Embed Size (px)
Citation preview
CtBoard 1 20/01/2011 1
Manual do Usuário
CtBoard
-
Ferramenta Multidisciplinar
CtBoard
CtBoard 2 Rev 4.0 2
Índice
Capítulo 1 - Sobre a CtBoard 3
1.1. Apresentação da CtBoard ....................................................................................................... 3
1.2. Como a CtBoard pode ajudar em seus estudos? ................................................................... 3
1.3. Qual DSP é utilizado na CtBoard? .......................................................................................... 3
1.4. A CtBoard suporta outros modelos de microcontrolaradores ou DSP´s? ............................... 4
Capítulo 2 - Instalando a CtBoard ..................................................................................................................... 5
2.1. Sistema requerido para utilizar a CtBoard .............................................................................. 5
2.2. Opções de conexão ................................................................................................................. 5
2.3. Seqüência para conexão com LabVIEW ................................................................................. 5
2.3.1. Trabalhando com o DAC Mosaico .................................................................................. 7
2.4. Seqüência para conexão modo stand-alone ........................................................................... 9
2.4.1. Instalação do Software supervisório ............................................................................. 10
Capítulo 3 - Limitações da CtBoard ................................................................................................................. 12
3.1. Limitações de alimentação .................................................................................................... 12
Capítulo 4 - Informações gerais do produto .................................................................................................... 13
4.1. Disposição da placa .............................................................................................................. 13
4.2. Descrição do protocolo padrão Stand Alone ......................................................................... 14
4.3 Problemas mais comuns ....................................................................................................... 17
4.4. Pinagem do conector de ligação com a bancada virtual ....................................................... 18
4.5. Pinagem dos conectores de ligação para modo stand-alone ............................................... 22
4.6. Pinagem do conector para área de prototipagem ................................................................. 23
4.7. Pinagem do conector de ligação para bandeira dsPIC ......................................................... 24
4.8. Posicionamento do jumper de configuração da placa........................................................... 26
Capítulo 5 - Certificado de Garantia ................................................................................................................ 27
5.1. Tempo de Garantia ............................................................................................................................... 27
5.2. Condições de Garantia ......................................................................................................................... 27
5.3. Exclusões de Garantia .......................................................................................................................... 27
5.4. Limitação de Responsabilidade ............................................................................................................ 27
CtBoard
CtBoard 3 Rev 4.0 3
1. Sobre a CtBoard
1.1. 1.1. Apresentação da CtBoard
Agradecemos novamente a confiança em adquirir produtos Mosaico (uma divisão da Mosaico High Performance
Solutions) parabenizando-o por sua escolha. A divisão de tecnologia, Hiware, da Mosaico em parceria com a
equipe de desenvolvimento da Mosaico, num esforço em conjunto, lançam ao mercado nacional a CtBoard. O fato
do produto agregar robustez, alta qualidade e ótimo preço, possibilitou o seu processo de licenciamento junto à
National Instruments, tornando a ferramenta uma referência em instituições de ensino em todo país.
Seu objetivo é claro, permitir de maneira fácil e intuitiva, realizar experimentos relacionados à Engenharia de
Controle, e desta forma complementar o aprendizado.
O kit da CtBoard adquirido, é composto por:
• 1 placa CtBoard;
• 1 fonte de alimentação bi-volt 24V / 3A;
• 1 CD com este Guia do Usuário, Apostila de Experimentos; Experimentos, software Supervisório e
informações complementares;
1.2. 1.2. Como a CtBoard pode ajudar em seus estudos?
A CtBoard permite você realizar:
• Experimentos de controle assistidos pelo ambiente LabView da National Instruments;
• Experimentos de controle assistidos pelo software Supervisório da Mosaico;
• Experimentos de controle a partir de circuito analógico, montado na área do kit reservada à prototipagem;
• Experimentos de controle digital, através da programação do DSP embarcado no kit.
1.3. 1.3. Qual DSP é utilizado na CtBoard?
O DSP utilizado pelo kit, é um dsPIC da Microchip, modelo 33FJ64GP706, cuja função é gerenciar todos os
periféricos e sinais de controle envolvidos no kit de forma transparente para usuário. Suas principais
características são:
• Arquitetura de 16 bits;
• Velocidade da CPU de até 40 MIPS;
• Memória de Programa de 64Kbytes e Memória de Dados de 32Kbytes;
• 53 pinos de E/S.

CtBoard
CtBoard 4 Rev 4.0 4
1.4. 1.4. A CtBoard suporta outros modelos de microcontrolaradores ou DSP´s?
Sim. É possível o usuário criar sua própria “bandeira”, com o microcontrolador ou DSP mais adequado para o seu
trabalho, visto que o esquema elétrico da bandeira dsPIC incorporada ao kit, bem como o esquema do restante do
circuito são fornecidos no CD que acompanha o produto.
CtBoard
CtBoard 5 Rev 4.0 5
2 Instalando a CtBoard
2.1. Sistema requerido para utilizar a CtBoard
O sistema mínimo requerido para a correta utilização da CtBoard tanto para operação stand-alone quanto para a
operação através do LabVIEW (ambos serão descritos em maiores detalhes a seguir) é o seguinte:
• Microcomputador IBM-PC ou compatível com 128 MB de RAM, teclado, mouse, monitor SVGA, HD de 40
GB, porta de comunicação USB e porta de comunicação Serial;
• Processador com velocidade superior a 1.8GHz;
• Microsoft Windows XP;
Componentes requeridos somente para operação com LabVIEW:
• National Instruments LabVIEW 7.5 (opcional);
• Bancada virtual National Instruments ELVIS (opcional);
• Placa ou módulo de aquisição de dados National Instruments (opcional - desnecessário para o NI-ELVIS
II);
2.2. Opções de conexão
Como mencionado anteriormente, o usuário pode optar entre trabalhar com o kit tanto com o LabVIEW quanto em
modo stand-alone. No modo stand-alone, o software Supervisório (fornecido no CD do produto) é utilizado para
monitorar os dados e experimentos realizados com o kit; toda a comunicação será estabelecida através do
conector serial presente na placa. Caso o usuário necessite personalizar ainda mais sua aplicação, os dados
enviados pelo kit ao Supervisório são estabelecidos em um protocolo aberto, ou seja, é totalmente liberada a
forma de comunicação para o usuário, permitindo desde a criação de um software diferente quanto o
interfeaceamento com outros dispositivos de mercado. (ex. CLP`s).
A partir de agora, serão descritos os passos para a ligação do kit em ambos os modos de operação citados.
2.3. Seqüência para conexão com LabVIEW
A seqüência para o correto funcionamento segue estes passos:
• Desembale cuidadosamente o kit e coloque-o sobre uma superfície limpa e plana;
• Retire o cartão (placa) de prototipagem original do NI-ELVIS e coloque a CtBoard na mesma disposição,
ou seja, conecte-a no conector de comunicação do NI-ELVIS (CN8A\B);
CtBoard
CtBoard 6 Rev 4.0 6
• Posicione o jumper de configuração número 1 (DIP1) na posição “NI-ELVIS”;
• Realize as conexões entre o NI-ELVIS e o sistema de aquisição presente (ex. NI-6008, USB-6251, etc),
para maiores informações consulte o manual específico do dispositivo;
OBS: A bancada NI-ELVIS necessita obrigatoriamente de um dispositivo de aquisição externo para efetuar a
conexão entre o microcomputador e a sua interface. A bancada NI-ELVIS II já possui um sistema de aquisição
USB integrada na sua interface, simplificando as conexões.
• Inicialize o microcomputador e execute o ambiente LabVIEW;
• Conecte uma extremidade da fonte de alimentação fornecida ao kit e a segunda extremidade, na tomada
de alimentação mais próxima;
• Insira o CD do kit na unidade de leitura, e na pasta “Exercícios\LabVIEW\USB-6251” abra o exercício
desejado (arquivos .vi);
• Inicie a simulação através do LabVIEW;
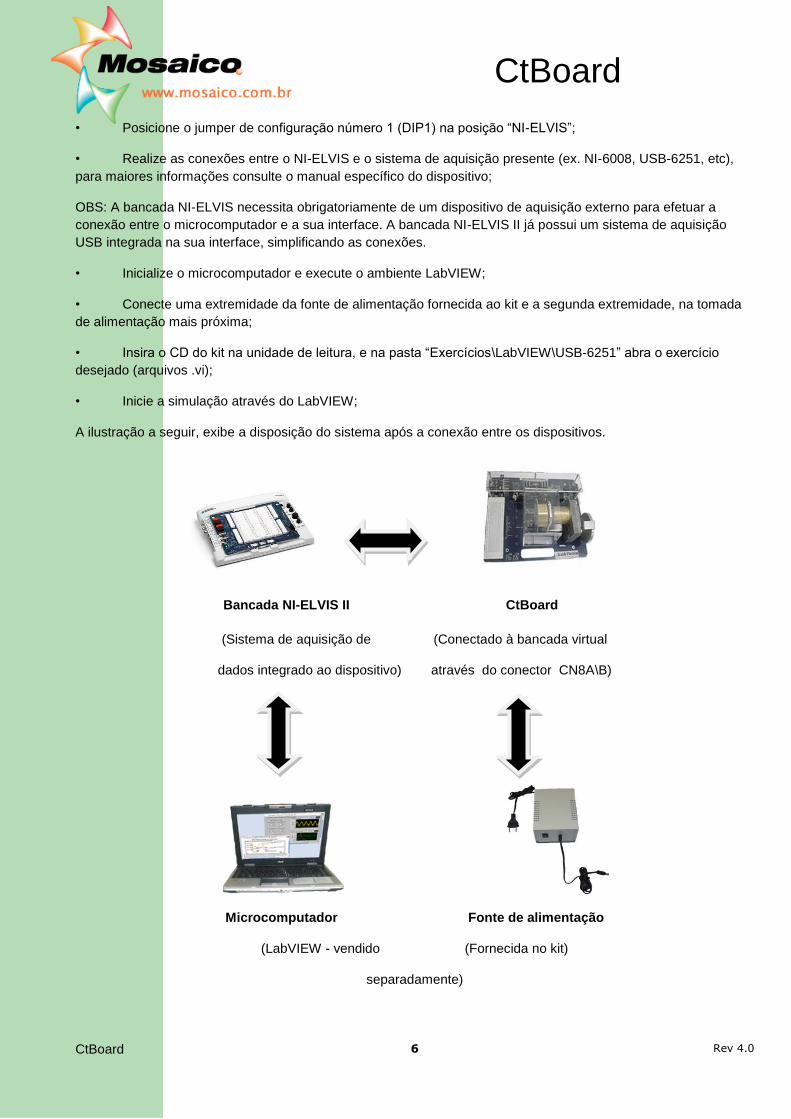
A ilustração a seguir, exibe a disposição do sistema após a conexão entre os dispositivos.
Bancada NI-ELVIS II CtBoard
(Sistema de aquisição de (Conectado à bancada virtual
dados integrado ao dispositivo) através do conector CN8A\B)
Microcomputador Fonte de alimentação
(LabVIEW - vendido (Fornecida no kit)
separadamente)
CtBoard
CtBoard 7 Rev 4.0 7
2.3.1. Trabalhando com o DAC Mosaico
O DAC Mosaico é um acessório, vendido separadamente, que permite ao usuário desfrutar todas as
características e funcionalidades do software LabVIEW porém numa concepção mais econômica e simplificada.
Esse acessório trabalha com a placa de aquisição da National Instrumentes modelo NI USB-6008, cujas
características atendem as necessidades do kit CtBoard. A mesma não substituiu as funcionalidades das
bancadas virtuais da National Instruments, visto que sua concepção foca apenas a aquisição e geração de sinais
analógicos para o sistema, portanto, não se enquadrando como um equipamento de instrumentação virtual.
Imagem de uma placa padrão DAC Mosaico
CtBoard
CtBoard 8 Rev 4.0 8
A seqüência para instalação da placa DAC Mosaico segue os seguintes passos:
• Desembale cuidadosamente a placa e coloque-a sobre uma superfície limpa e plana;
• Instale a partir do CD de instalação da National Instruments o software DAQMx, este CD encontra-se na
caixa do equipamento e maiores informações a respeito dessa instalação poderão ser obitdas na própria
documentação presente no CD;
• Conecte uma extremidade do cabo USB, fornecido no pacote, ao dispositivo NI-USB-6008 e a outrano
microcomputador, aguarde pelo início do Assistente de Instalação de Novo Hardware do sistema operacional. Ao
término desse passo o driver do dispositivo será instalado no sistema;
• Conecte a placa DAC Mosaico ao kit CtBoard através do conector de comunicação CN8A\B (presente na
extremidade superior do kit);
• Posicione o jumper J1 na posição correta, AO0 ou AO1, desejada para que o equipamento utilize um
desses canais de conversão digital-analógico durante a realização dos experimentos, esses canais deverão ser
referenciados dentro dos arquivos de experimentos através dos blocos DAQ Assitant presentes na planta;
Os experimentos para o kit CtBoard utilizando a placa DAC Mosaico estão disponibilizados na pasta
“\Exercícios\LabVIEW\USB-6008”. O esquema elétrico do produto está disponibilizado na pasta \Esquemas
Elétricos\DAC Mosaico.
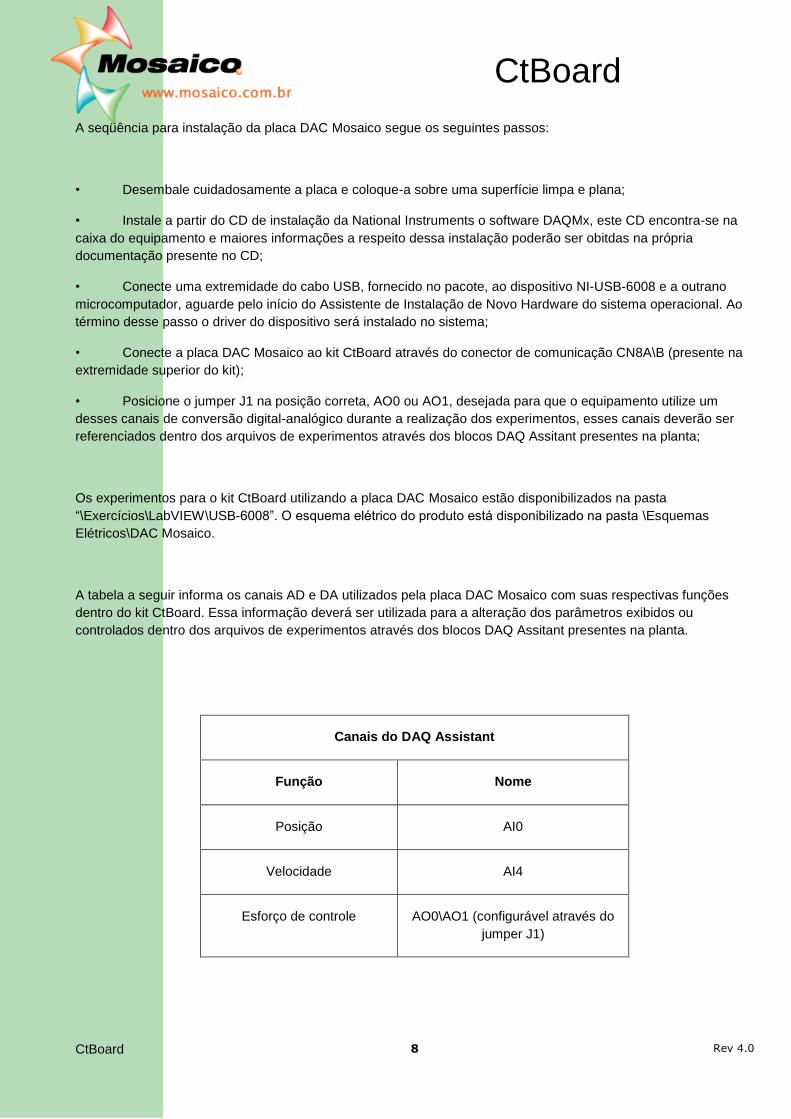
A tabela a seguir informa os canais AD e DA utilizados pela placa DAC Mosaico com suas respectivas funções
dentro do kit CtBoard. Essa informação deverá ser utilizada para a alteração dos parâmetros exibidos ou
controlados dentro dos arquivos de experimentos através dos blocos DAQ Assitant presentes na planta.
Canais do DAQ Assistant
Função Nome
Posição AI0
Velocidade AI4
Esforço de controle AO0\AO1 (configurável através do
jumper J1)
CtBoard
CtBoard 9 Rev 4.0 9
2.4. Seqüência para conexão modo stand-alone
A seqüência para o correto funcionamento segue estes passos:
• Desembale cuidadosamente o kit e coloque-o sobre uma superfície limpa e plana;
• Conecte o cabo de comunicação serial na CtBoard através do conector CN6;
• Posicione o jumper de configuração número 1 (DIP1) na posição “Stand- Alone”;
• Conecte uma extremidade da fonte de alimentação fornecida ao kit e a segunda extremidade, na tomada
de alimentação mais próxima;
• Inicialize o microcomputador e execute o software Supervisório (consulte o apêndice desse manual para
obter detalhes sobre sua instalação);
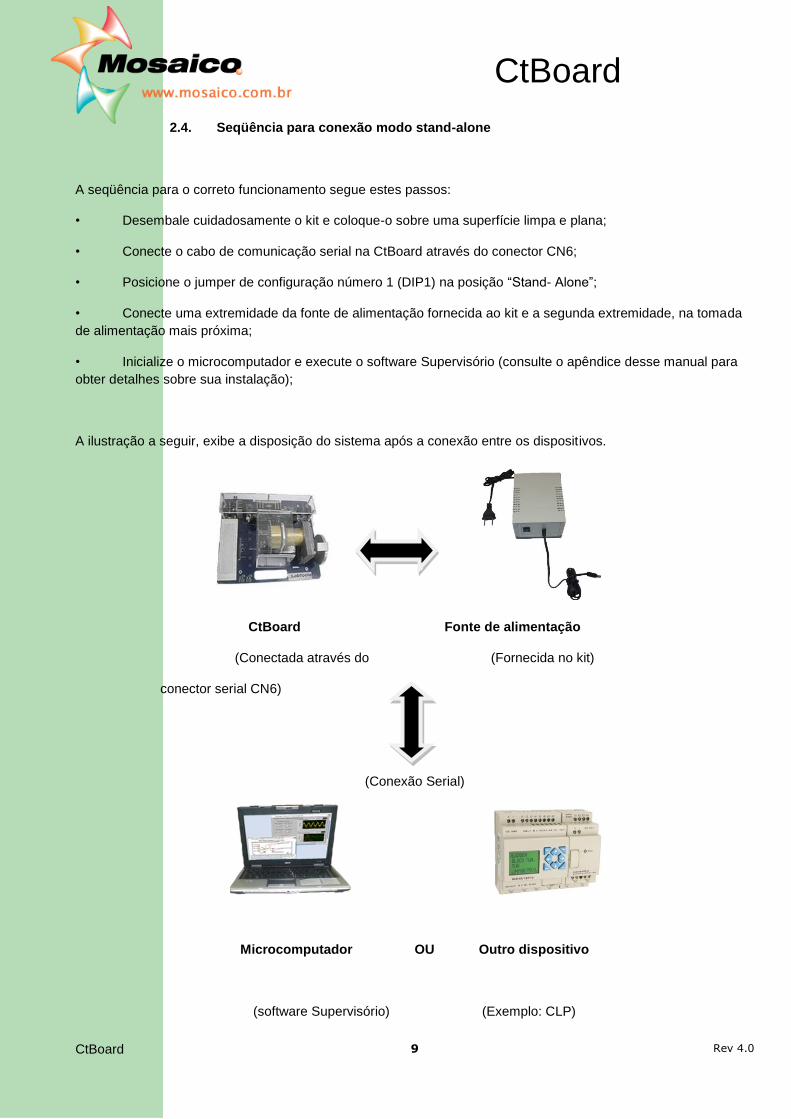
A ilustração a seguir, exibe a disposição do sistema após a conexão entre os dispositivos.
CtBoard Fonte de alimentação
(Conectada através do (Fornecida no kit)
conector serial CN6)
(Conexão Serial)
Microcomputador OU Outro dispositivo
(software Supervisório) (Exemplo: CLP)

CtBoard
CtBoard 10 Rev 4.0 10
2.4.1. Instalação do Software supervisório
Caminho para os arquivos de instalação:
“\Ambiente de desenvolvimento\Software Supervisório\Instalação”
Arquivos:
ccrc.sys
MSCOMCTL.OCX
MSCOMM32.OCX
setup.exe
Os arquivos extensão OCX e SYS serão copiados para o local adequado do Windows assim que setup.exe for
executado pela primeira vez.
Assim, basta executar setup.exe.
Configuração do Supervisório:
Ao abrir o software, surgirá a tela Configurações de comunicação.
Serão exibidas as opções de Porta COM, Baud Rate, Paridade, Núm. bts e Stop bits. Destas opções, está
disponível para alteração apenas Porta COM. As demais opções são apenas informações da configuração
existente e única para o kit.
Após selecionar a porta correta que será usada para a comunicação e clicar no botão OK, surgirá a tela principal
do supervisório.

CtBoard
CtBoard 11 Rev 4.0 11
A primeira guia (tab), denominada 'Sistema', apresenta a arquitetura da planta. Há o setpoint e duas malhas de
controle: uma para a velocidade e outra para a posição.
Ao passar o mouse sobre a figura, algumas caixas serão selecionadas:
- SP: setpoint. Ao clicar, aparece uma caixa de texto para entrar com a velocidade em RPM (o valor está
compreendido entre -400 e 400. O sinal informa o sentido de rotação)
- C1(s): configurações para o controle da velocidade. Ao clicar, aparece a tela entitulada Parâmetro do controlador
C1. Nesta tela, pode-se optar por controle PID ou Equação de diferenças.
Ao selecionar PID, será necessário configurar a Banda proporcional (BP), o Tempo integral (Ti), o Tempo
derivativo (Td) e o Tempo tracking (Tt).
Ao selecionar Equação de diferenças, será necessário configurar os coeficientes conforma a equação mostrada na
parte inferior da janela.
- C2(s): tem as mesmas configurações existentes para C1(s), porém para controle da posição
- Kvel: ganho (realimentação) para velocidade. Ao clicar, aparece uma caixa de texto para entrar com um valor,
que vai de -10 a 10.
- Kpos: ganho (realimentação) para posição. Ao clicar, aparece uma caixa de texto para entrar com um valor, que
vai de -10 a 10.
- Fsample: freqüência de amostragem dos controladores. Ao clicar, aparece uma caixa de seleção para configurar
a freqüência com que os controladores atuarão no processo.
A segunda guia, denominada 'Gráfico', aparesenta um gráfico cartesiano para plotar as informações recebidas do
controlador. As informações que podem ser plotadas são mostradas à direita do gráfico. Se o usuário desejar
visualizá-las, a caixa de marcação deve ser ativada. A curva de cada informação é mostrada na mesma cor da
caixa de marcação.
Estas informações mudam de acordo com o tipo de controle optado (PID ou Equação de diferenças).
O campo Eixo y permite variar a faixa de plotagem no eixo das ordenadas, sendo o máximo 400 e o mínimo -400.
O botão de start envia para o controlador o setpoint configurado na guia 'Sistema'. Com isso, os dados começam a
ser plotados. Ao iniciar, surge um campo para entrar com um novo setpoint, se desejado, permitindo fazer a
análise da resposta do sistema.
Além do botão start, há o botão PWM para acionamento manual, em que o usuário pode entrar com um valor do
PWM de 0% a 100%. Usando o sinal negativo, o motor gira no sentido contrário.
O botão Stop pára a plotagem dos pontos e também o controlador.
Todas as informações recebidas do controlador, são armazenadas em um log, conforme pode ser observado na
guia 'Dados'. Estes dados podem ser exportados para uma planilha do Excel ou para um arquivo do Matlab (.m).

CtBoard
CtBoard 12 Rev 4.0 12
3Limitações da CtBoard
3.1. Limitações de alimentação
O fato importante a ser ressaltado na utilização do kit é em relação a sua fonte de alimentação. Dependendo do
experimento, o esforço de controle exigido pelo kit de sua fonte de alimentação pode exceder a máxima corrente
de pico da fonte (aproximadamente 5A), o que acarretará na reinicialização indesejável do kit ou até mesmo em
seu desligamento. Nessa situação, redimensione os parâmetros de controle evitando a ultrapassagem desse
limite.

CtBoard
CtBoard 13 Rev 4.0 13
4. Informações gerais do produto
4.1. Disposição da placa
1- Conector para fonte de alimentação;
2- Conector de ligação com a bancada virtual NI-ELVIS;
3- Conector serial para modo stand-alone;
4- Conector DIMM 168 vias para ligação com a bandeira dsPIC;
5- Botão de reset do kit;
6- Jumper de configuração do modo de operação do kit;
7- Área de prototipagem;
8- Conector, com sinais de controle, para circuito montado na área de prototipagem.

CtBoard
CtBoard 14 Rev 4.0 14
4.2. Descrição do protocolo padrão Stand Alone
Quando selecionado para trabalhar em modo stand-alone, através da chave DIP1, o kit CtBoard disponibiliza suas
informações de controle através do conector DB-9 disponível na placa. Essas informações são utilizadas pelo
Software Supervisório, incluso no CD de documentação, mas podem ser também utilizadas em aplicações
específicas aonde um hardware ou um software específico se encarregarão de “fechar” a malha de controle do
sistema.
A especificação do canal de comunicação está baseada no padrão RS-232 e possui as seguintes características
de operação:
• Baud Rate -> 19200 bps
• Paridade -> Nenhuma
• Bits -> 8
• Bits de parada -> 2
As características acima citadas devem ser incialmente configuradas no dispositivo que atuará em conjunto com o
kit CtBoard. Para maiores detalhes à respeito da pinagem do conector DB-9, consulte o item 4.6. desse capítulo.
Os datagramas que trafegam no anal de comunicação obedecem, salvo algumas modificações, ao padrão
ModBUS, cuja difusão na indústria é notória.
Os datagramas trocados no canal de comunicação obedecem a seguinte carta de tempo:
4.1.
A cada pacote compreendido entre as informações de “Start” e “End” é aguardado, em aproximadamente 15ms, o
envio de uma informação, caso exista algum tipo de estouro desse tempo (time-out) toda informação recebida pelo
kit será descartada e um novo datagrama deverá ser enviado.
Vale ressaltar que nesse esquema de comunicação o kit CtBoard será considerado o dispositivo escravo (slave),
ou seja, permanecerá no aguardo do envio de comandos que solicitem seu envio de dados para o dispositivo
mestre (master), que por exemplo, poderá ser um microcomputador rodando um software de alto nível.
A seguir, serão exibidas as informações que compoem o pacote de dados do datagrama.
CtBoard 15 20/01/2011 15
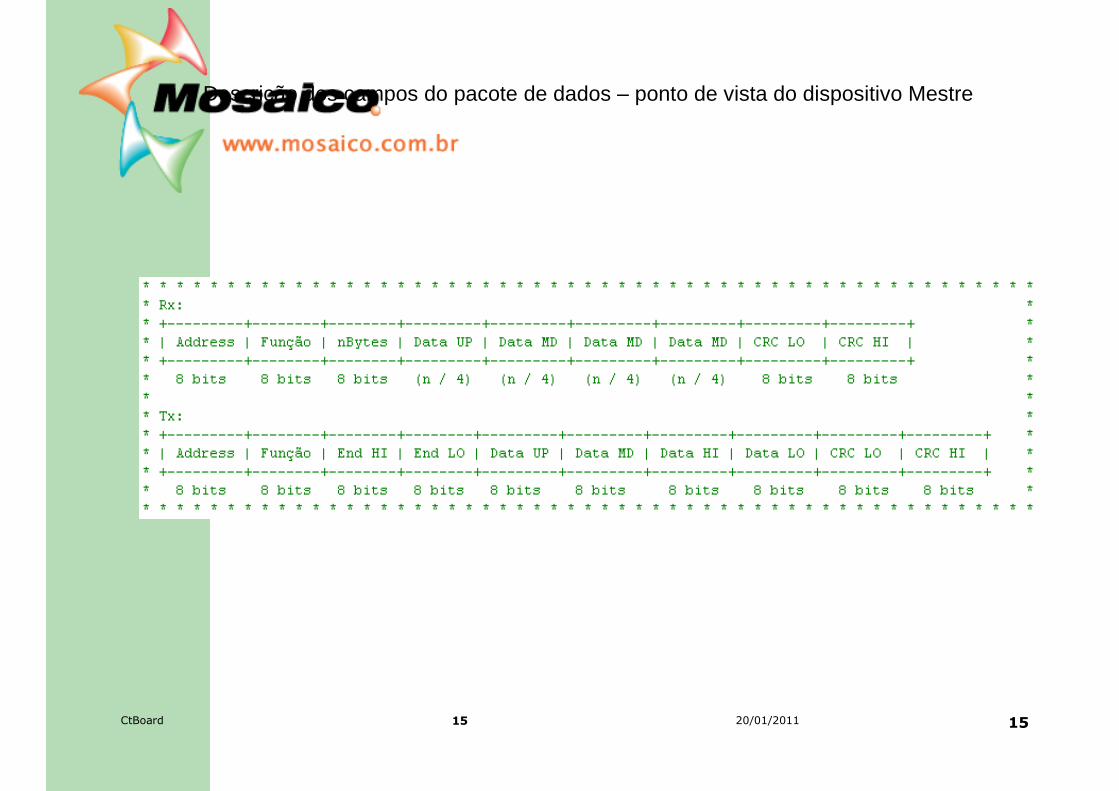
Descrição dos campos do pacote de dados – ponto de vista do dispositivo Mestre
CtBoard 16 20/01/2011 16
Campo Address
Informa o endereço do dispositivo slave. Por definição o endereço sempre será igual a 1.
Campo Função
Informa a função do pacote:
1 igual a pacote TX
2 igual a pacote RX
Campo nBytes
Informa um ponteiro para o número de dados subseqüentes até o término do pacote
Campos Data UP/MD/HI e LO
Formam os 32 bits de informação dos dados acessados ou modificados em formato ponto flutuante compatível
com a normatização IEEE-754.
Campos END HI e LO
Formam os 16 bits de informação que indicam o registro de controle do kit que será consultado ou modificado
pelos valores presentes nos campos do tipo Data
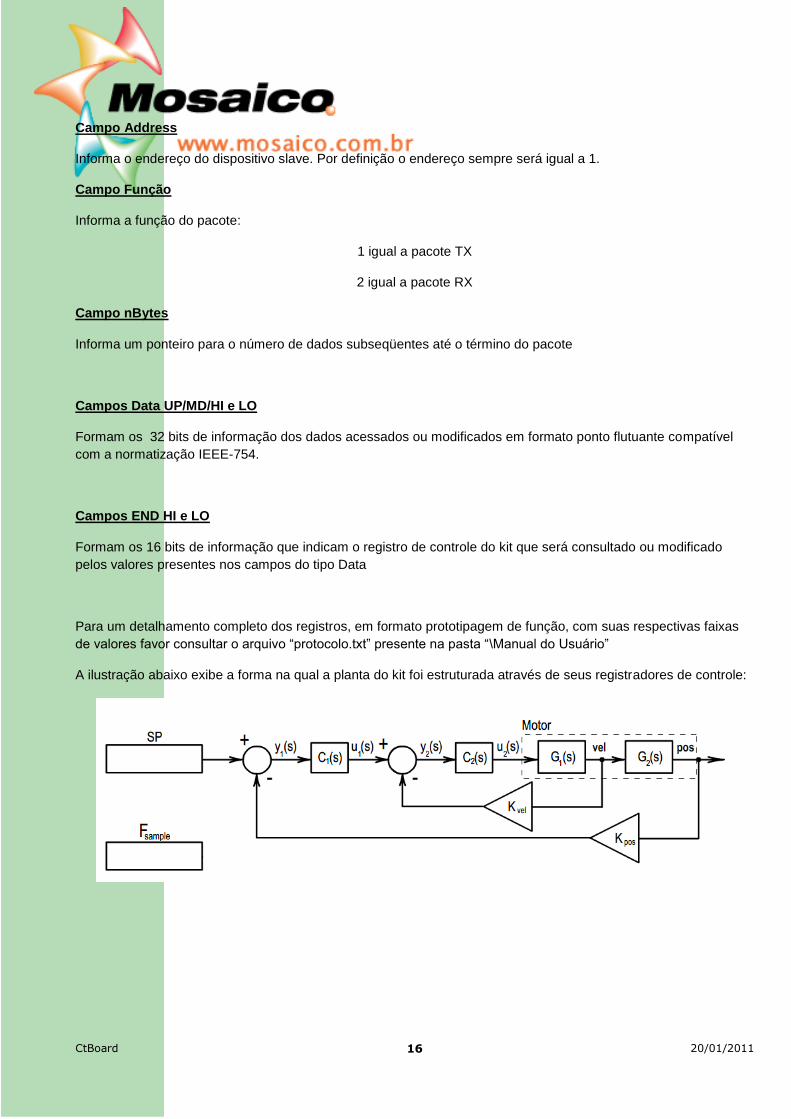
Para um detalhamento completo dos registros, em formato prototipagem de função, com suas respectivas faixas
de valores favor consultar o arquivo “protocolo.txt” presente na pasta “\Manual do Usuário”
A ilustração abaixo exibe a forma na qual a planta do kit foi estruturada através de seus registradores de controle:
CtBoard
CtBoard 17 Rev 4.0 17
4.3 Problemas mais comuns
1 - A CtBoard não reconhece os comandos do LabVIEW:
Quando ocorrer o erro acima, verifique se o posicionamento da chave 1 (DIP1) indica a opção ”NI-ELVIS”.
Verifique todas as conexões entre os dispositivos envolvidos.
2- A CtBoard não reconhece os comandos do software Supervisório:
Quando ocorrer o erro acima, verifique se o posicionamento da chave 1 (DIP1) indica a opção ”STAND-ALONE”.
Verifique todas as conexões entre os dispositivos envolvidos.
CtBoard
CtBoard 18 Rev 4.0 18
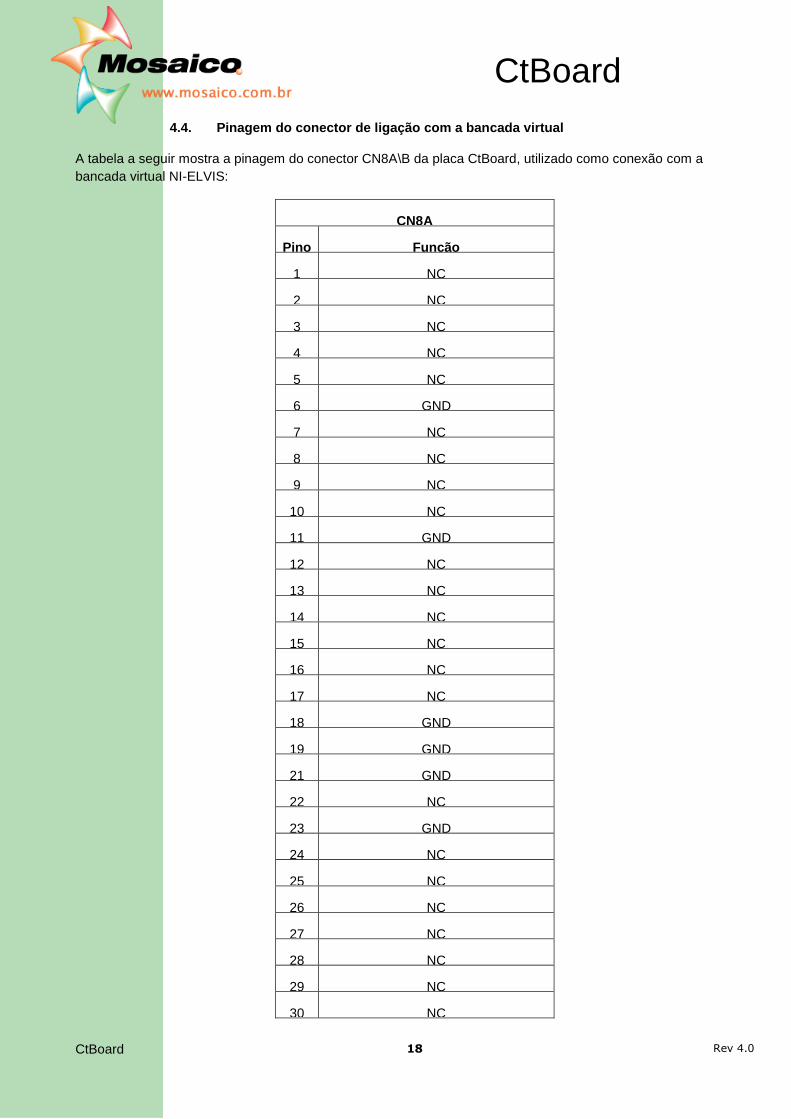
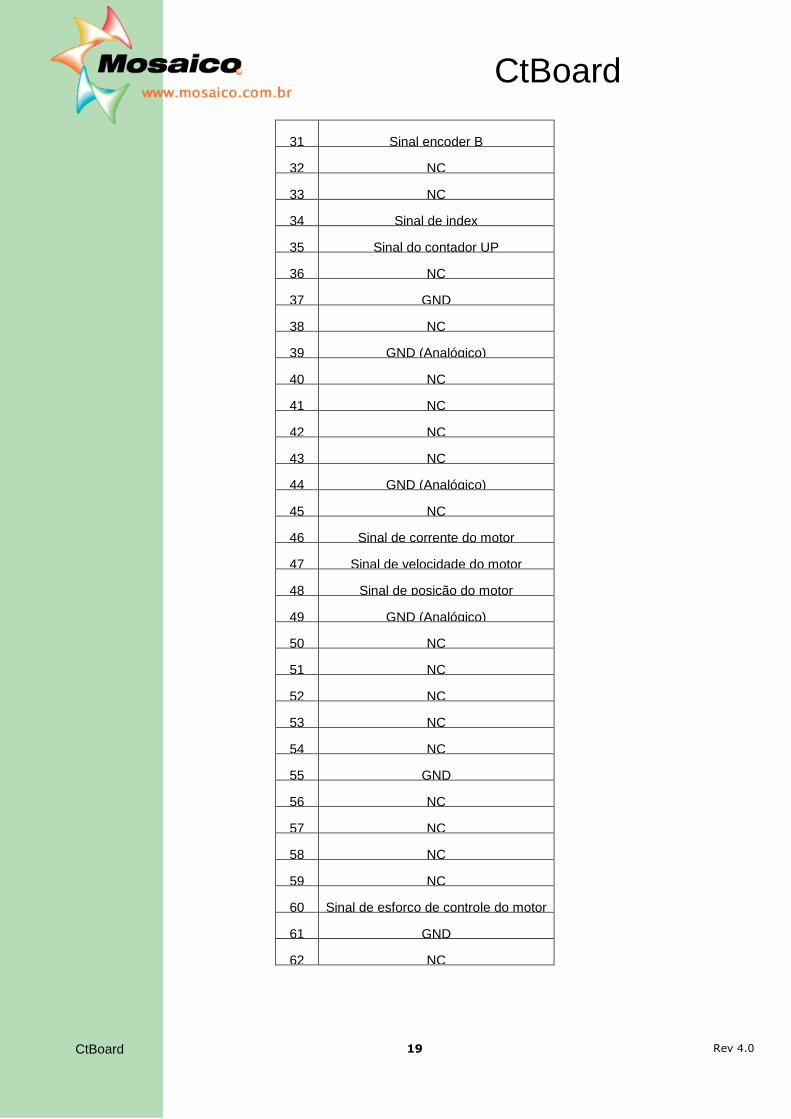
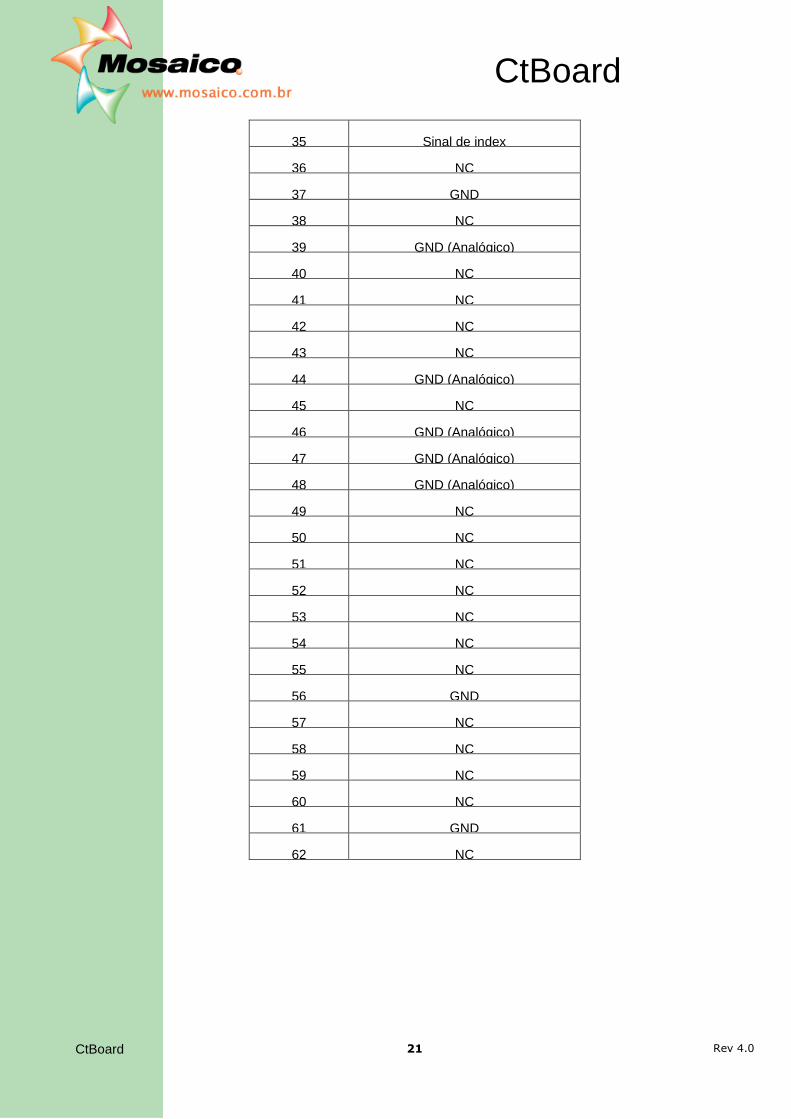
4.4. Pinagem do conector de ligação com a bancada virtual
A tabela a seguir mostra a pinagem do conector CN8A\B da placa CtBoard, utilizado como conexão com a
bancada virtual NI-ELVIS:
CN8A
Pino Função
1 NC
2 NC
3 NC
4 NC
5 NC
6 GND
7 NC
8 NC
9 NC
10 NC
11 GND
12 NC
13 NC
14 NC
15 NC
16 NC
17 NC
18 GND
19 GND
21 GND
22 NC
23 GND
24 NC
25 NC
26 NC
27 NC
28 NC
29 NC
30 NC
CtBoard
CtBoard 19 Rev 4.0 19
31 Sinal encoder B
32 NC
33 NC
34 Sinal de index
35 Sinal do contador UP
36 NC
37 GND
38 NC
39 GND (Analógico)
40 NC
41 NC
42 NC
43 NC
44 GND (Analógico)
45 NC
46 Sinal de corrente do motor
47 Sinal de velocidade do motor
48 Sinal de posição do motor
49 GND (Analógico)
50 NC
51 NC
52 NC
53 NC
54 NC
55 GND
56 NC
57 NC
58 NC
59 NC
60 Sinal de esforço de controle do motor
61 GND
62 NC

CtBoard
CtBoard 20 Rev 4.0 20
CN8B
Pino Função
1 NC
2 NC
3 GND
4 GND
5 GND
6 GND
7 NC
8 NC
9 NC
10 NC
11 GND
12 NC
13 NC
14 NC
15 NC
16 NC
17 NC
18 GND
19 GND
22 GND
23 GND
24 NC
25 NC
26 NC
27 NC
28 NC
29 NC
30 NC
31 NC
32 Sinal do encoder A
33 Sinal de contagem DOWN
34 NC
CtBoard
CtBoard 21 Rev 4.0 21
35 Sinal de index
36 NC
37 GND
38 NC
39 GND (Analógico)
40 NC
41 NC
42 NC
43 NC
44 GND (Analógico)
45 NC
46 GND (Analógico)
47 GND (Analógico)
48 GND (Analógico)
49 NC
50 NC
51 NC
52 NC
53 NC
54 NC
55 NC
56 GND
57 NC
58 NC
59 NC
60 NC
61 GND
62 NC

CtBoard
CtBoard 22 Rev 4.0 22
4.5. Pinagem dos conectores de ligação para modo stand-alone
As tabelas a seguir mostram os pinos dos conectores serial CN6 utilizado no modo stand-alone para conexão com
o software supervisório ou dispositivo compatível:
CN6
Pino Função
1 RX
2 TX
3 NC
4 NC
5 GND
6 NC
7 RTS
8 CTS
9 NC

CtBoard
CtBoard 23 Rev 4.0 23
4.6. Pinagem do conector para área de prototipagem
A tabela a seguir mostra a pinagem do conector CN9 da placa CtBoard, utilizado como fonte de sinais para a área
de prototipagem:
CN9
Pino Função
1 +15V
2 -15V
3 +5V
4 +5V
5 GND(Analógico)
6 GND(Analógico)
7 Sinal de corrente do motor (-10 à
+10V) 8 Sinal de posição do motor (-10 à
+10V) 9 Sinal de velocidade do motor (-10 à
+10V) 10 Sinal de esforço de controle do
motor (-10 à +10V) 11 Sinal do encoder A
12 Sinal do encoder B
13 Sinal de contagem UP
14 Sinal de contagem DOWN
15 Sinal INDEX
16 GND
17 PROT01 (Pino E/S – configurável no
LabVIEW) 18 GND
19 PROT02 (Pino E/S – configurável no
LabVIEW) 20 GND
CtBoard
CtBoard 24 Rev 4.0 24
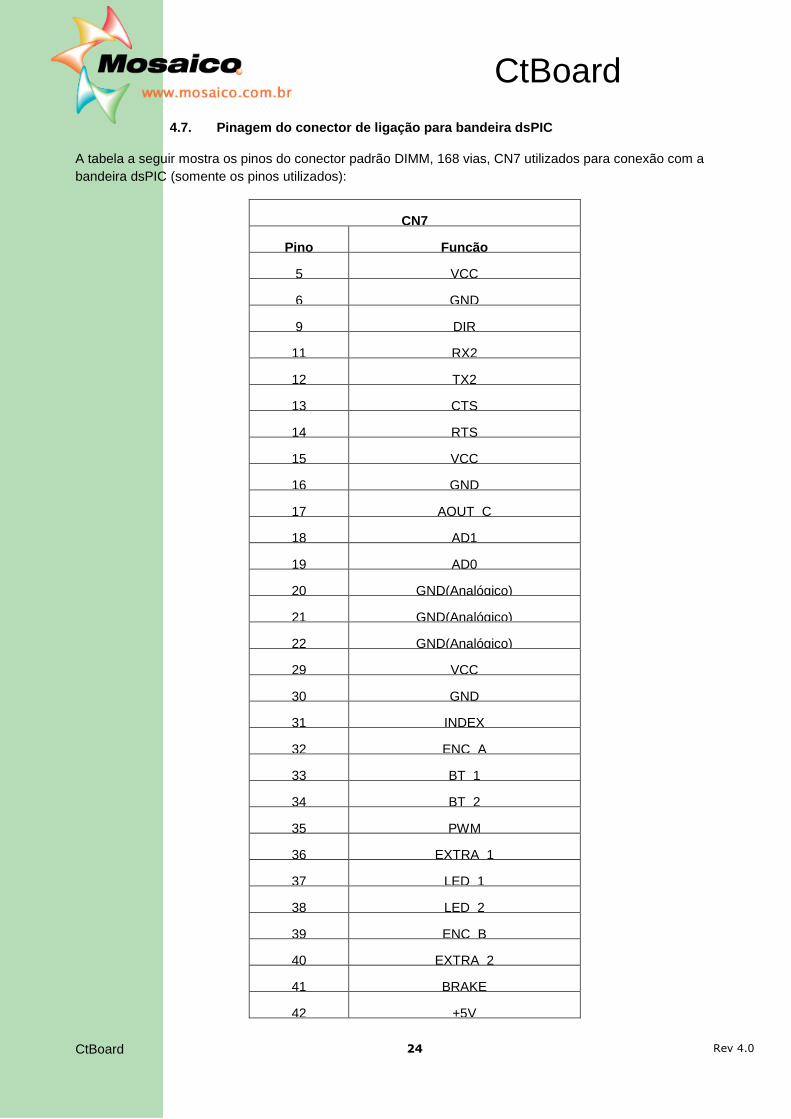
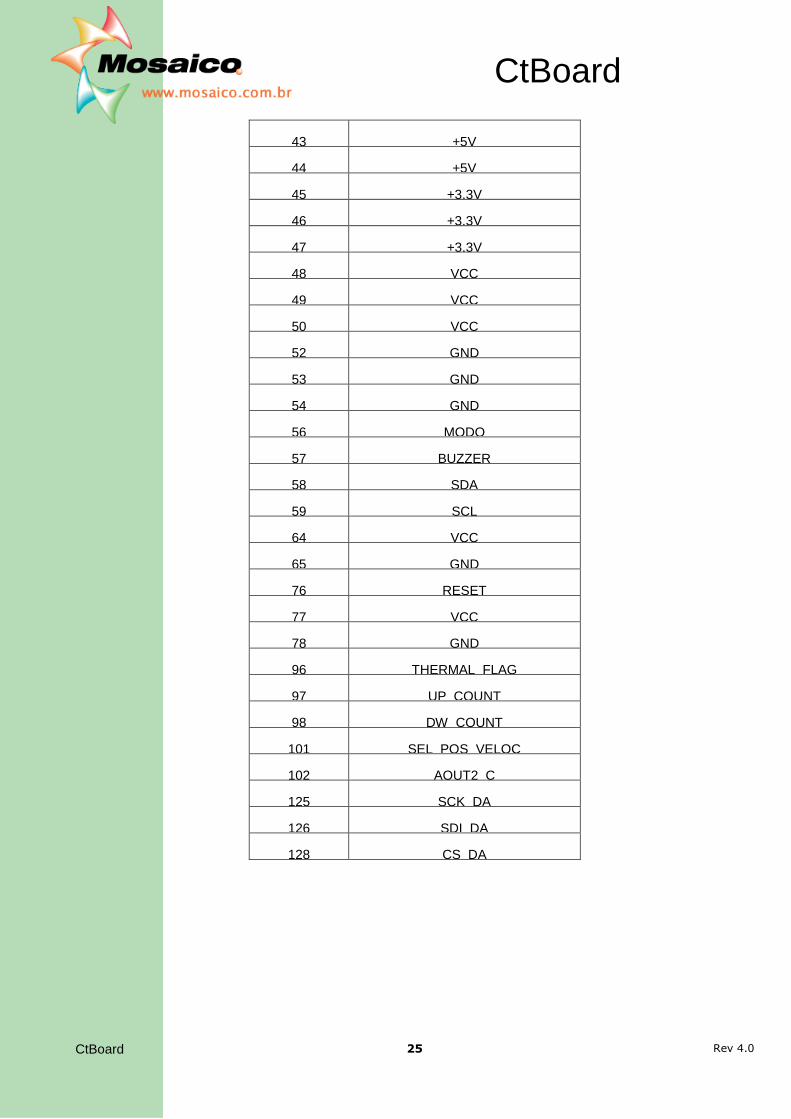
4.7. Pinagem do conector de ligação para bandeira dsPIC
A tabela a seguir mostra os pinos do conector padrão DIMM, 168 vias, CN7 utilizados para conexão com a
bandeira dsPIC (somente os pinos utilizados):
CN7
Pino Função
5 VCC
6 GND
9 DIR
11 RX2
12 TX2
13 CTS
14 RTS
15 VCC
16 GND
17 AOUT_C
18 AD1
19 AD0
20 GND(Analógico)
21 GND(Analógico)
22 GND(Analógico)
29 VCC
30 GND
31 INDEX
32 ENC_A
33 BT_1
34 BT_2
35 PWM
36 EXTRA_1
37 LED_1
38 LED_2
39 ENC_B
40 EXTRA_2
41 BRAKE
42 +5V
CtBoard
CtBoard 25 Rev 4.0 25
43 +5V
44 +5V
45 +3,3V
46 +3,3V
47 +3,3V
48 VCC
49 VCC
50 VCC
52 GND
53 GND
54 GND
56 MODO
57 BUZZER
58 SDA
59 SCL
64 VCC
65 GND
76 RESET
77 VCC
78 GND
96 THERMAL_FLAG
97 UP_COUNT
98 DW_COUNT
101 SEL_POS_VELOC
102 AOUT2_C
125 SCK_DA
126 SDI_DA
128 CS_DA
CtBoard
CtBoard 26 Rev 4.0 26
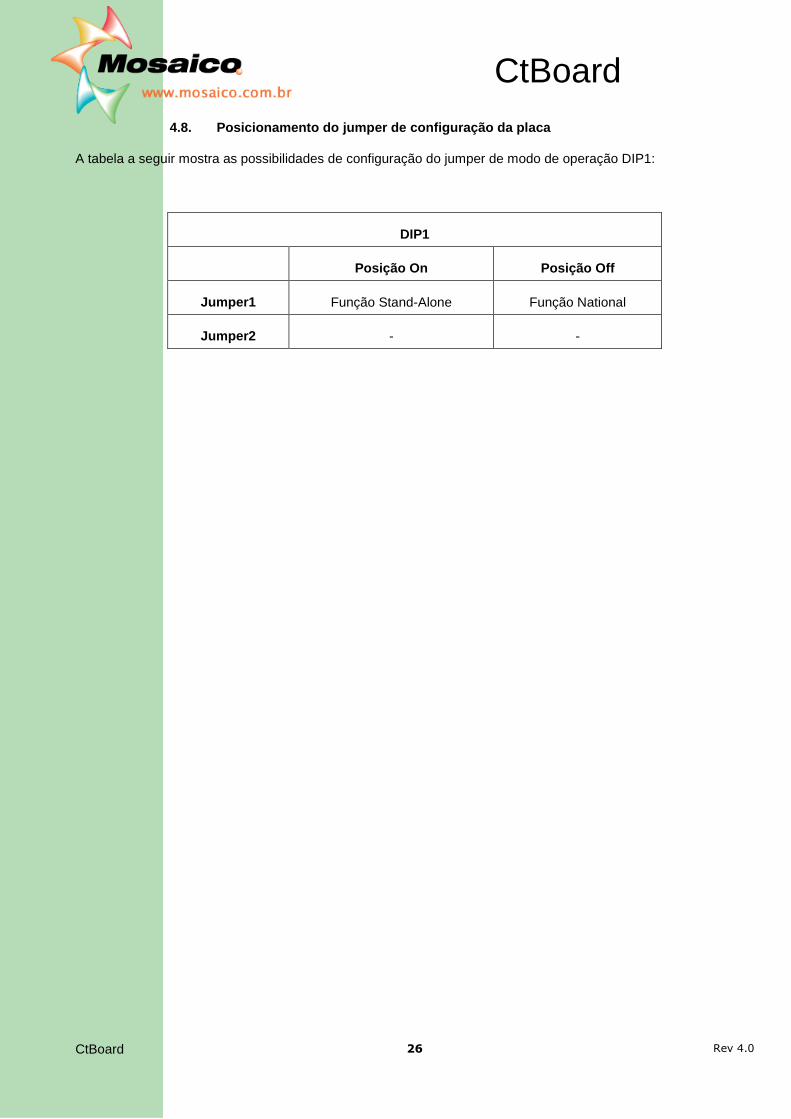
4.8. Posicionamento do jumper de configuração da placa
A tabela a seguir mostra as possibilidades de configuração do jumper de modo de operação DIP1:
DIP1
Posição On Posição Off
Jumper1 Função Stand-Alone Função National
Jumper2 - -
CtBoard
CtBoard 27 Rev 4.0 27
5. Certificado de Garantia
5.1. Tempo de Garantia
A Mosaico garante contra defeitos de fabricação durante 4 meses para mão de obra de conserto.
O prazo de garantia começa a ser contado a partir da data de emissão da Nota Fiscal de compra.
5.2. Condições de Garantia
Durante o prazo coberto pela garantia, à Mosaico fará o reparo do defeito apresentado, ou substituirá o produto,
se isso for necessário.
Os produtos deverão ser encaminhados à Mosaico, devidamente embalados por conta e risco do comprador, e
acompanhados deste Certificado de Garantia “sem emendas ou rasuras” e da respectiva Nota Fiscal de aquisição.
O atendimento para reparos dos defeitos nos produtos cobertos por este Certificado de Garantia será feito
somente na Mosaico, ficando, portanto, excluído o atendimento domiciliar.
5.3. Exclusões de Garantia
Estão excluídos da garantia os defeitos provenientes de:
• Alterações do produto ou dos equipamentos;
• Utilização incorreta do produto ou dos equipamentos;
• Queda, raio, incêndio ou descarga elétrica;
• Manutenção efetuada por pessoal não credenciado pela Mosaico.
Obs.: Todas as características de funcionamento dos produtos Mosaico estão em seus respectivos manuais.
5.4. Limitação de Responsabilidade
A presente garantia limita-se apenas ao reparo do defeito apresentado, a substituição do produto ou equipamento
defeituoso. Nenhuma outra garantia implícita ou explícita, é dada ao comprador.
A Mosaico não se responsabiliza por qualquer dano, perda, inconveniência ou prejuízo direto ou indireto que
possa advir de uso ou inabilidade de se usarem os produtos cobertos por esta garantia.
A Mosaico estabelece o prazo de 30 dias (a ser contado a partir da data da nota Fiscal de Venda) para que seja
reclamado qualquer eventual falta de componentes.
Importante: Todas as despesas de frete e seguro são de responsabilidade do usuário, ou seja, em caso de
necessidade o Cliente é responsável pelo encaminhamento do equipamento até a Mosaico.





























