeo Darwinista conhecida como Teoria da Seleccedilatildeo Natural
nos indica entre outros pressupostos que a multiplicidade de espeacutecies que habitam
a face da terra eacute produto de um sistema altamente complexo e competitivo de
sobrevivecircncia sistema este que reflete fatores preditores da aptidatildeo definidos como
geneacuteticos e do meio ambiente As capacidades de reproduccedilatildeo de alimentaccedilatildeo e de
locomoccedilatildeo satildeo moduladas por aspectos do genoacutetipo influenciados pelos fatores
ambientais O conceito de aptidatildeo relacionada agrave locomoccedilatildeo desde um ponto de
vista bioloacutegico pode ser abordado analiticamente atraveacutes de seus componentes
principais Estes satildeo velocidade aceleraccedilatildeo maneabilidade resistecircncia economia
e estabilidade (ALEXANDER 2003)
A locomoccedilatildeo tem importacircncia fundamental para a sobrevivecircncia pois
possibilita entre outros fatores a procura por alimentos a busca por um local com
melhor clima caccedilar uma presa ou fugir de um perigo eminente (SAIBENE e
MINETTI 2003) Nos mamiacuteferos terrestres a locomoccedilatildeo acontece atraveacutes do uso
das pernas Este tipo de locomoccedilatildeo tem nos humanos por exemplo alguns
aspectos de ineficiecircncia quando comparada com outros animais (peixes e paacutessaros)
A ineficiecircncia da locomoccedilatildeo de biacutepedes eacute baseada no fato de que os segmentos
inferiores encostam repetidamente no solo para absorver e transferir energia
(trabalho negativo e positivo respectivamente) com o meio ambiente de modo que
os segmentos sofrem uma colisatildeo no momento de contato com o solo
caracterizando situaccedilotildees de grandes aceleraccedilotildees Para manter a velocidade meacutedia
de locomoccedilatildeo torna-se necessaacuterio uma re aceleraccedilatildeo do centro de massa (CM)
28
Energia quiacutemica eacute despendida para manter os muacutesculos ativos durante estas
diferentes fases A fim de atenuar este dispecircndio dois mecanismos baacutesicos satildeo
usados pelo sistema locomotor na corrida e na caminhada o mecanismo do pecircndulo
na caminhada e o mecanismo da massa-mola para a corrida (CAVAGNA e
KANEKO 1977 ver figura 11) Na caminhada a energia potencial eacute alta quando o
CM estaacute sobre o ponto de contato do corpo com o solo mas a partir deste momento
a energia potencial gravitacional comeccedila a diminuir e a energia cineacutetica horizontal
obteacutem um acreacutescimo gradativo Quando o ponto de contato volta a estar na frente do
CM a energia cineacutetica diminui e potencial aumenta
Estes comportamentos entre energia cineacutetica horizontal e potencial
gravitacional acontecem em oposiccedilatildeo de fase (CAVAGNA et al 1963) e portanto
com um processo de reconversatildeo entre energia cineacutetica e potencial gravitacional
(recovery ndash R) Por outro lado na corrida os acreacutescimos de energia potencial e
cineacutetica acontecem concomitantemente portanto o mecanismo de conservaccedilatildeo de
energia citado anteriormente natildeo se aplica neste tipo de locomoccedilatildeo Eacute postulado
que durante a primeira metade da fase de apoio da corrida principalmente
muacutesculos e tendotildees alongam armazenando energia elaacutestica enquanto que os
moacutedulos de energia cineacutetica horizontal e potencial gravitacional diminuem Esta
energia elaacutestica armazenada como uma mola comprimida por uma massa eacute
transformada em energia cineacutetica horizontal e potencial gravitacional de modo
gradativo durante a segunda metade da fase de apoio (CAVAGNA et al 1964
KOMI 2000 figura 11) Evidecircncias de energia elaacutestica armazenada e reconvertida
tambeacutem foram encontradas em cangurus (ALEXANDER e VERNON 1975) e em
cavalos (BIEWENER 1998) Os ligamentos do arco do peacute tambeacutem respondem pelo
comportamento elaacutestico do sistema locomotor na corrida (KER et al 1987)
Enquanto que a medida de trabalho externo possui uma correspondecircncia com
o trabalho mecacircnico realizado pelos muacutesculos na caminhada os valores obtidos
para a corrida superestimam o trabalho muscular realizado devido agrave dificuldade de
quantificar a energia elaacutestica durante o movimento (SAIBENE e MINETTI 2003) De
fato parte consideraacutevel do aumento e diminuiccedilatildeo da energia mecacircnica total na
corrida natildeo eacute causada pelas contraccedilotildees (excecircntricas e concecircntricas) musculares
mas pelo alongamento e encurtamento das estruturas elaacutesticas da unidade muacutesculo-
tendatildeo mais especificamente os tendotildees e estruturas elaacutesticas do muacutesculo
Portanto na corrida a adiccedilatildeo do trabalho interno e a transferecircncia entre segmentos
29
dos mesmos membros (inferiores e superiores) permitem uma estimativa mais
proacutexima do trabalho mecacircnico total (WILLEMS et al 1995)
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-
invertido para a caminhada e massa-mola para a corrida (Fonte
SAIBENE e MINETTI 2003 modificado no presente estudo)
As determinantes mecacircnicas da locomoccedilatildeo humana e animal tem sido
extensivamente estudadas em diferentes situaccedilotildees velocidade (CAVAGNA et al
1963 1964) gravidade (KRAM et al 1997 CAVAGNA et al 2000 1998
CAVAGNA et al 2005) planos inclinados (MINETTI et al 1993 1994)
O trabalho mecacircnico durante a locomoccedilatildeo em inclinaccedilotildees tem sido estudado
na caminhada (MINETTI et al 1993) e na corrida (MINETTI et al 1994)
encontrando valores de maior eficiecircncia mecacircnica entre 10 e 15 de inclinaccedilatildeo
negativa (declive) Todavia o modelo do pecircndulo invertido natildeo se sustenta para
situaccedilotildees de inclinaccedilotildees extremas Deste modo a reconversatildeo de energia parece
natildeo atuar na determinaccedilatildeo da velocidade oacutetima de caminhada nestas situaccedilotildees
Uma nova hipoacutetese eacute que os muacutesculos posturais do quadril possam contribuir para
gerar o alto custo de transporte em velocidades baixas de caminhada em inclinaccedilotildees
diferentes da inclinaccedilatildeo oacutetima (-10 onde haacute o menor custo metaboacutelico e
mecacircnico)
Esta hipoacutetese pretende ser testada atraveacutes da anaacutelise do custo
eletromiograacutefico (EMG) durante caminhada em diferentes velocidades e inclinaccedilotildees
de terreno O custo EMG seraacute compreendido como o somatoacuterio de ativaccedilatildeo EMG em
funccedilatildeo da distacircncia percorrida Se satisfatoacuterio o custo EMG poderaacute explicar as curva
30
em forma de U de custo metaboacutelico em funccedilatildeo da velocidade determinadas no
trabalho pioneiro de MARGARIA (1938)
Diferentemente da caminhada a corrida pode ser explicada do ponto de vista
mecacircnico pelo modelo massa-mola Este modelo possibilita dividir a oscilaccedilatildeo
vertical do CM em duas partes durante a passada da corrida a fase inferior da
oscilaccedilatildeo (quando a forccedila vertical exercida no solo eacute maior do que o peso corporal) e
a fase superior da oscilaccedilatildeo (quando a forccedila vertical eacute menor do que o peso
corporal) De acordo com o modelo massa-mola a duraccedilatildeo da fase inferior da
oscilaccedilatildeo representa meio periacuteodo do sistema e o deslocamento do CM durante este
periacuteodo representa a amplitude da oscilaccedilatildeo (BLICKHAN 1989 CAVAGNA et al
2005) Observaccedilotildees preliminares suportam a hipoacutetese de que sujeitos idosos
utilizem de uma maior geraccedilatildeo de trabalho interno devido a diminuiccedilatildeo da fase
superior da oscilaccedilatildeo do CM
Portanto a anaacutelise dos determinantes mecacircnicos da caminhada e corrida
deveratildeo contribuir no entendimento da locomoccedilatildeo desde um ponto de vista
energeacutetico Aleacutem disso procuramos realizar um estudo teoacuterico com o objetivo de
predizer variaacuteveis fundamentais e trabalho mecacircnico da locomoccedilatildeo terrestre
Informaccedilotildees biomecacircnicas sobre a energia da locomoccedilatildeo poderatildeo servir
como base para aplicaccedilotildees futuras na aacuterea da Fisioterapia na anaacutelise da locomoccedilatildeo
patoloacutegica bem como na Educaccedilatildeo Fiacutesica e Esportes atraveacutes do uso deste
conhecimento nas aacutereas do esporte de rendimento e sauacutede agraves quais utilizam-se das
atividades fiacutesicas locomotoras
13 Formato da tese
O estado-da-arte apresentado no capiacutetulo introdutoacuterio mostra um
desenvolvimento notaacutevel do corpo de conhecimento relacionado agrave mecacircnica e
energeacutetica da locomoccedilatildeo humana As bases cientiacuteficas atuais que procuram
encontrar as determinantes mecacircnicas de caracteriacutesticas fundamentais da
caminhada e corrida humana tais como velocidade e inclinaccedilatildeo oacutetima da
locomoccedilatildeo eficiecircncia e economia em situaccedilatildeo com carga e inclinaccedilatildeo e mudanccedila
de formas de locomoccedilatildeo conforme o aumento da velocidade demonstram ser
satisfatoacuterias em inuacutemeras situaccedilotildees
31
Contudo modelos biomecacircnicos que analisem natildeo apenas situaccedilotildees
particulares mas que expliquem as questotildees fundamentais da locomoccedilatildeo humana
tendo em consideraccedilatildeo a complexidade deste tipo de movimento ainda satildeo
escassos Atualmente temos hipoacuteteses que necessitam de experimentaccedilatildeo para
tornaacute-las robustas o suficiente para responder as questotildees fundamentais da
locomoccedilatildeo e ao mesmo tempo se manterem simples o bastante que as caracterize
como fundamentais Portanto a presente tese ENERGEacuteTICA E MECAcircNICA DA
CAMINHADA E CORRIDA HUMANA Com especial referecircncia agrave locomoccedilatildeo em
plano inclinado e efeitos da idade natildeo oferece uma resposta final e acabada para as
relaccedilotildees entre a energeacutetica e mecacircnica da locomoccedilatildeo humana mas tem como eixo
principal por meio de abordagens experimentais e teoacutericas avanccedilar no
entendimento dos paradigmas mecacircnicos das formas fundamentais de locomoccedilatildeo
usadas pelo ser humano caminhada e corrida
Em base disso o capiacutetulo 2 Custo EMG da Caminhada Humana procura
avanccedilar e aperfeiccediloar a hipoacutetese do Custo de Geraccedilatildeo de Forccedila (KRAM e TAYLOR
1990) com o desenvolvimento do modelo do Custo de Ativaccedilatildeo Muscular que daacute
base para o estudo Atraveacutes de experimentos em diferentes velocidades e
inclinaccedilotildees de caminhada eacute dada uma explicaccedilatildeo das curvas em forma de U do
custo metaboacutelico em funccedilatildeo da velocidade determinadas no estudo pioneiro de
MARGARIA em 1938
Motivado pela falta de explicaccedilatildeo das mudanccedilas estruturais e funcionais
devido agrave idade aplicadas agrave mecacircnica e energeacutetica da locomoccedilatildeo humana o capiacutetulo
3 Mecacircnica da Corrida em Idosos compara o trabalho mecacircnico e o sistema massa-
mola entre jovens e idosos em diferentes velocidades de corrida analisando o
sistema massa-mola natildeo apenas pelas suas caracteriacutesticas originais (BLICKHAN
1989 MCMAHON e CHENG 1990) mas tambeacutem pelas assimetrias deste sistema
na corrida humana determinadas recentemente na literatura (CAVAGNA 2006)
Nestes dois estudos eacute usada a abordagem experimental o primeiro se
utilizando da teacutecnica de EMG e o segundo estudo abordando a teacutecnica da
dinamometria especificamente o uso de plataformas de forccedila A percepccedilatildeo da
limitaccedilatildeo metodoloacutegica do uso deste equipamento aliada agrave necessidade de
abordagens teoacutericas da mecacircnica e energeacutetica da caminhada e corrida humana e
animal em situaccedilotildees onde apenas uma curva forccedila de reaccedilatildeo do solo versus tempo
eacute disponiacutevel ofereceram a justificativa para o capiacutetulo 4 Prediccedilatildeo da Vf CP e Custo
32
Energeacutetico da Locomoccedilatildeo Terrestre A construccedilatildeo de um modelo biomecacircnico
destes paracircmetros eacute endereccedilada neste estudo atraveacutes de meacutetodo de miacutenimos
quadrados e princiacutepios da dinacircmica e otimizaccedilatildeo de paracircmetros caracterizadores da
locomoccedilatildeo nomeadamente massa corporal frequumlecircncia de passo (FP) fator de forma
ldquoqrdquo e duty factor (DF)
Finalmente no capiacutetulo 5 os resultados de cada estudo satildeo sumarizados e
no capiacutetulo 6 satildeo apresentadas algumas consideraccedilotildees sobre a mecacircnica e
energeacutetica da locomoccedilatildeo humana e os possiacuteveis desdobramentos advindos dos
presentes achados Ainda no capiacutetulo 8 estatildeo inseridos os apecircndices da tese
131 Objetivo geral
O objetivo da presente tese eacute analisar o custo EMG da caminhada humana e
a mecacircnica da corrida de idosos Esta seacuterie de estudos tem tambeacutem como objetivo
construir um modelo biomecacircnico do custo energeacutetico da locomoccedilatildeo terrestre
132 Objetivos especiacuteficos
- Estudar as determinantes da velocidade oacutetima de caminhada em inclinaccedilotildees com
ecircnfase na construccedilatildeo do modelo do custo EMG da caminhada humana
- Comparar a mecacircnica da corrida com particular referecircncia ao trabalho mecacircnico e
sistema massa-mola entre jovens e idosos em vaacuterias velocidades de corrida
- Construir um modelo biomecacircnico capaz de predizer paracircmetros fundamentais e
custo energeacutetico da locomoccedilatildeo terrestre
33
2 O CUSTO EMG DA CAMINHADA HUMANA
21 Introduccedilatildeo
Durante um ciclo de passada de caminhada a energia cineacutetica do CM
corporal varia inversamente com a energia potencial gravitacional do CM Apesar da
presenccedila importante deste comportamento a transformaccedilatildeo de energia entre uma
forma e outra natildeo eacute total e o restante de energia necessaacuterio para manter a
locomoccedilatildeo eacute providenciado pelos muacutesculos e eacute quando normalizado pela massa
corporal e por unidade de distacircncia igual agrave 03 Jkg-1m-1 durante a velocidade oacutetima
de caminhada (aproximadamente 45 kmh-1 em adultos) Este mecanismo pendular
de minimizaccedilatildeo de energia foi primeiramente observado por CAVAGNA et al (1963)
e denominado como modelo do ldquopecircndulo invertidordquo
Interessantemente natildeo obstante a sua simplicidade o modelo auxiliou no
entendimento e aprofundamento das determinantes mecacircnicas da locomoccedilatildeo
Atraveacutes deste meacutetodo foi possiacutevel oferecer o primeiro insight desde o ponto-de-vista
mecacircnico sobre a velocidade oacutetima de locomoccedilatildeo e a forma em U do custo de
transporte da caminhada [ml de oxigecircnio - O2 - por kg de massa corporal por
distacircncia percorrida observada por MARGARIA (1938)] Na seacuterie de experimentos
desenvolvida por Cavagna e colegas (CAVAGNA et al 1976 HEGLUND et al
34
1982b) foi apresentada a formulaccedilatildeo matemaacutetica denominada como Recovery (R)
definida como
W f + W -Wv extR() = 100 Eq 21 W f + Wv
onde W f eacute trabalho mecacircnico externo horizontal Wv eacute trabalho mecacircnico externo
vertical e Wext eacute trabalho mecacircnico externo Esta equaccedilatildeo determina o percentual de
reconversatildeo via pendular entre energia cineacutetica e potencial gravitacional durante a
passada E de fato na velocidade oacutetima de caminhada o R alcanccedila
aproximadamente seu valor maacuteximo
Poreacutem o custo de geraccedilatildeo de trabalho como mecanismo principal do custo
energeacutetico da locomoccedilatildeo tem recebido vaacuterias criacuteticas da literatura As criacuteticas se
baseiam principalmente (1) na questatildeo do paradoxo do trabalho zero que afirma
que fisicamente durante um ciclo de passada completo em velocidade constante e
no plano as variaccedilotildees de energias cineacuteticas e potencial satildeo iguais agrave zero
(desprezando a resistecircncia do ar e fricccedilotildees teciduais) portanto analisando de um
ponto-de-vista somente da fiacutesica o sujeito natildeo realizaria trabalho nesta situaccedilatildeo
(ALESHINSKY 1986) (2) o problema da co-contraccedilatildeo afirma que existe um custo
metaboacutelico importante devido agrave contraccedilatildeo de muacutesculos antagonistas que natildeo geram
movimento portanto sem geraccedilatildeo de trabalho mecacircnico Este uacuteltimo
questionamento levou um grupo de pesquisadores a formular a denominada
hipoacutetese da forccedila ou Teoria do custo energeacutetico da geraccedilatildeo de forccedila (HEGLUND et
al 1982b KRAM e TAYLOR 1990 ROBERTS et al 1998) para explicar de modo
simplificado o custo energeacutetico da locomoccedilatildeo
Essencialmente a hipoacutetese da forccedila afirma que o custo energeacutetico da corrida
ou caminhada eacute determinado pelo produto da integral da curva forccedila de reaccedilatildeo do
solo-tempo por um fator proporcional agrave taxa de ciclos de pontes-cruzadas de miosina
no muacutesculo independente da geraccedilatildeo de trabalho mecacircnico Apesar da hipoacutetese
concordar com achados experimentais estes satildeo encontrados em situaccedilotildees
limitadas e aleacutem disso a hipoacutetese da forccedila considera como negligenciaacutevel o custo
de balanccedilar os segmentos para traacutes e para frente Esta pressuposiccedilatildeo eacute considerada
como incorreta (MARSH et al 2004) O problema principal desta hipoacutetese se refere
35
agrave desconsideraccedilatildeo do trabalho elemento fundamental segundo a primeira lei da
termodinacircmica Conforme apontado por HEGLUND 2004) ldquoforccedila natildeo eacute trabalho
nem mesmo eacute energia Se a energia metaboacutelica eacute consumida aquela energia deve
ir para algum lugar Se a energia de um segmento corporal aumenta aquela energia
vem de algum lugar Se a energia daquele segmento diminui a energia vai para
algum lugarrdquo
Durante a locomoccedilatildeo em inclinaccedilotildees foi observado que na inclinaccedilatildeo oacutetima
(aproximadamente -10) a constante de custo metaboacutelico inverso ao tempo de
apoio obteve uma variaccedilatildeo significativa (MINETTI et al 1994) indicando que o
custo de geraccedilatildeo de trabalho mecacircnico era mais satisfatoacuterio do que o custo de
geraccedilatildeo de forccedila Mas um achado intrigante nos estudos de Minetti e
colaboradores sobre as determinantes mecacircnicas da energeacutetica da caminhada e
corrida em inclinaccedilotildees (1993 e 1994 respectivamente) foi sobre a ausecircncia de
trabalho mecacircnico negativo em inclinaccedilotildees positivas e de trabalho positivo em
inclinaccedilotildees negativas (apoacutes 30 de inclinaccedilatildeo na corrida e 15 na caminhada)
independente da velocidade Portanto o modelo do custo de geraccedilatildeo de trabalho
como determinante do custo energeacutetico da locomoccedilatildeo natildeo se aplica nestas
situaccedilotildees perdendo sua amplitude como Teoria geral para a energeacutetica e mecacircnica
da caminhada
Tendo em consideraccedilatildeo que durante situaccedilotildees de locomoccedilatildeo de pouca
eficiecircncia mecacircnica como na situaccedilatildeo de velocidades mais baixas que a velocidade
oacutetima e durante inclinaccedilotildees extremas satildeo geradas situaccedilotildees de instabilidade de
locomoccedilatildeo e provavelmente maiores co-contraccedilotildees musculares propomos neste
experimento testar a hipoacutetese denominada de ldquocusto EMG da caminhada humanardquo
Uma base importante desta hipoacutetese reside no raciociacutenio de que nas situaccedilotildees
citadas anteriormente a contribuiccedilatildeo de muacutesculos que contraem isometricamente
principalmente os posturais teratildeo uma contribuiccedilatildeo importante para o alto custo
relativo da locomoccedilatildeo
Portanto o objetivo deste estudo eacute desenvolver o modelo do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees Teoricamente a hipoacutetese do
presente estudo diferente da hipoacutetese da forccedila natildeo iraacute desconsiderar o trabalho
mecacircnico gerado mas este seraacute considerado como um dos produtos da variaccedilatildeo da
energia (devido ao consumo de energia metaboacutelico) e a quantidade de ativaccedilatildeo
muscular e as eficiecircncias de ativaccedilatildeo satildeo as determinantes do custo energeacutetico
36
usando os equivalentes metaboacutelicos da ativaccedilatildeo EMG da literatura W+ Wshy
(BIGLAND-RITCHIE e WOODS 1976) e durante contraccedilatildeo isomeacutetrica
(CERRETELLI et al 1976) O modelo eacute apresentado em detalhes na metodologia
22 Metodologia
221 Construccedilatildeo do modelo
O presente modelo eacute configurado como biomecacircnico e se utiliza de
pressupostos originados da fiacutesica e da biologia
O modelo assume que i) toda a energia despendida pelos muacutesculos possui
uma correspondente quantidade de ativaccedilatildeo EMG ii) a atividade EMG realizada
pelos muacutesculos posturais durante todo o ciclo de passada e pelos muacutesculos
propulsores durante a fase aeacuterea seraacute considerada como uma atividade EMG
realizada durante contraccedilotildees isomeacutetricas Seraacute considerada como contraccedilatildeo
excecircntrica e concecircntrica a atividade EMG realizada pelos muacutesculos propulsores
durante a primeira e segunda metades da fase de apoio respectivamente iii) O
custo energeacutetico da locomoccedilatildeo eacute devido agrave ativaccedilatildeo de muacutesculos propulsores e
posturais estes uacuteltimos natildeo diretamente ligados agrave geraccedilatildeo de trabalho mecacircnico iv)
Mais do que uma relaccedilatildeo com a produccedilatildeo de forccedila muscular a quantidade de
ativaccedilatildeo EMG e consequumlentemente o custo EMG possui uma correspondecircncia com
o trabalho mecacircnico realizado durante a ativaccedilatildeo muscular
Um conjunto de algoritmos foi desenvolvido em Labview a fim de analisar o
sinal EMG e as variaacuteveis espaccedilos-temporais (figuras 21 22 e 23 apecircndice 81) O
programa retifica suaviza (atraveacutes de uma integraccedilatildeo com janelamento moacutevel
50Hz do tipo Hamming) e divide todas as curvas de EMG por ciclo de passada
retirando os ciclos de passadas com um tempo 20 menor ou maior do tempo
meacutedio do ciclo de passada e do tempo de apoio Apoacutes normaliza o tempo do ciclo
para 100 quadros (interpolaccedilatildeo via spline) e calcula a meacutedia desvio-padratildeo e
coeficiente de variaccedilatildeo em cada quadro por muacutesculo analisado Este procedimento
tem o objetivo de criar graacuteficos de atividade eletromiograacutefica em funccedilatildeo do
37
percentual do ciclo de passada A fim de analisar o efeito das ponderaccedilotildees pelo
volume muscular e dobra cutacircnea foram desenvolvidas duas estrateacutegias de
modelamento nomeadamente ldquoabordagem experimentalrdquo e ldquoabordagem teoacutericardquo
Abordagem experimental
Usando o sinal suavizado sem a normalizaccedilatildeo foi realizada uma integral em
funccedilatildeo do tempo do seguinte modo
t
Iemg(t) = f EMG dt Eq 22 0
Este valor integrado eacute dividido pelo CP determinando a quantidade de
atividade EMG em funccedilatildeo da distacircncia e seraacute considerado como um custo miacutenimo
EMG Os valores de custo EMG satildeo ponderados em funccedilatildeo do volume muscular
(WINTERS e WOO 1990) e da dobra cutacircnea (NORDANDER et al 2003) do
seguinte modo
Iemg1 Iemg2 Iemg16EmgCost (mV m) = ( + + l middot CP-1 Eq 23 exp ( Mass1 Sk inf1 Mass2 Sk inf2 Mass16 Sk inf16 lmiddot middot middot Masstotal Sk inftotal Masstotal Sk inftotal Masstotal Sk inftotal
onde EmgCostexp eacute o custo miacutenimo EMG experimental Mass eacute a massa dos
muacutesculos analisados e eacute o somatoacuterio de todas as massas musculares Masstotal
analisadas Sk inf eacute a dobra cutacircnea de cada regiatildeo de colocaccedilatildeo dos eletrodos e
eacute o somatoacuterio de todas as dobras cutacircneas analisadas A fim de Sk inftotal
compreender melhor as determinantes da velocidade oacutetima nas inclinaccedilotildees dividiu-
se a Iemg em trecircs aacutereas (a) fase de contato (b) fase aeacuterea e (c) offset (figura 21)
Abordagem teoacuterica
A presente abordagem calcula o sinal EMG atraveacutes dos seus equivalentes
metaboacutelicos Estes equivalentes satildeo advindos da literatura (BIGLAND-RITCHIE e
WOODS 1976) e o objetivo deste procedimento foi verificar se levando em
38
consideraccedilatildeo os equivalentes metaboacutelicos da atividade EMG (para contraccedilotildees
concecircntrica excecircntrica e isomeacutetrica) seria possiacutevel explicar mais satisfatoriamente
as velocidades oacutetimas na caminhada em inclinaccedilotildees Este procedimento assume
que uma determinada quantidade de ativaccedilatildeo eleacutetrica muscular gera distintos custos
energeacuteticos sendo estes dependentes do tipo de contraccedilatildeo muscular Para este
propoacutesito primeiro dividimos a anaacutelise em dois grupos de muacutesculos propulsores
(gluteus maximus gluteus medius deltoideus anterior rectus femuralis vastus
lateralis biceps femuralis caput longus tibialis anterior e gastrocnemius lateralis) e
posturais (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis trapezius ascendens)
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset
Os muacutesculos posturais foram considerados como muacutesculos contraindo
isometricamente durante todo o ciclo de passada enquanto que os muacutesculos
39
propulsores foram analisados como realizando (a) contraccedilatildeo excecircntrica na primeira
fase de contato (b) concecircntrica na segunda fase de contato e (c) contraccedilatildeo
isomeacutetrica durante a fase aeacuterea (figura 22)
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda metade
da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo isomeacutetrica
Setas verticais apontando para baixo indicam momento de contato e de
despregue
Assim foram calculadas as correspondentes integrais
t 2c
Iemgexc (t) = f EMG dt Eq 24 0
40
onde Iemgexc eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a primeira
metade da fase de contato (contraccedilatildeo excecircntrica)
tc
Iemgcon (t) = f EMG dt Eq 25 t 2c
onde Iemgcon eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a segunda
metade da fase de contato (contraccedilatildeo concecircntrica)
ta
Iemgiso (t) = f EMG dt Eq 26 0
onde Iemgiso eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a fase aeacuterea
(contraccedilatildeo isomeacutetrica)
As integrais foram convertidas para uma unidade de counts usada por
BIGLAND-RITCHIE e WOODS 1976) usando um fator de transformaccedilatildeo igual agrave 200
counts (mVs)-1 deste modo temos a atividade EMG durante contraccedilatildeo excecircntrica
(EMGneg) concecircntrica (EMGpos) e isomeacutetrica (EMGiso) em counts Os equivalentes
metaboacutelicos satildeo obtidos atraveacutes de equaccedilotildees de regressatildeo linear criadas no
presente estudo usando dados experimentais de Bigland e Ritchie (1976) como
segue
VO2neg (ml) = 00015 EMGneg + 03353 Eq 27
VO2 pos(ml) = 00042 EMGpos + 01493 Eq 28
(ml) = 00042 EMGiso + 01493 Eq 29 VO2iso
EmgCosttheor (J m) = 201[(VO2 iso1 + VO2 iso 2 + VO2 iso16) + (VO2 neg 1 + VO2 neg 2 + VO2 neg 16) +
(VO2 pos1 + VO2 pos 2 + VO2 pos16)] CP-1 Eq 210
onde EmgCosttheor eacute o custo EMG teoacuterico O somatoacuterio dos dispecircndios energeacuteticos
dados em ml de O2 foram convertidos para Joules (J) usando um equivalente
41
energeacutetico de 201 Jml-1 (BLAXTER 1989) e apoacutes foram divididos por CP (conforme
equaccedilatildeo 210) Nesta abordagem teoacuterica entende-se o EmgCosttheor como um custo
miacutenimo energeacutetico devido agrave notoacuteria impossibilidade de obter a totalidade da ativaccedilatildeo
EMG e consequentemente do custo energeacutetico da locomoccedilatildeo Mais do que isso o
modelo procura compreender as determinantes da velocidade oacutetima de caminhada
nas inclinaccedilotildees
222 Testando o modelo
Um homem adulto sem histoacuteria de lesotildees no sistema muacutesculo-esqueleacutetico
realizou caminhadas de 2 minutos sobre uma esteira (WOODWAY Usa) nas
velocidades de 2 3 4 5 6 e 7 kmh-1 e nas inclinaccedilotildees de 0 5 10 e 15 O uso
das velocidades 6 ou 7 kmh-1 foram escolhidas em funccedilatildeo do Nuacutemero de Froude
(Fr) O valor maacuteximo de Fr foi o equivalente agrave velocidade espontacircnea de transiccedilatildeo
(aproximadamente 05 no plano MINETTI et al 1994) O uso do Fr eacute baseado da
teoria das similaridades dinacircmicas Esta teoria afirma que dois animais
geometricamente similares (como no caso do presente estudo) deslocam-se
tambeacutem de modo similar quando o movimento eacute multiplicado por fatores
relacionados ao tempo dimensotildees lineares e forccedilas (ver ALEXANDER 2005)
Fr = Vf 2 gL Eq 211
onde Vf eacute velocidade de progressatildeo em ms-1 g eacute aceleraccedilatildeo gravitacional (g) (981
ms-2) e L eacute um comprimento corporal conhecido (no presente estudo foi utilizado o
comprimento de membros inferiores em m)
Coleta de dados
O voluntaacuterio foi informado do objetivo do estudo dos riscos e eventuais
desconfortos e assinou um termo de consentimento
O indiviacuteduo estava vestido com roupas apropriadas para caminhada A coleta
de dados foi realizada em inclinaccedilotildees de 0 5 10 e 15 nas velocidades de 2 3 4
5 6 7 kmh-1 para cada inclinaccedilatildeo A atividade EMG de dezesseis muacutesculos foi
42
analisada (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis deltoideus anterior trapezius ascendens gluteus
maximus gluteus medius rectus femuralis vastus lateralis biceps femuralis caput
longus tibialis anterior e gastrocnemius lateralis) usando um eletromioacutegrafo portaacutetil
(EMGpocket Elite System Itaacutelia)
Para a preparaccedilatildeo do local e colocaccedilatildeo dos eletrodos de superfiacutecie bipolares
foram observadas as orientaccedilotildees da Seniam (FRERIKS et al 1991)
Simultaneamente ao registro EMG sinais advindos de seis sensores de pressatildeo
(footswitches) trecircs em cada peacute (regiatildeo do calcanhar quinto e primeiro metatarsos
inferiores) foram registrados no eletromiograacutefo portaacutetil Os sinais EMGrsquos foram preacuteshy
amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um niacutevel de ruiacutedo menor do
que 1 mV rms e filtrados por um filtro do tipo Butterworth (50-450 Hz terceira
ordem) A frequumlecircncia de amostragem da EMG e dos sensores de pressatildeo foi de
1000 Hz
Foram coletadas a massa e estatura corporal e comprimento de membro
inferior As dobras cutacircneas tambeacutem foram coletadas antes dos testes usando um
plicocircmetro (The body calliper CA Usa)
Um possiacutevel efeito de fadiga no sinal EMG foi controlado repetindo o primeiro
teste Com diferenccedilas maiores de 10 entre a integral EMG dos muacutesculos
analisados do primeiro e uacuteltimo teste a coleta seria descartada poreacutem a diferenccedila
foi menor do que este limite
23 Resultados
231 Variaacuteveis espaccedilos-temporais
As variaacuteveis espaccedilos-temporais da caminhada em diferentes velocidades e
diferentes inclinaccedilotildees satildeo apresentadas na tabela 21 O CP e a FP aumentam com
o aumento da velocidade poreacutem natildeo com o aumento da inclinaccedilatildeo O DF eacute maior na
velocidade oacutetima de locomoccedilatildeo nas inclinaccedilotildees (10 e 15) enquanto que apresenta
uma relaccedilatildeo inversa com Vf nas inclinaccedilotildees mais baixas (0 e 5)
43
232 Atividade EMG
A atividade EMG dos muacutesculos posturais (erector spinae longissimus erector
spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis trapezius ascendens) e
dos muacutesculos propulsores (gluteus maximus gluteus medius rectus femoralis
vastus lateralis deltoideus anterior biceps femoralis caput longus tibialis anterior e
gastrocnemius lateralis) eacute apresentada nas figuras 23 e 24 Os resultados do
presente estudo referente ao comportamento da atividade EMG durante caminhada
no plano satildeo semelhantes agrave literatura tanto em relaccedilatildeo aos muacutesculos propulsores
(LAY et al 2007 NYMARK et al 2005) quanto para os muacutesculos posturais (WHITE
e MCNAIR 2002 DEN OTTER et al 2004 LAMOTH et al 2006)
De um modo geral o sinal EMG em funccedilatildeo do percentual do ciclo (portanto
independente da distacircncia percorrida) aumentou conforme o aumento da velocidade
e inclinaccedilatildeo Observa-se tambeacutem um aumento no offset nas maiores inclinaccedilotildees
(veja figuras 23 e 24)
Tabela 21 Valores meacutedios e desvios-padratildeo (dp) de frequumlecircncia de passada (FP)
comprimento de passada (CP) tempo de fase aeacuterea (ta) tempo de contato (tc)e
duty factor (DF) nas diferentes velocidades (Vf) em diferentes inclinaccedilotildees do
terreno
0
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0518 0022 1074 0044 0706 0039 1227 0087 064
3 0660 0017 1263 0032 0604 0030 0912 0042 060
4 0779 0013 1426 0025 0541 0023 0743 0028 058
5 0879 0010 1580 0018 0492 0022 0646 0024 057
6 0970 0009 1719 0015 0446 0012 0586 0014 057
7 1061 0022 1834 0042 0415 0010 0528 0024 056
5
44
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0504 0026 2210 0056 0656 0054 1334 0089 067
3 0640 0015 2606 0030 0635 0033 0930 0048 059
4 0797 0013 2790 0023 0526 0017 0729 0028 058
5 0895 0008 3104 0014 0478 0017 0639 0020 057
6 1002 0009 3326 0016 0426 0009 0572 0014 057
7 1081 0015 3600 0025 0400 0007 0525 0014 057
10
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0302 0000 3674 0000 1309 0090 1998 0090 060
3 0262 0013 3182 0151 1216 0094 2602 0174 068
4 0300 0007 3699 0085 1229 0086 2101 0114 063
5
6 0495 0006 3300 0036 0854 0021 1166 0028 058
7 0556 0008 3429 0015 0775 0022 1023 0026 057
15
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0275 0022 3041 0216 1282 0079 2368 0255 065
3 0319 0011 3492 0122 1208 0074 1936 0121 062
4 0399 0007 3482 0059 1497 0046 1011 0040 040
5 0450 0008 3703 0068 0919 0041 1302 0060 059
6 0524 0009 3711 0064 0808 0026 1101 0035 058
7 0597 0012 3257 0069 0721 0024 0954 0037 057
O maior pico de ativaccedilatildeo EMG entre os muacutesculos propulsores foi do tibialis
anterior com valor de 73 mV agrave 7 kmh-1 agrave 15 enquanto que para os muacutesculos
posturais foi do trapezius ascendens com 34 mV tambeacutem agrave 7 kmh-1 agrave 15
erector
spinae
longissimus
erector
spinae
iliocostalis
trapezius
descendens
latissimus
dorsis
obliquus
externus
abdominis
obliquus
internus
abdominis
rectus
abdominis
deltoideus
anterior
45
0 5 10 15
Figura 2 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
trapezius
ascenden
gluteus
maximus
gluteus
medius
rectus
femoralis
vastus
lateralis
biceps
femoralis
caput
tibialis
anterior
gastrocnemius
lateralis
46
0 5 10 15
Figura 24
47
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
com o tempo de passada normalizado em percentual do ciclo O 0-100 representa
o momento de contato com o solo As cores indicam a velocidade de caminhada (de
2 agrave 7 kmh-1) Cada muacutesculo eacute representado nas linhas e em cada coluna eacute
apresentada a atividade EMG por inclinaccedilatildeo
A ativaccedilatildeo EMG parece seguir um padratildeo bem definido com exceccedilatildeo do
trapezius descendens obliquus internus abdominis onde picos de ativaccedilotildees
aparecem apoacutes os 3 kmh-1 seguindo um comportamento de aumento com o
acreacutescimo da inclinaccedilatildeo e no muacutesculo deltoideus anterior no qual ateacute a velocidade
de 5 kmh-1 o pico maior se apresenta no final da fase de apoio enquanto que nas
velocidades de 6 e 7 kmh-1 o pico passa a se situar na fase aeacuterea O uacutenico muacutesculo
analisado neste estudo que apresenta um comportamento diferente entre as
inclinaccedilotildees eacute o rectus femoralis onde nas inclinaccedilotildees 0 5 e 10 os picos aparecem
apenas nas velocidades raacutepidas enquanto que na inclinaccedilatildeo de 15 o pico eacute visiacutevel
logo na velocidade de 2 kmh-1
Poreacutem quando analisamos a quantidade de ativaccedilatildeo por distacircncia percorrida
ou seja o custo EMG os resultados mudam
233 Custo EMG
A quantidade de atividade EMG calculada atraveacutes da abordagem
experimental eacute apresentada na figura 25 Durante a caminhada no plano (primeira
linha da figura 25) eacute possiacutevel observar um miacutenimo de ativaccedilatildeo no somatoacuterio total
devido principalmente agrave ativaccedilatildeo durante a fase aeacuterea e ao offset Este miacutenimo
acontece tambeacutem na inclinaccedilatildeo a 10 de inclinaccedilatildeo mas a 5 e a 15 a
quantidade de ativaccedilatildeo parece diminuir conforme o aumento da Vf
A figura 26 apresenta os valores de custo EMG calculado atraveacutes da
abordagem teoacuterica Observa-se um miacutenimo a 0 e 15 de inclinaccedilatildeo
Para nosso conhecimento natildeo existem dados de atividade EMG de muacutesculo
posturais durante caminhada nas inclinaccedilotildees A quantidade de ativaccedilatildeo EMG por
passada dos muacutesculos posturais e propulsores parecem aumentar com o acreacutescimo
da velocidade e inclinaccedilatildeo
48
49
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
24 Discussatildeo
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular
Inicialmente proposto para a corrida de quadruacutepedes (KRAM e TAYLOR
1990) e apoacutes para a corrida de biacutepedes (ROBERTS et al 1998 ROBERTS et al
1997) corrida para traacutes (WRIGHT e WEYAND 2001) e caminhada humana
(GRIFFIN et al 2003) a teoria do custo energeacutetico da geraccedilatildeo de forccedila foi formulada
a partir dos resultados que para animais com grande variaccedilatildeo de massa correndo
em diversas velocidades o custo mecacircnico natildeo se correlacionava bem com o custo
metaboacutelico da locomoccedilatildeo terrestre (HEGLUND et al 1982b TAYLOR 1985)
0 5
10
15
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
50
Uma justificativa para explicar esse resultado se referia ao fato de que o
muacutesculo durante a fase de apoio na corrida contraia isometricamente deste modo
natildeo realizando trabalho
Recentemente foi observado que esse comportamento acontece tambeacutem no
muacutesculo gastrocnemius medialis durante a caminhada (FUKUNAGA et al 2001)
Poreacutem na corrida este comportamento sucede apenas em velocidades maiores de
13 kmh-1 em adultos (CAVAGNA 2006) e natildeo eacute visiacutevel em idosos mesmo em
velocidades maacuteximas (estudo sobre a mecacircnica da corrida em idosos Capiacutetulo 3)
Ainda assim a teoria afirma que o custo metaboacutelico despendido pelos muacutesculos eacute
proporcional agrave integral forccedila de reaccedilatildeo do solo-tempo multiplicada por um fator
proporcional agrave taxa de ciclos de pontes cruzadas no muacutesculo-esqueleacutetico
A proposiccedilatildeo do Custo Energeacutetico da Geraccedilatildeo de Forccedila assume que i) a
maior parte da forccedila exercida pelos muacutesculos acontece em oposiccedilatildeo agrave gravidade ii)
uma unidade de volume muscular ativado exerce uma respectiva forccedila no solo
independente da velocidade ou tamanho do animal iii) originalmente foi presumido
que os muacutesculos agiam em similares amplitudes da relaccedilatildeo forccedila-velocidade [esta
pressuposiccedilatildeo foi recentemente interpretada em um interessante modelo
biomecacircnico proposto por BLANCO e GAMBINI 2006) como independente para a
determinaccedilatildeo das relaccedilotildees encontradas por KRAM e TAYLOR 1990)] portanto eacute
esperado que animais pequenos que realizam o tempo de contato menor usem
fibras glicoliacuteticas em maior quantidade e consequentemente tenham um maior
dispecircndio energeacutetico e assim explica-se o fato de que animais pequenos despendem
mais energia para transportar 1 N de forccedila por km percorrido do que animais
maiores (HOYT e TAYLOR 1981) Portanto o custo energeacutetico da locomoccedilatildeo
segundo a presente teoria eacute determinado pelo custo de suportar o peso corporal e o
tempo disponiacutevel para exercer forccedila contra o solo
Ainda assim a teoria apresenta seacuterias restriccedilotildees e parece funcionar em
situaccedilotildees particulares A formulaccedilatildeo apresentada por Kram e Taylor indica como
insignificante o dispecircndio energeacutetico devido aos movimentos de balanccedilo dos
membros quando natildeo estatildeo em apoio Vaacuterias evidecircncias em aves (MARSH et al
2004) e em humanos (DOKE et al 2005 GOTTSCHALL e KRAM 2005 DOKE e
KUO 2007) demonstram que este dispecircndio natildeo eacute despreziacutevel Outra criacutetica
levantada pela literatura (ALEXANDER 1991 HEGLUND 2004) se refere agrave
desconsideraccedilatildeo do trabalho variaacutevel fundamental na Termodinacircmica para explicar
51
a energeacutetica da locomoccedilatildeo Forccedila natildeo eacute trabalho nem mesmo eacute energia portanto
ela isoladamente natildeo possibilita uma resposta final sobre a energia A hipoacutetese do
custo de ativaccedilatildeo muscular apresentado aqui natildeo despreza o dispecircndio energeacutetico
dos membros superiores e aleacutem disso considera as eficiecircncias dos diferentes tipos
de trabalho mecacircnico quando insere os equivalentes metaboacutelicos da ativaccedilatildeo
muscular (abordagem teoacuterica Metodologia)
242 Sobre o meacutetodo
Algumas consideraccedilotildees importantes podem ser feitas sobre a teacutecnica da
EMG Comumente esta teacutecnica eacute usada nos campos da biomecacircnica e biologia
experimental a fim de determinar a quantidade de ativaccedilatildeo muscular e os periacuteodos
em que elas acontecem poreacutem neste estudo pretendeu-se usar a determinada
teacutecnica a fim de oferecer uma informaccedilatildeo global da ativaccedilatildeo de tal modo que
pudesse ter uma correspondecircncia com a ativaccedilatildeo EMG de todo o corpo incluindo os
muacutesculos posturais que natildeo geram trabalho muscular importante mas segundo a
hipoacutetese central do presente estudo participam de forma decisiva como uma
determinante da caminhada humana
Assim esta abordagem permite inferir sobre os mecanismos principais da
locomoccedilatildeo e permite explicar a biomecacircnica da locomoccedilatildeo especialmente referente
agrave energeacutetica da caminhada humana Aleacutem de auxiliar na explicaccedilatildeo da velocidade
oacutetima no plano o custo EMG parece dar um indicativo sobre a energeacutetica em
situaccedilotildees criacuteticas com restriccedilotildees do ambiente (inclinaccedilatildeo) e situaccedilotildees natildeo usuais
(velocidades de progressatildeo baixas)
Nestas situaccedilotildees eacute provaacutevel que dois mecanismos estejam relacionados a fim
de justificar a hipoacutetese do custo EMG i) a estabilidade dinacircmica prejudicada e ii) o
custo da co-contraccedilatildeo Os dois mecanismos parecem estar diretamente ligados ao
maior custo EMG e consequumlentemente ao custo energeacutetico da caminhada
Evidecircncias experimentais datildeo suporte para esta inferecircncia Durante caminhada
realizada para fins de lazer em velocidades muito baixas ou mesmo em marchas
patoloacutegicas foi encontrado um aumento na atividade EMG em comparaccedilatildeo com a
velocidade auto-selecionada correspondente agrave velocidade oacutetima Os achados
mostram um aumento de ativaccedilatildeo EMG com o aumento da Vf mesmo em muacutesculos
do tronco durante locomoccedilatildeo no plano (ANDERS et al 2007) Novamente o foco do
52
presente estudo foi referente agrave quantidade de ativaccedilatildeo em funccedilatildeo da distacircncia
percorrida enquanto que nestes estudos a variaacutevel em questatildeo foi avaliada em
funccedilatildeo da passada Aleacutem disso aumentos foram encontrados nos valores de coshy
contraccedilatildeo durante velocidades muito baixas (020 e 030 ms-1) em comparaccedilatildeo com
a velocidade auto-selecionada (NYMARK et al 2005)
As relaccedilotildees entre estabilidade articular e quantidade de ativaccedilatildeo geral
(ANDERSON e BEHM 2004) e estabilidade corporal e ativaccedilatildeo de muacutesculos
localizados especificamente no tronco (GARDNER-MORSE e STOKES 1998
GRANATA e MARRAS 2000 GRANATA e ORISHIMO 2001) satildeo bem
estabelecidas na literatura inclusive indicando um prejuiacutezo maior na ativaccedilatildeo EMG
durante perturbaccedilotildees agrave estabilidade com contraccedilotildees concecircntricas do que
excecircntricas e isomeacutetricas Um possiacutevel modo de testar estes mecanismos poderia
ser atraveacutes da perturbaccedilatildeo da estabilidade e os efeitos na ativaccedilatildeo EMG durante
caminhada (por exemplo em terrenos irregulares)
Outro achado importante que daacute sustentaccedilatildeo agrave hipoacutetese do custo EMG da
caminhada humana eacute observado por PRILUTSKY e GREGOR 2001) onde a
atividade EMG de muacutesculos propulsores (rectus femoralis gastrocnemius medialis
vastus medialis biceps femoralis gluteus maximus e soleus) foi maior na corrida do
que na caminhada em velocidades abaixo da velocidade de transiccedilatildeo entre
caminhada e corrida enquanto que durante velocidades acima da de transiccedilatildeo os
muacutesculos propulsores apresentam uma maior atividade EMG na caminhada do que
na corrida o que coincide com o dispecircndio metaboacutelico nestas situaccedilotildees
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia
A alta especializaccedilatildeo da locomoccedilatildeo suportando cargas em regiotildees inoacutespitas da
terra indica um desafio para o entendimento dos fundamentos da mecacircnica e
energeacutetica da locomoccedilatildeo humana Mundialmente famosos satildeo os achados sobre a
economia de locomoccedilatildeo de mulheres africanas que transportam cargas sobre a
cabeccedila de ateacute 70 da massa corporal sem um maior custo mecacircnico devido a um
ajuste aperfeiccediloado das curvas de energia potencial e cineacutetica do centro de massa
colaborando para um mais alto R (percentual de reconversatildeo entre energia cineacutetica
53
e potencial durante um ciclo de passada) (MALOIY et al 1986) Evidecircncias de um
custo metaboacutelico relativamente baixo da locomoccedilatildeo no plano foram tambeacutem
encontradas em carregadores Nepaleses (BASTIEN et al 2005) Poreacutem
diferentemente das condiccedilotildees geograacuteficas nas quais as mulheres africanas realizam
suas atividades locomotoras o espaccedilo geograacutefico dos carregadores Nepaleses eacute
caracterizado por terrenos inclinados Em um estudo recente Minetti e
colaboradores (MINETTI et al 2006) apresentaram as primeiras informaccedilotildees sobre
eficiecircncia mecacircnica (potecircncia mecacircnica desenvolvida dividida pela potecircncia
metaboacutelica despendida) de carregadores Nepaleses em inclinaccedilotildees extremas
especialmente da regiatildeo do Himalaia indicando uma eficiecircncia aproximadamente
33 maior do que a de montanhistas Caucasianos De fato os carregadores
Nepaleses apresentam caracteriacutesticas notaacuteveis do ponto de vista energeacutetico
Transportam desde a infacircncia cargas geralmente entre 80 e 90 da massa corporal
(utilizando-se de uma faixa posta agrave testa no qual eacute ligada a uma cesta de vime nas
costas) em terrenos acidentados com inclinaccedilotildees de ateacute 50 em situaccedilatildeo de
hipoacutexia de altitude (MALVILLE et al 2001)
A hipoacutetese da transferecircncia eficiente entre energia cineacutetica e potencial do
centro de massa corporal natildeo se sustenta pois em inclinaccedilotildees maiores de 15 e ndash
15 as mudanccedilas de energia potencial ocorrem apenas positivamente e
negativamente respectivamente (MINETTI et al 1993) Portanto sem a
possibilidade de transferecircncia de energia por via pendular e tendo em consideraccedilatildeo
a menor variabilidade de oscilaccedilatildeo do tronco dos Nepaleses encontrada por
MINETTI et al 2006) apresentamos uma hipoacutetese de que o custo de ativaccedilatildeo
muscular (ou custo EMG) da locomoccedilatildeo eacute menor no grupo de carregadores do
Himalaia do que nos montanhistas Caucasianos Devido agrave falta de informaccedilotildees
espaccedilos-temporais da locomoccedilatildeo com carga em grandes inclinaccedilotildees foram
analisados estes paracircmetros da passada a fim de auxiliar no entendimento da
energeacutetica e mecacircnica da locomoccedilatildeo em planos inclinados
251 Materiais e meacutetodos
Cinco carregadores Nepaleses (idade 23 plusmn 9 anos estatura 163 plusmn 003 m
massa corporal 546 plusmn 62 kg) e cinco montanhistas Caucasianos (idade 32 plusmn 3
anos estatura 176 plusmn 007 m massa corporal 742 plusmn 67 kg) selecionados por
54
voluntariedade realizaram o experimento em Namche-Bazar regiatildeo do vale
Khumbu no Parque Nacional de Sagarmatildethatilde (Everest em nepalecircs) O experimento
consistia de caminhada sem e com carga (40 kg) em situaccedilatildeo de subida e descida
com uma inclinaccedilatildeo meacutedia de 22 em um ritmo que poderiam suportar por muitas
horas Os Nepaleses utilizavam a usual faixa na testa onde era ligada com a cesta
nas costas onde suportavam o peso enquanto que os Caucasianos usavam uma
mochila de alpinismo O trecho foi escolhido de modo a assegurar que as trocas de
energia fossem principalmente devidas as mudanccedilas de energia potencial sem a
possibilidade de transferecircncia entre energia potencial e cineacutetica dentro de uma
passada (MINETTI et al 2006) Antes de iniciar os experimentos eram realizadas
medidas de dobras cutacircneas nas regiotildees de colocaccedilatildeo de eletrodos
O set-up experimental incluiu um eletromioacutegrafo portaacutetil (PocketEmg BTS
Milatildeo Itaacutelia) um analisador de gases portaacutetil (K4b2 Cosmed Roma Itaacutelia) um GPS
(GPSmAP76CS) e lactiacutemetro (Accutrend Roche Diagnostic Basel Suiacuteccedila) Foram
analisados a atividade EMG de quatorze muacutesculos (erector spinae longissimus
erector spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis deltoideus anterior
trapezius ascendens gluteus maximus gluteus medius biceps femuralis caput
longus vastus lateralis e gastrocnemius lateralis) Para a preparaccedilatildeo do local e
colocaccedilatildeo dos eletrodos de superfiacutecie bipolares foram seguidas as orientaccedilotildees da
Seniam (FRERIKS et al 1991) Simultaneamente ao registro EMG sinais advindos
de seis sensores de pressatildeo (footswitches) trecircs em cada peacute (regiatildeo do calcanhar
primeiro e quinto metatarso inferior) eram registrados no eletromiograacutefo portaacutetil Os
sinais EMGrsquos foram preacute-amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um
niacutevel de ruiacutedo menor do que 1 μV rms e filtrados por um filtro do tipo Butterworth (50shy
450 Hz terceira ordem) A frequumlecircncia de amostragem da EMG e dos sensores de
pressatildeo foi de 1000 Hz
O custo metaboacutelico foi calculado segundo procedimentos do estudo anterior
(MINETTI et al 2006) O sinal EMG foi retificado e integrado e os valores meacutedios da
atividade EMG de todo o trecho foram subtraiacutedos pelos respectivos valores da
situaccedilatildeo em repouso (idem ao consumo de O2) e divididos pela velocidade meacutedia
(Vf ) A potecircncia EMG geral foi obtida a partir do somatoacuterio dos quatorze muacutesculos
ponderado pelos respectivos volumes musculares (YAMAGUCHI et al 1991) e
55
dobra cutacircnea respectiva Determinou-se o Custo EMG atraveacutes do procedimento
experimental
Para fins de comparaccedilatildeo das Vf rsquos de locomoccedilatildeo usamos o Nf baseado na
teoria das similaridades dinacircmicas (sub-seccedilatildeo 222) para normalizar a Vf No caso
presente ao inveacutes de utilizar o comprimento de membro inferior utilizamos a
estatura da seguinte forma
Vf 2
Fr = Eq 212 g estatura
Tendo em consideraccedilatildeo que a estatura meacutedia dos Caucasianos eacute maior (013
m) e que as Vf rsquos de subida e descida dos Caucasianos com carga foram 35 e 17
menores do que as dos Nepaleses deste modo os Frrsquos dos Caucasianos para os
mesmos trechos foram 40 e 24 menores do que dos Nepaleses
Os procedimentos para anaacutelise dos dados de posiccedilatildeo e Vf oriundos do GPS
satildeo os mesmos de MINETTI et al 2006) A potecircncia mecacircnica vertical (PMV) foi
calculada como segue
g h mtotPMV = Eq 213 t
onde Ah eacute variaccedilatildeo de altura mtot eacute a massa total (massa corporal + carga) g eacute
aceleraccedilatildeo gravitacional e At eacute o tempo de locomoccedilatildeo
Uma seacuterie de programas computacionais (Labview versatildeo 71 National
Instruments Austin USA) foram construiacutedos para o processamento dos dados EMG
GPS e paracircmetros espaccedilos-temporais
Foi utilizado Testes-t de student para amostras independentes para comparar
os paracircmetros espaccedilos-temporais entre Nepaleses e Caucasianos (SPSS para
Windows versatildeo 14 USA)
56
252 Resultados
Variaacuteveis espaccedilos-temporais
O Fr dos Nepaleses foi maior do que as dos Caucasianos em situaccedilatildeo com
carga (plt001) mas sem carga as diferenccedilas diminuem acentuadamente (4 e 23
maiores sem e com carga respectivamente pgt005) O CP e FP dos Nepaleses
foram maiores na subida com carga mas durante a descida com carga apesar da
Vf maior apenas o CP foi maior nos Nepaleses e a FP foi similar (pgt005)
Paracircmetros energeacuteticos
A atividade EMG por unidade de tempo foi similar entre Nepaleses e
Caucasianos Contudo a ativaccedilatildeo EMG total ou seja por unidade de distacircncia
(ldquocustordquo EMG da locomoccedilatildeo) foi notavelmente maior nos Caucasianos na situaccedilatildeo
com carga especialmente na fase de subida (observe a inclinaccedilatildeo das retas na
figura 27)
A atividade EMG tambeacutem foi analisada no domiacutenio da frequumlecircncia para testar
uma possiacutevel diminuiccedilatildeo nos paracircmetros de mediana meacutedia e pico da frequumlecircncia
que pudessem explicar via fadiga neuromuscular (KNAFLITZ e BONATO 1999) o
efeito da carga no aumento da ativaccedilatildeo EMG por distacircncia percorrida nos
Caucasianos (inclinaccedilotildees das retas na figura 27)
Utilizou-se a transformada raacutepida de Fourier com janelamento de 10 segundos
analisando o centro dos bursts de 512 pontos determinados por uma integraccedilatildeo com
janelamento moacutevel Hanning de 50 ms Todavia nenhuma diferenccedila significativa foi
encontrada nos paracircmetros de frequumlecircncia entre os primeiros e uacuteltimos vinte
segundos de experimento (diminuiccedilotildees lt 5)
O notaacutevel desempenho dos Nepaleses na subida com carga eacute confirmado pela
PMV 33 maior do que a dos Caucasianos Embora a Vf e a PMV sejam maiores
nos Nepaleses estes apresentam um custo metaboacutelico 39 menor que os
Caucasianos Esta economia energeacutetica especiacutefica agrave situaccedilatildeo de carga e inclinaccedilatildeo
extrema eacute observada tambeacutem na figura 28 na qual os Caucasianos sem carga
apresentam uma eficiecircncia similar agraves eficiecircncias dos Nepaleses mas com uma baixa
eficiecircncia na situaccedilatildeo com carga
57
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal +
carga) dos carregadores Nepaleses (NEP) e montanhistas Caucasianos
(CAU) em subida (up) e descida (down)
A eficiecircncia menor dos Caucasianos na situaccedilatildeo com carga parece ser
explicada pela quantidade de ativaccedilatildeo muscular A interessante semelhanccedila entre o
custo EMG e o custo energeacutetico (figura 27) demonstram a eficaacutecia do meacutetodo EMG
utilizado no presente estudo a fim de representar uma ativaccedilatildeo muscular geral
durante a locomoccedilatildeo
253 Discussatildeo
A menor ativaccedilatildeo muscular eacute extremamente interessante pois explica de modo
importante o mecanismo da alta eficiecircncia e economia energeacutetica nos Nepaleses
58
Os resultados de potecircncia metaboacutelica e PMV confirmam os achados de
MINETTI et al 2006) Aleacutem disso o custo energeacutetico na situaccedilatildeo sem carga eacute
similar entre Caucasianos e Nepaleses Em outras palavras o desempenho notaacutevel
dos Nepaleses eacute especiacutefico somente na situaccedilatildeo de subida com carga
000
004
008
012
016
020
024
028
-12 -10 -08 -06 -04 -02 00
efi
ciecirc
nc
ia m
iacutenim
a d
e t
rab
alh
o p
os
itiv
o NEP 0kg
CAU 0kg
NEP 40kg
CAU 40kg
14
15
eficiecircncia miacutenima de trabalho negativo
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da
PMV (positiva ou negativa) pela potecircncia metaboacutelica respectiva
(MINETTI et al 2006) As linhas satildeo as razotildees entre eficiecircncia
muscular positiva e negativa (WOLEDGE et al 1985)
A melhor economia nos Nepaleses durante a subida com carga pode ser
relacionada agraves propriedades mecacircnicas de contraccedilatildeo muscular especificamente agrave
relaccedilatildeo potecircncia-velocidade Tendo em consideraccedilatildeo que os Caucasianos
realizaram o trecho de subida com carga em uma velocidade de progressatildeo 33
menor que os Nepaleses pode-se inferir que os Caucasianos realizaram a atividade
em uma regiatildeo menor de produccedilatildeo de potecircncia devido agrave relativa baixa velocidade
que por sua vez corresponde agrave uma zona de baixa eficiecircncia Outro fator secundaacuterio
pode ser a aclimataccedilatildeo de longo prazo destes indiviacuteduos agrave hipoacutexia de altitude
favorecendo o transporte e utilizaccedilatildeo de O2 no muacutesculo esqueleacutetico
59
Surpreendentemente a ativaccedilatildeo EMG por unidade de tempo eacute semelhante
entre Nepaleses e Caucasianos e por consequumlecircncia a ativaccedilatildeo total eacute menor nos
Nepaleses
Pode-se afirmar tambeacutem que a razatildeo entre ativaccedilatildeo EMG na subida e descida
independente da massa total eacute em torno de 15 e 2 corroborando com os dados de
BIGLAND-RITCHIE e WOODS 1976)
Em conclusatildeo a hipoacutetese da ativaccedilatildeo muscular econocircmica nos carregadores
Nepaleses eacute confirmada Os paracircmetros espaccedilos-temporais da passada parecem
natildeo justificar o menor custo energeacutetico nos Nepaleses O custo EMG foi maior nos
Caucasianos especialmente durante a ascensatildeo com carga indicando uma
justificativa a um achado anterior de maior estabilidade no tronco em Nepaleses
(MINETTI et al 2006)
60
3 MECAcircNICA DA CORRIDA DE IDOSOS
31 Introduccedilatildeo
Nos idosos a forccedila muscular eacute reduzida Isso tem sido atribuiacutedo
principalmente a atrofia da massa muscular com a reduccedilatildeo da aacuterea de sua secccedilatildeo
transversal (DOHERTY 2003 FRONTERA et al 2000 TRAPPE et al 2003) e
tambeacutem agrave deficiecircncia na produccedilatildeo intriacutenseca de forccedila no niacutevel da interaccedilatildeo entre
actina e miosina (PHILLIPS et al 1991 FRONTERA et al 2000 LOWE et al 2001
MORSE et al 2005) Experimentos realizados tanto em espeacutecimes isoladas de
muacutesculo (OCHALA et al 2006 PHILLIPS et al 1991) quanto in vivo em humanos
(KLASS et al 2005 PORTER et al 1997 POUSSON et al 2001 VANDERVOORT
et al 1990) mostram que a forccedila que um muacutesculo exerce ao alongar-se
(frequumlentemente chamada de contraccedilatildeo excecircntrica) tem reduccedilatildeo menor devido ao
processo de envelhecimento que a forccedila desenvolvida durante contraccedilatildeo isomeacutetrica
e durante encurtamento (frequumlentemente chamada de contraccedilatildeo concecircntrica)
O efeito das mudanccedilas das propriedades de contraccedilatildeo do muacutesculo no
trabalho mecacircnico realizado durante locomoccedilatildeo natildeo eacute conhecido O trabalho
mecacircnico realizado ao caminhar natildeo tem sido considerado significativamente maior
em indiviacuteduos idosos apesar de um maior dispecircndio energeacutetico resultando em uma
61
menor eficiecircncia mecacircnica atribuiacuteda agrave co-contraccedilatildeo de muacutesculos antagonistas
(MIAN et al 2006)
O mecanismo elaacutestico da corrida contraacuterio ao mecanismo pendular da
caminhada necessita de uma intervenccedilatildeo muscular muito maior para manter o
movimento do CM Um ciclo alongamento-encurtamento das unidades muacutesculoshy
tendiacuteneas ocorre em cada passo da corrida com grande entrada e saiacuteda de energia
mecacircnica para dentro e para fora das unidades muacutesculo-tendiacuteneas A mecacircnica da
corrida assim mais que a caminhada pode revelar mudanccedilas no trabalho mecacircnico
realizado em cada passo devido ao desempenho muscular reduzido nos idosos
Aleacutem disso uma assimetria contato-despregue ocorre durante a corrida
surgindo do fato que as unidades muacutesculo-tendiacuteneas contraacuterio a uma mola sem
atrito tecircm comportamento diferente durante alongamento e encurtamento
Recentemente foi observado que a assimetria contato-despregue eacute uma
consequumlecircncia da relaccedilatildeo forccedila-velocidade do muacutesculo e eacute maior quanto maior for a
mudanccedila no comprimento do muacutesculo em relaccedilatildeo agravequela do tendatildeo dentro das
unidades muacutesculo-tendiacuteneas (CAVAGNA 2006)
O trabalho mecacircnico realizado durante a corrida em idosos e sua assimetria
contato-despregue para nosso conhecimento ainda natildeo satildeo determinados
Neste estudo foi calculado o trabalho mecacircnico externo realizado para manter
o movimento do CM e o tempo das trocas de energia mecacircnica durante as fases de
trabalho negativo e positivo do bouncing do corpo em indiviacuteduos idosos correndo
em diferentes velocidades Os resultados obtidos em indiviacuteduos idosos satildeo
comparados agravequeles obtidos em indiviacuteduos jovens A hipoacutetese apresentada eacute que o
aumento da discrepacircncia em idosos entre o desenvolvimento da forccedila durante
alongamento e durante encurtamento se operacional durante a corrida iraacute aumentar
a assimetria contato-despregue do aparente bouncing do corpo em relaccedilatildeo agravequele
de indiviacuteduos jovens
32 Materiais e Meacutetodos
321 Amostra e procedimento experimental
Os experimentos foram realizados em oito indiviacuteduos idosos (homens idade
62
736plusmn55 anos altura 172plusmn006 m massa 711plusmn92 kg media plusmn dp) e oito indiviacuteduos
jovens (6 homens e duas mulheres idade 208plusmn16 anos altura 176plusmn008 m massa
634plusmn100 kg) Trecircs indiviacuteduos em cada grupo satildeo treinados (volume miacutenimo
semanal de corrida de 40 km) enquanto cinco satildeo sedentaacuterios saudaacuteveis Os
resultados relatados neste estudo satildeo uma meacutedia dos dados obtidos de todos os
sujeitos em cada grupo independente de seu treinamento Resultados similares
poreacutem foram obtidos comparando os trecircs indiviacuteduos idosos treinados com os trecircs
indiviacuteduos jovens do sexo masculino natildeo treinados de acordo com os achados que
o efeito da idade nas unidades muacutesculo-tendiacuteneas satildeo similares em corredores e
indiviacuteduos natildeo-ativos (KARAMANIDIS e ARAMPATZIS 2005) Consentimento
informado escrito foi obtido de cada indiviacuteduo Os estudos foram realizados de
acordo com a Declaraccedilatildeo de Helsinque
Os indiviacuteduos correram de um lado para o outro ao longo de uma pista de
corrida de 50 metros a qual foi incorporada no niacutevel do solo 8 plataformas de forccedila
de 05 m 05 m em sequumlecircncia totalizando um espaccedilo contiacutenuo de 4 m 05 m
sensiacutevel agrave forccedila aplicada na plataforma nas direccedilotildees anterior e vertical A uacutenica
instruccedilatildeo dada a cada indiviacuteduo foi para correr normalmente em uma velocidade
constante mensurada por duas fotoceacutelulas posicionadas distantes de 1 agrave 3 m
(dependendo da velocidade) ao longo do lado da plataforma Mais caracteriacutesticas da
plataforma de forccedila satildeo descritas por CAVAGNA (1975)
O procedimento do experimento consistiu em medir a forccedila aplicada no solo
no plano sagital durante corrida em diferentes velocidades Os dados foram
adquiridos em um microcomputador a uma taxa de 500 Hz por canal de i) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo anterior (Ff) ii) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo vertical (Fv) e iii) sinal das
fotoceacutelulas A aquisiccedilatildeo e anaacutelise dos dados foram realizadas atraveacutes de um
conversor analoacutegico-digital (National Instruments Austin TX USA) e um software
feito em LabView para Macintosh (versatildeo 71)
Foram feitas anaacutelises em um total de 124 corridas com velocidades meacutedias
entre 3 e 17 kmh-1 para os idosos e 229 corridas entre 3 e 21 kmh-1 para os jovens
O nuacutemero menor de execuccedilotildees realizado pelos idosos foi para diminuir riscos de
fadiga neste grupo
63
322 Dos registros da plataforma ao trabalho externo
O processo usado para calcular as mudanccedilas da energia mecacircnica do CM do
corpo derivadas das forccedilas de reaccedilatildeo do solo eacute descrito em detalhes por CAVAGNA
1975) Em resumo somente o movimento no plano sagital foi considerado para
calcular a energia mecacircnica do CM A energia cineacutetica de translaccedilatildeo lateral do CM
foi ignorada O sinal da plataforma de forccedila sem carga foi mensurado imediatamente
antes de cada corrida e subtraiacutedo dos registros da Fv e da Ff de modo a computar
uma possiacutevel mudanccedila da linha de base da plataforma Somente o grupo de
registros da Fv e da Ff compreendida entre os cruzamentos das fotoceacutelulas foi
utilizado para anaacutelises subsequumlentes As velocidades vertical e anterior do CM foram
obtidas como segue
Antes do todas as aquisiccedilotildees a plataforma era calibrada com cargas
conhecidas no sentido vertical e horizontal acircntero-posterior
A forccedila vertical meacutedia mensurada pela plataforma de forccedila Fvplate em um
intervalo de tempo correspondente a um nuacutemero de quadros nf em um determinado
nuacutemero de passos T selecionados entre picos (ou vales) nos registros de forccedila
devem igualar ao PC mensurado com uma balanccedila Fvscale
IfirstPeakorValley
SecondPeakorValleyF = Fvi
= F Eq 31 vplate vscalenf
Fvplate foi entatildeo subtraiacuteda da coluna de dados Fv e o resultado (Fv-Fvplate)M (M
eacute a massa corporal) foi integrado no tempo para obter as mudanccedilas nos registros da
velocidade vertical para o intervalo de tempo entre os cruzamentos das fotoceacutelulas
FinalTime AVel = f [(Fv - Fv plate) M]dt Eq 32
InitialTime
Um ou mais passos regulares foram subsequumlentemente escolhidos para
anaacutelise entre dois picos ou vales da curva de velocidade vertical A regularidade dos
passos (drift) foi determinada pela diferenccedila entre incrementos positivos e negativos
agraves mudanccedilas nas velocidades vertical e horizontal divididas pela soma dos
incrementos
64
| V | V | V |I + increments I VincrementsDrift = 100 Eq 33
| V | + | V |I + increments I Vincrements
Durante a corrida no plano os deslocamentos verticais ascendente e
descendente do CM do corpo satildeo em meacutedia iguais durante um nuacutemero inteiro de
passos ie a velocidade vertical meacutedia deve ser nula Baseado nessa consideraccedilatildeo
a aacuterea abaixo das mudanccedilas da velocidade vertical registrada correspondendo ao
intervalo selecionado acima seraacute dividido por nf e o resultado seraacute subtraiacutedo do total
da variaccedilatildeo da velocidade vertical registrada entre os cruzamentos das fotoceacutelulas
para obter os valores instantacircneos positivo (ascendente) e negativo (descendente)
da Vv
nf
f AVv dt
V (t) = i= 0 -AV Eq 34 v nf v
As mudanccedilas na velocidade horizontal foram determinadas pela integraccedilatildeo da
curva FfM durante o tempo entre os cruzamentos das fotoceacutelulas Ltphoto A aacuterea
abaixo dessa variaccedilatildeo de velocidade horizontal foi entatildeo dividida por Ltphoto e o
resultado foi subtraiacutedo do mesmo registro para localizar a velocidade meacutedia de
corrida no traccedilado
Atphoto
AVf (t) = f Ff M dt Eq 35 i= 0
A velocidade meacutedia de corrida mensurada atraveacutes da distacircncia das
fotoceacutelulaLtphoto foi entatildeo somada a seacuterie resultante para obter os valores
instantacircneos de Vf
f AVf dt Vf (t) = + AVf Eq 36
A tphoto
65
A velocidade vertical instantacircnea Vv(t) foi utilizada para calcular a energia
cineacutetica instantacircnea do movimento vertical
Ekv (t) = 05M Vv (t)2 Eq 37
e por integraccedilatildeo o deslocamento vertical do CM Sv(t)
Sv (t) = f Vv (t) dt Eq 38
com a correspondente energia potencial gravitacional
E p (t) = M g Sv (t) Eq 39
A energia cineacutetica horizontal foi calculada como
Ekf (t) = 05M Vf (t)2 Eq 310
a energia cineacutetica translacional total do CM no plano sagital como
(t) Eq 311 Ek (t) = Ekv (t) + Ekf
e a energia mecacircnica translacional do CM no plano sagital como
Ecm(t) = Ekv (t) + Ekf (t) + E p (t) Eq 312
Apoacutes como mencionado acima a seleccedilatildeo foi feita inicialmente entre picos (ou
vales) das mudanccedilas da velocidade vertical os registros foram expandidos para
incluir o vale anterior (ou pico) de Ep(t) ateacute uma imagem clara dos passos a ser
obtidos (figura 31)
Algoritmos foram feitos para calcular o trabalho realizado durante os passos
selecionados entre vales (ou picos) da Ep Wv Wkf e Wext foram calculados com as
amplitudes dos vales ou picos e os valores inicial e final nos registros da Ep(t) Ekf(t)
e Ecm(t) Valores positivos das variaccedilotildees de energia foram considerados como
66
trabalho positivo valores negativos foram considerados como trabalho negativo Em
uma perfeita corrida em velocidade constante no plano a razatildeo entre os valores
absolutos de trabalho positivo e negativo realizados em um nuacutemero inteiro de
passos deve ser igual a um
323 Estimativa do trabalho interno
O trabalho positivo normalizado pela massa e unidade de distacircncia para
acelerar os membros em relaccedilatildeo ao CM do corpo foi estimado para cada corrida
com a equaccedilatildeo
W int ML(J kg-1 m -1) = 014010-200L Vf f Eq 313
onde L eacute o comprimento do passo em metros Vf a velocidade meacutedia de corrida em
metros por segundo e f eacute a frequumlecircncia de passos em Hz (CAVAGNA et al 1997) Os
valores estimados de WintML como uma funccedilatildeo da velocidade em kmh-1 foram
interpolados por um ajuste polinomial de segunda ordem Deve ser salientado que
usando a mesma equaccedilatildeo para calcular Wint nos indiviacuteduos jovens e idosos assume-
se o mesmo movimento dos membros nos dois grupos
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato
Como a energia mecacircnica do CM eacute constante quando o corpo eacute deslocado no
ar (a resistecircncia do ar eacute negligenciada) o tempo aeacutereo foi calculado como o intervalo
de tempo durante o qual
dEcm(t) dt = 0 Eq 314
Como descrito em detalhes em um estudo preacutevio (CAVAGNA 2006) esse
processo pode resultar em uma superestimativa (7) do tempo aeacutereo devido ao
ruiacutedo do registro do dEcm(t)dt A duraccedilatildeo da frenagem tbrake e a duraccedilatildeo da
propulsatildeo tpush foram calculadas como o intervalo de tempo durante o qual o
dEcm(t)dt foi positivo e negativo respectivamente Novamente devido ao ruiacutedo do
67
registro do dEcm(t)dt tbrake eou tpush foi provavelmente em alguns casos
subestimado (5-7 CAVAGNA 2006) O mesmo eacute verdade para os deslocamentos
descendente e ascendente do CM durante contato Scdown e Scup que foram
mensurados nas porccedilotildees descendente e ascendente da curva Ep(t)
respectivamente durante o intervalo de tempo onde dEcm(t)dt eacute negativo e positivo
respectivamente O deslocamento vertical descendente total Svdown e deslocamento
vertical ascendente Svup foram calculados do decreacutescimo e acreacutescimo totais da
curva Ep(t) respectivamente ocorrendo entre dois ou mais picos (ou vales) de Ep
divididos pelo nuacutemero de passos
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio
A forccedila vertical Fv aplicada pelo peacute no solo eacute
= PC + M a Eq 315 Fv v
onde Mb eacute a massa do corpo e av eacute a aceleraccedilatildeo vertical do CM ie o tempo
derivado de sua velocidade vertical Vv Quando a velocidade vertical e Ekv estatildeo no
maacuteximo a derivada eacute nula av=0 e como consequumlecircncia
Fv = PC Eq 316
A localizaccedilatildeo dos picos Ekv alcanccedilados durante os passos (figura 31) foi
entatildeo utilizada para determinar os instantes onde a Fv eacute igual ao PC A localizaccedilatildeo e
as amplitudes de Ep simultacircneo com os picos de Ekv foram utilizados para determinar
a parte do deslocamento vertical ocorrendo abaixo do ponto de equiliacutebrio durante a
desaceleraccedilatildeo descendente do CM Scedown e durante a aceleraccedilatildeo ascendente do
CM Sceup As diferenccedilas
S - S = S Eq 317 vdown cedown aedown
e
68
S - S = S Eq 318 vup ceup aeup
informa sobre o deslocamento vertical quando o CM do corpo acelera descendente e
desacelera ascendente respectivamente (CAVAGNA et al 1988)
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente
A velocidade vertical maacutexima e a energia cineacutetica maacutexima Ek=Ekv+Ekf
alcanccediladas pelo CM durante deslocamento descendente Vvmxdown e Ekmxdown e
durante a elevaccedilatildeo Vvmxup e Ekmxup satildeo determinados por comparaccedilatildeo dos picos
em Ekv e Ek com a curva Ep simultacircnea Como a velocidade vertical maacutexima pode
aumentar com a amplitude do deslocamento vertical que pode ser diferente durante
a elevaccedilatildeo e o deslocamento descendente (ver eg as curvas Ep na figura 31) a
razatildeo entre as velocidades descendente e ascendente maacuteximas foram normalizadas
(V V )(S S ) = (V V )norm Eq 319 vmxdown vmxup vup vdown vmxdown vmxup
327 Transduccedilatildeo Ep Ek durante o passo
O tempo de curso da transduccedilatildeo ocorrendo no passo entre energia potencial
gravitacional Ep e energia cineacutetica do CM Ek pode ser determinado pelo valor
absoluto das mudanccedilas ambos incrementos positivos e negativos de Ep Ek e Ecm
em intervalos curtos de tempo dentro do ciclo do passo (CAVAGNA et al 2002)
1 | Ecm(t) |r(t) = Eq 320
(| E p (t) | + | Ek (t) |)
A transduccedilatildeo Ep-Ek eacute completa (r(t)=1) durante a fase aeacuterea quando nenhum
trabalho externo eacute realizado pela forccedila muscular Entretanto a transduccedilatildeo Ep-Ek
tambeacutem ocorre durante contato quando o corpo eacute parcialmente sustentado pelo peacute
no chatildeo na parte superior da trajetoacuteria do CM (0lt r(t)lt1)
69
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado
70
(incrementos de Ecm) eacute indicado em vermelho enquanto que o tempo de
trabalho mecacircnico negativo (decrementos de Ecm) eacute indicado em azul
A transduccedilatildeo Ep-Ek eacute nula (r(t)=0) em duas fases do passo a e onde Ek
aumenta e diminui respectivamente simultaneamente com a energia potencial
gravitacional Ep (CAVAGNA et al 2002) Note que trabalho externo positivo e
negativo satildeo ambos realizados nas fases a e do passo (r(t)=0) e nas fases do
passo onde uma transduccedilatildeo ocorre entre Ek e Ep (0lt r(t)lt 1)
Nesse estudo r(t) foi calculado a partir do valor absoluto do tempo derivado
de Ep Ek e Ecm no intervalo de tempo contido entre dois ou mais picos (ou vales) de
Ep O valor cumulativo de energia recuperada Rint(t) resultando da transduccedilatildeo
instantacircnea de Ek-Ep foi determinado na aacuterea abaixo do r(t) registrado dividida pelo
periacuteodo do passo
T Rint (t) = ( f r(u)du) T Eq 321
0
No final do passo Rint(t)=Rint (CAVAGNA et al 2002) Para determinar a
assimetria do ciclo do passo eacute uacutetil saber quanto da transduccedilatildeo Ek-Ep ocorre durante
o deslocamento descendente e durante a elevaccedilatildeo do CM A derivada
dE p dt Eq 322
eacute utilizada para determinar a quantidade de transduccedilatildeo ocorrendo durante o
deslocamento descendente Rintdown e durante a elevaccedilatildeo do CM Rintup A
assimetria do passo foi quantificada pela razatildeo
Rintdown Rintup Eq 323
328 Rigidez vertical (k)
A k normalizada pela massa
k M Eq 324
71
caracterizando a frequumlecircncia natural do sistema eacute em todas as condiccedilotildees (com ou
sem uma fase aeacuterea) a inclinaccedilatildeo da relaccedilatildeo av-Sv quando avgt1g A inclinaccedilatildeo
meacutedia nessa amplitude pode ser avaliada pela razatildeo entre a aceleraccedilatildeo ascendente
maacutexima avmx e a amplitude da oscilaccedilatildeo
(S + S )ceup cedownS = Eq 325 ce 2
No presente estudo a k normalizada pela massa foi mensurada como
k M = a S Eq 326 vmx ce
E a frequumlecircncia natural do sistema massa-mola como
)05 (a Svmx cefs = Eq 327 2
329 Estatiacutestica
Os dados coletados como uma funccedilatildeo da velocidade decorrida foram
agrupados em classes de intervalos de um kmh-1 como segue 3 agrave lt4 kmh-1 4 agrave lt5
kmh-1 20 agrave lt21 kmh-1 Quando comparadas agraves meacutedias de diferentes variaacuteveis
com o mesmo nuacutemero de itens em uma certa velocidade de corrida dentro de um
grupo de indiviacuteduos um teste t para amostra pareadas foi utilizado para determinar
quando as meacutedias eram significativamente diferentes Quando comparadas as
meacutedias de diferentes variaacuteveis entre os dois grupos de indiviacuteduos com diferentes
nuacutemero de itens um teste t para amostras independentes foi utilizado (SPSS versatildeo
14) Em todos os testes o p usado foi menor do que 5
33 Resultados
Na primeira seccedilatildeo dos Resultados o bouncing do corpo a cada passo eacute
descrito desconsiderando as diferenccedilas no movimento ascendente e descendente
72
do CM (Por exemplo O deslocamento vertical Sv eacute medido como (Svup+Svdown)2 o
tempo de contato com o solo como tc =(tcup+tcdown)2 etc) Este procedimento
pressupotildee uma igualdade dinacircmica durante a subida e a descida do CM como em
um oscilador harmocircnico (CAVAGNA et al 1988 BLICKHAN 1989 SCHEPENS et
al 1998)
A potecircncia meacutedia do passo despendida para acelerar e elevar o CM do corpo
e do correspondente trabalho mecacircnico realizado por unidade distacircncia satildeo
apresentados na segunda parte Na terceira seccedilatildeo a assimetria contato-despregue
eacute considerada analisando separadamente os eventos que ocorrem durante a subida
e durante a descida do CM (CAVAGNA 2006) Em todas as seccedilotildees os resultados
obtidos sobre os indiviacuteduos idosos satildeo comparados com aqueles obtidos nos
indiviacuteduos jovens
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM
Parte superior e inferior do bouncing
O periacuteodo do passo (T parte superior da figura 33) o deslocamento vertical
do CM durante cada etapa (Sv meio da figura) e o comprimento do passo (L na
parte inferior da figura) satildeo apresentados em funccedilatildeo da velocidade de corrida (Vf) na
figura 33 (quadrados pretos) Segundo o modelo massa-mola o periacuteodo do passo
a oscilaccedilatildeo vertical do CM e o correspondente deslocamento para frente foram
divididos em duas partes uma parte mais baixa que acontece quando a Fv eacute maior
do que o PC (tce Sce e Lce ciacuterculos vermelhos) e uma parte superior quando a Fv eacute
menor que o PC (tae Sae e Lae ciacuterculos azuis abertos) Para comparaccedilatildeo o periacuteodo
do passo o deslocamento vertical e o comprimento do passo tambeacutem foram
divididos de acordo com a tradiccedilatildeo nas suas fraccedilotildees que ocorrem durante a fase
de contato com o terreno (tc Sc e Lc pontilhada linhas vermelhas) e durante a fase
aeacuterea (ta Sa e La linhas pontilhadas em azul) O significado biomecacircnico dos
resultados na figura 33 tem sido explicado em estudos anteriores realizados em
indiviacuteduos adultos de diferentes idades (CAVAGNA et al 1988) e em crianccedilas com
idades entre os 2 e 16 anos (SCHEPENS et al 1998) durante a corrida em
diferentes velocidades Em ambos os estudos as partes inferior e superior do
bouncing do corpo foram simeacutetricos ateacute ~ 11 kmh-1 (isto eacute tce=tae e Sce=Sae) e
- -
73
assimeacutetricos em velocidades mais elevadas (isto eacute taegttce e SaegtSce) O momento
vertical ganho e perdido durante tce deve ser igual ao momento vertical ganho e
perdido durante tae ie
avce tce = avae tae Eq 328
O bouncing simeacutetrico implica a mesma aceleraccedilatildeo vertical meacutedia durante a
parte inferior e superior do bouncing A aceleraccedilatildeo vertical meacutedia durante a parte
inferior do bouncing avce aumentou com a velocidade enquanto que a aceleraccedilatildeo
vertical meacutedia durante a parte superior do bouncing avae natildeo pode exceder 1 g (eacute 1 g
quando tae= ta) Deste modo o bouncing torna-se assimeacutetrico quando a aceleraccedilatildeo
vertical meacutedia durante tce exceder 1g Os resultados obtidos em relaccedilatildeo aos
indiviacuteduos jovens demonstram que o bouncing tende a ser simeacutetrico em baixas
velocidades e assimeacutetrico em altas velocidades (ver tce versus tae e Sce versus Sae na
tabela 1) Por outro lado os resultados obtidos no grupo dos idosos mostram duas
diferenccedilas importantes i) o bouncing eacute simeacutetrico nas velocidades mais altas (tce=tae e
Sce=Sae) e ii) a assimetria quando presente eacute invertida (ou seja tcegttae e ScegtSae)
Amplitude do deslocamento vertical
O deslocamento vertical do CM corporal em cada etapa da corrida Sv atinge
um maacuteximo em velocidades intermediaacuterias sendo inferior nos indiviacuteduos idosos do
que nos jovens ~ 75 cm a ~ 75 kmh-1 nos idosos e ~ 10 cm a ~ 10 kmh-1 nos
jovens Valores similares de Sv foram medidos com procedimento experimental
diferente em adultos idosos e jovens correndo a ~ 10 kmh-1 (KARAMANIDIS e
ARAMPATZIS 2005) A reduccedilatildeo de Sv nos indiviacuteduos idosos eacute devida a uma
reduccedilatildeo de todas as suas componentes (Sce Sae Sc e Sa) mas eacute particularmente
relevante considerar aqui a reduccedilatildeo da Sce (tabela 32) que representa a amplitude
da oscilaccedilatildeo do sistema massa-mola a partir de sua posiccedilatildeo de equiliacutebrio (Fv igual
ao PC) ateacute sua compressatildeo maacutexima (Fv maacutexima) A amplitude da oscilaccedilatildeo eacute menor
nos idosos do que nos jovens Como esperado esta eacute acompanhada por uma
aceleraccedilatildeo menor para cima atingida no final da compressatildeo avmx e por uma menor
velocidade maacutexima ascendente Vvmx atingida quando av=0 (figura 34 e tabela 32)
74
A velocidade vertical menor resulta por sua vez em um curto tempo aeacutereo efetivo
tae (figura 33 e tabela 32)
Frequumlecircncia de passo e do sistema massa-mola
Os dois paineacuteis superiores da figura 33 mostram que o periacuteodo do passo (T=
tae+ tce) eacute menor nos idosos do que nos jovens Isto eacute devido ao tempo aeacutereo efetivo
tae mais curto enquanto que o tempo de contato efetivo tce eacute igual entre os jovens e
os idosos (tabela 32) Segundo o modelo massa-mola da corrida o tce representa
metade do periacuteodo de oscilaccedilatildeo do sistema elaacutestico Este meio-periacuteodo similar
sugere uma frequumlecircncia de ressonacircncia semelhante fs=(kM)-05(2n) do sistema
elaacutestico aparente atraveacutes do qual o corpo se desloca ou seja uma k normalizada
pela massa corporal (kM) A figura 35 mostra que em altas velocidades k eacute maior
nos indiviacuteduos idosos (paineacuteis superior) mas devido agrave sua maior massa corporal agrave
rigidez de massa especiacutefica vertical (kM= avmxSce veja na Metodologia) eacute de fato
similar ao dos jovens (paineacuteis centrais da figura 35 e tabela 32) Em ambos os
grupos kM tende a ser aproximadamente constante ateacute ~ 10 kmh-1 e em seguida
aumenta com a velocidade Os dois paineacuteis inferiores da figura 35 mostram a
frequumlecircncia do passo f apresentada em conjunto com a frequumlecircncia de ressonacircncia do
sistema fs Pode ser observado que i) f eacute maior nos idosos do que nos jovens ii) nos
idosos a f permanece semelhante agrave fs (tabela 1) enquanto que iii) nos jovens a f eacute
inferior agrave fs (tabela 31)
332 Trabalho
O trabalho externo normalizado pela M Wext realizado para sustentar o
movimento do CM corporal no plano sagital eacute descrito na figura 36 em funccedilatildeo da
velocidade de corrida Pode ser observado que trabalho feito para sustentar as
mudanccedilas de velocidade horizontal Wextf aumenta conforme o acreacutescimo de
velocidade de modo semelhante em indiviacuteduos jovens e idosos O trabalho
realizado contra a gravidade Wextv eacute menor nos indiviacuteduos idosos (tabela 32) O
trabalho externo Wext Wextf + Wextv tambeacutem eacute menor nos idosos particularmente
nas maiores velocidades de progressatildeo
75
A menor potecircncia mecacircnica despendida contra a gravidade pelos idosos
mostra que o menor deslocamento vertical em cada passo natildeo eacute compensado pelo
aumento na frequumlecircncia de passo induzido pelo menor tempo aeacutereo efetivo tae (figura
33) A constataccedilatildeo de que o envelhecimento diminui o trabalho feito contra a
gravidade Wextv deixando inalterado o trabalho para sustentar as mudanccedilas na
velocidade horizontal Wextf resulta em uma velocidade menor de corrida onde o
Wextv se iguala ao Wextf esta velocidade eacute ~ 12 kmh-1 nos idosos e ~ 15 kmh-1 nos
jovens Os dois paineacuteis inferiores na figura 36 (analisados mais profundamente na
Discussatildeo) apresentam o trabalho mecacircnico total realizado por unidade de distacircncia
percorrida Wtot =Wext+Wint onde Wext eacute o trabalho positivo feito para manter o
movimento em relaccedilatildeo ao ambiente e o Wint eacute o trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM (calculado conforme descrito na Metodologia)
333 Assimetria contato-despregue
Os deslocamentos verticais do CM para baixo e para cima durante a fase de
contato estatildeo traccedilados na figura 37 e estatildeo expressos como uma fraccedilatildeo dos
deslocamentos verticais descendente e ascendente (ScdownSvdown ciacuterculos cheios e
ScupSvup ciacuterculos abertos) Na mesma figura eacute apresentada a fraccedilatildeo do
deslocamento vertical realizado pela amplitude da oscilaccedilatildeo do sistema massa-mola
para baixo de av=0 ateacute avmx (ScedownSvdown quadrados cheios) e para cima de avmx
ateacute av=0 (SceupSvup quadrados abertos) Quando a fase aeacuterea eacute nula nas
velocidades mais baixas de corrida todo o deslocamento vertical acontece em
contato com o solo e ScSv=1 Com o aumento da velocidade acontece uma fase
aeacuterea de duraccedilatildeo progressivamente maior durante a corrida e a fraccedilatildeo do
deslocamento vertical em contato com o solo diminui mais acentuadamente durante
o deslocamento para baixo (ciacuterculos cheios) do que durante o deslocamento para
cima (ciacuterculos abertos) ou seja (ScupSvup)gt(ScdownSvdown) Em outras palavras a
altura do CM no instante do contato eacute superior agrave sua altura no instante do toque no
solo o que indica que a elevaccedilatildeo do CM eacute inferior agrave descida durante a fase de
contato do peacute com o solo (CAVAGNA 2006) Esta assimetria contato-despregue
estaacute presente em ambos os grupos mas eacute maior nos idosos do que nos jovens
principalmente devido a uma menor reduccedilatildeo na ScupSvup com o aumento da
velocidade uma maior elevaccedilatildeo do CM se daacute em contato com o solo nos indiviacuteduos
76
idosos Em ambas as faixas etaacuterias a fraccedilatildeo de deslocamento vertical ocupada pela
amplitude de oscilaccedilatildeo SceSv se aproxima de metade de Sv quase independente da
velocidade apoiando a ideacuteia de que a oscilaccedilatildeo vertical do sistema massa-mola eacute
equilibrado em torno do ponto onde a Fv se iguala ao PC Em contraste ScSv muda
acentuadamente com a velocidade ateacute o ponto em que toda a oscilaccedilatildeo tem lugar
no contato com o solo (ScSv=1)
34 Discussatildeo
341 Sobre o meacutetodo
Este sub-capiacutetulo procura discutir o meacutetodo usado no estudo especialmente
em relaccedilatildeo ao raciociacutenio envolvido e a discussatildeo de algumas abordagens similares
ao modelo usado no presente estudo
O meacutetodo dinamomeacutetrico usado no presente estudo tem como base a teoria
do custo de geraccedilatildeo de trabalho mecacircnico Esta teoria pode ser considerada como a
primeira tentativa satisfatoacuteria nas aacutereas limiacutetrofes entre biomecacircnica biologia
experimental e fisiologia comparativa de explicar sob o ponto-de-vista mecacircnico as
formas principais de locomoccedilatildeo humana a caminhada e a corrida
Baseados no meacutetodo de FENN (1930) para a determinaccedilatildeo do trabalho
mecacircnico contra a gravidade e o trabalho mecacircnico devido agraves mudanccedilas de
velocidade Cavagna e colaboradores perceberam que o ser humano quando
caminhava e corria apresentava caracteriacutesticas nas curvas de energia mecacircnica e
no somatoacuterio dos incrementos positivos nestas energias que permitiam diferenciar
estes tipos de locomoccedilatildeo ao mesmo tempo que auxiliavam no entendimento do
comportamento da unidade muacutesculo-tendatildeo e dos mecanismos minimizadores de
dispecircndio energeacutetico mecanismo pendular e elaacutestico (ver figura 32) Os
incrementos positivos de energia mecacircnica (trabalho positivo) satildeo originados
principalmente por muacutesculos e tendotildees enquanto que os incrementos negativos de
energia mecacircnica (trabalho negativo) satildeo em parte armazenados nas estruturas natildeo
contraacuteteis dos muacutesculos e tendotildees e outra parte eacute degradada em forma de calor
Tendo em consideraccedilatildeo os princiacutepios da termodinacircmica foi possiacutevel aplicar
estes mecanismos a fim de entender o porquecirc que durante a fase de apoio na
corrida a energia cineacutetica se apresenta em fase com a energia potencial do CM em
77
relaccedilatildeo ao meio ambiente enquanto que na caminhada estas energias apresentam
comportamentos contraacuterios
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da
caminhada (pecircndulo-invertido) e de segmento complacente da corrida
(massa-mola) e seus principais constituintes Note que o tracejado
indica a trajetoacuteria do corpo de massa m durante o contato g eacute a
aceleraccedilatildeo gravitacional k eacute a rigidez da mola l0 eacute o comprimento do
membro inferior e a0 eacute o acircngulo da perna de apoio no momento do
contato com o solo
O somatoacuterio dos incrementos positivos de energia mecacircnica tambeacutem
conhecido como trabalho mecacircnico externo eacute menor do que a energia metaboacutelica
despendida pelos muacutesculos durante a caminhada enquanto que o trabalho
mecacircnico externo na corrida apresenta valor maior ao da energia metaboacutelica
despendida pelos muacutesculos Este aparente paradoxo demonstrava que a razatildeo
entre potecircncia mecacircnica gerada e a potecircncia metaboacutelica despendida ultrapassava a
eficiecircncia maacutexima de transformaccedilatildeo de energia quiacutemica em trabalho mecacircnico e foi
considerado como a primeira evidecircncia de que as unidades muacutesculo-tendatildeo
responsaacuteveis pela frenagem e propulsatildeo durante a fase de apoio da corrida eram
tambeacutem responsaacuteveis por absorccedilatildeo e re-utilizaccedilatildeo de energia elaacutestica (CAVAGNA et
al 1964) permitindo mais tarde a formulaccedilatildeo do modelo massa-mola ou ldquobouncingrdquo
da corrida (BLICKHAN 1989 MCMAHON e CHENG 1990 figura 32) e o posterior
estudo do ciclo alongamento-encurtamento do muacutesculo-esqueleacutetico
78
Portanto durante atividades ciacuteclicas como a locomoccedilatildeo os muacutesculos
responsaacuteveis pelo movimento possuem uma capacidade de geraccedilatildeo de forccedila
durante seu encurtamento (contraccedilatildeo concecircntrica) maior do que em contraccedilotildees
similares mas precedidas de contraccedilatildeo isomeacutetrica No caso da locomoccedilatildeo mais
especificamente da corrida durante contraccedilotildees concecircntricas os muacutesculos
propulsores utilizam uma energia armazenada durante a precedente contraccedilatildeo
excecircntrica (CAVAGNA et al 1964 CAVAGNA et al 1968) O modelo massa-mola
assume que a unidade muacutesculo-tendatildeo exerce um comportamento similar agrave de uma
mola ou seja quando a mola diminui de comprimento apoacutes o impacto (alongamento
do muacutesculo) armazena energia potencial elaacutestica e quando a mola aumenta seu
comprimento (encurtamento do muacutesculo) durante a segunda fase de contato
transforma energia potencial elaacutestica em energia cineacutetica O modelo tambeacutem
assume mesma altura e velocidade do CM no momento do contato e despregue
A primeira pressuposiccedilatildeo do modelo (sobre a semelhanccedila entre mola e
unidade muacutesculo-tendatildeo) apesar de correta natildeo indica informaccedilotildees sobre seus
constituintes o muacutesculo e o tendatildeo Vaacuterias evidecircncias mostram diferenccedilas no
comportamento mecacircnico do muacutesculo e do tendatildeo e estas diferenccedilas satildeo
moduladas pela forccedila imposta agrave unidade consequumlentemente dependentes da
velocidade de corrida Por exemplo KRAM e TAYLOR (1990) sugeriram que o
dispecircndio de energia durante a corrida era devido ao custo de geraccedilatildeo de forccedila das
fibras musculares agindo de forma isomeacutetrica sem realizaccedilatildeo de trabalho muscular
Evidecircncias em modelo animal confirmam este raciociacutenio (ROBERTS et al 1997
BIEWENER 1998)
Ainda assim para ser inteiramente vaacutelido este modelo o tempo de trabalho
externo positivo e negativo devem ser iguais em todas as velocidades de corrida
contudo uma assimetria nos tempos de trabalho positivo e negativo satildeo encontradas
na corrida humana em velocidades baixas (ateacute 14 kmh-1) com um menor tempo
para o trabalho mecacircnico externo negativo (CAVAGNA 2006)
Portanto o mecanismo de minimizaccedilatildeo de energia apresentada por KRAM e
TAYLOR 1990) parece se sustentar apenas em altas velocidades Em velocidades
menores os muacutesculos propulsores ativam em intensidade menor portanto gerando
uma tensatildeo menor no tendatildeo provavelmente insuficiente para gerar uma mudanccedila
importante no comprimento do tendatildeo Portanto o trabalho muscular eacute significativo
com contraccedilotildees excecircntricas em maior velocidade do que as contraccedilotildees
79
concecircntricas o que corresponde com a relaccedilatildeo forccedila versus velocidade e tambeacutem
com os resultados de eficiecircncia muscular para seacuteries de alongamento encurtamento
em diferentes velocidades (maior eficiecircncia em alta velocidade de encurtamento e
menor velocidade de alongamento ndash HEGLUND e CAVAGNA 1987) Ou seja em
velocidades menores parece existir um importante trabalho muscular executado de
modo assimeacutetrico com o tendatildeo agindo apenas como transmissor de forccedilas
enquanto que em altas velocidades com o aumento do pico de estresse no muacutesculo
e consequumlentemente aumento da rigidez da unidade muacutesculo-tendatildeo o muacutesculo
contrai isometricamente e o tendatildeo muda de comprimento agindo como um elaacutestico
(o muacutesculo tambeacutem gera tensatildeo devido agrave histerese do tendatildeo poreacutem eacute
negligenciaacutevel ndash ALEXANDER 2002)
Sobre o segundo criteacuterio (da semelhanccedila de altura e velocidade no contato e
despregue) os proacuteprios autores do modelo massa-mola indicam que em geral os
animais apresentam uma velocidade no contato maior do que no despregue bem
como realizam o contato com as articulaccedilotildees das pernas mais flexionadas do que
no despregue (BLICKHAN 1989) Poreacutem se as anaacutelises da velocidade e altura satildeo
modificadas do momento de contato e despregue para o iniacutecio da fase aeacuterea e de
contato efetivos (quando a forccedila vertical eacute igual aacute forccedila peso) levando em
consideraccedilatildeo o periacuteodo natural do sistema elaacutestico a velocidade continua maior no
iniacutecio do contato efetivo em todas as velocidades de corrida mas a altura do CM eacute
maior no contato efetivo inicial do que no momento de fase aeacuterea inicial em
velocidades baixas de corrida (aproximadamente de 8 agrave 14 kmh-1) Acima destas
velocidades a altura do CM eacute maior no iniacutecio da fase aeacuterea efetiva do que no iniacutecio
da fase de contato efetivo (CAVAGNA 2006) Estas assimetrias podem chegar ateacute
30
Um ponto chave na formulaccedilatildeo deste modelo eacute a determinaccedilatildeo da rigidez do
sistema massa-mola aqui tambeacutem uma simplificaccedilatildeo do fenocircmeno pois considera
apenas os valores maacuteximos de forccedila e deslocamento verticais como se durante toda
a fase de apoio a rigidez fosse constante
Caacutelculo da rigidez de mola
Os caacutelculos da rigidez de mola do sistema bouncing representam as
propriedades de mola do movimento vertical do corpo e da perna A rigidez vertical eacute
80
estimada como a razatildeo do pico de forccedila vertical (algumas vezes denominado como
forccedila maacutexima durante a fase ativa do tempo de contato) e o deslocamento maacuteximo
vertical do CM durante o apoio (CAVAGNA et al 1988 MCMAHON e CHENG
1990) Outro meacutetodo alternativo para o caacutelculo da rigidez vertical utiliza o tempo de
contato efetivo assumindo que este tempo representa o meio periacuteodo de oscilaccedilatildeo
do sistema elaacutestico (ver CAVAGNA et al 2005) k = Mb( tce)2 onde Mb eacute massa
corporal Este uacuteltimo meacutetodo apresenta a vantagem de evitar a influecircncia das
oscilaccedilotildees de aceleraccedilatildeo vertical do CM apoacutes o contato inicial A rigidez de perna eacute
a razatildeo do pico de forccedila vertical e a mudanccedila no comprimento de perna durante o
apoio A variaccedilatildeo do comprimento de perna eacute determinada com a equaccedilatildeo 330
(MCMAHON e CHENG 1990)
delta l = ycm + l0 (1V cosa0) Eq 329
Onde l0 eacute o comprimento de perna em repouso e a0 eacute o acircngulo da perna no
contato inicial em relaccedilatildeo agrave vertical (a0 = sin-1(Vf tc2 l0) onde Vf eacute a velocidade
horizontal e tc eacute o tempo de apoio Apesar do uso frequumlente desta medida no campo
das Ciecircncias do Esporte e Biologia Experimental a rigidez de pernas possui uma
forte limitaccedilatildeo devido ao uso da medida de membro inferior incorrer em um alto grau
de erro (e 1 cm dados natildeo publicados) Aleacutem disso se utiliza da medida de tempo
de contato enquanto que a relaccedilatildeo inversa com o sistema massa-mola eacute dada pelo
tempo de contato efetivo (quando a forccedila vertical eacute maior do que o peso corporal)
portanto natildeo representa as mudanccedilas do sistema massa-mola frente agrave restriccedilotildees do
ambiente (eg gravidade CAVAGNA et al 2005)
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical
A menor amplitude de oscilaccedilatildeo do sistema elaacutestico nos idosos (Sce na figura
33) implica i) uma menor forccedila vertical maacutexima Fvmx e energia elaacutestica armazenada
em cada passo ii) uma maior frequumlecircncia de passo iii) uma menor variaccedilatildeo de
energia externa para manter o movimento do CM do corpo em relaccedilatildeo ao meio
ambiente externo e iv) um maior trabalho interno para acelerar os segmentos
relativo ao CM
81
Destaca-se que as divisotildees do passo baseadas no tempo de contato efetivo
(vermelho) aeacutereo efetivo (azul) correspondem agrave aproximadamente metade da
duraccedilatildeo e deslocamento durante o passo Em contraste a fraccedilatildeo do passo realizado
durante o tempo aeacutereo e de contato variam bastante com a velocidade Aleacutem disso
o tcetae e SceSce nos idosos enquanto que o contraacuterio acontece com os jovens
Linhas representam a meacutedia ponderada de todos os dados (Kaleidagraph 364) e a
uacutenica proposta destas linhas eacute ser um guia para os olhos elas natildeo descrevem o
mecanismo fiacutesico envolvido (figura 33)
Tabela 31 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nos quais os pares de variaacuteveis listadas satildeo significativamente diferentes dentro de
cada grupo experimental
Vf Idoso Jovem
(km h-1) tce vs tae Sce vs Sae fs vs f tce vs tae Sce vs Sae fs vs f
3 006 312 10-4 079 001 004 117 10-3
4 031 013 028 008 058 005
5 003 003 004 091 014 020
6 001 473 10-3 003 005 026 001
7 002 001 020 011 045 001
8 102 10-7 361 10-8 190 10-4 003 048 256 10-3
9 445 10-4 753 10-6 002 001 057 151 10-3
10 250 10-4 212 10-5 510 10-4 243 10-3 091 284 10-3
11 014 003 028 158 10-4 019 234 10-4
12 044 013 061 249 10-5 002 328 10-5
13 018 003 020 310 10-6 261 10-3 100 10-5
14 001 042 005 388 10-6 183 10-3 166 10-5
15 029 022 012 107 10-6 256 10-4 166 10-6
16 057 048 090 947 10-5 361 10-3 292 10-4
Forccedila e energia elaacutestica
A forccedila maacutexima vertical eacute dada pela massa corporal multiplicada pela
aceleraccedilatildeo vertical maacutexima e o resultado eacute somado ao peso corporal Avmx (equaccedilatildeo
82
34) A massa corporal meacutedia eacute 711 kg nos idosos e 634 kg nos jovens A variaccedilatildeo
da aceleraccedilatildeo maacutexima atingida pelos indiviacuteduos idosos nas suas altas velocidades
(15-17 kmh-1) eacute de 1077 plusmn 197 ms-2 (n=7) Considerando que nas mesmas
velocidades alcanccediladas pelos jovens a variaccedilatildeo foi de 1886 plusmn 274 ms-2 (n=24)
(figura 34) Note que a aceleraccedilatildeo ascendente e velocidade vertical maiores
atingidas pelos jovens Contraacuterio ao bouncing elaacutestico a velocidade vertical maacutexima
alcanccedilada durante o deslocamento descendente eacute maior do que o alcanccedilado
durante a elevaccedilatildeo sendo esta diferenccedila maior nos idosos
Tabela 32 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Wf Wv tce tae Sce
3 008 003 095 482 10-3 005
4 008 015 004 074 062
5 062 002 083 006 006
6 259 10-3 138 10-4 034 427 10-4 001
7 049 133 10-6 073 287 10-5 140 10-3
8 004 162 10-6 039 231 10-6 198 10-3
9 007 581 10-6 028 107 10-5 407 10-4
10 005 120 10-10 094 605 10-9 176 10-6
11 014 170 10-6 025 383 10-7 435 10-6
12 014 471 10-7 019 321 10-6 380 10-5
13 007 114 10-6 068 228 10-6 196 10-6
14 099 400 10-6 005 170 10-5 231 10-5
15 014 222 10-7 010 142 10-6 685 10-8
16 066 208 10-4 061 184 10-4 718 10-4
De acordo com a equaccedilatildeo 34 estes nuacutemeros resultam em uma forccedila vertical
maacutexima Fvmxold=1463 kN e Fvmxyoung=1818 kN note que 75 de diferenccedila na Avmx
resulta em 24 de diferenccedila em Fvmx devido agrave maior massa corporal dos indiviacuteduos
idosos A forccedila mais baixa alcanccedilada durante o contato pelos indiviacuteduos idosos pode
83
ser explicada em parte pela bem documentada perda de forccedila muscular (eg
DOHERTY 2003) e em parte por uma estrateacutegia de aumentar a seguranccedila do
sistema muacutesculo-esqueleacutetico (KARAMANIDIS e ARAMPATZIS 2005)
A aparente k a 15-17 kmh-1 eacute 3732plusmn885 kNm-1 (n=7) nos indiviacuteduos idosos
e 2869plusmn650 kNm-1 (n=24) nos indiviacuteduos jovens (figura 35) Assumindo uma
relaccedilatildeo forccedila-comprimento linear dos elementos elaacutesticos seu alongamento maacuteximo
(de zero a Fvmx) seria (14633732)=0039 m nos idosos e (18182869)=0063 m
nos indiviacuteduos jovens Os paineacuteis inferiores da figura 35 mostram que a frequumlecircncia
de passo (linhas contiacutenuas) eacute similar agrave frequumlecircncia natural do sistema (linhas
pontilhadas) em todas as velocidades nos idosos enquanto que com os jovens a
frequumlecircncia do passo torna-se menor do que a frequumlecircncia do sistema com o aumento
da velocidade
Tabela 33 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Avmx Vvmx AvmxSce (AvmxSce)Mb Sv
3 004 003 099 039 002
4 001 011 003 022 034
5 152 10-3 001 024 040 003
6 601 10-4 232 10-4 049 067 772 10-4
7 132 10-3 422 10-6 066 007 367 10-5
8 918 10-7 154 10-6 025 018 271 10-5
9 526 10-5 131 10-6 007 067 137 10-5
10 134 10-7 196 10-11 072 001 146 10-8
11 439 10-4 744 10-7 046 004 798 10-7
12 533 10-6 666 10-7 040 002 552 10-6
13 264 10-4 401 10-6 061 022 158 10-6
14 115 10-3 366 10-6 005 652 10-5 126 10-5
15 891 10-6 725 10-8 031 009 316 10-7
16 353 10-3 258 10-4 048 005 267 10-4
84
Visto que a energia potencial gravitacional e a energia cineacutetica do CM estatildeo
em fase durante a corrida o sistema elaacutestico sofre sua maacutexima tensatildeo quando o
componente vertical da forccedila de reaccedilatildeo do solo encontra-se no maacuteximo ((Fvmx)) e o
componente horizontal eacute nulo (Ff=0)
Na verdade Fvmx ocorre no ponto mais baixo da trajetoacuteria (Epmn) quando o
CM termina sua desaceleraccedilatildeo e comeccedila a sua aceleraccedilatildeo (ou seja Ff=0 e Ekfmn) A
energia elaacutestica armazenada em cada passo pode assim ser computada usando-se
apenas a forccedila vertical como (14630039)2=2853 J e (18180063)2=5727 J para
os indiviacuteduos idosos e para os indiviacuteduos jovens respectivamente Esta energia
elaacutestica eacute posteriormente utilizada em parte durante o impulso para elevar e acelerar
a frente o CM
Tabela 34 Comparaccedilatildeo das assimetrias contato-despregue entre jovens idosos e
sistema elaacutestico
IDOSO JOVEM ELAacuteSTICO
Vvmxdown Vvmxup 118plusmn011 107plusmn008 1
f 124plusmn018 106plusmn010 1
Rintdown Rintup 213plusmn130 126plusmn032 1
tpush tbrake 125plusmn016 115plusmn013 1
Ekmxdown - Ekmxup (J) 1003plusmn625 752plusmn542 0
Valores satildeo meacutediaplusmndp (plt0001 N=124 ( N=122) para idosos e N=195 para jovens)
Amplitude de velocidades 3-17 kmh-1
A maacutexima compressatildeo elaacutestica do sistema tambeacutem pode ser analisada como
o deslocamento vertical do CM durante o contato o que em 15-17 kmh-1 eacute em
meacutedia Sc=0032plusmn0006 m (n=7) nos idosos e Sc=0060plusmn0007 m (n=24) nos jovens
(em vez de 0039 m e 0063 m como calculado acima)
85
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um
passo em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis
a direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup +
86
Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo (tae)
da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na direccedilatildeo
vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os ciacuterculos em
vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2) e
a frente (Lce) A linha em vermelho pontilhada em cada painel indica o tempo de
contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente (Lc) durante o
passo As linhas azuis pontilhadas em cada painel indicam o tempo aeacutereo total
(ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La) durante o passo As
barras verticais indicam o desvio-padratildeo da meacutedia os nuacutemeros proacuteximos aos
siacutembolos nos paineacuteis superiores indicam o nuacutemero de itens nas meacutedias
A discrepacircncia pode ser devida em parte agrave uma subestimaccedilatildeo do Sc como
medido (ver Metodologia) A energia elaacutestica armazenada computada como (Fvmx
Sc)2 eacute (1463 0032)2=2341 J (em vez de 2853 J conforme calculado acima) e
(1818 0060)2=5454 J (em vez de 5727 J) para indiviacuteduos idosos e indiviacuteduos
jovens respectivamente
A partir dos dados meacutedios de frequumlecircncia de passo e potecircncia em um mesmo
conjunto de velocidades (figuras 36 e 37) o trabalho externo em cada passo
resultou (405 711)368=7825 J nos indiviacuteduos idosos e (538
634)279=12226 J nos indiviacuteduos jovens Daqui resulta que a contribuiccedilatildeo
elaacutestica para o trabalho externo em cada passo poderia ser 28537825=036 e
572712226=047 respectivamente (ou 23417825=030 e 545412226=045
usando Sc)
Estes caacutelculos aproximados em conjunto com uma maior assimetria contato-
despregue que seraacute discutida a seguir (tabela 34) indicam uma menor restituiccedilatildeo
elaacutestica do corpo nos idosos A maior rigidez k medida nos indiviacuteduos idosos em
sua mais alta velocidade de corrida (figura 35) em aparente desacordo com a
menor rigidez dos tendotildees do gastrocnemius (ONAMBELE et al 2006) do
quadriacuteceps (KARAMANIDIS e ARAMPATZIS 2005) medidos nos idosos Por outro
lado um aumento pela idade da rigidez dos elementos elaacutesticos nos tendotildees e
muacutesculos foi relatado em favor dos muacutesculos flexores do cotovelo (VALOUR e
POUSSON 2003)
87
Importante ressaltar que na complexa deformaccedilatildeo de todo corpo no solo a
aparente k eacute o resultado de um conjunto de unidades muacutesculo-tendatildeo em seacuterie cujas
propriedades elaacutesticas dependem do niacutevel de ativaccedilatildeo muscular O nuacutemero de
unidades muacutesculo-tendatildeo em seacuterie depende por sua vez da orientaccedilatildeo dos
segmentos e do tronco durante o impacto sobre o solo que pode ser diferente nos
indiviacuteduos idosos e nos indiviacuteduos jovens (por exemplo apoio na parte da frente do
peacute mais do que no calcanhar)
O maior valor de k encontrado em idosos em suas mais altas velocidades de
corrida portanto natildeo eacute necessariamente uma indicaccedilatildeo de uma maior rigidez dos
seus tendotildees ou unidades de muacutesculo-tendatildeo medidos durante contraccedilotildees
voluntaacuterias maacuteximas
Frequumlecircncia
O menor tempo aeacutereo efetivo tae nos idosos causa um aumento na
frequumlecircncia da passo f =1(tce+tae) para valores que satildeo iguais e por vezes
superiores agrave frequumlecircncia do sistema fs=1(2tce) Diferentemente dos jovens que
optam em uma grande extensatildeo de velocidades por uma FP mais baixa agrave do
sistema aumentando o tae em relaccedilatildeo ao tce (figuras 33 35 e tabela 32)
Os fatores que determinam a escolha da f a uma determinada velocidade de
corrida satildeo i) sintonizando a frequumlecircncia de passo f para a frequumlecircncia natural do
sistema fs (CAVAGNA et al 1997) e ii) escolhendo uma f que minimize a potecircncia
meacutedia de passada limitada aerobicamente (Wextf figura 36) dentro dos limites
estabelecidos pela potecircncia anaeroacutebica meacutedia durante o empurre (trabalho positivo)
(W+tpush liberada imediatamente pelo muacutesculo durante a contraccedilatildeo) (CAVAGNA et
al 1991) A primeira estrateacutegia eacute normalmente adotada em baixas velocidades de
corrida e modificada para a segunda estrateacutegia de corrida em altas velocidades Isto
eacute feito atraveacutes de um aumento da aceleraccedilatildeo ascendente meacutedia avce acima de 1 g
com o consequumlente aumento de tae em relaccedilatildeo ao tce (equaccedilatildeo 36) Assim a
frequumlecircncia de passo f=1(tce+tae) torna-se menor do que a frequumlecircncia do sistema
fs=1(2tce) bem como o incremento da potecircncia meacutedia do passo Wextf eacute controlada
Nos indiviacuteduos idosos a segunda estrateacutegia nunca eacute adotada A aceleraccedilatildeo meacutedia
para cima nunca excede 1 g mesmo nas velocidades altas 15-17 kmh-1 onde avce
=742plusmn123 ms-2 (n=7) segue-se que f fs em todas as velocidades (figura 35) Isto
88
permite uma menor forccedila durante o empurre da corrida em alta velocidade
resultando em uma potecircncia meacutedia durante o empurre ~ 60 daquela dos jovens
mas o aumento da frequumlecircncia da passada resulta em um maior Wint e um grande
incremento na potecircncia meacutedia de passo Wextf em corridas de alta velocidade (ver
abaixo) Aleacutem disso como se verificou neste estudo a mais baixa deformaccedilatildeo
elaacutestica do sistema diminui a fraccedilatildeo de Wext possivelmente sustentado pelo
mecanismo elaacutestico (ver tabela 34) Em contrapartida a segunda estrateacutegia eacute
seguida pelos jovens onde avce =1248plusmn18 ms-2 (n=24) no mesmo intervalo de
velocidades (15-17 kmh-1) resultando em uma menor frequumlecircncia de passo (f lt fs)
que limita o aumento do Wint da corrida em altas velocidades e um consequumlente
incremento da Wextf+ (ver abaixo)
Aleacutem disso a maior deformaccedilatildeo elaacutestica do sistema permite uma maior
utilizaccedilatildeo da energia elaacutestica (tabela 34) Sabe-se que uma mudanccedila na frequumlecircncia
de passo a uma determinada velocidade tem efeitos opostos sobre a potecircncia
externa o que diminui com o aumento da frequumlecircncia da passada e a potecircncia
interna para reposicionar os segmentos em cada passo que aumenta com a
frequumlecircncia (CAVAGNA et al 1991)
Em que medida a menor potecircncia externa meacutedia do passo devido agrave menor
amplitude da oscilaccedilatildeo dos segmentos nos idosos eacute compensada por uma maior
potecircncia interna meacutedia do passo devido ao aumento da frequumlecircncia de passo
89
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e velocidade
vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown (paineacuteis inferiores)
atingidos pelo CM durante o passo em funccedilatildeo da velocidade de corrida Estatiacutestica
e outras indicaccedilotildees conforme a figura 33
O total do trabalho realizado por unidade distacircncia Wtot =Wint+Wext foi somado
pelo Wint estimado pelas equaccedilotildees 32 e 33 para os indiviacuteduos jovens e idosos
como descrito nos Meacutetodos e pelo Wext calculado a partir das seguintes equaccedilotildees
obtidas pela interpolaccedilatildeo de todos os dados experimentais
W ML(J kg-1 m -1) = 29738 Vf - 03217 Eq 330 extyoung
90
(R=0831) para o grupo de indiviacuteduos jovens e
W ML(J kg-1 m -1) = 28445 Vf - 040856 Eq 331 extold
(R=0762) para o grupo de indiviacuteduos idosos O Wtot resultante (linhas
pontilhadas nos paineacuteis inferiores da figura 36) mostra que o trabalho externo menor
no idoso por unidade de distacircncia eacute progressivamente compensado com o aumento
da velocidade por um maior trabalho interno devido agrave sua frequumlecircncia de passada
(FP) aumentada O Wtot alcanccedila um minimum a ~75 kmh-1 nos indiviacuteduos idosos e
um miacutenimo a ~8-12 kmh-1 nos indiviacuteduos jovens
A diferenccedila em Wtot eacute invertida acima de ~14 kmh-1 Eacute possiacutevel que a menor
utilizaccedilatildeo da energia elaacutestica em idosos aumente o gasto de sua energia metaboacutelica
para o mesmo Wtot O consumo de O2 durante a corrida a 10 kmh-1 aumentou com a
idade em corredores treinados do sexo feminino (EVANS et al 1995)
343 A assimetria contato-despregue
As quatro fases do bouncing as diferenccedilas com um sistema elaacutestico
Antes de descrever a assimetria contato-despregue no aparente bouncing do
CM em cada passo da corrida vale a pena referir que os momentos de contato e
despregue podem natildeo ocorrer durante corridas de baixa velocidade quando a
oscilaccedilatildeo vertical do CM do corpo se daacute totalmente em contato com o solo (figura
38) Eacute oacutebvio que neste caso o contato com o solo natildeo pode ser tomado como um
indicador de contato e despregue quando se descreve o bouncing do sistema
elaacutestico Neste caso a oscilaccedilatildeo vertical ocorre abaixo e acima da posiccedilatildeo de
equiliacutebrio (onde a Fv iguala o PC e a velocidade vertical eacute maacutexima) Mesmo quando
uma fase aeacuterea ocorre durante o passo a fraccedilatildeo do deslocamento vertical do CM
total em que o corpo estaacute em contato com o solo ScSv muda amplamente com a
velocidade enquanto que a fraccedilatildeo do deslocamento vertical abaixo e acima do ponto
de equiliacutebrio SceSv se aproxima da metade do Sv quase independente da
velocidade (figura 37)
91
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e frequumlecircncia
do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute maior nos idosos
nas altas velocidades (paineacuteis superiores) a rigidez vertical normalizada pela massa
eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras indicaccedilotildees conforme figura 33
92
Estas observaccedilotildees indicam que eacute mais adequado considerar-se contato
efetivo o instante no qual a Fv aumenta acima do PC (ao inveacutes do instante em que o
peacute estaacute em contato com o solo) e despregue efetivo o instante em que a Fv diminui
para valores menores do que o PC (ao inveacutes do instante no qual o peacute deixa o solo)
A assimetria contato-despregue desaparece quando o bouncing do corpo eacute mais
corretamente dividido desta forma (ou seja tce versus tae em vez de tc versus ta)
(CAVAGNA et al 1988 MCMAHON e CHENG 1990) Ainda na figura 37 pode ser
observado que ScSv mudam mais com a velocidade do que a amplitude da
oscilaccedilatildeo SceSv ao qual atinge a metade do deslocamento vertical Sv Exceto as
velocidades muito baixas quando a fase aeacuterea eacute nula (ScSv=1 eg paineacuteis
superiores nas figuras 31 e 38) o deslocamento descendente enquanto o peacute toca o
solo eacute menor do que o deslocamento ascendente particularmente nos idosos a
descida baliacutestica do CM eacute maior do que a elevaccedilatildeo baliacutestica (veja a linha azul
pontilhada na figura 38)
Segundo a equaccedilatildeo 34 a velocidade vertical descendente eacute maacutexima no
instante do contato efetivo e a velocidade vertical ascendente eacute maacutexima no instante
do despregue efetivo No movimento harmocircnico de um sistema elaacutestico as
velocidades ascendentes e descendentes maacuteximas satildeo iguais Isso natildeo eacute verdade
na corrida humana a velocidade maacutexima descendente eacute superior agrave velocidade
maacutexima ascendente (CAVAGNA 2006) Estes resultados mostram que a assimetria
eacute maior em indiviacuteduos idosos do que nos jovens na variaccedilatildeo normal de velocidades
(3-17 kmh-1) a proporccedilatildeo normalizada ((VvmxdownVvmxup)norm=116plusmn009 (n=124)
nos idosos e 107plusmn007 (n=195) nos jovens (p=126 10-19) (tabela 34) Outras
assimetrias satildeo apresentadas a seguir atraveacutes da anaacutelise das mudanccedilas na energia
potencial gravitacional Ep e energia cineacutetica translacional Ek=Ekv+Ekf do CM
corporal durante as quatro fases de oscilaccedilatildeo do sistema em relaccedilatildeo a posiccedilatildeo de
equiliacutebrio (Fv=Mg) (CAVAGNA 2006) Estas fases satildeo apresentadas na figura 38 a
partir do topo da trajetoacuteria do CM corporal Durante a aceleraccedilatildeo descendente
(Saedown azul) a Ep diminui e a Ek aumenta indicando uma transduccedilatildeo de Ep em Ek
o que ocorre tanto na presenccedila quanto na ausecircncia de uma fase aeacuterea (por
exemplo na parte superior do painel esquerdo da figura 38) O montante desta
transduccedilatildeo eacute dado pelo incremento Rintdown da curva do Rint(t) apoacutes o maacuteximo de Ep
Durante a desaceleraccedilatildeo descendente (Scedown vermelho) o trabalho externo
negativo eacute feito para diminuir simultaneamente Ep e Ek O trecho superior da curva
93
Rint(t) correspondente agrave fraccedilatildeo do passo mostra que natildeo ocorre transduccedilatildeo entre
Ep e Ek Note-se que o pico de Ek durante o passo eacute atingido proacuteximo ao iniacutecio da
fase de trabalho negativo consistente com a velocidade maacutexima de alongamento
das unidades muacutesculo-tendotildees (HEGLUND e CAVAGNA 1987)
Durante a aceleraccedilatildeo ascendente (Sceup vermelho) trabalho positivo externo
eacute feito para aumentar simultaneamente Ep e Ek O trecho inferior da curva Rint(t)
correspondente agrave fraccedilatildeo a do passo mostra que natildeo ocorre transduccedilatildeo entre Ep e
Ek Note que enquanto eacute quase totalmente contida dentro do Scedown a continua
apoacutes o final do Sceup ou seja dentro da desaceleraccedilatildeo ascendente do CM (Saeup
azul) Em outras palavras a perna ainda estaacute a exercer uma forccedila propulsiva a fim
de acelerar o corpo a frente embora a forccedila vertical tenha diminuiacutedo para valores
abaixo do peso corporal Essa assimetria eacute maior no idoso A proporccedilatildeo a eacute
124plusmn018 nos indiviacuteduos idosos e 106plusmn010 nos indiviacuteduos jovens (p=41510-19
tabela 34)
Importante notar a origem diferente dos dois picos Ekmxup (inferior) e
Ekmxdown (superior) alcanccedilados durante o passo de corrida durante a elevaccedilatildeo e
descenso do CM Ekmxup se deve ao empurre para frente enquanto Ekmxdown eacute
devido agrave gravidade A diferenccedila meacutedia Ekmxdown- Ekmxup=752plusmn542 nos indiviacuteduos
jovens e 987plusmn592 nos idosos (p=00004) indica uma maior perda da energia
cineacutetica Ekv no idoso adquirida durante a descida (tabela 34)
Durante a desaceleraccedilatildeo ascendente do CM (Saeup azul) a transduccedilatildeo de Ek
em Ep acontece apenas na uacuteltima parte da elevaccedilatildeo porque como descrito acima
Ep e Ek aumentam simultaneamente durante a maior parte do Saeup Na verdade a
transduccedilatildeo de Ek em Ep eacute quase nula nos idosos (figura 38) O incremento da curva
Rint(t) que ocorre durante a elevaccedilatildeo Rintup eacute inferior ao que ocorre durante a
queda Rintdown Tambeacutem esta assimetria eacute maior no idoso A proporccedilatildeo
RintdownRintup nos indiviacuteduos idosos eacute 213plusmn13 e 126 plusmn 032 nos indiviacuteduos jovens
(p=33310-11 tabela 34) Este fenocircmeno eacute acompanhado por uma maior fraccedilatildeo da
elevaccedilatildeo em contato com o solo como indicado pela maior proporccedilatildeo ScupSvup nos
idosos (figura 37) Um tempo aeacutereo inferior nos idosos durante a corrida em ~ 10
kmh-1 foi encontrado por KARAMANIDIS e ARAMPATZIS 2005)
94
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com seus
95
dois componentes o trabalho realizado contra a gravidade (Wv ciacuterculos abertos) e
para sustentar as mudanccedilas de velocidade a frente (Wf quadrados abertos)
Estatiacutestica e outras indicaccedilotildees conforme figura 33
Note que particularmente nos idosos a transduccedilatildeo da Ek em Ep durante a
elevaccedilatildeo (incremento Rintup da curva Rint(t) abaixo da linha horizontal pontilhada) eacute
menor do que a transduccedilatildeo da Ep em Ek durante o deslocamento descendente
(incrementos Rintdown da curva Rint(t) acima da linha horizontal pontilhada) esta
assimetria eacute acompanhada pela elevaccedilatildeo baliacutestica (nulo nos idosos) menor do que a
descida baliacutestica Nos trechos horizontais da curva Rint(t) nenhuma transduccedilatildeo
ocorre Ep e Ek e unidades muacutesculo-tendatildeo absorvem simultaneamente Ep e Ek (fase
) e aumentam Ep e Ek simultaneamente (fase a) Note que enquanto que a fase eacute
realizada durante Scedown a estende-se aleacutem do Sceup dentro de uma grande parte
do Saeup devido ao continuo aumento da Ek Esta assimetria tambeacutem eacute maior nos
idosos
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As fraccedilotildees do
deslocamento vertical do CM durante contato ScSv (ciacuterculos preenchidos
deslocamento descendente ciacuterculos abertos deslocamento ascendente) e quando
a Fv eacute maior do que o PC SceSv (quadrados preenchidos deslocamento
96
descendente quadrados abertos deslocamento ascendente) satildeo apresentados em
funccedilatildeo da velocidade de corrida Estatiacutestica conforme figura 33
Um trabalho externo positivo eacute realizado (segmentos vermelhos na figura 31)
natildeo soacute para aumentar simultaneamente Ep e Ek (fraccedilatildeo a do passo) mas tambeacutem
quando ocorre transduccedilatildeo da Ek em Ep no final do empurre durante o alcance do
platocirc de Ecm (figura 31) Daqui resulta que a duraccedilatildeo de trabalho positivo tpush eacute
superior agrave duraccedilatildeo a a proporccedilatildeo tpushta diminui com a velocidade de ~19 agrave 3-5
kmh-1 para ~11 agrave 15-17 kmh-1 Da mesma forma o trabalho externo negativo eacute
feito (segmentos azuis na figura 31) natildeo apenas para diminuir simultaneamente Ep e
Ek (fraccedilatildeo do passo) mas tambeacutem quando ocorre uma transduccedilatildeo de Ep em Ek no
iniacutecio da frenagem durante a acentuada diminuiccedilatildeo de Ecm no final de seu platocirc
(figura 31) Consequentemente a duraccedilatildeo do trabalho negativo tbrake eacute maior do que
a duraccedilatildeo a proporccedilatildeo tbraket diminui com a velocidade de ~17 agrave 3-5 kmh-1 para
~12 agrave 15-17 kmh-1
A duraccedilatildeo do empurre e da frenagem estatildeo apresentados na figura 39 em
funccedilatildeo da Vf Observa-se que tanto nos indiviacuteduos idosos quanto nos jovens tpushgt
tbrake ateacute 13-14 kmh-1 (tabela 31) A proporccedilatildeo eacute tpushtbrake=125plusmn016 nos indiviacuteduos
idosos e 115plusmn013 nos indiviacuteduos jovens (p=11610-9 tabela 34) Novamente a
assimetria eacute maior nos indiviacuteduos idosos
Durante a corrida no plano a uma velocidade constante o momentum perdido
Fbrake tbrake equivale ao momentum adquirido Fpush tpush (realmente na direccedilatildeo vertical
o momentum perdido eacute ligeiramente maior que o momentum adquirido porque a
velocidade descendente maacutexima eacute 7-16 maior do que a velocidade ascendente
maacutexima tabela 34) Deste modo se tpushgt tbrake entatildeo Fpush lt Fbrake ou seja a forccedila
meacutedia durante o trabalho positivo eacute inferior agrave forccedila meacutedia durante o trabalho
negativo
As assimetrias do bouncing acima descritas estatildeo resumidas na tabela 34
onde eacute feita uma comparaccedilatildeo entre indiviacuteduos idosos indiviacuteduos jovens e um
sistema elaacutestico Observa-se que o desvio de um sistema elaacutestico eacute maior para os
indiviacuteduos idosos do que para os indiviacuteduos jovens isto eacute o salto dos indiviacuteduos
idosos eacute menos elaacutestico do que o dos indiviacuteduos jovens Note a mesma conclusatildeo
foi encontrada acerca da estimativa da energia elaacutestica armazenada em cada passo
97
98
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito idoso
paineacuteis a direita sujeito jovem em cada painel o comportamento da transduccedilatildeo Ep-
Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas na energia potencial
gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf normalizada para oscilar entre
zero e um Mesmos passos da figura 1 cada painel comeccedila e termina no valor
menor da curva Ep As cores diferentes na curva Ep distinguem as fraccedilotildees do passo
onde a Fv exercida no solo eacute maior do que o PC (vermelho) e menor do que o PC
(azul) As linhas contiacutenuas de Ep indicam a fase de contato enquanto que as linhas
pontilhadas Ep (azul fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As
quatro fases correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown (azul)
e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas pontilhadas verticais
satildeo apresentadas nos dois picos de Ek e ocupam a fraccedilatildeo onde a transduccedilatildeo Ep-Ek
ocorre conforme indicado pelos incrementos da curva Rint(t)
Por que o bouncing do corpo eacute diferente daquele de um sistema elaacutestico
A cada passo executado as unidades muacutesculo-tendatildeo satildeo submetidas a um
ciclo alongamento-encurtamento durante o contato com o solo As unidades
muacutesculo-tendatildeo satildeo constituiacutedas por duas estruturas em seacuterie que apresentam
respostas diferentes durante o alongamento e encurtamento Enquanto os tendotildees
tecircm um comportamento semelhante entre o alongamento e encurtamento devido agrave
sua pequena histerese (ALEXANDER 2002) o muacutesculo exerce uma maior forccedila
durante o alongamento do que durante o encurtamento dependente da relaccedilatildeo
forccedila-velocidade (FENN e MARSH 1935 HILL 1938) Este fato resulta em uma
resposta diferente das unidades muacutesculo-tendatildeo a um ciclo alongamento-
encurtamento dependente da mudanccedila do comprimento relativo de muacutesculo e
tendatildeo durante o ciclo (CAVAGNA 2006)
O alongamento dos muacutesculos em relaccedilatildeo ao alongamento do tendatildeo depende
da rigidez do muacutesculo em relaccedilatildeo agrave do tendatildeo a rigidez do muacutesculo por sua vez
depende da sua ativaccedilatildeo Se a ativaccedilatildeo eacute elevada como em altas velocidades
(BIEWENER 1998) e o muacutesculo eacute mantido isomeacutetrico como alguns estudos
sugerem para a corrida (KRAM e TAYLOR 1990 BIEWENER et al 1998
99
ROBERTS et al 1998) a maioria da mudanccedila no comprimento seraacute realizada pelos
tendotildees e as caracteriacutesticas do bouncing se aproximaratildeo agraves de um corpo elaacutestico
Se por outro lado a ativaccedilatildeo muscular for baixa uma importante fraccedilatildeo da mudanccedila
do comprimento seraacute realizada pelo muacutesculo Neste caso a forccedila desenvolvida
durante o alongamento eacute esperada que exceda a que foi desenvolvida durante o
encurtamento e as caracteriacutesticas do bouncing foram distintas agrave de um corpo
elaacutestico
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos
painel inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura 31)
e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e barras
azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de corrida
Estatiacutestica conforme figura 33
Esta eacute possivelmente a razatildeo pela qual a proporccedilatildeo tpushtbrake (figura 39) eacute
maior em velocidades baixas de corrida quando a ativaccedilatildeo muscular eacute menor e o
comprimento muscular eacute alterado e consequumlentemente o trabalho sustentado por
filamentos de muacutesculos que deslizam dentro das unidades muacutesculo-tendatildeo eacute
relativamente maior (CAVAGNA 2006) Pode ser observado que a duraccedilatildeo de
trabalho externo positivo eacute maior do que a duraccedilatildeo do trabalho externo negativo ateacute
a velocidade de 12-14 kmh-1 (tabela 31) como esperado a partir da relaccedilatildeo forccedilashy
100
velocidade muscular Isto sugere que com o aumento da velocidade a contribuiccedilatildeo
do trabalho pelas estruturas contraacuteteis eacute progressivamente substituiacutedo pela
armazenagem e re-utilizaccedilatildeo de energia elaacutestica pelos tendotildees A razatildeo tpushtbrake eacute
maior nos idosos (tabela 34)
Um corolaacuterio deste ponto de vista eacute que as fibras musculares curtas
aparentemente de pouca importacircncia ligadas em seacuterie com tendotildees muito longos
(ALEXANDER 2001) tecircm papel fundamental de modular a energia elaacutestica
armazenada nos tendotildees e para ajustar toda a extensatildeo da mudanccedila imposta agrave
unidade muacutesculo-tendatildeo Uma forccedila muscular maior durante o alongamento do que
durante o encurtamento juntamente com a perda de energia durante o ciclo
alongamento-encurtamento satildeo tanto consequumlecircncias da relaccedilatildeo forccedila-velocidade do
muacutesculo e podem explicar pelo menos qualitativamente o conjunto dos desvios do
sistema elaacutestico (tabela 33)
O maior desvio de um sistema elaacutestico encontrado nos indiviacuteduos mais idosos
eacute coerente com a menor forccedila desenvolvida pelos seus muacutesculos o que implicaria
uma mudanccedila relativamente maior do comprimento do muacutesculo nas unidades
muacutesculo-tendatildeo A segunda razatildeo pode ser a maior diferenccedila na forccedila desenvolvida
pelos muacutesculos durante o alongamento relativo ao encurtamento relatado na
literatura em idosos (PHILLIPS et al 1991 OCHALA et al 2006 VANDERVOORT
et al 1990 PORTER et al 1997 POUSSON et al 2001 KLASS et al 2005)
Em conclusatildeo modificaccedilotildees na estrutura muscular menor forccedila e uma
relaccedilatildeo forccedila-velocidade mais assimeacutetrica resultam em uma modificaccedilatildeo da energia
mecacircnica do CM do corpo durante a corrida A menor forccedila especialmente durante
trabalho positivo explica a menor amplitude da oscilaccedilatildeo vertical que por sua vez eacute
a causa do menor trabalho externo da maior frequumlecircncia da passada e maior
trabalho interno A relaccedilatildeo forccedila-velocidade mais assimeacutetrica explica a maior
assimetria contato-despregue Ambas as modificaccedilotildees resultam em uma menor
utilizaccedilatildeo da energia elaacutestica durante o bouncing do idoso
101
4 PREDIZENDO Vf CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO TERRESTRE
41 Introduccedilatildeo
A dinacircmica da locomoccedilatildeo eacute determinada principalmente pelas forccedilas de
reaccedilatildeo do solo geradas de modo agrave re-acelerar e deslocar o corpo contra a forccedila
gravitacional em um ciclo de passada O meacutetodo para analisar o trabalho e o custo
mecacircnico externos usando plataformas dinamomeacutetricas foi introduzido por Cavagna
e colaboradores (caminhada CAVAGNA et al 1963 corrida CAVAGNA et al
1964) Desde entatildeo o Wext tem sido investigado em diferentes condiccedilotildees e
populaccedilotildees [terreno (FORMENTI et al 2005 FORMENTI e MINETTI 2007)
crianccedilas (CAVAGNA et al 1983 SCHEPENS et al 1998 SCHEPENS et al 2001)
meacutetodo de locomoccedilatildeo (MINETTI 1998a ARDIGO et al 2003) deficiecircncia de
hormocircnio do crescimento (MINETTI et al 2000) gradiente de locomoccedilatildeo (MINETTI
et al 1993 1994) idosos (MIAN et al 2006 estudo atual capiacutetulo 3)]
Apesar de sua relevacircncia cientiacutefica o nuacutemero de laboratoacuterios onde trabalho e
custo mecacircnico satildeo avaliados eacute limitado devido a questotildees metodoloacutegicas Em
especial a aquisiccedilatildeo da energia mecacircnica externa eacute atualmente limitada pela
necessidade de espaccedilo suficiente para posicionar plataformas de forccedila para coletar
dois passos sucessivos de modo a obter o miacutenimo de duas curvas de forccedilas de
reaccedilatildeo do solo consecutivas essenciais para esse meacutetodo Durante a corrida haacute um
periacuteodo entre as duas curvas durante o qual ambos os peacutes estatildeo fora do solo (em
velocidades normais) enquanto que durante a caminhada esse periacuteodo eacute
substituiacutedo por uma fase de apoio duplo
Independente se as duas curvas estatildeo sobrepostas ou natildeo (caminhando ou
correndo respectivamente) haacute ainda alguma dificuldade em obter
102
experimentalmente no miacutenimo duas curvas similares de modo que a Fv meacutedia seja
igual ao PC Normalmente mais de um terccedilo das aquisiccedilotildees com indiviacuteduos normais
satildeo rejeitadas (dados natildeo-publicados) devido agrave dificuldade de caminhar ou correr
em plataformas em uma velocidade constante E aleacutem disso a maior parte dos setshy
uprsquos biomecacircnicos satildeo dispostos de modo que as curvas sucessivas sejam obtidas
da mesma plataforma Dados de Bastien e colaboradores mostram que duas
medidas sucessivas em diferentes plataformas de forccedila eram possiacuteveis apenas em
10 das tentativas Assim medir o Wint realizado durante o duplo apoio eacute uma tarefa
difiacutecil e essa variaacutevel em seu maacuteximo representa mais de 40 do Wext (BASTIEN
et al 2003)
Deste modo o presente texto procura analisar as possibilidades de anaacutelise da
biomecacircnica da locomoccedilatildeo em situaccedilotildees onde apenas uma plataforma de forccedila com
dimensotildees capazes de analisar apenas um apoio simples satildeo disponiacuteveis
O objetivo desse trabalho eacute estabelecer uma equaccedilatildeo capaz de predizer o
trabalho mecacircnico usando procedimentos de prediccedilatildeo linear e otimizaccedilatildeo e checar
sua validade analisando experimentos de locomoccedilatildeo em diferentes velocidades
42 Equaccedilatildeo do tempo de atraso
Usando a primeira lei de Newton (um corpo se move a uma velocidade
constante quando a soma total das forccedilas externas eacute igual a zero) temos que a Fv
meacutedia exercida contra o solo durante um ciclo de passada a uma velocidade
constante eacute igual ao PC (CAVAGNA e MARGARIA 1966) Se somente as forccedilas de
reaccedilatildeo do solo de um uacutenico passo satildeo coletadas e a simetria eacute assumida
(KARAMANIDIS et al 2003) o atraso de tempo entre passos (s) pode ser obtido
por
F t Ivc c vt = = Eq 41 step M g M g
onde tc e Fvc satildeo a duraccedilatildeo e a Fv meacutedia durante o fase de contato (figura 41)
respectivamente e Iv eacute o impulso vertical Essa informaccedilatildeo eacute crucial se a passada
completa deve ser reconstruiacuteda (no novo passo elaborado somente a forccedila
103
horizontal precisa ser invertida enquanto que a Fv precisa ser somente duplicada a
partir do atraso do tempo tstep)
M g M gFP = = Eq 42
2F t 2 Ivc c v
de onde o CP (CP m) pode ser inferido
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de reaccedilatildeo do solo durante a
corrida
O DF (ALEXANDER e JAYES 1980) ie a fraccedilatildeo do tempo de passada no
qual um uacutenico peacute estaacute no solo eacute
104
M g 1DF = = Eq 43
2F F vc vc2
M g
e deste modo eacute possiacutevel indicar se o modo de locomoccedilatildeo eacute caminhada (DF05) ou
corrida (DFlt05) Ateacute esse ponto a uacutenica variaacutevel a ser conhecida antecipadamente
eacute a massa corporal (kg)
43 Estimativa da velocidade horizontal
Enquanto pares de fotoceacutelulas satildeo comumente encontrados em laboratoacuterios
por vezes a Vf natildeo eacute conhecida (paleontologia biomecacircnica forecircnsica etc) Assim
FP DF e massa podem entrar no modelo de prediccedilatildeo de velocidade (ms-1) com
base em dados coletados previamente (NILSSON e THORSTENSSON 1989)
Vf = (1953F M g) - (14843Iv M g) + 5415 Eq 44 v peak
onde Fvpeak eacute a forccedila de impacto vertical e Iv eacute impulso vertical O erro meacutedio da
estimativa (SEE = 05 dp(1 ndash R2)) eacute 005 ms-1 Entatildeo o CP pode ser obtido como
VfFP ou
1953Fv peak -14843Iv + 5415M gCP = Eq 45
2Fvc
Apesar do alto coeficiente de regressatildeo e baixo erro padratildeo da meacutedia esse
meacutetodo necessita do primeiro pico vertical e assim se torna limitado por exemplo
em humanos para corredores que apoacuteiam o peacute com o calcanhar no momento do
contato Para evitar essa limitaccedilatildeo foi construiacutedo um modelo de regressatildeo linear
muacuteltipla incluindo variaacuteveis descritivas (MINETTI e ALEXANDER 1997) da
energeacutetica da locomoccedilatildeo
qregression + + DFregression + FPregressionVf = Eq 46 3
105
Para cada regressatildeo o meacutetodo dos miacutenimos quadrados eacute usado Enquanto
que o DF e o FP satildeo calculados (equaccedilotildees 42 e 43) o fator q precisa ser
determinado O fator q (tambeacutem conhecido como fator de forma) oferece
informaccedilotildees relacionadas ao formato da curva forccedila-tempo durante a fase de apoio
Usualmente a forccedila vertical pode ser determinada somente com dois primeiros
cossenos de uma seacuterie de Fourier (ALEXANDER 1978)
tc ) Eq 47 Fv = x cos( tc ) V qcos(3
onde x eacute PC e tc eacute tempo de contato A ausecircncia de coeficientes seno indica uma
simetria nas curvas forccedila-tempo e nestes casos o fator q eacute constante Em outras
palavras conhecendo somente o valor da Fv e sua respectiva fase eacute possiacutevel
encontrar o fator q Todavia na caminhada satildeo frequumlentemente observadas curvas
assimeacutetricas (NILSSON e THORSTENSSON 1989) assim incluiacuteu-se dois
coeficientes senos na equaccedilatildeo
tc ) Eq 48 Fv = x cos( tc ) V qcos(3 tc ) + a1 sin(2 tc ) V a2 sin(4
onde a1 e a2 satildeo constantes Assim usando um simples caacutelculo de meacutedia aritmeacutetica
para o q durante o tc noacutes temos
q1 + q2 + q3 + qnqmean = Eq 49 n
Usando os valores de fator q advindos da literatura (MINETTI e ALEXANDER
1997) construiacutemos a seguinte equaccedilatildeo de regressatildeo em situaccedilotildees de caminhada
DF 05 qregression = 23061q + 05873 R=079 Eq 410
onde qregression eacute a Vf estimada e utilizada na equaccedilatildeo 46 Para situaccedilotildees de corrida
o fator q natildeo varia em funccedilatildeo da velocidade (figura 42) obtendo um coeficiente
106
angular da equaccedilatildeo de regressatildeo muito baixo (00916) portanto em situaccedilotildees de
corrida o qregression eacute cancelado
As seguintes equaccedilotildees (411 412 413 e 414) foram originadas dos dados
apresentados na figura 43 de MINETTI (1998b) Nesta figura as informaccedilotildees satildeo
valores meacutedios (meacutedias advindas de 22 agrave 42 medidas para cada velocidade e tipo
de locomoccedilatildeo) de medidas de FP e DF portanto as equaccedilotildees a seguir apresentam
valores de R subestimados enquanto que as equaccedilotildees de regressatildeo representam
de modo satisfatoacuterio os dados de origem A Vf predita pela frequumlecircncia de passada
FPregression foi determinada para a caminhada como
DF 05 FPregression = 27781FP V12077 R=098 Eq 411
e para a corrida
DF lt 05 FPregression = 75469FP - 79561 R=090 Eq 412
A Vf predita pelo duty factor DFregression foi determinado para a caminhada
como
DF 05 DFregression = V12342DF + 84628 R=099 Eq 413
e para a corrida
DF lt 05 DFregression = -16912DF + 87422 R=098 Eq 414
44 Equaccedilatildeo de custo energeacutetico
O atraso entre passos tstep e a Vf satildeo cruciais para ldquosintetizarrdquo toda a
passada e calcular o trabalho mecacircnico externo e a recuperaccedilatildeo de energia (ambos
valores total (CAVAGNA e KANEKO 1977) e instantacircneo (CAVAGNA et al 2002))
Assim as forccedilas de reaccedilatildeo do solo satildeo integradas duas vezes para posiccedilatildeo
do CM e dados da velocidade A primeira integraccedilatildeo das forccedilas horizontais e
107
verticais menos o PC ambas divididas pela massa corporal resultam na aceleraccedilatildeo
do CM A constante de integraccedilatildeo usada para as forccedilas acircntero-posteriores foi a
velocidade meacutedia de progressatildeo Para as forccedilas vertical e meacutedio-lateral noacutes
assumimos que as velocidades inicial e final em todo o ciclo eram iguais A variaccedilatildeo
positiva ponto-a-ponto da Ep somada a variaccedilatildeo positiva ponto-a-ponto da Ek
durante uma passada completa resulta na energia mecacircnica externa total Ecm
(CAVAGNA e KANEKO 1977 WILLEMS et al 1995) Para evitar o ldquoparadoxo do
trabalho zerordquo o trabalho externo eacute determinado somando somente os incrementos
positivos da Ecm Sabendo o Wext e estimando o Wint (MINETTI 1998b) foi
calculado o Wtot e o custo energeacutetico (Ctot) da locomoccedilatildeo
A velocidade horizontal foi determinada atraveacutes do meacutetodo de regressatildeo
linear muacuteltipla usando como variaacuteveis independentes os coeficientes da curva Fv (de
NILSSON e THORSTENSSON 1989) A validade cruzada das equaccedilotildees
desenvolvidas no presente estudo foi calculada por coeficientes de regressatildeo (R)
45 Discussatildeo
O presente modelo prediz a velocidade horizontal e o custo energeacutetico da
locomoccedilatildeo terrestre Aleacutem disso o modelo matemaacutetico permite estimar outros
importantes paracircmetros da locomoccedilatildeo como a FP e o DF
Outros modelos
Tem sido proposto que o custo energeacutetico da locomoccedilatildeo terrestre pode ser
determinado pelo custo da produccedilatildeo de forccedila para suportar o PC (KRAM e TAYLOR
1990) Fundamentalmente o custo de geraccedilatildeo de forccedila indica que a potecircncia
metaboacutelica da locomoccedilatildeo eacute relacionada diretamente ao PC e o tempo disponiacutevel
para produzir forccedila
c Mg E
metabolic = Eq 415 tc
108
onde c eacute uma constante de custo (que expressa a proporcionalidade entre taxa de
dispecircndio de energia normalizado pela massa e taxa de geraccedilatildeo de forccedila)
entretanto esse modelo tecircm sido alvo de criacuteticas Resumidamente a principal criacutetica
eacute baseada em i) a suposiccedilatildeo que o dispecircndio metaboacutelico devido ao movimento dos
membros superiores eacute negligenciaacutevel e ii) a desconsideraccedilatildeo do conceito de
trabalho O presente trabalho tambeacutem mostra que levar em consideraccedilatildeo apenas o
tempo da geraccedilatildeo de forccedila e a forccedila natildeo eacute o bastante para determinar o custo
energeacutetico da locomoccedilatildeo As informaccedilotildees contidas no proacuteprio comportamento da
curva forccedila vertical-tempo parecem influenciar de modo importante a determinaccedilatildeo
de paracircmetros fundamentais da locomoccedilatildeo Especialmente o Iv e o fator de forma q
indicam um ajuste da curva de regressatildeo linear importante para a determinaccedilatildeo da
Vf
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de progressatildeo
A prediccedilatildeo da FP e DF foram comparados com os valores
determinados experimentalmente em dois sujeitos (sujeitos RR e TD 175 e
170m de estatura 78 e 84kg de massa corporal) correndo em vaacuterias velocidades de
progressatildeo As forccedilas de reaccedilatildeo do solo foram registradas em uma plataforma de
forccedila AMTI agrave uma frequumlecircncia de amostragem de 1000Hz e a Vf foi determinada
quadro a quadro atraveacutes de uma cacircmera colocada agrave 5m de distacircncia da aacuterea de
interesse e 1m de altura do piso A mesma foi posta de forma a registrar o
movimento no plano sagital dos sujeitos com uma frequumlecircncia de amostragem de
109
50Hz Um procedimento de calibraccedilatildeo 2D foi realizado a fim de converter as
informaccedilotildees de pixels para metros As informaccedilotildees de posiccedilatildeo linear foram filtradas
atraveacutes de um filtro passa-baixa do tipo Butterworth com frequumlecircncia de corte
variando entre 3 e 9Hz determinados para cada corrida atraveacutes do procedimento de
anaacutelise residual (WINTER 2005) A coordenada horizontal do ponto anatocircmico do
quadril foi utilizada para determinar a FPexp CPexp e a velocidade meacutedia
experimentais A FPexp foi determinada pela frequumlecircncia de amostragem fsample
dividida pelo nuacutemero de quadros que totalizam um ciclo de passada nframes
f sampleFPexp = Eq 416 n frames
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de progressatildeo Fonte
Minetti 1998b
O CPexp foi determinado pela posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo FinalhorPosition diminuiacutedo pela posiccedilatildeo horizontal do quadril no
primeiro quadro InitialhorPosition
CPexp = horPosition = FinalhorPosition V InitialhorPosition Eq 417
110
A velocidade meacutedia experimental Vfexp foi determinada pela variaccedilatildeo da
posiccedilatildeo horizontal durante um ciclo de passada dividida pela variaccedilatildeo de tempo de
um ciclo de passada a partir da Eq 411
n frames 1time = = Eq 418
f sample FPexp
temos
horPositionVfexp = Eq 419 time
A razatildeo entre a frequumlecircncia FP experimental e teoacuterica foi de 1001 A razatildeo
para o DF foi de 0977
O presente modelo pode auxiliar a determinar paracircmetros espaccedilos-temporais
e energeacuteticos de animais extintos prevendo a forccedila de reaccedilatildeo do solo de um uacutenico
passo
Atraveacutes da anaacutelise das informaccedilotildees contidas em uma curva de forccedila de
reaccedilatildeo do solo vertical pelo tempo informaccedilotildees fundamentais da mecacircnica e
energeacutetica da locomoccedilatildeo podem ser estimadas em situaccedilotildees que a informaccedilatildeo
experimental direta natildeo for disponiacutevel
111
5 CONCLUSAtildeO GERAL
51 O custo EMG da caminhada humana
O objetivo deste estudo foi construir um modelo do custo EMG da caminhada
humana Para tanto criou-se duas abordagens experimental e teoacuterica sendo que a
teoacuterica parece ter uma melhor relaccedilatildeo com as evidecircncias experimentais sobre a
energeacutetica da locomoccedilatildeo humana A estabilidade em conjunto com a atividade EMG
de muacutesculos posturais parece ser um mecanismo primaacuterio da energeacutetica da
locomoccedilatildeo
52 A mecacircnica da corrida de idosos
A mecacircnica da corrida de idosos foi comparada com a de jovens atraveacutes da
determinaccedilatildeo e comparaccedilatildeo do trabalho mecacircnico e de paracircmetros do sistema
massa-mola especialmente usando aspectos de assimetria do mecanismo elaacutestico
de minimizaccedilatildeo de energia entre os grupos experimentais
Os idosos produzem menos forccedila durante a fase de trabalho mecacircnico
positivo com uma menor oscilaccedilatildeo vertical durante a fase aeacuterea e menor oscilaccedilatildeo
total Consequentemente a capacidade de armazenar e re-utilizar energia elaacutestica
112
dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio energeacutetico neste
grupo quando comparado com jovens
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre
Tendo apenas as informaccedilotildees de uma curva forccedila vertical versus tempo e a
massa corporal construiu-se um modelo biomecacircnico de prediccedilatildeo do CP Vf e custo
energeacutetico da locomoccedilatildeo terrestre Os resultados advindos do modelamento
correspondem aos paracircmetros determinados experimentalmente Laboratoacuterios que
detenham apenas uma plataforma de forccedila ou nas aacutereas onde as informaccedilotildees de
entrada do atual modelo constituam a uacutenica fonte de dados disponiacutevel (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis-chaves da
locomoccedilatildeo podem ser realizadas com razoaacutevel acuraacutecia
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico
O seguinte texto representa um esforccedilo de raciociacutenio a partir dos achados da
presente tese aliados ao referencial teoacuterico abordado durante os capiacutetulos
anteriores a fim de compreender as determinantes da locomoccedilatildeo humana Mais do
que oferecer uma resposta final sobre a mecacircnica e a energeacutetica da locomoccedilatildeo
humana este texto lanccedila uma provaacutevel resposta ainda inicial acerca das
determinantes envolvidas da locomoccedilatildeo humana
As situaccedilotildees de locomoccedilatildeo que desafiam as noccedilotildees atuais da mecacircnica e
energeacutetica da locomoccedilatildeo tratadas nesta tese nomeadamente o processo de
envelhecimento e as inclinaccedilotildees satildeo algumas das questotildees que natildeo satildeo todavia
compreendidas pelas teorias atuais da locomoccedilatildeo humana mas que a presente
hipoacutetese pretende responder A locomoccedilatildeo humana eacute determinada desde o ponto
de vista mecacircnico como uma seacuterie de accedilotildees complexas de segmentos interligados
ao qual geram torques atraveacutes da ativaccedilatildeo muscular e transmissatildeo de forccedilas pelos
tendotildees anexados em seacuterie aos muacutesculos e agraves articulaccedilotildees que conectam os
Restriccedilotildees da tarefa
velocidade
Restriccedilotildees do organismo
- massa
- comprimento do membro
i f i
Tendatildeo
- energia
Energia
mecacircnica do
CM
Mecanismo
minimizador
Dispecircndio
energeacutetico
Restriccedilotildees do
ambiente Muacutesculos
- eficiecircncia
113
segmentos Todo este sistema eacute controlado pelo sistema nervoso central e
perifeacuterico Ainda assim apesar da extrema complexidade deste tipo de movimento
conforme discutido extensivamente nas seccedilotildees 21 31 e 41 a corrida e a
caminhada humana se caracterizam como sistemas capazes de minimizar o
dispecircndio energeacutetico advindo dos muacutesculos sistemas estes denominados de
massa-mola e pecircndulo invertido respectivamente Desde a sua introduccedilatildeo ateacute os
dias atuais estes sistemas tecircm recebido intensas criacuteticas da literatura abordadas em
capiacutetulos precedentes poreacutem mais do que por agrave prova os achados principais que
deram base para estes sistemas as criacuteticas satildeo direcionadas agraves limitaccedilotildees dos
sistemas especialmente da forma em que foram propostos A seacuterie de experimentos
realizados primeiramente com humanos (CAVAGNA et al 1963 1964) e apoacutes com
animais (FEDAK et al 1982 HEGLUND et al 1982a HEGLUND et al 1982b
TAYLOR et al 1982) demonstraram de modo inequiacutevoco que as curvas de energia
potencial gravitacional e cineacutetica do CM se apresentavam em fase durante a
corridagalope e em contra-fase (atraso de 180 graus) na caminhada Deste ponto
em diante eacute estabelecido que durante a transiccedilatildeo da caminhada para a corrida os
sistemas satildeo modificados de um modo discreto ou seja o pecircndulo invertido seria
ldquodesligadordquo e o sistema massa-mola acionado automaticamente
Figura 51 Modelo conceitual da locomoccedilatildeo humana
114
Este raciociacutenio adveacutem dos achados de Cavagna e colegas e aleacutem disso da
observaccedilatildeo de paracircmetros cinemaacuteticos e cineacuteticos aos quais respondem de forma
discreta na mudanccedila do tipo de locomoccedilatildeo por exemplo o DF durante caminhada
varia de 065 em baixas velocidades ateacute 055 em altas velocidades de forma
contiacutenua poreacutem quando o sujeito faz a transiccedilatildeo para a corrida o DF passa para
04 O fator de forma ldquoqrdquo da curva de forccedila vertical em funccedilatildeo do tempo tambeacutem se
modifica abruptamente variando de 07 na caminhada para -01 durante corrida
(ALEXANDER e JAYES 1980) Uma justificativa para este comportamento discreto
eacute relacionado agrave um tipo de locomoccedilatildeo pouco usada por seres-humanos o skipping
Por outro lado evidecircncias experimentais tecircm demonstrado que em algumas
velocidades de caminhada parece existir um mecanismo elaacutestico de minimizaccedilatildeo de
energia (FUKUNAGA et al 2001) denominado de sistema de ldquocatapultardquo devido agrave
caracteriacutestica de baixa velocidade durante a frenagem e alta velocidade na fase de
propulsatildeo (ISHIKAWA et al 2005 ISHIKAWA et al 2007) Por outro lado durante a
corrida no estudo da mecacircnica da corrida dos idosos foi observada uma transduccedilatildeo
de energia cineacutetica e potencial gravitacional em baixas velocidades diminuindo com
o aumento da velocidade (relativo ao deslocamento vertical total capiacutetulo 3)
enquanto que a contribuiccedilatildeo do tendatildeo e consequentemente do componente
elaacutestico da unidade muacutesculo-tendatildeo aumentam (CAVAGNA 2006) Portanto os dois
sistemas parecem natildeo mudar atraveacutes de transformaccedilotildees abruptas como os
paracircmetros anteriormente apresentados poderiam induzir mas eacute notoacuterio um
continuum de mudanccedilas nas caracteriacutesticas mecacircnicas destes dois tipos de
locomoccedilatildeo e a mudanccedila na predominacircncia do mecanismo minimizador parece ser o
responsaacutevel pela transiccedilatildeo de um tipo de locomoccedilatildeo para outro
Para construir este modelo eacute necessaacuterio sabermos quanto de energia eacute
recuperado pelos mecanismos minimizadores A energia recuperada por via
pendular eacute calculada como (ver capiacutetulo 327)
cpendular = Rint Eq 51
e a energia elaacutestica armazenada como
115
Fvmx k = Eq 52 celaacutestica 2
Este raciociacutenio leva agrave um modelo de minimizaccedilatildeo de energia assumido
simplesmente como o somatoacuterio dos mecanismos elaacutestico e pendular
= Eq 53 creconvertida cpendular + celaacutestica
Assumindo como constante o dispecircndio energeacutetico sob outras formas de
energia (teacutermica) a energia despendida para a contraccedilatildeo dos muacutesculos esqueleacuteticos
a fim de gerar a locomoccedilatildeo pode ser determinada por
= -E Eq 54 Emuscular Emetaboacutelica repouso
e deste modo podemos afirmar que a energia total para percorrer determinada
distacircncia eacute dada por
= Eq 55 total Ereconvertida + Emuscular
e este valor em um amplo espectro de velocidades e tipos de locomoccedilatildeo apresente
uma relaccedilatildeo linear direta com a velocidade da locomoccedilatildeo (restriccedilatildeo da tarefa)
Mas quais os fatores que determinam este continuum de mecanismos
minimizadores O compromisso entre estes mecanismos (pendular e elaacutestico) eacute
diretamente ligado ao comportamento da energia mecacircnica vertical (potencial
gravitacional + cineacutetica) e da unidade muacutesculo-tendatildeo E em uacuteltima anaacutelise estas
caracteriacutesticas mecacircnicas parecem ser moduladas por restriccedilotildees do ambiente (g
inclinaccedilatildeo) restriccedilotildees da tarefa (velocidade) e restriccedilotildees do organismo (massa e
comprimento de membros inferiores) conforme figura 51
Hipoacuteteses levantadas com o atual modelo
i) A velocidade de transiccedilatildeo deve coincidir com a mudanccedila na
predominacircncia do mecanismo minimizador de energia
ii) Analisar o mecanismo pendular em diferentes velocidades de corrida
116
iii) Quando as demais restriccedilotildees estatildeo controladas as restriccedilotildees do
organismo e o compromisso entre massa e comprimento de membro
inferior poderiam explicar as mudanccedilas no uso dos mecanismos pendular
e elaacutestico
iv) Existe uma velocidade oacutetima para a corrida humana
v) O somatoacuterio da quantidade de energia reconvertida por meio pendular e
elaacutestico somado ao dispecircndio energeacutetico dos muacutesculos deve ser altamente
relacionado com a velocidade de locomoccedilatildeo
541 Respondendo algumas criacuteticas atuais
Este modelo pode explicar os resultados de GEYER et al 2006) sobre a
possibilidade de um modelo de ldquopecircndulo-invertido carregado por uma molardquo
(BLICKHAN et al 2007) ser aplicado na caminhada devido a melhor representaccedilatildeo
da curva forccedila tempo pelo meacutetodo proposto do que pelo modelo do pecircndulo-
invertido Apesar da boa representaccedilatildeo de uma variaacutevel mecacircnica da locomoccedilatildeo o
modelo despreza uma questatildeo central da anaacutelise da locomoccedilatildeo a determinaccedilatildeo do
mecanismo minimizador de energia Portanto apesar da coincidecircncia da resposta de
forccedila de reaccedilatildeo do solo vertical originada pelo modelo e a medida experimental o
modelo apenas apresenta uma possibilidade do ponto de vista matemaacutetico de
representaccedilatildeo do modelo teoacuterico de continuum apresentado aqui
Recentemente uma extensa revisatildeo de BIEWENER 2006) analisou como as
flutuaccedilotildees na energia mecacircnica do CM de animais podem ser usadas a fim de
identificar os mecanismos fundamentais envolvidos na locomoccedilatildeo terrestre e indicou
que quando satildeo comparados os padrotildees mecacircnicos e cinemaacuteticos de uma ampla
diversidade de quadruacutepedes e biacutepedes padrotildees mais complexos emergem
observando que alguns animais menos aptos para a locomoccedilatildeo (less cursorial)
podem combinar padrotildees mecacircnicos da caminhada e corrida em velocidades
intermediaacuterias ou em animais de grande tamanho (eg elefantes apresentam
aspectos de corrida mas com um comportamento pendular entre a energia cineacutetica e
potencial gravitacional do CM) Novamente a hipoacutetese do continuum se apresenta
como um forte candidato para explicar atraveacutes de uma teoria simples e unificante a
locomoccedilatildeo de vertebrados
117
O que acontece nas inclinaccedilotildees
Quando nos deslocamos no plano eacute bem determinado que o trabalho
mecacircnico liacutequido apresente um valor muito baixo e natildeo eacute igual a zero devido agrave
resistecircncia do ar e agrave fricccedilatildeo dos tecidos mas ainda assim eacute comumente assumido
como negligenciaacutevel (ALEXANDER 1989) poreacutem a energia mecacircnica total para
movimentar o CM em relaccedilatildeo ao ambiente externo varia durante um ciclo de
passada de modo que o somatoacuterio dos incrementos (trabalho positivo) seja igual ao
somatoacuterio dos decrementos (trabalho negativo) Como observado no estudo ldquocusto
EMG da caminhada humanardquo (Capiacutetulo 2) existe uma predominacircncia de trabalho
positivo em inclinaccedilotildees positivas e predominacircncia de trabalho negativo em
inclinaccedilotildees negativas (figura 52)
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido de
elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006
118
Portanto o pecircndulo invertido natildeo atua como mecanismo minimizador de
dispecircndio energeacutetico e natildeo obstante a falta de evidecircncias eacute razoaacutevel supor que a
energia elaacutestica natildeo atue de forma importante nas inclinaccedilotildees Importante notar que
a inexistecircncia de um mecanismo minimizador natildeo significa que o modelo natildeo
contempla esta situaccedilatildeo apenas demonstra que devido agrave uma restriccedilatildeo severa do
ambiente (inclinaccedilatildeo extrema) o organismo natildeo dispotildee de nenhum auxiacutelio
importante para economizar energia sobrecarregando os muacutesculos a fim de produzir
a energia necessaacuteria para manter o movimento de locomoccedilatildeo Nesta situaccedilatildeo o
dispecircndio energeacutetico eacute dependente apenas da quantidade de ativaccedilatildeo muscular e
seus respectivos equivalentes energeacuteticos de atividade EMG como demonstrado no
estudo do custo EMG da caminhada humana
55 Propostas para futuros estudos
551 Custo EMG da caminhada humana
Testar o modelo do Custo EMG
- em diferentes terrenos
- em populaccedilotildees com patologias do sistema nervoso
- em inclinaccedilotildees negativas
552 Mecacircnica da corrida dos idosos
- desenvolver um modelo matemaacutetico que tenha em consideraccedilatildeo os
comportamentos diferentes entre a fase de encurtamento e alongamento das
unidades muacutesculo-tendatildeo atraveacutes de um modelo viscoelaacutesticohiperelaacutestico
- estudar o bouncing elaacutestico da corrida em inclinaccedilotildees
- estudar o efeito da fadiga no bouncing elaacutestico da corrida humana
- estudar o modelo massa-mola ponto-a-ponto
- estudar o bouncing elaacutestico entre sujeitos com diferentes estruturas
muacutesculo-esqueleacuteticas (velocistas vs fundistas obesos vs natildeo-obesos homens vs
mulheres)
119
- usar os paracircmetros do modelo massa-mola e as assimetrias contato-
despregue de sujeitos normais para comparaccedilatildeo com amputados e portadores de
necessidades especiais com restriccedilotildees na locomoccedilatildeo
- estudar o bouncing elaacutestico na corrida de velocidade de atletas de alto
rendimento
553 Modelo matemaacutetico da locomoccedilatildeo terrestre
Testar o modelo
- para situaccedilatildeo de aceleraccedilotildees
- em animais extintos
120
6 Referecircncias
ALESHINSKY SY An energy sources and fractions approach to the mechanical
energy expenditure problem--IV Criticism of the concept of energy transfers within
and between links J Biomech 19 4 307-309 1986
ALEXANDER RM Damper for bad vibrations Nature 414 6866 855-857 2001
ALEXANDER RM Energy-saving mechanisms in walking and running J Exp Biol 160
55-69 1991
ALEXANDER RM Models and the scaling of energy costs for locomotion J Exp Biol
208 Pt 9 1645-1652 2005
ALEXANDER RM Optimization and gaits in the locomotion of vertebrates Physiol Rev
69 4 1199-1227 1989
ALEXANDER RM Principles of animal locomotion Princeton NJ Princeton
University Press 2003
ALEXANDER RM Tendon elasticity and muscle function Comp Biochem Physiol A
Mol Integr Physiol 133 4 1001-1011 2002
ALEXANDER RM Vertical movements in walking and running Journal of Zoology
185 27-40 1978
ALEXANDER RM JAYES AS Fourier analysis of forces exerted in walking and
running J Biomech 13 4 383-390 1980
ALEXANDER RM VERNON A Mechanics of hopping by kangaroos (Macropodidae)
Journal of Zoology 177 265-303 1975
121
ANDERS C WAGNER H PUTA C GRASSME R PETROVITCH A SCHOLLE
HC Trunk muscle activation patterns during walking at different speeds J
Electromyogr Kinesiol 17 2 245-252 2007
ANDERSON KG BEHM DG Maintenance of EMG activity and loss of force output
with instability J Strength Cond Res 18 3 637-640 2004
ARDIGO LP SAIBENE F MINETTI AE The optimal locomotion on gradients
walking running or cycling Eur J Appl Physiol 90 3-4 365-371 2003
BASTIEN GJ HEGLUND NC SCHEPENS B The double contact phase in walking
children J Exp Biol 206 Pt 17 2967-2978 2003
BASTIEN GJ SCHEPENS B WILLEMS PA HEGLUND NC Energetics of load
carrying in Nepalese porters Science 308 5729 1755 2005
BIEWENER AA Muscle-tendon stresses and elastic energy storage during locomotion
in the horse Comp Biochem Physiol B Biochem Mol Biol 120 1 73-87 1998
BIEWENER AA Patterns of mechanical energy change in tetrapod gait pendula
springs and work J Exp Zoolog A Comp Exp Biol 305 11 899-911 2006
BIEWENER AA KONIECZYNSKI DD BAUDINETTE RV In vivo muscle forceshy
length behavior during steady-speed hopping in tammar wallabies J Exp Biol 201
Pt 11 1681-1694 1998
BIGLAND-RITCHIE B WOODS JJ Integrated electromyogram and oxygen uptake
during positive and negative work J Physiol 260 2 267-277 1976
BLANCO RE GAMBINI R A biomechanical model for size speed and anatomical
variations of the energetic costs of running mammals J Theor Biol 241 1 49-61
2006
BLAXTER K Energy metabolism in animals and man Cambridge UK Cambridge
University Press 1989
BLICKHAN R The spring-mass model for running and hopping J Biomech 22 11-12
1217-1227 1989
BLICKHAN R SEYFARTH A GEYER H GRIMMER S WAGNER H GUNTHER
M Intelligence by mechanics Philos Transact A Math Phys Eng Sci 365 1850
199-220 2007
122
CAVAGNA GA Force platforms as ergometers J Appl Physiol 39 1 174-179 1975
CAVAGNA GA The landing-take-off asymmetry in human running J Exp Biol 209 Pt
20 4051-4060 2006
CAVAGNA GA DUSMAN B MARGARIA R Positive work done by a previously
stretched muscle J Appl Physiol 24 1 21-32 1968
CAVAGNA GA FRANZETTI P FUCHIMOTO T The mechanics of walking in
children J Physiol 343 323-339 1983
CAVAGNA GA FRANZETTI P HEGLUND NC WILLEMS P The determinants of
the step frequency in running trotting and hopping in man and other vertebrates J
Physiol 399 81-92 1988
CAVAGNA GA HEGLUND NC WILLEMS PA Effect of an increase in gravity on the
power output and the rebound of the body in human running J Exp Biol 208 Pt 12
2333-2346 2005
CAVAGNA GA KANEKO M Mechanical work and efficiency in level walking and
running J Physiol 268 2 467--481 1977
CAVAGNA GA MANTOVANI M WILLEMS PA MUSCH G The resonant step
frequency in human running Pflugers Arch 434 6 678-684 1997
CAVAGNA GA MARGARIA R Mechanics of walking J Appl Physiol 21 1 271-278
1966
CAVAGNA GA SAIBENE FP MARGARIA R External work in walking J Appl
Physiol 18 1-9 1963
CAVAGNA GA SAIBENE FP MARGARIA R Mechanical Work in Running J Appl
Physiol 19 249-256 1964
CAVAGNA GA THYS H ZAMBONI A The sources of external work in level walking
and running J Physiol 262 3 639-657 1976
CAVAGNA GA WILLEMS PA FRANZETTI P DETREMBLEUR C The two power
limits conditioning step frequency in human running J Physiol 437 95-108 1991
CAVAGNA GA WILLEMS PA HEGLUND NC The role of gravity in human walking
pendular energy exchange external work and optimal speed J Physiol 528 Pt 3
657-668 2000
123
CAVAGNA GA WILLEMS PA HEGLUND NC Walking on Mars Nature 393 6686
636 1998
CAVAGNA GA WILLEMS PA LEGRAMANDI MA HEGLUND NC Pendular
energy transduction within the step in human walking J Exp Biol 205 Pt 21 3413shy
3422 2002
CERRETELLI P VEICSTEINAS A FUMAGALLI M DELLORTO L Energetics of
isometric exercise in man J Appl Physiol 41 2 136-141 1976
DEN OTTER AR GEURTS AC MULDER T DUYSENS J Speed related changes
in muscle activity from normal to very slow walking speeds Gait Posture 19 3 270shy
278 2004
DOHERTY TJ Invited review Aging and sarcopenia J Appl Physiol 95 4 1717-1727
2003
DOKE J DONELAN JM KUO AD Mechanics and energetics of swinging the human
leg J Exp Biol 208 Pt 3 439-445 2005
DOKE J KUO AD Energetic cost of producing cyclic muscle force rather than work to
swing the human leg J Exp Biol 210 Pt 13 2390-2398 2007
EVANS SL DAVY KP STEVENSON ET SEALS DR Physiological determinants
of 10-km performance in highly trained female runners of different ages J Appl
Physiol 78 5 1931-1941 1995
FEDAK MA HEGLUND NC TAYLOR CR Energetics and mechanics of terrestrial
locomotion II Kinetic energy changes of the limbs and body as a function of speed
and body size in birds and mammals J Exp Biol 97 23-40 1982
FENN WO Work against gravity and work due to velocity changes in running Am J
Physiol 93 433-462 1930
FENN WO MARSH BS Muscular force at different speeds of shortening J Physiol
85 3 277-297 1935
FORMENTI F ARDIGO LP MINETTI AE Human locomotion on snow determinants
of economy and speed of skiing across the ages Proc Biol Sci 272 1572 1561shy
1569 2005
124
FORMENTI F MINETTI AE Human locomotion on ice the evolution of ice-skating
energetics through history J Exp Biol 210 Pt 10 1825-1833 2007
FRERIKS B HERMENS H DISSELHORST-KLUG C RAU G The
recommendations for sensor and sensor placement procedures for surface
electromyography In HERMENS H (editor) European recommendations for
surface electromyography Enschede Roessingh Research and Development
1991
FRONTERA WR SUH D KRIVICKAS LS HUGHES VA GOLDSTEIN R
ROUBENOFF R Skeletal muscle fiber quality in older men and women Am J
Physiol Cell Physiol 279 3 C611-618 2000
FUKUNAGA T KUBO K KAWAKAMI Y FUKASHIRO S KANEHISA H
MAGANARIS CN In vivo behaviour of human muscle tendon during walking Proc
Biol Sci 268 1464 229-233 2001
GARDNER-MORSE MG STOKES IA The effects of abdominal muscle coactivation
on lumbar spine stability Spine 23 1 86-91 discussion 91-82 1998
GEYER H SEYFARTH A BLICKHAN R Compliant leg behaviour explains basic
dynamics of walking and running Proc Biol Sci 273 1603 2861-2867 2006
GOTTSCHALL JS KRAM R Energy cost and muscular activity required for leg swing
during walking J Appl Physiol 99 1 23-30 2005
GOTTSCHALL JS KRAM R Mechanical energy fluctuations during hill walking the
effects of slope on inverted pendulum exchange J Exp Biol 209 Pt 24 4895-4900
2006
GRANATA KP MARRAS WS Cost-benefit of muscle cocontraction in protecting
against spinal instability Spine 25 11 1398-1404 2000
GRANATA KP ORISHIMO KF Response of trunk muscle coactivation to changes in
spinal stability J Biomech 34 9 1117-1123 2001
GRIFFIN TM ROBERTS TJ KRAM R Metabolic cost of generating muscular force
in human walking insights from load-carrying and speed experiments J Appl
Physiol 95 1 172-183 2003
HEGLUND NC Running a-fowl of the law Science 303 47-48 2004
125
HEGLUND NC CAVAGNA GA Mechanical work oxygen consumption and efficiency
in isolated frog and rat muscle Am J Physiol 253 1 Pt 1 C22-29 1987
HEGLUND NC CAVAGNA GA TAYLOR CR Energetics and mechanics of
terrestrial locomotion III Energy changes of the centre of mass as a function of
speed and body size in birds and mammals J Exp Biol 97 41-56 1982a
HEGLUND NC FEDAK MA TAYLOR CR CAVAGNA GA Energetics and
mechanics of terrestrial locomotion IV Total mechanical energy changes as a
function of speed and body size in birds and mammals J Exp Biol 97 57-66
1982b
HILL AV The heat of shortening and the dynamic constants of muscle Proceedings of
the Royal Society B 126 136-195 1938
HOYT DF TAYLOR CR Gait and the energetics of locomotion in horses Nature
292 239-240 1981
ISHIKAWA M KOMI PV GREY MJ LEPOLA V BRUGGEMANN GP Muscleshy
tendon interaction and elastic energy usage in human walking J Appl Physiol 99
2 603-608 2005
ISHIKAWA M PAKASLAHTI J KOMI PV Medial gastrocnemius muscle behavior
during human running and walking Gait Posture 25 3 380-384 2007
KARAMANIDIS K ARAMPATZIS A Mechanical and morphological properties of
different muscle-tendon units in the lower extremity and running mechanics effect of
aging and physical activity J Exp Biol 208 Pt 20 3907-3923 2005
KARAMANIDIS K ARAMPATZIS A BRUGGEMANN GP Symmetry and
reproducibility of kinematic parameters during various running techniques Med Sci
Sports Exerc 35 6 1009-1016 2003
KER RF BENNETT MB BIBBY SR KESTER RC ALEXANDER RM The
spring in the arch of the human foot Nature 325 7000 147-149 1987
KLASS M BAUDRY S DUCHATEAU J Aging does not affect voluntary activation of
the ankle dorsiflexors during isometric concentric and eccentric contractions J Appl
Physiol 99 1 31-38 2005
126
KNAFLITZ M BONATO P Time-frequency methods applied to muscle fatigue
assessment during dynamica contractions J Electromyogr Kinesiol 9 337-350
1999
KOMI PV Stretch-shortening cycle a powerful model to study normal and fatigued
muscle J Biomech 33 10 1197-1206 2000
KRAM R DOMINGO A FERRIS DP Effect of reduced gravity on the preferred walkshy
run transition speed J Exp Biol 200 Pt 4 821-826 1997
KRAM R TAYLOR CR Energetics of running a new perspective Nature 346 6281
265-267 1990
LAMOTH CJ MEIJER OG DAFFERTSHOFER A WUISMAN PI BEEK PJ
Effects of chronic low back pain on trunk coordination and back muscle activity during
walking changes in motor control Eur Spine J 15 1 23-40 2006
LAY AN HASS CJ RICHARD NICHOLS T GREGOR RJ The effects of sloped
surfaces on locomotion an electromyographic analysis J Biomech 40 6 1276shy
1285 2007
LOWE DA SUREK JT THOMAS DD THOMPSON LV Electron paramagnetic
resonance reveals age-related myosin structural changes in rat skeletal muscle
fibers Am J Physiol Cell Physiol 280 3 C540-547 2001
MALOIY GM HEGLUND NC PRAGER L CAVAGNA GA TAYLOR CR
Energetic cost of carrying loads have African women discovered an economic way
Nature 319 668-669 1986
MALVILLE NJ BYRNES WC ALLEN LIM B BASNYAT R Commercial porters of
eastern nepal health status physical work capacity and energy Expenditure Am J
Hum Biol 13 44-56 2001
MARGARIA R Sulla fisiologia e specialmente sul consumo energetico della marcia
e della corsa a varia velocitagrave ed inclinazione del terreno 1938
MARSH RL ELLERBY DJ CARR JA HENRY HT BUCHANAN CI Partitioning
the energetics of walking and running swinging the limbs is expensive Science
303 5654 80-83 2004
127
MCMAHON TA CHENG GC The mechanics of running how does stiffness couple
with speed J Biomech 23 Suppl 1 65-78 1990
MIAN OS THOM JM ARDIGO LP NARICI MV MINETTI AE Metabolic cost
mechanical work and efficiency during walking in young and older men Acta
Physiol (Oxf) 186 2 127-139 2006
MINETTI AE The biomechanics of skipping gaits a third locomotion paradigm Proc
Biol Sci 265 1402 1227-1235 1998a
MINETTI AE A model equation for the prediction of mechanical internal work of
terrestrial locomotion J Biomech 31 5 463-468 1998b
MINETTI AE ALEXANDER RM A theory of metabolic costs for bipedal gaits J Theor
Biol 186 4 467-476 1997
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of gradient walking
energetics in man J Physiol 472 725-735 1993
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of the minimum
energy cost of gradient running in humans J Exp Biol 195 211-225 1994
MINETTI AE ARDIGO LP SAIBENE F FERRERO S SARTORIO A Mechanical
and metabolic profile of locomotion in adults with childhood-onset GH deficiency Eur
J Endocrinol 142 1 35-41 2000
MINETTI AE FORMENTI F ARDIGO LP Himalayan porters specialization
metabolic power economy efficiency and skill Proc Biol Sci 273 1602 2791shy
2797 2006
MORSE CI THOM JM REEVES ND BIRCH KM NARICI MV In vivo
physiological cross-sectional area and specific force are reduced in the
gastrocnemius of elderly men J Appl Physiol 99 3 1050-1055 2005
NILSSON J THORSTENSSON A Ground reaction forces at different speeds of human
walking and running Acta Physiol Scand 136 2 217-227 1989
NYMARK JR BALMER SJ MELIS EH LEMAIRE ED MILLAR S
Electromyographic and kinematic nondisabled gait differences at extremely slow
overground and treadmill walking speeds J Rehabil Res Dev 42 4 523-534 2005
128
OCHALA J DORER DJ FRONTERA WR KRIVICKAS LS Single skeletal muscle
fiber behavior after a quick stretch in young and older men a possible explanation of
the relative preservation of eccentric force in old age Pflugers Arch 452 4 464shy
470 2006
ONAMBELE GL NARICI MV MAGANARIS CN Calf muscle-tendon properties and
postural balance in old age J Appl Physiol 100 6 2048-2056 2006
PHILLIPS SK BRUCE SA WOLEDGE RC In mice the muscle weakness due to
age is absent during stretching J Physiol 437 63-70 1991
PORTER MM VANDERVOORT AA KRAMER JF Eccentric peak torque of the
plantar and dorsiflexors is maintained in older women J Gerontol A Biol Sci Med
Sci 52 2 B125-131 1997
POUSSON M LEPERS R VAN HOECKE J Changes in isokinetic torque and
muscular activity of elbow flexors muscles with age Exp Gerontol 36 10 1687shy
1698 2001
PRILUTSKY BI GREGOR RJ Swing- and support-related muscle actions
differentially trigger human walk-run and run-walk transitions J Exp Biol 204 Pt 13
2277-2287 2001
ROBERTS TJ KRAM R WEYAND PG TAYLOR CR Energetics of bipedal
running I Metabolic cost of generating force J Exp Biol 201 Pt 19 2745-2751
1998
ROBERTS TJ MARSH RL WEYAND PG TAYLOR CR Muscular force in
running turkeys the economy of minimizing work Science 275 5303 1113-1115
1997
SAIBENE F MINETTI AE Biomechanical and physiological aspects of legged
locomotion in humans Eur J Appl Physiol 88 4-5 297-316 2003
SCHEPENS B WILLEMS PA CAVAGNA GA The mechanics of running in children
J Physiol 509 ( Pt 3) 927-940 1998
SCHEPENS B WILLEMS PA CAVAGNA GA HEGLUND NC Mechanical power
and efficiency in running children Pflugers Arch 442 1 107-116 2001
129
TAYLOR CR Force development during sustained locomotion a determinant of gait
speed and metabolic power J Exp Biol 115 253-262 1985
TAYLOR CR HEGLUND NC MALOIY GM Energetics and mechanics of terrestrial
locomotion I Metabolic energy consumption as a function of speed and body size in
birds and mammals J Exp Biol 97 1-21 1982
TRAPPE S GALLAGHER P HARBER M CARRITHERS J FLUCKEY J
TRAPPE T Single muscle fibre contractile properties in young and old men and
women J Physiol 552 Pt 1 47-58 2003
VALOUR D POUSSON M Compliance changes of the series elastic component of
elbow flexor muscles with age in humans Pflugers Arch 445 6 721-727 2003
VANDERVOORT AA KRAMER JF WHARRAM ER Eccentric knee strength of
elderly females J Gerontol 45 4 B125-128 1990
WHITE SG MCNAIR PJ Abdominal and erector spinae muscle activity during gait
the use of cluster analysis to identify patterns of activity Clin Biomech (Bristol
Avon) 17 3 177-184 2002
WILLEMS PA CAVAGNA GA HEGLUND NC External internal and total work in
human locomotion J Exp Biol 198 Pt 2 379-393 1995
WINTER D Biomechanics and motor control of human movement 3rd Waterloo
John Wiley amp Sons 2005
WINTERS JM WOO S Multiple muscle systems Springer-Verlag 1990
WOLEDGE RC CURTIN N HOMSHER E Energetic aspects of muscle
contraction Londres Academic Press 1985
WRIGHT S WEYAND PG The application of ground force explains the energetic cost
of running backward and forward J Exp Biol 204 Pt 10 1805-1815 2001
YAMAGUCHI G SAWA A MORAN D RESSLER M WINTERS JM A survey of
human musculotendon actuator parameters J M Winters 1991
130
Apecircndices
A- Programa de anaacutelise EMG da caminhada LocoEmg
Uma seacuterie de algoritmos (figuras A1 A2 e A3) foram desenvolvidos em
ambiente Labview versatildeo 71 a fim de analisar o sinal bruto de EMG Para tanto
informaccedilotildees advindas de sensores de pressatildeo foram calculadas de forma a
possibilitar as seguintes anaacutelises
Figura A1 Janela principal do programa LocoEmgVI
131
Este programa foi utilizado no capiacutetulo 2 no experimento do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees e no experimento do custo EMG
da locomoccedilatildeo de montanhistas Caucasianos e carregadores Nepaleses no Himalaia
Nepal Atraveacutes do uso dos sensores de pressatildeo foi possiacutevel calcular o tempo de
passada o tempo de vocirco o tempo de apoio e o tempo de apoio duplo para utilizar
no desenvolvimento das abordagens experimental e teoacuterica do custo EMG da
locomoccedilatildeo humana
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI
Os dados de input do programa foram inseridos na janela principal (figura
A1) onde no final da anaacutelise satildeo apresentados os resultados de atividade EMG
meacutedia e desvio padratildeo em funccedilatildeo do percentual do ciclo de passadaO bloco de
diagrama apresentado na figura A2 mostra a estrutura geral do programa com seus
algoritmos localizados nas subrotinas (quadrados verdes)
As principais subrotinas ou algoritmos de primeiro niacutevel satildeo i) Abre e organiza
arquivo ii) Filtra sinal EMG iii) Calcula Variaacuteveis Espaccedilo-Temporais iv) Divide
Ciclos e Interpola Sinal EMG v) Integra Sinal EMG vi) Salva Resultados vi) Imprime
Resultados Gerais
132
Na subrotina Salva resultados arrays eram transformados em arquivos no
formato txt para posterior anaacutelise estatiacutestica Os arquivos eram variaacuteveis espaccedilo-
temporais valores meacutedios interpolados para fase de apoio e balanccedilo valores Emg
meacutedios e desvio-padratildeo interpolados por ciclo de passada e somatoacuterio das integrais
Emg brutos e convertidos por Equivalentes Metaboacutelicos de Ativaccedilatildeo Emg
A janela de impressatildeo eacute apresentada na figura A3
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados
Nesta janela os dados EMGrsquos por muacutesculo satildeo apresentados atraveacutes de seus
valores valores meacutedios e dprsquos em funccedilatildeo do percentual do ciclo de passada
Informaccedilotildees da Vf nome do arquivo inclinaccedilatildeo do terreno e nuacutemero de ciclos
analisados tambeacutem satildeo apresentados Arquivos de imagem destas janelas foram
elaborados e armazenados para posterior verificaccedilatildeo dos dados
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada)
133
PEYREacute-TARTARUGA LA TARTARUGA MP COERTJENS M KRUEL LFM
Influence of Allometry scale on relationship between running economy and
kinematical parameters Biology of Sport (aceito) 2008
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
OLIVEIRA AR KRUEL LFM Physiologic and biomechanical effects ofwater run
training on running performance European Journal of Applied Physiology
(submetido) 2008
CORREA TC PEYREacute-TARTARUGA LA FURLAN E RIBAS R LOSS JF
Mathematical model of energy cost in sprint running Proceedings of XXV
International Symposium on Biomechanics in Sports ISBS (CD) 2007
PEYREacute-TARTARUGA LA COERTJENS M TARTARUGA MP DE MEDEIROS
MH KRUEL LFM Influence of the allometric scale on the relationship between
running economy and biomechanical variables in runners Medicine and Science in
Sports and Exercise 39 (Supplement) S208-S209 2007
PEYREacute-TARTARUGA LA DE MEDEIROS MH COERTJENS M TARTARUGA
MP KRUEL LFM The relation between running economy and kinematical
variables influence of body mass in competitive runners Journal of Biomechanics
39 (Supplement 1) S631 2006
ILHA J ARAUJO RT MALYSZ T PEYREacute-TARTARUGA LA ACHAVAL M
Effects of endurance and resistance exercise training on locomotion of rats after
sciatic nerve crush Physiological Mini Reviews 2 (4) 109 2006
ILHA J PEYREacute-TARTARUGA LA ARAUJO RT METZEN F MALYSZ T
CANTO F ACHAVAL ELENA M LOSS JF Locomotor behaviour assessment in
the rat by kinematic analysis Journal of Biomechanics 39 (Supplement 1) S507
2006
SCHIEHLL PE PEYREacute-TARTARUGA LA ZINGANO GM LOSS JF
Estimation of the quantification of the elastics loads on the jump fit circuit Journal of
134
Biomechanics 39 (Supplement 1) S555 2006
MARTINEZ FG PEYREacute-TARTARUGA LA HERMEL EES XAVIER LL
RASIA-FILHO AA ACHAVAL M Intermediate filament expression in the medial
5thamygdala subnuclei during postnatal development of male and female rats
Forum of the Federation of European Neuroscience Societes Viena FENS 3
A1556 2006
FRAGA CHW BLOEDOW LS CARPES F PEYREacute-TARTARUGA LA
TARTARUGA MP FOLLMER B GUIMARAtildeES ACS Methodologic proposal to
verify the influence of cycling on running kinematic aspects in Triathlon Revista
Motriz 12 (2) 159-164 2006
PEYREacute-TARTARUGA LA KRUEL LFM Deep water running limits and
possibilities to elite runners Brazilian Journal of Sports Medicine 12 (5)286-290
2006
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
RIBAS LR KRUEL LFM Comparison of the subtalar joint angle during
submaximal running speeds Acta Ortopeacutedica Brasileira 13 (2) 57-60 2005
C- Textos completos referentes agrave tese
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA Old men
running mechanical work and elastic bounce Proceedings of the Royal Society B
275 (1633) 411-418 2008 101098rspb20071288
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA The landingshy
takeoff asymmetry is enhanced in old age Journal of Experimental Biology
(aceito com modificaccedilotildees) 2008
MINETTI AE PEYREacute-TARTARUGA LA ARDIGOgrave LP FORMENTI F SUSTA
135
D Energetical and electromyographical cost of locomotion in Nepalese Porters on
Himalaya Anais do XII Congresso Brasileiro de Biomecacircnica 88-94 2007
D- Paracircmetros musculares
Os paracircmetros musculares utilizados no estudo Custo EMG da caminhada
humana foram adquiridos de YAMAGUCHI et al (1991) e satildeo apresentados em
detalhes nas duas figura seguintes (figuras D1 e D2)
Figura D1 Paracircmetros musculares utilizados Fonte YAMAGUCHI et al 1991
136

3
---------------------------------------------------------
--------------------------------------------------------
---------------------------------------------------------
4
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL
PROGRAMA DE POacuteS-GRADUACcedilAtildeO EM CIEcircNCIAS DO MOVIMENTO HUMANO
A COMISSAtildeO EXAMINADORA ABAIXO ASSINADA APROVA A TESE
ENERGEacuteTICA E MECAcircNICA DA CAMINHADA E CORRIDA HUMANA
Com especial referecircncia agrave locomoccedilatildeo em plano inclinado e efeitos da idade
ELABORADA POR
LEONARDO ALEXANDRE PEYREacute TARTARUGA
ORIENTADO POR
JEFFERSON FAGUNDES LOSS
COMO REQUISITO PARCIAL PARA A OBTENCcedilAtildeO DO GRAU DE
DOUTOR EM CIEcircNCIAS DO MOVIMENTO HUMANO
COMISSAtildeO EXAMINADORA
Alberto Enrico Minetti MD
Istituto di Fisiologia Umana I Universitagrave degli Studi di Milano Itaacutelia
Carlos Bolli Mota PhD
Laboratoacuterio de Biomecacircnica Universidade Federal de Santa Maria Brasil
Rogeacuterio Jose Marczak Dr Eng
Grupo de Mecacircnica Aplicada Universidade Federal do Rio Grande do Sul Brasil
Porto Alegre 13 de fevereiro de 2008
5
DEDICATOacuteRIA
Aos meus irmatildeos Ivaacuten e Virginia
Pela convivecircncia pela paciecircncia pelo exemplo
de caraacuteter entrega e brilhantismo nas coisas
que fazem
6
AGRADECIMENTOS
Agradeccedilo a todos que ajudaram de forma direta ou indireta na concretizaccedilatildeo do meu doutorado Tenho a plena convicccedilatildeo de que esta obra eacute fruto de um trabalho coletivo e estas linhas representam muito timidamente meu sentimento de gratidatildeo com todas as pessoas que estiveram comigo nesta caminhada
Ao meu orientador Prof Jefferson Loss por tantas coisas que surgiram advindas daquele convite no Centro Oliacutempico Especialmente agrave liberdade dada para seguir o caminho que trilhei nestes trecircs anos e ao exemplo de busca incessante de aprofundamento no que estamos estudando
Agrave minha Matildee pela palavra certa na hora certa Agrave memoacuteria do meu pai Eduardo Juan Peyreacute Priguetti Agrave minha famiacutelia Matildee Ivaacuten Virgiacutenia La Abuela Felipe Fernanda La Tia Gianella Marcus Joseacute Luiz Juliana
Agrave minha amada namorada e companheira Ileana pelo apoio e amor Obrigado por trilhar este caminho ao meu lado obrigado pelo esforccedilo e pela forccedila de vontade para encarar a fase ldquomilaneserdquo de nossas vidas Agradeccedilo tambeacutem agrave famiacutelia de Cordoba Abel Raquel Gabriela Adriaacuten Gerardo e Camila
Ao Grupo de Investigaccedilatildeo da Mecacircnica do Movimento ndash BIOMEC Faacutebia Artur Faacutebio Paulo Coxa Francisco Carolzita Joely Gustavo Dani Aldabe Letiacutecia Deacutebi Maicon Lipe e Marcelo pelo companheirismo e aprendizagem Em especial aos meus professores de Matlab Daniel Everton e La Torre
Aos meus bolsistas e alunos Roberto Ribas Thiago Duarte Queiroz Mariana Boos e Carlos Coutinho especialmente ao Roberto e ao Thiago pela ajuda nestes uacuteltimos meses
Aos colegas do Grupo de Histofisiologia Comparada da Ufrgs em especial agrave Profa Matilde Jocemar Thais e a Rafaela pela convivecircncia e ensinamentos durante meu primeiro ano de doutorado
Aos Professores e funcionaacuterios do Istituto di Fisiologia Umana I de Milatildeo pela recepccedilatildeo calorosa e apoio incondicional
Aos meus co-orientadores Prof Alberto Minetti e Prof Giovanni Cavagna pela orientaccedilatildeo disponibilidade e atenccedilatildeo dispensada al braziliano grazie mille Aos meus companheiros Davide Susta e Mario Legramandi pelo companheirismo e ensinamentos durante o ano em Milatildeo
Aos sujeitos dos experimentos apresentados nesta tese Aos meus caros companheiros da Expediccedilatildeo no Nepal Ardigograve Formenti Susta e
Canova pela descontraccedilatildeo e parceria Ao Comitecirc de Pesquisa em Altitude da Repuacuteblica da Itaacutelia Everest-K2-CNR por ter dado o apoio financeiro para minha participaccedilatildeo na Expediccedilatildeo Aos caros Kagi Bista e Botko e aos carregadores Nepaleses Namaskar
Ao CNPq pelo apoio financeiro que permitiu meus estudos durante estes trecircs anos inclusive meus estudos no exterior
Aos companheiros funcionaacuterios da Esef que me ldquosuportamrdquo desde 1995 em especial aos colegas do Poacutes-Graduaccedilatildeo Rosane Ana e Andrezito e aos colegas do Lapex Dani Luciano Alex Carla Maacutercia Sarinha Vanessa e Luiz
7
SUMAacuteRIO
LISTA DE FIGURAS 10
RESUMO 14
ABSTRACT 16
DEFINICcedilAtildeO DE TERMOS 18
LISTA DE SIacuteMBOLOS E ABREVIATURAS 20
INTRODUCcedilAtildeO GERAL 27
11 Locomoccedilatildeo humana 27
13 Formato da tese 30
131 Objetivo geral 32
132 Objetivos especiacuteficos 32
2 O CUSTO EMG DA CAMINHADA HUMANA 33
21 Introduccedilatildeo 33
22 Metodologia 36
221 Construccedilatildeo do modelo 36
222 Testando o modelo 41
23 Resultados 42
231 Variaacuteveis espaccedilos-temporais 42
232 Atividade EMG 43
8
233 Custo EMG 47
24 Discussatildeo 49
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular 49
242 Sobre o meacutetodo 51
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia 52
251 Materiais e meacutetodos 53
252 Resultados 56
253 Discussatildeo 57
3 MECAcircNICA DA CORRIDA DE IDOSOS 60
31 Introduccedilatildeo 60
32 Materiais e Meacutetodos 61
321 Amostra e procedimento experimental 61
322 Dos registros da plataforma ao trabalho externo 63
323 Estimativa do trabalho interno 66
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato 66
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio 67
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente 68
327 Transduccedilatildeo EpEk durante o passo 68
328 Rigidez vertical (k) 70
329 Estatiacutestica 71
33 Resultados 71
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM 72
332 Trabalho 74
333 Assimetria contato-despregue 75
34 Discussatildeo 76
341 Sobre o meacutetodo 76
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical 80
343 A assimetria contato-despregue 90
9
4 PREDIZENDO VF CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO
TERRESTRE 101
41 Introduccedilatildeo 101
42 Equaccedilatildeo do tempo de atraso 102
43 Estimativa da velocidade horizontal 104
44 Equaccedilatildeo de custo energeacutetico 106
45 Discussatildeo 107
5 CONCLUSAtildeO GERAL 111
51 O custo EMG da caminhada humana 111
52 A mecacircnica da corrida de idosos 111
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre 112
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico 112
541 Respondendo algumas criacuteticas atuais 116
55 Propostas para futuros estudos 118
551 Custo EMG da caminhada humana 118
552 Mecacircnica da corrida dos idosos 118
553 Modelo matemaacutetico da locomoccedilatildeo terrestre 119
6 REFEREcircNCIAS 120
APEcircNDICES 130
A- Programa de anaacutelise EMG da caminhada LocoEmg 130
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada) 132
C- Textos completos referentes agrave tese 134
D- Paracircmetros musculares 135
10
Lista de Figuras
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-invertido para a
caminhada e massa-mola para a corrida (Fonte SAIBENE e MINETTI 2003
modificado no presente estudo) 29
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset 38
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda
metade da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo
isomeacutetrica Setas verticais apontando para baixo indicam momento de contato
e de despregue 39
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de
passada com o tempo de passada normalizado em percentual do ciclo O 0shy
100 representa o momento de contato com o solo As cores indicam a
velocidade de caminhada (de 2 agrave 7 kmh-1) Cada muacutesculo eacute representado
nas linhas e em cada coluna eacute apresentada a atividade EMG por inclinaccedilatildeo 46
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal + carga)
11
dos carregadores Nepaleses (NEP) e montanhistas Caucasianos (CAU) em
subida (up) e descida (down) 57
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da PMV (positiva ou
negativa) pela potecircncia metaboacutelica respectiva (MINETTI et al 2006) As
linhas satildeo as razotildees entre eficiecircncia muscular positiva e negativa
(WOLEDGE et al 1985) 58
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado 69
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da caminhada
(pecircndulo-invertido) e de segmento complacente da corrida (massa-mola) e
seus principais constituintes Note que o tracejado indica a trajetoacuteria do corpo
de massa m durante o contato g eacute a aceleraccedilatildeo gravitacional k eacute a rigidez da
mola ll0 eacute o comprimento do membro inferior e a0 eacute o acircngulo da perna de
apoio no momento do contato com o solo 77
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um passo
em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis a
direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup
+ Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo
(tae) da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na
direccedilatildeo vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os
ciacuterculos em vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2)
e a frente (Lce) A linha em vermelho pontilhada em cada painel indica o
tempo de contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente
(Lc) durante o passo As linhas azuis pontilhadas em cada painel indicam o
tempo aeacutereo total (ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La)
durante o passo As barras verticais indicam o desvio-padratildeo da meacutedia os
12
nuacutemeros proacuteximos aos siacutembolos nos paineacuteis superiores indicam o nuacutemero de
itens nas meacutedias 85
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e
velocidade vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown
(paineacuteis inferiores) atingidos pelo CM durante o passo em funccedilatildeo da
velocidade de corrida Estatiacutestica e outras indicaccedilotildees conforme a figura 33 89
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e
frequumlecircncia do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute
maior nos idosos nas altas velocidades (paineacuteis superiores) a rigidez vertical
normalizada pela massa eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras
indicaccedilotildees conforme figura 33 91
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com
seus 94
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As
fraccedilotildees do deslocamento vertical do CM durante contato ScSv (ciacuterculos
preenchidos deslocamento descendente ciacuterculos abertos deslocamento
ascendente) e quando a Fv eacute maior do que o PC SceSv (quadrados
preenchidos deslocamento 95
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito
idoso paineacuteis a direita sujeito jovem em cada painel o comportamento da
transduccedilatildeo Ep-Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas
na energia potencial gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf
normalizada para oscilar entre zero e um Mesmos passos da figura 1 cada
painel comeccedila e termina no valor menor da curva Ep As cores diferentes na
curva Ep distinguem as fraccedilotildees do passo onde a Fv exercida no solo eacute maior
do que o PC (vermelho) e menor do que o PC (azul) As linhas contiacutenuas de
Ep indicam a fase de contato enquanto que as linhas pontilhadas Ep (azul
fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As quatro fases
correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
13
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown
(azul) e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas
pontilhadas verticais satildeo apresentadas nos dois picos de Ek e ocupam a
fraccedilatildeo onde a transduccedilatildeo Ep-Ek ocorre conforme indicado pelos incrementos
da curva Rint(t) 98
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos painel
inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura
31) e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e
barras azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de
corrida Estatiacutestica conforme figura 33 99
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de
reaccedilatildeo do solo durante a corrida 103
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de
progressatildeo 108
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de
progressatildeo Fonte Minetti 1998b 109
Figura 51 Modelo conceitual da locomoccedilatildeo humana 113
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido
de elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006117
Figura A1 Janela principal do programa LocoEmgVI 130
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI 131
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados 132
14
Resumo
Dois modelos mecacircnicos o pecircndulo-invertido e o massa-mola explicam como
os mecanismos pendular e elaacutestico minimizam o dispecircndio energeacutetico advindo dos
muacutesculos durante caminhada e corrida humana A presente tese testa dois efeitos
que para nosso conhecimento todavia natildeo possuem respostas conclusivas da
literatura nomeadamente o processo de envelhecimento na mecacircnica da corrida
humana e o efeito da inclinaccedilatildeo do terreno na velocidade oacutetima da caminhada Para
estudar o primeiro efeito as forccedilas de reaccedilatildeo do solo provenientes de uma
plataforma de forccedila (4m x 050m) foram usadas para a posterior comparaccedilatildeo de i)
trabalho mecacircnico ii) paracircmetros do sistema massa-mola e iii) assimetrias contato-
despregue entre jovens e idosos Os idosos produzem menos forccedila durante a fase
de trabalho mecacircnico positivo com uma menor oscilaccedilatildeo vertical total e oscilaccedilatildeo
durante a fase aeacuterea Consequumlentemente a capacidade de armazenar e re-utilizar
energia elaacutestica dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio
energeacutetico neste grupo quando comparado com jovens Para o modelo do custo
eletromiograacutefico (EMG) da caminhada humana criou-se duas abordagens
experimental e teoacuterica Em ambas as abordagens informaccedilotildees da atividade EMG de
dezesseis muacutesculos sendo 8 posturais e 8 propulsores foram coletadas e
analisadas a partir da integral EMG A abordagem teoacuterica parece ter uma melhor
relaccedilatildeo com as evidecircncias experimentais sobre a energeacutetica da caminhada humana
em inclinaccedilotildees Os principais mecanismos envolvidos na nova hipoacutetese satildeo i)
muacutesculos posturais que natildeo realizam trabalho muscular exercem uma funccedilatildeo
importante na determinaccedilatildeo do dispecircndio energeacutetico total e ii) a presente hipoacutetese
leva em consideraccedilatildeo a co-contraccedilatildeo de muacutesculos antagonistas no dispecircndio
15
energeacutetico total Mais experimentos satildeo necessaacuterios para confirmar o modelo
apresentado neste estudo Aleacutem disso atraveacutes de estrateacutegias de otimizaccedilatildeo e
prediccedilatildeo linear um modelo teoacuterico foi delineado a fim de determinar paracircmetros
mecacircnicos (comprimento de passada e velocidade de progressatildeo) e energeacuteticos da
locomoccedilatildeo terrestre em situaccedilotildees onde as informaccedilotildees disponiacuteveis satildeo apenas a
massa e uma curva forccedila de reaccedilatildeo vertical versus tempo Os resultados advindos
do modelamento correspondem aos paracircmetros determinados experimentalmente
Laboratoacuterios que detenham apenas uma plataforma de forccedila ou nas aacutereas onde as
informaccedilotildees de entrada do atual modelo sejam as uacutenicas informaccedilotildees (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis primaacuterias da
locomoccedilatildeo podem ser preditas com razoaacutevel acuraacutecia
Palavras-chave custo eletromiograacutefico da caminhada mecacircnica da corrida de
idosos modelo teoacuterico da locomoccedilatildeo terrestre mecanismos minimizadores de
energia locomoccedilatildeo humana
16
Abstract
Two mechanical models the inverted pendulum and spring-mass explain how
do the pendular and elastic mechanisms minimizing energy expenditure from
muscles during human walking and running Here we test two effects that to our
knowledge do not have yet conclusive responses from literature specifically the
ageing effects on mechanics of human running and the effect of gradient on walking
optimal speed In order to check the former effect the ground reaction forces came
from a force platform (4m x 05m) were used for a later comparison i) mechanical
work ii) spring-mass parameters and iii) landing-takeoff asymmetries The old
subjects produce less force during positive work resulting in a smaller overall and
aerial vertical oscillation of the centre of mass Consequently the potential for restore
elastic energy from tendons is reduced contributing to greater energy expenditure
than in young subjects In relation to Electromyographical (EMG) Cost of human
walking we created two approaches experimental and theoretical In both
approaches information from EMG activity of sixteen muscles eight postural and
eight propulsor were collected and analysed The theoretical approach seems to fit
better with the energy expenditure during gradient walking The main mechanisms
involved in this new hypothesis are i) postural muscles that do not perform muscular
work play an important role in the total energy expenditure and ii) the present
hypothesis take the co-contraction into account of the antagonist muscles in the total
energy expenditure Further experiments are necessary to confirm this hypothesis
Besides using optimization and linear prediction procedures a theoretical model was
designed to estimate mechanical parameters (stride length and velocity of
progression) and energetic variables of terrestrial locomotion when available
information consists only of mass and one vertical ground reaction force versus time
17
The results from this modelling are similar to experimentally obtained data
Laboratories with just one force platform or in areas where the present modelrsquos input
information be the unique accessible data (eg palaeontology forensic
biomechanics etc) the prime variables of locomotion may be estimated with
reasonable accuracy
Keywords electromyographical cost of walking running mechanics in the
elderly theoretical model of terrestrial locomotion mechanisms for minimizing
expenditure energy human locomotion
18
Definiccedilatildeo de Termos
Contraccedilatildeo concecircntrica contraccedilatildeo muscular realizada durante encurtamento
do muacutesculo
Contraccedilatildeo excecircntrica contraccedilatildeo muscular realizada durante alongamento
do muacutesculo
Custo energeacutetico o dispecircndio advindo dos muacutesculos em funccedilatildeo da distacircncia
percorrida normalizado pela massa corporal A unidade eacute em Jkg-1m -1
Eficiecircncia mecacircnica a potecircncia mecacircnica gerada dividida pela potecircncia
metaboacutelica despendida durante uma passada
Passada um periacuteodo que compreende desde o momento do contato de um
peacute com o solo e finaliza no subsequumlente momento de contato do mesmo peacute
Passo um periacuteodo que compreende desde o momento do contato de um peacute
com o solo e finaliza no subsequumlente momento de contato do peacute contra-
lateral
Potecircncia mecacircnica externa o somatoacuterio dos incrementos positivos de
energia mecacircnica externa durante uma passada dividido pelo tempo da
passada
Recovery ndash R percentual de transferecircncia entre energia cineacutetica e potencial
gravitacional durante um ciclo de passada
Tempo aeacutereo efetivo duraccedilatildeo no qual a forca vertical eacute menor do que a
forccedila peso durante um passo
Tempo de contato efetivo duraccedilatildeo no qual a forccedila vertical eacute maior do que a
forccedila peso durante um passo
Trabalho mecacircnico externo O trabalho realizado para elevar e acelerar o
CM em relaccedilatildeo ao ambiente externo No presente estudo foi desconsiderado
19
o trabalho mecacircnico externo advindo de aceleraccedilotildees horizontais meacutedio-
laterais
Trabalho mecacircnico interno O trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM
Trabalho mecacircnico total O somatoacuterio dos moacutedulos do trabalho mecacircnico
externo e interno No presente estudo o trabalho interno foi considerado
aceitando transferecircncia de energia mecacircnica entre segmentos de mesmos
membros
20
Lista de Siacutembolos e Abreviaturas
l0 comprimento do membro inferior
μV microvolts
0 acircngulo da perna de apoio com o solo no momento
do contato
Fvc Fv meacutedia durante a fase de contato do peacute com o
solo
Ah variaccedilatildeo de altura
AhorPosition idem ao CPexp
At tempo de locomoccedilatildeo
Atime tempo de passada
Ltphoto tempo entre as passagens pelas fotoceacutelulas
2D duas dimensotildees
av aceleraccedilatildeo vertical do CM
avae aceleraccedilatildeo vertical do CM durante fase aeacuterea
efetiva
avce aceleraccedilatildeo vertical do CM durante contato efetivo
avmx aceleraccedilatildeo vertical maacutexima do CM
c constante de custo
CAU Caucasianos
CM centro de massa
cos cosseno
CP comprimento de passada
21
CPexp comprimento de passada determinada
experimentalmente
Ctot Custo energeacutetico da locomoccedilatildeo
dB decibeacuteis
DF duty factor (fraccedilatildeo da passada na qual um peacute toca
o solo)
DFregression valores de Vf preditos por regressatildeo linear
advindos de DF
dp desvio-padratildeo
dt periacuteodo de um quadro
Ecm energia mecacircnica do CM
Ek energia cineacutetica
Ekf energia cineacutetica horizontal
Ekfmn energia cineacutetica horizontal miacutenima
Ekmxdown energia cineacutetica vertical maacutexima durante
deslocamento descendente do CM
Ekmxup energia cineacutetica vertical maacutexima durante
deslocamento ascendente do CM
Ekv energia cineacutetica vertical
Emetabolic potecircncia metaboacutelica
EMG eletromiografia ou eletromiograacutefico
EmgCosttheor custo EMG teoacuterico
EmgCostexp custo EMG teoacuterico
EMGiso atividade EMG durante contraccedilatildeo isomeacutetrica
EMGneg atividade EMG durante trabalho negativo
EMGpos atividade EMG durante trabalho positivo
cmuscular energia metaboacutelica advinda do muacutesculo-esqueleacutetico
cmetaboacutelica energia metaboacutelica total durante locomoccedilatildeo
crepouso energia metaboacutelica durante posiccedilatildeo em peacute
celaacutestica energia recuperada por via elaacutestica
cpendular energia recuperada por via pendular
creconvertida energia total recuperada
Ep energia potencial gravitacional do CM
22
Epmn energia potencial gravitacional miacutenima do CM
total energia total necessaacuteria para realizar a locomoccedilatildeo
f frequumlecircncia de passo
Ff componente antero-posterior da forccedila de reaccedilatildeo do
solo
FinalhorPosition posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo de passada
FP frequumlecircncia de passada
FPexp frequumlecircncia de passada determinada
experimentalmente
FPregression valores de Vf preditos por regressatildeo linear a partir
de dados de FP
FPtheor frequumlecircncia de passada obtida indiretamente
Fr nuacutemero de froude
fs frequumlecircncia do sistema massa-mola
fsample frequumlecircncia de amostragem
Fv componente vertical da forccedila de reaccedilatildeo do solo
Fvmx Fv maacutexima
Fvmxyoung Fv maacutexima nos jovens
Fvmxold Fv maacutexima nos idosos
Fvscale PC mensurado com uma balanccedila
Fvpeak pico de impacto vertical
Fvplate forccedila vertical media durante um ciclo de passada
g aceleraccedilatildeo gravitacional
GPS sistema de posicionamento global
h hora
Hz Hertz
Iv impulso vertical
InitialhorPosition posiccedilatildeo horizontal do quadril no quadro que inicia o
ciclo de passada
Iemg integral EMG
Iemgcon integral EMG durante contraccedilatildeo concecircntrica
Iemgexc integral EMG durante contraccedilatildeo excecircntrica
J Joules
23
k rigidez vertical
kg quilograma
km quilometro
L comprimento do passo
Lae deslocamento horizontal do CM durante fase aeacuterea
efetiva
Lce deslocamento horizontal do CM durante contato
efetivo
M massa corporal
m metros
Mass massa dos muacutesculos analisados
ms milisegundos
mtot massa total (massa total somada agrave carga externa)
mV milivolts
N Newtons
NEP Nepaleses
nframes nuacutemero de quadros que totalizam um ciclo de
passada
nf nuacutemero de quadros
norm normalizado
O2 oxigecircnio
p iacutendice de significacircncia estatiacutestico
PC peso corporal
PMV potecircncia mecacircnica vertical
q fator de forma da curva de Fv em funccedilatildeo do tempo
qmean meacutedia dos valores qrsquos durante o tc
qregression valores de Vf predito por regressatildeo linear a partir
de dados de q
R Recovery percentual de reconversatildeo entre energia
cineacutetica e potencial gravitacional
R coeficiente de correlaccedilatildeo
r transduccedilatildeo entre energia cineacutetica e potencial
gravitacional
24
Rint transduccedilatildeo acumulada entre energia cineacutetica e
potencial gravitacional durante um passo
Rintdown transduccedilatildeo acumulada durante deslocamento
descendente do CM
Rintup transduccedilatildeo acumulada durante deslocamento
ascendente do CM
rms raiz quadrada da meacutedia dos quadrados
s segundos
Sae deslocamento vertical do CM durante fase aeacuterea
efetiva
Saedown deslocamento descendente do CM durante Sae
Saeup deslocamento ascendente do CM durante Sae
Sc deslocamento do CM durante a fase de contato
Sce deslocamento vertical do CM durante contato
efetivo
Scdown deslocamento descendente do CM durante Sc
Scup deslocamento ascendente do CM durante Sc
Scedown deslocamento descendente do CM durante Sce
Sceup deslocamento ascendente do CM durante Sce
SEE erro meacutedio da estimativa
sin seno
Skinf dobra cutacircnea
Sv deslocamento do CM durante um passo
Svdown deslocamento descendente do CM durante Sv
Svup deslocamento ascendente do CM durante Sv
T tempo de um passo
t tempo
ta tempo em que a acontece durante W+
t tempo em que acontece durante W-
ta periacuteodo do passo no qual o peacute natildeo estaacute em contato
com o solo
tae periacuteodo do passo no qual a Fv eacute maior do que o PC
peso corporal
25
taedown periacuteodo do deslocamento descendente do CM
durante tae
taeup periacuteodo do deslocamento ascendente do CM
durante tae
tbrake tempo de Wshy
tc periacuteodo do passo no qual um peacute estaacute em contato
com o solo
tce periacuteodo do passo no qual a Fv eacute menor do que o
PC
tcedown periacuteodo do deslocamento descendente do CM
durante tce
tceup periacuteodo do deslocamento ascendente do CM
durante tce
tpush tempo de W+
tstep tempo do passo
Vf velocidade de progressatildeo
V f velocidade meacutedia de progressatildeo
Vfexp velocidade de progressatildeo determinada
experimentalmente
VO2iso consumo de O2 durante contraccedilatildeo isomeacutetrica
VO2neg consumo de O2 durante trabalho mecacircnico
negativo
VO2pos consumo de O2 durante trabalho mecacircnico positivo
Vv velocidade vertical do CM
Vvmx velocidade vertical maacutexima do CM
Vvmxdown velocidade vertical maacutexima durante deslocamento
descendente do CM
Vvmxup velocidade vertical maacutexima durante deslocamento
ascendente do CM
Wshy trabalho mecacircnico negativo
W Watts
W+ trabalho mecacircnico positivo
Wext trabalho mecacircnico externo
Wextf trabalho mecacircnico externo horizontal
26
Wextf+ trabalho mecacircnico externo horizontal positivo
Wextv trabalho mecacircnico externo vertical
Wint trabalho mecacircnico interno
Wtot trabalho mecacircnico total
a fase durante W+ em que Ek e Ep do CM aumentam
concomitantemente
fase durante W- em que Ek e Ep do CM diminuem
concomitantemente
27
INTRODUCcedilAtildeO GERAL
11 Locomoccedilatildeo humana
A teoria da evoluccedilatildeo Darwinista conhecida como Teoria da Seleccedilatildeo Natural
nos indica entre outros pressupostos que a multiplicidade de espeacutecies que habitam
a face da terra eacute produto de um sistema altamente complexo e competitivo de
sobrevivecircncia sistema este que reflete fatores preditores da aptidatildeo definidos como
geneacuteticos e do meio ambiente As capacidades de reproduccedilatildeo de alimentaccedilatildeo e de
locomoccedilatildeo satildeo moduladas por aspectos do genoacutetipo influenciados pelos fatores
ambientais O conceito de aptidatildeo relacionada agrave locomoccedilatildeo desde um ponto de
vista bioloacutegico pode ser abordado analiticamente atraveacutes de seus componentes
principais Estes satildeo velocidade aceleraccedilatildeo maneabilidade resistecircncia economia
e estabilidade (ALEXANDER 2003)
A locomoccedilatildeo tem importacircncia fundamental para a sobrevivecircncia pois
possibilita entre outros fatores a procura por alimentos a busca por um local com
melhor clima caccedilar uma presa ou fugir de um perigo eminente (SAIBENE e
MINETTI 2003) Nos mamiacuteferos terrestres a locomoccedilatildeo acontece atraveacutes do uso
das pernas Este tipo de locomoccedilatildeo tem nos humanos por exemplo alguns
aspectos de ineficiecircncia quando comparada com outros animais (peixes e paacutessaros)
A ineficiecircncia da locomoccedilatildeo de biacutepedes eacute baseada no fato de que os segmentos
inferiores encostam repetidamente no solo para absorver e transferir energia
(trabalho negativo e positivo respectivamente) com o meio ambiente de modo que
os segmentos sofrem uma colisatildeo no momento de contato com o solo
caracterizando situaccedilotildees de grandes aceleraccedilotildees Para manter a velocidade meacutedia
de locomoccedilatildeo torna-se necessaacuterio uma re aceleraccedilatildeo do centro de massa (CM)
28
Energia quiacutemica eacute despendida para manter os muacutesculos ativos durante estas
diferentes fases A fim de atenuar este dispecircndio dois mecanismos baacutesicos satildeo
usados pelo sistema locomotor na corrida e na caminhada o mecanismo do pecircndulo
na caminhada e o mecanismo da massa-mola para a corrida (CAVAGNA e
KANEKO 1977 ver figura 11) Na caminhada a energia potencial eacute alta quando o
CM estaacute sobre o ponto de contato do corpo com o solo mas a partir deste momento
a energia potencial gravitacional comeccedila a diminuir e a energia cineacutetica horizontal
obteacutem um acreacutescimo gradativo Quando o ponto de contato volta a estar na frente do
CM a energia cineacutetica diminui e potencial aumenta
Estes comportamentos entre energia cineacutetica horizontal e potencial
gravitacional acontecem em oposiccedilatildeo de fase (CAVAGNA et al 1963) e portanto
com um processo de reconversatildeo entre energia cineacutetica e potencial gravitacional
(recovery ndash R) Por outro lado na corrida os acreacutescimos de energia potencial e
cineacutetica acontecem concomitantemente portanto o mecanismo de conservaccedilatildeo de
energia citado anteriormente natildeo se aplica neste tipo de locomoccedilatildeo Eacute postulado
que durante a primeira metade da fase de apoio da corrida principalmente
muacutesculos e tendotildees alongam armazenando energia elaacutestica enquanto que os
moacutedulos de energia cineacutetica horizontal e potencial gravitacional diminuem Esta
energia elaacutestica armazenada como uma mola comprimida por uma massa eacute
transformada em energia cineacutetica horizontal e potencial gravitacional de modo
gradativo durante a segunda metade da fase de apoio (CAVAGNA et al 1964
KOMI 2000 figura 11) Evidecircncias de energia elaacutestica armazenada e reconvertida
tambeacutem foram encontradas em cangurus (ALEXANDER e VERNON 1975) e em
cavalos (BIEWENER 1998) Os ligamentos do arco do peacute tambeacutem respondem pelo
comportamento elaacutestico do sistema locomotor na corrida (KER et al 1987)
Enquanto que a medida de trabalho externo possui uma correspondecircncia com
o trabalho mecacircnico realizado pelos muacutesculos na caminhada os valores obtidos
para a corrida superestimam o trabalho muscular realizado devido agrave dificuldade de
quantificar a energia elaacutestica durante o movimento (SAIBENE e MINETTI 2003) De
fato parte consideraacutevel do aumento e diminuiccedilatildeo da energia mecacircnica total na
corrida natildeo eacute causada pelas contraccedilotildees (excecircntricas e concecircntricas) musculares
mas pelo alongamento e encurtamento das estruturas elaacutesticas da unidade muacutesculo-
tendatildeo mais especificamente os tendotildees e estruturas elaacutesticas do muacutesculo
Portanto na corrida a adiccedilatildeo do trabalho interno e a transferecircncia entre segmentos
29
dos mesmos membros (inferiores e superiores) permitem uma estimativa mais
proacutexima do trabalho mecacircnico total (WILLEMS et al 1995)
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-
invertido para a caminhada e massa-mola para a corrida (Fonte
SAIBENE e MINETTI 2003 modificado no presente estudo)
As determinantes mecacircnicas da locomoccedilatildeo humana e animal tem sido
extensivamente estudadas em diferentes situaccedilotildees velocidade (CAVAGNA et al
1963 1964) gravidade (KRAM et al 1997 CAVAGNA et al 2000 1998
CAVAGNA et al 2005) planos inclinados (MINETTI et al 1993 1994)
O trabalho mecacircnico durante a locomoccedilatildeo em inclinaccedilotildees tem sido estudado
na caminhada (MINETTI et al 1993) e na corrida (MINETTI et al 1994)
encontrando valores de maior eficiecircncia mecacircnica entre 10 e 15 de inclinaccedilatildeo
negativa (declive) Todavia o modelo do pecircndulo invertido natildeo se sustenta para
situaccedilotildees de inclinaccedilotildees extremas Deste modo a reconversatildeo de energia parece
natildeo atuar na determinaccedilatildeo da velocidade oacutetima de caminhada nestas situaccedilotildees
Uma nova hipoacutetese eacute que os muacutesculos posturais do quadril possam contribuir para
gerar o alto custo de transporte em velocidades baixas de caminhada em inclinaccedilotildees
diferentes da inclinaccedilatildeo oacutetima (-10 onde haacute o menor custo metaboacutelico e
mecacircnico)
Esta hipoacutetese pretende ser testada atraveacutes da anaacutelise do custo
eletromiograacutefico (EMG) durante caminhada em diferentes velocidades e inclinaccedilotildees
de terreno O custo EMG seraacute compreendido como o somatoacuterio de ativaccedilatildeo EMG em
funccedilatildeo da distacircncia percorrida Se satisfatoacuterio o custo EMG poderaacute explicar as curva
30
em forma de U de custo metaboacutelico em funccedilatildeo da velocidade determinadas no
trabalho pioneiro de MARGARIA (1938)
Diferentemente da caminhada a corrida pode ser explicada do ponto de vista
mecacircnico pelo modelo massa-mola Este modelo possibilita dividir a oscilaccedilatildeo
vertical do CM em duas partes durante a passada da corrida a fase inferior da
oscilaccedilatildeo (quando a forccedila vertical exercida no solo eacute maior do que o peso corporal) e
a fase superior da oscilaccedilatildeo (quando a forccedila vertical eacute menor do que o peso
corporal) De acordo com o modelo massa-mola a duraccedilatildeo da fase inferior da
oscilaccedilatildeo representa meio periacuteodo do sistema e o deslocamento do CM durante este
periacuteodo representa a amplitude da oscilaccedilatildeo (BLICKHAN 1989 CAVAGNA et al
2005) Observaccedilotildees preliminares suportam a hipoacutetese de que sujeitos idosos
utilizem de uma maior geraccedilatildeo de trabalho interno devido a diminuiccedilatildeo da fase
superior da oscilaccedilatildeo do CM
Portanto a anaacutelise dos determinantes mecacircnicos da caminhada e corrida
deveratildeo contribuir no entendimento da locomoccedilatildeo desde um ponto de vista
energeacutetico Aleacutem disso procuramos realizar um estudo teoacuterico com o objetivo de
predizer variaacuteveis fundamentais e trabalho mecacircnico da locomoccedilatildeo terrestre
Informaccedilotildees biomecacircnicas sobre a energia da locomoccedilatildeo poderatildeo servir
como base para aplicaccedilotildees futuras na aacuterea da Fisioterapia na anaacutelise da locomoccedilatildeo
patoloacutegica bem como na Educaccedilatildeo Fiacutesica e Esportes atraveacutes do uso deste
conhecimento nas aacutereas do esporte de rendimento e sauacutede agraves quais utilizam-se das
atividades fiacutesicas locomotoras
13 Formato da tese
O estado-da-arte apresentado no capiacutetulo introdutoacuterio mostra um
desenvolvimento notaacutevel do corpo de conhecimento relacionado agrave mecacircnica e
energeacutetica da locomoccedilatildeo humana As bases cientiacuteficas atuais que procuram
encontrar as determinantes mecacircnicas de caracteriacutesticas fundamentais da
caminhada e corrida humana tais como velocidade e inclinaccedilatildeo oacutetima da
locomoccedilatildeo eficiecircncia e economia em situaccedilatildeo com carga e inclinaccedilatildeo e mudanccedila
de formas de locomoccedilatildeo conforme o aumento da velocidade demonstram ser
satisfatoacuterias em inuacutemeras situaccedilotildees
31
Contudo modelos biomecacircnicos que analisem natildeo apenas situaccedilotildees
particulares mas que expliquem as questotildees fundamentais da locomoccedilatildeo humana
tendo em consideraccedilatildeo a complexidade deste tipo de movimento ainda satildeo
escassos Atualmente temos hipoacuteteses que necessitam de experimentaccedilatildeo para
tornaacute-las robustas o suficiente para responder as questotildees fundamentais da
locomoccedilatildeo e ao mesmo tempo se manterem simples o bastante que as caracterize
como fundamentais Portanto a presente tese ENERGEacuteTICA E MECAcircNICA DA
CAMINHADA E CORRIDA HUMANA Com especial referecircncia agrave locomoccedilatildeo em
plano inclinado e efeitos da idade natildeo oferece uma resposta final e acabada para as
relaccedilotildees entre a energeacutetica e mecacircnica da locomoccedilatildeo humana mas tem como eixo
principal por meio de abordagens experimentais e teoacutericas avanccedilar no
entendimento dos paradigmas mecacircnicos das formas fundamentais de locomoccedilatildeo
usadas pelo ser humano caminhada e corrida
Em base disso o capiacutetulo 2 Custo EMG da Caminhada Humana procura
avanccedilar e aperfeiccediloar a hipoacutetese do Custo de Geraccedilatildeo de Forccedila (KRAM e TAYLOR
1990) com o desenvolvimento do modelo do Custo de Ativaccedilatildeo Muscular que daacute
base para o estudo Atraveacutes de experimentos em diferentes velocidades e
inclinaccedilotildees de caminhada eacute dada uma explicaccedilatildeo das curvas em forma de U do
custo metaboacutelico em funccedilatildeo da velocidade determinadas no estudo pioneiro de
MARGARIA em 1938
Motivado pela falta de explicaccedilatildeo das mudanccedilas estruturais e funcionais
devido agrave idade aplicadas agrave mecacircnica e energeacutetica da locomoccedilatildeo humana o capiacutetulo
3 Mecacircnica da Corrida em Idosos compara o trabalho mecacircnico e o sistema massa-
mola entre jovens e idosos em diferentes velocidades de corrida analisando o
sistema massa-mola natildeo apenas pelas suas caracteriacutesticas originais (BLICKHAN
1989 MCMAHON e CHENG 1990) mas tambeacutem pelas assimetrias deste sistema
na corrida humana determinadas recentemente na literatura (CAVAGNA 2006)
Nestes dois estudos eacute usada a abordagem experimental o primeiro se
utilizando da teacutecnica de EMG e o segundo estudo abordando a teacutecnica da
dinamometria especificamente o uso de plataformas de forccedila A percepccedilatildeo da
limitaccedilatildeo metodoloacutegica do uso deste equipamento aliada agrave necessidade de
abordagens teoacutericas da mecacircnica e energeacutetica da caminhada e corrida humana e
animal em situaccedilotildees onde apenas uma curva forccedila de reaccedilatildeo do solo versus tempo
eacute disponiacutevel ofereceram a justificativa para o capiacutetulo 4 Prediccedilatildeo da Vf CP e Custo
32
Energeacutetico da Locomoccedilatildeo Terrestre A construccedilatildeo de um modelo biomecacircnico
destes paracircmetros eacute endereccedilada neste estudo atraveacutes de meacutetodo de miacutenimos
quadrados e princiacutepios da dinacircmica e otimizaccedilatildeo de paracircmetros caracterizadores da
locomoccedilatildeo nomeadamente massa corporal frequumlecircncia de passo (FP) fator de forma
ldquoqrdquo e duty factor (DF)
Finalmente no capiacutetulo 5 os resultados de cada estudo satildeo sumarizados e
no capiacutetulo 6 satildeo apresentadas algumas consideraccedilotildees sobre a mecacircnica e
energeacutetica da locomoccedilatildeo humana e os possiacuteveis desdobramentos advindos dos
presentes achados Ainda no capiacutetulo 8 estatildeo inseridos os apecircndices da tese
131 Objetivo geral
O objetivo da presente tese eacute analisar o custo EMG da caminhada humana e
a mecacircnica da corrida de idosos Esta seacuterie de estudos tem tambeacutem como objetivo
construir um modelo biomecacircnico do custo energeacutetico da locomoccedilatildeo terrestre
132 Objetivos especiacuteficos
- Estudar as determinantes da velocidade oacutetima de caminhada em inclinaccedilotildees com
ecircnfase na construccedilatildeo do modelo do custo EMG da caminhada humana
- Comparar a mecacircnica da corrida com particular referecircncia ao trabalho mecacircnico e
sistema massa-mola entre jovens e idosos em vaacuterias velocidades de corrida
- Construir um modelo biomecacircnico capaz de predizer paracircmetros fundamentais e
custo energeacutetico da locomoccedilatildeo terrestre
33
2 O CUSTO EMG DA CAMINHADA HUMANA
21 Introduccedilatildeo
Durante um ciclo de passada de caminhada a energia cineacutetica do CM
corporal varia inversamente com a energia potencial gravitacional do CM Apesar da
presenccedila importante deste comportamento a transformaccedilatildeo de energia entre uma
forma e outra natildeo eacute total e o restante de energia necessaacuterio para manter a
locomoccedilatildeo eacute providenciado pelos muacutesculos e eacute quando normalizado pela massa
corporal e por unidade de distacircncia igual agrave 03 Jkg-1m-1 durante a velocidade oacutetima
de caminhada (aproximadamente 45 kmh-1 em adultos) Este mecanismo pendular
de minimizaccedilatildeo de energia foi primeiramente observado por CAVAGNA et al (1963)
e denominado como modelo do ldquopecircndulo invertidordquo
Interessantemente natildeo obstante a sua simplicidade o modelo auxiliou no
entendimento e aprofundamento das determinantes mecacircnicas da locomoccedilatildeo
Atraveacutes deste meacutetodo foi possiacutevel oferecer o primeiro insight desde o ponto-de-vista
mecacircnico sobre a velocidade oacutetima de locomoccedilatildeo e a forma em U do custo de
transporte da caminhada [ml de oxigecircnio - O2 - por kg de massa corporal por
distacircncia percorrida observada por MARGARIA (1938)] Na seacuterie de experimentos
desenvolvida por Cavagna e colegas (CAVAGNA et al 1976 HEGLUND et al
34
1982b) foi apresentada a formulaccedilatildeo matemaacutetica denominada como Recovery (R)
definida como
W f + W -Wv extR() = 100 Eq 21 W f + Wv
onde W f eacute trabalho mecacircnico externo horizontal Wv eacute trabalho mecacircnico externo
vertical e Wext eacute trabalho mecacircnico externo Esta equaccedilatildeo determina o percentual de
reconversatildeo via pendular entre energia cineacutetica e potencial gravitacional durante a
passada E de fato na velocidade oacutetima de caminhada o R alcanccedila
aproximadamente seu valor maacuteximo
Poreacutem o custo de geraccedilatildeo de trabalho como mecanismo principal do custo
energeacutetico da locomoccedilatildeo tem recebido vaacuterias criacuteticas da literatura As criacuteticas se
baseiam principalmente (1) na questatildeo do paradoxo do trabalho zero que afirma
que fisicamente durante um ciclo de passada completo em velocidade constante e
no plano as variaccedilotildees de energias cineacuteticas e potencial satildeo iguais agrave zero
(desprezando a resistecircncia do ar e fricccedilotildees teciduais) portanto analisando de um
ponto-de-vista somente da fiacutesica o sujeito natildeo realizaria trabalho nesta situaccedilatildeo
(ALESHINSKY 1986) (2) o problema da co-contraccedilatildeo afirma que existe um custo
metaboacutelico importante devido agrave contraccedilatildeo de muacutesculos antagonistas que natildeo geram
movimento portanto sem geraccedilatildeo de trabalho mecacircnico Este uacuteltimo
questionamento levou um grupo de pesquisadores a formular a denominada
hipoacutetese da forccedila ou Teoria do custo energeacutetico da geraccedilatildeo de forccedila (HEGLUND et
al 1982b KRAM e TAYLOR 1990 ROBERTS et al 1998) para explicar de modo
simplificado o custo energeacutetico da locomoccedilatildeo
Essencialmente a hipoacutetese da forccedila afirma que o custo energeacutetico da corrida
ou caminhada eacute determinado pelo produto da integral da curva forccedila de reaccedilatildeo do
solo-tempo por um fator proporcional agrave taxa de ciclos de pontes-cruzadas de miosina
no muacutesculo independente da geraccedilatildeo de trabalho mecacircnico Apesar da hipoacutetese
concordar com achados experimentais estes satildeo encontrados em situaccedilotildees
limitadas e aleacutem disso a hipoacutetese da forccedila considera como negligenciaacutevel o custo
de balanccedilar os segmentos para traacutes e para frente Esta pressuposiccedilatildeo eacute considerada
como incorreta (MARSH et al 2004) O problema principal desta hipoacutetese se refere
35
agrave desconsideraccedilatildeo do trabalho elemento fundamental segundo a primeira lei da
termodinacircmica Conforme apontado por HEGLUND 2004) ldquoforccedila natildeo eacute trabalho
nem mesmo eacute energia Se a energia metaboacutelica eacute consumida aquela energia deve
ir para algum lugar Se a energia de um segmento corporal aumenta aquela energia
vem de algum lugar Se a energia daquele segmento diminui a energia vai para
algum lugarrdquo
Durante a locomoccedilatildeo em inclinaccedilotildees foi observado que na inclinaccedilatildeo oacutetima
(aproximadamente -10) a constante de custo metaboacutelico inverso ao tempo de
apoio obteve uma variaccedilatildeo significativa (MINETTI et al 1994) indicando que o
custo de geraccedilatildeo de trabalho mecacircnico era mais satisfatoacuterio do que o custo de
geraccedilatildeo de forccedila Mas um achado intrigante nos estudos de Minetti e
colaboradores sobre as determinantes mecacircnicas da energeacutetica da caminhada e
corrida em inclinaccedilotildees (1993 e 1994 respectivamente) foi sobre a ausecircncia de
trabalho mecacircnico negativo em inclinaccedilotildees positivas e de trabalho positivo em
inclinaccedilotildees negativas (apoacutes 30 de inclinaccedilatildeo na corrida e 15 na caminhada)
independente da velocidade Portanto o modelo do custo de geraccedilatildeo de trabalho
como determinante do custo energeacutetico da locomoccedilatildeo natildeo se aplica nestas
situaccedilotildees perdendo sua amplitude como Teoria geral para a energeacutetica e mecacircnica
da caminhada
Tendo em consideraccedilatildeo que durante situaccedilotildees de locomoccedilatildeo de pouca
eficiecircncia mecacircnica como na situaccedilatildeo de velocidades mais baixas que a velocidade
oacutetima e durante inclinaccedilotildees extremas satildeo geradas situaccedilotildees de instabilidade de
locomoccedilatildeo e provavelmente maiores co-contraccedilotildees musculares propomos neste
experimento testar a hipoacutetese denominada de ldquocusto EMG da caminhada humanardquo
Uma base importante desta hipoacutetese reside no raciociacutenio de que nas situaccedilotildees
citadas anteriormente a contribuiccedilatildeo de muacutesculos que contraem isometricamente
principalmente os posturais teratildeo uma contribuiccedilatildeo importante para o alto custo
relativo da locomoccedilatildeo
Portanto o objetivo deste estudo eacute desenvolver o modelo do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees Teoricamente a hipoacutetese do
presente estudo diferente da hipoacutetese da forccedila natildeo iraacute desconsiderar o trabalho
mecacircnico gerado mas este seraacute considerado como um dos produtos da variaccedilatildeo da
energia (devido ao consumo de energia metaboacutelico) e a quantidade de ativaccedilatildeo
muscular e as eficiecircncias de ativaccedilatildeo satildeo as determinantes do custo energeacutetico
36
usando os equivalentes metaboacutelicos da ativaccedilatildeo EMG da literatura W+ Wshy
(BIGLAND-RITCHIE e WOODS 1976) e durante contraccedilatildeo isomeacutetrica
(CERRETELLI et al 1976) O modelo eacute apresentado em detalhes na metodologia
22 Metodologia
221 Construccedilatildeo do modelo
O presente modelo eacute configurado como biomecacircnico e se utiliza de
pressupostos originados da fiacutesica e da biologia
O modelo assume que i) toda a energia despendida pelos muacutesculos possui
uma correspondente quantidade de ativaccedilatildeo EMG ii) a atividade EMG realizada
pelos muacutesculos posturais durante todo o ciclo de passada e pelos muacutesculos
propulsores durante a fase aeacuterea seraacute considerada como uma atividade EMG
realizada durante contraccedilotildees isomeacutetricas Seraacute considerada como contraccedilatildeo
excecircntrica e concecircntrica a atividade EMG realizada pelos muacutesculos propulsores
durante a primeira e segunda metades da fase de apoio respectivamente iii) O
custo energeacutetico da locomoccedilatildeo eacute devido agrave ativaccedilatildeo de muacutesculos propulsores e
posturais estes uacuteltimos natildeo diretamente ligados agrave geraccedilatildeo de trabalho mecacircnico iv)
Mais do que uma relaccedilatildeo com a produccedilatildeo de forccedila muscular a quantidade de
ativaccedilatildeo EMG e consequumlentemente o custo EMG possui uma correspondecircncia com
o trabalho mecacircnico realizado durante a ativaccedilatildeo muscular
Um conjunto de algoritmos foi desenvolvido em Labview a fim de analisar o
sinal EMG e as variaacuteveis espaccedilos-temporais (figuras 21 22 e 23 apecircndice 81) O
programa retifica suaviza (atraveacutes de uma integraccedilatildeo com janelamento moacutevel
50Hz do tipo Hamming) e divide todas as curvas de EMG por ciclo de passada
retirando os ciclos de passadas com um tempo 20 menor ou maior do tempo
meacutedio do ciclo de passada e do tempo de apoio Apoacutes normaliza o tempo do ciclo
para 100 quadros (interpolaccedilatildeo via spline) e calcula a meacutedia desvio-padratildeo e
coeficiente de variaccedilatildeo em cada quadro por muacutesculo analisado Este procedimento
tem o objetivo de criar graacuteficos de atividade eletromiograacutefica em funccedilatildeo do
37
percentual do ciclo de passada A fim de analisar o efeito das ponderaccedilotildees pelo
volume muscular e dobra cutacircnea foram desenvolvidas duas estrateacutegias de
modelamento nomeadamente ldquoabordagem experimentalrdquo e ldquoabordagem teoacutericardquo
Abordagem experimental
Usando o sinal suavizado sem a normalizaccedilatildeo foi realizada uma integral em
funccedilatildeo do tempo do seguinte modo
t
Iemg(t) = f EMG dt Eq 22 0
Este valor integrado eacute dividido pelo CP determinando a quantidade de
atividade EMG em funccedilatildeo da distacircncia e seraacute considerado como um custo miacutenimo
EMG Os valores de custo EMG satildeo ponderados em funccedilatildeo do volume muscular
(WINTERS e WOO 1990) e da dobra cutacircnea (NORDANDER et al 2003) do
seguinte modo
Iemg1 Iemg2 Iemg16EmgCost (mV m) = ( + + l middot CP-1 Eq 23 exp ( Mass1 Sk inf1 Mass2 Sk inf2 Mass16 Sk inf16 lmiddot middot middot Masstotal Sk inftotal Masstotal Sk inftotal Masstotal Sk inftotal
onde EmgCostexp eacute o custo miacutenimo EMG experimental Mass eacute a massa dos
muacutesculos analisados e eacute o somatoacuterio de todas as massas musculares Masstotal
analisadas Sk inf eacute a dobra cutacircnea de cada regiatildeo de colocaccedilatildeo dos eletrodos e
eacute o somatoacuterio de todas as dobras cutacircneas analisadas A fim de Sk inftotal
compreender melhor as determinantes da velocidade oacutetima nas inclinaccedilotildees dividiu-
se a Iemg em trecircs aacutereas (a) fase de contato (b) fase aeacuterea e (c) offset (figura 21)
Abordagem teoacuterica
A presente abordagem calcula o sinal EMG atraveacutes dos seus equivalentes
metaboacutelicos Estes equivalentes satildeo advindos da literatura (BIGLAND-RITCHIE e
WOODS 1976) e o objetivo deste procedimento foi verificar se levando em
38
consideraccedilatildeo os equivalentes metaboacutelicos da atividade EMG (para contraccedilotildees
concecircntrica excecircntrica e isomeacutetrica) seria possiacutevel explicar mais satisfatoriamente
as velocidades oacutetimas na caminhada em inclinaccedilotildees Este procedimento assume
que uma determinada quantidade de ativaccedilatildeo eleacutetrica muscular gera distintos custos
energeacuteticos sendo estes dependentes do tipo de contraccedilatildeo muscular Para este
propoacutesito primeiro dividimos a anaacutelise em dois grupos de muacutesculos propulsores
(gluteus maximus gluteus medius deltoideus anterior rectus femuralis vastus
lateralis biceps femuralis caput longus tibialis anterior e gastrocnemius lateralis) e
posturais (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis trapezius ascendens)
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset
Os muacutesculos posturais foram considerados como muacutesculos contraindo
isometricamente durante todo o ciclo de passada enquanto que os muacutesculos
39
propulsores foram analisados como realizando (a) contraccedilatildeo excecircntrica na primeira
fase de contato (b) concecircntrica na segunda fase de contato e (c) contraccedilatildeo
isomeacutetrica durante a fase aeacuterea (figura 22)
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda metade
da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo isomeacutetrica
Setas verticais apontando para baixo indicam momento de contato e de
despregue
Assim foram calculadas as correspondentes integrais
t 2c
Iemgexc (t) = f EMG dt Eq 24 0
40
onde Iemgexc eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a primeira
metade da fase de contato (contraccedilatildeo excecircntrica)
tc
Iemgcon (t) = f EMG dt Eq 25 t 2c
onde Iemgcon eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a segunda
metade da fase de contato (contraccedilatildeo concecircntrica)
ta
Iemgiso (t) = f EMG dt Eq 26 0
onde Iemgiso eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a fase aeacuterea
(contraccedilatildeo isomeacutetrica)
As integrais foram convertidas para uma unidade de counts usada por
BIGLAND-RITCHIE e WOODS 1976) usando um fator de transformaccedilatildeo igual agrave 200
counts (mVs)-1 deste modo temos a atividade EMG durante contraccedilatildeo excecircntrica
(EMGneg) concecircntrica (EMGpos) e isomeacutetrica (EMGiso) em counts Os equivalentes
metaboacutelicos satildeo obtidos atraveacutes de equaccedilotildees de regressatildeo linear criadas no
presente estudo usando dados experimentais de Bigland e Ritchie (1976) como
segue
VO2neg (ml) = 00015 EMGneg + 03353 Eq 27
VO2 pos(ml) = 00042 EMGpos + 01493 Eq 28
(ml) = 00042 EMGiso + 01493 Eq 29 VO2iso
EmgCosttheor (J m) = 201[(VO2 iso1 + VO2 iso 2 + VO2 iso16) + (VO2 neg 1 + VO2 neg 2 + VO2 neg 16) +
(VO2 pos1 + VO2 pos 2 + VO2 pos16)] CP-1 Eq 210
onde EmgCosttheor eacute o custo EMG teoacuterico O somatoacuterio dos dispecircndios energeacuteticos
dados em ml de O2 foram convertidos para Joules (J) usando um equivalente
41
energeacutetico de 201 Jml-1 (BLAXTER 1989) e apoacutes foram divididos por CP (conforme
equaccedilatildeo 210) Nesta abordagem teoacuterica entende-se o EmgCosttheor como um custo
miacutenimo energeacutetico devido agrave notoacuteria impossibilidade de obter a totalidade da ativaccedilatildeo
EMG e consequentemente do custo energeacutetico da locomoccedilatildeo Mais do que isso o
modelo procura compreender as determinantes da velocidade oacutetima de caminhada
nas inclinaccedilotildees
222 Testando o modelo
Um homem adulto sem histoacuteria de lesotildees no sistema muacutesculo-esqueleacutetico
realizou caminhadas de 2 minutos sobre uma esteira (WOODWAY Usa) nas
velocidades de 2 3 4 5 6 e 7 kmh-1 e nas inclinaccedilotildees de 0 5 10 e 15 O uso
das velocidades 6 ou 7 kmh-1 foram escolhidas em funccedilatildeo do Nuacutemero de Froude
(Fr) O valor maacuteximo de Fr foi o equivalente agrave velocidade espontacircnea de transiccedilatildeo
(aproximadamente 05 no plano MINETTI et al 1994) O uso do Fr eacute baseado da
teoria das similaridades dinacircmicas Esta teoria afirma que dois animais
geometricamente similares (como no caso do presente estudo) deslocam-se
tambeacutem de modo similar quando o movimento eacute multiplicado por fatores
relacionados ao tempo dimensotildees lineares e forccedilas (ver ALEXANDER 2005)
Fr = Vf 2 gL Eq 211
onde Vf eacute velocidade de progressatildeo em ms-1 g eacute aceleraccedilatildeo gravitacional (g) (981
ms-2) e L eacute um comprimento corporal conhecido (no presente estudo foi utilizado o
comprimento de membros inferiores em m)
Coleta de dados
O voluntaacuterio foi informado do objetivo do estudo dos riscos e eventuais
desconfortos e assinou um termo de consentimento
O indiviacuteduo estava vestido com roupas apropriadas para caminhada A coleta
de dados foi realizada em inclinaccedilotildees de 0 5 10 e 15 nas velocidades de 2 3 4
5 6 7 kmh-1 para cada inclinaccedilatildeo A atividade EMG de dezesseis muacutesculos foi
42
analisada (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis deltoideus anterior trapezius ascendens gluteus
maximus gluteus medius rectus femuralis vastus lateralis biceps femuralis caput
longus tibialis anterior e gastrocnemius lateralis) usando um eletromioacutegrafo portaacutetil
(EMGpocket Elite System Itaacutelia)
Para a preparaccedilatildeo do local e colocaccedilatildeo dos eletrodos de superfiacutecie bipolares
foram observadas as orientaccedilotildees da Seniam (FRERIKS et al 1991)
Simultaneamente ao registro EMG sinais advindos de seis sensores de pressatildeo
(footswitches) trecircs em cada peacute (regiatildeo do calcanhar quinto e primeiro metatarsos
inferiores) foram registrados no eletromiograacutefo portaacutetil Os sinais EMGrsquos foram preacuteshy
amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um niacutevel de ruiacutedo menor do
que 1 mV rms e filtrados por um filtro do tipo Butterworth (50-450 Hz terceira
ordem) A frequumlecircncia de amostragem da EMG e dos sensores de pressatildeo foi de
1000 Hz
Foram coletadas a massa e estatura corporal e comprimento de membro
inferior As dobras cutacircneas tambeacutem foram coletadas antes dos testes usando um
plicocircmetro (The body calliper CA Usa)
Um possiacutevel efeito de fadiga no sinal EMG foi controlado repetindo o primeiro
teste Com diferenccedilas maiores de 10 entre a integral EMG dos muacutesculos
analisados do primeiro e uacuteltimo teste a coleta seria descartada poreacutem a diferenccedila
foi menor do que este limite
23 Resultados
231 Variaacuteveis espaccedilos-temporais
As variaacuteveis espaccedilos-temporais da caminhada em diferentes velocidades e
diferentes inclinaccedilotildees satildeo apresentadas na tabela 21 O CP e a FP aumentam com
o aumento da velocidade poreacutem natildeo com o aumento da inclinaccedilatildeo O DF eacute maior na
velocidade oacutetima de locomoccedilatildeo nas inclinaccedilotildees (10 e 15) enquanto que apresenta
uma relaccedilatildeo inversa com Vf nas inclinaccedilotildees mais baixas (0 e 5)
43
232 Atividade EMG
A atividade EMG dos muacutesculos posturais (erector spinae longissimus erector
spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis trapezius ascendens) e
dos muacutesculos propulsores (gluteus maximus gluteus medius rectus femoralis
vastus lateralis deltoideus anterior biceps femoralis caput longus tibialis anterior e
gastrocnemius lateralis) eacute apresentada nas figuras 23 e 24 Os resultados do
presente estudo referente ao comportamento da atividade EMG durante caminhada
no plano satildeo semelhantes agrave literatura tanto em relaccedilatildeo aos muacutesculos propulsores
(LAY et al 2007 NYMARK et al 2005) quanto para os muacutesculos posturais (WHITE
e MCNAIR 2002 DEN OTTER et al 2004 LAMOTH et al 2006)
De um modo geral o sinal EMG em funccedilatildeo do percentual do ciclo (portanto
independente da distacircncia percorrida) aumentou conforme o aumento da velocidade
e inclinaccedilatildeo Observa-se tambeacutem um aumento no offset nas maiores inclinaccedilotildees
(veja figuras 23 e 24)
Tabela 21 Valores meacutedios e desvios-padratildeo (dp) de frequumlecircncia de passada (FP)
comprimento de passada (CP) tempo de fase aeacuterea (ta) tempo de contato (tc)e
duty factor (DF) nas diferentes velocidades (Vf) em diferentes inclinaccedilotildees do
terreno
0
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0518 0022 1074 0044 0706 0039 1227 0087 064
3 0660 0017 1263 0032 0604 0030 0912 0042 060
4 0779 0013 1426 0025 0541 0023 0743 0028 058
5 0879 0010 1580 0018 0492 0022 0646 0024 057
6 0970 0009 1719 0015 0446 0012 0586 0014 057
7 1061 0022 1834 0042 0415 0010 0528 0024 056
5
44
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0504 0026 2210 0056 0656 0054 1334 0089 067
3 0640 0015 2606 0030 0635 0033 0930 0048 059
4 0797 0013 2790 0023 0526 0017 0729 0028 058
5 0895 0008 3104 0014 0478 0017 0639 0020 057
6 1002 0009 3326 0016 0426 0009 0572 0014 057
7 1081 0015 3600 0025 0400 0007 0525 0014 057
10
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0302 0000 3674 0000 1309 0090 1998 0090 060
3 0262 0013 3182 0151 1216 0094 2602 0174 068
4 0300 0007 3699 0085 1229 0086 2101 0114 063
5
6 0495 0006 3300 0036 0854 0021 1166 0028 058
7 0556 0008 3429 0015 0775 0022 1023 0026 057
15
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0275 0022 3041 0216 1282 0079 2368 0255 065
3 0319 0011 3492 0122 1208 0074 1936 0121 062
4 0399 0007 3482 0059 1497 0046 1011 0040 040
5 0450 0008 3703 0068 0919 0041 1302 0060 059
6 0524 0009 3711 0064 0808 0026 1101 0035 058
7 0597 0012 3257 0069 0721 0024 0954 0037 057
O maior pico de ativaccedilatildeo EMG entre os muacutesculos propulsores foi do tibialis
anterior com valor de 73 mV agrave 7 kmh-1 agrave 15 enquanto que para os muacutesculos
posturais foi do trapezius ascendens com 34 mV tambeacutem agrave 7 kmh-1 agrave 15
erector
spinae
longissimus
erector
spinae
iliocostalis
trapezius
descendens
latissimus
dorsis
obliquus
externus
abdominis
obliquus
internus
abdominis
rectus
abdominis
deltoideus
anterior
45
0 5 10 15
Figura 2 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
trapezius
ascenden
gluteus
maximus
gluteus
medius
rectus
femoralis
vastus
lateralis
biceps
femoralis
caput
tibialis
anterior
gastrocnemius
lateralis
46
0 5 10 15
Figura 24
47
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
com o tempo de passada normalizado em percentual do ciclo O 0-100 representa
o momento de contato com o solo As cores indicam a velocidade de caminhada (de
2 agrave 7 kmh-1) Cada muacutesculo eacute representado nas linhas e em cada coluna eacute
apresentada a atividade EMG por inclinaccedilatildeo
A ativaccedilatildeo EMG parece seguir um padratildeo bem definido com exceccedilatildeo do
trapezius descendens obliquus internus abdominis onde picos de ativaccedilotildees
aparecem apoacutes os 3 kmh-1 seguindo um comportamento de aumento com o
acreacutescimo da inclinaccedilatildeo e no muacutesculo deltoideus anterior no qual ateacute a velocidade
de 5 kmh-1 o pico maior se apresenta no final da fase de apoio enquanto que nas
velocidades de 6 e 7 kmh-1 o pico passa a se situar na fase aeacuterea O uacutenico muacutesculo
analisado neste estudo que apresenta um comportamento diferente entre as
inclinaccedilotildees eacute o rectus femoralis onde nas inclinaccedilotildees 0 5 e 10 os picos aparecem
apenas nas velocidades raacutepidas enquanto que na inclinaccedilatildeo de 15 o pico eacute visiacutevel
logo na velocidade de 2 kmh-1
Poreacutem quando analisamos a quantidade de ativaccedilatildeo por distacircncia percorrida
ou seja o custo EMG os resultados mudam
233 Custo EMG
A quantidade de atividade EMG calculada atraveacutes da abordagem
experimental eacute apresentada na figura 25 Durante a caminhada no plano (primeira
linha da figura 25) eacute possiacutevel observar um miacutenimo de ativaccedilatildeo no somatoacuterio total
devido principalmente agrave ativaccedilatildeo durante a fase aeacuterea e ao offset Este miacutenimo
acontece tambeacutem na inclinaccedilatildeo a 10 de inclinaccedilatildeo mas a 5 e a 15 a
quantidade de ativaccedilatildeo parece diminuir conforme o aumento da Vf
A figura 26 apresenta os valores de custo EMG calculado atraveacutes da
abordagem teoacuterica Observa-se um miacutenimo a 0 e 15 de inclinaccedilatildeo
Para nosso conhecimento natildeo existem dados de atividade EMG de muacutesculo
posturais durante caminhada nas inclinaccedilotildees A quantidade de ativaccedilatildeo EMG por
passada dos muacutesculos posturais e propulsores parecem aumentar com o acreacutescimo
da velocidade e inclinaccedilatildeo
48
49
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
24 Discussatildeo
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular
Inicialmente proposto para a corrida de quadruacutepedes (KRAM e TAYLOR
1990) e apoacutes para a corrida de biacutepedes (ROBERTS et al 1998 ROBERTS et al
1997) corrida para traacutes (WRIGHT e WEYAND 2001) e caminhada humana
(GRIFFIN et al 2003) a teoria do custo energeacutetico da geraccedilatildeo de forccedila foi formulada
a partir dos resultados que para animais com grande variaccedilatildeo de massa correndo
em diversas velocidades o custo mecacircnico natildeo se correlacionava bem com o custo
metaboacutelico da locomoccedilatildeo terrestre (HEGLUND et al 1982b TAYLOR 1985)
0 5
10
15
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
50
Uma justificativa para explicar esse resultado se referia ao fato de que o
muacutesculo durante a fase de apoio na corrida contraia isometricamente deste modo
natildeo realizando trabalho
Recentemente foi observado que esse comportamento acontece tambeacutem no
muacutesculo gastrocnemius medialis durante a caminhada (FUKUNAGA et al 2001)
Poreacutem na corrida este comportamento sucede apenas em velocidades maiores de
13 kmh-1 em adultos (CAVAGNA 2006) e natildeo eacute visiacutevel em idosos mesmo em
velocidades maacuteximas (estudo sobre a mecacircnica da corrida em idosos Capiacutetulo 3)
Ainda assim a teoria afirma que o custo metaboacutelico despendido pelos muacutesculos eacute
proporcional agrave integral forccedila de reaccedilatildeo do solo-tempo multiplicada por um fator
proporcional agrave taxa de ciclos de pontes cruzadas no muacutesculo-esqueleacutetico
A proposiccedilatildeo do Custo Energeacutetico da Geraccedilatildeo de Forccedila assume que i) a
maior parte da forccedila exercida pelos muacutesculos acontece em oposiccedilatildeo agrave gravidade ii)
uma unidade de volume muscular ativado exerce uma respectiva forccedila no solo
independente da velocidade ou tamanho do animal iii) originalmente foi presumido
que os muacutesculos agiam em similares amplitudes da relaccedilatildeo forccedila-velocidade [esta
pressuposiccedilatildeo foi recentemente interpretada em um interessante modelo
biomecacircnico proposto por BLANCO e GAMBINI 2006) como independente para a
determinaccedilatildeo das relaccedilotildees encontradas por KRAM e TAYLOR 1990)] portanto eacute
esperado que animais pequenos que realizam o tempo de contato menor usem
fibras glicoliacuteticas em maior quantidade e consequentemente tenham um maior
dispecircndio energeacutetico e assim explica-se o fato de que animais pequenos despendem
mais energia para transportar 1 N de forccedila por km percorrido do que animais
maiores (HOYT e TAYLOR 1981) Portanto o custo energeacutetico da locomoccedilatildeo
segundo a presente teoria eacute determinado pelo custo de suportar o peso corporal e o
tempo disponiacutevel para exercer forccedila contra o solo
Ainda assim a teoria apresenta seacuterias restriccedilotildees e parece funcionar em
situaccedilotildees particulares A formulaccedilatildeo apresentada por Kram e Taylor indica como
insignificante o dispecircndio energeacutetico devido aos movimentos de balanccedilo dos
membros quando natildeo estatildeo em apoio Vaacuterias evidecircncias em aves (MARSH et al
2004) e em humanos (DOKE et al 2005 GOTTSCHALL e KRAM 2005 DOKE e
KUO 2007) demonstram que este dispecircndio natildeo eacute despreziacutevel Outra criacutetica
levantada pela literatura (ALEXANDER 1991 HEGLUND 2004) se refere agrave
desconsideraccedilatildeo do trabalho variaacutevel fundamental na Termodinacircmica para explicar
51
a energeacutetica da locomoccedilatildeo Forccedila natildeo eacute trabalho nem mesmo eacute energia portanto
ela isoladamente natildeo possibilita uma resposta final sobre a energia A hipoacutetese do
custo de ativaccedilatildeo muscular apresentado aqui natildeo despreza o dispecircndio energeacutetico
dos membros superiores e aleacutem disso considera as eficiecircncias dos diferentes tipos
de trabalho mecacircnico quando insere os equivalentes metaboacutelicos da ativaccedilatildeo
muscular (abordagem teoacuterica Metodologia)
242 Sobre o meacutetodo
Algumas consideraccedilotildees importantes podem ser feitas sobre a teacutecnica da
EMG Comumente esta teacutecnica eacute usada nos campos da biomecacircnica e biologia
experimental a fim de determinar a quantidade de ativaccedilatildeo muscular e os periacuteodos
em que elas acontecem poreacutem neste estudo pretendeu-se usar a determinada
teacutecnica a fim de oferecer uma informaccedilatildeo global da ativaccedilatildeo de tal modo que
pudesse ter uma correspondecircncia com a ativaccedilatildeo EMG de todo o corpo incluindo os
muacutesculos posturais que natildeo geram trabalho muscular importante mas segundo a
hipoacutetese central do presente estudo participam de forma decisiva como uma
determinante da caminhada humana
Assim esta abordagem permite inferir sobre os mecanismos principais da
locomoccedilatildeo e permite explicar a biomecacircnica da locomoccedilatildeo especialmente referente
agrave energeacutetica da caminhada humana Aleacutem de auxiliar na explicaccedilatildeo da velocidade
oacutetima no plano o custo EMG parece dar um indicativo sobre a energeacutetica em
situaccedilotildees criacuteticas com restriccedilotildees do ambiente (inclinaccedilatildeo) e situaccedilotildees natildeo usuais
(velocidades de progressatildeo baixas)
Nestas situaccedilotildees eacute provaacutevel que dois mecanismos estejam relacionados a fim
de justificar a hipoacutetese do custo EMG i) a estabilidade dinacircmica prejudicada e ii) o
custo da co-contraccedilatildeo Os dois mecanismos parecem estar diretamente ligados ao
maior custo EMG e consequumlentemente ao custo energeacutetico da caminhada
Evidecircncias experimentais datildeo suporte para esta inferecircncia Durante caminhada
realizada para fins de lazer em velocidades muito baixas ou mesmo em marchas
patoloacutegicas foi encontrado um aumento na atividade EMG em comparaccedilatildeo com a
velocidade auto-selecionada correspondente agrave velocidade oacutetima Os achados
mostram um aumento de ativaccedilatildeo EMG com o aumento da Vf mesmo em muacutesculos
do tronco durante locomoccedilatildeo no plano (ANDERS et al 2007) Novamente o foco do
52
presente estudo foi referente agrave quantidade de ativaccedilatildeo em funccedilatildeo da distacircncia
percorrida enquanto que nestes estudos a variaacutevel em questatildeo foi avaliada em
funccedilatildeo da passada Aleacutem disso aumentos foram encontrados nos valores de coshy
contraccedilatildeo durante velocidades muito baixas (020 e 030 ms-1) em comparaccedilatildeo com
a velocidade auto-selecionada (NYMARK et al 2005)
As relaccedilotildees entre estabilidade articular e quantidade de ativaccedilatildeo geral
(ANDERSON e BEHM 2004) e estabilidade corporal e ativaccedilatildeo de muacutesculos
localizados especificamente no tronco (GARDNER-MORSE e STOKES 1998
GRANATA e MARRAS 2000 GRANATA e ORISHIMO 2001) satildeo bem
estabelecidas na literatura inclusive indicando um prejuiacutezo maior na ativaccedilatildeo EMG
durante perturbaccedilotildees agrave estabilidade com contraccedilotildees concecircntricas do que
excecircntricas e isomeacutetricas Um possiacutevel modo de testar estes mecanismos poderia
ser atraveacutes da perturbaccedilatildeo da estabilidade e os efeitos na ativaccedilatildeo EMG durante
caminhada (por exemplo em terrenos irregulares)
Outro achado importante que daacute sustentaccedilatildeo agrave hipoacutetese do custo EMG da
caminhada humana eacute observado por PRILUTSKY e GREGOR 2001) onde a
atividade EMG de muacutesculos propulsores (rectus femoralis gastrocnemius medialis
vastus medialis biceps femoralis gluteus maximus e soleus) foi maior na corrida do
que na caminhada em velocidades abaixo da velocidade de transiccedilatildeo entre
caminhada e corrida enquanto que durante velocidades acima da de transiccedilatildeo os
muacutesculos propulsores apresentam uma maior atividade EMG na caminhada do que
na corrida o que coincide com o dispecircndio metaboacutelico nestas situaccedilotildees
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia
A alta especializaccedilatildeo da locomoccedilatildeo suportando cargas em regiotildees inoacutespitas da
terra indica um desafio para o entendimento dos fundamentos da mecacircnica e
energeacutetica da locomoccedilatildeo humana Mundialmente famosos satildeo os achados sobre a
economia de locomoccedilatildeo de mulheres africanas que transportam cargas sobre a
cabeccedila de ateacute 70 da massa corporal sem um maior custo mecacircnico devido a um
ajuste aperfeiccediloado das curvas de energia potencial e cineacutetica do centro de massa
colaborando para um mais alto R (percentual de reconversatildeo entre energia cineacutetica
53
e potencial durante um ciclo de passada) (MALOIY et al 1986) Evidecircncias de um
custo metaboacutelico relativamente baixo da locomoccedilatildeo no plano foram tambeacutem
encontradas em carregadores Nepaleses (BASTIEN et al 2005) Poreacutem
diferentemente das condiccedilotildees geograacuteficas nas quais as mulheres africanas realizam
suas atividades locomotoras o espaccedilo geograacutefico dos carregadores Nepaleses eacute
caracterizado por terrenos inclinados Em um estudo recente Minetti e
colaboradores (MINETTI et al 2006) apresentaram as primeiras informaccedilotildees sobre
eficiecircncia mecacircnica (potecircncia mecacircnica desenvolvida dividida pela potecircncia
metaboacutelica despendida) de carregadores Nepaleses em inclinaccedilotildees extremas
especialmente da regiatildeo do Himalaia indicando uma eficiecircncia aproximadamente
33 maior do que a de montanhistas Caucasianos De fato os carregadores
Nepaleses apresentam caracteriacutesticas notaacuteveis do ponto de vista energeacutetico
Transportam desde a infacircncia cargas geralmente entre 80 e 90 da massa corporal
(utilizando-se de uma faixa posta agrave testa no qual eacute ligada a uma cesta de vime nas
costas) em terrenos acidentados com inclinaccedilotildees de ateacute 50 em situaccedilatildeo de
hipoacutexia de altitude (MALVILLE et al 2001)
A hipoacutetese da transferecircncia eficiente entre energia cineacutetica e potencial do
centro de massa corporal natildeo se sustenta pois em inclinaccedilotildees maiores de 15 e ndash
15 as mudanccedilas de energia potencial ocorrem apenas positivamente e
negativamente respectivamente (MINETTI et al 1993) Portanto sem a
possibilidade de transferecircncia de energia por via pendular e tendo em consideraccedilatildeo
a menor variabilidade de oscilaccedilatildeo do tronco dos Nepaleses encontrada por
MINETTI et al 2006) apresentamos uma hipoacutetese de que o custo de ativaccedilatildeo
muscular (ou custo EMG) da locomoccedilatildeo eacute menor no grupo de carregadores do
Himalaia do que nos montanhistas Caucasianos Devido agrave falta de informaccedilotildees
espaccedilos-temporais da locomoccedilatildeo com carga em grandes inclinaccedilotildees foram
analisados estes paracircmetros da passada a fim de auxiliar no entendimento da
energeacutetica e mecacircnica da locomoccedilatildeo em planos inclinados
251 Materiais e meacutetodos
Cinco carregadores Nepaleses (idade 23 plusmn 9 anos estatura 163 plusmn 003 m
massa corporal 546 plusmn 62 kg) e cinco montanhistas Caucasianos (idade 32 plusmn 3
anos estatura 176 plusmn 007 m massa corporal 742 plusmn 67 kg) selecionados por
54
voluntariedade realizaram o experimento em Namche-Bazar regiatildeo do vale
Khumbu no Parque Nacional de Sagarmatildethatilde (Everest em nepalecircs) O experimento
consistia de caminhada sem e com carga (40 kg) em situaccedilatildeo de subida e descida
com uma inclinaccedilatildeo meacutedia de 22 em um ritmo que poderiam suportar por muitas
horas Os Nepaleses utilizavam a usual faixa na testa onde era ligada com a cesta
nas costas onde suportavam o peso enquanto que os Caucasianos usavam uma
mochila de alpinismo O trecho foi escolhido de modo a assegurar que as trocas de
energia fossem principalmente devidas as mudanccedilas de energia potencial sem a
possibilidade de transferecircncia entre energia potencial e cineacutetica dentro de uma
passada (MINETTI et al 2006) Antes de iniciar os experimentos eram realizadas
medidas de dobras cutacircneas nas regiotildees de colocaccedilatildeo de eletrodos
O set-up experimental incluiu um eletromioacutegrafo portaacutetil (PocketEmg BTS
Milatildeo Itaacutelia) um analisador de gases portaacutetil (K4b2 Cosmed Roma Itaacutelia) um GPS
(GPSmAP76CS) e lactiacutemetro (Accutrend Roche Diagnostic Basel Suiacuteccedila) Foram
analisados a atividade EMG de quatorze muacutesculos (erector spinae longissimus
erector spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis deltoideus anterior
trapezius ascendens gluteus maximus gluteus medius biceps femuralis caput
longus vastus lateralis e gastrocnemius lateralis) Para a preparaccedilatildeo do local e
colocaccedilatildeo dos eletrodos de superfiacutecie bipolares foram seguidas as orientaccedilotildees da
Seniam (FRERIKS et al 1991) Simultaneamente ao registro EMG sinais advindos
de seis sensores de pressatildeo (footswitches) trecircs em cada peacute (regiatildeo do calcanhar
primeiro e quinto metatarso inferior) eram registrados no eletromiograacutefo portaacutetil Os
sinais EMGrsquos foram preacute-amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um
niacutevel de ruiacutedo menor do que 1 μV rms e filtrados por um filtro do tipo Butterworth (50shy
450 Hz terceira ordem) A frequumlecircncia de amostragem da EMG e dos sensores de
pressatildeo foi de 1000 Hz
O custo metaboacutelico foi calculado segundo procedimentos do estudo anterior
(MINETTI et al 2006) O sinal EMG foi retificado e integrado e os valores meacutedios da
atividade EMG de todo o trecho foram subtraiacutedos pelos respectivos valores da
situaccedilatildeo em repouso (idem ao consumo de O2) e divididos pela velocidade meacutedia
(Vf ) A potecircncia EMG geral foi obtida a partir do somatoacuterio dos quatorze muacutesculos
ponderado pelos respectivos volumes musculares (YAMAGUCHI et al 1991) e
55
dobra cutacircnea respectiva Determinou-se o Custo EMG atraveacutes do procedimento
experimental
Para fins de comparaccedilatildeo das Vf rsquos de locomoccedilatildeo usamos o Nf baseado na
teoria das similaridades dinacircmicas (sub-seccedilatildeo 222) para normalizar a Vf No caso
presente ao inveacutes de utilizar o comprimento de membro inferior utilizamos a
estatura da seguinte forma
Vf 2
Fr = Eq 212 g estatura
Tendo em consideraccedilatildeo que a estatura meacutedia dos Caucasianos eacute maior (013
m) e que as Vf rsquos de subida e descida dos Caucasianos com carga foram 35 e 17
menores do que as dos Nepaleses deste modo os Frrsquos dos Caucasianos para os
mesmos trechos foram 40 e 24 menores do que dos Nepaleses
Os procedimentos para anaacutelise dos dados de posiccedilatildeo e Vf oriundos do GPS
satildeo os mesmos de MINETTI et al 2006) A potecircncia mecacircnica vertical (PMV) foi
calculada como segue
g h mtotPMV = Eq 213 t
onde Ah eacute variaccedilatildeo de altura mtot eacute a massa total (massa corporal + carga) g eacute
aceleraccedilatildeo gravitacional e At eacute o tempo de locomoccedilatildeo
Uma seacuterie de programas computacionais (Labview versatildeo 71 National
Instruments Austin USA) foram construiacutedos para o processamento dos dados EMG
GPS e paracircmetros espaccedilos-temporais
Foi utilizado Testes-t de student para amostras independentes para comparar
os paracircmetros espaccedilos-temporais entre Nepaleses e Caucasianos (SPSS para
Windows versatildeo 14 USA)
56
252 Resultados
Variaacuteveis espaccedilos-temporais
O Fr dos Nepaleses foi maior do que as dos Caucasianos em situaccedilatildeo com
carga (plt001) mas sem carga as diferenccedilas diminuem acentuadamente (4 e 23
maiores sem e com carga respectivamente pgt005) O CP e FP dos Nepaleses
foram maiores na subida com carga mas durante a descida com carga apesar da
Vf maior apenas o CP foi maior nos Nepaleses e a FP foi similar (pgt005)
Paracircmetros energeacuteticos
A atividade EMG por unidade de tempo foi similar entre Nepaleses e
Caucasianos Contudo a ativaccedilatildeo EMG total ou seja por unidade de distacircncia
(ldquocustordquo EMG da locomoccedilatildeo) foi notavelmente maior nos Caucasianos na situaccedilatildeo
com carga especialmente na fase de subida (observe a inclinaccedilatildeo das retas na
figura 27)
A atividade EMG tambeacutem foi analisada no domiacutenio da frequumlecircncia para testar
uma possiacutevel diminuiccedilatildeo nos paracircmetros de mediana meacutedia e pico da frequumlecircncia
que pudessem explicar via fadiga neuromuscular (KNAFLITZ e BONATO 1999) o
efeito da carga no aumento da ativaccedilatildeo EMG por distacircncia percorrida nos
Caucasianos (inclinaccedilotildees das retas na figura 27)
Utilizou-se a transformada raacutepida de Fourier com janelamento de 10 segundos
analisando o centro dos bursts de 512 pontos determinados por uma integraccedilatildeo com
janelamento moacutevel Hanning de 50 ms Todavia nenhuma diferenccedila significativa foi
encontrada nos paracircmetros de frequumlecircncia entre os primeiros e uacuteltimos vinte
segundos de experimento (diminuiccedilotildees lt 5)
O notaacutevel desempenho dos Nepaleses na subida com carga eacute confirmado pela
PMV 33 maior do que a dos Caucasianos Embora a Vf e a PMV sejam maiores
nos Nepaleses estes apresentam um custo metaboacutelico 39 menor que os
Caucasianos Esta economia energeacutetica especiacutefica agrave situaccedilatildeo de carga e inclinaccedilatildeo
extrema eacute observada tambeacutem na figura 28 na qual os Caucasianos sem carga
apresentam uma eficiecircncia similar agraves eficiecircncias dos Nepaleses mas com uma baixa
eficiecircncia na situaccedilatildeo com carga
57
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal +
carga) dos carregadores Nepaleses (NEP) e montanhistas Caucasianos
(CAU) em subida (up) e descida (down)
A eficiecircncia menor dos Caucasianos na situaccedilatildeo com carga parece ser
explicada pela quantidade de ativaccedilatildeo muscular A interessante semelhanccedila entre o
custo EMG e o custo energeacutetico (figura 27) demonstram a eficaacutecia do meacutetodo EMG
utilizado no presente estudo a fim de representar uma ativaccedilatildeo muscular geral
durante a locomoccedilatildeo
253 Discussatildeo
A menor ativaccedilatildeo muscular eacute extremamente interessante pois explica de modo
importante o mecanismo da alta eficiecircncia e economia energeacutetica nos Nepaleses
58
Os resultados de potecircncia metaboacutelica e PMV confirmam os achados de
MINETTI et al 2006) Aleacutem disso o custo energeacutetico na situaccedilatildeo sem carga eacute
similar entre Caucasianos e Nepaleses Em outras palavras o desempenho notaacutevel
dos Nepaleses eacute especiacutefico somente na situaccedilatildeo de subida com carga
000
004
008
012
016
020
024
028
-12 -10 -08 -06 -04 -02 00
efi
ciecirc
nc
ia m
iacutenim
a d
e t
rab
alh
o p
os
itiv
o NEP 0kg
CAU 0kg
NEP 40kg
CAU 40kg
14
15
eficiecircncia miacutenima de trabalho negativo
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da
PMV (positiva ou negativa) pela potecircncia metaboacutelica respectiva
(MINETTI et al 2006) As linhas satildeo as razotildees entre eficiecircncia
muscular positiva e negativa (WOLEDGE et al 1985)
A melhor economia nos Nepaleses durante a subida com carga pode ser
relacionada agraves propriedades mecacircnicas de contraccedilatildeo muscular especificamente agrave
relaccedilatildeo potecircncia-velocidade Tendo em consideraccedilatildeo que os Caucasianos
realizaram o trecho de subida com carga em uma velocidade de progressatildeo 33
menor que os Nepaleses pode-se inferir que os Caucasianos realizaram a atividade
em uma regiatildeo menor de produccedilatildeo de potecircncia devido agrave relativa baixa velocidade
que por sua vez corresponde agrave uma zona de baixa eficiecircncia Outro fator secundaacuterio
pode ser a aclimataccedilatildeo de longo prazo destes indiviacuteduos agrave hipoacutexia de altitude
favorecendo o transporte e utilizaccedilatildeo de O2 no muacutesculo esqueleacutetico
59
Surpreendentemente a ativaccedilatildeo EMG por unidade de tempo eacute semelhante
entre Nepaleses e Caucasianos e por consequumlecircncia a ativaccedilatildeo total eacute menor nos
Nepaleses
Pode-se afirmar tambeacutem que a razatildeo entre ativaccedilatildeo EMG na subida e descida
independente da massa total eacute em torno de 15 e 2 corroborando com os dados de
BIGLAND-RITCHIE e WOODS 1976)
Em conclusatildeo a hipoacutetese da ativaccedilatildeo muscular econocircmica nos carregadores
Nepaleses eacute confirmada Os paracircmetros espaccedilos-temporais da passada parecem
natildeo justificar o menor custo energeacutetico nos Nepaleses O custo EMG foi maior nos
Caucasianos especialmente durante a ascensatildeo com carga indicando uma
justificativa a um achado anterior de maior estabilidade no tronco em Nepaleses
(MINETTI et al 2006)
60
3 MECAcircNICA DA CORRIDA DE IDOSOS
31 Introduccedilatildeo
Nos idosos a forccedila muscular eacute reduzida Isso tem sido atribuiacutedo
principalmente a atrofia da massa muscular com a reduccedilatildeo da aacuterea de sua secccedilatildeo
transversal (DOHERTY 2003 FRONTERA et al 2000 TRAPPE et al 2003) e
tambeacutem agrave deficiecircncia na produccedilatildeo intriacutenseca de forccedila no niacutevel da interaccedilatildeo entre
actina e miosina (PHILLIPS et al 1991 FRONTERA et al 2000 LOWE et al 2001
MORSE et al 2005) Experimentos realizados tanto em espeacutecimes isoladas de
muacutesculo (OCHALA et al 2006 PHILLIPS et al 1991) quanto in vivo em humanos
(KLASS et al 2005 PORTER et al 1997 POUSSON et al 2001 VANDERVOORT
et al 1990) mostram que a forccedila que um muacutesculo exerce ao alongar-se
(frequumlentemente chamada de contraccedilatildeo excecircntrica) tem reduccedilatildeo menor devido ao
processo de envelhecimento que a forccedila desenvolvida durante contraccedilatildeo isomeacutetrica
e durante encurtamento (frequumlentemente chamada de contraccedilatildeo concecircntrica)
O efeito das mudanccedilas das propriedades de contraccedilatildeo do muacutesculo no
trabalho mecacircnico realizado durante locomoccedilatildeo natildeo eacute conhecido O trabalho
mecacircnico realizado ao caminhar natildeo tem sido considerado significativamente maior
em indiviacuteduos idosos apesar de um maior dispecircndio energeacutetico resultando em uma
61
menor eficiecircncia mecacircnica atribuiacuteda agrave co-contraccedilatildeo de muacutesculos antagonistas
(MIAN et al 2006)
O mecanismo elaacutestico da corrida contraacuterio ao mecanismo pendular da
caminhada necessita de uma intervenccedilatildeo muscular muito maior para manter o
movimento do CM Um ciclo alongamento-encurtamento das unidades muacutesculoshy
tendiacuteneas ocorre em cada passo da corrida com grande entrada e saiacuteda de energia
mecacircnica para dentro e para fora das unidades muacutesculo-tendiacuteneas A mecacircnica da
corrida assim mais que a caminhada pode revelar mudanccedilas no trabalho mecacircnico
realizado em cada passo devido ao desempenho muscular reduzido nos idosos
Aleacutem disso uma assimetria contato-despregue ocorre durante a corrida
surgindo do fato que as unidades muacutesculo-tendiacuteneas contraacuterio a uma mola sem
atrito tecircm comportamento diferente durante alongamento e encurtamento
Recentemente foi observado que a assimetria contato-despregue eacute uma
consequumlecircncia da relaccedilatildeo forccedila-velocidade do muacutesculo e eacute maior quanto maior for a
mudanccedila no comprimento do muacutesculo em relaccedilatildeo agravequela do tendatildeo dentro das
unidades muacutesculo-tendiacuteneas (CAVAGNA 2006)
O trabalho mecacircnico realizado durante a corrida em idosos e sua assimetria
contato-despregue para nosso conhecimento ainda natildeo satildeo determinados
Neste estudo foi calculado o trabalho mecacircnico externo realizado para manter
o movimento do CM e o tempo das trocas de energia mecacircnica durante as fases de
trabalho negativo e positivo do bouncing do corpo em indiviacuteduos idosos correndo
em diferentes velocidades Os resultados obtidos em indiviacuteduos idosos satildeo
comparados agravequeles obtidos em indiviacuteduos jovens A hipoacutetese apresentada eacute que o
aumento da discrepacircncia em idosos entre o desenvolvimento da forccedila durante
alongamento e durante encurtamento se operacional durante a corrida iraacute aumentar
a assimetria contato-despregue do aparente bouncing do corpo em relaccedilatildeo agravequele
de indiviacuteduos jovens
32 Materiais e Meacutetodos
321 Amostra e procedimento experimental
Os experimentos foram realizados em oito indiviacuteduos idosos (homens idade
62
736plusmn55 anos altura 172plusmn006 m massa 711plusmn92 kg media plusmn dp) e oito indiviacuteduos
jovens (6 homens e duas mulheres idade 208plusmn16 anos altura 176plusmn008 m massa
634plusmn100 kg) Trecircs indiviacuteduos em cada grupo satildeo treinados (volume miacutenimo
semanal de corrida de 40 km) enquanto cinco satildeo sedentaacuterios saudaacuteveis Os
resultados relatados neste estudo satildeo uma meacutedia dos dados obtidos de todos os
sujeitos em cada grupo independente de seu treinamento Resultados similares
poreacutem foram obtidos comparando os trecircs indiviacuteduos idosos treinados com os trecircs
indiviacuteduos jovens do sexo masculino natildeo treinados de acordo com os achados que
o efeito da idade nas unidades muacutesculo-tendiacuteneas satildeo similares em corredores e
indiviacuteduos natildeo-ativos (KARAMANIDIS e ARAMPATZIS 2005) Consentimento
informado escrito foi obtido de cada indiviacuteduo Os estudos foram realizados de
acordo com a Declaraccedilatildeo de Helsinque
Os indiviacuteduos correram de um lado para o outro ao longo de uma pista de
corrida de 50 metros a qual foi incorporada no niacutevel do solo 8 plataformas de forccedila
de 05 m 05 m em sequumlecircncia totalizando um espaccedilo contiacutenuo de 4 m 05 m
sensiacutevel agrave forccedila aplicada na plataforma nas direccedilotildees anterior e vertical A uacutenica
instruccedilatildeo dada a cada indiviacuteduo foi para correr normalmente em uma velocidade
constante mensurada por duas fotoceacutelulas posicionadas distantes de 1 agrave 3 m
(dependendo da velocidade) ao longo do lado da plataforma Mais caracteriacutesticas da
plataforma de forccedila satildeo descritas por CAVAGNA (1975)
O procedimento do experimento consistiu em medir a forccedila aplicada no solo
no plano sagital durante corrida em diferentes velocidades Os dados foram
adquiridos em um microcomputador a uma taxa de 500 Hz por canal de i) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo anterior (Ff) ii) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo vertical (Fv) e iii) sinal das
fotoceacutelulas A aquisiccedilatildeo e anaacutelise dos dados foram realizadas atraveacutes de um
conversor analoacutegico-digital (National Instruments Austin TX USA) e um software
feito em LabView para Macintosh (versatildeo 71)
Foram feitas anaacutelises em um total de 124 corridas com velocidades meacutedias
entre 3 e 17 kmh-1 para os idosos e 229 corridas entre 3 e 21 kmh-1 para os jovens
O nuacutemero menor de execuccedilotildees realizado pelos idosos foi para diminuir riscos de
fadiga neste grupo
63
322 Dos registros da plataforma ao trabalho externo
O processo usado para calcular as mudanccedilas da energia mecacircnica do CM do
corpo derivadas das forccedilas de reaccedilatildeo do solo eacute descrito em detalhes por CAVAGNA
1975) Em resumo somente o movimento no plano sagital foi considerado para
calcular a energia mecacircnica do CM A energia cineacutetica de translaccedilatildeo lateral do CM
foi ignorada O sinal da plataforma de forccedila sem carga foi mensurado imediatamente
antes de cada corrida e subtraiacutedo dos registros da Fv e da Ff de modo a computar
uma possiacutevel mudanccedila da linha de base da plataforma Somente o grupo de
registros da Fv e da Ff compreendida entre os cruzamentos das fotoceacutelulas foi
utilizado para anaacutelises subsequumlentes As velocidades vertical e anterior do CM foram
obtidas como segue
Antes do todas as aquisiccedilotildees a plataforma era calibrada com cargas
conhecidas no sentido vertical e horizontal acircntero-posterior
A forccedila vertical meacutedia mensurada pela plataforma de forccedila Fvplate em um
intervalo de tempo correspondente a um nuacutemero de quadros nf em um determinado
nuacutemero de passos T selecionados entre picos (ou vales) nos registros de forccedila
devem igualar ao PC mensurado com uma balanccedila Fvscale
IfirstPeakorValley
SecondPeakorValleyF = Fvi
= F Eq 31 vplate vscalenf
Fvplate foi entatildeo subtraiacuteda da coluna de dados Fv e o resultado (Fv-Fvplate)M (M
eacute a massa corporal) foi integrado no tempo para obter as mudanccedilas nos registros da
velocidade vertical para o intervalo de tempo entre os cruzamentos das fotoceacutelulas
FinalTime AVel = f [(Fv - Fv plate) M]dt Eq 32
InitialTime
Um ou mais passos regulares foram subsequumlentemente escolhidos para
anaacutelise entre dois picos ou vales da curva de velocidade vertical A regularidade dos
passos (drift) foi determinada pela diferenccedila entre incrementos positivos e negativos
agraves mudanccedilas nas velocidades vertical e horizontal divididas pela soma dos
incrementos
64
| V | V | V |I + increments I VincrementsDrift = 100 Eq 33
| V | + | V |I + increments I Vincrements
Durante a corrida no plano os deslocamentos verticais ascendente e
descendente do CM do corpo satildeo em meacutedia iguais durante um nuacutemero inteiro de
passos ie a velocidade vertical meacutedia deve ser nula Baseado nessa consideraccedilatildeo
a aacuterea abaixo das mudanccedilas da velocidade vertical registrada correspondendo ao
intervalo selecionado acima seraacute dividido por nf e o resultado seraacute subtraiacutedo do total
da variaccedilatildeo da velocidade vertical registrada entre os cruzamentos das fotoceacutelulas
para obter os valores instantacircneos positivo (ascendente) e negativo (descendente)
da Vv
nf
f AVv dt
V (t) = i= 0 -AV Eq 34 v nf v
As mudanccedilas na velocidade horizontal foram determinadas pela integraccedilatildeo da
curva FfM durante o tempo entre os cruzamentos das fotoceacutelulas Ltphoto A aacuterea
abaixo dessa variaccedilatildeo de velocidade horizontal foi entatildeo dividida por Ltphoto e o
resultado foi subtraiacutedo do mesmo registro para localizar a velocidade meacutedia de
corrida no traccedilado
Atphoto
AVf (t) = f Ff M dt Eq 35 i= 0
A velocidade meacutedia de corrida mensurada atraveacutes da distacircncia das
fotoceacutelulaLtphoto foi entatildeo somada a seacuterie resultante para obter os valores
instantacircneos de Vf
f AVf dt Vf (t) = + AVf Eq 36
A tphoto
65
A velocidade vertical instantacircnea Vv(t) foi utilizada para calcular a energia
cineacutetica instantacircnea do movimento vertical
Ekv (t) = 05M Vv (t)2 Eq 37
e por integraccedilatildeo o deslocamento vertical do CM Sv(t)
Sv (t) = f Vv (t) dt Eq 38
com a correspondente energia potencial gravitacional
E p (t) = M g Sv (t) Eq 39
A energia cineacutetica horizontal foi calculada como
Ekf (t) = 05M Vf (t)2 Eq 310
a energia cineacutetica translacional total do CM no plano sagital como
(t) Eq 311 Ek (t) = Ekv (t) + Ekf
e a energia mecacircnica translacional do CM no plano sagital como
Ecm(t) = Ekv (t) + Ekf (t) + E p (t) Eq 312
Apoacutes como mencionado acima a seleccedilatildeo foi feita inicialmente entre picos (ou
vales) das mudanccedilas da velocidade vertical os registros foram expandidos para
incluir o vale anterior (ou pico) de Ep(t) ateacute uma imagem clara dos passos a ser
obtidos (figura 31)
Algoritmos foram feitos para calcular o trabalho realizado durante os passos
selecionados entre vales (ou picos) da Ep Wv Wkf e Wext foram calculados com as
amplitudes dos vales ou picos e os valores inicial e final nos registros da Ep(t) Ekf(t)
e Ecm(t) Valores positivos das variaccedilotildees de energia foram considerados como
66
trabalho positivo valores negativos foram considerados como trabalho negativo Em
uma perfeita corrida em velocidade constante no plano a razatildeo entre os valores
absolutos de trabalho positivo e negativo realizados em um nuacutemero inteiro de
passos deve ser igual a um
323 Estimativa do trabalho interno
O trabalho positivo normalizado pela massa e unidade de distacircncia para
acelerar os membros em relaccedilatildeo ao CM do corpo foi estimado para cada corrida
com a equaccedilatildeo
W int ML(J kg-1 m -1) = 014010-200L Vf f Eq 313
onde L eacute o comprimento do passo em metros Vf a velocidade meacutedia de corrida em
metros por segundo e f eacute a frequumlecircncia de passos em Hz (CAVAGNA et al 1997) Os
valores estimados de WintML como uma funccedilatildeo da velocidade em kmh-1 foram
interpolados por um ajuste polinomial de segunda ordem Deve ser salientado que
usando a mesma equaccedilatildeo para calcular Wint nos indiviacuteduos jovens e idosos assume-
se o mesmo movimento dos membros nos dois grupos
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato
Como a energia mecacircnica do CM eacute constante quando o corpo eacute deslocado no
ar (a resistecircncia do ar eacute negligenciada) o tempo aeacutereo foi calculado como o intervalo
de tempo durante o qual
dEcm(t) dt = 0 Eq 314
Como descrito em detalhes em um estudo preacutevio (CAVAGNA 2006) esse
processo pode resultar em uma superestimativa (7) do tempo aeacutereo devido ao
ruiacutedo do registro do dEcm(t)dt A duraccedilatildeo da frenagem tbrake e a duraccedilatildeo da
propulsatildeo tpush foram calculadas como o intervalo de tempo durante o qual o
dEcm(t)dt foi positivo e negativo respectivamente Novamente devido ao ruiacutedo do
67
registro do dEcm(t)dt tbrake eou tpush foi provavelmente em alguns casos
subestimado (5-7 CAVAGNA 2006) O mesmo eacute verdade para os deslocamentos
descendente e ascendente do CM durante contato Scdown e Scup que foram
mensurados nas porccedilotildees descendente e ascendente da curva Ep(t)
respectivamente durante o intervalo de tempo onde dEcm(t)dt eacute negativo e positivo
respectivamente O deslocamento vertical descendente total Svdown e deslocamento
vertical ascendente Svup foram calculados do decreacutescimo e acreacutescimo totais da
curva Ep(t) respectivamente ocorrendo entre dois ou mais picos (ou vales) de Ep
divididos pelo nuacutemero de passos
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio
A forccedila vertical Fv aplicada pelo peacute no solo eacute
= PC + M a Eq 315 Fv v
onde Mb eacute a massa do corpo e av eacute a aceleraccedilatildeo vertical do CM ie o tempo
derivado de sua velocidade vertical Vv Quando a velocidade vertical e Ekv estatildeo no
maacuteximo a derivada eacute nula av=0 e como consequumlecircncia
Fv = PC Eq 316
A localizaccedilatildeo dos picos Ekv alcanccedilados durante os passos (figura 31) foi
entatildeo utilizada para determinar os instantes onde a Fv eacute igual ao PC A localizaccedilatildeo e
as amplitudes de Ep simultacircneo com os picos de Ekv foram utilizados para determinar
a parte do deslocamento vertical ocorrendo abaixo do ponto de equiliacutebrio durante a
desaceleraccedilatildeo descendente do CM Scedown e durante a aceleraccedilatildeo ascendente do
CM Sceup As diferenccedilas
S - S = S Eq 317 vdown cedown aedown
e
68
S - S = S Eq 318 vup ceup aeup
informa sobre o deslocamento vertical quando o CM do corpo acelera descendente e
desacelera ascendente respectivamente (CAVAGNA et al 1988)
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente
A velocidade vertical maacutexima e a energia cineacutetica maacutexima Ek=Ekv+Ekf
alcanccediladas pelo CM durante deslocamento descendente Vvmxdown e Ekmxdown e
durante a elevaccedilatildeo Vvmxup e Ekmxup satildeo determinados por comparaccedilatildeo dos picos
em Ekv e Ek com a curva Ep simultacircnea Como a velocidade vertical maacutexima pode
aumentar com a amplitude do deslocamento vertical que pode ser diferente durante
a elevaccedilatildeo e o deslocamento descendente (ver eg as curvas Ep na figura 31) a
razatildeo entre as velocidades descendente e ascendente maacuteximas foram normalizadas
(V V )(S S ) = (V V )norm Eq 319 vmxdown vmxup vup vdown vmxdown vmxup
327 Transduccedilatildeo Ep Ek durante o passo
O tempo de curso da transduccedilatildeo ocorrendo no passo entre energia potencial
gravitacional Ep e energia cineacutetica do CM Ek pode ser determinado pelo valor
absoluto das mudanccedilas ambos incrementos positivos e negativos de Ep Ek e Ecm
em intervalos curtos de tempo dentro do ciclo do passo (CAVAGNA et al 2002)
1 | Ecm(t) |r(t) = Eq 320
(| E p (t) | + | Ek (t) |)
A transduccedilatildeo Ep-Ek eacute completa (r(t)=1) durante a fase aeacuterea quando nenhum
trabalho externo eacute realizado pela forccedila muscular Entretanto a transduccedilatildeo Ep-Ek
tambeacutem ocorre durante contato quando o corpo eacute parcialmente sustentado pelo peacute
no chatildeo na parte superior da trajetoacuteria do CM (0lt r(t)lt1)
69
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado
70
(incrementos de Ecm) eacute indicado em vermelho enquanto que o tempo de
trabalho mecacircnico negativo (decrementos de Ecm) eacute indicado em azul
A transduccedilatildeo Ep-Ek eacute nula (r(t)=0) em duas fases do passo a e onde Ek
aumenta e diminui respectivamente simultaneamente com a energia potencial
gravitacional Ep (CAVAGNA et al 2002) Note que trabalho externo positivo e
negativo satildeo ambos realizados nas fases a e do passo (r(t)=0) e nas fases do
passo onde uma transduccedilatildeo ocorre entre Ek e Ep (0lt r(t)lt 1)
Nesse estudo r(t) foi calculado a partir do valor absoluto do tempo derivado
de Ep Ek e Ecm no intervalo de tempo contido entre dois ou mais picos (ou vales) de
Ep O valor cumulativo de energia recuperada Rint(t) resultando da transduccedilatildeo
instantacircnea de Ek-Ep foi determinado na aacuterea abaixo do r(t) registrado dividida pelo
periacuteodo do passo
T Rint (t) = ( f r(u)du) T Eq 321
0
No final do passo Rint(t)=Rint (CAVAGNA et al 2002) Para determinar a
assimetria do ciclo do passo eacute uacutetil saber quanto da transduccedilatildeo Ek-Ep ocorre durante
o deslocamento descendente e durante a elevaccedilatildeo do CM A derivada
dE p dt Eq 322
eacute utilizada para determinar a quantidade de transduccedilatildeo ocorrendo durante o
deslocamento descendente Rintdown e durante a elevaccedilatildeo do CM Rintup A
assimetria do passo foi quantificada pela razatildeo
Rintdown Rintup Eq 323
328 Rigidez vertical (k)
A k normalizada pela massa
k M Eq 324
71
caracterizando a frequumlecircncia natural do sistema eacute em todas as condiccedilotildees (com ou
sem uma fase aeacuterea) a inclinaccedilatildeo da relaccedilatildeo av-Sv quando avgt1g A inclinaccedilatildeo
meacutedia nessa amplitude pode ser avaliada pela razatildeo entre a aceleraccedilatildeo ascendente
maacutexima avmx e a amplitude da oscilaccedilatildeo
(S + S )ceup cedownS = Eq 325 ce 2
No presente estudo a k normalizada pela massa foi mensurada como
k M = a S Eq 326 vmx ce
E a frequumlecircncia natural do sistema massa-mola como
)05 (a Svmx cefs = Eq 327 2
329 Estatiacutestica
Os dados coletados como uma funccedilatildeo da velocidade decorrida foram
agrupados em classes de intervalos de um kmh-1 como segue 3 agrave lt4 kmh-1 4 agrave lt5
kmh-1 20 agrave lt21 kmh-1 Quando comparadas agraves meacutedias de diferentes variaacuteveis
com o mesmo nuacutemero de itens em uma certa velocidade de corrida dentro de um
grupo de indiviacuteduos um teste t para amostra pareadas foi utilizado para determinar
quando as meacutedias eram significativamente diferentes Quando comparadas as
meacutedias de diferentes variaacuteveis entre os dois grupos de indiviacuteduos com diferentes
nuacutemero de itens um teste t para amostras independentes foi utilizado (SPSS versatildeo
14) Em todos os testes o p usado foi menor do que 5
33 Resultados
Na primeira seccedilatildeo dos Resultados o bouncing do corpo a cada passo eacute
descrito desconsiderando as diferenccedilas no movimento ascendente e descendente
72
do CM (Por exemplo O deslocamento vertical Sv eacute medido como (Svup+Svdown)2 o
tempo de contato com o solo como tc =(tcup+tcdown)2 etc) Este procedimento
pressupotildee uma igualdade dinacircmica durante a subida e a descida do CM como em
um oscilador harmocircnico (CAVAGNA et al 1988 BLICKHAN 1989 SCHEPENS et
al 1998)
A potecircncia meacutedia do passo despendida para acelerar e elevar o CM do corpo
e do correspondente trabalho mecacircnico realizado por unidade distacircncia satildeo
apresentados na segunda parte Na terceira seccedilatildeo a assimetria contato-despregue
eacute considerada analisando separadamente os eventos que ocorrem durante a subida
e durante a descida do CM (CAVAGNA 2006) Em todas as seccedilotildees os resultados
obtidos sobre os indiviacuteduos idosos satildeo comparados com aqueles obtidos nos
indiviacuteduos jovens
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM
Parte superior e inferior do bouncing
O periacuteodo do passo (T parte superior da figura 33) o deslocamento vertical
do CM durante cada etapa (Sv meio da figura) e o comprimento do passo (L na
parte inferior da figura) satildeo apresentados em funccedilatildeo da velocidade de corrida (Vf) na
figura 33 (quadrados pretos) Segundo o modelo massa-mola o periacuteodo do passo
a oscilaccedilatildeo vertical do CM e o correspondente deslocamento para frente foram
divididos em duas partes uma parte mais baixa que acontece quando a Fv eacute maior
do que o PC (tce Sce e Lce ciacuterculos vermelhos) e uma parte superior quando a Fv eacute
menor que o PC (tae Sae e Lae ciacuterculos azuis abertos) Para comparaccedilatildeo o periacuteodo
do passo o deslocamento vertical e o comprimento do passo tambeacutem foram
divididos de acordo com a tradiccedilatildeo nas suas fraccedilotildees que ocorrem durante a fase
de contato com o terreno (tc Sc e Lc pontilhada linhas vermelhas) e durante a fase
aeacuterea (ta Sa e La linhas pontilhadas em azul) O significado biomecacircnico dos
resultados na figura 33 tem sido explicado em estudos anteriores realizados em
indiviacuteduos adultos de diferentes idades (CAVAGNA et al 1988) e em crianccedilas com
idades entre os 2 e 16 anos (SCHEPENS et al 1998) durante a corrida em
diferentes velocidades Em ambos os estudos as partes inferior e superior do
bouncing do corpo foram simeacutetricos ateacute ~ 11 kmh-1 (isto eacute tce=tae e Sce=Sae) e
- -
73
assimeacutetricos em velocidades mais elevadas (isto eacute taegttce e SaegtSce) O momento
vertical ganho e perdido durante tce deve ser igual ao momento vertical ganho e
perdido durante tae ie
avce tce = avae tae Eq 328
O bouncing simeacutetrico implica a mesma aceleraccedilatildeo vertical meacutedia durante a
parte inferior e superior do bouncing A aceleraccedilatildeo vertical meacutedia durante a parte
inferior do bouncing avce aumentou com a velocidade enquanto que a aceleraccedilatildeo
vertical meacutedia durante a parte superior do bouncing avae natildeo pode exceder 1 g (eacute 1 g
quando tae= ta) Deste modo o bouncing torna-se assimeacutetrico quando a aceleraccedilatildeo
vertical meacutedia durante tce exceder 1g Os resultados obtidos em relaccedilatildeo aos
indiviacuteduos jovens demonstram que o bouncing tende a ser simeacutetrico em baixas
velocidades e assimeacutetrico em altas velocidades (ver tce versus tae e Sce versus Sae na
tabela 1) Por outro lado os resultados obtidos no grupo dos idosos mostram duas
diferenccedilas importantes i) o bouncing eacute simeacutetrico nas velocidades mais altas (tce=tae e
Sce=Sae) e ii) a assimetria quando presente eacute invertida (ou seja tcegttae e ScegtSae)
Amplitude do deslocamento vertical
O deslocamento vertical do CM corporal em cada etapa da corrida Sv atinge
um maacuteximo em velocidades intermediaacuterias sendo inferior nos indiviacuteduos idosos do
que nos jovens ~ 75 cm a ~ 75 kmh-1 nos idosos e ~ 10 cm a ~ 10 kmh-1 nos
jovens Valores similares de Sv foram medidos com procedimento experimental
diferente em adultos idosos e jovens correndo a ~ 10 kmh-1 (KARAMANIDIS e
ARAMPATZIS 2005) A reduccedilatildeo de Sv nos indiviacuteduos idosos eacute devida a uma
reduccedilatildeo de todas as suas componentes (Sce Sae Sc e Sa) mas eacute particularmente
relevante considerar aqui a reduccedilatildeo da Sce (tabela 32) que representa a amplitude
da oscilaccedilatildeo do sistema massa-mola a partir de sua posiccedilatildeo de equiliacutebrio (Fv igual
ao PC) ateacute sua compressatildeo maacutexima (Fv maacutexima) A amplitude da oscilaccedilatildeo eacute menor
nos idosos do que nos jovens Como esperado esta eacute acompanhada por uma
aceleraccedilatildeo menor para cima atingida no final da compressatildeo avmx e por uma menor
velocidade maacutexima ascendente Vvmx atingida quando av=0 (figura 34 e tabela 32)
74
A velocidade vertical menor resulta por sua vez em um curto tempo aeacutereo efetivo
tae (figura 33 e tabela 32)
Frequumlecircncia de passo e do sistema massa-mola
Os dois paineacuteis superiores da figura 33 mostram que o periacuteodo do passo (T=
tae+ tce) eacute menor nos idosos do que nos jovens Isto eacute devido ao tempo aeacutereo efetivo
tae mais curto enquanto que o tempo de contato efetivo tce eacute igual entre os jovens e
os idosos (tabela 32) Segundo o modelo massa-mola da corrida o tce representa
metade do periacuteodo de oscilaccedilatildeo do sistema elaacutestico Este meio-periacuteodo similar
sugere uma frequumlecircncia de ressonacircncia semelhante fs=(kM)-05(2n) do sistema
elaacutestico aparente atraveacutes do qual o corpo se desloca ou seja uma k normalizada
pela massa corporal (kM) A figura 35 mostra que em altas velocidades k eacute maior
nos indiviacuteduos idosos (paineacuteis superior) mas devido agrave sua maior massa corporal agrave
rigidez de massa especiacutefica vertical (kM= avmxSce veja na Metodologia) eacute de fato
similar ao dos jovens (paineacuteis centrais da figura 35 e tabela 32) Em ambos os
grupos kM tende a ser aproximadamente constante ateacute ~ 10 kmh-1 e em seguida
aumenta com a velocidade Os dois paineacuteis inferiores da figura 35 mostram a
frequumlecircncia do passo f apresentada em conjunto com a frequumlecircncia de ressonacircncia do
sistema fs Pode ser observado que i) f eacute maior nos idosos do que nos jovens ii) nos
idosos a f permanece semelhante agrave fs (tabela 1) enquanto que iii) nos jovens a f eacute
inferior agrave fs (tabela 31)
332 Trabalho
O trabalho externo normalizado pela M Wext realizado para sustentar o
movimento do CM corporal no plano sagital eacute descrito na figura 36 em funccedilatildeo da
velocidade de corrida Pode ser observado que trabalho feito para sustentar as
mudanccedilas de velocidade horizontal Wextf aumenta conforme o acreacutescimo de
velocidade de modo semelhante em indiviacuteduos jovens e idosos O trabalho
realizado contra a gravidade Wextv eacute menor nos indiviacuteduos idosos (tabela 32) O
trabalho externo Wext Wextf + Wextv tambeacutem eacute menor nos idosos particularmente
nas maiores velocidades de progressatildeo
75
A menor potecircncia mecacircnica despendida contra a gravidade pelos idosos
mostra que o menor deslocamento vertical em cada passo natildeo eacute compensado pelo
aumento na frequumlecircncia de passo induzido pelo menor tempo aeacutereo efetivo tae (figura
33) A constataccedilatildeo de que o envelhecimento diminui o trabalho feito contra a
gravidade Wextv deixando inalterado o trabalho para sustentar as mudanccedilas na
velocidade horizontal Wextf resulta em uma velocidade menor de corrida onde o
Wextv se iguala ao Wextf esta velocidade eacute ~ 12 kmh-1 nos idosos e ~ 15 kmh-1 nos
jovens Os dois paineacuteis inferiores na figura 36 (analisados mais profundamente na
Discussatildeo) apresentam o trabalho mecacircnico total realizado por unidade de distacircncia
percorrida Wtot =Wext+Wint onde Wext eacute o trabalho positivo feito para manter o
movimento em relaccedilatildeo ao ambiente e o Wint eacute o trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM (calculado conforme descrito na Metodologia)
333 Assimetria contato-despregue
Os deslocamentos verticais do CM para baixo e para cima durante a fase de
contato estatildeo traccedilados na figura 37 e estatildeo expressos como uma fraccedilatildeo dos
deslocamentos verticais descendente e ascendente (ScdownSvdown ciacuterculos cheios e
ScupSvup ciacuterculos abertos) Na mesma figura eacute apresentada a fraccedilatildeo do
deslocamento vertical realizado pela amplitude da oscilaccedilatildeo do sistema massa-mola
para baixo de av=0 ateacute avmx (ScedownSvdown quadrados cheios) e para cima de avmx
ateacute av=0 (SceupSvup quadrados abertos) Quando a fase aeacuterea eacute nula nas
velocidades mais baixas de corrida todo o deslocamento vertical acontece em
contato com o solo e ScSv=1 Com o aumento da velocidade acontece uma fase
aeacuterea de duraccedilatildeo progressivamente maior durante a corrida e a fraccedilatildeo do
deslocamento vertical em contato com o solo diminui mais acentuadamente durante
o deslocamento para baixo (ciacuterculos cheios) do que durante o deslocamento para
cima (ciacuterculos abertos) ou seja (ScupSvup)gt(ScdownSvdown) Em outras palavras a
altura do CM no instante do contato eacute superior agrave sua altura no instante do toque no
solo o que indica que a elevaccedilatildeo do CM eacute inferior agrave descida durante a fase de
contato do peacute com o solo (CAVAGNA 2006) Esta assimetria contato-despregue
estaacute presente em ambos os grupos mas eacute maior nos idosos do que nos jovens
principalmente devido a uma menor reduccedilatildeo na ScupSvup com o aumento da
velocidade uma maior elevaccedilatildeo do CM se daacute em contato com o solo nos indiviacuteduos
76
idosos Em ambas as faixas etaacuterias a fraccedilatildeo de deslocamento vertical ocupada pela
amplitude de oscilaccedilatildeo SceSv se aproxima de metade de Sv quase independente da
velocidade apoiando a ideacuteia de que a oscilaccedilatildeo vertical do sistema massa-mola eacute
equilibrado em torno do ponto onde a Fv se iguala ao PC Em contraste ScSv muda
acentuadamente com a velocidade ateacute o ponto em que toda a oscilaccedilatildeo tem lugar
no contato com o solo (ScSv=1)
34 Discussatildeo
341 Sobre o meacutetodo
Este sub-capiacutetulo procura discutir o meacutetodo usado no estudo especialmente
em relaccedilatildeo ao raciociacutenio envolvido e a discussatildeo de algumas abordagens similares
ao modelo usado no presente estudo
O meacutetodo dinamomeacutetrico usado no presente estudo tem como base a teoria
do custo de geraccedilatildeo de trabalho mecacircnico Esta teoria pode ser considerada como a
primeira tentativa satisfatoacuteria nas aacutereas limiacutetrofes entre biomecacircnica biologia
experimental e fisiologia comparativa de explicar sob o ponto-de-vista mecacircnico as
formas principais de locomoccedilatildeo humana a caminhada e a corrida
Baseados no meacutetodo de FENN (1930) para a determinaccedilatildeo do trabalho
mecacircnico contra a gravidade e o trabalho mecacircnico devido agraves mudanccedilas de
velocidade Cavagna e colaboradores perceberam que o ser humano quando
caminhava e corria apresentava caracteriacutesticas nas curvas de energia mecacircnica e
no somatoacuterio dos incrementos positivos nestas energias que permitiam diferenciar
estes tipos de locomoccedilatildeo ao mesmo tempo que auxiliavam no entendimento do
comportamento da unidade muacutesculo-tendatildeo e dos mecanismos minimizadores de
dispecircndio energeacutetico mecanismo pendular e elaacutestico (ver figura 32) Os
incrementos positivos de energia mecacircnica (trabalho positivo) satildeo originados
principalmente por muacutesculos e tendotildees enquanto que os incrementos negativos de
energia mecacircnica (trabalho negativo) satildeo em parte armazenados nas estruturas natildeo
contraacuteteis dos muacutesculos e tendotildees e outra parte eacute degradada em forma de calor
Tendo em consideraccedilatildeo os princiacutepios da termodinacircmica foi possiacutevel aplicar
estes mecanismos a fim de entender o porquecirc que durante a fase de apoio na
corrida a energia cineacutetica se apresenta em fase com a energia potencial do CM em
77
relaccedilatildeo ao meio ambiente enquanto que na caminhada estas energias apresentam
comportamentos contraacuterios
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da
caminhada (pecircndulo-invertido) e de segmento complacente da corrida
(massa-mola) e seus principais constituintes Note que o tracejado
indica a trajetoacuteria do corpo de massa m durante o contato g eacute a
aceleraccedilatildeo gravitacional k eacute a rigidez da mola l0 eacute o comprimento do
membro inferior e a0 eacute o acircngulo da perna de apoio no momento do
contato com o solo
O somatoacuterio dos incrementos positivos de energia mecacircnica tambeacutem
conhecido como trabalho mecacircnico externo eacute menor do que a energia metaboacutelica
despendida pelos muacutesculos durante a caminhada enquanto que o trabalho
mecacircnico externo na corrida apresenta valor maior ao da energia metaboacutelica
despendida pelos muacutesculos Este aparente paradoxo demonstrava que a razatildeo
entre potecircncia mecacircnica gerada e a potecircncia metaboacutelica despendida ultrapassava a
eficiecircncia maacutexima de transformaccedilatildeo de energia quiacutemica em trabalho mecacircnico e foi
considerado como a primeira evidecircncia de que as unidades muacutesculo-tendatildeo
responsaacuteveis pela frenagem e propulsatildeo durante a fase de apoio da corrida eram
tambeacutem responsaacuteveis por absorccedilatildeo e re-utilizaccedilatildeo de energia elaacutestica (CAVAGNA et
al 1964) permitindo mais tarde a formulaccedilatildeo do modelo massa-mola ou ldquobouncingrdquo
da corrida (BLICKHAN 1989 MCMAHON e CHENG 1990 figura 32) e o posterior
estudo do ciclo alongamento-encurtamento do muacutesculo-esqueleacutetico
78
Portanto durante atividades ciacuteclicas como a locomoccedilatildeo os muacutesculos
responsaacuteveis pelo movimento possuem uma capacidade de geraccedilatildeo de forccedila
durante seu encurtamento (contraccedilatildeo concecircntrica) maior do que em contraccedilotildees
similares mas precedidas de contraccedilatildeo isomeacutetrica No caso da locomoccedilatildeo mais
especificamente da corrida durante contraccedilotildees concecircntricas os muacutesculos
propulsores utilizam uma energia armazenada durante a precedente contraccedilatildeo
excecircntrica (CAVAGNA et al 1964 CAVAGNA et al 1968) O modelo massa-mola
assume que a unidade muacutesculo-tendatildeo exerce um comportamento similar agrave de uma
mola ou seja quando a mola diminui de comprimento apoacutes o impacto (alongamento
do muacutesculo) armazena energia potencial elaacutestica e quando a mola aumenta seu
comprimento (encurtamento do muacutesculo) durante a segunda fase de contato
transforma energia potencial elaacutestica em energia cineacutetica O modelo tambeacutem
assume mesma altura e velocidade do CM no momento do contato e despregue
A primeira pressuposiccedilatildeo do modelo (sobre a semelhanccedila entre mola e
unidade muacutesculo-tendatildeo) apesar de correta natildeo indica informaccedilotildees sobre seus
constituintes o muacutesculo e o tendatildeo Vaacuterias evidecircncias mostram diferenccedilas no
comportamento mecacircnico do muacutesculo e do tendatildeo e estas diferenccedilas satildeo
moduladas pela forccedila imposta agrave unidade consequumlentemente dependentes da
velocidade de corrida Por exemplo KRAM e TAYLOR (1990) sugeriram que o
dispecircndio de energia durante a corrida era devido ao custo de geraccedilatildeo de forccedila das
fibras musculares agindo de forma isomeacutetrica sem realizaccedilatildeo de trabalho muscular
Evidecircncias em modelo animal confirmam este raciociacutenio (ROBERTS et al 1997
BIEWENER 1998)
Ainda assim para ser inteiramente vaacutelido este modelo o tempo de trabalho
externo positivo e negativo devem ser iguais em todas as velocidades de corrida
contudo uma assimetria nos tempos de trabalho positivo e negativo satildeo encontradas
na corrida humana em velocidades baixas (ateacute 14 kmh-1) com um menor tempo
para o trabalho mecacircnico externo negativo (CAVAGNA 2006)
Portanto o mecanismo de minimizaccedilatildeo de energia apresentada por KRAM e
TAYLOR 1990) parece se sustentar apenas em altas velocidades Em velocidades
menores os muacutesculos propulsores ativam em intensidade menor portanto gerando
uma tensatildeo menor no tendatildeo provavelmente insuficiente para gerar uma mudanccedila
importante no comprimento do tendatildeo Portanto o trabalho muscular eacute significativo
com contraccedilotildees excecircntricas em maior velocidade do que as contraccedilotildees
79
concecircntricas o que corresponde com a relaccedilatildeo forccedila versus velocidade e tambeacutem
com os resultados de eficiecircncia muscular para seacuteries de alongamento encurtamento
em diferentes velocidades (maior eficiecircncia em alta velocidade de encurtamento e
menor velocidade de alongamento ndash HEGLUND e CAVAGNA 1987) Ou seja em
velocidades menores parece existir um importante trabalho muscular executado de
modo assimeacutetrico com o tendatildeo agindo apenas como transmissor de forccedilas
enquanto que em altas velocidades com o aumento do pico de estresse no muacutesculo
e consequumlentemente aumento da rigidez da unidade muacutesculo-tendatildeo o muacutesculo
contrai isometricamente e o tendatildeo muda de comprimento agindo como um elaacutestico
(o muacutesculo tambeacutem gera tensatildeo devido agrave histerese do tendatildeo poreacutem eacute
negligenciaacutevel ndash ALEXANDER 2002)
Sobre o segundo criteacuterio (da semelhanccedila de altura e velocidade no contato e
despregue) os proacuteprios autores do modelo massa-mola indicam que em geral os
animais apresentam uma velocidade no contato maior do que no despregue bem
como realizam o contato com as articulaccedilotildees das pernas mais flexionadas do que
no despregue (BLICKHAN 1989) Poreacutem se as anaacutelises da velocidade e altura satildeo
modificadas do momento de contato e despregue para o iniacutecio da fase aeacuterea e de
contato efetivos (quando a forccedila vertical eacute igual aacute forccedila peso) levando em
consideraccedilatildeo o periacuteodo natural do sistema elaacutestico a velocidade continua maior no
iniacutecio do contato efetivo em todas as velocidades de corrida mas a altura do CM eacute
maior no contato efetivo inicial do que no momento de fase aeacuterea inicial em
velocidades baixas de corrida (aproximadamente de 8 agrave 14 kmh-1) Acima destas
velocidades a altura do CM eacute maior no iniacutecio da fase aeacuterea efetiva do que no iniacutecio
da fase de contato efetivo (CAVAGNA 2006) Estas assimetrias podem chegar ateacute
30
Um ponto chave na formulaccedilatildeo deste modelo eacute a determinaccedilatildeo da rigidez do
sistema massa-mola aqui tambeacutem uma simplificaccedilatildeo do fenocircmeno pois considera
apenas os valores maacuteximos de forccedila e deslocamento verticais como se durante toda
a fase de apoio a rigidez fosse constante
Caacutelculo da rigidez de mola
Os caacutelculos da rigidez de mola do sistema bouncing representam as
propriedades de mola do movimento vertical do corpo e da perna A rigidez vertical eacute
80
estimada como a razatildeo do pico de forccedila vertical (algumas vezes denominado como
forccedila maacutexima durante a fase ativa do tempo de contato) e o deslocamento maacuteximo
vertical do CM durante o apoio (CAVAGNA et al 1988 MCMAHON e CHENG
1990) Outro meacutetodo alternativo para o caacutelculo da rigidez vertical utiliza o tempo de
contato efetivo assumindo que este tempo representa o meio periacuteodo de oscilaccedilatildeo
do sistema elaacutestico (ver CAVAGNA et al 2005) k = Mb( tce)2 onde Mb eacute massa
corporal Este uacuteltimo meacutetodo apresenta a vantagem de evitar a influecircncia das
oscilaccedilotildees de aceleraccedilatildeo vertical do CM apoacutes o contato inicial A rigidez de perna eacute
a razatildeo do pico de forccedila vertical e a mudanccedila no comprimento de perna durante o
apoio A variaccedilatildeo do comprimento de perna eacute determinada com a equaccedilatildeo 330
(MCMAHON e CHENG 1990)
delta l = ycm + l0 (1V cosa0) Eq 329
Onde l0 eacute o comprimento de perna em repouso e a0 eacute o acircngulo da perna no
contato inicial em relaccedilatildeo agrave vertical (a0 = sin-1(Vf tc2 l0) onde Vf eacute a velocidade
horizontal e tc eacute o tempo de apoio Apesar do uso frequumlente desta medida no campo
das Ciecircncias do Esporte e Biologia Experimental a rigidez de pernas possui uma
forte limitaccedilatildeo devido ao uso da medida de membro inferior incorrer em um alto grau
de erro (e 1 cm dados natildeo publicados) Aleacutem disso se utiliza da medida de tempo
de contato enquanto que a relaccedilatildeo inversa com o sistema massa-mola eacute dada pelo
tempo de contato efetivo (quando a forccedila vertical eacute maior do que o peso corporal)
portanto natildeo representa as mudanccedilas do sistema massa-mola frente agrave restriccedilotildees do
ambiente (eg gravidade CAVAGNA et al 2005)
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical
A menor amplitude de oscilaccedilatildeo do sistema elaacutestico nos idosos (Sce na figura
33) implica i) uma menor forccedila vertical maacutexima Fvmx e energia elaacutestica armazenada
em cada passo ii) uma maior frequumlecircncia de passo iii) uma menor variaccedilatildeo de
energia externa para manter o movimento do CM do corpo em relaccedilatildeo ao meio
ambiente externo e iv) um maior trabalho interno para acelerar os segmentos
relativo ao CM
81
Destaca-se que as divisotildees do passo baseadas no tempo de contato efetivo
(vermelho) aeacutereo efetivo (azul) correspondem agrave aproximadamente metade da
duraccedilatildeo e deslocamento durante o passo Em contraste a fraccedilatildeo do passo realizado
durante o tempo aeacutereo e de contato variam bastante com a velocidade Aleacutem disso
o tcetae e SceSce nos idosos enquanto que o contraacuterio acontece com os jovens
Linhas representam a meacutedia ponderada de todos os dados (Kaleidagraph 364) e a
uacutenica proposta destas linhas eacute ser um guia para os olhos elas natildeo descrevem o
mecanismo fiacutesico envolvido (figura 33)
Tabela 31 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nos quais os pares de variaacuteveis listadas satildeo significativamente diferentes dentro de
cada grupo experimental
Vf Idoso Jovem
(km h-1) tce vs tae Sce vs Sae fs vs f tce vs tae Sce vs Sae fs vs f
3 006 312 10-4 079 001 004 117 10-3
4 031 013 028 008 058 005
5 003 003 004 091 014 020
6 001 473 10-3 003 005 026 001
7 002 001 020 011 045 001
8 102 10-7 361 10-8 190 10-4 003 048 256 10-3
9 445 10-4 753 10-6 002 001 057 151 10-3
10 250 10-4 212 10-5 510 10-4 243 10-3 091 284 10-3
11 014 003 028 158 10-4 019 234 10-4
12 044 013 061 249 10-5 002 328 10-5
13 018 003 020 310 10-6 261 10-3 100 10-5
14 001 042 005 388 10-6 183 10-3 166 10-5
15 029 022 012 107 10-6 256 10-4 166 10-6
16 057 048 090 947 10-5 361 10-3 292 10-4
Forccedila e energia elaacutestica
A forccedila maacutexima vertical eacute dada pela massa corporal multiplicada pela
aceleraccedilatildeo vertical maacutexima e o resultado eacute somado ao peso corporal Avmx (equaccedilatildeo
82
34) A massa corporal meacutedia eacute 711 kg nos idosos e 634 kg nos jovens A variaccedilatildeo
da aceleraccedilatildeo maacutexima atingida pelos indiviacuteduos idosos nas suas altas velocidades
(15-17 kmh-1) eacute de 1077 plusmn 197 ms-2 (n=7) Considerando que nas mesmas
velocidades alcanccediladas pelos jovens a variaccedilatildeo foi de 1886 plusmn 274 ms-2 (n=24)
(figura 34) Note que a aceleraccedilatildeo ascendente e velocidade vertical maiores
atingidas pelos jovens Contraacuterio ao bouncing elaacutestico a velocidade vertical maacutexima
alcanccedilada durante o deslocamento descendente eacute maior do que o alcanccedilado
durante a elevaccedilatildeo sendo esta diferenccedila maior nos idosos
Tabela 32 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Wf Wv tce tae Sce
3 008 003 095 482 10-3 005
4 008 015 004 074 062
5 062 002 083 006 006
6 259 10-3 138 10-4 034 427 10-4 001
7 049 133 10-6 073 287 10-5 140 10-3
8 004 162 10-6 039 231 10-6 198 10-3
9 007 581 10-6 028 107 10-5 407 10-4
10 005 120 10-10 094 605 10-9 176 10-6
11 014 170 10-6 025 383 10-7 435 10-6
12 014 471 10-7 019 321 10-6 380 10-5
13 007 114 10-6 068 228 10-6 196 10-6
14 099 400 10-6 005 170 10-5 231 10-5
15 014 222 10-7 010 142 10-6 685 10-8
16 066 208 10-4 061 184 10-4 718 10-4
De acordo com a equaccedilatildeo 34 estes nuacutemeros resultam em uma forccedila vertical
maacutexima Fvmxold=1463 kN e Fvmxyoung=1818 kN note que 75 de diferenccedila na Avmx
resulta em 24 de diferenccedila em Fvmx devido agrave maior massa corporal dos indiviacuteduos
idosos A forccedila mais baixa alcanccedilada durante o contato pelos indiviacuteduos idosos pode
83
ser explicada em parte pela bem documentada perda de forccedila muscular (eg
DOHERTY 2003) e em parte por uma estrateacutegia de aumentar a seguranccedila do
sistema muacutesculo-esqueleacutetico (KARAMANIDIS e ARAMPATZIS 2005)
A aparente k a 15-17 kmh-1 eacute 3732plusmn885 kNm-1 (n=7) nos indiviacuteduos idosos
e 2869plusmn650 kNm-1 (n=24) nos indiviacuteduos jovens (figura 35) Assumindo uma
relaccedilatildeo forccedila-comprimento linear dos elementos elaacutesticos seu alongamento maacuteximo
(de zero a Fvmx) seria (14633732)=0039 m nos idosos e (18182869)=0063 m
nos indiviacuteduos jovens Os paineacuteis inferiores da figura 35 mostram que a frequumlecircncia
de passo (linhas contiacutenuas) eacute similar agrave frequumlecircncia natural do sistema (linhas
pontilhadas) em todas as velocidades nos idosos enquanto que com os jovens a
frequumlecircncia do passo torna-se menor do que a frequumlecircncia do sistema com o aumento
da velocidade
Tabela 33 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Avmx Vvmx AvmxSce (AvmxSce)Mb Sv
3 004 003 099 039 002
4 001 011 003 022 034
5 152 10-3 001 024 040 003
6 601 10-4 232 10-4 049 067 772 10-4
7 132 10-3 422 10-6 066 007 367 10-5
8 918 10-7 154 10-6 025 018 271 10-5
9 526 10-5 131 10-6 007 067 137 10-5
10 134 10-7 196 10-11 072 001 146 10-8
11 439 10-4 744 10-7 046 004 798 10-7
12 533 10-6 666 10-7 040 002 552 10-6
13 264 10-4 401 10-6 061 022 158 10-6
14 115 10-3 366 10-6 005 652 10-5 126 10-5
15 891 10-6 725 10-8 031 009 316 10-7
16 353 10-3 258 10-4 048 005 267 10-4
84
Visto que a energia potencial gravitacional e a energia cineacutetica do CM estatildeo
em fase durante a corrida o sistema elaacutestico sofre sua maacutexima tensatildeo quando o
componente vertical da forccedila de reaccedilatildeo do solo encontra-se no maacuteximo ((Fvmx)) e o
componente horizontal eacute nulo (Ff=0)
Na verdade Fvmx ocorre no ponto mais baixo da trajetoacuteria (Epmn) quando o
CM termina sua desaceleraccedilatildeo e comeccedila a sua aceleraccedilatildeo (ou seja Ff=0 e Ekfmn) A
energia elaacutestica armazenada em cada passo pode assim ser computada usando-se
apenas a forccedila vertical como (14630039)2=2853 J e (18180063)2=5727 J para
os indiviacuteduos idosos e para os indiviacuteduos jovens respectivamente Esta energia
elaacutestica eacute posteriormente utilizada em parte durante o impulso para elevar e acelerar
a frente o CM
Tabela 34 Comparaccedilatildeo das assimetrias contato-despregue entre jovens idosos e
sistema elaacutestico
IDOSO JOVEM ELAacuteSTICO
Vvmxdown Vvmxup 118plusmn011 107plusmn008 1
f 124plusmn018 106plusmn010 1
Rintdown Rintup 213plusmn130 126plusmn032 1
tpush tbrake 125plusmn016 115plusmn013 1
Ekmxdown - Ekmxup (J) 1003plusmn625 752plusmn542 0
Valores satildeo meacutediaplusmndp (plt0001 N=124 ( N=122) para idosos e N=195 para jovens)
Amplitude de velocidades 3-17 kmh-1
A maacutexima compressatildeo elaacutestica do sistema tambeacutem pode ser analisada como
o deslocamento vertical do CM durante o contato o que em 15-17 kmh-1 eacute em
meacutedia Sc=0032plusmn0006 m (n=7) nos idosos e Sc=0060plusmn0007 m (n=24) nos jovens
(em vez de 0039 m e 0063 m como calculado acima)
85
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um
passo em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis
a direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup +
86
Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo (tae)
da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na direccedilatildeo
vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os ciacuterculos em
vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2) e
a frente (Lce) A linha em vermelho pontilhada em cada painel indica o tempo de
contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente (Lc) durante o
passo As linhas azuis pontilhadas em cada painel indicam o tempo aeacutereo total
(ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La) durante o passo As
barras verticais indicam o desvio-padratildeo da meacutedia os nuacutemeros proacuteximos aos
siacutembolos nos paineacuteis superiores indicam o nuacutemero de itens nas meacutedias
A discrepacircncia pode ser devida em parte agrave uma subestimaccedilatildeo do Sc como
medido (ver Metodologia) A energia elaacutestica armazenada computada como (Fvmx
Sc)2 eacute (1463 0032)2=2341 J (em vez de 2853 J conforme calculado acima) e
(1818 0060)2=5454 J (em vez de 5727 J) para indiviacuteduos idosos e indiviacuteduos
jovens respectivamente
A partir dos dados meacutedios de frequumlecircncia de passo e potecircncia em um mesmo
conjunto de velocidades (figuras 36 e 37) o trabalho externo em cada passo
resultou (405 711)368=7825 J nos indiviacuteduos idosos e (538
634)279=12226 J nos indiviacuteduos jovens Daqui resulta que a contribuiccedilatildeo
elaacutestica para o trabalho externo em cada passo poderia ser 28537825=036 e
572712226=047 respectivamente (ou 23417825=030 e 545412226=045
usando Sc)
Estes caacutelculos aproximados em conjunto com uma maior assimetria contato-
despregue que seraacute discutida a seguir (tabela 34) indicam uma menor restituiccedilatildeo
elaacutestica do corpo nos idosos A maior rigidez k medida nos indiviacuteduos idosos em
sua mais alta velocidade de corrida (figura 35) em aparente desacordo com a
menor rigidez dos tendotildees do gastrocnemius (ONAMBELE et al 2006) do
quadriacuteceps (KARAMANIDIS e ARAMPATZIS 2005) medidos nos idosos Por outro
lado um aumento pela idade da rigidez dos elementos elaacutesticos nos tendotildees e
muacutesculos foi relatado em favor dos muacutesculos flexores do cotovelo (VALOUR e
POUSSON 2003)
87
Importante ressaltar que na complexa deformaccedilatildeo de todo corpo no solo a
aparente k eacute o resultado de um conjunto de unidades muacutesculo-tendatildeo em seacuterie cujas
propriedades elaacutesticas dependem do niacutevel de ativaccedilatildeo muscular O nuacutemero de
unidades muacutesculo-tendatildeo em seacuterie depende por sua vez da orientaccedilatildeo dos
segmentos e do tronco durante o impacto sobre o solo que pode ser diferente nos
indiviacuteduos idosos e nos indiviacuteduos jovens (por exemplo apoio na parte da frente do
peacute mais do que no calcanhar)
O maior valor de k encontrado em idosos em suas mais altas velocidades de
corrida portanto natildeo eacute necessariamente uma indicaccedilatildeo de uma maior rigidez dos
seus tendotildees ou unidades de muacutesculo-tendatildeo medidos durante contraccedilotildees
voluntaacuterias maacuteximas
Frequumlecircncia
O menor tempo aeacutereo efetivo tae nos idosos causa um aumento na
frequumlecircncia da passo f =1(tce+tae) para valores que satildeo iguais e por vezes
superiores agrave frequumlecircncia do sistema fs=1(2tce) Diferentemente dos jovens que
optam em uma grande extensatildeo de velocidades por uma FP mais baixa agrave do
sistema aumentando o tae em relaccedilatildeo ao tce (figuras 33 35 e tabela 32)
Os fatores que determinam a escolha da f a uma determinada velocidade de
corrida satildeo i) sintonizando a frequumlecircncia de passo f para a frequumlecircncia natural do
sistema fs (CAVAGNA et al 1997) e ii) escolhendo uma f que minimize a potecircncia
meacutedia de passada limitada aerobicamente (Wextf figura 36) dentro dos limites
estabelecidos pela potecircncia anaeroacutebica meacutedia durante o empurre (trabalho positivo)
(W+tpush liberada imediatamente pelo muacutesculo durante a contraccedilatildeo) (CAVAGNA et
al 1991) A primeira estrateacutegia eacute normalmente adotada em baixas velocidades de
corrida e modificada para a segunda estrateacutegia de corrida em altas velocidades Isto
eacute feito atraveacutes de um aumento da aceleraccedilatildeo ascendente meacutedia avce acima de 1 g
com o consequumlente aumento de tae em relaccedilatildeo ao tce (equaccedilatildeo 36) Assim a
frequumlecircncia de passo f=1(tce+tae) torna-se menor do que a frequumlecircncia do sistema
fs=1(2tce) bem como o incremento da potecircncia meacutedia do passo Wextf eacute controlada
Nos indiviacuteduos idosos a segunda estrateacutegia nunca eacute adotada A aceleraccedilatildeo meacutedia
para cima nunca excede 1 g mesmo nas velocidades altas 15-17 kmh-1 onde avce
=742plusmn123 ms-2 (n=7) segue-se que f fs em todas as velocidades (figura 35) Isto
88
permite uma menor forccedila durante o empurre da corrida em alta velocidade
resultando em uma potecircncia meacutedia durante o empurre ~ 60 daquela dos jovens
mas o aumento da frequumlecircncia da passada resulta em um maior Wint e um grande
incremento na potecircncia meacutedia de passo Wextf em corridas de alta velocidade (ver
abaixo) Aleacutem disso como se verificou neste estudo a mais baixa deformaccedilatildeo
elaacutestica do sistema diminui a fraccedilatildeo de Wext possivelmente sustentado pelo
mecanismo elaacutestico (ver tabela 34) Em contrapartida a segunda estrateacutegia eacute
seguida pelos jovens onde avce =1248plusmn18 ms-2 (n=24) no mesmo intervalo de
velocidades (15-17 kmh-1) resultando em uma menor frequumlecircncia de passo (f lt fs)
que limita o aumento do Wint da corrida em altas velocidades e um consequumlente
incremento da Wextf+ (ver abaixo)
Aleacutem disso a maior deformaccedilatildeo elaacutestica do sistema permite uma maior
utilizaccedilatildeo da energia elaacutestica (tabela 34) Sabe-se que uma mudanccedila na frequumlecircncia
de passo a uma determinada velocidade tem efeitos opostos sobre a potecircncia
externa o que diminui com o aumento da frequumlecircncia da passada e a potecircncia
interna para reposicionar os segmentos em cada passo que aumenta com a
frequumlecircncia (CAVAGNA et al 1991)
Em que medida a menor potecircncia externa meacutedia do passo devido agrave menor
amplitude da oscilaccedilatildeo dos segmentos nos idosos eacute compensada por uma maior
potecircncia interna meacutedia do passo devido ao aumento da frequumlecircncia de passo
89
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e velocidade
vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown (paineacuteis inferiores)
atingidos pelo CM durante o passo em funccedilatildeo da velocidade de corrida Estatiacutestica
e outras indicaccedilotildees conforme a figura 33
O total do trabalho realizado por unidade distacircncia Wtot =Wint+Wext foi somado
pelo Wint estimado pelas equaccedilotildees 32 e 33 para os indiviacuteduos jovens e idosos
como descrito nos Meacutetodos e pelo Wext calculado a partir das seguintes equaccedilotildees
obtidas pela interpolaccedilatildeo de todos os dados experimentais
W ML(J kg-1 m -1) = 29738 Vf - 03217 Eq 330 extyoung
90
(R=0831) para o grupo de indiviacuteduos jovens e
W ML(J kg-1 m -1) = 28445 Vf - 040856 Eq 331 extold
(R=0762) para o grupo de indiviacuteduos idosos O Wtot resultante (linhas
pontilhadas nos paineacuteis inferiores da figura 36) mostra que o trabalho externo menor
no idoso por unidade de distacircncia eacute progressivamente compensado com o aumento
da velocidade por um maior trabalho interno devido agrave sua frequumlecircncia de passada
(FP) aumentada O Wtot alcanccedila um minimum a ~75 kmh-1 nos indiviacuteduos idosos e
um miacutenimo a ~8-12 kmh-1 nos indiviacuteduos jovens
A diferenccedila em Wtot eacute invertida acima de ~14 kmh-1 Eacute possiacutevel que a menor
utilizaccedilatildeo da energia elaacutestica em idosos aumente o gasto de sua energia metaboacutelica
para o mesmo Wtot O consumo de O2 durante a corrida a 10 kmh-1 aumentou com a
idade em corredores treinados do sexo feminino (EVANS et al 1995)
343 A assimetria contato-despregue
As quatro fases do bouncing as diferenccedilas com um sistema elaacutestico
Antes de descrever a assimetria contato-despregue no aparente bouncing do
CM em cada passo da corrida vale a pena referir que os momentos de contato e
despregue podem natildeo ocorrer durante corridas de baixa velocidade quando a
oscilaccedilatildeo vertical do CM do corpo se daacute totalmente em contato com o solo (figura
38) Eacute oacutebvio que neste caso o contato com o solo natildeo pode ser tomado como um
indicador de contato e despregue quando se descreve o bouncing do sistema
elaacutestico Neste caso a oscilaccedilatildeo vertical ocorre abaixo e acima da posiccedilatildeo de
equiliacutebrio (onde a Fv iguala o PC e a velocidade vertical eacute maacutexima) Mesmo quando
uma fase aeacuterea ocorre durante o passo a fraccedilatildeo do deslocamento vertical do CM
total em que o corpo estaacute em contato com o solo ScSv muda amplamente com a
velocidade enquanto que a fraccedilatildeo do deslocamento vertical abaixo e acima do ponto
de equiliacutebrio SceSv se aproxima da metade do Sv quase independente da
velocidade (figura 37)
91
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e frequumlecircncia
do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute maior nos idosos
nas altas velocidades (paineacuteis superiores) a rigidez vertical normalizada pela massa
eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras indicaccedilotildees conforme figura 33
92
Estas observaccedilotildees indicam que eacute mais adequado considerar-se contato
efetivo o instante no qual a Fv aumenta acima do PC (ao inveacutes do instante em que o
peacute estaacute em contato com o solo) e despregue efetivo o instante em que a Fv diminui
para valores menores do que o PC (ao inveacutes do instante no qual o peacute deixa o solo)
A assimetria contato-despregue desaparece quando o bouncing do corpo eacute mais
corretamente dividido desta forma (ou seja tce versus tae em vez de tc versus ta)
(CAVAGNA et al 1988 MCMAHON e CHENG 1990) Ainda na figura 37 pode ser
observado que ScSv mudam mais com a velocidade do que a amplitude da
oscilaccedilatildeo SceSv ao qual atinge a metade do deslocamento vertical Sv Exceto as
velocidades muito baixas quando a fase aeacuterea eacute nula (ScSv=1 eg paineacuteis
superiores nas figuras 31 e 38) o deslocamento descendente enquanto o peacute toca o
solo eacute menor do que o deslocamento ascendente particularmente nos idosos a
descida baliacutestica do CM eacute maior do que a elevaccedilatildeo baliacutestica (veja a linha azul
pontilhada na figura 38)
Segundo a equaccedilatildeo 34 a velocidade vertical descendente eacute maacutexima no
instante do contato efetivo e a velocidade vertical ascendente eacute maacutexima no instante
do despregue efetivo No movimento harmocircnico de um sistema elaacutestico as
velocidades ascendentes e descendentes maacuteximas satildeo iguais Isso natildeo eacute verdade
na corrida humana a velocidade maacutexima descendente eacute superior agrave velocidade
maacutexima ascendente (CAVAGNA 2006) Estes resultados mostram que a assimetria
eacute maior em indiviacuteduos idosos do que nos jovens na variaccedilatildeo normal de velocidades
(3-17 kmh-1) a proporccedilatildeo normalizada ((VvmxdownVvmxup)norm=116plusmn009 (n=124)
nos idosos e 107plusmn007 (n=195) nos jovens (p=126 10-19) (tabela 34) Outras
assimetrias satildeo apresentadas a seguir atraveacutes da anaacutelise das mudanccedilas na energia
potencial gravitacional Ep e energia cineacutetica translacional Ek=Ekv+Ekf do CM
corporal durante as quatro fases de oscilaccedilatildeo do sistema em relaccedilatildeo a posiccedilatildeo de
equiliacutebrio (Fv=Mg) (CAVAGNA 2006) Estas fases satildeo apresentadas na figura 38 a
partir do topo da trajetoacuteria do CM corporal Durante a aceleraccedilatildeo descendente
(Saedown azul) a Ep diminui e a Ek aumenta indicando uma transduccedilatildeo de Ep em Ek
o que ocorre tanto na presenccedila quanto na ausecircncia de uma fase aeacuterea (por
exemplo na parte superior do painel esquerdo da figura 38) O montante desta
transduccedilatildeo eacute dado pelo incremento Rintdown da curva do Rint(t) apoacutes o maacuteximo de Ep
Durante a desaceleraccedilatildeo descendente (Scedown vermelho) o trabalho externo
negativo eacute feito para diminuir simultaneamente Ep e Ek O trecho superior da curva
93
Rint(t) correspondente agrave fraccedilatildeo do passo mostra que natildeo ocorre transduccedilatildeo entre
Ep e Ek Note-se que o pico de Ek durante o passo eacute atingido proacuteximo ao iniacutecio da
fase de trabalho negativo consistente com a velocidade maacutexima de alongamento
das unidades muacutesculo-tendotildees (HEGLUND e CAVAGNA 1987)
Durante a aceleraccedilatildeo ascendente (Sceup vermelho) trabalho positivo externo
eacute feito para aumentar simultaneamente Ep e Ek O trecho inferior da curva Rint(t)
correspondente agrave fraccedilatildeo a do passo mostra que natildeo ocorre transduccedilatildeo entre Ep e
Ek Note que enquanto eacute quase totalmente contida dentro do Scedown a continua
apoacutes o final do Sceup ou seja dentro da desaceleraccedilatildeo ascendente do CM (Saeup
azul) Em outras palavras a perna ainda estaacute a exercer uma forccedila propulsiva a fim
de acelerar o corpo a frente embora a forccedila vertical tenha diminuiacutedo para valores
abaixo do peso corporal Essa assimetria eacute maior no idoso A proporccedilatildeo a eacute
124plusmn018 nos indiviacuteduos idosos e 106plusmn010 nos indiviacuteduos jovens (p=41510-19
tabela 34)
Importante notar a origem diferente dos dois picos Ekmxup (inferior) e
Ekmxdown (superior) alcanccedilados durante o passo de corrida durante a elevaccedilatildeo e
descenso do CM Ekmxup se deve ao empurre para frente enquanto Ekmxdown eacute
devido agrave gravidade A diferenccedila meacutedia Ekmxdown- Ekmxup=752plusmn542 nos indiviacuteduos
jovens e 987plusmn592 nos idosos (p=00004) indica uma maior perda da energia
cineacutetica Ekv no idoso adquirida durante a descida (tabela 34)
Durante a desaceleraccedilatildeo ascendente do CM (Saeup azul) a transduccedilatildeo de Ek
em Ep acontece apenas na uacuteltima parte da elevaccedilatildeo porque como descrito acima
Ep e Ek aumentam simultaneamente durante a maior parte do Saeup Na verdade a
transduccedilatildeo de Ek em Ep eacute quase nula nos idosos (figura 38) O incremento da curva
Rint(t) que ocorre durante a elevaccedilatildeo Rintup eacute inferior ao que ocorre durante a
queda Rintdown Tambeacutem esta assimetria eacute maior no idoso A proporccedilatildeo
RintdownRintup nos indiviacuteduos idosos eacute 213plusmn13 e 126 plusmn 032 nos indiviacuteduos jovens
(p=33310-11 tabela 34) Este fenocircmeno eacute acompanhado por uma maior fraccedilatildeo da
elevaccedilatildeo em contato com o solo como indicado pela maior proporccedilatildeo ScupSvup nos
idosos (figura 37) Um tempo aeacutereo inferior nos idosos durante a corrida em ~ 10
kmh-1 foi encontrado por KARAMANIDIS e ARAMPATZIS 2005)
94
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com seus
95
dois componentes o trabalho realizado contra a gravidade (Wv ciacuterculos abertos) e
para sustentar as mudanccedilas de velocidade a frente (Wf quadrados abertos)
Estatiacutestica e outras indicaccedilotildees conforme figura 33
Note que particularmente nos idosos a transduccedilatildeo da Ek em Ep durante a
elevaccedilatildeo (incremento Rintup da curva Rint(t) abaixo da linha horizontal pontilhada) eacute
menor do que a transduccedilatildeo da Ep em Ek durante o deslocamento descendente
(incrementos Rintdown da curva Rint(t) acima da linha horizontal pontilhada) esta
assimetria eacute acompanhada pela elevaccedilatildeo baliacutestica (nulo nos idosos) menor do que a
descida baliacutestica Nos trechos horizontais da curva Rint(t) nenhuma transduccedilatildeo
ocorre Ep e Ek e unidades muacutesculo-tendatildeo absorvem simultaneamente Ep e Ek (fase
) e aumentam Ep e Ek simultaneamente (fase a) Note que enquanto que a fase eacute
realizada durante Scedown a estende-se aleacutem do Sceup dentro de uma grande parte
do Saeup devido ao continuo aumento da Ek Esta assimetria tambeacutem eacute maior nos
idosos
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As fraccedilotildees do
deslocamento vertical do CM durante contato ScSv (ciacuterculos preenchidos
deslocamento descendente ciacuterculos abertos deslocamento ascendente) e quando
a Fv eacute maior do que o PC SceSv (quadrados preenchidos deslocamento
96
descendente quadrados abertos deslocamento ascendente) satildeo apresentados em
funccedilatildeo da velocidade de corrida Estatiacutestica conforme figura 33
Um trabalho externo positivo eacute realizado (segmentos vermelhos na figura 31)
natildeo soacute para aumentar simultaneamente Ep e Ek (fraccedilatildeo a do passo) mas tambeacutem
quando ocorre transduccedilatildeo da Ek em Ep no final do empurre durante o alcance do
platocirc de Ecm (figura 31) Daqui resulta que a duraccedilatildeo de trabalho positivo tpush eacute
superior agrave duraccedilatildeo a a proporccedilatildeo tpushta diminui com a velocidade de ~19 agrave 3-5
kmh-1 para ~11 agrave 15-17 kmh-1 Da mesma forma o trabalho externo negativo eacute
feito (segmentos azuis na figura 31) natildeo apenas para diminuir simultaneamente Ep e
Ek (fraccedilatildeo do passo) mas tambeacutem quando ocorre uma transduccedilatildeo de Ep em Ek no
iniacutecio da frenagem durante a acentuada diminuiccedilatildeo de Ecm no final de seu platocirc
(figura 31) Consequentemente a duraccedilatildeo do trabalho negativo tbrake eacute maior do que
a duraccedilatildeo a proporccedilatildeo tbraket diminui com a velocidade de ~17 agrave 3-5 kmh-1 para
~12 agrave 15-17 kmh-1
A duraccedilatildeo do empurre e da frenagem estatildeo apresentados na figura 39 em
funccedilatildeo da Vf Observa-se que tanto nos indiviacuteduos idosos quanto nos jovens tpushgt
tbrake ateacute 13-14 kmh-1 (tabela 31) A proporccedilatildeo eacute tpushtbrake=125plusmn016 nos indiviacuteduos
idosos e 115plusmn013 nos indiviacuteduos jovens (p=11610-9 tabela 34) Novamente a
assimetria eacute maior nos indiviacuteduos idosos
Durante a corrida no plano a uma velocidade constante o momentum perdido
Fbrake tbrake equivale ao momentum adquirido Fpush tpush (realmente na direccedilatildeo vertical
o momentum perdido eacute ligeiramente maior que o momentum adquirido porque a
velocidade descendente maacutexima eacute 7-16 maior do que a velocidade ascendente
maacutexima tabela 34) Deste modo se tpushgt tbrake entatildeo Fpush lt Fbrake ou seja a forccedila
meacutedia durante o trabalho positivo eacute inferior agrave forccedila meacutedia durante o trabalho
negativo
As assimetrias do bouncing acima descritas estatildeo resumidas na tabela 34
onde eacute feita uma comparaccedilatildeo entre indiviacuteduos idosos indiviacuteduos jovens e um
sistema elaacutestico Observa-se que o desvio de um sistema elaacutestico eacute maior para os
indiviacuteduos idosos do que para os indiviacuteduos jovens isto eacute o salto dos indiviacuteduos
idosos eacute menos elaacutestico do que o dos indiviacuteduos jovens Note a mesma conclusatildeo
foi encontrada acerca da estimativa da energia elaacutestica armazenada em cada passo
97
98
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito idoso
paineacuteis a direita sujeito jovem em cada painel o comportamento da transduccedilatildeo Ep-
Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas na energia potencial
gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf normalizada para oscilar entre
zero e um Mesmos passos da figura 1 cada painel comeccedila e termina no valor
menor da curva Ep As cores diferentes na curva Ep distinguem as fraccedilotildees do passo
onde a Fv exercida no solo eacute maior do que o PC (vermelho) e menor do que o PC
(azul) As linhas contiacutenuas de Ep indicam a fase de contato enquanto que as linhas
pontilhadas Ep (azul fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As
quatro fases correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown (azul)
e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas pontilhadas verticais
satildeo apresentadas nos dois picos de Ek e ocupam a fraccedilatildeo onde a transduccedilatildeo Ep-Ek
ocorre conforme indicado pelos incrementos da curva Rint(t)
Por que o bouncing do corpo eacute diferente daquele de um sistema elaacutestico
A cada passo executado as unidades muacutesculo-tendatildeo satildeo submetidas a um
ciclo alongamento-encurtamento durante o contato com o solo As unidades
muacutesculo-tendatildeo satildeo constituiacutedas por duas estruturas em seacuterie que apresentam
respostas diferentes durante o alongamento e encurtamento Enquanto os tendotildees
tecircm um comportamento semelhante entre o alongamento e encurtamento devido agrave
sua pequena histerese (ALEXANDER 2002) o muacutesculo exerce uma maior forccedila
durante o alongamento do que durante o encurtamento dependente da relaccedilatildeo
forccedila-velocidade (FENN e MARSH 1935 HILL 1938) Este fato resulta em uma
resposta diferente das unidades muacutesculo-tendatildeo a um ciclo alongamento-
encurtamento dependente da mudanccedila do comprimento relativo de muacutesculo e
tendatildeo durante o ciclo (CAVAGNA 2006)
O alongamento dos muacutesculos em relaccedilatildeo ao alongamento do tendatildeo depende
da rigidez do muacutesculo em relaccedilatildeo agrave do tendatildeo a rigidez do muacutesculo por sua vez
depende da sua ativaccedilatildeo Se a ativaccedilatildeo eacute elevada como em altas velocidades
(BIEWENER 1998) e o muacutesculo eacute mantido isomeacutetrico como alguns estudos
sugerem para a corrida (KRAM e TAYLOR 1990 BIEWENER et al 1998
99
ROBERTS et al 1998) a maioria da mudanccedila no comprimento seraacute realizada pelos
tendotildees e as caracteriacutesticas do bouncing se aproximaratildeo agraves de um corpo elaacutestico
Se por outro lado a ativaccedilatildeo muscular for baixa uma importante fraccedilatildeo da mudanccedila
do comprimento seraacute realizada pelo muacutesculo Neste caso a forccedila desenvolvida
durante o alongamento eacute esperada que exceda a que foi desenvolvida durante o
encurtamento e as caracteriacutesticas do bouncing foram distintas agrave de um corpo
elaacutestico
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos
painel inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura 31)
e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e barras
azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de corrida
Estatiacutestica conforme figura 33
Esta eacute possivelmente a razatildeo pela qual a proporccedilatildeo tpushtbrake (figura 39) eacute
maior em velocidades baixas de corrida quando a ativaccedilatildeo muscular eacute menor e o
comprimento muscular eacute alterado e consequumlentemente o trabalho sustentado por
filamentos de muacutesculos que deslizam dentro das unidades muacutesculo-tendatildeo eacute
relativamente maior (CAVAGNA 2006) Pode ser observado que a duraccedilatildeo de
trabalho externo positivo eacute maior do que a duraccedilatildeo do trabalho externo negativo ateacute
a velocidade de 12-14 kmh-1 (tabela 31) como esperado a partir da relaccedilatildeo forccedilashy
100
velocidade muscular Isto sugere que com o aumento da velocidade a contribuiccedilatildeo
do trabalho pelas estruturas contraacuteteis eacute progressivamente substituiacutedo pela
armazenagem e re-utilizaccedilatildeo de energia elaacutestica pelos tendotildees A razatildeo tpushtbrake eacute
maior nos idosos (tabela 34)
Um corolaacuterio deste ponto de vista eacute que as fibras musculares curtas
aparentemente de pouca importacircncia ligadas em seacuterie com tendotildees muito longos
(ALEXANDER 2001) tecircm papel fundamental de modular a energia elaacutestica
armazenada nos tendotildees e para ajustar toda a extensatildeo da mudanccedila imposta agrave
unidade muacutesculo-tendatildeo Uma forccedila muscular maior durante o alongamento do que
durante o encurtamento juntamente com a perda de energia durante o ciclo
alongamento-encurtamento satildeo tanto consequumlecircncias da relaccedilatildeo forccedila-velocidade do
muacutesculo e podem explicar pelo menos qualitativamente o conjunto dos desvios do
sistema elaacutestico (tabela 33)
O maior desvio de um sistema elaacutestico encontrado nos indiviacuteduos mais idosos
eacute coerente com a menor forccedila desenvolvida pelos seus muacutesculos o que implicaria
uma mudanccedila relativamente maior do comprimento do muacutesculo nas unidades
muacutesculo-tendatildeo A segunda razatildeo pode ser a maior diferenccedila na forccedila desenvolvida
pelos muacutesculos durante o alongamento relativo ao encurtamento relatado na
literatura em idosos (PHILLIPS et al 1991 OCHALA et al 2006 VANDERVOORT
et al 1990 PORTER et al 1997 POUSSON et al 2001 KLASS et al 2005)
Em conclusatildeo modificaccedilotildees na estrutura muscular menor forccedila e uma
relaccedilatildeo forccedila-velocidade mais assimeacutetrica resultam em uma modificaccedilatildeo da energia
mecacircnica do CM do corpo durante a corrida A menor forccedila especialmente durante
trabalho positivo explica a menor amplitude da oscilaccedilatildeo vertical que por sua vez eacute
a causa do menor trabalho externo da maior frequumlecircncia da passada e maior
trabalho interno A relaccedilatildeo forccedila-velocidade mais assimeacutetrica explica a maior
assimetria contato-despregue Ambas as modificaccedilotildees resultam em uma menor
utilizaccedilatildeo da energia elaacutestica durante o bouncing do idoso
101
4 PREDIZENDO Vf CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO TERRESTRE
41 Introduccedilatildeo
A dinacircmica da locomoccedilatildeo eacute determinada principalmente pelas forccedilas de
reaccedilatildeo do solo geradas de modo agrave re-acelerar e deslocar o corpo contra a forccedila
gravitacional em um ciclo de passada O meacutetodo para analisar o trabalho e o custo
mecacircnico externos usando plataformas dinamomeacutetricas foi introduzido por Cavagna
e colaboradores (caminhada CAVAGNA et al 1963 corrida CAVAGNA et al
1964) Desde entatildeo o Wext tem sido investigado em diferentes condiccedilotildees e
populaccedilotildees [terreno (FORMENTI et al 2005 FORMENTI e MINETTI 2007)
crianccedilas (CAVAGNA et al 1983 SCHEPENS et al 1998 SCHEPENS et al 2001)
meacutetodo de locomoccedilatildeo (MINETTI 1998a ARDIGO et al 2003) deficiecircncia de
hormocircnio do crescimento (MINETTI et al 2000) gradiente de locomoccedilatildeo (MINETTI
et al 1993 1994) idosos (MIAN et al 2006 estudo atual capiacutetulo 3)]
Apesar de sua relevacircncia cientiacutefica o nuacutemero de laboratoacuterios onde trabalho e
custo mecacircnico satildeo avaliados eacute limitado devido a questotildees metodoloacutegicas Em
especial a aquisiccedilatildeo da energia mecacircnica externa eacute atualmente limitada pela
necessidade de espaccedilo suficiente para posicionar plataformas de forccedila para coletar
dois passos sucessivos de modo a obter o miacutenimo de duas curvas de forccedilas de
reaccedilatildeo do solo consecutivas essenciais para esse meacutetodo Durante a corrida haacute um
periacuteodo entre as duas curvas durante o qual ambos os peacutes estatildeo fora do solo (em
velocidades normais) enquanto que durante a caminhada esse periacuteodo eacute
substituiacutedo por uma fase de apoio duplo
Independente se as duas curvas estatildeo sobrepostas ou natildeo (caminhando ou
correndo respectivamente) haacute ainda alguma dificuldade em obter
102
experimentalmente no miacutenimo duas curvas similares de modo que a Fv meacutedia seja
igual ao PC Normalmente mais de um terccedilo das aquisiccedilotildees com indiviacuteduos normais
satildeo rejeitadas (dados natildeo-publicados) devido agrave dificuldade de caminhar ou correr
em plataformas em uma velocidade constante E aleacutem disso a maior parte dos setshy
uprsquos biomecacircnicos satildeo dispostos de modo que as curvas sucessivas sejam obtidas
da mesma plataforma Dados de Bastien e colaboradores mostram que duas
medidas sucessivas em diferentes plataformas de forccedila eram possiacuteveis apenas em
10 das tentativas Assim medir o Wint realizado durante o duplo apoio eacute uma tarefa
difiacutecil e essa variaacutevel em seu maacuteximo representa mais de 40 do Wext (BASTIEN
et al 2003)
Deste modo o presente texto procura analisar as possibilidades de anaacutelise da
biomecacircnica da locomoccedilatildeo em situaccedilotildees onde apenas uma plataforma de forccedila com
dimensotildees capazes de analisar apenas um apoio simples satildeo disponiacuteveis
O objetivo desse trabalho eacute estabelecer uma equaccedilatildeo capaz de predizer o
trabalho mecacircnico usando procedimentos de prediccedilatildeo linear e otimizaccedilatildeo e checar
sua validade analisando experimentos de locomoccedilatildeo em diferentes velocidades
42 Equaccedilatildeo do tempo de atraso
Usando a primeira lei de Newton (um corpo se move a uma velocidade
constante quando a soma total das forccedilas externas eacute igual a zero) temos que a Fv
meacutedia exercida contra o solo durante um ciclo de passada a uma velocidade
constante eacute igual ao PC (CAVAGNA e MARGARIA 1966) Se somente as forccedilas de
reaccedilatildeo do solo de um uacutenico passo satildeo coletadas e a simetria eacute assumida
(KARAMANIDIS et al 2003) o atraso de tempo entre passos (s) pode ser obtido
por
F t Ivc c vt = = Eq 41 step M g M g
onde tc e Fvc satildeo a duraccedilatildeo e a Fv meacutedia durante o fase de contato (figura 41)
respectivamente e Iv eacute o impulso vertical Essa informaccedilatildeo eacute crucial se a passada
completa deve ser reconstruiacuteda (no novo passo elaborado somente a forccedila
103
horizontal precisa ser invertida enquanto que a Fv precisa ser somente duplicada a
partir do atraso do tempo tstep)
M g M gFP = = Eq 42
2F t 2 Ivc c v
de onde o CP (CP m) pode ser inferido
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de reaccedilatildeo do solo durante a
corrida
O DF (ALEXANDER e JAYES 1980) ie a fraccedilatildeo do tempo de passada no
qual um uacutenico peacute estaacute no solo eacute
104
M g 1DF = = Eq 43
2F F vc vc2
M g
e deste modo eacute possiacutevel indicar se o modo de locomoccedilatildeo eacute caminhada (DF05) ou
corrida (DFlt05) Ateacute esse ponto a uacutenica variaacutevel a ser conhecida antecipadamente
eacute a massa corporal (kg)
43 Estimativa da velocidade horizontal
Enquanto pares de fotoceacutelulas satildeo comumente encontrados em laboratoacuterios
por vezes a Vf natildeo eacute conhecida (paleontologia biomecacircnica forecircnsica etc) Assim
FP DF e massa podem entrar no modelo de prediccedilatildeo de velocidade (ms-1) com
base em dados coletados previamente (NILSSON e THORSTENSSON 1989)
Vf = (1953F M g) - (14843Iv M g) + 5415 Eq 44 v peak
onde Fvpeak eacute a forccedila de impacto vertical e Iv eacute impulso vertical O erro meacutedio da
estimativa (SEE = 05 dp(1 ndash R2)) eacute 005 ms-1 Entatildeo o CP pode ser obtido como
VfFP ou
1953Fv peak -14843Iv + 5415M gCP = Eq 45
2Fvc
Apesar do alto coeficiente de regressatildeo e baixo erro padratildeo da meacutedia esse
meacutetodo necessita do primeiro pico vertical e assim se torna limitado por exemplo
em humanos para corredores que apoacuteiam o peacute com o calcanhar no momento do
contato Para evitar essa limitaccedilatildeo foi construiacutedo um modelo de regressatildeo linear
muacuteltipla incluindo variaacuteveis descritivas (MINETTI e ALEXANDER 1997) da
energeacutetica da locomoccedilatildeo
qregression + + DFregression + FPregressionVf = Eq 46 3
105
Para cada regressatildeo o meacutetodo dos miacutenimos quadrados eacute usado Enquanto
que o DF e o FP satildeo calculados (equaccedilotildees 42 e 43) o fator q precisa ser
determinado O fator q (tambeacutem conhecido como fator de forma) oferece
informaccedilotildees relacionadas ao formato da curva forccedila-tempo durante a fase de apoio
Usualmente a forccedila vertical pode ser determinada somente com dois primeiros
cossenos de uma seacuterie de Fourier (ALEXANDER 1978)
tc ) Eq 47 Fv = x cos( tc ) V qcos(3
onde x eacute PC e tc eacute tempo de contato A ausecircncia de coeficientes seno indica uma
simetria nas curvas forccedila-tempo e nestes casos o fator q eacute constante Em outras
palavras conhecendo somente o valor da Fv e sua respectiva fase eacute possiacutevel
encontrar o fator q Todavia na caminhada satildeo frequumlentemente observadas curvas
assimeacutetricas (NILSSON e THORSTENSSON 1989) assim incluiacuteu-se dois
coeficientes senos na equaccedilatildeo
tc ) Eq 48 Fv = x cos( tc ) V qcos(3 tc ) + a1 sin(2 tc ) V a2 sin(4
onde a1 e a2 satildeo constantes Assim usando um simples caacutelculo de meacutedia aritmeacutetica
para o q durante o tc noacutes temos
q1 + q2 + q3 + qnqmean = Eq 49 n
Usando os valores de fator q advindos da literatura (MINETTI e ALEXANDER
1997) construiacutemos a seguinte equaccedilatildeo de regressatildeo em situaccedilotildees de caminhada
DF 05 qregression = 23061q + 05873 R=079 Eq 410
onde qregression eacute a Vf estimada e utilizada na equaccedilatildeo 46 Para situaccedilotildees de corrida
o fator q natildeo varia em funccedilatildeo da velocidade (figura 42) obtendo um coeficiente
106
angular da equaccedilatildeo de regressatildeo muito baixo (00916) portanto em situaccedilotildees de
corrida o qregression eacute cancelado
As seguintes equaccedilotildees (411 412 413 e 414) foram originadas dos dados
apresentados na figura 43 de MINETTI (1998b) Nesta figura as informaccedilotildees satildeo
valores meacutedios (meacutedias advindas de 22 agrave 42 medidas para cada velocidade e tipo
de locomoccedilatildeo) de medidas de FP e DF portanto as equaccedilotildees a seguir apresentam
valores de R subestimados enquanto que as equaccedilotildees de regressatildeo representam
de modo satisfatoacuterio os dados de origem A Vf predita pela frequumlecircncia de passada
FPregression foi determinada para a caminhada como
DF 05 FPregression = 27781FP V12077 R=098 Eq 411
e para a corrida
DF lt 05 FPregression = 75469FP - 79561 R=090 Eq 412
A Vf predita pelo duty factor DFregression foi determinado para a caminhada
como
DF 05 DFregression = V12342DF + 84628 R=099 Eq 413
e para a corrida
DF lt 05 DFregression = -16912DF + 87422 R=098 Eq 414
44 Equaccedilatildeo de custo energeacutetico
O atraso entre passos tstep e a Vf satildeo cruciais para ldquosintetizarrdquo toda a
passada e calcular o trabalho mecacircnico externo e a recuperaccedilatildeo de energia (ambos
valores total (CAVAGNA e KANEKO 1977) e instantacircneo (CAVAGNA et al 2002))
Assim as forccedilas de reaccedilatildeo do solo satildeo integradas duas vezes para posiccedilatildeo
do CM e dados da velocidade A primeira integraccedilatildeo das forccedilas horizontais e
107
verticais menos o PC ambas divididas pela massa corporal resultam na aceleraccedilatildeo
do CM A constante de integraccedilatildeo usada para as forccedilas acircntero-posteriores foi a
velocidade meacutedia de progressatildeo Para as forccedilas vertical e meacutedio-lateral noacutes
assumimos que as velocidades inicial e final em todo o ciclo eram iguais A variaccedilatildeo
positiva ponto-a-ponto da Ep somada a variaccedilatildeo positiva ponto-a-ponto da Ek
durante uma passada completa resulta na energia mecacircnica externa total Ecm
(CAVAGNA e KANEKO 1977 WILLEMS et al 1995) Para evitar o ldquoparadoxo do
trabalho zerordquo o trabalho externo eacute determinado somando somente os incrementos
positivos da Ecm Sabendo o Wext e estimando o Wint (MINETTI 1998b) foi
calculado o Wtot e o custo energeacutetico (Ctot) da locomoccedilatildeo
A velocidade horizontal foi determinada atraveacutes do meacutetodo de regressatildeo
linear muacuteltipla usando como variaacuteveis independentes os coeficientes da curva Fv (de
NILSSON e THORSTENSSON 1989) A validade cruzada das equaccedilotildees
desenvolvidas no presente estudo foi calculada por coeficientes de regressatildeo (R)
45 Discussatildeo
O presente modelo prediz a velocidade horizontal e o custo energeacutetico da
locomoccedilatildeo terrestre Aleacutem disso o modelo matemaacutetico permite estimar outros
importantes paracircmetros da locomoccedilatildeo como a FP e o DF
Outros modelos
Tem sido proposto que o custo energeacutetico da locomoccedilatildeo terrestre pode ser
determinado pelo custo da produccedilatildeo de forccedila para suportar o PC (KRAM e TAYLOR
1990) Fundamentalmente o custo de geraccedilatildeo de forccedila indica que a potecircncia
metaboacutelica da locomoccedilatildeo eacute relacionada diretamente ao PC e o tempo disponiacutevel
para produzir forccedila
c Mg E
metabolic = Eq 415 tc
108
onde c eacute uma constante de custo (que expressa a proporcionalidade entre taxa de
dispecircndio de energia normalizado pela massa e taxa de geraccedilatildeo de forccedila)
entretanto esse modelo tecircm sido alvo de criacuteticas Resumidamente a principal criacutetica
eacute baseada em i) a suposiccedilatildeo que o dispecircndio metaboacutelico devido ao movimento dos
membros superiores eacute negligenciaacutevel e ii) a desconsideraccedilatildeo do conceito de
trabalho O presente trabalho tambeacutem mostra que levar em consideraccedilatildeo apenas o
tempo da geraccedilatildeo de forccedila e a forccedila natildeo eacute o bastante para determinar o custo
energeacutetico da locomoccedilatildeo As informaccedilotildees contidas no proacuteprio comportamento da
curva forccedila vertical-tempo parecem influenciar de modo importante a determinaccedilatildeo
de paracircmetros fundamentais da locomoccedilatildeo Especialmente o Iv e o fator de forma q
indicam um ajuste da curva de regressatildeo linear importante para a determinaccedilatildeo da
Vf
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de progressatildeo
A prediccedilatildeo da FP e DF foram comparados com os valores
determinados experimentalmente em dois sujeitos (sujeitos RR e TD 175 e
170m de estatura 78 e 84kg de massa corporal) correndo em vaacuterias velocidades de
progressatildeo As forccedilas de reaccedilatildeo do solo foram registradas em uma plataforma de
forccedila AMTI agrave uma frequumlecircncia de amostragem de 1000Hz e a Vf foi determinada
quadro a quadro atraveacutes de uma cacircmera colocada agrave 5m de distacircncia da aacuterea de
interesse e 1m de altura do piso A mesma foi posta de forma a registrar o
movimento no plano sagital dos sujeitos com uma frequumlecircncia de amostragem de
109
50Hz Um procedimento de calibraccedilatildeo 2D foi realizado a fim de converter as
informaccedilotildees de pixels para metros As informaccedilotildees de posiccedilatildeo linear foram filtradas
atraveacutes de um filtro passa-baixa do tipo Butterworth com frequumlecircncia de corte
variando entre 3 e 9Hz determinados para cada corrida atraveacutes do procedimento de
anaacutelise residual (WINTER 2005) A coordenada horizontal do ponto anatocircmico do
quadril foi utilizada para determinar a FPexp CPexp e a velocidade meacutedia
experimentais A FPexp foi determinada pela frequumlecircncia de amostragem fsample
dividida pelo nuacutemero de quadros que totalizam um ciclo de passada nframes
f sampleFPexp = Eq 416 n frames
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de progressatildeo Fonte
Minetti 1998b
O CPexp foi determinado pela posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo FinalhorPosition diminuiacutedo pela posiccedilatildeo horizontal do quadril no
primeiro quadro InitialhorPosition
CPexp = horPosition = FinalhorPosition V InitialhorPosition Eq 417
110
A velocidade meacutedia experimental Vfexp foi determinada pela variaccedilatildeo da
posiccedilatildeo horizontal durante um ciclo de passada dividida pela variaccedilatildeo de tempo de
um ciclo de passada a partir da Eq 411
n frames 1time = = Eq 418
f sample FPexp
temos
horPositionVfexp = Eq 419 time
A razatildeo entre a frequumlecircncia FP experimental e teoacuterica foi de 1001 A razatildeo
para o DF foi de 0977
O presente modelo pode auxiliar a determinar paracircmetros espaccedilos-temporais
e energeacuteticos de animais extintos prevendo a forccedila de reaccedilatildeo do solo de um uacutenico
passo
Atraveacutes da anaacutelise das informaccedilotildees contidas em uma curva de forccedila de
reaccedilatildeo do solo vertical pelo tempo informaccedilotildees fundamentais da mecacircnica e
energeacutetica da locomoccedilatildeo podem ser estimadas em situaccedilotildees que a informaccedilatildeo
experimental direta natildeo for disponiacutevel
111
5 CONCLUSAtildeO GERAL
51 O custo EMG da caminhada humana
O objetivo deste estudo foi construir um modelo do custo EMG da caminhada
humana Para tanto criou-se duas abordagens experimental e teoacuterica sendo que a
teoacuterica parece ter uma melhor relaccedilatildeo com as evidecircncias experimentais sobre a
energeacutetica da locomoccedilatildeo humana A estabilidade em conjunto com a atividade EMG
de muacutesculos posturais parece ser um mecanismo primaacuterio da energeacutetica da
locomoccedilatildeo
52 A mecacircnica da corrida de idosos
A mecacircnica da corrida de idosos foi comparada com a de jovens atraveacutes da
determinaccedilatildeo e comparaccedilatildeo do trabalho mecacircnico e de paracircmetros do sistema
massa-mola especialmente usando aspectos de assimetria do mecanismo elaacutestico
de minimizaccedilatildeo de energia entre os grupos experimentais
Os idosos produzem menos forccedila durante a fase de trabalho mecacircnico
positivo com uma menor oscilaccedilatildeo vertical durante a fase aeacuterea e menor oscilaccedilatildeo
total Consequentemente a capacidade de armazenar e re-utilizar energia elaacutestica
112
dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio energeacutetico neste
grupo quando comparado com jovens
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre
Tendo apenas as informaccedilotildees de uma curva forccedila vertical versus tempo e a
massa corporal construiu-se um modelo biomecacircnico de prediccedilatildeo do CP Vf e custo
energeacutetico da locomoccedilatildeo terrestre Os resultados advindos do modelamento
correspondem aos paracircmetros determinados experimentalmente Laboratoacuterios que
detenham apenas uma plataforma de forccedila ou nas aacutereas onde as informaccedilotildees de
entrada do atual modelo constituam a uacutenica fonte de dados disponiacutevel (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis-chaves da
locomoccedilatildeo podem ser realizadas com razoaacutevel acuraacutecia
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico
O seguinte texto representa um esforccedilo de raciociacutenio a partir dos achados da
presente tese aliados ao referencial teoacuterico abordado durante os capiacutetulos
anteriores a fim de compreender as determinantes da locomoccedilatildeo humana Mais do
que oferecer uma resposta final sobre a mecacircnica e a energeacutetica da locomoccedilatildeo
humana este texto lanccedila uma provaacutevel resposta ainda inicial acerca das
determinantes envolvidas da locomoccedilatildeo humana
As situaccedilotildees de locomoccedilatildeo que desafiam as noccedilotildees atuais da mecacircnica e
energeacutetica da locomoccedilatildeo tratadas nesta tese nomeadamente o processo de
envelhecimento e as inclinaccedilotildees satildeo algumas das questotildees que natildeo satildeo todavia
compreendidas pelas teorias atuais da locomoccedilatildeo humana mas que a presente
hipoacutetese pretende responder A locomoccedilatildeo humana eacute determinada desde o ponto
de vista mecacircnico como uma seacuterie de accedilotildees complexas de segmentos interligados
ao qual geram torques atraveacutes da ativaccedilatildeo muscular e transmissatildeo de forccedilas pelos
tendotildees anexados em seacuterie aos muacutesculos e agraves articulaccedilotildees que conectam os
Restriccedilotildees da tarefa
velocidade
Restriccedilotildees do organismo
- massa
- comprimento do membro
i f i
Tendatildeo
- energia
Energia
mecacircnica do
CM
Mecanismo
minimizador
Dispecircndio
energeacutetico
Restriccedilotildees do
ambiente Muacutesculos
- eficiecircncia
113
segmentos Todo este sistema eacute controlado pelo sistema nervoso central e
perifeacuterico Ainda assim apesar da extrema complexidade deste tipo de movimento
conforme discutido extensivamente nas seccedilotildees 21 31 e 41 a corrida e a
caminhada humana se caracterizam como sistemas capazes de minimizar o
dispecircndio energeacutetico advindo dos muacutesculos sistemas estes denominados de
massa-mola e pecircndulo invertido respectivamente Desde a sua introduccedilatildeo ateacute os
dias atuais estes sistemas tecircm recebido intensas criacuteticas da literatura abordadas em
capiacutetulos precedentes poreacutem mais do que por agrave prova os achados principais que
deram base para estes sistemas as criacuteticas satildeo direcionadas agraves limitaccedilotildees dos
sistemas especialmente da forma em que foram propostos A seacuterie de experimentos
realizados primeiramente com humanos (CAVAGNA et al 1963 1964) e apoacutes com
animais (FEDAK et al 1982 HEGLUND et al 1982a HEGLUND et al 1982b
TAYLOR et al 1982) demonstraram de modo inequiacutevoco que as curvas de energia
potencial gravitacional e cineacutetica do CM se apresentavam em fase durante a
corridagalope e em contra-fase (atraso de 180 graus) na caminhada Deste ponto
em diante eacute estabelecido que durante a transiccedilatildeo da caminhada para a corrida os
sistemas satildeo modificados de um modo discreto ou seja o pecircndulo invertido seria
ldquodesligadordquo e o sistema massa-mola acionado automaticamente
Figura 51 Modelo conceitual da locomoccedilatildeo humana
114
Este raciociacutenio adveacutem dos achados de Cavagna e colegas e aleacutem disso da
observaccedilatildeo de paracircmetros cinemaacuteticos e cineacuteticos aos quais respondem de forma
discreta na mudanccedila do tipo de locomoccedilatildeo por exemplo o DF durante caminhada
varia de 065 em baixas velocidades ateacute 055 em altas velocidades de forma
contiacutenua poreacutem quando o sujeito faz a transiccedilatildeo para a corrida o DF passa para
04 O fator de forma ldquoqrdquo da curva de forccedila vertical em funccedilatildeo do tempo tambeacutem se
modifica abruptamente variando de 07 na caminhada para -01 durante corrida
(ALEXANDER e JAYES 1980) Uma justificativa para este comportamento discreto
eacute relacionado agrave um tipo de locomoccedilatildeo pouco usada por seres-humanos o skipping
Por outro lado evidecircncias experimentais tecircm demonstrado que em algumas
velocidades de caminhada parece existir um mecanismo elaacutestico de minimizaccedilatildeo de
energia (FUKUNAGA et al 2001) denominado de sistema de ldquocatapultardquo devido agrave
caracteriacutestica de baixa velocidade durante a frenagem e alta velocidade na fase de
propulsatildeo (ISHIKAWA et al 2005 ISHIKAWA et al 2007) Por outro lado durante a
corrida no estudo da mecacircnica da corrida dos idosos foi observada uma transduccedilatildeo
de energia cineacutetica e potencial gravitacional em baixas velocidades diminuindo com
o aumento da velocidade (relativo ao deslocamento vertical total capiacutetulo 3)
enquanto que a contribuiccedilatildeo do tendatildeo e consequentemente do componente
elaacutestico da unidade muacutesculo-tendatildeo aumentam (CAVAGNA 2006) Portanto os dois
sistemas parecem natildeo mudar atraveacutes de transformaccedilotildees abruptas como os
paracircmetros anteriormente apresentados poderiam induzir mas eacute notoacuterio um
continuum de mudanccedilas nas caracteriacutesticas mecacircnicas destes dois tipos de
locomoccedilatildeo e a mudanccedila na predominacircncia do mecanismo minimizador parece ser o
responsaacutevel pela transiccedilatildeo de um tipo de locomoccedilatildeo para outro
Para construir este modelo eacute necessaacuterio sabermos quanto de energia eacute
recuperado pelos mecanismos minimizadores A energia recuperada por via
pendular eacute calculada como (ver capiacutetulo 327)
cpendular = Rint Eq 51
e a energia elaacutestica armazenada como
115
Fvmx k = Eq 52 celaacutestica 2
Este raciociacutenio leva agrave um modelo de minimizaccedilatildeo de energia assumido
simplesmente como o somatoacuterio dos mecanismos elaacutestico e pendular
= Eq 53 creconvertida cpendular + celaacutestica
Assumindo como constante o dispecircndio energeacutetico sob outras formas de
energia (teacutermica) a energia despendida para a contraccedilatildeo dos muacutesculos esqueleacuteticos
a fim de gerar a locomoccedilatildeo pode ser determinada por
= -E Eq 54 Emuscular Emetaboacutelica repouso
e deste modo podemos afirmar que a energia total para percorrer determinada
distacircncia eacute dada por
= Eq 55 total Ereconvertida + Emuscular
e este valor em um amplo espectro de velocidades e tipos de locomoccedilatildeo apresente
uma relaccedilatildeo linear direta com a velocidade da locomoccedilatildeo (restriccedilatildeo da tarefa)
Mas quais os fatores que determinam este continuum de mecanismos
minimizadores O compromisso entre estes mecanismos (pendular e elaacutestico) eacute
diretamente ligado ao comportamento da energia mecacircnica vertical (potencial
gravitacional + cineacutetica) e da unidade muacutesculo-tendatildeo E em uacuteltima anaacutelise estas
caracteriacutesticas mecacircnicas parecem ser moduladas por restriccedilotildees do ambiente (g
inclinaccedilatildeo) restriccedilotildees da tarefa (velocidade) e restriccedilotildees do organismo (massa e
comprimento de membros inferiores) conforme figura 51
Hipoacuteteses levantadas com o atual modelo
i) A velocidade de transiccedilatildeo deve coincidir com a mudanccedila na
predominacircncia do mecanismo minimizador de energia
ii) Analisar o mecanismo pendular em diferentes velocidades de corrida
116
iii) Quando as demais restriccedilotildees estatildeo controladas as restriccedilotildees do
organismo e o compromisso entre massa e comprimento de membro
inferior poderiam explicar as mudanccedilas no uso dos mecanismos pendular
e elaacutestico
iv) Existe uma velocidade oacutetima para a corrida humana
v) O somatoacuterio da quantidade de energia reconvertida por meio pendular e
elaacutestico somado ao dispecircndio energeacutetico dos muacutesculos deve ser altamente
relacionado com a velocidade de locomoccedilatildeo
541 Respondendo algumas criacuteticas atuais
Este modelo pode explicar os resultados de GEYER et al 2006) sobre a
possibilidade de um modelo de ldquopecircndulo-invertido carregado por uma molardquo
(BLICKHAN et al 2007) ser aplicado na caminhada devido a melhor representaccedilatildeo
da curva forccedila tempo pelo meacutetodo proposto do que pelo modelo do pecircndulo-
invertido Apesar da boa representaccedilatildeo de uma variaacutevel mecacircnica da locomoccedilatildeo o
modelo despreza uma questatildeo central da anaacutelise da locomoccedilatildeo a determinaccedilatildeo do
mecanismo minimizador de energia Portanto apesar da coincidecircncia da resposta de
forccedila de reaccedilatildeo do solo vertical originada pelo modelo e a medida experimental o
modelo apenas apresenta uma possibilidade do ponto de vista matemaacutetico de
representaccedilatildeo do modelo teoacuterico de continuum apresentado aqui
Recentemente uma extensa revisatildeo de BIEWENER 2006) analisou como as
flutuaccedilotildees na energia mecacircnica do CM de animais podem ser usadas a fim de
identificar os mecanismos fundamentais envolvidos na locomoccedilatildeo terrestre e indicou
que quando satildeo comparados os padrotildees mecacircnicos e cinemaacuteticos de uma ampla
diversidade de quadruacutepedes e biacutepedes padrotildees mais complexos emergem
observando que alguns animais menos aptos para a locomoccedilatildeo (less cursorial)
podem combinar padrotildees mecacircnicos da caminhada e corrida em velocidades
intermediaacuterias ou em animais de grande tamanho (eg elefantes apresentam
aspectos de corrida mas com um comportamento pendular entre a energia cineacutetica e
potencial gravitacional do CM) Novamente a hipoacutetese do continuum se apresenta
como um forte candidato para explicar atraveacutes de uma teoria simples e unificante a
locomoccedilatildeo de vertebrados
117
O que acontece nas inclinaccedilotildees
Quando nos deslocamos no plano eacute bem determinado que o trabalho
mecacircnico liacutequido apresente um valor muito baixo e natildeo eacute igual a zero devido agrave
resistecircncia do ar e agrave fricccedilatildeo dos tecidos mas ainda assim eacute comumente assumido
como negligenciaacutevel (ALEXANDER 1989) poreacutem a energia mecacircnica total para
movimentar o CM em relaccedilatildeo ao ambiente externo varia durante um ciclo de
passada de modo que o somatoacuterio dos incrementos (trabalho positivo) seja igual ao
somatoacuterio dos decrementos (trabalho negativo) Como observado no estudo ldquocusto
EMG da caminhada humanardquo (Capiacutetulo 2) existe uma predominacircncia de trabalho
positivo em inclinaccedilotildees positivas e predominacircncia de trabalho negativo em
inclinaccedilotildees negativas (figura 52)
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido de
elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006
118
Portanto o pecircndulo invertido natildeo atua como mecanismo minimizador de
dispecircndio energeacutetico e natildeo obstante a falta de evidecircncias eacute razoaacutevel supor que a
energia elaacutestica natildeo atue de forma importante nas inclinaccedilotildees Importante notar que
a inexistecircncia de um mecanismo minimizador natildeo significa que o modelo natildeo
contempla esta situaccedilatildeo apenas demonstra que devido agrave uma restriccedilatildeo severa do
ambiente (inclinaccedilatildeo extrema) o organismo natildeo dispotildee de nenhum auxiacutelio
importante para economizar energia sobrecarregando os muacutesculos a fim de produzir
a energia necessaacuteria para manter o movimento de locomoccedilatildeo Nesta situaccedilatildeo o
dispecircndio energeacutetico eacute dependente apenas da quantidade de ativaccedilatildeo muscular e
seus respectivos equivalentes energeacuteticos de atividade EMG como demonstrado no
estudo do custo EMG da caminhada humana
55 Propostas para futuros estudos
551 Custo EMG da caminhada humana
Testar o modelo do Custo EMG
- em diferentes terrenos
- em populaccedilotildees com patologias do sistema nervoso
- em inclinaccedilotildees negativas
552 Mecacircnica da corrida dos idosos
- desenvolver um modelo matemaacutetico que tenha em consideraccedilatildeo os
comportamentos diferentes entre a fase de encurtamento e alongamento das
unidades muacutesculo-tendatildeo atraveacutes de um modelo viscoelaacutesticohiperelaacutestico
- estudar o bouncing elaacutestico da corrida em inclinaccedilotildees
- estudar o efeito da fadiga no bouncing elaacutestico da corrida humana
- estudar o modelo massa-mola ponto-a-ponto
- estudar o bouncing elaacutestico entre sujeitos com diferentes estruturas
muacutesculo-esqueleacuteticas (velocistas vs fundistas obesos vs natildeo-obesos homens vs
mulheres)
119
- usar os paracircmetros do modelo massa-mola e as assimetrias contato-
despregue de sujeitos normais para comparaccedilatildeo com amputados e portadores de
necessidades especiais com restriccedilotildees na locomoccedilatildeo
- estudar o bouncing elaacutestico na corrida de velocidade de atletas de alto
rendimento
553 Modelo matemaacutetico da locomoccedilatildeo terrestre
Testar o modelo
- para situaccedilatildeo de aceleraccedilotildees
- em animais extintos
120
6 Referecircncias
ALESHINSKY SY An energy sources and fractions approach to the mechanical
energy expenditure problem--IV Criticism of the concept of energy transfers within
and between links J Biomech 19 4 307-309 1986
ALEXANDER RM Damper for bad vibrations Nature 414 6866 855-857 2001
ALEXANDER RM Energy-saving mechanisms in walking and running J Exp Biol 160
55-69 1991
ALEXANDER RM Models and the scaling of energy costs for locomotion J Exp Biol
208 Pt 9 1645-1652 2005
ALEXANDER RM Optimization and gaits in the locomotion of vertebrates Physiol Rev
69 4 1199-1227 1989
ALEXANDER RM Principles of animal locomotion Princeton NJ Princeton
University Press 2003
ALEXANDER RM Tendon elasticity and muscle function Comp Biochem Physiol A
Mol Integr Physiol 133 4 1001-1011 2002
ALEXANDER RM Vertical movements in walking and running Journal of Zoology
185 27-40 1978
ALEXANDER RM JAYES AS Fourier analysis of forces exerted in walking and
running J Biomech 13 4 383-390 1980
ALEXANDER RM VERNON A Mechanics of hopping by kangaroos (Macropodidae)
Journal of Zoology 177 265-303 1975
121
ANDERS C WAGNER H PUTA C GRASSME R PETROVITCH A SCHOLLE
HC Trunk muscle activation patterns during walking at different speeds J
Electromyogr Kinesiol 17 2 245-252 2007
ANDERSON KG BEHM DG Maintenance of EMG activity and loss of force output
with instability J Strength Cond Res 18 3 637-640 2004
ARDIGO LP SAIBENE F MINETTI AE The optimal locomotion on gradients
walking running or cycling Eur J Appl Physiol 90 3-4 365-371 2003
BASTIEN GJ HEGLUND NC SCHEPENS B The double contact phase in walking
children J Exp Biol 206 Pt 17 2967-2978 2003
BASTIEN GJ SCHEPENS B WILLEMS PA HEGLUND NC Energetics of load
carrying in Nepalese porters Science 308 5729 1755 2005
BIEWENER AA Muscle-tendon stresses and elastic energy storage during locomotion
in the horse Comp Biochem Physiol B Biochem Mol Biol 120 1 73-87 1998
BIEWENER AA Patterns of mechanical energy change in tetrapod gait pendula
springs and work J Exp Zoolog A Comp Exp Biol 305 11 899-911 2006
BIEWENER AA KONIECZYNSKI DD BAUDINETTE RV In vivo muscle forceshy
length behavior during steady-speed hopping in tammar wallabies J Exp Biol 201
Pt 11 1681-1694 1998
BIGLAND-RITCHIE B WOODS JJ Integrated electromyogram and oxygen uptake
during positive and negative work J Physiol 260 2 267-277 1976
BLANCO RE GAMBINI R A biomechanical model for size speed and anatomical
variations of the energetic costs of running mammals J Theor Biol 241 1 49-61
2006
BLAXTER K Energy metabolism in animals and man Cambridge UK Cambridge
University Press 1989
BLICKHAN R The spring-mass model for running and hopping J Biomech 22 11-12
1217-1227 1989
BLICKHAN R SEYFARTH A GEYER H GRIMMER S WAGNER H GUNTHER
M Intelligence by mechanics Philos Transact A Math Phys Eng Sci 365 1850
199-220 2007
122
CAVAGNA GA Force platforms as ergometers J Appl Physiol 39 1 174-179 1975
CAVAGNA GA The landing-take-off asymmetry in human running J Exp Biol 209 Pt
20 4051-4060 2006
CAVAGNA GA DUSMAN B MARGARIA R Positive work done by a previously
stretched muscle J Appl Physiol 24 1 21-32 1968
CAVAGNA GA FRANZETTI P FUCHIMOTO T The mechanics of walking in
children J Physiol 343 323-339 1983
CAVAGNA GA FRANZETTI P HEGLUND NC WILLEMS P The determinants of
the step frequency in running trotting and hopping in man and other vertebrates J
Physiol 399 81-92 1988
CAVAGNA GA HEGLUND NC WILLEMS PA Effect of an increase in gravity on the
power output and the rebound of the body in human running J Exp Biol 208 Pt 12
2333-2346 2005
CAVAGNA GA KANEKO M Mechanical work and efficiency in level walking and
running J Physiol 268 2 467--481 1977
CAVAGNA GA MANTOVANI M WILLEMS PA MUSCH G The resonant step
frequency in human running Pflugers Arch 434 6 678-684 1997
CAVAGNA GA MARGARIA R Mechanics of walking J Appl Physiol 21 1 271-278
1966
CAVAGNA GA SAIBENE FP MARGARIA R External work in walking J Appl
Physiol 18 1-9 1963
CAVAGNA GA SAIBENE FP MARGARIA R Mechanical Work in Running J Appl
Physiol 19 249-256 1964
CAVAGNA GA THYS H ZAMBONI A The sources of external work in level walking
and running J Physiol 262 3 639-657 1976
CAVAGNA GA WILLEMS PA FRANZETTI P DETREMBLEUR C The two power
limits conditioning step frequency in human running J Physiol 437 95-108 1991
CAVAGNA GA WILLEMS PA HEGLUND NC The role of gravity in human walking
pendular energy exchange external work and optimal speed J Physiol 528 Pt 3
657-668 2000
123
CAVAGNA GA WILLEMS PA HEGLUND NC Walking on Mars Nature 393 6686
636 1998
CAVAGNA GA WILLEMS PA LEGRAMANDI MA HEGLUND NC Pendular
energy transduction within the step in human walking J Exp Biol 205 Pt 21 3413shy
3422 2002
CERRETELLI P VEICSTEINAS A FUMAGALLI M DELLORTO L Energetics of
isometric exercise in man J Appl Physiol 41 2 136-141 1976
DEN OTTER AR GEURTS AC MULDER T DUYSENS J Speed related changes
in muscle activity from normal to very slow walking speeds Gait Posture 19 3 270shy
278 2004
DOHERTY TJ Invited review Aging and sarcopenia J Appl Physiol 95 4 1717-1727
2003
DOKE J DONELAN JM KUO AD Mechanics and energetics of swinging the human
leg J Exp Biol 208 Pt 3 439-445 2005
DOKE J KUO AD Energetic cost of producing cyclic muscle force rather than work to
swing the human leg J Exp Biol 210 Pt 13 2390-2398 2007
EVANS SL DAVY KP STEVENSON ET SEALS DR Physiological determinants
of 10-km performance in highly trained female runners of different ages J Appl
Physiol 78 5 1931-1941 1995
FEDAK MA HEGLUND NC TAYLOR CR Energetics and mechanics of terrestrial
locomotion II Kinetic energy changes of the limbs and body as a function of speed
and body size in birds and mammals J Exp Biol 97 23-40 1982
FENN WO Work against gravity and work due to velocity changes in running Am J
Physiol 93 433-462 1930
FENN WO MARSH BS Muscular force at different speeds of shortening J Physiol
85 3 277-297 1935
FORMENTI F ARDIGO LP MINETTI AE Human locomotion on snow determinants
of economy and speed of skiing across the ages Proc Biol Sci 272 1572 1561shy
1569 2005
124
FORMENTI F MINETTI AE Human locomotion on ice the evolution of ice-skating
energetics through history J Exp Biol 210 Pt 10 1825-1833 2007
FRERIKS B HERMENS H DISSELHORST-KLUG C RAU G The
recommendations for sensor and sensor placement procedures for surface
electromyography In HERMENS H (editor) European recommendations for
surface electromyography Enschede Roessingh Research and Development
1991
FRONTERA WR SUH D KRIVICKAS LS HUGHES VA GOLDSTEIN R
ROUBENOFF R Skeletal muscle fiber quality in older men and women Am J
Physiol Cell Physiol 279 3 C611-618 2000
FUKUNAGA T KUBO K KAWAKAMI Y FUKASHIRO S KANEHISA H
MAGANARIS CN In vivo behaviour of human muscle tendon during walking Proc
Biol Sci 268 1464 229-233 2001
GARDNER-MORSE MG STOKES IA The effects of abdominal muscle coactivation
on lumbar spine stability Spine 23 1 86-91 discussion 91-82 1998
GEYER H SEYFARTH A BLICKHAN R Compliant leg behaviour explains basic
dynamics of walking and running Proc Biol Sci 273 1603 2861-2867 2006
GOTTSCHALL JS KRAM R Energy cost and muscular activity required for leg swing
during walking J Appl Physiol 99 1 23-30 2005
GOTTSCHALL JS KRAM R Mechanical energy fluctuations during hill walking the
effects of slope on inverted pendulum exchange J Exp Biol 209 Pt 24 4895-4900
2006
GRANATA KP MARRAS WS Cost-benefit of muscle cocontraction in protecting
against spinal instability Spine 25 11 1398-1404 2000
GRANATA KP ORISHIMO KF Response of trunk muscle coactivation to changes in
spinal stability J Biomech 34 9 1117-1123 2001
GRIFFIN TM ROBERTS TJ KRAM R Metabolic cost of generating muscular force
in human walking insights from load-carrying and speed experiments J Appl
Physiol 95 1 172-183 2003
HEGLUND NC Running a-fowl of the law Science 303 47-48 2004
125
HEGLUND NC CAVAGNA GA Mechanical work oxygen consumption and efficiency
in isolated frog and rat muscle Am J Physiol 253 1 Pt 1 C22-29 1987
HEGLUND NC CAVAGNA GA TAYLOR CR Energetics and mechanics of
terrestrial locomotion III Energy changes of the centre of mass as a function of
speed and body size in birds and mammals J Exp Biol 97 41-56 1982a
HEGLUND NC FEDAK MA TAYLOR CR CAVAGNA GA Energetics and
mechanics of terrestrial locomotion IV Total mechanical energy changes as a
function of speed and body size in birds and mammals J Exp Biol 97 57-66
1982b
HILL AV The heat of shortening and the dynamic constants of muscle Proceedings of
the Royal Society B 126 136-195 1938
HOYT DF TAYLOR CR Gait and the energetics of locomotion in horses Nature
292 239-240 1981
ISHIKAWA M KOMI PV GREY MJ LEPOLA V BRUGGEMANN GP Muscleshy
tendon interaction and elastic energy usage in human walking J Appl Physiol 99
2 603-608 2005
ISHIKAWA M PAKASLAHTI J KOMI PV Medial gastrocnemius muscle behavior
during human running and walking Gait Posture 25 3 380-384 2007
KARAMANIDIS K ARAMPATZIS A Mechanical and morphological properties of
different muscle-tendon units in the lower extremity and running mechanics effect of
aging and physical activity J Exp Biol 208 Pt 20 3907-3923 2005
KARAMANIDIS K ARAMPATZIS A BRUGGEMANN GP Symmetry and
reproducibility of kinematic parameters during various running techniques Med Sci
Sports Exerc 35 6 1009-1016 2003
KER RF BENNETT MB BIBBY SR KESTER RC ALEXANDER RM The
spring in the arch of the human foot Nature 325 7000 147-149 1987
KLASS M BAUDRY S DUCHATEAU J Aging does not affect voluntary activation of
the ankle dorsiflexors during isometric concentric and eccentric contractions J Appl
Physiol 99 1 31-38 2005
126
KNAFLITZ M BONATO P Time-frequency methods applied to muscle fatigue
assessment during dynamica contractions J Electromyogr Kinesiol 9 337-350
1999
KOMI PV Stretch-shortening cycle a powerful model to study normal and fatigued
muscle J Biomech 33 10 1197-1206 2000
KRAM R DOMINGO A FERRIS DP Effect of reduced gravity on the preferred walkshy
run transition speed J Exp Biol 200 Pt 4 821-826 1997
KRAM R TAYLOR CR Energetics of running a new perspective Nature 346 6281
265-267 1990
LAMOTH CJ MEIJER OG DAFFERTSHOFER A WUISMAN PI BEEK PJ
Effects of chronic low back pain on trunk coordination and back muscle activity during
walking changes in motor control Eur Spine J 15 1 23-40 2006
LAY AN HASS CJ RICHARD NICHOLS T GREGOR RJ The effects of sloped
surfaces on locomotion an electromyographic analysis J Biomech 40 6 1276shy
1285 2007
LOWE DA SUREK JT THOMAS DD THOMPSON LV Electron paramagnetic
resonance reveals age-related myosin structural changes in rat skeletal muscle
fibers Am J Physiol Cell Physiol 280 3 C540-547 2001
MALOIY GM HEGLUND NC PRAGER L CAVAGNA GA TAYLOR CR
Energetic cost of carrying loads have African women discovered an economic way
Nature 319 668-669 1986
MALVILLE NJ BYRNES WC ALLEN LIM B BASNYAT R Commercial porters of
eastern nepal health status physical work capacity and energy Expenditure Am J
Hum Biol 13 44-56 2001
MARGARIA R Sulla fisiologia e specialmente sul consumo energetico della marcia
e della corsa a varia velocitagrave ed inclinazione del terreno 1938
MARSH RL ELLERBY DJ CARR JA HENRY HT BUCHANAN CI Partitioning
the energetics of walking and running swinging the limbs is expensive Science
303 5654 80-83 2004
127
MCMAHON TA CHENG GC The mechanics of running how does stiffness couple
with speed J Biomech 23 Suppl 1 65-78 1990
MIAN OS THOM JM ARDIGO LP NARICI MV MINETTI AE Metabolic cost
mechanical work and efficiency during walking in young and older men Acta
Physiol (Oxf) 186 2 127-139 2006
MINETTI AE The biomechanics of skipping gaits a third locomotion paradigm Proc
Biol Sci 265 1402 1227-1235 1998a
MINETTI AE A model equation for the prediction of mechanical internal work of
terrestrial locomotion J Biomech 31 5 463-468 1998b
MINETTI AE ALEXANDER RM A theory of metabolic costs for bipedal gaits J Theor
Biol 186 4 467-476 1997
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of gradient walking
energetics in man J Physiol 472 725-735 1993
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of the minimum
energy cost of gradient running in humans J Exp Biol 195 211-225 1994
MINETTI AE ARDIGO LP SAIBENE F FERRERO S SARTORIO A Mechanical
and metabolic profile of locomotion in adults with childhood-onset GH deficiency Eur
J Endocrinol 142 1 35-41 2000
MINETTI AE FORMENTI F ARDIGO LP Himalayan porters specialization
metabolic power economy efficiency and skill Proc Biol Sci 273 1602 2791shy
2797 2006
MORSE CI THOM JM REEVES ND BIRCH KM NARICI MV In vivo
physiological cross-sectional area and specific force are reduced in the
gastrocnemius of elderly men J Appl Physiol 99 3 1050-1055 2005
NILSSON J THORSTENSSON A Ground reaction forces at different speeds of human
walking and running Acta Physiol Scand 136 2 217-227 1989
NYMARK JR BALMER SJ MELIS EH LEMAIRE ED MILLAR S
Electromyographic and kinematic nondisabled gait differences at extremely slow
overground and treadmill walking speeds J Rehabil Res Dev 42 4 523-534 2005
128
OCHALA J DORER DJ FRONTERA WR KRIVICKAS LS Single skeletal muscle
fiber behavior after a quick stretch in young and older men a possible explanation of
the relative preservation of eccentric force in old age Pflugers Arch 452 4 464shy
470 2006
ONAMBELE GL NARICI MV MAGANARIS CN Calf muscle-tendon properties and
postural balance in old age J Appl Physiol 100 6 2048-2056 2006
PHILLIPS SK BRUCE SA WOLEDGE RC In mice the muscle weakness due to
age is absent during stretching J Physiol 437 63-70 1991
PORTER MM VANDERVOORT AA KRAMER JF Eccentric peak torque of the
plantar and dorsiflexors is maintained in older women J Gerontol A Biol Sci Med
Sci 52 2 B125-131 1997
POUSSON M LEPERS R VAN HOECKE J Changes in isokinetic torque and
muscular activity of elbow flexors muscles with age Exp Gerontol 36 10 1687shy
1698 2001
PRILUTSKY BI GREGOR RJ Swing- and support-related muscle actions
differentially trigger human walk-run and run-walk transitions J Exp Biol 204 Pt 13
2277-2287 2001
ROBERTS TJ KRAM R WEYAND PG TAYLOR CR Energetics of bipedal
running I Metabolic cost of generating force J Exp Biol 201 Pt 19 2745-2751
1998
ROBERTS TJ MARSH RL WEYAND PG TAYLOR CR Muscular force in
running turkeys the economy of minimizing work Science 275 5303 1113-1115
1997
SAIBENE F MINETTI AE Biomechanical and physiological aspects of legged
locomotion in humans Eur J Appl Physiol 88 4-5 297-316 2003
SCHEPENS B WILLEMS PA CAVAGNA GA The mechanics of running in children
J Physiol 509 ( Pt 3) 927-940 1998
SCHEPENS B WILLEMS PA CAVAGNA GA HEGLUND NC Mechanical power
and efficiency in running children Pflugers Arch 442 1 107-116 2001
129
TAYLOR CR Force development during sustained locomotion a determinant of gait
speed and metabolic power J Exp Biol 115 253-262 1985
TAYLOR CR HEGLUND NC MALOIY GM Energetics and mechanics of terrestrial
locomotion I Metabolic energy consumption as a function of speed and body size in
birds and mammals J Exp Biol 97 1-21 1982
TRAPPE S GALLAGHER P HARBER M CARRITHERS J FLUCKEY J
TRAPPE T Single muscle fibre contractile properties in young and old men and
women J Physiol 552 Pt 1 47-58 2003
VALOUR D POUSSON M Compliance changes of the series elastic component of
elbow flexor muscles with age in humans Pflugers Arch 445 6 721-727 2003
VANDERVOORT AA KRAMER JF WHARRAM ER Eccentric knee strength of
elderly females J Gerontol 45 4 B125-128 1990
WHITE SG MCNAIR PJ Abdominal and erector spinae muscle activity during gait
the use of cluster analysis to identify patterns of activity Clin Biomech (Bristol
Avon) 17 3 177-184 2002
WILLEMS PA CAVAGNA GA HEGLUND NC External internal and total work in
human locomotion J Exp Biol 198 Pt 2 379-393 1995
WINTER D Biomechanics and motor control of human movement 3rd Waterloo
John Wiley amp Sons 2005
WINTERS JM WOO S Multiple muscle systems Springer-Verlag 1990
WOLEDGE RC CURTIN N HOMSHER E Energetic aspects of muscle
contraction Londres Academic Press 1985
WRIGHT S WEYAND PG The application of ground force explains the energetic cost
of running backward and forward J Exp Biol 204 Pt 10 1805-1815 2001
YAMAGUCHI G SAWA A MORAN D RESSLER M WINTERS JM A survey of
human musculotendon actuator parameters J M Winters 1991
130
Apecircndices
A- Programa de anaacutelise EMG da caminhada LocoEmg
Uma seacuterie de algoritmos (figuras A1 A2 e A3) foram desenvolvidos em
ambiente Labview versatildeo 71 a fim de analisar o sinal bruto de EMG Para tanto
informaccedilotildees advindas de sensores de pressatildeo foram calculadas de forma a
possibilitar as seguintes anaacutelises
Figura A1 Janela principal do programa LocoEmgVI
131
Este programa foi utilizado no capiacutetulo 2 no experimento do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees e no experimento do custo EMG
da locomoccedilatildeo de montanhistas Caucasianos e carregadores Nepaleses no Himalaia
Nepal Atraveacutes do uso dos sensores de pressatildeo foi possiacutevel calcular o tempo de
passada o tempo de vocirco o tempo de apoio e o tempo de apoio duplo para utilizar
no desenvolvimento das abordagens experimental e teoacuterica do custo EMG da
locomoccedilatildeo humana
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI
Os dados de input do programa foram inseridos na janela principal (figura
A1) onde no final da anaacutelise satildeo apresentados os resultados de atividade EMG
meacutedia e desvio padratildeo em funccedilatildeo do percentual do ciclo de passadaO bloco de
diagrama apresentado na figura A2 mostra a estrutura geral do programa com seus
algoritmos localizados nas subrotinas (quadrados verdes)
As principais subrotinas ou algoritmos de primeiro niacutevel satildeo i) Abre e organiza
arquivo ii) Filtra sinal EMG iii) Calcula Variaacuteveis Espaccedilo-Temporais iv) Divide
Ciclos e Interpola Sinal EMG v) Integra Sinal EMG vi) Salva Resultados vi) Imprime
Resultados Gerais
132
Na subrotina Salva resultados arrays eram transformados em arquivos no
formato txt para posterior anaacutelise estatiacutestica Os arquivos eram variaacuteveis espaccedilo-
temporais valores meacutedios interpolados para fase de apoio e balanccedilo valores Emg
meacutedios e desvio-padratildeo interpolados por ciclo de passada e somatoacuterio das integrais
Emg brutos e convertidos por Equivalentes Metaboacutelicos de Ativaccedilatildeo Emg
A janela de impressatildeo eacute apresentada na figura A3
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados
Nesta janela os dados EMGrsquos por muacutesculo satildeo apresentados atraveacutes de seus
valores valores meacutedios e dprsquos em funccedilatildeo do percentual do ciclo de passada
Informaccedilotildees da Vf nome do arquivo inclinaccedilatildeo do terreno e nuacutemero de ciclos
analisados tambeacutem satildeo apresentados Arquivos de imagem destas janelas foram
elaborados e armazenados para posterior verificaccedilatildeo dos dados
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada)
133
PEYREacute-TARTARUGA LA TARTARUGA MP COERTJENS M KRUEL LFM
Influence of Allometry scale on relationship between running economy and
kinematical parameters Biology of Sport (aceito) 2008
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
OLIVEIRA AR KRUEL LFM Physiologic and biomechanical effects ofwater run
training on running performance European Journal of Applied Physiology
(submetido) 2008
CORREA TC PEYREacute-TARTARUGA LA FURLAN E RIBAS R LOSS JF
Mathematical model of energy cost in sprint running Proceedings of XXV
International Symposium on Biomechanics in Sports ISBS (CD) 2007
PEYREacute-TARTARUGA LA COERTJENS M TARTARUGA MP DE MEDEIROS
MH KRUEL LFM Influence of the allometric scale on the relationship between
running economy and biomechanical variables in runners Medicine and Science in
Sports and Exercise 39 (Supplement) S208-S209 2007
PEYREacute-TARTARUGA LA DE MEDEIROS MH COERTJENS M TARTARUGA
MP KRUEL LFM The relation between running economy and kinematical
variables influence of body mass in competitive runners Journal of Biomechanics
39 (Supplement 1) S631 2006
ILHA J ARAUJO RT MALYSZ T PEYREacute-TARTARUGA LA ACHAVAL M
Effects of endurance and resistance exercise training on locomotion of rats after
sciatic nerve crush Physiological Mini Reviews 2 (4) 109 2006
ILHA J PEYREacute-TARTARUGA LA ARAUJO RT METZEN F MALYSZ T
CANTO F ACHAVAL ELENA M LOSS JF Locomotor behaviour assessment in
the rat by kinematic analysis Journal of Biomechanics 39 (Supplement 1) S507
2006
SCHIEHLL PE PEYREacute-TARTARUGA LA ZINGANO GM LOSS JF
Estimation of the quantification of the elastics loads on the jump fit circuit Journal of
134
Biomechanics 39 (Supplement 1) S555 2006
MARTINEZ FG PEYREacute-TARTARUGA LA HERMEL EES XAVIER LL
RASIA-FILHO AA ACHAVAL M Intermediate filament expression in the medial
5thamygdala subnuclei during postnatal development of male and female rats
Forum of the Federation of European Neuroscience Societes Viena FENS 3
A1556 2006
FRAGA CHW BLOEDOW LS CARPES F PEYREacute-TARTARUGA LA
TARTARUGA MP FOLLMER B GUIMARAtildeES ACS Methodologic proposal to
verify the influence of cycling on running kinematic aspects in Triathlon Revista
Motriz 12 (2) 159-164 2006
PEYREacute-TARTARUGA LA KRUEL LFM Deep water running limits and
possibilities to elite runners Brazilian Journal of Sports Medicine 12 (5)286-290
2006
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
RIBAS LR KRUEL LFM Comparison of the subtalar joint angle during
submaximal running speeds Acta Ortopeacutedica Brasileira 13 (2) 57-60 2005
C- Textos completos referentes agrave tese
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA Old men
running mechanical work and elastic bounce Proceedings of the Royal Society B
275 (1633) 411-418 2008 101098rspb20071288
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA The landingshy
takeoff asymmetry is enhanced in old age Journal of Experimental Biology
(aceito com modificaccedilotildees) 2008
MINETTI AE PEYREacute-TARTARUGA LA ARDIGOgrave LP FORMENTI F SUSTA
135
D Energetical and electromyographical cost of locomotion in Nepalese Porters on
Himalaya Anais do XII Congresso Brasileiro de Biomecacircnica 88-94 2007
D- Paracircmetros musculares
Os paracircmetros musculares utilizados no estudo Custo EMG da caminhada
humana foram adquiridos de YAMAGUCHI et al (1991) e satildeo apresentados em
detalhes nas duas figura seguintes (figuras D1 e D2)
Figura D1 Paracircmetros musculares utilizados Fonte YAMAGUCHI et al 1991
136

---------------------------------------------------------
--------------------------------------------------------
---------------------------------------------------------
4
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL
PROGRAMA DE POacuteS-GRADUACcedilAtildeO EM CIEcircNCIAS DO MOVIMENTO HUMANO
A COMISSAtildeO EXAMINADORA ABAIXO ASSINADA APROVA A TESE
ENERGEacuteTICA E MECAcircNICA DA CAMINHADA E CORRIDA HUMANA
Com especial referecircncia agrave locomoccedilatildeo em plano inclinado e efeitos da idade
ELABORADA POR
LEONARDO ALEXANDRE PEYREacute TARTARUGA
ORIENTADO POR
JEFFERSON FAGUNDES LOSS
COMO REQUISITO PARCIAL PARA A OBTENCcedilAtildeO DO GRAU DE
DOUTOR EM CIEcircNCIAS DO MOVIMENTO HUMANO
COMISSAtildeO EXAMINADORA
Alberto Enrico Minetti MD
Istituto di Fisiologia Umana I Universitagrave degli Studi di Milano Itaacutelia
Carlos Bolli Mota PhD
Laboratoacuterio de Biomecacircnica Universidade Federal de Santa Maria Brasil
Rogeacuterio Jose Marczak Dr Eng
Grupo de Mecacircnica Aplicada Universidade Federal do Rio Grande do Sul Brasil
Porto Alegre 13 de fevereiro de 2008
5
DEDICATOacuteRIA
Aos meus irmatildeos Ivaacuten e Virginia
Pela convivecircncia pela paciecircncia pelo exemplo
de caraacuteter entrega e brilhantismo nas coisas
que fazem
6
AGRADECIMENTOS
Agradeccedilo a todos que ajudaram de forma direta ou indireta na concretizaccedilatildeo do meu doutorado Tenho a plena convicccedilatildeo de que esta obra eacute fruto de um trabalho coletivo e estas linhas representam muito timidamente meu sentimento de gratidatildeo com todas as pessoas que estiveram comigo nesta caminhada
Ao meu orientador Prof Jefferson Loss por tantas coisas que surgiram advindas daquele convite no Centro Oliacutempico Especialmente agrave liberdade dada para seguir o caminho que trilhei nestes trecircs anos e ao exemplo de busca incessante de aprofundamento no que estamos estudando
Agrave minha Matildee pela palavra certa na hora certa Agrave memoacuteria do meu pai Eduardo Juan Peyreacute Priguetti Agrave minha famiacutelia Matildee Ivaacuten Virgiacutenia La Abuela Felipe Fernanda La Tia Gianella Marcus Joseacute Luiz Juliana
Agrave minha amada namorada e companheira Ileana pelo apoio e amor Obrigado por trilhar este caminho ao meu lado obrigado pelo esforccedilo e pela forccedila de vontade para encarar a fase ldquomilaneserdquo de nossas vidas Agradeccedilo tambeacutem agrave famiacutelia de Cordoba Abel Raquel Gabriela Adriaacuten Gerardo e Camila
Ao Grupo de Investigaccedilatildeo da Mecacircnica do Movimento ndash BIOMEC Faacutebia Artur Faacutebio Paulo Coxa Francisco Carolzita Joely Gustavo Dani Aldabe Letiacutecia Deacutebi Maicon Lipe e Marcelo pelo companheirismo e aprendizagem Em especial aos meus professores de Matlab Daniel Everton e La Torre
Aos meus bolsistas e alunos Roberto Ribas Thiago Duarte Queiroz Mariana Boos e Carlos Coutinho especialmente ao Roberto e ao Thiago pela ajuda nestes uacuteltimos meses
Aos colegas do Grupo de Histofisiologia Comparada da Ufrgs em especial agrave Profa Matilde Jocemar Thais e a Rafaela pela convivecircncia e ensinamentos durante meu primeiro ano de doutorado
Aos Professores e funcionaacuterios do Istituto di Fisiologia Umana I de Milatildeo pela recepccedilatildeo calorosa e apoio incondicional
Aos meus co-orientadores Prof Alberto Minetti e Prof Giovanni Cavagna pela orientaccedilatildeo disponibilidade e atenccedilatildeo dispensada al braziliano grazie mille Aos meus companheiros Davide Susta e Mario Legramandi pelo companheirismo e ensinamentos durante o ano em Milatildeo
Aos sujeitos dos experimentos apresentados nesta tese Aos meus caros companheiros da Expediccedilatildeo no Nepal Ardigograve Formenti Susta e
Canova pela descontraccedilatildeo e parceria Ao Comitecirc de Pesquisa em Altitude da Repuacuteblica da Itaacutelia Everest-K2-CNR por ter dado o apoio financeiro para minha participaccedilatildeo na Expediccedilatildeo Aos caros Kagi Bista e Botko e aos carregadores Nepaleses Namaskar
Ao CNPq pelo apoio financeiro que permitiu meus estudos durante estes trecircs anos inclusive meus estudos no exterior
Aos companheiros funcionaacuterios da Esef que me ldquosuportamrdquo desde 1995 em especial aos colegas do Poacutes-Graduaccedilatildeo Rosane Ana e Andrezito e aos colegas do Lapex Dani Luciano Alex Carla Maacutercia Sarinha Vanessa e Luiz
7
SUMAacuteRIO
LISTA DE FIGURAS 10
RESUMO 14
ABSTRACT 16
DEFINICcedilAtildeO DE TERMOS 18
LISTA DE SIacuteMBOLOS E ABREVIATURAS 20
INTRODUCcedilAtildeO GERAL 27
11 Locomoccedilatildeo humana 27
13 Formato da tese 30
131 Objetivo geral 32
132 Objetivos especiacuteficos 32
2 O CUSTO EMG DA CAMINHADA HUMANA 33
21 Introduccedilatildeo 33
22 Metodologia 36
221 Construccedilatildeo do modelo 36
222 Testando o modelo 41
23 Resultados 42
231 Variaacuteveis espaccedilos-temporais 42
232 Atividade EMG 43
8
233 Custo EMG 47
24 Discussatildeo 49
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular 49
242 Sobre o meacutetodo 51
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia 52
251 Materiais e meacutetodos 53
252 Resultados 56
253 Discussatildeo 57
3 MECAcircNICA DA CORRIDA DE IDOSOS 60
31 Introduccedilatildeo 60
32 Materiais e Meacutetodos 61
321 Amostra e procedimento experimental 61
322 Dos registros da plataforma ao trabalho externo 63
323 Estimativa do trabalho interno 66
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato 66
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio 67
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente 68
327 Transduccedilatildeo EpEk durante o passo 68
328 Rigidez vertical (k) 70
329 Estatiacutestica 71
33 Resultados 71
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM 72
332 Trabalho 74
333 Assimetria contato-despregue 75
34 Discussatildeo 76
341 Sobre o meacutetodo 76
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical 80
343 A assimetria contato-despregue 90
9
4 PREDIZENDO VF CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO
TERRESTRE 101
41 Introduccedilatildeo 101
42 Equaccedilatildeo do tempo de atraso 102
43 Estimativa da velocidade horizontal 104
44 Equaccedilatildeo de custo energeacutetico 106
45 Discussatildeo 107
5 CONCLUSAtildeO GERAL 111
51 O custo EMG da caminhada humana 111
52 A mecacircnica da corrida de idosos 111
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre 112
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico 112
541 Respondendo algumas criacuteticas atuais 116
55 Propostas para futuros estudos 118
551 Custo EMG da caminhada humana 118
552 Mecacircnica da corrida dos idosos 118
553 Modelo matemaacutetico da locomoccedilatildeo terrestre 119
6 REFEREcircNCIAS 120
APEcircNDICES 130
A- Programa de anaacutelise EMG da caminhada LocoEmg 130
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada) 132
C- Textos completos referentes agrave tese 134
D- Paracircmetros musculares 135
10
Lista de Figuras
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-invertido para a
caminhada e massa-mola para a corrida (Fonte SAIBENE e MINETTI 2003
modificado no presente estudo) 29
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset 38
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda
metade da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo
isomeacutetrica Setas verticais apontando para baixo indicam momento de contato
e de despregue 39
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de
passada com o tempo de passada normalizado em percentual do ciclo O 0shy
100 representa o momento de contato com o solo As cores indicam a
velocidade de caminhada (de 2 agrave 7 kmh-1) Cada muacutesculo eacute representado
nas linhas e em cada coluna eacute apresentada a atividade EMG por inclinaccedilatildeo 46
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal + carga)
11
dos carregadores Nepaleses (NEP) e montanhistas Caucasianos (CAU) em
subida (up) e descida (down) 57
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da PMV (positiva ou
negativa) pela potecircncia metaboacutelica respectiva (MINETTI et al 2006) As
linhas satildeo as razotildees entre eficiecircncia muscular positiva e negativa
(WOLEDGE et al 1985) 58
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado 69
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da caminhada
(pecircndulo-invertido) e de segmento complacente da corrida (massa-mola) e
seus principais constituintes Note que o tracejado indica a trajetoacuteria do corpo
de massa m durante o contato g eacute a aceleraccedilatildeo gravitacional k eacute a rigidez da
mola ll0 eacute o comprimento do membro inferior e a0 eacute o acircngulo da perna de
apoio no momento do contato com o solo 77
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um passo
em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis a
direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup
+ Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo
(tae) da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na
direccedilatildeo vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os
ciacuterculos em vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2)
e a frente (Lce) A linha em vermelho pontilhada em cada painel indica o
tempo de contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente
(Lc) durante o passo As linhas azuis pontilhadas em cada painel indicam o
tempo aeacutereo total (ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La)
durante o passo As barras verticais indicam o desvio-padratildeo da meacutedia os
12
nuacutemeros proacuteximos aos siacutembolos nos paineacuteis superiores indicam o nuacutemero de
itens nas meacutedias 85
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e
velocidade vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown
(paineacuteis inferiores) atingidos pelo CM durante o passo em funccedilatildeo da
velocidade de corrida Estatiacutestica e outras indicaccedilotildees conforme a figura 33 89
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e
frequumlecircncia do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute
maior nos idosos nas altas velocidades (paineacuteis superiores) a rigidez vertical
normalizada pela massa eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras
indicaccedilotildees conforme figura 33 91
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com
seus 94
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As
fraccedilotildees do deslocamento vertical do CM durante contato ScSv (ciacuterculos
preenchidos deslocamento descendente ciacuterculos abertos deslocamento
ascendente) e quando a Fv eacute maior do que o PC SceSv (quadrados
preenchidos deslocamento 95
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito
idoso paineacuteis a direita sujeito jovem em cada painel o comportamento da
transduccedilatildeo Ep-Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas
na energia potencial gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf
normalizada para oscilar entre zero e um Mesmos passos da figura 1 cada
painel comeccedila e termina no valor menor da curva Ep As cores diferentes na
curva Ep distinguem as fraccedilotildees do passo onde a Fv exercida no solo eacute maior
do que o PC (vermelho) e menor do que o PC (azul) As linhas contiacutenuas de
Ep indicam a fase de contato enquanto que as linhas pontilhadas Ep (azul
fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As quatro fases
correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
13
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown
(azul) e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas
pontilhadas verticais satildeo apresentadas nos dois picos de Ek e ocupam a
fraccedilatildeo onde a transduccedilatildeo Ep-Ek ocorre conforme indicado pelos incrementos
da curva Rint(t) 98
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos painel
inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura
31) e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e
barras azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de
corrida Estatiacutestica conforme figura 33 99
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de
reaccedilatildeo do solo durante a corrida 103
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de
progressatildeo 108
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de
progressatildeo Fonte Minetti 1998b 109
Figura 51 Modelo conceitual da locomoccedilatildeo humana 113
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido
de elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006117
Figura A1 Janela principal do programa LocoEmgVI 130
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI 131
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados 132
14
Resumo
Dois modelos mecacircnicos o pecircndulo-invertido e o massa-mola explicam como
os mecanismos pendular e elaacutestico minimizam o dispecircndio energeacutetico advindo dos
muacutesculos durante caminhada e corrida humana A presente tese testa dois efeitos
que para nosso conhecimento todavia natildeo possuem respostas conclusivas da
literatura nomeadamente o processo de envelhecimento na mecacircnica da corrida
humana e o efeito da inclinaccedilatildeo do terreno na velocidade oacutetima da caminhada Para
estudar o primeiro efeito as forccedilas de reaccedilatildeo do solo provenientes de uma
plataforma de forccedila (4m x 050m) foram usadas para a posterior comparaccedilatildeo de i)
trabalho mecacircnico ii) paracircmetros do sistema massa-mola e iii) assimetrias contato-
despregue entre jovens e idosos Os idosos produzem menos forccedila durante a fase
de trabalho mecacircnico positivo com uma menor oscilaccedilatildeo vertical total e oscilaccedilatildeo
durante a fase aeacuterea Consequumlentemente a capacidade de armazenar e re-utilizar
energia elaacutestica dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio
energeacutetico neste grupo quando comparado com jovens Para o modelo do custo
eletromiograacutefico (EMG) da caminhada humana criou-se duas abordagens
experimental e teoacuterica Em ambas as abordagens informaccedilotildees da atividade EMG de
dezesseis muacutesculos sendo 8 posturais e 8 propulsores foram coletadas e
analisadas a partir da integral EMG A abordagem teoacuterica parece ter uma melhor
relaccedilatildeo com as evidecircncias experimentais sobre a energeacutetica da caminhada humana
em inclinaccedilotildees Os principais mecanismos envolvidos na nova hipoacutetese satildeo i)
muacutesculos posturais que natildeo realizam trabalho muscular exercem uma funccedilatildeo
importante na determinaccedilatildeo do dispecircndio energeacutetico total e ii) a presente hipoacutetese
leva em consideraccedilatildeo a co-contraccedilatildeo de muacutesculos antagonistas no dispecircndio
15
energeacutetico total Mais experimentos satildeo necessaacuterios para confirmar o modelo
apresentado neste estudo Aleacutem disso atraveacutes de estrateacutegias de otimizaccedilatildeo e
prediccedilatildeo linear um modelo teoacuterico foi delineado a fim de determinar paracircmetros
mecacircnicos (comprimento de passada e velocidade de progressatildeo) e energeacuteticos da
locomoccedilatildeo terrestre em situaccedilotildees onde as informaccedilotildees disponiacuteveis satildeo apenas a
massa e uma curva forccedila de reaccedilatildeo vertical versus tempo Os resultados advindos
do modelamento correspondem aos paracircmetros determinados experimentalmente
Laboratoacuterios que detenham apenas uma plataforma de forccedila ou nas aacutereas onde as
informaccedilotildees de entrada do atual modelo sejam as uacutenicas informaccedilotildees (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis primaacuterias da
locomoccedilatildeo podem ser preditas com razoaacutevel acuraacutecia
Palavras-chave custo eletromiograacutefico da caminhada mecacircnica da corrida de
idosos modelo teoacuterico da locomoccedilatildeo terrestre mecanismos minimizadores de
energia locomoccedilatildeo humana
16
Abstract
Two mechanical models the inverted pendulum and spring-mass explain how
do the pendular and elastic mechanisms minimizing energy expenditure from
muscles during human walking and running Here we test two effects that to our
knowledge do not have yet conclusive responses from literature specifically the
ageing effects on mechanics of human running and the effect of gradient on walking
optimal speed In order to check the former effect the ground reaction forces came
from a force platform (4m x 05m) were used for a later comparison i) mechanical
work ii) spring-mass parameters and iii) landing-takeoff asymmetries The old
subjects produce less force during positive work resulting in a smaller overall and
aerial vertical oscillation of the centre of mass Consequently the potential for restore
elastic energy from tendons is reduced contributing to greater energy expenditure
than in young subjects In relation to Electromyographical (EMG) Cost of human
walking we created two approaches experimental and theoretical In both
approaches information from EMG activity of sixteen muscles eight postural and
eight propulsor were collected and analysed The theoretical approach seems to fit
better with the energy expenditure during gradient walking The main mechanisms
involved in this new hypothesis are i) postural muscles that do not perform muscular
work play an important role in the total energy expenditure and ii) the present
hypothesis take the co-contraction into account of the antagonist muscles in the total
energy expenditure Further experiments are necessary to confirm this hypothesis
Besides using optimization and linear prediction procedures a theoretical model was
designed to estimate mechanical parameters (stride length and velocity of
progression) and energetic variables of terrestrial locomotion when available
information consists only of mass and one vertical ground reaction force versus time
17
The results from this modelling are similar to experimentally obtained data
Laboratories with just one force platform or in areas where the present modelrsquos input
information be the unique accessible data (eg palaeontology forensic
biomechanics etc) the prime variables of locomotion may be estimated with
reasonable accuracy
Keywords electromyographical cost of walking running mechanics in the
elderly theoretical model of terrestrial locomotion mechanisms for minimizing
expenditure energy human locomotion
18
Definiccedilatildeo de Termos
Contraccedilatildeo concecircntrica contraccedilatildeo muscular realizada durante encurtamento
do muacutesculo
Contraccedilatildeo excecircntrica contraccedilatildeo muscular realizada durante alongamento
do muacutesculo
Custo energeacutetico o dispecircndio advindo dos muacutesculos em funccedilatildeo da distacircncia
percorrida normalizado pela massa corporal A unidade eacute em Jkg-1m -1
Eficiecircncia mecacircnica a potecircncia mecacircnica gerada dividida pela potecircncia
metaboacutelica despendida durante uma passada
Passada um periacuteodo que compreende desde o momento do contato de um
peacute com o solo e finaliza no subsequumlente momento de contato do mesmo peacute
Passo um periacuteodo que compreende desde o momento do contato de um peacute
com o solo e finaliza no subsequumlente momento de contato do peacute contra-
lateral
Potecircncia mecacircnica externa o somatoacuterio dos incrementos positivos de
energia mecacircnica externa durante uma passada dividido pelo tempo da
passada
Recovery ndash R percentual de transferecircncia entre energia cineacutetica e potencial
gravitacional durante um ciclo de passada
Tempo aeacutereo efetivo duraccedilatildeo no qual a forca vertical eacute menor do que a
forccedila peso durante um passo
Tempo de contato efetivo duraccedilatildeo no qual a forccedila vertical eacute maior do que a
forccedila peso durante um passo
Trabalho mecacircnico externo O trabalho realizado para elevar e acelerar o
CM em relaccedilatildeo ao ambiente externo No presente estudo foi desconsiderado
19
o trabalho mecacircnico externo advindo de aceleraccedilotildees horizontais meacutedio-
laterais
Trabalho mecacircnico interno O trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM
Trabalho mecacircnico total O somatoacuterio dos moacutedulos do trabalho mecacircnico
externo e interno No presente estudo o trabalho interno foi considerado
aceitando transferecircncia de energia mecacircnica entre segmentos de mesmos
membros
20
Lista de Siacutembolos e Abreviaturas
l0 comprimento do membro inferior
μV microvolts
0 acircngulo da perna de apoio com o solo no momento
do contato
Fvc Fv meacutedia durante a fase de contato do peacute com o
solo
Ah variaccedilatildeo de altura
AhorPosition idem ao CPexp
At tempo de locomoccedilatildeo
Atime tempo de passada
Ltphoto tempo entre as passagens pelas fotoceacutelulas
2D duas dimensotildees
av aceleraccedilatildeo vertical do CM
avae aceleraccedilatildeo vertical do CM durante fase aeacuterea
efetiva
avce aceleraccedilatildeo vertical do CM durante contato efetivo
avmx aceleraccedilatildeo vertical maacutexima do CM
c constante de custo
CAU Caucasianos
CM centro de massa
cos cosseno
CP comprimento de passada
21
CPexp comprimento de passada determinada
experimentalmente
Ctot Custo energeacutetico da locomoccedilatildeo
dB decibeacuteis
DF duty factor (fraccedilatildeo da passada na qual um peacute toca
o solo)
DFregression valores de Vf preditos por regressatildeo linear
advindos de DF
dp desvio-padratildeo
dt periacuteodo de um quadro
Ecm energia mecacircnica do CM
Ek energia cineacutetica
Ekf energia cineacutetica horizontal
Ekfmn energia cineacutetica horizontal miacutenima
Ekmxdown energia cineacutetica vertical maacutexima durante
deslocamento descendente do CM
Ekmxup energia cineacutetica vertical maacutexima durante
deslocamento ascendente do CM
Ekv energia cineacutetica vertical
Emetabolic potecircncia metaboacutelica
EMG eletromiografia ou eletromiograacutefico
EmgCosttheor custo EMG teoacuterico
EmgCostexp custo EMG teoacuterico
EMGiso atividade EMG durante contraccedilatildeo isomeacutetrica
EMGneg atividade EMG durante trabalho negativo
EMGpos atividade EMG durante trabalho positivo
cmuscular energia metaboacutelica advinda do muacutesculo-esqueleacutetico
cmetaboacutelica energia metaboacutelica total durante locomoccedilatildeo
crepouso energia metaboacutelica durante posiccedilatildeo em peacute
celaacutestica energia recuperada por via elaacutestica
cpendular energia recuperada por via pendular
creconvertida energia total recuperada
Ep energia potencial gravitacional do CM
22
Epmn energia potencial gravitacional miacutenima do CM
total energia total necessaacuteria para realizar a locomoccedilatildeo
f frequumlecircncia de passo
Ff componente antero-posterior da forccedila de reaccedilatildeo do
solo
FinalhorPosition posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo de passada
FP frequumlecircncia de passada
FPexp frequumlecircncia de passada determinada
experimentalmente
FPregression valores de Vf preditos por regressatildeo linear a partir
de dados de FP
FPtheor frequumlecircncia de passada obtida indiretamente
Fr nuacutemero de froude
fs frequumlecircncia do sistema massa-mola
fsample frequumlecircncia de amostragem
Fv componente vertical da forccedila de reaccedilatildeo do solo
Fvmx Fv maacutexima
Fvmxyoung Fv maacutexima nos jovens
Fvmxold Fv maacutexima nos idosos
Fvscale PC mensurado com uma balanccedila
Fvpeak pico de impacto vertical
Fvplate forccedila vertical media durante um ciclo de passada
g aceleraccedilatildeo gravitacional
GPS sistema de posicionamento global
h hora
Hz Hertz
Iv impulso vertical
InitialhorPosition posiccedilatildeo horizontal do quadril no quadro que inicia o
ciclo de passada
Iemg integral EMG
Iemgcon integral EMG durante contraccedilatildeo concecircntrica
Iemgexc integral EMG durante contraccedilatildeo excecircntrica
J Joules
23
k rigidez vertical
kg quilograma
km quilometro
L comprimento do passo
Lae deslocamento horizontal do CM durante fase aeacuterea
efetiva
Lce deslocamento horizontal do CM durante contato
efetivo
M massa corporal
m metros
Mass massa dos muacutesculos analisados
ms milisegundos
mtot massa total (massa total somada agrave carga externa)
mV milivolts
N Newtons
NEP Nepaleses
nframes nuacutemero de quadros que totalizam um ciclo de
passada
nf nuacutemero de quadros
norm normalizado
O2 oxigecircnio
p iacutendice de significacircncia estatiacutestico
PC peso corporal
PMV potecircncia mecacircnica vertical
q fator de forma da curva de Fv em funccedilatildeo do tempo
qmean meacutedia dos valores qrsquos durante o tc
qregression valores de Vf predito por regressatildeo linear a partir
de dados de q
R Recovery percentual de reconversatildeo entre energia
cineacutetica e potencial gravitacional
R coeficiente de correlaccedilatildeo
r transduccedilatildeo entre energia cineacutetica e potencial
gravitacional
24
Rint transduccedilatildeo acumulada entre energia cineacutetica e
potencial gravitacional durante um passo
Rintdown transduccedilatildeo acumulada durante deslocamento
descendente do CM
Rintup transduccedilatildeo acumulada durante deslocamento
ascendente do CM
rms raiz quadrada da meacutedia dos quadrados
s segundos
Sae deslocamento vertical do CM durante fase aeacuterea
efetiva
Saedown deslocamento descendente do CM durante Sae
Saeup deslocamento ascendente do CM durante Sae
Sc deslocamento do CM durante a fase de contato
Sce deslocamento vertical do CM durante contato
efetivo
Scdown deslocamento descendente do CM durante Sc
Scup deslocamento ascendente do CM durante Sc
Scedown deslocamento descendente do CM durante Sce
Sceup deslocamento ascendente do CM durante Sce
SEE erro meacutedio da estimativa
sin seno
Skinf dobra cutacircnea
Sv deslocamento do CM durante um passo
Svdown deslocamento descendente do CM durante Sv
Svup deslocamento ascendente do CM durante Sv
T tempo de um passo
t tempo
ta tempo em que a acontece durante W+
t tempo em que acontece durante W-
ta periacuteodo do passo no qual o peacute natildeo estaacute em contato
com o solo
tae periacuteodo do passo no qual a Fv eacute maior do que o PC
peso corporal
25
taedown periacuteodo do deslocamento descendente do CM
durante tae
taeup periacuteodo do deslocamento ascendente do CM
durante tae
tbrake tempo de Wshy
tc periacuteodo do passo no qual um peacute estaacute em contato
com o solo
tce periacuteodo do passo no qual a Fv eacute menor do que o
PC
tcedown periacuteodo do deslocamento descendente do CM
durante tce
tceup periacuteodo do deslocamento ascendente do CM
durante tce
tpush tempo de W+
tstep tempo do passo
Vf velocidade de progressatildeo
V f velocidade meacutedia de progressatildeo
Vfexp velocidade de progressatildeo determinada
experimentalmente
VO2iso consumo de O2 durante contraccedilatildeo isomeacutetrica
VO2neg consumo de O2 durante trabalho mecacircnico
negativo
VO2pos consumo de O2 durante trabalho mecacircnico positivo
Vv velocidade vertical do CM
Vvmx velocidade vertical maacutexima do CM
Vvmxdown velocidade vertical maacutexima durante deslocamento
descendente do CM
Vvmxup velocidade vertical maacutexima durante deslocamento
ascendente do CM
Wshy trabalho mecacircnico negativo
W Watts
W+ trabalho mecacircnico positivo
Wext trabalho mecacircnico externo
Wextf trabalho mecacircnico externo horizontal
26
Wextf+ trabalho mecacircnico externo horizontal positivo
Wextv trabalho mecacircnico externo vertical
Wint trabalho mecacircnico interno
Wtot trabalho mecacircnico total
a fase durante W+ em que Ek e Ep do CM aumentam
concomitantemente
fase durante W- em que Ek e Ep do CM diminuem
concomitantemente
27
INTRODUCcedilAtildeO GERAL
11 Locomoccedilatildeo humana
A teoria da evoluccedilatildeo Darwinista conhecida como Teoria da Seleccedilatildeo Natural
nos indica entre outros pressupostos que a multiplicidade de espeacutecies que habitam
a face da terra eacute produto de um sistema altamente complexo e competitivo de
sobrevivecircncia sistema este que reflete fatores preditores da aptidatildeo definidos como
geneacuteticos e do meio ambiente As capacidades de reproduccedilatildeo de alimentaccedilatildeo e de
locomoccedilatildeo satildeo moduladas por aspectos do genoacutetipo influenciados pelos fatores
ambientais O conceito de aptidatildeo relacionada agrave locomoccedilatildeo desde um ponto de
vista bioloacutegico pode ser abordado analiticamente atraveacutes de seus componentes
principais Estes satildeo velocidade aceleraccedilatildeo maneabilidade resistecircncia economia
e estabilidade (ALEXANDER 2003)
A locomoccedilatildeo tem importacircncia fundamental para a sobrevivecircncia pois
possibilita entre outros fatores a procura por alimentos a busca por um local com
melhor clima caccedilar uma presa ou fugir de um perigo eminente (SAIBENE e
MINETTI 2003) Nos mamiacuteferos terrestres a locomoccedilatildeo acontece atraveacutes do uso
das pernas Este tipo de locomoccedilatildeo tem nos humanos por exemplo alguns
aspectos de ineficiecircncia quando comparada com outros animais (peixes e paacutessaros)
A ineficiecircncia da locomoccedilatildeo de biacutepedes eacute baseada no fato de que os segmentos
inferiores encostam repetidamente no solo para absorver e transferir energia
(trabalho negativo e positivo respectivamente) com o meio ambiente de modo que
os segmentos sofrem uma colisatildeo no momento de contato com o solo
caracterizando situaccedilotildees de grandes aceleraccedilotildees Para manter a velocidade meacutedia
de locomoccedilatildeo torna-se necessaacuterio uma re aceleraccedilatildeo do centro de massa (CM)
28
Energia quiacutemica eacute despendida para manter os muacutesculos ativos durante estas
diferentes fases A fim de atenuar este dispecircndio dois mecanismos baacutesicos satildeo
usados pelo sistema locomotor na corrida e na caminhada o mecanismo do pecircndulo
na caminhada e o mecanismo da massa-mola para a corrida (CAVAGNA e
KANEKO 1977 ver figura 11) Na caminhada a energia potencial eacute alta quando o
CM estaacute sobre o ponto de contato do corpo com o solo mas a partir deste momento
a energia potencial gravitacional comeccedila a diminuir e a energia cineacutetica horizontal
obteacutem um acreacutescimo gradativo Quando o ponto de contato volta a estar na frente do
CM a energia cineacutetica diminui e potencial aumenta
Estes comportamentos entre energia cineacutetica horizontal e potencial
gravitacional acontecem em oposiccedilatildeo de fase (CAVAGNA et al 1963) e portanto
com um processo de reconversatildeo entre energia cineacutetica e potencial gravitacional
(recovery ndash R) Por outro lado na corrida os acreacutescimos de energia potencial e
cineacutetica acontecem concomitantemente portanto o mecanismo de conservaccedilatildeo de
energia citado anteriormente natildeo se aplica neste tipo de locomoccedilatildeo Eacute postulado
que durante a primeira metade da fase de apoio da corrida principalmente
muacutesculos e tendotildees alongam armazenando energia elaacutestica enquanto que os
moacutedulos de energia cineacutetica horizontal e potencial gravitacional diminuem Esta
energia elaacutestica armazenada como uma mola comprimida por uma massa eacute
transformada em energia cineacutetica horizontal e potencial gravitacional de modo
gradativo durante a segunda metade da fase de apoio (CAVAGNA et al 1964
KOMI 2000 figura 11) Evidecircncias de energia elaacutestica armazenada e reconvertida
tambeacutem foram encontradas em cangurus (ALEXANDER e VERNON 1975) e em
cavalos (BIEWENER 1998) Os ligamentos do arco do peacute tambeacutem respondem pelo
comportamento elaacutestico do sistema locomotor na corrida (KER et al 1987)
Enquanto que a medida de trabalho externo possui uma correspondecircncia com
o trabalho mecacircnico realizado pelos muacutesculos na caminhada os valores obtidos
para a corrida superestimam o trabalho muscular realizado devido agrave dificuldade de
quantificar a energia elaacutestica durante o movimento (SAIBENE e MINETTI 2003) De
fato parte consideraacutevel do aumento e diminuiccedilatildeo da energia mecacircnica total na
corrida natildeo eacute causada pelas contraccedilotildees (excecircntricas e concecircntricas) musculares
mas pelo alongamento e encurtamento das estruturas elaacutesticas da unidade muacutesculo-
tendatildeo mais especificamente os tendotildees e estruturas elaacutesticas do muacutesculo
Portanto na corrida a adiccedilatildeo do trabalho interno e a transferecircncia entre segmentos
29
dos mesmos membros (inferiores e superiores) permitem uma estimativa mais
proacutexima do trabalho mecacircnico total (WILLEMS et al 1995)
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-
invertido para a caminhada e massa-mola para a corrida (Fonte
SAIBENE e MINETTI 2003 modificado no presente estudo)
As determinantes mecacircnicas da locomoccedilatildeo humana e animal tem sido
extensivamente estudadas em diferentes situaccedilotildees velocidade (CAVAGNA et al
1963 1964) gravidade (KRAM et al 1997 CAVAGNA et al 2000 1998
CAVAGNA et al 2005) planos inclinados (MINETTI et al 1993 1994)
O trabalho mecacircnico durante a locomoccedilatildeo em inclinaccedilotildees tem sido estudado
na caminhada (MINETTI et al 1993) e na corrida (MINETTI et al 1994)
encontrando valores de maior eficiecircncia mecacircnica entre 10 e 15 de inclinaccedilatildeo
negativa (declive) Todavia o modelo do pecircndulo invertido natildeo se sustenta para
situaccedilotildees de inclinaccedilotildees extremas Deste modo a reconversatildeo de energia parece
natildeo atuar na determinaccedilatildeo da velocidade oacutetima de caminhada nestas situaccedilotildees
Uma nova hipoacutetese eacute que os muacutesculos posturais do quadril possam contribuir para
gerar o alto custo de transporte em velocidades baixas de caminhada em inclinaccedilotildees
diferentes da inclinaccedilatildeo oacutetima (-10 onde haacute o menor custo metaboacutelico e
mecacircnico)
Esta hipoacutetese pretende ser testada atraveacutes da anaacutelise do custo
eletromiograacutefico (EMG) durante caminhada em diferentes velocidades e inclinaccedilotildees
de terreno O custo EMG seraacute compreendido como o somatoacuterio de ativaccedilatildeo EMG em
funccedilatildeo da distacircncia percorrida Se satisfatoacuterio o custo EMG poderaacute explicar as curva
30
em forma de U de custo metaboacutelico em funccedilatildeo da velocidade determinadas no
trabalho pioneiro de MARGARIA (1938)
Diferentemente da caminhada a corrida pode ser explicada do ponto de vista
mecacircnico pelo modelo massa-mola Este modelo possibilita dividir a oscilaccedilatildeo
vertical do CM em duas partes durante a passada da corrida a fase inferior da
oscilaccedilatildeo (quando a forccedila vertical exercida no solo eacute maior do que o peso corporal) e
a fase superior da oscilaccedilatildeo (quando a forccedila vertical eacute menor do que o peso
corporal) De acordo com o modelo massa-mola a duraccedilatildeo da fase inferior da
oscilaccedilatildeo representa meio periacuteodo do sistema e o deslocamento do CM durante este
periacuteodo representa a amplitude da oscilaccedilatildeo (BLICKHAN 1989 CAVAGNA et al
2005) Observaccedilotildees preliminares suportam a hipoacutetese de que sujeitos idosos
utilizem de uma maior geraccedilatildeo de trabalho interno devido a diminuiccedilatildeo da fase
superior da oscilaccedilatildeo do CM
Portanto a anaacutelise dos determinantes mecacircnicos da caminhada e corrida
deveratildeo contribuir no entendimento da locomoccedilatildeo desde um ponto de vista
energeacutetico Aleacutem disso procuramos realizar um estudo teoacuterico com o objetivo de
predizer variaacuteveis fundamentais e trabalho mecacircnico da locomoccedilatildeo terrestre
Informaccedilotildees biomecacircnicas sobre a energia da locomoccedilatildeo poderatildeo servir
como base para aplicaccedilotildees futuras na aacuterea da Fisioterapia na anaacutelise da locomoccedilatildeo
patoloacutegica bem como na Educaccedilatildeo Fiacutesica e Esportes atraveacutes do uso deste
conhecimento nas aacutereas do esporte de rendimento e sauacutede agraves quais utilizam-se das
atividades fiacutesicas locomotoras
13 Formato da tese
O estado-da-arte apresentado no capiacutetulo introdutoacuterio mostra um
desenvolvimento notaacutevel do corpo de conhecimento relacionado agrave mecacircnica e
energeacutetica da locomoccedilatildeo humana As bases cientiacuteficas atuais que procuram
encontrar as determinantes mecacircnicas de caracteriacutesticas fundamentais da
caminhada e corrida humana tais como velocidade e inclinaccedilatildeo oacutetima da
locomoccedilatildeo eficiecircncia e economia em situaccedilatildeo com carga e inclinaccedilatildeo e mudanccedila
de formas de locomoccedilatildeo conforme o aumento da velocidade demonstram ser
satisfatoacuterias em inuacutemeras situaccedilotildees
31
Contudo modelos biomecacircnicos que analisem natildeo apenas situaccedilotildees
particulares mas que expliquem as questotildees fundamentais da locomoccedilatildeo humana
tendo em consideraccedilatildeo a complexidade deste tipo de movimento ainda satildeo
escassos Atualmente temos hipoacuteteses que necessitam de experimentaccedilatildeo para
tornaacute-las robustas o suficiente para responder as questotildees fundamentais da
locomoccedilatildeo e ao mesmo tempo se manterem simples o bastante que as caracterize
como fundamentais Portanto a presente tese ENERGEacuteTICA E MECAcircNICA DA
CAMINHADA E CORRIDA HUMANA Com especial referecircncia agrave locomoccedilatildeo em
plano inclinado e efeitos da idade natildeo oferece uma resposta final e acabada para as
relaccedilotildees entre a energeacutetica e mecacircnica da locomoccedilatildeo humana mas tem como eixo
principal por meio de abordagens experimentais e teoacutericas avanccedilar no
entendimento dos paradigmas mecacircnicos das formas fundamentais de locomoccedilatildeo
usadas pelo ser humano caminhada e corrida
Em base disso o capiacutetulo 2 Custo EMG da Caminhada Humana procura
avanccedilar e aperfeiccediloar a hipoacutetese do Custo de Geraccedilatildeo de Forccedila (KRAM e TAYLOR
1990) com o desenvolvimento do modelo do Custo de Ativaccedilatildeo Muscular que daacute
base para o estudo Atraveacutes de experimentos em diferentes velocidades e
inclinaccedilotildees de caminhada eacute dada uma explicaccedilatildeo das curvas em forma de U do
custo metaboacutelico em funccedilatildeo da velocidade determinadas no estudo pioneiro de
MARGARIA em 1938
Motivado pela falta de explicaccedilatildeo das mudanccedilas estruturais e funcionais
devido agrave idade aplicadas agrave mecacircnica e energeacutetica da locomoccedilatildeo humana o capiacutetulo
3 Mecacircnica da Corrida em Idosos compara o trabalho mecacircnico e o sistema massa-
mola entre jovens e idosos em diferentes velocidades de corrida analisando o
sistema massa-mola natildeo apenas pelas suas caracteriacutesticas originais (BLICKHAN
1989 MCMAHON e CHENG 1990) mas tambeacutem pelas assimetrias deste sistema
na corrida humana determinadas recentemente na literatura (CAVAGNA 2006)
Nestes dois estudos eacute usada a abordagem experimental o primeiro se
utilizando da teacutecnica de EMG e o segundo estudo abordando a teacutecnica da
dinamometria especificamente o uso de plataformas de forccedila A percepccedilatildeo da
limitaccedilatildeo metodoloacutegica do uso deste equipamento aliada agrave necessidade de
abordagens teoacutericas da mecacircnica e energeacutetica da caminhada e corrida humana e
animal em situaccedilotildees onde apenas uma curva forccedila de reaccedilatildeo do solo versus tempo
eacute disponiacutevel ofereceram a justificativa para o capiacutetulo 4 Prediccedilatildeo da Vf CP e Custo
32
Energeacutetico da Locomoccedilatildeo Terrestre A construccedilatildeo de um modelo biomecacircnico
destes paracircmetros eacute endereccedilada neste estudo atraveacutes de meacutetodo de miacutenimos
quadrados e princiacutepios da dinacircmica e otimizaccedilatildeo de paracircmetros caracterizadores da
locomoccedilatildeo nomeadamente massa corporal frequumlecircncia de passo (FP) fator de forma
ldquoqrdquo e duty factor (DF)
Finalmente no capiacutetulo 5 os resultados de cada estudo satildeo sumarizados e
no capiacutetulo 6 satildeo apresentadas algumas consideraccedilotildees sobre a mecacircnica e
energeacutetica da locomoccedilatildeo humana e os possiacuteveis desdobramentos advindos dos
presentes achados Ainda no capiacutetulo 8 estatildeo inseridos os apecircndices da tese
131 Objetivo geral
O objetivo da presente tese eacute analisar o custo EMG da caminhada humana e
a mecacircnica da corrida de idosos Esta seacuterie de estudos tem tambeacutem como objetivo
construir um modelo biomecacircnico do custo energeacutetico da locomoccedilatildeo terrestre
132 Objetivos especiacuteficos
- Estudar as determinantes da velocidade oacutetima de caminhada em inclinaccedilotildees com
ecircnfase na construccedilatildeo do modelo do custo EMG da caminhada humana
- Comparar a mecacircnica da corrida com particular referecircncia ao trabalho mecacircnico e
sistema massa-mola entre jovens e idosos em vaacuterias velocidades de corrida
- Construir um modelo biomecacircnico capaz de predizer paracircmetros fundamentais e
custo energeacutetico da locomoccedilatildeo terrestre
33
2 O CUSTO EMG DA CAMINHADA HUMANA
21 Introduccedilatildeo
Durante um ciclo de passada de caminhada a energia cineacutetica do CM
corporal varia inversamente com a energia potencial gravitacional do CM Apesar da
presenccedila importante deste comportamento a transformaccedilatildeo de energia entre uma
forma e outra natildeo eacute total e o restante de energia necessaacuterio para manter a
locomoccedilatildeo eacute providenciado pelos muacutesculos e eacute quando normalizado pela massa
corporal e por unidade de distacircncia igual agrave 03 Jkg-1m-1 durante a velocidade oacutetima
de caminhada (aproximadamente 45 kmh-1 em adultos) Este mecanismo pendular
de minimizaccedilatildeo de energia foi primeiramente observado por CAVAGNA et al (1963)
e denominado como modelo do ldquopecircndulo invertidordquo
Interessantemente natildeo obstante a sua simplicidade o modelo auxiliou no
entendimento e aprofundamento das determinantes mecacircnicas da locomoccedilatildeo
Atraveacutes deste meacutetodo foi possiacutevel oferecer o primeiro insight desde o ponto-de-vista
mecacircnico sobre a velocidade oacutetima de locomoccedilatildeo e a forma em U do custo de
transporte da caminhada [ml de oxigecircnio - O2 - por kg de massa corporal por
distacircncia percorrida observada por MARGARIA (1938)] Na seacuterie de experimentos
desenvolvida por Cavagna e colegas (CAVAGNA et al 1976 HEGLUND et al
34
1982b) foi apresentada a formulaccedilatildeo matemaacutetica denominada como Recovery (R)
definida como
W f + W -Wv extR() = 100 Eq 21 W f + Wv
onde W f eacute trabalho mecacircnico externo horizontal Wv eacute trabalho mecacircnico externo
vertical e Wext eacute trabalho mecacircnico externo Esta equaccedilatildeo determina o percentual de
reconversatildeo via pendular entre energia cineacutetica e potencial gravitacional durante a
passada E de fato na velocidade oacutetima de caminhada o R alcanccedila
aproximadamente seu valor maacuteximo
Poreacutem o custo de geraccedilatildeo de trabalho como mecanismo principal do custo
energeacutetico da locomoccedilatildeo tem recebido vaacuterias criacuteticas da literatura As criacuteticas se
baseiam principalmente (1) na questatildeo do paradoxo do trabalho zero que afirma
que fisicamente durante um ciclo de passada completo em velocidade constante e
no plano as variaccedilotildees de energias cineacuteticas e potencial satildeo iguais agrave zero
(desprezando a resistecircncia do ar e fricccedilotildees teciduais) portanto analisando de um
ponto-de-vista somente da fiacutesica o sujeito natildeo realizaria trabalho nesta situaccedilatildeo
(ALESHINSKY 1986) (2) o problema da co-contraccedilatildeo afirma que existe um custo
metaboacutelico importante devido agrave contraccedilatildeo de muacutesculos antagonistas que natildeo geram
movimento portanto sem geraccedilatildeo de trabalho mecacircnico Este uacuteltimo
questionamento levou um grupo de pesquisadores a formular a denominada
hipoacutetese da forccedila ou Teoria do custo energeacutetico da geraccedilatildeo de forccedila (HEGLUND et
al 1982b KRAM e TAYLOR 1990 ROBERTS et al 1998) para explicar de modo
simplificado o custo energeacutetico da locomoccedilatildeo
Essencialmente a hipoacutetese da forccedila afirma que o custo energeacutetico da corrida
ou caminhada eacute determinado pelo produto da integral da curva forccedila de reaccedilatildeo do
solo-tempo por um fator proporcional agrave taxa de ciclos de pontes-cruzadas de miosina
no muacutesculo independente da geraccedilatildeo de trabalho mecacircnico Apesar da hipoacutetese
concordar com achados experimentais estes satildeo encontrados em situaccedilotildees
limitadas e aleacutem disso a hipoacutetese da forccedila considera como negligenciaacutevel o custo
de balanccedilar os segmentos para traacutes e para frente Esta pressuposiccedilatildeo eacute considerada
como incorreta (MARSH et al 2004) O problema principal desta hipoacutetese se refere
35
agrave desconsideraccedilatildeo do trabalho elemento fundamental segundo a primeira lei da
termodinacircmica Conforme apontado por HEGLUND 2004) ldquoforccedila natildeo eacute trabalho
nem mesmo eacute energia Se a energia metaboacutelica eacute consumida aquela energia deve
ir para algum lugar Se a energia de um segmento corporal aumenta aquela energia
vem de algum lugar Se a energia daquele segmento diminui a energia vai para
algum lugarrdquo
Durante a locomoccedilatildeo em inclinaccedilotildees foi observado que na inclinaccedilatildeo oacutetima
(aproximadamente -10) a constante de custo metaboacutelico inverso ao tempo de
apoio obteve uma variaccedilatildeo significativa (MINETTI et al 1994) indicando que o
custo de geraccedilatildeo de trabalho mecacircnico era mais satisfatoacuterio do que o custo de
geraccedilatildeo de forccedila Mas um achado intrigante nos estudos de Minetti e
colaboradores sobre as determinantes mecacircnicas da energeacutetica da caminhada e
corrida em inclinaccedilotildees (1993 e 1994 respectivamente) foi sobre a ausecircncia de
trabalho mecacircnico negativo em inclinaccedilotildees positivas e de trabalho positivo em
inclinaccedilotildees negativas (apoacutes 30 de inclinaccedilatildeo na corrida e 15 na caminhada)
independente da velocidade Portanto o modelo do custo de geraccedilatildeo de trabalho
como determinante do custo energeacutetico da locomoccedilatildeo natildeo se aplica nestas
situaccedilotildees perdendo sua amplitude como Teoria geral para a energeacutetica e mecacircnica
da caminhada
Tendo em consideraccedilatildeo que durante situaccedilotildees de locomoccedilatildeo de pouca
eficiecircncia mecacircnica como na situaccedilatildeo de velocidades mais baixas que a velocidade
oacutetima e durante inclinaccedilotildees extremas satildeo geradas situaccedilotildees de instabilidade de
locomoccedilatildeo e provavelmente maiores co-contraccedilotildees musculares propomos neste
experimento testar a hipoacutetese denominada de ldquocusto EMG da caminhada humanardquo
Uma base importante desta hipoacutetese reside no raciociacutenio de que nas situaccedilotildees
citadas anteriormente a contribuiccedilatildeo de muacutesculos que contraem isometricamente
principalmente os posturais teratildeo uma contribuiccedilatildeo importante para o alto custo
relativo da locomoccedilatildeo
Portanto o objetivo deste estudo eacute desenvolver o modelo do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees Teoricamente a hipoacutetese do
presente estudo diferente da hipoacutetese da forccedila natildeo iraacute desconsiderar o trabalho
mecacircnico gerado mas este seraacute considerado como um dos produtos da variaccedilatildeo da
energia (devido ao consumo de energia metaboacutelico) e a quantidade de ativaccedilatildeo
muscular e as eficiecircncias de ativaccedilatildeo satildeo as determinantes do custo energeacutetico
36
usando os equivalentes metaboacutelicos da ativaccedilatildeo EMG da literatura W+ Wshy
(BIGLAND-RITCHIE e WOODS 1976) e durante contraccedilatildeo isomeacutetrica
(CERRETELLI et al 1976) O modelo eacute apresentado em detalhes na metodologia
22 Metodologia
221 Construccedilatildeo do modelo
O presente modelo eacute configurado como biomecacircnico e se utiliza de
pressupostos originados da fiacutesica e da biologia
O modelo assume que i) toda a energia despendida pelos muacutesculos possui
uma correspondente quantidade de ativaccedilatildeo EMG ii) a atividade EMG realizada
pelos muacutesculos posturais durante todo o ciclo de passada e pelos muacutesculos
propulsores durante a fase aeacuterea seraacute considerada como uma atividade EMG
realizada durante contraccedilotildees isomeacutetricas Seraacute considerada como contraccedilatildeo
excecircntrica e concecircntrica a atividade EMG realizada pelos muacutesculos propulsores
durante a primeira e segunda metades da fase de apoio respectivamente iii) O
custo energeacutetico da locomoccedilatildeo eacute devido agrave ativaccedilatildeo de muacutesculos propulsores e
posturais estes uacuteltimos natildeo diretamente ligados agrave geraccedilatildeo de trabalho mecacircnico iv)
Mais do que uma relaccedilatildeo com a produccedilatildeo de forccedila muscular a quantidade de
ativaccedilatildeo EMG e consequumlentemente o custo EMG possui uma correspondecircncia com
o trabalho mecacircnico realizado durante a ativaccedilatildeo muscular
Um conjunto de algoritmos foi desenvolvido em Labview a fim de analisar o
sinal EMG e as variaacuteveis espaccedilos-temporais (figuras 21 22 e 23 apecircndice 81) O
programa retifica suaviza (atraveacutes de uma integraccedilatildeo com janelamento moacutevel
50Hz do tipo Hamming) e divide todas as curvas de EMG por ciclo de passada
retirando os ciclos de passadas com um tempo 20 menor ou maior do tempo
meacutedio do ciclo de passada e do tempo de apoio Apoacutes normaliza o tempo do ciclo
para 100 quadros (interpolaccedilatildeo via spline) e calcula a meacutedia desvio-padratildeo e
coeficiente de variaccedilatildeo em cada quadro por muacutesculo analisado Este procedimento
tem o objetivo de criar graacuteficos de atividade eletromiograacutefica em funccedilatildeo do
37
percentual do ciclo de passada A fim de analisar o efeito das ponderaccedilotildees pelo
volume muscular e dobra cutacircnea foram desenvolvidas duas estrateacutegias de
modelamento nomeadamente ldquoabordagem experimentalrdquo e ldquoabordagem teoacutericardquo
Abordagem experimental
Usando o sinal suavizado sem a normalizaccedilatildeo foi realizada uma integral em
funccedilatildeo do tempo do seguinte modo
t
Iemg(t) = f EMG dt Eq 22 0
Este valor integrado eacute dividido pelo CP determinando a quantidade de
atividade EMG em funccedilatildeo da distacircncia e seraacute considerado como um custo miacutenimo
EMG Os valores de custo EMG satildeo ponderados em funccedilatildeo do volume muscular
(WINTERS e WOO 1990) e da dobra cutacircnea (NORDANDER et al 2003) do
seguinte modo
Iemg1 Iemg2 Iemg16EmgCost (mV m) = ( + + l middot CP-1 Eq 23 exp ( Mass1 Sk inf1 Mass2 Sk inf2 Mass16 Sk inf16 lmiddot middot middot Masstotal Sk inftotal Masstotal Sk inftotal Masstotal Sk inftotal
onde EmgCostexp eacute o custo miacutenimo EMG experimental Mass eacute a massa dos
muacutesculos analisados e eacute o somatoacuterio de todas as massas musculares Masstotal
analisadas Sk inf eacute a dobra cutacircnea de cada regiatildeo de colocaccedilatildeo dos eletrodos e
eacute o somatoacuterio de todas as dobras cutacircneas analisadas A fim de Sk inftotal
compreender melhor as determinantes da velocidade oacutetima nas inclinaccedilotildees dividiu-
se a Iemg em trecircs aacutereas (a) fase de contato (b) fase aeacuterea e (c) offset (figura 21)
Abordagem teoacuterica
A presente abordagem calcula o sinal EMG atraveacutes dos seus equivalentes
metaboacutelicos Estes equivalentes satildeo advindos da literatura (BIGLAND-RITCHIE e
WOODS 1976) e o objetivo deste procedimento foi verificar se levando em
38
consideraccedilatildeo os equivalentes metaboacutelicos da atividade EMG (para contraccedilotildees
concecircntrica excecircntrica e isomeacutetrica) seria possiacutevel explicar mais satisfatoriamente
as velocidades oacutetimas na caminhada em inclinaccedilotildees Este procedimento assume
que uma determinada quantidade de ativaccedilatildeo eleacutetrica muscular gera distintos custos
energeacuteticos sendo estes dependentes do tipo de contraccedilatildeo muscular Para este
propoacutesito primeiro dividimos a anaacutelise em dois grupos de muacutesculos propulsores
(gluteus maximus gluteus medius deltoideus anterior rectus femuralis vastus
lateralis biceps femuralis caput longus tibialis anterior e gastrocnemius lateralis) e
posturais (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis trapezius ascendens)
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset
Os muacutesculos posturais foram considerados como muacutesculos contraindo
isometricamente durante todo o ciclo de passada enquanto que os muacutesculos
39
propulsores foram analisados como realizando (a) contraccedilatildeo excecircntrica na primeira
fase de contato (b) concecircntrica na segunda fase de contato e (c) contraccedilatildeo
isomeacutetrica durante a fase aeacuterea (figura 22)
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda metade
da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo isomeacutetrica
Setas verticais apontando para baixo indicam momento de contato e de
despregue
Assim foram calculadas as correspondentes integrais
t 2c
Iemgexc (t) = f EMG dt Eq 24 0
40
onde Iemgexc eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a primeira
metade da fase de contato (contraccedilatildeo excecircntrica)
tc
Iemgcon (t) = f EMG dt Eq 25 t 2c
onde Iemgcon eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a segunda
metade da fase de contato (contraccedilatildeo concecircntrica)
ta
Iemgiso (t) = f EMG dt Eq 26 0
onde Iemgiso eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a fase aeacuterea
(contraccedilatildeo isomeacutetrica)
As integrais foram convertidas para uma unidade de counts usada por
BIGLAND-RITCHIE e WOODS 1976) usando um fator de transformaccedilatildeo igual agrave 200
counts (mVs)-1 deste modo temos a atividade EMG durante contraccedilatildeo excecircntrica
(EMGneg) concecircntrica (EMGpos) e isomeacutetrica (EMGiso) em counts Os equivalentes
metaboacutelicos satildeo obtidos atraveacutes de equaccedilotildees de regressatildeo linear criadas no
presente estudo usando dados experimentais de Bigland e Ritchie (1976) como
segue
VO2neg (ml) = 00015 EMGneg + 03353 Eq 27
VO2 pos(ml) = 00042 EMGpos + 01493 Eq 28
(ml) = 00042 EMGiso + 01493 Eq 29 VO2iso
EmgCosttheor (J m) = 201[(VO2 iso1 + VO2 iso 2 + VO2 iso16) + (VO2 neg 1 + VO2 neg 2 + VO2 neg 16) +
(VO2 pos1 + VO2 pos 2 + VO2 pos16)] CP-1 Eq 210
onde EmgCosttheor eacute o custo EMG teoacuterico O somatoacuterio dos dispecircndios energeacuteticos
dados em ml de O2 foram convertidos para Joules (J) usando um equivalente
41
energeacutetico de 201 Jml-1 (BLAXTER 1989) e apoacutes foram divididos por CP (conforme
equaccedilatildeo 210) Nesta abordagem teoacuterica entende-se o EmgCosttheor como um custo
miacutenimo energeacutetico devido agrave notoacuteria impossibilidade de obter a totalidade da ativaccedilatildeo
EMG e consequentemente do custo energeacutetico da locomoccedilatildeo Mais do que isso o
modelo procura compreender as determinantes da velocidade oacutetima de caminhada
nas inclinaccedilotildees
222 Testando o modelo
Um homem adulto sem histoacuteria de lesotildees no sistema muacutesculo-esqueleacutetico
realizou caminhadas de 2 minutos sobre uma esteira (WOODWAY Usa) nas
velocidades de 2 3 4 5 6 e 7 kmh-1 e nas inclinaccedilotildees de 0 5 10 e 15 O uso
das velocidades 6 ou 7 kmh-1 foram escolhidas em funccedilatildeo do Nuacutemero de Froude
(Fr) O valor maacuteximo de Fr foi o equivalente agrave velocidade espontacircnea de transiccedilatildeo
(aproximadamente 05 no plano MINETTI et al 1994) O uso do Fr eacute baseado da
teoria das similaridades dinacircmicas Esta teoria afirma que dois animais
geometricamente similares (como no caso do presente estudo) deslocam-se
tambeacutem de modo similar quando o movimento eacute multiplicado por fatores
relacionados ao tempo dimensotildees lineares e forccedilas (ver ALEXANDER 2005)
Fr = Vf 2 gL Eq 211
onde Vf eacute velocidade de progressatildeo em ms-1 g eacute aceleraccedilatildeo gravitacional (g) (981
ms-2) e L eacute um comprimento corporal conhecido (no presente estudo foi utilizado o
comprimento de membros inferiores em m)
Coleta de dados
O voluntaacuterio foi informado do objetivo do estudo dos riscos e eventuais
desconfortos e assinou um termo de consentimento
O indiviacuteduo estava vestido com roupas apropriadas para caminhada A coleta
de dados foi realizada em inclinaccedilotildees de 0 5 10 e 15 nas velocidades de 2 3 4
5 6 7 kmh-1 para cada inclinaccedilatildeo A atividade EMG de dezesseis muacutesculos foi
42
analisada (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis deltoideus anterior trapezius ascendens gluteus
maximus gluteus medius rectus femuralis vastus lateralis biceps femuralis caput
longus tibialis anterior e gastrocnemius lateralis) usando um eletromioacutegrafo portaacutetil
(EMGpocket Elite System Itaacutelia)
Para a preparaccedilatildeo do local e colocaccedilatildeo dos eletrodos de superfiacutecie bipolares
foram observadas as orientaccedilotildees da Seniam (FRERIKS et al 1991)
Simultaneamente ao registro EMG sinais advindos de seis sensores de pressatildeo
(footswitches) trecircs em cada peacute (regiatildeo do calcanhar quinto e primeiro metatarsos
inferiores) foram registrados no eletromiograacutefo portaacutetil Os sinais EMGrsquos foram preacuteshy
amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um niacutevel de ruiacutedo menor do
que 1 mV rms e filtrados por um filtro do tipo Butterworth (50-450 Hz terceira
ordem) A frequumlecircncia de amostragem da EMG e dos sensores de pressatildeo foi de
1000 Hz
Foram coletadas a massa e estatura corporal e comprimento de membro
inferior As dobras cutacircneas tambeacutem foram coletadas antes dos testes usando um
plicocircmetro (The body calliper CA Usa)
Um possiacutevel efeito de fadiga no sinal EMG foi controlado repetindo o primeiro
teste Com diferenccedilas maiores de 10 entre a integral EMG dos muacutesculos
analisados do primeiro e uacuteltimo teste a coleta seria descartada poreacutem a diferenccedila
foi menor do que este limite
23 Resultados
231 Variaacuteveis espaccedilos-temporais
As variaacuteveis espaccedilos-temporais da caminhada em diferentes velocidades e
diferentes inclinaccedilotildees satildeo apresentadas na tabela 21 O CP e a FP aumentam com
o aumento da velocidade poreacutem natildeo com o aumento da inclinaccedilatildeo O DF eacute maior na
velocidade oacutetima de locomoccedilatildeo nas inclinaccedilotildees (10 e 15) enquanto que apresenta
uma relaccedilatildeo inversa com Vf nas inclinaccedilotildees mais baixas (0 e 5)
43
232 Atividade EMG
A atividade EMG dos muacutesculos posturais (erector spinae longissimus erector
spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis trapezius ascendens) e
dos muacutesculos propulsores (gluteus maximus gluteus medius rectus femoralis
vastus lateralis deltoideus anterior biceps femoralis caput longus tibialis anterior e
gastrocnemius lateralis) eacute apresentada nas figuras 23 e 24 Os resultados do
presente estudo referente ao comportamento da atividade EMG durante caminhada
no plano satildeo semelhantes agrave literatura tanto em relaccedilatildeo aos muacutesculos propulsores
(LAY et al 2007 NYMARK et al 2005) quanto para os muacutesculos posturais (WHITE
e MCNAIR 2002 DEN OTTER et al 2004 LAMOTH et al 2006)
De um modo geral o sinal EMG em funccedilatildeo do percentual do ciclo (portanto
independente da distacircncia percorrida) aumentou conforme o aumento da velocidade
e inclinaccedilatildeo Observa-se tambeacutem um aumento no offset nas maiores inclinaccedilotildees
(veja figuras 23 e 24)
Tabela 21 Valores meacutedios e desvios-padratildeo (dp) de frequumlecircncia de passada (FP)
comprimento de passada (CP) tempo de fase aeacuterea (ta) tempo de contato (tc)e
duty factor (DF) nas diferentes velocidades (Vf) em diferentes inclinaccedilotildees do
terreno
0
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0518 0022 1074 0044 0706 0039 1227 0087 064
3 0660 0017 1263 0032 0604 0030 0912 0042 060
4 0779 0013 1426 0025 0541 0023 0743 0028 058
5 0879 0010 1580 0018 0492 0022 0646 0024 057
6 0970 0009 1719 0015 0446 0012 0586 0014 057
7 1061 0022 1834 0042 0415 0010 0528 0024 056
5
44
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0504 0026 2210 0056 0656 0054 1334 0089 067
3 0640 0015 2606 0030 0635 0033 0930 0048 059
4 0797 0013 2790 0023 0526 0017 0729 0028 058
5 0895 0008 3104 0014 0478 0017 0639 0020 057
6 1002 0009 3326 0016 0426 0009 0572 0014 057
7 1081 0015 3600 0025 0400 0007 0525 0014 057
10
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0302 0000 3674 0000 1309 0090 1998 0090 060
3 0262 0013 3182 0151 1216 0094 2602 0174 068
4 0300 0007 3699 0085 1229 0086 2101 0114 063
5
6 0495 0006 3300 0036 0854 0021 1166 0028 058
7 0556 0008 3429 0015 0775 0022 1023 0026 057
15
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0275 0022 3041 0216 1282 0079 2368 0255 065
3 0319 0011 3492 0122 1208 0074 1936 0121 062
4 0399 0007 3482 0059 1497 0046 1011 0040 040
5 0450 0008 3703 0068 0919 0041 1302 0060 059
6 0524 0009 3711 0064 0808 0026 1101 0035 058
7 0597 0012 3257 0069 0721 0024 0954 0037 057
O maior pico de ativaccedilatildeo EMG entre os muacutesculos propulsores foi do tibialis
anterior com valor de 73 mV agrave 7 kmh-1 agrave 15 enquanto que para os muacutesculos
posturais foi do trapezius ascendens com 34 mV tambeacutem agrave 7 kmh-1 agrave 15
erector
spinae
longissimus
erector
spinae
iliocostalis
trapezius
descendens
latissimus
dorsis
obliquus
externus
abdominis
obliquus
internus
abdominis
rectus
abdominis
deltoideus
anterior
45
0 5 10 15
Figura 2 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
trapezius
ascenden
gluteus
maximus
gluteus
medius
rectus
femoralis
vastus
lateralis
biceps
femoralis
caput
tibialis
anterior
gastrocnemius
lateralis
46
0 5 10 15
Figura 24
47
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
com o tempo de passada normalizado em percentual do ciclo O 0-100 representa
o momento de contato com o solo As cores indicam a velocidade de caminhada (de
2 agrave 7 kmh-1) Cada muacutesculo eacute representado nas linhas e em cada coluna eacute
apresentada a atividade EMG por inclinaccedilatildeo
A ativaccedilatildeo EMG parece seguir um padratildeo bem definido com exceccedilatildeo do
trapezius descendens obliquus internus abdominis onde picos de ativaccedilotildees
aparecem apoacutes os 3 kmh-1 seguindo um comportamento de aumento com o
acreacutescimo da inclinaccedilatildeo e no muacutesculo deltoideus anterior no qual ateacute a velocidade
de 5 kmh-1 o pico maior se apresenta no final da fase de apoio enquanto que nas
velocidades de 6 e 7 kmh-1 o pico passa a se situar na fase aeacuterea O uacutenico muacutesculo
analisado neste estudo que apresenta um comportamento diferente entre as
inclinaccedilotildees eacute o rectus femoralis onde nas inclinaccedilotildees 0 5 e 10 os picos aparecem
apenas nas velocidades raacutepidas enquanto que na inclinaccedilatildeo de 15 o pico eacute visiacutevel
logo na velocidade de 2 kmh-1
Poreacutem quando analisamos a quantidade de ativaccedilatildeo por distacircncia percorrida
ou seja o custo EMG os resultados mudam
233 Custo EMG
A quantidade de atividade EMG calculada atraveacutes da abordagem
experimental eacute apresentada na figura 25 Durante a caminhada no plano (primeira
linha da figura 25) eacute possiacutevel observar um miacutenimo de ativaccedilatildeo no somatoacuterio total
devido principalmente agrave ativaccedilatildeo durante a fase aeacuterea e ao offset Este miacutenimo
acontece tambeacutem na inclinaccedilatildeo a 10 de inclinaccedilatildeo mas a 5 e a 15 a
quantidade de ativaccedilatildeo parece diminuir conforme o aumento da Vf
A figura 26 apresenta os valores de custo EMG calculado atraveacutes da
abordagem teoacuterica Observa-se um miacutenimo a 0 e 15 de inclinaccedilatildeo
Para nosso conhecimento natildeo existem dados de atividade EMG de muacutesculo
posturais durante caminhada nas inclinaccedilotildees A quantidade de ativaccedilatildeo EMG por
passada dos muacutesculos posturais e propulsores parecem aumentar com o acreacutescimo
da velocidade e inclinaccedilatildeo
48
49
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
24 Discussatildeo
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular
Inicialmente proposto para a corrida de quadruacutepedes (KRAM e TAYLOR
1990) e apoacutes para a corrida de biacutepedes (ROBERTS et al 1998 ROBERTS et al
1997) corrida para traacutes (WRIGHT e WEYAND 2001) e caminhada humana
(GRIFFIN et al 2003) a teoria do custo energeacutetico da geraccedilatildeo de forccedila foi formulada
a partir dos resultados que para animais com grande variaccedilatildeo de massa correndo
em diversas velocidades o custo mecacircnico natildeo se correlacionava bem com o custo
metaboacutelico da locomoccedilatildeo terrestre (HEGLUND et al 1982b TAYLOR 1985)
0 5
10
15
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
50
Uma justificativa para explicar esse resultado se referia ao fato de que o
muacutesculo durante a fase de apoio na corrida contraia isometricamente deste modo
natildeo realizando trabalho
Recentemente foi observado que esse comportamento acontece tambeacutem no
muacutesculo gastrocnemius medialis durante a caminhada (FUKUNAGA et al 2001)
Poreacutem na corrida este comportamento sucede apenas em velocidades maiores de
13 kmh-1 em adultos (CAVAGNA 2006) e natildeo eacute visiacutevel em idosos mesmo em
velocidades maacuteximas (estudo sobre a mecacircnica da corrida em idosos Capiacutetulo 3)
Ainda assim a teoria afirma que o custo metaboacutelico despendido pelos muacutesculos eacute
proporcional agrave integral forccedila de reaccedilatildeo do solo-tempo multiplicada por um fator
proporcional agrave taxa de ciclos de pontes cruzadas no muacutesculo-esqueleacutetico
A proposiccedilatildeo do Custo Energeacutetico da Geraccedilatildeo de Forccedila assume que i) a
maior parte da forccedila exercida pelos muacutesculos acontece em oposiccedilatildeo agrave gravidade ii)
uma unidade de volume muscular ativado exerce uma respectiva forccedila no solo
independente da velocidade ou tamanho do animal iii) originalmente foi presumido
que os muacutesculos agiam em similares amplitudes da relaccedilatildeo forccedila-velocidade [esta
pressuposiccedilatildeo foi recentemente interpretada em um interessante modelo
biomecacircnico proposto por BLANCO e GAMBINI 2006) como independente para a
determinaccedilatildeo das relaccedilotildees encontradas por KRAM e TAYLOR 1990)] portanto eacute
esperado que animais pequenos que realizam o tempo de contato menor usem
fibras glicoliacuteticas em maior quantidade e consequentemente tenham um maior
dispecircndio energeacutetico e assim explica-se o fato de que animais pequenos despendem
mais energia para transportar 1 N de forccedila por km percorrido do que animais
maiores (HOYT e TAYLOR 1981) Portanto o custo energeacutetico da locomoccedilatildeo
segundo a presente teoria eacute determinado pelo custo de suportar o peso corporal e o
tempo disponiacutevel para exercer forccedila contra o solo
Ainda assim a teoria apresenta seacuterias restriccedilotildees e parece funcionar em
situaccedilotildees particulares A formulaccedilatildeo apresentada por Kram e Taylor indica como
insignificante o dispecircndio energeacutetico devido aos movimentos de balanccedilo dos
membros quando natildeo estatildeo em apoio Vaacuterias evidecircncias em aves (MARSH et al
2004) e em humanos (DOKE et al 2005 GOTTSCHALL e KRAM 2005 DOKE e
KUO 2007) demonstram que este dispecircndio natildeo eacute despreziacutevel Outra criacutetica
levantada pela literatura (ALEXANDER 1991 HEGLUND 2004) se refere agrave
desconsideraccedilatildeo do trabalho variaacutevel fundamental na Termodinacircmica para explicar
51
a energeacutetica da locomoccedilatildeo Forccedila natildeo eacute trabalho nem mesmo eacute energia portanto
ela isoladamente natildeo possibilita uma resposta final sobre a energia A hipoacutetese do
custo de ativaccedilatildeo muscular apresentado aqui natildeo despreza o dispecircndio energeacutetico
dos membros superiores e aleacutem disso considera as eficiecircncias dos diferentes tipos
de trabalho mecacircnico quando insere os equivalentes metaboacutelicos da ativaccedilatildeo
muscular (abordagem teoacuterica Metodologia)
242 Sobre o meacutetodo
Algumas consideraccedilotildees importantes podem ser feitas sobre a teacutecnica da
EMG Comumente esta teacutecnica eacute usada nos campos da biomecacircnica e biologia
experimental a fim de determinar a quantidade de ativaccedilatildeo muscular e os periacuteodos
em que elas acontecem poreacutem neste estudo pretendeu-se usar a determinada
teacutecnica a fim de oferecer uma informaccedilatildeo global da ativaccedilatildeo de tal modo que
pudesse ter uma correspondecircncia com a ativaccedilatildeo EMG de todo o corpo incluindo os
muacutesculos posturais que natildeo geram trabalho muscular importante mas segundo a
hipoacutetese central do presente estudo participam de forma decisiva como uma
determinante da caminhada humana
Assim esta abordagem permite inferir sobre os mecanismos principais da
locomoccedilatildeo e permite explicar a biomecacircnica da locomoccedilatildeo especialmente referente
agrave energeacutetica da caminhada humana Aleacutem de auxiliar na explicaccedilatildeo da velocidade
oacutetima no plano o custo EMG parece dar um indicativo sobre a energeacutetica em
situaccedilotildees criacuteticas com restriccedilotildees do ambiente (inclinaccedilatildeo) e situaccedilotildees natildeo usuais
(velocidades de progressatildeo baixas)
Nestas situaccedilotildees eacute provaacutevel que dois mecanismos estejam relacionados a fim
de justificar a hipoacutetese do custo EMG i) a estabilidade dinacircmica prejudicada e ii) o
custo da co-contraccedilatildeo Os dois mecanismos parecem estar diretamente ligados ao
maior custo EMG e consequumlentemente ao custo energeacutetico da caminhada
Evidecircncias experimentais datildeo suporte para esta inferecircncia Durante caminhada
realizada para fins de lazer em velocidades muito baixas ou mesmo em marchas
patoloacutegicas foi encontrado um aumento na atividade EMG em comparaccedilatildeo com a
velocidade auto-selecionada correspondente agrave velocidade oacutetima Os achados
mostram um aumento de ativaccedilatildeo EMG com o aumento da Vf mesmo em muacutesculos
do tronco durante locomoccedilatildeo no plano (ANDERS et al 2007) Novamente o foco do
52
presente estudo foi referente agrave quantidade de ativaccedilatildeo em funccedilatildeo da distacircncia
percorrida enquanto que nestes estudos a variaacutevel em questatildeo foi avaliada em
funccedilatildeo da passada Aleacutem disso aumentos foram encontrados nos valores de coshy
contraccedilatildeo durante velocidades muito baixas (020 e 030 ms-1) em comparaccedilatildeo com
a velocidade auto-selecionada (NYMARK et al 2005)
As relaccedilotildees entre estabilidade articular e quantidade de ativaccedilatildeo geral
(ANDERSON e BEHM 2004) e estabilidade corporal e ativaccedilatildeo de muacutesculos
localizados especificamente no tronco (GARDNER-MORSE e STOKES 1998
GRANATA e MARRAS 2000 GRANATA e ORISHIMO 2001) satildeo bem
estabelecidas na literatura inclusive indicando um prejuiacutezo maior na ativaccedilatildeo EMG
durante perturbaccedilotildees agrave estabilidade com contraccedilotildees concecircntricas do que
excecircntricas e isomeacutetricas Um possiacutevel modo de testar estes mecanismos poderia
ser atraveacutes da perturbaccedilatildeo da estabilidade e os efeitos na ativaccedilatildeo EMG durante
caminhada (por exemplo em terrenos irregulares)
Outro achado importante que daacute sustentaccedilatildeo agrave hipoacutetese do custo EMG da
caminhada humana eacute observado por PRILUTSKY e GREGOR 2001) onde a
atividade EMG de muacutesculos propulsores (rectus femoralis gastrocnemius medialis
vastus medialis biceps femoralis gluteus maximus e soleus) foi maior na corrida do
que na caminhada em velocidades abaixo da velocidade de transiccedilatildeo entre
caminhada e corrida enquanto que durante velocidades acima da de transiccedilatildeo os
muacutesculos propulsores apresentam uma maior atividade EMG na caminhada do que
na corrida o que coincide com o dispecircndio metaboacutelico nestas situaccedilotildees
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia
A alta especializaccedilatildeo da locomoccedilatildeo suportando cargas em regiotildees inoacutespitas da
terra indica um desafio para o entendimento dos fundamentos da mecacircnica e
energeacutetica da locomoccedilatildeo humana Mundialmente famosos satildeo os achados sobre a
economia de locomoccedilatildeo de mulheres africanas que transportam cargas sobre a
cabeccedila de ateacute 70 da massa corporal sem um maior custo mecacircnico devido a um
ajuste aperfeiccediloado das curvas de energia potencial e cineacutetica do centro de massa
colaborando para um mais alto R (percentual de reconversatildeo entre energia cineacutetica
53
e potencial durante um ciclo de passada) (MALOIY et al 1986) Evidecircncias de um
custo metaboacutelico relativamente baixo da locomoccedilatildeo no plano foram tambeacutem
encontradas em carregadores Nepaleses (BASTIEN et al 2005) Poreacutem
diferentemente das condiccedilotildees geograacuteficas nas quais as mulheres africanas realizam
suas atividades locomotoras o espaccedilo geograacutefico dos carregadores Nepaleses eacute
caracterizado por terrenos inclinados Em um estudo recente Minetti e
colaboradores (MINETTI et al 2006) apresentaram as primeiras informaccedilotildees sobre
eficiecircncia mecacircnica (potecircncia mecacircnica desenvolvida dividida pela potecircncia
metaboacutelica despendida) de carregadores Nepaleses em inclinaccedilotildees extremas
especialmente da regiatildeo do Himalaia indicando uma eficiecircncia aproximadamente
33 maior do que a de montanhistas Caucasianos De fato os carregadores
Nepaleses apresentam caracteriacutesticas notaacuteveis do ponto de vista energeacutetico
Transportam desde a infacircncia cargas geralmente entre 80 e 90 da massa corporal
(utilizando-se de uma faixa posta agrave testa no qual eacute ligada a uma cesta de vime nas
costas) em terrenos acidentados com inclinaccedilotildees de ateacute 50 em situaccedilatildeo de
hipoacutexia de altitude (MALVILLE et al 2001)
A hipoacutetese da transferecircncia eficiente entre energia cineacutetica e potencial do
centro de massa corporal natildeo se sustenta pois em inclinaccedilotildees maiores de 15 e ndash
15 as mudanccedilas de energia potencial ocorrem apenas positivamente e
negativamente respectivamente (MINETTI et al 1993) Portanto sem a
possibilidade de transferecircncia de energia por via pendular e tendo em consideraccedilatildeo
a menor variabilidade de oscilaccedilatildeo do tronco dos Nepaleses encontrada por
MINETTI et al 2006) apresentamos uma hipoacutetese de que o custo de ativaccedilatildeo
muscular (ou custo EMG) da locomoccedilatildeo eacute menor no grupo de carregadores do
Himalaia do que nos montanhistas Caucasianos Devido agrave falta de informaccedilotildees
espaccedilos-temporais da locomoccedilatildeo com carga em grandes inclinaccedilotildees foram
analisados estes paracircmetros da passada a fim de auxiliar no entendimento da
energeacutetica e mecacircnica da locomoccedilatildeo em planos inclinados
251 Materiais e meacutetodos
Cinco carregadores Nepaleses (idade 23 plusmn 9 anos estatura 163 plusmn 003 m
massa corporal 546 plusmn 62 kg) e cinco montanhistas Caucasianos (idade 32 plusmn 3
anos estatura 176 plusmn 007 m massa corporal 742 plusmn 67 kg) selecionados por
54
voluntariedade realizaram o experimento em Namche-Bazar regiatildeo do vale
Khumbu no Parque Nacional de Sagarmatildethatilde (Everest em nepalecircs) O experimento
consistia de caminhada sem e com carga (40 kg) em situaccedilatildeo de subida e descida
com uma inclinaccedilatildeo meacutedia de 22 em um ritmo que poderiam suportar por muitas
horas Os Nepaleses utilizavam a usual faixa na testa onde era ligada com a cesta
nas costas onde suportavam o peso enquanto que os Caucasianos usavam uma
mochila de alpinismo O trecho foi escolhido de modo a assegurar que as trocas de
energia fossem principalmente devidas as mudanccedilas de energia potencial sem a
possibilidade de transferecircncia entre energia potencial e cineacutetica dentro de uma
passada (MINETTI et al 2006) Antes de iniciar os experimentos eram realizadas
medidas de dobras cutacircneas nas regiotildees de colocaccedilatildeo de eletrodos
O set-up experimental incluiu um eletromioacutegrafo portaacutetil (PocketEmg BTS
Milatildeo Itaacutelia) um analisador de gases portaacutetil (K4b2 Cosmed Roma Itaacutelia) um GPS
(GPSmAP76CS) e lactiacutemetro (Accutrend Roche Diagnostic Basel Suiacuteccedila) Foram
analisados a atividade EMG de quatorze muacutesculos (erector spinae longissimus
erector spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis deltoideus anterior
trapezius ascendens gluteus maximus gluteus medius biceps femuralis caput
longus vastus lateralis e gastrocnemius lateralis) Para a preparaccedilatildeo do local e
colocaccedilatildeo dos eletrodos de superfiacutecie bipolares foram seguidas as orientaccedilotildees da
Seniam (FRERIKS et al 1991) Simultaneamente ao registro EMG sinais advindos
de seis sensores de pressatildeo (footswitches) trecircs em cada peacute (regiatildeo do calcanhar
primeiro e quinto metatarso inferior) eram registrados no eletromiograacutefo portaacutetil Os
sinais EMGrsquos foram preacute-amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um
niacutevel de ruiacutedo menor do que 1 μV rms e filtrados por um filtro do tipo Butterworth (50shy
450 Hz terceira ordem) A frequumlecircncia de amostragem da EMG e dos sensores de
pressatildeo foi de 1000 Hz
O custo metaboacutelico foi calculado segundo procedimentos do estudo anterior
(MINETTI et al 2006) O sinal EMG foi retificado e integrado e os valores meacutedios da
atividade EMG de todo o trecho foram subtraiacutedos pelos respectivos valores da
situaccedilatildeo em repouso (idem ao consumo de O2) e divididos pela velocidade meacutedia
(Vf ) A potecircncia EMG geral foi obtida a partir do somatoacuterio dos quatorze muacutesculos
ponderado pelos respectivos volumes musculares (YAMAGUCHI et al 1991) e
55
dobra cutacircnea respectiva Determinou-se o Custo EMG atraveacutes do procedimento
experimental
Para fins de comparaccedilatildeo das Vf rsquos de locomoccedilatildeo usamos o Nf baseado na
teoria das similaridades dinacircmicas (sub-seccedilatildeo 222) para normalizar a Vf No caso
presente ao inveacutes de utilizar o comprimento de membro inferior utilizamos a
estatura da seguinte forma
Vf 2
Fr = Eq 212 g estatura
Tendo em consideraccedilatildeo que a estatura meacutedia dos Caucasianos eacute maior (013
m) e que as Vf rsquos de subida e descida dos Caucasianos com carga foram 35 e 17
menores do que as dos Nepaleses deste modo os Frrsquos dos Caucasianos para os
mesmos trechos foram 40 e 24 menores do que dos Nepaleses
Os procedimentos para anaacutelise dos dados de posiccedilatildeo e Vf oriundos do GPS
satildeo os mesmos de MINETTI et al 2006) A potecircncia mecacircnica vertical (PMV) foi
calculada como segue
g h mtotPMV = Eq 213 t
onde Ah eacute variaccedilatildeo de altura mtot eacute a massa total (massa corporal + carga) g eacute
aceleraccedilatildeo gravitacional e At eacute o tempo de locomoccedilatildeo
Uma seacuterie de programas computacionais (Labview versatildeo 71 National
Instruments Austin USA) foram construiacutedos para o processamento dos dados EMG
GPS e paracircmetros espaccedilos-temporais
Foi utilizado Testes-t de student para amostras independentes para comparar
os paracircmetros espaccedilos-temporais entre Nepaleses e Caucasianos (SPSS para
Windows versatildeo 14 USA)
56
252 Resultados
Variaacuteveis espaccedilos-temporais
O Fr dos Nepaleses foi maior do que as dos Caucasianos em situaccedilatildeo com
carga (plt001) mas sem carga as diferenccedilas diminuem acentuadamente (4 e 23
maiores sem e com carga respectivamente pgt005) O CP e FP dos Nepaleses
foram maiores na subida com carga mas durante a descida com carga apesar da
Vf maior apenas o CP foi maior nos Nepaleses e a FP foi similar (pgt005)
Paracircmetros energeacuteticos
A atividade EMG por unidade de tempo foi similar entre Nepaleses e
Caucasianos Contudo a ativaccedilatildeo EMG total ou seja por unidade de distacircncia
(ldquocustordquo EMG da locomoccedilatildeo) foi notavelmente maior nos Caucasianos na situaccedilatildeo
com carga especialmente na fase de subida (observe a inclinaccedilatildeo das retas na
figura 27)
A atividade EMG tambeacutem foi analisada no domiacutenio da frequumlecircncia para testar
uma possiacutevel diminuiccedilatildeo nos paracircmetros de mediana meacutedia e pico da frequumlecircncia
que pudessem explicar via fadiga neuromuscular (KNAFLITZ e BONATO 1999) o
efeito da carga no aumento da ativaccedilatildeo EMG por distacircncia percorrida nos
Caucasianos (inclinaccedilotildees das retas na figura 27)
Utilizou-se a transformada raacutepida de Fourier com janelamento de 10 segundos
analisando o centro dos bursts de 512 pontos determinados por uma integraccedilatildeo com
janelamento moacutevel Hanning de 50 ms Todavia nenhuma diferenccedila significativa foi
encontrada nos paracircmetros de frequumlecircncia entre os primeiros e uacuteltimos vinte
segundos de experimento (diminuiccedilotildees lt 5)
O notaacutevel desempenho dos Nepaleses na subida com carga eacute confirmado pela
PMV 33 maior do que a dos Caucasianos Embora a Vf e a PMV sejam maiores
nos Nepaleses estes apresentam um custo metaboacutelico 39 menor que os
Caucasianos Esta economia energeacutetica especiacutefica agrave situaccedilatildeo de carga e inclinaccedilatildeo
extrema eacute observada tambeacutem na figura 28 na qual os Caucasianos sem carga
apresentam uma eficiecircncia similar agraves eficiecircncias dos Nepaleses mas com uma baixa
eficiecircncia na situaccedilatildeo com carga
57
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal +
carga) dos carregadores Nepaleses (NEP) e montanhistas Caucasianos
(CAU) em subida (up) e descida (down)
A eficiecircncia menor dos Caucasianos na situaccedilatildeo com carga parece ser
explicada pela quantidade de ativaccedilatildeo muscular A interessante semelhanccedila entre o
custo EMG e o custo energeacutetico (figura 27) demonstram a eficaacutecia do meacutetodo EMG
utilizado no presente estudo a fim de representar uma ativaccedilatildeo muscular geral
durante a locomoccedilatildeo
253 Discussatildeo
A menor ativaccedilatildeo muscular eacute extremamente interessante pois explica de modo
importante o mecanismo da alta eficiecircncia e economia energeacutetica nos Nepaleses
58
Os resultados de potecircncia metaboacutelica e PMV confirmam os achados de
MINETTI et al 2006) Aleacutem disso o custo energeacutetico na situaccedilatildeo sem carga eacute
similar entre Caucasianos e Nepaleses Em outras palavras o desempenho notaacutevel
dos Nepaleses eacute especiacutefico somente na situaccedilatildeo de subida com carga
000
004
008
012
016
020
024
028
-12 -10 -08 -06 -04 -02 00
efi
ciecirc
nc
ia m
iacutenim
a d
e t
rab
alh
o p
os
itiv
o NEP 0kg
CAU 0kg
NEP 40kg
CAU 40kg
14
15
eficiecircncia miacutenima de trabalho negativo
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da
PMV (positiva ou negativa) pela potecircncia metaboacutelica respectiva
(MINETTI et al 2006) As linhas satildeo as razotildees entre eficiecircncia
muscular positiva e negativa (WOLEDGE et al 1985)
A melhor economia nos Nepaleses durante a subida com carga pode ser
relacionada agraves propriedades mecacircnicas de contraccedilatildeo muscular especificamente agrave
relaccedilatildeo potecircncia-velocidade Tendo em consideraccedilatildeo que os Caucasianos
realizaram o trecho de subida com carga em uma velocidade de progressatildeo 33
menor que os Nepaleses pode-se inferir que os Caucasianos realizaram a atividade
em uma regiatildeo menor de produccedilatildeo de potecircncia devido agrave relativa baixa velocidade
que por sua vez corresponde agrave uma zona de baixa eficiecircncia Outro fator secundaacuterio
pode ser a aclimataccedilatildeo de longo prazo destes indiviacuteduos agrave hipoacutexia de altitude
favorecendo o transporte e utilizaccedilatildeo de O2 no muacutesculo esqueleacutetico
59
Surpreendentemente a ativaccedilatildeo EMG por unidade de tempo eacute semelhante
entre Nepaleses e Caucasianos e por consequumlecircncia a ativaccedilatildeo total eacute menor nos
Nepaleses
Pode-se afirmar tambeacutem que a razatildeo entre ativaccedilatildeo EMG na subida e descida
independente da massa total eacute em torno de 15 e 2 corroborando com os dados de
BIGLAND-RITCHIE e WOODS 1976)
Em conclusatildeo a hipoacutetese da ativaccedilatildeo muscular econocircmica nos carregadores
Nepaleses eacute confirmada Os paracircmetros espaccedilos-temporais da passada parecem
natildeo justificar o menor custo energeacutetico nos Nepaleses O custo EMG foi maior nos
Caucasianos especialmente durante a ascensatildeo com carga indicando uma
justificativa a um achado anterior de maior estabilidade no tronco em Nepaleses
(MINETTI et al 2006)
60
3 MECAcircNICA DA CORRIDA DE IDOSOS
31 Introduccedilatildeo
Nos idosos a forccedila muscular eacute reduzida Isso tem sido atribuiacutedo
principalmente a atrofia da massa muscular com a reduccedilatildeo da aacuterea de sua secccedilatildeo
transversal (DOHERTY 2003 FRONTERA et al 2000 TRAPPE et al 2003) e
tambeacutem agrave deficiecircncia na produccedilatildeo intriacutenseca de forccedila no niacutevel da interaccedilatildeo entre
actina e miosina (PHILLIPS et al 1991 FRONTERA et al 2000 LOWE et al 2001
MORSE et al 2005) Experimentos realizados tanto em espeacutecimes isoladas de
muacutesculo (OCHALA et al 2006 PHILLIPS et al 1991) quanto in vivo em humanos
(KLASS et al 2005 PORTER et al 1997 POUSSON et al 2001 VANDERVOORT
et al 1990) mostram que a forccedila que um muacutesculo exerce ao alongar-se
(frequumlentemente chamada de contraccedilatildeo excecircntrica) tem reduccedilatildeo menor devido ao
processo de envelhecimento que a forccedila desenvolvida durante contraccedilatildeo isomeacutetrica
e durante encurtamento (frequumlentemente chamada de contraccedilatildeo concecircntrica)
O efeito das mudanccedilas das propriedades de contraccedilatildeo do muacutesculo no
trabalho mecacircnico realizado durante locomoccedilatildeo natildeo eacute conhecido O trabalho
mecacircnico realizado ao caminhar natildeo tem sido considerado significativamente maior
em indiviacuteduos idosos apesar de um maior dispecircndio energeacutetico resultando em uma
61
menor eficiecircncia mecacircnica atribuiacuteda agrave co-contraccedilatildeo de muacutesculos antagonistas
(MIAN et al 2006)
O mecanismo elaacutestico da corrida contraacuterio ao mecanismo pendular da
caminhada necessita de uma intervenccedilatildeo muscular muito maior para manter o
movimento do CM Um ciclo alongamento-encurtamento das unidades muacutesculoshy
tendiacuteneas ocorre em cada passo da corrida com grande entrada e saiacuteda de energia
mecacircnica para dentro e para fora das unidades muacutesculo-tendiacuteneas A mecacircnica da
corrida assim mais que a caminhada pode revelar mudanccedilas no trabalho mecacircnico
realizado em cada passo devido ao desempenho muscular reduzido nos idosos
Aleacutem disso uma assimetria contato-despregue ocorre durante a corrida
surgindo do fato que as unidades muacutesculo-tendiacuteneas contraacuterio a uma mola sem
atrito tecircm comportamento diferente durante alongamento e encurtamento
Recentemente foi observado que a assimetria contato-despregue eacute uma
consequumlecircncia da relaccedilatildeo forccedila-velocidade do muacutesculo e eacute maior quanto maior for a
mudanccedila no comprimento do muacutesculo em relaccedilatildeo agravequela do tendatildeo dentro das
unidades muacutesculo-tendiacuteneas (CAVAGNA 2006)
O trabalho mecacircnico realizado durante a corrida em idosos e sua assimetria
contato-despregue para nosso conhecimento ainda natildeo satildeo determinados
Neste estudo foi calculado o trabalho mecacircnico externo realizado para manter
o movimento do CM e o tempo das trocas de energia mecacircnica durante as fases de
trabalho negativo e positivo do bouncing do corpo em indiviacuteduos idosos correndo
em diferentes velocidades Os resultados obtidos em indiviacuteduos idosos satildeo
comparados agravequeles obtidos em indiviacuteduos jovens A hipoacutetese apresentada eacute que o
aumento da discrepacircncia em idosos entre o desenvolvimento da forccedila durante
alongamento e durante encurtamento se operacional durante a corrida iraacute aumentar
a assimetria contato-despregue do aparente bouncing do corpo em relaccedilatildeo agravequele
de indiviacuteduos jovens
32 Materiais e Meacutetodos
321 Amostra e procedimento experimental
Os experimentos foram realizados em oito indiviacuteduos idosos (homens idade
62
736plusmn55 anos altura 172plusmn006 m massa 711plusmn92 kg media plusmn dp) e oito indiviacuteduos
jovens (6 homens e duas mulheres idade 208plusmn16 anos altura 176plusmn008 m massa
634plusmn100 kg) Trecircs indiviacuteduos em cada grupo satildeo treinados (volume miacutenimo
semanal de corrida de 40 km) enquanto cinco satildeo sedentaacuterios saudaacuteveis Os
resultados relatados neste estudo satildeo uma meacutedia dos dados obtidos de todos os
sujeitos em cada grupo independente de seu treinamento Resultados similares
poreacutem foram obtidos comparando os trecircs indiviacuteduos idosos treinados com os trecircs
indiviacuteduos jovens do sexo masculino natildeo treinados de acordo com os achados que
o efeito da idade nas unidades muacutesculo-tendiacuteneas satildeo similares em corredores e
indiviacuteduos natildeo-ativos (KARAMANIDIS e ARAMPATZIS 2005) Consentimento
informado escrito foi obtido de cada indiviacuteduo Os estudos foram realizados de
acordo com a Declaraccedilatildeo de Helsinque
Os indiviacuteduos correram de um lado para o outro ao longo de uma pista de
corrida de 50 metros a qual foi incorporada no niacutevel do solo 8 plataformas de forccedila
de 05 m 05 m em sequumlecircncia totalizando um espaccedilo contiacutenuo de 4 m 05 m
sensiacutevel agrave forccedila aplicada na plataforma nas direccedilotildees anterior e vertical A uacutenica
instruccedilatildeo dada a cada indiviacuteduo foi para correr normalmente em uma velocidade
constante mensurada por duas fotoceacutelulas posicionadas distantes de 1 agrave 3 m
(dependendo da velocidade) ao longo do lado da plataforma Mais caracteriacutesticas da
plataforma de forccedila satildeo descritas por CAVAGNA (1975)
O procedimento do experimento consistiu em medir a forccedila aplicada no solo
no plano sagital durante corrida em diferentes velocidades Os dados foram
adquiridos em um microcomputador a uma taxa de 500 Hz por canal de i) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo anterior (Ff) ii) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo vertical (Fv) e iii) sinal das
fotoceacutelulas A aquisiccedilatildeo e anaacutelise dos dados foram realizadas atraveacutes de um
conversor analoacutegico-digital (National Instruments Austin TX USA) e um software
feito em LabView para Macintosh (versatildeo 71)
Foram feitas anaacutelises em um total de 124 corridas com velocidades meacutedias
entre 3 e 17 kmh-1 para os idosos e 229 corridas entre 3 e 21 kmh-1 para os jovens
O nuacutemero menor de execuccedilotildees realizado pelos idosos foi para diminuir riscos de
fadiga neste grupo
63
322 Dos registros da plataforma ao trabalho externo
O processo usado para calcular as mudanccedilas da energia mecacircnica do CM do
corpo derivadas das forccedilas de reaccedilatildeo do solo eacute descrito em detalhes por CAVAGNA
1975) Em resumo somente o movimento no plano sagital foi considerado para
calcular a energia mecacircnica do CM A energia cineacutetica de translaccedilatildeo lateral do CM
foi ignorada O sinal da plataforma de forccedila sem carga foi mensurado imediatamente
antes de cada corrida e subtraiacutedo dos registros da Fv e da Ff de modo a computar
uma possiacutevel mudanccedila da linha de base da plataforma Somente o grupo de
registros da Fv e da Ff compreendida entre os cruzamentos das fotoceacutelulas foi
utilizado para anaacutelises subsequumlentes As velocidades vertical e anterior do CM foram
obtidas como segue
Antes do todas as aquisiccedilotildees a plataforma era calibrada com cargas
conhecidas no sentido vertical e horizontal acircntero-posterior
A forccedila vertical meacutedia mensurada pela plataforma de forccedila Fvplate em um
intervalo de tempo correspondente a um nuacutemero de quadros nf em um determinado
nuacutemero de passos T selecionados entre picos (ou vales) nos registros de forccedila
devem igualar ao PC mensurado com uma balanccedila Fvscale
IfirstPeakorValley
SecondPeakorValleyF = Fvi
= F Eq 31 vplate vscalenf
Fvplate foi entatildeo subtraiacuteda da coluna de dados Fv e o resultado (Fv-Fvplate)M (M
eacute a massa corporal) foi integrado no tempo para obter as mudanccedilas nos registros da
velocidade vertical para o intervalo de tempo entre os cruzamentos das fotoceacutelulas
FinalTime AVel = f [(Fv - Fv plate) M]dt Eq 32
InitialTime
Um ou mais passos regulares foram subsequumlentemente escolhidos para
anaacutelise entre dois picos ou vales da curva de velocidade vertical A regularidade dos
passos (drift) foi determinada pela diferenccedila entre incrementos positivos e negativos
agraves mudanccedilas nas velocidades vertical e horizontal divididas pela soma dos
incrementos
64
| V | V | V |I + increments I VincrementsDrift = 100 Eq 33
| V | + | V |I + increments I Vincrements
Durante a corrida no plano os deslocamentos verticais ascendente e
descendente do CM do corpo satildeo em meacutedia iguais durante um nuacutemero inteiro de
passos ie a velocidade vertical meacutedia deve ser nula Baseado nessa consideraccedilatildeo
a aacuterea abaixo das mudanccedilas da velocidade vertical registrada correspondendo ao
intervalo selecionado acima seraacute dividido por nf e o resultado seraacute subtraiacutedo do total
da variaccedilatildeo da velocidade vertical registrada entre os cruzamentos das fotoceacutelulas
para obter os valores instantacircneos positivo (ascendente) e negativo (descendente)
da Vv
nf
f AVv dt
V (t) = i= 0 -AV Eq 34 v nf v
As mudanccedilas na velocidade horizontal foram determinadas pela integraccedilatildeo da
curva FfM durante o tempo entre os cruzamentos das fotoceacutelulas Ltphoto A aacuterea
abaixo dessa variaccedilatildeo de velocidade horizontal foi entatildeo dividida por Ltphoto e o
resultado foi subtraiacutedo do mesmo registro para localizar a velocidade meacutedia de
corrida no traccedilado
Atphoto
AVf (t) = f Ff M dt Eq 35 i= 0
A velocidade meacutedia de corrida mensurada atraveacutes da distacircncia das
fotoceacutelulaLtphoto foi entatildeo somada a seacuterie resultante para obter os valores
instantacircneos de Vf
f AVf dt Vf (t) = + AVf Eq 36
A tphoto
65
A velocidade vertical instantacircnea Vv(t) foi utilizada para calcular a energia
cineacutetica instantacircnea do movimento vertical
Ekv (t) = 05M Vv (t)2 Eq 37
e por integraccedilatildeo o deslocamento vertical do CM Sv(t)
Sv (t) = f Vv (t) dt Eq 38
com a correspondente energia potencial gravitacional
E p (t) = M g Sv (t) Eq 39
A energia cineacutetica horizontal foi calculada como
Ekf (t) = 05M Vf (t)2 Eq 310
a energia cineacutetica translacional total do CM no plano sagital como
(t) Eq 311 Ek (t) = Ekv (t) + Ekf
e a energia mecacircnica translacional do CM no plano sagital como
Ecm(t) = Ekv (t) + Ekf (t) + E p (t) Eq 312
Apoacutes como mencionado acima a seleccedilatildeo foi feita inicialmente entre picos (ou
vales) das mudanccedilas da velocidade vertical os registros foram expandidos para
incluir o vale anterior (ou pico) de Ep(t) ateacute uma imagem clara dos passos a ser
obtidos (figura 31)
Algoritmos foram feitos para calcular o trabalho realizado durante os passos
selecionados entre vales (ou picos) da Ep Wv Wkf e Wext foram calculados com as
amplitudes dos vales ou picos e os valores inicial e final nos registros da Ep(t) Ekf(t)
e Ecm(t) Valores positivos das variaccedilotildees de energia foram considerados como
66
trabalho positivo valores negativos foram considerados como trabalho negativo Em
uma perfeita corrida em velocidade constante no plano a razatildeo entre os valores
absolutos de trabalho positivo e negativo realizados em um nuacutemero inteiro de
passos deve ser igual a um
323 Estimativa do trabalho interno
O trabalho positivo normalizado pela massa e unidade de distacircncia para
acelerar os membros em relaccedilatildeo ao CM do corpo foi estimado para cada corrida
com a equaccedilatildeo
W int ML(J kg-1 m -1) = 014010-200L Vf f Eq 313
onde L eacute o comprimento do passo em metros Vf a velocidade meacutedia de corrida em
metros por segundo e f eacute a frequumlecircncia de passos em Hz (CAVAGNA et al 1997) Os
valores estimados de WintML como uma funccedilatildeo da velocidade em kmh-1 foram
interpolados por um ajuste polinomial de segunda ordem Deve ser salientado que
usando a mesma equaccedilatildeo para calcular Wint nos indiviacuteduos jovens e idosos assume-
se o mesmo movimento dos membros nos dois grupos
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato
Como a energia mecacircnica do CM eacute constante quando o corpo eacute deslocado no
ar (a resistecircncia do ar eacute negligenciada) o tempo aeacutereo foi calculado como o intervalo
de tempo durante o qual
dEcm(t) dt = 0 Eq 314
Como descrito em detalhes em um estudo preacutevio (CAVAGNA 2006) esse
processo pode resultar em uma superestimativa (7) do tempo aeacutereo devido ao
ruiacutedo do registro do dEcm(t)dt A duraccedilatildeo da frenagem tbrake e a duraccedilatildeo da
propulsatildeo tpush foram calculadas como o intervalo de tempo durante o qual o
dEcm(t)dt foi positivo e negativo respectivamente Novamente devido ao ruiacutedo do
67
registro do dEcm(t)dt tbrake eou tpush foi provavelmente em alguns casos
subestimado (5-7 CAVAGNA 2006) O mesmo eacute verdade para os deslocamentos
descendente e ascendente do CM durante contato Scdown e Scup que foram
mensurados nas porccedilotildees descendente e ascendente da curva Ep(t)
respectivamente durante o intervalo de tempo onde dEcm(t)dt eacute negativo e positivo
respectivamente O deslocamento vertical descendente total Svdown e deslocamento
vertical ascendente Svup foram calculados do decreacutescimo e acreacutescimo totais da
curva Ep(t) respectivamente ocorrendo entre dois ou mais picos (ou vales) de Ep
divididos pelo nuacutemero de passos
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio
A forccedila vertical Fv aplicada pelo peacute no solo eacute
= PC + M a Eq 315 Fv v
onde Mb eacute a massa do corpo e av eacute a aceleraccedilatildeo vertical do CM ie o tempo
derivado de sua velocidade vertical Vv Quando a velocidade vertical e Ekv estatildeo no
maacuteximo a derivada eacute nula av=0 e como consequumlecircncia
Fv = PC Eq 316
A localizaccedilatildeo dos picos Ekv alcanccedilados durante os passos (figura 31) foi
entatildeo utilizada para determinar os instantes onde a Fv eacute igual ao PC A localizaccedilatildeo e
as amplitudes de Ep simultacircneo com os picos de Ekv foram utilizados para determinar
a parte do deslocamento vertical ocorrendo abaixo do ponto de equiliacutebrio durante a
desaceleraccedilatildeo descendente do CM Scedown e durante a aceleraccedilatildeo ascendente do
CM Sceup As diferenccedilas
S - S = S Eq 317 vdown cedown aedown
e
68
S - S = S Eq 318 vup ceup aeup
informa sobre o deslocamento vertical quando o CM do corpo acelera descendente e
desacelera ascendente respectivamente (CAVAGNA et al 1988)
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente
A velocidade vertical maacutexima e a energia cineacutetica maacutexima Ek=Ekv+Ekf
alcanccediladas pelo CM durante deslocamento descendente Vvmxdown e Ekmxdown e
durante a elevaccedilatildeo Vvmxup e Ekmxup satildeo determinados por comparaccedilatildeo dos picos
em Ekv e Ek com a curva Ep simultacircnea Como a velocidade vertical maacutexima pode
aumentar com a amplitude do deslocamento vertical que pode ser diferente durante
a elevaccedilatildeo e o deslocamento descendente (ver eg as curvas Ep na figura 31) a
razatildeo entre as velocidades descendente e ascendente maacuteximas foram normalizadas
(V V )(S S ) = (V V )norm Eq 319 vmxdown vmxup vup vdown vmxdown vmxup
327 Transduccedilatildeo Ep Ek durante o passo
O tempo de curso da transduccedilatildeo ocorrendo no passo entre energia potencial
gravitacional Ep e energia cineacutetica do CM Ek pode ser determinado pelo valor
absoluto das mudanccedilas ambos incrementos positivos e negativos de Ep Ek e Ecm
em intervalos curtos de tempo dentro do ciclo do passo (CAVAGNA et al 2002)
1 | Ecm(t) |r(t) = Eq 320
(| E p (t) | + | Ek (t) |)
A transduccedilatildeo Ep-Ek eacute completa (r(t)=1) durante a fase aeacuterea quando nenhum
trabalho externo eacute realizado pela forccedila muscular Entretanto a transduccedilatildeo Ep-Ek
tambeacutem ocorre durante contato quando o corpo eacute parcialmente sustentado pelo peacute
no chatildeo na parte superior da trajetoacuteria do CM (0lt r(t)lt1)
69
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado
70
(incrementos de Ecm) eacute indicado em vermelho enquanto que o tempo de
trabalho mecacircnico negativo (decrementos de Ecm) eacute indicado em azul
A transduccedilatildeo Ep-Ek eacute nula (r(t)=0) em duas fases do passo a e onde Ek
aumenta e diminui respectivamente simultaneamente com a energia potencial
gravitacional Ep (CAVAGNA et al 2002) Note que trabalho externo positivo e
negativo satildeo ambos realizados nas fases a e do passo (r(t)=0) e nas fases do
passo onde uma transduccedilatildeo ocorre entre Ek e Ep (0lt r(t)lt 1)
Nesse estudo r(t) foi calculado a partir do valor absoluto do tempo derivado
de Ep Ek e Ecm no intervalo de tempo contido entre dois ou mais picos (ou vales) de
Ep O valor cumulativo de energia recuperada Rint(t) resultando da transduccedilatildeo
instantacircnea de Ek-Ep foi determinado na aacuterea abaixo do r(t) registrado dividida pelo
periacuteodo do passo
T Rint (t) = ( f r(u)du) T Eq 321
0
No final do passo Rint(t)=Rint (CAVAGNA et al 2002) Para determinar a
assimetria do ciclo do passo eacute uacutetil saber quanto da transduccedilatildeo Ek-Ep ocorre durante
o deslocamento descendente e durante a elevaccedilatildeo do CM A derivada
dE p dt Eq 322
eacute utilizada para determinar a quantidade de transduccedilatildeo ocorrendo durante o
deslocamento descendente Rintdown e durante a elevaccedilatildeo do CM Rintup A
assimetria do passo foi quantificada pela razatildeo
Rintdown Rintup Eq 323
328 Rigidez vertical (k)
A k normalizada pela massa
k M Eq 324
71
caracterizando a frequumlecircncia natural do sistema eacute em todas as condiccedilotildees (com ou
sem uma fase aeacuterea) a inclinaccedilatildeo da relaccedilatildeo av-Sv quando avgt1g A inclinaccedilatildeo
meacutedia nessa amplitude pode ser avaliada pela razatildeo entre a aceleraccedilatildeo ascendente
maacutexima avmx e a amplitude da oscilaccedilatildeo
(S + S )ceup cedownS = Eq 325 ce 2
No presente estudo a k normalizada pela massa foi mensurada como
k M = a S Eq 326 vmx ce
E a frequumlecircncia natural do sistema massa-mola como
)05 (a Svmx cefs = Eq 327 2
329 Estatiacutestica
Os dados coletados como uma funccedilatildeo da velocidade decorrida foram
agrupados em classes de intervalos de um kmh-1 como segue 3 agrave lt4 kmh-1 4 agrave lt5
kmh-1 20 agrave lt21 kmh-1 Quando comparadas agraves meacutedias de diferentes variaacuteveis
com o mesmo nuacutemero de itens em uma certa velocidade de corrida dentro de um
grupo de indiviacuteduos um teste t para amostra pareadas foi utilizado para determinar
quando as meacutedias eram significativamente diferentes Quando comparadas as
meacutedias de diferentes variaacuteveis entre os dois grupos de indiviacuteduos com diferentes
nuacutemero de itens um teste t para amostras independentes foi utilizado (SPSS versatildeo
14) Em todos os testes o p usado foi menor do que 5
33 Resultados
Na primeira seccedilatildeo dos Resultados o bouncing do corpo a cada passo eacute
descrito desconsiderando as diferenccedilas no movimento ascendente e descendente
72
do CM (Por exemplo O deslocamento vertical Sv eacute medido como (Svup+Svdown)2 o
tempo de contato com o solo como tc =(tcup+tcdown)2 etc) Este procedimento
pressupotildee uma igualdade dinacircmica durante a subida e a descida do CM como em
um oscilador harmocircnico (CAVAGNA et al 1988 BLICKHAN 1989 SCHEPENS et
al 1998)
A potecircncia meacutedia do passo despendida para acelerar e elevar o CM do corpo
e do correspondente trabalho mecacircnico realizado por unidade distacircncia satildeo
apresentados na segunda parte Na terceira seccedilatildeo a assimetria contato-despregue
eacute considerada analisando separadamente os eventos que ocorrem durante a subida
e durante a descida do CM (CAVAGNA 2006) Em todas as seccedilotildees os resultados
obtidos sobre os indiviacuteduos idosos satildeo comparados com aqueles obtidos nos
indiviacuteduos jovens
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM
Parte superior e inferior do bouncing
O periacuteodo do passo (T parte superior da figura 33) o deslocamento vertical
do CM durante cada etapa (Sv meio da figura) e o comprimento do passo (L na
parte inferior da figura) satildeo apresentados em funccedilatildeo da velocidade de corrida (Vf) na
figura 33 (quadrados pretos) Segundo o modelo massa-mola o periacuteodo do passo
a oscilaccedilatildeo vertical do CM e o correspondente deslocamento para frente foram
divididos em duas partes uma parte mais baixa que acontece quando a Fv eacute maior
do que o PC (tce Sce e Lce ciacuterculos vermelhos) e uma parte superior quando a Fv eacute
menor que o PC (tae Sae e Lae ciacuterculos azuis abertos) Para comparaccedilatildeo o periacuteodo
do passo o deslocamento vertical e o comprimento do passo tambeacutem foram
divididos de acordo com a tradiccedilatildeo nas suas fraccedilotildees que ocorrem durante a fase
de contato com o terreno (tc Sc e Lc pontilhada linhas vermelhas) e durante a fase
aeacuterea (ta Sa e La linhas pontilhadas em azul) O significado biomecacircnico dos
resultados na figura 33 tem sido explicado em estudos anteriores realizados em
indiviacuteduos adultos de diferentes idades (CAVAGNA et al 1988) e em crianccedilas com
idades entre os 2 e 16 anos (SCHEPENS et al 1998) durante a corrida em
diferentes velocidades Em ambos os estudos as partes inferior e superior do
bouncing do corpo foram simeacutetricos ateacute ~ 11 kmh-1 (isto eacute tce=tae e Sce=Sae) e
- -
73
assimeacutetricos em velocidades mais elevadas (isto eacute taegttce e SaegtSce) O momento
vertical ganho e perdido durante tce deve ser igual ao momento vertical ganho e
perdido durante tae ie
avce tce = avae tae Eq 328
O bouncing simeacutetrico implica a mesma aceleraccedilatildeo vertical meacutedia durante a
parte inferior e superior do bouncing A aceleraccedilatildeo vertical meacutedia durante a parte
inferior do bouncing avce aumentou com a velocidade enquanto que a aceleraccedilatildeo
vertical meacutedia durante a parte superior do bouncing avae natildeo pode exceder 1 g (eacute 1 g
quando tae= ta) Deste modo o bouncing torna-se assimeacutetrico quando a aceleraccedilatildeo
vertical meacutedia durante tce exceder 1g Os resultados obtidos em relaccedilatildeo aos
indiviacuteduos jovens demonstram que o bouncing tende a ser simeacutetrico em baixas
velocidades e assimeacutetrico em altas velocidades (ver tce versus tae e Sce versus Sae na
tabela 1) Por outro lado os resultados obtidos no grupo dos idosos mostram duas
diferenccedilas importantes i) o bouncing eacute simeacutetrico nas velocidades mais altas (tce=tae e
Sce=Sae) e ii) a assimetria quando presente eacute invertida (ou seja tcegttae e ScegtSae)
Amplitude do deslocamento vertical
O deslocamento vertical do CM corporal em cada etapa da corrida Sv atinge
um maacuteximo em velocidades intermediaacuterias sendo inferior nos indiviacuteduos idosos do
que nos jovens ~ 75 cm a ~ 75 kmh-1 nos idosos e ~ 10 cm a ~ 10 kmh-1 nos
jovens Valores similares de Sv foram medidos com procedimento experimental
diferente em adultos idosos e jovens correndo a ~ 10 kmh-1 (KARAMANIDIS e
ARAMPATZIS 2005) A reduccedilatildeo de Sv nos indiviacuteduos idosos eacute devida a uma
reduccedilatildeo de todas as suas componentes (Sce Sae Sc e Sa) mas eacute particularmente
relevante considerar aqui a reduccedilatildeo da Sce (tabela 32) que representa a amplitude
da oscilaccedilatildeo do sistema massa-mola a partir de sua posiccedilatildeo de equiliacutebrio (Fv igual
ao PC) ateacute sua compressatildeo maacutexima (Fv maacutexima) A amplitude da oscilaccedilatildeo eacute menor
nos idosos do que nos jovens Como esperado esta eacute acompanhada por uma
aceleraccedilatildeo menor para cima atingida no final da compressatildeo avmx e por uma menor
velocidade maacutexima ascendente Vvmx atingida quando av=0 (figura 34 e tabela 32)
74
A velocidade vertical menor resulta por sua vez em um curto tempo aeacutereo efetivo
tae (figura 33 e tabela 32)
Frequumlecircncia de passo e do sistema massa-mola
Os dois paineacuteis superiores da figura 33 mostram que o periacuteodo do passo (T=
tae+ tce) eacute menor nos idosos do que nos jovens Isto eacute devido ao tempo aeacutereo efetivo
tae mais curto enquanto que o tempo de contato efetivo tce eacute igual entre os jovens e
os idosos (tabela 32) Segundo o modelo massa-mola da corrida o tce representa
metade do periacuteodo de oscilaccedilatildeo do sistema elaacutestico Este meio-periacuteodo similar
sugere uma frequumlecircncia de ressonacircncia semelhante fs=(kM)-05(2n) do sistema
elaacutestico aparente atraveacutes do qual o corpo se desloca ou seja uma k normalizada
pela massa corporal (kM) A figura 35 mostra que em altas velocidades k eacute maior
nos indiviacuteduos idosos (paineacuteis superior) mas devido agrave sua maior massa corporal agrave
rigidez de massa especiacutefica vertical (kM= avmxSce veja na Metodologia) eacute de fato
similar ao dos jovens (paineacuteis centrais da figura 35 e tabela 32) Em ambos os
grupos kM tende a ser aproximadamente constante ateacute ~ 10 kmh-1 e em seguida
aumenta com a velocidade Os dois paineacuteis inferiores da figura 35 mostram a
frequumlecircncia do passo f apresentada em conjunto com a frequumlecircncia de ressonacircncia do
sistema fs Pode ser observado que i) f eacute maior nos idosos do que nos jovens ii) nos
idosos a f permanece semelhante agrave fs (tabela 1) enquanto que iii) nos jovens a f eacute
inferior agrave fs (tabela 31)
332 Trabalho
O trabalho externo normalizado pela M Wext realizado para sustentar o
movimento do CM corporal no plano sagital eacute descrito na figura 36 em funccedilatildeo da
velocidade de corrida Pode ser observado que trabalho feito para sustentar as
mudanccedilas de velocidade horizontal Wextf aumenta conforme o acreacutescimo de
velocidade de modo semelhante em indiviacuteduos jovens e idosos O trabalho
realizado contra a gravidade Wextv eacute menor nos indiviacuteduos idosos (tabela 32) O
trabalho externo Wext Wextf + Wextv tambeacutem eacute menor nos idosos particularmente
nas maiores velocidades de progressatildeo
75
A menor potecircncia mecacircnica despendida contra a gravidade pelos idosos
mostra que o menor deslocamento vertical em cada passo natildeo eacute compensado pelo
aumento na frequumlecircncia de passo induzido pelo menor tempo aeacutereo efetivo tae (figura
33) A constataccedilatildeo de que o envelhecimento diminui o trabalho feito contra a
gravidade Wextv deixando inalterado o trabalho para sustentar as mudanccedilas na
velocidade horizontal Wextf resulta em uma velocidade menor de corrida onde o
Wextv se iguala ao Wextf esta velocidade eacute ~ 12 kmh-1 nos idosos e ~ 15 kmh-1 nos
jovens Os dois paineacuteis inferiores na figura 36 (analisados mais profundamente na
Discussatildeo) apresentam o trabalho mecacircnico total realizado por unidade de distacircncia
percorrida Wtot =Wext+Wint onde Wext eacute o trabalho positivo feito para manter o
movimento em relaccedilatildeo ao ambiente e o Wint eacute o trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM (calculado conforme descrito na Metodologia)
333 Assimetria contato-despregue
Os deslocamentos verticais do CM para baixo e para cima durante a fase de
contato estatildeo traccedilados na figura 37 e estatildeo expressos como uma fraccedilatildeo dos
deslocamentos verticais descendente e ascendente (ScdownSvdown ciacuterculos cheios e
ScupSvup ciacuterculos abertos) Na mesma figura eacute apresentada a fraccedilatildeo do
deslocamento vertical realizado pela amplitude da oscilaccedilatildeo do sistema massa-mola
para baixo de av=0 ateacute avmx (ScedownSvdown quadrados cheios) e para cima de avmx
ateacute av=0 (SceupSvup quadrados abertos) Quando a fase aeacuterea eacute nula nas
velocidades mais baixas de corrida todo o deslocamento vertical acontece em
contato com o solo e ScSv=1 Com o aumento da velocidade acontece uma fase
aeacuterea de duraccedilatildeo progressivamente maior durante a corrida e a fraccedilatildeo do
deslocamento vertical em contato com o solo diminui mais acentuadamente durante
o deslocamento para baixo (ciacuterculos cheios) do que durante o deslocamento para
cima (ciacuterculos abertos) ou seja (ScupSvup)gt(ScdownSvdown) Em outras palavras a
altura do CM no instante do contato eacute superior agrave sua altura no instante do toque no
solo o que indica que a elevaccedilatildeo do CM eacute inferior agrave descida durante a fase de
contato do peacute com o solo (CAVAGNA 2006) Esta assimetria contato-despregue
estaacute presente em ambos os grupos mas eacute maior nos idosos do que nos jovens
principalmente devido a uma menor reduccedilatildeo na ScupSvup com o aumento da
velocidade uma maior elevaccedilatildeo do CM se daacute em contato com o solo nos indiviacuteduos
76
idosos Em ambas as faixas etaacuterias a fraccedilatildeo de deslocamento vertical ocupada pela
amplitude de oscilaccedilatildeo SceSv se aproxima de metade de Sv quase independente da
velocidade apoiando a ideacuteia de que a oscilaccedilatildeo vertical do sistema massa-mola eacute
equilibrado em torno do ponto onde a Fv se iguala ao PC Em contraste ScSv muda
acentuadamente com a velocidade ateacute o ponto em que toda a oscilaccedilatildeo tem lugar
no contato com o solo (ScSv=1)
34 Discussatildeo
341 Sobre o meacutetodo
Este sub-capiacutetulo procura discutir o meacutetodo usado no estudo especialmente
em relaccedilatildeo ao raciociacutenio envolvido e a discussatildeo de algumas abordagens similares
ao modelo usado no presente estudo
O meacutetodo dinamomeacutetrico usado no presente estudo tem como base a teoria
do custo de geraccedilatildeo de trabalho mecacircnico Esta teoria pode ser considerada como a
primeira tentativa satisfatoacuteria nas aacutereas limiacutetrofes entre biomecacircnica biologia
experimental e fisiologia comparativa de explicar sob o ponto-de-vista mecacircnico as
formas principais de locomoccedilatildeo humana a caminhada e a corrida
Baseados no meacutetodo de FENN (1930) para a determinaccedilatildeo do trabalho
mecacircnico contra a gravidade e o trabalho mecacircnico devido agraves mudanccedilas de
velocidade Cavagna e colaboradores perceberam que o ser humano quando
caminhava e corria apresentava caracteriacutesticas nas curvas de energia mecacircnica e
no somatoacuterio dos incrementos positivos nestas energias que permitiam diferenciar
estes tipos de locomoccedilatildeo ao mesmo tempo que auxiliavam no entendimento do
comportamento da unidade muacutesculo-tendatildeo e dos mecanismos minimizadores de
dispecircndio energeacutetico mecanismo pendular e elaacutestico (ver figura 32) Os
incrementos positivos de energia mecacircnica (trabalho positivo) satildeo originados
principalmente por muacutesculos e tendotildees enquanto que os incrementos negativos de
energia mecacircnica (trabalho negativo) satildeo em parte armazenados nas estruturas natildeo
contraacuteteis dos muacutesculos e tendotildees e outra parte eacute degradada em forma de calor
Tendo em consideraccedilatildeo os princiacutepios da termodinacircmica foi possiacutevel aplicar
estes mecanismos a fim de entender o porquecirc que durante a fase de apoio na
corrida a energia cineacutetica se apresenta em fase com a energia potencial do CM em
77
relaccedilatildeo ao meio ambiente enquanto que na caminhada estas energias apresentam
comportamentos contraacuterios
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da
caminhada (pecircndulo-invertido) e de segmento complacente da corrida
(massa-mola) e seus principais constituintes Note que o tracejado
indica a trajetoacuteria do corpo de massa m durante o contato g eacute a
aceleraccedilatildeo gravitacional k eacute a rigidez da mola l0 eacute o comprimento do
membro inferior e a0 eacute o acircngulo da perna de apoio no momento do
contato com o solo
O somatoacuterio dos incrementos positivos de energia mecacircnica tambeacutem
conhecido como trabalho mecacircnico externo eacute menor do que a energia metaboacutelica
despendida pelos muacutesculos durante a caminhada enquanto que o trabalho
mecacircnico externo na corrida apresenta valor maior ao da energia metaboacutelica
despendida pelos muacutesculos Este aparente paradoxo demonstrava que a razatildeo
entre potecircncia mecacircnica gerada e a potecircncia metaboacutelica despendida ultrapassava a
eficiecircncia maacutexima de transformaccedilatildeo de energia quiacutemica em trabalho mecacircnico e foi
considerado como a primeira evidecircncia de que as unidades muacutesculo-tendatildeo
responsaacuteveis pela frenagem e propulsatildeo durante a fase de apoio da corrida eram
tambeacutem responsaacuteveis por absorccedilatildeo e re-utilizaccedilatildeo de energia elaacutestica (CAVAGNA et
al 1964) permitindo mais tarde a formulaccedilatildeo do modelo massa-mola ou ldquobouncingrdquo
da corrida (BLICKHAN 1989 MCMAHON e CHENG 1990 figura 32) e o posterior
estudo do ciclo alongamento-encurtamento do muacutesculo-esqueleacutetico
78
Portanto durante atividades ciacuteclicas como a locomoccedilatildeo os muacutesculos
responsaacuteveis pelo movimento possuem uma capacidade de geraccedilatildeo de forccedila
durante seu encurtamento (contraccedilatildeo concecircntrica) maior do que em contraccedilotildees
similares mas precedidas de contraccedilatildeo isomeacutetrica No caso da locomoccedilatildeo mais
especificamente da corrida durante contraccedilotildees concecircntricas os muacutesculos
propulsores utilizam uma energia armazenada durante a precedente contraccedilatildeo
excecircntrica (CAVAGNA et al 1964 CAVAGNA et al 1968) O modelo massa-mola
assume que a unidade muacutesculo-tendatildeo exerce um comportamento similar agrave de uma
mola ou seja quando a mola diminui de comprimento apoacutes o impacto (alongamento
do muacutesculo) armazena energia potencial elaacutestica e quando a mola aumenta seu
comprimento (encurtamento do muacutesculo) durante a segunda fase de contato
transforma energia potencial elaacutestica em energia cineacutetica O modelo tambeacutem
assume mesma altura e velocidade do CM no momento do contato e despregue
A primeira pressuposiccedilatildeo do modelo (sobre a semelhanccedila entre mola e
unidade muacutesculo-tendatildeo) apesar de correta natildeo indica informaccedilotildees sobre seus
constituintes o muacutesculo e o tendatildeo Vaacuterias evidecircncias mostram diferenccedilas no
comportamento mecacircnico do muacutesculo e do tendatildeo e estas diferenccedilas satildeo
moduladas pela forccedila imposta agrave unidade consequumlentemente dependentes da
velocidade de corrida Por exemplo KRAM e TAYLOR (1990) sugeriram que o
dispecircndio de energia durante a corrida era devido ao custo de geraccedilatildeo de forccedila das
fibras musculares agindo de forma isomeacutetrica sem realizaccedilatildeo de trabalho muscular
Evidecircncias em modelo animal confirmam este raciociacutenio (ROBERTS et al 1997
BIEWENER 1998)
Ainda assim para ser inteiramente vaacutelido este modelo o tempo de trabalho
externo positivo e negativo devem ser iguais em todas as velocidades de corrida
contudo uma assimetria nos tempos de trabalho positivo e negativo satildeo encontradas
na corrida humana em velocidades baixas (ateacute 14 kmh-1) com um menor tempo
para o trabalho mecacircnico externo negativo (CAVAGNA 2006)
Portanto o mecanismo de minimizaccedilatildeo de energia apresentada por KRAM e
TAYLOR 1990) parece se sustentar apenas em altas velocidades Em velocidades
menores os muacutesculos propulsores ativam em intensidade menor portanto gerando
uma tensatildeo menor no tendatildeo provavelmente insuficiente para gerar uma mudanccedila
importante no comprimento do tendatildeo Portanto o trabalho muscular eacute significativo
com contraccedilotildees excecircntricas em maior velocidade do que as contraccedilotildees
79
concecircntricas o que corresponde com a relaccedilatildeo forccedila versus velocidade e tambeacutem
com os resultados de eficiecircncia muscular para seacuteries de alongamento encurtamento
em diferentes velocidades (maior eficiecircncia em alta velocidade de encurtamento e
menor velocidade de alongamento ndash HEGLUND e CAVAGNA 1987) Ou seja em
velocidades menores parece existir um importante trabalho muscular executado de
modo assimeacutetrico com o tendatildeo agindo apenas como transmissor de forccedilas
enquanto que em altas velocidades com o aumento do pico de estresse no muacutesculo
e consequumlentemente aumento da rigidez da unidade muacutesculo-tendatildeo o muacutesculo
contrai isometricamente e o tendatildeo muda de comprimento agindo como um elaacutestico
(o muacutesculo tambeacutem gera tensatildeo devido agrave histerese do tendatildeo poreacutem eacute
negligenciaacutevel ndash ALEXANDER 2002)
Sobre o segundo criteacuterio (da semelhanccedila de altura e velocidade no contato e
despregue) os proacuteprios autores do modelo massa-mola indicam que em geral os
animais apresentam uma velocidade no contato maior do que no despregue bem
como realizam o contato com as articulaccedilotildees das pernas mais flexionadas do que
no despregue (BLICKHAN 1989) Poreacutem se as anaacutelises da velocidade e altura satildeo
modificadas do momento de contato e despregue para o iniacutecio da fase aeacuterea e de
contato efetivos (quando a forccedila vertical eacute igual aacute forccedila peso) levando em
consideraccedilatildeo o periacuteodo natural do sistema elaacutestico a velocidade continua maior no
iniacutecio do contato efetivo em todas as velocidades de corrida mas a altura do CM eacute
maior no contato efetivo inicial do que no momento de fase aeacuterea inicial em
velocidades baixas de corrida (aproximadamente de 8 agrave 14 kmh-1) Acima destas
velocidades a altura do CM eacute maior no iniacutecio da fase aeacuterea efetiva do que no iniacutecio
da fase de contato efetivo (CAVAGNA 2006) Estas assimetrias podem chegar ateacute
30
Um ponto chave na formulaccedilatildeo deste modelo eacute a determinaccedilatildeo da rigidez do
sistema massa-mola aqui tambeacutem uma simplificaccedilatildeo do fenocircmeno pois considera
apenas os valores maacuteximos de forccedila e deslocamento verticais como se durante toda
a fase de apoio a rigidez fosse constante
Caacutelculo da rigidez de mola
Os caacutelculos da rigidez de mola do sistema bouncing representam as
propriedades de mola do movimento vertical do corpo e da perna A rigidez vertical eacute
80
estimada como a razatildeo do pico de forccedila vertical (algumas vezes denominado como
forccedila maacutexima durante a fase ativa do tempo de contato) e o deslocamento maacuteximo
vertical do CM durante o apoio (CAVAGNA et al 1988 MCMAHON e CHENG
1990) Outro meacutetodo alternativo para o caacutelculo da rigidez vertical utiliza o tempo de
contato efetivo assumindo que este tempo representa o meio periacuteodo de oscilaccedilatildeo
do sistema elaacutestico (ver CAVAGNA et al 2005) k = Mb( tce)2 onde Mb eacute massa
corporal Este uacuteltimo meacutetodo apresenta a vantagem de evitar a influecircncia das
oscilaccedilotildees de aceleraccedilatildeo vertical do CM apoacutes o contato inicial A rigidez de perna eacute
a razatildeo do pico de forccedila vertical e a mudanccedila no comprimento de perna durante o
apoio A variaccedilatildeo do comprimento de perna eacute determinada com a equaccedilatildeo 330
(MCMAHON e CHENG 1990)
delta l = ycm + l0 (1V cosa0) Eq 329
Onde l0 eacute o comprimento de perna em repouso e a0 eacute o acircngulo da perna no
contato inicial em relaccedilatildeo agrave vertical (a0 = sin-1(Vf tc2 l0) onde Vf eacute a velocidade
horizontal e tc eacute o tempo de apoio Apesar do uso frequumlente desta medida no campo
das Ciecircncias do Esporte e Biologia Experimental a rigidez de pernas possui uma
forte limitaccedilatildeo devido ao uso da medida de membro inferior incorrer em um alto grau
de erro (e 1 cm dados natildeo publicados) Aleacutem disso se utiliza da medida de tempo
de contato enquanto que a relaccedilatildeo inversa com o sistema massa-mola eacute dada pelo
tempo de contato efetivo (quando a forccedila vertical eacute maior do que o peso corporal)
portanto natildeo representa as mudanccedilas do sistema massa-mola frente agrave restriccedilotildees do
ambiente (eg gravidade CAVAGNA et al 2005)
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical
A menor amplitude de oscilaccedilatildeo do sistema elaacutestico nos idosos (Sce na figura
33) implica i) uma menor forccedila vertical maacutexima Fvmx e energia elaacutestica armazenada
em cada passo ii) uma maior frequumlecircncia de passo iii) uma menor variaccedilatildeo de
energia externa para manter o movimento do CM do corpo em relaccedilatildeo ao meio
ambiente externo e iv) um maior trabalho interno para acelerar os segmentos
relativo ao CM
81
Destaca-se que as divisotildees do passo baseadas no tempo de contato efetivo
(vermelho) aeacutereo efetivo (azul) correspondem agrave aproximadamente metade da
duraccedilatildeo e deslocamento durante o passo Em contraste a fraccedilatildeo do passo realizado
durante o tempo aeacutereo e de contato variam bastante com a velocidade Aleacutem disso
o tcetae e SceSce nos idosos enquanto que o contraacuterio acontece com os jovens
Linhas representam a meacutedia ponderada de todos os dados (Kaleidagraph 364) e a
uacutenica proposta destas linhas eacute ser um guia para os olhos elas natildeo descrevem o
mecanismo fiacutesico envolvido (figura 33)
Tabela 31 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nos quais os pares de variaacuteveis listadas satildeo significativamente diferentes dentro de
cada grupo experimental
Vf Idoso Jovem
(km h-1) tce vs tae Sce vs Sae fs vs f tce vs tae Sce vs Sae fs vs f
3 006 312 10-4 079 001 004 117 10-3
4 031 013 028 008 058 005
5 003 003 004 091 014 020
6 001 473 10-3 003 005 026 001
7 002 001 020 011 045 001
8 102 10-7 361 10-8 190 10-4 003 048 256 10-3
9 445 10-4 753 10-6 002 001 057 151 10-3
10 250 10-4 212 10-5 510 10-4 243 10-3 091 284 10-3
11 014 003 028 158 10-4 019 234 10-4
12 044 013 061 249 10-5 002 328 10-5
13 018 003 020 310 10-6 261 10-3 100 10-5
14 001 042 005 388 10-6 183 10-3 166 10-5
15 029 022 012 107 10-6 256 10-4 166 10-6
16 057 048 090 947 10-5 361 10-3 292 10-4
Forccedila e energia elaacutestica
A forccedila maacutexima vertical eacute dada pela massa corporal multiplicada pela
aceleraccedilatildeo vertical maacutexima e o resultado eacute somado ao peso corporal Avmx (equaccedilatildeo
82
34) A massa corporal meacutedia eacute 711 kg nos idosos e 634 kg nos jovens A variaccedilatildeo
da aceleraccedilatildeo maacutexima atingida pelos indiviacuteduos idosos nas suas altas velocidades
(15-17 kmh-1) eacute de 1077 plusmn 197 ms-2 (n=7) Considerando que nas mesmas
velocidades alcanccediladas pelos jovens a variaccedilatildeo foi de 1886 plusmn 274 ms-2 (n=24)
(figura 34) Note que a aceleraccedilatildeo ascendente e velocidade vertical maiores
atingidas pelos jovens Contraacuterio ao bouncing elaacutestico a velocidade vertical maacutexima
alcanccedilada durante o deslocamento descendente eacute maior do que o alcanccedilado
durante a elevaccedilatildeo sendo esta diferenccedila maior nos idosos
Tabela 32 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Wf Wv tce tae Sce
3 008 003 095 482 10-3 005
4 008 015 004 074 062
5 062 002 083 006 006
6 259 10-3 138 10-4 034 427 10-4 001
7 049 133 10-6 073 287 10-5 140 10-3
8 004 162 10-6 039 231 10-6 198 10-3
9 007 581 10-6 028 107 10-5 407 10-4
10 005 120 10-10 094 605 10-9 176 10-6
11 014 170 10-6 025 383 10-7 435 10-6
12 014 471 10-7 019 321 10-6 380 10-5
13 007 114 10-6 068 228 10-6 196 10-6
14 099 400 10-6 005 170 10-5 231 10-5
15 014 222 10-7 010 142 10-6 685 10-8
16 066 208 10-4 061 184 10-4 718 10-4
De acordo com a equaccedilatildeo 34 estes nuacutemeros resultam em uma forccedila vertical
maacutexima Fvmxold=1463 kN e Fvmxyoung=1818 kN note que 75 de diferenccedila na Avmx
resulta em 24 de diferenccedila em Fvmx devido agrave maior massa corporal dos indiviacuteduos
idosos A forccedila mais baixa alcanccedilada durante o contato pelos indiviacuteduos idosos pode
83
ser explicada em parte pela bem documentada perda de forccedila muscular (eg
DOHERTY 2003) e em parte por uma estrateacutegia de aumentar a seguranccedila do
sistema muacutesculo-esqueleacutetico (KARAMANIDIS e ARAMPATZIS 2005)
A aparente k a 15-17 kmh-1 eacute 3732plusmn885 kNm-1 (n=7) nos indiviacuteduos idosos
e 2869plusmn650 kNm-1 (n=24) nos indiviacuteduos jovens (figura 35) Assumindo uma
relaccedilatildeo forccedila-comprimento linear dos elementos elaacutesticos seu alongamento maacuteximo
(de zero a Fvmx) seria (14633732)=0039 m nos idosos e (18182869)=0063 m
nos indiviacuteduos jovens Os paineacuteis inferiores da figura 35 mostram que a frequumlecircncia
de passo (linhas contiacutenuas) eacute similar agrave frequumlecircncia natural do sistema (linhas
pontilhadas) em todas as velocidades nos idosos enquanto que com os jovens a
frequumlecircncia do passo torna-se menor do que a frequumlecircncia do sistema com o aumento
da velocidade
Tabela 33 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Avmx Vvmx AvmxSce (AvmxSce)Mb Sv
3 004 003 099 039 002
4 001 011 003 022 034
5 152 10-3 001 024 040 003
6 601 10-4 232 10-4 049 067 772 10-4
7 132 10-3 422 10-6 066 007 367 10-5
8 918 10-7 154 10-6 025 018 271 10-5
9 526 10-5 131 10-6 007 067 137 10-5
10 134 10-7 196 10-11 072 001 146 10-8
11 439 10-4 744 10-7 046 004 798 10-7
12 533 10-6 666 10-7 040 002 552 10-6
13 264 10-4 401 10-6 061 022 158 10-6
14 115 10-3 366 10-6 005 652 10-5 126 10-5
15 891 10-6 725 10-8 031 009 316 10-7
16 353 10-3 258 10-4 048 005 267 10-4
84
Visto que a energia potencial gravitacional e a energia cineacutetica do CM estatildeo
em fase durante a corrida o sistema elaacutestico sofre sua maacutexima tensatildeo quando o
componente vertical da forccedila de reaccedilatildeo do solo encontra-se no maacuteximo ((Fvmx)) e o
componente horizontal eacute nulo (Ff=0)
Na verdade Fvmx ocorre no ponto mais baixo da trajetoacuteria (Epmn) quando o
CM termina sua desaceleraccedilatildeo e comeccedila a sua aceleraccedilatildeo (ou seja Ff=0 e Ekfmn) A
energia elaacutestica armazenada em cada passo pode assim ser computada usando-se
apenas a forccedila vertical como (14630039)2=2853 J e (18180063)2=5727 J para
os indiviacuteduos idosos e para os indiviacuteduos jovens respectivamente Esta energia
elaacutestica eacute posteriormente utilizada em parte durante o impulso para elevar e acelerar
a frente o CM
Tabela 34 Comparaccedilatildeo das assimetrias contato-despregue entre jovens idosos e
sistema elaacutestico
IDOSO JOVEM ELAacuteSTICO
Vvmxdown Vvmxup 118plusmn011 107plusmn008 1
f 124plusmn018 106plusmn010 1
Rintdown Rintup 213plusmn130 126plusmn032 1
tpush tbrake 125plusmn016 115plusmn013 1
Ekmxdown - Ekmxup (J) 1003plusmn625 752plusmn542 0
Valores satildeo meacutediaplusmndp (plt0001 N=124 ( N=122) para idosos e N=195 para jovens)
Amplitude de velocidades 3-17 kmh-1
A maacutexima compressatildeo elaacutestica do sistema tambeacutem pode ser analisada como
o deslocamento vertical do CM durante o contato o que em 15-17 kmh-1 eacute em
meacutedia Sc=0032plusmn0006 m (n=7) nos idosos e Sc=0060plusmn0007 m (n=24) nos jovens
(em vez de 0039 m e 0063 m como calculado acima)
85
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um
passo em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis
a direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup +
86
Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo (tae)
da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na direccedilatildeo
vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os ciacuterculos em
vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2) e
a frente (Lce) A linha em vermelho pontilhada em cada painel indica o tempo de
contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente (Lc) durante o
passo As linhas azuis pontilhadas em cada painel indicam o tempo aeacutereo total
(ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La) durante o passo As
barras verticais indicam o desvio-padratildeo da meacutedia os nuacutemeros proacuteximos aos
siacutembolos nos paineacuteis superiores indicam o nuacutemero de itens nas meacutedias
A discrepacircncia pode ser devida em parte agrave uma subestimaccedilatildeo do Sc como
medido (ver Metodologia) A energia elaacutestica armazenada computada como (Fvmx
Sc)2 eacute (1463 0032)2=2341 J (em vez de 2853 J conforme calculado acima) e
(1818 0060)2=5454 J (em vez de 5727 J) para indiviacuteduos idosos e indiviacuteduos
jovens respectivamente
A partir dos dados meacutedios de frequumlecircncia de passo e potecircncia em um mesmo
conjunto de velocidades (figuras 36 e 37) o trabalho externo em cada passo
resultou (405 711)368=7825 J nos indiviacuteduos idosos e (538
634)279=12226 J nos indiviacuteduos jovens Daqui resulta que a contribuiccedilatildeo
elaacutestica para o trabalho externo em cada passo poderia ser 28537825=036 e
572712226=047 respectivamente (ou 23417825=030 e 545412226=045
usando Sc)
Estes caacutelculos aproximados em conjunto com uma maior assimetria contato-
despregue que seraacute discutida a seguir (tabela 34) indicam uma menor restituiccedilatildeo
elaacutestica do corpo nos idosos A maior rigidez k medida nos indiviacuteduos idosos em
sua mais alta velocidade de corrida (figura 35) em aparente desacordo com a
menor rigidez dos tendotildees do gastrocnemius (ONAMBELE et al 2006) do
quadriacuteceps (KARAMANIDIS e ARAMPATZIS 2005) medidos nos idosos Por outro
lado um aumento pela idade da rigidez dos elementos elaacutesticos nos tendotildees e
muacutesculos foi relatado em favor dos muacutesculos flexores do cotovelo (VALOUR e
POUSSON 2003)
87
Importante ressaltar que na complexa deformaccedilatildeo de todo corpo no solo a
aparente k eacute o resultado de um conjunto de unidades muacutesculo-tendatildeo em seacuterie cujas
propriedades elaacutesticas dependem do niacutevel de ativaccedilatildeo muscular O nuacutemero de
unidades muacutesculo-tendatildeo em seacuterie depende por sua vez da orientaccedilatildeo dos
segmentos e do tronco durante o impacto sobre o solo que pode ser diferente nos
indiviacuteduos idosos e nos indiviacuteduos jovens (por exemplo apoio na parte da frente do
peacute mais do que no calcanhar)
O maior valor de k encontrado em idosos em suas mais altas velocidades de
corrida portanto natildeo eacute necessariamente uma indicaccedilatildeo de uma maior rigidez dos
seus tendotildees ou unidades de muacutesculo-tendatildeo medidos durante contraccedilotildees
voluntaacuterias maacuteximas
Frequumlecircncia
O menor tempo aeacutereo efetivo tae nos idosos causa um aumento na
frequumlecircncia da passo f =1(tce+tae) para valores que satildeo iguais e por vezes
superiores agrave frequumlecircncia do sistema fs=1(2tce) Diferentemente dos jovens que
optam em uma grande extensatildeo de velocidades por uma FP mais baixa agrave do
sistema aumentando o tae em relaccedilatildeo ao tce (figuras 33 35 e tabela 32)
Os fatores que determinam a escolha da f a uma determinada velocidade de
corrida satildeo i) sintonizando a frequumlecircncia de passo f para a frequumlecircncia natural do
sistema fs (CAVAGNA et al 1997) e ii) escolhendo uma f que minimize a potecircncia
meacutedia de passada limitada aerobicamente (Wextf figura 36) dentro dos limites
estabelecidos pela potecircncia anaeroacutebica meacutedia durante o empurre (trabalho positivo)
(W+tpush liberada imediatamente pelo muacutesculo durante a contraccedilatildeo) (CAVAGNA et
al 1991) A primeira estrateacutegia eacute normalmente adotada em baixas velocidades de
corrida e modificada para a segunda estrateacutegia de corrida em altas velocidades Isto
eacute feito atraveacutes de um aumento da aceleraccedilatildeo ascendente meacutedia avce acima de 1 g
com o consequumlente aumento de tae em relaccedilatildeo ao tce (equaccedilatildeo 36) Assim a
frequumlecircncia de passo f=1(tce+tae) torna-se menor do que a frequumlecircncia do sistema
fs=1(2tce) bem como o incremento da potecircncia meacutedia do passo Wextf eacute controlada
Nos indiviacuteduos idosos a segunda estrateacutegia nunca eacute adotada A aceleraccedilatildeo meacutedia
para cima nunca excede 1 g mesmo nas velocidades altas 15-17 kmh-1 onde avce
=742plusmn123 ms-2 (n=7) segue-se que f fs em todas as velocidades (figura 35) Isto
88
permite uma menor forccedila durante o empurre da corrida em alta velocidade
resultando em uma potecircncia meacutedia durante o empurre ~ 60 daquela dos jovens
mas o aumento da frequumlecircncia da passada resulta em um maior Wint e um grande
incremento na potecircncia meacutedia de passo Wextf em corridas de alta velocidade (ver
abaixo) Aleacutem disso como se verificou neste estudo a mais baixa deformaccedilatildeo
elaacutestica do sistema diminui a fraccedilatildeo de Wext possivelmente sustentado pelo
mecanismo elaacutestico (ver tabela 34) Em contrapartida a segunda estrateacutegia eacute
seguida pelos jovens onde avce =1248plusmn18 ms-2 (n=24) no mesmo intervalo de
velocidades (15-17 kmh-1) resultando em uma menor frequumlecircncia de passo (f lt fs)
que limita o aumento do Wint da corrida em altas velocidades e um consequumlente
incremento da Wextf+ (ver abaixo)
Aleacutem disso a maior deformaccedilatildeo elaacutestica do sistema permite uma maior
utilizaccedilatildeo da energia elaacutestica (tabela 34) Sabe-se que uma mudanccedila na frequumlecircncia
de passo a uma determinada velocidade tem efeitos opostos sobre a potecircncia
externa o que diminui com o aumento da frequumlecircncia da passada e a potecircncia
interna para reposicionar os segmentos em cada passo que aumenta com a
frequumlecircncia (CAVAGNA et al 1991)
Em que medida a menor potecircncia externa meacutedia do passo devido agrave menor
amplitude da oscilaccedilatildeo dos segmentos nos idosos eacute compensada por uma maior
potecircncia interna meacutedia do passo devido ao aumento da frequumlecircncia de passo
89
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e velocidade
vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown (paineacuteis inferiores)
atingidos pelo CM durante o passo em funccedilatildeo da velocidade de corrida Estatiacutestica
e outras indicaccedilotildees conforme a figura 33
O total do trabalho realizado por unidade distacircncia Wtot =Wint+Wext foi somado
pelo Wint estimado pelas equaccedilotildees 32 e 33 para os indiviacuteduos jovens e idosos
como descrito nos Meacutetodos e pelo Wext calculado a partir das seguintes equaccedilotildees
obtidas pela interpolaccedilatildeo de todos os dados experimentais
W ML(J kg-1 m -1) = 29738 Vf - 03217 Eq 330 extyoung
90
(R=0831) para o grupo de indiviacuteduos jovens e
W ML(J kg-1 m -1) = 28445 Vf - 040856 Eq 331 extold
(R=0762) para o grupo de indiviacuteduos idosos O Wtot resultante (linhas
pontilhadas nos paineacuteis inferiores da figura 36) mostra que o trabalho externo menor
no idoso por unidade de distacircncia eacute progressivamente compensado com o aumento
da velocidade por um maior trabalho interno devido agrave sua frequumlecircncia de passada
(FP) aumentada O Wtot alcanccedila um minimum a ~75 kmh-1 nos indiviacuteduos idosos e
um miacutenimo a ~8-12 kmh-1 nos indiviacuteduos jovens
A diferenccedila em Wtot eacute invertida acima de ~14 kmh-1 Eacute possiacutevel que a menor
utilizaccedilatildeo da energia elaacutestica em idosos aumente o gasto de sua energia metaboacutelica
para o mesmo Wtot O consumo de O2 durante a corrida a 10 kmh-1 aumentou com a
idade em corredores treinados do sexo feminino (EVANS et al 1995)
343 A assimetria contato-despregue
As quatro fases do bouncing as diferenccedilas com um sistema elaacutestico
Antes de descrever a assimetria contato-despregue no aparente bouncing do
CM em cada passo da corrida vale a pena referir que os momentos de contato e
despregue podem natildeo ocorrer durante corridas de baixa velocidade quando a
oscilaccedilatildeo vertical do CM do corpo se daacute totalmente em contato com o solo (figura
38) Eacute oacutebvio que neste caso o contato com o solo natildeo pode ser tomado como um
indicador de contato e despregue quando se descreve o bouncing do sistema
elaacutestico Neste caso a oscilaccedilatildeo vertical ocorre abaixo e acima da posiccedilatildeo de
equiliacutebrio (onde a Fv iguala o PC e a velocidade vertical eacute maacutexima) Mesmo quando
uma fase aeacuterea ocorre durante o passo a fraccedilatildeo do deslocamento vertical do CM
total em que o corpo estaacute em contato com o solo ScSv muda amplamente com a
velocidade enquanto que a fraccedilatildeo do deslocamento vertical abaixo e acima do ponto
de equiliacutebrio SceSv se aproxima da metade do Sv quase independente da
velocidade (figura 37)
91
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e frequumlecircncia
do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute maior nos idosos
nas altas velocidades (paineacuteis superiores) a rigidez vertical normalizada pela massa
eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras indicaccedilotildees conforme figura 33
92
Estas observaccedilotildees indicam que eacute mais adequado considerar-se contato
efetivo o instante no qual a Fv aumenta acima do PC (ao inveacutes do instante em que o
peacute estaacute em contato com o solo) e despregue efetivo o instante em que a Fv diminui
para valores menores do que o PC (ao inveacutes do instante no qual o peacute deixa o solo)
A assimetria contato-despregue desaparece quando o bouncing do corpo eacute mais
corretamente dividido desta forma (ou seja tce versus tae em vez de tc versus ta)
(CAVAGNA et al 1988 MCMAHON e CHENG 1990) Ainda na figura 37 pode ser
observado que ScSv mudam mais com a velocidade do que a amplitude da
oscilaccedilatildeo SceSv ao qual atinge a metade do deslocamento vertical Sv Exceto as
velocidades muito baixas quando a fase aeacuterea eacute nula (ScSv=1 eg paineacuteis
superiores nas figuras 31 e 38) o deslocamento descendente enquanto o peacute toca o
solo eacute menor do que o deslocamento ascendente particularmente nos idosos a
descida baliacutestica do CM eacute maior do que a elevaccedilatildeo baliacutestica (veja a linha azul
pontilhada na figura 38)
Segundo a equaccedilatildeo 34 a velocidade vertical descendente eacute maacutexima no
instante do contato efetivo e a velocidade vertical ascendente eacute maacutexima no instante
do despregue efetivo No movimento harmocircnico de um sistema elaacutestico as
velocidades ascendentes e descendentes maacuteximas satildeo iguais Isso natildeo eacute verdade
na corrida humana a velocidade maacutexima descendente eacute superior agrave velocidade
maacutexima ascendente (CAVAGNA 2006) Estes resultados mostram que a assimetria
eacute maior em indiviacuteduos idosos do que nos jovens na variaccedilatildeo normal de velocidades
(3-17 kmh-1) a proporccedilatildeo normalizada ((VvmxdownVvmxup)norm=116plusmn009 (n=124)
nos idosos e 107plusmn007 (n=195) nos jovens (p=126 10-19) (tabela 34) Outras
assimetrias satildeo apresentadas a seguir atraveacutes da anaacutelise das mudanccedilas na energia
potencial gravitacional Ep e energia cineacutetica translacional Ek=Ekv+Ekf do CM
corporal durante as quatro fases de oscilaccedilatildeo do sistema em relaccedilatildeo a posiccedilatildeo de
equiliacutebrio (Fv=Mg) (CAVAGNA 2006) Estas fases satildeo apresentadas na figura 38 a
partir do topo da trajetoacuteria do CM corporal Durante a aceleraccedilatildeo descendente
(Saedown azul) a Ep diminui e a Ek aumenta indicando uma transduccedilatildeo de Ep em Ek
o que ocorre tanto na presenccedila quanto na ausecircncia de uma fase aeacuterea (por
exemplo na parte superior do painel esquerdo da figura 38) O montante desta
transduccedilatildeo eacute dado pelo incremento Rintdown da curva do Rint(t) apoacutes o maacuteximo de Ep
Durante a desaceleraccedilatildeo descendente (Scedown vermelho) o trabalho externo
negativo eacute feito para diminuir simultaneamente Ep e Ek O trecho superior da curva
93
Rint(t) correspondente agrave fraccedilatildeo do passo mostra que natildeo ocorre transduccedilatildeo entre
Ep e Ek Note-se que o pico de Ek durante o passo eacute atingido proacuteximo ao iniacutecio da
fase de trabalho negativo consistente com a velocidade maacutexima de alongamento
das unidades muacutesculo-tendotildees (HEGLUND e CAVAGNA 1987)
Durante a aceleraccedilatildeo ascendente (Sceup vermelho) trabalho positivo externo
eacute feito para aumentar simultaneamente Ep e Ek O trecho inferior da curva Rint(t)
correspondente agrave fraccedilatildeo a do passo mostra que natildeo ocorre transduccedilatildeo entre Ep e
Ek Note que enquanto eacute quase totalmente contida dentro do Scedown a continua
apoacutes o final do Sceup ou seja dentro da desaceleraccedilatildeo ascendente do CM (Saeup
azul) Em outras palavras a perna ainda estaacute a exercer uma forccedila propulsiva a fim
de acelerar o corpo a frente embora a forccedila vertical tenha diminuiacutedo para valores
abaixo do peso corporal Essa assimetria eacute maior no idoso A proporccedilatildeo a eacute
124plusmn018 nos indiviacuteduos idosos e 106plusmn010 nos indiviacuteduos jovens (p=41510-19
tabela 34)
Importante notar a origem diferente dos dois picos Ekmxup (inferior) e
Ekmxdown (superior) alcanccedilados durante o passo de corrida durante a elevaccedilatildeo e
descenso do CM Ekmxup se deve ao empurre para frente enquanto Ekmxdown eacute
devido agrave gravidade A diferenccedila meacutedia Ekmxdown- Ekmxup=752plusmn542 nos indiviacuteduos
jovens e 987plusmn592 nos idosos (p=00004) indica uma maior perda da energia
cineacutetica Ekv no idoso adquirida durante a descida (tabela 34)
Durante a desaceleraccedilatildeo ascendente do CM (Saeup azul) a transduccedilatildeo de Ek
em Ep acontece apenas na uacuteltima parte da elevaccedilatildeo porque como descrito acima
Ep e Ek aumentam simultaneamente durante a maior parte do Saeup Na verdade a
transduccedilatildeo de Ek em Ep eacute quase nula nos idosos (figura 38) O incremento da curva
Rint(t) que ocorre durante a elevaccedilatildeo Rintup eacute inferior ao que ocorre durante a
queda Rintdown Tambeacutem esta assimetria eacute maior no idoso A proporccedilatildeo
RintdownRintup nos indiviacuteduos idosos eacute 213plusmn13 e 126 plusmn 032 nos indiviacuteduos jovens
(p=33310-11 tabela 34) Este fenocircmeno eacute acompanhado por uma maior fraccedilatildeo da
elevaccedilatildeo em contato com o solo como indicado pela maior proporccedilatildeo ScupSvup nos
idosos (figura 37) Um tempo aeacutereo inferior nos idosos durante a corrida em ~ 10
kmh-1 foi encontrado por KARAMANIDIS e ARAMPATZIS 2005)
94
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com seus
95
dois componentes o trabalho realizado contra a gravidade (Wv ciacuterculos abertos) e
para sustentar as mudanccedilas de velocidade a frente (Wf quadrados abertos)
Estatiacutestica e outras indicaccedilotildees conforme figura 33
Note que particularmente nos idosos a transduccedilatildeo da Ek em Ep durante a
elevaccedilatildeo (incremento Rintup da curva Rint(t) abaixo da linha horizontal pontilhada) eacute
menor do que a transduccedilatildeo da Ep em Ek durante o deslocamento descendente
(incrementos Rintdown da curva Rint(t) acima da linha horizontal pontilhada) esta
assimetria eacute acompanhada pela elevaccedilatildeo baliacutestica (nulo nos idosos) menor do que a
descida baliacutestica Nos trechos horizontais da curva Rint(t) nenhuma transduccedilatildeo
ocorre Ep e Ek e unidades muacutesculo-tendatildeo absorvem simultaneamente Ep e Ek (fase
) e aumentam Ep e Ek simultaneamente (fase a) Note que enquanto que a fase eacute
realizada durante Scedown a estende-se aleacutem do Sceup dentro de uma grande parte
do Saeup devido ao continuo aumento da Ek Esta assimetria tambeacutem eacute maior nos
idosos
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As fraccedilotildees do
deslocamento vertical do CM durante contato ScSv (ciacuterculos preenchidos
deslocamento descendente ciacuterculos abertos deslocamento ascendente) e quando
a Fv eacute maior do que o PC SceSv (quadrados preenchidos deslocamento
96
descendente quadrados abertos deslocamento ascendente) satildeo apresentados em
funccedilatildeo da velocidade de corrida Estatiacutestica conforme figura 33
Um trabalho externo positivo eacute realizado (segmentos vermelhos na figura 31)
natildeo soacute para aumentar simultaneamente Ep e Ek (fraccedilatildeo a do passo) mas tambeacutem
quando ocorre transduccedilatildeo da Ek em Ep no final do empurre durante o alcance do
platocirc de Ecm (figura 31) Daqui resulta que a duraccedilatildeo de trabalho positivo tpush eacute
superior agrave duraccedilatildeo a a proporccedilatildeo tpushta diminui com a velocidade de ~19 agrave 3-5
kmh-1 para ~11 agrave 15-17 kmh-1 Da mesma forma o trabalho externo negativo eacute
feito (segmentos azuis na figura 31) natildeo apenas para diminuir simultaneamente Ep e
Ek (fraccedilatildeo do passo) mas tambeacutem quando ocorre uma transduccedilatildeo de Ep em Ek no
iniacutecio da frenagem durante a acentuada diminuiccedilatildeo de Ecm no final de seu platocirc
(figura 31) Consequentemente a duraccedilatildeo do trabalho negativo tbrake eacute maior do que
a duraccedilatildeo a proporccedilatildeo tbraket diminui com a velocidade de ~17 agrave 3-5 kmh-1 para
~12 agrave 15-17 kmh-1
A duraccedilatildeo do empurre e da frenagem estatildeo apresentados na figura 39 em
funccedilatildeo da Vf Observa-se que tanto nos indiviacuteduos idosos quanto nos jovens tpushgt
tbrake ateacute 13-14 kmh-1 (tabela 31) A proporccedilatildeo eacute tpushtbrake=125plusmn016 nos indiviacuteduos
idosos e 115plusmn013 nos indiviacuteduos jovens (p=11610-9 tabela 34) Novamente a
assimetria eacute maior nos indiviacuteduos idosos
Durante a corrida no plano a uma velocidade constante o momentum perdido
Fbrake tbrake equivale ao momentum adquirido Fpush tpush (realmente na direccedilatildeo vertical
o momentum perdido eacute ligeiramente maior que o momentum adquirido porque a
velocidade descendente maacutexima eacute 7-16 maior do que a velocidade ascendente
maacutexima tabela 34) Deste modo se tpushgt tbrake entatildeo Fpush lt Fbrake ou seja a forccedila
meacutedia durante o trabalho positivo eacute inferior agrave forccedila meacutedia durante o trabalho
negativo
As assimetrias do bouncing acima descritas estatildeo resumidas na tabela 34
onde eacute feita uma comparaccedilatildeo entre indiviacuteduos idosos indiviacuteduos jovens e um
sistema elaacutestico Observa-se que o desvio de um sistema elaacutestico eacute maior para os
indiviacuteduos idosos do que para os indiviacuteduos jovens isto eacute o salto dos indiviacuteduos
idosos eacute menos elaacutestico do que o dos indiviacuteduos jovens Note a mesma conclusatildeo
foi encontrada acerca da estimativa da energia elaacutestica armazenada em cada passo
97
98
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito idoso
paineacuteis a direita sujeito jovem em cada painel o comportamento da transduccedilatildeo Ep-
Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas na energia potencial
gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf normalizada para oscilar entre
zero e um Mesmos passos da figura 1 cada painel comeccedila e termina no valor
menor da curva Ep As cores diferentes na curva Ep distinguem as fraccedilotildees do passo
onde a Fv exercida no solo eacute maior do que o PC (vermelho) e menor do que o PC
(azul) As linhas contiacutenuas de Ep indicam a fase de contato enquanto que as linhas
pontilhadas Ep (azul fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As
quatro fases correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown (azul)
e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas pontilhadas verticais
satildeo apresentadas nos dois picos de Ek e ocupam a fraccedilatildeo onde a transduccedilatildeo Ep-Ek
ocorre conforme indicado pelos incrementos da curva Rint(t)
Por que o bouncing do corpo eacute diferente daquele de um sistema elaacutestico
A cada passo executado as unidades muacutesculo-tendatildeo satildeo submetidas a um
ciclo alongamento-encurtamento durante o contato com o solo As unidades
muacutesculo-tendatildeo satildeo constituiacutedas por duas estruturas em seacuterie que apresentam
respostas diferentes durante o alongamento e encurtamento Enquanto os tendotildees
tecircm um comportamento semelhante entre o alongamento e encurtamento devido agrave
sua pequena histerese (ALEXANDER 2002) o muacutesculo exerce uma maior forccedila
durante o alongamento do que durante o encurtamento dependente da relaccedilatildeo
forccedila-velocidade (FENN e MARSH 1935 HILL 1938) Este fato resulta em uma
resposta diferente das unidades muacutesculo-tendatildeo a um ciclo alongamento-
encurtamento dependente da mudanccedila do comprimento relativo de muacutesculo e
tendatildeo durante o ciclo (CAVAGNA 2006)
O alongamento dos muacutesculos em relaccedilatildeo ao alongamento do tendatildeo depende
da rigidez do muacutesculo em relaccedilatildeo agrave do tendatildeo a rigidez do muacutesculo por sua vez
depende da sua ativaccedilatildeo Se a ativaccedilatildeo eacute elevada como em altas velocidades
(BIEWENER 1998) e o muacutesculo eacute mantido isomeacutetrico como alguns estudos
sugerem para a corrida (KRAM e TAYLOR 1990 BIEWENER et al 1998
99
ROBERTS et al 1998) a maioria da mudanccedila no comprimento seraacute realizada pelos
tendotildees e as caracteriacutesticas do bouncing se aproximaratildeo agraves de um corpo elaacutestico
Se por outro lado a ativaccedilatildeo muscular for baixa uma importante fraccedilatildeo da mudanccedila
do comprimento seraacute realizada pelo muacutesculo Neste caso a forccedila desenvolvida
durante o alongamento eacute esperada que exceda a que foi desenvolvida durante o
encurtamento e as caracteriacutesticas do bouncing foram distintas agrave de um corpo
elaacutestico
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos
painel inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura 31)
e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e barras
azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de corrida
Estatiacutestica conforme figura 33
Esta eacute possivelmente a razatildeo pela qual a proporccedilatildeo tpushtbrake (figura 39) eacute
maior em velocidades baixas de corrida quando a ativaccedilatildeo muscular eacute menor e o
comprimento muscular eacute alterado e consequumlentemente o trabalho sustentado por
filamentos de muacutesculos que deslizam dentro das unidades muacutesculo-tendatildeo eacute
relativamente maior (CAVAGNA 2006) Pode ser observado que a duraccedilatildeo de
trabalho externo positivo eacute maior do que a duraccedilatildeo do trabalho externo negativo ateacute
a velocidade de 12-14 kmh-1 (tabela 31) como esperado a partir da relaccedilatildeo forccedilashy
100
velocidade muscular Isto sugere que com o aumento da velocidade a contribuiccedilatildeo
do trabalho pelas estruturas contraacuteteis eacute progressivamente substituiacutedo pela
armazenagem e re-utilizaccedilatildeo de energia elaacutestica pelos tendotildees A razatildeo tpushtbrake eacute
maior nos idosos (tabela 34)
Um corolaacuterio deste ponto de vista eacute que as fibras musculares curtas
aparentemente de pouca importacircncia ligadas em seacuterie com tendotildees muito longos
(ALEXANDER 2001) tecircm papel fundamental de modular a energia elaacutestica
armazenada nos tendotildees e para ajustar toda a extensatildeo da mudanccedila imposta agrave
unidade muacutesculo-tendatildeo Uma forccedila muscular maior durante o alongamento do que
durante o encurtamento juntamente com a perda de energia durante o ciclo
alongamento-encurtamento satildeo tanto consequumlecircncias da relaccedilatildeo forccedila-velocidade do
muacutesculo e podem explicar pelo menos qualitativamente o conjunto dos desvios do
sistema elaacutestico (tabela 33)
O maior desvio de um sistema elaacutestico encontrado nos indiviacuteduos mais idosos
eacute coerente com a menor forccedila desenvolvida pelos seus muacutesculos o que implicaria
uma mudanccedila relativamente maior do comprimento do muacutesculo nas unidades
muacutesculo-tendatildeo A segunda razatildeo pode ser a maior diferenccedila na forccedila desenvolvida
pelos muacutesculos durante o alongamento relativo ao encurtamento relatado na
literatura em idosos (PHILLIPS et al 1991 OCHALA et al 2006 VANDERVOORT
et al 1990 PORTER et al 1997 POUSSON et al 2001 KLASS et al 2005)
Em conclusatildeo modificaccedilotildees na estrutura muscular menor forccedila e uma
relaccedilatildeo forccedila-velocidade mais assimeacutetrica resultam em uma modificaccedilatildeo da energia
mecacircnica do CM do corpo durante a corrida A menor forccedila especialmente durante
trabalho positivo explica a menor amplitude da oscilaccedilatildeo vertical que por sua vez eacute
a causa do menor trabalho externo da maior frequumlecircncia da passada e maior
trabalho interno A relaccedilatildeo forccedila-velocidade mais assimeacutetrica explica a maior
assimetria contato-despregue Ambas as modificaccedilotildees resultam em uma menor
utilizaccedilatildeo da energia elaacutestica durante o bouncing do idoso
101
4 PREDIZENDO Vf CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO TERRESTRE
41 Introduccedilatildeo
A dinacircmica da locomoccedilatildeo eacute determinada principalmente pelas forccedilas de
reaccedilatildeo do solo geradas de modo agrave re-acelerar e deslocar o corpo contra a forccedila
gravitacional em um ciclo de passada O meacutetodo para analisar o trabalho e o custo
mecacircnico externos usando plataformas dinamomeacutetricas foi introduzido por Cavagna
e colaboradores (caminhada CAVAGNA et al 1963 corrida CAVAGNA et al
1964) Desde entatildeo o Wext tem sido investigado em diferentes condiccedilotildees e
populaccedilotildees [terreno (FORMENTI et al 2005 FORMENTI e MINETTI 2007)
crianccedilas (CAVAGNA et al 1983 SCHEPENS et al 1998 SCHEPENS et al 2001)
meacutetodo de locomoccedilatildeo (MINETTI 1998a ARDIGO et al 2003) deficiecircncia de
hormocircnio do crescimento (MINETTI et al 2000) gradiente de locomoccedilatildeo (MINETTI
et al 1993 1994) idosos (MIAN et al 2006 estudo atual capiacutetulo 3)]
Apesar de sua relevacircncia cientiacutefica o nuacutemero de laboratoacuterios onde trabalho e
custo mecacircnico satildeo avaliados eacute limitado devido a questotildees metodoloacutegicas Em
especial a aquisiccedilatildeo da energia mecacircnica externa eacute atualmente limitada pela
necessidade de espaccedilo suficiente para posicionar plataformas de forccedila para coletar
dois passos sucessivos de modo a obter o miacutenimo de duas curvas de forccedilas de
reaccedilatildeo do solo consecutivas essenciais para esse meacutetodo Durante a corrida haacute um
periacuteodo entre as duas curvas durante o qual ambos os peacutes estatildeo fora do solo (em
velocidades normais) enquanto que durante a caminhada esse periacuteodo eacute
substituiacutedo por uma fase de apoio duplo
Independente se as duas curvas estatildeo sobrepostas ou natildeo (caminhando ou
correndo respectivamente) haacute ainda alguma dificuldade em obter
102
experimentalmente no miacutenimo duas curvas similares de modo que a Fv meacutedia seja
igual ao PC Normalmente mais de um terccedilo das aquisiccedilotildees com indiviacuteduos normais
satildeo rejeitadas (dados natildeo-publicados) devido agrave dificuldade de caminhar ou correr
em plataformas em uma velocidade constante E aleacutem disso a maior parte dos setshy
uprsquos biomecacircnicos satildeo dispostos de modo que as curvas sucessivas sejam obtidas
da mesma plataforma Dados de Bastien e colaboradores mostram que duas
medidas sucessivas em diferentes plataformas de forccedila eram possiacuteveis apenas em
10 das tentativas Assim medir o Wint realizado durante o duplo apoio eacute uma tarefa
difiacutecil e essa variaacutevel em seu maacuteximo representa mais de 40 do Wext (BASTIEN
et al 2003)
Deste modo o presente texto procura analisar as possibilidades de anaacutelise da
biomecacircnica da locomoccedilatildeo em situaccedilotildees onde apenas uma plataforma de forccedila com
dimensotildees capazes de analisar apenas um apoio simples satildeo disponiacuteveis
O objetivo desse trabalho eacute estabelecer uma equaccedilatildeo capaz de predizer o
trabalho mecacircnico usando procedimentos de prediccedilatildeo linear e otimizaccedilatildeo e checar
sua validade analisando experimentos de locomoccedilatildeo em diferentes velocidades
42 Equaccedilatildeo do tempo de atraso
Usando a primeira lei de Newton (um corpo se move a uma velocidade
constante quando a soma total das forccedilas externas eacute igual a zero) temos que a Fv
meacutedia exercida contra o solo durante um ciclo de passada a uma velocidade
constante eacute igual ao PC (CAVAGNA e MARGARIA 1966) Se somente as forccedilas de
reaccedilatildeo do solo de um uacutenico passo satildeo coletadas e a simetria eacute assumida
(KARAMANIDIS et al 2003) o atraso de tempo entre passos (s) pode ser obtido
por
F t Ivc c vt = = Eq 41 step M g M g
onde tc e Fvc satildeo a duraccedilatildeo e a Fv meacutedia durante o fase de contato (figura 41)
respectivamente e Iv eacute o impulso vertical Essa informaccedilatildeo eacute crucial se a passada
completa deve ser reconstruiacuteda (no novo passo elaborado somente a forccedila
103
horizontal precisa ser invertida enquanto que a Fv precisa ser somente duplicada a
partir do atraso do tempo tstep)
M g M gFP = = Eq 42
2F t 2 Ivc c v
de onde o CP (CP m) pode ser inferido
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de reaccedilatildeo do solo durante a
corrida
O DF (ALEXANDER e JAYES 1980) ie a fraccedilatildeo do tempo de passada no
qual um uacutenico peacute estaacute no solo eacute
104
M g 1DF = = Eq 43
2F F vc vc2
M g
e deste modo eacute possiacutevel indicar se o modo de locomoccedilatildeo eacute caminhada (DF05) ou
corrida (DFlt05) Ateacute esse ponto a uacutenica variaacutevel a ser conhecida antecipadamente
eacute a massa corporal (kg)
43 Estimativa da velocidade horizontal
Enquanto pares de fotoceacutelulas satildeo comumente encontrados em laboratoacuterios
por vezes a Vf natildeo eacute conhecida (paleontologia biomecacircnica forecircnsica etc) Assim
FP DF e massa podem entrar no modelo de prediccedilatildeo de velocidade (ms-1) com
base em dados coletados previamente (NILSSON e THORSTENSSON 1989)
Vf = (1953F M g) - (14843Iv M g) + 5415 Eq 44 v peak
onde Fvpeak eacute a forccedila de impacto vertical e Iv eacute impulso vertical O erro meacutedio da
estimativa (SEE = 05 dp(1 ndash R2)) eacute 005 ms-1 Entatildeo o CP pode ser obtido como
VfFP ou
1953Fv peak -14843Iv + 5415M gCP = Eq 45
2Fvc
Apesar do alto coeficiente de regressatildeo e baixo erro padratildeo da meacutedia esse
meacutetodo necessita do primeiro pico vertical e assim se torna limitado por exemplo
em humanos para corredores que apoacuteiam o peacute com o calcanhar no momento do
contato Para evitar essa limitaccedilatildeo foi construiacutedo um modelo de regressatildeo linear
muacuteltipla incluindo variaacuteveis descritivas (MINETTI e ALEXANDER 1997) da
energeacutetica da locomoccedilatildeo
qregression + + DFregression + FPregressionVf = Eq 46 3
105
Para cada regressatildeo o meacutetodo dos miacutenimos quadrados eacute usado Enquanto
que o DF e o FP satildeo calculados (equaccedilotildees 42 e 43) o fator q precisa ser
determinado O fator q (tambeacutem conhecido como fator de forma) oferece
informaccedilotildees relacionadas ao formato da curva forccedila-tempo durante a fase de apoio
Usualmente a forccedila vertical pode ser determinada somente com dois primeiros
cossenos de uma seacuterie de Fourier (ALEXANDER 1978)
tc ) Eq 47 Fv = x cos( tc ) V qcos(3
onde x eacute PC e tc eacute tempo de contato A ausecircncia de coeficientes seno indica uma
simetria nas curvas forccedila-tempo e nestes casos o fator q eacute constante Em outras
palavras conhecendo somente o valor da Fv e sua respectiva fase eacute possiacutevel
encontrar o fator q Todavia na caminhada satildeo frequumlentemente observadas curvas
assimeacutetricas (NILSSON e THORSTENSSON 1989) assim incluiacuteu-se dois
coeficientes senos na equaccedilatildeo
tc ) Eq 48 Fv = x cos( tc ) V qcos(3 tc ) + a1 sin(2 tc ) V a2 sin(4
onde a1 e a2 satildeo constantes Assim usando um simples caacutelculo de meacutedia aritmeacutetica
para o q durante o tc noacutes temos
q1 + q2 + q3 + qnqmean = Eq 49 n
Usando os valores de fator q advindos da literatura (MINETTI e ALEXANDER
1997) construiacutemos a seguinte equaccedilatildeo de regressatildeo em situaccedilotildees de caminhada
DF 05 qregression = 23061q + 05873 R=079 Eq 410
onde qregression eacute a Vf estimada e utilizada na equaccedilatildeo 46 Para situaccedilotildees de corrida
o fator q natildeo varia em funccedilatildeo da velocidade (figura 42) obtendo um coeficiente
106
angular da equaccedilatildeo de regressatildeo muito baixo (00916) portanto em situaccedilotildees de
corrida o qregression eacute cancelado
As seguintes equaccedilotildees (411 412 413 e 414) foram originadas dos dados
apresentados na figura 43 de MINETTI (1998b) Nesta figura as informaccedilotildees satildeo
valores meacutedios (meacutedias advindas de 22 agrave 42 medidas para cada velocidade e tipo
de locomoccedilatildeo) de medidas de FP e DF portanto as equaccedilotildees a seguir apresentam
valores de R subestimados enquanto que as equaccedilotildees de regressatildeo representam
de modo satisfatoacuterio os dados de origem A Vf predita pela frequumlecircncia de passada
FPregression foi determinada para a caminhada como
DF 05 FPregression = 27781FP V12077 R=098 Eq 411
e para a corrida
DF lt 05 FPregression = 75469FP - 79561 R=090 Eq 412
A Vf predita pelo duty factor DFregression foi determinado para a caminhada
como
DF 05 DFregression = V12342DF + 84628 R=099 Eq 413
e para a corrida
DF lt 05 DFregression = -16912DF + 87422 R=098 Eq 414
44 Equaccedilatildeo de custo energeacutetico
O atraso entre passos tstep e a Vf satildeo cruciais para ldquosintetizarrdquo toda a
passada e calcular o trabalho mecacircnico externo e a recuperaccedilatildeo de energia (ambos
valores total (CAVAGNA e KANEKO 1977) e instantacircneo (CAVAGNA et al 2002))
Assim as forccedilas de reaccedilatildeo do solo satildeo integradas duas vezes para posiccedilatildeo
do CM e dados da velocidade A primeira integraccedilatildeo das forccedilas horizontais e
107
verticais menos o PC ambas divididas pela massa corporal resultam na aceleraccedilatildeo
do CM A constante de integraccedilatildeo usada para as forccedilas acircntero-posteriores foi a
velocidade meacutedia de progressatildeo Para as forccedilas vertical e meacutedio-lateral noacutes
assumimos que as velocidades inicial e final em todo o ciclo eram iguais A variaccedilatildeo
positiva ponto-a-ponto da Ep somada a variaccedilatildeo positiva ponto-a-ponto da Ek
durante uma passada completa resulta na energia mecacircnica externa total Ecm
(CAVAGNA e KANEKO 1977 WILLEMS et al 1995) Para evitar o ldquoparadoxo do
trabalho zerordquo o trabalho externo eacute determinado somando somente os incrementos
positivos da Ecm Sabendo o Wext e estimando o Wint (MINETTI 1998b) foi
calculado o Wtot e o custo energeacutetico (Ctot) da locomoccedilatildeo
A velocidade horizontal foi determinada atraveacutes do meacutetodo de regressatildeo
linear muacuteltipla usando como variaacuteveis independentes os coeficientes da curva Fv (de
NILSSON e THORSTENSSON 1989) A validade cruzada das equaccedilotildees
desenvolvidas no presente estudo foi calculada por coeficientes de regressatildeo (R)
45 Discussatildeo
O presente modelo prediz a velocidade horizontal e o custo energeacutetico da
locomoccedilatildeo terrestre Aleacutem disso o modelo matemaacutetico permite estimar outros
importantes paracircmetros da locomoccedilatildeo como a FP e o DF
Outros modelos
Tem sido proposto que o custo energeacutetico da locomoccedilatildeo terrestre pode ser
determinado pelo custo da produccedilatildeo de forccedila para suportar o PC (KRAM e TAYLOR
1990) Fundamentalmente o custo de geraccedilatildeo de forccedila indica que a potecircncia
metaboacutelica da locomoccedilatildeo eacute relacionada diretamente ao PC e o tempo disponiacutevel
para produzir forccedila
c Mg E
metabolic = Eq 415 tc
108
onde c eacute uma constante de custo (que expressa a proporcionalidade entre taxa de
dispecircndio de energia normalizado pela massa e taxa de geraccedilatildeo de forccedila)
entretanto esse modelo tecircm sido alvo de criacuteticas Resumidamente a principal criacutetica
eacute baseada em i) a suposiccedilatildeo que o dispecircndio metaboacutelico devido ao movimento dos
membros superiores eacute negligenciaacutevel e ii) a desconsideraccedilatildeo do conceito de
trabalho O presente trabalho tambeacutem mostra que levar em consideraccedilatildeo apenas o
tempo da geraccedilatildeo de forccedila e a forccedila natildeo eacute o bastante para determinar o custo
energeacutetico da locomoccedilatildeo As informaccedilotildees contidas no proacuteprio comportamento da
curva forccedila vertical-tempo parecem influenciar de modo importante a determinaccedilatildeo
de paracircmetros fundamentais da locomoccedilatildeo Especialmente o Iv e o fator de forma q
indicam um ajuste da curva de regressatildeo linear importante para a determinaccedilatildeo da
Vf
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de progressatildeo
A prediccedilatildeo da FP e DF foram comparados com os valores
determinados experimentalmente em dois sujeitos (sujeitos RR e TD 175 e
170m de estatura 78 e 84kg de massa corporal) correndo em vaacuterias velocidades de
progressatildeo As forccedilas de reaccedilatildeo do solo foram registradas em uma plataforma de
forccedila AMTI agrave uma frequumlecircncia de amostragem de 1000Hz e a Vf foi determinada
quadro a quadro atraveacutes de uma cacircmera colocada agrave 5m de distacircncia da aacuterea de
interesse e 1m de altura do piso A mesma foi posta de forma a registrar o
movimento no plano sagital dos sujeitos com uma frequumlecircncia de amostragem de
109
50Hz Um procedimento de calibraccedilatildeo 2D foi realizado a fim de converter as
informaccedilotildees de pixels para metros As informaccedilotildees de posiccedilatildeo linear foram filtradas
atraveacutes de um filtro passa-baixa do tipo Butterworth com frequumlecircncia de corte
variando entre 3 e 9Hz determinados para cada corrida atraveacutes do procedimento de
anaacutelise residual (WINTER 2005) A coordenada horizontal do ponto anatocircmico do
quadril foi utilizada para determinar a FPexp CPexp e a velocidade meacutedia
experimentais A FPexp foi determinada pela frequumlecircncia de amostragem fsample
dividida pelo nuacutemero de quadros que totalizam um ciclo de passada nframes
f sampleFPexp = Eq 416 n frames
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de progressatildeo Fonte
Minetti 1998b
O CPexp foi determinado pela posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo FinalhorPosition diminuiacutedo pela posiccedilatildeo horizontal do quadril no
primeiro quadro InitialhorPosition
CPexp = horPosition = FinalhorPosition V InitialhorPosition Eq 417
110
A velocidade meacutedia experimental Vfexp foi determinada pela variaccedilatildeo da
posiccedilatildeo horizontal durante um ciclo de passada dividida pela variaccedilatildeo de tempo de
um ciclo de passada a partir da Eq 411
n frames 1time = = Eq 418
f sample FPexp
temos
horPositionVfexp = Eq 419 time
A razatildeo entre a frequumlecircncia FP experimental e teoacuterica foi de 1001 A razatildeo
para o DF foi de 0977
O presente modelo pode auxiliar a determinar paracircmetros espaccedilos-temporais
e energeacuteticos de animais extintos prevendo a forccedila de reaccedilatildeo do solo de um uacutenico
passo
Atraveacutes da anaacutelise das informaccedilotildees contidas em uma curva de forccedila de
reaccedilatildeo do solo vertical pelo tempo informaccedilotildees fundamentais da mecacircnica e
energeacutetica da locomoccedilatildeo podem ser estimadas em situaccedilotildees que a informaccedilatildeo
experimental direta natildeo for disponiacutevel
111
5 CONCLUSAtildeO GERAL
51 O custo EMG da caminhada humana
O objetivo deste estudo foi construir um modelo do custo EMG da caminhada
humana Para tanto criou-se duas abordagens experimental e teoacuterica sendo que a
teoacuterica parece ter uma melhor relaccedilatildeo com as evidecircncias experimentais sobre a
energeacutetica da locomoccedilatildeo humana A estabilidade em conjunto com a atividade EMG
de muacutesculos posturais parece ser um mecanismo primaacuterio da energeacutetica da
locomoccedilatildeo
52 A mecacircnica da corrida de idosos
A mecacircnica da corrida de idosos foi comparada com a de jovens atraveacutes da
determinaccedilatildeo e comparaccedilatildeo do trabalho mecacircnico e de paracircmetros do sistema
massa-mola especialmente usando aspectos de assimetria do mecanismo elaacutestico
de minimizaccedilatildeo de energia entre os grupos experimentais
Os idosos produzem menos forccedila durante a fase de trabalho mecacircnico
positivo com uma menor oscilaccedilatildeo vertical durante a fase aeacuterea e menor oscilaccedilatildeo
total Consequentemente a capacidade de armazenar e re-utilizar energia elaacutestica
112
dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio energeacutetico neste
grupo quando comparado com jovens
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre
Tendo apenas as informaccedilotildees de uma curva forccedila vertical versus tempo e a
massa corporal construiu-se um modelo biomecacircnico de prediccedilatildeo do CP Vf e custo
energeacutetico da locomoccedilatildeo terrestre Os resultados advindos do modelamento
correspondem aos paracircmetros determinados experimentalmente Laboratoacuterios que
detenham apenas uma plataforma de forccedila ou nas aacutereas onde as informaccedilotildees de
entrada do atual modelo constituam a uacutenica fonte de dados disponiacutevel (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis-chaves da
locomoccedilatildeo podem ser realizadas com razoaacutevel acuraacutecia
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico
O seguinte texto representa um esforccedilo de raciociacutenio a partir dos achados da
presente tese aliados ao referencial teoacuterico abordado durante os capiacutetulos
anteriores a fim de compreender as determinantes da locomoccedilatildeo humana Mais do
que oferecer uma resposta final sobre a mecacircnica e a energeacutetica da locomoccedilatildeo
humana este texto lanccedila uma provaacutevel resposta ainda inicial acerca das
determinantes envolvidas da locomoccedilatildeo humana
As situaccedilotildees de locomoccedilatildeo que desafiam as noccedilotildees atuais da mecacircnica e
energeacutetica da locomoccedilatildeo tratadas nesta tese nomeadamente o processo de
envelhecimento e as inclinaccedilotildees satildeo algumas das questotildees que natildeo satildeo todavia
compreendidas pelas teorias atuais da locomoccedilatildeo humana mas que a presente
hipoacutetese pretende responder A locomoccedilatildeo humana eacute determinada desde o ponto
de vista mecacircnico como uma seacuterie de accedilotildees complexas de segmentos interligados
ao qual geram torques atraveacutes da ativaccedilatildeo muscular e transmissatildeo de forccedilas pelos
tendotildees anexados em seacuterie aos muacutesculos e agraves articulaccedilotildees que conectam os
Restriccedilotildees da tarefa
velocidade
Restriccedilotildees do organismo
- massa
- comprimento do membro
i f i
Tendatildeo
- energia
Energia
mecacircnica do
CM
Mecanismo
minimizador
Dispecircndio
energeacutetico
Restriccedilotildees do
ambiente Muacutesculos
- eficiecircncia
113
segmentos Todo este sistema eacute controlado pelo sistema nervoso central e
perifeacuterico Ainda assim apesar da extrema complexidade deste tipo de movimento
conforme discutido extensivamente nas seccedilotildees 21 31 e 41 a corrida e a
caminhada humana se caracterizam como sistemas capazes de minimizar o
dispecircndio energeacutetico advindo dos muacutesculos sistemas estes denominados de
massa-mola e pecircndulo invertido respectivamente Desde a sua introduccedilatildeo ateacute os
dias atuais estes sistemas tecircm recebido intensas criacuteticas da literatura abordadas em
capiacutetulos precedentes poreacutem mais do que por agrave prova os achados principais que
deram base para estes sistemas as criacuteticas satildeo direcionadas agraves limitaccedilotildees dos
sistemas especialmente da forma em que foram propostos A seacuterie de experimentos
realizados primeiramente com humanos (CAVAGNA et al 1963 1964) e apoacutes com
animais (FEDAK et al 1982 HEGLUND et al 1982a HEGLUND et al 1982b
TAYLOR et al 1982) demonstraram de modo inequiacutevoco que as curvas de energia
potencial gravitacional e cineacutetica do CM se apresentavam em fase durante a
corridagalope e em contra-fase (atraso de 180 graus) na caminhada Deste ponto
em diante eacute estabelecido que durante a transiccedilatildeo da caminhada para a corrida os
sistemas satildeo modificados de um modo discreto ou seja o pecircndulo invertido seria
ldquodesligadordquo e o sistema massa-mola acionado automaticamente
Figura 51 Modelo conceitual da locomoccedilatildeo humana
114
Este raciociacutenio adveacutem dos achados de Cavagna e colegas e aleacutem disso da
observaccedilatildeo de paracircmetros cinemaacuteticos e cineacuteticos aos quais respondem de forma
discreta na mudanccedila do tipo de locomoccedilatildeo por exemplo o DF durante caminhada
varia de 065 em baixas velocidades ateacute 055 em altas velocidades de forma
contiacutenua poreacutem quando o sujeito faz a transiccedilatildeo para a corrida o DF passa para
04 O fator de forma ldquoqrdquo da curva de forccedila vertical em funccedilatildeo do tempo tambeacutem se
modifica abruptamente variando de 07 na caminhada para -01 durante corrida
(ALEXANDER e JAYES 1980) Uma justificativa para este comportamento discreto
eacute relacionado agrave um tipo de locomoccedilatildeo pouco usada por seres-humanos o skipping
Por outro lado evidecircncias experimentais tecircm demonstrado que em algumas
velocidades de caminhada parece existir um mecanismo elaacutestico de minimizaccedilatildeo de
energia (FUKUNAGA et al 2001) denominado de sistema de ldquocatapultardquo devido agrave
caracteriacutestica de baixa velocidade durante a frenagem e alta velocidade na fase de
propulsatildeo (ISHIKAWA et al 2005 ISHIKAWA et al 2007) Por outro lado durante a
corrida no estudo da mecacircnica da corrida dos idosos foi observada uma transduccedilatildeo
de energia cineacutetica e potencial gravitacional em baixas velocidades diminuindo com
o aumento da velocidade (relativo ao deslocamento vertical total capiacutetulo 3)
enquanto que a contribuiccedilatildeo do tendatildeo e consequentemente do componente
elaacutestico da unidade muacutesculo-tendatildeo aumentam (CAVAGNA 2006) Portanto os dois
sistemas parecem natildeo mudar atraveacutes de transformaccedilotildees abruptas como os
paracircmetros anteriormente apresentados poderiam induzir mas eacute notoacuterio um
continuum de mudanccedilas nas caracteriacutesticas mecacircnicas destes dois tipos de
locomoccedilatildeo e a mudanccedila na predominacircncia do mecanismo minimizador parece ser o
responsaacutevel pela transiccedilatildeo de um tipo de locomoccedilatildeo para outro
Para construir este modelo eacute necessaacuterio sabermos quanto de energia eacute
recuperado pelos mecanismos minimizadores A energia recuperada por via
pendular eacute calculada como (ver capiacutetulo 327)
cpendular = Rint Eq 51
e a energia elaacutestica armazenada como
115
Fvmx k = Eq 52 celaacutestica 2
Este raciociacutenio leva agrave um modelo de minimizaccedilatildeo de energia assumido
simplesmente como o somatoacuterio dos mecanismos elaacutestico e pendular
= Eq 53 creconvertida cpendular + celaacutestica
Assumindo como constante o dispecircndio energeacutetico sob outras formas de
energia (teacutermica) a energia despendida para a contraccedilatildeo dos muacutesculos esqueleacuteticos
a fim de gerar a locomoccedilatildeo pode ser determinada por
= -E Eq 54 Emuscular Emetaboacutelica repouso
e deste modo podemos afirmar que a energia total para percorrer determinada
distacircncia eacute dada por
= Eq 55 total Ereconvertida + Emuscular
e este valor em um amplo espectro de velocidades e tipos de locomoccedilatildeo apresente
uma relaccedilatildeo linear direta com a velocidade da locomoccedilatildeo (restriccedilatildeo da tarefa)
Mas quais os fatores que determinam este continuum de mecanismos
minimizadores O compromisso entre estes mecanismos (pendular e elaacutestico) eacute
diretamente ligado ao comportamento da energia mecacircnica vertical (potencial
gravitacional + cineacutetica) e da unidade muacutesculo-tendatildeo E em uacuteltima anaacutelise estas
caracteriacutesticas mecacircnicas parecem ser moduladas por restriccedilotildees do ambiente (g
inclinaccedilatildeo) restriccedilotildees da tarefa (velocidade) e restriccedilotildees do organismo (massa e
comprimento de membros inferiores) conforme figura 51
Hipoacuteteses levantadas com o atual modelo
i) A velocidade de transiccedilatildeo deve coincidir com a mudanccedila na
predominacircncia do mecanismo minimizador de energia
ii) Analisar o mecanismo pendular em diferentes velocidades de corrida
116
iii) Quando as demais restriccedilotildees estatildeo controladas as restriccedilotildees do
organismo e o compromisso entre massa e comprimento de membro
inferior poderiam explicar as mudanccedilas no uso dos mecanismos pendular
e elaacutestico
iv) Existe uma velocidade oacutetima para a corrida humana
v) O somatoacuterio da quantidade de energia reconvertida por meio pendular e
elaacutestico somado ao dispecircndio energeacutetico dos muacutesculos deve ser altamente
relacionado com a velocidade de locomoccedilatildeo
541 Respondendo algumas criacuteticas atuais
Este modelo pode explicar os resultados de GEYER et al 2006) sobre a
possibilidade de um modelo de ldquopecircndulo-invertido carregado por uma molardquo
(BLICKHAN et al 2007) ser aplicado na caminhada devido a melhor representaccedilatildeo
da curva forccedila tempo pelo meacutetodo proposto do que pelo modelo do pecircndulo-
invertido Apesar da boa representaccedilatildeo de uma variaacutevel mecacircnica da locomoccedilatildeo o
modelo despreza uma questatildeo central da anaacutelise da locomoccedilatildeo a determinaccedilatildeo do
mecanismo minimizador de energia Portanto apesar da coincidecircncia da resposta de
forccedila de reaccedilatildeo do solo vertical originada pelo modelo e a medida experimental o
modelo apenas apresenta uma possibilidade do ponto de vista matemaacutetico de
representaccedilatildeo do modelo teoacuterico de continuum apresentado aqui
Recentemente uma extensa revisatildeo de BIEWENER 2006) analisou como as
flutuaccedilotildees na energia mecacircnica do CM de animais podem ser usadas a fim de
identificar os mecanismos fundamentais envolvidos na locomoccedilatildeo terrestre e indicou
que quando satildeo comparados os padrotildees mecacircnicos e cinemaacuteticos de uma ampla
diversidade de quadruacutepedes e biacutepedes padrotildees mais complexos emergem
observando que alguns animais menos aptos para a locomoccedilatildeo (less cursorial)
podem combinar padrotildees mecacircnicos da caminhada e corrida em velocidades
intermediaacuterias ou em animais de grande tamanho (eg elefantes apresentam
aspectos de corrida mas com um comportamento pendular entre a energia cineacutetica e
potencial gravitacional do CM) Novamente a hipoacutetese do continuum se apresenta
como um forte candidato para explicar atraveacutes de uma teoria simples e unificante a
locomoccedilatildeo de vertebrados
117
O que acontece nas inclinaccedilotildees
Quando nos deslocamos no plano eacute bem determinado que o trabalho
mecacircnico liacutequido apresente um valor muito baixo e natildeo eacute igual a zero devido agrave
resistecircncia do ar e agrave fricccedilatildeo dos tecidos mas ainda assim eacute comumente assumido
como negligenciaacutevel (ALEXANDER 1989) poreacutem a energia mecacircnica total para
movimentar o CM em relaccedilatildeo ao ambiente externo varia durante um ciclo de
passada de modo que o somatoacuterio dos incrementos (trabalho positivo) seja igual ao
somatoacuterio dos decrementos (trabalho negativo) Como observado no estudo ldquocusto
EMG da caminhada humanardquo (Capiacutetulo 2) existe uma predominacircncia de trabalho
positivo em inclinaccedilotildees positivas e predominacircncia de trabalho negativo em
inclinaccedilotildees negativas (figura 52)
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido de
elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006
118
Portanto o pecircndulo invertido natildeo atua como mecanismo minimizador de
dispecircndio energeacutetico e natildeo obstante a falta de evidecircncias eacute razoaacutevel supor que a
energia elaacutestica natildeo atue de forma importante nas inclinaccedilotildees Importante notar que
a inexistecircncia de um mecanismo minimizador natildeo significa que o modelo natildeo
contempla esta situaccedilatildeo apenas demonstra que devido agrave uma restriccedilatildeo severa do
ambiente (inclinaccedilatildeo extrema) o organismo natildeo dispotildee de nenhum auxiacutelio
importante para economizar energia sobrecarregando os muacutesculos a fim de produzir
a energia necessaacuteria para manter o movimento de locomoccedilatildeo Nesta situaccedilatildeo o
dispecircndio energeacutetico eacute dependente apenas da quantidade de ativaccedilatildeo muscular e
seus respectivos equivalentes energeacuteticos de atividade EMG como demonstrado no
estudo do custo EMG da caminhada humana
55 Propostas para futuros estudos
551 Custo EMG da caminhada humana
Testar o modelo do Custo EMG
- em diferentes terrenos
- em populaccedilotildees com patologias do sistema nervoso
- em inclinaccedilotildees negativas
552 Mecacircnica da corrida dos idosos
- desenvolver um modelo matemaacutetico que tenha em consideraccedilatildeo os
comportamentos diferentes entre a fase de encurtamento e alongamento das
unidades muacutesculo-tendatildeo atraveacutes de um modelo viscoelaacutesticohiperelaacutestico
- estudar o bouncing elaacutestico da corrida em inclinaccedilotildees
- estudar o efeito da fadiga no bouncing elaacutestico da corrida humana
- estudar o modelo massa-mola ponto-a-ponto
- estudar o bouncing elaacutestico entre sujeitos com diferentes estruturas
muacutesculo-esqueleacuteticas (velocistas vs fundistas obesos vs natildeo-obesos homens vs
mulheres)
119
- usar os paracircmetros do modelo massa-mola e as assimetrias contato-
despregue de sujeitos normais para comparaccedilatildeo com amputados e portadores de
necessidades especiais com restriccedilotildees na locomoccedilatildeo
- estudar o bouncing elaacutestico na corrida de velocidade de atletas de alto
rendimento
553 Modelo matemaacutetico da locomoccedilatildeo terrestre
Testar o modelo
- para situaccedilatildeo de aceleraccedilotildees
- em animais extintos
120
6 Referecircncias
ALESHINSKY SY An energy sources and fractions approach to the mechanical
energy expenditure problem--IV Criticism of the concept of energy transfers within
and between links J Biomech 19 4 307-309 1986
ALEXANDER RM Damper for bad vibrations Nature 414 6866 855-857 2001
ALEXANDER RM Energy-saving mechanisms in walking and running J Exp Biol 160
55-69 1991
ALEXANDER RM Models and the scaling of energy costs for locomotion J Exp Biol
208 Pt 9 1645-1652 2005
ALEXANDER RM Optimization and gaits in the locomotion of vertebrates Physiol Rev
69 4 1199-1227 1989
ALEXANDER RM Principles of animal locomotion Princeton NJ Princeton
University Press 2003
ALEXANDER RM Tendon elasticity and muscle function Comp Biochem Physiol A
Mol Integr Physiol 133 4 1001-1011 2002
ALEXANDER RM Vertical movements in walking and running Journal of Zoology
185 27-40 1978
ALEXANDER RM JAYES AS Fourier analysis of forces exerted in walking and
running J Biomech 13 4 383-390 1980
ALEXANDER RM VERNON A Mechanics of hopping by kangaroos (Macropodidae)
Journal of Zoology 177 265-303 1975
121
ANDERS C WAGNER H PUTA C GRASSME R PETROVITCH A SCHOLLE
HC Trunk muscle activation patterns during walking at different speeds J
Electromyogr Kinesiol 17 2 245-252 2007
ANDERSON KG BEHM DG Maintenance of EMG activity and loss of force output
with instability J Strength Cond Res 18 3 637-640 2004
ARDIGO LP SAIBENE F MINETTI AE The optimal locomotion on gradients
walking running or cycling Eur J Appl Physiol 90 3-4 365-371 2003
BASTIEN GJ HEGLUND NC SCHEPENS B The double contact phase in walking
children J Exp Biol 206 Pt 17 2967-2978 2003
BASTIEN GJ SCHEPENS B WILLEMS PA HEGLUND NC Energetics of load
carrying in Nepalese porters Science 308 5729 1755 2005
BIEWENER AA Muscle-tendon stresses and elastic energy storage during locomotion
in the horse Comp Biochem Physiol B Biochem Mol Biol 120 1 73-87 1998
BIEWENER AA Patterns of mechanical energy change in tetrapod gait pendula
springs and work J Exp Zoolog A Comp Exp Biol 305 11 899-911 2006
BIEWENER AA KONIECZYNSKI DD BAUDINETTE RV In vivo muscle forceshy
length behavior during steady-speed hopping in tammar wallabies J Exp Biol 201
Pt 11 1681-1694 1998
BIGLAND-RITCHIE B WOODS JJ Integrated electromyogram and oxygen uptake
during positive and negative work J Physiol 260 2 267-277 1976
BLANCO RE GAMBINI R A biomechanical model for size speed and anatomical
variations of the energetic costs of running mammals J Theor Biol 241 1 49-61
2006
BLAXTER K Energy metabolism in animals and man Cambridge UK Cambridge
University Press 1989
BLICKHAN R The spring-mass model for running and hopping J Biomech 22 11-12
1217-1227 1989
BLICKHAN R SEYFARTH A GEYER H GRIMMER S WAGNER H GUNTHER
M Intelligence by mechanics Philos Transact A Math Phys Eng Sci 365 1850
199-220 2007
122
CAVAGNA GA Force platforms as ergometers J Appl Physiol 39 1 174-179 1975
CAVAGNA GA The landing-take-off asymmetry in human running J Exp Biol 209 Pt
20 4051-4060 2006
CAVAGNA GA DUSMAN B MARGARIA R Positive work done by a previously
stretched muscle J Appl Physiol 24 1 21-32 1968
CAVAGNA GA FRANZETTI P FUCHIMOTO T The mechanics of walking in
children J Physiol 343 323-339 1983
CAVAGNA GA FRANZETTI P HEGLUND NC WILLEMS P The determinants of
the step frequency in running trotting and hopping in man and other vertebrates J
Physiol 399 81-92 1988
CAVAGNA GA HEGLUND NC WILLEMS PA Effect of an increase in gravity on the
power output and the rebound of the body in human running J Exp Biol 208 Pt 12
2333-2346 2005
CAVAGNA GA KANEKO M Mechanical work and efficiency in level walking and
running J Physiol 268 2 467--481 1977
CAVAGNA GA MANTOVANI M WILLEMS PA MUSCH G The resonant step
frequency in human running Pflugers Arch 434 6 678-684 1997
CAVAGNA GA MARGARIA R Mechanics of walking J Appl Physiol 21 1 271-278
1966
CAVAGNA GA SAIBENE FP MARGARIA R External work in walking J Appl
Physiol 18 1-9 1963
CAVAGNA GA SAIBENE FP MARGARIA R Mechanical Work in Running J Appl
Physiol 19 249-256 1964
CAVAGNA GA THYS H ZAMBONI A The sources of external work in level walking
and running J Physiol 262 3 639-657 1976
CAVAGNA GA WILLEMS PA FRANZETTI P DETREMBLEUR C The two power
limits conditioning step frequency in human running J Physiol 437 95-108 1991
CAVAGNA GA WILLEMS PA HEGLUND NC The role of gravity in human walking
pendular energy exchange external work and optimal speed J Physiol 528 Pt 3
657-668 2000
123
CAVAGNA GA WILLEMS PA HEGLUND NC Walking on Mars Nature 393 6686
636 1998
CAVAGNA GA WILLEMS PA LEGRAMANDI MA HEGLUND NC Pendular
energy transduction within the step in human walking J Exp Biol 205 Pt 21 3413shy
3422 2002
CERRETELLI P VEICSTEINAS A FUMAGALLI M DELLORTO L Energetics of
isometric exercise in man J Appl Physiol 41 2 136-141 1976
DEN OTTER AR GEURTS AC MULDER T DUYSENS J Speed related changes
in muscle activity from normal to very slow walking speeds Gait Posture 19 3 270shy
278 2004
DOHERTY TJ Invited review Aging and sarcopenia J Appl Physiol 95 4 1717-1727
2003
DOKE J DONELAN JM KUO AD Mechanics and energetics of swinging the human
leg J Exp Biol 208 Pt 3 439-445 2005
DOKE J KUO AD Energetic cost of producing cyclic muscle force rather than work to
swing the human leg J Exp Biol 210 Pt 13 2390-2398 2007
EVANS SL DAVY KP STEVENSON ET SEALS DR Physiological determinants
of 10-km performance in highly trained female runners of different ages J Appl
Physiol 78 5 1931-1941 1995
FEDAK MA HEGLUND NC TAYLOR CR Energetics and mechanics of terrestrial
locomotion II Kinetic energy changes of the limbs and body as a function of speed
and body size in birds and mammals J Exp Biol 97 23-40 1982
FENN WO Work against gravity and work due to velocity changes in running Am J
Physiol 93 433-462 1930
FENN WO MARSH BS Muscular force at different speeds of shortening J Physiol
85 3 277-297 1935
FORMENTI F ARDIGO LP MINETTI AE Human locomotion on snow determinants
of economy and speed of skiing across the ages Proc Biol Sci 272 1572 1561shy
1569 2005
124
FORMENTI F MINETTI AE Human locomotion on ice the evolution of ice-skating
energetics through history J Exp Biol 210 Pt 10 1825-1833 2007
FRERIKS B HERMENS H DISSELHORST-KLUG C RAU G The
recommendations for sensor and sensor placement procedures for surface
electromyography In HERMENS H (editor) European recommendations for
surface electromyography Enschede Roessingh Research and Development
1991
FRONTERA WR SUH D KRIVICKAS LS HUGHES VA GOLDSTEIN R
ROUBENOFF R Skeletal muscle fiber quality in older men and women Am J
Physiol Cell Physiol 279 3 C611-618 2000
FUKUNAGA T KUBO K KAWAKAMI Y FUKASHIRO S KANEHISA H
MAGANARIS CN In vivo behaviour of human muscle tendon during walking Proc
Biol Sci 268 1464 229-233 2001
GARDNER-MORSE MG STOKES IA The effects of abdominal muscle coactivation
on lumbar spine stability Spine 23 1 86-91 discussion 91-82 1998
GEYER H SEYFARTH A BLICKHAN R Compliant leg behaviour explains basic
dynamics of walking and running Proc Biol Sci 273 1603 2861-2867 2006
GOTTSCHALL JS KRAM R Energy cost and muscular activity required for leg swing
during walking J Appl Physiol 99 1 23-30 2005
GOTTSCHALL JS KRAM R Mechanical energy fluctuations during hill walking the
effects of slope on inverted pendulum exchange J Exp Biol 209 Pt 24 4895-4900
2006
GRANATA KP MARRAS WS Cost-benefit of muscle cocontraction in protecting
against spinal instability Spine 25 11 1398-1404 2000
GRANATA KP ORISHIMO KF Response of trunk muscle coactivation to changes in
spinal stability J Biomech 34 9 1117-1123 2001
GRIFFIN TM ROBERTS TJ KRAM R Metabolic cost of generating muscular force
in human walking insights from load-carrying and speed experiments J Appl
Physiol 95 1 172-183 2003
HEGLUND NC Running a-fowl of the law Science 303 47-48 2004
125
HEGLUND NC CAVAGNA GA Mechanical work oxygen consumption and efficiency
in isolated frog and rat muscle Am J Physiol 253 1 Pt 1 C22-29 1987
HEGLUND NC CAVAGNA GA TAYLOR CR Energetics and mechanics of
terrestrial locomotion III Energy changes of the centre of mass as a function of
speed and body size in birds and mammals J Exp Biol 97 41-56 1982a
HEGLUND NC FEDAK MA TAYLOR CR CAVAGNA GA Energetics and
mechanics of terrestrial locomotion IV Total mechanical energy changes as a
function of speed and body size in birds and mammals J Exp Biol 97 57-66
1982b
HILL AV The heat of shortening and the dynamic constants of muscle Proceedings of
the Royal Society B 126 136-195 1938
HOYT DF TAYLOR CR Gait and the energetics of locomotion in horses Nature
292 239-240 1981
ISHIKAWA M KOMI PV GREY MJ LEPOLA V BRUGGEMANN GP Muscleshy
tendon interaction and elastic energy usage in human walking J Appl Physiol 99
2 603-608 2005
ISHIKAWA M PAKASLAHTI J KOMI PV Medial gastrocnemius muscle behavior
during human running and walking Gait Posture 25 3 380-384 2007
KARAMANIDIS K ARAMPATZIS A Mechanical and morphological properties of
different muscle-tendon units in the lower extremity and running mechanics effect of
aging and physical activity J Exp Biol 208 Pt 20 3907-3923 2005
KARAMANIDIS K ARAMPATZIS A BRUGGEMANN GP Symmetry and
reproducibility of kinematic parameters during various running techniques Med Sci
Sports Exerc 35 6 1009-1016 2003
KER RF BENNETT MB BIBBY SR KESTER RC ALEXANDER RM The
spring in the arch of the human foot Nature 325 7000 147-149 1987
KLASS M BAUDRY S DUCHATEAU J Aging does not affect voluntary activation of
the ankle dorsiflexors during isometric concentric and eccentric contractions J Appl
Physiol 99 1 31-38 2005
126
KNAFLITZ M BONATO P Time-frequency methods applied to muscle fatigue
assessment during dynamica contractions J Electromyogr Kinesiol 9 337-350
1999
KOMI PV Stretch-shortening cycle a powerful model to study normal and fatigued
muscle J Biomech 33 10 1197-1206 2000
KRAM R DOMINGO A FERRIS DP Effect of reduced gravity on the preferred walkshy
run transition speed J Exp Biol 200 Pt 4 821-826 1997
KRAM R TAYLOR CR Energetics of running a new perspective Nature 346 6281
265-267 1990
LAMOTH CJ MEIJER OG DAFFERTSHOFER A WUISMAN PI BEEK PJ
Effects of chronic low back pain on trunk coordination and back muscle activity during
walking changes in motor control Eur Spine J 15 1 23-40 2006
LAY AN HASS CJ RICHARD NICHOLS T GREGOR RJ The effects of sloped
surfaces on locomotion an electromyographic analysis J Biomech 40 6 1276shy
1285 2007
LOWE DA SUREK JT THOMAS DD THOMPSON LV Electron paramagnetic
resonance reveals age-related myosin structural changes in rat skeletal muscle
fibers Am J Physiol Cell Physiol 280 3 C540-547 2001
MALOIY GM HEGLUND NC PRAGER L CAVAGNA GA TAYLOR CR
Energetic cost of carrying loads have African women discovered an economic way
Nature 319 668-669 1986
MALVILLE NJ BYRNES WC ALLEN LIM B BASNYAT R Commercial porters of
eastern nepal health status physical work capacity and energy Expenditure Am J
Hum Biol 13 44-56 2001
MARGARIA R Sulla fisiologia e specialmente sul consumo energetico della marcia
e della corsa a varia velocitagrave ed inclinazione del terreno 1938
MARSH RL ELLERBY DJ CARR JA HENRY HT BUCHANAN CI Partitioning
the energetics of walking and running swinging the limbs is expensive Science
303 5654 80-83 2004
127
MCMAHON TA CHENG GC The mechanics of running how does stiffness couple
with speed J Biomech 23 Suppl 1 65-78 1990
MIAN OS THOM JM ARDIGO LP NARICI MV MINETTI AE Metabolic cost
mechanical work and efficiency during walking in young and older men Acta
Physiol (Oxf) 186 2 127-139 2006
MINETTI AE The biomechanics of skipping gaits a third locomotion paradigm Proc
Biol Sci 265 1402 1227-1235 1998a
MINETTI AE A model equation for the prediction of mechanical internal work of
terrestrial locomotion J Biomech 31 5 463-468 1998b
MINETTI AE ALEXANDER RM A theory of metabolic costs for bipedal gaits J Theor
Biol 186 4 467-476 1997
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of gradient walking
energetics in man J Physiol 472 725-735 1993
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of the minimum
energy cost of gradient running in humans J Exp Biol 195 211-225 1994
MINETTI AE ARDIGO LP SAIBENE F FERRERO S SARTORIO A Mechanical
and metabolic profile of locomotion in adults with childhood-onset GH deficiency Eur
J Endocrinol 142 1 35-41 2000
MINETTI AE FORMENTI F ARDIGO LP Himalayan porters specialization
metabolic power economy efficiency and skill Proc Biol Sci 273 1602 2791shy
2797 2006
MORSE CI THOM JM REEVES ND BIRCH KM NARICI MV In vivo
physiological cross-sectional area and specific force are reduced in the
gastrocnemius of elderly men J Appl Physiol 99 3 1050-1055 2005
NILSSON J THORSTENSSON A Ground reaction forces at different speeds of human
walking and running Acta Physiol Scand 136 2 217-227 1989
NYMARK JR BALMER SJ MELIS EH LEMAIRE ED MILLAR S
Electromyographic and kinematic nondisabled gait differences at extremely slow
overground and treadmill walking speeds J Rehabil Res Dev 42 4 523-534 2005
128
OCHALA J DORER DJ FRONTERA WR KRIVICKAS LS Single skeletal muscle
fiber behavior after a quick stretch in young and older men a possible explanation of
the relative preservation of eccentric force in old age Pflugers Arch 452 4 464shy
470 2006
ONAMBELE GL NARICI MV MAGANARIS CN Calf muscle-tendon properties and
postural balance in old age J Appl Physiol 100 6 2048-2056 2006
PHILLIPS SK BRUCE SA WOLEDGE RC In mice the muscle weakness due to
age is absent during stretching J Physiol 437 63-70 1991
PORTER MM VANDERVOORT AA KRAMER JF Eccentric peak torque of the
plantar and dorsiflexors is maintained in older women J Gerontol A Biol Sci Med
Sci 52 2 B125-131 1997
POUSSON M LEPERS R VAN HOECKE J Changes in isokinetic torque and
muscular activity of elbow flexors muscles with age Exp Gerontol 36 10 1687shy
1698 2001
PRILUTSKY BI GREGOR RJ Swing- and support-related muscle actions
differentially trigger human walk-run and run-walk transitions J Exp Biol 204 Pt 13
2277-2287 2001
ROBERTS TJ KRAM R WEYAND PG TAYLOR CR Energetics of bipedal
running I Metabolic cost of generating force J Exp Biol 201 Pt 19 2745-2751
1998
ROBERTS TJ MARSH RL WEYAND PG TAYLOR CR Muscular force in
running turkeys the economy of minimizing work Science 275 5303 1113-1115
1997
SAIBENE F MINETTI AE Biomechanical and physiological aspects of legged
locomotion in humans Eur J Appl Physiol 88 4-5 297-316 2003
SCHEPENS B WILLEMS PA CAVAGNA GA The mechanics of running in children
J Physiol 509 ( Pt 3) 927-940 1998
SCHEPENS B WILLEMS PA CAVAGNA GA HEGLUND NC Mechanical power
and efficiency in running children Pflugers Arch 442 1 107-116 2001
129
TAYLOR CR Force development during sustained locomotion a determinant of gait
speed and metabolic power J Exp Biol 115 253-262 1985
TAYLOR CR HEGLUND NC MALOIY GM Energetics and mechanics of terrestrial
locomotion I Metabolic energy consumption as a function of speed and body size in
birds and mammals J Exp Biol 97 1-21 1982
TRAPPE S GALLAGHER P HARBER M CARRITHERS J FLUCKEY J
TRAPPE T Single muscle fibre contractile properties in young and old men and
women J Physiol 552 Pt 1 47-58 2003
VALOUR D POUSSON M Compliance changes of the series elastic component of
elbow flexor muscles with age in humans Pflugers Arch 445 6 721-727 2003
VANDERVOORT AA KRAMER JF WHARRAM ER Eccentric knee strength of
elderly females J Gerontol 45 4 B125-128 1990
WHITE SG MCNAIR PJ Abdominal and erector spinae muscle activity during gait
the use of cluster analysis to identify patterns of activity Clin Biomech (Bristol
Avon) 17 3 177-184 2002
WILLEMS PA CAVAGNA GA HEGLUND NC External internal and total work in
human locomotion J Exp Biol 198 Pt 2 379-393 1995
WINTER D Biomechanics and motor control of human movement 3rd Waterloo
John Wiley amp Sons 2005
WINTERS JM WOO S Multiple muscle systems Springer-Verlag 1990
WOLEDGE RC CURTIN N HOMSHER E Energetic aspects of muscle
contraction Londres Academic Press 1985
WRIGHT S WEYAND PG The application of ground force explains the energetic cost
of running backward and forward J Exp Biol 204 Pt 10 1805-1815 2001
YAMAGUCHI G SAWA A MORAN D RESSLER M WINTERS JM A survey of
human musculotendon actuator parameters J M Winters 1991
130
Apecircndices
A- Programa de anaacutelise EMG da caminhada LocoEmg
Uma seacuterie de algoritmos (figuras A1 A2 e A3) foram desenvolvidos em
ambiente Labview versatildeo 71 a fim de analisar o sinal bruto de EMG Para tanto
informaccedilotildees advindas de sensores de pressatildeo foram calculadas de forma a
possibilitar as seguintes anaacutelises
Figura A1 Janela principal do programa LocoEmgVI
131
Este programa foi utilizado no capiacutetulo 2 no experimento do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees e no experimento do custo EMG
da locomoccedilatildeo de montanhistas Caucasianos e carregadores Nepaleses no Himalaia
Nepal Atraveacutes do uso dos sensores de pressatildeo foi possiacutevel calcular o tempo de
passada o tempo de vocirco o tempo de apoio e o tempo de apoio duplo para utilizar
no desenvolvimento das abordagens experimental e teoacuterica do custo EMG da
locomoccedilatildeo humana
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI
Os dados de input do programa foram inseridos na janela principal (figura
A1) onde no final da anaacutelise satildeo apresentados os resultados de atividade EMG
meacutedia e desvio padratildeo em funccedilatildeo do percentual do ciclo de passadaO bloco de
diagrama apresentado na figura A2 mostra a estrutura geral do programa com seus
algoritmos localizados nas subrotinas (quadrados verdes)
As principais subrotinas ou algoritmos de primeiro niacutevel satildeo i) Abre e organiza
arquivo ii) Filtra sinal EMG iii) Calcula Variaacuteveis Espaccedilo-Temporais iv) Divide
Ciclos e Interpola Sinal EMG v) Integra Sinal EMG vi) Salva Resultados vi) Imprime
Resultados Gerais
132
Na subrotina Salva resultados arrays eram transformados em arquivos no
formato txt para posterior anaacutelise estatiacutestica Os arquivos eram variaacuteveis espaccedilo-
temporais valores meacutedios interpolados para fase de apoio e balanccedilo valores Emg
meacutedios e desvio-padratildeo interpolados por ciclo de passada e somatoacuterio das integrais
Emg brutos e convertidos por Equivalentes Metaboacutelicos de Ativaccedilatildeo Emg
A janela de impressatildeo eacute apresentada na figura A3
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados
Nesta janela os dados EMGrsquos por muacutesculo satildeo apresentados atraveacutes de seus
valores valores meacutedios e dprsquos em funccedilatildeo do percentual do ciclo de passada
Informaccedilotildees da Vf nome do arquivo inclinaccedilatildeo do terreno e nuacutemero de ciclos
analisados tambeacutem satildeo apresentados Arquivos de imagem destas janelas foram
elaborados e armazenados para posterior verificaccedilatildeo dos dados
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada)
133
PEYREacute-TARTARUGA LA TARTARUGA MP COERTJENS M KRUEL LFM
Influence of Allometry scale on relationship between running economy and
kinematical parameters Biology of Sport (aceito) 2008
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
OLIVEIRA AR KRUEL LFM Physiologic and biomechanical effects ofwater run
training on running performance European Journal of Applied Physiology
(submetido) 2008
CORREA TC PEYREacute-TARTARUGA LA FURLAN E RIBAS R LOSS JF
Mathematical model of energy cost in sprint running Proceedings of XXV
International Symposium on Biomechanics in Sports ISBS (CD) 2007
PEYREacute-TARTARUGA LA COERTJENS M TARTARUGA MP DE MEDEIROS
MH KRUEL LFM Influence of the allometric scale on the relationship between
running economy and biomechanical variables in runners Medicine and Science in
Sports and Exercise 39 (Supplement) S208-S209 2007
PEYREacute-TARTARUGA LA DE MEDEIROS MH COERTJENS M TARTARUGA
MP KRUEL LFM The relation between running economy and kinematical
variables influence of body mass in competitive runners Journal of Biomechanics
39 (Supplement 1) S631 2006
ILHA J ARAUJO RT MALYSZ T PEYREacute-TARTARUGA LA ACHAVAL M
Effects of endurance and resistance exercise training on locomotion of rats after
sciatic nerve crush Physiological Mini Reviews 2 (4) 109 2006
ILHA J PEYREacute-TARTARUGA LA ARAUJO RT METZEN F MALYSZ T
CANTO F ACHAVAL ELENA M LOSS JF Locomotor behaviour assessment in
the rat by kinematic analysis Journal of Biomechanics 39 (Supplement 1) S507
2006
SCHIEHLL PE PEYREacute-TARTARUGA LA ZINGANO GM LOSS JF
Estimation of the quantification of the elastics loads on the jump fit circuit Journal of
134
Biomechanics 39 (Supplement 1) S555 2006
MARTINEZ FG PEYREacute-TARTARUGA LA HERMEL EES XAVIER LL
RASIA-FILHO AA ACHAVAL M Intermediate filament expression in the medial
5thamygdala subnuclei during postnatal development of male and female rats
Forum of the Federation of European Neuroscience Societes Viena FENS 3
A1556 2006
FRAGA CHW BLOEDOW LS CARPES F PEYREacute-TARTARUGA LA
TARTARUGA MP FOLLMER B GUIMARAtildeES ACS Methodologic proposal to
verify the influence of cycling on running kinematic aspects in Triathlon Revista
Motriz 12 (2) 159-164 2006
PEYREacute-TARTARUGA LA KRUEL LFM Deep water running limits and
possibilities to elite runners Brazilian Journal of Sports Medicine 12 (5)286-290
2006
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
RIBAS LR KRUEL LFM Comparison of the subtalar joint angle during
submaximal running speeds Acta Ortopeacutedica Brasileira 13 (2) 57-60 2005
C- Textos completos referentes agrave tese
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA Old men
running mechanical work and elastic bounce Proceedings of the Royal Society B
275 (1633) 411-418 2008 101098rspb20071288
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA The landingshy
takeoff asymmetry is enhanced in old age Journal of Experimental Biology
(aceito com modificaccedilotildees) 2008
MINETTI AE PEYREacute-TARTARUGA LA ARDIGOgrave LP FORMENTI F SUSTA
135
D Energetical and electromyographical cost of locomotion in Nepalese Porters on
Himalaya Anais do XII Congresso Brasileiro de Biomecacircnica 88-94 2007
D- Paracircmetros musculares
Os paracircmetros musculares utilizados no estudo Custo EMG da caminhada
humana foram adquiridos de YAMAGUCHI et al (1991) e satildeo apresentados em
detalhes nas duas figura seguintes (figuras D1 e D2)
Figura D1 Paracircmetros musculares utilizados Fonte YAMAGUCHI et al 1991
136

5
DEDICATOacuteRIA
Aos meus irmatildeos Ivaacuten e Virginia
Pela convivecircncia pela paciecircncia pelo exemplo
de caraacuteter entrega e brilhantismo nas coisas
que fazem
6
AGRADECIMENTOS
Agradeccedilo a todos que ajudaram de forma direta ou indireta na concretizaccedilatildeo do meu doutorado Tenho a plena convicccedilatildeo de que esta obra eacute fruto de um trabalho coletivo e estas linhas representam muito timidamente meu sentimento de gratidatildeo com todas as pessoas que estiveram comigo nesta caminhada
Ao meu orientador Prof Jefferson Loss por tantas coisas que surgiram advindas daquele convite no Centro Oliacutempico Especialmente agrave liberdade dada para seguir o caminho que trilhei nestes trecircs anos e ao exemplo de busca incessante de aprofundamento no que estamos estudando
Agrave minha Matildee pela palavra certa na hora certa Agrave memoacuteria do meu pai Eduardo Juan Peyreacute Priguetti Agrave minha famiacutelia Matildee Ivaacuten Virgiacutenia La Abuela Felipe Fernanda La Tia Gianella Marcus Joseacute Luiz Juliana
Agrave minha amada namorada e companheira Ileana pelo apoio e amor Obrigado por trilhar este caminho ao meu lado obrigado pelo esforccedilo e pela forccedila de vontade para encarar a fase ldquomilaneserdquo de nossas vidas Agradeccedilo tambeacutem agrave famiacutelia de Cordoba Abel Raquel Gabriela Adriaacuten Gerardo e Camila
Ao Grupo de Investigaccedilatildeo da Mecacircnica do Movimento ndash BIOMEC Faacutebia Artur Faacutebio Paulo Coxa Francisco Carolzita Joely Gustavo Dani Aldabe Letiacutecia Deacutebi Maicon Lipe e Marcelo pelo companheirismo e aprendizagem Em especial aos meus professores de Matlab Daniel Everton e La Torre
Aos meus bolsistas e alunos Roberto Ribas Thiago Duarte Queiroz Mariana Boos e Carlos Coutinho especialmente ao Roberto e ao Thiago pela ajuda nestes uacuteltimos meses
Aos colegas do Grupo de Histofisiologia Comparada da Ufrgs em especial agrave Profa Matilde Jocemar Thais e a Rafaela pela convivecircncia e ensinamentos durante meu primeiro ano de doutorado
Aos Professores e funcionaacuterios do Istituto di Fisiologia Umana I de Milatildeo pela recepccedilatildeo calorosa e apoio incondicional
Aos meus co-orientadores Prof Alberto Minetti e Prof Giovanni Cavagna pela orientaccedilatildeo disponibilidade e atenccedilatildeo dispensada al braziliano grazie mille Aos meus companheiros Davide Susta e Mario Legramandi pelo companheirismo e ensinamentos durante o ano em Milatildeo
Aos sujeitos dos experimentos apresentados nesta tese Aos meus caros companheiros da Expediccedilatildeo no Nepal Ardigograve Formenti Susta e
Canova pela descontraccedilatildeo e parceria Ao Comitecirc de Pesquisa em Altitude da Repuacuteblica da Itaacutelia Everest-K2-CNR por ter dado o apoio financeiro para minha participaccedilatildeo na Expediccedilatildeo Aos caros Kagi Bista e Botko e aos carregadores Nepaleses Namaskar
Ao CNPq pelo apoio financeiro que permitiu meus estudos durante estes trecircs anos inclusive meus estudos no exterior
Aos companheiros funcionaacuterios da Esef que me ldquosuportamrdquo desde 1995 em especial aos colegas do Poacutes-Graduaccedilatildeo Rosane Ana e Andrezito e aos colegas do Lapex Dani Luciano Alex Carla Maacutercia Sarinha Vanessa e Luiz
7
SUMAacuteRIO
LISTA DE FIGURAS 10
RESUMO 14
ABSTRACT 16
DEFINICcedilAtildeO DE TERMOS 18
LISTA DE SIacuteMBOLOS E ABREVIATURAS 20
INTRODUCcedilAtildeO GERAL 27
11 Locomoccedilatildeo humana 27
13 Formato da tese 30
131 Objetivo geral 32
132 Objetivos especiacuteficos 32
2 O CUSTO EMG DA CAMINHADA HUMANA 33
21 Introduccedilatildeo 33
22 Metodologia 36
221 Construccedilatildeo do modelo 36
222 Testando o modelo 41
23 Resultados 42
231 Variaacuteveis espaccedilos-temporais 42
232 Atividade EMG 43
8
233 Custo EMG 47
24 Discussatildeo 49
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular 49
242 Sobre o meacutetodo 51
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia 52
251 Materiais e meacutetodos 53
252 Resultados 56
253 Discussatildeo 57
3 MECAcircNICA DA CORRIDA DE IDOSOS 60
31 Introduccedilatildeo 60
32 Materiais e Meacutetodos 61
321 Amostra e procedimento experimental 61
322 Dos registros da plataforma ao trabalho externo 63
323 Estimativa do trabalho interno 66
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato 66
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio 67
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente 68
327 Transduccedilatildeo EpEk durante o passo 68
328 Rigidez vertical (k) 70
329 Estatiacutestica 71
33 Resultados 71
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM 72
332 Trabalho 74
333 Assimetria contato-despregue 75
34 Discussatildeo 76
341 Sobre o meacutetodo 76
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical 80
343 A assimetria contato-despregue 90
9
4 PREDIZENDO VF CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO
TERRESTRE 101
41 Introduccedilatildeo 101
42 Equaccedilatildeo do tempo de atraso 102
43 Estimativa da velocidade horizontal 104
44 Equaccedilatildeo de custo energeacutetico 106
45 Discussatildeo 107
5 CONCLUSAtildeO GERAL 111
51 O custo EMG da caminhada humana 111
52 A mecacircnica da corrida de idosos 111
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre 112
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico 112
541 Respondendo algumas criacuteticas atuais 116
55 Propostas para futuros estudos 118
551 Custo EMG da caminhada humana 118
552 Mecacircnica da corrida dos idosos 118
553 Modelo matemaacutetico da locomoccedilatildeo terrestre 119
6 REFEREcircNCIAS 120
APEcircNDICES 130
A- Programa de anaacutelise EMG da caminhada LocoEmg 130
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada) 132
C- Textos completos referentes agrave tese 134
D- Paracircmetros musculares 135
10
Lista de Figuras
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-invertido para a
caminhada e massa-mola para a corrida (Fonte SAIBENE e MINETTI 2003
modificado no presente estudo) 29
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset 38
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda
metade da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo
isomeacutetrica Setas verticais apontando para baixo indicam momento de contato
e de despregue 39
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de
passada com o tempo de passada normalizado em percentual do ciclo O 0shy
100 representa o momento de contato com o solo As cores indicam a
velocidade de caminhada (de 2 agrave 7 kmh-1) Cada muacutesculo eacute representado
nas linhas e em cada coluna eacute apresentada a atividade EMG por inclinaccedilatildeo 46
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal + carga)
11
dos carregadores Nepaleses (NEP) e montanhistas Caucasianos (CAU) em
subida (up) e descida (down) 57
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da PMV (positiva ou
negativa) pela potecircncia metaboacutelica respectiva (MINETTI et al 2006) As
linhas satildeo as razotildees entre eficiecircncia muscular positiva e negativa
(WOLEDGE et al 1985) 58
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado 69
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da caminhada
(pecircndulo-invertido) e de segmento complacente da corrida (massa-mola) e
seus principais constituintes Note que o tracejado indica a trajetoacuteria do corpo
de massa m durante o contato g eacute a aceleraccedilatildeo gravitacional k eacute a rigidez da
mola ll0 eacute o comprimento do membro inferior e a0 eacute o acircngulo da perna de
apoio no momento do contato com o solo 77
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um passo
em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis a
direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup
+ Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo
(tae) da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na
direccedilatildeo vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os
ciacuterculos em vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2)
e a frente (Lce) A linha em vermelho pontilhada em cada painel indica o
tempo de contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente
(Lc) durante o passo As linhas azuis pontilhadas em cada painel indicam o
tempo aeacutereo total (ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La)
durante o passo As barras verticais indicam o desvio-padratildeo da meacutedia os
12
nuacutemeros proacuteximos aos siacutembolos nos paineacuteis superiores indicam o nuacutemero de
itens nas meacutedias 85
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e
velocidade vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown
(paineacuteis inferiores) atingidos pelo CM durante o passo em funccedilatildeo da
velocidade de corrida Estatiacutestica e outras indicaccedilotildees conforme a figura 33 89
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e
frequumlecircncia do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute
maior nos idosos nas altas velocidades (paineacuteis superiores) a rigidez vertical
normalizada pela massa eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras
indicaccedilotildees conforme figura 33 91
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com
seus 94
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As
fraccedilotildees do deslocamento vertical do CM durante contato ScSv (ciacuterculos
preenchidos deslocamento descendente ciacuterculos abertos deslocamento
ascendente) e quando a Fv eacute maior do que o PC SceSv (quadrados
preenchidos deslocamento 95
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito
idoso paineacuteis a direita sujeito jovem em cada painel o comportamento da
transduccedilatildeo Ep-Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas
na energia potencial gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf
normalizada para oscilar entre zero e um Mesmos passos da figura 1 cada
painel comeccedila e termina no valor menor da curva Ep As cores diferentes na
curva Ep distinguem as fraccedilotildees do passo onde a Fv exercida no solo eacute maior
do que o PC (vermelho) e menor do que o PC (azul) As linhas contiacutenuas de
Ep indicam a fase de contato enquanto que as linhas pontilhadas Ep (azul
fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As quatro fases
correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
13
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown
(azul) e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas
pontilhadas verticais satildeo apresentadas nos dois picos de Ek e ocupam a
fraccedilatildeo onde a transduccedilatildeo Ep-Ek ocorre conforme indicado pelos incrementos
da curva Rint(t) 98
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos painel
inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura
31) e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e
barras azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de
corrida Estatiacutestica conforme figura 33 99
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de
reaccedilatildeo do solo durante a corrida 103
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de
progressatildeo 108
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de
progressatildeo Fonte Minetti 1998b 109
Figura 51 Modelo conceitual da locomoccedilatildeo humana 113
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido
de elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006117
Figura A1 Janela principal do programa LocoEmgVI 130
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI 131
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados 132
14
Resumo
Dois modelos mecacircnicos o pecircndulo-invertido e o massa-mola explicam como
os mecanismos pendular e elaacutestico minimizam o dispecircndio energeacutetico advindo dos
muacutesculos durante caminhada e corrida humana A presente tese testa dois efeitos
que para nosso conhecimento todavia natildeo possuem respostas conclusivas da
literatura nomeadamente o processo de envelhecimento na mecacircnica da corrida
humana e o efeito da inclinaccedilatildeo do terreno na velocidade oacutetima da caminhada Para
estudar o primeiro efeito as forccedilas de reaccedilatildeo do solo provenientes de uma
plataforma de forccedila (4m x 050m) foram usadas para a posterior comparaccedilatildeo de i)
trabalho mecacircnico ii) paracircmetros do sistema massa-mola e iii) assimetrias contato-
despregue entre jovens e idosos Os idosos produzem menos forccedila durante a fase
de trabalho mecacircnico positivo com uma menor oscilaccedilatildeo vertical total e oscilaccedilatildeo
durante a fase aeacuterea Consequumlentemente a capacidade de armazenar e re-utilizar
energia elaacutestica dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio
energeacutetico neste grupo quando comparado com jovens Para o modelo do custo
eletromiograacutefico (EMG) da caminhada humana criou-se duas abordagens
experimental e teoacuterica Em ambas as abordagens informaccedilotildees da atividade EMG de
dezesseis muacutesculos sendo 8 posturais e 8 propulsores foram coletadas e
analisadas a partir da integral EMG A abordagem teoacuterica parece ter uma melhor
relaccedilatildeo com as evidecircncias experimentais sobre a energeacutetica da caminhada humana
em inclinaccedilotildees Os principais mecanismos envolvidos na nova hipoacutetese satildeo i)
muacutesculos posturais que natildeo realizam trabalho muscular exercem uma funccedilatildeo
importante na determinaccedilatildeo do dispecircndio energeacutetico total e ii) a presente hipoacutetese
leva em consideraccedilatildeo a co-contraccedilatildeo de muacutesculos antagonistas no dispecircndio
15
energeacutetico total Mais experimentos satildeo necessaacuterios para confirmar o modelo
apresentado neste estudo Aleacutem disso atraveacutes de estrateacutegias de otimizaccedilatildeo e
prediccedilatildeo linear um modelo teoacuterico foi delineado a fim de determinar paracircmetros
mecacircnicos (comprimento de passada e velocidade de progressatildeo) e energeacuteticos da
locomoccedilatildeo terrestre em situaccedilotildees onde as informaccedilotildees disponiacuteveis satildeo apenas a
massa e uma curva forccedila de reaccedilatildeo vertical versus tempo Os resultados advindos
do modelamento correspondem aos paracircmetros determinados experimentalmente
Laboratoacuterios que detenham apenas uma plataforma de forccedila ou nas aacutereas onde as
informaccedilotildees de entrada do atual modelo sejam as uacutenicas informaccedilotildees (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis primaacuterias da
locomoccedilatildeo podem ser preditas com razoaacutevel acuraacutecia
Palavras-chave custo eletromiograacutefico da caminhada mecacircnica da corrida de
idosos modelo teoacuterico da locomoccedilatildeo terrestre mecanismos minimizadores de
energia locomoccedilatildeo humana
16
Abstract
Two mechanical models the inverted pendulum and spring-mass explain how
do the pendular and elastic mechanisms minimizing energy expenditure from
muscles during human walking and running Here we test two effects that to our
knowledge do not have yet conclusive responses from literature specifically the
ageing effects on mechanics of human running and the effect of gradient on walking
optimal speed In order to check the former effect the ground reaction forces came
from a force platform (4m x 05m) were used for a later comparison i) mechanical
work ii) spring-mass parameters and iii) landing-takeoff asymmetries The old
subjects produce less force during positive work resulting in a smaller overall and
aerial vertical oscillation of the centre of mass Consequently the potential for restore
elastic energy from tendons is reduced contributing to greater energy expenditure
than in young subjects In relation to Electromyographical (EMG) Cost of human
walking we created two approaches experimental and theoretical In both
approaches information from EMG activity of sixteen muscles eight postural and
eight propulsor were collected and analysed The theoretical approach seems to fit
better with the energy expenditure during gradient walking The main mechanisms
involved in this new hypothesis are i) postural muscles that do not perform muscular
work play an important role in the total energy expenditure and ii) the present
hypothesis take the co-contraction into account of the antagonist muscles in the total
energy expenditure Further experiments are necessary to confirm this hypothesis
Besides using optimization and linear prediction procedures a theoretical model was
designed to estimate mechanical parameters (stride length and velocity of
progression) and energetic variables of terrestrial locomotion when available
information consists only of mass and one vertical ground reaction force versus time
17
The results from this modelling are similar to experimentally obtained data
Laboratories with just one force platform or in areas where the present modelrsquos input
information be the unique accessible data (eg palaeontology forensic
biomechanics etc) the prime variables of locomotion may be estimated with
reasonable accuracy
Keywords electromyographical cost of walking running mechanics in the
elderly theoretical model of terrestrial locomotion mechanisms for minimizing
expenditure energy human locomotion
18
Definiccedilatildeo de Termos
Contraccedilatildeo concecircntrica contraccedilatildeo muscular realizada durante encurtamento
do muacutesculo
Contraccedilatildeo excecircntrica contraccedilatildeo muscular realizada durante alongamento
do muacutesculo
Custo energeacutetico o dispecircndio advindo dos muacutesculos em funccedilatildeo da distacircncia
percorrida normalizado pela massa corporal A unidade eacute em Jkg-1m -1
Eficiecircncia mecacircnica a potecircncia mecacircnica gerada dividida pela potecircncia
metaboacutelica despendida durante uma passada
Passada um periacuteodo que compreende desde o momento do contato de um
peacute com o solo e finaliza no subsequumlente momento de contato do mesmo peacute
Passo um periacuteodo que compreende desde o momento do contato de um peacute
com o solo e finaliza no subsequumlente momento de contato do peacute contra-
lateral
Potecircncia mecacircnica externa o somatoacuterio dos incrementos positivos de
energia mecacircnica externa durante uma passada dividido pelo tempo da
passada
Recovery ndash R percentual de transferecircncia entre energia cineacutetica e potencial
gravitacional durante um ciclo de passada
Tempo aeacutereo efetivo duraccedilatildeo no qual a forca vertical eacute menor do que a
forccedila peso durante um passo
Tempo de contato efetivo duraccedilatildeo no qual a forccedila vertical eacute maior do que a
forccedila peso durante um passo
Trabalho mecacircnico externo O trabalho realizado para elevar e acelerar o
CM em relaccedilatildeo ao ambiente externo No presente estudo foi desconsiderado
19
o trabalho mecacircnico externo advindo de aceleraccedilotildees horizontais meacutedio-
laterais
Trabalho mecacircnico interno O trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM
Trabalho mecacircnico total O somatoacuterio dos moacutedulos do trabalho mecacircnico
externo e interno No presente estudo o trabalho interno foi considerado
aceitando transferecircncia de energia mecacircnica entre segmentos de mesmos
membros
20
Lista de Siacutembolos e Abreviaturas
l0 comprimento do membro inferior
μV microvolts
0 acircngulo da perna de apoio com o solo no momento
do contato
Fvc Fv meacutedia durante a fase de contato do peacute com o
solo
Ah variaccedilatildeo de altura
AhorPosition idem ao CPexp
At tempo de locomoccedilatildeo
Atime tempo de passada
Ltphoto tempo entre as passagens pelas fotoceacutelulas
2D duas dimensotildees
av aceleraccedilatildeo vertical do CM
avae aceleraccedilatildeo vertical do CM durante fase aeacuterea
efetiva
avce aceleraccedilatildeo vertical do CM durante contato efetivo
avmx aceleraccedilatildeo vertical maacutexima do CM
c constante de custo
CAU Caucasianos
CM centro de massa
cos cosseno
CP comprimento de passada
21
CPexp comprimento de passada determinada
experimentalmente
Ctot Custo energeacutetico da locomoccedilatildeo
dB decibeacuteis
DF duty factor (fraccedilatildeo da passada na qual um peacute toca
o solo)
DFregression valores de Vf preditos por regressatildeo linear
advindos de DF
dp desvio-padratildeo
dt periacuteodo de um quadro
Ecm energia mecacircnica do CM
Ek energia cineacutetica
Ekf energia cineacutetica horizontal
Ekfmn energia cineacutetica horizontal miacutenima
Ekmxdown energia cineacutetica vertical maacutexima durante
deslocamento descendente do CM
Ekmxup energia cineacutetica vertical maacutexima durante
deslocamento ascendente do CM
Ekv energia cineacutetica vertical
Emetabolic potecircncia metaboacutelica
EMG eletromiografia ou eletromiograacutefico
EmgCosttheor custo EMG teoacuterico
EmgCostexp custo EMG teoacuterico
EMGiso atividade EMG durante contraccedilatildeo isomeacutetrica
EMGneg atividade EMG durante trabalho negativo
EMGpos atividade EMG durante trabalho positivo
cmuscular energia metaboacutelica advinda do muacutesculo-esqueleacutetico
cmetaboacutelica energia metaboacutelica total durante locomoccedilatildeo
crepouso energia metaboacutelica durante posiccedilatildeo em peacute
celaacutestica energia recuperada por via elaacutestica
cpendular energia recuperada por via pendular
creconvertida energia total recuperada
Ep energia potencial gravitacional do CM
22
Epmn energia potencial gravitacional miacutenima do CM
total energia total necessaacuteria para realizar a locomoccedilatildeo
f frequumlecircncia de passo
Ff componente antero-posterior da forccedila de reaccedilatildeo do
solo
FinalhorPosition posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo de passada
FP frequumlecircncia de passada
FPexp frequumlecircncia de passada determinada
experimentalmente
FPregression valores de Vf preditos por regressatildeo linear a partir
de dados de FP
FPtheor frequumlecircncia de passada obtida indiretamente
Fr nuacutemero de froude
fs frequumlecircncia do sistema massa-mola
fsample frequumlecircncia de amostragem
Fv componente vertical da forccedila de reaccedilatildeo do solo
Fvmx Fv maacutexima
Fvmxyoung Fv maacutexima nos jovens
Fvmxold Fv maacutexima nos idosos
Fvscale PC mensurado com uma balanccedila
Fvpeak pico de impacto vertical
Fvplate forccedila vertical media durante um ciclo de passada
g aceleraccedilatildeo gravitacional
GPS sistema de posicionamento global
h hora
Hz Hertz
Iv impulso vertical
InitialhorPosition posiccedilatildeo horizontal do quadril no quadro que inicia o
ciclo de passada
Iemg integral EMG
Iemgcon integral EMG durante contraccedilatildeo concecircntrica
Iemgexc integral EMG durante contraccedilatildeo excecircntrica
J Joules
23
k rigidez vertical
kg quilograma
km quilometro
L comprimento do passo
Lae deslocamento horizontal do CM durante fase aeacuterea
efetiva
Lce deslocamento horizontal do CM durante contato
efetivo
M massa corporal
m metros
Mass massa dos muacutesculos analisados
ms milisegundos
mtot massa total (massa total somada agrave carga externa)
mV milivolts
N Newtons
NEP Nepaleses
nframes nuacutemero de quadros que totalizam um ciclo de
passada
nf nuacutemero de quadros
norm normalizado
O2 oxigecircnio
p iacutendice de significacircncia estatiacutestico
PC peso corporal
PMV potecircncia mecacircnica vertical
q fator de forma da curva de Fv em funccedilatildeo do tempo
qmean meacutedia dos valores qrsquos durante o tc
qregression valores de Vf predito por regressatildeo linear a partir
de dados de q
R Recovery percentual de reconversatildeo entre energia
cineacutetica e potencial gravitacional
R coeficiente de correlaccedilatildeo
r transduccedilatildeo entre energia cineacutetica e potencial
gravitacional
24
Rint transduccedilatildeo acumulada entre energia cineacutetica e
potencial gravitacional durante um passo
Rintdown transduccedilatildeo acumulada durante deslocamento
descendente do CM
Rintup transduccedilatildeo acumulada durante deslocamento
ascendente do CM
rms raiz quadrada da meacutedia dos quadrados
s segundos
Sae deslocamento vertical do CM durante fase aeacuterea
efetiva
Saedown deslocamento descendente do CM durante Sae
Saeup deslocamento ascendente do CM durante Sae
Sc deslocamento do CM durante a fase de contato
Sce deslocamento vertical do CM durante contato
efetivo
Scdown deslocamento descendente do CM durante Sc
Scup deslocamento ascendente do CM durante Sc
Scedown deslocamento descendente do CM durante Sce
Sceup deslocamento ascendente do CM durante Sce
SEE erro meacutedio da estimativa
sin seno
Skinf dobra cutacircnea
Sv deslocamento do CM durante um passo
Svdown deslocamento descendente do CM durante Sv
Svup deslocamento ascendente do CM durante Sv
T tempo de um passo
t tempo
ta tempo em que a acontece durante W+
t tempo em que acontece durante W-
ta periacuteodo do passo no qual o peacute natildeo estaacute em contato
com o solo
tae periacuteodo do passo no qual a Fv eacute maior do que o PC
peso corporal
25
taedown periacuteodo do deslocamento descendente do CM
durante tae
taeup periacuteodo do deslocamento ascendente do CM
durante tae
tbrake tempo de Wshy
tc periacuteodo do passo no qual um peacute estaacute em contato
com o solo
tce periacuteodo do passo no qual a Fv eacute menor do que o
PC
tcedown periacuteodo do deslocamento descendente do CM
durante tce
tceup periacuteodo do deslocamento ascendente do CM
durante tce
tpush tempo de W+
tstep tempo do passo
Vf velocidade de progressatildeo
V f velocidade meacutedia de progressatildeo
Vfexp velocidade de progressatildeo determinada
experimentalmente
VO2iso consumo de O2 durante contraccedilatildeo isomeacutetrica
VO2neg consumo de O2 durante trabalho mecacircnico
negativo
VO2pos consumo de O2 durante trabalho mecacircnico positivo
Vv velocidade vertical do CM
Vvmx velocidade vertical maacutexima do CM
Vvmxdown velocidade vertical maacutexima durante deslocamento
descendente do CM
Vvmxup velocidade vertical maacutexima durante deslocamento
ascendente do CM
Wshy trabalho mecacircnico negativo
W Watts
W+ trabalho mecacircnico positivo
Wext trabalho mecacircnico externo
Wextf trabalho mecacircnico externo horizontal
26
Wextf+ trabalho mecacircnico externo horizontal positivo
Wextv trabalho mecacircnico externo vertical
Wint trabalho mecacircnico interno
Wtot trabalho mecacircnico total
a fase durante W+ em que Ek e Ep do CM aumentam
concomitantemente
fase durante W- em que Ek e Ep do CM diminuem
concomitantemente
27
INTRODUCcedilAtildeO GERAL
11 Locomoccedilatildeo humana
A teoria da evoluccedilatildeo Darwinista conhecida como Teoria da Seleccedilatildeo Natural
nos indica entre outros pressupostos que a multiplicidade de espeacutecies que habitam
a face da terra eacute produto de um sistema altamente complexo e competitivo de
sobrevivecircncia sistema este que reflete fatores preditores da aptidatildeo definidos como
geneacuteticos e do meio ambiente As capacidades de reproduccedilatildeo de alimentaccedilatildeo e de
locomoccedilatildeo satildeo moduladas por aspectos do genoacutetipo influenciados pelos fatores
ambientais O conceito de aptidatildeo relacionada agrave locomoccedilatildeo desde um ponto de
vista bioloacutegico pode ser abordado analiticamente atraveacutes de seus componentes
principais Estes satildeo velocidade aceleraccedilatildeo maneabilidade resistecircncia economia
e estabilidade (ALEXANDER 2003)
A locomoccedilatildeo tem importacircncia fundamental para a sobrevivecircncia pois
possibilita entre outros fatores a procura por alimentos a busca por um local com
melhor clima caccedilar uma presa ou fugir de um perigo eminente (SAIBENE e
MINETTI 2003) Nos mamiacuteferos terrestres a locomoccedilatildeo acontece atraveacutes do uso
das pernas Este tipo de locomoccedilatildeo tem nos humanos por exemplo alguns
aspectos de ineficiecircncia quando comparada com outros animais (peixes e paacutessaros)
A ineficiecircncia da locomoccedilatildeo de biacutepedes eacute baseada no fato de que os segmentos
inferiores encostam repetidamente no solo para absorver e transferir energia
(trabalho negativo e positivo respectivamente) com o meio ambiente de modo que
os segmentos sofrem uma colisatildeo no momento de contato com o solo
caracterizando situaccedilotildees de grandes aceleraccedilotildees Para manter a velocidade meacutedia
de locomoccedilatildeo torna-se necessaacuterio uma re aceleraccedilatildeo do centro de massa (CM)
28
Energia quiacutemica eacute despendida para manter os muacutesculos ativos durante estas
diferentes fases A fim de atenuar este dispecircndio dois mecanismos baacutesicos satildeo
usados pelo sistema locomotor na corrida e na caminhada o mecanismo do pecircndulo
na caminhada e o mecanismo da massa-mola para a corrida (CAVAGNA e
KANEKO 1977 ver figura 11) Na caminhada a energia potencial eacute alta quando o
CM estaacute sobre o ponto de contato do corpo com o solo mas a partir deste momento
a energia potencial gravitacional comeccedila a diminuir e a energia cineacutetica horizontal
obteacutem um acreacutescimo gradativo Quando o ponto de contato volta a estar na frente do
CM a energia cineacutetica diminui e potencial aumenta
Estes comportamentos entre energia cineacutetica horizontal e potencial
gravitacional acontecem em oposiccedilatildeo de fase (CAVAGNA et al 1963) e portanto
com um processo de reconversatildeo entre energia cineacutetica e potencial gravitacional
(recovery ndash R) Por outro lado na corrida os acreacutescimos de energia potencial e
cineacutetica acontecem concomitantemente portanto o mecanismo de conservaccedilatildeo de
energia citado anteriormente natildeo se aplica neste tipo de locomoccedilatildeo Eacute postulado
que durante a primeira metade da fase de apoio da corrida principalmente
muacutesculos e tendotildees alongam armazenando energia elaacutestica enquanto que os
moacutedulos de energia cineacutetica horizontal e potencial gravitacional diminuem Esta
energia elaacutestica armazenada como uma mola comprimida por uma massa eacute
transformada em energia cineacutetica horizontal e potencial gravitacional de modo
gradativo durante a segunda metade da fase de apoio (CAVAGNA et al 1964
KOMI 2000 figura 11) Evidecircncias de energia elaacutestica armazenada e reconvertida
tambeacutem foram encontradas em cangurus (ALEXANDER e VERNON 1975) e em
cavalos (BIEWENER 1998) Os ligamentos do arco do peacute tambeacutem respondem pelo
comportamento elaacutestico do sistema locomotor na corrida (KER et al 1987)
Enquanto que a medida de trabalho externo possui uma correspondecircncia com
o trabalho mecacircnico realizado pelos muacutesculos na caminhada os valores obtidos
para a corrida superestimam o trabalho muscular realizado devido agrave dificuldade de
quantificar a energia elaacutestica durante o movimento (SAIBENE e MINETTI 2003) De
fato parte consideraacutevel do aumento e diminuiccedilatildeo da energia mecacircnica total na
corrida natildeo eacute causada pelas contraccedilotildees (excecircntricas e concecircntricas) musculares
mas pelo alongamento e encurtamento das estruturas elaacutesticas da unidade muacutesculo-
tendatildeo mais especificamente os tendotildees e estruturas elaacutesticas do muacutesculo
Portanto na corrida a adiccedilatildeo do trabalho interno e a transferecircncia entre segmentos
29
dos mesmos membros (inferiores e superiores) permitem uma estimativa mais
proacutexima do trabalho mecacircnico total (WILLEMS et al 1995)
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-
invertido para a caminhada e massa-mola para a corrida (Fonte
SAIBENE e MINETTI 2003 modificado no presente estudo)
As determinantes mecacircnicas da locomoccedilatildeo humana e animal tem sido
extensivamente estudadas em diferentes situaccedilotildees velocidade (CAVAGNA et al
1963 1964) gravidade (KRAM et al 1997 CAVAGNA et al 2000 1998
CAVAGNA et al 2005) planos inclinados (MINETTI et al 1993 1994)
O trabalho mecacircnico durante a locomoccedilatildeo em inclinaccedilotildees tem sido estudado
na caminhada (MINETTI et al 1993) e na corrida (MINETTI et al 1994)
encontrando valores de maior eficiecircncia mecacircnica entre 10 e 15 de inclinaccedilatildeo
negativa (declive) Todavia o modelo do pecircndulo invertido natildeo se sustenta para
situaccedilotildees de inclinaccedilotildees extremas Deste modo a reconversatildeo de energia parece
natildeo atuar na determinaccedilatildeo da velocidade oacutetima de caminhada nestas situaccedilotildees
Uma nova hipoacutetese eacute que os muacutesculos posturais do quadril possam contribuir para
gerar o alto custo de transporte em velocidades baixas de caminhada em inclinaccedilotildees
diferentes da inclinaccedilatildeo oacutetima (-10 onde haacute o menor custo metaboacutelico e
mecacircnico)
Esta hipoacutetese pretende ser testada atraveacutes da anaacutelise do custo
eletromiograacutefico (EMG) durante caminhada em diferentes velocidades e inclinaccedilotildees
de terreno O custo EMG seraacute compreendido como o somatoacuterio de ativaccedilatildeo EMG em
funccedilatildeo da distacircncia percorrida Se satisfatoacuterio o custo EMG poderaacute explicar as curva
30
em forma de U de custo metaboacutelico em funccedilatildeo da velocidade determinadas no
trabalho pioneiro de MARGARIA (1938)
Diferentemente da caminhada a corrida pode ser explicada do ponto de vista
mecacircnico pelo modelo massa-mola Este modelo possibilita dividir a oscilaccedilatildeo
vertical do CM em duas partes durante a passada da corrida a fase inferior da
oscilaccedilatildeo (quando a forccedila vertical exercida no solo eacute maior do que o peso corporal) e
a fase superior da oscilaccedilatildeo (quando a forccedila vertical eacute menor do que o peso
corporal) De acordo com o modelo massa-mola a duraccedilatildeo da fase inferior da
oscilaccedilatildeo representa meio periacuteodo do sistema e o deslocamento do CM durante este
periacuteodo representa a amplitude da oscilaccedilatildeo (BLICKHAN 1989 CAVAGNA et al
2005) Observaccedilotildees preliminares suportam a hipoacutetese de que sujeitos idosos
utilizem de uma maior geraccedilatildeo de trabalho interno devido a diminuiccedilatildeo da fase
superior da oscilaccedilatildeo do CM
Portanto a anaacutelise dos determinantes mecacircnicos da caminhada e corrida
deveratildeo contribuir no entendimento da locomoccedilatildeo desde um ponto de vista
energeacutetico Aleacutem disso procuramos realizar um estudo teoacuterico com o objetivo de
predizer variaacuteveis fundamentais e trabalho mecacircnico da locomoccedilatildeo terrestre
Informaccedilotildees biomecacircnicas sobre a energia da locomoccedilatildeo poderatildeo servir
como base para aplicaccedilotildees futuras na aacuterea da Fisioterapia na anaacutelise da locomoccedilatildeo
patoloacutegica bem como na Educaccedilatildeo Fiacutesica e Esportes atraveacutes do uso deste
conhecimento nas aacutereas do esporte de rendimento e sauacutede agraves quais utilizam-se das
atividades fiacutesicas locomotoras
13 Formato da tese
O estado-da-arte apresentado no capiacutetulo introdutoacuterio mostra um
desenvolvimento notaacutevel do corpo de conhecimento relacionado agrave mecacircnica e
energeacutetica da locomoccedilatildeo humana As bases cientiacuteficas atuais que procuram
encontrar as determinantes mecacircnicas de caracteriacutesticas fundamentais da
caminhada e corrida humana tais como velocidade e inclinaccedilatildeo oacutetima da
locomoccedilatildeo eficiecircncia e economia em situaccedilatildeo com carga e inclinaccedilatildeo e mudanccedila
de formas de locomoccedilatildeo conforme o aumento da velocidade demonstram ser
satisfatoacuterias em inuacutemeras situaccedilotildees
31
Contudo modelos biomecacircnicos que analisem natildeo apenas situaccedilotildees
particulares mas que expliquem as questotildees fundamentais da locomoccedilatildeo humana
tendo em consideraccedilatildeo a complexidade deste tipo de movimento ainda satildeo
escassos Atualmente temos hipoacuteteses que necessitam de experimentaccedilatildeo para
tornaacute-las robustas o suficiente para responder as questotildees fundamentais da
locomoccedilatildeo e ao mesmo tempo se manterem simples o bastante que as caracterize
como fundamentais Portanto a presente tese ENERGEacuteTICA E MECAcircNICA DA
CAMINHADA E CORRIDA HUMANA Com especial referecircncia agrave locomoccedilatildeo em
plano inclinado e efeitos da idade natildeo oferece uma resposta final e acabada para as
relaccedilotildees entre a energeacutetica e mecacircnica da locomoccedilatildeo humana mas tem como eixo
principal por meio de abordagens experimentais e teoacutericas avanccedilar no
entendimento dos paradigmas mecacircnicos das formas fundamentais de locomoccedilatildeo
usadas pelo ser humano caminhada e corrida
Em base disso o capiacutetulo 2 Custo EMG da Caminhada Humana procura
avanccedilar e aperfeiccediloar a hipoacutetese do Custo de Geraccedilatildeo de Forccedila (KRAM e TAYLOR
1990) com o desenvolvimento do modelo do Custo de Ativaccedilatildeo Muscular que daacute
base para o estudo Atraveacutes de experimentos em diferentes velocidades e
inclinaccedilotildees de caminhada eacute dada uma explicaccedilatildeo das curvas em forma de U do
custo metaboacutelico em funccedilatildeo da velocidade determinadas no estudo pioneiro de
MARGARIA em 1938
Motivado pela falta de explicaccedilatildeo das mudanccedilas estruturais e funcionais
devido agrave idade aplicadas agrave mecacircnica e energeacutetica da locomoccedilatildeo humana o capiacutetulo
3 Mecacircnica da Corrida em Idosos compara o trabalho mecacircnico e o sistema massa-
mola entre jovens e idosos em diferentes velocidades de corrida analisando o
sistema massa-mola natildeo apenas pelas suas caracteriacutesticas originais (BLICKHAN
1989 MCMAHON e CHENG 1990) mas tambeacutem pelas assimetrias deste sistema
na corrida humana determinadas recentemente na literatura (CAVAGNA 2006)
Nestes dois estudos eacute usada a abordagem experimental o primeiro se
utilizando da teacutecnica de EMG e o segundo estudo abordando a teacutecnica da
dinamometria especificamente o uso de plataformas de forccedila A percepccedilatildeo da
limitaccedilatildeo metodoloacutegica do uso deste equipamento aliada agrave necessidade de
abordagens teoacutericas da mecacircnica e energeacutetica da caminhada e corrida humana e
animal em situaccedilotildees onde apenas uma curva forccedila de reaccedilatildeo do solo versus tempo
eacute disponiacutevel ofereceram a justificativa para o capiacutetulo 4 Prediccedilatildeo da Vf CP e Custo
32
Energeacutetico da Locomoccedilatildeo Terrestre A construccedilatildeo de um modelo biomecacircnico
destes paracircmetros eacute endereccedilada neste estudo atraveacutes de meacutetodo de miacutenimos
quadrados e princiacutepios da dinacircmica e otimizaccedilatildeo de paracircmetros caracterizadores da
locomoccedilatildeo nomeadamente massa corporal frequumlecircncia de passo (FP) fator de forma
ldquoqrdquo e duty factor (DF)
Finalmente no capiacutetulo 5 os resultados de cada estudo satildeo sumarizados e
no capiacutetulo 6 satildeo apresentadas algumas consideraccedilotildees sobre a mecacircnica e
energeacutetica da locomoccedilatildeo humana e os possiacuteveis desdobramentos advindos dos
presentes achados Ainda no capiacutetulo 8 estatildeo inseridos os apecircndices da tese
131 Objetivo geral
O objetivo da presente tese eacute analisar o custo EMG da caminhada humana e
a mecacircnica da corrida de idosos Esta seacuterie de estudos tem tambeacutem como objetivo
construir um modelo biomecacircnico do custo energeacutetico da locomoccedilatildeo terrestre
132 Objetivos especiacuteficos
- Estudar as determinantes da velocidade oacutetima de caminhada em inclinaccedilotildees com
ecircnfase na construccedilatildeo do modelo do custo EMG da caminhada humana
- Comparar a mecacircnica da corrida com particular referecircncia ao trabalho mecacircnico e
sistema massa-mola entre jovens e idosos em vaacuterias velocidades de corrida
- Construir um modelo biomecacircnico capaz de predizer paracircmetros fundamentais e
custo energeacutetico da locomoccedilatildeo terrestre
33
2 O CUSTO EMG DA CAMINHADA HUMANA
21 Introduccedilatildeo
Durante um ciclo de passada de caminhada a energia cineacutetica do CM
corporal varia inversamente com a energia potencial gravitacional do CM Apesar da
presenccedila importante deste comportamento a transformaccedilatildeo de energia entre uma
forma e outra natildeo eacute total e o restante de energia necessaacuterio para manter a
locomoccedilatildeo eacute providenciado pelos muacutesculos e eacute quando normalizado pela massa
corporal e por unidade de distacircncia igual agrave 03 Jkg-1m-1 durante a velocidade oacutetima
de caminhada (aproximadamente 45 kmh-1 em adultos) Este mecanismo pendular
de minimizaccedilatildeo de energia foi primeiramente observado por CAVAGNA et al (1963)
e denominado como modelo do ldquopecircndulo invertidordquo
Interessantemente natildeo obstante a sua simplicidade o modelo auxiliou no
entendimento e aprofundamento das determinantes mecacircnicas da locomoccedilatildeo
Atraveacutes deste meacutetodo foi possiacutevel oferecer o primeiro insight desde o ponto-de-vista
mecacircnico sobre a velocidade oacutetima de locomoccedilatildeo e a forma em U do custo de
transporte da caminhada [ml de oxigecircnio - O2 - por kg de massa corporal por
distacircncia percorrida observada por MARGARIA (1938)] Na seacuterie de experimentos
desenvolvida por Cavagna e colegas (CAVAGNA et al 1976 HEGLUND et al
34
1982b) foi apresentada a formulaccedilatildeo matemaacutetica denominada como Recovery (R)
definida como
W f + W -Wv extR() = 100 Eq 21 W f + Wv
onde W f eacute trabalho mecacircnico externo horizontal Wv eacute trabalho mecacircnico externo
vertical e Wext eacute trabalho mecacircnico externo Esta equaccedilatildeo determina o percentual de
reconversatildeo via pendular entre energia cineacutetica e potencial gravitacional durante a
passada E de fato na velocidade oacutetima de caminhada o R alcanccedila
aproximadamente seu valor maacuteximo
Poreacutem o custo de geraccedilatildeo de trabalho como mecanismo principal do custo
energeacutetico da locomoccedilatildeo tem recebido vaacuterias criacuteticas da literatura As criacuteticas se
baseiam principalmente (1) na questatildeo do paradoxo do trabalho zero que afirma
que fisicamente durante um ciclo de passada completo em velocidade constante e
no plano as variaccedilotildees de energias cineacuteticas e potencial satildeo iguais agrave zero
(desprezando a resistecircncia do ar e fricccedilotildees teciduais) portanto analisando de um
ponto-de-vista somente da fiacutesica o sujeito natildeo realizaria trabalho nesta situaccedilatildeo
(ALESHINSKY 1986) (2) o problema da co-contraccedilatildeo afirma que existe um custo
metaboacutelico importante devido agrave contraccedilatildeo de muacutesculos antagonistas que natildeo geram
movimento portanto sem geraccedilatildeo de trabalho mecacircnico Este uacuteltimo
questionamento levou um grupo de pesquisadores a formular a denominada
hipoacutetese da forccedila ou Teoria do custo energeacutetico da geraccedilatildeo de forccedila (HEGLUND et
al 1982b KRAM e TAYLOR 1990 ROBERTS et al 1998) para explicar de modo
simplificado o custo energeacutetico da locomoccedilatildeo
Essencialmente a hipoacutetese da forccedila afirma que o custo energeacutetico da corrida
ou caminhada eacute determinado pelo produto da integral da curva forccedila de reaccedilatildeo do
solo-tempo por um fator proporcional agrave taxa de ciclos de pontes-cruzadas de miosina
no muacutesculo independente da geraccedilatildeo de trabalho mecacircnico Apesar da hipoacutetese
concordar com achados experimentais estes satildeo encontrados em situaccedilotildees
limitadas e aleacutem disso a hipoacutetese da forccedila considera como negligenciaacutevel o custo
de balanccedilar os segmentos para traacutes e para frente Esta pressuposiccedilatildeo eacute considerada
como incorreta (MARSH et al 2004) O problema principal desta hipoacutetese se refere
35
agrave desconsideraccedilatildeo do trabalho elemento fundamental segundo a primeira lei da
termodinacircmica Conforme apontado por HEGLUND 2004) ldquoforccedila natildeo eacute trabalho
nem mesmo eacute energia Se a energia metaboacutelica eacute consumida aquela energia deve
ir para algum lugar Se a energia de um segmento corporal aumenta aquela energia
vem de algum lugar Se a energia daquele segmento diminui a energia vai para
algum lugarrdquo
Durante a locomoccedilatildeo em inclinaccedilotildees foi observado que na inclinaccedilatildeo oacutetima
(aproximadamente -10) a constante de custo metaboacutelico inverso ao tempo de
apoio obteve uma variaccedilatildeo significativa (MINETTI et al 1994) indicando que o
custo de geraccedilatildeo de trabalho mecacircnico era mais satisfatoacuterio do que o custo de
geraccedilatildeo de forccedila Mas um achado intrigante nos estudos de Minetti e
colaboradores sobre as determinantes mecacircnicas da energeacutetica da caminhada e
corrida em inclinaccedilotildees (1993 e 1994 respectivamente) foi sobre a ausecircncia de
trabalho mecacircnico negativo em inclinaccedilotildees positivas e de trabalho positivo em
inclinaccedilotildees negativas (apoacutes 30 de inclinaccedilatildeo na corrida e 15 na caminhada)
independente da velocidade Portanto o modelo do custo de geraccedilatildeo de trabalho
como determinante do custo energeacutetico da locomoccedilatildeo natildeo se aplica nestas
situaccedilotildees perdendo sua amplitude como Teoria geral para a energeacutetica e mecacircnica
da caminhada
Tendo em consideraccedilatildeo que durante situaccedilotildees de locomoccedilatildeo de pouca
eficiecircncia mecacircnica como na situaccedilatildeo de velocidades mais baixas que a velocidade
oacutetima e durante inclinaccedilotildees extremas satildeo geradas situaccedilotildees de instabilidade de
locomoccedilatildeo e provavelmente maiores co-contraccedilotildees musculares propomos neste
experimento testar a hipoacutetese denominada de ldquocusto EMG da caminhada humanardquo
Uma base importante desta hipoacutetese reside no raciociacutenio de que nas situaccedilotildees
citadas anteriormente a contribuiccedilatildeo de muacutesculos que contraem isometricamente
principalmente os posturais teratildeo uma contribuiccedilatildeo importante para o alto custo
relativo da locomoccedilatildeo
Portanto o objetivo deste estudo eacute desenvolver o modelo do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees Teoricamente a hipoacutetese do
presente estudo diferente da hipoacutetese da forccedila natildeo iraacute desconsiderar o trabalho
mecacircnico gerado mas este seraacute considerado como um dos produtos da variaccedilatildeo da
energia (devido ao consumo de energia metaboacutelico) e a quantidade de ativaccedilatildeo
muscular e as eficiecircncias de ativaccedilatildeo satildeo as determinantes do custo energeacutetico
36
usando os equivalentes metaboacutelicos da ativaccedilatildeo EMG da literatura W+ Wshy
(BIGLAND-RITCHIE e WOODS 1976) e durante contraccedilatildeo isomeacutetrica
(CERRETELLI et al 1976) O modelo eacute apresentado em detalhes na metodologia
22 Metodologia
221 Construccedilatildeo do modelo
O presente modelo eacute configurado como biomecacircnico e se utiliza de
pressupostos originados da fiacutesica e da biologia
O modelo assume que i) toda a energia despendida pelos muacutesculos possui
uma correspondente quantidade de ativaccedilatildeo EMG ii) a atividade EMG realizada
pelos muacutesculos posturais durante todo o ciclo de passada e pelos muacutesculos
propulsores durante a fase aeacuterea seraacute considerada como uma atividade EMG
realizada durante contraccedilotildees isomeacutetricas Seraacute considerada como contraccedilatildeo
excecircntrica e concecircntrica a atividade EMG realizada pelos muacutesculos propulsores
durante a primeira e segunda metades da fase de apoio respectivamente iii) O
custo energeacutetico da locomoccedilatildeo eacute devido agrave ativaccedilatildeo de muacutesculos propulsores e
posturais estes uacuteltimos natildeo diretamente ligados agrave geraccedilatildeo de trabalho mecacircnico iv)
Mais do que uma relaccedilatildeo com a produccedilatildeo de forccedila muscular a quantidade de
ativaccedilatildeo EMG e consequumlentemente o custo EMG possui uma correspondecircncia com
o trabalho mecacircnico realizado durante a ativaccedilatildeo muscular
Um conjunto de algoritmos foi desenvolvido em Labview a fim de analisar o
sinal EMG e as variaacuteveis espaccedilos-temporais (figuras 21 22 e 23 apecircndice 81) O
programa retifica suaviza (atraveacutes de uma integraccedilatildeo com janelamento moacutevel
50Hz do tipo Hamming) e divide todas as curvas de EMG por ciclo de passada
retirando os ciclos de passadas com um tempo 20 menor ou maior do tempo
meacutedio do ciclo de passada e do tempo de apoio Apoacutes normaliza o tempo do ciclo
para 100 quadros (interpolaccedilatildeo via spline) e calcula a meacutedia desvio-padratildeo e
coeficiente de variaccedilatildeo em cada quadro por muacutesculo analisado Este procedimento
tem o objetivo de criar graacuteficos de atividade eletromiograacutefica em funccedilatildeo do
37
percentual do ciclo de passada A fim de analisar o efeito das ponderaccedilotildees pelo
volume muscular e dobra cutacircnea foram desenvolvidas duas estrateacutegias de
modelamento nomeadamente ldquoabordagem experimentalrdquo e ldquoabordagem teoacutericardquo
Abordagem experimental
Usando o sinal suavizado sem a normalizaccedilatildeo foi realizada uma integral em
funccedilatildeo do tempo do seguinte modo
t
Iemg(t) = f EMG dt Eq 22 0
Este valor integrado eacute dividido pelo CP determinando a quantidade de
atividade EMG em funccedilatildeo da distacircncia e seraacute considerado como um custo miacutenimo
EMG Os valores de custo EMG satildeo ponderados em funccedilatildeo do volume muscular
(WINTERS e WOO 1990) e da dobra cutacircnea (NORDANDER et al 2003) do
seguinte modo
Iemg1 Iemg2 Iemg16EmgCost (mV m) = ( + + l middot CP-1 Eq 23 exp ( Mass1 Sk inf1 Mass2 Sk inf2 Mass16 Sk inf16 lmiddot middot middot Masstotal Sk inftotal Masstotal Sk inftotal Masstotal Sk inftotal
onde EmgCostexp eacute o custo miacutenimo EMG experimental Mass eacute a massa dos
muacutesculos analisados e eacute o somatoacuterio de todas as massas musculares Masstotal
analisadas Sk inf eacute a dobra cutacircnea de cada regiatildeo de colocaccedilatildeo dos eletrodos e
eacute o somatoacuterio de todas as dobras cutacircneas analisadas A fim de Sk inftotal
compreender melhor as determinantes da velocidade oacutetima nas inclinaccedilotildees dividiu-
se a Iemg em trecircs aacutereas (a) fase de contato (b) fase aeacuterea e (c) offset (figura 21)
Abordagem teoacuterica
A presente abordagem calcula o sinal EMG atraveacutes dos seus equivalentes
metaboacutelicos Estes equivalentes satildeo advindos da literatura (BIGLAND-RITCHIE e
WOODS 1976) e o objetivo deste procedimento foi verificar se levando em
38
consideraccedilatildeo os equivalentes metaboacutelicos da atividade EMG (para contraccedilotildees
concecircntrica excecircntrica e isomeacutetrica) seria possiacutevel explicar mais satisfatoriamente
as velocidades oacutetimas na caminhada em inclinaccedilotildees Este procedimento assume
que uma determinada quantidade de ativaccedilatildeo eleacutetrica muscular gera distintos custos
energeacuteticos sendo estes dependentes do tipo de contraccedilatildeo muscular Para este
propoacutesito primeiro dividimos a anaacutelise em dois grupos de muacutesculos propulsores
(gluteus maximus gluteus medius deltoideus anterior rectus femuralis vastus
lateralis biceps femuralis caput longus tibialis anterior e gastrocnemius lateralis) e
posturais (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis trapezius ascendens)
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset
Os muacutesculos posturais foram considerados como muacutesculos contraindo
isometricamente durante todo o ciclo de passada enquanto que os muacutesculos
39
propulsores foram analisados como realizando (a) contraccedilatildeo excecircntrica na primeira
fase de contato (b) concecircntrica na segunda fase de contato e (c) contraccedilatildeo
isomeacutetrica durante a fase aeacuterea (figura 22)
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda metade
da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo isomeacutetrica
Setas verticais apontando para baixo indicam momento de contato e de
despregue
Assim foram calculadas as correspondentes integrais
t 2c
Iemgexc (t) = f EMG dt Eq 24 0
40
onde Iemgexc eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a primeira
metade da fase de contato (contraccedilatildeo excecircntrica)
tc
Iemgcon (t) = f EMG dt Eq 25 t 2c
onde Iemgcon eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a segunda
metade da fase de contato (contraccedilatildeo concecircntrica)
ta
Iemgiso (t) = f EMG dt Eq 26 0
onde Iemgiso eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a fase aeacuterea
(contraccedilatildeo isomeacutetrica)
As integrais foram convertidas para uma unidade de counts usada por
BIGLAND-RITCHIE e WOODS 1976) usando um fator de transformaccedilatildeo igual agrave 200
counts (mVs)-1 deste modo temos a atividade EMG durante contraccedilatildeo excecircntrica
(EMGneg) concecircntrica (EMGpos) e isomeacutetrica (EMGiso) em counts Os equivalentes
metaboacutelicos satildeo obtidos atraveacutes de equaccedilotildees de regressatildeo linear criadas no
presente estudo usando dados experimentais de Bigland e Ritchie (1976) como
segue
VO2neg (ml) = 00015 EMGneg + 03353 Eq 27
VO2 pos(ml) = 00042 EMGpos + 01493 Eq 28
(ml) = 00042 EMGiso + 01493 Eq 29 VO2iso
EmgCosttheor (J m) = 201[(VO2 iso1 + VO2 iso 2 + VO2 iso16) + (VO2 neg 1 + VO2 neg 2 + VO2 neg 16) +
(VO2 pos1 + VO2 pos 2 + VO2 pos16)] CP-1 Eq 210
onde EmgCosttheor eacute o custo EMG teoacuterico O somatoacuterio dos dispecircndios energeacuteticos
dados em ml de O2 foram convertidos para Joules (J) usando um equivalente
41
energeacutetico de 201 Jml-1 (BLAXTER 1989) e apoacutes foram divididos por CP (conforme
equaccedilatildeo 210) Nesta abordagem teoacuterica entende-se o EmgCosttheor como um custo
miacutenimo energeacutetico devido agrave notoacuteria impossibilidade de obter a totalidade da ativaccedilatildeo
EMG e consequentemente do custo energeacutetico da locomoccedilatildeo Mais do que isso o
modelo procura compreender as determinantes da velocidade oacutetima de caminhada
nas inclinaccedilotildees
222 Testando o modelo
Um homem adulto sem histoacuteria de lesotildees no sistema muacutesculo-esqueleacutetico
realizou caminhadas de 2 minutos sobre uma esteira (WOODWAY Usa) nas
velocidades de 2 3 4 5 6 e 7 kmh-1 e nas inclinaccedilotildees de 0 5 10 e 15 O uso
das velocidades 6 ou 7 kmh-1 foram escolhidas em funccedilatildeo do Nuacutemero de Froude
(Fr) O valor maacuteximo de Fr foi o equivalente agrave velocidade espontacircnea de transiccedilatildeo
(aproximadamente 05 no plano MINETTI et al 1994) O uso do Fr eacute baseado da
teoria das similaridades dinacircmicas Esta teoria afirma que dois animais
geometricamente similares (como no caso do presente estudo) deslocam-se
tambeacutem de modo similar quando o movimento eacute multiplicado por fatores
relacionados ao tempo dimensotildees lineares e forccedilas (ver ALEXANDER 2005)
Fr = Vf 2 gL Eq 211
onde Vf eacute velocidade de progressatildeo em ms-1 g eacute aceleraccedilatildeo gravitacional (g) (981
ms-2) e L eacute um comprimento corporal conhecido (no presente estudo foi utilizado o
comprimento de membros inferiores em m)
Coleta de dados
O voluntaacuterio foi informado do objetivo do estudo dos riscos e eventuais
desconfortos e assinou um termo de consentimento
O indiviacuteduo estava vestido com roupas apropriadas para caminhada A coleta
de dados foi realizada em inclinaccedilotildees de 0 5 10 e 15 nas velocidades de 2 3 4
5 6 7 kmh-1 para cada inclinaccedilatildeo A atividade EMG de dezesseis muacutesculos foi
42
analisada (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis deltoideus anterior trapezius ascendens gluteus
maximus gluteus medius rectus femuralis vastus lateralis biceps femuralis caput
longus tibialis anterior e gastrocnemius lateralis) usando um eletromioacutegrafo portaacutetil
(EMGpocket Elite System Itaacutelia)
Para a preparaccedilatildeo do local e colocaccedilatildeo dos eletrodos de superfiacutecie bipolares
foram observadas as orientaccedilotildees da Seniam (FRERIKS et al 1991)
Simultaneamente ao registro EMG sinais advindos de seis sensores de pressatildeo
(footswitches) trecircs em cada peacute (regiatildeo do calcanhar quinto e primeiro metatarsos
inferiores) foram registrados no eletromiograacutefo portaacutetil Os sinais EMGrsquos foram preacuteshy
amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um niacutevel de ruiacutedo menor do
que 1 mV rms e filtrados por um filtro do tipo Butterworth (50-450 Hz terceira
ordem) A frequumlecircncia de amostragem da EMG e dos sensores de pressatildeo foi de
1000 Hz
Foram coletadas a massa e estatura corporal e comprimento de membro
inferior As dobras cutacircneas tambeacutem foram coletadas antes dos testes usando um
plicocircmetro (The body calliper CA Usa)
Um possiacutevel efeito de fadiga no sinal EMG foi controlado repetindo o primeiro
teste Com diferenccedilas maiores de 10 entre a integral EMG dos muacutesculos
analisados do primeiro e uacuteltimo teste a coleta seria descartada poreacutem a diferenccedila
foi menor do que este limite
23 Resultados
231 Variaacuteveis espaccedilos-temporais
As variaacuteveis espaccedilos-temporais da caminhada em diferentes velocidades e
diferentes inclinaccedilotildees satildeo apresentadas na tabela 21 O CP e a FP aumentam com
o aumento da velocidade poreacutem natildeo com o aumento da inclinaccedilatildeo O DF eacute maior na
velocidade oacutetima de locomoccedilatildeo nas inclinaccedilotildees (10 e 15) enquanto que apresenta
uma relaccedilatildeo inversa com Vf nas inclinaccedilotildees mais baixas (0 e 5)
43
232 Atividade EMG
A atividade EMG dos muacutesculos posturais (erector spinae longissimus erector
spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis trapezius ascendens) e
dos muacutesculos propulsores (gluteus maximus gluteus medius rectus femoralis
vastus lateralis deltoideus anterior biceps femoralis caput longus tibialis anterior e
gastrocnemius lateralis) eacute apresentada nas figuras 23 e 24 Os resultados do
presente estudo referente ao comportamento da atividade EMG durante caminhada
no plano satildeo semelhantes agrave literatura tanto em relaccedilatildeo aos muacutesculos propulsores
(LAY et al 2007 NYMARK et al 2005) quanto para os muacutesculos posturais (WHITE
e MCNAIR 2002 DEN OTTER et al 2004 LAMOTH et al 2006)
De um modo geral o sinal EMG em funccedilatildeo do percentual do ciclo (portanto
independente da distacircncia percorrida) aumentou conforme o aumento da velocidade
e inclinaccedilatildeo Observa-se tambeacutem um aumento no offset nas maiores inclinaccedilotildees
(veja figuras 23 e 24)
Tabela 21 Valores meacutedios e desvios-padratildeo (dp) de frequumlecircncia de passada (FP)
comprimento de passada (CP) tempo de fase aeacuterea (ta) tempo de contato (tc)e
duty factor (DF) nas diferentes velocidades (Vf) em diferentes inclinaccedilotildees do
terreno
0
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0518 0022 1074 0044 0706 0039 1227 0087 064
3 0660 0017 1263 0032 0604 0030 0912 0042 060
4 0779 0013 1426 0025 0541 0023 0743 0028 058
5 0879 0010 1580 0018 0492 0022 0646 0024 057
6 0970 0009 1719 0015 0446 0012 0586 0014 057
7 1061 0022 1834 0042 0415 0010 0528 0024 056
5
44
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0504 0026 2210 0056 0656 0054 1334 0089 067
3 0640 0015 2606 0030 0635 0033 0930 0048 059
4 0797 0013 2790 0023 0526 0017 0729 0028 058
5 0895 0008 3104 0014 0478 0017 0639 0020 057
6 1002 0009 3326 0016 0426 0009 0572 0014 057
7 1081 0015 3600 0025 0400 0007 0525 0014 057
10
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0302 0000 3674 0000 1309 0090 1998 0090 060
3 0262 0013 3182 0151 1216 0094 2602 0174 068
4 0300 0007 3699 0085 1229 0086 2101 0114 063
5
6 0495 0006 3300 0036 0854 0021 1166 0028 058
7 0556 0008 3429 0015 0775 0022 1023 0026 057
15
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0275 0022 3041 0216 1282 0079 2368 0255 065
3 0319 0011 3492 0122 1208 0074 1936 0121 062
4 0399 0007 3482 0059 1497 0046 1011 0040 040
5 0450 0008 3703 0068 0919 0041 1302 0060 059
6 0524 0009 3711 0064 0808 0026 1101 0035 058
7 0597 0012 3257 0069 0721 0024 0954 0037 057
O maior pico de ativaccedilatildeo EMG entre os muacutesculos propulsores foi do tibialis
anterior com valor de 73 mV agrave 7 kmh-1 agrave 15 enquanto que para os muacutesculos
posturais foi do trapezius ascendens com 34 mV tambeacutem agrave 7 kmh-1 agrave 15
erector
spinae
longissimus
erector
spinae
iliocostalis
trapezius
descendens
latissimus
dorsis
obliquus
externus
abdominis
obliquus
internus
abdominis
rectus
abdominis
deltoideus
anterior
45
0 5 10 15
Figura 2 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
trapezius
ascenden
gluteus
maximus
gluteus
medius
rectus
femoralis
vastus
lateralis
biceps
femoralis
caput
tibialis
anterior
gastrocnemius
lateralis
46
0 5 10 15
Figura 24
47
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
com o tempo de passada normalizado em percentual do ciclo O 0-100 representa
o momento de contato com o solo As cores indicam a velocidade de caminhada (de
2 agrave 7 kmh-1) Cada muacutesculo eacute representado nas linhas e em cada coluna eacute
apresentada a atividade EMG por inclinaccedilatildeo
A ativaccedilatildeo EMG parece seguir um padratildeo bem definido com exceccedilatildeo do
trapezius descendens obliquus internus abdominis onde picos de ativaccedilotildees
aparecem apoacutes os 3 kmh-1 seguindo um comportamento de aumento com o
acreacutescimo da inclinaccedilatildeo e no muacutesculo deltoideus anterior no qual ateacute a velocidade
de 5 kmh-1 o pico maior se apresenta no final da fase de apoio enquanto que nas
velocidades de 6 e 7 kmh-1 o pico passa a se situar na fase aeacuterea O uacutenico muacutesculo
analisado neste estudo que apresenta um comportamento diferente entre as
inclinaccedilotildees eacute o rectus femoralis onde nas inclinaccedilotildees 0 5 e 10 os picos aparecem
apenas nas velocidades raacutepidas enquanto que na inclinaccedilatildeo de 15 o pico eacute visiacutevel
logo na velocidade de 2 kmh-1
Poreacutem quando analisamos a quantidade de ativaccedilatildeo por distacircncia percorrida
ou seja o custo EMG os resultados mudam
233 Custo EMG
A quantidade de atividade EMG calculada atraveacutes da abordagem
experimental eacute apresentada na figura 25 Durante a caminhada no plano (primeira
linha da figura 25) eacute possiacutevel observar um miacutenimo de ativaccedilatildeo no somatoacuterio total
devido principalmente agrave ativaccedilatildeo durante a fase aeacuterea e ao offset Este miacutenimo
acontece tambeacutem na inclinaccedilatildeo a 10 de inclinaccedilatildeo mas a 5 e a 15 a
quantidade de ativaccedilatildeo parece diminuir conforme o aumento da Vf
A figura 26 apresenta os valores de custo EMG calculado atraveacutes da
abordagem teoacuterica Observa-se um miacutenimo a 0 e 15 de inclinaccedilatildeo
Para nosso conhecimento natildeo existem dados de atividade EMG de muacutesculo
posturais durante caminhada nas inclinaccedilotildees A quantidade de ativaccedilatildeo EMG por
passada dos muacutesculos posturais e propulsores parecem aumentar com o acreacutescimo
da velocidade e inclinaccedilatildeo
48
49
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
24 Discussatildeo
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular
Inicialmente proposto para a corrida de quadruacutepedes (KRAM e TAYLOR
1990) e apoacutes para a corrida de biacutepedes (ROBERTS et al 1998 ROBERTS et al
1997) corrida para traacutes (WRIGHT e WEYAND 2001) e caminhada humana
(GRIFFIN et al 2003) a teoria do custo energeacutetico da geraccedilatildeo de forccedila foi formulada
a partir dos resultados que para animais com grande variaccedilatildeo de massa correndo
em diversas velocidades o custo mecacircnico natildeo se correlacionava bem com o custo
metaboacutelico da locomoccedilatildeo terrestre (HEGLUND et al 1982b TAYLOR 1985)
0 5
10
15
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
50
Uma justificativa para explicar esse resultado se referia ao fato de que o
muacutesculo durante a fase de apoio na corrida contraia isometricamente deste modo
natildeo realizando trabalho
Recentemente foi observado que esse comportamento acontece tambeacutem no
muacutesculo gastrocnemius medialis durante a caminhada (FUKUNAGA et al 2001)
Poreacutem na corrida este comportamento sucede apenas em velocidades maiores de
13 kmh-1 em adultos (CAVAGNA 2006) e natildeo eacute visiacutevel em idosos mesmo em
velocidades maacuteximas (estudo sobre a mecacircnica da corrida em idosos Capiacutetulo 3)
Ainda assim a teoria afirma que o custo metaboacutelico despendido pelos muacutesculos eacute
proporcional agrave integral forccedila de reaccedilatildeo do solo-tempo multiplicada por um fator
proporcional agrave taxa de ciclos de pontes cruzadas no muacutesculo-esqueleacutetico
A proposiccedilatildeo do Custo Energeacutetico da Geraccedilatildeo de Forccedila assume que i) a
maior parte da forccedila exercida pelos muacutesculos acontece em oposiccedilatildeo agrave gravidade ii)
uma unidade de volume muscular ativado exerce uma respectiva forccedila no solo
independente da velocidade ou tamanho do animal iii) originalmente foi presumido
que os muacutesculos agiam em similares amplitudes da relaccedilatildeo forccedila-velocidade [esta
pressuposiccedilatildeo foi recentemente interpretada em um interessante modelo
biomecacircnico proposto por BLANCO e GAMBINI 2006) como independente para a
determinaccedilatildeo das relaccedilotildees encontradas por KRAM e TAYLOR 1990)] portanto eacute
esperado que animais pequenos que realizam o tempo de contato menor usem
fibras glicoliacuteticas em maior quantidade e consequentemente tenham um maior
dispecircndio energeacutetico e assim explica-se o fato de que animais pequenos despendem
mais energia para transportar 1 N de forccedila por km percorrido do que animais
maiores (HOYT e TAYLOR 1981) Portanto o custo energeacutetico da locomoccedilatildeo
segundo a presente teoria eacute determinado pelo custo de suportar o peso corporal e o
tempo disponiacutevel para exercer forccedila contra o solo
Ainda assim a teoria apresenta seacuterias restriccedilotildees e parece funcionar em
situaccedilotildees particulares A formulaccedilatildeo apresentada por Kram e Taylor indica como
insignificante o dispecircndio energeacutetico devido aos movimentos de balanccedilo dos
membros quando natildeo estatildeo em apoio Vaacuterias evidecircncias em aves (MARSH et al
2004) e em humanos (DOKE et al 2005 GOTTSCHALL e KRAM 2005 DOKE e
KUO 2007) demonstram que este dispecircndio natildeo eacute despreziacutevel Outra criacutetica
levantada pela literatura (ALEXANDER 1991 HEGLUND 2004) se refere agrave
desconsideraccedilatildeo do trabalho variaacutevel fundamental na Termodinacircmica para explicar
51
a energeacutetica da locomoccedilatildeo Forccedila natildeo eacute trabalho nem mesmo eacute energia portanto
ela isoladamente natildeo possibilita uma resposta final sobre a energia A hipoacutetese do
custo de ativaccedilatildeo muscular apresentado aqui natildeo despreza o dispecircndio energeacutetico
dos membros superiores e aleacutem disso considera as eficiecircncias dos diferentes tipos
de trabalho mecacircnico quando insere os equivalentes metaboacutelicos da ativaccedilatildeo
muscular (abordagem teoacuterica Metodologia)
242 Sobre o meacutetodo
Algumas consideraccedilotildees importantes podem ser feitas sobre a teacutecnica da
EMG Comumente esta teacutecnica eacute usada nos campos da biomecacircnica e biologia
experimental a fim de determinar a quantidade de ativaccedilatildeo muscular e os periacuteodos
em que elas acontecem poreacutem neste estudo pretendeu-se usar a determinada
teacutecnica a fim de oferecer uma informaccedilatildeo global da ativaccedilatildeo de tal modo que
pudesse ter uma correspondecircncia com a ativaccedilatildeo EMG de todo o corpo incluindo os
muacutesculos posturais que natildeo geram trabalho muscular importante mas segundo a
hipoacutetese central do presente estudo participam de forma decisiva como uma
determinante da caminhada humana
Assim esta abordagem permite inferir sobre os mecanismos principais da
locomoccedilatildeo e permite explicar a biomecacircnica da locomoccedilatildeo especialmente referente
agrave energeacutetica da caminhada humana Aleacutem de auxiliar na explicaccedilatildeo da velocidade
oacutetima no plano o custo EMG parece dar um indicativo sobre a energeacutetica em
situaccedilotildees criacuteticas com restriccedilotildees do ambiente (inclinaccedilatildeo) e situaccedilotildees natildeo usuais
(velocidades de progressatildeo baixas)
Nestas situaccedilotildees eacute provaacutevel que dois mecanismos estejam relacionados a fim
de justificar a hipoacutetese do custo EMG i) a estabilidade dinacircmica prejudicada e ii) o
custo da co-contraccedilatildeo Os dois mecanismos parecem estar diretamente ligados ao
maior custo EMG e consequumlentemente ao custo energeacutetico da caminhada
Evidecircncias experimentais datildeo suporte para esta inferecircncia Durante caminhada
realizada para fins de lazer em velocidades muito baixas ou mesmo em marchas
patoloacutegicas foi encontrado um aumento na atividade EMG em comparaccedilatildeo com a
velocidade auto-selecionada correspondente agrave velocidade oacutetima Os achados
mostram um aumento de ativaccedilatildeo EMG com o aumento da Vf mesmo em muacutesculos
do tronco durante locomoccedilatildeo no plano (ANDERS et al 2007) Novamente o foco do
52
presente estudo foi referente agrave quantidade de ativaccedilatildeo em funccedilatildeo da distacircncia
percorrida enquanto que nestes estudos a variaacutevel em questatildeo foi avaliada em
funccedilatildeo da passada Aleacutem disso aumentos foram encontrados nos valores de coshy
contraccedilatildeo durante velocidades muito baixas (020 e 030 ms-1) em comparaccedilatildeo com
a velocidade auto-selecionada (NYMARK et al 2005)
As relaccedilotildees entre estabilidade articular e quantidade de ativaccedilatildeo geral
(ANDERSON e BEHM 2004) e estabilidade corporal e ativaccedilatildeo de muacutesculos
localizados especificamente no tronco (GARDNER-MORSE e STOKES 1998
GRANATA e MARRAS 2000 GRANATA e ORISHIMO 2001) satildeo bem
estabelecidas na literatura inclusive indicando um prejuiacutezo maior na ativaccedilatildeo EMG
durante perturbaccedilotildees agrave estabilidade com contraccedilotildees concecircntricas do que
excecircntricas e isomeacutetricas Um possiacutevel modo de testar estes mecanismos poderia
ser atraveacutes da perturbaccedilatildeo da estabilidade e os efeitos na ativaccedilatildeo EMG durante
caminhada (por exemplo em terrenos irregulares)
Outro achado importante que daacute sustentaccedilatildeo agrave hipoacutetese do custo EMG da
caminhada humana eacute observado por PRILUTSKY e GREGOR 2001) onde a
atividade EMG de muacutesculos propulsores (rectus femoralis gastrocnemius medialis
vastus medialis biceps femoralis gluteus maximus e soleus) foi maior na corrida do
que na caminhada em velocidades abaixo da velocidade de transiccedilatildeo entre
caminhada e corrida enquanto que durante velocidades acima da de transiccedilatildeo os
muacutesculos propulsores apresentam uma maior atividade EMG na caminhada do que
na corrida o que coincide com o dispecircndio metaboacutelico nestas situaccedilotildees
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia
A alta especializaccedilatildeo da locomoccedilatildeo suportando cargas em regiotildees inoacutespitas da
terra indica um desafio para o entendimento dos fundamentos da mecacircnica e
energeacutetica da locomoccedilatildeo humana Mundialmente famosos satildeo os achados sobre a
economia de locomoccedilatildeo de mulheres africanas que transportam cargas sobre a
cabeccedila de ateacute 70 da massa corporal sem um maior custo mecacircnico devido a um
ajuste aperfeiccediloado das curvas de energia potencial e cineacutetica do centro de massa
colaborando para um mais alto R (percentual de reconversatildeo entre energia cineacutetica
53
e potencial durante um ciclo de passada) (MALOIY et al 1986) Evidecircncias de um
custo metaboacutelico relativamente baixo da locomoccedilatildeo no plano foram tambeacutem
encontradas em carregadores Nepaleses (BASTIEN et al 2005) Poreacutem
diferentemente das condiccedilotildees geograacuteficas nas quais as mulheres africanas realizam
suas atividades locomotoras o espaccedilo geograacutefico dos carregadores Nepaleses eacute
caracterizado por terrenos inclinados Em um estudo recente Minetti e
colaboradores (MINETTI et al 2006) apresentaram as primeiras informaccedilotildees sobre
eficiecircncia mecacircnica (potecircncia mecacircnica desenvolvida dividida pela potecircncia
metaboacutelica despendida) de carregadores Nepaleses em inclinaccedilotildees extremas
especialmente da regiatildeo do Himalaia indicando uma eficiecircncia aproximadamente
33 maior do que a de montanhistas Caucasianos De fato os carregadores
Nepaleses apresentam caracteriacutesticas notaacuteveis do ponto de vista energeacutetico
Transportam desde a infacircncia cargas geralmente entre 80 e 90 da massa corporal
(utilizando-se de uma faixa posta agrave testa no qual eacute ligada a uma cesta de vime nas
costas) em terrenos acidentados com inclinaccedilotildees de ateacute 50 em situaccedilatildeo de
hipoacutexia de altitude (MALVILLE et al 2001)
A hipoacutetese da transferecircncia eficiente entre energia cineacutetica e potencial do
centro de massa corporal natildeo se sustenta pois em inclinaccedilotildees maiores de 15 e ndash
15 as mudanccedilas de energia potencial ocorrem apenas positivamente e
negativamente respectivamente (MINETTI et al 1993) Portanto sem a
possibilidade de transferecircncia de energia por via pendular e tendo em consideraccedilatildeo
a menor variabilidade de oscilaccedilatildeo do tronco dos Nepaleses encontrada por
MINETTI et al 2006) apresentamos uma hipoacutetese de que o custo de ativaccedilatildeo
muscular (ou custo EMG) da locomoccedilatildeo eacute menor no grupo de carregadores do
Himalaia do que nos montanhistas Caucasianos Devido agrave falta de informaccedilotildees
espaccedilos-temporais da locomoccedilatildeo com carga em grandes inclinaccedilotildees foram
analisados estes paracircmetros da passada a fim de auxiliar no entendimento da
energeacutetica e mecacircnica da locomoccedilatildeo em planos inclinados
251 Materiais e meacutetodos
Cinco carregadores Nepaleses (idade 23 plusmn 9 anos estatura 163 plusmn 003 m
massa corporal 546 plusmn 62 kg) e cinco montanhistas Caucasianos (idade 32 plusmn 3
anos estatura 176 plusmn 007 m massa corporal 742 plusmn 67 kg) selecionados por
54
voluntariedade realizaram o experimento em Namche-Bazar regiatildeo do vale
Khumbu no Parque Nacional de Sagarmatildethatilde (Everest em nepalecircs) O experimento
consistia de caminhada sem e com carga (40 kg) em situaccedilatildeo de subida e descida
com uma inclinaccedilatildeo meacutedia de 22 em um ritmo que poderiam suportar por muitas
horas Os Nepaleses utilizavam a usual faixa na testa onde era ligada com a cesta
nas costas onde suportavam o peso enquanto que os Caucasianos usavam uma
mochila de alpinismo O trecho foi escolhido de modo a assegurar que as trocas de
energia fossem principalmente devidas as mudanccedilas de energia potencial sem a
possibilidade de transferecircncia entre energia potencial e cineacutetica dentro de uma
passada (MINETTI et al 2006) Antes de iniciar os experimentos eram realizadas
medidas de dobras cutacircneas nas regiotildees de colocaccedilatildeo de eletrodos
O set-up experimental incluiu um eletromioacutegrafo portaacutetil (PocketEmg BTS
Milatildeo Itaacutelia) um analisador de gases portaacutetil (K4b2 Cosmed Roma Itaacutelia) um GPS
(GPSmAP76CS) e lactiacutemetro (Accutrend Roche Diagnostic Basel Suiacuteccedila) Foram
analisados a atividade EMG de quatorze muacutesculos (erector spinae longissimus
erector spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis deltoideus anterior
trapezius ascendens gluteus maximus gluteus medius biceps femuralis caput
longus vastus lateralis e gastrocnemius lateralis) Para a preparaccedilatildeo do local e
colocaccedilatildeo dos eletrodos de superfiacutecie bipolares foram seguidas as orientaccedilotildees da
Seniam (FRERIKS et al 1991) Simultaneamente ao registro EMG sinais advindos
de seis sensores de pressatildeo (footswitches) trecircs em cada peacute (regiatildeo do calcanhar
primeiro e quinto metatarso inferior) eram registrados no eletromiograacutefo portaacutetil Os
sinais EMGrsquos foram preacute-amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um
niacutevel de ruiacutedo menor do que 1 μV rms e filtrados por um filtro do tipo Butterworth (50shy
450 Hz terceira ordem) A frequumlecircncia de amostragem da EMG e dos sensores de
pressatildeo foi de 1000 Hz
O custo metaboacutelico foi calculado segundo procedimentos do estudo anterior
(MINETTI et al 2006) O sinal EMG foi retificado e integrado e os valores meacutedios da
atividade EMG de todo o trecho foram subtraiacutedos pelos respectivos valores da
situaccedilatildeo em repouso (idem ao consumo de O2) e divididos pela velocidade meacutedia
(Vf ) A potecircncia EMG geral foi obtida a partir do somatoacuterio dos quatorze muacutesculos
ponderado pelos respectivos volumes musculares (YAMAGUCHI et al 1991) e
55
dobra cutacircnea respectiva Determinou-se o Custo EMG atraveacutes do procedimento
experimental
Para fins de comparaccedilatildeo das Vf rsquos de locomoccedilatildeo usamos o Nf baseado na
teoria das similaridades dinacircmicas (sub-seccedilatildeo 222) para normalizar a Vf No caso
presente ao inveacutes de utilizar o comprimento de membro inferior utilizamos a
estatura da seguinte forma
Vf 2
Fr = Eq 212 g estatura
Tendo em consideraccedilatildeo que a estatura meacutedia dos Caucasianos eacute maior (013
m) e que as Vf rsquos de subida e descida dos Caucasianos com carga foram 35 e 17
menores do que as dos Nepaleses deste modo os Frrsquos dos Caucasianos para os
mesmos trechos foram 40 e 24 menores do que dos Nepaleses
Os procedimentos para anaacutelise dos dados de posiccedilatildeo e Vf oriundos do GPS
satildeo os mesmos de MINETTI et al 2006) A potecircncia mecacircnica vertical (PMV) foi
calculada como segue
g h mtotPMV = Eq 213 t
onde Ah eacute variaccedilatildeo de altura mtot eacute a massa total (massa corporal + carga) g eacute
aceleraccedilatildeo gravitacional e At eacute o tempo de locomoccedilatildeo
Uma seacuterie de programas computacionais (Labview versatildeo 71 National
Instruments Austin USA) foram construiacutedos para o processamento dos dados EMG
GPS e paracircmetros espaccedilos-temporais
Foi utilizado Testes-t de student para amostras independentes para comparar
os paracircmetros espaccedilos-temporais entre Nepaleses e Caucasianos (SPSS para
Windows versatildeo 14 USA)
56
252 Resultados
Variaacuteveis espaccedilos-temporais
O Fr dos Nepaleses foi maior do que as dos Caucasianos em situaccedilatildeo com
carga (plt001) mas sem carga as diferenccedilas diminuem acentuadamente (4 e 23
maiores sem e com carga respectivamente pgt005) O CP e FP dos Nepaleses
foram maiores na subida com carga mas durante a descida com carga apesar da
Vf maior apenas o CP foi maior nos Nepaleses e a FP foi similar (pgt005)
Paracircmetros energeacuteticos
A atividade EMG por unidade de tempo foi similar entre Nepaleses e
Caucasianos Contudo a ativaccedilatildeo EMG total ou seja por unidade de distacircncia
(ldquocustordquo EMG da locomoccedilatildeo) foi notavelmente maior nos Caucasianos na situaccedilatildeo
com carga especialmente na fase de subida (observe a inclinaccedilatildeo das retas na
figura 27)
A atividade EMG tambeacutem foi analisada no domiacutenio da frequumlecircncia para testar
uma possiacutevel diminuiccedilatildeo nos paracircmetros de mediana meacutedia e pico da frequumlecircncia
que pudessem explicar via fadiga neuromuscular (KNAFLITZ e BONATO 1999) o
efeito da carga no aumento da ativaccedilatildeo EMG por distacircncia percorrida nos
Caucasianos (inclinaccedilotildees das retas na figura 27)
Utilizou-se a transformada raacutepida de Fourier com janelamento de 10 segundos
analisando o centro dos bursts de 512 pontos determinados por uma integraccedilatildeo com
janelamento moacutevel Hanning de 50 ms Todavia nenhuma diferenccedila significativa foi
encontrada nos paracircmetros de frequumlecircncia entre os primeiros e uacuteltimos vinte
segundos de experimento (diminuiccedilotildees lt 5)
O notaacutevel desempenho dos Nepaleses na subida com carga eacute confirmado pela
PMV 33 maior do que a dos Caucasianos Embora a Vf e a PMV sejam maiores
nos Nepaleses estes apresentam um custo metaboacutelico 39 menor que os
Caucasianos Esta economia energeacutetica especiacutefica agrave situaccedilatildeo de carga e inclinaccedilatildeo
extrema eacute observada tambeacutem na figura 28 na qual os Caucasianos sem carga
apresentam uma eficiecircncia similar agraves eficiecircncias dos Nepaleses mas com uma baixa
eficiecircncia na situaccedilatildeo com carga
57
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal +
carga) dos carregadores Nepaleses (NEP) e montanhistas Caucasianos
(CAU) em subida (up) e descida (down)
A eficiecircncia menor dos Caucasianos na situaccedilatildeo com carga parece ser
explicada pela quantidade de ativaccedilatildeo muscular A interessante semelhanccedila entre o
custo EMG e o custo energeacutetico (figura 27) demonstram a eficaacutecia do meacutetodo EMG
utilizado no presente estudo a fim de representar uma ativaccedilatildeo muscular geral
durante a locomoccedilatildeo
253 Discussatildeo
A menor ativaccedilatildeo muscular eacute extremamente interessante pois explica de modo
importante o mecanismo da alta eficiecircncia e economia energeacutetica nos Nepaleses
58
Os resultados de potecircncia metaboacutelica e PMV confirmam os achados de
MINETTI et al 2006) Aleacutem disso o custo energeacutetico na situaccedilatildeo sem carga eacute
similar entre Caucasianos e Nepaleses Em outras palavras o desempenho notaacutevel
dos Nepaleses eacute especiacutefico somente na situaccedilatildeo de subida com carga
000
004
008
012
016
020
024
028
-12 -10 -08 -06 -04 -02 00
efi
ciecirc
nc
ia m
iacutenim
a d
e t
rab
alh
o p
os
itiv
o NEP 0kg
CAU 0kg
NEP 40kg
CAU 40kg
14
15
eficiecircncia miacutenima de trabalho negativo
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da
PMV (positiva ou negativa) pela potecircncia metaboacutelica respectiva
(MINETTI et al 2006) As linhas satildeo as razotildees entre eficiecircncia
muscular positiva e negativa (WOLEDGE et al 1985)
A melhor economia nos Nepaleses durante a subida com carga pode ser
relacionada agraves propriedades mecacircnicas de contraccedilatildeo muscular especificamente agrave
relaccedilatildeo potecircncia-velocidade Tendo em consideraccedilatildeo que os Caucasianos
realizaram o trecho de subida com carga em uma velocidade de progressatildeo 33
menor que os Nepaleses pode-se inferir que os Caucasianos realizaram a atividade
em uma regiatildeo menor de produccedilatildeo de potecircncia devido agrave relativa baixa velocidade
que por sua vez corresponde agrave uma zona de baixa eficiecircncia Outro fator secundaacuterio
pode ser a aclimataccedilatildeo de longo prazo destes indiviacuteduos agrave hipoacutexia de altitude
favorecendo o transporte e utilizaccedilatildeo de O2 no muacutesculo esqueleacutetico
59
Surpreendentemente a ativaccedilatildeo EMG por unidade de tempo eacute semelhante
entre Nepaleses e Caucasianos e por consequumlecircncia a ativaccedilatildeo total eacute menor nos
Nepaleses
Pode-se afirmar tambeacutem que a razatildeo entre ativaccedilatildeo EMG na subida e descida
independente da massa total eacute em torno de 15 e 2 corroborando com os dados de
BIGLAND-RITCHIE e WOODS 1976)
Em conclusatildeo a hipoacutetese da ativaccedilatildeo muscular econocircmica nos carregadores
Nepaleses eacute confirmada Os paracircmetros espaccedilos-temporais da passada parecem
natildeo justificar o menor custo energeacutetico nos Nepaleses O custo EMG foi maior nos
Caucasianos especialmente durante a ascensatildeo com carga indicando uma
justificativa a um achado anterior de maior estabilidade no tronco em Nepaleses
(MINETTI et al 2006)
60
3 MECAcircNICA DA CORRIDA DE IDOSOS
31 Introduccedilatildeo
Nos idosos a forccedila muscular eacute reduzida Isso tem sido atribuiacutedo
principalmente a atrofia da massa muscular com a reduccedilatildeo da aacuterea de sua secccedilatildeo
transversal (DOHERTY 2003 FRONTERA et al 2000 TRAPPE et al 2003) e
tambeacutem agrave deficiecircncia na produccedilatildeo intriacutenseca de forccedila no niacutevel da interaccedilatildeo entre
actina e miosina (PHILLIPS et al 1991 FRONTERA et al 2000 LOWE et al 2001
MORSE et al 2005) Experimentos realizados tanto em espeacutecimes isoladas de
muacutesculo (OCHALA et al 2006 PHILLIPS et al 1991) quanto in vivo em humanos
(KLASS et al 2005 PORTER et al 1997 POUSSON et al 2001 VANDERVOORT
et al 1990) mostram que a forccedila que um muacutesculo exerce ao alongar-se
(frequumlentemente chamada de contraccedilatildeo excecircntrica) tem reduccedilatildeo menor devido ao
processo de envelhecimento que a forccedila desenvolvida durante contraccedilatildeo isomeacutetrica
e durante encurtamento (frequumlentemente chamada de contraccedilatildeo concecircntrica)
O efeito das mudanccedilas das propriedades de contraccedilatildeo do muacutesculo no
trabalho mecacircnico realizado durante locomoccedilatildeo natildeo eacute conhecido O trabalho
mecacircnico realizado ao caminhar natildeo tem sido considerado significativamente maior
em indiviacuteduos idosos apesar de um maior dispecircndio energeacutetico resultando em uma
61
menor eficiecircncia mecacircnica atribuiacuteda agrave co-contraccedilatildeo de muacutesculos antagonistas
(MIAN et al 2006)
O mecanismo elaacutestico da corrida contraacuterio ao mecanismo pendular da
caminhada necessita de uma intervenccedilatildeo muscular muito maior para manter o
movimento do CM Um ciclo alongamento-encurtamento das unidades muacutesculoshy
tendiacuteneas ocorre em cada passo da corrida com grande entrada e saiacuteda de energia
mecacircnica para dentro e para fora das unidades muacutesculo-tendiacuteneas A mecacircnica da
corrida assim mais que a caminhada pode revelar mudanccedilas no trabalho mecacircnico
realizado em cada passo devido ao desempenho muscular reduzido nos idosos
Aleacutem disso uma assimetria contato-despregue ocorre durante a corrida
surgindo do fato que as unidades muacutesculo-tendiacuteneas contraacuterio a uma mola sem
atrito tecircm comportamento diferente durante alongamento e encurtamento
Recentemente foi observado que a assimetria contato-despregue eacute uma
consequumlecircncia da relaccedilatildeo forccedila-velocidade do muacutesculo e eacute maior quanto maior for a
mudanccedila no comprimento do muacutesculo em relaccedilatildeo agravequela do tendatildeo dentro das
unidades muacutesculo-tendiacuteneas (CAVAGNA 2006)
O trabalho mecacircnico realizado durante a corrida em idosos e sua assimetria
contato-despregue para nosso conhecimento ainda natildeo satildeo determinados
Neste estudo foi calculado o trabalho mecacircnico externo realizado para manter
o movimento do CM e o tempo das trocas de energia mecacircnica durante as fases de
trabalho negativo e positivo do bouncing do corpo em indiviacuteduos idosos correndo
em diferentes velocidades Os resultados obtidos em indiviacuteduos idosos satildeo
comparados agravequeles obtidos em indiviacuteduos jovens A hipoacutetese apresentada eacute que o
aumento da discrepacircncia em idosos entre o desenvolvimento da forccedila durante
alongamento e durante encurtamento se operacional durante a corrida iraacute aumentar
a assimetria contato-despregue do aparente bouncing do corpo em relaccedilatildeo agravequele
de indiviacuteduos jovens
32 Materiais e Meacutetodos
321 Amostra e procedimento experimental
Os experimentos foram realizados em oito indiviacuteduos idosos (homens idade
62
736plusmn55 anos altura 172plusmn006 m massa 711plusmn92 kg media plusmn dp) e oito indiviacuteduos
jovens (6 homens e duas mulheres idade 208plusmn16 anos altura 176plusmn008 m massa
634plusmn100 kg) Trecircs indiviacuteduos em cada grupo satildeo treinados (volume miacutenimo
semanal de corrida de 40 km) enquanto cinco satildeo sedentaacuterios saudaacuteveis Os
resultados relatados neste estudo satildeo uma meacutedia dos dados obtidos de todos os
sujeitos em cada grupo independente de seu treinamento Resultados similares
poreacutem foram obtidos comparando os trecircs indiviacuteduos idosos treinados com os trecircs
indiviacuteduos jovens do sexo masculino natildeo treinados de acordo com os achados que
o efeito da idade nas unidades muacutesculo-tendiacuteneas satildeo similares em corredores e
indiviacuteduos natildeo-ativos (KARAMANIDIS e ARAMPATZIS 2005) Consentimento
informado escrito foi obtido de cada indiviacuteduo Os estudos foram realizados de
acordo com a Declaraccedilatildeo de Helsinque
Os indiviacuteduos correram de um lado para o outro ao longo de uma pista de
corrida de 50 metros a qual foi incorporada no niacutevel do solo 8 plataformas de forccedila
de 05 m 05 m em sequumlecircncia totalizando um espaccedilo contiacutenuo de 4 m 05 m
sensiacutevel agrave forccedila aplicada na plataforma nas direccedilotildees anterior e vertical A uacutenica
instruccedilatildeo dada a cada indiviacuteduo foi para correr normalmente em uma velocidade
constante mensurada por duas fotoceacutelulas posicionadas distantes de 1 agrave 3 m
(dependendo da velocidade) ao longo do lado da plataforma Mais caracteriacutesticas da
plataforma de forccedila satildeo descritas por CAVAGNA (1975)
O procedimento do experimento consistiu em medir a forccedila aplicada no solo
no plano sagital durante corrida em diferentes velocidades Os dados foram
adquiridos em um microcomputador a uma taxa de 500 Hz por canal de i) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo anterior (Ff) ii) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo vertical (Fv) e iii) sinal das
fotoceacutelulas A aquisiccedilatildeo e anaacutelise dos dados foram realizadas atraveacutes de um
conversor analoacutegico-digital (National Instruments Austin TX USA) e um software
feito em LabView para Macintosh (versatildeo 71)
Foram feitas anaacutelises em um total de 124 corridas com velocidades meacutedias
entre 3 e 17 kmh-1 para os idosos e 229 corridas entre 3 e 21 kmh-1 para os jovens
O nuacutemero menor de execuccedilotildees realizado pelos idosos foi para diminuir riscos de
fadiga neste grupo
63
322 Dos registros da plataforma ao trabalho externo
O processo usado para calcular as mudanccedilas da energia mecacircnica do CM do
corpo derivadas das forccedilas de reaccedilatildeo do solo eacute descrito em detalhes por CAVAGNA
1975) Em resumo somente o movimento no plano sagital foi considerado para
calcular a energia mecacircnica do CM A energia cineacutetica de translaccedilatildeo lateral do CM
foi ignorada O sinal da plataforma de forccedila sem carga foi mensurado imediatamente
antes de cada corrida e subtraiacutedo dos registros da Fv e da Ff de modo a computar
uma possiacutevel mudanccedila da linha de base da plataforma Somente o grupo de
registros da Fv e da Ff compreendida entre os cruzamentos das fotoceacutelulas foi
utilizado para anaacutelises subsequumlentes As velocidades vertical e anterior do CM foram
obtidas como segue
Antes do todas as aquisiccedilotildees a plataforma era calibrada com cargas
conhecidas no sentido vertical e horizontal acircntero-posterior
A forccedila vertical meacutedia mensurada pela plataforma de forccedila Fvplate em um
intervalo de tempo correspondente a um nuacutemero de quadros nf em um determinado
nuacutemero de passos T selecionados entre picos (ou vales) nos registros de forccedila
devem igualar ao PC mensurado com uma balanccedila Fvscale
IfirstPeakorValley
SecondPeakorValleyF = Fvi
= F Eq 31 vplate vscalenf
Fvplate foi entatildeo subtraiacuteda da coluna de dados Fv e o resultado (Fv-Fvplate)M (M
eacute a massa corporal) foi integrado no tempo para obter as mudanccedilas nos registros da
velocidade vertical para o intervalo de tempo entre os cruzamentos das fotoceacutelulas
FinalTime AVel = f [(Fv - Fv plate) M]dt Eq 32
InitialTime
Um ou mais passos regulares foram subsequumlentemente escolhidos para
anaacutelise entre dois picos ou vales da curva de velocidade vertical A regularidade dos
passos (drift) foi determinada pela diferenccedila entre incrementos positivos e negativos
agraves mudanccedilas nas velocidades vertical e horizontal divididas pela soma dos
incrementos
64
| V | V | V |I + increments I VincrementsDrift = 100 Eq 33
| V | + | V |I + increments I Vincrements
Durante a corrida no plano os deslocamentos verticais ascendente e
descendente do CM do corpo satildeo em meacutedia iguais durante um nuacutemero inteiro de
passos ie a velocidade vertical meacutedia deve ser nula Baseado nessa consideraccedilatildeo
a aacuterea abaixo das mudanccedilas da velocidade vertical registrada correspondendo ao
intervalo selecionado acima seraacute dividido por nf e o resultado seraacute subtraiacutedo do total
da variaccedilatildeo da velocidade vertical registrada entre os cruzamentos das fotoceacutelulas
para obter os valores instantacircneos positivo (ascendente) e negativo (descendente)
da Vv
nf
f AVv dt
V (t) = i= 0 -AV Eq 34 v nf v
As mudanccedilas na velocidade horizontal foram determinadas pela integraccedilatildeo da
curva FfM durante o tempo entre os cruzamentos das fotoceacutelulas Ltphoto A aacuterea
abaixo dessa variaccedilatildeo de velocidade horizontal foi entatildeo dividida por Ltphoto e o
resultado foi subtraiacutedo do mesmo registro para localizar a velocidade meacutedia de
corrida no traccedilado
Atphoto
AVf (t) = f Ff M dt Eq 35 i= 0
A velocidade meacutedia de corrida mensurada atraveacutes da distacircncia das
fotoceacutelulaLtphoto foi entatildeo somada a seacuterie resultante para obter os valores
instantacircneos de Vf
f AVf dt Vf (t) = + AVf Eq 36
A tphoto
65
A velocidade vertical instantacircnea Vv(t) foi utilizada para calcular a energia
cineacutetica instantacircnea do movimento vertical
Ekv (t) = 05M Vv (t)2 Eq 37
e por integraccedilatildeo o deslocamento vertical do CM Sv(t)
Sv (t) = f Vv (t) dt Eq 38
com a correspondente energia potencial gravitacional
E p (t) = M g Sv (t) Eq 39
A energia cineacutetica horizontal foi calculada como
Ekf (t) = 05M Vf (t)2 Eq 310
a energia cineacutetica translacional total do CM no plano sagital como
(t) Eq 311 Ek (t) = Ekv (t) + Ekf
e a energia mecacircnica translacional do CM no plano sagital como
Ecm(t) = Ekv (t) + Ekf (t) + E p (t) Eq 312
Apoacutes como mencionado acima a seleccedilatildeo foi feita inicialmente entre picos (ou
vales) das mudanccedilas da velocidade vertical os registros foram expandidos para
incluir o vale anterior (ou pico) de Ep(t) ateacute uma imagem clara dos passos a ser
obtidos (figura 31)
Algoritmos foram feitos para calcular o trabalho realizado durante os passos
selecionados entre vales (ou picos) da Ep Wv Wkf e Wext foram calculados com as
amplitudes dos vales ou picos e os valores inicial e final nos registros da Ep(t) Ekf(t)
e Ecm(t) Valores positivos das variaccedilotildees de energia foram considerados como
66
trabalho positivo valores negativos foram considerados como trabalho negativo Em
uma perfeita corrida em velocidade constante no plano a razatildeo entre os valores
absolutos de trabalho positivo e negativo realizados em um nuacutemero inteiro de
passos deve ser igual a um
323 Estimativa do trabalho interno
O trabalho positivo normalizado pela massa e unidade de distacircncia para
acelerar os membros em relaccedilatildeo ao CM do corpo foi estimado para cada corrida
com a equaccedilatildeo
W int ML(J kg-1 m -1) = 014010-200L Vf f Eq 313
onde L eacute o comprimento do passo em metros Vf a velocidade meacutedia de corrida em
metros por segundo e f eacute a frequumlecircncia de passos em Hz (CAVAGNA et al 1997) Os
valores estimados de WintML como uma funccedilatildeo da velocidade em kmh-1 foram
interpolados por um ajuste polinomial de segunda ordem Deve ser salientado que
usando a mesma equaccedilatildeo para calcular Wint nos indiviacuteduos jovens e idosos assume-
se o mesmo movimento dos membros nos dois grupos
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato
Como a energia mecacircnica do CM eacute constante quando o corpo eacute deslocado no
ar (a resistecircncia do ar eacute negligenciada) o tempo aeacutereo foi calculado como o intervalo
de tempo durante o qual
dEcm(t) dt = 0 Eq 314
Como descrito em detalhes em um estudo preacutevio (CAVAGNA 2006) esse
processo pode resultar em uma superestimativa (7) do tempo aeacutereo devido ao
ruiacutedo do registro do dEcm(t)dt A duraccedilatildeo da frenagem tbrake e a duraccedilatildeo da
propulsatildeo tpush foram calculadas como o intervalo de tempo durante o qual o
dEcm(t)dt foi positivo e negativo respectivamente Novamente devido ao ruiacutedo do
67
registro do dEcm(t)dt tbrake eou tpush foi provavelmente em alguns casos
subestimado (5-7 CAVAGNA 2006) O mesmo eacute verdade para os deslocamentos
descendente e ascendente do CM durante contato Scdown e Scup que foram
mensurados nas porccedilotildees descendente e ascendente da curva Ep(t)
respectivamente durante o intervalo de tempo onde dEcm(t)dt eacute negativo e positivo
respectivamente O deslocamento vertical descendente total Svdown e deslocamento
vertical ascendente Svup foram calculados do decreacutescimo e acreacutescimo totais da
curva Ep(t) respectivamente ocorrendo entre dois ou mais picos (ou vales) de Ep
divididos pelo nuacutemero de passos
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio
A forccedila vertical Fv aplicada pelo peacute no solo eacute
= PC + M a Eq 315 Fv v
onde Mb eacute a massa do corpo e av eacute a aceleraccedilatildeo vertical do CM ie o tempo
derivado de sua velocidade vertical Vv Quando a velocidade vertical e Ekv estatildeo no
maacuteximo a derivada eacute nula av=0 e como consequumlecircncia
Fv = PC Eq 316
A localizaccedilatildeo dos picos Ekv alcanccedilados durante os passos (figura 31) foi
entatildeo utilizada para determinar os instantes onde a Fv eacute igual ao PC A localizaccedilatildeo e
as amplitudes de Ep simultacircneo com os picos de Ekv foram utilizados para determinar
a parte do deslocamento vertical ocorrendo abaixo do ponto de equiliacutebrio durante a
desaceleraccedilatildeo descendente do CM Scedown e durante a aceleraccedilatildeo ascendente do
CM Sceup As diferenccedilas
S - S = S Eq 317 vdown cedown aedown
e
68
S - S = S Eq 318 vup ceup aeup
informa sobre o deslocamento vertical quando o CM do corpo acelera descendente e
desacelera ascendente respectivamente (CAVAGNA et al 1988)
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente
A velocidade vertical maacutexima e a energia cineacutetica maacutexima Ek=Ekv+Ekf
alcanccediladas pelo CM durante deslocamento descendente Vvmxdown e Ekmxdown e
durante a elevaccedilatildeo Vvmxup e Ekmxup satildeo determinados por comparaccedilatildeo dos picos
em Ekv e Ek com a curva Ep simultacircnea Como a velocidade vertical maacutexima pode
aumentar com a amplitude do deslocamento vertical que pode ser diferente durante
a elevaccedilatildeo e o deslocamento descendente (ver eg as curvas Ep na figura 31) a
razatildeo entre as velocidades descendente e ascendente maacuteximas foram normalizadas
(V V )(S S ) = (V V )norm Eq 319 vmxdown vmxup vup vdown vmxdown vmxup
327 Transduccedilatildeo Ep Ek durante o passo
O tempo de curso da transduccedilatildeo ocorrendo no passo entre energia potencial
gravitacional Ep e energia cineacutetica do CM Ek pode ser determinado pelo valor
absoluto das mudanccedilas ambos incrementos positivos e negativos de Ep Ek e Ecm
em intervalos curtos de tempo dentro do ciclo do passo (CAVAGNA et al 2002)
1 | Ecm(t) |r(t) = Eq 320
(| E p (t) | + | Ek (t) |)
A transduccedilatildeo Ep-Ek eacute completa (r(t)=1) durante a fase aeacuterea quando nenhum
trabalho externo eacute realizado pela forccedila muscular Entretanto a transduccedilatildeo Ep-Ek
tambeacutem ocorre durante contato quando o corpo eacute parcialmente sustentado pelo peacute
no chatildeo na parte superior da trajetoacuteria do CM (0lt r(t)lt1)
69
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado
70
(incrementos de Ecm) eacute indicado em vermelho enquanto que o tempo de
trabalho mecacircnico negativo (decrementos de Ecm) eacute indicado em azul
A transduccedilatildeo Ep-Ek eacute nula (r(t)=0) em duas fases do passo a e onde Ek
aumenta e diminui respectivamente simultaneamente com a energia potencial
gravitacional Ep (CAVAGNA et al 2002) Note que trabalho externo positivo e
negativo satildeo ambos realizados nas fases a e do passo (r(t)=0) e nas fases do
passo onde uma transduccedilatildeo ocorre entre Ek e Ep (0lt r(t)lt 1)
Nesse estudo r(t) foi calculado a partir do valor absoluto do tempo derivado
de Ep Ek e Ecm no intervalo de tempo contido entre dois ou mais picos (ou vales) de
Ep O valor cumulativo de energia recuperada Rint(t) resultando da transduccedilatildeo
instantacircnea de Ek-Ep foi determinado na aacuterea abaixo do r(t) registrado dividida pelo
periacuteodo do passo
T Rint (t) = ( f r(u)du) T Eq 321
0
No final do passo Rint(t)=Rint (CAVAGNA et al 2002) Para determinar a
assimetria do ciclo do passo eacute uacutetil saber quanto da transduccedilatildeo Ek-Ep ocorre durante
o deslocamento descendente e durante a elevaccedilatildeo do CM A derivada
dE p dt Eq 322
eacute utilizada para determinar a quantidade de transduccedilatildeo ocorrendo durante o
deslocamento descendente Rintdown e durante a elevaccedilatildeo do CM Rintup A
assimetria do passo foi quantificada pela razatildeo
Rintdown Rintup Eq 323
328 Rigidez vertical (k)
A k normalizada pela massa
k M Eq 324
71
caracterizando a frequumlecircncia natural do sistema eacute em todas as condiccedilotildees (com ou
sem uma fase aeacuterea) a inclinaccedilatildeo da relaccedilatildeo av-Sv quando avgt1g A inclinaccedilatildeo
meacutedia nessa amplitude pode ser avaliada pela razatildeo entre a aceleraccedilatildeo ascendente
maacutexima avmx e a amplitude da oscilaccedilatildeo
(S + S )ceup cedownS = Eq 325 ce 2
No presente estudo a k normalizada pela massa foi mensurada como
k M = a S Eq 326 vmx ce
E a frequumlecircncia natural do sistema massa-mola como
)05 (a Svmx cefs = Eq 327 2
329 Estatiacutestica
Os dados coletados como uma funccedilatildeo da velocidade decorrida foram
agrupados em classes de intervalos de um kmh-1 como segue 3 agrave lt4 kmh-1 4 agrave lt5
kmh-1 20 agrave lt21 kmh-1 Quando comparadas agraves meacutedias de diferentes variaacuteveis
com o mesmo nuacutemero de itens em uma certa velocidade de corrida dentro de um
grupo de indiviacuteduos um teste t para amostra pareadas foi utilizado para determinar
quando as meacutedias eram significativamente diferentes Quando comparadas as
meacutedias de diferentes variaacuteveis entre os dois grupos de indiviacuteduos com diferentes
nuacutemero de itens um teste t para amostras independentes foi utilizado (SPSS versatildeo
14) Em todos os testes o p usado foi menor do que 5
33 Resultados
Na primeira seccedilatildeo dos Resultados o bouncing do corpo a cada passo eacute
descrito desconsiderando as diferenccedilas no movimento ascendente e descendente
72
do CM (Por exemplo O deslocamento vertical Sv eacute medido como (Svup+Svdown)2 o
tempo de contato com o solo como tc =(tcup+tcdown)2 etc) Este procedimento
pressupotildee uma igualdade dinacircmica durante a subida e a descida do CM como em
um oscilador harmocircnico (CAVAGNA et al 1988 BLICKHAN 1989 SCHEPENS et
al 1998)
A potecircncia meacutedia do passo despendida para acelerar e elevar o CM do corpo
e do correspondente trabalho mecacircnico realizado por unidade distacircncia satildeo
apresentados na segunda parte Na terceira seccedilatildeo a assimetria contato-despregue
eacute considerada analisando separadamente os eventos que ocorrem durante a subida
e durante a descida do CM (CAVAGNA 2006) Em todas as seccedilotildees os resultados
obtidos sobre os indiviacuteduos idosos satildeo comparados com aqueles obtidos nos
indiviacuteduos jovens
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM
Parte superior e inferior do bouncing
O periacuteodo do passo (T parte superior da figura 33) o deslocamento vertical
do CM durante cada etapa (Sv meio da figura) e o comprimento do passo (L na
parte inferior da figura) satildeo apresentados em funccedilatildeo da velocidade de corrida (Vf) na
figura 33 (quadrados pretos) Segundo o modelo massa-mola o periacuteodo do passo
a oscilaccedilatildeo vertical do CM e o correspondente deslocamento para frente foram
divididos em duas partes uma parte mais baixa que acontece quando a Fv eacute maior
do que o PC (tce Sce e Lce ciacuterculos vermelhos) e uma parte superior quando a Fv eacute
menor que o PC (tae Sae e Lae ciacuterculos azuis abertos) Para comparaccedilatildeo o periacuteodo
do passo o deslocamento vertical e o comprimento do passo tambeacutem foram
divididos de acordo com a tradiccedilatildeo nas suas fraccedilotildees que ocorrem durante a fase
de contato com o terreno (tc Sc e Lc pontilhada linhas vermelhas) e durante a fase
aeacuterea (ta Sa e La linhas pontilhadas em azul) O significado biomecacircnico dos
resultados na figura 33 tem sido explicado em estudos anteriores realizados em
indiviacuteduos adultos de diferentes idades (CAVAGNA et al 1988) e em crianccedilas com
idades entre os 2 e 16 anos (SCHEPENS et al 1998) durante a corrida em
diferentes velocidades Em ambos os estudos as partes inferior e superior do
bouncing do corpo foram simeacutetricos ateacute ~ 11 kmh-1 (isto eacute tce=tae e Sce=Sae) e
- -
73
assimeacutetricos em velocidades mais elevadas (isto eacute taegttce e SaegtSce) O momento
vertical ganho e perdido durante tce deve ser igual ao momento vertical ganho e
perdido durante tae ie
avce tce = avae tae Eq 328
O bouncing simeacutetrico implica a mesma aceleraccedilatildeo vertical meacutedia durante a
parte inferior e superior do bouncing A aceleraccedilatildeo vertical meacutedia durante a parte
inferior do bouncing avce aumentou com a velocidade enquanto que a aceleraccedilatildeo
vertical meacutedia durante a parte superior do bouncing avae natildeo pode exceder 1 g (eacute 1 g
quando tae= ta) Deste modo o bouncing torna-se assimeacutetrico quando a aceleraccedilatildeo
vertical meacutedia durante tce exceder 1g Os resultados obtidos em relaccedilatildeo aos
indiviacuteduos jovens demonstram que o bouncing tende a ser simeacutetrico em baixas
velocidades e assimeacutetrico em altas velocidades (ver tce versus tae e Sce versus Sae na
tabela 1) Por outro lado os resultados obtidos no grupo dos idosos mostram duas
diferenccedilas importantes i) o bouncing eacute simeacutetrico nas velocidades mais altas (tce=tae e
Sce=Sae) e ii) a assimetria quando presente eacute invertida (ou seja tcegttae e ScegtSae)
Amplitude do deslocamento vertical
O deslocamento vertical do CM corporal em cada etapa da corrida Sv atinge
um maacuteximo em velocidades intermediaacuterias sendo inferior nos indiviacuteduos idosos do
que nos jovens ~ 75 cm a ~ 75 kmh-1 nos idosos e ~ 10 cm a ~ 10 kmh-1 nos
jovens Valores similares de Sv foram medidos com procedimento experimental
diferente em adultos idosos e jovens correndo a ~ 10 kmh-1 (KARAMANIDIS e
ARAMPATZIS 2005) A reduccedilatildeo de Sv nos indiviacuteduos idosos eacute devida a uma
reduccedilatildeo de todas as suas componentes (Sce Sae Sc e Sa) mas eacute particularmente
relevante considerar aqui a reduccedilatildeo da Sce (tabela 32) que representa a amplitude
da oscilaccedilatildeo do sistema massa-mola a partir de sua posiccedilatildeo de equiliacutebrio (Fv igual
ao PC) ateacute sua compressatildeo maacutexima (Fv maacutexima) A amplitude da oscilaccedilatildeo eacute menor
nos idosos do que nos jovens Como esperado esta eacute acompanhada por uma
aceleraccedilatildeo menor para cima atingida no final da compressatildeo avmx e por uma menor
velocidade maacutexima ascendente Vvmx atingida quando av=0 (figura 34 e tabela 32)
74
A velocidade vertical menor resulta por sua vez em um curto tempo aeacutereo efetivo
tae (figura 33 e tabela 32)
Frequumlecircncia de passo e do sistema massa-mola
Os dois paineacuteis superiores da figura 33 mostram que o periacuteodo do passo (T=
tae+ tce) eacute menor nos idosos do que nos jovens Isto eacute devido ao tempo aeacutereo efetivo
tae mais curto enquanto que o tempo de contato efetivo tce eacute igual entre os jovens e
os idosos (tabela 32) Segundo o modelo massa-mola da corrida o tce representa
metade do periacuteodo de oscilaccedilatildeo do sistema elaacutestico Este meio-periacuteodo similar
sugere uma frequumlecircncia de ressonacircncia semelhante fs=(kM)-05(2n) do sistema
elaacutestico aparente atraveacutes do qual o corpo se desloca ou seja uma k normalizada
pela massa corporal (kM) A figura 35 mostra que em altas velocidades k eacute maior
nos indiviacuteduos idosos (paineacuteis superior) mas devido agrave sua maior massa corporal agrave
rigidez de massa especiacutefica vertical (kM= avmxSce veja na Metodologia) eacute de fato
similar ao dos jovens (paineacuteis centrais da figura 35 e tabela 32) Em ambos os
grupos kM tende a ser aproximadamente constante ateacute ~ 10 kmh-1 e em seguida
aumenta com a velocidade Os dois paineacuteis inferiores da figura 35 mostram a
frequumlecircncia do passo f apresentada em conjunto com a frequumlecircncia de ressonacircncia do
sistema fs Pode ser observado que i) f eacute maior nos idosos do que nos jovens ii) nos
idosos a f permanece semelhante agrave fs (tabela 1) enquanto que iii) nos jovens a f eacute
inferior agrave fs (tabela 31)
332 Trabalho
O trabalho externo normalizado pela M Wext realizado para sustentar o
movimento do CM corporal no plano sagital eacute descrito na figura 36 em funccedilatildeo da
velocidade de corrida Pode ser observado que trabalho feito para sustentar as
mudanccedilas de velocidade horizontal Wextf aumenta conforme o acreacutescimo de
velocidade de modo semelhante em indiviacuteduos jovens e idosos O trabalho
realizado contra a gravidade Wextv eacute menor nos indiviacuteduos idosos (tabela 32) O
trabalho externo Wext Wextf + Wextv tambeacutem eacute menor nos idosos particularmente
nas maiores velocidades de progressatildeo
75
A menor potecircncia mecacircnica despendida contra a gravidade pelos idosos
mostra que o menor deslocamento vertical em cada passo natildeo eacute compensado pelo
aumento na frequumlecircncia de passo induzido pelo menor tempo aeacutereo efetivo tae (figura
33) A constataccedilatildeo de que o envelhecimento diminui o trabalho feito contra a
gravidade Wextv deixando inalterado o trabalho para sustentar as mudanccedilas na
velocidade horizontal Wextf resulta em uma velocidade menor de corrida onde o
Wextv se iguala ao Wextf esta velocidade eacute ~ 12 kmh-1 nos idosos e ~ 15 kmh-1 nos
jovens Os dois paineacuteis inferiores na figura 36 (analisados mais profundamente na
Discussatildeo) apresentam o trabalho mecacircnico total realizado por unidade de distacircncia
percorrida Wtot =Wext+Wint onde Wext eacute o trabalho positivo feito para manter o
movimento em relaccedilatildeo ao ambiente e o Wint eacute o trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM (calculado conforme descrito na Metodologia)
333 Assimetria contato-despregue
Os deslocamentos verticais do CM para baixo e para cima durante a fase de
contato estatildeo traccedilados na figura 37 e estatildeo expressos como uma fraccedilatildeo dos
deslocamentos verticais descendente e ascendente (ScdownSvdown ciacuterculos cheios e
ScupSvup ciacuterculos abertos) Na mesma figura eacute apresentada a fraccedilatildeo do
deslocamento vertical realizado pela amplitude da oscilaccedilatildeo do sistema massa-mola
para baixo de av=0 ateacute avmx (ScedownSvdown quadrados cheios) e para cima de avmx
ateacute av=0 (SceupSvup quadrados abertos) Quando a fase aeacuterea eacute nula nas
velocidades mais baixas de corrida todo o deslocamento vertical acontece em
contato com o solo e ScSv=1 Com o aumento da velocidade acontece uma fase
aeacuterea de duraccedilatildeo progressivamente maior durante a corrida e a fraccedilatildeo do
deslocamento vertical em contato com o solo diminui mais acentuadamente durante
o deslocamento para baixo (ciacuterculos cheios) do que durante o deslocamento para
cima (ciacuterculos abertos) ou seja (ScupSvup)gt(ScdownSvdown) Em outras palavras a
altura do CM no instante do contato eacute superior agrave sua altura no instante do toque no
solo o que indica que a elevaccedilatildeo do CM eacute inferior agrave descida durante a fase de
contato do peacute com o solo (CAVAGNA 2006) Esta assimetria contato-despregue
estaacute presente em ambos os grupos mas eacute maior nos idosos do que nos jovens
principalmente devido a uma menor reduccedilatildeo na ScupSvup com o aumento da
velocidade uma maior elevaccedilatildeo do CM se daacute em contato com o solo nos indiviacuteduos
76
idosos Em ambas as faixas etaacuterias a fraccedilatildeo de deslocamento vertical ocupada pela
amplitude de oscilaccedilatildeo SceSv se aproxima de metade de Sv quase independente da
velocidade apoiando a ideacuteia de que a oscilaccedilatildeo vertical do sistema massa-mola eacute
equilibrado em torno do ponto onde a Fv se iguala ao PC Em contraste ScSv muda
acentuadamente com a velocidade ateacute o ponto em que toda a oscilaccedilatildeo tem lugar
no contato com o solo (ScSv=1)
34 Discussatildeo
341 Sobre o meacutetodo
Este sub-capiacutetulo procura discutir o meacutetodo usado no estudo especialmente
em relaccedilatildeo ao raciociacutenio envolvido e a discussatildeo de algumas abordagens similares
ao modelo usado no presente estudo
O meacutetodo dinamomeacutetrico usado no presente estudo tem como base a teoria
do custo de geraccedilatildeo de trabalho mecacircnico Esta teoria pode ser considerada como a
primeira tentativa satisfatoacuteria nas aacutereas limiacutetrofes entre biomecacircnica biologia
experimental e fisiologia comparativa de explicar sob o ponto-de-vista mecacircnico as
formas principais de locomoccedilatildeo humana a caminhada e a corrida
Baseados no meacutetodo de FENN (1930) para a determinaccedilatildeo do trabalho
mecacircnico contra a gravidade e o trabalho mecacircnico devido agraves mudanccedilas de
velocidade Cavagna e colaboradores perceberam que o ser humano quando
caminhava e corria apresentava caracteriacutesticas nas curvas de energia mecacircnica e
no somatoacuterio dos incrementos positivos nestas energias que permitiam diferenciar
estes tipos de locomoccedilatildeo ao mesmo tempo que auxiliavam no entendimento do
comportamento da unidade muacutesculo-tendatildeo e dos mecanismos minimizadores de
dispecircndio energeacutetico mecanismo pendular e elaacutestico (ver figura 32) Os
incrementos positivos de energia mecacircnica (trabalho positivo) satildeo originados
principalmente por muacutesculos e tendotildees enquanto que os incrementos negativos de
energia mecacircnica (trabalho negativo) satildeo em parte armazenados nas estruturas natildeo
contraacuteteis dos muacutesculos e tendotildees e outra parte eacute degradada em forma de calor
Tendo em consideraccedilatildeo os princiacutepios da termodinacircmica foi possiacutevel aplicar
estes mecanismos a fim de entender o porquecirc que durante a fase de apoio na
corrida a energia cineacutetica se apresenta em fase com a energia potencial do CM em
77
relaccedilatildeo ao meio ambiente enquanto que na caminhada estas energias apresentam
comportamentos contraacuterios
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da
caminhada (pecircndulo-invertido) e de segmento complacente da corrida
(massa-mola) e seus principais constituintes Note que o tracejado
indica a trajetoacuteria do corpo de massa m durante o contato g eacute a
aceleraccedilatildeo gravitacional k eacute a rigidez da mola l0 eacute o comprimento do
membro inferior e a0 eacute o acircngulo da perna de apoio no momento do
contato com o solo
O somatoacuterio dos incrementos positivos de energia mecacircnica tambeacutem
conhecido como trabalho mecacircnico externo eacute menor do que a energia metaboacutelica
despendida pelos muacutesculos durante a caminhada enquanto que o trabalho
mecacircnico externo na corrida apresenta valor maior ao da energia metaboacutelica
despendida pelos muacutesculos Este aparente paradoxo demonstrava que a razatildeo
entre potecircncia mecacircnica gerada e a potecircncia metaboacutelica despendida ultrapassava a
eficiecircncia maacutexima de transformaccedilatildeo de energia quiacutemica em trabalho mecacircnico e foi
considerado como a primeira evidecircncia de que as unidades muacutesculo-tendatildeo
responsaacuteveis pela frenagem e propulsatildeo durante a fase de apoio da corrida eram
tambeacutem responsaacuteveis por absorccedilatildeo e re-utilizaccedilatildeo de energia elaacutestica (CAVAGNA et
al 1964) permitindo mais tarde a formulaccedilatildeo do modelo massa-mola ou ldquobouncingrdquo
da corrida (BLICKHAN 1989 MCMAHON e CHENG 1990 figura 32) e o posterior
estudo do ciclo alongamento-encurtamento do muacutesculo-esqueleacutetico
78
Portanto durante atividades ciacuteclicas como a locomoccedilatildeo os muacutesculos
responsaacuteveis pelo movimento possuem uma capacidade de geraccedilatildeo de forccedila
durante seu encurtamento (contraccedilatildeo concecircntrica) maior do que em contraccedilotildees
similares mas precedidas de contraccedilatildeo isomeacutetrica No caso da locomoccedilatildeo mais
especificamente da corrida durante contraccedilotildees concecircntricas os muacutesculos
propulsores utilizam uma energia armazenada durante a precedente contraccedilatildeo
excecircntrica (CAVAGNA et al 1964 CAVAGNA et al 1968) O modelo massa-mola
assume que a unidade muacutesculo-tendatildeo exerce um comportamento similar agrave de uma
mola ou seja quando a mola diminui de comprimento apoacutes o impacto (alongamento
do muacutesculo) armazena energia potencial elaacutestica e quando a mola aumenta seu
comprimento (encurtamento do muacutesculo) durante a segunda fase de contato
transforma energia potencial elaacutestica em energia cineacutetica O modelo tambeacutem
assume mesma altura e velocidade do CM no momento do contato e despregue
A primeira pressuposiccedilatildeo do modelo (sobre a semelhanccedila entre mola e
unidade muacutesculo-tendatildeo) apesar de correta natildeo indica informaccedilotildees sobre seus
constituintes o muacutesculo e o tendatildeo Vaacuterias evidecircncias mostram diferenccedilas no
comportamento mecacircnico do muacutesculo e do tendatildeo e estas diferenccedilas satildeo
moduladas pela forccedila imposta agrave unidade consequumlentemente dependentes da
velocidade de corrida Por exemplo KRAM e TAYLOR (1990) sugeriram que o
dispecircndio de energia durante a corrida era devido ao custo de geraccedilatildeo de forccedila das
fibras musculares agindo de forma isomeacutetrica sem realizaccedilatildeo de trabalho muscular
Evidecircncias em modelo animal confirmam este raciociacutenio (ROBERTS et al 1997
BIEWENER 1998)
Ainda assim para ser inteiramente vaacutelido este modelo o tempo de trabalho
externo positivo e negativo devem ser iguais em todas as velocidades de corrida
contudo uma assimetria nos tempos de trabalho positivo e negativo satildeo encontradas
na corrida humana em velocidades baixas (ateacute 14 kmh-1) com um menor tempo
para o trabalho mecacircnico externo negativo (CAVAGNA 2006)
Portanto o mecanismo de minimizaccedilatildeo de energia apresentada por KRAM e
TAYLOR 1990) parece se sustentar apenas em altas velocidades Em velocidades
menores os muacutesculos propulsores ativam em intensidade menor portanto gerando
uma tensatildeo menor no tendatildeo provavelmente insuficiente para gerar uma mudanccedila
importante no comprimento do tendatildeo Portanto o trabalho muscular eacute significativo
com contraccedilotildees excecircntricas em maior velocidade do que as contraccedilotildees
79
concecircntricas o que corresponde com a relaccedilatildeo forccedila versus velocidade e tambeacutem
com os resultados de eficiecircncia muscular para seacuteries de alongamento encurtamento
em diferentes velocidades (maior eficiecircncia em alta velocidade de encurtamento e
menor velocidade de alongamento ndash HEGLUND e CAVAGNA 1987) Ou seja em
velocidades menores parece existir um importante trabalho muscular executado de
modo assimeacutetrico com o tendatildeo agindo apenas como transmissor de forccedilas
enquanto que em altas velocidades com o aumento do pico de estresse no muacutesculo
e consequumlentemente aumento da rigidez da unidade muacutesculo-tendatildeo o muacutesculo
contrai isometricamente e o tendatildeo muda de comprimento agindo como um elaacutestico
(o muacutesculo tambeacutem gera tensatildeo devido agrave histerese do tendatildeo poreacutem eacute
negligenciaacutevel ndash ALEXANDER 2002)
Sobre o segundo criteacuterio (da semelhanccedila de altura e velocidade no contato e
despregue) os proacuteprios autores do modelo massa-mola indicam que em geral os
animais apresentam uma velocidade no contato maior do que no despregue bem
como realizam o contato com as articulaccedilotildees das pernas mais flexionadas do que
no despregue (BLICKHAN 1989) Poreacutem se as anaacutelises da velocidade e altura satildeo
modificadas do momento de contato e despregue para o iniacutecio da fase aeacuterea e de
contato efetivos (quando a forccedila vertical eacute igual aacute forccedila peso) levando em
consideraccedilatildeo o periacuteodo natural do sistema elaacutestico a velocidade continua maior no
iniacutecio do contato efetivo em todas as velocidades de corrida mas a altura do CM eacute
maior no contato efetivo inicial do que no momento de fase aeacuterea inicial em
velocidades baixas de corrida (aproximadamente de 8 agrave 14 kmh-1) Acima destas
velocidades a altura do CM eacute maior no iniacutecio da fase aeacuterea efetiva do que no iniacutecio
da fase de contato efetivo (CAVAGNA 2006) Estas assimetrias podem chegar ateacute
30
Um ponto chave na formulaccedilatildeo deste modelo eacute a determinaccedilatildeo da rigidez do
sistema massa-mola aqui tambeacutem uma simplificaccedilatildeo do fenocircmeno pois considera
apenas os valores maacuteximos de forccedila e deslocamento verticais como se durante toda
a fase de apoio a rigidez fosse constante
Caacutelculo da rigidez de mola
Os caacutelculos da rigidez de mola do sistema bouncing representam as
propriedades de mola do movimento vertical do corpo e da perna A rigidez vertical eacute
80
estimada como a razatildeo do pico de forccedila vertical (algumas vezes denominado como
forccedila maacutexima durante a fase ativa do tempo de contato) e o deslocamento maacuteximo
vertical do CM durante o apoio (CAVAGNA et al 1988 MCMAHON e CHENG
1990) Outro meacutetodo alternativo para o caacutelculo da rigidez vertical utiliza o tempo de
contato efetivo assumindo que este tempo representa o meio periacuteodo de oscilaccedilatildeo
do sistema elaacutestico (ver CAVAGNA et al 2005) k = Mb( tce)2 onde Mb eacute massa
corporal Este uacuteltimo meacutetodo apresenta a vantagem de evitar a influecircncia das
oscilaccedilotildees de aceleraccedilatildeo vertical do CM apoacutes o contato inicial A rigidez de perna eacute
a razatildeo do pico de forccedila vertical e a mudanccedila no comprimento de perna durante o
apoio A variaccedilatildeo do comprimento de perna eacute determinada com a equaccedilatildeo 330
(MCMAHON e CHENG 1990)
delta l = ycm + l0 (1V cosa0) Eq 329
Onde l0 eacute o comprimento de perna em repouso e a0 eacute o acircngulo da perna no
contato inicial em relaccedilatildeo agrave vertical (a0 = sin-1(Vf tc2 l0) onde Vf eacute a velocidade
horizontal e tc eacute o tempo de apoio Apesar do uso frequumlente desta medida no campo
das Ciecircncias do Esporte e Biologia Experimental a rigidez de pernas possui uma
forte limitaccedilatildeo devido ao uso da medida de membro inferior incorrer em um alto grau
de erro (e 1 cm dados natildeo publicados) Aleacutem disso se utiliza da medida de tempo
de contato enquanto que a relaccedilatildeo inversa com o sistema massa-mola eacute dada pelo
tempo de contato efetivo (quando a forccedila vertical eacute maior do que o peso corporal)
portanto natildeo representa as mudanccedilas do sistema massa-mola frente agrave restriccedilotildees do
ambiente (eg gravidade CAVAGNA et al 2005)
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical
A menor amplitude de oscilaccedilatildeo do sistema elaacutestico nos idosos (Sce na figura
33) implica i) uma menor forccedila vertical maacutexima Fvmx e energia elaacutestica armazenada
em cada passo ii) uma maior frequumlecircncia de passo iii) uma menor variaccedilatildeo de
energia externa para manter o movimento do CM do corpo em relaccedilatildeo ao meio
ambiente externo e iv) um maior trabalho interno para acelerar os segmentos
relativo ao CM
81
Destaca-se que as divisotildees do passo baseadas no tempo de contato efetivo
(vermelho) aeacutereo efetivo (azul) correspondem agrave aproximadamente metade da
duraccedilatildeo e deslocamento durante o passo Em contraste a fraccedilatildeo do passo realizado
durante o tempo aeacutereo e de contato variam bastante com a velocidade Aleacutem disso
o tcetae e SceSce nos idosos enquanto que o contraacuterio acontece com os jovens
Linhas representam a meacutedia ponderada de todos os dados (Kaleidagraph 364) e a
uacutenica proposta destas linhas eacute ser um guia para os olhos elas natildeo descrevem o
mecanismo fiacutesico envolvido (figura 33)
Tabela 31 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nos quais os pares de variaacuteveis listadas satildeo significativamente diferentes dentro de
cada grupo experimental
Vf Idoso Jovem
(km h-1) tce vs tae Sce vs Sae fs vs f tce vs tae Sce vs Sae fs vs f
3 006 312 10-4 079 001 004 117 10-3
4 031 013 028 008 058 005
5 003 003 004 091 014 020
6 001 473 10-3 003 005 026 001
7 002 001 020 011 045 001
8 102 10-7 361 10-8 190 10-4 003 048 256 10-3
9 445 10-4 753 10-6 002 001 057 151 10-3
10 250 10-4 212 10-5 510 10-4 243 10-3 091 284 10-3
11 014 003 028 158 10-4 019 234 10-4
12 044 013 061 249 10-5 002 328 10-5
13 018 003 020 310 10-6 261 10-3 100 10-5
14 001 042 005 388 10-6 183 10-3 166 10-5
15 029 022 012 107 10-6 256 10-4 166 10-6
16 057 048 090 947 10-5 361 10-3 292 10-4
Forccedila e energia elaacutestica
A forccedila maacutexima vertical eacute dada pela massa corporal multiplicada pela
aceleraccedilatildeo vertical maacutexima e o resultado eacute somado ao peso corporal Avmx (equaccedilatildeo
82
34) A massa corporal meacutedia eacute 711 kg nos idosos e 634 kg nos jovens A variaccedilatildeo
da aceleraccedilatildeo maacutexima atingida pelos indiviacuteduos idosos nas suas altas velocidades
(15-17 kmh-1) eacute de 1077 plusmn 197 ms-2 (n=7) Considerando que nas mesmas
velocidades alcanccediladas pelos jovens a variaccedilatildeo foi de 1886 plusmn 274 ms-2 (n=24)
(figura 34) Note que a aceleraccedilatildeo ascendente e velocidade vertical maiores
atingidas pelos jovens Contraacuterio ao bouncing elaacutestico a velocidade vertical maacutexima
alcanccedilada durante o deslocamento descendente eacute maior do que o alcanccedilado
durante a elevaccedilatildeo sendo esta diferenccedila maior nos idosos
Tabela 32 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Wf Wv tce tae Sce
3 008 003 095 482 10-3 005
4 008 015 004 074 062
5 062 002 083 006 006
6 259 10-3 138 10-4 034 427 10-4 001
7 049 133 10-6 073 287 10-5 140 10-3
8 004 162 10-6 039 231 10-6 198 10-3
9 007 581 10-6 028 107 10-5 407 10-4
10 005 120 10-10 094 605 10-9 176 10-6
11 014 170 10-6 025 383 10-7 435 10-6
12 014 471 10-7 019 321 10-6 380 10-5
13 007 114 10-6 068 228 10-6 196 10-6
14 099 400 10-6 005 170 10-5 231 10-5
15 014 222 10-7 010 142 10-6 685 10-8
16 066 208 10-4 061 184 10-4 718 10-4
De acordo com a equaccedilatildeo 34 estes nuacutemeros resultam em uma forccedila vertical
maacutexima Fvmxold=1463 kN e Fvmxyoung=1818 kN note que 75 de diferenccedila na Avmx
resulta em 24 de diferenccedila em Fvmx devido agrave maior massa corporal dos indiviacuteduos
idosos A forccedila mais baixa alcanccedilada durante o contato pelos indiviacuteduos idosos pode
83
ser explicada em parte pela bem documentada perda de forccedila muscular (eg
DOHERTY 2003) e em parte por uma estrateacutegia de aumentar a seguranccedila do
sistema muacutesculo-esqueleacutetico (KARAMANIDIS e ARAMPATZIS 2005)
A aparente k a 15-17 kmh-1 eacute 3732plusmn885 kNm-1 (n=7) nos indiviacuteduos idosos
e 2869plusmn650 kNm-1 (n=24) nos indiviacuteduos jovens (figura 35) Assumindo uma
relaccedilatildeo forccedila-comprimento linear dos elementos elaacutesticos seu alongamento maacuteximo
(de zero a Fvmx) seria (14633732)=0039 m nos idosos e (18182869)=0063 m
nos indiviacuteduos jovens Os paineacuteis inferiores da figura 35 mostram que a frequumlecircncia
de passo (linhas contiacutenuas) eacute similar agrave frequumlecircncia natural do sistema (linhas
pontilhadas) em todas as velocidades nos idosos enquanto que com os jovens a
frequumlecircncia do passo torna-se menor do que a frequumlecircncia do sistema com o aumento
da velocidade
Tabela 33 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Avmx Vvmx AvmxSce (AvmxSce)Mb Sv
3 004 003 099 039 002
4 001 011 003 022 034
5 152 10-3 001 024 040 003
6 601 10-4 232 10-4 049 067 772 10-4
7 132 10-3 422 10-6 066 007 367 10-5
8 918 10-7 154 10-6 025 018 271 10-5
9 526 10-5 131 10-6 007 067 137 10-5
10 134 10-7 196 10-11 072 001 146 10-8
11 439 10-4 744 10-7 046 004 798 10-7
12 533 10-6 666 10-7 040 002 552 10-6
13 264 10-4 401 10-6 061 022 158 10-6
14 115 10-3 366 10-6 005 652 10-5 126 10-5
15 891 10-6 725 10-8 031 009 316 10-7
16 353 10-3 258 10-4 048 005 267 10-4
84
Visto que a energia potencial gravitacional e a energia cineacutetica do CM estatildeo
em fase durante a corrida o sistema elaacutestico sofre sua maacutexima tensatildeo quando o
componente vertical da forccedila de reaccedilatildeo do solo encontra-se no maacuteximo ((Fvmx)) e o
componente horizontal eacute nulo (Ff=0)
Na verdade Fvmx ocorre no ponto mais baixo da trajetoacuteria (Epmn) quando o
CM termina sua desaceleraccedilatildeo e comeccedila a sua aceleraccedilatildeo (ou seja Ff=0 e Ekfmn) A
energia elaacutestica armazenada em cada passo pode assim ser computada usando-se
apenas a forccedila vertical como (14630039)2=2853 J e (18180063)2=5727 J para
os indiviacuteduos idosos e para os indiviacuteduos jovens respectivamente Esta energia
elaacutestica eacute posteriormente utilizada em parte durante o impulso para elevar e acelerar
a frente o CM
Tabela 34 Comparaccedilatildeo das assimetrias contato-despregue entre jovens idosos e
sistema elaacutestico
IDOSO JOVEM ELAacuteSTICO
Vvmxdown Vvmxup 118plusmn011 107plusmn008 1
f 124plusmn018 106plusmn010 1
Rintdown Rintup 213plusmn130 126plusmn032 1
tpush tbrake 125plusmn016 115plusmn013 1
Ekmxdown - Ekmxup (J) 1003plusmn625 752plusmn542 0
Valores satildeo meacutediaplusmndp (plt0001 N=124 ( N=122) para idosos e N=195 para jovens)
Amplitude de velocidades 3-17 kmh-1
A maacutexima compressatildeo elaacutestica do sistema tambeacutem pode ser analisada como
o deslocamento vertical do CM durante o contato o que em 15-17 kmh-1 eacute em
meacutedia Sc=0032plusmn0006 m (n=7) nos idosos e Sc=0060plusmn0007 m (n=24) nos jovens
(em vez de 0039 m e 0063 m como calculado acima)
85
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um
passo em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis
a direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup +
86
Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo (tae)
da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na direccedilatildeo
vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os ciacuterculos em
vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2) e
a frente (Lce) A linha em vermelho pontilhada em cada painel indica o tempo de
contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente (Lc) durante o
passo As linhas azuis pontilhadas em cada painel indicam o tempo aeacutereo total
(ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La) durante o passo As
barras verticais indicam o desvio-padratildeo da meacutedia os nuacutemeros proacuteximos aos
siacutembolos nos paineacuteis superiores indicam o nuacutemero de itens nas meacutedias
A discrepacircncia pode ser devida em parte agrave uma subestimaccedilatildeo do Sc como
medido (ver Metodologia) A energia elaacutestica armazenada computada como (Fvmx
Sc)2 eacute (1463 0032)2=2341 J (em vez de 2853 J conforme calculado acima) e
(1818 0060)2=5454 J (em vez de 5727 J) para indiviacuteduos idosos e indiviacuteduos
jovens respectivamente
A partir dos dados meacutedios de frequumlecircncia de passo e potecircncia em um mesmo
conjunto de velocidades (figuras 36 e 37) o trabalho externo em cada passo
resultou (405 711)368=7825 J nos indiviacuteduos idosos e (538
634)279=12226 J nos indiviacuteduos jovens Daqui resulta que a contribuiccedilatildeo
elaacutestica para o trabalho externo em cada passo poderia ser 28537825=036 e
572712226=047 respectivamente (ou 23417825=030 e 545412226=045
usando Sc)
Estes caacutelculos aproximados em conjunto com uma maior assimetria contato-
despregue que seraacute discutida a seguir (tabela 34) indicam uma menor restituiccedilatildeo
elaacutestica do corpo nos idosos A maior rigidez k medida nos indiviacuteduos idosos em
sua mais alta velocidade de corrida (figura 35) em aparente desacordo com a
menor rigidez dos tendotildees do gastrocnemius (ONAMBELE et al 2006) do
quadriacuteceps (KARAMANIDIS e ARAMPATZIS 2005) medidos nos idosos Por outro
lado um aumento pela idade da rigidez dos elementos elaacutesticos nos tendotildees e
muacutesculos foi relatado em favor dos muacutesculos flexores do cotovelo (VALOUR e
POUSSON 2003)
87
Importante ressaltar que na complexa deformaccedilatildeo de todo corpo no solo a
aparente k eacute o resultado de um conjunto de unidades muacutesculo-tendatildeo em seacuterie cujas
propriedades elaacutesticas dependem do niacutevel de ativaccedilatildeo muscular O nuacutemero de
unidades muacutesculo-tendatildeo em seacuterie depende por sua vez da orientaccedilatildeo dos
segmentos e do tronco durante o impacto sobre o solo que pode ser diferente nos
indiviacuteduos idosos e nos indiviacuteduos jovens (por exemplo apoio na parte da frente do
peacute mais do que no calcanhar)
O maior valor de k encontrado em idosos em suas mais altas velocidades de
corrida portanto natildeo eacute necessariamente uma indicaccedilatildeo de uma maior rigidez dos
seus tendotildees ou unidades de muacutesculo-tendatildeo medidos durante contraccedilotildees
voluntaacuterias maacuteximas
Frequumlecircncia
O menor tempo aeacutereo efetivo tae nos idosos causa um aumento na
frequumlecircncia da passo f =1(tce+tae) para valores que satildeo iguais e por vezes
superiores agrave frequumlecircncia do sistema fs=1(2tce) Diferentemente dos jovens que
optam em uma grande extensatildeo de velocidades por uma FP mais baixa agrave do
sistema aumentando o tae em relaccedilatildeo ao tce (figuras 33 35 e tabela 32)
Os fatores que determinam a escolha da f a uma determinada velocidade de
corrida satildeo i) sintonizando a frequumlecircncia de passo f para a frequumlecircncia natural do
sistema fs (CAVAGNA et al 1997) e ii) escolhendo uma f que minimize a potecircncia
meacutedia de passada limitada aerobicamente (Wextf figura 36) dentro dos limites
estabelecidos pela potecircncia anaeroacutebica meacutedia durante o empurre (trabalho positivo)
(W+tpush liberada imediatamente pelo muacutesculo durante a contraccedilatildeo) (CAVAGNA et
al 1991) A primeira estrateacutegia eacute normalmente adotada em baixas velocidades de
corrida e modificada para a segunda estrateacutegia de corrida em altas velocidades Isto
eacute feito atraveacutes de um aumento da aceleraccedilatildeo ascendente meacutedia avce acima de 1 g
com o consequumlente aumento de tae em relaccedilatildeo ao tce (equaccedilatildeo 36) Assim a
frequumlecircncia de passo f=1(tce+tae) torna-se menor do que a frequumlecircncia do sistema
fs=1(2tce) bem como o incremento da potecircncia meacutedia do passo Wextf eacute controlada
Nos indiviacuteduos idosos a segunda estrateacutegia nunca eacute adotada A aceleraccedilatildeo meacutedia
para cima nunca excede 1 g mesmo nas velocidades altas 15-17 kmh-1 onde avce
=742plusmn123 ms-2 (n=7) segue-se que f fs em todas as velocidades (figura 35) Isto
88
permite uma menor forccedila durante o empurre da corrida em alta velocidade
resultando em uma potecircncia meacutedia durante o empurre ~ 60 daquela dos jovens
mas o aumento da frequumlecircncia da passada resulta em um maior Wint e um grande
incremento na potecircncia meacutedia de passo Wextf em corridas de alta velocidade (ver
abaixo) Aleacutem disso como se verificou neste estudo a mais baixa deformaccedilatildeo
elaacutestica do sistema diminui a fraccedilatildeo de Wext possivelmente sustentado pelo
mecanismo elaacutestico (ver tabela 34) Em contrapartida a segunda estrateacutegia eacute
seguida pelos jovens onde avce =1248plusmn18 ms-2 (n=24) no mesmo intervalo de
velocidades (15-17 kmh-1) resultando em uma menor frequumlecircncia de passo (f lt fs)
que limita o aumento do Wint da corrida em altas velocidades e um consequumlente
incremento da Wextf+ (ver abaixo)
Aleacutem disso a maior deformaccedilatildeo elaacutestica do sistema permite uma maior
utilizaccedilatildeo da energia elaacutestica (tabela 34) Sabe-se que uma mudanccedila na frequumlecircncia
de passo a uma determinada velocidade tem efeitos opostos sobre a potecircncia
externa o que diminui com o aumento da frequumlecircncia da passada e a potecircncia
interna para reposicionar os segmentos em cada passo que aumenta com a
frequumlecircncia (CAVAGNA et al 1991)
Em que medida a menor potecircncia externa meacutedia do passo devido agrave menor
amplitude da oscilaccedilatildeo dos segmentos nos idosos eacute compensada por uma maior
potecircncia interna meacutedia do passo devido ao aumento da frequumlecircncia de passo
89
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e velocidade
vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown (paineacuteis inferiores)
atingidos pelo CM durante o passo em funccedilatildeo da velocidade de corrida Estatiacutestica
e outras indicaccedilotildees conforme a figura 33
O total do trabalho realizado por unidade distacircncia Wtot =Wint+Wext foi somado
pelo Wint estimado pelas equaccedilotildees 32 e 33 para os indiviacuteduos jovens e idosos
como descrito nos Meacutetodos e pelo Wext calculado a partir das seguintes equaccedilotildees
obtidas pela interpolaccedilatildeo de todos os dados experimentais
W ML(J kg-1 m -1) = 29738 Vf - 03217 Eq 330 extyoung
90
(R=0831) para o grupo de indiviacuteduos jovens e
W ML(J kg-1 m -1) = 28445 Vf - 040856 Eq 331 extold
(R=0762) para o grupo de indiviacuteduos idosos O Wtot resultante (linhas
pontilhadas nos paineacuteis inferiores da figura 36) mostra que o trabalho externo menor
no idoso por unidade de distacircncia eacute progressivamente compensado com o aumento
da velocidade por um maior trabalho interno devido agrave sua frequumlecircncia de passada
(FP) aumentada O Wtot alcanccedila um minimum a ~75 kmh-1 nos indiviacuteduos idosos e
um miacutenimo a ~8-12 kmh-1 nos indiviacuteduos jovens
A diferenccedila em Wtot eacute invertida acima de ~14 kmh-1 Eacute possiacutevel que a menor
utilizaccedilatildeo da energia elaacutestica em idosos aumente o gasto de sua energia metaboacutelica
para o mesmo Wtot O consumo de O2 durante a corrida a 10 kmh-1 aumentou com a
idade em corredores treinados do sexo feminino (EVANS et al 1995)
343 A assimetria contato-despregue
As quatro fases do bouncing as diferenccedilas com um sistema elaacutestico
Antes de descrever a assimetria contato-despregue no aparente bouncing do
CM em cada passo da corrida vale a pena referir que os momentos de contato e
despregue podem natildeo ocorrer durante corridas de baixa velocidade quando a
oscilaccedilatildeo vertical do CM do corpo se daacute totalmente em contato com o solo (figura
38) Eacute oacutebvio que neste caso o contato com o solo natildeo pode ser tomado como um
indicador de contato e despregue quando se descreve o bouncing do sistema
elaacutestico Neste caso a oscilaccedilatildeo vertical ocorre abaixo e acima da posiccedilatildeo de
equiliacutebrio (onde a Fv iguala o PC e a velocidade vertical eacute maacutexima) Mesmo quando
uma fase aeacuterea ocorre durante o passo a fraccedilatildeo do deslocamento vertical do CM
total em que o corpo estaacute em contato com o solo ScSv muda amplamente com a
velocidade enquanto que a fraccedilatildeo do deslocamento vertical abaixo e acima do ponto
de equiliacutebrio SceSv se aproxima da metade do Sv quase independente da
velocidade (figura 37)
91
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e frequumlecircncia
do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute maior nos idosos
nas altas velocidades (paineacuteis superiores) a rigidez vertical normalizada pela massa
eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras indicaccedilotildees conforme figura 33
92
Estas observaccedilotildees indicam que eacute mais adequado considerar-se contato
efetivo o instante no qual a Fv aumenta acima do PC (ao inveacutes do instante em que o
peacute estaacute em contato com o solo) e despregue efetivo o instante em que a Fv diminui
para valores menores do que o PC (ao inveacutes do instante no qual o peacute deixa o solo)
A assimetria contato-despregue desaparece quando o bouncing do corpo eacute mais
corretamente dividido desta forma (ou seja tce versus tae em vez de tc versus ta)
(CAVAGNA et al 1988 MCMAHON e CHENG 1990) Ainda na figura 37 pode ser
observado que ScSv mudam mais com a velocidade do que a amplitude da
oscilaccedilatildeo SceSv ao qual atinge a metade do deslocamento vertical Sv Exceto as
velocidades muito baixas quando a fase aeacuterea eacute nula (ScSv=1 eg paineacuteis
superiores nas figuras 31 e 38) o deslocamento descendente enquanto o peacute toca o
solo eacute menor do que o deslocamento ascendente particularmente nos idosos a
descida baliacutestica do CM eacute maior do que a elevaccedilatildeo baliacutestica (veja a linha azul
pontilhada na figura 38)
Segundo a equaccedilatildeo 34 a velocidade vertical descendente eacute maacutexima no
instante do contato efetivo e a velocidade vertical ascendente eacute maacutexima no instante
do despregue efetivo No movimento harmocircnico de um sistema elaacutestico as
velocidades ascendentes e descendentes maacuteximas satildeo iguais Isso natildeo eacute verdade
na corrida humana a velocidade maacutexima descendente eacute superior agrave velocidade
maacutexima ascendente (CAVAGNA 2006) Estes resultados mostram que a assimetria
eacute maior em indiviacuteduos idosos do que nos jovens na variaccedilatildeo normal de velocidades
(3-17 kmh-1) a proporccedilatildeo normalizada ((VvmxdownVvmxup)norm=116plusmn009 (n=124)
nos idosos e 107plusmn007 (n=195) nos jovens (p=126 10-19) (tabela 34) Outras
assimetrias satildeo apresentadas a seguir atraveacutes da anaacutelise das mudanccedilas na energia
potencial gravitacional Ep e energia cineacutetica translacional Ek=Ekv+Ekf do CM
corporal durante as quatro fases de oscilaccedilatildeo do sistema em relaccedilatildeo a posiccedilatildeo de
equiliacutebrio (Fv=Mg) (CAVAGNA 2006) Estas fases satildeo apresentadas na figura 38 a
partir do topo da trajetoacuteria do CM corporal Durante a aceleraccedilatildeo descendente
(Saedown azul) a Ep diminui e a Ek aumenta indicando uma transduccedilatildeo de Ep em Ek
o que ocorre tanto na presenccedila quanto na ausecircncia de uma fase aeacuterea (por
exemplo na parte superior do painel esquerdo da figura 38) O montante desta
transduccedilatildeo eacute dado pelo incremento Rintdown da curva do Rint(t) apoacutes o maacuteximo de Ep
Durante a desaceleraccedilatildeo descendente (Scedown vermelho) o trabalho externo
negativo eacute feito para diminuir simultaneamente Ep e Ek O trecho superior da curva
93
Rint(t) correspondente agrave fraccedilatildeo do passo mostra que natildeo ocorre transduccedilatildeo entre
Ep e Ek Note-se que o pico de Ek durante o passo eacute atingido proacuteximo ao iniacutecio da
fase de trabalho negativo consistente com a velocidade maacutexima de alongamento
das unidades muacutesculo-tendotildees (HEGLUND e CAVAGNA 1987)
Durante a aceleraccedilatildeo ascendente (Sceup vermelho) trabalho positivo externo
eacute feito para aumentar simultaneamente Ep e Ek O trecho inferior da curva Rint(t)
correspondente agrave fraccedilatildeo a do passo mostra que natildeo ocorre transduccedilatildeo entre Ep e
Ek Note que enquanto eacute quase totalmente contida dentro do Scedown a continua
apoacutes o final do Sceup ou seja dentro da desaceleraccedilatildeo ascendente do CM (Saeup
azul) Em outras palavras a perna ainda estaacute a exercer uma forccedila propulsiva a fim
de acelerar o corpo a frente embora a forccedila vertical tenha diminuiacutedo para valores
abaixo do peso corporal Essa assimetria eacute maior no idoso A proporccedilatildeo a eacute
124plusmn018 nos indiviacuteduos idosos e 106plusmn010 nos indiviacuteduos jovens (p=41510-19
tabela 34)
Importante notar a origem diferente dos dois picos Ekmxup (inferior) e
Ekmxdown (superior) alcanccedilados durante o passo de corrida durante a elevaccedilatildeo e
descenso do CM Ekmxup se deve ao empurre para frente enquanto Ekmxdown eacute
devido agrave gravidade A diferenccedila meacutedia Ekmxdown- Ekmxup=752plusmn542 nos indiviacuteduos
jovens e 987plusmn592 nos idosos (p=00004) indica uma maior perda da energia
cineacutetica Ekv no idoso adquirida durante a descida (tabela 34)
Durante a desaceleraccedilatildeo ascendente do CM (Saeup azul) a transduccedilatildeo de Ek
em Ep acontece apenas na uacuteltima parte da elevaccedilatildeo porque como descrito acima
Ep e Ek aumentam simultaneamente durante a maior parte do Saeup Na verdade a
transduccedilatildeo de Ek em Ep eacute quase nula nos idosos (figura 38) O incremento da curva
Rint(t) que ocorre durante a elevaccedilatildeo Rintup eacute inferior ao que ocorre durante a
queda Rintdown Tambeacutem esta assimetria eacute maior no idoso A proporccedilatildeo
RintdownRintup nos indiviacuteduos idosos eacute 213plusmn13 e 126 plusmn 032 nos indiviacuteduos jovens
(p=33310-11 tabela 34) Este fenocircmeno eacute acompanhado por uma maior fraccedilatildeo da
elevaccedilatildeo em contato com o solo como indicado pela maior proporccedilatildeo ScupSvup nos
idosos (figura 37) Um tempo aeacutereo inferior nos idosos durante a corrida em ~ 10
kmh-1 foi encontrado por KARAMANIDIS e ARAMPATZIS 2005)
94
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com seus
95
dois componentes o trabalho realizado contra a gravidade (Wv ciacuterculos abertos) e
para sustentar as mudanccedilas de velocidade a frente (Wf quadrados abertos)
Estatiacutestica e outras indicaccedilotildees conforme figura 33
Note que particularmente nos idosos a transduccedilatildeo da Ek em Ep durante a
elevaccedilatildeo (incremento Rintup da curva Rint(t) abaixo da linha horizontal pontilhada) eacute
menor do que a transduccedilatildeo da Ep em Ek durante o deslocamento descendente
(incrementos Rintdown da curva Rint(t) acima da linha horizontal pontilhada) esta
assimetria eacute acompanhada pela elevaccedilatildeo baliacutestica (nulo nos idosos) menor do que a
descida baliacutestica Nos trechos horizontais da curva Rint(t) nenhuma transduccedilatildeo
ocorre Ep e Ek e unidades muacutesculo-tendatildeo absorvem simultaneamente Ep e Ek (fase
) e aumentam Ep e Ek simultaneamente (fase a) Note que enquanto que a fase eacute
realizada durante Scedown a estende-se aleacutem do Sceup dentro de uma grande parte
do Saeup devido ao continuo aumento da Ek Esta assimetria tambeacutem eacute maior nos
idosos
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As fraccedilotildees do
deslocamento vertical do CM durante contato ScSv (ciacuterculos preenchidos
deslocamento descendente ciacuterculos abertos deslocamento ascendente) e quando
a Fv eacute maior do que o PC SceSv (quadrados preenchidos deslocamento
96
descendente quadrados abertos deslocamento ascendente) satildeo apresentados em
funccedilatildeo da velocidade de corrida Estatiacutestica conforme figura 33
Um trabalho externo positivo eacute realizado (segmentos vermelhos na figura 31)
natildeo soacute para aumentar simultaneamente Ep e Ek (fraccedilatildeo a do passo) mas tambeacutem
quando ocorre transduccedilatildeo da Ek em Ep no final do empurre durante o alcance do
platocirc de Ecm (figura 31) Daqui resulta que a duraccedilatildeo de trabalho positivo tpush eacute
superior agrave duraccedilatildeo a a proporccedilatildeo tpushta diminui com a velocidade de ~19 agrave 3-5
kmh-1 para ~11 agrave 15-17 kmh-1 Da mesma forma o trabalho externo negativo eacute
feito (segmentos azuis na figura 31) natildeo apenas para diminuir simultaneamente Ep e
Ek (fraccedilatildeo do passo) mas tambeacutem quando ocorre uma transduccedilatildeo de Ep em Ek no
iniacutecio da frenagem durante a acentuada diminuiccedilatildeo de Ecm no final de seu platocirc
(figura 31) Consequentemente a duraccedilatildeo do trabalho negativo tbrake eacute maior do que
a duraccedilatildeo a proporccedilatildeo tbraket diminui com a velocidade de ~17 agrave 3-5 kmh-1 para
~12 agrave 15-17 kmh-1
A duraccedilatildeo do empurre e da frenagem estatildeo apresentados na figura 39 em
funccedilatildeo da Vf Observa-se que tanto nos indiviacuteduos idosos quanto nos jovens tpushgt
tbrake ateacute 13-14 kmh-1 (tabela 31) A proporccedilatildeo eacute tpushtbrake=125plusmn016 nos indiviacuteduos
idosos e 115plusmn013 nos indiviacuteduos jovens (p=11610-9 tabela 34) Novamente a
assimetria eacute maior nos indiviacuteduos idosos
Durante a corrida no plano a uma velocidade constante o momentum perdido
Fbrake tbrake equivale ao momentum adquirido Fpush tpush (realmente na direccedilatildeo vertical
o momentum perdido eacute ligeiramente maior que o momentum adquirido porque a
velocidade descendente maacutexima eacute 7-16 maior do que a velocidade ascendente
maacutexima tabela 34) Deste modo se tpushgt tbrake entatildeo Fpush lt Fbrake ou seja a forccedila
meacutedia durante o trabalho positivo eacute inferior agrave forccedila meacutedia durante o trabalho
negativo
As assimetrias do bouncing acima descritas estatildeo resumidas na tabela 34
onde eacute feita uma comparaccedilatildeo entre indiviacuteduos idosos indiviacuteduos jovens e um
sistema elaacutestico Observa-se que o desvio de um sistema elaacutestico eacute maior para os
indiviacuteduos idosos do que para os indiviacuteduos jovens isto eacute o salto dos indiviacuteduos
idosos eacute menos elaacutestico do que o dos indiviacuteduos jovens Note a mesma conclusatildeo
foi encontrada acerca da estimativa da energia elaacutestica armazenada em cada passo
97
98
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito idoso
paineacuteis a direita sujeito jovem em cada painel o comportamento da transduccedilatildeo Ep-
Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas na energia potencial
gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf normalizada para oscilar entre
zero e um Mesmos passos da figura 1 cada painel comeccedila e termina no valor
menor da curva Ep As cores diferentes na curva Ep distinguem as fraccedilotildees do passo
onde a Fv exercida no solo eacute maior do que o PC (vermelho) e menor do que o PC
(azul) As linhas contiacutenuas de Ep indicam a fase de contato enquanto que as linhas
pontilhadas Ep (azul fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As
quatro fases correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown (azul)
e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas pontilhadas verticais
satildeo apresentadas nos dois picos de Ek e ocupam a fraccedilatildeo onde a transduccedilatildeo Ep-Ek
ocorre conforme indicado pelos incrementos da curva Rint(t)
Por que o bouncing do corpo eacute diferente daquele de um sistema elaacutestico
A cada passo executado as unidades muacutesculo-tendatildeo satildeo submetidas a um
ciclo alongamento-encurtamento durante o contato com o solo As unidades
muacutesculo-tendatildeo satildeo constituiacutedas por duas estruturas em seacuterie que apresentam
respostas diferentes durante o alongamento e encurtamento Enquanto os tendotildees
tecircm um comportamento semelhante entre o alongamento e encurtamento devido agrave
sua pequena histerese (ALEXANDER 2002) o muacutesculo exerce uma maior forccedila
durante o alongamento do que durante o encurtamento dependente da relaccedilatildeo
forccedila-velocidade (FENN e MARSH 1935 HILL 1938) Este fato resulta em uma
resposta diferente das unidades muacutesculo-tendatildeo a um ciclo alongamento-
encurtamento dependente da mudanccedila do comprimento relativo de muacutesculo e
tendatildeo durante o ciclo (CAVAGNA 2006)
O alongamento dos muacutesculos em relaccedilatildeo ao alongamento do tendatildeo depende
da rigidez do muacutesculo em relaccedilatildeo agrave do tendatildeo a rigidez do muacutesculo por sua vez
depende da sua ativaccedilatildeo Se a ativaccedilatildeo eacute elevada como em altas velocidades
(BIEWENER 1998) e o muacutesculo eacute mantido isomeacutetrico como alguns estudos
sugerem para a corrida (KRAM e TAYLOR 1990 BIEWENER et al 1998
99
ROBERTS et al 1998) a maioria da mudanccedila no comprimento seraacute realizada pelos
tendotildees e as caracteriacutesticas do bouncing se aproximaratildeo agraves de um corpo elaacutestico
Se por outro lado a ativaccedilatildeo muscular for baixa uma importante fraccedilatildeo da mudanccedila
do comprimento seraacute realizada pelo muacutesculo Neste caso a forccedila desenvolvida
durante o alongamento eacute esperada que exceda a que foi desenvolvida durante o
encurtamento e as caracteriacutesticas do bouncing foram distintas agrave de um corpo
elaacutestico
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos
painel inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura 31)
e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e barras
azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de corrida
Estatiacutestica conforme figura 33
Esta eacute possivelmente a razatildeo pela qual a proporccedilatildeo tpushtbrake (figura 39) eacute
maior em velocidades baixas de corrida quando a ativaccedilatildeo muscular eacute menor e o
comprimento muscular eacute alterado e consequumlentemente o trabalho sustentado por
filamentos de muacutesculos que deslizam dentro das unidades muacutesculo-tendatildeo eacute
relativamente maior (CAVAGNA 2006) Pode ser observado que a duraccedilatildeo de
trabalho externo positivo eacute maior do que a duraccedilatildeo do trabalho externo negativo ateacute
a velocidade de 12-14 kmh-1 (tabela 31) como esperado a partir da relaccedilatildeo forccedilashy
100
velocidade muscular Isto sugere que com o aumento da velocidade a contribuiccedilatildeo
do trabalho pelas estruturas contraacuteteis eacute progressivamente substituiacutedo pela
armazenagem e re-utilizaccedilatildeo de energia elaacutestica pelos tendotildees A razatildeo tpushtbrake eacute
maior nos idosos (tabela 34)
Um corolaacuterio deste ponto de vista eacute que as fibras musculares curtas
aparentemente de pouca importacircncia ligadas em seacuterie com tendotildees muito longos
(ALEXANDER 2001) tecircm papel fundamental de modular a energia elaacutestica
armazenada nos tendotildees e para ajustar toda a extensatildeo da mudanccedila imposta agrave
unidade muacutesculo-tendatildeo Uma forccedila muscular maior durante o alongamento do que
durante o encurtamento juntamente com a perda de energia durante o ciclo
alongamento-encurtamento satildeo tanto consequumlecircncias da relaccedilatildeo forccedila-velocidade do
muacutesculo e podem explicar pelo menos qualitativamente o conjunto dos desvios do
sistema elaacutestico (tabela 33)
O maior desvio de um sistema elaacutestico encontrado nos indiviacuteduos mais idosos
eacute coerente com a menor forccedila desenvolvida pelos seus muacutesculos o que implicaria
uma mudanccedila relativamente maior do comprimento do muacutesculo nas unidades
muacutesculo-tendatildeo A segunda razatildeo pode ser a maior diferenccedila na forccedila desenvolvida
pelos muacutesculos durante o alongamento relativo ao encurtamento relatado na
literatura em idosos (PHILLIPS et al 1991 OCHALA et al 2006 VANDERVOORT
et al 1990 PORTER et al 1997 POUSSON et al 2001 KLASS et al 2005)
Em conclusatildeo modificaccedilotildees na estrutura muscular menor forccedila e uma
relaccedilatildeo forccedila-velocidade mais assimeacutetrica resultam em uma modificaccedilatildeo da energia
mecacircnica do CM do corpo durante a corrida A menor forccedila especialmente durante
trabalho positivo explica a menor amplitude da oscilaccedilatildeo vertical que por sua vez eacute
a causa do menor trabalho externo da maior frequumlecircncia da passada e maior
trabalho interno A relaccedilatildeo forccedila-velocidade mais assimeacutetrica explica a maior
assimetria contato-despregue Ambas as modificaccedilotildees resultam em uma menor
utilizaccedilatildeo da energia elaacutestica durante o bouncing do idoso
101
4 PREDIZENDO Vf CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO TERRESTRE
41 Introduccedilatildeo
A dinacircmica da locomoccedilatildeo eacute determinada principalmente pelas forccedilas de
reaccedilatildeo do solo geradas de modo agrave re-acelerar e deslocar o corpo contra a forccedila
gravitacional em um ciclo de passada O meacutetodo para analisar o trabalho e o custo
mecacircnico externos usando plataformas dinamomeacutetricas foi introduzido por Cavagna
e colaboradores (caminhada CAVAGNA et al 1963 corrida CAVAGNA et al
1964) Desde entatildeo o Wext tem sido investigado em diferentes condiccedilotildees e
populaccedilotildees [terreno (FORMENTI et al 2005 FORMENTI e MINETTI 2007)
crianccedilas (CAVAGNA et al 1983 SCHEPENS et al 1998 SCHEPENS et al 2001)
meacutetodo de locomoccedilatildeo (MINETTI 1998a ARDIGO et al 2003) deficiecircncia de
hormocircnio do crescimento (MINETTI et al 2000) gradiente de locomoccedilatildeo (MINETTI
et al 1993 1994) idosos (MIAN et al 2006 estudo atual capiacutetulo 3)]
Apesar de sua relevacircncia cientiacutefica o nuacutemero de laboratoacuterios onde trabalho e
custo mecacircnico satildeo avaliados eacute limitado devido a questotildees metodoloacutegicas Em
especial a aquisiccedilatildeo da energia mecacircnica externa eacute atualmente limitada pela
necessidade de espaccedilo suficiente para posicionar plataformas de forccedila para coletar
dois passos sucessivos de modo a obter o miacutenimo de duas curvas de forccedilas de
reaccedilatildeo do solo consecutivas essenciais para esse meacutetodo Durante a corrida haacute um
periacuteodo entre as duas curvas durante o qual ambos os peacutes estatildeo fora do solo (em
velocidades normais) enquanto que durante a caminhada esse periacuteodo eacute
substituiacutedo por uma fase de apoio duplo
Independente se as duas curvas estatildeo sobrepostas ou natildeo (caminhando ou
correndo respectivamente) haacute ainda alguma dificuldade em obter
102
experimentalmente no miacutenimo duas curvas similares de modo que a Fv meacutedia seja
igual ao PC Normalmente mais de um terccedilo das aquisiccedilotildees com indiviacuteduos normais
satildeo rejeitadas (dados natildeo-publicados) devido agrave dificuldade de caminhar ou correr
em plataformas em uma velocidade constante E aleacutem disso a maior parte dos setshy
uprsquos biomecacircnicos satildeo dispostos de modo que as curvas sucessivas sejam obtidas
da mesma plataforma Dados de Bastien e colaboradores mostram que duas
medidas sucessivas em diferentes plataformas de forccedila eram possiacuteveis apenas em
10 das tentativas Assim medir o Wint realizado durante o duplo apoio eacute uma tarefa
difiacutecil e essa variaacutevel em seu maacuteximo representa mais de 40 do Wext (BASTIEN
et al 2003)
Deste modo o presente texto procura analisar as possibilidades de anaacutelise da
biomecacircnica da locomoccedilatildeo em situaccedilotildees onde apenas uma plataforma de forccedila com
dimensotildees capazes de analisar apenas um apoio simples satildeo disponiacuteveis
O objetivo desse trabalho eacute estabelecer uma equaccedilatildeo capaz de predizer o
trabalho mecacircnico usando procedimentos de prediccedilatildeo linear e otimizaccedilatildeo e checar
sua validade analisando experimentos de locomoccedilatildeo em diferentes velocidades
42 Equaccedilatildeo do tempo de atraso
Usando a primeira lei de Newton (um corpo se move a uma velocidade
constante quando a soma total das forccedilas externas eacute igual a zero) temos que a Fv
meacutedia exercida contra o solo durante um ciclo de passada a uma velocidade
constante eacute igual ao PC (CAVAGNA e MARGARIA 1966) Se somente as forccedilas de
reaccedilatildeo do solo de um uacutenico passo satildeo coletadas e a simetria eacute assumida
(KARAMANIDIS et al 2003) o atraso de tempo entre passos (s) pode ser obtido
por
F t Ivc c vt = = Eq 41 step M g M g
onde tc e Fvc satildeo a duraccedilatildeo e a Fv meacutedia durante o fase de contato (figura 41)
respectivamente e Iv eacute o impulso vertical Essa informaccedilatildeo eacute crucial se a passada
completa deve ser reconstruiacuteda (no novo passo elaborado somente a forccedila
103
horizontal precisa ser invertida enquanto que a Fv precisa ser somente duplicada a
partir do atraso do tempo tstep)
M g M gFP = = Eq 42
2F t 2 Ivc c v
de onde o CP (CP m) pode ser inferido
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de reaccedilatildeo do solo durante a
corrida
O DF (ALEXANDER e JAYES 1980) ie a fraccedilatildeo do tempo de passada no
qual um uacutenico peacute estaacute no solo eacute
104
M g 1DF = = Eq 43
2F F vc vc2
M g
e deste modo eacute possiacutevel indicar se o modo de locomoccedilatildeo eacute caminhada (DF05) ou
corrida (DFlt05) Ateacute esse ponto a uacutenica variaacutevel a ser conhecida antecipadamente
eacute a massa corporal (kg)
43 Estimativa da velocidade horizontal
Enquanto pares de fotoceacutelulas satildeo comumente encontrados em laboratoacuterios
por vezes a Vf natildeo eacute conhecida (paleontologia biomecacircnica forecircnsica etc) Assim
FP DF e massa podem entrar no modelo de prediccedilatildeo de velocidade (ms-1) com
base em dados coletados previamente (NILSSON e THORSTENSSON 1989)
Vf = (1953F M g) - (14843Iv M g) + 5415 Eq 44 v peak
onde Fvpeak eacute a forccedila de impacto vertical e Iv eacute impulso vertical O erro meacutedio da
estimativa (SEE = 05 dp(1 ndash R2)) eacute 005 ms-1 Entatildeo o CP pode ser obtido como
VfFP ou
1953Fv peak -14843Iv + 5415M gCP = Eq 45
2Fvc
Apesar do alto coeficiente de regressatildeo e baixo erro padratildeo da meacutedia esse
meacutetodo necessita do primeiro pico vertical e assim se torna limitado por exemplo
em humanos para corredores que apoacuteiam o peacute com o calcanhar no momento do
contato Para evitar essa limitaccedilatildeo foi construiacutedo um modelo de regressatildeo linear
muacuteltipla incluindo variaacuteveis descritivas (MINETTI e ALEXANDER 1997) da
energeacutetica da locomoccedilatildeo
qregression + + DFregression + FPregressionVf = Eq 46 3
105
Para cada regressatildeo o meacutetodo dos miacutenimos quadrados eacute usado Enquanto
que o DF e o FP satildeo calculados (equaccedilotildees 42 e 43) o fator q precisa ser
determinado O fator q (tambeacutem conhecido como fator de forma) oferece
informaccedilotildees relacionadas ao formato da curva forccedila-tempo durante a fase de apoio
Usualmente a forccedila vertical pode ser determinada somente com dois primeiros
cossenos de uma seacuterie de Fourier (ALEXANDER 1978)
tc ) Eq 47 Fv = x cos( tc ) V qcos(3
onde x eacute PC e tc eacute tempo de contato A ausecircncia de coeficientes seno indica uma
simetria nas curvas forccedila-tempo e nestes casos o fator q eacute constante Em outras
palavras conhecendo somente o valor da Fv e sua respectiva fase eacute possiacutevel
encontrar o fator q Todavia na caminhada satildeo frequumlentemente observadas curvas
assimeacutetricas (NILSSON e THORSTENSSON 1989) assim incluiacuteu-se dois
coeficientes senos na equaccedilatildeo
tc ) Eq 48 Fv = x cos( tc ) V qcos(3 tc ) + a1 sin(2 tc ) V a2 sin(4
onde a1 e a2 satildeo constantes Assim usando um simples caacutelculo de meacutedia aritmeacutetica
para o q durante o tc noacutes temos
q1 + q2 + q3 + qnqmean = Eq 49 n
Usando os valores de fator q advindos da literatura (MINETTI e ALEXANDER
1997) construiacutemos a seguinte equaccedilatildeo de regressatildeo em situaccedilotildees de caminhada
DF 05 qregression = 23061q + 05873 R=079 Eq 410
onde qregression eacute a Vf estimada e utilizada na equaccedilatildeo 46 Para situaccedilotildees de corrida
o fator q natildeo varia em funccedilatildeo da velocidade (figura 42) obtendo um coeficiente
106
angular da equaccedilatildeo de regressatildeo muito baixo (00916) portanto em situaccedilotildees de
corrida o qregression eacute cancelado
As seguintes equaccedilotildees (411 412 413 e 414) foram originadas dos dados
apresentados na figura 43 de MINETTI (1998b) Nesta figura as informaccedilotildees satildeo
valores meacutedios (meacutedias advindas de 22 agrave 42 medidas para cada velocidade e tipo
de locomoccedilatildeo) de medidas de FP e DF portanto as equaccedilotildees a seguir apresentam
valores de R subestimados enquanto que as equaccedilotildees de regressatildeo representam
de modo satisfatoacuterio os dados de origem A Vf predita pela frequumlecircncia de passada
FPregression foi determinada para a caminhada como
DF 05 FPregression = 27781FP V12077 R=098 Eq 411
e para a corrida
DF lt 05 FPregression = 75469FP - 79561 R=090 Eq 412
A Vf predita pelo duty factor DFregression foi determinado para a caminhada
como
DF 05 DFregression = V12342DF + 84628 R=099 Eq 413
e para a corrida
DF lt 05 DFregression = -16912DF + 87422 R=098 Eq 414
44 Equaccedilatildeo de custo energeacutetico
O atraso entre passos tstep e a Vf satildeo cruciais para ldquosintetizarrdquo toda a
passada e calcular o trabalho mecacircnico externo e a recuperaccedilatildeo de energia (ambos
valores total (CAVAGNA e KANEKO 1977) e instantacircneo (CAVAGNA et al 2002))
Assim as forccedilas de reaccedilatildeo do solo satildeo integradas duas vezes para posiccedilatildeo
do CM e dados da velocidade A primeira integraccedilatildeo das forccedilas horizontais e
107
verticais menos o PC ambas divididas pela massa corporal resultam na aceleraccedilatildeo
do CM A constante de integraccedilatildeo usada para as forccedilas acircntero-posteriores foi a
velocidade meacutedia de progressatildeo Para as forccedilas vertical e meacutedio-lateral noacutes
assumimos que as velocidades inicial e final em todo o ciclo eram iguais A variaccedilatildeo
positiva ponto-a-ponto da Ep somada a variaccedilatildeo positiva ponto-a-ponto da Ek
durante uma passada completa resulta na energia mecacircnica externa total Ecm
(CAVAGNA e KANEKO 1977 WILLEMS et al 1995) Para evitar o ldquoparadoxo do
trabalho zerordquo o trabalho externo eacute determinado somando somente os incrementos
positivos da Ecm Sabendo o Wext e estimando o Wint (MINETTI 1998b) foi
calculado o Wtot e o custo energeacutetico (Ctot) da locomoccedilatildeo
A velocidade horizontal foi determinada atraveacutes do meacutetodo de regressatildeo
linear muacuteltipla usando como variaacuteveis independentes os coeficientes da curva Fv (de
NILSSON e THORSTENSSON 1989) A validade cruzada das equaccedilotildees
desenvolvidas no presente estudo foi calculada por coeficientes de regressatildeo (R)
45 Discussatildeo
O presente modelo prediz a velocidade horizontal e o custo energeacutetico da
locomoccedilatildeo terrestre Aleacutem disso o modelo matemaacutetico permite estimar outros
importantes paracircmetros da locomoccedilatildeo como a FP e o DF
Outros modelos
Tem sido proposto que o custo energeacutetico da locomoccedilatildeo terrestre pode ser
determinado pelo custo da produccedilatildeo de forccedila para suportar o PC (KRAM e TAYLOR
1990) Fundamentalmente o custo de geraccedilatildeo de forccedila indica que a potecircncia
metaboacutelica da locomoccedilatildeo eacute relacionada diretamente ao PC e o tempo disponiacutevel
para produzir forccedila
c Mg E
metabolic = Eq 415 tc
108
onde c eacute uma constante de custo (que expressa a proporcionalidade entre taxa de
dispecircndio de energia normalizado pela massa e taxa de geraccedilatildeo de forccedila)
entretanto esse modelo tecircm sido alvo de criacuteticas Resumidamente a principal criacutetica
eacute baseada em i) a suposiccedilatildeo que o dispecircndio metaboacutelico devido ao movimento dos
membros superiores eacute negligenciaacutevel e ii) a desconsideraccedilatildeo do conceito de
trabalho O presente trabalho tambeacutem mostra que levar em consideraccedilatildeo apenas o
tempo da geraccedilatildeo de forccedila e a forccedila natildeo eacute o bastante para determinar o custo
energeacutetico da locomoccedilatildeo As informaccedilotildees contidas no proacuteprio comportamento da
curva forccedila vertical-tempo parecem influenciar de modo importante a determinaccedilatildeo
de paracircmetros fundamentais da locomoccedilatildeo Especialmente o Iv e o fator de forma q
indicam um ajuste da curva de regressatildeo linear importante para a determinaccedilatildeo da
Vf
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de progressatildeo
A prediccedilatildeo da FP e DF foram comparados com os valores
determinados experimentalmente em dois sujeitos (sujeitos RR e TD 175 e
170m de estatura 78 e 84kg de massa corporal) correndo em vaacuterias velocidades de
progressatildeo As forccedilas de reaccedilatildeo do solo foram registradas em uma plataforma de
forccedila AMTI agrave uma frequumlecircncia de amostragem de 1000Hz e a Vf foi determinada
quadro a quadro atraveacutes de uma cacircmera colocada agrave 5m de distacircncia da aacuterea de
interesse e 1m de altura do piso A mesma foi posta de forma a registrar o
movimento no plano sagital dos sujeitos com uma frequumlecircncia de amostragem de
109
50Hz Um procedimento de calibraccedilatildeo 2D foi realizado a fim de converter as
informaccedilotildees de pixels para metros As informaccedilotildees de posiccedilatildeo linear foram filtradas
atraveacutes de um filtro passa-baixa do tipo Butterworth com frequumlecircncia de corte
variando entre 3 e 9Hz determinados para cada corrida atraveacutes do procedimento de
anaacutelise residual (WINTER 2005) A coordenada horizontal do ponto anatocircmico do
quadril foi utilizada para determinar a FPexp CPexp e a velocidade meacutedia
experimentais A FPexp foi determinada pela frequumlecircncia de amostragem fsample
dividida pelo nuacutemero de quadros que totalizam um ciclo de passada nframes
f sampleFPexp = Eq 416 n frames
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de progressatildeo Fonte
Minetti 1998b
O CPexp foi determinado pela posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo FinalhorPosition diminuiacutedo pela posiccedilatildeo horizontal do quadril no
primeiro quadro InitialhorPosition
CPexp = horPosition = FinalhorPosition V InitialhorPosition Eq 417
110
A velocidade meacutedia experimental Vfexp foi determinada pela variaccedilatildeo da
posiccedilatildeo horizontal durante um ciclo de passada dividida pela variaccedilatildeo de tempo de
um ciclo de passada a partir da Eq 411
n frames 1time = = Eq 418
f sample FPexp
temos
horPositionVfexp = Eq 419 time
A razatildeo entre a frequumlecircncia FP experimental e teoacuterica foi de 1001 A razatildeo
para o DF foi de 0977
O presente modelo pode auxiliar a determinar paracircmetros espaccedilos-temporais
e energeacuteticos de animais extintos prevendo a forccedila de reaccedilatildeo do solo de um uacutenico
passo
Atraveacutes da anaacutelise das informaccedilotildees contidas em uma curva de forccedila de
reaccedilatildeo do solo vertical pelo tempo informaccedilotildees fundamentais da mecacircnica e
energeacutetica da locomoccedilatildeo podem ser estimadas em situaccedilotildees que a informaccedilatildeo
experimental direta natildeo for disponiacutevel
111
5 CONCLUSAtildeO GERAL
51 O custo EMG da caminhada humana
O objetivo deste estudo foi construir um modelo do custo EMG da caminhada
humana Para tanto criou-se duas abordagens experimental e teoacuterica sendo que a
teoacuterica parece ter uma melhor relaccedilatildeo com as evidecircncias experimentais sobre a
energeacutetica da locomoccedilatildeo humana A estabilidade em conjunto com a atividade EMG
de muacutesculos posturais parece ser um mecanismo primaacuterio da energeacutetica da
locomoccedilatildeo
52 A mecacircnica da corrida de idosos
A mecacircnica da corrida de idosos foi comparada com a de jovens atraveacutes da
determinaccedilatildeo e comparaccedilatildeo do trabalho mecacircnico e de paracircmetros do sistema
massa-mola especialmente usando aspectos de assimetria do mecanismo elaacutestico
de minimizaccedilatildeo de energia entre os grupos experimentais
Os idosos produzem menos forccedila durante a fase de trabalho mecacircnico
positivo com uma menor oscilaccedilatildeo vertical durante a fase aeacuterea e menor oscilaccedilatildeo
total Consequentemente a capacidade de armazenar e re-utilizar energia elaacutestica
112
dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio energeacutetico neste
grupo quando comparado com jovens
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre
Tendo apenas as informaccedilotildees de uma curva forccedila vertical versus tempo e a
massa corporal construiu-se um modelo biomecacircnico de prediccedilatildeo do CP Vf e custo
energeacutetico da locomoccedilatildeo terrestre Os resultados advindos do modelamento
correspondem aos paracircmetros determinados experimentalmente Laboratoacuterios que
detenham apenas uma plataforma de forccedila ou nas aacutereas onde as informaccedilotildees de
entrada do atual modelo constituam a uacutenica fonte de dados disponiacutevel (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis-chaves da
locomoccedilatildeo podem ser realizadas com razoaacutevel acuraacutecia
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico
O seguinte texto representa um esforccedilo de raciociacutenio a partir dos achados da
presente tese aliados ao referencial teoacuterico abordado durante os capiacutetulos
anteriores a fim de compreender as determinantes da locomoccedilatildeo humana Mais do
que oferecer uma resposta final sobre a mecacircnica e a energeacutetica da locomoccedilatildeo
humana este texto lanccedila uma provaacutevel resposta ainda inicial acerca das
determinantes envolvidas da locomoccedilatildeo humana
As situaccedilotildees de locomoccedilatildeo que desafiam as noccedilotildees atuais da mecacircnica e
energeacutetica da locomoccedilatildeo tratadas nesta tese nomeadamente o processo de
envelhecimento e as inclinaccedilotildees satildeo algumas das questotildees que natildeo satildeo todavia
compreendidas pelas teorias atuais da locomoccedilatildeo humana mas que a presente
hipoacutetese pretende responder A locomoccedilatildeo humana eacute determinada desde o ponto
de vista mecacircnico como uma seacuterie de accedilotildees complexas de segmentos interligados
ao qual geram torques atraveacutes da ativaccedilatildeo muscular e transmissatildeo de forccedilas pelos
tendotildees anexados em seacuterie aos muacutesculos e agraves articulaccedilotildees que conectam os
Restriccedilotildees da tarefa
velocidade
Restriccedilotildees do organismo
- massa
- comprimento do membro
i f i
Tendatildeo
- energia
Energia
mecacircnica do
CM
Mecanismo
minimizador
Dispecircndio
energeacutetico
Restriccedilotildees do
ambiente Muacutesculos
- eficiecircncia
113
segmentos Todo este sistema eacute controlado pelo sistema nervoso central e
perifeacuterico Ainda assim apesar da extrema complexidade deste tipo de movimento
conforme discutido extensivamente nas seccedilotildees 21 31 e 41 a corrida e a
caminhada humana se caracterizam como sistemas capazes de minimizar o
dispecircndio energeacutetico advindo dos muacutesculos sistemas estes denominados de
massa-mola e pecircndulo invertido respectivamente Desde a sua introduccedilatildeo ateacute os
dias atuais estes sistemas tecircm recebido intensas criacuteticas da literatura abordadas em
capiacutetulos precedentes poreacutem mais do que por agrave prova os achados principais que
deram base para estes sistemas as criacuteticas satildeo direcionadas agraves limitaccedilotildees dos
sistemas especialmente da forma em que foram propostos A seacuterie de experimentos
realizados primeiramente com humanos (CAVAGNA et al 1963 1964) e apoacutes com
animais (FEDAK et al 1982 HEGLUND et al 1982a HEGLUND et al 1982b
TAYLOR et al 1982) demonstraram de modo inequiacutevoco que as curvas de energia
potencial gravitacional e cineacutetica do CM se apresentavam em fase durante a
corridagalope e em contra-fase (atraso de 180 graus) na caminhada Deste ponto
em diante eacute estabelecido que durante a transiccedilatildeo da caminhada para a corrida os
sistemas satildeo modificados de um modo discreto ou seja o pecircndulo invertido seria
ldquodesligadordquo e o sistema massa-mola acionado automaticamente
Figura 51 Modelo conceitual da locomoccedilatildeo humana
114
Este raciociacutenio adveacutem dos achados de Cavagna e colegas e aleacutem disso da
observaccedilatildeo de paracircmetros cinemaacuteticos e cineacuteticos aos quais respondem de forma
discreta na mudanccedila do tipo de locomoccedilatildeo por exemplo o DF durante caminhada
varia de 065 em baixas velocidades ateacute 055 em altas velocidades de forma
contiacutenua poreacutem quando o sujeito faz a transiccedilatildeo para a corrida o DF passa para
04 O fator de forma ldquoqrdquo da curva de forccedila vertical em funccedilatildeo do tempo tambeacutem se
modifica abruptamente variando de 07 na caminhada para -01 durante corrida
(ALEXANDER e JAYES 1980) Uma justificativa para este comportamento discreto
eacute relacionado agrave um tipo de locomoccedilatildeo pouco usada por seres-humanos o skipping
Por outro lado evidecircncias experimentais tecircm demonstrado que em algumas
velocidades de caminhada parece existir um mecanismo elaacutestico de minimizaccedilatildeo de
energia (FUKUNAGA et al 2001) denominado de sistema de ldquocatapultardquo devido agrave
caracteriacutestica de baixa velocidade durante a frenagem e alta velocidade na fase de
propulsatildeo (ISHIKAWA et al 2005 ISHIKAWA et al 2007) Por outro lado durante a
corrida no estudo da mecacircnica da corrida dos idosos foi observada uma transduccedilatildeo
de energia cineacutetica e potencial gravitacional em baixas velocidades diminuindo com
o aumento da velocidade (relativo ao deslocamento vertical total capiacutetulo 3)
enquanto que a contribuiccedilatildeo do tendatildeo e consequentemente do componente
elaacutestico da unidade muacutesculo-tendatildeo aumentam (CAVAGNA 2006) Portanto os dois
sistemas parecem natildeo mudar atraveacutes de transformaccedilotildees abruptas como os
paracircmetros anteriormente apresentados poderiam induzir mas eacute notoacuterio um
continuum de mudanccedilas nas caracteriacutesticas mecacircnicas destes dois tipos de
locomoccedilatildeo e a mudanccedila na predominacircncia do mecanismo minimizador parece ser o
responsaacutevel pela transiccedilatildeo de um tipo de locomoccedilatildeo para outro
Para construir este modelo eacute necessaacuterio sabermos quanto de energia eacute
recuperado pelos mecanismos minimizadores A energia recuperada por via
pendular eacute calculada como (ver capiacutetulo 327)
cpendular = Rint Eq 51
e a energia elaacutestica armazenada como
115
Fvmx k = Eq 52 celaacutestica 2
Este raciociacutenio leva agrave um modelo de minimizaccedilatildeo de energia assumido
simplesmente como o somatoacuterio dos mecanismos elaacutestico e pendular
= Eq 53 creconvertida cpendular + celaacutestica
Assumindo como constante o dispecircndio energeacutetico sob outras formas de
energia (teacutermica) a energia despendida para a contraccedilatildeo dos muacutesculos esqueleacuteticos
a fim de gerar a locomoccedilatildeo pode ser determinada por
= -E Eq 54 Emuscular Emetaboacutelica repouso
e deste modo podemos afirmar que a energia total para percorrer determinada
distacircncia eacute dada por
= Eq 55 total Ereconvertida + Emuscular
e este valor em um amplo espectro de velocidades e tipos de locomoccedilatildeo apresente
uma relaccedilatildeo linear direta com a velocidade da locomoccedilatildeo (restriccedilatildeo da tarefa)
Mas quais os fatores que determinam este continuum de mecanismos
minimizadores O compromisso entre estes mecanismos (pendular e elaacutestico) eacute
diretamente ligado ao comportamento da energia mecacircnica vertical (potencial
gravitacional + cineacutetica) e da unidade muacutesculo-tendatildeo E em uacuteltima anaacutelise estas
caracteriacutesticas mecacircnicas parecem ser moduladas por restriccedilotildees do ambiente (g
inclinaccedilatildeo) restriccedilotildees da tarefa (velocidade) e restriccedilotildees do organismo (massa e
comprimento de membros inferiores) conforme figura 51
Hipoacuteteses levantadas com o atual modelo
i) A velocidade de transiccedilatildeo deve coincidir com a mudanccedila na
predominacircncia do mecanismo minimizador de energia
ii) Analisar o mecanismo pendular em diferentes velocidades de corrida
116
iii) Quando as demais restriccedilotildees estatildeo controladas as restriccedilotildees do
organismo e o compromisso entre massa e comprimento de membro
inferior poderiam explicar as mudanccedilas no uso dos mecanismos pendular
e elaacutestico
iv) Existe uma velocidade oacutetima para a corrida humana
v) O somatoacuterio da quantidade de energia reconvertida por meio pendular e
elaacutestico somado ao dispecircndio energeacutetico dos muacutesculos deve ser altamente
relacionado com a velocidade de locomoccedilatildeo
541 Respondendo algumas criacuteticas atuais
Este modelo pode explicar os resultados de GEYER et al 2006) sobre a
possibilidade de um modelo de ldquopecircndulo-invertido carregado por uma molardquo
(BLICKHAN et al 2007) ser aplicado na caminhada devido a melhor representaccedilatildeo
da curva forccedila tempo pelo meacutetodo proposto do que pelo modelo do pecircndulo-
invertido Apesar da boa representaccedilatildeo de uma variaacutevel mecacircnica da locomoccedilatildeo o
modelo despreza uma questatildeo central da anaacutelise da locomoccedilatildeo a determinaccedilatildeo do
mecanismo minimizador de energia Portanto apesar da coincidecircncia da resposta de
forccedila de reaccedilatildeo do solo vertical originada pelo modelo e a medida experimental o
modelo apenas apresenta uma possibilidade do ponto de vista matemaacutetico de
representaccedilatildeo do modelo teoacuterico de continuum apresentado aqui
Recentemente uma extensa revisatildeo de BIEWENER 2006) analisou como as
flutuaccedilotildees na energia mecacircnica do CM de animais podem ser usadas a fim de
identificar os mecanismos fundamentais envolvidos na locomoccedilatildeo terrestre e indicou
que quando satildeo comparados os padrotildees mecacircnicos e cinemaacuteticos de uma ampla
diversidade de quadruacutepedes e biacutepedes padrotildees mais complexos emergem
observando que alguns animais menos aptos para a locomoccedilatildeo (less cursorial)
podem combinar padrotildees mecacircnicos da caminhada e corrida em velocidades
intermediaacuterias ou em animais de grande tamanho (eg elefantes apresentam
aspectos de corrida mas com um comportamento pendular entre a energia cineacutetica e
potencial gravitacional do CM) Novamente a hipoacutetese do continuum se apresenta
como um forte candidato para explicar atraveacutes de uma teoria simples e unificante a
locomoccedilatildeo de vertebrados
117
O que acontece nas inclinaccedilotildees
Quando nos deslocamos no plano eacute bem determinado que o trabalho
mecacircnico liacutequido apresente um valor muito baixo e natildeo eacute igual a zero devido agrave
resistecircncia do ar e agrave fricccedilatildeo dos tecidos mas ainda assim eacute comumente assumido
como negligenciaacutevel (ALEXANDER 1989) poreacutem a energia mecacircnica total para
movimentar o CM em relaccedilatildeo ao ambiente externo varia durante um ciclo de
passada de modo que o somatoacuterio dos incrementos (trabalho positivo) seja igual ao
somatoacuterio dos decrementos (trabalho negativo) Como observado no estudo ldquocusto
EMG da caminhada humanardquo (Capiacutetulo 2) existe uma predominacircncia de trabalho
positivo em inclinaccedilotildees positivas e predominacircncia de trabalho negativo em
inclinaccedilotildees negativas (figura 52)
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido de
elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006
118
Portanto o pecircndulo invertido natildeo atua como mecanismo minimizador de
dispecircndio energeacutetico e natildeo obstante a falta de evidecircncias eacute razoaacutevel supor que a
energia elaacutestica natildeo atue de forma importante nas inclinaccedilotildees Importante notar que
a inexistecircncia de um mecanismo minimizador natildeo significa que o modelo natildeo
contempla esta situaccedilatildeo apenas demonstra que devido agrave uma restriccedilatildeo severa do
ambiente (inclinaccedilatildeo extrema) o organismo natildeo dispotildee de nenhum auxiacutelio
importante para economizar energia sobrecarregando os muacutesculos a fim de produzir
a energia necessaacuteria para manter o movimento de locomoccedilatildeo Nesta situaccedilatildeo o
dispecircndio energeacutetico eacute dependente apenas da quantidade de ativaccedilatildeo muscular e
seus respectivos equivalentes energeacuteticos de atividade EMG como demonstrado no
estudo do custo EMG da caminhada humana
55 Propostas para futuros estudos
551 Custo EMG da caminhada humana
Testar o modelo do Custo EMG
- em diferentes terrenos
- em populaccedilotildees com patologias do sistema nervoso
- em inclinaccedilotildees negativas
552 Mecacircnica da corrida dos idosos
- desenvolver um modelo matemaacutetico que tenha em consideraccedilatildeo os
comportamentos diferentes entre a fase de encurtamento e alongamento das
unidades muacutesculo-tendatildeo atraveacutes de um modelo viscoelaacutesticohiperelaacutestico
- estudar o bouncing elaacutestico da corrida em inclinaccedilotildees
- estudar o efeito da fadiga no bouncing elaacutestico da corrida humana
- estudar o modelo massa-mola ponto-a-ponto
- estudar o bouncing elaacutestico entre sujeitos com diferentes estruturas
muacutesculo-esqueleacuteticas (velocistas vs fundistas obesos vs natildeo-obesos homens vs
mulheres)
119
- usar os paracircmetros do modelo massa-mola e as assimetrias contato-
despregue de sujeitos normais para comparaccedilatildeo com amputados e portadores de
necessidades especiais com restriccedilotildees na locomoccedilatildeo
- estudar o bouncing elaacutestico na corrida de velocidade de atletas de alto
rendimento
553 Modelo matemaacutetico da locomoccedilatildeo terrestre
Testar o modelo
- para situaccedilatildeo de aceleraccedilotildees
- em animais extintos
120
6 Referecircncias
ALESHINSKY SY An energy sources and fractions approach to the mechanical
energy expenditure problem--IV Criticism of the concept of energy transfers within
and between links J Biomech 19 4 307-309 1986
ALEXANDER RM Damper for bad vibrations Nature 414 6866 855-857 2001
ALEXANDER RM Energy-saving mechanisms in walking and running J Exp Biol 160
55-69 1991
ALEXANDER RM Models and the scaling of energy costs for locomotion J Exp Biol
208 Pt 9 1645-1652 2005
ALEXANDER RM Optimization and gaits in the locomotion of vertebrates Physiol Rev
69 4 1199-1227 1989
ALEXANDER RM Principles of animal locomotion Princeton NJ Princeton
University Press 2003
ALEXANDER RM Tendon elasticity and muscle function Comp Biochem Physiol A
Mol Integr Physiol 133 4 1001-1011 2002
ALEXANDER RM Vertical movements in walking and running Journal of Zoology
185 27-40 1978
ALEXANDER RM JAYES AS Fourier analysis of forces exerted in walking and
running J Biomech 13 4 383-390 1980
ALEXANDER RM VERNON A Mechanics of hopping by kangaroos (Macropodidae)
Journal of Zoology 177 265-303 1975
121
ANDERS C WAGNER H PUTA C GRASSME R PETROVITCH A SCHOLLE
HC Trunk muscle activation patterns during walking at different speeds J
Electromyogr Kinesiol 17 2 245-252 2007
ANDERSON KG BEHM DG Maintenance of EMG activity and loss of force output
with instability J Strength Cond Res 18 3 637-640 2004
ARDIGO LP SAIBENE F MINETTI AE The optimal locomotion on gradients
walking running or cycling Eur J Appl Physiol 90 3-4 365-371 2003
BASTIEN GJ HEGLUND NC SCHEPENS B The double contact phase in walking
children J Exp Biol 206 Pt 17 2967-2978 2003
BASTIEN GJ SCHEPENS B WILLEMS PA HEGLUND NC Energetics of load
carrying in Nepalese porters Science 308 5729 1755 2005
BIEWENER AA Muscle-tendon stresses and elastic energy storage during locomotion
in the horse Comp Biochem Physiol B Biochem Mol Biol 120 1 73-87 1998
BIEWENER AA Patterns of mechanical energy change in tetrapod gait pendula
springs and work J Exp Zoolog A Comp Exp Biol 305 11 899-911 2006
BIEWENER AA KONIECZYNSKI DD BAUDINETTE RV In vivo muscle forceshy
length behavior during steady-speed hopping in tammar wallabies J Exp Biol 201
Pt 11 1681-1694 1998
BIGLAND-RITCHIE B WOODS JJ Integrated electromyogram and oxygen uptake
during positive and negative work J Physiol 260 2 267-277 1976
BLANCO RE GAMBINI R A biomechanical model for size speed and anatomical
variations of the energetic costs of running mammals J Theor Biol 241 1 49-61
2006
BLAXTER K Energy metabolism in animals and man Cambridge UK Cambridge
University Press 1989
BLICKHAN R The spring-mass model for running and hopping J Biomech 22 11-12
1217-1227 1989
BLICKHAN R SEYFARTH A GEYER H GRIMMER S WAGNER H GUNTHER
M Intelligence by mechanics Philos Transact A Math Phys Eng Sci 365 1850
199-220 2007
122
CAVAGNA GA Force platforms as ergometers J Appl Physiol 39 1 174-179 1975
CAVAGNA GA The landing-take-off asymmetry in human running J Exp Biol 209 Pt
20 4051-4060 2006
CAVAGNA GA DUSMAN B MARGARIA R Positive work done by a previously
stretched muscle J Appl Physiol 24 1 21-32 1968
CAVAGNA GA FRANZETTI P FUCHIMOTO T The mechanics of walking in
children J Physiol 343 323-339 1983
CAVAGNA GA FRANZETTI P HEGLUND NC WILLEMS P The determinants of
the step frequency in running trotting and hopping in man and other vertebrates J
Physiol 399 81-92 1988
CAVAGNA GA HEGLUND NC WILLEMS PA Effect of an increase in gravity on the
power output and the rebound of the body in human running J Exp Biol 208 Pt 12
2333-2346 2005
CAVAGNA GA KANEKO M Mechanical work and efficiency in level walking and
running J Physiol 268 2 467--481 1977
CAVAGNA GA MANTOVANI M WILLEMS PA MUSCH G The resonant step
frequency in human running Pflugers Arch 434 6 678-684 1997
CAVAGNA GA MARGARIA R Mechanics of walking J Appl Physiol 21 1 271-278
1966
CAVAGNA GA SAIBENE FP MARGARIA R External work in walking J Appl
Physiol 18 1-9 1963
CAVAGNA GA SAIBENE FP MARGARIA R Mechanical Work in Running J Appl
Physiol 19 249-256 1964
CAVAGNA GA THYS H ZAMBONI A The sources of external work in level walking
and running J Physiol 262 3 639-657 1976
CAVAGNA GA WILLEMS PA FRANZETTI P DETREMBLEUR C The two power
limits conditioning step frequency in human running J Physiol 437 95-108 1991
CAVAGNA GA WILLEMS PA HEGLUND NC The role of gravity in human walking
pendular energy exchange external work and optimal speed J Physiol 528 Pt 3
657-668 2000
123
CAVAGNA GA WILLEMS PA HEGLUND NC Walking on Mars Nature 393 6686
636 1998
CAVAGNA GA WILLEMS PA LEGRAMANDI MA HEGLUND NC Pendular
energy transduction within the step in human walking J Exp Biol 205 Pt 21 3413shy
3422 2002
CERRETELLI P VEICSTEINAS A FUMAGALLI M DELLORTO L Energetics of
isometric exercise in man J Appl Physiol 41 2 136-141 1976
DEN OTTER AR GEURTS AC MULDER T DUYSENS J Speed related changes
in muscle activity from normal to very slow walking speeds Gait Posture 19 3 270shy
278 2004
DOHERTY TJ Invited review Aging and sarcopenia J Appl Physiol 95 4 1717-1727
2003
DOKE J DONELAN JM KUO AD Mechanics and energetics of swinging the human
leg J Exp Biol 208 Pt 3 439-445 2005
DOKE J KUO AD Energetic cost of producing cyclic muscle force rather than work to
swing the human leg J Exp Biol 210 Pt 13 2390-2398 2007
EVANS SL DAVY KP STEVENSON ET SEALS DR Physiological determinants
of 10-km performance in highly trained female runners of different ages J Appl
Physiol 78 5 1931-1941 1995
FEDAK MA HEGLUND NC TAYLOR CR Energetics and mechanics of terrestrial
locomotion II Kinetic energy changes of the limbs and body as a function of speed
and body size in birds and mammals J Exp Biol 97 23-40 1982
FENN WO Work against gravity and work due to velocity changes in running Am J
Physiol 93 433-462 1930
FENN WO MARSH BS Muscular force at different speeds of shortening J Physiol
85 3 277-297 1935
FORMENTI F ARDIGO LP MINETTI AE Human locomotion on snow determinants
of economy and speed of skiing across the ages Proc Biol Sci 272 1572 1561shy
1569 2005
124
FORMENTI F MINETTI AE Human locomotion on ice the evolution of ice-skating
energetics through history J Exp Biol 210 Pt 10 1825-1833 2007
FRERIKS B HERMENS H DISSELHORST-KLUG C RAU G The
recommendations for sensor and sensor placement procedures for surface
electromyography In HERMENS H (editor) European recommendations for
surface electromyography Enschede Roessingh Research and Development
1991
FRONTERA WR SUH D KRIVICKAS LS HUGHES VA GOLDSTEIN R
ROUBENOFF R Skeletal muscle fiber quality in older men and women Am J
Physiol Cell Physiol 279 3 C611-618 2000
FUKUNAGA T KUBO K KAWAKAMI Y FUKASHIRO S KANEHISA H
MAGANARIS CN In vivo behaviour of human muscle tendon during walking Proc
Biol Sci 268 1464 229-233 2001
GARDNER-MORSE MG STOKES IA The effects of abdominal muscle coactivation
on lumbar spine stability Spine 23 1 86-91 discussion 91-82 1998
GEYER H SEYFARTH A BLICKHAN R Compliant leg behaviour explains basic
dynamics of walking and running Proc Biol Sci 273 1603 2861-2867 2006
GOTTSCHALL JS KRAM R Energy cost and muscular activity required for leg swing
during walking J Appl Physiol 99 1 23-30 2005
GOTTSCHALL JS KRAM R Mechanical energy fluctuations during hill walking the
effects of slope on inverted pendulum exchange J Exp Biol 209 Pt 24 4895-4900
2006
GRANATA KP MARRAS WS Cost-benefit of muscle cocontraction in protecting
against spinal instability Spine 25 11 1398-1404 2000
GRANATA KP ORISHIMO KF Response of trunk muscle coactivation to changes in
spinal stability J Biomech 34 9 1117-1123 2001
GRIFFIN TM ROBERTS TJ KRAM R Metabolic cost of generating muscular force
in human walking insights from load-carrying and speed experiments J Appl
Physiol 95 1 172-183 2003
HEGLUND NC Running a-fowl of the law Science 303 47-48 2004
125
HEGLUND NC CAVAGNA GA Mechanical work oxygen consumption and efficiency
in isolated frog and rat muscle Am J Physiol 253 1 Pt 1 C22-29 1987
HEGLUND NC CAVAGNA GA TAYLOR CR Energetics and mechanics of
terrestrial locomotion III Energy changes of the centre of mass as a function of
speed and body size in birds and mammals J Exp Biol 97 41-56 1982a
HEGLUND NC FEDAK MA TAYLOR CR CAVAGNA GA Energetics and
mechanics of terrestrial locomotion IV Total mechanical energy changes as a
function of speed and body size in birds and mammals J Exp Biol 97 57-66
1982b
HILL AV The heat of shortening and the dynamic constants of muscle Proceedings of
the Royal Society B 126 136-195 1938
HOYT DF TAYLOR CR Gait and the energetics of locomotion in horses Nature
292 239-240 1981
ISHIKAWA M KOMI PV GREY MJ LEPOLA V BRUGGEMANN GP Muscleshy
tendon interaction and elastic energy usage in human walking J Appl Physiol 99
2 603-608 2005
ISHIKAWA M PAKASLAHTI J KOMI PV Medial gastrocnemius muscle behavior
during human running and walking Gait Posture 25 3 380-384 2007
KARAMANIDIS K ARAMPATZIS A Mechanical and morphological properties of
different muscle-tendon units in the lower extremity and running mechanics effect of
aging and physical activity J Exp Biol 208 Pt 20 3907-3923 2005
KARAMANIDIS K ARAMPATZIS A BRUGGEMANN GP Symmetry and
reproducibility of kinematic parameters during various running techniques Med Sci
Sports Exerc 35 6 1009-1016 2003
KER RF BENNETT MB BIBBY SR KESTER RC ALEXANDER RM The
spring in the arch of the human foot Nature 325 7000 147-149 1987
KLASS M BAUDRY S DUCHATEAU J Aging does not affect voluntary activation of
the ankle dorsiflexors during isometric concentric and eccentric contractions J Appl
Physiol 99 1 31-38 2005
126
KNAFLITZ M BONATO P Time-frequency methods applied to muscle fatigue
assessment during dynamica contractions J Electromyogr Kinesiol 9 337-350
1999
KOMI PV Stretch-shortening cycle a powerful model to study normal and fatigued
muscle J Biomech 33 10 1197-1206 2000
KRAM R DOMINGO A FERRIS DP Effect of reduced gravity on the preferred walkshy
run transition speed J Exp Biol 200 Pt 4 821-826 1997
KRAM R TAYLOR CR Energetics of running a new perspective Nature 346 6281
265-267 1990
LAMOTH CJ MEIJER OG DAFFERTSHOFER A WUISMAN PI BEEK PJ
Effects of chronic low back pain on trunk coordination and back muscle activity during
walking changes in motor control Eur Spine J 15 1 23-40 2006
LAY AN HASS CJ RICHARD NICHOLS T GREGOR RJ The effects of sloped
surfaces on locomotion an electromyographic analysis J Biomech 40 6 1276shy
1285 2007
LOWE DA SUREK JT THOMAS DD THOMPSON LV Electron paramagnetic
resonance reveals age-related myosin structural changes in rat skeletal muscle
fibers Am J Physiol Cell Physiol 280 3 C540-547 2001
MALOIY GM HEGLUND NC PRAGER L CAVAGNA GA TAYLOR CR
Energetic cost of carrying loads have African women discovered an economic way
Nature 319 668-669 1986
MALVILLE NJ BYRNES WC ALLEN LIM B BASNYAT R Commercial porters of
eastern nepal health status physical work capacity and energy Expenditure Am J
Hum Biol 13 44-56 2001
MARGARIA R Sulla fisiologia e specialmente sul consumo energetico della marcia
e della corsa a varia velocitagrave ed inclinazione del terreno 1938
MARSH RL ELLERBY DJ CARR JA HENRY HT BUCHANAN CI Partitioning
the energetics of walking and running swinging the limbs is expensive Science
303 5654 80-83 2004
127
MCMAHON TA CHENG GC The mechanics of running how does stiffness couple
with speed J Biomech 23 Suppl 1 65-78 1990
MIAN OS THOM JM ARDIGO LP NARICI MV MINETTI AE Metabolic cost
mechanical work and efficiency during walking in young and older men Acta
Physiol (Oxf) 186 2 127-139 2006
MINETTI AE The biomechanics of skipping gaits a third locomotion paradigm Proc
Biol Sci 265 1402 1227-1235 1998a
MINETTI AE A model equation for the prediction of mechanical internal work of
terrestrial locomotion J Biomech 31 5 463-468 1998b
MINETTI AE ALEXANDER RM A theory of metabolic costs for bipedal gaits J Theor
Biol 186 4 467-476 1997
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of gradient walking
energetics in man J Physiol 472 725-735 1993
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of the minimum
energy cost of gradient running in humans J Exp Biol 195 211-225 1994
MINETTI AE ARDIGO LP SAIBENE F FERRERO S SARTORIO A Mechanical
and metabolic profile of locomotion in adults with childhood-onset GH deficiency Eur
J Endocrinol 142 1 35-41 2000
MINETTI AE FORMENTI F ARDIGO LP Himalayan porters specialization
metabolic power economy efficiency and skill Proc Biol Sci 273 1602 2791shy
2797 2006
MORSE CI THOM JM REEVES ND BIRCH KM NARICI MV In vivo
physiological cross-sectional area and specific force are reduced in the
gastrocnemius of elderly men J Appl Physiol 99 3 1050-1055 2005
NILSSON J THORSTENSSON A Ground reaction forces at different speeds of human
walking and running Acta Physiol Scand 136 2 217-227 1989
NYMARK JR BALMER SJ MELIS EH LEMAIRE ED MILLAR S
Electromyographic and kinematic nondisabled gait differences at extremely slow
overground and treadmill walking speeds J Rehabil Res Dev 42 4 523-534 2005
128
OCHALA J DORER DJ FRONTERA WR KRIVICKAS LS Single skeletal muscle
fiber behavior after a quick stretch in young and older men a possible explanation of
the relative preservation of eccentric force in old age Pflugers Arch 452 4 464shy
470 2006
ONAMBELE GL NARICI MV MAGANARIS CN Calf muscle-tendon properties and
postural balance in old age J Appl Physiol 100 6 2048-2056 2006
PHILLIPS SK BRUCE SA WOLEDGE RC In mice the muscle weakness due to
age is absent during stretching J Physiol 437 63-70 1991
PORTER MM VANDERVOORT AA KRAMER JF Eccentric peak torque of the
plantar and dorsiflexors is maintained in older women J Gerontol A Biol Sci Med
Sci 52 2 B125-131 1997
POUSSON M LEPERS R VAN HOECKE J Changes in isokinetic torque and
muscular activity of elbow flexors muscles with age Exp Gerontol 36 10 1687shy
1698 2001
PRILUTSKY BI GREGOR RJ Swing- and support-related muscle actions
differentially trigger human walk-run and run-walk transitions J Exp Biol 204 Pt 13
2277-2287 2001
ROBERTS TJ KRAM R WEYAND PG TAYLOR CR Energetics of bipedal
running I Metabolic cost of generating force J Exp Biol 201 Pt 19 2745-2751
1998
ROBERTS TJ MARSH RL WEYAND PG TAYLOR CR Muscular force in
running turkeys the economy of minimizing work Science 275 5303 1113-1115
1997
SAIBENE F MINETTI AE Biomechanical and physiological aspects of legged
locomotion in humans Eur J Appl Physiol 88 4-5 297-316 2003
SCHEPENS B WILLEMS PA CAVAGNA GA The mechanics of running in children
J Physiol 509 ( Pt 3) 927-940 1998
SCHEPENS B WILLEMS PA CAVAGNA GA HEGLUND NC Mechanical power
and efficiency in running children Pflugers Arch 442 1 107-116 2001
129
TAYLOR CR Force development during sustained locomotion a determinant of gait
speed and metabolic power J Exp Biol 115 253-262 1985
TAYLOR CR HEGLUND NC MALOIY GM Energetics and mechanics of terrestrial
locomotion I Metabolic energy consumption as a function of speed and body size in
birds and mammals J Exp Biol 97 1-21 1982
TRAPPE S GALLAGHER P HARBER M CARRITHERS J FLUCKEY J
TRAPPE T Single muscle fibre contractile properties in young and old men and
women J Physiol 552 Pt 1 47-58 2003
VALOUR D POUSSON M Compliance changes of the series elastic component of
elbow flexor muscles with age in humans Pflugers Arch 445 6 721-727 2003
VANDERVOORT AA KRAMER JF WHARRAM ER Eccentric knee strength of
elderly females J Gerontol 45 4 B125-128 1990
WHITE SG MCNAIR PJ Abdominal and erector spinae muscle activity during gait
the use of cluster analysis to identify patterns of activity Clin Biomech (Bristol
Avon) 17 3 177-184 2002
WILLEMS PA CAVAGNA GA HEGLUND NC External internal and total work in
human locomotion J Exp Biol 198 Pt 2 379-393 1995
WINTER D Biomechanics and motor control of human movement 3rd Waterloo
John Wiley amp Sons 2005
WINTERS JM WOO S Multiple muscle systems Springer-Verlag 1990
WOLEDGE RC CURTIN N HOMSHER E Energetic aspects of muscle
contraction Londres Academic Press 1985
WRIGHT S WEYAND PG The application of ground force explains the energetic cost
of running backward and forward J Exp Biol 204 Pt 10 1805-1815 2001
YAMAGUCHI G SAWA A MORAN D RESSLER M WINTERS JM A survey of
human musculotendon actuator parameters J M Winters 1991
130
Apecircndices
A- Programa de anaacutelise EMG da caminhada LocoEmg
Uma seacuterie de algoritmos (figuras A1 A2 e A3) foram desenvolvidos em
ambiente Labview versatildeo 71 a fim de analisar o sinal bruto de EMG Para tanto
informaccedilotildees advindas de sensores de pressatildeo foram calculadas de forma a
possibilitar as seguintes anaacutelises
Figura A1 Janela principal do programa LocoEmgVI
131
Este programa foi utilizado no capiacutetulo 2 no experimento do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees e no experimento do custo EMG
da locomoccedilatildeo de montanhistas Caucasianos e carregadores Nepaleses no Himalaia
Nepal Atraveacutes do uso dos sensores de pressatildeo foi possiacutevel calcular o tempo de
passada o tempo de vocirco o tempo de apoio e o tempo de apoio duplo para utilizar
no desenvolvimento das abordagens experimental e teoacuterica do custo EMG da
locomoccedilatildeo humana
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI
Os dados de input do programa foram inseridos na janela principal (figura
A1) onde no final da anaacutelise satildeo apresentados os resultados de atividade EMG
meacutedia e desvio padratildeo em funccedilatildeo do percentual do ciclo de passadaO bloco de
diagrama apresentado na figura A2 mostra a estrutura geral do programa com seus
algoritmos localizados nas subrotinas (quadrados verdes)
As principais subrotinas ou algoritmos de primeiro niacutevel satildeo i) Abre e organiza
arquivo ii) Filtra sinal EMG iii) Calcula Variaacuteveis Espaccedilo-Temporais iv) Divide
Ciclos e Interpola Sinal EMG v) Integra Sinal EMG vi) Salva Resultados vi) Imprime
Resultados Gerais
132
Na subrotina Salva resultados arrays eram transformados em arquivos no
formato txt para posterior anaacutelise estatiacutestica Os arquivos eram variaacuteveis espaccedilo-
temporais valores meacutedios interpolados para fase de apoio e balanccedilo valores Emg
meacutedios e desvio-padratildeo interpolados por ciclo de passada e somatoacuterio das integrais
Emg brutos e convertidos por Equivalentes Metaboacutelicos de Ativaccedilatildeo Emg
A janela de impressatildeo eacute apresentada na figura A3
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados
Nesta janela os dados EMGrsquos por muacutesculo satildeo apresentados atraveacutes de seus
valores valores meacutedios e dprsquos em funccedilatildeo do percentual do ciclo de passada
Informaccedilotildees da Vf nome do arquivo inclinaccedilatildeo do terreno e nuacutemero de ciclos
analisados tambeacutem satildeo apresentados Arquivos de imagem destas janelas foram
elaborados e armazenados para posterior verificaccedilatildeo dos dados
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada)
133
PEYREacute-TARTARUGA LA TARTARUGA MP COERTJENS M KRUEL LFM
Influence of Allometry scale on relationship between running economy and
kinematical parameters Biology of Sport (aceito) 2008
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
OLIVEIRA AR KRUEL LFM Physiologic and biomechanical effects ofwater run
training on running performance European Journal of Applied Physiology
(submetido) 2008
CORREA TC PEYREacute-TARTARUGA LA FURLAN E RIBAS R LOSS JF
Mathematical model of energy cost in sprint running Proceedings of XXV
International Symposium on Biomechanics in Sports ISBS (CD) 2007
PEYREacute-TARTARUGA LA COERTJENS M TARTARUGA MP DE MEDEIROS
MH KRUEL LFM Influence of the allometric scale on the relationship between
running economy and biomechanical variables in runners Medicine and Science in
Sports and Exercise 39 (Supplement) S208-S209 2007
PEYREacute-TARTARUGA LA DE MEDEIROS MH COERTJENS M TARTARUGA
MP KRUEL LFM The relation between running economy and kinematical
variables influence of body mass in competitive runners Journal of Biomechanics
39 (Supplement 1) S631 2006
ILHA J ARAUJO RT MALYSZ T PEYREacute-TARTARUGA LA ACHAVAL M
Effects of endurance and resistance exercise training on locomotion of rats after
sciatic nerve crush Physiological Mini Reviews 2 (4) 109 2006
ILHA J PEYREacute-TARTARUGA LA ARAUJO RT METZEN F MALYSZ T
CANTO F ACHAVAL ELENA M LOSS JF Locomotor behaviour assessment in
the rat by kinematic analysis Journal of Biomechanics 39 (Supplement 1) S507
2006
SCHIEHLL PE PEYREacute-TARTARUGA LA ZINGANO GM LOSS JF
Estimation of the quantification of the elastics loads on the jump fit circuit Journal of
134
Biomechanics 39 (Supplement 1) S555 2006
MARTINEZ FG PEYREacute-TARTARUGA LA HERMEL EES XAVIER LL
RASIA-FILHO AA ACHAVAL M Intermediate filament expression in the medial
5thamygdala subnuclei during postnatal development of male and female rats
Forum of the Federation of European Neuroscience Societes Viena FENS 3
A1556 2006
FRAGA CHW BLOEDOW LS CARPES F PEYREacute-TARTARUGA LA
TARTARUGA MP FOLLMER B GUIMARAtildeES ACS Methodologic proposal to
verify the influence of cycling on running kinematic aspects in Triathlon Revista
Motriz 12 (2) 159-164 2006
PEYREacute-TARTARUGA LA KRUEL LFM Deep water running limits and
possibilities to elite runners Brazilian Journal of Sports Medicine 12 (5)286-290
2006
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
RIBAS LR KRUEL LFM Comparison of the subtalar joint angle during
submaximal running speeds Acta Ortopeacutedica Brasileira 13 (2) 57-60 2005
C- Textos completos referentes agrave tese
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA Old men
running mechanical work and elastic bounce Proceedings of the Royal Society B
275 (1633) 411-418 2008 101098rspb20071288
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA The landingshy
takeoff asymmetry is enhanced in old age Journal of Experimental Biology
(aceito com modificaccedilotildees) 2008
MINETTI AE PEYREacute-TARTARUGA LA ARDIGOgrave LP FORMENTI F SUSTA
135
D Energetical and electromyographical cost of locomotion in Nepalese Porters on
Himalaya Anais do XII Congresso Brasileiro de Biomecacircnica 88-94 2007
D- Paracircmetros musculares
Os paracircmetros musculares utilizados no estudo Custo EMG da caminhada
humana foram adquiridos de YAMAGUCHI et al (1991) e satildeo apresentados em
detalhes nas duas figura seguintes (figuras D1 e D2)
Figura D1 Paracircmetros musculares utilizados Fonte YAMAGUCHI et al 1991
136

6
AGRADECIMENTOS
Agradeccedilo a todos que ajudaram de forma direta ou indireta na concretizaccedilatildeo do meu doutorado Tenho a plena convicccedilatildeo de que esta obra eacute fruto de um trabalho coletivo e estas linhas representam muito timidamente meu sentimento de gratidatildeo com todas as pessoas que estiveram comigo nesta caminhada
Ao meu orientador Prof Jefferson Loss por tantas coisas que surgiram advindas daquele convite no Centro Oliacutempico Especialmente agrave liberdade dada para seguir o caminho que trilhei nestes trecircs anos e ao exemplo de busca incessante de aprofundamento no que estamos estudando
Agrave minha Matildee pela palavra certa na hora certa Agrave memoacuteria do meu pai Eduardo Juan Peyreacute Priguetti Agrave minha famiacutelia Matildee Ivaacuten Virgiacutenia La Abuela Felipe Fernanda La Tia Gianella Marcus Joseacute Luiz Juliana
Agrave minha amada namorada e companheira Ileana pelo apoio e amor Obrigado por trilhar este caminho ao meu lado obrigado pelo esforccedilo e pela forccedila de vontade para encarar a fase ldquomilaneserdquo de nossas vidas Agradeccedilo tambeacutem agrave famiacutelia de Cordoba Abel Raquel Gabriela Adriaacuten Gerardo e Camila
Ao Grupo de Investigaccedilatildeo da Mecacircnica do Movimento ndash BIOMEC Faacutebia Artur Faacutebio Paulo Coxa Francisco Carolzita Joely Gustavo Dani Aldabe Letiacutecia Deacutebi Maicon Lipe e Marcelo pelo companheirismo e aprendizagem Em especial aos meus professores de Matlab Daniel Everton e La Torre
Aos meus bolsistas e alunos Roberto Ribas Thiago Duarte Queiroz Mariana Boos e Carlos Coutinho especialmente ao Roberto e ao Thiago pela ajuda nestes uacuteltimos meses
Aos colegas do Grupo de Histofisiologia Comparada da Ufrgs em especial agrave Profa Matilde Jocemar Thais e a Rafaela pela convivecircncia e ensinamentos durante meu primeiro ano de doutorado
Aos Professores e funcionaacuterios do Istituto di Fisiologia Umana I de Milatildeo pela recepccedilatildeo calorosa e apoio incondicional
Aos meus co-orientadores Prof Alberto Minetti e Prof Giovanni Cavagna pela orientaccedilatildeo disponibilidade e atenccedilatildeo dispensada al braziliano grazie mille Aos meus companheiros Davide Susta e Mario Legramandi pelo companheirismo e ensinamentos durante o ano em Milatildeo
Aos sujeitos dos experimentos apresentados nesta tese Aos meus caros companheiros da Expediccedilatildeo no Nepal Ardigograve Formenti Susta e
Canova pela descontraccedilatildeo e parceria Ao Comitecirc de Pesquisa em Altitude da Repuacuteblica da Itaacutelia Everest-K2-CNR por ter dado o apoio financeiro para minha participaccedilatildeo na Expediccedilatildeo Aos caros Kagi Bista e Botko e aos carregadores Nepaleses Namaskar
Ao CNPq pelo apoio financeiro que permitiu meus estudos durante estes trecircs anos inclusive meus estudos no exterior
Aos companheiros funcionaacuterios da Esef que me ldquosuportamrdquo desde 1995 em especial aos colegas do Poacutes-Graduaccedilatildeo Rosane Ana e Andrezito e aos colegas do Lapex Dani Luciano Alex Carla Maacutercia Sarinha Vanessa e Luiz
7
SUMAacuteRIO
LISTA DE FIGURAS 10
RESUMO 14
ABSTRACT 16
DEFINICcedilAtildeO DE TERMOS 18
LISTA DE SIacuteMBOLOS E ABREVIATURAS 20
INTRODUCcedilAtildeO GERAL 27
11 Locomoccedilatildeo humana 27
13 Formato da tese 30
131 Objetivo geral 32
132 Objetivos especiacuteficos 32
2 O CUSTO EMG DA CAMINHADA HUMANA 33
21 Introduccedilatildeo 33
22 Metodologia 36
221 Construccedilatildeo do modelo 36
222 Testando o modelo 41
23 Resultados 42
231 Variaacuteveis espaccedilos-temporais 42
232 Atividade EMG 43
8
233 Custo EMG 47
24 Discussatildeo 49
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular 49
242 Sobre o meacutetodo 51
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia 52
251 Materiais e meacutetodos 53
252 Resultados 56
253 Discussatildeo 57
3 MECAcircNICA DA CORRIDA DE IDOSOS 60
31 Introduccedilatildeo 60
32 Materiais e Meacutetodos 61
321 Amostra e procedimento experimental 61
322 Dos registros da plataforma ao trabalho externo 63
323 Estimativa do trabalho interno 66
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato 66
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio 67
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente 68
327 Transduccedilatildeo EpEk durante o passo 68
328 Rigidez vertical (k) 70
329 Estatiacutestica 71
33 Resultados 71
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM 72
332 Trabalho 74
333 Assimetria contato-despregue 75
34 Discussatildeo 76
341 Sobre o meacutetodo 76
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical 80
343 A assimetria contato-despregue 90
9
4 PREDIZENDO VF CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO
TERRESTRE 101
41 Introduccedilatildeo 101
42 Equaccedilatildeo do tempo de atraso 102
43 Estimativa da velocidade horizontal 104
44 Equaccedilatildeo de custo energeacutetico 106
45 Discussatildeo 107
5 CONCLUSAtildeO GERAL 111
51 O custo EMG da caminhada humana 111
52 A mecacircnica da corrida de idosos 111
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre 112
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico 112
541 Respondendo algumas criacuteticas atuais 116
55 Propostas para futuros estudos 118
551 Custo EMG da caminhada humana 118
552 Mecacircnica da corrida dos idosos 118
553 Modelo matemaacutetico da locomoccedilatildeo terrestre 119
6 REFEREcircNCIAS 120
APEcircNDICES 130
A- Programa de anaacutelise EMG da caminhada LocoEmg 130
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada) 132
C- Textos completos referentes agrave tese 134
D- Paracircmetros musculares 135
10
Lista de Figuras
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-invertido para a
caminhada e massa-mola para a corrida (Fonte SAIBENE e MINETTI 2003
modificado no presente estudo) 29
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset 38
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda
metade da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo
isomeacutetrica Setas verticais apontando para baixo indicam momento de contato
e de despregue 39
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de
passada com o tempo de passada normalizado em percentual do ciclo O 0shy
100 representa o momento de contato com o solo As cores indicam a
velocidade de caminhada (de 2 agrave 7 kmh-1) Cada muacutesculo eacute representado
nas linhas e em cada coluna eacute apresentada a atividade EMG por inclinaccedilatildeo 46
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal + carga)
11
dos carregadores Nepaleses (NEP) e montanhistas Caucasianos (CAU) em
subida (up) e descida (down) 57
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da PMV (positiva ou
negativa) pela potecircncia metaboacutelica respectiva (MINETTI et al 2006) As
linhas satildeo as razotildees entre eficiecircncia muscular positiva e negativa
(WOLEDGE et al 1985) 58
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado 69
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da caminhada
(pecircndulo-invertido) e de segmento complacente da corrida (massa-mola) e
seus principais constituintes Note que o tracejado indica a trajetoacuteria do corpo
de massa m durante o contato g eacute a aceleraccedilatildeo gravitacional k eacute a rigidez da
mola ll0 eacute o comprimento do membro inferior e a0 eacute o acircngulo da perna de
apoio no momento do contato com o solo 77
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um passo
em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis a
direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup
+ Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo
(tae) da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na
direccedilatildeo vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os
ciacuterculos em vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2)
e a frente (Lce) A linha em vermelho pontilhada em cada painel indica o
tempo de contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente
(Lc) durante o passo As linhas azuis pontilhadas em cada painel indicam o
tempo aeacutereo total (ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La)
durante o passo As barras verticais indicam o desvio-padratildeo da meacutedia os
12
nuacutemeros proacuteximos aos siacutembolos nos paineacuteis superiores indicam o nuacutemero de
itens nas meacutedias 85
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e
velocidade vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown
(paineacuteis inferiores) atingidos pelo CM durante o passo em funccedilatildeo da
velocidade de corrida Estatiacutestica e outras indicaccedilotildees conforme a figura 33 89
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e
frequumlecircncia do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute
maior nos idosos nas altas velocidades (paineacuteis superiores) a rigidez vertical
normalizada pela massa eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras
indicaccedilotildees conforme figura 33 91
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com
seus 94
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As
fraccedilotildees do deslocamento vertical do CM durante contato ScSv (ciacuterculos
preenchidos deslocamento descendente ciacuterculos abertos deslocamento
ascendente) e quando a Fv eacute maior do que o PC SceSv (quadrados
preenchidos deslocamento 95
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito
idoso paineacuteis a direita sujeito jovem em cada painel o comportamento da
transduccedilatildeo Ep-Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas
na energia potencial gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf
normalizada para oscilar entre zero e um Mesmos passos da figura 1 cada
painel comeccedila e termina no valor menor da curva Ep As cores diferentes na
curva Ep distinguem as fraccedilotildees do passo onde a Fv exercida no solo eacute maior
do que o PC (vermelho) e menor do que o PC (azul) As linhas contiacutenuas de
Ep indicam a fase de contato enquanto que as linhas pontilhadas Ep (azul
fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As quatro fases
correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
13
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown
(azul) e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas
pontilhadas verticais satildeo apresentadas nos dois picos de Ek e ocupam a
fraccedilatildeo onde a transduccedilatildeo Ep-Ek ocorre conforme indicado pelos incrementos
da curva Rint(t) 98
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos painel
inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura
31) e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e
barras azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de
corrida Estatiacutestica conforme figura 33 99
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de
reaccedilatildeo do solo durante a corrida 103
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de
progressatildeo 108
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de
progressatildeo Fonte Minetti 1998b 109
Figura 51 Modelo conceitual da locomoccedilatildeo humana 113
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido
de elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006117
Figura A1 Janela principal do programa LocoEmgVI 130
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI 131
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados 132
14
Resumo
Dois modelos mecacircnicos o pecircndulo-invertido e o massa-mola explicam como
os mecanismos pendular e elaacutestico minimizam o dispecircndio energeacutetico advindo dos
muacutesculos durante caminhada e corrida humana A presente tese testa dois efeitos
que para nosso conhecimento todavia natildeo possuem respostas conclusivas da
literatura nomeadamente o processo de envelhecimento na mecacircnica da corrida
humana e o efeito da inclinaccedilatildeo do terreno na velocidade oacutetima da caminhada Para
estudar o primeiro efeito as forccedilas de reaccedilatildeo do solo provenientes de uma
plataforma de forccedila (4m x 050m) foram usadas para a posterior comparaccedilatildeo de i)
trabalho mecacircnico ii) paracircmetros do sistema massa-mola e iii) assimetrias contato-
despregue entre jovens e idosos Os idosos produzem menos forccedila durante a fase
de trabalho mecacircnico positivo com uma menor oscilaccedilatildeo vertical total e oscilaccedilatildeo
durante a fase aeacuterea Consequumlentemente a capacidade de armazenar e re-utilizar
energia elaacutestica dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio
energeacutetico neste grupo quando comparado com jovens Para o modelo do custo
eletromiograacutefico (EMG) da caminhada humana criou-se duas abordagens
experimental e teoacuterica Em ambas as abordagens informaccedilotildees da atividade EMG de
dezesseis muacutesculos sendo 8 posturais e 8 propulsores foram coletadas e
analisadas a partir da integral EMG A abordagem teoacuterica parece ter uma melhor
relaccedilatildeo com as evidecircncias experimentais sobre a energeacutetica da caminhada humana
em inclinaccedilotildees Os principais mecanismos envolvidos na nova hipoacutetese satildeo i)
muacutesculos posturais que natildeo realizam trabalho muscular exercem uma funccedilatildeo
importante na determinaccedilatildeo do dispecircndio energeacutetico total e ii) a presente hipoacutetese
leva em consideraccedilatildeo a co-contraccedilatildeo de muacutesculos antagonistas no dispecircndio
15
energeacutetico total Mais experimentos satildeo necessaacuterios para confirmar o modelo
apresentado neste estudo Aleacutem disso atraveacutes de estrateacutegias de otimizaccedilatildeo e
prediccedilatildeo linear um modelo teoacuterico foi delineado a fim de determinar paracircmetros
mecacircnicos (comprimento de passada e velocidade de progressatildeo) e energeacuteticos da
locomoccedilatildeo terrestre em situaccedilotildees onde as informaccedilotildees disponiacuteveis satildeo apenas a
massa e uma curva forccedila de reaccedilatildeo vertical versus tempo Os resultados advindos
do modelamento correspondem aos paracircmetros determinados experimentalmente
Laboratoacuterios que detenham apenas uma plataforma de forccedila ou nas aacutereas onde as
informaccedilotildees de entrada do atual modelo sejam as uacutenicas informaccedilotildees (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis primaacuterias da
locomoccedilatildeo podem ser preditas com razoaacutevel acuraacutecia
Palavras-chave custo eletromiograacutefico da caminhada mecacircnica da corrida de
idosos modelo teoacuterico da locomoccedilatildeo terrestre mecanismos minimizadores de
energia locomoccedilatildeo humana
16
Abstract
Two mechanical models the inverted pendulum and spring-mass explain how
do the pendular and elastic mechanisms minimizing energy expenditure from
muscles during human walking and running Here we test two effects that to our
knowledge do not have yet conclusive responses from literature specifically the
ageing effects on mechanics of human running and the effect of gradient on walking
optimal speed In order to check the former effect the ground reaction forces came
from a force platform (4m x 05m) were used for a later comparison i) mechanical
work ii) spring-mass parameters and iii) landing-takeoff asymmetries The old
subjects produce less force during positive work resulting in a smaller overall and
aerial vertical oscillation of the centre of mass Consequently the potential for restore
elastic energy from tendons is reduced contributing to greater energy expenditure
than in young subjects In relation to Electromyographical (EMG) Cost of human
walking we created two approaches experimental and theoretical In both
approaches information from EMG activity of sixteen muscles eight postural and
eight propulsor were collected and analysed The theoretical approach seems to fit
better with the energy expenditure during gradient walking The main mechanisms
involved in this new hypothesis are i) postural muscles that do not perform muscular
work play an important role in the total energy expenditure and ii) the present
hypothesis take the co-contraction into account of the antagonist muscles in the total
energy expenditure Further experiments are necessary to confirm this hypothesis
Besides using optimization and linear prediction procedures a theoretical model was
designed to estimate mechanical parameters (stride length and velocity of
progression) and energetic variables of terrestrial locomotion when available
information consists only of mass and one vertical ground reaction force versus time
17
The results from this modelling are similar to experimentally obtained data
Laboratories with just one force platform or in areas where the present modelrsquos input
information be the unique accessible data (eg palaeontology forensic
biomechanics etc) the prime variables of locomotion may be estimated with
reasonable accuracy
Keywords electromyographical cost of walking running mechanics in the
elderly theoretical model of terrestrial locomotion mechanisms for minimizing
expenditure energy human locomotion
18
Definiccedilatildeo de Termos
Contraccedilatildeo concecircntrica contraccedilatildeo muscular realizada durante encurtamento
do muacutesculo
Contraccedilatildeo excecircntrica contraccedilatildeo muscular realizada durante alongamento
do muacutesculo
Custo energeacutetico o dispecircndio advindo dos muacutesculos em funccedilatildeo da distacircncia
percorrida normalizado pela massa corporal A unidade eacute em Jkg-1m -1
Eficiecircncia mecacircnica a potecircncia mecacircnica gerada dividida pela potecircncia
metaboacutelica despendida durante uma passada
Passada um periacuteodo que compreende desde o momento do contato de um
peacute com o solo e finaliza no subsequumlente momento de contato do mesmo peacute
Passo um periacuteodo que compreende desde o momento do contato de um peacute
com o solo e finaliza no subsequumlente momento de contato do peacute contra-
lateral
Potecircncia mecacircnica externa o somatoacuterio dos incrementos positivos de
energia mecacircnica externa durante uma passada dividido pelo tempo da
passada
Recovery ndash R percentual de transferecircncia entre energia cineacutetica e potencial
gravitacional durante um ciclo de passada
Tempo aeacutereo efetivo duraccedilatildeo no qual a forca vertical eacute menor do que a
forccedila peso durante um passo
Tempo de contato efetivo duraccedilatildeo no qual a forccedila vertical eacute maior do que a
forccedila peso durante um passo
Trabalho mecacircnico externo O trabalho realizado para elevar e acelerar o
CM em relaccedilatildeo ao ambiente externo No presente estudo foi desconsiderado
19
o trabalho mecacircnico externo advindo de aceleraccedilotildees horizontais meacutedio-
laterais
Trabalho mecacircnico interno O trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM
Trabalho mecacircnico total O somatoacuterio dos moacutedulos do trabalho mecacircnico
externo e interno No presente estudo o trabalho interno foi considerado
aceitando transferecircncia de energia mecacircnica entre segmentos de mesmos
membros
20
Lista de Siacutembolos e Abreviaturas
l0 comprimento do membro inferior
μV microvolts
0 acircngulo da perna de apoio com o solo no momento
do contato
Fvc Fv meacutedia durante a fase de contato do peacute com o
solo
Ah variaccedilatildeo de altura
AhorPosition idem ao CPexp
At tempo de locomoccedilatildeo
Atime tempo de passada
Ltphoto tempo entre as passagens pelas fotoceacutelulas
2D duas dimensotildees
av aceleraccedilatildeo vertical do CM
avae aceleraccedilatildeo vertical do CM durante fase aeacuterea
efetiva
avce aceleraccedilatildeo vertical do CM durante contato efetivo
avmx aceleraccedilatildeo vertical maacutexima do CM
c constante de custo
CAU Caucasianos
CM centro de massa
cos cosseno
CP comprimento de passada
21
CPexp comprimento de passada determinada
experimentalmente
Ctot Custo energeacutetico da locomoccedilatildeo
dB decibeacuteis
DF duty factor (fraccedilatildeo da passada na qual um peacute toca
o solo)
DFregression valores de Vf preditos por regressatildeo linear
advindos de DF
dp desvio-padratildeo
dt periacuteodo de um quadro
Ecm energia mecacircnica do CM
Ek energia cineacutetica
Ekf energia cineacutetica horizontal
Ekfmn energia cineacutetica horizontal miacutenima
Ekmxdown energia cineacutetica vertical maacutexima durante
deslocamento descendente do CM
Ekmxup energia cineacutetica vertical maacutexima durante
deslocamento ascendente do CM
Ekv energia cineacutetica vertical
Emetabolic potecircncia metaboacutelica
EMG eletromiografia ou eletromiograacutefico
EmgCosttheor custo EMG teoacuterico
EmgCostexp custo EMG teoacuterico
EMGiso atividade EMG durante contraccedilatildeo isomeacutetrica
EMGneg atividade EMG durante trabalho negativo
EMGpos atividade EMG durante trabalho positivo
cmuscular energia metaboacutelica advinda do muacutesculo-esqueleacutetico
cmetaboacutelica energia metaboacutelica total durante locomoccedilatildeo
crepouso energia metaboacutelica durante posiccedilatildeo em peacute
celaacutestica energia recuperada por via elaacutestica
cpendular energia recuperada por via pendular
creconvertida energia total recuperada
Ep energia potencial gravitacional do CM
22
Epmn energia potencial gravitacional miacutenima do CM
total energia total necessaacuteria para realizar a locomoccedilatildeo
f frequumlecircncia de passo
Ff componente antero-posterior da forccedila de reaccedilatildeo do
solo
FinalhorPosition posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo de passada
FP frequumlecircncia de passada
FPexp frequumlecircncia de passada determinada
experimentalmente
FPregression valores de Vf preditos por regressatildeo linear a partir
de dados de FP
FPtheor frequumlecircncia de passada obtida indiretamente
Fr nuacutemero de froude
fs frequumlecircncia do sistema massa-mola
fsample frequumlecircncia de amostragem
Fv componente vertical da forccedila de reaccedilatildeo do solo
Fvmx Fv maacutexima
Fvmxyoung Fv maacutexima nos jovens
Fvmxold Fv maacutexima nos idosos
Fvscale PC mensurado com uma balanccedila
Fvpeak pico de impacto vertical
Fvplate forccedila vertical media durante um ciclo de passada
g aceleraccedilatildeo gravitacional
GPS sistema de posicionamento global
h hora
Hz Hertz
Iv impulso vertical
InitialhorPosition posiccedilatildeo horizontal do quadril no quadro que inicia o
ciclo de passada
Iemg integral EMG
Iemgcon integral EMG durante contraccedilatildeo concecircntrica
Iemgexc integral EMG durante contraccedilatildeo excecircntrica
J Joules
23
k rigidez vertical
kg quilograma
km quilometro
L comprimento do passo
Lae deslocamento horizontal do CM durante fase aeacuterea
efetiva
Lce deslocamento horizontal do CM durante contato
efetivo
M massa corporal
m metros
Mass massa dos muacutesculos analisados
ms milisegundos
mtot massa total (massa total somada agrave carga externa)
mV milivolts
N Newtons
NEP Nepaleses
nframes nuacutemero de quadros que totalizam um ciclo de
passada
nf nuacutemero de quadros
norm normalizado
O2 oxigecircnio
p iacutendice de significacircncia estatiacutestico
PC peso corporal
PMV potecircncia mecacircnica vertical
q fator de forma da curva de Fv em funccedilatildeo do tempo
qmean meacutedia dos valores qrsquos durante o tc
qregression valores de Vf predito por regressatildeo linear a partir
de dados de q
R Recovery percentual de reconversatildeo entre energia
cineacutetica e potencial gravitacional
R coeficiente de correlaccedilatildeo
r transduccedilatildeo entre energia cineacutetica e potencial
gravitacional
24
Rint transduccedilatildeo acumulada entre energia cineacutetica e
potencial gravitacional durante um passo
Rintdown transduccedilatildeo acumulada durante deslocamento
descendente do CM
Rintup transduccedilatildeo acumulada durante deslocamento
ascendente do CM
rms raiz quadrada da meacutedia dos quadrados
s segundos
Sae deslocamento vertical do CM durante fase aeacuterea
efetiva
Saedown deslocamento descendente do CM durante Sae
Saeup deslocamento ascendente do CM durante Sae
Sc deslocamento do CM durante a fase de contato
Sce deslocamento vertical do CM durante contato
efetivo
Scdown deslocamento descendente do CM durante Sc
Scup deslocamento ascendente do CM durante Sc
Scedown deslocamento descendente do CM durante Sce
Sceup deslocamento ascendente do CM durante Sce
SEE erro meacutedio da estimativa
sin seno
Skinf dobra cutacircnea
Sv deslocamento do CM durante um passo
Svdown deslocamento descendente do CM durante Sv
Svup deslocamento ascendente do CM durante Sv
T tempo de um passo
t tempo
ta tempo em que a acontece durante W+
t tempo em que acontece durante W-
ta periacuteodo do passo no qual o peacute natildeo estaacute em contato
com o solo
tae periacuteodo do passo no qual a Fv eacute maior do que o PC
peso corporal
25
taedown periacuteodo do deslocamento descendente do CM
durante tae
taeup periacuteodo do deslocamento ascendente do CM
durante tae
tbrake tempo de Wshy
tc periacuteodo do passo no qual um peacute estaacute em contato
com o solo
tce periacuteodo do passo no qual a Fv eacute menor do que o
PC
tcedown periacuteodo do deslocamento descendente do CM
durante tce
tceup periacuteodo do deslocamento ascendente do CM
durante tce
tpush tempo de W+
tstep tempo do passo
Vf velocidade de progressatildeo
V f velocidade meacutedia de progressatildeo
Vfexp velocidade de progressatildeo determinada
experimentalmente
VO2iso consumo de O2 durante contraccedilatildeo isomeacutetrica
VO2neg consumo de O2 durante trabalho mecacircnico
negativo
VO2pos consumo de O2 durante trabalho mecacircnico positivo
Vv velocidade vertical do CM
Vvmx velocidade vertical maacutexima do CM
Vvmxdown velocidade vertical maacutexima durante deslocamento
descendente do CM
Vvmxup velocidade vertical maacutexima durante deslocamento
ascendente do CM
Wshy trabalho mecacircnico negativo
W Watts
W+ trabalho mecacircnico positivo
Wext trabalho mecacircnico externo
Wextf trabalho mecacircnico externo horizontal
26
Wextf+ trabalho mecacircnico externo horizontal positivo
Wextv trabalho mecacircnico externo vertical
Wint trabalho mecacircnico interno
Wtot trabalho mecacircnico total
a fase durante W+ em que Ek e Ep do CM aumentam
concomitantemente
fase durante W- em que Ek e Ep do CM diminuem
concomitantemente
27
INTRODUCcedilAtildeO GERAL
11 Locomoccedilatildeo humana
A teoria da evoluccedilatildeo Darwinista conhecida como Teoria da Seleccedilatildeo Natural
nos indica entre outros pressupostos que a multiplicidade de espeacutecies que habitam
a face da terra eacute produto de um sistema altamente complexo e competitivo de
sobrevivecircncia sistema este que reflete fatores preditores da aptidatildeo definidos como
geneacuteticos e do meio ambiente As capacidades de reproduccedilatildeo de alimentaccedilatildeo e de
locomoccedilatildeo satildeo moduladas por aspectos do genoacutetipo influenciados pelos fatores
ambientais O conceito de aptidatildeo relacionada agrave locomoccedilatildeo desde um ponto de
vista bioloacutegico pode ser abordado analiticamente atraveacutes de seus componentes
principais Estes satildeo velocidade aceleraccedilatildeo maneabilidade resistecircncia economia
e estabilidade (ALEXANDER 2003)
A locomoccedilatildeo tem importacircncia fundamental para a sobrevivecircncia pois
possibilita entre outros fatores a procura por alimentos a busca por um local com
melhor clima caccedilar uma presa ou fugir de um perigo eminente (SAIBENE e
MINETTI 2003) Nos mamiacuteferos terrestres a locomoccedilatildeo acontece atraveacutes do uso
das pernas Este tipo de locomoccedilatildeo tem nos humanos por exemplo alguns
aspectos de ineficiecircncia quando comparada com outros animais (peixes e paacutessaros)
A ineficiecircncia da locomoccedilatildeo de biacutepedes eacute baseada no fato de que os segmentos
inferiores encostam repetidamente no solo para absorver e transferir energia
(trabalho negativo e positivo respectivamente) com o meio ambiente de modo que
os segmentos sofrem uma colisatildeo no momento de contato com o solo
caracterizando situaccedilotildees de grandes aceleraccedilotildees Para manter a velocidade meacutedia
de locomoccedilatildeo torna-se necessaacuterio uma re aceleraccedilatildeo do centro de massa (CM)
28
Energia quiacutemica eacute despendida para manter os muacutesculos ativos durante estas
diferentes fases A fim de atenuar este dispecircndio dois mecanismos baacutesicos satildeo
usados pelo sistema locomotor na corrida e na caminhada o mecanismo do pecircndulo
na caminhada e o mecanismo da massa-mola para a corrida (CAVAGNA e
KANEKO 1977 ver figura 11) Na caminhada a energia potencial eacute alta quando o
CM estaacute sobre o ponto de contato do corpo com o solo mas a partir deste momento
a energia potencial gravitacional comeccedila a diminuir e a energia cineacutetica horizontal
obteacutem um acreacutescimo gradativo Quando o ponto de contato volta a estar na frente do
CM a energia cineacutetica diminui e potencial aumenta
Estes comportamentos entre energia cineacutetica horizontal e potencial
gravitacional acontecem em oposiccedilatildeo de fase (CAVAGNA et al 1963) e portanto
com um processo de reconversatildeo entre energia cineacutetica e potencial gravitacional
(recovery ndash R) Por outro lado na corrida os acreacutescimos de energia potencial e
cineacutetica acontecem concomitantemente portanto o mecanismo de conservaccedilatildeo de
energia citado anteriormente natildeo se aplica neste tipo de locomoccedilatildeo Eacute postulado
que durante a primeira metade da fase de apoio da corrida principalmente
muacutesculos e tendotildees alongam armazenando energia elaacutestica enquanto que os
moacutedulos de energia cineacutetica horizontal e potencial gravitacional diminuem Esta
energia elaacutestica armazenada como uma mola comprimida por uma massa eacute
transformada em energia cineacutetica horizontal e potencial gravitacional de modo
gradativo durante a segunda metade da fase de apoio (CAVAGNA et al 1964
KOMI 2000 figura 11) Evidecircncias de energia elaacutestica armazenada e reconvertida
tambeacutem foram encontradas em cangurus (ALEXANDER e VERNON 1975) e em
cavalos (BIEWENER 1998) Os ligamentos do arco do peacute tambeacutem respondem pelo
comportamento elaacutestico do sistema locomotor na corrida (KER et al 1987)
Enquanto que a medida de trabalho externo possui uma correspondecircncia com
o trabalho mecacircnico realizado pelos muacutesculos na caminhada os valores obtidos
para a corrida superestimam o trabalho muscular realizado devido agrave dificuldade de
quantificar a energia elaacutestica durante o movimento (SAIBENE e MINETTI 2003) De
fato parte consideraacutevel do aumento e diminuiccedilatildeo da energia mecacircnica total na
corrida natildeo eacute causada pelas contraccedilotildees (excecircntricas e concecircntricas) musculares
mas pelo alongamento e encurtamento das estruturas elaacutesticas da unidade muacutesculo-
tendatildeo mais especificamente os tendotildees e estruturas elaacutesticas do muacutesculo
Portanto na corrida a adiccedilatildeo do trabalho interno e a transferecircncia entre segmentos
29
dos mesmos membros (inferiores e superiores) permitem uma estimativa mais
proacutexima do trabalho mecacircnico total (WILLEMS et al 1995)
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-
invertido para a caminhada e massa-mola para a corrida (Fonte
SAIBENE e MINETTI 2003 modificado no presente estudo)
As determinantes mecacircnicas da locomoccedilatildeo humana e animal tem sido
extensivamente estudadas em diferentes situaccedilotildees velocidade (CAVAGNA et al
1963 1964) gravidade (KRAM et al 1997 CAVAGNA et al 2000 1998
CAVAGNA et al 2005) planos inclinados (MINETTI et al 1993 1994)
O trabalho mecacircnico durante a locomoccedilatildeo em inclinaccedilotildees tem sido estudado
na caminhada (MINETTI et al 1993) e na corrida (MINETTI et al 1994)
encontrando valores de maior eficiecircncia mecacircnica entre 10 e 15 de inclinaccedilatildeo
negativa (declive) Todavia o modelo do pecircndulo invertido natildeo se sustenta para
situaccedilotildees de inclinaccedilotildees extremas Deste modo a reconversatildeo de energia parece
natildeo atuar na determinaccedilatildeo da velocidade oacutetima de caminhada nestas situaccedilotildees
Uma nova hipoacutetese eacute que os muacutesculos posturais do quadril possam contribuir para
gerar o alto custo de transporte em velocidades baixas de caminhada em inclinaccedilotildees
diferentes da inclinaccedilatildeo oacutetima (-10 onde haacute o menor custo metaboacutelico e
mecacircnico)
Esta hipoacutetese pretende ser testada atraveacutes da anaacutelise do custo
eletromiograacutefico (EMG) durante caminhada em diferentes velocidades e inclinaccedilotildees
de terreno O custo EMG seraacute compreendido como o somatoacuterio de ativaccedilatildeo EMG em
funccedilatildeo da distacircncia percorrida Se satisfatoacuterio o custo EMG poderaacute explicar as curva
30
em forma de U de custo metaboacutelico em funccedilatildeo da velocidade determinadas no
trabalho pioneiro de MARGARIA (1938)
Diferentemente da caminhada a corrida pode ser explicada do ponto de vista
mecacircnico pelo modelo massa-mola Este modelo possibilita dividir a oscilaccedilatildeo
vertical do CM em duas partes durante a passada da corrida a fase inferior da
oscilaccedilatildeo (quando a forccedila vertical exercida no solo eacute maior do que o peso corporal) e
a fase superior da oscilaccedilatildeo (quando a forccedila vertical eacute menor do que o peso
corporal) De acordo com o modelo massa-mola a duraccedilatildeo da fase inferior da
oscilaccedilatildeo representa meio periacuteodo do sistema e o deslocamento do CM durante este
periacuteodo representa a amplitude da oscilaccedilatildeo (BLICKHAN 1989 CAVAGNA et al
2005) Observaccedilotildees preliminares suportam a hipoacutetese de que sujeitos idosos
utilizem de uma maior geraccedilatildeo de trabalho interno devido a diminuiccedilatildeo da fase
superior da oscilaccedilatildeo do CM
Portanto a anaacutelise dos determinantes mecacircnicos da caminhada e corrida
deveratildeo contribuir no entendimento da locomoccedilatildeo desde um ponto de vista
energeacutetico Aleacutem disso procuramos realizar um estudo teoacuterico com o objetivo de
predizer variaacuteveis fundamentais e trabalho mecacircnico da locomoccedilatildeo terrestre
Informaccedilotildees biomecacircnicas sobre a energia da locomoccedilatildeo poderatildeo servir
como base para aplicaccedilotildees futuras na aacuterea da Fisioterapia na anaacutelise da locomoccedilatildeo
patoloacutegica bem como na Educaccedilatildeo Fiacutesica e Esportes atraveacutes do uso deste
conhecimento nas aacutereas do esporte de rendimento e sauacutede agraves quais utilizam-se das
atividades fiacutesicas locomotoras
13 Formato da tese
O estado-da-arte apresentado no capiacutetulo introdutoacuterio mostra um
desenvolvimento notaacutevel do corpo de conhecimento relacionado agrave mecacircnica e
energeacutetica da locomoccedilatildeo humana As bases cientiacuteficas atuais que procuram
encontrar as determinantes mecacircnicas de caracteriacutesticas fundamentais da
caminhada e corrida humana tais como velocidade e inclinaccedilatildeo oacutetima da
locomoccedilatildeo eficiecircncia e economia em situaccedilatildeo com carga e inclinaccedilatildeo e mudanccedila
de formas de locomoccedilatildeo conforme o aumento da velocidade demonstram ser
satisfatoacuterias em inuacutemeras situaccedilotildees
31
Contudo modelos biomecacircnicos que analisem natildeo apenas situaccedilotildees
particulares mas que expliquem as questotildees fundamentais da locomoccedilatildeo humana
tendo em consideraccedilatildeo a complexidade deste tipo de movimento ainda satildeo
escassos Atualmente temos hipoacuteteses que necessitam de experimentaccedilatildeo para
tornaacute-las robustas o suficiente para responder as questotildees fundamentais da
locomoccedilatildeo e ao mesmo tempo se manterem simples o bastante que as caracterize
como fundamentais Portanto a presente tese ENERGEacuteTICA E MECAcircNICA DA
CAMINHADA E CORRIDA HUMANA Com especial referecircncia agrave locomoccedilatildeo em
plano inclinado e efeitos da idade natildeo oferece uma resposta final e acabada para as
relaccedilotildees entre a energeacutetica e mecacircnica da locomoccedilatildeo humana mas tem como eixo
principal por meio de abordagens experimentais e teoacutericas avanccedilar no
entendimento dos paradigmas mecacircnicos das formas fundamentais de locomoccedilatildeo
usadas pelo ser humano caminhada e corrida
Em base disso o capiacutetulo 2 Custo EMG da Caminhada Humana procura
avanccedilar e aperfeiccediloar a hipoacutetese do Custo de Geraccedilatildeo de Forccedila (KRAM e TAYLOR
1990) com o desenvolvimento do modelo do Custo de Ativaccedilatildeo Muscular que daacute
base para o estudo Atraveacutes de experimentos em diferentes velocidades e
inclinaccedilotildees de caminhada eacute dada uma explicaccedilatildeo das curvas em forma de U do
custo metaboacutelico em funccedilatildeo da velocidade determinadas no estudo pioneiro de
MARGARIA em 1938
Motivado pela falta de explicaccedilatildeo das mudanccedilas estruturais e funcionais
devido agrave idade aplicadas agrave mecacircnica e energeacutetica da locomoccedilatildeo humana o capiacutetulo
3 Mecacircnica da Corrida em Idosos compara o trabalho mecacircnico e o sistema massa-
mola entre jovens e idosos em diferentes velocidades de corrida analisando o
sistema massa-mola natildeo apenas pelas suas caracteriacutesticas originais (BLICKHAN
1989 MCMAHON e CHENG 1990) mas tambeacutem pelas assimetrias deste sistema
na corrida humana determinadas recentemente na literatura (CAVAGNA 2006)
Nestes dois estudos eacute usada a abordagem experimental o primeiro se
utilizando da teacutecnica de EMG e o segundo estudo abordando a teacutecnica da
dinamometria especificamente o uso de plataformas de forccedila A percepccedilatildeo da
limitaccedilatildeo metodoloacutegica do uso deste equipamento aliada agrave necessidade de
abordagens teoacutericas da mecacircnica e energeacutetica da caminhada e corrida humana e
animal em situaccedilotildees onde apenas uma curva forccedila de reaccedilatildeo do solo versus tempo
eacute disponiacutevel ofereceram a justificativa para o capiacutetulo 4 Prediccedilatildeo da Vf CP e Custo
32
Energeacutetico da Locomoccedilatildeo Terrestre A construccedilatildeo de um modelo biomecacircnico
destes paracircmetros eacute endereccedilada neste estudo atraveacutes de meacutetodo de miacutenimos
quadrados e princiacutepios da dinacircmica e otimizaccedilatildeo de paracircmetros caracterizadores da
locomoccedilatildeo nomeadamente massa corporal frequumlecircncia de passo (FP) fator de forma
ldquoqrdquo e duty factor (DF)
Finalmente no capiacutetulo 5 os resultados de cada estudo satildeo sumarizados e
no capiacutetulo 6 satildeo apresentadas algumas consideraccedilotildees sobre a mecacircnica e
energeacutetica da locomoccedilatildeo humana e os possiacuteveis desdobramentos advindos dos
presentes achados Ainda no capiacutetulo 8 estatildeo inseridos os apecircndices da tese
131 Objetivo geral
O objetivo da presente tese eacute analisar o custo EMG da caminhada humana e
a mecacircnica da corrida de idosos Esta seacuterie de estudos tem tambeacutem como objetivo
construir um modelo biomecacircnico do custo energeacutetico da locomoccedilatildeo terrestre
132 Objetivos especiacuteficos
- Estudar as determinantes da velocidade oacutetima de caminhada em inclinaccedilotildees com
ecircnfase na construccedilatildeo do modelo do custo EMG da caminhada humana
- Comparar a mecacircnica da corrida com particular referecircncia ao trabalho mecacircnico e
sistema massa-mola entre jovens e idosos em vaacuterias velocidades de corrida
- Construir um modelo biomecacircnico capaz de predizer paracircmetros fundamentais e
custo energeacutetico da locomoccedilatildeo terrestre
33
2 O CUSTO EMG DA CAMINHADA HUMANA
21 Introduccedilatildeo
Durante um ciclo de passada de caminhada a energia cineacutetica do CM
corporal varia inversamente com a energia potencial gravitacional do CM Apesar da
presenccedila importante deste comportamento a transformaccedilatildeo de energia entre uma
forma e outra natildeo eacute total e o restante de energia necessaacuterio para manter a
locomoccedilatildeo eacute providenciado pelos muacutesculos e eacute quando normalizado pela massa
corporal e por unidade de distacircncia igual agrave 03 Jkg-1m-1 durante a velocidade oacutetima
de caminhada (aproximadamente 45 kmh-1 em adultos) Este mecanismo pendular
de minimizaccedilatildeo de energia foi primeiramente observado por CAVAGNA et al (1963)
e denominado como modelo do ldquopecircndulo invertidordquo
Interessantemente natildeo obstante a sua simplicidade o modelo auxiliou no
entendimento e aprofundamento das determinantes mecacircnicas da locomoccedilatildeo
Atraveacutes deste meacutetodo foi possiacutevel oferecer o primeiro insight desde o ponto-de-vista
mecacircnico sobre a velocidade oacutetima de locomoccedilatildeo e a forma em U do custo de
transporte da caminhada [ml de oxigecircnio - O2 - por kg de massa corporal por
distacircncia percorrida observada por MARGARIA (1938)] Na seacuterie de experimentos
desenvolvida por Cavagna e colegas (CAVAGNA et al 1976 HEGLUND et al
34
1982b) foi apresentada a formulaccedilatildeo matemaacutetica denominada como Recovery (R)
definida como
W f + W -Wv extR() = 100 Eq 21 W f + Wv
onde W f eacute trabalho mecacircnico externo horizontal Wv eacute trabalho mecacircnico externo
vertical e Wext eacute trabalho mecacircnico externo Esta equaccedilatildeo determina o percentual de
reconversatildeo via pendular entre energia cineacutetica e potencial gravitacional durante a
passada E de fato na velocidade oacutetima de caminhada o R alcanccedila
aproximadamente seu valor maacuteximo
Poreacutem o custo de geraccedilatildeo de trabalho como mecanismo principal do custo
energeacutetico da locomoccedilatildeo tem recebido vaacuterias criacuteticas da literatura As criacuteticas se
baseiam principalmente (1) na questatildeo do paradoxo do trabalho zero que afirma
que fisicamente durante um ciclo de passada completo em velocidade constante e
no plano as variaccedilotildees de energias cineacuteticas e potencial satildeo iguais agrave zero
(desprezando a resistecircncia do ar e fricccedilotildees teciduais) portanto analisando de um
ponto-de-vista somente da fiacutesica o sujeito natildeo realizaria trabalho nesta situaccedilatildeo
(ALESHINSKY 1986) (2) o problema da co-contraccedilatildeo afirma que existe um custo
metaboacutelico importante devido agrave contraccedilatildeo de muacutesculos antagonistas que natildeo geram
movimento portanto sem geraccedilatildeo de trabalho mecacircnico Este uacuteltimo
questionamento levou um grupo de pesquisadores a formular a denominada
hipoacutetese da forccedila ou Teoria do custo energeacutetico da geraccedilatildeo de forccedila (HEGLUND et
al 1982b KRAM e TAYLOR 1990 ROBERTS et al 1998) para explicar de modo
simplificado o custo energeacutetico da locomoccedilatildeo
Essencialmente a hipoacutetese da forccedila afirma que o custo energeacutetico da corrida
ou caminhada eacute determinado pelo produto da integral da curva forccedila de reaccedilatildeo do
solo-tempo por um fator proporcional agrave taxa de ciclos de pontes-cruzadas de miosina
no muacutesculo independente da geraccedilatildeo de trabalho mecacircnico Apesar da hipoacutetese
concordar com achados experimentais estes satildeo encontrados em situaccedilotildees
limitadas e aleacutem disso a hipoacutetese da forccedila considera como negligenciaacutevel o custo
de balanccedilar os segmentos para traacutes e para frente Esta pressuposiccedilatildeo eacute considerada
como incorreta (MARSH et al 2004) O problema principal desta hipoacutetese se refere
35
agrave desconsideraccedilatildeo do trabalho elemento fundamental segundo a primeira lei da
termodinacircmica Conforme apontado por HEGLUND 2004) ldquoforccedila natildeo eacute trabalho
nem mesmo eacute energia Se a energia metaboacutelica eacute consumida aquela energia deve
ir para algum lugar Se a energia de um segmento corporal aumenta aquela energia
vem de algum lugar Se a energia daquele segmento diminui a energia vai para
algum lugarrdquo
Durante a locomoccedilatildeo em inclinaccedilotildees foi observado que na inclinaccedilatildeo oacutetima
(aproximadamente -10) a constante de custo metaboacutelico inverso ao tempo de
apoio obteve uma variaccedilatildeo significativa (MINETTI et al 1994) indicando que o
custo de geraccedilatildeo de trabalho mecacircnico era mais satisfatoacuterio do que o custo de
geraccedilatildeo de forccedila Mas um achado intrigante nos estudos de Minetti e
colaboradores sobre as determinantes mecacircnicas da energeacutetica da caminhada e
corrida em inclinaccedilotildees (1993 e 1994 respectivamente) foi sobre a ausecircncia de
trabalho mecacircnico negativo em inclinaccedilotildees positivas e de trabalho positivo em
inclinaccedilotildees negativas (apoacutes 30 de inclinaccedilatildeo na corrida e 15 na caminhada)
independente da velocidade Portanto o modelo do custo de geraccedilatildeo de trabalho
como determinante do custo energeacutetico da locomoccedilatildeo natildeo se aplica nestas
situaccedilotildees perdendo sua amplitude como Teoria geral para a energeacutetica e mecacircnica
da caminhada
Tendo em consideraccedilatildeo que durante situaccedilotildees de locomoccedilatildeo de pouca
eficiecircncia mecacircnica como na situaccedilatildeo de velocidades mais baixas que a velocidade
oacutetima e durante inclinaccedilotildees extremas satildeo geradas situaccedilotildees de instabilidade de
locomoccedilatildeo e provavelmente maiores co-contraccedilotildees musculares propomos neste
experimento testar a hipoacutetese denominada de ldquocusto EMG da caminhada humanardquo
Uma base importante desta hipoacutetese reside no raciociacutenio de que nas situaccedilotildees
citadas anteriormente a contribuiccedilatildeo de muacutesculos que contraem isometricamente
principalmente os posturais teratildeo uma contribuiccedilatildeo importante para o alto custo
relativo da locomoccedilatildeo
Portanto o objetivo deste estudo eacute desenvolver o modelo do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees Teoricamente a hipoacutetese do
presente estudo diferente da hipoacutetese da forccedila natildeo iraacute desconsiderar o trabalho
mecacircnico gerado mas este seraacute considerado como um dos produtos da variaccedilatildeo da
energia (devido ao consumo de energia metaboacutelico) e a quantidade de ativaccedilatildeo
muscular e as eficiecircncias de ativaccedilatildeo satildeo as determinantes do custo energeacutetico
36
usando os equivalentes metaboacutelicos da ativaccedilatildeo EMG da literatura W+ Wshy
(BIGLAND-RITCHIE e WOODS 1976) e durante contraccedilatildeo isomeacutetrica
(CERRETELLI et al 1976) O modelo eacute apresentado em detalhes na metodologia
22 Metodologia
221 Construccedilatildeo do modelo
O presente modelo eacute configurado como biomecacircnico e se utiliza de
pressupostos originados da fiacutesica e da biologia
O modelo assume que i) toda a energia despendida pelos muacutesculos possui
uma correspondente quantidade de ativaccedilatildeo EMG ii) a atividade EMG realizada
pelos muacutesculos posturais durante todo o ciclo de passada e pelos muacutesculos
propulsores durante a fase aeacuterea seraacute considerada como uma atividade EMG
realizada durante contraccedilotildees isomeacutetricas Seraacute considerada como contraccedilatildeo
excecircntrica e concecircntrica a atividade EMG realizada pelos muacutesculos propulsores
durante a primeira e segunda metades da fase de apoio respectivamente iii) O
custo energeacutetico da locomoccedilatildeo eacute devido agrave ativaccedilatildeo de muacutesculos propulsores e
posturais estes uacuteltimos natildeo diretamente ligados agrave geraccedilatildeo de trabalho mecacircnico iv)
Mais do que uma relaccedilatildeo com a produccedilatildeo de forccedila muscular a quantidade de
ativaccedilatildeo EMG e consequumlentemente o custo EMG possui uma correspondecircncia com
o trabalho mecacircnico realizado durante a ativaccedilatildeo muscular
Um conjunto de algoritmos foi desenvolvido em Labview a fim de analisar o
sinal EMG e as variaacuteveis espaccedilos-temporais (figuras 21 22 e 23 apecircndice 81) O
programa retifica suaviza (atraveacutes de uma integraccedilatildeo com janelamento moacutevel
50Hz do tipo Hamming) e divide todas as curvas de EMG por ciclo de passada
retirando os ciclos de passadas com um tempo 20 menor ou maior do tempo
meacutedio do ciclo de passada e do tempo de apoio Apoacutes normaliza o tempo do ciclo
para 100 quadros (interpolaccedilatildeo via spline) e calcula a meacutedia desvio-padratildeo e
coeficiente de variaccedilatildeo em cada quadro por muacutesculo analisado Este procedimento
tem o objetivo de criar graacuteficos de atividade eletromiograacutefica em funccedilatildeo do
37
percentual do ciclo de passada A fim de analisar o efeito das ponderaccedilotildees pelo
volume muscular e dobra cutacircnea foram desenvolvidas duas estrateacutegias de
modelamento nomeadamente ldquoabordagem experimentalrdquo e ldquoabordagem teoacutericardquo
Abordagem experimental
Usando o sinal suavizado sem a normalizaccedilatildeo foi realizada uma integral em
funccedilatildeo do tempo do seguinte modo
t
Iemg(t) = f EMG dt Eq 22 0
Este valor integrado eacute dividido pelo CP determinando a quantidade de
atividade EMG em funccedilatildeo da distacircncia e seraacute considerado como um custo miacutenimo
EMG Os valores de custo EMG satildeo ponderados em funccedilatildeo do volume muscular
(WINTERS e WOO 1990) e da dobra cutacircnea (NORDANDER et al 2003) do
seguinte modo
Iemg1 Iemg2 Iemg16EmgCost (mV m) = ( + + l middot CP-1 Eq 23 exp ( Mass1 Sk inf1 Mass2 Sk inf2 Mass16 Sk inf16 lmiddot middot middot Masstotal Sk inftotal Masstotal Sk inftotal Masstotal Sk inftotal
onde EmgCostexp eacute o custo miacutenimo EMG experimental Mass eacute a massa dos
muacutesculos analisados e eacute o somatoacuterio de todas as massas musculares Masstotal
analisadas Sk inf eacute a dobra cutacircnea de cada regiatildeo de colocaccedilatildeo dos eletrodos e
eacute o somatoacuterio de todas as dobras cutacircneas analisadas A fim de Sk inftotal
compreender melhor as determinantes da velocidade oacutetima nas inclinaccedilotildees dividiu-
se a Iemg em trecircs aacutereas (a) fase de contato (b) fase aeacuterea e (c) offset (figura 21)
Abordagem teoacuterica
A presente abordagem calcula o sinal EMG atraveacutes dos seus equivalentes
metaboacutelicos Estes equivalentes satildeo advindos da literatura (BIGLAND-RITCHIE e
WOODS 1976) e o objetivo deste procedimento foi verificar se levando em
38
consideraccedilatildeo os equivalentes metaboacutelicos da atividade EMG (para contraccedilotildees
concecircntrica excecircntrica e isomeacutetrica) seria possiacutevel explicar mais satisfatoriamente
as velocidades oacutetimas na caminhada em inclinaccedilotildees Este procedimento assume
que uma determinada quantidade de ativaccedilatildeo eleacutetrica muscular gera distintos custos
energeacuteticos sendo estes dependentes do tipo de contraccedilatildeo muscular Para este
propoacutesito primeiro dividimos a anaacutelise em dois grupos de muacutesculos propulsores
(gluteus maximus gluteus medius deltoideus anterior rectus femuralis vastus
lateralis biceps femuralis caput longus tibialis anterior e gastrocnemius lateralis) e
posturais (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis trapezius ascendens)
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset
Os muacutesculos posturais foram considerados como muacutesculos contraindo
isometricamente durante todo o ciclo de passada enquanto que os muacutesculos
39
propulsores foram analisados como realizando (a) contraccedilatildeo excecircntrica na primeira
fase de contato (b) concecircntrica na segunda fase de contato e (c) contraccedilatildeo
isomeacutetrica durante a fase aeacuterea (figura 22)
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda metade
da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo isomeacutetrica
Setas verticais apontando para baixo indicam momento de contato e de
despregue
Assim foram calculadas as correspondentes integrais
t 2c
Iemgexc (t) = f EMG dt Eq 24 0
40
onde Iemgexc eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a primeira
metade da fase de contato (contraccedilatildeo excecircntrica)
tc
Iemgcon (t) = f EMG dt Eq 25 t 2c
onde Iemgcon eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a segunda
metade da fase de contato (contraccedilatildeo concecircntrica)
ta
Iemgiso (t) = f EMG dt Eq 26 0
onde Iemgiso eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a fase aeacuterea
(contraccedilatildeo isomeacutetrica)
As integrais foram convertidas para uma unidade de counts usada por
BIGLAND-RITCHIE e WOODS 1976) usando um fator de transformaccedilatildeo igual agrave 200
counts (mVs)-1 deste modo temos a atividade EMG durante contraccedilatildeo excecircntrica
(EMGneg) concecircntrica (EMGpos) e isomeacutetrica (EMGiso) em counts Os equivalentes
metaboacutelicos satildeo obtidos atraveacutes de equaccedilotildees de regressatildeo linear criadas no
presente estudo usando dados experimentais de Bigland e Ritchie (1976) como
segue
VO2neg (ml) = 00015 EMGneg + 03353 Eq 27
VO2 pos(ml) = 00042 EMGpos + 01493 Eq 28
(ml) = 00042 EMGiso + 01493 Eq 29 VO2iso
EmgCosttheor (J m) = 201[(VO2 iso1 + VO2 iso 2 + VO2 iso16) + (VO2 neg 1 + VO2 neg 2 + VO2 neg 16) +
(VO2 pos1 + VO2 pos 2 + VO2 pos16)] CP-1 Eq 210
onde EmgCosttheor eacute o custo EMG teoacuterico O somatoacuterio dos dispecircndios energeacuteticos
dados em ml de O2 foram convertidos para Joules (J) usando um equivalente
41
energeacutetico de 201 Jml-1 (BLAXTER 1989) e apoacutes foram divididos por CP (conforme
equaccedilatildeo 210) Nesta abordagem teoacuterica entende-se o EmgCosttheor como um custo
miacutenimo energeacutetico devido agrave notoacuteria impossibilidade de obter a totalidade da ativaccedilatildeo
EMG e consequentemente do custo energeacutetico da locomoccedilatildeo Mais do que isso o
modelo procura compreender as determinantes da velocidade oacutetima de caminhada
nas inclinaccedilotildees
222 Testando o modelo
Um homem adulto sem histoacuteria de lesotildees no sistema muacutesculo-esqueleacutetico
realizou caminhadas de 2 minutos sobre uma esteira (WOODWAY Usa) nas
velocidades de 2 3 4 5 6 e 7 kmh-1 e nas inclinaccedilotildees de 0 5 10 e 15 O uso
das velocidades 6 ou 7 kmh-1 foram escolhidas em funccedilatildeo do Nuacutemero de Froude
(Fr) O valor maacuteximo de Fr foi o equivalente agrave velocidade espontacircnea de transiccedilatildeo
(aproximadamente 05 no plano MINETTI et al 1994) O uso do Fr eacute baseado da
teoria das similaridades dinacircmicas Esta teoria afirma que dois animais
geometricamente similares (como no caso do presente estudo) deslocam-se
tambeacutem de modo similar quando o movimento eacute multiplicado por fatores
relacionados ao tempo dimensotildees lineares e forccedilas (ver ALEXANDER 2005)
Fr = Vf 2 gL Eq 211
onde Vf eacute velocidade de progressatildeo em ms-1 g eacute aceleraccedilatildeo gravitacional (g) (981
ms-2) e L eacute um comprimento corporal conhecido (no presente estudo foi utilizado o
comprimento de membros inferiores em m)
Coleta de dados
O voluntaacuterio foi informado do objetivo do estudo dos riscos e eventuais
desconfortos e assinou um termo de consentimento
O indiviacuteduo estava vestido com roupas apropriadas para caminhada A coleta
de dados foi realizada em inclinaccedilotildees de 0 5 10 e 15 nas velocidades de 2 3 4
5 6 7 kmh-1 para cada inclinaccedilatildeo A atividade EMG de dezesseis muacutesculos foi
42
analisada (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis deltoideus anterior trapezius ascendens gluteus
maximus gluteus medius rectus femuralis vastus lateralis biceps femuralis caput
longus tibialis anterior e gastrocnemius lateralis) usando um eletromioacutegrafo portaacutetil
(EMGpocket Elite System Itaacutelia)
Para a preparaccedilatildeo do local e colocaccedilatildeo dos eletrodos de superfiacutecie bipolares
foram observadas as orientaccedilotildees da Seniam (FRERIKS et al 1991)
Simultaneamente ao registro EMG sinais advindos de seis sensores de pressatildeo
(footswitches) trecircs em cada peacute (regiatildeo do calcanhar quinto e primeiro metatarsos
inferiores) foram registrados no eletromiograacutefo portaacutetil Os sinais EMGrsquos foram preacuteshy
amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um niacutevel de ruiacutedo menor do
que 1 mV rms e filtrados por um filtro do tipo Butterworth (50-450 Hz terceira
ordem) A frequumlecircncia de amostragem da EMG e dos sensores de pressatildeo foi de
1000 Hz
Foram coletadas a massa e estatura corporal e comprimento de membro
inferior As dobras cutacircneas tambeacutem foram coletadas antes dos testes usando um
plicocircmetro (The body calliper CA Usa)
Um possiacutevel efeito de fadiga no sinal EMG foi controlado repetindo o primeiro
teste Com diferenccedilas maiores de 10 entre a integral EMG dos muacutesculos
analisados do primeiro e uacuteltimo teste a coleta seria descartada poreacutem a diferenccedila
foi menor do que este limite
23 Resultados
231 Variaacuteveis espaccedilos-temporais
As variaacuteveis espaccedilos-temporais da caminhada em diferentes velocidades e
diferentes inclinaccedilotildees satildeo apresentadas na tabela 21 O CP e a FP aumentam com
o aumento da velocidade poreacutem natildeo com o aumento da inclinaccedilatildeo O DF eacute maior na
velocidade oacutetima de locomoccedilatildeo nas inclinaccedilotildees (10 e 15) enquanto que apresenta
uma relaccedilatildeo inversa com Vf nas inclinaccedilotildees mais baixas (0 e 5)
43
232 Atividade EMG
A atividade EMG dos muacutesculos posturais (erector spinae longissimus erector
spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis trapezius ascendens) e
dos muacutesculos propulsores (gluteus maximus gluteus medius rectus femoralis
vastus lateralis deltoideus anterior biceps femoralis caput longus tibialis anterior e
gastrocnemius lateralis) eacute apresentada nas figuras 23 e 24 Os resultados do
presente estudo referente ao comportamento da atividade EMG durante caminhada
no plano satildeo semelhantes agrave literatura tanto em relaccedilatildeo aos muacutesculos propulsores
(LAY et al 2007 NYMARK et al 2005) quanto para os muacutesculos posturais (WHITE
e MCNAIR 2002 DEN OTTER et al 2004 LAMOTH et al 2006)
De um modo geral o sinal EMG em funccedilatildeo do percentual do ciclo (portanto
independente da distacircncia percorrida) aumentou conforme o aumento da velocidade
e inclinaccedilatildeo Observa-se tambeacutem um aumento no offset nas maiores inclinaccedilotildees
(veja figuras 23 e 24)
Tabela 21 Valores meacutedios e desvios-padratildeo (dp) de frequumlecircncia de passada (FP)
comprimento de passada (CP) tempo de fase aeacuterea (ta) tempo de contato (tc)e
duty factor (DF) nas diferentes velocidades (Vf) em diferentes inclinaccedilotildees do
terreno
0
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0518 0022 1074 0044 0706 0039 1227 0087 064
3 0660 0017 1263 0032 0604 0030 0912 0042 060
4 0779 0013 1426 0025 0541 0023 0743 0028 058
5 0879 0010 1580 0018 0492 0022 0646 0024 057
6 0970 0009 1719 0015 0446 0012 0586 0014 057
7 1061 0022 1834 0042 0415 0010 0528 0024 056
5
44
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0504 0026 2210 0056 0656 0054 1334 0089 067
3 0640 0015 2606 0030 0635 0033 0930 0048 059
4 0797 0013 2790 0023 0526 0017 0729 0028 058
5 0895 0008 3104 0014 0478 0017 0639 0020 057
6 1002 0009 3326 0016 0426 0009 0572 0014 057
7 1081 0015 3600 0025 0400 0007 0525 0014 057
10
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0302 0000 3674 0000 1309 0090 1998 0090 060
3 0262 0013 3182 0151 1216 0094 2602 0174 068
4 0300 0007 3699 0085 1229 0086 2101 0114 063
5
6 0495 0006 3300 0036 0854 0021 1166 0028 058
7 0556 0008 3429 0015 0775 0022 1023 0026 057
15
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0275 0022 3041 0216 1282 0079 2368 0255 065
3 0319 0011 3492 0122 1208 0074 1936 0121 062
4 0399 0007 3482 0059 1497 0046 1011 0040 040
5 0450 0008 3703 0068 0919 0041 1302 0060 059
6 0524 0009 3711 0064 0808 0026 1101 0035 058
7 0597 0012 3257 0069 0721 0024 0954 0037 057
O maior pico de ativaccedilatildeo EMG entre os muacutesculos propulsores foi do tibialis
anterior com valor de 73 mV agrave 7 kmh-1 agrave 15 enquanto que para os muacutesculos
posturais foi do trapezius ascendens com 34 mV tambeacutem agrave 7 kmh-1 agrave 15
erector
spinae
longissimus
erector
spinae
iliocostalis
trapezius
descendens
latissimus
dorsis
obliquus
externus
abdominis
obliquus
internus
abdominis
rectus
abdominis
deltoideus
anterior
45
0 5 10 15
Figura 2 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
trapezius
ascenden
gluteus
maximus
gluteus
medius
rectus
femoralis
vastus
lateralis
biceps
femoralis
caput
tibialis
anterior
gastrocnemius
lateralis
46
0 5 10 15
Figura 24
47
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
com o tempo de passada normalizado em percentual do ciclo O 0-100 representa
o momento de contato com o solo As cores indicam a velocidade de caminhada (de
2 agrave 7 kmh-1) Cada muacutesculo eacute representado nas linhas e em cada coluna eacute
apresentada a atividade EMG por inclinaccedilatildeo
A ativaccedilatildeo EMG parece seguir um padratildeo bem definido com exceccedilatildeo do
trapezius descendens obliquus internus abdominis onde picos de ativaccedilotildees
aparecem apoacutes os 3 kmh-1 seguindo um comportamento de aumento com o
acreacutescimo da inclinaccedilatildeo e no muacutesculo deltoideus anterior no qual ateacute a velocidade
de 5 kmh-1 o pico maior se apresenta no final da fase de apoio enquanto que nas
velocidades de 6 e 7 kmh-1 o pico passa a se situar na fase aeacuterea O uacutenico muacutesculo
analisado neste estudo que apresenta um comportamento diferente entre as
inclinaccedilotildees eacute o rectus femoralis onde nas inclinaccedilotildees 0 5 e 10 os picos aparecem
apenas nas velocidades raacutepidas enquanto que na inclinaccedilatildeo de 15 o pico eacute visiacutevel
logo na velocidade de 2 kmh-1
Poreacutem quando analisamos a quantidade de ativaccedilatildeo por distacircncia percorrida
ou seja o custo EMG os resultados mudam
233 Custo EMG
A quantidade de atividade EMG calculada atraveacutes da abordagem
experimental eacute apresentada na figura 25 Durante a caminhada no plano (primeira
linha da figura 25) eacute possiacutevel observar um miacutenimo de ativaccedilatildeo no somatoacuterio total
devido principalmente agrave ativaccedilatildeo durante a fase aeacuterea e ao offset Este miacutenimo
acontece tambeacutem na inclinaccedilatildeo a 10 de inclinaccedilatildeo mas a 5 e a 15 a
quantidade de ativaccedilatildeo parece diminuir conforme o aumento da Vf
A figura 26 apresenta os valores de custo EMG calculado atraveacutes da
abordagem teoacuterica Observa-se um miacutenimo a 0 e 15 de inclinaccedilatildeo
Para nosso conhecimento natildeo existem dados de atividade EMG de muacutesculo
posturais durante caminhada nas inclinaccedilotildees A quantidade de ativaccedilatildeo EMG por
passada dos muacutesculos posturais e propulsores parecem aumentar com o acreacutescimo
da velocidade e inclinaccedilatildeo
48
49
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
24 Discussatildeo
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular
Inicialmente proposto para a corrida de quadruacutepedes (KRAM e TAYLOR
1990) e apoacutes para a corrida de biacutepedes (ROBERTS et al 1998 ROBERTS et al
1997) corrida para traacutes (WRIGHT e WEYAND 2001) e caminhada humana
(GRIFFIN et al 2003) a teoria do custo energeacutetico da geraccedilatildeo de forccedila foi formulada
a partir dos resultados que para animais com grande variaccedilatildeo de massa correndo
em diversas velocidades o custo mecacircnico natildeo se correlacionava bem com o custo
metaboacutelico da locomoccedilatildeo terrestre (HEGLUND et al 1982b TAYLOR 1985)
0 5
10
15
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
50
Uma justificativa para explicar esse resultado se referia ao fato de que o
muacutesculo durante a fase de apoio na corrida contraia isometricamente deste modo
natildeo realizando trabalho
Recentemente foi observado que esse comportamento acontece tambeacutem no
muacutesculo gastrocnemius medialis durante a caminhada (FUKUNAGA et al 2001)
Poreacutem na corrida este comportamento sucede apenas em velocidades maiores de
13 kmh-1 em adultos (CAVAGNA 2006) e natildeo eacute visiacutevel em idosos mesmo em
velocidades maacuteximas (estudo sobre a mecacircnica da corrida em idosos Capiacutetulo 3)
Ainda assim a teoria afirma que o custo metaboacutelico despendido pelos muacutesculos eacute
proporcional agrave integral forccedila de reaccedilatildeo do solo-tempo multiplicada por um fator
proporcional agrave taxa de ciclos de pontes cruzadas no muacutesculo-esqueleacutetico
A proposiccedilatildeo do Custo Energeacutetico da Geraccedilatildeo de Forccedila assume que i) a
maior parte da forccedila exercida pelos muacutesculos acontece em oposiccedilatildeo agrave gravidade ii)
uma unidade de volume muscular ativado exerce uma respectiva forccedila no solo
independente da velocidade ou tamanho do animal iii) originalmente foi presumido
que os muacutesculos agiam em similares amplitudes da relaccedilatildeo forccedila-velocidade [esta
pressuposiccedilatildeo foi recentemente interpretada em um interessante modelo
biomecacircnico proposto por BLANCO e GAMBINI 2006) como independente para a
determinaccedilatildeo das relaccedilotildees encontradas por KRAM e TAYLOR 1990)] portanto eacute
esperado que animais pequenos que realizam o tempo de contato menor usem
fibras glicoliacuteticas em maior quantidade e consequentemente tenham um maior
dispecircndio energeacutetico e assim explica-se o fato de que animais pequenos despendem
mais energia para transportar 1 N de forccedila por km percorrido do que animais
maiores (HOYT e TAYLOR 1981) Portanto o custo energeacutetico da locomoccedilatildeo
segundo a presente teoria eacute determinado pelo custo de suportar o peso corporal e o
tempo disponiacutevel para exercer forccedila contra o solo
Ainda assim a teoria apresenta seacuterias restriccedilotildees e parece funcionar em
situaccedilotildees particulares A formulaccedilatildeo apresentada por Kram e Taylor indica como
insignificante o dispecircndio energeacutetico devido aos movimentos de balanccedilo dos
membros quando natildeo estatildeo em apoio Vaacuterias evidecircncias em aves (MARSH et al
2004) e em humanos (DOKE et al 2005 GOTTSCHALL e KRAM 2005 DOKE e
KUO 2007) demonstram que este dispecircndio natildeo eacute despreziacutevel Outra criacutetica
levantada pela literatura (ALEXANDER 1991 HEGLUND 2004) se refere agrave
desconsideraccedilatildeo do trabalho variaacutevel fundamental na Termodinacircmica para explicar
51
a energeacutetica da locomoccedilatildeo Forccedila natildeo eacute trabalho nem mesmo eacute energia portanto
ela isoladamente natildeo possibilita uma resposta final sobre a energia A hipoacutetese do
custo de ativaccedilatildeo muscular apresentado aqui natildeo despreza o dispecircndio energeacutetico
dos membros superiores e aleacutem disso considera as eficiecircncias dos diferentes tipos
de trabalho mecacircnico quando insere os equivalentes metaboacutelicos da ativaccedilatildeo
muscular (abordagem teoacuterica Metodologia)
242 Sobre o meacutetodo
Algumas consideraccedilotildees importantes podem ser feitas sobre a teacutecnica da
EMG Comumente esta teacutecnica eacute usada nos campos da biomecacircnica e biologia
experimental a fim de determinar a quantidade de ativaccedilatildeo muscular e os periacuteodos
em que elas acontecem poreacutem neste estudo pretendeu-se usar a determinada
teacutecnica a fim de oferecer uma informaccedilatildeo global da ativaccedilatildeo de tal modo que
pudesse ter uma correspondecircncia com a ativaccedilatildeo EMG de todo o corpo incluindo os
muacutesculos posturais que natildeo geram trabalho muscular importante mas segundo a
hipoacutetese central do presente estudo participam de forma decisiva como uma
determinante da caminhada humana
Assim esta abordagem permite inferir sobre os mecanismos principais da
locomoccedilatildeo e permite explicar a biomecacircnica da locomoccedilatildeo especialmente referente
agrave energeacutetica da caminhada humana Aleacutem de auxiliar na explicaccedilatildeo da velocidade
oacutetima no plano o custo EMG parece dar um indicativo sobre a energeacutetica em
situaccedilotildees criacuteticas com restriccedilotildees do ambiente (inclinaccedilatildeo) e situaccedilotildees natildeo usuais
(velocidades de progressatildeo baixas)
Nestas situaccedilotildees eacute provaacutevel que dois mecanismos estejam relacionados a fim
de justificar a hipoacutetese do custo EMG i) a estabilidade dinacircmica prejudicada e ii) o
custo da co-contraccedilatildeo Os dois mecanismos parecem estar diretamente ligados ao
maior custo EMG e consequumlentemente ao custo energeacutetico da caminhada
Evidecircncias experimentais datildeo suporte para esta inferecircncia Durante caminhada
realizada para fins de lazer em velocidades muito baixas ou mesmo em marchas
patoloacutegicas foi encontrado um aumento na atividade EMG em comparaccedilatildeo com a
velocidade auto-selecionada correspondente agrave velocidade oacutetima Os achados
mostram um aumento de ativaccedilatildeo EMG com o aumento da Vf mesmo em muacutesculos
do tronco durante locomoccedilatildeo no plano (ANDERS et al 2007) Novamente o foco do
52
presente estudo foi referente agrave quantidade de ativaccedilatildeo em funccedilatildeo da distacircncia
percorrida enquanto que nestes estudos a variaacutevel em questatildeo foi avaliada em
funccedilatildeo da passada Aleacutem disso aumentos foram encontrados nos valores de coshy
contraccedilatildeo durante velocidades muito baixas (020 e 030 ms-1) em comparaccedilatildeo com
a velocidade auto-selecionada (NYMARK et al 2005)
As relaccedilotildees entre estabilidade articular e quantidade de ativaccedilatildeo geral
(ANDERSON e BEHM 2004) e estabilidade corporal e ativaccedilatildeo de muacutesculos
localizados especificamente no tronco (GARDNER-MORSE e STOKES 1998
GRANATA e MARRAS 2000 GRANATA e ORISHIMO 2001) satildeo bem
estabelecidas na literatura inclusive indicando um prejuiacutezo maior na ativaccedilatildeo EMG
durante perturbaccedilotildees agrave estabilidade com contraccedilotildees concecircntricas do que
excecircntricas e isomeacutetricas Um possiacutevel modo de testar estes mecanismos poderia
ser atraveacutes da perturbaccedilatildeo da estabilidade e os efeitos na ativaccedilatildeo EMG durante
caminhada (por exemplo em terrenos irregulares)
Outro achado importante que daacute sustentaccedilatildeo agrave hipoacutetese do custo EMG da
caminhada humana eacute observado por PRILUTSKY e GREGOR 2001) onde a
atividade EMG de muacutesculos propulsores (rectus femoralis gastrocnemius medialis
vastus medialis biceps femoralis gluteus maximus e soleus) foi maior na corrida do
que na caminhada em velocidades abaixo da velocidade de transiccedilatildeo entre
caminhada e corrida enquanto que durante velocidades acima da de transiccedilatildeo os
muacutesculos propulsores apresentam uma maior atividade EMG na caminhada do que
na corrida o que coincide com o dispecircndio metaboacutelico nestas situaccedilotildees
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia
A alta especializaccedilatildeo da locomoccedilatildeo suportando cargas em regiotildees inoacutespitas da
terra indica um desafio para o entendimento dos fundamentos da mecacircnica e
energeacutetica da locomoccedilatildeo humana Mundialmente famosos satildeo os achados sobre a
economia de locomoccedilatildeo de mulheres africanas que transportam cargas sobre a
cabeccedila de ateacute 70 da massa corporal sem um maior custo mecacircnico devido a um
ajuste aperfeiccediloado das curvas de energia potencial e cineacutetica do centro de massa
colaborando para um mais alto R (percentual de reconversatildeo entre energia cineacutetica
53
e potencial durante um ciclo de passada) (MALOIY et al 1986) Evidecircncias de um
custo metaboacutelico relativamente baixo da locomoccedilatildeo no plano foram tambeacutem
encontradas em carregadores Nepaleses (BASTIEN et al 2005) Poreacutem
diferentemente das condiccedilotildees geograacuteficas nas quais as mulheres africanas realizam
suas atividades locomotoras o espaccedilo geograacutefico dos carregadores Nepaleses eacute
caracterizado por terrenos inclinados Em um estudo recente Minetti e
colaboradores (MINETTI et al 2006) apresentaram as primeiras informaccedilotildees sobre
eficiecircncia mecacircnica (potecircncia mecacircnica desenvolvida dividida pela potecircncia
metaboacutelica despendida) de carregadores Nepaleses em inclinaccedilotildees extremas
especialmente da regiatildeo do Himalaia indicando uma eficiecircncia aproximadamente
33 maior do que a de montanhistas Caucasianos De fato os carregadores
Nepaleses apresentam caracteriacutesticas notaacuteveis do ponto de vista energeacutetico
Transportam desde a infacircncia cargas geralmente entre 80 e 90 da massa corporal
(utilizando-se de uma faixa posta agrave testa no qual eacute ligada a uma cesta de vime nas
costas) em terrenos acidentados com inclinaccedilotildees de ateacute 50 em situaccedilatildeo de
hipoacutexia de altitude (MALVILLE et al 2001)
A hipoacutetese da transferecircncia eficiente entre energia cineacutetica e potencial do
centro de massa corporal natildeo se sustenta pois em inclinaccedilotildees maiores de 15 e ndash
15 as mudanccedilas de energia potencial ocorrem apenas positivamente e
negativamente respectivamente (MINETTI et al 1993) Portanto sem a
possibilidade de transferecircncia de energia por via pendular e tendo em consideraccedilatildeo
a menor variabilidade de oscilaccedilatildeo do tronco dos Nepaleses encontrada por
MINETTI et al 2006) apresentamos uma hipoacutetese de que o custo de ativaccedilatildeo
muscular (ou custo EMG) da locomoccedilatildeo eacute menor no grupo de carregadores do
Himalaia do que nos montanhistas Caucasianos Devido agrave falta de informaccedilotildees
espaccedilos-temporais da locomoccedilatildeo com carga em grandes inclinaccedilotildees foram
analisados estes paracircmetros da passada a fim de auxiliar no entendimento da
energeacutetica e mecacircnica da locomoccedilatildeo em planos inclinados
251 Materiais e meacutetodos
Cinco carregadores Nepaleses (idade 23 plusmn 9 anos estatura 163 plusmn 003 m
massa corporal 546 plusmn 62 kg) e cinco montanhistas Caucasianos (idade 32 plusmn 3
anos estatura 176 plusmn 007 m massa corporal 742 plusmn 67 kg) selecionados por
54
voluntariedade realizaram o experimento em Namche-Bazar regiatildeo do vale
Khumbu no Parque Nacional de Sagarmatildethatilde (Everest em nepalecircs) O experimento
consistia de caminhada sem e com carga (40 kg) em situaccedilatildeo de subida e descida
com uma inclinaccedilatildeo meacutedia de 22 em um ritmo que poderiam suportar por muitas
horas Os Nepaleses utilizavam a usual faixa na testa onde era ligada com a cesta
nas costas onde suportavam o peso enquanto que os Caucasianos usavam uma
mochila de alpinismo O trecho foi escolhido de modo a assegurar que as trocas de
energia fossem principalmente devidas as mudanccedilas de energia potencial sem a
possibilidade de transferecircncia entre energia potencial e cineacutetica dentro de uma
passada (MINETTI et al 2006) Antes de iniciar os experimentos eram realizadas
medidas de dobras cutacircneas nas regiotildees de colocaccedilatildeo de eletrodos
O set-up experimental incluiu um eletromioacutegrafo portaacutetil (PocketEmg BTS
Milatildeo Itaacutelia) um analisador de gases portaacutetil (K4b2 Cosmed Roma Itaacutelia) um GPS
(GPSmAP76CS) e lactiacutemetro (Accutrend Roche Diagnostic Basel Suiacuteccedila) Foram
analisados a atividade EMG de quatorze muacutesculos (erector spinae longissimus
erector spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis deltoideus anterior
trapezius ascendens gluteus maximus gluteus medius biceps femuralis caput
longus vastus lateralis e gastrocnemius lateralis) Para a preparaccedilatildeo do local e
colocaccedilatildeo dos eletrodos de superfiacutecie bipolares foram seguidas as orientaccedilotildees da
Seniam (FRERIKS et al 1991) Simultaneamente ao registro EMG sinais advindos
de seis sensores de pressatildeo (footswitches) trecircs em cada peacute (regiatildeo do calcanhar
primeiro e quinto metatarso inferior) eram registrados no eletromiograacutefo portaacutetil Os
sinais EMGrsquos foram preacute-amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um
niacutevel de ruiacutedo menor do que 1 μV rms e filtrados por um filtro do tipo Butterworth (50shy
450 Hz terceira ordem) A frequumlecircncia de amostragem da EMG e dos sensores de
pressatildeo foi de 1000 Hz
O custo metaboacutelico foi calculado segundo procedimentos do estudo anterior
(MINETTI et al 2006) O sinal EMG foi retificado e integrado e os valores meacutedios da
atividade EMG de todo o trecho foram subtraiacutedos pelos respectivos valores da
situaccedilatildeo em repouso (idem ao consumo de O2) e divididos pela velocidade meacutedia
(Vf ) A potecircncia EMG geral foi obtida a partir do somatoacuterio dos quatorze muacutesculos
ponderado pelos respectivos volumes musculares (YAMAGUCHI et al 1991) e
55
dobra cutacircnea respectiva Determinou-se o Custo EMG atraveacutes do procedimento
experimental
Para fins de comparaccedilatildeo das Vf rsquos de locomoccedilatildeo usamos o Nf baseado na
teoria das similaridades dinacircmicas (sub-seccedilatildeo 222) para normalizar a Vf No caso
presente ao inveacutes de utilizar o comprimento de membro inferior utilizamos a
estatura da seguinte forma
Vf 2
Fr = Eq 212 g estatura
Tendo em consideraccedilatildeo que a estatura meacutedia dos Caucasianos eacute maior (013
m) e que as Vf rsquos de subida e descida dos Caucasianos com carga foram 35 e 17
menores do que as dos Nepaleses deste modo os Frrsquos dos Caucasianos para os
mesmos trechos foram 40 e 24 menores do que dos Nepaleses
Os procedimentos para anaacutelise dos dados de posiccedilatildeo e Vf oriundos do GPS
satildeo os mesmos de MINETTI et al 2006) A potecircncia mecacircnica vertical (PMV) foi
calculada como segue
g h mtotPMV = Eq 213 t
onde Ah eacute variaccedilatildeo de altura mtot eacute a massa total (massa corporal + carga) g eacute
aceleraccedilatildeo gravitacional e At eacute o tempo de locomoccedilatildeo
Uma seacuterie de programas computacionais (Labview versatildeo 71 National
Instruments Austin USA) foram construiacutedos para o processamento dos dados EMG
GPS e paracircmetros espaccedilos-temporais
Foi utilizado Testes-t de student para amostras independentes para comparar
os paracircmetros espaccedilos-temporais entre Nepaleses e Caucasianos (SPSS para
Windows versatildeo 14 USA)
56
252 Resultados
Variaacuteveis espaccedilos-temporais
O Fr dos Nepaleses foi maior do que as dos Caucasianos em situaccedilatildeo com
carga (plt001) mas sem carga as diferenccedilas diminuem acentuadamente (4 e 23
maiores sem e com carga respectivamente pgt005) O CP e FP dos Nepaleses
foram maiores na subida com carga mas durante a descida com carga apesar da
Vf maior apenas o CP foi maior nos Nepaleses e a FP foi similar (pgt005)
Paracircmetros energeacuteticos
A atividade EMG por unidade de tempo foi similar entre Nepaleses e
Caucasianos Contudo a ativaccedilatildeo EMG total ou seja por unidade de distacircncia
(ldquocustordquo EMG da locomoccedilatildeo) foi notavelmente maior nos Caucasianos na situaccedilatildeo
com carga especialmente na fase de subida (observe a inclinaccedilatildeo das retas na
figura 27)
A atividade EMG tambeacutem foi analisada no domiacutenio da frequumlecircncia para testar
uma possiacutevel diminuiccedilatildeo nos paracircmetros de mediana meacutedia e pico da frequumlecircncia
que pudessem explicar via fadiga neuromuscular (KNAFLITZ e BONATO 1999) o
efeito da carga no aumento da ativaccedilatildeo EMG por distacircncia percorrida nos
Caucasianos (inclinaccedilotildees das retas na figura 27)
Utilizou-se a transformada raacutepida de Fourier com janelamento de 10 segundos
analisando o centro dos bursts de 512 pontos determinados por uma integraccedilatildeo com
janelamento moacutevel Hanning de 50 ms Todavia nenhuma diferenccedila significativa foi
encontrada nos paracircmetros de frequumlecircncia entre os primeiros e uacuteltimos vinte
segundos de experimento (diminuiccedilotildees lt 5)
O notaacutevel desempenho dos Nepaleses na subida com carga eacute confirmado pela
PMV 33 maior do que a dos Caucasianos Embora a Vf e a PMV sejam maiores
nos Nepaleses estes apresentam um custo metaboacutelico 39 menor que os
Caucasianos Esta economia energeacutetica especiacutefica agrave situaccedilatildeo de carga e inclinaccedilatildeo
extrema eacute observada tambeacutem na figura 28 na qual os Caucasianos sem carga
apresentam uma eficiecircncia similar agraves eficiecircncias dos Nepaleses mas com uma baixa
eficiecircncia na situaccedilatildeo com carga
57
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal +
carga) dos carregadores Nepaleses (NEP) e montanhistas Caucasianos
(CAU) em subida (up) e descida (down)
A eficiecircncia menor dos Caucasianos na situaccedilatildeo com carga parece ser
explicada pela quantidade de ativaccedilatildeo muscular A interessante semelhanccedila entre o
custo EMG e o custo energeacutetico (figura 27) demonstram a eficaacutecia do meacutetodo EMG
utilizado no presente estudo a fim de representar uma ativaccedilatildeo muscular geral
durante a locomoccedilatildeo
253 Discussatildeo
A menor ativaccedilatildeo muscular eacute extremamente interessante pois explica de modo
importante o mecanismo da alta eficiecircncia e economia energeacutetica nos Nepaleses
58
Os resultados de potecircncia metaboacutelica e PMV confirmam os achados de
MINETTI et al 2006) Aleacutem disso o custo energeacutetico na situaccedilatildeo sem carga eacute
similar entre Caucasianos e Nepaleses Em outras palavras o desempenho notaacutevel
dos Nepaleses eacute especiacutefico somente na situaccedilatildeo de subida com carga
000
004
008
012
016
020
024
028
-12 -10 -08 -06 -04 -02 00
efi
ciecirc
nc
ia m
iacutenim
a d
e t
rab
alh
o p
os
itiv
o NEP 0kg
CAU 0kg
NEP 40kg
CAU 40kg
14
15
eficiecircncia miacutenima de trabalho negativo
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da
PMV (positiva ou negativa) pela potecircncia metaboacutelica respectiva
(MINETTI et al 2006) As linhas satildeo as razotildees entre eficiecircncia
muscular positiva e negativa (WOLEDGE et al 1985)
A melhor economia nos Nepaleses durante a subida com carga pode ser
relacionada agraves propriedades mecacircnicas de contraccedilatildeo muscular especificamente agrave
relaccedilatildeo potecircncia-velocidade Tendo em consideraccedilatildeo que os Caucasianos
realizaram o trecho de subida com carga em uma velocidade de progressatildeo 33
menor que os Nepaleses pode-se inferir que os Caucasianos realizaram a atividade
em uma regiatildeo menor de produccedilatildeo de potecircncia devido agrave relativa baixa velocidade
que por sua vez corresponde agrave uma zona de baixa eficiecircncia Outro fator secundaacuterio
pode ser a aclimataccedilatildeo de longo prazo destes indiviacuteduos agrave hipoacutexia de altitude
favorecendo o transporte e utilizaccedilatildeo de O2 no muacutesculo esqueleacutetico
59
Surpreendentemente a ativaccedilatildeo EMG por unidade de tempo eacute semelhante
entre Nepaleses e Caucasianos e por consequumlecircncia a ativaccedilatildeo total eacute menor nos
Nepaleses
Pode-se afirmar tambeacutem que a razatildeo entre ativaccedilatildeo EMG na subida e descida
independente da massa total eacute em torno de 15 e 2 corroborando com os dados de
BIGLAND-RITCHIE e WOODS 1976)
Em conclusatildeo a hipoacutetese da ativaccedilatildeo muscular econocircmica nos carregadores
Nepaleses eacute confirmada Os paracircmetros espaccedilos-temporais da passada parecem
natildeo justificar o menor custo energeacutetico nos Nepaleses O custo EMG foi maior nos
Caucasianos especialmente durante a ascensatildeo com carga indicando uma
justificativa a um achado anterior de maior estabilidade no tronco em Nepaleses
(MINETTI et al 2006)
60
3 MECAcircNICA DA CORRIDA DE IDOSOS
31 Introduccedilatildeo
Nos idosos a forccedila muscular eacute reduzida Isso tem sido atribuiacutedo
principalmente a atrofia da massa muscular com a reduccedilatildeo da aacuterea de sua secccedilatildeo
transversal (DOHERTY 2003 FRONTERA et al 2000 TRAPPE et al 2003) e
tambeacutem agrave deficiecircncia na produccedilatildeo intriacutenseca de forccedila no niacutevel da interaccedilatildeo entre
actina e miosina (PHILLIPS et al 1991 FRONTERA et al 2000 LOWE et al 2001
MORSE et al 2005) Experimentos realizados tanto em espeacutecimes isoladas de
muacutesculo (OCHALA et al 2006 PHILLIPS et al 1991) quanto in vivo em humanos
(KLASS et al 2005 PORTER et al 1997 POUSSON et al 2001 VANDERVOORT
et al 1990) mostram que a forccedila que um muacutesculo exerce ao alongar-se
(frequumlentemente chamada de contraccedilatildeo excecircntrica) tem reduccedilatildeo menor devido ao
processo de envelhecimento que a forccedila desenvolvida durante contraccedilatildeo isomeacutetrica
e durante encurtamento (frequumlentemente chamada de contraccedilatildeo concecircntrica)
O efeito das mudanccedilas das propriedades de contraccedilatildeo do muacutesculo no
trabalho mecacircnico realizado durante locomoccedilatildeo natildeo eacute conhecido O trabalho
mecacircnico realizado ao caminhar natildeo tem sido considerado significativamente maior
em indiviacuteduos idosos apesar de um maior dispecircndio energeacutetico resultando em uma
61
menor eficiecircncia mecacircnica atribuiacuteda agrave co-contraccedilatildeo de muacutesculos antagonistas
(MIAN et al 2006)
O mecanismo elaacutestico da corrida contraacuterio ao mecanismo pendular da
caminhada necessita de uma intervenccedilatildeo muscular muito maior para manter o
movimento do CM Um ciclo alongamento-encurtamento das unidades muacutesculoshy
tendiacuteneas ocorre em cada passo da corrida com grande entrada e saiacuteda de energia
mecacircnica para dentro e para fora das unidades muacutesculo-tendiacuteneas A mecacircnica da
corrida assim mais que a caminhada pode revelar mudanccedilas no trabalho mecacircnico
realizado em cada passo devido ao desempenho muscular reduzido nos idosos
Aleacutem disso uma assimetria contato-despregue ocorre durante a corrida
surgindo do fato que as unidades muacutesculo-tendiacuteneas contraacuterio a uma mola sem
atrito tecircm comportamento diferente durante alongamento e encurtamento
Recentemente foi observado que a assimetria contato-despregue eacute uma
consequumlecircncia da relaccedilatildeo forccedila-velocidade do muacutesculo e eacute maior quanto maior for a
mudanccedila no comprimento do muacutesculo em relaccedilatildeo agravequela do tendatildeo dentro das
unidades muacutesculo-tendiacuteneas (CAVAGNA 2006)
O trabalho mecacircnico realizado durante a corrida em idosos e sua assimetria
contato-despregue para nosso conhecimento ainda natildeo satildeo determinados
Neste estudo foi calculado o trabalho mecacircnico externo realizado para manter
o movimento do CM e o tempo das trocas de energia mecacircnica durante as fases de
trabalho negativo e positivo do bouncing do corpo em indiviacuteduos idosos correndo
em diferentes velocidades Os resultados obtidos em indiviacuteduos idosos satildeo
comparados agravequeles obtidos em indiviacuteduos jovens A hipoacutetese apresentada eacute que o
aumento da discrepacircncia em idosos entre o desenvolvimento da forccedila durante
alongamento e durante encurtamento se operacional durante a corrida iraacute aumentar
a assimetria contato-despregue do aparente bouncing do corpo em relaccedilatildeo agravequele
de indiviacuteduos jovens
32 Materiais e Meacutetodos
321 Amostra e procedimento experimental
Os experimentos foram realizados em oito indiviacuteduos idosos (homens idade
62
736plusmn55 anos altura 172plusmn006 m massa 711plusmn92 kg media plusmn dp) e oito indiviacuteduos
jovens (6 homens e duas mulheres idade 208plusmn16 anos altura 176plusmn008 m massa
634plusmn100 kg) Trecircs indiviacuteduos em cada grupo satildeo treinados (volume miacutenimo
semanal de corrida de 40 km) enquanto cinco satildeo sedentaacuterios saudaacuteveis Os
resultados relatados neste estudo satildeo uma meacutedia dos dados obtidos de todos os
sujeitos em cada grupo independente de seu treinamento Resultados similares
poreacutem foram obtidos comparando os trecircs indiviacuteduos idosos treinados com os trecircs
indiviacuteduos jovens do sexo masculino natildeo treinados de acordo com os achados que
o efeito da idade nas unidades muacutesculo-tendiacuteneas satildeo similares em corredores e
indiviacuteduos natildeo-ativos (KARAMANIDIS e ARAMPATZIS 2005) Consentimento
informado escrito foi obtido de cada indiviacuteduo Os estudos foram realizados de
acordo com a Declaraccedilatildeo de Helsinque
Os indiviacuteduos correram de um lado para o outro ao longo de uma pista de
corrida de 50 metros a qual foi incorporada no niacutevel do solo 8 plataformas de forccedila
de 05 m 05 m em sequumlecircncia totalizando um espaccedilo contiacutenuo de 4 m 05 m
sensiacutevel agrave forccedila aplicada na plataforma nas direccedilotildees anterior e vertical A uacutenica
instruccedilatildeo dada a cada indiviacuteduo foi para correr normalmente em uma velocidade
constante mensurada por duas fotoceacutelulas posicionadas distantes de 1 agrave 3 m
(dependendo da velocidade) ao longo do lado da plataforma Mais caracteriacutesticas da
plataforma de forccedila satildeo descritas por CAVAGNA (1975)
O procedimento do experimento consistiu em medir a forccedila aplicada no solo
no plano sagital durante corrida em diferentes velocidades Os dados foram
adquiridos em um microcomputador a uma taxa de 500 Hz por canal de i) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo anterior (Ff) ii) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo vertical (Fv) e iii) sinal das
fotoceacutelulas A aquisiccedilatildeo e anaacutelise dos dados foram realizadas atraveacutes de um
conversor analoacutegico-digital (National Instruments Austin TX USA) e um software
feito em LabView para Macintosh (versatildeo 71)
Foram feitas anaacutelises em um total de 124 corridas com velocidades meacutedias
entre 3 e 17 kmh-1 para os idosos e 229 corridas entre 3 e 21 kmh-1 para os jovens
O nuacutemero menor de execuccedilotildees realizado pelos idosos foi para diminuir riscos de
fadiga neste grupo
63
322 Dos registros da plataforma ao trabalho externo
O processo usado para calcular as mudanccedilas da energia mecacircnica do CM do
corpo derivadas das forccedilas de reaccedilatildeo do solo eacute descrito em detalhes por CAVAGNA
1975) Em resumo somente o movimento no plano sagital foi considerado para
calcular a energia mecacircnica do CM A energia cineacutetica de translaccedilatildeo lateral do CM
foi ignorada O sinal da plataforma de forccedila sem carga foi mensurado imediatamente
antes de cada corrida e subtraiacutedo dos registros da Fv e da Ff de modo a computar
uma possiacutevel mudanccedila da linha de base da plataforma Somente o grupo de
registros da Fv e da Ff compreendida entre os cruzamentos das fotoceacutelulas foi
utilizado para anaacutelises subsequumlentes As velocidades vertical e anterior do CM foram
obtidas como segue
Antes do todas as aquisiccedilotildees a plataforma era calibrada com cargas
conhecidas no sentido vertical e horizontal acircntero-posterior
A forccedila vertical meacutedia mensurada pela plataforma de forccedila Fvplate em um
intervalo de tempo correspondente a um nuacutemero de quadros nf em um determinado
nuacutemero de passos T selecionados entre picos (ou vales) nos registros de forccedila
devem igualar ao PC mensurado com uma balanccedila Fvscale
IfirstPeakorValley
SecondPeakorValleyF = Fvi
= F Eq 31 vplate vscalenf
Fvplate foi entatildeo subtraiacuteda da coluna de dados Fv e o resultado (Fv-Fvplate)M (M
eacute a massa corporal) foi integrado no tempo para obter as mudanccedilas nos registros da
velocidade vertical para o intervalo de tempo entre os cruzamentos das fotoceacutelulas
FinalTime AVel = f [(Fv - Fv plate) M]dt Eq 32
InitialTime
Um ou mais passos regulares foram subsequumlentemente escolhidos para
anaacutelise entre dois picos ou vales da curva de velocidade vertical A regularidade dos
passos (drift) foi determinada pela diferenccedila entre incrementos positivos e negativos
agraves mudanccedilas nas velocidades vertical e horizontal divididas pela soma dos
incrementos
64
| V | V | V |I + increments I VincrementsDrift = 100 Eq 33
| V | + | V |I + increments I Vincrements
Durante a corrida no plano os deslocamentos verticais ascendente e
descendente do CM do corpo satildeo em meacutedia iguais durante um nuacutemero inteiro de
passos ie a velocidade vertical meacutedia deve ser nula Baseado nessa consideraccedilatildeo
a aacuterea abaixo das mudanccedilas da velocidade vertical registrada correspondendo ao
intervalo selecionado acima seraacute dividido por nf e o resultado seraacute subtraiacutedo do total
da variaccedilatildeo da velocidade vertical registrada entre os cruzamentos das fotoceacutelulas
para obter os valores instantacircneos positivo (ascendente) e negativo (descendente)
da Vv
nf
f AVv dt
V (t) = i= 0 -AV Eq 34 v nf v
As mudanccedilas na velocidade horizontal foram determinadas pela integraccedilatildeo da
curva FfM durante o tempo entre os cruzamentos das fotoceacutelulas Ltphoto A aacuterea
abaixo dessa variaccedilatildeo de velocidade horizontal foi entatildeo dividida por Ltphoto e o
resultado foi subtraiacutedo do mesmo registro para localizar a velocidade meacutedia de
corrida no traccedilado
Atphoto
AVf (t) = f Ff M dt Eq 35 i= 0
A velocidade meacutedia de corrida mensurada atraveacutes da distacircncia das
fotoceacutelulaLtphoto foi entatildeo somada a seacuterie resultante para obter os valores
instantacircneos de Vf
f AVf dt Vf (t) = + AVf Eq 36
A tphoto
65
A velocidade vertical instantacircnea Vv(t) foi utilizada para calcular a energia
cineacutetica instantacircnea do movimento vertical
Ekv (t) = 05M Vv (t)2 Eq 37
e por integraccedilatildeo o deslocamento vertical do CM Sv(t)
Sv (t) = f Vv (t) dt Eq 38
com a correspondente energia potencial gravitacional
E p (t) = M g Sv (t) Eq 39
A energia cineacutetica horizontal foi calculada como
Ekf (t) = 05M Vf (t)2 Eq 310
a energia cineacutetica translacional total do CM no plano sagital como
(t) Eq 311 Ek (t) = Ekv (t) + Ekf
e a energia mecacircnica translacional do CM no plano sagital como
Ecm(t) = Ekv (t) + Ekf (t) + E p (t) Eq 312
Apoacutes como mencionado acima a seleccedilatildeo foi feita inicialmente entre picos (ou
vales) das mudanccedilas da velocidade vertical os registros foram expandidos para
incluir o vale anterior (ou pico) de Ep(t) ateacute uma imagem clara dos passos a ser
obtidos (figura 31)
Algoritmos foram feitos para calcular o trabalho realizado durante os passos
selecionados entre vales (ou picos) da Ep Wv Wkf e Wext foram calculados com as
amplitudes dos vales ou picos e os valores inicial e final nos registros da Ep(t) Ekf(t)
e Ecm(t) Valores positivos das variaccedilotildees de energia foram considerados como
66
trabalho positivo valores negativos foram considerados como trabalho negativo Em
uma perfeita corrida em velocidade constante no plano a razatildeo entre os valores
absolutos de trabalho positivo e negativo realizados em um nuacutemero inteiro de
passos deve ser igual a um
323 Estimativa do trabalho interno
O trabalho positivo normalizado pela massa e unidade de distacircncia para
acelerar os membros em relaccedilatildeo ao CM do corpo foi estimado para cada corrida
com a equaccedilatildeo
W int ML(J kg-1 m -1) = 014010-200L Vf f Eq 313
onde L eacute o comprimento do passo em metros Vf a velocidade meacutedia de corrida em
metros por segundo e f eacute a frequumlecircncia de passos em Hz (CAVAGNA et al 1997) Os
valores estimados de WintML como uma funccedilatildeo da velocidade em kmh-1 foram
interpolados por um ajuste polinomial de segunda ordem Deve ser salientado que
usando a mesma equaccedilatildeo para calcular Wint nos indiviacuteduos jovens e idosos assume-
se o mesmo movimento dos membros nos dois grupos
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato
Como a energia mecacircnica do CM eacute constante quando o corpo eacute deslocado no
ar (a resistecircncia do ar eacute negligenciada) o tempo aeacutereo foi calculado como o intervalo
de tempo durante o qual
dEcm(t) dt = 0 Eq 314
Como descrito em detalhes em um estudo preacutevio (CAVAGNA 2006) esse
processo pode resultar em uma superestimativa (7) do tempo aeacutereo devido ao
ruiacutedo do registro do dEcm(t)dt A duraccedilatildeo da frenagem tbrake e a duraccedilatildeo da
propulsatildeo tpush foram calculadas como o intervalo de tempo durante o qual o
dEcm(t)dt foi positivo e negativo respectivamente Novamente devido ao ruiacutedo do
67
registro do dEcm(t)dt tbrake eou tpush foi provavelmente em alguns casos
subestimado (5-7 CAVAGNA 2006) O mesmo eacute verdade para os deslocamentos
descendente e ascendente do CM durante contato Scdown e Scup que foram
mensurados nas porccedilotildees descendente e ascendente da curva Ep(t)
respectivamente durante o intervalo de tempo onde dEcm(t)dt eacute negativo e positivo
respectivamente O deslocamento vertical descendente total Svdown e deslocamento
vertical ascendente Svup foram calculados do decreacutescimo e acreacutescimo totais da
curva Ep(t) respectivamente ocorrendo entre dois ou mais picos (ou vales) de Ep
divididos pelo nuacutemero de passos
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio
A forccedila vertical Fv aplicada pelo peacute no solo eacute
= PC + M a Eq 315 Fv v
onde Mb eacute a massa do corpo e av eacute a aceleraccedilatildeo vertical do CM ie o tempo
derivado de sua velocidade vertical Vv Quando a velocidade vertical e Ekv estatildeo no
maacuteximo a derivada eacute nula av=0 e como consequumlecircncia
Fv = PC Eq 316
A localizaccedilatildeo dos picos Ekv alcanccedilados durante os passos (figura 31) foi
entatildeo utilizada para determinar os instantes onde a Fv eacute igual ao PC A localizaccedilatildeo e
as amplitudes de Ep simultacircneo com os picos de Ekv foram utilizados para determinar
a parte do deslocamento vertical ocorrendo abaixo do ponto de equiliacutebrio durante a
desaceleraccedilatildeo descendente do CM Scedown e durante a aceleraccedilatildeo ascendente do
CM Sceup As diferenccedilas
S - S = S Eq 317 vdown cedown aedown
e
68
S - S = S Eq 318 vup ceup aeup
informa sobre o deslocamento vertical quando o CM do corpo acelera descendente e
desacelera ascendente respectivamente (CAVAGNA et al 1988)
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente
A velocidade vertical maacutexima e a energia cineacutetica maacutexima Ek=Ekv+Ekf
alcanccediladas pelo CM durante deslocamento descendente Vvmxdown e Ekmxdown e
durante a elevaccedilatildeo Vvmxup e Ekmxup satildeo determinados por comparaccedilatildeo dos picos
em Ekv e Ek com a curva Ep simultacircnea Como a velocidade vertical maacutexima pode
aumentar com a amplitude do deslocamento vertical que pode ser diferente durante
a elevaccedilatildeo e o deslocamento descendente (ver eg as curvas Ep na figura 31) a
razatildeo entre as velocidades descendente e ascendente maacuteximas foram normalizadas
(V V )(S S ) = (V V )norm Eq 319 vmxdown vmxup vup vdown vmxdown vmxup
327 Transduccedilatildeo Ep Ek durante o passo
O tempo de curso da transduccedilatildeo ocorrendo no passo entre energia potencial
gravitacional Ep e energia cineacutetica do CM Ek pode ser determinado pelo valor
absoluto das mudanccedilas ambos incrementos positivos e negativos de Ep Ek e Ecm
em intervalos curtos de tempo dentro do ciclo do passo (CAVAGNA et al 2002)
1 | Ecm(t) |r(t) = Eq 320
(| E p (t) | + | Ek (t) |)
A transduccedilatildeo Ep-Ek eacute completa (r(t)=1) durante a fase aeacuterea quando nenhum
trabalho externo eacute realizado pela forccedila muscular Entretanto a transduccedilatildeo Ep-Ek
tambeacutem ocorre durante contato quando o corpo eacute parcialmente sustentado pelo peacute
no chatildeo na parte superior da trajetoacuteria do CM (0lt r(t)lt1)
69
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado
70
(incrementos de Ecm) eacute indicado em vermelho enquanto que o tempo de
trabalho mecacircnico negativo (decrementos de Ecm) eacute indicado em azul
A transduccedilatildeo Ep-Ek eacute nula (r(t)=0) em duas fases do passo a e onde Ek
aumenta e diminui respectivamente simultaneamente com a energia potencial
gravitacional Ep (CAVAGNA et al 2002) Note que trabalho externo positivo e
negativo satildeo ambos realizados nas fases a e do passo (r(t)=0) e nas fases do
passo onde uma transduccedilatildeo ocorre entre Ek e Ep (0lt r(t)lt 1)
Nesse estudo r(t) foi calculado a partir do valor absoluto do tempo derivado
de Ep Ek e Ecm no intervalo de tempo contido entre dois ou mais picos (ou vales) de
Ep O valor cumulativo de energia recuperada Rint(t) resultando da transduccedilatildeo
instantacircnea de Ek-Ep foi determinado na aacuterea abaixo do r(t) registrado dividida pelo
periacuteodo do passo
T Rint (t) = ( f r(u)du) T Eq 321
0
No final do passo Rint(t)=Rint (CAVAGNA et al 2002) Para determinar a
assimetria do ciclo do passo eacute uacutetil saber quanto da transduccedilatildeo Ek-Ep ocorre durante
o deslocamento descendente e durante a elevaccedilatildeo do CM A derivada
dE p dt Eq 322
eacute utilizada para determinar a quantidade de transduccedilatildeo ocorrendo durante o
deslocamento descendente Rintdown e durante a elevaccedilatildeo do CM Rintup A
assimetria do passo foi quantificada pela razatildeo
Rintdown Rintup Eq 323
328 Rigidez vertical (k)
A k normalizada pela massa
k M Eq 324
71
caracterizando a frequumlecircncia natural do sistema eacute em todas as condiccedilotildees (com ou
sem uma fase aeacuterea) a inclinaccedilatildeo da relaccedilatildeo av-Sv quando avgt1g A inclinaccedilatildeo
meacutedia nessa amplitude pode ser avaliada pela razatildeo entre a aceleraccedilatildeo ascendente
maacutexima avmx e a amplitude da oscilaccedilatildeo
(S + S )ceup cedownS = Eq 325 ce 2
No presente estudo a k normalizada pela massa foi mensurada como
k M = a S Eq 326 vmx ce
E a frequumlecircncia natural do sistema massa-mola como
)05 (a Svmx cefs = Eq 327 2
329 Estatiacutestica
Os dados coletados como uma funccedilatildeo da velocidade decorrida foram
agrupados em classes de intervalos de um kmh-1 como segue 3 agrave lt4 kmh-1 4 agrave lt5
kmh-1 20 agrave lt21 kmh-1 Quando comparadas agraves meacutedias de diferentes variaacuteveis
com o mesmo nuacutemero de itens em uma certa velocidade de corrida dentro de um
grupo de indiviacuteduos um teste t para amostra pareadas foi utilizado para determinar
quando as meacutedias eram significativamente diferentes Quando comparadas as
meacutedias de diferentes variaacuteveis entre os dois grupos de indiviacuteduos com diferentes
nuacutemero de itens um teste t para amostras independentes foi utilizado (SPSS versatildeo
14) Em todos os testes o p usado foi menor do que 5
33 Resultados
Na primeira seccedilatildeo dos Resultados o bouncing do corpo a cada passo eacute
descrito desconsiderando as diferenccedilas no movimento ascendente e descendente
72
do CM (Por exemplo O deslocamento vertical Sv eacute medido como (Svup+Svdown)2 o
tempo de contato com o solo como tc =(tcup+tcdown)2 etc) Este procedimento
pressupotildee uma igualdade dinacircmica durante a subida e a descida do CM como em
um oscilador harmocircnico (CAVAGNA et al 1988 BLICKHAN 1989 SCHEPENS et
al 1998)
A potecircncia meacutedia do passo despendida para acelerar e elevar o CM do corpo
e do correspondente trabalho mecacircnico realizado por unidade distacircncia satildeo
apresentados na segunda parte Na terceira seccedilatildeo a assimetria contato-despregue
eacute considerada analisando separadamente os eventos que ocorrem durante a subida
e durante a descida do CM (CAVAGNA 2006) Em todas as seccedilotildees os resultados
obtidos sobre os indiviacuteduos idosos satildeo comparados com aqueles obtidos nos
indiviacuteduos jovens
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM
Parte superior e inferior do bouncing
O periacuteodo do passo (T parte superior da figura 33) o deslocamento vertical
do CM durante cada etapa (Sv meio da figura) e o comprimento do passo (L na
parte inferior da figura) satildeo apresentados em funccedilatildeo da velocidade de corrida (Vf) na
figura 33 (quadrados pretos) Segundo o modelo massa-mola o periacuteodo do passo
a oscilaccedilatildeo vertical do CM e o correspondente deslocamento para frente foram
divididos em duas partes uma parte mais baixa que acontece quando a Fv eacute maior
do que o PC (tce Sce e Lce ciacuterculos vermelhos) e uma parte superior quando a Fv eacute
menor que o PC (tae Sae e Lae ciacuterculos azuis abertos) Para comparaccedilatildeo o periacuteodo
do passo o deslocamento vertical e o comprimento do passo tambeacutem foram
divididos de acordo com a tradiccedilatildeo nas suas fraccedilotildees que ocorrem durante a fase
de contato com o terreno (tc Sc e Lc pontilhada linhas vermelhas) e durante a fase
aeacuterea (ta Sa e La linhas pontilhadas em azul) O significado biomecacircnico dos
resultados na figura 33 tem sido explicado em estudos anteriores realizados em
indiviacuteduos adultos de diferentes idades (CAVAGNA et al 1988) e em crianccedilas com
idades entre os 2 e 16 anos (SCHEPENS et al 1998) durante a corrida em
diferentes velocidades Em ambos os estudos as partes inferior e superior do
bouncing do corpo foram simeacutetricos ateacute ~ 11 kmh-1 (isto eacute tce=tae e Sce=Sae) e
- -
73
assimeacutetricos em velocidades mais elevadas (isto eacute taegttce e SaegtSce) O momento
vertical ganho e perdido durante tce deve ser igual ao momento vertical ganho e
perdido durante tae ie
avce tce = avae tae Eq 328
O bouncing simeacutetrico implica a mesma aceleraccedilatildeo vertical meacutedia durante a
parte inferior e superior do bouncing A aceleraccedilatildeo vertical meacutedia durante a parte
inferior do bouncing avce aumentou com a velocidade enquanto que a aceleraccedilatildeo
vertical meacutedia durante a parte superior do bouncing avae natildeo pode exceder 1 g (eacute 1 g
quando tae= ta) Deste modo o bouncing torna-se assimeacutetrico quando a aceleraccedilatildeo
vertical meacutedia durante tce exceder 1g Os resultados obtidos em relaccedilatildeo aos
indiviacuteduos jovens demonstram que o bouncing tende a ser simeacutetrico em baixas
velocidades e assimeacutetrico em altas velocidades (ver tce versus tae e Sce versus Sae na
tabela 1) Por outro lado os resultados obtidos no grupo dos idosos mostram duas
diferenccedilas importantes i) o bouncing eacute simeacutetrico nas velocidades mais altas (tce=tae e
Sce=Sae) e ii) a assimetria quando presente eacute invertida (ou seja tcegttae e ScegtSae)
Amplitude do deslocamento vertical
O deslocamento vertical do CM corporal em cada etapa da corrida Sv atinge
um maacuteximo em velocidades intermediaacuterias sendo inferior nos indiviacuteduos idosos do
que nos jovens ~ 75 cm a ~ 75 kmh-1 nos idosos e ~ 10 cm a ~ 10 kmh-1 nos
jovens Valores similares de Sv foram medidos com procedimento experimental
diferente em adultos idosos e jovens correndo a ~ 10 kmh-1 (KARAMANIDIS e
ARAMPATZIS 2005) A reduccedilatildeo de Sv nos indiviacuteduos idosos eacute devida a uma
reduccedilatildeo de todas as suas componentes (Sce Sae Sc e Sa) mas eacute particularmente
relevante considerar aqui a reduccedilatildeo da Sce (tabela 32) que representa a amplitude
da oscilaccedilatildeo do sistema massa-mola a partir de sua posiccedilatildeo de equiliacutebrio (Fv igual
ao PC) ateacute sua compressatildeo maacutexima (Fv maacutexima) A amplitude da oscilaccedilatildeo eacute menor
nos idosos do que nos jovens Como esperado esta eacute acompanhada por uma
aceleraccedilatildeo menor para cima atingida no final da compressatildeo avmx e por uma menor
velocidade maacutexima ascendente Vvmx atingida quando av=0 (figura 34 e tabela 32)
74
A velocidade vertical menor resulta por sua vez em um curto tempo aeacutereo efetivo
tae (figura 33 e tabela 32)
Frequumlecircncia de passo e do sistema massa-mola
Os dois paineacuteis superiores da figura 33 mostram que o periacuteodo do passo (T=
tae+ tce) eacute menor nos idosos do que nos jovens Isto eacute devido ao tempo aeacutereo efetivo
tae mais curto enquanto que o tempo de contato efetivo tce eacute igual entre os jovens e
os idosos (tabela 32) Segundo o modelo massa-mola da corrida o tce representa
metade do periacuteodo de oscilaccedilatildeo do sistema elaacutestico Este meio-periacuteodo similar
sugere uma frequumlecircncia de ressonacircncia semelhante fs=(kM)-05(2n) do sistema
elaacutestico aparente atraveacutes do qual o corpo se desloca ou seja uma k normalizada
pela massa corporal (kM) A figura 35 mostra que em altas velocidades k eacute maior
nos indiviacuteduos idosos (paineacuteis superior) mas devido agrave sua maior massa corporal agrave
rigidez de massa especiacutefica vertical (kM= avmxSce veja na Metodologia) eacute de fato
similar ao dos jovens (paineacuteis centrais da figura 35 e tabela 32) Em ambos os
grupos kM tende a ser aproximadamente constante ateacute ~ 10 kmh-1 e em seguida
aumenta com a velocidade Os dois paineacuteis inferiores da figura 35 mostram a
frequumlecircncia do passo f apresentada em conjunto com a frequumlecircncia de ressonacircncia do
sistema fs Pode ser observado que i) f eacute maior nos idosos do que nos jovens ii) nos
idosos a f permanece semelhante agrave fs (tabela 1) enquanto que iii) nos jovens a f eacute
inferior agrave fs (tabela 31)
332 Trabalho
O trabalho externo normalizado pela M Wext realizado para sustentar o
movimento do CM corporal no plano sagital eacute descrito na figura 36 em funccedilatildeo da
velocidade de corrida Pode ser observado que trabalho feito para sustentar as
mudanccedilas de velocidade horizontal Wextf aumenta conforme o acreacutescimo de
velocidade de modo semelhante em indiviacuteduos jovens e idosos O trabalho
realizado contra a gravidade Wextv eacute menor nos indiviacuteduos idosos (tabela 32) O
trabalho externo Wext Wextf + Wextv tambeacutem eacute menor nos idosos particularmente
nas maiores velocidades de progressatildeo
75
A menor potecircncia mecacircnica despendida contra a gravidade pelos idosos
mostra que o menor deslocamento vertical em cada passo natildeo eacute compensado pelo
aumento na frequumlecircncia de passo induzido pelo menor tempo aeacutereo efetivo tae (figura
33) A constataccedilatildeo de que o envelhecimento diminui o trabalho feito contra a
gravidade Wextv deixando inalterado o trabalho para sustentar as mudanccedilas na
velocidade horizontal Wextf resulta em uma velocidade menor de corrida onde o
Wextv se iguala ao Wextf esta velocidade eacute ~ 12 kmh-1 nos idosos e ~ 15 kmh-1 nos
jovens Os dois paineacuteis inferiores na figura 36 (analisados mais profundamente na
Discussatildeo) apresentam o trabalho mecacircnico total realizado por unidade de distacircncia
percorrida Wtot =Wext+Wint onde Wext eacute o trabalho positivo feito para manter o
movimento em relaccedilatildeo ao ambiente e o Wint eacute o trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM (calculado conforme descrito na Metodologia)
333 Assimetria contato-despregue
Os deslocamentos verticais do CM para baixo e para cima durante a fase de
contato estatildeo traccedilados na figura 37 e estatildeo expressos como uma fraccedilatildeo dos
deslocamentos verticais descendente e ascendente (ScdownSvdown ciacuterculos cheios e
ScupSvup ciacuterculos abertos) Na mesma figura eacute apresentada a fraccedilatildeo do
deslocamento vertical realizado pela amplitude da oscilaccedilatildeo do sistema massa-mola
para baixo de av=0 ateacute avmx (ScedownSvdown quadrados cheios) e para cima de avmx
ateacute av=0 (SceupSvup quadrados abertos) Quando a fase aeacuterea eacute nula nas
velocidades mais baixas de corrida todo o deslocamento vertical acontece em
contato com o solo e ScSv=1 Com o aumento da velocidade acontece uma fase
aeacuterea de duraccedilatildeo progressivamente maior durante a corrida e a fraccedilatildeo do
deslocamento vertical em contato com o solo diminui mais acentuadamente durante
o deslocamento para baixo (ciacuterculos cheios) do que durante o deslocamento para
cima (ciacuterculos abertos) ou seja (ScupSvup)gt(ScdownSvdown) Em outras palavras a
altura do CM no instante do contato eacute superior agrave sua altura no instante do toque no
solo o que indica que a elevaccedilatildeo do CM eacute inferior agrave descida durante a fase de
contato do peacute com o solo (CAVAGNA 2006) Esta assimetria contato-despregue
estaacute presente em ambos os grupos mas eacute maior nos idosos do que nos jovens
principalmente devido a uma menor reduccedilatildeo na ScupSvup com o aumento da
velocidade uma maior elevaccedilatildeo do CM se daacute em contato com o solo nos indiviacuteduos
76
idosos Em ambas as faixas etaacuterias a fraccedilatildeo de deslocamento vertical ocupada pela
amplitude de oscilaccedilatildeo SceSv se aproxima de metade de Sv quase independente da
velocidade apoiando a ideacuteia de que a oscilaccedilatildeo vertical do sistema massa-mola eacute
equilibrado em torno do ponto onde a Fv se iguala ao PC Em contraste ScSv muda
acentuadamente com a velocidade ateacute o ponto em que toda a oscilaccedilatildeo tem lugar
no contato com o solo (ScSv=1)
34 Discussatildeo
341 Sobre o meacutetodo
Este sub-capiacutetulo procura discutir o meacutetodo usado no estudo especialmente
em relaccedilatildeo ao raciociacutenio envolvido e a discussatildeo de algumas abordagens similares
ao modelo usado no presente estudo
O meacutetodo dinamomeacutetrico usado no presente estudo tem como base a teoria
do custo de geraccedilatildeo de trabalho mecacircnico Esta teoria pode ser considerada como a
primeira tentativa satisfatoacuteria nas aacutereas limiacutetrofes entre biomecacircnica biologia
experimental e fisiologia comparativa de explicar sob o ponto-de-vista mecacircnico as
formas principais de locomoccedilatildeo humana a caminhada e a corrida
Baseados no meacutetodo de FENN (1930) para a determinaccedilatildeo do trabalho
mecacircnico contra a gravidade e o trabalho mecacircnico devido agraves mudanccedilas de
velocidade Cavagna e colaboradores perceberam que o ser humano quando
caminhava e corria apresentava caracteriacutesticas nas curvas de energia mecacircnica e
no somatoacuterio dos incrementos positivos nestas energias que permitiam diferenciar
estes tipos de locomoccedilatildeo ao mesmo tempo que auxiliavam no entendimento do
comportamento da unidade muacutesculo-tendatildeo e dos mecanismos minimizadores de
dispecircndio energeacutetico mecanismo pendular e elaacutestico (ver figura 32) Os
incrementos positivos de energia mecacircnica (trabalho positivo) satildeo originados
principalmente por muacutesculos e tendotildees enquanto que os incrementos negativos de
energia mecacircnica (trabalho negativo) satildeo em parte armazenados nas estruturas natildeo
contraacuteteis dos muacutesculos e tendotildees e outra parte eacute degradada em forma de calor
Tendo em consideraccedilatildeo os princiacutepios da termodinacircmica foi possiacutevel aplicar
estes mecanismos a fim de entender o porquecirc que durante a fase de apoio na
corrida a energia cineacutetica se apresenta em fase com a energia potencial do CM em
77
relaccedilatildeo ao meio ambiente enquanto que na caminhada estas energias apresentam
comportamentos contraacuterios
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da
caminhada (pecircndulo-invertido) e de segmento complacente da corrida
(massa-mola) e seus principais constituintes Note que o tracejado
indica a trajetoacuteria do corpo de massa m durante o contato g eacute a
aceleraccedilatildeo gravitacional k eacute a rigidez da mola l0 eacute o comprimento do
membro inferior e a0 eacute o acircngulo da perna de apoio no momento do
contato com o solo
O somatoacuterio dos incrementos positivos de energia mecacircnica tambeacutem
conhecido como trabalho mecacircnico externo eacute menor do que a energia metaboacutelica
despendida pelos muacutesculos durante a caminhada enquanto que o trabalho
mecacircnico externo na corrida apresenta valor maior ao da energia metaboacutelica
despendida pelos muacutesculos Este aparente paradoxo demonstrava que a razatildeo
entre potecircncia mecacircnica gerada e a potecircncia metaboacutelica despendida ultrapassava a
eficiecircncia maacutexima de transformaccedilatildeo de energia quiacutemica em trabalho mecacircnico e foi
considerado como a primeira evidecircncia de que as unidades muacutesculo-tendatildeo
responsaacuteveis pela frenagem e propulsatildeo durante a fase de apoio da corrida eram
tambeacutem responsaacuteveis por absorccedilatildeo e re-utilizaccedilatildeo de energia elaacutestica (CAVAGNA et
al 1964) permitindo mais tarde a formulaccedilatildeo do modelo massa-mola ou ldquobouncingrdquo
da corrida (BLICKHAN 1989 MCMAHON e CHENG 1990 figura 32) e o posterior
estudo do ciclo alongamento-encurtamento do muacutesculo-esqueleacutetico
78
Portanto durante atividades ciacuteclicas como a locomoccedilatildeo os muacutesculos
responsaacuteveis pelo movimento possuem uma capacidade de geraccedilatildeo de forccedila
durante seu encurtamento (contraccedilatildeo concecircntrica) maior do que em contraccedilotildees
similares mas precedidas de contraccedilatildeo isomeacutetrica No caso da locomoccedilatildeo mais
especificamente da corrida durante contraccedilotildees concecircntricas os muacutesculos
propulsores utilizam uma energia armazenada durante a precedente contraccedilatildeo
excecircntrica (CAVAGNA et al 1964 CAVAGNA et al 1968) O modelo massa-mola
assume que a unidade muacutesculo-tendatildeo exerce um comportamento similar agrave de uma
mola ou seja quando a mola diminui de comprimento apoacutes o impacto (alongamento
do muacutesculo) armazena energia potencial elaacutestica e quando a mola aumenta seu
comprimento (encurtamento do muacutesculo) durante a segunda fase de contato
transforma energia potencial elaacutestica em energia cineacutetica O modelo tambeacutem
assume mesma altura e velocidade do CM no momento do contato e despregue
A primeira pressuposiccedilatildeo do modelo (sobre a semelhanccedila entre mola e
unidade muacutesculo-tendatildeo) apesar de correta natildeo indica informaccedilotildees sobre seus
constituintes o muacutesculo e o tendatildeo Vaacuterias evidecircncias mostram diferenccedilas no
comportamento mecacircnico do muacutesculo e do tendatildeo e estas diferenccedilas satildeo
moduladas pela forccedila imposta agrave unidade consequumlentemente dependentes da
velocidade de corrida Por exemplo KRAM e TAYLOR (1990) sugeriram que o
dispecircndio de energia durante a corrida era devido ao custo de geraccedilatildeo de forccedila das
fibras musculares agindo de forma isomeacutetrica sem realizaccedilatildeo de trabalho muscular
Evidecircncias em modelo animal confirmam este raciociacutenio (ROBERTS et al 1997
BIEWENER 1998)
Ainda assim para ser inteiramente vaacutelido este modelo o tempo de trabalho
externo positivo e negativo devem ser iguais em todas as velocidades de corrida
contudo uma assimetria nos tempos de trabalho positivo e negativo satildeo encontradas
na corrida humana em velocidades baixas (ateacute 14 kmh-1) com um menor tempo
para o trabalho mecacircnico externo negativo (CAVAGNA 2006)
Portanto o mecanismo de minimizaccedilatildeo de energia apresentada por KRAM e
TAYLOR 1990) parece se sustentar apenas em altas velocidades Em velocidades
menores os muacutesculos propulsores ativam em intensidade menor portanto gerando
uma tensatildeo menor no tendatildeo provavelmente insuficiente para gerar uma mudanccedila
importante no comprimento do tendatildeo Portanto o trabalho muscular eacute significativo
com contraccedilotildees excecircntricas em maior velocidade do que as contraccedilotildees
79
concecircntricas o que corresponde com a relaccedilatildeo forccedila versus velocidade e tambeacutem
com os resultados de eficiecircncia muscular para seacuteries de alongamento encurtamento
em diferentes velocidades (maior eficiecircncia em alta velocidade de encurtamento e
menor velocidade de alongamento ndash HEGLUND e CAVAGNA 1987) Ou seja em
velocidades menores parece existir um importante trabalho muscular executado de
modo assimeacutetrico com o tendatildeo agindo apenas como transmissor de forccedilas
enquanto que em altas velocidades com o aumento do pico de estresse no muacutesculo
e consequumlentemente aumento da rigidez da unidade muacutesculo-tendatildeo o muacutesculo
contrai isometricamente e o tendatildeo muda de comprimento agindo como um elaacutestico
(o muacutesculo tambeacutem gera tensatildeo devido agrave histerese do tendatildeo poreacutem eacute
negligenciaacutevel ndash ALEXANDER 2002)
Sobre o segundo criteacuterio (da semelhanccedila de altura e velocidade no contato e
despregue) os proacuteprios autores do modelo massa-mola indicam que em geral os
animais apresentam uma velocidade no contato maior do que no despregue bem
como realizam o contato com as articulaccedilotildees das pernas mais flexionadas do que
no despregue (BLICKHAN 1989) Poreacutem se as anaacutelises da velocidade e altura satildeo
modificadas do momento de contato e despregue para o iniacutecio da fase aeacuterea e de
contato efetivos (quando a forccedila vertical eacute igual aacute forccedila peso) levando em
consideraccedilatildeo o periacuteodo natural do sistema elaacutestico a velocidade continua maior no
iniacutecio do contato efetivo em todas as velocidades de corrida mas a altura do CM eacute
maior no contato efetivo inicial do que no momento de fase aeacuterea inicial em
velocidades baixas de corrida (aproximadamente de 8 agrave 14 kmh-1) Acima destas
velocidades a altura do CM eacute maior no iniacutecio da fase aeacuterea efetiva do que no iniacutecio
da fase de contato efetivo (CAVAGNA 2006) Estas assimetrias podem chegar ateacute
30
Um ponto chave na formulaccedilatildeo deste modelo eacute a determinaccedilatildeo da rigidez do
sistema massa-mola aqui tambeacutem uma simplificaccedilatildeo do fenocircmeno pois considera
apenas os valores maacuteximos de forccedila e deslocamento verticais como se durante toda
a fase de apoio a rigidez fosse constante
Caacutelculo da rigidez de mola
Os caacutelculos da rigidez de mola do sistema bouncing representam as
propriedades de mola do movimento vertical do corpo e da perna A rigidez vertical eacute
80
estimada como a razatildeo do pico de forccedila vertical (algumas vezes denominado como
forccedila maacutexima durante a fase ativa do tempo de contato) e o deslocamento maacuteximo
vertical do CM durante o apoio (CAVAGNA et al 1988 MCMAHON e CHENG
1990) Outro meacutetodo alternativo para o caacutelculo da rigidez vertical utiliza o tempo de
contato efetivo assumindo que este tempo representa o meio periacuteodo de oscilaccedilatildeo
do sistema elaacutestico (ver CAVAGNA et al 2005) k = Mb( tce)2 onde Mb eacute massa
corporal Este uacuteltimo meacutetodo apresenta a vantagem de evitar a influecircncia das
oscilaccedilotildees de aceleraccedilatildeo vertical do CM apoacutes o contato inicial A rigidez de perna eacute
a razatildeo do pico de forccedila vertical e a mudanccedila no comprimento de perna durante o
apoio A variaccedilatildeo do comprimento de perna eacute determinada com a equaccedilatildeo 330
(MCMAHON e CHENG 1990)
delta l = ycm + l0 (1V cosa0) Eq 329
Onde l0 eacute o comprimento de perna em repouso e a0 eacute o acircngulo da perna no
contato inicial em relaccedilatildeo agrave vertical (a0 = sin-1(Vf tc2 l0) onde Vf eacute a velocidade
horizontal e tc eacute o tempo de apoio Apesar do uso frequumlente desta medida no campo
das Ciecircncias do Esporte e Biologia Experimental a rigidez de pernas possui uma
forte limitaccedilatildeo devido ao uso da medida de membro inferior incorrer em um alto grau
de erro (e 1 cm dados natildeo publicados) Aleacutem disso se utiliza da medida de tempo
de contato enquanto que a relaccedilatildeo inversa com o sistema massa-mola eacute dada pelo
tempo de contato efetivo (quando a forccedila vertical eacute maior do que o peso corporal)
portanto natildeo representa as mudanccedilas do sistema massa-mola frente agrave restriccedilotildees do
ambiente (eg gravidade CAVAGNA et al 2005)
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical
A menor amplitude de oscilaccedilatildeo do sistema elaacutestico nos idosos (Sce na figura
33) implica i) uma menor forccedila vertical maacutexima Fvmx e energia elaacutestica armazenada
em cada passo ii) uma maior frequumlecircncia de passo iii) uma menor variaccedilatildeo de
energia externa para manter o movimento do CM do corpo em relaccedilatildeo ao meio
ambiente externo e iv) um maior trabalho interno para acelerar os segmentos
relativo ao CM
81
Destaca-se que as divisotildees do passo baseadas no tempo de contato efetivo
(vermelho) aeacutereo efetivo (azul) correspondem agrave aproximadamente metade da
duraccedilatildeo e deslocamento durante o passo Em contraste a fraccedilatildeo do passo realizado
durante o tempo aeacutereo e de contato variam bastante com a velocidade Aleacutem disso
o tcetae e SceSce nos idosos enquanto que o contraacuterio acontece com os jovens
Linhas representam a meacutedia ponderada de todos os dados (Kaleidagraph 364) e a
uacutenica proposta destas linhas eacute ser um guia para os olhos elas natildeo descrevem o
mecanismo fiacutesico envolvido (figura 33)
Tabela 31 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nos quais os pares de variaacuteveis listadas satildeo significativamente diferentes dentro de
cada grupo experimental
Vf Idoso Jovem
(km h-1) tce vs tae Sce vs Sae fs vs f tce vs tae Sce vs Sae fs vs f
3 006 312 10-4 079 001 004 117 10-3
4 031 013 028 008 058 005
5 003 003 004 091 014 020
6 001 473 10-3 003 005 026 001
7 002 001 020 011 045 001
8 102 10-7 361 10-8 190 10-4 003 048 256 10-3
9 445 10-4 753 10-6 002 001 057 151 10-3
10 250 10-4 212 10-5 510 10-4 243 10-3 091 284 10-3
11 014 003 028 158 10-4 019 234 10-4
12 044 013 061 249 10-5 002 328 10-5
13 018 003 020 310 10-6 261 10-3 100 10-5
14 001 042 005 388 10-6 183 10-3 166 10-5
15 029 022 012 107 10-6 256 10-4 166 10-6
16 057 048 090 947 10-5 361 10-3 292 10-4
Forccedila e energia elaacutestica
A forccedila maacutexima vertical eacute dada pela massa corporal multiplicada pela
aceleraccedilatildeo vertical maacutexima e o resultado eacute somado ao peso corporal Avmx (equaccedilatildeo
82
34) A massa corporal meacutedia eacute 711 kg nos idosos e 634 kg nos jovens A variaccedilatildeo
da aceleraccedilatildeo maacutexima atingida pelos indiviacuteduos idosos nas suas altas velocidades
(15-17 kmh-1) eacute de 1077 plusmn 197 ms-2 (n=7) Considerando que nas mesmas
velocidades alcanccediladas pelos jovens a variaccedilatildeo foi de 1886 plusmn 274 ms-2 (n=24)
(figura 34) Note que a aceleraccedilatildeo ascendente e velocidade vertical maiores
atingidas pelos jovens Contraacuterio ao bouncing elaacutestico a velocidade vertical maacutexima
alcanccedilada durante o deslocamento descendente eacute maior do que o alcanccedilado
durante a elevaccedilatildeo sendo esta diferenccedila maior nos idosos
Tabela 32 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Wf Wv tce tae Sce
3 008 003 095 482 10-3 005
4 008 015 004 074 062
5 062 002 083 006 006
6 259 10-3 138 10-4 034 427 10-4 001
7 049 133 10-6 073 287 10-5 140 10-3
8 004 162 10-6 039 231 10-6 198 10-3
9 007 581 10-6 028 107 10-5 407 10-4
10 005 120 10-10 094 605 10-9 176 10-6
11 014 170 10-6 025 383 10-7 435 10-6
12 014 471 10-7 019 321 10-6 380 10-5
13 007 114 10-6 068 228 10-6 196 10-6
14 099 400 10-6 005 170 10-5 231 10-5
15 014 222 10-7 010 142 10-6 685 10-8
16 066 208 10-4 061 184 10-4 718 10-4
De acordo com a equaccedilatildeo 34 estes nuacutemeros resultam em uma forccedila vertical
maacutexima Fvmxold=1463 kN e Fvmxyoung=1818 kN note que 75 de diferenccedila na Avmx
resulta em 24 de diferenccedila em Fvmx devido agrave maior massa corporal dos indiviacuteduos
idosos A forccedila mais baixa alcanccedilada durante o contato pelos indiviacuteduos idosos pode
83
ser explicada em parte pela bem documentada perda de forccedila muscular (eg
DOHERTY 2003) e em parte por uma estrateacutegia de aumentar a seguranccedila do
sistema muacutesculo-esqueleacutetico (KARAMANIDIS e ARAMPATZIS 2005)
A aparente k a 15-17 kmh-1 eacute 3732plusmn885 kNm-1 (n=7) nos indiviacuteduos idosos
e 2869plusmn650 kNm-1 (n=24) nos indiviacuteduos jovens (figura 35) Assumindo uma
relaccedilatildeo forccedila-comprimento linear dos elementos elaacutesticos seu alongamento maacuteximo
(de zero a Fvmx) seria (14633732)=0039 m nos idosos e (18182869)=0063 m
nos indiviacuteduos jovens Os paineacuteis inferiores da figura 35 mostram que a frequumlecircncia
de passo (linhas contiacutenuas) eacute similar agrave frequumlecircncia natural do sistema (linhas
pontilhadas) em todas as velocidades nos idosos enquanto que com os jovens a
frequumlecircncia do passo torna-se menor do que a frequumlecircncia do sistema com o aumento
da velocidade
Tabela 33 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Avmx Vvmx AvmxSce (AvmxSce)Mb Sv
3 004 003 099 039 002
4 001 011 003 022 034
5 152 10-3 001 024 040 003
6 601 10-4 232 10-4 049 067 772 10-4
7 132 10-3 422 10-6 066 007 367 10-5
8 918 10-7 154 10-6 025 018 271 10-5
9 526 10-5 131 10-6 007 067 137 10-5
10 134 10-7 196 10-11 072 001 146 10-8
11 439 10-4 744 10-7 046 004 798 10-7
12 533 10-6 666 10-7 040 002 552 10-6
13 264 10-4 401 10-6 061 022 158 10-6
14 115 10-3 366 10-6 005 652 10-5 126 10-5
15 891 10-6 725 10-8 031 009 316 10-7
16 353 10-3 258 10-4 048 005 267 10-4
84
Visto que a energia potencial gravitacional e a energia cineacutetica do CM estatildeo
em fase durante a corrida o sistema elaacutestico sofre sua maacutexima tensatildeo quando o
componente vertical da forccedila de reaccedilatildeo do solo encontra-se no maacuteximo ((Fvmx)) e o
componente horizontal eacute nulo (Ff=0)
Na verdade Fvmx ocorre no ponto mais baixo da trajetoacuteria (Epmn) quando o
CM termina sua desaceleraccedilatildeo e comeccedila a sua aceleraccedilatildeo (ou seja Ff=0 e Ekfmn) A
energia elaacutestica armazenada em cada passo pode assim ser computada usando-se
apenas a forccedila vertical como (14630039)2=2853 J e (18180063)2=5727 J para
os indiviacuteduos idosos e para os indiviacuteduos jovens respectivamente Esta energia
elaacutestica eacute posteriormente utilizada em parte durante o impulso para elevar e acelerar
a frente o CM
Tabela 34 Comparaccedilatildeo das assimetrias contato-despregue entre jovens idosos e
sistema elaacutestico
IDOSO JOVEM ELAacuteSTICO
Vvmxdown Vvmxup 118plusmn011 107plusmn008 1
f 124plusmn018 106plusmn010 1
Rintdown Rintup 213plusmn130 126plusmn032 1
tpush tbrake 125plusmn016 115plusmn013 1
Ekmxdown - Ekmxup (J) 1003plusmn625 752plusmn542 0
Valores satildeo meacutediaplusmndp (plt0001 N=124 ( N=122) para idosos e N=195 para jovens)
Amplitude de velocidades 3-17 kmh-1
A maacutexima compressatildeo elaacutestica do sistema tambeacutem pode ser analisada como
o deslocamento vertical do CM durante o contato o que em 15-17 kmh-1 eacute em
meacutedia Sc=0032plusmn0006 m (n=7) nos idosos e Sc=0060plusmn0007 m (n=24) nos jovens
(em vez de 0039 m e 0063 m como calculado acima)
85
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um
passo em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis
a direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup +
86
Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo (tae)
da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na direccedilatildeo
vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os ciacuterculos em
vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2) e
a frente (Lce) A linha em vermelho pontilhada em cada painel indica o tempo de
contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente (Lc) durante o
passo As linhas azuis pontilhadas em cada painel indicam o tempo aeacutereo total
(ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La) durante o passo As
barras verticais indicam o desvio-padratildeo da meacutedia os nuacutemeros proacuteximos aos
siacutembolos nos paineacuteis superiores indicam o nuacutemero de itens nas meacutedias
A discrepacircncia pode ser devida em parte agrave uma subestimaccedilatildeo do Sc como
medido (ver Metodologia) A energia elaacutestica armazenada computada como (Fvmx
Sc)2 eacute (1463 0032)2=2341 J (em vez de 2853 J conforme calculado acima) e
(1818 0060)2=5454 J (em vez de 5727 J) para indiviacuteduos idosos e indiviacuteduos
jovens respectivamente
A partir dos dados meacutedios de frequumlecircncia de passo e potecircncia em um mesmo
conjunto de velocidades (figuras 36 e 37) o trabalho externo em cada passo
resultou (405 711)368=7825 J nos indiviacuteduos idosos e (538
634)279=12226 J nos indiviacuteduos jovens Daqui resulta que a contribuiccedilatildeo
elaacutestica para o trabalho externo em cada passo poderia ser 28537825=036 e
572712226=047 respectivamente (ou 23417825=030 e 545412226=045
usando Sc)
Estes caacutelculos aproximados em conjunto com uma maior assimetria contato-
despregue que seraacute discutida a seguir (tabela 34) indicam uma menor restituiccedilatildeo
elaacutestica do corpo nos idosos A maior rigidez k medida nos indiviacuteduos idosos em
sua mais alta velocidade de corrida (figura 35) em aparente desacordo com a
menor rigidez dos tendotildees do gastrocnemius (ONAMBELE et al 2006) do
quadriacuteceps (KARAMANIDIS e ARAMPATZIS 2005) medidos nos idosos Por outro
lado um aumento pela idade da rigidez dos elementos elaacutesticos nos tendotildees e
muacutesculos foi relatado em favor dos muacutesculos flexores do cotovelo (VALOUR e
POUSSON 2003)
87
Importante ressaltar que na complexa deformaccedilatildeo de todo corpo no solo a
aparente k eacute o resultado de um conjunto de unidades muacutesculo-tendatildeo em seacuterie cujas
propriedades elaacutesticas dependem do niacutevel de ativaccedilatildeo muscular O nuacutemero de
unidades muacutesculo-tendatildeo em seacuterie depende por sua vez da orientaccedilatildeo dos
segmentos e do tronco durante o impacto sobre o solo que pode ser diferente nos
indiviacuteduos idosos e nos indiviacuteduos jovens (por exemplo apoio na parte da frente do
peacute mais do que no calcanhar)
O maior valor de k encontrado em idosos em suas mais altas velocidades de
corrida portanto natildeo eacute necessariamente uma indicaccedilatildeo de uma maior rigidez dos
seus tendotildees ou unidades de muacutesculo-tendatildeo medidos durante contraccedilotildees
voluntaacuterias maacuteximas
Frequumlecircncia
O menor tempo aeacutereo efetivo tae nos idosos causa um aumento na
frequumlecircncia da passo f =1(tce+tae) para valores que satildeo iguais e por vezes
superiores agrave frequumlecircncia do sistema fs=1(2tce) Diferentemente dos jovens que
optam em uma grande extensatildeo de velocidades por uma FP mais baixa agrave do
sistema aumentando o tae em relaccedilatildeo ao tce (figuras 33 35 e tabela 32)
Os fatores que determinam a escolha da f a uma determinada velocidade de
corrida satildeo i) sintonizando a frequumlecircncia de passo f para a frequumlecircncia natural do
sistema fs (CAVAGNA et al 1997) e ii) escolhendo uma f que minimize a potecircncia
meacutedia de passada limitada aerobicamente (Wextf figura 36) dentro dos limites
estabelecidos pela potecircncia anaeroacutebica meacutedia durante o empurre (trabalho positivo)
(W+tpush liberada imediatamente pelo muacutesculo durante a contraccedilatildeo) (CAVAGNA et
al 1991) A primeira estrateacutegia eacute normalmente adotada em baixas velocidades de
corrida e modificada para a segunda estrateacutegia de corrida em altas velocidades Isto
eacute feito atraveacutes de um aumento da aceleraccedilatildeo ascendente meacutedia avce acima de 1 g
com o consequumlente aumento de tae em relaccedilatildeo ao tce (equaccedilatildeo 36) Assim a
frequumlecircncia de passo f=1(tce+tae) torna-se menor do que a frequumlecircncia do sistema
fs=1(2tce) bem como o incremento da potecircncia meacutedia do passo Wextf eacute controlada
Nos indiviacuteduos idosos a segunda estrateacutegia nunca eacute adotada A aceleraccedilatildeo meacutedia
para cima nunca excede 1 g mesmo nas velocidades altas 15-17 kmh-1 onde avce
=742plusmn123 ms-2 (n=7) segue-se que f fs em todas as velocidades (figura 35) Isto
88
permite uma menor forccedila durante o empurre da corrida em alta velocidade
resultando em uma potecircncia meacutedia durante o empurre ~ 60 daquela dos jovens
mas o aumento da frequumlecircncia da passada resulta em um maior Wint e um grande
incremento na potecircncia meacutedia de passo Wextf em corridas de alta velocidade (ver
abaixo) Aleacutem disso como se verificou neste estudo a mais baixa deformaccedilatildeo
elaacutestica do sistema diminui a fraccedilatildeo de Wext possivelmente sustentado pelo
mecanismo elaacutestico (ver tabela 34) Em contrapartida a segunda estrateacutegia eacute
seguida pelos jovens onde avce =1248plusmn18 ms-2 (n=24) no mesmo intervalo de
velocidades (15-17 kmh-1) resultando em uma menor frequumlecircncia de passo (f lt fs)
que limita o aumento do Wint da corrida em altas velocidades e um consequumlente
incremento da Wextf+ (ver abaixo)
Aleacutem disso a maior deformaccedilatildeo elaacutestica do sistema permite uma maior
utilizaccedilatildeo da energia elaacutestica (tabela 34) Sabe-se que uma mudanccedila na frequumlecircncia
de passo a uma determinada velocidade tem efeitos opostos sobre a potecircncia
externa o que diminui com o aumento da frequumlecircncia da passada e a potecircncia
interna para reposicionar os segmentos em cada passo que aumenta com a
frequumlecircncia (CAVAGNA et al 1991)
Em que medida a menor potecircncia externa meacutedia do passo devido agrave menor
amplitude da oscilaccedilatildeo dos segmentos nos idosos eacute compensada por uma maior
potecircncia interna meacutedia do passo devido ao aumento da frequumlecircncia de passo
89
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e velocidade
vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown (paineacuteis inferiores)
atingidos pelo CM durante o passo em funccedilatildeo da velocidade de corrida Estatiacutestica
e outras indicaccedilotildees conforme a figura 33
O total do trabalho realizado por unidade distacircncia Wtot =Wint+Wext foi somado
pelo Wint estimado pelas equaccedilotildees 32 e 33 para os indiviacuteduos jovens e idosos
como descrito nos Meacutetodos e pelo Wext calculado a partir das seguintes equaccedilotildees
obtidas pela interpolaccedilatildeo de todos os dados experimentais
W ML(J kg-1 m -1) = 29738 Vf - 03217 Eq 330 extyoung
90
(R=0831) para o grupo de indiviacuteduos jovens e
W ML(J kg-1 m -1) = 28445 Vf - 040856 Eq 331 extold
(R=0762) para o grupo de indiviacuteduos idosos O Wtot resultante (linhas
pontilhadas nos paineacuteis inferiores da figura 36) mostra que o trabalho externo menor
no idoso por unidade de distacircncia eacute progressivamente compensado com o aumento
da velocidade por um maior trabalho interno devido agrave sua frequumlecircncia de passada
(FP) aumentada O Wtot alcanccedila um minimum a ~75 kmh-1 nos indiviacuteduos idosos e
um miacutenimo a ~8-12 kmh-1 nos indiviacuteduos jovens
A diferenccedila em Wtot eacute invertida acima de ~14 kmh-1 Eacute possiacutevel que a menor
utilizaccedilatildeo da energia elaacutestica em idosos aumente o gasto de sua energia metaboacutelica
para o mesmo Wtot O consumo de O2 durante a corrida a 10 kmh-1 aumentou com a
idade em corredores treinados do sexo feminino (EVANS et al 1995)
343 A assimetria contato-despregue
As quatro fases do bouncing as diferenccedilas com um sistema elaacutestico
Antes de descrever a assimetria contato-despregue no aparente bouncing do
CM em cada passo da corrida vale a pena referir que os momentos de contato e
despregue podem natildeo ocorrer durante corridas de baixa velocidade quando a
oscilaccedilatildeo vertical do CM do corpo se daacute totalmente em contato com o solo (figura
38) Eacute oacutebvio que neste caso o contato com o solo natildeo pode ser tomado como um
indicador de contato e despregue quando se descreve o bouncing do sistema
elaacutestico Neste caso a oscilaccedilatildeo vertical ocorre abaixo e acima da posiccedilatildeo de
equiliacutebrio (onde a Fv iguala o PC e a velocidade vertical eacute maacutexima) Mesmo quando
uma fase aeacuterea ocorre durante o passo a fraccedilatildeo do deslocamento vertical do CM
total em que o corpo estaacute em contato com o solo ScSv muda amplamente com a
velocidade enquanto que a fraccedilatildeo do deslocamento vertical abaixo e acima do ponto
de equiliacutebrio SceSv se aproxima da metade do Sv quase independente da
velocidade (figura 37)
91
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e frequumlecircncia
do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute maior nos idosos
nas altas velocidades (paineacuteis superiores) a rigidez vertical normalizada pela massa
eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras indicaccedilotildees conforme figura 33
92
Estas observaccedilotildees indicam que eacute mais adequado considerar-se contato
efetivo o instante no qual a Fv aumenta acima do PC (ao inveacutes do instante em que o
peacute estaacute em contato com o solo) e despregue efetivo o instante em que a Fv diminui
para valores menores do que o PC (ao inveacutes do instante no qual o peacute deixa o solo)
A assimetria contato-despregue desaparece quando o bouncing do corpo eacute mais
corretamente dividido desta forma (ou seja tce versus tae em vez de tc versus ta)
(CAVAGNA et al 1988 MCMAHON e CHENG 1990) Ainda na figura 37 pode ser
observado que ScSv mudam mais com a velocidade do que a amplitude da
oscilaccedilatildeo SceSv ao qual atinge a metade do deslocamento vertical Sv Exceto as
velocidades muito baixas quando a fase aeacuterea eacute nula (ScSv=1 eg paineacuteis
superiores nas figuras 31 e 38) o deslocamento descendente enquanto o peacute toca o
solo eacute menor do que o deslocamento ascendente particularmente nos idosos a
descida baliacutestica do CM eacute maior do que a elevaccedilatildeo baliacutestica (veja a linha azul
pontilhada na figura 38)
Segundo a equaccedilatildeo 34 a velocidade vertical descendente eacute maacutexima no
instante do contato efetivo e a velocidade vertical ascendente eacute maacutexima no instante
do despregue efetivo No movimento harmocircnico de um sistema elaacutestico as
velocidades ascendentes e descendentes maacuteximas satildeo iguais Isso natildeo eacute verdade
na corrida humana a velocidade maacutexima descendente eacute superior agrave velocidade
maacutexima ascendente (CAVAGNA 2006) Estes resultados mostram que a assimetria
eacute maior em indiviacuteduos idosos do que nos jovens na variaccedilatildeo normal de velocidades
(3-17 kmh-1) a proporccedilatildeo normalizada ((VvmxdownVvmxup)norm=116plusmn009 (n=124)
nos idosos e 107plusmn007 (n=195) nos jovens (p=126 10-19) (tabela 34) Outras
assimetrias satildeo apresentadas a seguir atraveacutes da anaacutelise das mudanccedilas na energia
potencial gravitacional Ep e energia cineacutetica translacional Ek=Ekv+Ekf do CM
corporal durante as quatro fases de oscilaccedilatildeo do sistema em relaccedilatildeo a posiccedilatildeo de
equiliacutebrio (Fv=Mg) (CAVAGNA 2006) Estas fases satildeo apresentadas na figura 38 a
partir do topo da trajetoacuteria do CM corporal Durante a aceleraccedilatildeo descendente
(Saedown azul) a Ep diminui e a Ek aumenta indicando uma transduccedilatildeo de Ep em Ek
o que ocorre tanto na presenccedila quanto na ausecircncia de uma fase aeacuterea (por
exemplo na parte superior do painel esquerdo da figura 38) O montante desta
transduccedilatildeo eacute dado pelo incremento Rintdown da curva do Rint(t) apoacutes o maacuteximo de Ep
Durante a desaceleraccedilatildeo descendente (Scedown vermelho) o trabalho externo
negativo eacute feito para diminuir simultaneamente Ep e Ek O trecho superior da curva
93
Rint(t) correspondente agrave fraccedilatildeo do passo mostra que natildeo ocorre transduccedilatildeo entre
Ep e Ek Note-se que o pico de Ek durante o passo eacute atingido proacuteximo ao iniacutecio da
fase de trabalho negativo consistente com a velocidade maacutexima de alongamento
das unidades muacutesculo-tendotildees (HEGLUND e CAVAGNA 1987)
Durante a aceleraccedilatildeo ascendente (Sceup vermelho) trabalho positivo externo
eacute feito para aumentar simultaneamente Ep e Ek O trecho inferior da curva Rint(t)
correspondente agrave fraccedilatildeo a do passo mostra que natildeo ocorre transduccedilatildeo entre Ep e
Ek Note que enquanto eacute quase totalmente contida dentro do Scedown a continua
apoacutes o final do Sceup ou seja dentro da desaceleraccedilatildeo ascendente do CM (Saeup
azul) Em outras palavras a perna ainda estaacute a exercer uma forccedila propulsiva a fim
de acelerar o corpo a frente embora a forccedila vertical tenha diminuiacutedo para valores
abaixo do peso corporal Essa assimetria eacute maior no idoso A proporccedilatildeo a eacute
124plusmn018 nos indiviacuteduos idosos e 106plusmn010 nos indiviacuteduos jovens (p=41510-19
tabela 34)
Importante notar a origem diferente dos dois picos Ekmxup (inferior) e
Ekmxdown (superior) alcanccedilados durante o passo de corrida durante a elevaccedilatildeo e
descenso do CM Ekmxup se deve ao empurre para frente enquanto Ekmxdown eacute
devido agrave gravidade A diferenccedila meacutedia Ekmxdown- Ekmxup=752plusmn542 nos indiviacuteduos
jovens e 987plusmn592 nos idosos (p=00004) indica uma maior perda da energia
cineacutetica Ekv no idoso adquirida durante a descida (tabela 34)
Durante a desaceleraccedilatildeo ascendente do CM (Saeup azul) a transduccedilatildeo de Ek
em Ep acontece apenas na uacuteltima parte da elevaccedilatildeo porque como descrito acima
Ep e Ek aumentam simultaneamente durante a maior parte do Saeup Na verdade a
transduccedilatildeo de Ek em Ep eacute quase nula nos idosos (figura 38) O incremento da curva
Rint(t) que ocorre durante a elevaccedilatildeo Rintup eacute inferior ao que ocorre durante a
queda Rintdown Tambeacutem esta assimetria eacute maior no idoso A proporccedilatildeo
RintdownRintup nos indiviacuteduos idosos eacute 213plusmn13 e 126 plusmn 032 nos indiviacuteduos jovens
(p=33310-11 tabela 34) Este fenocircmeno eacute acompanhado por uma maior fraccedilatildeo da
elevaccedilatildeo em contato com o solo como indicado pela maior proporccedilatildeo ScupSvup nos
idosos (figura 37) Um tempo aeacutereo inferior nos idosos durante a corrida em ~ 10
kmh-1 foi encontrado por KARAMANIDIS e ARAMPATZIS 2005)
94
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com seus
95
dois componentes o trabalho realizado contra a gravidade (Wv ciacuterculos abertos) e
para sustentar as mudanccedilas de velocidade a frente (Wf quadrados abertos)
Estatiacutestica e outras indicaccedilotildees conforme figura 33
Note que particularmente nos idosos a transduccedilatildeo da Ek em Ep durante a
elevaccedilatildeo (incremento Rintup da curva Rint(t) abaixo da linha horizontal pontilhada) eacute
menor do que a transduccedilatildeo da Ep em Ek durante o deslocamento descendente
(incrementos Rintdown da curva Rint(t) acima da linha horizontal pontilhada) esta
assimetria eacute acompanhada pela elevaccedilatildeo baliacutestica (nulo nos idosos) menor do que a
descida baliacutestica Nos trechos horizontais da curva Rint(t) nenhuma transduccedilatildeo
ocorre Ep e Ek e unidades muacutesculo-tendatildeo absorvem simultaneamente Ep e Ek (fase
) e aumentam Ep e Ek simultaneamente (fase a) Note que enquanto que a fase eacute
realizada durante Scedown a estende-se aleacutem do Sceup dentro de uma grande parte
do Saeup devido ao continuo aumento da Ek Esta assimetria tambeacutem eacute maior nos
idosos
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As fraccedilotildees do
deslocamento vertical do CM durante contato ScSv (ciacuterculos preenchidos
deslocamento descendente ciacuterculos abertos deslocamento ascendente) e quando
a Fv eacute maior do que o PC SceSv (quadrados preenchidos deslocamento
96
descendente quadrados abertos deslocamento ascendente) satildeo apresentados em
funccedilatildeo da velocidade de corrida Estatiacutestica conforme figura 33
Um trabalho externo positivo eacute realizado (segmentos vermelhos na figura 31)
natildeo soacute para aumentar simultaneamente Ep e Ek (fraccedilatildeo a do passo) mas tambeacutem
quando ocorre transduccedilatildeo da Ek em Ep no final do empurre durante o alcance do
platocirc de Ecm (figura 31) Daqui resulta que a duraccedilatildeo de trabalho positivo tpush eacute
superior agrave duraccedilatildeo a a proporccedilatildeo tpushta diminui com a velocidade de ~19 agrave 3-5
kmh-1 para ~11 agrave 15-17 kmh-1 Da mesma forma o trabalho externo negativo eacute
feito (segmentos azuis na figura 31) natildeo apenas para diminuir simultaneamente Ep e
Ek (fraccedilatildeo do passo) mas tambeacutem quando ocorre uma transduccedilatildeo de Ep em Ek no
iniacutecio da frenagem durante a acentuada diminuiccedilatildeo de Ecm no final de seu platocirc
(figura 31) Consequentemente a duraccedilatildeo do trabalho negativo tbrake eacute maior do que
a duraccedilatildeo a proporccedilatildeo tbraket diminui com a velocidade de ~17 agrave 3-5 kmh-1 para
~12 agrave 15-17 kmh-1
A duraccedilatildeo do empurre e da frenagem estatildeo apresentados na figura 39 em
funccedilatildeo da Vf Observa-se que tanto nos indiviacuteduos idosos quanto nos jovens tpushgt
tbrake ateacute 13-14 kmh-1 (tabela 31) A proporccedilatildeo eacute tpushtbrake=125plusmn016 nos indiviacuteduos
idosos e 115plusmn013 nos indiviacuteduos jovens (p=11610-9 tabela 34) Novamente a
assimetria eacute maior nos indiviacuteduos idosos
Durante a corrida no plano a uma velocidade constante o momentum perdido
Fbrake tbrake equivale ao momentum adquirido Fpush tpush (realmente na direccedilatildeo vertical
o momentum perdido eacute ligeiramente maior que o momentum adquirido porque a
velocidade descendente maacutexima eacute 7-16 maior do que a velocidade ascendente
maacutexima tabela 34) Deste modo se tpushgt tbrake entatildeo Fpush lt Fbrake ou seja a forccedila
meacutedia durante o trabalho positivo eacute inferior agrave forccedila meacutedia durante o trabalho
negativo
As assimetrias do bouncing acima descritas estatildeo resumidas na tabela 34
onde eacute feita uma comparaccedilatildeo entre indiviacuteduos idosos indiviacuteduos jovens e um
sistema elaacutestico Observa-se que o desvio de um sistema elaacutestico eacute maior para os
indiviacuteduos idosos do que para os indiviacuteduos jovens isto eacute o salto dos indiviacuteduos
idosos eacute menos elaacutestico do que o dos indiviacuteduos jovens Note a mesma conclusatildeo
foi encontrada acerca da estimativa da energia elaacutestica armazenada em cada passo
97
98
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito idoso
paineacuteis a direita sujeito jovem em cada painel o comportamento da transduccedilatildeo Ep-
Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas na energia potencial
gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf normalizada para oscilar entre
zero e um Mesmos passos da figura 1 cada painel comeccedila e termina no valor
menor da curva Ep As cores diferentes na curva Ep distinguem as fraccedilotildees do passo
onde a Fv exercida no solo eacute maior do que o PC (vermelho) e menor do que o PC
(azul) As linhas contiacutenuas de Ep indicam a fase de contato enquanto que as linhas
pontilhadas Ep (azul fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As
quatro fases correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown (azul)
e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas pontilhadas verticais
satildeo apresentadas nos dois picos de Ek e ocupam a fraccedilatildeo onde a transduccedilatildeo Ep-Ek
ocorre conforme indicado pelos incrementos da curva Rint(t)
Por que o bouncing do corpo eacute diferente daquele de um sistema elaacutestico
A cada passo executado as unidades muacutesculo-tendatildeo satildeo submetidas a um
ciclo alongamento-encurtamento durante o contato com o solo As unidades
muacutesculo-tendatildeo satildeo constituiacutedas por duas estruturas em seacuterie que apresentam
respostas diferentes durante o alongamento e encurtamento Enquanto os tendotildees
tecircm um comportamento semelhante entre o alongamento e encurtamento devido agrave
sua pequena histerese (ALEXANDER 2002) o muacutesculo exerce uma maior forccedila
durante o alongamento do que durante o encurtamento dependente da relaccedilatildeo
forccedila-velocidade (FENN e MARSH 1935 HILL 1938) Este fato resulta em uma
resposta diferente das unidades muacutesculo-tendatildeo a um ciclo alongamento-
encurtamento dependente da mudanccedila do comprimento relativo de muacutesculo e
tendatildeo durante o ciclo (CAVAGNA 2006)
O alongamento dos muacutesculos em relaccedilatildeo ao alongamento do tendatildeo depende
da rigidez do muacutesculo em relaccedilatildeo agrave do tendatildeo a rigidez do muacutesculo por sua vez
depende da sua ativaccedilatildeo Se a ativaccedilatildeo eacute elevada como em altas velocidades
(BIEWENER 1998) e o muacutesculo eacute mantido isomeacutetrico como alguns estudos
sugerem para a corrida (KRAM e TAYLOR 1990 BIEWENER et al 1998
99
ROBERTS et al 1998) a maioria da mudanccedila no comprimento seraacute realizada pelos
tendotildees e as caracteriacutesticas do bouncing se aproximaratildeo agraves de um corpo elaacutestico
Se por outro lado a ativaccedilatildeo muscular for baixa uma importante fraccedilatildeo da mudanccedila
do comprimento seraacute realizada pelo muacutesculo Neste caso a forccedila desenvolvida
durante o alongamento eacute esperada que exceda a que foi desenvolvida durante o
encurtamento e as caracteriacutesticas do bouncing foram distintas agrave de um corpo
elaacutestico
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos
painel inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura 31)
e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e barras
azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de corrida
Estatiacutestica conforme figura 33
Esta eacute possivelmente a razatildeo pela qual a proporccedilatildeo tpushtbrake (figura 39) eacute
maior em velocidades baixas de corrida quando a ativaccedilatildeo muscular eacute menor e o
comprimento muscular eacute alterado e consequumlentemente o trabalho sustentado por
filamentos de muacutesculos que deslizam dentro das unidades muacutesculo-tendatildeo eacute
relativamente maior (CAVAGNA 2006) Pode ser observado que a duraccedilatildeo de
trabalho externo positivo eacute maior do que a duraccedilatildeo do trabalho externo negativo ateacute
a velocidade de 12-14 kmh-1 (tabela 31) como esperado a partir da relaccedilatildeo forccedilashy
100
velocidade muscular Isto sugere que com o aumento da velocidade a contribuiccedilatildeo
do trabalho pelas estruturas contraacuteteis eacute progressivamente substituiacutedo pela
armazenagem e re-utilizaccedilatildeo de energia elaacutestica pelos tendotildees A razatildeo tpushtbrake eacute
maior nos idosos (tabela 34)
Um corolaacuterio deste ponto de vista eacute que as fibras musculares curtas
aparentemente de pouca importacircncia ligadas em seacuterie com tendotildees muito longos
(ALEXANDER 2001) tecircm papel fundamental de modular a energia elaacutestica
armazenada nos tendotildees e para ajustar toda a extensatildeo da mudanccedila imposta agrave
unidade muacutesculo-tendatildeo Uma forccedila muscular maior durante o alongamento do que
durante o encurtamento juntamente com a perda de energia durante o ciclo
alongamento-encurtamento satildeo tanto consequumlecircncias da relaccedilatildeo forccedila-velocidade do
muacutesculo e podem explicar pelo menos qualitativamente o conjunto dos desvios do
sistema elaacutestico (tabela 33)
O maior desvio de um sistema elaacutestico encontrado nos indiviacuteduos mais idosos
eacute coerente com a menor forccedila desenvolvida pelos seus muacutesculos o que implicaria
uma mudanccedila relativamente maior do comprimento do muacutesculo nas unidades
muacutesculo-tendatildeo A segunda razatildeo pode ser a maior diferenccedila na forccedila desenvolvida
pelos muacutesculos durante o alongamento relativo ao encurtamento relatado na
literatura em idosos (PHILLIPS et al 1991 OCHALA et al 2006 VANDERVOORT
et al 1990 PORTER et al 1997 POUSSON et al 2001 KLASS et al 2005)
Em conclusatildeo modificaccedilotildees na estrutura muscular menor forccedila e uma
relaccedilatildeo forccedila-velocidade mais assimeacutetrica resultam em uma modificaccedilatildeo da energia
mecacircnica do CM do corpo durante a corrida A menor forccedila especialmente durante
trabalho positivo explica a menor amplitude da oscilaccedilatildeo vertical que por sua vez eacute
a causa do menor trabalho externo da maior frequumlecircncia da passada e maior
trabalho interno A relaccedilatildeo forccedila-velocidade mais assimeacutetrica explica a maior
assimetria contato-despregue Ambas as modificaccedilotildees resultam em uma menor
utilizaccedilatildeo da energia elaacutestica durante o bouncing do idoso
101
4 PREDIZENDO Vf CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO TERRESTRE
41 Introduccedilatildeo
A dinacircmica da locomoccedilatildeo eacute determinada principalmente pelas forccedilas de
reaccedilatildeo do solo geradas de modo agrave re-acelerar e deslocar o corpo contra a forccedila
gravitacional em um ciclo de passada O meacutetodo para analisar o trabalho e o custo
mecacircnico externos usando plataformas dinamomeacutetricas foi introduzido por Cavagna
e colaboradores (caminhada CAVAGNA et al 1963 corrida CAVAGNA et al
1964) Desde entatildeo o Wext tem sido investigado em diferentes condiccedilotildees e
populaccedilotildees [terreno (FORMENTI et al 2005 FORMENTI e MINETTI 2007)
crianccedilas (CAVAGNA et al 1983 SCHEPENS et al 1998 SCHEPENS et al 2001)
meacutetodo de locomoccedilatildeo (MINETTI 1998a ARDIGO et al 2003) deficiecircncia de
hormocircnio do crescimento (MINETTI et al 2000) gradiente de locomoccedilatildeo (MINETTI
et al 1993 1994) idosos (MIAN et al 2006 estudo atual capiacutetulo 3)]
Apesar de sua relevacircncia cientiacutefica o nuacutemero de laboratoacuterios onde trabalho e
custo mecacircnico satildeo avaliados eacute limitado devido a questotildees metodoloacutegicas Em
especial a aquisiccedilatildeo da energia mecacircnica externa eacute atualmente limitada pela
necessidade de espaccedilo suficiente para posicionar plataformas de forccedila para coletar
dois passos sucessivos de modo a obter o miacutenimo de duas curvas de forccedilas de
reaccedilatildeo do solo consecutivas essenciais para esse meacutetodo Durante a corrida haacute um
periacuteodo entre as duas curvas durante o qual ambos os peacutes estatildeo fora do solo (em
velocidades normais) enquanto que durante a caminhada esse periacuteodo eacute
substituiacutedo por uma fase de apoio duplo
Independente se as duas curvas estatildeo sobrepostas ou natildeo (caminhando ou
correndo respectivamente) haacute ainda alguma dificuldade em obter
102
experimentalmente no miacutenimo duas curvas similares de modo que a Fv meacutedia seja
igual ao PC Normalmente mais de um terccedilo das aquisiccedilotildees com indiviacuteduos normais
satildeo rejeitadas (dados natildeo-publicados) devido agrave dificuldade de caminhar ou correr
em plataformas em uma velocidade constante E aleacutem disso a maior parte dos setshy
uprsquos biomecacircnicos satildeo dispostos de modo que as curvas sucessivas sejam obtidas
da mesma plataforma Dados de Bastien e colaboradores mostram que duas
medidas sucessivas em diferentes plataformas de forccedila eram possiacuteveis apenas em
10 das tentativas Assim medir o Wint realizado durante o duplo apoio eacute uma tarefa
difiacutecil e essa variaacutevel em seu maacuteximo representa mais de 40 do Wext (BASTIEN
et al 2003)
Deste modo o presente texto procura analisar as possibilidades de anaacutelise da
biomecacircnica da locomoccedilatildeo em situaccedilotildees onde apenas uma plataforma de forccedila com
dimensotildees capazes de analisar apenas um apoio simples satildeo disponiacuteveis
O objetivo desse trabalho eacute estabelecer uma equaccedilatildeo capaz de predizer o
trabalho mecacircnico usando procedimentos de prediccedilatildeo linear e otimizaccedilatildeo e checar
sua validade analisando experimentos de locomoccedilatildeo em diferentes velocidades
42 Equaccedilatildeo do tempo de atraso
Usando a primeira lei de Newton (um corpo se move a uma velocidade
constante quando a soma total das forccedilas externas eacute igual a zero) temos que a Fv
meacutedia exercida contra o solo durante um ciclo de passada a uma velocidade
constante eacute igual ao PC (CAVAGNA e MARGARIA 1966) Se somente as forccedilas de
reaccedilatildeo do solo de um uacutenico passo satildeo coletadas e a simetria eacute assumida
(KARAMANIDIS et al 2003) o atraso de tempo entre passos (s) pode ser obtido
por
F t Ivc c vt = = Eq 41 step M g M g
onde tc e Fvc satildeo a duraccedilatildeo e a Fv meacutedia durante o fase de contato (figura 41)
respectivamente e Iv eacute o impulso vertical Essa informaccedilatildeo eacute crucial se a passada
completa deve ser reconstruiacuteda (no novo passo elaborado somente a forccedila
103
horizontal precisa ser invertida enquanto que a Fv precisa ser somente duplicada a
partir do atraso do tempo tstep)
M g M gFP = = Eq 42
2F t 2 Ivc c v
de onde o CP (CP m) pode ser inferido
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de reaccedilatildeo do solo durante a
corrida
O DF (ALEXANDER e JAYES 1980) ie a fraccedilatildeo do tempo de passada no
qual um uacutenico peacute estaacute no solo eacute
104
M g 1DF = = Eq 43
2F F vc vc2
M g
e deste modo eacute possiacutevel indicar se o modo de locomoccedilatildeo eacute caminhada (DF05) ou
corrida (DFlt05) Ateacute esse ponto a uacutenica variaacutevel a ser conhecida antecipadamente
eacute a massa corporal (kg)
43 Estimativa da velocidade horizontal
Enquanto pares de fotoceacutelulas satildeo comumente encontrados em laboratoacuterios
por vezes a Vf natildeo eacute conhecida (paleontologia biomecacircnica forecircnsica etc) Assim
FP DF e massa podem entrar no modelo de prediccedilatildeo de velocidade (ms-1) com
base em dados coletados previamente (NILSSON e THORSTENSSON 1989)
Vf = (1953F M g) - (14843Iv M g) + 5415 Eq 44 v peak
onde Fvpeak eacute a forccedila de impacto vertical e Iv eacute impulso vertical O erro meacutedio da
estimativa (SEE = 05 dp(1 ndash R2)) eacute 005 ms-1 Entatildeo o CP pode ser obtido como
VfFP ou
1953Fv peak -14843Iv + 5415M gCP = Eq 45
2Fvc
Apesar do alto coeficiente de regressatildeo e baixo erro padratildeo da meacutedia esse
meacutetodo necessita do primeiro pico vertical e assim se torna limitado por exemplo
em humanos para corredores que apoacuteiam o peacute com o calcanhar no momento do
contato Para evitar essa limitaccedilatildeo foi construiacutedo um modelo de regressatildeo linear
muacuteltipla incluindo variaacuteveis descritivas (MINETTI e ALEXANDER 1997) da
energeacutetica da locomoccedilatildeo
qregression + + DFregression + FPregressionVf = Eq 46 3
105
Para cada regressatildeo o meacutetodo dos miacutenimos quadrados eacute usado Enquanto
que o DF e o FP satildeo calculados (equaccedilotildees 42 e 43) o fator q precisa ser
determinado O fator q (tambeacutem conhecido como fator de forma) oferece
informaccedilotildees relacionadas ao formato da curva forccedila-tempo durante a fase de apoio
Usualmente a forccedila vertical pode ser determinada somente com dois primeiros
cossenos de uma seacuterie de Fourier (ALEXANDER 1978)
tc ) Eq 47 Fv = x cos( tc ) V qcos(3
onde x eacute PC e tc eacute tempo de contato A ausecircncia de coeficientes seno indica uma
simetria nas curvas forccedila-tempo e nestes casos o fator q eacute constante Em outras
palavras conhecendo somente o valor da Fv e sua respectiva fase eacute possiacutevel
encontrar o fator q Todavia na caminhada satildeo frequumlentemente observadas curvas
assimeacutetricas (NILSSON e THORSTENSSON 1989) assim incluiacuteu-se dois
coeficientes senos na equaccedilatildeo
tc ) Eq 48 Fv = x cos( tc ) V qcos(3 tc ) + a1 sin(2 tc ) V a2 sin(4
onde a1 e a2 satildeo constantes Assim usando um simples caacutelculo de meacutedia aritmeacutetica
para o q durante o tc noacutes temos
q1 + q2 + q3 + qnqmean = Eq 49 n
Usando os valores de fator q advindos da literatura (MINETTI e ALEXANDER
1997) construiacutemos a seguinte equaccedilatildeo de regressatildeo em situaccedilotildees de caminhada
DF 05 qregression = 23061q + 05873 R=079 Eq 410
onde qregression eacute a Vf estimada e utilizada na equaccedilatildeo 46 Para situaccedilotildees de corrida
o fator q natildeo varia em funccedilatildeo da velocidade (figura 42) obtendo um coeficiente
106
angular da equaccedilatildeo de regressatildeo muito baixo (00916) portanto em situaccedilotildees de
corrida o qregression eacute cancelado
As seguintes equaccedilotildees (411 412 413 e 414) foram originadas dos dados
apresentados na figura 43 de MINETTI (1998b) Nesta figura as informaccedilotildees satildeo
valores meacutedios (meacutedias advindas de 22 agrave 42 medidas para cada velocidade e tipo
de locomoccedilatildeo) de medidas de FP e DF portanto as equaccedilotildees a seguir apresentam
valores de R subestimados enquanto que as equaccedilotildees de regressatildeo representam
de modo satisfatoacuterio os dados de origem A Vf predita pela frequumlecircncia de passada
FPregression foi determinada para a caminhada como
DF 05 FPregression = 27781FP V12077 R=098 Eq 411
e para a corrida
DF lt 05 FPregression = 75469FP - 79561 R=090 Eq 412
A Vf predita pelo duty factor DFregression foi determinado para a caminhada
como
DF 05 DFregression = V12342DF + 84628 R=099 Eq 413
e para a corrida
DF lt 05 DFregression = -16912DF + 87422 R=098 Eq 414
44 Equaccedilatildeo de custo energeacutetico
O atraso entre passos tstep e a Vf satildeo cruciais para ldquosintetizarrdquo toda a
passada e calcular o trabalho mecacircnico externo e a recuperaccedilatildeo de energia (ambos
valores total (CAVAGNA e KANEKO 1977) e instantacircneo (CAVAGNA et al 2002))
Assim as forccedilas de reaccedilatildeo do solo satildeo integradas duas vezes para posiccedilatildeo
do CM e dados da velocidade A primeira integraccedilatildeo das forccedilas horizontais e
107
verticais menos o PC ambas divididas pela massa corporal resultam na aceleraccedilatildeo
do CM A constante de integraccedilatildeo usada para as forccedilas acircntero-posteriores foi a
velocidade meacutedia de progressatildeo Para as forccedilas vertical e meacutedio-lateral noacutes
assumimos que as velocidades inicial e final em todo o ciclo eram iguais A variaccedilatildeo
positiva ponto-a-ponto da Ep somada a variaccedilatildeo positiva ponto-a-ponto da Ek
durante uma passada completa resulta na energia mecacircnica externa total Ecm
(CAVAGNA e KANEKO 1977 WILLEMS et al 1995) Para evitar o ldquoparadoxo do
trabalho zerordquo o trabalho externo eacute determinado somando somente os incrementos
positivos da Ecm Sabendo o Wext e estimando o Wint (MINETTI 1998b) foi
calculado o Wtot e o custo energeacutetico (Ctot) da locomoccedilatildeo
A velocidade horizontal foi determinada atraveacutes do meacutetodo de regressatildeo
linear muacuteltipla usando como variaacuteveis independentes os coeficientes da curva Fv (de
NILSSON e THORSTENSSON 1989) A validade cruzada das equaccedilotildees
desenvolvidas no presente estudo foi calculada por coeficientes de regressatildeo (R)
45 Discussatildeo
O presente modelo prediz a velocidade horizontal e o custo energeacutetico da
locomoccedilatildeo terrestre Aleacutem disso o modelo matemaacutetico permite estimar outros
importantes paracircmetros da locomoccedilatildeo como a FP e o DF
Outros modelos
Tem sido proposto que o custo energeacutetico da locomoccedilatildeo terrestre pode ser
determinado pelo custo da produccedilatildeo de forccedila para suportar o PC (KRAM e TAYLOR
1990) Fundamentalmente o custo de geraccedilatildeo de forccedila indica que a potecircncia
metaboacutelica da locomoccedilatildeo eacute relacionada diretamente ao PC e o tempo disponiacutevel
para produzir forccedila
c Mg E
metabolic = Eq 415 tc
108
onde c eacute uma constante de custo (que expressa a proporcionalidade entre taxa de
dispecircndio de energia normalizado pela massa e taxa de geraccedilatildeo de forccedila)
entretanto esse modelo tecircm sido alvo de criacuteticas Resumidamente a principal criacutetica
eacute baseada em i) a suposiccedilatildeo que o dispecircndio metaboacutelico devido ao movimento dos
membros superiores eacute negligenciaacutevel e ii) a desconsideraccedilatildeo do conceito de
trabalho O presente trabalho tambeacutem mostra que levar em consideraccedilatildeo apenas o
tempo da geraccedilatildeo de forccedila e a forccedila natildeo eacute o bastante para determinar o custo
energeacutetico da locomoccedilatildeo As informaccedilotildees contidas no proacuteprio comportamento da
curva forccedila vertical-tempo parecem influenciar de modo importante a determinaccedilatildeo
de paracircmetros fundamentais da locomoccedilatildeo Especialmente o Iv e o fator de forma q
indicam um ajuste da curva de regressatildeo linear importante para a determinaccedilatildeo da
Vf
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de progressatildeo
A prediccedilatildeo da FP e DF foram comparados com os valores
determinados experimentalmente em dois sujeitos (sujeitos RR e TD 175 e
170m de estatura 78 e 84kg de massa corporal) correndo em vaacuterias velocidades de
progressatildeo As forccedilas de reaccedilatildeo do solo foram registradas em uma plataforma de
forccedila AMTI agrave uma frequumlecircncia de amostragem de 1000Hz e a Vf foi determinada
quadro a quadro atraveacutes de uma cacircmera colocada agrave 5m de distacircncia da aacuterea de
interesse e 1m de altura do piso A mesma foi posta de forma a registrar o
movimento no plano sagital dos sujeitos com uma frequumlecircncia de amostragem de
109
50Hz Um procedimento de calibraccedilatildeo 2D foi realizado a fim de converter as
informaccedilotildees de pixels para metros As informaccedilotildees de posiccedilatildeo linear foram filtradas
atraveacutes de um filtro passa-baixa do tipo Butterworth com frequumlecircncia de corte
variando entre 3 e 9Hz determinados para cada corrida atraveacutes do procedimento de
anaacutelise residual (WINTER 2005) A coordenada horizontal do ponto anatocircmico do
quadril foi utilizada para determinar a FPexp CPexp e a velocidade meacutedia
experimentais A FPexp foi determinada pela frequumlecircncia de amostragem fsample
dividida pelo nuacutemero de quadros que totalizam um ciclo de passada nframes
f sampleFPexp = Eq 416 n frames
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de progressatildeo Fonte
Minetti 1998b
O CPexp foi determinado pela posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo FinalhorPosition diminuiacutedo pela posiccedilatildeo horizontal do quadril no
primeiro quadro InitialhorPosition
CPexp = horPosition = FinalhorPosition V InitialhorPosition Eq 417
110
A velocidade meacutedia experimental Vfexp foi determinada pela variaccedilatildeo da
posiccedilatildeo horizontal durante um ciclo de passada dividida pela variaccedilatildeo de tempo de
um ciclo de passada a partir da Eq 411
n frames 1time = = Eq 418
f sample FPexp
temos
horPositionVfexp = Eq 419 time
A razatildeo entre a frequumlecircncia FP experimental e teoacuterica foi de 1001 A razatildeo
para o DF foi de 0977
O presente modelo pode auxiliar a determinar paracircmetros espaccedilos-temporais
e energeacuteticos de animais extintos prevendo a forccedila de reaccedilatildeo do solo de um uacutenico
passo
Atraveacutes da anaacutelise das informaccedilotildees contidas em uma curva de forccedila de
reaccedilatildeo do solo vertical pelo tempo informaccedilotildees fundamentais da mecacircnica e
energeacutetica da locomoccedilatildeo podem ser estimadas em situaccedilotildees que a informaccedilatildeo
experimental direta natildeo for disponiacutevel
111
5 CONCLUSAtildeO GERAL
51 O custo EMG da caminhada humana
O objetivo deste estudo foi construir um modelo do custo EMG da caminhada
humana Para tanto criou-se duas abordagens experimental e teoacuterica sendo que a
teoacuterica parece ter uma melhor relaccedilatildeo com as evidecircncias experimentais sobre a
energeacutetica da locomoccedilatildeo humana A estabilidade em conjunto com a atividade EMG
de muacutesculos posturais parece ser um mecanismo primaacuterio da energeacutetica da
locomoccedilatildeo
52 A mecacircnica da corrida de idosos
A mecacircnica da corrida de idosos foi comparada com a de jovens atraveacutes da
determinaccedilatildeo e comparaccedilatildeo do trabalho mecacircnico e de paracircmetros do sistema
massa-mola especialmente usando aspectos de assimetria do mecanismo elaacutestico
de minimizaccedilatildeo de energia entre os grupos experimentais
Os idosos produzem menos forccedila durante a fase de trabalho mecacircnico
positivo com uma menor oscilaccedilatildeo vertical durante a fase aeacuterea e menor oscilaccedilatildeo
total Consequentemente a capacidade de armazenar e re-utilizar energia elaacutestica
112
dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio energeacutetico neste
grupo quando comparado com jovens
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre
Tendo apenas as informaccedilotildees de uma curva forccedila vertical versus tempo e a
massa corporal construiu-se um modelo biomecacircnico de prediccedilatildeo do CP Vf e custo
energeacutetico da locomoccedilatildeo terrestre Os resultados advindos do modelamento
correspondem aos paracircmetros determinados experimentalmente Laboratoacuterios que
detenham apenas uma plataforma de forccedila ou nas aacutereas onde as informaccedilotildees de
entrada do atual modelo constituam a uacutenica fonte de dados disponiacutevel (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis-chaves da
locomoccedilatildeo podem ser realizadas com razoaacutevel acuraacutecia
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico
O seguinte texto representa um esforccedilo de raciociacutenio a partir dos achados da
presente tese aliados ao referencial teoacuterico abordado durante os capiacutetulos
anteriores a fim de compreender as determinantes da locomoccedilatildeo humana Mais do
que oferecer uma resposta final sobre a mecacircnica e a energeacutetica da locomoccedilatildeo
humana este texto lanccedila uma provaacutevel resposta ainda inicial acerca das
determinantes envolvidas da locomoccedilatildeo humana
As situaccedilotildees de locomoccedilatildeo que desafiam as noccedilotildees atuais da mecacircnica e
energeacutetica da locomoccedilatildeo tratadas nesta tese nomeadamente o processo de
envelhecimento e as inclinaccedilotildees satildeo algumas das questotildees que natildeo satildeo todavia
compreendidas pelas teorias atuais da locomoccedilatildeo humana mas que a presente
hipoacutetese pretende responder A locomoccedilatildeo humana eacute determinada desde o ponto
de vista mecacircnico como uma seacuterie de accedilotildees complexas de segmentos interligados
ao qual geram torques atraveacutes da ativaccedilatildeo muscular e transmissatildeo de forccedilas pelos
tendotildees anexados em seacuterie aos muacutesculos e agraves articulaccedilotildees que conectam os
Restriccedilotildees da tarefa
velocidade
Restriccedilotildees do organismo
- massa
- comprimento do membro
i f i
Tendatildeo
- energia
Energia
mecacircnica do
CM
Mecanismo
minimizador
Dispecircndio
energeacutetico
Restriccedilotildees do
ambiente Muacutesculos
- eficiecircncia
113
segmentos Todo este sistema eacute controlado pelo sistema nervoso central e
perifeacuterico Ainda assim apesar da extrema complexidade deste tipo de movimento
conforme discutido extensivamente nas seccedilotildees 21 31 e 41 a corrida e a
caminhada humana se caracterizam como sistemas capazes de minimizar o
dispecircndio energeacutetico advindo dos muacutesculos sistemas estes denominados de
massa-mola e pecircndulo invertido respectivamente Desde a sua introduccedilatildeo ateacute os
dias atuais estes sistemas tecircm recebido intensas criacuteticas da literatura abordadas em
capiacutetulos precedentes poreacutem mais do que por agrave prova os achados principais que
deram base para estes sistemas as criacuteticas satildeo direcionadas agraves limitaccedilotildees dos
sistemas especialmente da forma em que foram propostos A seacuterie de experimentos
realizados primeiramente com humanos (CAVAGNA et al 1963 1964) e apoacutes com
animais (FEDAK et al 1982 HEGLUND et al 1982a HEGLUND et al 1982b
TAYLOR et al 1982) demonstraram de modo inequiacutevoco que as curvas de energia
potencial gravitacional e cineacutetica do CM se apresentavam em fase durante a
corridagalope e em contra-fase (atraso de 180 graus) na caminhada Deste ponto
em diante eacute estabelecido que durante a transiccedilatildeo da caminhada para a corrida os
sistemas satildeo modificados de um modo discreto ou seja o pecircndulo invertido seria
ldquodesligadordquo e o sistema massa-mola acionado automaticamente
Figura 51 Modelo conceitual da locomoccedilatildeo humana
114
Este raciociacutenio adveacutem dos achados de Cavagna e colegas e aleacutem disso da
observaccedilatildeo de paracircmetros cinemaacuteticos e cineacuteticos aos quais respondem de forma
discreta na mudanccedila do tipo de locomoccedilatildeo por exemplo o DF durante caminhada
varia de 065 em baixas velocidades ateacute 055 em altas velocidades de forma
contiacutenua poreacutem quando o sujeito faz a transiccedilatildeo para a corrida o DF passa para
04 O fator de forma ldquoqrdquo da curva de forccedila vertical em funccedilatildeo do tempo tambeacutem se
modifica abruptamente variando de 07 na caminhada para -01 durante corrida
(ALEXANDER e JAYES 1980) Uma justificativa para este comportamento discreto
eacute relacionado agrave um tipo de locomoccedilatildeo pouco usada por seres-humanos o skipping
Por outro lado evidecircncias experimentais tecircm demonstrado que em algumas
velocidades de caminhada parece existir um mecanismo elaacutestico de minimizaccedilatildeo de
energia (FUKUNAGA et al 2001) denominado de sistema de ldquocatapultardquo devido agrave
caracteriacutestica de baixa velocidade durante a frenagem e alta velocidade na fase de
propulsatildeo (ISHIKAWA et al 2005 ISHIKAWA et al 2007) Por outro lado durante a
corrida no estudo da mecacircnica da corrida dos idosos foi observada uma transduccedilatildeo
de energia cineacutetica e potencial gravitacional em baixas velocidades diminuindo com
o aumento da velocidade (relativo ao deslocamento vertical total capiacutetulo 3)
enquanto que a contribuiccedilatildeo do tendatildeo e consequentemente do componente
elaacutestico da unidade muacutesculo-tendatildeo aumentam (CAVAGNA 2006) Portanto os dois
sistemas parecem natildeo mudar atraveacutes de transformaccedilotildees abruptas como os
paracircmetros anteriormente apresentados poderiam induzir mas eacute notoacuterio um
continuum de mudanccedilas nas caracteriacutesticas mecacircnicas destes dois tipos de
locomoccedilatildeo e a mudanccedila na predominacircncia do mecanismo minimizador parece ser o
responsaacutevel pela transiccedilatildeo de um tipo de locomoccedilatildeo para outro
Para construir este modelo eacute necessaacuterio sabermos quanto de energia eacute
recuperado pelos mecanismos minimizadores A energia recuperada por via
pendular eacute calculada como (ver capiacutetulo 327)
cpendular = Rint Eq 51
e a energia elaacutestica armazenada como
115
Fvmx k = Eq 52 celaacutestica 2
Este raciociacutenio leva agrave um modelo de minimizaccedilatildeo de energia assumido
simplesmente como o somatoacuterio dos mecanismos elaacutestico e pendular
= Eq 53 creconvertida cpendular + celaacutestica
Assumindo como constante o dispecircndio energeacutetico sob outras formas de
energia (teacutermica) a energia despendida para a contraccedilatildeo dos muacutesculos esqueleacuteticos
a fim de gerar a locomoccedilatildeo pode ser determinada por
= -E Eq 54 Emuscular Emetaboacutelica repouso
e deste modo podemos afirmar que a energia total para percorrer determinada
distacircncia eacute dada por
= Eq 55 total Ereconvertida + Emuscular
e este valor em um amplo espectro de velocidades e tipos de locomoccedilatildeo apresente
uma relaccedilatildeo linear direta com a velocidade da locomoccedilatildeo (restriccedilatildeo da tarefa)
Mas quais os fatores que determinam este continuum de mecanismos
minimizadores O compromisso entre estes mecanismos (pendular e elaacutestico) eacute
diretamente ligado ao comportamento da energia mecacircnica vertical (potencial
gravitacional + cineacutetica) e da unidade muacutesculo-tendatildeo E em uacuteltima anaacutelise estas
caracteriacutesticas mecacircnicas parecem ser moduladas por restriccedilotildees do ambiente (g
inclinaccedilatildeo) restriccedilotildees da tarefa (velocidade) e restriccedilotildees do organismo (massa e
comprimento de membros inferiores) conforme figura 51
Hipoacuteteses levantadas com o atual modelo
i) A velocidade de transiccedilatildeo deve coincidir com a mudanccedila na
predominacircncia do mecanismo minimizador de energia
ii) Analisar o mecanismo pendular em diferentes velocidades de corrida
116
iii) Quando as demais restriccedilotildees estatildeo controladas as restriccedilotildees do
organismo e o compromisso entre massa e comprimento de membro
inferior poderiam explicar as mudanccedilas no uso dos mecanismos pendular
e elaacutestico
iv) Existe uma velocidade oacutetima para a corrida humana
v) O somatoacuterio da quantidade de energia reconvertida por meio pendular e
elaacutestico somado ao dispecircndio energeacutetico dos muacutesculos deve ser altamente
relacionado com a velocidade de locomoccedilatildeo
541 Respondendo algumas criacuteticas atuais
Este modelo pode explicar os resultados de GEYER et al 2006) sobre a
possibilidade de um modelo de ldquopecircndulo-invertido carregado por uma molardquo
(BLICKHAN et al 2007) ser aplicado na caminhada devido a melhor representaccedilatildeo
da curva forccedila tempo pelo meacutetodo proposto do que pelo modelo do pecircndulo-
invertido Apesar da boa representaccedilatildeo de uma variaacutevel mecacircnica da locomoccedilatildeo o
modelo despreza uma questatildeo central da anaacutelise da locomoccedilatildeo a determinaccedilatildeo do
mecanismo minimizador de energia Portanto apesar da coincidecircncia da resposta de
forccedila de reaccedilatildeo do solo vertical originada pelo modelo e a medida experimental o
modelo apenas apresenta uma possibilidade do ponto de vista matemaacutetico de
representaccedilatildeo do modelo teoacuterico de continuum apresentado aqui
Recentemente uma extensa revisatildeo de BIEWENER 2006) analisou como as
flutuaccedilotildees na energia mecacircnica do CM de animais podem ser usadas a fim de
identificar os mecanismos fundamentais envolvidos na locomoccedilatildeo terrestre e indicou
que quando satildeo comparados os padrotildees mecacircnicos e cinemaacuteticos de uma ampla
diversidade de quadruacutepedes e biacutepedes padrotildees mais complexos emergem
observando que alguns animais menos aptos para a locomoccedilatildeo (less cursorial)
podem combinar padrotildees mecacircnicos da caminhada e corrida em velocidades
intermediaacuterias ou em animais de grande tamanho (eg elefantes apresentam
aspectos de corrida mas com um comportamento pendular entre a energia cineacutetica e
potencial gravitacional do CM) Novamente a hipoacutetese do continuum se apresenta
como um forte candidato para explicar atraveacutes de uma teoria simples e unificante a
locomoccedilatildeo de vertebrados
117
O que acontece nas inclinaccedilotildees
Quando nos deslocamos no plano eacute bem determinado que o trabalho
mecacircnico liacutequido apresente um valor muito baixo e natildeo eacute igual a zero devido agrave
resistecircncia do ar e agrave fricccedilatildeo dos tecidos mas ainda assim eacute comumente assumido
como negligenciaacutevel (ALEXANDER 1989) poreacutem a energia mecacircnica total para
movimentar o CM em relaccedilatildeo ao ambiente externo varia durante um ciclo de
passada de modo que o somatoacuterio dos incrementos (trabalho positivo) seja igual ao
somatoacuterio dos decrementos (trabalho negativo) Como observado no estudo ldquocusto
EMG da caminhada humanardquo (Capiacutetulo 2) existe uma predominacircncia de trabalho
positivo em inclinaccedilotildees positivas e predominacircncia de trabalho negativo em
inclinaccedilotildees negativas (figura 52)
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido de
elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006
118
Portanto o pecircndulo invertido natildeo atua como mecanismo minimizador de
dispecircndio energeacutetico e natildeo obstante a falta de evidecircncias eacute razoaacutevel supor que a
energia elaacutestica natildeo atue de forma importante nas inclinaccedilotildees Importante notar que
a inexistecircncia de um mecanismo minimizador natildeo significa que o modelo natildeo
contempla esta situaccedilatildeo apenas demonstra que devido agrave uma restriccedilatildeo severa do
ambiente (inclinaccedilatildeo extrema) o organismo natildeo dispotildee de nenhum auxiacutelio
importante para economizar energia sobrecarregando os muacutesculos a fim de produzir
a energia necessaacuteria para manter o movimento de locomoccedilatildeo Nesta situaccedilatildeo o
dispecircndio energeacutetico eacute dependente apenas da quantidade de ativaccedilatildeo muscular e
seus respectivos equivalentes energeacuteticos de atividade EMG como demonstrado no
estudo do custo EMG da caminhada humana
55 Propostas para futuros estudos
551 Custo EMG da caminhada humana
Testar o modelo do Custo EMG
- em diferentes terrenos
- em populaccedilotildees com patologias do sistema nervoso
- em inclinaccedilotildees negativas
552 Mecacircnica da corrida dos idosos
- desenvolver um modelo matemaacutetico que tenha em consideraccedilatildeo os
comportamentos diferentes entre a fase de encurtamento e alongamento das
unidades muacutesculo-tendatildeo atraveacutes de um modelo viscoelaacutesticohiperelaacutestico
- estudar o bouncing elaacutestico da corrida em inclinaccedilotildees
- estudar o efeito da fadiga no bouncing elaacutestico da corrida humana
- estudar o modelo massa-mola ponto-a-ponto
- estudar o bouncing elaacutestico entre sujeitos com diferentes estruturas
muacutesculo-esqueleacuteticas (velocistas vs fundistas obesos vs natildeo-obesos homens vs
mulheres)
119
- usar os paracircmetros do modelo massa-mola e as assimetrias contato-
despregue de sujeitos normais para comparaccedilatildeo com amputados e portadores de
necessidades especiais com restriccedilotildees na locomoccedilatildeo
- estudar o bouncing elaacutestico na corrida de velocidade de atletas de alto
rendimento
553 Modelo matemaacutetico da locomoccedilatildeo terrestre
Testar o modelo
- para situaccedilatildeo de aceleraccedilotildees
- em animais extintos
120
6 Referecircncias
ALESHINSKY SY An energy sources and fractions approach to the mechanical
energy expenditure problem--IV Criticism of the concept of energy transfers within
and between links J Biomech 19 4 307-309 1986
ALEXANDER RM Damper for bad vibrations Nature 414 6866 855-857 2001
ALEXANDER RM Energy-saving mechanisms in walking and running J Exp Biol 160
55-69 1991
ALEXANDER RM Models and the scaling of energy costs for locomotion J Exp Biol
208 Pt 9 1645-1652 2005
ALEXANDER RM Optimization and gaits in the locomotion of vertebrates Physiol Rev
69 4 1199-1227 1989
ALEXANDER RM Principles of animal locomotion Princeton NJ Princeton
University Press 2003
ALEXANDER RM Tendon elasticity and muscle function Comp Biochem Physiol A
Mol Integr Physiol 133 4 1001-1011 2002
ALEXANDER RM Vertical movements in walking and running Journal of Zoology
185 27-40 1978
ALEXANDER RM JAYES AS Fourier analysis of forces exerted in walking and
running J Biomech 13 4 383-390 1980
ALEXANDER RM VERNON A Mechanics of hopping by kangaroos (Macropodidae)
Journal of Zoology 177 265-303 1975
121
ANDERS C WAGNER H PUTA C GRASSME R PETROVITCH A SCHOLLE
HC Trunk muscle activation patterns during walking at different speeds J
Electromyogr Kinesiol 17 2 245-252 2007
ANDERSON KG BEHM DG Maintenance of EMG activity and loss of force output
with instability J Strength Cond Res 18 3 637-640 2004
ARDIGO LP SAIBENE F MINETTI AE The optimal locomotion on gradients
walking running or cycling Eur J Appl Physiol 90 3-4 365-371 2003
BASTIEN GJ HEGLUND NC SCHEPENS B The double contact phase in walking
children J Exp Biol 206 Pt 17 2967-2978 2003
BASTIEN GJ SCHEPENS B WILLEMS PA HEGLUND NC Energetics of load
carrying in Nepalese porters Science 308 5729 1755 2005
BIEWENER AA Muscle-tendon stresses and elastic energy storage during locomotion
in the horse Comp Biochem Physiol B Biochem Mol Biol 120 1 73-87 1998
BIEWENER AA Patterns of mechanical energy change in tetrapod gait pendula
springs and work J Exp Zoolog A Comp Exp Biol 305 11 899-911 2006
BIEWENER AA KONIECZYNSKI DD BAUDINETTE RV In vivo muscle forceshy
length behavior during steady-speed hopping in tammar wallabies J Exp Biol 201
Pt 11 1681-1694 1998
BIGLAND-RITCHIE B WOODS JJ Integrated electromyogram and oxygen uptake
during positive and negative work J Physiol 260 2 267-277 1976
BLANCO RE GAMBINI R A biomechanical model for size speed and anatomical
variations of the energetic costs of running mammals J Theor Biol 241 1 49-61
2006
BLAXTER K Energy metabolism in animals and man Cambridge UK Cambridge
University Press 1989
BLICKHAN R The spring-mass model for running and hopping J Biomech 22 11-12
1217-1227 1989
BLICKHAN R SEYFARTH A GEYER H GRIMMER S WAGNER H GUNTHER
M Intelligence by mechanics Philos Transact A Math Phys Eng Sci 365 1850
199-220 2007
122
CAVAGNA GA Force platforms as ergometers J Appl Physiol 39 1 174-179 1975
CAVAGNA GA The landing-take-off asymmetry in human running J Exp Biol 209 Pt
20 4051-4060 2006
CAVAGNA GA DUSMAN B MARGARIA R Positive work done by a previously
stretched muscle J Appl Physiol 24 1 21-32 1968
CAVAGNA GA FRANZETTI P FUCHIMOTO T The mechanics of walking in
children J Physiol 343 323-339 1983
CAVAGNA GA FRANZETTI P HEGLUND NC WILLEMS P The determinants of
the step frequency in running trotting and hopping in man and other vertebrates J
Physiol 399 81-92 1988
CAVAGNA GA HEGLUND NC WILLEMS PA Effect of an increase in gravity on the
power output and the rebound of the body in human running J Exp Biol 208 Pt 12
2333-2346 2005
CAVAGNA GA KANEKO M Mechanical work and efficiency in level walking and
running J Physiol 268 2 467--481 1977
CAVAGNA GA MANTOVANI M WILLEMS PA MUSCH G The resonant step
frequency in human running Pflugers Arch 434 6 678-684 1997
CAVAGNA GA MARGARIA R Mechanics of walking J Appl Physiol 21 1 271-278
1966
CAVAGNA GA SAIBENE FP MARGARIA R External work in walking J Appl
Physiol 18 1-9 1963
CAVAGNA GA SAIBENE FP MARGARIA R Mechanical Work in Running J Appl
Physiol 19 249-256 1964
CAVAGNA GA THYS H ZAMBONI A The sources of external work in level walking
and running J Physiol 262 3 639-657 1976
CAVAGNA GA WILLEMS PA FRANZETTI P DETREMBLEUR C The two power
limits conditioning step frequency in human running J Physiol 437 95-108 1991
CAVAGNA GA WILLEMS PA HEGLUND NC The role of gravity in human walking
pendular energy exchange external work and optimal speed J Physiol 528 Pt 3
657-668 2000
123
CAVAGNA GA WILLEMS PA HEGLUND NC Walking on Mars Nature 393 6686
636 1998
CAVAGNA GA WILLEMS PA LEGRAMANDI MA HEGLUND NC Pendular
energy transduction within the step in human walking J Exp Biol 205 Pt 21 3413shy
3422 2002
CERRETELLI P VEICSTEINAS A FUMAGALLI M DELLORTO L Energetics of
isometric exercise in man J Appl Physiol 41 2 136-141 1976
DEN OTTER AR GEURTS AC MULDER T DUYSENS J Speed related changes
in muscle activity from normal to very slow walking speeds Gait Posture 19 3 270shy
278 2004
DOHERTY TJ Invited review Aging and sarcopenia J Appl Physiol 95 4 1717-1727
2003
DOKE J DONELAN JM KUO AD Mechanics and energetics of swinging the human
leg J Exp Biol 208 Pt 3 439-445 2005
DOKE J KUO AD Energetic cost of producing cyclic muscle force rather than work to
swing the human leg J Exp Biol 210 Pt 13 2390-2398 2007
EVANS SL DAVY KP STEVENSON ET SEALS DR Physiological determinants
of 10-km performance in highly trained female runners of different ages J Appl
Physiol 78 5 1931-1941 1995
FEDAK MA HEGLUND NC TAYLOR CR Energetics and mechanics of terrestrial
locomotion II Kinetic energy changes of the limbs and body as a function of speed
and body size in birds and mammals J Exp Biol 97 23-40 1982
FENN WO Work against gravity and work due to velocity changes in running Am J
Physiol 93 433-462 1930
FENN WO MARSH BS Muscular force at different speeds of shortening J Physiol
85 3 277-297 1935
FORMENTI F ARDIGO LP MINETTI AE Human locomotion on snow determinants
of economy and speed of skiing across the ages Proc Biol Sci 272 1572 1561shy
1569 2005
124
FORMENTI F MINETTI AE Human locomotion on ice the evolution of ice-skating
energetics through history J Exp Biol 210 Pt 10 1825-1833 2007
FRERIKS B HERMENS H DISSELHORST-KLUG C RAU G The
recommendations for sensor and sensor placement procedures for surface
electromyography In HERMENS H (editor) European recommendations for
surface electromyography Enschede Roessingh Research and Development
1991
FRONTERA WR SUH D KRIVICKAS LS HUGHES VA GOLDSTEIN R
ROUBENOFF R Skeletal muscle fiber quality in older men and women Am J
Physiol Cell Physiol 279 3 C611-618 2000
FUKUNAGA T KUBO K KAWAKAMI Y FUKASHIRO S KANEHISA H
MAGANARIS CN In vivo behaviour of human muscle tendon during walking Proc
Biol Sci 268 1464 229-233 2001
GARDNER-MORSE MG STOKES IA The effects of abdominal muscle coactivation
on lumbar spine stability Spine 23 1 86-91 discussion 91-82 1998
GEYER H SEYFARTH A BLICKHAN R Compliant leg behaviour explains basic
dynamics of walking and running Proc Biol Sci 273 1603 2861-2867 2006
GOTTSCHALL JS KRAM R Energy cost and muscular activity required for leg swing
during walking J Appl Physiol 99 1 23-30 2005
GOTTSCHALL JS KRAM R Mechanical energy fluctuations during hill walking the
effects of slope on inverted pendulum exchange J Exp Biol 209 Pt 24 4895-4900
2006
GRANATA KP MARRAS WS Cost-benefit of muscle cocontraction in protecting
against spinal instability Spine 25 11 1398-1404 2000
GRANATA KP ORISHIMO KF Response of trunk muscle coactivation to changes in
spinal stability J Biomech 34 9 1117-1123 2001
GRIFFIN TM ROBERTS TJ KRAM R Metabolic cost of generating muscular force
in human walking insights from load-carrying and speed experiments J Appl
Physiol 95 1 172-183 2003
HEGLUND NC Running a-fowl of the law Science 303 47-48 2004
125
HEGLUND NC CAVAGNA GA Mechanical work oxygen consumption and efficiency
in isolated frog and rat muscle Am J Physiol 253 1 Pt 1 C22-29 1987
HEGLUND NC CAVAGNA GA TAYLOR CR Energetics and mechanics of
terrestrial locomotion III Energy changes of the centre of mass as a function of
speed and body size in birds and mammals J Exp Biol 97 41-56 1982a
HEGLUND NC FEDAK MA TAYLOR CR CAVAGNA GA Energetics and
mechanics of terrestrial locomotion IV Total mechanical energy changes as a
function of speed and body size in birds and mammals J Exp Biol 97 57-66
1982b
HILL AV The heat of shortening and the dynamic constants of muscle Proceedings of
the Royal Society B 126 136-195 1938
HOYT DF TAYLOR CR Gait and the energetics of locomotion in horses Nature
292 239-240 1981
ISHIKAWA M KOMI PV GREY MJ LEPOLA V BRUGGEMANN GP Muscleshy
tendon interaction and elastic energy usage in human walking J Appl Physiol 99
2 603-608 2005
ISHIKAWA M PAKASLAHTI J KOMI PV Medial gastrocnemius muscle behavior
during human running and walking Gait Posture 25 3 380-384 2007
KARAMANIDIS K ARAMPATZIS A Mechanical and morphological properties of
different muscle-tendon units in the lower extremity and running mechanics effect of
aging and physical activity J Exp Biol 208 Pt 20 3907-3923 2005
KARAMANIDIS K ARAMPATZIS A BRUGGEMANN GP Symmetry and
reproducibility of kinematic parameters during various running techniques Med Sci
Sports Exerc 35 6 1009-1016 2003
KER RF BENNETT MB BIBBY SR KESTER RC ALEXANDER RM The
spring in the arch of the human foot Nature 325 7000 147-149 1987
KLASS M BAUDRY S DUCHATEAU J Aging does not affect voluntary activation of
the ankle dorsiflexors during isometric concentric and eccentric contractions J Appl
Physiol 99 1 31-38 2005
126
KNAFLITZ M BONATO P Time-frequency methods applied to muscle fatigue
assessment during dynamica contractions J Electromyogr Kinesiol 9 337-350
1999
KOMI PV Stretch-shortening cycle a powerful model to study normal and fatigued
muscle J Biomech 33 10 1197-1206 2000
KRAM R DOMINGO A FERRIS DP Effect of reduced gravity on the preferred walkshy
run transition speed J Exp Biol 200 Pt 4 821-826 1997
KRAM R TAYLOR CR Energetics of running a new perspective Nature 346 6281
265-267 1990
LAMOTH CJ MEIJER OG DAFFERTSHOFER A WUISMAN PI BEEK PJ
Effects of chronic low back pain on trunk coordination and back muscle activity during
walking changes in motor control Eur Spine J 15 1 23-40 2006
LAY AN HASS CJ RICHARD NICHOLS T GREGOR RJ The effects of sloped
surfaces on locomotion an electromyographic analysis J Biomech 40 6 1276shy
1285 2007
LOWE DA SUREK JT THOMAS DD THOMPSON LV Electron paramagnetic
resonance reveals age-related myosin structural changes in rat skeletal muscle
fibers Am J Physiol Cell Physiol 280 3 C540-547 2001
MALOIY GM HEGLUND NC PRAGER L CAVAGNA GA TAYLOR CR
Energetic cost of carrying loads have African women discovered an economic way
Nature 319 668-669 1986
MALVILLE NJ BYRNES WC ALLEN LIM B BASNYAT R Commercial porters of
eastern nepal health status physical work capacity and energy Expenditure Am J
Hum Biol 13 44-56 2001
MARGARIA R Sulla fisiologia e specialmente sul consumo energetico della marcia
e della corsa a varia velocitagrave ed inclinazione del terreno 1938
MARSH RL ELLERBY DJ CARR JA HENRY HT BUCHANAN CI Partitioning
the energetics of walking and running swinging the limbs is expensive Science
303 5654 80-83 2004
127
MCMAHON TA CHENG GC The mechanics of running how does stiffness couple
with speed J Biomech 23 Suppl 1 65-78 1990
MIAN OS THOM JM ARDIGO LP NARICI MV MINETTI AE Metabolic cost
mechanical work and efficiency during walking in young and older men Acta
Physiol (Oxf) 186 2 127-139 2006
MINETTI AE The biomechanics of skipping gaits a third locomotion paradigm Proc
Biol Sci 265 1402 1227-1235 1998a
MINETTI AE A model equation for the prediction of mechanical internal work of
terrestrial locomotion J Biomech 31 5 463-468 1998b
MINETTI AE ALEXANDER RM A theory of metabolic costs for bipedal gaits J Theor
Biol 186 4 467-476 1997
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of gradient walking
energetics in man J Physiol 472 725-735 1993
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of the minimum
energy cost of gradient running in humans J Exp Biol 195 211-225 1994
MINETTI AE ARDIGO LP SAIBENE F FERRERO S SARTORIO A Mechanical
and metabolic profile of locomotion in adults with childhood-onset GH deficiency Eur
J Endocrinol 142 1 35-41 2000
MINETTI AE FORMENTI F ARDIGO LP Himalayan porters specialization
metabolic power economy efficiency and skill Proc Biol Sci 273 1602 2791shy
2797 2006
MORSE CI THOM JM REEVES ND BIRCH KM NARICI MV In vivo
physiological cross-sectional area and specific force are reduced in the
gastrocnemius of elderly men J Appl Physiol 99 3 1050-1055 2005
NILSSON J THORSTENSSON A Ground reaction forces at different speeds of human
walking and running Acta Physiol Scand 136 2 217-227 1989
NYMARK JR BALMER SJ MELIS EH LEMAIRE ED MILLAR S
Electromyographic and kinematic nondisabled gait differences at extremely slow
overground and treadmill walking speeds J Rehabil Res Dev 42 4 523-534 2005
128
OCHALA J DORER DJ FRONTERA WR KRIVICKAS LS Single skeletal muscle
fiber behavior after a quick stretch in young and older men a possible explanation of
the relative preservation of eccentric force in old age Pflugers Arch 452 4 464shy
470 2006
ONAMBELE GL NARICI MV MAGANARIS CN Calf muscle-tendon properties and
postural balance in old age J Appl Physiol 100 6 2048-2056 2006
PHILLIPS SK BRUCE SA WOLEDGE RC In mice the muscle weakness due to
age is absent during stretching J Physiol 437 63-70 1991
PORTER MM VANDERVOORT AA KRAMER JF Eccentric peak torque of the
plantar and dorsiflexors is maintained in older women J Gerontol A Biol Sci Med
Sci 52 2 B125-131 1997
POUSSON M LEPERS R VAN HOECKE J Changes in isokinetic torque and
muscular activity of elbow flexors muscles with age Exp Gerontol 36 10 1687shy
1698 2001
PRILUTSKY BI GREGOR RJ Swing- and support-related muscle actions
differentially trigger human walk-run and run-walk transitions J Exp Biol 204 Pt 13
2277-2287 2001
ROBERTS TJ KRAM R WEYAND PG TAYLOR CR Energetics of bipedal
running I Metabolic cost of generating force J Exp Biol 201 Pt 19 2745-2751
1998
ROBERTS TJ MARSH RL WEYAND PG TAYLOR CR Muscular force in
running turkeys the economy of minimizing work Science 275 5303 1113-1115
1997
SAIBENE F MINETTI AE Biomechanical and physiological aspects of legged
locomotion in humans Eur J Appl Physiol 88 4-5 297-316 2003
SCHEPENS B WILLEMS PA CAVAGNA GA The mechanics of running in children
J Physiol 509 ( Pt 3) 927-940 1998
SCHEPENS B WILLEMS PA CAVAGNA GA HEGLUND NC Mechanical power
and efficiency in running children Pflugers Arch 442 1 107-116 2001
129
TAYLOR CR Force development during sustained locomotion a determinant of gait
speed and metabolic power J Exp Biol 115 253-262 1985
TAYLOR CR HEGLUND NC MALOIY GM Energetics and mechanics of terrestrial
locomotion I Metabolic energy consumption as a function of speed and body size in
birds and mammals J Exp Biol 97 1-21 1982
TRAPPE S GALLAGHER P HARBER M CARRITHERS J FLUCKEY J
TRAPPE T Single muscle fibre contractile properties in young and old men and
women J Physiol 552 Pt 1 47-58 2003
VALOUR D POUSSON M Compliance changes of the series elastic component of
elbow flexor muscles with age in humans Pflugers Arch 445 6 721-727 2003
VANDERVOORT AA KRAMER JF WHARRAM ER Eccentric knee strength of
elderly females J Gerontol 45 4 B125-128 1990
WHITE SG MCNAIR PJ Abdominal and erector spinae muscle activity during gait
the use of cluster analysis to identify patterns of activity Clin Biomech (Bristol
Avon) 17 3 177-184 2002
WILLEMS PA CAVAGNA GA HEGLUND NC External internal and total work in
human locomotion J Exp Biol 198 Pt 2 379-393 1995
WINTER D Biomechanics and motor control of human movement 3rd Waterloo
John Wiley amp Sons 2005
WINTERS JM WOO S Multiple muscle systems Springer-Verlag 1990
WOLEDGE RC CURTIN N HOMSHER E Energetic aspects of muscle
contraction Londres Academic Press 1985
WRIGHT S WEYAND PG The application of ground force explains the energetic cost
of running backward and forward J Exp Biol 204 Pt 10 1805-1815 2001
YAMAGUCHI G SAWA A MORAN D RESSLER M WINTERS JM A survey of
human musculotendon actuator parameters J M Winters 1991
130
Apecircndices
A- Programa de anaacutelise EMG da caminhada LocoEmg
Uma seacuterie de algoritmos (figuras A1 A2 e A3) foram desenvolvidos em
ambiente Labview versatildeo 71 a fim de analisar o sinal bruto de EMG Para tanto
informaccedilotildees advindas de sensores de pressatildeo foram calculadas de forma a
possibilitar as seguintes anaacutelises
Figura A1 Janela principal do programa LocoEmgVI
131
Este programa foi utilizado no capiacutetulo 2 no experimento do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees e no experimento do custo EMG
da locomoccedilatildeo de montanhistas Caucasianos e carregadores Nepaleses no Himalaia
Nepal Atraveacutes do uso dos sensores de pressatildeo foi possiacutevel calcular o tempo de
passada o tempo de vocirco o tempo de apoio e o tempo de apoio duplo para utilizar
no desenvolvimento das abordagens experimental e teoacuterica do custo EMG da
locomoccedilatildeo humana
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI
Os dados de input do programa foram inseridos na janela principal (figura
A1) onde no final da anaacutelise satildeo apresentados os resultados de atividade EMG
meacutedia e desvio padratildeo em funccedilatildeo do percentual do ciclo de passadaO bloco de
diagrama apresentado na figura A2 mostra a estrutura geral do programa com seus
algoritmos localizados nas subrotinas (quadrados verdes)
As principais subrotinas ou algoritmos de primeiro niacutevel satildeo i) Abre e organiza
arquivo ii) Filtra sinal EMG iii) Calcula Variaacuteveis Espaccedilo-Temporais iv) Divide
Ciclos e Interpola Sinal EMG v) Integra Sinal EMG vi) Salva Resultados vi) Imprime
Resultados Gerais
132
Na subrotina Salva resultados arrays eram transformados em arquivos no
formato txt para posterior anaacutelise estatiacutestica Os arquivos eram variaacuteveis espaccedilo-
temporais valores meacutedios interpolados para fase de apoio e balanccedilo valores Emg
meacutedios e desvio-padratildeo interpolados por ciclo de passada e somatoacuterio das integrais
Emg brutos e convertidos por Equivalentes Metaboacutelicos de Ativaccedilatildeo Emg
A janela de impressatildeo eacute apresentada na figura A3
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados
Nesta janela os dados EMGrsquos por muacutesculo satildeo apresentados atraveacutes de seus
valores valores meacutedios e dprsquos em funccedilatildeo do percentual do ciclo de passada
Informaccedilotildees da Vf nome do arquivo inclinaccedilatildeo do terreno e nuacutemero de ciclos
analisados tambeacutem satildeo apresentados Arquivos de imagem destas janelas foram
elaborados e armazenados para posterior verificaccedilatildeo dos dados
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada)
133
PEYREacute-TARTARUGA LA TARTARUGA MP COERTJENS M KRUEL LFM
Influence of Allometry scale on relationship between running economy and
kinematical parameters Biology of Sport (aceito) 2008
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
OLIVEIRA AR KRUEL LFM Physiologic and biomechanical effects ofwater run
training on running performance European Journal of Applied Physiology
(submetido) 2008
CORREA TC PEYREacute-TARTARUGA LA FURLAN E RIBAS R LOSS JF
Mathematical model of energy cost in sprint running Proceedings of XXV
International Symposium on Biomechanics in Sports ISBS (CD) 2007
PEYREacute-TARTARUGA LA COERTJENS M TARTARUGA MP DE MEDEIROS
MH KRUEL LFM Influence of the allometric scale on the relationship between
running economy and biomechanical variables in runners Medicine and Science in
Sports and Exercise 39 (Supplement) S208-S209 2007
PEYREacute-TARTARUGA LA DE MEDEIROS MH COERTJENS M TARTARUGA
MP KRUEL LFM The relation between running economy and kinematical
variables influence of body mass in competitive runners Journal of Biomechanics
39 (Supplement 1) S631 2006
ILHA J ARAUJO RT MALYSZ T PEYREacute-TARTARUGA LA ACHAVAL M
Effects of endurance and resistance exercise training on locomotion of rats after
sciatic nerve crush Physiological Mini Reviews 2 (4) 109 2006
ILHA J PEYREacute-TARTARUGA LA ARAUJO RT METZEN F MALYSZ T
CANTO F ACHAVAL ELENA M LOSS JF Locomotor behaviour assessment in
the rat by kinematic analysis Journal of Biomechanics 39 (Supplement 1) S507
2006
SCHIEHLL PE PEYREacute-TARTARUGA LA ZINGANO GM LOSS JF
Estimation of the quantification of the elastics loads on the jump fit circuit Journal of
134
Biomechanics 39 (Supplement 1) S555 2006
MARTINEZ FG PEYREacute-TARTARUGA LA HERMEL EES XAVIER LL
RASIA-FILHO AA ACHAVAL M Intermediate filament expression in the medial
5thamygdala subnuclei during postnatal development of male and female rats
Forum of the Federation of European Neuroscience Societes Viena FENS 3
A1556 2006
FRAGA CHW BLOEDOW LS CARPES F PEYREacute-TARTARUGA LA
TARTARUGA MP FOLLMER B GUIMARAtildeES ACS Methodologic proposal to
verify the influence of cycling on running kinematic aspects in Triathlon Revista
Motriz 12 (2) 159-164 2006
PEYREacute-TARTARUGA LA KRUEL LFM Deep water running limits and
possibilities to elite runners Brazilian Journal of Sports Medicine 12 (5)286-290
2006
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
RIBAS LR KRUEL LFM Comparison of the subtalar joint angle during
submaximal running speeds Acta Ortopeacutedica Brasileira 13 (2) 57-60 2005
C- Textos completos referentes agrave tese
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA Old men
running mechanical work and elastic bounce Proceedings of the Royal Society B
275 (1633) 411-418 2008 101098rspb20071288
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA The landingshy
takeoff asymmetry is enhanced in old age Journal of Experimental Biology
(aceito com modificaccedilotildees) 2008
MINETTI AE PEYREacute-TARTARUGA LA ARDIGOgrave LP FORMENTI F SUSTA
135
D Energetical and electromyographical cost of locomotion in Nepalese Porters on
Himalaya Anais do XII Congresso Brasileiro de Biomecacircnica 88-94 2007
D- Paracircmetros musculares
Os paracircmetros musculares utilizados no estudo Custo EMG da caminhada
humana foram adquiridos de YAMAGUCHI et al (1991) e satildeo apresentados em
detalhes nas duas figura seguintes (figuras D1 e D2)
Figura D1 Paracircmetros musculares utilizados Fonte YAMAGUCHI et al 1991
136

7
SUMAacuteRIO
LISTA DE FIGURAS 10
RESUMO 14
ABSTRACT 16
DEFINICcedilAtildeO DE TERMOS 18
LISTA DE SIacuteMBOLOS E ABREVIATURAS 20
INTRODUCcedilAtildeO GERAL 27
11 Locomoccedilatildeo humana 27
13 Formato da tese 30
131 Objetivo geral 32
132 Objetivos especiacuteficos 32
2 O CUSTO EMG DA CAMINHADA HUMANA 33
21 Introduccedilatildeo 33
22 Metodologia 36
221 Construccedilatildeo do modelo 36
222 Testando o modelo 41
23 Resultados 42
231 Variaacuteveis espaccedilos-temporais 42
232 Atividade EMG 43
8
233 Custo EMG 47
24 Discussatildeo 49
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular 49
242 Sobre o meacutetodo 51
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia 52
251 Materiais e meacutetodos 53
252 Resultados 56
253 Discussatildeo 57
3 MECAcircNICA DA CORRIDA DE IDOSOS 60
31 Introduccedilatildeo 60
32 Materiais e Meacutetodos 61
321 Amostra e procedimento experimental 61
322 Dos registros da plataforma ao trabalho externo 63
323 Estimativa do trabalho interno 66
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato 66
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio 67
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente 68
327 Transduccedilatildeo EpEk durante o passo 68
328 Rigidez vertical (k) 70
329 Estatiacutestica 71
33 Resultados 71
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM 72
332 Trabalho 74
333 Assimetria contato-despregue 75
34 Discussatildeo 76
341 Sobre o meacutetodo 76
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical 80
343 A assimetria contato-despregue 90
9
4 PREDIZENDO VF CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO
TERRESTRE 101
41 Introduccedilatildeo 101
42 Equaccedilatildeo do tempo de atraso 102
43 Estimativa da velocidade horizontal 104
44 Equaccedilatildeo de custo energeacutetico 106
45 Discussatildeo 107
5 CONCLUSAtildeO GERAL 111
51 O custo EMG da caminhada humana 111
52 A mecacircnica da corrida de idosos 111
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre 112
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico 112
541 Respondendo algumas criacuteticas atuais 116
55 Propostas para futuros estudos 118
551 Custo EMG da caminhada humana 118
552 Mecacircnica da corrida dos idosos 118
553 Modelo matemaacutetico da locomoccedilatildeo terrestre 119
6 REFEREcircNCIAS 120
APEcircNDICES 130
A- Programa de anaacutelise EMG da caminhada LocoEmg 130
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada) 132
C- Textos completos referentes agrave tese 134
D- Paracircmetros musculares 135
10
Lista de Figuras
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-invertido para a
caminhada e massa-mola para a corrida (Fonte SAIBENE e MINETTI 2003
modificado no presente estudo) 29
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset 38
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda
metade da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo
isomeacutetrica Setas verticais apontando para baixo indicam momento de contato
e de despregue 39
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de
passada com o tempo de passada normalizado em percentual do ciclo O 0shy
100 representa o momento de contato com o solo As cores indicam a
velocidade de caminhada (de 2 agrave 7 kmh-1) Cada muacutesculo eacute representado
nas linhas e em cada coluna eacute apresentada a atividade EMG por inclinaccedilatildeo 46
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal + carga)
11
dos carregadores Nepaleses (NEP) e montanhistas Caucasianos (CAU) em
subida (up) e descida (down) 57
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da PMV (positiva ou
negativa) pela potecircncia metaboacutelica respectiva (MINETTI et al 2006) As
linhas satildeo as razotildees entre eficiecircncia muscular positiva e negativa
(WOLEDGE et al 1985) 58
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado 69
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da caminhada
(pecircndulo-invertido) e de segmento complacente da corrida (massa-mola) e
seus principais constituintes Note que o tracejado indica a trajetoacuteria do corpo
de massa m durante o contato g eacute a aceleraccedilatildeo gravitacional k eacute a rigidez da
mola ll0 eacute o comprimento do membro inferior e a0 eacute o acircngulo da perna de
apoio no momento do contato com o solo 77
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um passo
em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis a
direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup
+ Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo
(tae) da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na
direccedilatildeo vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os
ciacuterculos em vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2)
e a frente (Lce) A linha em vermelho pontilhada em cada painel indica o
tempo de contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente
(Lc) durante o passo As linhas azuis pontilhadas em cada painel indicam o
tempo aeacutereo total (ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La)
durante o passo As barras verticais indicam o desvio-padratildeo da meacutedia os
12
nuacutemeros proacuteximos aos siacutembolos nos paineacuteis superiores indicam o nuacutemero de
itens nas meacutedias 85
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e
velocidade vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown
(paineacuteis inferiores) atingidos pelo CM durante o passo em funccedilatildeo da
velocidade de corrida Estatiacutestica e outras indicaccedilotildees conforme a figura 33 89
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e
frequumlecircncia do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute
maior nos idosos nas altas velocidades (paineacuteis superiores) a rigidez vertical
normalizada pela massa eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras
indicaccedilotildees conforme figura 33 91
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com
seus 94
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As
fraccedilotildees do deslocamento vertical do CM durante contato ScSv (ciacuterculos
preenchidos deslocamento descendente ciacuterculos abertos deslocamento
ascendente) e quando a Fv eacute maior do que o PC SceSv (quadrados
preenchidos deslocamento 95
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito
idoso paineacuteis a direita sujeito jovem em cada painel o comportamento da
transduccedilatildeo Ep-Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas
na energia potencial gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf
normalizada para oscilar entre zero e um Mesmos passos da figura 1 cada
painel comeccedila e termina no valor menor da curva Ep As cores diferentes na
curva Ep distinguem as fraccedilotildees do passo onde a Fv exercida no solo eacute maior
do que o PC (vermelho) e menor do que o PC (azul) As linhas contiacutenuas de
Ep indicam a fase de contato enquanto que as linhas pontilhadas Ep (azul
fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As quatro fases
correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
13
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown
(azul) e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas
pontilhadas verticais satildeo apresentadas nos dois picos de Ek e ocupam a
fraccedilatildeo onde a transduccedilatildeo Ep-Ek ocorre conforme indicado pelos incrementos
da curva Rint(t) 98
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos painel
inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura
31) e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e
barras azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de
corrida Estatiacutestica conforme figura 33 99
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de
reaccedilatildeo do solo durante a corrida 103
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de
progressatildeo 108
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de
progressatildeo Fonte Minetti 1998b 109
Figura 51 Modelo conceitual da locomoccedilatildeo humana 113
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido
de elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006117
Figura A1 Janela principal do programa LocoEmgVI 130
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI 131
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados 132
14
Resumo
Dois modelos mecacircnicos o pecircndulo-invertido e o massa-mola explicam como
os mecanismos pendular e elaacutestico minimizam o dispecircndio energeacutetico advindo dos
muacutesculos durante caminhada e corrida humana A presente tese testa dois efeitos
que para nosso conhecimento todavia natildeo possuem respostas conclusivas da
literatura nomeadamente o processo de envelhecimento na mecacircnica da corrida
humana e o efeito da inclinaccedilatildeo do terreno na velocidade oacutetima da caminhada Para
estudar o primeiro efeito as forccedilas de reaccedilatildeo do solo provenientes de uma
plataforma de forccedila (4m x 050m) foram usadas para a posterior comparaccedilatildeo de i)
trabalho mecacircnico ii) paracircmetros do sistema massa-mola e iii) assimetrias contato-
despregue entre jovens e idosos Os idosos produzem menos forccedila durante a fase
de trabalho mecacircnico positivo com uma menor oscilaccedilatildeo vertical total e oscilaccedilatildeo
durante a fase aeacuterea Consequumlentemente a capacidade de armazenar e re-utilizar
energia elaacutestica dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio
energeacutetico neste grupo quando comparado com jovens Para o modelo do custo
eletromiograacutefico (EMG) da caminhada humana criou-se duas abordagens
experimental e teoacuterica Em ambas as abordagens informaccedilotildees da atividade EMG de
dezesseis muacutesculos sendo 8 posturais e 8 propulsores foram coletadas e
analisadas a partir da integral EMG A abordagem teoacuterica parece ter uma melhor
relaccedilatildeo com as evidecircncias experimentais sobre a energeacutetica da caminhada humana
em inclinaccedilotildees Os principais mecanismos envolvidos na nova hipoacutetese satildeo i)
muacutesculos posturais que natildeo realizam trabalho muscular exercem uma funccedilatildeo
importante na determinaccedilatildeo do dispecircndio energeacutetico total e ii) a presente hipoacutetese
leva em consideraccedilatildeo a co-contraccedilatildeo de muacutesculos antagonistas no dispecircndio
15
energeacutetico total Mais experimentos satildeo necessaacuterios para confirmar o modelo
apresentado neste estudo Aleacutem disso atraveacutes de estrateacutegias de otimizaccedilatildeo e
prediccedilatildeo linear um modelo teoacuterico foi delineado a fim de determinar paracircmetros
mecacircnicos (comprimento de passada e velocidade de progressatildeo) e energeacuteticos da
locomoccedilatildeo terrestre em situaccedilotildees onde as informaccedilotildees disponiacuteveis satildeo apenas a
massa e uma curva forccedila de reaccedilatildeo vertical versus tempo Os resultados advindos
do modelamento correspondem aos paracircmetros determinados experimentalmente
Laboratoacuterios que detenham apenas uma plataforma de forccedila ou nas aacutereas onde as
informaccedilotildees de entrada do atual modelo sejam as uacutenicas informaccedilotildees (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis primaacuterias da
locomoccedilatildeo podem ser preditas com razoaacutevel acuraacutecia
Palavras-chave custo eletromiograacutefico da caminhada mecacircnica da corrida de
idosos modelo teoacuterico da locomoccedilatildeo terrestre mecanismos minimizadores de
energia locomoccedilatildeo humana
16
Abstract
Two mechanical models the inverted pendulum and spring-mass explain how
do the pendular and elastic mechanisms minimizing energy expenditure from
muscles during human walking and running Here we test two effects that to our
knowledge do not have yet conclusive responses from literature specifically the
ageing effects on mechanics of human running and the effect of gradient on walking
optimal speed In order to check the former effect the ground reaction forces came
from a force platform (4m x 05m) were used for a later comparison i) mechanical
work ii) spring-mass parameters and iii) landing-takeoff asymmetries The old
subjects produce less force during positive work resulting in a smaller overall and
aerial vertical oscillation of the centre of mass Consequently the potential for restore
elastic energy from tendons is reduced contributing to greater energy expenditure
than in young subjects In relation to Electromyographical (EMG) Cost of human
walking we created two approaches experimental and theoretical In both
approaches information from EMG activity of sixteen muscles eight postural and
eight propulsor were collected and analysed The theoretical approach seems to fit
better with the energy expenditure during gradient walking The main mechanisms
involved in this new hypothesis are i) postural muscles that do not perform muscular
work play an important role in the total energy expenditure and ii) the present
hypothesis take the co-contraction into account of the antagonist muscles in the total
energy expenditure Further experiments are necessary to confirm this hypothesis
Besides using optimization and linear prediction procedures a theoretical model was
designed to estimate mechanical parameters (stride length and velocity of
progression) and energetic variables of terrestrial locomotion when available
information consists only of mass and one vertical ground reaction force versus time
17
The results from this modelling are similar to experimentally obtained data
Laboratories with just one force platform or in areas where the present modelrsquos input
information be the unique accessible data (eg palaeontology forensic
biomechanics etc) the prime variables of locomotion may be estimated with
reasonable accuracy
Keywords electromyographical cost of walking running mechanics in the
elderly theoretical model of terrestrial locomotion mechanisms for minimizing
expenditure energy human locomotion
18
Definiccedilatildeo de Termos
Contraccedilatildeo concecircntrica contraccedilatildeo muscular realizada durante encurtamento
do muacutesculo
Contraccedilatildeo excecircntrica contraccedilatildeo muscular realizada durante alongamento
do muacutesculo
Custo energeacutetico o dispecircndio advindo dos muacutesculos em funccedilatildeo da distacircncia
percorrida normalizado pela massa corporal A unidade eacute em Jkg-1m -1
Eficiecircncia mecacircnica a potecircncia mecacircnica gerada dividida pela potecircncia
metaboacutelica despendida durante uma passada
Passada um periacuteodo que compreende desde o momento do contato de um
peacute com o solo e finaliza no subsequumlente momento de contato do mesmo peacute
Passo um periacuteodo que compreende desde o momento do contato de um peacute
com o solo e finaliza no subsequumlente momento de contato do peacute contra-
lateral
Potecircncia mecacircnica externa o somatoacuterio dos incrementos positivos de
energia mecacircnica externa durante uma passada dividido pelo tempo da
passada
Recovery ndash R percentual de transferecircncia entre energia cineacutetica e potencial
gravitacional durante um ciclo de passada
Tempo aeacutereo efetivo duraccedilatildeo no qual a forca vertical eacute menor do que a
forccedila peso durante um passo
Tempo de contato efetivo duraccedilatildeo no qual a forccedila vertical eacute maior do que a
forccedila peso durante um passo
Trabalho mecacircnico externo O trabalho realizado para elevar e acelerar o
CM em relaccedilatildeo ao ambiente externo No presente estudo foi desconsiderado
19
o trabalho mecacircnico externo advindo de aceleraccedilotildees horizontais meacutedio-
laterais
Trabalho mecacircnico interno O trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM
Trabalho mecacircnico total O somatoacuterio dos moacutedulos do trabalho mecacircnico
externo e interno No presente estudo o trabalho interno foi considerado
aceitando transferecircncia de energia mecacircnica entre segmentos de mesmos
membros
20
Lista de Siacutembolos e Abreviaturas
l0 comprimento do membro inferior
μV microvolts
0 acircngulo da perna de apoio com o solo no momento
do contato
Fvc Fv meacutedia durante a fase de contato do peacute com o
solo
Ah variaccedilatildeo de altura
AhorPosition idem ao CPexp
At tempo de locomoccedilatildeo
Atime tempo de passada
Ltphoto tempo entre as passagens pelas fotoceacutelulas
2D duas dimensotildees
av aceleraccedilatildeo vertical do CM
avae aceleraccedilatildeo vertical do CM durante fase aeacuterea
efetiva
avce aceleraccedilatildeo vertical do CM durante contato efetivo
avmx aceleraccedilatildeo vertical maacutexima do CM
c constante de custo
CAU Caucasianos
CM centro de massa
cos cosseno
CP comprimento de passada
21
CPexp comprimento de passada determinada
experimentalmente
Ctot Custo energeacutetico da locomoccedilatildeo
dB decibeacuteis
DF duty factor (fraccedilatildeo da passada na qual um peacute toca
o solo)
DFregression valores de Vf preditos por regressatildeo linear
advindos de DF
dp desvio-padratildeo
dt periacuteodo de um quadro
Ecm energia mecacircnica do CM
Ek energia cineacutetica
Ekf energia cineacutetica horizontal
Ekfmn energia cineacutetica horizontal miacutenima
Ekmxdown energia cineacutetica vertical maacutexima durante
deslocamento descendente do CM
Ekmxup energia cineacutetica vertical maacutexima durante
deslocamento ascendente do CM
Ekv energia cineacutetica vertical
Emetabolic potecircncia metaboacutelica
EMG eletromiografia ou eletromiograacutefico
EmgCosttheor custo EMG teoacuterico
EmgCostexp custo EMG teoacuterico
EMGiso atividade EMG durante contraccedilatildeo isomeacutetrica
EMGneg atividade EMG durante trabalho negativo
EMGpos atividade EMG durante trabalho positivo
cmuscular energia metaboacutelica advinda do muacutesculo-esqueleacutetico
cmetaboacutelica energia metaboacutelica total durante locomoccedilatildeo
crepouso energia metaboacutelica durante posiccedilatildeo em peacute
celaacutestica energia recuperada por via elaacutestica
cpendular energia recuperada por via pendular
creconvertida energia total recuperada
Ep energia potencial gravitacional do CM
22
Epmn energia potencial gravitacional miacutenima do CM
total energia total necessaacuteria para realizar a locomoccedilatildeo
f frequumlecircncia de passo
Ff componente antero-posterior da forccedila de reaccedilatildeo do
solo
FinalhorPosition posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo de passada
FP frequumlecircncia de passada
FPexp frequumlecircncia de passada determinada
experimentalmente
FPregression valores de Vf preditos por regressatildeo linear a partir
de dados de FP
FPtheor frequumlecircncia de passada obtida indiretamente
Fr nuacutemero de froude
fs frequumlecircncia do sistema massa-mola
fsample frequumlecircncia de amostragem
Fv componente vertical da forccedila de reaccedilatildeo do solo
Fvmx Fv maacutexima
Fvmxyoung Fv maacutexima nos jovens
Fvmxold Fv maacutexima nos idosos
Fvscale PC mensurado com uma balanccedila
Fvpeak pico de impacto vertical
Fvplate forccedila vertical media durante um ciclo de passada
g aceleraccedilatildeo gravitacional
GPS sistema de posicionamento global
h hora
Hz Hertz
Iv impulso vertical
InitialhorPosition posiccedilatildeo horizontal do quadril no quadro que inicia o
ciclo de passada
Iemg integral EMG
Iemgcon integral EMG durante contraccedilatildeo concecircntrica
Iemgexc integral EMG durante contraccedilatildeo excecircntrica
J Joules
23
k rigidez vertical
kg quilograma
km quilometro
L comprimento do passo
Lae deslocamento horizontal do CM durante fase aeacuterea
efetiva
Lce deslocamento horizontal do CM durante contato
efetivo
M massa corporal
m metros
Mass massa dos muacutesculos analisados
ms milisegundos
mtot massa total (massa total somada agrave carga externa)
mV milivolts
N Newtons
NEP Nepaleses
nframes nuacutemero de quadros que totalizam um ciclo de
passada
nf nuacutemero de quadros
norm normalizado
O2 oxigecircnio
p iacutendice de significacircncia estatiacutestico
PC peso corporal
PMV potecircncia mecacircnica vertical
q fator de forma da curva de Fv em funccedilatildeo do tempo
qmean meacutedia dos valores qrsquos durante o tc
qregression valores de Vf predito por regressatildeo linear a partir
de dados de q
R Recovery percentual de reconversatildeo entre energia
cineacutetica e potencial gravitacional
R coeficiente de correlaccedilatildeo
r transduccedilatildeo entre energia cineacutetica e potencial
gravitacional
24
Rint transduccedilatildeo acumulada entre energia cineacutetica e
potencial gravitacional durante um passo
Rintdown transduccedilatildeo acumulada durante deslocamento
descendente do CM
Rintup transduccedilatildeo acumulada durante deslocamento
ascendente do CM
rms raiz quadrada da meacutedia dos quadrados
s segundos
Sae deslocamento vertical do CM durante fase aeacuterea
efetiva
Saedown deslocamento descendente do CM durante Sae
Saeup deslocamento ascendente do CM durante Sae
Sc deslocamento do CM durante a fase de contato
Sce deslocamento vertical do CM durante contato
efetivo
Scdown deslocamento descendente do CM durante Sc
Scup deslocamento ascendente do CM durante Sc
Scedown deslocamento descendente do CM durante Sce
Sceup deslocamento ascendente do CM durante Sce
SEE erro meacutedio da estimativa
sin seno
Skinf dobra cutacircnea
Sv deslocamento do CM durante um passo
Svdown deslocamento descendente do CM durante Sv
Svup deslocamento ascendente do CM durante Sv
T tempo de um passo
t tempo
ta tempo em que a acontece durante W+
t tempo em que acontece durante W-
ta periacuteodo do passo no qual o peacute natildeo estaacute em contato
com o solo
tae periacuteodo do passo no qual a Fv eacute maior do que o PC
peso corporal
25
taedown periacuteodo do deslocamento descendente do CM
durante tae
taeup periacuteodo do deslocamento ascendente do CM
durante tae
tbrake tempo de Wshy
tc periacuteodo do passo no qual um peacute estaacute em contato
com o solo
tce periacuteodo do passo no qual a Fv eacute menor do que o
PC
tcedown periacuteodo do deslocamento descendente do CM
durante tce
tceup periacuteodo do deslocamento ascendente do CM
durante tce
tpush tempo de W+
tstep tempo do passo
Vf velocidade de progressatildeo
V f velocidade meacutedia de progressatildeo
Vfexp velocidade de progressatildeo determinada
experimentalmente
VO2iso consumo de O2 durante contraccedilatildeo isomeacutetrica
VO2neg consumo de O2 durante trabalho mecacircnico
negativo
VO2pos consumo de O2 durante trabalho mecacircnico positivo
Vv velocidade vertical do CM
Vvmx velocidade vertical maacutexima do CM
Vvmxdown velocidade vertical maacutexima durante deslocamento
descendente do CM
Vvmxup velocidade vertical maacutexima durante deslocamento
ascendente do CM
Wshy trabalho mecacircnico negativo
W Watts
W+ trabalho mecacircnico positivo
Wext trabalho mecacircnico externo
Wextf trabalho mecacircnico externo horizontal
26
Wextf+ trabalho mecacircnico externo horizontal positivo
Wextv trabalho mecacircnico externo vertical
Wint trabalho mecacircnico interno
Wtot trabalho mecacircnico total
a fase durante W+ em que Ek e Ep do CM aumentam
concomitantemente
fase durante W- em que Ek e Ep do CM diminuem
concomitantemente
27
INTRODUCcedilAtildeO GERAL
11 Locomoccedilatildeo humana
A teoria da evoluccedilatildeo Darwinista conhecida como Teoria da Seleccedilatildeo Natural
nos indica entre outros pressupostos que a multiplicidade de espeacutecies que habitam
a face da terra eacute produto de um sistema altamente complexo e competitivo de
sobrevivecircncia sistema este que reflete fatores preditores da aptidatildeo definidos como
geneacuteticos e do meio ambiente As capacidades de reproduccedilatildeo de alimentaccedilatildeo e de
locomoccedilatildeo satildeo moduladas por aspectos do genoacutetipo influenciados pelos fatores
ambientais O conceito de aptidatildeo relacionada agrave locomoccedilatildeo desde um ponto de
vista bioloacutegico pode ser abordado analiticamente atraveacutes de seus componentes
principais Estes satildeo velocidade aceleraccedilatildeo maneabilidade resistecircncia economia
e estabilidade (ALEXANDER 2003)
A locomoccedilatildeo tem importacircncia fundamental para a sobrevivecircncia pois
possibilita entre outros fatores a procura por alimentos a busca por um local com
melhor clima caccedilar uma presa ou fugir de um perigo eminente (SAIBENE e
MINETTI 2003) Nos mamiacuteferos terrestres a locomoccedilatildeo acontece atraveacutes do uso
das pernas Este tipo de locomoccedilatildeo tem nos humanos por exemplo alguns
aspectos de ineficiecircncia quando comparada com outros animais (peixes e paacutessaros)
A ineficiecircncia da locomoccedilatildeo de biacutepedes eacute baseada no fato de que os segmentos
inferiores encostam repetidamente no solo para absorver e transferir energia
(trabalho negativo e positivo respectivamente) com o meio ambiente de modo que
os segmentos sofrem uma colisatildeo no momento de contato com o solo
caracterizando situaccedilotildees de grandes aceleraccedilotildees Para manter a velocidade meacutedia
de locomoccedilatildeo torna-se necessaacuterio uma re aceleraccedilatildeo do centro de massa (CM)
28
Energia quiacutemica eacute despendida para manter os muacutesculos ativos durante estas
diferentes fases A fim de atenuar este dispecircndio dois mecanismos baacutesicos satildeo
usados pelo sistema locomotor na corrida e na caminhada o mecanismo do pecircndulo
na caminhada e o mecanismo da massa-mola para a corrida (CAVAGNA e
KANEKO 1977 ver figura 11) Na caminhada a energia potencial eacute alta quando o
CM estaacute sobre o ponto de contato do corpo com o solo mas a partir deste momento
a energia potencial gravitacional comeccedila a diminuir e a energia cineacutetica horizontal
obteacutem um acreacutescimo gradativo Quando o ponto de contato volta a estar na frente do
CM a energia cineacutetica diminui e potencial aumenta
Estes comportamentos entre energia cineacutetica horizontal e potencial
gravitacional acontecem em oposiccedilatildeo de fase (CAVAGNA et al 1963) e portanto
com um processo de reconversatildeo entre energia cineacutetica e potencial gravitacional
(recovery ndash R) Por outro lado na corrida os acreacutescimos de energia potencial e
cineacutetica acontecem concomitantemente portanto o mecanismo de conservaccedilatildeo de
energia citado anteriormente natildeo se aplica neste tipo de locomoccedilatildeo Eacute postulado
que durante a primeira metade da fase de apoio da corrida principalmente
muacutesculos e tendotildees alongam armazenando energia elaacutestica enquanto que os
moacutedulos de energia cineacutetica horizontal e potencial gravitacional diminuem Esta
energia elaacutestica armazenada como uma mola comprimida por uma massa eacute
transformada em energia cineacutetica horizontal e potencial gravitacional de modo
gradativo durante a segunda metade da fase de apoio (CAVAGNA et al 1964
KOMI 2000 figura 11) Evidecircncias de energia elaacutestica armazenada e reconvertida
tambeacutem foram encontradas em cangurus (ALEXANDER e VERNON 1975) e em
cavalos (BIEWENER 1998) Os ligamentos do arco do peacute tambeacutem respondem pelo
comportamento elaacutestico do sistema locomotor na corrida (KER et al 1987)
Enquanto que a medida de trabalho externo possui uma correspondecircncia com
o trabalho mecacircnico realizado pelos muacutesculos na caminhada os valores obtidos
para a corrida superestimam o trabalho muscular realizado devido agrave dificuldade de
quantificar a energia elaacutestica durante o movimento (SAIBENE e MINETTI 2003) De
fato parte consideraacutevel do aumento e diminuiccedilatildeo da energia mecacircnica total na
corrida natildeo eacute causada pelas contraccedilotildees (excecircntricas e concecircntricas) musculares
mas pelo alongamento e encurtamento das estruturas elaacutesticas da unidade muacutesculo-
tendatildeo mais especificamente os tendotildees e estruturas elaacutesticas do muacutesculo
Portanto na corrida a adiccedilatildeo do trabalho interno e a transferecircncia entre segmentos
29
dos mesmos membros (inferiores e superiores) permitem uma estimativa mais
proacutexima do trabalho mecacircnico total (WILLEMS et al 1995)
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-
invertido para a caminhada e massa-mola para a corrida (Fonte
SAIBENE e MINETTI 2003 modificado no presente estudo)
As determinantes mecacircnicas da locomoccedilatildeo humana e animal tem sido
extensivamente estudadas em diferentes situaccedilotildees velocidade (CAVAGNA et al
1963 1964) gravidade (KRAM et al 1997 CAVAGNA et al 2000 1998
CAVAGNA et al 2005) planos inclinados (MINETTI et al 1993 1994)
O trabalho mecacircnico durante a locomoccedilatildeo em inclinaccedilotildees tem sido estudado
na caminhada (MINETTI et al 1993) e na corrida (MINETTI et al 1994)
encontrando valores de maior eficiecircncia mecacircnica entre 10 e 15 de inclinaccedilatildeo
negativa (declive) Todavia o modelo do pecircndulo invertido natildeo se sustenta para
situaccedilotildees de inclinaccedilotildees extremas Deste modo a reconversatildeo de energia parece
natildeo atuar na determinaccedilatildeo da velocidade oacutetima de caminhada nestas situaccedilotildees
Uma nova hipoacutetese eacute que os muacutesculos posturais do quadril possam contribuir para
gerar o alto custo de transporte em velocidades baixas de caminhada em inclinaccedilotildees
diferentes da inclinaccedilatildeo oacutetima (-10 onde haacute o menor custo metaboacutelico e
mecacircnico)
Esta hipoacutetese pretende ser testada atraveacutes da anaacutelise do custo
eletromiograacutefico (EMG) durante caminhada em diferentes velocidades e inclinaccedilotildees
de terreno O custo EMG seraacute compreendido como o somatoacuterio de ativaccedilatildeo EMG em
funccedilatildeo da distacircncia percorrida Se satisfatoacuterio o custo EMG poderaacute explicar as curva
30
em forma de U de custo metaboacutelico em funccedilatildeo da velocidade determinadas no
trabalho pioneiro de MARGARIA (1938)
Diferentemente da caminhada a corrida pode ser explicada do ponto de vista
mecacircnico pelo modelo massa-mola Este modelo possibilita dividir a oscilaccedilatildeo
vertical do CM em duas partes durante a passada da corrida a fase inferior da
oscilaccedilatildeo (quando a forccedila vertical exercida no solo eacute maior do que o peso corporal) e
a fase superior da oscilaccedilatildeo (quando a forccedila vertical eacute menor do que o peso
corporal) De acordo com o modelo massa-mola a duraccedilatildeo da fase inferior da
oscilaccedilatildeo representa meio periacuteodo do sistema e o deslocamento do CM durante este
periacuteodo representa a amplitude da oscilaccedilatildeo (BLICKHAN 1989 CAVAGNA et al
2005) Observaccedilotildees preliminares suportam a hipoacutetese de que sujeitos idosos
utilizem de uma maior geraccedilatildeo de trabalho interno devido a diminuiccedilatildeo da fase
superior da oscilaccedilatildeo do CM
Portanto a anaacutelise dos determinantes mecacircnicos da caminhada e corrida
deveratildeo contribuir no entendimento da locomoccedilatildeo desde um ponto de vista
energeacutetico Aleacutem disso procuramos realizar um estudo teoacuterico com o objetivo de
predizer variaacuteveis fundamentais e trabalho mecacircnico da locomoccedilatildeo terrestre
Informaccedilotildees biomecacircnicas sobre a energia da locomoccedilatildeo poderatildeo servir
como base para aplicaccedilotildees futuras na aacuterea da Fisioterapia na anaacutelise da locomoccedilatildeo
patoloacutegica bem como na Educaccedilatildeo Fiacutesica e Esportes atraveacutes do uso deste
conhecimento nas aacutereas do esporte de rendimento e sauacutede agraves quais utilizam-se das
atividades fiacutesicas locomotoras
13 Formato da tese
O estado-da-arte apresentado no capiacutetulo introdutoacuterio mostra um
desenvolvimento notaacutevel do corpo de conhecimento relacionado agrave mecacircnica e
energeacutetica da locomoccedilatildeo humana As bases cientiacuteficas atuais que procuram
encontrar as determinantes mecacircnicas de caracteriacutesticas fundamentais da
caminhada e corrida humana tais como velocidade e inclinaccedilatildeo oacutetima da
locomoccedilatildeo eficiecircncia e economia em situaccedilatildeo com carga e inclinaccedilatildeo e mudanccedila
de formas de locomoccedilatildeo conforme o aumento da velocidade demonstram ser
satisfatoacuterias em inuacutemeras situaccedilotildees
31
Contudo modelos biomecacircnicos que analisem natildeo apenas situaccedilotildees
particulares mas que expliquem as questotildees fundamentais da locomoccedilatildeo humana
tendo em consideraccedilatildeo a complexidade deste tipo de movimento ainda satildeo
escassos Atualmente temos hipoacuteteses que necessitam de experimentaccedilatildeo para
tornaacute-las robustas o suficiente para responder as questotildees fundamentais da
locomoccedilatildeo e ao mesmo tempo se manterem simples o bastante que as caracterize
como fundamentais Portanto a presente tese ENERGEacuteTICA E MECAcircNICA DA
CAMINHADA E CORRIDA HUMANA Com especial referecircncia agrave locomoccedilatildeo em
plano inclinado e efeitos da idade natildeo oferece uma resposta final e acabada para as
relaccedilotildees entre a energeacutetica e mecacircnica da locomoccedilatildeo humana mas tem como eixo
principal por meio de abordagens experimentais e teoacutericas avanccedilar no
entendimento dos paradigmas mecacircnicos das formas fundamentais de locomoccedilatildeo
usadas pelo ser humano caminhada e corrida
Em base disso o capiacutetulo 2 Custo EMG da Caminhada Humana procura
avanccedilar e aperfeiccediloar a hipoacutetese do Custo de Geraccedilatildeo de Forccedila (KRAM e TAYLOR
1990) com o desenvolvimento do modelo do Custo de Ativaccedilatildeo Muscular que daacute
base para o estudo Atraveacutes de experimentos em diferentes velocidades e
inclinaccedilotildees de caminhada eacute dada uma explicaccedilatildeo das curvas em forma de U do
custo metaboacutelico em funccedilatildeo da velocidade determinadas no estudo pioneiro de
MARGARIA em 1938
Motivado pela falta de explicaccedilatildeo das mudanccedilas estruturais e funcionais
devido agrave idade aplicadas agrave mecacircnica e energeacutetica da locomoccedilatildeo humana o capiacutetulo
3 Mecacircnica da Corrida em Idosos compara o trabalho mecacircnico e o sistema massa-
mola entre jovens e idosos em diferentes velocidades de corrida analisando o
sistema massa-mola natildeo apenas pelas suas caracteriacutesticas originais (BLICKHAN
1989 MCMAHON e CHENG 1990) mas tambeacutem pelas assimetrias deste sistema
na corrida humana determinadas recentemente na literatura (CAVAGNA 2006)
Nestes dois estudos eacute usada a abordagem experimental o primeiro se
utilizando da teacutecnica de EMG e o segundo estudo abordando a teacutecnica da
dinamometria especificamente o uso de plataformas de forccedila A percepccedilatildeo da
limitaccedilatildeo metodoloacutegica do uso deste equipamento aliada agrave necessidade de
abordagens teoacutericas da mecacircnica e energeacutetica da caminhada e corrida humana e
animal em situaccedilotildees onde apenas uma curva forccedila de reaccedilatildeo do solo versus tempo
eacute disponiacutevel ofereceram a justificativa para o capiacutetulo 4 Prediccedilatildeo da Vf CP e Custo
32
Energeacutetico da Locomoccedilatildeo Terrestre A construccedilatildeo de um modelo biomecacircnico
destes paracircmetros eacute endereccedilada neste estudo atraveacutes de meacutetodo de miacutenimos
quadrados e princiacutepios da dinacircmica e otimizaccedilatildeo de paracircmetros caracterizadores da
locomoccedilatildeo nomeadamente massa corporal frequumlecircncia de passo (FP) fator de forma
ldquoqrdquo e duty factor (DF)
Finalmente no capiacutetulo 5 os resultados de cada estudo satildeo sumarizados e
no capiacutetulo 6 satildeo apresentadas algumas consideraccedilotildees sobre a mecacircnica e
energeacutetica da locomoccedilatildeo humana e os possiacuteveis desdobramentos advindos dos
presentes achados Ainda no capiacutetulo 8 estatildeo inseridos os apecircndices da tese
131 Objetivo geral
O objetivo da presente tese eacute analisar o custo EMG da caminhada humana e
a mecacircnica da corrida de idosos Esta seacuterie de estudos tem tambeacutem como objetivo
construir um modelo biomecacircnico do custo energeacutetico da locomoccedilatildeo terrestre
132 Objetivos especiacuteficos
- Estudar as determinantes da velocidade oacutetima de caminhada em inclinaccedilotildees com
ecircnfase na construccedilatildeo do modelo do custo EMG da caminhada humana
- Comparar a mecacircnica da corrida com particular referecircncia ao trabalho mecacircnico e
sistema massa-mola entre jovens e idosos em vaacuterias velocidades de corrida
- Construir um modelo biomecacircnico capaz de predizer paracircmetros fundamentais e
custo energeacutetico da locomoccedilatildeo terrestre
33
2 O CUSTO EMG DA CAMINHADA HUMANA
21 Introduccedilatildeo
Durante um ciclo de passada de caminhada a energia cineacutetica do CM
corporal varia inversamente com a energia potencial gravitacional do CM Apesar da
presenccedila importante deste comportamento a transformaccedilatildeo de energia entre uma
forma e outra natildeo eacute total e o restante de energia necessaacuterio para manter a
locomoccedilatildeo eacute providenciado pelos muacutesculos e eacute quando normalizado pela massa
corporal e por unidade de distacircncia igual agrave 03 Jkg-1m-1 durante a velocidade oacutetima
de caminhada (aproximadamente 45 kmh-1 em adultos) Este mecanismo pendular
de minimizaccedilatildeo de energia foi primeiramente observado por CAVAGNA et al (1963)
e denominado como modelo do ldquopecircndulo invertidordquo
Interessantemente natildeo obstante a sua simplicidade o modelo auxiliou no
entendimento e aprofundamento das determinantes mecacircnicas da locomoccedilatildeo
Atraveacutes deste meacutetodo foi possiacutevel oferecer o primeiro insight desde o ponto-de-vista
mecacircnico sobre a velocidade oacutetima de locomoccedilatildeo e a forma em U do custo de
transporte da caminhada [ml de oxigecircnio - O2 - por kg de massa corporal por
distacircncia percorrida observada por MARGARIA (1938)] Na seacuterie de experimentos
desenvolvida por Cavagna e colegas (CAVAGNA et al 1976 HEGLUND et al
34
1982b) foi apresentada a formulaccedilatildeo matemaacutetica denominada como Recovery (R)
definida como
W f + W -Wv extR() = 100 Eq 21 W f + Wv
onde W f eacute trabalho mecacircnico externo horizontal Wv eacute trabalho mecacircnico externo
vertical e Wext eacute trabalho mecacircnico externo Esta equaccedilatildeo determina o percentual de
reconversatildeo via pendular entre energia cineacutetica e potencial gravitacional durante a
passada E de fato na velocidade oacutetima de caminhada o R alcanccedila
aproximadamente seu valor maacuteximo
Poreacutem o custo de geraccedilatildeo de trabalho como mecanismo principal do custo
energeacutetico da locomoccedilatildeo tem recebido vaacuterias criacuteticas da literatura As criacuteticas se
baseiam principalmente (1) na questatildeo do paradoxo do trabalho zero que afirma
que fisicamente durante um ciclo de passada completo em velocidade constante e
no plano as variaccedilotildees de energias cineacuteticas e potencial satildeo iguais agrave zero
(desprezando a resistecircncia do ar e fricccedilotildees teciduais) portanto analisando de um
ponto-de-vista somente da fiacutesica o sujeito natildeo realizaria trabalho nesta situaccedilatildeo
(ALESHINSKY 1986) (2) o problema da co-contraccedilatildeo afirma que existe um custo
metaboacutelico importante devido agrave contraccedilatildeo de muacutesculos antagonistas que natildeo geram
movimento portanto sem geraccedilatildeo de trabalho mecacircnico Este uacuteltimo
questionamento levou um grupo de pesquisadores a formular a denominada
hipoacutetese da forccedila ou Teoria do custo energeacutetico da geraccedilatildeo de forccedila (HEGLUND et
al 1982b KRAM e TAYLOR 1990 ROBERTS et al 1998) para explicar de modo
simplificado o custo energeacutetico da locomoccedilatildeo
Essencialmente a hipoacutetese da forccedila afirma que o custo energeacutetico da corrida
ou caminhada eacute determinado pelo produto da integral da curva forccedila de reaccedilatildeo do
solo-tempo por um fator proporcional agrave taxa de ciclos de pontes-cruzadas de miosina
no muacutesculo independente da geraccedilatildeo de trabalho mecacircnico Apesar da hipoacutetese
concordar com achados experimentais estes satildeo encontrados em situaccedilotildees
limitadas e aleacutem disso a hipoacutetese da forccedila considera como negligenciaacutevel o custo
de balanccedilar os segmentos para traacutes e para frente Esta pressuposiccedilatildeo eacute considerada
como incorreta (MARSH et al 2004) O problema principal desta hipoacutetese se refere
35
agrave desconsideraccedilatildeo do trabalho elemento fundamental segundo a primeira lei da
termodinacircmica Conforme apontado por HEGLUND 2004) ldquoforccedila natildeo eacute trabalho
nem mesmo eacute energia Se a energia metaboacutelica eacute consumida aquela energia deve
ir para algum lugar Se a energia de um segmento corporal aumenta aquela energia
vem de algum lugar Se a energia daquele segmento diminui a energia vai para
algum lugarrdquo
Durante a locomoccedilatildeo em inclinaccedilotildees foi observado que na inclinaccedilatildeo oacutetima
(aproximadamente -10) a constante de custo metaboacutelico inverso ao tempo de
apoio obteve uma variaccedilatildeo significativa (MINETTI et al 1994) indicando que o
custo de geraccedilatildeo de trabalho mecacircnico era mais satisfatoacuterio do que o custo de
geraccedilatildeo de forccedila Mas um achado intrigante nos estudos de Minetti e
colaboradores sobre as determinantes mecacircnicas da energeacutetica da caminhada e
corrida em inclinaccedilotildees (1993 e 1994 respectivamente) foi sobre a ausecircncia de
trabalho mecacircnico negativo em inclinaccedilotildees positivas e de trabalho positivo em
inclinaccedilotildees negativas (apoacutes 30 de inclinaccedilatildeo na corrida e 15 na caminhada)
independente da velocidade Portanto o modelo do custo de geraccedilatildeo de trabalho
como determinante do custo energeacutetico da locomoccedilatildeo natildeo se aplica nestas
situaccedilotildees perdendo sua amplitude como Teoria geral para a energeacutetica e mecacircnica
da caminhada
Tendo em consideraccedilatildeo que durante situaccedilotildees de locomoccedilatildeo de pouca
eficiecircncia mecacircnica como na situaccedilatildeo de velocidades mais baixas que a velocidade
oacutetima e durante inclinaccedilotildees extremas satildeo geradas situaccedilotildees de instabilidade de
locomoccedilatildeo e provavelmente maiores co-contraccedilotildees musculares propomos neste
experimento testar a hipoacutetese denominada de ldquocusto EMG da caminhada humanardquo
Uma base importante desta hipoacutetese reside no raciociacutenio de que nas situaccedilotildees
citadas anteriormente a contribuiccedilatildeo de muacutesculos que contraem isometricamente
principalmente os posturais teratildeo uma contribuiccedilatildeo importante para o alto custo
relativo da locomoccedilatildeo
Portanto o objetivo deste estudo eacute desenvolver o modelo do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees Teoricamente a hipoacutetese do
presente estudo diferente da hipoacutetese da forccedila natildeo iraacute desconsiderar o trabalho
mecacircnico gerado mas este seraacute considerado como um dos produtos da variaccedilatildeo da
energia (devido ao consumo de energia metaboacutelico) e a quantidade de ativaccedilatildeo
muscular e as eficiecircncias de ativaccedilatildeo satildeo as determinantes do custo energeacutetico
36
usando os equivalentes metaboacutelicos da ativaccedilatildeo EMG da literatura W+ Wshy
(BIGLAND-RITCHIE e WOODS 1976) e durante contraccedilatildeo isomeacutetrica
(CERRETELLI et al 1976) O modelo eacute apresentado em detalhes na metodologia
22 Metodologia
221 Construccedilatildeo do modelo
O presente modelo eacute configurado como biomecacircnico e se utiliza de
pressupostos originados da fiacutesica e da biologia
O modelo assume que i) toda a energia despendida pelos muacutesculos possui
uma correspondente quantidade de ativaccedilatildeo EMG ii) a atividade EMG realizada
pelos muacutesculos posturais durante todo o ciclo de passada e pelos muacutesculos
propulsores durante a fase aeacuterea seraacute considerada como uma atividade EMG
realizada durante contraccedilotildees isomeacutetricas Seraacute considerada como contraccedilatildeo
excecircntrica e concecircntrica a atividade EMG realizada pelos muacutesculos propulsores
durante a primeira e segunda metades da fase de apoio respectivamente iii) O
custo energeacutetico da locomoccedilatildeo eacute devido agrave ativaccedilatildeo de muacutesculos propulsores e
posturais estes uacuteltimos natildeo diretamente ligados agrave geraccedilatildeo de trabalho mecacircnico iv)
Mais do que uma relaccedilatildeo com a produccedilatildeo de forccedila muscular a quantidade de
ativaccedilatildeo EMG e consequumlentemente o custo EMG possui uma correspondecircncia com
o trabalho mecacircnico realizado durante a ativaccedilatildeo muscular
Um conjunto de algoritmos foi desenvolvido em Labview a fim de analisar o
sinal EMG e as variaacuteveis espaccedilos-temporais (figuras 21 22 e 23 apecircndice 81) O
programa retifica suaviza (atraveacutes de uma integraccedilatildeo com janelamento moacutevel
50Hz do tipo Hamming) e divide todas as curvas de EMG por ciclo de passada
retirando os ciclos de passadas com um tempo 20 menor ou maior do tempo
meacutedio do ciclo de passada e do tempo de apoio Apoacutes normaliza o tempo do ciclo
para 100 quadros (interpolaccedilatildeo via spline) e calcula a meacutedia desvio-padratildeo e
coeficiente de variaccedilatildeo em cada quadro por muacutesculo analisado Este procedimento
tem o objetivo de criar graacuteficos de atividade eletromiograacutefica em funccedilatildeo do
37
percentual do ciclo de passada A fim de analisar o efeito das ponderaccedilotildees pelo
volume muscular e dobra cutacircnea foram desenvolvidas duas estrateacutegias de
modelamento nomeadamente ldquoabordagem experimentalrdquo e ldquoabordagem teoacutericardquo
Abordagem experimental
Usando o sinal suavizado sem a normalizaccedilatildeo foi realizada uma integral em
funccedilatildeo do tempo do seguinte modo
t
Iemg(t) = f EMG dt Eq 22 0
Este valor integrado eacute dividido pelo CP determinando a quantidade de
atividade EMG em funccedilatildeo da distacircncia e seraacute considerado como um custo miacutenimo
EMG Os valores de custo EMG satildeo ponderados em funccedilatildeo do volume muscular
(WINTERS e WOO 1990) e da dobra cutacircnea (NORDANDER et al 2003) do
seguinte modo
Iemg1 Iemg2 Iemg16EmgCost (mV m) = ( + + l middot CP-1 Eq 23 exp ( Mass1 Sk inf1 Mass2 Sk inf2 Mass16 Sk inf16 lmiddot middot middot Masstotal Sk inftotal Masstotal Sk inftotal Masstotal Sk inftotal
onde EmgCostexp eacute o custo miacutenimo EMG experimental Mass eacute a massa dos
muacutesculos analisados e eacute o somatoacuterio de todas as massas musculares Masstotal
analisadas Sk inf eacute a dobra cutacircnea de cada regiatildeo de colocaccedilatildeo dos eletrodos e
eacute o somatoacuterio de todas as dobras cutacircneas analisadas A fim de Sk inftotal
compreender melhor as determinantes da velocidade oacutetima nas inclinaccedilotildees dividiu-
se a Iemg em trecircs aacutereas (a) fase de contato (b) fase aeacuterea e (c) offset (figura 21)
Abordagem teoacuterica
A presente abordagem calcula o sinal EMG atraveacutes dos seus equivalentes
metaboacutelicos Estes equivalentes satildeo advindos da literatura (BIGLAND-RITCHIE e
WOODS 1976) e o objetivo deste procedimento foi verificar se levando em
38
consideraccedilatildeo os equivalentes metaboacutelicos da atividade EMG (para contraccedilotildees
concecircntrica excecircntrica e isomeacutetrica) seria possiacutevel explicar mais satisfatoriamente
as velocidades oacutetimas na caminhada em inclinaccedilotildees Este procedimento assume
que uma determinada quantidade de ativaccedilatildeo eleacutetrica muscular gera distintos custos
energeacuteticos sendo estes dependentes do tipo de contraccedilatildeo muscular Para este
propoacutesito primeiro dividimos a anaacutelise em dois grupos de muacutesculos propulsores
(gluteus maximus gluteus medius deltoideus anterior rectus femuralis vastus
lateralis biceps femuralis caput longus tibialis anterior e gastrocnemius lateralis) e
posturais (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis trapezius ascendens)
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset
Os muacutesculos posturais foram considerados como muacutesculos contraindo
isometricamente durante todo o ciclo de passada enquanto que os muacutesculos
39
propulsores foram analisados como realizando (a) contraccedilatildeo excecircntrica na primeira
fase de contato (b) concecircntrica na segunda fase de contato e (c) contraccedilatildeo
isomeacutetrica durante a fase aeacuterea (figura 22)
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda metade
da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo isomeacutetrica
Setas verticais apontando para baixo indicam momento de contato e de
despregue
Assim foram calculadas as correspondentes integrais
t 2c
Iemgexc (t) = f EMG dt Eq 24 0
40
onde Iemgexc eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a primeira
metade da fase de contato (contraccedilatildeo excecircntrica)
tc
Iemgcon (t) = f EMG dt Eq 25 t 2c
onde Iemgcon eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a segunda
metade da fase de contato (contraccedilatildeo concecircntrica)
ta
Iemgiso (t) = f EMG dt Eq 26 0
onde Iemgiso eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a fase aeacuterea
(contraccedilatildeo isomeacutetrica)
As integrais foram convertidas para uma unidade de counts usada por
BIGLAND-RITCHIE e WOODS 1976) usando um fator de transformaccedilatildeo igual agrave 200
counts (mVs)-1 deste modo temos a atividade EMG durante contraccedilatildeo excecircntrica
(EMGneg) concecircntrica (EMGpos) e isomeacutetrica (EMGiso) em counts Os equivalentes
metaboacutelicos satildeo obtidos atraveacutes de equaccedilotildees de regressatildeo linear criadas no
presente estudo usando dados experimentais de Bigland e Ritchie (1976) como
segue
VO2neg (ml) = 00015 EMGneg + 03353 Eq 27
VO2 pos(ml) = 00042 EMGpos + 01493 Eq 28
(ml) = 00042 EMGiso + 01493 Eq 29 VO2iso
EmgCosttheor (J m) = 201[(VO2 iso1 + VO2 iso 2 + VO2 iso16) + (VO2 neg 1 + VO2 neg 2 + VO2 neg 16) +
(VO2 pos1 + VO2 pos 2 + VO2 pos16)] CP-1 Eq 210
onde EmgCosttheor eacute o custo EMG teoacuterico O somatoacuterio dos dispecircndios energeacuteticos
dados em ml de O2 foram convertidos para Joules (J) usando um equivalente
41
energeacutetico de 201 Jml-1 (BLAXTER 1989) e apoacutes foram divididos por CP (conforme
equaccedilatildeo 210) Nesta abordagem teoacuterica entende-se o EmgCosttheor como um custo
miacutenimo energeacutetico devido agrave notoacuteria impossibilidade de obter a totalidade da ativaccedilatildeo
EMG e consequentemente do custo energeacutetico da locomoccedilatildeo Mais do que isso o
modelo procura compreender as determinantes da velocidade oacutetima de caminhada
nas inclinaccedilotildees
222 Testando o modelo
Um homem adulto sem histoacuteria de lesotildees no sistema muacutesculo-esqueleacutetico
realizou caminhadas de 2 minutos sobre uma esteira (WOODWAY Usa) nas
velocidades de 2 3 4 5 6 e 7 kmh-1 e nas inclinaccedilotildees de 0 5 10 e 15 O uso
das velocidades 6 ou 7 kmh-1 foram escolhidas em funccedilatildeo do Nuacutemero de Froude
(Fr) O valor maacuteximo de Fr foi o equivalente agrave velocidade espontacircnea de transiccedilatildeo
(aproximadamente 05 no plano MINETTI et al 1994) O uso do Fr eacute baseado da
teoria das similaridades dinacircmicas Esta teoria afirma que dois animais
geometricamente similares (como no caso do presente estudo) deslocam-se
tambeacutem de modo similar quando o movimento eacute multiplicado por fatores
relacionados ao tempo dimensotildees lineares e forccedilas (ver ALEXANDER 2005)
Fr = Vf 2 gL Eq 211
onde Vf eacute velocidade de progressatildeo em ms-1 g eacute aceleraccedilatildeo gravitacional (g) (981
ms-2) e L eacute um comprimento corporal conhecido (no presente estudo foi utilizado o
comprimento de membros inferiores em m)
Coleta de dados
O voluntaacuterio foi informado do objetivo do estudo dos riscos e eventuais
desconfortos e assinou um termo de consentimento
O indiviacuteduo estava vestido com roupas apropriadas para caminhada A coleta
de dados foi realizada em inclinaccedilotildees de 0 5 10 e 15 nas velocidades de 2 3 4
5 6 7 kmh-1 para cada inclinaccedilatildeo A atividade EMG de dezesseis muacutesculos foi
42
analisada (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis deltoideus anterior trapezius ascendens gluteus
maximus gluteus medius rectus femuralis vastus lateralis biceps femuralis caput
longus tibialis anterior e gastrocnemius lateralis) usando um eletromioacutegrafo portaacutetil
(EMGpocket Elite System Itaacutelia)
Para a preparaccedilatildeo do local e colocaccedilatildeo dos eletrodos de superfiacutecie bipolares
foram observadas as orientaccedilotildees da Seniam (FRERIKS et al 1991)
Simultaneamente ao registro EMG sinais advindos de seis sensores de pressatildeo
(footswitches) trecircs em cada peacute (regiatildeo do calcanhar quinto e primeiro metatarsos
inferiores) foram registrados no eletromiograacutefo portaacutetil Os sinais EMGrsquos foram preacuteshy
amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um niacutevel de ruiacutedo menor do
que 1 mV rms e filtrados por um filtro do tipo Butterworth (50-450 Hz terceira
ordem) A frequumlecircncia de amostragem da EMG e dos sensores de pressatildeo foi de
1000 Hz
Foram coletadas a massa e estatura corporal e comprimento de membro
inferior As dobras cutacircneas tambeacutem foram coletadas antes dos testes usando um
plicocircmetro (The body calliper CA Usa)
Um possiacutevel efeito de fadiga no sinal EMG foi controlado repetindo o primeiro
teste Com diferenccedilas maiores de 10 entre a integral EMG dos muacutesculos
analisados do primeiro e uacuteltimo teste a coleta seria descartada poreacutem a diferenccedila
foi menor do que este limite
23 Resultados
231 Variaacuteveis espaccedilos-temporais
As variaacuteveis espaccedilos-temporais da caminhada em diferentes velocidades e
diferentes inclinaccedilotildees satildeo apresentadas na tabela 21 O CP e a FP aumentam com
o aumento da velocidade poreacutem natildeo com o aumento da inclinaccedilatildeo O DF eacute maior na
velocidade oacutetima de locomoccedilatildeo nas inclinaccedilotildees (10 e 15) enquanto que apresenta
uma relaccedilatildeo inversa com Vf nas inclinaccedilotildees mais baixas (0 e 5)
43
232 Atividade EMG
A atividade EMG dos muacutesculos posturais (erector spinae longissimus erector
spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis trapezius ascendens) e
dos muacutesculos propulsores (gluteus maximus gluteus medius rectus femoralis
vastus lateralis deltoideus anterior biceps femoralis caput longus tibialis anterior e
gastrocnemius lateralis) eacute apresentada nas figuras 23 e 24 Os resultados do
presente estudo referente ao comportamento da atividade EMG durante caminhada
no plano satildeo semelhantes agrave literatura tanto em relaccedilatildeo aos muacutesculos propulsores
(LAY et al 2007 NYMARK et al 2005) quanto para os muacutesculos posturais (WHITE
e MCNAIR 2002 DEN OTTER et al 2004 LAMOTH et al 2006)
De um modo geral o sinal EMG em funccedilatildeo do percentual do ciclo (portanto
independente da distacircncia percorrida) aumentou conforme o aumento da velocidade
e inclinaccedilatildeo Observa-se tambeacutem um aumento no offset nas maiores inclinaccedilotildees
(veja figuras 23 e 24)
Tabela 21 Valores meacutedios e desvios-padratildeo (dp) de frequumlecircncia de passada (FP)
comprimento de passada (CP) tempo de fase aeacuterea (ta) tempo de contato (tc)e
duty factor (DF) nas diferentes velocidades (Vf) em diferentes inclinaccedilotildees do
terreno
0
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0518 0022 1074 0044 0706 0039 1227 0087 064
3 0660 0017 1263 0032 0604 0030 0912 0042 060
4 0779 0013 1426 0025 0541 0023 0743 0028 058
5 0879 0010 1580 0018 0492 0022 0646 0024 057
6 0970 0009 1719 0015 0446 0012 0586 0014 057
7 1061 0022 1834 0042 0415 0010 0528 0024 056
5
44
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0504 0026 2210 0056 0656 0054 1334 0089 067
3 0640 0015 2606 0030 0635 0033 0930 0048 059
4 0797 0013 2790 0023 0526 0017 0729 0028 058
5 0895 0008 3104 0014 0478 0017 0639 0020 057
6 1002 0009 3326 0016 0426 0009 0572 0014 057
7 1081 0015 3600 0025 0400 0007 0525 0014 057
10
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0302 0000 3674 0000 1309 0090 1998 0090 060
3 0262 0013 3182 0151 1216 0094 2602 0174 068
4 0300 0007 3699 0085 1229 0086 2101 0114 063
5
6 0495 0006 3300 0036 0854 0021 1166 0028 058
7 0556 0008 3429 0015 0775 0022 1023 0026 057
15
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0275 0022 3041 0216 1282 0079 2368 0255 065
3 0319 0011 3492 0122 1208 0074 1936 0121 062
4 0399 0007 3482 0059 1497 0046 1011 0040 040
5 0450 0008 3703 0068 0919 0041 1302 0060 059
6 0524 0009 3711 0064 0808 0026 1101 0035 058
7 0597 0012 3257 0069 0721 0024 0954 0037 057
O maior pico de ativaccedilatildeo EMG entre os muacutesculos propulsores foi do tibialis
anterior com valor de 73 mV agrave 7 kmh-1 agrave 15 enquanto que para os muacutesculos
posturais foi do trapezius ascendens com 34 mV tambeacutem agrave 7 kmh-1 agrave 15
erector
spinae
longissimus
erector
spinae
iliocostalis
trapezius
descendens
latissimus
dorsis
obliquus
externus
abdominis
obliquus
internus
abdominis
rectus
abdominis
deltoideus
anterior
45
0 5 10 15
Figura 2 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
trapezius
ascenden
gluteus
maximus
gluteus
medius
rectus
femoralis
vastus
lateralis
biceps
femoralis
caput
tibialis
anterior
gastrocnemius
lateralis
46
0 5 10 15
Figura 24
47
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
com o tempo de passada normalizado em percentual do ciclo O 0-100 representa
o momento de contato com o solo As cores indicam a velocidade de caminhada (de
2 agrave 7 kmh-1) Cada muacutesculo eacute representado nas linhas e em cada coluna eacute
apresentada a atividade EMG por inclinaccedilatildeo
A ativaccedilatildeo EMG parece seguir um padratildeo bem definido com exceccedilatildeo do
trapezius descendens obliquus internus abdominis onde picos de ativaccedilotildees
aparecem apoacutes os 3 kmh-1 seguindo um comportamento de aumento com o
acreacutescimo da inclinaccedilatildeo e no muacutesculo deltoideus anterior no qual ateacute a velocidade
de 5 kmh-1 o pico maior se apresenta no final da fase de apoio enquanto que nas
velocidades de 6 e 7 kmh-1 o pico passa a se situar na fase aeacuterea O uacutenico muacutesculo
analisado neste estudo que apresenta um comportamento diferente entre as
inclinaccedilotildees eacute o rectus femoralis onde nas inclinaccedilotildees 0 5 e 10 os picos aparecem
apenas nas velocidades raacutepidas enquanto que na inclinaccedilatildeo de 15 o pico eacute visiacutevel
logo na velocidade de 2 kmh-1
Poreacutem quando analisamos a quantidade de ativaccedilatildeo por distacircncia percorrida
ou seja o custo EMG os resultados mudam
233 Custo EMG
A quantidade de atividade EMG calculada atraveacutes da abordagem
experimental eacute apresentada na figura 25 Durante a caminhada no plano (primeira
linha da figura 25) eacute possiacutevel observar um miacutenimo de ativaccedilatildeo no somatoacuterio total
devido principalmente agrave ativaccedilatildeo durante a fase aeacuterea e ao offset Este miacutenimo
acontece tambeacutem na inclinaccedilatildeo a 10 de inclinaccedilatildeo mas a 5 e a 15 a
quantidade de ativaccedilatildeo parece diminuir conforme o aumento da Vf
A figura 26 apresenta os valores de custo EMG calculado atraveacutes da
abordagem teoacuterica Observa-se um miacutenimo a 0 e 15 de inclinaccedilatildeo
Para nosso conhecimento natildeo existem dados de atividade EMG de muacutesculo
posturais durante caminhada nas inclinaccedilotildees A quantidade de ativaccedilatildeo EMG por
passada dos muacutesculos posturais e propulsores parecem aumentar com o acreacutescimo
da velocidade e inclinaccedilatildeo
48
49
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
24 Discussatildeo
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular
Inicialmente proposto para a corrida de quadruacutepedes (KRAM e TAYLOR
1990) e apoacutes para a corrida de biacutepedes (ROBERTS et al 1998 ROBERTS et al
1997) corrida para traacutes (WRIGHT e WEYAND 2001) e caminhada humana
(GRIFFIN et al 2003) a teoria do custo energeacutetico da geraccedilatildeo de forccedila foi formulada
a partir dos resultados que para animais com grande variaccedilatildeo de massa correndo
em diversas velocidades o custo mecacircnico natildeo se correlacionava bem com o custo
metaboacutelico da locomoccedilatildeo terrestre (HEGLUND et al 1982b TAYLOR 1985)
0 5
10
15
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
50
Uma justificativa para explicar esse resultado se referia ao fato de que o
muacutesculo durante a fase de apoio na corrida contraia isometricamente deste modo
natildeo realizando trabalho
Recentemente foi observado que esse comportamento acontece tambeacutem no
muacutesculo gastrocnemius medialis durante a caminhada (FUKUNAGA et al 2001)
Poreacutem na corrida este comportamento sucede apenas em velocidades maiores de
13 kmh-1 em adultos (CAVAGNA 2006) e natildeo eacute visiacutevel em idosos mesmo em
velocidades maacuteximas (estudo sobre a mecacircnica da corrida em idosos Capiacutetulo 3)
Ainda assim a teoria afirma que o custo metaboacutelico despendido pelos muacutesculos eacute
proporcional agrave integral forccedila de reaccedilatildeo do solo-tempo multiplicada por um fator
proporcional agrave taxa de ciclos de pontes cruzadas no muacutesculo-esqueleacutetico
A proposiccedilatildeo do Custo Energeacutetico da Geraccedilatildeo de Forccedila assume que i) a
maior parte da forccedila exercida pelos muacutesculos acontece em oposiccedilatildeo agrave gravidade ii)
uma unidade de volume muscular ativado exerce uma respectiva forccedila no solo
independente da velocidade ou tamanho do animal iii) originalmente foi presumido
que os muacutesculos agiam em similares amplitudes da relaccedilatildeo forccedila-velocidade [esta
pressuposiccedilatildeo foi recentemente interpretada em um interessante modelo
biomecacircnico proposto por BLANCO e GAMBINI 2006) como independente para a
determinaccedilatildeo das relaccedilotildees encontradas por KRAM e TAYLOR 1990)] portanto eacute
esperado que animais pequenos que realizam o tempo de contato menor usem
fibras glicoliacuteticas em maior quantidade e consequentemente tenham um maior
dispecircndio energeacutetico e assim explica-se o fato de que animais pequenos despendem
mais energia para transportar 1 N de forccedila por km percorrido do que animais
maiores (HOYT e TAYLOR 1981) Portanto o custo energeacutetico da locomoccedilatildeo
segundo a presente teoria eacute determinado pelo custo de suportar o peso corporal e o
tempo disponiacutevel para exercer forccedila contra o solo
Ainda assim a teoria apresenta seacuterias restriccedilotildees e parece funcionar em
situaccedilotildees particulares A formulaccedilatildeo apresentada por Kram e Taylor indica como
insignificante o dispecircndio energeacutetico devido aos movimentos de balanccedilo dos
membros quando natildeo estatildeo em apoio Vaacuterias evidecircncias em aves (MARSH et al
2004) e em humanos (DOKE et al 2005 GOTTSCHALL e KRAM 2005 DOKE e
KUO 2007) demonstram que este dispecircndio natildeo eacute despreziacutevel Outra criacutetica
levantada pela literatura (ALEXANDER 1991 HEGLUND 2004) se refere agrave
desconsideraccedilatildeo do trabalho variaacutevel fundamental na Termodinacircmica para explicar
51
a energeacutetica da locomoccedilatildeo Forccedila natildeo eacute trabalho nem mesmo eacute energia portanto
ela isoladamente natildeo possibilita uma resposta final sobre a energia A hipoacutetese do
custo de ativaccedilatildeo muscular apresentado aqui natildeo despreza o dispecircndio energeacutetico
dos membros superiores e aleacutem disso considera as eficiecircncias dos diferentes tipos
de trabalho mecacircnico quando insere os equivalentes metaboacutelicos da ativaccedilatildeo
muscular (abordagem teoacuterica Metodologia)
242 Sobre o meacutetodo
Algumas consideraccedilotildees importantes podem ser feitas sobre a teacutecnica da
EMG Comumente esta teacutecnica eacute usada nos campos da biomecacircnica e biologia
experimental a fim de determinar a quantidade de ativaccedilatildeo muscular e os periacuteodos
em que elas acontecem poreacutem neste estudo pretendeu-se usar a determinada
teacutecnica a fim de oferecer uma informaccedilatildeo global da ativaccedilatildeo de tal modo que
pudesse ter uma correspondecircncia com a ativaccedilatildeo EMG de todo o corpo incluindo os
muacutesculos posturais que natildeo geram trabalho muscular importante mas segundo a
hipoacutetese central do presente estudo participam de forma decisiva como uma
determinante da caminhada humana
Assim esta abordagem permite inferir sobre os mecanismos principais da
locomoccedilatildeo e permite explicar a biomecacircnica da locomoccedilatildeo especialmente referente
agrave energeacutetica da caminhada humana Aleacutem de auxiliar na explicaccedilatildeo da velocidade
oacutetima no plano o custo EMG parece dar um indicativo sobre a energeacutetica em
situaccedilotildees criacuteticas com restriccedilotildees do ambiente (inclinaccedilatildeo) e situaccedilotildees natildeo usuais
(velocidades de progressatildeo baixas)
Nestas situaccedilotildees eacute provaacutevel que dois mecanismos estejam relacionados a fim
de justificar a hipoacutetese do custo EMG i) a estabilidade dinacircmica prejudicada e ii) o
custo da co-contraccedilatildeo Os dois mecanismos parecem estar diretamente ligados ao
maior custo EMG e consequumlentemente ao custo energeacutetico da caminhada
Evidecircncias experimentais datildeo suporte para esta inferecircncia Durante caminhada
realizada para fins de lazer em velocidades muito baixas ou mesmo em marchas
patoloacutegicas foi encontrado um aumento na atividade EMG em comparaccedilatildeo com a
velocidade auto-selecionada correspondente agrave velocidade oacutetima Os achados
mostram um aumento de ativaccedilatildeo EMG com o aumento da Vf mesmo em muacutesculos
do tronco durante locomoccedilatildeo no plano (ANDERS et al 2007) Novamente o foco do
52
presente estudo foi referente agrave quantidade de ativaccedilatildeo em funccedilatildeo da distacircncia
percorrida enquanto que nestes estudos a variaacutevel em questatildeo foi avaliada em
funccedilatildeo da passada Aleacutem disso aumentos foram encontrados nos valores de coshy
contraccedilatildeo durante velocidades muito baixas (020 e 030 ms-1) em comparaccedilatildeo com
a velocidade auto-selecionada (NYMARK et al 2005)
As relaccedilotildees entre estabilidade articular e quantidade de ativaccedilatildeo geral
(ANDERSON e BEHM 2004) e estabilidade corporal e ativaccedilatildeo de muacutesculos
localizados especificamente no tronco (GARDNER-MORSE e STOKES 1998
GRANATA e MARRAS 2000 GRANATA e ORISHIMO 2001) satildeo bem
estabelecidas na literatura inclusive indicando um prejuiacutezo maior na ativaccedilatildeo EMG
durante perturbaccedilotildees agrave estabilidade com contraccedilotildees concecircntricas do que
excecircntricas e isomeacutetricas Um possiacutevel modo de testar estes mecanismos poderia
ser atraveacutes da perturbaccedilatildeo da estabilidade e os efeitos na ativaccedilatildeo EMG durante
caminhada (por exemplo em terrenos irregulares)
Outro achado importante que daacute sustentaccedilatildeo agrave hipoacutetese do custo EMG da
caminhada humana eacute observado por PRILUTSKY e GREGOR 2001) onde a
atividade EMG de muacutesculos propulsores (rectus femoralis gastrocnemius medialis
vastus medialis biceps femoralis gluteus maximus e soleus) foi maior na corrida do
que na caminhada em velocidades abaixo da velocidade de transiccedilatildeo entre
caminhada e corrida enquanto que durante velocidades acima da de transiccedilatildeo os
muacutesculos propulsores apresentam uma maior atividade EMG na caminhada do que
na corrida o que coincide com o dispecircndio metaboacutelico nestas situaccedilotildees
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia
A alta especializaccedilatildeo da locomoccedilatildeo suportando cargas em regiotildees inoacutespitas da
terra indica um desafio para o entendimento dos fundamentos da mecacircnica e
energeacutetica da locomoccedilatildeo humana Mundialmente famosos satildeo os achados sobre a
economia de locomoccedilatildeo de mulheres africanas que transportam cargas sobre a
cabeccedila de ateacute 70 da massa corporal sem um maior custo mecacircnico devido a um
ajuste aperfeiccediloado das curvas de energia potencial e cineacutetica do centro de massa
colaborando para um mais alto R (percentual de reconversatildeo entre energia cineacutetica
53
e potencial durante um ciclo de passada) (MALOIY et al 1986) Evidecircncias de um
custo metaboacutelico relativamente baixo da locomoccedilatildeo no plano foram tambeacutem
encontradas em carregadores Nepaleses (BASTIEN et al 2005) Poreacutem
diferentemente das condiccedilotildees geograacuteficas nas quais as mulheres africanas realizam
suas atividades locomotoras o espaccedilo geograacutefico dos carregadores Nepaleses eacute
caracterizado por terrenos inclinados Em um estudo recente Minetti e
colaboradores (MINETTI et al 2006) apresentaram as primeiras informaccedilotildees sobre
eficiecircncia mecacircnica (potecircncia mecacircnica desenvolvida dividida pela potecircncia
metaboacutelica despendida) de carregadores Nepaleses em inclinaccedilotildees extremas
especialmente da regiatildeo do Himalaia indicando uma eficiecircncia aproximadamente
33 maior do que a de montanhistas Caucasianos De fato os carregadores
Nepaleses apresentam caracteriacutesticas notaacuteveis do ponto de vista energeacutetico
Transportam desde a infacircncia cargas geralmente entre 80 e 90 da massa corporal
(utilizando-se de uma faixa posta agrave testa no qual eacute ligada a uma cesta de vime nas
costas) em terrenos acidentados com inclinaccedilotildees de ateacute 50 em situaccedilatildeo de
hipoacutexia de altitude (MALVILLE et al 2001)
A hipoacutetese da transferecircncia eficiente entre energia cineacutetica e potencial do
centro de massa corporal natildeo se sustenta pois em inclinaccedilotildees maiores de 15 e ndash
15 as mudanccedilas de energia potencial ocorrem apenas positivamente e
negativamente respectivamente (MINETTI et al 1993) Portanto sem a
possibilidade de transferecircncia de energia por via pendular e tendo em consideraccedilatildeo
a menor variabilidade de oscilaccedilatildeo do tronco dos Nepaleses encontrada por
MINETTI et al 2006) apresentamos uma hipoacutetese de que o custo de ativaccedilatildeo
muscular (ou custo EMG) da locomoccedilatildeo eacute menor no grupo de carregadores do
Himalaia do que nos montanhistas Caucasianos Devido agrave falta de informaccedilotildees
espaccedilos-temporais da locomoccedilatildeo com carga em grandes inclinaccedilotildees foram
analisados estes paracircmetros da passada a fim de auxiliar no entendimento da
energeacutetica e mecacircnica da locomoccedilatildeo em planos inclinados
251 Materiais e meacutetodos
Cinco carregadores Nepaleses (idade 23 plusmn 9 anos estatura 163 plusmn 003 m
massa corporal 546 plusmn 62 kg) e cinco montanhistas Caucasianos (idade 32 plusmn 3
anos estatura 176 plusmn 007 m massa corporal 742 plusmn 67 kg) selecionados por
54
voluntariedade realizaram o experimento em Namche-Bazar regiatildeo do vale
Khumbu no Parque Nacional de Sagarmatildethatilde (Everest em nepalecircs) O experimento
consistia de caminhada sem e com carga (40 kg) em situaccedilatildeo de subida e descida
com uma inclinaccedilatildeo meacutedia de 22 em um ritmo que poderiam suportar por muitas
horas Os Nepaleses utilizavam a usual faixa na testa onde era ligada com a cesta
nas costas onde suportavam o peso enquanto que os Caucasianos usavam uma
mochila de alpinismo O trecho foi escolhido de modo a assegurar que as trocas de
energia fossem principalmente devidas as mudanccedilas de energia potencial sem a
possibilidade de transferecircncia entre energia potencial e cineacutetica dentro de uma
passada (MINETTI et al 2006) Antes de iniciar os experimentos eram realizadas
medidas de dobras cutacircneas nas regiotildees de colocaccedilatildeo de eletrodos
O set-up experimental incluiu um eletromioacutegrafo portaacutetil (PocketEmg BTS
Milatildeo Itaacutelia) um analisador de gases portaacutetil (K4b2 Cosmed Roma Itaacutelia) um GPS
(GPSmAP76CS) e lactiacutemetro (Accutrend Roche Diagnostic Basel Suiacuteccedila) Foram
analisados a atividade EMG de quatorze muacutesculos (erector spinae longissimus
erector spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis deltoideus anterior
trapezius ascendens gluteus maximus gluteus medius biceps femuralis caput
longus vastus lateralis e gastrocnemius lateralis) Para a preparaccedilatildeo do local e
colocaccedilatildeo dos eletrodos de superfiacutecie bipolares foram seguidas as orientaccedilotildees da
Seniam (FRERIKS et al 1991) Simultaneamente ao registro EMG sinais advindos
de seis sensores de pressatildeo (footswitches) trecircs em cada peacute (regiatildeo do calcanhar
primeiro e quinto metatarso inferior) eram registrados no eletromiograacutefo portaacutetil Os
sinais EMGrsquos foram preacute-amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um
niacutevel de ruiacutedo menor do que 1 μV rms e filtrados por um filtro do tipo Butterworth (50shy
450 Hz terceira ordem) A frequumlecircncia de amostragem da EMG e dos sensores de
pressatildeo foi de 1000 Hz
O custo metaboacutelico foi calculado segundo procedimentos do estudo anterior
(MINETTI et al 2006) O sinal EMG foi retificado e integrado e os valores meacutedios da
atividade EMG de todo o trecho foram subtraiacutedos pelos respectivos valores da
situaccedilatildeo em repouso (idem ao consumo de O2) e divididos pela velocidade meacutedia
(Vf ) A potecircncia EMG geral foi obtida a partir do somatoacuterio dos quatorze muacutesculos
ponderado pelos respectivos volumes musculares (YAMAGUCHI et al 1991) e
55
dobra cutacircnea respectiva Determinou-se o Custo EMG atraveacutes do procedimento
experimental
Para fins de comparaccedilatildeo das Vf rsquos de locomoccedilatildeo usamos o Nf baseado na
teoria das similaridades dinacircmicas (sub-seccedilatildeo 222) para normalizar a Vf No caso
presente ao inveacutes de utilizar o comprimento de membro inferior utilizamos a
estatura da seguinte forma
Vf 2
Fr = Eq 212 g estatura
Tendo em consideraccedilatildeo que a estatura meacutedia dos Caucasianos eacute maior (013
m) e que as Vf rsquos de subida e descida dos Caucasianos com carga foram 35 e 17
menores do que as dos Nepaleses deste modo os Frrsquos dos Caucasianos para os
mesmos trechos foram 40 e 24 menores do que dos Nepaleses
Os procedimentos para anaacutelise dos dados de posiccedilatildeo e Vf oriundos do GPS
satildeo os mesmos de MINETTI et al 2006) A potecircncia mecacircnica vertical (PMV) foi
calculada como segue
g h mtotPMV = Eq 213 t
onde Ah eacute variaccedilatildeo de altura mtot eacute a massa total (massa corporal + carga) g eacute
aceleraccedilatildeo gravitacional e At eacute o tempo de locomoccedilatildeo
Uma seacuterie de programas computacionais (Labview versatildeo 71 National
Instruments Austin USA) foram construiacutedos para o processamento dos dados EMG
GPS e paracircmetros espaccedilos-temporais
Foi utilizado Testes-t de student para amostras independentes para comparar
os paracircmetros espaccedilos-temporais entre Nepaleses e Caucasianos (SPSS para
Windows versatildeo 14 USA)
56
252 Resultados
Variaacuteveis espaccedilos-temporais
O Fr dos Nepaleses foi maior do que as dos Caucasianos em situaccedilatildeo com
carga (plt001) mas sem carga as diferenccedilas diminuem acentuadamente (4 e 23
maiores sem e com carga respectivamente pgt005) O CP e FP dos Nepaleses
foram maiores na subida com carga mas durante a descida com carga apesar da
Vf maior apenas o CP foi maior nos Nepaleses e a FP foi similar (pgt005)
Paracircmetros energeacuteticos
A atividade EMG por unidade de tempo foi similar entre Nepaleses e
Caucasianos Contudo a ativaccedilatildeo EMG total ou seja por unidade de distacircncia
(ldquocustordquo EMG da locomoccedilatildeo) foi notavelmente maior nos Caucasianos na situaccedilatildeo
com carga especialmente na fase de subida (observe a inclinaccedilatildeo das retas na
figura 27)
A atividade EMG tambeacutem foi analisada no domiacutenio da frequumlecircncia para testar
uma possiacutevel diminuiccedilatildeo nos paracircmetros de mediana meacutedia e pico da frequumlecircncia
que pudessem explicar via fadiga neuromuscular (KNAFLITZ e BONATO 1999) o
efeito da carga no aumento da ativaccedilatildeo EMG por distacircncia percorrida nos
Caucasianos (inclinaccedilotildees das retas na figura 27)
Utilizou-se a transformada raacutepida de Fourier com janelamento de 10 segundos
analisando o centro dos bursts de 512 pontos determinados por uma integraccedilatildeo com
janelamento moacutevel Hanning de 50 ms Todavia nenhuma diferenccedila significativa foi
encontrada nos paracircmetros de frequumlecircncia entre os primeiros e uacuteltimos vinte
segundos de experimento (diminuiccedilotildees lt 5)
O notaacutevel desempenho dos Nepaleses na subida com carga eacute confirmado pela
PMV 33 maior do que a dos Caucasianos Embora a Vf e a PMV sejam maiores
nos Nepaleses estes apresentam um custo metaboacutelico 39 menor que os
Caucasianos Esta economia energeacutetica especiacutefica agrave situaccedilatildeo de carga e inclinaccedilatildeo
extrema eacute observada tambeacutem na figura 28 na qual os Caucasianos sem carga
apresentam uma eficiecircncia similar agraves eficiecircncias dos Nepaleses mas com uma baixa
eficiecircncia na situaccedilatildeo com carga
57
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal +
carga) dos carregadores Nepaleses (NEP) e montanhistas Caucasianos
(CAU) em subida (up) e descida (down)
A eficiecircncia menor dos Caucasianos na situaccedilatildeo com carga parece ser
explicada pela quantidade de ativaccedilatildeo muscular A interessante semelhanccedila entre o
custo EMG e o custo energeacutetico (figura 27) demonstram a eficaacutecia do meacutetodo EMG
utilizado no presente estudo a fim de representar uma ativaccedilatildeo muscular geral
durante a locomoccedilatildeo
253 Discussatildeo
A menor ativaccedilatildeo muscular eacute extremamente interessante pois explica de modo
importante o mecanismo da alta eficiecircncia e economia energeacutetica nos Nepaleses
58
Os resultados de potecircncia metaboacutelica e PMV confirmam os achados de
MINETTI et al 2006) Aleacutem disso o custo energeacutetico na situaccedilatildeo sem carga eacute
similar entre Caucasianos e Nepaleses Em outras palavras o desempenho notaacutevel
dos Nepaleses eacute especiacutefico somente na situaccedilatildeo de subida com carga
000
004
008
012
016
020
024
028
-12 -10 -08 -06 -04 -02 00
efi
ciecirc
nc
ia m
iacutenim
a d
e t
rab
alh
o p
os
itiv
o NEP 0kg
CAU 0kg
NEP 40kg
CAU 40kg
14
15
eficiecircncia miacutenima de trabalho negativo
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da
PMV (positiva ou negativa) pela potecircncia metaboacutelica respectiva
(MINETTI et al 2006) As linhas satildeo as razotildees entre eficiecircncia
muscular positiva e negativa (WOLEDGE et al 1985)
A melhor economia nos Nepaleses durante a subida com carga pode ser
relacionada agraves propriedades mecacircnicas de contraccedilatildeo muscular especificamente agrave
relaccedilatildeo potecircncia-velocidade Tendo em consideraccedilatildeo que os Caucasianos
realizaram o trecho de subida com carga em uma velocidade de progressatildeo 33
menor que os Nepaleses pode-se inferir que os Caucasianos realizaram a atividade
em uma regiatildeo menor de produccedilatildeo de potecircncia devido agrave relativa baixa velocidade
que por sua vez corresponde agrave uma zona de baixa eficiecircncia Outro fator secundaacuterio
pode ser a aclimataccedilatildeo de longo prazo destes indiviacuteduos agrave hipoacutexia de altitude
favorecendo o transporte e utilizaccedilatildeo de O2 no muacutesculo esqueleacutetico
59
Surpreendentemente a ativaccedilatildeo EMG por unidade de tempo eacute semelhante
entre Nepaleses e Caucasianos e por consequumlecircncia a ativaccedilatildeo total eacute menor nos
Nepaleses
Pode-se afirmar tambeacutem que a razatildeo entre ativaccedilatildeo EMG na subida e descida
independente da massa total eacute em torno de 15 e 2 corroborando com os dados de
BIGLAND-RITCHIE e WOODS 1976)
Em conclusatildeo a hipoacutetese da ativaccedilatildeo muscular econocircmica nos carregadores
Nepaleses eacute confirmada Os paracircmetros espaccedilos-temporais da passada parecem
natildeo justificar o menor custo energeacutetico nos Nepaleses O custo EMG foi maior nos
Caucasianos especialmente durante a ascensatildeo com carga indicando uma
justificativa a um achado anterior de maior estabilidade no tronco em Nepaleses
(MINETTI et al 2006)
60
3 MECAcircNICA DA CORRIDA DE IDOSOS
31 Introduccedilatildeo
Nos idosos a forccedila muscular eacute reduzida Isso tem sido atribuiacutedo
principalmente a atrofia da massa muscular com a reduccedilatildeo da aacuterea de sua secccedilatildeo
transversal (DOHERTY 2003 FRONTERA et al 2000 TRAPPE et al 2003) e
tambeacutem agrave deficiecircncia na produccedilatildeo intriacutenseca de forccedila no niacutevel da interaccedilatildeo entre
actina e miosina (PHILLIPS et al 1991 FRONTERA et al 2000 LOWE et al 2001
MORSE et al 2005) Experimentos realizados tanto em espeacutecimes isoladas de
muacutesculo (OCHALA et al 2006 PHILLIPS et al 1991) quanto in vivo em humanos
(KLASS et al 2005 PORTER et al 1997 POUSSON et al 2001 VANDERVOORT
et al 1990) mostram que a forccedila que um muacutesculo exerce ao alongar-se
(frequumlentemente chamada de contraccedilatildeo excecircntrica) tem reduccedilatildeo menor devido ao
processo de envelhecimento que a forccedila desenvolvida durante contraccedilatildeo isomeacutetrica
e durante encurtamento (frequumlentemente chamada de contraccedilatildeo concecircntrica)
O efeito das mudanccedilas das propriedades de contraccedilatildeo do muacutesculo no
trabalho mecacircnico realizado durante locomoccedilatildeo natildeo eacute conhecido O trabalho
mecacircnico realizado ao caminhar natildeo tem sido considerado significativamente maior
em indiviacuteduos idosos apesar de um maior dispecircndio energeacutetico resultando em uma
61
menor eficiecircncia mecacircnica atribuiacuteda agrave co-contraccedilatildeo de muacutesculos antagonistas
(MIAN et al 2006)
O mecanismo elaacutestico da corrida contraacuterio ao mecanismo pendular da
caminhada necessita de uma intervenccedilatildeo muscular muito maior para manter o
movimento do CM Um ciclo alongamento-encurtamento das unidades muacutesculoshy
tendiacuteneas ocorre em cada passo da corrida com grande entrada e saiacuteda de energia
mecacircnica para dentro e para fora das unidades muacutesculo-tendiacuteneas A mecacircnica da
corrida assim mais que a caminhada pode revelar mudanccedilas no trabalho mecacircnico
realizado em cada passo devido ao desempenho muscular reduzido nos idosos
Aleacutem disso uma assimetria contato-despregue ocorre durante a corrida
surgindo do fato que as unidades muacutesculo-tendiacuteneas contraacuterio a uma mola sem
atrito tecircm comportamento diferente durante alongamento e encurtamento
Recentemente foi observado que a assimetria contato-despregue eacute uma
consequumlecircncia da relaccedilatildeo forccedila-velocidade do muacutesculo e eacute maior quanto maior for a
mudanccedila no comprimento do muacutesculo em relaccedilatildeo agravequela do tendatildeo dentro das
unidades muacutesculo-tendiacuteneas (CAVAGNA 2006)
O trabalho mecacircnico realizado durante a corrida em idosos e sua assimetria
contato-despregue para nosso conhecimento ainda natildeo satildeo determinados
Neste estudo foi calculado o trabalho mecacircnico externo realizado para manter
o movimento do CM e o tempo das trocas de energia mecacircnica durante as fases de
trabalho negativo e positivo do bouncing do corpo em indiviacuteduos idosos correndo
em diferentes velocidades Os resultados obtidos em indiviacuteduos idosos satildeo
comparados agravequeles obtidos em indiviacuteduos jovens A hipoacutetese apresentada eacute que o
aumento da discrepacircncia em idosos entre o desenvolvimento da forccedila durante
alongamento e durante encurtamento se operacional durante a corrida iraacute aumentar
a assimetria contato-despregue do aparente bouncing do corpo em relaccedilatildeo agravequele
de indiviacuteduos jovens
32 Materiais e Meacutetodos
321 Amostra e procedimento experimental
Os experimentos foram realizados em oito indiviacuteduos idosos (homens idade
62
736plusmn55 anos altura 172plusmn006 m massa 711plusmn92 kg media plusmn dp) e oito indiviacuteduos
jovens (6 homens e duas mulheres idade 208plusmn16 anos altura 176plusmn008 m massa
634plusmn100 kg) Trecircs indiviacuteduos em cada grupo satildeo treinados (volume miacutenimo
semanal de corrida de 40 km) enquanto cinco satildeo sedentaacuterios saudaacuteveis Os
resultados relatados neste estudo satildeo uma meacutedia dos dados obtidos de todos os
sujeitos em cada grupo independente de seu treinamento Resultados similares
poreacutem foram obtidos comparando os trecircs indiviacuteduos idosos treinados com os trecircs
indiviacuteduos jovens do sexo masculino natildeo treinados de acordo com os achados que
o efeito da idade nas unidades muacutesculo-tendiacuteneas satildeo similares em corredores e
indiviacuteduos natildeo-ativos (KARAMANIDIS e ARAMPATZIS 2005) Consentimento
informado escrito foi obtido de cada indiviacuteduo Os estudos foram realizados de
acordo com a Declaraccedilatildeo de Helsinque
Os indiviacuteduos correram de um lado para o outro ao longo de uma pista de
corrida de 50 metros a qual foi incorporada no niacutevel do solo 8 plataformas de forccedila
de 05 m 05 m em sequumlecircncia totalizando um espaccedilo contiacutenuo de 4 m 05 m
sensiacutevel agrave forccedila aplicada na plataforma nas direccedilotildees anterior e vertical A uacutenica
instruccedilatildeo dada a cada indiviacuteduo foi para correr normalmente em uma velocidade
constante mensurada por duas fotoceacutelulas posicionadas distantes de 1 agrave 3 m
(dependendo da velocidade) ao longo do lado da plataforma Mais caracteriacutesticas da
plataforma de forccedila satildeo descritas por CAVAGNA (1975)
O procedimento do experimento consistiu em medir a forccedila aplicada no solo
no plano sagital durante corrida em diferentes velocidades Os dados foram
adquiridos em um microcomputador a uma taxa de 500 Hz por canal de i) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo anterior (Ff) ii) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo vertical (Fv) e iii) sinal das
fotoceacutelulas A aquisiccedilatildeo e anaacutelise dos dados foram realizadas atraveacutes de um
conversor analoacutegico-digital (National Instruments Austin TX USA) e um software
feito em LabView para Macintosh (versatildeo 71)
Foram feitas anaacutelises em um total de 124 corridas com velocidades meacutedias
entre 3 e 17 kmh-1 para os idosos e 229 corridas entre 3 e 21 kmh-1 para os jovens
O nuacutemero menor de execuccedilotildees realizado pelos idosos foi para diminuir riscos de
fadiga neste grupo
63
322 Dos registros da plataforma ao trabalho externo
O processo usado para calcular as mudanccedilas da energia mecacircnica do CM do
corpo derivadas das forccedilas de reaccedilatildeo do solo eacute descrito em detalhes por CAVAGNA
1975) Em resumo somente o movimento no plano sagital foi considerado para
calcular a energia mecacircnica do CM A energia cineacutetica de translaccedilatildeo lateral do CM
foi ignorada O sinal da plataforma de forccedila sem carga foi mensurado imediatamente
antes de cada corrida e subtraiacutedo dos registros da Fv e da Ff de modo a computar
uma possiacutevel mudanccedila da linha de base da plataforma Somente o grupo de
registros da Fv e da Ff compreendida entre os cruzamentos das fotoceacutelulas foi
utilizado para anaacutelises subsequumlentes As velocidades vertical e anterior do CM foram
obtidas como segue
Antes do todas as aquisiccedilotildees a plataforma era calibrada com cargas
conhecidas no sentido vertical e horizontal acircntero-posterior
A forccedila vertical meacutedia mensurada pela plataforma de forccedila Fvplate em um
intervalo de tempo correspondente a um nuacutemero de quadros nf em um determinado
nuacutemero de passos T selecionados entre picos (ou vales) nos registros de forccedila
devem igualar ao PC mensurado com uma balanccedila Fvscale
IfirstPeakorValley
SecondPeakorValleyF = Fvi
= F Eq 31 vplate vscalenf
Fvplate foi entatildeo subtraiacuteda da coluna de dados Fv e o resultado (Fv-Fvplate)M (M
eacute a massa corporal) foi integrado no tempo para obter as mudanccedilas nos registros da
velocidade vertical para o intervalo de tempo entre os cruzamentos das fotoceacutelulas
FinalTime AVel = f [(Fv - Fv plate) M]dt Eq 32
InitialTime
Um ou mais passos regulares foram subsequumlentemente escolhidos para
anaacutelise entre dois picos ou vales da curva de velocidade vertical A regularidade dos
passos (drift) foi determinada pela diferenccedila entre incrementos positivos e negativos
agraves mudanccedilas nas velocidades vertical e horizontal divididas pela soma dos
incrementos
64
| V | V | V |I + increments I VincrementsDrift = 100 Eq 33
| V | + | V |I + increments I Vincrements
Durante a corrida no plano os deslocamentos verticais ascendente e
descendente do CM do corpo satildeo em meacutedia iguais durante um nuacutemero inteiro de
passos ie a velocidade vertical meacutedia deve ser nula Baseado nessa consideraccedilatildeo
a aacuterea abaixo das mudanccedilas da velocidade vertical registrada correspondendo ao
intervalo selecionado acima seraacute dividido por nf e o resultado seraacute subtraiacutedo do total
da variaccedilatildeo da velocidade vertical registrada entre os cruzamentos das fotoceacutelulas
para obter os valores instantacircneos positivo (ascendente) e negativo (descendente)
da Vv
nf
f AVv dt
V (t) = i= 0 -AV Eq 34 v nf v
As mudanccedilas na velocidade horizontal foram determinadas pela integraccedilatildeo da
curva FfM durante o tempo entre os cruzamentos das fotoceacutelulas Ltphoto A aacuterea
abaixo dessa variaccedilatildeo de velocidade horizontal foi entatildeo dividida por Ltphoto e o
resultado foi subtraiacutedo do mesmo registro para localizar a velocidade meacutedia de
corrida no traccedilado
Atphoto
AVf (t) = f Ff M dt Eq 35 i= 0
A velocidade meacutedia de corrida mensurada atraveacutes da distacircncia das
fotoceacutelulaLtphoto foi entatildeo somada a seacuterie resultante para obter os valores
instantacircneos de Vf
f AVf dt Vf (t) = + AVf Eq 36
A tphoto
65
A velocidade vertical instantacircnea Vv(t) foi utilizada para calcular a energia
cineacutetica instantacircnea do movimento vertical
Ekv (t) = 05M Vv (t)2 Eq 37
e por integraccedilatildeo o deslocamento vertical do CM Sv(t)
Sv (t) = f Vv (t) dt Eq 38
com a correspondente energia potencial gravitacional
E p (t) = M g Sv (t) Eq 39
A energia cineacutetica horizontal foi calculada como
Ekf (t) = 05M Vf (t)2 Eq 310
a energia cineacutetica translacional total do CM no plano sagital como
(t) Eq 311 Ek (t) = Ekv (t) + Ekf
e a energia mecacircnica translacional do CM no plano sagital como
Ecm(t) = Ekv (t) + Ekf (t) + E p (t) Eq 312
Apoacutes como mencionado acima a seleccedilatildeo foi feita inicialmente entre picos (ou
vales) das mudanccedilas da velocidade vertical os registros foram expandidos para
incluir o vale anterior (ou pico) de Ep(t) ateacute uma imagem clara dos passos a ser
obtidos (figura 31)
Algoritmos foram feitos para calcular o trabalho realizado durante os passos
selecionados entre vales (ou picos) da Ep Wv Wkf e Wext foram calculados com as
amplitudes dos vales ou picos e os valores inicial e final nos registros da Ep(t) Ekf(t)
e Ecm(t) Valores positivos das variaccedilotildees de energia foram considerados como
66
trabalho positivo valores negativos foram considerados como trabalho negativo Em
uma perfeita corrida em velocidade constante no plano a razatildeo entre os valores
absolutos de trabalho positivo e negativo realizados em um nuacutemero inteiro de
passos deve ser igual a um
323 Estimativa do trabalho interno
O trabalho positivo normalizado pela massa e unidade de distacircncia para
acelerar os membros em relaccedilatildeo ao CM do corpo foi estimado para cada corrida
com a equaccedilatildeo
W int ML(J kg-1 m -1) = 014010-200L Vf f Eq 313
onde L eacute o comprimento do passo em metros Vf a velocidade meacutedia de corrida em
metros por segundo e f eacute a frequumlecircncia de passos em Hz (CAVAGNA et al 1997) Os
valores estimados de WintML como uma funccedilatildeo da velocidade em kmh-1 foram
interpolados por um ajuste polinomial de segunda ordem Deve ser salientado que
usando a mesma equaccedilatildeo para calcular Wint nos indiviacuteduos jovens e idosos assume-
se o mesmo movimento dos membros nos dois grupos
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato
Como a energia mecacircnica do CM eacute constante quando o corpo eacute deslocado no
ar (a resistecircncia do ar eacute negligenciada) o tempo aeacutereo foi calculado como o intervalo
de tempo durante o qual
dEcm(t) dt = 0 Eq 314
Como descrito em detalhes em um estudo preacutevio (CAVAGNA 2006) esse
processo pode resultar em uma superestimativa (7) do tempo aeacutereo devido ao
ruiacutedo do registro do dEcm(t)dt A duraccedilatildeo da frenagem tbrake e a duraccedilatildeo da
propulsatildeo tpush foram calculadas como o intervalo de tempo durante o qual o
dEcm(t)dt foi positivo e negativo respectivamente Novamente devido ao ruiacutedo do
67
registro do dEcm(t)dt tbrake eou tpush foi provavelmente em alguns casos
subestimado (5-7 CAVAGNA 2006) O mesmo eacute verdade para os deslocamentos
descendente e ascendente do CM durante contato Scdown e Scup que foram
mensurados nas porccedilotildees descendente e ascendente da curva Ep(t)
respectivamente durante o intervalo de tempo onde dEcm(t)dt eacute negativo e positivo
respectivamente O deslocamento vertical descendente total Svdown e deslocamento
vertical ascendente Svup foram calculados do decreacutescimo e acreacutescimo totais da
curva Ep(t) respectivamente ocorrendo entre dois ou mais picos (ou vales) de Ep
divididos pelo nuacutemero de passos
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio
A forccedila vertical Fv aplicada pelo peacute no solo eacute
= PC + M a Eq 315 Fv v
onde Mb eacute a massa do corpo e av eacute a aceleraccedilatildeo vertical do CM ie o tempo
derivado de sua velocidade vertical Vv Quando a velocidade vertical e Ekv estatildeo no
maacuteximo a derivada eacute nula av=0 e como consequumlecircncia
Fv = PC Eq 316
A localizaccedilatildeo dos picos Ekv alcanccedilados durante os passos (figura 31) foi
entatildeo utilizada para determinar os instantes onde a Fv eacute igual ao PC A localizaccedilatildeo e
as amplitudes de Ep simultacircneo com os picos de Ekv foram utilizados para determinar
a parte do deslocamento vertical ocorrendo abaixo do ponto de equiliacutebrio durante a
desaceleraccedilatildeo descendente do CM Scedown e durante a aceleraccedilatildeo ascendente do
CM Sceup As diferenccedilas
S - S = S Eq 317 vdown cedown aedown
e
68
S - S = S Eq 318 vup ceup aeup
informa sobre o deslocamento vertical quando o CM do corpo acelera descendente e
desacelera ascendente respectivamente (CAVAGNA et al 1988)
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente
A velocidade vertical maacutexima e a energia cineacutetica maacutexima Ek=Ekv+Ekf
alcanccediladas pelo CM durante deslocamento descendente Vvmxdown e Ekmxdown e
durante a elevaccedilatildeo Vvmxup e Ekmxup satildeo determinados por comparaccedilatildeo dos picos
em Ekv e Ek com a curva Ep simultacircnea Como a velocidade vertical maacutexima pode
aumentar com a amplitude do deslocamento vertical que pode ser diferente durante
a elevaccedilatildeo e o deslocamento descendente (ver eg as curvas Ep na figura 31) a
razatildeo entre as velocidades descendente e ascendente maacuteximas foram normalizadas
(V V )(S S ) = (V V )norm Eq 319 vmxdown vmxup vup vdown vmxdown vmxup
327 Transduccedilatildeo Ep Ek durante o passo
O tempo de curso da transduccedilatildeo ocorrendo no passo entre energia potencial
gravitacional Ep e energia cineacutetica do CM Ek pode ser determinado pelo valor
absoluto das mudanccedilas ambos incrementos positivos e negativos de Ep Ek e Ecm
em intervalos curtos de tempo dentro do ciclo do passo (CAVAGNA et al 2002)
1 | Ecm(t) |r(t) = Eq 320
(| E p (t) | + | Ek (t) |)
A transduccedilatildeo Ep-Ek eacute completa (r(t)=1) durante a fase aeacuterea quando nenhum
trabalho externo eacute realizado pela forccedila muscular Entretanto a transduccedilatildeo Ep-Ek
tambeacutem ocorre durante contato quando o corpo eacute parcialmente sustentado pelo peacute
no chatildeo na parte superior da trajetoacuteria do CM (0lt r(t)lt1)
69
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado
70
(incrementos de Ecm) eacute indicado em vermelho enquanto que o tempo de
trabalho mecacircnico negativo (decrementos de Ecm) eacute indicado em azul
A transduccedilatildeo Ep-Ek eacute nula (r(t)=0) em duas fases do passo a e onde Ek
aumenta e diminui respectivamente simultaneamente com a energia potencial
gravitacional Ep (CAVAGNA et al 2002) Note que trabalho externo positivo e
negativo satildeo ambos realizados nas fases a e do passo (r(t)=0) e nas fases do
passo onde uma transduccedilatildeo ocorre entre Ek e Ep (0lt r(t)lt 1)
Nesse estudo r(t) foi calculado a partir do valor absoluto do tempo derivado
de Ep Ek e Ecm no intervalo de tempo contido entre dois ou mais picos (ou vales) de
Ep O valor cumulativo de energia recuperada Rint(t) resultando da transduccedilatildeo
instantacircnea de Ek-Ep foi determinado na aacuterea abaixo do r(t) registrado dividida pelo
periacuteodo do passo
T Rint (t) = ( f r(u)du) T Eq 321
0
No final do passo Rint(t)=Rint (CAVAGNA et al 2002) Para determinar a
assimetria do ciclo do passo eacute uacutetil saber quanto da transduccedilatildeo Ek-Ep ocorre durante
o deslocamento descendente e durante a elevaccedilatildeo do CM A derivada
dE p dt Eq 322
eacute utilizada para determinar a quantidade de transduccedilatildeo ocorrendo durante o
deslocamento descendente Rintdown e durante a elevaccedilatildeo do CM Rintup A
assimetria do passo foi quantificada pela razatildeo
Rintdown Rintup Eq 323
328 Rigidez vertical (k)
A k normalizada pela massa
k M Eq 324
71
caracterizando a frequumlecircncia natural do sistema eacute em todas as condiccedilotildees (com ou
sem uma fase aeacuterea) a inclinaccedilatildeo da relaccedilatildeo av-Sv quando avgt1g A inclinaccedilatildeo
meacutedia nessa amplitude pode ser avaliada pela razatildeo entre a aceleraccedilatildeo ascendente
maacutexima avmx e a amplitude da oscilaccedilatildeo
(S + S )ceup cedownS = Eq 325 ce 2
No presente estudo a k normalizada pela massa foi mensurada como
k M = a S Eq 326 vmx ce
E a frequumlecircncia natural do sistema massa-mola como
)05 (a Svmx cefs = Eq 327 2
329 Estatiacutestica
Os dados coletados como uma funccedilatildeo da velocidade decorrida foram
agrupados em classes de intervalos de um kmh-1 como segue 3 agrave lt4 kmh-1 4 agrave lt5
kmh-1 20 agrave lt21 kmh-1 Quando comparadas agraves meacutedias de diferentes variaacuteveis
com o mesmo nuacutemero de itens em uma certa velocidade de corrida dentro de um
grupo de indiviacuteduos um teste t para amostra pareadas foi utilizado para determinar
quando as meacutedias eram significativamente diferentes Quando comparadas as
meacutedias de diferentes variaacuteveis entre os dois grupos de indiviacuteduos com diferentes
nuacutemero de itens um teste t para amostras independentes foi utilizado (SPSS versatildeo
14) Em todos os testes o p usado foi menor do que 5
33 Resultados
Na primeira seccedilatildeo dos Resultados o bouncing do corpo a cada passo eacute
descrito desconsiderando as diferenccedilas no movimento ascendente e descendente
72
do CM (Por exemplo O deslocamento vertical Sv eacute medido como (Svup+Svdown)2 o
tempo de contato com o solo como tc =(tcup+tcdown)2 etc) Este procedimento
pressupotildee uma igualdade dinacircmica durante a subida e a descida do CM como em
um oscilador harmocircnico (CAVAGNA et al 1988 BLICKHAN 1989 SCHEPENS et
al 1998)
A potecircncia meacutedia do passo despendida para acelerar e elevar o CM do corpo
e do correspondente trabalho mecacircnico realizado por unidade distacircncia satildeo
apresentados na segunda parte Na terceira seccedilatildeo a assimetria contato-despregue
eacute considerada analisando separadamente os eventos que ocorrem durante a subida
e durante a descida do CM (CAVAGNA 2006) Em todas as seccedilotildees os resultados
obtidos sobre os indiviacuteduos idosos satildeo comparados com aqueles obtidos nos
indiviacuteduos jovens
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM
Parte superior e inferior do bouncing
O periacuteodo do passo (T parte superior da figura 33) o deslocamento vertical
do CM durante cada etapa (Sv meio da figura) e o comprimento do passo (L na
parte inferior da figura) satildeo apresentados em funccedilatildeo da velocidade de corrida (Vf) na
figura 33 (quadrados pretos) Segundo o modelo massa-mola o periacuteodo do passo
a oscilaccedilatildeo vertical do CM e o correspondente deslocamento para frente foram
divididos em duas partes uma parte mais baixa que acontece quando a Fv eacute maior
do que o PC (tce Sce e Lce ciacuterculos vermelhos) e uma parte superior quando a Fv eacute
menor que o PC (tae Sae e Lae ciacuterculos azuis abertos) Para comparaccedilatildeo o periacuteodo
do passo o deslocamento vertical e o comprimento do passo tambeacutem foram
divididos de acordo com a tradiccedilatildeo nas suas fraccedilotildees que ocorrem durante a fase
de contato com o terreno (tc Sc e Lc pontilhada linhas vermelhas) e durante a fase
aeacuterea (ta Sa e La linhas pontilhadas em azul) O significado biomecacircnico dos
resultados na figura 33 tem sido explicado em estudos anteriores realizados em
indiviacuteduos adultos de diferentes idades (CAVAGNA et al 1988) e em crianccedilas com
idades entre os 2 e 16 anos (SCHEPENS et al 1998) durante a corrida em
diferentes velocidades Em ambos os estudos as partes inferior e superior do
bouncing do corpo foram simeacutetricos ateacute ~ 11 kmh-1 (isto eacute tce=tae e Sce=Sae) e
- -
73
assimeacutetricos em velocidades mais elevadas (isto eacute taegttce e SaegtSce) O momento
vertical ganho e perdido durante tce deve ser igual ao momento vertical ganho e
perdido durante tae ie
avce tce = avae tae Eq 328
O bouncing simeacutetrico implica a mesma aceleraccedilatildeo vertical meacutedia durante a
parte inferior e superior do bouncing A aceleraccedilatildeo vertical meacutedia durante a parte
inferior do bouncing avce aumentou com a velocidade enquanto que a aceleraccedilatildeo
vertical meacutedia durante a parte superior do bouncing avae natildeo pode exceder 1 g (eacute 1 g
quando tae= ta) Deste modo o bouncing torna-se assimeacutetrico quando a aceleraccedilatildeo
vertical meacutedia durante tce exceder 1g Os resultados obtidos em relaccedilatildeo aos
indiviacuteduos jovens demonstram que o bouncing tende a ser simeacutetrico em baixas
velocidades e assimeacutetrico em altas velocidades (ver tce versus tae e Sce versus Sae na
tabela 1) Por outro lado os resultados obtidos no grupo dos idosos mostram duas
diferenccedilas importantes i) o bouncing eacute simeacutetrico nas velocidades mais altas (tce=tae e
Sce=Sae) e ii) a assimetria quando presente eacute invertida (ou seja tcegttae e ScegtSae)
Amplitude do deslocamento vertical
O deslocamento vertical do CM corporal em cada etapa da corrida Sv atinge
um maacuteximo em velocidades intermediaacuterias sendo inferior nos indiviacuteduos idosos do
que nos jovens ~ 75 cm a ~ 75 kmh-1 nos idosos e ~ 10 cm a ~ 10 kmh-1 nos
jovens Valores similares de Sv foram medidos com procedimento experimental
diferente em adultos idosos e jovens correndo a ~ 10 kmh-1 (KARAMANIDIS e
ARAMPATZIS 2005) A reduccedilatildeo de Sv nos indiviacuteduos idosos eacute devida a uma
reduccedilatildeo de todas as suas componentes (Sce Sae Sc e Sa) mas eacute particularmente
relevante considerar aqui a reduccedilatildeo da Sce (tabela 32) que representa a amplitude
da oscilaccedilatildeo do sistema massa-mola a partir de sua posiccedilatildeo de equiliacutebrio (Fv igual
ao PC) ateacute sua compressatildeo maacutexima (Fv maacutexima) A amplitude da oscilaccedilatildeo eacute menor
nos idosos do que nos jovens Como esperado esta eacute acompanhada por uma
aceleraccedilatildeo menor para cima atingida no final da compressatildeo avmx e por uma menor
velocidade maacutexima ascendente Vvmx atingida quando av=0 (figura 34 e tabela 32)
74
A velocidade vertical menor resulta por sua vez em um curto tempo aeacutereo efetivo
tae (figura 33 e tabela 32)
Frequumlecircncia de passo e do sistema massa-mola
Os dois paineacuteis superiores da figura 33 mostram que o periacuteodo do passo (T=
tae+ tce) eacute menor nos idosos do que nos jovens Isto eacute devido ao tempo aeacutereo efetivo
tae mais curto enquanto que o tempo de contato efetivo tce eacute igual entre os jovens e
os idosos (tabela 32) Segundo o modelo massa-mola da corrida o tce representa
metade do periacuteodo de oscilaccedilatildeo do sistema elaacutestico Este meio-periacuteodo similar
sugere uma frequumlecircncia de ressonacircncia semelhante fs=(kM)-05(2n) do sistema
elaacutestico aparente atraveacutes do qual o corpo se desloca ou seja uma k normalizada
pela massa corporal (kM) A figura 35 mostra que em altas velocidades k eacute maior
nos indiviacuteduos idosos (paineacuteis superior) mas devido agrave sua maior massa corporal agrave
rigidez de massa especiacutefica vertical (kM= avmxSce veja na Metodologia) eacute de fato
similar ao dos jovens (paineacuteis centrais da figura 35 e tabela 32) Em ambos os
grupos kM tende a ser aproximadamente constante ateacute ~ 10 kmh-1 e em seguida
aumenta com a velocidade Os dois paineacuteis inferiores da figura 35 mostram a
frequumlecircncia do passo f apresentada em conjunto com a frequumlecircncia de ressonacircncia do
sistema fs Pode ser observado que i) f eacute maior nos idosos do que nos jovens ii) nos
idosos a f permanece semelhante agrave fs (tabela 1) enquanto que iii) nos jovens a f eacute
inferior agrave fs (tabela 31)
332 Trabalho
O trabalho externo normalizado pela M Wext realizado para sustentar o
movimento do CM corporal no plano sagital eacute descrito na figura 36 em funccedilatildeo da
velocidade de corrida Pode ser observado que trabalho feito para sustentar as
mudanccedilas de velocidade horizontal Wextf aumenta conforme o acreacutescimo de
velocidade de modo semelhante em indiviacuteduos jovens e idosos O trabalho
realizado contra a gravidade Wextv eacute menor nos indiviacuteduos idosos (tabela 32) O
trabalho externo Wext Wextf + Wextv tambeacutem eacute menor nos idosos particularmente
nas maiores velocidades de progressatildeo
75
A menor potecircncia mecacircnica despendida contra a gravidade pelos idosos
mostra que o menor deslocamento vertical em cada passo natildeo eacute compensado pelo
aumento na frequumlecircncia de passo induzido pelo menor tempo aeacutereo efetivo tae (figura
33) A constataccedilatildeo de que o envelhecimento diminui o trabalho feito contra a
gravidade Wextv deixando inalterado o trabalho para sustentar as mudanccedilas na
velocidade horizontal Wextf resulta em uma velocidade menor de corrida onde o
Wextv se iguala ao Wextf esta velocidade eacute ~ 12 kmh-1 nos idosos e ~ 15 kmh-1 nos
jovens Os dois paineacuteis inferiores na figura 36 (analisados mais profundamente na
Discussatildeo) apresentam o trabalho mecacircnico total realizado por unidade de distacircncia
percorrida Wtot =Wext+Wint onde Wext eacute o trabalho positivo feito para manter o
movimento em relaccedilatildeo ao ambiente e o Wint eacute o trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM (calculado conforme descrito na Metodologia)
333 Assimetria contato-despregue
Os deslocamentos verticais do CM para baixo e para cima durante a fase de
contato estatildeo traccedilados na figura 37 e estatildeo expressos como uma fraccedilatildeo dos
deslocamentos verticais descendente e ascendente (ScdownSvdown ciacuterculos cheios e
ScupSvup ciacuterculos abertos) Na mesma figura eacute apresentada a fraccedilatildeo do
deslocamento vertical realizado pela amplitude da oscilaccedilatildeo do sistema massa-mola
para baixo de av=0 ateacute avmx (ScedownSvdown quadrados cheios) e para cima de avmx
ateacute av=0 (SceupSvup quadrados abertos) Quando a fase aeacuterea eacute nula nas
velocidades mais baixas de corrida todo o deslocamento vertical acontece em
contato com o solo e ScSv=1 Com o aumento da velocidade acontece uma fase
aeacuterea de duraccedilatildeo progressivamente maior durante a corrida e a fraccedilatildeo do
deslocamento vertical em contato com o solo diminui mais acentuadamente durante
o deslocamento para baixo (ciacuterculos cheios) do que durante o deslocamento para
cima (ciacuterculos abertos) ou seja (ScupSvup)gt(ScdownSvdown) Em outras palavras a
altura do CM no instante do contato eacute superior agrave sua altura no instante do toque no
solo o que indica que a elevaccedilatildeo do CM eacute inferior agrave descida durante a fase de
contato do peacute com o solo (CAVAGNA 2006) Esta assimetria contato-despregue
estaacute presente em ambos os grupos mas eacute maior nos idosos do que nos jovens
principalmente devido a uma menor reduccedilatildeo na ScupSvup com o aumento da
velocidade uma maior elevaccedilatildeo do CM se daacute em contato com o solo nos indiviacuteduos
76
idosos Em ambas as faixas etaacuterias a fraccedilatildeo de deslocamento vertical ocupada pela
amplitude de oscilaccedilatildeo SceSv se aproxima de metade de Sv quase independente da
velocidade apoiando a ideacuteia de que a oscilaccedilatildeo vertical do sistema massa-mola eacute
equilibrado em torno do ponto onde a Fv se iguala ao PC Em contraste ScSv muda
acentuadamente com a velocidade ateacute o ponto em que toda a oscilaccedilatildeo tem lugar
no contato com o solo (ScSv=1)
34 Discussatildeo
341 Sobre o meacutetodo
Este sub-capiacutetulo procura discutir o meacutetodo usado no estudo especialmente
em relaccedilatildeo ao raciociacutenio envolvido e a discussatildeo de algumas abordagens similares
ao modelo usado no presente estudo
O meacutetodo dinamomeacutetrico usado no presente estudo tem como base a teoria
do custo de geraccedilatildeo de trabalho mecacircnico Esta teoria pode ser considerada como a
primeira tentativa satisfatoacuteria nas aacutereas limiacutetrofes entre biomecacircnica biologia
experimental e fisiologia comparativa de explicar sob o ponto-de-vista mecacircnico as
formas principais de locomoccedilatildeo humana a caminhada e a corrida
Baseados no meacutetodo de FENN (1930) para a determinaccedilatildeo do trabalho
mecacircnico contra a gravidade e o trabalho mecacircnico devido agraves mudanccedilas de
velocidade Cavagna e colaboradores perceberam que o ser humano quando
caminhava e corria apresentava caracteriacutesticas nas curvas de energia mecacircnica e
no somatoacuterio dos incrementos positivos nestas energias que permitiam diferenciar
estes tipos de locomoccedilatildeo ao mesmo tempo que auxiliavam no entendimento do
comportamento da unidade muacutesculo-tendatildeo e dos mecanismos minimizadores de
dispecircndio energeacutetico mecanismo pendular e elaacutestico (ver figura 32) Os
incrementos positivos de energia mecacircnica (trabalho positivo) satildeo originados
principalmente por muacutesculos e tendotildees enquanto que os incrementos negativos de
energia mecacircnica (trabalho negativo) satildeo em parte armazenados nas estruturas natildeo
contraacuteteis dos muacutesculos e tendotildees e outra parte eacute degradada em forma de calor
Tendo em consideraccedilatildeo os princiacutepios da termodinacircmica foi possiacutevel aplicar
estes mecanismos a fim de entender o porquecirc que durante a fase de apoio na
corrida a energia cineacutetica se apresenta em fase com a energia potencial do CM em
77
relaccedilatildeo ao meio ambiente enquanto que na caminhada estas energias apresentam
comportamentos contraacuterios
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da
caminhada (pecircndulo-invertido) e de segmento complacente da corrida
(massa-mola) e seus principais constituintes Note que o tracejado
indica a trajetoacuteria do corpo de massa m durante o contato g eacute a
aceleraccedilatildeo gravitacional k eacute a rigidez da mola l0 eacute o comprimento do
membro inferior e a0 eacute o acircngulo da perna de apoio no momento do
contato com o solo
O somatoacuterio dos incrementos positivos de energia mecacircnica tambeacutem
conhecido como trabalho mecacircnico externo eacute menor do que a energia metaboacutelica
despendida pelos muacutesculos durante a caminhada enquanto que o trabalho
mecacircnico externo na corrida apresenta valor maior ao da energia metaboacutelica
despendida pelos muacutesculos Este aparente paradoxo demonstrava que a razatildeo
entre potecircncia mecacircnica gerada e a potecircncia metaboacutelica despendida ultrapassava a
eficiecircncia maacutexima de transformaccedilatildeo de energia quiacutemica em trabalho mecacircnico e foi
considerado como a primeira evidecircncia de que as unidades muacutesculo-tendatildeo
responsaacuteveis pela frenagem e propulsatildeo durante a fase de apoio da corrida eram
tambeacutem responsaacuteveis por absorccedilatildeo e re-utilizaccedilatildeo de energia elaacutestica (CAVAGNA et
al 1964) permitindo mais tarde a formulaccedilatildeo do modelo massa-mola ou ldquobouncingrdquo
da corrida (BLICKHAN 1989 MCMAHON e CHENG 1990 figura 32) e o posterior
estudo do ciclo alongamento-encurtamento do muacutesculo-esqueleacutetico
78
Portanto durante atividades ciacuteclicas como a locomoccedilatildeo os muacutesculos
responsaacuteveis pelo movimento possuem uma capacidade de geraccedilatildeo de forccedila
durante seu encurtamento (contraccedilatildeo concecircntrica) maior do que em contraccedilotildees
similares mas precedidas de contraccedilatildeo isomeacutetrica No caso da locomoccedilatildeo mais
especificamente da corrida durante contraccedilotildees concecircntricas os muacutesculos
propulsores utilizam uma energia armazenada durante a precedente contraccedilatildeo
excecircntrica (CAVAGNA et al 1964 CAVAGNA et al 1968) O modelo massa-mola
assume que a unidade muacutesculo-tendatildeo exerce um comportamento similar agrave de uma
mola ou seja quando a mola diminui de comprimento apoacutes o impacto (alongamento
do muacutesculo) armazena energia potencial elaacutestica e quando a mola aumenta seu
comprimento (encurtamento do muacutesculo) durante a segunda fase de contato
transforma energia potencial elaacutestica em energia cineacutetica O modelo tambeacutem
assume mesma altura e velocidade do CM no momento do contato e despregue
A primeira pressuposiccedilatildeo do modelo (sobre a semelhanccedila entre mola e
unidade muacutesculo-tendatildeo) apesar de correta natildeo indica informaccedilotildees sobre seus
constituintes o muacutesculo e o tendatildeo Vaacuterias evidecircncias mostram diferenccedilas no
comportamento mecacircnico do muacutesculo e do tendatildeo e estas diferenccedilas satildeo
moduladas pela forccedila imposta agrave unidade consequumlentemente dependentes da
velocidade de corrida Por exemplo KRAM e TAYLOR (1990) sugeriram que o
dispecircndio de energia durante a corrida era devido ao custo de geraccedilatildeo de forccedila das
fibras musculares agindo de forma isomeacutetrica sem realizaccedilatildeo de trabalho muscular
Evidecircncias em modelo animal confirmam este raciociacutenio (ROBERTS et al 1997
BIEWENER 1998)
Ainda assim para ser inteiramente vaacutelido este modelo o tempo de trabalho
externo positivo e negativo devem ser iguais em todas as velocidades de corrida
contudo uma assimetria nos tempos de trabalho positivo e negativo satildeo encontradas
na corrida humana em velocidades baixas (ateacute 14 kmh-1) com um menor tempo
para o trabalho mecacircnico externo negativo (CAVAGNA 2006)
Portanto o mecanismo de minimizaccedilatildeo de energia apresentada por KRAM e
TAYLOR 1990) parece se sustentar apenas em altas velocidades Em velocidades
menores os muacutesculos propulsores ativam em intensidade menor portanto gerando
uma tensatildeo menor no tendatildeo provavelmente insuficiente para gerar uma mudanccedila
importante no comprimento do tendatildeo Portanto o trabalho muscular eacute significativo
com contraccedilotildees excecircntricas em maior velocidade do que as contraccedilotildees
79
concecircntricas o que corresponde com a relaccedilatildeo forccedila versus velocidade e tambeacutem
com os resultados de eficiecircncia muscular para seacuteries de alongamento encurtamento
em diferentes velocidades (maior eficiecircncia em alta velocidade de encurtamento e
menor velocidade de alongamento ndash HEGLUND e CAVAGNA 1987) Ou seja em
velocidades menores parece existir um importante trabalho muscular executado de
modo assimeacutetrico com o tendatildeo agindo apenas como transmissor de forccedilas
enquanto que em altas velocidades com o aumento do pico de estresse no muacutesculo
e consequumlentemente aumento da rigidez da unidade muacutesculo-tendatildeo o muacutesculo
contrai isometricamente e o tendatildeo muda de comprimento agindo como um elaacutestico
(o muacutesculo tambeacutem gera tensatildeo devido agrave histerese do tendatildeo poreacutem eacute
negligenciaacutevel ndash ALEXANDER 2002)
Sobre o segundo criteacuterio (da semelhanccedila de altura e velocidade no contato e
despregue) os proacuteprios autores do modelo massa-mola indicam que em geral os
animais apresentam uma velocidade no contato maior do que no despregue bem
como realizam o contato com as articulaccedilotildees das pernas mais flexionadas do que
no despregue (BLICKHAN 1989) Poreacutem se as anaacutelises da velocidade e altura satildeo
modificadas do momento de contato e despregue para o iniacutecio da fase aeacuterea e de
contato efetivos (quando a forccedila vertical eacute igual aacute forccedila peso) levando em
consideraccedilatildeo o periacuteodo natural do sistema elaacutestico a velocidade continua maior no
iniacutecio do contato efetivo em todas as velocidades de corrida mas a altura do CM eacute
maior no contato efetivo inicial do que no momento de fase aeacuterea inicial em
velocidades baixas de corrida (aproximadamente de 8 agrave 14 kmh-1) Acima destas
velocidades a altura do CM eacute maior no iniacutecio da fase aeacuterea efetiva do que no iniacutecio
da fase de contato efetivo (CAVAGNA 2006) Estas assimetrias podem chegar ateacute
30
Um ponto chave na formulaccedilatildeo deste modelo eacute a determinaccedilatildeo da rigidez do
sistema massa-mola aqui tambeacutem uma simplificaccedilatildeo do fenocircmeno pois considera
apenas os valores maacuteximos de forccedila e deslocamento verticais como se durante toda
a fase de apoio a rigidez fosse constante
Caacutelculo da rigidez de mola
Os caacutelculos da rigidez de mola do sistema bouncing representam as
propriedades de mola do movimento vertical do corpo e da perna A rigidez vertical eacute
80
estimada como a razatildeo do pico de forccedila vertical (algumas vezes denominado como
forccedila maacutexima durante a fase ativa do tempo de contato) e o deslocamento maacuteximo
vertical do CM durante o apoio (CAVAGNA et al 1988 MCMAHON e CHENG
1990) Outro meacutetodo alternativo para o caacutelculo da rigidez vertical utiliza o tempo de
contato efetivo assumindo que este tempo representa o meio periacuteodo de oscilaccedilatildeo
do sistema elaacutestico (ver CAVAGNA et al 2005) k = Mb( tce)2 onde Mb eacute massa
corporal Este uacuteltimo meacutetodo apresenta a vantagem de evitar a influecircncia das
oscilaccedilotildees de aceleraccedilatildeo vertical do CM apoacutes o contato inicial A rigidez de perna eacute
a razatildeo do pico de forccedila vertical e a mudanccedila no comprimento de perna durante o
apoio A variaccedilatildeo do comprimento de perna eacute determinada com a equaccedilatildeo 330
(MCMAHON e CHENG 1990)
delta l = ycm + l0 (1V cosa0) Eq 329
Onde l0 eacute o comprimento de perna em repouso e a0 eacute o acircngulo da perna no
contato inicial em relaccedilatildeo agrave vertical (a0 = sin-1(Vf tc2 l0) onde Vf eacute a velocidade
horizontal e tc eacute o tempo de apoio Apesar do uso frequumlente desta medida no campo
das Ciecircncias do Esporte e Biologia Experimental a rigidez de pernas possui uma
forte limitaccedilatildeo devido ao uso da medida de membro inferior incorrer em um alto grau
de erro (e 1 cm dados natildeo publicados) Aleacutem disso se utiliza da medida de tempo
de contato enquanto que a relaccedilatildeo inversa com o sistema massa-mola eacute dada pelo
tempo de contato efetivo (quando a forccedila vertical eacute maior do que o peso corporal)
portanto natildeo representa as mudanccedilas do sistema massa-mola frente agrave restriccedilotildees do
ambiente (eg gravidade CAVAGNA et al 2005)
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical
A menor amplitude de oscilaccedilatildeo do sistema elaacutestico nos idosos (Sce na figura
33) implica i) uma menor forccedila vertical maacutexima Fvmx e energia elaacutestica armazenada
em cada passo ii) uma maior frequumlecircncia de passo iii) uma menor variaccedilatildeo de
energia externa para manter o movimento do CM do corpo em relaccedilatildeo ao meio
ambiente externo e iv) um maior trabalho interno para acelerar os segmentos
relativo ao CM
81
Destaca-se que as divisotildees do passo baseadas no tempo de contato efetivo
(vermelho) aeacutereo efetivo (azul) correspondem agrave aproximadamente metade da
duraccedilatildeo e deslocamento durante o passo Em contraste a fraccedilatildeo do passo realizado
durante o tempo aeacutereo e de contato variam bastante com a velocidade Aleacutem disso
o tcetae e SceSce nos idosos enquanto que o contraacuterio acontece com os jovens
Linhas representam a meacutedia ponderada de todos os dados (Kaleidagraph 364) e a
uacutenica proposta destas linhas eacute ser um guia para os olhos elas natildeo descrevem o
mecanismo fiacutesico envolvido (figura 33)
Tabela 31 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nos quais os pares de variaacuteveis listadas satildeo significativamente diferentes dentro de
cada grupo experimental
Vf Idoso Jovem
(km h-1) tce vs tae Sce vs Sae fs vs f tce vs tae Sce vs Sae fs vs f
3 006 312 10-4 079 001 004 117 10-3
4 031 013 028 008 058 005
5 003 003 004 091 014 020
6 001 473 10-3 003 005 026 001
7 002 001 020 011 045 001
8 102 10-7 361 10-8 190 10-4 003 048 256 10-3
9 445 10-4 753 10-6 002 001 057 151 10-3
10 250 10-4 212 10-5 510 10-4 243 10-3 091 284 10-3
11 014 003 028 158 10-4 019 234 10-4
12 044 013 061 249 10-5 002 328 10-5
13 018 003 020 310 10-6 261 10-3 100 10-5
14 001 042 005 388 10-6 183 10-3 166 10-5
15 029 022 012 107 10-6 256 10-4 166 10-6
16 057 048 090 947 10-5 361 10-3 292 10-4
Forccedila e energia elaacutestica
A forccedila maacutexima vertical eacute dada pela massa corporal multiplicada pela
aceleraccedilatildeo vertical maacutexima e o resultado eacute somado ao peso corporal Avmx (equaccedilatildeo
82
34) A massa corporal meacutedia eacute 711 kg nos idosos e 634 kg nos jovens A variaccedilatildeo
da aceleraccedilatildeo maacutexima atingida pelos indiviacuteduos idosos nas suas altas velocidades
(15-17 kmh-1) eacute de 1077 plusmn 197 ms-2 (n=7) Considerando que nas mesmas
velocidades alcanccediladas pelos jovens a variaccedilatildeo foi de 1886 plusmn 274 ms-2 (n=24)
(figura 34) Note que a aceleraccedilatildeo ascendente e velocidade vertical maiores
atingidas pelos jovens Contraacuterio ao bouncing elaacutestico a velocidade vertical maacutexima
alcanccedilada durante o deslocamento descendente eacute maior do que o alcanccedilado
durante a elevaccedilatildeo sendo esta diferenccedila maior nos idosos
Tabela 32 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Wf Wv tce tae Sce
3 008 003 095 482 10-3 005
4 008 015 004 074 062
5 062 002 083 006 006
6 259 10-3 138 10-4 034 427 10-4 001
7 049 133 10-6 073 287 10-5 140 10-3
8 004 162 10-6 039 231 10-6 198 10-3
9 007 581 10-6 028 107 10-5 407 10-4
10 005 120 10-10 094 605 10-9 176 10-6
11 014 170 10-6 025 383 10-7 435 10-6
12 014 471 10-7 019 321 10-6 380 10-5
13 007 114 10-6 068 228 10-6 196 10-6
14 099 400 10-6 005 170 10-5 231 10-5
15 014 222 10-7 010 142 10-6 685 10-8
16 066 208 10-4 061 184 10-4 718 10-4
De acordo com a equaccedilatildeo 34 estes nuacutemeros resultam em uma forccedila vertical
maacutexima Fvmxold=1463 kN e Fvmxyoung=1818 kN note que 75 de diferenccedila na Avmx
resulta em 24 de diferenccedila em Fvmx devido agrave maior massa corporal dos indiviacuteduos
idosos A forccedila mais baixa alcanccedilada durante o contato pelos indiviacuteduos idosos pode
83
ser explicada em parte pela bem documentada perda de forccedila muscular (eg
DOHERTY 2003) e em parte por uma estrateacutegia de aumentar a seguranccedila do
sistema muacutesculo-esqueleacutetico (KARAMANIDIS e ARAMPATZIS 2005)
A aparente k a 15-17 kmh-1 eacute 3732plusmn885 kNm-1 (n=7) nos indiviacuteduos idosos
e 2869plusmn650 kNm-1 (n=24) nos indiviacuteduos jovens (figura 35) Assumindo uma
relaccedilatildeo forccedila-comprimento linear dos elementos elaacutesticos seu alongamento maacuteximo
(de zero a Fvmx) seria (14633732)=0039 m nos idosos e (18182869)=0063 m
nos indiviacuteduos jovens Os paineacuteis inferiores da figura 35 mostram que a frequumlecircncia
de passo (linhas contiacutenuas) eacute similar agrave frequumlecircncia natural do sistema (linhas
pontilhadas) em todas as velocidades nos idosos enquanto que com os jovens a
frequumlecircncia do passo torna-se menor do que a frequumlecircncia do sistema com o aumento
da velocidade
Tabela 33 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Avmx Vvmx AvmxSce (AvmxSce)Mb Sv
3 004 003 099 039 002
4 001 011 003 022 034
5 152 10-3 001 024 040 003
6 601 10-4 232 10-4 049 067 772 10-4
7 132 10-3 422 10-6 066 007 367 10-5
8 918 10-7 154 10-6 025 018 271 10-5
9 526 10-5 131 10-6 007 067 137 10-5
10 134 10-7 196 10-11 072 001 146 10-8
11 439 10-4 744 10-7 046 004 798 10-7
12 533 10-6 666 10-7 040 002 552 10-6
13 264 10-4 401 10-6 061 022 158 10-6
14 115 10-3 366 10-6 005 652 10-5 126 10-5
15 891 10-6 725 10-8 031 009 316 10-7
16 353 10-3 258 10-4 048 005 267 10-4
84
Visto que a energia potencial gravitacional e a energia cineacutetica do CM estatildeo
em fase durante a corrida o sistema elaacutestico sofre sua maacutexima tensatildeo quando o
componente vertical da forccedila de reaccedilatildeo do solo encontra-se no maacuteximo ((Fvmx)) e o
componente horizontal eacute nulo (Ff=0)
Na verdade Fvmx ocorre no ponto mais baixo da trajetoacuteria (Epmn) quando o
CM termina sua desaceleraccedilatildeo e comeccedila a sua aceleraccedilatildeo (ou seja Ff=0 e Ekfmn) A
energia elaacutestica armazenada em cada passo pode assim ser computada usando-se
apenas a forccedila vertical como (14630039)2=2853 J e (18180063)2=5727 J para
os indiviacuteduos idosos e para os indiviacuteduos jovens respectivamente Esta energia
elaacutestica eacute posteriormente utilizada em parte durante o impulso para elevar e acelerar
a frente o CM
Tabela 34 Comparaccedilatildeo das assimetrias contato-despregue entre jovens idosos e
sistema elaacutestico
IDOSO JOVEM ELAacuteSTICO
Vvmxdown Vvmxup 118plusmn011 107plusmn008 1
f 124plusmn018 106plusmn010 1
Rintdown Rintup 213plusmn130 126plusmn032 1
tpush tbrake 125plusmn016 115plusmn013 1
Ekmxdown - Ekmxup (J) 1003plusmn625 752plusmn542 0
Valores satildeo meacutediaplusmndp (plt0001 N=124 ( N=122) para idosos e N=195 para jovens)
Amplitude de velocidades 3-17 kmh-1
A maacutexima compressatildeo elaacutestica do sistema tambeacutem pode ser analisada como
o deslocamento vertical do CM durante o contato o que em 15-17 kmh-1 eacute em
meacutedia Sc=0032plusmn0006 m (n=7) nos idosos e Sc=0060plusmn0007 m (n=24) nos jovens
(em vez de 0039 m e 0063 m como calculado acima)
85
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um
passo em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis
a direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup +
86
Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo (tae)
da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na direccedilatildeo
vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os ciacuterculos em
vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2) e
a frente (Lce) A linha em vermelho pontilhada em cada painel indica o tempo de
contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente (Lc) durante o
passo As linhas azuis pontilhadas em cada painel indicam o tempo aeacutereo total
(ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La) durante o passo As
barras verticais indicam o desvio-padratildeo da meacutedia os nuacutemeros proacuteximos aos
siacutembolos nos paineacuteis superiores indicam o nuacutemero de itens nas meacutedias
A discrepacircncia pode ser devida em parte agrave uma subestimaccedilatildeo do Sc como
medido (ver Metodologia) A energia elaacutestica armazenada computada como (Fvmx
Sc)2 eacute (1463 0032)2=2341 J (em vez de 2853 J conforme calculado acima) e
(1818 0060)2=5454 J (em vez de 5727 J) para indiviacuteduos idosos e indiviacuteduos
jovens respectivamente
A partir dos dados meacutedios de frequumlecircncia de passo e potecircncia em um mesmo
conjunto de velocidades (figuras 36 e 37) o trabalho externo em cada passo
resultou (405 711)368=7825 J nos indiviacuteduos idosos e (538
634)279=12226 J nos indiviacuteduos jovens Daqui resulta que a contribuiccedilatildeo
elaacutestica para o trabalho externo em cada passo poderia ser 28537825=036 e
572712226=047 respectivamente (ou 23417825=030 e 545412226=045
usando Sc)
Estes caacutelculos aproximados em conjunto com uma maior assimetria contato-
despregue que seraacute discutida a seguir (tabela 34) indicam uma menor restituiccedilatildeo
elaacutestica do corpo nos idosos A maior rigidez k medida nos indiviacuteduos idosos em
sua mais alta velocidade de corrida (figura 35) em aparente desacordo com a
menor rigidez dos tendotildees do gastrocnemius (ONAMBELE et al 2006) do
quadriacuteceps (KARAMANIDIS e ARAMPATZIS 2005) medidos nos idosos Por outro
lado um aumento pela idade da rigidez dos elementos elaacutesticos nos tendotildees e
muacutesculos foi relatado em favor dos muacutesculos flexores do cotovelo (VALOUR e
POUSSON 2003)
87
Importante ressaltar que na complexa deformaccedilatildeo de todo corpo no solo a
aparente k eacute o resultado de um conjunto de unidades muacutesculo-tendatildeo em seacuterie cujas
propriedades elaacutesticas dependem do niacutevel de ativaccedilatildeo muscular O nuacutemero de
unidades muacutesculo-tendatildeo em seacuterie depende por sua vez da orientaccedilatildeo dos
segmentos e do tronco durante o impacto sobre o solo que pode ser diferente nos
indiviacuteduos idosos e nos indiviacuteduos jovens (por exemplo apoio na parte da frente do
peacute mais do que no calcanhar)
O maior valor de k encontrado em idosos em suas mais altas velocidades de
corrida portanto natildeo eacute necessariamente uma indicaccedilatildeo de uma maior rigidez dos
seus tendotildees ou unidades de muacutesculo-tendatildeo medidos durante contraccedilotildees
voluntaacuterias maacuteximas
Frequumlecircncia
O menor tempo aeacutereo efetivo tae nos idosos causa um aumento na
frequumlecircncia da passo f =1(tce+tae) para valores que satildeo iguais e por vezes
superiores agrave frequumlecircncia do sistema fs=1(2tce) Diferentemente dos jovens que
optam em uma grande extensatildeo de velocidades por uma FP mais baixa agrave do
sistema aumentando o tae em relaccedilatildeo ao tce (figuras 33 35 e tabela 32)
Os fatores que determinam a escolha da f a uma determinada velocidade de
corrida satildeo i) sintonizando a frequumlecircncia de passo f para a frequumlecircncia natural do
sistema fs (CAVAGNA et al 1997) e ii) escolhendo uma f que minimize a potecircncia
meacutedia de passada limitada aerobicamente (Wextf figura 36) dentro dos limites
estabelecidos pela potecircncia anaeroacutebica meacutedia durante o empurre (trabalho positivo)
(W+tpush liberada imediatamente pelo muacutesculo durante a contraccedilatildeo) (CAVAGNA et
al 1991) A primeira estrateacutegia eacute normalmente adotada em baixas velocidades de
corrida e modificada para a segunda estrateacutegia de corrida em altas velocidades Isto
eacute feito atraveacutes de um aumento da aceleraccedilatildeo ascendente meacutedia avce acima de 1 g
com o consequumlente aumento de tae em relaccedilatildeo ao tce (equaccedilatildeo 36) Assim a
frequumlecircncia de passo f=1(tce+tae) torna-se menor do que a frequumlecircncia do sistema
fs=1(2tce) bem como o incremento da potecircncia meacutedia do passo Wextf eacute controlada
Nos indiviacuteduos idosos a segunda estrateacutegia nunca eacute adotada A aceleraccedilatildeo meacutedia
para cima nunca excede 1 g mesmo nas velocidades altas 15-17 kmh-1 onde avce
=742plusmn123 ms-2 (n=7) segue-se que f fs em todas as velocidades (figura 35) Isto
88
permite uma menor forccedila durante o empurre da corrida em alta velocidade
resultando em uma potecircncia meacutedia durante o empurre ~ 60 daquela dos jovens
mas o aumento da frequumlecircncia da passada resulta em um maior Wint e um grande
incremento na potecircncia meacutedia de passo Wextf em corridas de alta velocidade (ver
abaixo) Aleacutem disso como se verificou neste estudo a mais baixa deformaccedilatildeo
elaacutestica do sistema diminui a fraccedilatildeo de Wext possivelmente sustentado pelo
mecanismo elaacutestico (ver tabela 34) Em contrapartida a segunda estrateacutegia eacute
seguida pelos jovens onde avce =1248plusmn18 ms-2 (n=24) no mesmo intervalo de
velocidades (15-17 kmh-1) resultando em uma menor frequumlecircncia de passo (f lt fs)
que limita o aumento do Wint da corrida em altas velocidades e um consequumlente
incremento da Wextf+ (ver abaixo)
Aleacutem disso a maior deformaccedilatildeo elaacutestica do sistema permite uma maior
utilizaccedilatildeo da energia elaacutestica (tabela 34) Sabe-se que uma mudanccedila na frequumlecircncia
de passo a uma determinada velocidade tem efeitos opostos sobre a potecircncia
externa o que diminui com o aumento da frequumlecircncia da passada e a potecircncia
interna para reposicionar os segmentos em cada passo que aumenta com a
frequumlecircncia (CAVAGNA et al 1991)
Em que medida a menor potecircncia externa meacutedia do passo devido agrave menor
amplitude da oscilaccedilatildeo dos segmentos nos idosos eacute compensada por uma maior
potecircncia interna meacutedia do passo devido ao aumento da frequumlecircncia de passo
89
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e velocidade
vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown (paineacuteis inferiores)
atingidos pelo CM durante o passo em funccedilatildeo da velocidade de corrida Estatiacutestica
e outras indicaccedilotildees conforme a figura 33
O total do trabalho realizado por unidade distacircncia Wtot =Wint+Wext foi somado
pelo Wint estimado pelas equaccedilotildees 32 e 33 para os indiviacuteduos jovens e idosos
como descrito nos Meacutetodos e pelo Wext calculado a partir das seguintes equaccedilotildees
obtidas pela interpolaccedilatildeo de todos os dados experimentais
W ML(J kg-1 m -1) = 29738 Vf - 03217 Eq 330 extyoung
90
(R=0831) para o grupo de indiviacuteduos jovens e
W ML(J kg-1 m -1) = 28445 Vf - 040856 Eq 331 extold
(R=0762) para o grupo de indiviacuteduos idosos O Wtot resultante (linhas
pontilhadas nos paineacuteis inferiores da figura 36) mostra que o trabalho externo menor
no idoso por unidade de distacircncia eacute progressivamente compensado com o aumento
da velocidade por um maior trabalho interno devido agrave sua frequumlecircncia de passada
(FP) aumentada O Wtot alcanccedila um minimum a ~75 kmh-1 nos indiviacuteduos idosos e
um miacutenimo a ~8-12 kmh-1 nos indiviacuteduos jovens
A diferenccedila em Wtot eacute invertida acima de ~14 kmh-1 Eacute possiacutevel que a menor
utilizaccedilatildeo da energia elaacutestica em idosos aumente o gasto de sua energia metaboacutelica
para o mesmo Wtot O consumo de O2 durante a corrida a 10 kmh-1 aumentou com a
idade em corredores treinados do sexo feminino (EVANS et al 1995)
343 A assimetria contato-despregue
As quatro fases do bouncing as diferenccedilas com um sistema elaacutestico
Antes de descrever a assimetria contato-despregue no aparente bouncing do
CM em cada passo da corrida vale a pena referir que os momentos de contato e
despregue podem natildeo ocorrer durante corridas de baixa velocidade quando a
oscilaccedilatildeo vertical do CM do corpo se daacute totalmente em contato com o solo (figura
38) Eacute oacutebvio que neste caso o contato com o solo natildeo pode ser tomado como um
indicador de contato e despregue quando se descreve o bouncing do sistema
elaacutestico Neste caso a oscilaccedilatildeo vertical ocorre abaixo e acima da posiccedilatildeo de
equiliacutebrio (onde a Fv iguala o PC e a velocidade vertical eacute maacutexima) Mesmo quando
uma fase aeacuterea ocorre durante o passo a fraccedilatildeo do deslocamento vertical do CM
total em que o corpo estaacute em contato com o solo ScSv muda amplamente com a
velocidade enquanto que a fraccedilatildeo do deslocamento vertical abaixo e acima do ponto
de equiliacutebrio SceSv se aproxima da metade do Sv quase independente da
velocidade (figura 37)
91
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e frequumlecircncia
do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute maior nos idosos
nas altas velocidades (paineacuteis superiores) a rigidez vertical normalizada pela massa
eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras indicaccedilotildees conforme figura 33
92
Estas observaccedilotildees indicam que eacute mais adequado considerar-se contato
efetivo o instante no qual a Fv aumenta acima do PC (ao inveacutes do instante em que o
peacute estaacute em contato com o solo) e despregue efetivo o instante em que a Fv diminui
para valores menores do que o PC (ao inveacutes do instante no qual o peacute deixa o solo)
A assimetria contato-despregue desaparece quando o bouncing do corpo eacute mais
corretamente dividido desta forma (ou seja tce versus tae em vez de tc versus ta)
(CAVAGNA et al 1988 MCMAHON e CHENG 1990) Ainda na figura 37 pode ser
observado que ScSv mudam mais com a velocidade do que a amplitude da
oscilaccedilatildeo SceSv ao qual atinge a metade do deslocamento vertical Sv Exceto as
velocidades muito baixas quando a fase aeacuterea eacute nula (ScSv=1 eg paineacuteis
superiores nas figuras 31 e 38) o deslocamento descendente enquanto o peacute toca o
solo eacute menor do que o deslocamento ascendente particularmente nos idosos a
descida baliacutestica do CM eacute maior do que a elevaccedilatildeo baliacutestica (veja a linha azul
pontilhada na figura 38)
Segundo a equaccedilatildeo 34 a velocidade vertical descendente eacute maacutexima no
instante do contato efetivo e a velocidade vertical ascendente eacute maacutexima no instante
do despregue efetivo No movimento harmocircnico de um sistema elaacutestico as
velocidades ascendentes e descendentes maacuteximas satildeo iguais Isso natildeo eacute verdade
na corrida humana a velocidade maacutexima descendente eacute superior agrave velocidade
maacutexima ascendente (CAVAGNA 2006) Estes resultados mostram que a assimetria
eacute maior em indiviacuteduos idosos do que nos jovens na variaccedilatildeo normal de velocidades
(3-17 kmh-1) a proporccedilatildeo normalizada ((VvmxdownVvmxup)norm=116plusmn009 (n=124)
nos idosos e 107plusmn007 (n=195) nos jovens (p=126 10-19) (tabela 34) Outras
assimetrias satildeo apresentadas a seguir atraveacutes da anaacutelise das mudanccedilas na energia
potencial gravitacional Ep e energia cineacutetica translacional Ek=Ekv+Ekf do CM
corporal durante as quatro fases de oscilaccedilatildeo do sistema em relaccedilatildeo a posiccedilatildeo de
equiliacutebrio (Fv=Mg) (CAVAGNA 2006) Estas fases satildeo apresentadas na figura 38 a
partir do topo da trajetoacuteria do CM corporal Durante a aceleraccedilatildeo descendente
(Saedown azul) a Ep diminui e a Ek aumenta indicando uma transduccedilatildeo de Ep em Ek
o que ocorre tanto na presenccedila quanto na ausecircncia de uma fase aeacuterea (por
exemplo na parte superior do painel esquerdo da figura 38) O montante desta
transduccedilatildeo eacute dado pelo incremento Rintdown da curva do Rint(t) apoacutes o maacuteximo de Ep
Durante a desaceleraccedilatildeo descendente (Scedown vermelho) o trabalho externo
negativo eacute feito para diminuir simultaneamente Ep e Ek O trecho superior da curva
93
Rint(t) correspondente agrave fraccedilatildeo do passo mostra que natildeo ocorre transduccedilatildeo entre
Ep e Ek Note-se que o pico de Ek durante o passo eacute atingido proacuteximo ao iniacutecio da
fase de trabalho negativo consistente com a velocidade maacutexima de alongamento
das unidades muacutesculo-tendotildees (HEGLUND e CAVAGNA 1987)
Durante a aceleraccedilatildeo ascendente (Sceup vermelho) trabalho positivo externo
eacute feito para aumentar simultaneamente Ep e Ek O trecho inferior da curva Rint(t)
correspondente agrave fraccedilatildeo a do passo mostra que natildeo ocorre transduccedilatildeo entre Ep e
Ek Note que enquanto eacute quase totalmente contida dentro do Scedown a continua
apoacutes o final do Sceup ou seja dentro da desaceleraccedilatildeo ascendente do CM (Saeup
azul) Em outras palavras a perna ainda estaacute a exercer uma forccedila propulsiva a fim
de acelerar o corpo a frente embora a forccedila vertical tenha diminuiacutedo para valores
abaixo do peso corporal Essa assimetria eacute maior no idoso A proporccedilatildeo a eacute
124plusmn018 nos indiviacuteduos idosos e 106plusmn010 nos indiviacuteduos jovens (p=41510-19
tabela 34)
Importante notar a origem diferente dos dois picos Ekmxup (inferior) e
Ekmxdown (superior) alcanccedilados durante o passo de corrida durante a elevaccedilatildeo e
descenso do CM Ekmxup se deve ao empurre para frente enquanto Ekmxdown eacute
devido agrave gravidade A diferenccedila meacutedia Ekmxdown- Ekmxup=752plusmn542 nos indiviacuteduos
jovens e 987plusmn592 nos idosos (p=00004) indica uma maior perda da energia
cineacutetica Ekv no idoso adquirida durante a descida (tabela 34)
Durante a desaceleraccedilatildeo ascendente do CM (Saeup azul) a transduccedilatildeo de Ek
em Ep acontece apenas na uacuteltima parte da elevaccedilatildeo porque como descrito acima
Ep e Ek aumentam simultaneamente durante a maior parte do Saeup Na verdade a
transduccedilatildeo de Ek em Ep eacute quase nula nos idosos (figura 38) O incremento da curva
Rint(t) que ocorre durante a elevaccedilatildeo Rintup eacute inferior ao que ocorre durante a
queda Rintdown Tambeacutem esta assimetria eacute maior no idoso A proporccedilatildeo
RintdownRintup nos indiviacuteduos idosos eacute 213plusmn13 e 126 plusmn 032 nos indiviacuteduos jovens
(p=33310-11 tabela 34) Este fenocircmeno eacute acompanhado por uma maior fraccedilatildeo da
elevaccedilatildeo em contato com o solo como indicado pela maior proporccedilatildeo ScupSvup nos
idosos (figura 37) Um tempo aeacutereo inferior nos idosos durante a corrida em ~ 10
kmh-1 foi encontrado por KARAMANIDIS e ARAMPATZIS 2005)
94
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com seus
95
dois componentes o trabalho realizado contra a gravidade (Wv ciacuterculos abertos) e
para sustentar as mudanccedilas de velocidade a frente (Wf quadrados abertos)
Estatiacutestica e outras indicaccedilotildees conforme figura 33
Note que particularmente nos idosos a transduccedilatildeo da Ek em Ep durante a
elevaccedilatildeo (incremento Rintup da curva Rint(t) abaixo da linha horizontal pontilhada) eacute
menor do que a transduccedilatildeo da Ep em Ek durante o deslocamento descendente
(incrementos Rintdown da curva Rint(t) acima da linha horizontal pontilhada) esta
assimetria eacute acompanhada pela elevaccedilatildeo baliacutestica (nulo nos idosos) menor do que a
descida baliacutestica Nos trechos horizontais da curva Rint(t) nenhuma transduccedilatildeo
ocorre Ep e Ek e unidades muacutesculo-tendatildeo absorvem simultaneamente Ep e Ek (fase
) e aumentam Ep e Ek simultaneamente (fase a) Note que enquanto que a fase eacute
realizada durante Scedown a estende-se aleacutem do Sceup dentro de uma grande parte
do Saeup devido ao continuo aumento da Ek Esta assimetria tambeacutem eacute maior nos
idosos
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As fraccedilotildees do
deslocamento vertical do CM durante contato ScSv (ciacuterculos preenchidos
deslocamento descendente ciacuterculos abertos deslocamento ascendente) e quando
a Fv eacute maior do que o PC SceSv (quadrados preenchidos deslocamento
96
descendente quadrados abertos deslocamento ascendente) satildeo apresentados em
funccedilatildeo da velocidade de corrida Estatiacutestica conforme figura 33
Um trabalho externo positivo eacute realizado (segmentos vermelhos na figura 31)
natildeo soacute para aumentar simultaneamente Ep e Ek (fraccedilatildeo a do passo) mas tambeacutem
quando ocorre transduccedilatildeo da Ek em Ep no final do empurre durante o alcance do
platocirc de Ecm (figura 31) Daqui resulta que a duraccedilatildeo de trabalho positivo tpush eacute
superior agrave duraccedilatildeo a a proporccedilatildeo tpushta diminui com a velocidade de ~19 agrave 3-5
kmh-1 para ~11 agrave 15-17 kmh-1 Da mesma forma o trabalho externo negativo eacute
feito (segmentos azuis na figura 31) natildeo apenas para diminuir simultaneamente Ep e
Ek (fraccedilatildeo do passo) mas tambeacutem quando ocorre uma transduccedilatildeo de Ep em Ek no
iniacutecio da frenagem durante a acentuada diminuiccedilatildeo de Ecm no final de seu platocirc
(figura 31) Consequentemente a duraccedilatildeo do trabalho negativo tbrake eacute maior do que
a duraccedilatildeo a proporccedilatildeo tbraket diminui com a velocidade de ~17 agrave 3-5 kmh-1 para
~12 agrave 15-17 kmh-1
A duraccedilatildeo do empurre e da frenagem estatildeo apresentados na figura 39 em
funccedilatildeo da Vf Observa-se que tanto nos indiviacuteduos idosos quanto nos jovens tpushgt
tbrake ateacute 13-14 kmh-1 (tabela 31) A proporccedilatildeo eacute tpushtbrake=125plusmn016 nos indiviacuteduos
idosos e 115plusmn013 nos indiviacuteduos jovens (p=11610-9 tabela 34) Novamente a
assimetria eacute maior nos indiviacuteduos idosos
Durante a corrida no plano a uma velocidade constante o momentum perdido
Fbrake tbrake equivale ao momentum adquirido Fpush tpush (realmente na direccedilatildeo vertical
o momentum perdido eacute ligeiramente maior que o momentum adquirido porque a
velocidade descendente maacutexima eacute 7-16 maior do que a velocidade ascendente
maacutexima tabela 34) Deste modo se tpushgt tbrake entatildeo Fpush lt Fbrake ou seja a forccedila
meacutedia durante o trabalho positivo eacute inferior agrave forccedila meacutedia durante o trabalho
negativo
As assimetrias do bouncing acima descritas estatildeo resumidas na tabela 34
onde eacute feita uma comparaccedilatildeo entre indiviacuteduos idosos indiviacuteduos jovens e um
sistema elaacutestico Observa-se que o desvio de um sistema elaacutestico eacute maior para os
indiviacuteduos idosos do que para os indiviacuteduos jovens isto eacute o salto dos indiviacuteduos
idosos eacute menos elaacutestico do que o dos indiviacuteduos jovens Note a mesma conclusatildeo
foi encontrada acerca da estimativa da energia elaacutestica armazenada em cada passo
97
98
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito idoso
paineacuteis a direita sujeito jovem em cada painel o comportamento da transduccedilatildeo Ep-
Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas na energia potencial
gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf normalizada para oscilar entre
zero e um Mesmos passos da figura 1 cada painel comeccedila e termina no valor
menor da curva Ep As cores diferentes na curva Ep distinguem as fraccedilotildees do passo
onde a Fv exercida no solo eacute maior do que o PC (vermelho) e menor do que o PC
(azul) As linhas contiacutenuas de Ep indicam a fase de contato enquanto que as linhas
pontilhadas Ep (azul fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As
quatro fases correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown (azul)
e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas pontilhadas verticais
satildeo apresentadas nos dois picos de Ek e ocupam a fraccedilatildeo onde a transduccedilatildeo Ep-Ek
ocorre conforme indicado pelos incrementos da curva Rint(t)
Por que o bouncing do corpo eacute diferente daquele de um sistema elaacutestico
A cada passo executado as unidades muacutesculo-tendatildeo satildeo submetidas a um
ciclo alongamento-encurtamento durante o contato com o solo As unidades
muacutesculo-tendatildeo satildeo constituiacutedas por duas estruturas em seacuterie que apresentam
respostas diferentes durante o alongamento e encurtamento Enquanto os tendotildees
tecircm um comportamento semelhante entre o alongamento e encurtamento devido agrave
sua pequena histerese (ALEXANDER 2002) o muacutesculo exerce uma maior forccedila
durante o alongamento do que durante o encurtamento dependente da relaccedilatildeo
forccedila-velocidade (FENN e MARSH 1935 HILL 1938) Este fato resulta em uma
resposta diferente das unidades muacutesculo-tendatildeo a um ciclo alongamento-
encurtamento dependente da mudanccedila do comprimento relativo de muacutesculo e
tendatildeo durante o ciclo (CAVAGNA 2006)
O alongamento dos muacutesculos em relaccedilatildeo ao alongamento do tendatildeo depende
da rigidez do muacutesculo em relaccedilatildeo agrave do tendatildeo a rigidez do muacutesculo por sua vez
depende da sua ativaccedilatildeo Se a ativaccedilatildeo eacute elevada como em altas velocidades
(BIEWENER 1998) e o muacutesculo eacute mantido isomeacutetrico como alguns estudos
sugerem para a corrida (KRAM e TAYLOR 1990 BIEWENER et al 1998
99
ROBERTS et al 1998) a maioria da mudanccedila no comprimento seraacute realizada pelos
tendotildees e as caracteriacutesticas do bouncing se aproximaratildeo agraves de um corpo elaacutestico
Se por outro lado a ativaccedilatildeo muscular for baixa uma importante fraccedilatildeo da mudanccedila
do comprimento seraacute realizada pelo muacutesculo Neste caso a forccedila desenvolvida
durante o alongamento eacute esperada que exceda a que foi desenvolvida durante o
encurtamento e as caracteriacutesticas do bouncing foram distintas agrave de um corpo
elaacutestico
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos
painel inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura 31)
e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e barras
azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de corrida
Estatiacutestica conforme figura 33
Esta eacute possivelmente a razatildeo pela qual a proporccedilatildeo tpushtbrake (figura 39) eacute
maior em velocidades baixas de corrida quando a ativaccedilatildeo muscular eacute menor e o
comprimento muscular eacute alterado e consequumlentemente o trabalho sustentado por
filamentos de muacutesculos que deslizam dentro das unidades muacutesculo-tendatildeo eacute
relativamente maior (CAVAGNA 2006) Pode ser observado que a duraccedilatildeo de
trabalho externo positivo eacute maior do que a duraccedilatildeo do trabalho externo negativo ateacute
a velocidade de 12-14 kmh-1 (tabela 31) como esperado a partir da relaccedilatildeo forccedilashy
100
velocidade muscular Isto sugere que com o aumento da velocidade a contribuiccedilatildeo
do trabalho pelas estruturas contraacuteteis eacute progressivamente substituiacutedo pela
armazenagem e re-utilizaccedilatildeo de energia elaacutestica pelos tendotildees A razatildeo tpushtbrake eacute
maior nos idosos (tabela 34)
Um corolaacuterio deste ponto de vista eacute que as fibras musculares curtas
aparentemente de pouca importacircncia ligadas em seacuterie com tendotildees muito longos
(ALEXANDER 2001) tecircm papel fundamental de modular a energia elaacutestica
armazenada nos tendotildees e para ajustar toda a extensatildeo da mudanccedila imposta agrave
unidade muacutesculo-tendatildeo Uma forccedila muscular maior durante o alongamento do que
durante o encurtamento juntamente com a perda de energia durante o ciclo
alongamento-encurtamento satildeo tanto consequumlecircncias da relaccedilatildeo forccedila-velocidade do
muacutesculo e podem explicar pelo menos qualitativamente o conjunto dos desvios do
sistema elaacutestico (tabela 33)
O maior desvio de um sistema elaacutestico encontrado nos indiviacuteduos mais idosos
eacute coerente com a menor forccedila desenvolvida pelos seus muacutesculos o que implicaria
uma mudanccedila relativamente maior do comprimento do muacutesculo nas unidades
muacutesculo-tendatildeo A segunda razatildeo pode ser a maior diferenccedila na forccedila desenvolvida
pelos muacutesculos durante o alongamento relativo ao encurtamento relatado na
literatura em idosos (PHILLIPS et al 1991 OCHALA et al 2006 VANDERVOORT
et al 1990 PORTER et al 1997 POUSSON et al 2001 KLASS et al 2005)
Em conclusatildeo modificaccedilotildees na estrutura muscular menor forccedila e uma
relaccedilatildeo forccedila-velocidade mais assimeacutetrica resultam em uma modificaccedilatildeo da energia
mecacircnica do CM do corpo durante a corrida A menor forccedila especialmente durante
trabalho positivo explica a menor amplitude da oscilaccedilatildeo vertical que por sua vez eacute
a causa do menor trabalho externo da maior frequumlecircncia da passada e maior
trabalho interno A relaccedilatildeo forccedila-velocidade mais assimeacutetrica explica a maior
assimetria contato-despregue Ambas as modificaccedilotildees resultam em uma menor
utilizaccedilatildeo da energia elaacutestica durante o bouncing do idoso
101
4 PREDIZENDO Vf CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO TERRESTRE
41 Introduccedilatildeo
A dinacircmica da locomoccedilatildeo eacute determinada principalmente pelas forccedilas de
reaccedilatildeo do solo geradas de modo agrave re-acelerar e deslocar o corpo contra a forccedila
gravitacional em um ciclo de passada O meacutetodo para analisar o trabalho e o custo
mecacircnico externos usando plataformas dinamomeacutetricas foi introduzido por Cavagna
e colaboradores (caminhada CAVAGNA et al 1963 corrida CAVAGNA et al
1964) Desde entatildeo o Wext tem sido investigado em diferentes condiccedilotildees e
populaccedilotildees [terreno (FORMENTI et al 2005 FORMENTI e MINETTI 2007)
crianccedilas (CAVAGNA et al 1983 SCHEPENS et al 1998 SCHEPENS et al 2001)
meacutetodo de locomoccedilatildeo (MINETTI 1998a ARDIGO et al 2003) deficiecircncia de
hormocircnio do crescimento (MINETTI et al 2000) gradiente de locomoccedilatildeo (MINETTI
et al 1993 1994) idosos (MIAN et al 2006 estudo atual capiacutetulo 3)]
Apesar de sua relevacircncia cientiacutefica o nuacutemero de laboratoacuterios onde trabalho e
custo mecacircnico satildeo avaliados eacute limitado devido a questotildees metodoloacutegicas Em
especial a aquisiccedilatildeo da energia mecacircnica externa eacute atualmente limitada pela
necessidade de espaccedilo suficiente para posicionar plataformas de forccedila para coletar
dois passos sucessivos de modo a obter o miacutenimo de duas curvas de forccedilas de
reaccedilatildeo do solo consecutivas essenciais para esse meacutetodo Durante a corrida haacute um
periacuteodo entre as duas curvas durante o qual ambos os peacutes estatildeo fora do solo (em
velocidades normais) enquanto que durante a caminhada esse periacuteodo eacute
substituiacutedo por uma fase de apoio duplo
Independente se as duas curvas estatildeo sobrepostas ou natildeo (caminhando ou
correndo respectivamente) haacute ainda alguma dificuldade em obter
102
experimentalmente no miacutenimo duas curvas similares de modo que a Fv meacutedia seja
igual ao PC Normalmente mais de um terccedilo das aquisiccedilotildees com indiviacuteduos normais
satildeo rejeitadas (dados natildeo-publicados) devido agrave dificuldade de caminhar ou correr
em plataformas em uma velocidade constante E aleacutem disso a maior parte dos setshy
uprsquos biomecacircnicos satildeo dispostos de modo que as curvas sucessivas sejam obtidas
da mesma plataforma Dados de Bastien e colaboradores mostram que duas
medidas sucessivas em diferentes plataformas de forccedila eram possiacuteveis apenas em
10 das tentativas Assim medir o Wint realizado durante o duplo apoio eacute uma tarefa
difiacutecil e essa variaacutevel em seu maacuteximo representa mais de 40 do Wext (BASTIEN
et al 2003)
Deste modo o presente texto procura analisar as possibilidades de anaacutelise da
biomecacircnica da locomoccedilatildeo em situaccedilotildees onde apenas uma plataforma de forccedila com
dimensotildees capazes de analisar apenas um apoio simples satildeo disponiacuteveis
O objetivo desse trabalho eacute estabelecer uma equaccedilatildeo capaz de predizer o
trabalho mecacircnico usando procedimentos de prediccedilatildeo linear e otimizaccedilatildeo e checar
sua validade analisando experimentos de locomoccedilatildeo em diferentes velocidades
42 Equaccedilatildeo do tempo de atraso
Usando a primeira lei de Newton (um corpo se move a uma velocidade
constante quando a soma total das forccedilas externas eacute igual a zero) temos que a Fv
meacutedia exercida contra o solo durante um ciclo de passada a uma velocidade
constante eacute igual ao PC (CAVAGNA e MARGARIA 1966) Se somente as forccedilas de
reaccedilatildeo do solo de um uacutenico passo satildeo coletadas e a simetria eacute assumida
(KARAMANIDIS et al 2003) o atraso de tempo entre passos (s) pode ser obtido
por
F t Ivc c vt = = Eq 41 step M g M g
onde tc e Fvc satildeo a duraccedilatildeo e a Fv meacutedia durante o fase de contato (figura 41)
respectivamente e Iv eacute o impulso vertical Essa informaccedilatildeo eacute crucial se a passada
completa deve ser reconstruiacuteda (no novo passo elaborado somente a forccedila
103
horizontal precisa ser invertida enquanto que a Fv precisa ser somente duplicada a
partir do atraso do tempo tstep)
M g M gFP = = Eq 42
2F t 2 Ivc c v
de onde o CP (CP m) pode ser inferido
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de reaccedilatildeo do solo durante a
corrida
O DF (ALEXANDER e JAYES 1980) ie a fraccedilatildeo do tempo de passada no
qual um uacutenico peacute estaacute no solo eacute
104
M g 1DF = = Eq 43
2F F vc vc2
M g
e deste modo eacute possiacutevel indicar se o modo de locomoccedilatildeo eacute caminhada (DF05) ou
corrida (DFlt05) Ateacute esse ponto a uacutenica variaacutevel a ser conhecida antecipadamente
eacute a massa corporal (kg)
43 Estimativa da velocidade horizontal
Enquanto pares de fotoceacutelulas satildeo comumente encontrados em laboratoacuterios
por vezes a Vf natildeo eacute conhecida (paleontologia biomecacircnica forecircnsica etc) Assim
FP DF e massa podem entrar no modelo de prediccedilatildeo de velocidade (ms-1) com
base em dados coletados previamente (NILSSON e THORSTENSSON 1989)
Vf = (1953F M g) - (14843Iv M g) + 5415 Eq 44 v peak
onde Fvpeak eacute a forccedila de impacto vertical e Iv eacute impulso vertical O erro meacutedio da
estimativa (SEE = 05 dp(1 ndash R2)) eacute 005 ms-1 Entatildeo o CP pode ser obtido como
VfFP ou
1953Fv peak -14843Iv + 5415M gCP = Eq 45
2Fvc
Apesar do alto coeficiente de regressatildeo e baixo erro padratildeo da meacutedia esse
meacutetodo necessita do primeiro pico vertical e assim se torna limitado por exemplo
em humanos para corredores que apoacuteiam o peacute com o calcanhar no momento do
contato Para evitar essa limitaccedilatildeo foi construiacutedo um modelo de regressatildeo linear
muacuteltipla incluindo variaacuteveis descritivas (MINETTI e ALEXANDER 1997) da
energeacutetica da locomoccedilatildeo
qregression + + DFregression + FPregressionVf = Eq 46 3
105
Para cada regressatildeo o meacutetodo dos miacutenimos quadrados eacute usado Enquanto
que o DF e o FP satildeo calculados (equaccedilotildees 42 e 43) o fator q precisa ser
determinado O fator q (tambeacutem conhecido como fator de forma) oferece
informaccedilotildees relacionadas ao formato da curva forccedila-tempo durante a fase de apoio
Usualmente a forccedila vertical pode ser determinada somente com dois primeiros
cossenos de uma seacuterie de Fourier (ALEXANDER 1978)
tc ) Eq 47 Fv = x cos( tc ) V qcos(3
onde x eacute PC e tc eacute tempo de contato A ausecircncia de coeficientes seno indica uma
simetria nas curvas forccedila-tempo e nestes casos o fator q eacute constante Em outras
palavras conhecendo somente o valor da Fv e sua respectiva fase eacute possiacutevel
encontrar o fator q Todavia na caminhada satildeo frequumlentemente observadas curvas
assimeacutetricas (NILSSON e THORSTENSSON 1989) assim incluiacuteu-se dois
coeficientes senos na equaccedilatildeo
tc ) Eq 48 Fv = x cos( tc ) V qcos(3 tc ) + a1 sin(2 tc ) V a2 sin(4
onde a1 e a2 satildeo constantes Assim usando um simples caacutelculo de meacutedia aritmeacutetica
para o q durante o tc noacutes temos
q1 + q2 + q3 + qnqmean = Eq 49 n
Usando os valores de fator q advindos da literatura (MINETTI e ALEXANDER
1997) construiacutemos a seguinte equaccedilatildeo de regressatildeo em situaccedilotildees de caminhada
DF 05 qregression = 23061q + 05873 R=079 Eq 410
onde qregression eacute a Vf estimada e utilizada na equaccedilatildeo 46 Para situaccedilotildees de corrida
o fator q natildeo varia em funccedilatildeo da velocidade (figura 42) obtendo um coeficiente
106
angular da equaccedilatildeo de regressatildeo muito baixo (00916) portanto em situaccedilotildees de
corrida o qregression eacute cancelado
As seguintes equaccedilotildees (411 412 413 e 414) foram originadas dos dados
apresentados na figura 43 de MINETTI (1998b) Nesta figura as informaccedilotildees satildeo
valores meacutedios (meacutedias advindas de 22 agrave 42 medidas para cada velocidade e tipo
de locomoccedilatildeo) de medidas de FP e DF portanto as equaccedilotildees a seguir apresentam
valores de R subestimados enquanto que as equaccedilotildees de regressatildeo representam
de modo satisfatoacuterio os dados de origem A Vf predita pela frequumlecircncia de passada
FPregression foi determinada para a caminhada como
DF 05 FPregression = 27781FP V12077 R=098 Eq 411
e para a corrida
DF lt 05 FPregression = 75469FP - 79561 R=090 Eq 412
A Vf predita pelo duty factor DFregression foi determinado para a caminhada
como
DF 05 DFregression = V12342DF + 84628 R=099 Eq 413
e para a corrida
DF lt 05 DFregression = -16912DF + 87422 R=098 Eq 414
44 Equaccedilatildeo de custo energeacutetico
O atraso entre passos tstep e a Vf satildeo cruciais para ldquosintetizarrdquo toda a
passada e calcular o trabalho mecacircnico externo e a recuperaccedilatildeo de energia (ambos
valores total (CAVAGNA e KANEKO 1977) e instantacircneo (CAVAGNA et al 2002))
Assim as forccedilas de reaccedilatildeo do solo satildeo integradas duas vezes para posiccedilatildeo
do CM e dados da velocidade A primeira integraccedilatildeo das forccedilas horizontais e
107
verticais menos o PC ambas divididas pela massa corporal resultam na aceleraccedilatildeo
do CM A constante de integraccedilatildeo usada para as forccedilas acircntero-posteriores foi a
velocidade meacutedia de progressatildeo Para as forccedilas vertical e meacutedio-lateral noacutes
assumimos que as velocidades inicial e final em todo o ciclo eram iguais A variaccedilatildeo
positiva ponto-a-ponto da Ep somada a variaccedilatildeo positiva ponto-a-ponto da Ek
durante uma passada completa resulta na energia mecacircnica externa total Ecm
(CAVAGNA e KANEKO 1977 WILLEMS et al 1995) Para evitar o ldquoparadoxo do
trabalho zerordquo o trabalho externo eacute determinado somando somente os incrementos
positivos da Ecm Sabendo o Wext e estimando o Wint (MINETTI 1998b) foi
calculado o Wtot e o custo energeacutetico (Ctot) da locomoccedilatildeo
A velocidade horizontal foi determinada atraveacutes do meacutetodo de regressatildeo
linear muacuteltipla usando como variaacuteveis independentes os coeficientes da curva Fv (de
NILSSON e THORSTENSSON 1989) A validade cruzada das equaccedilotildees
desenvolvidas no presente estudo foi calculada por coeficientes de regressatildeo (R)
45 Discussatildeo
O presente modelo prediz a velocidade horizontal e o custo energeacutetico da
locomoccedilatildeo terrestre Aleacutem disso o modelo matemaacutetico permite estimar outros
importantes paracircmetros da locomoccedilatildeo como a FP e o DF
Outros modelos
Tem sido proposto que o custo energeacutetico da locomoccedilatildeo terrestre pode ser
determinado pelo custo da produccedilatildeo de forccedila para suportar o PC (KRAM e TAYLOR
1990) Fundamentalmente o custo de geraccedilatildeo de forccedila indica que a potecircncia
metaboacutelica da locomoccedilatildeo eacute relacionada diretamente ao PC e o tempo disponiacutevel
para produzir forccedila
c Mg E
metabolic = Eq 415 tc
108
onde c eacute uma constante de custo (que expressa a proporcionalidade entre taxa de
dispecircndio de energia normalizado pela massa e taxa de geraccedilatildeo de forccedila)
entretanto esse modelo tecircm sido alvo de criacuteticas Resumidamente a principal criacutetica
eacute baseada em i) a suposiccedilatildeo que o dispecircndio metaboacutelico devido ao movimento dos
membros superiores eacute negligenciaacutevel e ii) a desconsideraccedilatildeo do conceito de
trabalho O presente trabalho tambeacutem mostra que levar em consideraccedilatildeo apenas o
tempo da geraccedilatildeo de forccedila e a forccedila natildeo eacute o bastante para determinar o custo
energeacutetico da locomoccedilatildeo As informaccedilotildees contidas no proacuteprio comportamento da
curva forccedila vertical-tempo parecem influenciar de modo importante a determinaccedilatildeo
de paracircmetros fundamentais da locomoccedilatildeo Especialmente o Iv e o fator de forma q
indicam um ajuste da curva de regressatildeo linear importante para a determinaccedilatildeo da
Vf
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de progressatildeo
A prediccedilatildeo da FP e DF foram comparados com os valores
determinados experimentalmente em dois sujeitos (sujeitos RR e TD 175 e
170m de estatura 78 e 84kg de massa corporal) correndo em vaacuterias velocidades de
progressatildeo As forccedilas de reaccedilatildeo do solo foram registradas em uma plataforma de
forccedila AMTI agrave uma frequumlecircncia de amostragem de 1000Hz e a Vf foi determinada
quadro a quadro atraveacutes de uma cacircmera colocada agrave 5m de distacircncia da aacuterea de
interesse e 1m de altura do piso A mesma foi posta de forma a registrar o
movimento no plano sagital dos sujeitos com uma frequumlecircncia de amostragem de
109
50Hz Um procedimento de calibraccedilatildeo 2D foi realizado a fim de converter as
informaccedilotildees de pixels para metros As informaccedilotildees de posiccedilatildeo linear foram filtradas
atraveacutes de um filtro passa-baixa do tipo Butterworth com frequumlecircncia de corte
variando entre 3 e 9Hz determinados para cada corrida atraveacutes do procedimento de
anaacutelise residual (WINTER 2005) A coordenada horizontal do ponto anatocircmico do
quadril foi utilizada para determinar a FPexp CPexp e a velocidade meacutedia
experimentais A FPexp foi determinada pela frequumlecircncia de amostragem fsample
dividida pelo nuacutemero de quadros que totalizam um ciclo de passada nframes
f sampleFPexp = Eq 416 n frames
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de progressatildeo Fonte
Minetti 1998b
O CPexp foi determinado pela posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo FinalhorPosition diminuiacutedo pela posiccedilatildeo horizontal do quadril no
primeiro quadro InitialhorPosition
CPexp = horPosition = FinalhorPosition V InitialhorPosition Eq 417
110
A velocidade meacutedia experimental Vfexp foi determinada pela variaccedilatildeo da
posiccedilatildeo horizontal durante um ciclo de passada dividida pela variaccedilatildeo de tempo de
um ciclo de passada a partir da Eq 411
n frames 1time = = Eq 418
f sample FPexp
temos
horPositionVfexp = Eq 419 time
A razatildeo entre a frequumlecircncia FP experimental e teoacuterica foi de 1001 A razatildeo
para o DF foi de 0977
O presente modelo pode auxiliar a determinar paracircmetros espaccedilos-temporais
e energeacuteticos de animais extintos prevendo a forccedila de reaccedilatildeo do solo de um uacutenico
passo
Atraveacutes da anaacutelise das informaccedilotildees contidas em uma curva de forccedila de
reaccedilatildeo do solo vertical pelo tempo informaccedilotildees fundamentais da mecacircnica e
energeacutetica da locomoccedilatildeo podem ser estimadas em situaccedilotildees que a informaccedilatildeo
experimental direta natildeo for disponiacutevel
111
5 CONCLUSAtildeO GERAL
51 O custo EMG da caminhada humana
O objetivo deste estudo foi construir um modelo do custo EMG da caminhada
humana Para tanto criou-se duas abordagens experimental e teoacuterica sendo que a
teoacuterica parece ter uma melhor relaccedilatildeo com as evidecircncias experimentais sobre a
energeacutetica da locomoccedilatildeo humana A estabilidade em conjunto com a atividade EMG
de muacutesculos posturais parece ser um mecanismo primaacuterio da energeacutetica da
locomoccedilatildeo
52 A mecacircnica da corrida de idosos
A mecacircnica da corrida de idosos foi comparada com a de jovens atraveacutes da
determinaccedilatildeo e comparaccedilatildeo do trabalho mecacircnico e de paracircmetros do sistema
massa-mola especialmente usando aspectos de assimetria do mecanismo elaacutestico
de minimizaccedilatildeo de energia entre os grupos experimentais
Os idosos produzem menos forccedila durante a fase de trabalho mecacircnico
positivo com uma menor oscilaccedilatildeo vertical durante a fase aeacuterea e menor oscilaccedilatildeo
total Consequentemente a capacidade de armazenar e re-utilizar energia elaacutestica
112
dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio energeacutetico neste
grupo quando comparado com jovens
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre
Tendo apenas as informaccedilotildees de uma curva forccedila vertical versus tempo e a
massa corporal construiu-se um modelo biomecacircnico de prediccedilatildeo do CP Vf e custo
energeacutetico da locomoccedilatildeo terrestre Os resultados advindos do modelamento
correspondem aos paracircmetros determinados experimentalmente Laboratoacuterios que
detenham apenas uma plataforma de forccedila ou nas aacutereas onde as informaccedilotildees de
entrada do atual modelo constituam a uacutenica fonte de dados disponiacutevel (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis-chaves da
locomoccedilatildeo podem ser realizadas com razoaacutevel acuraacutecia
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico
O seguinte texto representa um esforccedilo de raciociacutenio a partir dos achados da
presente tese aliados ao referencial teoacuterico abordado durante os capiacutetulos
anteriores a fim de compreender as determinantes da locomoccedilatildeo humana Mais do
que oferecer uma resposta final sobre a mecacircnica e a energeacutetica da locomoccedilatildeo
humana este texto lanccedila uma provaacutevel resposta ainda inicial acerca das
determinantes envolvidas da locomoccedilatildeo humana
As situaccedilotildees de locomoccedilatildeo que desafiam as noccedilotildees atuais da mecacircnica e
energeacutetica da locomoccedilatildeo tratadas nesta tese nomeadamente o processo de
envelhecimento e as inclinaccedilotildees satildeo algumas das questotildees que natildeo satildeo todavia
compreendidas pelas teorias atuais da locomoccedilatildeo humana mas que a presente
hipoacutetese pretende responder A locomoccedilatildeo humana eacute determinada desde o ponto
de vista mecacircnico como uma seacuterie de accedilotildees complexas de segmentos interligados
ao qual geram torques atraveacutes da ativaccedilatildeo muscular e transmissatildeo de forccedilas pelos
tendotildees anexados em seacuterie aos muacutesculos e agraves articulaccedilotildees que conectam os
Restriccedilotildees da tarefa
velocidade
Restriccedilotildees do organismo
- massa
- comprimento do membro
i f i
Tendatildeo
- energia
Energia
mecacircnica do
CM
Mecanismo
minimizador
Dispecircndio
energeacutetico
Restriccedilotildees do
ambiente Muacutesculos
- eficiecircncia
113
segmentos Todo este sistema eacute controlado pelo sistema nervoso central e
perifeacuterico Ainda assim apesar da extrema complexidade deste tipo de movimento
conforme discutido extensivamente nas seccedilotildees 21 31 e 41 a corrida e a
caminhada humana se caracterizam como sistemas capazes de minimizar o
dispecircndio energeacutetico advindo dos muacutesculos sistemas estes denominados de
massa-mola e pecircndulo invertido respectivamente Desde a sua introduccedilatildeo ateacute os
dias atuais estes sistemas tecircm recebido intensas criacuteticas da literatura abordadas em
capiacutetulos precedentes poreacutem mais do que por agrave prova os achados principais que
deram base para estes sistemas as criacuteticas satildeo direcionadas agraves limitaccedilotildees dos
sistemas especialmente da forma em que foram propostos A seacuterie de experimentos
realizados primeiramente com humanos (CAVAGNA et al 1963 1964) e apoacutes com
animais (FEDAK et al 1982 HEGLUND et al 1982a HEGLUND et al 1982b
TAYLOR et al 1982) demonstraram de modo inequiacutevoco que as curvas de energia
potencial gravitacional e cineacutetica do CM se apresentavam em fase durante a
corridagalope e em contra-fase (atraso de 180 graus) na caminhada Deste ponto
em diante eacute estabelecido que durante a transiccedilatildeo da caminhada para a corrida os
sistemas satildeo modificados de um modo discreto ou seja o pecircndulo invertido seria
ldquodesligadordquo e o sistema massa-mola acionado automaticamente
Figura 51 Modelo conceitual da locomoccedilatildeo humana
114
Este raciociacutenio adveacutem dos achados de Cavagna e colegas e aleacutem disso da
observaccedilatildeo de paracircmetros cinemaacuteticos e cineacuteticos aos quais respondem de forma
discreta na mudanccedila do tipo de locomoccedilatildeo por exemplo o DF durante caminhada
varia de 065 em baixas velocidades ateacute 055 em altas velocidades de forma
contiacutenua poreacutem quando o sujeito faz a transiccedilatildeo para a corrida o DF passa para
04 O fator de forma ldquoqrdquo da curva de forccedila vertical em funccedilatildeo do tempo tambeacutem se
modifica abruptamente variando de 07 na caminhada para -01 durante corrida
(ALEXANDER e JAYES 1980) Uma justificativa para este comportamento discreto
eacute relacionado agrave um tipo de locomoccedilatildeo pouco usada por seres-humanos o skipping
Por outro lado evidecircncias experimentais tecircm demonstrado que em algumas
velocidades de caminhada parece existir um mecanismo elaacutestico de minimizaccedilatildeo de
energia (FUKUNAGA et al 2001) denominado de sistema de ldquocatapultardquo devido agrave
caracteriacutestica de baixa velocidade durante a frenagem e alta velocidade na fase de
propulsatildeo (ISHIKAWA et al 2005 ISHIKAWA et al 2007) Por outro lado durante a
corrida no estudo da mecacircnica da corrida dos idosos foi observada uma transduccedilatildeo
de energia cineacutetica e potencial gravitacional em baixas velocidades diminuindo com
o aumento da velocidade (relativo ao deslocamento vertical total capiacutetulo 3)
enquanto que a contribuiccedilatildeo do tendatildeo e consequentemente do componente
elaacutestico da unidade muacutesculo-tendatildeo aumentam (CAVAGNA 2006) Portanto os dois
sistemas parecem natildeo mudar atraveacutes de transformaccedilotildees abruptas como os
paracircmetros anteriormente apresentados poderiam induzir mas eacute notoacuterio um
continuum de mudanccedilas nas caracteriacutesticas mecacircnicas destes dois tipos de
locomoccedilatildeo e a mudanccedila na predominacircncia do mecanismo minimizador parece ser o
responsaacutevel pela transiccedilatildeo de um tipo de locomoccedilatildeo para outro
Para construir este modelo eacute necessaacuterio sabermos quanto de energia eacute
recuperado pelos mecanismos minimizadores A energia recuperada por via
pendular eacute calculada como (ver capiacutetulo 327)
cpendular = Rint Eq 51
e a energia elaacutestica armazenada como
115
Fvmx k = Eq 52 celaacutestica 2
Este raciociacutenio leva agrave um modelo de minimizaccedilatildeo de energia assumido
simplesmente como o somatoacuterio dos mecanismos elaacutestico e pendular
= Eq 53 creconvertida cpendular + celaacutestica
Assumindo como constante o dispecircndio energeacutetico sob outras formas de
energia (teacutermica) a energia despendida para a contraccedilatildeo dos muacutesculos esqueleacuteticos
a fim de gerar a locomoccedilatildeo pode ser determinada por
= -E Eq 54 Emuscular Emetaboacutelica repouso
e deste modo podemos afirmar que a energia total para percorrer determinada
distacircncia eacute dada por
= Eq 55 total Ereconvertida + Emuscular
e este valor em um amplo espectro de velocidades e tipos de locomoccedilatildeo apresente
uma relaccedilatildeo linear direta com a velocidade da locomoccedilatildeo (restriccedilatildeo da tarefa)
Mas quais os fatores que determinam este continuum de mecanismos
minimizadores O compromisso entre estes mecanismos (pendular e elaacutestico) eacute
diretamente ligado ao comportamento da energia mecacircnica vertical (potencial
gravitacional + cineacutetica) e da unidade muacutesculo-tendatildeo E em uacuteltima anaacutelise estas
caracteriacutesticas mecacircnicas parecem ser moduladas por restriccedilotildees do ambiente (g
inclinaccedilatildeo) restriccedilotildees da tarefa (velocidade) e restriccedilotildees do organismo (massa e
comprimento de membros inferiores) conforme figura 51
Hipoacuteteses levantadas com o atual modelo
i) A velocidade de transiccedilatildeo deve coincidir com a mudanccedila na
predominacircncia do mecanismo minimizador de energia
ii) Analisar o mecanismo pendular em diferentes velocidades de corrida
116
iii) Quando as demais restriccedilotildees estatildeo controladas as restriccedilotildees do
organismo e o compromisso entre massa e comprimento de membro
inferior poderiam explicar as mudanccedilas no uso dos mecanismos pendular
e elaacutestico
iv) Existe uma velocidade oacutetima para a corrida humana
v) O somatoacuterio da quantidade de energia reconvertida por meio pendular e
elaacutestico somado ao dispecircndio energeacutetico dos muacutesculos deve ser altamente
relacionado com a velocidade de locomoccedilatildeo
541 Respondendo algumas criacuteticas atuais
Este modelo pode explicar os resultados de GEYER et al 2006) sobre a
possibilidade de um modelo de ldquopecircndulo-invertido carregado por uma molardquo
(BLICKHAN et al 2007) ser aplicado na caminhada devido a melhor representaccedilatildeo
da curva forccedila tempo pelo meacutetodo proposto do que pelo modelo do pecircndulo-
invertido Apesar da boa representaccedilatildeo de uma variaacutevel mecacircnica da locomoccedilatildeo o
modelo despreza uma questatildeo central da anaacutelise da locomoccedilatildeo a determinaccedilatildeo do
mecanismo minimizador de energia Portanto apesar da coincidecircncia da resposta de
forccedila de reaccedilatildeo do solo vertical originada pelo modelo e a medida experimental o
modelo apenas apresenta uma possibilidade do ponto de vista matemaacutetico de
representaccedilatildeo do modelo teoacuterico de continuum apresentado aqui
Recentemente uma extensa revisatildeo de BIEWENER 2006) analisou como as
flutuaccedilotildees na energia mecacircnica do CM de animais podem ser usadas a fim de
identificar os mecanismos fundamentais envolvidos na locomoccedilatildeo terrestre e indicou
que quando satildeo comparados os padrotildees mecacircnicos e cinemaacuteticos de uma ampla
diversidade de quadruacutepedes e biacutepedes padrotildees mais complexos emergem
observando que alguns animais menos aptos para a locomoccedilatildeo (less cursorial)
podem combinar padrotildees mecacircnicos da caminhada e corrida em velocidades
intermediaacuterias ou em animais de grande tamanho (eg elefantes apresentam
aspectos de corrida mas com um comportamento pendular entre a energia cineacutetica e
potencial gravitacional do CM) Novamente a hipoacutetese do continuum se apresenta
como um forte candidato para explicar atraveacutes de uma teoria simples e unificante a
locomoccedilatildeo de vertebrados
117
O que acontece nas inclinaccedilotildees
Quando nos deslocamos no plano eacute bem determinado que o trabalho
mecacircnico liacutequido apresente um valor muito baixo e natildeo eacute igual a zero devido agrave
resistecircncia do ar e agrave fricccedilatildeo dos tecidos mas ainda assim eacute comumente assumido
como negligenciaacutevel (ALEXANDER 1989) poreacutem a energia mecacircnica total para
movimentar o CM em relaccedilatildeo ao ambiente externo varia durante um ciclo de
passada de modo que o somatoacuterio dos incrementos (trabalho positivo) seja igual ao
somatoacuterio dos decrementos (trabalho negativo) Como observado no estudo ldquocusto
EMG da caminhada humanardquo (Capiacutetulo 2) existe uma predominacircncia de trabalho
positivo em inclinaccedilotildees positivas e predominacircncia de trabalho negativo em
inclinaccedilotildees negativas (figura 52)
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido de
elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006
118
Portanto o pecircndulo invertido natildeo atua como mecanismo minimizador de
dispecircndio energeacutetico e natildeo obstante a falta de evidecircncias eacute razoaacutevel supor que a
energia elaacutestica natildeo atue de forma importante nas inclinaccedilotildees Importante notar que
a inexistecircncia de um mecanismo minimizador natildeo significa que o modelo natildeo
contempla esta situaccedilatildeo apenas demonstra que devido agrave uma restriccedilatildeo severa do
ambiente (inclinaccedilatildeo extrema) o organismo natildeo dispotildee de nenhum auxiacutelio
importante para economizar energia sobrecarregando os muacutesculos a fim de produzir
a energia necessaacuteria para manter o movimento de locomoccedilatildeo Nesta situaccedilatildeo o
dispecircndio energeacutetico eacute dependente apenas da quantidade de ativaccedilatildeo muscular e
seus respectivos equivalentes energeacuteticos de atividade EMG como demonstrado no
estudo do custo EMG da caminhada humana
55 Propostas para futuros estudos
551 Custo EMG da caminhada humana
Testar o modelo do Custo EMG
- em diferentes terrenos
- em populaccedilotildees com patologias do sistema nervoso
- em inclinaccedilotildees negativas
552 Mecacircnica da corrida dos idosos
- desenvolver um modelo matemaacutetico que tenha em consideraccedilatildeo os
comportamentos diferentes entre a fase de encurtamento e alongamento das
unidades muacutesculo-tendatildeo atraveacutes de um modelo viscoelaacutesticohiperelaacutestico
- estudar o bouncing elaacutestico da corrida em inclinaccedilotildees
- estudar o efeito da fadiga no bouncing elaacutestico da corrida humana
- estudar o modelo massa-mola ponto-a-ponto
- estudar o bouncing elaacutestico entre sujeitos com diferentes estruturas
muacutesculo-esqueleacuteticas (velocistas vs fundistas obesos vs natildeo-obesos homens vs
mulheres)
119
- usar os paracircmetros do modelo massa-mola e as assimetrias contato-
despregue de sujeitos normais para comparaccedilatildeo com amputados e portadores de
necessidades especiais com restriccedilotildees na locomoccedilatildeo
- estudar o bouncing elaacutestico na corrida de velocidade de atletas de alto
rendimento
553 Modelo matemaacutetico da locomoccedilatildeo terrestre
Testar o modelo
- para situaccedilatildeo de aceleraccedilotildees
- em animais extintos
120
6 Referecircncias
ALESHINSKY SY An energy sources and fractions approach to the mechanical
energy expenditure problem--IV Criticism of the concept of energy transfers within
and between links J Biomech 19 4 307-309 1986
ALEXANDER RM Damper for bad vibrations Nature 414 6866 855-857 2001
ALEXANDER RM Energy-saving mechanisms in walking and running J Exp Biol 160
55-69 1991
ALEXANDER RM Models and the scaling of energy costs for locomotion J Exp Biol
208 Pt 9 1645-1652 2005
ALEXANDER RM Optimization and gaits in the locomotion of vertebrates Physiol Rev
69 4 1199-1227 1989
ALEXANDER RM Principles of animal locomotion Princeton NJ Princeton
University Press 2003
ALEXANDER RM Tendon elasticity and muscle function Comp Biochem Physiol A
Mol Integr Physiol 133 4 1001-1011 2002
ALEXANDER RM Vertical movements in walking and running Journal of Zoology
185 27-40 1978
ALEXANDER RM JAYES AS Fourier analysis of forces exerted in walking and
running J Biomech 13 4 383-390 1980
ALEXANDER RM VERNON A Mechanics of hopping by kangaroos (Macropodidae)
Journal of Zoology 177 265-303 1975
121
ANDERS C WAGNER H PUTA C GRASSME R PETROVITCH A SCHOLLE
HC Trunk muscle activation patterns during walking at different speeds J
Electromyogr Kinesiol 17 2 245-252 2007
ANDERSON KG BEHM DG Maintenance of EMG activity and loss of force output
with instability J Strength Cond Res 18 3 637-640 2004
ARDIGO LP SAIBENE F MINETTI AE The optimal locomotion on gradients
walking running or cycling Eur J Appl Physiol 90 3-4 365-371 2003
BASTIEN GJ HEGLUND NC SCHEPENS B The double contact phase in walking
children J Exp Biol 206 Pt 17 2967-2978 2003
BASTIEN GJ SCHEPENS B WILLEMS PA HEGLUND NC Energetics of load
carrying in Nepalese porters Science 308 5729 1755 2005
BIEWENER AA Muscle-tendon stresses and elastic energy storage during locomotion
in the horse Comp Biochem Physiol B Biochem Mol Biol 120 1 73-87 1998
BIEWENER AA Patterns of mechanical energy change in tetrapod gait pendula
springs and work J Exp Zoolog A Comp Exp Biol 305 11 899-911 2006
BIEWENER AA KONIECZYNSKI DD BAUDINETTE RV In vivo muscle forceshy
length behavior during steady-speed hopping in tammar wallabies J Exp Biol 201
Pt 11 1681-1694 1998
BIGLAND-RITCHIE B WOODS JJ Integrated electromyogram and oxygen uptake
during positive and negative work J Physiol 260 2 267-277 1976
BLANCO RE GAMBINI R A biomechanical model for size speed and anatomical
variations of the energetic costs of running mammals J Theor Biol 241 1 49-61
2006
BLAXTER K Energy metabolism in animals and man Cambridge UK Cambridge
University Press 1989
BLICKHAN R The spring-mass model for running and hopping J Biomech 22 11-12
1217-1227 1989
BLICKHAN R SEYFARTH A GEYER H GRIMMER S WAGNER H GUNTHER
M Intelligence by mechanics Philos Transact A Math Phys Eng Sci 365 1850
199-220 2007
122
CAVAGNA GA Force platforms as ergometers J Appl Physiol 39 1 174-179 1975
CAVAGNA GA The landing-take-off asymmetry in human running J Exp Biol 209 Pt
20 4051-4060 2006
CAVAGNA GA DUSMAN B MARGARIA R Positive work done by a previously
stretched muscle J Appl Physiol 24 1 21-32 1968
CAVAGNA GA FRANZETTI P FUCHIMOTO T The mechanics of walking in
children J Physiol 343 323-339 1983
CAVAGNA GA FRANZETTI P HEGLUND NC WILLEMS P The determinants of
the step frequency in running trotting and hopping in man and other vertebrates J
Physiol 399 81-92 1988
CAVAGNA GA HEGLUND NC WILLEMS PA Effect of an increase in gravity on the
power output and the rebound of the body in human running J Exp Biol 208 Pt 12
2333-2346 2005
CAVAGNA GA KANEKO M Mechanical work and efficiency in level walking and
running J Physiol 268 2 467--481 1977
CAVAGNA GA MANTOVANI M WILLEMS PA MUSCH G The resonant step
frequency in human running Pflugers Arch 434 6 678-684 1997
CAVAGNA GA MARGARIA R Mechanics of walking J Appl Physiol 21 1 271-278
1966
CAVAGNA GA SAIBENE FP MARGARIA R External work in walking J Appl
Physiol 18 1-9 1963
CAVAGNA GA SAIBENE FP MARGARIA R Mechanical Work in Running J Appl
Physiol 19 249-256 1964
CAVAGNA GA THYS H ZAMBONI A The sources of external work in level walking
and running J Physiol 262 3 639-657 1976
CAVAGNA GA WILLEMS PA FRANZETTI P DETREMBLEUR C The two power
limits conditioning step frequency in human running J Physiol 437 95-108 1991
CAVAGNA GA WILLEMS PA HEGLUND NC The role of gravity in human walking
pendular energy exchange external work and optimal speed J Physiol 528 Pt 3
657-668 2000
123
CAVAGNA GA WILLEMS PA HEGLUND NC Walking on Mars Nature 393 6686
636 1998
CAVAGNA GA WILLEMS PA LEGRAMANDI MA HEGLUND NC Pendular
energy transduction within the step in human walking J Exp Biol 205 Pt 21 3413shy
3422 2002
CERRETELLI P VEICSTEINAS A FUMAGALLI M DELLORTO L Energetics of
isometric exercise in man J Appl Physiol 41 2 136-141 1976
DEN OTTER AR GEURTS AC MULDER T DUYSENS J Speed related changes
in muscle activity from normal to very slow walking speeds Gait Posture 19 3 270shy
278 2004
DOHERTY TJ Invited review Aging and sarcopenia J Appl Physiol 95 4 1717-1727
2003
DOKE J DONELAN JM KUO AD Mechanics and energetics of swinging the human
leg J Exp Biol 208 Pt 3 439-445 2005
DOKE J KUO AD Energetic cost of producing cyclic muscle force rather than work to
swing the human leg J Exp Biol 210 Pt 13 2390-2398 2007
EVANS SL DAVY KP STEVENSON ET SEALS DR Physiological determinants
of 10-km performance in highly trained female runners of different ages J Appl
Physiol 78 5 1931-1941 1995
FEDAK MA HEGLUND NC TAYLOR CR Energetics and mechanics of terrestrial
locomotion II Kinetic energy changes of the limbs and body as a function of speed
and body size in birds and mammals J Exp Biol 97 23-40 1982
FENN WO Work against gravity and work due to velocity changes in running Am J
Physiol 93 433-462 1930
FENN WO MARSH BS Muscular force at different speeds of shortening J Physiol
85 3 277-297 1935
FORMENTI F ARDIGO LP MINETTI AE Human locomotion on snow determinants
of economy and speed of skiing across the ages Proc Biol Sci 272 1572 1561shy
1569 2005
124
FORMENTI F MINETTI AE Human locomotion on ice the evolution of ice-skating
energetics through history J Exp Biol 210 Pt 10 1825-1833 2007
FRERIKS B HERMENS H DISSELHORST-KLUG C RAU G The
recommendations for sensor and sensor placement procedures for surface
electromyography In HERMENS H (editor) European recommendations for
surface electromyography Enschede Roessingh Research and Development
1991
FRONTERA WR SUH D KRIVICKAS LS HUGHES VA GOLDSTEIN R
ROUBENOFF R Skeletal muscle fiber quality in older men and women Am J
Physiol Cell Physiol 279 3 C611-618 2000
FUKUNAGA T KUBO K KAWAKAMI Y FUKASHIRO S KANEHISA H
MAGANARIS CN In vivo behaviour of human muscle tendon during walking Proc
Biol Sci 268 1464 229-233 2001
GARDNER-MORSE MG STOKES IA The effects of abdominal muscle coactivation
on lumbar spine stability Spine 23 1 86-91 discussion 91-82 1998
GEYER H SEYFARTH A BLICKHAN R Compliant leg behaviour explains basic
dynamics of walking and running Proc Biol Sci 273 1603 2861-2867 2006
GOTTSCHALL JS KRAM R Energy cost and muscular activity required for leg swing
during walking J Appl Physiol 99 1 23-30 2005
GOTTSCHALL JS KRAM R Mechanical energy fluctuations during hill walking the
effects of slope on inverted pendulum exchange J Exp Biol 209 Pt 24 4895-4900
2006
GRANATA KP MARRAS WS Cost-benefit of muscle cocontraction in protecting
against spinal instability Spine 25 11 1398-1404 2000
GRANATA KP ORISHIMO KF Response of trunk muscle coactivation to changes in
spinal stability J Biomech 34 9 1117-1123 2001
GRIFFIN TM ROBERTS TJ KRAM R Metabolic cost of generating muscular force
in human walking insights from load-carrying and speed experiments J Appl
Physiol 95 1 172-183 2003
HEGLUND NC Running a-fowl of the law Science 303 47-48 2004
125
HEGLUND NC CAVAGNA GA Mechanical work oxygen consumption and efficiency
in isolated frog and rat muscle Am J Physiol 253 1 Pt 1 C22-29 1987
HEGLUND NC CAVAGNA GA TAYLOR CR Energetics and mechanics of
terrestrial locomotion III Energy changes of the centre of mass as a function of
speed and body size in birds and mammals J Exp Biol 97 41-56 1982a
HEGLUND NC FEDAK MA TAYLOR CR CAVAGNA GA Energetics and
mechanics of terrestrial locomotion IV Total mechanical energy changes as a
function of speed and body size in birds and mammals J Exp Biol 97 57-66
1982b
HILL AV The heat of shortening and the dynamic constants of muscle Proceedings of
the Royal Society B 126 136-195 1938
HOYT DF TAYLOR CR Gait and the energetics of locomotion in horses Nature
292 239-240 1981
ISHIKAWA M KOMI PV GREY MJ LEPOLA V BRUGGEMANN GP Muscleshy
tendon interaction and elastic energy usage in human walking J Appl Physiol 99
2 603-608 2005
ISHIKAWA M PAKASLAHTI J KOMI PV Medial gastrocnemius muscle behavior
during human running and walking Gait Posture 25 3 380-384 2007
KARAMANIDIS K ARAMPATZIS A Mechanical and morphological properties of
different muscle-tendon units in the lower extremity and running mechanics effect of
aging and physical activity J Exp Biol 208 Pt 20 3907-3923 2005
KARAMANIDIS K ARAMPATZIS A BRUGGEMANN GP Symmetry and
reproducibility of kinematic parameters during various running techniques Med Sci
Sports Exerc 35 6 1009-1016 2003
KER RF BENNETT MB BIBBY SR KESTER RC ALEXANDER RM The
spring in the arch of the human foot Nature 325 7000 147-149 1987
KLASS M BAUDRY S DUCHATEAU J Aging does not affect voluntary activation of
the ankle dorsiflexors during isometric concentric and eccentric contractions J Appl
Physiol 99 1 31-38 2005
126
KNAFLITZ M BONATO P Time-frequency methods applied to muscle fatigue
assessment during dynamica contractions J Electromyogr Kinesiol 9 337-350
1999
KOMI PV Stretch-shortening cycle a powerful model to study normal and fatigued
muscle J Biomech 33 10 1197-1206 2000
KRAM R DOMINGO A FERRIS DP Effect of reduced gravity on the preferred walkshy
run transition speed J Exp Biol 200 Pt 4 821-826 1997
KRAM R TAYLOR CR Energetics of running a new perspective Nature 346 6281
265-267 1990
LAMOTH CJ MEIJER OG DAFFERTSHOFER A WUISMAN PI BEEK PJ
Effects of chronic low back pain on trunk coordination and back muscle activity during
walking changes in motor control Eur Spine J 15 1 23-40 2006
LAY AN HASS CJ RICHARD NICHOLS T GREGOR RJ The effects of sloped
surfaces on locomotion an electromyographic analysis J Biomech 40 6 1276shy
1285 2007
LOWE DA SUREK JT THOMAS DD THOMPSON LV Electron paramagnetic
resonance reveals age-related myosin structural changes in rat skeletal muscle
fibers Am J Physiol Cell Physiol 280 3 C540-547 2001
MALOIY GM HEGLUND NC PRAGER L CAVAGNA GA TAYLOR CR
Energetic cost of carrying loads have African women discovered an economic way
Nature 319 668-669 1986
MALVILLE NJ BYRNES WC ALLEN LIM B BASNYAT R Commercial porters of
eastern nepal health status physical work capacity and energy Expenditure Am J
Hum Biol 13 44-56 2001
MARGARIA R Sulla fisiologia e specialmente sul consumo energetico della marcia
e della corsa a varia velocitagrave ed inclinazione del terreno 1938
MARSH RL ELLERBY DJ CARR JA HENRY HT BUCHANAN CI Partitioning
the energetics of walking and running swinging the limbs is expensive Science
303 5654 80-83 2004
127
MCMAHON TA CHENG GC The mechanics of running how does stiffness couple
with speed J Biomech 23 Suppl 1 65-78 1990
MIAN OS THOM JM ARDIGO LP NARICI MV MINETTI AE Metabolic cost
mechanical work and efficiency during walking in young and older men Acta
Physiol (Oxf) 186 2 127-139 2006
MINETTI AE The biomechanics of skipping gaits a third locomotion paradigm Proc
Biol Sci 265 1402 1227-1235 1998a
MINETTI AE A model equation for the prediction of mechanical internal work of
terrestrial locomotion J Biomech 31 5 463-468 1998b
MINETTI AE ALEXANDER RM A theory of metabolic costs for bipedal gaits J Theor
Biol 186 4 467-476 1997
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of gradient walking
energetics in man J Physiol 472 725-735 1993
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of the minimum
energy cost of gradient running in humans J Exp Biol 195 211-225 1994
MINETTI AE ARDIGO LP SAIBENE F FERRERO S SARTORIO A Mechanical
and metabolic profile of locomotion in adults with childhood-onset GH deficiency Eur
J Endocrinol 142 1 35-41 2000
MINETTI AE FORMENTI F ARDIGO LP Himalayan porters specialization
metabolic power economy efficiency and skill Proc Biol Sci 273 1602 2791shy
2797 2006
MORSE CI THOM JM REEVES ND BIRCH KM NARICI MV In vivo
physiological cross-sectional area and specific force are reduced in the
gastrocnemius of elderly men J Appl Physiol 99 3 1050-1055 2005
NILSSON J THORSTENSSON A Ground reaction forces at different speeds of human
walking and running Acta Physiol Scand 136 2 217-227 1989
NYMARK JR BALMER SJ MELIS EH LEMAIRE ED MILLAR S
Electromyographic and kinematic nondisabled gait differences at extremely slow
overground and treadmill walking speeds J Rehabil Res Dev 42 4 523-534 2005
128
OCHALA J DORER DJ FRONTERA WR KRIVICKAS LS Single skeletal muscle
fiber behavior after a quick stretch in young and older men a possible explanation of
the relative preservation of eccentric force in old age Pflugers Arch 452 4 464shy
470 2006
ONAMBELE GL NARICI MV MAGANARIS CN Calf muscle-tendon properties and
postural balance in old age J Appl Physiol 100 6 2048-2056 2006
PHILLIPS SK BRUCE SA WOLEDGE RC In mice the muscle weakness due to
age is absent during stretching J Physiol 437 63-70 1991
PORTER MM VANDERVOORT AA KRAMER JF Eccentric peak torque of the
plantar and dorsiflexors is maintained in older women J Gerontol A Biol Sci Med
Sci 52 2 B125-131 1997
POUSSON M LEPERS R VAN HOECKE J Changes in isokinetic torque and
muscular activity of elbow flexors muscles with age Exp Gerontol 36 10 1687shy
1698 2001
PRILUTSKY BI GREGOR RJ Swing- and support-related muscle actions
differentially trigger human walk-run and run-walk transitions J Exp Biol 204 Pt 13
2277-2287 2001
ROBERTS TJ KRAM R WEYAND PG TAYLOR CR Energetics of bipedal
running I Metabolic cost of generating force J Exp Biol 201 Pt 19 2745-2751
1998
ROBERTS TJ MARSH RL WEYAND PG TAYLOR CR Muscular force in
running turkeys the economy of minimizing work Science 275 5303 1113-1115
1997
SAIBENE F MINETTI AE Biomechanical and physiological aspects of legged
locomotion in humans Eur J Appl Physiol 88 4-5 297-316 2003
SCHEPENS B WILLEMS PA CAVAGNA GA The mechanics of running in children
J Physiol 509 ( Pt 3) 927-940 1998
SCHEPENS B WILLEMS PA CAVAGNA GA HEGLUND NC Mechanical power
and efficiency in running children Pflugers Arch 442 1 107-116 2001
129
TAYLOR CR Force development during sustained locomotion a determinant of gait
speed and metabolic power J Exp Biol 115 253-262 1985
TAYLOR CR HEGLUND NC MALOIY GM Energetics and mechanics of terrestrial
locomotion I Metabolic energy consumption as a function of speed and body size in
birds and mammals J Exp Biol 97 1-21 1982
TRAPPE S GALLAGHER P HARBER M CARRITHERS J FLUCKEY J
TRAPPE T Single muscle fibre contractile properties in young and old men and
women J Physiol 552 Pt 1 47-58 2003
VALOUR D POUSSON M Compliance changes of the series elastic component of
elbow flexor muscles with age in humans Pflugers Arch 445 6 721-727 2003
VANDERVOORT AA KRAMER JF WHARRAM ER Eccentric knee strength of
elderly females J Gerontol 45 4 B125-128 1990
WHITE SG MCNAIR PJ Abdominal and erector spinae muscle activity during gait
the use of cluster analysis to identify patterns of activity Clin Biomech (Bristol
Avon) 17 3 177-184 2002
WILLEMS PA CAVAGNA GA HEGLUND NC External internal and total work in
human locomotion J Exp Biol 198 Pt 2 379-393 1995
WINTER D Biomechanics and motor control of human movement 3rd Waterloo
John Wiley amp Sons 2005
WINTERS JM WOO S Multiple muscle systems Springer-Verlag 1990
WOLEDGE RC CURTIN N HOMSHER E Energetic aspects of muscle
contraction Londres Academic Press 1985
WRIGHT S WEYAND PG The application of ground force explains the energetic cost
of running backward and forward J Exp Biol 204 Pt 10 1805-1815 2001
YAMAGUCHI G SAWA A MORAN D RESSLER M WINTERS JM A survey of
human musculotendon actuator parameters J M Winters 1991
130
Apecircndices
A- Programa de anaacutelise EMG da caminhada LocoEmg
Uma seacuterie de algoritmos (figuras A1 A2 e A3) foram desenvolvidos em
ambiente Labview versatildeo 71 a fim de analisar o sinal bruto de EMG Para tanto
informaccedilotildees advindas de sensores de pressatildeo foram calculadas de forma a
possibilitar as seguintes anaacutelises
Figura A1 Janela principal do programa LocoEmgVI
131
Este programa foi utilizado no capiacutetulo 2 no experimento do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees e no experimento do custo EMG
da locomoccedilatildeo de montanhistas Caucasianos e carregadores Nepaleses no Himalaia
Nepal Atraveacutes do uso dos sensores de pressatildeo foi possiacutevel calcular o tempo de
passada o tempo de vocirco o tempo de apoio e o tempo de apoio duplo para utilizar
no desenvolvimento das abordagens experimental e teoacuterica do custo EMG da
locomoccedilatildeo humana
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI
Os dados de input do programa foram inseridos na janela principal (figura
A1) onde no final da anaacutelise satildeo apresentados os resultados de atividade EMG
meacutedia e desvio padratildeo em funccedilatildeo do percentual do ciclo de passadaO bloco de
diagrama apresentado na figura A2 mostra a estrutura geral do programa com seus
algoritmos localizados nas subrotinas (quadrados verdes)
As principais subrotinas ou algoritmos de primeiro niacutevel satildeo i) Abre e organiza
arquivo ii) Filtra sinal EMG iii) Calcula Variaacuteveis Espaccedilo-Temporais iv) Divide
Ciclos e Interpola Sinal EMG v) Integra Sinal EMG vi) Salva Resultados vi) Imprime
Resultados Gerais
132
Na subrotina Salva resultados arrays eram transformados em arquivos no
formato txt para posterior anaacutelise estatiacutestica Os arquivos eram variaacuteveis espaccedilo-
temporais valores meacutedios interpolados para fase de apoio e balanccedilo valores Emg
meacutedios e desvio-padratildeo interpolados por ciclo de passada e somatoacuterio das integrais
Emg brutos e convertidos por Equivalentes Metaboacutelicos de Ativaccedilatildeo Emg
A janela de impressatildeo eacute apresentada na figura A3
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados
Nesta janela os dados EMGrsquos por muacutesculo satildeo apresentados atraveacutes de seus
valores valores meacutedios e dprsquos em funccedilatildeo do percentual do ciclo de passada
Informaccedilotildees da Vf nome do arquivo inclinaccedilatildeo do terreno e nuacutemero de ciclos
analisados tambeacutem satildeo apresentados Arquivos de imagem destas janelas foram
elaborados e armazenados para posterior verificaccedilatildeo dos dados
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada)
133
PEYREacute-TARTARUGA LA TARTARUGA MP COERTJENS M KRUEL LFM
Influence of Allometry scale on relationship between running economy and
kinematical parameters Biology of Sport (aceito) 2008
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
OLIVEIRA AR KRUEL LFM Physiologic and biomechanical effects ofwater run
training on running performance European Journal of Applied Physiology
(submetido) 2008
CORREA TC PEYREacute-TARTARUGA LA FURLAN E RIBAS R LOSS JF
Mathematical model of energy cost in sprint running Proceedings of XXV
International Symposium on Biomechanics in Sports ISBS (CD) 2007
PEYREacute-TARTARUGA LA COERTJENS M TARTARUGA MP DE MEDEIROS
MH KRUEL LFM Influence of the allometric scale on the relationship between
running economy and biomechanical variables in runners Medicine and Science in
Sports and Exercise 39 (Supplement) S208-S209 2007
PEYREacute-TARTARUGA LA DE MEDEIROS MH COERTJENS M TARTARUGA
MP KRUEL LFM The relation between running economy and kinematical
variables influence of body mass in competitive runners Journal of Biomechanics
39 (Supplement 1) S631 2006
ILHA J ARAUJO RT MALYSZ T PEYREacute-TARTARUGA LA ACHAVAL M
Effects of endurance and resistance exercise training on locomotion of rats after
sciatic nerve crush Physiological Mini Reviews 2 (4) 109 2006
ILHA J PEYREacute-TARTARUGA LA ARAUJO RT METZEN F MALYSZ T
CANTO F ACHAVAL ELENA M LOSS JF Locomotor behaviour assessment in
the rat by kinematic analysis Journal of Biomechanics 39 (Supplement 1) S507
2006
SCHIEHLL PE PEYREacute-TARTARUGA LA ZINGANO GM LOSS JF
Estimation of the quantification of the elastics loads on the jump fit circuit Journal of
134
Biomechanics 39 (Supplement 1) S555 2006
MARTINEZ FG PEYREacute-TARTARUGA LA HERMEL EES XAVIER LL
RASIA-FILHO AA ACHAVAL M Intermediate filament expression in the medial
5thamygdala subnuclei during postnatal development of male and female rats
Forum of the Federation of European Neuroscience Societes Viena FENS 3
A1556 2006
FRAGA CHW BLOEDOW LS CARPES F PEYREacute-TARTARUGA LA
TARTARUGA MP FOLLMER B GUIMARAtildeES ACS Methodologic proposal to
verify the influence of cycling on running kinematic aspects in Triathlon Revista
Motriz 12 (2) 159-164 2006
PEYREacute-TARTARUGA LA KRUEL LFM Deep water running limits and
possibilities to elite runners Brazilian Journal of Sports Medicine 12 (5)286-290
2006
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
RIBAS LR KRUEL LFM Comparison of the subtalar joint angle during
submaximal running speeds Acta Ortopeacutedica Brasileira 13 (2) 57-60 2005
C- Textos completos referentes agrave tese
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA Old men
running mechanical work and elastic bounce Proceedings of the Royal Society B
275 (1633) 411-418 2008 101098rspb20071288
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA The landingshy
takeoff asymmetry is enhanced in old age Journal of Experimental Biology
(aceito com modificaccedilotildees) 2008
MINETTI AE PEYREacute-TARTARUGA LA ARDIGOgrave LP FORMENTI F SUSTA
135
D Energetical and electromyographical cost of locomotion in Nepalese Porters on
Himalaya Anais do XII Congresso Brasileiro de Biomecacircnica 88-94 2007
D- Paracircmetros musculares
Os paracircmetros musculares utilizados no estudo Custo EMG da caminhada
humana foram adquiridos de YAMAGUCHI et al (1991) e satildeo apresentados em
detalhes nas duas figura seguintes (figuras D1 e D2)
Figura D1 Paracircmetros musculares utilizados Fonte YAMAGUCHI et al 1991
136

8
233 Custo EMG 47
24 Discussatildeo 49
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular 49
242 Sobre o meacutetodo 51
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia 52
251 Materiais e meacutetodos 53
252 Resultados 56
253 Discussatildeo 57
3 MECAcircNICA DA CORRIDA DE IDOSOS 60
31 Introduccedilatildeo 60
32 Materiais e Meacutetodos 61
321 Amostra e procedimento experimental 61
322 Dos registros da plataforma ao trabalho externo 63
323 Estimativa do trabalho interno 66
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato 66
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio 67
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente 68
327 Transduccedilatildeo EpEk durante o passo 68
328 Rigidez vertical (k) 70
329 Estatiacutestica 71
33 Resultados 71
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM 72
332 Trabalho 74
333 Assimetria contato-despregue 75
34 Discussatildeo 76
341 Sobre o meacutetodo 76
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical 80
343 A assimetria contato-despregue 90
9
4 PREDIZENDO VF CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO
TERRESTRE 101
41 Introduccedilatildeo 101
42 Equaccedilatildeo do tempo de atraso 102
43 Estimativa da velocidade horizontal 104
44 Equaccedilatildeo de custo energeacutetico 106
45 Discussatildeo 107
5 CONCLUSAtildeO GERAL 111
51 O custo EMG da caminhada humana 111
52 A mecacircnica da corrida de idosos 111
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre 112
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico 112
541 Respondendo algumas criacuteticas atuais 116
55 Propostas para futuros estudos 118
551 Custo EMG da caminhada humana 118
552 Mecacircnica da corrida dos idosos 118
553 Modelo matemaacutetico da locomoccedilatildeo terrestre 119
6 REFEREcircNCIAS 120
APEcircNDICES 130
A- Programa de anaacutelise EMG da caminhada LocoEmg 130
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada) 132
C- Textos completos referentes agrave tese 134
D- Paracircmetros musculares 135
10
Lista de Figuras
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-invertido para a
caminhada e massa-mola para a corrida (Fonte SAIBENE e MINETTI 2003
modificado no presente estudo) 29
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset 38
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda
metade da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo
isomeacutetrica Setas verticais apontando para baixo indicam momento de contato
e de despregue 39
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de
passada com o tempo de passada normalizado em percentual do ciclo O 0shy
100 representa o momento de contato com o solo As cores indicam a
velocidade de caminhada (de 2 agrave 7 kmh-1) Cada muacutesculo eacute representado
nas linhas e em cada coluna eacute apresentada a atividade EMG por inclinaccedilatildeo 46
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal + carga)
11
dos carregadores Nepaleses (NEP) e montanhistas Caucasianos (CAU) em
subida (up) e descida (down) 57
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da PMV (positiva ou
negativa) pela potecircncia metaboacutelica respectiva (MINETTI et al 2006) As
linhas satildeo as razotildees entre eficiecircncia muscular positiva e negativa
(WOLEDGE et al 1985) 58
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado 69
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da caminhada
(pecircndulo-invertido) e de segmento complacente da corrida (massa-mola) e
seus principais constituintes Note que o tracejado indica a trajetoacuteria do corpo
de massa m durante o contato g eacute a aceleraccedilatildeo gravitacional k eacute a rigidez da
mola ll0 eacute o comprimento do membro inferior e a0 eacute o acircngulo da perna de
apoio no momento do contato com o solo 77
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um passo
em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis a
direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup
+ Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo
(tae) da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na
direccedilatildeo vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os
ciacuterculos em vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2)
e a frente (Lce) A linha em vermelho pontilhada em cada painel indica o
tempo de contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente
(Lc) durante o passo As linhas azuis pontilhadas em cada painel indicam o
tempo aeacutereo total (ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La)
durante o passo As barras verticais indicam o desvio-padratildeo da meacutedia os
12
nuacutemeros proacuteximos aos siacutembolos nos paineacuteis superiores indicam o nuacutemero de
itens nas meacutedias 85
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e
velocidade vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown
(paineacuteis inferiores) atingidos pelo CM durante o passo em funccedilatildeo da
velocidade de corrida Estatiacutestica e outras indicaccedilotildees conforme a figura 33 89
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e
frequumlecircncia do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute
maior nos idosos nas altas velocidades (paineacuteis superiores) a rigidez vertical
normalizada pela massa eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras
indicaccedilotildees conforme figura 33 91
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com
seus 94
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As
fraccedilotildees do deslocamento vertical do CM durante contato ScSv (ciacuterculos
preenchidos deslocamento descendente ciacuterculos abertos deslocamento
ascendente) e quando a Fv eacute maior do que o PC SceSv (quadrados
preenchidos deslocamento 95
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito
idoso paineacuteis a direita sujeito jovem em cada painel o comportamento da
transduccedilatildeo Ep-Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas
na energia potencial gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf
normalizada para oscilar entre zero e um Mesmos passos da figura 1 cada
painel comeccedila e termina no valor menor da curva Ep As cores diferentes na
curva Ep distinguem as fraccedilotildees do passo onde a Fv exercida no solo eacute maior
do que o PC (vermelho) e menor do que o PC (azul) As linhas contiacutenuas de
Ep indicam a fase de contato enquanto que as linhas pontilhadas Ep (azul
fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As quatro fases
correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
13
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown
(azul) e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas
pontilhadas verticais satildeo apresentadas nos dois picos de Ek e ocupam a
fraccedilatildeo onde a transduccedilatildeo Ep-Ek ocorre conforme indicado pelos incrementos
da curva Rint(t) 98
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos painel
inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura
31) e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e
barras azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de
corrida Estatiacutestica conforme figura 33 99
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de
reaccedilatildeo do solo durante a corrida 103
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de
progressatildeo 108
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de
progressatildeo Fonte Minetti 1998b 109
Figura 51 Modelo conceitual da locomoccedilatildeo humana 113
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido
de elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006117
Figura A1 Janela principal do programa LocoEmgVI 130
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI 131
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados 132
14
Resumo
Dois modelos mecacircnicos o pecircndulo-invertido e o massa-mola explicam como
os mecanismos pendular e elaacutestico minimizam o dispecircndio energeacutetico advindo dos
muacutesculos durante caminhada e corrida humana A presente tese testa dois efeitos
que para nosso conhecimento todavia natildeo possuem respostas conclusivas da
literatura nomeadamente o processo de envelhecimento na mecacircnica da corrida
humana e o efeito da inclinaccedilatildeo do terreno na velocidade oacutetima da caminhada Para
estudar o primeiro efeito as forccedilas de reaccedilatildeo do solo provenientes de uma
plataforma de forccedila (4m x 050m) foram usadas para a posterior comparaccedilatildeo de i)
trabalho mecacircnico ii) paracircmetros do sistema massa-mola e iii) assimetrias contato-
despregue entre jovens e idosos Os idosos produzem menos forccedila durante a fase
de trabalho mecacircnico positivo com uma menor oscilaccedilatildeo vertical total e oscilaccedilatildeo
durante a fase aeacuterea Consequumlentemente a capacidade de armazenar e re-utilizar
energia elaacutestica dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio
energeacutetico neste grupo quando comparado com jovens Para o modelo do custo
eletromiograacutefico (EMG) da caminhada humana criou-se duas abordagens
experimental e teoacuterica Em ambas as abordagens informaccedilotildees da atividade EMG de
dezesseis muacutesculos sendo 8 posturais e 8 propulsores foram coletadas e
analisadas a partir da integral EMG A abordagem teoacuterica parece ter uma melhor
relaccedilatildeo com as evidecircncias experimentais sobre a energeacutetica da caminhada humana
em inclinaccedilotildees Os principais mecanismos envolvidos na nova hipoacutetese satildeo i)
muacutesculos posturais que natildeo realizam trabalho muscular exercem uma funccedilatildeo
importante na determinaccedilatildeo do dispecircndio energeacutetico total e ii) a presente hipoacutetese
leva em consideraccedilatildeo a co-contraccedilatildeo de muacutesculos antagonistas no dispecircndio
15
energeacutetico total Mais experimentos satildeo necessaacuterios para confirmar o modelo
apresentado neste estudo Aleacutem disso atraveacutes de estrateacutegias de otimizaccedilatildeo e
prediccedilatildeo linear um modelo teoacuterico foi delineado a fim de determinar paracircmetros
mecacircnicos (comprimento de passada e velocidade de progressatildeo) e energeacuteticos da
locomoccedilatildeo terrestre em situaccedilotildees onde as informaccedilotildees disponiacuteveis satildeo apenas a
massa e uma curva forccedila de reaccedilatildeo vertical versus tempo Os resultados advindos
do modelamento correspondem aos paracircmetros determinados experimentalmente
Laboratoacuterios que detenham apenas uma plataforma de forccedila ou nas aacutereas onde as
informaccedilotildees de entrada do atual modelo sejam as uacutenicas informaccedilotildees (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis primaacuterias da
locomoccedilatildeo podem ser preditas com razoaacutevel acuraacutecia
Palavras-chave custo eletromiograacutefico da caminhada mecacircnica da corrida de
idosos modelo teoacuterico da locomoccedilatildeo terrestre mecanismos minimizadores de
energia locomoccedilatildeo humana
16
Abstract
Two mechanical models the inverted pendulum and spring-mass explain how
do the pendular and elastic mechanisms minimizing energy expenditure from
muscles during human walking and running Here we test two effects that to our
knowledge do not have yet conclusive responses from literature specifically the
ageing effects on mechanics of human running and the effect of gradient on walking
optimal speed In order to check the former effect the ground reaction forces came
from a force platform (4m x 05m) were used for a later comparison i) mechanical
work ii) spring-mass parameters and iii) landing-takeoff asymmetries The old
subjects produce less force during positive work resulting in a smaller overall and
aerial vertical oscillation of the centre of mass Consequently the potential for restore
elastic energy from tendons is reduced contributing to greater energy expenditure
than in young subjects In relation to Electromyographical (EMG) Cost of human
walking we created two approaches experimental and theoretical In both
approaches information from EMG activity of sixteen muscles eight postural and
eight propulsor were collected and analysed The theoretical approach seems to fit
better with the energy expenditure during gradient walking The main mechanisms
involved in this new hypothesis are i) postural muscles that do not perform muscular
work play an important role in the total energy expenditure and ii) the present
hypothesis take the co-contraction into account of the antagonist muscles in the total
energy expenditure Further experiments are necessary to confirm this hypothesis
Besides using optimization and linear prediction procedures a theoretical model was
designed to estimate mechanical parameters (stride length and velocity of
progression) and energetic variables of terrestrial locomotion when available
information consists only of mass and one vertical ground reaction force versus time
17
The results from this modelling are similar to experimentally obtained data
Laboratories with just one force platform or in areas where the present modelrsquos input
information be the unique accessible data (eg palaeontology forensic
biomechanics etc) the prime variables of locomotion may be estimated with
reasonable accuracy
Keywords electromyographical cost of walking running mechanics in the
elderly theoretical model of terrestrial locomotion mechanisms for minimizing
expenditure energy human locomotion
18
Definiccedilatildeo de Termos
Contraccedilatildeo concecircntrica contraccedilatildeo muscular realizada durante encurtamento
do muacutesculo
Contraccedilatildeo excecircntrica contraccedilatildeo muscular realizada durante alongamento
do muacutesculo
Custo energeacutetico o dispecircndio advindo dos muacutesculos em funccedilatildeo da distacircncia
percorrida normalizado pela massa corporal A unidade eacute em Jkg-1m -1
Eficiecircncia mecacircnica a potecircncia mecacircnica gerada dividida pela potecircncia
metaboacutelica despendida durante uma passada
Passada um periacuteodo que compreende desde o momento do contato de um
peacute com o solo e finaliza no subsequumlente momento de contato do mesmo peacute
Passo um periacuteodo que compreende desde o momento do contato de um peacute
com o solo e finaliza no subsequumlente momento de contato do peacute contra-
lateral
Potecircncia mecacircnica externa o somatoacuterio dos incrementos positivos de
energia mecacircnica externa durante uma passada dividido pelo tempo da
passada
Recovery ndash R percentual de transferecircncia entre energia cineacutetica e potencial
gravitacional durante um ciclo de passada
Tempo aeacutereo efetivo duraccedilatildeo no qual a forca vertical eacute menor do que a
forccedila peso durante um passo
Tempo de contato efetivo duraccedilatildeo no qual a forccedila vertical eacute maior do que a
forccedila peso durante um passo
Trabalho mecacircnico externo O trabalho realizado para elevar e acelerar o
CM em relaccedilatildeo ao ambiente externo No presente estudo foi desconsiderado
19
o trabalho mecacircnico externo advindo de aceleraccedilotildees horizontais meacutedio-
laterais
Trabalho mecacircnico interno O trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM
Trabalho mecacircnico total O somatoacuterio dos moacutedulos do trabalho mecacircnico
externo e interno No presente estudo o trabalho interno foi considerado
aceitando transferecircncia de energia mecacircnica entre segmentos de mesmos
membros
20
Lista de Siacutembolos e Abreviaturas
l0 comprimento do membro inferior
μV microvolts
0 acircngulo da perna de apoio com o solo no momento
do contato
Fvc Fv meacutedia durante a fase de contato do peacute com o
solo
Ah variaccedilatildeo de altura
AhorPosition idem ao CPexp
At tempo de locomoccedilatildeo
Atime tempo de passada
Ltphoto tempo entre as passagens pelas fotoceacutelulas
2D duas dimensotildees
av aceleraccedilatildeo vertical do CM
avae aceleraccedilatildeo vertical do CM durante fase aeacuterea
efetiva
avce aceleraccedilatildeo vertical do CM durante contato efetivo
avmx aceleraccedilatildeo vertical maacutexima do CM
c constante de custo
CAU Caucasianos
CM centro de massa
cos cosseno
CP comprimento de passada
21
CPexp comprimento de passada determinada
experimentalmente
Ctot Custo energeacutetico da locomoccedilatildeo
dB decibeacuteis
DF duty factor (fraccedilatildeo da passada na qual um peacute toca
o solo)
DFregression valores de Vf preditos por regressatildeo linear
advindos de DF
dp desvio-padratildeo
dt periacuteodo de um quadro
Ecm energia mecacircnica do CM
Ek energia cineacutetica
Ekf energia cineacutetica horizontal
Ekfmn energia cineacutetica horizontal miacutenima
Ekmxdown energia cineacutetica vertical maacutexima durante
deslocamento descendente do CM
Ekmxup energia cineacutetica vertical maacutexima durante
deslocamento ascendente do CM
Ekv energia cineacutetica vertical
Emetabolic potecircncia metaboacutelica
EMG eletromiografia ou eletromiograacutefico
EmgCosttheor custo EMG teoacuterico
EmgCostexp custo EMG teoacuterico
EMGiso atividade EMG durante contraccedilatildeo isomeacutetrica
EMGneg atividade EMG durante trabalho negativo
EMGpos atividade EMG durante trabalho positivo
cmuscular energia metaboacutelica advinda do muacutesculo-esqueleacutetico
cmetaboacutelica energia metaboacutelica total durante locomoccedilatildeo
crepouso energia metaboacutelica durante posiccedilatildeo em peacute
celaacutestica energia recuperada por via elaacutestica
cpendular energia recuperada por via pendular
creconvertida energia total recuperada
Ep energia potencial gravitacional do CM
22
Epmn energia potencial gravitacional miacutenima do CM
total energia total necessaacuteria para realizar a locomoccedilatildeo
f frequumlecircncia de passo
Ff componente antero-posterior da forccedila de reaccedilatildeo do
solo
FinalhorPosition posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo de passada
FP frequumlecircncia de passada
FPexp frequumlecircncia de passada determinada
experimentalmente
FPregression valores de Vf preditos por regressatildeo linear a partir
de dados de FP
FPtheor frequumlecircncia de passada obtida indiretamente
Fr nuacutemero de froude
fs frequumlecircncia do sistema massa-mola
fsample frequumlecircncia de amostragem
Fv componente vertical da forccedila de reaccedilatildeo do solo
Fvmx Fv maacutexima
Fvmxyoung Fv maacutexima nos jovens
Fvmxold Fv maacutexima nos idosos
Fvscale PC mensurado com uma balanccedila
Fvpeak pico de impacto vertical
Fvplate forccedila vertical media durante um ciclo de passada
g aceleraccedilatildeo gravitacional
GPS sistema de posicionamento global
h hora
Hz Hertz
Iv impulso vertical
InitialhorPosition posiccedilatildeo horizontal do quadril no quadro que inicia o
ciclo de passada
Iemg integral EMG
Iemgcon integral EMG durante contraccedilatildeo concecircntrica
Iemgexc integral EMG durante contraccedilatildeo excecircntrica
J Joules
23
k rigidez vertical
kg quilograma
km quilometro
L comprimento do passo
Lae deslocamento horizontal do CM durante fase aeacuterea
efetiva
Lce deslocamento horizontal do CM durante contato
efetivo
M massa corporal
m metros
Mass massa dos muacutesculos analisados
ms milisegundos
mtot massa total (massa total somada agrave carga externa)
mV milivolts
N Newtons
NEP Nepaleses
nframes nuacutemero de quadros que totalizam um ciclo de
passada
nf nuacutemero de quadros
norm normalizado
O2 oxigecircnio
p iacutendice de significacircncia estatiacutestico
PC peso corporal
PMV potecircncia mecacircnica vertical
q fator de forma da curva de Fv em funccedilatildeo do tempo
qmean meacutedia dos valores qrsquos durante o tc
qregression valores de Vf predito por regressatildeo linear a partir
de dados de q
R Recovery percentual de reconversatildeo entre energia
cineacutetica e potencial gravitacional
R coeficiente de correlaccedilatildeo
r transduccedilatildeo entre energia cineacutetica e potencial
gravitacional
24
Rint transduccedilatildeo acumulada entre energia cineacutetica e
potencial gravitacional durante um passo
Rintdown transduccedilatildeo acumulada durante deslocamento
descendente do CM
Rintup transduccedilatildeo acumulada durante deslocamento
ascendente do CM
rms raiz quadrada da meacutedia dos quadrados
s segundos
Sae deslocamento vertical do CM durante fase aeacuterea
efetiva
Saedown deslocamento descendente do CM durante Sae
Saeup deslocamento ascendente do CM durante Sae
Sc deslocamento do CM durante a fase de contato
Sce deslocamento vertical do CM durante contato
efetivo
Scdown deslocamento descendente do CM durante Sc
Scup deslocamento ascendente do CM durante Sc
Scedown deslocamento descendente do CM durante Sce
Sceup deslocamento ascendente do CM durante Sce
SEE erro meacutedio da estimativa
sin seno
Skinf dobra cutacircnea
Sv deslocamento do CM durante um passo
Svdown deslocamento descendente do CM durante Sv
Svup deslocamento ascendente do CM durante Sv
T tempo de um passo
t tempo
ta tempo em que a acontece durante W+
t tempo em que acontece durante W-
ta periacuteodo do passo no qual o peacute natildeo estaacute em contato
com o solo
tae periacuteodo do passo no qual a Fv eacute maior do que o PC
peso corporal
25
taedown periacuteodo do deslocamento descendente do CM
durante tae
taeup periacuteodo do deslocamento ascendente do CM
durante tae
tbrake tempo de Wshy
tc periacuteodo do passo no qual um peacute estaacute em contato
com o solo
tce periacuteodo do passo no qual a Fv eacute menor do que o
PC
tcedown periacuteodo do deslocamento descendente do CM
durante tce
tceup periacuteodo do deslocamento ascendente do CM
durante tce
tpush tempo de W+
tstep tempo do passo
Vf velocidade de progressatildeo
V f velocidade meacutedia de progressatildeo
Vfexp velocidade de progressatildeo determinada
experimentalmente
VO2iso consumo de O2 durante contraccedilatildeo isomeacutetrica
VO2neg consumo de O2 durante trabalho mecacircnico
negativo
VO2pos consumo de O2 durante trabalho mecacircnico positivo
Vv velocidade vertical do CM
Vvmx velocidade vertical maacutexima do CM
Vvmxdown velocidade vertical maacutexima durante deslocamento
descendente do CM
Vvmxup velocidade vertical maacutexima durante deslocamento
ascendente do CM
Wshy trabalho mecacircnico negativo
W Watts
W+ trabalho mecacircnico positivo
Wext trabalho mecacircnico externo
Wextf trabalho mecacircnico externo horizontal
26
Wextf+ trabalho mecacircnico externo horizontal positivo
Wextv trabalho mecacircnico externo vertical
Wint trabalho mecacircnico interno
Wtot trabalho mecacircnico total
a fase durante W+ em que Ek e Ep do CM aumentam
concomitantemente
fase durante W- em que Ek e Ep do CM diminuem
concomitantemente
27
INTRODUCcedilAtildeO GERAL
11 Locomoccedilatildeo humana
A teoria da evoluccedilatildeo Darwinista conhecida como Teoria da Seleccedilatildeo Natural
nos indica entre outros pressupostos que a multiplicidade de espeacutecies que habitam
a face da terra eacute produto de um sistema altamente complexo e competitivo de
sobrevivecircncia sistema este que reflete fatores preditores da aptidatildeo definidos como
geneacuteticos e do meio ambiente As capacidades de reproduccedilatildeo de alimentaccedilatildeo e de
locomoccedilatildeo satildeo moduladas por aspectos do genoacutetipo influenciados pelos fatores
ambientais O conceito de aptidatildeo relacionada agrave locomoccedilatildeo desde um ponto de
vista bioloacutegico pode ser abordado analiticamente atraveacutes de seus componentes
principais Estes satildeo velocidade aceleraccedilatildeo maneabilidade resistecircncia economia
e estabilidade (ALEXANDER 2003)
A locomoccedilatildeo tem importacircncia fundamental para a sobrevivecircncia pois
possibilita entre outros fatores a procura por alimentos a busca por um local com
melhor clima caccedilar uma presa ou fugir de um perigo eminente (SAIBENE e
MINETTI 2003) Nos mamiacuteferos terrestres a locomoccedilatildeo acontece atraveacutes do uso
das pernas Este tipo de locomoccedilatildeo tem nos humanos por exemplo alguns
aspectos de ineficiecircncia quando comparada com outros animais (peixes e paacutessaros)
A ineficiecircncia da locomoccedilatildeo de biacutepedes eacute baseada no fato de que os segmentos
inferiores encostam repetidamente no solo para absorver e transferir energia
(trabalho negativo e positivo respectivamente) com o meio ambiente de modo que
os segmentos sofrem uma colisatildeo no momento de contato com o solo
caracterizando situaccedilotildees de grandes aceleraccedilotildees Para manter a velocidade meacutedia
de locomoccedilatildeo torna-se necessaacuterio uma re aceleraccedilatildeo do centro de massa (CM)
28
Energia quiacutemica eacute despendida para manter os muacutesculos ativos durante estas
diferentes fases A fim de atenuar este dispecircndio dois mecanismos baacutesicos satildeo
usados pelo sistema locomotor na corrida e na caminhada o mecanismo do pecircndulo
na caminhada e o mecanismo da massa-mola para a corrida (CAVAGNA e
KANEKO 1977 ver figura 11) Na caminhada a energia potencial eacute alta quando o
CM estaacute sobre o ponto de contato do corpo com o solo mas a partir deste momento
a energia potencial gravitacional comeccedila a diminuir e a energia cineacutetica horizontal
obteacutem um acreacutescimo gradativo Quando o ponto de contato volta a estar na frente do
CM a energia cineacutetica diminui e potencial aumenta
Estes comportamentos entre energia cineacutetica horizontal e potencial
gravitacional acontecem em oposiccedilatildeo de fase (CAVAGNA et al 1963) e portanto
com um processo de reconversatildeo entre energia cineacutetica e potencial gravitacional
(recovery ndash R) Por outro lado na corrida os acreacutescimos de energia potencial e
cineacutetica acontecem concomitantemente portanto o mecanismo de conservaccedilatildeo de
energia citado anteriormente natildeo se aplica neste tipo de locomoccedilatildeo Eacute postulado
que durante a primeira metade da fase de apoio da corrida principalmente
muacutesculos e tendotildees alongam armazenando energia elaacutestica enquanto que os
moacutedulos de energia cineacutetica horizontal e potencial gravitacional diminuem Esta
energia elaacutestica armazenada como uma mola comprimida por uma massa eacute
transformada em energia cineacutetica horizontal e potencial gravitacional de modo
gradativo durante a segunda metade da fase de apoio (CAVAGNA et al 1964
KOMI 2000 figura 11) Evidecircncias de energia elaacutestica armazenada e reconvertida
tambeacutem foram encontradas em cangurus (ALEXANDER e VERNON 1975) e em
cavalos (BIEWENER 1998) Os ligamentos do arco do peacute tambeacutem respondem pelo
comportamento elaacutestico do sistema locomotor na corrida (KER et al 1987)
Enquanto que a medida de trabalho externo possui uma correspondecircncia com
o trabalho mecacircnico realizado pelos muacutesculos na caminhada os valores obtidos
para a corrida superestimam o trabalho muscular realizado devido agrave dificuldade de
quantificar a energia elaacutestica durante o movimento (SAIBENE e MINETTI 2003) De
fato parte consideraacutevel do aumento e diminuiccedilatildeo da energia mecacircnica total na
corrida natildeo eacute causada pelas contraccedilotildees (excecircntricas e concecircntricas) musculares
mas pelo alongamento e encurtamento das estruturas elaacutesticas da unidade muacutesculo-
tendatildeo mais especificamente os tendotildees e estruturas elaacutesticas do muacutesculo
Portanto na corrida a adiccedilatildeo do trabalho interno e a transferecircncia entre segmentos
29
dos mesmos membros (inferiores e superiores) permitem uma estimativa mais
proacutexima do trabalho mecacircnico total (WILLEMS et al 1995)
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-
invertido para a caminhada e massa-mola para a corrida (Fonte
SAIBENE e MINETTI 2003 modificado no presente estudo)
As determinantes mecacircnicas da locomoccedilatildeo humana e animal tem sido
extensivamente estudadas em diferentes situaccedilotildees velocidade (CAVAGNA et al
1963 1964) gravidade (KRAM et al 1997 CAVAGNA et al 2000 1998
CAVAGNA et al 2005) planos inclinados (MINETTI et al 1993 1994)
O trabalho mecacircnico durante a locomoccedilatildeo em inclinaccedilotildees tem sido estudado
na caminhada (MINETTI et al 1993) e na corrida (MINETTI et al 1994)
encontrando valores de maior eficiecircncia mecacircnica entre 10 e 15 de inclinaccedilatildeo
negativa (declive) Todavia o modelo do pecircndulo invertido natildeo se sustenta para
situaccedilotildees de inclinaccedilotildees extremas Deste modo a reconversatildeo de energia parece
natildeo atuar na determinaccedilatildeo da velocidade oacutetima de caminhada nestas situaccedilotildees
Uma nova hipoacutetese eacute que os muacutesculos posturais do quadril possam contribuir para
gerar o alto custo de transporte em velocidades baixas de caminhada em inclinaccedilotildees
diferentes da inclinaccedilatildeo oacutetima (-10 onde haacute o menor custo metaboacutelico e
mecacircnico)
Esta hipoacutetese pretende ser testada atraveacutes da anaacutelise do custo
eletromiograacutefico (EMG) durante caminhada em diferentes velocidades e inclinaccedilotildees
de terreno O custo EMG seraacute compreendido como o somatoacuterio de ativaccedilatildeo EMG em
funccedilatildeo da distacircncia percorrida Se satisfatoacuterio o custo EMG poderaacute explicar as curva
30
em forma de U de custo metaboacutelico em funccedilatildeo da velocidade determinadas no
trabalho pioneiro de MARGARIA (1938)
Diferentemente da caminhada a corrida pode ser explicada do ponto de vista
mecacircnico pelo modelo massa-mola Este modelo possibilita dividir a oscilaccedilatildeo
vertical do CM em duas partes durante a passada da corrida a fase inferior da
oscilaccedilatildeo (quando a forccedila vertical exercida no solo eacute maior do que o peso corporal) e
a fase superior da oscilaccedilatildeo (quando a forccedila vertical eacute menor do que o peso
corporal) De acordo com o modelo massa-mola a duraccedilatildeo da fase inferior da
oscilaccedilatildeo representa meio periacuteodo do sistema e o deslocamento do CM durante este
periacuteodo representa a amplitude da oscilaccedilatildeo (BLICKHAN 1989 CAVAGNA et al
2005) Observaccedilotildees preliminares suportam a hipoacutetese de que sujeitos idosos
utilizem de uma maior geraccedilatildeo de trabalho interno devido a diminuiccedilatildeo da fase
superior da oscilaccedilatildeo do CM
Portanto a anaacutelise dos determinantes mecacircnicos da caminhada e corrida
deveratildeo contribuir no entendimento da locomoccedilatildeo desde um ponto de vista
energeacutetico Aleacutem disso procuramos realizar um estudo teoacuterico com o objetivo de
predizer variaacuteveis fundamentais e trabalho mecacircnico da locomoccedilatildeo terrestre
Informaccedilotildees biomecacircnicas sobre a energia da locomoccedilatildeo poderatildeo servir
como base para aplicaccedilotildees futuras na aacuterea da Fisioterapia na anaacutelise da locomoccedilatildeo
patoloacutegica bem como na Educaccedilatildeo Fiacutesica e Esportes atraveacutes do uso deste
conhecimento nas aacutereas do esporte de rendimento e sauacutede agraves quais utilizam-se das
atividades fiacutesicas locomotoras
13 Formato da tese
O estado-da-arte apresentado no capiacutetulo introdutoacuterio mostra um
desenvolvimento notaacutevel do corpo de conhecimento relacionado agrave mecacircnica e
energeacutetica da locomoccedilatildeo humana As bases cientiacuteficas atuais que procuram
encontrar as determinantes mecacircnicas de caracteriacutesticas fundamentais da
caminhada e corrida humana tais como velocidade e inclinaccedilatildeo oacutetima da
locomoccedilatildeo eficiecircncia e economia em situaccedilatildeo com carga e inclinaccedilatildeo e mudanccedila
de formas de locomoccedilatildeo conforme o aumento da velocidade demonstram ser
satisfatoacuterias em inuacutemeras situaccedilotildees
31
Contudo modelos biomecacircnicos que analisem natildeo apenas situaccedilotildees
particulares mas que expliquem as questotildees fundamentais da locomoccedilatildeo humana
tendo em consideraccedilatildeo a complexidade deste tipo de movimento ainda satildeo
escassos Atualmente temos hipoacuteteses que necessitam de experimentaccedilatildeo para
tornaacute-las robustas o suficiente para responder as questotildees fundamentais da
locomoccedilatildeo e ao mesmo tempo se manterem simples o bastante que as caracterize
como fundamentais Portanto a presente tese ENERGEacuteTICA E MECAcircNICA DA
CAMINHADA E CORRIDA HUMANA Com especial referecircncia agrave locomoccedilatildeo em
plano inclinado e efeitos da idade natildeo oferece uma resposta final e acabada para as
relaccedilotildees entre a energeacutetica e mecacircnica da locomoccedilatildeo humana mas tem como eixo
principal por meio de abordagens experimentais e teoacutericas avanccedilar no
entendimento dos paradigmas mecacircnicos das formas fundamentais de locomoccedilatildeo
usadas pelo ser humano caminhada e corrida
Em base disso o capiacutetulo 2 Custo EMG da Caminhada Humana procura
avanccedilar e aperfeiccediloar a hipoacutetese do Custo de Geraccedilatildeo de Forccedila (KRAM e TAYLOR
1990) com o desenvolvimento do modelo do Custo de Ativaccedilatildeo Muscular que daacute
base para o estudo Atraveacutes de experimentos em diferentes velocidades e
inclinaccedilotildees de caminhada eacute dada uma explicaccedilatildeo das curvas em forma de U do
custo metaboacutelico em funccedilatildeo da velocidade determinadas no estudo pioneiro de
MARGARIA em 1938
Motivado pela falta de explicaccedilatildeo das mudanccedilas estruturais e funcionais
devido agrave idade aplicadas agrave mecacircnica e energeacutetica da locomoccedilatildeo humana o capiacutetulo
3 Mecacircnica da Corrida em Idosos compara o trabalho mecacircnico e o sistema massa-
mola entre jovens e idosos em diferentes velocidades de corrida analisando o
sistema massa-mola natildeo apenas pelas suas caracteriacutesticas originais (BLICKHAN
1989 MCMAHON e CHENG 1990) mas tambeacutem pelas assimetrias deste sistema
na corrida humana determinadas recentemente na literatura (CAVAGNA 2006)
Nestes dois estudos eacute usada a abordagem experimental o primeiro se
utilizando da teacutecnica de EMG e o segundo estudo abordando a teacutecnica da
dinamometria especificamente o uso de plataformas de forccedila A percepccedilatildeo da
limitaccedilatildeo metodoloacutegica do uso deste equipamento aliada agrave necessidade de
abordagens teoacutericas da mecacircnica e energeacutetica da caminhada e corrida humana e
animal em situaccedilotildees onde apenas uma curva forccedila de reaccedilatildeo do solo versus tempo
eacute disponiacutevel ofereceram a justificativa para o capiacutetulo 4 Prediccedilatildeo da Vf CP e Custo
32
Energeacutetico da Locomoccedilatildeo Terrestre A construccedilatildeo de um modelo biomecacircnico
destes paracircmetros eacute endereccedilada neste estudo atraveacutes de meacutetodo de miacutenimos
quadrados e princiacutepios da dinacircmica e otimizaccedilatildeo de paracircmetros caracterizadores da
locomoccedilatildeo nomeadamente massa corporal frequumlecircncia de passo (FP) fator de forma
ldquoqrdquo e duty factor (DF)
Finalmente no capiacutetulo 5 os resultados de cada estudo satildeo sumarizados e
no capiacutetulo 6 satildeo apresentadas algumas consideraccedilotildees sobre a mecacircnica e
energeacutetica da locomoccedilatildeo humana e os possiacuteveis desdobramentos advindos dos
presentes achados Ainda no capiacutetulo 8 estatildeo inseridos os apecircndices da tese
131 Objetivo geral
O objetivo da presente tese eacute analisar o custo EMG da caminhada humana e
a mecacircnica da corrida de idosos Esta seacuterie de estudos tem tambeacutem como objetivo
construir um modelo biomecacircnico do custo energeacutetico da locomoccedilatildeo terrestre
132 Objetivos especiacuteficos
- Estudar as determinantes da velocidade oacutetima de caminhada em inclinaccedilotildees com
ecircnfase na construccedilatildeo do modelo do custo EMG da caminhada humana
- Comparar a mecacircnica da corrida com particular referecircncia ao trabalho mecacircnico e
sistema massa-mola entre jovens e idosos em vaacuterias velocidades de corrida
- Construir um modelo biomecacircnico capaz de predizer paracircmetros fundamentais e
custo energeacutetico da locomoccedilatildeo terrestre
33
2 O CUSTO EMG DA CAMINHADA HUMANA
21 Introduccedilatildeo
Durante um ciclo de passada de caminhada a energia cineacutetica do CM
corporal varia inversamente com a energia potencial gravitacional do CM Apesar da
presenccedila importante deste comportamento a transformaccedilatildeo de energia entre uma
forma e outra natildeo eacute total e o restante de energia necessaacuterio para manter a
locomoccedilatildeo eacute providenciado pelos muacutesculos e eacute quando normalizado pela massa
corporal e por unidade de distacircncia igual agrave 03 Jkg-1m-1 durante a velocidade oacutetima
de caminhada (aproximadamente 45 kmh-1 em adultos) Este mecanismo pendular
de minimizaccedilatildeo de energia foi primeiramente observado por CAVAGNA et al (1963)
e denominado como modelo do ldquopecircndulo invertidordquo
Interessantemente natildeo obstante a sua simplicidade o modelo auxiliou no
entendimento e aprofundamento das determinantes mecacircnicas da locomoccedilatildeo
Atraveacutes deste meacutetodo foi possiacutevel oferecer o primeiro insight desde o ponto-de-vista
mecacircnico sobre a velocidade oacutetima de locomoccedilatildeo e a forma em U do custo de
transporte da caminhada [ml de oxigecircnio - O2 - por kg de massa corporal por
distacircncia percorrida observada por MARGARIA (1938)] Na seacuterie de experimentos
desenvolvida por Cavagna e colegas (CAVAGNA et al 1976 HEGLUND et al
34
1982b) foi apresentada a formulaccedilatildeo matemaacutetica denominada como Recovery (R)
definida como
W f + W -Wv extR() = 100 Eq 21 W f + Wv
onde W f eacute trabalho mecacircnico externo horizontal Wv eacute trabalho mecacircnico externo
vertical e Wext eacute trabalho mecacircnico externo Esta equaccedilatildeo determina o percentual de
reconversatildeo via pendular entre energia cineacutetica e potencial gravitacional durante a
passada E de fato na velocidade oacutetima de caminhada o R alcanccedila
aproximadamente seu valor maacuteximo
Poreacutem o custo de geraccedilatildeo de trabalho como mecanismo principal do custo
energeacutetico da locomoccedilatildeo tem recebido vaacuterias criacuteticas da literatura As criacuteticas se
baseiam principalmente (1) na questatildeo do paradoxo do trabalho zero que afirma
que fisicamente durante um ciclo de passada completo em velocidade constante e
no plano as variaccedilotildees de energias cineacuteticas e potencial satildeo iguais agrave zero
(desprezando a resistecircncia do ar e fricccedilotildees teciduais) portanto analisando de um
ponto-de-vista somente da fiacutesica o sujeito natildeo realizaria trabalho nesta situaccedilatildeo
(ALESHINSKY 1986) (2) o problema da co-contraccedilatildeo afirma que existe um custo
metaboacutelico importante devido agrave contraccedilatildeo de muacutesculos antagonistas que natildeo geram
movimento portanto sem geraccedilatildeo de trabalho mecacircnico Este uacuteltimo
questionamento levou um grupo de pesquisadores a formular a denominada
hipoacutetese da forccedila ou Teoria do custo energeacutetico da geraccedilatildeo de forccedila (HEGLUND et
al 1982b KRAM e TAYLOR 1990 ROBERTS et al 1998) para explicar de modo
simplificado o custo energeacutetico da locomoccedilatildeo
Essencialmente a hipoacutetese da forccedila afirma que o custo energeacutetico da corrida
ou caminhada eacute determinado pelo produto da integral da curva forccedila de reaccedilatildeo do
solo-tempo por um fator proporcional agrave taxa de ciclos de pontes-cruzadas de miosina
no muacutesculo independente da geraccedilatildeo de trabalho mecacircnico Apesar da hipoacutetese
concordar com achados experimentais estes satildeo encontrados em situaccedilotildees
limitadas e aleacutem disso a hipoacutetese da forccedila considera como negligenciaacutevel o custo
de balanccedilar os segmentos para traacutes e para frente Esta pressuposiccedilatildeo eacute considerada
como incorreta (MARSH et al 2004) O problema principal desta hipoacutetese se refere
35
agrave desconsideraccedilatildeo do trabalho elemento fundamental segundo a primeira lei da
termodinacircmica Conforme apontado por HEGLUND 2004) ldquoforccedila natildeo eacute trabalho
nem mesmo eacute energia Se a energia metaboacutelica eacute consumida aquela energia deve
ir para algum lugar Se a energia de um segmento corporal aumenta aquela energia
vem de algum lugar Se a energia daquele segmento diminui a energia vai para
algum lugarrdquo
Durante a locomoccedilatildeo em inclinaccedilotildees foi observado que na inclinaccedilatildeo oacutetima
(aproximadamente -10) a constante de custo metaboacutelico inverso ao tempo de
apoio obteve uma variaccedilatildeo significativa (MINETTI et al 1994) indicando que o
custo de geraccedilatildeo de trabalho mecacircnico era mais satisfatoacuterio do que o custo de
geraccedilatildeo de forccedila Mas um achado intrigante nos estudos de Minetti e
colaboradores sobre as determinantes mecacircnicas da energeacutetica da caminhada e
corrida em inclinaccedilotildees (1993 e 1994 respectivamente) foi sobre a ausecircncia de
trabalho mecacircnico negativo em inclinaccedilotildees positivas e de trabalho positivo em
inclinaccedilotildees negativas (apoacutes 30 de inclinaccedilatildeo na corrida e 15 na caminhada)
independente da velocidade Portanto o modelo do custo de geraccedilatildeo de trabalho
como determinante do custo energeacutetico da locomoccedilatildeo natildeo se aplica nestas
situaccedilotildees perdendo sua amplitude como Teoria geral para a energeacutetica e mecacircnica
da caminhada
Tendo em consideraccedilatildeo que durante situaccedilotildees de locomoccedilatildeo de pouca
eficiecircncia mecacircnica como na situaccedilatildeo de velocidades mais baixas que a velocidade
oacutetima e durante inclinaccedilotildees extremas satildeo geradas situaccedilotildees de instabilidade de
locomoccedilatildeo e provavelmente maiores co-contraccedilotildees musculares propomos neste
experimento testar a hipoacutetese denominada de ldquocusto EMG da caminhada humanardquo
Uma base importante desta hipoacutetese reside no raciociacutenio de que nas situaccedilotildees
citadas anteriormente a contribuiccedilatildeo de muacutesculos que contraem isometricamente
principalmente os posturais teratildeo uma contribuiccedilatildeo importante para o alto custo
relativo da locomoccedilatildeo
Portanto o objetivo deste estudo eacute desenvolver o modelo do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees Teoricamente a hipoacutetese do
presente estudo diferente da hipoacutetese da forccedila natildeo iraacute desconsiderar o trabalho
mecacircnico gerado mas este seraacute considerado como um dos produtos da variaccedilatildeo da
energia (devido ao consumo de energia metaboacutelico) e a quantidade de ativaccedilatildeo
muscular e as eficiecircncias de ativaccedilatildeo satildeo as determinantes do custo energeacutetico
36
usando os equivalentes metaboacutelicos da ativaccedilatildeo EMG da literatura W+ Wshy
(BIGLAND-RITCHIE e WOODS 1976) e durante contraccedilatildeo isomeacutetrica
(CERRETELLI et al 1976) O modelo eacute apresentado em detalhes na metodologia
22 Metodologia
221 Construccedilatildeo do modelo
O presente modelo eacute configurado como biomecacircnico e se utiliza de
pressupostos originados da fiacutesica e da biologia
O modelo assume que i) toda a energia despendida pelos muacutesculos possui
uma correspondente quantidade de ativaccedilatildeo EMG ii) a atividade EMG realizada
pelos muacutesculos posturais durante todo o ciclo de passada e pelos muacutesculos
propulsores durante a fase aeacuterea seraacute considerada como uma atividade EMG
realizada durante contraccedilotildees isomeacutetricas Seraacute considerada como contraccedilatildeo
excecircntrica e concecircntrica a atividade EMG realizada pelos muacutesculos propulsores
durante a primeira e segunda metades da fase de apoio respectivamente iii) O
custo energeacutetico da locomoccedilatildeo eacute devido agrave ativaccedilatildeo de muacutesculos propulsores e
posturais estes uacuteltimos natildeo diretamente ligados agrave geraccedilatildeo de trabalho mecacircnico iv)
Mais do que uma relaccedilatildeo com a produccedilatildeo de forccedila muscular a quantidade de
ativaccedilatildeo EMG e consequumlentemente o custo EMG possui uma correspondecircncia com
o trabalho mecacircnico realizado durante a ativaccedilatildeo muscular
Um conjunto de algoritmos foi desenvolvido em Labview a fim de analisar o
sinal EMG e as variaacuteveis espaccedilos-temporais (figuras 21 22 e 23 apecircndice 81) O
programa retifica suaviza (atraveacutes de uma integraccedilatildeo com janelamento moacutevel
50Hz do tipo Hamming) e divide todas as curvas de EMG por ciclo de passada
retirando os ciclos de passadas com um tempo 20 menor ou maior do tempo
meacutedio do ciclo de passada e do tempo de apoio Apoacutes normaliza o tempo do ciclo
para 100 quadros (interpolaccedilatildeo via spline) e calcula a meacutedia desvio-padratildeo e
coeficiente de variaccedilatildeo em cada quadro por muacutesculo analisado Este procedimento
tem o objetivo de criar graacuteficos de atividade eletromiograacutefica em funccedilatildeo do
37
percentual do ciclo de passada A fim de analisar o efeito das ponderaccedilotildees pelo
volume muscular e dobra cutacircnea foram desenvolvidas duas estrateacutegias de
modelamento nomeadamente ldquoabordagem experimentalrdquo e ldquoabordagem teoacutericardquo
Abordagem experimental
Usando o sinal suavizado sem a normalizaccedilatildeo foi realizada uma integral em
funccedilatildeo do tempo do seguinte modo
t
Iemg(t) = f EMG dt Eq 22 0
Este valor integrado eacute dividido pelo CP determinando a quantidade de
atividade EMG em funccedilatildeo da distacircncia e seraacute considerado como um custo miacutenimo
EMG Os valores de custo EMG satildeo ponderados em funccedilatildeo do volume muscular
(WINTERS e WOO 1990) e da dobra cutacircnea (NORDANDER et al 2003) do
seguinte modo
Iemg1 Iemg2 Iemg16EmgCost (mV m) = ( + + l middot CP-1 Eq 23 exp ( Mass1 Sk inf1 Mass2 Sk inf2 Mass16 Sk inf16 lmiddot middot middot Masstotal Sk inftotal Masstotal Sk inftotal Masstotal Sk inftotal
onde EmgCostexp eacute o custo miacutenimo EMG experimental Mass eacute a massa dos
muacutesculos analisados e eacute o somatoacuterio de todas as massas musculares Masstotal
analisadas Sk inf eacute a dobra cutacircnea de cada regiatildeo de colocaccedilatildeo dos eletrodos e
eacute o somatoacuterio de todas as dobras cutacircneas analisadas A fim de Sk inftotal
compreender melhor as determinantes da velocidade oacutetima nas inclinaccedilotildees dividiu-
se a Iemg em trecircs aacutereas (a) fase de contato (b) fase aeacuterea e (c) offset (figura 21)
Abordagem teoacuterica
A presente abordagem calcula o sinal EMG atraveacutes dos seus equivalentes
metaboacutelicos Estes equivalentes satildeo advindos da literatura (BIGLAND-RITCHIE e
WOODS 1976) e o objetivo deste procedimento foi verificar se levando em
38
consideraccedilatildeo os equivalentes metaboacutelicos da atividade EMG (para contraccedilotildees
concecircntrica excecircntrica e isomeacutetrica) seria possiacutevel explicar mais satisfatoriamente
as velocidades oacutetimas na caminhada em inclinaccedilotildees Este procedimento assume
que uma determinada quantidade de ativaccedilatildeo eleacutetrica muscular gera distintos custos
energeacuteticos sendo estes dependentes do tipo de contraccedilatildeo muscular Para este
propoacutesito primeiro dividimos a anaacutelise em dois grupos de muacutesculos propulsores
(gluteus maximus gluteus medius deltoideus anterior rectus femuralis vastus
lateralis biceps femuralis caput longus tibialis anterior e gastrocnemius lateralis) e
posturais (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis trapezius ascendens)
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset
Os muacutesculos posturais foram considerados como muacutesculos contraindo
isometricamente durante todo o ciclo de passada enquanto que os muacutesculos
39
propulsores foram analisados como realizando (a) contraccedilatildeo excecircntrica na primeira
fase de contato (b) concecircntrica na segunda fase de contato e (c) contraccedilatildeo
isomeacutetrica durante a fase aeacuterea (figura 22)
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda metade
da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo isomeacutetrica
Setas verticais apontando para baixo indicam momento de contato e de
despregue
Assim foram calculadas as correspondentes integrais
t 2c
Iemgexc (t) = f EMG dt Eq 24 0
40
onde Iemgexc eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a primeira
metade da fase de contato (contraccedilatildeo excecircntrica)
tc
Iemgcon (t) = f EMG dt Eq 25 t 2c
onde Iemgcon eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a segunda
metade da fase de contato (contraccedilatildeo concecircntrica)
ta
Iemgiso (t) = f EMG dt Eq 26 0
onde Iemgiso eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a fase aeacuterea
(contraccedilatildeo isomeacutetrica)
As integrais foram convertidas para uma unidade de counts usada por
BIGLAND-RITCHIE e WOODS 1976) usando um fator de transformaccedilatildeo igual agrave 200
counts (mVs)-1 deste modo temos a atividade EMG durante contraccedilatildeo excecircntrica
(EMGneg) concecircntrica (EMGpos) e isomeacutetrica (EMGiso) em counts Os equivalentes
metaboacutelicos satildeo obtidos atraveacutes de equaccedilotildees de regressatildeo linear criadas no
presente estudo usando dados experimentais de Bigland e Ritchie (1976) como
segue
VO2neg (ml) = 00015 EMGneg + 03353 Eq 27
VO2 pos(ml) = 00042 EMGpos + 01493 Eq 28
(ml) = 00042 EMGiso + 01493 Eq 29 VO2iso
EmgCosttheor (J m) = 201[(VO2 iso1 + VO2 iso 2 + VO2 iso16) + (VO2 neg 1 + VO2 neg 2 + VO2 neg 16) +
(VO2 pos1 + VO2 pos 2 + VO2 pos16)] CP-1 Eq 210
onde EmgCosttheor eacute o custo EMG teoacuterico O somatoacuterio dos dispecircndios energeacuteticos
dados em ml de O2 foram convertidos para Joules (J) usando um equivalente
41
energeacutetico de 201 Jml-1 (BLAXTER 1989) e apoacutes foram divididos por CP (conforme
equaccedilatildeo 210) Nesta abordagem teoacuterica entende-se o EmgCosttheor como um custo
miacutenimo energeacutetico devido agrave notoacuteria impossibilidade de obter a totalidade da ativaccedilatildeo
EMG e consequentemente do custo energeacutetico da locomoccedilatildeo Mais do que isso o
modelo procura compreender as determinantes da velocidade oacutetima de caminhada
nas inclinaccedilotildees
222 Testando o modelo
Um homem adulto sem histoacuteria de lesotildees no sistema muacutesculo-esqueleacutetico
realizou caminhadas de 2 minutos sobre uma esteira (WOODWAY Usa) nas
velocidades de 2 3 4 5 6 e 7 kmh-1 e nas inclinaccedilotildees de 0 5 10 e 15 O uso
das velocidades 6 ou 7 kmh-1 foram escolhidas em funccedilatildeo do Nuacutemero de Froude
(Fr) O valor maacuteximo de Fr foi o equivalente agrave velocidade espontacircnea de transiccedilatildeo
(aproximadamente 05 no plano MINETTI et al 1994) O uso do Fr eacute baseado da
teoria das similaridades dinacircmicas Esta teoria afirma que dois animais
geometricamente similares (como no caso do presente estudo) deslocam-se
tambeacutem de modo similar quando o movimento eacute multiplicado por fatores
relacionados ao tempo dimensotildees lineares e forccedilas (ver ALEXANDER 2005)
Fr = Vf 2 gL Eq 211
onde Vf eacute velocidade de progressatildeo em ms-1 g eacute aceleraccedilatildeo gravitacional (g) (981
ms-2) e L eacute um comprimento corporal conhecido (no presente estudo foi utilizado o
comprimento de membros inferiores em m)
Coleta de dados
O voluntaacuterio foi informado do objetivo do estudo dos riscos e eventuais
desconfortos e assinou um termo de consentimento
O indiviacuteduo estava vestido com roupas apropriadas para caminhada A coleta
de dados foi realizada em inclinaccedilotildees de 0 5 10 e 15 nas velocidades de 2 3 4
5 6 7 kmh-1 para cada inclinaccedilatildeo A atividade EMG de dezesseis muacutesculos foi
42
analisada (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis deltoideus anterior trapezius ascendens gluteus
maximus gluteus medius rectus femuralis vastus lateralis biceps femuralis caput
longus tibialis anterior e gastrocnemius lateralis) usando um eletromioacutegrafo portaacutetil
(EMGpocket Elite System Itaacutelia)
Para a preparaccedilatildeo do local e colocaccedilatildeo dos eletrodos de superfiacutecie bipolares
foram observadas as orientaccedilotildees da Seniam (FRERIKS et al 1991)
Simultaneamente ao registro EMG sinais advindos de seis sensores de pressatildeo
(footswitches) trecircs em cada peacute (regiatildeo do calcanhar quinto e primeiro metatarsos
inferiores) foram registrados no eletromiograacutefo portaacutetil Os sinais EMGrsquos foram preacuteshy
amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um niacutevel de ruiacutedo menor do
que 1 mV rms e filtrados por um filtro do tipo Butterworth (50-450 Hz terceira
ordem) A frequumlecircncia de amostragem da EMG e dos sensores de pressatildeo foi de
1000 Hz
Foram coletadas a massa e estatura corporal e comprimento de membro
inferior As dobras cutacircneas tambeacutem foram coletadas antes dos testes usando um
plicocircmetro (The body calliper CA Usa)
Um possiacutevel efeito de fadiga no sinal EMG foi controlado repetindo o primeiro
teste Com diferenccedilas maiores de 10 entre a integral EMG dos muacutesculos
analisados do primeiro e uacuteltimo teste a coleta seria descartada poreacutem a diferenccedila
foi menor do que este limite
23 Resultados
231 Variaacuteveis espaccedilos-temporais
As variaacuteveis espaccedilos-temporais da caminhada em diferentes velocidades e
diferentes inclinaccedilotildees satildeo apresentadas na tabela 21 O CP e a FP aumentam com
o aumento da velocidade poreacutem natildeo com o aumento da inclinaccedilatildeo O DF eacute maior na
velocidade oacutetima de locomoccedilatildeo nas inclinaccedilotildees (10 e 15) enquanto que apresenta
uma relaccedilatildeo inversa com Vf nas inclinaccedilotildees mais baixas (0 e 5)
43
232 Atividade EMG
A atividade EMG dos muacutesculos posturais (erector spinae longissimus erector
spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis trapezius ascendens) e
dos muacutesculos propulsores (gluteus maximus gluteus medius rectus femoralis
vastus lateralis deltoideus anterior biceps femoralis caput longus tibialis anterior e
gastrocnemius lateralis) eacute apresentada nas figuras 23 e 24 Os resultados do
presente estudo referente ao comportamento da atividade EMG durante caminhada
no plano satildeo semelhantes agrave literatura tanto em relaccedilatildeo aos muacutesculos propulsores
(LAY et al 2007 NYMARK et al 2005) quanto para os muacutesculos posturais (WHITE
e MCNAIR 2002 DEN OTTER et al 2004 LAMOTH et al 2006)
De um modo geral o sinal EMG em funccedilatildeo do percentual do ciclo (portanto
independente da distacircncia percorrida) aumentou conforme o aumento da velocidade
e inclinaccedilatildeo Observa-se tambeacutem um aumento no offset nas maiores inclinaccedilotildees
(veja figuras 23 e 24)
Tabela 21 Valores meacutedios e desvios-padratildeo (dp) de frequumlecircncia de passada (FP)
comprimento de passada (CP) tempo de fase aeacuterea (ta) tempo de contato (tc)e
duty factor (DF) nas diferentes velocidades (Vf) em diferentes inclinaccedilotildees do
terreno
0
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0518 0022 1074 0044 0706 0039 1227 0087 064
3 0660 0017 1263 0032 0604 0030 0912 0042 060
4 0779 0013 1426 0025 0541 0023 0743 0028 058
5 0879 0010 1580 0018 0492 0022 0646 0024 057
6 0970 0009 1719 0015 0446 0012 0586 0014 057
7 1061 0022 1834 0042 0415 0010 0528 0024 056
5
44
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0504 0026 2210 0056 0656 0054 1334 0089 067
3 0640 0015 2606 0030 0635 0033 0930 0048 059
4 0797 0013 2790 0023 0526 0017 0729 0028 058
5 0895 0008 3104 0014 0478 0017 0639 0020 057
6 1002 0009 3326 0016 0426 0009 0572 0014 057
7 1081 0015 3600 0025 0400 0007 0525 0014 057
10
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0302 0000 3674 0000 1309 0090 1998 0090 060
3 0262 0013 3182 0151 1216 0094 2602 0174 068
4 0300 0007 3699 0085 1229 0086 2101 0114 063
5
6 0495 0006 3300 0036 0854 0021 1166 0028 058
7 0556 0008 3429 0015 0775 0022 1023 0026 057
15
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0275 0022 3041 0216 1282 0079 2368 0255 065
3 0319 0011 3492 0122 1208 0074 1936 0121 062
4 0399 0007 3482 0059 1497 0046 1011 0040 040
5 0450 0008 3703 0068 0919 0041 1302 0060 059
6 0524 0009 3711 0064 0808 0026 1101 0035 058
7 0597 0012 3257 0069 0721 0024 0954 0037 057
O maior pico de ativaccedilatildeo EMG entre os muacutesculos propulsores foi do tibialis
anterior com valor de 73 mV agrave 7 kmh-1 agrave 15 enquanto que para os muacutesculos
posturais foi do trapezius ascendens com 34 mV tambeacutem agrave 7 kmh-1 agrave 15
erector
spinae
longissimus
erector
spinae
iliocostalis
trapezius
descendens
latissimus
dorsis
obliquus
externus
abdominis
obliquus
internus
abdominis
rectus
abdominis
deltoideus
anterior
45
0 5 10 15
Figura 2 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
trapezius
ascenden
gluteus
maximus
gluteus
medius
rectus
femoralis
vastus
lateralis
biceps
femoralis
caput
tibialis
anterior
gastrocnemius
lateralis
46
0 5 10 15
Figura 24
47
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
com o tempo de passada normalizado em percentual do ciclo O 0-100 representa
o momento de contato com o solo As cores indicam a velocidade de caminhada (de
2 agrave 7 kmh-1) Cada muacutesculo eacute representado nas linhas e em cada coluna eacute
apresentada a atividade EMG por inclinaccedilatildeo
A ativaccedilatildeo EMG parece seguir um padratildeo bem definido com exceccedilatildeo do
trapezius descendens obliquus internus abdominis onde picos de ativaccedilotildees
aparecem apoacutes os 3 kmh-1 seguindo um comportamento de aumento com o
acreacutescimo da inclinaccedilatildeo e no muacutesculo deltoideus anterior no qual ateacute a velocidade
de 5 kmh-1 o pico maior se apresenta no final da fase de apoio enquanto que nas
velocidades de 6 e 7 kmh-1 o pico passa a se situar na fase aeacuterea O uacutenico muacutesculo
analisado neste estudo que apresenta um comportamento diferente entre as
inclinaccedilotildees eacute o rectus femoralis onde nas inclinaccedilotildees 0 5 e 10 os picos aparecem
apenas nas velocidades raacutepidas enquanto que na inclinaccedilatildeo de 15 o pico eacute visiacutevel
logo na velocidade de 2 kmh-1
Poreacutem quando analisamos a quantidade de ativaccedilatildeo por distacircncia percorrida
ou seja o custo EMG os resultados mudam
233 Custo EMG
A quantidade de atividade EMG calculada atraveacutes da abordagem
experimental eacute apresentada na figura 25 Durante a caminhada no plano (primeira
linha da figura 25) eacute possiacutevel observar um miacutenimo de ativaccedilatildeo no somatoacuterio total
devido principalmente agrave ativaccedilatildeo durante a fase aeacuterea e ao offset Este miacutenimo
acontece tambeacutem na inclinaccedilatildeo a 10 de inclinaccedilatildeo mas a 5 e a 15 a
quantidade de ativaccedilatildeo parece diminuir conforme o aumento da Vf
A figura 26 apresenta os valores de custo EMG calculado atraveacutes da
abordagem teoacuterica Observa-se um miacutenimo a 0 e 15 de inclinaccedilatildeo
Para nosso conhecimento natildeo existem dados de atividade EMG de muacutesculo
posturais durante caminhada nas inclinaccedilotildees A quantidade de ativaccedilatildeo EMG por
passada dos muacutesculos posturais e propulsores parecem aumentar com o acreacutescimo
da velocidade e inclinaccedilatildeo
48
49
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
24 Discussatildeo
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular
Inicialmente proposto para a corrida de quadruacutepedes (KRAM e TAYLOR
1990) e apoacutes para a corrida de biacutepedes (ROBERTS et al 1998 ROBERTS et al
1997) corrida para traacutes (WRIGHT e WEYAND 2001) e caminhada humana
(GRIFFIN et al 2003) a teoria do custo energeacutetico da geraccedilatildeo de forccedila foi formulada
a partir dos resultados que para animais com grande variaccedilatildeo de massa correndo
em diversas velocidades o custo mecacircnico natildeo se correlacionava bem com o custo
metaboacutelico da locomoccedilatildeo terrestre (HEGLUND et al 1982b TAYLOR 1985)
0 5
10
15
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
50
Uma justificativa para explicar esse resultado se referia ao fato de que o
muacutesculo durante a fase de apoio na corrida contraia isometricamente deste modo
natildeo realizando trabalho
Recentemente foi observado que esse comportamento acontece tambeacutem no
muacutesculo gastrocnemius medialis durante a caminhada (FUKUNAGA et al 2001)
Poreacutem na corrida este comportamento sucede apenas em velocidades maiores de
13 kmh-1 em adultos (CAVAGNA 2006) e natildeo eacute visiacutevel em idosos mesmo em
velocidades maacuteximas (estudo sobre a mecacircnica da corrida em idosos Capiacutetulo 3)
Ainda assim a teoria afirma que o custo metaboacutelico despendido pelos muacutesculos eacute
proporcional agrave integral forccedila de reaccedilatildeo do solo-tempo multiplicada por um fator
proporcional agrave taxa de ciclos de pontes cruzadas no muacutesculo-esqueleacutetico
A proposiccedilatildeo do Custo Energeacutetico da Geraccedilatildeo de Forccedila assume que i) a
maior parte da forccedila exercida pelos muacutesculos acontece em oposiccedilatildeo agrave gravidade ii)
uma unidade de volume muscular ativado exerce uma respectiva forccedila no solo
independente da velocidade ou tamanho do animal iii) originalmente foi presumido
que os muacutesculos agiam em similares amplitudes da relaccedilatildeo forccedila-velocidade [esta
pressuposiccedilatildeo foi recentemente interpretada em um interessante modelo
biomecacircnico proposto por BLANCO e GAMBINI 2006) como independente para a
determinaccedilatildeo das relaccedilotildees encontradas por KRAM e TAYLOR 1990)] portanto eacute
esperado que animais pequenos que realizam o tempo de contato menor usem
fibras glicoliacuteticas em maior quantidade e consequentemente tenham um maior
dispecircndio energeacutetico e assim explica-se o fato de que animais pequenos despendem
mais energia para transportar 1 N de forccedila por km percorrido do que animais
maiores (HOYT e TAYLOR 1981) Portanto o custo energeacutetico da locomoccedilatildeo
segundo a presente teoria eacute determinado pelo custo de suportar o peso corporal e o
tempo disponiacutevel para exercer forccedila contra o solo
Ainda assim a teoria apresenta seacuterias restriccedilotildees e parece funcionar em
situaccedilotildees particulares A formulaccedilatildeo apresentada por Kram e Taylor indica como
insignificante o dispecircndio energeacutetico devido aos movimentos de balanccedilo dos
membros quando natildeo estatildeo em apoio Vaacuterias evidecircncias em aves (MARSH et al
2004) e em humanos (DOKE et al 2005 GOTTSCHALL e KRAM 2005 DOKE e
KUO 2007) demonstram que este dispecircndio natildeo eacute despreziacutevel Outra criacutetica
levantada pela literatura (ALEXANDER 1991 HEGLUND 2004) se refere agrave
desconsideraccedilatildeo do trabalho variaacutevel fundamental na Termodinacircmica para explicar
51
a energeacutetica da locomoccedilatildeo Forccedila natildeo eacute trabalho nem mesmo eacute energia portanto
ela isoladamente natildeo possibilita uma resposta final sobre a energia A hipoacutetese do
custo de ativaccedilatildeo muscular apresentado aqui natildeo despreza o dispecircndio energeacutetico
dos membros superiores e aleacutem disso considera as eficiecircncias dos diferentes tipos
de trabalho mecacircnico quando insere os equivalentes metaboacutelicos da ativaccedilatildeo
muscular (abordagem teoacuterica Metodologia)
242 Sobre o meacutetodo
Algumas consideraccedilotildees importantes podem ser feitas sobre a teacutecnica da
EMG Comumente esta teacutecnica eacute usada nos campos da biomecacircnica e biologia
experimental a fim de determinar a quantidade de ativaccedilatildeo muscular e os periacuteodos
em que elas acontecem poreacutem neste estudo pretendeu-se usar a determinada
teacutecnica a fim de oferecer uma informaccedilatildeo global da ativaccedilatildeo de tal modo que
pudesse ter uma correspondecircncia com a ativaccedilatildeo EMG de todo o corpo incluindo os
muacutesculos posturais que natildeo geram trabalho muscular importante mas segundo a
hipoacutetese central do presente estudo participam de forma decisiva como uma
determinante da caminhada humana
Assim esta abordagem permite inferir sobre os mecanismos principais da
locomoccedilatildeo e permite explicar a biomecacircnica da locomoccedilatildeo especialmente referente
agrave energeacutetica da caminhada humana Aleacutem de auxiliar na explicaccedilatildeo da velocidade
oacutetima no plano o custo EMG parece dar um indicativo sobre a energeacutetica em
situaccedilotildees criacuteticas com restriccedilotildees do ambiente (inclinaccedilatildeo) e situaccedilotildees natildeo usuais
(velocidades de progressatildeo baixas)
Nestas situaccedilotildees eacute provaacutevel que dois mecanismos estejam relacionados a fim
de justificar a hipoacutetese do custo EMG i) a estabilidade dinacircmica prejudicada e ii) o
custo da co-contraccedilatildeo Os dois mecanismos parecem estar diretamente ligados ao
maior custo EMG e consequumlentemente ao custo energeacutetico da caminhada
Evidecircncias experimentais datildeo suporte para esta inferecircncia Durante caminhada
realizada para fins de lazer em velocidades muito baixas ou mesmo em marchas
patoloacutegicas foi encontrado um aumento na atividade EMG em comparaccedilatildeo com a
velocidade auto-selecionada correspondente agrave velocidade oacutetima Os achados
mostram um aumento de ativaccedilatildeo EMG com o aumento da Vf mesmo em muacutesculos
do tronco durante locomoccedilatildeo no plano (ANDERS et al 2007) Novamente o foco do
52
presente estudo foi referente agrave quantidade de ativaccedilatildeo em funccedilatildeo da distacircncia
percorrida enquanto que nestes estudos a variaacutevel em questatildeo foi avaliada em
funccedilatildeo da passada Aleacutem disso aumentos foram encontrados nos valores de coshy
contraccedilatildeo durante velocidades muito baixas (020 e 030 ms-1) em comparaccedilatildeo com
a velocidade auto-selecionada (NYMARK et al 2005)
As relaccedilotildees entre estabilidade articular e quantidade de ativaccedilatildeo geral
(ANDERSON e BEHM 2004) e estabilidade corporal e ativaccedilatildeo de muacutesculos
localizados especificamente no tronco (GARDNER-MORSE e STOKES 1998
GRANATA e MARRAS 2000 GRANATA e ORISHIMO 2001) satildeo bem
estabelecidas na literatura inclusive indicando um prejuiacutezo maior na ativaccedilatildeo EMG
durante perturbaccedilotildees agrave estabilidade com contraccedilotildees concecircntricas do que
excecircntricas e isomeacutetricas Um possiacutevel modo de testar estes mecanismos poderia
ser atraveacutes da perturbaccedilatildeo da estabilidade e os efeitos na ativaccedilatildeo EMG durante
caminhada (por exemplo em terrenos irregulares)
Outro achado importante que daacute sustentaccedilatildeo agrave hipoacutetese do custo EMG da
caminhada humana eacute observado por PRILUTSKY e GREGOR 2001) onde a
atividade EMG de muacutesculos propulsores (rectus femoralis gastrocnemius medialis
vastus medialis biceps femoralis gluteus maximus e soleus) foi maior na corrida do
que na caminhada em velocidades abaixo da velocidade de transiccedilatildeo entre
caminhada e corrida enquanto que durante velocidades acima da de transiccedilatildeo os
muacutesculos propulsores apresentam uma maior atividade EMG na caminhada do que
na corrida o que coincide com o dispecircndio metaboacutelico nestas situaccedilotildees
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia
A alta especializaccedilatildeo da locomoccedilatildeo suportando cargas em regiotildees inoacutespitas da
terra indica um desafio para o entendimento dos fundamentos da mecacircnica e
energeacutetica da locomoccedilatildeo humana Mundialmente famosos satildeo os achados sobre a
economia de locomoccedilatildeo de mulheres africanas que transportam cargas sobre a
cabeccedila de ateacute 70 da massa corporal sem um maior custo mecacircnico devido a um
ajuste aperfeiccediloado das curvas de energia potencial e cineacutetica do centro de massa
colaborando para um mais alto R (percentual de reconversatildeo entre energia cineacutetica
53
e potencial durante um ciclo de passada) (MALOIY et al 1986) Evidecircncias de um
custo metaboacutelico relativamente baixo da locomoccedilatildeo no plano foram tambeacutem
encontradas em carregadores Nepaleses (BASTIEN et al 2005) Poreacutem
diferentemente das condiccedilotildees geograacuteficas nas quais as mulheres africanas realizam
suas atividades locomotoras o espaccedilo geograacutefico dos carregadores Nepaleses eacute
caracterizado por terrenos inclinados Em um estudo recente Minetti e
colaboradores (MINETTI et al 2006) apresentaram as primeiras informaccedilotildees sobre
eficiecircncia mecacircnica (potecircncia mecacircnica desenvolvida dividida pela potecircncia
metaboacutelica despendida) de carregadores Nepaleses em inclinaccedilotildees extremas
especialmente da regiatildeo do Himalaia indicando uma eficiecircncia aproximadamente
33 maior do que a de montanhistas Caucasianos De fato os carregadores
Nepaleses apresentam caracteriacutesticas notaacuteveis do ponto de vista energeacutetico
Transportam desde a infacircncia cargas geralmente entre 80 e 90 da massa corporal
(utilizando-se de uma faixa posta agrave testa no qual eacute ligada a uma cesta de vime nas
costas) em terrenos acidentados com inclinaccedilotildees de ateacute 50 em situaccedilatildeo de
hipoacutexia de altitude (MALVILLE et al 2001)
A hipoacutetese da transferecircncia eficiente entre energia cineacutetica e potencial do
centro de massa corporal natildeo se sustenta pois em inclinaccedilotildees maiores de 15 e ndash
15 as mudanccedilas de energia potencial ocorrem apenas positivamente e
negativamente respectivamente (MINETTI et al 1993) Portanto sem a
possibilidade de transferecircncia de energia por via pendular e tendo em consideraccedilatildeo
a menor variabilidade de oscilaccedilatildeo do tronco dos Nepaleses encontrada por
MINETTI et al 2006) apresentamos uma hipoacutetese de que o custo de ativaccedilatildeo
muscular (ou custo EMG) da locomoccedilatildeo eacute menor no grupo de carregadores do
Himalaia do que nos montanhistas Caucasianos Devido agrave falta de informaccedilotildees
espaccedilos-temporais da locomoccedilatildeo com carga em grandes inclinaccedilotildees foram
analisados estes paracircmetros da passada a fim de auxiliar no entendimento da
energeacutetica e mecacircnica da locomoccedilatildeo em planos inclinados
251 Materiais e meacutetodos
Cinco carregadores Nepaleses (idade 23 plusmn 9 anos estatura 163 plusmn 003 m
massa corporal 546 plusmn 62 kg) e cinco montanhistas Caucasianos (idade 32 plusmn 3
anos estatura 176 plusmn 007 m massa corporal 742 plusmn 67 kg) selecionados por
54
voluntariedade realizaram o experimento em Namche-Bazar regiatildeo do vale
Khumbu no Parque Nacional de Sagarmatildethatilde (Everest em nepalecircs) O experimento
consistia de caminhada sem e com carga (40 kg) em situaccedilatildeo de subida e descida
com uma inclinaccedilatildeo meacutedia de 22 em um ritmo que poderiam suportar por muitas
horas Os Nepaleses utilizavam a usual faixa na testa onde era ligada com a cesta
nas costas onde suportavam o peso enquanto que os Caucasianos usavam uma
mochila de alpinismo O trecho foi escolhido de modo a assegurar que as trocas de
energia fossem principalmente devidas as mudanccedilas de energia potencial sem a
possibilidade de transferecircncia entre energia potencial e cineacutetica dentro de uma
passada (MINETTI et al 2006) Antes de iniciar os experimentos eram realizadas
medidas de dobras cutacircneas nas regiotildees de colocaccedilatildeo de eletrodos
O set-up experimental incluiu um eletromioacutegrafo portaacutetil (PocketEmg BTS
Milatildeo Itaacutelia) um analisador de gases portaacutetil (K4b2 Cosmed Roma Itaacutelia) um GPS
(GPSmAP76CS) e lactiacutemetro (Accutrend Roche Diagnostic Basel Suiacuteccedila) Foram
analisados a atividade EMG de quatorze muacutesculos (erector spinae longissimus
erector spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis deltoideus anterior
trapezius ascendens gluteus maximus gluteus medius biceps femuralis caput
longus vastus lateralis e gastrocnemius lateralis) Para a preparaccedilatildeo do local e
colocaccedilatildeo dos eletrodos de superfiacutecie bipolares foram seguidas as orientaccedilotildees da
Seniam (FRERIKS et al 1991) Simultaneamente ao registro EMG sinais advindos
de seis sensores de pressatildeo (footswitches) trecircs em cada peacute (regiatildeo do calcanhar
primeiro e quinto metatarso inferior) eram registrados no eletromiograacutefo portaacutetil Os
sinais EMGrsquos foram preacute-amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um
niacutevel de ruiacutedo menor do que 1 μV rms e filtrados por um filtro do tipo Butterworth (50shy
450 Hz terceira ordem) A frequumlecircncia de amostragem da EMG e dos sensores de
pressatildeo foi de 1000 Hz
O custo metaboacutelico foi calculado segundo procedimentos do estudo anterior
(MINETTI et al 2006) O sinal EMG foi retificado e integrado e os valores meacutedios da
atividade EMG de todo o trecho foram subtraiacutedos pelos respectivos valores da
situaccedilatildeo em repouso (idem ao consumo de O2) e divididos pela velocidade meacutedia
(Vf ) A potecircncia EMG geral foi obtida a partir do somatoacuterio dos quatorze muacutesculos
ponderado pelos respectivos volumes musculares (YAMAGUCHI et al 1991) e
55
dobra cutacircnea respectiva Determinou-se o Custo EMG atraveacutes do procedimento
experimental
Para fins de comparaccedilatildeo das Vf rsquos de locomoccedilatildeo usamos o Nf baseado na
teoria das similaridades dinacircmicas (sub-seccedilatildeo 222) para normalizar a Vf No caso
presente ao inveacutes de utilizar o comprimento de membro inferior utilizamos a
estatura da seguinte forma
Vf 2
Fr = Eq 212 g estatura
Tendo em consideraccedilatildeo que a estatura meacutedia dos Caucasianos eacute maior (013
m) e que as Vf rsquos de subida e descida dos Caucasianos com carga foram 35 e 17
menores do que as dos Nepaleses deste modo os Frrsquos dos Caucasianos para os
mesmos trechos foram 40 e 24 menores do que dos Nepaleses
Os procedimentos para anaacutelise dos dados de posiccedilatildeo e Vf oriundos do GPS
satildeo os mesmos de MINETTI et al 2006) A potecircncia mecacircnica vertical (PMV) foi
calculada como segue
g h mtotPMV = Eq 213 t
onde Ah eacute variaccedilatildeo de altura mtot eacute a massa total (massa corporal + carga) g eacute
aceleraccedilatildeo gravitacional e At eacute o tempo de locomoccedilatildeo
Uma seacuterie de programas computacionais (Labview versatildeo 71 National
Instruments Austin USA) foram construiacutedos para o processamento dos dados EMG
GPS e paracircmetros espaccedilos-temporais
Foi utilizado Testes-t de student para amostras independentes para comparar
os paracircmetros espaccedilos-temporais entre Nepaleses e Caucasianos (SPSS para
Windows versatildeo 14 USA)
56
252 Resultados
Variaacuteveis espaccedilos-temporais
O Fr dos Nepaleses foi maior do que as dos Caucasianos em situaccedilatildeo com
carga (plt001) mas sem carga as diferenccedilas diminuem acentuadamente (4 e 23
maiores sem e com carga respectivamente pgt005) O CP e FP dos Nepaleses
foram maiores na subida com carga mas durante a descida com carga apesar da
Vf maior apenas o CP foi maior nos Nepaleses e a FP foi similar (pgt005)
Paracircmetros energeacuteticos
A atividade EMG por unidade de tempo foi similar entre Nepaleses e
Caucasianos Contudo a ativaccedilatildeo EMG total ou seja por unidade de distacircncia
(ldquocustordquo EMG da locomoccedilatildeo) foi notavelmente maior nos Caucasianos na situaccedilatildeo
com carga especialmente na fase de subida (observe a inclinaccedilatildeo das retas na
figura 27)
A atividade EMG tambeacutem foi analisada no domiacutenio da frequumlecircncia para testar
uma possiacutevel diminuiccedilatildeo nos paracircmetros de mediana meacutedia e pico da frequumlecircncia
que pudessem explicar via fadiga neuromuscular (KNAFLITZ e BONATO 1999) o
efeito da carga no aumento da ativaccedilatildeo EMG por distacircncia percorrida nos
Caucasianos (inclinaccedilotildees das retas na figura 27)
Utilizou-se a transformada raacutepida de Fourier com janelamento de 10 segundos
analisando o centro dos bursts de 512 pontos determinados por uma integraccedilatildeo com
janelamento moacutevel Hanning de 50 ms Todavia nenhuma diferenccedila significativa foi
encontrada nos paracircmetros de frequumlecircncia entre os primeiros e uacuteltimos vinte
segundos de experimento (diminuiccedilotildees lt 5)
O notaacutevel desempenho dos Nepaleses na subida com carga eacute confirmado pela
PMV 33 maior do que a dos Caucasianos Embora a Vf e a PMV sejam maiores
nos Nepaleses estes apresentam um custo metaboacutelico 39 menor que os
Caucasianos Esta economia energeacutetica especiacutefica agrave situaccedilatildeo de carga e inclinaccedilatildeo
extrema eacute observada tambeacutem na figura 28 na qual os Caucasianos sem carga
apresentam uma eficiecircncia similar agraves eficiecircncias dos Nepaleses mas com uma baixa
eficiecircncia na situaccedilatildeo com carga
57
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal +
carga) dos carregadores Nepaleses (NEP) e montanhistas Caucasianos
(CAU) em subida (up) e descida (down)
A eficiecircncia menor dos Caucasianos na situaccedilatildeo com carga parece ser
explicada pela quantidade de ativaccedilatildeo muscular A interessante semelhanccedila entre o
custo EMG e o custo energeacutetico (figura 27) demonstram a eficaacutecia do meacutetodo EMG
utilizado no presente estudo a fim de representar uma ativaccedilatildeo muscular geral
durante a locomoccedilatildeo
253 Discussatildeo
A menor ativaccedilatildeo muscular eacute extremamente interessante pois explica de modo
importante o mecanismo da alta eficiecircncia e economia energeacutetica nos Nepaleses
58
Os resultados de potecircncia metaboacutelica e PMV confirmam os achados de
MINETTI et al 2006) Aleacutem disso o custo energeacutetico na situaccedilatildeo sem carga eacute
similar entre Caucasianos e Nepaleses Em outras palavras o desempenho notaacutevel
dos Nepaleses eacute especiacutefico somente na situaccedilatildeo de subida com carga
000
004
008
012
016
020
024
028
-12 -10 -08 -06 -04 -02 00
efi
ciecirc
nc
ia m
iacutenim
a d
e t
rab
alh
o p
os
itiv
o NEP 0kg
CAU 0kg
NEP 40kg
CAU 40kg
14
15
eficiecircncia miacutenima de trabalho negativo
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da
PMV (positiva ou negativa) pela potecircncia metaboacutelica respectiva
(MINETTI et al 2006) As linhas satildeo as razotildees entre eficiecircncia
muscular positiva e negativa (WOLEDGE et al 1985)
A melhor economia nos Nepaleses durante a subida com carga pode ser
relacionada agraves propriedades mecacircnicas de contraccedilatildeo muscular especificamente agrave
relaccedilatildeo potecircncia-velocidade Tendo em consideraccedilatildeo que os Caucasianos
realizaram o trecho de subida com carga em uma velocidade de progressatildeo 33
menor que os Nepaleses pode-se inferir que os Caucasianos realizaram a atividade
em uma regiatildeo menor de produccedilatildeo de potecircncia devido agrave relativa baixa velocidade
que por sua vez corresponde agrave uma zona de baixa eficiecircncia Outro fator secundaacuterio
pode ser a aclimataccedilatildeo de longo prazo destes indiviacuteduos agrave hipoacutexia de altitude
favorecendo o transporte e utilizaccedilatildeo de O2 no muacutesculo esqueleacutetico
59
Surpreendentemente a ativaccedilatildeo EMG por unidade de tempo eacute semelhante
entre Nepaleses e Caucasianos e por consequumlecircncia a ativaccedilatildeo total eacute menor nos
Nepaleses
Pode-se afirmar tambeacutem que a razatildeo entre ativaccedilatildeo EMG na subida e descida
independente da massa total eacute em torno de 15 e 2 corroborando com os dados de
BIGLAND-RITCHIE e WOODS 1976)
Em conclusatildeo a hipoacutetese da ativaccedilatildeo muscular econocircmica nos carregadores
Nepaleses eacute confirmada Os paracircmetros espaccedilos-temporais da passada parecem
natildeo justificar o menor custo energeacutetico nos Nepaleses O custo EMG foi maior nos
Caucasianos especialmente durante a ascensatildeo com carga indicando uma
justificativa a um achado anterior de maior estabilidade no tronco em Nepaleses
(MINETTI et al 2006)
60
3 MECAcircNICA DA CORRIDA DE IDOSOS
31 Introduccedilatildeo
Nos idosos a forccedila muscular eacute reduzida Isso tem sido atribuiacutedo
principalmente a atrofia da massa muscular com a reduccedilatildeo da aacuterea de sua secccedilatildeo
transversal (DOHERTY 2003 FRONTERA et al 2000 TRAPPE et al 2003) e
tambeacutem agrave deficiecircncia na produccedilatildeo intriacutenseca de forccedila no niacutevel da interaccedilatildeo entre
actina e miosina (PHILLIPS et al 1991 FRONTERA et al 2000 LOWE et al 2001
MORSE et al 2005) Experimentos realizados tanto em espeacutecimes isoladas de
muacutesculo (OCHALA et al 2006 PHILLIPS et al 1991) quanto in vivo em humanos
(KLASS et al 2005 PORTER et al 1997 POUSSON et al 2001 VANDERVOORT
et al 1990) mostram que a forccedila que um muacutesculo exerce ao alongar-se
(frequumlentemente chamada de contraccedilatildeo excecircntrica) tem reduccedilatildeo menor devido ao
processo de envelhecimento que a forccedila desenvolvida durante contraccedilatildeo isomeacutetrica
e durante encurtamento (frequumlentemente chamada de contraccedilatildeo concecircntrica)
O efeito das mudanccedilas das propriedades de contraccedilatildeo do muacutesculo no
trabalho mecacircnico realizado durante locomoccedilatildeo natildeo eacute conhecido O trabalho
mecacircnico realizado ao caminhar natildeo tem sido considerado significativamente maior
em indiviacuteduos idosos apesar de um maior dispecircndio energeacutetico resultando em uma
61
menor eficiecircncia mecacircnica atribuiacuteda agrave co-contraccedilatildeo de muacutesculos antagonistas
(MIAN et al 2006)
O mecanismo elaacutestico da corrida contraacuterio ao mecanismo pendular da
caminhada necessita de uma intervenccedilatildeo muscular muito maior para manter o
movimento do CM Um ciclo alongamento-encurtamento das unidades muacutesculoshy
tendiacuteneas ocorre em cada passo da corrida com grande entrada e saiacuteda de energia
mecacircnica para dentro e para fora das unidades muacutesculo-tendiacuteneas A mecacircnica da
corrida assim mais que a caminhada pode revelar mudanccedilas no trabalho mecacircnico
realizado em cada passo devido ao desempenho muscular reduzido nos idosos
Aleacutem disso uma assimetria contato-despregue ocorre durante a corrida
surgindo do fato que as unidades muacutesculo-tendiacuteneas contraacuterio a uma mola sem
atrito tecircm comportamento diferente durante alongamento e encurtamento
Recentemente foi observado que a assimetria contato-despregue eacute uma
consequumlecircncia da relaccedilatildeo forccedila-velocidade do muacutesculo e eacute maior quanto maior for a
mudanccedila no comprimento do muacutesculo em relaccedilatildeo agravequela do tendatildeo dentro das
unidades muacutesculo-tendiacuteneas (CAVAGNA 2006)
O trabalho mecacircnico realizado durante a corrida em idosos e sua assimetria
contato-despregue para nosso conhecimento ainda natildeo satildeo determinados
Neste estudo foi calculado o trabalho mecacircnico externo realizado para manter
o movimento do CM e o tempo das trocas de energia mecacircnica durante as fases de
trabalho negativo e positivo do bouncing do corpo em indiviacuteduos idosos correndo
em diferentes velocidades Os resultados obtidos em indiviacuteduos idosos satildeo
comparados agravequeles obtidos em indiviacuteduos jovens A hipoacutetese apresentada eacute que o
aumento da discrepacircncia em idosos entre o desenvolvimento da forccedila durante
alongamento e durante encurtamento se operacional durante a corrida iraacute aumentar
a assimetria contato-despregue do aparente bouncing do corpo em relaccedilatildeo agravequele
de indiviacuteduos jovens
32 Materiais e Meacutetodos
321 Amostra e procedimento experimental
Os experimentos foram realizados em oito indiviacuteduos idosos (homens idade
62
736plusmn55 anos altura 172plusmn006 m massa 711plusmn92 kg media plusmn dp) e oito indiviacuteduos
jovens (6 homens e duas mulheres idade 208plusmn16 anos altura 176plusmn008 m massa
634plusmn100 kg) Trecircs indiviacuteduos em cada grupo satildeo treinados (volume miacutenimo
semanal de corrida de 40 km) enquanto cinco satildeo sedentaacuterios saudaacuteveis Os
resultados relatados neste estudo satildeo uma meacutedia dos dados obtidos de todos os
sujeitos em cada grupo independente de seu treinamento Resultados similares
poreacutem foram obtidos comparando os trecircs indiviacuteduos idosos treinados com os trecircs
indiviacuteduos jovens do sexo masculino natildeo treinados de acordo com os achados que
o efeito da idade nas unidades muacutesculo-tendiacuteneas satildeo similares em corredores e
indiviacuteduos natildeo-ativos (KARAMANIDIS e ARAMPATZIS 2005) Consentimento
informado escrito foi obtido de cada indiviacuteduo Os estudos foram realizados de
acordo com a Declaraccedilatildeo de Helsinque
Os indiviacuteduos correram de um lado para o outro ao longo de uma pista de
corrida de 50 metros a qual foi incorporada no niacutevel do solo 8 plataformas de forccedila
de 05 m 05 m em sequumlecircncia totalizando um espaccedilo contiacutenuo de 4 m 05 m
sensiacutevel agrave forccedila aplicada na plataforma nas direccedilotildees anterior e vertical A uacutenica
instruccedilatildeo dada a cada indiviacuteduo foi para correr normalmente em uma velocidade
constante mensurada por duas fotoceacutelulas posicionadas distantes de 1 agrave 3 m
(dependendo da velocidade) ao longo do lado da plataforma Mais caracteriacutesticas da
plataforma de forccedila satildeo descritas por CAVAGNA (1975)
O procedimento do experimento consistiu em medir a forccedila aplicada no solo
no plano sagital durante corrida em diferentes velocidades Os dados foram
adquiridos em um microcomputador a uma taxa de 500 Hz por canal de i) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo anterior (Ff) ii) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo vertical (Fv) e iii) sinal das
fotoceacutelulas A aquisiccedilatildeo e anaacutelise dos dados foram realizadas atraveacutes de um
conversor analoacutegico-digital (National Instruments Austin TX USA) e um software
feito em LabView para Macintosh (versatildeo 71)
Foram feitas anaacutelises em um total de 124 corridas com velocidades meacutedias
entre 3 e 17 kmh-1 para os idosos e 229 corridas entre 3 e 21 kmh-1 para os jovens
O nuacutemero menor de execuccedilotildees realizado pelos idosos foi para diminuir riscos de
fadiga neste grupo
63
322 Dos registros da plataforma ao trabalho externo
O processo usado para calcular as mudanccedilas da energia mecacircnica do CM do
corpo derivadas das forccedilas de reaccedilatildeo do solo eacute descrito em detalhes por CAVAGNA
1975) Em resumo somente o movimento no plano sagital foi considerado para
calcular a energia mecacircnica do CM A energia cineacutetica de translaccedilatildeo lateral do CM
foi ignorada O sinal da plataforma de forccedila sem carga foi mensurado imediatamente
antes de cada corrida e subtraiacutedo dos registros da Fv e da Ff de modo a computar
uma possiacutevel mudanccedila da linha de base da plataforma Somente o grupo de
registros da Fv e da Ff compreendida entre os cruzamentos das fotoceacutelulas foi
utilizado para anaacutelises subsequumlentes As velocidades vertical e anterior do CM foram
obtidas como segue
Antes do todas as aquisiccedilotildees a plataforma era calibrada com cargas
conhecidas no sentido vertical e horizontal acircntero-posterior
A forccedila vertical meacutedia mensurada pela plataforma de forccedila Fvplate em um
intervalo de tempo correspondente a um nuacutemero de quadros nf em um determinado
nuacutemero de passos T selecionados entre picos (ou vales) nos registros de forccedila
devem igualar ao PC mensurado com uma balanccedila Fvscale
IfirstPeakorValley
SecondPeakorValleyF = Fvi
= F Eq 31 vplate vscalenf
Fvplate foi entatildeo subtraiacuteda da coluna de dados Fv e o resultado (Fv-Fvplate)M (M
eacute a massa corporal) foi integrado no tempo para obter as mudanccedilas nos registros da
velocidade vertical para o intervalo de tempo entre os cruzamentos das fotoceacutelulas
FinalTime AVel = f [(Fv - Fv plate) M]dt Eq 32
InitialTime
Um ou mais passos regulares foram subsequumlentemente escolhidos para
anaacutelise entre dois picos ou vales da curva de velocidade vertical A regularidade dos
passos (drift) foi determinada pela diferenccedila entre incrementos positivos e negativos
agraves mudanccedilas nas velocidades vertical e horizontal divididas pela soma dos
incrementos
64
| V | V | V |I + increments I VincrementsDrift = 100 Eq 33
| V | + | V |I + increments I Vincrements
Durante a corrida no plano os deslocamentos verticais ascendente e
descendente do CM do corpo satildeo em meacutedia iguais durante um nuacutemero inteiro de
passos ie a velocidade vertical meacutedia deve ser nula Baseado nessa consideraccedilatildeo
a aacuterea abaixo das mudanccedilas da velocidade vertical registrada correspondendo ao
intervalo selecionado acima seraacute dividido por nf e o resultado seraacute subtraiacutedo do total
da variaccedilatildeo da velocidade vertical registrada entre os cruzamentos das fotoceacutelulas
para obter os valores instantacircneos positivo (ascendente) e negativo (descendente)
da Vv
nf
f AVv dt
V (t) = i= 0 -AV Eq 34 v nf v
As mudanccedilas na velocidade horizontal foram determinadas pela integraccedilatildeo da
curva FfM durante o tempo entre os cruzamentos das fotoceacutelulas Ltphoto A aacuterea
abaixo dessa variaccedilatildeo de velocidade horizontal foi entatildeo dividida por Ltphoto e o
resultado foi subtraiacutedo do mesmo registro para localizar a velocidade meacutedia de
corrida no traccedilado
Atphoto
AVf (t) = f Ff M dt Eq 35 i= 0
A velocidade meacutedia de corrida mensurada atraveacutes da distacircncia das
fotoceacutelulaLtphoto foi entatildeo somada a seacuterie resultante para obter os valores
instantacircneos de Vf
f AVf dt Vf (t) = + AVf Eq 36
A tphoto
65
A velocidade vertical instantacircnea Vv(t) foi utilizada para calcular a energia
cineacutetica instantacircnea do movimento vertical
Ekv (t) = 05M Vv (t)2 Eq 37
e por integraccedilatildeo o deslocamento vertical do CM Sv(t)
Sv (t) = f Vv (t) dt Eq 38
com a correspondente energia potencial gravitacional
E p (t) = M g Sv (t) Eq 39
A energia cineacutetica horizontal foi calculada como
Ekf (t) = 05M Vf (t)2 Eq 310
a energia cineacutetica translacional total do CM no plano sagital como
(t) Eq 311 Ek (t) = Ekv (t) + Ekf
e a energia mecacircnica translacional do CM no plano sagital como
Ecm(t) = Ekv (t) + Ekf (t) + E p (t) Eq 312
Apoacutes como mencionado acima a seleccedilatildeo foi feita inicialmente entre picos (ou
vales) das mudanccedilas da velocidade vertical os registros foram expandidos para
incluir o vale anterior (ou pico) de Ep(t) ateacute uma imagem clara dos passos a ser
obtidos (figura 31)
Algoritmos foram feitos para calcular o trabalho realizado durante os passos
selecionados entre vales (ou picos) da Ep Wv Wkf e Wext foram calculados com as
amplitudes dos vales ou picos e os valores inicial e final nos registros da Ep(t) Ekf(t)
e Ecm(t) Valores positivos das variaccedilotildees de energia foram considerados como
66
trabalho positivo valores negativos foram considerados como trabalho negativo Em
uma perfeita corrida em velocidade constante no plano a razatildeo entre os valores
absolutos de trabalho positivo e negativo realizados em um nuacutemero inteiro de
passos deve ser igual a um
323 Estimativa do trabalho interno
O trabalho positivo normalizado pela massa e unidade de distacircncia para
acelerar os membros em relaccedilatildeo ao CM do corpo foi estimado para cada corrida
com a equaccedilatildeo
W int ML(J kg-1 m -1) = 014010-200L Vf f Eq 313
onde L eacute o comprimento do passo em metros Vf a velocidade meacutedia de corrida em
metros por segundo e f eacute a frequumlecircncia de passos em Hz (CAVAGNA et al 1997) Os
valores estimados de WintML como uma funccedilatildeo da velocidade em kmh-1 foram
interpolados por um ajuste polinomial de segunda ordem Deve ser salientado que
usando a mesma equaccedilatildeo para calcular Wint nos indiviacuteduos jovens e idosos assume-
se o mesmo movimento dos membros nos dois grupos
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato
Como a energia mecacircnica do CM eacute constante quando o corpo eacute deslocado no
ar (a resistecircncia do ar eacute negligenciada) o tempo aeacutereo foi calculado como o intervalo
de tempo durante o qual
dEcm(t) dt = 0 Eq 314
Como descrito em detalhes em um estudo preacutevio (CAVAGNA 2006) esse
processo pode resultar em uma superestimativa (7) do tempo aeacutereo devido ao
ruiacutedo do registro do dEcm(t)dt A duraccedilatildeo da frenagem tbrake e a duraccedilatildeo da
propulsatildeo tpush foram calculadas como o intervalo de tempo durante o qual o
dEcm(t)dt foi positivo e negativo respectivamente Novamente devido ao ruiacutedo do
67
registro do dEcm(t)dt tbrake eou tpush foi provavelmente em alguns casos
subestimado (5-7 CAVAGNA 2006) O mesmo eacute verdade para os deslocamentos
descendente e ascendente do CM durante contato Scdown e Scup que foram
mensurados nas porccedilotildees descendente e ascendente da curva Ep(t)
respectivamente durante o intervalo de tempo onde dEcm(t)dt eacute negativo e positivo
respectivamente O deslocamento vertical descendente total Svdown e deslocamento
vertical ascendente Svup foram calculados do decreacutescimo e acreacutescimo totais da
curva Ep(t) respectivamente ocorrendo entre dois ou mais picos (ou vales) de Ep
divididos pelo nuacutemero de passos
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio
A forccedila vertical Fv aplicada pelo peacute no solo eacute
= PC + M a Eq 315 Fv v
onde Mb eacute a massa do corpo e av eacute a aceleraccedilatildeo vertical do CM ie o tempo
derivado de sua velocidade vertical Vv Quando a velocidade vertical e Ekv estatildeo no
maacuteximo a derivada eacute nula av=0 e como consequumlecircncia
Fv = PC Eq 316
A localizaccedilatildeo dos picos Ekv alcanccedilados durante os passos (figura 31) foi
entatildeo utilizada para determinar os instantes onde a Fv eacute igual ao PC A localizaccedilatildeo e
as amplitudes de Ep simultacircneo com os picos de Ekv foram utilizados para determinar
a parte do deslocamento vertical ocorrendo abaixo do ponto de equiliacutebrio durante a
desaceleraccedilatildeo descendente do CM Scedown e durante a aceleraccedilatildeo ascendente do
CM Sceup As diferenccedilas
S - S = S Eq 317 vdown cedown aedown
e
68
S - S = S Eq 318 vup ceup aeup
informa sobre o deslocamento vertical quando o CM do corpo acelera descendente e
desacelera ascendente respectivamente (CAVAGNA et al 1988)
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente
A velocidade vertical maacutexima e a energia cineacutetica maacutexima Ek=Ekv+Ekf
alcanccediladas pelo CM durante deslocamento descendente Vvmxdown e Ekmxdown e
durante a elevaccedilatildeo Vvmxup e Ekmxup satildeo determinados por comparaccedilatildeo dos picos
em Ekv e Ek com a curva Ep simultacircnea Como a velocidade vertical maacutexima pode
aumentar com a amplitude do deslocamento vertical que pode ser diferente durante
a elevaccedilatildeo e o deslocamento descendente (ver eg as curvas Ep na figura 31) a
razatildeo entre as velocidades descendente e ascendente maacuteximas foram normalizadas
(V V )(S S ) = (V V )norm Eq 319 vmxdown vmxup vup vdown vmxdown vmxup
327 Transduccedilatildeo Ep Ek durante o passo
O tempo de curso da transduccedilatildeo ocorrendo no passo entre energia potencial
gravitacional Ep e energia cineacutetica do CM Ek pode ser determinado pelo valor
absoluto das mudanccedilas ambos incrementos positivos e negativos de Ep Ek e Ecm
em intervalos curtos de tempo dentro do ciclo do passo (CAVAGNA et al 2002)
1 | Ecm(t) |r(t) = Eq 320
(| E p (t) | + | Ek (t) |)
A transduccedilatildeo Ep-Ek eacute completa (r(t)=1) durante a fase aeacuterea quando nenhum
trabalho externo eacute realizado pela forccedila muscular Entretanto a transduccedilatildeo Ep-Ek
tambeacutem ocorre durante contato quando o corpo eacute parcialmente sustentado pelo peacute
no chatildeo na parte superior da trajetoacuteria do CM (0lt r(t)lt1)
69
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado
70
(incrementos de Ecm) eacute indicado em vermelho enquanto que o tempo de
trabalho mecacircnico negativo (decrementos de Ecm) eacute indicado em azul
A transduccedilatildeo Ep-Ek eacute nula (r(t)=0) em duas fases do passo a e onde Ek
aumenta e diminui respectivamente simultaneamente com a energia potencial
gravitacional Ep (CAVAGNA et al 2002) Note que trabalho externo positivo e
negativo satildeo ambos realizados nas fases a e do passo (r(t)=0) e nas fases do
passo onde uma transduccedilatildeo ocorre entre Ek e Ep (0lt r(t)lt 1)
Nesse estudo r(t) foi calculado a partir do valor absoluto do tempo derivado
de Ep Ek e Ecm no intervalo de tempo contido entre dois ou mais picos (ou vales) de
Ep O valor cumulativo de energia recuperada Rint(t) resultando da transduccedilatildeo
instantacircnea de Ek-Ep foi determinado na aacuterea abaixo do r(t) registrado dividida pelo
periacuteodo do passo
T Rint (t) = ( f r(u)du) T Eq 321
0
No final do passo Rint(t)=Rint (CAVAGNA et al 2002) Para determinar a
assimetria do ciclo do passo eacute uacutetil saber quanto da transduccedilatildeo Ek-Ep ocorre durante
o deslocamento descendente e durante a elevaccedilatildeo do CM A derivada
dE p dt Eq 322
eacute utilizada para determinar a quantidade de transduccedilatildeo ocorrendo durante o
deslocamento descendente Rintdown e durante a elevaccedilatildeo do CM Rintup A
assimetria do passo foi quantificada pela razatildeo
Rintdown Rintup Eq 323
328 Rigidez vertical (k)
A k normalizada pela massa
k M Eq 324
71
caracterizando a frequumlecircncia natural do sistema eacute em todas as condiccedilotildees (com ou
sem uma fase aeacuterea) a inclinaccedilatildeo da relaccedilatildeo av-Sv quando avgt1g A inclinaccedilatildeo
meacutedia nessa amplitude pode ser avaliada pela razatildeo entre a aceleraccedilatildeo ascendente
maacutexima avmx e a amplitude da oscilaccedilatildeo
(S + S )ceup cedownS = Eq 325 ce 2
No presente estudo a k normalizada pela massa foi mensurada como
k M = a S Eq 326 vmx ce
E a frequumlecircncia natural do sistema massa-mola como
)05 (a Svmx cefs = Eq 327 2
329 Estatiacutestica
Os dados coletados como uma funccedilatildeo da velocidade decorrida foram
agrupados em classes de intervalos de um kmh-1 como segue 3 agrave lt4 kmh-1 4 agrave lt5
kmh-1 20 agrave lt21 kmh-1 Quando comparadas agraves meacutedias de diferentes variaacuteveis
com o mesmo nuacutemero de itens em uma certa velocidade de corrida dentro de um
grupo de indiviacuteduos um teste t para amostra pareadas foi utilizado para determinar
quando as meacutedias eram significativamente diferentes Quando comparadas as
meacutedias de diferentes variaacuteveis entre os dois grupos de indiviacuteduos com diferentes
nuacutemero de itens um teste t para amostras independentes foi utilizado (SPSS versatildeo
14) Em todos os testes o p usado foi menor do que 5
33 Resultados
Na primeira seccedilatildeo dos Resultados o bouncing do corpo a cada passo eacute
descrito desconsiderando as diferenccedilas no movimento ascendente e descendente
72
do CM (Por exemplo O deslocamento vertical Sv eacute medido como (Svup+Svdown)2 o
tempo de contato com o solo como tc =(tcup+tcdown)2 etc) Este procedimento
pressupotildee uma igualdade dinacircmica durante a subida e a descida do CM como em
um oscilador harmocircnico (CAVAGNA et al 1988 BLICKHAN 1989 SCHEPENS et
al 1998)
A potecircncia meacutedia do passo despendida para acelerar e elevar o CM do corpo
e do correspondente trabalho mecacircnico realizado por unidade distacircncia satildeo
apresentados na segunda parte Na terceira seccedilatildeo a assimetria contato-despregue
eacute considerada analisando separadamente os eventos que ocorrem durante a subida
e durante a descida do CM (CAVAGNA 2006) Em todas as seccedilotildees os resultados
obtidos sobre os indiviacuteduos idosos satildeo comparados com aqueles obtidos nos
indiviacuteduos jovens
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM
Parte superior e inferior do bouncing
O periacuteodo do passo (T parte superior da figura 33) o deslocamento vertical
do CM durante cada etapa (Sv meio da figura) e o comprimento do passo (L na
parte inferior da figura) satildeo apresentados em funccedilatildeo da velocidade de corrida (Vf) na
figura 33 (quadrados pretos) Segundo o modelo massa-mola o periacuteodo do passo
a oscilaccedilatildeo vertical do CM e o correspondente deslocamento para frente foram
divididos em duas partes uma parte mais baixa que acontece quando a Fv eacute maior
do que o PC (tce Sce e Lce ciacuterculos vermelhos) e uma parte superior quando a Fv eacute
menor que o PC (tae Sae e Lae ciacuterculos azuis abertos) Para comparaccedilatildeo o periacuteodo
do passo o deslocamento vertical e o comprimento do passo tambeacutem foram
divididos de acordo com a tradiccedilatildeo nas suas fraccedilotildees que ocorrem durante a fase
de contato com o terreno (tc Sc e Lc pontilhada linhas vermelhas) e durante a fase
aeacuterea (ta Sa e La linhas pontilhadas em azul) O significado biomecacircnico dos
resultados na figura 33 tem sido explicado em estudos anteriores realizados em
indiviacuteduos adultos de diferentes idades (CAVAGNA et al 1988) e em crianccedilas com
idades entre os 2 e 16 anos (SCHEPENS et al 1998) durante a corrida em
diferentes velocidades Em ambos os estudos as partes inferior e superior do
bouncing do corpo foram simeacutetricos ateacute ~ 11 kmh-1 (isto eacute tce=tae e Sce=Sae) e
- -
73
assimeacutetricos em velocidades mais elevadas (isto eacute taegttce e SaegtSce) O momento
vertical ganho e perdido durante tce deve ser igual ao momento vertical ganho e
perdido durante tae ie
avce tce = avae tae Eq 328
O bouncing simeacutetrico implica a mesma aceleraccedilatildeo vertical meacutedia durante a
parte inferior e superior do bouncing A aceleraccedilatildeo vertical meacutedia durante a parte
inferior do bouncing avce aumentou com a velocidade enquanto que a aceleraccedilatildeo
vertical meacutedia durante a parte superior do bouncing avae natildeo pode exceder 1 g (eacute 1 g
quando tae= ta) Deste modo o bouncing torna-se assimeacutetrico quando a aceleraccedilatildeo
vertical meacutedia durante tce exceder 1g Os resultados obtidos em relaccedilatildeo aos
indiviacuteduos jovens demonstram que o bouncing tende a ser simeacutetrico em baixas
velocidades e assimeacutetrico em altas velocidades (ver tce versus tae e Sce versus Sae na
tabela 1) Por outro lado os resultados obtidos no grupo dos idosos mostram duas
diferenccedilas importantes i) o bouncing eacute simeacutetrico nas velocidades mais altas (tce=tae e
Sce=Sae) e ii) a assimetria quando presente eacute invertida (ou seja tcegttae e ScegtSae)
Amplitude do deslocamento vertical
O deslocamento vertical do CM corporal em cada etapa da corrida Sv atinge
um maacuteximo em velocidades intermediaacuterias sendo inferior nos indiviacuteduos idosos do
que nos jovens ~ 75 cm a ~ 75 kmh-1 nos idosos e ~ 10 cm a ~ 10 kmh-1 nos
jovens Valores similares de Sv foram medidos com procedimento experimental
diferente em adultos idosos e jovens correndo a ~ 10 kmh-1 (KARAMANIDIS e
ARAMPATZIS 2005) A reduccedilatildeo de Sv nos indiviacuteduos idosos eacute devida a uma
reduccedilatildeo de todas as suas componentes (Sce Sae Sc e Sa) mas eacute particularmente
relevante considerar aqui a reduccedilatildeo da Sce (tabela 32) que representa a amplitude
da oscilaccedilatildeo do sistema massa-mola a partir de sua posiccedilatildeo de equiliacutebrio (Fv igual
ao PC) ateacute sua compressatildeo maacutexima (Fv maacutexima) A amplitude da oscilaccedilatildeo eacute menor
nos idosos do que nos jovens Como esperado esta eacute acompanhada por uma
aceleraccedilatildeo menor para cima atingida no final da compressatildeo avmx e por uma menor
velocidade maacutexima ascendente Vvmx atingida quando av=0 (figura 34 e tabela 32)
74
A velocidade vertical menor resulta por sua vez em um curto tempo aeacutereo efetivo
tae (figura 33 e tabela 32)
Frequumlecircncia de passo e do sistema massa-mola
Os dois paineacuteis superiores da figura 33 mostram que o periacuteodo do passo (T=
tae+ tce) eacute menor nos idosos do que nos jovens Isto eacute devido ao tempo aeacutereo efetivo
tae mais curto enquanto que o tempo de contato efetivo tce eacute igual entre os jovens e
os idosos (tabela 32) Segundo o modelo massa-mola da corrida o tce representa
metade do periacuteodo de oscilaccedilatildeo do sistema elaacutestico Este meio-periacuteodo similar
sugere uma frequumlecircncia de ressonacircncia semelhante fs=(kM)-05(2n) do sistema
elaacutestico aparente atraveacutes do qual o corpo se desloca ou seja uma k normalizada
pela massa corporal (kM) A figura 35 mostra que em altas velocidades k eacute maior
nos indiviacuteduos idosos (paineacuteis superior) mas devido agrave sua maior massa corporal agrave
rigidez de massa especiacutefica vertical (kM= avmxSce veja na Metodologia) eacute de fato
similar ao dos jovens (paineacuteis centrais da figura 35 e tabela 32) Em ambos os
grupos kM tende a ser aproximadamente constante ateacute ~ 10 kmh-1 e em seguida
aumenta com a velocidade Os dois paineacuteis inferiores da figura 35 mostram a
frequumlecircncia do passo f apresentada em conjunto com a frequumlecircncia de ressonacircncia do
sistema fs Pode ser observado que i) f eacute maior nos idosos do que nos jovens ii) nos
idosos a f permanece semelhante agrave fs (tabela 1) enquanto que iii) nos jovens a f eacute
inferior agrave fs (tabela 31)
332 Trabalho
O trabalho externo normalizado pela M Wext realizado para sustentar o
movimento do CM corporal no plano sagital eacute descrito na figura 36 em funccedilatildeo da
velocidade de corrida Pode ser observado que trabalho feito para sustentar as
mudanccedilas de velocidade horizontal Wextf aumenta conforme o acreacutescimo de
velocidade de modo semelhante em indiviacuteduos jovens e idosos O trabalho
realizado contra a gravidade Wextv eacute menor nos indiviacuteduos idosos (tabela 32) O
trabalho externo Wext Wextf + Wextv tambeacutem eacute menor nos idosos particularmente
nas maiores velocidades de progressatildeo
75
A menor potecircncia mecacircnica despendida contra a gravidade pelos idosos
mostra que o menor deslocamento vertical em cada passo natildeo eacute compensado pelo
aumento na frequumlecircncia de passo induzido pelo menor tempo aeacutereo efetivo tae (figura
33) A constataccedilatildeo de que o envelhecimento diminui o trabalho feito contra a
gravidade Wextv deixando inalterado o trabalho para sustentar as mudanccedilas na
velocidade horizontal Wextf resulta em uma velocidade menor de corrida onde o
Wextv se iguala ao Wextf esta velocidade eacute ~ 12 kmh-1 nos idosos e ~ 15 kmh-1 nos
jovens Os dois paineacuteis inferiores na figura 36 (analisados mais profundamente na
Discussatildeo) apresentam o trabalho mecacircnico total realizado por unidade de distacircncia
percorrida Wtot =Wext+Wint onde Wext eacute o trabalho positivo feito para manter o
movimento em relaccedilatildeo ao ambiente e o Wint eacute o trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM (calculado conforme descrito na Metodologia)
333 Assimetria contato-despregue
Os deslocamentos verticais do CM para baixo e para cima durante a fase de
contato estatildeo traccedilados na figura 37 e estatildeo expressos como uma fraccedilatildeo dos
deslocamentos verticais descendente e ascendente (ScdownSvdown ciacuterculos cheios e
ScupSvup ciacuterculos abertos) Na mesma figura eacute apresentada a fraccedilatildeo do
deslocamento vertical realizado pela amplitude da oscilaccedilatildeo do sistema massa-mola
para baixo de av=0 ateacute avmx (ScedownSvdown quadrados cheios) e para cima de avmx
ateacute av=0 (SceupSvup quadrados abertos) Quando a fase aeacuterea eacute nula nas
velocidades mais baixas de corrida todo o deslocamento vertical acontece em
contato com o solo e ScSv=1 Com o aumento da velocidade acontece uma fase
aeacuterea de duraccedilatildeo progressivamente maior durante a corrida e a fraccedilatildeo do
deslocamento vertical em contato com o solo diminui mais acentuadamente durante
o deslocamento para baixo (ciacuterculos cheios) do que durante o deslocamento para
cima (ciacuterculos abertos) ou seja (ScupSvup)gt(ScdownSvdown) Em outras palavras a
altura do CM no instante do contato eacute superior agrave sua altura no instante do toque no
solo o que indica que a elevaccedilatildeo do CM eacute inferior agrave descida durante a fase de
contato do peacute com o solo (CAVAGNA 2006) Esta assimetria contato-despregue
estaacute presente em ambos os grupos mas eacute maior nos idosos do que nos jovens
principalmente devido a uma menor reduccedilatildeo na ScupSvup com o aumento da
velocidade uma maior elevaccedilatildeo do CM se daacute em contato com o solo nos indiviacuteduos
76
idosos Em ambas as faixas etaacuterias a fraccedilatildeo de deslocamento vertical ocupada pela
amplitude de oscilaccedilatildeo SceSv se aproxima de metade de Sv quase independente da
velocidade apoiando a ideacuteia de que a oscilaccedilatildeo vertical do sistema massa-mola eacute
equilibrado em torno do ponto onde a Fv se iguala ao PC Em contraste ScSv muda
acentuadamente com a velocidade ateacute o ponto em que toda a oscilaccedilatildeo tem lugar
no contato com o solo (ScSv=1)
34 Discussatildeo
341 Sobre o meacutetodo
Este sub-capiacutetulo procura discutir o meacutetodo usado no estudo especialmente
em relaccedilatildeo ao raciociacutenio envolvido e a discussatildeo de algumas abordagens similares
ao modelo usado no presente estudo
O meacutetodo dinamomeacutetrico usado no presente estudo tem como base a teoria
do custo de geraccedilatildeo de trabalho mecacircnico Esta teoria pode ser considerada como a
primeira tentativa satisfatoacuteria nas aacutereas limiacutetrofes entre biomecacircnica biologia
experimental e fisiologia comparativa de explicar sob o ponto-de-vista mecacircnico as
formas principais de locomoccedilatildeo humana a caminhada e a corrida
Baseados no meacutetodo de FENN (1930) para a determinaccedilatildeo do trabalho
mecacircnico contra a gravidade e o trabalho mecacircnico devido agraves mudanccedilas de
velocidade Cavagna e colaboradores perceberam que o ser humano quando
caminhava e corria apresentava caracteriacutesticas nas curvas de energia mecacircnica e
no somatoacuterio dos incrementos positivos nestas energias que permitiam diferenciar
estes tipos de locomoccedilatildeo ao mesmo tempo que auxiliavam no entendimento do
comportamento da unidade muacutesculo-tendatildeo e dos mecanismos minimizadores de
dispecircndio energeacutetico mecanismo pendular e elaacutestico (ver figura 32) Os
incrementos positivos de energia mecacircnica (trabalho positivo) satildeo originados
principalmente por muacutesculos e tendotildees enquanto que os incrementos negativos de
energia mecacircnica (trabalho negativo) satildeo em parte armazenados nas estruturas natildeo
contraacuteteis dos muacutesculos e tendotildees e outra parte eacute degradada em forma de calor
Tendo em consideraccedilatildeo os princiacutepios da termodinacircmica foi possiacutevel aplicar
estes mecanismos a fim de entender o porquecirc que durante a fase de apoio na
corrida a energia cineacutetica se apresenta em fase com a energia potencial do CM em
77
relaccedilatildeo ao meio ambiente enquanto que na caminhada estas energias apresentam
comportamentos contraacuterios
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da
caminhada (pecircndulo-invertido) e de segmento complacente da corrida
(massa-mola) e seus principais constituintes Note que o tracejado
indica a trajetoacuteria do corpo de massa m durante o contato g eacute a
aceleraccedilatildeo gravitacional k eacute a rigidez da mola l0 eacute o comprimento do
membro inferior e a0 eacute o acircngulo da perna de apoio no momento do
contato com o solo
O somatoacuterio dos incrementos positivos de energia mecacircnica tambeacutem
conhecido como trabalho mecacircnico externo eacute menor do que a energia metaboacutelica
despendida pelos muacutesculos durante a caminhada enquanto que o trabalho
mecacircnico externo na corrida apresenta valor maior ao da energia metaboacutelica
despendida pelos muacutesculos Este aparente paradoxo demonstrava que a razatildeo
entre potecircncia mecacircnica gerada e a potecircncia metaboacutelica despendida ultrapassava a
eficiecircncia maacutexima de transformaccedilatildeo de energia quiacutemica em trabalho mecacircnico e foi
considerado como a primeira evidecircncia de que as unidades muacutesculo-tendatildeo
responsaacuteveis pela frenagem e propulsatildeo durante a fase de apoio da corrida eram
tambeacutem responsaacuteveis por absorccedilatildeo e re-utilizaccedilatildeo de energia elaacutestica (CAVAGNA et
al 1964) permitindo mais tarde a formulaccedilatildeo do modelo massa-mola ou ldquobouncingrdquo
da corrida (BLICKHAN 1989 MCMAHON e CHENG 1990 figura 32) e o posterior
estudo do ciclo alongamento-encurtamento do muacutesculo-esqueleacutetico
78
Portanto durante atividades ciacuteclicas como a locomoccedilatildeo os muacutesculos
responsaacuteveis pelo movimento possuem uma capacidade de geraccedilatildeo de forccedila
durante seu encurtamento (contraccedilatildeo concecircntrica) maior do que em contraccedilotildees
similares mas precedidas de contraccedilatildeo isomeacutetrica No caso da locomoccedilatildeo mais
especificamente da corrida durante contraccedilotildees concecircntricas os muacutesculos
propulsores utilizam uma energia armazenada durante a precedente contraccedilatildeo
excecircntrica (CAVAGNA et al 1964 CAVAGNA et al 1968) O modelo massa-mola
assume que a unidade muacutesculo-tendatildeo exerce um comportamento similar agrave de uma
mola ou seja quando a mola diminui de comprimento apoacutes o impacto (alongamento
do muacutesculo) armazena energia potencial elaacutestica e quando a mola aumenta seu
comprimento (encurtamento do muacutesculo) durante a segunda fase de contato
transforma energia potencial elaacutestica em energia cineacutetica O modelo tambeacutem
assume mesma altura e velocidade do CM no momento do contato e despregue
A primeira pressuposiccedilatildeo do modelo (sobre a semelhanccedila entre mola e
unidade muacutesculo-tendatildeo) apesar de correta natildeo indica informaccedilotildees sobre seus
constituintes o muacutesculo e o tendatildeo Vaacuterias evidecircncias mostram diferenccedilas no
comportamento mecacircnico do muacutesculo e do tendatildeo e estas diferenccedilas satildeo
moduladas pela forccedila imposta agrave unidade consequumlentemente dependentes da
velocidade de corrida Por exemplo KRAM e TAYLOR (1990) sugeriram que o
dispecircndio de energia durante a corrida era devido ao custo de geraccedilatildeo de forccedila das
fibras musculares agindo de forma isomeacutetrica sem realizaccedilatildeo de trabalho muscular
Evidecircncias em modelo animal confirmam este raciociacutenio (ROBERTS et al 1997
BIEWENER 1998)
Ainda assim para ser inteiramente vaacutelido este modelo o tempo de trabalho
externo positivo e negativo devem ser iguais em todas as velocidades de corrida
contudo uma assimetria nos tempos de trabalho positivo e negativo satildeo encontradas
na corrida humana em velocidades baixas (ateacute 14 kmh-1) com um menor tempo
para o trabalho mecacircnico externo negativo (CAVAGNA 2006)
Portanto o mecanismo de minimizaccedilatildeo de energia apresentada por KRAM e
TAYLOR 1990) parece se sustentar apenas em altas velocidades Em velocidades
menores os muacutesculos propulsores ativam em intensidade menor portanto gerando
uma tensatildeo menor no tendatildeo provavelmente insuficiente para gerar uma mudanccedila
importante no comprimento do tendatildeo Portanto o trabalho muscular eacute significativo
com contraccedilotildees excecircntricas em maior velocidade do que as contraccedilotildees
79
concecircntricas o que corresponde com a relaccedilatildeo forccedila versus velocidade e tambeacutem
com os resultados de eficiecircncia muscular para seacuteries de alongamento encurtamento
em diferentes velocidades (maior eficiecircncia em alta velocidade de encurtamento e
menor velocidade de alongamento ndash HEGLUND e CAVAGNA 1987) Ou seja em
velocidades menores parece existir um importante trabalho muscular executado de
modo assimeacutetrico com o tendatildeo agindo apenas como transmissor de forccedilas
enquanto que em altas velocidades com o aumento do pico de estresse no muacutesculo
e consequumlentemente aumento da rigidez da unidade muacutesculo-tendatildeo o muacutesculo
contrai isometricamente e o tendatildeo muda de comprimento agindo como um elaacutestico
(o muacutesculo tambeacutem gera tensatildeo devido agrave histerese do tendatildeo poreacutem eacute
negligenciaacutevel ndash ALEXANDER 2002)
Sobre o segundo criteacuterio (da semelhanccedila de altura e velocidade no contato e
despregue) os proacuteprios autores do modelo massa-mola indicam que em geral os
animais apresentam uma velocidade no contato maior do que no despregue bem
como realizam o contato com as articulaccedilotildees das pernas mais flexionadas do que
no despregue (BLICKHAN 1989) Poreacutem se as anaacutelises da velocidade e altura satildeo
modificadas do momento de contato e despregue para o iniacutecio da fase aeacuterea e de
contato efetivos (quando a forccedila vertical eacute igual aacute forccedila peso) levando em
consideraccedilatildeo o periacuteodo natural do sistema elaacutestico a velocidade continua maior no
iniacutecio do contato efetivo em todas as velocidades de corrida mas a altura do CM eacute
maior no contato efetivo inicial do que no momento de fase aeacuterea inicial em
velocidades baixas de corrida (aproximadamente de 8 agrave 14 kmh-1) Acima destas
velocidades a altura do CM eacute maior no iniacutecio da fase aeacuterea efetiva do que no iniacutecio
da fase de contato efetivo (CAVAGNA 2006) Estas assimetrias podem chegar ateacute
30
Um ponto chave na formulaccedilatildeo deste modelo eacute a determinaccedilatildeo da rigidez do
sistema massa-mola aqui tambeacutem uma simplificaccedilatildeo do fenocircmeno pois considera
apenas os valores maacuteximos de forccedila e deslocamento verticais como se durante toda
a fase de apoio a rigidez fosse constante
Caacutelculo da rigidez de mola
Os caacutelculos da rigidez de mola do sistema bouncing representam as
propriedades de mola do movimento vertical do corpo e da perna A rigidez vertical eacute
80
estimada como a razatildeo do pico de forccedila vertical (algumas vezes denominado como
forccedila maacutexima durante a fase ativa do tempo de contato) e o deslocamento maacuteximo
vertical do CM durante o apoio (CAVAGNA et al 1988 MCMAHON e CHENG
1990) Outro meacutetodo alternativo para o caacutelculo da rigidez vertical utiliza o tempo de
contato efetivo assumindo que este tempo representa o meio periacuteodo de oscilaccedilatildeo
do sistema elaacutestico (ver CAVAGNA et al 2005) k = Mb( tce)2 onde Mb eacute massa
corporal Este uacuteltimo meacutetodo apresenta a vantagem de evitar a influecircncia das
oscilaccedilotildees de aceleraccedilatildeo vertical do CM apoacutes o contato inicial A rigidez de perna eacute
a razatildeo do pico de forccedila vertical e a mudanccedila no comprimento de perna durante o
apoio A variaccedilatildeo do comprimento de perna eacute determinada com a equaccedilatildeo 330
(MCMAHON e CHENG 1990)
delta l = ycm + l0 (1V cosa0) Eq 329
Onde l0 eacute o comprimento de perna em repouso e a0 eacute o acircngulo da perna no
contato inicial em relaccedilatildeo agrave vertical (a0 = sin-1(Vf tc2 l0) onde Vf eacute a velocidade
horizontal e tc eacute o tempo de apoio Apesar do uso frequumlente desta medida no campo
das Ciecircncias do Esporte e Biologia Experimental a rigidez de pernas possui uma
forte limitaccedilatildeo devido ao uso da medida de membro inferior incorrer em um alto grau
de erro (e 1 cm dados natildeo publicados) Aleacutem disso se utiliza da medida de tempo
de contato enquanto que a relaccedilatildeo inversa com o sistema massa-mola eacute dada pelo
tempo de contato efetivo (quando a forccedila vertical eacute maior do que o peso corporal)
portanto natildeo representa as mudanccedilas do sistema massa-mola frente agrave restriccedilotildees do
ambiente (eg gravidade CAVAGNA et al 2005)
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical
A menor amplitude de oscilaccedilatildeo do sistema elaacutestico nos idosos (Sce na figura
33) implica i) uma menor forccedila vertical maacutexima Fvmx e energia elaacutestica armazenada
em cada passo ii) uma maior frequumlecircncia de passo iii) uma menor variaccedilatildeo de
energia externa para manter o movimento do CM do corpo em relaccedilatildeo ao meio
ambiente externo e iv) um maior trabalho interno para acelerar os segmentos
relativo ao CM
81
Destaca-se que as divisotildees do passo baseadas no tempo de contato efetivo
(vermelho) aeacutereo efetivo (azul) correspondem agrave aproximadamente metade da
duraccedilatildeo e deslocamento durante o passo Em contraste a fraccedilatildeo do passo realizado
durante o tempo aeacutereo e de contato variam bastante com a velocidade Aleacutem disso
o tcetae e SceSce nos idosos enquanto que o contraacuterio acontece com os jovens
Linhas representam a meacutedia ponderada de todos os dados (Kaleidagraph 364) e a
uacutenica proposta destas linhas eacute ser um guia para os olhos elas natildeo descrevem o
mecanismo fiacutesico envolvido (figura 33)
Tabela 31 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nos quais os pares de variaacuteveis listadas satildeo significativamente diferentes dentro de
cada grupo experimental
Vf Idoso Jovem
(km h-1) tce vs tae Sce vs Sae fs vs f tce vs tae Sce vs Sae fs vs f
3 006 312 10-4 079 001 004 117 10-3
4 031 013 028 008 058 005
5 003 003 004 091 014 020
6 001 473 10-3 003 005 026 001
7 002 001 020 011 045 001
8 102 10-7 361 10-8 190 10-4 003 048 256 10-3
9 445 10-4 753 10-6 002 001 057 151 10-3
10 250 10-4 212 10-5 510 10-4 243 10-3 091 284 10-3
11 014 003 028 158 10-4 019 234 10-4
12 044 013 061 249 10-5 002 328 10-5
13 018 003 020 310 10-6 261 10-3 100 10-5
14 001 042 005 388 10-6 183 10-3 166 10-5
15 029 022 012 107 10-6 256 10-4 166 10-6
16 057 048 090 947 10-5 361 10-3 292 10-4
Forccedila e energia elaacutestica
A forccedila maacutexima vertical eacute dada pela massa corporal multiplicada pela
aceleraccedilatildeo vertical maacutexima e o resultado eacute somado ao peso corporal Avmx (equaccedilatildeo
82
34) A massa corporal meacutedia eacute 711 kg nos idosos e 634 kg nos jovens A variaccedilatildeo
da aceleraccedilatildeo maacutexima atingida pelos indiviacuteduos idosos nas suas altas velocidades
(15-17 kmh-1) eacute de 1077 plusmn 197 ms-2 (n=7) Considerando que nas mesmas
velocidades alcanccediladas pelos jovens a variaccedilatildeo foi de 1886 plusmn 274 ms-2 (n=24)
(figura 34) Note que a aceleraccedilatildeo ascendente e velocidade vertical maiores
atingidas pelos jovens Contraacuterio ao bouncing elaacutestico a velocidade vertical maacutexima
alcanccedilada durante o deslocamento descendente eacute maior do que o alcanccedilado
durante a elevaccedilatildeo sendo esta diferenccedila maior nos idosos
Tabela 32 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Wf Wv tce tae Sce
3 008 003 095 482 10-3 005
4 008 015 004 074 062
5 062 002 083 006 006
6 259 10-3 138 10-4 034 427 10-4 001
7 049 133 10-6 073 287 10-5 140 10-3
8 004 162 10-6 039 231 10-6 198 10-3
9 007 581 10-6 028 107 10-5 407 10-4
10 005 120 10-10 094 605 10-9 176 10-6
11 014 170 10-6 025 383 10-7 435 10-6
12 014 471 10-7 019 321 10-6 380 10-5
13 007 114 10-6 068 228 10-6 196 10-6
14 099 400 10-6 005 170 10-5 231 10-5
15 014 222 10-7 010 142 10-6 685 10-8
16 066 208 10-4 061 184 10-4 718 10-4
De acordo com a equaccedilatildeo 34 estes nuacutemeros resultam em uma forccedila vertical
maacutexima Fvmxold=1463 kN e Fvmxyoung=1818 kN note que 75 de diferenccedila na Avmx
resulta em 24 de diferenccedila em Fvmx devido agrave maior massa corporal dos indiviacuteduos
idosos A forccedila mais baixa alcanccedilada durante o contato pelos indiviacuteduos idosos pode
83
ser explicada em parte pela bem documentada perda de forccedila muscular (eg
DOHERTY 2003) e em parte por uma estrateacutegia de aumentar a seguranccedila do
sistema muacutesculo-esqueleacutetico (KARAMANIDIS e ARAMPATZIS 2005)
A aparente k a 15-17 kmh-1 eacute 3732plusmn885 kNm-1 (n=7) nos indiviacuteduos idosos
e 2869plusmn650 kNm-1 (n=24) nos indiviacuteduos jovens (figura 35) Assumindo uma
relaccedilatildeo forccedila-comprimento linear dos elementos elaacutesticos seu alongamento maacuteximo
(de zero a Fvmx) seria (14633732)=0039 m nos idosos e (18182869)=0063 m
nos indiviacuteduos jovens Os paineacuteis inferiores da figura 35 mostram que a frequumlecircncia
de passo (linhas contiacutenuas) eacute similar agrave frequumlecircncia natural do sistema (linhas
pontilhadas) em todas as velocidades nos idosos enquanto que com os jovens a
frequumlecircncia do passo torna-se menor do que a frequumlecircncia do sistema com o aumento
da velocidade
Tabela 33 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Avmx Vvmx AvmxSce (AvmxSce)Mb Sv
3 004 003 099 039 002
4 001 011 003 022 034
5 152 10-3 001 024 040 003
6 601 10-4 232 10-4 049 067 772 10-4
7 132 10-3 422 10-6 066 007 367 10-5
8 918 10-7 154 10-6 025 018 271 10-5
9 526 10-5 131 10-6 007 067 137 10-5
10 134 10-7 196 10-11 072 001 146 10-8
11 439 10-4 744 10-7 046 004 798 10-7
12 533 10-6 666 10-7 040 002 552 10-6
13 264 10-4 401 10-6 061 022 158 10-6
14 115 10-3 366 10-6 005 652 10-5 126 10-5
15 891 10-6 725 10-8 031 009 316 10-7
16 353 10-3 258 10-4 048 005 267 10-4
84
Visto que a energia potencial gravitacional e a energia cineacutetica do CM estatildeo
em fase durante a corrida o sistema elaacutestico sofre sua maacutexima tensatildeo quando o
componente vertical da forccedila de reaccedilatildeo do solo encontra-se no maacuteximo ((Fvmx)) e o
componente horizontal eacute nulo (Ff=0)
Na verdade Fvmx ocorre no ponto mais baixo da trajetoacuteria (Epmn) quando o
CM termina sua desaceleraccedilatildeo e comeccedila a sua aceleraccedilatildeo (ou seja Ff=0 e Ekfmn) A
energia elaacutestica armazenada em cada passo pode assim ser computada usando-se
apenas a forccedila vertical como (14630039)2=2853 J e (18180063)2=5727 J para
os indiviacuteduos idosos e para os indiviacuteduos jovens respectivamente Esta energia
elaacutestica eacute posteriormente utilizada em parte durante o impulso para elevar e acelerar
a frente o CM
Tabela 34 Comparaccedilatildeo das assimetrias contato-despregue entre jovens idosos e
sistema elaacutestico
IDOSO JOVEM ELAacuteSTICO
Vvmxdown Vvmxup 118plusmn011 107plusmn008 1
f 124plusmn018 106plusmn010 1
Rintdown Rintup 213plusmn130 126plusmn032 1
tpush tbrake 125plusmn016 115plusmn013 1
Ekmxdown - Ekmxup (J) 1003plusmn625 752plusmn542 0
Valores satildeo meacutediaplusmndp (plt0001 N=124 ( N=122) para idosos e N=195 para jovens)
Amplitude de velocidades 3-17 kmh-1
A maacutexima compressatildeo elaacutestica do sistema tambeacutem pode ser analisada como
o deslocamento vertical do CM durante o contato o que em 15-17 kmh-1 eacute em
meacutedia Sc=0032plusmn0006 m (n=7) nos idosos e Sc=0060plusmn0007 m (n=24) nos jovens
(em vez de 0039 m e 0063 m como calculado acima)
85
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um
passo em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis
a direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup +
86
Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo (tae)
da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na direccedilatildeo
vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os ciacuterculos em
vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2) e
a frente (Lce) A linha em vermelho pontilhada em cada painel indica o tempo de
contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente (Lc) durante o
passo As linhas azuis pontilhadas em cada painel indicam o tempo aeacutereo total
(ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La) durante o passo As
barras verticais indicam o desvio-padratildeo da meacutedia os nuacutemeros proacuteximos aos
siacutembolos nos paineacuteis superiores indicam o nuacutemero de itens nas meacutedias
A discrepacircncia pode ser devida em parte agrave uma subestimaccedilatildeo do Sc como
medido (ver Metodologia) A energia elaacutestica armazenada computada como (Fvmx
Sc)2 eacute (1463 0032)2=2341 J (em vez de 2853 J conforme calculado acima) e
(1818 0060)2=5454 J (em vez de 5727 J) para indiviacuteduos idosos e indiviacuteduos
jovens respectivamente
A partir dos dados meacutedios de frequumlecircncia de passo e potecircncia em um mesmo
conjunto de velocidades (figuras 36 e 37) o trabalho externo em cada passo
resultou (405 711)368=7825 J nos indiviacuteduos idosos e (538
634)279=12226 J nos indiviacuteduos jovens Daqui resulta que a contribuiccedilatildeo
elaacutestica para o trabalho externo em cada passo poderia ser 28537825=036 e
572712226=047 respectivamente (ou 23417825=030 e 545412226=045
usando Sc)
Estes caacutelculos aproximados em conjunto com uma maior assimetria contato-
despregue que seraacute discutida a seguir (tabela 34) indicam uma menor restituiccedilatildeo
elaacutestica do corpo nos idosos A maior rigidez k medida nos indiviacuteduos idosos em
sua mais alta velocidade de corrida (figura 35) em aparente desacordo com a
menor rigidez dos tendotildees do gastrocnemius (ONAMBELE et al 2006) do
quadriacuteceps (KARAMANIDIS e ARAMPATZIS 2005) medidos nos idosos Por outro
lado um aumento pela idade da rigidez dos elementos elaacutesticos nos tendotildees e
muacutesculos foi relatado em favor dos muacutesculos flexores do cotovelo (VALOUR e
POUSSON 2003)
87
Importante ressaltar que na complexa deformaccedilatildeo de todo corpo no solo a
aparente k eacute o resultado de um conjunto de unidades muacutesculo-tendatildeo em seacuterie cujas
propriedades elaacutesticas dependem do niacutevel de ativaccedilatildeo muscular O nuacutemero de
unidades muacutesculo-tendatildeo em seacuterie depende por sua vez da orientaccedilatildeo dos
segmentos e do tronco durante o impacto sobre o solo que pode ser diferente nos
indiviacuteduos idosos e nos indiviacuteduos jovens (por exemplo apoio na parte da frente do
peacute mais do que no calcanhar)
O maior valor de k encontrado em idosos em suas mais altas velocidades de
corrida portanto natildeo eacute necessariamente uma indicaccedilatildeo de uma maior rigidez dos
seus tendotildees ou unidades de muacutesculo-tendatildeo medidos durante contraccedilotildees
voluntaacuterias maacuteximas
Frequumlecircncia
O menor tempo aeacutereo efetivo tae nos idosos causa um aumento na
frequumlecircncia da passo f =1(tce+tae) para valores que satildeo iguais e por vezes
superiores agrave frequumlecircncia do sistema fs=1(2tce) Diferentemente dos jovens que
optam em uma grande extensatildeo de velocidades por uma FP mais baixa agrave do
sistema aumentando o tae em relaccedilatildeo ao tce (figuras 33 35 e tabela 32)
Os fatores que determinam a escolha da f a uma determinada velocidade de
corrida satildeo i) sintonizando a frequumlecircncia de passo f para a frequumlecircncia natural do
sistema fs (CAVAGNA et al 1997) e ii) escolhendo uma f que minimize a potecircncia
meacutedia de passada limitada aerobicamente (Wextf figura 36) dentro dos limites
estabelecidos pela potecircncia anaeroacutebica meacutedia durante o empurre (trabalho positivo)
(W+tpush liberada imediatamente pelo muacutesculo durante a contraccedilatildeo) (CAVAGNA et
al 1991) A primeira estrateacutegia eacute normalmente adotada em baixas velocidades de
corrida e modificada para a segunda estrateacutegia de corrida em altas velocidades Isto
eacute feito atraveacutes de um aumento da aceleraccedilatildeo ascendente meacutedia avce acima de 1 g
com o consequumlente aumento de tae em relaccedilatildeo ao tce (equaccedilatildeo 36) Assim a
frequumlecircncia de passo f=1(tce+tae) torna-se menor do que a frequumlecircncia do sistema
fs=1(2tce) bem como o incremento da potecircncia meacutedia do passo Wextf eacute controlada
Nos indiviacuteduos idosos a segunda estrateacutegia nunca eacute adotada A aceleraccedilatildeo meacutedia
para cima nunca excede 1 g mesmo nas velocidades altas 15-17 kmh-1 onde avce
=742plusmn123 ms-2 (n=7) segue-se que f fs em todas as velocidades (figura 35) Isto
88
permite uma menor forccedila durante o empurre da corrida em alta velocidade
resultando em uma potecircncia meacutedia durante o empurre ~ 60 daquela dos jovens
mas o aumento da frequumlecircncia da passada resulta em um maior Wint e um grande
incremento na potecircncia meacutedia de passo Wextf em corridas de alta velocidade (ver
abaixo) Aleacutem disso como se verificou neste estudo a mais baixa deformaccedilatildeo
elaacutestica do sistema diminui a fraccedilatildeo de Wext possivelmente sustentado pelo
mecanismo elaacutestico (ver tabela 34) Em contrapartida a segunda estrateacutegia eacute
seguida pelos jovens onde avce =1248plusmn18 ms-2 (n=24) no mesmo intervalo de
velocidades (15-17 kmh-1) resultando em uma menor frequumlecircncia de passo (f lt fs)
que limita o aumento do Wint da corrida em altas velocidades e um consequumlente
incremento da Wextf+ (ver abaixo)
Aleacutem disso a maior deformaccedilatildeo elaacutestica do sistema permite uma maior
utilizaccedilatildeo da energia elaacutestica (tabela 34) Sabe-se que uma mudanccedila na frequumlecircncia
de passo a uma determinada velocidade tem efeitos opostos sobre a potecircncia
externa o que diminui com o aumento da frequumlecircncia da passada e a potecircncia
interna para reposicionar os segmentos em cada passo que aumenta com a
frequumlecircncia (CAVAGNA et al 1991)
Em que medida a menor potecircncia externa meacutedia do passo devido agrave menor
amplitude da oscilaccedilatildeo dos segmentos nos idosos eacute compensada por uma maior
potecircncia interna meacutedia do passo devido ao aumento da frequumlecircncia de passo
89
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e velocidade
vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown (paineacuteis inferiores)
atingidos pelo CM durante o passo em funccedilatildeo da velocidade de corrida Estatiacutestica
e outras indicaccedilotildees conforme a figura 33
O total do trabalho realizado por unidade distacircncia Wtot =Wint+Wext foi somado
pelo Wint estimado pelas equaccedilotildees 32 e 33 para os indiviacuteduos jovens e idosos
como descrito nos Meacutetodos e pelo Wext calculado a partir das seguintes equaccedilotildees
obtidas pela interpolaccedilatildeo de todos os dados experimentais
W ML(J kg-1 m -1) = 29738 Vf - 03217 Eq 330 extyoung
90
(R=0831) para o grupo de indiviacuteduos jovens e
W ML(J kg-1 m -1) = 28445 Vf - 040856 Eq 331 extold
(R=0762) para o grupo de indiviacuteduos idosos O Wtot resultante (linhas
pontilhadas nos paineacuteis inferiores da figura 36) mostra que o trabalho externo menor
no idoso por unidade de distacircncia eacute progressivamente compensado com o aumento
da velocidade por um maior trabalho interno devido agrave sua frequumlecircncia de passada
(FP) aumentada O Wtot alcanccedila um minimum a ~75 kmh-1 nos indiviacuteduos idosos e
um miacutenimo a ~8-12 kmh-1 nos indiviacuteduos jovens
A diferenccedila em Wtot eacute invertida acima de ~14 kmh-1 Eacute possiacutevel que a menor
utilizaccedilatildeo da energia elaacutestica em idosos aumente o gasto de sua energia metaboacutelica
para o mesmo Wtot O consumo de O2 durante a corrida a 10 kmh-1 aumentou com a
idade em corredores treinados do sexo feminino (EVANS et al 1995)
343 A assimetria contato-despregue
As quatro fases do bouncing as diferenccedilas com um sistema elaacutestico
Antes de descrever a assimetria contato-despregue no aparente bouncing do
CM em cada passo da corrida vale a pena referir que os momentos de contato e
despregue podem natildeo ocorrer durante corridas de baixa velocidade quando a
oscilaccedilatildeo vertical do CM do corpo se daacute totalmente em contato com o solo (figura
38) Eacute oacutebvio que neste caso o contato com o solo natildeo pode ser tomado como um
indicador de contato e despregue quando se descreve o bouncing do sistema
elaacutestico Neste caso a oscilaccedilatildeo vertical ocorre abaixo e acima da posiccedilatildeo de
equiliacutebrio (onde a Fv iguala o PC e a velocidade vertical eacute maacutexima) Mesmo quando
uma fase aeacuterea ocorre durante o passo a fraccedilatildeo do deslocamento vertical do CM
total em que o corpo estaacute em contato com o solo ScSv muda amplamente com a
velocidade enquanto que a fraccedilatildeo do deslocamento vertical abaixo e acima do ponto
de equiliacutebrio SceSv se aproxima da metade do Sv quase independente da
velocidade (figura 37)
91
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e frequumlecircncia
do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute maior nos idosos
nas altas velocidades (paineacuteis superiores) a rigidez vertical normalizada pela massa
eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras indicaccedilotildees conforme figura 33
92
Estas observaccedilotildees indicam que eacute mais adequado considerar-se contato
efetivo o instante no qual a Fv aumenta acima do PC (ao inveacutes do instante em que o
peacute estaacute em contato com o solo) e despregue efetivo o instante em que a Fv diminui
para valores menores do que o PC (ao inveacutes do instante no qual o peacute deixa o solo)
A assimetria contato-despregue desaparece quando o bouncing do corpo eacute mais
corretamente dividido desta forma (ou seja tce versus tae em vez de tc versus ta)
(CAVAGNA et al 1988 MCMAHON e CHENG 1990) Ainda na figura 37 pode ser
observado que ScSv mudam mais com a velocidade do que a amplitude da
oscilaccedilatildeo SceSv ao qual atinge a metade do deslocamento vertical Sv Exceto as
velocidades muito baixas quando a fase aeacuterea eacute nula (ScSv=1 eg paineacuteis
superiores nas figuras 31 e 38) o deslocamento descendente enquanto o peacute toca o
solo eacute menor do que o deslocamento ascendente particularmente nos idosos a
descida baliacutestica do CM eacute maior do que a elevaccedilatildeo baliacutestica (veja a linha azul
pontilhada na figura 38)
Segundo a equaccedilatildeo 34 a velocidade vertical descendente eacute maacutexima no
instante do contato efetivo e a velocidade vertical ascendente eacute maacutexima no instante
do despregue efetivo No movimento harmocircnico de um sistema elaacutestico as
velocidades ascendentes e descendentes maacuteximas satildeo iguais Isso natildeo eacute verdade
na corrida humana a velocidade maacutexima descendente eacute superior agrave velocidade
maacutexima ascendente (CAVAGNA 2006) Estes resultados mostram que a assimetria
eacute maior em indiviacuteduos idosos do que nos jovens na variaccedilatildeo normal de velocidades
(3-17 kmh-1) a proporccedilatildeo normalizada ((VvmxdownVvmxup)norm=116plusmn009 (n=124)
nos idosos e 107plusmn007 (n=195) nos jovens (p=126 10-19) (tabela 34) Outras
assimetrias satildeo apresentadas a seguir atraveacutes da anaacutelise das mudanccedilas na energia
potencial gravitacional Ep e energia cineacutetica translacional Ek=Ekv+Ekf do CM
corporal durante as quatro fases de oscilaccedilatildeo do sistema em relaccedilatildeo a posiccedilatildeo de
equiliacutebrio (Fv=Mg) (CAVAGNA 2006) Estas fases satildeo apresentadas na figura 38 a
partir do topo da trajetoacuteria do CM corporal Durante a aceleraccedilatildeo descendente
(Saedown azul) a Ep diminui e a Ek aumenta indicando uma transduccedilatildeo de Ep em Ek
o que ocorre tanto na presenccedila quanto na ausecircncia de uma fase aeacuterea (por
exemplo na parte superior do painel esquerdo da figura 38) O montante desta
transduccedilatildeo eacute dado pelo incremento Rintdown da curva do Rint(t) apoacutes o maacuteximo de Ep
Durante a desaceleraccedilatildeo descendente (Scedown vermelho) o trabalho externo
negativo eacute feito para diminuir simultaneamente Ep e Ek O trecho superior da curva
93
Rint(t) correspondente agrave fraccedilatildeo do passo mostra que natildeo ocorre transduccedilatildeo entre
Ep e Ek Note-se que o pico de Ek durante o passo eacute atingido proacuteximo ao iniacutecio da
fase de trabalho negativo consistente com a velocidade maacutexima de alongamento
das unidades muacutesculo-tendotildees (HEGLUND e CAVAGNA 1987)
Durante a aceleraccedilatildeo ascendente (Sceup vermelho) trabalho positivo externo
eacute feito para aumentar simultaneamente Ep e Ek O trecho inferior da curva Rint(t)
correspondente agrave fraccedilatildeo a do passo mostra que natildeo ocorre transduccedilatildeo entre Ep e
Ek Note que enquanto eacute quase totalmente contida dentro do Scedown a continua
apoacutes o final do Sceup ou seja dentro da desaceleraccedilatildeo ascendente do CM (Saeup
azul) Em outras palavras a perna ainda estaacute a exercer uma forccedila propulsiva a fim
de acelerar o corpo a frente embora a forccedila vertical tenha diminuiacutedo para valores
abaixo do peso corporal Essa assimetria eacute maior no idoso A proporccedilatildeo a eacute
124plusmn018 nos indiviacuteduos idosos e 106plusmn010 nos indiviacuteduos jovens (p=41510-19
tabela 34)
Importante notar a origem diferente dos dois picos Ekmxup (inferior) e
Ekmxdown (superior) alcanccedilados durante o passo de corrida durante a elevaccedilatildeo e
descenso do CM Ekmxup se deve ao empurre para frente enquanto Ekmxdown eacute
devido agrave gravidade A diferenccedila meacutedia Ekmxdown- Ekmxup=752plusmn542 nos indiviacuteduos
jovens e 987plusmn592 nos idosos (p=00004) indica uma maior perda da energia
cineacutetica Ekv no idoso adquirida durante a descida (tabela 34)
Durante a desaceleraccedilatildeo ascendente do CM (Saeup azul) a transduccedilatildeo de Ek
em Ep acontece apenas na uacuteltima parte da elevaccedilatildeo porque como descrito acima
Ep e Ek aumentam simultaneamente durante a maior parte do Saeup Na verdade a
transduccedilatildeo de Ek em Ep eacute quase nula nos idosos (figura 38) O incremento da curva
Rint(t) que ocorre durante a elevaccedilatildeo Rintup eacute inferior ao que ocorre durante a
queda Rintdown Tambeacutem esta assimetria eacute maior no idoso A proporccedilatildeo
RintdownRintup nos indiviacuteduos idosos eacute 213plusmn13 e 126 plusmn 032 nos indiviacuteduos jovens
(p=33310-11 tabela 34) Este fenocircmeno eacute acompanhado por uma maior fraccedilatildeo da
elevaccedilatildeo em contato com o solo como indicado pela maior proporccedilatildeo ScupSvup nos
idosos (figura 37) Um tempo aeacutereo inferior nos idosos durante a corrida em ~ 10
kmh-1 foi encontrado por KARAMANIDIS e ARAMPATZIS 2005)
94
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com seus
95
dois componentes o trabalho realizado contra a gravidade (Wv ciacuterculos abertos) e
para sustentar as mudanccedilas de velocidade a frente (Wf quadrados abertos)
Estatiacutestica e outras indicaccedilotildees conforme figura 33
Note que particularmente nos idosos a transduccedilatildeo da Ek em Ep durante a
elevaccedilatildeo (incremento Rintup da curva Rint(t) abaixo da linha horizontal pontilhada) eacute
menor do que a transduccedilatildeo da Ep em Ek durante o deslocamento descendente
(incrementos Rintdown da curva Rint(t) acima da linha horizontal pontilhada) esta
assimetria eacute acompanhada pela elevaccedilatildeo baliacutestica (nulo nos idosos) menor do que a
descida baliacutestica Nos trechos horizontais da curva Rint(t) nenhuma transduccedilatildeo
ocorre Ep e Ek e unidades muacutesculo-tendatildeo absorvem simultaneamente Ep e Ek (fase
) e aumentam Ep e Ek simultaneamente (fase a) Note que enquanto que a fase eacute
realizada durante Scedown a estende-se aleacutem do Sceup dentro de uma grande parte
do Saeup devido ao continuo aumento da Ek Esta assimetria tambeacutem eacute maior nos
idosos
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As fraccedilotildees do
deslocamento vertical do CM durante contato ScSv (ciacuterculos preenchidos
deslocamento descendente ciacuterculos abertos deslocamento ascendente) e quando
a Fv eacute maior do que o PC SceSv (quadrados preenchidos deslocamento
96
descendente quadrados abertos deslocamento ascendente) satildeo apresentados em
funccedilatildeo da velocidade de corrida Estatiacutestica conforme figura 33
Um trabalho externo positivo eacute realizado (segmentos vermelhos na figura 31)
natildeo soacute para aumentar simultaneamente Ep e Ek (fraccedilatildeo a do passo) mas tambeacutem
quando ocorre transduccedilatildeo da Ek em Ep no final do empurre durante o alcance do
platocirc de Ecm (figura 31) Daqui resulta que a duraccedilatildeo de trabalho positivo tpush eacute
superior agrave duraccedilatildeo a a proporccedilatildeo tpushta diminui com a velocidade de ~19 agrave 3-5
kmh-1 para ~11 agrave 15-17 kmh-1 Da mesma forma o trabalho externo negativo eacute
feito (segmentos azuis na figura 31) natildeo apenas para diminuir simultaneamente Ep e
Ek (fraccedilatildeo do passo) mas tambeacutem quando ocorre uma transduccedilatildeo de Ep em Ek no
iniacutecio da frenagem durante a acentuada diminuiccedilatildeo de Ecm no final de seu platocirc
(figura 31) Consequentemente a duraccedilatildeo do trabalho negativo tbrake eacute maior do que
a duraccedilatildeo a proporccedilatildeo tbraket diminui com a velocidade de ~17 agrave 3-5 kmh-1 para
~12 agrave 15-17 kmh-1
A duraccedilatildeo do empurre e da frenagem estatildeo apresentados na figura 39 em
funccedilatildeo da Vf Observa-se que tanto nos indiviacuteduos idosos quanto nos jovens tpushgt
tbrake ateacute 13-14 kmh-1 (tabela 31) A proporccedilatildeo eacute tpushtbrake=125plusmn016 nos indiviacuteduos
idosos e 115plusmn013 nos indiviacuteduos jovens (p=11610-9 tabela 34) Novamente a
assimetria eacute maior nos indiviacuteduos idosos
Durante a corrida no plano a uma velocidade constante o momentum perdido
Fbrake tbrake equivale ao momentum adquirido Fpush tpush (realmente na direccedilatildeo vertical
o momentum perdido eacute ligeiramente maior que o momentum adquirido porque a
velocidade descendente maacutexima eacute 7-16 maior do que a velocidade ascendente
maacutexima tabela 34) Deste modo se tpushgt tbrake entatildeo Fpush lt Fbrake ou seja a forccedila
meacutedia durante o trabalho positivo eacute inferior agrave forccedila meacutedia durante o trabalho
negativo
As assimetrias do bouncing acima descritas estatildeo resumidas na tabela 34
onde eacute feita uma comparaccedilatildeo entre indiviacuteduos idosos indiviacuteduos jovens e um
sistema elaacutestico Observa-se que o desvio de um sistema elaacutestico eacute maior para os
indiviacuteduos idosos do que para os indiviacuteduos jovens isto eacute o salto dos indiviacuteduos
idosos eacute menos elaacutestico do que o dos indiviacuteduos jovens Note a mesma conclusatildeo
foi encontrada acerca da estimativa da energia elaacutestica armazenada em cada passo
97
98
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito idoso
paineacuteis a direita sujeito jovem em cada painel o comportamento da transduccedilatildeo Ep-
Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas na energia potencial
gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf normalizada para oscilar entre
zero e um Mesmos passos da figura 1 cada painel comeccedila e termina no valor
menor da curva Ep As cores diferentes na curva Ep distinguem as fraccedilotildees do passo
onde a Fv exercida no solo eacute maior do que o PC (vermelho) e menor do que o PC
(azul) As linhas contiacutenuas de Ep indicam a fase de contato enquanto que as linhas
pontilhadas Ep (azul fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As
quatro fases correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown (azul)
e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas pontilhadas verticais
satildeo apresentadas nos dois picos de Ek e ocupam a fraccedilatildeo onde a transduccedilatildeo Ep-Ek
ocorre conforme indicado pelos incrementos da curva Rint(t)
Por que o bouncing do corpo eacute diferente daquele de um sistema elaacutestico
A cada passo executado as unidades muacutesculo-tendatildeo satildeo submetidas a um
ciclo alongamento-encurtamento durante o contato com o solo As unidades
muacutesculo-tendatildeo satildeo constituiacutedas por duas estruturas em seacuterie que apresentam
respostas diferentes durante o alongamento e encurtamento Enquanto os tendotildees
tecircm um comportamento semelhante entre o alongamento e encurtamento devido agrave
sua pequena histerese (ALEXANDER 2002) o muacutesculo exerce uma maior forccedila
durante o alongamento do que durante o encurtamento dependente da relaccedilatildeo
forccedila-velocidade (FENN e MARSH 1935 HILL 1938) Este fato resulta em uma
resposta diferente das unidades muacutesculo-tendatildeo a um ciclo alongamento-
encurtamento dependente da mudanccedila do comprimento relativo de muacutesculo e
tendatildeo durante o ciclo (CAVAGNA 2006)
O alongamento dos muacutesculos em relaccedilatildeo ao alongamento do tendatildeo depende
da rigidez do muacutesculo em relaccedilatildeo agrave do tendatildeo a rigidez do muacutesculo por sua vez
depende da sua ativaccedilatildeo Se a ativaccedilatildeo eacute elevada como em altas velocidades
(BIEWENER 1998) e o muacutesculo eacute mantido isomeacutetrico como alguns estudos
sugerem para a corrida (KRAM e TAYLOR 1990 BIEWENER et al 1998
99
ROBERTS et al 1998) a maioria da mudanccedila no comprimento seraacute realizada pelos
tendotildees e as caracteriacutesticas do bouncing se aproximaratildeo agraves de um corpo elaacutestico
Se por outro lado a ativaccedilatildeo muscular for baixa uma importante fraccedilatildeo da mudanccedila
do comprimento seraacute realizada pelo muacutesculo Neste caso a forccedila desenvolvida
durante o alongamento eacute esperada que exceda a que foi desenvolvida durante o
encurtamento e as caracteriacutesticas do bouncing foram distintas agrave de um corpo
elaacutestico
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos
painel inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura 31)
e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e barras
azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de corrida
Estatiacutestica conforme figura 33
Esta eacute possivelmente a razatildeo pela qual a proporccedilatildeo tpushtbrake (figura 39) eacute
maior em velocidades baixas de corrida quando a ativaccedilatildeo muscular eacute menor e o
comprimento muscular eacute alterado e consequumlentemente o trabalho sustentado por
filamentos de muacutesculos que deslizam dentro das unidades muacutesculo-tendatildeo eacute
relativamente maior (CAVAGNA 2006) Pode ser observado que a duraccedilatildeo de
trabalho externo positivo eacute maior do que a duraccedilatildeo do trabalho externo negativo ateacute
a velocidade de 12-14 kmh-1 (tabela 31) como esperado a partir da relaccedilatildeo forccedilashy
100
velocidade muscular Isto sugere que com o aumento da velocidade a contribuiccedilatildeo
do trabalho pelas estruturas contraacuteteis eacute progressivamente substituiacutedo pela
armazenagem e re-utilizaccedilatildeo de energia elaacutestica pelos tendotildees A razatildeo tpushtbrake eacute
maior nos idosos (tabela 34)
Um corolaacuterio deste ponto de vista eacute que as fibras musculares curtas
aparentemente de pouca importacircncia ligadas em seacuterie com tendotildees muito longos
(ALEXANDER 2001) tecircm papel fundamental de modular a energia elaacutestica
armazenada nos tendotildees e para ajustar toda a extensatildeo da mudanccedila imposta agrave
unidade muacutesculo-tendatildeo Uma forccedila muscular maior durante o alongamento do que
durante o encurtamento juntamente com a perda de energia durante o ciclo
alongamento-encurtamento satildeo tanto consequumlecircncias da relaccedilatildeo forccedila-velocidade do
muacutesculo e podem explicar pelo menos qualitativamente o conjunto dos desvios do
sistema elaacutestico (tabela 33)
O maior desvio de um sistema elaacutestico encontrado nos indiviacuteduos mais idosos
eacute coerente com a menor forccedila desenvolvida pelos seus muacutesculos o que implicaria
uma mudanccedila relativamente maior do comprimento do muacutesculo nas unidades
muacutesculo-tendatildeo A segunda razatildeo pode ser a maior diferenccedila na forccedila desenvolvida
pelos muacutesculos durante o alongamento relativo ao encurtamento relatado na
literatura em idosos (PHILLIPS et al 1991 OCHALA et al 2006 VANDERVOORT
et al 1990 PORTER et al 1997 POUSSON et al 2001 KLASS et al 2005)
Em conclusatildeo modificaccedilotildees na estrutura muscular menor forccedila e uma
relaccedilatildeo forccedila-velocidade mais assimeacutetrica resultam em uma modificaccedilatildeo da energia
mecacircnica do CM do corpo durante a corrida A menor forccedila especialmente durante
trabalho positivo explica a menor amplitude da oscilaccedilatildeo vertical que por sua vez eacute
a causa do menor trabalho externo da maior frequumlecircncia da passada e maior
trabalho interno A relaccedilatildeo forccedila-velocidade mais assimeacutetrica explica a maior
assimetria contato-despregue Ambas as modificaccedilotildees resultam em uma menor
utilizaccedilatildeo da energia elaacutestica durante o bouncing do idoso
101
4 PREDIZENDO Vf CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO TERRESTRE
41 Introduccedilatildeo
A dinacircmica da locomoccedilatildeo eacute determinada principalmente pelas forccedilas de
reaccedilatildeo do solo geradas de modo agrave re-acelerar e deslocar o corpo contra a forccedila
gravitacional em um ciclo de passada O meacutetodo para analisar o trabalho e o custo
mecacircnico externos usando plataformas dinamomeacutetricas foi introduzido por Cavagna
e colaboradores (caminhada CAVAGNA et al 1963 corrida CAVAGNA et al
1964) Desde entatildeo o Wext tem sido investigado em diferentes condiccedilotildees e
populaccedilotildees [terreno (FORMENTI et al 2005 FORMENTI e MINETTI 2007)
crianccedilas (CAVAGNA et al 1983 SCHEPENS et al 1998 SCHEPENS et al 2001)
meacutetodo de locomoccedilatildeo (MINETTI 1998a ARDIGO et al 2003) deficiecircncia de
hormocircnio do crescimento (MINETTI et al 2000) gradiente de locomoccedilatildeo (MINETTI
et al 1993 1994) idosos (MIAN et al 2006 estudo atual capiacutetulo 3)]
Apesar de sua relevacircncia cientiacutefica o nuacutemero de laboratoacuterios onde trabalho e
custo mecacircnico satildeo avaliados eacute limitado devido a questotildees metodoloacutegicas Em
especial a aquisiccedilatildeo da energia mecacircnica externa eacute atualmente limitada pela
necessidade de espaccedilo suficiente para posicionar plataformas de forccedila para coletar
dois passos sucessivos de modo a obter o miacutenimo de duas curvas de forccedilas de
reaccedilatildeo do solo consecutivas essenciais para esse meacutetodo Durante a corrida haacute um
periacuteodo entre as duas curvas durante o qual ambos os peacutes estatildeo fora do solo (em
velocidades normais) enquanto que durante a caminhada esse periacuteodo eacute
substituiacutedo por uma fase de apoio duplo
Independente se as duas curvas estatildeo sobrepostas ou natildeo (caminhando ou
correndo respectivamente) haacute ainda alguma dificuldade em obter
102
experimentalmente no miacutenimo duas curvas similares de modo que a Fv meacutedia seja
igual ao PC Normalmente mais de um terccedilo das aquisiccedilotildees com indiviacuteduos normais
satildeo rejeitadas (dados natildeo-publicados) devido agrave dificuldade de caminhar ou correr
em plataformas em uma velocidade constante E aleacutem disso a maior parte dos setshy
uprsquos biomecacircnicos satildeo dispostos de modo que as curvas sucessivas sejam obtidas
da mesma plataforma Dados de Bastien e colaboradores mostram que duas
medidas sucessivas em diferentes plataformas de forccedila eram possiacuteveis apenas em
10 das tentativas Assim medir o Wint realizado durante o duplo apoio eacute uma tarefa
difiacutecil e essa variaacutevel em seu maacuteximo representa mais de 40 do Wext (BASTIEN
et al 2003)
Deste modo o presente texto procura analisar as possibilidades de anaacutelise da
biomecacircnica da locomoccedilatildeo em situaccedilotildees onde apenas uma plataforma de forccedila com
dimensotildees capazes de analisar apenas um apoio simples satildeo disponiacuteveis
O objetivo desse trabalho eacute estabelecer uma equaccedilatildeo capaz de predizer o
trabalho mecacircnico usando procedimentos de prediccedilatildeo linear e otimizaccedilatildeo e checar
sua validade analisando experimentos de locomoccedilatildeo em diferentes velocidades
42 Equaccedilatildeo do tempo de atraso
Usando a primeira lei de Newton (um corpo se move a uma velocidade
constante quando a soma total das forccedilas externas eacute igual a zero) temos que a Fv
meacutedia exercida contra o solo durante um ciclo de passada a uma velocidade
constante eacute igual ao PC (CAVAGNA e MARGARIA 1966) Se somente as forccedilas de
reaccedilatildeo do solo de um uacutenico passo satildeo coletadas e a simetria eacute assumida
(KARAMANIDIS et al 2003) o atraso de tempo entre passos (s) pode ser obtido
por
F t Ivc c vt = = Eq 41 step M g M g
onde tc e Fvc satildeo a duraccedilatildeo e a Fv meacutedia durante o fase de contato (figura 41)
respectivamente e Iv eacute o impulso vertical Essa informaccedilatildeo eacute crucial se a passada
completa deve ser reconstruiacuteda (no novo passo elaborado somente a forccedila
103
horizontal precisa ser invertida enquanto que a Fv precisa ser somente duplicada a
partir do atraso do tempo tstep)
M g M gFP = = Eq 42
2F t 2 Ivc c v
de onde o CP (CP m) pode ser inferido
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de reaccedilatildeo do solo durante a
corrida
O DF (ALEXANDER e JAYES 1980) ie a fraccedilatildeo do tempo de passada no
qual um uacutenico peacute estaacute no solo eacute
104
M g 1DF = = Eq 43
2F F vc vc2
M g
e deste modo eacute possiacutevel indicar se o modo de locomoccedilatildeo eacute caminhada (DF05) ou
corrida (DFlt05) Ateacute esse ponto a uacutenica variaacutevel a ser conhecida antecipadamente
eacute a massa corporal (kg)
43 Estimativa da velocidade horizontal
Enquanto pares de fotoceacutelulas satildeo comumente encontrados em laboratoacuterios
por vezes a Vf natildeo eacute conhecida (paleontologia biomecacircnica forecircnsica etc) Assim
FP DF e massa podem entrar no modelo de prediccedilatildeo de velocidade (ms-1) com
base em dados coletados previamente (NILSSON e THORSTENSSON 1989)
Vf = (1953F M g) - (14843Iv M g) + 5415 Eq 44 v peak
onde Fvpeak eacute a forccedila de impacto vertical e Iv eacute impulso vertical O erro meacutedio da
estimativa (SEE = 05 dp(1 ndash R2)) eacute 005 ms-1 Entatildeo o CP pode ser obtido como
VfFP ou
1953Fv peak -14843Iv + 5415M gCP = Eq 45
2Fvc
Apesar do alto coeficiente de regressatildeo e baixo erro padratildeo da meacutedia esse
meacutetodo necessita do primeiro pico vertical e assim se torna limitado por exemplo
em humanos para corredores que apoacuteiam o peacute com o calcanhar no momento do
contato Para evitar essa limitaccedilatildeo foi construiacutedo um modelo de regressatildeo linear
muacuteltipla incluindo variaacuteveis descritivas (MINETTI e ALEXANDER 1997) da
energeacutetica da locomoccedilatildeo
qregression + + DFregression + FPregressionVf = Eq 46 3
105
Para cada regressatildeo o meacutetodo dos miacutenimos quadrados eacute usado Enquanto
que o DF e o FP satildeo calculados (equaccedilotildees 42 e 43) o fator q precisa ser
determinado O fator q (tambeacutem conhecido como fator de forma) oferece
informaccedilotildees relacionadas ao formato da curva forccedila-tempo durante a fase de apoio
Usualmente a forccedila vertical pode ser determinada somente com dois primeiros
cossenos de uma seacuterie de Fourier (ALEXANDER 1978)
tc ) Eq 47 Fv = x cos( tc ) V qcos(3
onde x eacute PC e tc eacute tempo de contato A ausecircncia de coeficientes seno indica uma
simetria nas curvas forccedila-tempo e nestes casos o fator q eacute constante Em outras
palavras conhecendo somente o valor da Fv e sua respectiva fase eacute possiacutevel
encontrar o fator q Todavia na caminhada satildeo frequumlentemente observadas curvas
assimeacutetricas (NILSSON e THORSTENSSON 1989) assim incluiacuteu-se dois
coeficientes senos na equaccedilatildeo
tc ) Eq 48 Fv = x cos( tc ) V qcos(3 tc ) + a1 sin(2 tc ) V a2 sin(4
onde a1 e a2 satildeo constantes Assim usando um simples caacutelculo de meacutedia aritmeacutetica
para o q durante o tc noacutes temos
q1 + q2 + q3 + qnqmean = Eq 49 n
Usando os valores de fator q advindos da literatura (MINETTI e ALEXANDER
1997) construiacutemos a seguinte equaccedilatildeo de regressatildeo em situaccedilotildees de caminhada
DF 05 qregression = 23061q + 05873 R=079 Eq 410
onde qregression eacute a Vf estimada e utilizada na equaccedilatildeo 46 Para situaccedilotildees de corrida
o fator q natildeo varia em funccedilatildeo da velocidade (figura 42) obtendo um coeficiente
106
angular da equaccedilatildeo de regressatildeo muito baixo (00916) portanto em situaccedilotildees de
corrida o qregression eacute cancelado
As seguintes equaccedilotildees (411 412 413 e 414) foram originadas dos dados
apresentados na figura 43 de MINETTI (1998b) Nesta figura as informaccedilotildees satildeo
valores meacutedios (meacutedias advindas de 22 agrave 42 medidas para cada velocidade e tipo
de locomoccedilatildeo) de medidas de FP e DF portanto as equaccedilotildees a seguir apresentam
valores de R subestimados enquanto que as equaccedilotildees de regressatildeo representam
de modo satisfatoacuterio os dados de origem A Vf predita pela frequumlecircncia de passada
FPregression foi determinada para a caminhada como
DF 05 FPregression = 27781FP V12077 R=098 Eq 411
e para a corrida
DF lt 05 FPregression = 75469FP - 79561 R=090 Eq 412
A Vf predita pelo duty factor DFregression foi determinado para a caminhada
como
DF 05 DFregression = V12342DF + 84628 R=099 Eq 413
e para a corrida
DF lt 05 DFregression = -16912DF + 87422 R=098 Eq 414
44 Equaccedilatildeo de custo energeacutetico
O atraso entre passos tstep e a Vf satildeo cruciais para ldquosintetizarrdquo toda a
passada e calcular o trabalho mecacircnico externo e a recuperaccedilatildeo de energia (ambos
valores total (CAVAGNA e KANEKO 1977) e instantacircneo (CAVAGNA et al 2002))
Assim as forccedilas de reaccedilatildeo do solo satildeo integradas duas vezes para posiccedilatildeo
do CM e dados da velocidade A primeira integraccedilatildeo das forccedilas horizontais e
107
verticais menos o PC ambas divididas pela massa corporal resultam na aceleraccedilatildeo
do CM A constante de integraccedilatildeo usada para as forccedilas acircntero-posteriores foi a
velocidade meacutedia de progressatildeo Para as forccedilas vertical e meacutedio-lateral noacutes
assumimos que as velocidades inicial e final em todo o ciclo eram iguais A variaccedilatildeo
positiva ponto-a-ponto da Ep somada a variaccedilatildeo positiva ponto-a-ponto da Ek
durante uma passada completa resulta na energia mecacircnica externa total Ecm
(CAVAGNA e KANEKO 1977 WILLEMS et al 1995) Para evitar o ldquoparadoxo do
trabalho zerordquo o trabalho externo eacute determinado somando somente os incrementos
positivos da Ecm Sabendo o Wext e estimando o Wint (MINETTI 1998b) foi
calculado o Wtot e o custo energeacutetico (Ctot) da locomoccedilatildeo
A velocidade horizontal foi determinada atraveacutes do meacutetodo de regressatildeo
linear muacuteltipla usando como variaacuteveis independentes os coeficientes da curva Fv (de
NILSSON e THORSTENSSON 1989) A validade cruzada das equaccedilotildees
desenvolvidas no presente estudo foi calculada por coeficientes de regressatildeo (R)
45 Discussatildeo
O presente modelo prediz a velocidade horizontal e o custo energeacutetico da
locomoccedilatildeo terrestre Aleacutem disso o modelo matemaacutetico permite estimar outros
importantes paracircmetros da locomoccedilatildeo como a FP e o DF
Outros modelos
Tem sido proposto que o custo energeacutetico da locomoccedilatildeo terrestre pode ser
determinado pelo custo da produccedilatildeo de forccedila para suportar o PC (KRAM e TAYLOR
1990) Fundamentalmente o custo de geraccedilatildeo de forccedila indica que a potecircncia
metaboacutelica da locomoccedilatildeo eacute relacionada diretamente ao PC e o tempo disponiacutevel
para produzir forccedila
c Mg E
metabolic = Eq 415 tc
108
onde c eacute uma constante de custo (que expressa a proporcionalidade entre taxa de
dispecircndio de energia normalizado pela massa e taxa de geraccedilatildeo de forccedila)
entretanto esse modelo tecircm sido alvo de criacuteticas Resumidamente a principal criacutetica
eacute baseada em i) a suposiccedilatildeo que o dispecircndio metaboacutelico devido ao movimento dos
membros superiores eacute negligenciaacutevel e ii) a desconsideraccedilatildeo do conceito de
trabalho O presente trabalho tambeacutem mostra que levar em consideraccedilatildeo apenas o
tempo da geraccedilatildeo de forccedila e a forccedila natildeo eacute o bastante para determinar o custo
energeacutetico da locomoccedilatildeo As informaccedilotildees contidas no proacuteprio comportamento da
curva forccedila vertical-tempo parecem influenciar de modo importante a determinaccedilatildeo
de paracircmetros fundamentais da locomoccedilatildeo Especialmente o Iv e o fator de forma q
indicam um ajuste da curva de regressatildeo linear importante para a determinaccedilatildeo da
Vf
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de progressatildeo
A prediccedilatildeo da FP e DF foram comparados com os valores
determinados experimentalmente em dois sujeitos (sujeitos RR e TD 175 e
170m de estatura 78 e 84kg de massa corporal) correndo em vaacuterias velocidades de
progressatildeo As forccedilas de reaccedilatildeo do solo foram registradas em uma plataforma de
forccedila AMTI agrave uma frequumlecircncia de amostragem de 1000Hz e a Vf foi determinada
quadro a quadro atraveacutes de uma cacircmera colocada agrave 5m de distacircncia da aacuterea de
interesse e 1m de altura do piso A mesma foi posta de forma a registrar o
movimento no plano sagital dos sujeitos com uma frequumlecircncia de amostragem de
109
50Hz Um procedimento de calibraccedilatildeo 2D foi realizado a fim de converter as
informaccedilotildees de pixels para metros As informaccedilotildees de posiccedilatildeo linear foram filtradas
atraveacutes de um filtro passa-baixa do tipo Butterworth com frequumlecircncia de corte
variando entre 3 e 9Hz determinados para cada corrida atraveacutes do procedimento de
anaacutelise residual (WINTER 2005) A coordenada horizontal do ponto anatocircmico do
quadril foi utilizada para determinar a FPexp CPexp e a velocidade meacutedia
experimentais A FPexp foi determinada pela frequumlecircncia de amostragem fsample
dividida pelo nuacutemero de quadros que totalizam um ciclo de passada nframes
f sampleFPexp = Eq 416 n frames
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de progressatildeo Fonte
Minetti 1998b
O CPexp foi determinado pela posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo FinalhorPosition diminuiacutedo pela posiccedilatildeo horizontal do quadril no
primeiro quadro InitialhorPosition
CPexp = horPosition = FinalhorPosition V InitialhorPosition Eq 417
110
A velocidade meacutedia experimental Vfexp foi determinada pela variaccedilatildeo da
posiccedilatildeo horizontal durante um ciclo de passada dividida pela variaccedilatildeo de tempo de
um ciclo de passada a partir da Eq 411
n frames 1time = = Eq 418
f sample FPexp
temos
horPositionVfexp = Eq 419 time
A razatildeo entre a frequumlecircncia FP experimental e teoacuterica foi de 1001 A razatildeo
para o DF foi de 0977
O presente modelo pode auxiliar a determinar paracircmetros espaccedilos-temporais
e energeacuteticos de animais extintos prevendo a forccedila de reaccedilatildeo do solo de um uacutenico
passo
Atraveacutes da anaacutelise das informaccedilotildees contidas em uma curva de forccedila de
reaccedilatildeo do solo vertical pelo tempo informaccedilotildees fundamentais da mecacircnica e
energeacutetica da locomoccedilatildeo podem ser estimadas em situaccedilotildees que a informaccedilatildeo
experimental direta natildeo for disponiacutevel
111
5 CONCLUSAtildeO GERAL
51 O custo EMG da caminhada humana
O objetivo deste estudo foi construir um modelo do custo EMG da caminhada
humana Para tanto criou-se duas abordagens experimental e teoacuterica sendo que a
teoacuterica parece ter uma melhor relaccedilatildeo com as evidecircncias experimentais sobre a
energeacutetica da locomoccedilatildeo humana A estabilidade em conjunto com a atividade EMG
de muacutesculos posturais parece ser um mecanismo primaacuterio da energeacutetica da
locomoccedilatildeo
52 A mecacircnica da corrida de idosos
A mecacircnica da corrida de idosos foi comparada com a de jovens atraveacutes da
determinaccedilatildeo e comparaccedilatildeo do trabalho mecacircnico e de paracircmetros do sistema
massa-mola especialmente usando aspectos de assimetria do mecanismo elaacutestico
de minimizaccedilatildeo de energia entre os grupos experimentais
Os idosos produzem menos forccedila durante a fase de trabalho mecacircnico
positivo com uma menor oscilaccedilatildeo vertical durante a fase aeacuterea e menor oscilaccedilatildeo
total Consequentemente a capacidade de armazenar e re-utilizar energia elaacutestica
112
dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio energeacutetico neste
grupo quando comparado com jovens
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre
Tendo apenas as informaccedilotildees de uma curva forccedila vertical versus tempo e a
massa corporal construiu-se um modelo biomecacircnico de prediccedilatildeo do CP Vf e custo
energeacutetico da locomoccedilatildeo terrestre Os resultados advindos do modelamento
correspondem aos paracircmetros determinados experimentalmente Laboratoacuterios que
detenham apenas uma plataforma de forccedila ou nas aacutereas onde as informaccedilotildees de
entrada do atual modelo constituam a uacutenica fonte de dados disponiacutevel (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis-chaves da
locomoccedilatildeo podem ser realizadas com razoaacutevel acuraacutecia
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico
O seguinte texto representa um esforccedilo de raciociacutenio a partir dos achados da
presente tese aliados ao referencial teoacuterico abordado durante os capiacutetulos
anteriores a fim de compreender as determinantes da locomoccedilatildeo humana Mais do
que oferecer uma resposta final sobre a mecacircnica e a energeacutetica da locomoccedilatildeo
humana este texto lanccedila uma provaacutevel resposta ainda inicial acerca das
determinantes envolvidas da locomoccedilatildeo humana
As situaccedilotildees de locomoccedilatildeo que desafiam as noccedilotildees atuais da mecacircnica e
energeacutetica da locomoccedilatildeo tratadas nesta tese nomeadamente o processo de
envelhecimento e as inclinaccedilotildees satildeo algumas das questotildees que natildeo satildeo todavia
compreendidas pelas teorias atuais da locomoccedilatildeo humana mas que a presente
hipoacutetese pretende responder A locomoccedilatildeo humana eacute determinada desde o ponto
de vista mecacircnico como uma seacuterie de accedilotildees complexas de segmentos interligados
ao qual geram torques atraveacutes da ativaccedilatildeo muscular e transmissatildeo de forccedilas pelos
tendotildees anexados em seacuterie aos muacutesculos e agraves articulaccedilotildees que conectam os
Restriccedilotildees da tarefa
velocidade
Restriccedilotildees do organismo
- massa
- comprimento do membro
i f i
Tendatildeo
- energia
Energia
mecacircnica do
CM
Mecanismo
minimizador
Dispecircndio
energeacutetico
Restriccedilotildees do
ambiente Muacutesculos
- eficiecircncia
113
segmentos Todo este sistema eacute controlado pelo sistema nervoso central e
perifeacuterico Ainda assim apesar da extrema complexidade deste tipo de movimento
conforme discutido extensivamente nas seccedilotildees 21 31 e 41 a corrida e a
caminhada humana se caracterizam como sistemas capazes de minimizar o
dispecircndio energeacutetico advindo dos muacutesculos sistemas estes denominados de
massa-mola e pecircndulo invertido respectivamente Desde a sua introduccedilatildeo ateacute os
dias atuais estes sistemas tecircm recebido intensas criacuteticas da literatura abordadas em
capiacutetulos precedentes poreacutem mais do que por agrave prova os achados principais que
deram base para estes sistemas as criacuteticas satildeo direcionadas agraves limitaccedilotildees dos
sistemas especialmente da forma em que foram propostos A seacuterie de experimentos
realizados primeiramente com humanos (CAVAGNA et al 1963 1964) e apoacutes com
animais (FEDAK et al 1982 HEGLUND et al 1982a HEGLUND et al 1982b
TAYLOR et al 1982) demonstraram de modo inequiacutevoco que as curvas de energia
potencial gravitacional e cineacutetica do CM se apresentavam em fase durante a
corridagalope e em contra-fase (atraso de 180 graus) na caminhada Deste ponto
em diante eacute estabelecido que durante a transiccedilatildeo da caminhada para a corrida os
sistemas satildeo modificados de um modo discreto ou seja o pecircndulo invertido seria
ldquodesligadordquo e o sistema massa-mola acionado automaticamente
Figura 51 Modelo conceitual da locomoccedilatildeo humana
114
Este raciociacutenio adveacutem dos achados de Cavagna e colegas e aleacutem disso da
observaccedilatildeo de paracircmetros cinemaacuteticos e cineacuteticos aos quais respondem de forma
discreta na mudanccedila do tipo de locomoccedilatildeo por exemplo o DF durante caminhada
varia de 065 em baixas velocidades ateacute 055 em altas velocidades de forma
contiacutenua poreacutem quando o sujeito faz a transiccedilatildeo para a corrida o DF passa para
04 O fator de forma ldquoqrdquo da curva de forccedila vertical em funccedilatildeo do tempo tambeacutem se
modifica abruptamente variando de 07 na caminhada para -01 durante corrida
(ALEXANDER e JAYES 1980) Uma justificativa para este comportamento discreto
eacute relacionado agrave um tipo de locomoccedilatildeo pouco usada por seres-humanos o skipping
Por outro lado evidecircncias experimentais tecircm demonstrado que em algumas
velocidades de caminhada parece existir um mecanismo elaacutestico de minimizaccedilatildeo de
energia (FUKUNAGA et al 2001) denominado de sistema de ldquocatapultardquo devido agrave
caracteriacutestica de baixa velocidade durante a frenagem e alta velocidade na fase de
propulsatildeo (ISHIKAWA et al 2005 ISHIKAWA et al 2007) Por outro lado durante a
corrida no estudo da mecacircnica da corrida dos idosos foi observada uma transduccedilatildeo
de energia cineacutetica e potencial gravitacional em baixas velocidades diminuindo com
o aumento da velocidade (relativo ao deslocamento vertical total capiacutetulo 3)
enquanto que a contribuiccedilatildeo do tendatildeo e consequentemente do componente
elaacutestico da unidade muacutesculo-tendatildeo aumentam (CAVAGNA 2006) Portanto os dois
sistemas parecem natildeo mudar atraveacutes de transformaccedilotildees abruptas como os
paracircmetros anteriormente apresentados poderiam induzir mas eacute notoacuterio um
continuum de mudanccedilas nas caracteriacutesticas mecacircnicas destes dois tipos de
locomoccedilatildeo e a mudanccedila na predominacircncia do mecanismo minimizador parece ser o
responsaacutevel pela transiccedilatildeo de um tipo de locomoccedilatildeo para outro
Para construir este modelo eacute necessaacuterio sabermos quanto de energia eacute
recuperado pelos mecanismos minimizadores A energia recuperada por via
pendular eacute calculada como (ver capiacutetulo 327)
cpendular = Rint Eq 51
e a energia elaacutestica armazenada como
115
Fvmx k = Eq 52 celaacutestica 2
Este raciociacutenio leva agrave um modelo de minimizaccedilatildeo de energia assumido
simplesmente como o somatoacuterio dos mecanismos elaacutestico e pendular
= Eq 53 creconvertida cpendular + celaacutestica
Assumindo como constante o dispecircndio energeacutetico sob outras formas de
energia (teacutermica) a energia despendida para a contraccedilatildeo dos muacutesculos esqueleacuteticos
a fim de gerar a locomoccedilatildeo pode ser determinada por
= -E Eq 54 Emuscular Emetaboacutelica repouso
e deste modo podemos afirmar que a energia total para percorrer determinada
distacircncia eacute dada por
= Eq 55 total Ereconvertida + Emuscular
e este valor em um amplo espectro de velocidades e tipos de locomoccedilatildeo apresente
uma relaccedilatildeo linear direta com a velocidade da locomoccedilatildeo (restriccedilatildeo da tarefa)
Mas quais os fatores que determinam este continuum de mecanismos
minimizadores O compromisso entre estes mecanismos (pendular e elaacutestico) eacute
diretamente ligado ao comportamento da energia mecacircnica vertical (potencial
gravitacional + cineacutetica) e da unidade muacutesculo-tendatildeo E em uacuteltima anaacutelise estas
caracteriacutesticas mecacircnicas parecem ser moduladas por restriccedilotildees do ambiente (g
inclinaccedilatildeo) restriccedilotildees da tarefa (velocidade) e restriccedilotildees do organismo (massa e
comprimento de membros inferiores) conforme figura 51
Hipoacuteteses levantadas com o atual modelo
i) A velocidade de transiccedilatildeo deve coincidir com a mudanccedila na
predominacircncia do mecanismo minimizador de energia
ii) Analisar o mecanismo pendular em diferentes velocidades de corrida
116
iii) Quando as demais restriccedilotildees estatildeo controladas as restriccedilotildees do
organismo e o compromisso entre massa e comprimento de membro
inferior poderiam explicar as mudanccedilas no uso dos mecanismos pendular
e elaacutestico
iv) Existe uma velocidade oacutetima para a corrida humana
v) O somatoacuterio da quantidade de energia reconvertida por meio pendular e
elaacutestico somado ao dispecircndio energeacutetico dos muacutesculos deve ser altamente
relacionado com a velocidade de locomoccedilatildeo
541 Respondendo algumas criacuteticas atuais
Este modelo pode explicar os resultados de GEYER et al 2006) sobre a
possibilidade de um modelo de ldquopecircndulo-invertido carregado por uma molardquo
(BLICKHAN et al 2007) ser aplicado na caminhada devido a melhor representaccedilatildeo
da curva forccedila tempo pelo meacutetodo proposto do que pelo modelo do pecircndulo-
invertido Apesar da boa representaccedilatildeo de uma variaacutevel mecacircnica da locomoccedilatildeo o
modelo despreza uma questatildeo central da anaacutelise da locomoccedilatildeo a determinaccedilatildeo do
mecanismo minimizador de energia Portanto apesar da coincidecircncia da resposta de
forccedila de reaccedilatildeo do solo vertical originada pelo modelo e a medida experimental o
modelo apenas apresenta uma possibilidade do ponto de vista matemaacutetico de
representaccedilatildeo do modelo teoacuterico de continuum apresentado aqui
Recentemente uma extensa revisatildeo de BIEWENER 2006) analisou como as
flutuaccedilotildees na energia mecacircnica do CM de animais podem ser usadas a fim de
identificar os mecanismos fundamentais envolvidos na locomoccedilatildeo terrestre e indicou
que quando satildeo comparados os padrotildees mecacircnicos e cinemaacuteticos de uma ampla
diversidade de quadruacutepedes e biacutepedes padrotildees mais complexos emergem
observando que alguns animais menos aptos para a locomoccedilatildeo (less cursorial)
podem combinar padrotildees mecacircnicos da caminhada e corrida em velocidades
intermediaacuterias ou em animais de grande tamanho (eg elefantes apresentam
aspectos de corrida mas com um comportamento pendular entre a energia cineacutetica e
potencial gravitacional do CM) Novamente a hipoacutetese do continuum se apresenta
como um forte candidato para explicar atraveacutes de uma teoria simples e unificante a
locomoccedilatildeo de vertebrados
117
O que acontece nas inclinaccedilotildees
Quando nos deslocamos no plano eacute bem determinado que o trabalho
mecacircnico liacutequido apresente um valor muito baixo e natildeo eacute igual a zero devido agrave
resistecircncia do ar e agrave fricccedilatildeo dos tecidos mas ainda assim eacute comumente assumido
como negligenciaacutevel (ALEXANDER 1989) poreacutem a energia mecacircnica total para
movimentar o CM em relaccedilatildeo ao ambiente externo varia durante um ciclo de
passada de modo que o somatoacuterio dos incrementos (trabalho positivo) seja igual ao
somatoacuterio dos decrementos (trabalho negativo) Como observado no estudo ldquocusto
EMG da caminhada humanardquo (Capiacutetulo 2) existe uma predominacircncia de trabalho
positivo em inclinaccedilotildees positivas e predominacircncia de trabalho negativo em
inclinaccedilotildees negativas (figura 52)
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido de
elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006
118
Portanto o pecircndulo invertido natildeo atua como mecanismo minimizador de
dispecircndio energeacutetico e natildeo obstante a falta de evidecircncias eacute razoaacutevel supor que a
energia elaacutestica natildeo atue de forma importante nas inclinaccedilotildees Importante notar que
a inexistecircncia de um mecanismo minimizador natildeo significa que o modelo natildeo
contempla esta situaccedilatildeo apenas demonstra que devido agrave uma restriccedilatildeo severa do
ambiente (inclinaccedilatildeo extrema) o organismo natildeo dispotildee de nenhum auxiacutelio
importante para economizar energia sobrecarregando os muacutesculos a fim de produzir
a energia necessaacuteria para manter o movimento de locomoccedilatildeo Nesta situaccedilatildeo o
dispecircndio energeacutetico eacute dependente apenas da quantidade de ativaccedilatildeo muscular e
seus respectivos equivalentes energeacuteticos de atividade EMG como demonstrado no
estudo do custo EMG da caminhada humana
55 Propostas para futuros estudos
551 Custo EMG da caminhada humana
Testar o modelo do Custo EMG
- em diferentes terrenos
- em populaccedilotildees com patologias do sistema nervoso
- em inclinaccedilotildees negativas
552 Mecacircnica da corrida dos idosos
- desenvolver um modelo matemaacutetico que tenha em consideraccedilatildeo os
comportamentos diferentes entre a fase de encurtamento e alongamento das
unidades muacutesculo-tendatildeo atraveacutes de um modelo viscoelaacutesticohiperelaacutestico
- estudar o bouncing elaacutestico da corrida em inclinaccedilotildees
- estudar o efeito da fadiga no bouncing elaacutestico da corrida humana
- estudar o modelo massa-mola ponto-a-ponto
- estudar o bouncing elaacutestico entre sujeitos com diferentes estruturas
muacutesculo-esqueleacuteticas (velocistas vs fundistas obesos vs natildeo-obesos homens vs
mulheres)
119
- usar os paracircmetros do modelo massa-mola e as assimetrias contato-
despregue de sujeitos normais para comparaccedilatildeo com amputados e portadores de
necessidades especiais com restriccedilotildees na locomoccedilatildeo
- estudar o bouncing elaacutestico na corrida de velocidade de atletas de alto
rendimento
553 Modelo matemaacutetico da locomoccedilatildeo terrestre
Testar o modelo
- para situaccedilatildeo de aceleraccedilotildees
- em animais extintos
120
6 Referecircncias
ALESHINSKY SY An energy sources and fractions approach to the mechanical
energy expenditure problem--IV Criticism of the concept of energy transfers within
and between links J Biomech 19 4 307-309 1986
ALEXANDER RM Damper for bad vibrations Nature 414 6866 855-857 2001
ALEXANDER RM Energy-saving mechanisms in walking and running J Exp Biol 160
55-69 1991
ALEXANDER RM Models and the scaling of energy costs for locomotion J Exp Biol
208 Pt 9 1645-1652 2005
ALEXANDER RM Optimization and gaits in the locomotion of vertebrates Physiol Rev
69 4 1199-1227 1989
ALEXANDER RM Principles of animal locomotion Princeton NJ Princeton
University Press 2003
ALEXANDER RM Tendon elasticity and muscle function Comp Biochem Physiol A
Mol Integr Physiol 133 4 1001-1011 2002
ALEXANDER RM Vertical movements in walking and running Journal of Zoology
185 27-40 1978
ALEXANDER RM JAYES AS Fourier analysis of forces exerted in walking and
running J Biomech 13 4 383-390 1980
ALEXANDER RM VERNON A Mechanics of hopping by kangaroos (Macropodidae)
Journal of Zoology 177 265-303 1975
121
ANDERS C WAGNER H PUTA C GRASSME R PETROVITCH A SCHOLLE
HC Trunk muscle activation patterns during walking at different speeds J
Electromyogr Kinesiol 17 2 245-252 2007
ANDERSON KG BEHM DG Maintenance of EMG activity and loss of force output
with instability J Strength Cond Res 18 3 637-640 2004
ARDIGO LP SAIBENE F MINETTI AE The optimal locomotion on gradients
walking running or cycling Eur J Appl Physiol 90 3-4 365-371 2003
BASTIEN GJ HEGLUND NC SCHEPENS B The double contact phase in walking
children J Exp Biol 206 Pt 17 2967-2978 2003
BASTIEN GJ SCHEPENS B WILLEMS PA HEGLUND NC Energetics of load
carrying in Nepalese porters Science 308 5729 1755 2005
BIEWENER AA Muscle-tendon stresses and elastic energy storage during locomotion
in the horse Comp Biochem Physiol B Biochem Mol Biol 120 1 73-87 1998
BIEWENER AA Patterns of mechanical energy change in tetrapod gait pendula
springs and work J Exp Zoolog A Comp Exp Biol 305 11 899-911 2006
BIEWENER AA KONIECZYNSKI DD BAUDINETTE RV In vivo muscle forceshy
length behavior during steady-speed hopping in tammar wallabies J Exp Biol 201
Pt 11 1681-1694 1998
BIGLAND-RITCHIE B WOODS JJ Integrated electromyogram and oxygen uptake
during positive and negative work J Physiol 260 2 267-277 1976
BLANCO RE GAMBINI R A biomechanical model for size speed and anatomical
variations of the energetic costs of running mammals J Theor Biol 241 1 49-61
2006
BLAXTER K Energy metabolism in animals and man Cambridge UK Cambridge
University Press 1989
BLICKHAN R The spring-mass model for running and hopping J Biomech 22 11-12
1217-1227 1989
BLICKHAN R SEYFARTH A GEYER H GRIMMER S WAGNER H GUNTHER
M Intelligence by mechanics Philos Transact A Math Phys Eng Sci 365 1850
199-220 2007
122
CAVAGNA GA Force platforms as ergometers J Appl Physiol 39 1 174-179 1975
CAVAGNA GA The landing-take-off asymmetry in human running J Exp Biol 209 Pt
20 4051-4060 2006
CAVAGNA GA DUSMAN B MARGARIA R Positive work done by a previously
stretched muscle J Appl Physiol 24 1 21-32 1968
CAVAGNA GA FRANZETTI P FUCHIMOTO T The mechanics of walking in
children J Physiol 343 323-339 1983
CAVAGNA GA FRANZETTI P HEGLUND NC WILLEMS P The determinants of
the step frequency in running trotting and hopping in man and other vertebrates J
Physiol 399 81-92 1988
CAVAGNA GA HEGLUND NC WILLEMS PA Effect of an increase in gravity on the
power output and the rebound of the body in human running J Exp Biol 208 Pt 12
2333-2346 2005
CAVAGNA GA KANEKO M Mechanical work and efficiency in level walking and
running J Physiol 268 2 467--481 1977
CAVAGNA GA MANTOVANI M WILLEMS PA MUSCH G The resonant step
frequency in human running Pflugers Arch 434 6 678-684 1997
CAVAGNA GA MARGARIA R Mechanics of walking J Appl Physiol 21 1 271-278
1966
CAVAGNA GA SAIBENE FP MARGARIA R External work in walking J Appl
Physiol 18 1-9 1963
CAVAGNA GA SAIBENE FP MARGARIA R Mechanical Work in Running J Appl
Physiol 19 249-256 1964
CAVAGNA GA THYS H ZAMBONI A The sources of external work in level walking
and running J Physiol 262 3 639-657 1976
CAVAGNA GA WILLEMS PA FRANZETTI P DETREMBLEUR C The two power
limits conditioning step frequency in human running J Physiol 437 95-108 1991
CAVAGNA GA WILLEMS PA HEGLUND NC The role of gravity in human walking
pendular energy exchange external work and optimal speed J Physiol 528 Pt 3
657-668 2000
123
CAVAGNA GA WILLEMS PA HEGLUND NC Walking on Mars Nature 393 6686
636 1998
CAVAGNA GA WILLEMS PA LEGRAMANDI MA HEGLUND NC Pendular
energy transduction within the step in human walking J Exp Biol 205 Pt 21 3413shy
3422 2002
CERRETELLI P VEICSTEINAS A FUMAGALLI M DELLORTO L Energetics of
isometric exercise in man J Appl Physiol 41 2 136-141 1976
DEN OTTER AR GEURTS AC MULDER T DUYSENS J Speed related changes
in muscle activity from normal to very slow walking speeds Gait Posture 19 3 270shy
278 2004
DOHERTY TJ Invited review Aging and sarcopenia J Appl Physiol 95 4 1717-1727
2003
DOKE J DONELAN JM KUO AD Mechanics and energetics of swinging the human
leg J Exp Biol 208 Pt 3 439-445 2005
DOKE J KUO AD Energetic cost of producing cyclic muscle force rather than work to
swing the human leg J Exp Biol 210 Pt 13 2390-2398 2007
EVANS SL DAVY KP STEVENSON ET SEALS DR Physiological determinants
of 10-km performance in highly trained female runners of different ages J Appl
Physiol 78 5 1931-1941 1995
FEDAK MA HEGLUND NC TAYLOR CR Energetics and mechanics of terrestrial
locomotion II Kinetic energy changes of the limbs and body as a function of speed
and body size in birds and mammals J Exp Biol 97 23-40 1982
FENN WO Work against gravity and work due to velocity changes in running Am J
Physiol 93 433-462 1930
FENN WO MARSH BS Muscular force at different speeds of shortening J Physiol
85 3 277-297 1935
FORMENTI F ARDIGO LP MINETTI AE Human locomotion on snow determinants
of economy and speed of skiing across the ages Proc Biol Sci 272 1572 1561shy
1569 2005
124
FORMENTI F MINETTI AE Human locomotion on ice the evolution of ice-skating
energetics through history J Exp Biol 210 Pt 10 1825-1833 2007
FRERIKS B HERMENS H DISSELHORST-KLUG C RAU G The
recommendations for sensor and sensor placement procedures for surface
electromyography In HERMENS H (editor) European recommendations for
surface electromyography Enschede Roessingh Research and Development
1991
FRONTERA WR SUH D KRIVICKAS LS HUGHES VA GOLDSTEIN R
ROUBENOFF R Skeletal muscle fiber quality in older men and women Am J
Physiol Cell Physiol 279 3 C611-618 2000
FUKUNAGA T KUBO K KAWAKAMI Y FUKASHIRO S KANEHISA H
MAGANARIS CN In vivo behaviour of human muscle tendon during walking Proc
Biol Sci 268 1464 229-233 2001
GARDNER-MORSE MG STOKES IA The effects of abdominal muscle coactivation
on lumbar spine stability Spine 23 1 86-91 discussion 91-82 1998
GEYER H SEYFARTH A BLICKHAN R Compliant leg behaviour explains basic
dynamics of walking and running Proc Biol Sci 273 1603 2861-2867 2006
GOTTSCHALL JS KRAM R Energy cost and muscular activity required for leg swing
during walking J Appl Physiol 99 1 23-30 2005
GOTTSCHALL JS KRAM R Mechanical energy fluctuations during hill walking the
effects of slope on inverted pendulum exchange J Exp Biol 209 Pt 24 4895-4900
2006
GRANATA KP MARRAS WS Cost-benefit of muscle cocontraction in protecting
against spinal instability Spine 25 11 1398-1404 2000
GRANATA KP ORISHIMO KF Response of trunk muscle coactivation to changes in
spinal stability J Biomech 34 9 1117-1123 2001
GRIFFIN TM ROBERTS TJ KRAM R Metabolic cost of generating muscular force
in human walking insights from load-carrying and speed experiments J Appl
Physiol 95 1 172-183 2003
HEGLUND NC Running a-fowl of the law Science 303 47-48 2004
125
HEGLUND NC CAVAGNA GA Mechanical work oxygen consumption and efficiency
in isolated frog and rat muscle Am J Physiol 253 1 Pt 1 C22-29 1987
HEGLUND NC CAVAGNA GA TAYLOR CR Energetics and mechanics of
terrestrial locomotion III Energy changes of the centre of mass as a function of
speed and body size in birds and mammals J Exp Biol 97 41-56 1982a
HEGLUND NC FEDAK MA TAYLOR CR CAVAGNA GA Energetics and
mechanics of terrestrial locomotion IV Total mechanical energy changes as a
function of speed and body size in birds and mammals J Exp Biol 97 57-66
1982b
HILL AV The heat of shortening and the dynamic constants of muscle Proceedings of
the Royal Society B 126 136-195 1938
HOYT DF TAYLOR CR Gait and the energetics of locomotion in horses Nature
292 239-240 1981
ISHIKAWA M KOMI PV GREY MJ LEPOLA V BRUGGEMANN GP Muscleshy
tendon interaction and elastic energy usage in human walking J Appl Physiol 99
2 603-608 2005
ISHIKAWA M PAKASLAHTI J KOMI PV Medial gastrocnemius muscle behavior
during human running and walking Gait Posture 25 3 380-384 2007
KARAMANIDIS K ARAMPATZIS A Mechanical and morphological properties of
different muscle-tendon units in the lower extremity and running mechanics effect of
aging and physical activity J Exp Biol 208 Pt 20 3907-3923 2005
KARAMANIDIS K ARAMPATZIS A BRUGGEMANN GP Symmetry and
reproducibility of kinematic parameters during various running techniques Med Sci
Sports Exerc 35 6 1009-1016 2003
KER RF BENNETT MB BIBBY SR KESTER RC ALEXANDER RM The
spring in the arch of the human foot Nature 325 7000 147-149 1987
KLASS M BAUDRY S DUCHATEAU J Aging does not affect voluntary activation of
the ankle dorsiflexors during isometric concentric and eccentric contractions J Appl
Physiol 99 1 31-38 2005
126
KNAFLITZ M BONATO P Time-frequency methods applied to muscle fatigue
assessment during dynamica contractions J Electromyogr Kinesiol 9 337-350
1999
KOMI PV Stretch-shortening cycle a powerful model to study normal and fatigued
muscle J Biomech 33 10 1197-1206 2000
KRAM R DOMINGO A FERRIS DP Effect of reduced gravity on the preferred walkshy
run transition speed J Exp Biol 200 Pt 4 821-826 1997
KRAM R TAYLOR CR Energetics of running a new perspective Nature 346 6281
265-267 1990
LAMOTH CJ MEIJER OG DAFFERTSHOFER A WUISMAN PI BEEK PJ
Effects of chronic low back pain on trunk coordination and back muscle activity during
walking changes in motor control Eur Spine J 15 1 23-40 2006
LAY AN HASS CJ RICHARD NICHOLS T GREGOR RJ The effects of sloped
surfaces on locomotion an electromyographic analysis J Biomech 40 6 1276shy
1285 2007
LOWE DA SUREK JT THOMAS DD THOMPSON LV Electron paramagnetic
resonance reveals age-related myosin structural changes in rat skeletal muscle
fibers Am J Physiol Cell Physiol 280 3 C540-547 2001
MALOIY GM HEGLUND NC PRAGER L CAVAGNA GA TAYLOR CR
Energetic cost of carrying loads have African women discovered an economic way
Nature 319 668-669 1986
MALVILLE NJ BYRNES WC ALLEN LIM B BASNYAT R Commercial porters of
eastern nepal health status physical work capacity and energy Expenditure Am J
Hum Biol 13 44-56 2001
MARGARIA R Sulla fisiologia e specialmente sul consumo energetico della marcia
e della corsa a varia velocitagrave ed inclinazione del terreno 1938
MARSH RL ELLERBY DJ CARR JA HENRY HT BUCHANAN CI Partitioning
the energetics of walking and running swinging the limbs is expensive Science
303 5654 80-83 2004
127
MCMAHON TA CHENG GC The mechanics of running how does stiffness couple
with speed J Biomech 23 Suppl 1 65-78 1990
MIAN OS THOM JM ARDIGO LP NARICI MV MINETTI AE Metabolic cost
mechanical work and efficiency during walking in young and older men Acta
Physiol (Oxf) 186 2 127-139 2006
MINETTI AE The biomechanics of skipping gaits a third locomotion paradigm Proc
Biol Sci 265 1402 1227-1235 1998a
MINETTI AE A model equation for the prediction of mechanical internal work of
terrestrial locomotion J Biomech 31 5 463-468 1998b
MINETTI AE ALEXANDER RM A theory of metabolic costs for bipedal gaits J Theor
Biol 186 4 467-476 1997
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of gradient walking
energetics in man J Physiol 472 725-735 1993
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of the minimum
energy cost of gradient running in humans J Exp Biol 195 211-225 1994
MINETTI AE ARDIGO LP SAIBENE F FERRERO S SARTORIO A Mechanical
and metabolic profile of locomotion in adults with childhood-onset GH deficiency Eur
J Endocrinol 142 1 35-41 2000
MINETTI AE FORMENTI F ARDIGO LP Himalayan porters specialization
metabolic power economy efficiency and skill Proc Biol Sci 273 1602 2791shy
2797 2006
MORSE CI THOM JM REEVES ND BIRCH KM NARICI MV In vivo
physiological cross-sectional area and specific force are reduced in the
gastrocnemius of elderly men J Appl Physiol 99 3 1050-1055 2005
NILSSON J THORSTENSSON A Ground reaction forces at different speeds of human
walking and running Acta Physiol Scand 136 2 217-227 1989
NYMARK JR BALMER SJ MELIS EH LEMAIRE ED MILLAR S
Electromyographic and kinematic nondisabled gait differences at extremely slow
overground and treadmill walking speeds J Rehabil Res Dev 42 4 523-534 2005
128
OCHALA J DORER DJ FRONTERA WR KRIVICKAS LS Single skeletal muscle
fiber behavior after a quick stretch in young and older men a possible explanation of
the relative preservation of eccentric force in old age Pflugers Arch 452 4 464shy
470 2006
ONAMBELE GL NARICI MV MAGANARIS CN Calf muscle-tendon properties and
postural balance in old age J Appl Physiol 100 6 2048-2056 2006
PHILLIPS SK BRUCE SA WOLEDGE RC In mice the muscle weakness due to
age is absent during stretching J Physiol 437 63-70 1991
PORTER MM VANDERVOORT AA KRAMER JF Eccentric peak torque of the
plantar and dorsiflexors is maintained in older women J Gerontol A Biol Sci Med
Sci 52 2 B125-131 1997
POUSSON M LEPERS R VAN HOECKE J Changes in isokinetic torque and
muscular activity of elbow flexors muscles with age Exp Gerontol 36 10 1687shy
1698 2001
PRILUTSKY BI GREGOR RJ Swing- and support-related muscle actions
differentially trigger human walk-run and run-walk transitions J Exp Biol 204 Pt 13
2277-2287 2001
ROBERTS TJ KRAM R WEYAND PG TAYLOR CR Energetics of bipedal
running I Metabolic cost of generating force J Exp Biol 201 Pt 19 2745-2751
1998
ROBERTS TJ MARSH RL WEYAND PG TAYLOR CR Muscular force in
running turkeys the economy of minimizing work Science 275 5303 1113-1115
1997
SAIBENE F MINETTI AE Biomechanical and physiological aspects of legged
locomotion in humans Eur J Appl Physiol 88 4-5 297-316 2003
SCHEPENS B WILLEMS PA CAVAGNA GA The mechanics of running in children
J Physiol 509 ( Pt 3) 927-940 1998
SCHEPENS B WILLEMS PA CAVAGNA GA HEGLUND NC Mechanical power
and efficiency in running children Pflugers Arch 442 1 107-116 2001
129
TAYLOR CR Force development during sustained locomotion a determinant of gait
speed and metabolic power J Exp Biol 115 253-262 1985
TAYLOR CR HEGLUND NC MALOIY GM Energetics and mechanics of terrestrial
locomotion I Metabolic energy consumption as a function of speed and body size in
birds and mammals J Exp Biol 97 1-21 1982
TRAPPE S GALLAGHER P HARBER M CARRITHERS J FLUCKEY J
TRAPPE T Single muscle fibre contractile properties in young and old men and
women J Physiol 552 Pt 1 47-58 2003
VALOUR D POUSSON M Compliance changes of the series elastic component of
elbow flexor muscles with age in humans Pflugers Arch 445 6 721-727 2003
VANDERVOORT AA KRAMER JF WHARRAM ER Eccentric knee strength of
elderly females J Gerontol 45 4 B125-128 1990
WHITE SG MCNAIR PJ Abdominal and erector spinae muscle activity during gait
the use of cluster analysis to identify patterns of activity Clin Biomech (Bristol
Avon) 17 3 177-184 2002
WILLEMS PA CAVAGNA GA HEGLUND NC External internal and total work in
human locomotion J Exp Biol 198 Pt 2 379-393 1995
WINTER D Biomechanics and motor control of human movement 3rd Waterloo
John Wiley amp Sons 2005
WINTERS JM WOO S Multiple muscle systems Springer-Verlag 1990
WOLEDGE RC CURTIN N HOMSHER E Energetic aspects of muscle
contraction Londres Academic Press 1985
WRIGHT S WEYAND PG The application of ground force explains the energetic cost
of running backward and forward J Exp Biol 204 Pt 10 1805-1815 2001
YAMAGUCHI G SAWA A MORAN D RESSLER M WINTERS JM A survey of
human musculotendon actuator parameters J M Winters 1991
130
Apecircndices
A- Programa de anaacutelise EMG da caminhada LocoEmg
Uma seacuterie de algoritmos (figuras A1 A2 e A3) foram desenvolvidos em
ambiente Labview versatildeo 71 a fim de analisar o sinal bruto de EMG Para tanto
informaccedilotildees advindas de sensores de pressatildeo foram calculadas de forma a
possibilitar as seguintes anaacutelises
Figura A1 Janela principal do programa LocoEmgVI
131
Este programa foi utilizado no capiacutetulo 2 no experimento do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees e no experimento do custo EMG
da locomoccedilatildeo de montanhistas Caucasianos e carregadores Nepaleses no Himalaia
Nepal Atraveacutes do uso dos sensores de pressatildeo foi possiacutevel calcular o tempo de
passada o tempo de vocirco o tempo de apoio e o tempo de apoio duplo para utilizar
no desenvolvimento das abordagens experimental e teoacuterica do custo EMG da
locomoccedilatildeo humana
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI
Os dados de input do programa foram inseridos na janela principal (figura
A1) onde no final da anaacutelise satildeo apresentados os resultados de atividade EMG
meacutedia e desvio padratildeo em funccedilatildeo do percentual do ciclo de passadaO bloco de
diagrama apresentado na figura A2 mostra a estrutura geral do programa com seus
algoritmos localizados nas subrotinas (quadrados verdes)
As principais subrotinas ou algoritmos de primeiro niacutevel satildeo i) Abre e organiza
arquivo ii) Filtra sinal EMG iii) Calcula Variaacuteveis Espaccedilo-Temporais iv) Divide
Ciclos e Interpola Sinal EMG v) Integra Sinal EMG vi) Salva Resultados vi) Imprime
Resultados Gerais
132
Na subrotina Salva resultados arrays eram transformados em arquivos no
formato txt para posterior anaacutelise estatiacutestica Os arquivos eram variaacuteveis espaccedilo-
temporais valores meacutedios interpolados para fase de apoio e balanccedilo valores Emg
meacutedios e desvio-padratildeo interpolados por ciclo de passada e somatoacuterio das integrais
Emg brutos e convertidos por Equivalentes Metaboacutelicos de Ativaccedilatildeo Emg
A janela de impressatildeo eacute apresentada na figura A3
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados
Nesta janela os dados EMGrsquos por muacutesculo satildeo apresentados atraveacutes de seus
valores valores meacutedios e dprsquos em funccedilatildeo do percentual do ciclo de passada
Informaccedilotildees da Vf nome do arquivo inclinaccedilatildeo do terreno e nuacutemero de ciclos
analisados tambeacutem satildeo apresentados Arquivos de imagem destas janelas foram
elaborados e armazenados para posterior verificaccedilatildeo dos dados
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada)
133
PEYREacute-TARTARUGA LA TARTARUGA MP COERTJENS M KRUEL LFM
Influence of Allometry scale on relationship between running economy and
kinematical parameters Biology of Sport (aceito) 2008
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
OLIVEIRA AR KRUEL LFM Physiologic and biomechanical effects ofwater run
training on running performance European Journal of Applied Physiology
(submetido) 2008
CORREA TC PEYREacute-TARTARUGA LA FURLAN E RIBAS R LOSS JF
Mathematical model of energy cost in sprint running Proceedings of XXV
International Symposium on Biomechanics in Sports ISBS (CD) 2007
PEYREacute-TARTARUGA LA COERTJENS M TARTARUGA MP DE MEDEIROS
MH KRUEL LFM Influence of the allometric scale on the relationship between
running economy and biomechanical variables in runners Medicine and Science in
Sports and Exercise 39 (Supplement) S208-S209 2007
PEYREacute-TARTARUGA LA DE MEDEIROS MH COERTJENS M TARTARUGA
MP KRUEL LFM The relation between running economy and kinematical
variables influence of body mass in competitive runners Journal of Biomechanics
39 (Supplement 1) S631 2006
ILHA J ARAUJO RT MALYSZ T PEYREacute-TARTARUGA LA ACHAVAL M
Effects of endurance and resistance exercise training on locomotion of rats after
sciatic nerve crush Physiological Mini Reviews 2 (4) 109 2006
ILHA J PEYREacute-TARTARUGA LA ARAUJO RT METZEN F MALYSZ T
CANTO F ACHAVAL ELENA M LOSS JF Locomotor behaviour assessment in
the rat by kinematic analysis Journal of Biomechanics 39 (Supplement 1) S507
2006
SCHIEHLL PE PEYREacute-TARTARUGA LA ZINGANO GM LOSS JF
Estimation of the quantification of the elastics loads on the jump fit circuit Journal of
134
Biomechanics 39 (Supplement 1) S555 2006
MARTINEZ FG PEYREacute-TARTARUGA LA HERMEL EES XAVIER LL
RASIA-FILHO AA ACHAVAL M Intermediate filament expression in the medial
5thamygdala subnuclei during postnatal development of male and female rats
Forum of the Federation of European Neuroscience Societes Viena FENS 3
A1556 2006
FRAGA CHW BLOEDOW LS CARPES F PEYREacute-TARTARUGA LA
TARTARUGA MP FOLLMER B GUIMARAtildeES ACS Methodologic proposal to
verify the influence of cycling on running kinematic aspects in Triathlon Revista
Motriz 12 (2) 159-164 2006
PEYREacute-TARTARUGA LA KRUEL LFM Deep water running limits and
possibilities to elite runners Brazilian Journal of Sports Medicine 12 (5)286-290
2006
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
RIBAS LR KRUEL LFM Comparison of the subtalar joint angle during
submaximal running speeds Acta Ortopeacutedica Brasileira 13 (2) 57-60 2005
C- Textos completos referentes agrave tese
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA Old men
running mechanical work and elastic bounce Proceedings of the Royal Society B
275 (1633) 411-418 2008 101098rspb20071288
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA The landingshy
takeoff asymmetry is enhanced in old age Journal of Experimental Biology
(aceito com modificaccedilotildees) 2008
MINETTI AE PEYREacute-TARTARUGA LA ARDIGOgrave LP FORMENTI F SUSTA
135
D Energetical and electromyographical cost of locomotion in Nepalese Porters on
Himalaya Anais do XII Congresso Brasileiro de Biomecacircnica 88-94 2007
D- Paracircmetros musculares
Os paracircmetros musculares utilizados no estudo Custo EMG da caminhada
humana foram adquiridos de YAMAGUCHI et al (1991) e satildeo apresentados em
detalhes nas duas figura seguintes (figuras D1 e D2)
Figura D1 Paracircmetros musculares utilizados Fonte YAMAGUCHI et al 1991
136

9
4 PREDIZENDO VF CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO
TERRESTRE 101
41 Introduccedilatildeo 101
42 Equaccedilatildeo do tempo de atraso 102
43 Estimativa da velocidade horizontal 104
44 Equaccedilatildeo de custo energeacutetico 106
45 Discussatildeo 107
5 CONCLUSAtildeO GERAL 111
51 O custo EMG da caminhada humana 111
52 A mecacircnica da corrida de idosos 111
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre 112
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico 112
541 Respondendo algumas criacuteticas atuais 116
55 Propostas para futuros estudos 118
551 Custo EMG da caminhada humana 118
552 Mecacircnica da corrida dos idosos 118
553 Modelo matemaacutetico da locomoccedilatildeo terrestre 119
6 REFEREcircNCIAS 120
APEcircNDICES 130
A- Programa de anaacutelise EMG da caminhada LocoEmg 130
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada) 132
C- Textos completos referentes agrave tese 134
D- Paracircmetros musculares 135
10
Lista de Figuras
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-invertido para a
caminhada e massa-mola para a corrida (Fonte SAIBENE e MINETTI 2003
modificado no presente estudo) 29
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset 38
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda
metade da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo
isomeacutetrica Setas verticais apontando para baixo indicam momento de contato
e de despregue 39
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de
passada com o tempo de passada normalizado em percentual do ciclo O 0shy
100 representa o momento de contato com o solo As cores indicam a
velocidade de caminhada (de 2 agrave 7 kmh-1) Cada muacutesculo eacute representado
nas linhas e em cada coluna eacute apresentada a atividade EMG por inclinaccedilatildeo 46
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees 49
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal + carga)
11
dos carregadores Nepaleses (NEP) e montanhistas Caucasianos (CAU) em
subida (up) e descida (down) 57
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da PMV (positiva ou
negativa) pela potecircncia metaboacutelica respectiva (MINETTI et al 2006) As
linhas satildeo as razotildees entre eficiecircncia muscular positiva e negativa
(WOLEDGE et al 1985) 58
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado 69
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da caminhada
(pecircndulo-invertido) e de segmento complacente da corrida (massa-mola) e
seus principais constituintes Note que o tracejado indica a trajetoacuteria do corpo
de massa m durante o contato g eacute a aceleraccedilatildeo gravitacional k eacute a rigidez da
mola ll0 eacute o comprimento do membro inferior e a0 eacute o acircngulo da perna de
apoio no momento do contato com o solo 77
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um passo
em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis a
direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup
+ Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo
(tae) da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na
direccedilatildeo vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os
ciacuterculos em vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2)
e a frente (Lce) A linha em vermelho pontilhada em cada painel indica o
tempo de contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente
(Lc) durante o passo As linhas azuis pontilhadas em cada painel indicam o
tempo aeacutereo total (ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La)
durante o passo As barras verticais indicam o desvio-padratildeo da meacutedia os
12
nuacutemeros proacuteximos aos siacutembolos nos paineacuteis superiores indicam o nuacutemero de
itens nas meacutedias 85
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e
velocidade vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown
(paineacuteis inferiores) atingidos pelo CM durante o passo em funccedilatildeo da
velocidade de corrida Estatiacutestica e outras indicaccedilotildees conforme a figura 33 89
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e
frequumlecircncia do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute
maior nos idosos nas altas velocidades (paineacuteis superiores) a rigidez vertical
normalizada pela massa eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras
indicaccedilotildees conforme figura 33 91
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com
seus 94
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As
fraccedilotildees do deslocamento vertical do CM durante contato ScSv (ciacuterculos
preenchidos deslocamento descendente ciacuterculos abertos deslocamento
ascendente) e quando a Fv eacute maior do que o PC SceSv (quadrados
preenchidos deslocamento 95
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito
idoso paineacuteis a direita sujeito jovem em cada painel o comportamento da
transduccedilatildeo Ep-Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas
na energia potencial gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf
normalizada para oscilar entre zero e um Mesmos passos da figura 1 cada
painel comeccedila e termina no valor menor da curva Ep As cores diferentes na
curva Ep distinguem as fraccedilotildees do passo onde a Fv exercida no solo eacute maior
do que o PC (vermelho) e menor do que o PC (azul) As linhas contiacutenuas de
Ep indicam a fase de contato enquanto que as linhas pontilhadas Ep (azul
fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As quatro fases
correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
13
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown
(azul) e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas
pontilhadas verticais satildeo apresentadas nos dois picos de Ek e ocupam a
fraccedilatildeo onde a transduccedilatildeo Ep-Ek ocorre conforme indicado pelos incrementos
da curva Rint(t) 98
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos painel
inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura
31) e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e
barras azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de
corrida Estatiacutestica conforme figura 33 99
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de
reaccedilatildeo do solo durante a corrida 103
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de
progressatildeo 108
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de
progressatildeo Fonte Minetti 1998b 109
Figura 51 Modelo conceitual da locomoccedilatildeo humana 113
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido
de elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006117
Figura A1 Janela principal do programa LocoEmgVI 130
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI 131
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados 132
14
Resumo
Dois modelos mecacircnicos o pecircndulo-invertido e o massa-mola explicam como
os mecanismos pendular e elaacutestico minimizam o dispecircndio energeacutetico advindo dos
muacutesculos durante caminhada e corrida humana A presente tese testa dois efeitos
que para nosso conhecimento todavia natildeo possuem respostas conclusivas da
literatura nomeadamente o processo de envelhecimento na mecacircnica da corrida
humana e o efeito da inclinaccedilatildeo do terreno na velocidade oacutetima da caminhada Para
estudar o primeiro efeito as forccedilas de reaccedilatildeo do solo provenientes de uma
plataforma de forccedila (4m x 050m) foram usadas para a posterior comparaccedilatildeo de i)
trabalho mecacircnico ii) paracircmetros do sistema massa-mola e iii) assimetrias contato-
despregue entre jovens e idosos Os idosos produzem menos forccedila durante a fase
de trabalho mecacircnico positivo com uma menor oscilaccedilatildeo vertical total e oscilaccedilatildeo
durante a fase aeacuterea Consequumlentemente a capacidade de armazenar e re-utilizar
energia elaacutestica dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio
energeacutetico neste grupo quando comparado com jovens Para o modelo do custo
eletromiograacutefico (EMG) da caminhada humana criou-se duas abordagens
experimental e teoacuterica Em ambas as abordagens informaccedilotildees da atividade EMG de
dezesseis muacutesculos sendo 8 posturais e 8 propulsores foram coletadas e
analisadas a partir da integral EMG A abordagem teoacuterica parece ter uma melhor
relaccedilatildeo com as evidecircncias experimentais sobre a energeacutetica da caminhada humana
em inclinaccedilotildees Os principais mecanismos envolvidos na nova hipoacutetese satildeo i)
muacutesculos posturais que natildeo realizam trabalho muscular exercem uma funccedilatildeo
importante na determinaccedilatildeo do dispecircndio energeacutetico total e ii) a presente hipoacutetese
leva em consideraccedilatildeo a co-contraccedilatildeo de muacutesculos antagonistas no dispecircndio
15
energeacutetico total Mais experimentos satildeo necessaacuterios para confirmar o modelo
apresentado neste estudo Aleacutem disso atraveacutes de estrateacutegias de otimizaccedilatildeo e
prediccedilatildeo linear um modelo teoacuterico foi delineado a fim de determinar paracircmetros
mecacircnicos (comprimento de passada e velocidade de progressatildeo) e energeacuteticos da
locomoccedilatildeo terrestre em situaccedilotildees onde as informaccedilotildees disponiacuteveis satildeo apenas a
massa e uma curva forccedila de reaccedilatildeo vertical versus tempo Os resultados advindos
do modelamento correspondem aos paracircmetros determinados experimentalmente
Laboratoacuterios que detenham apenas uma plataforma de forccedila ou nas aacutereas onde as
informaccedilotildees de entrada do atual modelo sejam as uacutenicas informaccedilotildees (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis primaacuterias da
locomoccedilatildeo podem ser preditas com razoaacutevel acuraacutecia
Palavras-chave custo eletromiograacutefico da caminhada mecacircnica da corrida de
idosos modelo teoacuterico da locomoccedilatildeo terrestre mecanismos minimizadores de
energia locomoccedilatildeo humana
16
Abstract
Two mechanical models the inverted pendulum and spring-mass explain how
do the pendular and elastic mechanisms minimizing energy expenditure from
muscles during human walking and running Here we test two effects that to our
knowledge do not have yet conclusive responses from literature specifically the
ageing effects on mechanics of human running and the effect of gradient on walking
optimal speed In order to check the former effect the ground reaction forces came
from a force platform (4m x 05m) were used for a later comparison i) mechanical
work ii) spring-mass parameters and iii) landing-takeoff asymmetries The old
subjects produce less force during positive work resulting in a smaller overall and
aerial vertical oscillation of the centre of mass Consequently the potential for restore
elastic energy from tendons is reduced contributing to greater energy expenditure
than in young subjects In relation to Electromyographical (EMG) Cost of human
walking we created two approaches experimental and theoretical In both
approaches information from EMG activity of sixteen muscles eight postural and
eight propulsor were collected and analysed The theoretical approach seems to fit
better with the energy expenditure during gradient walking The main mechanisms
involved in this new hypothesis are i) postural muscles that do not perform muscular
work play an important role in the total energy expenditure and ii) the present
hypothesis take the co-contraction into account of the antagonist muscles in the total
energy expenditure Further experiments are necessary to confirm this hypothesis
Besides using optimization and linear prediction procedures a theoretical model was
designed to estimate mechanical parameters (stride length and velocity of
progression) and energetic variables of terrestrial locomotion when available
information consists only of mass and one vertical ground reaction force versus time
17
The results from this modelling are similar to experimentally obtained data
Laboratories with just one force platform or in areas where the present modelrsquos input
information be the unique accessible data (eg palaeontology forensic
biomechanics etc) the prime variables of locomotion may be estimated with
reasonable accuracy
Keywords electromyographical cost of walking running mechanics in the
elderly theoretical model of terrestrial locomotion mechanisms for minimizing
expenditure energy human locomotion
18
Definiccedilatildeo de Termos
Contraccedilatildeo concecircntrica contraccedilatildeo muscular realizada durante encurtamento
do muacutesculo
Contraccedilatildeo excecircntrica contraccedilatildeo muscular realizada durante alongamento
do muacutesculo
Custo energeacutetico o dispecircndio advindo dos muacutesculos em funccedilatildeo da distacircncia
percorrida normalizado pela massa corporal A unidade eacute em Jkg-1m -1
Eficiecircncia mecacircnica a potecircncia mecacircnica gerada dividida pela potecircncia
metaboacutelica despendida durante uma passada
Passada um periacuteodo que compreende desde o momento do contato de um
peacute com o solo e finaliza no subsequumlente momento de contato do mesmo peacute
Passo um periacuteodo que compreende desde o momento do contato de um peacute
com o solo e finaliza no subsequumlente momento de contato do peacute contra-
lateral
Potecircncia mecacircnica externa o somatoacuterio dos incrementos positivos de
energia mecacircnica externa durante uma passada dividido pelo tempo da
passada
Recovery ndash R percentual de transferecircncia entre energia cineacutetica e potencial
gravitacional durante um ciclo de passada
Tempo aeacutereo efetivo duraccedilatildeo no qual a forca vertical eacute menor do que a
forccedila peso durante um passo
Tempo de contato efetivo duraccedilatildeo no qual a forccedila vertical eacute maior do que a
forccedila peso durante um passo
Trabalho mecacircnico externo O trabalho realizado para elevar e acelerar o
CM em relaccedilatildeo ao ambiente externo No presente estudo foi desconsiderado
19
o trabalho mecacircnico externo advindo de aceleraccedilotildees horizontais meacutedio-
laterais
Trabalho mecacircnico interno O trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM
Trabalho mecacircnico total O somatoacuterio dos moacutedulos do trabalho mecacircnico
externo e interno No presente estudo o trabalho interno foi considerado
aceitando transferecircncia de energia mecacircnica entre segmentos de mesmos
membros
20
Lista de Siacutembolos e Abreviaturas
l0 comprimento do membro inferior
μV microvolts
0 acircngulo da perna de apoio com o solo no momento
do contato
Fvc Fv meacutedia durante a fase de contato do peacute com o
solo
Ah variaccedilatildeo de altura
AhorPosition idem ao CPexp
At tempo de locomoccedilatildeo
Atime tempo de passada
Ltphoto tempo entre as passagens pelas fotoceacutelulas
2D duas dimensotildees
av aceleraccedilatildeo vertical do CM
avae aceleraccedilatildeo vertical do CM durante fase aeacuterea
efetiva
avce aceleraccedilatildeo vertical do CM durante contato efetivo
avmx aceleraccedilatildeo vertical maacutexima do CM
c constante de custo
CAU Caucasianos
CM centro de massa
cos cosseno
CP comprimento de passada
21
CPexp comprimento de passada determinada
experimentalmente
Ctot Custo energeacutetico da locomoccedilatildeo
dB decibeacuteis
DF duty factor (fraccedilatildeo da passada na qual um peacute toca
o solo)
DFregression valores de Vf preditos por regressatildeo linear
advindos de DF
dp desvio-padratildeo
dt periacuteodo de um quadro
Ecm energia mecacircnica do CM
Ek energia cineacutetica
Ekf energia cineacutetica horizontal
Ekfmn energia cineacutetica horizontal miacutenima
Ekmxdown energia cineacutetica vertical maacutexima durante
deslocamento descendente do CM
Ekmxup energia cineacutetica vertical maacutexima durante
deslocamento ascendente do CM
Ekv energia cineacutetica vertical
Emetabolic potecircncia metaboacutelica
EMG eletromiografia ou eletromiograacutefico
EmgCosttheor custo EMG teoacuterico
EmgCostexp custo EMG teoacuterico
EMGiso atividade EMG durante contraccedilatildeo isomeacutetrica
EMGneg atividade EMG durante trabalho negativo
EMGpos atividade EMG durante trabalho positivo
cmuscular energia metaboacutelica advinda do muacutesculo-esqueleacutetico
cmetaboacutelica energia metaboacutelica total durante locomoccedilatildeo
crepouso energia metaboacutelica durante posiccedilatildeo em peacute
celaacutestica energia recuperada por via elaacutestica
cpendular energia recuperada por via pendular
creconvertida energia total recuperada
Ep energia potencial gravitacional do CM
22
Epmn energia potencial gravitacional miacutenima do CM
total energia total necessaacuteria para realizar a locomoccedilatildeo
f frequumlecircncia de passo
Ff componente antero-posterior da forccedila de reaccedilatildeo do
solo
FinalhorPosition posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo de passada
FP frequumlecircncia de passada
FPexp frequumlecircncia de passada determinada
experimentalmente
FPregression valores de Vf preditos por regressatildeo linear a partir
de dados de FP
FPtheor frequumlecircncia de passada obtida indiretamente
Fr nuacutemero de froude
fs frequumlecircncia do sistema massa-mola
fsample frequumlecircncia de amostragem
Fv componente vertical da forccedila de reaccedilatildeo do solo
Fvmx Fv maacutexima
Fvmxyoung Fv maacutexima nos jovens
Fvmxold Fv maacutexima nos idosos
Fvscale PC mensurado com uma balanccedila
Fvpeak pico de impacto vertical
Fvplate forccedila vertical media durante um ciclo de passada
g aceleraccedilatildeo gravitacional
GPS sistema de posicionamento global
h hora
Hz Hertz
Iv impulso vertical
InitialhorPosition posiccedilatildeo horizontal do quadril no quadro que inicia o
ciclo de passada
Iemg integral EMG
Iemgcon integral EMG durante contraccedilatildeo concecircntrica
Iemgexc integral EMG durante contraccedilatildeo excecircntrica
J Joules
23
k rigidez vertical
kg quilograma
km quilometro
L comprimento do passo
Lae deslocamento horizontal do CM durante fase aeacuterea
efetiva
Lce deslocamento horizontal do CM durante contato
efetivo
M massa corporal
m metros
Mass massa dos muacutesculos analisados
ms milisegundos
mtot massa total (massa total somada agrave carga externa)
mV milivolts
N Newtons
NEP Nepaleses
nframes nuacutemero de quadros que totalizam um ciclo de
passada
nf nuacutemero de quadros
norm normalizado
O2 oxigecircnio
p iacutendice de significacircncia estatiacutestico
PC peso corporal
PMV potecircncia mecacircnica vertical
q fator de forma da curva de Fv em funccedilatildeo do tempo
qmean meacutedia dos valores qrsquos durante o tc
qregression valores de Vf predito por regressatildeo linear a partir
de dados de q
R Recovery percentual de reconversatildeo entre energia
cineacutetica e potencial gravitacional
R coeficiente de correlaccedilatildeo
r transduccedilatildeo entre energia cineacutetica e potencial
gravitacional
24
Rint transduccedilatildeo acumulada entre energia cineacutetica e
potencial gravitacional durante um passo
Rintdown transduccedilatildeo acumulada durante deslocamento
descendente do CM
Rintup transduccedilatildeo acumulada durante deslocamento
ascendente do CM
rms raiz quadrada da meacutedia dos quadrados
s segundos
Sae deslocamento vertical do CM durante fase aeacuterea
efetiva
Saedown deslocamento descendente do CM durante Sae
Saeup deslocamento ascendente do CM durante Sae
Sc deslocamento do CM durante a fase de contato
Sce deslocamento vertical do CM durante contato
efetivo
Scdown deslocamento descendente do CM durante Sc
Scup deslocamento ascendente do CM durante Sc
Scedown deslocamento descendente do CM durante Sce
Sceup deslocamento ascendente do CM durante Sce
SEE erro meacutedio da estimativa
sin seno
Skinf dobra cutacircnea
Sv deslocamento do CM durante um passo
Svdown deslocamento descendente do CM durante Sv
Svup deslocamento ascendente do CM durante Sv
T tempo de um passo
t tempo
ta tempo em que a acontece durante W+
t tempo em que acontece durante W-
ta periacuteodo do passo no qual o peacute natildeo estaacute em contato
com o solo
tae periacuteodo do passo no qual a Fv eacute maior do que o PC
peso corporal
25
taedown periacuteodo do deslocamento descendente do CM
durante tae
taeup periacuteodo do deslocamento ascendente do CM
durante tae
tbrake tempo de Wshy
tc periacuteodo do passo no qual um peacute estaacute em contato
com o solo
tce periacuteodo do passo no qual a Fv eacute menor do que o
PC
tcedown periacuteodo do deslocamento descendente do CM
durante tce
tceup periacuteodo do deslocamento ascendente do CM
durante tce
tpush tempo de W+
tstep tempo do passo
Vf velocidade de progressatildeo
V f velocidade meacutedia de progressatildeo
Vfexp velocidade de progressatildeo determinada
experimentalmente
VO2iso consumo de O2 durante contraccedilatildeo isomeacutetrica
VO2neg consumo de O2 durante trabalho mecacircnico
negativo
VO2pos consumo de O2 durante trabalho mecacircnico positivo
Vv velocidade vertical do CM
Vvmx velocidade vertical maacutexima do CM
Vvmxdown velocidade vertical maacutexima durante deslocamento
descendente do CM
Vvmxup velocidade vertical maacutexima durante deslocamento
ascendente do CM
Wshy trabalho mecacircnico negativo
W Watts
W+ trabalho mecacircnico positivo
Wext trabalho mecacircnico externo
Wextf trabalho mecacircnico externo horizontal
26
Wextf+ trabalho mecacircnico externo horizontal positivo
Wextv trabalho mecacircnico externo vertical
Wint trabalho mecacircnico interno
Wtot trabalho mecacircnico total
a fase durante W+ em que Ek e Ep do CM aumentam
concomitantemente
fase durante W- em que Ek e Ep do CM diminuem
concomitantemente
27
INTRODUCcedilAtildeO GERAL
11 Locomoccedilatildeo humana
A teoria da evoluccedilatildeo Darwinista conhecida como Teoria da Seleccedilatildeo Natural
nos indica entre outros pressupostos que a multiplicidade de espeacutecies que habitam
a face da terra eacute produto de um sistema altamente complexo e competitivo de
sobrevivecircncia sistema este que reflete fatores preditores da aptidatildeo definidos como
geneacuteticos e do meio ambiente As capacidades de reproduccedilatildeo de alimentaccedilatildeo e de
locomoccedilatildeo satildeo moduladas por aspectos do genoacutetipo influenciados pelos fatores
ambientais O conceito de aptidatildeo relacionada agrave locomoccedilatildeo desde um ponto de
vista bioloacutegico pode ser abordado analiticamente atraveacutes de seus componentes
principais Estes satildeo velocidade aceleraccedilatildeo maneabilidade resistecircncia economia
e estabilidade (ALEXANDER 2003)
A locomoccedilatildeo tem importacircncia fundamental para a sobrevivecircncia pois
possibilita entre outros fatores a procura por alimentos a busca por um local com
melhor clima caccedilar uma presa ou fugir de um perigo eminente (SAIBENE e
MINETTI 2003) Nos mamiacuteferos terrestres a locomoccedilatildeo acontece atraveacutes do uso
das pernas Este tipo de locomoccedilatildeo tem nos humanos por exemplo alguns
aspectos de ineficiecircncia quando comparada com outros animais (peixes e paacutessaros)
A ineficiecircncia da locomoccedilatildeo de biacutepedes eacute baseada no fato de que os segmentos
inferiores encostam repetidamente no solo para absorver e transferir energia
(trabalho negativo e positivo respectivamente) com o meio ambiente de modo que
os segmentos sofrem uma colisatildeo no momento de contato com o solo
caracterizando situaccedilotildees de grandes aceleraccedilotildees Para manter a velocidade meacutedia
de locomoccedilatildeo torna-se necessaacuterio uma re aceleraccedilatildeo do centro de massa (CM)
28
Energia quiacutemica eacute despendida para manter os muacutesculos ativos durante estas
diferentes fases A fim de atenuar este dispecircndio dois mecanismos baacutesicos satildeo
usados pelo sistema locomotor na corrida e na caminhada o mecanismo do pecircndulo
na caminhada e o mecanismo da massa-mola para a corrida (CAVAGNA e
KANEKO 1977 ver figura 11) Na caminhada a energia potencial eacute alta quando o
CM estaacute sobre o ponto de contato do corpo com o solo mas a partir deste momento
a energia potencial gravitacional comeccedila a diminuir e a energia cineacutetica horizontal
obteacutem um acreacutescimo gradativo Quando o ponto de contato volta a estar na frente do
CM a energia cineacutetica diminui e potencial aumenta
Estes comportamentos entre energia cineacutetica horizontal e potencial
gravitacional acontecem em oposiccedilatildeo de fase (CAVAGNA et al 1963) e portanto
com um processo de reconversatildeo entre energia cineacutetica e potencial gravitacional
(recovery ndash R) Por outro lado na corrida os acreacutescimos de energia potencial e
cineacutetica acontecem concomitantemente portanto o mecanismo de conservaccedilatildeo de
energia citado anteriormente natildeo se aplica neste tipo de locomoccedilatildeo Eacute postulado
que durante a primeira metade da fase de apoio da corrida principalmente
muacutesculos e tendotildees alongam armazenando energia elaacutestica enquanto que os
moacutedulos de energia cineacutetica horizontal e potencial gravitacional diminuem Esta
energia elaacutestica armazenada como uma mola comprimida por uma massa eacute
transformada em energia cineacutetica horizontal e potencial gravitacional de modo
gradativo durante a segunda metade da fase de apoio (CAVAGNA et al 1964
KOMI 2000 figura 11) Evidecircncias de energia elaacutestica armazenada e reconvertida
tambeacutem foram encontradas em cangurus (ALEXANDER e VERNON 1975) e em
cavalos (BIEWENER 1998) Os ligamentos do arco do peacute tambeacutem respondem pelo
comportamento elaacutestico do sistema locomotor na corrida (KER et al 1987)
Enquanto que a medida de trabalho externo possui uma correspondecircncia com
o trabalho mecacircnico realizado pelos muacutesculos na caminhada os valores obtidos
para a corrida superestimam o trabalho muscular realizado devido agrave dificuldade de
quantificar a energia elaacutestica durante o movimento (SAIBENE e MINETTI 2003) De
fato parte consideraacutevel do aumento e diminuiccedilatildeo da energia mecacircnica total na
corrida natildeo eacute causada pelas contraccedilotildees (excecircntricas e concecircntricas) musculares
mas pelo alongamento e encurtamento das estruturas elaacutesticas da unidade muacutesculo-
tendatildeo mais especificamente os tendotildees e estruturas elaacutesticas do muacutesculo
Portanto na corrida a adiccedilatildeo do trabalho interno e a transferecircncia entre segmentos
29
dos mesmos membros (inferiores e superiores) permitem uma estimativa mais
proacutexima do trabalho mecacircnico total (WILLEMS et al 1995)
Figura 11 Modelos mecacircnicos da locomoccedilatildeo humana pecircndulo-
invertido para a caminhada e massa-mola para a corrida (Fonte
SAIBENE e MINETTI 2003 modificado no presente estudo)
As determinantes mecacircnicas da locomoccedilatildeo humana e animal tem sido
extensivamente estudadas em diferentes situaccedilotildees velocidade (CAVAGNA et al
1963 1964) gravidade (KRAM et al 1997 CAVAGNA et al 2000 1998
CAVAGNA et al 2005) planos inclinados (MINETTI et al 1993 1994)
O trabalho mecacircnico durante a locomoccedilatildeo em inclinaccedilotildees tem sido estudado
na caminhada (MINETTI et al 1993) e na corrida (MINETTI et al 1994)
encontrando valores de maior eficiecircncia mecacircnica entre 10 e 15 de inclinaccedilatildeo
negativa (declive) Todavia o modelo do pecircndulo invertido natildeo se sustenta para
situaccedilotildees de inclinaccedilotildees extremas Deste modo a reconversatildeo de energia parece
natildeo atuar na determinaccedilatildeo da velocidade oacutetima de caminhada nestas situaccedilotildees
Uma nova hipoacutetese eacute que os muacutesculos posturais do quadril possam contribuir para
gerar o alto custo de transporte em velocidades baixas de caminhada em inclinaccedilotildees
diferentes da inclinaccedilatildeo oacutetima (-10 onde haacute o menor custo metaboacutelico e
mecacircnico)
Esta hipoacutetese pretende ser testada atraveacutes da anaacutelise do custo
eletromiograacutefico (EMG) durante caminhada em diferentes velocidades e inclinaccedilotildees
de terreno O custo EMG seraacute compreendido como o somatoacuterio de ativaccedilatildeo EMG em
funccedilatildeo da distacircncia percorrida Se satisfatoacuterio o custo EMG poderaacute explicar as curva
30
em forma de U de custo metaboacutelico em funccedilatildeo da velocidade determinadas no
trabalho pioneiro de MARGARIA (1938)
Diferentemente da caminhada a corrida pode ser explicada do ponto de vista
mecacircnico pelo modelo massa-mola Este modelo possibilita dividir a oscilaccedilatildeo
vertical do CM em duas partes durante a passada da corrida a fase inferior da
oscilaccedilatildeo (quando a forccedila vertical exercida no solo eacute maior do que o peso corporal) e
a fase superior da oscilaccedilatildeo (quando a forccedila vertical eacute menor do que o peso
corporal) De acordo com o modelo massa-mola a duraccedilatildeo da fase inferior da
oscilaccedilatildeo representa meio periacuteodo do sistema e o deslocamento do CM durante este
periacuteodo representa a amplitude da oscilaccedilatildeo (BLICKHAN 1989 CAVAGNA et al
2005) Observaccedilotildees preliminares suportam a hipoacutetese de que sujeitos idosos
utilizem de uma maior geraccedilatildeo de trabalho interno devido a diminuiccedilatildeo da fase
superior da oscilaccedilatildeo do CM
Portanto a anaacutelise dos determinantes mecacircnicos da caminhada e corrida
deveratildeo contribuir no entendimento da locomoccedilatildeo desde um ponto de vista
energeacutetico Aleacutem disso procuramos realizar um estudo teoacuterico com o objetivo de
predizer variaacuteveis fundamentais e trabalho mecacircnico da locomoccedilatildeo terrestre
Informaccedilotildees biomecacircnicas sobre a energia da locomoccedilatildeo poderatildeo servir
como base para aplicaccedilotildees futuras na aacuterea da Fisioterapia na anaacutelise da locomoccedilatildeo
patoloacutegica bem como na Educaccedilatildeo Fiacutesica e Esportes atraveacutes do uso deste
conhecimento nas aacutereas do esporte de rendimento e sauacutede agraves quais utilizam-se das
atividades fiacutesicas locomotoras
13 Formato da tese
O estado-da-arte apresentado no capiacutetulo introdutoacuterio mostra um
desenvolvimento notaacutevel do corpo de conhecimento relacionado agrave mecacircnica e
energeacutetica da locomoccedilatildeo humana As bases cientiacuteficas atuais que procuram
encontrar as determinantes mecacircnicas de caracteriacutesticas fundamentais da
caminhada e corrida humana tais como velocidade e inclinaccedilatildeo oacutetima da
locomoccedilatildeo eficiecircncia e economia em situaccedilatildeo com carga e inclinaccedilatildeo e mudanccedila
de formas de locomoccedilatildeo conforme o aumento da velocidade demonstram ser
satisfatoacuterias em inuacutemeras situaccedilotildees
31
Contudo modelos biomecacircnicos que analisem natildeo apenas situaccedilotildees
particulares mas que expliquem as questotildees fundamentais da locomoccedilatildeo humana
tendo em consideraccedilatildeo a complexidade deste tipo de movimento ainda satildeo
escassos Atualmente temos hipoacuteteses que necessitam de experimentaccedilatildeo para
tornaacute-las robustas o suficiente para responder as questotildees fundamentais da
locomoccedilatildeo e ao mesmo tempo se manterem simples o bastante que as caracterize
como fundamentais Portanto a presente tese ENERGEacuteTICA E MECAcircNICA DA
CAMINHADA E CORRIDA HUMANA Com especial referecircncia agrave locomoccedilatildeo em
plano inclinado e efeitos da idade natildeo oferece uma resposta final e acabada para as
relaccedilotildees entre a energeacutetica e mecacircnica da locomoccedilatildeo humana mas tem como eixo
principal por meio de abordagens experimentais e teoacutericas avanccedilar no
entendimento dos paradigmas mecacircnicos das formas fundamentais de locomoccedilatildeo
usadas pelo ser humano caminhada e corrida
Em base disso o capiacutetulo 2 Custo EMG da Caminhada Humana procura
avanccedilar e aperfeiccediloar a hipoacutetese do Custo de Geraccedilatildeo de Forccedila (KRAM e TAYLOR
1990) com o desenvolvimento do modelo do Custo de Ativaccedilatildeo Muscular que daacute
base para o estudo Atraveacutes de experimentos em diferentes velocidades e
inclinaccedilotildees de caminhada eacute dada uma explicaccedilatildeo das curvas em forma de U do
custo metaboacutelico em funccedilatildeo da velocidade determinadas no estudo pioneiro de
MARGARIA em 1938
Motivado pela falta de explicaccedilatildeo das mudanccedilas estruturais e funcionais
devido agrave idade aplicadas agrave mecacircnica e energeacutetica da locomoccedilatildeo humana o capiacutetulo
3 Mecacircnica da Corrida em Idosos compara o trabalho mecacircnico e o sistema massa-
mola entre jovens e idosos em diferentes velocidades de corrida analisando o
sistema massa-mola natildeo apenas pelas suas caracteriacutesticas originais (BLICKHAN
1989 MCMAHON e CHENG 1990) mas tambeacutem pelas assimetrias deste sistema
na corrida humana determinadas recentemente na literatura (CAVAGNA 2006)
Nestes dois estudos eacute usada a abordagem experimental o primeiro se
utilizando da teacutecnica de EMG e o segundo estudo abordando a teacutecnica da
dinamometria especificamente o uso de plataformas de forccedila A percepccedilatildeo da
limitaccedilatildeo metodoloacutegica do uso deste equipamento aliada agrave necessidade de
abordagens teoacutericas da mecacircnica e energeacutetica da caminhada e corrida humana e
animal em situaccedilotildees onde apenas uma curva forccedila de reaccedilatildeo do solo versus tempo
eacute disponiacutevel ofereceram a justificativa para o capiacutetulo 4 Prediccedilatildeo da Vf CP e Custo
32
Energeacutetico da Locomoccedilatildeo Terrestre A construccedilatildeo de um modelo biomecacircnico
destes paracircmetros eacute endereccedilada neste estudo atraveacutes de meacutetodo de miacutenimos
quadrados e princiacutepios da dinacircmica e otimizaccedilatildeo de paracircmetros caracterizadores da
locomoccedilatildeo nomeadamente massa corporal frequumlecircncia de passo (FP) fator de forma
ldquoqrdquo e duty factor (DF)
Finalmente no capiacutetulo 5 os resultados de cada estudo satildeo sumarizados e
no capiacutetulo 6 satildeo apresentadas algumas consideraccedilotildees sobre a mecacircnica e
energeacutetica da locomoccedilatildeo humana e os possiacuteveis desdobramentos advindos dos
presentes achados Ainda no capiacutetulo 8 estatildeo inseridos os apecircndices da tese
131 Objetivo geral
O objetivo da presente tese eacute analisar o custo EMG da caminhada humana e
a mecacircnica da corrida de idosos Esta seacuterie de estudos tem tambeacutem como objetivo
construir um modelo biomecacircnico do custo energeacutetico da locomoccedilatildeo terrestre
132 Objetivos especiacuteficos
- Estudar as determinantes da velocidade oacutetima de caminhada em inclinaccedilotildees com
ecircnfase na construccedilatildeo do modelo do custo EMG da caminhada humana
- Comparar a mecacircnica da corrida com particular referecircncia ao trabalho mecacircnico e
sistema massa-mola entre jovens e idosos em vaacuterias velocidades de corrida
- Construir um modelo biomecacircnico capaz de predizer paracircmetros fundamentais e
custo energeacutetico da locomoccedilatildeo terrestre
33
2 O CUSTO EMG DA CAMINHADA HUMANA
21 Introduccedilatildeo
Durante um ciclo de passada de caminhada a energia cineacutetica do CM
corporal varia inversamente com a energia potencial gravitacional do CM Apesar da
presenccedila importante deste comportamento a transformaccedilatildeo de energia entre uma
forma e outra natildeo eacute total e o restante de energia necessaacuterio para manter a
locomoccedilatildeo eacute providenciado pelos muacutesculos e eacute quando normalizado pela massa
corporal e por unidade de distacircncia igual agrave 03 Jkg-1m-1 durante a velocidade oacutetima
de caminhada (aproximadamente 45 kmh-1 em adultos) Este mecanismo pendular
de minimizaccedilatildeo de energia foi primeiramente observado por CAVAGNA et al (1963)
e denominado como modelo do ldquopecircndulo invertidordquo
Interessantemente natildeo obstante a sua simplicidade o modelo auxiliou no
entendimento e aprofundamento das determinantes mecacircnicas da locomoccedilatildeo
Atraveacutes deste meacutetodo foi possiacutevel oferecer o primeiro insight desde o ponto-de-vista
mecacircnico sobre a velocidade oacutetima de locomoccedilatildeo e a forma em U do custo de
transporte da caminhada [ml de oxigecircnio - O2 - por kg de massa corporal por
distacircncia percorrida observada por MARGARIA (1938)] Na seacuterie de experimentos
desenvolvida por Cavagna e colegas (CAVAGNA et al 1976 HEGLUND et al
34
1982b) foi apresentada a formulaccedilatildeo matemaacutetica denominada como Recovery (R)
definida como
W f + W -Wv extR() = 100 Eq 21 W f + Wv
onde W f eacute trabalho mecacircnico externo horizontal Wv eacute trabalho mecacircnico externo
vertical e Wext eacute trabalho mecacircnico externo Esta equaccedilatildeo determina o percentual de
reconversatildeo via pendular entre energia cineacutetica e potencial gravitacional durante a
passada E de fato na velocidade oacutetima de caminhada o R alcanccedila
aproximadamente seu valor maacuteximo
Poreacutem o custo de geraccedilatildeo de trabalho como mecanismo principal do custo
energeacutetico da locomoccedilatildeo tem recebido vaacuterias criacuteticas da literatura As criacuteticas se
baseiam principalmente (1) na questatildeo do paradoxo do trabalho zero que afirma
que fisicamente durante um ciclo de passada completo em velocidade constante e
no plano as variaccedilotildees de energias cineacuteticas e potencial satildeo iguais agrave zero
(desprezando a resistecircncia do ar e fricccedilotildees teciduais) portanto analisando de um
ponto-de-vista somente da fiacutesica o sujeito natildeo realizaria trabalho nesta situaccedilatildeo
(ALESHINSKY 1986) (2) o problema da co-contraccedilatildeo afirma que existe um custo
metaboacutelico importante devido agrave contraccedilatildeo de muacutesculos antagonistas que natildeo geram
movimento portanto sem geraccedilatildeo de trabalho mecacircnico Este uacuteltimo
questionamento levou um grupo de pesquisadores a formular a denominada
hipoacutetese da forccedila ou Teoria do custo energeacutetico da geraccedilatildeo de forccedila (HEGLUND et
al 1982b KRAM e TAYLOR 1990 ROBERTS et al 1998) para explicar de modo
simplificado o custo energeacutetico da locomoccedilatildeo
Essencialmente a hipoacutetese da forccedila afirma que o custo energeacutetico da corrida
ou caminhada eacute determinado pelo produto da integral da curva forccedila de reaccedilatildeo do
solo-tempo por um fator proporcional agrave taxa de ciclos de pontes-cruzadas de miosina
no muacutesculo independente da geraccedilatildeo de trabalho mecacircnico Apesar da hipoacutetese
concordar com achados experimentais estes satildeo encontrados em situaccedilotildees
limitadas e aleacutem disso a hipoacutetese da forccedila considera como negligenciaacutevel o custo
de balanccedilar os segmentos para traacutes e para frente Esta pressuposiccedilatildeo eacute considerada
como incorreta (MARSH et al 2004) O problema principal desta hipoacutetese se refere
35
agrave desconsideraccedilatildeo do trabalho elemento fundamental segundo a primeira lei da
termodinacircmica Conforme apontado por HEGLUND 2004) ldquoforccedila natildeo eacute trabalho
nem mesmo eacute energia Se a energia metaboacutelica eacute consumida aquela energia deve
ir para algum lugar Se a energia de um segmento corporal aumenta aquela energia
vem de algum lugar Se a energia daquele segmento diminui a energia vai para
algum lugarrdquo
Durante a locomoccedilatildeo em inclinaccedilotildees foi observado que na inclinaccedilatildeo oacutetima
(aproximadamente -10) a constante de custo metaboacutelico inverso ao tempo de
apoio obteve uma variaccedilatildeo significativa (MINETTI et al 1994) indicando que o
custo de geraccedilatildeo de trabalho mecacircnico era mais satisfatoacuterio do que o custo de
geraccedilatildeo de forccedila Mas um achado intrigante nos estudos de Minetti e
colaboradores sobre as determinantes mecacircnicas da energeacutetica da caminhada e
corrida em inclinaccedilotildees (1993 e 1994 respectivamente) foi sobre a ausecircncia de
trabalho mecacircnico negativo em inclinaccedilotildees positivas e de trabalho positivo em
inclinaccedilotildees negativas (apoacutes 30 de inclinaccedilatildeo na corrida e 15 na caminhada)
independente da velocidade Portanto o modelo do custo de geraccedilatildeo de trabalho
como determinante do custo energeacutetico da locomoccedilatildeo natildeo se aplica nestas
situaccedilotildees perdendo sua amplitude como Teoria geral para a energeacutetica e mecacircnica
da caminhada
Tendo em consideraccedilatildeo que durante situaccedilotildees de locomoccedilatildeo de pouca
eficiecircncia mecacircnica como na situaccedilatildeo de velocidades mais baixas que a velocidade
oacutetima e durante inclinaccedilotildees extremas satildeo geradas situaccedilotildees de instabilidade de
locomoccedilatildeo e provavelmente maiores co-contraccedilotildees musculares propomos neste
experimento testar a hipoacutetese denominada de ldquocusto EMG da caminhada humanardquo
Uma base importante desta hipoacutetese reside no raciociacutenio de que nas situaccedilotildees
citadas anteriormente a contribuiccedilatildeo de muacutesculos que contraem isometricamente
principalmente os posturais teratildeo uma contribuiccedilatildeo importante para o alto custo
relativo da locomoccedilatildeo
Portanto o objetivo deste estudo eacute desenvolver o modelo do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees Teoricamente a hipoacutetese do
presente estudo diferente da hipoacutetese da forccedila natildeo iraacute desconsiderar o trabalho
mecacircnico gerado mas este seraacute considerado como um dos produtos da variaccedilatildeo da
energia (devido ao consumo de energia metaboacutelico) e a quantidade de ativaccedilatildeo
muscular e as eficiecircncias de ativaccedilatildeo satildeo as determinantes do custo energeacutetico
36
usando os equivalentes metaboacutelicos da ativaccedilatildeo EMG da literatura W+ Wshy
(BIGLAND-RITCHIE e WOODS 1976) e durante contraccedilatildeo isomeacutetrica
(CERRETELLI et al 1976) O modelo eacute apresentado em detalhes na metodologia
22 Metodologia
221 Construccedilatildeo do modelo
O presente modelo eacute configurado como biomecacircnico e se utiliza de
pressupostos originados da fiacutesica e da biologia
O modelo assume que i) toda a energia despendida pelos muacutesculos possui
uma correspondente quantidade de ativaccedilatildeo EMG ii) a atividade EMG realizada
pelos muacutesculos posturais durante todo o ciclo de passada e pelos muacutesculos
propulsores durante a fase aeacuterea seraacute considerada como uma atividade EMG
realizada durante contraccedilotildees isomeacutetricas Seraacute considerada como contraccedilatildeo
excecircntrica e concecircntrica a atividade EMG realizada pelos muacutesculos propulsores
durante a primeira e segunda metades da fase de apoio respectivamente iii) O
custo energeacutetico da locomoccedilatildeo eacute devido agrave ativaccedilatildeo de muacutesculos propulsores e
posturais estes uacuteltimos natildeo diretamente ligados agrave geraccedilatildeo de trabalho mecacircnico iv)
Mais do que uma relaccedilatildeo com a produccedilatildeo de forccedila muscular a quantidade de
ativaccedilatildeo EMG e consequumlentemente o custo EMG possui uma correspondecircncia com
o trabalho mecacircnico realizado durante a ativaccedilatildeo muscular
Um conjunto de algoritmos foi desenvolvido em Labview a fim de analisar o
sinal EMG e as variaacuteveis espaccedilos-temporais (figuras 21 22 e 23 apecircndice 81) O
programa retifica suaviza (atraveacutes de uma integraccedilatildeo com janelamento moacutevel
50Hz do tipo Hamming) e divide todas as curvas de EMG por ciclo de passada
retirando os ciclos de passadas com um tempo 20 menor ou maior do tempo
meacutedio do ciclo de passada e do tempo de apoio Apoacutes normaliza o tempo do ciclo
para 100 quadros (interpolaccedilatildeo via spline) e calcula a meacutedia desvio-padratildeo e
coeficiente de variaccedilatildeo em cada quadro por muacutesculo analisado Este procedimento
tem o objetivo de criar graacuteficos de atividade eletromiograacutefica em funccedilatildeo do
37
percentual do ciclo de passada A fim de analisar o efeito das ponderaccedilotildees pelo
volume muscular e dobra cutacircnea foram desenvolvidas duas estrateacutegias de
modelamento nomeadamente ldquoabordagem experimentalrdquo e ldquoabordagem teoacutericardquo
Abordagem experimental
Usando o sinal suavizado sem a normalizaccedilatildeo foi realizada uma integral em
funccedilatildeo do tempo do seguinte modo
t
Iemg(t) = f EMG dt Eq 22 0
Este valor integrado eacute dividido pelo CP determinando a quantidade de
atividade EMG em funccedilatildeo da distacircncia e seraacute considerado como um custo miacutenimo
EMG Os valores de custo EMG satildeo ponderados em funccedilatildeo do volume muscular
(WINTERS e WOO 1990) e da dobra cutacircnea (NORDANDER et al 2003) do
seguinte modo
Iemg1 Iemg2 Iemg16EmgCost (mV m) = ( + + l middot CP-1 Eq 23 exp ( Mass1 Sk inf1 Mass2 Sk inf2 Mass16 Sk inf16 lmiddot middot middot Masstotal Sk inftotal Masstotal Sk inftotal Masstotal Sk inftotal
onde EmgCostexp eacute o custo miacutenimo EMG experimental Mass eacute a massa dos
muacutesculos analisados e eacute o somatoacuterio de todas as massas musculares Masstotal
analisadas Sk inf eacute a dobra cutacircnea de cada regiatildeo de colocaccedilatildeo dos eletrodos e
eacute o somatoacuterio de todas as dobras cutacircneas analisadas A fim de Sk inftotal
compreender melhor as determinantes da velocidade oacutetima nas inclinaccedilotildees dividiu-
se a Iemg em trecircs aacutereas (a) fase de contato (b) fase aeacuterea e (c) offset (figura 21)
Abordagem teoacuterica
A presente abordagem calcula o sinal EMG atraveacutes dos seus equivalentes
metaboacutelicos Estes equivalentes satildeo advindos da literatura (BIGLAND-RITCHIE e
WOODS 1976) e o objetivo deste procedimento foi verificar se levando em
38
consideraccedilatildeo os equivalentes metaboacutelicos da atividade EMG (para contraccedilotildees
concecircntrica excecircntrica e isomeacutetrica) seria possiacutevel explicar mais satisfatoriamente
as velocidades oacutetimas na caminhada em inclinaccedilotildees Este procedimento assume
que uma determinada quantidade de ativaccedilatildeo eleacutetrica muscular gera distintos custos
energeacuteticos sendo estes dependentes do tipo de contraccedilatildeo muscular Para este
propoacutesito primeiro dividimos a anaacutelise em dois grupos de muacutesculos propulsores
(gluteus maximus gluteus medius deltoideus anterior rectus femuralis vastus
lateralis biceps femuralis caput longus tibialis anterior e gastrocnemius lateralis) e
posturais (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis trapezius ascendens)
Figura 21 Sinal EMG lsquoexperimentalrsquo filtrado retificado e suavizado dividido em
trecircs aacutereas pelas linhas cinzas (a) fase de apoio (b) fase aeacuterea e (c) offset
Os muacutesculos posturais foram considerados como muacutesculos contraindo
isometricamente durante todo o ciclo de passada enquanto que os muacutesculos
39
propulsores foram analisados como realizando (a) contraccedilatildeo excecircntrica na primeira
fase de contato (b) concecircntrica na segunda fase de contato e (c) contraccedilatildeo
isomeacutetrica durante a fase aeacuterea (figura 22)
Figura 22 Sinal EMG filtrado retificado e suavizado analisado atraveacutes da
abordagem teoacuterica dividido em trecircs aacutereas pelas linhas cinzas tracejadas (a)
primeira metade da fase de contato - contraccedilatildeo excecircntrica (b) segunda metade
da fase de contato - contraccedilatildeo concecircntrica e (c) fase aeacuterea-contraccedilatildeo isomeacutetrica
Setas verticais apontando para baixo indicam momento de contato e de
despregue
Assim foram calculadas as correspondentes integrais
t 2c
Iemgexc (t) = f EMG dt Eq 24 0
40
onde Iemgexc eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a primeira
metade da fase de contato (contraccedilatildeo excecircntrica)
tc
Iemgcon (t) = f EMG dt Eq 25 t 2c
onde Iemgcon eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a segunda
metade da fase de contato (contraccedilatildeo concecircntrica)
ta
Iemgiso (t) = f EMG dt Eq 26 0
onde Iemgiso eacute a integral da ativaccedilatildeo EMG em funccedilatildeo do tempo durante a fase aeacuterea
(contraccedilatildeo isomeacutetrica)
As integrais foram convertidas para uma unidade de counts usada por
BIGLAND-RITCHIE e WOODS 1976) usando um fator de transformaccedilatildeo igual agrave 200
counts (mVs)-1 deste modo temos a atividade EMG durante contraccedilatildeo excecircntrica
(EMGneg) concecircntrica (EMGpos) e isomeacutetrica (EMGiso) em counts Os equivalentes
metaboacutelicos satildeo obtidos atraveacutes de equaccedilotildees de regressatildeo linear criadas no
presente estudo usando dados experimentais de Bigland e Ritchie (1976) como
segue
VO2neg (ml) = 00015 EMGneg + 03353 Eq 27
VO2 pos(ml) = 00042 EMGpos + 01493 Eq 28
(ml) = 00042 EMGiso + 01493 Eq 29 VO2iso
EmgCosttheor (J m) = 201[(VO2 iso1 + VO2 iso 2 + VO2 iso16) + (VO2 neg 1 + VO2 neg 2 + VO2 neg 16) +
(VO2 pos1 + VO2 pos 2 + VO2 pos16)] CP-1 Eq 210
onde EmgCosttheor eacute o custo EMG teoacuterico O somatoacuterio dos dispecircndios energeacuteticos
dados em ml de O2 foram convertidos para Joules (J) usando um equivalente
41
energeacutetico de 201 Jml-1 (BLAXTER 1989) e apoacutes foram divididos por CP (conforme
equaccedilatildeo 210) Nesta abordagem teoacuterica entende-se o EmgCosttheor como um custo
miacutenimo energeacutetico devido agrave notoacuteria impossibilidade de obter a totalidade da ativaccedilatildeo
EMG e consequentemente do custo energeacutetico da locomoccedilatildeo Mais do que isso o
modelo procura compreender as determinantes da velocidade oacutetima de caminhada
nas inclinaccedilotildees
222 Testando o modelo
Um homem adulto sem histoacuteria de lesotildees no sistema muacutesculo-esqueleacutetico
realizou caminhadas de 2 minutos sobre uma esteira (WOODWAY Usa) nas
velocidades de 2 3 4 5 6 e 7 kmh-1 e nas inclinaccedilotildees de 0 5 10 e 15 O uso
das velocidades 6 ou 7 kmh-1 foram escolhidas em funccedilatildeo do Nuacutemero de Froude
(Fr) O valor maacuteximo de Fr foi o equivalente agrave velocidade espontacircnea de transiccedilatildeo
(aproximadamente 05 no plano MINETTI et al 1994) O uso do Fr eacute baseado da
teoria das similaridades dinacircmicas Esta teoria afirma que dois animais
geometricamente similares (como no caso do presente estudo) deslocam-se
tambeacutem de modo similar quando o movimento eacute multiplicado por fatores
relacionados ao tempo dimensotildees lineares e forccedilas (ver ALEXANDER 2005)
Fr = Vf 2 gL Eq 211
onde Vf eacute velocidade de progressatildeo em ms-1 g eacute aceleraccedilatildeo gravitacional (g) (981
ms-2) e L eacute um comprimento corporal conhecido (no presente estudo foi utilizado o
comprimento de membros inferiores em m)
Coleta de dados
O voluntaacuterio foi informado do objetivo do estudo dos riscos e eventuais
desconfortos e assinou um termo de consentimento
O indiviacuteduo estava vestido com roupas apropriadas para caminhada A coleta
de dados foi realizada em inclinaccedilotildees de 0 5 10 e 15 nas velocidades de 2 3 4
5 6 7 kmh-1 para cada inclinaccedilatildeo A atividade EMG de dezesseis muacutesculos foi
42
analisada (erector spinae longissimus erector spinae iliocostalis trapezius
descendens latissimus dorsis obliquus externus abdominis obliquus internus
abdominis rectus abdominis deltoideus anterior trapezius ascendens gluteus
maximus gluteus medius rectus femuralis vastus lateralis biceps femuralis caput
longus tibialis anterior e gastrocnemius lateralis) usando um eletromioacutegrafo portaacutetil
(EMGpocket Elite System Itaacutelia)
Para a preparaccedilatildeo do local e colocaccedilatildeo dos eletrodos de superfiacutecie bipolares
foram observadas as orientaccedilotildees da Seniam (FRERIKS et al 1991)
Simultaneamente ao registro EMG sinais advindos de seis sensores de pressatildeo
(footswitches) trecircs em cada peacute (regiatildeo do calcanhar quinto e primeiro metatarsos
inferiores) foram registrados no eletromiograacutefo portaacutetil Os sinais EMGrsquos foram preacuteshy
amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um niacutevel de ruiacutedo menor do
que 1 mV rms e filtrados por um filtro do tipo Butterworth (50-450 Hz terceira
ordem) A frequumlecircncia de amostragem da EMG e dos sensores de pressatildeo foi de
1000 Hz
Foram coletadas a massa e estatura corporal e comprimento de membro
inferior As dobras cutacircneas tambeacutem foram coletadas antes dos testes usando um
plicocircmetro (The body calliper CA Usa)
Um possiacutevel efeito de fadiga no sinal EMG foi controlado repetindo o primeiro
teste Com diferenccedilas maiores de 10 entre a integral EMG dos muacutesculos
analisados do primeiro e uacuteltimo teste a coleta seria descartada poreacutem a diferenccedila
foi menor do que este limite
23 Resultados
231 Variaacuteveis espaccedilos-temporais
As variaacuteveis espaccedilos-temporais da caminhada em diferentes velocidades e
diferentes inclinaccedilotildees satildeo apresentadas na tabela 21 O CP e a FP aumentam com
o aumento da velocidade poreacutem natildeo com o aumento da inclinaccedilatildeo O DF eacute maior na
velocidade oacutetima de locomoccedilatildeo nas inclinaccedilotildees (10 e 15) enquanto que apresenta
uma relaccedilatildeo inversa com Vf nas inclinaccedilotildees mais baixas (0 e 5)
43
232 Atividade EMG
A atividade EMG dos muacutesculos posturais (erector spinae longissimus erector
spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis trapezius ascendens) e
dos muacutesculos propulsores (gluteus maximus gluteus medius rectus femoralis
vastus lateralis deltoideus anterior biceps femoralis caput longus tibialis anterior e
gastrocnemius lateralis) eacute apresentada nas figuras 23 e 24 Os resultados do
presente estudo referente ao comportamento da atividade EMG durante caminhada
no plano satildeo semelhantes agrave literatura tanto em relaccedilatildeo aos muacutesculos propulsores
(LAY et al 2007 NYMARK et al 2005) quanto para os muacutesculos posturais (WHITE
e MCNAIR 2002 DEN OTTER et al 2004 LAMOTH et al 2006)
De um modo geral o sinal EMG em funccedilatildeo do percentual do ciclo (portanto
independente da distacircncia percorrida) aumentou conforme o aumento da velocidade
e inclinaccedilatildeo Observa-se tambeacutem um aumento no offset nas maiores inclinaccedilotildees
(veja figuras 23 e 24)
Tabela 21 Valores meacutedios e desvios-padratildeo (dp) de frequumlecircncia de passada (FP)
comprimento de passada (CP) tempo de fase aeacuterea (ta) tempo de contato (tc)e
duty factor (DF) nas diferentes velocidades (Vf) em diferentes inclinaccedilotildees do
terreno
0
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0518 0022 1074 0044 0706 0039 1227 0087 064
3 0660 0017 1263 0032 0604 0030 0912 0042 060
4 0779 0013 1426 0025 0541 0023 0743 0028 058
5 0879 0010 1580 0018 0492 0022 0646 0024 057
6 0970 0009 1719 0015 0446 0012 0586 0014 057
7 1061 0022 1834 0042 0415 0010 0528 0024 056
5
44
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0504 0026 2210 0056 0656 0054 1334 0089 067
3 0640 0015 2606 0030 0635 0033 0930 0048 059
4 0797 0013 2790 0023 0526 0017 0729 0028 058
5 0895 0008 3104 0014 0478 0017 0639 0020 057
6 1002 0009 3326 0016 0426 0009 0572 0014 057
7 1081 0015 3600 0025 0400 0007 0525 0014 057
10
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0302 0000 3674 0000 1309 0090 1998 0090 060
3 0262 0013 3182 0151 1216 0094 2602 0174 068
4 0300 0007 3699 0085 1229 0086 2101 0114 063
5
6 0495 0006 3300 0036 0854 0021 1166 0028 058
7 0556 0008 3429 0015 0775 0022 1023 0026 057
15
Vf
(kmh-1) FP (passadass-1) CP (m) ta (s) tc (s) DF
Meacutedia dp Meacutedia dp Meacutedia Dp Meacutedia dp Meacutedia
2 0275 0022 3041 0216 1282 0079 2368 0255 065
3 0319 0011 3492 0122 1208 0074 1936 0121 062
4 0399 0007 3482 0059 1497 0046 1011 0040 040
5 0450 0008 3703 0068 0919 0041 1302 0060 059
6 0524 0009 3711 0064 0808 0026 1101 0035 058
7 0597 0012 3257 0069 0721 0024 0954 0037 057
O maior pico de ativaccedilatildeo EMG entre os muacutesculos propulsores foi do tibialis
anterior com valor de 73 mV agrave 7 kmh-1 agrave 15 enquanto que para os muacutesculos
posturais foi do trapezius ascendens com 34 mV tambeacutem agrave 7 kmh-1 agrave 15
erector
spinae
longissimus
erector
spinae
iliocostalis
trapezius
descendens
latissimus
dorsis
obliquus
externus
abdominis
obliquus
internus
abdominis
rectus
abdominis
deltoideus
anterior
45
0 5 10 15
Figura 2 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
trapezius
ascenden
gluteus
maximus
gluteus
medius
rectus
femoralis
vastus
lateralis
biceps
femoralis
caput
tibialis
anterior
gastrocnemius
lateralis
46
0 5 10 15
Figura 24
47
Figura 23 e 24 Valores meacutedios de atividade EMG entre 52 e 70 ciclos de passada
com o tempo de passada normalizado em percentual do ciclo O 0-100 representa
o momento de contato com o solo As cores indicam a velocidade de caminhada (de
2 agrave 7 kmh-1) Cada muacutesculo eacute representado nas linhas e em cada coluna eacute
apresentada a atividade EMG por inclinaccedilatildeo
A ativaccedilatildeo EMG parece seguir um padratildeo bem definido com exceccedilatildeo do
trapezius descendens obliquus internus abdominis onde picos de ativaccedilotildees
aparecem apoacutes os 3 kmh-1 seguindo um comportamento de aumento com o
acreacutescimo da inclinaccedilatildeo e no muacutesculo deltoideus anterior no qual ateacute a velocidade
de 5 kmh-1 o pico maior se apresenta no final da fase de apoio enquanto que nas
velocidades de 6 e 7 kmh-1 o pico passa a se situar na fase aeacuterea O uacutenico muacutesculo
analisado neste estudo que apresenta um comportamento diferente entre as
inclinaccedilotildees eacute o rectus femoralis onde nas inclinaccedilotildees 0 5 e 10 os picos aparecem
apenas nas velocidades raacutepidas enquanto que na inclinaccedilatildeo de 15 o pico eacute visiacutevel
logo na velocidade de 2 kmh-1
Poreacutem quando analisamos a quantidade de ativaccedilatildeo por distacircncia percorrida
ou seja o custo EMG os resultados mudam
233 Custo EMG
A quantidade de atividade EMG calculada atraveacutes da abordagem
experimental eacute apresentada na figura 25 Durante a caminhada no plano (primeira
linha da figura 25) eacute possiacutevel observar um miacutenimo de ativaccedilatildeo no somatoacuterio total
devido principalmente agrave ativaccedilatildeo durante a fase aeacuterea e ao offset Este miacutenimo
acontece tambeacutem na inclinaccedilatildeo a 10 de inclinaccedilatildeo mas a 5 e a 15 a
quantidade de ativaccedilatildeo parece diminuir conforme o aumento da Vf
A figura 26 apresenta os valores de custo EMG calculado atraveacutes da
abordagem teoacuterica Observa-se um miacutenimo a 0 e 15 de inclinaccedilatildeo
Para nosso conhecimento natildeo existem dados de atividade EMG de muacutesculo
posturais durante caminhada nas inclinaccedilotildees A quantidade de ativaccedilatildeo EMG por
passada dos muacutesculos posturais e propulsores parecem aumentar com o acreacutescimo
da velocidade e inclinaccedilatildeo
48
49
Figura 25 Custo EMG lsquoexperimentalrsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
24 Discussatildeo
241 Sobre a hipoacutetese da forccedila e a hipoacutetese da ativaccedilatildeo muscular
Inicialmente proposto para a corrida de quadruacutepedes (KRAM e TAYLOR
1990) e apoacutes para a corrida de biacutepedes (ROBERTS et al 1998 ROBERTS et al
1997) corrida para traacutes (WRIGHT e WEYAND 2001) e caminhada humana
(GRIFFIN et al 2003) a teoria do custo energeacutetico da geraccedilatildeo de forccedila foi formulada
a partir dos resultados que para animais com grande variaccedilatildeo de massa correndo
em diversas velocidades o custo mecacircnico natildeo se correlacionava bem com o custo
metaboacutelico da locomoccedilatildeo terrestre (HEGLUND et al 1982b TAYLOR 1985)
0 5
10
15
Figura 26 Custo EMG lsquoteoacutericorsquo da caminhada em diferentes velocidades e
inclinaccedilotildees
50
Uma justificativa para explicar esse resultado se referia ao fato de que o
muacutesculo durante a fase de apoio na corrida contraia isometricamente deste modo
natildeo realizando trabalho
Recentemente foi observado que esse comportamento acontece tambeacutem no
muacutesculo gastrocnemius medialis durante a caminhada (FUKUNAGA et al 2001)
Poreacutem na corrida este comportamento sucede apenas em velocidades maiores de
13 kmh-1 em adultos (CAVAGNA 2006) e natildeo eacute visiacutevel em idosos mesmo em
velocidades maacuteximas (estudo sobre a mecacircnica da corrida em idosos Capiacutetulo 3)
Ainda assim a teoria afirma que o custo metaboacutelico despendido pelos muacutesculos eacute
proporcional agrave integral forccedila de reaccedilatildeo do solo-tempo multiplicada por um fator
proporcional agrave taxa de ciclos de pontes cruzadas no muacutesculo-esqueleacutetico
A proposiccedilatildeo do Custo Energeacutetico da Geraccedilatildeo de Forccedila assume que i) a
maior parte da forccedila exercida pelos muacutesculos acontece em oposiccedilatildeo agrave gravidade ii)
uma unidade de volume muscular ativado exerce uma respectiva forccedila no solo
independente da velocidade ou tamanho do animal iii) originalmente foi presumido
que os muacutesculos agiam em similares amplitudes da relaccedilatildeo forccedila-velocidade [esta
pressuposiccedilatildeo foi recentemente interpretada em um interessante modelo
biomecacircnico proposto por BLANCO e GAMBINI 2006) como independente para a
determinaccedilatildeo das relaccedilotildees encontradas por KRAM e TAYLOR 1990)] portanto eacute
esperado que animais pequenos que realizam o tempo de contato menor usem
fibras glicoliacuteticas em maior quantidade e consequentemente tenham um maior
dispecircndio energeacutetico e assim explica-se o fato de que animais pequenos despendem
mais energia para transportar 1 N de forccedila por km percorrido do que animais
maiores (HOYT e TAYLOR 1981) Portanto o custo energeacutetico da locomoccedilatildeo
segundo a presente teoria eacute determinado pelo custo de suportar o peso corporal e o
tempo disponiacutevel para exercer forccedila contra o solo
Ainda assim a teoria apresenta seacuterias restriccedilotildees e parece funcionar em
situaccedilotildees particulares A formulaccedilatildeo apresentada por Kram e Taylor indica como
insignificante o dispecircndio energeacutetico devido aos movimentos de balanccedilo dos
membros quando natildeo estatildeo em apoio Vaacuterias evidecircncias em aves (MARSH et al
2004) e em humanos (DOKE et al 2005 GOTTSCHALL e KRAM 2005 DOKE e
KUO 2007) demonstram que este dispecircndio natildeo eacute despreziacutevel Outra criacutetica
levantada pela literatura (ALEXANDER 1991 HEGLUND 2004) se refere agrave
desconsideraccedilatildeo do trabalho variaacutevel fundamental na Termodinacircmica para explicar
51
a energeacutetica da locomoccedilatildeo Forccedila natildeo eacute trabalho nem mesmo eacute energia portanto
ela isoladamente natildeo possibilita uma resposta final sobre a energia A hipoacutetese do
custo de ativaccedilatildeo muscular apresentado aqui natildeo despreza o dispecircndio energeacutetico
dos membros superiores e aleacutem disso considera as eficiecircncias dos diferentes tipos
de trabalho mecacircnico quando insere os equivalentes metaboacutelicos da ativaccedilatildeo
muscular (abordagem teoacuterica Metodologia)
242 Sobre o meacutetodo
Algumas consideraccedilotildees importantes podem ser feitas sobre a teacutecnica da
EMG Comumente esta teacutecnica eacute usada nos campos da biomecacircnica e biologia
experimental a fim de determinar a quantidade de ativaccedilatildeo muscular e os periacuteodos
em que elas acontecem poreacutem neste estudo pretendeu-se usar a determinada
teacutecnica a fim de oferecer uma informaccedilatildeo global da ativaccedilatildeo de tal modo que
pudesse ter uma correspondecircncia com a ativaccedilatildeo EMG de todo o corpo incluindo os
muacutesculos posturais que natildeo geram trabalho muscular importante mas segundo a
hipoacutetese central do presente estudo participam de forma decisiva como uma
determinante da caminhada humana
Assim esta abordagem permite inferir sobre os mecanismos principais da
locomoccedilatildeo e permite explicar a biomecacircnica da locomoccedilatildeo especialmente referente
agrave energeacutetica da caminhada humana Aleacutem de auxiliar na explicaccedilatildeo da velocidade
oacutetima no plano o custo EMG parece dar um indicativo sobre a energeacutetica em
situaccedilotildees criacuteticas com restriccedilotildees do ambiente (inclinaccedilatildeo) e situaccedilotildees natildeo usuais
(velocidades de progressatildeo baixas)
Nestas situaccedilotildees eacute provaacutevel que dois mecanismos estejam relacionados a fim
de justificar a hipoacutetese do custo EMG i) a estabilidade dinacircmica prejudicada e ii) o
custo da co-contraccedilatildeo Os dois mecanismos parecem estar diretamente ligados ao
maior custo EMG e consequumlentemente ao custo energeacutetico da caminhada
Evidecircncias experimentais datildeo suporte para esta inferecircncia Durante caminhada
realizada para fins de lazer em velocidades muito baixas ou mesmo em marchas
patoloacutegicas foi encontrado um aumento na atividade EMG em comparaccedilatildeo com a
velocidade auto-selecionada correspondente agrave velocidade oacutetima Os achados
mostram um aumento de ativaccedilatildeo EMG com o aumento da Vf mesmo em muacutesculos
do tronco durante locomoccedilatildeo no plano (ANDERS et al 2007) Novamente o foco do
52
presente estudo foi referente agrave quantidade de ativaccedilatildeo em funccedilatildeo da distacircncia
percorrida enquanto que nestes estudos a variaacutevel em questatildeo foi avaliada em
funccedilatildeo da passada Aleacutem disso aumentos foram encontrados nos valores de coshy
contraccedilatildeo durante velocidades muito baixas (020 e 030 ms-1) em comparaccedilatildeo com
a velocidade auto-selecionada (NYMARK et al 2005)
As relaccedilotildees entre estabilidade articular e quantidade de ativaccedilatildeo geral
(ANDERSON e BEHM 2004) e estabilidade corporal e ativaccedilatildeo de muacutesculos
localizados especificamente no tronco (GARDNER-MORSE e STOKES 1998
GRANATA e MARRAS 2000 GRANATA e ORISHIMO 2001) satildeo bem
estabelecidas na literatura inclusive indicando um prejuiacutezo maior na ativaccedilatildeo EMG
durante perturbaccedilotildees agrave estabilidade com contraccedilotildees concecircntricas do que
excecircntricas e isomeacutetricas Um possiacutevel modo de testar estes mecanismos poderia
ser atraveacutes da perturbaccedilatildeo da estabilidade e os efeitos na ativaccedilatildeo EMG durante
caminhada (por exemplo em terrenos irregulares)
Outro achado importante que daacute sustentaccedilatildeo agrave hipoacutetese do custo EMG da
caminhada humana eacute observado por PRILUTSKY e GREGOR 2001) onde a
atividade EMG de muacutesculos propulsores (rectus femoralis gastrocnemius medialis
vastus medialis biceps femoralis gluteus maximus e soleus) foi maior na corrida do
que na caminhada em velocidades abaixo da velocidade de transiccedilatildeo entre
caminhada e corrida enquanto que durante velocidades acima da de transiccedilatildeo os
muacutesculos propulsores apresentam uma maior atividade EMG na caminhada do que
na corrida o que coincide com o dispecircndio metaboacutelico nestas situaccedilotildees
25 Uma aplicaccedilatildeo do modelo O custo EMG de carregadores Nepaleses no
Himalaia
A alta especializaccedilatildeo da locomoccedilatildeo suportando cargas em regiotildees inoacutespitas da
terra indica um desafio para o entendimento dos fundamentos da mecacircnica e
energeacutetica da locomoccedilatildeo humana Mundialmente famosos satildeo os achados sobre a
economia de locomoccedilatildeo de mulheres africanas que transportam cargas sobre a
cabeccedila de ateacute 70 da massa corporal sem um maior custo mecacircnico devido a um
ajuste aperfeiccediloado das curvas de energia potencial e cineacutetica do centro de massa
colaborando para um mais alto R (percentual de reconversatildeo entre energia cineacutetica
53
e potencial durante um ciclo de passada) (MALOIY et al 1986) Evidecircncias de um
custo metaboacutelico relativamente baixo da locomoccedilatildeo no plano foram tambeacutem
encontradas em carregadores Nepaleses (BASTIEN et al 2005) Poreacutem
diferentemente das condiccedilotildees geograacuteficas nas quais as mulheres africanas realizam
suas atividades locomotoras o espaccedilo geograacutefico dos carregadores Nepaleses eacute
caracterizado por terrenos inclinados Em um estudo recente Minetti e
colaboradores (MINETTI et al 2006) apresentaram as primeiras informaccedilotildees sobre
eficiecircncia mecacircnica (potecircncia mecacircnica desenvolvida dividida pela potecircncia
metaboacutelica despendida) de carregadores Nepaleses em inclinaccedilotildees extremas
especialmente da regiatildeo do Himalaia indicando uma eficiecircncia aproximadamente
33 maior do que a de montanhistas Caucasianos De fato os carregadores
Nepaleses apresentam caracteriacutesticas notaacuteveis do ponto de vista energeacutetico
Transportam desde a infacircncia cargas geralmente entre 80 e 90 da massa corporal
(utilizando-se de uma faixa posta agrave testa no qual eacute ligada a uma cesta de vime nas
costas) em terrenos acidentados com inclinaccedilotildees de ateacute 50 em situaccedilatildeo de
hipoacutexia de altitude (MALVILLE et al 2001)
A hipoacutetese da transferecircncia eficiente entre energia cineacutetica e potencial do
centro de massa corporal natildeo se sustenta pois em inclinaccedilotildees maiores de 15 e ndash
15 as mudanccedilas de energia potencial ocorrem apenas positivamente e
negativamente respectivamente (MINETTI et al 1993) Portanto sem a
possibilidade de transferecircncia de energia por via pendular e tendo em consideraccedilatildeo
a menor variabilidade de oscilaccedilatildeo do tronco dos Nepaleses encontrada por
MINETTI et al 2006) apresentamos uma hipoacutetese de que o custo de ativaccedilatildeo
muscular (ou custo EMG) da locomoccedilatildeo eacute menor no grupo de carregadores do
Himalaia do que nos montanhistas Caucasianos Devido agrave falta de informaccedilotildees
espaccedilos-temporais da locomoccedilatildeo com carga em grandes inclinaccedilotildees foram
analisados estes paracircmetros da passada a fim de auxiliar no entendimento da
energeacutetica e mecacircnica da locomoccedilatildeo em planos inclinados
251 Materiais e meacutetodos
Cinco carregadores Nepaleses (idade 23 plusmn 9 anos estatura 163 plusmn 003 m
massa corporal 546 plusmn 62 kg) e cinco montanhistas Caucasianos (idade 32 plusmn 3
anos estatura 176 plusmn 007 m massa corporal 742 plusmn 67 kg) selecionados por
54
voluntariedade realizaram o experimento em Namche-Bazar regiatildeo do vale
Khumbu no Parque Nacional de Sagarmatildethatilde (Everest em nepalecircs) O experimento
consistia de caminhada sem e com carga (40 kg) em situaccedilatildeo de subida e descida
com uma inclinaccedilatildeo meacutedia de 22 em um ritmo que poderiam suportar por muitas
horas Os Nepaleses utilizavam a usual faixa na testa onde era ligada com a cesta
nas costas onde suportavam o peso enquanto que os Caucasianos usavam uma
mochila de alpinismo O trecho foi escolhido de modo a assegurar que as trocas de
energia fossem principalmente devidas as mudanccedilas de energia potencial sem a
possibilidade de transferecircncia entre energia potencial e cineacutetica dentro de uma
passada (MINETTI et al 2006) Antes de iniciar os experimentos eram realizadas
medidas de dobras cutacircneas nas regiotildees de colocaccedilatildeo de eletrodos
O set-up experimental incluiu um eletromioacutegrafo portaacutetil (PocketEmg BTS
Milatildeo Itaacutelia) um analisador de gases portaacutetil (K4b2 Cosmed Roma Itaacutelia) um GPS
(GPSmAP76CS) e lactiacutemetro (Accutrend Roche Diagnostic Basel Suiacuteccedila) Foram
analisados a atividade EMG de quatorze muacutesculos (erector spinae longissimus
erector spinae iliocostalis trapezius descendens latissimus dorsis obliquus externus
abdominis obliquus internus abdominis rectus abdominis deltoideus anterior
trapezius ascendens gluteus maximus gluteus medius biceps femuralis caput
longus vastus lateralis e gastrocnemius lateralis) Para a preparaccedilatildeo do local e
colocaccedilatildeo dos eletrodos de superfiacutecie bipolares foram seguidas as orientaccedilotildees da
Seniam (FRERIKS et al 1991) Simultaneamente ao registro EMG sinais advindos
de seis sensores de pressatildeo (footswitches) trecircs em cada peacute (regiatildeo do calcanhar
primeiro e quinto metatarso inferior) eram registrados no eletromiograacutefo portaacutetil Os
sinais EMGrsquos foram preacute-amplificados com razatildeo de rejeiccedilatildeo maior de 95 dB e um
niacutevel de ruiacutedo menor do que 1 μV rms e filtrados por um filtro do tipo Butterworth (50shy
450 Hz terceira ordem) A frequumlecircncia de amostragem da EMG e dos sensores de
pressatildeo foi de 1000 Hz
O custo metaboacutelico foi calculado segundo procedimentos do estudo anterior
(MINETTI et al 2006) O sinal EMG foi retificado e integrado e os valores meacutedios da
atividade EMG de todo o trecho foram subtraiacutedos pelos respectivos valores da
situaccedilatildeo em repouso (idem ao consumo de O2) e divididos pela velocidade meacutedia
(Vf ) A potecircncia EMG geral foi obtida a partir do somatoacuterio dos quatorze muacutesculos
ponderado pelos respectivos volumes musculares (YAMAGUCHI et al 1991) e
55
dobra cutacircnea respectiva Determinou-se o Custo EMG atraveacutes do procedimento
experimental
Para fins de comparaccedilatildeo das Vf rsquos de locomoccedilatildeo usamos o Nf baseado na
teoria das similaridades dinacircmicas (sub-seccedilatildeo 222) para normalizar a Vf No caso
presente ao inveacutes de utilizar o comprimento de membro inferior utilizamos a
estatura da seguinte forma
Vf 2
Fr = Eq 212 g estatura
Tendo em consideraccedilatildeo que a estatura meacutedia dos Caucasianos eacute maior (013
m) e que as Vf rsquos de subida e descida dos Caucasianos com carga foram 35 e 17
menores do que as dos Nepaleses deste modo os Frrsquos dos Caucasianos para os
mesmos trechos foram 40 e 24 menores do que dos Nepaleses
Os procedimentos para anaacutelise dos dados de posiccedilatildeo e Vf oriundos do GPS
satildeo os mesmos de MINETTI et al 2006) A potecircncia mecacircnica vertical (PMV) foi
calculada como segue
g h mtotPMV = Eq 213 t
onde Ah eacute variaccedilatildeo de altura mtot eacute a massa total (massa corporal + carga) g eacute
aceleraccedilatildeo gravitacional e At eacute o tempo de locomoccedilatildeo
Uma seacuterie de programas computacionais (Labview versatildeo 71 National
Instruments Austin USA) foram construiacutedos para o processamento dos dados EMG
GPS e paracircmetros espaccedilos-temporais
Foi utilizado Testes-t de student para amostras independentes para comparar
os paracircmetros espaccedilos-temporais entre Nepaleses e Caucasianos (SPSS para
Windows versatildeo 14 USA)
56
252 Resultados
Variaacuteveis espaccedilos-temporais
O Fr dos Nepaleses foi maior do que as dos Caucasianos em situaccedilatildeo com
carga (plt001) mas sem carga as diferenccedilas diminuem acentuadamente (4 e 23
maiores sem e com carga respectivamente pgt005) O CP e FP dos Nepaleses
foram maiores na subida com carga mas durante a descida com carga apesar da
Vf maior apenas o CP foi maior nos Nepaleses e a FP foi similar (pgt005)
Paracircmetros energeacuteticos
A atividade EMG por unidade de tempo foi similar entre Nepaleses e
Caucasianos Contudo a ativaccedilatildeo EMG total ou seja por unidade de distacircncia
(ldquocustordquo EMG da locomoccedilatildeo) foi notavelmente maior nos Caucasianos na situaccedilatildeo
com carga especialmente na fase de subida (observe a inclinaccedilatildeo das retas na
figura 27)
A atividade EMG tambeacutem foi analisada no domiacutenio da frequumlecircncia para testar
uma possiacutevel diminuiccedilatildeo nos paracircmetros de mediana meacutedia e pico da frequumlecircncia
que pudessem explicar via fadiga neuromuscular (KNAFLITZ e BONATO 1999) o
efeito da carga no aumento da ativaccedilatildeo EMG por distacircncia percorrida nos
Caucasianos (inclinaccedilotildees das retas na figura 27)
Utilizou-se a transformada raacutepida de Fourier com janelamento de 10 segundos
analisando o centro dos bursts de 512 pontos determinados por uma integraccedilatildeo com
janelamento moacutevel Hanning de 50 ms Todavia nenhuma diferenccedila significativa foi
encontrada nos paracircmetros de frequumlecircncia entre os primeiros e uacuteltimos vinte
segundos de experimento (diminuiccedilotildees lt 5)
O notaacutevel desempenho dos Nepaleses na subida com carga eacute confirmado pela
PMV 33 maior do que a dos Caucasianos Embora a Vf e a PMV sejam maiores
nos Nepaleses estes apresentam um custo metaboacutelico 39 menor que os
Caucasianos Esta economia energeacutetica especiacutefica agrave situaccedilatildeo de carga e inclinaccedilatildeo
extrema eacute observada tambeacutem na figura 28 na qual os Caucasianos sem carga
apresentam uma eficiecircncia similar agraves eficiecircncias dos Nepaleses mas com uma baixa
eficiecircncia na situaccedilatildeo com carga
57
Figura 27 Meacutedias e erros-padrotildees da meacutedia do custo EMG PMV e custo
metaboacutelico em funccedilatildeo da massa total transportada (massa corporal +
carga) dos carregadores Nepaleses (NEP) e montanhistas Caucasianos
(CAU) em subida (up) e descida (down)
A eficiecircncia menor dos Caucasianos na situaccedilatildeo com carga parece ser
explicada pela quantidade de ativaccedilatildeo muscular A interessante semelhanccedila entre o
custo EMG e o custo energeacutetico (figura 27) demonstram a eficaacutecia do meacutetodo EMG
utilizado no presente estudo a fim de representar uma ativaccedilatildeo muscular geral
durante a locomoccedilatildeo
253 Discussatildeo
A menor ativaccedilatildeo muscular eacute extremamente interessante pois explica de modo
importante o mecanismo da alta eficiecircncia e economia energeacutetica nos Nepaleses
58
Os resultados de potecircncia metaboacutelica e PMV confirmam os achados de
MINETTI et al 2006) Aleacutem disso o custo energeacutetico na situaccedilatildeo sem carga eacute
similar entre Caucasianos e Nepaleses Em outras palavras o desempenho notaacutevel
dos Nepaleses eacute especiacutefico somente na situaccedilatildeo de subida com carga
000
004
008
012
016
020
024
028
-12 -10 -08 -06 -04 -02 00
efi
ciecirc
nc
ia m
iacutenim
a d
e t
rab
alh
o p
os
itiv
o NEP 0kg
CAU 0kg
NEP 40kg
CAU 40kg
14
15
eficiecircncia miacutenima de trabalho negativo
Figura 28 A eficiecircncia miacutenima foi obtida atraveacutes da divisatildeo da
PMV (positiva ou negativa) pela potecircncia metaboacutelica respectiva
(MINETTI et al 2006) As linhas satildeo as razotildees entre eficiecircncia
muscular positiva e negativa (WOLEDGE et al 1985)
A melhor economia nos Nepaleses durante a subida com carga pode ser
relacionada agraves propriedades mecacircnicas de contraccedilatildeo muscular especificamente agrave
relaccedilatildeo potecircncia-velocidade Tendo em consideraccedilatildeo que os Caucasianos
realizaram o trecho de subida com carga em uma velocidade de progressatildeo 33
menor que os Nepaleses pode-se inferir que os Caucasianos realizaram a atividade
em uma regiatildeo menor de produccedilatildeo de potecircncia devido agrave relativa baixa velocidade
que por sua vez corresponde agrave uma zona de baixa eficiecircncia Outro fator secundaacuterio
pode ser a aclimataccedilatildeo de longo prazo destes indiviacuteduos agrave hipoacutexia de altitude
favorecendo o transporte e utilizaccedilatildeo de O2 no muacutesculo esqueleacutetico
59
Surpreendentemente a ativaccedilatildeo EMG por unidade de tempo eacute semelhante
entre Nepaleses e Caucasianos e por consequumlecircncia a ativaccedilatildeo total eacute menor nos
Nepaleses
Pode-se afirmar tambeacutem que a razatildeo entre ativaccedilatildeo EMG na subida e descida
independente da massa total eacute em torno de 15 e 2 corroborando com os dados de
BIGLAND-RITCHIE e WOODS 1976)
Em conclusatildeo a hipoacutetese da ativaccedilatildeo muscular econocircmica nos carregadores
Nepaleses eacute confirmada Os paracircmetros espaccedilos-temporais da passada parecem
natildeo justificar o menor custo energeacutetico nos Nepaleses O custo EMG foi maior nos
Caucasianos especialmente durante a ascensatildeo com carga indicando uma
justificativa a um achado anterior de maior estabilidade no tronco em Nepaleses
(MINETTI et al 2006)
60
3 MECAcircNICA DA CORRIDA DE IDOSOS
31 Introduccedilatildeo
Nos idosos a forccedila muscular eacute reduzida Isso tem sido atribuiacutedo
principalmente a atrofia da massa muscular com a reduccedilatildeo da aacuterea de sua secccedilatildeo
transversal (DOHERTY 2003 FRONTERA et al 2000 TRAPPE et al 2003) e
tambeacutem agrave deficiecircncia na produccedilatildeo intriacutenseca de forccedila no niacutevel da interaccedilatildeo entre
actina e miosina (PHILLIPS et al 1991 FRONTERA et al 2000 LOWE et al 2001
MORSE et al 2005) Experimentos realizados tanto em espeacutecimes isoladas de
muacutesculo (OCHALA et al 2006 PHILLIPS et al 1991) quanto in vivo em humanos
(KLASS et al 2005 PORTER et al 1997 POUSSON et al 2001 VANDERVOORT
et al 1990) mostram que a forccedila que um muacutesculo exerce ao alongar-se
(frequumlentemente chamada de contraccedilatildeo excecircntrica) tem reduccedilatildeo menor devido ao
processo de envelhecimento que a forccedila desenvolvida durante contraccedilatildeo isomeacutetrica
e durante encurtamento (frequumlentemente chamada de contraccedilatildeo concecircntrica)
O efeito das mudanccedilas das propriedades de contraccedilatildeo do muacutesculo no
trabalho mecacircnico realizado durante locomoccedilatildeo natildeo eacute conhecido O trabalho
mecacircnico realizado ao caminhar natildeo tem sido considerado significativamente maior
em indiviacuteduos idosos apesar de um maior dispecircndio energeacutetico resultando em uma
61
menor eficiecircncia mecacircnica atribuiacuteda agrave co-contraccedilatildeo de muacutesculos antagonistas
(MIAN et al 2006)
O mecanismo elaacutestico da corrida contraacuterio ao mecanismo pendular da
caminhada necessita de uma intervenccedilatildeo muscular muito maior para manter o
movimento do CM Um ciclo alongamento-encurtamento das unidades muacutesculoshy
tendiacuteneas ocorre em cada passo da corrida com grande entrada e saiacuteda de energia
mecacircnica para dentro e para fora das unidades muacutesculo-tendiacuteneas A mecacircnica da
corrida assim mais que a caminhada pode revelar mudanccedilas no trabalho mecacircnico
realizado em cada passo devido ao desempenho muscular reduzido nos idosos
Aleacutem disso uma assimetria contato-despregue ocorre durante a corrida
surgindo do fato que as unidades muacutesculo-tendiacuteneas contraacuterio a uma mola sem
atrito tecircm comportamento diferente durante alongamento e encurtamento
Recentemente foi observado que a assimetria contato-despregue eacute uma
consequumlecircncia da relaccedilatildeo forccedila-velocidade do muacutesculo e eacute maior quanto maior for a
mudanccedila no comprimento do muacutesculo em relaccedilatildeo agravequela do tendatildeo dentro das
unidades muacutesculo-tendiacuteneas (CAVAGNA 2006)
O trabalho mecacircnico realizado durante a corrida em idosos e sua assimetria
contato-despregue para nosso conhecimento ainda natildeo satildeo determinados
Neste estudo foi calculado o trabalho mecacircnico externo realizado para manter
o movimento do CM e o tempo das trocas de energia mecacircnica durante as fases de
trabalho negativo e positivo do bouncing do corpo em indiviacuteduos idosos correndo
em diferentes velocidades Os resultados obtidos em indiviacuteduos idosos satildeo
comparados agravequeles obtidos em indiviacuteduos jovens A hipoacutetese apresentada eacute que o
aumento da discrepacircncia em idosos entre o desenvolvimento da forccedila durante
alongamento e durante encurtamento se operacional durante a corrida iraacute aumentar
a assimetria contato-despregue do aparente bouncing do corpo em relaccedilatildeo agravequele
de indiviacuteduos jovens
32 Materiais e Meacutetodos
321 Amostra e procedimento experimental
Os experimentos foram realizados em oito indiviacuteduos idosos (homens idade
62
736plusmn55 anos altura 172plusmn006 m massa 711plusmn92 kg media plusmn dp) e oito indiviacuteduos
jovens (6 homens e duas mulheres idade 208plusmn16 anos altura 176plusmn008 m massa
634plusmn100 kg) Trecircs indiviacuteduos em cada grupo satildeo treinados (volume miacutenimo
semanal de corrida de 40 km) enquanto cinco satildeo sedentaacuterios saudaacuteveis Os
resultados relatados neste estudo satildeo uma meacutedia dos dados obtidos de todos os
sujeitos em cada grupo independente de seu treinamento Resultados similares
poreacutem foram obtidos comparando os trecircs indiviacuteduos idosos treinados com os trecircs
indiviacuteduos jovens do sexo masculino natildeo treinados de acordo com os achados que
o efeito da idade nas unidades muacutesculo-tendiacuteneas satildeo similares em corredores e
indiviacuteduos natildeo-ativos (KARAMANIDIS e ARAMPATZIS 2005) Consentimento
informado escrito foi obtido de cada indiviacuteduo Os estudos foram realizados de
acordo com a Declaraccedilatildeo de Helsinque
Os indiviacuteduos correram de um lado para o outro ao longo de uma pista de
corrida de 50 metros a qual foi incorporada no niacutevel do solo 8 plataformas de forccedila
de 05 m 05 m em sequumlecircncia totalizando um espaccedilo contiacutenuo de 4 m 05 m
sensiacutevel agrave forccedila aplicada na plataforma nas direccedilotildees anterior e vertical A uacutenica
instruccedilatildeo dada a cada indiviacuteduo foi para correr normalmente em uma velocidade
constante mensurada por duas fotoceacutelulas posicionadas distantes de 1 agrave 3 m
(dependendo da velocidade) ao longo do lado da plataforma Mais caracteriacutesticas da
plataforma de forccedila satildeo descritas por CAVAGNA (1975)
O procedimento do experimento consistiu em medir a forccedila aplicada no solo
no plano sagital durante corrida em diferentes velocidades Os dados foram
adquiridos em um microcomputador a uma taxa de 500 Hz por canal de i) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo anterior (Ff) ii) sinal da
plataforma proporcional agrave forccedila aplicada na direccedilatildeo vertical (Fv) e iii) sinal das
fotoceacutelulas A aquisiccedilatildeo e anaacutelise dos dados foram realizadas atraveacutes de um
conversor analoacutegico-digital (National Instruments Austin TX USA) e um software
feito em LabView para Macintosh (versatildeo 71)
Foram feitas anaacutelises em um total de 124 corridas com velocidades meacutedias
entre 3 e 17 kmh-1 para os idosos e 229 corridas entre 3 e 21 kmh-1 para os jovens
O nuacutemero menor de execuccedilotildees realizado pelos idosos foi para diminuir riscos de
fadiga neste grupo
63
322 Dos registros da plataforma ao trabalho externo
O processo usado para calcular as mudanccedilas da energia mecacircnica do CM do
corpo derivadas das forccedilas de reaccedilatildeo do solo eacute descrito em detalhes por CAVAGNA
1975) Em resumo somente o movimento no plano sagital foi considerado para
calcular a energia mecacircnica do CM A energia cineacutetica de translaccedilatildeo lateral do CM
foi ignorada O sinal da plataforma de forccedila sem carga foi mensurado imediatamente
antes de cada corrida e subtraiacutedo dos registros da Fv e da Ff de modo a computar
uma possiacutevel mudanccedila da linha de base da plataforma Somente o grupo de
registros da Fv e da Ff compreendida entre os cruzamentos das fotoceacutelulas foi
utilizado para anaacutelises subsequumlentes As velocidades vertical e anterior do CM foram
obtidas como segue
Antes do todas as aquisiccedilotildees a plataforma era calibrada com cargas
conhecidas no sentido vertical e horizontal acircntero-posterior
A forccedila vertical meacutedia mensurada pela plataforma de forccedila Fvplate em um
intervalo de tempo correspondente a um nuacutemero de quadros nf em um determinado
nuacutemero de passos T selecionados entre picos (ou vales) nos registros de forccedila
devem igualar ao PC mensurado com uma balanccedila Fvscale
IfirstPeakorValley
SecondPeakorValleyF = Fvi
= F Eq 31 vplate vscalenf
Fvplate foi entatildeo subtraiacuteda da coluna de dados Fv e o resultado (Fv-Fvplate)M (M
eacute a massa corporal) foi integrado no tempo para obter as mudanccedilas nos registros da
velocidade vertical para o intervalo de tempo entre os cruzamentos das fotoceacutelulas
FinalTime AVel = f [(Fv - Fv plate) M]dt Eq 32
InitialTime
Um ou mais passos regulares foram subsequumlentemente escolhidos para
anaacutelise entre dois picos ou vales da curva de velocidade vertical A regularidade dos
passos (drift) foi determinada pela diferenccedila entre incrementos positivos e negativos
agraves mudanccedilas nas velocidades vertical e horizontal divididas pela soma dos
incrementos
64
| V | V | V |I + increments I VincrementsDrift = 100 Eq 33
| V | + | V |I + increments I Vincrements
Durante a corrida no plano os deslocamentos verticais ascendente e
descendente do CM do corpo satildeo em meacutedia iguais durante um nuacutemero inteiro de
passos ie a velocidade vertical meacutedia deve ser nula Baseado nessa consideraccedilatildeo
a aacuterea abaixo das mudanccedilas da velocidade vertical registrada correspondendo ao
intervalo selecionado acima seraacute dividido por nf e o resultado seraacute subtraiacutedo do total
da variaccedilatildeo da velocidade vertical registrada entre os cruzamentos das fotoceacutelulas
para obter os valores instantacircneos positivo (ascendente) e negativo (descendente)
da Vv
nf
f AVv dt
V (t) = i= 0 -AV Eq 34 v nf v
As mudanccedilas na velocidade horizontal foram determinadas pela integraccedilatildeo da
curva FfM durante o tempo entre os cruzamentos das fotoceacutelulas Ltphoto A aacuterea
abaixo dessa variaccedilatildeo de velocidade horizontal foi entatildeo dividida por Ltphoto e o
resultado foi subtraiacutedo do mesmo registro para localizar a velocidade meacutedia de
corrida no traccedilado
Atphoto
AVf (t) = f Ff M dt Eq 35 i= 0
A velocidade meacutedia de corrida mensurada atraveacutes da distacircncia das
fotoceacutelulaLtphoto foi entatildeo somada a seacuterie resultante para obter os valores
instantacircneos de Vf
f AVf dt Vf (t) = + AVf Eq 36
A tphoto
65
A velocidade vertical instantacircnea Vv(t) foi utilizada para calcular a energia
cineacutetica instantacircnea do movimento vertical
Ekv (t) = 05M Vv (t)2 Eq 37
e por integraccedilatildeo o deslocamento vertical do CM Sv(t)
Sv (t) = f Vv (t) dt Eq 38
com a correspondente energia potencial gravitacional
E p (t) = M g Sv (t) Eq 39
A energia cineacutetica horizontal foi calculada como
Ekf (t) = 05M Vf (t)2 Eq 310
a energia cineacutetica translacional total do CM no plano sagital como
(t) Eq 311 Ek (t) = Ekv (t) + Ekf
e a energia mecacircnica translacional do CM no plano sagital como
Ecm(t) = Ekv (t) + Ekf (t) + E p (t) Eq 312
Apoacutes como mencionado acima a seleccedilatildeo foi feita inicialmente entre picos (ou
vales) das mudanccedilas da velocidade vertical os registros foram expandidos para
incluir o vale anterior (ou pico) de Ep(t) ateacute uma imagem clara dos passos a ser
obtidos (figura 31)
Algoritmos foram feitos para calcular o trabalho realizado durante os passos
selecionados entre vales (ou picos) da Ep Wv Wkf e Wext foram calculados com as
amplitudes dos vales ou picos e os valores inicial e final nos registros da Ep(t) Ekf(t)
e Ecm(t) Valores positivos das variaccedilotildees de energia foram considerados como
66
trabalho positivo valores negativos foram considerados como trabalho negativo Em
uma perfeita corrida em velocidade constante no plano a razatildeo entre os valores
absolutos de trabalho positivo e negativo realizados em um nuacutemero inteiro de
passos deve ser igual a um
323 Estimativa do trabalho interno
O trabalho positivo normalizado pela massa e unidade de distacircncia para
acelerar os membros em relaccedilatildeo ao CM do corpo foi estimado para cada corrida
com a equaccedilatildeo
W int ML(J kg-1 m -1) = 014010-200L Vf f Eq 313
onde L eacute o comprimento do passo em metros Vf a velocidade meacutedia de corrida em
metros por segundo e f eacute a frequumlecircncia de passos em Hz (CAVAGNA et al 1997) Os
valores estimados de WintML como uma funccedilatildeo da velocidade em kmh-1 foram
interpolados por um ajuste polinomial de segunda ordem Deve ser salientado que
usando a mesma equaccedilatildeo para calcular Wint nos indiviacuteduos jovens e idosos assume-
se o mesmo movimento dos membros nos dois grupos
324 Tempo aeacutereo duraccedilatildeo da frenagem e propulsatildeo e deslocamento vertical
durante contato
Como a energia mecacircnica do CM eacute constante quando o corpo eacute deslocado no
ar (a resistecircncia do ar eacute negligenciada) o tempo aeacutereo foi calculado como o intervalo
de tempo durante o qual
dEcm(t) dt = 0 Eq 314
Como descrito em detalhes em um estudo preacutevio (CAVAGNA 2006) esse
processo pode resultar em uma superestimativa (7) do tempo aeacutereo devido ao
ruiacutedo do registro do dEcm(t)dt A duraccedilatildeo da frenagem tbrake e a duraccedilatildeo da
propulsatildeo tpush foram calculadas como o intervalo de tempo durante o qual o
dEcm(t)dt foi positivo e negativo respectivamente Novamente devido ao ruiacutedo do
67
registro do dEcm(t)dt tbrake eou tpush foi provavelmente em alguns casos
subestimado (5-7 CAVAGNA 2006) O mesmo eacute verdade para os deslocamentos
descendente e ascendente do CM durante contato Scdown e Scup que foram
mensurados nas porccedilotildees descendente e ascendente da curva Ep(t)
respectivamente durante o intervalo de tempo onde dEcm(t)dt eacute negativo e positivo
respectivamente O deslocamento vertical descendente total Svdown e deslocamento
vertical ascendente Svup foram calculados do decreacutescimo e acreacutescimo totais da
curva Ep(t) respectivamente ocorrendo entre dois ou mais picos (ou vales) de Ep
divididos pelo nuacutemero de passos
325 Deslocamento vertical abaixo e acima dos pontos de equiliacutebrio
A forccedila vertical Fv aplicada pelo peacute no solo eacute
= PC + M a Eq 315 Fv v
onde Mb eacute a massa do corpo e av eacute a aceleraccedilatildeo vertical do CM ie o tempo
derivado de sua velocidade vertical Vv Quando a velocidade vertical e Ekv estatildeo no
maacuteximo a derivada eacute nula av=0 e como consequumlecircncia
Fv = PC Eq 316
A localizaccedilatildeo dos picos Ekv alcanccedilados durante os passos (figura 31) foi
entatildeo utilizada para determinar os instantes onde a Fv eacute igual ao PC A localizaccedilatildeo e
as amplitudes de Ep simultacircneo com os picos de Ekv foram utilizados para determinar
a parte do deslocamento vertical ocorrendo abaixo do ponto de equiliacutebrio durante a
desaceleraccedilatildeo descendente do CM Scedown e durante a aceleraccedilatildeo ascendente do
CM Sceup As diferenccedilas
S - S = S Eq 317 vdown cedown aedown
e
68
S - S = S Eq 318 vup ceup aeup
informa sobre o deslocamento vertical quando o CM do corpo acelera descendente e
desacelera ascendente respectivamente (CAVAGNA et al 1988)
326 Velocidade vertical maacutexima e energia cineacutetica alcanccedilada durante o
deslocamento descendente e ascendente
A velocidade vertical maacutexima e a energia cineacutetica maacutexima Ek=Ekv+Ekf
alcanccediladas pelo CM durante deslocamento descendente Vvmxdown e Ekmxdown e
durante a elevaccedilatildeo Vvmxup e Ekmxup satildeo determinados por comparaccedilatildeo dos picos
em Ekv e Ek com a curva Ep simultacircnea Como a velocidade vertical maacutexima pode
aumentar com a amplitude do deslocamento vertical que pode ser diferente durante
a elevaccedilatildeo e o deslocamento descendente (ver eg as curvas Ep na figura 31) a
razatildeo entre as velocidades descendente e ascendente maacuteximas foram normalizadas
(V V )(S S ) = (V V )norm Eq 319 vmxdown vmxup vup vdown vmxdown vmxup
327 Transduccedilatildeo Ep Ek durante o passo
O tempo de curso da transduccedilatildeo ocorrendo no passo entre energia potencial
gravitacional Ep e energia cineacutetica do CM Ek pode ser determinado pelo valor
absoluto das mudanccedilas ambos incrementos positivos e negativos de Ep Ek e Ecm
em intervalos curtos de tempo dentro do ciclo do passo (CAVAGNA et al 2002)
1 | Ecm(t) |r(t) = Eq 320
(| E p (t) | + | Ek (t) |)
A transduccedilatildeo Ep-Ek eacute completa (r(t)=1) durante a fase aeacuterea quando nenhum
trabalho externo eacute realizado pela forccedila muscular Entretanto a transduccedilatildeo Ep-Ek
tambeacutem ocorre durante contato quando o corpo eacute parcialmente sustentado pelo peacute
no chatildeo na parte superior da trajetoacuteria do CM (0lt r(t)lt1)
69
Figura 31 A energia mecacircnica total (Ecm) energia potencial (Ep) vertical a
frente e cineacutetica total (Ekv Ekf e Ek respectivamente) As barras horizontais
indicam o tempo de contato durante o passo (entre os dois miacutenimos de Ep) O
tempo de contato durante o qual trabalho mecacircnico externo eacute realizado
70
(incrementos de Ecm) eacute indicado em vermelho enquanto que o tempo de
trabalho mecacircnico negativo (decrementos de Ecm) eacute indicado em azul
A transduccedilatildeo Ep-Ek eacute nula (r(t)=0) em duas fases do passo a e onde Ek
aumenta e diminui respectivamente simultaneamente com a energia potencial
gravitacional Ep (CAVAGNA et al 2002) Note que trabalho externo positivo e
negativo satildeo ambos realizados nas fases a e do passo (r(t)=0) e nas fases do
passo onde uma transduccedilatildeo ocorre entre Ek e Ep (0lt r(t)lt 1)
Nesse estudo r(t) foi calculado a partir do valor absoluto do tempo derivado
de Ep Ek e Ecm no intervalo de tempo contido entre dois ou mais picos (ou vales) de
Ep O valor cumulativo de energia recuperada Rint(t) resultando da transduccedilatildeo
instantacircnea de Ek-Ep foi determinado na aacuterea abaixo do r(t) registrado dividida pelo
periacuteodo do passo
T Rint (t) = ( f r(u)du) T Eq 321
0
No final do passo Rint(t)=Rint (CAVAGNA et al 2002) Para determinar a
assimetria do ciclo do passo eacute uacutetil saber quanto da transduccedilatildeo Ek-Ep ocorre durante
o deslocamento descendente e durante a elevaccedilatildeo do CM A derivada
dE p dt Eq 322
eacute utilizada para determinar a quantidade de transduccedilatildeo ocorrendo durante o
deslocamento descendente Rintdown e durante a elevaccedilatildeo do CM Rintup A
assimetria do passo foi quantificada pela razatildeo
Rintdown Rintup Eq 323
328 Rigidez vertical (k)
A k normalizada pela massa
k M Eq 324
71
caracterizando a frequumlecircncia natural do sistema eacute em todas as condiccedilotildees (com ou
sem uma fase aeacuterea) a inclinaccedilatildeo da relaccedilatildeo av-Sv quando avgt1g A inclinaccedilatildeo
meacutedia nessa amplitude pode ser avaliada pela razatildeo entre a aceleraccedilatildeo ascendente
maacutexima avmx e a amplitude da oscilaccedilatildeo
(S + S )ceup cedownS = Eq 325 ce 2
No presente estudo a k normalizada pela massa foi mensurada como
k M = a S Eq 326 vmx ce
E a frequumlecircncia natural do sistema massa-mola como
)05 (a Svmx cefs = Eq 327 2
329 Estatiacutestica
Os dados coletados como uma funccedilatildeo da velocidade decorrida foram
agrupados em classes de intervalos de um kmh-1 como segue 3 agrave lt4 kmh-1 4 agrave lt5
kmh-1 20 agrave lt21 kmh-1 Quando comparadas agraves meacutedias de diferentes variaacuteveis
com o mesmo nuacutemero de itens em uma certa velocidade de corrida dentro de um
grupo de indiviacuteduos um teste t para amostra pareadas foi utilizado para determinar
quando as meacutedias eram significativamente diferentes Quando comparadas as
meacutedias de diferentes variaacuteveis entre os dois grupos de indiviacuteduos com diferentes
nuacutemero de itens um teste t para amostras independentes foi utilizado (SPSS versatildeo
14) Em todos os testes o p usado foi menor do que 5
33 Resultados
Na primeira seccedilatildeo dos Resultados o bouncing do corpo a cada passo eacute
descrito desconsiderando as diferenccedilas no movimento ascendente e descendente
72
do CM (Por exemplo O deslocamento vertical Sv eacute medido como (Svup+Svdown)2 o
tempo de contato com o solo como tc =(tcup+tcdown)2 etc) Este procedimento
pressupotildee uma igualdade dinacircmica durante a subida e a descida do CM como em
um oscilador harmocircnico (CAVAGNA et al 1988 BLICKHAN 1989 SCHEPENS et
al 1998)
A potecircncia meacutedia do passo despendida para acelerar e elevar o CM do corpo
e do correspondente trabalho mecacircnico realizado por unidade distacircncia satildeo
apresentados na segunda parte Na terceira seccedilatildeo a assimetria contato-despregue
eacute considerada analisando separadamente os eventos que ocorrem durante a subida
e durante a descida do CM (CAVAGNA 2006) Em todas as seccedilotildees os resultados
obtidos sobre os indiviacuteduos idosos satildeo comparados com aqueles obtidos nos
indiviacuteduos jovens
331 Meacutedia dos deslocamentos ascendentes e descendentes do CM
Parte superior e inferior do bouncing
O periacuteodo do passo (T parte superior da figura 33) o deslocamento vertical
do CM durante cada etapa (Sv meio da figura) e o comprimento do passo (L na
parte inferior da figura) satildeo apresentados em funccedilatildeo da velocidade de corrida (Vf) na
figura 33 (quadrados pretos) Segundo o modelo massa-mola o periacuteodo do passo
a oscilaccedilatildeo vertical do CM e o correspondente deslocamento para frente foram
divididos em duas partes uma parte mais baixa que acontece quando a Fv eacute maior
do que o PC (tce Sce e Lce ciacuterculos vermelhos) e uma parte superior quando a Fv eacute
menor que o PC (tae Sae e Lae ciacuterculos azuis abertos) Para comparaccedilatildeo o periacuteodo
do passo o deslocamento vertical e o comprimento do passo tambeacutem foram
divididos de acordo com a tradiccedilatildeo nas suas fraccedilotildees que ocorrem durante a fase
de contato com o terreno (tc Sc e Lc pontilhada linhas vermelhas) e durante a fase
aeacuterea (ta Sa e La linhas pontilhadas em azul) O significado biomecacircnico dos
resultados na figura 33 tem sido explicado em estudos anteriores realizados em
indiviacuteduos adultos de diferentes idades (CAVAGNA et al 1988) e em crianccedilas com
idades entre os 2 e 16 anos (SCHEPENS et al 1998) durante a corrida em
diferentes velocidades Em ambos os estudos as partes inferior e superior do
bouncing do corpo foram simeacutetricos ateacute ~ 11 kmh-1 (isto eacute tce=tae e Sce=Sae) e
- -
73
assimeacutetricos em velocidades mais elevadas (isto eacute taegttce e SaegtSce) O momento
vertical ganho e perdido durante tce deve ser igual ao momento vertical ganho e
perdido durante tae ie
avce tce = avae tae Eq 328
O bouncing simeacutetrico implica a mesma aceleraccedilatildeo vertical meacutedia durante a
parte inferior e superior do bouncing A aceleraccedilatildeo vertical meacutedia durante a parte
inferior do bouncing avce aumentou com a velocidade enquanto que a aceleraccedilatildeo
vertical meacutedia durante a parte superior do bouncing avae natildeo pode exceder 1 g (eacute 1 g
quando tae= ta) Deste modo o bouncing torna-se assimeacutetrico quando a aceleraccedilatildeo
vertical meacutedia durante tce exceder 1g Os resultados obtidos em relaccedilatildeo aos
indiviacuteduos jovens demonstram que o bouncing tende a ser simeacutetrico em baixas
velocidades e assimeacutetrico em altas velocidades (ver tce versus tae e Sce versus Sae na
tabela 1) Por outro lado os resultados obtidos no grupo dos idosos mostram duas
diferenccedilas importantes i) o bouncing eacute simeacutetrico nas velocidades mais altas (tce=tae e
Sce=Sae) e ii) a assimetria quando presente eacute invertida (ou seja tcegttae e ScegtSae)
Amplitude do deslocamento vertical
O deslocamento vertical do CM corporal em cada etapa da corrida Sv atinge
um maacuteximo em velocidades intermediaacuterias sendo inferior nos indiviacuteduos idosos do
que nos jovens ~ 75 cm a ~ 75 kmh-1 nos idosos e ~ 10 cm a ~ 10 kmh-1 nos
jovens Valores similares de Sv foram medidos com procedimento experimental
diferente em adultos idosos e jovens correndo a ~ 10 kmh-1 (KARAMANIDIS e
ARAMPATZIS 2005) A reduccedilatildeo de Sv nos indiviacuteduos idosos eacute devida a uma
reduccedilatildeo de todas as suas componentes (Sce Sae Sc e Sa) mas eacute particularmente
relevante considerar aqui a reduccedilatildeo da Sce (tabela 32) que representa a amplitude
da oscilaccedilatildeo do sistema massa-mola a partir de sua posiccedilatildeo de equiliacutebrio (Fv igual
ao PC) ateacute sua compressatildeo maacutexima (Fv maacutexima) A amplitude da oscilaccedilatildeo eacute menor
nos idosos do que nos jovens Como esperado esta eacute acompanhada por uma
aceleraccedilatildeo menor para cima atingida no final da compressatildeo avmx e por uma menor
velocidade maacutexima ascendente Vvmx atingida quando av=0 (figura 34 e tabela 32)
74
A velocidade vertical menor resulta por sua vez em um curto tempo aeacutereo efetivo
tae (figura 33 e tabela 32)
Frequumlecircncia de passo e do sistema massa-mola
Os dois paineacuteis superiores da figura 33 mostram que o periacuteodo do passo (T=
tae+ tce) eacute menor nos idosos do que nos jovens Isto eacute devido ao tempo aeacutereo efetivo
tae mais curto enquanto que o tempo de contato efetivo tce eacute igual entre os jovens e
os idosos (tabela 32) Segundo o modelo massa-mola da corrida o tce representa
metade do periacuteodo de oscilaccedilatildeo do sistema elaacutestico Este meio-periacuteodo similar
sugere uma frequumlecircncia de ressonacircncia semelhante fs=(kM)-05(2n) do sistema
elaacutestico aparente atraveacutes do qual o corpo se desloca ou seja uma k normalizada
pela massa corporal (kM) A figura 35 mostra que em altas velocidades k eacute maior
nos indiviacuteduos idosos (paineacuteis superior) mas devido agrave sua maior massa corporal agrave
rigidez de massa especiacutefica vertical (kM= avmxSce veja na Metodologia) eacute de fato
similar ao dos jovens (paineacuteis centrais da figura 35 e tabela 32) Em ambos os
grupos kM tende a ser aproximadamente constante ateacute ~ 10 kmh-1 e em seguida
aumenta com a velocidade Os dois paineacuteis inferiores da figura 35 mostram a
frequumlecircncia do passo f apresentada em conjunto com a frequumlecircncia de ressonacircncia do
sistema fs Pode ser observado que i) f eacute maior nos idosos do que nos jovens ii) nos
idosos a f permanece semelhante agrave fs (tabela 1) enquanto que iii) nos jovens a f eacute
inferior agrave fs (tabela 31)
332 Trabalho
O trabalho externo normalizado pela M Wext realizado para sustentar o
movimento do CM corporal no plano sagital eacute descrito na figura 36 em funccedilatildeo da
velocidade de corrida Pode ser observado que trabalho feito para sustentar as
mudanccedilas de velocidade horizontal Wextf aumenta conforme o acreacutescimo de
velocidade de modo semelhante em indiviacuteduos jovens e idosos O trabalho
realizado contra a gravidade Wextv eacute menor nos indiviacuteduos idosos (tabela 32) O
trabalho externo Wext Wextf + Wextv tambeacutem eacute menor nos idosos particularmente
nas maiores velocidades de progressatildeo
75
A menor potecircncia mecacircnica despendida contra a gravidade pelos idosos
mostra que o menor deslocamento vertical em cada passo natildeo eacute compensado pelo
aumento na frequumlecircncia de passo induzido pelo menor tempo aeacutereo efetivo tae (figura
33) A constataccedilatildeo de que o envelhecimento diminui o trabalho feito contra a
gravidade Wextv deixando inalterado o trabalho para sustentar as mudanccedilas na
velocidade horizontal Wextf resulta em uma velocidade menor de corrida onde o
Wextv se iguala ao Wextf esta velocidade eacute ~ 12 kmh-1 nos idosos e ~ 15 kmh-1 nos
jovens Os dois paineacuteis inferiores na figura 36 (analisados mais profundamente na
Discussatildeo) apresentam o trabalho mecacircnico total realizado por unidade de distacircncia
percorrida Wtot =Wext+Wint onde Wext eacute o trabalho positivo feito para manter o
movimento em relaccedilatildeo ao ambiente e o Wint eacute o trabalho realizado para acelerar os
segmentos em relaccedilatildeo ao CM (calculado conforme descrito na Metodologia)
333 Assimetria contato-despregue
Os deslocamentos verticais do CM para baixo e para cima durante a fase de
contato estatildeo traccedilados na figura 37 e estatildeo expressos como uma fraccedilatildeo dos
deslocamentos verticais descendente e ascendente (ScdownSvdown ciacuterculos cheios e
ScupSvup ciacuterculos abertos) Na mesma figura eacute apresentada a fraccedilatildeo do
deslocamento vertical realizado pela amplitude da oscilaccedilatildeo do sistema massa-mola
para baixo de av=0 ateacute avmx (ScedownSvdown quadrados cheios) e para cima de avmx
ateacute av=0 (SceupSvup quadrados abertos) Quando a fase aeacuterea eacute nula nas
velocidades mais baixas de corrida todo o deslocamento vertical acontece em
contato com o solo e ScSv=1 Com o aumento da velocidade acontece uma fase
aeacuterea de duraccedilatildeo progressivamente maior durante a corrida e a fraccedilatildeo do
deslocamento vertical em contato com o solo diminui mais acentuadamente durante
o deslocamento para baixo (ciacuterculos cheios) do que durante o deslocamento para
cima (ciacuterculos abertos) ou seja (ScupSvup)gt(ScdownSvdown) Em outras palavras a
altura do CM no instante do contato eacute superior agrave sua altura no instante do toque no
solo o que indica que a elevaccedilatildeo do CM eacute inferior agrave descida durante a fase de
contato do peacute com o solo (CAVAGNA 2006) Esta assimetria contato-despregue
estaacute presente em ambos os grupos mas eacute maior nos idosos do que nos jovens
principalmente devido a uma menor reduccedilatildeo na ScupSvup com o aumento da
velocidade uma maior elevaccedilatildeo do CM se daacute em contato com o solo nos indiviacuteduos
76
idosos Em ambas as faixas etaacuterias a fraccedilatildeo de deslocamento vertical ocupada pela
amplitude de oscilaccedilatildeo SceSv se aproxima de metade de Sv quase independente da
velocidade apoiando a ideacuteia de que a oscilaccedilatildeo vertical do sistema massa-mola eacute
equilibrado em torno do ponto onde a Fv se iguala ao PC Em contraste ScSv muda
acentuadamente com a velocidade ateacute o ponto em que toda a oscilaccedilatildeo tem lugar
no contato com o solo (ScSv=1)
34 Discussatildeo
341 Sobre o meacutetodo
Este sub-capiacutetulo procura discutir o meacutetodo usado no estudo especialmente
em relaccedilatildeo ao raciociacutenio envolvido e a discussatildeo de algumas abordagens similares
ao modelo usado no presente estudo
O meacutetodo dinamomeacutetrico usado no presente estudo tem como base a teoria
do custo de geraccedilatildeo de trabalho mecacircnico Esta teoria pode ser considerada como a
primeira tentativa satisfatoacuteria nas aacutereas limiacutetrofes entre biomecacircnica biologia
experimental e fisiologia comparativa de explicar sob o ponto-de-vista mecacircnico as
formas principais de locomoccedilatildeo humana a caminhada e a corrida
Baseados no meacutetodo de FENN (1930) para a determinaccedilatildeo do trabalho
mecacircnico contra a gravidade e o trabalho mecacircnico devido agraves mudanccedilas de
velocidade Cavagna e colaboradores perceberam que o ser humano quando
caminhava e corria apresentava caracteriacutesticas nas curvas de energia mecacircnica e
no somatoacuterio dos incrementos positivos nestas energias que permitiam diferenciar
estes tipos de locomoccedilatildeo ao mesmo tempo que auxiliavam no entendimento do
comportamento da unidade muacutesculo-tendatildeo e dos mecanismos minimizadores de
dispecircndio energeacutetico mecanismo pendular e elaacutestico (ver figura 32) Os
incrementos positivos de energia mecacircnica (trabalho positivo) satildeo originados
principalmente por muacutesculos e tendotildees enquanto que os incrementos negativos de
energia mecacircnica (trabalho negativo) satildeo em parte armazenados nas estruturas natildeo
contraacuteteis dos muacutesculos e tendotildees e outra parte eacute degradada em forma de calor
Tendo em consideraccedilatildeo os princiacutepios da termodinacircmica foi possiacutevel aplicar
estes mecanismos a fim de entender o porquecirc que durante a fase de apoio na
corrida a energia cineacutetica se apresenta em fase com a energia potencial do CM em
77
relaccedilatildeo ao meio ambiente enquanto que na caminhada estas energias apresentam
comportamentos contraacuterios
Figura 32 Representaccedilatildeo graacutefica do modelo de segmento riacutegido da
caminhada (pecircndulo-invertido) e de segmento complacente da corrida
(massa-mola) e seus principais constituintes Note que o tracejado
indica a trajetoacuteria do corpo de massa m durante o contato g eacute a
aceleraccedilatildeo gravitacional k eacute a rigidez da mola l0 eacute o comprimento do
membro inferior e a0 eacute o acircngulo da perna de apoio no momento do
contato com o solo
O somatoacuterio dos incrementos positivos de energia mecacircnica tambeacutem
conhecido como trabalho mecacircnico externo eacute menor do que a energia metaboacutelica
despendida pelos muacutesculos durante a caminhada enquanto que o trabalho
mecacircnico externo na corrida apresenta valor maior ao da energia metaboacutelica
despendida pelos muacutesculos Este aparente paradoxo demonstrava que a razatildeo
entre potecircncia mecacircnica gerada e a potecircncia metaboacutelica despendida ultrapassava a
eficiecircncia maacutexima de transformaccedilatildeo de energia quiacutemica em trabalho mecacircnico e foi
considerado como a primeira evidecircncia de que as unidades muacutesculo-tendatildeo
responsaacuteveis pela frenagem e propulsatildeo durante a fase de apoio da corrida eram
tambeacutem responsaacuteveis por absorccedilatildeo e re-utilizaccedilatildeo de energia elaacutestica (CAVAGNA et
al 1964) permitindo mais tarde a formulaccedilatildeo do modelo massa-mola ou ldquobouncingrdquo
da corrida (BLICKHAN 1989 MCMAHON e CHENG 1990 figura 32) e o posterior
estudo do ciclo alongamento-encurtamento do muacutesculo-esqueleacutetico
78
Portanto durante atividades ciacuteclicas como a locomoccedilatildeo os muacutesculos
responsaacuteveis pelo movimento possuem uma capacidade de geraccedilatildeo de forccedila
durante seu encurtamento (contraccedilatildeo concecircntrica) maior do que em contraccedilotildees
similares mas precedidas de contraccedilatildeo isomeacutetrica No caso da locomoccedilatildeo mais
especificamente da corrida durante contraccedilotildees concecircntricas os muacutesculos
propulsores utilizam uma energia armazenada durante a precedente contraccedilatildeo
excecircntrica (CAVAGNA et al 1964 CAVAGNA et al 1968) O modelo massa-mola
assume que a unidade muacutesculo-tendatildeo exerce um comportamento similar agrave de uma
mola ou seja quando a mola diminui de comprimento apoacutes o impacto (alongamento
do muacutesculo) armazena energia potencial elaacutestica e quando a mola aumenta seu
comprimento (encurtamento do muacutesculo) durante a segunda fase de contato
transforma energia potencial elaacutestica em energia cineacutetica O modelo tambeacutem
assume mesma altura e velocidade do CM no momento do contato e despregue
A primeira pressuposiccedilatildeo do modelo (sobre a semelhanccedila entre mola e
unidade muacutesculo-tendatildeo) apesar de correta natildeo indica informaccedilotildees sobre seus
constituintes o muacutesculo e o tendatildeo Vaacuterias evidecircncias mostram diferenccedilas no
comportamento mecacircnico do muacutesculo e do tendatildeo e estas diferenccedilas satildeo
moduladas pela forccedila imposta agrave unidade consequumlentemente dependentes da
velocidade de corrida Por exemplo KRAM e TAYLOR (1990) sugeriram que o
dispecircndio de energia durante a corrida era devido ao custo de geraccedilatildeo de forccedila das
fibras musculares agindo de forma isomeacutetrica sem realizaccedilatildeo de trabalho muscular
Evidecircncias em modelo animal confirmam este raciociacutenio (ROBERTS et al 1997
BIEWENER 1998)
Ainda assim para ser inteiramente vaacutelido este modelo o tempo de trabalho
externo positivo e negativo devem ser iguais em todas as velocidades de corrida
contudo uma assimetria nos tempos de trabalho positivo e negativo satildeo encontradas
na corrida humana em velocidades baixas (ateacute 14 kmh-1) com um menor tempo
para o trabalho mecacircnico externo negativo (CAVAGNA 2006)
Portanto o mecanismo de minimizaccedilatildeo de energia apresentada por KRAM e
TAYLOR 1990) parece se sustentar apenas em altas velocidades Em velocidades
menores os muacutesculos propulsores ativam em intensidade menor portanto gerando
uma tensatildeo menor no tendatildeo provavelmente insuficiente para gerar uma mudanccedila
importante no comprimento do tendatildeo Portanto o trabalho muscular eacute significativo
com contraccedilotildees excecircntricas em maior velocidade do que as contraccedilotildees
79
concecircntricas o que corresponde com a relaccedilatildeo forccedila versus velocidade e tambeacutem
com os resultados de eficiecircncia muscular para seacuteries de alongamento encurtamento
em diferentes velocidades (maior eficiecircncia em alta velocidade de encurtamento e
menor velocidade de alongamento ndash HEGLUND e CAVAGNA 1987) Ou seja em
velocidades menores parece existir um importante trabalho muscular executado de
modo assimeacutetrico com o tendatildeo agindo apenas como transmissor de forccedilas
enquanto que em altas velocidades com o aumento do pico de estresse no muacutesculo
e consequumlentemente aumento da rigidez da unidade muacutesculo-tendatildeo o muacutesculo
contrai isometricamente e o tendatildeo muda de comprimento agindo como um elaacutestico
(o muacutesculo tambeacutem gera tensatildeo devido agrave histerese do tendatildeo poreacutem eacute
negligenciaacutevel ndash ALEXANDER 2002)
Sobre o segundo criteacuterio (da semelhanccedila de altura e velocidade no contato e
despregue) os proacuteprios autores do modelo massa-mola indicam que em geral os
animais apresentam uma velocidade no contato maior do que no despregue bem
como realizam o contato com as articulaccedilotildees das pernas mais flexionadas do que
no despregue (BLICKHAN 1989) Poreacutem se as anaacutelises da velocidade e altura satildeo
modificadas do momento de contato e despregue para o iniacutecio da fase aeacuterea e de
contato efetivos (quando a forccedila vertical eacute igual aacute forccedila peso) levando em
consideraccedilatildeo o periacuteodo natural do sistema elaacutestico a velocidade continua maior no
iniacutecio do contato efetivo em todas as velocidades de corrida mas a altura do CM eacute
maior no contato efetivo inicial do que no momento de fase aeacuterea inicial em
velocidades baixas de corrida (aproximadamente de 8 agrave 14 kmh-1) Acima destas
velocidades a altura do CM eacute maior no iniacutecio da fase aeacuterea efetiva do que no iniacutecio
da fase de contato efetivo (CAVAGNA 2006) Estas assimetrias podem chegar ateacute
30
Um ponto chave na formulaccedilatildeo deste modelo eacute a determinaccedilatildeo da rigidez do
sistema massa-mola aqui tambeacutem uma simplificaccedilatildeo do fenocircmeno pois considera
apenas os valores maacuteximos de forccedila e deslocamento verticais como se durante toda
a fase de apoio a rigidez fosse constante
Caacutelculo da rigidez de mola
Os caacutelculos da rigidez de mola do sistema bouncing representam as
propriedades de mola do movimento vertical do corpo e da perna A rigidez vertical eacute
80
estimada como a razatildeo do pico de forccedila vertical (algumas vezes denominado como
forccedila maacutexima durante a fase ativa do tempo de contato) e o deslocamento maacuteximo
vertical do CM durante o apoio (CAVAGNA et al 1988 MCMAHON e CHENG
1990) Outro meacutetodo alternativo para o caacutelculo da rigidez vertical utiliza o tempo de
contato efetivo assumindo que este tempo representa o meio periacuteodo de oscilaccedilatildeo
do sistema elaacutestico (ver CAVAGNA et al 2005) k = Mb( tce)2 onde Mb eacute massa
corporal Este uacuteltimo meacutetodo apresenta a vantagem de evitar a influecircncia das
oscilaccedilotildees de aceleraccedilatildeo vertical do CM apoacutes o contato inicial A rigidez de perna eacute
a razatildeo do pico de forccedila vertical e a mudanccedila no comprimento de perna durante o
apoio A variaccedilatildeo do comprimento de perna eacute determinada com a equaccedilatildeo 330
(MCMAHON e CHENG 1990)
delta l = ycm + l0 (1V cosa0) Eq 329
Onde l0 eacute o comprimento de perna em repouso e a0 eacute o acircngulo da perna no
contato inicial em relaccedilatildeo agrave vertical (a0 = sin-1(Vf tc2 l0) onde Vf eacute a velocidade
horizontal e tc eacute o tempo de apoio Apesar do uso frequumlente desta medida no campo
das Ciecircncias do Esporte e Biologia Experimental a rigidez de pernas possui uma
forte limitaccedilatildeo devido ao uso da medida de membro inferior incorrer em um alto grau
de erro (e 1 cm dados natildeo publicados) Aleacutem disso se utiliza da medida de tempo
de contato enquanto que a relaccedilatildeo inversa com o sistema massa-mola eacute dada pelo
tempo de contato efetivo (quando a forccedila vertical eacute maior do que o peso corporal)
portanto natildeo representa as mudanccedilas do sistema massa-mola frente agrave restriccedilotildees do
ambiente (eg gravidade CAVAGNA et al 2005)
342 Diferenccedilas na amplitude da oscilaccedilatildeo vertical
A menor amplitude de oscilaccedilatildeo do sistema elaacutestico nos idosos (Sce na figura
33) implica i) uma menor forccedila vertical maacutexima Fvmx e energia elaacutestica armazenada
em cada passo ii) uma maior frequumlecircncia de passo iii) uma menor variaccedilatildeo de
energia externa para manter o movimento do CM do corpo em relaccedilatildeo ao meio
ambiente externo e iv) um maior trabalho interno para acelerar os segmentos
relativo ao CM
81
Destaca-se que as divisotildees do passo baseadas no tempo de contato efetivo
(vermelho) aeacutereo efetivo (azul) correspondem agrave aproximadamente metade da
duraccedilatildeo e deslocamento durante o passo Em contraste a fraccedilatildeo do passo realizado
durante o tempo aeacutereo e de contato variam bastante com a velocidade Aleacutem disso
o tcetae e SceSce nos idosos enquanto que o contraacuterio acontece com os jovens
Linhas representam a meacutedia ponderada de todos os dados (Kaleidagraph 364) e a
uacutenica proposta destas linhas eacute ser um guia para os olhos elas natildeo descrevem o
mecanismo fiacutesico envolvido (figura 33)
Tabela 31 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nos quais os pares de variaacuteveis listadas satildeo significativamente diferentes dentro de
cada grupo experimental
Vf Idoso Jovem
(km h-1) tce vs tae Sce vs Sae fs vs f tce vs tae Sce vs Sae fs vs f
3 006 312 10-4 079 001 004 117 10-3
4 031 013 028 008 058 005
5 003 003 004 091 014 020
6 001 473 10-3 003 005 026 001
7 002 001 020 011 045 001
8 102 10-7 361 10-8 190 10-4 003 048 256 10-3
9 445 10-4 753 10-6 002 001 057 151 10-3
10 250 10-4 212 10-5 510 10-4 243 10-3 091 284 10-3
11 014 003 028 158 10-4 019 234 10-4
12 044 013 061 249 10-5 002 328 10-5
13 018 003 020 310 10-6 261 10-3 100 10-5
14 001 042 005 388 10-6 183 10-3 166 10-5
15 029 022 012 107 10-6 256 10-4 166 10-6
16 057 048 090 947 10-5 361 10-3 292 10-4
Forccedila e energia elaacutestica
A forccedila maacutexima vertical eacute dada pela massa corporal multiplicada pela
aceleraccedilatildeo vertical maacutexima e o resultado eacute somado ao peso corporal Avmx (equaccedilatildeo
82
34) A massa corporal meacutedia eacute 711 kg nos idosos e 634 kg nos jovens A variaccedilatildeo
da aceleraccedilatildeo maacutexima atingida pelos indiviacuteduos idosos nas suas altas velocidades
(15-17 kmh-1) eacute de 1077 plusmn 197 ms-2 (n=7) Considerando que nas mesmas
velocidades alcanccediladas pelos jovens a variaccedilatildeo foi de 1886 plusmn 274 ms-2 (n=24)
(figura 34) Note que a aceleraccedilatildeo ascendente e velocidade vertical maiores
atingidas pelos jovens Contraacuterio ao bouncing elaacutestico a velocidade vertical maacutexima
alcanccedilada durante o deslocamento descendente eacute maior do que o alcanccedilado
durante a elevaccedilatildeo sendo esta diferenccedila maior nos idosos
Tabela 32 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Wf Wv tce tae Sce
3 008 003 095 482 10-3 005
4 008 015 004 074 062
5 062 002 083 006 006
6 259 10-3 138 10-4 034 427 10-4 001
7 049 133 10-6 073 287 10-5 140 10-3
8 004 162 10-6 039 231 10-6 198 10-3
9 007 581 10-6 028 107 10-5 407 10-4
10 005 120 10-10 094 605 10-9 176 10-6
11 014 170 10-6 025 383 10-7 435 10-6
12 014 471 10-7 019 321 10-6 380 10-5
13 007 114 10-6 068 228 10-6 196 10-6
14 099 400 10-6 005 170 10-5 231 10-5
15 014 222 10-7 010 142 10-6 685 10-8
16 066 208 10-4 061 184 10-4 718 10-4
De acordo com a equaccedilatildeo 34 estes nuacutemeros resultam em uma forccedila vertical
maacutexima Fvmxold=1463 kN e Fvmxyoung=1818 kN note que 75 de diferenccedila na Avmx
resulta em 24 de diferenccedila em Fvmx devido agrave maior massa corporal dos indiviacuteduos
idosos A forccedila mais baixa alcanccedilada durante o contato pelos indiviacuteduos idosos pode
83
ser explicada em parte pela bem documentada perda de forccedila muscular (eg
DOHERTY 2003) e em parte por uma estrateacutegia de aumentar a seguranccedila do
sistema muacutesculo-esqueleacutetico (KARAMANIDIS e ARAMPATZIS 2005)
A aparente k a 15-17 kmh-1 eacute 3732plusmn885 kNm-1 (n=7) nos indiviacuteduos idosos
e 2869plusmn650 kNm-1 (n=24) nos indiviacuteduos jovens (figura 35) Assumindo uma
relaccedilatildeo forccedila-comprimento linear dos elementos elaacutesticos seu alongamento maacuteximo
(de zero a Fvmx) seria (14633732)=0039 m nos idosos e (18182869)=0063 m
nos indiviacuteduos jovens Os paineacuteis inferiores da figura 35 mostram que a frequumlecircncia
de passo (linhas contiacutenuas) eacute similar agrave frequumlecircncia natural do sistema (linhas
pontilhadas) em todas as velocidades nos idosos enquanto que com os jovens a
frequumlecircncia do passo torna-se menor do que a frequumlecircncia do sistema com o aumento
da velocidade
Tabela 33 Iacutendices de significacircncia estatiacutestica (prsquos) indicando as velocidades (Vfrsquos)
nas quais as variaacuteveis listadas satildeo significativamente diferentes entre os grupos
experimentais
Vf
(km h-1) Avmx Vvmx AvmxSce (AvmxSce)Mb Sv
3 004 003 099 039 002
4 001 011 003 022 034
5 152 10-3 001 024 040 003
6 601 10-4 232 10-4 049 067 772 10-4
7 132 10-3 422 10-6 066 007 367 10-5
8 918 10-7 154 10-6 025 018 271 10-5
9 526 10-5 131 10-6 007 067 137 10-5
10 134 10-7 196 10-11 072 001 146 10-8
11 439 10-4 744 10-7 046 004 798 10-7
12 533 10-6 666 10-7 040 002 552 10-6
13 264 10-4 401 10-6 061 022 158 10-6
14 115 10-3 366 10-6 005 652 10-5 126 10-5
15 891 10-6 725 10-8 031 009 316 10-7
16 353 10-3 258 10-4 048 005 267 10-4
84
Visto que a energia potencial gravitacional e a energia cineacutetica do CM estatildeo
em fase durante a corrida o sistema elaacutestico sofre sua maacutexima tensatildeo quando o
componente vertical da forccedila de reaccedilatildeo do solo encontra-se no maacuteximo ((Fvmx)) e o
componente horizontal eacute nulo (Ff=0)
Na verdade Fvmx ocorre no ponto mais baixo da trajetoacuteria (Epmn) quando o
CM termina sua desaceleraccedilatildeo e comeccedila a sua aceleraccedilatildeo (ou seja Ff=0 e Ekfmn) A
energia elaacutestica armazenada em cada passo pode assim ser computada usando-se
apenas a forccedila vertical como (14630039)2=2853 J e (18180063)2=5727 J para
os indiviacuteduos idosos e para os indiviacuteduos jovens respectivamente Esta energia
elaacutestica eacute posteriormente utilizada em parte durante o impulso para elevar e acelerar
a frente o CM
Tabela 34 Comparaccedilatildeo das assimetrias contato-despregue entre jovens idosos e
sistema elaacutestico
IDOSO JOVEM ELAacuteSTICO
Vvmxdown Vvmxup 118plusmn011 107plusmn008 1
f 124plusmn018 106plusmn010 1
Rintdown Rintup 213plusmn130 126plusmn032 1
tpush tbrake 125plusmn016 115plusmn013 1
Ekmxdown - Ekmxup (J) 1003plusmn625 752plusmn542 0
Valores satildeo meacutediaplusmndp (plt0001 N=124 ( N=122) para idosos e N=195 para jovens)
Amplitude de velocidades 3-17 kmh-1
A maacutexima compressatildeo elaacutestica do sistema tambeacutem pode ser analisada como
o deslocamento vertical do CM durante o contato o que em 15-17 kmh-1 eacute em
meacutedia Sc=0032plusmn0006 m (n=7) nos idosos e Sc=0060plusmn0007 m (n=24) nos jovens
(em vez de 0039 m e 0063 m como calculado acima)
85
Figura 33 Tempo e deslocamentos horizontal e vertical do CM durante um
passo em funccedilatildeo da velocidade de corrida Paineacuteis a esquerda idosos paineacuteis
a direita jovens com dados superpostos dos idosos (cinza) para comparaccedilatildeo
O quadrados pretos preenchidos indicam de cima para baixo o periacuteodo do
passo (T) deslocamento vertical do CM corporal durante o passo (Sv = (Svup +
86
Svdown)2) e comprimento de passo (L) Os ciacuterculos azuis indicam a duraccedilatildeo (tae)
da fase aeacuterea efetiva e o deslocamento do CM durante esta fase na direccedilatildeo
vertical (Sae = (Saeup + Saedown)2) e na direccedilatildeo a frente (Lae) Os ciacuterculos em
vermelho indicam a duraccedilatildeo (tce) do tempo de contato efetivo e os
deslocamentos correspondentes na direccedilatildeo vertical (Sce= (Sceup + Scedown)2) e
a frente (Lce) A linha em vermelho pontilhada em cada painel indica o tempo de
contato efetivo (tc) o deslocamento do CM vertical (Sc) e a frente (Lc) durante o
passo As linhas azuis pontilhadas em cada painel indicam o tempo aeacutereo total
(ta) deslocamento aeacutereo do CM vertical (Sa) e a frente (La) durante o passo As
barras verticais indicam o desvio-padratildeo da meacutedia os nuacutemeros proacuteximos aos
siacutembolos nos paineacuteis superiores indicam o nuacutemero de itens nas meacutedias
A discrepacircncia pode ser devida em parte agrave uma subestimaccedilatildeo do Sc como
medido (ver Metodologia) A energia elaacutestica armazenada computada como (Fvmx
Sc)2 eacute (1463 0032)2=2341 J (em vez de 2853 J conforme calculado acima) e
(1818 0060)2=5454 J (em vez de 5727 J) para indiviacuteduos idosos e indiviacuteduos
jovens respectivamente
A partir dos dados meacutedios de frequumlecircncia de passo e potecircncia em um mesmo
conjunto de velocidades (figuras 36 e 37) o trabalho externo em cada passo
resultou (405 711)368=7825 J nos indiviacuteduos idosos e (538
634)279=12226 J nos indiviacuteduos jovens Daqui resulta que a contribuiccedilatildeo
elaacutestica para o trabalho externo em cada passo poderia ser 28537825=036 e
572712226=047 respectivamente (ou 23417825=030 e 545412226=045
usando Sc)
Estes caacutelculos aproximados em conjunto com uma maior assimetria contato-
despregue que seraacute discutida a seguir (tabela 34) indicam uma menor restituiccedilatildeo
elaacutestica do corpo nos idosos A maior rigidez k medida nos indiviacuteduos idosos em
sua mais alta velocidade de corrida (figura 35) em aparente desacordo com a
menor rigidez dos tendotildees do gastrocnemius (ONAMBELE et al 2006) do
quadriacuteceps (KARAMANIDIS e ARAMPATZIS 2005) medidos nos idosos Por outro
lado um aumento pela idade da rigidez dos elementos elaacutesticos nos tendotildees e
muacutesculos foi relatado em favor dos muacutesculos flexores do cotovelo (VALOUR e
POUSSON 2003)
87
Importante ressaltar que na complexa deformaccedilatildeo de todo corpo no solo a
aparente k eacute o resultado de um conjunto de unidades muacutesculo-tendatildeo em seacuterie cujas
propriedades elaacutesticas dependem do niacutevel de ativaccedilatildeo muscular O nuacutemero de
unidades muacutesculo-tendatildeo em seacuterie depende por sua vez da orientaccedilatildeo dos
segmentos e do tronco durante o impacto sobre o solo que pode ser diferente nos
indiviacuteduos idosos e nos indiviacuteduos jovens (por exemplo apoio na parte da frente do
peacute mais do que no calcanhar)
O maior valor de k encontrado em idosos em suas mais altas velocidades de
corrida portanto natildeo eacute necessariamente uma indicaccedilatildeo de uma maior rigidez dos
seus tendotildees ou unidades de muacutesculo-tendatildeo medidos durante contraccedilotildees
voluntaacuterias maacuteximas
Frequumlecircncia
O menor tempo aeacutereo efetivo tae nos idosos causa um aumento na
frequumlecircncia da passo f =1(tce+tae) para valores que satildeo iguais e por vezes
superiores agrave frequumlecircncia do sistema fs=1(2tce) Diferentemente dos jovens que
optam em uma grande extensatildeo de velocidades por uma FP mais baixa agrave do
sistema aumentando o tae em relaccedilatildeo ao tce (figuras 33 35 e tabela 32)
Os fatores que determinam a escolha da f a uma determinada velocidade de
corrida satildeo i) sintonizando a frequumlecircncia de passo f para a frequumlecircncia natural do
sistema fs (CAVAGNA et al 1997) e ii) escolhendo uma f que minimize a potecircncia
meacutedia de passada limitada aerobicamente (Wextf figura 36) dentro dos limites
estabelecidos pela potecircncia anaeroacutebica meacutedia durante o empurre (trabalho positivo)
(W+tpush liberada imediatamente pelo muacutesculo durante a contraccedilatildeo) (CAVAGNA et
al 1991) A primeira estrateacutegia eacute normalmente adotada em baixas velocidades de
corrida e modificada para a segunda estrateacutegia de corrida em altas velocidades Isto
eacute feito atraveacutes de um aumento da aceleraccedilatildeo ascendente meacutedia avce acima de 1 g
com o consequumlente aumento de tae em relaccedilatildeo ao tce (equaccedilatildeo 36) Assim a
frequumlecircncia de passo f=1(tce+tae) torna-se menor do que a frequumlecircncia do sistema
fs=1(2tce) bem como o incremento da potecircncia meacutedia do passo Wextf eacute controlada
Nos indiviacuteduos idosos a segunda estrateacutegia nunca eacute adotada A aceleraccedilatildeo meacutedia
para cima nunca excede 1 g mesmo nas velocidades altas 15-17 kmh-1 onde avce
=742plusmn123 ms-2 (n=7) segue-se que f fs em todas as velocidades (figura 35) Isto
88
permite uma menor forccedila durante o empurre da corrida em alta velocidade
resultando em uma potecircncia meacutedia durante o empurre ~ 60 daquela dos jovens
mas o aumento da frequumlecircncia da passada resulta em um maior Wint e um grande
incremento na potecircncia meacutedia de passo Wextf em corridas de alta velocidade (ver
abaixo) Aleacutem disso como se verificou neste estudo a mais baixa deformaccedilatildeo
elaacutestica do sistema diminui a fraccedilatildeo de Wext possivelmente sustentado pelo
mecanismo elaacutestico (ver tabela 34) Em contrapartida a segunda estrateacutegia eacute
seguida pelos jovens onde avce =1248plusmn18 ms-2 (n=24) no mesmo intervalo de
velocidades (15-17 kmh-1) resultando em uma menor frequumlecircncia de passo (f lt fs)
que limita o aumento do Wint da corrida em altas velocidades e um consequumlente
incremento da Wextf+ (ver abaixo)
Aleacutem disso a maior deformaccedilatildeo elaacutestica do sistema permite uma maior
utilizaccedilatildeo da energia elaacutestica (tabela 34) Sabe-se que uma mudanccedila na frequumlecircncia
de passo a uma determinada velocidade tem efeitos opostos sobre a potecircncia
externa o que diminui com o aumento da frequumlecircncia da passada e a potecircncia
interna para reposicionar os segmentos em cada passo que aumenta com a
frequumlecircncia (CAVAGNA et al 1991)
Em que medida a menor potecircncia externa meacutedia do passo devido agrave menor
amplitude da oscilaccedilatildeo dos segmentos nos idosos eacute compensada por uma maior
potecircncia interna meacutedia do passo devido ao aumento da frequumlecircncia de passo
89
Figura 34 Aceleraccedilatildeo ascendente maacutexima avmx (paineacuteis superiores) e velocidade
vertical maacutexima ascendente e descendente Vvmxup e Vvmxdown (paineacuteis inferiores)
atingidos pelo CM durante o passo em funccedilatildeo da velocidade de corrida Estatiacutestica
e outras indicaccedilotildees conforme a figura 33
O total do trabalho realizado por unidade distacircncia Wtot =Wint+Wext foi somado
pelo Wint estimado pelas equaccedilotildees 32 e 33 para os indiviacuteduos jovens e idosos
como descrito nos Meacutetodos e pelo Wext calculado a partir das seguintes equaccedilotildees
obtidas pela interpolaccedilatildeo de todos os dados experimentais
W ML(J kg-1 m -1) = 29738 Vf - 03217 Eq 330 extyoung
90
(R=0831) para o grupo de indiviacuteduos jovens e
W ML(J kg-1 m -1) = 28445 Vf - 040856 Eq 331 extold
(R=0762) para o grupo de indiviacuteduos idosos O Wtot resultante (linhas
pontilhadas nos paineacuteis inferiores da figura 36) mostra que o trabalho externo menor
no idoso por unidade de distacircncia eacute progressivamente compensado com o aumento
da velocidade por um maior trabalho interno devido agrave sua frequumlecircncia de passada
(FP) aumentada O Wtot alcanccedila um minimum a ~75 kmh-1 nos indiviacuteduos idosos e
um miacutenimo a ~8-12 kmh-1 nos indiviacuteduos jovens
A diferenccedila em Wtot eacute invertida acima de ~14 kmh-1 Eacute possiacutevel que a menor
utilizaccedilatildeo da energia elaacutestica em idosos aumente o gasto de sua energia metaboacutelica
para o mesmo Wtot O consumo de O2 durante a corrida a 10 kmh-1 aumentou com a
idade em corredores treinados do sexo feminino (EVANS et al 1995)
343 A assimetria contato-despregue
As quatro fases do bouncing as diferenccedilas com um sistema elaacutestico
Antes de descrever a assimetria contato-despregue no aparente bouncing do
CM em cada passo da corrida vale a pena referir que os momentos de contato e
despregue podem natildeo ocorrer durante corridas de baixa velocidade quando a
oscilaccedilatildeo vertical do CM do corpo se daacute totalmente em contato com o solo (figura
38) Eacute oacutebvio que neste caso o contato com o solo natildeo pode ser tomado como um
indicador de contato e despregue quando se descreve o bouncing do sistema
elaacutestico Neste caso a oscilaccedilatildeo vertical ocorre abaixo e acima da posiccedilatildeo de
equiliacutebrio (onde a Fv iguala o PC e a velocidade vertical eacute maacutexima) Mesmo quando
uma fase aeacuterea ocorre durante o passo a fraccedilatildeo do deslocamento vertical do CM
total em que o corpo estaacute em contato com o solo ScSv muda amplamente com a
velocidade enquanto que a fraccedilatildeo do deslocamento vertical abaixo e acima do ponto
de equiliacutebrio SceSv se aproxima da metade do Sv quase independente da
velocidade (figura 37)
91
Figura 35 Rigidez vertical frequumlecircncia natural do sistema massa-mola e frequumlecircncia
do passo em funccedilatildeo da velocidade Enquanto que a rigidez k eacute maior nos idosos
nas altas velocidades (paineacuteis superiores) a rigidez vertical normalizada pela massa
eacute similar (paineacuteis intermediaacuterios) Estatiacutestica e outras indicaccedilotildees conforme figura 33
92
Estas observaccedilotildees indicam que eacute mais adequado considerar-se contato
efetivo o instante no qual a Fv aumenta acima do PC (ao inveacutes do instante em que o
peacute estaacute em contato com o solo) e despregue efetivo o instante em que a Fv diminui
para valores menores do que o PC (ao inveacutes do instante no qual o peacute deixa o solo)
A assimetria contato-despregue desaparece quando o bouncing do corpo eacute mais
corretamente dividido desta forma (ou seja tce versus tae em vez de tc versus ta)
(CAVAGNA et al 1988 MCMAHON e CHENG 1990) Ainda na figura 37 pode ser
observado que ScSv mudam mais com a velocidade do que a amplitude da
oscilaccedilatildeo SceSv ao qual atinge a metade do deslocamento vertical Sv Exceto as
velocidades muito baixas quando a fase aeacuterea eacute nula (ScSv=1 eg paineacuteis
superiores nas figuras 31 e 38) o deslocamento descendente enquanto o peacute toca o
solo eacute menor do que o deslocamento ascendente particularmente nos idosos a
descida baliacutestica do CM eacute maior do que a elevaccedilatildeo baliacutestica (veja a linha azul
pontilhada na figura 38)
Segundo a equaccedilatildeo 34 a velocidade vertical descendente eacute maacutexima no
instante do contato efetivo e a velocidade vertical ascendente eacute maacutexima no instante
do despregue efetivo No movimento harmocircnico de um sistema elaacutestico as
velocidades ascendentes e descendentes maacuteximas satildeo iguais Isso natildeo eacute verdade
na corrida humana a velocidade maacutexima descendente eacute superior agrave velocidade
maacutexima ascendente (CAVAGNA 2006) Estes resultados mostram que a assimetria
eacute maior em indiviacuteduos idosos do que nos jovens na variaccedilatildeo normal de velocidades
(3-17 kmh-1) a proporccedilatildeo normalizada ((VvmxdownVvmxup)norm=116plusmn009 (n=124)
nos idosos e 107plusmn007 (n=195) nos jovens (p=126 10-19) (tabela 34) Outras
assimetrias satildeo apresentadas a seguir atraveacutes da anaacutelise das mudanccedilas na energia
potencial gravitacional Ep e energia cineacutetica translacional Ek=Ekv+Ekf do CM
corporal durante as quatro fases de oscilaccedilatildeo do sistema em relaccedilatildeo a posiccedilatildeo de
equiliacutebrio (Fv=Mg) (CAVAGNA 2006) Estas fases satildeo apresentadas na figura 38 a
partir do topo da trajetoacuteria do CM corporal Durante a aceleraccedilatildeo descendente
(Saedown azul) a Ep diminui e a Ek aumenta indicando uma transduccedilatildeo de Ep em Ek
o que ocorre tanto na presenccedila quanto na ausecircncia de uma fase aeacuterea (por
exemplo na parte superior do painel esquerdo da figura 38) O montante desta
transduccedilatildeo eacute dado pelo incremento Rintdown da curva do Rint(t) apoacutes o maacuteximo de Ep
Durante a desaceleraccedilatildeo descendente (Scedown vermelho) o trabalho externo
negativo eacute feito para diminuir simultaneamente Ep e Ek O trecho superior da curva
93
Rint(t) correspondente agrave fraccedilatildeo do passo mostra que natildeo ocorre transduccedilatildeo entre
Ep e Ek Note-se que o pico de Ek durante o passo eacute atingido proacuteximo ao iniacutecio da
fase de trabalho negativo consistente com a velocidade maacutexima de alongamento
das unidades muacutesculo-tendotildees (HEGLUND e CAVAGNA 1987)
Durante a aceleraccedilatildeo ascendente (Sceup vermelho) trabalho positivo externo
eacute feito para aumentar simultaneamente Ep e Ek O trecho inferior da curva Rint(t)
correspondente agrave fraccedilatildeo a do passo mostra que natildeo ocorre transduccedilatildeo entre Ep e
Ek Note que enquanto eacute quase totalmente contida dentro do Scedown a continua
apoacutes o final do Sceup ou seja dentro da desaceleraccedilatildeo ascendente do CM (Saeup
azul) Em outras palavras a perna ainda estaacute a exercer uma forccedila propulsiva a fim
de acelerar o corpo a frente embora a forccedila vertical tenha diminuiacutedo para valores
abaixo do peso corporal Essa assimetria eacute maior no idoso A proporccedilatildeo a eacute
124plusmn018 nos indiviacuteduos idosos e 106plusmn010 nos indiviacuteduos jovens (p=41510-19
tabela 34)
Importante notar a origem diferente dos dois picos Ekmxup (inferior) e
Ekmxdown (superior) alcanccedilados durante o passo de corrida durante a elevaccedilatildeo e
descenso do CM Ekmxup se deve ao empurre para frente enquanto Ekmxdown eacute
devido agrave gravidade A diferenccedila meacutedia Ekmxdown- Ekmxup=752plusmn542 nos indiviacuteduos
jovens e 987plusmn592 nos idosos (p=00004) indica uma maior perda da energia
cineacutetica Ekv no idoso adquirida durante a descida (tabela 34)
Durante a desaceleraccedilatildeo ascendente do CM (Saeup azul) a transduccedilatildeo de Ek
em Ep acontece apenas na uacuteltima parte da elevaccedilatildeo porque como descrito acima
Ep e Ek aumentam simultaneamente durante a maior parte do Saeup Na verdade a
transduccedilatildeo de Ek em Ep eacute quase nula nos idosos (figura 38) O incremento da curva
Rint(t) que ocorre durante a elevaccedilatildeo Rintup eacute inferior ao que ocorre durante a
queda Rintdown Tambeacutem esta assimetria eacute maior no idoso A proporccedilatildeo
RintdownRintup nos indiviacuteduos idosos eacute 213plusmn13 e 126 plusmn 032 nos indiviacuteduos jovens
(p=33310-11 tabela 34) Este fenocircmeno eacute acompanhado por uma maior fraccedilatildeo da
elevaccedilatildeo em contato com o solo como indicado pela maior proporccedilatildeo ScupSvup nos
idosos (figura 37) Um tempo aeacutereo inferior nos idosos durante a corrida em ~ 10
kmh-1 foi encontrado por KARAMANIDIS e ARAMPATZIS 2005)
94
Figura 36 Potecircncia e trabalho mecacircnico por unidade de distacircncia A potecircncia e
trabalho mecacircnico externo meacutedio por unidade de distacircncia (Wext ciacuterculos
preenchidos) satildeo apresentados nos paineacuteis superiores e intermediaacuterios com seus
95
dois componentes o trabalho realizado contra a gravidade (Wv ciacuterculos abertos) e
para sustentar as mudanccedilas de velocidade a frente (Wf quadrados abertos)
Estatiacutestica e outras indicaccedilotildees conforme figura 33
Note que particularmente nos idosos a transduccedilatildeo da Ek em Ep durante a
elevaccedilatildeo (incremento Rintup da curva Rint(t) abaixo da linha horizontal pontilhada) eacute
menor do que a transduccedilatildeo da Ep em Ek durante o deslocamento descendente
(incrementos Rintdown da curva Rint(t) acima da linha horizontal pontilhada) esta
assimetria eacute acompanhada pela elevaccedilatildeo baliacutestica (nulo nos idosos) menor do que a
descida baliacutestica Nos trechos horizontais da curva Rint(t) nenhuma transduccedilatildeo
ocorre Ep e Ek e unidades muacutesculo-tendatildeo absorvem simultaneamente Ep e Ek (fase
) e aumentam Ep e Ek simultaneamente (fase a) Note que enquanto que a fase eacute
realizada durante Scedown a estende-se aleacutem do Sceup dentro de uma grande parte
do Saeup devido ao continuo aumento da Ek Esta assimetria tambeacutem eacute maior nos
idosos
Figura 37 Deslocamento vertical durante contato e amplitude da oscilaccedilatildeo do
sistema massa-mola Painel superior idosos painel inferior jovens As fraccedilotildees do
deslocamento vertical do CM durante contato ScSv (ciacuterculos preenchidos
deslocamento descendente ciacuterculos abertos deslocamento ascendente) e quando
a Fv eacute maior do que o PC SceSv (quadrados preenchidos deslocamento
96
descendente quadrados abertos deslocamento ascendente) satildeo apresentados em
funccedilatildeo da velocidade de corrida Estatiacutestica conforme figura 33
Um trabalho externo positivo eacute realizado (segmentos vermelhos na figura 31)
natildeo soacute para aumentar simultaneamente Ep e Ek (fraccedilatildeo a do passo) mas tambeacutem
quando ocorre transduccedilatildeo da Ek em Ep no final do empurre durante o alcance do
platocirc de Ecm (figura 31) Daqui resulta que a duraccedilatildeo de trabalho positivo tpush eacute
superior agrave duraccedilatildeo a a proporccedilatildeo tpushta diminui com a velocidade de ~19 agrave 3-5
kmh-1 para ~11 agrave 15-17 kmh-1 Da mesma forma o trabalho externo negativo eacute
feito (segmentos azuis na figura 31) natildeo apenas para diminuir simultaneamente Ep e
Ek (fraccedilatildeo do passo) mas tambeacutem quando ocorre uma transduccedilatildeo de Ep em Ek no
iniacutecio da frenagem durante a acentuada diminuiccedilatildeo de Ecm no final de seu platocirc
(figura 31) Consequentemente a duraccedilatildeo do trabalho negativo tbrake eacute maior do que
a duraccedilatildeo a proporccedilatildeo tbraket diminui com a velocidade de ~17 agrave 3-5 kmh-1 para
~12 agrave 15-17 kmh-1
A duraccedilatildeo do empurre e da frenagem estatildeo apresentados na figura 39 em
funccedilatildeo da Vf Observa-se que tanto nos indiviacuteduos idosos quanto nos jovens tpushgt
tbrake ateacute 13-14 kmh-1 (tabela 31) A proporccedilatildeo eacute tpushtbrake=125plusmn016 nos indiviacuteduos
idosos e 115plusmn013 nos indiviacuteduos jovens (p=11610-9 tabela 34) Novamente a
assimetria eacute maior nos indiviacuteduos idosos
Durante a corrida no plano a uma velocidade constante o momentum perdido
Fbrake tbrake equivale ao momentum adquirido Fpush tpush (realmente na direccedilatildeo vertical
o momentum perdido eacute ligeiramente maior que o momentum adquirido porque a
velocidade descendente maacutexima eacute 7-16 maior do que a velocidade ascendente
maacutexima tabela 34) Deste modo se tpushgt tbrake entatildeo Fpush lt Fbrake ou seja a forccedila
meacutedia durante o trabalho positivo eacute inferior agrave forccedila meacutedia durante o trabalho
negativo
As assimetrias do bouncing acima descritas estatildeo resumidas na tabela 34
onde eacute feita uma comparaccedilatildeo entre indiviacuteduos idosos indiviacuteduos jovens e um
sistema elaacutestico Observa-se que o desvio de um sistema elaacutestico eacute maior para os
indiviacuteduos idosos do que para os indiviacuteduos jovens isto eacute o salto dos indiviacuteduos
idosos eacute menos elaacutestico do que o dos indiviacuteduos jovens Note a mesma conclusatildeo
foi encontrada acerca da estimativa da energia elaacutestica armazenada em cada passo
97
98
Figura 38 As quatro fases do bouncing do corpo Paineacuteis a esquerda sujeito idoso
paineacuteis a direita sujeito jovem em cada painel o comportamento da transduccedilatildeo Ep-
Ek Rint(t) (preto) eacute apresentada com as mudanccedilas simultacircneas na energia potencial
gravitacional Ep e energia cineacutetica total Ek=Ekv+Ekf normalizada para oscilar entre
zero e um Mesmos passos da figura 1 cada painel comeccedila e termina no valor
menor da curva Ep As cores diferentes na curva Ep distinguem as fraccedilotildees do passo
onde a Fv exercida no solo eacute maior do que o PC (vermelho) e menor do que o PC
(azul) As linhas contiacutenuas de Ep indicam a fase de contato enquanto que as linhas
pontilhadas Ep (azul fraco) indicam a fase aeacuterea (ausente nos paineacuteis superiores) As
quatro fases correspondem ao deslocamento vertical durante a aceleraccedilatildeo Sceup
(vermelho) e desaceleraccedilatildeo Saeup (azul) ascendentes e a aceleraccedilatildeo Saedown (azul)
e desaceleraccedilatildeo descendentes Scedown (vermelho) As linhas pontilhadas verticais
satildeo apresentadas nos dois picos de Ek e ocupam a fraccedilatildeo onde a transduccedilatildeo Ep-Ek
ocorre conforme indicado pelos incrementos da curva Rint(t)
Por que o bouncing do corpo eacute diferente daquele de um sistema elaacutestico
A cada passo executado as unidades muacutesculo-tendatildeo satildeo submetidas a um
ciclo alongamento-encurtamento durante o contato com o solo As unidades
muacutesculo-tendatildeo satildeo constituiacutedas por duas estruturas em seacuterie que apresentam
respostas diferentes durante o alongamento e encurtamento Enquanto os tendotildees
tecircm um comportamento semelhante entre o alongamento e encurtamento devido agrave
sua pequena histerese (ALEXANDER 2002) o muacutesculo exerce uma maior forccedila
durante o alongamento do que durante o encurtamento dependente da relaccedilatildeo
forccedila-velocidade (FENN e MARSH 1935 HILL 1938) Este fato resulta em uma
resposta diferente das unidades muacutesculo-tendatildeo a um ciclo alongamento-
encurtamento dependente da mudanccedila do comprimento relativo de muacutesculo e
tendatildeo durante o ciclo (CAVAGNA 2006)
O alongamento dos muacutesculos em relaccedilatildeo ao alongamento do tendatildeo depende
da rigidez do muacutesculo em relaccedilatildeo agrave do tendatildeo a rigidez do muacutesculo por sua vez
depende da sua ativaccedilatildeo Se a ativaccedilatildeo eacute elevada como em altas velocidades
(BIEWENER 1998) e o muacutesculo eacute mantido isomeacutetrico como alguns estudos
sugerem para a corrida (KRAM e TAYLOR 1990 BIEWENER et al 1998
99
ROBERTS et al 1998) a maioria da mudanccedila no comprimento seraacute realizada pelos
tendotildees e as caracteriacutesticas do bouncing se aproximaratildeo agraves de um corpo elaacutestico
Se por outro lado a ativaccedilatildeo muscular for baixa uma importante fraccedilatildeo da mudanccedila
do comprimento seraacute realizada pelo muacutesculo Neste caso a forccedila desenvolvida
durante o alongamento eacute esperada que exceda a que foi desenvolvida durante o
encurtamento e as caracteriacutesticas do bouncing foram distintas agrave de um corpo
elaacutestico
Figura 39 Duraccedilatildeo do trabalho positivo e negativo Painel superior idosos
painel inferior jovens Os tempos durante o qual o trabalho externo positivo eacute
realizado a cada passo tpush (ciacuterculos abertos e barras vermelhas na figura 31)
e trabalho externo negativo eacute realizado tbrake (ciacuterculos preenchidos e barras
azuis na figura 31) satildeo apresentadas em funccedilatildeo da velocidade de corrida
Estatiacutestica conforme figura 33
Esta eacute possivelmente a razatildeo pela qual a proporccedilatildeo tpushtbrake (figura 39) eacute
maior em velocidades baixas de corrida quando a ativaccedilatildeo muscular eacute menor e o
comprimento muscular eacute alterado e consequumlentemente o trabalho sustentado por
filamentos de muacutesculos que deslizam dentro das unidades muacutesculo-tendatildeo eacute
relativamente maior (CAVAGNA 2006) Pode ser observado que a duraccedilatildeo de
trabalho externo positivo eacute maior do que a duraccedilatildeo do trabalho externo negativo ateacute
a velocidade de 12-14 kmh-1 (tabela 31) como esperado a partir da relaccedilatildeo forccedilashy
100
velocidade muscular Isto sugere que com o aumento da velocidade a contribuiccedilatildeo
do trabalho pelas estruturas contraacuteteis eacute progressivamente substituiacutedo pela
armazenagem e re-utilizaccedilatildeo de energia elaacutestica pelos tendotildees A razatildeo tpushtbrake eacute
maior nos idosos (tabela 34)
Um corolaacuterio deste ponto de vista eacute que as fibras musculares curtas
aparentemente de pouca importacircncia ligadas em seacuterie com tendotildees muito longos
(ALEXANDER 2001) tecircm papel fundamental de modular a energia elaacutestica
armazenada nos tendotildees e para ajustar toda a extensatildeo da mudanccedila imposta agrave
unidade muacutesculo-tendatildeo Uma forccedila muscular maior durante o alongamento do que
durante o encurtamento juntamente com a perda de energia durante o ciclo
alongamento-encurtamento satildeo tanto consequumlecircncias da relaccedilatildeo forccedila-velocidade do
muacutesculo e podem explicar pelo menos qualitativamente o conjunto dos desvios do
sistema elaacutestico (tabela 33)
O maior desvio de um sistema elaacutestico encontrado nos indiviacuteduos mais idosos
eacute coerente com a menor forccedila desenvolvida pelos seus muacutesculos o que implicaria
uma mudanccedila relativamente maior do comprimento do muacutesculo nas unidades
muacutesculo-tendatildeo A segunda razatildeo pode ser a maior diferenccedila na forccedila desenvolvida
pelos muacutesculos durante o alongamento relativo ao encurtamento relatado na
literatura em idosos (PHILLIPS et al 1991 OCHALA et al 2006 VANDERVOORT
et al 1990 PORTER et al 1997 POUSSON et al 2001 KLASS et al 2005)
Em conclusatildeo modificaccedilotildees na estrutura muscular menor forccedila e uma
relaccedilatildeo forccedila-velocidade mais assimeacutetrica resultam em uma modificaccedilatildeo da energia
mecacircnica do CM do corpo durante a corrida A menor forccedila especialmente durante
trabalho positivo explica a menor amplitude da oscilaccedilatildeo vertical que por sua vez eacute
a causa do menor trabalho externo da maior frequumlecircncia da passada e maior
trabalho interno A relaccedilatildeo forccedila-velocidade mais assimeacutetrica explica a maior
assimetria contato-despregue Ambas as modificaccedilotildees resultam em uma menor
utilizaccedilatildeo da energia elaacutestica durante o bouncing do idoso
101
4 PREDIZENDO Vf CP E CUSTO ENERGEacuteTICO DA LOCOMOCcedilAtildeO TERRESTRE
41 Introduccedilatildeo
A dinacircmica da locomoccedilatildeo eacute determinada principalmente pelas forccedilas de
reaccedilatildeo do solo geradas de modo agrave re-acelerar e deslocar o corpo contra a forccedila
gravitacional em um ciclo de passada O meacutetodo para analisar o trabalho e o custo
mecacircnico externos usando plataformas dinamomeacutetricas foi introduzido por Cavagna
e colaboradores (caminhada CAVAGNA et al 1963 corrida CAVAGNA et al
1964) Desde entatildeo o Wext tem sido investigado em diferentes condiccedilotildees e
populaccedilotildees [terreno (FORMENTI et al 2005 FORMENTI e MINETTI 2007)
crianccedilas (CAVAGNA et al 1983 SCHEPENS et al 1998 SCHEPENS et al 2001)
meacutetodo de locomoccedilatildeo (MINETTI 1998a ARDIGO et al 2003) deficiecircncia de
hormocircnio do crescimento (MINETTI et al 2000) gradiente de locomoccedilatildeo (MINETTI
et al 1993 1994) idosos (MIAN et al 2006 estudo atual capiacutetulo 3)]
Apesar de sua relevacircncia cientiacutefica o nuacutemero de laboratoacuterios onde trabalho e
custo mecacircnico satildeo avaliados eacute limitado devido a questotildees metodoloacutegicas Em
especial a aquisiccedilatildeo da energia mecacircnica externa eacute atualmente limitada pela
necessidade de espaccedilo suficiente para posicionar plataformas de forccedila para coletar
dois passos sucessivos de modo a obter o miacutenimo de duas curvas de forccedilas de
reaccedilatildeo do solo consecutivas essenciais para esse meacutetodo Durante a corrida haacute um
periacuteodo entre as duas curvas durante o qual ambos os peacutes estatildeo fora do solo (em
velocidades normais) enquanto que durante a caminhada esse periacuteodo eacute
substituiacutedo por uma fase de apoio duplo
Independente se as duas curvas estatildeo sobrepostas ou natildeo (caminhando ou
correndo respectivamente) haacute ainda alguma dificuldade em obter
102
experimentalmente no miacutenimo duas curvas similares de modo que a Fv meacutedia seja
igual ao PC Normalmente mais de um terccedilo das aquisiccedilotildees com indiviacuteduos normais
satildeo rejeitadas (dados natildeo-publicados) devido agrave dificuldade de caminhar ou correr
em plataformas em uma velocidade constante E aleacutem disso a maior parte dos setshy
uprsquos biomecacircnicos satildeo dispostos de modo que as curvas sucessivas sejam obtidas
da mesma plataforma Dados de Bastien e colaboradores mostram que duas
medidas sucessivas em diferentes plataformas de forccedila eram possiacuteveis apenas em
10 das tentativas Assim medir o Wint realizado durante o duplo apoio eacute uma tarefa
difiacutecil e essa variaacutevel em seu maacuteximo representa mais de 40 do Wext (BASTIEN
et al 2003)
Deste modo o presente texto procura analisar as possibilidades de anaacutelise da
biomecacircnica da locomoccedilatildeo em situaccedilotildees onde apenas uma plataforma de forccedila com
dimensotildees capazes de analisar apenas um apoio simples satildeo disponiacuteveis
O objetivo desse trabalho eacute estabelecer uma equaccedilatildeo capaz de predizer o
trabalho mecacircnico usando procedimentos de prediccedilatildeo linear e otimizaccedilatildeo e checar
sua validade analisando experimentos de locomoccedilatildeo em diferentes velocidades
42 Equaccedilatildeo do tempo de atraso
Usando a primeira lei de Newton (um corpo se move a uma velocidade
constante quando a soma total das forccedilas externas eacute igual a zero) temos que a Fv
meacutedia exercida contra o solo durante um ciclo de passada a uma velocidade
constante eacute igual ao PC (CAVAGNA e MARGARIA 1966) Se somente as forccedilas de
reaccedilatildeo do solo de um uacutenico passo satildeo coletadas e a simetria eacute assumida
(KARAMANIDIS et al 2003) o atraso de tempo entre passos (s) pode ser obtido
por
F t Ivc c vt = = Eq 41 step M g M g
onde tc e Fvc satildeo a duraccedilatildeo e a Fv meacutedia durante o fase de contato (figura 41)
respectivamente e Iv eacute o impulso vertical Essa informaccedilatildeo eacute crucial se a passada
completa deve ser reconstruiacuteda (no novo passo elaborado somente a forccedila
103
horizontal precisa ser invertida enquanto que a Fv precisa ser somente duplicada a
partir do atraso do tempo tstep)
M g M gFP = = Eq 42
2F t 2 Ivc c v
de onde o CP (CP m) pode ser inferido
Figura 41 Curva original e reconstruiacuteda de componente vertical da forccedila de reaccedilatildeo do solo durante a
corrida
O DF (ALEXANDER e JAYES 1980) ie a fraccedilatildeo do tempo de passada no
qual um uacutenico peacute estaacute no solo eacute
104
M g 1DF = = Eq 43
2F F vc vc2
M g
e deste modo eacute possiacutevel indicar se o modo de locomoccedilatildeo eacute caminhada (DF05) ou
corrida (DFlt05) Ateacute esse ponto a uacutenica variaacutevel a ser conhecida antecipadamente
eacute a massa corporal (kg)
43 Estimativa da velocidade horizontal
Enquanto pares de fotoceacutelulas satildeo comumente encontrados em laboratoacuterios
por vezes a Vf natildeo eacute conhecida (paleontologia biomecacircnica forecircnsica etc) Assim
FP DF e massa podem entrar no modelo de prediccedilatildeo de velocidade (ms-1) com
base em dados coletados previamente (NILSSON e THORSTENSSON 1989)
Vf = (1953F M g) - (14843Iv M g) + 5415 Eq 44 v peak
onde Fvpeak eacute a forccedila de impacto vertical e Iv eacute impulso vertical O erro meacutedio da
estimativa (SEE = 05 dp(1 ndash R2)) eacute 005 ms-1 Entatildeo o CP pode ser obtido como
VfFP ou
1953Fv peak -14843Iv + 5415M gCP = Eq 45
2Fvc
Apesar do alto coeficiente de regressatildeo e baixo erro padratildeo da meacutedia esse
meacutetodo necessita do primeiro pico vertical e assim se torna limitado por exemplo
em humanos para corredores que apoacuteiam o peacute com o calcanhar no momento do
contato Para evitar essa limitaccedilatildeo foi construiacutedo um modelo de regressatildeo linear
muacuteltipla incluindo variaacuteveis descritivas (MINETTI e ALEXANDER 1997) da
energeacutetica da locomoccedilatildeo
qregression + + DFregression + FPregressionVf = Eq 46 3
105
Para cada regressatildeo o meacutetodo dos miacutenimos quadrados eacute usado Enquanto
que o DF e o FP satildeo calculados (equaccedilotildees 42 e 43) o fator q precisa ser
determinado O fator q (tambeacutem conhecido como fator de forma) oferece
informaccedilotildees relacionadas ao formato da curva forccedila-tempo durante a fase de apoio
Usualmente a forccedila vertical pode ser determinada somente com dois primeiros
cossenos de uma seacuterie de Fourier (ALEXANDER 1978)
tc ) Eq 47 Fv = x cos( tc ) V qcos(3
onde x eacute PC e tc eacute tempo de contato A ausecircncia de coeficientes seno indica uma
simetria nas curvas forccedila-tempo e nestes casos o fator q eacute constante Em outras
palavras conhecendo somente o valor da Fv e sua respectiva fase eacute possiacutevel
encontrar o fator q Todavia na caminhada satildeo frequumlentemente observadas curvas
assimeacutetricas (NILSSON e THORSTENSSON 1989) assim incluiacuteu-se dois
coeficientes senos na equaccedilatildeo
tc ) Eq 48 Fv = x cos( tc ) V qcos(3 tc ) + a1 sin(2 tc ) V a2 sin(4
onde a1 e a2 satildeo constantes Assim usando um simples caacutelculo de meacutedia aritmeacutetica
para o q durante o tc noacutes temos
q1 + q2 + q3 + qnqmean = Eq 49 n
Usando os valores de fator q advindos da literatura (MINETTI e ALEXANDER
1997) construiacutemos a seguinte equaccedilatildeo de regressatildeo em situaccedilotildees de caminhada
DF 05 qregression = 23061q + 05873 R=079 Eq 410
onde qregression eacute a Vf estimada e utilizada na equaccedilatildeo 46 Para situaccedilotildees de corrida
o fator q natildeo varia em funccedilatildeo da velocidade (figura 42) obtendo um coeficiente
106
angular da equaccedilatildeo de regressatildeo muito baixo (00916) portanto em situaccedilotildees de
corrida o qregression eacute cancelado
As seguintes equaccedilotildees (411 412 413 e 414) foram originadas dos dados
apresentados na figura 43 de MINETTI (1998b) Nesta figura as informaccedilotildees satildeo
valores meacutedios (meacutedias advindas de 22 agrave 42 medidas para cada velocidade e tipo
de locomoccedilatildeo) de medidas de FP e DF portanto as equaccedilotildees a seguir apresentam
valores de R subestimados enquanto que as equaccedilotildees de regressatildeo representam
de modo satisfatoacuterio os dados de origem A Vf predita pela frequumlecircncia de passada
FPregression foi determinada para a caminhada como
DF 05 FPregression = 27781FP V12077 R=098 Eq 411
e para a corrida
DF lt 05 FPregression = 75469FP - 79561 R=090 Eq 412
A Vf predita pelo duty factor DFregression foi determinado para a caminhada
como
DF 05 DFregression = V12342DF + 84628 R=099 Eq 413
e para a corrida
DF lt 05 DFregression = -16912DF + 87422 R=098 Eq 414
44 Equaccedilatildeo de custo energeacutetico
O atraso entre passos tstep e a Vf satildeo cruciais para ldquosintetizarrdquo toda a
passada e calcular o trabalho mecacircnico externo e a recuperaccedilatildeo de energia (ambos
valores total (CAVAGNA e KANEKO 1977) e instantacircneo (CAVAGNA et al 2002))
Assim as forccedilas de reaccedilatildeo do solo satildeo integradas duas vezes para posiccedilatildeo
do CM e dados da velocidade A primeira integraccedilatildeo das forccedilas horizontais e
107
verticais menos o PC ambas divididas pela massa corporal resultam na aceleraccedilatildeo
do CM A constante de integraccedilatildeo usada para as forccedilas acircntero-posteriores foi a
velocidade meacutedia de progressatildeo Para as forccedilas vertical e meacutedio-lateral noacutes
assumimos que as velocidades inicial e final em todo o ciclo eram iguais A variaccedilatildeo
positiva ponto-a-ponto da Ep somada a variaccedilatildeo positiva ponto-a-ponto da Ek
durante uma passada completa resulta na energia mecacircnica externa total Ecm
(CAVAGNA e KANEKO 1977 WILLEMS et al 1995) Para evitar o ldquoparadoxo do
trabalho zerordquo o trabalho externo eacute determinado somando somente os incrementos
positivos da Ecm Sabendo o Wext e estimando o Wint (MINETTI 1998b) foi
calculado o Wtot e o custo energeacutetico (Ctot) da locomoccedilatildeo
A velocidade horizontal foi determinada atraveacutes do meacutetodo de regressatildeo
linear muacuteltipla usando como variaacuteveis independentes os coeficientes da curva Fv (de
NILSSON e THORSTENSSON 1989) A validade cruzada das equaccedilotildees
desenvolvidas no presente estudo foi calculada por coeficientes de regressatildeo (R)
45 Discussatildeo
O presente modelo prediz a velocidade horizontal e o custo energeacutetico da
locomoccedilatildeo terrestre Aleacutem disso o modelo matemaacutetico permite estimar outros
importantes paracircmetros da locomoccedilatildeo como a FP e o DF
Outros modelos
Tem sido proposto que o custo energeacutetico da locomoccedilatildeo terrestre pode ser
determinado pelo custo da produccedilatildeo de forccedila para suportar o PC (KRAM e TAYLOR
1990) Fundamentalmente o custo de geraccedilatildeo de forccedila indica que a potecircncia
metaboacutelica da locomoccedilatildeo eacute relacionada diretamente ao PC e o tempo disponiacutevel
para produzir forccedila
c Mg E
metabolic = Eq 415 tc
108
onde c eacute uma constante de custo (que expressa a proporcionalidade entre taxa de
dispecircndio de energia normalizado pela massa e taxa de geraccedilatildeo de forccedila)
entretanto esse modelo tecircm sido alvo de criacuteticas Resumidamente a principal criacutetica
eacute baseada em i) a suposiccedilatildeo que o dispecircndio metaboacutelico devido ao movimento dos
membros superiores eacute negligenciaacutevel e ii) a desconsideraccedilatildeo do conceito de
trabalho O presente trabalho tambeacutem mostra que levar em consideraccedilatildeo apenas o
tempo da geraccedilatildeo de forccedila e a forccedila natildeo eacute o bastante para determinar o custo
energeacutetico da locomoccedilatildeo As informaccedilotildees contidas no proacuteprio comportamento da
curva forccedila vertical-tempo parecem influenciar de modo importante a determinaccedilatildeo
de paracircmetros fundamentais da locomoccedilatildeo Especialmente o Iv e o fator de forma q
indicam um ajuste da curva de regressatildeo linear importante para a determinaccedilatildeo da
Vf
Figura 42 FP e DF calculados pelo presente modelo (equaccedilatildeo 42 theor) e
determinados experimentalmente (exp) em diferentes velocidades de progressatildeo
A prediccedilatildeo da FP e DF foram comparados com os valores
determinados experimentalmente em dois sujeitos (sujeitos RR e TD 175 e
170m de estatura 78 e 84kg de massa corporal) correndo em vaacuterias velocidades de
progressatildeo As forccedilas de reaccedilatildeo do solo foram registradas em uma plataforma de
forccedila AMTI agrave uma frequumlecircncia de amostragem de 1000Hz e a Vf foi determinada
quadro a quadro atraveacutes de uma cacircmera colocada agrave 5m de distacircncia da aacuterea de
interesse e 1m de altura do piso A mesma foi posta de forma a registrar o
movimento no plano sagital dos sujeitos com uma frequumlecircncia de amostragem de
109
50Hz Um procedimento de calibraccedilatildeo 2D foi realizado a fim de converter as
informaccedilotildees de pixels para metros As informaccedilotildees de posiccedilatildeo linear foram filtradas
atraveacutes de um filtro passa-baixa do tipo Butterworth com frequumlecircncia de corte
variando entre 3 e 9Hz determinados para cada corrida atraveacutes do procedimento de
anaacutelise residual (WINTER 2005) A coordenada horizontal do ponto anatocircmico do
quadril foi utilizada para determinar a FPexp CPexp e a velocidade meacutedia
experimentais A FPexp foi determinada pela frequumlecircncia de amostragem fsample
dividida pelo nuacutemero de quadros que totalizam um ciclo de passada nframes
f sampleFPexp = Eq 416 n frames
Figura 43 Frequumlecircncia de passo f e duty factor em funccedilatildeo da velocidade de progressatildeo Fonte
Minetti 1998b
O CPexp foi determinado pela posiccedilatildeo horizontal do quadril no quadro que
encerra o ciclo FinalhorPosition diminuiacutedo pela posiccedilatildeo horizontal do quadril no
primeiro quadro InitialhorPosition
CPexp = horPosition = FinalhorPosition V InitialhorPosition Eq 417
110
A velocidade meacutedia experimental Vfexp foi determinada pela variaccedilatildeo da
posiccedilatildeo horizontal durante um ciclo de passada dividida pela variaccedilatildeo de tempo de
um ciclo de passada a partir da Eq 411
n frames 1time = = Eq 418
f sample FPexp
temos
horPositionVfexp = Eq 419 time
A razatildeo entre a frequumlecircncia FP experimental e teoacuterica foi de 1001 A razatildeo
para o DF foi de 0977
O presente modelo pode auxiliar a determinar paracircmetros espaccedilos-temporais
e energeacuteticos de animais extintos prevendo a forccedila de reaccedilatildeo do solo de um uacutenico
passo
Atraveacutes da anaacutelise das informaccedilotildees contidas em uma curva de forccedila de
reaccedilatildeo do solo vertical pelo tempo informaccedilotildees fundamentais da mecacircnica e
energeacutetica da locomoccedilatildeo podem ser estimadas em situaccedilotildees que a informaccedilatildeo
experimental direta natildeo for disponiacutevel
111
5 CONCLUSAtildeO GERAL
51 O custo EMG da caminhada humana
O objetivo deste estudo foi construir um modelo do custo EMG da caminhada
humana Para tanto criou-se duas abordagens experimental e teoacuterica sendo que a
teoacuterica parece ter uma melhor relaccedilatildeo com as evidecircncias experimentais sobre a
energeacutetica da locomoccedilatildeo humana A estabilidade em conjunto com a atividade EMG
de muacutesculos posturais parece ser um mecanismo primaacuterio da energeacutetica da
locomoccedilatildeo
52 A mecacircnica da corrida de idosos
A mecacircnica da corrida de idosos foi comparada com a de jovens atraveacutes da
determinaccedilatildeo e comparaccedilatildeo do trabalho mecacircnico e de paracircmetros do sistema
massa-mola especialmente usando aspectos de assimetria do mecanismo elaacutestico
de minimizaccedilatildeo de energia entre os grupos experimentais
Os idosos produzem menos forccedila durante a fase de trabalho mecacircnico
positivo com uma menor oscilaccedilatildeo vertical durante a fase aeacuterea e menor oscilaccedilatildeo
total Consequentemente a capacidade de armazenar e re-utilizar energia elaacutestica
112
dos tendotildees eacute prejudicada contribuindo para o maior dispecircndio energeacutetico neste
grupo quando comparado com jovens
53 Um modelamento matemaacutetico da locomoccedilatildeo terrestre
Tendo apenas as informaccedilotildees de uma curva forccedila vertical versus tempo e a
massa corporal construiu-se um modelo biomecacircnico de prediccedilatildeo do CP Vf e custo
energeacutetico da locomoccedilatildeo terrestre Os resultados advindos do modelamento
correspondem aos paracircmetros determinados experimentalmente Laboratoacuterios que
detenham apenas uma plataforma de forccedila ou nas aacutereas onde as informaccedilotildees de
entrada do atual modelo constituam a uacutenica fonte de dados disponiacutevel (eg
paleontologia biomecacircnica forecircnsica etc) a prediccedilatildeo de variaacuteveis-chaves da
locomoccedilatildeo podem ser realizadas com razoaacutevel acuraacutecia
54 Uma hipoacutetese unificadora da locomoccedilatildeo terrestre ndash o continuum entre os
mecanismos pendular e elaacutestico
O seguinte texto representa um esforccedilo de raciociacutenio a partir dos achados da
presente tese aliados ao referencial teoacuterico abordado durante os capiacutetulos
anteriores a fim de compreender as determinantes da locomoccedilatildeo humana Mais do
que oferecer uma resposta final sobre a mecacircnica e a energeacutetica da locomoccedilatildeo
humana este texto lanccedila uma provaacutevel resposta ainda inicial acerca das
determinantes envolvidas da locomoccedilatildeo humana
As situaccedilotildees de locomoccedilatildeo que desafiam as noccedilotildees atuais da mecacircnica e
energeacutetica da locomoccedilatildeo tratadas nesta tese nomeadamente o processo de
envelhecimento e as inclinaccedilotildees satildeo algumas das questotildees que natildeo satildeo todavia
compreendidas pelas teorias atuais da locomoccedilatildeo humana mas que a presente
hipoacutetese pretende responder A locomoccedilatildeo humana eacute determinada desde o ponto
de vista mecacircnico como uma seacuterie de accedilotildees complexas de segmentos interligados
ao qual geram torques atraveacutes da ativaccedilatildeo muscular e transmissatildeo de forccedilas pelos
tendotildees anexados em seacuterie aos muacutesculos e agraves articulaccedilotildees que conectam os
Restriccedilotildees da tarefa
velocidade
Restriccedilotildees do organismo
- massa
- comprimento do membro
i f i
Tendatildeo
- energia
Energia
mecacircnica do
CM
Mecanismo
minimizador
Dispecircndio
energeacutetico
Restriccedilotildees do
ambiente Muacutesculos
- eficiecircncia
113
segmentos Todo este sistema eacute controlado pelo sistema nervoso central e
perifeacuterico Ainda assim apesar da extrema complexidade deste tipo de movimento
conforme discutido extensivamente nas seccedilotildees 21 31 e 41 a corrida e a
caminhada humana se caracterizam como sistemas capazes de minimizar o
dispecircndio energeacutetico advindo dos muacutesculos sistemas estes denominados de
massa-mola e pecircndulo invertido respectivamente Desde a sua introduccedilatildeo ateacute os
dias atuais estes sistemas tecircm recebido intensas criacuteticas da literatura abordadas em
capiacutetulos precedentes poreacutem mais do que por agrave prova os achados principais que
deram base para estes sistemas as criacuteticas satildeo direcionadas agraves limitaccedilotildees dos
sistemas especialmente da forma em que foram propostos A seacuterie de experimentos
realizados primeiramente com humanos (CAVAGNA et al 1963 1964) e apoacutes com
animais (FEDAK et al 1982 HEGLUND et al 1982a HEGLUND et al 1982b
TAYLOR et al 1982) demonstraram de modo inequiacutevoco que as curvas de energia
potencial gravitacional e cineacutetica do CM se apresentavam em fase durante a
corridagalope e em contra-fase (atraso de 180 graus) na caminhada Deste ponto
em diante eacute estabelecido que durante a transiccedilatildeo da caminhada para a corrida os
sistemas satildeo modificados de um modo discreto ou seja o pecircndulo invertido seria
ldquodesligadordquo e o sistema massa-mola acionado automaticamente
Figura 51 Modelo conceitual da locomoccedilatildeo humana
114
Este raciociacutenio adveacutem dos achados de Cavagna e colegas e aleacutem disso da
observaccedilatildeo de paracircmetros cinemaacuteticos e cineacuteticos aos quais respondem de forma
discreta na mudanccedila do tipo de locomoccedilatildeo por exemplo o DF durante caminhada
varia de 065 em baixas velocidades ateacute 055 em altas velocidades de forma
contiacutenua poreacutem quando o sujeito faz a transiccedilatildeo para a corrida o DF passa para
04 O fator de forma ldquoqrdquo da curva de forccedila vertical em funccedilatildeo do tempo tambeacutem se
modifica abruptamente variando de 07 na caminhada para -01 durante corrida
(ALEXANDER e JAYES 1980) Uma justificativa para este comportamento discreto
eacute relacionado agrave um tipo de locomoccedilatildeo pouco usada por seres-humanos o skipping
Por outro lado evidecircncias experimentais tecircm demonstrado que em algumas
velocidades de caminhada parece existir um mecanismo elaacutestico de minimizaccedilatildeo de
energia (FUKUNAGA et al 2001) denominado de sistema de ldquocatapultardquo devido agrave
caracteriacutestica de baixa velocidade durante a frenagem e alta velocidade na fase de
propulsatildeo (ISHIKAWA et al 2005 ISHIKAWA et al 2007) Por outro lado durante a
corrida no estudo da mecacircnica da corrida dos idosos foi observada uma transduccedilatildeo
de energia cineacutetica e potencial gravitacional em baixas velocidades diminuindo com
o aumento da velocidade (relativo ao deslocamento vertical total capiacutetulo 3)
enquanto que a contribuiccedilatildeo do tendatildeo e consequentemente do componente
elaacutestico da unidade muacutesculo-tendatildeo aumentam (CAVAGNA 2006) Portanto os dois
sistemas parecem natildeo mudar atraveacutes de transformaccedilotildees abruptas como os
paracircmetros anteriormente apresentados poderiam induzir mas eacute notoacuterio um
continuum de mudanccedilas nas caracteriacutesticas mecacircnicas destes dois tipos de
locomoccedilatildeo e a mudanccedila na predominacircncia do mecanismo minimizador parece ser o
responsaacutevel pela transiccedilatildeo de um tipo de locomoccedilatildeo para outro
Para construir este modelo eacute necessaacuterio sabermos quanto de energia eacute
recuperado pelos mecanismos minimizadores A energia recuperada por via
pendular eacute calculada como (ver capiacutetulo 327)
cpendular = Rint Eq 51
e a energia elaacutestica armazenada como
115
Fvmx k = Eq 52 celaacutestica 2
Este raciociacutenio leva agrave um modelo de minimizaccedilatildeo de energia assumido
simplesmente como o somatoacuterio dos mecanismos elaacutestico e pendular
= Eq 53 creconvertida cpendular + celaacutestica
Assumindo como constante o dispecircndio energeacutetico sob outras formas de
energia (teacutermica) a energia despendida para a contraccedilatildeo dos muacutesculos esqueleacuteticos
a fim de gerar a locomoccedilatildeo pode ser determinada por
= -E Eq 54 Emuscular Emetaboacutelica repouso
e deste modo podemos afirmar que a energia total para percorrer determinada
distacircncia eacute dada por
= Eq 55 total Ereconvertida + Emuscular
e este valor em um amplo espectro de velocidades e tipos de locomoccedilatildeo apresente
uma relaccedilatildeo linear direta com a velocidade da locomoccedilatildeo (restriccedilatildeo da tarefa)
Mas quais os fatores que determinam este continuum de mecanismos
minimizadores O compromisso entre estes mecanismos (pendular e elaacutestico) eacute
diretamente ligado ao comportamento da energia mecacircnica vertical (potencial
gravitacional + cineacutetica) e da unidade muacutesculo-tendatildeo E em uacuteltima anaacutelise estas
caracteriacutesticas mecacircnicas parecem ser moduladas por restriccedilotildees do ambiente (g
inclinaccedilatildeo) restriccedilotildees da tarefa (velocidade) e restriccedilotildees do organismo (massa e
comprimento de membros inferiores) conforme figura 51
Hipoacuteteses levantadas com o atual modelo
i) A velocidade de transiccedilatildeo deve coincidir com a mudanccedila na
predominacircncia do mecanismo minimizador de energia
ii) Analisar o mecanismo pendular em diferentes velocidades de corrida
116
iii) Quando as demais restriccedilotildees estatildeo controladas as restriccedilotildees do
organismo e o compromisso entre massa e comprimento de membro
inferior poderiam explicar as mudanccedilas no uso dos mecanismos pendular
e elaacutestico
iv) Existe uma velocidade oacutetima para a corrida humana
v) O somatoacuterio da quantidade de energia reconvertida por meio pendular e
elaacutestico somado ao dispecircndio energeacutetico dos muacutesculos deve ser altamente
relacionado com a velocidade de locomoccedilatildeo
541 Respondendo algumas criacuteticas atuais
Este modelo pode explicar os resultados de GEYER et al 2006) sobre a
possibilidade de um modelo de ldquopecircndulo-invertido carregado por uma molardquo
(BLICKHAN et al 2007) ser aplicado na caminhada devido a melhor representaccedilatildeo
da curva forccedila tempo pelo meacutetodo proposto do que pelo modelo do pecircndulo-
invertido Apesar da boa representaccedilatildeo de uma variaacutevel mecacircnica da locomoccedilatildeo o
modelo despreza uma questatildeo central da anaacutelise da locomoccedilatildeo a determinaccedilatildeo do
mecanismo minimizador de energia Portanto apesar da coincidecircncia da resposta de
forccedila de reaccedilatildeo do solo vertical originada pelo modelo e a medida experimental o
modelo apenas apresenta uma possibilidade do ponto de vista matemaacutetico de
representaccedilatildeo do modelo teoacuterico de continuum apresentado aqui
Recentemente uma extensa revisatildeo de BIEWENER 2006) analisou como as
flutuaccedilotildees na energia mecacircnica do CM de animais podem ser usadas a fim de
identificar os mecanismos fundamentais envolvidos na locomoccedilatildeo terrestre e indicou
que quando satildeo comparados os padrotildees mecacircnicos e cinemaacuteticos de uma ampla
diversidade de quadruacutepedes e biacutepedes padrotildees mais complexos emergem
observando que alguns animais menos aptos para a locomoccedilatildeo (less cursorial)
podem combinar padrotildees mecacircnicos da caminhada e corrida em velocidades
intermediaacuterias ou em animais de grande tamanho (eg elefantes apresentam
aspectos de corrida mas com um comportamento pendular entre a energia cineacutetica e
potencial gravitacional do CM) Novamente a hipoacutetese do continuum se apresenta
como um forte candidato para explicar atraveacutes de uma teoria simples e unificante a
locomoccedilatildeo de vertebrados
117
O que acontece nas inclinaccedilotildees
Quando nos deslocamos no plano eacute bem determinado que o trabalho
mecacircnico liacutequido apresente um valor muito baixo e natildeo eacute igual a zero devido agrave
resistecircncia do ar e agrave fricccedilatildeo dos tecidos mas ainda assim eacute comumente assumido
como negligenciaacutevel (ALEXANDER 1989) poreacutem a energia mecacircnica total para
movimentar o CM em relaccedilatildeo ao ambiente externo varia durante um ciclo de
passada de modo que o somatoacuterio dos incrementos (trabalho positivo) seja igual ao
somatoacuterio dos decrementos (trabalho negativo) Como observado no estudo ldquocusto
EMG da caminhada humanardquo (Capiacutetulo 2) existe uma predominacircncia de trabalho
positivo em inclinaccedilotildees positivas e predominacircncia de trabalho negativo em
inclinaccedilotildees negativas (figura 52)
Figura 52 (A) Energia cineacutetica e potencial gravitacional somadas (B) Energia
cineacutetica e potencial gravitacional somadas poreacutem excluindo o trabalho liacutequido de
elevar eu descer o centro de massa Fonte GOTTSCHALL e KRAM 2006
118
Portanto o pecircndulo invertido natildeo atua como mecanismo minimizador de
dispecircndio energeacutetico e natildeo obstante a falta de evidecircncias eacute razoaacutevel supor que a
energia elaacutestica natildeo atue de forma importante nas inclinaccedilotildees Importante notar que
a inexistecircncia de um mecanismo minimizador natildeo significa que o modelo natildeo
contempla esta situaccedilatildeo apenas demonstra que devido agrave uma restriccedilatildeo severa do
ambiente (inclinaccedilatildeo extrema) o organismo natildeo dispotildee de nenhum auxiacutelio
importante para economizar energia sobrecarregando os muacutesculos a fim de produzir
a energia necessaacuteria para manter o movimento de locomoccedilatildeo Nesta situaccedilatildeo o
dispecircndio energeacutetico eacute dependente apenas da quantidade de ativaccedilatildeo muscular e
seus respectivos equivalentes energeacuteticos de atividade EMG como demonstrado no
estudo do custo EMG da caminhada humana
55 Propostas para futuros estudos
551 Custo EMG da caminhada humana
Testar o modelo do Custo EMG
- em diferentes terrenos
- em populaccedilotildees com patologias do sistema nervoso
- em inclinaccedilotildees negativas
552 Mecacircnica da corrida dos idosos
- desenvolver um modelo matemaacutetico que tenha em consideraccedilatildeo os
comportamentos diferentes entre a fase de encurtamento e alongamento das
unidades muacutesculo-tendatildeo atraveacutes de um modelo viscoelaacutesticohiperelaacutestico
- estudar o bouncing elaacutestico da corrida em inclinaccedilotildees
- estudar o efeito da fadiga no bouncing elaacutestico da corrida humana
- estudar o modelo massa-mola ponto-a-ponto
- estudar o bouncing elaacutestico entre sujeitos com diferentes estruturas
muacutesculo-esqueleacuteticas (velocistas vs fundistas obesos vs natildeo-obesos homens vs
mulheres)
119
- usar os paracircmetros do modelo massa-mola e as assimetrias contato-
despregue de sujeitos normais para comparaccedilatildeo com amputados e portadores de
necessidades especiais com restriccedilotildees na locomoccedilatildeo
- estudar o bouncing elaacutestico na corrida de velocidade de atletas de alto
rendimento
553 Modelo matemaacutetico da locomoccedilatildeo terrestre
Testar o modelo
- para situaccedilatildeo de aceleraccedilotildees
- em animais extintos
120
6 Referecircncias
ALESHINSKY SY An energy sources and fractions approach to the mechanical
energy expenditure problem--IV Criticism of the concept of energy transfers within
and between links J Biomech 19 4 307-309 1986
ALEXANDER RM Damper for bad vibrations Nature 414 6866 855-857 2001
ALEXANDER RM Energy-saving mechanisms in walking and running J Exp Biol 160
55-69 1991
ALEXANDER RM Models and the scaling of energy costs for locomotion J Exp Biol
208 Pt 9 1645-1652 2005
ALEXANDER RM Optimization and gaits in the locomotion of vertebrates Physiol Rev
69 4 1199-1227 1989
ALEXANDER RM Principles of animal locomotion Princeton NJ Princeton
University Press 2003
ALEXANDER RM Tendon elasticity and muscle function Comp Biochem Physiol A
Mol Integr Physiol 133 4 1001-1011 2002
ALEXANDER RM Vertical movements in walking and running Journal of Zoology
185 27-40 1978
ALEXANDER RM JAYES AS Fourier analysis of forces exerted in walking and
running J Biomech 13 4 383-390 1980
ALEXANDER RM VERNON A Mechanics of hopping by kangaroos (Macropodidae)
Journal of Zoology 177 265-303 1975
121
ANDERS C WAGNER H PUTA C GRASSME R PETROVITCH A SCHOLLE
HC Trunk muscle activation patterns during walking at different speeds J
Electromyogr Kinesiol 17 2 245-252 2007
ANDERSON KG BEHM DG Maintenance of EMG activity and loss of force output
with instability J Strength Cond Res 18 3 637-640 2004
ARDIGO LP SAIBENE F MINETTI AE The optimal locomotion on gradients
walking running or cycling Eur J Appl Physiol 90 3-4 365-371 2003
BASTIEN GJ HEGLUND NC SCHEPENS B The double contact phase in walking
children J Exp Biol 206 Pt 17 2967-2978 2003
BASTIEN GJ SCHEPENS B WILLEMS PA HEGLUND NC Energetics of load
carrying in Nepalese porters Science 308 5729 1755 2005
BIEWENER AA Muscle-tendon stresses and elastic energy storage during locomotion
in the horse Comp Biochem Physiol B Biochem Mol Biol 120 1 73-87 1998
BIEWENER AA Patterns of mechanical energy change in tetrapod gait pendula
springs and work J Exp Zoolog A Comp Exp Biol 305 11 899-911 2006
BIEWENER AA KONIECZYNSKI DD BAUDINETTE RV In vivo muscle forceshy
length behavior during steady-speed hopping in tammar wallabies J Exp Biol 201
Pt 11 1681-1694 1998
BIGLAND-RITCHIE B WOODS JJ Integrated electromyogram and oxygen uptake
during positive and negative work J Physiol 260 2 267-277 1976
BLANCO RE GAMBINI R A biomechanical model for size speed and anatomical
variations of the energetic costs of running mammals J Theor Biol 241 1 49-61
2006
BLAXTER K Energy metabolism in animals and man Cambridge UK Cambridge
University Press 1989
BLICKHAN R The spring-mass model for running and hopping J Biomech 22 11-12
1217-1227 1989
BLICKHAN R SEYFARTH A GEYER H GRIMMER S WAGNER H GUNTHER
M Intelligence by mechanics Philos Transact A Math Phys Eng Sci 365 1850
199-220 2007
122
CAVAGNA GA Force platforms as ergometers J Appl Physiol 39 1 174-179 1975
CAVAGNA GA The landing-take-off asymmetry in human running J Exp Biol 209 Pt
20 4051-4060 2006
CAVAGNA GA DUSMAN B MARGARIA R Positive work done by a previously
stretched muscle J Appl Physiol 24 1 21-32 1968
CAVAGNA GA FRANZETTI P FUCHIMOTO T The mechanics of walking in
children J Physiol 343 323-339 1983
CAVAGNA GA FRANZETTI P HEGLUND NC WILLEMS P The determinants of
the step frequency in running trotting and hopping in man and other vertebrates J
Physiol 399 81-92 1988
CAVAGNA GA HEGLUND NC WILLEMS PA Effect of an increase in gravity on the
power output and the rebound of the body in human running J Exp Biol 208 Pt 12
2333-2346 2005
CAVAGNA GA KANEKO M Mechanical work and efficiency in level walking and
running J Physiol 268 2 467--481 1977
CAVAGNA GA MANTOVANI M WILLEMS PA MUSCH G The resonant step
frequency in human running Pflugers Arch 434 6 678-684 1997
CAVAGNA GA MARGARIA R Mechanics of walking J Appl Physiol 21 1 271-278
1966
CAVAGNA GA SAIBENE FP MARGARIA R External work in walking J Appl
Physiol 18 1-9 1963
CAVAGNA GA SAIBENE FP MARGARIA R Mechanical Work in Running J Appl
Physiol 19 249-256 1964
CAVAGNA GA THYS H ZAMBONI A The sources of external work in level walking
and running J Physiol 262 3 639-657 1976
CAVAGNA GA WILLEMS PA FRANZETTI P DETREMBLEUR C The two power
limits conditioning step frequency in human running J Physiol 437 95-108 1991
CAVAGNA GA WILLEMS PA HEGLUND NC The role of gravity in human walking
pendular energy exchange external work and optimal speed J Physiol 528 Pt 3
657-668 2000
123
CAVAGNA GA WILLEMS PA HEGLUND NC Walking on Mars Nature 393 6686
636 1998
CAVAGNA GA WILLEMS PA LEGRAMANDI MA HEGLUND NC Pendular
energy transduction within the step in human walking J Exp Biol 205 Pt 21 3413shy
3422 2002
CERRETELLI P VEICSTEINAS A FUMAGALLI M DELLORTO L Energetics of
isometric exercise in man J Appl Physiol 41 2 136-141 1976
DEN OTTER AR GEURTS AC MULDER T DUYSENS J Speed related changes
in muscle activity from normal to very slow walking speeds Gait Posture 19 3 270shy
278 2004
DOHERTY TJ Invited review Aging and sarcopenia J Appl Physiol 95 4 1717-1727
2003
DOKE J DONELAN JM KUO AD Mechanics and energetics of swinging the human
leg J Exp Biol 208 Pt 3 439-445 2005
DOKE J KUO AD Energetic cost of producing cyclic muscle force rather than work to
swing the human leg J Exp Biol 210 Pt 13 2390-2398 2007
EVANS SL DAVY KP STEVENSON ET SEALS DR Physiological determinants
of 10-km performance in highly trained female runners of different ages J Appl
Physiol 78 5 1931-1941 1995
FEDAK MA HEGLUND NC TAYLOR CR Energetics and mechanics of terrestrial
locomotion II Kinetic energy changes of the limbs and body as a function of speed
and body size in birds and mammals J Exp Biol 97 23-40 1982
FENN WO Work against gravity and work due to velocity changes in running Am J
Physiol 93 433-462 1930
FENN WO MARSH BS Muscular force at different speeds of shortening J Physiol
85 3 277-297 1935
FORMENTI F ARDIGO LP MINETTI AE Human locomotion on snow determinants
of economy and speed of skiing across the ages Proc Biol Sci 272 1572 1561shy
1569 2005
124
FORMENTI F MINETTI AE Human locomotion on ice the evolution of ice-skating
energetics through history J Exp Biol 210 Pt 10 1825-1833 2007
FRERIKS B HERMENS H DISSELHORST-KLUG C RAU G The
recommendations for sensor and sensor placement procedures for surface
electromyography In HERMENS H (editor) European recommendations for
surface electromyography Enschede Roessingh Research and Development
1991
FRONTERA WR SUH D KRIVICKAS LS HUGHES VA GOLDSTEIN R
ROUBENOFF R Skeletal muscle fiber quality in older men and women Am J
Physiol Cell Physiol 279 3 C611-618 2000
FUKUNAGA T KUBO K KAWAKAMI Y FUKASHIRO S KANEHISA H
MAGANARIS CN In vivo behaviour of human muscle tendon during walking Proc
Biol Sci 268 1464 229-233 2001
GARDNER-MORSE MG STOKES IA The effects of abdominal muscle coactivation
on lumbar spine stability Spine 23 1 86-91 discussion 91-82 1998
GEYER H SEYFARTH A BLICKHAN R Compliant leg behaviour explains basic
dynamics of walking and running Proc Biol Sci 273 1603 2861-2867 2006
GOTTSCHALL JS KRAM R Energy cost and muscular activity required for leg swing
during walking J Appl Physiol 99 1 23-30 2005
GOTTSCHALL JS KRAM R Mechanical energy fluctuations during hill walking the
effects of slope on inverted pendulum exchange J Exp Biol 209 Pt 24 4895-4900
2006
GRANATA KP MARRAS WS Cost-benefit of muscle cocontraction in protecting
against spinal instability Spine 25 11 1398-1404 2000
GRANATA KP ORISHIMO KF Response of trunk muscle coactivation to changes in
spinal stability J Biomech 34 9 1117-1123 2001
GRIFFIN TM ROBERTS TJ KRAM R Metabolic cost of generating muscular force
in human walking insights from load-carrying and speed experiments J Appl
Physiol 95 1 172-183 2003
HEGLUND NC Running a-fowl of the law Science 303 47-48 2004
125
HEGLUND NC CAVAGNA GA Mechanical work oxygen consumption and efficiency
in isolated frog and rat muscle Am J Physiol 253 1 Pt 1 C22-29 1987
HEGLUND NC CAVAGNA GA TAYLOR CR Energetics and mechanics of
terrestrial locomotion III Energy changes of the centre of mass as a function of
speed and body size in birds and mammals J Exp Biol 97 41-56 1982a
HEGLUND NC FEDAK MA TAYLOR CR CAVAGNA GA Energetics and
mechanics of terrestrial locomotion IV Total mechanical energy changes as a
function of speed and body size in birds and mammals J Exp Biol 97 57-66
1982b
HILL AV The heat of shortening and the dynamic constants of muscle Proceedings of
the Royal Society B 126 136-195 1938
HOYT DF TAYLOR CR Gait and the energetics of locomotion in horses Nature
292 239-240 1981
ISHIKAWA M KOMI PV GREY MJ LEPOLA V BRUGGEMANN GP Muscleshy
tendon interaction and elastic energy usage in human walking J Appl Physiol 99
2 603-608 2005
ISHIKAWA M PAKASLAHTI J KOMI PV Medial gastrocnemius muscle behavior
during human running and walking Gait Posture 25 3 380-384 2007
KARAMANIDIS K ARAMPATZIS A Mechanical and morphological properties of
different muscle-tendon units in the lower extremity and running mechanics effect of
aging and physical activity J Exp Biol 208 Pt 20 3907-3923 2005
KARAMANIDIS K ARAMPATZIS A BRUGGEMANN GP Symmetry and
reproducibility of kinematic parameters during various running techniques Med Sci
Sports Exerc 35 6 1009-1016 2003
KER RF BENNETT MB BIBBY SR KESTER RC ALEXANDER RM The
spring in the arch of the human foot Nature 325 7000 147-149 1987
KLASS M BAUDRY S DUCHATEAU J Aging does not affect voluntary activation of
the ankle dorsiflexors during isometric concentric and eccentric contractions J Appl
Physiol 99 1 31-38 2005
126
KNAFLITZ M BONATO P Time-frequency methods applied to muscle fatigue
assessment during dynamica contractions J Electromyogr Kinesiol 9 337-350
1999
KOMI PV Stretch-shortening cycle a powerful model to study normal and fatigued
muscle J Biomech 33 10 1197-1206 2000
KRAM R DOMINGO A FERRIS DP Effect of reduced gravity on the preferred walkshy
run transition speed J Exp Biol 200 Pt 4 821-826 1997
KRAM R TAYLOR CR Energetics of running a new perspective Nature 346 6281
265-267 1990
LAMOTH CJ MEIJER OG DAFFERTSHOFER A WUISMAN PI BEEK PJ
Effects of chronic low back pain on trunk coordination and back muscle activity during
walking changes in motor control Eur Spine J 15 1 23-40 2006
LAY AN HASS CJ RICHARD NICHOLS T GREGOR RJ The effects of sloped
surfaces on locomotion an electromyographic analysis J Biomech 40 6 1276shy
1285 2007
LOWE DA SUREK JT THOMAS DD THOMPSON LV Electron paramagnetic
resonance reveals age-related myosin structural changes in rat skeletal muscle
fibers Am J Physiol Cell Physiol 280 3 C540-547 2001
MALOIY GM HEGLUND NC PRAGER L CAVAGNA GA TAYLOR CR
Energetic cost of carrying loads have African women discovered an economic way
Nature 319 668-669 1986
MALVILLE NJ BYRNES WC ALLEN LIM B BASNYAT R Commercial porters of
eastern nepal health status physical work capacity and energy Expenditure Am J
Hum Biol 13 44-56 2001
MARGARIA R Sulla fisiologia e specialmente sul consumo energetico della marcia
e della corsa a varia velocitagrave ed inclinazione del terreno 1938
MARSH RL ELLERBY DJ CARR JA HENRY HT BUCHANAN CI Partitioning
the energetics of walking and running swinging the limbs is expensive Science
303 5654 80-83 2004
127
MCMAHON TA CHENG GC The mechanics of running how does stiffness couple
with speed J Biomech 23 Suppl 1 65-78 1990
MIAN OS THOM JM ARDIGO LP NARICI MV MINETTI AE Metabolic cost
mechanical work and efficiency during walking in young and older men Acta
Physiol (Oxf) 186 2 127-139 2006
MINETTI AE The biomechanics of skipping gaits a third locomotion paradigm Proc
Biol Sci 265 1402 1227-1235 1998a
MINETTI AE A model equation for the prediction of mechanical internal work of
terrestrial locomotion J Biomech 31 5 463-468 1998b
MINETTI AE ALEXANDER RM A theory of metabolic costs for bipedal gaits J Theor
Biol 186 4 467-476 1997
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of gradient walking
energetics in man J Physiol 472 725-735 1993
MINETTI AE ARDIGO LP SAIBENE F Mechanical determinants of the minimum
energy cost of gradient running in humans J Exp Biol 195 211-225 1994
MINETTI AE ARDIGO LP SAIBENE F FERRERO S SARTORIO A Mechanical
and metabolic profile of locomotion in adults with childhood-onset GH deficiency Eur
J Endocrinol 142 1 35-41 2000
MINETTI AE FORMENTI F ARDIGO LP Himalayan porters specialization
metabolic power economy efficiency and skill Proc Biol Sci 273 1602 2791shy
2797 2006
MORSE CI THOM JM REEVES ND BIRCH KM NARICI MV In vivo
physiological cross-sectional area and specific force are reduced in the
gastrocnemius of elderly men J Appl Physiol 99 3 1050-1055 2005
NILSSON J THORSTENSSON A Ground reaction forces at different speeds of human
walking and running Acta Physiol Scand 136 2 217-227 1989
NYMARK JR BALMER SJ MELIS EH LEMAIRE ED MILLAR S
Electromyographic and kinematic nondisabled gait differences at extremely slow
overground and treadmill walking speeds J Rehabil Res Dev 42 4 523-534 2005
128
OCHALA J DORER DJ FRONTERA WR KRIVICKAS LS Single skeletal muscle
fiber behavior after a quick stretch in young and older men a possible explanation of
the relative preservation of eccentric force in old age Pflugers Arch 452 4 464shy
470 2006
ONAMBELE GL NARICI MV MAGANARIS CN Calf muscle-tendon properties and
postural balance in old age J Appl Physiol 100 6 2048-2056 2006
PHILLIPS SK BRUCE SA WOLEDGE RC In mice the muscle weakness due to
age is absent during stretching J Physiol 437 63-70 1991
PORTER MM VANDERVOORT AA KRAMER JF Eccentric peak torque of the
plantar and dorsiflexors is maintained in older women J Gerontol A Biol Sci Med
Sci 52 2 B125-131 1997
POUSSON M LEPERS R VAN HOECKE J Changes in isokinetic torque and
muscular activity of elbow flexors muscles with age Exp Gerontol 36 10 1687shy
1698 2001
PRILUTSKY BI GREGOR RJ Swing- and support-related muscle actions
differentially trigger human walk-run and run-walk transitions J Exp Biol 204 Pt 13
2277-2287 2001
ROBERTS TJ KRAM R WEYAND PG TAYLOR CR Energetics of bipedal
running I Metabolic cost of generating force J Exp Biol 201 Pt 19 2745-2751
1998
ROBERTS TJ MARSH RL WEYAND PG TAYLOR CR Muscular force in
running turkeys the economy of minimizing work Science 275 5303 1113-1115
1997
SAIBENE F MINETTI AE Biomechanical and physiological aspects of legged
locomotion in humans Eur J Appl Physiol 88 4-5 297-316 2003
SCHEPENS B WILLEMS PA CAVAGNA GA The mechanics of running in children
J Physiol 509 ( Pt 3) 927-940 1998
SCHEPENS B WILLEMS PA CAVAGNA GA HEGLUND NC Mechanical power
and efficiency in running children Pflugers Arch 442 1 107-116 2001
129
TAYLOR CR Force development during sustained locomotion a determinant of gait
speed and metabolic power J Exp Biol 115 253-262 1985
TAYLOR CR HEGLUND NC MALOIY GM Energetics and mechanics of terrestrial
locomotion I Metabolic energy consumption as a function of speed and body size in
birds and mammals J Exp Biol 97 1-21 1982
TRAPPE S GALLAGHER P HARBER M CARRITHERS J FLUCKEY J
TRAPPE T Single muscle fibre contractile properties in young and old men and
women J Physiol 552 Pt 1 47-58 2003
VALOUR D POUSSON M Compliance changes of the series elastic component of
elbow flexor muscles with age in humans Pflugers Arch 445 6 721-727 2003
VANDERVOORT AA KRAMER JF WHARRAM ER Eccentric knee strength of
elderly females J Gerontol 45 4 B125-128 1990
WHITE SG MCNAIR PJ Abdominal and erector spinae muscle activity during gait
the use of cluster analysis to identify patterns of activity Clin Biomech (Bristol
Avon) 17 3 177-184 2002
WILLEMS PA CAVAGNA GA HEGLUND NC External internal and total work in
human locomotion J Exp Biol 198 Pt 2 379-393 1995
WINTER D Biomechanics and motor control of human movement 3rd Waterloo
John Wiley amp Sons 2005
WINTERS JM WOO S Multiple muscle systems Springer-Verlag 1990
WOLEDGE RC CURTIN N HOMSHER E Energetic aspects of muscle
contraction Londres Academic Press 1985
WRIGHT S WEYAND PG The application of ground force explains the energetic cost
of running backward and forward J Exp Biol 204 Pt 10 1805-1815 2001
YAMAGUCHI G SAWA A MORAN D RESSLER M WINTERS JM A survey of
human musculotendon actuator parameters J M Winters 1991
130
Apecircndices
A- Programa de anaacutelise EMG da caminhada LocoEmg
Uma seacuterie de algoritmos (figuras A1 A2 e A3) foram desenvolvidos em
ambiente Labview versatildeo 71 a fim de analisar o sinal bruto de EMG Para tanto
informaccedilotildees advindas de sensores de pressatildeo foram calculadas de forma a
possibilitar as seguintes anaacutelises
Figura A1 Janela principal do programa LocoEmgVI
131
Este programa foi utilizado no capiacutetulo 2 no experimento do custo EMG da
locomoccedilatildeo em diferentes velocidades e inclinaccedilotildees e no experimento do custo EMG
da locomoccedilatildeo de montanhistas Caucasianos e carregadores Nepaleses no Himalaia
Nepal Atraveacutes do uso dos sensores de pressatildeo foi possiacutevel calcular o tempo de
passada o tempo de vocirco o tempo de apoio e o tempo de apoio duplo para utilizar
no desenvolvimento das abordagens experimental e teoacuterica do custo EMG da
locomoccedilatildeo humana
Figura A2 Bloco de diagramas da janela principal do Programa LocoEmgVI
Os dados de input do programa foram inseridos na janela principal (figura
A1) onde no final da anaacutelise satildeo apresentados os resultados de atividade EMG
meacutedia e desvio padratildeo em funccedilatildeo do percentual do ciclo de passadaO bloco de
diagrama apresentado na figura A2 mostra a estrutura geral do programa com seus
algoritmos localizados nas subrotinas (quadrados verdes)
As principais subrotinas ou algoritmos de primeiro niacutevel satildeo i) Abre e organiza
arquivo ii) Filtra sinal EMG iii) Calcula Variaacuteveis Espaccedilo-Temporais iv) Divide
Ciclos e Interpola Sinal EMG v) Integra Sinal EMG vi) Salva Resultados vi) Imprime
Resultados Gerais
132
Na subrotina Salva resultados arrays eram transformados em arquivos no
formato txt para posterior anaacutelise estatiacutestica Os arquivos eram variaacuteveis espaccedilo-
temporais valores meacutedios interpolados para fase de apoio e balanccedilo valores Emg
meacutedios e desvio-padratildeo interpolados por ciclo de passada e somatoacuterio das integrais
Emg brutos e convertidos por Equivalentes Metaboacutelicos de Ativaccedilatildeo Emg
A janela de impressatildeo eacute apresentada na figura A3
Figura A3 Janela de Impressatildeo para anaacutelise qualitativa e controle dos dados
Nesta janela os dados EMGrsquos por muacutesculo satildeo apresentados atraveacutes de seus
valores valores meacutedios e dprsquos em funccedilatildeo do percentual do ciclo de passada
Informaccedilotildees da Vf nome do arquivo inclinaccedilatildeo do terreno e nuacutemero de ciclos
analisados tambeacutem satildeo apresentados Arquivos de imagem destas janelas foram
elaborados e armazenados para posterior verificaccedilatildeo dos dados
B- Produccedilatildeo bibliograacutefica natildeo referente agrave tese (natildeo anexada)
133
PEYREacute-TARTARUGA LA TARTARUGA MP COERTJENS M KRUEL LFM
Influence of Allometry scale on relationship between running economy and
kinematical parameters Biology of Sport (aceito) 2008
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
OLIVEIRA AR KRUEL LFM Physiologic and biomechanical effects ofwater run
training on running performance European Journal of Applied Physiology
(submetido) 2008
CORREA TC PEYREacute-TARTARUGA LA FURLAN E RIBAS R LOSS JF
Mathematical model of energy cost in sprint running Proceedings of XXV
International Symposium on Biomechanics in Sports ISBS (CD) 2007
PEYREacute-TARTARUGA LA COERTJENS M TARTARUGA MP DE MEDEIROS
MH KRUEL LFM Influence of the allometric scale on the relationship between
running economy and biomechanical variables in runners Medicine and Science in
Sports and Exercise 39 (Supplement) S208-S209 2007
PEYREacute-TARTARUGA LA DE MEDEIROS MH COERTJENS M TARTARUGA
MP KRUEL LFM The relation between running economy and kinematical
variables influence of body mass in competitive runners Journal of Biomechanics
39 (Supplement 1) S631 2006
ILHA J ARAUJO RT MALYSZ T PEYREacute-TARTARUGA LA ACHAVAL M
Effects of endurance and resistance exercise training on locomotion of rats after
sciatic nerve crush Physiological Mini Reviews 2 (4) 109 2006
ILHA J PEYREacute-TARTARUGA LA ARAUJO RT METZEN F MALYSZ T
CANTO F ACHAVAL ELENA M LOSS JF Locomotor behaviour assessment in
the rat by kinematic analysis Journal of Biomechanics 39 (Supplement 1) S507
2006
SCHIEHLL PE PEYREacute-TARTARUGA LA ZINGANO GM LOSS JF
Estimation of the quantification of the elastics loads on the jump fit circuit Journal of
134
Biomechanics 39 (Supplement 1) S555 2006
MARTINEZ FG PEYREacute-TARTARUGA LA HERMEL EES XAVIER LL
RASIA-FILHO AA ACHAVAL M Intermediate filament expression in the medial
5thamygdala subnuclei during postnatal development of male and female rats
Forum of the Federation of European Neuroscience Societes Viena FENS 3
A1556 2006
FRAGA CHW BLOEDOW LS CARPES F PEYREacute-TARTARUGA LA
TARTARUGA MP FOLLMER B GUIMARAtildeES ACS Methodologic proposal to
verify the influence of cycling on running kinematic aspects in Triathlon Revista
Motriz 12 (2) 159-164 2006
PEYREacute-TARTARUGA LA KRUEL LFM Deep water running limits and
possibilities to elite runners Brazilian Journal of Sports Medicine 12 (5)286-290
2006
PEYREacute-TARTARUGA LA TARTARUGA MP BLACK GL COERTJENS M
RIBAS LR KRUEL LFM Comparison of the subtalar joint angle during
submaximal running speeds Acta Ortopeacutedica Brasileira 13 (2) 57-60 2005
C- Textos completos referentes agrave tese
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA Old men
running mechanical work and elastic bounce Proceedings of the Royal Society B
275 (1633) 411-418 2008 101098rspb20071288
CAVAGNA GA LEGRAMANDI MA PEYREacute-TARTARUGA LA The landingshy
takeoff asymmetry is enhanced in old age Journal of Experimental Biology
(aceito com modificaccedilotildees) 2008
MINETTI AE PEYREacute-TARTARUGA LA ARDIGOgrave LP FORMENTI F SUSTA
135
D Energetical and electromyographical cost of locomotion in Nepalese Porters on
Himalaya Anais do XII Congresso Brasileiro de Biomecacircnica 88-94 2007
D- Paracircmetros musculares
Os paracircmetros musculares utilizados no estudo Custo EMG da caminhada
humana foram adquiridos de YAMAGUCHI et al (1991) e satildeo apresentados em
detalhes nas duas figura seguintes (figuras D1 e D2)
Figura D1 Paracircmetros musculares utilizados Fonte YAMAGUCHI et al 1991
136